
Berichte aus dem IDS Band 03/2009 Herausgeber: Jörg Wallaschek
Florian Schiedeck
Entwicklung eines Modells
für Formgedächtnisaktoren im geregelten dynamischen Betrieb

Berichte aus dem IDS Wissenschaftliche Schriftenreihe des Instituts für Dynamik und Schwingungen der Leibniz Universität Hannover Herausgeber: Prof. Dr.-Ing. Jörg Wallaschek Deutsche Nationalbibliothek - CIP-Einheitsaufnahme Ein Titeldatensatz für diese Publikation ist erhältlich bei: Deutsche Nationalbibliothek Zugleich: Dissertation, Gottfried Wilhelm Leibniz Universität Hannover, 2009 Dieses Werk ist urheberrechtlich geschützt. Alle Rechte, auch das des Nachdruckes, der Wiedergabe, der Speicherung in Datenverarbeitungsanlagen und der Übersetzung des vollständigen Werkes oder von Teilen davon, sind vorbehalten. © PZH Produktionstechnisches Zentrum GmbH, 2009 An der Universität 2 • 30823 Garbsen Tel: 0511-762-19434 • Fax: 0511-762-18037 http: www.pzh-gmbh.de • mail: [email protected] ISBN 978-3-941416-23-9 ISSN 1868-1999 Verlag: PZH Produktionstechnisches Zentrum GmbH Herstellung: Digital Print, Garbsen Printed in Germany

Entwicklung eines Modellsfür Formgedächtnisaktoren im
geregelten dynamischen Betrieb
Von der Fakultät für Maschinenbauder Gottfried Wilhelm Leibniz Universität Hannover
zur Erlangung des akademischen GradesDoktor-Ingenieur
genehmigte
Dissertation
vonDipl.-Ing. Florian Schiedeck
geboren am 14. Juli 1977 in Straubing
2009

1. Referent: Prof. Dr.-Ing. Jörg Wallaschek2. Referent: Prof. Dr.-Ing. habil. Eberhard KallenbachTag der Promotion: 25. März 2009

III
Vorwort
Diese Arbeit entstand während meiner Tätigkeit als wissenschaftlicher Mitarbeiter amFachgebiet Mechatronik und Dynamik des Heinz Nixdorf Instituts der Universität Pader-born und am Institut für Dynamik und Schwingungen der Leibniz Universität Hannover.
An erster Stelle bedanke ich mich bei Herrn Prof. Dr.-Ing. J. Wallaschek für die Möglich-keit zur Promotion. Sein starker Rückhalt und sein entgegengebrachtes Vertrauen warenmaßgeblich für den Erfolg dieser Arbeit. Dies gilt im gleichen Maße für meine Mitarbeitbei Herrn Prof. Wallaschek in Paderborn und in Hannover.
Die Bereitschaft von Herrn Prof. Dr.-Ing. habil. E. Kallenbach, das zweite Referat zuübernehmen, war eine große Freude für mich, für die ich mich herzlich bedanke. Herr Prof.Kallenbach war schon während meines Studiums an der Technischen Universität Ilmenaueine prägende Persönlichkeit sowohl für meine Kommilitonen als auch für mich.
Herrn Prof. Dr.-Ing. H.-H. Gatzen danke ich für die Übernahme des Vorsitzes der Prü-fungskommission und für die Unterstützung bei der Vorbereitung auf meine Promotions-prüfung.
Einen entscheidenden Anteil für das Gelingen dieser Arbeit haben meine Kollegen desFachgebiets Mechatronik und Dynamik und des Instituts für Dynamik und Schwingungen.In beiden Gruppen war die gemeinsame Arbeit in Forschung und Lehre stets eine großeFreude und reich an Erfahrungen. Stellvertretend möchte ich zwei besonders wichtige Per-sonen für meine Arbeit nennen: Herrn Dr.-Ing. T. Hemsel danke ich für seine Hilfestellungbei meinem Einstieg in die Wissenschaft. Herrn Dipl.-Ing. S. Mojrzisch danke ich für diezahlreichen Diskussionen und Anregungen bei der Bearbeitung der Problemstellungen imRahmen dieser Arbeit. Darüber hinaus bedanke ich mich für das große Engagement undInteresse der von mir betreuten Studien- und Diplomarbeiter, deren Untersuchungsergeb-nisse diese Arbeit mit voran getrieben haben.
Meine Kommilitonen Herr Dipl.-Ing. S. Vogeler und Herr Dipl.-Ing. R. Volkert gabenmir immer wieder moralische und freundschaftliche Unterstützung während des langenWeges bis zur Promotion. Ich wünsche Beiden viel Erfolg und die nötige Ausdauer fürden Abschluss ihrer eigenen Promotionen.
Meiner lieben Irina danke ich für ihren wichtigen Beistand in den vergangenen Jahrenund ihr unermüdliches Korrekturlesen meiner Arbeit. Mein größter Dank gilt meinenEltern. Ihre Unterstützung bei allen meinen Vorhaben war die wichtigste Voraussetzungfür meine bisher erreichten Ziele.
Hannover, im April 2009 Florian Schiedeck

IV
Kurzfassung
Aktoren aus Formgedächtnislegierungen weisen mit über 1 kJ/kg die mit Abstand höchsteEnergiedichte aller Aktorprinzipien auf. Das macht sie für diejenigen Antriebsaufgabeninteressant, bei denen auf kleinem Bauraum eine hohe mechanische Arbeit aufgebrachtwerden muss. Zur Erzeugung begrenzter Stellbewegungen mit unidirektionaler Kraftwir-kung werden Formgedächtnislegierungen in Drahtform eingesetzt. Der Formgedächtnisef-fekt tritt bei Legierungen mit reversibler martensitischer Phasenumwandlung auf. Nickel-Titan – oft auch als NiTiNOL, Flexinol oder MuscleWire bezeichnet – ist wegen der hohenEffektstabilität die am häufigsten eingesetzte Formgedächtnislegierung.
Diese Arbeit behandelt die Einsatzmöglichkeiten von Formgedächtnislegierungen alsStellantriebe. Nach der Beschreibung des Stands der Technik werden im Hauptteil dieForschungsergebnisse vorgestellt. Dieser gliedert sich in folgende Teile: experimentelle Un-tersuchung und Modellierung von Formgedächtnislegierungen sowie Regelung und Appli-kation von Formgedächtnisaktoren. Zunächst wird das thermomechanische Dehnungs- undWiderstandsverhalten von NiTi-Formgedächtnislegierungen auch unter dem Aspekt Alte-rung experimentell untersucht. Weitere Messungen hinsichtlich dynamischer Eigenschaf-ten runden das Systemverständnis ab. Ausgehend von der thermodynamischen Energiebi-lanz erfolgt die Modellierung von Formgedächtnislegierungen mit extrinsischem Zweiweg-verhalten. Das domänenübergreifende Simulationsmodell besteht aus thermischen, elektri-schen und mechanischen Teilmodellen für die Temperaturhysterese, für das Widerstands-und für das Dehnungsverhalten. Damit wird das makroskopische Verhalten von Aktorenaus Formgedächtnislegierungen im dynamischen Betrieb beschrieben. Unter Verwendungder daraus gewonnenen Erkenntnisse wird ein systemspezifischer Ansteuerungs- und Rege-lungsentwurf für Formgedächtnisaktoren als Positionier- und Stellantriebe durchgeführt.Dabei wird insbesondere das Potential von Self-Sensing, d. h. die Nutzung inhärentersensorischer Eigenschaften, untersucht, um eine Positionsregelung auf Basis einer Wi-derstandsmessung zu realisieren. Des Weiteren können Nichtlinearitäten gezielt für eineselbstsensierende Ansteuerung genutzt werden. Abschließend werden die Möglichkeitender Applikation von Aktoren mit Formgedächtnislegierungen betrachtet. Dafür wird ei-ne Methode zur verlässlichkeitsorientierten Technologiebewertung entwickelt und für dieAnalyse existierender Lösungen eingesetzt. Die Ergebnisse fließen in den Entwurf einesAktorprototyps ein.
Schlagworte Aktoren mit Formgedächtnislegierungen, Modellierung, Regelung, Zuver-lässigkeitsanalyse

V
Abstract
With an energy density of more than 1 kJ/kg actuators based on shape memory alloysexhibit by far the highest energy density of all known actuating principles. Because of this,they are interesting for applications, where high mechanical work has to be generatedin small available space. To realize unidirectional forces with a finite actuation rangewires made of shape memory alloys are used. The shape memory effect appears in alloyswith reversible martensitic phase transformation. Due to the high effect-stability Nickel-Titanium – also known as NiTiNOL, Flexinol, or MuscleWire – is the most commonlyused shape memory alloy.
This work deals with the application of shape memory alloys as actuators. After descri-bing the state of the art, the research results are presented. The mainpart is divided intothe following topics: experimental study, modeling, control, and application of shape me-mory actuators. First, the thermomechanical characteristics of NiTi shape memory alloysare experimentally investigated regarding the behaviour of strain and resistance – andalso with respect to fatigue. Further measurements related to the dynamic behavior leadto a better understanding of the system. Subsequently, a multi-domain model of shapememory alloys with extrinsic two-way behaviour is derived. Based on the thermodynamicenergy balance as well as thermal, electrical, and mechanical sub-models for temperaturehysteresis, resistance behavior, and stress-strain relation respectively, the macroscopicperformance of actuators with shape memory alloys in dynamic operation can be simu-lated. Using these results, a system-specific procedure is developed in order to drive andcontrol shape memory actuators for positioning and actuating. In particular, the possibi-lities of self-sensing due to inherent sensory properties will be investigated, which enablea control of position based on resistance measurement. In addition, nonlinearities can beapplied to a self-sensing drive control. Finally, the application of actuators based on shapememory alloys will be considered. A procedure for a dependability-oriented evaluation oftechnologies is developed and applied to existing solutions; results of this evaluation areincorporated in the design of a new actuator principle.
Keywords shape memory alloy actuators, modeling, closed-loop control, dependabilityanalysis


VII
Inhaltsverzeichnis
Akronyme X
Symbolverzeichnis XI
1 Einleitung 11.1 Der Formgedächtniseffekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Thesen der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Aufbau der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Stand der Technik bei Formgedächtnisaktoren 52.1 Grundlagen des Formgedächtniseffekts . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Pseudoplastizität und Pseudoelastizität . . . . . . . . . . . . . . . . 92.1.2 Ausprägungen des thermischen Formgedächtniseffekts . . . . . . . . 92.1.3 Legierungen mit Formgedächtnis . . . . . . . . . . . . . . . . . . . 11
2.2 Modelle für Formgedächtnislegierungen . . . . . . . . . . . . . . . . . . . . 122.2.1 Thermodynamische Energiebilanz . . . . . . . . . . . . . . . . . . . 132.2.2 Umwandlungsgrad und Temperaturhysterese . . . . . . . . . . . . . 142.2.3 Materialverhalten während der Phasenumwandlung . . . . . . . . . 162.2.4 Thermomechanisches Verformungsverhalten . . . . . . . . . . . . . 162.2.5 Modellstruktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Regelungsstrategien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.3.1 Struktur des Regelkreises . . . . . . . . . . . . . . . . . . . . . . . . 192.3.2 Sensorbasierte Lage- und Kraftregelung . . . . . . . . . . . . . . . . 202.3.3 Widerstandsbasierte Regelung . . . . . . . . . . . . . . . . . . . . . 21
2.4 Formgedächtnisaktoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.4.1 Bauformen von Aktoren mit Formgedächtnislegierungen . . . . . . . 242.4.2 Einsatz von Formgedächtnislegierungen . . . . . . . . . . . . . . . . 262.4.3 Auslegung von Formgedächtnisaktoren . . . . . . . . . . . . . . . . 29
2.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 Gegenstand der Arbeit 333.1 Analyse des Stands der Technik . . . . . . . . . . . . . . . . . . . . . . . . 333.2 Ziele der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.3 Aufgabenstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4 Experimentelle Untersuchungen 364.1 Beschreibung des Versuchsstands . . . . . . . . . . . . . . . . . . . . . . . 364.2 Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2.1 Thermomechanisches Verhalten . . . . . . . . . . . . . . . . . . . . 394.2.2 Abhängigkeiten von Widerstand und Dehnung . . . . . . . . . . . . 424.2.3 Umwandlungsenthalpie . . . . . . . . . . . . . . . . . . . . . . . . . 44

VIII Inhaltsverzeichnis
4.2.4 Experimentelle Ermittlung des Frequenzgangs . . . . . . . . . . . . 454.2.5 Alterungs- und Ermüdungsverhalten . . . . . . . . . . . . . . . . . 47
4.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5 Modellierung des elektro-thermo-mechanischen Verhaltens 495.1 Modellklassifizierung und -strukturierung . . . . . . . . . . . . . . . . . . . 495.2 Beschreibung der Teilmodelle . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2.1 Temperaturhysterese . . . . . . . . . . . . . . . . . . . . . . . . . . 515.2.2 Widerstandsverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . 575.2.3 Mechanisches Teilsystem . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3 Simulationsergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.4 Übertragungsverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.4.1 Ermittlung der Übertragungsfunktion . . . . . . . . . . . . . . . . . 625.4.2 Klein- und Großsignalverhalten . . . . . . . . . . . . . . . . . . . . 645.4.3 Thermische und mechanische Knickfrequenz . . . . . . . . . . . . . 66
5.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6 Modellgestützter Regelungsentwurf 676.1 Streckencharakteristik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 676.2 Systemspezifischer Entwurf einer Positionsregelung . . . . . . . . . . . . . 69
6.2.1 Auswahl des Reglers . . . . . . . . . . . . . . . . . . . . . . . . . . 696.2.2 Parameteridentifikation und Reglerparametrierung . . . . . . . . . . 706.2.3 Vorsteuerung und Stellbegrenzung . . . . . . . . . . . . . . . . . . . 756.2.4 Implementierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.3 Endlagenregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.3.1 Regelalgorithmus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 786.3.2 Ansteuerung und Signalerfassung . . . . . . . . . . . . . . . . . . . 806.3.3 Einfluss auf die Alterung . . . . . . . . . . . . . . . . . . . . . . . . 82
6.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7 Dynamisch betriebener Formgedächtnisantrieb 847.1 Formgedächtnislegierungen als Aktoren . . . . . . . . . . . . . . . . . . . . 84
7.1.1 Applikationsbeispiel . . . . . . . . . . . . . . . . . . . . . . . . . . 847.1.2 Dynamisches Verhalten . . . . . . . . . . . . . . . . . . . . . . . . . 89
7.2 Verlässlichkeitsorientierte Technologiebewertung . . . . . . . . . . . . . . . 917.2.1 Komponentenanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . 937.2.2 Fehleridentifikation . . . . . . . . . . . . . . . . . . . . . . . . . . . 937.2.3 Fehleranalyse und -bewertung . . . . . . . . . . . . . . . . . . . . . 967.2.4 Übertragbarkeitsanalyse . . . . . . . . . . . . . . . . . . . . . . . . 99
7.3 Entwicklung eines Formgedächtnisantriebs . . . . . . . . . . . . . . . . . . 1007.3.1 Aufbau und Funktionsweise . . . . . . . . . . . . . . . . . . . . . . 1017.3.2 Betriebsverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1017.3.3 Modellierung und Simulation . . . . . . . . . . . . . . . . . . . . . 1037.3.4 Positionsregelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
7.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
8 Diskussion der Ergebnisse 108
A Legierungseigenschaften 110

Inhaltsverzeichnis IX
B Modellberechnungen 112B.1 Wärmeübergangskoeffizient . . . . . . . . . . . . . . . . . . . . . . . . . . 112
B.1.1 Wärmeübergang durch freie Konvektion . . . . . . . . . . . . . . . 112B.1.2 Wärmeübergang durch Mischkonvektion . . . . . . . . . . . . . . . 113
B.2 Jiles-Atherton-Hysteresemodell . . . . . . . . . . . . . . . . . . . . . . . . 114
C Mess- und Simulationsergebnisse 116C.1 Simulationsparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116C.2 Pulsantworten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117C.3 Frequenzgänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Literaturverzeichnis 120

X
Akronyme
DDK Dynamische DifferenzenkalorimetrieDSC Differential Scanning CalorimetryFG FormgedächtnisFGE FormgedächtniseffektFGL FormgedächtnislegierungFMEA Failure Mode and Effects AnalysisFTA Fault Tree AnalysisHAZOP Hazard and Operability StudiesLVDT Linear Variable Differential TransformerNiTiNOL Nickel Titanium Naval Ordnance LaboratoryOPV OperationsverstärkerRT RaumtemperaturSMA Shape Memory AlloySME Shape Memory EffectTK Temperaturkoeffizient

XI
Symbolverzeichnis
Symbol Beschreibung Einheit
Lateinische FormelzeichenA Querschnittsfläche m2
Cth Wärmekapazität J/KD Dämpfungsgrad —Dm mittlerer Wicklungsdurchmesser mE Elastizitätsmodul PaF Kraft NG Schubmodul PaGr Grashof-Zahl —H Enthalpie JKi Verstärkungsfaktor —L Federlänge mNu Nußelt-Zahl (dimensionsloser Wärmeübergangskoeffizient) —P Leistung WPr Prandtl-Zahl —Q Wärmemenge JRel, R elektrischer Widerstand ΩRth Wärmewiderstand K/WRa Rayleigh-Zahl —Re Reynolds-Zahl —S Oberfläche m2
T thermodynamische Temperatur KTon, Tcycle Einschalt-, Zyklusdauer sTS Abtastzeit sTi Zeitkonstante sU innere Energie JUB Betriebsspannung VV Volumen m3
W Arbeit, Energie Ja Beschleunigung m/s2
b Dämpfungskonstante N s/mc Federrate N/mcp massenspezifische Wärmekapazität bei konstantem Druck J/ (kg K)cσ Verschiebungskoeffizient der Umwandlungstemperaturen K/Pad (Draht-)Durchmesser me Dehnung mf Frequenz Hzh spezifische Umwandlungsenthalpie J/kgi Strom Ak Korrekturfaktor —

XII Symbolverzeichnis
l Länge mm Masse kgn Zyklenzahl —nt Windungszahl —p Bildvariable der Laplace-Transformation —s Aktorhub mt Zeit su elektrische Spannung Vv Geschwindigkeit m/sw Wickelverhältnis —x Transformationsdehnung mz Höhe m
Griechische Formelzeichenαconv Wärmeübergangskoeffizient W/ (m2 K)αel linearer Temperaturkoeffizient des Widerstands 1/Kαth thermischer (Längen-)Ausdehnungskoeffizient 1/Kβel quadratischer Temperaturkoeffizient des Widerstands 1/K2
δ Alterungsrate —η Wirkungsgrad —ηA Artnutzwert bei Federn —ηela dynamische Viskosität N s/m2
γ mechanische Scherung —λcond Wärmeleitfähigkeit W/ (K m)λR normierter Widerstand —µ Poisson-Zahl (Querkontraktionszahl) —ν kinematische Viskosität m2/sω Kreisfrequenz s−1
ψ Austenitanteil —σ mechanische Spannung Paτ mechanische Schubspannung Paτela viskoelastische Zeitkonstante sτth thermische Zeitkonstante sε (relative) mechanische (Längs-)Dehnung —εq mechanische Querdehnung —εrad Emissionsgrad — Massendichte kg/m3
el spezifischer elektrischer Widerstand Ω mϑ Celsius-Temperatur Cξ Martensitanteil —
IndizesA AustenitD DrahtG GleichgewichtL LastLu LuftM MartensitO offener Kreis

Symbolverzeichnis XIII
R ReglerS StreckeU UmgebungÜ Übertemperaturα Tieftemperaturphase (Martensit)β Hochtemperaturphase (Austenit)c beträchtlich (engl.: considerable)co koerzitivd desistieren (engl.: desist)d entzwillt (engl.: detwinned)f Ende (engl.: finish)m schmelzen (engl.: melt)re remanents Beginn (engl.: start)t verzwillt (engl.: twinned)
KennzahlenAf Austenit-Endtemperatur CAs Austenit-Starttemperatur CMd Martensit-Desisttemperatur CMf Martensit-Endtemperatur CMs Martensit-Starttemperatur CMσ Martensit-Spannungstemperatur CTc Diffusionstemperatur CTG Gleichgewichtstemperatur CTm Schmelztemperatur C
KonstantenT0 Nullpunkttemperatur 273,15 Kg Erdbeschleunigung 9,81 m/s2
j imaginäre Einheit√−1
σrad Stefan-Boltzmann-Konstante 5,67051 · 10−8 W/(m2 K4)


1
1 Einleitung
Der technische Fortschritt lässt sich anhand von Werkstoffen, die die jeweilige Epoche ent-scheidend geprägt haben, charakterisieren und chronologisieren. Die frühzeitliche Mensch-heitsgeschichte wird in Stein-, Bronze- und Eisenzeit unterteilt. Ebenso lässt sich dieNeuzeit gliedern. Die Industrialisierung im 19. Jahrhundert ging v. a. mit der Weiterent-wicklung und Verbreitung von Stahl einher. Das Zeitalter der Halbleiter startete 1947mit der Erfindung des Transistors, und der Übergang zum nächsten Zeitalter deutet sichdurch die zunehmende Verbreitung von Funktionswerkstoffen (engl.: Smart Materials)an. Hornbogen [2006] versteht darunter u. a. auch Wolframdraht für Glühlampen sowiethermische und elektrische Leit- bzw. Isolierwerkstoffe. Im engeren Sinne zeichnen sichFunktionswerkstoffe durch extrinsische und intrinsische Fähigkeiten aus, um zum einenauf Anrege- und Umgebungsbedingungen anzusprechen und zum anderen die Funktio-nalitäten entsprechend dieser Bedingungen zu aktivieren, wobei die Anregungen eineninternen oder externen Ursprung haben können [Akhras, 2000]. Beispiele hierfür sindpiezoelektrische Keramiken, Elektro-/Magnetostriktiva, elektroaktive Polymere und nichtzuletzt Formgedächtnislegierungen.
1.1 Der Formgedächtniseffekt
Temperatur
Auslenkung
Warmedehnung
FGE
¨
Abbildung 1.1: FGE und Wärmedehnung
Formgedächtnislegierungen1 (FGL) zei-gen ein ausgeprägtes Formgedächtnis(FG), d. h. sie können sich an eine fest-gelegte Ausgangsform „erinnern“. Die imkalten Zustand scheinbar plastisch ver-formte Legierung nimmt beim Erwär-men immer wieder die gleiche Form an.Der Formgedächtniseffekt2 (FGE) beruhtauf einer Phasenumwandlung und Ent-zwillung des Kristallgitters. Durch ei-ne temperatur- und spannungsinduzierteForm- bzw. Volumenänderung wird elek-trische Energie über thermische Energiein mechanische Kräfte und Bewegungengewandelt. FGL können somit als Fest-körperaktoren eingesetzt werden. Wegender thermischen Aktivierung liegt ein Ver-gleich mit der Wärmedehnung bei Bi-metallen nahe [Jendritza, 1998]. Während jedoch die Wärmedehnung eine lineare Tempe-raturabhängigkeit besitzt, findet beim FGE in erster Näherung ein Hin- und Herschaltender Dehnung in einem schmalen Temperaturbereich statt (Abbildung 1.1). Zudem ist das
1engl.: Shape Memory Alloy (SMA)2engl.: Shape Memory Effect (SME)

2 1 Einleitung
Arbeitsvermögen beim FGE um eine Größenordnung größer als bei der Wärmedehnungvon Bimetallen im gleichen Temperaturintervall [Winzek, 2006].
FGL zeichnen sich durch eine sehr hohe Energiedichte aus, die höher als bei allenanderen Antriebsprinzipien ist [Schiedeck und Hemsel, 2006]. Diese resultiert aus dervergleichsweise großen Dehnung, die bei diesen Materialien erreicht werden kann. Dasbedeutet, dass FGL – bezogen auf das Aktorvolumen – die meiste mechanische Arbeitverrichten können.
Der schwedische Physiker Arne Ölander beobachtete 1932 das interessante Phänomenbei der Arbeit mit Legierungen aus Gold und Cadmium [Hahnebach, 2003; Elahinia, 2004].Die AuCd-Legierung konnte im kalten Zustand plastisch verformt werden, um nach an-schließender Erwärmung wieder die ursprüngliche Form anzunehmen. 1938 wurde auchbei ZnCu-Legierungen der FGE entdeckt. Doch erst in den fünfziger Jahren des letz-ten Jahrhunderts wurde dieser Effekt an den genannten Legierungen intensiv untersucht.Chang und Read [1951] beschrieben erstmals ausführlich das thermomechanische Ver-formungsverhalten von AuCd-Legierungen. William J. Buehler stieß 1961 durch Zufallauf den FGE bei NiTi-Legierungen. In den Laboren der US-Navy sollte das im Schiffs-bau eingesetzte Metall Titan weiterentwickelt werden, um die Elastizität zu erhöhen3.Das daraus entstandene Material mit der Bezeichnung NiTiNOL wurde nach den Le-gierungsbestandteilen (Nickel und Titan) und dem Namen des Labors (Naval OrdnanceLaboratory) benannt.
1.2 Motivation
Wissenschaftler und Ingenieure arbeiten seit über vier Jahrzehnten an der technischenAnwendung von FGL. Die Vielzahl der angemeldeten Patente mit FGL einerseits und dierelativ geringe Anzahl der kommerziell erfolgreichen Anwendungen andererseits lassendarauf schließen, dass bei einem Großteil dieser Erfindungen die spezifischen Anforde-rungen und Einschränkungen nicht im ausreichenden Maße berücksichtigt wurden [Heck-mann, 2003]. Diese Arbeit soll einen Beitrag zur Verbesserung des Verständnisses von FGLin Aktoranwendungen leisten, indem eine ganzheitliche Betrachtung bzgl. Modellierung,Regelung und Applikation erfolgt. Die Motivation dafür ergibt sich aus der Feststellungvon Hornbogen [1991]:
„FGL sind neue Werkstoffe, die nicht nur verbesserte, sondern neue Eigen-schaften liefern. Für ihre Entwicklung zum technisch ausgereiften Werkstoff istsowohl noch viel Grundlagenforschung notwendig, als auch angewandte For-schung von der Halbzeugherstellung bis zu Normung der Gebrauchseigenschaf-ten. Darüber hinaus müssen die Konstrukteure über die neuen Eigenschafteninformiert und von deren Vorteilen überzeugt werden.“
Das Interesse der Industrie an FGL für den technischen Einsatz ist groß und wächststetig. Immer häufiger werden FGL bei der Bearbeitung verschiedenster Problemstellun-gen in die Überlegungen mit einbezogen. Dadurch verspricht man sich verbesserte odererweiterte Eigenschaften des Gesamtsystems, schreckt jedoch meist vor den damit verbun-denen Risiken zurück. Damit wird deutlich, in welchem Spannungsfeld zwischen Chancenund Risiken sich FGL derzeit befinden.
3siehe [Buehler u. a., 1963]

1.3 Thesen der Arbeit 3
1.3 Thesen der Arbeit
Vorab werden die zentralen Aussagen dieser Arbeit in konzentrierter Form vorgestellt.Sie geben die Ergebnisse aus der Analyse des aktuellen Forschungsstands und aus dendurchgeführten Forschungsarbeiten wieder. Zusammenfassend lassen sich folgende Thesenformulieren:
1. Durch die wachsende Automatisierung nimmt die Anzahl der Antriebsaufgaben ste-tig zu. Allein im Automobil werden immer mehr Aktoren kleiner und mittlerer Lei-stung für Komfortfunktionen eingesetzt. Daneben werden in der Robotik effektiveund robuste Antriebe benötigt, um vielfältige Bewegungsformen zu erzeugen.
2. FGL besitzen Eigenschaften, aus denen sich einzigartige und neue Möglichkeitenfür den Einsatz dieses Materials als Aktoren ergeben. Diese werden durch eine ge-naue Kenntnis und detaillierte Beschreibung der Systemeigenschaften besser nutz-bar. Durch Hervorheben von Vorteilen und durch Konzepte zur Vermeidung derNachteile kann der vorhandenen Skepsis gegenüber FG-Aktoren entgegen getretenwerden.
3. Die Beschreibung von FGL mit konzentrierten Parametern ist geeignet, um ein phy-sikalisch motiviertes Modell zu entwickeln. Auf Basis der thermodynamischen Ener-giebilanz und unter Berücksichtigung der Temperaturhysterese sowie des nichtlinea-ren Dehnungsverhaltens kann eine genaue Vorhersage des dynamischen Betriebsver-haltens erfolgen.
4. Die Temperaturhysterese kann unter Berücksichtigung des mechanischen Einflussesmit Sigmoidfunktionen modelliert werden. Für die Parametrierung sind ausschließ-lich die Phasenumwandlungstemperaturen erforderlich. Alternativ ist eine Hystere-semodellierung nach dem Verfahren von Jiles und Atherton möglich, das sich aufdie Temperaturhysterese bei FGL übertragen lässt.
5. Die Nutzung inhärenter Eigenschaften bietet neue Möglichkeiten bei der Ansteue-rung und beim Betrieb von FG-Aktoren. Insbesondere auf Basis des Widerstands-werts lässt sich eine Positionsregelung entwickeln.
6. Auf Basis einer linearisierten Übertragungsfunktion für Klein- und Großsignalan-regung ist ein systematischer Entwurf einer Positionsregelung durchführbar. DerRegelkreis ist stabil, stationär genau, hinreichend gedämpft und genügend schnell.
7. Durch Beobachtung des Widerstandsverhaltens kann eine robuste und kostengün-stige Endlagenregelung realisiert werden. Die widerstandsbasierte Heizleistungsre-gelung in der Endlage erhöht durch angepasste Leistungsaufnahme die Effizienz undLebensdauer von FG-Aktoren.
8. Beim Einsatz von FGL in der Aktorik existieren Probleme hinsichtlich der me-chanischen und elektrischen Kontaktierung, des sicheren und vorhersagbaren Be-triebs sowie des Entwurfs von robusten und eingebetteten Aktorkonzepten. Durchdie Kombination klassischer Verlässlichkeitsmethoden lassen sich die wesentlichenAspekte für die Entwicklung von FG-Aktoren ermitteln.

4 1 Einleitung
1.4 Aufbau der Arbeit
Im Anschluss an diese Einleitung erfolgt zunächst die Klärung des Forschungsstands.Auf Basis einer Literatur-, Patent- und Internetrecherche wird in Kapitel 2 der aktuel-le Stand der Technik beschrieben. Das Forschungsgebiet wird folgendermaßen unterteilt:Grundlagen des FGE (Abschnitt 2.1), Ansätze zur Modellierung von FGL (Abschnitt 2.2),Strategien zur Regelung von FGL (Abschnitt 2.3) sowie Bauformen und Applikation vonFG-Aktoren (Abschnitt 2.4). Auf Basis des recherchierten Forschungsstands wird in Ka-pitel 3 die Aufgabenstellung abgeleitet und der Gegenstand der Arbeit definiert. Anschlie-ßend werden die Forschungsergebnisse auf dem Gebiet der FGL für Aktoranwendungendargestellt. Experimentelle Untersuchungen liefern grundlegende Erkenntnisse über dasSystemverhalten von FGL (Kapitel 4). Die Ergebnisse der verschiedenen Untersuchungenbilden die Grundlage für das weitere Vorgehen. In Kapitel 5 wird durch die Erweiterungvorhandener Ansätze und die Entwicklung neuer Modelle das Verhalten von eindimen-sional belasteten FGL charakterisiert und phänomenologisch beschrieben. Daraus werdenmathematische Modelle abgeleitet, die unter Nutzung der vorangegangenen experimen-tellen Untersuchungen parametrisiert werden. Das Simulationsmodell wird anhand vonVersuchen für charakteristische Anwendungsfälle validiert. Auf Basis der gewonnenen Er-kenntnisse bei der Modellierung erfolgt in Kapitel 6 der modellbasierte Entwurf einerRegelung zur Verbesserung des Aktorverhaltens. Dabei sollen v. a. inhärente Eigenschaf-ten durch Erfassung innerer Zustandsvariablen genutzt werden.4 Die Ergebnisse aus denUntersuchungen und aus einer verlässlichkeitsorientierten Analyse kommerzieller Aktorenwerden in einem Aktorprototypen appliziert (Kapitel 7). Abschließend folgt in Kapitel 8eine Zusammenfassung und Diskussion der Ergebnisse. Der Anhang beinhaltet Tabellenzu Materialdaten der hier untersuchten FGL und weitergehende Ausführungen.
4in der Literatur als Self-Sensing bezeichnet

5
2 Stand der Technik beiFormgedächtnisaktoren
Im Folgenden wird – reduziert auf die für die durchgeführten Forschungsarbeiten wichtigenAspekte – der Stand der Technik dargestellt. Dazu werden zunächst die Mechanismen desFGE bei der Phasenumwandlung und das Verformungsverhalten von FGL beschrieben.Anschließend werden die für diese Arbeit relevanten Modelle von FGL sowie etablierteRegelungsstrategien für FG-Aktoren erläutert. Abschließend folgen ein Überblick gängigerBauformen und allgemeine Betrachtungen für den Betrieb von Aktoren mit FGL.
2.1 Grundlagen des Formgedächtniseffekts
Der FGE in metallischen Legierungen beruht auf einer temperatur- und spannungsin-duzierten Martensitumwandlung [Hesselbach, 1999]. Diese diffusionslose kristallografischeTransformation zwischen den beiden Phasen Martensit und Austenit findet innerhalb ei-nes bestimmten Temperaturintervalls statt und ist reversibel [Bhattacharya u. a., 2004;Conti u. a., 2004]. Bei der Phasenumwandlung kommt es infolge innerer Reibung beimDurchlauf der Phasengrenze durch das Kristallgitter zu einer Temperaturhysterese. Fürdie Martensitbildung ist eine Unterkühlung, für die Austenitbildung eine Überhitzungnotwendig. Die Umwandlungstemperaturen Ms, Mf , As und Af definieren die Start- bzw.Endtemperaturen der jeweiligen Phasenumwandlung (Abbildung 2.1a). Oberhalb von Af
Temperatur
Martensitanteil
As
AfMs
Mf
innere
Schleifeaußere
Schleife
¨
(a) Temperaturhysterese
mechanische Spannung
Temperatur
Mf
Ms
As
Af
(b) Spannungsabhängigkeit
Abbildung 2.1: Phasenumwandlungstemperaturen
liegt Austenit vor. Sinkt die Temperatur unter Ms, beginnt die Martensitbildung. Diesesetzt sich fort, bis die Transformation bei Mf abgeschlossen ist. Beim Erwärmen beginntdie Rückumwandlung des Martensits in den Austenit bei As und endet bei Af .

6 2 Stand der Technik bei Formgedächtnisaktoren
Im Allgemeinen gilt Mf < Ms < As < Af , aber auch Ms > As ist möglich [Schleich,2003]. Die Temperaturhysterese hat für NiTi eine Breite von etwa 10 . . . 30 K zwischen denäußeren Hystereseästen und eine Differenz von etwa 5 . . . 20 K zwischen Beginn und Endeeiner vollständigen Phasenumwandlung. Bei nicht vollständig abgeschlossener Phasenum-wandlung werden innere Hystereseschleifen durchlaufen. Die Umwandlungstemperaturenerhöhen sich mit der mechanischen Belastung [Warlimont u. a., 1974; Leo, 2007]. DieSpannungsrate cσ = dT/dσ beschreibt die proportionale Beziehung zwischen Erhöhungder Umwandlungstemperaturen und mechanischer Spannung (Abbildung 2.1b) und istabhängig von der Umwandlungsenthalpie, der reversiblen Transformationsdehnung undder Gleichgewichtstemperatur [Bhattacharya, 2003].
Für ein FG müssen sich die beiden Phasen der Martensitumwandlung mischen können,damit sich bei Abkühlung Keime der Tieftemperaturphase in der Hochtemperaturphasebilden [Müller, 1997]. Nach Bhattacharya [2003] ist eine solche Phasenmischung möglich,wenn die Gitterstruktur der Hochtemperaturphase kubisch und die Phasentransformati-on volumenerhaltend ist. Grundsätzlich müssen für den FGE folgende Voraussetzungenerfüllt werden [Hornbogen, 1991]:
Kompatibilität Die neue Phase muss sich innerhalb des Mutterkristalls bilden können.Beide Phasen müssen kohärent sein, d. h. die Ähnlichkeit der Gitter hinsichtlichAtomabstände, Symmetrie und Koordinationszahl ist zwingend erforderlich.
Geringe Diffusion Die Umwandlungstemperaturen müssen unterhalb der Diffusionstem-peratur Tc <
13 Tm (Schmelztemperatur Tm) liegen, so dass die Sprungzeit für den
Platzwechsel der Atome groß ist.
Reversibilität Die Rückumwandlung muss so verlaufen, dass die ursprüngliche Strukturmöglichst fehlerfrei wiederhergestellt wird.
Der FGE ist in Abbildung 2.2 schematisch dargestellt und resultiert aus mikroskopi-schen Deformationsmechanismen (vgl. [Helm, 2001]). Die Hochtemperaturphase Austenit
verzwilltes
Martensit
teilweise
entzwilltes
Martensit
vollstandig
entzwilltes
Martensit
Austenit
¨
Verformung
Temperatur
Abbildung 2.2: Schematische Darstellung des FGE

2.1 Grundlagen des Formgedächtniseffekts 7
besitzt eine kubisch-raumzentrierte Kristallstruktur. Beim Abkühlen finden Klappvor-gänge statt, die zu einer verzwillten Martensitstruktur mit einer Vielzahl von Varian-ten führen. In entsprechend thermomechanisch vorbehandelten NiTi-Legierungen bildetsich vor dem eigentlichen Martensit eine rhomboedrisch verzerrte Kristallstruktur, diesogenannte R-Phase [Gümpel, 2004]. Diese Zwischenphase tritt während des Abkühlensder Hochtemperaturphase auf, wird aber im Weiteren nicht tiefer behandelt. Die Nie-dertemperaturphase Martensit ist durch eine monokline bzw. verzerrte, orthorhombischeStruktur gekennzeichnet. Diese Phase ist thermodynamisch metastabil und duktil. Duktilbeschreibt die Fähigkeit bzw. das Verhalten eines Werkstoffes, unter Einwirkung äußererKräfte zur plastischen Verformung zu neigen, ohne dass dabei Werkstofftrennungen auf-treten. Das heißt, eine mechanische Belastung bei Temperaturen unterhalb Mf führt zurVerschiebung der hochbeweglichen Zwillingsgrenzen und bewirkt nach Überschreiten derscheinbaren Streckgrenze eine gitterinvariante Verformung, jedoch keine Veränderung derKristallgitterstruktur. Das Gitter wächst in günstig orientierten Martensitvarianten, unddie Zwillingskristalle klappen um. Es entsteht ausgerichteter, entzwillter Martensit. We-gen des geringen Energiegehalts der Zwillingsgrenzen ist die zur Entzwillung notwendigeSpannung wesentlich niedriger als die für die Bildung und Bewegung von Versetzungenerforderliche Spannung1. Die Entlastung des Martensitgitters bewirkt eine elastische Ent-spannung, aber keine erneute Zwillingsbildung. Die Verformung bleibt erhalten, solangedie Legierung nicht über die Umwandlungstemperaturen erwärmt wird. Durch Erwärmungdes Martensits über As setzt die Phasenumwandlung ein, und die ursprüngliche Kristal-lorientierung des symmetrischen Austenits bildet sich wieder zurück. Bis zum Erreichenvon Af liegt ein Mischphasenzustand vor. Wegen der makroskopischen Ähnlichkeit in denAbmessungen zwischen dem Austenit und dem ursprünglichen Zwillingsmartensit nimmtdie Legierung nach vollständiger Phasenumwandlung die Ausgangsform an. Während derFormänderung kann Arbeit verrichtet werden.
Liegt die Legierungstemperatur zwischen Af und Md bildet sich bei einer ausreichendhohen Belastung spannungsinduzierter Martensit. Die mechanische Belastung führt zu ei-ner kristallographischen Scherung, so dass die Verformung mit der Richtung der äußerenSpannung bestmöglich übereinstimmt. Liegt die Legierungstemperatur über der kriti-schen Temperatur Md, die weit über den Umwandlungstemperaturen liegt, findet keinespannungs- oder temperaturinduzierte Martensitbildung statt. Die Martensitbildung wirdunterdrückt, da für die spannungsinduzierte Martensitbildung mehr Energie als für dieirreversible Verformung benötigt wird. Die Legierung bleibt immer austenitisch und zeigtein ähnliches Verformungsverhalten wie Stahl. Bis zur Elastizitätsgrenze ist die Verfor-mung proportional zur Spannung, darüber ist die Verformung irreversibel und führt beiErreichen der Bruchgrenze zum Bruch.
Hesse u. a. [2003] beschreiben das unterschiedliche Verformungsverhalten von FGL beiZug- und Druckbelastung. Die maximale reversible Dehnung ist bei Druckbelastung halbso groß wie bei Zugbelastung. Der austenitische Elastizitätsmodul ist in beiden Fällenähnlich. Martensit verhält sich identisch bis zum Erreichen der jeweiligen scheinbarenStreckgrenze, die bei Druckbelastung höher als bei Zugbelastung ist. Allerdings unter-scheiden sich die Mechanismen der Martensitverformung durch Reibungseffekte bei deranschließenden Entzwillung, so dass der Elastizitätsmodul bei Zugbelastung um eine Grö-ßenordnung geringer als bei Druckbelastung ist. Da FG-Drähte ausschließlich zugbelastetwerden können, muss bei der Modellierung nur die unidirektionale und eindimensionaleBelastung berücksichtigt werden.
1wirkliche Streckgrenze

8 2 Stand der Technik bei Formgedächtnisaktoren
Spannung
Dehnung
As
Af
Ms
Mf
Temperatur
(a) Pseudoplastizität
Spannung
Dehnung
Temperatur
As
Af
Md
(b) Pseudoelastizität
Abbildung 2.3: Verformungsverhalten im σ-ε-T -Diagramm

2.1 Grundlagen des Formgedächtniseffekts 9
2.1.1 Pseudoplastizität und Pseudoelastizität
Das Verformungsverhalten konventioneller Werkstoffe im σ-ε-T -Diagramm (mechanischeSpannung σ, Dehnung ε, Temperatur T ) ist durch reversible Verformung bzw. Elastizität,thermische Dehnung, plastische Verformung und schließlich Bruch gekennzeichnet [Horn-bogen, 1991]. In Abhängigkeit von verschiedenen Randbedingungen zeigen FGL Anomali-en des Verformungsverhaltens im Vergleich zu herkömmlichen Metallen. In der Fachlitera-tur werden zur Beschreibung dieser Anomalien die Begriffe Pseudoplastizität und Pseudo-elastizität genutzt. Diese sollen anhand der σ-ε-T -Diagramme in Abbildung 2.3 erläutertwerden.
Die Pseudoplastizität ist die Fähigkeit einer FGL, nach einer scheinbar plastischen Ver-formung durch Wärmezufuhr wieder in ihre Ursprungsform zurückzukehren, und stelltdie Eigenschaft dar, die allgemein als FGE verstanden wird. Zunächst liegt die Legie-rungstemperatur unter Ms, und die FGL wird in der Martensitphase durch mechanischeBelastung bis zu 8% gedehnt. Nach Belastungsende bleibt die Legierung verformt. Durcheine Temperaturerhöhung über Af und der damit verbundenen temperaturinduziertenAustenitbildung nimmt die Legierung wieder ihre Ursprungsform an. Diese Form bleibtbeim Abkühlen erhalten. Dieses Verhalten wird als Einwegeffekt bzw. thermischer FGEbezeichnet. Die Pseudoelastizität beschreibt einen isothermen Vorgang während eines Be-lastungszyklus. Die Legierungstemperatur liegt zwischen Af und Md, so dass im unbela-steten Zustand Austenit vorliegt. Durch zunehmende mechanische Spannung erhöhen sichdie Umwandlungstemperaturen, und sobald die (Martensit-)Umwandlungstemperaturenüber die Materialtemperatur steigen, kommt es zur spannungsinduzierten Martensitbil-dung. Bei nachlassender Belastung sinken die (Austenit-)Umwandlungstemperaturen wie-der unter die Materialtemperatur, so dass sich erneut Austenit bildet und das Materialin seine Ursprungsform zurückkehrt. Man spricht von Pseudoelastizität, weil infolge derHysterese Energie dissipiert und nicht die gesamte Energie wieder freigegeben wird.
2.1.2 Ausprägungen des thermischen Formgedächtniseffekts
Der thermische FGE bezeichnet die temperaturinduzierte Austenitbildung beim Erwär-men einer pseudoplastisch verformten FGL. Für den technischen Einsatz sind der extrin-sische und intrinsische Zweiwegeffekt sowie das „unterdrückte“ Formgedächtnis relevant.In Abbildung 2.4 bzw. 2.5 sind die dazugehörigen σ-ε-T -Diagramme dargestellt.
Beim extrinsischen Zweiwegeffekt arbeitet die FGL gegen eine ständig anliegende Last.Diese sei groß genug, um in der Martensitphase eine pseudoplastische Verformung her-beizuführen, und klein genug, um die Rückverformung bei der temperaturinduziertenAustenitbildung nicht zu unterdrücken. Wegen der Belastung erhöhen sich die Umwand-lungstemperaturen. Bei einer zyklischen Temperaturänderung verformt sich das FG-Ele-ment durch die anliegende Belastung während des Abkühlens und erlangt beim Erwärmendurch die Austenitbildung seine ursprüngliche Form wieder. Ohne äußere Kräfte wäre nurein Einwegeffekt möglich, da eine anfängliche Verformung durch das Erwärmen zurückgeht, beim Abkühlen aber keine erneute Verformung stattfindet (siehe Pseudoplastizität).
Um den intrinsischen Zweiwegeffekt zu erhalten, wird der Legierung neben einer Hoch-temperaturform auch eine Niedertemperaturform eingeprägt. Dies geschieht durch einethermomechanische Behandlung, das so genannte Trainieren [Stöckel u. a., 1988; Escher,1993]. Dadurch bilden sich bevorzugte Martensit-Varianten, und die FGL nimmt beimAbkühlen eine zweite Form an, die sich von der Form im warmen Zustand unterscheidet.Diese kann jedoch nur eingenommen werden, wenn keine äußeren Kräfte wirken.

10 2 Stand der Technik bei Formgedächtnisaktoren
Spannung
Dehnung
Temperatu
r
∆Mf
Mf(σ)∆Af
Af(σ)
As
MsMf
Af
(a) Extrinsischer Zweiwegeffekt
Spannung
Dehnung
As
Ms
Tempera
tur
Mf
Af
(b) Intrinsischer Zweiwegeffekt
Abbildung 2.4: Zweiwegeffekt im σ-ε-T -Diagramm

2.1 Grundlagen des Formgedächtniseffekts 11
Kann sich eine FGL bei Temperaturerhöhung über Af nicht vollständig zurück ver-formen, wird das Formgedächtnis unterdrückt [Stöckel u. a., 1988]. Das Bestreben derLegierung, in der Austenitphase wieder ihre Ursprungsform anzunehmen, wird durch me-chanische Anschläge behindert und führt zu Spannungen innerhalb des Materials. Diemechanische Spannung steigt proportional mit der Temperatur an.
Spannung
Dehnung
Tempera
tur
As
MsMf
Af
Md
Abbildung 2.5: Unterdrücktes Formgedächtnis im σ-ε-T -Diagramm
2.1.3 Legierungen mit Formgedächtnis
Für den Einsatz als Aktoren werden an FGL einige grundlegende Anforderungen gestellt,die je nach Legierung unterschiedlich gut erfüllt werden. Diese sind im Wesentlichen:
• ausgeprägter und stabiler Formgedächtniseffekt mit geringer Ermüdung und langerLebensdauer im Hinblick auf den Aktorhub
• hohe Umwandlungstemperaturen zur Vermeidung einer ungewollten Aktivierungdurch die Umgebungstemperatur und Gewährleistung einer vollständigen Marten-sitbildung beim Abkühlen für ein sicheres Betriebsverhalten
• schmale Temperaturhysterese zur schnellen Aktivierung
• leichte Verformbarkeit des Martensits und gleichzeitig hohe Festigkeit des Austenits
• hoher Grad der Energieumwandlung von Joule’scher Wärme in mechanische Arbeit
• günstige Materialkosten

12 2 Stand der Technik bei Formgedächtnisaktoren
46 48 50 52−200
−100
0
100
200
Um
wan
dlu
ngs
tem
per
atur
inC
Ni-Gehalt in at%
Ms
Mf
As
Af
Abbildung 2.6: Stöchiometrische Abhängig-keit der Umwandlungstemperaturen bei NiTi[Murray, 1991]
Die am meisten verwendeten Legie-rungen sind NiTi und NiTiCu, dasie insbesondere für Aktoranwendungenvorteilhafte Eigenschaften besitzen. DieUmwandlungstemperaturen bei NixTi1−x
sind abhängig von der exakten Stöchio-metrie (Abbildung 2.6). Bei weniger als50 at% Nickelanteil sind die Umwand-lungstemperaturen auf etwa 100 C be-schränkt, bei zunehmendem Nickelanteilreduzieren sich die Umwandlungstempe-raturen um ca. 10 K pro 0,1 at%. DurchVariation des Nickelanteils ist es möglich,Legierungen herzustellen, die bei Raum-temperatur als Martensit oder Auste-nit vorliegen und damit pseudoplastischesbzw. pseudoelastisches Verhalten zeigen.Weiterhin zeigen Cu-basierte Legierungenwie CuZnAl und CuAlNi, die von Uebel
[2002] detailliert untersucht wurden, den FGE. Diese besitzen höhere Umwandlungstem-peraturen und sind verhältnismäßig preisgünstig, haben jedoch schlechtere FG-Eigen-schaften im Vergleich zu NiTi. Andere FGL befinden sich momentan noch in frühenEntwicklungsstadien und sind kommerziell noch nicht verfügbar. Dabei sollen höhere Um-wandlungstemperaturen mit guten FG-Eigenschaften kombiniert werden. Der Einfluss derHerstellbedingungen auf diese Größen wurde von Donner [1992] untersucht. Die Materi-aldaten ausgewählter Legierungen befinden sich in Tabelle A.1.
2.2 Modelle für Formgedächtnislegierungen
Die Modellierung von FGL kann nach unterschiedlichen Konzepten und Schwerpunk-ten erfolgen. In der Fachwelt haben sich verschiedene Ansätze etabliert, von denen diegeläufigsten von Stork [1997] zusammengefasst wurden. Die Beschreibung der Martensit-umwandlung einer FGL kann mit makroskopischen Modellen erfolgen. Modelle mit einemhöheren Detaillierungsgrad lösen die Phasentransformation genauer auf, sind jedoch imHinblick auf die technische Umsetzung weniger geeignet (Tabelle 2.1).
Tabelle 2.1: Modelle zur Beschreibung der Martensitumwandlung [Kohl, 2004]
Modellelemente Theorie Modelltyp Bewertung
Kristallgitter, Atombin-dungen, Gitterbaufehler
Festkörperphysik mikroskopisch + / −
Gefüge, Körnerstatistische Thermodyna-mik, Festkörperphysik
mesoskopisch 0 / 0
Volumenelemente, Bau-gruppen
statistische Thermodyna-mik
makroskopisch − / +
nach Detaillierungsgrad/Anwendbarkeit

2.2 Modelle für Formgedächtnislegierungen 13
Im Folgenden werden (Teil-)Modelle für die Legierungstemperaturberechnung, die Tem-peraturhysterese, das Materialverhalten während der Phasenumwandlung und das Ver-formungsverhalten von FGL in Drahtform vorgestellt. Diese bilden die Grundlage für dieEntwicklung des Modells für dynamisch betriebene FGL in Kapitel 5.
2.2.1 Thermodynamische Energiebilanz
Neben der mechanischen Spannung hat die Legierungstemperatur direkten Einfluss auf diePhasenumwandlung bei FGL. Das Produkt aus (absoluter) Temperatur T und Wärmeka-pazität Cp entspricht der inneren bzw. thermischen Energie U einer FGL. Durch zu- undabgeführte Energie verändert sich die innere Energie (Abbildung 2.7), und die Legierungs-temperatur steigt bzw. fällt bis zum Erreichen des thermodynamischen Gleichgewichts.Die am Aufheiz- und Abkühlvorgang eines FG-Aktors beteiligten Energieflüsse sind die
Wel
Wmech
Qcond Qrad Qconv Htransf
U
Abbildung 2.7: Thermodynamische Energiebilanz
elektrische Heizleistung Pel = Reli2, die zeitliche Änderung der Umwandlungsenthalpie
der FGL Htransf = |∆H| ξ, die zeitlichen Änderungen der kinetischen und potenziellenEnergie der Lastmasse Wkin = d(mLv
2/2)/dt bzw. Wpot = d(mLgz)/dt sowie die Wär-meübergänge zwischen FGL und Umgebung durch Konvektion Qconv, Strahlung Qrad undLeitung Qcond. Die thermodynamische Energiebilanz für die innere Energie einer FGL
U = Pel − Htransf − Wkin − Wpot − Qconv − Qrad − Qcond (2.1)
fasst alle ein- und ausgehenden Energieströme vorzeichenbehaftet zusammen. Mit derWärmekapazität Cp = V cp, dem elektrischen Widerstand Rel und der Umwandlungsent-halpie ∆H = V∆h des FG-Elements sowie der Lastmasse mL, der Umgebungstempera-tur TU und den Wärmeübergangszahlen für Konvektion αconvSconv, Strahlung εradσradSrad
bzw. Leitung λcondScond
lcond
ergibt sich (Dichte , Volumen V , Oberfläche S):
V cpT = Reli2 + V |∆h| ξ −mLva−mLgz . . .
. . .− αconvSconv (T − TU)− εradσradSrad
(
T 4 − T 4U
)
− λcondScond
lcond(T − TU) (2.2)
Diese nichtlineare, inhomogene Differentialgleichung erster Ordnung mit veränderlichenKoeffizienten bildet die Grundlage für die Modellierung und Berechnung der Legierungs-temperatur [Oelschläger, 2003; Meier und Oelschläger, 2004a,b; Velazquez, 2006]. DieÄnderung der Enthalpie ist die Wärme, die während einer Phasenumwandlung vom Sy-stem aufgenommen bzw. abgegeben wird. Für exotherme Reaktionen (Martensitbildung)ist der Wert von ∆H negativ, da das System Wärme abgibt. Für endotherme Vorgänge(Austenitbildung) ist sie dementsprechend positiv.

14 2 Stand der Technik bei Formgedächtnisaktoren
2.2.2 Umwandlungsgrad und Temperaturhysterese
Eine wesentliche Zustandsgröße von FGL ist der (Phasen-)Umwandlungsgrad zwischenMartensit und Austenit. Der Martensitanteil
ξ = lim∆V→0
∆VM
∆V(2.3)
beschreibt den Volumenanteil VM am Gesamtvolumen V , der als Martensit vorliegt, undder Austenitanteil
ψ = lim∆V→0
∆VA
∆V(2.4)
den Volumenanteil VA, der als Austenit vorliegt [Bhattacharya u. a., 2002]. Unter Ver-nachlässigung der R-Phase liegt eine FGL nur als Martensit oder Austenit vor, und es giltξ + ψ = 1. Diese Bedingung wird erfüllt, wenn sich die Änderungsraten
ξ =dξ
dt=∂ξ
∂TT (2.5)
ψ =dψ
dt=∂ψ
∂TT (2.6)
kompensieren (ξ + ψ = 0).Der Umwandlungsgrad ist eine hysteresebehaftete Funktion der Temperatur. Die Ursa-
chen dafür liegen in der notwendigen Unterkühlung bzw. Überhitzung zur Aktivierung derPhasenumwandlung (Abschnitt 2.1). Zusätzlich erhöhen sich die Umwandlungstempera-turen bei Belastung. Allgemein lässt sich der Umwandlungsgrad mit dem Martensitanteil
ξ = H
T, σ, sgn(
ξ)
(2.7)
als Funktion H der Temperatur T , mechanischen Spannung σ und Umwandlungsrichtungsgn
(
ξ)
beschreiben. Die Phasenumwandlung kann theoretisch mit Schallgeschwindigkeiterfolgen. Tatsächlich ist die Umwandlungsgeschwindigkeit durch die Geschwindigkeit derTemperaturänderung begrenzt, weshalb der Phasenumwandlungsgrad unabhängig von derÄnderungsrate ξ angenommen werden kann.
Für eine hinreichend genaue Simulation ist die Berücksichtigung der Temperaturhys-terese erforderlich. In der Literatur sind verschiedene Modellansätze für Hysteresekurvenzu finden. Weit verbreitet sind Jiles-Atherton- und Preisach-Modelle, die in der Elektro-magnetik und Piezotechnik angewendet werden, deren Parameter jedoch aufwendig vonHysterese- und Neukurvenmessungen abgeleitet werden müssen [Gorbet, 1997]. Eine an-dere gebräuchliche Methode, das thermische Hystereseverhalten bei der martensitischenPhasenumwandlung zu modellieren, ist die bereichsweise Definition der äußeren Hystere-seäste durch analytische Funktionen. Stork [1997] gibt in seiner Arbeit einen umfassendenÜberblick der Hysteresemodelle. Generell lassen sich Hysteresemodelle nach verschiedenenKriterien klassifizieren [Ivanyi, 1997]:
Look-Up-Tabelle Äußere und innere Hysteresekurven werden gemessen und die Messda-ten in Look-Up-Tabellen abgelegt. Sie sind daher numerische bzw. experimentelleModelle. Die Genauigkeit hängt von der Anzahl der Stützstellen ab, zwischen de-nen interpoliert wird. Dies führt zu einem hohen Speicherbedarf. Außerdem ergebensich Schwierigkeiten bei der Abbildung innerer Hystereseschleifen, da diese komplexeAlgorithmen mit hohem Rechenaufwand erfordern.

2.2 Modelle für Formgedächtnislegierungen 15
Sigmoidfunktionen Die Hystereseäste werden mit z. T. bereichsweise definierten, sigmoi-den Funktionen analytisch beschrieben, die durch eine geeignete Skalierung undVerschiebung der Hystereseform sehr nahe kommen. Der Vorteil liegt in der anschau-lichen Parametrierung und Implementierung. Zudem liefert eine Differentiation eineanalytische Beschreibung der Änderungsrate.
Preisach-Modell Auf Basis eines phänomenologischen Ansatzes erfolgt die Hysterese-modellierung durch Superposition unendlich vieler zweiparametriger, rechteckigerElementarhysteresen, die in einer bestimmten Häufigkeitsverteilung vorliegen [Iva-nyi, 1997; Mayergoyz, 2003]. Die Verteilungsfunktion wird aus Hysteresemessungenbestimmt. Dieses Modell eignet sich für reversible Prozesse. Die Invertierung desModells erfolgt iterativ und ist rechen- und speicherintensiv.
Jiles-Atherton-Modell Der Ansatz von Jiles und Atherton berücksichtigt die physikali-schen Vorgänge der magnetischen Hysterese. Für FGL lässt sich eine physikalischeAnalogie ableiten [Gorbet, 1997]. Die Abweichungen zur Anhysteresekurve infolgereversibler und irreversibler Magnetisierung werden additiv verknüpft. Dieses phy-sikalische Modell zeichnet sich durch hohe Genauigkeit aus, ist invertierbar undbenötigt keine Iterationen.
In dieser Arbeit erfolgt die Beschreibung der Temperaturhysterese mittels Sigmoidfunk-tionen und alternativ nach einem für die Temperaturhysterese angepassten Verfahren vonJiles und Atherton. Während die Vorteile der analytischen Modellierung mit Sigmoid-funktionen in der einfachen Implementierung und Parametrierung sowie im niedrigenRechenbedarf liegen, zeichnet sich das Jiles-Atherton-Modell durch seinen physikalischmotivierten Ansatz aus. Die Ansätze beider Verfahren werden im Folgenden kurz be-schrieben.
Liang und Rogers [1990] haben ein analytisches Hysteresemodell aus Sigmoidfunktio-nen mit einer bereichsweisen Definition der äußeren Hystereseäste vorgestellt, das dieMöglichkeit der Nachbildung innerer Hystereseschleifen besitzt. Der Umwandlungsgrad
ξ =
1 T ≤Mf1−ξ′
2 cos(
π T−Mf
Ms−Mf
)
+ 1+ξ′
2 Mf < T < Ms
0 T ≥Ms
falls ξ > 0 (2.8a)
ξ =
1 T ≤ Asξ′
2 cos(
π T−As
Af−As
)
+ ξ′
2 As < T < Af
0 T ≥ Af
falls ξ < 0 (2.8b)
wird mittels einer Cosinus-Funktion beschrieben. Hierbei ist eine Unterscheidung der Um-wandlungsrichtung ξ und eine Bereichsunterscheidung bzgl. der Umwandlungstempera-turen erforderlich. Eine korrekte Beschreibung innerer Hystereseschleifen ist durch eineAnpassung des Anfangsmartensitanteils 0 ≤ ξ′ ≤ 1 möglich, wenn Mf < Ms < As < Af
ist. Dies ist für die gebräuchlichsten FGL der Fall [Leo, 2007].Das Hysteresemodell nach Jiles und Atherton [1983, 1986] ist eine Beschreibung der
Magnetisierungskurve M = f(H) als Funktion der magnetischen Feldstärke H in ferro-magnetischen Werkstoffen unter Berücksichtigung von reversiblen und irreversiblen Effek-ten (Anhang B.2). Durch die Analogie zwischen Umwandlungsgrad und Magnetisierungsowie Temperatur und Feldstärke kann auch die Temperaturhysterese bei FGL modelliertwerden (Abschnitt 5.2.1.2).

16 2 Stand der Technik bei Formgedächtnisaktoren
2.2.3 Materialverhalten während der Phasenumwandlung
Bei der Phasenumwandlung zwischen Martensit und Austenit ändert sich die Kristall-struktur. Dadurch werden auch materialspezifische Eigenschaften beeinflusst. Diese ther-mischen, elektrischen und mechanischen Größen werden in Abhängigkeit vom Umwand-lungsgrad berechnet und ergeben sich aus dem Mischphasenzustand. Dabei wird ein pro-portionaler Zusammenhang
X = f(ξ) = ξXM + (1− ξ)XA (2.9)
zwischen einer Materialgröße X und dem Martensitanteil ξ angenommen. Der Index (Moder A) gibt den Wert der Eigenschaft bei vollständig umgewandeltem Martensit bzw.Austenit an. Eine Auflistung von 23 phasenabhängigen Materialkennwerten gibt Harrison[1990] an. Nach diesem Ansatz berechnet sich beispielsweise der spezifische Widerstand
ρel = ξρel,M + (1− ξ) ρel,A (2.10)
aus dem Mischzustand der beiden Phasen [Oelschläger, 2003].
2.2.4 Thermomechanisches Verformungsverhalten
Die Berechnung des Drahthubs erfolgt auf Basis des thermomechanischen Verformungs-verhaltens. Dieses kann mit der nichtlinearen Green-Lagrange-Dehnung und der 2. Piola-Kirchhoff-Spannung beschrieben werden. Bei Vernachlässigung der Querdehnung ergibtsich nach Knothe und Wessels [2008]
ε =∆l
l0+
1
2
(
∆l
l0
)2
bzw. σ =Fl0A0l
(2.11)
für den eindimensionalen Dehnungszustand eines mit der Kraft F zugbelasteten Drahtes.Der Index 0 kennzeichnet die Drahtlänge l0 bzw. den Drahtquerschnitt A0 im unverform-ten Zustand. Für relativ kleine Verformungen, wie sie bei FGL auftreten, reichen dielinearisierten bzw. ingenieurtechnischen Definitionen von Dehnung und Spannung aus
ε =∆l
l0bzw. σ =
F
A. (2.12)
Nach Oelschläger [2003] setzt sich die gesamte Drahtdehnung aus der pseudoplastischenTransformationsdehnung εtransf durch den FGE, aus der thermischen Wärmeausdehnungεth durch Erwärmung und aus der elastischen Dehnung εela durch mechanische Belastungzusammen2. Die pseudoplastische Transformationsdehnung
εtransf = εrevξ (2.13)
ist bei quasistatischer Dehnung proportional zum Martensitanteil ξ. Dies kann auch fürden mehrachsigen Spannungszustand angenommen werden [Calloch u. a., 2006]. Der Pro-portionalitätsfaktor ist die maximale reversible Dehnung εrev und lässt sich für den jewei-ligen Anwendungsfall durch Messung der Länge des ungedehnten und gedehnten Drahtesbestimmen. Der Quotient aus Längenänderung und Ausgangslänge ergibt die maximaleDehnung. Diese ist vollständig reversibel. Im eingebauten Zustand wirkt die mechanische
2siehe auch [Meier und Oelschläger, 2004a,b]

2.2 Modelle für Formgedächtnislegierungen 17
Spannung in eine Richtung, so dass eine Modellierung verschiedener Martensitvariantenbzw. der Übergang ineinander nicht erforderlich ist [Stork, 1997]. Die thermische Dehnung
εth = TÜαth(ξ) = TÜ [ξαth,M + (1− ξ)αth,A] (2.14)
ergibt sich aus dem Produkt der Übertemperatur TÜ = T − TU mit dem thermischenAusdehnungskoeffizienten αth. Dieser setzt sich aus dem Verhältnis der unterschiedlichenthermischen Ausdehnungskoeffizienten für Martensit und Austenit zusammen, so dass dieTemperaturabhängigkeit berücksichtigt wird. Die elastische Dehnung
εela =σ
E(ξ)(2.15)
ist der Quotient aus mechanischer Spannung σ und Elastizitätsmodul E. Für den Elasti-zitätsmodul muss ein Mischansatz
E(ξ) =
ξEM + (1− ξ)EA Ansatz nach VoigtEMEA
ξEA+(1−ξ)EM
Ansatz nach Reuss(2.16)
gewählt werden [Brinson und Huang, 1996]. Beim Ansatz nach Voigt wird eine homogeneDehnung beider Phasen angenommen, nach Reuss eine homogene Spannung. Beide An-sätze sind ungenaue Näherungen, stellen aber einen oberen (Voigt) und unteren (Reuss)Grenzwert für den approximierten Elastizitätsmodul des Mischphasenzustands dar. NachHill [1952] entspricht der tatsächliche Wert des Elastizitätsmoduls in guter Näherung demMittelwert dieser idealisierten Grenzannahmen. Die absolute Drahtdehnung
e = ∆l = εl0 mit ε = εtransf + εth + εela (2.17)
wird über die relative Dehnung ε und die Länge l0 des ungedehnten, d. h. unbelastetenund austenitischen, Drahtes berechnet.
Madill und Wang [1998] setzen gemäß Voigt für die Zugspannung in einem mit konstan-ter Zuglast beaufschlagten Draht σ = ξσM+(1− ξ)σA an. Unter Nutzung der Spannungs-Dehnungs-Beziehungen für Austenit und Martensit in Abbildung 2.8 kann für die Draht-dehnung die Funktion
ε(σ, ξ) =
σ/ (Ea − [Ea − Em] ξ) 0 < ε < εy
(σ + ξ [Et − Em] εy) / (Ea − [Ea − Et] ξ) εy < ε < εd
(σ + ξ [Et − Em] εy + [Ed − Et] εd) / (Ea − [Ea − Ed] ξ) εd < ε
(2.18)in Abhängigkeit von der mechanischen Spannung σ und vom Martensitanteil ξ entwickeltwerden. Neben der Phasenabhängigkeit wird die Nichtlinearität des martensitischen Ver-formungsverhaltens über den Dehnungsbereich berücksichtigt. Tabelle 2.2 enthält die da-zugehörigen Materialkennwerte.
Zusammen mit der Drahtlänge l ändert sich der Drahtdurchmesser d. Zur Ermittlungdes aktuellen Drahtdurchmessers gibt es zwei Ansätze. Bei Annahme einer konstantenDichte bleibt bei Massenerhaltung auch das Drahtvolumen V konstant, und aus der Län-genänderung folgt für den Durchmesser
d =
√
V
l
4
πmit V = Al =
π
4d2l = konst. (2.19)

18 2 Stand der Technik bei Formgedächtnisaktoren
ε
Ea
σ
(a) Austenit
σ
ε
Em
Ed
Et
εy εd
Ry
Rd
(b) Martensit
Abbildung 2.8: Spannungs-Dehnungs-Diagramm nach Madill und Wang [1998] (Ry Ela-stizitätsgrenze, Rd Entzwillungsgrenze)
Tabelle 2.2: Spannnungs-Dehnungs-Parameter nach Madill und Wang [1998]
Bezeichnung Symbol Wert Einheit
E-Modul Austenit Ea 35,917 GPaE-Modul Martensit, vollständig verzwillt Em 16,800 GPaE-Modul Martensit, teilweise verzwillt Et 0,826 GPaE-Modul Martensit, vollständig entzwillt Ed 16,800 GPaStreckgrenze Martensit, verzwillt εy
m 1,36 %Minimaldehnung Martensit, entzwillt εd
m 5,96 %
Wird hingegen die Querdehnung berücksichtigt, gilt für den Durchmesser
d = (1 + εq) d0 = (1− µε) d0 mit εq =∆d
d0= −µ∆l
l0= −µε. (2.20)
Die Querdehnung εq ist über die Poisson-Zahl µ mit der Längsdehnung ε verknüpft, sodass sich durch die Dehnung des Drahtes dessen Volumen und – bei Erhaltung der Masse– die Dichte ändern. Für µ = 0,5 bleibt das Volumen konstant.
2.2.5 Modellstruktur
Existierende, aus den beschriebenen Teilmodellen aufgebaute Modelle, die von Oelschläger[2003] u. A. genutzt wurden und heute noch Stand der Technik sind [Meier und Dilthey,2008], können mit dem Blockschaltbild in Abbildung 2.9 dargestellt werden. Die beimBestromen zugeführte Heizleistung wird mit anderen Wärmeflüssen bilanziert und führtdurch Joule’sche Wärme zum Erwärmen der Legierung. Mit einem trigonometrischen An-satz auf Basis einer Cosinus-Funktion wird der Grad der Phasenumwandlung ermittelt,von dem wiederum der elektrische Widerstand und die Transformationsdehnung als linea-re Funktion des Umwandlungsgrads abgeleitet werden. Mit diesem Modell lässt sich derextrinsische Zweiwegeffekt bei freier Rückverformung im quasistatischen Betrieb simulie-ren.

2.3 Regelungsstrategien 19
Heizleistung Energiebilanz
Temperaturhysterese Dehnung
Pu, i ξ εϑ
σ
Widerstand
R
Abbildung 2.9: Blockschaltbild existierender Modelle für FGL
2.3 Regelungsstrategien
Um mit FG-Aktoren das dynamische Verhalten eines Systems optimal beeinflussen zukönnen, wird eine Regelung benötigt. Zunächst wird die Struktur des Regelkreises beiFGL beschrieben. Weiterhin werden ausgewählte Ansätze zur Regelung dargestellt.
2.3.1 Struktur des Regelkreises
Abbildung 2.10 und Tabelle 2.3 zeigen die Struktur und die Größen eines geschlossenenRegelkreises [Dörrscheidt und Latzel, 1993; Föllinger, 1994]. Im Folgenden sollen die spezi-fischen Aspekte im Hinblick auf den Aufbau eines Regelkreises für FG-Aktoren behandeltwerden. Ikuta u. a. [1991] schlagen für eine Regelung vier Rückführgrößen vor, die in zweiKategorien unterteilt werden: Dehnung und Kraft als externe Größen sowie Tempera-tur und Widerstand als interne Größen. Durch direktes Messen der zu regelnden Größe,d. h. Position oder Kraft, kann ein schnelles und robustes Regelergebnis erreicht werden.Wird auf andere Zustands- bzw. Hilfsgrößen zurückgegriffen, kann auf die direkte Erfas-sung der Regelgröße und damit Sensoren verzichtet oder durch unterlagerte Regelkreise(Kaskadenregelung) das Regelergebnis verbessert werden.
Fuhrungsgroße Regler Steller Strecke
w u xye
z
r
Messwertgeber
-+
¨ ¨
Abbildung 2.10: Einschleifiger Regelkreis
Die Nutzung inhärenter Messeffekte von Aktoren kann zur Bestimmung der Regelgrößenim Betrieb verwendet werden [Pawelczak, 2005]. In diesem Zusammenhang wird oft vonsensorloser Regelung gesprochen, was die Möglichkeit des Verzichts auf Sensoren zur Mes-sung der Regelgröße betont. Sensorlos kann jedoch per Definiton keine Regelung arbeiten,da auf eine Messung nicht verzichtet werden kann. Stattdessen erfolgt die Rückführung

20 2 Stand der Technik bei Formgedächtnisaktoren
Tabelle 2.3: Größen des Regelkreises nach DIN 19226-1 [1994]
Bezeichnung Symbol Beispiel
Regelgröße x Weg, Kraft, Temperatur (als Hilfsgröße)Rückführgröße r wie Regelgröße, WiderstandFührungsgröße w wie erfasste RegelgrößeRegeldifferenz e = w − rReglerausgangsgröße u = f(e)Stellgröße y = f(u) Heizleistung (Strom, Spannung)Störgröße z Umgebungstemperatur, Fluidströmung, Last
der Regelgröße durch Messung einer anderen Messgröße, mit Hilfe derer auf die eigent-liche Regelgröße zurückgeschlossen wird. Der Aktor selbst dient als Wandlerelement zurMessung der inhärenten Eigenschaft und ersetzt somit ein zusätzliches Wandlerelementzur Erfassung der Regelgröße. Alle weiteren Komponenten eines Sensors (z. B. Signalauf-bereitung) bleiben erhalten. Deshalb ist der Ausdruck sensorlos mehr im ökonomischenals im technischen Sinne zu verstehen. Der englische Begriff Self-Sensing ist daher dietreffendere Bezeichnung für die Nutzung inhärenter Messeffekte. Mittels Self-Sensing er-geben sich neue Möglichkeiten in der Regelung, allerdings dürfen andere Aspekte nichtvernachlässigt werden (Tabelle 2.4).
Tabelle 2.4: Möglichkeiten und Risiken durch Self-Sensing
Vorteile Nachteile
+ Nutzung des Funktionsmaterials alsAktor und Sensor
+ Miniaturisierung durch Funktionsinte-gration
+ Reduzierung der Systemkomponenten+ Erweiterung des Funktionsumfangs
− höhere Anforderung an das Systemver-ständnis
− Erhöhung des Auswertungsaufwands− Steigerung der Systemkomplexität
2.3.2 Sensorbasierte Lage- und Kraftregelung
Die Positionsregelung von FG-Antrieben erfolgt in der Regel auf Basis einer zurückgeführ-ten Positionsmessung und kann durch einen PI-Regler realisiert werden. Ein PI-Reglerarbeitet im Gegensatz zu einem P-Regler stationär genau. Auf einen D-Anteil kann beiFG-Aktoren wegen der relativ geringen Dynamik des an sich gedämpften Systems verzich-tet werden. In der Arbeit von van der Wijst [1998] wurde gezeigt, dass ein differenziellerAnteil im Regler die erreichbare Bandbreite nicht verbessert. Die Verstärkungen für denProportional- und Integralanteil können mit einem linearisierten Modell abgeschätzt wer-den, allerdings ist die Anwendbarkeit dieser Werte in der Praxis nur beschränkt möglich.
Beim extrinsischen Zweiwegeffekt können verschiedene Vorspannarten zum Einsatzkommen. Unterschiedliche Vorspannmethoden erfordern eine Anpassung der Regelungund Parametrierung [van der Wijst, 1998]. Durch eine Vorsteuerung kann bei einem ge-wichtsbelasteten FG-Draht der Regelfehler im Vergleich zu einer Regelung ausschließlich

2.3 Regelungsstrategien 21
mit Rückführung um den Faktor vier verringert werden. Bei einem mit Gegenfeder bzw.antagonistisch arbeitenden FG-Draht ist dieser Effekt wegen einer größeren möglichenRegelverstärkung deutlich geringer. Die Untersuchungsergebnisse einer Positionsregelungunter konstanter Last bei sprung-, rampen- und sinusförmiger Sollvorgabe von da Silva[2000] zeigen, dass die Last einen unwesentlichen Einfluss auf das Regelergebnis hat undbereits mit einem P-Regler ein gutes Regelverhalten erzielt wird. Die maximale Arbeits-frequenz ist abhängig von der thermischen Zeitkonstante τth. Eigene Messungen zeigen,dass die minimale Arbeitszyklusdauer mit Tcycle = 1/fcycle = 5τth angesetzt werden kann.
Stork [1997] entwirft einen einschleifigen Regelkreis für eine stetige Positions- oderKraftregelung. Die zu regelnde Größe wird direkt erfasst und zum Regler zurückgeführt.Durch Linearisierung der nichtlinearen Zustandsgleichungen an verschiedenen Arbeits-punkten (und für beide Umwandlungsrichtungen) ist es möglich, den Regler mit Metho-den der linearen Regelungstheorie auszulegen. Die linearisierten Übertragungsfunktionenfür Dehnung bzw. Kraft in Abhängigkeit von der Heizleistung werden auf ein Verzöge-rungsglied erster Ordnung reduziert. Die Zusammenfassung der linearen, arbeitspunkt-und richtungsabhängigen Modelle ergeben ein so genanntes „Multi-Modell“. Die Modell-koeffizienten hängen stark vom Wärmeabgabekoeffizienten und der Steigung des Hyste-reseastes ab. Durch die sprunghafte Änderung der Steigung der Hysteresefunktion in denUmkehrpunkten wird der Gültigkeitsbereich der linearisierten Modelle eingeschränkt. DieUnterdrückung von Schwingungen, die bei der Regelung mit einem PI-Regler mit kon-stanten Koeffizienten auftreten, erfolgt durch Adaption der Reglerverstärkung auf Basiseines nichtlinearen Aktormodells. Die parallele Simulation und Adaption der Parametersind jedoch sehr rechenintensiv.
2.3.3 Widerstandsbasierte Regelung
Die Änderung des elektrischen Widerstands während des thermischen Zyklierens kann fürdie Positionierung genutzt werden [Funakubo, 1991; Kristen, 1993; Mertmann, 1997]. So-wohl Widerstand als auch Dehnung sind abhängig vom Umwandlungsgrad und lassen sichdaher in Beziehung zueinander bringen. In erster Näherung kann ein linearer Zusammen-hang zwischen Widerstand und Dehnung angenommen werden, um die Auslenkung durchMessung des aktuellen Widerstands abzuschätzen und zu regeln. Lediglich zu Beginn undam Ende der Phasenumwandlung bzw. Stellbewegung tritt ein inverses Widerstandsver-halten auf. Die Ergebnisse einer sensor- und widerstandsbasierten Regelung von Pons u. a.[1997] in Abbildung 2.11 zeigen, dass eine Positionsregelung durch Rückführung des Wi-derstands möglich ist. Allerdings zeigen die Regelergebnisse bei sensorbasierter Regelungstarkes Überschwingen, und bei widerstandsbasierter Regelung nähert sich die Positionnur sehr langsam dem Sollwert an. Das lässt darauf schließen, dass die Reglerparameternicht optimal eingestellt sind, weil entsprechende Entwurfsverfahren fehlten oder nichtangewendet werden konnten.
Ikuta u. a. [1988] haben eine widerstandsbasierte Regelung von zwei antagonistisch ar-beitenden FG-Drähten entworfen. Dazu wird ein dimensionsloser normierter Widerstand
λR =Rmax −RRmax −Rmin
mit Rmin ≤ R ≤ Rmax (2.21)
definiert, der dem Umwandlungsgrad entspricht. Bei einem hohen Widerstandswert R liegtMartensit vor (λR = 0), bei einem niedrigen Austenit (λR = 1). Der Widerstand beiderDrähte wird gemessen und daraus λR1 und λR2 für den ersten bzw. zweiten Draht berech-net. Während der Positionsregelung muss λR1 + λR2 = 1 erfüllt werden, d. h. bei Vorgabe

22 2 Stand der Technik bei Formgedächtnisaktoren
Zeit t in s
Deh
nungε
in%
(a) Sensorbasierte RegelungZeit t in s
Deh
nungε
in%
(b) Widerstandsbasierte Regelung
Abbildung 2.11: Positionsregelung eines FG-Drahtes (durchgezogene Linie: Sollwert,gestrichelte Linie: Istwert, gepunktete Linie: Schätzwert) [Pons u. a., 1997]
von λR1 = λR muss λR2 = 1−λR sein. Mit diesem Ansatz können über einen großen Stell-bereich gute Ergebnisse bei der Positionsregelung ohne Wegsensor erzielt werden. Außer-dem wird durch die widerstandsbasierte Regelung zweier antagonistisch arbeitender FG-Drähte die Hysterese zwischen Positions- und Führungsgröße reduziert, Überhitzung ver-mieden, die Robustheit gegenüber Änderungen der Abkühlbedingungen verbessert undeine Sensorfunktion für eine Positionsregelung realisiert. Eine Kaskadenregelung unterNutzung dieses Verfahrens im unterlagerten Regelkreis in Kombination mit einem Positi-onssensor im äußeren Regelkreis ermöglicht die Regelung der Stellkraft [Ikuta, 1990]. Dadie Steifigkeit einer FGL mit dem Umwandlungsgrad korreliert, kann mit c = K1λR +K2
direkt über den (normierten) Widerstand auf die Steifigkeit geschlossen werden. Die Kon-stanten können experimentell ermittelt werden. Die Kraft
F = cx = (K1λR +K2) x (2.22)
ergibt sich aus dem gemessenen Weg x und dem normierten Widerstand λ.Für die beschriebenen Verfahren zur widerstandsbasierten Positionsregelung wird die
genaue Kenntnis des minimalen und maximalen Widerstandswerts bzw. eine analytischeBeschreibung des Zusammenhangs zwischen Dehnung und Widerstand vorausgesetzt. ImAllgemeinen verändern sich sowohl die Eckwerte und als auch die Form der Widerstands-Dehnungs-Kurve in Abhängigkeit von der Belastung oder während des Betriebs übermehrere Arbeitszyklen durch Alterung. In der Praxis ist deshalb bei der Initialisierungein Heizzyklus zur Bestimmung der Eckwerte erforderlich, was oft nicht explizit erwähntwird und bei manchen Applikationen im eingebauten Zustand nicht möglich ist.
2.4 Formgedächtnisaktoren
Anwendungen mit FGL erfreuen sich einer wachsenden Akzeptanz in verschiedenen Ge-bieten. Dennoch sind Materialkennwerte und Entwurfstechniken noch nicht durchgehendstandardisiert verfügbar wie bei konventionellen Aktoren und Materialien. Am weitestenfortgeschritten ist die Standardisierung von Herstellung, Materialprüfung und -eigenschaf-

2.4 Formgedächtnisaktoren 23
ten in der Medizintechnik [Otsuka und Kakeshita, 2002; Rice, 2002; Schwartz, 2002]. Ty-pische Eigenschaften von FG-Aktoren im Vergleich zu anderen Antriebsprinzipien sindin Tabelle 2.5 aufgelistet. Die wesentlichen Vorteile sind der einfache Aufbau und daseinfache Funktionsprinzip. Die größten Nachteile sind der niedrige Wirkungsgrad und diegeringe Bandbreite. In Abbildung 2.12 wird anhand des Stellbereichs und der Stellkraftdas Leistungsspektrum von FG-Aktoren mit konventionellen Antrieben verglichen.
Tabelle 2.5: Eigenschaften von FG-Aktoren [Velazquez, 2006; Hesselbach, 1999; Funa-kubo, 1991; Elahinia, 2004]
Vorteile Nachteile
+ extrem hohe Energiedichte+ einfache Funktionsweise+ vielfältige Formen+ kompakte und einfache Bauweise+ geringes Gewicht bzw. Volumen+ Lautlosigkeit+ Self-Sensing+ hohe Effektstabilität+ keine magnetischen Felder
− sehr geringer Wirkungsgrad− geringe Arbeitsfrequenz bzw. Band-
breite− stark nichtlineares Verhalten− eingeschränkter Arbeitstemperaturbe-
reich− komplexes Materialverhalten− schwierige Bearbeitung
F in N
s in mm
1
10
100
0,001 0,10,01 1 10
Elektro-
magnetische
Aktoren
Aktoren mit FGL
Piezo-
elektrische
Aktoren
Elektro-
dynamische
Aktoren
Elektrochemische Aktoren
Elektrostatische
Mikroaktoren
Abbildung 2.12: Arbeitsbereiche verschiedener Linearstellantriebe kleiner und mittlererLeistung [Jendritza, 1998; Wallaschek, 2006; Heimann u. a., 2007; Isermann, 2007]
Die Einsatzmöglichkeiten von FGL lassen sich auf Basis des unterschiedlichen Verfor-mungsverhaltens in zwei Kategorien unterteilen. Pseudoelastische FGL werden als Kon-struktionsmaterial vornehmlich in biomedizinischen Anwendungen wie Stents, Kabelfüh-rungen bei der Orthodentose, Osteosynthesen, usw. eingesetzt. Eine weitere Anwendung

24 2 Stand der Technik bei Formgedächtnisaktoren
unter Nutzung dieser Eigenschaft sind Brillengestelle. Der thermische FGE bildet die zwei-te Kategorie und wird v. a. für Joule-Effekt-Aktoren genutzt. Ein FG-Draht kann dabeieinen elektromagnetischen Stellaktor ersetzen. Nachfolgend werden verschiedene Baufor-men und Aspekte für den Einsatz von FGL als Aktoren erläutert.
2.4.1 Bauformen von Aktoren mit Formgedächtnislegierungen
Die einfachste Ausführung von FG-Aktoren ist die Drahtform. Drähte mit thermischem3
FGE sind in nahezu beliebigen Durchmessern zwischen 50 µm und 1 mm als Meterwareerhältlich. Drähte mit mechanischem4 FGE gibt es bis 3 mm Durchmesser und vereinzeltgrößer. Die erforderliche Stellbewegung bestimmt die Länge des Drahtes. Nach der elektri-schen Kontaktierung und mechanischen Befestigung kann der FG-Draht betrieben werden.Wegen des großen Verhältnisses von Länge zu Durchmesser werden Drähte nur auf Zugbelastet. Druckbeanspruchung würde zum Knicken führen. Das ermöglicht eine unidirek-tionale Kraftwirkung mit begrenztem Arbeitsweg. Mit Hilfe geeigneter Mechanismen wieUmlenkrollen ist es möglich, die Aktorlänge deutlich zu reduzieren oder den Draht kom-pakt in die Anwendung zu integrieren. Dabei ist zu beachten, dass der Krümmungsradiusmindestens dem 50-fachen des Drahtdurchmessers entsprechen soll und Biegewechselbe-anspruchung im Material auftritt [MacGregor, 2001].
Das Verhältnis von Aktorhub zu Baulänge bei Aktoren mit FG-Drähten kann durchAneinanderreihung mehrerer Einzeldrähte um ein Vielfaches verbessert werden. DiesesAktorkonzept nutzt einen Stapel von n+ 1 parallel angeordneten, starren Koppelelemen-ten, die relativ zueinander beweglich sind. Die Koppelelemente sind elektrisch leitfähigund gegeneinander elektrisch isoliert. Die n FG-Drähte sind mechanisch und elektrischmit den gegenüberliegenden Enden benachbarter Koppelelemente verbunden, so dass Kop-pelelemente und Drähte alternierend elektrisch und mechanisch in Reihe geschaltet sind.Abbildung 2.13 zeigt den mechanischen Aufbau dieses Prinzips. Bei Kontraktion der Dräh-
(a) Explosionsdarstellung (b) Zusammenbau
Abbildung 2.13: Drahtaktor mit Hubaddition [von Behrens und Fairbanks, 2002, 2003]
te addieren sich die Einzelhübe der n Einzeldrähte zum Gesamthub, der dem Hub einesDrahtes mit der n-fachen Länge eines Einzeldrahtes entspricht. Das Prinzip der Hubad-dition mehrerer FG-Drähte durch mechanische Reihenschaltung mit Schubplatten wirdin einigen kommerziell erhältlichen Aktoren genutzt (Abbildung 2.14 und Tabelle 2.6).[Gummin und Donakowski, 2001; MacGregor, 2001; Gummin u. a., 2002; von Behrensund Fairbanks, 2003]
3temperaturinduzierte Austenitbildung4spannungsinduzierte Martensitbildung

2.4 Formgedächtnisaktoren 25
(a) NM 70 (Nanomuscle) (b) DM01-15 (Miga Motor) (c) mPod (Miga Motor)
Abbildung 2.14: Kommerzielle Aktoren mit FGL (www.migamotors.com)
Tabelle 2.6: Kenndaten ausgewählter FG-Aktoren (Herstellerangaben, Stand: 2008)
NM 70 DM01-15 mPodEigenschaft Nanomuscle Miga Motor Miga Motor Einheit
Kraft 0,7 9 . . . 20 11 NHub 4,0 12,7 6,35 mmBetriebsspannung 3,5 . . . 4,0 9 . . . 28 6 VBetriebsstrom 0,41 . . . 0,47 3,0 . . . 9,3 2,0 AWiderstand 8,5 3,0 2,9 ΩAnzugszeit 0,2 0,025 . . . 1 0,5 sAbfallzeit 0,6 3 . . . 15 k. A. sGewicht 1,1 20 4,25 gAbmessungen 35× 6× 5 80× 16× 7 50,8× 8,25× 9,5 mm3
Temperaturbereich −70 . . . 75 −20 . . . 75 k. A. CArbeitszyklen 1.000.000 > 1.000.000 k. A. —Drahtdurchmesser 0,1 k. A. 0,3 mmPreis eines Aktors 12 149 59 $
Breidert und Welp [2005] haben dieses Prinzip in ihrem modularen Aktorsystem um-gesetzt. Zur Reduzierung der Baulänge besteht das Aktormodul aus Schubplatten, diemit FG-Drähten in Reihe verspannt sind. Der Gesamthub setzt sich aus den einzelnenVerschiebungen der relativ zueinander beweglichen Schubplatten zusammen. Auch derStellaktor von Jansen u. a. [2004] zielt auf eine Reduzierung der Baulänge durch Hubad-dition. Allerdings wird hier das Flaschenzugprinzip genutzt.
Eine weitere weit verbreitete Bauform für FGL sind zylindrische Schraubenfedern. Die-se Geometrie hat den Vorteil, dass auf kurzer Baulänge eine große Drahtlänge integriertwerden kann. Dadurch ist eine Dehnung der FG-Feder von bis zu 50% bezogen auf dieFederlänge möglich. Allerdings ist der Ausnutzungsgrad des Arbeitsvolumens bei dieserBauform nicht so hoch wie bei Drähten, die über den gesamten Querschnitt mit der glei-chen mechanischen Spannung belastet werden. Federn in Spiralform werden wegen derTorsion am Außenradius des Federdrahtes am höchsten und in der neutralen Faser über-haupt nicht belastet. Außerdem verschlechtert sich durch die nah beieinander liegendenWicklungen das Abkühlverhalten.
Rohre bzw. Hülsen aus FGL finden bei Klemmverbindungen Verwendung und sindneben Drähten die am weitesten verbreitete Bauform. FG-Hülsen sind bis 15 mm Au-ßendurchmesser und bis 1,2 mm Wandstärke erhältlich. Daneben gibt es Dünnschichten

26 2 Stand der Technik bei Formgedächtnisaktoren
bzw. Bleche in Schichtdicken von 0,1 mm bis 3 mm. Durch geeignetes thermomechanischesTrainieren kann einer FGL jede beliebige Form eingeprägt werden, an die sie sich erinnernsoll [Gümpel, 2004]. Das Verfahren setzt jedoch Erfahrung und Prozesssicherheit vorausund ist deshalb für Einzelanfertigungen kaum rentabel. Trotzdem kann es durchaus sinn-voll sein, diese Möglichkeit in Betracht zu ziehen, insbesondere wenn sich dadurch andereVorteile hinsichtlich Bauraum oder Bewegungsform ergeben.
2.4.2 Einsatz von Formgedächtnislegierungen
Nach Butera [2001] können FG-Aktoren aufgrund ihrer Charakteristik eine Alternativezu herkömmlichen Elektromagneten bei Komfortfunktionen im Bereich der Automobil-technik darstellen. Dabei müssen die allgemeinen Anforderungen an Komponenten imAutomobil berücksichtigt werden (Tabelle 2.7). Insbesondere der geforderte Arbeitstem-
Tabelle 2.7: Allgemeine Anforderungen an Komponenten im Automobil [Butera, 2001]
Kriterium Anforderung
Betriebsspannung 12± 4 VDCTemperaturbereich −40 . . . 85 CArbeitszyklen 10.000 . . . 100.000Luftfeuchtigkeit 95% bei 65 C für 100 hVibration 50 . . . 2.000 Hz bzw. 4 . . . 10 g RMS
peraturbereich stellt derzeit die größte Hürde dar, da die Umwandlungstemperaturen vonNiTi-Legierungen innerhalb dieses Bereichs liegen und daher eine unerwünschte Selbstak-tivierung durch die Umgebungstemperatur möglich ist. Die Arbeitszyklen können dagegen– insbesondere mit den später vorgestellten Ansteuerungsmethoden – durchaus sicherge-stellt werden.
AnwendungenEinsatzfelder für FG-Aktoren im Automobil sind Entriegelungssysteme für Tankdeckelund Heckklappen oder die Betätigung von Scheinwerferblenden [Strauß u. a., 2008]. DurchErwärmen und Kühlen kann der thermische FGE gezielt und nahezu beliebig oft genutztwerden. Die Erwärmung erfolgt durch Bestromen des FG-Drahtes. Dazu muss die Um-gebungstemperatur unterhalb der Martensit-Endtemperatur Mf liegen. Bei einer Umge-bungstemperatur oberhalb der Austenit-Starttemperatur As, wie sie im Automobilbereichauftreten kann, kommt es zu einer unerwünschten Aktivierung der FG-Drähte.
Der thermische FGE kann in Form des intrinsischen Zweiwegeffekts für eine Anzeige-bewegung ohne nennenswerte Belastung – gleichbedeutend mit freier Rückverformung –genutzt werden. Damit ist es möglich, Millionen von Zyklen ohne erkennbare Anzeichenvon Alterung durchzuführen. Stellelemente dagegen sind ausgelegt, auf Basis des extrin-sischen Zweiwegeffekts mechanische Arbeit zu verrichten. Insbesondere im (Eisenbahn-)Modellbau erweist sich die langsame und gleichmäßige Betätigung als vorteilhaft, da sichBewegungsabläufe wie z. B. das Weichen- oder Signalstellen realitätsnah nachbilden las-sen. FGL werden an verschiedenen Stellen als Aktoren für künstliche Finger und Greifereingesetzt. Beispiele hierfür sind der Fingerantrieb von Schleich [2003] bzw. Engelhardtu. a. [2004], der Greifer mit Zweiwegeffekt von Escher [1993] und die Pinzettengreifer vonSchmitz u. a. [2004] bzw. Winzek [2006]. Auch für den Greifer eines autonomen Miniatur-roboters werden FG-Drähte genutzt [Kaiser u. a., 2007a,b,c].

2.4 Formgedächtnisaktoren 27
Mit Hilfe von Hülsen aus FGL können Rohre verbunden werden. Die Hülsen werden inder Austenitphase mit einem kleineren Innendurchmesser als der Außendurchmesser derzu verbindenen Rohre gefertigt, anschließend gekühlt und im martensitischen Zustandaufgeweitet. Bis zur Installation müssen die Hülsen unterhalb der Austenit-Umwand-lungstemperaturen gekühlt bleiben. Die Rohre werden stumpf aneinander gesetzt, unddie Hülse über die Verbindungsstelle geschoben. Nach dem Zusammensetzen der Rohr-verbindung kehrt die Hülse durch Erwärmung wieder in ihre Urform zurück und zieht sichzusammen. Beim Kontakt mit den zu verbindenden Rohren wird die vollständige Rück-verformung blockiert, und die Hülse erzeugt eine wohldefinierte Klemmkraft. Solange dieFG-Hülse austenitisch ist, bleibt die Klemmkraft erhalten. Durch Abkühlen bis zur Mar-tensitphase geht die Klemmkraft auf Null zurück. Aus diesem Grund muss die Martensit-Starttemperatur Ms unterhalb der minimalen Umgebungstemperatur liegen.
Beim Einsatz von FGL als Konstruktionselemente wird nicht der thermische FGE, son-dern die Pseudoelastizität genutzt. Es handelt sich deshalb nicht um eine Aktoranwen-dung. Allerdings ist diese Anwendungsart für FGL weit verbreitet, weshalb kurz daraufeingegangen wird. Für Brillengestelle werden pseudoelastische FGL verwendet, die sichdurch ein hohes Dehnungsvermögen auszeichnen. Die Gestelle erscheinen nahezu unzer-störbar im Hinblick auf bleibende Verformungen. Darüber hinaus sind FGL sehr korro-sionsbeständig, so dass keine Oberflächenbehandlung erforderlich ist. Für den Einsatzpseudoelastischer FGL in Zahnspangen spricht zum einen die hohe Biokompatibilität undzum anderen die konstante Kraftentwicklung über einen großen Dehnungsbereich. Einweiterer interessanter Ansatz findet sich bei Nahm u. a. [2005]. Hier werden FGL nichtals Aktoren, sondern als Sensoren eingesetzt. Die Widerstandsänderung pseudoelastischerFGL unter mechanischer Belastung wird genutzt, um Dehnungsmessstreifen aufzubauen.
Erwärmungsarten
Um den FGE und die damit verbundene Bewegung zu aktivieren, muss die FGL über diePhasenumwandlungstemperaturen erwärmt werden. Für die Aktivierung des FGE existie-ren unterschiedliche Möglichkeiten. Bei der direkten Aktivierung erfolgt die Erwärmungder FGL durch das umgebende Medium (Flüssigkeiten oder Gase, z. B. Körpertempera-tur). Diese Erwärmungsart hat den Vorteil, dass keine externen Energiequellen zum Heizenbenötigt werden, und wird häufig dann eingesetzt, wenn nur eine einmalige Aktivierungder FGL nach dem Einsetzen in das Medium erfolgen soll (vgl. Stents zum Weiten vonBlutgefäßen [Rice, 2002]). Die Phasenumwandlung findet in Abhängigkeit von der Umge-bungstemperatur statt. Im Gegensatz zu den folgenden aktiven Erwärmungsarten kanndieser Vorgang als passiv bezeichnet werden. Die indirekte Erwärmung einer FGL durchelektrische Heizelemente (z. B. ein umwickelter oder in Silikon eingelegter Widerstands-draht) kann je nach thermischer Dynamik des Heizelements sehr schnell erfolgen. Bei derAbkühlung ist darauf zu achten, dass auch das Heizelement abkühlen muss. Das Abkühlenkann durch zusätzliche Kühlelemente (z. B. Peltier-Elemente) unterstützt werden. DünneFGL-Bauteile können die erforderliche Umwandlungstemperatur durch Strahlungswärmeerreichen. Dieser Mechanismus wird z. B. bei Knochenimplantaten angewendet, wenn diedirekte Erwärmung nicht ausreichend ist. Die Erwärmung einer stromdurchflossenen FGLdurch Joule’sche Wärme bei elektrischer Aktivierung bietet sich an, wenn der Querschnittdes Bauteils im Verhältnis zu seiner Länge klein ist. Da die Wärme direkt im Bauteil ent-steht, kann die erforderliche Umwandlungstemperatur schnell erreicht werden. Abgesehenvon den Kontaktstellen muss das Bauteil von seiner Umgebung elektrisch isoliert sein, umKurzschlüsse und Fehlströme zu vermeiden.

28 2 Stand der Technik bei Formgedächtnisaktoren
VorspannmethodenBeim Einsatz des extrinsischen Zweiwegeffekts wird eine Vorspannung des einseitig einge-spannten FG-Elements benötigt. Die erforderliche Zugkraft kann unter Berücksichtigungder anliegenden Last auf drei unterschiedliche Arten erzeugt werden: durch eine Gewichts-last, eine Gegenfeder oder einen antagonistisch wirkenden FG-Draht (Abbildung 2.15).Die einfachste Methode der Erzeugung einer Vorspannung ist die Belastung mit einer
FGL
s
(a) passiv durch Gewicht oder Feder
Agonist Antagonist
FGL
ϕ
(b) aktiv durch Antagonist
Abbildung 2.15: Möglichkeiten der Vorspannung von FG-Aktoren
Masse, deren Gewichtskraft das FG-Element dehnt. Da die Belastung wegunabhängigist, ist keine besondere Justierung der Vorspannung erforderlich, solange genügend Be-wegungsraum für die Masse zur Verfügung steht. Bei der Konstruktion muss allerdingsberücksichtigt werden, dass sich die Einbaulage nicht ändern darf, da sonst die Gewichts-kraft nicht mehr in Zugrichtung des Drahtes wirkt. Bei der Nutzung einer Gegenfederals Vorspannelement ist darauf zu achten, dass sich die Federkraft möglichst wenig überden Weg ändert. Die Federkraft darf über den Stellbereich weder zu groß noch zu kleinwerden, um einen sicheren und langlebigen Betrieb zu gewährleisten. Diese Gefahr lässtsich durch eine weiche Feder reduzieren. Im Allgemeinen ist die Gegenfeder in der Ru-helage (vollständig gedehntes FG-Element, 0% Hub) weniger gedehnt als in der Endlage(ungedehntes FG-Element in der Ursprungsform, 100% Hub), d. h. die Federkraft in derRuhelage F0% ist geringer als die Federkraft in der Endlage F100%. Die Feder muss soausgelegt werden, dass F100% < Fzul und F0% > Ferf erfüllt wird. Durch Alterungs- undErmüdungserscheinungen kann es erforderlich sein, dass die Vorspannung justiert werdenkann, was den Konstruktionsaufwand der Befestigung erhöht. Das Agonist-Antagonist-Prinzip5 kann auch bei FG-Aktoren angewendet werden. Daraus leitet sich die häufig auf-tretende englische Bezeichnung „muscle wire“ für FG-Drähte ab. Dabei arbeiten zwei FG-Elemente, meist Drähte, wechselweise gegeneinander. Für einen sicheren Betrieb ist eineJustierung erforderlich. Durch die antagonistische Anordnung verbessern sich die Steuer-barkeit und das Ansprechverhalten im Vergleich zu FG-Drähten, die gegen eine passiveLast arbeiten, da die Bewegung in beide Richtungen aktiv gesteuert werden kann [Ikutau. a., 1988].
5wechselweise Kontraktion der Beuge- und Streckmuskeln

2.4 Formgedächtnisaktoren 29
2.4.3 Auslegung von Formgedächtnisaktoren
In den meisten Fällen werden einfache Geometrien wie Drähte und Federn für Aktoran-wendungen verwendet. Drähte besitzen im Vergleich zu Federn ein besseres Abkühlver-halten und werden über den Querschnitt gleichmäßig belastet. Federn hingegen dehnensich bezogen auf die Länge um ein Vielfaches im Vergleich zu Drähten. Im Folgenden wer-den Richtlinien z. B. nach Mertmann u. a. [2002] zur Auslegung von FGL angegeben underläutert [Schiedeck u. a., 2006]. In dieser Arbeit haben sich die Parameter in Tabelle 2.8für die Auslegung und Abschätzung der Dynamik von FG-Aktoren als sinnvoll erwiesen.
Tabelle 2.8: Kennwerte für den Entwurf von FG-Aktoren
Eigenschaft Symbol Wert Einheit
maximale reversible Dehnung εrev 4 %erforderliche Spannung beim Abkühlen σerf 35 MPazulässige Spannung beim Erwärmen σzul 350 MPamaximale reversible Scherung γrev 4 %erforderliche Schubspannung τerf 10 MPazulässige Schubspannung τzul 100 MPaerforderliche Heiztemperatur Terf Af + 10 K Czulässige Heiztemperatur Tzul Af + 80 K Cmaximale Umgebungstemperatur TU Mf − 10 K C
Vorschriften zur DimensionierungDie Abmessungen der FGL werden nach den Anforderungen bzgl. Nennhub und Nennkraftausgelegt [Hesselbach, 1999]. Bei Drähten aus FGL wird der maximale Hub smax durchdie reversible Drahtdehnung εrev begrenzt, so dass eine minimale Drahtlänge von
lmin =smax
εrev(2.23)
erforderlich ist. Die Querschnittsfläche A wird so dimensioniert, dass die zulässige Span-nung σzul nicht überschritten wird. Die Spannung σ muss andererseits ausreichend großsein, damit der Draht in der Martensitphase verformt wird. Dazu ist eine minimale Span-nung σerf erforderlich, weshalb der Drahtquerschnitt nicht zu groß sein darf. Bei Drähtenmit der Querschnittsfläche A = d2π/4 werden mit einem Drahtdurchmesser von
√
4Fmax
πσzul= dmin < d < dmax =
√
4Fmin
πσerf(2.24)
die Belastungsgrenzen σerf < σvorh = Fvorh/A < σzul eines mit der Kraft F zugbelastetenDrahtes eingehalten. Die anliegende mechanische Spannung hängt im Wesentlichen vonder Belastungsart ab. Die Gegenkraft kann sowohl passiv wie in Abbildung 2.16 durchein Gewicht oder eine Feder [Stoeckel, 1990] als auch aktiv duch eine zweite FGL, welchenach dem Agonist-Antigonist-Prinzip arbeitet, erzeugt werden.
Ähnliche Vorschriften werden für die Auslegung von zylindrischen Schraubenfedern ausFGL verwendet [Waram, 1990; Ohkata und Suzuki, 1998; Velazquez und Pissaloux, 2004;Janocha, 2004; Liu u. a., 2007]. Dabei wird ein lineares Spannungs-Dehnungs-Modellgenutzt, um das Verhalten einer NiTi-Feder zu beschreiben. Die ungleichmäßige Span-nungsverteilung infolge der Drahtkrümmung wird durch einen Korrekturfaktor k berück-sichtigt, der bei dynamisch beanspruchten Federn nach Wahl berechnet werden kann

30 2 Stand der Technik bei Formgedächtnisaktoren
Dehnung
Kraft
Austenit
Martens
itFeder
Arbeitsshub
(a) Gegenfeder
Dehnung
Kraft
Austenit
Martens
it
Gewicht
Arbeitsshub
(b) Gegengewicht
Abbildung 2.16: Belastungsarten
[DIN EN 13906-1, 2002; Krause, 1993]. Als nützliche Entwurfskennzahl zur Bestimmungdes mittleren Wicklungsdurchmessers Dm dient das Wickelverhältnis w = Dm/d, das bei4 . . . 6 . . . 9 liegen sollte. Der Drahtdurchmesser
3
√
8kwFvorh
πτzul= dmin < d < dmax = 3
√
8kwFvorh
πτerfmit k =
4w − 1
4w − 4+
0,615
w(2.25)
wird unter Berücksichtigung von τerf < τk = kτvorh < τzul in Abhängigkeit von der Feder-kraft F und der damit verbundenen Schubspannung τ festgelegt. Die Windungszahl
nt =ds
πD2∆γmit ∆γ = γk,M − γk,A und γk,i =
τk
Gi=
kds
πnD2m
(2.26)
ergibt sich aus der Differenz der Scherung ∆γ im kalten und warmen Zustand, die sichmit den entsprechenden Schubmoduln Gi berechnen lässt. Nachdem die Federdimensionenfestgelegt sind, können die Federraten
ci =Gid
4
8D3mnt
(2.27)
für Martensit (i = M) und Austenit (i = A) berechnet werden. Bei zylindrischen Schrau-benfedern wird der Drahtquerschnitt durch den Schubspannungsverlauf nicht optimal aus-genutzt wie bei reiner Zugspannung in einem Draht, der einem Zugstab entspricht. Dergrößere erforderliche Drahtdurchmesser erhöht die Wärmekapazität und verschlechtert da-durch die thermische Dynamik. Der Artnutzgrad ηA = W/Wopt, der einen „Wirkungsgrad“für die Federarbeit W =
∫
F ds darstellt, ist ein Maß für die Ausnutzung des Arbeits-vermögens einer Feder [Albers, 2008]. Die Federarbeit wird auf das maximale Arbeits-vermögen einer optimalen Federgeometrie mit gleichem Volumen bezogen. Ein optimalesEnergiespeichervermögen Wopt = V σzul
2/ (2E) besitzt der Zugstab, bei dem die mecha-nische Spannung über den gesamten Querschnitt gleich verteilt ist. Der Artnutzwert vonzylindrischen Schraubenfedern mit rundem Drahtquerschnitt beträgt 0,5.

2.4 Formgedächtnisaktoren 31
Abschätzung der AktordynamikIm Weiteren erfolgt eine Abschätzung der Dynamik von FG-Aktoren. Die vereinfachtethermodynamische Energiebilanz U = Pel − Qconv liefert eine lineare, inhomogene Diffe-rentialgleichung erster Ordnung
Cp
αconvS︸ ︷︷ ︸
τth=RthCth
T + T =Reli
2
αconvS︸ ︷︷ ︸
PelRth
+TU (2.28)
mit der thermischen Zeitkonstante τth zur Beschreibung des Temperaturverlaufs beim Be-stromen [Han u. a., 2003; Velazquez u. a., 2005]. Darin werden die elektrische Heizleistung,der Wärmeverlust durch Konvektion und die Änderung der inneren Energie berücksich-tigt. Die Aktordynamik lässt sich mit der thermischen Zeitkonstante τth abschätzen (Ab-schnitt 4.2.4 und 5.4). Die stationäre Endtemperatur T∞ und die IntegrationskonstanteK der allgemeinen Lösung der Differentialgleichung
T (t) = T∞ −Ke−t
τth mit T∞ =Reli
2
αconvS+ TU und K = T∞ − TU (2.29)
lassen sich aus der Anfangs- (T (0) = TU) und der Endbedingung (T (∞) = T∞) bestim-men.
Um eine Überhitzung der Legierung zu vermeiden, darf die zugeführte HeizleistungPel = Reli
2 nicht zu groß sein, so dass T∞ < Tzul gewährleistet ist. Allerdings muss genü-gend Heizstrom i eingespeist werden, um T∞ > Terf zu erreichen und die Austenitbildungvollständig abzuschließen. Der Betriebsbereich des Heizstroms
√
Terf − TU
RthRel= imin < i < imax =
√
Tzul − TU
RthRel(2.30)
hängt von der unteren und oberen Grenztemperatur ab. Durch Gleichsetzen der analyti-schen Beschreibung des Temperaturverlaufs in Gleichung 2.29 mit der Austenit-Endtem-peratur T (tAf) = Af lässt sich der Zeitpunkt der vollständigen Austenitbildung
tAf = −τth ln(
[T∞ − Af ]αconvS
Reli2
)
(2.31)
berechnen. Diese entspricht der Anzugszeit t1, bei der die Stellbewegung abgeschlossen ist.Damit die Martensitbildung für die Rückstellbewegung vollständig abgeschlossen werdenkann, muss die Umgebungstemperatur TU unterhalb der Martensit-Endtemperatur Mf
liegen. Tabelle 2.9 enthält typische Betriebsparameter von FG-Aktoren mit unterschied-lichem Drahtdurchmesser bei freier Konvektion.
Tabelle 2.9: Betriebsparameter von FG-Drahtaktoren (NiTi, 100 mm lang)
Durchmesser Widerstand Spannung Strom Zeitkonstante
50 µm 45,8 Ω 4,6 V 0,1 A 0,2 s100 µm 11,5 Ω 2,3 V 0,2 A 0,6 s200 µm 2,9 Ω 1,4 V 0,5 A 1,9 s500 µm 0,5 Ω 0,6 V 1,4 A 9,1 s

32 2 Stand der Technik bei Formgedächtnisaktoren
Eine Verkürzung der Anzugszeit beim Aktivieren eines FG-Antriebs kann durch einekurzzeitig überhöhte Leistungszufuhr6 erreicht werden. Zur Vermeidung einer Beschädi-gung durch Überhitzen darf die Übererregung nur zeitlich begrenzt erfolgen. Die stationäreEndtemperatur T∞ und thermische Zeitkonstante τth bestimmen den Temperaturverlaufwährend des Heizens. Auf Basis dieser Kenndaten kann der Umschaltzeitpunkt der Span-nung
u (t) =
UÜ t < −τth ln(T∞−Tzul
T∞−TU
)
UH < UÜ sonst(2.32)
zwischen Übererregungs- und Haltespannung UÜ bzw. UH vor Erreichen der zulässigenTemperatur Tzul festgelegt werden.
2.5 Zusammenfassung
Pseudoplastizität und -elastizität sind einzigartige Eigenschaften von FGL, die in einer re-versiblen Martensitumwandlung begründet sind. Das Dehnungsverhalten wird von der Le-gierungstemperatur und der mechanischen Spannung bestimmt. Eine zentrale Zustands-größe ist der Phasenumwandlungsgrad als hysteresebehaftete Funktion der Temperatur.Mit Hilfe einer nichtlinearen Differentialgleichung wird der Temperaturverlauf modelliert.Unter Berücksichtigung des Material- und Dehnungsverhaltens kann das Aktorverhaltenvon FGL beschrieben werden. Nichtlinearitäten stellen eine besondere Herausforderungan den Regelungsentwurf dar. Die Nutzung inhärenter Eigenschaften bietet Möglichkeitenfür eine „sensorlose“ Regelung.
Wegen unzureichender Standardisierung und vorhandener Skepsis bezüglich der Zuver-lässigkeit dieser Technologie beschränkt sich der Einsatz von FGL in der Aktorik bisherauf wenige Versuchs- bzw. Pilotanwendungen. Aufgrund der trägen Systemdynamik undder Nichtlinearität eignen sich FG-Antriebe nur eingeschränkt für Positionieraufgaben.Durch den einfachen Aufbau und Wirkmechanismus stellen FGL als Stellantriebe eineAlternative zu anderen unidirektional wirkenden Aktoren mit begrenztem Stellweg (z. B.Einfachhubmagnete) dar.
6vgl. Übererregung von Elektromagneten [Kallenbach u. a., 2003]

33
3 Gegenstand der Arbeit
In der folgenden Analyse des aktuellen Forschungsstands werden die wesentlichen Defiziteund Problemstellungen zusammengefasst. Daraus leiten sich die Ziele dieser Arbeit ab.Die Aufgaben, die zur Lösung der Problemstellung führen, werden aufgelistet, und dieSystematik zur Bearbeitung der Teilaufgaben wird vorgestellt.
3.1 Analyse des Stands der Technik
Die grundlegenden Vorgänge während der Phasenumwandlung beim FGE sind bekanntund wie in Kapitel 2 beschrieben in der Fachwelt akzeptiert. Bei der Modellierung des ma-kroskopischen Verhaltens von FGL existieren verschiedene anerkannte Ansätze, die sichv. a. hinsichtlich ihres Detaillierungsgrades unterscheiden. Teilweise auf Basis dieser Mo-delle, aber auch durch experimentelle Untersuchungen, existieren Strategien zur Regelungvon Weg und Kraft bei FG-Aktoren. Dabei gibt es sowohl klassische, d. h. sensorbasierte,als auch so genannte sensorlose Regelungen. Neben Anbietern von Halbzeugen in Formvon Draht oder Federn gibt es mittlerweile einige wenige Hersteller von kommerziellenFG-Aktoren. Der Einsatz von FGL als Aktoren erfolgt derzeit überwiegend als Prototy-pen oder in Nischenanwendungen. Trotz zunehmender Forschungsaktivitäten gibt es nochDefizite auf den Gebieten Modellierung, Regelung und Applikation von FGL als Aktoren.
Die beschriebenen Modelle sind auf einen bestimmten Anwendungsfall beschränkt.Meist handelt es sich um einen frei liegenden, bestromten FG-Draht mit einer Federoder einem Gewicht als Last. Die Möglichkeit einer vollständigen Rückverformung wirddabei vorausgesetzt, was jedoch nicht immer gegeben ist. Bei einer Blockade der Rück-stellbewegung ist eine vollständige Rückverformung nicht möglich. Dieser Fall wird invorhandenen Modellen nicht berücksichtigt. Die Dehnung des FG-Aktors wird proportio-nal zum Umwandlungsgrad angenommen, was nur für den quasistatischen Betrieb gültigist. Die Rückwirkung mechanischer Schwingungen (des Einmassenschwingers bestehendaus der Masse der Last und der Federsteifigkeit der FGL) auf die Stellbewegung des Ak-tors wird dabei nicht berücksichtigt. Die Hysteresemodellierung mit Hilfe von Cosinus-Funktionen beschreibt das reale Verhalten in den Randbereichen unzureichend, da dieWendetangenten nicht mit den Umwandlungstemperaturen zusammen fallen. Außerdemsind innere Hystereseschleifen nur nachbildbar, wenn Ms < As ist. Ist Ms > As treten Un-stetigkeiten im Kurvenverlauf bei der Umkehr der Phasenumwandlungsrichtung auf. Einephysikalisch motivierte Modellierung nach dem Ansatz von Jiles und Atherton würde denphysikalischen Vorgängen bei der Phasenumwandlung entsprechen, wenn es gelingt, dasfür die Magnetik entwickelte Modell auf die Temperaturhysterese bei FGL zu übertragenund zu parametrieren. Dieses in der Magnetik etablierte Modell wird für die Modellierungder Temperatrhysterese bei FGL bisher nicht angewendet.
Derzeitige Ansätze für den Entwurf einer Regelung von FGL basieren auf linearisier-ten Übertragungsfunktionen, die meist nur aufwendig und unzureichend genau ermitteltwerden können. Die bisher erreichbaren Regelergebnisse könnten mit einer ausreichendgenauen und anwendungsbezogen ermittelbaren Übertragungsfunktion für FG-Aktoren

34 3 Gegenstand der Arbeit
deutlich verbessert werden. Regelungen unter Verwendung des elektrischen Widerstandsbasieren auf anfangs zu ermittelnden Widerstandseckwerten. Durch Alterungs- und Er-müdungseffekte verändert sich das Widerstandsverhalten. Deshalb ist ein regelmäßigesIdentifizieren der Reglerparameter durch zwischenzeitliches Betätigen des Aktors erfor-derlich, was i. A. bei positionierenden oder schaltenden Antrieben nicht möglich bzw.erwünscht ist. Regelungsstrategien, die „ad hoc“ arbeiten, sind nicht vorhanden.
Die immer noch geringe Anzahl kommerziell erhältlicher Aktoren und Produkte mitFGL macht deutlich, dass das Wissen über den Einsatz von FGL nicht ausreichend ver-breitet ist, um diese Technologie als echte Alternative zu etablierten Aktorprinzipien beider Lösung von Antriebsaufgaben heran zu ziehen. Für den Entwicklungsprozess müssenzahlreiche systemspezifische Aspekte wie die Anfälligkeit gegenüber mechanischer undthermischer Überlastung oder das alterungsabhängige Dehnungsverhalten berücksichtigtwerden. Der Bedarf an Vorschriften und Richtlinien für die standardisierte Entwicklungvon FG-Aktoren ist noch nicht ausreichend gedeckt. Entsprechende Standards würden dieAkzeptanz dieser Technologie in der Anwendung steigern.
3.2 Ziele der Arbeit
Ausgehend von den Defiziten des aktuellen Forschungsstands werden folgende Ziele fürdiese Arbeit formuliert:
1. Entwicklung eines Simulationsmodells zur Modellierung des thermischen FGE so-wohl bei „Normal“-Belastung (extrinsischer Zweiwegeffekt) als auch bei Blockade(unterdrücktes FG) und insbesondere zur Beschreibung des dynamischen Verhaltens
2. Verifikation des Modells und Identifikation aller Modellparameter für hinreichendgenaue Simulationsergebnisse für unterschiedliche Belastungsfälle
3. Entwurf einer Positionsregelung für Stellantriebe mit FGL und Aufbau einer End-lagenregelung zur Verbesserung des Betriebsverhaltens unter Nutzung inhärenterEffekte
4. Entwicklung eines robusten Stellaktors mit FGL unter Berücksichtigung von Ver-lässlichkeitsaspekten
3.3 Aufgabenstellung
Auf Grundlage der genannten Ziele können die folgenden Aufgaben abgeleitet werden:Zunächst werden grundlegende experimentelle Untersuchungen von FGL durchgeführt.Detailuntersuchungen liefern weitere Erkenntnisse über das Aktorverhalten von FGL. An-schließend werden die aus der Literatur bekannten und eingangs beschriebenen Modelleweiter entwickelt, indem Teilmodelle erweitert und verbessert werden. Ziel ist eine analy-tisch-physikalisch motivierte Streckenbeschreibung. Auf Basis dieser Systemkenntnis wirdder Regelungsentwurf vorgenommen. Während Stork [1997] und Leester-Schädel [2004]eine Regelung bei schaltender Bewegung als nicht erforderlich erachten, soll hier durcheinen modellbasierten Regelungsentwurf die Robustheit von FG-Aktoren auch für Schalt-bewegungen verbessert werden. Die Erkenntnisse aus der Analyse kommerzieller Aktorensollen beim Entwurf eines Aktorprototyps berücksichtigt werden.

3.3 Aufgabenstellung 35
Ausgehend von der Analyse des Stands der Technik werden die einzelnen DomänenModellierung, Regelung und Applikation aufeinander aufbauend bearbeitet und durch ex-perimentelle Untersuchungen umrahmt. Beim Systemaufbau werden die einzelnen (Teil-)Lösungen durch Reflektion auf die Analyse abgesichert. Für die Bearbeitung der Aufga-benstellung ergeben sich folgende Teilaufgaben:
• Experimente
– Aufbau eines Versuchsstands
– Detailuntersuchungen des elektro-thermo-mechanischen Verhaltens zur Ablei-tung der Modelle
– Untersuchung des Alterungs- und Ermüdungsverhaltens
– Messungen zur Parametrierung und Validierung des Simulationsmodells
• Modellierung
– Weiterentwicklung und Verbesserung des Temperaturhysteresemodells auf Ba-sis von Sigmoidfunktionen
– Übertragung des Jiles-Atherton-Hysteresemodells auf die Temperaturhysteresebei FGL
– Entwicklung eines detaillierten Widerstandsmodells in Abhängigkeit von Pha-senumwandlungsgrad und Legierungstemperatur
– Beschreibung des dynamischen Verhaltens bei freier und blockierter Rückver-formung
– Abschätzung des dynamischen Verhaltens mittels linearisierter Übertragungs-funktionen
• Regelung
– Regelungstechnische Analyse der Streckencharakteristik von FGL
– Ableitung von Entwurfsregeln für eine sensor- und widerstandsbasierte Positi-onsregelung
– Entwurf einer Endlagenregelung unter Nutzung inhärenter Eigenschaften zurSteigerung der Betriebssicherheit und Verbesserung des Alterungsverhaltens
– experimentelle Überprüfung der Regelergebnisse
• Applikation
– Entwicklung einer Methode zur verlässlichkeitsorientierten Technologiebewer-tung von existierenden FG-Aktoren
– Ermittlung der wesentlichen Aspekte für den Entwurf von FG-Aktoren
– Aufbau eines Aktorprototyps unter Einbeziehung der Untersuchungsergebnisse
– Validierung des Simulationsmodells und der Regelungskonzepte

36
4 Experimentelle Untersuchungen
Um das Systemverständnis zu verbessern, wird das Verhalten von FG-Drähten aus NiTiexperimentell untersucht. Die Untersuchungen bilden die Grundlage für die Entwicklungdes Modells und dienen zur späteren Validierung der Simulationsergebnisse. Zur Durch-führung verschiedener Messungen wird ein universeller Versuchsstand entwickelt. Nebengrundlegenden Versuchen zum thermomechanischen Verhalten unter verschiedenen Rand-bedingungen werden Detailuntersuchungen zum dynamischen Verhalten und zur Alterungdurchgeführt. Die hier gezeigten Resultate geben das charakteristische Systemverhaltenwieder und sind repräsentativ für alle durchgeführten Messergebnisse.
4.1 Beschreibung des Versuchsstands
Der Versuchsstand ist vorrangig für Messungen an Drähten aus FGL mit einer Nennlängevon 100 mm und einem Durchmesser von 50 . . . 500 µm konzipiert. Darüber hinaus könnenmit entsprechenden Anschlussadaptern auch Aktoren verschiedener Bauform (z. B. Feder)und Hersteller (Nanomuscle bzw. Miga Motor) eingesetzt und untersucht werden. Abbil-dung 4.1 zeigt die Struktur des Versuchsstands für Aktormessungen. Der zu untersuchendeFG-Aktor wird vertikal am Gestell des Prüfstands befestigt. Am Aktor wird eine Verbin-dungsstange mit dem Ferritkern des Wegsensors (LVDT) und dem darunter befestigtenLastgewicht angehängt. Bei Bedarf kann das untere Ende der Verbindungsstange fest ein-gespannt sein, um die Aktorbewegung zu blockieren. Das Abbe’sche Komparatorprinzipwird gewährleistet, da Maßverkörperung (Ferritkern) und Messstrecke (Stellbewegung desAktors) fluchtend in Messrichtung angeordnet sind [Dutschke, 2002]. Zwischen Aktor undGestell befindet sich ein Kraftaufnehmer zum Erfassen der vertikal wirkenden Kräfte.Die vertikale Einbaulage des FG-Drahtes hat gegenüber dem horizontalen Einbau denVorteil, dass die Krafteinleitung bei Gewichtsbelastung ohne Umlenkrollen und ohne stö-rende Querkräfte erfolgt. Die elektrische Leistung wird über einen spannungsgesteuertenLeistungsverstärker eingebracht, der sowohl als Transkonduktanz- (spannungsgesteuer-te Stromquelle1) als auch als normaler Operationsverstärker (spannungsgesteuerte Span-nungsquelle2) betrieben werden kann [Tietze und Schenk, 2002]. Damit ist es möglich, überdie Steuerspannung am Spannungseingang des Verstärkers dem System entweder Strom(engl.: current) oder Spannung (engl.: voltage) einzuprägen. Der Versuchsstand kann soumgebaut werden, dass sich der FG-Draht in einem Heizbad mit Silikonöl befindet (Ab-bildung 4.2). Mit einer Heizung wird das Öl und der Draht erwärmt. Die Öltemperaturkann mit einem Temperaturfühler bestimmt werden. Der Draht ist am unteren Ende mitdem Gestell fest verbunden. Das Lastgewicht wird über ein umgelenktes Seil und dieVerbindungsstange mit Ferritkern am oberen Drahtende befestigt.
Der Versuchstand ist mit folgender Messtechnik ausgestattet: ein LVDT3 für die Stell-bewegung, eine Wägezelle für die Stellkraft und eine Strommesszange für den Heizstrom.
1VC-OPV, d. h. Spannungseingang (V) und Stromausgang (C)2VV-OPV, d. h. Spannungseingang (V) und -ausgang (V)3Linear Variable Differential Transformer bzw. Tauchankergeber

4.1 Beschreibung des Versuchsstands 37
Last
FG-Aktor
Ferritkern
Kraft-
aufnehmer
Bewegung
PC
AD
DA
Strom-
messzange
DS1103
LVDT
Leistungs-
vertarker
¨
Abbildung 4.1: Versuchsstand für Aktormessungen

38 4 Experimentelle Untersuchungen
FG-Draht
Kraft-
aufnehmer
Bewegung
Temperatur-
sensor
Heizbad
Last
PC
DS1103
DA
AD
LVDT
Ferritkern
Leistungs-
vertarker
¨Heizung
Abbildung 4.2: Versuchsstand mit Heizbad

4.2 Messungen 39
Außerdem wird die ausgegebene Heizspannung gemessen. Die Legierungstemperatur kannmit Hilfe des Heizbads eingeprägt und mit einem Temperaturfühler (PT100 oder Thermo-element) gemessen werden. Wird die Legierung aktiv durch Bestromen erwärmt, kann dieTemperatur mittels einer Thermografiekamera mit Mikroskopoptik ermittelt werden. Beidiesem Verfahren wird die Oberflächentemperatur über die Wärmestrahlung bestimmt.Die emittierte Strahlungsleistung ist von der Oberflächentemperatur und dem Emissi-onsgrad des Materials abhängig. Aus den Untersuchungsergebnissen dieser Arbeit wurdeein Emissionsgrad von εrad = 0,2 . . . 0,3 für FGL mit oxidierter Oberfläche ermittelt.Die Signale für Hub, Kraft, Strom, Spannung und Temperatur werden vom Prüfstands-rechner erfasst und verarbeitet. Dafür wird ein echtzeitfähiges Signalerfassungs- und Si-gnalausgabesystem (DS1103 von dSPACE) sowie die Software ControlDesk und MAT-LAB/Simulink/RTW zur Datenverarbeitung genutzt. Der Steuerungs- und Reglerentwurferfolgt am Steuerrechner unter MATLAB/Simulink. Das Simulinkmodell wird mit Hilfeder Toolbox Real-Time-Interface in einen Hex-Code kompiliert und auf die Echtzeithard-ware übertragen. Über eine Benutzeroberfläche am Steuerrechner können Steuerungsbe-fehle und Parameteränderungen vorgenommen sowie die Messergebnisse angezeigt werden.
cLast bLast
FFGL
s
FLast
mLast
e
Abbildung 4.3: Koordinaten
Die Stellbewegung kann in alternativen Koordina-ten angegeben werden, die jeweils für die Darstel-lung unterschiedlicher Mess- bzw. Simulationsergeb-nisse besser geeignet sind (Abbildung 4.3): Die ab-solute Dehnung e = ∆l = l − l0 entspricht einerVerlängerung des Aktors, der Aktorhub s gibt seineVerkürzung an. Die Koordinaten lassen sich ineinan-der umrechnen. Werden die Ursprünge beider Koor-dinaten so gewählt, dass eine Koordinate Null ist,wenn die jeweils andere den Maximalwert erreicht,gilt e = sA − s bzw. s = eM − e. Der MaximalhubsA wird im austenitischen Zustand, die Maximaldeh-nung eM im martensitischen Zustand erreicht.
4.2 Messungen
In diesem Abschnitt werden die Ergebnisse der Messungen an FG-Drähten aus den NiTi-Legierungen DY90 von Memory Metalle und SM495 von Euroflex dargestellt. Von grundle-gender Bedeutung für die Charakterisierung von FGL sind die Temperaturhysterese unddas Spannungs-Dehnungs-Diagramm. Weiterhin wird die Widerstands-Dehnungs-Bezie-hung bei unterschiedlicher Belastung sowie das Verhalten im Blockadefall untersucht. Dasdynamische Verhalten wird durch die Messung des Frequenzgangs ermittelt, der mittelsKorrelationsanalyse bestimmt wird. Abschließend werden Untersuchung zum Alterungs-verhalten vorgestellt. Aus den Messungen werden insbesondere die Simulationsparameterfür das in Kapitel 5 entwickelte Modell ermittelt (Tabelle C.1).
4.2.1 Thermomechanisches Verhalten
Die Temperaturhysterese ist charakteristisch für FGL und beschreibt die Phasenumwand-lung in Abhängigkeit von der Materialtemperatur und der anliegenden Belastung. Überdie quasistatische Dehnung bei langsamer Temperaturänderung lässt sich der Umwand-lungsgrad abschätzen. Abbildung 4.4 zeigt Messungen mit dem Versuchsaufbau aus Abbil-

40 4 Experimentelle Untersuchungen
dung 4.2 bei langsam steigender und fallender Öltemperatur. Die Dehnung-Temperatur-Hysterese verschiebt sich bei zunehmender mechanischer Belastung einerseits wegen derLastabhängigkeit der Umwandlungstemperaturen zu höheren Temperaturen und anderer-seits wegen der größeren elastischen Dehnung nach unten. Aus den Messkurven könnendie Lastabhängigkeit und die Werte der Umwandlungstemperaturen ermittelt werden.
40 60 80 100 120−1
0
1
2
3
4
5
Hubs
inm
m
Temperatur T in C
94 MPa156 MPa218 MPa
(a) DY90 (∣∣T∣∣ < 5 K/min)
40 60 80 100 120−1
0
1
2
3
4
5
Hubs
inm
m
Temperatur T in C
110 MPa140 MPa170 MPa200 MPa
(b) SM495 (∣∣T∣∣ < 5 K/min)
Abbildung 4.4: Messung der Temperaturhysterese bei unterschiedlicher Belastung
0 1 2 3 4 50
200
400
600
800
1000
Span
nungσ
inM
Pa
Dehnung ε in %
Martensit
Austenit
Abbildung 4.5: σ-ε-Kurve (DY90)
In Abbildung 4.5 sind die Spannungs-Dehnungs-Kurven von Martensit undAustenit dargestellt. Die Messungen amVersuchsaufbau in Abbildung 4.1 wur-den bei Raumtemperatur an einem unbe-stromten und an einem bestromten FG-Draht durchgeführt. Bei der Martensit-Kurve ist das Spannungsplateau der pseu-doplastischen Dehnung von ca. 65 MPazwischen 0,75% und 2,75% Dehnung zuerkennen. Die austenitische Kurve er-reicht die Streckgrenze bei etwa 900 MPa.
Abbildung 4.6 zeigt das Verhaltenbei blockierter Rückverformung. Ein un-ter Normallast pseudoplastisch und et-wa 3,5 mm gedehnter FG-Draht wird mit310 mA bis 350 mA in Schritten von10 mA bestromt. Der Draht kann sich zu-
nächst unter Normallast zurückverformen. Bei einer Restdehnung von 1 mm, 2 mm bzw.3 mm wird die Rückverformung blockiert. Dadurch wird die Martensitbildung unterdrücktund die zunächst konstante mechanische Spannung steigt proportional mit der Drahttem-peratur (Abschnitt 2.1.2). Je später die Blockade erfolgt, d. h. je mehr sich der Drahtverkürzen kann, desto höher liegt die Legierungstemperatur zum Zeitpunkt der Blockade.Nach Eintritt der Blockade steigt die mechanische Spannung mit der Temperatur. Dietemperaturproportionale Spannungszunahme ist unabhängig von der Position, in der die

4.2 Messungen 41
0.2
0.3
0.4
4
3
2
1
0
0 5 1040
60
80
100
0 5 100
100
200
300
iin
AT
inC
ein
mm
σin
MP
a
t in st in s
(a) Blockade bei 1 mm Restdehnung
32
1
4060
80100
0
100
200
300
T in C e in mm
σin
MP
a(b) Spannungsabhängigkeit σ = f(T, e)
0.2
0.3
0.4
4
3
2
1
0
0 5 1040
60
80
100
0 5 100
100
200
300
iin
AT
inC
ein
mm
σin
MP
a
t in st in s
(c) Blockade bei 2 mm Restdehnung
40 60 80 1000
50
100
150
200
250
300
Temperatur T in C
Span
nungσ
inM
Pa
(d) Spannungs-Temperatur-Beziehung
0.2
0.3
0.4
4
3
2
1
0
0 5 1040
60
80
100
0 5 100
100
200
300
iin
AT
inC
ein
mm
σin
MP
a
t in st in s
(e) Blockade bei 3 mm Restdehnung
4 3 2 1 00
50
100
150
200
250
300
Dehnung e in mm
Span
nungσ
inM
Pa
(f) Spannungs-Dehnung-Beziehung
Abbildung 4.6: Verhalten bei blockierter Rückverformung (SM495, 100 mm×∅ 200 µm)

42 4 Experimentelle Untersuchungen
Blockade eintritt. Je mehr freie Rückverformung bzw. je später die Blockade stattfin-det, desto niedriger ist die stationäre Endtemperatur, weil wegen des größeren Hubes eingrößerer Anteil der zugeführten Heizleistung in mechanische Leistung umgewandelt wird.
4.2.2 Abhängigkeiten von Widerstand und Dehnung
Die Größen Widerstand R = f(ξ, T ) und Dehnung ε = f(σ, ξ) sind von der TemperaturT , von der mechanischen Spannung σ und vom Umwandlungsgrad ξ = f(T, σ) abhängig.Der Umwandlungsgrad ist wiederum von der relativen Lage der Materialtemperatur zuden Umwandlungstemperaturen abhängig, die sich bei zunehmender mechanischer Be-lastung erhöhen. Die gemessene Widerstands-Dehnungs-Kurve eines gewichtsbelastetenFG-Drahtes und die Temperaturabhängigkeit des Widerstands bzw. der Dehnung sind inAbbildung 4.7 dargestellt. Der Arbeitszyklus lässt sich in sechs Bereiche unterteilen:
① Zu Beginn des Erwärmens steigt der Widerstand aufgrund der Temperaturerhöhungüber die Raumtemperatur (RT), eine Austenitbildung findet nicht statt.
② Sobald die Austenit-Umwandlungstemperaturen erreicht werden, beginnt der Wi-derstandswert wegen der einsetzenden Austenitbildung zu fallen.
③ Nach der vollständigen Austenitbildung steigt der Widerstand wieder an, wenn sichdie Temperatur weiterhin erhöht.
④ Nach dem Beginn des Abkühlens fällt zunächst der Widerstand mit der Temperatur.
⑤ Bei beginnender Martensitbildung erhöht sich der Widerstand.
⑥ Nach abgeschlossener Martensitbildung sinkt der Widerstand durch den Tempera-turrückgang wieder.
0 1 2 3 4
2.8
3.0
3.2
3.4
Wid
erst
andR
inΩ
Hub s in mm
(a) Messung (SM495, 100 mm×∅ 200 µm)
T
R
s
R, s
AfAsRT Mf Ms
1
2
3
4
5
6
(b) Schematische Darstellung
Abbildung 4.7: Widerstands-Dehnungs-Beziehung
Abbildung 4.8 zeigt Messungen der Widerstands-Dehnungs-Kurve eines gewichtsbe-lasteten FG-Drahtes während eines Heizzyklus mit unterschiedlichem Lastgewicht. DieFGL wird jeweils bis zum stationären Wert erwärmt und gekühlt. Die Kurven weisen einebelastungsabhängige Hysterese und Verschiebung auf. Die Ursachen dafür sind:

4.2 Messungen 43
Rin
ΩR
inΩ
s in mms in mms in mms in mm
100 g 200 g 300 g 400 g
500 g 600 g 700 g 800 g
(a) Einzelmessungen (SM495, 100 mm×∅ 200 µm)
s
R
100 g
800 gstationarer Zustand
Martensit
Austenit
¨
Heizen
(b) Schematische Darstellung
Abbildung 4.8: Lastabhängigkeit der Widerstands-Dehnungs-Beziehung
• Die zunehmende mechanische Belastung dehnt das Material stärker. Dabei nimmtdie Dehnung des weicheren Martensits stärker zu als die Dehnung des steiferenAustenits. Der Hubbereich bei höherer Belastung verschiebt sich daher in Richtunggrößerer Dehnung. Gleichzeitig erhöht die größere Dehnung zusammen mit demgeringer werdenden Querschnitt den Widerstand.
• Mit steigender Belastung erhöhen sich die Umwandlungstemperaturen. Bei gleicherTemperatur liegt dadurch ein höherer Martensitanteil vor bzw. bei gleichem Um-wandlungsgrad eine höhere Temperatur, was zu einer zusätzlichen Widerstandser-höhung führt. Die Kurven mit höherer Belastung haben zu Beginn einen größerenWiderstandsanstieg bis zum Maximum und verschieben sich in Richtung eines hö-heren Widerstands.
• Der Abfall der Widerstands-Dehnungs-Kurve während der Phasenumwandlung wirdbeim Heizen durch die Umwandlungsrate bestimmt und ist unabhängig von der an-liegenden Belastung. Das Material ist der Belastung entsprechend maximal gedehnt.Die Dehnung entspricht dem stationären Zustand.
• Entspricht die Dehnungsgeschwindigkeit beim Abkühlen derjenigen beim Heizen,liegt der Widerstand bei der Martensitbildung wegen der im Vergleich zu Austenitniedrigeren Umwandlungstemperaturen von Martensit unterhalb des Widerstandswährend der Austenitbildung, da bei gleichem Umwandlungsgrad die Legierungs-temperatur niedriger ist.
• Durch die Viskoelastizität ist die Widerstands-Dehnungs-Kurve beim Abkühlen be-lastungsabhängig. Bei hoher Belastung entspricht die Steigung beim Kühlen derje-nigen beim Heizen. Bei abnehmender Belastung macht sich die Materialdämpfungzunehmend bemerkbar: Der Widerstand nimmt bei fallender Temperatur mit derMartensitbildung zu, die Dehnung wird aufgrund der Viskoelastizität gedämpft. DieDehnung erreicht verzögert den stationären Endwert, was zu einer Hysterese führt.Eine höhere Belastung beschleunigt die Retardation und reduziert die Hysterese.

44 4 Experimentelle Untersuchungen
Retardation beschreibt die kontinuierliche Zunahme der Verformung bei einer konstan-ten Belastung. Im Gegensatz dazu beschreibt Relaxation den Spannungsabbau währendeiner konstanten Verformung. Die Zeitabhängigkeit der relativen Dehnung ε wird als Vis-koelastizität bezeichnet. Die reversible Gesamtdehnung wird in einen zeitunabhängigenund einen zeitabhängigen Anteil zerlegt. Das (Kelvin-)Voigt-Modell zur Beschreibung desviskoelastischen Verhaltens besteht aus einer Parallelschaltung von Feder und Dämpfer[Schmidt, 2004]. Die mechanische Spannung
σ = E (ε+ τelaε) = Eε+ ηelaε (4.1)
enthält neben dem statischen (Elastizitätsmodul E) einen dynamischen Anteil (dynami-sche Viskosität ηela = τelaE). In Analogie zur Dämpfung bei ferroelektrischen Legierungendurch spannungsabhängige Bewegungen der Bloch-Wände tritt bei FGL eine Material-dämpfung aufgrund der Verschiebung der Phasengrenzen auf [Hornbogen, 2006].
4.2.3 Umwandlungsenthalpie
Tabelle 4.1: Umwandlungsenthalpie
Quelle Wert in kJ/kg
[Tietze, 1985] 33,0[Oelschläger, 2003] 24,4
[Rafoth, 1998] 24,0[da Silva, 2000] 19,7
Die Umwandlungsenthalpie lässt sich mit-tels dynamischer Differenzenkalorimetrie(DDK)4 experimentell ermitteln. Tabel-le 4.1 enthält Angaben aus der Literaturzur spezifischen Umwandlungsenthalpievon NiTi. Bei einer erzwungenen, gleich-mäßigen Temperaturerhöhung steigt dieWärmeaufnahme während der Phasen-umwandlung (Abbildung 4.9). Das Inte-gral der glockenförmigen Kurve ergibt ei-
ne Sigmoidfunktion, wie sie charakteristisch für die Temperaturhysterese ist. Die Flächezwischen Messkurve und Basislinie ist ein Maß für die Umwandlungsenthalpie.
70 75 80 85 900
0.5
1
1.5
2
2.5
3
Wär
mes
tromQ
inW
/g
Temperatur T in C
MesskurveBasislinie
(a) DY90 (5 mg, 10 K/min, 18,24 kJ/kg)
70 75 80 85 903
3.5
4
4.5
5
5.5
6
Wär
mes
tromQ
inW
/g
Temperatur T in C
MesskurveBasislinie
(b) SM495 (7 mg, 10 K/min, 21 kJ/kg)
Abbildung 4.9: DDK-Messung
4engl.: Differential Scanning Calorimetry (DSC)

4.2 Messungen 45
4.2.4 Experimentelle Ermittlung des Frequenzgangs
Der Frequenzgang G(jω) beschreibt das Übertragungsverhalten eines Systems im Fre-quenzbereich und ist im Gegensatz zur Übertragungsfunktion G(p) unmittelbar messbar[Unbehauen, 2005]. Die direkte Bestimmung des Frequenzgangs ist mit einer Korrelati-onsanalyse möglich – sowohl numerisch von einem komplexen Simulationsmodell als auchexperimentell von einem realen System. Dieses Verfahren lässt sich auch auf sehr langsameProzesse, wie sie bei FG-Aktoren auftreten, anwenden, bei denen klassische Impedanz-analysatoren nicht einsetzbar sind. Im Weiteren wird die Analysemethode beschrieben.
Die Gewichtsfunktion g(t) (mit g(t) = 0 für t < 0) beschreibt die Systemantwort aufeinen Impuls im Zeitbereich. Das Fourier-Integral der Gewichtsfunktion
G(jω) =
∞∫
0
g(t) e−jωtdt =
∞∫
0
g(t) cos(ωt)dt− j
∞∫
0
g(t) sin(ωt)dt
= ℜG(jω)+ jℑG(jω) = A(ω) ejϕ(ω) (4.2)
liefert den Frequenzgang des Systems. Der Frequenzgang als komplexe Größe mit Real-teil ℜG(jω) und Imaginärteil ℑG(jω) lässt sich durch seinen Amplitudengang A(ω)und Phasengang ϕ(ω) darstellen. Für ein System mit der Gewichtsfunktion g(t) wirddas Ausgangssignal y(t) für ein beliebiges Eingangssignal u(t) im Zeitbereich mit demDuhamel’schen Faltungsintegral
y(t) =
∞∫
0
g(σ)u(t− σ) dσ (4.3)
berechnet. Eine Kreuzkorrelation von Ein- und Ausgangssignal des Systems ergibt
Ryu(τ) = limT→∞
1
2T
T∫
−T
y(t)u(t+ τ) dt = limT→∞
1
2T
T∫
−T
∞∫
0
g(σ)u(t− σ)u(t+ τ) dσdt
=
∞∫
0
g(σ) limT→∞
1
2T
T∫
−T
u(t− σ)u(t+ τ) dtdσ =
∞∫
0
g(σ)Ruu(τ + σ) dσ. (4.4)
Mit Ruy(τ) = Ryu(−τ) folgt
Ruy(τ) =
∞∫
0
g(σ)Ruu(σ − τ) dσ =
∞∫
0
g(σ)Ruu(τ − σ) dσ. (4.5)
Diese Integralgleichung kann genutzt werden, um die Gewichtsfunktion bzw. Übertra-gungsfunktion des Systems zu ermitteln [Unbehauen, 2000; Abel und Bollig, 2006]. Fürdas harmonische Eingangssignals u(t) =
√2 u sin(ωt) mit seiner Autokorrelationsfunktion
Ruu(τ) = u2 cos(ωτ) gilt
Ruu(τ − σ) = u2 cos(ωτ − ωσ) = u2 cos(ωτ) cos(ωσ) + u2 sin(ωτ) sin(ωσ) . (4.6)
Eingesetzt in Gleichung 4.5 erhält man mit den Werten τ = 0 und τ = − π2ω den Realteil
ℜG(jω) =
∞∫
0
g(σ) cos(ωσ) dσ =Ruy(0)
u2=Ryu(0)
u2=
√2
u
ω
2π
2π
ω∫
0
y(t) sin(ωt) dt (4.7)

46 4 Experimentelle Untersuchungen
bzw. Imaginärteil
ℑG(jω) = −∞∫
0
g(σ) sin(ωσ) dσ =Ruy
(
− π2ω)
u2=Ryu
(π
2ω
)
u2=
√2
u
ω
2π
2π
ω∫
0
y(t) cos(ωt) dt
(4.8)des Frequenzgangs aus Gleichung 4.2. Die Zeitverschiebung τ entspricht einer Phasenver-schiebung des Eingangssignals um 0 bzw −π2 . Aufgrund des stationären Eingangssignalsist eine Integration über eine Schwingungsperiode 2π/ω ausreichend und zulässig. AusReal- und Imaginärteil lassen sich Amplitude und Phase des Frequenzgangs berechnen.
Der Frequenzgang wird in einem Arbeitspunkt ermittelt, bei dem die FGL halb kon-trahiert ist. Dadurch schwingt der Aktor während der harmonischen Anregung um dieMittellage. Die Mittellage wird durch einen konstanten Heizstrom erreicht und gehalten.Dieser Grundstrom wird durch das harmonische Anregesignal überlagert, so dass der Heiz-strom i(t) = i0 +
√2 i sin(ωt) eingeprägt wird. Sowohl das Anregesignal u(t) als auch das
Ausgangssignal der Strecke y(t) setzten sich aus einem Gleich- und Wechselanteil zusam-men. Für die Berechnung des Frequenzgangs wird die Korrelation zwischen den jeweiligenWechselanteilen des Ein- und Ausgangssignals analysiert. Diese unterscheiden sich im All-gemeinen durch Amplitude und Phasenlage. Um den Wechselanteil des Ausgangssignals zuerhalten, wird der Gleichanteil y durch Integration über eine Schwingungsperiode ermitteltund subtrahiert. Das Blockschaltbild zur Messung des Frequenzgangs mittels Kreuzkorre-lation ist in Abbildung 4.10 dargestellt. Die bzgl. der Anregeamplitude normierten Signale
∫
G(jω)
ℑG(jω)
ℜG(jω)vs(t)
vc(t)
+u —y¯
1u–
√2 sin(ωt)
√2 cos(ωt) 1u–
y(t)u(t)
π/2
u
1T–
T
0
∫1T–
T
0
Abbildung 4.10: Direkte Bestimmung des Frequenzgangs mittels Korrelationsanalyse
vs(t) und vc(t) hinter den Multiplikatoren bestehen ebenfalls aus einem Gleichanteil vs
bzw. vc und einem Wechselanteil. Die Wechselanteile besitzen die Kreisfrequenz 2ω. Diegesuchten Werte des Real- und Imaginärteils entsprechen dem jeweiligen Mittelwert bzw.Gleichanteil der Signale. Durch Integration kann der Wechselanteil gefiltert werden.
Abbildung 4.11 zeigt die mittels Kreuzkorrelation ermittelten Frequenzgänge einesstromgesteuert angeregten und gewichtsbelasteten FG-Drahtes. Charakteristisch ist dieResonanzüberhöhung bei ca. 20 Hz. Auf die Kurven wird in Abschnitt 5.4 detailliert einge-gangen. Unterhalb von 1 Hz entspricht das Verhältnis der Anregeamplituden i bei Klein-und Großsignalanregung dem Faktor Zehn, und Nichtlinearitäten führen zu unterschied-lichen Kurvenverläufen (siehe Abschnitt 5.4.2). Bei Frequenzen über 10 Hz wird die An-regeamplitude erhöht, um die immer stärker gedämpften Stellbewegungen auswerten zukönnen. Die Frequenzgänge bilden die Basis für die Ermittlung und Parametrierung deslinearisierten Übertragungsverhaltens von FG-Aktoren.

4.2 Messungen 47
−40
−20
0
20
40
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
(mm
/A)
ϕin
Frequenz f in Hz
i = 2,8 mA (Kleinsignal)
i = 28 mA (Großsignal)
i = 113 mA (über 20 Hz)
Abbildung 4.11: Frequenzgang eines FG-Drahtes in Abhängigkeit von der Anregeam-plitude (DY90, 100 mm×∅ 100 µm)
4.2.5 Alterungs- und Ermüdungsverhalten
Mit zunehmender Zahl der Arbeitszyklen verändert sich das Bewegungsverhalten vonFGL. Die Ansammlung von Gitterdefekten durch das thermische Zyklieren und durch diemechanische Belastung führen zu einer thermomechanischen Ermüdung Thumann [1986].Neben der klassischen Materialermüdung kommt es zur Ermüdung des FGE, wodurchdie Umwandlungstemperaturen und die Temperaturhysterese verändert werden. Abbil-dung 4.12 zeigt das Alterungs- und Ermüdungsverhalten eines zyklisch aktivierten FGL-Drahtes. Tabelle 4.2 enthält die Parameter der Lebensdaueruntersuchung.
0 5 10 15 20
−4
−2
0
2
4
Hubs
inm
m
Zeit t in s
10 Zyklen
100 Zyklen
1.000 Zyklen
10.000 Zyklen
100.000 Zyklen
(a) Hubverlauf
100
101
102
103
104
105
0
1
2
3
4
5
∆s
unde s
tat
inm
m
Zyklus
Hubbereichstat. Auslenkung
(b) Maximalhub und statische Auslenkung
Abbildung 4.12: Änderung des Hubverhaltens im Dauerbetrieb (SM495)

48 4 Experimentelle Untersuchungen
Tabelle 4.2: Parameter der Lebensdaueruntersuchung
Parameter Symbol Wert Einheit
Zyklusdauer Tcycle 20 sEinschaltdauer Ton 6 sDrahtlänge l 100 mmDrahtdurchmesser d 200 µmZugbelastung m 400 gBetriebsspannung UB 1,5 V
Mit der Zyklenzahl n nehmen der Hubbereich ∆s(n) = maxs(n) − mins(n) unddie statische Auslenkung estat(n) = e(n, t = 0) exponentiell ab bzw. zu. Die Messungenzeigen, dass beide Größen gleichmäßig altern. Mit den Exponentialfunktionen
∆s(n) = s0n−δ = s0e
− ln(n)δ (4.9)
estat(n) = e∞(
1− n−δ)
= e∞(
1− e− ln(n)δ)
(4.10)
können der Hubbereich und die statische Auslenkung in Abhängigkeit von der Zyklen-zahl n berechnet werden, wobei die Ermüdung mit der Alterungsrate δ quantifiziert wird.
Damit ist es möglich, den Zeitpunkt nkrit = δ
√
s0/skrit der kritischen Ermüdung abzu-schätzen, bei dem der Hubbereich einen Grenzwert unterschreitet (skrit ≤ ∆s(nkrit)). DieNäherungsfunktionen mit den Parametern aus Tabelle 4.3 sind mit den Messdaten inAbbildung 4.12 eingezeichnet. Die ermittelten Parameter sind stark von der verwendetenLegierung und den Versuchsparametern abhängig. Die wesentlichen Einflussfaktoren aufdie Alterungsrate sind mechanische Belastung, Überhitzung und Einschaltdauer.
Tabelle 4.3: Alterungsparameter
Parameter Symbol Wert Einheit
Anfangsmaximalhub s0 4,72 mmEndauslenkung e∞ 12,63 mmAlterungsrate δ 0,0324 —durchschnittliche Lebensdauer nmax 105 . . . 106 —
4.3 Zusammenfassung
Die experimentellen Untersuchungen an FGL erfolgten an einem neu entwickelten Ver-suchsstand, dessen Aufbau und Messtechnik beschrieben wurde. Die Messung der Tempe-raturhysterese dient als Grundlage für die Hysteresemodellierung und Identifikation derHystereseparameter wie Phasenumwandlungstemperaturen und deren Verschiebungskoef-fizienten. Besonderes Augenmerk wurde auf die Untersuchung des thermomechanischenVerformungsverhaltens gelegt, um den Einfluss zunehmender Belastung bis zur Blockadezu ermitteln. Mittels Korrelationsanalyse konnte der Frequenzgang am realen System imKlein- und Großsignalbereich identifiziert werden. Im Rahmen eines Dauerversuchs wurdedas Alterungsverhalten von FGL untersucht.

49
5 Modellierung des elektro-thermo-mechanischen Verhaltens
Im Folgenden wird die Entwicklung eines Simulationsmodells für Drähte aus FGL be-schrieben. Die wesentlichen Bausteine sind in Abbildung 5.1 dargestellt: Ermittlung derLegierungstemperatur aus der thermodynamischen Energiebilanz, Darstellung der Tem-peraturhysterese, Phasenabhängigkeit und Dynamik des Widerstands- und Dehnungsver-haltens während der Phasenumwandlung. Die einzelnen Bausteine sind dem Neuheitsgradentsprechend eingefärbt.
Widerstands-
verhalten
Temperatur-
hysterese
Thermo-
dynamische
Energiebilanz
Dynamisches
Verformungs-
verhalten
0
+
++
Stand der Technik
Neuentwicklung
Weiterentwicklung
Abbildung 5.1: Bausteine des Simulationsmodells
Das Simulationsmodell wird zunächst klassifiziert. Nach der Vorstellung der Strukturdes Modells werden die einzelnen Teilmodelle erläutert. Anschließend werden die Simula-tionsergebnisse analysiert und experimentell validiert. Auf Basis der abgeleiteten Modell-gleichungen und des experimentell ermittelten Frequenzgangs in Abschnitt 4.2.4 wird dielinearisierte Übertragungsfunktion eines FG-Aktors bei freier Rückverformung unter Last(extrinsischer Zweiwegeffekt) beschrieben.
5.1 Modellklassifizierung und -strukturierung
Neben einem thermodynamischen Modell, das die Temperaturänderung und Phasenum-wandlung mit hinreichender Genauigkeit beschreibt, werden für eine vollständige Simula-tion des mechanischen, elektrischen und thermischen Verhaltens eines FG-Aktors weitereModelle benötigt. Das Simulationsmodell nutzt den Umwandlungsgrad als interne Varia-ble. Die Abhängigkeiten werden durch Bilanzgleichungen ausgedrückt, weshalb das Modellals phänomenologisch charakterisiert werden kann. Der Vorteil liegt in der verhältnismä-ßig anschaulichen Parametrierung und Struktur des Modells im Vergleich zu kristallo-graphisch-physikalischen Modellen [Elahinia, 2004]. Das dynamische Verhalten von FGL

50 5 Modellierung des elektro-thermo-mechanischen Verhaltens
wird durch ein Modell mit konzentrierten1 Parametern, d. h. über gewöhnliche Differen-tialgleichungen beschrieben. Durch Abstraktion der physikalischen Struktur erhält manein Schema, das nur die notwendigen Informationen für die Beziehungen zwischen denrelevanten Zustandsgrößen enthält [Lenk, 1971]. Beispiele für konzentrierte Parametersind Widerstand R, Induktivität L und Kapazität C in der Elektrotechnik sowie Feder c,Masse m und Dämpfer b in der Mechanik.
Heizleistung Energiebilanz Hysterese E-Modul
Pu, i ξϑ
Widerstand
R
σ s
Last
FLast
Abbildung 5.2: Blockschaltbild des Simulationsmodells
Abbildung 5.2 zeigt das Blockschaltbild des Gesamtmodells für FG-Aktoren, mit deminsbesondere das dynamische Verhalten des thermischen FGE simuliert werden kann. DasModell ist modular aus Submodellen zur Bestimmung bzw. Modellierung der Heizleistung,der thermodynamischen Energiebilanz, der Temperaturhysterese, des Widerstandsverhal-tens, der Spannungs-Dehnungs-Beziehung und des mechanischen Teilsystems aufgebaut.Die jeweiligen Eingangs-, Zustands- und Ausgangsgrößen der einzelnen Teilmodelle sind inTabelle 5.1 aufgelistet. Die Berechnungen von weiteren Hilfsgrößen wie Wärmeübergangs-
Tabelle 5.1: Teilmodelle des Simulationsmodells
Teilmodell Eingang Zustand Ausgang
HeizleistungHeizspannung bzw.-strom, Widerstand
Heizstrom bzw.-spannung
Heizleistung
Energiebilanz Heizleistung LegierungstemperaturLegierungs-temperatur
Temperatur-hysterese
Legierungstemperatur,mechanische Spannung
UmwandlungsrateUmwandlungs-grad
WiderstandLegierungstemperatur,Umwandlungsgrad
spezifischer Wider-stand
Widerstand
Dehnungs-verhalten
Umwandlungsgrad,Dehnung
E-ModulmechanischeSpannung
Lastverhaltenmechanische Span-nung, Belastung
Geschwindigkeit, Be-schleunigung
Aktorhub
koeffizient, -leitfähigkeit, -kapazität und Temperaturverschiebung erfolgen in zusätzlichenTeilmodellen. Bei der Initialisierung werden die Legierungsparameter aus Tabelle C.1und Umgebungsparameter wie Umgebungstemperatur, Lastgewicht und Heizstrom bzw.-spannung geladen. Das Modell kann dadurch an verschiedene (Draht-)Geometrien undLegierungen, aber auch an verschiedene Heizprofile und Belastungsfälle angepasst werden.
1engl.: lumped

5.2 Beschreibung der Teilmodelle 51
5.2 Beschreibung der Teilmodelle
Die thermodynamische Energiebilanz ist in Abschnitt 2.2 beschrieben und wird für dieModellierung der Legierungstemperatur verwendet. Die Darstellung der Temperaturhyste-rese zur Ermittlung des (Phasen-)Umwandlungsgrads erfolgt nach zwei unterschiedlichenAnsätzen, die alternativ verwendet werden können. Weiterhin wird die Temperatur- undPhasenabhängigkeit des Widerstandsverhaltens abgebildet. Die Beschreibung des mecha-nischen Verhaltens während der Phasenumwandlung erfolgt unter Berücksichtung dyna-mischer Prozesse.
5.2.1 Temperaturhysterese
Auf Basis der in Abschnitt 2.2.2 beschriebenen Ansätze werden die analytischen Beschrei-bungen der Temperaturhysterese weiter- bzw. neu entwickelt. Darüber hinaus wird derJiles-Atherton-Modellansatz auf den hysteresebehafteten Zusammenhang zwischen Um-wandlungsgrad und Legierungstemperatur übertragen. Bestimmte Materialeigenschaftenändern sich während der Phasenumwandlung, wohingegen andere phasenunabhängig sind.Die Phasenabhängigkeit wird mit einem Mischansatz berechnet (Abschnitt 2.2.3). Tabel-le 5.2 enthält eine Zusammenstellung der Phasenabhängigkeit verschiedener Materialpa-rameter des in dieser Arbeit entwickelten Modells.
Tabelle 5.2: Materialparameter während der Phasenumwandlung
Phasenabhängig Phasenunabhängig
• Elastizitätsmodul• spezifischer elektrischer Widerstand• Temperaturkoeffizient des Widerstands• thermischer Ausdehnungskoeffizient• Wärmeleitfähigkeit
• spezifische Wärmekapazität• Massendichte• Emissionsgrad
Die Umwandlungstemperaturen kennzeichnen den Beginn und das Ende der jeweiligenPhasenumwandlung. Die gemessenen Hysteresekurven in Bild 4.4 sowie in verschiede-nen Veröffentlichungen (z. B. [Duerig u. a., 1990]) besitzen einen sigmoiden Verlauf, beidem die Martensit- und Austenitbildung nicht erst bei den Starttemperaturen beginntbzw. nicht schon bei den Endtemperaturen vollständig endet. Vielmehr werden die Um-wandlungstemperaturen über die Wendetangenten an den beiden Hystereseästen ermittelt(Abbildung 5.3). Um den Einfluss der mechanischen Spannung zu berücksichtigen, wirdfür die Hysteresemodelle eine korrigierte Temperatur
T c = T − cσσ (5.1)
eingeführt, die die belastungsabhängige Verschiebung der Phasenumwandlungstempera-turen berücksichtigt. In Anlehnung an Elahinia [2004] wird die Festlegung der Phasen-umwandlungsrichtung über die korrigierte Temperatur vorgenommen:
sgn(
ξ)
= − sgn(
T c)
(5.2)

52 5 Modellierung des elektro-thermo-mechanischen Verhaltens
5.2.1.1 Analytische Hysteresemodellierung
Bei der analytischen Hysteresemodellierung werden die beiden Hystereseäste durch Sig-moidfunktionen beschrieben. Der Vorteil liegt darin, dass nur die Phasenumwandlungs-temperaturen für die Modellierung der Hystereseäste benötigt werden. Des Weiteren kanndie Phasenumwandlungsrate ξ direkt in Form einer mathematischen Gleichung beschrie-ben werden und muss nicht numerisch genähert werden. Der Cosinus-Ansatz aus Ab-schnitt 2.2.2 erfüllt nicht die Forderung, dass die Schnittpunkte der Wendetangenten deräußeren Hystereseäste mit ξ = 0 und ξ = 1 bei den Umwandlungstemperaturen liegen.Daher ist es erforderlich, besser geeignete Funktionen für die Beschreibung der Sigmoid-kurve zu nutzen.
Mit der skalierten Tangens-Hyperbolikus-Funktion
ξ(T c) =1− ξ
2tanh
(
2[Mf − T c
Ms −Mf+
1
2
])
+1 + ξ
2∀T c falls ξ > 0 (5.3a)
ξ(T c) =ξ
2tanh
(
2[As − T c
Af − As+
1
2
])
+ξ
2∀T c falls ξ < 0 (5.3b)
lässt sich die Form der gemessenen Hysteresekurve gut nachbilden. Ähnliche Ansätzefinden sich auch bei der Modellierung der Magnetisierungshysterese [Takacs, 2003]. DurchAnpassung der Skalierung ξ können auch innere Hystereseschleifen beschrieben werden.Der Ansatz
ξ(T c) =1− ξ
1 + exp(
2Mf+Ms−2T c
Mf−Ms
) + ξ ∀T c falls ξ > 0 (5.4a)
ξ(T c) =ξ
1 + exp(
2As+Af−2T c
As−Af
) ∀T c falls ξ < 0 (5.4b)
von Ikuta u. a. [1991] nutzt eine Exponentialfunktion zur analytischen Beschreibung derTemperaturhysterese. Die Beschreibungen mit dem Tangens Hyperbolikus und der Expo-nentialfunktion sind mit den hier verwendeten Funktionsargumenten mathematisch iden-tisch, wie der Vergleich
1
2tanh(−x) +
1
2=
1
2
e−x − ex
e−x + ex+
1
2=
1
1 + e2x(5.5)
zeigt, und führen zum gleichen Kurvenverlauf. Für beide Ansätze ist charakteristisch, dassdie Schnittpunkte der Wendetangenten mit ξ = 0 bzw. ξ = 1 den Umwandlungstempera-turen Ms, Mf , As und Af entsprechen (Abbildung 5.4). Die Steigung der Wendetangentenist −1/ (Ms −Mf) bzw. −1/ (Af − As). Eine alternative Ansatzfunktion ist die Arcustan-gens-Funktion
ξ(T c) =1− ξπ
arctan(
π[Mf − T c
Ms −Mf+
1
2
])
+1 + ξ
2∀T c falls ξ > 0 (5.6a)
ξ(T c) =ξ
πarctan
(
π[As − T c
Af − As+
1
2
])
+ξ
2∀T c falls ξ < 0 (5.6b)
zur Beschreibung der Hystereseäste. Diese Funktion besitzt eine schwächere Krümmungim Vergleich zur Tangens-Hyperbolikus-Funktion (Abbildung 5.3) und bildet die gemes-senen Hysteresekurven in Abschnitt 4.2 genauer ab.

5.2 Beschreibung der Teilmodelle 53
0
0.5
1
Mar
tensi
tant
eilξ
Temperatur T in C
Tangens HyperbolicusArcustangens
Ms
Mf As
Af
Abbildung 5.3: Vergleich trigonometrischer Funktionen zur Hysteresemodellierung
Bei einem Wechsel der Umwandlungsrichtung muss auf die korrekte Skalierung derAnsatzfunktionen geachtet werden. Werden die Hystereseäste vollständig durchlaufen,beträgt der Skaliermartensitanteil ξ Eins bzw. Null. Kommt es zu einer Umkehr derPhasenumwandlung bei 0 < ξ < 1, werden innere Hystereseschleifen durchlaufen. Dabeimüssen der Endmartensitanteil des hinlaufenden Astes und der Anfangsmartensitanteildes rücklaufenden Hystereseastes einen identischen Wert liefern: den Martensitanteil imUmkehrpunkt ξ. Wird für den Skaliermartensitanteil ξ des zurücklaufenden Astes deraktuelle Wert im Umkehrpunkt ξ verwendet, ergibt sich der Momentanmartensitanteil ξim zurücklaufenden Hystereseast (Abbildung 5.4). Dieser entspricht nicht dem Marten-sitanteil ξ im Umkehrpunkt bei T c
0 , der sich aus dem hinlaufenden Hystereseast ergibt.Dementsprechend muss der Skaliermartensitanteil ξ des zurücklaufenden Astes angepasstwerden. Beim Wechsel von Martensit- (ξ > 0) zu Austenitbildung (ξ < 0) gilt
ξ(T c0 )ξ=0=
1
2tanh
(Mf +Ms − 2T c
0
Ms −Mf
)
+1
2= ξ falls ξ > 0 (5.7a)
ξ(T c0 )ξ=ξ=
ξ
2tanh
(As + Af − 2T c
0
Af − As
)
+ξ
2= ξ falls ξ < 0 (5.7b)
und für ξ < 0 ist ξ(T c0 ) = ξ < ξ. Um ξ(T c
0 ) = ξ für ξ < 0 zu erhalten, muss derHystereseast nach dem Richtungswechsel der Phasenumwandlung mit dem Faktor ξ/ξmultipliziert werden. Auch beim Wechsel zwischen Austenit- und Martensitbildung ergibtsich zunächst eine Diskrepanz im Umkehrpunkt. Mit
ξ(T c0 )ξ=1=
1
2tanh
(As + Af − 2T c
0
Af − As
)
+1
2= ξ falls ξ > 0 (5.8a)
ξ(T c0 )ξ=ξ=
1− ξ2
tanh(Mf +Ms − 2T c
0
Ms −Mf
)
+1 + ξ
2= ξ falls ξ > 0 (5.8b)
ist ξ(T c0 ) = ξ > ξ für ξ > 0. Durch die Multiplikation des Austenitanteils ψ(T c) = 1−ξ(T c)
mit dem Faktor ψ/ψ wird die Kurve korrekt skaliert und ξ(T c0 ) = ξ erreicht.

54 5 Modellierung des elektro-thermo-mechanischen Verhaltens
TT0
ξ
ξ
˜
ξ
ˆ
¯
ξ
c c
hinlaufender Ast
zurucklaufender Ast¨
Umkehrpunktkorrigierte
Skalierung
(a) Wechsel von Martensit- zu Austenitbildung
TT0
ξ
ξ
˜
ξ
ˆ
¯
ξ
c c
hinlaufender Ast
zurucklaufender Ast¨
Umkehrpunkt
korrigierte
Skalierung
(b) Wechsel von Austenit- zu Martensitbildung
Abbildung 5.4: Temperaturhystereseskalierung beim Wechsel der Phasenumwandlungs-richtung (ξ Martensitanteil im Umkehrpunkt, ξ Momentanmartensitanteil, ξ Skaliermar-tensitanteil)
5.2.1.2 Hysteresemodell nach Jiles und Atherton
Die Phasenumwandlung bei FGL kann in Analogie zur magnetischen Hysterese mit derDomänentheorie beschrieben werden [Gorbet, 1997]. Die einzelnen Kristalle der FGL, dieeiner der beiden Phasen angehören, stellen Domänen dar (vgl. Weiß’sche Bezirke). DieDomänen des Martensits und Austenits sind während der Phasenumwandlung unter demMikroskop sichtbar [Funakubo, 1987]. Die Grenzen zwischen den Domänen entsprechenden Blochwänden. Beim Abkühlen vergrößert sich die Martensit-Domäne, beim Erwär-men nimmt die Martensitphase ab. Die Domänengrenzen, die die Phasen Martensit undAustenit trennen, verändern sich. Dabei führt innere Reibung zu irreversiblen Prozessenund lokalen Hystereseerscheinungen bei der Phasenumwandlung.
Bei der Übertragung des Jiles-Atherton-Hysteresemodells (Anhang B.2) auf die Tem-peraturhysterese werden die Analogien von Umwandlungsgrad und Magnetisierung sowie

5.2 Beschreibung der Teilmodelle 55
Tabelle 5.3: Analogie zwischen Magnetisierungs- und Temperaturhysterese
Magnetisierungshysterese Temperaturhysterese
H T c
M ξ
Heff = H + αM Teff = T c + αξ
Man = Ms
[
coth(He
a
)
− aHe
]
ξan = −0,5[
coth(Teff−T
c
G
a
)
− aTeff−T
c
G
]
M = Mrev +Mirr ξ = ξrev + ξirr
Mirr =∫ dMirr
dH dH ξirr =∫ dξirr
dT dTdMirr
dH = Man−Mirr
kδ−α(Man−Mirr)dξirr
dT = ξan−ξirr
kδ−α(ξan−ξirr)
M = cMan + (1− c)Mirr ξ = cξan + (1− c) ξirr
1
TG
0
T
ξ
0,5
M
H
AsMf AfMs
Tco
ξre
χan
χin
c c
Anhysterese
Abbildung 5.5: Jiles-Atherton-Temperaturhysteresemodell
von Temperatur und Feldstärke genutzt. In Tabelle 5.3 sind die Modellgleichungen zu-sammengefasst. Durch die Koordinatentransformation liegt der Mittelpunkt der Tempe-raturhysterese bei T c = T c
G und ξ = 0,5 (Abbildung 5.5).Die anhysteretische Kurve kann wie beim Jiles-Atherton-Verfahren [Jiles und Atherton,
1983, 1986] mit einer abgewandelten Langevin-Funktion
ξan = f(Teff − T c
G
a
)
= −0,5
[
coth(Teff − T c
G
a
)
− a
Teff − T cG
]
(5.9)
beschrieben werden. Prinzipiell kann für die anhysteretische Kurve jede beliebige Funktiongewählt werden, die symmetrisch zum Mittelpunkt der Hysterese verläuft. Ähnlich wiebei der analytischen Hysteresemodellierung eignen sich hierfür insbesondere Funktionenmit Tangens Hyperbolicus und Arcus Tangens:
ξan =1
2tanh
(T c
G − Teff
a
)
+1
2(5.10)
ξan =1
πarctan
(π
2
[T c
G − Teff
a
])
+1
2(5.11)

56 5 Modellierung des elektro-thermo-mechanischen Verhaltens
Der Martensitanteil nimmt mit steigender Temperatur ab (dξ/dt < 0 bei dT/dt > 0)bzw. nimmt mit sinkender Temperatur zu (dξ/dt > 0 bei dT/dt < 0). Daraus folgt, dassdξ/dT < 0 ist. Bei der Berechnung des irreversiblen Anteils wird mit
dζirr
dθ=
dζirr
dθdζirr
dθ > 0
0 sonst(5.12)
der numerische Fehler bei der Berechnung des Umwandlungsgrads reduziert.Die Form der Hysteresekurve wird durch die Parameter α, a, c und k bestimmt. Um die
Hysterese der geforderten Form anzupassen, werden die Parameter mittels des Verfahrensder kleinsten Fehlerquadrate anhand der Referenzkurve optimiert. Die Bestimmung derStartwerte für die Optimierung erfolgt nach den Ansätzen von Kleineberg [1995], derenHerleitung sich in Jiles u. a. [1992] findet und im Folgenden auf die Temperaturhystereseübertragen wird. Aus dem Wertebereich des Martensitanteils ξ ∈ [0; 1] folgt
Ms = 0,5 (5.13)
für die Höhe der Hysteresekurve. Der Quotient aus Koerzitiv- und Remanenzwert ergibtden Anfangswert für den Parameter
α = Tco/ξre. (5.14)
Während der Koerzitivwert Tco = (Af −Ms) /2 berechnet werden kann, muss der Re-manenzwert ξre zwischen 0 und 0,5 geschätzt werden (Abbildung 5.5). Mit α kann derAnfangswert
a = (1/χan + α) /6 (5.15)
berechnet werden, wobei χan die Initialsteigung der anhysteretischen Kurve darstellt. Un-ter der Annahme, dass die Initialsteigung der anhysteretischen Kurve der Steigung derHysteresekurve an der Koerzitivstelle entspricht, gilt χan = 1/ (Af − As). In Abhängigkeitvon a kann der Reversibilitätskoeffizient
c = 6χina (5.16)
ermittelt werden, wobei χin der Initialsteigung der Hysteresekurve entspricht. Diese kannmit χin = 0,5χan angenommen werden. Der Koeffizient
k = Tco (5.17)
kann mit dem Koerzitivwert initialisiert werden. Alle Parameter sind positiv (Parameterc ∈ [0; 1]). Typische Werte der einzelnen Kurvenparameter sind in Tabelle 5.4 aufgelistet.
Tabelle 5.4: Identifizierte Parameter des Jiles-Atherton-Temperaturhysteresemodells
Parameter Startwert Tangens Hyperbolicus Arcus Tangens Einheit
α 0,1 0,1948 0,1949 Ka 20 2,9445 3,9577 Kc 0,1 4,990 0,239 10−9
k 20 10,4601 10,4965 K

5.2 Beschreibung der Teilmodelle 57
5.2.2 Widerstandsverhalten
Während eines Heizzyklus und der damit verbundenen Phasenumwandlung zeigt der elek-trische Widerstand ein charakteristisches Verhalten (Abbildung 5.6), das auch experimen-tell untersucht wurde (Abschnitt 4.2.2). Bei der Phasenumwandlung sinkt der Widerstandaufgrund den abnehmenden Martensitanteils. Vor dem Einsetzen der Phasenumwandlungund nach dessen Ende steigt der Widerstand mit zunehmender Temperatur. Dieses Ver-halten ist durch die Geometrieänderung, überwiegend jedoch durch die Temperatur- undPhasenabhängigkeit des spezifischen Widerstands geprägt. Der Rückgang des Widerstandsdurch die Phasenumwandlung ist in dem betrachteten Temperaturbereich größer als derAnstieg durch die Erwärmung. Der Widerstand eines FG-Drahtes
R = el l/A (5.18)
ergibt sich aus der Drahtgeometrie (Drahtlänge l, Querschnittsfläche A) und dem spezifi-schen Widerstand el. Bei Raumtemperatur (RT) besitzt der spezifische Widerstand den
T
t
RTU
T∞
0
1
ξ
RRT
R,T,ξ
(a) Pulsantwort
Rmax
Rmin
R(s)
smaxsmin
(b) Widerstands-Dehnungs-Beziehung
t
R(ξ)
R(1)
R(0)
0
R
1
ξ
(c) Phasenabhängigkeit
t
R(T)
R(TU)
R(T∞)
T
TU
T∞
R
(d) Temperaturabhängigkeit
Abbildung 5.6: Abhängigkeiten des Widerstandsverhaltens

58 5 Modellierung des elektro-thermo-mechanischen Verhaltens
Wert RTel . Durch einen linearen und quadratischen Temperaturkoeffizienten (αel bzw. βel)
wird der Temperatureinfluss bei der Berechnung des spezifischen Widerstands
el = RTel
[
1 + αel (T − RT) + βel (T − RT)2]
(5.19)
berücksichtigt. Für Temperaturen unterhalb von ca. 200 C kann das quadratische Gliedvernachlässigt werden [Kories und Schmidt-Walter, 2000]. Sowohl der spezifische Wider-stand als auch die Temperaturkoeffizienten sind für Martensit und Austenit unterschied-lich. Mit dem Umwandlungsgrad ξ ergeben sich der Widerstand und die Koeffizienten alsMischverhältnis der beiden Phasen (Abschnitt 2.2.3):
RTel = ξRT
el,M + (1− ξ) RTel,A (5.20)
αel = ξαel,M + (1− ξ)αel,A (5.21)
βel = ξβel,M + (1− ξ) βel,A (5.22)
0 0.5 1 1.5 29.5
10
10.5
11
11.5
12
12.5
13
Wid
erst
andR
inΩ
Zeit t in s
MessungSimulation
(a) ohne Temperaturkoeffizient (TK)
0 0.5 1 1.5 29.5
10
10.5
11
11.5
12
12.5
13
Wid
erst
andR
inΩ
Zeit t in s
MessungSimulation
(b) phasenabhängiger TK
0 0.5 1 1.5 29.5
10
10.5
11
11.5
12
12.5
13
Wid
erst
andR
inΩ
Zeit t in s
MessungSimulation
(c) an Martensit angepasster, konstanter TK
0 0.5 1 1.5 29.5
10
10.5
11
11.5
12
12.5
13
Wid
erst
andR
inΩ
Zeit t in s
MessungSimulation
(d) an Austenit angepasster, konstanter TK
Abbildung 5.7: Widerstandsmodellierung (DY90, 100 mm×∅ 100 µm)

5.2 Beschreibung der Teilmodelle 59
Abbildung 5.7 zeigt die Simulationsergebnisse einer Modellierung ohne (a), mit kon-stanten (c,d) und mit phasenabhängigen (b) Temperaturkoeffizienten (TK). Wird derspezifische Widerstand lediglich phasenabhängig und ohne Berücksichtigung des direktenTemperatureinflusses berechnet, d. h. ohne Temperaturkoeffizienten wie in Gleichung 2.10,kann das inverse Verhalten vor und nach der Phasenumwandlung nicht abgebildet werden.Mit Temperaturkoeffizienten wird die genaue Darstellung des realen Verhaltens möglich.Bei Verwendung von konstanten und nicht von ξ abhängigen Temperaturkoeffizientenkann das Widerstandsverhalten entweder an Martensit oder an Austenit angepasst wer-den. Die Phasenabhängigkeit der Temperaturkoeffizienten muss deshalb zwingend berück-sichtigt werden, um das Widerstandsverhalten für den gesamten Heizzyklus korrekt ab-bilden zu können und eine hohe Modellgenauigkeit zu erreichen. Die identifizierten Wertesind in Tabelle C.1 zu finden.
5.2.3 Mechanisches Teilsystem
Abbildung 5.8 zeigt das mechanische System eines FG-Aktors mit Belastung. Die Aktor-kraft FFGL wirkt im allgemeinen Fall gegen eine passive Lastmasse mLast mit Feder cLast
und Dämpfer bLast sowie eine aktive Lastkraft FLast. Je nach Belastungsfall und Einbaulagekönnen einzelne Lastanteile entfallen. Aus der Impulsbilanz lässt sich die Bewegungsglei-chung
FFGL = mLasts+ bLasts+ cLast (s− s0) +mg + FLast (5.23)
ermitteln. Die Koordinate s der Masse entspricht dem Hub des FG-Aktors.
cLast bLast
FFGL = σA
s
g
FLast
mLast
Abbildung 5.8: Mechanisches System
Die durch den FG-Draht erzeugte KraftFFGL = σA berechnet sich über diemechanische Spannung σ = Eε + ηelaεund die Querschnittsfläche A. Dadurchwird der bestehende Modellansatz dahin-gehend erweitert, dass durch Berücksich-tigung der dynamischen Viskosität ηela
die Zeitabhängigkeit der Dehnung model-liert werden kann. Das erhöht die Genau-igkeit des Modells im Hinblick auf das dy-namische Verhalten. Der von Madill undWang [1998] vorgestellte Ansatz zur Be-schreibung des Zusammenhangs zwischenDehnung und Spannung (Abschnitt 2.2.4, Abbildung 2.8) wird verwendet, um denE-Modul als Funktion E = f(ξ, ε) von Umwandlungsgrad ξ und Dehnung ε zu definieren:
E(ξ, ε) =
Ea − (Ea − Em) ξ 0 < ε < εy
Ea − (Ea − Et) ξ − ξε (Et − Em) εy εy < ε < εd
Ea − (Ea − Ed) ξ − ξε
[(Et − Em) εy + (Ed − Et) εd] εd < ε
(5.24)
Die Bereichsunterscheidungen sind erforderlich, um den Übergang zwischen dem ela-stischen und pseudoplatischen Dehnungsverhalten des Martensits zu berücksichtigen. ImBereich zwischen εy und εd ist die Dehnung aufgrund der Entzwillung der Kristallstrukturpseudoplastisch, außerhalb davon elastisch (Abschnitt 2.1).

60 5 Modellierung des elektro-thermo-mechanischen Verhaltens
5.3 Simulationsergebnisse
ε
Austenit
Martensit
σ
∆σ
εB
σL
Zweiwegeffekt
Blockade
Abbildung 5.9: Belastungsfälle
Mit dem Simulationsmodell ist es mög-lich, den extrinsischen Zweiwegeffekt so-wohl bei freier Rückverformung als auchim Blockadefall sowie in beliebigen Kom-binationen abzubilden. Die unterschied-lichen Belastungsfälle sind in Abbil-dung 5.9 skizziert. Die im Folgenden dar-gestellten Simulationen wurden für einen100 mm langen und ∅ 100 µm dickenDraht aus DY90 durchgeführt und mitentsprechenden Messergebnissen vergli-chen. Insgesamt liegt eine gute Überein-stimmung zwischen Messung und Simula-tion vor. Abbildung 5.10 zeigt die Simula-tionsergebnisse des thermomechanischenVerformungsverhaltens bei blockierterRückverformung (Abschnitt 4.2.1). Dasvon Mertmann [1997] experimentell un-
tersuchte Verhalten kann abgebildet werden, und insbesondere die temperaturabhängigeSpannungszunahme entspricht den Messergebnissen aus Abbildung 4.6.
01
23
4060
80100
120140100
200
300
400
500
σin
MP
a
s in mmT in C
(a) Spannungsabhängigkeit σ = f(T, s)
40 60 80 100 120 140100
200
300
400
500
Span
nungσ
inM
Pa
Temperatur T in C
(b) Spannungs-Temperatur-Beziehung
Abbildung 5.10: Simulation der Blockade (DY90, 100 mm×∅ 100 µm)
Der Vergleich von Messung und Simulation bei freier Rückverformung unter konstan-ter Last ist in Abbildung 5.11 dargestellt. Dem kalten Draht wird zunächst ein hoherStrom eingeprägt, der anschließend auf einen kleinen Wert abfällt. Insbesondere wird derEinfluss der mechanischen Schwingungen beim Erreichen der Endlage und das inverseWiderstandsverhalten in den Randbereichen realitätsnah abgebildet. Aufgrund der hohenMessunsicherheit bei der Ermittlung der Drahttemperatur mittels Infrarotthermographiesind die Temperaturverläufe qualitativ zu vergleichen. Durch Skalierung des Modells lie-fert die Simulation auch für andere Drahtgeometrien gute Ergebnisse (Abbildung C.1).

5.3 Simulationsergebnisse 61
0 2 4 6 8−1
0
1
2
3
4
5
Akt
orhu
bs
inm
m
Zeit t in s
MessungSimulation
←− Detailausschnitt
(a) Hubverlauf
0.3 0.4 0.5 0.6 0.7 0.82.5
3
3.5
4
4.5
Akt
orhu
bs
inm
m
Zeit t in s
MessungSimulation
(b) Detailausschnitt
0 2 4 6 89
10
11
12
13
Wid
erst
andR
inΩ
Zeit t in s
MessungSimulation
(c) Widerstandsverlauf
0 2 4 6 80
0.05
0.1
0.15
0.2
0.25
0.3
Str
omi
inA
Zeit t in s
MessungSimulation
(d) Heizstrom
0 2 4 6 8
50
100
150
200
Tem
per
aturT
inC
Zeit t in s
MessungSimulation
(e) Temperaturverlauf
02
46
50
100
1500
100
200
T in C
σin
MP
a
ε in %
(f) σ-ε-T -Diagramm
Abbildung 5.11: Messung und Simulation der Pulsantwort (DY90, 100 mm×∅ 100 µm)

62 5 Modellierung des elektro-thermo-mechanischen Verhaltens
5.4 Übertragungsverhalten
FG-Aktoren sind elektro-thermo-mechanische Energiewandler, d. h. sie wandeln die durchBestromen zugeführte elektrische Energie über thermische Energie in mechanische Arbeit(Abbildung 5.12). Eingangsgröße ist die elektrische Spannung u. Der Stromfluss i durch die
i PelFFGL
Rel RthCth
u T v
mLast bLast cLast FLast
U Q˙ ˙ ξ = f(T)
s = f(ξ)
v = ds/dt
elektrischer Kreis thermischer Kreis mechanischer KreisFG-Effekt
Abbildung 5.12: Elektro-thermo-mechanische Energiewandlung
Legierung wird über den Ohm’schen Eigenwiderstand Rel in Heizleistung Pel umgesetzt,die zu einer Erwärmung des Drahtes führt. Durch die Temperaturänderung T kommt eszur Phasentransformation des Kristallgitters. Die durch eine Vorspannkraft verformte Le-gierung „erinnert“ sich an ihre Urform. Dabei wird durch die Stellbewegung s (mit s = v)und die Kraft FFGL mechanische Arbeit verrichtet. Das Übertragungsverhalten zwischenEin- und Ausgangsgrößen ist im Allgemeinen nichtlinear. Für geringe Temperaturänderun-gen und damit kleine Stellbewegungen kann ein lineares Übertragungsverhalten angenom-men werden, das im Weiteren beschrieben wird. Die Kenntnis des Übertragungsverhaltensermöglicht einen systematischen Reglerentwurf. Die Gesamtübertragungsfunktion ergibtsich aus den einzelnen Übertragungsfunktionen zwischen Heizleistung, Legierungstempe-ratur, Umwandlungsgrad und Stellbewegung. Dabei wird eine solche Belastung voraus-gesetzt, dass die FGL ein extrinsisches Zweiwegverhalten zeigt. Das heißt, die Belastungliegt in den dafür erforderlichen Grenzen und kann als konstant angesehen werden. Estritt keine Blockade der Stellbewegung auf.
5.4.1 Ermittlung der Übertragungsfunktion
Aus der reduzierten thermodynamischen Energiebilanz
CthT︸ ︷︷ ︸
U
= Reli2
︸ ︷︷ ︸
Pel
−R−1th (T − TU)
︸ ︷︷ ︸
Qconv
(5.25)
lässt sich die thermische Übertragungsfunktion
Gth,P(p) =LT (t)LPel(t)
=Rth
τthp+ 1(5.26)
zwischen Heizleistung und Legierungstemperatur ermitteln. Dabei ist τth = RthCth diethermische Zeitkonstante. Die Funktion besitzt PT1-Verhalten. Im engeren Sinne ist T dieTemperaturerhöhung bezüglich einer Arbeitspunkttemperatur, die innerhalb der Phasen-umwandlungstemperaturen liegt. Die Heizleistung wird durch Strom- oder Spannungsein-prägung erzeugt. Um die lineare Übertragungsfunktion zwischen Temperatur und Strom

5.4 Übertragungsverhalten 63
bzw. Spannung zu erhalten, muss die Heizleistung Pel = u2/Rel = Reli2 linearisiert werden.
Mit u = Reli folgt
Pel ≈ Pel|i0 +dPel
di
∣∣∣∣∣i0
i = Reli20 + 2Reli0i. (5.27)
Damit ergibt sich die thermische Übertragungsfunktion bei Stromeinprägung
Gth,i(p) =LT (t)L i(t) =
2RthReli0τthp+ 1
. (5.28)
Die thermische Übertragungsfunktion bei Spannungseinprägung lässt sich in gleicher Wei-se berechnen. Da die Phasenumwandlung mit Schallgeschwindigkeit erfolgt, ändert sichder Phasenumwandlungsgrad ohne Verzögerung mit der Temperatur. Für kleine Tempe-raturänderungen ist der Zusammenhang zwischen Phasenumwandlung und Temperatur
Gtransf(p) =Lξ(t)LT (t) = Ktransf mit
1
As − Af≤ Ktransf ≤ 0 (5.29)
linear. Der Verstärkungsfaktor Ktransf entspricht dem Anstieg der Temperaturhystereseim Arbeitspunkt. Der Einfluss der Temperaturhysterese auf das Übertragungsverhaltenwird später genauer betrachtet.
cFGLbFGL
x
s
g
cLast bLast
mLast
Abbildung 5.13: Mechanisches System mitFederfußpunkterregung
Abbildung 4.11 zeigt, dass sich der Fre-quenzgang aus einem PT1- und PT2-Ver-halten zusammensetzt. Letzteres ergibtsich aus dem Lastgewicht und den Ei-genschaften des FG-Drahtes, die zusam-men einen mechanischen Schwingkreis er-geben. Die FGL entspricht im mecha-nischen Sinn einer Feder mit variablerSteifigkeit cFGL und erzeugt eine Zug-kraft FFGL, die mit der Dehnung zu-nimmt. Die reversible Transformations-dehnung x = εrevl0ξ = erevξ wirkt als Fe-derfußpunkterregung. Zusätzlich ist Ma-terialdämpfung bFGL vorhanden. Mit demgemessenen Frequenzgang lässt sich dasin Abbildung 5.13 gezeigte mechanischeErsatzmodell mit Federfußpunkterregungbegründen. Für einen gewichtsbelastetenFG-Draht ohne äußere Kraft wird das mechanische Übertragungsverhalten mit
Gmech(p) =Ls(t)Lξ(t) =
−erev cFGL
mLastp2 + (bFGL + bLast) p+ (cFGL + cLast)(5.30)
wiedergegeben. Die mechanischen Ersatzparameter des Systems sind die gemittelte Stei-figkeit eines Zugstabes mit dem E-Modul E und die Materialdämpfung aufgrund derdynamischen Viskosität ηela:
cFGL = Ed20π/ (4l0) mit E = (EM + EA) /2 (5.31)
bFGL = ηelaA0/l0 (5.32)

64 5 Modellierung des elektro-thermo-mechanischen Verhaltens
Das Blockschaltbild und Bode-Diagramm der Gesamtübertragungsfunktion
GS(jω) =KS
(
1 + j ωωth
)(
1 + j2D ωωmech
− ω2
ω2
mech
) (5.33)
zwischen Heizstrom i und Stellbewegung s sind in Abbildung 5.14 dargestellt. Oberhalbder thermischen Knickfrequenz ωth fällt der Amplitudengang um 20 dB/Dekade ab, ober-halb der mechanischen Resonanzfrequenz ωmech um 60 dB/Dekade. Unter Nutzung derlinearisierten Übertragungsfunktion findet in Abschnitt 6.2 der Reglerentwurf statt.
Ti ξ s
KtransfKth Kmechτth D,ωmech
(a) Blockschaltbild
Ain
dB
ϕin
Frequenz f in Hz
KS
fth fmech
−90
−180
−270
(b) Frequenzgang
Abbildung 5.14: Linearisierte Streckenübertragungsfunktion
5.4.2 Klein- und Großsignalverhalten
Eine modellbasierte Bestimmung des Frequenzgangs für Klein- und Großsignalanregungbei Strom- und Spannungsanregung ist wie am realen System mittels Korrelationsanalysemöglich. Die am realen FG-Draht gemessenen und am Simulationsmodell ermittelten Fre-quenzgänge bei unterschiedlicher Anregungsamplitude sind in Abbildung 4.11 bzw. 5.15dargestellt. Die Unterschiede in den Frequenzgängen bei niedrigen Frequenzen entstehenbeim Durchlauf von Hystereseschleifen mit unterschiedlicher Breite (Abbildung 5.16). Fürgroße Anregeamplituden die zu einer Stellbewegung führen, die über 80% des maxima-len Stellbereichs führen, ist die Hysteresekurve stark gekrümmt und sehr breit. Ist dieAnregeamplitude klein, d. h. die Stellbewegung ist kleiner als 1% des maximalen Stell-bereichs, werden innere, flache und schmale Hystereseschleifen durchlaufen. Die Steigungder Verbindungslinie zwischen den Eckpunkten einer Hystereseschleife ist ein Maß für die

5.4 Übertragungsverhalten 65
−20
0
20
40
60
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
(mm
/A)
ϕin
Frequenz f in Hz
i = 2,8 mA (Kleinsignal)
i = 28 mA (Großsignal)
Abbildung 5.15: Frequenzgang des Simulationsmodells (DY90, 100 mm×∅ 100 µm)
T
ξ
Großsignalanregung
Kleinsignalanregung
Abbildung 5.16: Steigung und Breite der Hysterese in Abhängigkeit von der Anregung
Verstärkung Ktransf zwischen Umwandlungsgrad und Temperaturänderung und nimmtmit der Anregeamplitude zu. Außerdem verschiebt sich die thermische Knickfrequenz zuniedrigeren Frequenzen [Stork, 1997], da sich mit zunehmender Anregeamplitude die Hy-steresebreite vergrößert. Bei höheren Anregefrequenzen nähert sich der Frequenzgang fürGroßsignalanregung dem Amplituden- und Phasengang für Kleinsignalanregung an, da diedurchlaufenen Hystereseschleifen kleiner werden. Zusammenfassend gilt, dass beim Über-gang von Klein- zu Großsignalanregung die Streckenverstärkung KS und die thermischeZeitkonstante τth der linearisierten Übertragungsfunktion ansteigen, während die mecha-nische Resonanzfrequenz ωmech konstant bleibt. Dieses Verhalten wird durch einen Korrek-turfaktor berücksichtigt. Die gemessenen Frequenzgänge lassen sich mit τth,GS = 4τth,KS
und Ktransf,GS = 4Ktransf,KS gut abbilden.

66 5 Modellierung des elektro-thermo-mechanischen Verhaltens
5.4.3 Thermische und mechanische Knickfrequenz
Im Allgemeinen sind bei einer Antriebsaufgabe der Stellweg und die Stellkraft vorgegeben.Bei Stellantrieben mit FG-Drähten ergibt sich dadurch die erforderliche Drahtlänge. DerDrahtdurchmesser hingegen kann durch Parallelschaltung mehrerer Drähte variiert wer-den. Im Weiteren wird der Einfluss des Drahtdurchmessers auf das Übertragungsverhaltenanalysiert. Die thermische Knickfrequenz
ωth =1
τth=
1
RthCth(5.34)
verhält sich invers proportional zum Produkt aus thermischem Übergangswiderstand Rth
und Wärmekapazität Cth. Der Widerstand ist invers proportional zur Drahtoberflächebzw. zum Durchmesser (Rth ∼ d−1), die Kapazität proportional zum Drahtvolumen(Cth ∼ d2). Somit gilt ωth ∼ d−1, d. h. die thermische Knickfrequenz nimmt bei dicke-ren Drähten ab. Für einen gewichtsbelasteten FG-Draht ohne Lastfeder und -dämpfer istdie mechanische Resonanz
ωmech =
√
cFGL
mLast. (5.35)
Die Zugsteifigkeit ist proportional zum Drahtquerschnitt, und es gilt cFGL ∼ d2. Das Last-gewicht ist für den hier betrachteten Fall (extrinsisches Zweiwegverhalten ohne Blockade)so ausgelegt, dass die mechanische Zugspannung σ = 4mg/ (πd2) innerhalb der zulässigenGrenzen liegt. Diese sind unabhängig vom Drahtdurchmesser, und in erster Näherungkann eine konstante Zugspannung für Drähte mit unterschiedlichem Durchmesser an-genommen werden. Unter dieser Voraussetzung gilt mLast ∼ d2. Bei einer zusätzlichenBelastung durch äußere Federn oder Dämpfer wird die Gewichtslast entsprechend verklei-nert, um die Zugbeanspruchung konstant – d. h. in den zulässigen Grenzen – zu halten.Daraus folgt, dass die mechanische Resonanz bei Drähten gleicher Länge, aber mit un-terschiedlichem Durchmesser, gleich ist. Die mechanische Resonanzfrequenz für 100 mmlange Drähte aus NiTi liegt knapp unter 20 Hz. Bei vierfacher Drahtlänge wird die Re-sonanzfrequenz halbiert (Gleichung 5.31 und 5.35). Mit zunehmendem Drahtdurchmesserreduziert sich die thermische Knickfrequenz. Dadurch wird der FG-Aktor „langsamer“,und der Abstand zwischen thermischer und mechanischer Knickfrequenz wächst. Die me-chanische Resonanz wird durch den Amplitudenrückgang um 20 dB/Dekade stärker ge-dämpft und weniger stark angeregt. Wird der Drahtdurchmesser mit dem Ziel reduziert,eine höhere Dynamik zu erreichen, tritt auch das mechanische Schwingverhalten stärkerin Erscheinung.
5.5 Zusammenfassung
In diesem Kapitel wurde ein erweitertes Modell zur Simulation des thermischen FGEvorgestellt. Ausgangspunkt ist die thermodynamische Energiebilanz zur Ermittlung derLegierungstemperatur. Die Temperaturhysterese wurde mittels analytischer Funktionenund alternativ mit etablierten Ansätzen aus anderen Domänen modelliert, die auf FGLübertragen wurden. Die Modellierung des nichtlinearen Widerstandsverhaltens berück-sichtigt alle relevanten Effekte und liefert Ansätze für den folgenden Regelungsentwurf.Insbesondere durch die Möglichkeit, das Zweiwegverhalten und den Blockadefall darstel-len zu können, geht dieses Modell über existierende Ansätze hinaus. Weiterhin bietetdas Modell die Möglichkeit, den Frequenzgang modellbasiert zu bestimmen. Insbesonderewurde die mechanische Resonanz in bisherigen Arbeiten kaum berücksichtigt.

67
6 Modellgestützter Regelungsentwurf
FGL zeigen in vielerlei Hinsicht ein nichtlineares Verhalten: Zum einen erfolgt die Pha-senumwandlung und damit die Stellbewegung nahezu schaltend innerhalb eines schmalenTemperaturintervalls, so dass eine hohe Empfindlichkeit vorliegt. Zum anderen treten ei-ne Temperaturhysterese, veränderliche Wärmeübergänge und Parametervariationen auf.Dies führt zu einem stark nichtlinearen Zusammenhang zwischen zugeführter Heizleistungund Stellbewegung, so dass eine reine Steuerung des offenen Kreises nicht möglich ist. Füreinen robusten Betrieb unter äußeren Störeinflüssen ist daher ein geschlossener Regelkreisdurch Rückführung der Regelgröße erforderlich. Für den geschlossenen Regelungsentwurfbei FG-Aktoren stehen jedoch kaum und nur eingeschränkt übertragbare Verfahren zurVerfügung. Im Folgenden werden modell- und wissensbasierte Methoden für den geschlos-senen Entwurf einer Positions- und einer Endlagenregelung vorgestellt.
6.1 Streckencharakteristik
Das Streckenmodell von FGL entspricht dem Blockschaltbild in Abbildung 5.2. Eine Re-gelung des Aktorhubs und des Legierungswiderstands bietet sich an. Die Rückführung derTemperatur ist wegen der Schwierigkeiten bei der Erfassung der Messgröße nur aufwän-dig durchführbar. Darüber hinaus kann wegen der Temperaturhysterese nicht direkt aufandere Zustandsvariablen geschlossen werden.
Zunächst wird die Arbeitspunktstabilität bei Spannungs- und Stromeinprägung im of-fenem Steuerkreis untersucht. Um einen stationären Arbeitspunkt gesteuert einstellenzu können, müssen die zugeführte und abgeführte Wärmemenge in der thermodynami-schen Energiebilanz im Gleichgewicht sein, um die Temperatur konstant zu halten. Einekonstant gehaltene Temperatur im Bereich der Phasentransformation führt zu einem Um-wandlungsgrad, zu dem ein bestimmter Arbeitspunkt gehört.
Ein FG-Aktor lässt sich sowohl mit Spannungs- als auch mit Stromeinprägung betrei-ben. Ein rein gesteuerter Betrieb eines FG-Aktors im Sinne einer spannungsgesteuertenPositionsvorgabe ist jedoch nicht möglich, was hier kurz erläutert werden soll. Nach An-legen einer Gleichspannung beginnt mit der einsetzenden Phasenumwandlung neben derStellbewegung eine Abnahme des Widerstands. Dadurch nimmt trotz konstanter Span-nung die Stromaufnahme im Arbeitspunkt zu, und die zugeführte Heizleistung steigt. Diesbewirkt eine weitere Erwärmung und Phasenumwandlung, so dass der Widerstand weitersinkt und noch mehr Strom fließt. Es kommt zu einer Mitkopplung, d. h. die Ursachewird durch die Wirkung verstärkt. Der mittels Gleichspannung eingestellte Arbeitspunktist deshalb instabil und muss geregelt werden. Anders verhält es sich bei Stromsteue-rung. Nach Anlegen einer genügend hohen Stromstärke setzt neben der Stellbewegungdie Phasenumwandlung ein. Der Widerstand nimmt ab, so dass sich der Spannungsab-fall und die Leistungszufuhr verringern. Dadurch sinkt die Temperatur, der Widerstandund der Spannungsabfall steigen wieder an. Die Einstellung eines stabilen Arbeitspunktesmittels Stromsteuerung ist möglich. Der stromgesteuert eingestellte Arbeitspunkt ist fürkleine Störungen von außen stabil. Allerdings hängt die Lage des Arbeitspunktes stark

68 6 Modellgestützter Regelungsentwurf
von den Randbedingungen wie Umgebungstemperatur, Luftströmung und Belastung ab.Kleine Änderungen der Umgebungstemperatur von 1 . . . 2 K können eine Verschiebung desArbeitspunktes von 100% verursachen [Kristen, 1993].
Das Stabilitätsverhalten bei Spannungs- und Stromeinprägung kann mit
dPel
dξ
∣∣∣∣∣u=konst.
> 0 ⇒ instabiler Arbeitspunkt (6.1a)
bzw.
dPel
dξ
∣∣∣∣∣i=konst.
< 0 ⇒ stabiler Arbeitspunkt (6.1b)
ausgedrückt werden. Nimmt die Heizleistung im Arbeitspunkt bei kleinen Änderungendes Martensitanteils infolge einer Störung des thermodynamischen Gleichgewichts zu,setzt sich die Phasenumwandlung wegen der zusätzlichen Erwärmung fort. Bei Span-nungssteuerung kommt es zu einer Selbstverstärkung, und der Arbeitspunkt ist instabil.Bei Stromsteuerung ist der Differentialquotient negativ, d. h. bei einer kleinen Störung desthermodynamischen Gleichgewichts kehrt der Aktor wieder in den Arbeitspunkt zurück.
Im Hinblick auf die Stabilisierbarkeit1 wird der Regelungsentwurf zum gezielten Beein-flussen des Systems für den stromgesteuerten Betrieb durchgeführt. Die Reglerausgangs-größe, die als Eingangsgröße der Strecke den Systemzustand beeinflussen soll, ist von derAusgangsgröße der Strecke abhängig. Da die Zustandsvariablen nicht zwingend erfassbarsind, müssen geeignete Ausgangsvariablen genutzt werden. Zusammenfassend müssen fol-gende Anforderungen und Randbedingungen für den Regelungsentwurf bei FG-Aktorenberücksichtigt werden:
• Die Ausgangsgröße (Aktorhub bzw. -kraft) ist nichtlinear zur Eingangsgröße (Span-nung bzw. Strom). Der Zusammenhang ist insbesondere hysteretisch. Arbeitspunktekönnen instabil bzw. stark abhängig von den Umgebungsbedingungen sein.
• Das Aktorverhalten ist von der anliegenden Belastung und der Umgebungstempe-ratur abhängig. Die Umwandlungstemperaturen sind lastabhängig, d. h. bei größe-rer mechanischer Belastung ist eine höhere Heizleistung erforderlich, um die gleicheFormänderung zu erzielen. Bei höherer Umgebungstemperatur heizt die FGL schnel-ler auf und kühlt langsamer ab.
• Mit dem Widerstand als Messgröße kann auf die Ausgangsgröße Dehnung geschlos-sen werden. Während sich im mittleren Arbeitsbereich Dehnung und Widerstandproportional verhalten, ist der Zusammenhang zwischen Mess- und Ausgangsgrößezu Beginn und zum Ende der Stellbewegung mehrdeutig und in Abhängigkeit vonder Belastung hysteretisch [Pons u. a., 1997].
• Die Zustandsgrößen Martensitanteil und -rate sind abhängig von der Temperatur.Alle drei Größen sind im Betrieb nicht oder nur mit großem Aufwand messbar.Aus diesem Grund werden geeignete Messgrößen benötigt, um Rückschlüsse auf dieRegelgröße ziehen zu können.
1Nach Reinisch [1996] ist ein System stabilisierbar, wenn es durch offene Steuerung bzw. Zustands- oderAusgangsrückführung stabil gemacht werden kann.

6.2 Systemspezifischer Entwurf einer Positionsregelung 69
6.2 Systemspezifischer Entwurf einer Positionsregelung
Im Folgenden wird eine Regelung zum Stellen und Halten einer Position innerhalb desArbeitsbereiches entworfen. Die Belastung soll innerhalb der zulässigen Grenzen liegen,so dass ein extrinsisches Zweiwegverhalten gewährleistet ist. Für die Regelung sollen sys-temspezifische Eigenschaften berücksichtigt und insbesondere der elektrische Widerstandals Messgröße genutzt werden. Der elektrische Widerstand ist über einen großen Bereichproportional zur Dehnung (Abbildung 4.7). Lediglich in den Randbereichen ist die Zuord-nung zwischen Widerstand und Dehnung nicht eindeutig. Somit kann ein Regelkreis wiein Abbildung 6.1 aufgebaut werden, mit dem die Position auf Basis der zurückgeführtenAktordehnung geregelt werden kann. Diese wird entweder direkt gemessen oder aus derWiderstandsbeziehung abgeleitetet. Für beide Fälle ist der Reglerentwurf identisch.
Sollwert Regler Steller FG-Draht
snom u si∆s
smeas
R-s-Umrechnung
-+
R
Schalter
Regeleinrichtung
Abbildung 6.1: Regelkreis zur Positionsregelung
6.2.1 Auswahl des Reglers
Für die Regelung eines FG-Positionierantriebs ist ein PI-Regler geeignet, der die schnelleKompensation des P-Reglers und die guten stationären Eigenschaften des I-Reglers ver-knüpft [Dörrscheidt und Latzel, 1993]. Durch den P-Anteil erreicht die Regelgröße schnellden Sollwert. Der I-Anteil sorgt für eine stationär genaue Regelung. Auf einen D-Anteilwird verzichtet, um die Empfindlichkeit gegenüber dem Rauschen der Messgrößen zu redu-zieren. Der Reglerentwurf erfolgt anhand des Streckenübertragungsverhaltens, das durchSystemidentifikation im Zeit- und Frequenzbereich ermittelt werden kann. Im Zeitbereichkönnen die Streckenparameter anhand der Sprungantwort ermittelt werden. Allerdings istdieses Verfahren im Fall von FGL ungenau und nicht immer anwendbar. Eine Sprungant-wort berücksichtigt nur das Heiz- oder Abkühlverhalten. Im Frequenzbereich wird derFrequenzgang der offenen Strecke verwendet. Da bei der Bestimmung des Frequenzgangsdurch die harmonische Anregung sowohl das Heiz- als auch das Abkühlverhalten berück-sichtigt wird, kann das Übertragungsverhalten der FGL genauer beschrieben werden.
Neben der direkt gemessenen Position kann der mit
s(R) =ds
dRR +Ks ≈
Rmax −RRmax −Rmin
smax (6.2)
über den Widerstand R abgeleitete Aktorhub als Rückführgröße für die Positionsregelunggenutzt werden (Abschnitt 2.3.3). Die Reglerstruktur bleibt unverändert. Allerdings müs-sen für eine widerstandsbasierte Regelung vorhandene Nichtlinearitäten berücksichtigtwerden (Abschnitt 4.2.2), so dass folgende Einschränkungen gelten:

70 6 Modellgestützter Regelungsentwurf
• Die Positionsregelung arbeitet in einem Dehnungsbereich zwischen 0,5% und 3,5%Dehnung. Das entspricht bei 4% reversibler Transformationsdehnung etwa 15% bzw.85% des Stellbereichs. Außerhalb dieses Arbeitsbereiches ist eine eindeutige Zuord-nung zwischen Widerstand und Dehnung nicht gegeben.
• Die mechanische Belastung sollte zwischen 125 MPa und 175 MPa liegen, um dieHysterese zwischen Widerstand und Dehnung möglichst gering zu halten.
6.2.2 Parameteridentifikation und Reglerparametrierung
Der entworfene Regler wird auf einem Digitalrechner realisiert. Nach Unbehauen [2007]kann der Regler als quasikontinuierlich angesehen werden, wenn
• die Abtastzeit Ts wesentlich kleiner als die dominierenden Zeitkonstanten des Sy-stems ist,
• die Auflösung der AD- und DA-Wandler so hoch ist, dass Quantifizierungseffektevernachlässigbar sind und die diskretisierten Werte als wertekontinuierlich angenom-men werden können, und
• die Berechnungsdauer des Regelalgorithmus im Vergleich zur Abtastdauer ausrei-chend klein ist.
Sind diese Bedingungen erfüllt, können für die Parametrierung unmittelbar die Entwurfs-verfahren für kontinuierliche Regler genutzt werden. Für die in dieser Arbeit vorgenom-menen Untersuchungen gelten diese Forderungen als erfüllt.
Das Streckenübertragungsverhalten von FGL wird überwiegend durch das thermischeVerhalten geprägt. Zusätzlich muss der Einfluss des mechanischen Verhaltens bei höherenFrequenzen berücksichtigt werden. Die Streckenübertragungsfunktion
GS(p) =Ls(t)Li(t) =
KS
(1 + T1p) (1 + 2DT2p+ T 22 p
2)(6.3)
setzt sich aus einem PT1- und PT2-Glied zusammen (Abschnitt 5.4). Abbildung 6.2 zeigtden dazugehörigen Frequenzgang mit den identifizierten Streckenparametern in Tabel-le 6.1. Die Nichtlinearität des Übertragungsverhaltens bei Großsignalanregung führt zueiner Zunahme der Streckenverstärkung KS und der dominierenden Zeitkonstante T1. DieGroßsignalübertragungsfunktion nähert sich bei hohen Frequenzen der Kleinsignalüber-tragungsfunktion an.
Tabelle 6.1: Strecken- und Reglerparameter (DY90, 100 mm×∅ 100 µm)
Parameter Symbol Kleinsignal Großsignal Einheit
Streckenverstärkung KS 12,4 51,2 mm/Atherm. Zeitkonstante T1 569 2.275 msmech. Zeitkonstante T2 8,9 8,9 msDämpfungsgrad D 0,061 0,061 —Stabilitätsgrenze VG 7,8 31,1 —Reglerverstärkung KR 30,4 . . . 60,8 30,4 . . . 60,8 A/mNachstellzeit TR T1 T1 ms

6.2 Systemspezifischer Entwurf einer Positionsregelung 71
−40
−20
0
20
40
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
(mm
/A)
ϕin
Frequenz f in Hz
KleinsignalGroßsignal
Abbildung 6.2: Frequenzgang der Regelstrecke (DY90, 100 mm×∅ 100 µm)
Der Steller kann aufgrund der geringen Streckendynamik als P-Glied angenommen wer-den. Die Übertragungsfunktion des PI-Reglers (mit Steller)
GR(p) =Li(t)L∆s(t) = KR
(
1 +1
TRp
)
= KR1 + TRp
TRp(6.4)
besitzt die beiden freien Parameter KR und TR, mit denen Schnelligkeit und Dämpfungdes geschlossenen Regelkreises vorgegeben werden können [Dörrscheidt und Latzel, 1993].In Kombination mit der Strecke ergibt sich die Übertragungsfunktion des offenen KreisesGO(p) = GR(p)GS(p). Die Parameter des Reglers werden nach dem Frequenzkennlinien-bzw. Bode-Verfahren bestimmt, dessen Grundlage das Nyquist-Kriterium ist. Das heißt,die Phasenreserve des offenen Kreises darf bei der Durchtrittsfrequenz2 ωd nicht zu kleinwerden. Für ein Betragsoptimum soll der Betrag des Frequenzgangs des geschlossenenRegelkreises für einen möglichst großen, bei Null beginnenden Frequenzbereich möglichstnahe bei Eins liegen, um eine schnelle und genaue Regelung zu erreichen [Lutz und Wendt,2000]. Das bedeutet, die Durchtrittsfrequenz muss möglichst groß sein. Im Sinne einerKompensationsregelung wird die Reglerzeitkonstante mit TR = T1 > T2 gewählt, so dassdie größte Streckenzeitkonstante kompensiert wird. Unter Berücksichtigung der Phasenre-serve wird über die Reglerverstärkung KR der Amplitudengang angehoben, wodurch sichdie Durchtrittsfrequenz vergrößert. Wegen des fallenden Phasengangs führt eine zu großeReglerverstärkung zu einer abnehmenden Phasenreserve und schließlich zu einer Instabi-lität des geschlossenen Regelkreises. Die Kreisverstärkung V = KRKS muss ausreichendunterhalb der Stabilitätsgrenze VG liegen, um ein genügend gedämpftes Verhalten zu si-chern. Von Föllinger [1994] wird der Wertebereich V = 0,05 . . . 0,1VG mit
VG = 2DT1
T2+ 4D2 + 2D
T2
T1≈ 2D
T1
T2(6.5)
für eine PT1T2-Strecke mit T1 ≫ T2 vorgeschlagen.
2Frequenz, bei der der Amplitudengang die 0-dB-Linie schneidet [Dörrscheidt und Latzel, 1993]

72 6 Modellgestützter Regelungsentwurf
Die Abhängigkeit der Streckenübertragungsfunktion von der Anregeamplitude muss beider Reglerparametrierung berücksichtigt werden. Wird die Reglerzeitkonstante für dasGroßsignalverhalten ausgelegt, werden betragsmäßig große Regeldifferenzen schnell undkleine Regeldifferenzen langsam ausgeregelt. Wenn die Reglerzeitkonstante der thermi-schen Zeitkonstanten bei Kleinsignalanregung entspricht, werden kleine Regeldifferenzenschnell ausgeglichen. Es kommt jedoch zu Überschwingen. Die Festlegung der Reglerzeit-konstante auf den Mittelwert der beiden thermischen Zeitkonstanten stellt einen gutenKompromiss dar. So wird das Überschwingen bei großen Regeldifferenzen reduziert unddie Dynamik bei kleinen Regeldifferenzen erhöht. In Abbildung 6.3 ist der Frequenzgangdes offenen Regelkreises GO(p) bei Klein- und Großsignalanregung dargestellt. In beidenFällen ist die Phasenreserve ausreichend groß und die Resonanzüberhöhung genügendgedämpft, so dass der geschlossene Regelkreis stabil ist.
−40
−20
0
20
40
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
ϕin
Frequenz f in Hz
KleinsignalGroßsignal
Abbildung 6.3: Frequenzgang des offenen Regelkreises (KR = 50 Am , TR = 1,5 s)
Abbildung 6.4 zeigt die Sprungantwort des geschlossenen Kreises. Die mechanischenSchwingungen klingen deutlich vor Erreichen des Sollwerts ab (siehe Detailausschnitt).Um eine höhere Stelldynamik zu erreichen, ist eine größere Reglerverstärkung erforder-lich. Der Amplitudengang des offenen Regelkreises in Abbildung 6.3 zeigt jedoch einestarke Überhöhung bei der mechanischen Resonanzfrequenz, die dem Phasendurchgangbei −180 entspricht. Damit die Stabilitätsbedingung erfüllt wird, muss die Amplitu-denverstärkung an dieser Stelle deutlich unterhalb von 0 dB liegen. Deshalb ist mit demoben beschriebenen PI-Regler eine Durchtrittsfrequenz in der Größenordnung der thermi-schen Zeitkonstante erreichbar. Um die Durchtrittsfrequenz für eine schnellere Dynamikzu erhöhen, ist ein Korrekturglied erforderlich, das die Amplitude bei der mechanischenResonanzfrequenz senkt. Das kann durch ein allgemeines rationales Glied zweiter Ordnung(AR2-Glied) mit der Übertragungsfunktion
GK(p) =1 + 2DZTZp+ T 2
Zp2
1 + 2DNTNp+ T 2Np
2(6.6)

6.2 Systemspezifischer Entwurf einer Positionsregelung 73
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Hubv
erla
ufs m
eas/s n
om
Zeit t in s
←− Detailausschnitt
(a) Sprungantwort
0 0.05 0.1 0.15 0.2 0.250
0.05
0.1
0.15
0.2
0.25
Hubv
erla
ufs m
eas/s n
om
Zeit t in s
(b) Detailausschnitt
Abbildung 6.4: Sprungantwort des geschlossenen Regelkreises
erreicht werden. Mit dem Zählerpolynom wird das Nennerpolynom des PT2-Glieds kom-pensiert (DZ = D und TZ = T2). Für das Nennerpolynom des AR2-Glieds kann diegleiche Zeitkonstante gewählt werden (TN = T2). Die Dämpfung DN wird so gewählt, dasseinerseits die Resonanzüberhöhung im Amplitudengang ausreichend reduziert wird (hoheDämpfung), andererseits die Phase bei niedrigen Frequenzen schnell genug ansteigt, umeine ausreichende Phasenreserve zu gewährleisten. In Abbildung 6.5 ist der Frequenzgangdes offenen korrigierten Kreises mit AR2-Glied abgebildet. Die Durchtrittsfrequenz kannum ein Vielfaches erhöht werden.
−40
−20
0
20
40
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
ϕin
Frequenz f in Hz
KleinsignalGroßsignal
Abbildung 6.5: Frequenzgang des offenen Regelkreises mit zusätzlichem AR2-Glied(KR = 250 A
m , DN = 10DZ)

74 6 Modellgestützter Regelungsentwurf
−40
−20
0
20
40
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
ϕin
Frequenz f in Hz
KleinsignalGroßsignal
(a) ohne AR2-Glied
−40
−20
0
20
40
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
ϕin
Frequenz f in Hz
KleinsignalGroßsignal
(b) mit AR2-Glied
Abbildung 6.6: Frequenzgang des geschlossenen Regelkreises

6.2 Systemspezifischer Entwurf einer Positionsregelung 75
Abbildung 6.6 zeigt die Bode-Diagramme der geschlossenen Regelkreise ohne und mitKorrekturglied. Es ist deutlich zu erkennen, dass sich mit dem Korrekturglied die Band-breite deutlich vergrößern lässt. Für die Regelung heißt das, dass die Regelgröße schnellerdie Führungsgröße erreicht.
6.2.3 Vorsteuerung und Stellbegrenzung
Wird der elektrische Widerstand als Rückführgröße genutzt, muss sichergestellt werden,dass der FG-Aktor zu Beginn der Regelung den geforderten Dehnungsbereich zwischen0,5% und 3,5% erreicht hat und in diesem betrieben wird. Das heißt, die Legierungstempe-ratur muss zwischen Mf und Af liegen. Das kann mit einem vorgesteuerten Grundstrom,der zusätzlich zur Stellgröße des Reglers auf die Strecke wirkt, erreicht werden. Die Ab-schätzung dieses Grundstroms kann mit Gleichung 2.30 erfolgen. Für einen 100 µm dickenund 100 mm langen Draht muss der Grundstrom ca. 150 mA betragen. Eine Variation desGrundstroms in Abhängigkeit von der Führungsgröße ist nicht erforderlich, da bereitsVariationen von einigen zehn Milli-Ampere deutliche Temperaturänderungen hervorru-fen. Weil die Abschätzung des Grundstroms bereits auf vereinfachenden Annahmen be-ruht und stark von Umgebungsbedingungen (Temperatur, Strömung,. . .) abhängig ist, diezu Ungenauigkeiten in derselben Größenordnung führen, reicht ein konstanter, statischerGrundstrom istat aus. Die Anpassung des Heizstroms erfolgt durch den Regler.
Mit zunehmender Zahl der Arbeitszyklen verschiebt sich der Hubbereich in Richtung deranliegenden Belastung. Wird dies beim Regeln der Position nicht berücksichtigt, kommt eszur Überhitzung der FGL, wenn die Führungsgröße den Stellbereich überschreitet. Über-hitzung beschleunigt die Alterung und reduziert die Leistungsfähigkeit des Aktors. Umdies zu vermeiden, ist eine Stellgrößenbegrenzung erforderlich. In der Praxis hat sich eineBegrenzung der Stellgröße auf den doppelten Wert des Heizstroms für die mittlere notwen-dige Heizleistung bewährt. Daraus ergibt sich sowohl bei positiver als auch bei negativerRegeldifferenz die gleiche maximale Stellgröße, und die Aktordynamik ist beim Heizenund Kühlen gleich. Wäre die Heizleistung nicht begrenzt, würde der Heizvorgang deut-lich schneller erfolgen als das Abkühlen. Durch Symmetrisierung des Stellbereichs wirddas Übertragungsverhalten des FG-Aktors richtungsunabhängig [Stork, 1997]. Wird dieReglerverstärkung so gewählt, dass bei maximaler Regeldifferenz die Stellgröße innerhalbder Stellbegrenzung liegt, kann ein Wind-Up-Effekt3 vermieden werden.
6.2.4 Implementierung
Für die Implementierung des Reglers auf einem Digitalrechner ist eine Diskretisierung derReglerübertragungsfunktion erforderlich. Unter Anwendung der approximierten z-Trans-formation kann für die Bildvariable der Laplacetransformation die Substitutionsbeziehung
p ≈ z − 1
Tsz=
1− z−1
Ts(6.7)
in GR(p) eingesetzt werden [Unbehauen, 2007]. Die Abtastzeit Ts muss klein sein, damitder Diskretisierungsfehler gering bleibt. Durch Ersetzen der Bildvariable s erhält man die
3Der I-Anteil nimmt auch bei Überschreiten der Stellgrößenbegrenzung zu. Der Regler nimmt einenWert oberhalb der möglichen Stellgröße ein und verursacht beim Rücklauf ungewollte Verzögerungen.

76 6 Modellgestützter Regelungsentwurf
z-Übertragungsfunktion
GR(z) =Y (z)
X(z)= KR
1 + TR1−z−1
Ts
1−z−1
Ts
=KR (Ts + TR)−KRTRz
−1
1− z−1(6.8)
des PI-Reglers. Mit x(0) = 0 und y(0) = 0 ergibt sich die Differenzengleichung
y(n) = y(n− 1) +KR (Ts + TR)x(n)−KRTRx(n− 1) . (6.9)
Um die Leistungsfähigkeit der entwickelten Regelung zu überprüfen, wird die Positionnach einer stufenförmigen Sollwertvorgabe geregelt. Die Regelergebnisse mit widerstands-basierter und sensorbasierter Rückführgröße unter Verwendung des gleichen PI-Reglers(KR = 50 A/m, TR = 1,5 s, istat = 150 mA) sind in Abbildung 6.7 dargestellt. Der Regel-kreis ist stabil, stationär genau, hinreichend gedämpft und genügend schnell und erfüllt
0 20 40 600.5
1
1.5
2
2.5
3
3.5
Hubs
inm
m
Zeit t in s
smeassnom
(a) Widerstandsbasierte Regelung
0 20 40 600.5
1
1.5
2
2.5
3
3.5
Hubs
inm
m
Zeit t in s
smeassnom
(b) Sensorbasierte Regelung
0 1 2 3 410
10.5
11
11.5
12
12.5
13
13.5
Hub s in mm
Wid
erst
andR
inΩ
MessungNäherung
(c) Widerstands-Hub-Relation
0 20 40 60−0.5
0
0.5
Zeit t in s
Reg
elfe
hle
r∆s
inm
m
widerstandsbasiertsensorbasiert
(d) Vergleich des Regelfehlers
Abbildung 6.7: Ergebnis der Positionsregelung (DY90, 100 mm×∅ 100 µm, 150 g)

6.3 Endlagenregelung 77
damit alle Anforderungen an eine Regelung [Föllinger, 1994]. Das Regelergebnis der sen-sorbasierten Regelung ist besser als bei der widerstandsbasierten Regelung. Die für diewiderstandsbasierte Regelung zugrunde gelegte Widerstands-Hub-Relation
s(R) = −1,28mm
ΩR + 17,1 mm (6.10)
wurde experimentell ermittelt, ist jedoch streng genommen nur für den quasistatischenBetrieb gültig. Deshalb kommt es beim schnellen Regeln zum Überschwingen. Da sich dieBeziehung zwischen Hub und Widerstand über mehrere Zyklen ändert (Parameterände-rungen bis in den zweistelligen Prozentbereich), kommt es zu einer bleibenden Regelab-weichung. Deshalb ist für eine genaue Positionierung ein Wegsensor vorzuziehen.
0 20 40 600.5
1
1.5
2
2.5
3
3.5
Hubs
inm
m
Zeit t in s
smeassnom
(a) ohne AR2-Glied (KR = 150 A/m)
0 20 40 600.5
1
1.5
2
2.5
3
3.5
Hubs
inm
m
Zeit t in s
smeassnom
(b) mit AR2-Glied (KR = 250 A/m)
Abbildung 6.8: Erhöhung der Dynamik durch Stabilisierung der Positionsregelung
Abbildung 6.8 zeigt die Ergebnisse einer sensorbasierten Positionsregelung mit größe-rer Reglerverstärkung. Ziel ist die Erhöhung der Dynamik des geregelten Kreises. Durchdie konservative Auslegung der Reglerverstärkung (KRKS = 0,05 . . . 0,1VG), die zu einermehr als ausreichenden Dämpfung des Regelkreises führt, bleibt dafür Spielraum. Bei ei-ner zu hohen Reglerverstärkung wird der Regelkreis jedoch instabil, d. h. die mechanischeResonanz wird angefacht. Durch das AR2-Glied (Gleichung 6.6) kann der Kreis für hoheVerstärkungen stabilisiert werden, so dass eine deutliche Zunahme der Stelldynamik (Re-duzierung der Einregelzeit um den Faktor vier) bei zu vernachlässigendem Überschwingenmöglich ist und eine nahezu sprungartige Änderung der Position erreicht wird.
6.3 Endlagenregelung
Die Stellbewegung eines FG-Aktors während eines gesteuerten Heiz- und Kühlzyklus weistvor der Hub- und Rückstellbewegung eine Anzugsverzögerung bzw. Abfallverzögerungauf. Diese resultieren aus der benötigten Zeit für das Heizen bzw. Abkühlen der Legie-rungstemperatur auf die jeweiligen Startumwandlungstemperaturen. Durch eine Regelungder Heizleistung zum Halten der jeweiligen Startumwandlungstemperatur können dieseVerzögerungen reduziert werden. Eine Regelung der Heizleistung kann insbesondere ei-ne Überhitzung der Legierung beim dauerhaften Halten der Endlage vermeiden, und die

78 6 Modellgestützter Regelungsentwurf
Heizleistung kann ausreichend hoch gewählt werden, um auch bei niedriger Umgebungs-temperatur die Endlage sicher zu erreichen. Das kann mit einer elektrischen Endlagen-schaltung erzielt werden (Abschnitt 7.1.1). Allerdings stellen die benötigten elektrischenKontakte potentielle Fehlerstellen (z. B. unsicheres Schließen durch Verschmutzung bzw.Verschleiß durch Funkenschlag) dar. Im Folgenden wird die Entwicklung eines neuartigenAnsatzes für eine Endlagenregelung auf Basis inhärenter Eigenschaften vorgestellt4.
6.3.1 Regelalgorithmus
Die widerstandsbasierte Endlagenregelung nutzt das inverse Widerstandsverhalten zu Be-ginn und am Ende der Phasenumwandlung (Abbildung 6.9a), um die jeweilige Endlagezu ermitteln und zu halten. Vor Beginn der Phasenumwandlung steigt zunächst der Wi-derstand an. Sobald die Phasenumwandlung einsetzt, reduziert sich der Widerstandswert.Dabei wird ein Maximum durchlaufen und die FGL beginnt, sich zurück zu verformen.Bei abgeschlossener Phasenumwandlung und vollständiger Rückverformung erreicht derWiderstand einen Minimalwert und steigt danach mit zunehmender Temperatur wiederan. Maximaler und minimaler Widerstandswert stimmen mit der Ruhe- bzw. Endpositi-on überein. Wird die Heizleistung nach vollständiger Phasenumwandlung nicht geregelt,überhitzt der Draht. Kühlt die FGL wieder ab, sinkt zunächst der Widerstand auf seinMinimum und steigt bei einsetzender Rückumwandlung erneut an. Bei der Widerstands-änderung um das Minimum treten vier Fälle auf, aus denen sich Regeln für das Schaltender Heizleistung ableiten lassen (Abbildung 6.9b, Tabelle 6.2). Aufgrund der dem Austenitkristallographisch ähnlichen R-Phase reduziert sich die Hysteresebreite in der Nähe derEndlage auf ca. 2 K. Die Dehnung bei der R-Phasenumwandlung beträgt deutlich wenigerals 1% [Stachowiak und McCormick, 1988; Saburi, 1998].
t
R
Rmin
s
Rmax
R, s
Endlage
(a) Widerstandsverlauf
T
R
RRT
R-Phase
12
3
4
Kuhlen¨Heizen
(b) Heiz- und Abkühlverhalten
Abbildung 6.9: Widerstandsbasierte Endlagenregelung
Für die Endlagenregelung wird die zeitliche Änderung des Widerstandswerts in Ab-hängigkeit vom Heizzustand benutzt. Zunächst wird überprüft, ob der Widerstand einenkritischen Wert unterschritten hat (Rmin < Rkrit < RRT). Damit ist sichergestellt, dass der
4siehe auch [Schiedeck und Mojrzisch, 2008]

6.3 Endlagenregelung 79
Tabelle 6.2: Widerstandsbasierte Endlagenregelung
Fall Heizleistung Temperatur Widerstand Vorgehen
① eingeschaltet steigt sinkt weiter heizen② eingeschaltet steigt steigt nicht heizen③ ausgeschaltet sinkt sinkt nicht heizen④ ausgeschaltet sinkt steigt weiter heizen
Maximalwert des Widerstands überschritten und auf den Minimalwert – d. h. das Ende dermartensitischen Umwandlung – geregelt wird. Solange der Widerstand sinkt, wird weitergeheizt ①. Beginnt der Widerstand zu steigen, muss die Heizleistung abgeschaltet werden②. Bei abgeschalteter Heizleistung sinken die Temperatur und der Widerstandswert biszum Einsetzen der Rückumwandlung ③. Sobald die Rückumwandlung bei weiter sinken-der Temperatur einsetzt, steigt der Widerstandswert wieder an ④ und es muss wiedergeheizt werden, um die Endlage zu halten.
0 0.5 1 1.5 20
50
100
150
200
250
300
Tem
per
aturT
inC
Zeit t in s
mit Endlagenregelung
ohne Endlagenregelung
Abbildung 6.10: Reduzierung der Endlagen-temperatur (DY90, 100 mm×∅ 100 µm))
Wird die Heizleistung nach dem be-schriebenen Verfahren geschaltet, stelltsich die Endlagentemperatur auf die Aus-tenit-Endtemperatur ein. Es tritt keinÜberhitzen ein, und die Heizleistung zumHalten der Endlagenposition wird mini-miert. Abbildung 6.10 zeigt die Tempera-turverläufe beim Heizen eines FG-Drahtesmit und ohne Endlagenregelung. DiesesVerfahren ist robust gegenüber Schwan-kungen des minimalen und maximalenWiderstandswerts, da anstelle des Ab-solutwerts die relative Widerstandsände-rung als Regelgröße genutzt wird.
Zur Implementierung der Endlagenre-gelung wird die Widerstandsänderung
dR(t)
dt≈ R(t)−R(t− h)
h(6.11)
für genügend kleine Zeitschritte h mit einer Differenzengleichung angenähert. Für einequalitative Aussage über die Widerstandsänderung reicht ein Vergleich des aktuellen Wi-derstandswerts Ri := R(t) mit seinem Vorgängerwert Ri−1 := R(t− h) aus. Die Heiz-spannung bleibt eingeschaltet, bis der Widerstand einen kritischen Wert Rkrit unterschrei-tet, und wird im nächsten Schritt immer dann eingeschaltet, wenn bei eingeschalteterHeizleistung (ui = 1) der Widerstand sinkt (Ri < Ri−1) oder wenn bei ausgeschalteterHeizleistung (ui = 0) der Widerstand steigt (Ri > Ri−1). Andernfalls wird nicht geheizt.Der entsprechende Regelalgorithmus lautet:
ui+1 =
1 Ri > Rkrit
1 Ri < Rkrit ∧ [(Ri < Ri−1 ∧ ui) ∨ (Ri > Ri−1 ∧ ¬ui)]
0 sonst
mit u ∈ 0, 1
(6.12)

80 6 Modellgestützter Regelungsentwurf
6.3.2 Ansteuerung und Signalerfassung
Zur Ansteuerung und Regelung wurde die in Abbildung 6.11a gezeigte Schaltung ent-wickelt. Die Heizleistung kann mit einem elektrischen Schalter (MOSFET) durch einTTL-Signal geschaltet werden. Bei geschlossenem Schalter fließt ein Heizstrom iFGL = iheat
durch den FG-Draht und heizt diesen. Um während des Betriebs den Widerstand zu er-mitteln, wird eine Konstantstromquelle parallel zum Schalter M1 eingesetzt. Bei offenemSchalter fließt ein Messstrom imeas ≪ iheat durch den Draht. Der Spannungsabfall uFGL
ist dann proportional zum Widerstandswert RFGL = uFGL/imeas, da imeas konstant ist.Die Stromquelle besteht aus der Schaltung in Abbildung 6.11b und ist aus einem Bipo-lartransistor (T1) und zwei Dioden (D1, D2) aufgebaut [Tietze und Schenk, 2002]. DerMessstrom muss so gering sein, dass die Heizleistung vernachlässigt werden kann, undso groß, dass eine ausreichend hohe Spannung für die Widerstandsermittlung abfällt. AlsRichtwert können 10 . . . 20 mA angesetzt werden. Für einen hohen Verstärkungsfaktor desTransistors ist iC ≫ iB, und es gilt
imeas = iC ≈ iE =uD + uBE
R1=
0,7 V
R1. (6.13)
RFGL
M1
imeas
iFGL
R2 R1
CTRL
RES
uFGL
VDD
OPV
iheat
(a) Mess- und Steuerschaltung
T1
iC = imeas
R1
R2
D2
D1
iB
uBE
uD
iD — iB
iEiD
(b) Konstantstromquelle
Abbildung 6.11: Schaltung zur Steuerung und Widerstandsbestimmung
Idealerweise wird die Heizleistung so ausgelegt, dass sich beim An- und Abschalten derHeizspannung am Anschluss VDD ein symmetrisches Heiz- bzw. Kühlverhalten ergibt. Dasheißt, die zum Erwärmen auf T + ∆T benötigte Zeit entspricht der Zeit zum Abkühlenauf T − ∆T bzw. die zeitliche Temperaturrate ist beim Heizen und Kühlen gleich. Diesist der Fall, wenn die stationäre Endtemperatur T∞ um den gleichen Betrag oberhalb dererforderlichen Endlagentemperatur Af liegt wie die Umgebungstemperatur TU unterhalbvon Af . Es gilt T∞ −Af ≈ Af − TU. Dafür muss die zugeführte Heizleistung etwa doppeltso groß sein, wie zum Halten der Endlagentemperatur Af erforderlich ist. Die benötigteBetriebsspannung wird über den nach Gleichung 2.30 berechneten Heizstrom und denelektrischen Widerstand ermittelt.

6.3 Endlagenregelung 81
Die Schrittweite h der Abtastregelung darf nicht zu groß gewählt werden, um zu großeTemperaturänderungen zwischen zwei Abtastungen zu verhindern und gute Regelergeb-nisse zu erreichen. Bei zu kleiner Schrittweite jedoch verliert sich die Widerstandsänderungim Rauschen bzw. kann nicht aufgelöst werden. Im Folgenden wird die korrekte Schritt-weite abgeschätzt. Die zeitliche Temperaturänderung
T =
−T−TU
τth
+ Pel
Cth
heizen
−T−TU
τth
kühlen(6.14)
wird durch die thermische Zeitkonstante beschrieben und kann für Zeiträume bis 0,1τth
als linear angenommen werden (Abbildung 6.12a). Bei symmetrischen Heiz- und Abkühl-verhalten ist die Temperaturänderung in beiden Fällen gleich, und es gilt T ≈ ∆T/h fürkleine h. Die Widerstandsänderung in der Endlage infolge der Temperaturänderung
∆R(∆T ) = ellDAD
αel ∆T ≈ −ellDAD
αel (Af − TU)h
τth(6.15)
muss über dem Rauschpegel und der Messauflösung liegen (Abbildung 6.12b).
0 0.5 1 1.5 240
60
80
100
120
140
160
Tem
per
aturT
inC
Zeit t in s
exponentiallinear
Heizen
Kühlen
(a) Temperaturänderung (τth = 1,88 s)
0 0.05 0.10
0.005
0.01
0.015
0.02
Wid
erst
andsä
nder
ung
∆R
inΩ
Schrittweite h in s
(b) Widerstandsänderung
Abbildung 6.12: Widerstandsänderung in Abhängigkeit von der Temperaturänderungbei linearem Ansatz (SM495, 100 mm×∅ 200 µm)
Um das Messrauschen zu reduzieren, wird das Messsignal während eines Schrittes mehr-fach abgetastet (Abbildung 6.13). Durch den Vergleich der Summe der ersten Hälfte derzwischenabgetasteten Werte mit der Summe der zweiten Hälfte kann das Vorzeichen derSteigung ermittelt werden:
sgn
(
dR(t)
dt
)
=
+15∑
j=1Rj <
10∑
j=6Rj
−15∑
j=1Rj >
10∑
j=6Rj
(6.16)

82 6 Modellgestützter Regelungsentwurf
titi-1
1
5 6
10
h
t
R
Abbildung 6.13: Zwischenabtastung zur Filterung des Messsignals
6.3.3 Einfluss auf die Alterung
Um den Einfluss auf das Alterungsverhalten durch Vermeidung von Überhitzung mittelseiner Endlagenregelung zu zeigen, wurden Dauerversuche an zwei gleich belasteten FG-Drähten mit gleicher Betriebsspannung durchgeführt, von denen einer geregelt und derandere ungeregelt betrieben wurde.
0 2 4 6−1
0
1
2
3
4
5
Hubs
inm
m
Zeit t in s
10 Zyklen
100 Zyklen
1.000 Zyklen
10.000 Zyklen
30.000 Zyklen
(a) ohne Endlagenregelung (DY90)
0 2 4 6−1
0
1
2
3
4
5
Hubs
inm
m
Zeit t in s
10 Zyklen
50.000 Zyklen
(b) mit Endlagenregelung (DY90)
0 2 4 6 8 10 12−4
−2
0
2
4
6
Hubs
inm
m
Zeit t in s
10 Zyklen
1.000 Zyklen
10.000 Zyklen
100 Zyklen
(c) ohne Endlagenregelung (SM495)
0 2 4 6 8 10 12−4
−2
0
2
4
6
Hubs
inm
m
Zeit t in s
10 Zyklen
100.000 Zyklen
(d) mit Endlagenregelung (SM495)
Abbildung 6.14: Auswirkung der Endlagenregelung auf das Alterungsverhalten

6.4 Zusammenfassung 83
In Abbildung 6.14 sind die Auswirkungen der Endlagenregelung auf das Alterungsver-halten zu erkennen. Durch den Einsatz der Endlagenregelung reduziert sich insbesonderedie mit den Zyklen zunehmende statische Auslenkung im Vergleich zum ungeregelten FG-Draht. Das dynamische Verhalten verbessert sich, weil durch den begrenzten Temperatur-anstieg die FGL schneller abkühlt. Darüber hinaus können mit Endlagenregelung deutlichmehr Arbeitszyklen gefahren werden. Während es bei den ungeregelten FG-Drähten zuAusfällen kommt, arbeiten die geregelten FG-Drähte sicher bis zum Abbruch des Versuchs.Tabelle 6.3 enthält die Parameter der Alterungsuntersuchung.
Tabelle 6.3: Parameter der Alterungsuntersuchung
Parameter Symbol DY90 SM495 Einheit
Zyklusdauer Tcycle 6 12 sEinschaltdauer Ton 2 4 sDrahtlänge l 100 100 mmDrahtdurchmesser d 100 200 µmZugbelastung m 140 500 gBetriebsspannung UB 3,2 2,3 V
6.4 Zusammenfassung
Beim Entwurf einer Regelung für Aktoren mit FGL müssen verschiedene Aspekte außer-halb der linearen Regelungstheorie berücksichtigt werden. Die Strecke ist durch Instabi-litäten bei einer offenen Steuerung und durch eine hohe Empfindlichkeit gekennzeichnet.Allerdings bieten sich Möglichkeiten für eine „sensorlose“ Regelung. Diese wird wie einesensorbasierte Positionsregelung als Kompensationsregelung unter Berücksichtigung dermechanischen Resonanz ausgelegt. Dazu wird der Widerstandswert zur Positionsregelunggenutzt. Durch die Qualität der Regelergebnisse und die Notwendigkeit einer regelmäßigenInitialisierung ist diese Art der Regelung kaum praktizierbar, aber u. U. als Beobachter-funktion nutzbar. Die Anwendbarkeit der linearisierten Streckenübertragungsfunktionenkonnte beim Entwurf und bei der Parametrierung einer sensorbasierten Positionsrege-lung aufgezeigt werden. Durch Anwendung klassischer Entwurfsverfahren ist eine sehrschnelle und genaue Regelung von FG-Aktoren möglich. Äußerst vielversprechend ist diewiderstandsbasierte Endlagenregelung. Mit einer kostengünstigen Schaltung und einemressourceneffektiven Regelalgorithmus kann ein Überhitzen bei vollständiger Phasenum-wandlung vermieden und dadurch das Alterungsverhalten deutlich verbessert werden.

84
7 Dynamisch betriebenerFormgedächtnisantrieb
Die Erkenntnisse aus der Analyse des Stands der Technik sowie der Modellierung undRegelung von FGL sollen in einem Technologiedemonstrator umgesetzt werden. Dazuwird ein Aktor mit FG-Drähten entwickelt, der hinsichtlich antriebstechnischer Kennda-ten und Robustheit im Aufbau mit derzeitigen kommerziellen Systemen vergleichbar ist.Zunächst wird die Charakteristik von FGL als Aktoren dargestellt. Anschließend erfolgteine verlässlichkeitsorientierte Technologiebewertung anhand existierender Aktoren, derenErgebnisse in die Entwicklung einfließen. Anhand eines Prototyps soll die Applizierbarkeitvon FGL als Aktoren unter den Gesichtspunkten Modularität im Aufbau und Standar-disierung im Einsatz demonstriert werden. Weiterhin werden die zuvor beschriebenenVerfahren zur Modellierung und zum Regelungsentwurf angewendet und validiert.
7.1 Formgedächtnislegierungen als Aktoren
Um FGL als Aktoren in das Gebiet der Antriebstechnik einordnen zu können, werden inTabelle 7.1 in Anlehnung an Kallenbach und Bögelsack [1991] verschiedene Aktorprinzi-pien hinsichtlich ihres Energiewandlungsprinzips strukturiert. Dabei sollen nur Aktorenberücksichtigt werden, die elektrisch angesteuert werden können. Selbstaktive Aktoren wiePermanentmagnete sind für einen geregelten Betrieb nur bedingt einsetzbar. Fluidische1
Aktoren benötigen für den Betrieb ein zusätzliches (Fluid-)Medium und werden deshalbebenfalls nicht berücksichtigt.
7.1.1 Applikationsbeispiel
Ein mögliches Einsatzgebiet für FG-Aktoren ist ein Entriegelungsmechanismus für eineaktorische Tankklappe, die nicht mechanisch durch ein vom Fahrer manuell zu betäti-gendes Bowdenzugsystem, sondern durch einen elektrischen Stellantrieb entriegelt wird.Damit kann die Schließfunktion über die Zentralverriegelung gesteuert werden. Derzeiti-ge Stellantriebe, bestehend aus vielen Bauteilen und zusätzlichen Mechanismen, könnendurch einen einfach aufgebauten FG-Antrieb ersetzt werden [Lange, 2008]. Ein weite-res Einsatzbeispiel ist das Entriegeln der Einrastung zum vollständigen Vorklappen derRückenlehne eines Kfz-Sitzes [Nathan und Maue, 2007].
Die Leistungsfähigkeit und Eignung von FGL für Entriegelungsaufgaben kann an demVersuchsaufbau in Abbildung 7.1 aufgezeigt werden. Der drehbar gelagerte und federndvorgespannte Sperrriegel der Tankklappe ist mit einem FG-Draht verbunden. Durch Be-stromen verkürzt sich der Drahtaktor und entriegelt die Tankklappe. Der Draht wirdüber eine Umlenkrolle gelenkt, um den Bauraum zu reduzieren. Abbildung 7.2a zeigt dieKraftkennlinie der Rückstellfeder. Die Dimensionierung erfolgt nach den Vorschriften in
1hydraulisch und pneumatisch

7.1 Formgedächtnislegierungen als Aktoren 85
Tab
ell
e7
.1:
Ein
teilung
der
Akt
orpri
nzi
pie
n
Bez
eich
nung
Ener
giet
räge
rK
raft
erze
ugu
ng
Bei
spie
l
elek
trom
agnet
isch
erA
ktor
Wel→
Wm
ag→
Wm
ech
mag
net
isch
esFel
dR
elukt
anzk
raft
anm
agnet
isch
enG
renz-
fläc
hen
Ele
ktro
mag
net
,R
elukt
anzs
chri
ttm
o-to
r
Mag
net
feld
üb
erla
geru
ng
Wec
hse
lpol
schri
ttm
otor
,E
C-M
otor
,Syn
chro
nm
otor
Ausr
icht
ung
mag
net
isch
erD
omän
enM
agnet
ostr
ikti
on
mag
net
isch
induzi
erte
Phas
enum
wan
d-
lung
mag
net
isch
eFor
mge
däc
htnis
legi
erung
elek
trod
ynam
isch
erA
ktor
Wel∪W
mag→
Wm
ech
mag
net
isch
esFel
dL
oren
tzkr
aft
auf
bew
egte
Lad
ung
Tau
chsp
ule
nan
trie
b(V
oice
Coi
l),
Asy
nch
ronm
otor
elek
tros
tati
scher
Akt
orW
el→
Wm
ech
elek
tris
ches
Fel
ddie
lekt
risc
he
Ver
schie
bung
Pla
tten
konden
sato
r,die
lekt
risc
he
Po-
lym
ere
Ionen
diff
usi
onio
nis
che
Pol
ymer
e
Def
orm
atio
nei
nes
Die
lekt
riku
ms
Ele
ktro
stri
ktio
n
Dip
olbildung
inve
rser
Pie
zoeff
ekt
(ele
ktro
-)th
erm
isch
erA
ktor
Tem
per
atur
ther
mis
chin
duzi
erte
Phas
enum
wan
dlu
ng
For
mge
däc
htnis
legi
erung
( Wel→
)W
th→
Wm
ech
Wär
mea
usd
ehnu
ng
Bim
etal
l
elek
troc
hem
isch
erA
ktor
Wel→
Wch
em→
Wm
ech
elek
tris
ches
Fel
dch
emis
chin
duzi
erte
Vol
um
enän
der
ung
Pol
ymer
gel

86 7 Dynamisch betriebener Formgedächtnisantrieb
Abbildung 7.1: Tankklappenentriegelung
Abschnitt 2.4.3. Um die benötigten 10 . . . 20 N Kraft bei ca. 8 mm Stellweg zu erzeugen,wird ein 500 µm dicker und 250 mm langer Draht aus DY90 eingesetzt. Abbildung 7.2bzeigt die gemessene und simulierte Pulsantwort beim Entriegeln der Tankklappe. Die Si-mulation basiert auf dem in Kapitel 5 beschriebenen Modell unter Berücksichtigung derermittelten Federkennlinie.
Der Draht wird mit ca. 3 A bei 5 V betrieben. Mit dieser Heizleistung wird die Tankklap-pe in weniger als 1,5 s geöffnet. Der FG-Draht würde jedoch im Dauerbetrieb überhitzen.Um das zu vermeiden, muss die Heizleistung rechtzeitig abgeschaltet werden. Das Abschal-ten kann zeitbasiert wie in Abbildung 7.2b oder zustandsabhängig mit einer Endlagen-schaltung oder Endlagenregelung erfolgen. Bei einer zeitbasierten Stromabschaltung wirdder Abschaltzeitpunkt experimentell oder mit Gleichung 2.31 bestimmt. Dieses Verfahrenarbeitet sicher, solange sich die Anfangs- und Randbedingungen nicht ändern. Wird derFG-Draht erneut bestromt, bevor die Legierung nach einem vorangegangenen Arbeitszy-klus vollständig abgekühlt ist, oder hat sich die Umgebungstemperatur erhöht, kann es zueiner Überhitzung kommen. Bei sehr niedrigen Umgebungstemperaturen kann die Heiz-dauer unter Umständen zu kurz sein, um die Legierung ausreichend zu erhitzen. Anstelleeiner festen Einschaltdauer ist deshalb für einen sicheren Betrieb eine zustandsabhängigeHeizleistungsabschaltung erforderlich, bei der die Stromzufuhr unterbrochen wird, sobalddie Tankklappe geöffnet hat. Dadurch wird gewährleistet, dass die Entriegelung auch beiveränderlicher Umgebungstemperatur sicher arbeitet.
Abbildung 7.3 zeigt eine Endlagenschaltung zur Unterbrechung der Stromzufuhr beigeöffneter Tankklappe. Sobald der Taster T1 betätigt wird, werden der FG-Draht und dasRelais bestromt. Dabei schließt das Relais den Schalter S1 und hält diesen geschlossen, so

7.1 Formgedächtnislegierungen als Aktoren 87
0 2 4 6 810
12
14
16
18
20
Kra
ftF
cin
N
Hub s in mm
(a) Schließfederkennlinie
0 2 4 6 8 100
2
4
6
8
10
Hubs
inm
m
Zeit t in s
Strom i in A
MessungSimulation
(b) Pulsantwort
Abbildung 7.2: Betriebsverhalten des Entriegelungssystems
F2
Relais
S1 FGLT1
T2
FG-Draht
Tankklappe
F1
Abbildung 7.3: Endlagenschaltung
dass auch nach dem Loslassen des Tasters T1 weiter Strom fließt. Der sich verkürzendeDraht öffnet den Sperrriegel gegen die Feder F1. Die Tankklappe wird entriegelt und durchdie Vorspannfeder F2 geöffnet. Dabei öffnet die Tankklappe den Taster T2 und unterbrichtden Stromfluss. Der Draht kühlt ab, und die Tankklappe wird beim manuellen Schließenwieder verriegelt.
Eine Endlagenregelung nach dem in Abschnitt 6.3 beschriebenen Verfahren stellt si-cher, dass der FG-Draht bis zur abgeschlossenen Phasenumwandlung bestromt wird undohne zu überhitzen vollständig kontrahiert bleibt. Dadurch wird ein sicheres Entriegelnder Tankklappe gewährleistet, und auf die für eine Endlagenschaltung benötigten Tasterund Relais kann verzichtet werden. Bei der Endlagenregelung wird die Heizleistung aufBasis der Widerstandsänderung geregelt. Abbildung 7.4 zeigt das Betriebsverhalten desbestromten FG-Drahtes ohne und mit Endlagenregelung. Ohne Endlagenregelung wür-de die Legierung stark überhitzen2. Mit der widerstandsbasierten Endlagenregelung wirddas Ende der Phasenumwandlung sicher detektiert, so dass ein Entriegeln der Tankklappeohne Überhitzen gewährleistet ist.
2Bei der Messung wurde die Stromzufuhr unterbrochen.

88 7 Dynamisch betriebener Formgedächtnisantrieb
0 5 10 150
1
2
3
4
Str
omi
inA
Zeit t in s0 5 10 15
0
1
2
3
4
Str
omi
inA
Zeit t in s
(a) Heizstrom
0 5 10 151
1.2
1.4
1.6
1.8
2
Wid
erst
andR
inΩ
Zeit t in s0 5 10 15
1
1.2
1.4
1.6
1.8
2
Wid
erst
andR
inΩ
Zeit t in s
(b) Widerstand
0 5 10 1520
40
60
80
100
120
140
160
Tem
per
aturT
inC
Zeit t in s0 5 10 15
20
40
60
80
100
120
140
160
Tem
per
aturT
inC
Zeit t in s
(c) Temperatur
Abbildung 7.4: Betriebsverhalten ohne (links) und mit (rechts) Endlagenregelung

7.1 Formgedächtnislegierungen als Aktoren 89
7.1.2 Dynamisches Verhalten
Im Weiteren wird auf die spezifischen Eigenschaften eines FG-Aktors im dynamischen Be-trieb eingegangen [Schiedeck und Wallaschek, 2007]. Die Beschreibung des dynamischenVerhaltens erfolgt in Anlehnung an das dynamische Kennlinienfeld von Gleichstromma-gneten [Kallenbach u. a., 2003]. Abbildung 7.5 zeigt den Temperatur- und Hubverlaufwährend eines Schaltzyklus. Der Hubvorgang korreliert mit dem Grad der Phasenum-wandlung, der von der relativen Lage der Legierungstemperatur bzgl. der Umwandlungs-temperaturen abhängt. Deshalb ist die Hubgeschwindigkeit nicht von der Belastung, son-dern vom Temperaturverlauf abhängig. Die Zykluszeit t7 = t1 + t2 ist die Summe ausHub- und Abfallzeit und wird bei Einsatz in Raumtemperatur von Letzterer dominiert.Dabei tritt ein Anzugs- bzw. Abfallverzug auf. Diese Verzögerungen werden für die Er-wärmung bzw. Abkühlung auf die jeweilige Startumwandlungstemperatur benötigt, da fürein sicheres gesteuertes Betriebsverhalten die Umgebungstemperatur und stationäre End-temperatur ausreichend unterhalb bzw. oberhalb der Umwandlungstemperaturen liegenmüssen. Eine kurze Zyklusdauer bzw. schnelle Aktordynamik kann mit einer möglichsthohen Erwärmungs- und Abkühlrate erreicht werden [Nam u. a., 2007]. Die Erwärmungs-rate kann durch steigende Heizleistungszufuhr verbessert werden, das Abkühlen erfolgtdagegen meist passiv. Die Abkühlrate ist durch die Umgebungsbedingungen festgelegt undnimmt mit abnehmendem Drahtdurchmesser zu, weil sich er Einfluss der sinkenden Wär-mekapazität stärker als die kleiner werdende Oberfläche auswirkt (vgl. Abschnitt 5.4.3und [Schiedeck und Wallaschek, 2005]). Eine Zusammenfassung der Abhängigkeiten desdynamischen Verhaltens von der Belastung enthält Tabelle 7.2.
Tabelle 7.2: Abhängigkeiten des dynamischen Verhaltens eines FG-Aktors
Verhalten Erklärung
Zunahme der Martensit-Auslenkung sM
mit steigender Belastungelastische Dehnung des „weichen“ Mar-tensits
Zunahme des Anzugsverzugs t11 mit stei-gender Belastung
Verschiebung der Phasenumwandlungs-temperaturen
Unabhängigkeit der Hubzeit t12 von derBelastung
Anzugsgeschwindigkeit abhängig vomTemperaturgang
Anzugszeit erhöht sich mit steigenderBelastung
t1 = t11 + t12 (siehe oben)
Zunahme der Austenit-Auslenkung sA
mit steigender Belastungelastische Dehnung des „harten“ Auste-nits
Reduzierung des Abfallverzugs t21 mitzunehmender Belastung
Verschiebung der Phasenumwandlungs-temperaturen
Zunahme der Rücklaufzeit t22 mit abneh-mender Belastung
Viskoelastizität bei der Dehnung desMartensits
Abfallzeit verkürzt sich mit steigenderBelastung
t2 = t21 + t22 (siehe oben)

90 7 Dynamisch betriebener Formgedächtnisantrieb
s
t3
t11 t12 t22
t4
t5 t6
sM
sA
t
T
t21
uUB
TU
t2t1
e
eM
eA
t
t7
t
T∞
0
0
Abbildung 7.5: Dynamisches Verhalten eines FG-Aktors (t1 Anzugszeit, t11 Anzugsver-zug, t12 Hubzeit, t2 Abfallzeit, t21 Abfallverzug, t22 Rücklaufzeit, t3 Haltezeit, t4 Pausier-zeit, t5 Einschaltdauer, t6 Ausschaltdauer, t7 Zyklusdauer)

7.2 Verlässlichkeitsorientierte Technologiebewertung 91
7.2 Verlässlichkeitsorientierte Technologiebewertung
Im Bereich der Verlässlichkeitsanalyse gibt es zahlreiche Grundlagenwerke der verschie-denen Domänen in der Mechatronik, die einen umfassenden Stand der Technik darstellen[Storey, 1996; Bertsche und Lechner, 2004]. Darin enthalten sind etablierte Methoden wiez. B. die Ausfalleffektanalyse3, die Fehlerbaumanalyse4 oder die Gefahrenanalyse. Danebenexistieren auch Ansätze zur Auswahl und Kombination dieser Methoden [DIN EN 61508-4, 2002; VDI 4003, 2007]. Zur Definition grundlegender Begriffe und Zusammenhänge desArbeitsbereichs Verlässlichkeit wird auf die Arbeiten von Laprie [1992] und Kochs undPeterson [2002] verwiesen (siehe auch DIN 40041 [1990]).
Um die Entwicklung eines Antriebssystems mit FGL unter Berücksichtigung von Ver-lässlichkeitsaspekten zu systematisieren, werden die Grundansätze aus der Arbeit vonMüller [2008] aufgegriffen. In Zusammenarbeit mit Müller wurde daraus eine Methodezur verlässlichkeitsorientierten Technologiebewertung entwickelt und bei kommerziellenAktoren angewendet. Die Ergebnisse dieser Untersuchung werden auch in [Müller u. a.,2008] behandelt. Ziel ist die Bestimmung der wesentlichen Einflussfaktoren auf die Ver-lässlichkeit, die in der frühen Entwicklungsphase zu berücksichtigen sind. Hierfür werdenverschiedene grundlegende Prinzipien von Verlässlichkeitsmethoden in einem Prozess inte-griert. Dieser Prozess lässt sich, im Gegensatz zu anderen Verlässlichkeitsprozessansätzen,auf die Technologieebene anwenden. Das Vorgehen zur verlässlichkeitsorientierten Tech-nologiebewertung umfasst die folgenden Prozessbausteine:
Komponentenanalyse Die Komponente FG-Aktor wird systematisch anhand seiner Bau-teile, seiner Funktionen und Teilfunktionen sowie seiner veränderbaren Attributeanalysiert.
Fehleridentifikation Basierend auf der Komponentenanalyse werden potenzielle Fehleridentifiziert, d. h. sowohl potenzielle Fehler des Aktors selbst als auch in einem sys-temintegrierten Zustand. Dafür können verschiedene klassische Methoden angewen-det werden, z. B. die FMEA oder Hazard and Operability Studies (HAZOP).
Fehleranalyse und -bewertung Die identifizierten potenziellen Fehler werden einerseitsin Bezug auf mögliche Ursachen und andererseits in Bezug auf mögliche Folgenanalysiert. Neben der Analyse findet eine Risikobewertung der Fehler bzw. der po-tenziellen Folgen statt.
Übertragbarkeitsanalyse Die bei der Analyse der speziellen Aktoren gewonnenen Er-kenntnisse werden verallgemeinert und auf Übertragbarkeit geprüft. Darauf aufbau-end werden übertragbare Ergebnisse in Form einiger Hauptaspekte dargestellt.
Für die Analyse werden die Aktoren NM 70 der Fa. Nanomuscle und DM01-15-PL derFa. Miga Motor verwendet. Abbildung 7.6 zeigt Detailaufnahmen des Aktors von MigaMotor. Der Grundaufbau und die Funktionsweise dieser Aktoren sind in Abschnitt 2.4.1beschrieben. In beiden Aktoren werden mehrere FG-Drähte und starre Koppelelementeabwechselnd sowohl mechanisch als auch elektrisch miteinander verbunden und überein-ander gestapelt. Die Plättchen sind elektrisch gegeneinander isoliert. Die beweglichenPlättchen des Stapels werden durch das Aktorgehäuse bzw. -gestell in Antriebsrichtunggeführt. Ein Plättchen ist gestellfest. Die Stellbewegung des Plättchens, an dem auch der
3engl.: Failure Mode and Effects Analysis (FMEA)4engl.: Fault Tree Analysis (FTA)

92 7 Dynamisch betriebener Formgedächtnisantrieb
(a) geschlossen
(b) geöffnet
(c) zerlegt
Abbildung 7.6: DM01-15 von Miga Motor
Kraftanschluss an die Last erfolgt, wird durch das Gestell formschlüssig begrenzt. DieStromzufuhr erfolgt über zwei Zuleitungen.
Das Aktorgestell des Aktors von Nanomuscle besteht aus der Trägerstruktur wie in Ab-bildung 2.13 dargestellt. Das oberste Plättchen ist gestellfest, alle weiteren Plättchen sindbeweglich. In das Aktorgestell ist eine Steuerplatine mit der Schaltung aus Abbildung 7.7integriert. Über den Steuereingang (CTRL) wird die Heizspannung geschaltet. Die bei-den Kontakte P0 und P100 in den jeweiligen Endlagen stellen elektrische Endanschlägedar. Der FG-Aktor schließt in den Endlagen den jeweiligen elektrischen Kontakt. Sobalddieser Kontakt geschlossen ist, ist sichergestellt, dass der volle Aktorhub erreicht wurde.Das liefert zusätzliche Informationen für die Regelung. Bei vollständig gedehntem Aktorliegt am 0%-Anschluss die Spannung u0% = VDD (Versorgungsspannung VDD) und am100%-Anschluss u100% = 0 V an. Bei vollständig kontrahiertem Aktor ist es umgekehrt.Während der Bewegung zwischen den Endlagen ist die Spannung an beiden Kontaktengleich Null (u0% = u100% = 0 V). Zusammen mit den beiden Bipolartransistoren bildet derKontakt P100 eine Zweipunktregelung zur Vermeidung von Überhitzung beim Halten dervollen Kontraktion. Bei Aktivierung des Aktors (CTRL = 1) beginnt der MOSFET M1 zuleiten. Der Draht erwärmt und verkürzt sich. Sobald die volle Kontraktion erreicht wird,schließt der Kontakt P100 und der Bipolartransistor T1 wird leitend. Dadurch fällt dieGate-Spannung von M1 auf annähernd 0 V, so dass dieser sperrt. Damit wird die Bestro-mung unterbrochen, der Draht kühlt ab und wird unter Last wieder gedehnt. Sobald derKontakt P100 öffnet, sperrt T1, und M1 leitet. Der Draht wird bestromt und zieht sich

7.2 Verlässlichkeitsorientierte Technologiebewertung 93
0%
T1
R2
R1
100%
R4
R5
R3
CTRL
VDD
T2
P100 P0FG-Aktor
Tր
M1
FGL
GND
Abbildung 7.7: Endlagenkontakt nach WO 02/068820 A1
bis zum erneuten Erreichen der Endlage zusammen. Der Zyklus beginnt von vorne undunterbricht erst, wenn das Steuersignal zum Bestromen unterbrochen wird (CTRL = 0).Dadurch ist gewährleistet, dass der Draht in der Endlage nur soviel bestromt wird, wie erzum Halten der Endlage benötigt. In Folge dessen kann der Aktor mit unterschiedlichenSpannungen betrieben werden. Die Drahttemperatur wird auf dem niedrigstmöglichenNiveau gehalten, so dass nach Abschalten des Steuersignals die Rückstellbewegung ohneVerzögerung einsetzt.
7.2.1 Komponentenanalyse
Die FG-Aktoren (Komponenten) werden hinsichtlich Bauteile, (Teil-)Funktionen und ver-änderbaren Attributen analysiert. Zur Identifikation aller wichtigen Funktionen und Sub-funktionen wird die Funktionshierarchie der Aktoren erstellt (Abbildung 7.8). Durch dieoberen Strukturebenen werden beide untersuchten Aktoren beschrieben. Die erweiterteFunktionalität des Nanomuscle-Aktors durch die Ansteuerplatine mit Endlagenschaltungwird durch die unterste Ebene abgebildet. Tabelle 7.3 und 7.4 enthalten den Systemauf-bau der beiden Aktoren in Komponentensichtweise (Spalten: Haupt- und Subkomponente)sowie die Funktionen, die durch die einzelnen Komponenten erfüllt werden (Spalte: Funk-tion). Darüber hinaus werden die veränderbaren Attribute im System identifiziert undzugeordnet (Spalte: Attribut). Attribute können z. B. Energie- und Informationsflüsseoder auch Systemzustände sein.
7.2.2 Fehleridentifikation
Anhand der strukturierten Systembeschreibung durch Komponenten, Funktionen und At-tribute aus der vorhergehenden Phase können nun Fehler identifiziert und zugeordnetwerden. Dazu werden zwei verschiedene Methoden zur Fehleridentifikation verwendet. Im

94 7 Dynamisch betriebener Formgedächtnisantrieb
Tab
elle
7.3
:K
omp
onenten
-und
Ausfalleff
ektanalyse
(DM
01-15-PL
)
Hau
ptkom
pon
enteSubkom
pon
enteFunktion
Attrib
ut
identifi
zierteFeh
ler
Basism
odul
Geh
äuse
Kraftab
leitung
zum
Gestell
durch
Fixieru
ng
des
gestellfestenP
lätt-ch
ens
keine
Kraftab
leitung
Führu
ng
für
alleb
eweglich
enP
lättchen
inStellrichtu
ng
keine
Kraftfü
hru
ng
inA
ntriebsrichtu
ng
Führu
ngsb
egrenzu
ng
allerP
lätt-ch
endurch
Endan
schlag
keine
Üb
erlastbegren
zung
Zuleitu
ngen
Zuleitu
ng
der
elektrischen
Energie
zuP
lättchen
Ein
gangsleistu
ng
(Heizleistu
ng)
Ansch
lusskab
elbru
ch
Funktion
smod
ul
Plättch
enm
echan
ische
Kop
plu
ng
der
FG
-D
rähtezu
rK
raftweiterleitu
ng
keine
Kraftü
bertragu
ng
elektrische
Kop
plu
ng
der
FG
-D
rähtelose
Drahtkontaktieru
ng
Kraftan
schlu
ss-plättch
enL
astkrafteinleitu
ng
üb
erob
erstesP
lättchen
Ausgan
gsleistung
(Aktorkraft)
keine
Kraftein
leitung
Isolierschichten
elektrische
Isolationder
Plättch
enA
blösen
der
Isolationssch
ichtR
eduzieru
ng
der
Gleitreib
ung
Ablösen
der
Gleitsch
ichtF
G-D
rähteK
rafterzeugu
ng
durch
Energie-
wan
dlu
ng
Drahttem
peratu
rD
rahtbru
ch,
keinF
GE
Self-S
ensin
g
Um
gebung
Um
gebungsm
ediu
mK
onvektionU
mgeb
ungs-
temp
eratur
zuhoh
e/nied
rigeU
mgeb
ungs-
temp
eratur
Last
Rückstellkraft
Belastu
ng
zuhoh
e/nied
rigeR
ückstell-
kraft

7.2 Verlässlichkeitsorientierte Technologiebewertung 95
Tab
ell
e7
.4:
Kom
pon
ente
n-
und
Ausf
alle
ffek
tanal
yse
(NM
70)
Hau
ptk
omp
onen
teSubko
mp
onen
teFunkt
ion
Att
ribut
iden
tifizi
erte
Feh
ler
Bas
ism
odul
Ste
uer
pla
tine
mit
Kon
takt
bol
zen
Sch
nit
tste
lle
zur
Anst
euer
ung
und
Ener
gieq
uel
leE
inga
ngs
leis
tung
(Hei
zlei
stung)
Ansc
hlu
sska
bel
bru
ch
Trä
ger
der
Ste
uer
schal
tung
Ele
ktro
nik
kom
pon
ente
nau
sfal
lel
ektr
isch
erE
ndla
genko
ntak
tunsi
cher
erK
onta
ktsc
hlu
ssK
raft
able
itung
zum
Ges
tell
kein
Kra
ftsc
hlu
sszu
mG
este
llT
räge
rstr
ukt
ur
Fix
ieru
ng
des
gest
ellf
este
nP
lätt
-ch
ens
kein
eK
raft
wei
terl
eitu
ng
zur
Ste
uer
pla
tine
Führu
ng
für
alle
bew
eglich
enP
lätt
chen
mit
Lan
glöc
her
nke
ine
Kra
ftfü
hru
ng
inA
ntri
ebsr
icht
ung
Führu
ngs
beg
renzu
ng
alle
rP
lätt
-ch
endurc
hE
ndan
schla
gke
ine
Üb
erla
stb
egre
nzu
ng
Zule
itunge
nZ
ule
itung
der
elek
tris
chen
Ener
gie
zuP
lätt
chen
lose
Plä
ttch
enko
ntak
tier
ung
Aufb
aum
odul
Plä
ttch
enm
echan
isch
eK
opplu
ng
der
FG
-D
räht
ezu
rK
raft
wei
terl
eitu
ng
kein
eK
raft
üb
ertr
agung
elek
tris
che
Kop
plu
ng
der
FG
-D
räht
elo
seD
raht
kont
akti
erung
Kra
ftan
schlu
ss-
hak
enL
astk
raft
einle
itung
üb
erunt
erst
esP
lätt
chen
Ausg
angs
leis
tung
(Akt
orkr
aft)
kein
eK
raft
einle
itung
Isol
iers
chic
hten
elek
tris
che
Isol
atio
nder
Plä
ttch
enA
blö
sen
der
Isol
atio
nss
chic
htR
eduzi
erung
der
Gle
itre
ibung
Ablö
sen
der
Gle
itsc
hic
htF
G-D
räht
eK
raft
erze
ugu
ng
Dra
htte
mp
erat
ur
Dra
htbru
ch,
kein
FG
ESel
f-Sen
sing
Um
gebung
Um
gebungs
med
ium
Kon
vekt
ion
Um
gebungs
-te
mp
erat
ur
zuhoh
e/nie
dri
geU
mge
bungs
-te
mp
erat
ur
Las
tR
ück
stel
lkra
ftB
elas
tung
zuhoh
e/nie
dri
geL
ast

96 7 Dynamisch betriebener Formgedächtnisantrieb
variabel gesteuertes
Stellen einer Kraft
Aktor
Energie zufuhren
Elektronik
Energie wandeln
FGL
Kraft erzeugen
Elektronik/FGL
Kraft ubertragen
Kinematik
Kraft einleiten
Translator
Kraft fuhren
Fuhrung
Kraft ableiten
Gestell/Gehause
Energie steuern
Steuerplatine
Endlagen-
schaltung
Steuerplatine
nur NM 70
Abbildung 7.8: Allgemeine Funktionsstruktur der untersuchten FG-Aktoren
Detail sind dies die Ausfalleffektanalyse, die die ursprüngliche Idee der FMEA repräsen-tiert, und die HAZOP-Analyse, die durch Verknüpfung von Leitwörtern mit Attributenbei der Identifikation von Fehlern hilft.
Ausgangspunkt für die Ausfalleffektanalyse ist die Tabelle der Komponentenanalysemit den zugeordneten Funktionen. Jede Zeile der Tabelle wird auf potenzielle Ausfällehin analysiert. Diese Ausfälle von Subkomponenten oder Teilfunktionen sind gleichbedeu-tend mit identifizierten Fehlern im Sinne des Gesamtsystems (Tabelle 7.3 und 7.4, Spalte:identifizierte Fehler). Die HAZOP-Analyse gelangt durch verbale Verknüpfung von Leit-wörtern mit den identifizierten Attributen aus der Komponentenanalyse zur Identifika-tion von Fehlern. Für die hier untersuchten Systeme haben sich die Leitwörter „nicht“,„kein“, „mehr“, „weniger“, „ungewollt“, „zu viel“, „zu wenig“, „zu früh“, „zu spät“, „zulange“, „zu kurz“, „zu schnell“, „zu langsam“, „zu hoch“ und „zu niedrig“ als geeignetherausgestellt. Da sich die identifizierten Attribute bei den Aktoren decken, kann eine ge-meinsame HAZOP-Analyse durchgeführt werden. Die durch diese Methode identifiziertenFehler (Tabelle 7.5) ergänzen die Ergebnisse der Ausfalleffektanalyse.
7.2.3 Fehleranalyse und -bewertung
In dieser Prozessphase werden die identifizierten Fehler bezüglich ihrer Abhängigkeitenanalysiert, auf die ursächlichen Fehler reduziert und anschließend bewertet. Dieser Pro-zessschritt ist unterteilt in die Fehleranalyse und die Fehlerbewertung und wird für diebetrachteten Aktoren gemeinsam durchgeführt.
Bei der Fehleranalyse werden Abhängigkeiten ermittelt, mit denen die direkten Ursa-chen und Folgen von Fehlern dargestellt werden können. Darüber hinaus werden weiterverzweigte Folgen und Ursachen durch die Anwendung der Fehlerbaumanalyse erfasst.Insbesondere die Analyse hinsichtlich der Ursachen liefert interessante Erkenntnisse undLösungsansätze für einige Probleme. Die Fehlerbaumanalyse wurde für die folgenden vier

7.2 Verlässlichkeitsorientierte Technologiebewertung 97
Tabelle 7.5: HAZOP-Analyse
Attribut Leitwort identifizierte Fehler
Eingangsleistung zu hoch zu hohe elektrische Eingangsleistungzu niedrig zu niedrige elektrische Eingangsleistungkein keine elektrische Eingangsleistung
Drahttemperatur zu hoch zu hohe Drahttemperaturzu niedrig zu niedrige Drahttemperaturzu langsam zu langsame Drahterwärmung/-abkühlungkein keine Drahterwärmung
Ausgangsleistung kein keine mechanische Ausgangsleistungzu wenig zu wenig mechanische Ausgangsleistungzu langsam zu langsame mechanische Ausgangsleistungungewollt ungewollte Ausgangsleistung
Umgebungstemperatur zu hoch zu hohe Umgebungstemperaturzu niedrig zu niedrige Umgebungstemperatur
Belastung zu hoch zu hohe Belastungzu niedrig zu niedrige Belastungzu schnell zu schnelle Belastungsänderung
Fehler durchgeführt:• ungewollte Ausgangsleistung (d. h. fehlerhafte Aktivierung)• zu wenig Ausgangsleistung (zu wenig Hub bzw. Kraft)• zu langsame Ausgangsleistung bzw. Stellbewegung• keine Ausgangsleistung bzw. Stellbewegung
Abbildung 7.9 zeigt beispielhaft einen ausgewählten Fehlerbaum mit der Symbolik nachDIN IEC 1025 [1993] und DIN EN 61025 [2007]. In Verbindung mit den analysierten Feh-lern ergibt sich anhand der Komponentenstruktur die Fehlerliste in Tabelle 7.6 (Spalten:Fehlerursache, Ausfallbeschreibung und Fehlerauswirkung). Diese fasst die ursächlichenFehler zusammen, die weiterführend anhand der Merkmale Ausfallbeschreibung und Feh-lerauswirkung analysiert sind.
Zur Fehlerbewertung wird die Methode des Risikographen angewendet. Anhand vonKriterien, die das Risiko beschreiben bzw. bewerten, kann ein Zuordnungs- und Klassifi-zierungsschema erstellt werden, das die Form eines sich verästelnden Risikographen dar-stellt. Die verwendeten Beurteilungskriterien, die zu Risikoanforderungsklassen führen,sind Fehlerkonsequenz (K), Möglichkeit der Gefahrenabwendung (G) und Eintrittswahr-scheinlichkeit (W). Durch Kombination der Kriterien lässt sich der Risikograph gemäßAbbildung 7.10 aufstellen. Die Interpretation dieser Ordnung ist in Tabelle 7.7 dargestellt.Die Anforderungsklassen beschreiben, wie mit dem Risiko bzw. dem Fehler umzugehenist, und liefern eine Bewertung (B). Die Risikoklassen 6, 5 und 4 bedeuten, dass der Fehlerunbedingt zu vermeiden ist, die Klassen 3 und 2 beinhalten Fehler, die möglichst zu ver-meiden oder zu überwachen sind, während die Klasse 1 vernachlässigbare Fehler enthält.Damit ergibt sich die Fehlerbewertung in Tabelle 7.6 (Spalten: K, G, W und B).
Die Fehlerbewertung wird an einem Beispielfehler aufgezeigt: Ein Anschlusskabelbruchführt zu einem Totalausfall des FG-Aktors, die Fehlerkonsequenz ist stark (K1). Eine Ge-fahrenabwehr ist kaum möglich (G1), die Eintrittswahrscheinlichkeit jedoch gering (W2).

98 7 Dynamisch betriebener Formgedächtnisantrieb
Tab
elle
7.6
:Feh
lerlisteund
-bew
ertung
Feh
lerursach
eA
usfallb
eschreib
ung
Feh
lerausw
irkung
KG
WB
Ansch
lusskab
elbru
chkein
eH
eizleistung
keine
Ausgan
gsleistung
K1
G1
W2
B5
loseP
lättchen
kontaktierung
keine
Heizleistu
ng
keine
Ausgan
gsleistung
K1
G1
W3
B3
Kurzsch
luss
keine
Heizleistu
ng
keine
Ausgan
gsleistung
K1
G2
W3
B2
keine
Betrieb
sspan
nung
keine
Heizleistu
ng
keine
Ausgan
gsleistung
K1
G2
W2
B2
zunied
rigeB
etriebssp
annu
ng
zuw
enig
Heizleistu
ng
zugerin
geA
usgan
gsleistung
K2
G2
W2
B2
zuhoh
eB
etriebssp
annu
ng
führt
zum
Üb
erhitzen
Üb
erhitzu
ng,
Draht
bren
ntdurch
K1
G2
W2
B4
keinSteu
ersignal
keine
Heizleistu
ng
keine
Ausgan
gsleistung
K1
G2
W3
B2
zunied
rigesSteu
ersignal
zuw
enig
Heizleistu
ng
zugerin
geA
usgan
gsleistung
K2
G2
W1
B3
zuhoh
esSteu
ersignal
führt
zum
Üb
erhitzen
Üb
erhitzu
ng,
Draht
bren
ntdurch
K1
G2
W1
B5
zunied
rigeU
mgeb
ungstem
peratu
rzu
geringe
Ein
gangsleistu
ng
zur
Ak-
tivierung
keine
Aktivieru
ng
des
Aktors
K3
G1
W3
B1
zuhoh
eU
mgeb
ungstem
peratu
rU
mgeb
ungstem
peratu
rhöh
erals
Aktivieru
ngstem
peratu
rSelb
staktivierung
des
Aktors
K3
G1
W1
B2
Materialerm
üdung
verändertes
Deh
nungsverh
altenb
eider
Rücktran
sformation
reduzierte
Stellb
ewegu
ng
K2
G1
W1
B4
zugroße
therm
ische
Zeitkon
stantezu
trägeR
eaktiondes
Aktors
zulan
gsame
Stellb
ewegu
ng
K2
G1
W2
B3
zuhoh
eB
elastung
Besch
ädigu
ng
durch
mech
anisch
eÜ
berb
elastung
Üb
erbelastu
ng
des
Drahtes
K1
G1
W2
B5
zunied
rigeB
elastung
keine
Rückstellb
ewegu
ng
keine
Stellb
ewegu
ng
K3
G2
W3
B1
Drahtab
rissD
rahtbru
chod
erdefekte
Klem
mung
keine
Kraftü
bertragu
ng
K1
G1
W3
B3
keine
kraftschlü
ssigeV
erbin
dung
zwisch
enA
ktorund
Gestell
keine
Kraftab
leitung
vonSteu
erplati-
ne
oder
Geh
äuse
zum
Gestell
keine
Kraftü
bertragu
ng
K1
G2
W3
B2
Lösen
der
Kleb
everbin
dung
keine
Kraftw
eiterleitung
vonT
räger-stru
ktur
zur
Steu
erplatin
ekein
eK
raftüb
ertragung
K1
G2
W1
B5
Öff
nung
des
Geh
äuses
bzw
.B
ruch
der
Verb
indungsb
olzenkein
eK
raftführu
ng
durch
Geh
äuse
oder
Trägerstru
ktur
keine
Kraftü
bertragu
ng
K1
G1
W3
B3
Bru
chder
Plättch
enkein
eK
raftüb
ertragung
durch
Plätt-
chen
keine
Kraftü
bertragu
ng
K1
G1
W3
B3
gebroch
enes
Geh
äuse
oder
gebroch
e-ne
Trägerstru
ktur
keine
Endlagen
kraftbegren
zung
durch
Geh
äuse
oder
Trägerstru
ktur
plastisch
eV
erformung
bzw
.B
ruch
durch
Üb
erdeh
nung
des
Drahtes
K1
G1
W3
B3
keine
kraftschlü
ssigeV
erbin
dung
zwisch
enA
ktorund
Last
keine
Kraftein
leitung
durch
Haken
oder
Boh
rung
keine
Kraftü
bertragu
ng
K1
G1
W2
B5

7.2 Verlässlichkeitsorientierte Technologiebewertung 99
zu wenig
Ausgangsleistung
Materialermudung
durch Alterung
zu hohe Belastungzu niedrige
Drahttemperatur
zu niedrige
Eingangsleistung
zu niedrige
Umgebungs-
temperatur
zu niedrige
Betriebsspannung
zu niedriges
Steuersignal
¨Drahtbruch
Ereignis
ODER-Gatter
Abbildung 7.9: Fehlerbaum „zu wenig Ausgangsleistung“
Die Bewertung zeigt, dass dieser Fehler unbedingt vermieden werden sollte (B5).
7.2.4 Übertragbarkeitsanalyse
Die Komponentenanalyse macht deutlich, dass es eine gemeinsame Basis für eine Funkti-onshierarchie von FG-Aktoren gibt (Abbildung 7.8). Bei Analysen weiterer Aktoren oderauch für Neuentwicklungen kann diese Funktionshierarchie als Ausgangspunkt verwendetund erweitert werden. Zusammenfassend ergeben sich vier Verlässlichkeitsaspekte, die beider Entwicklung von FG-Aktoren am meisten beachtet werden müssen:
Kraftflussplanung Insbesondere mechanische Koppelstellen, die meist auch die elektri-sche Verbindung darstellen, erweisen sich als kritisch und müssen zuverlässig ausge-legt werden.
Langzeitverhalten Die Materialermüdung hat Auswirkungen auf das Dehnungsverhalten;durch Einplanung von Reserven bei der reversiblen Dehnung kann diesem AspektRechnung getragen werden.
thermische Belastungsspitzen Überhitzung durch zu hohe Heizleistung beschleunigt dieMaterialermüdung und kann zur Zerstörung führen. Eine Überwachung der Heizlei-stung und Schutzvorrichtungen können dies verhindern.
mechanische Belastungsspitzen Mechanische Überbelastung führt zu plastischer Ver-formung bis hin zum Bruch und darf nicht auf die FGL wirken.

100 7 Dynamisch betriebener Formgedächtnisantrieb
6
5
5
4
4
3
3
3
2
2
2
1
1
1
1 1
1
1
W1 W2 W3
G1
G2
G1
G2
G1
G2
K1
K2
K3
B
Abbildung 7.10: Risikograph
Tabelle 7.7: Kriterienklassifizierung
Risikoparameter Klassifizierung
Fehlerkonsequenz K
K1 TotalausfallK2 reduzierte AusgangsleistungK3 temporärer Ausfall
Möglichkeit der Gefahrenabwehr G
G1 kaum möglichG2 möglich
Eintrittswahrscheinlichkeit W
W1 relativ hochW2 geringW3 sehr gering
Fehlerbewertung B
1 vernachlässigbar2, 3 möglichst vermeiden oder überwachen4, 5, 6 unbedingt vermeiden
7.3 Entwicklung eines Formgedächtnisantriebs
Ziel bei der Entwicklung des Aktors ist die Vereinfachung des Aufbaus und die Ver-besserung der Robustheit im Vergleich zu den in Abschnitt 2.4.1 und 7.2 vorgestelltenkommerziellen Aktoren. Dabei sollen insbesondere auch inhärente Eigenschaften genutztwerden. Durch die Analyse von limitierenden Faktoren und Störeinflüssen erarbeitet Brei-dert [2006] eine Liste zusätzlicher Anforderungen an FG-Antriebe. Darunter sind insbe-sondere der Schutz der Antriebselemente vor mechanischer und elektrischer Überlastung,das Detektieren der Endlagen und die Berücksichtigung von Dehnungsanteilen durch denZweiwegeffekt hervorzuheben. Letzteres entsteht durch Trainingseffekte, so dass nebendem Einwegeffekt zunehmend ein intrinsischer Zweiwegeffekt auftritt. Das führt auch beifeststehendem Abtrieb zu einer Verlängerung und zu einem Ausbeulen der Drähte.

7.3 Entwicklung eines Formgedächtnisantriebs 101
7.3.1 Aufbau und Funktionsweise
Um Robustheit im mechanischen Aufbau zu gewährleisten, wurde ein neues Konzept ent-wickelt. Die Seele eines herkömmlichen Bowdenzugs5 bzw. Seilzugs, das Drahtseil, wirddurch einen Draht oder mehrere Drähte aus FGL ersetzt. Der Draht ist einseitig mit demEnde des flexiblen, in Führungsrichtung stabilen Schlauchs fest verbunden. Am anderen,beweglichen Ende des FG-Drahtes befindet sich der Translator für die Kraftkopplungzwischen Aktor und Last. Der Translator bewegt sich bei Verkürzung des Drahtes durchErwärmen. Der Schlauch des Bowdenzugs dient als mechanische Führung des FG-Drah-tes und als Gegenlager für die zu übertragenden Zugkräfte. Die Zugkraft kann so auchüber mehrfach gebogene Pfade übertragen werden. Das Erwärmen des FG-Drahtes erfolgtdurch elektrisches Bestromen, wobei das Metallgewebe des Schlauchs als Rückleitung zumSchließen des elektrischen Kreises genutzt wird. Die Kontaktierung kann an beiden Endendes Bowdenzugs erfolgen. Der Strom fließt dabei vom Einleitkontakt über das Metallge-webe des Bowdenzugs, den elektrischen Verbindungsleiter zwischen Metallgewebe undTranslator, den Translator und den FG-Draht zurück zum Ausleitkontakt. Der Aktor isthinsichtlich Anzahl der Drähte sowie Drahtdurchmesser und -länge frei skalierbar. Diein Abbildung 7.11 gezeigte Ausführung besitzt die in Tabelle 7.8 genannten Kenndaten.Weitere Details des Aufbaus sind in Abbildung 7.12 enthalten.
Abbildung 7.11: Prototyp „Smart Material Actuator“
7.3.2 Betriebsverhalten
Bei dem Prototypen handelt es sich um einen Antrieb mit begrenztem Stellbereich zur Er-zeugung einer unidirektionalen Kraft. Die Rückstellbewegung muss durch äußere Kräfteerfolgen. Vergleichbare Antriebe mit anderen Wirkprinzipien sind Hubmagnete, Pneu-matikzylinder oder pneumatische Muskeln (Fluidic Muscle). Hinsichtlich Leistungsdaten,Dynamik und Robustheit ist der Aktorprototyp vergleichbar mit anderen kommerziellenFG-Aktoren. Darüber hinaus besitzt der hier vorgestellte Aktor definierte mechanischeund elektrische Schnittstellen. In Tabelle 7.9 wird der Prototyp anhand der von Breidert[2006] vorgeschlagenen Kriterien charakterisiert.
5benannt nach dem Erfinder Frank Bowden (1848–1921)

102 7 Dynamisch betriebener Formgedächtnisantrieb
A A
Schnitt A-AB
EINZELHEIT B
C
EINZELHEIT C
@@
@@@I
Translator@@
@@
@@I
FG-Draht@@
@I
Bowdenzug
FG-Draht @@
@I
Isolationsschicht @@
@I
Bowdenzug
Abbildung 7.12: Konstruktionszeichnung

7.3 Entwicklung eines Formgedächtnisantriebs 103
Tabelle 7.8: Aktorkenndaten
Eigenschaft Wert Einheit Einflussgrößen
Nennkraft 5 . . . 10 N Drahtdurchmesser/-anzahlStellweg bei Nennkraft 5 mm DrahtlängeBetriebsspannung ∼ 1 V DrahtgeometrieBetriebsstrom 1,25 . . . 1,5 A DrahtgeometrieWiderstand 1,5 Ω DrahtgeometrieBandbreite ∼ 0,1 Hz relative EinschaltdauerAbmessungen ∅8× 180 mm×mmAnzahl der Drähte 2 —Drahtdurchmesser 200 µmDrahtlänge 140 mm
Tabelle 7.9: Charakterisierung des Aktorprototyps
Kriterium Charakterisierung
Art des Aktorelements zugbelasteter FG-DrahtAktivierung des Aktorelements elektrischer EigenwiderstandRückstellung des Aktorelements externe RückstellkraftArt der Antriebsbewegung TranslationUmformerprinzip DirektantriebSkalierbarkeit Drahtdurchmesser, Drahtlänge, Anzahl der DrähteModularisierbarkeit/Flexibilität biegsames GehäuseSystemschnittstellen Gewindestange, KontaktpinsSystemumfang Aktor
7.3.3 Modellierung und Simulation
Für die Modellierung des Aktorverhaltens werden die Aktorkenndaten in Tabelle 7.8 alsParameter für das Simulationsmodell übernommen. Um den Wärmeübergang durch denBowdenzugschlauch zu berücksichtigen, wird das existierende Modell um das thermischeNetzwerk in Abbildung 7.13 erweitert. Im Gegensatz zu einem frei liegenden Draht, wel-cher überwiegend durch freie Konvektion Wärme abgibt, findet der Wärmefluss beimBowdenzugaktor konvektiv über das Luftvolumen im Inneren des Bowdenzugs sowie par-allel dazu durch Wärmeleitung über den direkten Kontakt zwischen FG-Draht und Tef-lonschlauch statt. Von der Innenseite des Teflonschlauchs über das Metallgewebe bis zurAußenseite des Kunststoffmantels erfolgt Wärmeleitung. Über Konvektion an die Umge-bungsluft kühlt der Bowdenzug ab.
Abbildung 7.14 zeigt den Vergleich von Messung und Simulation der Antwort des Aktor-prototyps auf einen Strompuls. Das Aufheizverhalten kann durch das Simulationsmodellmit den genannten Anpassungen bzgl. des Wärmeübergangs sehr gut abgebildet werden.Das Abkühlen erfolgt in der Simulation langsamer als gemessen. Die Ursache für dieseAbweichung liegt in der Ungenauigkeit der Identifikation der Wärmeübergangsparameterfür den Bowdenzug, die nur mit vereinfachenden Annahmen erfolgen kann. Dennoch zeigtsich, dass insbesondere das Anzugsverhalten sehr gut mit dem entwickelten Simulations-modell beschrieben wird.

104 7 Dynamisch betriebener Formgedächtnisantrieb
Kunststoffmantel
MetallgewebeTeflonschlauch
FG-Draht
Luftvolumen
(a) Querschnitt
TTS,i TMG,i=TTS,a TKM,i=TMG,a TKM,a
Pel
Rconv
CD CLu CTS
TD
TLu Rtrans Rcond
Rtrans
CMG
Rcond
CKM
Rcond
RconvTD—TU
TU
(b) Ersatzschaltbild
Abbildung 7.13: Temperaturersatzschaltbild (D: FG-Draht, Lu: Luftvolumen, TS: Tef-lonschlauch, MG: Metallgewebe, KM: Kunststoffmantel)
0 2 4 6 8 10 12 14 16 18 200
1
2
3
4
5
Hubs
inm
m
Zeit t in s
Strom i in A
MessungSimulation
Abbildung 7.14: Pulsantwort des Bowdenzugaktors (1,5 A, 1000 g)

7.3 Entwicklung eines Formgedächtnisantriebs 105
7.3.4 Positionsregelung
Im Folgenden wird der PI-Regler für die Positionsregelung des Bowdenzugaktors ausge-legt. Die Reglerparameter werden nach dem in Abschnitt 6.2 beschriebenen Verfahrenermittelt. Die Reglerauslegung basiert auf der für FG-Aktoren identifizierten Übertra-gungsfunktion
GS(p) =Ls(t)Li(t) =
KS
(1 + T1p) (1 + 2DT2p+ T 22 p
2). (7.1)
Die Berechnung der Streckenparameter ist in Abschnitt 5.4 beschrieben und berücksichtigtdie elektrischen, thermischen und mechanischen Eigenschaften des Aktorsystems. Dabeimuss insbesondere der Einfluss des Bowdenzugschlauchs auf das thermische Übertragungs-verhalten berücksichtigt werden. Mit der Vierpoltheorie kann das thermische Netzwerk inAbbildung 7.13 auf das Ersatzschaltbild in Abbildung 7.15 reduziert werden [Philippow,2000]. Die Eingangsadmittanz des reduzierten Systems
Y th,ers =Pel
T= R−1
th,ers + jωCth,ers (7.2)
beschreibt das thermische Übertragungsverhalten des Bowdenzugs und liefert die Ersatz-parameter Rth,ers und Cth,ers (ω−1
th,ers = τth,ers = Rth,ersCth,ers). Der Frequenzgang des Bow-denzugaktors
GS(jω) =KS
(
1 + j ωωth
) (
1 + j2D ωωmech
− ω2
ω2
mech
) (7.3)
ist in Abbildung 7.16 für Klein- und Großsignalanregung dargestellt und dient als Grundla-ge für die Auslegung der Reglerparameter. Die berechneten Parameter sind in Tabelle 7.10aufgelistet.
Y
Pel
∆T Y R
(a) Vierpoldarstellung
Pel
Cth,ers Rth,ers
∆T
(b) Ersatzschaltbild
Abbildung 7.15: Reduziertes Temperaturersatzschaltbild
Tabelle 7.10: Strecken- und Reglerparameter (100 mm×∅ 100 µm)
Parameter Symbol Kleinsignal Großsignal Einheit
Streckenverstärkung KS 5,4 21,8 mm/Atherm. Zeitkonstante T1 4,0 16,1 smech. Zeitkonstante T2 8,5 8,5 msDämpfungsgrad D 0,132 0,132 —Stabilitätsgrenze VG 125 500 —Reglerverstärkung KR 115 . . . 230 115 . . . 230 A/mNachstellzeit TR T1 T1 s

106 7 Dynamisch betriebener Formgedächtnisantrieb
−40
−20
0
20
40
10−3
10−2
10−1
100
101
102
−270
−180
−90
0
Ain
dB
(mm
/A)
ϕin
Frequenz f in Hz
KleinsignalGroßsignal
Abbildung 7.16: Frequenzgang des FG-Aktors
Die Reglerverstärkung KR wird über die Stabilitätsgrenze VG eingestellt. Die Nachstell-zeit des Reglers TR entspricht dem Mittelwert der thermischen Zeitkonstanten des Klein-und Großsignalverhaltens. Abbildung 7.17 zeigt die Ergebnisse der Positionsregelung beistufenförmiger Sollwertvorgabe. Die allgemeinen Anforderungen an einen Regelkreis wer-den erfüllt. Durch das AR2-Korrekturglied kann eine bezogen auf den Durchmesser derFG-Drähte hohe Positionierdynamik ohne Überschwingen erreicht werden.
0 20 40 600.5
1
1.5
2
2.5
3
3.5
Hubs
inm
m
Zeit t in s
smeassnom
(a) Position
0 20 40 600
0.5
1
1.5
2
2.5
3
Str
omi
inA
Zeit t in s
(b) Heizstrom
Abbildung 7.17: Positionsregelung des FG-Aktors (KR = 250 A/m, TR = 10 s)

7.4 Zusammenfassung 107
7.4 Zusammenfassung
Für den Entwicklungsprozess von Aktoren mit FGL liegen bisher kaum Richtlinien vor.Vor diesem Hintergrund erfolgte zunächst die Erarbeitung wesentlicher Aspekte für dieAktorentwicklung. Auf Basis einer neu entwickelten Methode zur verlässlichkeitsorientier-ten Bewertung von FG-Aktoren wurde eine allgemeingültige Funktionsstruktur entwickelt,mit der zunächst Fehler und Ausfälle umfassend identifiziert werden können. Weiterhinkonnten durch Analyse und Bewertung der Fehler mittels klassischer Verlässlichkeitsme-thoden die Hauptaspekte für die Entwicklung von Aktoren mit FGL ermittelt werden.Unter Berücksichtigung dieser Aspekte wurde ein neues Aktorkonzept nach dem Bowden-zugprinzip vorgestellt, das sich v. a. durch Skalierbarkeit auszeichnet und insbesonderefür Stellaufgaben geeignet ist. Anhand dieses Aktors konnten die Eignung und Leistungs-fähigkeit des entwickelten Simulationsmodells mit konzentrierten Parametern und desRegelungsentwurfs unter Verwendung eines linearisierten Übertragungsverhaltens nach-gewiesen werden.

108
8 Diskussion der Ergebnisse
Die vorliegende Arbeit behandelt Aktoren auf Basis von FGL, die den thermischen FGEnutzen. FGL zeigen ein unkonventionelles Verformungsverhalten, das durch Temperaturund mechanische Spannung bestimmt wird. Für Aktoranwendungen wird der extrinsischeFGE genutzt, d. h. eine scheinbar plastisch verformte FGL „erinnert“ sich beim Erwär-men an ihre ursprüngliche Form und erzeugt bei der Rückstellbewegung unter Last eineAktorkraft. Der FGE beruht auf einer reversiblen Phasenumwandlung, die durch Tempe-raturänderung zyklisch aktiviert werden kann.
Experimentelle Untersuchungen von FGL in Drahtform liefern Kennlinien über dasstatische und dynamische Verhalten, aus denen sich Materialkennwerte ermitteln lassen.Durch Messung der Temperaturhysterese werden die Phasenumwandlungstemperaturenund deren Verschiebungskoeffizienten ermittelt, mit Versuchen zum Dehnungsverhaltenunter wechselnden Randbedingungen werden mechanische Eigenschaften abgeleitet, unddie Bestimmung des Frequenzgangs am realen System liefert thermische und mechanischeZeitkonstanten. In einem Lebensdauerversuch wird das Alterungsverhalten untersucht undcharakterisiert.
Unter Nutzung der experimentellen Ergebnisse und bestehender Modellierungsansät-ze wird ein Simulationsmodell zur Beschreibung des thermischen FGE aufgebaut. Diekonzentrierten Parameter des Modells in Blockschaltbildstruktur entsprechen den physi-kalischen Eigenschaften des nachzubildenden Systems. Das Modell ist modular aufgebaut.Die Legierungstemperatur wird aus der thermodynamischen Energiebilanz abgeleitet. EinHysteresemodell mit trigonometrischen Funktionen liefert den Phasenumwandlungsgradin Abhängigkeit von der Temperatur und mechanischen Spannung. Alternativ wird der aufdie Temperaturhysterese von FGL übertragene Ansatz von Jiles und Atherton verwendet.Während sich das erstgenannte Hysteresemodell leicht parametrieren lässt, folgt letzteresin Analogie zur magnetischen Hysterese einer physikalisch motivierten Beschreibung desrealen Systems. Über den Phasenumwandlungsgrad werden die weiteren Materialeigen-schaften wie Widerstand und E-Modul bestimmt, indem eine Kombination der Materi-alkennwerte beider Phasen entsprechend dem Mischphasenzustand angesetzt wird. DieAktorkraft wird mit einer fußpunkterregten Feder nachgebildet, deren Steifigkeit sich mitder Phasenumwandlung ändert. Das dadurch erzeugte Einmassenschwingsystem bildet dasdynamische Verhalten ab und geht über bisherige Ansätze hinaus. Neben dem thermischenFGE bei freier Rückverformung kann der Blockadefall simuliert werden. Blockade trittauf, wenn die Rückstellbewegung mechanisch begrenzt wird. Dabei werden hohe mecha-nische Spannungen induziert, die sich proportional mit der Temperatur erhöhen. Durchein erweitertes Widerstandsmodell, das neben der Phasenumwandlung den Temperatur-koeffizienten des Widerstands berücksichtigt, existiert eine Modellbasis für eine selbstsen-sierende Regelung der Heizleistung in der Endlage. Das dynamische Verhalten kann miteiner linearisierten Übertragungsfunktion gut angenähert werden. Die Beschreibung durchein PT1-Glied (thermisches Verhalten) und ein PT2-Glied (mechanisches Verhalten) decktsich sehr gut mit den experimentellen Ergebnissen. Die Parameter der Übertragungsglie-der lassen sich aus den physikalischen Eigenschaften des Systems ableiten.
Auf Basis der linearisierten Übertragungsfunktion kann ein Kompensationsregler für

109
eine Positionsregelung entworfen und ausgelegt werden. Dabei kann die Position durchden Ohm’schen Widerstand über einen großen Arbeitsbereich beobachtet und geregeltwerden. Mit diesem Verfahren kann ein kostengünstiger Regelkreis implementiert wer-den, der robust gegenüber Ausfällen von Komponenten ist, da auf externe Wegsensorenverzichtet werden kann. Die Anregung der mechanischen Resonanz von FG-Aktoren in-folge einer hohen Reglerverstärkung kann zu einer instabilen Regelung führen. Mit einemgeeigneten Kompensationsglied werden diese Instabilitäten sicher vermieden, indem diemechanische Resonanzerhöhung gedämpft wird. Dadurch lässt sich die Reglerdynamik imsensorbasiert geregelten Betrieb deutlich erhöhen. Unter Nutzung des Widerstands lässtsich eine selbstsensierende Regelung der Heizleistung in der Endlage realisieren, die robustgegenüber Veränderungen des Widerstandswerts infolge von Alterung ist. Mit einem effi-zienten Regelalgorithmus und einer einfachen Sensorik wird ein Überhitzen beim Haltender vollen Kontraktion vermieden, indem die relative Widerstandsänderung beobachtetund interpretiert wird. Dadurch wird das Langzeitverhalten bei häufigen Schaltzyklenerheblich verbessert.
Die Analyse bestehender Systeme durch Kombination klassischer Verlässlichkeitsmetho-den liefert wesentliche Erkenntnisse für die Entwicklung von Aktoren mit FGL. So sindinsbesondere Kraftflussplanung und Langzeitverhalten sowie thermische und mechanischeBelastungsspitzen zu berücksichtigen. Anhand eines Aktorprototyps wird die Einsetzbar-keit von FGL in der Aktorik nachgewiesen. Der Prototyp eines unidirektional wirkendenStellantriebs ist hinsichtlich seiner aktorischen Kenndaten und seiner Robustheit im Auf-bau vergleichbar mit existierenden Lösungen. Gegenüber konventionellen Antriebsprinzi-pien zeichnen sich FG-Aktoren im Allgemeinen durch eine extrem hohe Energiedichte undeinen einfachen, preisgünstigen Aufbau aus. Der vorgestellte Prototyp ist darüber hinaushinsichtlich Kraft und Hub in einem großen Bereich frei skalierbar.
„(. . .) Shape Memory is a Solution Looking for Problems.“
Mit diesen Worten fasst Schetky [1979, 1980] die übergeordnete Problematik zusam-men, mit der die FG-Technologie immer noch zu kämpfen hat. Diese Arbeit leistet mitder erweiterten Modellierung für ein tieferes Systemverständnis, den entwickelten Rege-lungsansätzen und Entwurfsverfahren sowie der geschlossenen Betrachtung unter Verläss-lichkeitsaspekten einen Beitrag, um die „Lösung“ weiter zu entwickeln. Die Frage nachden damit lösbaren Problemen konnte auch hier nicht abschließend beantwortet wer-den. Nach wie vor existiert eine Skepsis, aber auch großes Interesse, an der Anwendungvon FGL als Aktoren. Oftmals werden FG-Aktoren daran gemessen, wie gut sie konven-tionelle Aktoren in bestehenden Anwendungen ersetzen könnten – und scheitern daran.Gründe dafür sind neben dem noch wenig verbreiteten Detailwissen über FGL in Ent-wicklungsabteilungen v. a. grundlegende Probleme bei der Applikation durch fehlendeStandardisierung von Materialien, Prozessen und Schnittstellen. Ein wesentliches Ziel fürzukünftige Arbeiten muss es daher sein, die Alleinstellungsmerkmale von FG-Aktorendeutlicher hervorzuheben und dazu passende Applikationen zu finden, für die bisher kon-ventionelle Antriebssysteme nicht geeignet sind oder umständlich angepasst werden. EinAnsatzpunkt für weitere Arbeiten könnte die Nutzung des resonanten Betriebspunktessein. Hier entwickeln FG-Aktoren eine erstaunliche Dynamik bei großen Amplituden. DieLastabhängigkeit und das Langzeitverhalten in diesem Betriebspunkt sind jedoch nochnicht untersucht.

110
A Legierungseigenschaften
Tabelle A.1 enthält die Werkstoffkenndaten ausgewählter FGL [Friend, 2001; Gümpel,2004; Hornbogen, 2006; Janocha, 2004; Jendritza, 1998; Srinivasan und McFarland, 2001;Stork, 1997; Waram, 1990].
Tabelle A.1: Materialeigenschaften ausgewählter FGL
Eigenschaft NiTi CuZnAl CuAlNi Einheit
Mechanische Eigenschaften
E-Modul 70 . . . 98 70 . . . 101 GPaMartensit 35 GPaAustenit 50 . . . 70 70 . . . 101 80 . . . 101 GPa
Schubmodul GPaMartensit 3 . . . 14 GPaAustenit 25 GPa
Querkontraktionszahl 0,33 —Streckgrenzea 410 MPaMartensit 50 . . . 300 80 . . . 300 MPaAustenit 200 . . . 800 150 . . . 350 MPa
Zugfestigkeitb 800 . . . 1.500 400 . . . 800 MPaMartensit 700 . . . 2.000 MPaAustenit MPa
Bruchdehnung 40 . . . 50 10 . . . 15 5 . . . 6 %Martensit 20 . . . 60 10 . . . 15 %Austenit 15 . . . 20 %
Arbeitszyklen 100.000 10.000 5.000 —Dauerfestigkeitc 150 . . . 350 75 . . . 270 100 MPaSpannungsinduktiond 600 . . . 900 MPaThermodynamische Eigenschaften
Wärmekapazität 470 . . . 837 J/ (kg K)Umwandlungsenthalpie 12,4 . . . 33,0 J/gEnergiedichte 4,0 1,0 kJ/m3
spezifische Arbeit 1,0 . . . 4,0 1,0 kJ/kgLeistungsdichte W/m3
spezifische Leistung 500 W/kg
(Fortsetzung. . .)
aengl.: yield strengthbengl.: ultimate tensile strengthcfür 1.000.000 Zyklendbei unterdrücktem Formgedächtnis

111
(. . .Fortsetzung)
Eigenschaft NiTi CuZnAl CuAlNi Einheit
Elektromagnetische Eigenschaften
Widerstand 0,50 . . . 1,10 0,07 . . . 0,12 0,10 . . . 0,14 µΩ mMartensit 0,50 . . . 1,10 µΩ mAustenit 1,0 µΩ m
Permeabilität < 1,002 —Suszeptibilität 3,0 10−6 —Physikalische Eigenschaften
Schmelzpunkt 1.240 . . . 1.310 950 . . . 1.020 CDichte 6,45 . . . 6,52 7,64 . . . 8,00 7,10 . . . 7,20 g/cm3
Wärmeleitfähigkeit 16,4 W/ (K m)Martensit 18,0 120 W/ (K m)Austenit 8,6 W/ (K m)
Wärmedehnung 6,6 . . . 10 17 1/KMartensit 10 . . . 11 10−6/KAustenit 6,6 10−6/K
Eigenschaften des Formgedächtniseffekts
Einwegeffekt 6 . . . 8 4 . . . 6 5 . . . 6 %100 Zyklen 6 . . . 8 4 %10.000 Zyklen 2 %1.000.000 Zyklen 0,5 %
Zweiwegeffekt 3 . . . 5 0, 8 . . . 4 1 . . . 1,2 %100 Zyklen 6 1 %10.000 Zyklen 2 0,8 %1.000.000 Zyklen 0,5 0,5 %
Pseudoelastizität < 7 < 2 < 2 %Eigenschaften der Temperaturhysterese
Umwandlungstemp. −100 . . . 120 −200 . . . 120 −150 . . . 200 CHysteresebreite 15 . . . 30 5 . . . 20 20 . . . 30 KSpannungsrate 3 . . . 20 2 . . . 6 MPa/KÜberhitzbarkeit 400 150 . . . 200 300 CEigenschaften der Applikation
Herstellbarkeit schwierig einfachFormbarkeit sehr schwer gutKaltumformbarkeit mittel begrenztWarmformbarkeit recht gutSchweißbarkeit nahezu unmöglichZerspanbarkeit schlecht sehr gutKorrosionsbeständigkeit sehr gut befriedigend gutBiokompatibilität sehr gut schlecht schlechtVerschleißfestigkeit gut

112
B Modellberechnungen
B.1 Wärmeübergangskoeffizient
Der Wärmeübergangskoeffizient ist der Proportionalitätsfaktor zwischen Übertemperaturdes Körpers und durch Konvektion abgegebene thermische Leistung. Dabei muss zwischenfreier und erzwungener Konvektion unterschieden werden. Die folgenden Berechnungsvor-schriften stammen aus [VDI, 1997].
B.1.1 Wärmeübergang durch freie Konvektion
Der Wärmeübergangskoeffizient ist von der Bauteilgeometrie und den Umgebungsbedin-gungen abhängig und ändert sich mit der Bauteil- und Umgebungstemperatur, dem Um-gebungsmedium, Turbulenzen in der Umgebung und der Einbaulage des Bauteils. DieBeschreibung des Wärmeübergangs bei freier Konvektion infolge von Temperaturunter-schieden erfolgt mit der Nußelt-Zahl
Nu = f(Gr · Pr) (B.1)
als dimensionslosen Wärmeübergangskoeffizienten in Abhängigkeit von der Grashof- Grund Prandtl-Zahl Pr. Der eigentliche Wärmeübergangskoeffizient
αconv =Nuλcond,Lu
lan(B.2)
ist der Quotient aus dem Produkt von Nußelt-Zahl Nu und Wärmeleitfähigkeit λcond,Lu
des Umgebungsmediums Luft und der Anströmlänge lan des Bauteils.Während die temperaturabhängige Wärmeleitfähigkeit von Luft als Tabellenwert vor-
liegt, müssen die Nußelt-Zahl und die Anströmlänge explizit berechnet werden. Die An-strömlänge ist der Quotient aus der Oberfläche des umströmten Körpers und dem amWärmeübergang beteiligten Umfang seiner Projektionsfläche in Strömungsrichtung. Un-ter der Annahme, dass natürliche Konvektion in vertikaler Richtung erfolgt, werden ho-rizontale bzw. vertikale Zylinder unterschieden:
lquer (= lhorizontal) =lDdDπ
2 (lD + dD)≈ dDπ
2(B.3)
lparallel (= lvertikal) =4lDdDπ
d2Dπ
=4lDdD
(B.4)
Bei einem genügend dünnen Draht kann davon ausgegangen werden, dass die Konvekti-onsströmung unabhängig von der Einbaulage quer und nicht parallel zum Draht erfolgt.Deshalb ist eine Unterscheidung der Anströmung zwischen quer und längs zur Zylinder-achse besser geeignet. Die Nußelt-Zahl
Nu = f(Pr) =
0,752 + 0,387 [Ra · f(Pr)]1
6
2(B.5)

B.1 Wärmeübergangskoeffizient 113
berechnet sich aus der Rayleigh-Zahl Ra und einer Funktion der Prandtl-Zahl. Die Ray-leigh-Zahl
Ra = Gr · Pr (B.6)
ist das Produkt von Grashof-Zahl Gr und Prandtl-Zahl Pr.Während die Prandtl-Zahl von Luft in Abhängigkeit von der betrachteten mittleren
Temperatur als Tabellenwert vorliegt, wird der Einfluss der Prandtl-Zahl im gesamtenBereich Pr > 0 mit der Prandtl-Funktion
f(Pr) =
(
1 +(
0,599
Pr
) 9
16
)− 16
9
(B.7)
ermittelt. Die Grashof-Zahl
Gr =glan
3
νLu2αLu (T − TU) (B.8)
berechnet sich aus der Erdbeschleunigung g, der kinematischen Viskosität νLu und demthermischen Ausdehnungskoeffizienten αLu. Der thermische Ausdehnungskoeffizient vonLuft
αLu =1
TU=
1
ϑU + T0=
1
ϑU + 273,15 K(B.9)
hängt von der Umgebungstemperatur TU ab. Die vollständige Berechnung der Nußelt-Zahl
Nu =
0,752 + 0,387
(
glan3
νLu2
T − TU
TU· Pr · f(Pr)
) 1
6
2
(B.10)
ist eine Funktion von Anströmlänge, Drahttemperatur und Umgebungstemperatur. DieZahlenwerte von Pr, νLu und λcond,Lu für Luft werden z. B. im VDI-Wärmeatlas angegeben.
B.1.2 Wärmeübergang durch Mischkonvektion
Bei der Überlagerung von freier und erzwungener Konvektion spricht man von Mischkon-vektion. Die Nußelt-Zahl für Mischkonvektion
Numisch = f(Re ·Gr · Pr) (B.11)
hängt neben der Grashof- und Prandtl-Zahl von der Reynolds-Zahl Re ab. Die Reynolds-Zahl
Re =vLulan
νLu=vLulanLu
ηLu(B.12)
ist der Quotient aus dem Produkt von mittlerer Fluidgeschwindigkeit vLu und Anström-länge lan und der kinematischen Viskosität des Fluids νLu.
Für den beheizten Draht wird eine gleichgerichtete Mischkonvektion angenommen, d. h.die Zwangsströmung ist in Richtung der Auftriebskraft oder im spitzen Winkel hierzugerichtet. Nach dem Komponentenansatz gilt für 0,1 < Pr < 100:
Numisch =3
√
Nuerzw3 +Nufrei
3 (B.13)
Die Nußelt-Zahl Nufrei für freie Konvektion kann nach dem vorangegangenen Abschnittberechnet werden. Bei erzwungener Konvektion berechnet sich Nuerzw für 101 < Re < 107
und 0,6 < Pr < 1000 nach:
Nuerzw = 0,3 +√
Nulam2 +Nuturb
2 (B.14)

114 B Modellberechnungen
mit
Nulam = 0,664 ·√Re · 3√Pr (B.15)
und
Nuturb =0,037 ·Re0,8 · Pr
1 + 2,443 ·Re−0,1 · (Pr2/3 − 1)(B.16)
Der Minimalwert für Nuerzw rührt daher, dass quer angeströmte Zylinder stets eine endli-che Länge besitzen, so dass sich auch bei ruhender Umgebung ein minimaler Wärmeflusseinstellt.
B.2 Jiles-Atherton-Hysteresemodell
Ms
M
H0
Mre
-Hco
Neukurve
Abbildung B.1: Magnetisierungshysterese
Die Modellvorstellung der Magnetisie-rung M = f(H) in ferromagnetischenKreisen basiert auf magnetischen Do-mänen (Weiß’sche Bezirke), die durchBlochwände abgegrenzt werden. Bei An-legen eines äußeren Magnetfelds folgt dieMagnetisierung eines ursprünglich unma-gnetisierten Ferromagneten entlang derNeukurve. Zunächst verschieben sich dieBlochwände reversibel, und es kommt zueinem geringen Anstieg der Magnetisie-rung. Durch höhere Feldstärken treten ir-reversible Blochwandverschiebungen undirreversible Drehungen der Weiß’schenBezirke auf, die Magnetisierung steigtstark an. Für eine weitere Aussteuerung
bis zur Sättigung müssen reversible Drehprozesse der Domänen stattfinden. Bei abneh-mender Feldstärke verringert sich die Magnetisierung aufgrund der irreversiblen Prozessenicht entlang der Neukurve, sondern verläuft oberhalb davon [Kleineberg, 1995; Kallen-bach u. a., 2003; Smith, 2005].
Durch die Wechselwirkung der einzelnen Domänen in ferromagnetischen Materialienaufgrund einer angelegten äußeren Feldstärke und irreversibler Prozesse entsteht ein ei-genständiges Feld (ähnlich einem Dauermagneten). Die angelegte Feldstärke H und daseigenständige Feld αM resultieren in der effektiven Feldstärke
He = H + αM. (B.17)
Der Faktor α repräsentiert einen Parameter des Magnetfeldes zur quantitativen Beschrei-bung der Interaktion der Domänen.
Das Verfahren beruht ursprünglich auf dem Langevin-Modell zur Berechnung der Ma-gnetisierung paramagnetischer Werkstoffe. Die anhysteretische Magnetisierung
Man = Ms L(He
a
)
= Ms
[
coth(He
a
)
− a
He
]
(B.18)

B.2 Jiles-Atherton-Hysteresemodell 115
verbleibt beim Anlegen eines mit einem abklingenden Wechselfeld überlagerten Gleich-feldes und kann mit der Langevin-Funktion L(x) = coth(x) − 1
xanalytisch beschrieben
werden. Ms ist die Sättigungsmagnetisierung. a ist eine Materialkonstante des Magnet-werkstoffes und beeinflusst die Form der Kurve. Um die Hysterese eines Werkstoffes zubeschreiben, setzen Jiles und Atherton die Magnetisierung
M = Mrev +Mirr (B.19)
aus einem reversiblen Anteil durch reversible Blochwandverschiebungen und einem irrever-siblen Anteil durch irreversible Domänen- und Domänenwandverschiebungen zusammen.Für die irreversible Komponente gilt:
Mirr =∫ dMirr
dHdH (B.20)
dMirr
dH=
Man −Mirr
kδ − α (Man −Mirr)
!> 0 (B.21)
Der Faktor k („pinning coefficient“) beschreibt den volumenspezifischen Energieverlust. δist die Vorzeichenfunktion
δ = sgn(
H)
=
+1 dHdt > 0
−1 dHdt < 0
(B.22)
der zeitlichen Änderung der Feldstärke. Die reversible Komponente ist für kleine Änderun-gen proportional zur Differenz zwischen Man und M , d. h. Mrev = c (Man −Mirr). UnterBerücksichtigung des Reversibilitätskoeffizienten c wird die Magnetisierung
M = cMan + (1− c)Mirr (B.23)
berechnet [Ivanyi, 1997].Der Einfluss der einzelnen Parameter auf die Form der Hysteresekurve wird in Tabel-
le B.1 zusammengefasst [Kleineberg, 1995].
Tabelle B.1: Parametereinfluss beim Jiles-Atherton-Hysteresemodell
Parameter Einheit Physikalische Interpretation Einfluss auf Kurvenform
Ms A/m Sättigungsmagnetisierung Höhe der Hysteresekurvea A/m Bereichsenergiefaktor Anstieg der Hysteresekurveα — Bereichskoppelfaktor Rundung der Hysteresekurvek A/m Blochwandhaftkonstante Breite der Hysteresekurvec — Blochwandbiegekonstante Breite der Hysteresekurve
Die Implementierung der Gleichungen unter Matlab in einer „S-function“ basiert auffolgendem Gleichungssystem:
[
Mi+1
Mirr,i+1
]
=
[
0 1− c0 1
] [
MiMirr,i
]
+
[
0 0dMirr
dH −dMirr
dH
] [
HiHi−1
]
+
[
c0
]
Man,i (B.24)
Bi =[
1 0][
MiMirr,i
]
+[
1 0][
HiHi−1
]
(B.25)

116
C Mess- und Simulationsergebnisse
C.1 Simulationsparameter
Die Simulation des in dieser Arbeit vorgestellten Modells erfolgte mit den Parametern inTabelle C.1 für die Legierungen DY90 und SM495.
Tabelle C.1: Simulationsparameter
Parameter Symbol DY90 SM495 Einheit
Mechanische Simulationsparameter
E-ModulAustenit Ea 35,00 46,00 GPaMartensit, vollständig verzwillt Em 8,00 6,00 GPaMartensit, teilweise verzwillt Et 0,95 0,25 GPaMartensit, vollständig entzwillt Ed 5,50 6,00 GPa
StreckgrenzeStreckgrenze Martensit, verzwillt εy 0,55 0,25 %Minimaldehnung Martensit, entzwillt εd 4,50 3,15 %
Querkontraktionszahl µ 0,33 (dto.) —viskoelastische Zeitkonstante τela 3,375 (dto.) msdynamische Viskosität ηela 72,56 87,75 MPa sThermodynamische Simulationsparameter
Wärmekapazität cp 490 470 J/ (kg K)Umwandlungsenthalpie ∆h 33,0 33,0 J/gElektrische Simulationsparameter
spezifischer Widerstand bei RTMartensit RT
el,M 0,890 0,690 µΩ mAustenit RT
el,A 0,700 0,560 µΩ mlinearer TemperaturkoeffizientMartensit αel,M 1,80 3,45 10−3/KAustenit αel,A 1,20 1,52 10−3/K
Bridgman-Faktor κ 1,13 1,13 —Physikalische Simulationsparameter
Dichte 6.450 (dto.) g/cm3
Emissionsgrad ε 0,2 (dto.) —WärmeleitfähigkeitMartensit λcond,M 14 (dto.) W/ (K m)Austenit λcond,A 28 (dto.) W/ (K m)
(Fortsetzung. . .)

C.2 Pulsantworten 117
(. . .Fortsetzung)
Parameter Symbol DY90 SM495 Einheit
WärmedehnungMartensit αth,M 6,6 (dto.) 10−6/KAustenit αth,A 11,0 (dto.) 10−6/K
Simulationsparameter der Temperaturhysterese
PhasenumwandlungstemperaturenMartensit-Endtemperatur Mf 68 44 CMartensit-Starttemperatur Ms 84 62 CAustenit-Starttemperatur As 77 60 CAustenit-Endtemperatur Af 93 73 C
TemperaturverschiebungskoeffizientMartensit cσ,M 0,123 0,133 K/MPaAustenit cσ,A 0,133 0,142 K/MPa
C.2 Pulsantworten
Abbildung C.1 zeigt den Vergleich von Messung und Simulation einer Pulsantwort beiSpannungseinprägung. Die Simulation bildet die gemessenen mechanischen Schwingungenbeim Erreichen der Endlage bzw. Ruhelage gut ab.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−2
−1
0
1
2
3
4
5
Hubs
inm
m
Zeit t in s
MessungSimulation
Abbildung C.1: Pulsantwort (DY90, 100 mm×∅ 51 µm, 40 g, 5,2 V)
C.3 Frequenzgänge
Abbildung C.2 enthält die gemessenen Frequenzgänge verschieden dicker FG-Drähte. InAbbildung C.3 werden die gemessenen Frequenzgänge bei Strom- und Spannungsanregungmit den linearisierten Übertragungsfunktionen verglichen.

118 C Mess- und Simulationsergebnisse
−20
0
10−2
10−1
100
101
−90
−45
0
Ain
dB
(mm
/V)
ϕin
Frequenz f in Hz
50 µm100 µm200 µm
(a) Spannungseinprägung
0
20
10−2
10−1
100
101
−90
−45
0
Ain
dB
(mm
/A)
ϕin
Frequenz f in Hz
50 µm100 µm200 µm
(b) Stromeinprägung
Abbildung C.2: Messung des Frequenzgangs bei unterschiedlichem Drahtdurchmesser(NiTi, 100 mm)

C.3 Frequenzgänge 119
−30
−20
−10
0
10
10−2
10−1
100
101
102
−90
−45
0
Ain
dB
(mm
/V)
ϕin
Frequenz f in Hz
ÜbertragungsfunktionMessung
(a) Spannungseinprägung
−10
0
10
20
30
10−2
10−1
100
101
102
−90
−45
0
Ain
dB
(mm
/A)
ϕin
Frequenz f in Hz
ÜbertragungsfunktionMessung
(b) Stromeinprägung
Abbildung C.3: Frequenzgang aus Messung und linearer Übertragungsfunktion (NiTi,100 mm×∅ 100 µm)

120
Literaturverzeichnis
[Abel und Bollig 2006] Abel, Dirk ; Bollig, Alexander: Rapid Control Prototyping.Methoden und Anwendungen. Berlin : Springer, 2006
[Akhras 2000] Akhras, Georges: Smart Materials and Smart Systems for the Future.In: Canadian Military Journal Autumn (2000), S. 25–31
[Albers 2008] Albers, Albert: Elastische Elemente, Federn. In: Steinhilper, W.(Hrsg.) ; Sauer, B. (Hrsg.): Konstruktionselemente des Maschinenbaus Bd. 1: Grundla-gen der Berechnung und Gestaltung von Maschinenelementen. 7. Aufl. Berlin : Springer,2008, Kap. 5, S. 199–268
[von Behrens und Fairbanks 2002] Internationale Anmeldung WO 02/068820 A1 (6. Sep-tember 2002). Behrens, Peter E. von (Erf.) ; Fairbanks, Dylan M. (Erf.) ; Nano-muscle, Inc. (Anm.): Shape Memory Alloy Actuator with Improved TemperatureControl. – IPC F03G 7/06
[von Behrens und Fairbanks 2003] Internationale Anmeldung WO 03/095798 A1(20. November 2003). Behrens, Peter E. von (Erf.) ; Fairbanks, Dylan M.(Erf.) ; Nanomuscle, Inc. (Anm.): High Stroke, Highly Integrated SMA Actuator.– IPC F01B 29/10
[Bertsche und Lechner 2004] Bertsche, Bernd ; Lechner, Gisbert: Zuverlässigkeit imFahrzeug- und Maschinenbau. Ermittlung von Bauteil- und System-Zuverlässigkeiten.3., überarb. und erw. Aufl. Berlin : Springer, 2004
[Bhattacharya u. a. 2002] Bhattacharya, A. ; Sweeney, L. ; Faulkner, M. G.:Experimental Characterization of Free Convection During Thermal Phase Transforma-tions in Shape Memory Alloy Wires. In: Smart Material and Structures 11 (2002),Juni, Nr. 3, S. 411–422
[Bhattacharya 2003] Bhattacharya, Kaushik ; Sutton, Adrian P. (Hrsg.) ; Rudd,Robert E. (Hrsg.): Microstructure of Martensite. Why it forms and how it gives Riseto the Shape-Memory Effect. New York : Oxford University Press, 2003 (Oxford Serieson Material Modelling 2)
[Bhattacharya u. a. 2004] Bhattacharya, Kaushik ; Conti, Sergio ; Zanzotto, Gio-vanni ; Zimmer, Johannes: Crystal symmetry and the reversibility of martensitic trans-formations. In: Nature 428 (2004), 4. März, S. 55–59
[Breidert und Welp 2005] Breidert, J. ; Welp, E. G.: Modulares Aktorsystem aufder Basis von Formgedächtnistechnik. In: VDI-Berichte Nr. 1892, 2005, S. 593–610
[Breidert 2006] Breidert, Joachim: Schnittstellengestaltung für die Baukastensynthesemit Beispielen aus der Formgedächtnisaktorik, Ruhr-Universität Bochum, Dissertation,2006

Literaturverzeichnis 121
[Brinson und Huang 1996] Brinson, L. C. ; Huang, M. S.: Simplifications and Compa-risons of Shape Memory Alloy Constitutive Models. In: Journal of Intelligent MaterialSystems and Structures 7 (1996), Nr. 1, S. 108–114
[Buehler u. a. 1963] Buehler, W. J. ; Gilfrich, J. V. ; Wiley, R. C.: Effect of Low-Temperature Phase Changes on the Mechanical Properties of Alloys near CompositionTiNi. In: Journal of Applied Physics 34 (1963), Mai, Nr. 5
[Butera 2001] Butera, F.: Shape Memory Actuators for Automotive Applications. In:Auricchio, F. (Hrsg.) ; Faravelli, L. (Hrsg.) ; Magonette, G. (Hrsg.) ; Torra,V. (Hrsg.): Shape Memory Alloys. Advances in Modelling and Applications. Barcelona,Spanien : International Center for Numerical Methods in Engineering, September 2001(Theory and Engineering Applications of Computational Methods), Kap. 6, S. 405–430
[Calloch u. a. 2006] Calloch, S. ; Taillard, K. ; Arbab Chirani, S. ; Lexcellent,C. ; Patoor, E.: Relation between the Martensite Volume Fraction and the EquivalentTransformation Strain in Shape Memory Alloys. In: Materials Science and Engineering:A Bd. 438–440, Elsevier, 2006, S. 441–444
[Chang und Read 1951] Chang, L. C. ; Read, T. A.: Plastic Deformation and Diffu-sionless Phase Changes in Metals – The Gold Cadmium Beta Phase. In: Transactions ofthe American Institute of Mining, Metallurgical and Petroleum Engineers 191 (1951),S. 47–69
[Conti u. a. 2004] Conti, Sergio ; Zimmer, Johannes ; Bhattacharya, Kaushik ;Zanzotto, Giovanni: Warum ist Eisen kein Metall mit Gedächtnis? / Max-Planck-Gesellschaft. München, 3. März 2004 (C8/2004 (28)). – Presseinformation
[DIN 19226-1 1994] Norm DIN 19226 Teil 1: Regelungstechnik und Steuerungstechnik –Teil 1: Allgemeine Grundbegriffe. Februar 1994
[DIN 40041 1990] Norm DIN 40041: Zuverlässigkeit; Begriffe. Dezember 1990
[DIN EN 13906-1 2002] Norm DIN EN 13906 Teil 1: Zylindrische Schraubenfedern ausrunden Drähten und Stäben; Berechnung und Konstruktion – Teil 1: Druckfedern. Juli2002
[DIN EN 61025 2007] Norm DIN EN 61025: Fehlerzustandsbaumanalyse. August 2007
[DIN EN 61508-4 2002] Norm DIN EN 61508 Teil 4: Funktionale Sicherheit sicherheits-bezogener elektrischer/elektronischer/programmierbar elektronischer Systeme – Teil 4:Begriffe und Abkürzungen. November 2002
[DIN IEC 1025 1993] Norm DIN IEC 1025: Störungsbaumanalyse. Dezember 1993
[Donner 1992] Donner, Petra: Die Herstellung von Bändern und Drähten aus Legie-rungen mit Formgedächtnis, Ruhr-Universität Bochum, Dissertation, 1992
[Dörrscheidt und Latzel 1993] Dörrscheidt, F. ; Latzel, W. ; Fricke, H. (Hrsg.) ;Frohne, H. (Hrsg.) ; Höptner, N. (Hrsg.) ; Löcherer, K.-H. (Hrsg.) ; Vaske, P.(Hrsg.): Grundlagen der Regelungstechnik. 2., durchges. Aufl. Stuttgart : B. G. TeubnerVerlag, 1993 (Leitfaden der Elektrotechnik)

122 Literaturverzeichnis
[Duerig u. a. 1990] Duerig, T. W. (Hrsg.) ; Melton, K. N. (Hrsg.) ; Stöckel, D.(Hrsg.) ; Wayman, C. M. (Hrsg.): Engeneering Aspects of Shape Memory Alloys.London : Butterworth-Heinemann, 1990
[Dutschke 2002] Dutschke, Wolfgang W.: Fertigungsmesstechnik. 4., überarb. Aufl.Stuttgart : B. G. Teubner Verlag, 2002
[Elahinia 2004] Elahinia, Mohammad H.: Effect of System Dynamics on Shape Memo-ry Alloy Behavior and Control. Blacksburg, Virginia Polytechnic Institute, Dissertation,2004
[Engelhardt u. a. 2004] Engelhardt, T. ; Schleich, M. ; Ulbrich, H. ; Pfeiffer,F.: Entwicklung eines künstlichen Fingers mit Shape Memory Aktoren. In: DeutscheGesellschaft für Robotik (DGR) (Hrsg.): Robotik 2004. Leistungsstand – An-wendungen – Visionen – Trends. München : VDI-Verlag, 17. und 18. Juni 2004 (VDI-Berichte 1841), S. 133–140
[Escher 1993] Escher, Knut: Die Zweiweg-Formgedächtniseffekte zur Herstellung vonGreiferelementen, Ruhr-Universität Bochum, Dissertation, 1993
[Föllinger 1994] Föllinger, Otto: Regelungstechnik. Einführung in die Methoden undihre Anwendung. 8., überarb. Aufl. Heidelberg : Hüthig, 1994
[Friend 2001] Friend, C.: Shape-memory Alloys. In: Buschow, K. H. J. (Hrsg.) ;Cahn, Robert W. (Hrsg.) ; Flemings, Merton C. (Hrsg.) ; Ilschner, Bernard (Hrsg.) ;Kramer, Edward J. (Hrsg.) ; Mahajan, Subhash (Hrsg.) ; Veyssière, Patrick(Hrsg.): Encyclopedia of Materials: Science and Technology. Elsevier Science Ltd., 2001
[Funakubo 1987] Funakubo, Hiroyasu (Hrsg.): Precision Machinery and Robotics.Bd. 1: Shape Memory Alloys. New York : Gordon and Breach Science Publishers, 1987
[Funakubo 1991] Funakubo, Hiroyasu (Hrsg.): Precision Machinery and Robotics.Bd. 2: Actuators for Control. New York : Gordon and Breach Science Publishers, 1991
[Gümpel 2004] Gümpel, Paul ; Mettner, Michael (Hrsg.): Kontakt & Studium. Bd.655: Formgedächtnislegierungen. Einsatzmöglichkeiten in Maschinenbau, Medizintech-nik und Aktuatorik. Renningen : Expert Verlag, 2004
[Gorbet 1997] Gorbet, Robert B.: Control of Hysteretic Systems with Preisach Re-presentations, University of Waterloo, Dissertation, 1997
[Gummin und Donakowski 2001] Erteiltes Patent US 6,326,707 B1 (4. Dezember 2001).Gummin, Marc A. (Erf.) ; Donakowski, William (Erf.): Shape Memory Alloy Actua-tor. – IPC H02K 41/00
[Gummin u. a. 2002] Anmeldung US 2002/0185932 A1 (12. Dezember 2002). Gummin,Marc A. (Erf.) ; Donakowski, William (Erf.) ; Gaines, Geoffrey A. (Erf.): ShapeMemory Alloy Actuator. – IPC H02N 10/00
[Hahnebach 2003] Hahnebach, Bernd: Formgedächtnislegierungen für adaptive Trag-werke. Weimar, Bauhaus-Universität Weimar, Fakultät Bauingenieurwesen, Diplomar-beit, 1. Mai 2003

Literaturverzeichnis 123
[Han u. a. 2003] Han, L. H. ; Lu, T. J. ; Evans, A. G.: Optimal Design of a LightweightShape Memory Alloy Actuator / Cambridge Centre for Micromechanics. Cambridge,August 2003. – Forschungsbericht
[Harrison 1990] Harrison, J. D.: Measurable Changes Concomitant with the ShapeMemory Effect Trasnformation. In: Duerig, T. W. (Hrsg.) ; Melton, K. N. (Hrsg.) ;Stöckel, D. (Hrsg.) ; Wayman, C. M. (Hrsg.): Engineering Aspects of Shape MemoryAlloys. Butterworth-Heinemann, 1990, S. 106–111
[Heckmann 2003] Heckmann, A.: Mikrostruktur und Ermüdung von NiTi-Formge-dächtnislegierungen, Ruhr-Universität Bochum, Dissertation, 2003
[Heimann u. a. 2007] Heimann, Bodo (Hrsg.) ; Gerth, Wilfried (Hrsg.) ; Popp, Karl(Hrsg.): Mechatronik. Komponenten – Methoden – Beispiele. 3., neu bearb. u. erw.Aufl. München : Carl Hanser Verlag, 2007
[Helm 2001] Helm, Dirk: Formgedächtnislegierungen – Experimentelle Untersuchungen,phänomenologische Modellierung und numerische Simulation der thermomechanischenMaterialeigenschaften, Universität Gesamthochschule Kassel, Dissertation, 2001
[Hesse u. a. 2003] Hesse, Tobias ; Ghorashi, Mehrdaad ; Inman, Daniel J.: Com-parison of the Experimental Behavior of a Shape Memory Alloy in Compression andTension. In: Proceedings of IMECE’03 Bd. 68. Washington, USA, 15.–21. November2003, S. 471–478
[Hesselbach 1999] Hesselbach, Jürgen: Shape Memory Actuators. In: Janocha,Hartmut (Hrsg.): Adaptronics and Smart Strutures. Springer, 1999, Kap. 6.4, S. 143–160
[Hill 1952] Hill, R.: The Elastic Behaviour of a Crystalline Aggregate. In: Proceedingsof the Physical Society Bd. A 65. London, Mai 1952, S. 349–354
[Hornbogen 1991] Hornbogen, Erhard ; Rheinisch-Westfälische Akademie derWissenschaften (Hrsg.): Legierungen mit Formgedächtnis. Opladen : WestdeutscherVerlag, 1991 (Vorträge N 388)
[Hornbogen 2006] Hornbogen, Erhard: Werkstoffe. 8., bearb. und erg. Aufl. Berlin :Springer, 2006
[Ikuta u. a. 1988] Ikuta, K. ; Tsukamoto, M. ; Hirose, S.: Shape memory alloy servoactuator system with electric resistance feedback and application for active endoscope.In: IEEE International Conference on Robotics and Automation Bd. 1. Philadelphia,USA, 24.–29. April 1988, S. 427–430
[Ikuta u. a. 1991] Ikuta, K. ; Tsukamoto, M. ; Hirose, S.: Mathematical modeland experimental verification of shape memory alloy for designing micro actuator. In:IEEE (Hrsg.): An Investigation of Micro Structures, Sensors, Actuators, Machines andRobots, 1991 (Micro Electro Mechanical Systems), S. 103–108
[Ikuta 1990] Ikuta, Koji: Micro/Miniature Shape Memory Alloy Actuator. In: IEEEInternational Conference on Robotics and Automation Bd. 3. Cincinnati, USA, 13.–18.Mai 1990, S. 2156–2161

124 Literaturverzeichnis
[Isermann 2007] Isermann, Rolf (Hrsg.): Mechatronische Systeme. 2., vollst. neu bearb.Aufl. Berlin : Springer, 2007
[Ivanyi 1997] Ivanyi, Amalia: Hysteresis Models in Electromagnetic Computation. Bu-dapest : Akademiai Kiado, 1997
[Janocha 2004] Janocha, Hartmut (Hrsg.): Actuators. Basics and Applications. Berlin :Springer, 2004
[Jansen u. a. 2004] Jansen, S. ; Breidert, J. ; Welp, E. G.: Positioning ActuatorBased on Shape Memory Wires. In: 9th International Conference on New Actuators.Bremen, 14.–16. Juni 2004 (Actuator), S. 94–97
[Jendritza 1998] Jendritza, Daniel J. ; Bartz, Wilfried J. (Hrsg.): Kontakt & Studi-um. Bd. 484: Technischer Einsatz neuer Aktoren. Grundlagen, Werkstoffe, Designregelnund Anwendungsbeispiele. 2., verb. Aufl. Renningen-Malmsheim : Expert Verlag, 1998
[Jiles und Atherton 1983] Jiles, D. C. ; Atherton, D. L.: Ferromagnetic Hysteresis.In: IEEE Transactions on Magnetics Bd. 19, September 1983
[Jiles und Atherton 1986] Jiles, D. C. ; Atherton, D. L.: Theory of FerromagneticHysteresis. In: Journal of Magnetism and Magnetic Materials Bd. 61. Amsterdam,1986, S. 48–60
[Jiles u. a. 1992] Jiles, D. C. ; Thoelke, J. B. ; Devine, M. K.: Numerical De-termination of Hysteresis Parameters for the Modeling of Magnetic Properties Usingthe Theory of Ferromagnetic Hysteresis. In: IEEE Transactions on Magnetics Bd. 28,Januar 1992, S. 27–35
[Kaiser u. a. 2007a] Kaiser, Ingo ; Mojrzisch, Sebastian ; Schiedeck, Florian: SmartMaterials as Actuators in Autonomous Miniature Robots. In: 4th International Sym-posium on Autonomous Minirobots for Research and Edutainment. Buenos Aires, Ar-gentinien, 2.–5. Oktober 2007
[Kaiser u. a. 2007b] Kaiser, Ingo ; Schiedeck, Florian ; Mojrzisch, Sebastian: Sokommt Bewegung in die Mikromechanik – Smarte Materialien in miniaturisierten Ro-botern. In: Mechatronik F&M 11-12 (2007), Dezember, S. 54–56
[Kaiser u. a. 2007c] Kaiser, Ingo ; Schiedeck, Florian ; Mojrzisch, Sebastian ;Gausemeier, Jürgen ; Wallaschek, Jörg: Funktionswerkstoffe als Aktoren in auto-nomen Miniaturrobotern. In: Internationales Forum Mechatronik. Winterthur, 12. und13. September 2007
[Kallenbach und Bögelsack 1991] Kallenbach, Eberhard ; Bögelsack, Gerhard:Gerätetechnische Antriebe. München : Carl Hanser Verlag, 1991
[Kallenbach u. a. 2003] Kallenbach, Eberhard ; Eick, Rüdiger ; Quendt, Peer ;Ströhla, Tom ; Feindt, Karsten ; Kallenbach, Matthias: Elektromagnete. 2.,überarb. und erg. Aufl. Wiesbaden : B. G. Teubner Verlag, 2003
[Kleineberg 1995] Kleineberg, Thomas: Modellierung nichtlinearer induktiver Bau-elemente der Leistungselektronik, Technische Universität Dresden, Dissertation, 1995

Literaturverzeichnis 125
[Knothe und Wessels 2008] Knothe, Klaus ; Wessels, Heribert: Finite Elemente. 4.,erw. Aufl. Berlin : Springer, 2008
[Kochs und Peterson 2002] Kochs, H.-D. ; Peterson, J.: Verlässlichkeit mechatroni-scher Systeme / Institut für Informationstechnik. Gerhard-Mercator-Universität Duis-burg, 2002. – Forschungsbericht
[Kohl 2004] Kohl, Manfred ; Baltes, H. (Hrsg.) ; Fujita, Hiroyuki (Hrsg.) ; Liep-mann, Dorian (Hrsg.): Shape Memory Microactuators. Berlin : Springer, 2004 (Micro-technology and MEMS)
[Kories und Schmidt-Walter 2000] Kories, Ralf ; Schmidt-Walter, Heinz: Taschen-buch der Elektrotechnik. 4., überarb. Aufl. Frankfurt : Verlag Harri Deutsch, 2000
[Krause 1993] Krause, Werner (Hrsg.): Konstruktionselemente der Feinmechanik. 2.,stark bearb. Aufl. München : Carl Hanser Verlag, 1993
[Kristen 1993] Kristen, Martin: Untersuchungen zur elektrischen Ansteuerung vonFormgedächtnis-Antrieben in der Handhabungstechnik, Technische Universität Braun-schweig, Dissertation, 1993
[Lange 2008] Lange, E.: Adaptronik macht Schluss mit unerwünschten Schwingungen.In: VDI nachrichten 18 (2008), 2. Mai, S. 14
[Laprie 1992] Laprie, J. C. ; Avizienis, A. (Hrsg.) ; Kopetz, H. (Hrsg.) ; Laprie,J. C. (Hrsg.): Dependable Computing and Fault-Tolerant Systems. Bd. 5: Dependability:Basic Concepts and Terminology in English, French, German, Italian, and Japanese.Wien : Springer, 1992
[Leester-Schädel 2004] Leester-Schädel, Monika: Mikrotechnisches Multiaktorsy-stem auf der Basis von Formgedächtnislegierungen, Technische Universität Braun-schweig, Dissertation, 2004
[Lenk 1971] Lenk, Arno: Elektromechanische Systeme. Bd. 1: Systeme mit konzentrier-ten Parametern. Berlin : Verlag Technik, 1971
[Leo 2007] Leo, Donald J. (Hrsg.): Engineering Analysis of Smart Material Systems.New Jersey : John Wiley & Sons, Inc., 2007
[Liang und Rogers 1990] Liang, C. ; Rogers, C. A.: One-Dimensional Thermome-chanical Constitutive Relations for Shape Memory Materials. In: Journal of IntelligentMaterial Systems and Structures 1 (1990), S. 207–234
[Liu u. a. 2007] Liu, Xiajie ; Yan, Shaoze ; Xu, Fen ; Wen, Shizhu: Experimental Studyand Modeling of a Differential SMA Spring Actuator. In: Key Engineering MaterialsBd. 336–338, 2007, S. 2631–2634
[Lutz und Wendt 2000] Lutz, Holger ; Wendt, Wolfgang: Taschenbuch der Regelungs-technik. 3., überarb. und erw. Aufl. Frankfurt : Verlag Harri Deutsch, 2000
[MacGregor 2001] Internationale Anmeldung WO 01/12985 A1 (22. Februar 2001).MacGregor, Roderick (Erf.) ; The Toy Foundry, Inc. (Anm.): Shape-MemoryAlloy Actuators and Control Systems. – IPC F03G 7/06

126 Literaturverzeichnis
[Madill und Wang 1998] Madill, Daniel R. ; Wang, David: Modeling and L2-Stabilityof a Shape Memory Alloy Position Control System. In: IEEE (Hrsg.): Transactions onControl Systems Technology Bd. 6, Juli 1998, S. 473–481
[Mayergoyz 2003] Mayergoyz, Isaak D.: Mathematical Models of Hysteresis and TheirApplications. New York : Elsevier, 2003 (Elsevier Series in Electromagnetism)
[Meier und Dilthey 2008] Meier, H. ; Dilthey, S.: Shape Memory Actuator DesignBased on a Numerical Simulation. In: International Conference and Exhibition on NewActuators and Drive Systems. Bremen, 9.–11. Juni 2008 (Actuator), S. 390–393
[Meier und Oelschläger 2004a] Meier, H. ; Oelschläger, L.: Numerical Modelling ofthe Activation Behaviour of SMA-Actuator Wires – Application in an Innovative DriveSystem. In: Materialwissenschaft und Werkstofftechnik 35 (2004), Nr. 5, S. 313–319
[Meier und Oelschläger 2004b] Meier, H. ; Oelschläger, L.: Numerical Thermodyna-mical Modelling of Shape Memory Alloy Wires. In: Materials Science and EngineeringA 378 (2004), Nr. 1–2, S. 484–489
[Mertmann u. a. 2002] Mertmann, M. ; Kautz, S. ; Brown, W.: Design Principles andNew Actuator Applications with NiTi Straight Wire Actuators. In: 8th InternationalConference on New Actuators. Bremen, 10.–12. Juni 2002 (Actuator), S. 85–90
[Mertmann 1997] Mertmann, Matthias: NiTi-Formgedächtnislegierungen für Akto-ren der Greifertechnik. Funktionelle Eigenschaften und Optimierung, Ruhr-UniversitätBochum, Dissertation, 1997
[Müller 1997] Müller, Stefan: Microstructures, Phase Transition and Geometry /Max-Planck-Institut für Mathematik in den Naturwissenschaften. Leipzig, 1997. –Preprint-Nr.: 3
[Müller 2008] Müller, Thomas: Integration von Verlässlichkeitsanalysen und-konzepten innerhalb der Entwicklungsmethodik mechatronischer Systeme, UniversitätPaderborn, Dissertation, 2008. – eingereicht, noch unveröffentlicht
[Müller u. a. 2008] Müller, Thomas ; Schiedeck, Florian ; Hemsel, Tobias: Verläss-lichkeitsorientierte Technologiebewertung innovativer Aktortechnologien am Beispielvon Formgedächtnisantrieben. In: 2. Tagung Zuverlässigkeit mechatronischer und adap-tronischer Systeme. Koblenz, 2. und 3. April 2008
[Murray 1991] Murray, J. L.: Ni-Ti (Nickel-Titanium). In: Nash, P. (Hrsg.): PhaseDiagrams of Binary Nickel Alloys. Materials Park, USA : ASM International, 1991(Monograph Series on Alloy Phase Diagrams), S. 342–355
[Nahm u. a. 2005] Nahm, S. H. ; Kim, Y. I. ; Kim, J. M. ; J., Yoon D.: A Study on theApplication of Ni-Ti Shape Memory Alloy as a Sensor. In: Materials Science ForumBd. 475–479, 2005, S. 2043–2046
[Nam u. a. 2007] Nam, Jung-min ; Lee, Lae-hwa ; Lee, Yun-jung ; Nam, Tae-hyun:Cooling and Heating Characteristics of Ti-Ni Based Shape Memory Alloy Wire Actua-tors. In: Solid State Phenomena Bd. 124–126, 2007, S. 1649–1652

Literaturverzeichnis 127
[Nathan und Maue 2007] Anmeldung US 2007/0236067 A1 (11. Oktober 2007). Na-than, John F. (Erf.) ; Maue, H. W. (Erf.) ; Lear Coorporation (Anm.): LatchActuator System. – IPC B60N 2/48
[Oelschläger 2003] Oelschläger, Lars: Numerische Modellierung des Aktivierungsver-haltens von Formgedächtnisaktoren am Beispiel eines Schrittantriebes, Ruhr-UniversitätBochum, Dissertation, 2003
[Ohkata und Suzuki 1998] Ohkata, I. ; Suzuki, Y.: The Design of Shape Memory AlloyActuators and Their Applications. In: Otsuka, K. (Hrsg.) ; Wayman, C. M. (Hrsg.):Shape Memory Materials. Cambridge University Press, 1998, Kap. 11, S. 240–266
[Otsuka und Kakeshita 2002] Otsuka, Kazuhiro ; Kakeshita, Tomoyuki: Science andTechnology of Shape-Memory Alloys: New Developments. In: MRS Bulletin 27 (2002),Februar, Nr. 2, S. 91–100
[Pawelczak 2005] Pawelczak, Dieter: Nutzung inhärenter Messeffekte von Aktorenund Methoden zur sensorlosen Positionsbestimmung im Betrieb. München, Universitätder Bundeswehr, Dissertation, 2005
[Philippow 2000] Philippow, Eugen: Grundlagen der Elektrotechnik. 10., durchges. u.erg. Aufl. Berlin : Verlag Technik, 2000
[Pons u. a. 1997] Pons, J. L. ; Reynaerts, D. ; Peirs, J. ; Ceres, R. ; VanBrussel,H.: Comparison of Different Control Approaches to Drive SMA Actuators. In: 8thInternational Conference on Advanced Robotics. Monterey, USA, 7.–9. Juli 1997, S. 819–824
[Rafoth 1998] Rafoth, Axel: Mechanische, thermische und elektrische Modellansätzezur Steuerung eines mit Formgedächtnismetallen angetriebenen selbstbeweglichen Roh-res, Universität Rostock, Dissertation, 1998
[Reinisch 1996] Reinisch, Karl: Analyse und Synthese kontinuierlicher Steuerungs-und Regelungssysteme. 3., unveränd. Aufl. Berlin : Verlag Technik, 1996
[Rice 2002] Rice, Carolyn: Shape Memory Alloys, Applications. In: Schwartz, Mel(Hrsg.): Encyclopedia of Smart Materials. John Wiley & Sons, Inc., 2002, S. 921–936
[Saburi 1998] Saburi, T.: Ti-Ni Shape Memory Alloys. In: Otsuka, K. (Hrsg.) ;Wayman, C. M. (Hrsg.): Shape Memory Materials. Cambridge University Press, 1998,Kap. 3, S. 49–96
[Schetky 1979] Schetky, L. M.: Shape-memory alloys. In: Scientific American 241(1979), November, Nr. 5, S. 68–76
[Schetky 1980] Schetky, L. M.: Legierungen, die sich an Formen erinnern. In: Spektrumder Wissenschaft (1980), Januar, Nr. 1, S. 48–57
[Schiedeck und Hemsel 2006] Schiedeck, Florian ; Hemsel, Tobias: Comparisonof Piezoelectric and Shape Memory Alloy Based Actuators. In: Wallaschek, Jörg(Hrsg.) ; Hemsel, Tobias (Hrsg.) ; Mracek, Maik (Hrsg.): Proceedings of 2nd Inter-national Workshop on Piezoelectric Materials and Applications in Actuators Bd. 180.Paderborn : HNI-Verlagsschriftenreihe, 2006, S. 239–242. – 2nd International Workshopon Piezoelectric Materials and Applications in Actuators, Paderborn, 22.–25. Mai 2005

128 Literaturverzeichnis
[Schiedeck u. a. 2006] Schiedeck, Florian ; Hemsel, Tobias ; Wallaschek, Jörg: TheUse of Shape Memory Alloy Wires in Actuators. In: Bizys, Nin (Hrsg.) ; Mercinkevi-cius, Henrikas A. (Hrsg.): Mechatronic Systems and Materials Bd. 113. Ütikon-Zürich,Schweiz : Trans Tech Publications, 2006, S. 195–198. – 1st International Conference ofMechatronic Systems and Materials, Vilnius, Litauen, 20.–23. Oktober 2005
[Schiedeck und Mojrzisch 2008] Schiedeck, Florian ; Mojrzisch, Sebastian: Improve-ment of SMA Actuator Performance Using Self-Sensing. In: Actuator 08. InternationalConference and Exhibition in New Actuators and Drive Systems. Bremen, 9.–11. Juni2008
[Schiedeck und Wallaschek 2005] Schiedeck, Florian ; Wallaschek, Jörg: Form-gedächtnisdrähte als Aktoren in mechatronischen Systemen. In: 50. InternationalesWissenschaftliches Kolloquium. Ilmenau : Verlag Isle, 19.–23. September 2005, S. 147–148
[Schiedeck und Wallaschek 2007] Schiedeck, Florian ; Wallaschek, Jörg: Modellie-rung und Regelung von Aktoren mit Formgedächtnislegierungen. In: Schinköthe, W.(Hrsg.): Innovative Klein- und Mikroantriebstechnik. Augsburg : VDE Verlag, 12. und13. Juni 2007 (GMM-Fachbericht 54), S. 141–146. – 7. GMM/ETG-Fachtagung
[Schleich 2003] Schleich, Martin: Formgedächtnismaterialien als Fingerantrieb, Tech-nische Universität München, Dissertation, 2003
[Schmidt 2004] Schmidt, Ina: Untersuchungen zur Dämpfungskapazität superelasti-scher Nickel-Titan-Formgedächtnislegierungen, Universität der Bundeswehr Hamburg,Dissertation, 2004
[Schmitz u. a. 2004] Schmitz, S. ; Winzek, B. ; Vitushinsky, R.: Serienfertigung vonMikrogreifern für die Mikromontage. In: Deutsche Gesellschaft für Robotik(DGR) (Hrsg.): Robotik 2004. Leistungsstand – Anwendungen – Visionen – Trends.München : VDI-Verlag, 17. und 18. Juni 2004 (VDI-Berichte 1841), S. 459–467
[Schwartz 2002] Schwartz, Mel (Hrsg.): Encyclopedia of Smart Materials. New York :John Wiley & Sons, Inc., 2002
[da Silva 2000] Silva, Edson P. da: Zur Kalometrie von Gedächtnislegierungen undzu ihrer Anwendung als elektrisch aktivierte Aktuatoren, Technische Universität Berlin,Dissertation, 2000
[Smith 2005] Smith, Ralph C.: Smart Material Systems. Model Development. Phil-adelphia : Society for Industrial and Applied Mathematics, 2005
[Srinivasan und McFarland 2001] Srinivasan, A. V. (Hrsg.) ; McFarland, D. M.(Hrsg.): Smart Structures: Analysis and Design. Cambridge : Cambridge UniversityPress, 2001
[Stachowiak und McCormick 1988] Stachowiak, G. B. ; McCormick, P. G.: ShapeMemory Behaviour Associated With the R and Martensitic Transformations in a NiTiAlloy. In: Acta Metallurgica 36 (1988), Februar, Nr. 2, S. 291–297

Literaturverzeichnis 129
[Stöckel u. a. 1988] Stöckel, Dieter ; Hornbogen, Erhard ; Ritter, Friedhelm ;Tautzenberger, Peter ; Bartz, Wilfried J. (Hrsg.): Kontakt & Studium. Bd.259: Legierungen mit Formgedächtnis. Industrielle Nutzung des Shape-Memory-Effek-tes. Grundlagen, Werkstoffe, Anwendungen. Ehningen bei Böblingen : Expert Verlag,1988
[Stoeckel 1990] Stoeckel, Dieter: Shape Memory Actuators for Automotive Applica-tions. In: Duerig, T. W. (Hrsg.) ; Melton, K. N. (Hrsg.) ; Stöckel, D. (Hrsg.) ;Wayman, C. M. (Hrsg.): Engineering Aspects of Shape Memory Alloys. Butterworth-Heinemann, 1990, S. 283–294
[Storey 1996] Storey, Neil: Safety-Critical Computer Systems. Essex : Addison-Wesley,1996
[Stork 1997] Stork, Holger: Aufbau, Modellierung und Regelung von Formgedächtnis-Aktorsystemen, Technische Universität Braunschweig, Dissertation, 1997
[Strauß u. a. 2008] Offenlegungsschrift DE 10 2006 031 819 A1 (10. Januar 2008).Strauß, Steffen (Erf.) ; Schiedeck, Florian (Erf.) ; Mojrzisch, Sebastian (Erf.) ;Hella KG Hueck & Co. (Anm.) ; Universität Paderborn (Anm.): Projektions-scheinwerfer für Fahrzeuge. – IPC F21V 14/08
[Takacs 2003] Takacs, Jeno: Mathematics of Hysteretic Phenomena. The T(x) Modelfor the Description of Hysteresis. Weinheim : Wiley-VCH, 2003
[Thumann 1986] Thumann, Manfred: Mechanische und thermische Ermüdung in β-Cu-Zn-X Formgedächtnis-Legierungen, Ruhr-Universität Bochum, Dissertation, 1986
[Tietze 1985] Tietze, Holger: Phasenübergänge mit Memory Effekt, Universität Frank-furt am Main, Dissertation, 1985
[Tietze und Schenk 2002] Tietze, Ulrich ; Schenk, Christoph: Halbleiter-Schaltungs-technik. 12. Aufl. Berlin Heidelberg : Springer, 2002
[Uebel 2002] Uebel, Andreas: Untersuchung des thermischen und mechanischen Hyste-reseverhaltens von einkristallinen Cu82Al14Ni4-Formgedächtnislegierungen, TechnischeUniversität Berlin, Dissertation, 2002
[Unbehauen 2000] Unbehauen, Heinz: Regelungstechnik III. Identifikation, Adaption,Optimierung. 6., verb. Aufl. Braunschweig/Wiesbaden : Vieweg, 2000
[Unbehauen 2005] Unbehauen, Heinz: Regelungstechnik I. Klassische Verfahren zurAnalyse und Synthese linearer kontinuierlicher Regelsysteme. 13., verb. Aufl. Braun-schweig/Wiesbaden : Vieweg, 2005
[Unbehauen 2007] Unbehauen, Heinz: Regelungstechnik II. Zustandsregelungen,digitale und nichtlineare Regelsysteme. 9., durchges. und korr. Aufl. Braun-schweig/Wiesbaden : Vieweg, 2007
[VDI 1997] VDI, Verein Deutscher Ingenieure ; VDI-Gesellschaft Verfahrens-technik und Chemieingenieurwesen (Hrsg.): VDI-Wärmeatlas. Berechnungsblät-ter für den Wärmeübergang. 8. Aufl. Berlin : Springer, 1997

130 Literaturverzeichnis
[VDI 4003 2007] Norm VDI 4003: Zuverlässigkeitsmanagement. März 2007
[Velazquez u. a. 2005] Velazquez, R. ; Pissaloux, E. ; Hafez, M. ; Szewczyk,J.: Measurement of SMA Thermal Properties in the Design/Evaluation of Actuators.In: Proceedings of the 15th International Symposium of Measurement and Control inRobotics. Brüssel, Belgien, 8.–10. November 2005 (Measurement in Robotics)
[Velazquez 2006] Velazquez, Ramiro: Contribution à la Conception et à la Réali-sation d’Interfaces Tactiles Portables pour les Déficients Visuels, Universite Paris 6,Dissertation, 2006
[Velazquez und Pissaloux 2004] Velazquez, Ramiro ; Pissaloux, Edwige: Designof Shape Memory Alloy Helical Springs Using Force and Time Response Criteria. In:Mechatronics & Robotics. Aachen, 13.–15. September 2004
[Wallaschek 2006] Wallaschek, Jörg: Sensoren und Aktoren. In: Steinhilper, W.(Hrsg.) ; Sauer, B. (Hrsg.): Konstruktionselemente des Maschinenbaus Bd. 2: Grundla-gen von Maschinenelementen für Antriebsaufgaben. 5., vollst. neu bearb. Aufl. Berlin :Springer, 2006, Kap. 18, S. 665–704
[Waram 1990] Waram, Tom: Design Principles For Ni-Ti-Actuators. In: Duerig,T. W. (Hrsg.) ; Melton, K. N. (Hrsg.) ; Stöckel, D. (Hrsg.) ; Wayman, C. M.(Hrsg.): Engineering Aspects of Shape Memory Alloys. Butterworth-Heinemann, 1990,S. 234–244
[Warlimont u. a. 1974] Warlimont, H. ; Delaey, L. ; Krishnan, R. V. ; Tas, H.:Thermoelasticity, pseudoelasticity and the memory effects associated with martensitictransformations. Part 3: Thermodynamics and kinetics. In: Journal of Materials Science9 (1974), September, Nr. 9, S. 1545–1555
[van der Wijst 1998] Wijst, Marc van der: Shape Control of Structures and Materialswith Shape Memory Alloys, Technische Universiteit Eindhoven, Dissertation, 1998
[Winzek 2006] Winzek, Bernhard: Präzise Positionieren mit drei Fingern. In: Mecha-tronik F&M 1–2 (2006), S. 52–54

Wissenschaftlicher Werdegang
Persönliche Daten
Georg Johannes Florian Schiedeckgeboren am 14. Juli 1977 in Straubing
Schulbildung
1984–1988 Alois-Reichenberger-Volksschule, Grundschule Pondorf
1988–1997 Anton-Bruckner-Gymnasium Straubing
Grundwehrdienst
1997–1998 3./ Pionierbataillon 4, Bogen
Studium
1998–2000 Technische Universität Ilmenau, Grundstudium Maschinenbau
2000–2003 Technische Universität Ilmenau, Hauptstudium Mechatronik
Forschungstätigkeit
2004–2007 Universität Paderborn, Heinz Nixdorf InstitutMechatronik und Dynamik, Prof. Dr.-Ing. J. Wallaschek
seit 2007 Gottfried Wilhelm Leibniz Universität HannoverInstitut für Dynamik und Schwingungen, Prof. Dr.-Ing. J. Wallaschek


Bereits veröffentlicht wurden in der Reihe „Berichte aus dem IDS“:
Band 03/2009 Florian Schiedeck: Entwicklung eines Modells für Formgedächtnisaktoren im geregelten dynamischen Betrieb, ISBN 978-3-941416-23-9
Band 02/2009 Marcus Neubauer: Schwingungsdämpfung mit beschalteten Piezowandlern und Anwendung zur Unterdrückung von Bremsenquietschen, ISBN 978-3-941416-13-0
Band 01/2009 Lutz Bellmann: Untersuchungen zu den viskoelastischen Eigenschaften von Bremsbelägen im Parameterbereich des Bremsenquietschens, ISBN 978-3-941416-12-3
Eine aktuelle Übersicht über alle bisher erschienenen Bände finden Sie auch im Internet: http://www.pzh-gmbh.de/verlag
Recommended









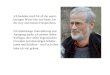






![Auslegung eines Solarturmkraftwerks mit … · Allen voran bedanke ich mich bei meinen Eltern für die selbstlose Unterstützung, die ... Spezifische Wärmekapazität d [m] Receiverrohr-Außendurchmesser](https://img.pdfslide.org/doc/110x75/5ba0a33309d3f242318d30d5/auslegung-eines-solarturmkraftwerks-mit-allen-voran-bedanke-ich-mich-bei-meinen.jpg)