Embed Size (px)
Citation preview

http://support.automation.siemens.com/WW/view/de/73257075
FAQ 12/2014
Wie kann ein Antrieb überGerätestammdatei (GSD) indas TIA-Portal eingebundenwerden?SIMATIC S7-1500 / TIA-Portal ab V12 SP1

Fragestellung
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 2
Siem
ens
AG20
14Al
lrig
hts
rese
rved
Dieser Beitrag stammt aus dem Siemens Industry Online Support. Es gelten diedort genannten Nutzungsbedingungen (www.siemens.com/nutzungsbedingungen).
Security-hinweise
Siemens bietet Produkte und Lösungen mit Industrial Security-Funktionen an,die den sicheren Betrieb von Anlagen, Lösungen, Maschinen, Geräten und/oderNetzwerken unterstützen. Sie sind wichtige Komponenten in einemganzheitlichen Industrial Security-Konzept. Die Produkte und Lösungen vonSiemens werden unter diesem Gesichtspunkt ständig weiterentwickelt. Siemensempfiehlt, sich unbedingt regelmäßig über Produkt-Updates zu informieren.
Für den sicheren Betrieb von Produkten und Lösungen von Siemens ist eserforderlich, geeignete Schutzmaßnahmen (z. B. Zellenschutzkonzept) zuergreifen und jede Komponente in ein ganzheitliches Industrial Security-Konzeptzu integrieren, das dem aktuellen Stand der Technik entspricht. Dabei sind aucheingesetzte Produkte von anderen Herstellern zu berücksichtigen.Weitergehende Informationen über Industrial Security finden Sie unterhttp://www.siemens.com/industrialsecurity.
Um stets über Produkt-Updates informiert zu sein, melden Sie sich für unserenproduktspezifischen Newsletter an. Weitere Informationen hierzu finden Sieunter http://support.automation.siemens.com.
FrageWie kann ein Antrieb über Gerätestammdatei (GSD) in das TIA-Portal eingebun-den werden?
AntwortFolgen Sie zur umfassenden Beantwortung dieser Frage den in diesem Dokumentaufgeführten Handlungsanweisungen und Hinweisen.
Inhaltsverzeichnis
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 3
Siem
ens
AG20
14Al
lrig
hts
rese
rved
Inhaltsverzeichnis1 Motivation ........................................................................................................... 5
1.1 Motion Control mit der SIMATIC S7-1500 ............................................ 51.2 Die STEP 7-Option SINAMICS Startdrive ............................................ 51.3 Inbetriebnahmesoftware für den Antrieb .............................................. 71.4 Für diese Dokumentation verwendete Software .................................. 7
2 GSD-Dateien im TIA-Portal ............................................................................... 8
2.1 Vorhandene GSD-Dateien ................................................................... 82.2 Zusätzliche GSD-Dateien ergänzen ..................................................... 82.2.1 Bezugsquellen ...................................................................................... 82.2.2 Einbinden der GSD-Dateien ................................................................. 9
3 Anbindung eines Antriebs an die S7-1500 .................................................... 11
3.1 Auswahl des Antriebs aus dem Hardware-Katalog ............................ 113.2 Herstellung der Busverbindung .......................................................... 123.2.1 Feldbus PROFIBUS DP ..................................................................... 123.2.2 Feldbus PROFINET I/O ...................................................................... 15
4 Aufbau der Kommunikationsverbindung ...................................................... 18
4.1 Telegrammauswahl ............................................................................ 184.1.1 Mit der SIMATIC S7-1500 nutzbare Antriebstelegramme .................. 184.1.2 Auswahlhilfe zu den Antriebstelegrammen ........................................ 194.1.3 Zusätzliche Telegramme der Antriebsfamilie SINAMICS S ............... 204.2 Verbindung über PROFIBUS DP ....................................................... 204.3 Verbindung über PROFINET I/O ........................................................ 24
5 Einstellung der Taktsynchronität ................................................................... 28
5.1 PROFIBUS DP ................................................................................... 285.1.1 Grundlagen und Begriffsklärung ........................................................ 285.1.2 Einstellungen im TIA-Portal ................................................................ 285.2 PROFINET I/O ................................................................................... 305.2.1 Grundlagen und Begriffsklärung ........................................................ 305.2.2 Einstellungen im TIA-Portal ................................................................ 32
6 Motion Control Funktionen der S7-1500 ....................................................... 37
6.1 Technologieobjekte ............................................................................ 376.2 Auswahl des Antriebs am Technologieobjekt .................................... 386.3 Ansteuerung der Achse aus dem Anwenderprogramm ..................... 40
7 Inbetriebnahmesoftware STARTER ............................................................... 43
7.1 Arbeiten mit Antrieben ........................................................................ 437.2 Anlegen eines Antriebsgeräts ............................................................ 447.2.1 PROFIBUS DP ................................................................................... 447.2.2 PROFINET I/O ................................................................................... 457.3 Anlegen der Antriebe .......................................................................... 467.3.1 Anpassung der Kommunikationstelegramme .................................... 48
8 Glossar.............................................................................................................. 50
9 Anhang.............................................................................................................. 55
9.1 Besonderheit bei SIMODRIVE Antrieben ........................................... 559.1.1 Grundsätzliches .................................................................................. 559.1.2 Anbindung des Antriebs an die S7-1500............................................ 559.1.3 Aufbau der Kommunikationsverbindung ............................................ 569.1.4 Auswahl des Antriebs am Technologieobjekt .................................... 579.1.5 Kontrolle der Antriebs-Anbindung über das Technologieobjekt ......... 59

Inhaltsverzeichnis
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 4
Siem
ens
AG20
14Al
lrig
hts
rese
rved
10 Literaturhinweise ............................................................................................. 61
10.1 Literaturangaben ................................................................................ 6110.2 Internet-Link-Angaben ........................................................................ 62
1 Motivation1.1 Motion Control mit der SIMATIC S7-1500
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 5
1 Motivation1.1 Motion Control mit der SIMATIC S7-1500
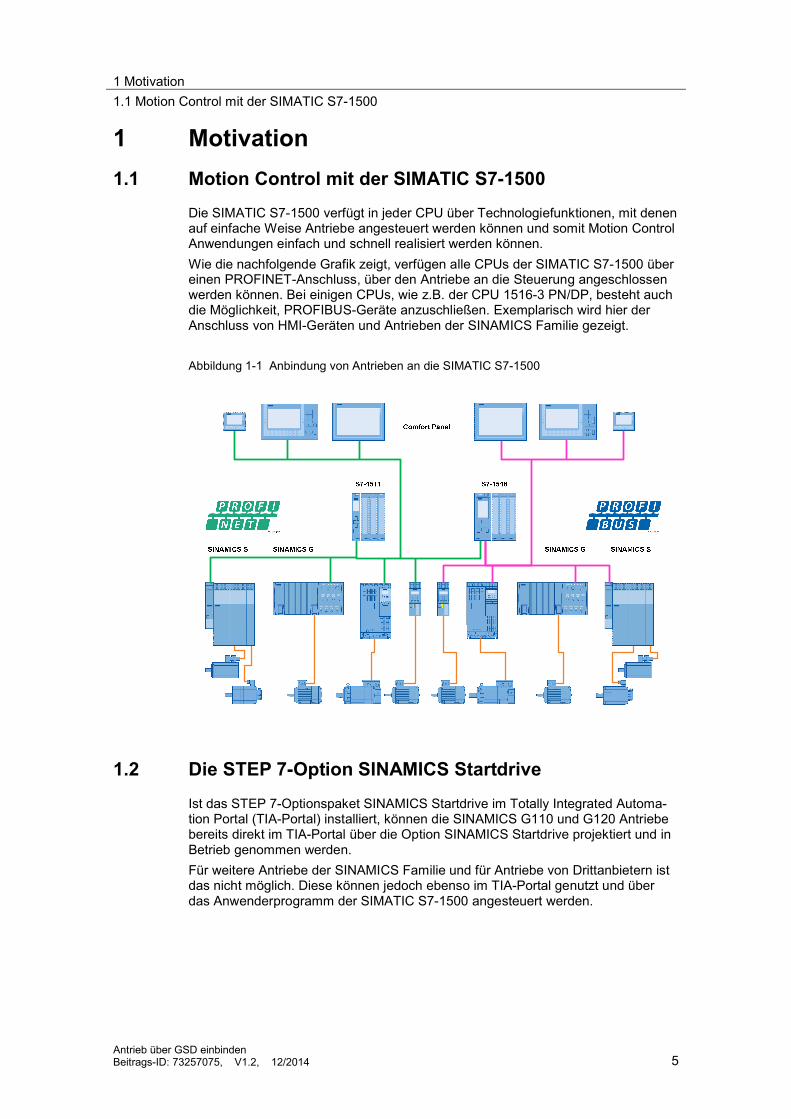
Die SIMATIC S7-1500 verfügt in jeder CPU über Technologiefunktionen, mit denenauf einfache Weise Antriebe angesteuert werden können und somit Motion ControlAnwendungen einfach und schnell realisiert werden können.Wie die nachfolgende Grafik zeigt, verfügen alle CPUs der SIMATIC S7-1500 übereinen PROFINET-Anschluss, über den Antriebe an die Steuerung angeschlossenwerden können. Bei einigen CPUs, wie z.B. der CPU 1516-3 PN/DP, besteht auchdie Möglichkeit, PROFIBUS-Geräte anzuschließen. Exemplarisch wird hier derAnschluss von HMI-Geräten und Antrieben der SINAMICS Familie gezeigt.
Abbildung 1-1 Anbindung von Antrieben an die SIMATIC S7-1500
1.2 Die STEP 7-Option SINAMICS Startdrive
Ist das STEP 7-Optionspaket SINAMICS Startdrive im Totally Integrated Automa-tion Portal (TIA-Portal) installiert, können die SINAMICS G110 und G120 Antriebebereits direkt im TIA-Portal über die Option SINAMICS Startdrive projektiert und inBetrieb genommen werden.Für weitere Antriebe der SINAMICS Familie und für Antriebe von Drittanbietern istdas nicht möglich. Diese können jedoch ebenso im TIA-Portal genutzt und überdas Anwenderprogramm der SIMATIC S7-1500 angesteuert werden.
1 Motivation1.2 Die STEP 7-Option SINAMICS Startdrive
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 6
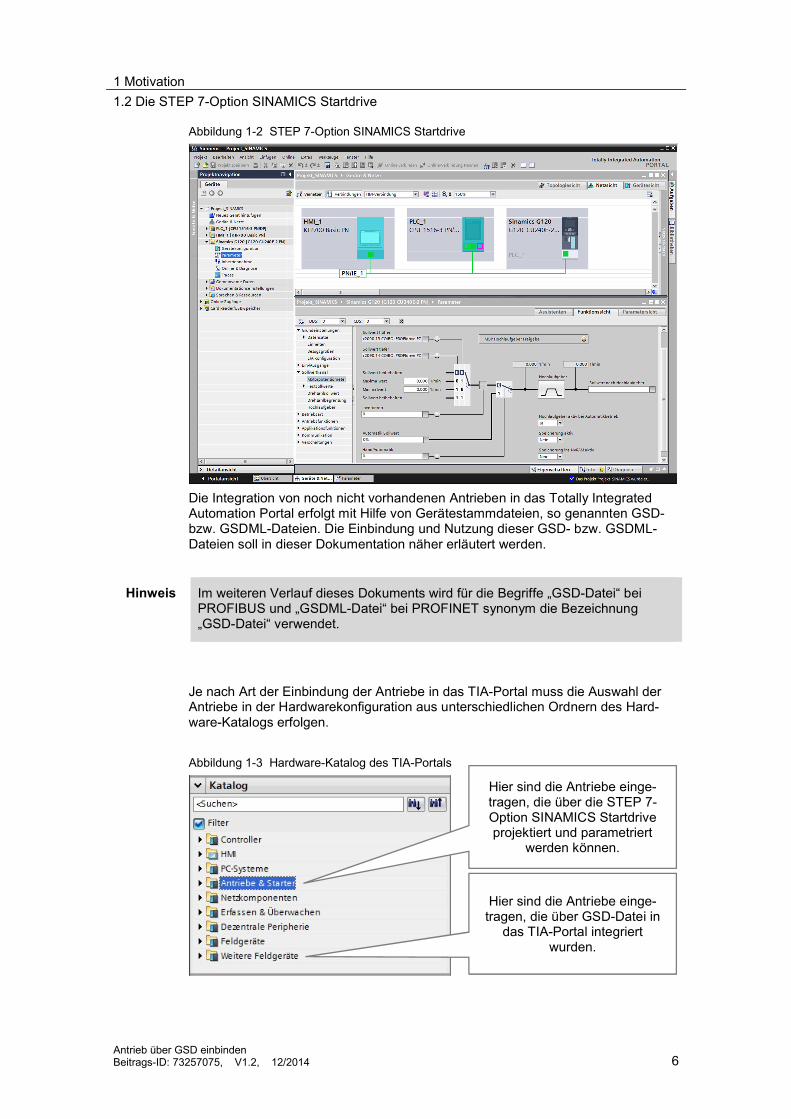
Abbildung 1-2 STEP 7-Option SINAMICS Startdrive
Die Integration von noch nicht vorhandenen Antrieben in das Totally IntegratedAutomation Portal erfolgt mit Hilfe von Gerätestammdateien, so genannten GSD-bzw. GSDML-Dateien. Die Einbindung und Nutzung dieser GSD- bzw. GSDML-Dateien soll in dieser Dokumentation näher erläutert werden.
Hinweis Im weiteren Verlauf dieses Dokuments wird für die Begriffe „GSD-Datei“ beiPROFIBUS und „GSDML-Datei“ bei PROFINET synonym die Bezeichnung„GSD-Datei“ verwendet.
Je nach Art der Einbindung der Antriebe in das TIA-Portal muss die Auswahl derAntriebe in der Hardwarekonfiguration aus unterschiedlichen Ordnern des Hard-ware-Katalogs erfolgen.
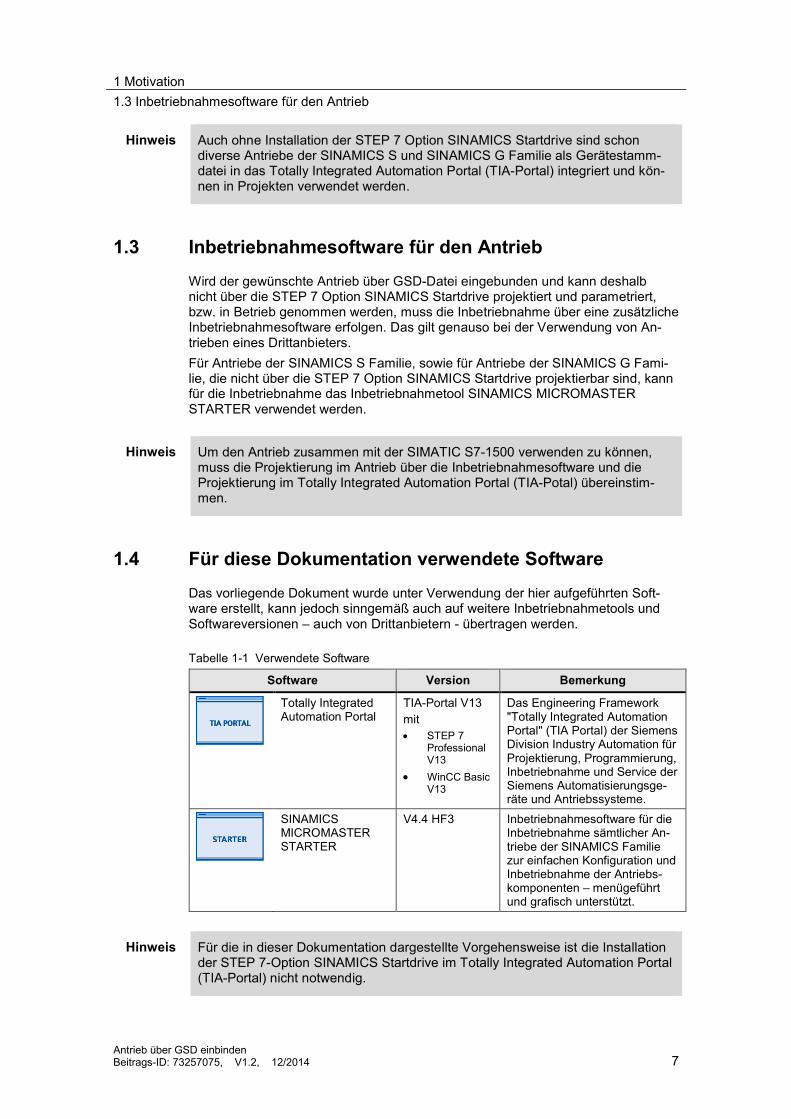
Abbildung 1-3 Hardware-Katalog des TIA-Portals
Hier sind die Antriebe einge-tragen, die über die STEP 7-Option SINAMICS Startdriveprojektiert und parametriert
werden können.
Hier sind die Antriebe einge-tragen, die über GSD-Datei in
das TIA-Portal integriertwurden.
1 Motivation1.3 Inbetriebnahmesoftware für den Antrieb
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 7
Hinweis Auch ohne Installation der STEP 7 Option SINAMICS Startdrive sind schondiverse Antriebe der SINAMICS S und SINAMICS G Familie als Gerätestamm-datei in das Totally Integrated Automation Portal (TIA-Portal) integriert und kön-nen in Projekten verwendet werden.
1.3 Inbetriebnahmesoftware für den AntriebWird der gewünschte Antrieb über GSD-Datei eingebunden und kann deshalbnicht über die STEP 7 Option SINAMICS Startdrive projektiert und parametriert,bzw. in Betrieb genommen werden, muss die Inbetriebnahme über eine zusätzlicheInbetriebnahmesoftware erfolgen. Das gilt genauso bei der Verwendung von An-trieben eines Drittanbieters.Für Antriebe der SINAMICS S Familie, sowie für Antriebe der SINAMICS G Fami-lie, die nicht über die STEP 7 Option SINAMICS Startdrive projektierbar sind, kannfür die Inbetriebnahme das Inbetriebnahmetool SINAMICS MICROMASTERSTARTER verwendet werden.
Hinweis Um den Antrieb zusammen mit der SIMATIC S7-1500 verwenden zu können,muss die Projektierung im Antrieb über die Inbetriebnahmesoftware und dieProjektierung im Totally Integrated Automation Portal (TIA-Potal) übereinstim-men.
1.4 Für diese Dokumentation verwendete SoftwareDas vorliegende Dokument wurde unter Verwendung der hier aufgeführten Soft-ware erstellt, kann jedoch sinngemäß auch auf weitere Inbetriebnahmetools undSoftwareversionen – auch von Drittanbietern - übertragen werden.
Tabelle 1-1 Verwendete Software
Software Version Bemerkung
Totally IntegratedAutomation Portal
TIA-Portal V13mit STEP 7
ProfessionalV13WinCC BasicV13
Das Engineering Framework"Totally Integrated AutomationPortal" (TIA Portal) der SiemensDivision Industry Automation fürProjektierung, Programmierung,Inbetriebnahme und Service derSiemens Automatisierungsge-räte und Antriebssysteme.
SINAMICSMICROMASTERSTARTER
V4.4 HF3 Inbetriebnahmesoftware für dieInbetriebnahme sämtlicher An-triebe der SINAMICS Familiezur einfachen Konfiguration undInbetriebnahme der Antriebs-komponenten – menügeführtund grafisch unterstützt.
Hinweis Für die in dieser Dokumentation dargestellte Vorgehensweise ist die Installationder STEP 7-Option SINAMICS Startdrive im Totally Integrated Automation Portal(TIA-Portal) nicht notwendig.
2 GSD-Dateien im TIA-Portal2.1 Vorhandene GSD-Dateien
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 8
2 GSD-Dateien im TIA-Portal2.1 Vorhandene GSD-Dateien
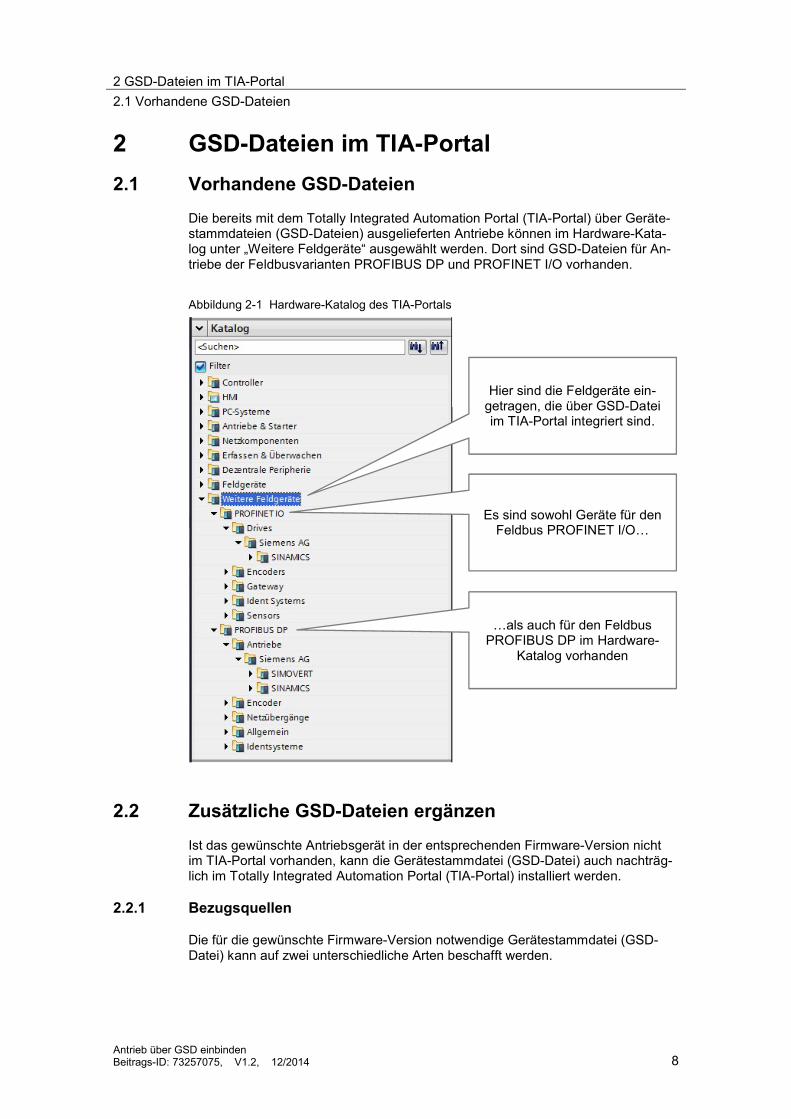
Die bereits mit dem Totally Integrated Automation Portal (TIA-Portal) über Geräte-stammdateien (GSD-Dateien) ausgelieferten Antriebe können im Hardware-Kata-log unter „Weitere Feldgeräte“ ausgewählt werden. Dort sind GSD-Dateien für An-triebe der Feldbusvarianten PROFIBUS DP und PROFINET I/O vorhanden.
Abbildung 2-1 Hardware-Katalog des TIA-Portals
2.2 Zusätzliche GSD-Dateien ergänzen
Ist das gewünschte Antriebsgerät in der entsprechenden Firmware-Version nichtim TIA-Portal vorhanden, kann die Gerätestammdatei (GSD-Datei) auch nachträg-lich im Totally Integrated Automation Portal (TIA-Portal) installiert werden.
2.2.1 Bezugsquellen
Die für die gewünschte Firmware-Version notwendige Gerätestammdatei (GSD-Datei) kann auf zwei unterschiedliche Arten beschafft werden.
Hier sind die Feldgeräte ein-getragen, die über GSD-Dateiim TIA-Portal integriert sind.
Es sind sowohl Geräte für denFeldbus PROFINET I/O…
…als auch für den FeldbusPROFIBUS DP im Hardware-
Katalog vorhanden
2 GSD-Dateien im TIA-Portal2.2 Zusätzliche GSD-Dateien ergänzen
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 9
Download aus dem Siemens Industry Online SupportIm Siemens Industry Online Support stehen verschiedene Downloadseiten bereit,die zu den entsprechenden SINAMICS Antrieben die Gerätestammdateien (GSD-Dateien) zum Download anbieten: Feldbus PROFINET I/O (GSDML-Dateien): siehe \7\. Feldbus PROFIBUS DP (GSD-Dateien): siehe \8\.
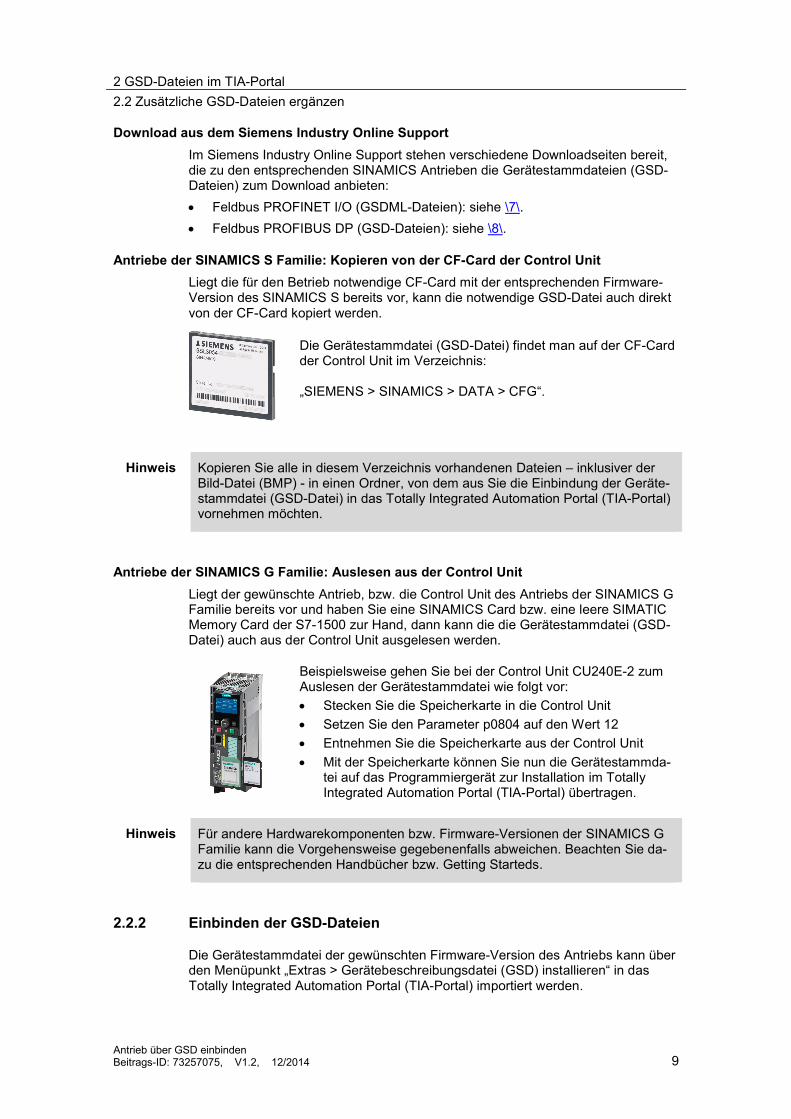
Antriebe der SINAMICS S Familie: Kopieren von der CF-Card der Control UnitLiegt die für den Betrieb notwendige CF-Card mit der entsprechenden Firmware-Version des SINAMICS S bereits vor, kann die notwendige GSD-Datei auch direktvon der CF-Card kopiert werden.
Die Gerätestammdatei (GSD-Datei) findet man auf der CF-Cardder Control Unit im Verzeichnis:
„SIEMENS > SINAMICS > DATA > CFG“.
Hinweis Kopieren Sie alle in diesem Verzeichnis vorhandenen Dateien – inklusiver derBild-Datei (BMP) - in einen Ordner, von dem aus Sie die Einbindung der Geräte-stammdatei (GSD-Datei) in das Totally Integrated Automation Portal (TIA-Portal)vornehmen möchten.
Antriebe der SINAMICS G Familie: Auslesen aus der Control UnitLiegt der gewünschte Antrieb, bzw. die Control Unit des Antriebs der SINAMICS GFamilie bereits vor und haben Sie eine SINAMICS Card bzw. eine leere SIMATICMemory Card der S7-1500 zur Hand, dann kann die die Gerätestammdatei (GSD-Datei) auch aus der Control Unit ausgelesen werden.
Beispielsweise gehen Sie bei der Control Unit CU240E-2 zumAuslesen der Gerätestammdatei wie folgt vor: Stecken Sie die Speicherkarte in die Control Unit Setzen Sie den Parameter p0804 auf den Wert 12 Entnehmen Sie die Speicherkarte aus der Control Unit Mit der Speicherkarte können Sie nun die Gerätestammda-
tei auf das Programmiergerät zur Installation im TotallyIntegrated Automation Portal (TIA-Portal) übertragen.
Hinweis Für andere Hardwarekomponenten bzw. Firmware-Versionen der SINAMICS GFamilie kann die Vorgehensweise gegebenenfalls abweichen. Beachten Sie da-zu die entsprechenden Handbücher bzw. Getting Starteds.
2.2.2 Einbinden der GSD-Dateien
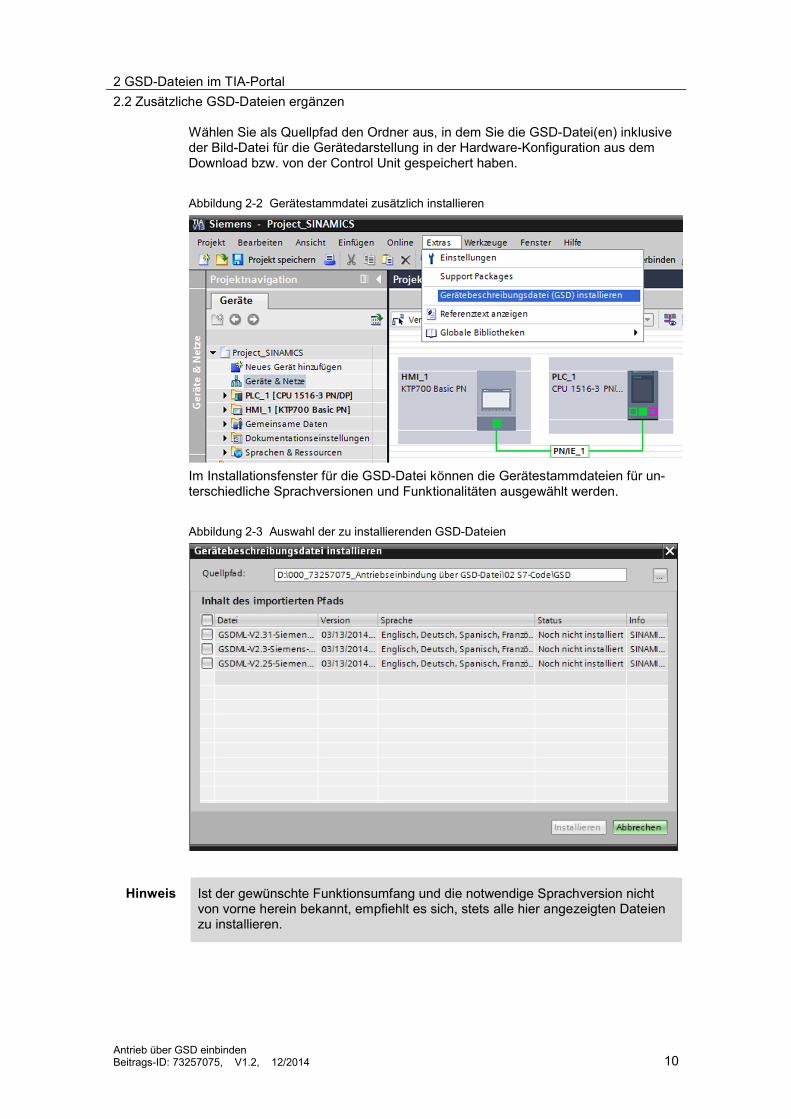
Die Gerätestammdatei der gewünschten Firmware-Version des Antriebs kann überden Menüpunkt „Extras > Gerätebeschreibungsdatei (GSD) installieren“ in dasTotally Integrated Automation Portal (TIA-Portal) importiert werden.
2 GSD-Dateien im TIA-Portal2.2 Zusätzliche GSD-Dateien ergänzen
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 10
Wählen Sie als Quellpfad den Ordner aus, in dem Sie die GSD-Datei(en) inklusiveder Bild-Datei für die Gerätedarstellung in der Hardware-Konfiguration aus demDownload bzw. von der Control Unit gespeichert haben.
Abbildung 2-2 Gerätestammdatei zusätzlich installieren
Im Installationsfenster für die GSD-Datei können die Gerätestammdateien für un-terschiedliche Sprachversionen und Funktionalitäten ausgewählt werden.
Abbildung 2-3 Auswahl der zu installierenden GSD-Dateien
Hinweis Ist der gewünschte Funktionsumfang und die notwendige Sprachversion nichtvon vorne herein bekannt, empfiehlt es sich, stets alle hier angezeigten Dateienzu installieren.
3 Anbindung eines Antriebs an die S7-15003.1 Auswahl des Antriebs aus dem Hardware-Katalog
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 11
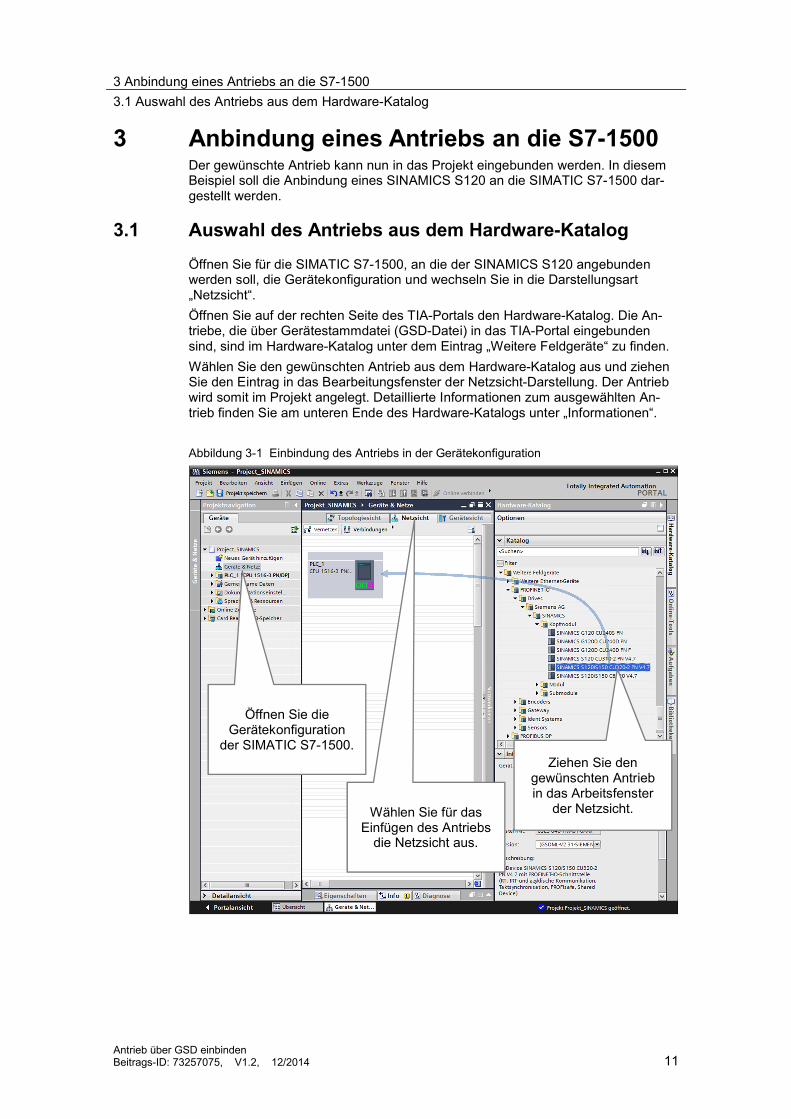
3 Anbindung eines Antriebs an die S7-1500Der gewünschte Antrieb kann nun in das Projekt eingebunden werden. In diesemBeispiel soll die Anbindung eines SINAMICS S120 an die SIMATIC S7-1500 dar-gestellt werden.
3.1 Auswahl des Antriebs aus dem Hardware-Katalog
Öffnen Sie für die SIMATIC S7-1500, an die der SINAMICS S120 angebundenwerden soll, die Gerätekonfiguration und wechseln Sie in die Darstellungsart„Netzsicht“.Öffnen Sie auf der rechten Seite des TIA-Portals den Hardware-Katalog. Die An-triebe, die über Gerätestammdatei (GSD-Datei) in das TIA-Portal eingebundensind, sind im Hardware-Katalog unter dem Eintrag „Weitere Feldgeräte“ zu finden.Wählen Sie den gewünschten Antrieb aus dem Hardware-Katalog aus und ziehenSie den Eintrag in das Bearbeitungsfenster der Netzsicht-Darstellung. Der Antriebwird somit im Projekt angelegt. Detaillierte Informationen zum ausgewählten An-trieb finden Sie am unteren Ende des Hardware-Katalogs unter „Informationen“.
Abbildung 3-1 Einbindung des Antriebs in der Gerätekonfiguration
Öffnen Sie dieGerätekonfiguration
der SIMATIC S7-1500.Ziehen Sie den
gewünschten Antriebin das Arbeitsfenster
der Netzsicht.Wählen Sie für dasEinfügen des Antriebs
die Netzsicht aus.
3 Anbindung eines Antriebs an die S7-15003.2 Herstellung der Busverbindung
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 12
Hinweis Achten Sie bei der Auswahl des gewünschten Antriebs auf die richtige Wahl derFeldbus-Technologie. Andernfalls ist die Herstellung der Busverbindung zwi-schen der SIMATIC S7-1500 und dem Antrieb mit dem gewünschten Feldbusnicht möglich.
3.2 Herstellung der BusverbindungIst der Antrieb in das Projekt eingefügt, kann in der „Netzsicht“ die Busverbindungzwischen der SIMATIC S7-1500 und dem neu eingefügten Antrieb hergestelltwerden.
Hinweis Über die Busverbindung wird zunächst einmal der Kommunikationspartner derSIMATIC S7-1500 bzw. des Antriebs festgelegt. Eine Projektierung der auszu-tauschenden Daten zwischen SIMATIC S7-1500 und Antrieb findet hier nochnicht statt. Mit der Busverbindung wird lediglich die Möglichkeit eines Datenaus-tauschs geschaffen und die physikalische Schnittstelle festgelegt.
3.2.1 Feldbus PROFIBUS DP
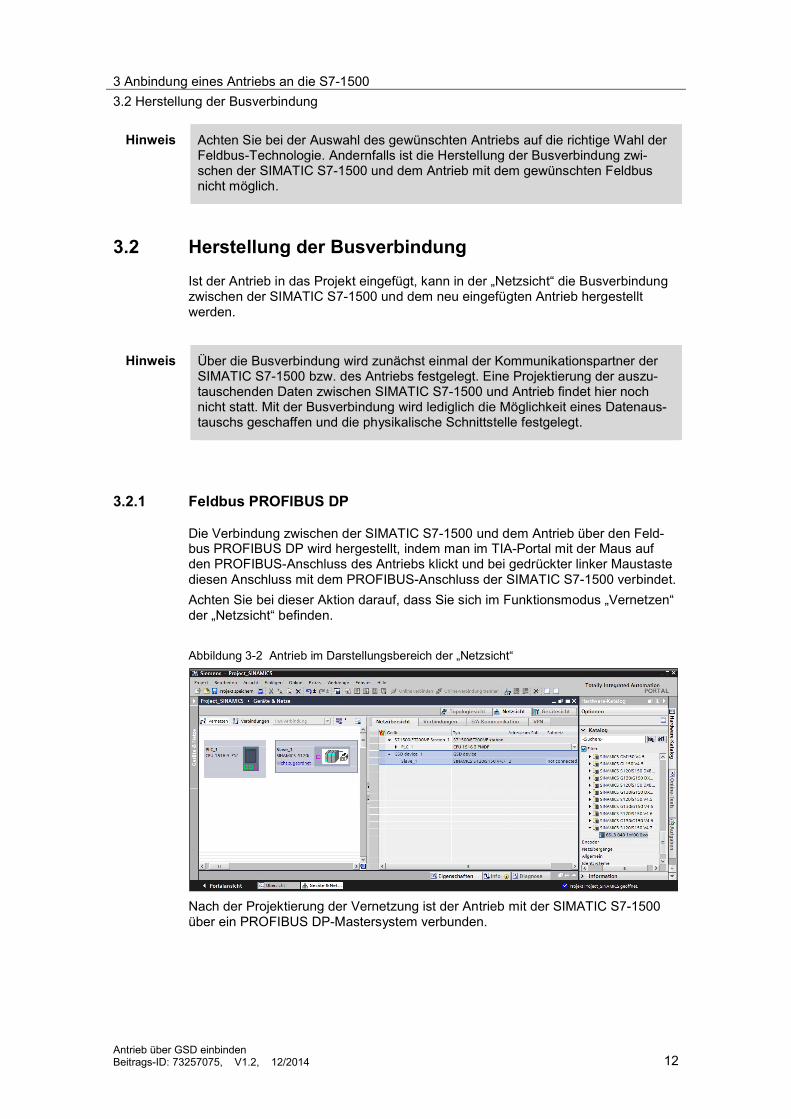
Die Verbindung zwischen der SIMATIC S7-1500 und dem Antrieb über den Feld-bus PROFIBUS DP wird hergestellt, indem man im TIA-Portal mit der Maus aufden PROFIBUS-Anschluss des Antriebs klickt und bei gedrückter linker Maustastediesen Anschluss mit dem PROFIBUS-Anschluss der SIMATIC S7-1500 verbindet.Achten Sie bei dieser Aktion darauf, dass Sie sich im Funktionsmodus „Vernetzen“der „Netzsicht“ befinden.
Abbildung 3-2 Antrieb im Darstellungsbereich der „Netzsicht“
Nach der Projektierung der Vernetzung ist der Antrieb mit der SIMATIC S7-1500über ein PROFIBUS DP-Mastersystem verbunden.
3 Anbindung eines Antriebs an die S7-15003.2 Herstellung der Busverbindung
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 13
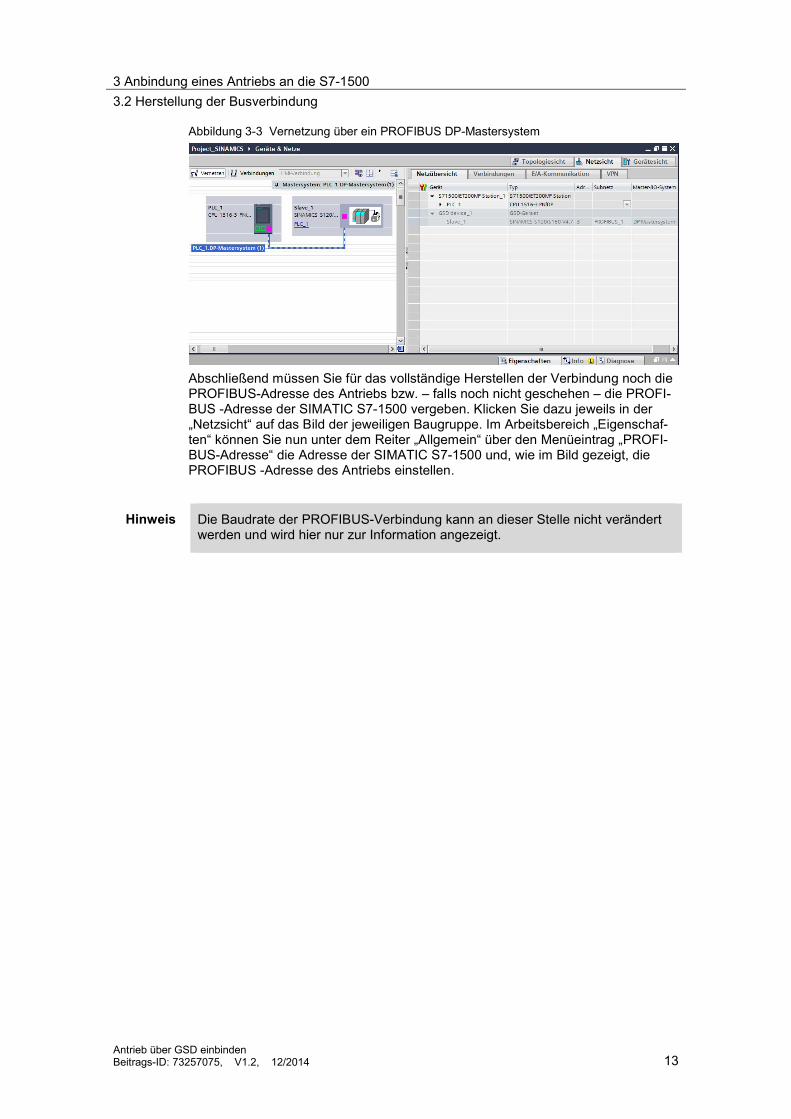
Abbildung 3-3 Vernetzung über ein PROFIBUS DP-Mastersystem
Abschließend müssen Sie für das vollständige Herstellen der Verbindung noch diePROFIBUS-Adresse des Antriebs bzw. – falls noch nicht geschehen – die PROFI-BUS -Adresse der SIMATIC S7-1500 vergeben. Klicken Sie dazu jeweils in der„Netzsicht“ auf das Bild der jeweiligen Baugruppe. Im Arbeitsbereich „Eigenschaf-ten“ können Sie nun unter dem Reiter „Allgemein“ über den Menüeintrag „PROFI-BUS-Adresse“ die Adresse der SIMATIC S7-1500 und, wie im Bild gezeigt, diePROFIBUS -Adresse des Antriebs einstellen.
Hinweis Die Baudrate der PROFIBUS-Verbindung kann an dieser Stelle nicht verändertwerden und wird hier nur zur Information angezeigt.
3 Anbindung eines Antriebs an die S7-15003.2 Herstellung der Busverbindung
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 14
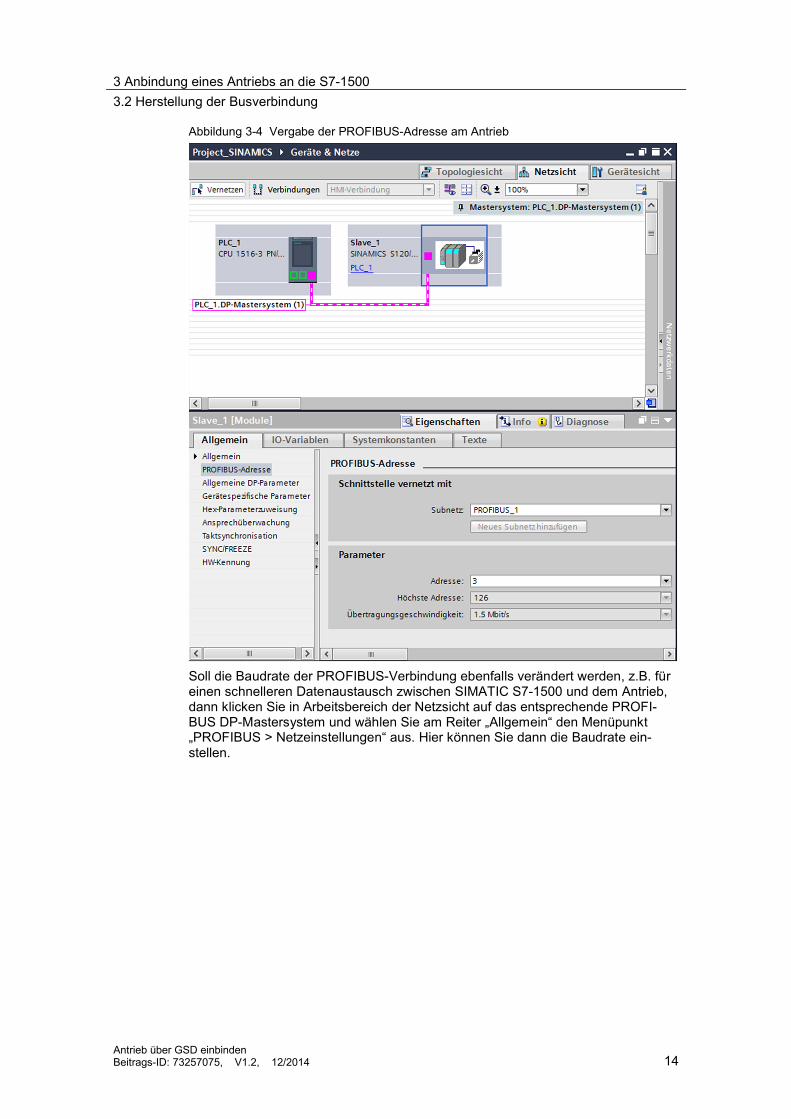
Abbildung 3-4 Vergabe der PROFIBUS-Adresse am Antrieb
Soll die Baudrate der PROFIBUS-Verbindung ebenfalls verändert werden, z.B. füreinen schnelleren Datenaustausch zwischen SIMATIC S7-1500 und dem Antrieb,dann klicken Sie in Arbeitsbereich der Netzsicht auf das entsprechende PROFI-BUS DP-Mastersystem und wählen Sie am Reiter „Allgemein“ den Menüpunkt„PROFIBUS > Netzeinstellungen“ aus. Hier können Sie dann die Baudrate ein-stellen.
3 Anbindung eines Antriebs an die S7-15003.2 Herstellung der Busverbindung
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 15
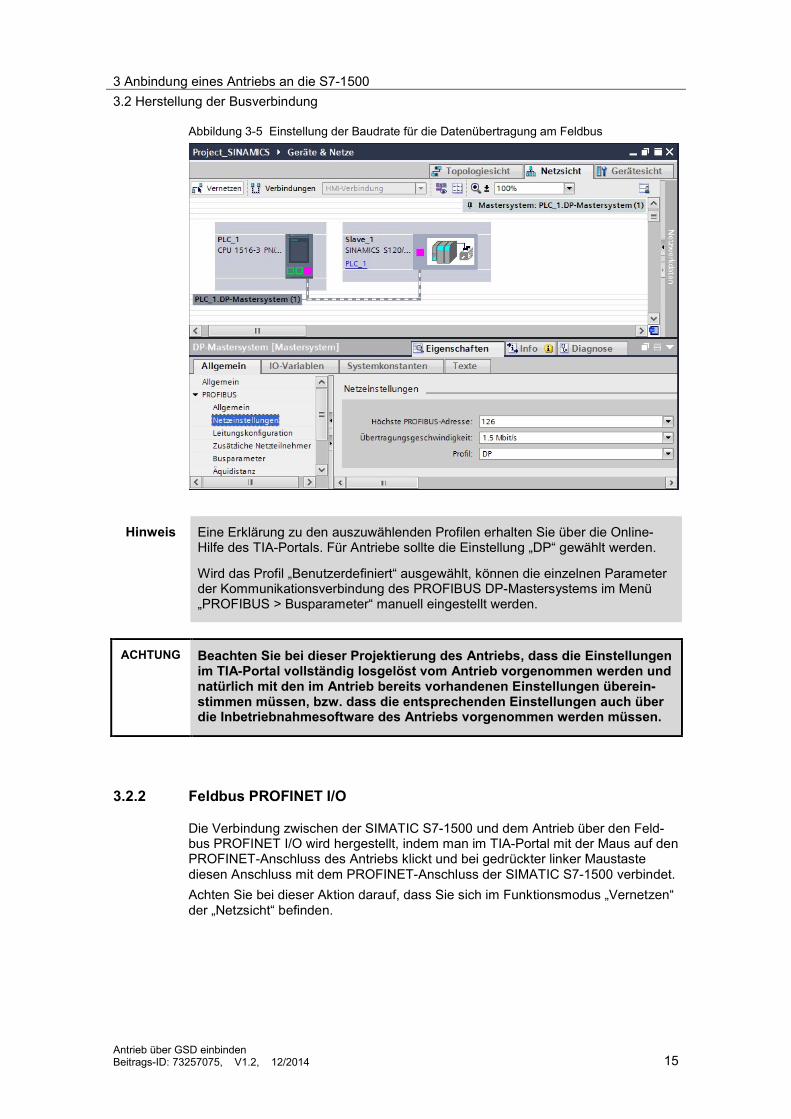
Abbildung 3-5 Einstellung der Baudrate für die Datenübertragung am Feldbus
Hinweis Eine Erklärung zu den auszuwählenden Profilen erhalten Sie über die Online-Hilfe des TIA-Portals. Für Antriebe sollte die Einstellung „DP“ gewählt werden.
Wird das Profil „Benutzerdefiniert“ ausgewählt, können die einzelnen Parameterder Kommunikationsverbindung des PROFIBUS DP-Mastersystems im Menü„PROFIBUS > Busparameter“ manuell eingestellt werden.
ACHTUNG Beachten Sie bei dieser Projektierung des Antriebs, dass die Einstellungenim TIA-Portal vollständig losgelöst vom Antrieb vorgenommen werden undnatürlich mit den im Antrieb bereits vorhandenen Einstellungen überein-stimmen müssen, bzw. dass die entsprechenden Einstellungen auch überdie Inbetriebnahmesoftware des Antriebs vorgenommen werden müssen.
3.2.2 Feldbus PROFINET I/O
Die Verbindung zwischen der SIMATIC S7-1500 und dem Antrieb über den Feld-bus PROFINET I/O wird hergestellt, indem man im TIA-Portal mit der Maus auf denPROFINET-Anschluss des Antriebs klickt und bei gedrückter linker Maustastediesen Anschluss mit dem PROFINET-Anschluss der SIMATIC S7-1500 verbindet.Achten Sie bei dieser Aktion darauf, dass Sie sich im Funktionsmodus „Vernetzen“der „Netzsicht“ befinden.
3 Anbindung eines Antriebs an die S7-15003.2 Herstellung der Busverbindung
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 16
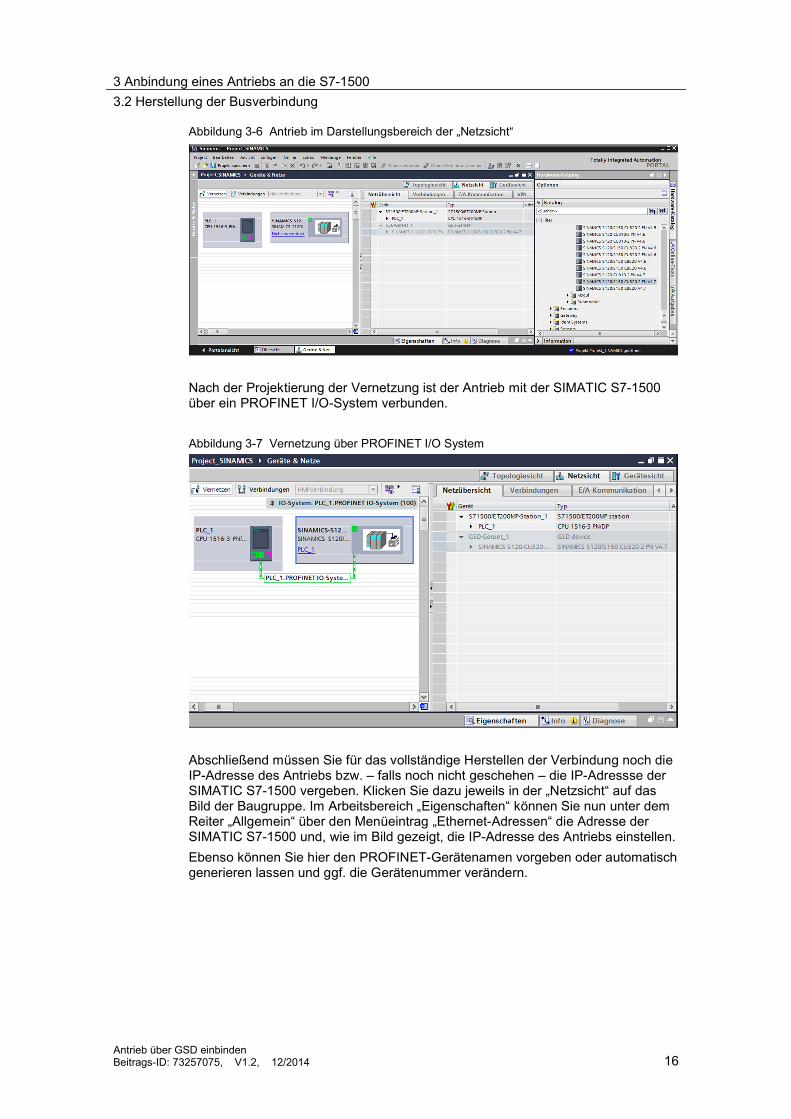
Abbildung 3-6 Antrieb im Darstellungsbereich der „Netzsicht“
Nach der Projektierung der Vernetzung ist der Antrieb mit der SIMATIC S7-1500über ein PROFINET I/O-System verbunden.
Abbildung 3-7 Vernetzung über PROFINET I/O System
Abschließend müssen Sie für das vollständige Herstellen der Verbindung noch dieIP-Adresse des Antriebs bzw. – falls noch nicht geschehen – die IP-Adressse derSIMATIC S7-1500 vergeben. Klicken Sie dazu jeweils in der „Netzsicht“ auf dasBild der Baugruppe. Im Arbeitsbereich „Eigenschaften“ können Sie nun unter demReiter „Allgemein“ über den Menüeintrag „Ethernet-Adressen“ die Adresse derSIMATIC S7-1500 und, wie im Bild gezeigt, die IP-Adresse des Antriebs einstellen.Ebenso können Sie hier den PROFINET-Gerätenamen vorgeben oder automatischgenerieren lassen und ggf. die Gerätenummer verändern.
3 Anbindung eines Antriebs an die S7-15003.2 Herstellung der Busverbindung
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 17
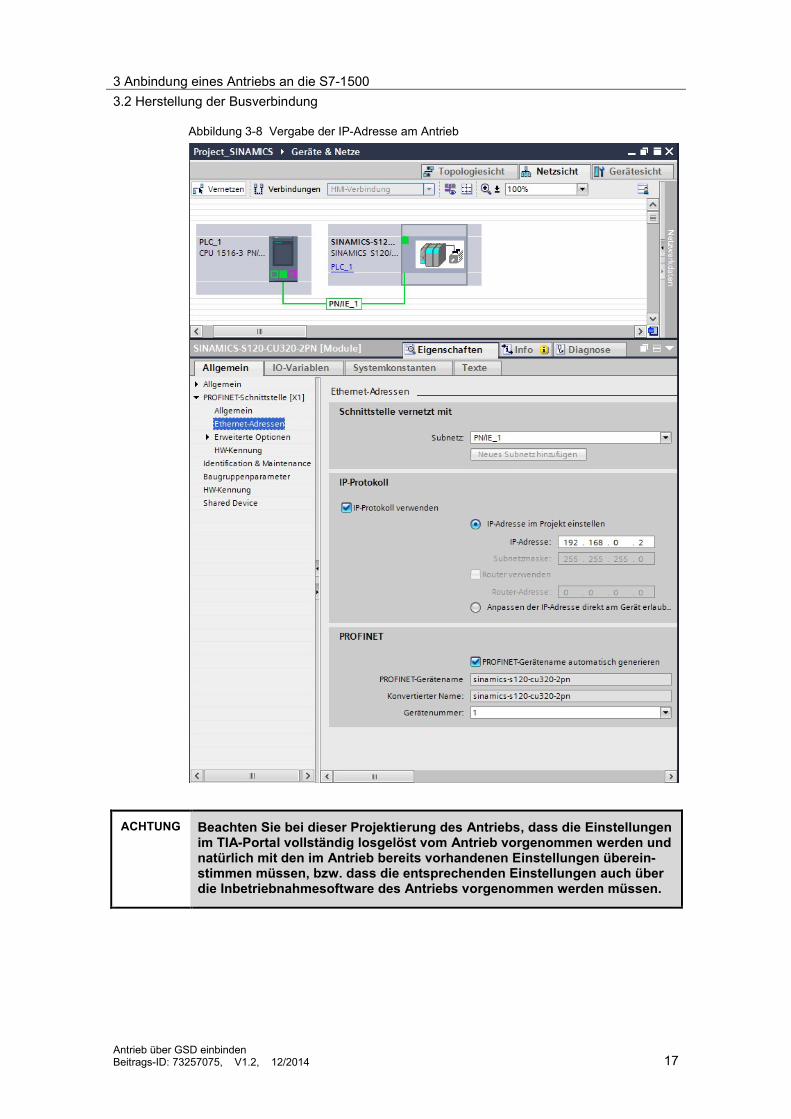
Abbildung 3-8 Vergabe der IP-Adresse am Antrieb
ACHTUNG Beachten Sie bei dieser Projektierung des Antriebs, dass die Einstellungenim TIA-Portal vollständig losgelöst vom Antrieb vorgenommen werden undnatürlich mit den im Antrieb bereits vorhandenen Einstellungen überein-stimmen müssen, bzw. dass die entsprechenden Einstellungen auch überdie Inbetriebnahmesoftware des Antriebs vorgenommen werden müssen.
4 Aufbau der Kommunikationsverbindung4.1 Telegrammauswahl
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 18
4 Aufbau der Kommunikationsverbindung4.1 Telegrammauswahl
Der Datenaustausch zwischen der SIMATIC S7-1500 und dem Antrieb erfolgt übersogenannte Telegramme, über die die auszutauschenden Daten nach PROFIdrive-Standard festgelegt werden.
4.1.1 Mit der SIMATIC S7-1500 nutzbare Antriebstelegramme
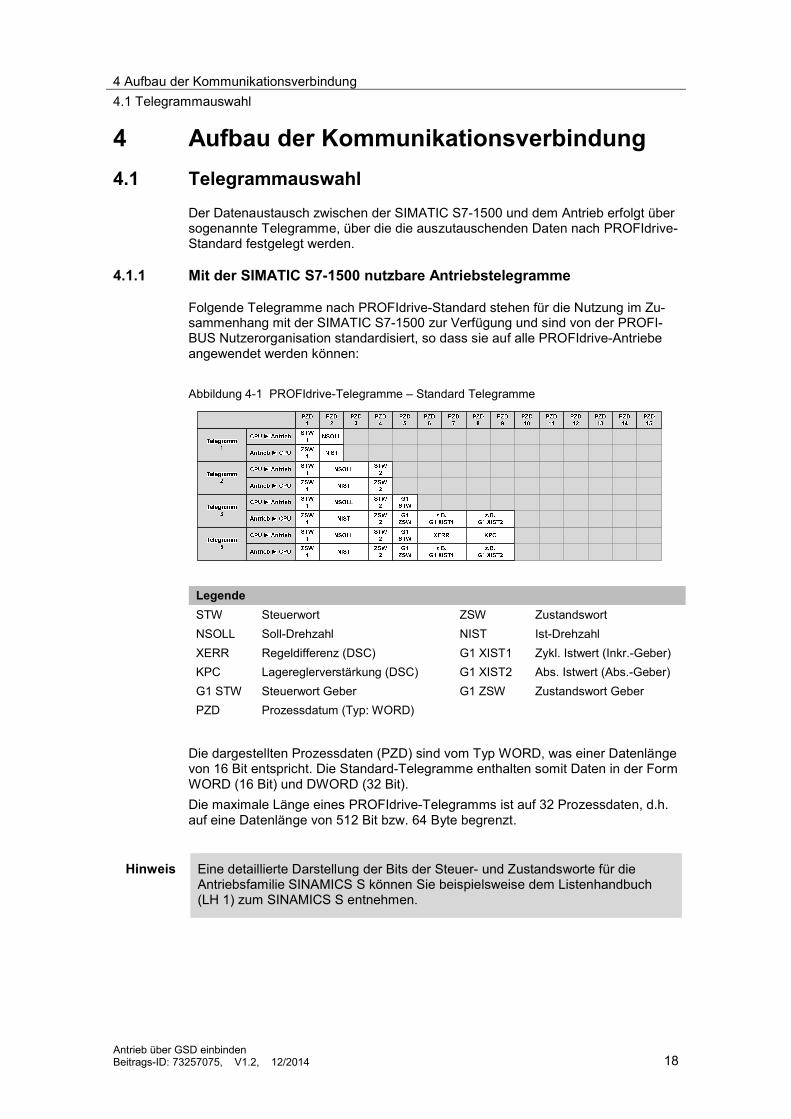
Folgende Telegramme nach PROFIdrive-Standard stehen für die Nutzung im Zu-sammenhang mit der SIMATIC S7-1500 zur Verfügung und sind von der PROFI-BUS Nutzerorganisation standardisiert, so dass sie auf alle PROFIdrive-Antriebeangewendet werden können:
Abbildung 4-1 PROFIdrive-Telegramme – Standard Telegramme
LegendeSTW Steuerwort ZSW ZustandswortNSOLL Soll-Drehzahl NIST Ist-DrehzahlXERR Regeldifferenz (DSC) G1 XIST1 Zykl. Istwert (Inkr.-Geber)KPC Lagereglerverstärkung (DSC) G1 XIST2 Abs. Istwert (Abs.-Geber)G1 STW Steuerwort Geber G1 ZSW Zustandswort GeberPZD Prozessdatum (Typ: WORD)
Die dargestellten Prozessdaten (PZD) sind vom Typ WORD, was einer Datenlängevon 16 Bit entspricht. Die Standard-Telegramme enthalten somit Daten in der FormWORD (16 Bit) und DWORD (32 Bit).Die maximale Länge eines PROFIdrive-Telegramms ist auf 32 Prozessdaten, d.h.auf eine Datenlänge von 512 Bit bzw. 64 Byte begrenzt.
Hinweis Eine detaillierte Darstellung der Bits der Steuer- und Zustandsworte für dieAntriebsfamilie SINAMICS S können Sie beispielsweise dem Listenhandbuch(LH 1) zum SINAMICS S entnehmen.
4 Aufbau der Kommunikationsverbindung4.1 Telegrammauswahl
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 19
4.1.2 Auswahlhilfe zu den Antriebstelegrammen
Zur Auswahl des geeigneten Telegramms für die Datenübertragung zwischen derSIMATIC S7-1500 und dem Antrieb müssen die Hauptunterscheidungskriterien derTelegramme näher betrachtet werden: Genauigkeit des übertragenen Soll- und Istwerts
Reicht für das Erreichen der gewünschten Funktion (Abstufungen der Dreh-zahlsollwerte bzw. Regelungsverhalten der Lageregelung) die Übergabe desDrehzahlsollwerts an den Antrieb in 16-Bit Auflösung aus?
Übertragung des am Antrieb angeschlossenen GeberwertsSoll für die Lageregelung in der SIMATIC S7-1500 der Istwert eines am Antriebangeschlossenen Gebers an die Steuerung übertragen werden?
Nutzung der Antriebsfunktion DSC (Dynamic Servo Control)Soll zur Verbesserung der Regelungseigenschaften des Antriebs die Antriebs-funktion DSC (Dynamic Servo Control) genutzt werden, die eine schnelle Aus-regelung von Störungen direkt im Antrieb ermöglicht?
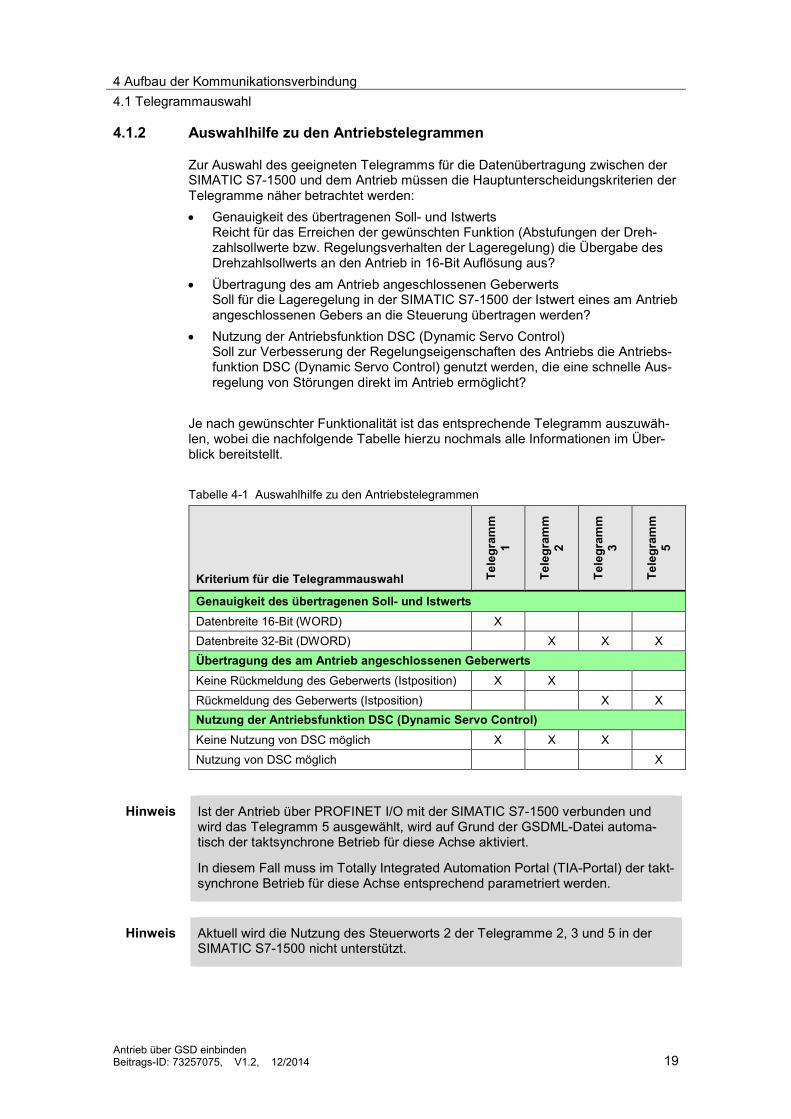
Je nach gewünschter Funktionalität ist das entsprechende Telegramm auszuwäh-len, wobei die nachfolgende Tabelle hierzu nochmals alle Informationen im Über-blick bereitstellt.
Tabelle 4-1 Auswahlhilfe zu den Antriebstelegrammen
Kriterium für die Telegrammauswahl Tele
gram
m1
Tele
gram
m2
Tele
gram
m3
Tele
gram
m5
Genauigkeit des übertragenen Soll- und IstwertsDatenbreite 16-Bit (WORD) XDatenbreite 32-Bit (DWORD) X X XÜbertragung des am Antrieb angeschlossenen GeberwertsKeine Rückmeldung des Geberwerts (Istposition) X XRückmeldung des Geberwerts (Istposition) X XNutzung der Antriebsfunktion DSC (Dynamic Servo Control)Keine Nutzung von DSC möglich X X XNutzung von DSC möglich X
Hinweis Ist der Antrieb über PROFINET I/O mit der SIMATIC S7-1500 verbunden undwird das Telegramm 5 ausgewählt, wird auf Grund der GSDML-Datei automa-tisch der taktsynchrone Betrieb für diese Achse aktiviert.
In diesem Fall muss im Totally Integrated Automation Portal (TIA-Portal) der takt-synchrone Betrieb für diese Achse entsprechend parametriert werden.
Hinweis Aktuell wird die Nutzung des Steuerworts 2 der Telegramme 2, 3 und 5 in derSIMATIC S7-1500 nicht unterstützt.

4 Aufbau der Kommunikationsverbindung4.2 Verbindung über PROFIBUS DP
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 20
4.1.3 Zusätzliche Telegramme der Antriebsfamilie SINAMICS S
Die Antriebsfamilie SINAMICS S stellt zusätzlich zu den Antriebstelegrammennoch Siemens-spezifische Zusatztelegramme für den Datenaustausch zwischender SIMATIC S7-1500 und der Control Unit bzw. der Einspeisung (Active Infeed –Active Line Module) des Antriebs zur Verfügung.Folgende Zusatztelegramme können für den Datenaustausch genutzt werden:
Abbildung 4-2 Zusätzliche Telegramme der Antriebsfamilie SINAMICS S
LegendeE_STW Steuerwort Einspeisung E_ZSW Zustandswort EinspeisungA Digital Digitale Ausgänge der CU E Digital Digitale Eingänge der CUMT STW Messtaster Steuerwort MT ZSW Messtaster ZustandswortMT1 Messtaster 1 MT6 Messtaster 6ZS_F Messzeit fallende Flanke ZS_S Messzeit steigende Flanke
Die zusätzlichen Telegramme der Antriebsfamilie SINAMICS S können nur überdas Anwenderprogramm der SIMATIC S7-1500 angesprochen bzw. ausgewertetwerden. Eine Nutzung dieser Telegramme über Technologieobjekte der MotionControl Funktionen der SIMATIC S7-1500 ist nicht möglich.Über diese Telegramme kann sehr leicht eine Beeinflussung der Control Unit bzw.der Einspeisung des Antriebs und eine Nutzung der digitalen Ein- und Ausgängeder Control Unit in der SIMATIC S7-1500, z.B. für Endschaltersignale, realisiertwerden.
Hinweis Das Einschalten eines Active Infeed bzw. eines Active Line Modules (ALM) zurNutzung der Antriebsachsen muss gesondert, beispielsweise über das hier ge-nannte Telegramm 370, durchgeführt werden.Ein automatisches Einschalten der Einspeisung über die Technologiefunktion„MC_Power“ wird nicht durchgeführt.
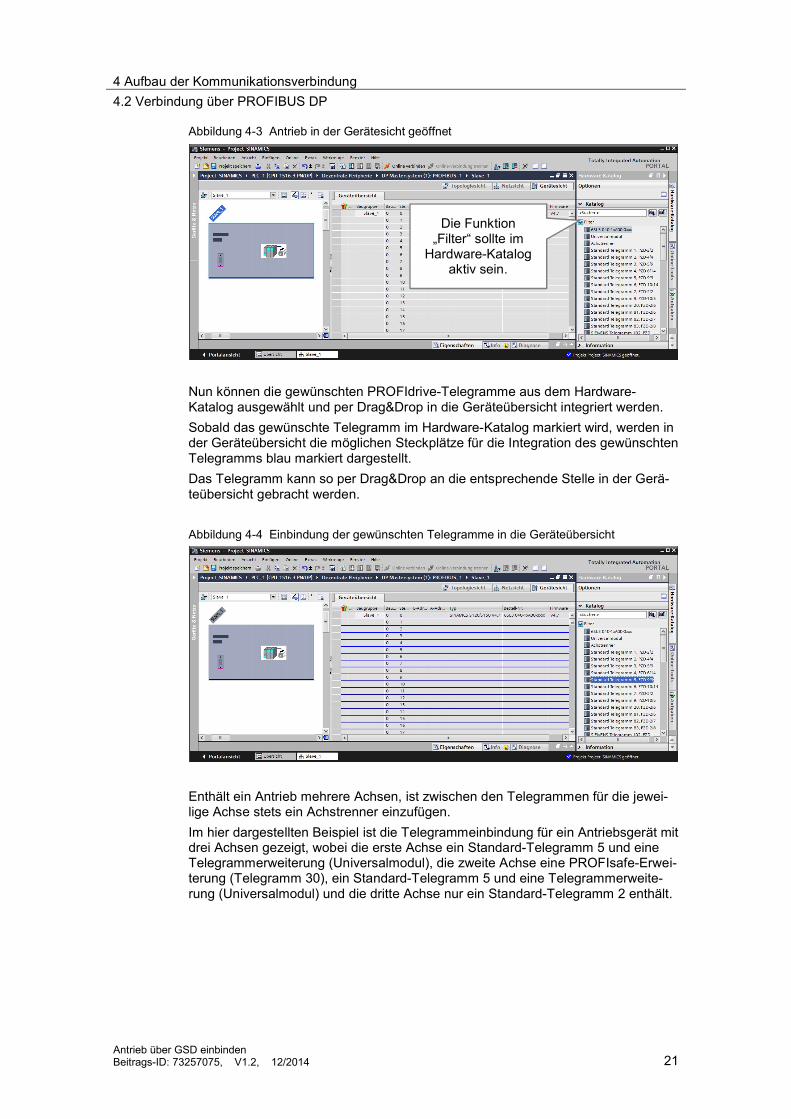
4.2 Verbindung über PROFIBUS DPWechseln Sie im Totally Integrated Automation Portal (TIA-Portal) durch einenDoppelklick auf den gewünschten Antrieb in die „Gerätesicht“. Ist im Hardware-Katalog die Funktion „Filter“ aktiviert, werden Ihnen automatisch die für diesenAntrieb verfügbaren PROFIdrive-Telegramme angezeigt.
4 Aufbau der Kommunikationsverbindung4.2 Verbindung über PROFIBUS DP
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 21
Abbildung 4-3 Antrieb in der Gerätesicht geöffnet
Nun können die gewünschten PROFIdrive-Telegramme aus dem Hardware-Katalog ausgewählt und per Drag&Drop in die Geräteübersicht integriert werden.Sobald das gewünschte Telegramm im Hardware-Katalog markiert wird, werden inder Geräteübersicht die möglichen Steckplätze für die Integration des gewünschtenTelegramms blau markiert dargestellt.Das Telegramm kann so per Drag&Drop an die entsprechende Stelle in der Gerä-teübersicht gebracht werden.
Abbildung 4-4 Einbindung der gewünschten Telegramme in die Geräteübersicht
Enthält ein Antrieb mehrere Achsen, ist zwischen den Telegrammen für die jewei-lige Achse stets ein Achstrenner einzufügen.Im hier dargestellten Beispiel ist die Telegrammeinbindung für ein Antriebsgerät mitdrei Achsen gezeigt, wobei die erste Achse ein Standard-Telegramm 5 und eineTelegrammerweiterung (Universalmodul), die zweite Achse eine PROFIsafe-Erwei-terung (Telegramm 30), ein Standard-Telegramm 5 und eine Telegrammerweite-rung (Universalmodul) und die dritte Achse nur ein Standard-Telegramm 2 enthält.
Die Funktion„Filter“ sollte im
Hardware-Katalogaktiv sein.
4 Aufbau der Kommunikationsverbindung4.2 Verbindung über PROFIBUS DP
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 22
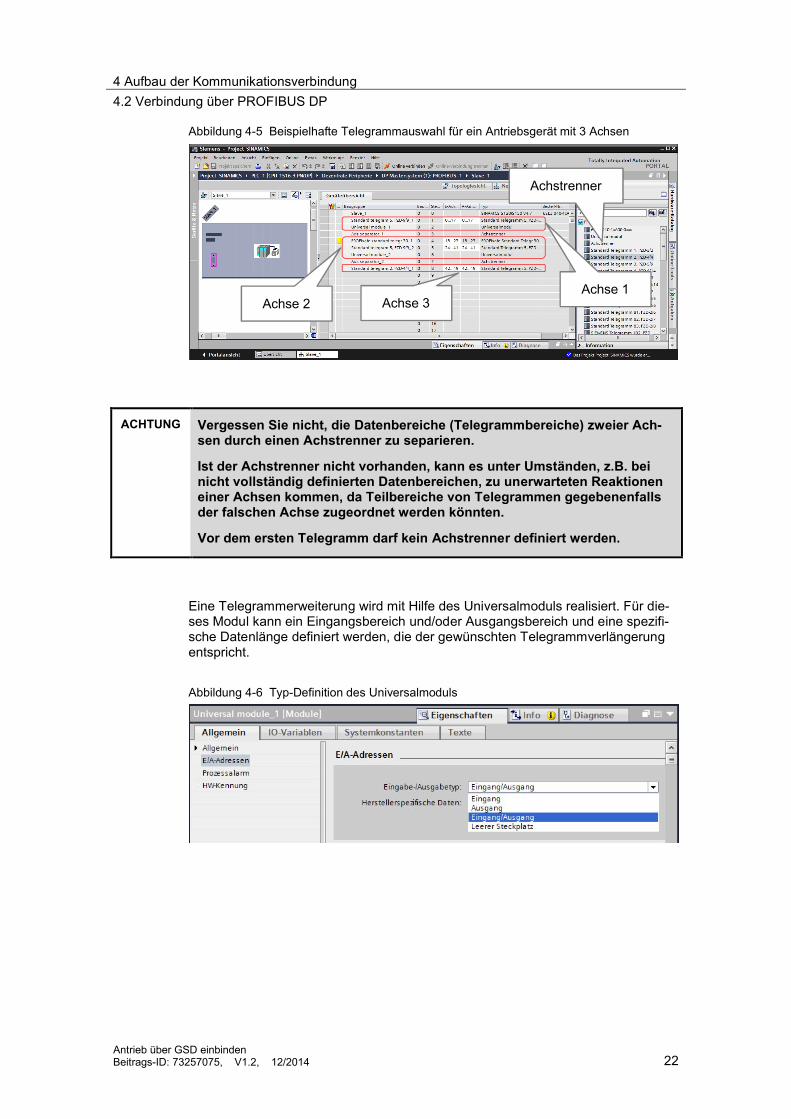
Abbildung 4-5 Beispielhafte Telegrammauswahl für ein Antriebsgerät mit 3 Achsen
ACHTUNG Vergessen Sie nicht, die Datenbereiche (Telegrammbereiche) zweier Ach-sen durch einen Achstrenner zu separieren.
Ist der Achstrenner nicht vorhanden, kann es unter Umständen, z.B. beinicht vollständig definierten Datenbereichen, zu unerwarteten Reaktioneneiner Achsen kommen, da Teilbereiche von Telegrammen gegebenenfallsder falschen Achse zugeordnet werden könnten.
Vor dem ersten Telegramm darf kein Achstrenner definiert werden.
Eine Telegrammerweiterung wird mit Hilfe des Universalmoduls realisiert. Für die-ses Modul kann ein Eingangsbereich und/oder Ausgangsbereich und eine spezifi-sche Datenlänge definiert werden, die der gewünschten Telegrammverlängerungentspricht.
Abbildung 4-6 Typ-Definition des Universalmoduls
Achse 1Achse 2 Achse 3
Achstrenner
4 Aufbau der Kommunikationsverbindung4.2 Verbindung über PROFIBUS DP
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 23
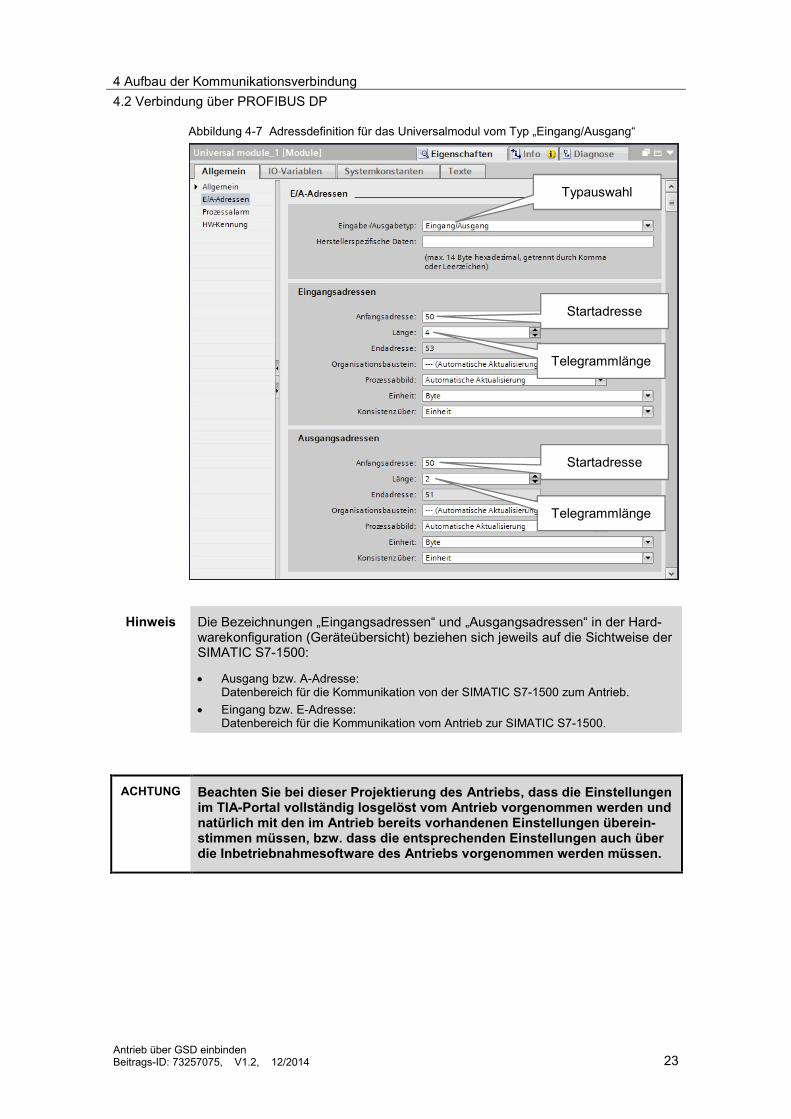
Abbildung 4-7 Adressdefinition für das Universalmodul vom Typ „Eingang/Ausgang“
Hinweis Die Bezeichnungen „Eingangsadressen“ und „Ausgangsadressen“ in der Hard-warekonfiguration (Geräteübersicht) beziehen sich jeweils auf die Sichtweise derSIMATIC S7-1500:
Ausgang bzw. A-Adresse:Datenbereich für die Kommunikation von der SIMATIC S7-1500 zum Antrieb.
Eingang bzw. E-Adresse:Datenbereich für die Kommunikation vom Antrieb zur SIMATIC S7-1500.
ACHTUNG Beachten Sie bei dieser Projektierung des Antriebs, dass die Einstellungenim TIA-Portal vollständig losgelöst vom Antrieb vorgenommen werden undnatürlich mit den im Antrieb bereits vorhandenen Einstellungen überein-stimmen müssen, bzw. dass die entsprechenden Einstellungen auch überdie Inbetriebnahmesoftware des Antriebs vorgenommen werden müssen.
Typauswahl
Startadresse
Telegrammlänge
Startadresse
Telegrammlänge
4 Aufbau der Kommunikationsverbindung4.3 Verbindung über PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 24
4.3 Verbindung über PROFINET I/O
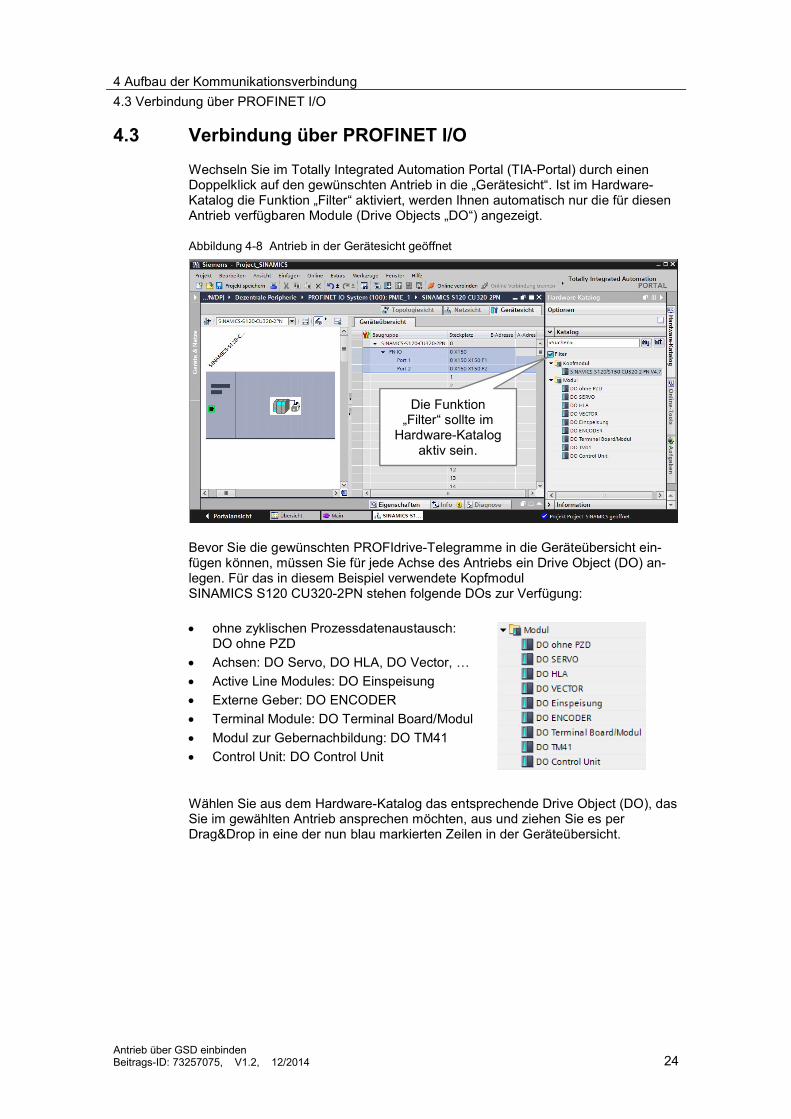
Wechseln Sie im Totally Integrated Automation Portal (TIA-Portal) durch einenDoppelklick auf den gewünschten Antrieb in die „Gerätesicht“. Ist im Hardware-Katalog die Funktion „Filter“ aktiviert, werden Ihnen automatisch nur die für diesenAntrieb verfügbaren Module (Drive Objects „DO“) angezeigt.
Abbildung 4-8 Antrieb in der Gerätesicht geöffnet
Bevor Sie die gewünschten PROFIdrive-Telegramme in die Geräteübersicht ein-fügen können, müssen Sie für jede Achse des Antriebs ein Drive Object (DO) an-legen. Für das in diesem Beispiel verwendete KopfmodulSINAMICS S120 CU320-2PN stehen folgende DOs zur Verfügung:
ohne zyklischen Prozessdatenaustausch:DO ohne PZD
Achsen: DO Servo, DO HLA, DO Vector, … Active Line Modules: DO Einspeisung Externe Geber: DO ENCODER Terminal Module: DO Terminal Board/Modul Modul zur Gebernachbildung: DO TM41 Control Unit: DO Control Unit
Wählen Sie aus dem Hardware-Katalog das entsprechende Drive Object (DO), dasSie im gewählten Antrieb ansprechen möchten, aus und ziehen Sie es perDrag&Drop in eine der nun blau markierten Zeilen in der Geräteübersicht.
Die Funktion„Filter“ sollte im
Hardware-Katalogaktiv sein.
4 Aufbau der Kommunikationsverbindung4.3 Verbindung über PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 25
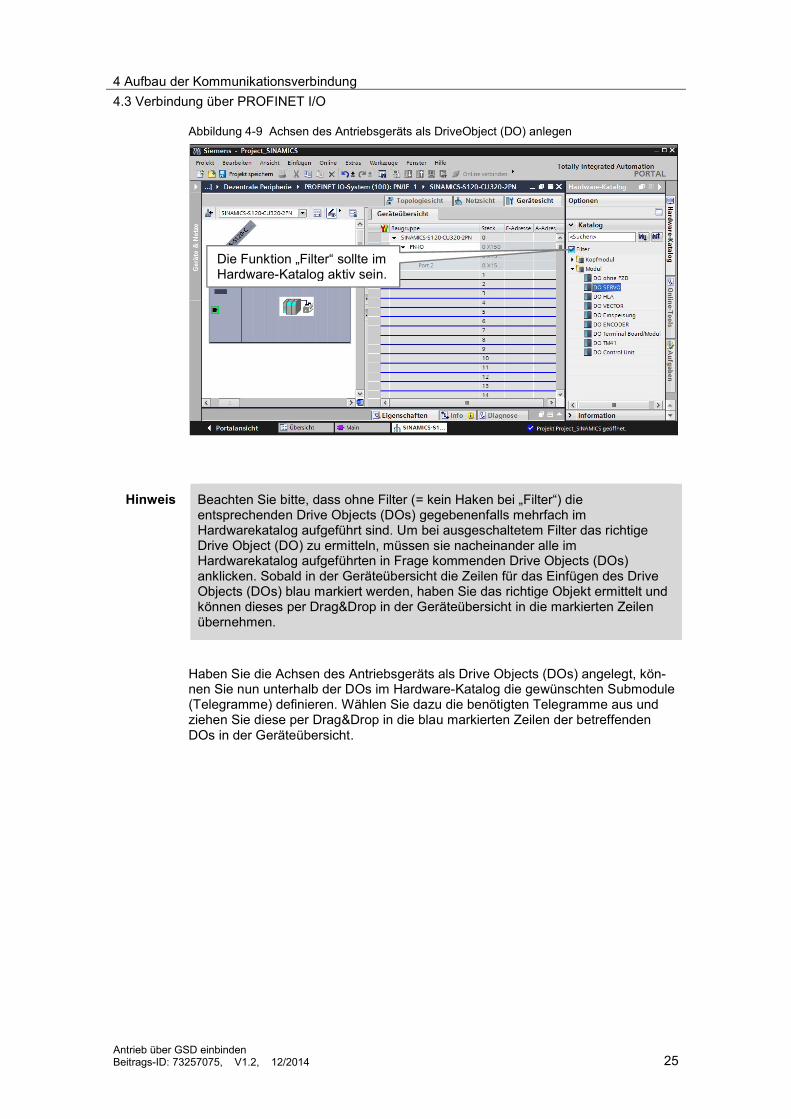
Abbildung 4-9 Achsen des Antriebsgeräts als DriveObject (DO) anlegen
Hinweis Beachten Sie bitte, dass ohne Filter (= kein Haken bei „Filter“) dieentsprechenden Drive Objects (DOs) gegebenenfalls mehrfach imHardwarekatalog aufgeführt sind. Um bei ausgeschaltetem Filter das richtigeDrive Object (DO) zu ermitteln, müssen sie nacheinander alle imHardwarekatalog aufgeführten in Frage kommenden Drive Objects (DOs)anklicken. Sobald in der Geräteübersicht die Zeilen für das Einfügen des DriveObjects (DOs) blau markiert werden, haben Sie das richtige Objekt ermittelt undkönnen dieses per Drag&Drop in der Geräteübersicht in die markierten Zeilenübernehmen.
Haben Sie die Achsen des Antriebsgeräts als Drive Objects (DOs) angelegt, kön-nen Sie nun unterhalb der DOs im Hardware-Katalog die gewünschten Submodule(Telegramme) definieren. Wählen Sie dazu die benötigten Telegramme aus undziehen Sie diese per Drag&Drop in die blau markierten Zeilen der betreffendenDOs in der Geräteübersicht.
Die Funktion „Filter“ sollte imHardware-Katalog aktiv sein.
4 Aufbau der Kommunikationsverbindung4.3 Verbindung über PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 26
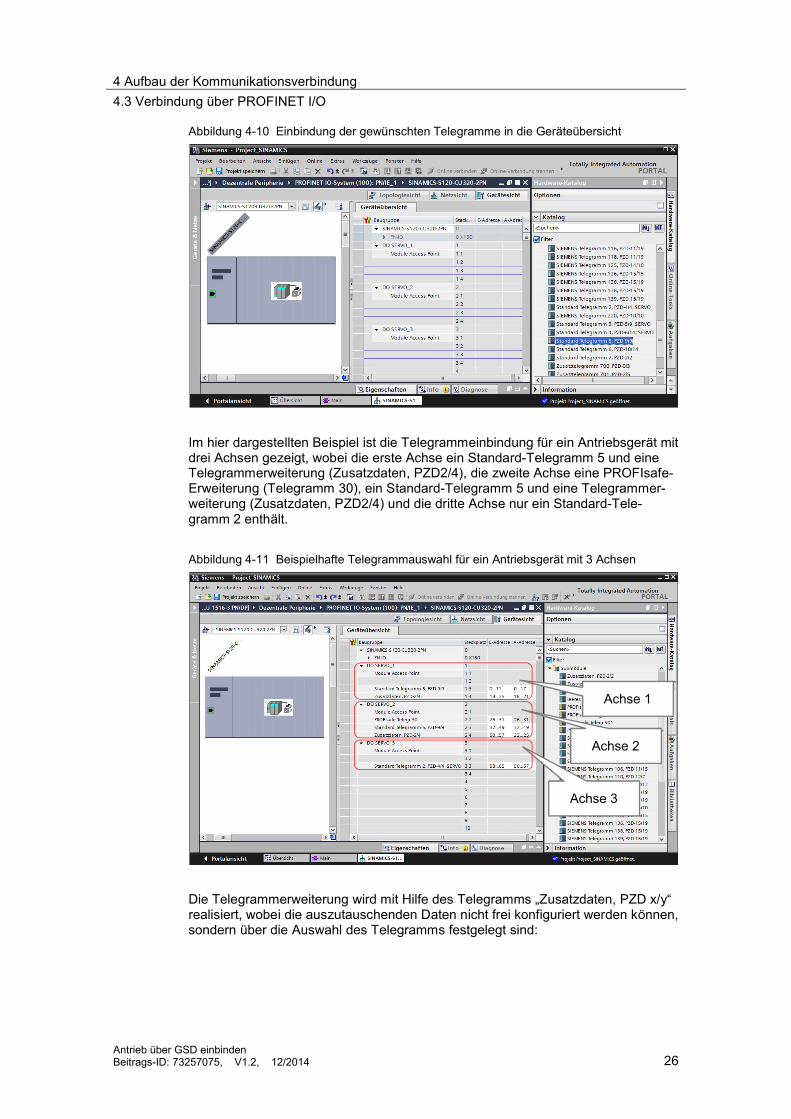
Abbildung 4-10 Einbindung der gewünschten Telegramme in die Geräteübersicht
Im hier dargestellten Beispiel ist die Telegrammeinbindung für ein Antriebsgerät mitdrei Achsen gezeigt, wobei die erste Achse ein Standard-Telegramm 5 und eineTelegrammerweiterung (Zusatzdaten, PZD2/4), die zweite Achse eine PROFIsafe-Erweiterung (Telegramm 30), ein Standard-Telegramm 5 und eine Telegrammer-weiterung (Zusatzdaten, PZD2/4) und die dritte Achse nur ein Standard-Tele-gramm 2 enthält.
Abbildung 4-11 Beispielhafte Telegrammauswahl für ein Antriebsgerät mit 3 Achsen
Die Telegrammerweiterung wird mit Hilfe des Telegramms „Zusatzdaten, PZD x/y“realisiert, wobei die auszutauschenden Daten nicht frei konfiguriert werden können,sondern über die Auswahl des Telegramms festgelegt sind:
Achse 1
Achse 2
Achse 3
4 Aufbau der Kommunikationsverbindung4.3 Verbindung über PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 27
Zusatzdaten, PZD-2/22 Worte vom Antrieb zur SIMATIC S7-15002 Worte von der SIMATIC S7-1500 zum Antrieb
Zusatzdaten, PZD-2/42 Worte vom Antrieb zur SIMATIC S7-15004 Worte von der SIMATIC S7-1500 zum Antrieb
Zusatzdaten, PZD-2/62 Worte vom Antrieb zur SIMATIC S7-15006 Worte von der SIMATIC S7-1500 zum Antrieb
Hinweis Die Bezeichnungen „Eingangsadressen“ und „Ausgangsadressen“ in der Hard-warekonfiguration (Geräteübersicht) beziehen sich jeweils auf die Sichtweise derSIMATIC S7-1500:
Ausgang bzw. A-Adresse:Datenbereich für die Kommunikation von der SIMATIC S7-1500 zum Antrieb.
Eingang bzw. E-Adresse:Datenbereich für die Kommunikation vom Antrieb zur SIMATIC S7-1500.
ACHTUNG Beachten Sie bei dieser Projektierung des Antriebs, dass die Einstellungenim TIA-Portal vollständig losgelöst vom Antrieb vorgenommen werden undnatürlich mit den im Antrieb bereits vorhandenen Einstellungen überein-stimmen müssen, bzw. dass die entsprechenden Einstellungen auch überdie Inbetriebnahmesoftware des Antriebs vorgenommen werden müssen.
5 Einstellung der Taktsynchronität5.1 PROFIBUS DP
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 28
5 Einstellung der TaktsynchronitätSollen die an der SIMATIC S7-1500 angeschlossenen Achsen als Positionierach-sen über die Lageregelung des Technologieobjekts der SIMATIC S7-1500 betrie-ben werden, oder soll zur Erhöhung der Genauigkeit der Achsen die Funktion DSC(Dynamic Servo Control) genutzt werden, bei der die Lageregelung zur schnellerenStörgrößenausregelung in den Antrieb verlagert wird, muss der Antrieb über eintaktsynchrones Bussystem mit dem Automatisierungssystem verbunden sein.
Hinweis Ist der Antrieb über PROFINET I/O mit der SIMATIC S7-1500 verbunden undwird das Telegramm 5 ausgewählt, wird auf Grund der GSDML-Datei automa-tisch der taktsynchrone Betrieb für diese Achse aktiviert.
In diesem Fall muss im Totally Integrated Automation Portal (TIA-Portal) der takt-synchrone Betrieb für diese Achse entsprechend parametriert werden.
Die nachfolgenden Kapitel geben Ihnen Hinweise zur Einrichtung eines taktsyn-chronen Bussystems für PROFIBUS DP und PROFINET I/O.
5.1 PROFIBUS DP
5.1.1 Grundlagen und Begriffsklärung
ÄquidistanzÄquidistanz gewährleistet eine exakt gleich lange Zeitspanne für Buszyklen."Gleich lange Buszyklen" bedeuten, dass der PROFIBUS DP-Master den DP-Buszyklus immer wieder nach der gleichen Zeitspanne beginnt. Die angeschlos-senen Slaves erhalten deshalb ebenfalls in exakt gleich bleibenden Zeitabständenihre Daten vom Master. Man spricht hier auch von einer "Taktung des Buszyklus".Äquidistanz ist die Voraussetzung für Taktsynchronität.
TaktsynchronitätMit der Systemeigenschaft "Taktsynchronität" lassen sich Messwerte und Prozess-daten in einem festen Systemtakt erfassen. Im gleichen Systemtakt erfolgt die Sig-nalverarbeitung bis zum Schalten auf die Ausgangsklemme. Die Taktsynchronitätträgt somit zu einer hohen Güte der Steuerung und damit zu einer größeren Ferti-gungsgenauigkeit bei. Mit der Taktsynchronität werden die möglichen Schwankun-gen der Prozessreaktionszeiten drastisch reduziert. Die zeitlich gesicherte Bearbei-tung kann für einen höheren Maschinentakt genutzt werden.Grundsätzlich bietet sich die Taktsynchronität überall dort an, wo Messwerte syn-chron erfasst werden müssen, Bewegungen koordiniert und Prozessreaktionendefiniert und gleichzeitig erfolgen müssen.
5.1.2 Einstellungen im TIA-Portal
Um die Taktsynchronität zu aktivieren, aktivieren Sie zuerst die Taktsynchronisa-tion in den Eigenschaften des Antriebs.
5 Einstellung der Taktsynchronität5.1 PROFIBUS DP
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 29
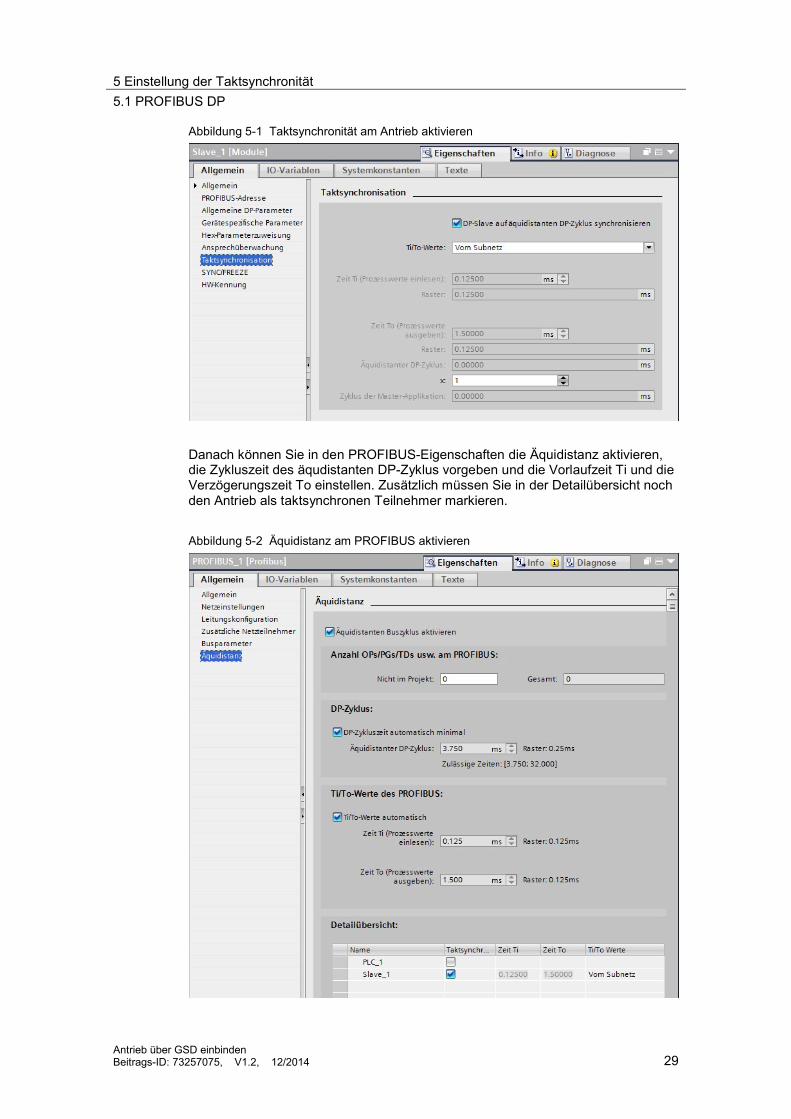
Abbildung 5-1 Taktsynchronität am Antrieb aktivieren
Danach können Sie in den PROFIBUS-Eigenschaften die Äquidistanz aktivieren,die Zykluszeit des äqudistanten DP-Zyklus vorgeben und die Vorlaufzeit Ti und dieVerzögerungszeit To einstellen. Zusätzlich müssen Sie in der Detailübersicht nochden Antrieb als taktsynchronen Teilnehmer markieren.
Abbildung 5-2 Äquidistanz am PROFIBUS aktivieren
5 Einstellung der Taktsynchronität5.2 PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 30
5.2 PROFINET I/O
5.2.1 Grundlagen und Begriffsklärung
IRT-Ethernet - Isochronous Realtime EthernetIRT ist ein Übertragungsverfahren, bei dem die PROFINET-Geräte mit sehr hoherGenauigkeit synchronisiert werden.Ein Sync-Master gibt den Takt vor, Sync-Slaves synchronisieren sich auf diesenTakt. Sowohl ein IO-Controller, als auch ein IO-Device kann die Rolle des Sync-Masters innehaben.Sync-Master und Sync-Slaves sind immer Teilnehmer einer Sync-Domain. Inner-halb der Sync-Domain wird für die IRT-Kommunikation Bandbreite reserviert. Real-Time- und Non-Real-Time-Kommunikation (TCP/IP-Kommunikation) ist außerhalbder reservierten Bandbreite möglich.
Sync-DomainFür die Synchronisierung von PROFINET IO-Geräten wird eine Sync-Domain be-nötigt. Die Sync-Domain gewährleistet, dass alle Teilnehmer, die ihr angehören, imGleichtakt kommunizieren.Voraussetzung für die IRT-Kommunikation ist ein Synchronisations-Takt für allePROFINET-Geräte in einer Sync-Domain zur Verteilung einer gemeinsamen Zeit-basis. Mit dieser Basissynchronisation wird ein Gleichlauf des Übertragungs-Zyklusder PROFINET-Geräte innerhalb einer Sync-Domain erzielt. Der Sync-Master (inder Regel ein IO-Controller) generiert den gemeinsamen Synchronisationstakt undgibt die Zeitbasis vor, auf die sich alle anderen Sync-Slaves (z.B. IO-Devices) syn-chronisieren.Wenn der Sync-Master ausfällt, dann fällt die Kommunikation der IRT-Geräte aufRT-Qualität zurück.
PROFINET mit IRT aufbauenBeachten Sie beim Aufbau und Betrieb eines PROFINET IO-Systems im IRT-Be-trieb die folgenden Regeln. Sie dienen dazu, einen optimalen Betrieb IhresPROFINET IO-Systems sicherzustellen. Bei der Verwendung von IRT müssen Sie die Topologie konfigurieren. Aktuali-
sierungszeit, Bandbreite und weitere Parameter werden dadurch exakt berech-net.
Möchten Sie mehrere Sync-Domains nutzen, projektieren Sie eine Sync-Domain-Boundary für den Port, der mit einem PROFINET-Gerät der jeweilsanderen Sync-Domain verbunden ist.
In einer Sync-Domain können Sie nur jeweils einen Sync-Master projektieren. Ein PROFINET IO-System darf nur einer einzigen Sync-Domain angehören. Wenn Sie PROFINET-Geräte in einer Sync-Domain projektieren und mit IRT
synchronisieren wollen, müssen die betreffenden PROFINET-Geräte die IRT-Kommunikation unterstützen.
Verwenden Sie nach Möglichkeit dasselbe PROFINET-Gerät als PROFINETIO-Contoller und Sync-Master.
Wird nur ein Teil der PROFINET-Geräte eines PROFINET IO-Systems syn-chronisiert, dann platzieren Sie PROFINET-Geräte, die nicht an der IRT-Kommunikation teilnehmen, außerhalb der Sync-Domain.
5 Einstellung der Taktsynchronität5.2 PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 31
TaktsynchronitätMit der Systemeigenschaft "Taktsynchronität" lassen sich Messwerte und Prozess-daten in einem festen Systemtakt erfassen. Im gleichen Systemtakt erfolgt die Sig-nalverarbeitung bis zum Schalten auf die Ausgangsklemme. Die Taktsynchronitätträgt somit zu einer hohen Güte der Steuerung und damit zu einer größeren Ferti-gungsgenauigkeit bei. Mit der Taktsynchronität werden die möglichen Schwankun-gen der Prozessreaktionszeiten drastisch reduziert. Die zeitlich gesicherte Bearbei-tung kann für einen höheren Maschinentakt genutzt werden.Grundsätzlich bietet sich die Taktsynchronität überall dort an, wo Messwerte syn-chron erfasst werden müssen, Bewegungen koordiniert und Prozessreaktionendefiniert und gleichzeitig erfolgen müssen.
Zeitlicher Ablauf der taktsynchronen VerarbeitungIm Folgenden ist der prinzipielle zeitliche Ablauf aller an der Synchronisation betei-ligten Komponenten vom Einlesen der Eingangsdaten bis zum Ausgeben der Aus-gangsdaten erläutert: Taktsynchrones Einlesen der Eingangsdaten Transport der Eingangsdaten über das PROFINET-Subnetz zum IO-Controller
(CPU) Weiterverarbeitung der Daten in der taktsynchronen Applikation der CPU Transport der Ausgangsdaten über das PROFINET-Subnetz zum ausgeben-
den IO-Device Taktsynchrones Ausgeben der Ausgangsdaten
Vorlaufzeit TiDamit zum Startzeitpunkt des neuen Systemtaktes ein konsistenter Zustand derEingänge zum IO-Controller übertragen werden kann, muss der Einlesevorgangum die Zeit Ti vorverlegt werden. Die Zeit Ti umfasst für ein bestimmtes Eingangs-modul minimal die Signalaufbereitungs- und Wandlungszeit an den Elektronikmo-dulen und die Zeit zur Übertragung zum Interface Modul am IO-Device-Rückwand-bus.In einer Anlage wird erreicht, dass die Werte zeitgleich eingelesen werden, indemdie Vorlaufzeit Ti aller taktsynchron gelesenen Eingangsmodule auf einen gleichenWert gesetzt wird, der größer oder gleich der größten minimalen Vorlaufzeit Ti allertaktsynchronen Eingangsmodule ist. STEP 7 stellt mit der Standardeinstellungsicher, dass eine gemeinsame kleinstmögliche Vorlaufzeit Ti eingestellt wird.
Verzögerungszeit ToDamit zum Startzeitpunkt des neuen Systemtaktes ein konsistenter Zustand derAusgänge zum Prozess übertragen werden kann, erfolgt die Ausgabe an derKlemme erst zum Zeitpunkt To nach dem Taktschlag. Die Zeit To umfasst für einbestimmtes Ausgangsmodul minimal die Zeit der Übertragung vom IO-Controllerzum IO-Device (über PROFINET IO) und im IO-Device die Übertragung derAusgänge vom Interfacemodul zum Elektronikmodul (Rückwandbus) mit der daringegebenenfalls enthaltenen Zeit für die Digital-Analog-Wandlung.Dass die Werte zeitgleich geschrieben werden wird in einer Anlage erreicht, indemdie Verzögerungszeit To aller taktsynchronen Ausgangsmodule auf einen gleichenWert gesetzt wird. Dieser Wert muss größer oder gleich der größten minimalenVerzögerungszeit To aller taktsynchronen Ausgangsmodule sein. STEP 7 berech-net automatisch eine gemeinsame kleinstmögliche Verzögerungszeit To.
5 Einstellung der Taktsynchronität5.2 PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 32
Taktsynchronität – Verwendungshinweise für Komponenten und SchnittstellenAchten Sie beim Aufbau einer taktsynchronen Kommunikation über PROFINET auffolgende Punkte: Die Taktsynchronität ist nur mit den in der CPU integrierten Schnittstellen mög-
lich. Bei der SIMATIC S7-1500 mit zwei PROFINET-Schnittstellen ist nur dieSchnittstelle X1 für PROFINET IO und Taktsynchronität projektierbar. Der takt-synchrone Betrieb mit CPs ist nicht möglich.
Eine volle Taktsynchronität von "Klemme" zu "Klemme" ist nur dann möglich,wenn alle in der Kette beteiligten Komponenten die Systemeigenschaft "Takt-synchronität" unterstützen. Achten Sie bei der Auswahl im Katalog auf denEintrag "Taktsynchronität" bzw. "taktsynchrone Bearbeitung" im Informations-feld der Baugruppe.
Wenn Sie ein IO-Device taktsynchron betreiben (d. h. indem Sie ihm z. B. dieRolle Sync-Slave zugewiesen haben), dann muss mindestens ein taktsynchronbetriebenes Modul bzw. Submodul im IO-Device vorhanden sein.
Hinweis Bei der Nutzung von PROFINET muss der projektierte PROFINET-Name desAntriebs im Totally Integrated Automation Portal (TIA-Portal) mit dem projektier-ten Namen in der Inbetriebnahmesoftware des Antriebs, z.B. SINAMICS MICRO-MASTER STARTER, übereinstimmen.Beachten Sie dabei auch die Schreibweise mit Groß- und Kleinbuchstaben.
Stimmt die Schreibweise des PROFINET-Name im im Totally Integrated Auto-mation Portal (TIA-Portal) und im Antrieb nicht überein, kann gegebenenfallskeine Verbindung zwischen der SIMATIC S7-1500 und dem Antrieb aufgebautwerden.
5.2.2 Einstellungen im TIA-Portal
Um die Taktsynchronität zu aktivieren, müssen im TIA-Portal sowohl die Parameterfür die Taktsynchronität, als auch die Sync-Domain projektiert werden.
TaktsynchronitätAktivieren Sie in der Geräteübersicht des Antriebs am Telegramm der gewünsch-ten Achse unter Eigenschaften > E/A-Adressen die Funktion „taktsynchroner Be-trieb“ für die Ein- und Ausgangsadressen der Achse.Die Zuordnung des Organisationsbausteins für den taktsynchronen Betrieb kanndabei noch vernachlässigt werden. Diese erfolgt automatisch bei der Zuordnungder Achse zu einem Technologieobjekt in der SIMATIC S7-1500.
5 Einstellung der Taktsynchronität5.2 PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 33
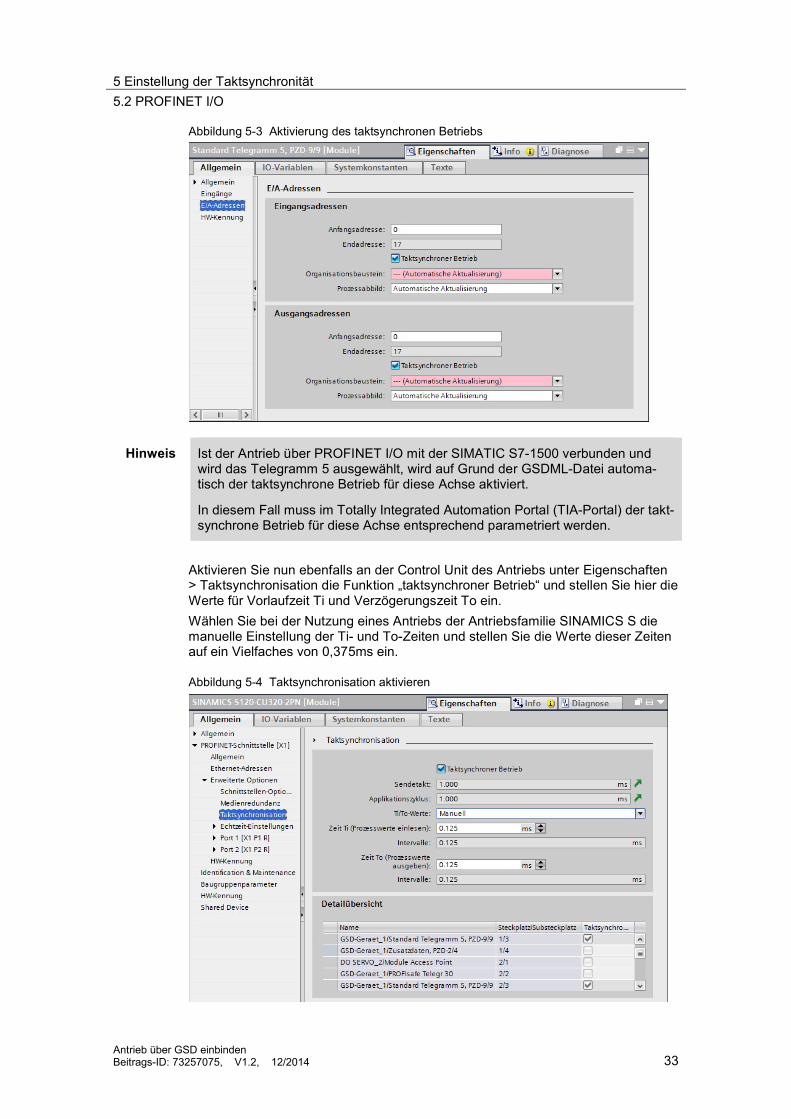
Abbildung 5-3 Aktivierung des taktsynchronen Betriebs
Hinweis Ist der Antrieb über PROFINET I/O mit der SIMATIC S7-1500 verbunden undwird das Telegramm 5 ausgewählt, wird auf Grund der GSDML-Datei automa-tisch der taktsynchrone Betrieb für diese Achse aktiviert.
In diesem Fall muss im Totally Integrated Automation Portal (TIA-Portal) der takt-synchrone Betrieb für diese Achse entsprechend parametriert werden.
Aktivieren Sie nun ebenfalls an der Control Unit des Antriebs unter Eigenschaften> Taktsynchronisation die Funktion „taktsynchroner Betrieb“ und stellen Sie hier dieWerte für Vorlaufzeit Ti und Verzögerungszeit To ein.Wählen Sie bei der Nutzung eines Antriebs der Antriebsfamilie SINAMICS S diemanuelle Einstellung der Ti- und To-Zeiten und stellen Sie die Werte dieser Zeitenauf ein Vielfaches von 0,375ms ein.
Abbildung 5-4 Taktsynchronisation aktivieren
5 Einstellung der Taktsynchronität5.2 PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 34
ACHTUNG Für die Nutzung der Taktsynchronität im Zusammenhang mit der Antriebs-familie SINAMICS S müssen die Zeiten Ti (Prozesswerte einlesen) und To(Prozesswerte ausgeben) manuell auf ein Vielfaches von 0,375ms einge-stellt werden.
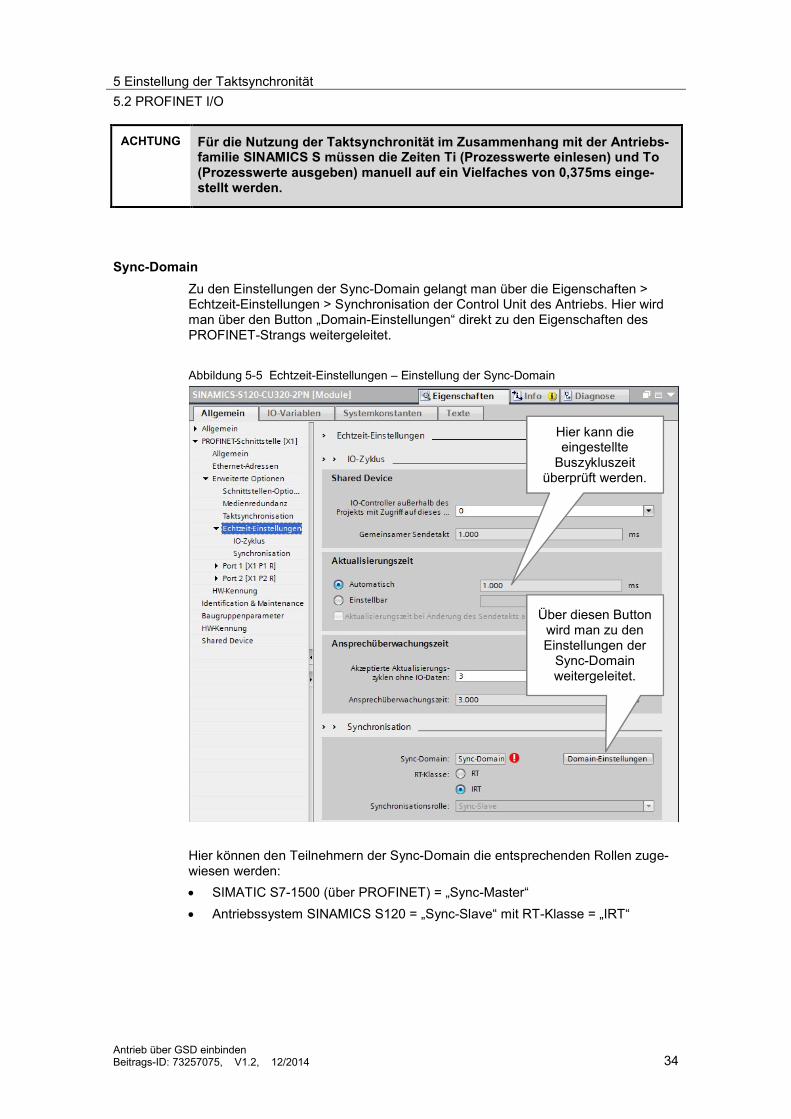
Sync-DomainZu den Einstellungen der Sync-Domain gelangt man über die Eigenschaften >Echtzeit-Einstellungen > Synchronisation der Control Unit des Antriebs. Hier wirdman über den Button „Domain-Einstellungen“ direkt zu den Eigenschaften desPROFINET-Strangs weitergeleitet.
Abbildung 5-5 Echtzeit-Einstellungen – Einstellung der Sync-Domain
Hier können den Teilnehmern der Sync-Domain die entsprechenden Rollen zuge-wiesen werden: SIMATIC S7-1500 (über PROFINET) = „Sync-Master“ Antriebssystem SINAMICS S120 = „Sync-Slave“ mit RT-Klasse = „IRT“
Hier kann dieeingestellte
Buszykluszeitüberprüft werden.
Über diesen Buttonwird man zu denEinstellungen der
Sync-Domainweitergeleitet.
5 Einstellung der Taktsynchronität5.2 PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 35
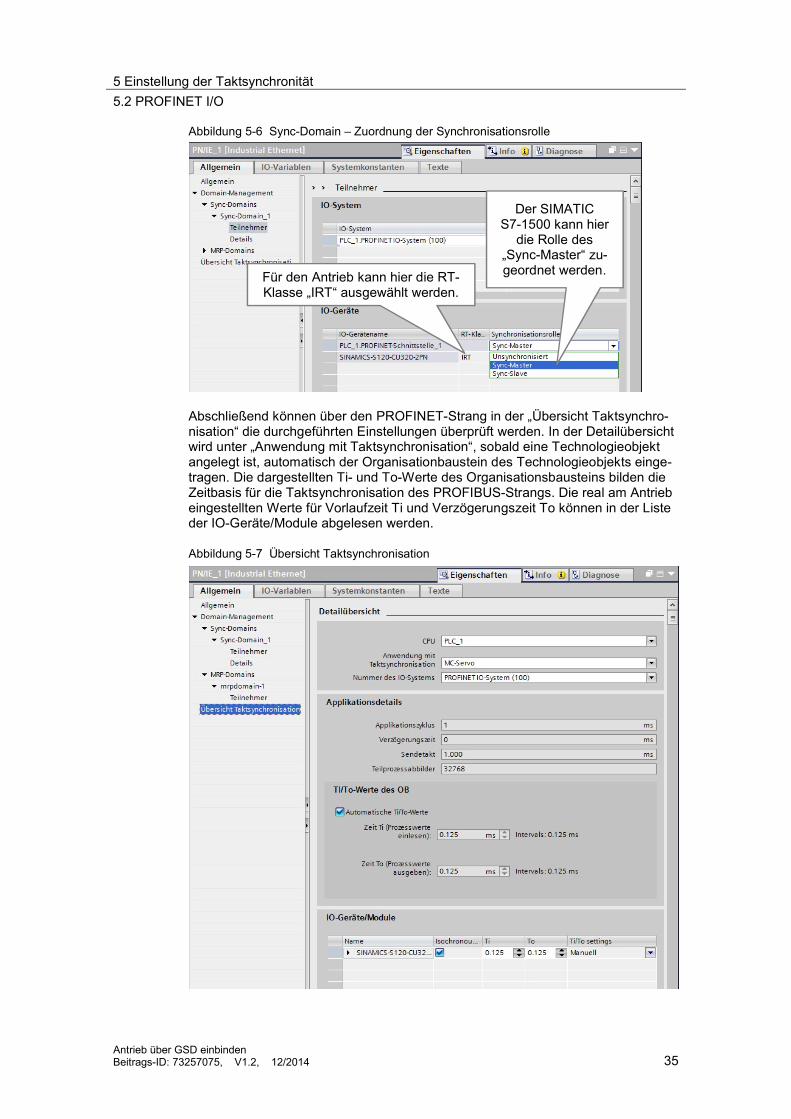
Abbildung 5-6 Sync-Domain – Zuordnung der Synchronisationsrolle
Abschließend können über den PROFINET-Strang in der „Übersicht Taktsynchro-nisation“ die durchgeführten Einstellungen überprüft werden. In der Detailübersichtwird unter „Anwendung mit Taktsynchronisation“, sobald eine Technologieobjektangelegt ist, automatisch der Organisationbaustein des Technologieobjekts einge-tragen. Die dargestellten Ti- und To-Werte des Organisationsbausteins bilden dieZeitbasis für die Taktsynchronisation des PROFIBUS-Strangs. Die real am Antriebeingestellten Werte für Vorlaufzeit Ti und Verzögerungszeit To können in der Listeder IO-Geräte/Module abgelesen werden.
Abbildung 5-7 Übersicht Taktsynchronisation
Der SIMATICS7-1500 kann hier
die Rolle des„Sync-Master“ zu-geordnet werden.Für den Antrieb kann hier die RT-
Klasse „IRT“ ausgewählt werden.
5 Einstellung der Taktsynchronität5.2 PROFINET I/O
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 36
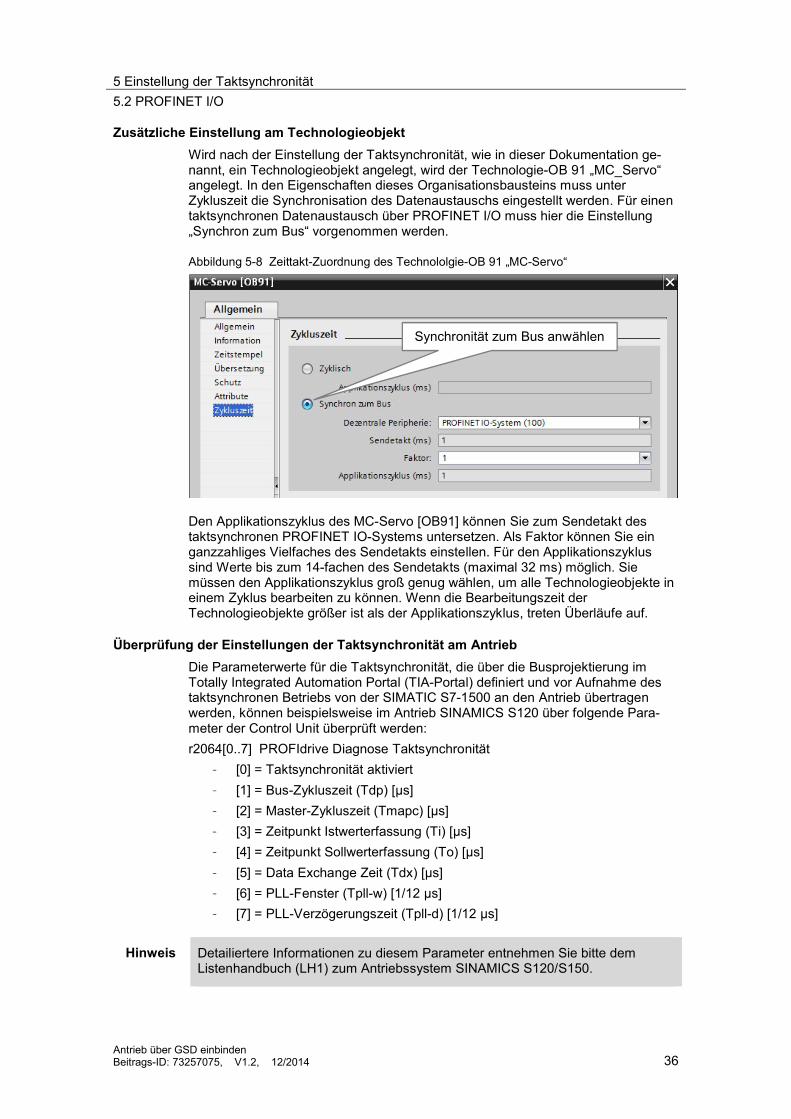
Zusätzliche Einstellung am TechnologieobjektWird nach der Einstellung der Taktsynchronität, wie in dieser Dokumentation ge-nannt, ein Technologieobjekt angelegt, wird der Technologie-OB 91 „MC_Servo“angelegt. In den Eigenschaften dieses Organisationsbausteins muss unterZykluszeit die Synchronisation des Datenaustauschs eingestellt werden. Für einentaktsynchronen Datenaustausch über PROFINET I/O muss hier die Einstellung„Synchron zum Bus“ vorgenommen werden.
Abbildung 5-8 Zeittakt-Zuordnung des Technololgie-OB 91 „MC-Servo“
Den Applikationszyklus des MC-Servo [OB91] können Sie zum Sendetakt destaktsynchronen PROFINET IO-Systems untersetzen. Als Faktor können Sie einganzzahliges Vielfaches des Sendetakts einstellen. Für den Applikationszyklussind Werte bis zum 14-fachen des Sendetakts (maximal 32 ms) möglich. Siemüssen den Applikationszyklus groß genug wählen, um alle Technologieobjekte ineinem Zyklus bearbeiten zu können. Wenn die Bearbeitungszeit derTechnologieobjekte größer ist als der Applikationszyklus, treten Überläufe auf.
Überprüfung der Einstellungen der Taktsynchronität am AntriebDie Parameterwerte für die Taktsynchronität, die über die Busprojektierung imTotally Integrated Automation Portal (TIA-Portal) definiert und vor Aufnahme destaktsynchronen Betriebs von der SIMATIC S7-1500 an den Antrieb übertragenwerden, können beispielsweise im Antrieb SINAMICS S120 über folgende Para-meter der Control Unit überprüft werden:r2064[0..7] PROFIdrive Diagnose Taktsynchronität
– [0] = Taktsynchronität aktiviert– [1] = Bus-Zykluszeit (Tdp) [ s]– [2] = Master-Zykluszeit (Tmapc) [ s]– [3] = Zeitpunkt Istwerterfassung (Ti) [ s]– [4] = Zeitpunkt Sollwerterfassung (To) [ s]– [5] = Data Exchange Zeit (Tdx) [ s]– [6] = PLL-Fenster (Tpll-w) [1/12 s]– [7] = PLL-Verzögerungszeit (Tpll-d) [1/12 s]
Hinweis Detailiertere Informationen zu diesem Parameter entnehmen Sie bitte demListenhandbuch (LH1) zum Antriebssystem SINAMICS S120/S150.
Synchronität zum Bus anwählen
6 Motion Control Funktionen der S7-15006.1 Technologieobjekte
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 37
6 Motion Control Funktionen der S7-15006.1 Technologieobjekte
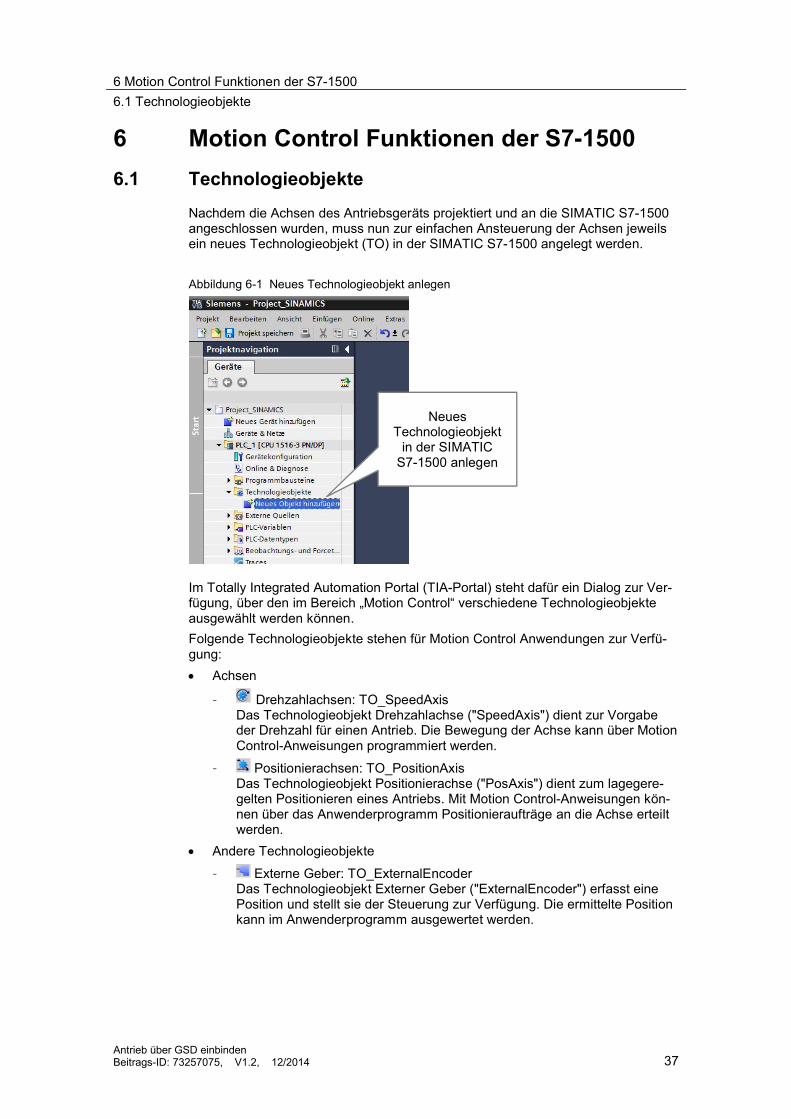
Nachdem die Achsen des Antriebsgeräts projektiert und an die SIMATIC S7-1500angeschlossen wurden, muss nun zur einfachen Ansteuerung der Achsen jeweilsein neues Technologieobjekt (TO) in der SIMATIC S7-1500 angelegt werden.
Abbildung 6-1 Neues Technologieobjekt anlegen
Im Totally Integrated Automation Portal (TIA-Portal) steht dafür ein Dialog zur Ver-fügung, über den im Bereich „Motion Control“ verschiedene Technologieobjekteausgewählt werden können.Folgende Technologieobjekte stehen für Motion Control Anwendungen zur Verfü-gung: Achsen
– Drehzahlachsen: TO_SpeedAxisDas Technologieobjekt Drehzahlachse ("SpeedAxis") dient zur Vorgabeder Drehzahl für einen Antrieb. Die Bewegung der Achse kann über MotionControl-Anweisungen programmiert werden.
– Positionierachsen: TO_PositionAxisDas Technologieobjekt Positionierachse ("PosAxis") dient zum lagegere-gelten Positionieren eines Antriebs. Mit Motion Control-Anweisungen kön-nen über das Anwenderprogramm Positionieraufträge an die Achse erteiltwerden.
Andere Technologieobjekte
– Externe Geber: TO_ExternalEncoderDas Technologieobjekt Externer Geber ("ExternalEncoder") erfasst einePosition und stellt sie der Steuerung zur Verfügung. Die ermittelte Positionkann im Anwenderprogramm ausgewertet werden.
NeuesTechnologieobjekt
in der SIMATICS7-1500 anlegen
6 Motion Control Funktionen der S7-15006.2 Auswahl des Antriebs am Technologieobjekt
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 38
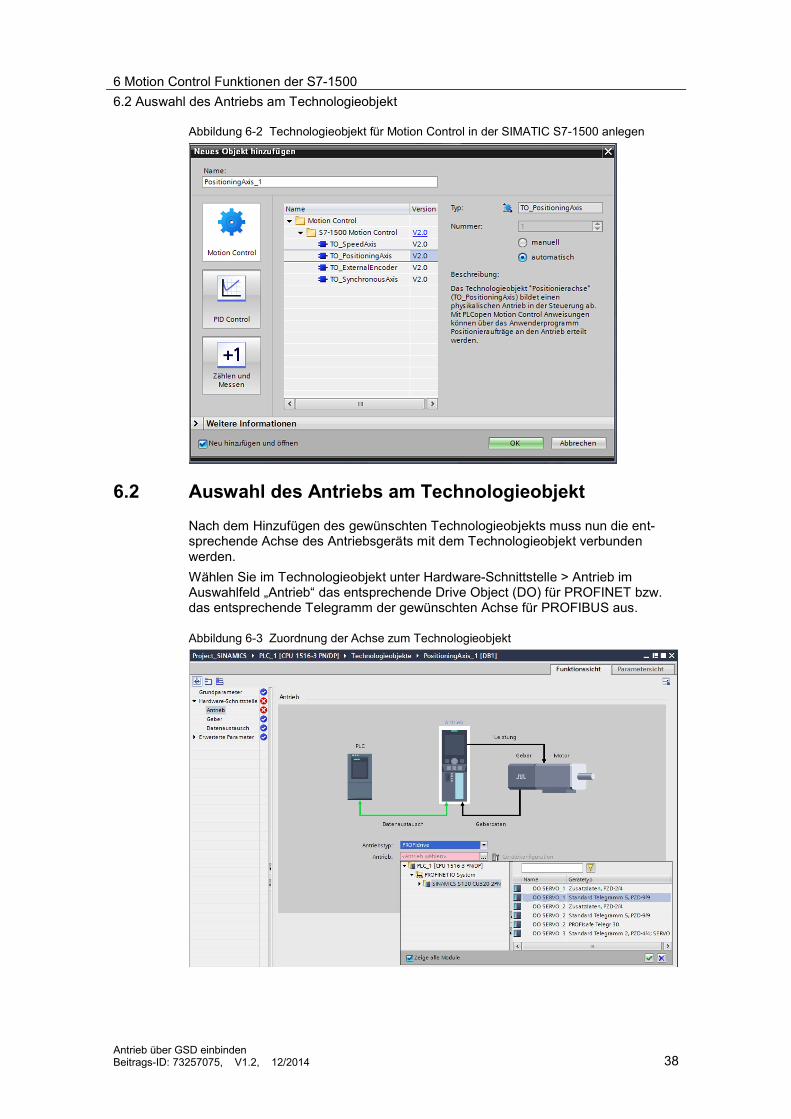
Abbildung 6-2 Technologieobjekt für Motion Control in der SIMATIC S7-1500 anlegen
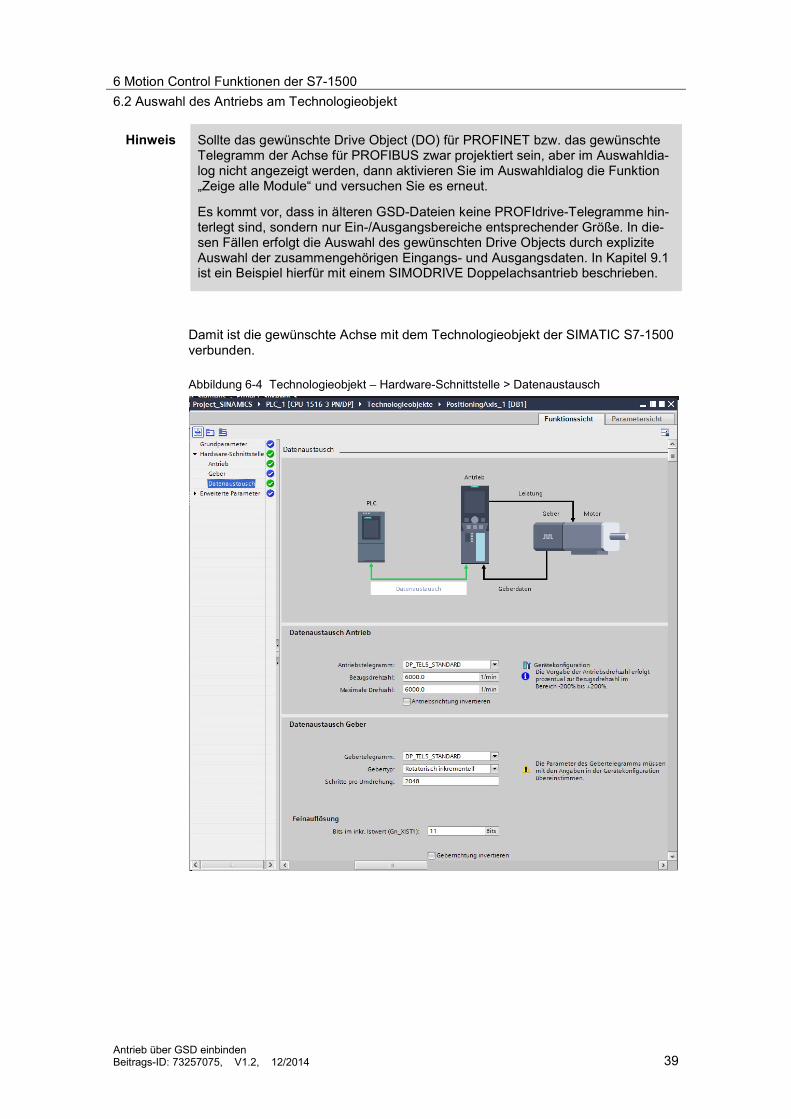
6.2 Auswahl des Antriebs am TechnologieobjektNach dem Hinzufügen des gewünschten Technologieobjekts muss nun die ent-sprechende Achse des Antriebsgeräts mit dem Technologieobjekt verbundenwerden.Wählen Sie im Technologieobjekt unter Hardware-Schnittstelle > Antrieb imAuswahlfeld „Antrieb“ das entsprechende Drive Object (DO) für PROFINET bzw.das entsprechende Telegramm der gewünschten Achse für PROFIBUS aus.
Abbildung 6-3 Zuordnung der Achse zum Technologieobjekt
6 Motion Control Funktionen der S7-15006.2 Auswahl des Antriebs am Technologieobjekt
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 39
Hinweis Sollte das gewünschte Drive Object (DO) für PROFINET bzw. das gewünschteTelegramm der Achse für PROFIBUS zwar projektiert sein, aber im Auswahldia-log nicht angezeigt werden, dann aktivieren Sie im Auswahldialog die Funktion„Zeige alle Module“ und versuchen Sie es erneut.
Es kommt vor, dass in älteren GSD-Dateien keine PROFIdrive-Telegramme hin-terlegt sind, sondern nur Ein-/Ausgangsbereiche entsprechender Größe. In die-sen Fällen erfolgt die Auswahl des gewünschten Drive Objects durch expliziteAuswahl der zusammengehörigen Eingangs- und Ausgangsdaten. In Kapitel 9.1ist ein Beispiel hierfür mit einem SIMODRIVE Doppelachsantrieb beschrieben.
Damit ist die gewünschte Achse mit dem Technologieobjekt der SIMATIC S7-1500verbunden.
Abbildung 6-4 Technologieobjekt – Hardware-Schnittstelle > Datenaustausch
6 Motion Control Funktionen der S7-15006.3 Ansteuerung der Achse aus dem Anwenderprogramm
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 40
Hinweis Erfolgt der Datenaustausch mit der ausgewählten Achse über das PROFIdrive-Telegramm 5, wird beim Anlegen des Technologieobjekts Positionierachse auto-matisch die Funktion DSC (Dynamic Servo Control) zur Verlagerung der Lage-regelung in den Antrieb aktiviert.
Soll DSC (Dynamic Servo Control) nicht genutzt werden, muss diese Funktionexplizit im Technologieobjekt unter Erweiterte Parameter > Regelkreis von„Lageregelung im Antrieb (DSC aktiviert)“ auf „Lageregelung in der PLC“ umge-stellt werden. Die Lageregelung der Achse wird dann wieder allein vom Techno-logieobjekt übernommen.
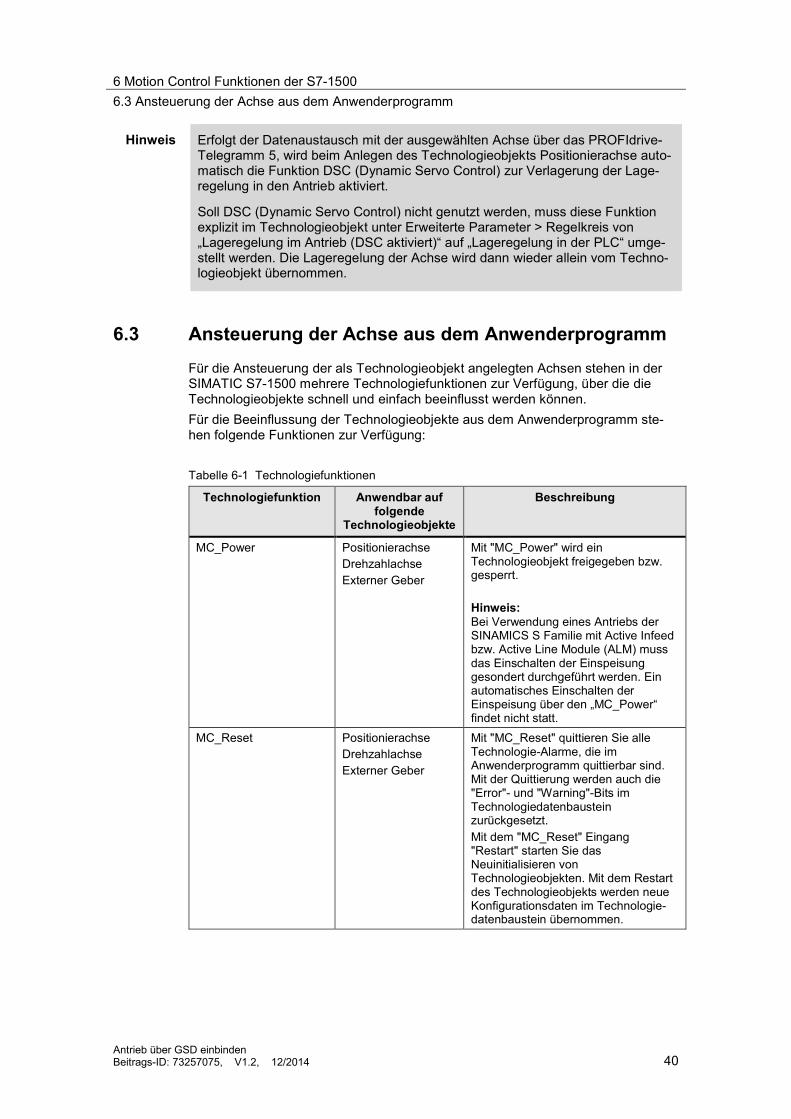
6.3 Ansteuerung der Achse aus dem AnwenderprogrammFür die Ansteuerung der als Technologieobjekt angelegten Achsen stehen in derSIMATIC S7-1500 mehrere Technologiefunktionen zur Verfügung, über die dieTechnologieobjekte schnell und einfach beeinflusst werden können.Für die Beeinflussung der Technologieobjekte aus dem Anwenderprogramm ste-hen folgende Funktionen zur Verfügung:
Tabelle 6-1 Technologiefunktionen
Technologiefunktion Anwendbar auffolgende
Technologieobjekte
Beschreibung
MC_Power PositionierachseDrehzahlachseExterner Geber
Mit "MC_Power" wird einTechnologieobjekt freigegeben bzw.gesperrt.
Hinweis:Bei Verwendung eines Antriebs derSINAMICS S Familie mit Active Infeedbzw. Active Line Module (ALM) mussdas Einschalten der Einspeisunggesondert durchgeführt werden. Einautomatisches Einschalten derEinspeisung über den „MC_Power“findet nicht statt.
MC_Reset PositionierachseDrehzahlachseExterner Geber
Mit "MC_Reset" quittieren Sie alleTechnologie-Alarme, die imAnwenderprogramm quittierbar sind.Mit der Quittierung werden auch die"Error"- und "Warning"-Bits imTechnologiedatenbausteinzurückgesetzt.Mit dem "MC_Reset" Eingang"Restart" starten Sie dasNeuinitialisieren vonTechnologieobjekten. Mit dem Restartdes Technologieobjekts werden neueKonfigurationsdaten im Technologie-datenbaustein übernommen.
6 Motion Control Funktionen der S7-15006.3 Ansteuerung der Achse aus dem Anwenderprogramm
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 41
Technologiefunktion Anwendbar auffolgende
Technologieobjekte
Beschreibung
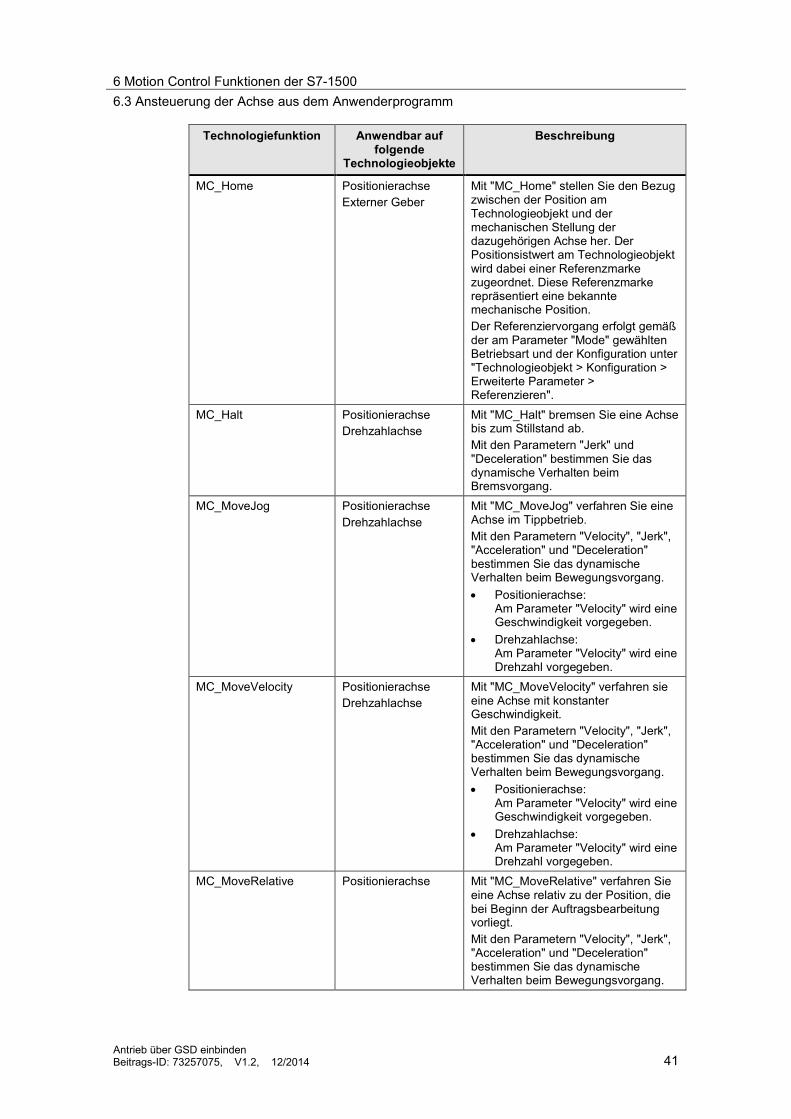
MC_Home PositionierachseExterner Geber
Mit "MC_Home" stellen Sie den Bezugzwischen der Position amTechnologieobjekt und dermechanischen Stellung derdazugehörigen Achse her. DerPositionsistwert am Technologieobjektwird dabei einer Referenzmarkezugeordnet. Diese Referenzmarkerepräsentiert eine bekanntemechanische Position.Der Referenziervorgang erfolgt gemäßder am Parameter "Mode" gewähltenBetriebsart und der Konfiguration unter"Technologieobjekt > Konfiguration >Erweiterte Parameter >Referenzieren".
MC_Halt PositionierachseDrehzahlachse
Mit "MC_Halt" bremsen Sie eine Achsebis zum Stillstand ab.Mit den Parametern "Jerk" und"Deceleration" bestimmen Sie dasdynamische Verhalten beimBremsvorgang.
MC_MoveJog PositionierachseDrehzahlachse
Mit "MC_MoveJog" verfahren Sie eineAchse im Tippbetrieb.Mit den Parametern "Velocity", "Jerk","Acceleration" und "Deceleration"bestimmen Sie das dynamischeVerhalten beim Bewegungsvorgang. Positionierachse:
Am Parameter "Velocity" wird eineGeschwindigkeit vorgegeben.
Drehzahlachse:Am Parameter "Velocity" wird eineDrehzahl vorgegeben.
MC_MoveVelocity PositionierachseDrehzahlachse
Mit "MC_MoveVelocity" verfahren sieeine Achse mit konstanterGeschwindigkeit.Mit den Parametern "Velocity", "Jerk","Acceleration" und "Deceleration"bestimmen Sie das dynamischeVerhalten beim Bewegungsvorgang. Positionierachse:
Am Parameter "Velocity" wird eineGeschwindigkeit vorgegeben.
Drehzahlachse:Am Parameter "Velocity" wird eineDrehzahl vorgegeben.
MC_MoveRelative Positionierachse Mit "MC_MoveRelative" verfahren Sieeine Achse relativ zu der Position, diebei Beginn der Auftragsbearbeitungvorliegt.Mit den Parametern "Velocity", "Jerk","Acceleration" und "Deceleration"bestimmen Sie das dynamischeVerhalten beim Bewegungsvorgang.
6 Motion Control Funktionen der S7-15006.3 Ansteuerung der Achse aus dem Anwenderprogramm
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 42
Technologiefunktion Anwendbar auffolgende
Technologieobjekte
Beschreibung
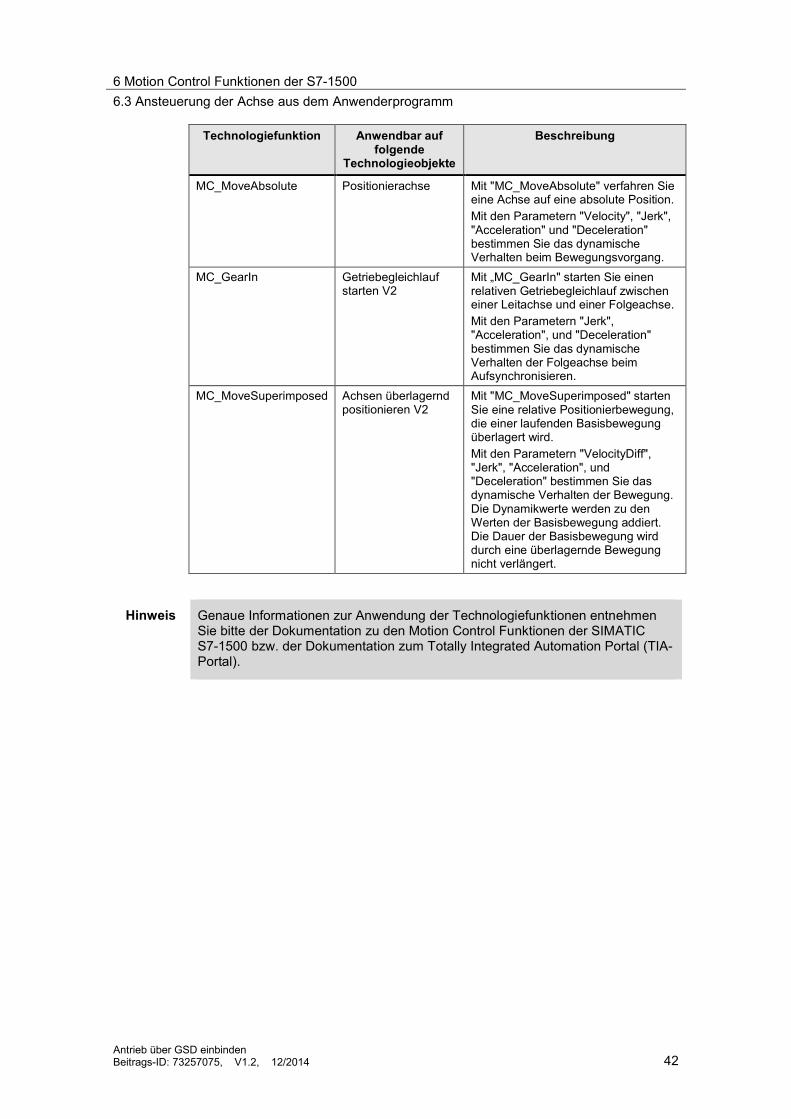
MC_MoveAbsolute Positionierachse Mit "MC_MoveAbsolute" verfahren Sieeine Achse auf eine absolute Position.Mit den Parametern "Velocity", "Jerk","Acceleration" und "Deceleration"bestimmen Sie das dynamischeVerhalten beim Bewegungsvorgang.
MC_GearIn Getriebegleichlaufstarten V2
Mit „MC_GearIn" starten Sie einenrelativen Getriebegleichlauf zwischeneiner Leitachse und einer Folgeachse.Mit den Parametern "Jerk","Acceleration", und "Deceleration"bestimmen Sie das dynamischeVerhalten der Folgeachse beimAufsynchronisieren.
MC_MoveSuperimposed Achsen überlagerndpositionieren V2
Mit "MC_MoveSuperimposed" startenSie eine relative Positionierbewegung,die einer laufenden Basisbewegungüberlagert wird.Mit den Parametern "VelocityDiff","Jerk", "Acceleration", und"Deceleration" bestimmen Sie dasdynamische Verhalten der Bewegung.Die Dynamikwerte werden zu denWerten der Basisbewegung addiert.Die Dauer der Basisbewegung wirddurch eine überlagernde Bewegungnicht verlängert.
Hinweis Genaue Informationen zur Anwendung der Technologiefunktionen entnehmenSie bitte der Dokumentation zu den Motion Control Funktionen der SIMATICS7-1500 bzw. der Dokumentation zum Totally Integrated Automation Portal (TIA-Portal).
7 Inbetriebnahmesoftware STARTER7.1 Arbeiten mit Antrieben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 43
7 Inbetriebnahmesoftware STARTER7.1 Arbeiten mit Antrieben
Im Gegensatz zur Projektierung der SIMATIC S7-1500 im Totally Integrated Auto-mation Portal (TIA-Portal), bei der der Steuerungsausbau über „Geräte & Netze“offline festgelegt und danach in die Steuerung geladen wird, werden Antriebe derFamilien SINAMICS G und SINAMICS S in der Regel Online projektiert.
Abbildung 7-1 Antriebsgerät online über „Erreichbare Teilnehmer“ suchen
Dabei wird das Antriebssystem betriebsfertig aufgebaut und der aktuelle Ausbaudes Antriebs wird dann per Online-Verbindung in die InbetriebnahmesoftwareSINAMICS MICROMASTER STARTER geladen. Auf diese Weise kann die Inbe-triebnahme von Antrieben mit Drive-CLiQ Komponenten sehr schnell und einfachdurchgeführt werden.
Abbildung 7-2 Antriebsgerät automatisch konfigurieren
7 Inbetriebnahmesoftware STARTER7.2 Anlegen eines Antriebsgeräts
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 44
Hinweis Nähere Hinweise zur Verwendung der Inbetriebnahmesoftware SINAMICSMICROMASTER STARTER entnehmen Sie bitte dem zugehörigen Handbuchoder der Hilfedatei zum SINAMICS MICROMASTER STARTER.
Sind nicht alle Komponenten des Antriebssystems mit der Drive-CLiQ Technologieausgerüstet, oder wurden Antriebskomponenten verwendet, die keine automati-sche Inbetriebnahme unterstützen, kann die Inbetriebnahme des Antriebssystemsnatürlich auch manuell, per Offline-Konfiguration, erfolgen.Diese Vorgehensweise wird im folgenden Kapitel kurz dargestellt, bevor auf dieAnpassung der Telegrammkonfiguration näher eingegangen wird.
7.2 Anlegen eines AntriebsgerätsZur Inbetriebnahme eines Antriebs der SINAMICS Familie legen Sie am besten einneues Antriebsprojekt an und fügen diesem Projekt einen neuen Einzelantrieb hin-zu.
7.2.1 PROFIBUS DP
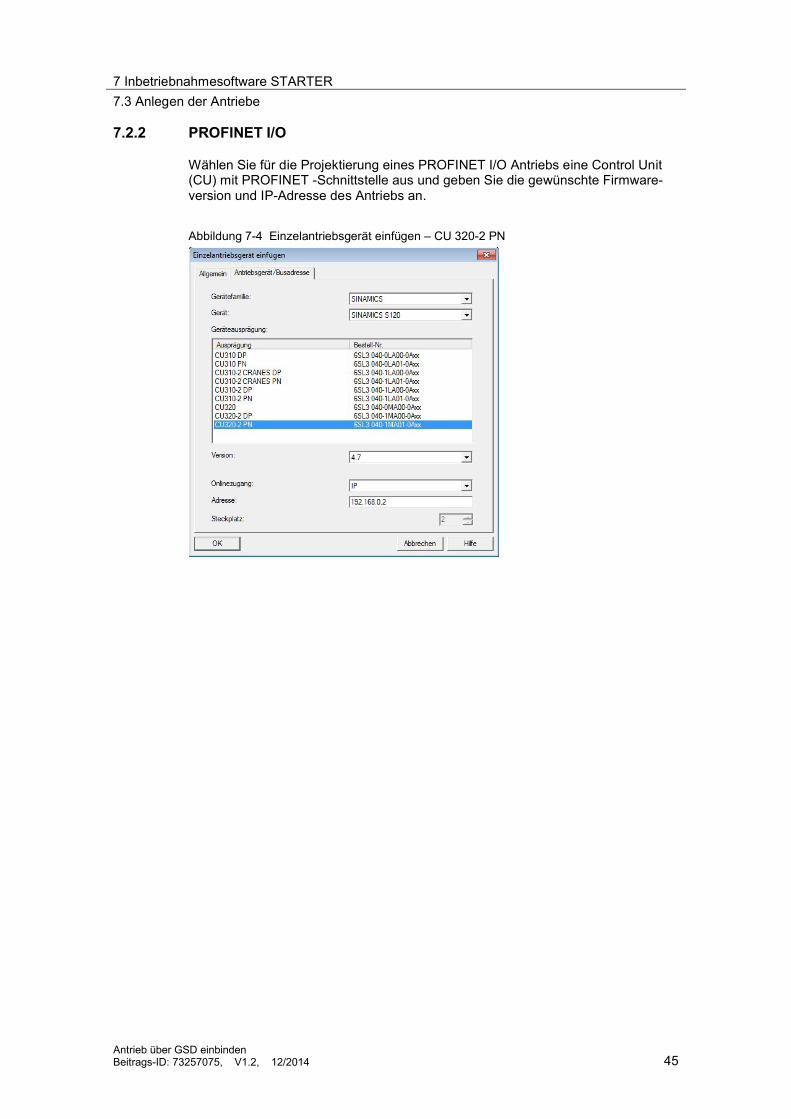
Wählen Sie für die Projektierung eines PROFIBUS DP Antriebs eine Control Unit(CU) mit PROFIBUS-Schnittstelle aus und geben Sie die gewünschte Firmware-version und PROFIBUS-Adresse des Antriebs an.
Abbildung 7-3 Einzelantriebsgerät einfügen – CU 320-2 DP
7 Inbetriebnahmesoftware STARTER7.3 Anlegen der Antriebe
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 45
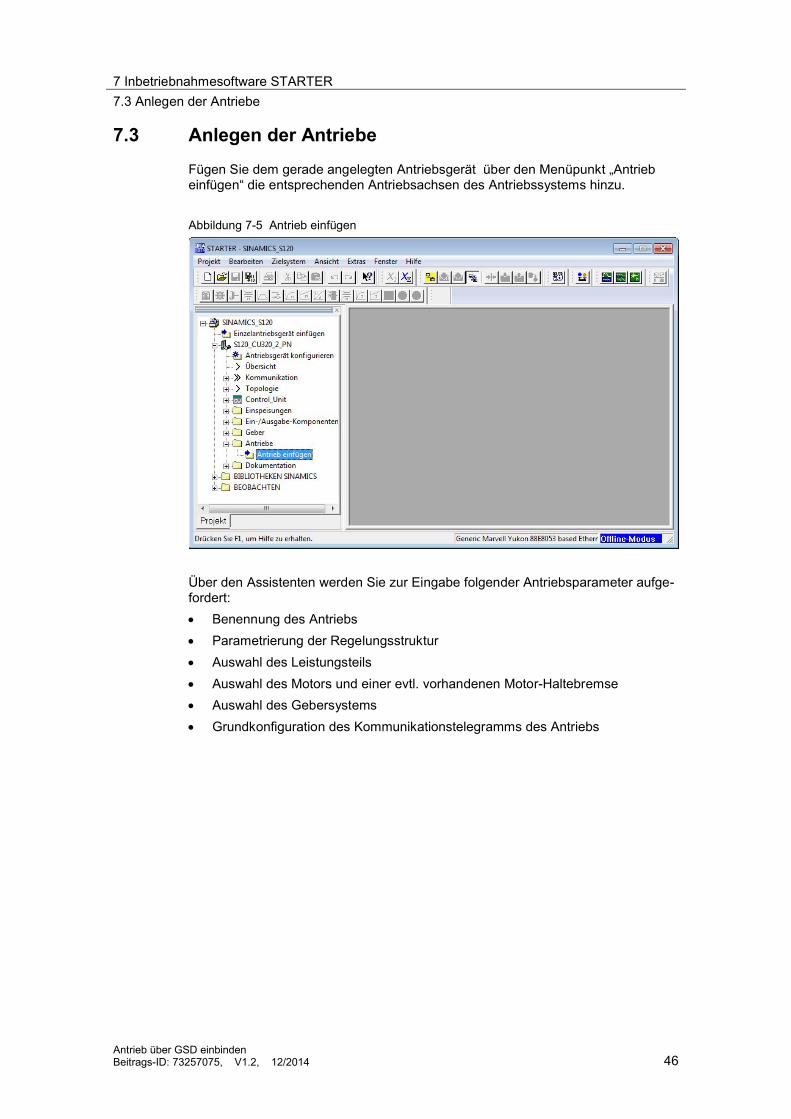
7.2.2 PROFINET I/O
Wählen Sie für die Projektierung eines PROFINET I/O Antriebs eine Control Unit(CU) mit PROFINET -Schnittstelle aus und geben Sie die gewünschte Firmware-version und IP-Adresse des Antriebs an.
Abbildung 7-4 Einzelantriebsgerät einfügen – CU 320-2 PN
7 Inbetriebnahmesoftware STARTER7.3 Anlegen der Antriebe
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 46
7.3 Anlegen der Antriebe
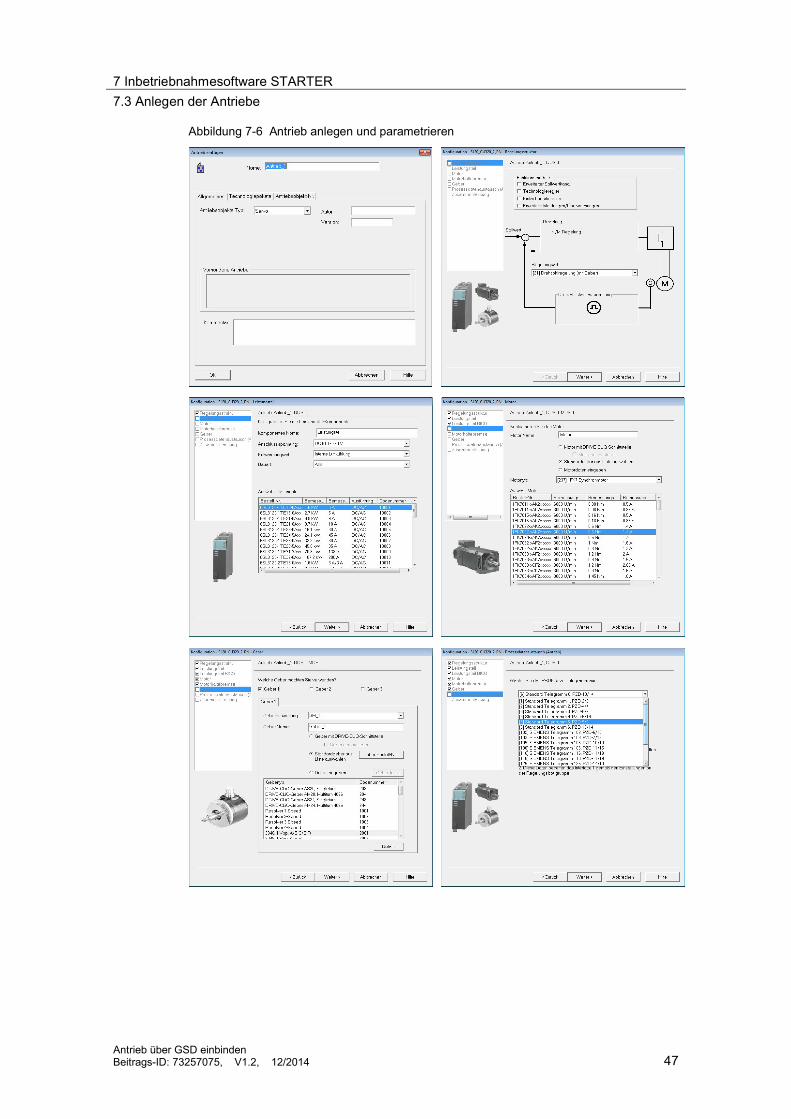
Fügen Sie dem gerade angelegten Antriebsgerät über den Menüpunkt „Antriebeinfügen“ die entsprechenden Antriebsachsen des Antriebssystems hinzu.
Abbildung 7-5 Antrieb einfügen
Über den Assistenten werden Sie zur Eingabe folgender Antriebsparameter aufge-fordert: Benennung des Antriebs Parametrierung der Regelungsstruktur Auswahl des Leistungsteils Auswahl des Motors und einer evtl. vorhandenen Motor-Haltebremse Auswahl des Gebersystems Grundkonfiguration des Kommunikationstelegramms des Antriebs
7 Inbetriebnahmesoftware STARTER7.3 Anlegen der Antriebe
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 47
Abbildung 7-6 Antrieb anlegen und parametrieren
7 Inbetriebnahmesoftware STARTER7.3 Anlegen der Antriebe
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 48
7.3.1 Anpassung der Kommunikationstelegramme
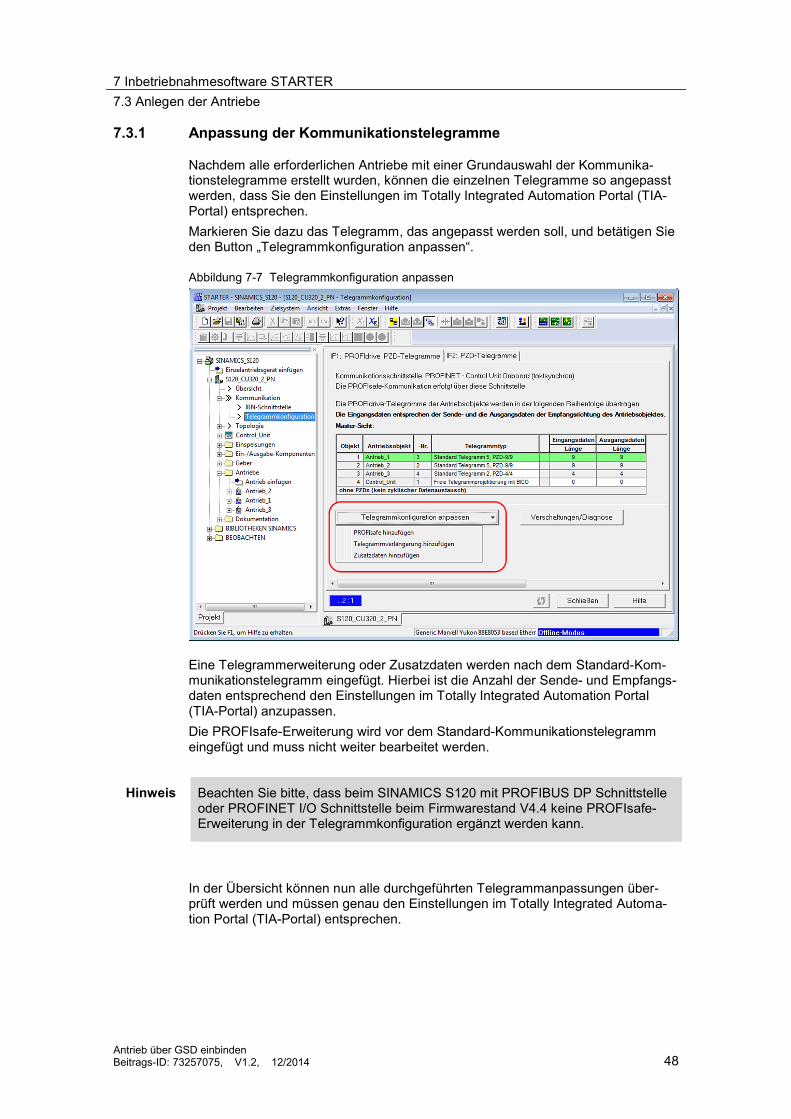
Nachdem alle erforderlichen Antriebe mit einer Grundauswahl der Kommunika-tionstelegramme erstellt wurden, können die einzelnen Telegramme so angepasstwerden, dass Sie den Einstellungen im Totally Integrated Automation Portal (TIA-Portal) entsprechen.Markieren Sie dazu das Telegramm, das angepasst werden soll, und betätigen Sieden Button „Telegrammkonfiguration anpassen“.
Abbildung 7-7 Telegrammkonfiguration anpassen
Eine Telegrammerweiterung oder Zusatzdaten werden nach dem Standard-Kom-munikationstelegramm eingefügt. Hierbei ist die Anzahl der Sende- und Empfangs-daten entsprechend den Einstellungen im Totally Integrated Automation Portal(TIA-Portal) anzupassen.Die PROFIsafe-Erweiterung wird vor dem Standard-Kommunikationstelegrammeingefügt und muss nicht weiter bearbeitet werden.
Hinweis Beachten Sie bitte, dass beim SINAMICS S120 mit PROFIBUS DP Schnittstelleoder PROFINET I/O Schnittstelle beim Firmwarestand V4.4 keine PROFIsafe-Erweiterung in der Telegrammkonfiguration ergänzt werden kann.
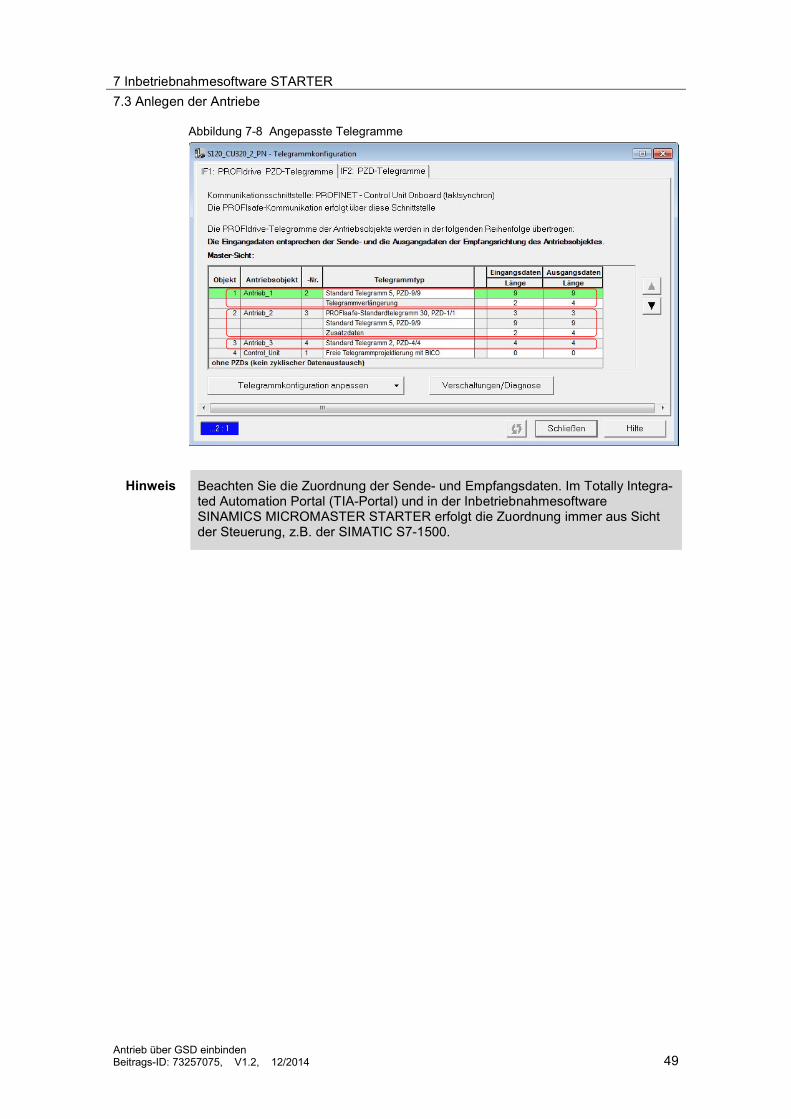
In der Übersicht können nun alle durchgeführten Telegrammanpassungen über-prüft werden und müssen genau den Einstellungen im Totally Integrated Automa-tion Portal (TIA-Portal) entsprechen.
7 Inbetriebnahmesoftware STARTER7.3 Anlegen der Antriebe
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 49
Abbildung 7-8 Angepasste Telegramme
Hinweis Beachten Sie die Zuordnung der Sende- und Empfangsdaten. Im Totally Integra-ted Automation Portal (TIA-Portal) und in der InbetriebnahmesoftwareSINAMICS MICROMASTER STARTER erfolgt die Zuordnung immer aus Sichtder Steuerung, z.B. der SIMATIC S7-1500.
8 Glossar
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 50
8 GlossarIn diesem Kapitel werden spezielle, in dieser Dokumentation verwendete Begriffeund Abkürzungen kurz erläutert.
Äquidistanz bei PROFIBUS DPDie Äquidistanz gewährleistet eine exakt gleich lange Zeitspanne für Buszyklen."Gleich lange Buszyklen" bedeuten, dass der PROFIBUS DP-Master den DP-Bus-zyklus immer wieder nach der gleichen Zeitspanne beginnt. Die angeschlossenenSlaves erhalten deshalb ebenfalls in exakt gleich bleibenden Zeitabständen ihreDaten vom Master. Man spricht hier auch von einer "Taktung des Buszyklus".Äquidistanz ist die Voraussetzung für Taktsynchronität.
Hinweis Die maximal zulässige Zykluszeit für den Betrieb taktsynchroner Antriebe beträgt8ms bei PROFIBUS DP.
Dies wirkt sich auf die maximale Anzahl der an der SIMATIC S7-1500 betreibba-ren taktsynchronen Achsen aus. Beachten Sie dies bei der Auslegung IhresAutomatisierungskonzepts.
Drive Object (DO) - AllgemeinEin Drive Object (DO), bzw. Antriebsobjekt ist eine eigenständige, in sich geschlos-sene Software-Funktionalität, die ihre eigenen Parameter und evtl. auch ihre eige-nen Stör- und Warnmeldungen hat. Die Drive Objects (DO)können standardmäßigvorhanden sein (z. B. Auswertung Ein-/Ausgänge), einfach anlegbar (z. B. Termi-nal Board) oder auch mehrfach anlegbar sein (z. B. Antriebsregelung).Die Drive Objects (DO), die von der Control Unit bearbeitet werden, werden überKonfigurationsparameter bei der Erstinbetriebnahme im STARTER eingerichtet. In-nerhalb einer Control Unit können verschiedene Drive Objects (DO) angelegt wer-den. Bei den Drive Objects (DO) handelt es sich um konfigurierbare Funktions-blöcke, mit denen bestimmte Antriebsfunktionen ausgeführt werden können. Wennnach der Erstinbetriebnahme zusätzliche Drive Objects (DO) konfiguriert oder ge-löscht werden sollen, muss dies über den Konfigurationsmodus des Antriebssys-tems erfolgen. Auf die Parameter eines Drive Objects (DO) kann nur zugegriffenwerden, nachdem das Antriebsobjekt konfiguriert und aus dem Konfigurationsmo-dus in den Parametriermodus gewechselt wurde.
Drive Object (DO) - AntriebsregelungEin Drive Object (DO) für die Antriebsregelung besitzt auf jedem Steckplatz vierSlots. Der erste Slot ist fest mit dem Module Access Point verknüpft und kanndurch den Anwender nicht verändert werden. Der zweite Slot ist für die optionaleEinbindung eines PROFIsafe-Telegramms reserviert. Im dritten Slot kann dasStandard-Telegramm des Antriebs für den Datenaustausch eingebunden werden.Der vierte Slot ist für optionale Einbindung einer Telegrammerweiterung reserviert.
8 Glossar
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 51
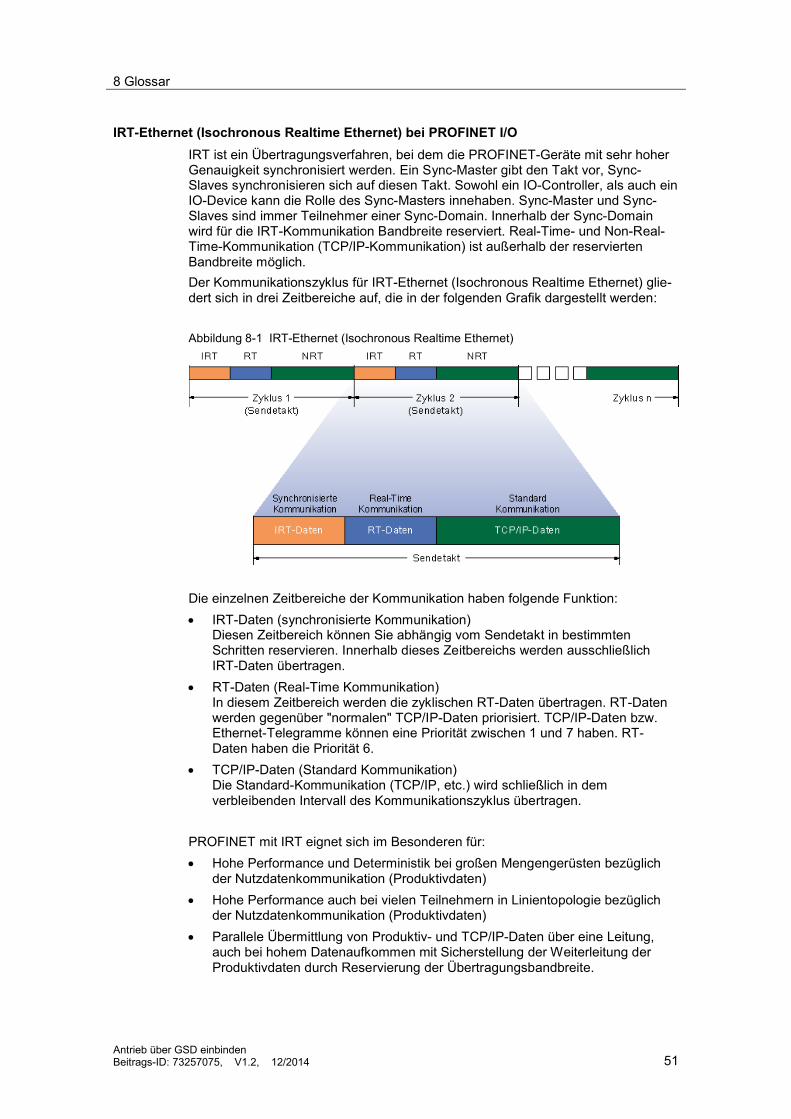
IRT-Ethernet (Isochronous Realtime Ethernet) bei PROFINET I/OIRT ist ein Übertragungsverfahren, bei dem die PROFINET-Geräte mit sehr hoherGenauigkeit synchronisiert werden. Ein Sync-Master gibt den Takt vor, Sync-Slaves synchronisieren sich auf diesen Takt. Sowohl ein IO-Controller, als auch einIO-Device kann die Rolle des Sync-Masters innehaben. Sync-Master und Sync-Slaves sind immer Teilnehmer einer Sync-Domain. Innerhalb der Sync-Domainwird für die IRT-Kommunikation Bandbreite reserviert. Real-Time- und Non-Real-Time-Kommunikation (TCP/IP-Kommunikation) ist außerhalb der reserviertenBandbreite möglich.Der Kommunikationszyklus für IRT-Ethernet (Isochronous Realtime Ethernet) glie-dert sich in drei Zeitbereiche auf, die in der folgenden Grafik dargestellt werden:
Abbildung 8-1 IRT-Ethernet (Isochronous Realtime Ethernet)
Die einzelnen Zeitbereiche der Kommunikation haben folgende Funktion: IRT-Daten (synchronisierte Kommunikation)
Diesen Zeitbereich können Sie abhängig vom Sendetakt in bestimmtenSchritten reservieren. Innerhalb dieses Zeitbereichs werden ausschließlichIRT-Daten übertragen.
RT-Daten (Real-Time Kommunikation)In diesem Zeitbereich werden die zyklischen RT-Daten übertragen. RT-Datenwerden gegenüber "normalen" TCP/IP-Daten priorisiert. TCP/IP-Daten bzw.Ethernet-Telegramme können eine Priorität zwischen 1 und 7 haben. RT-Daten haben die Priorität 6.
TCP/IP-Daten (Standard Kommunikation)Die Standard-Kommunikation (TCP/IP, etc.) wird schließlich in demverbleibenden Intervall des Kommunikationszyklus übertragen.
PROFINET mit IRT eignet sich im Besonderen für: Hohe Performance und Deterministik bei großen Mengengerüsten bezüglich
der Nutzdatenkommunikation (Produktivdaten) Hohe Performance auch bei vielen Teilnehmern in Linientopologie bezüglich
der Nutzdatenkommunikation (Produktivdaten) Parallele Übermittlung von Produktiv- und TCP/IP-Daten über eine Leitung,
auch bei hohem Datenaufkommen mit Sicherstellung der Weiterleitung derProduktivdaten durch Reservierung der Übertragungsbandbreite.
8 Glossar
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 52
NRT-Ethernet (Non-Realtime Ethernet) bei PROFINET I/ONRT-Ethernet (Non-Realtime Ethernet) entspricht der Standard-Kommunikationüber Ethernet unter Verwendung von TCP/IP, usw.
RT-Ethernet (Realtime Ethernet) bei PROFINET I/ORT-Ethernet (Realtime Ethernet) entspricht dem NRT-Ethernet mit einer priorisier-ten Behandlung der zu übertragenden Datenpakete.
RT-Klassen für PROFINET I/OPROFINET IO ist ein skalierbares Echtzeit-Kommunikationssystem auf Basis derEthernet-Technologie. Der skalierbare Ansatz drückt sich in verschiedenenEchtzeitklassen aus: RT (Realtime Ethernet):
Übertragung der Daten in priorisierten Ethernet-Telegrammen, nicht taktsyn-chron. Die benötigte Bandbreite fällt in den Bereich der freien Bandbreite fürdie TCP/IP-Kommunikation.
IRT (Isochronous Realtime Ethernet):Taktsynchrone Übertragung der Daten mit hoher Stabilität für zeitkritischeAnwendungen (z. B. Motion-Control). Die benötigte Bandbreite fällt in denBereich der für zyklische Daten reservierte Bandbreite.
Je nach Gerät werden nicht alle Echtzeitklassen unterstützt.
Sync-Domain bei PROFINET I/OEine Sync-Domain ist eine Gruppe von PROFINET-Geräten, die auf einen gemein-samen Takt synchronisiert sind. Genau ein Gerät hat die Rolle des Sync-Masters(Taktgeber), alle anderen Geräte nehmen die Rolle eines Sync-Slaves ein. DerSync-Master ist meist ein IO-Controller oder ein Switch.Nicht synchronisierte PROFINET-Geräte sind nicht Teil einer Sync-Domain.
Synchronisationstakt bei PROFINET I/ODer Synchronisationstakt ist die Takteinstellung des Sync-Masters für seine Rolleals Sync-Master (Taktgeber) für den Datenaustausch innerhalb einer Gruppe vonPROFINET-Geräten einer Sync-Domain.
Hinweis Die maximal zulässige Zykluszeit für den Betrieb taktsynchroner Antriebe beträgt4ms bei PROFINET I/O.
Dies wirkt sich auf die maximale Anzahl der an der SIMATIC S7-1500 betreibba-ren taktsynchronen Achsen aus. Beachten Sie dies bei der Auslegung IhresAutomatisierungskonzepts.
8 Glossar
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 53
Sync-Master bei PROFINET I/OGenau ein Gerät in einer Sync-Domain hat die Rolle des Sync-Masters inne undstellt den Taktgeber für die Taktsynchronisation einer Gruppe von PROFINET-Geräten einer Sync-Domain dar.
Sync-Slave bei PROFINET I/OAlle Geräte einer Sync-Domain, die nicht die Rolle des Sync-Masters innehaben,stellen Sync-Slaves dar. Diese Geräte synchronisieren sich auf die Taktvorgabedes Sync-Masters (Taktgeber) für den Datenaustausch innerhalb dieser Sync-Domain.
Taktsynchronität bei PROFIBUS DPMit der Systemeigenschaft "Taktsynchronität" lassen sich Messwerte und Prozess-daten in einem festen Systemtakt erfassen. Im gleichen Systemtakt erfolgt die Sig-nalverarbeitung bis zum Schalten auf die Ausgangsklemme. Die Taktsynchronitätträgt somit zu einer hohen Güte der Steuerung und damit zu einer größeren Ferti-gungsgenauigkeit bei. Mit der Taktsynchronität werden die möglichen Schwankun-gen der Prozessreaktionszeiten drastisch reduziert. Die zeitlich gesicherte Bearbei-tung kann für einen höheren Maschinentakt genutzt werden.Grundsätzlich bietet sich die Taktsynchronität überall dort an, wo Messwerte syn-chron erfasst werden müssen, Bewegungen koordiniert und Prozessreaktionendefiniert und gleichzeitig erfolgen müssen.Die wesentliche Grundlage für synchronisierte Bearbeitungszyklen bildet der äqui-distante (isochrone) PROFIBUS. Er stellt eine Grundtaktung als Basis zur Verfü-gung. Durch die Systemeigenschaft "Taktsynchronität" wird eine Automatisierungs-lösung an den äquidistanten PROFIBUS gekoppelt.Dies bedeutet: Das Einlesen der Eingangsdaten wird mit dem DP-Zyklus synchronisiert; alle
Eingangsdaten werden zum selben Zeitpunkt eingelesen. Das Anwenderprogramm zur Bearbeitung der Peripheriedaten wird über die
Taktsynchronalarm-OBs OB 61 bis OB 64 mit dem DP-Zyklus synchronisiert. Die Ausgabe der Ausgangsdaten wird mit dem DP-Zyklus synchronisiert; alle
Ausgangsdaten werden gleichzeitig wirksam. Alle Ein- und Ausgangsdaten werden konsistent übertragen. Dies bedeutet,
dass alle Daten des Prozessabbildes logisch und zeitlich zusammengehören.
Verzögerungszeit To der Taktsynchronität bei PROFIBUS DPDamit zum Startzeitpunkt des neuen Systemtaktes ein konsistenter Zustand derAusgänge zum Prozess übertragen werden kann, erfolgt die Ausgabe an derKlemme erst zum Zeitpunkt To nach dem Taktschlag. Die Zeit To umfasst für einbestimmtes Ausgangsmodul minimal die Zeit der Übertragung vom IO-Controllerzum IO-Device (über PROFINET IO) und im IO-Device die Übertragung derAusgänge vom Interfacemodul zum Elektronikmodul (Rückwandbus) mit der daringegebenenfalls enthaltenen Zeit für die Digital-Analog-Wandlung.Dass die Werte zeitgleich geschrieben werden wird in der Anlage erreicht, indemdie Verzögerungszeit To aller taktsynchronen Ausgangsmodule auf einen gleichenWert gesetzt wird. Dieser Wert muss größer oder gleich der größten minimalen
8 Glossar
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 54
Verzögerungszeit To aller taktsynchronen Ausgangsmodule sein. STEP 7 berech-net automatisch eine gemeinsame kleinstmögliche Verzögerungszeit To.
Vorlaufzeit Ti der Taktsynchronität bei PROFIBUS DPDamit zum Startzeitpunkt des neuen Systemtaktes ein konsistenter Zustand derEingänge zum IO-Controller übertragen werden kann, muss der Einlesevorgangum die Zeit Ti vorverlegt werden. Die Zeit Ti umfasst für ein bestimmtes Eingangs-modul minimal die Signalaufbereitungs- und Wandlungszeit an den Elektronikmo-dulen und die Zeit zur Übertragung zum Interface Modul am IO-Device-Rückwand-bus.In der Anlage wird erreicht, dass die Werte zeitgleich eingelesen werden, indemdie Vorlaufzeit Ti aller taktsynchron gelesenen Eingangsmodule auf einen gleichenWert gesetzt wird, der größer oder gleich der größten minimalen Vorlaufzeit Ti allertaktsynchronen Eingangsmodule ist. STEP 7 stellt mit der Standardeinstellungsicher, dass eine gemeinsame kleinstmögliche Vorlaufzeit Ti eingestellt wird.
Zykluszeit des OB 1-Zyklus bei Nutzung der Taktsynchronität bei PROFIBUS DPEs ist möglich, taktsynchrone dezentrale Peripherie mit nicht taktsynchroner de-zentraler Peripherie an einem DP-Mastersystem zu kombinieren. Für eine besserePerformance wird jedoch empfohlen, taktsynchrone und nicht taktsynchrone Peri-pherie auf unterschiedliche DP-Mastersysteme aufzuteilen.Werden HMI-Geräte oder PG's eingesetzt, so sollten diese nicht am taktsynchro-nen DP-Mastersystem betrieben werden.Bei der Planung der Taktsynchronität ist zu beachten, dass die Taktsynchronalarm-OBs in einer hohen Priorität abgearbeitet werden und während dieser Zeit die zyk-lische Bearbeitung und Alarme unterbrochen werden.
Abbildung 8-2 Verlängerung des OB1-Zyklus durch die Taktsynchronität
OB 1
OB 1 OB 1 OB 1
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB1 mitTaktsynchronität
Taktsynchroner DP-Zyklus(Unterbrechung OB1)
OB1 ohneTaktsynchronität
OB 1OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB6x
OB 1 CycleTime
OB 1 CycleTime
Nimmt die Bearbeitungszeit des taktsynchronen Anwenderprogramms (OB 6x) dieHälfe der DP-Zykluszeit ein, so verdoppelt sich die Zykluszeit des OB 1. Nimmt dieBearbeitungszeit des OB 6x 66% ein, so verdreifacht sich die Zykluszeit des OB 1,und so fort.Soll neben einem taktsynchronen Anwenderprogramm noch ein zyklisches Anwen-derprogramm betrieben werden, so ist darauf zu achten, dass das taktsynchroneAnwenderprogramm prozentual keinen zu großen Anteil des DP-Zyklus einnimmt.
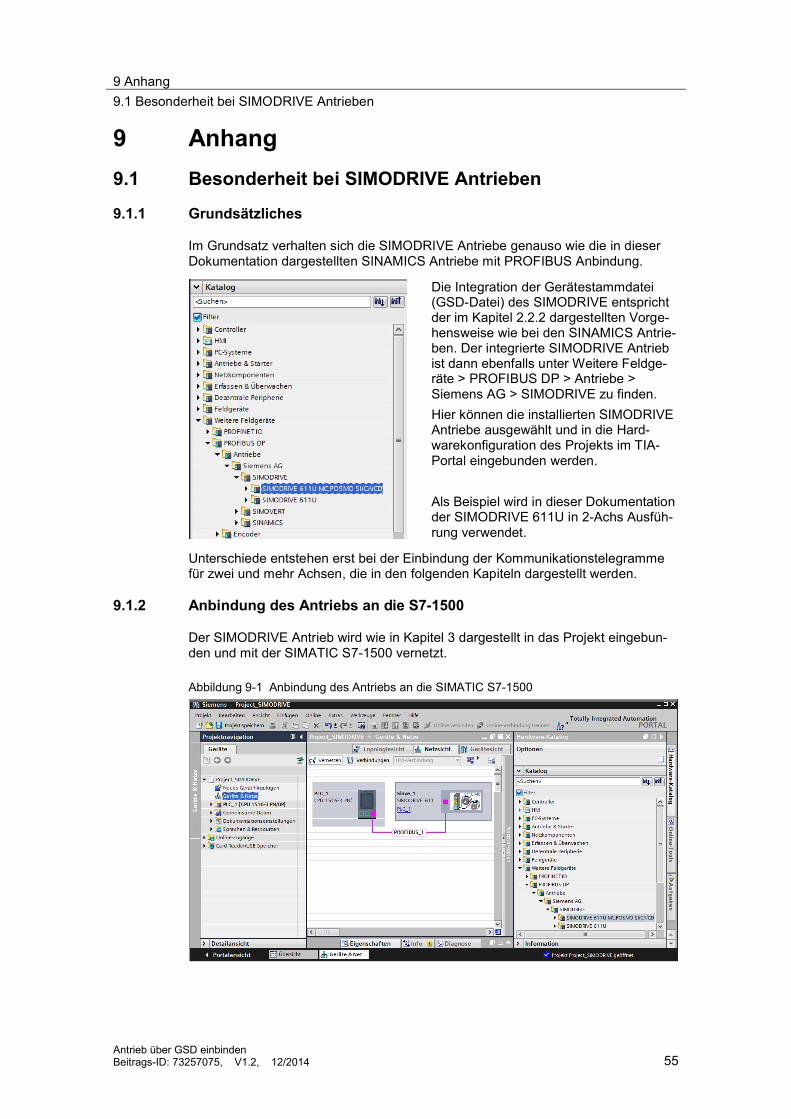
9 Anhang9.1 Besonderheit bei SIMODRIVE Antrieben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 55
9 Anhang9.1 Besonderheit bei SIMODRIVE Antrieben
9.1.1 Grundsätzliches
Im Grundsatz verhalten sich die SIMODRIVE Antriebe genauso wie die in dieserDokumentation dargestellten SINAMICS Antriebe mit PROFIBUS Anbindung.
Die Integration der Gerätestammdatei(GSD-Datei) des SIMODRIVE entsprichtder im Kapitel 2.2.2 dargestellten Vorge-hensweise wie bei den SINAMICS Antrie-ben. Der integrierte SIMODRIVE Antriebist dann ebenfalls unter Weitere Feldge-räte > PROFIBUS DP > Antriebe >Siemens AG > SIMODRIVE zu finden.Hier können die installierten SIMODRIVEAntriebe ausgewählt und in die Hard-warekonfiguration des Projekts im TIA-Portal eingebunden werden.
Als Beispiel wird in dieser Dokumentationder SIMODRIVE 611U in 2-Achs Ausfüh-rung verwendet.
Unterschiede entstehen erst bei der Einbindung der Kommunikationstelegrammefür zwei und mehr Achsen, die in den folgenden Kapiteln dargestellt werden.
9.1.2 Anbindung des Antriebs an die S7-1500
Der SIMODRIVE Antrieb wird wie in Kapitel 3 dargestellt in das Projekt eingebun-den und mit der SIMATIC S7-1500 vernetzt.
Abbildung 9-1 Anbindung des Antriebs an die SIMATIC S7-1500
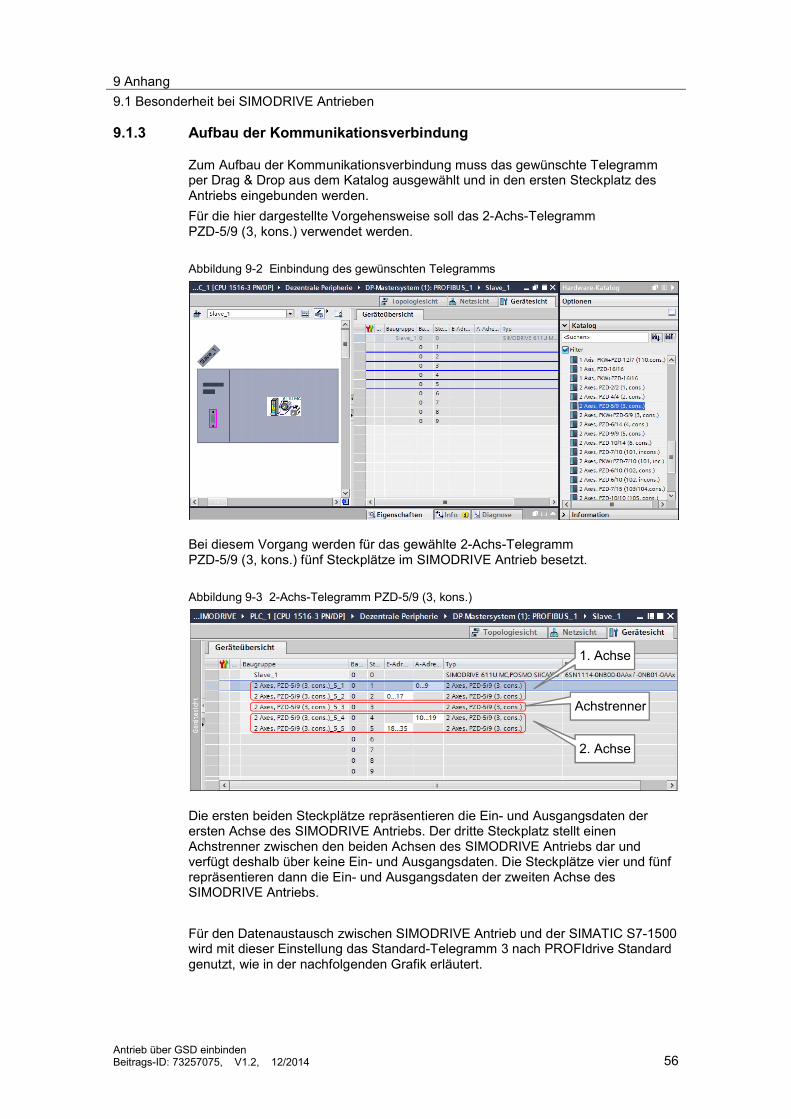
9 Anhang9.1 Besonderheit bei SIMODRIVE Antrieben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 56
9.1.3 Aufbau der Kommunikationsverbindung
Zum Aufbau der Kommunikationsverbindung muss das gewünschte Telegrammper Drag & Drop aus dem Katalog ausgewählt und in den ersten Steckplatz desAntriebs eingebunden werden.Für die hier dargestellte Vorgehensweise soll das 2-Achs-TelegrammPZD-5/9 (3, kons.) verwendet werden.
Abbildung 9-2 Einbindung des gewünschten Telegramms
Bei diesem Vorgang werden für das gewählte 2-Achs-TelegrammPZD-5/9 (3, kons.) fünf Steckplätze im SIMODRIVE Antrieb besetzt.
Abbildung 9-3 2-Achs-Telegramm PZD-5/9 (3, kons.)
Die ersten beiden Steckplätze repräsentieren die Ein- und Ausgangsdaten derersten Achse des SIMODRIVE Antriebs. Der dritte Steckplatz stellt einenAchstrenner zwischen den beiden Achsen des SIMODRIVE Antriebs dar undverfügt deshalb über keine Ein- und Ausgangsdaten. Die Steckplätze vier und fünfrepräsentieren dann die Ein- und Ausgangsdaten der zweiten Achse desSIMODRIVE Antriebs.
Für den Datenaustausch zwischen SIMODRIVE Antrieb und der SIMATIC S7-1500wird mit dieser Einstellung das Standard-Telegramm 3 nach PROFIdrive Standardgenutzt, wie in der nachfolgenden Grafik erläutert.
1. Achse
2. Achse
Achstrenner
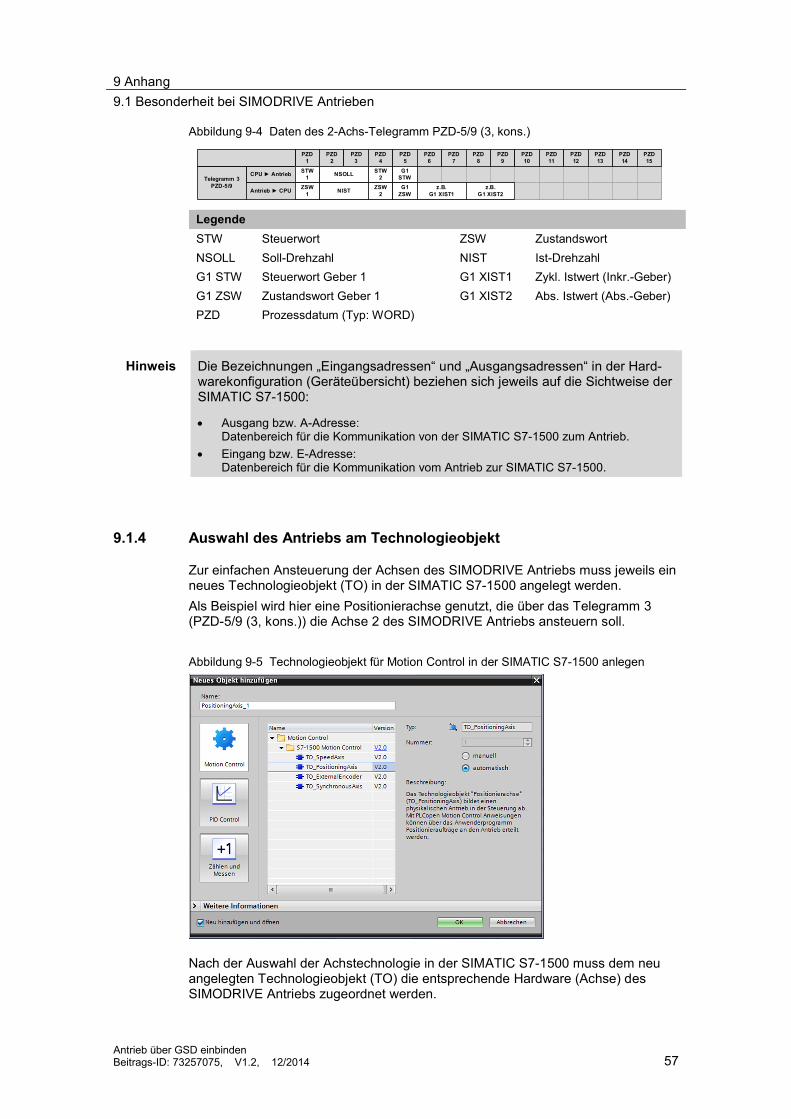
9 Anhang9.1 Besonderheit bei SIMODRIVE Antrieben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 57
Abbildung 9-4 Daten des 2-Achs-Telegramm PZD-5/9 (3, kons.)
PZD1
PZD2
PZD3
PZD4
PZD5
PZD6
PZD7
PZD8
PZD9
PZD10
PZD11
PZD12
PZD13
PZD14
PZD15
CPU AntriebTelegramm 3
PZD-5/9Antrieb CPU
STW1
ZSW1
NSOLL
NIST
STW2
ZSW2
G1STWG1
ZSWz.B.
G1 XIST1z.B.
G1 XIST2
LegendeSTW Steuerwort ZSW ZustandswortNSOLL Soll-Drehzahl NIST Ist-DrehzahlG1 STW Steuerwort Geber 1 G1 XIST1 Zykl. Istwert (Inkr.-Geber)G1 ZSW Zustandswort Geber 1 G1 XIST2 Abs. Istwert (Abs.-Geber)PZD Prozessdatum (Typ: WORD)
Hinweis Die Bezeichnungen „Eingangsadressen“ und „Ausgangsadressen“ in der Hard-warekonfiguration (Geräteübersicht) beziehen sich jeweils auf die Sichtweise derSIMATIC S7-1500:
Ausgang bzw. A-Adresse:Datenbereich für die Kommunikation von der SIMATIC S7-1500 zum Antrieb.
Eingang bzw. E-Adresse:Datenbereich für die Kommunikation vom Antrieb zur SIMATIC S7-1500.
9.1.4 Auswahl des Antriebs am Technologieobjekt
Zur einfachen Ansteuerung der Achsen des SIMODRIVE Antriebs muss jeweils einneues Technologieobjekt (TO) in der SIMATIC S7-1500 angelegt werden.Als Beispiel wird hier eine Positionierachse genutzt, die über das Telegramm 3(PZD-5/9 (3, kons.)) die Achse 2 des SIMODRIVE Antriebs ansteuern soll.
Abbildung 9-5 Technologieobjekt für Motion Control in der SIMATIC S7-1500 anlegen
Nach der Auswahl der Achstechnologie in der SIMATIC S7-1500 muss dem neuangelegten Technologieobjekt (TO) die entsprechende Hardware (Achse) desSIMODRIVE Antriebs zugeordnet werden.
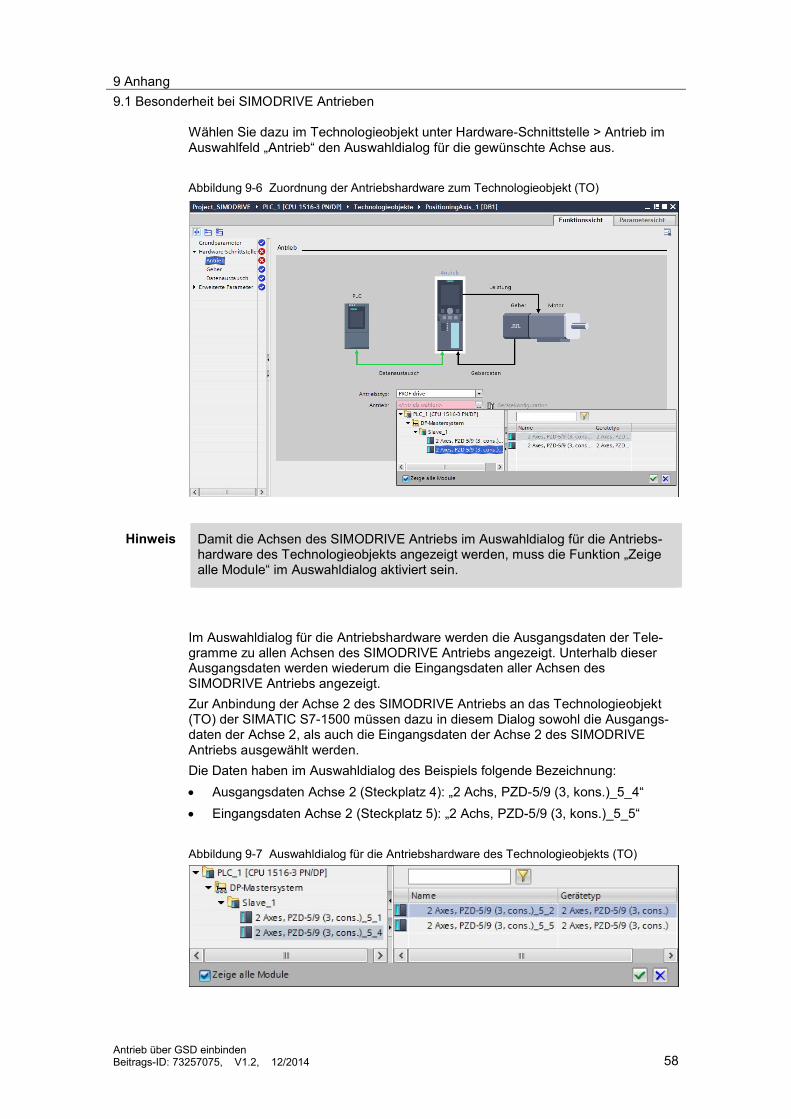
9 Anhang9.1 Besonderheit bei SIMODRIVE Antrieben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 58
Wählen Sie dazu im Technologieobjekt unter Hardware-Schnittstelle > Antrieb imAuswahlfeld „Antrieb“ den Auswahldialog für die gewünschte Achse aus.
Abbildung 9-6 Zuordnung der Antriebshardware zum Technologieobjekt (TO)
Hinweis Damit die Achsen des SIMODRIVE Antriebs im Auswahldialog für die Antriebs-hardware des Technologieobjekts angezeigt werden, muss die Funktion „Zeigealle Module“ im Auswahldialog aktiviert sein.
Im Auswahldialog für die Antriebshardware werden die Ausgangsdaten der Tele-gramme zu allen Achsen des SIMODRIVE Antriebs angezeigt. Unterhalb dieserAusgangsdaten werden wiederum die Eingangsdaten aller Achsen desSIMODRIVE Antriebs angezeigt.Zur Anbindung der Achse 2 des SIMODRIVE Antriebs an das Technologieobjekt(TO) der SIMATIC S7-1500 müssen dazu in diesem Dialog sowohl die Ausgangs-daten der Achse 2, als auch die Eingangsdaten der Achse 2 des SIMODRIVEAntriebs ausgewählt werden.Die Daten haben im Auswahldialog des Beispiels folgende Bezeichnung: Ausgangsdaten Achse 2 (Steckplatz 4): „2 Achs, PZD-5/9 (3, kons.)_5_4“ Eingangsdaten Achse 2 (Steckplatz 5): „2 Achs, PZD-5/9 (3, kons.)_5_5“
Abbildung 9-7 Auswahldialog für die Antriebshardware des Technologieobjekts (TO)
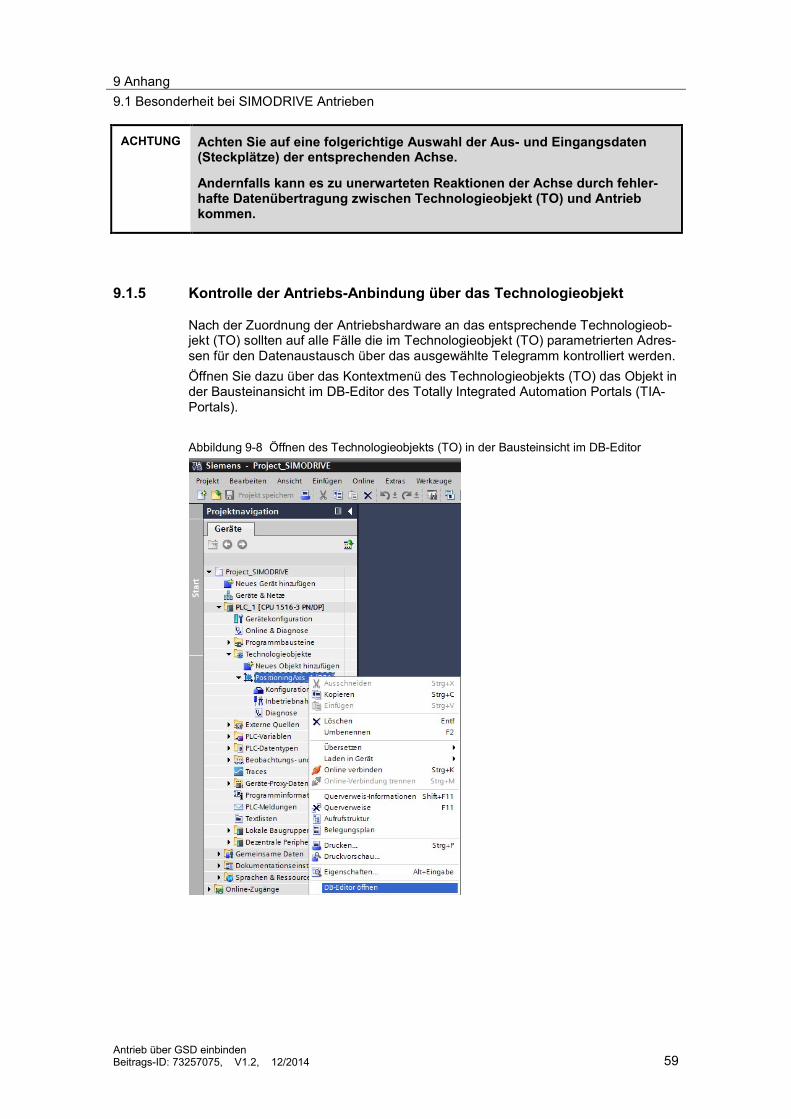
9 Anhang9.1 Besonderheit bei SIMODRIVE Antrieben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 59
ACHTUNG Achten Sie auf eine folgerichtige Auswahl der Aus- und Eingangsdaten(Steckplätze) der entsprechenden Achse.
Andernfalls kann es zu unerwarteten Reaktionen der Achse durch fehler-hafte Datenübertragung zwischen Technologieobjekt (TO) und Antriebkommen.
9.1.5 Kontrolle der Antriebs-Anbindung über das Technologieobjekt
Nach der Zuordnung der Antriebshardware an das entsprechende Technologieob-jekt (TO) sollten auf alle Fälle die im Technologieobjekt (TO) parametrierten Adres-sen für den Datenaustausch über das ausgewählte Telegramm kontrolliert werden.Öffnen Sie dazu über das Kontextmenü des Technologieobjekts (TO) das Objekt inder Bausteinansicht im DB-Editor des Totally Integrated Automation Portals (TIA-Portals).
Abbildung 9-8 Öffnen des Technologieobjekts (TO) in der Bausteinsicht im DB-Editor
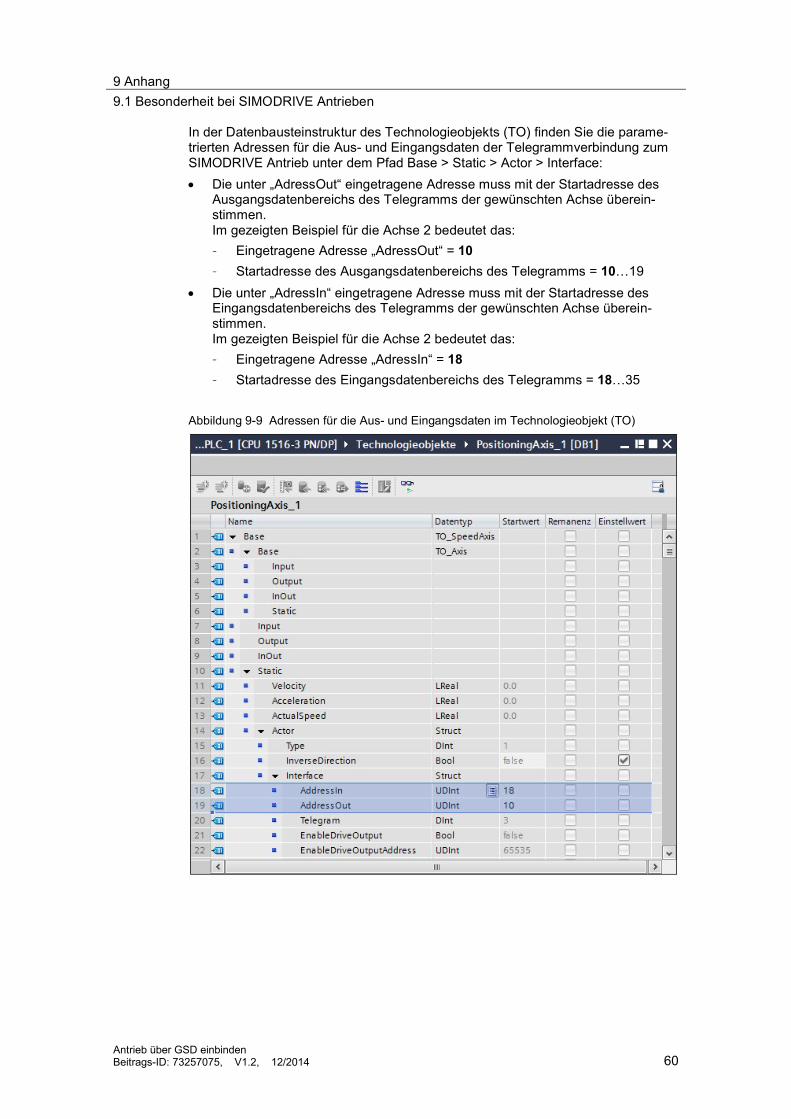
9 Anhang9.1 Besonderheit bei SIMODRIVE Antrieben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 60
In der Datenbausteinstruktur des Technologieobjekts (TO) finden Sie die parame-trierten Adressen für die Aus- und Eingangsdaten der Telegrammverbindung zumSIMODRIVE Antrieb unter dem Pfad Base > Static > Actor > Interface: Die unter „AdressOut“ eingetragene Adresse muss mit der Startadresse des
Ausgangsdatenbereichs des Telegramms der gewünschten Achse überein-stimmen.Im gezeigten Beispiel für die Achse 2 bedeutet das:– Eingetragene Adresse „AdressOut“ = 10– Startadresse des Ausgangsdatenbereichs des Telegramms = 10…19
Die unter „AdressIn“ eingetragene Adresse muss mit der Startadresse desEingangsdatenbereichs des Telegramms der gewünschten Achse überein-stimmen.Im gezeigten Beispiel für die Achse 2 bedeutet das:– Eingetragene Adresse „AdressIn“ = 18– Startadresse des Eingangsdatenbereichs des Telegramms = 18…35
Abbildung 9-9 Adressen für die Aus- und Eingangsdaten im Technologieobjekt (TO)
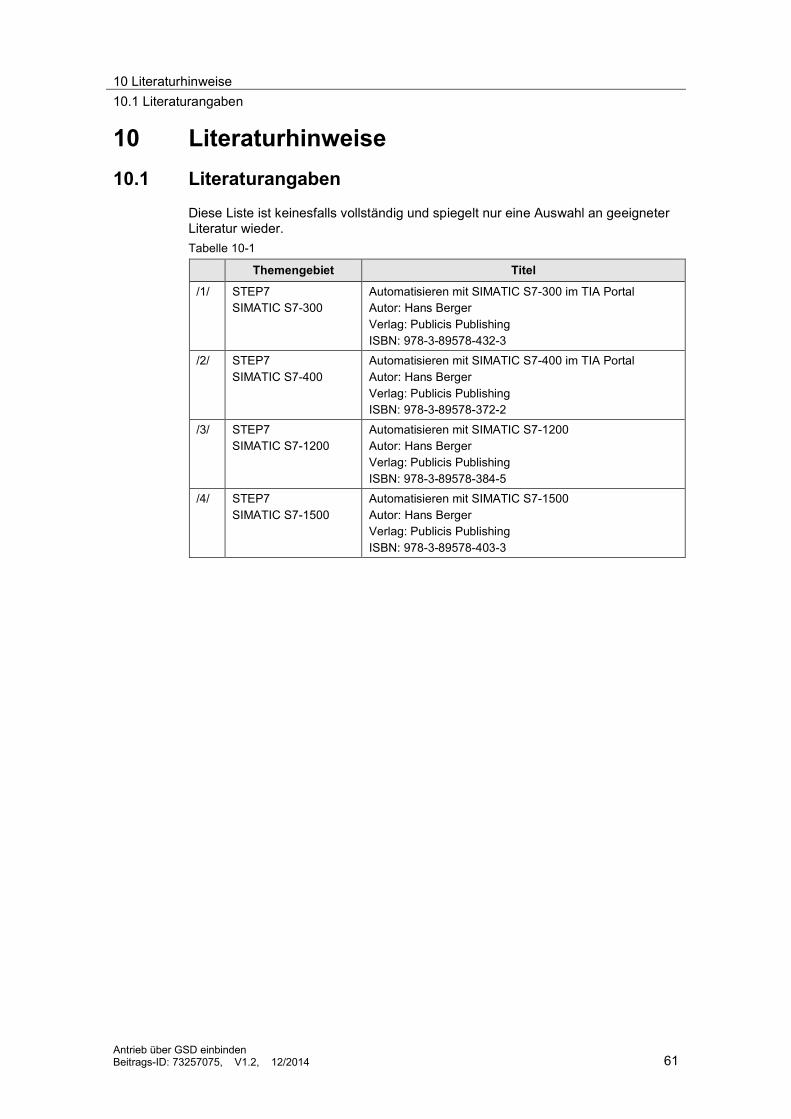
10 Literaturhinweise10.1 Literaturangaben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 61
10 Literaturhinweise10.1 Literaturangaben
Diese Liste ist keinesfalls vollständig und spiegelt nur eine Auswahl an geeigneterLiteratur wieder.Tabelle 10-1
Themengebiet Titel
/1/ STEP7SIMATIC S7-300
Automatisieren mit SIMATIC S7-300 im TIA PortalAutor: Hans BergerVerlag: Publicis PublishingISBN: 978-3-89578-432-3
/2/ STEP7SIMATIC S7-400
Automatisieren mit SIMATIC S7-400 im TIA PortalAutor: Hans BergerVerlag: Publicis PublishingISBN: 978-3-89578-372-2
/3/ STEP7SIMATIC S7-1200
Automatisieren mit SIMATIC S7-1200Autor: Hans BergerVerlag: Publicis PublishingISBN: 978-3-89578-384-5
/4/ STEP7SIMATIC S7-1500
Automatisieren mit SIMATIC S7-1500Autor: Hans BergerVerlag: Publicis PublishingISBN: 978-3-89578-403-3
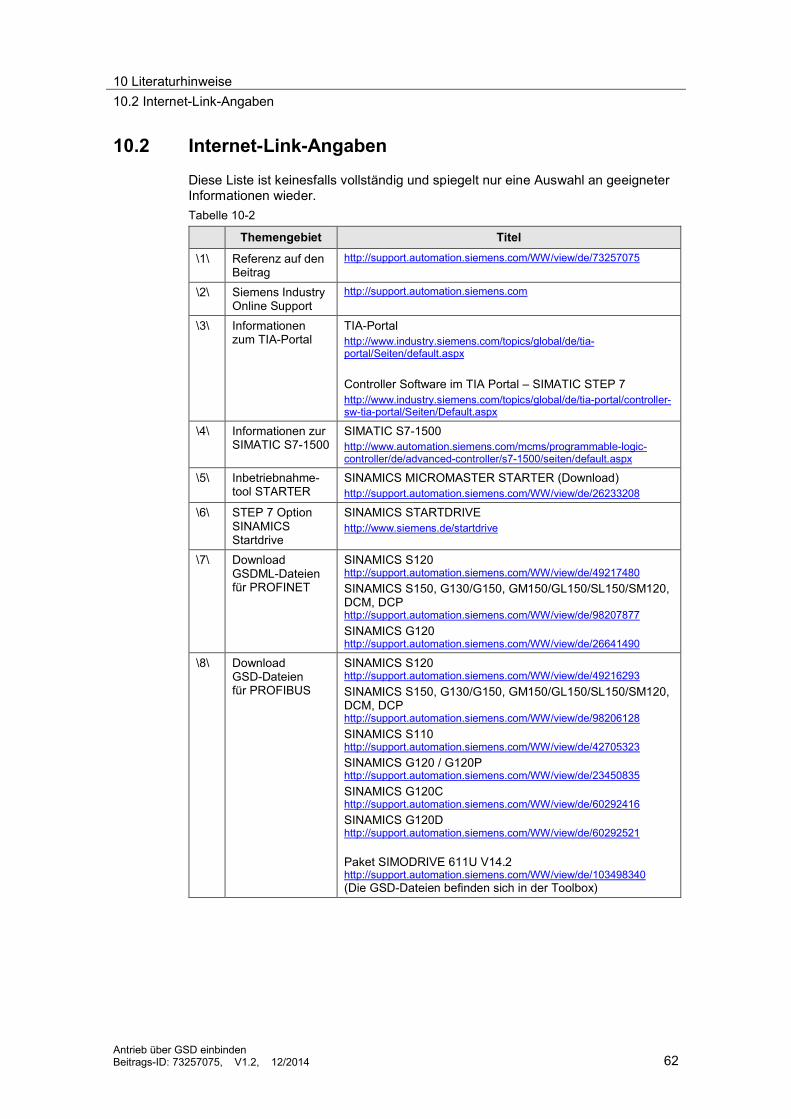
10 Literaturhinweise10.2 Internet-Link-Angaben
Antrieb über GSD einbindenBeitrags-ID: 73257075, V1.2, 12/2014 62
10.2 Internet-Link-Angaben
Diese Liste ist keinesfalls vollständig und spiegelt nur eine Auswahl an geeigneterInformationen wieder.Tabelle 10-2
Themengebiet Titel
\1\ Referenz auf denBeitrag
http://support.automation.siemens.com/WW/view/de/73257075
\2\ Siemens IndustryOnline Support
http://support.automation.siemens.com
\3\ Informationenzum TIA-Portal
TIA-Portalhttp://www.industry.siemens.com/topics/global/de/tia-portal/Seiten/default.aspx
Controller Software im TIA Portal – SIMATIC STEP 7http://www.industry.siemens.com/topics/global/de/tia-portal/controller-sw-tia-portal/Seiten/Default.aspx
\4\ Informationen zurSIMATIC S7-1500
SIMATIC S7-1500http://www.automation.siemens.com/mcms/programmable-logic-controller/de/advanced-controller/s7-1500/seiten/default.aspx
\5\ Inbetriebnahme-tool STARTER
SINAMICS MICROMASTER STARTER (Download)http://support.automation.siemens.com/WW/view/de/26233208
\6\ STEP 7 OptionSINAMICSStartdrive
SINAMICS STARTDRIVEhttp://www.siemens.de/startdrive
\7\ DownloadGSDML-Dateienfür PROFINET
SINAMICS S120http://support.automation.siemens.com/WW/view/de/49217480SINAMICS S150, G130/G150, GM150/GL150/SL150/SM120,DCM, DCPhttp://support.automation.siemens.com/WW/view/de/98207877SINAMICS G120http://support.automation.siemens.com/WW/view/de/26641490
\8\ DownloadGSD-Dateienfür PROFIBUS
SINAMICS S120http://support.automation.siemens.com/WW/view/de/49216293SINAMICS S150, G130/G150, GM150/GL150/SL150/SM120,DCM, DCPhttp://support.automation.siemens.com/WW/view/de/98206128SINAMICS S110http://support.automation.siemens.com/WW/view/de/42705323SINAMICS G120 / G120Phttp://support.automation.siemens.com/WW/view/de/23450835SINAMICS G120Chttp://support.automation.siemens.com/WW/view/de/60292416SINAMICS G120Dhttp://support.automation.siemens.com/WW/view/de/60292521
Paket SIMODRIVE 611U V14.2http://support.automation.siemens.com/WW/view/de/103498340(Die GSD-Dateien befinden sich in der Toolbox)