BioRobotikLabor.de
1
Entwurf und Regelung bionischer Roboter• Motivation
• Bionik (Methode, Vorgehensweise, Beispiele)• Biologische (Bewegungs-)Systeme (Eigenschaften, Vorteile, Evolution)
• Morphologie Mensch/Tier (vs. herkömmliche Roboter-Mechanik, Materialien)
• Physiologie Mensch/Tier (vs. herkömmliche Antriebe, Verarbeitung, Steuerung)
• Vorstellung bion. Aspekte in techn. Robotersystemen (Hausarbeit und Vortrag)
• Materialien, Strukturen für neue Kinematiken (Leichtbau, Herstellung/SLS)
• Aktoren für neue Antriebssysteme (Nachgiebigkeit, gewichtsbezogene Leistung)
• Modellbildung eines fluidischen Muskels (Versorgung, Leitung, Ventil, Muskel)
• Modellbildung eines antagonistischen Muskelpaares (Ellenbogen-)Gelenks
• Regelung eines antagonistischen Muskelpaares
• Roboter-Assistenzsystem Humanoider Muskelroboter ZAR5 (Anwendung)
• Roboter-Rüsselkinematik BROMMI:TAK (Anwendung)
Inhalt
BioRobotikLabor.de
2
• Dachverband, seit 2001- national: BIOKON e.V. - Das Bionik-Kompetenznetz, www.biokon.net- international: The Biomimetics Association, www.biokon-international.com
• Regionale Netzwerke: Baden-Württemberg, Hessen, Bremen u.v.a.m.
• Festo AG, 2006: Bionic Learning Network, www.festo.com/bionik
• VDI Richtlinien , 2007: www.vdi.de/bionik1. Konzeption und Strategie, VDI 62202. Bionische Oberflächen, VDI 62213. Bionische Roboter, VDI 6222(2012)
- Mensch-Technik-Interaktion/Schnittstelle, VDI 6222-2 (angedacht)4. Bionische Materialien, VDI 62235. Bionische Optimierung, VDI 6224
- Blatt 1 Evolutionäre Algorithmen- Blatt 2 Wachstumsgesetze
6. Bionische Informationsverarbeitung, VDI 62257. Bionische Architektur und Industriedesign, VDI 6226
Wer macht Bionik
BioRobotikLabor.de
3
VDI Richtlinie Bionische Roboter, VDI 6222: Definitionen
Robotik• innerhalb der Ingenieurdisziplinen ist die Robotik breit aufgestellt• Methode Bionik findet Anwendung z.B. bei der:- Konstruktion,- Sensorik,- Sensor-/Informations-Verarbeitung,- Aktorik, - Steuerung und Regelung etc.
Roboter• Def.: „Mechatronisches Bewegungssystem, also ein Integrationsprodukt von
Sensorik, Informationsverarbeitung und Aktorik“
Bionische Roboter• Def.: „Roboter, der mindestens ein umgesetztes dominantes biologisches Prinzip
in sich trägt und zumeist nach dem Prozess des bionischen Arbeitensentstanden ist“
BioRobotikLabor.de
4
• Natur liefert nahezu unendlich viele verschiedene biologische Prinzipien• Vorteile entstehen:1. aus inhärenten Eigenschaften (z.B. Nachgiebigkeit, Leichtbau) sowie2. aus einem bionisch orientierten Verhalten (z.B. Neuronale Netze, Reflexe)
• Besonders interessante Arbeitsgegenstände sind:- Strukturen und Leichtbau- Effizienz und Leistungsgewicht- Energiespeicherung und Energierückgewinnung- komplexe kinematische Ketten und Redundanz- neuro-bionische Regelung- adaptives Verhalten/Neuronale Netze- Sensorfusion- Schutz/Selbstschutz/Fremdschutz
VDI Richtlinie Bionische Roboter, VDI 6222: Inhalt
BioRobotikLabor.de
5
Vortrag: Mein bionischer Roboter
Aufgabe zur nächsten Veranstaltung am 26. Mai 2016:• Vorstellung eines bionischen Roboters Eurer Wahl (nicht ZAR5, nicht BROMMI)• 10 Minuten Gruppenvortrag (harte Deadline) bestehend aus:- 8 Minuten Impulsvortrag- 2 Minuten Diskussion
• bei 90 Minuten Veranstaltung können 9 Gruppen vortragen• jede Gruppe besteht aus 2-3 Personen -> maximal 27 können vortragen
Inhalt (Es müssen folgende Fragen beantwortet werden):1. Was ist das für ein Roboter (Vorstellung, Spezifikation etc.)?2. Von wem ist der Roboter (Hersteller, Institut, Personen)?3. Für welchen Einsatz ist er gedacht (Heimbereich, Maschinenbau, Spiel)?4. Warum ist das ein bionischer Roboter (Kriterien/Eigenschaften, Vorbild xyz)?5. Was konkret ist bionisch umgesetzt (z.B. Sehsinn)?6. Welche bionischen Fachrichtungen sind besonders umgesetzt (z.B. Materialbionik)?7. Ist Bionik hier vorteilhaft oder eher nachteilig (z.B. Vorteil: sieht schärfer)?8. Was kann man noch bionisch umsetzen und würde welche Vorteile bringen?
BioRobotikLabor.de
6
Vortrag: Mein bionischer Roboter
Hinweise:• plant 2 Minuten pro Folie ein (1+4 Folien)• jede Person muss mindestens 1-2 Folien vortragen• haltet die Zeiten ein! (8+2 Minuten)• Bilder sagen mehr als Worte (mehr frei reden, weniger ablesen)• Videos nur, wenn Sie helfen die Fragen zu beantworten• fasst Euch kurz: „Klarheit in den Worten heißt Klarheit in den Gedanken“ • 1. Folie: Titel, Titelbild, Namen, Matrikelnummern, E-Mail Adressen
Vorgehen:• Vorträge bis zum 25. Mai per E-Mail (ppt, pdf) an [email protected]• Dateiformat: „Vortragszeit_Namen.ppt“ (z.B. „1615_BoblanSchulz.ppt“)-> Ich kopiere alle auf mein Notebook, von wo aus sie dann gestartet werden
• Wenn Ihr Videos verwendet, bitte einbetten oder anfügen!!• Denkt daran:-> Wenig/keine Zeit beim Wechsel der Gruppe-> Jedes Nichtfunktionieren geht von Eurer Zeit ab
Termin-/Zeit-Findung über doodle: http://doodle.com/poll/7fev2mreq2c74eth• Nur maximal 3 Teilnehmer pro Zeitfenster möglich• Jeder Roboter nur einmal (im Kommentarfeld angeben), 2. Eintrag ungültig
BioRobotikLabor.de
7
BioRobotikLabor.de
8
Vortrag: Mein bionischer Roboter
Aufgaben, Lernerfolg
Vortragende:• Wissenschaft in Worte/Bilder fassen und einem Publikum präsentieren• kurz fassen, auf das Wesentliche konzentrieren/fokussieren• kompliziertes und kurz zuvor erlerntes einfach erklären/vermitteln• Posterpräsentationen werden oft durch 2-minütige Impulsvorträge vorgestellt• Unterrichtsmethode: „lehrend lernen wir“ (lat: ,Docendo discimus‘)• Rollen tauschen: vom Studierenden zum Lehrenden
Auditorium/Zuhörer:• Achtet auf die Kriterien! Sind alle genannt, klar/ausreichend beschrieben etc.?• Fragt in Diskussion nach, wenn Fragen unbeantwortet geblieben!
BioRobotikLabor.de
9
Entwurf und Regelung bionischer Roboter• Motivation
• Bionik (Methode, Vorgehensweise, Beispiele)
• Biologische (Bewegungs-)Systeme (Eigenschaften, Vorteile, Evolution)• Morphologie Mensch/Tier (vs. herkömmliche Roboter-Mechanik, Materialien)
• Physiologie Mensch/Tier (vs. herkömmliche Antriebe, Verarbeitung, Steuerung)
• Vorstellung bion. Aspekte in techn. Robotersystemen (Hausarbeit und Vortrag)
• Materialien, Strukturen für neue Kinematiken (Leichtbau, Herstellung/SLS)
• Aktoren für neue Antriebssysteme (Nachgiebigkeit, gewichtsbezogene Leistung)
• Modellbildung eines fluidischen Muskels (Versorgung, Leitung, Ventil, Muskel)
• Modellbildung eines antagonistischen Muskelpaares (Ellenbogen-)Gelenks
• Regelung eines antagonistischen Muskelpaares
• Roboter-Assistenzsystem Humanoider Muskelroboter ZAR5 (Anwendung)
• Roboter-Rüsselkinematik BROMMI:TAK (Anwendung)
Inhalt
BioRobotikLabor.de
10
Vier gute Gründe für bionische Roboter
1. Bewegung mit Extremitäten (Struktur und Leichtbau): a. Fortbewegung mit Beinen: Laufen, Gehen, Klettern etc.b. Bewegen, Manipulieren mit Fingern: Greifen, Fühlen, (Be-)Tasten etc.
• Art der Bewegung ist für uns Menschen: natürlich, vertraut, intuitiv, vorhersagbar• Aufgabengerechte/-bezogene Bewegungen: feinfühlig, weich, ergonomisch, situativ• Anpassungsfähigkeit, Gelenkigkeit: vielfältig, flexibel, redundante Kinematik
• Morphologie: - Lehre von der äußerlich wahrnehmbaren Form, Struktur, Gestalt d. Organismen- leichte, nach Struktur (Skelett) und Kraftfluss (Knochen) optimierte Materialien-> schnelle Bewegung durch:
~ geringe Massen(Trägheit) und ~ proximale Muskelanordnung
Warum hat die Natur kein Rad erfunden ?
BioRobotikLabor.de
11
Vier gute Gründe für bionische Roboter
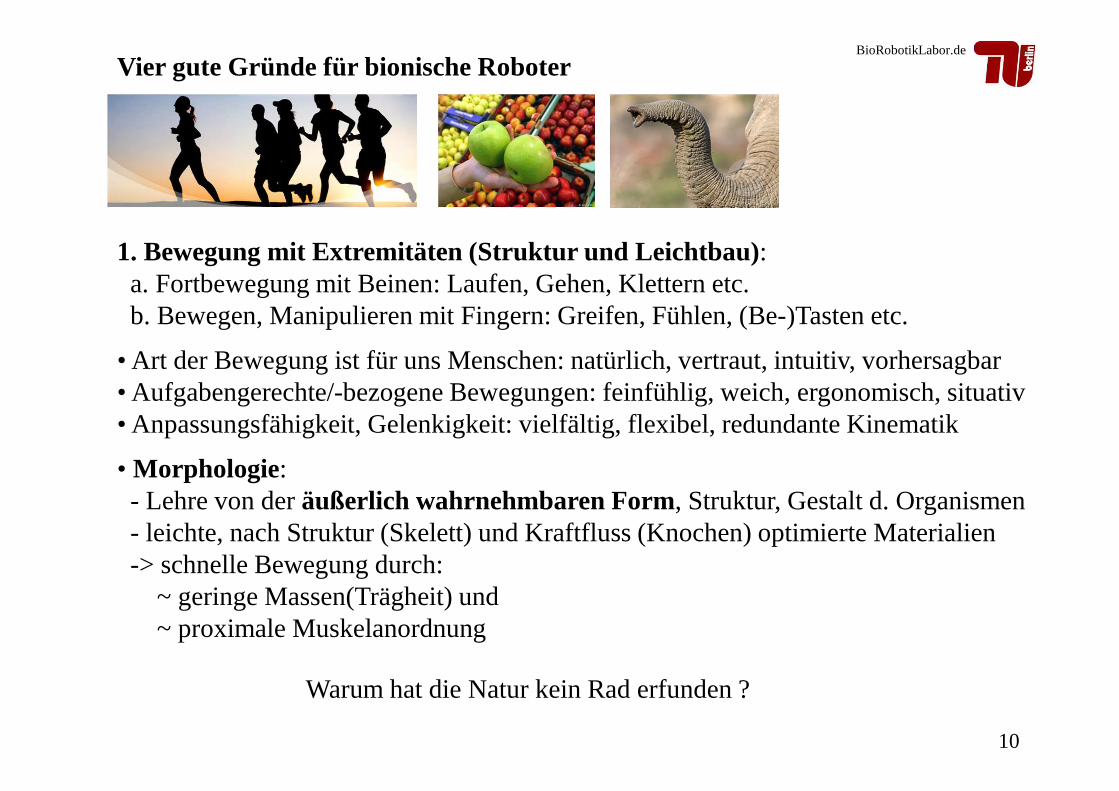
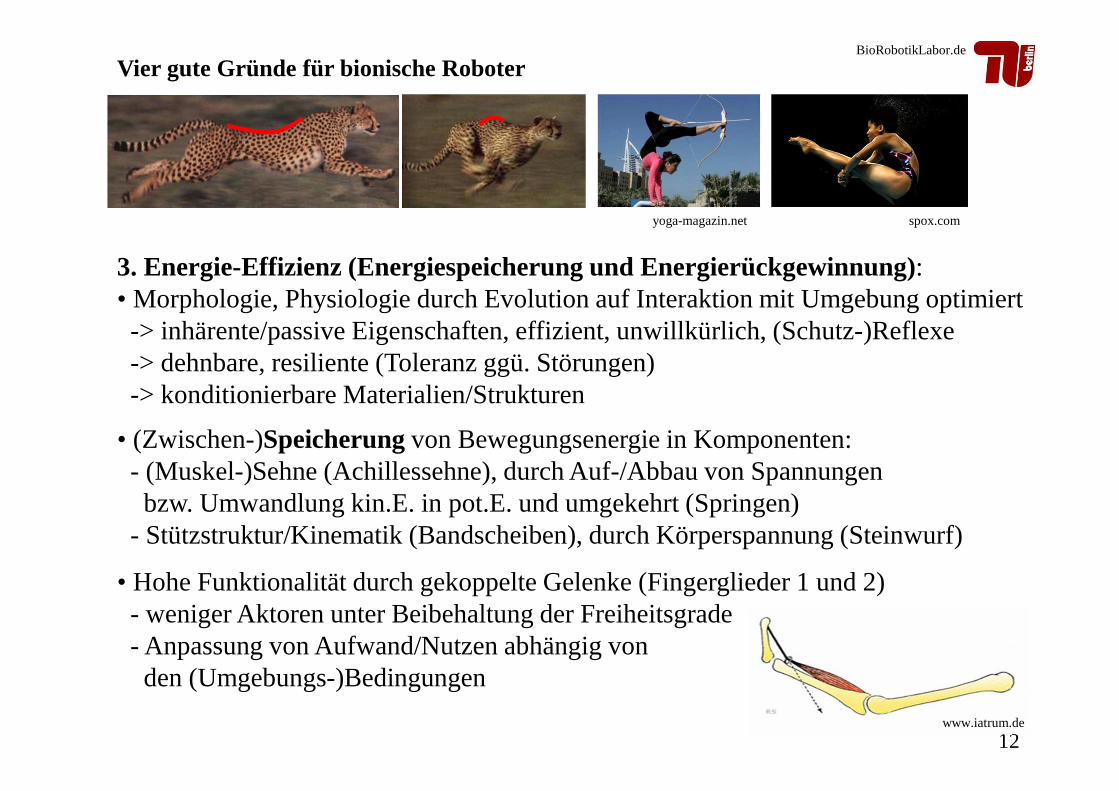
2. Antrieb durch Muskel-Sehnen-System (Effizienz und Leistungsgewicht): a. Antagonistisches Muskelpaar z.B. am Ellenbogen (Scharniergelenk)b. Mehrere Muskelgruppen z.B. an der Schulter (Kugelgelenk)
• Physiologie: - Lehre von den physikalischen und biochemischen Vorgängenin Zellen, Geweben und Organen
- weich, federnd/elastisch, nachgebend (Masse-Feder-Dämpfer-System!)-> federnde Bewegung durch inhärent (passiv) nachgebende Materialien-> über den Muskeltonus (tetanische Kontraktion) einstellbare (aktiv) Steifigkeiten-> kurze Reaktionszeit durch lokale, unwillkürliche Verarbeitung (Reflexe)
dt. SportBund www.kieser-training.com www.pferdephysiotherapie.at
BioRobotikLabor.de
12
Vier gute Gründe für bionische Roboter
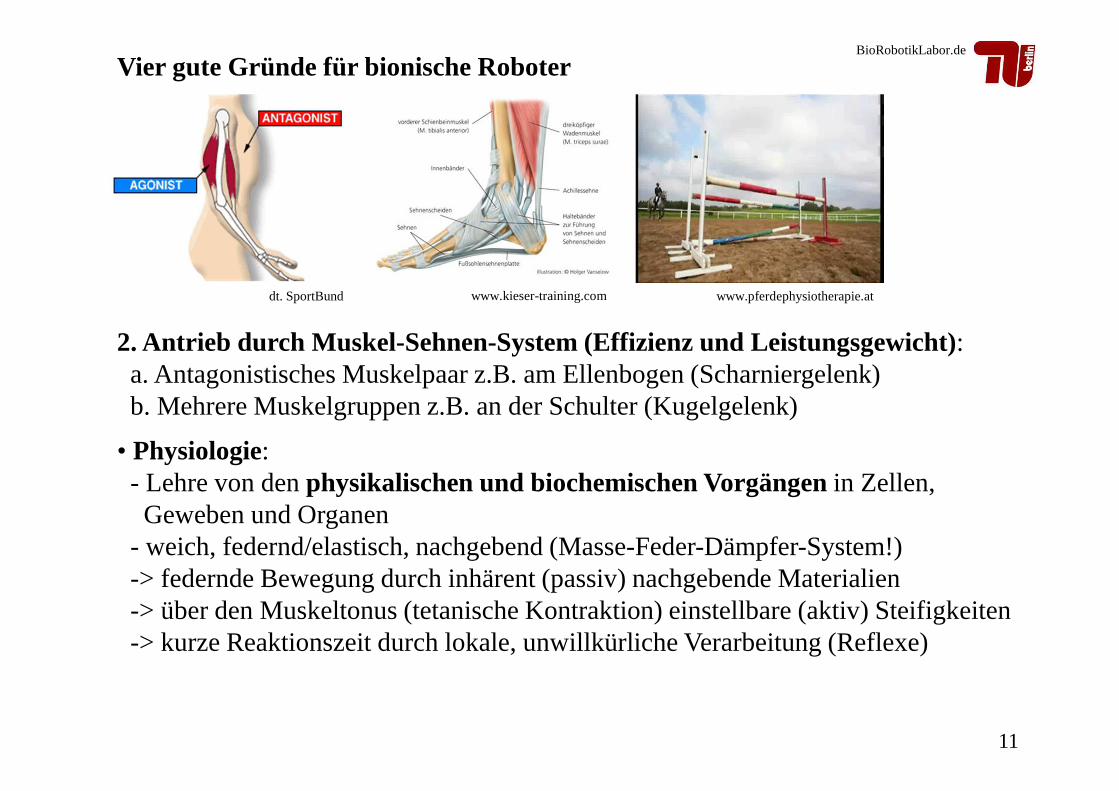
• Hohe Funktionalität durch gekoppelte Gelenke (Fingerglieder 1 und 2)- weniger Aktoren unter Beibehaltung der Freiheitsgrade - Anpassung von Aufwand/Nutzen abhängig von den (Umgebungs-)Bedingungen
www.iatrum.de
yoga-magazin.net spox.com
3. Energie-Effizienz (Energiespeicherung und Energierückgewinnung):• Morphologie, Physiologie durch Evolution auf Interaktion mit Umgebung optimiert-> inhärente/passive Eigenschaften, effizient, unwillkürlich, (Schutz-)Reflexe-> dehnbare, resiliente (Toleranz ggü. Störungen) -> konditionierbare Materialien/Strukturen
• (Zwischen-)Speicherungvon Bewegungsenergie in Komponenten: - (Muskel-)Sehne (Achillessehne), durch Auf-/Abbau von Spannungenbzw. Umwandlung kin.E. in pot.E. und umgekehrt (Springen)
- Stützstruktur/Kinematik (Bandscheiben), durch Körperspannung (Steinwurf)
BioRobotikLabor.de
13
Tetra Images / SuperStock
Vier gute Gründe für bionische Roboter
4. Gelenkigkeit, Variabilität (komplexe kinematische Ketten und Redundanz):a. Aufgabenbewältigung: Sporttreiben, Manipulieren, Nahrung suchen, Essen etc.b. Effiziente Stellungen und Bewegungen im Raum: wiederholende Handlungen
• Mehrdeutigkeiten in der kinematischen Erreichbarkeit, hoher Freiheitsgrad -> vielfältige, flexible, situative, kontrollierbare Stellungen und Bewegungen-> intuitiv, ergonomisch, effizient, sicher
• Hyperredundanz: - Übergang von diskreten zu kontinuierlichen Gelenken (Schlange, Rüssel)- Ausbildung von problemangepassten, virtuellen Gelenken (Elefantenrüssel)
yoga-magazin.net Foto: Georg Hochmuth
• Bewegungsprinzip von Dr. F. Habermann- (Vorzugs-)Biegestelle fungiert als Gelenk -> Reduktion der Anzahl der Freiheitsgrade-> energetisch und ergonomisch günstig-> muskulär verstärkt, optimal für Gesamtsys.
BioRobotikLabor.de
14
• altgr. phýsis‚Natur‘, lógos‚Lehre‚Vernunft‘ bzw. physiologica‚Naturkunde‘• Teilgebiet der Biologie• „Lehre von den physikalischen und biochemischen Vorgängenin den Zellen,
Geweben und Organen aller Lebewesen; sie bezieht auch das Zusammenwirken aller Lebensvorgänge im gesamten Organismus in ihre Betrachtung ein.“ (wiki)
• Ziel: möglichst auf molekularer Ebene Vorhersagen über das Verhalteneines Systems (z.B. Stoffwechsel, Bewegung, Wachstum, Fortpflanzung) zu formulieren
• Gerichtet auf Dynamik biologischer Vorgängeund deren kausale Zusammenhänge-> analysiert Veränderungen(Informationsverarbeitung) u. nicht statische Zustände • Werkzeuge (Versuchsanordnungen, Messverfahren) kommen aus Physik und Chemie
Physiologie: Definition
Physiologie der Menschen ist durch die Bewegung mit Muskeln/Sehnen bestimmt• Jeder gesunde Mensch besitzt 656 Muskeln• Menschlicher Körper besteht zu 40% (Mann) und 23% (Frau) aus Muskelmasse• Sind für versch. Bewegungen verantwortlich (schnell/langsam, pumpen, abgrenzen...)• Umformung, vereinfacht: • Energieumsatz:
- 50-70% Grundumsatz (Muskelmasse, innere Organe) unter Ruhebedingungen - 90% Maximalumsatz bei maximaler körperlicher Belastung
thermmechchemel EEEE +=+ (25% + 75%)
BioRobotikLabor.de
15
• Lat. musculus‚Mäuschen‘ - angespannter Muskel, sieht (unter der Haut) aus wie eine Maus
• Kontraktiles Organ• Durch Abfolge von Kontraktion und Erschlaffen bewegen innere/äußere Strukturen• Bewegung ist Grundlage der:
- aktiven Fortbewegung des Individuums, - Gestaltveränderung des Körpers und- vieler innerer Körperfunktionen
• Grundlegende Einteilung der Muskulatur bei Säugetieren (Menschen) erfolgt über den histologischen (geweblichen) Aufbau und den Mechanismus der Kontraktion1. Glatte Muskulatur (um Organe) und 2. Quergestreifte Muskulatura. Herzmuskulatur und b. Skelettmuskulatur
• Weitere Unterscheidungsmöglichkeiten ergeben sich durch:- die Form, die Fasertypen und funktionelle Aspekte
Physiologie: Muskel
BioRobotikLabor.de
16
©2002 Thomson Learning, Inc.
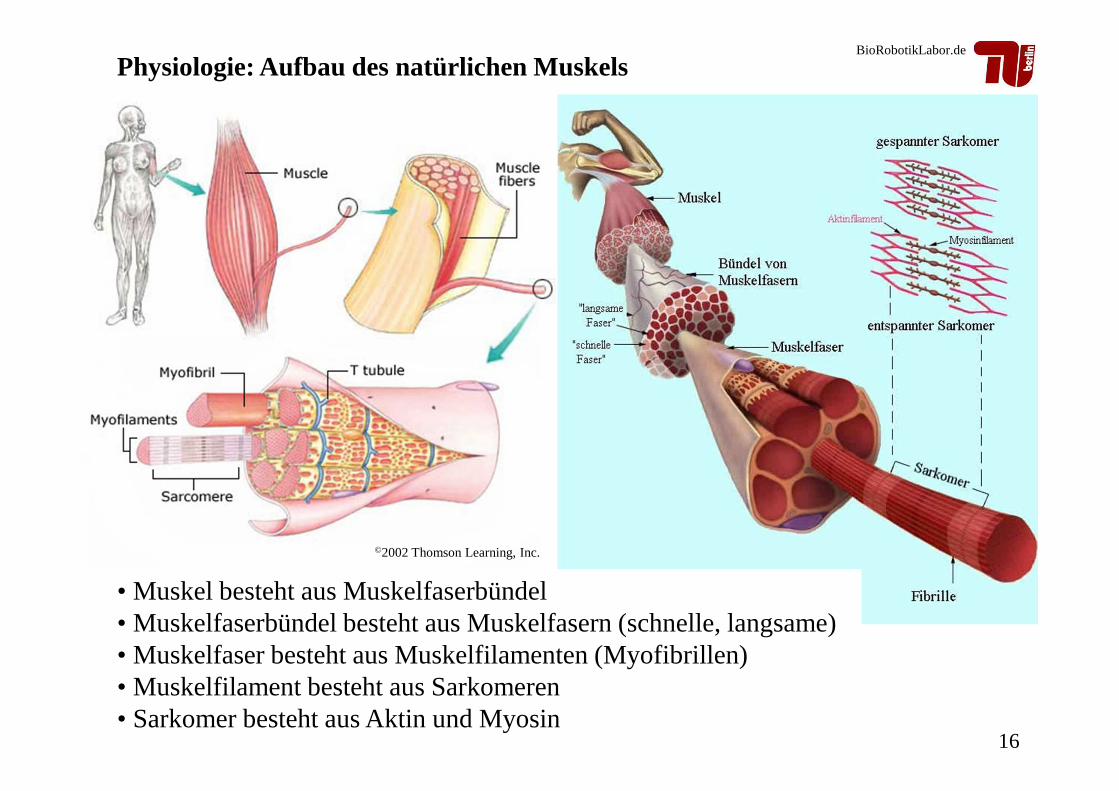
Physiologie: Aufbau des natürlichen Muskels
• Muskel besteht aus Muskelfaserbündel• Muskelfaserbündel besteht aus Muskelfasern (schnelle, langsame)• Muskelfaser besteht aus Muskelfilamenten (Myofibrillen)• Muskelfilament besteht aus Sarkomeren• Sarkomer besteht aus Aktin und Myosin
BioRobotikLabor.de
17
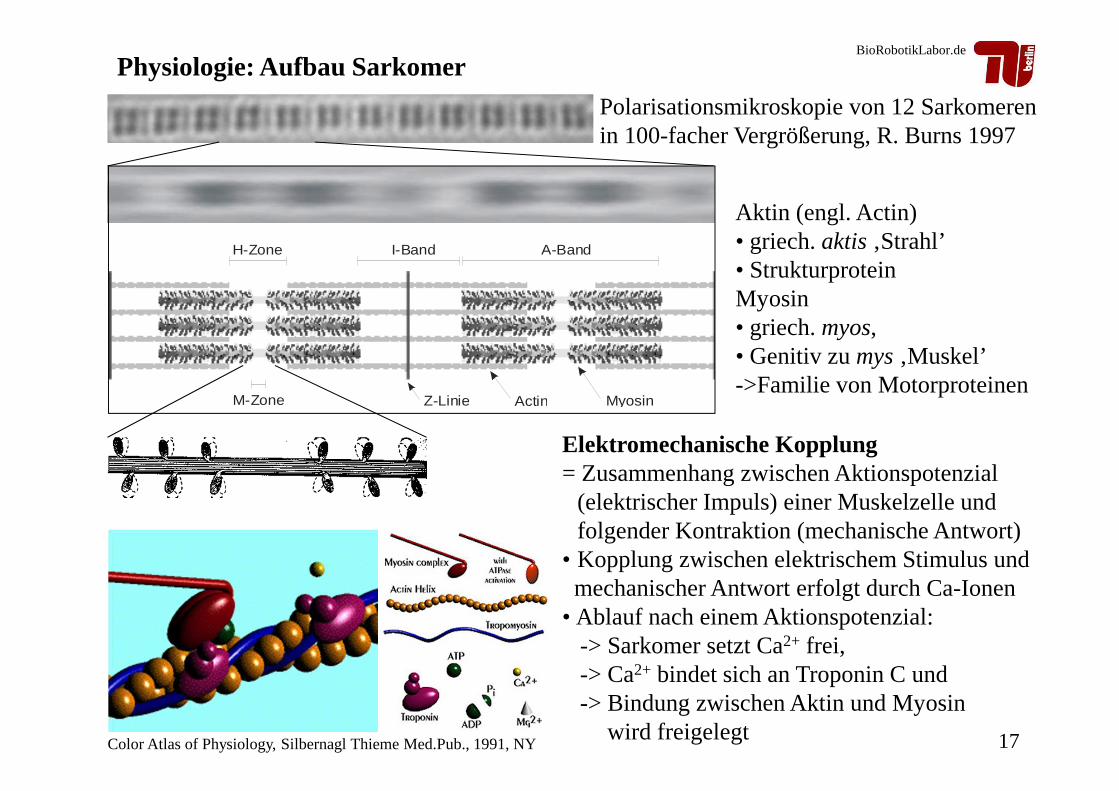
Polarisationsmikroskopie von 12 Sarkomeren in 100-facher Vergrößerung, R. Burns 1997
Z-Linie
H-Zone
M-Zone
A-BandI-Band
Actin Myosin
Color Atlas of Physiology, Silbernagl Thieme Med.Pub., 1991, NY
Physiologie: Aufbau Sarkomer
Elektromechanische Kopplung= Zusammenhang zwischen Aktionspotenzial
(elektrischer Impuls) einer Muskelzelle und folgender Kontraktion (mechanische Antwort)
• Kopplung zwischen elektrischem Stimulus und mechanischer Antwort erfolgt durch Ca-Ionen
• Ablauf nach einem Aktionspotenzial:-> Sarkomer setzt Ca2+ frei,-> Ca2+ bindet sich an Troponin C und-> Bindung zwischen Aktin und Myosin
wird freigelegt
Aktin (engl. Actin)• griech. aktis ‚Strahl’• StrukturproteinMyosin• griech. myos, • Genitiv zu mys‚Muskel’->Familie von Motorproteinen
BioRobotikLabor.de
18
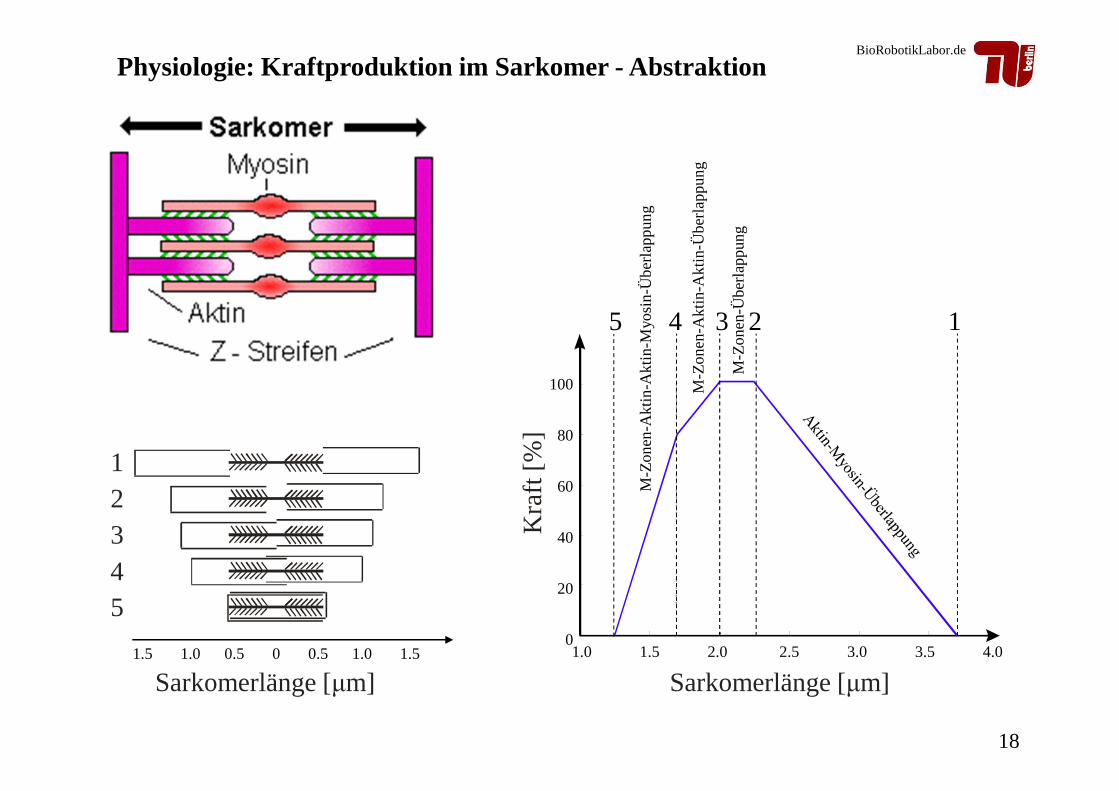
Physiologie: Kraftproduktion im Sarkomer - Abstrakti on
12345
1.5 1.0 0.5 0 0.5 1.0 1.5
Sarkomerlänge [µm] Sarkomerlänge [µm]
Kra
ft [%
]
100
80
60
40
20
01.0 1.5 2.0 2.5 3.0 3.5 4.0
5 4 3 2 1
M-Z
onen
-Übe
rlapp
ung
M-Z
onen
-Akt
in-A
ktin
-Übe
rlapp
ung
M-Z
onen
-Akt
in-A
ktin
-Myo
sin-
Üb
erla
ppun
g
BioRobotikLabor.de
19
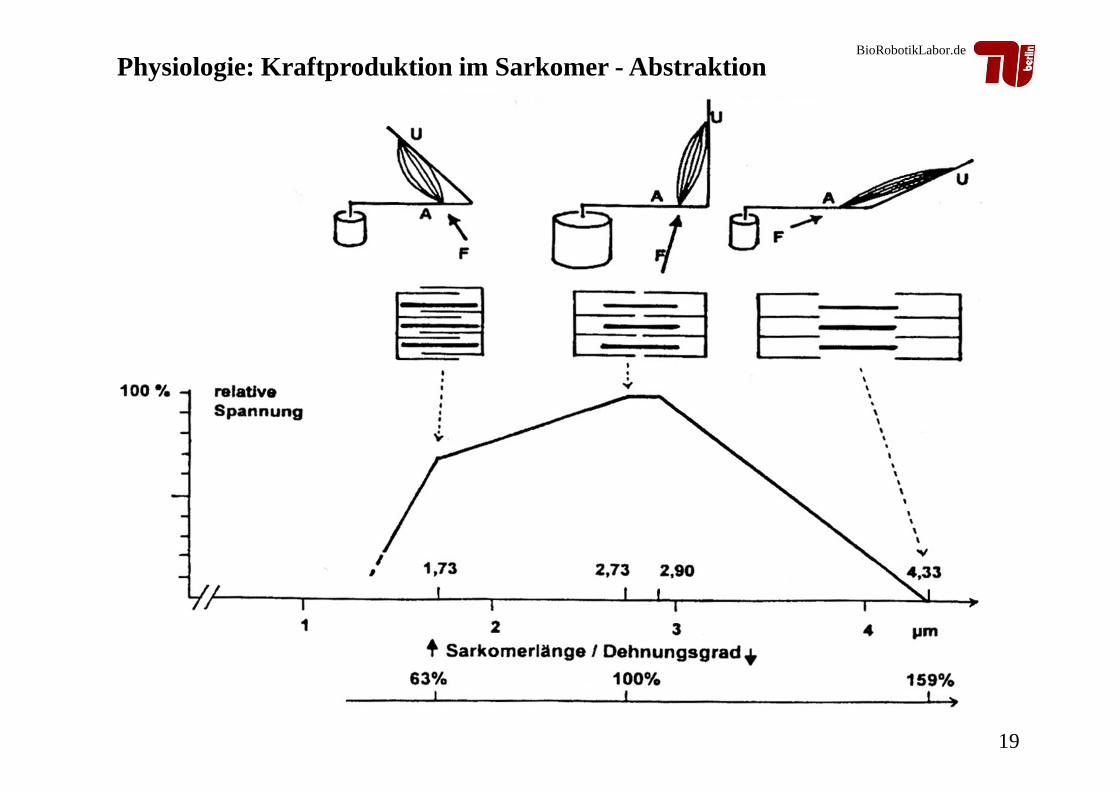
Physiologie: Kraftproduktion im Sarkomer - Abstrakti on
BioRobotikLabor.de
20
• Kontraktion ist ein mechanischer Vorgang• wird durch einen Nervenimpuls ausgelöst• dabei schieben sich die Eiweißmoleküle Aktin und Myosin ineinander• Bewegung:- durch schnell aufeinanderfolgende Konformationsänderungen der chem. Struktur(Konformation: beschreibt räuml. Anordnung der drehbarer Bindungen an den Kohlenstoffatomen)
- wodurch die Fortsätze der Myosinfilamente (schnelle Ruderbewegungen)die Myosinfilamente in die Aktinfilamente hineinziehen
- hört Nerv auf (keine Impulse am Muskel), erschlafft der Muskel (M.-Relaxation)
Physiologie: Muskel-Kontraktion
BioRobotikLabor.de
21
Physiologie: Muskel-Kontraktion
• Aus den elementaren Kontraktionsarten lassen sich komplexere Kontraktionsformenzusammensetzen, da diese im alltäglichen Leben am häufigsten benutzt werden: z.B.- Unterstützungszuckung: erst isometrische, dann isotonische Kontraktion
~ Bsp.: Anheben eines Gewichtes mit anschließendem Anwinkeln des Unterarms- Anschlagszuckung: erst isotonische, dann isometrische Kontraktion
~ Bsp.: Kaubewegung, Ohrfeige
• Je nach Kraft-(Spannungs-) bzw. Längenänderung des Muskels lassen sich mehrere elementare Kontraktionsarten unterscheiden:- isotonisch(„gleichgespannt“): Muskel verkürzt sich ohne Kraftänderung~ z.B.: Anheben eines Gewichtes (Kraft F konst., Höhe/Weg l steigt)
- isometrisch(„gleiche Länge“): Kraft erhöht sich bei gleichbleibender Länge~ haltend-statisch: physikalisch keine Arbeit [Nm] geleistet, da Weg gleich Null~ z.B.: Ziehen an verschlossener Tür (F steigt, l konst.)
- auxotonisch(„verschiedengespannt“): Sowohl Kraft als auch Länge ändern sich~ häufigste Kontraktionstyp bei Alltagsbewegungen~ z.B.: Ziehen am Gummiseil (F steigt, l steigt)
BioRobotikLabor.de
22
• Charakterisierung hinsichtlich resultierender Längen- u. Geschwindigkeitsänderung:- isokinetisch(„gleich schnell“): ~ Widerstand wird mit konstanter Geschwindigkeit überwunden~ Widerstand ändert sich, so dass die Geschwindigkeit konstant bleibt
Bsp.: Schwimmen- konzentrisch („mit einem [einzigen] Mittelpunkt/Schwerpunkt“): ~ Widerstand wird mit Verkürzung überwunden (positiv-dynamisch, überwindend)~ intramuskuläre Spannung ändert sich, und die Muskeln verkürzen sich
Bsp.: Gewicht anheben, Gegenstand beschleunigen -> physikalische Arbeit wird verrichtet
- exzentrisch(„aus der Mitte“):~ Widerstand ist größer als produzierte Spannung
-> Dehnung über Ausgangslänge (negativ-dynamisch, nachgebend)-> Spannungsänderungen und Verlängerung/Dehnung der Muskeln
~ Muskel bremst die Bewegung abBsp.: Gewicht absetzen, Bewegung bremsen, Bergabgehen (Oberschenkelmuskel)
-> physikalische Arbeit wird verrichtet (negativ)
Physiologie: Muskel-Kontraktion
BioRobotikLabor.de
23
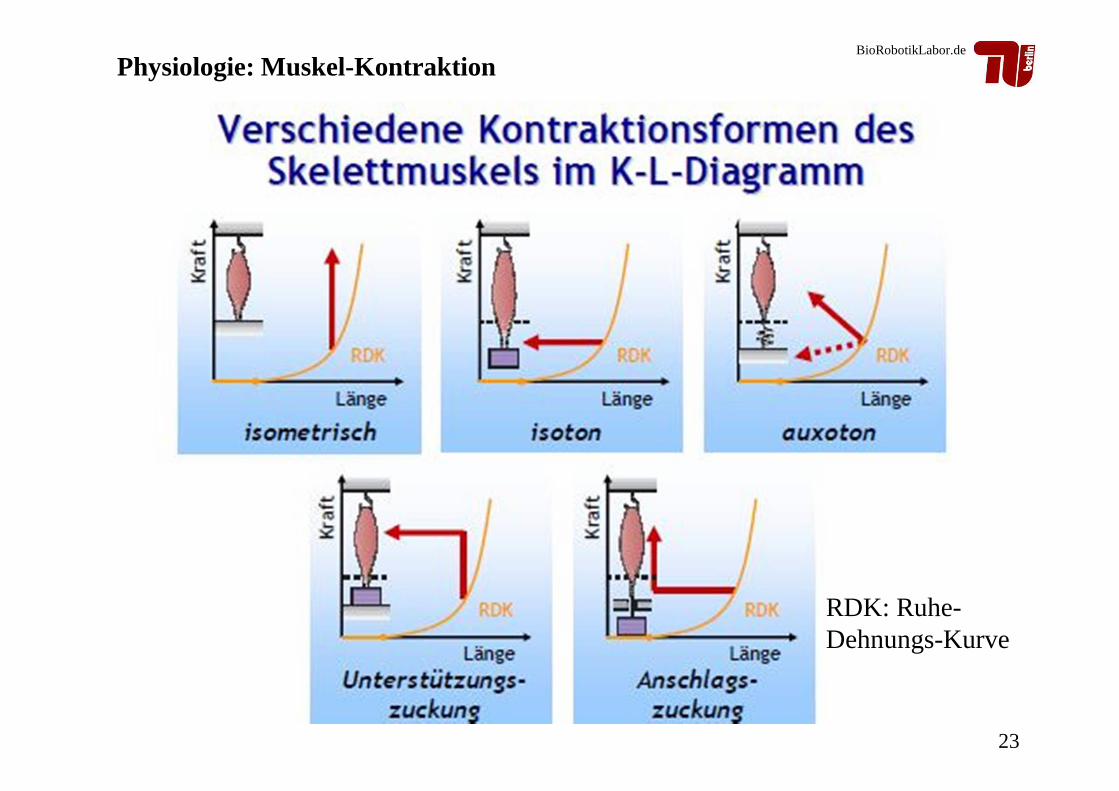
Physiologie: Muskel-Kontraktion
RDK: Ruhe-Dehnungs-Kurve
BioRobotikLabor.de
24
• Im Hinblick auf Zusammenarbeit werden Muskeln in 1. gegenspielende (Spieler-Gegenspieler) und 2. zusammenwirkende (Synergisten) unterteilt
1. Agonisten(Spieler) und Antagonisten(Gegenspieler) haben zueinander ein entgegengesetzte Wirkung- Adduktoren (Anzieher): ziehen Extremitäten an den Körper heran- Abduktoren (Abzieher): spreizen Extremitäten vom Körper abBsp.: äußere u. innere Oberschenkelmuskeln (Beine spreizen u. zusammenführen)Bsp.: Muskeln am Ellenbogen (Antagonisten Bizeps und Trizeps)
- Flexoren (Beuger): knicken Finger und Zehen ein,- Extensoren(Strecker): sind ihre AntagonistenBsp.: Finger, Ellenbogen
- Rotatoren: führen Drehbewegungen ausBsp.: Unterarm, Kopf
2. Synergistenhaben ähnliche Wirkung, arbeiten bei Bewegungsabläufen zusammenBsp.: Liegestütze mit Trizeps und Brustmuskel (pectoralis major, minor)
Physiologie: Muskel – Funktionelle Einteilung
BioRobotikLabor.de
25
• leistungsfähig: Peff = 9-280 W/kg (bis 18 kW/kg, Gecko)zum Vergleich: Daimler-Benz A-Klasse Dieselmotor Peff = 450 W/Kg
• kraftvoll: Fzug = 200 kN/m2
• nachgiebig, weich, federnd• sicher, ungefährlich für andere Menschen • Temperatur kompensiert: ca. 38 C• Treibstoff unspezifisch• hält ein Leben lang• leise• umweltfreundlich• essbar• käuflich zu erwerben: 10 EUR/Kg-> ≠≠≠≠ technische Aktuatoren
Prof. Albert Szent-Györgyi, 1893-1986
Physiologie: Eigenschaften natürlicher Muskeln – Abstraktion
BioRobotikLabor.de
26
LSELPE
LKE
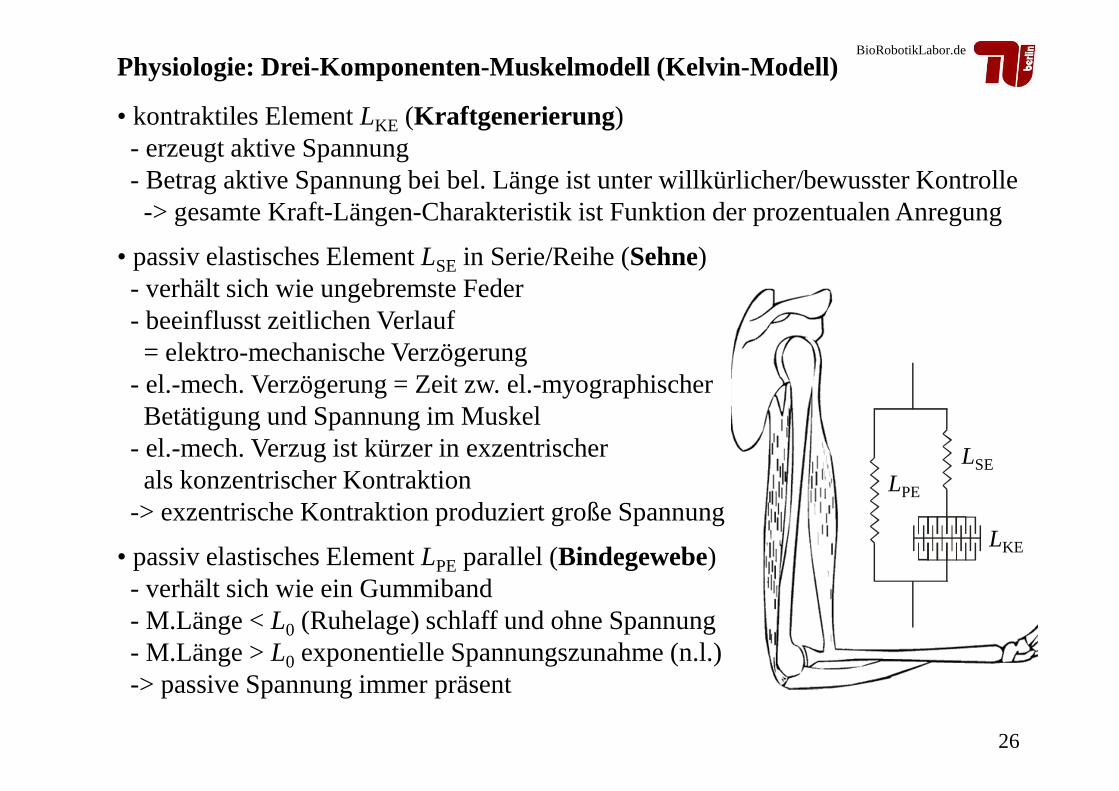
• kontraktiles Element LKE (Kraftgenerierung )- erzeugt aktive Spannung- Betrag aktive Spannung bei bel. Länge ist unter willkürlicher/bewusster Kontrolle-> gesamte Kraft-Längen-Charakteristik ist Funktion der prozentualen Anregung
• passiv elastisches Element LSE in Serie/Reihe (Sehne)- verhält sich wie ungebremste Feder- beeinflusst zeitlichen Verlauf = elektro-mechanische Verzögerung
- el.-mech. Verzögerung = Zeit zw. el.-myographischerBetätigung und Spannung im Muskel
- el.-mech. Verzug ist kürzer in exzentrischer als konzentrischer Kontraktion
-> exzentrische Kontraktion produziert große Spannung
• passiv elastisches Element LPE parallel (Bindegewebe)- verhält sich wie ein Gummiband- M.Länge < L0 (Ruhelage) schlaff und ohne Spannung- M.Länge > L0 exponentielle Spannungszunahme (n.l.)-> passive Spannung immer präsent
Physiologie: Drei-Komponenten-Muskelmodell (Kelvin-Modell)
BioRobotikLabor.de
27
Physiologie: Muskelmodelle – Abstraktion
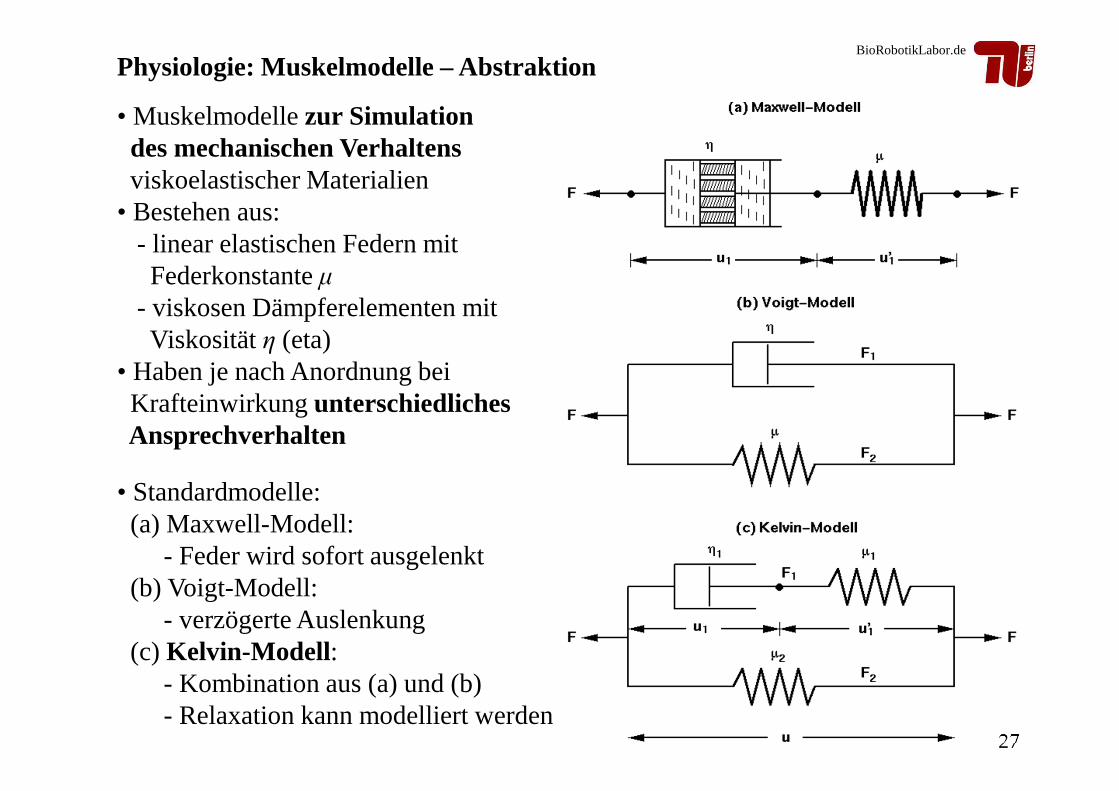
• Standardmodelle:(a) Maxwell-Modell:
- Feder wird sofort ausgelenkt(b) Voigt-Modell:
- verzögerte Auslenkung(c) Kelvin-Modell :
- Kombination aus (a) und (b)- Relaxation kann modelliert werden
• Muskelmodelle zur Simulation des mechanischen Verhaltensviskoelastischer Materialien
• Bestehen aus:- linear elastischen Federn mitFederkonstante µ
- viskosen Dämpferelementen mitViskosität η (eta)
• Haben je nach Anordnung beiKrafteinwirkung unterschiedlichesAnsprechverhalten
BioRobotikLabor.de
28
Physiologie: Muskel-Kraft-Längen-Zusammenhang (statisch)
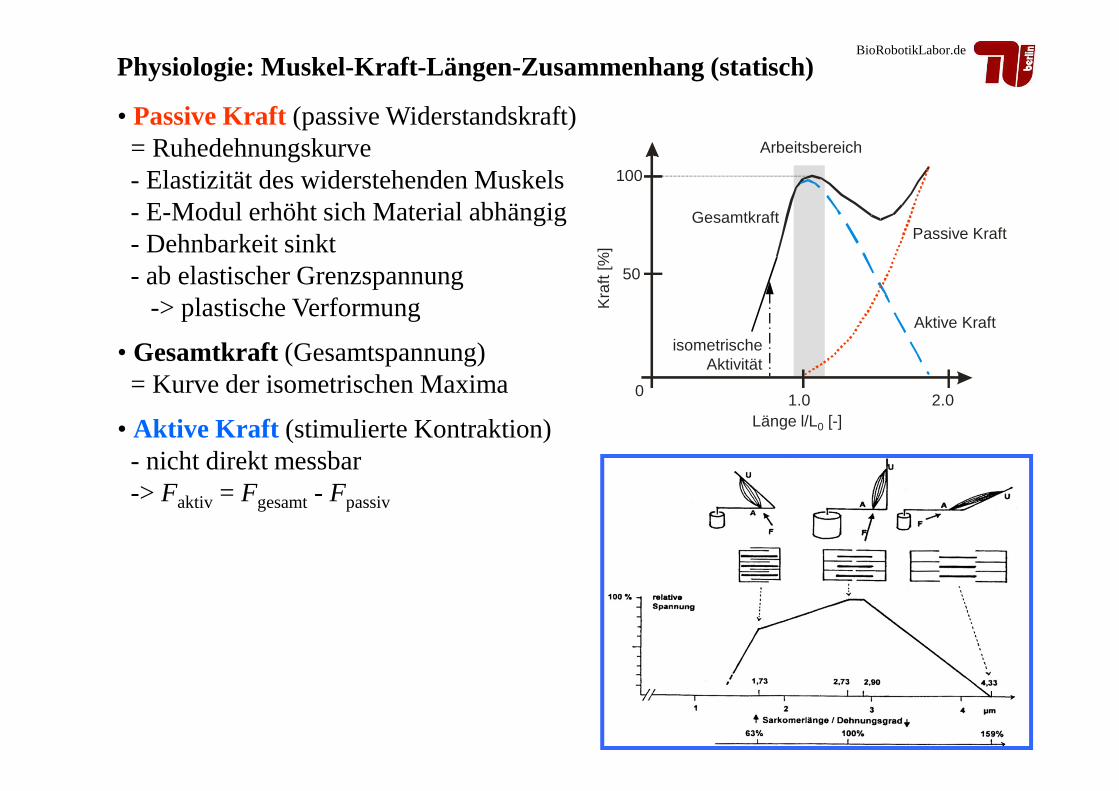
• Passive Kraft(passive Widerstandskraft)= Ruhedehnungskurve- Elastizität des widerstehenden Muskels- E-Modul erhöht sich Material abhängig - Dehnbarkeit sinkt- ab elastischer Grenzspannung
-> plastische Verformung
• Gesamtkraft (Gesamtspannung)= Kurve der isometrischen Maxima
• Aktive Kraft (stimulierte Kontraktion)- nicht direkt messbar-> Faktiv = Fgesamt- Fpassiv
01.0 2.0
50
100
Länge l/L0 [-]
Arbeitsbereich
Passive Kraft
Aktive Kraft
Gesamtkraft
Kra
ft [%
]
isometrischeAktivität
Recommended

















