Embed Size (px)
Citation preview
Т Е Х Н И Ч Е С К И У Н И В Е Р С И Т Е Т - С О Ф И Я
Ф А К У Л Т Е Т „А В Т О М А Т И К А”
Катедра „Автоматизация на електрозадвижванията”
маг. инж. Христо Любенов Стоянов
„ЕНЕРГОЕФЕКТИВНО УПРАВЛЕНИЕ В СИСТЕМИ ЗА СГРАДНА
АВТОМАТИЗАЦИЯ”
АВТОРЕФЕРАТ на дисертация
за присъждане на образователната и научна степен “доктор” по научна специалност „Авто-
матизация на производството“
Професионално направление: „5.2. Електротехника, електроника и автоматика“
Научен ръководител: проф. д-р Тодор Йонков Научно жури: проф. д-р инж. Тодор Стефанов Йонков доц. д-р инж. Евтим Йорданов Йончев проф. д.т.н. инж. Иван Лалов Димитров проф. д-р инж. Анатолий Трифонов Александров доц. д-р инж. Румен Иванов Райнов
СОФИЯ
2016
Дисертационният труд е обсъден пред катедрен съвет на катедра „Автоматизация на елект-розадвижванията” към факултет „Автоматика” на Техническия университет - София с прото-кол № 7/31.03.2016 г.
Дисертационният труд се състои от въведение, списък на основните означения, пет глави, списък на публикациите по труда, използвана литература в общ обем от 216 страници, 188 фигури и 35 таблици в текста. Цитирани са 136 литературни източника, от които 135 на латиница и 1 на кирилица. По труда са направени 6 научни публикации. Номерата на фигу-рите, таблиците и литературните източници в автореферата съвпадат с тези от дисертацията.
Защитата на дисертационния труд ще се състои на 12.07.2016 г. от 15.00 ч. в конферен-тната зала на БИЦ на Технически университет – София на открито заседание на научно жури в състав:
проф. д-р инж. Тодор Стефанов Йонков
доц. д-р инж. Евтим Йорданов Йончев
проф. д.т.н. инж. Иван Лалов Димитров
проф. д-р инж. Анатолий Трифонов Александров
доц. д-р инж. Румен Иванов Райнов
Материалите по защитата са на разположение на интересуващите се в канцеларията на факултет „Автоматика“ каб. 2340 на Технически университет – София.
Автор: маг. инж. Христо Любенов Стоянов
Заглавие: „ЕНЕРГОЕФЕКТИВНО УПРАВЛЕНИЕ В СИСТЕМИ ЗА СГРАДНА АВТОМАТИЗАЦИЯ“
Печатна база при Технически университет - София
1
ОБЩА ХАРАКТЕРИСТИКА НА ДИСЕРТАЦИОННИЯ ТРУД АКТУАЛНОСТ НА ПРОБЛЕМА
Днес в България повече от 800,000 кв.м. построена офисна площ и около 700,000 кв.м. офисна площ в процес на проектиране се нуждаят от Система за сградна автоматизация със свойствата на енергийно спестяване (в съответствие с Българския закон от декември 2007). В тази връзка е важно стартирането на процес на внедряване на интегрирани моделно базирани оптимални стратегии за управление, които по подходящ начин регулират стайната температура в сграда. Необходимо е разработването на математически апарат, прецизно описващ топлинните процеси. Така ще стане възможен синтезът на затворена енергоефективна система за сградна автоматизация.
Мултирегулируемите системи са ефективен и логичен начин за управление на сградните енергопотребяващи процеси. Имат потенциал за реализиране на икономии от около 18% годишно при отоплителните, вентилационните, климатичните (HVAC) системи и около 52% за осветителните системи. Интегрираните стратегии за управление на затопляне, охлаждане и изкуствено/естествено осветление се управляват едновременно от един мулти-контролер, вместо индивидуално от много контролни стратегии. Освен този голям потенциал съществуват и много други допълнителни перспективи като постоянство на температурният и осветителният комфорт. Повечето сградни компоненти са основно характеризирани с ограничения от тип насищане. Този ограничителен фактор трябва да бъде приоритизиран, заради значението му за методите в пространство на състоянието, които са не само полезни при анализа и проектирането на линейни системи, но също са важна начална точка за по-нататъшно оптимално и нелинейно управление в сградите.
Съвременната теория на управлението в областта на енергоспестяващите технологии е оформяща се в момента област. За сградния отрасъл все още има нужда от развитие на стратегиите за оптималното управление за получаване на бърза реакция на отоплителните, вентилационните, климатичните (HVAC) и осветителните системи на сгради за постигане на желания комфорт с минимални разходи и консумация на енергия. Особено с навлизането на компютърно базирани сградни автоматизирани системи (BAS) се поддържа изследването на сградното оборудване и компонентите с цел постигане на оптимално управление на функциите по ефикасен и рационален начин, като същевременно се намалява разхода на гориво и вредните емисии. Съвременните методи за управление всъщност са ефективен начин за справяне с аварийни ситуации в сгради, като централният компютър на автоматизираната сградна система може да включи устройство, изпълняващо оптимална контролна стратегия в зависимост от възникналата ситуация. Основно до момента в България енергийно спестяване се постига чрез използване на предсказващо устройство за достигане на вътрешната температура в определени граници. По този начин се цели получаване на оптимално от гледна точка на захранването с топлинна енергия и съответно получаване на минимални разходи.
Изложените досега стратегии и условия не са валидни за всички сгради, освен това системните компоненти и аспектите на изпълнение включват изисквания, наложени от обитателите на сградата и условията на околната среда. В повечето случаи това налага използването на подходящи методи за управление на комфорта и енергийните аспекти, включвайки един или повече ограничени фактори (например измерваната променлива трябва да достигне определена зададена стойност, преди да е изминало определено време). За разрешаване на тези проблеми се използва подход за разпределено управление и среди за симулация на сградно изпълнение чрез свързване на изпълнението.
Един от проблемите при симулация на сграден модел плюс система за контрол на средата е, че често компонентите и/или възможностите за управление на определена система могат да бъдат моделирани в една симулационна среда, докато модели за други компоненти и/или възможности за управление са само налични при друг симулационен софтуер. С други думи съществува като отделна област специфичен софтуер за симулация на сградни изпълнения, който обикновено е относително общ в условията за моделиране на управление и симулационни възможности. От друга страна
2
съществуват в зависимост от областта група среди за моделиране на управление, които са много развити в моделиране на управление и симулационни възможности (например Matlab/Simulink). За облекчаване на споменатото по-горе ограничение е съществено поставянето на нашите хипотези да съчетае двата подхода чрез свързване на изпълнението, което може да позволи оценяване на интегрирано изпълнение чрез предвиждане като цяло на ефекта от иновативни стратегии за управление при интегрирани сградни системи.
Идеята за тестващи системи за управление, свързани с виртуална сграда и HVAC система е най-напред широко развита в Анекс 17 от Международната Енергетична Агенция, коятo включва Европейски и Американски изследователски лаборатории. Окончателният доклад от този анекс е публикуван през 1993г. и доказва, че подходът е технически изпълним. Поне 6 тестови стенда са били развити в това време във Финландия, Белгия, Холандия, Великобритания, Франция и САЩ. Известни са многобройни публикации (Анекс 17, 1992), (Анекс 17, 1993), (два симпозиума по тази тема, организирани от АМЕРИКАНСКО ДРУЖЕСТВО НА ИНЖЕНЕРИТЕ ПО ОТОПЛИТЕЛНА И КЛИМАТИЧНА ТЕХНИКА през 1991 (Ashrae, 1991) и 1994 (Ashrae, 1994). ЦЕЛ НА ДИСЕРТАЦИОННИЯ ТРУД
Целта на дисертацията е разработване на методи за синтез на енергоспестяващи алгоритми за различни конфигурации системи за отопление, вентилация и климатизация (ОВК) на базата на предложени интегрирани модели на системните компоненти в различни програмни среди. ЗАДАЧИТЕ ЗА ПОСТИГАНЕ НА ПОСТАВЕНАТА ЦЕЛ СЕ СВЕЖДАТ ДО:
1. Разработване на моделни библиотеки, позволяващи облекчен анализ и синтез при физическата реализация на енергоефективни системи за управление на ОВК обекти.
2. Синтез на управляващи алгоритми за ОВК системи с подобрени енергетични показатели.
3. Схемна (контролерна) реализация на управляващи системи с енергоспестяващи свойства, приложени в системите за сградна автоматизация.
4. Изграждане на супервайзорно ниво за енергиен мениджмънт на обекти от типа "Интелектуална сграда".
СТРУКТУРА И ОБЕМ НА ДИСЕРТАЦИОННАТА РАБОТА
Дисертационната работа се състои от пет глави, списък на публикациите по труда, използвана литература в общ обем от 216 страници, 188 фигури и 35 таблици в текста. Цитирани са 136 литературни източника. МЕТОДИ ЗА ИЗСЛЕДВАНЕ
При разработването на труда е използван като основен подходът на математическото моделиране с последваща компютърна симулация. При това са приложени следните методи от теорията на управлението и термодинамика на системи за отопление вентилация и климатизация: методи за оптимизация на каскадни управляващи структури, системи за управление с превключваеми структури, елементи от моделно-базираното предсказващо управление. Широко се прилагат методите заложени в инструментите на MATLAB/SIMULINK и по-конкретно инструментът за работа в реално време на MATLAB/SIMULINK хардуерен симулационен модел на обекта – програмируем контролер (HIL) при компютърните симулационни изследвания.
КРАТКО СЪДЪРЖАНИЕ НА ДИСЕРТАЦИОННАТА РАБОТА ГЛАВА 1 ИЗТОЧНИЦИ НА ТОПЛИНА, СЪОРЪЖЕНИЯ ЗА КЛИМАТИЗАЦИЯ И КОМУНИКАЦИОННИ СГРАДНИ ПРОТОКОЛИ
1. Систематизирани са основните стратегии за енергоефективно управление в системите за ОВК.
3
2. Разгледани са начините за обмен на топлинна енергия, както и основните източници в затворено помещение.
3. Систематизирани са типови решения на съоръжения за целогодишна локална (зонова) и отдалечена климатизация на офисни и обществени сгради.
4. Разгледани са типови решения на системи за генериране и дистрибуция на топлинна (студова) енергия за офисни и обществени сгради.
5. Дефинирани са основните технологични изисквания и приложимостта на основните типове комуникационни мрежи в системите за управление на ОВК в сградни обекти.
ГЛАВА 2 МЕТОДОЛОГИЯ НА ИЗСЛЕДВАНИЯТА В ДИСЕРТАЦИЯТА
Направен е систематизиран обзор на методологията на изследванията в дисертацията.
ГЛАВА 3 МОДЕЛИРАНЕ НА ПРОЦЕСИТЕ В СИСТЕМИТЕ ЗА СГРАДНА АВТОМАТИЗАЦИЯ С ЕНЕРГОСПЕСТЯВАЩИ СВОЙСТВА
Математичното описание на термалното поведение на сградните системи е комплекс от заместващи модели на няколко взаимосвързани подсистеми, всяка една от които съдържа големи времеконстанти, нелинейности, неизвестни коефициенти - конвекция, материали и т.н. Освен това са налице външни непредсказуеми смущения, външни времеви (температура, влажност) смущения, температура на почвата, радиационни ефекти и други източници на енергия, както и човекът - осветяване, оборудване и др. Програмният продукт Simulink представлява потребителски ориентирана среда за бърза конфигурация на входовете и изходите на различни подсистеми, включени в сградата и оборудването, например HVAC (отопление, вентилация и климатизация). 3.1 Стая
Първа стъпка е дефинирането на сградната геометрия и термофизичните особености на всички елементи. В първо приближение използваме само Декартови координати. Математическият модел, описан долу, е базиран на уравненията за запазване на енергията и масата за управление на обема в температурно еднакви зони. По този начин за стая, заградена от m повърхности, поддържани от електрически нагревател, е в сила:
𝜌𝐴𝑐𝐴𝑉𝐴𝜕𝑇𝐴(𝑡)
𝜕𝑡= ∑ ℎ𝑖𝑛𝑡
𝑚𝑖=1 𝐴𝑖[𝑇𝑛,𝑖(𝑡) − 𝑇𝐴(𝑡)] + ℎ𝐶𝐴𝐶[𝑇𝑐(𝑡) − 𝑇𝐴(𝑡)] + 𝐷(𝑡), (3.1)
Смущенията 𝐷(𝑡) включват топлинния обмен с външния въздух през малка масова повърхност на сградната обвивка като врати и прозорци, вътрешно повишаване на енергията от оборудването, осветление и хора. Може да се запише израза:
𝐷(𝑡) = ∑𝑇𝑒𝑞(𝑡)−𝑇𝐴(𝑡)
𝑅𝑗
𝑚𝑗=1 + 𝑞𝑝 + 𝑞𝑒 + 𝑞𝐼 , (3.2)
В периода на водно-парен баланс отчитаме вентилацията, проникването и вътрешната генерация от оборудването и дишането на хората, следователно пълната формула има вида:
𝜌𝐴𝑉𝐴𝜕𝑤𝐴
𝜕𝑡= (�̇�𝑖𝑛𝑓 + �̇�𝑣𝑒𝑛𝑡)(𝑤𝑒𝑥𝑡 − 𝑤𝐴) + �̇�𝑏 + �̇�𝑔𝑒𝑟 (3.7)
Вода-пара състоянието от дишането на хората е пресметнато и обяснено в ASHRAE (1997), където се взема предвид стайната въздушна температура, съотношението на влажността и физическата активност през стените.
3.2 ОВК (HVAC) системи
HVAC системите са отговорни за значително голямата енергийна консумация, особено в офис сградите. Поради това според установения ред за осигуряване на дадена информация за симулиране поддържането на сградната температура, на първо приближение използваме математическите формули за електрическия нагревател, който може да се моделира чрез израза:
𝜌𝑐𝐶𝑐𝑉𝑐𝜕𝑇𝑐(𝑡)
𝜕𝑡= 𝑄(𝑡) − ℎ𝑐𝐴𝑐[𝑇𝑐(𝑡) − 𝑇𝐴(𝑡)] − 𝜎𝜀𝐴𝑐 ∑ 𝐹𝑆,𝑐−𝑖
𝑚𝑖=1 [𝑇𝑐
4(𝑡) − 𝑇𝑛,𝑖4 (𝑡)], (3.8)
4
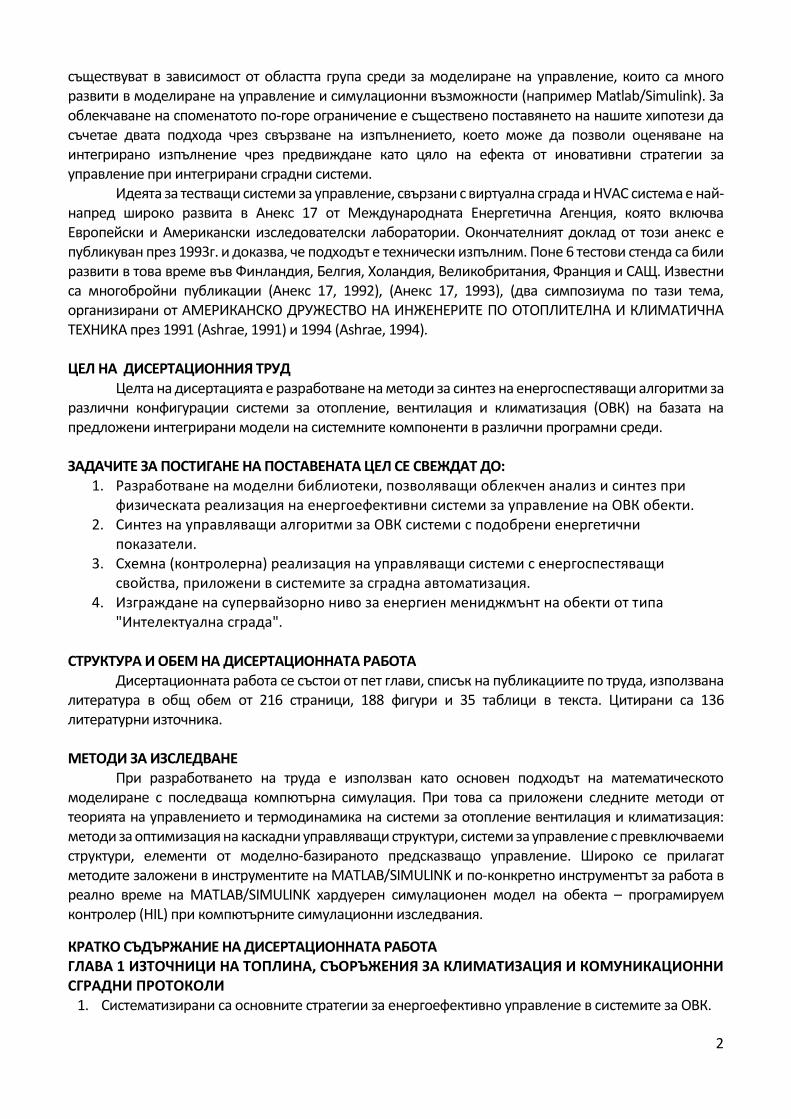
3.2.1 Външен и вътрешен слой на стена Математическият модел на междинен слой се основава на показаното от фигура 3.1.
Фигура 3.1 Представяне на среден слой на
стена Фигура 3.2 Повърхностен слой
Моделът може да се запише във вида:
𝑇𝑛+1−𝑇𝑛
∆𝑡=
1
𝐶[𝑞𝑙 + 𝑞𝑟]
𝑛 , (3.15)
където: n – момент от време на симулация. За външният слой е необходимо да се отчете (фигура 3.2), че:
𝐾 =𝜆
𝑑 , (3.16)
Използва се предходния модел с уравнение (3.15) и съответни топлинни потоци: Ляво – външен поток:
𝑞𝑒𝑥𝑡𝑒𝑟𝑛𝑎𝑙 = 𝛼𝑐(𝑇𝑎,𝑜𝑢𝑡 − 𝑇𝑠) + 𝑄𝑟𝑎𝑑,𝑜𝑢𝑡 , (3.17)
Дясно – структура:
𝑞𝑠𝑡𝑟𝑢𝑐𝑡𝑢𝑟𝑒 = 𝐾(𝑇𝑠,𝑟 − 𝑇𝑠) , (3.18)
Енергията, която се абсорбира от повърхността е: 𝑄𝑟𝑎𝑑,𝑜𝑢𝑡 = 𝛼(𝐼𝑑𝑖𝑟 + 𝐼𝑑𝑖𝑓𝑓) + 𝜀(𝐼𝑙𝑤 − 𝜎𝑇𝑠
4) , (3.19)
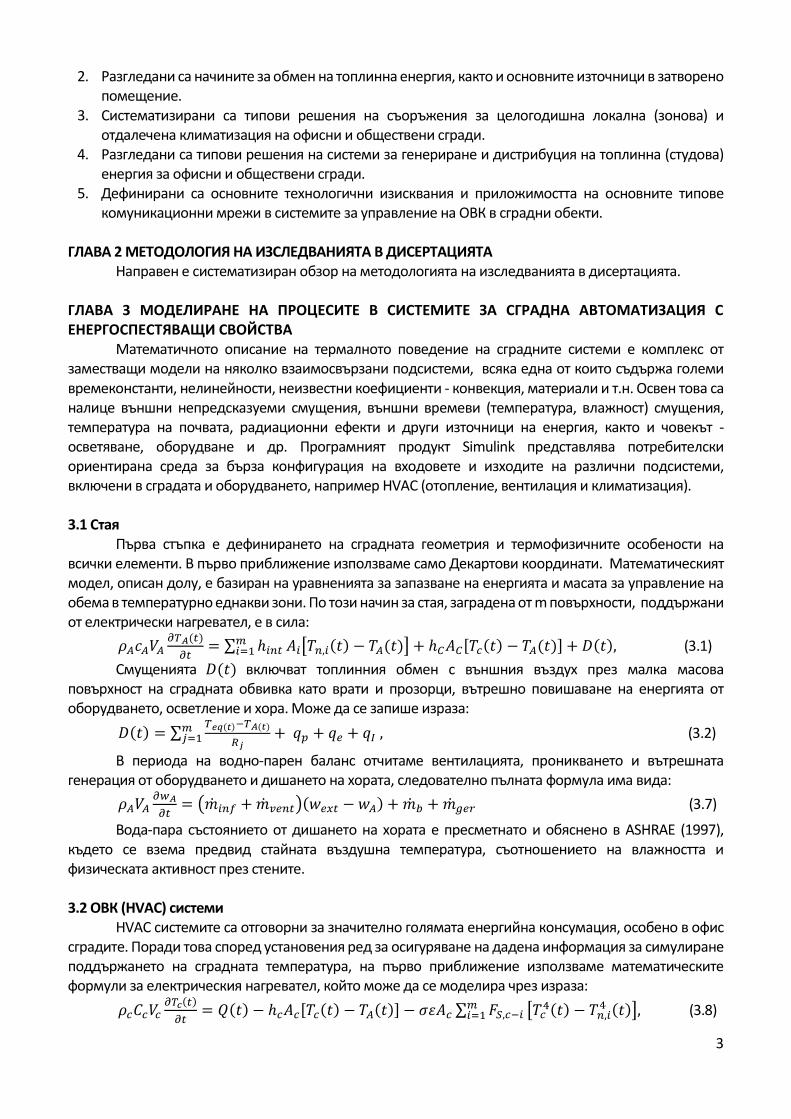
3.2.1.1 Вътрешен слой на стена На фигура 3.3 е показана реализацията на блока вътрешен слой на стена, изграден в средата
на Matlab/Simulink. Използвани са стандартни блокове от библиотеките. Моделът представлява звено от първи ред с коефициенти, зависещи изцяло от данните за конкретният материал.
Входните параметри за реализирания модел са два типа: 1. Начална температура и параметри, зависещи от вида на материала (стойностите за
различните материали са представени в таблица 3.1. 𝜆𝑇 - [𝑊 𝑚.𝐾2⁄ ] 𝜆𝑜, 𝑟𝑒𝑓 - [𝑊 𝑚.𝐾⁄ ]
𝜌0 - [𝑘𝑔 𝑚3⁄ ] 𝑐𝑝 - [ 𝐽 𝑘𝑔. 𝐾⁄ ]
2. Сигнали, постъпващи от съседните слоеве (ляв и десен) необходими за изчисляването на топлинните потоци 𝑞𝑙 и 𝑞𝑟.
Изходи на реализирания модел са: температурата 𝑇 и топлинната проводимост на материала 𝐾, от който е изграден междинният слой.
5
Фигура 3.3 Симулационна схема – вътрешен слой на стена
3.2.1.2 Външен слой на стена Особеността при моделирането на външен слой на стена е при определянето на топлинните
потоци (3.17) и (3.18). И по специално топлинният поток идващ от външната среда, той се определя от разликите във външната температура и температурата на повърхността на слоя. На фигура 3.4 е показана реализацията на блока външен слой на стена, изграден в средата на Matlab/Simulink.
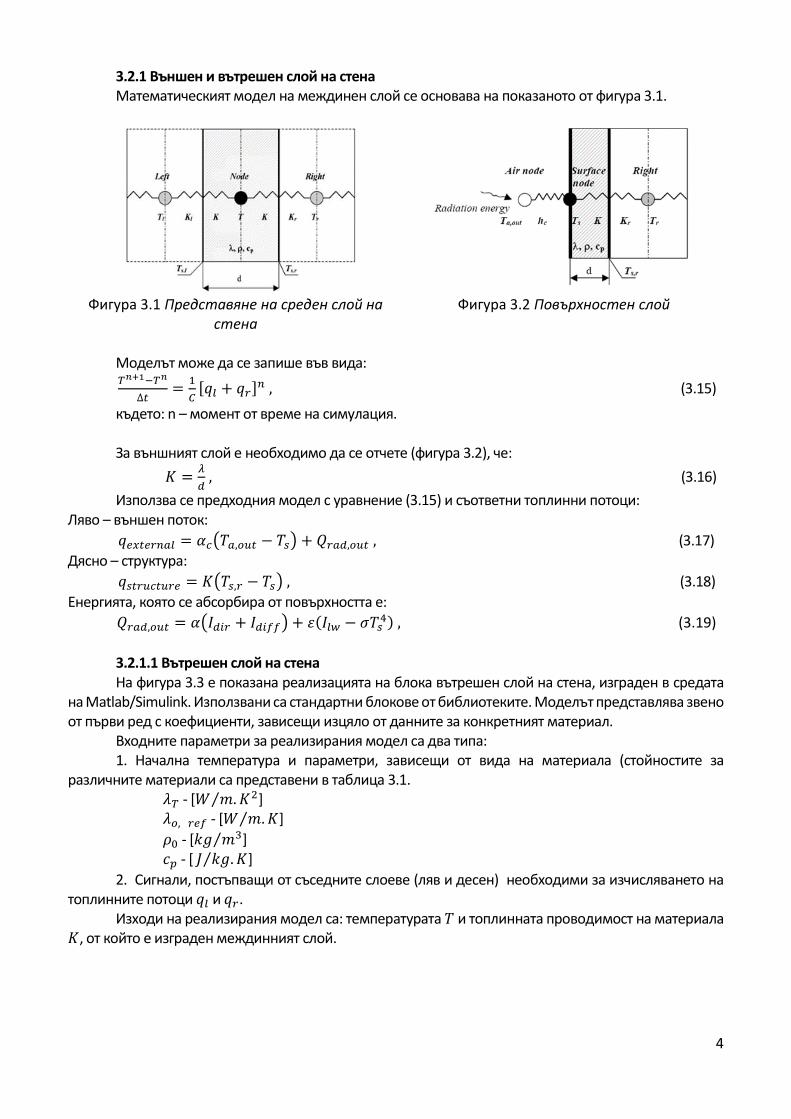
lambda_T lambda_dry dry_density heat_capacity emissivity absorptivity
[W/m.K 2 ] [W/m.K ] [kg/m 3 ] [J/kg.K ] - -
1 Гипсокартон 0.0 0.1600 950 840 0.90 0.6000
2 Фибростъкло 0.2 0.0400 12 840 0.90 0.6000
3 Дървена обшивка 0.0 0.1400 530 900 0.90 0.6000
4 Дървен под 0.0 0.1400 650 1200 0.90 0.6000
5 Прозоречно стъкло 0.0 1.0600 2500 750 0.90 0.0600
6 Бетон 0.0 0.5100 1400 1000 0.90 0.6000
7 Изолационна пяна 0.0 0.0400 10 1400 0.90 0.6000
8 Етажна бетонна плоча 0.0 1.1300 1400 1000 0.90 0.6000
9 Дървен панел 0.0 0.1600 395 1880 0.90 0.6000
10 Покривна плоскост 0.0 0.1400 530 1880 0.90 0.6000
11 Хартия 0.0 0.0400 55 1880 0.90 0.6000
12 Бетонен блок 0.0 0.5100 2300 840 0.90 0.6000
13 Бетонен трегер 0.0 1.1300 2300 840 0.90 0.6000
14 Газобетон 0.0 0.1800 600 840 0.90 0.6000
Таблица 3.1
№ Материал
𝜆 𝜆0,𝑟𝑒𝑓 𝜌0 𝐶𝑝 𝜀 𝛼
6
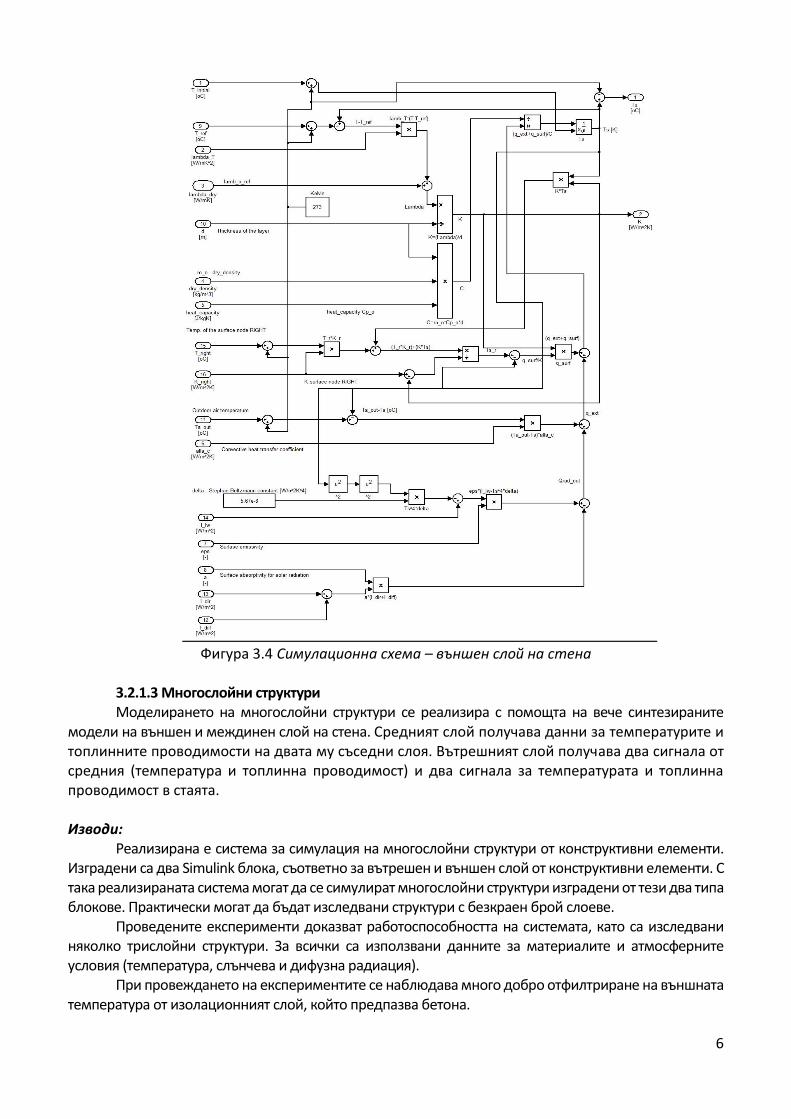
Фигура 3.4 Симулационна схема – външен слой на стена
3.2.1.3 Многослойни структури Моделирането на многослойни структури се реализира с помощта на вече синтезираните
модели на външен и междинен слой на стена. Средният слой получава данни за температурите и топлинните проводимости на двата му съседни слоя. Вътрешният слой получава два сигнала от средния (температура и топлинна проводимост) и два сигнала за температурата и топлинна проводимост в стаята.
Изводи:
Реализирана е система за симулация на многослойни структури от конструктивни елементи. Изградени са два Simulink блока, съответно за вътрешен и външен слой от конструктивни елементи. С така реализираната система могат да се симулират многослойни структури изградени от тези два типа блокове. Практически могат да бъдат изследвани структури с безкраен брой слоеве.
Проведените експерименти доказват работоспособността на системата, като са изследвани няколко трислойни структури. За всички са използвани данните за материалите и атмосферните условия (температура, слънчева и дифузна радиация).
При провеждането на експериментите се наблюдава много добро отфилтриране на външната температура от изолационният слой, който предпазва бетона.
7
При експериментите е увеличен размер на изолационния материал (междинният слой) се забелязва намаляване на амплитудата на колебанията на температурата на вътрешния слой. При експеримента с три слоя от бетон се наблюдава как бетонът действа като температурен мост и отфилтрира много слабо колебанията във външния слой, породени от температурата на околната среда и слънчевата радиация.
Така изградената системата може да бъде използвана за предварителна симулация на сгради и съоръжения с известена структура и параметри на композитните материали.
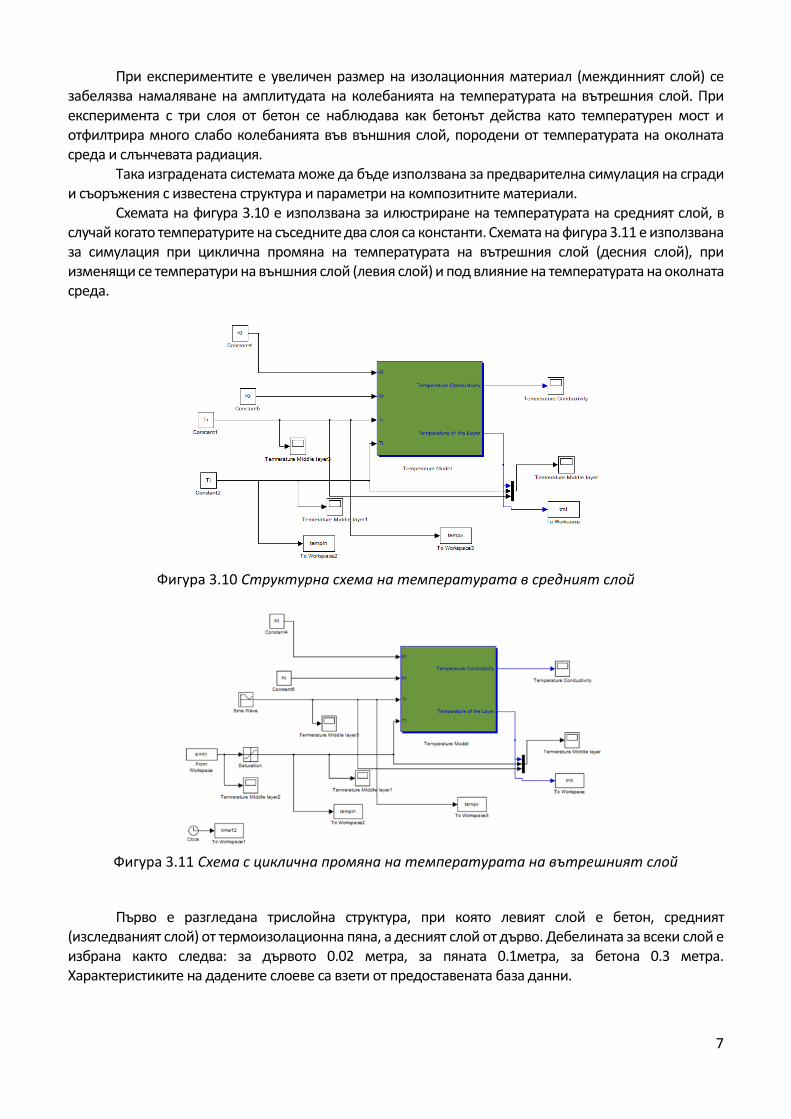
Схемата на фигура 3.10 е използвана за илюстриране на температурата на средният слой, в случай когато температурите на съседните два слоя са константи. Схемата на фигура 3.11 е използвана за симулация при циклична промяна на температурата на вътрешния слой (десния слой), при изменящи се температури на външния слой (левия слой) и под влияние на температурата на околната среда.
Фигура 3.10 Структурна схема на температурата в средният слой
Фигура 3.11 Схема с циклична промяна на температурата на вътрешният слой
Първо е разгледана трислойна структура, при която левият слой е бетон, средният (изследваният слой) от термоизолационна пяна, а десният слой от дърво. Дебелината за всеки слой е избрана както следва: за дървото 0.02 метра, за пяната 0.1метра, за бетона 0.3 метра. Характеристиките на дадените слоеве са взети от предоставената база данни.
8
ГЛАВА 4 УПРАВЛЕНИЕ НА СИСТЕМИ ЗА СГРАДНА АВТОМАТИЗАЦИЯ 4.1 Оптимални енергоспестяващи алгоритми за управление на системи за сградна автоматизация
За сградния отрасъл все още има нужда от развитие на стратегиите за оптималното управление за получаване на бърза реакция на отоплителните, вентилационните, климатичните (HVAC) и осветителните системи на сгради за постигане на желания комфорт с минимални разходи и консумация на енергия. Особено с навлизането на компютърно базирани сградни автоматизирани системи (BMS) се поддържа изследването на сградното оборудване и компонентите с цел постигане на оптимално управление на функциите по ефикасен и рационален начин, като същевременно се намалява разхода на гориво и вредните емисии. Съвременните методи за управление всъщност са ефикасен начин за справяне с аварийни ситуации в сгради, като централният компютър на автоматизираната сградна система може да включи устройство, изпълняващо оптимална контролна стратегия в зависимост от възникналата ситуация.
4.1.1 Вътрешен температурен комфорт Управлението е проектирано за постигане на вътрешна температура в определени граници на
адаптивен оптимален комфорт като се използва по стандарт (ASHRAE 55) температурата през зимата за сгради с естествена вентилация.
По времето, когато офис сградата е заета, регулаторът е проектиран с цел да минимизира консумацията на енергия и да оптимизира вътрешната температура заедно с предсказаният индекс на комфорт (Predicted Mean Vote - PMV) чрез избор на подходяща тегловна матрица на състоянието за регулатора. Като допълнение, PMV е мярка, която е стандартизирана (ISO 1984), използвана за предсказване на положението на комфорта в сгради.
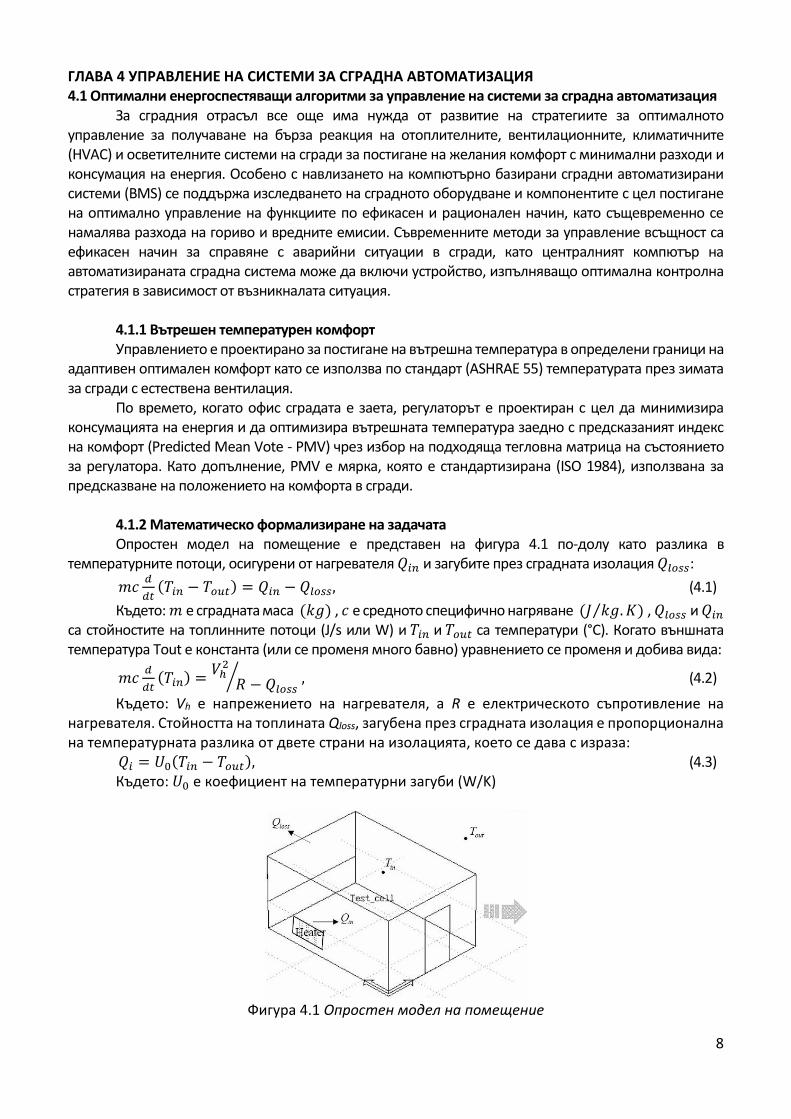
4.1.2 Математическо формализиране на задачата Опростен модел на помещение е представен на фигура 4.1 по-долу като разлика в
температурните потоци, осигурени от нагревателя 𝑄𝑖𝑛 и загубите през сградната изолация 𝑄𝑙𝑜𝑠𝑠:
𝑚𝑐𝑑
𝑑𝑡(𝑇𝑖𝑛 − 𝑇𝑜𝑢𝑡) = 𝑄𝑖𝑛 − 𝑄𝑙𝑜𝑠𝑠, (4.1)
Където: 𝑚 е сградната маса (𝑘𝑔) , 𝑐 е средното специфично нагряване (𝐽 𝑘𝑔. 𝐾)⁄ , 𝑄𝑙𝑜𝑠𝑠 и 𝑄𝑖𝑛 са стойностите на топлинните потоци (J/s или W) и 𝑇𝑖𝑛 и 𝑇𝑜𝑢𝑡 са температури (°C). Когато външната температура Tout е константа (или се променя много бавно) уравнението се променя и добива вида:
𝑚𝑐𝑑
𝑑𝑡(𝑇𝑖𝑛) =
𝑉ℎ2
𝑅 − 𝑄𝑙𝑜𝑠𝑠⁄ , (4.2)
Където: Vh е напрежението на нагревателя, а R е електрическото съпротивление на нагревателя. Стойността на топлината Qloss, загубена през сградната изолация е пропорционална на температурната разлика от двете страни на изолацията, което се дава с израза: 𝑄𝑖 = 𝑈0(𝑇𝑖𝑛 − 𝑇𝑜𝑢𝑡), (4.3)
Където: 𝑈0 е коефициент на температурни загуби (W/K)
Фигура 4.1 Опростен модел на помещение
9
Горните изрази дават връзката в формата на представянето в пространство на
състоянията.
𝑑
𝑑𝑡𝑇𝑖𝑛 = −
𝑈0
𝑚.𝑐𝑇𝑖𝑛 +
1
𝑚.𝑐𝑄𝑖𝑛 +
𝑈0
𝑟.𝑐𝑇𝑜𝑢𝑡 , (4.4)
Където: факторът 𝑈0
𝑟.𝑐𝑇𝑜𝑢𝑡 е ефектът на зашуменият вход.
cr
Uu
cmx
cm
Ux
..
1
.00
‚ (4.5) Сензори са инсталирани на различни места в стаята за осигуряване на своевременно
откриване на потенциални температурни промени. Вътрешната температура се изчислява като средна стойност от събраните данни от всички сензори. Оптималната стратегия за управление изисква да бъде проектирана с цел оптимизация на температурният комфорт в стаята и минимизиране на консумацията на енергия с целева функция, която удовлетворява изискванията, заложени от обитателите на сградата.
Удовлетворяването на тези условия зависи от температурните изисквания към средата и икономията на енергия. Предложена е следната математическа формулировка: Работен индекс J(U), минимизиране на израза за период
2
12
1
2
2
22
10
0,))100(()(min
q
qQdtPMVqRuxqUJ
t
tUu
, (4.6) Ограничение на енергията u(t) и за комфорт PMV са:
maxmin
maxmin )()()(
PMVPMVPMV
tututu
, (4.7) В работният индекс J(U) три условия допринасят за интегрираните разходи. Първият член
в израза представя отклонението от състоянието x от желаното състояние, вторият член от минимизираният израз представя работата на регулатора и последната част изразява оптималният температурен комфорт в сградата.
4.1.3 Синтез на регулатор Целта на теорията на оптимално управление е да осигури систематичен метод за синтез
на закони за управление със свойства, зададени за оптимизация на целева функция. Останалият проблем е получаване на структура на обратната връзка в модела на сграда.
Решението на задачата за управление с ограничения в уравненията от изчислителна гледна точка не е комплексно, поради това, че води до крайни стойности. Регулаторът е зададен да минимизира работният индекс:
2
12
1
2
2
22
10
0,))100(()(min
q
qQdtPMVqRuxqUJ
t
tUu
, (4.8) Обект на динамичната система е:
cr
Uu
cmx
cm
Ux
..
1
.00
, (4.9) Изразът за тоталната енергия на системата се представя с уравнение на Хамилтониан:
u
cmx
cm
U
x
VPMVqRuxq
x
VuxH
.
1
.))100((,, 0
'
2
2
22
1
, (4.10) Необходимите условия за оптималност (J минимум) от първи ред са:
10
)()(,
,,
)( 21 tptpu
x
VuxH
tp
, (4.11) Съществува производна на уравнението на Хамилтониан и функцията на управление u(t)
се намира от горният израз. На практика, когато x достигне зададената точка, имаме:
0
u
H
, (4.12) и получаваме следното оптимално управление:
x
V
cmRu
.
11
, (4.13) От горните два израза минимизацията на J довежда до следното нелинейно
диференциално уравнение (т. нар. уравнение на Рикати) с цел да намерим неизвестната (симетрична матрица) p:
0)(),(..
1)(.
.2)( 2
2
0
ftptpcm
Qtpcm
URtp
, (4.14) И така задачата за управление е решена, получен е закон за управление, в форма
зависеща от времето. Когато е изпълнено ft
оптималният регулатор става независим от времето.
Изводи:
Математическата процедура за моделно базирано оптимално управление при отопление е съобразена с два основни фактора – енергийни икономии и комфорт на обитателите. Тези фактори са свързани с подобряване на качеството на средата вътре в сградите и съответните моделно базирани алгоритми за управление е възможно да бъдат интегрирани с такива цели. Въпросите за начина на свързване и съвместната работа на регулатора и обекта и филтрацията на шумовете са широко приложими и е възможно развиването им за следващи стратегии за сградно управление. 4.2 Mоделно базирано предсказващо управление в интегрирани сградни системи
Голямата част от системите за отопление, вентилация и климатизация реализират изискванията за топлинен комфорт чрез едноконтурни системи за управление или чрез многоконтурни системи за управление по основните променливи: вътрешна температура и относителна влажност. При решаване на задачата за топлинният комфорт е необходимо да се вземат предвид много допълнителни фактори. Взаимодействието между хората и топлинната среда е твърде сложно.
Важни променливи на околната среда са показани в Таблица 4.1. Таблица 4.1
Номер Описание Измервателни единици
1 Време s
2 Температура на въздуха 10 °C
3 Точка на оросяване 10 °C
4 Общо излъчване в хоризонтална плоскост W/m2
5 Дифузно излъчване в хоризонтална плоскост W/m2
6 Нормално пряко излъчване W/m2
11
7 Инцидентно дълговълново излъчване W/m2
8 Обща осветеност lux
9 Дифузна осветеност lux
10 Пряка осветеност lux
11 Посока на вятъра deg
12 Скорост на вятъра m/s
Допуска се, че описаните променливи на околната среда се описват чрез временни
редове. Определението за комфорт е трудно да се формулира. В много случай това определение е свързано с индивидуални характеристики на човека.
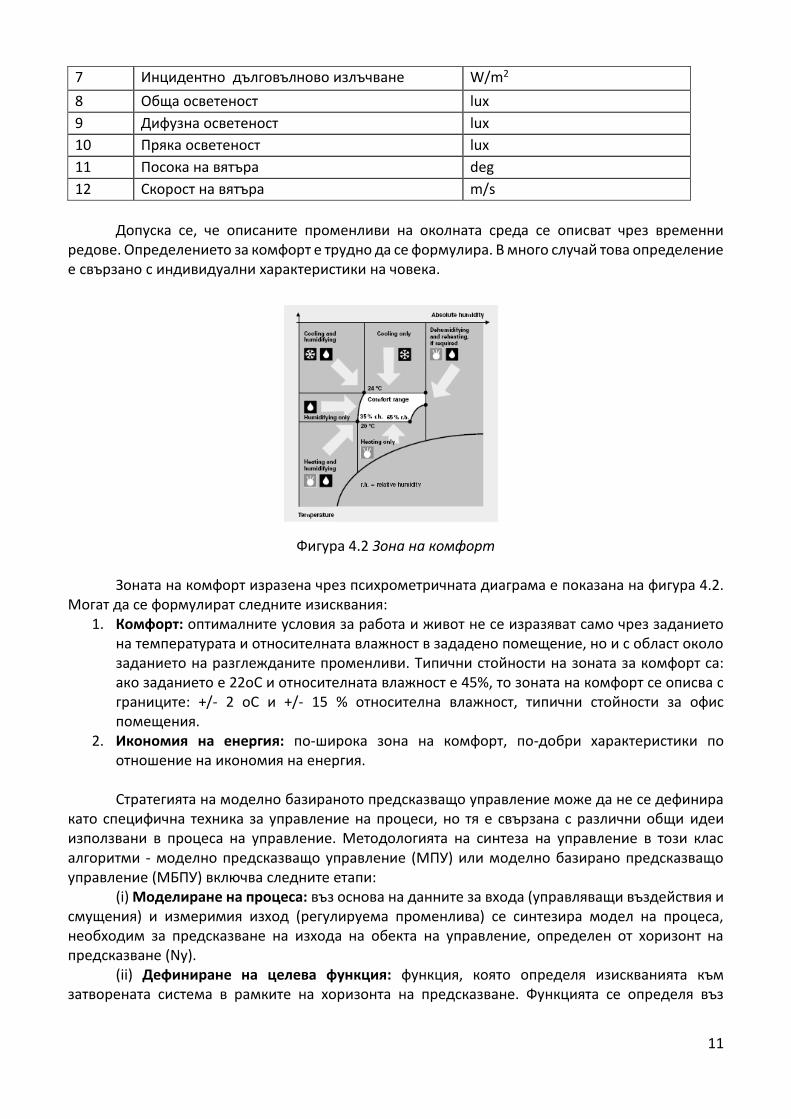
Фигура 4.2 Зона на комфорт
Зоната на комфорт изразена чрез психрометричната диаграма е показана на фигура 4.2.
Могат да се формулират следните изисквания: 1. Комфорт: оптималните условия за работа и живот не се изразяват само чрез заданието
на температурата и относителната влажност в зададено помещение, но и с област около заданието на разглежданите променливи. Типични стойности на зоната за комфорт са: ако заданието е 22оС и относителната влажност е 45%, то зоната на комфорт се описва с границите: +/- 2 оС и +/- 15 % относителна влажност, типични стойности за офис помещения.
2. Икономия на енергия: по-широка зона на комфорт, по-добри характеристики по отношение на икономия на енергия. Стратегията на моделно базираното предсказващо управление може да не се дефинира
като специфична техника за управление на процеси, но тя е свързана с различни общи идеи използвани в процеса на управление. Методологията на синтеза на управление в този клас алгоритми - моделно предсказващо управление (МПУ) или моделно базирано предсказващо управление (МБПУ) включва следните етапи:
(i) Моделиране на процеса: въз основа на данните за входа (управляващи въздействия и смущения) и измеримия изход (регулируема променлива) се синтезира модел на процеса, необходим за предсказване на изхода на обекта на управление, определен от хоризонт на предсказване (Ny).
(ii) Дефиниране на целева функция: функция, която определя изискванията към затворената система в рамките на хоризонта на предсказване. Функцията се определя въз
12
основа на предсказване на изхода, заданието на затворената система и управляващите въздействия.
(iii) Дефиниране на целева функция за оптимизация: целевата функция се оптимизира като функция на управляващите въздействия (до хоризонт на управление (Nu) ), които се прилагат върху обекта по време на процеса на предсказване. Формираните ограничения в този случай отразяват особеностите на системата за отопление, вентилация и климатизация.
(iv) Изместване на хоризонта на предсказване: към обекта се прилага само първото изчислено управляващо въздействие, след което процедурата се повтаря желан брой стъпки.
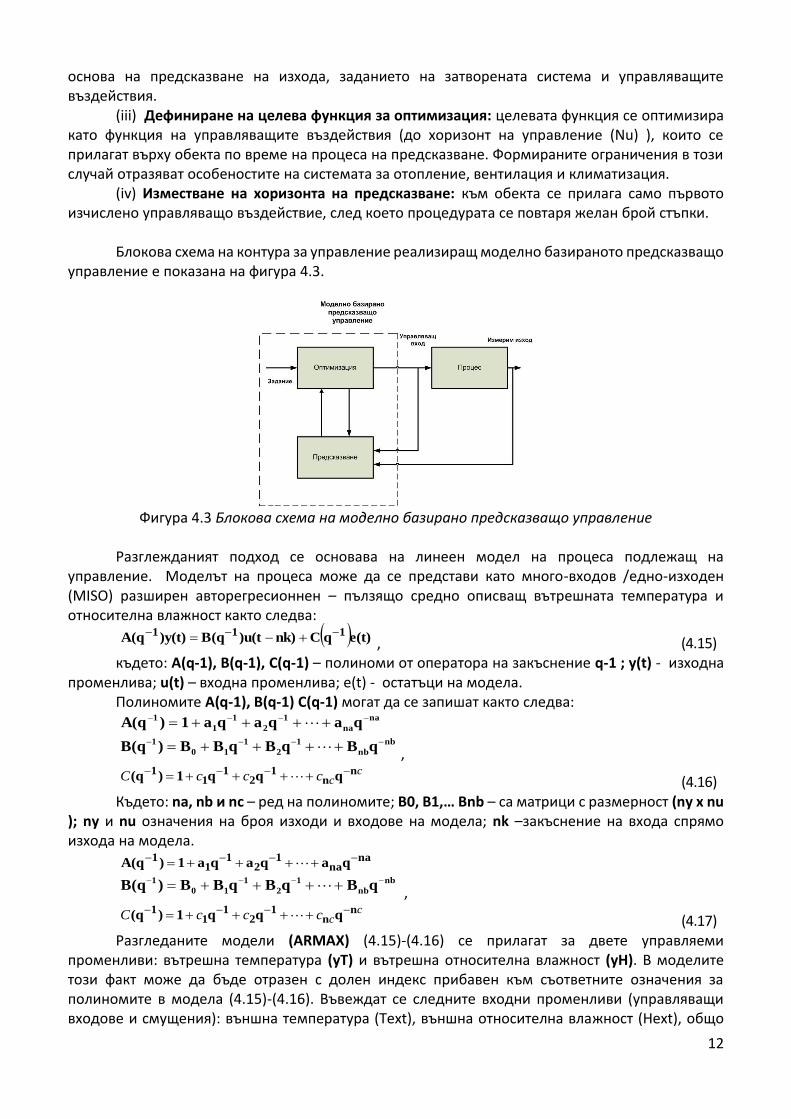
Блокова схема на контура за управление реализиращ моделно базираното предсказващо
управление е показана на фигура 4.3.
Фигура 4.3 Блокова схема на моделно базирано предсказващо управление
Разглежданият подход се основава на линеен модел на процеса подлежащ на
управление. Моделът на процеса може да се представи като много-входов /едно-изходен (MISO) разширен авторегресионнен – пълзящо средно описващ вътрешната температура и относителна влажност както следва:
e(t)qCnk))u(tB(q)y(t)A(q 111 , (4.15) където: A(q-1), B(q-1), C(q-1) – полиноми от оператора на закъснение q-1 ; y(t) - изходна
променлива; u(t) – входна променлива; e(t) - остатъци на модела. Полиномите A(q-1), B(q-1) C(q-1) могат да се запишат както следва:
na
na
1
2
1
1
1qaqaqa1)A(q
nb
nb
1
2
1
10
1qBqBqBB)B(q ,
cccccC n
n1
21
11 qqq1)(q (4.16)
Където: na, nb и nc – ред на полиномите; B0, B1,… Bnb – са матрици с размерност (ny x nu ); ny и nu означения на броя изходи и входове на модела; nk –закъснение на входа спрямо изхода на модела.
nana
12
11
1 qaqaqa1)A(q nb
nb
1
2
1
10
1qBqBqBB)B(q ,
cccccC n
n1
21
11 qqq1)(q (4.17)
Разгледаните модели (ARMAX) (4.15)-(4.16) се прилагат за двете управляеми променливи: вътрешна температура (yT) и вътрешна относителна влажност (yH). В моделите този факт може да бъде отразен с долен индекс прибавен към съответните означения за полиномите в модела (4.15)-(4.16). Въвеждат се следните входни променливи (управляващи входове и смущения): външна температура (Text), външна относителна влажност (Hext), общо
13
излъчване (Glr), управляващо въздействие (U) приложено към системата за отопление и охлаждане , Vent – променлива приложена към системата за вентилация и допълнителна променлива, която отразява допълнителни смущения: източници на енергия.
Структурната и параметрична идентификация на разглежданите ARMAX модели е извършена в средата на ARMAX. Синтезирани са модели за всяка седмица на разглежданият едногодишен период. Адекватността на моделите е проверена чрез прилагане на следните процедури:
първоначална оценка на реда на ARMAX моделите чрез прилагане на частичната автокорелационна функция и автокорелационната функция;
генериране на всички възможни структури и избор на структура на модела чрез информационният критерий на Акайке;
изследване на остатъците на получения модел;
визуализация на получените резултати.
Първичната обработка на експерименталните данни включва различни процедури: изглаждане чрез „пълзящо средно” и сезонна декомпозиция. Изследването на остатъците се извършва в средата на пакета MATLAB.
Целевата функция Jk се определя като:
1N
1j
2N
1j
2TTk
yy
kjkΔuλwkjkyJ ˆ
, (4.19) Където: wT е заданието за температурата, изразено като средна стойност на
температурата в комфортната зона и тегловен фактор.
Резултати: Моделите, описващи основните променливи: вътрешна температура (yT) и вътрешна
относителна влажност (yH) могат да бъдат описани в пространство на състоянието от вида:
u(t)DX(t)C(t)y
u(t)BX(t)A1)(tX
iii
iii
, (4.20) Където: Ai, Bi, Ci, Di са матрици с подходяща размерност, X – вектор на състоянието, y –
вектор на измеримият изход, u – вектор на входовете на модела на разглежданата променлива, i – индекс, който приема стойност T за вътрешната температура (yT) и H за вътрешната относителна влажност (yH).
От предложените модели и оптимизационни алгоритми могат да се покажат следните резултати. Предсказването на температурата и относителната влажност е показано на фигура 4.4 и фигура 4.5.
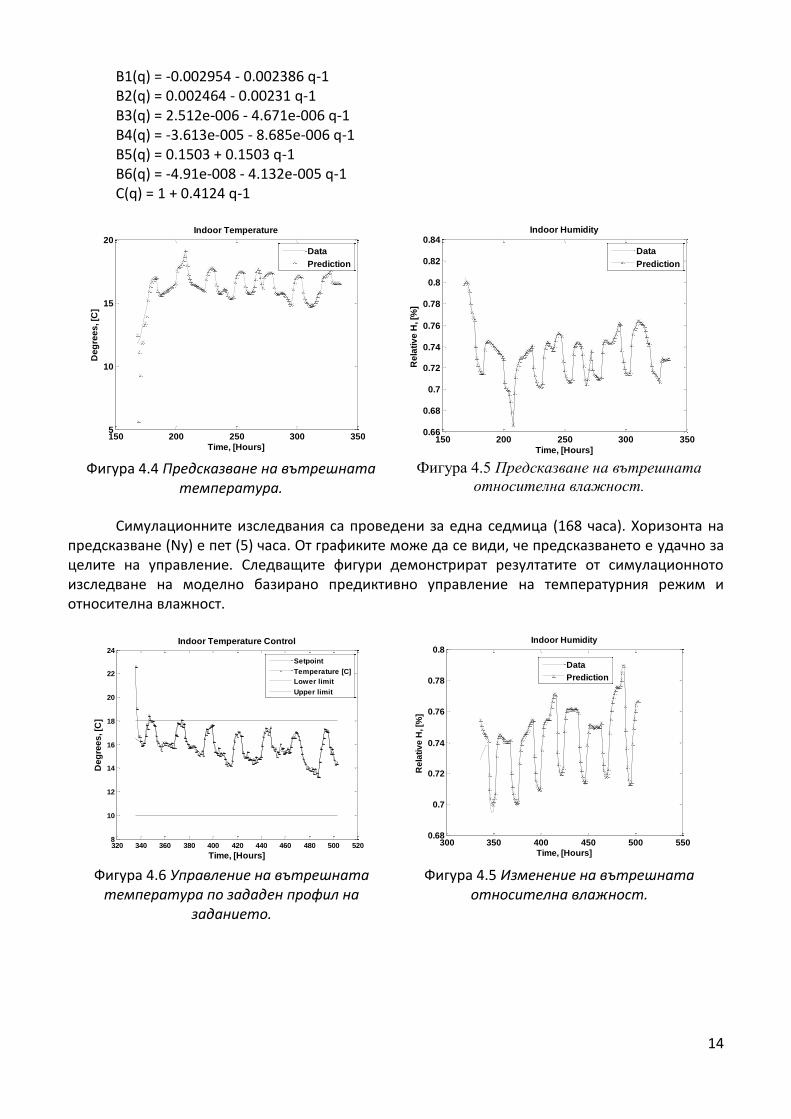
За температурата е намерен следният модел от вида (4.15)-(4.16): A(q) = 1 - 0.202 (+-0.07843) q-1 - 0.4492 (+-0.06191) q-2 B1(q) = 0.1173 (+-0.0002131) + 0.1505 (+-0.009218) q-1 + 0.04715 ( +-0.006461) q-2 B2(q) = -0.01358 (+-0.007172) + 0.0219 (+-0.01143) q-1 - 0.009831 (+-0.007195) q-2 B3(q) = -1.277e-6 (+-5.354e-006) + 4.649e-006 (+-5.343e-6) q-1 + 7.445e-6 (+-5.552e-6) q-2 B4(q) = 0.0009057 (+-3.793e-6) + 0.001125 (+-7.24e-5) q-1 + 0.0003329 (+-4.759e-5) q-2 B5(q) = 0.678 (+-0.06175) + 0.678 (+-0.06175) q-1 + 0.678 ( +-0.06175) q-2 B6(q) = -4.319e-7 (+-4.413e-7) + 0.001536 (+-1.99e-6) q-1 + 0.0008934 (+-0.0001211) q-2 C(q) = 1 + 0.5617 (+-0.09717) q-1 + 0.1192 (+-0.1207) q-2 - 0.6865 (+-0.09564) q Моделът, описващ относителната влажност е както следва (от вида (4.15)-(4.16)): A(q) = 1 - 0.8247 q-1
14
B1(q) = -0.002954 - 0.002386 q-1 B2(q) = 0.002464 - 0.00231 q-1 B3(q) = 2.512e-006 - 4.671e-006 q-1 B4(q) = -3.613e-005 - 8.685e-006 q-1 B5(q) = 0.1503 + 0.1503 q-1 B6(q) = -4.91e-008 - 4.132e-005 q-1 C(q) = 1 + 0.4124 q-1
Фигура 4.4 Предсказване на вътрешната
температура.
Фигура 4.5 Предсказване на вътрешната
относителна влажност.
Симулационните изследвания са проведени за една седмица (168 часа). Хоризонта на предсказване (Ny) е пет (5) часа. От графиките може да се види, че предсказването е удачно за целите на управление. Следващите фигури демонстрират резултатите от симулационното изследване на моделно базирано предиктивно управление на температурния режим и относителна влажност.
Фигура 4.6 Управление на вътрешната температура по зададен профил на
заданието.
Фигура 4.5 Изменение на вътрешната относителна влажност.
150 200 250 300 3505
10
15
20Indoor Temperature
Time, [Hours]
De
gre
es
, [C
]
Data
Prediction
150 200 250 300 3500.66
0.68
0.7
0.72
0.74
0.76
0.78
0.8
0.82
0.84Indoor Humidity
Time, [Hours]
Re
lati
ve
H, [%
]
Data
Prediction
320 340 360 380 400 420 440 460 480 500 5208
10
12
14
16
18
20
22
24
Indoor Temperature Control
Time, [Hours]
De
gre
es
, [C
]
Setpoint
Temperature [C]
Lower limit
Upper limit
300 350 400 450 500 5500.68
0.7
0.72
0.74
0.76
0.78
0.8Indoor Humidity
Time, [Hours]
Re
lati
ve
H, [%
]
Data
Prediction
15
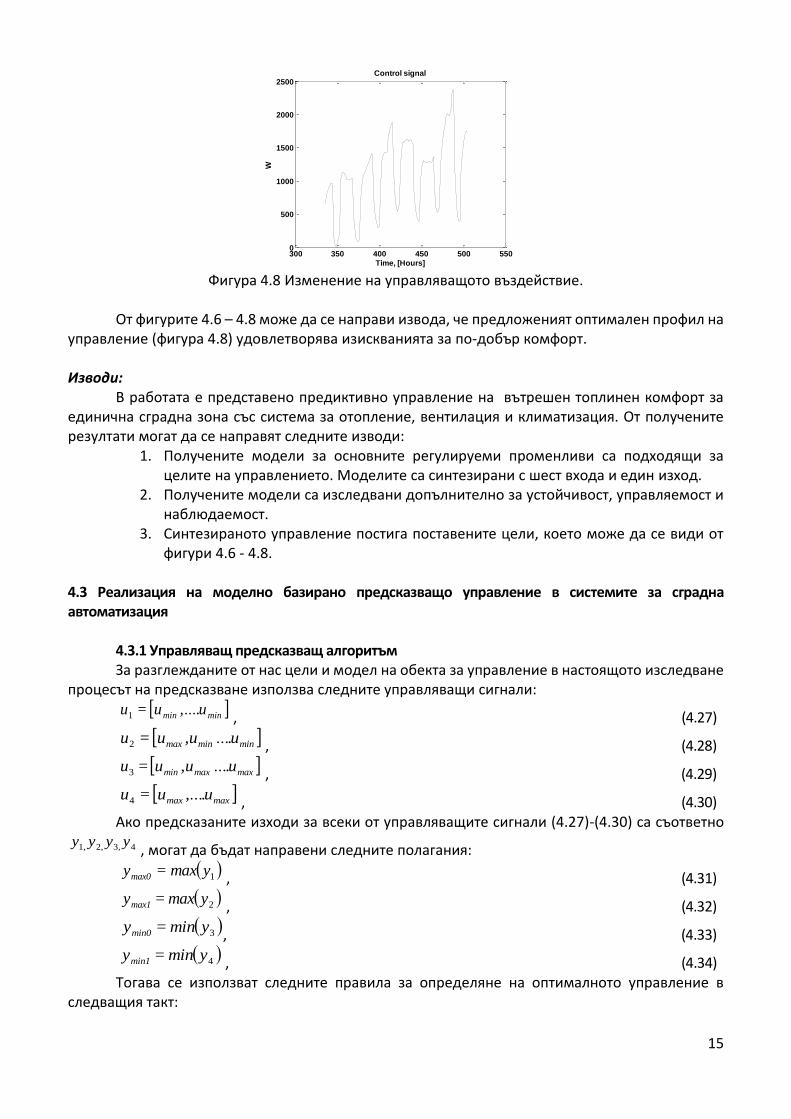
Фигура 4.8 Изменение на управляващото въздействие.
От фигурите 4.6 – 4.8 може да се направи извода, че предложеният оптимален профил на
управление (фигура 4.8) удовлетворява изискванията за по-добър комфорт.
Изводи: В работата е представено предиктивно управление на вътрешен топлинен комфорт за
единична сградна зона със система за отопление, вентилация и климатизация. От получените резултати могат да се направят следните изводи:
1. Получените модели за основните регулируеми променливи са подходящи за целите на управлението. Моделите са синтезирани с шест входа и един изход.
2. Получените модели са изследвани допълнително за устойчивост, управляемост и наблюдаемост.
3. Синтезираното управление постига поставените цели, което може да се види от фигури 4.6 - 4.8.
4.3 Реализация на моделно базирано предсказващо управление в системите за сградна автоматизация
4.3.1 Управляващ предсказващ алгоритъм За разглежданите от нас цели и модел на обекта за управление в настоящото изследване
процесът на предсказване използва следните управляващи сигнали:
minmin u…,u=u .1 , (4.27)
minminmax u…u,u=u .2 , (4.28)
maxmaxmin u…u,u=u .3 , (4.29)
maxmax u…,u=u .4 , (4.30) Ако предсказаните изходи за всеки от управляващите сигнали (4.27)-(4.30) са съответно
, могат да бъдат направени следните полагания:
1ymax=ymax0 , (4.31)
2ymax=ymax1 , (4.32)
3ymin=ymin0 , (4.33)
4ymin=ymin1 , (4.34) Тогава се използват следните правила за определяне на оптималното управление в
следващия такт:
300 350 400 450 500 5500
500
1000
1500
2000
2500Control signal
Time, [Hours]W
43,2,1, yyyy
16
Случай 1: Ако rmax0 y<y и rmax1 y>y , то
max0max1
max0maxmax1minr
max0max1
minmax
yy
yu+yu+y
yy
uu=tu
Случай 2: Ако rmin0 y<y и rmin1 y>y , то
min0min1
min0maxmin1min
r
min0min1
minmax
yy
yu+yu+y
yy
uu=tu
Случай 3: Ако rmax0 y>y, то minu=tu
Случай 4: Ако rmax1 y<y , то maxu=tu
Случай 5: Ако rmin0 y>y , то minu=tu
Случай 6: Ако rmin1 y<y , то maxu=tu
Във всички формули с ry е означено заданието.
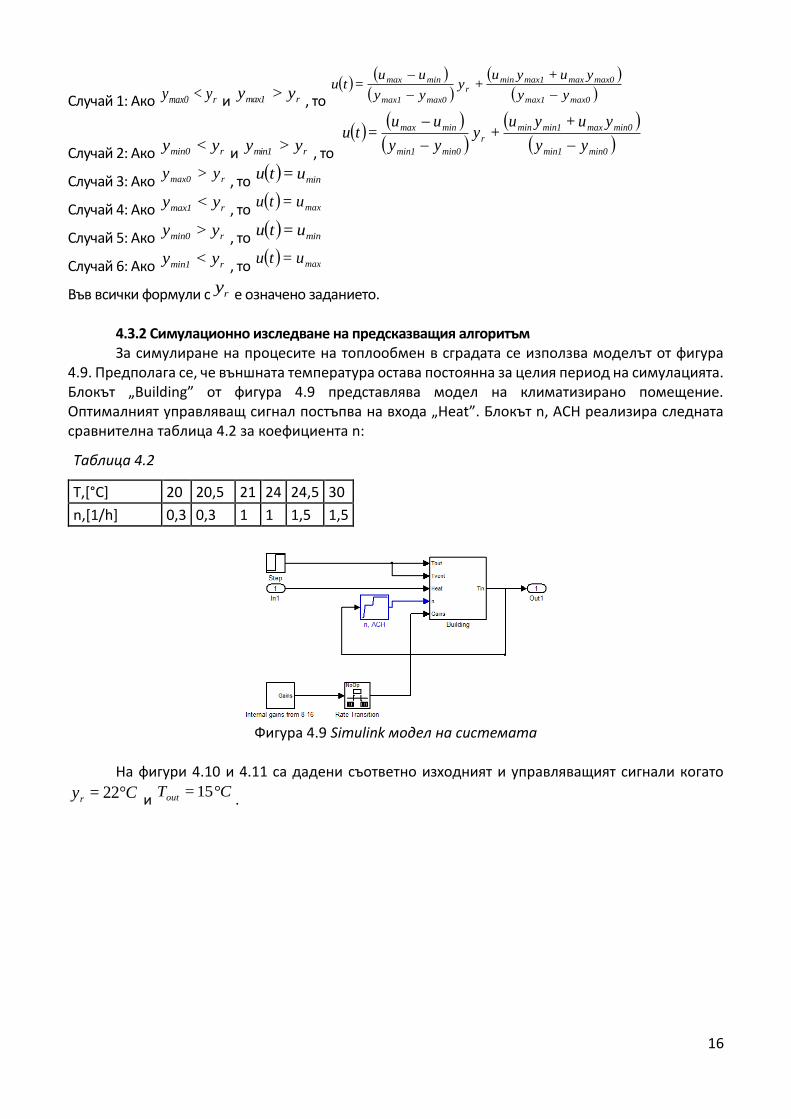
4.3.2 Симулационно изследване на предсказващия алгоритъм За симулиране на процесите на топлообмен в сградата се използва моделът от фигура
4.9. Предполага се, че външната температура остава постоянна за целия период на симулацията. Блокът „Building” от фигура 4.9 представлява модел на климатизирано помещение. Оптималният управляващ сигнал постъпва на входа „Heat”. Блокът n, ACH реализира следната сравнителна таблица 4.2 за коефициента n:
Таблица 4.2
T,[°C] 20 20,5 21 24 24,5 30
n,[1/h] 0,3 0,3 1 1 1,5 1,5
Фигура 4.9 Simulink модел на системата
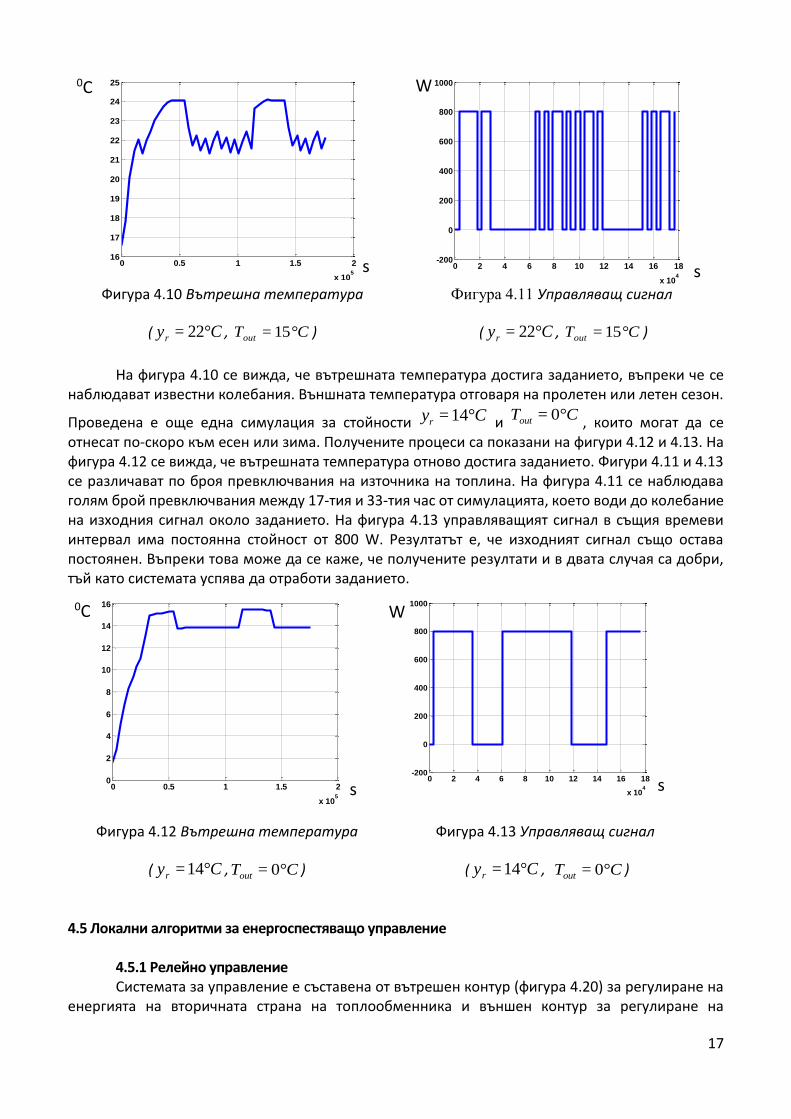
На фигури 4.10 и 4.11 са дадени съответно изходният и управляващият сигнали когато
°C=yr 22 и °C=Tout 15
.
17
Фигура 4.10 Вътрешна температура
( °C=yr 22 , °C=Tout 15 )
Фигура 4.11 Управляващ сигнал
( °C=yr 22 , °C=Tout 15 )
На фигура 4.10 се вижда, че вътрешната температура достига заданието, въпреки че се
наблюдават известни колебания. Външната температура отговаря на пролетен или летен сезон.
Проведена е още една симулация за стойности °C=yr 14 и °C=Tout 0 , които могат да се отнесат по-скоро към есен или зима. Получените процеси са показани на фигури 4.12 и 4.13. На фигура 4.12 се вижда, че вътрешната температура отново достига заданието. Фигури 4.11 и 4.13 се различават по броя превключвания на източника на топлина. На фигура 4.11 се наблюдава голям брой превключвания между 17-тия и 33-тия час от симулацията, което води до колебание на изходния сигнал около заданието. На фигура 4.13 управляващият сигнал в същия времеви интервал има постоянна стойност от 800 W. Резултатът е, че изходният сигнал също остава постоянен. Въпреки това може да се каже, че получените резултати и в двата случая са добри, тъй като системата успява да отработи заданието.
Фигура 4.12 Вътрешна температура
( °C=yr 14 , °C=Tout 0 )
Фигура 4.13 Управляващ сигнал
( °C=yr 14 , °C=Tout 0 )
4.5 Локални алгоритми за енергоспестяващо управление
4.5.1 Релейно управление Системата за управление е съставена от вътрешен контур (фигура 4.20) за регулиране на
енергията на вторичната страна на топлообменника и външен контур за регулиране на
0 0.5 1 1.5 2
x 105
16
17
18
19
20
21
22
23
24
25
0 2 4 6 8 10 12 14 16 18
x 104
-200
0
200
400
600
800
1000
0 0.5 1 1.5 2
x 105
0
2
4
6
8
10
12
14
16
0 2 4 6 8 10 12 14 16 18
x 104
-200
0
200
400
600
800
1000
s s
W 0C
0C
s
W
s
18
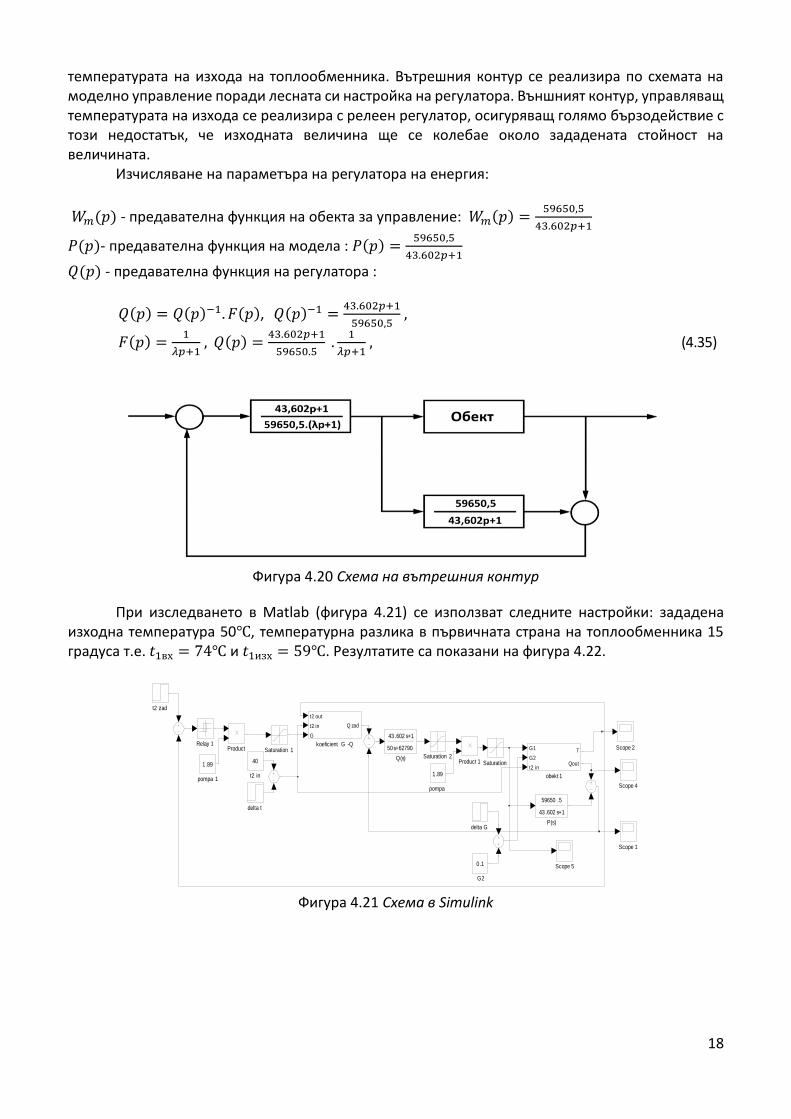
температурата на изхода на топлообменника. Вътрешния контур се реализира по схемата на моделно управление поради лесната си настройка на регулатора. Външният контур, управляващ температурата на изхода се реализира с релеен регулатор, осигуряващ голямо бързодействие с този недостатък, че изходната величина ще се колебае около зададената стойност на величината.
Изчисляване на параметъра на регулатора на енергия:
𝑊𝑚(𝑝) - предавателна функция на обекта за управление: 𝑊𝑚(𝑝) =59650,5
43.602𝑝+1
𝑃(𝑝)- предавателна функция на модела : 𝑃(𝑝) =59650,5
43.602𝑝+1
𝑄(𝑝) - предавателна функция на регулатора :
𝑄(𝑝) = 𝑄(𝑝)−1. 𝐹(𝑝), 𝑄(𝑝)−1 =
43.602𝑝+1
59650,5 ,
𝐹(𝑝) =1
𝜆𝑝+1 , 𝑄(𝑝) =
43.602𝑝+1
59650.5 .
1
𝜆𝑝+1 , (4.35)
Фигура 4.20 Схема на вътрешния контур
При изследването в Matlab (фигура 4.21) се използват следните настройки: зададена изходна температура 50℃, температурна разлика в първичната страна на топлообменника 15 градуса т.е. 𝑡1вх = 74℃ и 𝑡1изх = 59℃. Резултатите са показани на фигура 4.22.
Фигура 4.21 Схема в Simulink
t2 zad
t2 in
40
pompa 1
1.89
pompa
1.89 obekt 1
G1
G2
t2 in
T
Qout
koeficient G -Q
t2 out
t2 in
G
Q zad
delta t
delta G
Scope 5
Scope 4
Scope 2
Scope 1
Saturation 2Saturation 1
Saturation
Relay 1
Q(s)
43 .602 s+1
50s+62790
Product 1
Product
P(s)
59650 .5
43 .602 s+1
G2
0.1
19
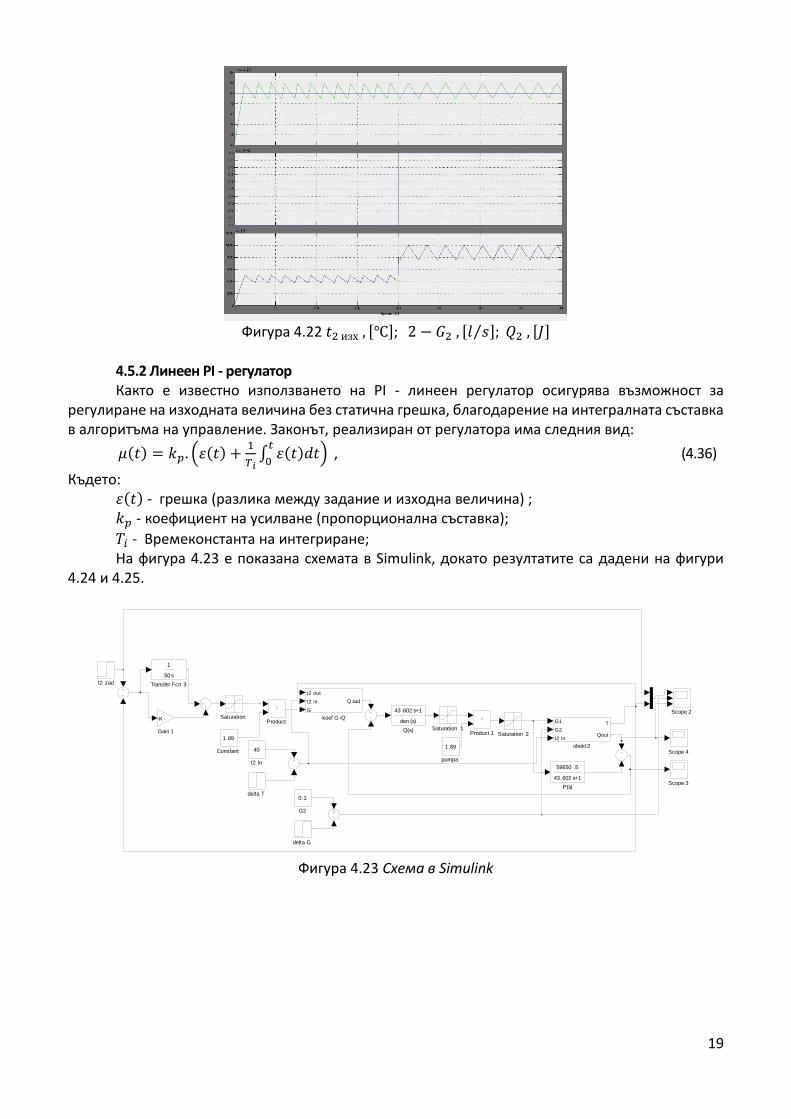
Фигура 4.22 𝑡2 изх , [℃]; 2 − 𝐺2 , [𝑙 𝑠⁄ ]; 𝑄2 , [𝐽]
4.5.2 Линеен PI - регулатор Както е известно използването на PI - линеен регулатор осигурява възможност за
регулиране на изходната величина без статична грешка, благодарение на интегралната съставка в алгоритъма на управление. Законът, реализиран от регулатора има следния вид:
𝜇(𝑡) = 𝑘𝑝. (𝜀(𝑡) +1
𝑇𝑖∫ 𝜀(𝑡)𝑑𝑡𝑡
0) , (4.36)
Където: 𝜀(𝑡) - грешка (разлика между задание и изходна величина) ; 𝑘𝑝 - коефициент на усилване (пропорционална съставка);
𝑇𝑖 - Времеконстанта на интегриране; На фигура 4.23 е показана схемата в Simulink, докато резултатите са дадени на фигури
4.24 и 4.25.
Фигура 4.23 Схема в Simulink
t2 zad
t2 in
40
pompa
1.89 obekt2
G1
G2
t2 in
T
Qout
koef G -Q
t2 out
t2 in
G
Q zad
delta T
delta G
Transfer Fcn 3
1
50s
Scope 4
Scope 3
Scope 2
Saturation 2Saturation 1
Saturation
Q(s)
43 .602 s+1
den (s)
Product 1
Product
P(s)
59650 .5
43 .602 s+1
Gain 1
-K-
G2
0.1
Constant
1.89
20
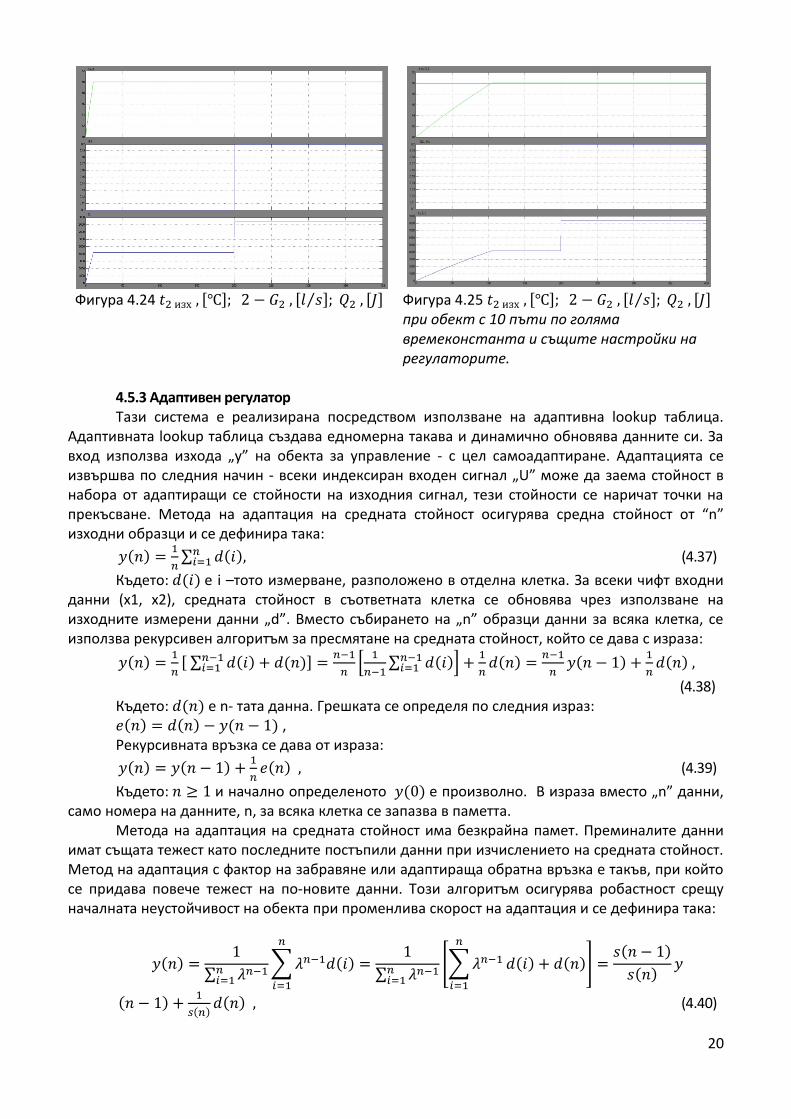
Фигура 4.24 𝑡2 изх , [℃]; 2 − 𝐺2 , [𝑙 𝑠⁄ ]; 𝑄2 , [𝐽] Фигура 4.25 𝑡2 изх , [℃]; 2 − 𝐺2 , [𝑙 𝑠⁄ ]; 𝑄2 , [𝐽]
при обект с 10 пъти по голяма времеконстанта и същите настройки на регулаторите.
4.5.3 Адаптивен регулатор Тази система е реализирана посредством използване на адаптивна lookup таблица.
Адаптивната lookup таблица създава едномерна такава и динамично обновява данните си. За вход използва изхода „у” на обекта за управление - с цел самоадаптиране. Адаптацията се извършва по следния начин - всеки индексиран входен сигнал „U” може да заема стойност в набора от адаптиращи се стойности на изходния сигнал, тези стойности се наричат точки на прекъсване. Метода на адаптация на средната стойност осигурява средна стойност от “n” изходни образци и се дефинира така:
𝑦(𝑛) =1
𝑛∑ 𝑑(𝑖),𝑛𝑖=1 (4.37)
Където: 𝑑(𝑖) е i –тото измерване, разположено в отделна клетка. За всеки чифт входни данни (х1, х2), средната стойност в съответната клетка се обновява чрез използване на изходните измерени данни „d”. Вместо събирането на „n” образци данни за всяка клетка, се използва рекурсивен алгоритъм за пресмятане на средната стойност, който се дава с израза:
𝑦(𝑛) =
1
𝑛[ ∑ 𝑑(𝑖) + 𝑑(𝑛)𝑛−1
𝑖=1 ] =𝑛−1
𝑛[
1
𝑛−1∑ 𝑑(𝑖)𝑛−1𝑖=1 ] +
1
𝑛𝑑(𝑛) =
𝑛−1
𝑛𝑦(𝑛 − 1) +
1
𝑛𝑑(𝑛) ,
(4.38) Където: 𝑑(𝑛) е n- тата данна. Грешката се определя по следния израз: 𝑒(𝑛) = 𝑑(𝑛) − 𝑦(𝑛 − 1) , Рекурсивната връзка се дава от израза:
𝑦(𝑛) = 𝑦(𝑛 − 1) +1
𝑛𝑒(𝑛) , (4.39)
Където: 𝑛 ≥ 1 и начално определеното 𝑦(0) е произволно. В израза вместо „n” данни, само номера на данните, n, за всяка клетка се запазва в паметта.
Метода на адаптация на средната стойност има безкрайна памет. Преминалите данни имат същата тежест като последните постъпили данни при изчислението на средната стойност. Метод на адаптация с фактор на забравяне или адаптираща обратна връзка е такъв, при който се придава повече тежест на по-новите данни. Този алгоритъм осигурява робастност срещу началната неустойчивост на обекта при променлива скорост на адаптация и се дефинира така:
𝑦(𝑛) =
1
∑ 𝜆𝑛−1𝑛𝑖=1
∑𝜆𝑛−1𝑑(𝑖) =1
∑ 𝜆𝑛−1𝑛𝑖=1
𝑛
𝑖=1
[∑𝜆𝑛−1𝑛
𝑖=1
𝑑(𝑖) + 𝑑(𝑛)] =𝑠(𝑛 − 1)
𝑠(𝑛)𝑦
(𝑛 − 1) +1
𝑠(𝑛)𝑑(𝑛) , (4.40)
21
Където: 𝜆 ∈ [0,1] е адаптивната обратна връзка и 𝑠(𝑘) = ∑ 𝜆𝑛−1𝑘𝑖=1 . Дефиницията на
грешката е: 𝑒(𝑛) = 𝑑(𝑛) − 𝑦(𝑛 − 1), където 𝑛 ≥ 1 и начално определеното 𝑦(0) е произволно, рекурсивната зависимост се дава с израза:
𝑦(𝑛) = 𝑦(𝑛 − 1) +1
𝑠(𝑛)𝑒(𝑛) = 𝑦(𝑛 − 1) +
1−𝜆
1−𝜆𝑛𝑒(𝑛) , (4.41)
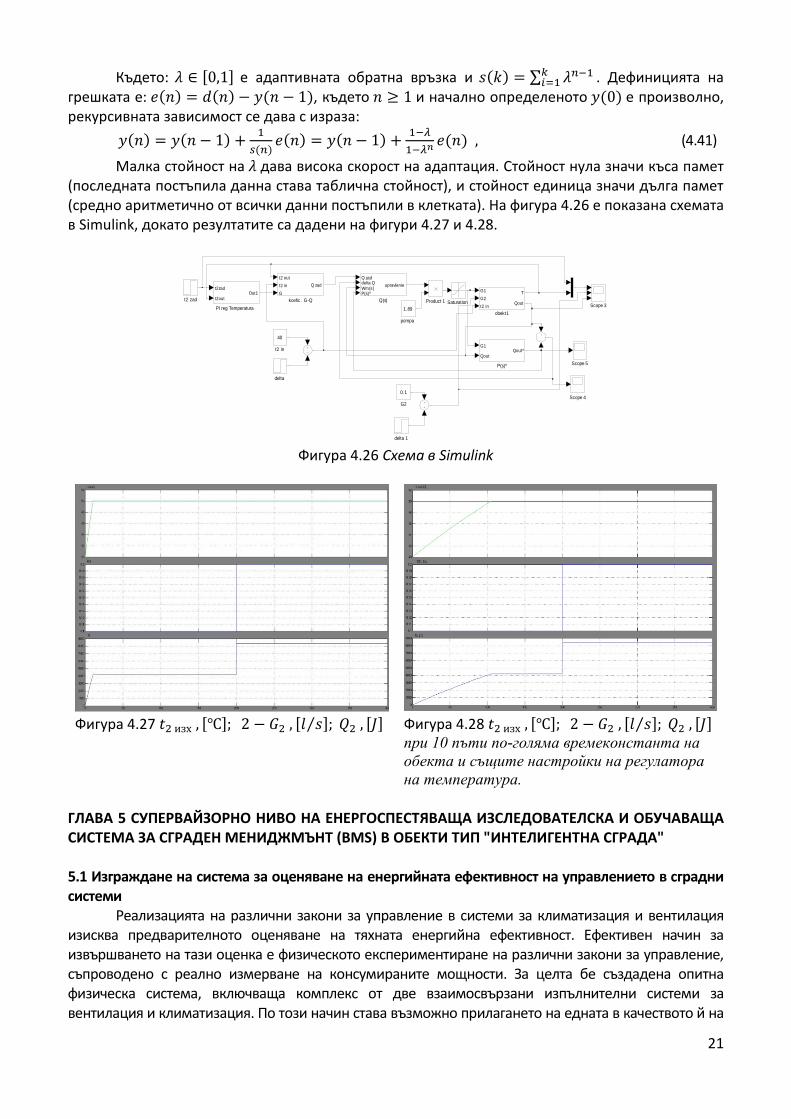
Малка стойност на 𝜆 дава висока скорост на адаптация. Стойност нула значи къса памет (последната постъпила данна става таблична стойност), и стойност единица значи дълга памет (средно аритметично от всички данни постъпили в клетката). На фигура 4.26 е показана схемата в Simulink, докато резултатите са дадени на фигури 4.27 и 4.28.
Фигура 4.26 Схема в Simulink
Фигура 4.27 𝑡2 изх , [℃]; 2 − 𝐺2 , [𝑙 𝑠⁄ ]; 𝑄2 , [𝐽] Фигура 4.28 𝑡2 изх , [℃]; 2 − 𝐺2 , [𝑙 𝑠⁄ ]; 𝑄2 , [𝐽]
при 10 пъти по-голяма времеконстанта на
обекта и същите настройки на регулатора
на температура. ГЛАВА 5 СУПЕРВАЙЗОРНО НИВО НА ЕНЕРГОСПЕСТЯВАЩА ИЗСЛЕДОВАТЕЛСКА И ОБУЧАВАЩА СИСТЕМА ЗА СГРАДЕН МЕНИДЖМЪНТ (BMS) В ОБЕКТИ ТИП "ИНТЕЛИГЕНТНА СГРАДА" 5.1 Изграждане на система за оценяване на енергийната ефективност на управлението в сградни системи
Реализацията на различни закони за управление в системи за климатизация и вентилация изисква предварителното оценяване на тяхната енергийна ефективност. Ефективен начин за извършването на тази оценка е физическото експериментиране на различни закони за управление, съпроводено с реално измерване на консумираните мощности. За целта бе създадена опитна физическа система, включваща комплекс от две взаимосвързани изпълнителни системи за вентилация и климатизация. По този начин става възможно прилагането на едната в качеството й на
t2 zad
t2 in
40
pompa
1.89obekt1
G1
G2
t2 in
T
Qoutkoefic . G-Q
t2 out
t2 in
G
Q zad
delta 1
delta
Scope 5
Scope 4
Scope 3SaturationQ(s)
Q zaddelta QWm(s)P(s)^
upravlenie
Product 1
PI reg Temperatura
t2zad
t2outOut1
P(s)^
G1
QoutQout^
G2
0.1
22
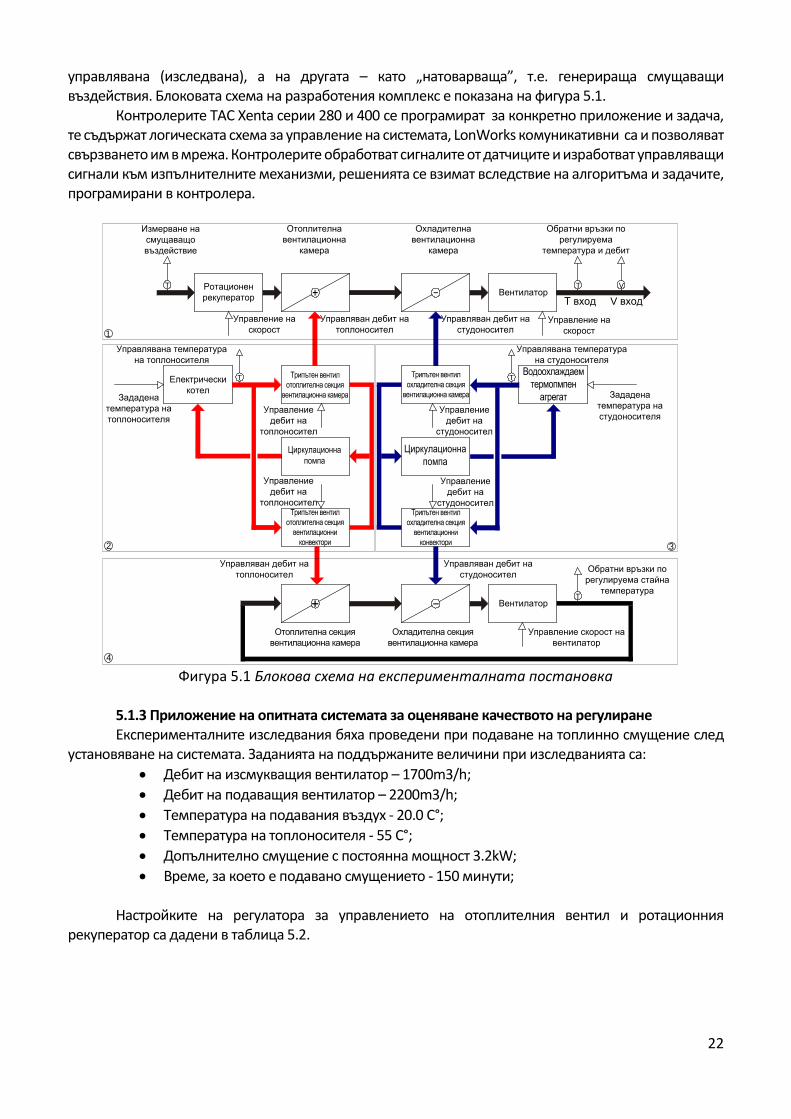
управлявана (изследвана), а на другата – като „натоварваща”, т.е. генерираща смущаващи въздействия. Блоковата схема на разработения комплекс е показана на фигура 5.1.
Контролерите TAC Xenta серии 280 и 400 се програмират за конкретно приложение и задача, те съдържат логическата схема за управление на системата, LonWorks комуникативни са и позволяват свързването им в мрежа. Контролерите обработват сигналите от датчиците и изработват управляващи сигнали към изпълнителните механизми, решенията се взимат вследствие на алгоритъма и задачите, програмирани в контролера.
Ротационен
рекуператор
Охладителна
вентилационна
камера
T VT
Електрически
котел
T Трипътен вентил
отоплителна секция
вентилационна камера
Отоплителна
вентилационна
камера
Обратни връзки по
регулируема
температура и дебит
Измерване на
смущаващо
въздействие
Управляван дебит на
топлоносител
Циркулационна
помпа
T
T
ВентилаторТ вход V вход
Управление на
скорост
Управляван дебит на
студоносителУправление на
скорост
Трипътен вентил
охладителна секция
вентилационна камера
Управлявана температура
на топлоносителя
Зададена
температура на
топлоносителя
Водоохлаждаем
термопмпен
агрегат Зададена
температура на
студоносителяУправление
дебит на
топлоносител
Управление
дебит на
студоносител
Циркулационна
помпа
Управление
дебит на
студоносител
Управление
дебит на
топлоносителТрипътен вентил
отоплителна секция
вентилационни
конвектори
Трипътен вентил
охладителна секция
вентилационни
конвектори
Управляван дебит на
топлоносител
Управляван дебит на
студоносителОбратни връзки по
регулируема стайна
температура
Отоплителна секция
вентилационна камера
Охладителна секция
вентилационна камера
Управление скорост на
вентилатор
Вентилатор
Управлявана температура
на студоносителя
1
2 3
4 Фигура 5.1 Блокова схема на експерименталната постановка
5.1.3 Приложение на опитната системата за оценяване качеството на регулиране Експерименталните изследвания бяха проведени при подаване на топлинно смущение след
установяване на системата. Заданията на поддържаните величини при изследванията са:
Дебит на изсмукващия вентилатор – 1700m3/h;
Дебит на подаващия вентилатор – 2200m3/h;
Температура на подавания въздух - 20.0 C°;
Температура на топлоносителя - 55 C°;
Допълнително смущение с постоянна мощност 3.2kW;
Време, за което е подавано смущението - 150 минути;
Настройките на регулатора за управлението на отоплителния вентил и ротационния рекуператор са дадени в таблица 5.2.
23
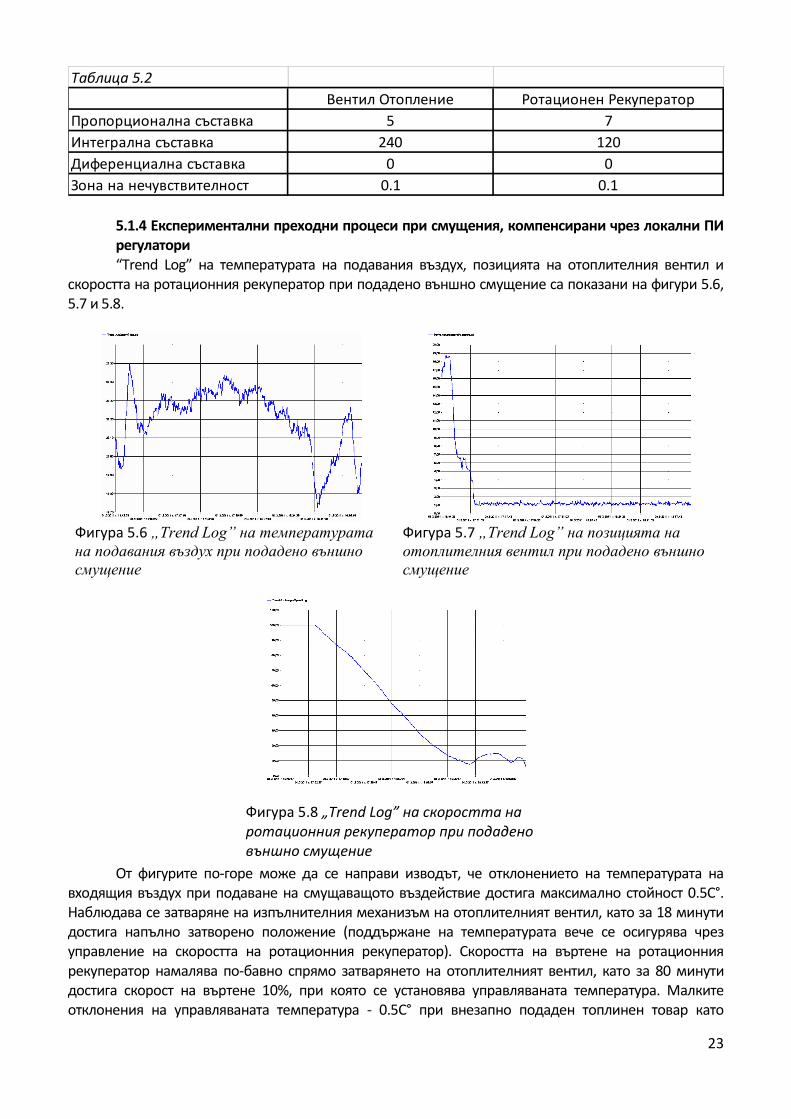
5.1.4 Експериментални преходни процеси при смущения, компенсирани чрез локални ПИ регулатори “Trend Log” на температурата на подавания въздух, позицията на отоплителния вентил и
скоростта на ротационния рекуператор при подадено външно смущение са показани на фигури 5.6, 5.7 и 5.8.
Фигура 5.6 „Trend Log” на температурата
на подавания въздух при подадено външно
смущение
Фигура 5.7 „Trend Log” на позицията на
отоплителния вентил при подадено външно
смущение
Фигура 5.8 „Trend Log” на скоростта на ротационния рекуператор при подадено външно смущение
От фигурите по-горе може да се направи изводът, че отклонението на температурата на входящия въздух при подаване на смущаващото въздействие достига максимално стойност 0.5C°. Наблюдава се затваряне на изпълнителния механизъм на отоплителният вентил, като за 18 минути достига напълно затворено положение (поддържане на температурата вече се осигурява чрез управление на скоростта на ротационния рекуператор). Скоростта на въртене на ротационния рекуператор намалява по-бавно спрямо затварянето на отоплителният вентил, като за 80 минути достига скорост на въртене 10%, при която се установява управляваната температура. Малките отклонения на управляваната температура - 0.5C° при внезапно подаден топлинен товар като
Таблица 5.2
Вентил Отопление Ротационен Рекуператор
Пропорционална съставка 5 7
Интегрална съставка 240 120
Диференциална съставка 0 0
Зона на нечувствителност 0.1 0.1
24
смущаващо въздействие говорят за постигане на относително добро качество на регулиране чрез локални ПИ контури.
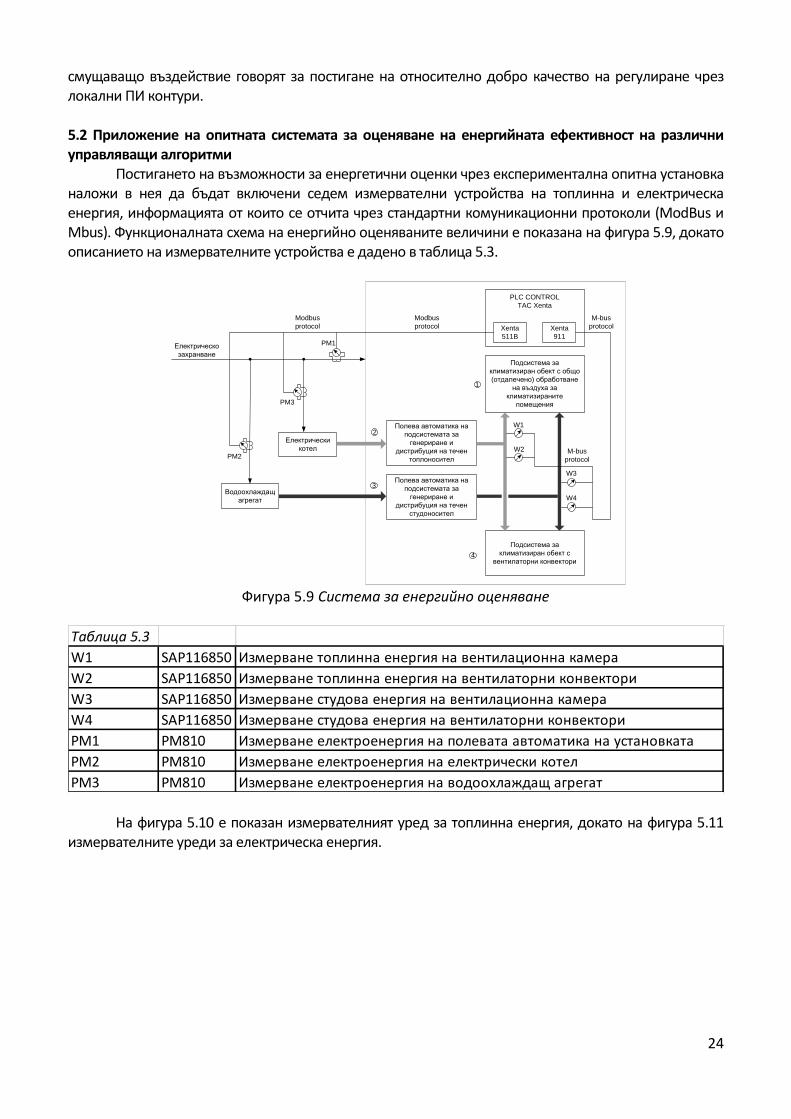
5.2 Приложение на опитната системата за оценяване на енергийната ефективност на различни управляващи алгоритми
Постигането на възможности за енергетични оценки чрез експериментална опитна установка наложи в нея да бъдат включени седем измервателни устройства на топлинна и електрическа енергия, информацията от които се отчита чрез стандартни комуникационни протоколи (ModBus и Mbus). Функционалната схема на енергийно оценяваните величини е показана на фигура 5.9, докато описанието на измервателните устройства е дадено в таблица 5.3.
2
3
1
PLC CONTROL
TAC Xenta
Xenta
511B
Xenta
911
Подсистема за
климатизиран обект с общо
(отдалечено) обработване
на въздуха за
климатизираните
помещения
Подсистема за
климатизиран обект с
вентилаторни конвектори
Полева автоматика на
подсистемата за
генериране и
дистрибуция на течен
студоносител
Полева автоматика на
подсистемата за
генериране и
дистрибуция на течен
топлоносител
Водоохлаждащ
агрегат
Електрически
котел
M-bus
protocol
M-bus
protocol
W1
W2
W3
W4
Modbus
protocol
Modbus
protocol
PM1
PM3
PM2
Електрическо
захранване
4
Фигура 5.9 Система за енергийно оценяване
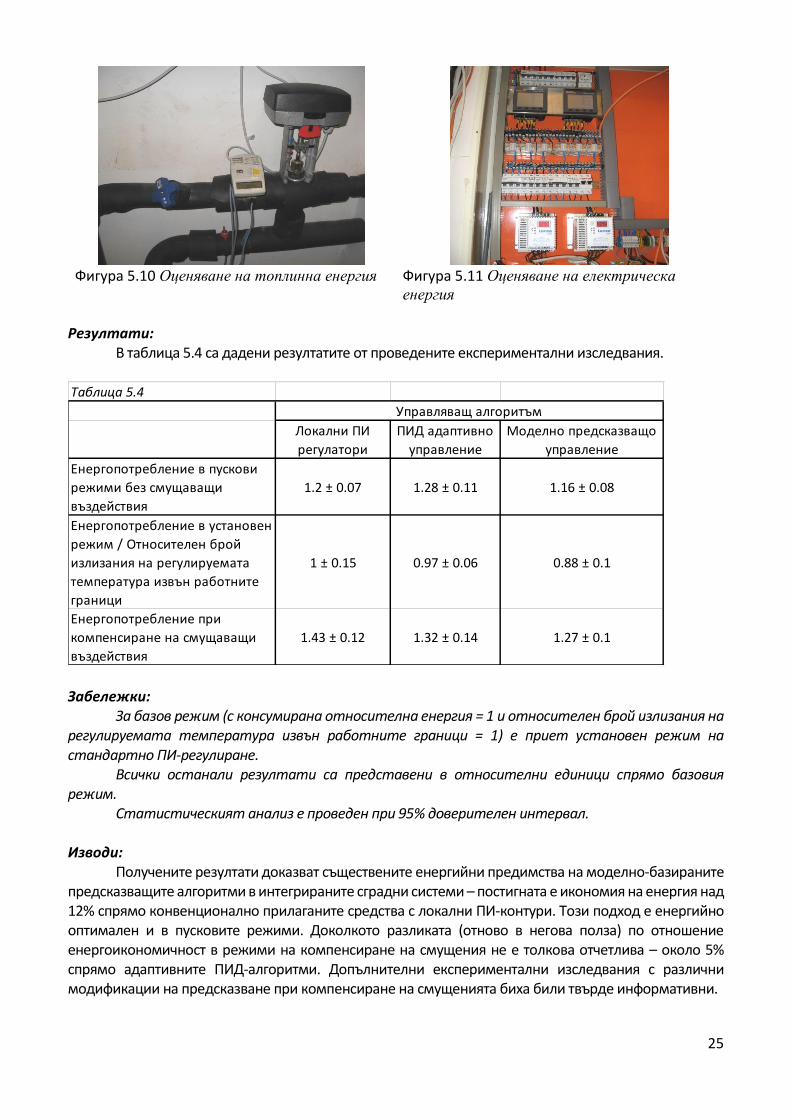
На фигура 5.10 е показан измервателният уред за топлинна енергия, докато на фигура 5.11 измервателните уреди за електрическа енергия.
Таблица 5.3
W1 SAP116850 Измерване топлинна енергия на вентилационна камера
W2 SAP116850 Измерване топлинна енергия на вентилаторни конвектори
W3 SAP116850 Измерване студова енергия на вентилационна камера
W4 SAP116850 Измерване студова енергия на вентилаторни конвектори
PM1 PM810 Измерване електроенергия на полевата автоматика на установката
PM2 PM810 Измерване електроенергия на електрически котел
PM3 PM810 Измерване електроенергия на водоохлаждащ агрегат
25
Фигура 5.10 Оценяване на топлинна енергия Фигура 5.11 Оценяване на електрическа
енергия Резултати:
В таблица 5.4 са дадени резултатите от проведените експериментални изследвания.
Забележки: За базов режим (с консумирана относителна енергия = 1 и относителен брой излизания на
регулируемата температура извън работните граници = 1) е приет установен режим на стандартно ПИ-регулиране.
Всички останали резултати са представени в относителни единици спрямо базовия режим.
Статистическият анализ е проведен при 95% доверителен интервал.
Изводи: Получените резултати доказват съществените енергийни предимства на моделно-базираните
предсказващите алгоритми в интегрираните сградни системи – постигната е икономия на енергия над 12% спрямо конвенционално прилаганите средства с локални ПИ-контури. Този подход е енергийно оптимален и в пусковите режими. Доколкото разликата (отново в негова полза) по отношение енергоикономичност в режими на компенсиране на смущения не е толкова отчетлива – около 5% спрямо адаптивните ПИД-алгоритми. Допълнителни експериментални изследвания с различни модификации на предсказване при компенсиране на смущенията биха били твърде информативни.
Таблица 5.4
Локални ПИ
регулатори
ПИД адаптивно
управление
Моделно предсказващо
управление
Енергопотребление в пускови
режими без смущаващи
въздействия
1.2 ± 0.07 1.28 ± 0.11 1.16 ± 0.08
Енергопотребление в установен
режим / Относителен брой
излизания на регулируемата
температура извън работните
граници
1 ± 0.15 0.97 ± 0.06 0.88 ± 0.1
Енергопотребление при
компенсиране на смущаващи
въздействия
1.43 ± 0.12 1.32 ± 0.14 1.27 ± 0.1
Управляващ алгоритъм
26
5.3 Изграждане на система за енергийно ефективно адаптивно управлението в сградни системи
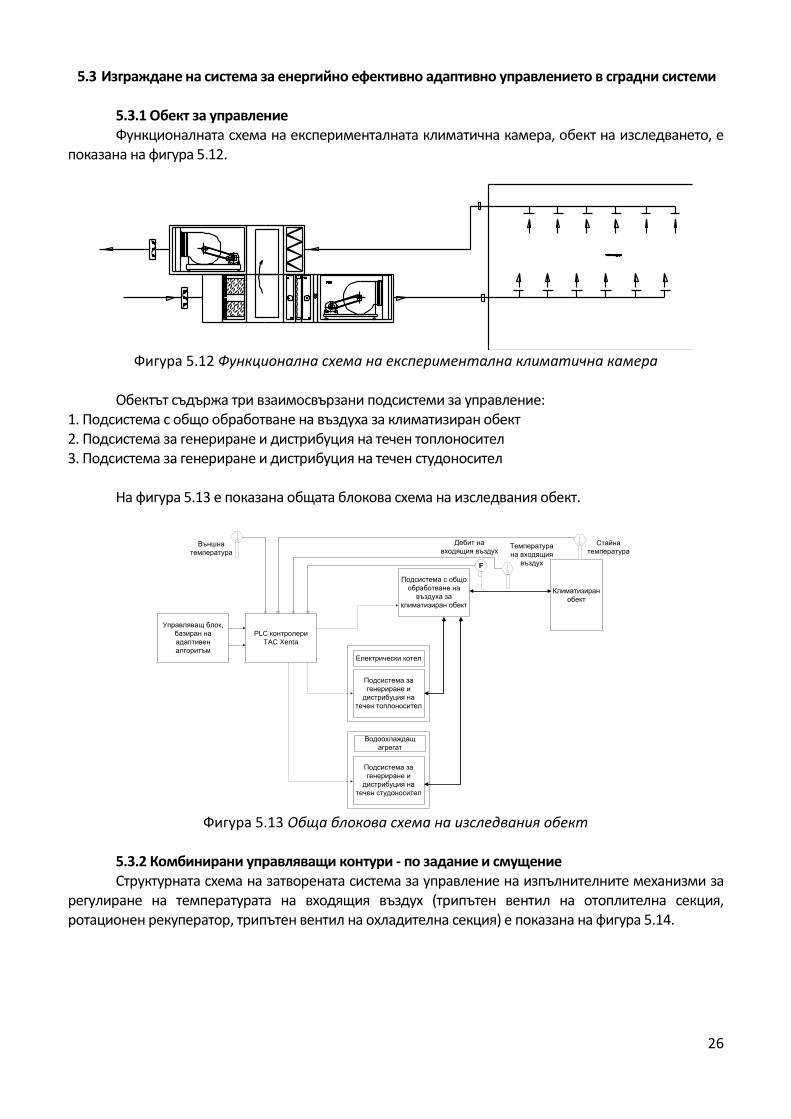
5.3.1 Обект за управление Функционалната схема на експерименталната климатична камера, обект на изследването, е
показана на фигура 5.12.
Фигура 5.12 Функционална схема на експериментална климатична камера
Обектът съдържа три взаимосвързани подсистеми за управление:
1. Подсистема с общо обработване на въздуха за климатизиран обект 2. Подсистема за генериране и дистрибуция на течен топлоносител 3. Подсистема за генериране и дистрибуция на течен студоносител
На фигура 5.13 е показана общата блокова схема на изследвания обект.
Управляващ блок,
базиран на
адаптивен
алгоритъм
PLC контролери
TAC Xenta
Подсистема с общо
обработване на
въздуха за
климатизиран обект
Подсистема за
генериране и
дистрибуция на
течен топлоносител
Подсистема за
генериране и
дистрибуция на
течен студоносител
Електрически котел
Водоохлаждащ
агрегат
Климатизиран
обект
F
Външна
температура
Стайна
температураТемпература
на входящия
въздух
Дебит на
входящия въздух
Фигура 5.13 Обща блокова схема на изследвания обект
5.3.2 Комбинирани управляващи контури - по задание и смущение Структурната схема на затворената система за управление на изпълнителните механизми за
регулиране на температурата на входящия въздух (трипътен вентил на отоплителна секция, ротационен рекуператор, трипътен вентил на охладителна секция) е показана на фигура 5.14.
27
Формировател на
задание
Модифициран PID
Логически блок
Инициализиращ
блок
Трипътен вентил на
отоплителната секция
Ротационен рекуператор
Трипътен вентил на
охладителната секция
Външна
температура
Задание
(отместване) Регулируема
температура на
входящия въздух
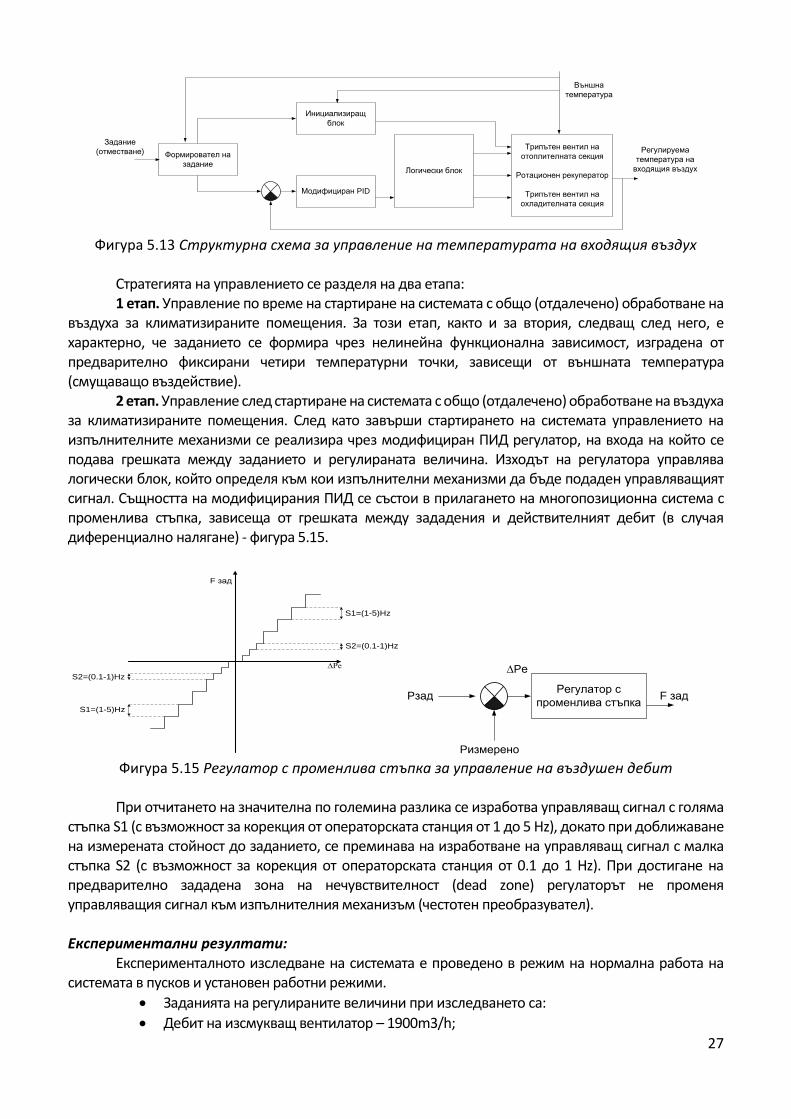
Фигура 5.13 Структурна схема за управление на температурата на входящия въздух
Стратегията на управлението се разделя на два етапа: 1 етап. Управление по време на стартиране на системата с общо (отдалечено) обработване на
въздуха за климатизираните помещения. За този етап, както и за втория, следващ след него, е характерно, че заданието се формира чрез нелинейна функционална зависимост, изградена от предварително фиксирани четири температурни точки, зависещи от външната температура (смущаващо въздействие).
2 етап. Управление след стартиране на системата с общо (отдалечено) обработване на въздуха за климатизираните помещения. След като завърши стартирането на системата управлението на изпълнителните механизми се реализира чрез модифициран ПИД регулатор, на входа на който се подава грешката между заданието и регулираната величина. Изходът на регулатора управлява логически блок, който определя към кои изпълнителни механизми да бъде подаден управляващият сигнал. Същността на модифицирания ПИД се състои в прилагането на многопозиционна система с променлива стъпка, зависеща от грешката между зададения и действителният дебит (в случая диференциално налягане) - фигура 5.15.
S2=(0.1-1)Hz
S1=(1-5)Hz
S2=(0.1-1)Hz
S1=(1-5)Hz
F зад
∆Ре
Регулатор с
променлива стъпкаPзад
Pизмерено
∆Pе
F зад
Фигура 5.15 Регулатор с променлива стъпка за управление на въздушен дебит
При отчитането на значителна по големина разлика се изработва управляващ сигнал с голяма
стъпка S1 (с възможност за корекция от операторската станция от 1 до 5 Hz), докато при доближаване на измерената стойност до заданието, се преминава на изработване на управляващ сигнал с малка стъпка S2 (с възможност за корекция от операторската станция от 0.1 до 1 Hz). При достигане на предварително зададена зона на нечувствителност (dead zone) регулаторът не променя управляващия сигнал към изпълнителния механизъм (честотен преобразувател).
Експериментални резултати:
Експерименталното изследване на системата е проведено в режим на нормална работа на системата в пусков и установен работни режими.
Заданията на регулираните величини при изследването са:
Дебит на изсмукващ вентилатор – 1900m3/h;
28
Дебит на подаващ вентилатор – 1900m3/h;
Температура на подавания въздух 22.4 C°;
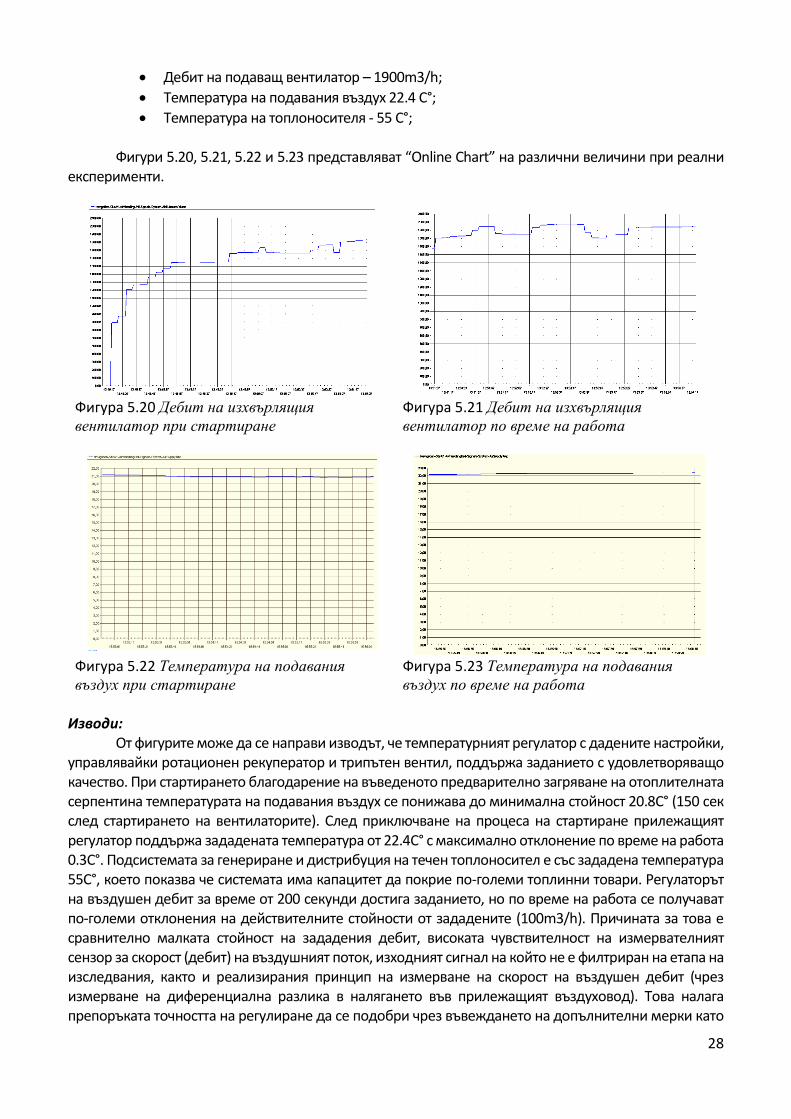
Температура на топлоносителя - 55 C°; Фигури 5.20, 5.21, 5.22 и 5.23 представляват “Online Chart” на различни величини при реални
експерименти.
Фигура 5.20 Дебит на изхвърлящия
вентилатор при стартиране Фигура 5.21 Дебит на изхвърлящия
вентилатор по време на работа
Фигура 5.22 Температура на подавания
въздух при стартиране Фигура 5.23 Температура на подавания
въздух по време на работа Изводи:
От фигурите може да се направи изводът, че температурният регулатор с дадените настройки, управлявайки ротационен рекуператор и трипътен вентил, поддържа заданието с удовлетворяващо качество. При стартирането благодарение на въведеното предварително загряване на отоплителната серпентина температурата на подавания въздух се понижава до минимална стойност 20.8C° (150 сек след стартирането на вентилаторите). След приключване на процеса на стартиране прилежащият регулатор поддържа зададената температура от 22.4C° с максимално отклонение по време на работа 0.3C°. Подсистемата за генериране и дистрибуция на течен топлоносител е със зададена температура 55C°, което показва че системата има капацитет да покрие по-големи топлинни товари. Регулаторът на въздушен дебит за време от 200 секунди достига заданието, но по време на работа се получават по-големи отклонения на действителните стойности от зададените (100m3/h). Причината за това е сравнително малката стойност на зададения дебит, високата чувствителност на измервателният сензор за скорост (дебит) на въздушният поток, изходният сигнал на който не е филтриран на етапа на изследвания, както и реализирания принцип на измерване на скорост на въздушен дебит (чрез измерване на диференциална разлика в налягането във прилежащият въздуховод). Това налага препоръката точността на регулиране да се подобри чрез въвеждането на допълнителни мерки като
29
например: филтриране на входящия сигнал от сензора за скорост (дебит), промяна на зоната на нечувствителност (Dead Zone), промяна на стъпката на регулатора и др.
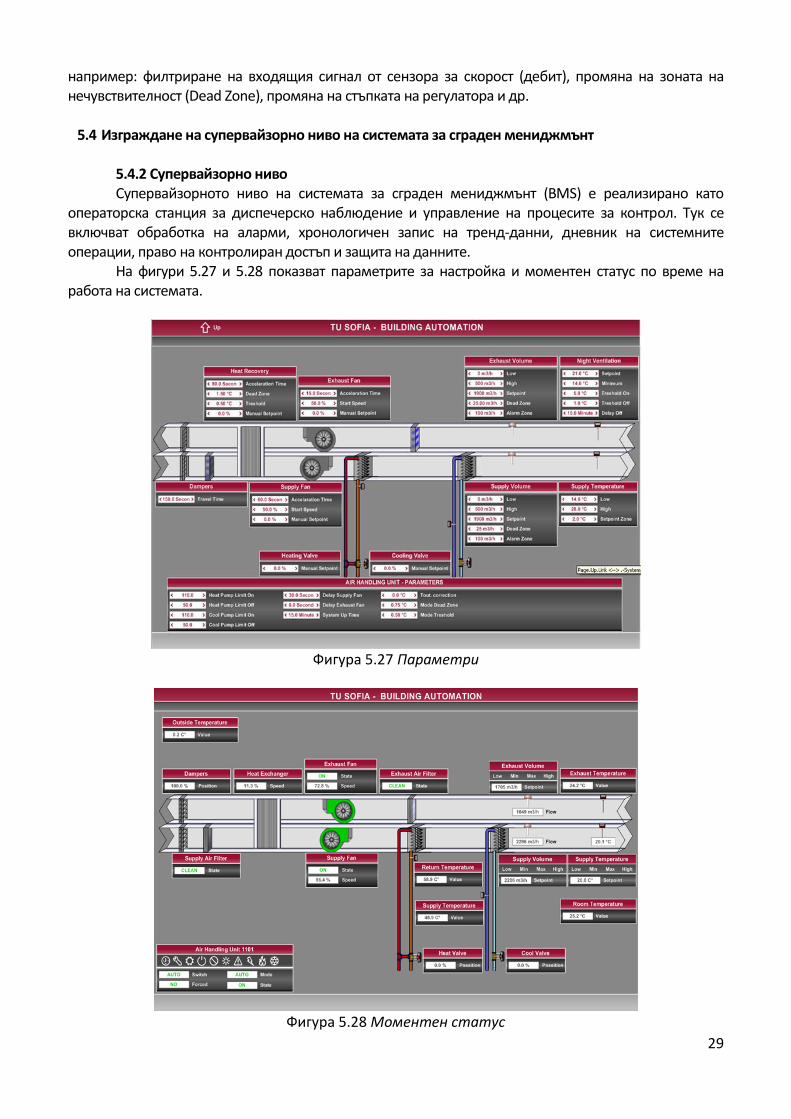
5.4 Изграждане на супервайзорно ниво на системата за сграден мениджмънт
5.4.2 Супервайзорно ниво Супервайзорното ниво на системата за сграден мениджмънт (BMS) е реализирано като
операторска станция за диспечерско наблюдение и управление на процесите за контрол. Тук се включват обработка на аларми, хронологичен запис на тренд-данни, дневник на системните операции, право на контролиран достъп и защита на данните.
На фигури 5.27 и 5.28 показват параметрите за настройка и моментен статус по време на работа на системата.
Фигура 5.27 Параметри
Фигура 5.28 Моментен статус
30
ОСНОВНИ РЕЗУЛТАТИ В ДИСЕРТАЦИОННИЯ ТРУД
1. Анализирана е приложимостта на моделирането на елементи и процеси в реално време при изграждане на нов клас системи за енергоефективно управление на интегрирани сградни обекти – тестващи системи с предаване в реално време на данните между модела на сградата и управляващия контролер. Последните са препоръчани от Международната Енергетична Агенция и Американската асоциация по отопление, вентилация и климатизация (ОВК) – ASHRAE. Предложена е сравнителна оценка на основните смущаващи въздействия с топлинен и светлинен характер върху основните стратегии за управление на ОВК обекти при отчитане влиянието на изграждащите материали. Дефинирани са основните технологични изисквания и приложимостта на основните типове комуникационни мрежи в системите за управление на ОВК в сградни обекти.
2. Предложена е методология за инженерно проектиране на системи за интегриран мениджмънт на сгради с енергоспестяващи свойства. Основните й елементи са демонстрирани в различни конфигурации на управляващите и управляваните структури на сградни обекти. Предложен е подход за описание и моделиране на основните променливи на околната среда, имащи пряко значение при генериране на заданията в системите за сградна климатизация (температура на въздуха на околната среда; точка на оросяване; обща радиация; разсеяна радиация; нормална директна радиация; дълговълнова радиация; обща осветеност; разсеяна осветеност; директна осветеност; посока на вятъра и скорост на вятъра).
3. На базата на уточнено описание на топлинното поведение на сградните системи е създаден комплекс от математически модели на основните взаимосвързани подсистеми в ОВК-обекти, отчитащи динамика, нелинейности, променливи параметри (породени от априорната неопределеност на изграждащите материали и процесите на конвекция). В моделите се отчита и влиянието на външни смущения.
4. Предложена е симулационна система в среда Simulink за анализ на многослойни структури от конструктивни елементи. Работоспособността на системата е доказана експериментално на базата на стандартизирани данни за атмосферните условия (температура, слънчева и дифузна радиация). Системата е подходяща за практическо използване на етапа на предварителното моделиране на обекти за ОВК. Създадени са динамични термични регресионни модели без и с външни въздействия, подходящи за оценяване на топлинните потоци в интегрираните сградни обекти. Симулационната система е адаптирана за развойната среда TAC MENTA.
5. Предложена е стратегия за моделно базирано оптимално управление при отопление, съобразена с два фактора – енергийни икономии и комфорт на обитателите. Подходяща е при реализирането на едноконтурни и многоконтурни системи за управление. Анализът на моделите и алгоритмите е проведен в програмната среда MATLAB, в съответствие с международно утвърдени стандарти (ASHRAE). Реализиран е моделно базиран предсказващ алгоритъм чрез съчетано използване в реално време на две програмни среди - моделираща и управляваща. Интерфейсът между управляващия компютър и обекта за управление се осъществява чрез специализиран хардуер (Inteco RT-DAC/PCI) и софтуер за работа в реално време (MATLAB/SIMULINK).
6. Физически е реализирана, експериментирана и внедрена в учебния процес на катедра АЕЗ експериментална система, съдържаща управляваща контролерна част, отоплителна/охладителна част, обект за управление и система за топлинно натоварване. Системата е използвана при анализ на управляващи алгоритми (релеен, ПИ, адаптивен). Предложени са реализации на изследваните управляващи алгоритми в средата ТАС-Menta, като е оценен обемът на минимално необходимото хардуерно осигуряване. Предложена и
31
реализирана е система за енергийно ефективно адаптивно управление в сградни системи, съдържаща комбинирани управляващи контури (по задание и смущение), върху която е експериментиран многопозиционен алгоритъм за управление с променлива стъпка, нелинейно зависеща от големината на грешката между зададения и действителния дебит на въздуха. Предложено е инженерно решение на PLC енергоикономично управление на интегрирани сградни обекти, включващи подсистеми за слънчева защита.
7. Реализирана е система за супервайзорно управление и мониторинг на енергоспестяваща изследователска и обучаваща система за сграден мениджмънт (BMS) в обекти тип "интелигентна сграда". Системата позволява оценяване на енергийната ефективност на управлението. Тя е имплементирана към експериментална система за ОВК, съдържаща 4 подсистеми: климатизиран обект с общо (отдалечено) обработване на въздуха, две подсистеми за генериране и дистрибуция на течен топлоносител/студоносител, климатизиран обект чрез вентилаторни конвектори.
8. Чрез експериментални изследвания са определени препоръчителните стойности за настройки на регулиращите контури. Получените преходни процеси при смущения, компенсирани чрез локални ПИ регулатори, показват отклонения на температурата на входящия въздух, по-ниски от 0.50C. Чрез проведени физически експерименти с различни управляващи алгоритми върху опитната система за оценяване на енергийната ефективност (включваща допълнителни измервателни устройства на топлинна и електрическа енергия, свързани чрез стандартни комуникационни протоколи ModBus и Mbus), се доказват енергийните предимства на моделно-базираните предсказващи алгоритми. Постигната е икономия на енергия над 12% спрямо конвенционално прилаганите средства с локални ПИ-контури. Този подход е енергийно оптимален и в пусковите режими.
СПИСЪК НА ПУБЛИКАЦИИТЕ ПО ДИСЕРТАЦИЯТА
1. Т.Йонков, Хр. Стоянов, Управление на честотни преобразуватели чрез „LonWorks” комуникационна мрежа в системите за сградна автоматизация, Конференция САИ 2012, октомври, София стр. 82-85
2. Христо Стоянов, Приложение на „LonWorks” комуникационна мрежа в информационните канали в системите за сградна автоматизация, XX Юбилеен международен симпозиум "Управление на топлоенергийни обекти и системи" 8-9 ноември 2012 г., Хотел "Жеравна" - гр. Банкя стр. 87-90
3. Христо Стоянов, ПРИЛОЖЕНИЕ НА ПРОГРАМИРУЕМИ ЛОГИЧЕСКИ КОНТРОЛЕРИ ЗА УПРАВЛЕНИЕ НА РЕЗЕРВИРАНО ЕЛЕКТРОЗАХРАНВАНЕ В СИСТЕМИ ЗА СГРАДНА АВТОМАТИЗАЦИЯ, Конференция ФА- 2013, Годишник на ТУ-София стр. 107-114
4. Хр. Стоянов, Теодора Петрова ПРИЛОЖЕНИЕ НА ПРОГРАМИРУЕМИ ЛОГИЧЕСКИ КОНТРОЛЕРИ ЗА УПРАВЛЕНИЕ НА ОПТИЧНИ СЛЪНЦЕЗАЩИТНИ ЩОРИ В СИСТЕМИ ЗА СГРАДНА АВТОМАТИЗАЦИЯ, Конференция ФА- 2013, Годишник на ТУ-София стр. 77-82
5. Т.Йонков, Хр. Стоянов, УПРАВЛЕНИЕ НА СИСТЕМА С ПРЕВКЛЮЧВАЩА СТРУКТУРА ЗА ПОДДЪРЖАНЕ НА НАДНАЛЯГАНЕ В ЧИСТИ ПОМЕЩЕИЯ В СИСТЕМИТЕ ЗА СГРАДНА АВТОМАТИЗАЦИЯ, Конференция ФА- 2014, Годишник на ТУ-София стр. 71-76
6. Хр. Стоянов, Т.Йонков УПРАВЛЕНИЕ НА ТЕРМОПОМПЕНИЕ СИСТЕМИ ЧРЕЗ КОРИГИРАНЕ В РЕАЛНО ВРЕМЕ НА ЗАДАНИЕТО НА ТЕМПЕРАТУРАТА НА ОТОПЛИТЕЛНИЯТ/ОХЛАДИТЕЛНИЯТ РАБОТЕН ФЛУИД, Конференция ФА- 2015, Годишник на ТУ-София стр. 33-40
32
ABSTRACT In the PhD thesis are developed methods for the synthesis of energy saving algorithms for different
configurations systems for heating, ventilation and air conditioning (HVAC) based on the proposed integrated models of system components in different programming environments.
Chapter 1 presents: a review of standard solutions of facilities for year-round local (zone) and total air conditioning of offices and public buildings; a review of standard solutions of systems for generation and distribution of heat (cold) energy for commercial and public buildings; definition of the main technological requirements and feasibility of the open communication networks in the management of HVAC system in building sites.
Chapter 2 presents an overview of systematic methodology of research in dissertation. Chapter 3 is devoted to development of model libraries enabling simplified analysis and synthesis in
the physical implementation of energy efficiensy management in HVAC systems. Chapter 4 presents some realization of control systems with energy-saving properties used in
building automation systems. Chapter 5 presents realization of supervisory level in BMS control systems with energy-saving
properties. MAIN RESULTS OF THE PhD THESIS
1. Analyzed applicability of modeling elements and processes in real time during the construction of a new class of systems for energy efficient management of integrated building sites - testing systems with real-time transmission of data between the building model and the control board.
2. A methodology for design of systems for integrated management of buildings with energy saving properties is proposed.
3. Based on the specified description of the thermal behavior of building systems, a complex mathematical models of the main interrelated subsystems in HVAC objects are created. The models takes into account the influence of external interference.
4. A simulation system in Simulink environment for the analysis of multilayer structures of the construction building elements is proposed. The system is suitable for practical use at the stage of preliminary modeling of objects in HVAC systems.
5. Proposed is a strategy model based optimal control for heating based to two factors - energy savings and comfort of the occupants. A model based predictive algorithm by combined use in real-time two programming environments - modeling and control is implemented. The interface between the managing computer and the site management is done through specialized hardware (Inteco RT-DAC / PCI) and real-time software (MATLAB / SIMULINK).
6. An experimental system for evaluation of energy efficiency is physically is realized and implemented in Technical University of Sofia, Automation of Electric Drives Department. The system is used for the analysis of control algorithms.
7. A supervisory level in BMS control systems with energy-saving properties is realized. The system allows evaluation of energy efficiency management. It is implemented on an experimental system for HVAC containing 4 subsystems: fancoils, AHU, heating and cooling subsystems.
8. By physical experiments with different control algorithms on the experimental system for evaluation of energy efficiency are proved energy benefits of model-based predictive algorithms. It is achieved energy savings of 12% compared to conventional local PI contours. This approach is optimal and energy in starting mode.








![W/² >8 Ç å Û å »#Ø b3z ° ¦ b ' 93z °5 b N&ã...5 8 b N&ã 2 »%, 2 Æ)+0£ | ~ 8 B ' 93z 5 8 b N&ã s \ å ¼ £ ^ K @ ¨ C o \ ] @ Ð í Ô Ñ í º Ä [ 6 Ð [ º @ ¨](https://img.pdfslide.org/doc/110x75/5ecc1e3391869f197e034b61/w-8-b3z-b-93z-5-b-n-5-8-b-n.jpg)

![ Z á ½ ¹ * J Z ¥ j } T ¥ b ' ] ¢ ë Å 7 - IL > * # % · 2018-06-18 · Title: Microsoft PowerPoint - è³ æ 1-5æ ±é »HDã ®å ã çµ ã ¿20180615 Fix.ppt [äº æ](https://img.pdfslide.org/doc/110x75/5facca138f21d94e9b431db0/-z-j-z-j-t-b-7-il-2018-06-18-title.jpg)



![Vale of York MSA inquiry - Parameters plan€¦ · PARAMETERS PLAN : dKd > î ô ì ñ î ï ô ñ ñ í ì ñ î ó ô ñ ò î í ñ ï õ ò ñ: EKd W D µ u v } v K o À o ] v](https://img.pdfslide.org/doc/110x75/5f913500bbb9f875b742ba9a/vale-of-york-msa-inquiry-parameters-plan-parameters-plan-dkd-.jpg)