Embed Size (px)
Citation preview
Werkzeugeinsatz in der Entwick-lung von Automotive-Software
D ie zunehmende Bedeutung der Software im Automobilbereich hat dazu geführt, dass sich die
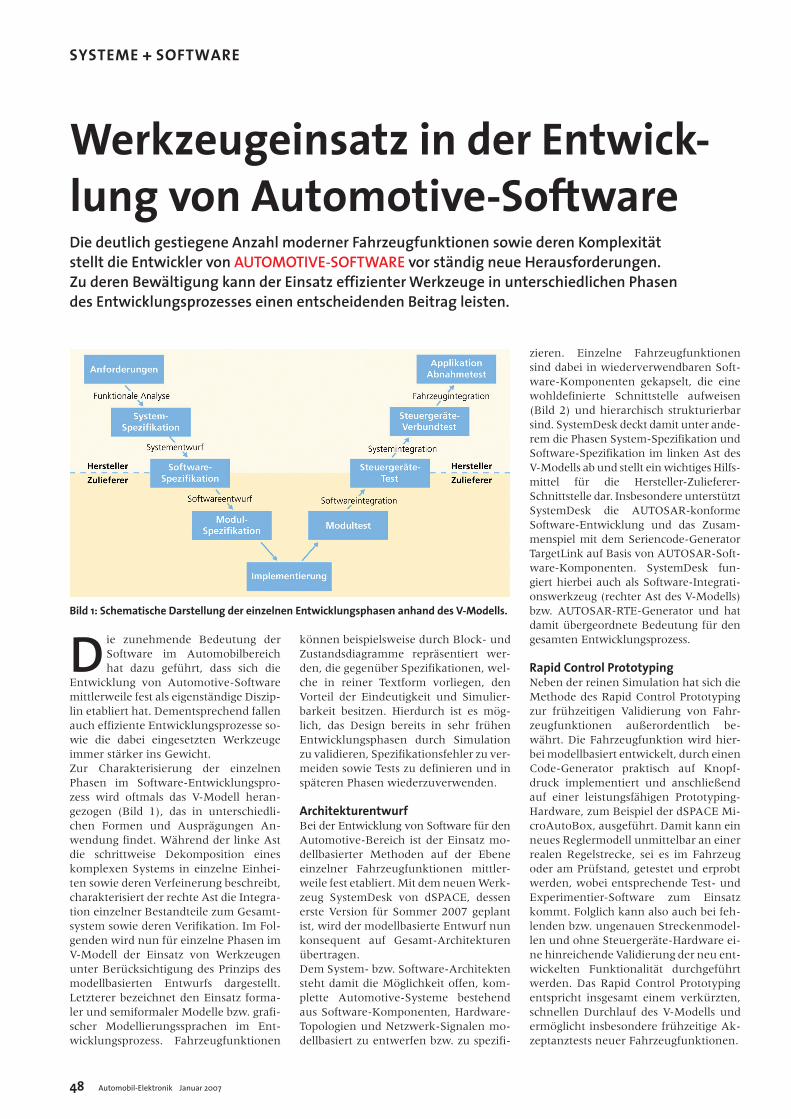
Entwicklung von Automotive-Software mittlerweile fest als eigenständige Diszip-lin etabliert hat. Dementsprechend fallen auch effiziente Entwicklungsprozesse so-wie die dabei eingesetzten Werkzeuge immer stärker ins Gewicht. Zur Charakterisierung der einzelnen Phasen im Software-Entwicklungspro-zess wird oftmals das V-Modell heran-gezogen (Bild 1), das in unterschiedli-chen Formen und Ausprägungen An-wendung findet. Während der linke Ast die schrittweise Dekomposition eines komplexen Systems in einzelne Einhei-ten sowie deren Verfeinerung beschreibt, charakterisiert der rechte Ast die Integra-tion einzelner Bestandteile zum Gesamt-system sowie deren Verifikation. Im Fol-genden wird nun für einzelne Phasen im V-Modell der Einsatz von Werkzeugen unter Berücksichtigung des Prinzips des modellbasierten Entwurfs dargestellt. Letzterer bezeichnet den Einsatz forma-ler und semiformaler Modelle bzw. grafi-scher Modellierungssprachen im Ent-wicklungsprozess. Fahrzeugfunktionen
Bild 1: Schematische Darstellung der einzelnen Entwicklungsphasen anhand des V-Modells.
Die deutlich gestiegene Anzahl moderner Fahrzeugfunktionen sowie deren Komplexität stellt die Entwickler von AUTOMOTIVE-SOFTWARE vor ständig neue Herausforderungen. Zu deren Bewältigung kann der Einsatz effizienter Werkzeuge in unterschiedlichen Phasen des Entwicklungsprozesses einen entscheidenden Beitrag leisten.
können beispielsweise durch Block- und Zustandsdiagramme repräsentiert wer-den, die gegenüber Spezifikationen, wel-che in reiner Textform vorliegen, den Vorteil der Eindeutigkeit und Simulier-barkeit besitzen. Hierdurch ist es mög-lich, das Design bereits in sehr frühen Entwicklungsphasen durch Simulation zu validieren, Spezifikationsfehler zu ver-meiden sowie Tests zu definieren und in späteren Phasen wiederzuverwenden.
Architekturentwurf Bei der Entwicklung von Software für den Automotive-Bereich ist der Einsatz mo-dellbasierter Methoden auf der Ebene einzelner Fahrzeugfunktionen mittler-weile fest etabliert. Mit dem neuen Werk-zeug SystemDesk von dSPACE, dessen erste Version für Sommer 2007 geplant ist, wird der modellbasierte Entwurf nun konsequent auf Gesamt-Architekturen übertragen. Dem System- bzw. Software-Architekten steht damit die Möglichkeit offen, kom-plette Automotive-Systeme bestehend aus Software-Komponenten, Hardware-Topologien und Netzwerk-Signalen mo-dellbasiert zu entwerfen bzw. zu spezifi-
zieren. Einzelne Fahrzeugfunktionen sind dabei in wiederverwendbaren Soft-ware-Komponenten gekapselt, die eine wohldefinierte Schnittstelle aufweisen (Bild 2) und hierarchisch strukturierbar sind. SystemDesk deckt damit unter ande-rem die Phasen System-Spezifikation und Software-Spezifikation im linken Ast des V-Modells ab und stellt ein wichtiges Hilfs-mittel für die Hersteller-Zulieferer-Schnittstelle dar. Insbesondere unterstützt SystemDesk die AUTOSAR-konforme Software-Entwicklung und das Zusam-menspiel mit dem Seriencode-Generator TargetLink auf Basis von AUTOSAR-Soft-ware-Komponenten. SystemDesk fun-giert hierbei auch als Software-Integrati-onswerkzeug (rechter Ast des V-Modells) bzw. AUTOSAR-RTE-Generator und hat damit übergeordnete Bedeutung für den gesamten Entwicklungsprozess.
Rapid Control Prototyping Neben der reinen Simulation hat sich die Methode des Rapid Control Prototyping zur frühzeitigen Validierung von Fahr-zeugfunktionen außerordentlich be-währt. Die Fahrzeugfunktion wird hier-bei modellbasiert entwickelt, durch einen Code-Generator praktisch auf Knopf-druck implementiert und anschließend auf einer leistungsfähigen Prototyping-Hardware, zum Beispiel der dSPACE Mi-croAutoBox, ausgeführt. Damit kann ein neues Reglermodell unmittelbar an einer realen Regelstrecke, sei es im Fahrzeug oder am Prüfstand, getestet und erprobt werden, wobei entsprechende Test- und Experimentier-Software zum Einsatz kommt. Folglich kann also auch bei feh-lenden bzw. ungenauen Streckenmodel-len und ohne Steuergeräte-Hardware ei-ne hinreichende Validierung der neu ent-wickelten Funktionalität durchgeführt werden. Das Rapid Control Prototyping entspricht insgesamt einem verkürzten, schnellen Durchlauf des V-Modells und ermöglicht insbesondere frühzeitige Ak-zeptanztests neuer Fahrzeugfunktionen.
48 Automobil-Elektronik Januar 2007
SYSTEME + SOFTWARE

Entdecken Sie weitere interessante Artikel und News zum Thema auf all-electronics.de!
Hier klicken & informieren!
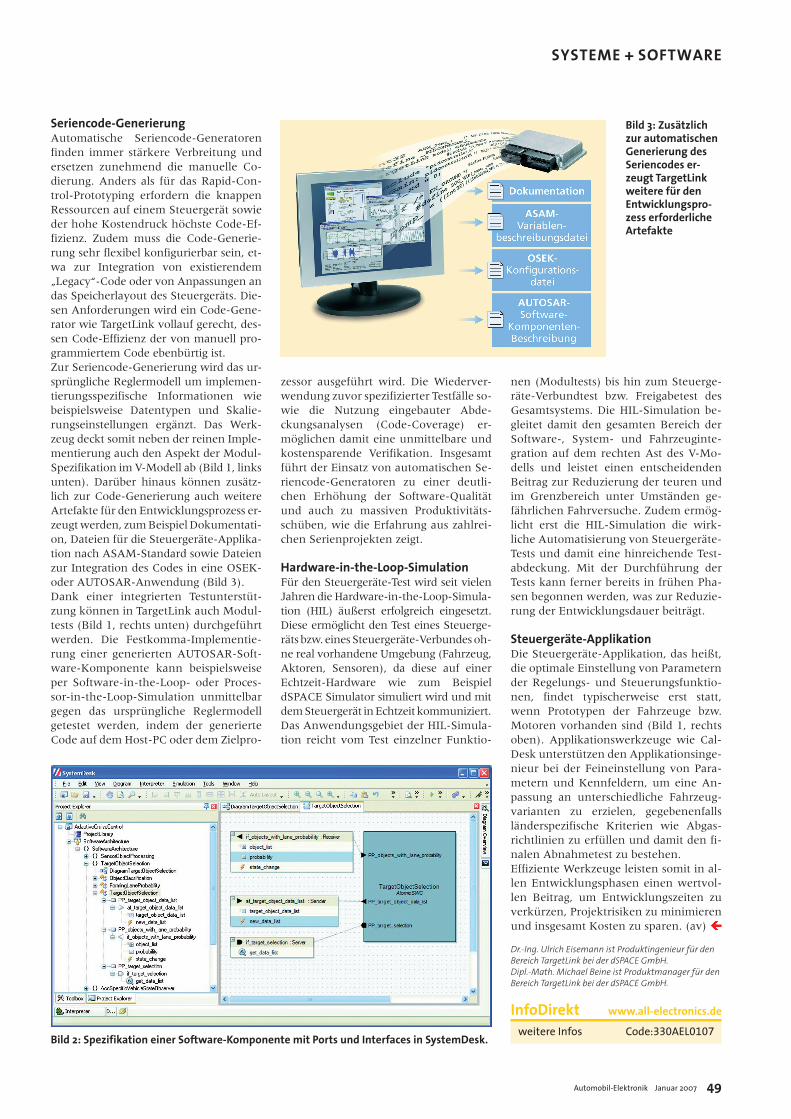
Bild 2: Spezifikation einer Software-Komponente mit Ports und Interfaces in SystemDesk.
Bild 3: Zusätzlich zur automatischen Generierung des Seriencodes er-zeugt TargetLink weitere für den Entwicklungspro-zess erforderliche Artefakte
Seriencode-Generierung Automatische Seriencode-Generatoren finden immer stärkere Verbreitung und ersetzen zunehmend die manuelle Co-dierung. Anders als für das Rapid-Con-trol-Prototyping erfordern die knappen Ressourcen auf einem Steuergerät sowie der hohe Kostendruck höchste Code-Ef-fizienz. Zudem muss die Code-Generie-rung sehr flexibel konfigurierbar sein, et-wa zur Integration von existierendem „Legacy“-Code oder von Anpassungen an das Speicherlayout des Steuergeräts. Die-sen Anforderungen wird ein Code-Gene-rator wie TargetLink vollauf gerecht, des-sen Code-Effizienz der von manuell pro-grammiertem Code ebenbürtig ist. Zur Seriencode-Generierung wird das ur-sprüngliche Reglermodell um implemen-tierungsspezifische Informationen wie beispielsweise Datentypen und Skalie-rungseinstellungen ergänzt. Das Werk-zeug deckt somit neben der reinen Imple-mentierung auch den Aspekt der Modul-Spezifikation im V-Modell ab (Bild 1, links unten). Darüber hinaus können zusätz-lich zur Code-Generierung auch weitere Artefakte für den Entwicklungsprozess er-zeugt werden, zum Beispiel Dokumentati-on, Dateien für die Steuergeräte-Applika-tion nach ASAM-Standard sowie Dateien zur Integration des Codes in eine OSEK- oder AUTOSAR-Anwendung (Bild 3). Dank einer integrierten Testunterstüt-zung können in TargetLink auch Modul-tests (Bild 1, rechts unten) durchgeführt werden. Die Festkomma-Implementie-rung einer generierten AUTOSAR-Soft-ware-Komponente kann beispielsweise per Software-in-the-Loop- oder Proces-sor-in-the-Loop-Simulation unmittelbar gegen das ursprüngliche Reglermodell getestet werden, indem der generierte Code auf dem Host-PC oder dem Zielpro-
zessor ausgeführt wird. Die Wiederver-wendung zuvor spezifizierter Testfälle so-wie die Nutzung eingebauter Abde-ckungsanalysen (Code-Coverage) er-möglichen damit eine unmittelbare und kostensparende Verifikation. Insgesamt führt der Einsatz von automatischen Se-riencode-Generatoren zu einer deutli-chen Erhöhung der Software-Qualität und auch zu massiven Produktivitäts-schüben, wie die Erfahrung aus zahlrei-chen Serienprojekten zeigt.
Hardware-in-the-Loop-Simulation Für den Steuergeräte-Test wird seit vielen Jahren die Hardware-in-the-Loop-Simula-tion (HIL) äußerst erfolgreich eingesetzt. Diese ermöglicht den Test eines Steuerge-räts bzw. eines Steuergeräte-Verbundes oh-ne real vorhandene Umgebung (Fahrzeug, Aktoren, Sensoren), da diese auf einer Echtzeit-Hardware wie zum Beispiel dSPACE Simulator simuliert wird und mit dem Steuergerät in Echtzeit kommuniziert. Das Anwendungsgebiet der HIL-Simula-tion reicht vom Test einzelner Funktio-
nen (Modultests) bis hin zum Steuerge-räte-Verbundtest bzw. Freigabetest des Gesamtsystems. Die HIL-Simulation be-gleitet damit den gesamten Bereich der Software-, System- und Fahrzeuginte-gration auf dem rechten Ast des V-Mo-dells und leistet einen entscheidenden Beitrag zur Reduzierung der teuren und im Grenzbereich unter Umständen ge-fährlichen Fahrversuche. Zudem ermög-licht erst die HIL-Simulation die wirk-liche Automatisierung von Steuergeräte-Tests und damit eine hinreichende Test-abdeckung. Mit der Durchführung der Tests kann ferner bereits in frühen Pha-sen begonnen werden, was zur Reduzie-rung der Entwicklungsdauer beiträgt.
Steuergeräte-Applikation Die Steuergeräte-Applikation, das heißt, die optimale Einstellung von Parametern der Regelungs- und Steuerungsfunktio-nen, findet typischerweise erst statt, wenn Prototypen der Fahrzeuge bzw. Motoren vorhanden sind (Bild 1, rechts oben). Applikationswerkzeuge wie Cal-Desk unterstützen den Applikationsinge-nieur bei der Feineinstellung von Para-metern und Kennfeldern, um eine An-passung an unterschiedliche Fahrzeug-varianten zu erzielen, gegebenenfalls länderspezifische Kriterien wie Abgas-richtlinien zu erfüllen und damit den fi-nalen Abnahmetest zu bestehen. Effiziente Werkzeuge leisten somit in al-len Entwicklungsphasen einen wertvol-len Beitrag, um Entwicklungszeiten zu verkürzen, Projektrisiken zu minimieren und insgesamt Kosten zu sparen. (av) Dr.-Ing. Ulrich Eisemann ist Produktingenieur für den Bereich TargetLink bei der dSPACE GmbH. Dipl.-Math. Michael Beine ist Produktmanager für den Bereich TargetLink bei der dSPACE GmbH. InfoDirekt www.all-electronics.de
weitere Infos Code:330AEL0107
Automobil-Elektronik Januar 2007 49
SYSTEME + SOFTWARE





























