Kleine Formelsammlung zu DigitaleSignalverarbeitung
Florian Franzmann∗
28. August 2005
Inhaltsverzeichnis
1 Elementare Grundlagen 3
1.1 Losungsformel fur quadratische Gleichungen . . . . . . . . . . . . . . . . . 3
1.2 Definition einiger Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 rect-Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2 sinc-Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Additionstheoreme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Integrationsregeln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4.1 Partielle Integration . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4.2 Substitutionsregel . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Abtasttheorem 5
2.1 Basisband-Signale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Bandpass-Signale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Interpolationsfilter 6
3.1 Bandpaßsignale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4 Eigenschaften von LTI-Systemen 6
4.1 Konvergenzbereich der z-Transformierten . . . . . . . . . . . . . . . . . . 6
4.2 Linearitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4.3 Zeitinvarianz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4.4 BIBO-Stabilitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4.4.1 Stabilitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.4.2 Bedingte (schwache) Stabilitat . . . . . . . . . . . . . . . . . . . . 8
1
Inhaltsverzeichnis
4.5 Kausalitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.6 FIR-Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.7 Reellwertige LTI-Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.8 Minimalphasigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.9 Maximalphasigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.10 Linearphasige Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.11 Allpaßfilter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.11.1 Zerlegung in stabilen Allpaß und minimalphasiges System . . . . . 9
4.11.2 Gruppenlaufzeit von Allpaßfiltern . . . . . . . . . . . . . . . . . . . 9
4.12 Betrag, Phase und Gruppenlaufzeit . . . . . . . . . . . . . . . . . . . . . . 9
4.12.1 Betrag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.12.2 Phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.12.3 Gruppenlaufzeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5 Transformationen 10
5.1 Fourier-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.1.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.1.2 Inverse Fourier-Transformation . . . . . . . . . . . . . . . . . . . . 10
5.1.3 Hinreichende Bedingung fur die Existenz der Fourier-Transformierten 10
5.2 z-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.2.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.2.2 Inverse z-Transformation . . . . . . . . . . . . . . . . . . . . . . . 10
5.3 Zeitdiskrete Fouriertransformation (DTFT) . . . . . . . . . . . . . . . . . 15
5.3.1 DTFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.3.2 IDTFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.4 Diskrete Fourier-Transformation (DFT) . . . . . . . . . . . . . . . . . . . 15
5.4.1 DFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.4.2 IDFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.4.3 Zyklische Faltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.5 Laplace-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.5.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.5.2 Inverse Laplace-Transformation . . . . . . . . . . . . . . . . . . . . 19
5.6 Symmetrien im Spektrum . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6 Idealisierte LTI-Systeme 19
6.1 Hilbert-Transformator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7 Zustandsraumbeschreibung 22
7.1 Im Zeitbereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.2 Im Frequenzbereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.3 Frobenius-Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.4 Signalflußgraphen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.4.1 Berechenbarkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.4.2 Transposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2

Tabellenverzeichnis
8 Filterentwurf 24
Tabellenverzeichnis
1 Korrespondenzen der Fourier-Transformation . . . . . . . . . . . . . . . . 11
2 Satze der Fourier-Transformation . . . . . . . . . . . . . . . . . . . . . . . 12
3 Korrespondenzen der zweiseitigen z-Transformation . . . . . . . . . . . . 13
4 Satze der zweiseitigen z-Transformation . . . . . . . . . . . . . . . . . . . 14
5 Satze der zweiseitigen z-Transformation . . . . . . . . . . . . . . . . . . . 16
6 Korrespondenzen der DTFT . . . . . . . . . . . . . . . . . . . . . . . . . . 17
7 Satze der DTFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
8 Korrespondenzen der zweiseitigen Laplace-Transformation . . . . . . . . . 20
9 Satze der zweiseitigen Laplace-Transformation . . . . . . . . . . . . . . . . 21
1 Elementare Grundlagen
1.1 Losungsformel fur quadratische Gleichungen
ax2 + bx+ c = 0
x1,2 =−b±
√b2 − 4ac
2afalls b2 − 4ac ≥ 0
x1,2 =−b± j
√
−(b2 − 4ac)
2afalls b2 − 4ac < 0
1.2 Definition einiger Funktionen
1.2.1 rect-Funktion
rect(at) =
1 fur |t| ≤ 12a
0 sonst
1.2.2 sinc-Funktion
sinc(ν) =
sin ν
ν fur ν 6= 0
1 fur ν = 0
1.3 Additionstheoreme
sinα · sin β =1
2(cos(α− β) − cos(α+ β))
cosα · cos β =1
2(cos(α− β) + cos(α+ β))
3
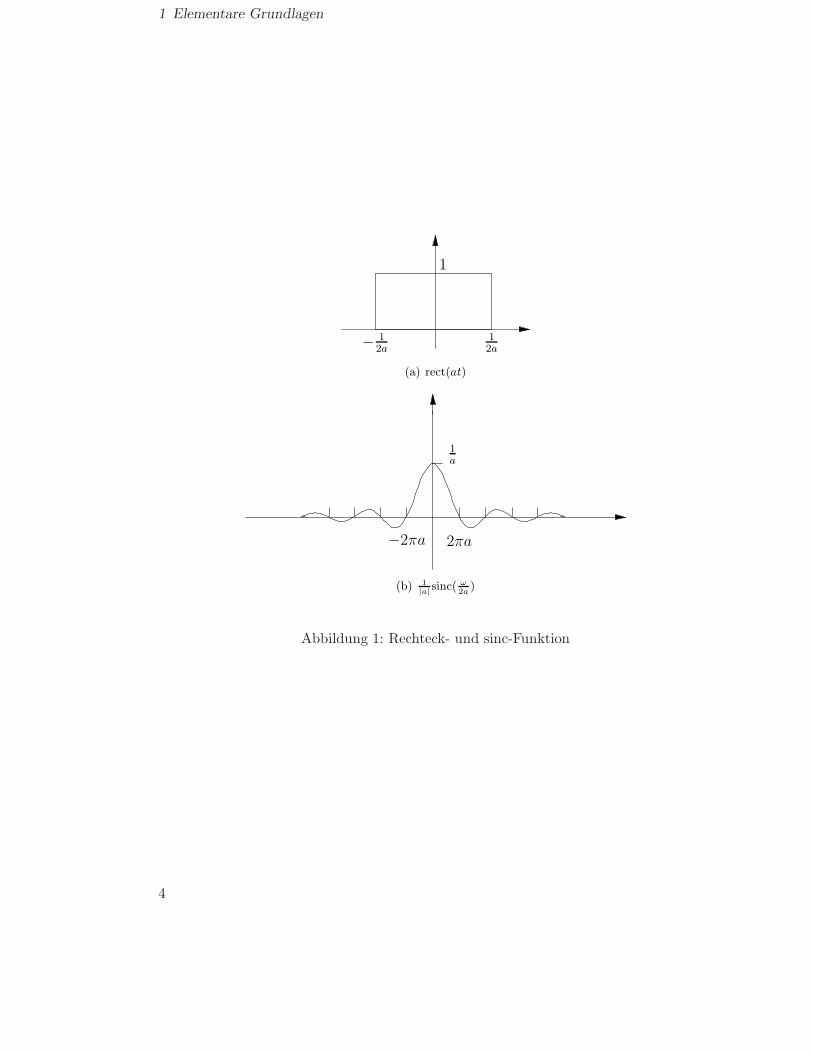
1 Elementare Grundlagen
1
− 12a
12a
(a) rect(at)
−2πa 2πa
1a
(b) 1|a|
sinc( ω
2a)
Abbildung 1: Rechteck- und sinc-Funktion
4

1.4 Integrationsregeln
sin2 α =1
2(1 − cos 2α)
cos2 α =1
2(1 + cos 2α)
sin 2α = 2 sinα cosα = 1 − cos2 α
cos 2α = cos2 α− sin2 α = 1 − sin2 α
sinα =ejα − e−jα
2j
cosα =ejα + e−jα
2j
ejα = cosα+ j sinα
e−jα = cosα− j sinα
1.4 Integrationsregeln
1.4.1 Partielle Integration∫
u(x)v′(x)dx = u(x)v(x) −∫
u′(x)v(x)dx
1.4.2 Substitutionsregel
x = u(t) bzw. t = v(x). u und v seien zueinander Umkehrfunktionen.∫
f(x)dx =
∫
f(u(t))u′(t)dt bzw.
∫
f(x)dx =
∫f(u(t))
v′(u(t))dt
2 Abtasttheorem
2.1 Basisband-Signale
ωB ≤ ωS
2=π
T
2.2 Bandpass-Signale
ωS = 2ωB mit ωB = ω2 − ω1
falls die obere Bandgrenze ω2 ganzzahliges Vielfach der Bandbreite ωB ist.Sonst wahle maximales ganzzahliges n, so daß
ωS = 2ω2
n> 2ωB
5

4 Eigenschaften von LTI-Systemen
3 Interpolationsfilter
3.1 Bandpaßsignale
H(jω) = T rect
(ωT
π
)
∗(
δ
(
ω − ω0 −∆ω
2
)
+ δ
(
ω + ω0 +∆ω
2
))
h(t) = sinc
(πt
2T
)
· cos((
ω0 +∆ω
2
)
· t)
4 Eigenschaften von LTI-Systemen
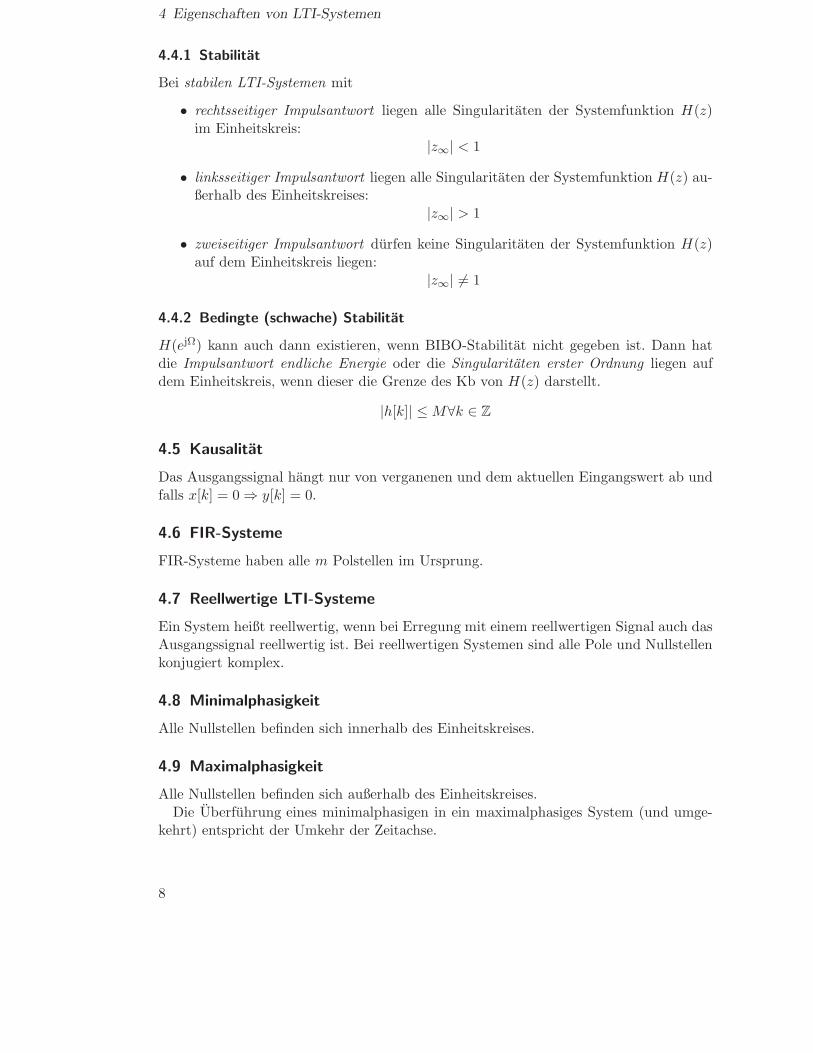
4.1 Konvergenzbereich der z-Transformierten
1. Der Konvergenzbereich ist ein Ring um den Ursprung der z-Ebene.
2. Der Konvergenzbereich enthalt keine Pole.
3. Ist x[k] von endlicher Dauer, so besteht der Konvergenzbereich aus der gesamtenz-Ebene außer evt. z = 0 und/oder z = ∞.
4. Bei kausalen Folgen: Liegt der Kreis |z| = r0 im Konvergenzbereich, dann auchalle endlichen Werte von z, fur die |z| > r0 gilt.
5. Bei antikausalen Folgen: Liegt der Kreis |z| = r0 im Konvergenzbereich, dann auchalle Werte von z, fur die 0 < |z| < r0 gilt.
6. Bei zweiseitigen Folgen: Liegt |z| = r0 im Konvergenzbereich, so ist der Konver-genzbereich ein Ring in der z-Ebene, der |z| = r0 enthalt.
4.2 Linearitat
Sc1x1[k] + c2x2[k] = c1Sx1[k] + c2Sx2[k] = c1x1[k] + c2x2[k]
4.3 Zeitinvarianz
y[k −N ] = Sx[k −N ]
4.4 BIBO-Stabilitat
|x[k]| ≤M1 <∞ ∀k ⇒ |y[k]| ≤M2 <∞ ∀k
6
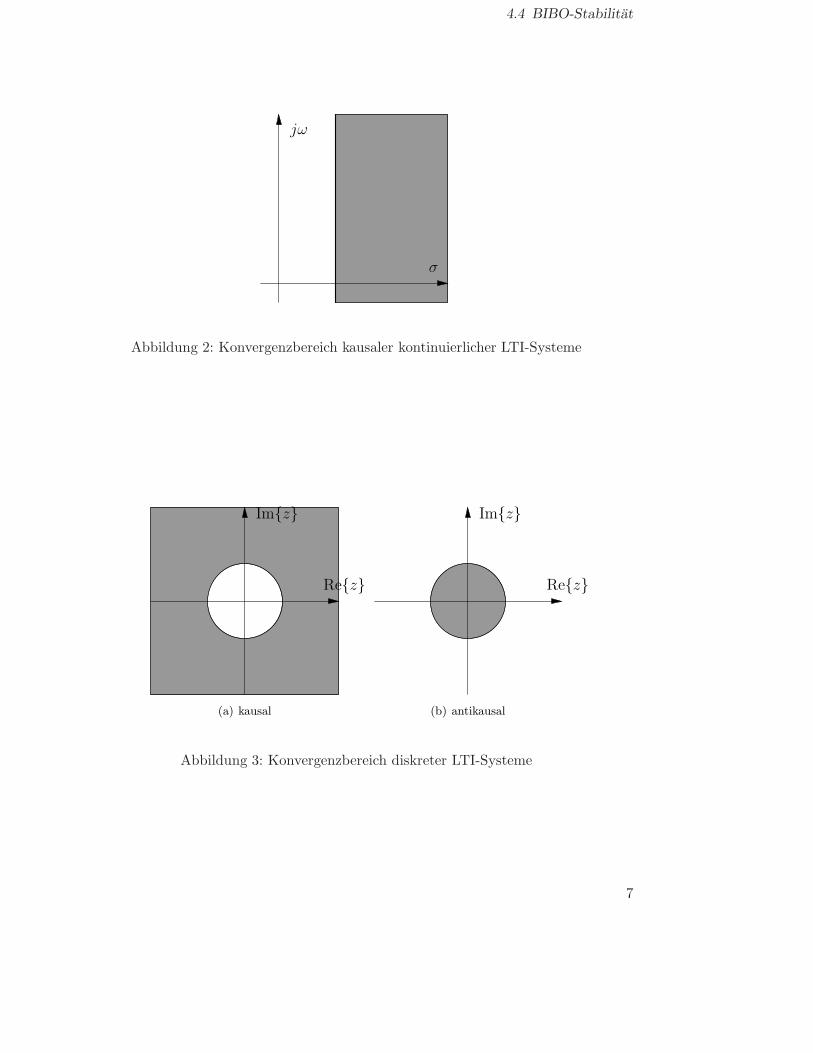
4.4 BIBO-Stabilitat
jω
σ
Abbildung 2: Konvergenzbereich kausaler kontinuierlicher LTI-Systeme
Imz
Rez
(a) kausal
Imz
Rez
(b) antikausal
Abbildung 3: Konvergenzbereich diskreter LTI-Systeme
7
4 Eigenschaften von LTI-Systemen
4.4.1 Stabilitat
Bei stabilen LTI-Systemen mit
• rechtsseitiger Impulsantwort liegen alle Singularitaten der Systemfunktion H(z)im Einheitskreis:
|z∞| < 1
• linksseitiger Impulsantwort liegen alle Singularitaten der Systemfunktion H(z) au-ßerhalb des Einheitskreises:
|z∞| > 1
• zweiseitiger Impulsantwort durfen keine Singularitaten der Systemfunktion H(z)auf dem Einheitskreis liegen:
|z∞| 6= 1
4.4.2 Bedingte (schwache) Stabilitat
H(ejΩ) kann auch dann existieren, wenn BIBO-Stabilitat nicht gegeben ist. Dann hatdie Impulsantwort endliche Energie oder die Singularitaten erster Ordnung liegen aufdem Einheitskreis, wenn dieser die Grenze des Kb von H(z) darstellt.
|h[k]| ≤M∀k ∈ Z
4.5 Kausalitat
Das Ausgangssignal hangt nur von verganenen und dem aktuellen Eingangswert ab undfalls x[k] = 0 ⇒ y[k] = 0.
4.6 FIR-Systeme
FIR-Systeme haben alle m Polstellen im Ursprung.
4.7 Reellwertige LTI-Systeme
Ein System heißt reellwertig, wenn bei Erregung mit einem reellwertigen Signal auch dasAusgangssignal reellwertig ist. Bei reellwertigen Systemen sind alle Pole und Nullstellenkonjugiert komplex.
4.8 Minimalphasigkeit
Alle Nullstellen befinden sich innerhalb des Einheitskreises.
4.9 Maximalphasigkeit
Alle Nullstellen befinden sich außerhalb des Einheitskreises.Die Uberfuhrung eines minimalphasigen in ein maximalphasiges System (und umge-
kehrt) entspricht der Umkehr der Zeitachse.
8

4.10 Linearphasige Systeme
4.10 Linearphasige Systeme
Bei linearphasigen Systemen liegen alle Pole im Ursprung und die Nullstellen als amEinheitskreis gespiegelte Paare bzw. auf dem Einheitskreis. Ist ein System linear undBIBO-stabil, so hat es endliche Impulsantwort.
4.11 Allpaßfilter
Fur Allpaßfilter gilt
|A(ejΩ)| = 1∀Ω ∧A(z) = znN(z−1)
N(z)
Pole und Nullstellen befinden sich spiegelbildlich zum Einheitskreis, d. h.
z0ν =1
z∗∞ν
Ein stabiler Allpaß ist minimalphasig, d. h. alle Nullstellen sind innerhalb des Einheits-kreises, alle Polstellen außerhalb.
4.11.1 Zerlegung in stabilen Allpaß und minimalphasiges System
H(z) =Zi(z) · Zo,∗(z)
N(z)︸ ︷︷ ︸
minimalphasig
· Zo(z)
Zo,∗(z)︸ ︷︷ ︸
stabiler Allpaß
mit Zi(z) Nullstellen im Einheitskreis, Zo(z) Nullstellen außerhalb des Einheitskreisesund Zo,∗(z) = zn · Zo(z
−1), N(z) Polstellen.
4.11.2 Gruppenlaufzeit von Allpaßfiltern
τA(Ω) =
n∑
ν=1
1 − ρ2ν
1 + ρ2ν − 2ρν cos(Ω − ψν)
4.12 Betrag, Phase und Gruppenlaufzeit
4.12.1 Betrag
H(ejΩ) = H(ejΩ) · e−jb(Ω) =
∑mµ=0 bmue
jµΩ
∑nν=0 aνejνΩ
= bm ·∏m
µ=1
(ejΩ − z0µ
)
∏nν=1 (ejΩ − z∞ν)
Zusammenhang zwischen Differenzengleichung und Systemfunktion:
N∑
n=0
any[k − n] =
N∑
n=0
bnx[k − n] ⇔ H(z) =Y (z)
X(z)=
∑Nm=0 bmz
−m
∑Nn=0 anz−n
9

5 Transformationen
4.12.2 Phase
b(Ω) = − argH(ejΩ)
= − arctan
ImH(ejΩ)ReH(ejΩ) = arg
N(ejΩ)
− arg
Z(ejΩ)
4.12.3 Gruppenlaufzeit
Die Gruppenlaufzeit wird bei zeitkontinulierlichen Systemen definiert als Ableitung derPhase nach der Frequenz:
τg(Ω) = τg(−Ω) = −d argH(ejΩ)dΩ
= −1
2
[
zH ′(z)H(z)
+ z−1H′(z−1)
H(z−1)
]∣∣∣∣z=ejΩ
5 Transformationen
5.1 Fourier-Transformation
5.1.1 Definition
X(jω) = Fx(t) =
∫ ∞
−∞x(t)e−jωtdt = Lx(t)
∣∣∣s=jω
X(jω) = |X(jω)| · ejϕ(jω)
5.1.2 Inverse Fourier-Transformation
x(t) =1
2π
∫ ∞
−∞X(jω)ejωtdω
5.1.3 Hinreichende Bedingung fur die Existenz der Fourier-Transformierten∫ ∞
−∞|x(t)|dt <∞
5.2 z-Transformation
5.2.1 Definition
Z x[k] = X(z) =∞∑
k=−∞x[k]z−k
5.2.2 Inverse z-Transformation
x[k] =1
2π
∮
X(z)zk−1dz
10

5.2 z-Transformation
Tabelle 1: Korrespondenzen der Fourier-Transformation
x(t) X(jω) = Fx(t)
δ(t) 1
1 2πδ(ω)
δ(t) jω
∑∞k=−∞ δ(t − kT ) = 1
T ⊥⊥⊥(
1T
)⊥⊥⊥
(ωT2π
)=
∑∞k=−∞ δ
(ω − 2π
T · k)
ε(t) πδ(ω) + 1jω
rect(at) 1|a|sinc
(ω2a
)
sinc(at) π|a|rect
(ω2a
)
1t −jπsign(ω)
sign(t) 2jω
ejω0t 2πδ(ω − ω0)
cos(ω0t) π[δ(ω + ω0) + δ(ω − ω0)]
sin(ω0t) jπ[δ(ω + ω0) − δ(ω − ω0)]
e−α|t|;α > 0 2αα2+ω2
e−a2t2√
πa e
− ω2
4a2
11

5 Transformationen
Tabelle 2: Satze der Fourier-Transformation
x(t) X(jω) = Fx(t)
Lineariat Ax1(t) +Bx2(t) AX1(jω) +BX2(jω)
Verschiebung x(t− τ) e−jωτX(jω)
Modulation ejω0tx(t) X(j(ω − ω0))
Differentiation im Frequenzbereich tx(t) −dX(jω)d(jω)
Differentiation im Zeitbereich dx(t)dt jωX(jω)
Integration∫ t−∞ x(τ)dτ 1
jωX(jω) + πX(0)δ(ω)
Ahnlichkeit x(at) 1|a|X
(jωa
)
; a ∈ R \ 0
Faltung x1(t) ∗ x2(t) X1(jω) ·X2(jω)
Multiplikation x1(t) · x2(t)12πX1(jω) ∗X2(jω)
Dualitatx1(t)x2(jt)
x2(jω)2πx1(−ω)
Symmetrienx(−t)x∗(t)
x∗(−t)
X(−jω)X∗(−jω)X∗(jω)
Parsevalsches Theorem∫ ∞−∞ |x(t)|2dt 1
2π
∫ ∞−∞ |X(jω)|2dω
12
5.2 z-Transformation
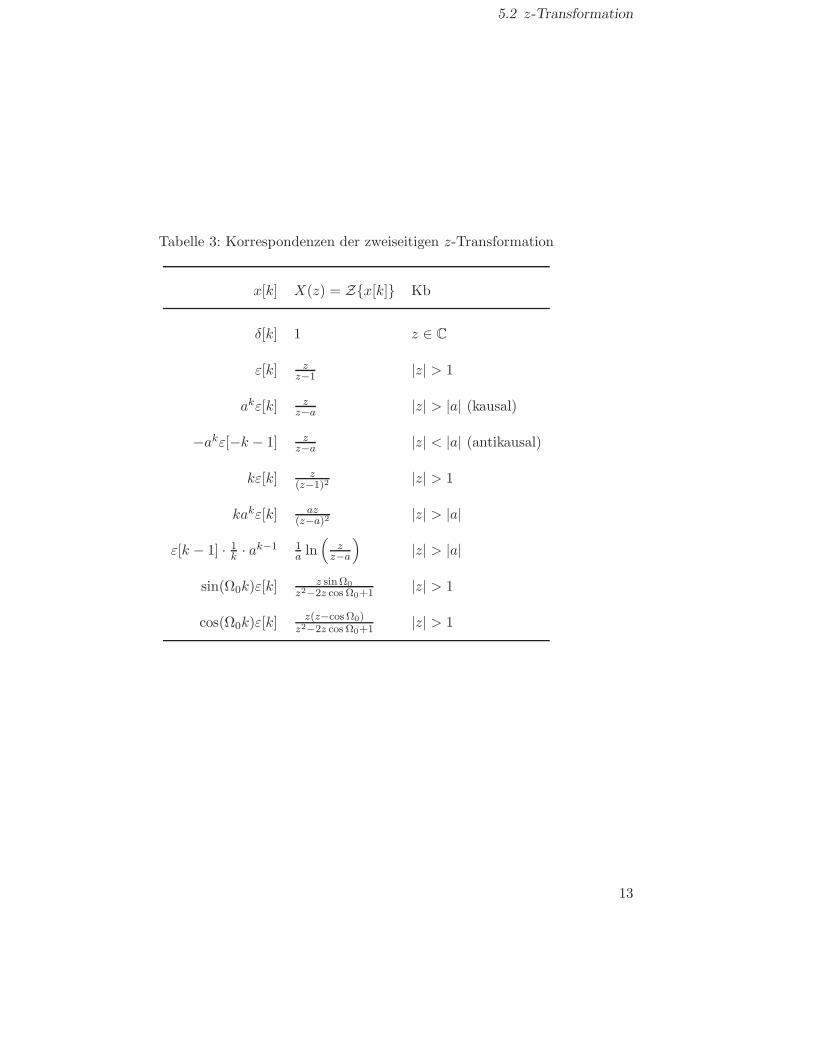
Tabelle 3: Korrespondenzen der zweiseitigen z-Transformation
x[k] X(z) = Zx[k] Kb
δ[k] 1 z ∈ C
ε[k] zz−1 |z| > 1
akε[k] zz−a |z| > |a| (kausal)
−akε[−k − 1] zz−a |z| < |a| (antikausal)
kε[k] z(z−1)2 |z| > 1
kakε[k] az(z−a)2 |z| > |a|
ε[k − 1] · 1k · ak−1 1
a ln(
zz−a
)
|z| > |a|
sin(Ω0k)ε[k]z sinΩ0
z2−2z cos Ω0+1|z| > 1
cos(Ω0k)ε[k]z(z−cos Ω0)
z2−2z cos Ω0+1|z| > 1
13
5 Transformationen
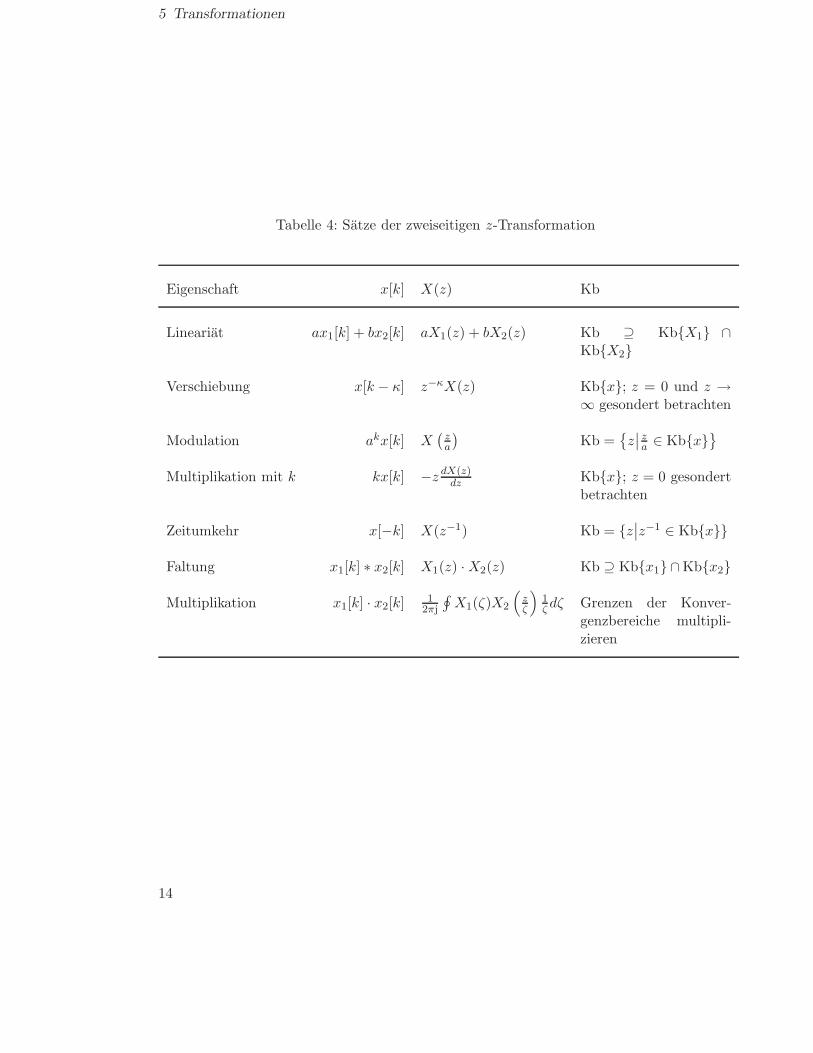
Tabelle 4: Satze der zweiseitigen z-Transformation
Eigenschaft x[k] X(z) Kb
Lineariat ax1[k] + bx2[k] aX1(z) + bX2(z) Kb ⊇ KbX1 ∩KbX2
Verschiebung x[k − κ] z−κX(z) Kbx; z = 0 und z →∞ gesondert betrachten
Modulation akx[k] X(
za
)Kb =
z∣∣ za ∈ Kbx
Multiplikation mit k kx[k] −z dX(z)dz Kbx; z = 0 gesondert
betrachten
Zeitumkehr x[−k] X(z−1) Kb = z∣∣z−1 ∈ Kbx
Faltung x1[k] ∗ x2[k] X1(z) ·X2(z) Kb ⊇ Kbx1 ∩Kbx2
Multiplikation x1[k] · x2[k]1
2πj
∮X1(ζ)X2
(zζ
)1ζ dζ Grenzen der Konver-
genzbereiche multipli-zieren
14

5.3 Zeitdiskrete Fouriertransformation (DTFT)
5.3 Zeitdiskrete Fouriertransformation (DTFT)
5.3.1 DTFT
Die Zeitdiskrete Fouriertransformation ist gegeben durch
X(ejΩ) = F∗ x[k] =
∞∑
k=−∞x[k]e−jΩk
Sie entspricht der zweiseitigen z-Transformation fur den Fall z = ejΩ, falls z = 1 ∈ Kb.
5.3.2 IDTFT
Die inverse DTFT braucht keinen Kb.
x[k] = F−1∗
X(ejΩ)
=
1
2π
∫ 2π
0X(ejΩ)ejΩkdΩ
5.4 Diskrete Fourier-Transformation (DFT)
5.4.1 DFT
Die DFT einer Folge x[k] der Lange M ist gegeben durch
X[µ] =
M−1∑
k=0
x[k] · wµkM = DFTM x[k] mit µ = 0(1)M − 1
mit dem DrehfaktorwM = e−j 2π
M
5.4.2 IDFT
Die Inverse DFT einer Folge X[µ] der Lange M ist definiert
x[k] =1
M
M−1∑
µ=0
X[µ]w−µkM = DFT−1
M X[µ] mit k = 0(1)M − 1
5.4.3 Zyklische Faltung
Eine zyklische Faltung der Lange M ist definiert als
x1[k] ©M x2[k] = x2[k] ©M x1[k]
⇔M−1∑
κ=0
x1[k − κ] · x2[κ] =
M−1∑
κ=0
x2[k − κ] · x1[κ]
mit x[k] = x[k] fur k = 0(1)M − 1.
15

5 Transformationen
Tabelle 5: Satze der zweiseitigen z-Transformation
x[k] X[µ]
Linearitat∑
i aixi[k] ai ∈ C∑
i aiXi[µ]
Zyklische Verschiebungim Zeitbereich
x[k + κ] X[µ] · w−µκM
Zyklische Verschiebungim Frequenzbereich
x[k] · wkλM X[µ+ λ]
Zeitumkehrung x[−k] = x[M − k] X[−µ]
Komplexe Konjugation x∗[k] X∗[−µ]
DFT der zyklischen Fal-tung im Zeitbereich
x1[k] ©M x2[k] X1[µ] ·X2[µ]
DFT der Multiplikationim Zeitbereich
x1[k] · x2[k]1M
∑M−1κ=0 X1[µ− κ] ·X2[κ]
16

5.4 Diskrete Fourier-Transformation (DFT)
Tabelle 6: Korrespondenzen der DTFT
x[k] X(ejΩ) = F∗x[k]
δ[k] 1
ε[k] π∑∞
n=−∞ δ(Ω − 2πn) + 11−e−jΩ
ε[k]ejΩ0k π∑∞
n=∞ δ(Ω − Ω0 − 2πn) + 11−e−j(Ω−Ω0)
1∑∞
µ=−∞ δ(
Ω2π − µ
)
ejΩ0k 2π∑∞
n=−∞ δ(Ω − Ω0 − 2πn)
cos Ω0k π∑∞
n=−∞ δ(Ω − Ω0 − 2πn) + δ(Ω + Ω0 − 2πn)
ε[k] · cos Ω0kπ2
∑∞n=−∞ δ(Ω − Ω0 − 2πn) + δ(Ω + Ω0 − 2πn)
+ ejΩ−cos Ω02 cos Ω−2 cos Ω0
ε[k] · sinΩ0kπ2j
∑∞n=−∞ δ(Ω − Ω0 − 2πn) − δ(Ω + Ω0 − 2πn)
+ sinΩ02 cos Ω−2 cos Ω0
sinΩ0k −jπ∑∞
n=−∞ δ(Ω − Ω0 − 2πn) − δ(Ω + Ω0 − 2πn)
rect[k] =
1 fur 0 ≤ k ≤ N
0 sonste−jΩ N−1
2 · sin(NΩ2 )
sin(Ω2 )
sign[k] =
1 fur k > 0
0 fur k = 0
−1 fur k < 0
1+e−jΩ
1−e−jΩ = −j 1tan(Ω/2)
akε[k] 11−ae−jΩ
17

5 Transformationen
Tabelle 7: Satze der DTFT
Eigenschaft x[k] X(ejΩ) = F∗x[k]
Linearitat ax1[k] + bx2[k] aX1(ejΩ) + bX2(e
jΩ)
Verschiebungssatz x[k − κ] e−jΩκX(ejΩ); κ ∈ Z
Zeitumkehr x[−k] X(e−jΩ)
Modulationssatz ejΩ0kx[k] X(ej(Ω−Ω0)); Ω0 ∈ R
Differentiation kx[k] jdX(ejΩ)dΩ
Konjugation x∗[k] X∗(e−jΩ)
Realteil Rex[k] Xg(ejΩ)
xg[k] ReX(ejΩ)
Imaginarteil Imx[k] Xu(ejΩ)
xu[k] jImX(ejΩ)
Faltungssatz x1[k] ∗ x2[k] X1(ejΩ)X2(e
jΩ)
Multiplikationssatz x1[k] · x2[k]12π
∫ 2π0 Y (ejΩ)X(ej(Ω−η))dη
= 12πX1(e
jΩ) ⊛X2(ejΩ)
Parsevalsches Theorem∑∞
k=−∞ |x[k]|2 12π
∫ π−π |X(ejΩ)|dΩ
18
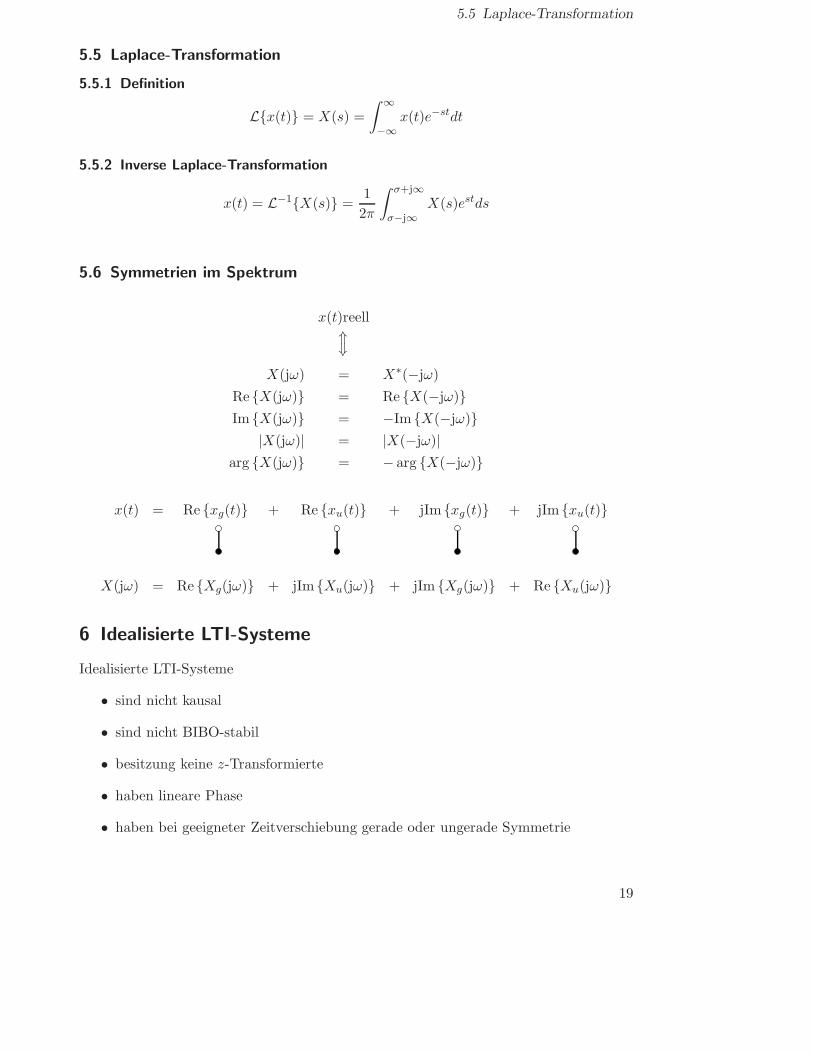
5.5 Laplace-Transformation
5.5 Laplace-Transformation
5.5.1 Definition
Lx(t) = X(s) =
∫ ∞
−∞x(t)e−stdt
5.5.2 Inverse Laplace-Transformation
x(t) = L−1X(s) =1
2π
∫ σ+j∞
σ−j∞X(s)estds
5.6 Symmetrien im Spektrum
x(t)reell
⇐⇒
X(jω) = X∗(−jω)
Re X(jω) = Re X(−jω)Im X(jω) = −Im X(−jω)
|X(jω)| = |X(−jω)|arg X(jω) = − arg X(−jω)
x(t) = Re xg(t) + Re xu(t) + jIm xg(t) + jIm xu(t)
X(jω) = Re Xg(jω) + jIm Xu(jω) + jIm Xg(jω) + Re Xu(jω)
6 Idealisierte LTI-Systeme
Idealisierte LTI-Systeme
• sind nicht kausal
• sind nicht BIBO-stabil
• besitzung keine z-Transformierte
• haben lineare Phase
• haben bei geeigneter Zeitverschiebung gerade oder ungerade Symmetrie
19
6 Idealisierte LTI-Systeme
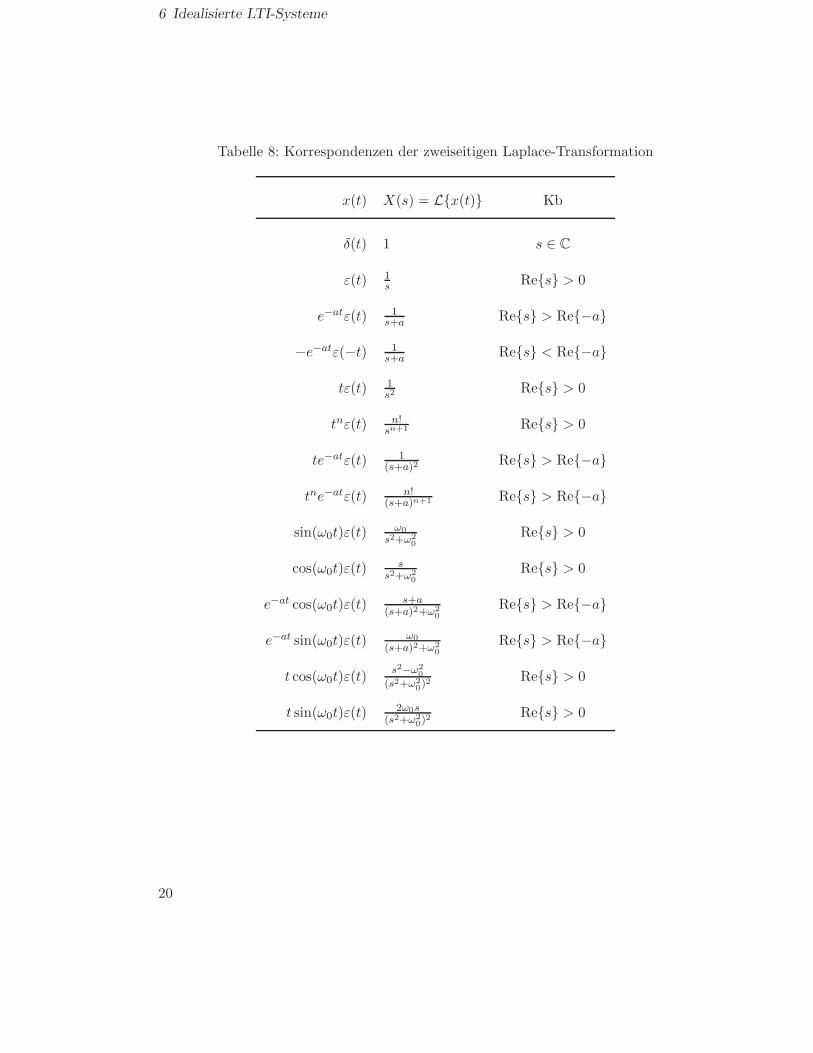
Tabelle 8: Korrespondenzen der zweiseitigen Laplace-Transformation
x(t) X(s) = Lx(t) Kb
δ(t) 1 s ∈ C
ε(t) 1s Res > 0
e−atε(t) 1s+a Res > Re−a
−e−atε(−t) 1s+a Res < Re−a
tε(t) 1s2 Res > 0
tnε(t) n!sn+1 Res > 0
te−atε(t) 1(s+a)2
Res > Re−a
tne−atε(t) n!(s+a)n+1 Res > Re−a
sin(ω0t)ε(t)ω0
s2+ω20
Res > 0
cos(ω0t)ε(t)s
s2+ω20
Res > 0
e−at cos(ω0t)ε(t)s+a
(s+a)2+ω20
Res > Re−a
e−at sin(ω0t)ε(t)ω0
(s+a)2+ω20
Res > Re−a
t cos(ω0t)ε(t)s2−ω2
0
(s2+ω20)2
Res > 0
t sin(ω0t)ε(t)2ω0s
(s2+ω20)2
Res > 0
20

Tabelle 9: Satze der zweiseitigen Laplace-Transformation
x(t) X(s) = Lx(t) Kb
Linearitat Ax1(t) +Bx2(t) AX1(s) +BX2(s) Kb ⊇ KbX1 ∩KbX2
Verschiebung x(t− τ) e−sτX(s) unverandert
Modulation e−atx(t) X(s − a) um Rea nachrechts verschoben
”Multiplikation mit t“,
Differentiation im Fre-quenzbereich
tx(t) − ddsX(s) unverandert
Differentiation im Zeit-bereich
ddtx(t) sX(s) Kb ⊇ KbX
Integration∫ t−∞ x(τ)dτ 1
sX(s) Kb ⊇ KbX∩s :Res > 0
Achsenskalierung x(at) 1|a|X
(sa
)Kb mit Faktor askalieren
21
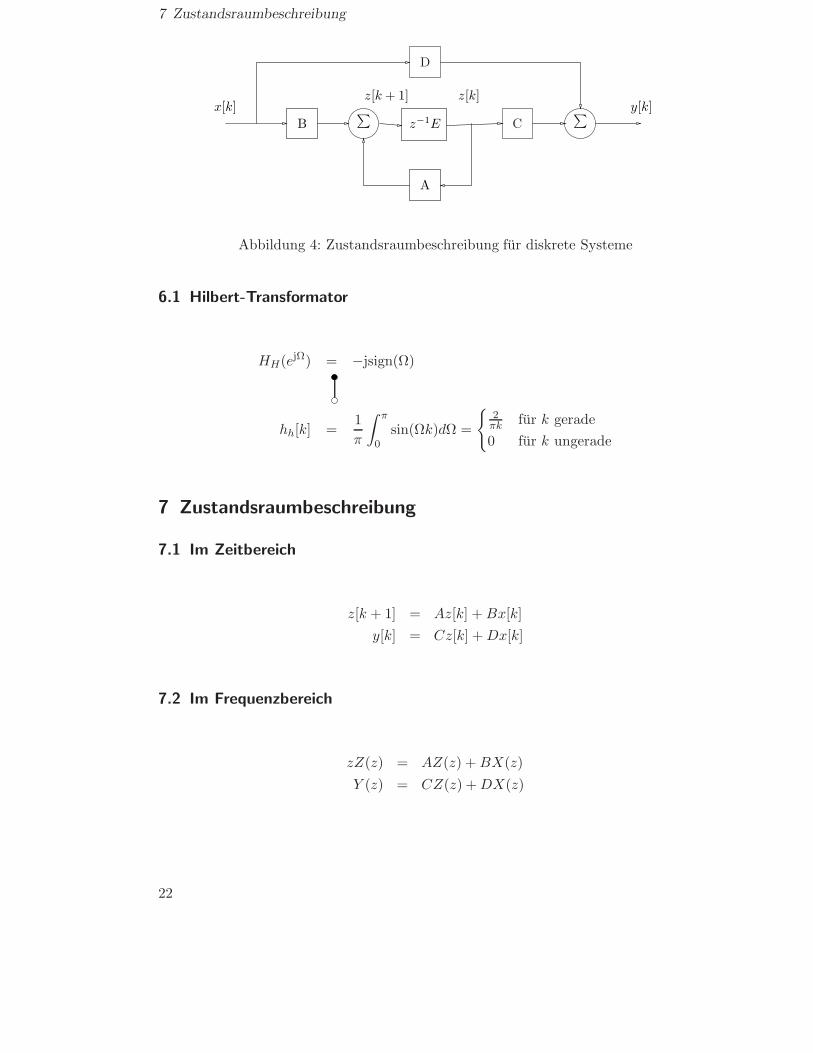
7 Zustandsraumbeschreibung
D
C∑ ∑
z−1EB
x[k] y[k]
A
z[k + 1] z[k]
Abbildung 4: Zustandsraumbeschreibung fur diskrete Systeme
6.1 Hilbert-Transformator
HH(ejΩ) = −jsign(Ω)
hh[k] =1
π
∫ π
0sin(Ωk)dΩ =
2
πk fur k gerade
0 fur k ungerade
7 Zustandsraumbeschreibung
7.1 Im Zeitbereich
z[k + 1] = Az[k] +Bx[k]
y[k] = Cz[k] +Dx[k]
7.2 Im Frequenzbereich
zZ(z) = AZ(z) +BX(z)
Y (z) = CZ(z) +DX(z)
22
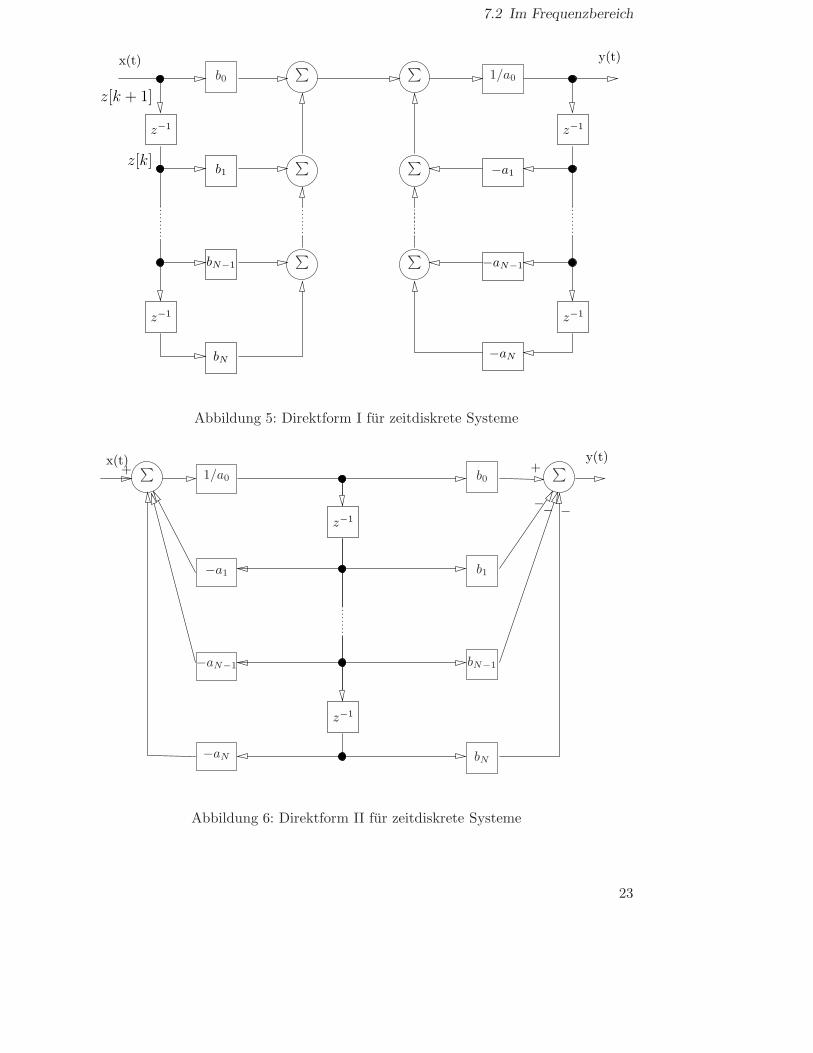
7.2 Im Frequenzbereich
∑
b0
∑
∑
∑
∑
∑
1/a0
x(t) y(t)
−a1
−aN−1
−aN
b1
bN−1
bN
z−1
z−1 z−1
z−1
z[k + 1]
z[k]
Abbildung 5: Direktform I fur zeitdiskrete Systeme
∑ ∑
b0
b1
bN−1
bN
1/a0
−aN−1
−a1
−aN
x(t) y(t)
−− −
++
z−1
z−1
Abbildung 6: Direktform II fur zeitdiskrete Systeme
23

8 Filterentwurf
7.3 Frobenius-Matrix
z1
z2
...
zN−1
zN
[k + 1] =
−a1a0
−a1a0
· · · −a1a0
−a1a0
1 0 · · · 0 0
0 1 · · · 0 0
......
. . ....
...
0 0 · · · 1 0
z1
z2
...
zN−1
zN
[k] +
1a0
0
0
...
0
x[k]
y[k] =
(
b1 − a1b0a0
· · · bN − aNb0a0
)
z1
z2
...
zN
[k] +b0a0x[k]
7.4 Signalflußgraphen
7.4.1 Berechenbarkeit
Ein Signalflußgraph heißt nicht berechenbar, wenn er verzogerungsfreie Schleifen enthalt.
7.4.2 Transposition
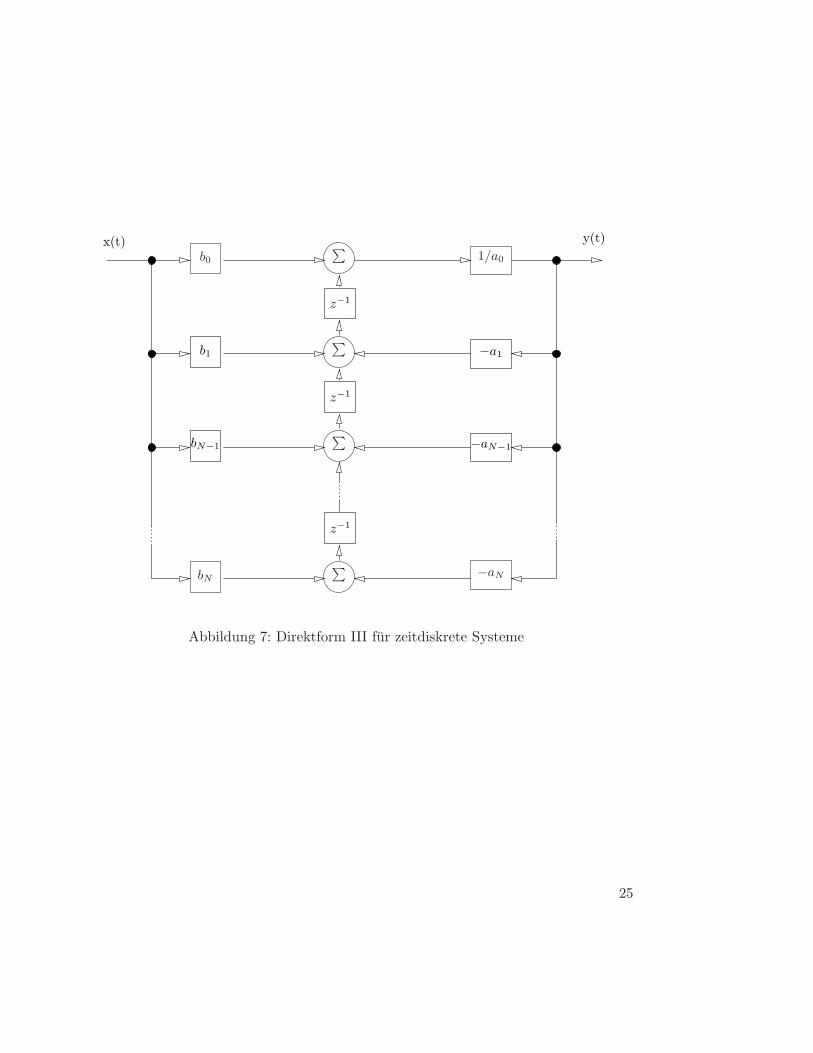
Umkehr aller Zweigrichtungen und Vertauschen von Ein- und Ausgangen fuhrt auf einbezuglich der Differenzengleichung aquivalentes Netzwerk. Fur digitale Schaltungen istdie Graphform, die erst verzogert und dann multipliziert und addiert zu bevorzugen.
8 Filterentwurf
Gegeben: fD, fS, δP , δS , fA.
1.
fA ≥ fmax + fS
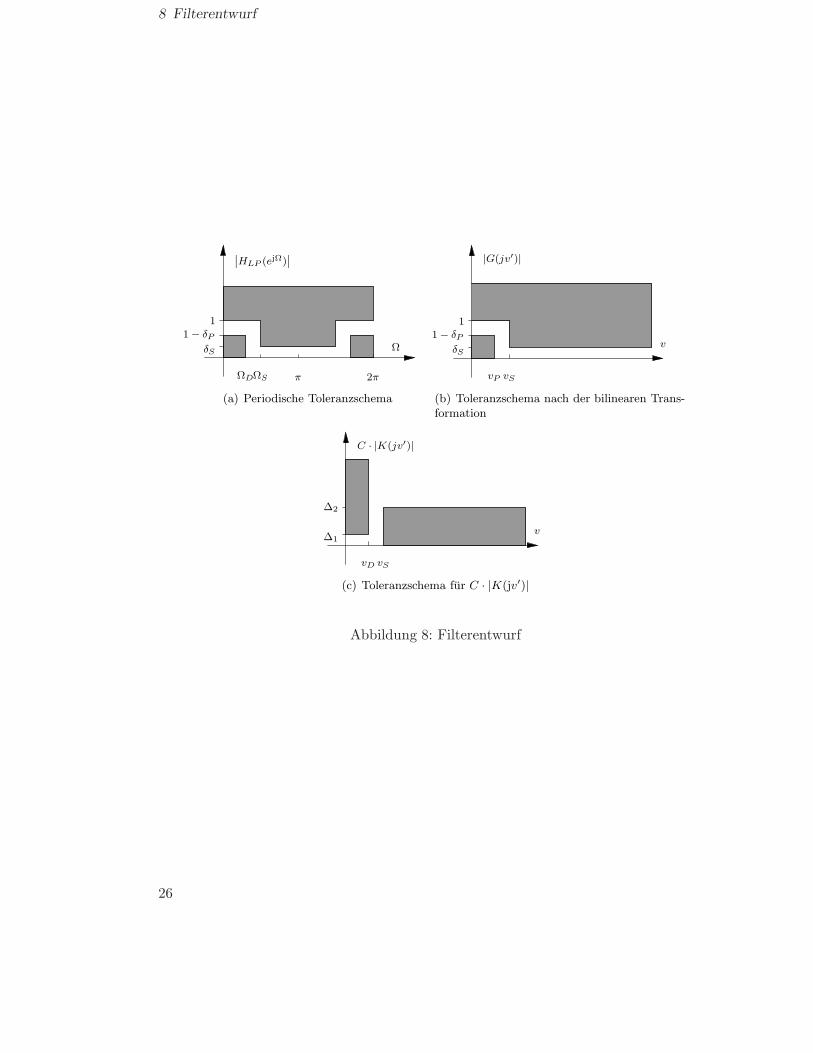
2. Periodisches Toleranzschema (siehe Abbildung 8(a)) des digitalen Tiefpasses.
Ω = 2π · ffA
24
∑
∑
∑
∑
b0
bN
1/a0
−aN
x(t) y(t)
b1
bN−1 −aN−1
−a1
z−1
z−1
z−1
Abbildung 7: Direktform III fur zeitdiskrete Systeme
25
8 Filterentwurf
π 2π
1 − δP
1
˛
˛HLP (ejΩ)˛
˛
Ω
ΩDΩS
δS
(a) Periodische Toleranzschema
1 − δP
1
vP vS
δS
|G(jv′)|
v
(b) Toleranzschema nach der bilinearen Trans-formation
∆2
vD vS
∆1
C · |K(jv′)|
v
(c) Toleranzschema fur C · |K(jv′)|
Abbildung 8: Filterentwurf
26
ΩD = 2π · fD
fA
ΩS = 2π · fS
fA
3. Bilineare Transformation (siehe Abbildung 8(b)).
w =z − 1
z + 1z =
1 + w
1 − w
w = u+ jv v = tanΩ
2
vD = tanΩD
2vS = tan
ΩS
2
4.
|C(jv)2| =1
1 + C2|K(jv)|2
∆1 =
√
2δD − δ2D
1 − δD∆2 =
√
1 − δ2S
δS
5. Berechnung der Filterordnung
a) Butterworth-Filter Filterordnung:
n ≥log ∆2
∆1
log v′Smit n ∈ N
C · |K(jv)| = C(v′)n
∆2
(v′)n≤ C ≤ ∆1
C bestimmt den Radius der Pole.
b) Tschebyscheff-Polynom Typ 1 Filterordnung:
n ≥arccosh∆2
∆1
arccoshvS=
ln
(
∆2∆1
+
√
∆22
∆21− 1
)
ln
(
vS
vD+
√
v2S
v2D
− 1
)
27
Recommended