Embed Size (px)
Citation preview
Mh. Math. 108, 277--293 (1989) l~ma~e~e ffir
Maihemalik �9 by Springer-Verlag 1989
Zur L2-Bestapproximation eines konvexen K6rpers durch einen bewegten konvexen KOrper
Von
Randolf Arnold, Dortmund
(Eingegangen am 19. Juni 1989)
Abstract. On the L2-Best Approximation of a Convex Body by a Moved Convex Body. Let K and L be convex bodies of the n-dimensional Euclidean space E n. The 0-distance of K and L is defined by 62 (K, L)..= ( S (hL -- hx)2do)1/2, where hK and hL
Sn-1
denote the support functions of K and L restricted to the unit sphere S n- 1 ~ E .. We consider the problem of best approximation of L by the images q~ K of K trader proper rigid motions ~0: E" --* E ". A motion 9~ that minimizes ~z (~ K, L) is called optimal for (K, L) in the sense of the metric Oz. The results in the general case (n/> 2 arbitrary) base on the fact that the Steiner points of ~0 K and L coincide if q~ is optimal for (K, L). For n = 2 we obtain a relationship between convex convolution bodies and the underlying approximation problem.
Einleitung
Bei der Untersuchung von Approximationsfragen im Raum ~,~n der konvexen K6rper des n-dimensionalen euklidischen Raumes E n wurden in der Literatur neben der tiblichen Hausdorff-Metrik ~ ' zahlreiche andere Abstandsbegriffe ffir konvexe K6rper zugrundege- legt. Die Arbeiten von GRONBAUM [9], SI-~PHARD und WEBSTER [17] und GRUBER [8] vermitteln zusammen einen wohl vollst/indigen Uber- blick fiber die bisher verwendeten Abstfinde.
Die Abbildung K~--, hlo die jedem Kr rpe r KE X n seine Stfitzfunk- tion h~r: E n ---, N zuordnet, induziert eine ganze Familie von Metriken auf ~,"C n, indem h K auf die ( n - 1)-dimensionale Einheitssphfire S n- 1 c E n eingeschr~inkt und als Element des Raumes C(S"-1) der stetigen Funkt ionen von S n-1 in N aufgefaBt wird. Zu jeder Norm I I " II yon C (a n- 1) erhfilt man dann mittels
~(K,L) = IlhLt S n-1 - hKIS n-!H
278 R. ARNOLD
eine entsprechende Metrik 0 auf o~ n, wobei die Maximumnorm II �9 Iloo
gerade den Hausdorff-Abstand a n liefert. Die durch die L P - N o r m (1 ~< p < oo)
Ilfllp = ( S If(x)[Pdo(x)) alp (do : Oberfl/ichenelement der S "-1) Sn-1
erzeugte p - M e t r i k O p auf 3r wurde (im Fall der Ebene) zuerst von MCCLUgV, und VITALE [12] betrachtet.
Wir legen im folgenden die durch das innere Produkt
Or] g) := S f(x) g (x) do (x) S n - 1
induzierte L2-Norm in C ( S ~-1) zugrunde und betrachten das fol- gende Approximationsprobtem:
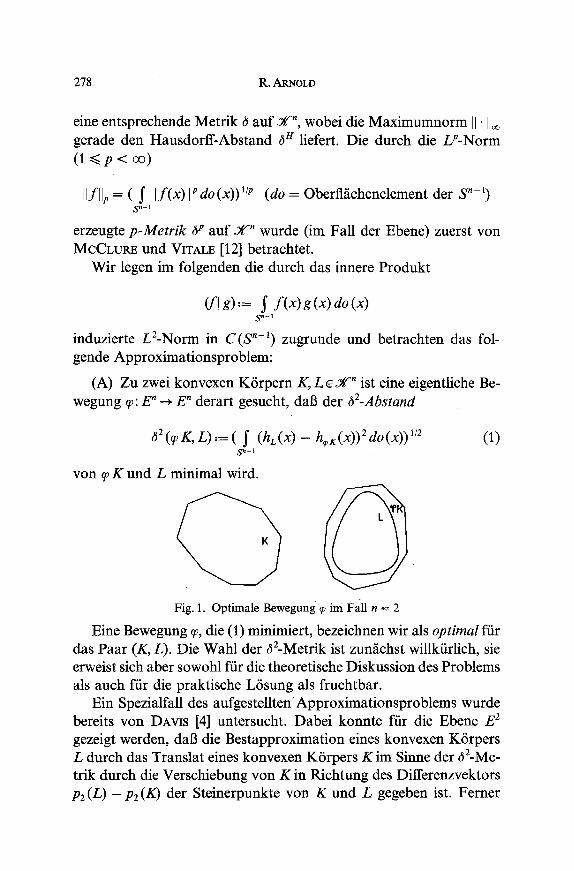
(A) Zu zwei konvexen Khrpern K, L ~ ~'~ ist eine eigentliche Be- wegung ~0: E n --, E ~ derart gesucht, dab der 02-Abstand
o 2 (~ x, L) := ( S (hL(x) - h ,K(x)) 2 ao(x)) ' /2 S n - l
yon ~o K und L minimal wird.
@ (1)
Fig. 1. Optimale Bewegung ~0 im Fall n - 2
Eine Bewegung ~, die (1) minimiert, bezeichnen wir als opt imal ffir das Paar (K, L). Die Wahl der 02-Metrik ist zun/ichst willkiirlich, sie erweist sich aber sowohl ffir die theoretische Diskussion des Problems als auch ffir die praktische L6sung als fruchtbar.
Ein Spezialfall des aufgestellten Approximationsproblems wurde bereits von DAVIS [4] untersucht. Dabei konnte ffir die Ebene E 2 gezeigt werden, dab die Bestapproximation eines konvexen K6rpers L dureh das Translat eines konvexen K6rpers K im Sinne der 02-Me - trik durch die Verschiebung von K in Richtung des Differenzvektors P2 (L) - P 2 (K) der Steinerpunkte von K und L gegeben ist. Ferner
Zur L2-Bestapproximation eines konvexen K6rpers 279
findet man Aussagen fiber die Bestapproximation durch ein Translat bei zugrundegelegter Hausdorff-Metrik in ~ " bei GROEMER [7]. Im Zusammenhang mit der Bewegung konvexer K6rper sind auch die etwas/ilteren Arbeiten fiber Stfitzbereiche und ihre Darstellung durch Fourierreihen zu berficksichtigen (siehe z.B. G6Ra'LER [5], [6]).
Die folgende Diskussion des Approximationsproblems (A) zerf/illt in zwei Teile: Im ersten Teil wird der allgemeine Fall (n ~> 2 beliebig) behandelt. Als Verallgemeinerung des oben genannten Resultates von DAVIS [4] kann zun/ichst gezeigt werden, dab die Steinerpunkte yon q~ K und L im Fall einer optimalen Bewegung ~ zusammenfallen. Darauf aufbauend wird die Existenz der optimalen Bewegung bewie- sen und eine Kennzeichnung dieser Bewegung angegeben. Es folgt die Untersuchung der optimalen Bewegung im Zusammenhang mit flu- 13eren Parallelk6rpern und gleichsinnig homothetischen K6rpern.
Der zweite Teil dieser Arbeit ist dem ebenen Fall (n = 2) gewid- met. Hier wird die optimale Lage zweier K6rper K, L e X 2 diskutiert und schliel31ich mit Hilfe von Fourierentwicklungen der Stfitzfunktio- nen der entscheidende Satz fiir die praktische Berechnung einer ebe- nen optimalen Bewegung aufgestellt.
1. Der allgemeine Fall
1.1. Die Riiume L 2 (S n- 1) und C ( S n- 1). Den Ausgangspunkt ffir die folgenden Betrachtungen bildet der n-dimensionale euklidische Raum E"(n >>. 2) mit dem Skalarprodukt (x ,y )= x~yl + . . . + x,y~. Uber die induzierte Norm I x I .'= (x, x)1/2 ist die (n - l)-dimensionale Einheitssphfire S ~-1.'-- {x~Enl I xl = 1} definiert, deren Ober- flfichenelement mit do bezeichnet sei. Die Menge L 2 (S n-l) der qua- dratisch Lebesgue-integrierbaren Funktionen f : S ~ - ~ - , [~ bildet einen reellen Vektorraum mit dem inneren Produkt
( f ig ) '= S f ( x ) g ( x ) d o ( x ) (2) sn-I
und der LZ-Halbnorm ilfli2 == 0elf) 1/2. Aus der umfangreichen Theo- fie dieses Raumes (insbesondere der harmonischen Analyse) ben6ti- gen wir zunfichst nut, dab die homogenen Polynome f (xl, �9 �9 x,) = xi (i = 1,..., n) vom Grad 1 eingeschrS.nkt auf S"-1 ein orthogonales System bilden (siehe z. B. [19]). Mit dem Volumen
280 R. ARNOLD
~n/2 (/ ' = Gammafunktion) (-'On ~ 1)
der Einheitskugel B" gilt genauer:
~lJ9 = S xixjdo(x) = O,.j~o, (O~.j= Kronecker-Symbol) (3) sn-I
Daraus ergibt sich fiir ein konstantes v e E" die Darstellung
1 v = - - S <v, x> x do ( x ) , (4)
(.O n S ~ - 1
in der das vektorwertige Integral koordinatenweise definiert ist. Der Teilraum c(sn-1)=L2(S n-l) der stetigen Funktionen
f: S "-1 --. ~ bildet zusammen mit dem inneren Produkt (. I') einen Praehilbertraum, wobei [[ �9 [Iz nun die L2-Norm ist. Ferner sei bemerkt, dab C (S n- 1) zum Banachraum wird, wenn die Maximumnorm
tlflloo := Max If(x) I xff Sn-1
zugrundegelegt ist.
1.2. Stiitzfunktionen. Wir betrachten die Menge ~ffn der konvexen K6rper (nichtleeren kompakten konvexen Teilmengen) des E". Durch die Operationen
K + L ..= {p + q I P E K, q ~ L} (Minkowski-Addition)
2 K ,= {2p I P e K}, 2 >~ 0 (skalare Multiplikation)
erhiilt man auf X TM die algebraische Struktur einer abelschen Halb- gruppe mit skalaren Operatoren. Die Beweise der nun folgenden bekannten Tatsachen kSnnen [11, w 10, w 12] entnommen werden.
Die Stiitzfunktion hK: E" ~ ~, hK(u)..= sup {(p, u)Ip~K} eines K6rpers Ke ~ " ist konvex. Aus der Theorie der konvexen Funktio- hen folgt, dab h~ stetig ist und die einseitigen Richtungsableitungen
(dhx)u (v).= lim hK (u + r v) -- hK (u) r ~ 0 + r
in jedem Punkt ueE" existieren. Nach [1] ist h/~ sogar fast iiberall (d. h. mit Ausnahme einer Menge vom Lebesgue-MaB Null) zweimal
Zur L2-Bestapproximation eines konvexen K6rpers 281
differenzierbar. Andererseits sind die Stfi tzfunktionen konvexer K6r- per unter allen Funk t ionen von E ~ in ~ durch die beiden Eigenschaf- ten
hK(U + v) <<. hK(U) + hK(V) (Subadditivit~it) (5)
hK(2 u) = 2 hK(u), 2 i> 0 (positive Homogenitfi t)
gekennzeichnet. Die Vertrfiglichkeit der Stfi tzfunktionen mit der alge- braischen Struktur von s ( ~ kann man den Identitfiten
hK+L=hK+hL; h~l~=2h K,2>~O (6)
entnehmen. Unmit te lbar aus der Definit ion von hK folgt:
Ist a~ E n ein fester Punkt , so ist
hK+o (u) = h,~(u) + <a, u>. (7)
Ffir eine Matrix A der speziellen orthogonalen Gruppe SO (n, ~) (A A ~ = E (Einheitsmatrix), de tA = 1) gilt
hA = hK(A-1 u), (S)
wobei A K,= {Ap lp~K}, p = (Pl . . . . ,Pn) ~ (r = transponiert).
Die Einschrfinkung hKIS n-1 der Stfi tzfunktionen hK, K e • " auf die Einheitssphfire fiihrt zu Funk t ionen des Raumes C(S"-I), die natfirlich ebenfalls fast iiberall zweimal differenzierbar sind und die Eigenschaften (6), (7), (8) besitzen. Das folgende L e m m a wird erst bei der Behandlung des ebenen Falles (n = 2) angewendet, kann aber all- gemein formulier t werden:
Lemma 1. Fiir die Stiitzfunktion hK: E ~ ~ ~ eines konvexen K6rpers K~ J{-" gilt:
- II hKI S n-1Ho~ <~ - ( d h ~ , ( - v) <~ (dh~,(v) <~ l[ hK[ S ~-~ 11~ (9)
fiir alle ue E", y e S "-~.
Beweis. Die konvexe Funk t ion h := hK erfiillt nach [11, S. 102]
h ( u - o~ 4 v ) - h ( H ) h ( u - ~x 3U) - h ( H ) ~ < - ~<
~<
~4 ~3
h (u + ~2 v) - h (u) ~< h (u + ~1 v) - h (u)
~X 2 CX 1

282 R. AR~OLD
fiir alle u, v e E", 0 < ~ 2 ~ 0tl, 0 < 0~ 3 ~ 0~ 4. Wir setzen ~1:= ~4 := 1 und erhalten ffir ~2 ~ 0 + , ~3 ~ 0 +
- h (u - v) + h (u) <. - (ah). ( - v) <~ (ah). (v) ~ h (u + v) - h (u).
Die Subadditivit/it (5) erm6glicht die weitere Abschfitzung
- h ( - v) <~ - (dh)u ( - v) <~ (dh)u (v) <~ h (v).
Der Ubergang zur Max imumnorm von h i S n-1 liefert die Behaup- tung. []
1.3. Eigensehaften der optimalen Bewegtmg. Wir wenden uns nun dem Extremalproblem (A) zu und beachten zunfichst, dab sich jede eigentliche Bewegung ~: E" ~ E" dutch
q~(u) = a + A u , a e E n, A e S O ( n , •) (10)
(mit u = (u~ , . . . , u,,) ~ e E n) eindeutig in einen Translationsanteil a und einen Drehungsanteil A zerlegen lfiBt. Daher besitzt das Problem (A) nach (7) die fiquivalente Darstellung
(A') Zu zwei konvexen K6rpern K, L e JT'" sind ein Punkt a e E" und eine Matrix AeSO(n , R) derart gesucht, dab die N o r m
II hz - hale -- (a, ") 112 minimal wird.
U m das Problem in zwei Schritten anzugehen, halten wir vorfiber- gehend die Matrix A e S O ( n , ~ ) fest und setzen hCa)..=hL - - h a K e C ( S " - ~ ) . Gesucht ist ein von A abh~ingiger Punkt a(A)eE ", der absolute Minimalstelle der Funkt ion g(a): E" ---, R mit
g(A)(v) '= II h (A) - (v, ")II 2 - II h (a) II~
ist. Es gilt
g(a) (v) = ~ ((v, x) 2 - 2 (v, x) h (A) (x)) do (x) -= S n- 1
= ~ ( v , ( v , x ) x - 2 x h ( A ) ( x ) ) d o ( x ) = s n - 1
Wir setzen
= (v, S (v, x> x do (x)> - 2 (v, S x h (~) (x) do (x)). S n - I s n - I
l
a (~) := • ~ x h (A) (x) do (x) O) n S n - 1
Zur Le-Bestapproximation eines konvexen K6rpers 283
und erhalten unter Berficksichtigung von (4) die Abschfitzung
g(A) (v) = % ([ v [ 2 - 2 (v, a(A))) ~> - % [ a(A) 12 = g(A) (a(~))
ffir alle v e E ~. Damit ist a (A~ die eindeufig bestimmte absolute Mini- malstelle der Funktion g(A). Aufgrund yon (10) wird a (A~ als optimaler Translationsvektor yon (K,L) bezfiglich A bezeichnet. Nach SI-mPrIARD [14], [15], [16] hat der Steinerpunkt (n-te Kriimmungs- schwerpunkt) p , (K) eines K6rpers Ke 3r die Darstellung
p, (K) = 1 ~ xhK(x )do(x ) . (11) ~n S"-
Es folgt a (A~ = p . ( L ) - pn (AIO = p,,(L) - Ap ~
wobei im letzten Schritt die Bewegungs/iquivarianz des Steinerpunk- tes angewendet wurde (siehe [13]). Wit erhalten als Verallgemeine- rung des oben angeffihrten Resultates von DAVIS [4] den
Satz 1. Es seien K, L konvexe K6rper des E n und a (A) der optimale Translationsvektor yon (K,L) beziiglich der Matr ix A~SO(n, ~). Dann gilt f i ir die Steinerpunkte pn (K) und p~ (L) yon K und L
pn(L) = a (A) + Ap~(K) . . (12)
Insbesondere fallen die Steinerpunkte yon q~ K und L i m Fall einer optimalen Bewegung qJ fiir (K, L) zusammen.
Bemerkung. Die Berechnung der optimalen Translation bei vorge- gebener Drehung A wurde hier mit elementaren Mitteln explizit durchgeffihrt. Zieht man die harmonische Analyse auf der Sphfire S ~- 1 hinzu, so ergibt sich die Darstellung yon a (A) unmittelbar, da die Minimierung der Funktion g(A) dem Problem der Bestapproximation von h (A) in dem von den homogenen Polynomen x1 . . . . ,x~ aufge- spannten Unterraum yon C (S n- 1) entspricht.
Das Abstandsquadrat
f(K,L)(A):=~2(a (A~ + A K , L) 2 = ]]h L - h ( a ( A ~ + A K ) ] ] 2 (13)
beschreibt den Fehler zwischen L und dem optimal ,,in Richtung L" verschobenen K6rper A K bei vorgegebener Drehung A z SO (n, ~). Dieser Fehler ist yon Translationen der Ausgangsk6rper K und L unabh/ingig, denn nach (12) gilt
f(K.L~(A) = ~2(A ( X + ( - p . ( ~ ) ) , L + ( - pn(L))) ~. (14)

284 R. ARNoLD
Durch (14) ist eine Abbildung f(K,L): SO (n, N) ~ N definiert, die als Fehlerfunktion des Paares (K, L) bezeichnet wird. Aus den Berech- nungen zur Minimierung von g(a) folgt leicht die Besselsehe Gleichung
II h (A) - <a (A), ")112 = II h (A) It 2 - co, [ a (A) [2
fiir h (A) bzgl. der Polynome Xl,..., x n. Aus dieser kann unter Beriick- sichtigung von (12) und (13) die Darstellung
f~K,L)(A) = t thL- h~Kll22 - ~o, lp,(L) - Ap,(K)12 (15)
der Fehlerfunktion abgeleitet werden. Da SO (n, ~) bekanntlich eine kompakte Lie-Gruppe ist und aus (15) die Stetigkeit von fo:,z) folgt, nimmtfK, L) ihr absolutes Minimum auf SO (n, ~) an. Wir erhalten die Existenz der optimalen Bewegung und ihre Kennzeichnung:
Satz 2. (a) Zu jedem Paar (K, L) yon konvexen K6rpern des euklidi- sehen Raumes E" existiert eine optimale Bewegung.
(b) Eine eigentliehe Bewegung qJ: E" ~ E" mit der Darstellung
q~(u) = a + Au, acE", A~SO(n, ~)
ist genau dann optimal fiir ein Paar (K, L) yon konvexen K6rpern des E n, wenn A eine absolute Minimalstelle der Fehlerfunktionf(K,r) ist und q~ den Steinerpunkt yon K auf den Steinerpunkt yon L abbildet. Die zweite Bedingung ist iiquivalent dazu, daft a der Differenzvektor der Steinerpunkte yon A K und List .
Der folgende Satz beschreibt das Verhalten der optimalen Bewe- gung beim ~bergang von K zu einem iiufleren Parallelk6rper K~ ,= K + e B" (e t> 0) bzw. einem gleiehsinnig homothetisehen K6rper a + 2K(ae E", 2 :> 0) (entsprechendes ffir L):
Satz 3. Es seien K, fir, L, s konvexe K6rper des euklidisehen Raumes E". Dann gilt:
(a) Ist q~ eine optimale Bewegung fiir (K, L), so ist q~ aueh optimal flit (K,, L~) mit beliebigen Zahlen e, ~ >I O. Die optimale Bewegung ist also parallelinvariant.
(b) Existiert eine eigentliehe Bewegung qJ: E"--+ E" mit q~K= = L,(e >i 0), so ist qJ optimalfiir (K,L).

Zur L2-Bestapproximation eines konvexen K6rpers 285
(c) Ist A ~ SO (n, ~) der Rotationsanteil einer optimalen Bewegung q~ yon (K, L) und sind K und ~2 sowie L u n d L gleichsinnig homothetisch, so ist A aueh Rotationsanteil einer optimalen Bewegung ~ yon (~2, L).
Beweis. Aufgrund der Bewegungs/iquivarianz des Steinerpunktes und seiner Vertr/iglichkeit mit der algebraischen Struktur von f " , also
p , ( 2 K + /zL) = 2p,(K) + #p,(L) ('1,#~>0),
(siehe [13]), kann bei dem Beweis yon (a)--(c) o.B.d.A. p , (K) = p , (L) = 0 angenommen werden.
Aus hr.(X) = e + hK(X), hL,~ (x) = n + hL (x) (a)
und
S hAK(x)do(x)= ~ h K ( A - I x ) d o ( x ) = ~ hK(x)do(x) (16) sn-1 s n - I sn - I
f/Jr alle A r SO (n, ~) folgt durch Einsetzen in die Formel (15):
f~K~,/~ (A) = II (7 - ~) + (hL - hA~)Ii~ =
= (7 - e)Zn~, + 2(7 - e) ~ (h L - hK)do +f(K, L3(A). S n- 1
Da sich f(K~.Lo~ und f(r~L~ nur u m einen kons tan ten Anteil unterschei- den, liefert Satz 2 (b) die Behauptung.
(b) Wir nehmen A K = L~ mit A e SO (n, ~), e ~> 0 an und erhalten nach (15) und (16) ftir eine beliebige Drehung B e SO (n, ~):
f~,~,~ ( B ) = H h~ - h~,~H~ = H hB- ,L - - h A - ~ A ~ [1~ =
= [[(hs-~ r - hA-, r) -- etlg = I[KB-,L-- hA-,r]]~ + nc%e=>~
>>. n ~o. 2 = f~i~,~ ( A ) .
(c) Sei ~7 = a + ,t K, s = b + # L (a, b ~ E"; ,1, # > 0). Aufgrund yon p, (A (,1 K)) = p , (A (# L)) = 0 ergibt sich aus (15), (6) und (16)
fx , z) (A) = 2 2 II hKj]~ + #2 II hL 112 2 -- 2 2/~ (hAK I h3 =
= '1('1 - #)II hKIl~ + #(# -- ,1)II hLlr 2 + 2#fK, L~(A).
Die Behaup tung folgt wegen 2 # > 0 wieder aus Satz 2 (b). []
Ist ~ eine opt imate Bewegung ffir alas Paar (K, L), so befinden sich q~ K und L in einer gegenseitigen Lage, die durch keine weitere Bewe-
286 R. ARNOLD
gung angewendet auf ~ K oder L ,,verbessert" werden kann. Die folgenden Definitionen sind daher naheliegend:
Zwei K6rper K, Le3f'" befinden sich in optimaler Lage genau dann, wenn die Identit/it id: E " ~ E" eine optimale Bewegung fiir (K,L) ist. Zwei K6rper K, LeJ~ "~" befinden sich in lokal optimaler Lage genau dann, wenn eine Umgebung U der Einheitsmatrix E~ SO (n, R) existiert mit
62(K,L) <~ O2(a + AK, L)
ffir alle a ~ E n, A E U. Es ist offensichtlich, dab aus der optimalen Lage zweier K6rper auch die lokal optimale Lage folgt.
Eine genauere Untersuchung der [lokal] optimalen Lage wird hier nur im Fall n = 2 vorgenommen. Aus den vorangehenden Sfitzen ergibt sich allerdings unmittelbar die
Folgerung 1. (a) Befinden sich zwei konvexe K6rper K, L des E n in lokal optimaler Lage, so stimmen ihre Steinerpunkte fiberein. Eine optimale Bewegung fiir (K, L) ist in diesem Fall eine Drehung um den gemeinsamen Steinerpunkt.
(b) F/Jr alle konvexen K6rper K des E n und Zahlen e >t 0 befinden sich K und K~ in optimaler Lage.
(c) Zwei gleichsinnig homothetische konvexe K6rper K, K des E" mit gemeinsamem Steinerpunkt befinden sich in optimaler Lage.
2. Der ebene Fall
2.1. Stiitzfunktionen als Elemente der Riiume C2~ , L22~. Zur Vorbe- reitung einer genaueren Untersuchung der optimalen Bewegung bzw. Lage im ebenen Fall (n = 2) betrachten wir die R~iume C2~ (der stetigen 2 ~-periodischen Funktionen yon ~ in ~) und L2~ (der qua- dratisch Lebesgue-integrierten 2 ~-periodischen Funktionen von ~ in ~). Durch die Transformation
F(t) = f(cos t, sin t), t~ ~ (17)
wird jeder Funktion f: S 1 ~ ~ eindeutig eine 2 ~-periodische Funk- tion F: R ~ ~ zugeordnet und umgekehrt. Setzt man in L2=

Zur L2-Bestapproximation eines konvexen K6rpers 287
sowie in C2~
2~
( F I G ) , = ~ F( t )G(t )d t , IIFI]2:=(FIF) ~/2 0
II FFroo := Max l F(t) I, t e ~
so induziert (17) die I somorphien (L2($1), ( . ] . ) ) - ( L ~ , ( . [ . ) ) ,
(C(S1),( �9 I')) - (C2~, (" I')) und (C(S~), [[ �9 IIo~) - (C2~, I1" Ho~). Sei nun K ein konvexer KSrper der euklidischen Ebene E 2. Die
eingeschdinkte Stt i tzfunktion hKIS ~ von K geht durch die Transfor- mat ion (17) in die (auf den Winkel t bezogene) Stiitzfunktion HKe C2~ ~ L~, von K/iber. Die in Abschni t t 1.2. aufgefiihrten Eigen- schaften der Funk t ion hK bzw. hK I S"- 1 fibertragen sich in folgender Weise auf IlK:
F/Jr K, L e ~/~/,2 /~ ~ 0, a = (a~, a2) ~ e E 2, AO = (cos0 - s in0 \ \ s i n 0 c o s 0 ) e
e SO (2, JR) und t e ~ ist
HK+L = HK + HL, H~K= 2HK (18)
HK+,(t) = HK(t) +a lcos t + a2sin t (19)
H~,K( 0 = HK(t -- 0) = : H~ (20)
Aus der Existenz der einseitigen Richtungsablei tungen von h k folgt die einseitige Differenzierbarkeit der Funk t ion H~. Dabei gilt
H'K(t --) = -- (dh~r sin0T(sin t, - cos t) ~ (21)
H'x( t+) = (dhD(cnst, si,0~(- sin t, cos t) ~
f/ir die links- bzw. rechtsseitige Ableitung. Wenden wir L e m m a 1 auf den Punk t u = (cos t, sin t) ~ und die Richtung v = ( - sin t, cos t) ~ e S 1 an, so ergibt sich die
Folgerung 2. Fiir die Stfi tzfunktion HKe C2, eines konvexen KSr- pers K~o~( 2 gilt:
-- ]] HK]I~ <~ H'K( t -- ) < H~( t + ) <. H HK[[o~ (22)
ffir alle t e ~. []
Schliel31ich fibertdigt sich auch die Eigenschaft der zweimaligen Differenzierbarkeit bis auf eine Lebesgue-Nullmenge auf die winkel- abhfingige Stfi tzfunktion H~:. Die verallgemeinerte Ableitung 20 Monatshefte ffir Mathematik, Bd. 108/4
288 R. ARNOLD
H'K(t) .'= (H'K(t --) + H~(t +))/2
von HK ist fiir alle t ~ • definiert und liefert an den Differenzierbar- keitsstellen von H~c den zugeh6rigen Ableitungswert. Die Bedeutung der verallgemeinerten Ableitung wird klar, wenn man die periodische Faltung zweier Stiitzfunktionen betrachtet.
Allgemein ist fiir zwei Ftmktionen F, G ~ L2:~ die periodische Fal- tung F* G ~ L~ durch
2~
V , G ( t ) : = S V ( t - r)G(r)dr o
definiert. Zu ihren fundamentalen Eigenschaften geh6rt das Verhal- ten bei Anwendung der endlichen Fouriertransformation
2#
L~,~F~--~ F(k)..= ~ V(t) e- ik 'dteC (keNo), o
denn es gilt
(F , G) (k) = ~'(k) �9 G (k) (23)
fiir alle F, G~ L2~, k e ~ 0. Die periodische Faltung HK* HL der Stiitzfunktionen zweier kon-
vexer K6rper K und L kann nach G6RTLER [6] als Stiitzfunktion eines weiteren konvexen K6rpers M gedeutet werden. Dieser wird als konvexer FaltungskSrper M,= K , L v o n K und L bezeichnet. Das folgende Lemma liefert eine Glattheitsaussage ffir Faltungsk6rper:
Lemma 2. Es seien K, L konvexe K6rper der euklidischen Ebene E 2
und HK, HL~ C2~ die zugehSrigen Stiitzfunktionen. Dann gilt:
(a) Li..
(b) Die periodisehe Faltung H K * HL ist zweimal stetig differenzier- bar auf R mit
(HK* HL)' = H;*HL= HK*H; (24)
(HK* HL)" = H~*H;.
Beweis. Ist (rj) eine beliebige reelle Nullfolge mit nicht nichtver- schwindenden Gliedern, so konvergiert die Funktionenfolge (GKj) der in t stetigen Differenzenquotienten
Zur L2-Bestapproximation eines konvexen K6rpers 289
GKj(O := gK( t + 0 - HK(O rj
fast fiberall gegen die verallgemeinerte Ableitung H/~ der nach Folge- rung 2 dehnungsbeschrfinkten Funktion H K. Die Funktionenfolge (GKj) ist daher gleichmiiflig beschrfinkt. (Entsprechendes gilt fiir den K6rper L.) Aus dem Konvergenzsatz von Lebesgue (siehe [2, S. 77])
i I 2 folgt H;~, H~EL2~ sowie die zweimal stetige Differenzierbarkeit der periodischen Faltung
2~z
Hx* HL(t) = S HK(t-- r)HL(r)dr. 0
Die Ableitung dieses Parameterintegrals berechnet sich dabei durch verallgemeinerte Differentiation unter dem Integral. Unter Berfick- sichtigung der partiellen Integration
2 ~ 2 ~
H;,(t - 0 H~(O dr = ~ H A t - r) H;(O dr 0 0
ergibt sich der Rest der Behauptung. []
2.2. Kriterien flit die [lokal] opfimale Lage. Die im Abschnitt 1.3. aufgestellten allgemeinen Resultate lassen sich in der euklidischen Ebene natfirlich auch dutch ausschlieBliche Verwendung winkelbezo- gener Stfitzfunktionen HK~ C:= erzielen. Insbesondere hat bereits KUBOTA [10] fiir glatte konvexe K6rper gezeigt, dab die Koeffizienten yon cos t und sin t in der Fourierentwicklung der Stiitzfunktion die kartesischen Koordinaten des Steinerpunktes sind (siehe auch (19)). Da die Lie-Gruppe SO (2, [~) eindimensional ist, sich also durch einen freien Drehwinkel 0 ~ Lq parametrisieren lfiBt, kann auch die Fehler- funktion eines Paares (K, L) konvexer K6rper in E 2 als Element des Raumes C2= definiert werden. Wir setzen
o /cos 0 - sin 0"~ F~K'L)(O)'='tK'L)(A~ cosO ] ' 0 e ~ .
Nach (15) und (20) ergibt sich ffir die (aufden Drehwinkel 0 bezogene) Fehlerfunktion F{~L)e C2= von (K, L) die Darstellung
F{K,L)(O ) = ]IH r -/~K]I22- =[P2(L) - A~ 2. (25)
Da das Problem der optimalen Translation bereits allgemein durch die Differenz der Steinerpunkte gel6st ist und die Fehlerfunktion 20*
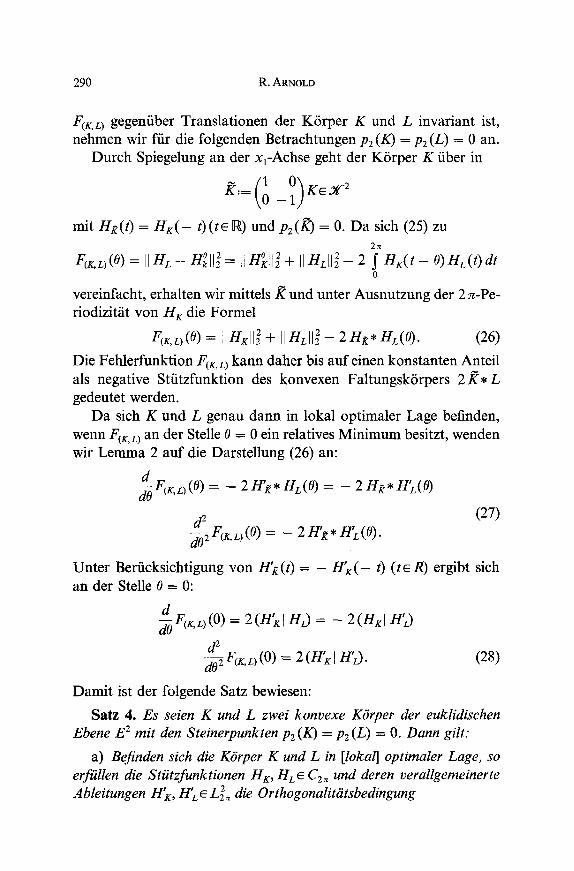
290 R. ARNOLD
F(K,L ) gegenfiber Translationen der K6rper K und L invariant ist, nehmen wir ffir die folgenden Betrachtungen P2 (K) = P2 (L) = 0 an.
Durch Spiegelung an der xl-Achse geht der K6rper K fiber in
K.'= (10 _ 0 1 ) K ~ 2
mit H~(t) = ILK(-- t)(t~ R) und pz(K') = 0. Da sich (25) zu 2~
= - H~I]2 ---I[/-FKI[~ + l[ HL[I~- 2 ~ H K ( t - O)HL(t)dt (O) I I o o
vereinfacht, erhalten wir m i t t e l s / ( u n d unter Ausnutzung der 2 Jr-Pe- riodizitiit von HK die Formel
F(K,L)(O) = [Ing[[ 2 + II HLII 2 - 2 n g , n t ( o ) . (26)
Die Fehlerfunktion F(K,z) kann daher bis auf einen konstanten Anteil als negative Stfitzfunktion des konvexen Faltungsk6rpers 2 K ' , L gedeutet werden.
Da sich K und L genau dann in lokal optimaler Lage befinden, wenn F(K,L) an der Stelle 0 = 0 ein relatives Min imum besitzt, wenden wir Lemma 2 auf die Darstellung (26) an:
dF(K,L)(O) = _ 2/-/ 'g, Hz(0 ) = _ 2HR,H'L(O)
(27) aaF, dO 2 (~,L)(0) = -- 2H~ ,H 'L(0 ) .
Unter Berficksichtigung von I-l'x(t) = - H ' x ( - t) ( te R) ergibt sich an der Stelle 0 = 0:
dF(K,L)(0) = 2(H]vl Hz) = - 2(HKI H'z)
d 2 dO 2 F(K,L) (0) ---- 2 (H~:I H'z). (28)
Damit ist der folgende Satz bewiesen:
Satz 4. Es seien K und L zwei konvexe K6rper der euklidischen Ebene E 2 mit den Steinerpunkten P2 (K) = P2 (L) = O. Dann gilt:
a) Befinden sich die K6rper K und L in [lokal] optimaler Lage, so erfiillen die Stiitzfunktionen IlK, HL e C2= und deren verallgemeinerte Ableitungen H'~, H'L e L~= die Orthogonalitiitsbedingung
Zur LE-Bestapproximation eines konvexen K6rpers 291
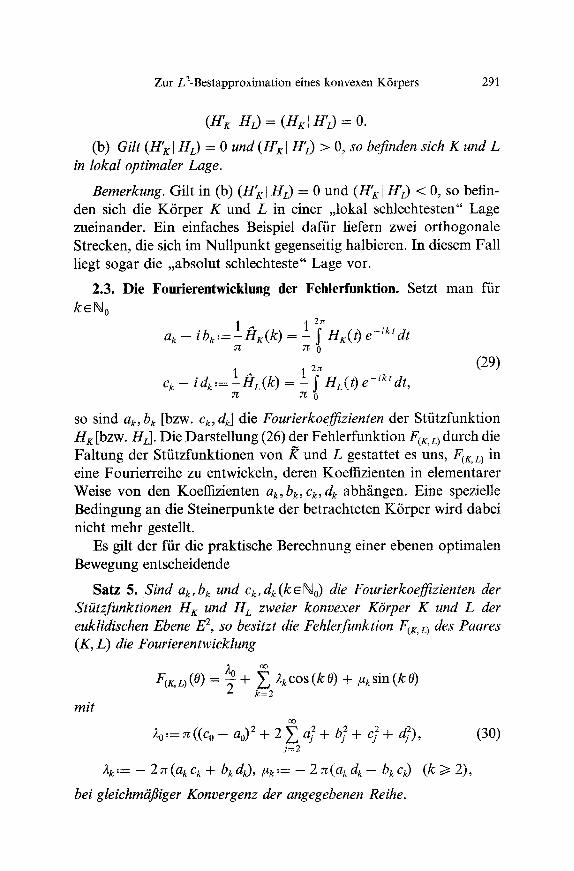
(H)[ HL) = (HKI H'z) = 0.
(b) Gilt (H~:I Hr) = 0 und (H)[ H'L) > 0, so befinden sich K und L in lokal optimaler Lage.
Bemerkung. Gilt in (b) (H'KIHL) = 0 und (H'KIH'c) < 0, so befin- den sich die K6rper K und L in einer ,,lokal schlechtesten" Lage zueinander. Ein einfaches Beispiel daffir liefern zwei orthogonale Strecken, die sich im Nullpunkt gegenseitig halbieren. In diesem Fall liegt sogar die ,,absolut schlechteste" Lage vor.
2.3. Die Fourierentwicklung der Fehlerfunktion. Setzt man ffir k~N0
ibk (k) K = 1 HK(t) e - i k t d t a k - -
(29) ck id k l ffiL(k ) 1 2~ - ,= = _ HL(t ) e-igtdt,
yc o
so sind ak, b~ [bzw. ck, dk] die Fourierkoeffizienten der Stiitzfunktion HK [bzw. Hz]. Die Darstellung (26) der Fehlerfunktion F(K ,L) durch die Faltung der Stiitzfunktionen yon K und L gestattet es uns, F(K,L) in eine Fourierreihe zu entwickeln, deren Koeffizienten in elementarer Weise von den Koeffizienten ak, bk, ck, dk abh/ingen. Eine spezielle Bedingung an die Steinerpunkte der betrachteten K6rper wird dabei nicht mehr gestellt.
Es gilt der fiir die praktische Berechnung einer ebenen optimalen Bewegung entscheidende
Satz 5. Sind ak, b k und Ck, dk(keNo) die Fourierkoeffizienten der Stiitzfunktionen H K und H L zweier konvexer K6rper K und L der euklidischen Ebene E 2, so besitzt die Fehlerfunktion F(K,L) des Paares (K, L) die Fourierentwicklung
20 oo F(K,L~(0) = -~ + ~ 2kcos(k0) + ~ksin(k0)
k=2 mit
20 .'= = ((c o - a0) 2 + 2 ~ 4 + bf + cf + ~ ) , j=2
,tk:= - 2zl(akck + bkdk), #k.'= -- 2=(akd~-- bkck) (k >~ 2),
bei gleichmiifliger Konvergenz der angegebenen Reike.
(30)

292 R. ARNOLD
BeweL~. Wir be t rach ten zun/ichst den Fall t72 (K) = 172 (L) = 0, der j a du rch al = bl = c~ = d~ = 0 gekennzeichnet ist. D a die Four ie r - koeffizienten der St i i tzfunkt ion H g des gespiegelten K6rpe r s R durch 5k = ak, ~'k = - bk gegeben sind, folgt aus (23) und (29) f/Jr alle k e n 0
l -(H~*Hzf (k )= -1/4g(k) /4L(k) = x(ak + ibk)(ck-- idk)=
= z~((akCk + bkdk) - i(akdk -- bkck)).
Die Dars te l lung (26) der Feh le r funk t ion F(K ' L) ffihrt also unmi t t e lba r zu den Four i e ren twick lung
O(3
F(K,L)(O) = II ngtl~ + II H L I I ~ - ~aoCo + ~ ,~gCOS (k 0) + /~ksin (k0) , k = 2
in der die Reihe au fg rund der Dif ferenzierbarkei t von F(K,L) gleich- m~il3ig konvergier t . Zu r U m f o r m u n g des kons t an t en Gliedes verwen- den wir die Parsevalsche Gleichung
)) HKII~ = ~z + a 2 + j = I
ffir H K und en tsprechend ffir H L. Die Trans la t ions invar ianz der Feh le r funk t ion und die Tatsache , d a b Trans la t ionen eines konvexen KSrpe r s nur die l inearen Gl ieder in der Four ie ren twick lung seiner Stf i tzfunkt ion beeinflussen, ft ihren zur Gfil t igkeit der Dars te l lung (30) ffir ein beliebiges Paa r (K, L) konvexer K6rper . []
Literatur
[1] ALEKSANDROV, A. D.: Almost everywhere existence of the second differential of a convex function and some properties of convex surfaces connected with it. (Russian) Uehenye Zapiski Leningrad. Gos. Univ., Math., Ser. 6, 6--35 (1939).
[2] BAUER, H.: Wahrscheinlichkeitstheorie und Grundziige der MaBtheorie. 3. Auflage. Berlin: de Gruyter. 1978..
[3] BLASCHKE, W.: Kreis und Kugel. 2. Auflage. Berlin: de Gruyter. 1956. [4] DAVIS, P.J.: Lemoine approximation and Steiner approximation of convex
sets. Manuscript 1982. [5] GtRTLER, H.: Zur Addition beweglicher ebener Eibereiche. Math. Z. 42,
313--321 (1937). [6] GORTLER, H.: Erzeugung stfitzbarer Bereiche II. Deutsche Mathematik 3,
189--200 (1938). [7] GROEMER, H.: On the Brunn--Minkowski theorem. Im Erscheinen. [8] GRUBER, P.M.: Approximation of convex bodies. In: Convexity and its
Applications (ed. by P. M. GRUBER, J. M. WILLS), pp. 131--162. Basel: Birkhfiuser. 1983.
Zur L2-Bestapproximation eines konvexen K6rpers 293
[9] GRUNBAUM, B.: Measures of symmetry for convex sets. Proc. Symp. Pure Math. 7, 233--270 (1963).
[10] KUBOTA, T.: ~ber Schwerpunkte der geschlossenen Kurven und Fltichen. Tohoku Math. J. 14, 20---27 (1918).
[11] LEICHTWEISS, K.: Konvexe Mengen. Berlin-Heidelberg-New York: Sprin- ger. 1980.
[12] McCLURE, D. E., VITALE, R.A.: Polygonal approximation of plane convex bodies. J. Math. Anal. Appl. 51, 326---358 (1975).
[13] SCHNEIDER, R.: Kriimmungsschwerpunkte konvexer Krrper II. Abh. Math. Sem. Hamburg 37, 204--217 (1972).
[14] Sm~PrtARD, G.C.: Approximation problems for convex polyhedra. Mathe- matika 11, 9--18 (1964).
[15] SI~PHARD, G.C.: The Steinerpoint of a convex polytope. Canad. J. Math. 18, 1294--1300 (1966).
[16] SHEPHARD, G. C.: A pre-Hilbert space consisting of classes of convex sets. Israel J. Math. 4, 1--10 (1966).
[17] SmSeHARD, G. C., WEBSTER, R. J.: Metrics for sets of convex bodies. Mathe- matika 12, 73--88 (1965).
[t8] STErSER, J.: Von dem Kriimmungsschwerpunkte ebener Curven. Ges. Werke Bd. 2, pp.99--159. Berlin: G. Reimer. 1882.
[19] TERRAS, A.: Harmonic Analysis on Symmetric Spaces and Applications I. New York: Springer. 1985.
R. ARNOLD Fachbereich Mathematik Universittit Dortmund Postfach 500 500 D-4600 Dortmund, Bundesrepublik Deutschland