Embed Size (px)
Citation preview

!
"""##$
1P
%&''()(*'*

1SIPART PS2 PA GerätehandbuchA5E00127924--04
SIPART PS2 PA6DR55xxAusgabe 04/2004
Gerätehandbuch
Elektropneumatischer Stellungsreglerfür Schub-- und Schwenkantriebe

2SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Copyright e Siemens AG 2002 All rights reserved
Weitergabe sowie Vervielfältigung dieser Anleitung,Verwertung und Mitteilung ihres Inhalts ist nichtgestattet, soweit nicht ausdrücklich zugestanden.Zuwiderhandlungen verpflichten zu Schadenersatz.Alle Rechte vorbehalten, insbesondere für den Fallder Patenterteilung oder GM--Eintragung
Siemens AGBereich Automatisierungs-- und AntriebstechnikGeschäftsgebiet Prozessinstrumentierung-- undAnalytikD--76181 Karlsruhe
Haftungsausschluss
Wir haben den Inhalt der Anleitung auf Überein--stimmung mit der beschriebenen Hard--und Soft--ware geprüft. Dennoch können Abweichungennicht ausgeschlossen werden, so dass wir für dievollständige Übereinstimmung keine Gewähr über-nehmen. Die Angaben in dieser Anleitung werdenregelmäßig überprüft, und notwendige Korrekturensind in den nachfolgenden Auflagen enthalten. FürVerbesserungsvorschläge sind wir dankbar.
e Siemens AG 2002Technische Änderungen bleiben vorbehalten
Marken
SIMATICR, SIPARTR, SIRECR, SITRANSR sind Marken von Siemens
Die übrigen Bezeichnungen in dieser Anleitung könnenMarken sein, deren Benutzung durchDrittefür deren Zwecke die Rechte der Inhaber verletzen können.
3SIPART PS2 PA GerätehandbuchA5E00127924--04
Inhaltsverzeichnis
0 Hinweise für den Betreiber 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.1 Allgemeine Hinweise 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.2 Klassifizierung der Sicherheitshinweise 8. . . . . . . . . . . . . . . . . . . . . . . . . .
0.3 Qualifiziertes Personal 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.4 Bestimmungsgemäßer Gebrauch 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.5 Technische Dokumentation 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.6 Hinweise zur Gewährleistung 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.7 Hinweise zur Lieferung 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.8 Normen und Vorschriften 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Einführung 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Allgemeines zum Stellungsregler 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Allgemeines zum PROFIBUS 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Übertragungstechnik 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Topologie 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Eigenschaften des PROFIBUS--PA 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.4 Profil 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.5 Anbindung 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Aufbau und Arbeitsweise 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Überblick 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Gerätekomponenten 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Grundplatine 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Elektrische Anschlüsse 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3 Pneumatische Anschlüsse 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.4 Anbausätze 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.5 Spülluftumschaltung (nicht bei druckfester Ausführung) 28. . . . . . . . . . . .
2.2.6 Drosseln 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Arbeitsweise 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Auslieferungszustand 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Optionsmodule 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.1 Optionsmodule in Normal- und eigensicherer Ausführung 30. . . . . . . . . .
2.5.2 Optionsmodule bei druckfester Ausführung 35. . . . . . . . . . . . . . . . . . . . . .
2.5.3 Alarmmodul 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4SIPART PS2 PA Gerätehandbuch
A5E00127924--04
2.5.4 Jy-Modul 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.5 SIA-Modul 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.6 Zubehör 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Betriebsvorbereitung 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Geräteidentifizierung (Typenschlüssel) 39. . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Maßbilder 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Montage 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Hinweise für den Einsatz von Stellungsreglern in nasser Umgebung 42.
3.3.2 Hinweise für den Einsatz von Stellungsreglern, die starkenBeschleunigungen oder Vibrationen ausgesetzt sind 44. . . . . . . . . . . . . .
3.3.3 Anbausatz ”Schubantrieb” 6DR4004-8V und 6DR4004-8L 46. . . . . . . . . .
3.3.4 Montageablauf (siehe Bild 3-7, Seite 48) 46. . . . . . . . . . . . . . . . . . . . . . . . .
3.3.5 Anbausatz ”Schwenkantrieb” 6DR4004-8D 49. . . . . . . . . . . . . . . . . . . . . . .
3.3.6 Montageablauf (siehe Bild 3-8 und Bild 3-9) 50. . . . . . . . . . . . . . . . . . . . . .
3.4 Elektrischer Anschluss 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Anschlussvariante: Optionen beim Stellungsregler in nicht eigensichererund druckfester Ausführung 60. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2 Anschlussvariante: Optionen beim Stellungsregler in eigensichererAusführung 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.3 Anschlussvariante: Optionen beim Stellungsregler in AusführungZündschutzart “n” 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Pneumatischer Anschluss 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Inbetriebnahme 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.1 Vorbereitungen für Schubantriebe 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.2 Automatische Initialisierung von Schubantrieben 68. . . . . . . . . . . . . . . . . .
3.6.3 Manuelle Initialisierung von Schubantrieben 70. . . . . . . . . . . . . . . . . . . . . .
3.6.4 Vorbereitungen für Schwenkantriebe 73. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.5 Automatische Initialisierung von Schwenkantrieben 73. . . . . . . . . . . . . . .
3.6.6 Manuelle Initialisierung von Schwenkantrieben 75. . . . . . . . . . . . . . . . . . .
3.6.7 Automatische Initialisierung (Struktogramme) 77. . . . . . . . . . . . . . . . . . . .
3.7 Kopieren von Initialisierungsdaten (Stellungsreglertausch) 81. . . . . . . . .
4 Vorortbedienung am Gerät 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Display 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Bedientasten 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Betriebsarten 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Parameter 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Diagnose 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Diagnoseanzeige 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Bedeutung der Diagnosewerte 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.3 Online-Diagnose 108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5SIPART PS2 PA GerätehandbuchA5E00127924--04
4.6 Bedeutung der sonstigen Displaytexte 112. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Optimierung der Reglerdaten 116. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Störungsbeseitigung 117. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Funktionen/Bedienung überPROFIBUS PA 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Systemeinbindung 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Azyklische Datenübertragung 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 SIMATIC PDM 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.1 Adresse vergeben 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.2 Laden in Gerät 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.3 Laden in PG/PC 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.4 Wartungsinformationen lesen 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.5 Wartungsinformationen setzen 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.6 Betrieb 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.7 Rücksetzen 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.8 Initialisierungsparameter 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.9 Selbstkalibrierung 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1.10 Schreibverriegelung 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Zyklische Datenübertragung 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.1 Konfigurieren 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.1.1 Konfigurieren der Nutzdaten 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Nutzdaten über PROFIBUS 131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.2.1 Status 137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.2.2 Diagnose 138. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.3 Diagnose nach PROFIBUS DP (DDLM_Slave_Diag) 139. . . . . . . . . . . . . .
6 Pflege und Wartung 141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Technische Daten 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Lieferspektrum 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Bestelldaten 150. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Lieferspektrum Optionen 151. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Lieferspektrum Zubehör 151. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Index 153. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Anhang 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1 Gerätestammdatei (GSD) 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Literatur und Kataloge 158. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.3 Bescheinigungen 159. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

6SIPART PS2 PA Gerätehandbuch
A5E00127924--04

Hinweise für den Betreiber
7SIPART PS2 PA GerätehandbuchA5E00127924--04
Hinweise für den Betreiber
Verehrter Kunde,
vor Beginn der Arbeiten lesen Sie bitte dieses Gerätehandbuch!Es enthält wichtige Hinweise und Daten, deren Beachtung dieGeräteverfügbarkeit sicherstellt und Ihnen Servicekosten erspart. DerUmgang mit dieser Regeleinrichtung wird Ihnen dadurch wesentlicherleichtert und führt Sie zu sicheren Ergebnissen.
Sie haben ein Gerät erworben, welches in verschiedenenKonfigurationen aufgebaut sein kann:
S SIPART PS2 ohne Ex--Schutz im Metall-- oder Kunststoffgehäuse
S SIPART PS2 mit EEx--ia/ib--Schutz im Metall-- oderKunststoffgehäuse
S SIPART PS2 EEx n im Metall-- oder Kunststoffgehäuse
S SIPART PS2 EEx d im druckfest gekapselten Metallgehäuse(EEx d)
Das vorliegende Gerätehandbuch berücksichtigt jede dieserMöglichkeiten. Abweichnungen zwischen den Geräten sind gesondertgekennzeichnet.
Das Lieferspektrum finden Sie im Kapitel 8, Seite 149.
0.1 Allgemeine Hinweise
Das in diesem Handbuch beschriebene Produkt hat das Werk in einemsicherheitstechnisch einwandfreien und geprüften Zustand verlassen.Um diesen Zustand zu erhalten und um einen einwandfreien undsicheren Betrieb dieses Produktes zu erreichen, darf es nur in der vomHersteller beschriebenen Weise eingesetzt werden. Darüber hinaussetzt der einwandfreie und sichere Betrieb dieses Produktes einensachgemäßen Transport, fachgerechte Lagerung und Aufstellung sowiesorgfältige Bedienung und Instandhaltung voraus.
0
Hinweise für den Betreiber
SIPART PS2 PA GerätehandbuchA5E00127924--048
Dieses Handbuch enthält die erforderlichen Informationen für denbestimmungsgemäßen Gebrauch des darin beschriebenen Produktes.Es wendet sich an technisch qualifiziertes Personal, welches speziellausgebildet ist oder einschlägiges Wissen auf dem Gebiet der Mess--,Steuerungs-- und Regelungstechnik, im weiterenAutomatisierungstechnik genannt, besitzt.
Die Kenntnis und das technisch einwandfreie Umsetzen der in diesemHandbuch enthaltenen Sicherheitshinweise und Warnungen sindVoraussetzung für die gefahrlose Montage und Inbetriebnahme sowiefür Sicherheit bei Betrieb und Instandhaltung des beschriebenenProduktes. Nur qualifiziertes Personal im Sinne von Kapitel 0.3 verfügtüber das erforderliche Fachwissen, um die in dieser Unterlage inallgemeingültiger Weise gegebenen Sicherheitshinweise undWarnungen im konkreten Einzelfall richtig zu interpretieren und in dieTat umzusetzen.
Die dem Gerät beiliegende Dokumentation ist in Kapitel 0.5 aufgelistet.
Dieses Handbuch ist kein fester Bestandteil des Lieferumfangs. Esenthält aus Gründen der Übersichtlichkeit nicht sämtliche Details zuallen Ausführungen des beschriebenen Produktes und kann auch nichtjeden erdenklichen Fall der Aufstellung, des Betriebes, derInstandhaltung und des Einsatzes in Systemen berücksichtigen. SolltenSie weitere Informationen benötigen oder sollten Probleme auftreten,die in dieser Unterlage nicht ausführlich genug behandelt werden, dannfordern Sie bitte die benötigte Auskunft von Ihrer örtlichen bzw.zuständigen Siemens--Niederlassung an.
In diesem Handbuch wird die Funktionalität, die Inbetriebnahme unddie Bedienung beschrieben.
Besonders beachten müssen Sie dabeiWarn-- und Hinweistexte.Diese sind vom übrigen Text abgesetzt und durch entsprechendePiktogramme (siehe Kapitel 0.2) besonders gekennzeichnet.
0.2 Klassifizierung der Sicherheitshinweise
Dieses Handbuch enthält Hinweise, die Sie zu Ihrer persönlichenSicherheit sowie zur Vermeidung von Sachschäden beachten müssen.Die Hinweise sind durch ein Warndreieck hervorgehoben und je nachGefährdungsgrad folgendermaßen dargestellt:
!GEFAHR
bedeutet, dass Tod oder schwere Körperverletzung eintreten wird,wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffenwerden.
!WARNUNG
bedeutet, dass Tod oder schwere Körperverletzung eintreten kann,wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffenwerden.
Hinweise für den Betreiber
9SIPART PS2 PA GerätehandbuchA5E00127924--04
!VORSICHT
mit Warndreieck bedeutet, dass eine leichte Körperverletzung eintretenkann, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffenwerden.
VORSICHT
ohne Warndreieck bedeutet, dass ein Sachschaden eintreten kann,wenn dieentsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
ACHTUNG
bedeutet, dass ein unerwünschtes Ergebnis oder Zustand eintretenkann, wenn der entsprechenden Hinweis nicht beachtet wird.
. HINWEIS
ist eine wichtige Information über das Produkt, die Handhabung desProduktes oder den jeweiligen Teil der Dokumentation, auf denbesonders aufmerksam gemacht werden soll und deren Beachtungwegen eines möglichen Nutzens empfohlen wird.
0.3 Qualifiziertes Personal
Bei unqualifizierten Eingriffen in das Gerät oder Nichtbeachtung der indiesem Handbuch gegebenen oder an dem Gerät angebrachtenWarnhinweise können schwere Körperverletzungen und/oderSachschäden eintreten. Nur entsprechend qualifiziertes Personal darfdeshalb Eingriffe an diesem Gerät vornehmen.
Qualifiziertes Personal im Sinne der sicherheitsbezogenen Hinweise indiesem Handbuch oder auf dem Produkt selbst sind Personen, die
S bei Geräten mit Explosionsschutz, eine Ausbildung oderUnterweisung bzw. Berechtigung besitzen, Arbeiten an elektrischenKreisen explosionsgefährdeter Anlagen durchzuführen.
S entweder als Projektierungspersonal mit den Sicherheitskonzeptender Automatisierungstechnik vertraut sind
S oder als Bedienungspersonal im Umgang mit Einrichtungen derAutomatisierungstechnik unterwiesen sind und den auf dieBedienung bezogenen Inhalt dieses Handbuches kennen.
S oder als Inbetriebsetzungs- und/oder Servicepersonal eine zurReparatur derartiger Einrichtungen der Automatisierungstechnikbefähigende Ausbildung besitzen bzw. die Berechtigung haben,Stromkreise und Geräte/Systeme gemäß den Standards der
Hinweise für den Betreiber
SIPART PS2 PA GerätehandbuchA5E00127924--0410
Sicherheitstechnik in Betrieb zu nehmen, zu erden und zukennzeichnen,
S darüber hinaus in Erster Hilfe geschult sind.
!WARNUNG
Das Gerät darf nur von qualifiziertem Personal montiert und in Betriebgenommen werden.
Das Gerät darf nur zu den in dieser Anleitung vorgegebenen Zweckeneingesetzt werden.
Das Gerät ist zum Anschluss an Funktions-- bzw. Schutzkleinspannungausgelegt.
Die elektrische Sicherheit wird allein durch die speisenden Gerätebestimmt.
VonpneumatischenAntriebenwerden großeStellkräfte aufgebracht. UmVerletzungen zu vermeiden, sind Montage und Inbetriebnahme untersorgfältiger Beachtung der Sicherheitsvorschriften des verwendetenAntriebes vorzunehmen.
Auf die notwendige Beachtung von Sicherheitsvorschriften fürexplosionsgefährdete Anlagen wird hiermit ausdrücklich hingewiesen.
Die Bestimmungen der für Ihr Land gültigen Prüfbescheinigung sind zubeachten. Bei der elektrischen Installation sind die für Ihr Land gültigennationalen Bestimmungen und Gesetze für explosionsgefährdeteBereiche zu beachten. In Deutschland sind dies z. B.:-- die Betriebssicherheitsverordnung-- die Bestimmung für das Errichten elektrischer Anlagen in
explosionsgefährdeten Bereichen, DIN EN 60079--14 (früher VDE0165, T1).
Es wird empfohlen zu prüfen, ob die vorhandene Hilfsenergie, soferndiese benötigt wird, mit der auf dem Typenschild undmit den für Ihr Landgültigen Normen übereinstimmt.
Verhindern Sie in explosionsgefährdeter Umgebung elektrostatischeAufladungen, wie sie z.B. beim Reinigen des Stellungsreglers imKunststoffgehäuse mit einem trockenen Tuch auftreten könnten.
Geräte der Zündschutzart ”Druckfeste Kapselung” dürfen nur inspannungslosem Zustand geöffnet werden.
!WARNUNG
Geräte der Zündschutzart ”Eigensicherheit” verlieren ihre Zulassung, so-bald sie an Stromkreisen betrieben wurden, die nicht der in Ihrem Landgültigen Prüfbescheinigung entsprechen.
Der einwandfreie und sichere Betrieb dieses Gerätes setztsachgemäßen Transport, fachgerechte Lagerung, Aufstellung undMontage sowie sorgfältige Bedienung und Instandhaltung voraus.
Hinweise für den Betreiber
11SIPART PS2 PA GerätehandbuchA5E00127924--04
0.4 Bestimmungsgemäßer Gebrauch
Bestimmungsgemäßer Gebrauch im Sinne dieses Handbuchesbedeutet, dass dieses Produkt nur für die im Katalog und in dertechnischen Beschreibung (siehe hierzu auch Kapitel 3 diesesHandbuches) beschriebenen Einsatzfälle vorgesehen ist.
Das in diesem Handbuch beschriebene Produkt ist unter Beachtungder einschlägigen Sicherheitsnormen entwickelt, gefertigt, geprüft unddokumentiert worden. Bei Beachtung der für Projektierung, Montage,bestimmungsgemäßen Betrieb und Instandhaltung beschriebenenHantierungsvorschriften und sicherheitstechnischen Hinweise gehendeshalb im Normalfall keine Gefahren in bezug auf Sachschäden oderfür die Gesundheit von Personen aus. Kleinspannungen, dieangeschlossen werden, müssen durch sichere Trennung erzeugt sein.
0.5 Technische Dokumentation
Außer dem vorliegenden Gerätehandbuch existieren noch alsUnterlagen, die den Geräten beigelegt werden:
S Faltblatt ”Bedienen kurz und bündig”Das Faltblatt erläutert in visualisierter Form die prinzipielleBedienung und Parametrierung sowie die automatischeInbetriebnahme.
S ”Betriebsanleitung”
In der Betriebsanleitung werden die grundlegenden Schritte zurMontage, Anschluss und Inbetriebsetzung beschrieben.
Die folgende Aufstellung enthält alle für diese Geräte verfügbarenDokumente:
Bestell--Nr. Art
A5E00127924A5E00127926A5E00120716A5E00120717A5E00120711A5E00120712A5E00120713A5E00120714A5E00120715
Gerätehandbuch deutschGerätehandbuch englischBetriebsanleitung dt./en.Betriebsanleitung fr./sp./it.Faltblatt deutschFaltblatt englischFaltblatt französischFaltblatt spanischFaltblatt italienisch
Diese Dokumente stehen Ihnen auch elektronisch im Internet unterder Adresse www.siemens.de/sipartps2 zur Verfügung.
Hinweise für den Betreiber
SIPART PS2 PA GerätehandbuchA5E00127924--0412
0.6 Hinweise zur Gewährleistung
Wir weisen darauf hin, dass der Inhalt dieses Gerätehandbuches nichtTeil einer früheren oder bestehenden Vereinbarung, Zusage oder einesRechtsverhältnisses ist oder diese abändern soll. Sämtliche Verpflich-tungen von Siemens ergeben sich aus dem jeweiligen Kaufvertrag, derauch die vollständige und allein gültige Gewähr-- leistungsregelungenthält. Diese vertraglichen Gewährleistungs-- bestimmungen werdendurch die Ausführungen in dieser Unterlage weder erweitert noch be-schränkt.
0.7 Hinweise zur Lieferung
Der jeweilige Lieferumfang ist entsprechend dem gültigen Kaufvertragauf den der Lieferung beigefügten Versandpapieren aufgeführt.
Beim Öffnen der Verpackung beachten Sie bitte die entsprechendenHinweise auf dem Verpackungsmaterial. Prüfen Sie die Lieferung aufVollständigkeit und Unversehrtheit. Insbesondere sollten Sie, soweitvorhanden, die Bestellnummer auf den Typenschildern mit denBestelldaten vergleichen.
Lieferspektrum siehe Kapitel 8, Seite 149.
0.8 Normen und Vorschriften
Soweit möglich, wurden für Spezifikation und Produktion diesesGerätes die harmonisierten europäischen Normen zugrunde gelegt.Sofern keine harmonisierten europäischen Normen angewandt wurden,gelten die Normen und Vorschriften für die BundesrepublikDeutschland (siehe hierzu auch Kapitel 7, Seite 141 ”TechnischenDaten”).
Bei einem Einsatz dieses Produktes außerhalb des Geltungsbereichesdieser Normen und Vorschriften sind die im Land des Betreibersgültigen Normen und Vorschriften zu beachten.
Einführung
13SIPART PS2 PA GerätehandbuchA5E00127924--04
Einführung
1.1 Allgemeines zum Stellungsregler
Der Stellungsregler dient zur Verstellung und Regelung von pneumati-schen Antrieben. Der Stellungsregler arbeitet elektropneumatisch, alsHilfsenergie dient Druckluft.
Der Stellungsregler mit der Kommunikationsschnittstelle PROFI-BUS PA dient als Komponente in einem digitalen Prozessautomatisie-rungssystem. Er kommuniziert als Slave mit dem Master über denFeldbus PROFIBUS PA. Neben der Kommunikation dient der Feldbuszur Versorgung des Stellungsreglers mit elektrischer Hilfsenergie.
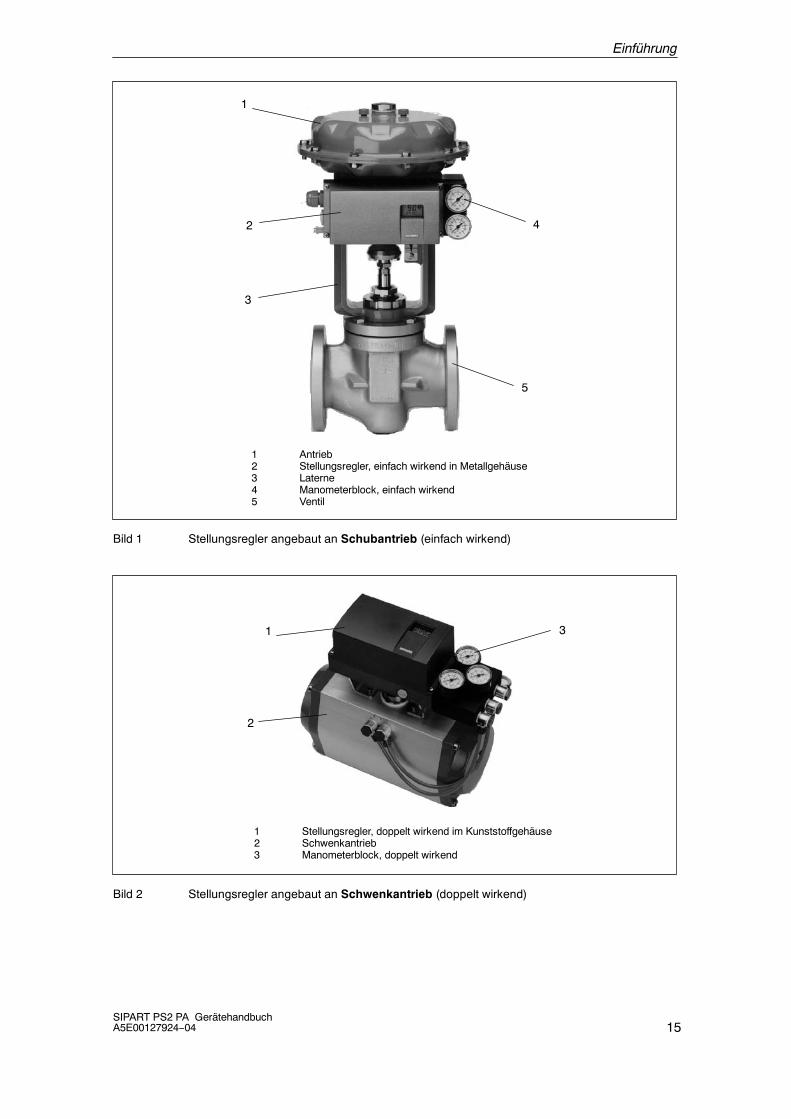
Mit dem Stellungsregler können z. B. Ventile wie folgt geregelt werden:
S mit Schubantrieb (Bild 1, Seite 15) oder
S mit Schwenkantrieb VDI/VDE 3845 (Bild 2, Seite 15)
Für Schubantriebe stehen verschiedene Anbauarten zur Verfügung:
S NAMUR bzw. IEC 534
S integrierter Anbau an ARCA
S integrierter Anbau an SAMSON (nicht druckfeste Ausführung)
So kann der Stellungsregler an allen üblichen Antrieben montiert undbetrieben werden.
Den Stellungsregler gibt es für folgende Antriebe:
S doppeltwirkende und
S einfachwirkende
Für folgende Anwendungen:
S explosionsgefährdete oder
S nicht explosionsgefährdete Anwendungen.
In dem Gehäuse sind die Elektronik mit Display, Stellungsrückmeldung,sowie der Ventilblock integriert.
Zweck
Ausführungen
Gehäuse
1
Einführung
14SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Das Gehäuse ist in drei Ausführungen lieferbar:
S Kunststoffgehäuse für einfach- und doppeltwirkende Antriebe
S Metallgehäuse für einfachwirkende Antriebe
S Druckfestes Metallgehäuse für einfach- und doppeltwirkende An-triebe
Das Gerät ist nach Schutzart IP65/NEMA4x aufgebaut.
Die eigensichere Variante kann im explosionsgefährdeten Bereich inZone 1 oder Zone 2 eingesetzt werden.Die druckfeste Variante kann im explosionsgefährdeten Bereich inZone 1 oder Zone 2 eingesetzt werden.Die Variante mit der Zündschutzart “n” kann im explosionsgefährdetenBereich in Zone 2 eingesetzt werden.
Der Stellungsregler kann mit verschiedenen Optionsmodulen (Kapitel2.5, Seite 30) erweitert werden. Insgesamt stehen die folgenden Mo-dule zur Verfügung:
S Jy-Modul: Zweileiter-Stromausgang 4 bis 20 mA für Stellungsrück-meldung
S Alarm-Modul: 3 binäre Ausgänge und 1 binärer Eingang
S SIA-Modul: ein binärer Ausgang für Störmeldungen, zwei binäreAusgänge für Grenzwertmelder
S Manometerblock: 2 oder 3 Manometer für einfach- und doppeltwir-kende Stellungsregler
S Anbauflansch (NAMUR) für Sicherheitsventilblock
S Anbausätze für Schub- und Schwenkantrieb
Zum getrennten Anbau von Stellungsregler und Positionssensor:
S Externes Stellungserfassungssystem
S Non--Contacting Position Sensor (NCS)
Für die Aufbautechnik des Stellungsreglers wurden ausschließlich um-weltverträgliche Materialien verwendet.
Das Gerätehandbuch ist auf chlorfrei gebleichtem Papier gedruckt.
Schutzart
Explosionsschutz
Optionen
Zubehör
Umweltschutz
Einführung
15SIPART PS2 PA GerätehandbuchA5E00127924--04
1
2
3
4
1 Antrieb2 Stellungsregler, einfach wirkend in Metallgehäuse3 Laterne4 Manometerblock, einfach wirkend5 Ventil
5
Bild 1 Stellungsregler angebaut an Schubantrieb (einfach wirkend)
1
2
3
1 Stellungsregler, doppelt wirkend im Kunststoffgehäuse2 Schwenkantrieb3 Manometerblock, doppelt wirkend
Bild 2 Stellungsregler angebaut an Schwenkantrieb (doppelt wirkend)
Einführung
16SIPART PS2 PA Gerätehandbuch
A5E00127924--04
1
2
3
4
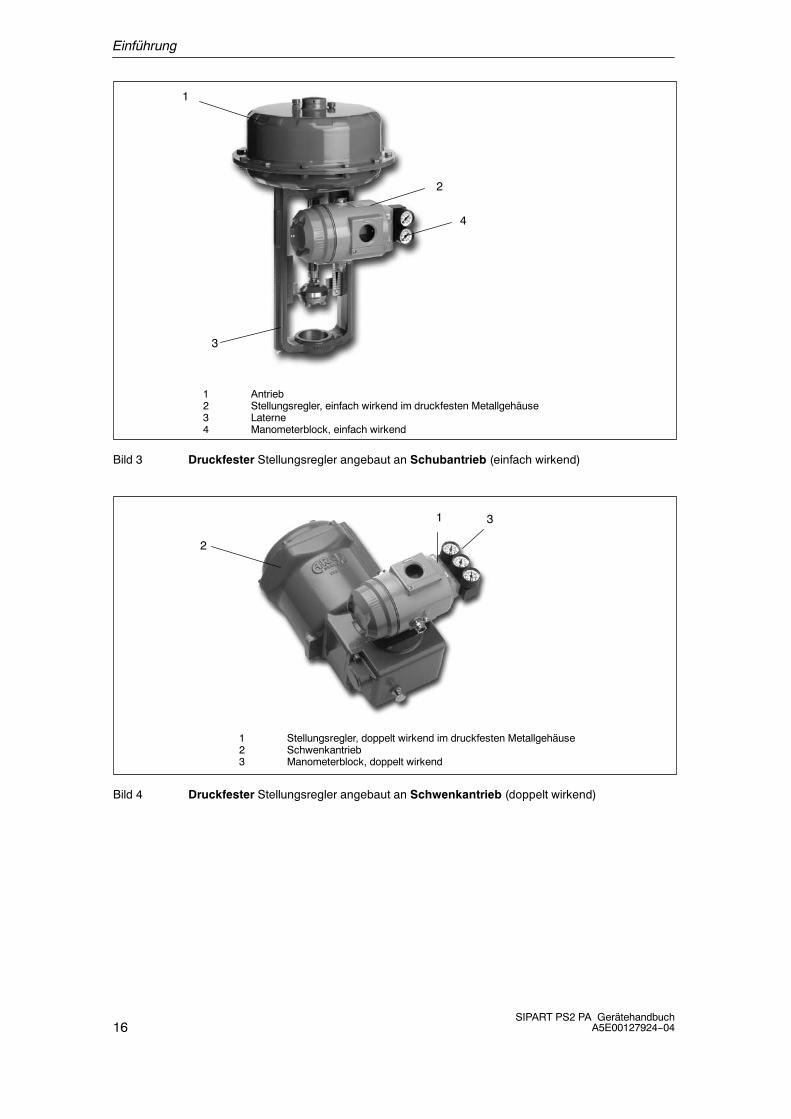
1 Antrieb2 Stellungsregler, einfach wirkend im druckfesten Metallgehäuse3 Laterne4 Manometerblock, einfach wirkend
Bild 3 Druckfester Stellungsregler angebaut an Schubantrieb (einfach wirkend)
1
2
3
1 Stellungsregler, doppelt wirkend im druckfesten Metallgehäuse2 Schwenkantrieb3 Manometerblock, doppelt wirkend
Bild 4 Druckfester Stellungsregler angebaut an Schwenkantrieb (doppelt wirkend)
Einführung
17SIPART PS2 PA GerätehandbuchA5E00127924--04
1.2 Allgemeines zum PROFIBUS
Der PROFIBUS--PA (PA = Process Automation) ist eine Variante des inder Fertigungstechnik weit verbreiteten PROFIBUS DP (DP = Dezen-trale Peripherie).Der PROFIBUS (Process Field Bus) ist ein offenes Kommunikationssy-stem für die Automatisierungstechnik und wird weltweit tausendfacheingesetzt. Er ist in der europäischen Norm EN 50170 spezifiziert.
1.2.1 Übertragungstechnik
Der PROFIBUS--PA besitzt eine spezielle Übertragungstechnik undwird damit den Belangen der Prozessautomatisierung und Verfahrens-technik gerecht. Diese Übertragungstechnik ist in der internationalenNorm IEC 61158--2 definiert. Die niedere Übertragungsrate reduziertdie Verlustleistung gegenüber PROFIBUS--DP und ermöglicht damiteine eigensichere Technik für den Einsatz in explosionsgefährdetenBereichen.
1.2.2 Topologie
Die Bustopologie kann weitgehend frei gewählt werden, somit sind Li-nien-, Stern- und Baumstrukturen sowie Mischformen möglich. An denPROFIBUS--PA können alle Arten von Feldgeräten, wie Messumfor-mer, Aktoren, Analysegeräte, usw. angeschlossen werden.
Der wesentliche Nutzen liegt in:
S der Einsparung von Installationskosten
S der Möglichkeit der weitergehenden Diagnose mit Steigerung derVerfügbarkeit von Anlagenteilen
S der Möglichkeit der automatischen Nachführung der Anlagendoku-mentation
S der Möglichkeit der Anlagenoptimierung im laufenden Betrieb
In einem Automatisierungssystem sind in der Regel mehrere PROFI-BUS--PA-Stränge über Koppeleinheiten mit dem schnellen PROFI-BUS--DP verbunden. An diesem ist auch das Prozessleitsystem ange-schlossen.
Beide Bussysteme nutzen eine einheitliche Protokollschicht. Damit istder PROFIBUS--PA eine ”kommunikationskompatible” Verlängerungdes PROFIBUS--DP ins Feld.
Einführung
18SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Master(Klasse 1)
Master(Klasse 2)
PROFIBUS-DP
I
PROFIBUS-PA
(Feldgeräte, dezentrale Peripherie, unterlagerteSteuerungen, Netzübergang zu PROFIBUS-PA)
8x
Slaves
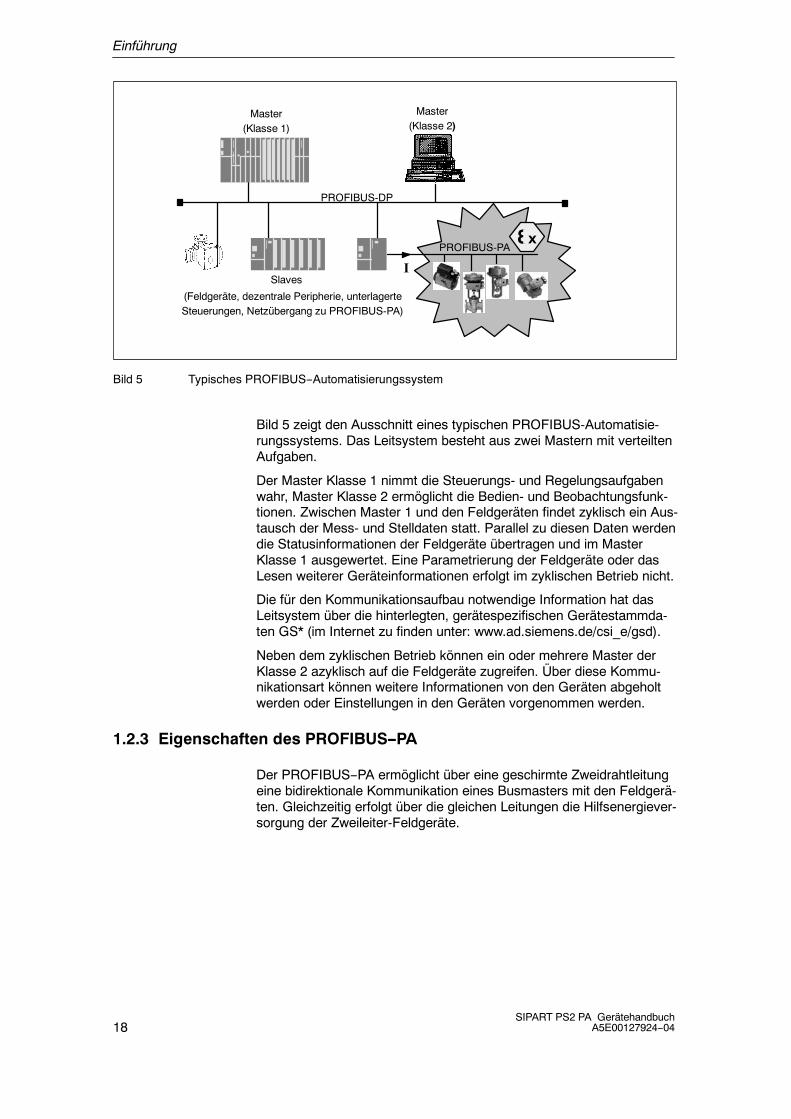
Bild 5 Typisches PROFIBUS--Automatisierungssystem
Bild 5 zeigt den Ausschnitt eines typischen PROFIBUS-Automatisie-rungssystems. Das Leitsystem besteht aus zwei Mastern mit verteiltenAufgaben.
Der Master Klasse 1 nimmt die Steuerungs- und Regelungsaufgabenwahr, Master Klasse 2 ermöglicht die Bedien- und Beobachtungsfunk-tionen. Zwischen Master 1 und den Feldgeräten findet zyklisch ein Aus-tausch der Mess- und Stelldaten statt. Parallel zu diesen Daten werdendie Statusinformationen der Feldgeräte übertragen und im MasterKlasse 1 ausgewertet. Eine Parametrierung der Feldgeräte oder dasLesen weiterer Geräteinformationen erfolgt im zyklischen Betrieb nicht.
Die für den Kommunikationsaufbau notwendige Information hat dasLeitsystem über die hinterlegten, gerätespezifischen Gerätestammda-ten GS* (im Internet zu finden unter: www.ad.siemens.de/csi_e/gsd).
Neben dem zyklischen Betrieb können ein oder mehrere Master derKlasse 2 azyklisch auf die Feldgeräte zugreifen. Über diese Kommu-nikationsart können weitere Informationen von den Geräten abgeholtwerden oder Einstellungen in den Geräten vorgenommen werden.
1.2.3 Eigenschaften des PROFIBUS--PA
Der PROFIBUS--PA ermöglicht über eine geschirmte Zweidrahtleitungeine bidirektionale Kommunikation eines Busmasters mit den Feldgerä-ten. Gleichzeitig erfolgt über die gleichen Leitungen die Hilfsenergiever-sorgung der Zweileiter-Feldgeräte.
Einführung
19SIPART PS2 PA GerätehandbuchA5E00127924--04
1.2.4 Profil
Ergänzend zu der EN--Norm 50170 hat die PNO (PROFIBUS-Nutzer-organisation) die Funktionalität der einzelnen Feldgerätetypen in einersogenannten Profilbeschreibung definiert. Dieses Profil legt funktionaleMindestanforderungen und optionale Erweiterungen fest. Das gerätein-terne ”Device Management” liefert dem Konfigurationstool des Leitsy-stems alle notwendigen Basisinformationen zum Auffinden der Profilpa-rameter. Damit kann ein Parametrierwerkzeug alle profilkonformenGeräte -- gleich welchen Typs und Herstellers -- bedienen.
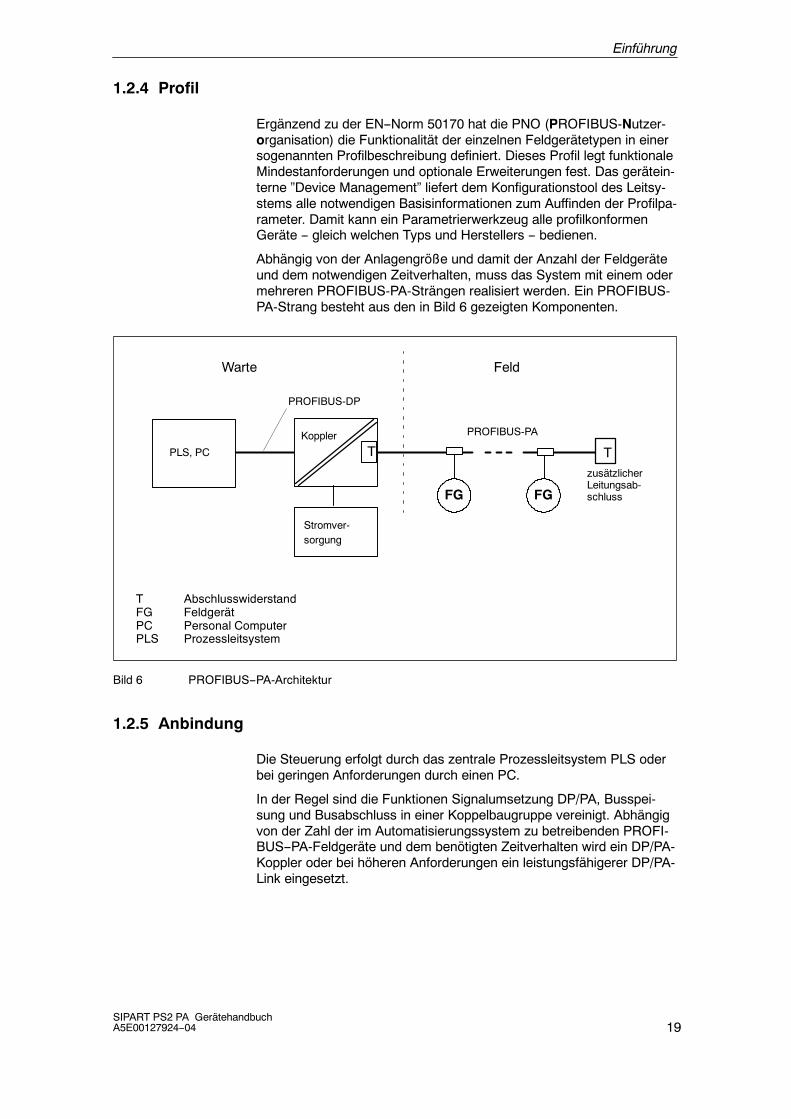
Abhängig von der Anlagengröße und damit der Anzahl der Feldgeräteund dem notwendigen Zeitverhalten, muss das System mit einem odermehreren PROFIBUS-PA-Strängen realisiert werden. Ein PROFIBUS-PA-Strang besteht aus den in Bild 6 gezeigten Komponenten.
PLS, PC
FG
PROFIBUS-PA
PROFIBUS-DP
zusätzlicherLeitungsab-schluss
T
FG
Warte Feld
TKoppler
Stromver-sorgung
T AbschlusswiderstandFG FeldgerätPC Personal ComputerPLS Prozessleitsystem
Bild 6 PROFIBUS--PA-Architektur
1.2.5 Anbindung
Die Steuerung erfolgt durch das zentrale Prozessleitsystem PLS oderbei geringen Anforderungen durch einen PC.
In der Regel sind die Funktionen Signalumsetzung DP/PA, Busspei-sung und Busabschluss in einer Koppelbaugruppe vereinigt. Abhängigvon der Zahl der im Automatisierungssystem zu betreibenden PROFI-BUS--PA-Feldgeräte und dem benötigten Zeitverhalten wird ein DP/PA-Koppler oder bei höheren Anforderungen ein leistungsfähigerer DP/PA-Link eingesetzt.
Einführung
20SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Aus übertragungstechnischen Gründen muss der Bus am entferntenEnde zusätzlich mit einem Abschlusswiderstand T versehen werden.Bei Verwendung des empfohlenen Buskabels ist die theoretisch mögli-che Leitungslänge (Summe aller Leitungsstücke) maximal 1900 m. Zu-sätzlich muss bei der Planung auch der Spannungsabfall über den dieFeldgeräte speisenden Leitungen berücksichtigt werden.
Bei der Projektierung ist aber auch der Strombedarf der einzelnen Teil-nehmer und der Spannungsabfall am Kabel zu berücksichtigen. Dieeinzelnen Feldgeräte FG können nahezu an beliebiger Stelle im Bussy-stem angeschlossen werden. Weitergehende Informationen sind dem”PNO-Leitfaden PROFIBUS--PA” zu entnehmen.
DP/PA-Koppler oder DP/PA-Link werden aus einem Netzteil mitSchutzkleinspannung (SELV, safety extra-low voltage) versorgt. ZurÜberbrückung kurzzeitiger Netzunterbrechungen muss dieses Netzteilausreichende Reserven besitzen.
Die maximale Anzahl an einen Busstrang anschließbaren Geräte hängtvon deren Stromaufnahme und den jeweiligen Einsatzbedingungen ab.Beim Betrieb im sicheren Bereich können die Koppler/Links bis zu400 mA in den Bus einspeisen.
Bei Betrieb in explosionsgefährdeten Bereichen ist die Eigensicherheitnur gewährleistet, wenn die maximal in den Bus eingespeiste Hilfsener-gie bestimmte Spannungs- und Stromwerte nicht überschreitet. Siehehierzu in Kapitel 7 “Technische Daten” Grundgerät in eigensichererAusführung.
!WARNUNG
Zur Speisung des eigensicheren PROFIBUSes dürfen nur zertifizierteSpeisegeräte (DP/PA-Koppler oder DP/PA-Links) verwendet werden.Die Anforderungen sind der EG-Baumusterprüfbescheinigung “für Ver-wendung in explosionsgefährdeten Bereichen” zu entnehmen.
Der Stellungsregler in druckfester Ausführung darf in Bereichen, in de-nen die Atmosphäre explosionsfähig werden kann, nur bei geschlosse-nem Gehäuse mit elektrischer Hilfsenergie versorgt werden.
Die Durchführungsöffnungen für die elektronischen Anschlüssemüssen mit EEx-d-zertifizierten Kabeleinführungen oder mitEEx-d-zertifizierten Verschlussstopfen verschlossen sein, oder esmuss bei Verwendung des “Conduit-Rohrsystems” eine Zündsperre immaximalen Abstand von 46 cm (18 Inch) vom Gehäuse angeordnetsein.
Aus der Summe der maximalen Stromaufnahmen der angeschlosse-nen Geräte (nach Norm≥ 10 mA pro Gerät) und des zur Verfügungstehenden Stromes, lässt sich die Zahl der an einen Busstrang an-schließbaren Geräte ermitteln. Aus Sicherheitsgründen sollte eineStromreserve eingeplant werden, da sonst das Risiko besteht, dass eindefekt gegangenes Gerät durch eine erhöhte Stromaufnahme den Busüberlastet und damit die Stromversorgung und Kommunikation mit al-len ungestörten Teilnehmern zusammenbrechen könnte. Die Höhe dervorzusehenden Reserve richtet sich nach der vom Geräteherstellergenannten Stromerhöhung im Fehlerfall.
Einführung
21SIPART PS2 PA GerätehandbuchA5E00127924--04
Damit die angeschlossenen Prozessgeräte voneinander unterscheidbarsind, hat jedes Gerät seine eigene Adresse.
Es ist darauf zu achten, dass vor einem Betrieb von zwei oder mehrFeldgeräten am Bus die Geräteadressen eingestellt werden. Damit dieAdressen eindeutig sind, darf jede Adresse nur einmal vergeben wer-den. Prinzipiell ist ein Adressbereich von 1 bis 125 möglich. Im Anliefe-rungszustand ist die Adresse 126 eingestellt. Üblicherweise werden inPROFIBUS-Anlagen den Mastern die unteren Adressen zugeteilt. Da-her wird empfohlen, bei der Adresszuteilung für die Stellungsregler mit30 zu beginnen.
Die Adresseinstellung erfolgt entweder mit den Bedientasten am Stel-lungsregler oder mit der SIMATIC PDM-Software über den Bus. Imletzteren Fall wird immer ein neuer Stellungsregler an den Bus ange-schlossen und die neue Adresse über die Software eingestellt. Danachwird der nächste Stellungsregler an den Bus angeschlossen undebenso verfahren.
Es empfiehlt sich, die eingestellte Adresse mit einem wischfesten Stiftauf dem Stellungsregler zu notieren.
Weiterführende Informationen über Komponenten, Aufbaurichtlinienund Projektierung finden Sie in der Systembeschreibung Feldtechnik/2/.

Einführung
22SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Aufbau und Arbeitsweise
23SIPART PS2 PA GerätehandbuchA5E00127924--04
Aufbau und Arbeitsweise
Das nachfolgende Kapitel beschreibt den mechanischen und elektri-schen Aufbau, die Gerätekomponenten und die prinzipielle Arbeits-weise des Stellungsreglers.
2.1 Überblick
Der elektropneumatische Stellungsregler bildet in Verbindung mit einemAntrieb ein Regelungssystem. Die aktuelle Stellung des Antriebes wirdüber ein Servo-Potentiometer erfasst und als Istwert x zurückgemeldet.Zusätzlich ist es möglich, an den Stellungsregler einen separaten Sen-sor zur Positionserfassung anzuschließen. Soll- und Istwert werdengleichzeitig auf dem Display ausgegeben.
Der Sollwert wird dem Stellungsregler vom Leitsystem über denPROFIBUS--PA digital vorgegeben.
Die PROFIBUS--PA-Variante des Stellungsreglers unterscheidet sichvon den bisherigen Versionen in der Busschnittstelle. Damit bleiben dieGrundfunktionen des Stellungsreglers einschließlich der Bedienung undAnzeige nahezu unverändert.
Der Stellungsregler arbeitet als prädiktiver (vorausschauender) Fünf-punktregler, über dessen Ausgangsgröße ±∆ y die integrierten Stellven-tile pulslängenmoduliert angesteuert werden.
Diese Stellsignale bewirken Druckänderungen in der/den Antriebskam-mer(n) und damit eine Verstellung des Antriebes bis die Regelabwei-chung zu Null wird.
Über drei Tasten und ein Display erfolgt bei abgenommenem Gehäuse-deckel die Bedienung (Handbetrieb) und das Konfigurieren (Strukturie-ren, Initialisieren und Parametrieren).
Standardmäßig verfügt das Grundgerät über einen binären Eingang(BE1). Dieser kann individuell konfiguriert werden und kann z.B. zurBlockierung der Bedienebenen verwendet werden. Ein weiterer Ein-gang (Shut down) dient dazu, den Antrieb in eine vorgegebene Sicher-heitsstellung (Endanschlag) zu fahren.
Mit dem Jy-Optionsmodul kann die aktuelle Antriebsstellung als Zweilei-tersignal Jy = 4 bis 20 mA ausgegeben werden.
Darüber hinaus kann der Antrieb auf zwei programmierbare Grenz-werte, die bei Hub- bzw. Drehwinkelüberschreitung oder -unterschrei-tung ansprechen, überwacht werden.
Einführung
2
Aufbau und Arbeitsweise
24SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Die Ausgabe der Grenzwertalarme erfolgt über das Alarm-Optionsmo-dul, das zusätzlich über einen Störmeldeausgang die Funktion desStellungsreglers und des Stellgerätes überwachen und melden kann.Im Automatikbetrieb wird dabei die Größe der Regeldifferenz in Abhän-gigkeit von der Stellzeit überwacht. Das Störsignal wird immer danngesetzt, wenn die Regelabweichung nach einer gewissen Zeit nichtausgeregelt werden kann, weil z.B. das Ventil klemmt oder der Netz-druck nicht ausreicht. Die drei Binärausgänge sind als Halbleiteraus-gänge realisiert und fehlerselbstmeldend, d. h. auch bei Ausfall derHilfsenergie und defekter Elektronik sprechen die Ausgänge an.
Über den ebenfalls auf dem Alarmmodul befindlichen binären Eingang(BE2) kann der Stellantrieb durch ein externes Ereignis je nach Konfi-guration, z. B. blockiert oder in seine Endlagen gefahren werden.
Wenn Sie vom Grundgerät elektrisch unabhängige Grenzwertmeldun-gen benötigen, müssen Sie anstatt des Alarmmoduls das SIA-Modulmit den Schlitzinitiatoren verwenden.
2.2 Gerätekomponenten
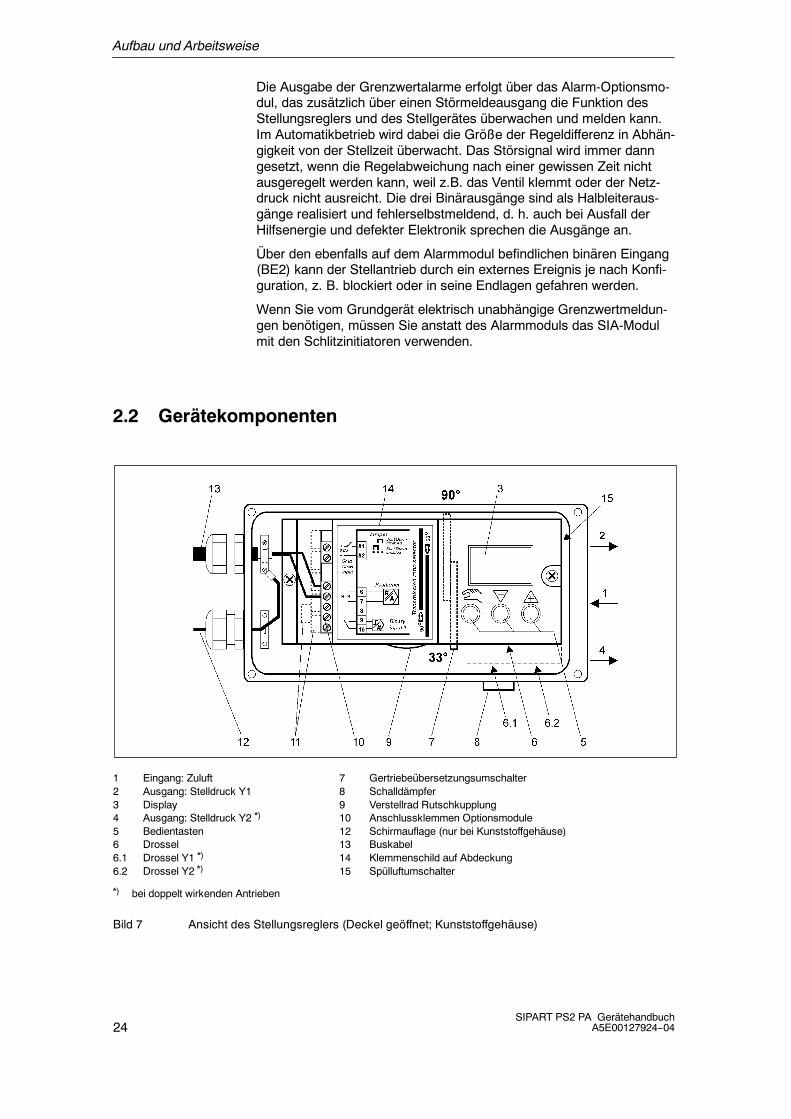
1 Eingang: Zuluft 7 Gertriebeübersetzungsumschalter2 Ausgang: Stelldruck Y1 8 Schalldämpfer3 Display 9 Verstellrad Rutschkupplung4 Ausgang: Stelldruck Y2 *) 10 Anschlussklemmen Optionsmodule5 Bedientasten 12 Schirmauflage (nur bei Kunststoffgehäuse)6 Drossel 13 Buskabel6.1 Drossel Y1 *) 14 Klemmenschild auf Abdeckung6.2 Drossel Y2 *) 15 Spülluftumschalter
*) bei doppelt wirkenden Antrieben
Bild 7 Ansicht des Stellungsreglers (Deckel geöffnet; Kunststoffgehäuse)
Aufbau und Arbeitsweise
25SIPART PS2 PA GerätehandbuchA5E00127924--04
8
9
6.2
6.1
10
3 7
----++
1
10
138
238
9
2 121
45
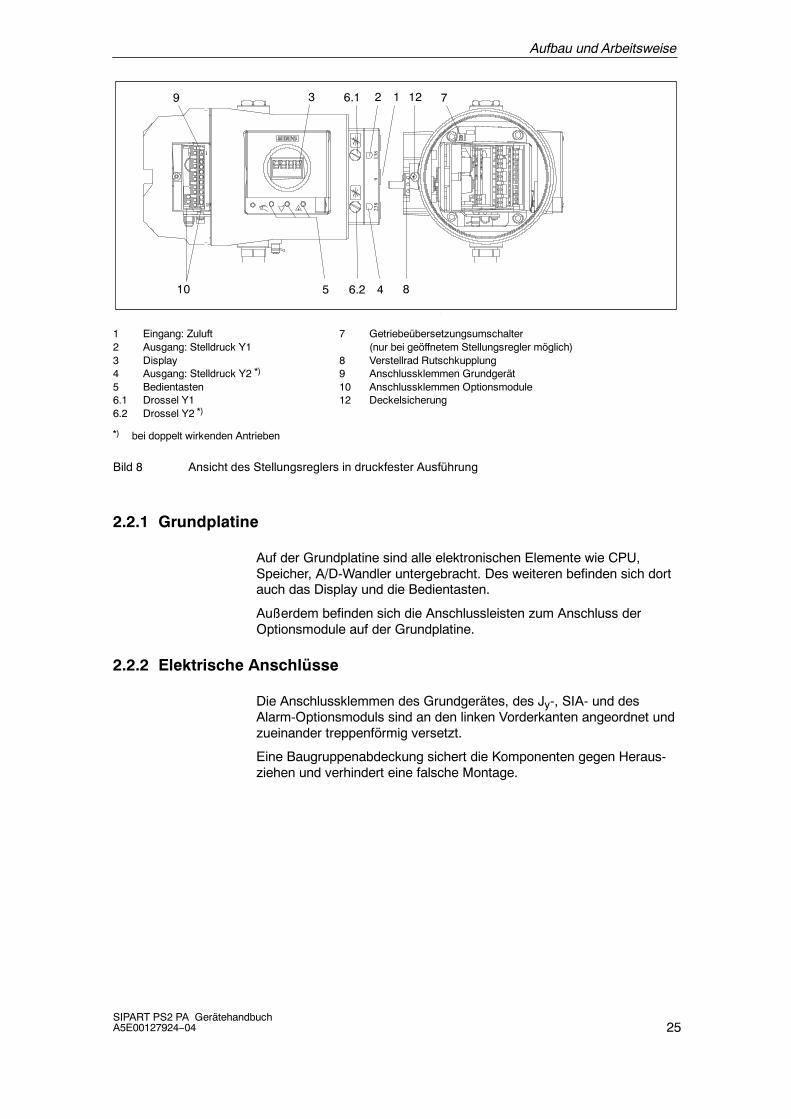
1 Eingang: Zuluft 7 Getriebeübersetzungsumschalter2 Ausgang: Stelldruck Y1 (nur bei geöffnetem Stellungsregler möglich)3 Display 8 Verstellrad Rutschkupplung4 Ausgang: Stelldruck Y2 *) 9 Anschlussklemmen Grundgerät5 Bedientasten 10 Anschlussklemmen Optionsmodule6.1 Drossel Y1 12 Deckelsicherung6.2 Drossel Y2 *)
*) bei doppelt wirkenden Antrieben
Bild 8 Ansicht des Stellungsreglers in druckfester Ausführung
2.2.1 Grundplatine
Auf der Grundplatine sind alle elektronischen Elemente wie CPU,Speicher, A/D-Wandler untergebracht. Des weiteren befinden sich dortauch das Display und die Bedientasten.
Außerdem befinden sich die Anschlussleisten zum Anschluss derOptionsmodule auf der Grundplatine.
2.2.2 Elektrische Anschlüsse
Die Anschlussklemmen des Grundgerätes, des Jy-, SIA- und desAlarm-Optionsmoduls sind an den linken Vorderkanten angeordnet undzueinander treppenförmig versetzt.
Eine Baugruppenabdeckung sichert die Komponenten gegen Heraus-ziehen und verhindert eine falsche Montage.
Aufbau und Arbeitsweise
26SIPART PS2 PA Gerätehandbuch
A5E00127924--04
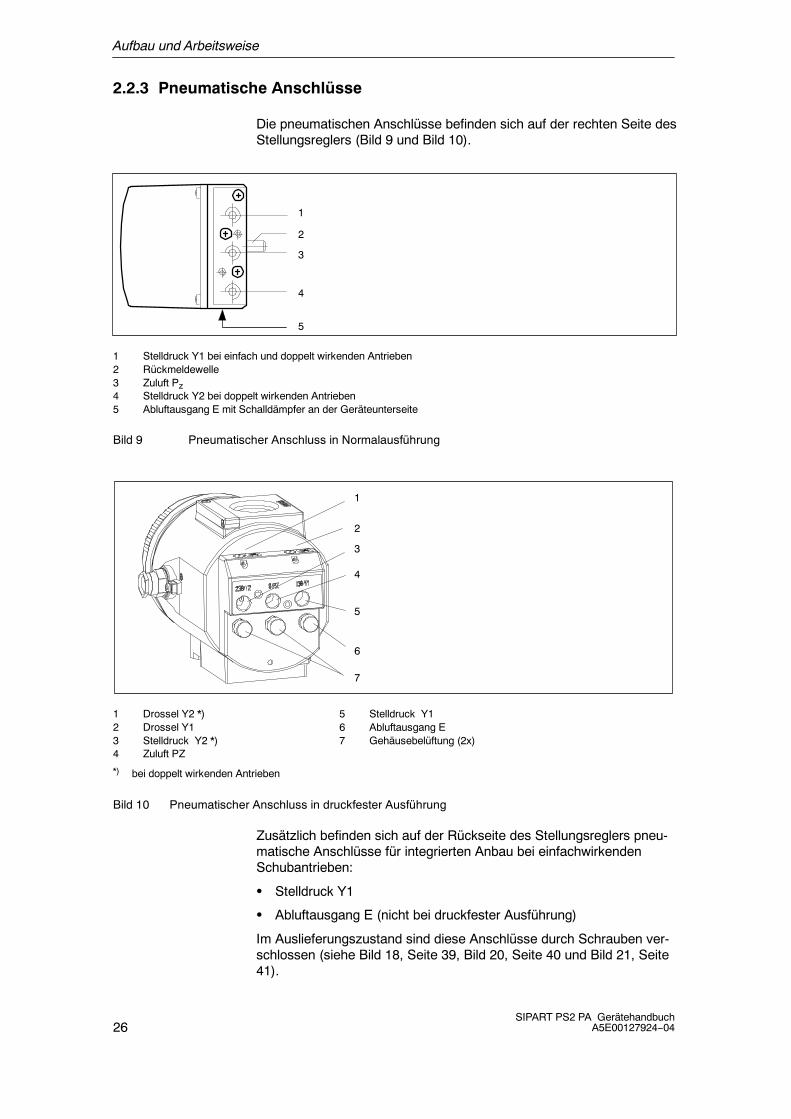
2.2.3 Pneumatische Anschlüsse
Die pneumatischen Anschlüsse befinden sich auf der rechten Seite desStellungsreglers (Bild 9 und Bild 10).
1
2
3
4
5
1 Stelldruck Y1 bei einfach und doppelt wirkenden Antrieben2 Rückmeldewelle3 Zuluft Pz4 Stelldruck Y2 bei doppelt wirkenden Antrieben5 Abluftausgang E mit Schalldämpfer an der Geräteunterseite
Bild 9 Pneumatischer Anschluss in Normalausführung
1
2
3
4
5
6
7
1 Drossel Y2 *) 5 Stelldruck Y12 Drossel Y1 6 Abluftausgang E3 Stelldruck Y2 *) 7 Gehäusebelüftung (2x)4 Zuluft PZ
*) bei doppelt wirkenden Antrieben
Bild 10 Pneumatischer Anschluss in druckfester Ausführung
Zusätzlich befinden sich auf der Rückseite des Stellungsreglers pneu-matische Anschlüsse für integrierten Anbau bei einfachwirkendenSchubantrieben:
S Stelldruck Y1
S Abluftausgang E (nicht bei druckfester Ausführung)
Im Auslieferungszustand sind diese Anschlüsse durch Schrauben ver-schlossen (siehe Bild 18, Seite 39, Bild 20, Seite 40 und Bild 21, Seite41).
Aufbau und Arbeitsweise
27SIPART PS2 PA GerätehandbuchA5E00127924--04
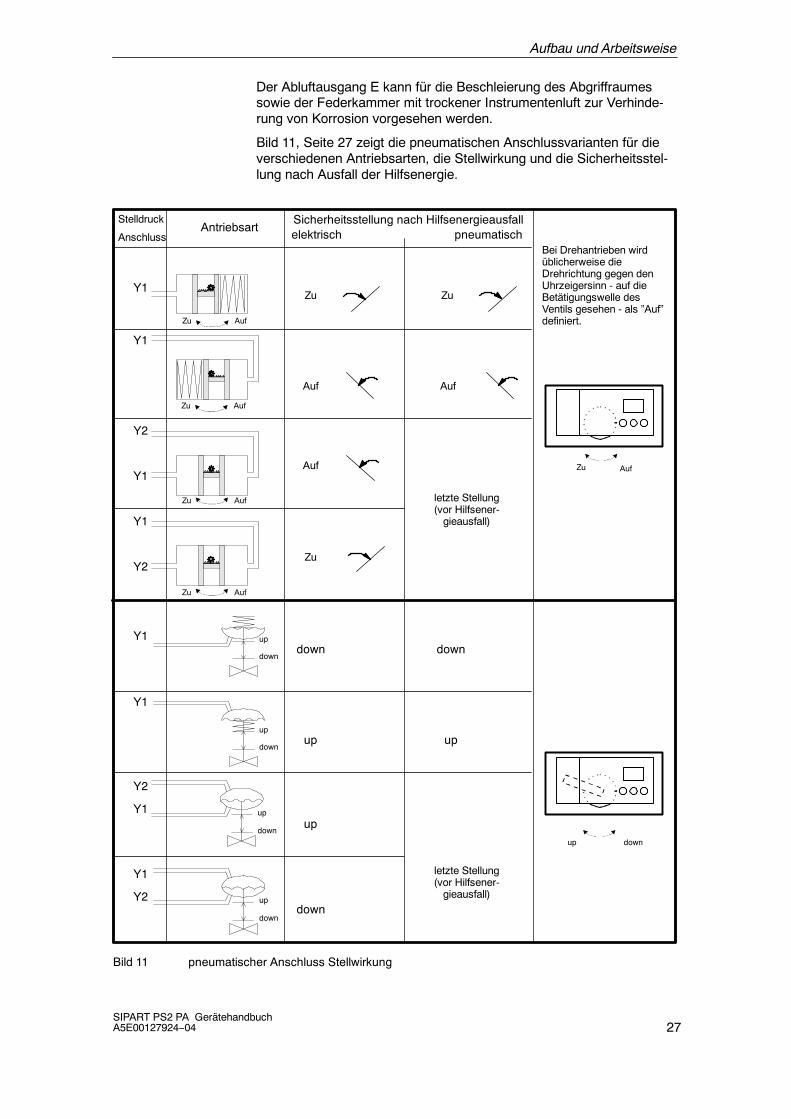
Der Abluftausgang E kann für die Beschleierung des Abgriffraumessowie der Federkammer mit trockener Instrumentenluft zur Verhinde-rung von Korrosion vorgesehen werden.
Bild 11, Seite 27 zeigt die pneumatischen Anschlussvarianten für dieverschiedenen Antriebsarten, die Stellwirkung und die Sicherheitsstel-lung nach Ausfall der Hilfsenergie.
up
down
up
down
up
down
up
down
Sicherheitsstellung nach Hilfsenergieausfallelektrisch pneumatisch
down down
up up
down
up
Y1
Y1
Y2
Y1
Y1
Y2
Y1
Y1
Y2
Y1
Y1
Y2
AufZu
Zu Zu
Auf Auf
Zu
Auf
letzte Stellung(vor Hilfsener-gieausfall)
AntriebsartStelldruck
AnschlussBei Drehantrieben wirdüblicherweise dieDrehrichtung gegen denUhrzeigersinn - auf dieBetätigungswelle desVentils gesehen - als ”Auf”definiert.
AufZu
up down
AufZu
AufZu
AufZu
letzte Stellung(vor Hilfsener-gieausfall)
Bild 11 pneumatischer Anschluss Stellwirkung
Aufbau und Arbeitsweise
28SIPART PS2 PA Gerätehandbuch
A5E00127924--04
2.2.4 Anbausätze
Der Stellungsregler kann mit Hilfe des entsprechenden Anbausatzes annahezu alle Antriebe montiert werden.
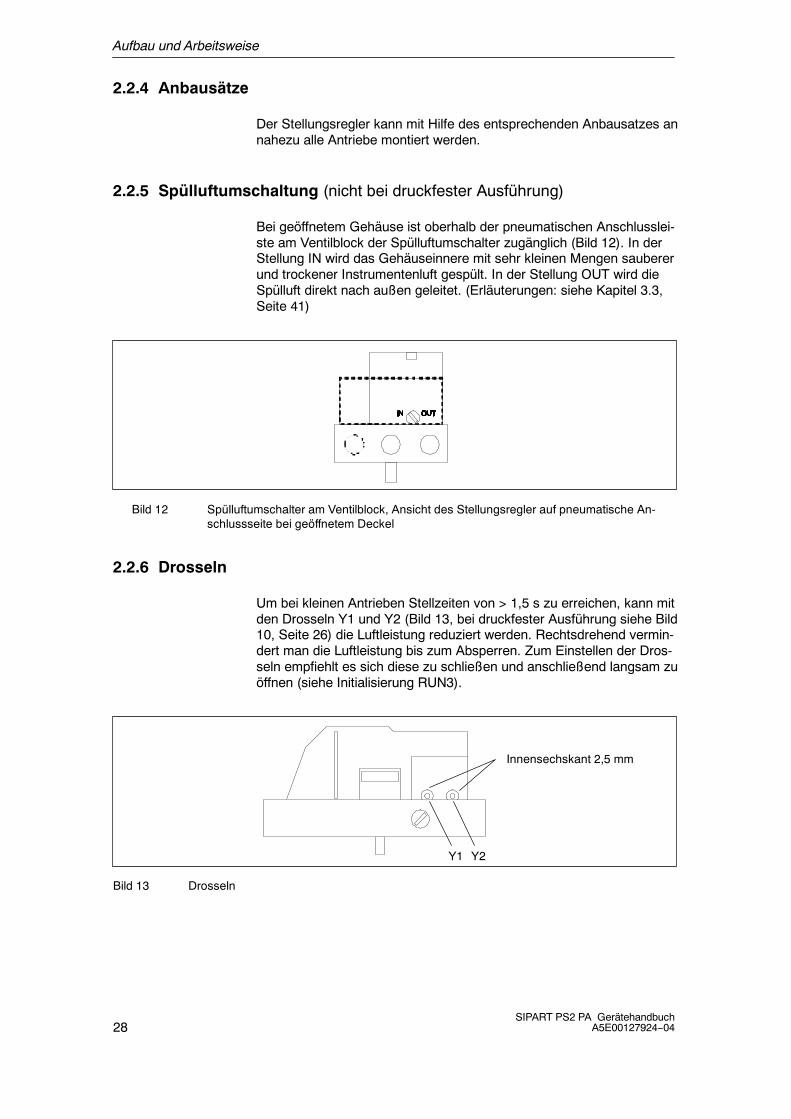
2.2.5 Spülluftumschaltung (nicht bei druckfester Ausführung)
Bei geöffnetem Gehäuse ist oberhalb der pneumatischen Anschlusslei-ste am Ventilblock der Spülluftumschalter zugänglich (Bild 12). In derStellung IN wird das Gehäuseinnere mit sehr kleinen Mengen saubererund trockener Instrumentenluft gespült. In der Stellung OUT wird dieSpülluft direkt nach außen geleitet. (Erläuterungen: siehe Kapitel 3.3,Seite 41)
Bild 12 Spülluftumschalter am Ventilblock, Ansicht des Stellungsregler auf pneumatische An-schlussseite bei geöffnetem Deckel
2.2.6 Drosseln
Um bei kleinen Antrieben Stellzeiten von > 1,5 s zu erreichen, kann mitden Drosseln Y1 und Y2 (Bild 13, bei druckfester Ausführung siehe Bild10, Seite 26) die Luftleistung reduziert werden. Rechtsdrehend vermin-dert man die Luftleistung bis zum Absperren. Zum Einstellen der Dros-seln empfiehlt es sich diese zu schließen und anschließend langsam zuöffnen (siehe Initialisierung RUN3).
Y1 Y2
Innensechskant 2,5 mm
Bild 13 Drosseln
Aufbau und Arbeitsweise
29SIPART PS2 PA GerätehandbuchA5E00127924--04
2.3 Arbeitsweise
Der elektropneumatische Stellungsregler SIPART PS2 bildet mit dempneumatischen Antrieb einen Regelkreis, in dem der Istwert x die Stel-lung der Antriebsstange bei Schubantrieben bzw. die Stellung der An-triebswelle bei Schwenkantrieben und die Führungsgröße w digital überden PROFIBUS vorgegeben ist.
Die Hub- bzw. Drehbewegung des Antriebes wird über entsprechendeAnbauteile, über die Rückmeldewelle und über ein spielfreies umschalt-bares Zahnradgetriebe auf ein hochwertiges Leitplastikpotentiometergegeben und auf den Analogeingang des Mikrocontrollers übertragen.Die aktuelle Position kann auch über einen externen Sensor dem Stel-lungsregler vorgegeben werden. Dabei erfolgt die Hub- bzw. Drehwin-kelerfassung durch eine externe Stellungserfassungseinheit (z. B. be-rührungslosen Stellungssensor (Non Contacting Position Sensor) oderein Potentiometer) direkt am Antrieb.
Der Stellungsregler korrigiert ggf. den Winkelfehler des Hubabgriffes,vergleicht den Istwert x mit dem Sollwert w und berechnet die Stellgrö-ßeninkrementeΔy. Je nach Größe und Richtung der Regelabwei-chung (x-w) wird das piezovorgesteuerte Zu- bzw. Abluftventil geöffnet.Das Volumen des Antriebes integriert die Stellinkremente zum Stell-druck y auf, der in etwa proportional die Antriebsstange bzw. die An-triebswelle bewegt. Durch diese Stellinkremente wird der Stelldruck solange verändert, bis die Regelabweichung zu Null wird.
Die pneumatischen Antriebe gibt es in einfach- und doppeltwirkenderAusführung. Bei der einfachwirkenden Variante wird nur eine Druck-kammer be- und entlüftet. Der entstehende Druck arbeitet gegen eineFeder. Bei der doppeltwirkenden Ausführung arbeiten zwei Druckkam-mern gegeneinander. Dabei wird bei der Belüftung eines Volumens dasGegenvolumen entlüftet.
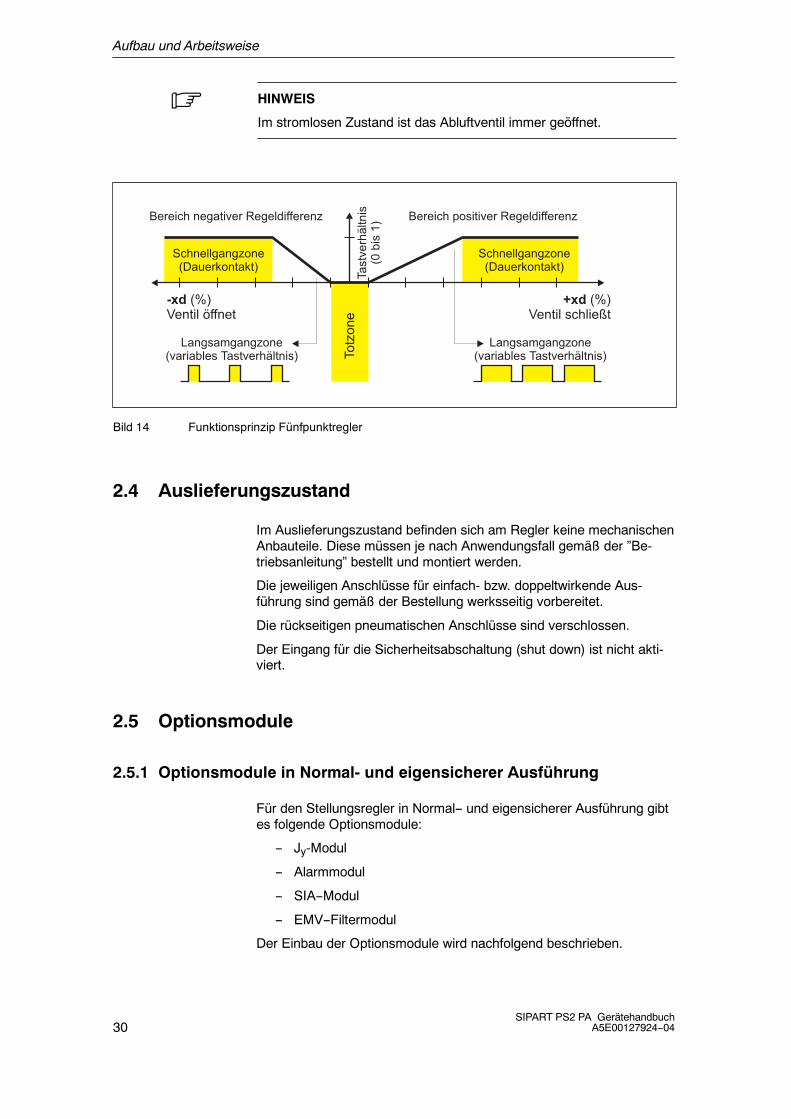
Der Regelalgorithmus ist ein adaptiver prädiktiver Fünfpunktregler(siehe Bild 14, Seite 30). Dabei werden die Ventile bei großenRegelabweichungen mit Dauerkontakt angesteuert (Schnellgangzone).Bei mittleren Regelabweichungen erfolgt die Ventilansteuerung durchpulslängenmodulierte Impulse (Langsamgangzone).
In der Zone kleiner Regelabweichung (adaptive Totzone) werden keineStellimpulse ausgegeben. Die Totzonenadaption und die ständigeAdaption der Mindestimpulslängen im Automatikbetrieb bewirken, dassdie bestmögliche Regelgenauigkeit bei kleinster Schalthäufigkeit er-reicht wird. Die Startparameter werden während der Initialisierungs-phase ermittelt und in einem nichtflüchtigen Speicher hinterlegt. Diessind im wesentlichen der reale Stellweg mit den mechanischen Endan-schlägen, die Stellzeiten, die Größe der Totzone usw.
Zusätzlich werden im laufenden Betrieb ständig die Anzahl der Stör-meldungen, Richtungsänderungen, sowie die Hubzahl ermittelt undviertelstündlich abgespeichert. Diese Parameter können Sie über dieKommunikationsprogramme, wie z.B. PDM und AMS, auslesen unddokumentieren. Insbesondere durch den Vergleich der Altwert mit denaktuell ermittelten Werten können Sie Rückschlüsse auf den Verschleißder Armatur ziehen (Diagnosefunktion).
Aufbau und Arbeitsweise
30SIPART PS2 PA Gerätehandbuch
A5E00127924--04
. HINWEIS
Im stromlosen Zustand ist das Abluftventil immer geöffnet.
Tastv
erh
ältnis
(0bis
1)
Schnellgangzone(Dauerkontakt)
Langsamgangzone(variables Tastverhältnis)
Langsamgangzone(variables Tastverhältnis)
Schnellgangzone(Dauerkontakt)
Bereich negativer Regeldifferenz
+xd (%)Ventil schließt
Bereich positiver Regeldifferenz
Totz
one
-xd (%)Ventil öffnet
Bild 14 Funktionsprinzip Fünfpunktregler
2.4 Auslieferungszustand
Im Auslieferungszustand befinden sich am Regler keine mechanischenAnbauteile. Diese müssen je nach Anwendungsfall gemäß der ”Be-triebsanleitung” bestellt und montiert werden.
Die jeweiligen Anschlüsse für einfach- bzw. doppeltwirkende Aus-führung sind gemäß der Bestellung werksseitig vorbereitet.
Die rückseitigen pneumatischen Anschlüsse sind verschlossen.
Der Eingang für die Sicherheitsabschaltung (shut down) ist nicht akti-viert.
2.5 Optionsmodule
2.5.1 Optionsmodule in Normal- und eigensicherer Ausführung
Für den Stellungsregler in Normal-- und eigensicherer Ausführung gibtes folgende Optionsmodule:
-- Jy-Modul
-- Alarmmodul
-- SIA--Modul
-- EMV--Filtermodul
Der Einbau der Optionsmodule wird nachfolgend beschrieben.
Aufbau und Arbeitsweise
31SIPART PS2 PA GerätehandbuchA5E00127924--04
Die Optionsmodule werden durch eine Baugruppenabdeckung ((1),siehe Bild 15, Seite 34 und Bild 16, Seite 36) geschützt und mecha-nisch fixiert.
. HINWEIS
Für den Einbau der Optionsmodule muss das Gehäuse geöffnetwerden. Solange der Stellungsregler geöffnet ist, ist die Schutzart IP65nicht gewährleistet.
Öffnen Sie das Gehäuse des Stellungsreglers wie folgt:
Zum Öffnen des Stellungsreglers müssen die vier Schrauben des Ge-häusedeckels mit einem Kreuzschlitzschraubendreher gelöst werden.
Stromversorgungsleitungen abklemmen bzw. freischalten.
Baugruppenabdeckung (1) entfernen. Dazu müssen die beiden Schrau-ben (1.1) mit einem Schraubendreher entfernt werden.
. HINWEIS
Um ein vorzeitiges Verschleißen der Befestigung durch die selbst-schneidenden Schrauben (1.1) zu verhindern, hat sich folgende Vorge-hensweise bei der Montage der Baugruppenabdeckung (1) bewährt:
1. die Schrauben entgegengesetzt dem Uhrzeigersinn solangedrehen, bis sie im Gewindegang spürbar einrasten
2. beide Schrauben im Uhrzeigersinn gefühlvoll festdrehen
Jy-Modul Das Jy-Modul (3) in die unteren Leiterplattenführungen des Containerseinschieben, elektrische Verbindung mit dem beiliegenden Bandkabel(6) herstellen.
Alarmmodul Das Alarmmodul (4) in die oberen Leiterplattenführungen des Contai-ners einschieben, elektrische Verbindung mit dem beiliegenden Band-kabel (5) herstellen.
SIA-Modul (Schlitzinitiator-Alarmmodul) Gehen Sie beim Einbau wie folgt vor:
1. Entfernen Sie alle elektrischen Anschlüsse der Grundelektronik(2).
2. Lösen Sie die beiden Befestigungsschrauben (2.1) der Grundelek-tronik.
3. Rasten Sie die Grundelektronik durch vorsichtiges Verbiegen dervier Halterungen aus.
4. Führen Sie das SIA-Modul (7) von oben bis zur oberen Leiterplat-tenführung des Containers ein.
Aufbau und Arbeitsweise
32SIPART PS2 PA Gerätehandbuch
A5E00127924--04
5. Schieben Sie das SIA-Modul in der Leiterplattenführung des Con-tainers ca. 3 mm nach rechts.
6. Spezialschraube (7.1) durch das SIA-Modul in die Achse des Stel-lungsreglers einschrauben (Anzugsmoment: 2 Nm).
VORSICHT
Der im Stellscheibenlager (11) eingepresste Stift muss kurz vordem Berühren mit der Spezialschraube ausgerichtet werden. Beimweiteren Eindrehen müssen dann Stellscheibenlager und Spezial-schraube gleichzeitig gedreht werden, damit sich die Stifte in dieSpezialschraube einfügen.
7. Isolierabdeckung (10) über dem SIA-Modul einseitig unter der Auf-lagefläche der Grundelektronik an die Containerwand anlegen. DieAussparungen der Isolierabdeckung müssen sich in die entspre-chenden Stege der Containerwand einfügen. Isolierabdeckungdurch vorsichtiges Verbiegen der Containerwände auf das SIA-Mo-dul auflegen.
8. Rasten Sie die Grundelektronik in den vier Halterungen ein undschrauben Sie die Grundelektronik mit den beiden Befestigungs-schrauben (2.1) wieder an.
9. Stellen Sie alle elektrische Verbindungen zwischen Grundelektro-nik und Optionen mit den beiliegenden Bandkabeln und zwischenGrundelektronik und Potentiometer mit dem Potentiometerkabelher.
10. Befestigen Sie die mitgelieferte Baugruppenabdeckung anstatt derStandardversion mit den beiden Schrauben.
11. Wählen Sie vom beiliegenden Schildersatz die Schilder aus, dieauch schon auf der Standardversion der Baugruppenabdeckungvorhanden sind. Kleben Sie die ausgewählten Schilder entspre-chend der Standardversion auf die montierte Baugruppenabdek-kung.
12. Stellen Sie alle elektrischen Verbindungen her.
Einstellen der beiden Grenzwerte:
. HINWEIS
Schließen Sie ein geeignetes Anzeigegerät wie z.B. den Initiator-Te-ster Typ 2/Ex von Peperl+Fuchs an die Klemmen 41 und 42 bzw. andie Klemmen 51 und 52 des SIA-Moduls an, um den Schaltzustandder Schlitzinitiatoren sehen zu können.
13. Fahren Sie den Antrieb auf die erste gewünschte mechanischePosition.
14. Verstellen Sie die obere Stellscheibe (7.2) so lange von Hand bisdas Ausgangssignal an Klemmen 41 und 42 wechselt.
15. Fahren Sie den Antrieb auf die zweite gewünschte mechanischePosition.

Aufbau und Arbeitsweise
33SIPART PS2 PA GerätehandbuchA5E00127924--04
16. Verstellen Sie die untere Stellscheibe (7.3) so lange von Hand bisdas Ausgangssignal an Klemmen 51 und 52 wechselt.
. HINWEIS
Wenn Sie die Stellscheibe über den Schaltpunkt hinaus bis zum näch-sten Schaltpunkt weiterdrehen, können Sie einen High-Low- oder ei-nen Low-High-Wechsel einstellen.Damit sich die Stellscheiben während des Betriebs nicht unbeabsich-tigt verstellen können, sind sie relativ schwergängig ausgelegt. WennSie Probleme bei der Verstellung haben hilft folgende Maßnahme: An-trieb mehrmals auf-- und zufahren, dabei die Stellscheiben festhalten.Dadurch wird die Reibung vorrübergehend verringert. Dann ist einleichteres und feinfühligeres Einstellen möglich.
Aufbau und Arbeitsweise
34SIPART PS2 PA Gerätehandbuch
A5E00127924--04
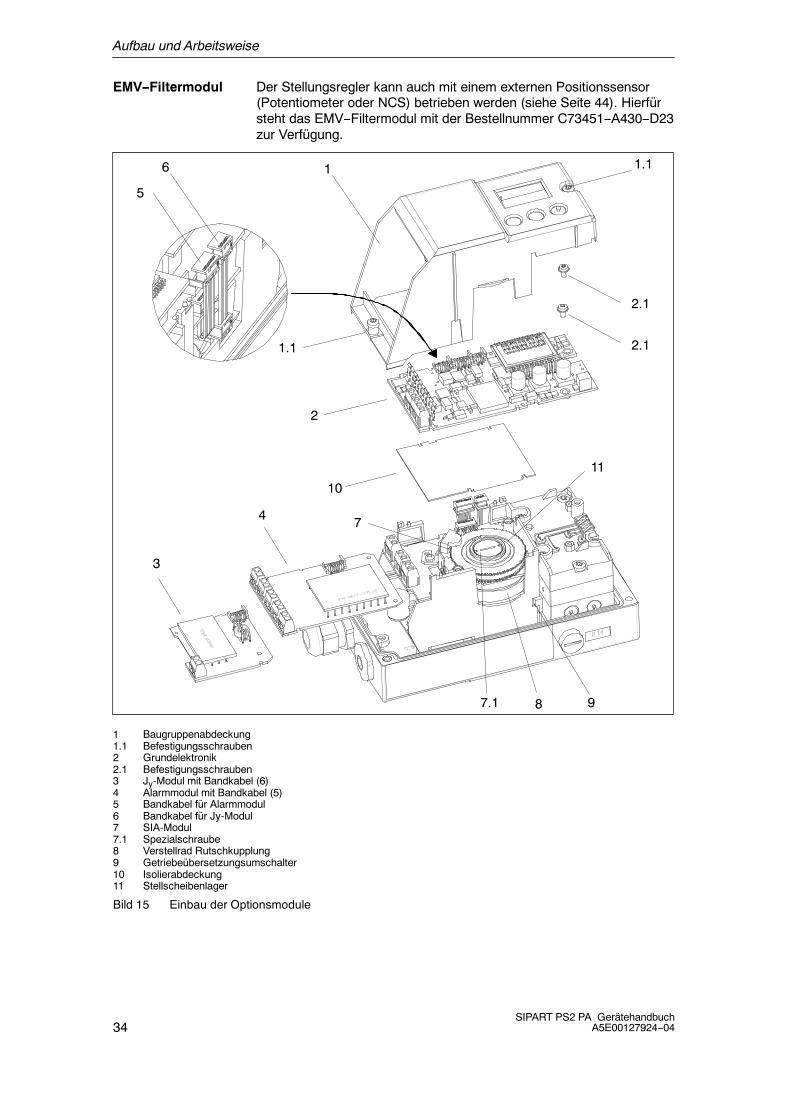
Der Stellungsregler kann auch mit einem externen Positionssensor(Potentiometer oder NCS) betrieben werden (siehe Seite 44). Hierfürsteht das EMV--Filtermodul mit der Bestellnummer C73451--A430--D23zur Verfügung.
5
6 1
1.1
10
2.1
7.1 8 9
3
4
2
1.1
7
2.1
11
1 Baugruppenabdeckung1.1 Befestigungsschrauben2 Grundelektronik2.1 Befestigungsschrauben3 Jy-Modul mit Bandkabel (6)4 Alarmmodul mit Bandkabel (5)5 Bandkabel für Alarmmodul6 Bandkabel für Jy-Modul7 SIA-Modul7.1 Spezialschraube8 Verstellrad Rutschkupplung9 Getriebeübersetzungsumschalter10 Isolierabdeckung11 Stellscheibenlager
Bild 15 Einbau der Optionsmodule
EMV--Filtermodul
Aufbau und Arbeitsweise
35SIPART PS2 PA GerätehandbuchA5E00127924--04
2.5.2 Optionsmodule bei druckfester Ausführung
Für den Stellungsregler in druckfester Ausführung gibt es folgende Op-tionsmodule:
-- Jy-Modul
-- Alarmmodul
Die Optionsmodule werden durch eine Baugruppenabdeckung ((1),siehe Bild 16, Seite 36) geschützt und mechanisch fixiert.
. HINWEIS
Für den Einbau der Optionsmodule muss das Gehäuse geöffnetwerden. Solange der Stellungsregler geöffnet ist, ist die SchutzartIP65/NEMA4x nicht gewährleistet.
!WARNUNG
Der Stellungsregler in druckfester Ausführung darf in Bereichen, indenen die Atmosphäre explosionsfähig werden kann, nur bei geschlos-senem Gehäuse mit elektrischer Hilfsenergie versorgt werden.
Die Durchführungsöffnungen für die elektronischen Anschlüsse müs-sen mit EEx-d-zertifizierten Kabeleinführungen oder mit EEx-d-zertifi-zierten Verschlussstopfen verschlossen sein, oder es muss bei Ver-wendung des “Conduit-Rohrsystems” eine Zündsperre im maximalenAbstand von 46 cm (18 Inch) vom Gehäuse angeordnet sein.
Öffnen Sie das Gehäuse des Stellungsreglers wie folgt:
Zuerst die Stromversorgungsleitungen abklemmen bzw. freischalten.
Zum Öffnen des Stellungsreglers muss die Deckelsicherung (12) geöff-net und der Schraubdeckel abgeschraubt werden.
Nach dem Lösen der vier Befestigungsschrauben (13.1) kann der kom-plette Träger (13) herausgenommen werden. Ggf. muss der Stellan-trieb soweit gedreht werden, dass sich die Kupplung leicht trennenlässt.
Baugruppenabdeckung (1) entfernen. Dazu müssen die beiden Schrau-ben (1.1) mit einem Schraubendreher entfernt werden.
. HINWEIS
Um ein vorzeitiges Verschleißen der Befestigung durch die eine selbst-schneidende Schraube (1.1) neben der Anzeige zu verhindern, hatsich folgende Vorgehensweise bei der Montage der Baugruppenab-deckung (1) bewährt:
1. die Schrauben entgegengesetzt dem Uhrzeigersinn solangedrehen, bis sie im Gewindegang spürbar einrasten
2. beide Schrauben im Uhrzeigersinn gefühlvoll festdrehen
Aufbau und Arbeitsweise
36SIPART PS2 PA Gerätehandbuch
A5E00127924--04
10
1.1
11
3
4
2
1
1.1
7
13.1
5 6
13
12
8
13.1
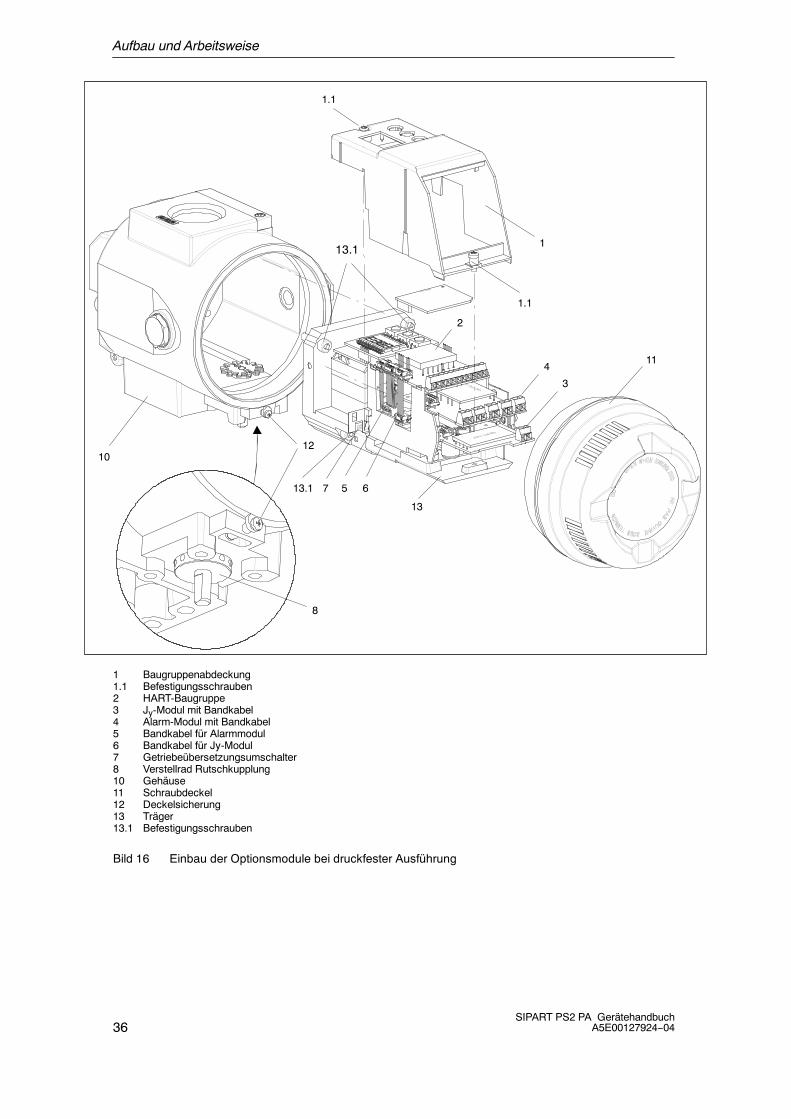
1 Baugruppenabdeckung1.1 Befestigungsschrauben2 HART-Baugruppe3 Jy-Modul mit Bandkabel4 Alarm-Modul mit Bandkabel5 Bandkabel für Alarmmodul6 Bandkabel für Jy-Modul7 Getriebeübersetzungsumschalter8 Verstellrad Rutschkupplung10 Gehäuse11 Schraubdeckel12 Deckelsicherung13 Träger13.1 Befestigungsschrauben
Bild 16 Einbau der Optionsmodule bei druckfester Ausführung
Aufbau und Arbeitsweise
37SIPART PS2 PA GerätehandbuchA5E00127924--04
2.5.3 Alarmmodul
Das Alarmmodul enthält
S 3 Binärausgänge und
S 1 Binäreingang
Die Binärausgänge dienen zur Ausgabe von Störungsmeldungen undAlarmen. Die Konfiguration wird in Kapitel 4.4, Seite 88, mit den Para-metern 44 bis 54 beschrieben.
Durch ein am Binäreingang (BE2) anliegendes externes Signal kann jenach Konfiguration der Stellantrieb z. B. blockiert oder in seine Endla-gen gefahren werden. Die Konfiguration wird in Kapitel 4.4, Seite 88,mit Parameter 43 beschrieben.
Das Alarmmodul ist in zwei Varianten verfügbar:
S explosionsgeschützt zum Anschluss an Schaltverstärker nachDIN 19234
S nicht explosionsgeschützt zum Anschluss an Spannungsquellen mitmaximal 35 V
Die Halbleiterausgänge des Alarmmoduls melden einen Alarm (Signal-zustand Low) indem sie hochohmig abschalten. Im Signalzustand High(ohne Alarm) sind sie leitend. Durch die dynamische Ansteuerung sindsie fehlerselbstmeldend.
Die Ausgänge sind von der Grundschaltung und untereinander poten-tialgetrennt.
Der Binäreingang ist zweifach ausgeführt:
S einmal potentialgetrennt für Spannungspegel
S einmal nicht potentialgetrennt für potentialfreie Kontakte
Diese beiden Eingänge sind als logische ODER-Verknüpfung ausge-führt.
Das Alarmmodul wird unterhalb der Grundplatine in den Baugruppen-träger bis zum Anschlag eingeschoben und über das mitgelieferte 8-po-lige Flachbandkabel (5) an der Grundplatine angeschlossen (siehe Bild15, Seite 34).
2.5.4 Jy-Modul
Mit dem Jy-Optionsmodul kann -- potentialgetrennt vom Grundgerät --die aktuelle Antriebsstellung als Zweileitersignal Jy = 4 bis 20 mA aus-gegeben werden. Durch die dynamische Ansteuerung des Jy-Modulsist auch dieses fehlerselbstmeldend.
Funktion
Einbau
Funktion
Aufbau und Arbeitsweise
38SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Das Jy-Modul wird in den unteren Schacht des Baugruppenträgers biszum Anschlag eingeschoben und über das mitgelieferte 6-polige Flach-bandkabel (6) an der Grundplatine angeschlossen (siehe Bild 15, Seite34).
2.5.5 SIA-Modul
Das SIA-Modul enthält:
S einen Binärausgang zur Ausgabe einer Sammelstörungsmeldung(siehe Alarmmodul)
Der potentialfreie Binärausgang ist als selbstfehlermeldender Halb-leiterausgang realisiert.
S zwei Binärausgänge zur Meldung von zwei mechanisch einstellba-ren Grenzwerten (L1, L2) durch Schlitzinitiatoren.
Diese beiden Ausgänge sind elektrisch unabhängig von der restli-chen Elektronik.
2.5.6 Zubehör
Y1
PZ
PZ
Y1
Y2
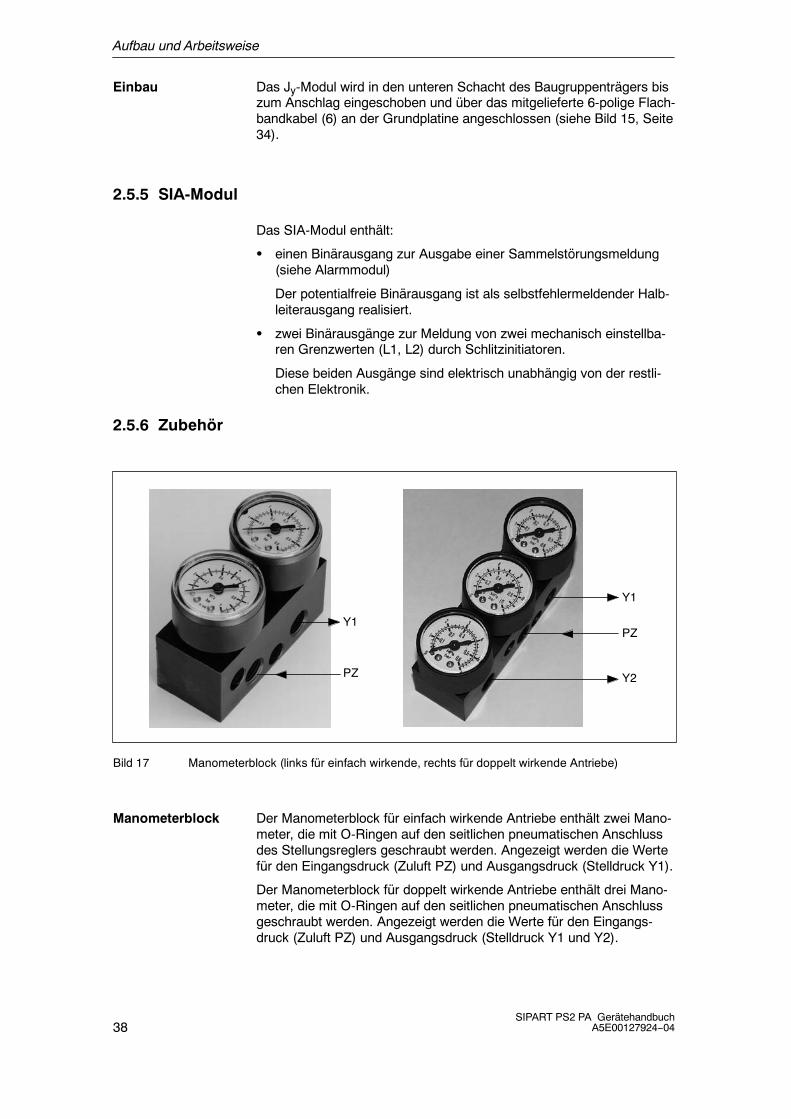
Bild 17 Manometerblock (links für einfach wirkende, rechts für doppelt wirkende Antriebe)
Der Manometerblock für einfach wirkende Antriebe enthält zwei Mano-meter, die mit O-Ringen auf den seitlichen pneumatischen Anschlussdes Stellungsreglers geschraubt werden. Angezeigt werden die Wertefür den Eingangsdruck (Zuluft PZ) und Ausgangsdruck (Stelldruck Y1).
Der Manometerblock für doppelt wirkende Antriebe enthält drei Mano-meter, die mit O-Ringen auf den seitlichen pneumatischen Anschlussgeschraubt werden. Angezeigt werden die Werte für den Eingangs-druck (Zuluft PZ) und Ausgangsdruck (Stelldruck Y1 und Y2).
Einbau
Manometerblock
Betriebsvorbereitung
39SIPART PS2 PA GerätehandbuchA5E00127924--04
Betriebsvorbereitung
Dieses Kapitel beschreibt alle Vorbereitungen, die für den Betrieb desStellungsreglers notwendig sind.
3.1 Geräteidentifizierung (Typenschlüssel)
Die Bestellnummer des Stellungsreglers befindet sich auf dem Typen-schild und auf der Verpackung. Vergleichen Sie diese mit der Bestell-nummer im Kapitel 8.1, Seite 150.
Der Einbau evtl. benötigter Module ist im Kapitel 2.5, Seite 30 diesesGerätehandbuches beschrieben.
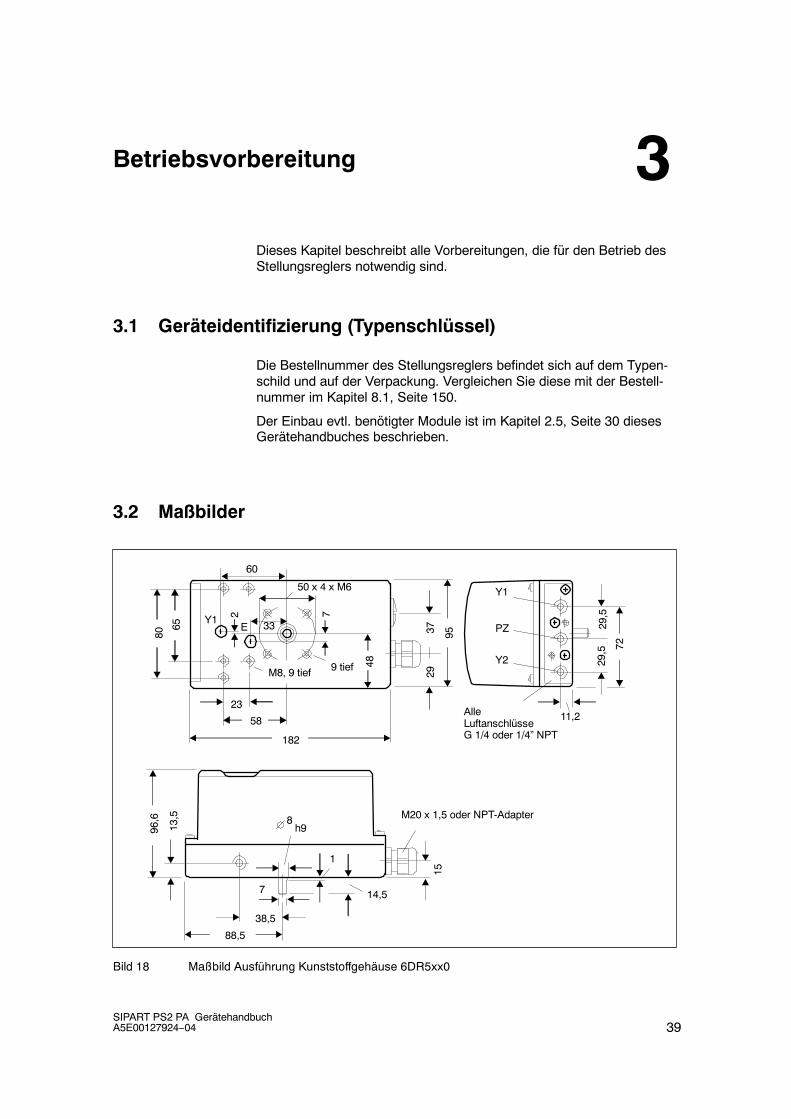
3.2 Maßbilder
11,223
50 x 4 x M6
AlleLuftanschlüsseG 1/4 oder 1/4” NPT
9 tiefM8, 9 tief
182
58
72
29,5
29,5
3729
95
65
80
M20 x 1,5 oder NPT-Adapter
88,5
8
15
96,6
13,5
h9
1
14,57
38,5
Y1E
60
33
Y1
PZ
Y2
2 7
48
Bild 18 Maßbild Ausführung Kunststoffgehäuse 6DR5xx0
3
Betriebsvorbereitung
40SIPART PS2 PA Gerätehandbuch
A5E00127924--04
90
79,5
20,5
3xG1/4 oder1/4” NPT
9,59
50
14
12
25
29,558,75
82
Gewindetiefe 5,5M4
5 510
2xM6
5,39,5
3,5
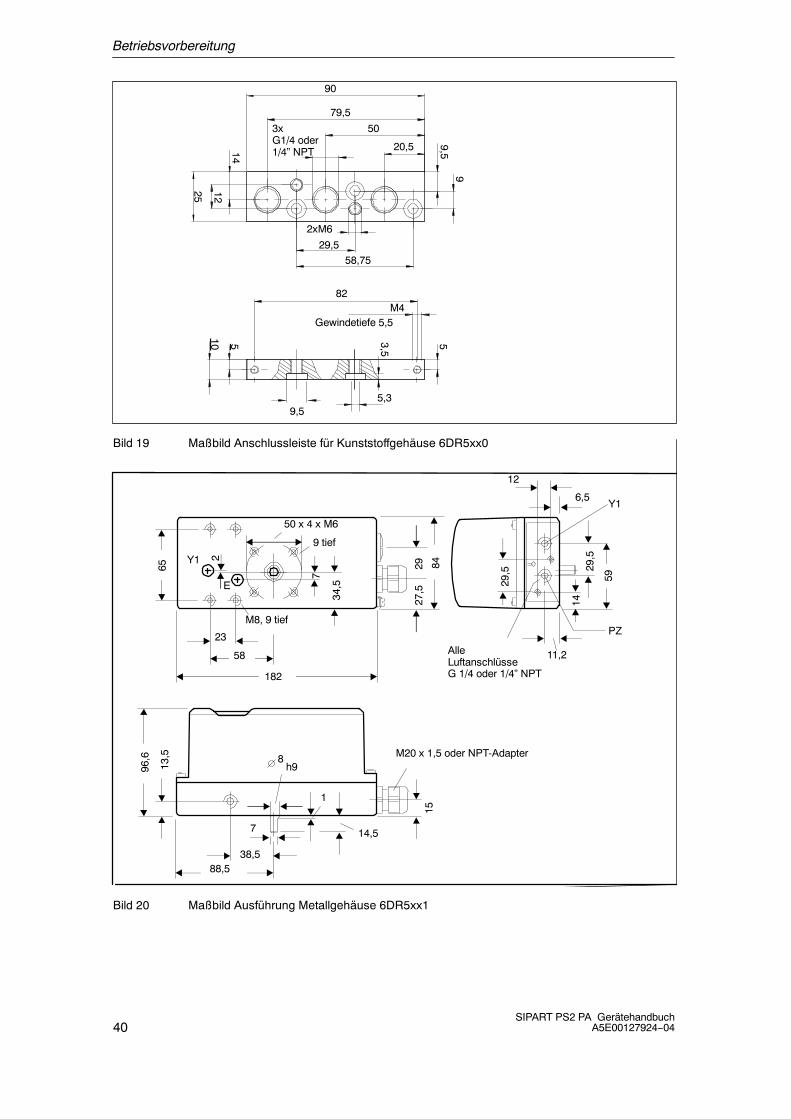
Bild 19 Maßbild Anschlussleiste für Kunststoffgehäuse 6DR5xx0
11,2
23
58
50 x 4 x M6
M8, 9 tief
88,5
8
AlleLuftanschlüsseG 1/4 oder 1/4” NPT
9 tief
182
34,5
27,5
84
59
29,5
2915
96,6
13,5
65
h9
1
14,57
38,5
Y1
E
6,5
12
29,5
14
7
2
Y1
PZ
M20 x 1,5 oder NPT-Adapter
Bild 20 Maßbild Ausführung Metallgehäuse 6DR5xx1
Betriebsvorbereitung
41SIPART PS2 PA GerätehandbuchA5E00127924--04
M8, 14 tief (4x)23
129,5
∅ 8 h9
3,5
235,3
60
M6, 11 tief (4x)
alle LuftanschlüsseG1/
4 oder 1/4”NPT
7,5 25,7 14,3
1)M6, 8 tief (2x)M20, M25 oder
1/2”NPT (2x)
87,2
65
43
7,75
50∅
∅136,5
34
254,5
10,25
19,25
33,5
33,5
7
12
E
82,5
158,5
1) Anschluss 238/Y2 nur beidoppeltwirkender Variante
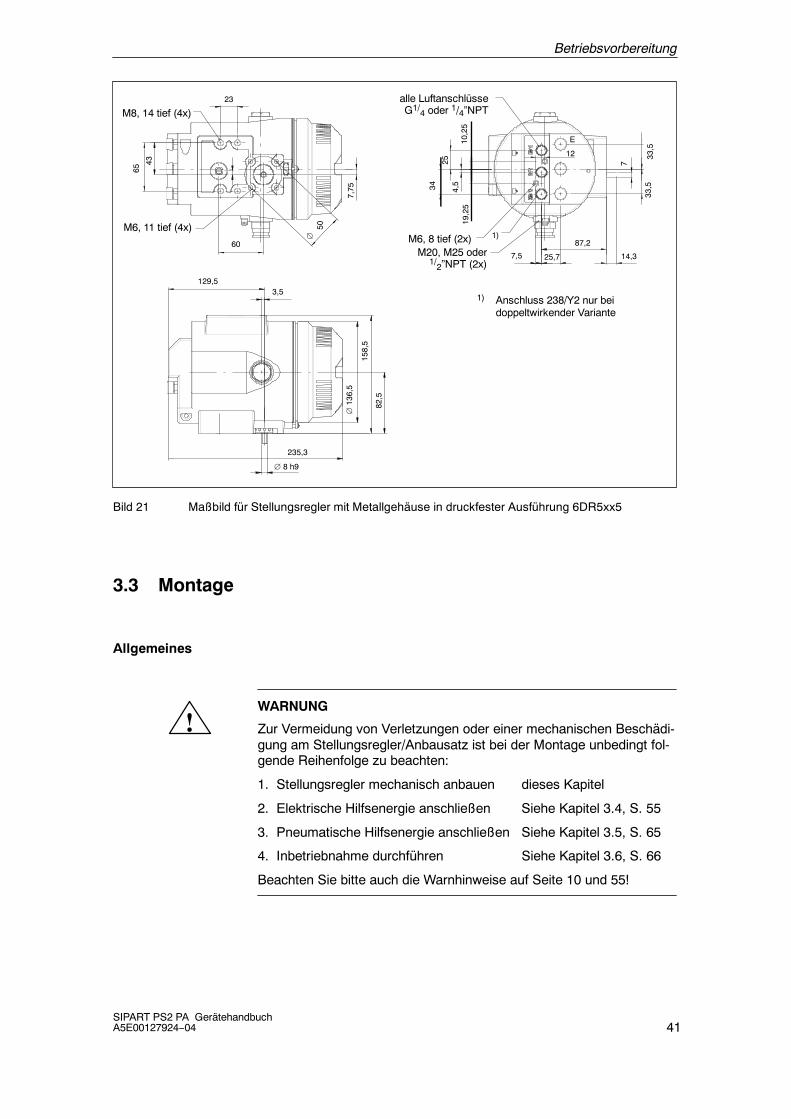
Bild 21 Maßbild für Stellungsregler mit Metallgehäuse in druckfester Ausführung 6DR5xx5
3.3 Montage
!WARNUNG
Zur Vermeidung von Verletzungen oder einer mechanischen Beschädi-gung am Stellungsregler/Anbausatz ist bei der Montage unbedingt fol-gende Reihenfolge zu beachten:
1. Stellungsregler mechanisch anbauen dieses Kapitel
2. Elektrische Hilfsenergie anschließen Siehe Kapitel 3.4, S. 55
3. Pneumatische Hilfsenergie anschließen Siehe Kapitel 3.5, S. 65
4. Inbetriebnahme durchführen Siehe Kapitel 3.6, S. 66
Beachten Sie bitte auch die Warnhinweise auf Seite 10 und 55!
Allgemeines
Betriebsvorbereitung
42SIPART PS2 PA Gerätehandbuch
A5E00127924--04
. HINWEIS
Der Stellungsregler wird auf Kundenwunsch mit den benötigten Op-tionsmodulen werksseitig bestückt und komplett geliefert. Ein Nach-rüsten der Optionsmodule sollte nur vom Kundendienst ausgeführtwerden.
Der Stellungsregler muss -- insbesondere in feuchter Umgebung -- somontiert werden, dass ein Einfrieren der Stellungsreglerachse bei nie-driger Umgebungstemperatur ausgeschlossen ist.
Die Bedientasten müssen mit der Abdeckkappe abgedeckt sein, umein Eindringen von Flüssigkeit zu verhindern.
!WARNUNG
Bei der Zusammenstellung der Komponenten muss sichergestellt sein,dass nur Stellungsregler und Optionsmodule miteinander kombiniertwerden, die für den jeweiligen Einsatzbereich zugelassen sind. Diesgilt insbesondere für den sicheren Betrieb des Stellungsreglers in Be-reichen, in denen die Atmosphäre explosionsfähig werden kann (Zone1 und 2). Hierbei sind unbedingt die Gerätekategorien (2 und 3) desGerätes selbst sowie die seiner Optionen zu beachten.
Zusätzlich müssen Sie immer dafür sorgen, dass in ein offenes Ge-häuse oder eine offene Verschraubung kein Wasser eindringt. Dieskann z. B. der Fall sein, wenn der Stellungsregler vor Ort nicht sofortendgültig montiert und angeschlossen werden kann.
Generell gilt, dass der Stellungsregler nur mit trockener Druckluft be-trieben werden darf. Benutzen Sie deshalb die üblichen Wasserab-scheider. In extremen Fällen ist sogar ein zusätzliches Trocknungsge-rät notwendig. Dies ist besonders wichtig, wenn Sie den Stellungsreglerbei tiefen Umgebungstemperaturen betreiben. Stellen Sie bitte zusätz-lich den Spülluftumschalter (am Ventilblock, oberhalb der pneumati-schen Anschlüsse) in die Stellung “OUT”.
Benutzen Sie bei Schwenkantrieben eine ausreichend stabile Konsole(z.B. Blechdicke > 4 mm mit Versteifungen) und bei Schubantriebenden Anbausatz “Schubantrieb” oder den integrierten Anbau.
3.3.1 Hinweise für den Einsatz von Stellungsreglern in nasser Umge-bung
Diese Information gibt Ihnen wichtige Hinweise für die Montage undden Betrieb des Stellungsreglers in nasser Umgebung (häufiger undstarker Regen oder/und lang anhaltende tropische Betauung), bei derdie Schutzart IP 65 nicht mehr ausreichend ist und insbesondere wenndie Gefahr besteht, dass das Wasser einfrieren kann.
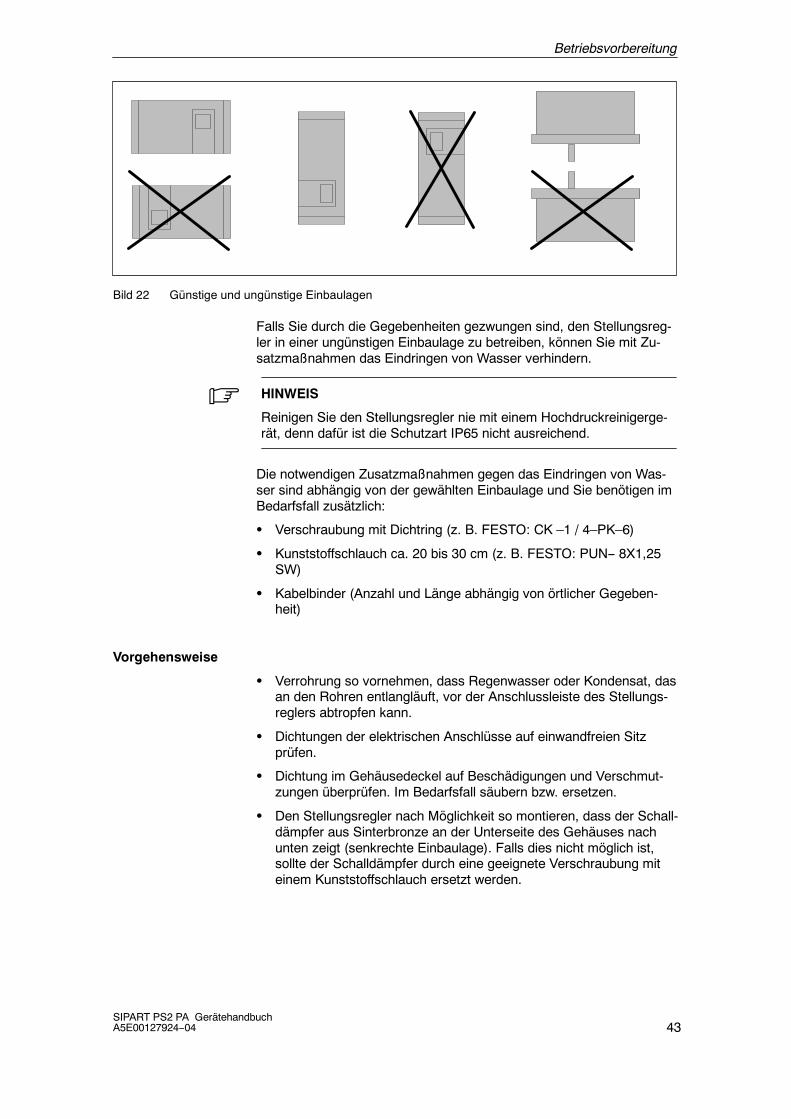
Um zu verhindern, dass im normalen Betrieb Wasser in das Gerät (z.B.durch die Abluftöffnungen) laufen kann oder das Display schlecht ab-lesbar ist, vermeiden Sie bitte die in Bild 22 dargestellten ungünstigenEinbaulagen.
Betriebsvorbereitung
43SIPART PS2 PA GerätehandbuchA5E00127924--04
Bild 22 Günstige und ungünstige Einbaulagen
Falls Sie durch die Gegebenheiten gezwungen sind, den Stellungsreg-ler in einer ungünstigen Einbaulage zu betreiben, können Sie mit Zu-satzmaßnahmen das Eindringen von Wasser verhindern.
. HINWEIS
Reinigen Sie den Stellungsregler nie mit einem Hochdruckreinigerge-rät, denn dafür ist die Schutzart IP65 nicht ausreichend.
Die notwendigen Zusatzmaßnahmen gegen das Eindringen von Was-ser sind abhängig von der gewählten Einbaulage und Sie benötigen imBedarfsfall zusätzlich:
S Verschraubung mit Dichtring (z. B. FESTO: CK –1 / 4–PK–6)
S Kunststoffschlauch ca. 20 bis 30 cm (z. B. FESTO: PUN-- 8X1,25SW)
S Kabelbinder (Anzahl und Länge abhängig von örtlicher Gegeben-heit)
Vorgehensweise
S Verrohrung so vornehmen, dass Regenwasser oder Kondensat, dasan den Rohren entlangläuft, vor der Anschlussleiste des Stellungs-reglers abtropfen kann.
S Dichtungen der elektrischen Anschlüsse auf einwandfreien Sitzprüfen.
S Dichtung im Gehäusedeckel auf Beschädigungen und Verschmut-zungen überprüfen. Im Bedarfsfall säubern bzw. ersetzen.
S Den Stellungsregler nach Möglichkeit so montieren, dass der Schall-dämpfer aus Sinterbronze an der Unterseite des Gehäuses nachunten zeigt (senkrechte Einbaulage). Falls dies nicht möglich ist,sollte der Schalldämpfer durch eine geeignete Verschraubung miteinem Kunststoffschlauch ersetzt werden.
Betriebsvorbereitung
44SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Montage der Verschraubung mit Kunststoffschlauch
S Schrauben Sie den Schalldämpfer aus Sinterbronze aus der Abluft-öffnung an der Unterseite des Gehäuses heraus.
S Schrauben Sie in die Abluftöffnung die o. g. Verschraubung ein.
S Montieren Sie den o. g. Kunststoffschlauch an die Verschraubungund überprüfen Sie den festen Sitz.
S Befestigen Sie den Kunststoffschlauch mit einem Kabelbinder ander Armatur so, dass die Öffnung nach unten zeigt.
S Stellen Sie sicher, dass der Schlauch keinen Knick aufweist und dieAbluft ungehindert ausströmen kann.
3.3.2 Hinweise für den Einsatz von Stellungsreglern, die starken Be-schleunigungen oder Vibrationen ausgesetzt sind
An mechanisch stark beanspruchten Armaturen, wie z. B. losbrechen-den Klappen, heftig rüttelnden oder vibrierenden Ventilen sowie bei“Dampfschlägen” treten starke Beschleunigungskräfte auf, die weitüber den spezifizierten Daten liegen können. Hierbei kann es in Ex-tremfällen zum Verstellen der Rutschkupplung kommen.
Für diese Fälle ist der Stellungsregler mit einer Feststelleinrichtung fürdie Rutschkupplung ausgestattet. Zusätzlich kann die Einstellung desGetriebeübersetzungsumschalters arretiert werden. Dadurch wird eineVerstellung aufgrund der o.g. Einflüsse verhindert.
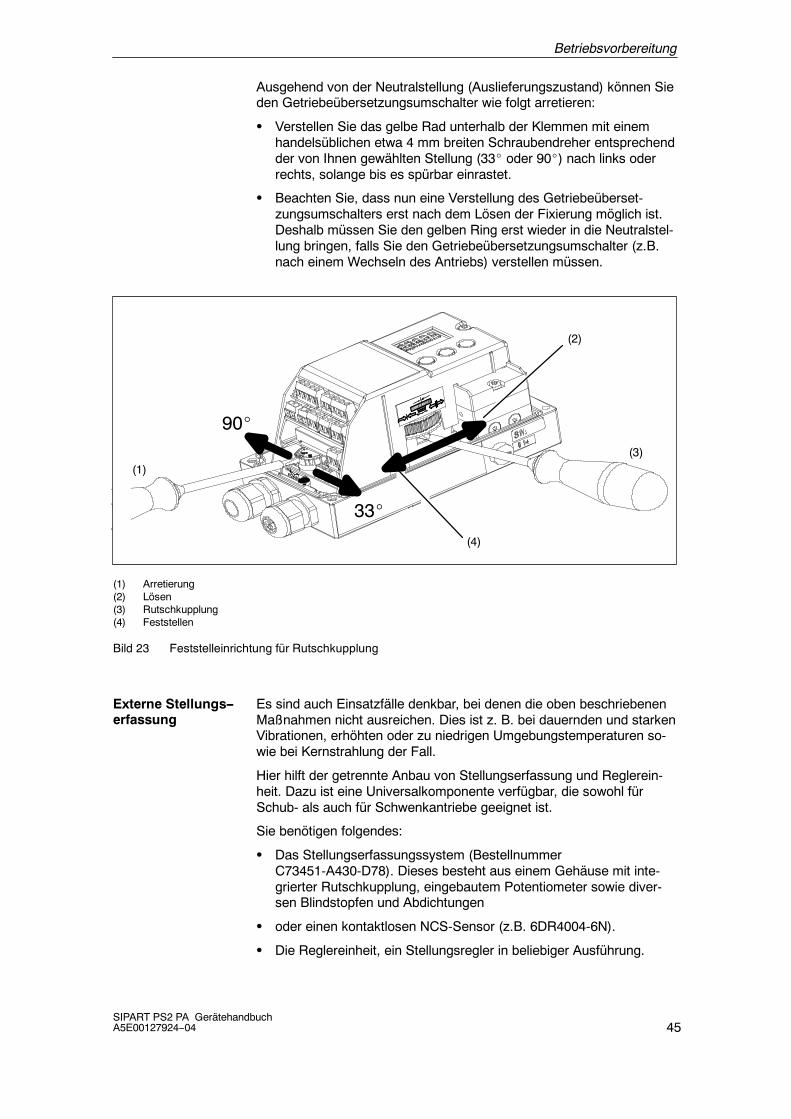
Diese beiden Einstellmöglichkeiten sind auf Zusatzschildern durchSymbole gekennzeichnet (siehe Bild 23, Seite 45).
Vorgehensweise
Nachdem Sie den Stellungsregler montiert und vollständig in Betriebgenommen haben, können Sie das Drehmoment der Rutschkupplungwie folgt einstellen:
S Stecken Sie an der Baugruppenabdeckung einen handelsüblichenetwa 4 mm breiten Schraubendreher in einen Schlitz des gelbesRades.
S Verstellen Sie nun das gelbe Rad mit dem Schraubendreher nachlinks, solange bis es spürbar einrastet. Dadurch verstärkt sich dasDrehmoment der Rutschkupplung.
S Eine fixierte Rutschkupplung erkennen Sie an einem etwa 1 mmbreiten Spalt zwischen dem gelben und schwarzen Rad.
S Falls Sie eine Nullpunkteinstellung z.B. nach einem Wechseln desAntriebs vornehmen müssen, reduzieren Sie bitte vorher das Dreh-moment durch eine Rechtsdrehung bis zum Anschlag des gelbenRades. Nach der Nullpunkteinstellung können Sie die Rutschkupp-lung wie oben beschrieben wieder fixieren.
Betriebsvorbereitung
45SIPART PS2 PA GerätehandbuchA5E00127924--04
Ausgehend von der Neutralstellung (Auslieferungszustand) können Sieden Getriebeübersetzungsumschalter wie folgt arretieren:
S Verstellen Sie das gelbe Rad unterhalb der Klemmen mit einemhandelsüblichen etwa 4 mm breiten Schraubendreher entsprechendder von Ihnen gewählten Stellung (33_ oder 90_) nach links oderrechts, solange bis es spürbar einrastet.
S Beachten Sie, dass nun eine Verstellung des Getriebeüberset-zungsumschalters erst nach dem Lösen der Fixierung möglich ist.Deshalb müssen Sie den gelben Ring erst wieder in die Neutralstel-lung bringen, falls Sie den Getriebeübersetzungsumschalter (z.B.nach einem Wechseln des Antriebs) verstellen müssen.
33
90(1)(3)
(2)
(4)
33_
90_
(1) Arretierung(2) Lösen(3) Rutschkupplung(4) Feststellen
Bild 23 Feststelleinrichtung für Rutschkupplung
Es sind auch Einsatzfälle denkbar, bei denen die oben beschriebenenMaßnahmen nicht ausreichen. Dies ist z. B. bei dauernden und starkenVibrationen, erhöhten oder zu niedrigen Umgebungstemperaturen so-wie bei Kernstrahlung der Fall.
Hier hilft der getrennte Anbau von Stellungserfassung und Reglerein-heit. Dazu ist eine Universalkomponente verfügbar, die sowohl fürSchub- als auch für Schwenkantriebe geeignet ist.
Sie benötigen folgendes:
S Das Stellungserfassungssystem (BestellnummerC73451-A430-D78). Dieses besteht aus einem Gehäuse mit inte-grierter Rutschkupplung, eingebautem Potentiometer sowie diver-sen Blindstopfen und Abdichtungen
S oder einen kontaktlosen NCS-Sensor (z.B. 6DR4004-6N).
S Die Reglereinheit, ein Stellungsregler in beliebiger Ausführung.
Externe Stellungs--erfassung
Betriebsvorbereitung
46SIPART PS2 PA Gerätehandbuch
A5E00127924--04
S Das EMV-Filtermodul, sie befindet sich in einem Set zusammen mitKabelschellen sowie M-20-Kabelverschraubung und hat die Bestell-nummer C73451-A430-D23. Das EMV-Filtermodul muss in denStellungsregler eingebaut werden. Das mit dem EMV-Filtermodulmitgelieferte Installationsanleitung erläutert Ihnen den Zusammen-bau der Komponenten.
S Ein 3-poliges Kabel zum Verbinden der Komponenten.
Dieses EMV--Filtermodul ist für die Reglereinheit auch immer dann zuverwenden, wenn anstatt des externen StellungserfassungssystemsC73451-A430-D78 ein beliebiges, am Antrieb montiertes Potentiometer(Widerstandswert 10 kOhm) oder ein NCS-Sensor eingesetzt werdensoll.
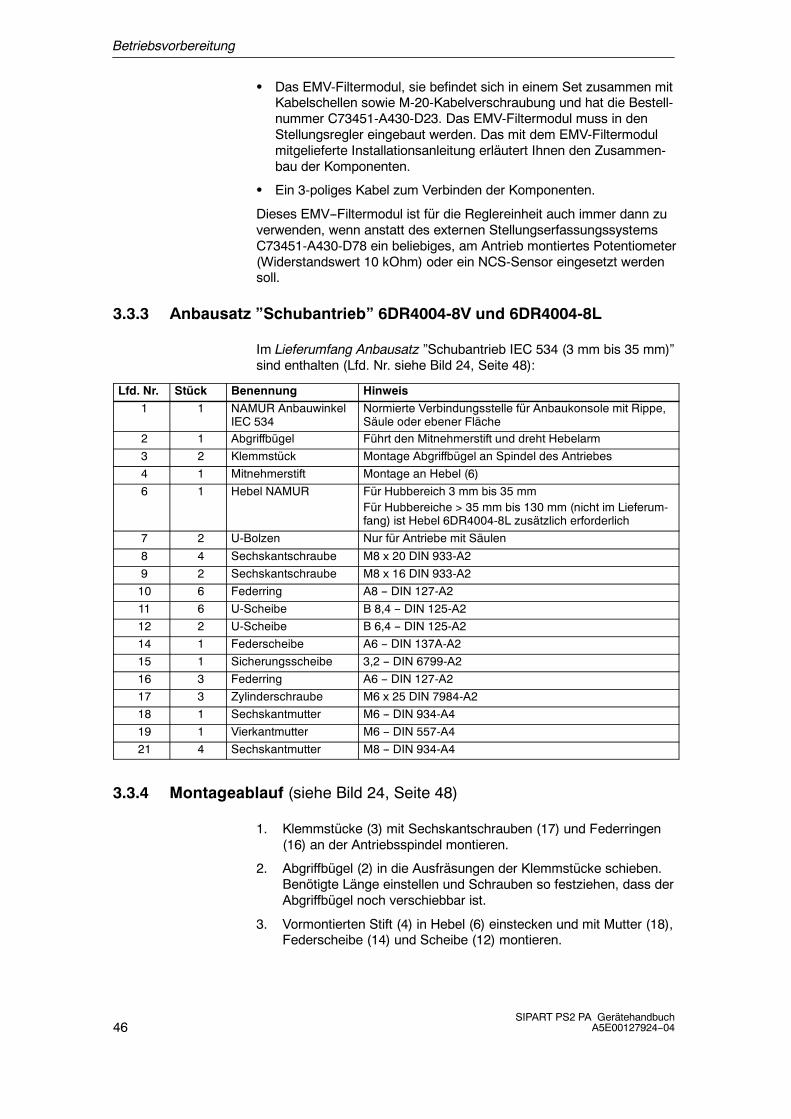
3.3.3 Anbausatz ”Schubantrieb” 6DR4004-8V und 6DR4004-8L
Im Lieferumfang Anbausatz ”Schubantrieb IEC 534 (3 mm bis 35 mm)”sind enthalten (Lfd. Nr. siehe Bild 24, Seite 48):
Lfd. Nr. Stück Benennung Hinweis1 1 NAMUR Anbauwinkel
IEC 534Normierte Verbindungsstelle für Anbaukonsole mit Rippe,Säule oder ebener Fläche
2 1 Abgriffbügel Führt den Mitnehmerstift und dreht Hebelarm3 2 Klemmstück Montage Abgriffbügel an Spindel des Antriebes4 1 Mitnehmerstift Montage an Hebel (6)6 1 Hebel NAMUR Für Hubbereich 3 mm bis 35 mm
Für Hubbereiche > 35 mm bis 130 mm (nicht im Lieferum-fang) ist Hebel 6DR4004-8L zusätzlich erforderlich
7 2 U-Bolzen Nur für Antriebe mit Säulen
8 4 Sechskantschraube M8 x 20 DIN 933-A29 2 Sechskantschraube M8 x 16 DIN 933-A210 6 Federring A8 -- DIN 127-A211 6 U-Scheibe B 8,4 -- DIN 125-A212 2 U-Scheibe B 6,4 -- DIN 125-A214 1 Federscheibe A6 -- DIN 137A-A215 1 Sicherungsscheibe 3,2 -- DIN 6799-A216 3 Federring A6 -- DIN 127-A217 3 Zylinderschraube M6 x 25 DIN 7984-A218 1 Sechskantmutter M6 -- DIN 934-A419 1 Vierkantmutter M6 -- DIN 557-A421 4 Sechskantmutter M8 -- DIN 934-A4
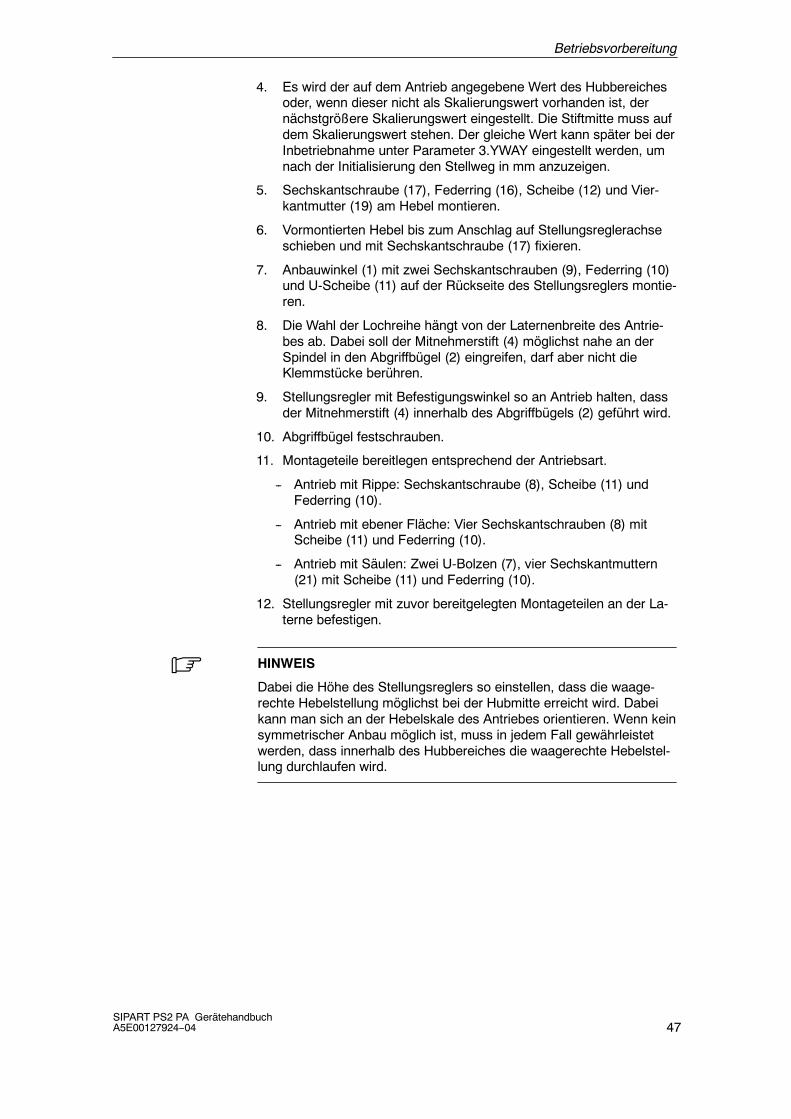
3.3.4 Montageablauf (siehe Bild 24, Seite 48)
1. Klemmstücke (3) mit Sechskantschrauben (17) und Federringen(16) an der Antriebsspindel montieren.
2. Abgriffbügel (2) in die Ausfräsungen der Klemmstücke schieben.Benötigte Länge einstellen und Schrauben so festziehen, dass derAbgriffbügel noch verschiebbar ist.
3. Vormontierten Stift (4) in Hebel (6) einstecken und mit Mutter (18),Federscheibe (14) und Scheibe (12) montieren.
Betriebsvorbereitung
47SIPART PS2 PA GerätehandbuchA5E00127924--04
4. Es wird der auf dem Antrieb angegebene Wert des Hubbereichesoder, wenn dieser nicht als Skalierungswert vorhanden ist, dernächstgrößere Skalierungswert eingestellt. Die Stiftmitte muss aufdem Skalierungswert stehen. Der gleiche Wert kann später bei derInbetriebnahme unter Parameter 3.YWAY eingestellt werden, umnach der Initialisierung den Stellweg in mm anzuzeigen.
5. Sechskantschraube (17), Federring (16), Scheibe (12) und Vier-kantmutter (19) am Hebel montieren.
6. Vormontierten Hebel bis zum Anschlag auf Stellungsreglerachseschieben und mit Sechskantschraube (17) fixieren.
7. Anbauwinkel (1) mit zwei Sechskantschrauben (9), Federring (10)und U-Scheibe (11) auf der Rückseite des Stellungsreglers montie-ren.
8. Die Wahl der Lochreihe hängt von der Laternenbreite des Antrie-bes ab. Dabei soll der Mitnehmerstift (4) möglichst nahe an derSpindel in den Abgriffbügel (2) eingreifen, darf aber nicht dieKlemmstücke berühren.
9. Stellungsregler mit Befestigungswinkel so an Antrieb halten, dassder Mitnehmerstift (4) innerhalb des Abgriffbügels (2) geführt wird.
10. Abgriffbügel festschrauben.
11. Montageteile bereitlegen entsprechend der Antriebsart.
-- Antrieb mit Rippe: Sechskantschraube (8), Scheibe (11) undFederring (10).
-- Antrieb mit ebener Fläche: Vier Sechskantschrauben (8) mitScheibe (11) und Federring (10).
-- Antrieb mit Säulen: Zwei U-Bolzen (7), vier Sechskantmuttern(21) mit Scheibe (11) und Federring (10).
12. Stellungsregler mit zuvor bereitgelegten Montageteilen an der La-terne befestigen.
. HINWEIS
Dabei die Höhe des Stellungsreglers so einstellen, dass die waage-rechte Hebelstellung möglichst bei der Hubmitte erreicht wird. Dabeikann man sich an der Hebelskale des Antriebes orientieren. Wenn keinsymmetrischer Anbau möglich ist, muss in jedem Fall gewährleistetwerden, dass innerhalb des Hubbereiches die waagerechte Hebelstel-lung durchlaufen wird.
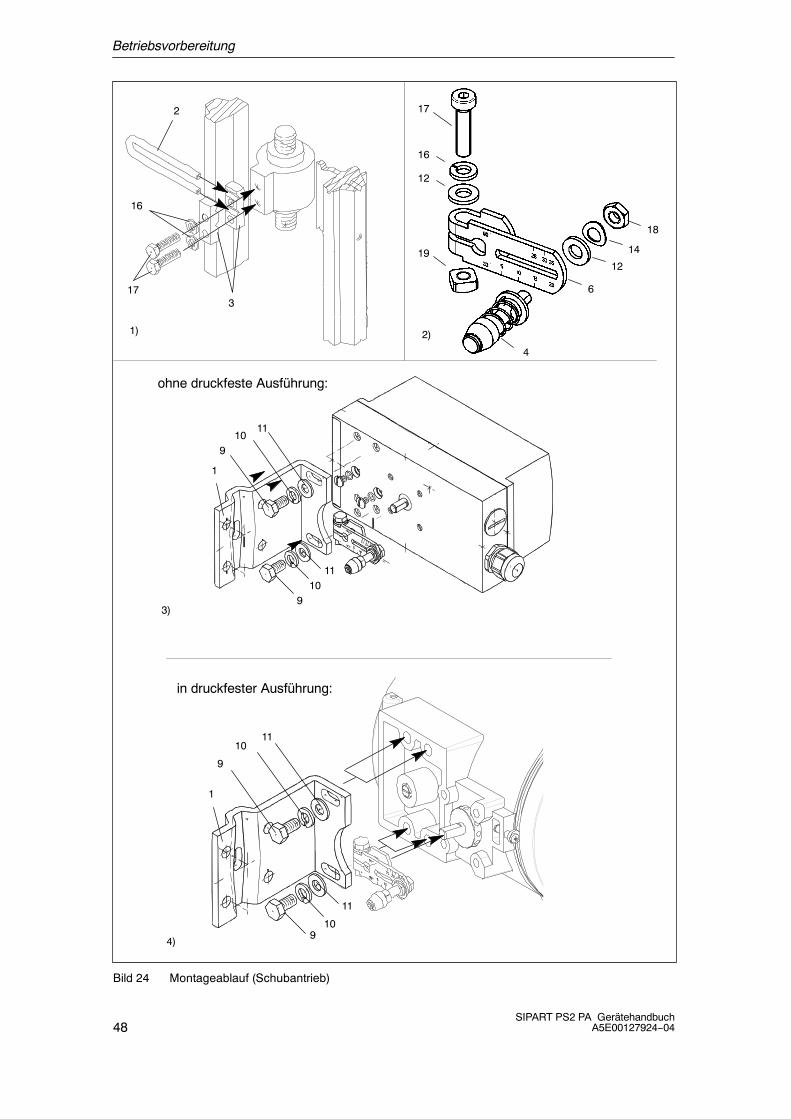
Betriebsvorbereitung
48SIPART PS2 PA Gerätehandbuch
A5E00127924--04
1)
2
17
16
3
3)910
11
910
11
1
4)9
10
11
9
1011
1
in druckfester Ausführung:
ohne druckfeste Ausführung:
17
16
12
19
4
6
12
14
18
2)
Bild 24 Montageablauf (Schubantrieb)
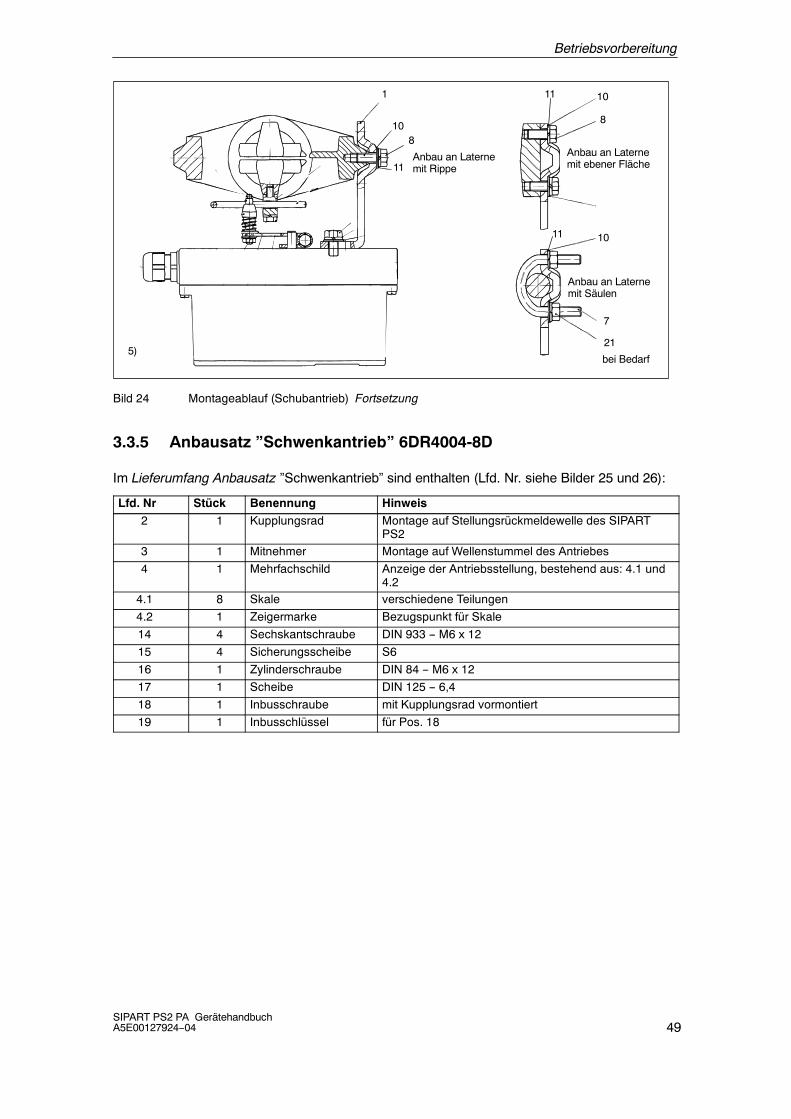
Betriebsvorbereitung
49SIPART PS2 PA GerätehandbuchA5E00127924--04
5)
8
1
10
11
7
21
11 10
11
bei Bedarf
Anbau an Laternemit Säulen
Anbau an Laternemit ebener Fläche
8
10
Anbau an Laternemit Rippe
Bild 24 Montageablauf (Schubantrieb) Fortsetzung
3.3.5 Anbausatz ”Schwenkantrieb” 6DR4004-8D
Im Lieferumfang Anbausatz ”Schwenkantrieb” sind enthalten (Lfd. Nr. siehe Bilder 25 und 26):
Lfd. Nr Stück Benennung Hinweis2 1 Kupplungsrad Montage auf Stellungsrückmeldewelle des SIPART
PS23 1 Mitnehmer Montage auf Wellenstummel des Antriebes4 1 Mehrfachschild Anzeige der Antriebsstellung, bestehend aus: 4.1 und
4.24.1 8 Skale verschiedene Teilungen4.2 1 Zeigermarke Bezugspunkt für Skale14 4 Sechskantschraube DIN 933 -- M6 x 1215 4 Sicherungsscheibe S616 1 Zylinderschraube DIN 84 -- M6 x 1217 1 Scheibe DIN 125 -- 6,418 1 Inbusschraube mit Kupplungsrad vormontiert19 1 Inbusschlüssel für Pos. 18
Betriebsvorbereitung
50SIPART PS2 PA Gerätehandbuch
A5E00127924--04
3.3.6 Montageablauf (siehe Bild 25 und Bild 26)
1. VDI/VDE 3845-Anbaukonsole ((9), antriebsspezifisch, Lieferum-fang Antriebshersteller) an der Rückseite des Stellungsreglers auf-setzen und mit Sechskantschrauben (14) und Sicherungsscheiben(15) festschrauben.
2. Zeigermarke (4.2) auf Anbaukonsole mittig zum Zentrierloch kle-ben.
3. Kupplungsrad (2) bis Anschlag auf Stellungsreglerachse schieben,etwa 1 mm zurückziehen und Inbusschraube (18) mit dem mitge-lieferten Inbusschlüssel festziehen.
4. Mitnehmer (3) auf Wellenstummel des Antriebes aufsetzen und mitZylinderschraube (16) und Scheibe (17) festschrauben.
5. Stellungsregler mit Anbaukonsole vorsichtig auf den Antrieb set-zen, so dass der Stift des Kupplungsrades in den Mitnehmer ein-greift.
6. Einheit Stellungsregler/Anbaukonsole auf Antrieb mittig ausrichtenund festschrauben.(Schrauben gehören nicht zum Lieferumfang, sondern sind Be-standteil der Anbaukonsole des Antriebes!)
7. Nach abgeschlossener Inbetriebnahme gemäß Kapitel 3.6, Seite66: Antrieb in Endlage fahren und Skale (4.1) entsprechend Dreh-richtung bzw. Schwenkbereich auf Kupplungsrad (2) aufkleben.Skale ist selbstklebend!
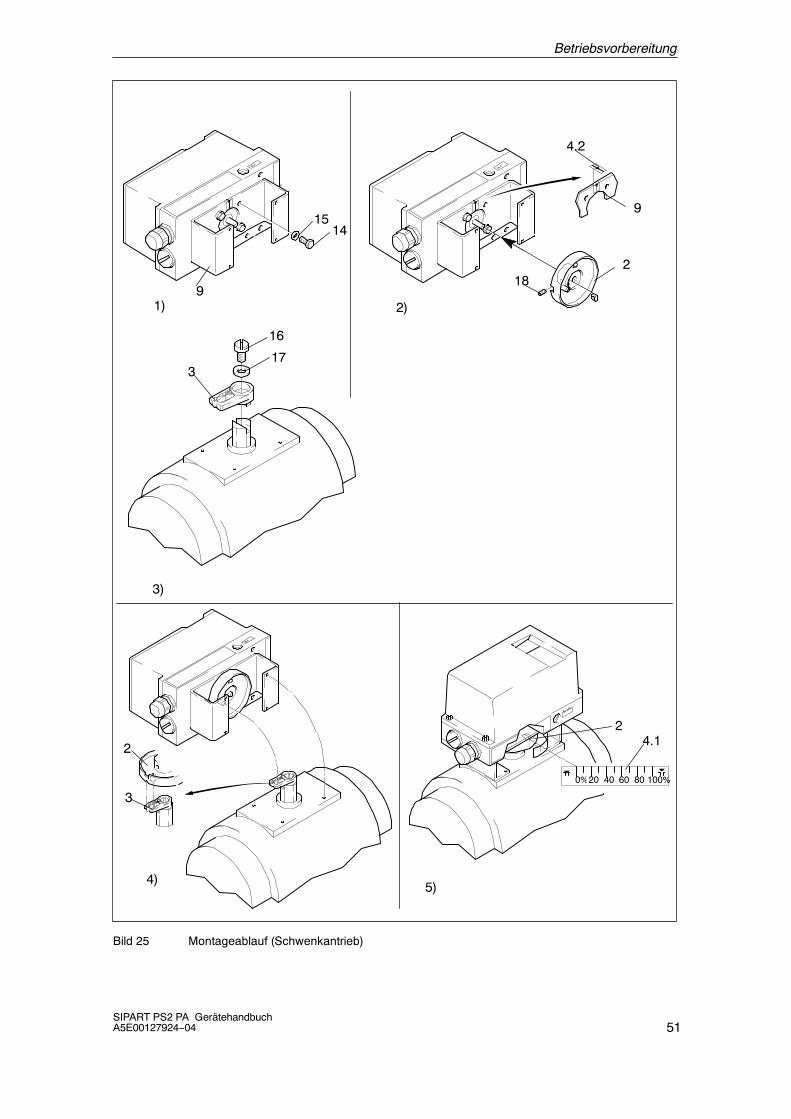
Betriebsvorbereitung
51SIPART PS2 PA GerätehandbuchA5E00127924--04
0%20 40 60 80 100%
1) 2)
3)
4) 5)
182
9
4.2
3
16
17
24.12
3
9
1415
Bild 25 Montageablauf (Schwenkantrieb)
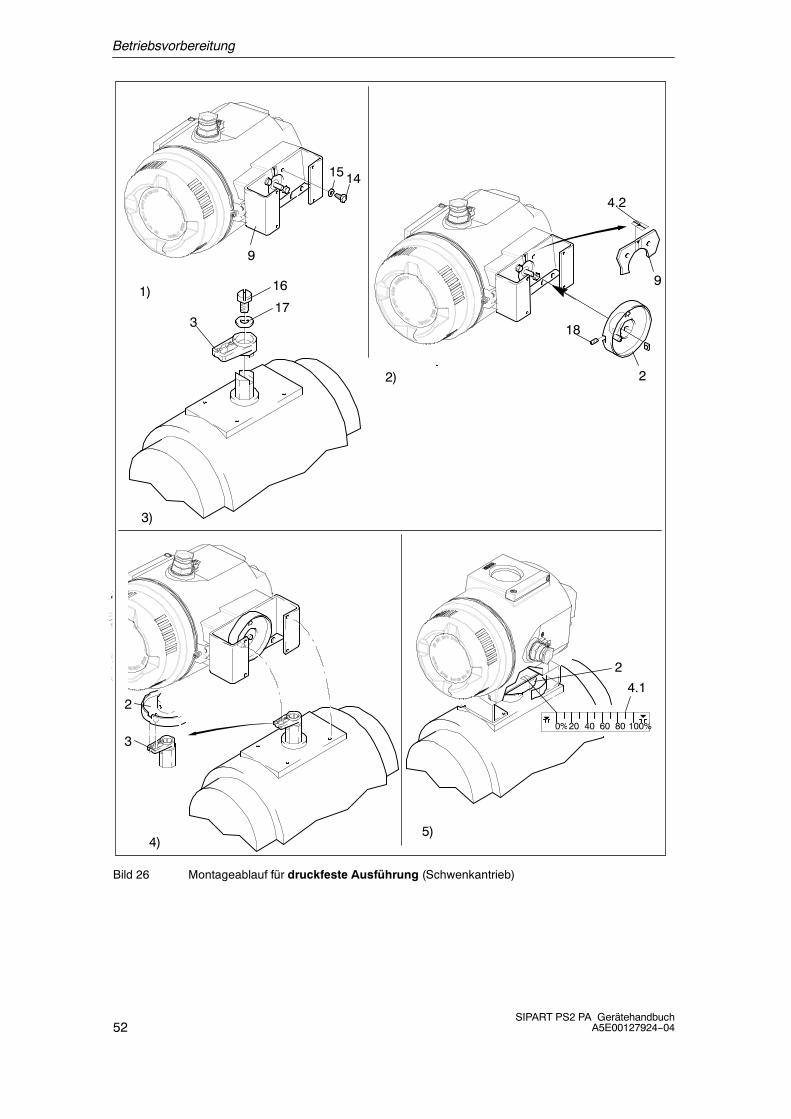
Betriebsvorbereitung
52SIPART PS2 PA Gerätehandbuch
A5E00127924--04
0%20 40 60 80 100%
1)
2)
3)
5)
18
2
9
4.2
3
16
17
2
4.1
9
1415
4)
2
3
Bild 26 Montageablauf für druckfeste Ausführung (Schwenkantrieb)
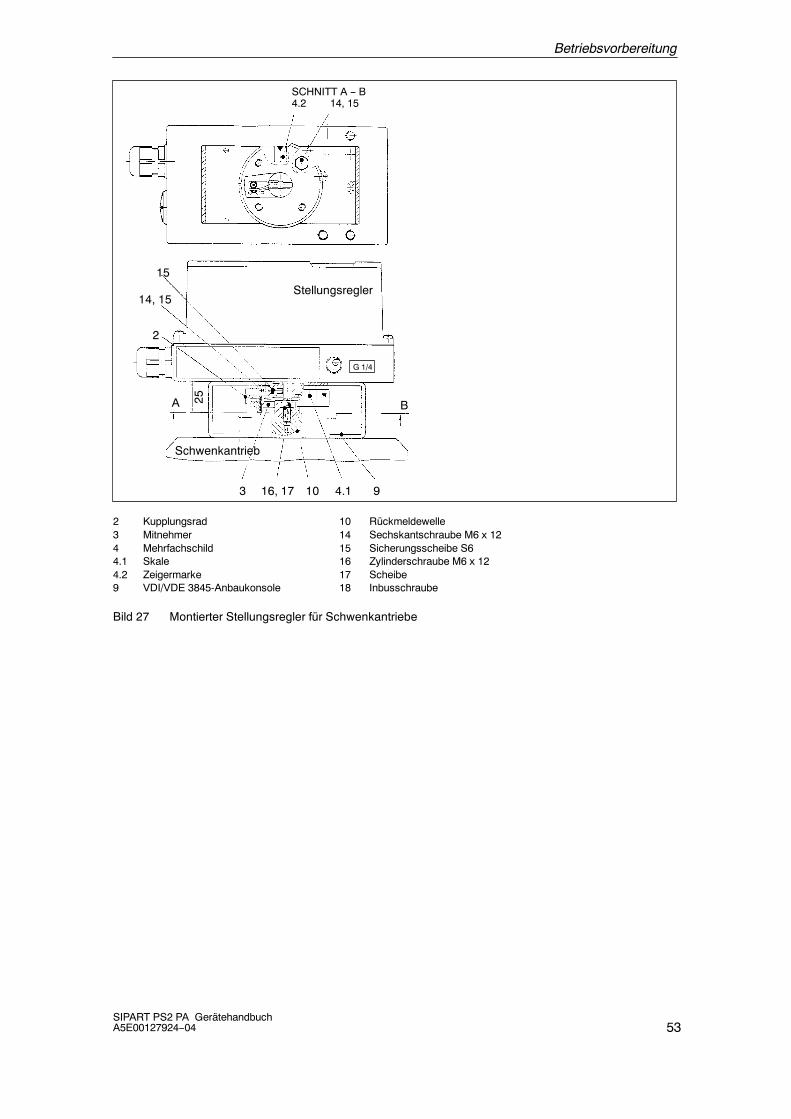
Betriebsvorbereitung
53SIPART PS2 PA GerätehandbuchA5E00127924--04
Stellungsregler
Schwenkantrieb
3 16, 17 10 4.1 9
A 25
2
14, 15
15
B
SCHNITT A -- B4.2 14, 15
G 1/4
2 Kupplungsrad 10 Rückmeldewelle3 Mitnehmer 14 Sechskantschraube M6 x 124 Mehrfachschild 15 Sicherungsscheibe S64.1 Skale 16 Zylinderschraube M6 x 124.2 Zeigermarke 17 Scheibe9 VDI/VDE 3845-Anbaukonsole 18 Inbusschraube
Bild 27 Montierter Stellungsregler für Schwenkantriebe
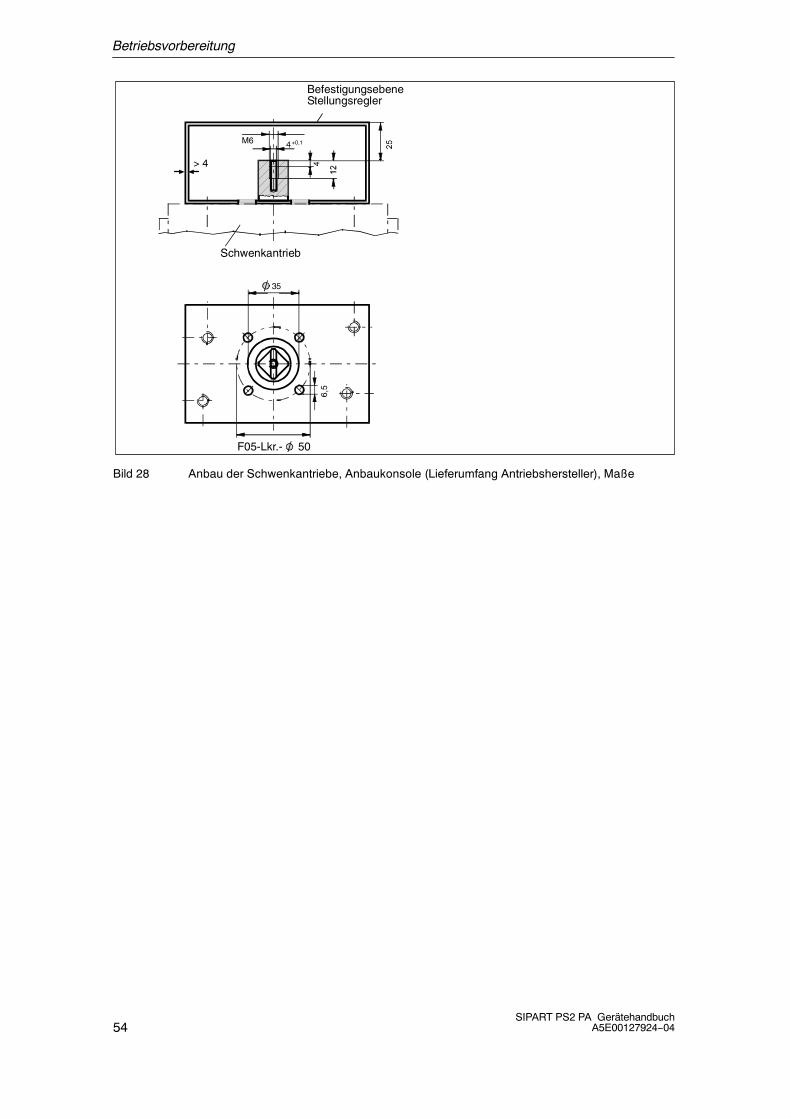
Betriebsvorbereitung
54SIPART PS2 PA Gerätehandbuch
A5E00127924--04
M6 4
35
Schwenkantrieb
BefestigungsebeneStellungsregler
F05-Lkr.- 50
+0,1
> 4
Bild 28 Anbau der Schwenkantriebe, Anbaukonsole (Lieferumfang Antriebshersteller), Maße
Betriebsvorbereitung
55SIPART PS2 PA GerätehandbuchA5E00127924--04
3.4 Elektrischer Anschluss
. HINWEIS
Evtl. benötigte Optionsbaugruppen müssen vor dem elektrischen An-schluss eingebaut werden (siehe Kapitel 2.5, Seite 30).
Beachten Sie: Der Getriebeübersetzungsumschalter kann nur beigeöffnetem Stellungsregler verstellt werden. Kontrollieren Sie deshalbvor dem Verschließen des Stellungsreglers diese Einstellung.
!WARNUNG
Die Bestimmungen der für Ihr Land gültigen Prüfbescheinigung sind zubeachten.Bei der elektrischen Installation sind die für Ihr Land gültigen nationa-len Bestimmungen und Gesetze für explosionsgefährdete Bereiche zubeachten. In Deutschland sind dies z.B.:
-- die Betriebssicherheitsverordnung-- die Bestimmung für das Errichten elektrischer Anlagen in explo-
sionsgefährdeten Bereichen DIN EN 60079--14 (früher VDE 0165,T1)
-- die Konformitätsbescheinigung
Es wird empfohlen zu prüfen, ob die vorhandene Hilfsenergie, soferndiese benötigt wird, mit der auf dem Typenschild und mit den für IhrLand gültigen Normen übereinstimmt.
Wurde die eigensichere Ausführung fälschlicherweise mit einer höhe-ren Betriebsspannung betrieben, darf der Stellungsregler nicht mehr ineigensicheren Anwendungen benutzt werden.
Der Stellungsregler in druckfester Ausführung darf nicht an einenPROFIBUS in eigensicherer Ausführung (Ex i) angeschlossen werden!
Der Stellungsregler in druckfester Ausführung darf in Bereichen, in de-nen die Atmosphäre explosionsfähig werden kann, nur bei geschlosse-nem Gehäuse mit elektrischer Hilfsenergie versorgt werden.
Durch Durchführungsöffnungen bei der druckfesten Ausführung für dieelektronischen Anschlüsse müssen mit EEx-d-zertifizierten Kabelein-führungen oder mit EEx-d-zertifizierten Verschlussstopfen verschlos-sen sein, oder es muss bei Verwendung des “Condiut-Rohrsystems”eine Zündsperre im maximalen Abstand von 46 cm (18 Inch) vom Ge-häuse angeordnet sein.
Zur Erhöhung der Elektromagnetischen Verträglichkeit (EMV) gegen-über Hochfrequenzstrahlung ist das Kunststoffgehäuse innen metalli-siert. Dieser Schirm ist mit den im Bild 29, Seite 56 dargestellten Ge-windebuchsen elektrisch leitend verbunden.
Die spezifizierte Störfestigkeit und Störaussendung sind nur dannsichergestellt, wenn die Busschirmung voll wirksam ist.
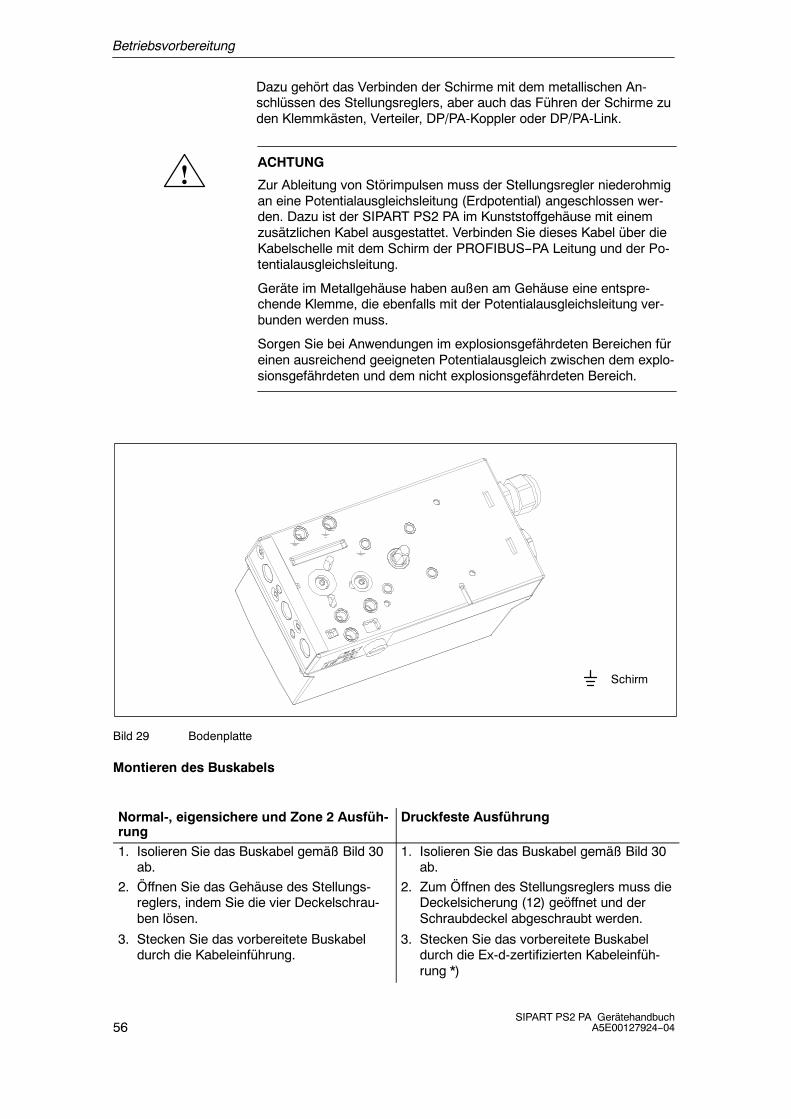
Betriebsvorbereitung
56SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Dazu gehört das Verbinden der Schirme mit dem metallischen An-schlüssen des Stellungsreglers, aber auch das Führen der Schirme zuden Klemmkästen, Verteiler, DP/PA-Koppler oder DP/PA-Link.
!ACHTUNG
Zur Ableitung von Störimpulsen muss der Stellungsregler niederohmigan eine Potentialausgleichsleitung (Erdpotential) angeschlossen wer-den. Dazu ist der SIPART PS2 PA im Kunststoffgehäuse mit einemzusätzlichen Kabel ausgestattet. Verbinden Sie dieses Kabel über dieKabelschelle mit dem Schirm der PROFIBUS--PA Leitung und der Po-tentialausgleichsleitung.
Geräte im Metallgehäuse haben außen am Gehäuse eine entspre-chende Klemme, die ebenfalls mit der Potentialausgleichsleitung ver-bunden werden muss.
Sorgen Sie bei Anwendungen im explosionsgefährdeten Bereichen füreinen ausreichend geeigneten Potentialausgleich zwischen dem explo-sionsgefährdeten und dem nicht explosionsgefährdeten Bereich.
Schirm
Bild 29 Bodenplatte
Montieren des Buskabels
Normal-, eigensichere und Zone 2 Ausfüh-rung
Druckfeste Ausführung
1. Isolieren Sie das Buskabel gemäß Bild 30ab.
1. Isolieren Sie das Buskabel gemäß Bild 30ab.
2. Öffnen Sie das Gehäuse des Stellungs-reglers, indem Sie die vier Deckelschrau-ben lösen.
2. Zum Öffnen des Stellungsreglers muss dieDeckelsicherung (12) geöffnet und derSchraubdeckel abgeschraubt werden.
3. Stecken Sie das vorbereitete Buskabeldurch die Kabeleinführung.
3. Stecken Sie das vorbereitete Buskabeldurch die Ex-d-zertifizierten Kabeleinfüh-rung *)
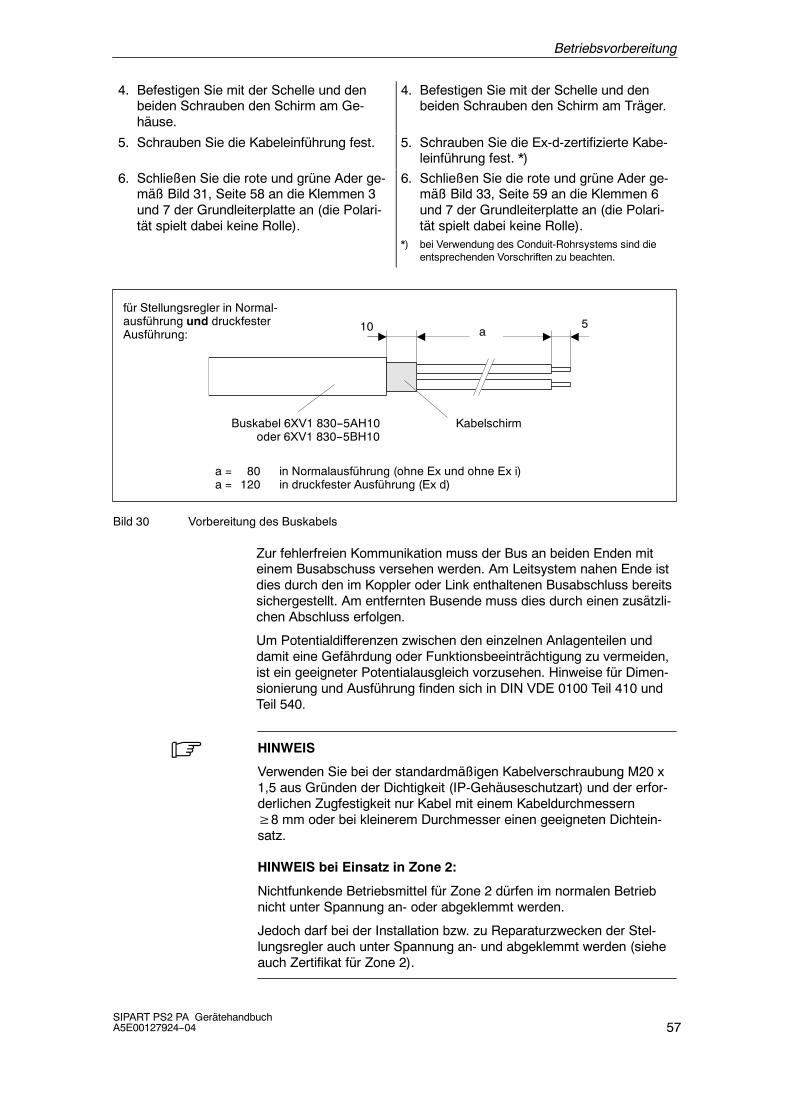
Betriebsvorbereitung
57SIPART PS2 PA GerätehandbuchA5E00127924--04
4. Befestigen Sie mit der Schelle und denbeiden Schrauben den Schirm am Ge-häuse.
4. Befestigen Sie mit der Schelle und denbeiden Schrauben den Schirm am Träger.
5. Schrauben Sie die Kabeleinführung fest. 5. Schrauben Sie die Ex-d-zertifizierte Kabe-leinführung fest. *)
6. Schließen Sie die rote und grüne Ader ge-mäß Bild 31, Seite 58 an die Klemmen 3und 7 der Grundleiterplatte an (die Polari-tät spielt dabei keine Rolle).
6. Schließen Sie die rote und grüne Ader ge-mäß Bild 33, Seite 59 an die Klemmen 6und 7 der Grundleiterplatte an (die Polari-tät spielt dabei keine Rolle).
*) bei Verwendung des Conduit-Rohrsystems sind dieentsprechenden Vorschriften zu beachten.
5a10
Buskabel 6XV1 830--5AH10oder 6XV1 830--5BH10
Kabelschirm
a = 80 in Normalausführung (ohne Ex und ohne Ex i)a = 120 in druckfester Ausführung (Ex d)
für Stellungsregler in Normal-ausführung und druckfesterAusführung:
Bild 30 Vorbereitung des Buskabels
Zur fehlerfreien Kommunikation muss der Bus an beiden Enden miteinem Busabschuss versehen werden. Am Leitsystem nahen Ende istdies durch den im Koppler oder Link enthaltenen Busabschluss bereitssichergestellt. Am entfernten Busende muss dies durch einen zusätzli-chen Abschluss erfolgen.
Um Potentialdifferenzen zwischen den einzelnen Anlagenteilen unddamit eine Gefährdung oder Funktionsbeeinträchtigung zu vermeiden,ist ein geeigneter Potentialausgleich vorzusehen. Hinweise für Dimen-sionierung und Ausführung finden sich in DIN VDE 0100 Teil 410 undTeil 540.
. HINWEIS
Verwenden Sie bei der standardmäßigen Kabelverschraubung M20 x1,5 aus Gründen der Dichtigkeit (IP-Gehäuseschutzart) und der erfor-derlichen Zugfestigkeit nur Kabel mit einem Kabeldurchmessern≥8 mm oder bei kleinerem Durchmesser einen geeigneten Dichtein-satz.
HINWEIS bei Einsatz in Zone 2:
Nichtfunkende Betriebsmittel für Zone 2 dürfen im normalen Betriebnicht unter Spannung an- oder abgeklemmt werden.
Jedoch darf bei der Installation bzw. zu Reparaturzwecken der Stel-lungsregler auch unter Spannung an- und abgeklemmt werden (sieheauch Zertifikat für Zone 2).
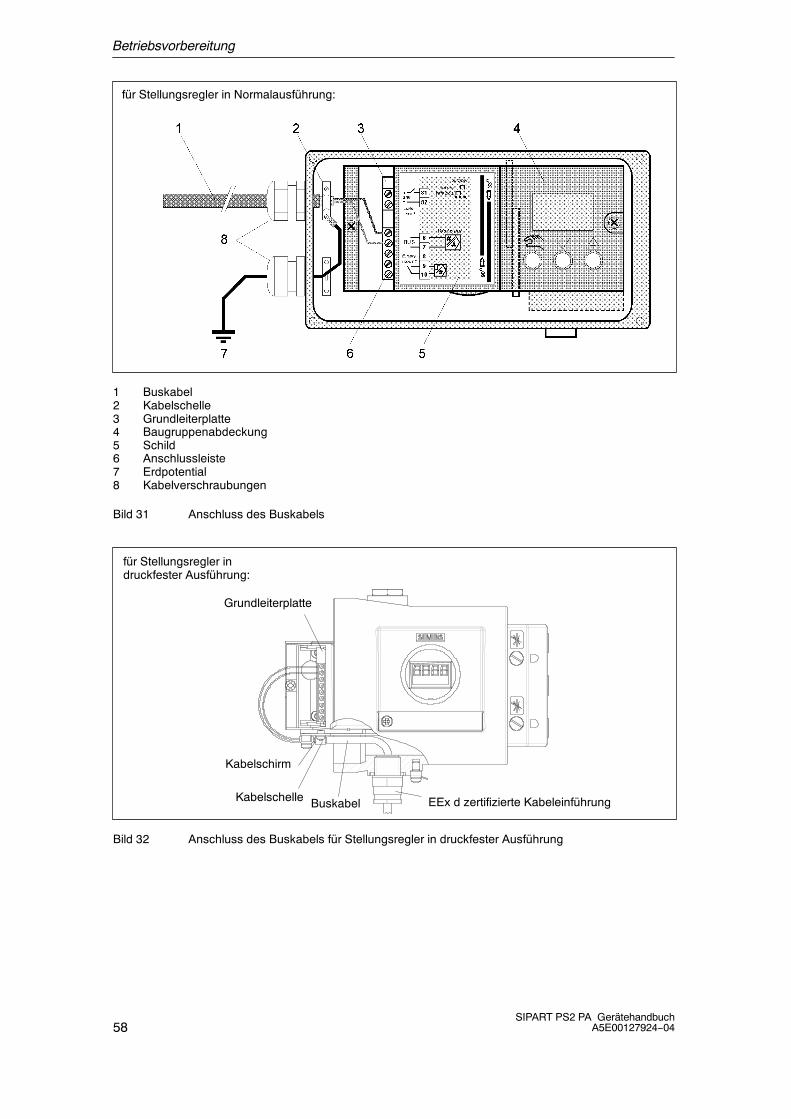
Betriebsvorbereitung
58SIPART PS2 PA Gerätehandbuch
A5E00127924--04
für Stellungsregler in Normalausführung:
1 Buskabel2 Kabelschelle3 Grundleiterplatte4 Baugruppenabdeckung5 Schild6 Anschlussleiste7 Erdpotential8 Kabelverschraubungen
Bild 31 Anschluss des Buskabels
Kabelschirm
Kabelschelle Buskabel EEx d zertifizierte Kabeleinführung
Grundleiterplatte
für Stellungsregler indruckfester Ausführung:
Bild 32 Anschluss des Buskabels für Stellungsregler in druckfester Ausführung
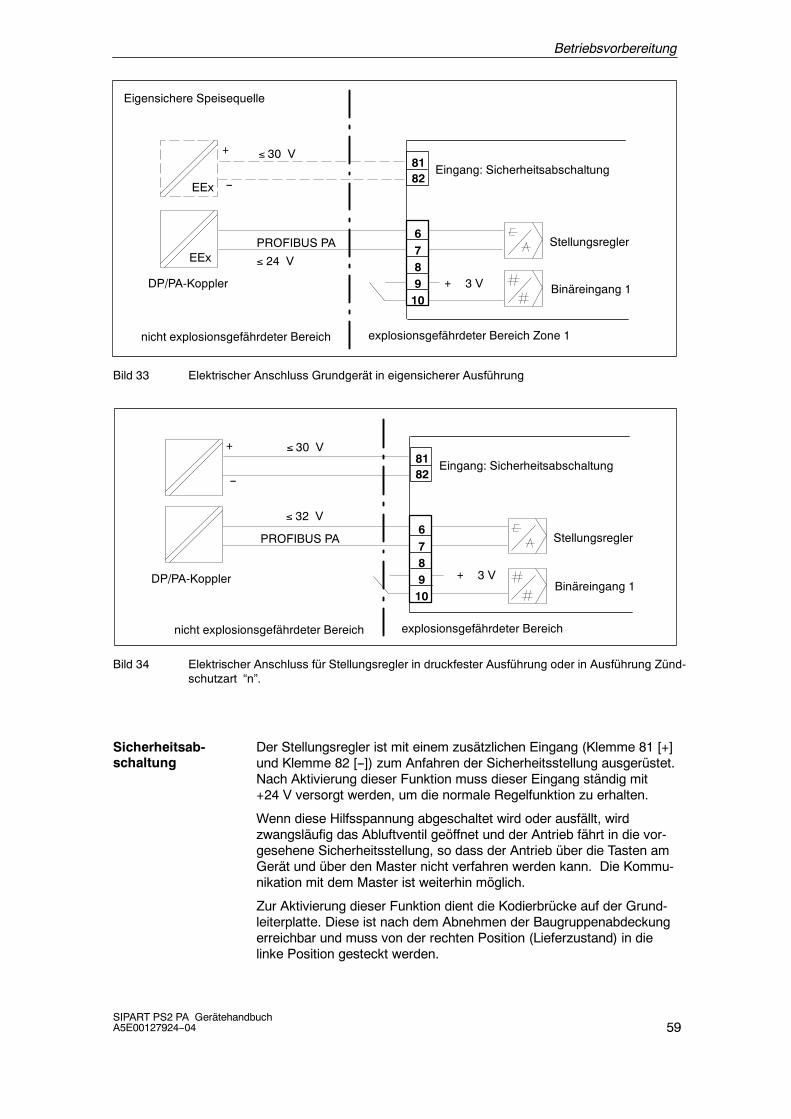
Betriebsvorbereitung
59SIPART PS2 PA GerätehandbuchA5E00127924--04
EEx
EEx
8182
+
--
≤ 30 V
678910
PROFIBUS PA
Eingang: Sicherheitsabschaltung
DP/PA-Koppler
Eigensichere Speisequelle
Stellungsregler
+ Binäreingang 1
nicht explosionsgefährdeter Bereich explosionsgefährdeter Bereich Zone 1
≤ 24 V
3 V
Bild 33 Elektrischer Anschluss Grundgerät in eigensicherer Ausführung
8182
+
--
≤ 30 V
678910
PROFIBUS PA
Eingang: Sicherheitsabschaltung
Stellungsregler
Binäreingang 1
≤ 32 V
nicht explosionsgefährdeter Bereich explosionsgefährdeter Bereich
DP/PA-Koppler + 3 V
Bild 34 Elektrischer Anschluss für Stellungsregler in druckfester Ausführung oder in Ausführung Zünd-schutzart “n”.
Der Stellungsregler ist mit einem zusätzlichen Eingang (Klemme 81 [+]und Klemme 82 [--]) zum Anfahren der Sicherheitsstellung ausgerüstet.Nach Aktivierung dieser Funktion muss dieser Eingang ständig mit+24 V versorgt werden, um die normale Regelfunktion zu erhalten.
Wenn diese Hilfsspannung abgeschaltet wird oder ausfällt, wirdzwangsläufig das Abluftventil geöffnet und der Antrieb fährt in die vor-gesehene Sicherheitsstellung, so dass der Antrieb über die Tasten amGerät und über den Master nicht verfahren werden kann. Die Kommu-nikation mit dem Master ist weiterhin möglich.
Zur Aktivierung dieser Funktion dient die Kodierbrücke auf der Grund-leiterplatte. Diese ist nach dem Abnehmen der Baugruppenabdeckungerreichbar und muss von der rechten Position (Lieferzustand) in dielinke Position gesteckt werden.
Sicherheitsab-schaltung
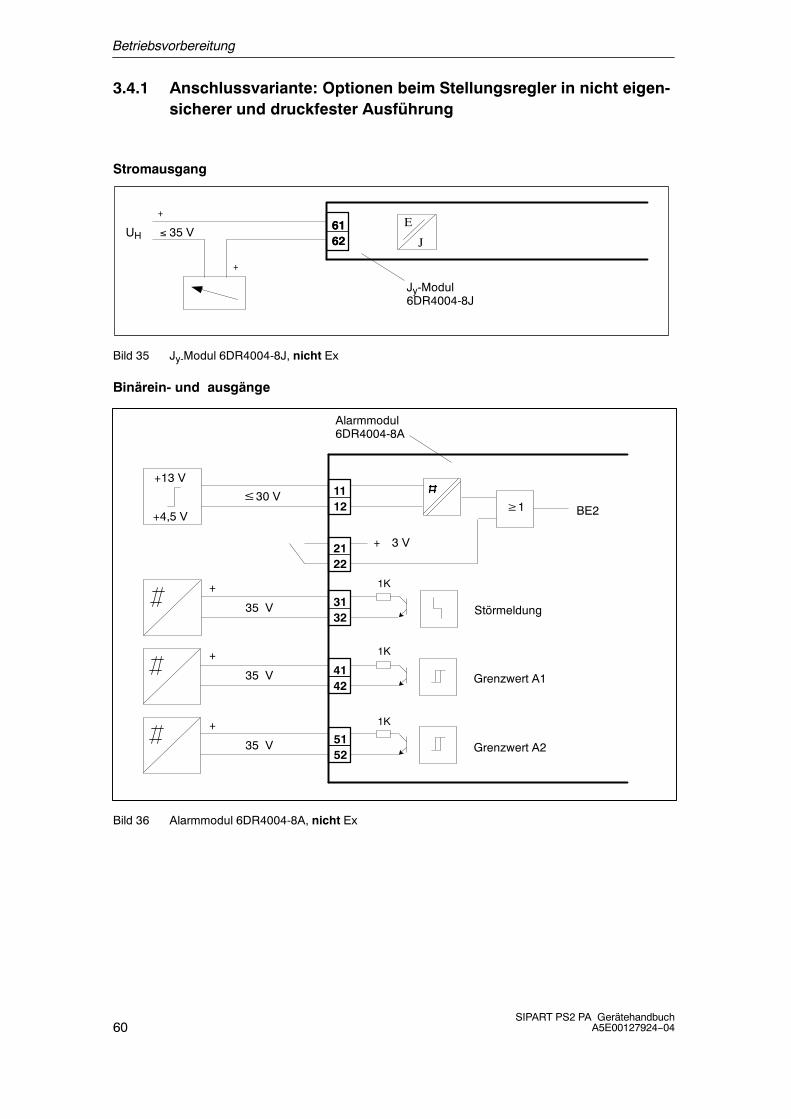
Betriebsvorbereitung
60SIPART PS2 PA Gerätehandbuch
A5E00127924--04
3.4.1 Anschlussvariante: Optionen beim Stellungsregler in nicht eigen-sicherer und druckfester Ausführung
UH ≤ 35 V 61626162 J
E
Jy-Modul6DR4004-8J
+
+
Bild 35 Jy-Modul 6DR4004-8J, nicht Ex
Binärein- und ausgänge
1112
+13 V
+4,5 V≥1 BE2
2122
+
3132
Störmeldung
4142
Grenzwert A1
5152
Grenzwert A2
Alarmmodul6DR4004-8A
1K
1K
1K
≤30 V
+
+
+
35 V
35 V
35 V
3 V
Bild 36 Alarmmodul 6DR4004-8A, nicht Ex
Stromausgang
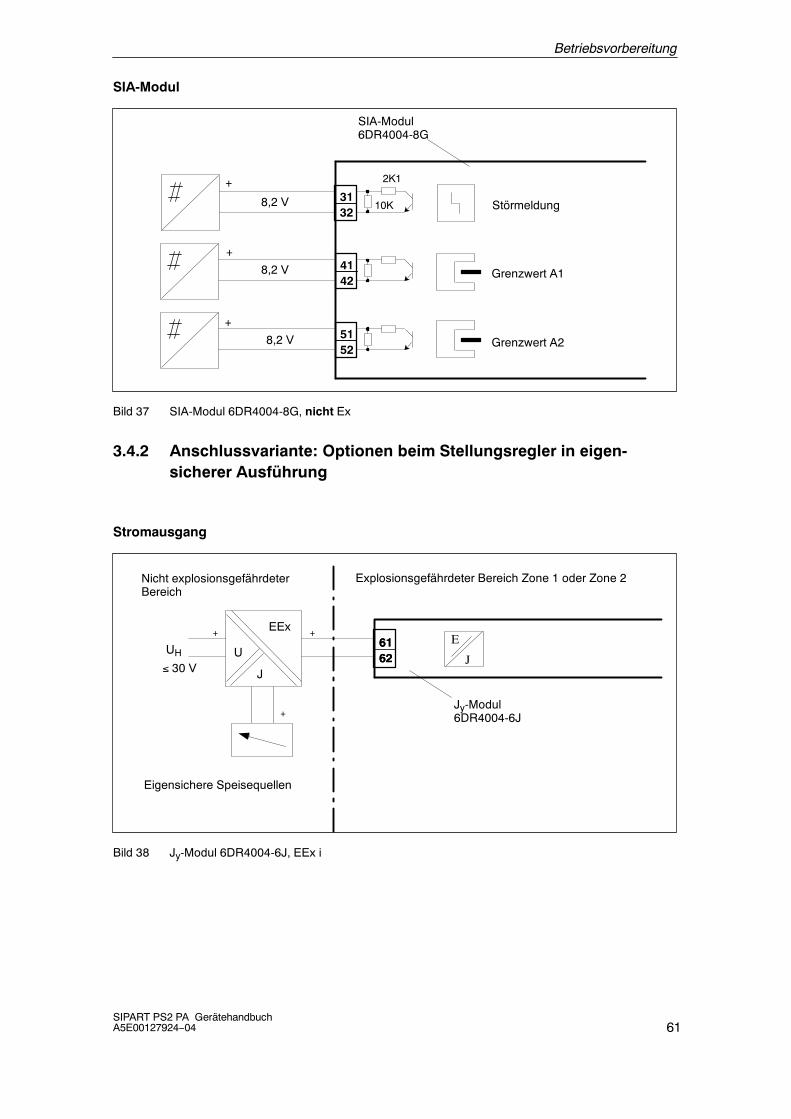
Betriebsvorbereitung
61SIPART PS2 PA GerätehandbuchA5E00127924--04
3132
Störmeldung
4142
Grenzwert A1
5152
Grenzwert A2
SIA-Modul6DR4004-8G
+ 2K1
10K8,2 V
8,2 V
8,2 V
+
+
Bild 37 SIA-Modul 6DR4004-8G, nicht Ex
3.4.2 Anschlussvariante: Optionen beim Stellungsregler in eigen-sicherer Ausführung
UH61626162 J
E
Jy-Modul6DR4004-6J
+
+
Explosionsgefährdeter Bereich Zone 1 oder Zone 2Nicht explosionsgefährdeterBereich
Eigensichere Speisequellen
J
EEx
U
+
≤ 30 V
Bild 38 Jy-Modul 6DR4004-6J, EEx i
SIA-Modul
Stromausgang
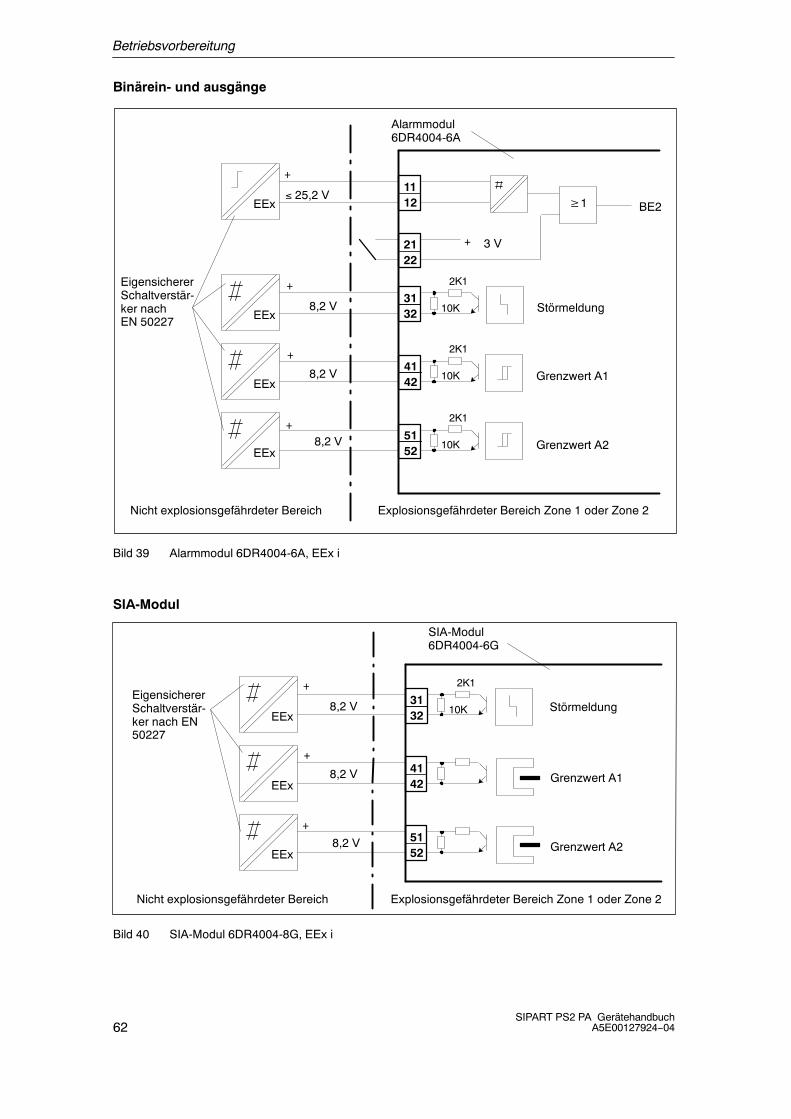
Betriebsvorbereitung
62SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Binärein- und ausgänge
+1112 ≥1 BE2
2122
+
3132 Störmeldung
4142 Grenzwert A1
5152 Grenzwert A2
Alarmmodul6DR4004-6A
EEx
EEx
EEx
EEx
EigensichererSchaltverstär-ker nachEN 50227
Explosionsgefährdeter Bereich Zone 1 oder Zone 2Nicht explosionsgefährdeter Bereich
2K1
10K
2K1
10K
2K1
10K
≤ 25,2 V
+
8,2 V
8,2 V
8,2 V
+
+
3 V
Bild 39 Alarmmodul 6DR4004-6A, EEx i
EEx
EEx
EEx
EigensichererSchaltverstär-ker nach EN50227
Explosionsgefährdeter Bereich Zone 1 oder Zone 2Nicht explosionsgefährdeter Bereich
3132
Störmeldung
4142
5152
SIA-Modul6DR4004-6G
Grenzwert A1
Grenzwert A2
2K1
10K
+
8,2 V
8,2 V
8,2 V
+
+
Bild 40 SIA-Modul 6DR4004-8G, EEx i
SIA-Modul
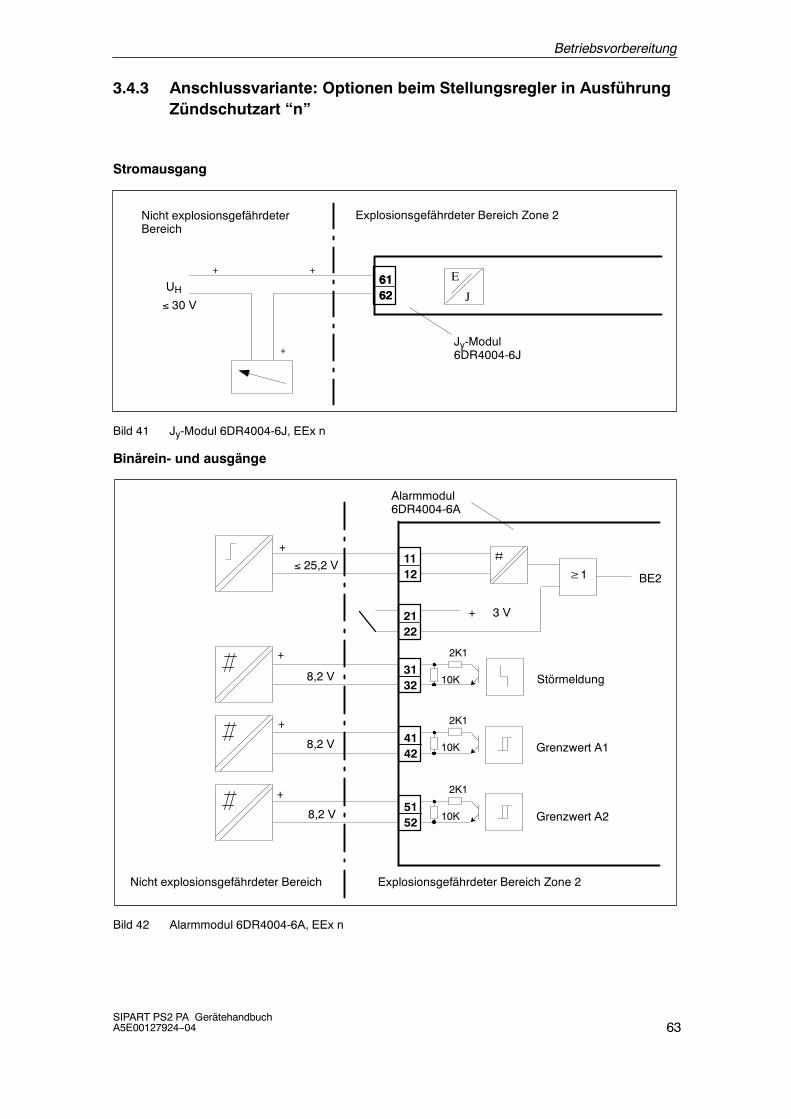
Betriebsvorbereitung
63SIPART PS2 PA GerätehandbuchA5E00127924--04
3.4.3 Anschlussvariante: Optionen beim Stellungsregler in AusführungZündschutzart “n”
UH61626162 J
E
Jy-Modul6DR4004-6J
+
+
Explosionsgefährdeter Bereich Zone 2Nicht explosionsgefährdeterBereich
+
≤ 30 V
Bild 41 Jy-Modul 6DR4004-6J, EEx n
Binärein- und ausgänge
+1112 ≥1 BE2
2122
3132 Störmeldung
4142 Grenzwert A1
5152 Grenzwert A2
Alarmmodul6DR4004-6A
Explosionsgefährdeter Bereich Zone 2Nicht explosionsgefährdeter Bereich
2K1
10K
2K1
10K
2K1
10K
≤ 25,2 V
+
8,2 V
8,2 V
8,2 V
+
+
+ 3 V
Bild 42 Alarmmodul 6DR4004-6A, EEx n
Stromausgang
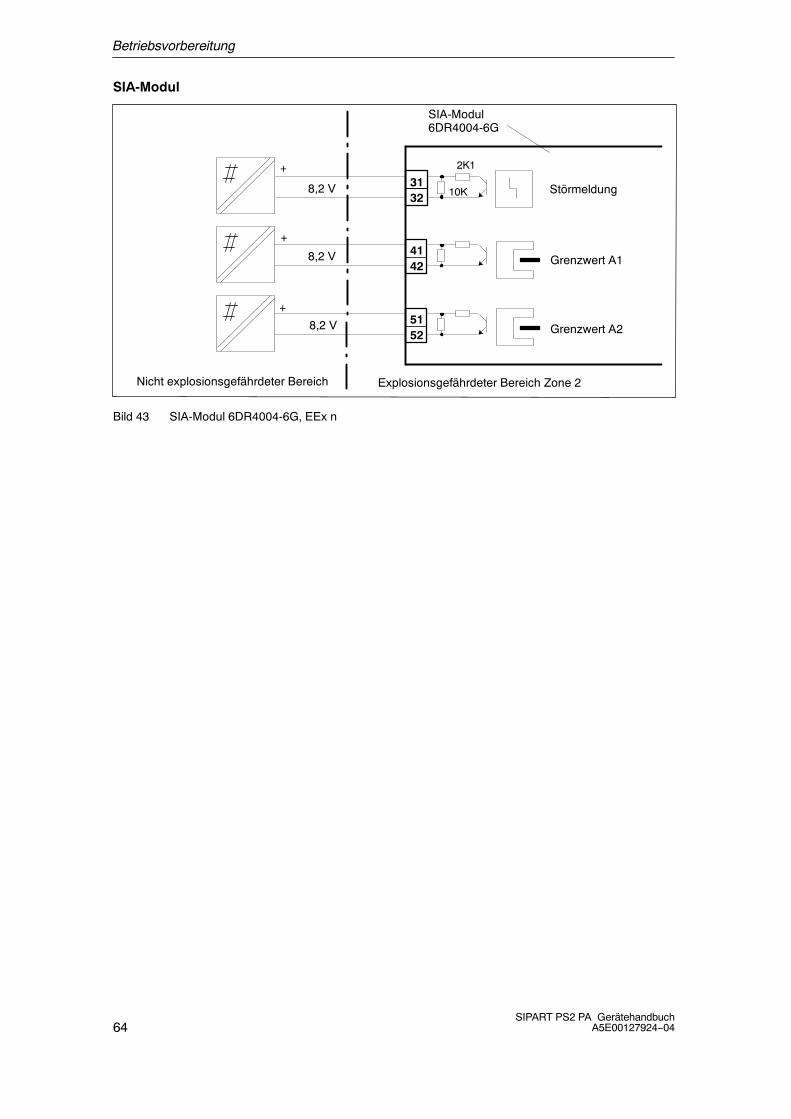
Betriebsvorbereitung
64SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Explosionsgefährdeter Bereich Zone 2Nicht explosionsgefährdeter Bereich
3132
Störmeldung
4142
5152
SIA-Modul6DR4004-6G
Grenzwert A1
Grenzwert A2
2K1
10K
+
8,2 V
8,2 V
8,2 V
+
+
Bild 43 SIA-Modul 6DR4004-6G, EEx n
SIA-Modul
Betriebsvorbereitung
65SIPART PS2 PA GerätehandbuchA5E00127924--04
3.5 Pneumatischer Anschluss
!WARNUNG
Aus Sicherheitsgründen darf nach der Montage die pneumatischeHilfsenergie nur dann zugeführt werden, wenn bei anliegendem elektri-schen Signal der Stellungsregler in die Bedienebene P-Handbetriebgeschaltet ist (Lieferzustand, siehe Bild 52, Seite 86).
. HINWEIS
Luftqualität beachten! Nicht geölte Industrieluft, Feststoffgehalt < 30 μm,Drucktaupunkt 20 K unter der niedrigsten Umgebungstemperatur (sieheKapitel 7 “Technische Daten”, Seite 137).
S Ggf. Manometerblock für Zuluftdruck und Stelldruck anschließen.
S Anschluss über Innengewinde G 1/4 DIN 45141 oder 1/4” NPT:
PZ Zuluft 1,4 bis 7 barY1 Stelldruck 1 für einfach und doppelt wirkende AntriebeY2 Stelldruck 2 für doppelt wirkende AntriebeE Abluftausgang (Schalldämpfer ggf. entfernen)siehe Bild 9 und 10, Seite 26.
S Sicherheitsstellung bei Ausfall der elektrischen Hilfsenergie:
einfachwirkend: Y1 Entlüftetdoppeltwirkend: Y1 Max. Stelldruck (Zuluftdruck)
Y2 Entlüftet
S Stelldruck Y1 bzw. Y2 (nur bei doppelt wirkenden Antrieben) ent-sprechend gewünschter Sicherheitsstellung anschließen.
S Zuluft an PZ anschließen.
. HINWEIS
Damit federbelastete pneumatische Antriebe den maximal möglichenStellweg zuverlässig ausnutzen können, muss der Versorgungsdruckhinreihend größer sein als der maximal benötigte Enddruck des Antriebs.
Prüfen Sie nach der Montage der pneumatischen Verbindungen dieDichtheit der gesamten Armatur. Denn eine evtl. Leckage würde nebendem dauernden Luftverbrauch auch dazu führen, dass der Stellungsreg-ler ständig versucht, diePositionsabweichungauszuregeln.Dies führt aufDauer gesehen zum vorzeitigen Verschleiß der gesamten Regeleinrich-tung.
Betriebsvorbereitung
66SIPART PS2 PA Gerätehandbuch
A5E00127924--04
3.6 Inbetriebnahme
Nachdem Sie den Stellungsregler an einen pneumatischen Antriebmontiert haben, müssen Sie ihn mit pneumatischer und elektrischerHilfsenergie versorgen.
Die elektrische Hilfsenergie kann durch eine Busanschaltung oder se-parate Spannungsquelle mit 15 bis 30 V DC erfolgen. Nun können Sieden Stellungsregler an den jeweiligen Antrieb anpassen, in dem Sie ihnparametrieren, initialisieren und die Busadresse einstellen. Dazu ist esnicht erforderlich, dass bereits die Kommunikation mit einem Masterläuft.
Ohne Initialisierung befindet sich der Stellungsregler in der BetriebsartP-Handbetrieb (dies ist ggf. auch durch ”PRST” zu erreichen) --”NOINI” blinkt.
Die Initialisierung kann auf 3 verschiedene Weisen geschehen:
S Automatische InitialisierungDie Initialisierung geschieht automatisch. Dabei ermittelt der Stel-lungsregler nacheinander u. a. den Wirksinn, den Stellweg bzw.Drehwinkel, die Stellzeiten des Antriebes und passt die Regelpara-meter an das dynamische Verhalten des Antriebs an.
S Manuelle InitialisierungDer Stellweg bzw. Drehwinkel des Antriebs kann manuell eingestelltwerden, die restlichen Parameter werden wie bei der automatischenInitialisierung selbsttätig ermittelt. Diese Funktion ist nützlich bei An-trieben mit weichen Endanschlägen.
S Kopieren von Initialisierungsdaten (Stellungsreglertausch)Sie können die Initialisierungsdaten eines Stellungsreglers auslesenund in einen anderen Stellungsregler kopieren. Dies ermöglicht denAustausch eines defekten Gerätes ohne einen laufenden Prozessdurch eine Initialisierung unterbrechen zu müssen.
Vor der Initialisierung müssen Sie dem Stellungsregler nur wenige Pa-rameter vorgeben. Die Restlichen sind so voreingestellt, dass sie imNormalfall nicht verstellt werden müssen. Wenn Sie die folgendenPunkte beachten, werden Sie keine Probleme bei der Inbetriebnahmehaben.
Die möglichen Betriebsarten und Parameter sowie deren Verstelllmög-lichkeiten und Wirkungen werden im Kapitel 4, Seite 83 Bedienung be-schrieben.
. HINWEIS
Beachten Sie: Der Betriebsdruck sollte während der Initialisierungmindestens ein bar größer sein, als zum Schließen/Öffnen des Ventilserforderlich ist.
Beachten Sie: Der Getriebeübersetzungsumschalter kann nur beigeöffnet em Stellungsregler verstellt werden. Kontrollieren Sie deshalbvor dem Verschließen des Gehäuses diese Einstellung.
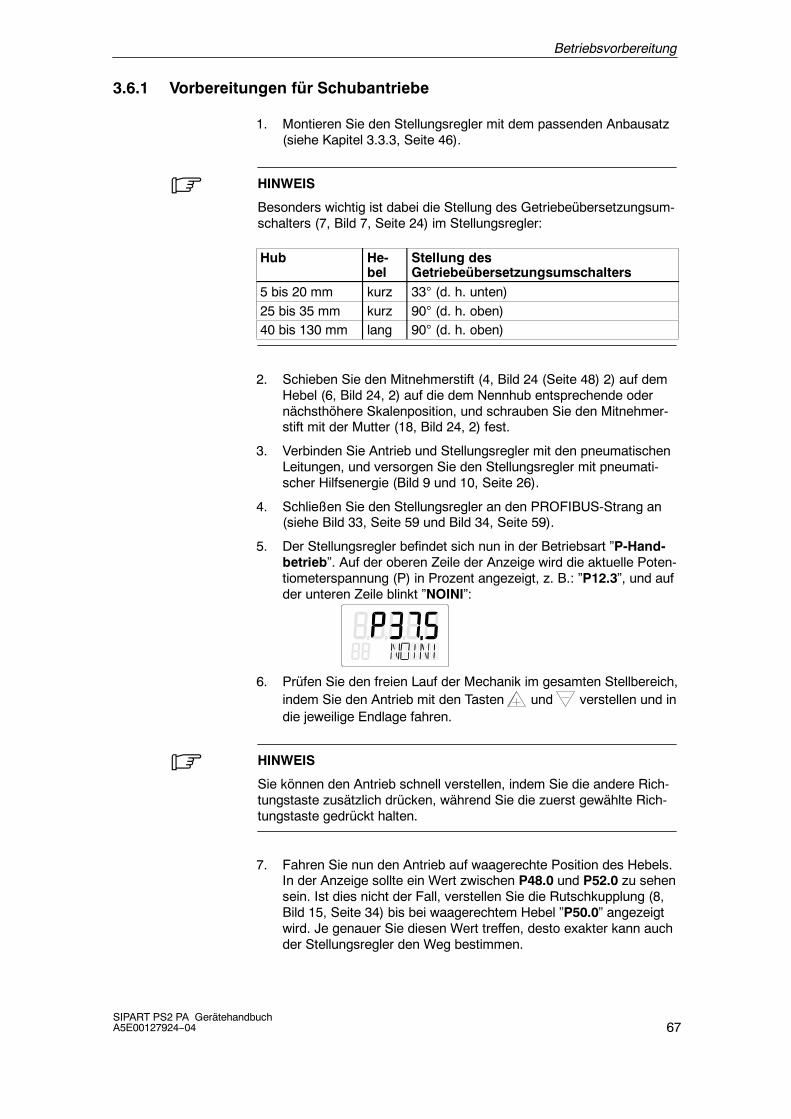
Betriebsvorbereitung
67SIPART PS2 PA GerätehandbuchA5E00127924--04
3.6.1 Vorbereitungen für Schubantriebe
1. Montieren Sie den Stellungsregler mit dem passenden Anbausatz(siehe Kapitel 3.3.3, Seite 46).
. HINWEIS
Besonders wichtig ist dabei die Stellung des Getriebeübersetzungsum-schalters (7, Bild 7, Seite 24) im Stellungsregler:
Hub He-bel
Stellung desGetriebeübersetzungsumschalters
5 bis 20 mm kurz 33° (d. h. unten)25 bis 35 mm kurz 90° (d. h. oben)40 bis 130 mm lang 90° (d. h. oben)
2. Schieben Sie den Mitnehmerstift (4, Bild 24 (Seite 48) 2) auf demHebel (6, Bild 24, 2) auf die dem Nennhub entsprechende odernächsthöhere Skalenposition, und schrauben Sie den Mitnehmer-stift mit der Mutter (18, Bild 24, 2) fest.
3. Verbinden Sie Antrieb und Stellungsregler mit den pneumatischenLeitungen, und versorgen Sie den Stellungsregler mit pneumati-scher Hilfsenergie (Bild 9 und 10, Seite 26).
4. Schließen Sie den Stellungsregler an den PROFIBUS-Strang an(siehe Bild 33, Seite 59 und Bild 34, Seite 59).
5. Der Stellungsregler befindet sich nun in der Betriebsart ”P-Hand-betrieb”. Auf der oberen Zeile der Anzeige wird die aktuelle Poten-tiometerspannung (P) in Prozent angezeigt, z. B.: ”P12.3”, und aufder unteren Zeile blinkt ”NOINI”:
6. Prüfen Sie den freien Lauf der Mechanik im gesamten Stellbereich,indem Sie den Antrieb mit den Tasten und verstellen und indie jeweilige Endlage fahren.
. HINWEIS
Sie können den Antrieb schnell verstellen, indem Sie die andere Rich-tungstaste zusätzlich drücken, während Sie die zuerst gewählte Rich-tungstaste gedrückt halten.
7. Fahren Sie nun den Antrieb auf waagerechte Position des Hebels.In der Anzeige sollte ein Wert zwischen P48.0 und P52.0 zu sehensein. Ist dies nicht der Fall, verstellen Sie die Rutschkupplung (8,Bild 15, Seite 34) bis bei waagerechtem Hebel ”P50.0” angezeigtwird. Je genauer Sie diesen Wert treffen, desto exakter kann auchder Stellungsregler den Weg bestimmen.
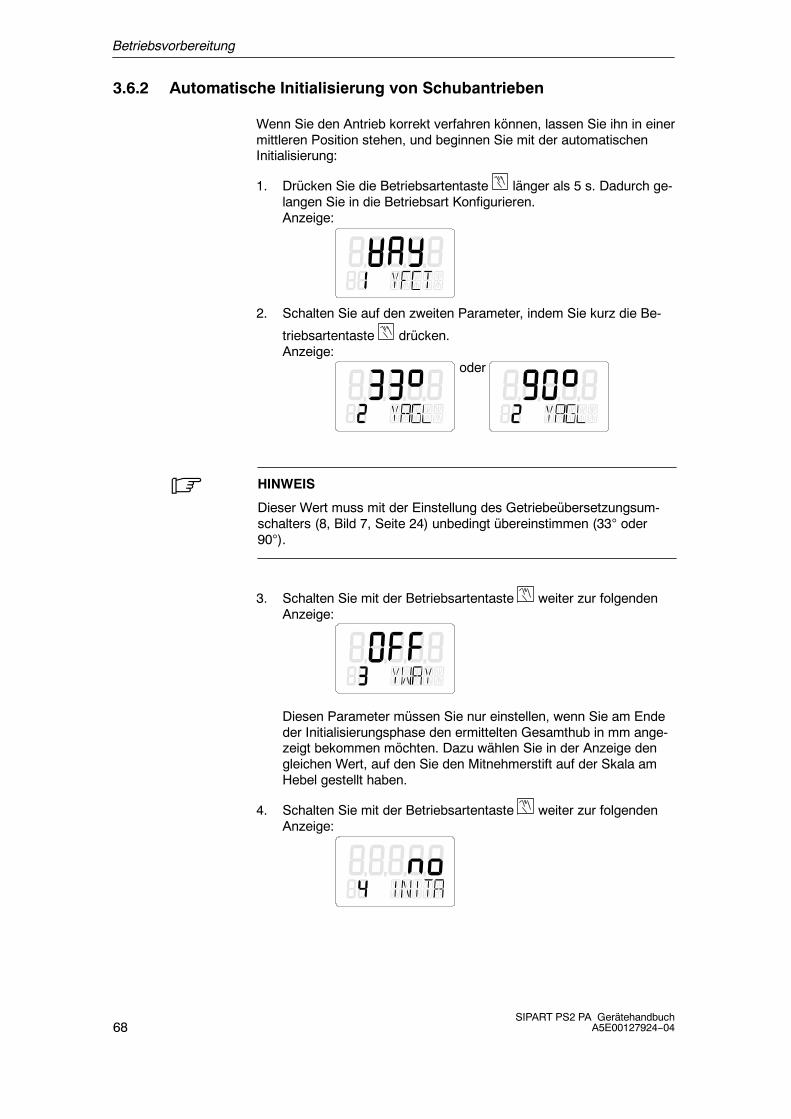
Betriebsvorbereitung
68SIPART PS2 PA Gerätehandbuch
A5E00127924--04
3.6.2 Automatische Initialisierung von Schubantrieben
Wenn Sie den Antrieb korrekt verfahren können, lassen Sie ihn in einermittleren Position stehen, und beginnen Sie mit der automatischenInitialisierung:
1. Drücken Sie die Betriebsartentaste länger als 5 s. Dadurch ge-langen Sie in die Betriebsart Konfigurieren.Anzeige:
2. Schalten Sie auf den zweiten Parameter, indem Sie kurz die Be-
triebsartentaste drücken.Anzeige:
oder
. HINWEIS
Dieser Wert muss mit der Einstellung des Getriebeübersetzungsum-schalters (8, Bild 7, Seite 24) unbedingt übereinstimmen (33° oder90°).
3. Schalten Sie mit der Betriebsartentaste weiter zur folgendenAnzeige:
Diesen Parameter müssen Sie nur einstellen, wenn Sie am Endeder Initialisierungsphase den ermittelten Gesamthub in mm ange-zeigt bekommen möchten. Dazu wählen Sie in der Anzeige dengleichen Wert, auf den Sie den Mitnehmerstift auf der Skala amHebel gestellt haben.
4. Schalten Sie mit der Betriebsartentaste weiter zur folgendenAnzeige:
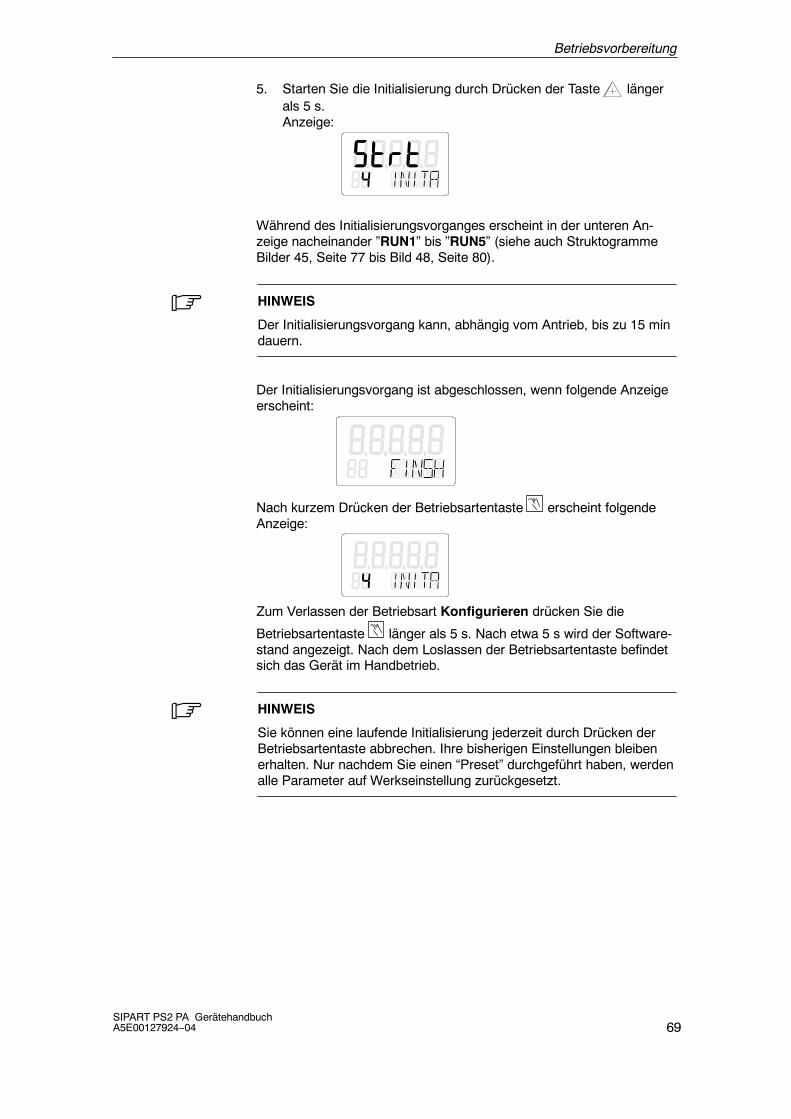
Betriebsvorbereitung
69SIPART PS2 PA GerätehandbuchA5E00127924--04
5. Starten Sie die Initialisierung durch Drücken der Taste längerals 5 s.Anzeige:
Während des Initialisierungsvorganges erscheint in der unteren An-zeige nacheinander ”RUN1” bis ”RUN5” (siehe auch StruktogrammeBilder 45, Seite 77 bis Bild 48, Seite 80).
. HINWEIS
Der Initialisierungsvorgang kann, abhängig vom Antrieb, bis zu 15 mindauern.
Der Initialisierungsvorgang ist abgeschlossen, wenn folgende Anzeigeerscheint:
Nach kurzem Drücken der Betriebsartentaste erscheint folgendeAnzeige:
Zum Verlassen der Betriebsart Konfigurieren drücken Sie die
Betriebsartentaste länger als 5 s. Nach etwa 5 s wird der Software-stand angezeigt. Nach dem Loslassen der Betriebsartentaste befindetsich das Gerät im Handbetrieb.
. HINWEIS
Sie können eine laufende Initialisierung jederzeit durch Drücken derBetriebsartentaste abbrechen. Ihre bisherigen Einstellungen bleibenerhalten. Nur nachdem Sie einen “Preset” durchgeführt haben, werdenalle Parameter auf Werkseinstellung zurückgesetzt.
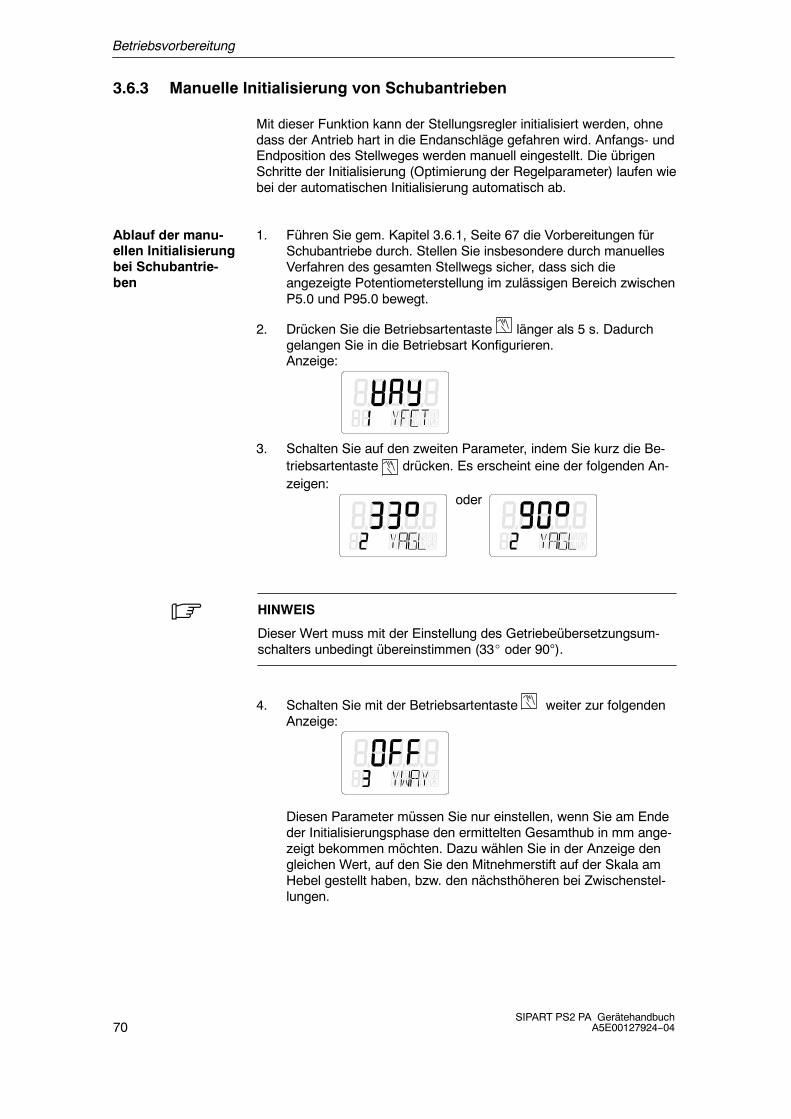
Betriebsvorbereitung
70SIPART PS2 PA Gerätehandbuch
A5E00127924--04
3.6.3 Manuelle Initialisierung von Schubantrieben
Mit dieser Funktion kann der Stellungsregler initialisiert werden, ohnedass der Antrieb hart in die Endanschläge gefahren wird. Anfangs- undEndposition des Stellweges werden manuell eingestellt. Die übrigenSchritte der Initialisierung (Optimierung der Regelparameter) laufen wiebei der automatischen Initialisierung automatisch ab.
1. Führen Sie gem. Kapitel 3.6.1, Seite 67 die Vorbereitungen fürSchubantriebe durch. Stellen Sie insbesondere durch manuellesVerfahren des gesamten Stellwegs sicher, dass sich dieangezeigte Potentiometerstellung im zulässigen Bereich zwischenP5.0 und P95.0 bewegt.
2. Drücken Sie die Betriebsartentaste länger als 5 s. Dadurchgelangen Sie in die Betriebsart Konfigurieren.Anzeige:
3. Schalten Sie auf den zweiten Parameter, indem Sie kurz die Be-triebsartentaste drücken. Es erscheint eine der folgenden An-zeigen:
oder
. HINWEIS
Dieser Wert muss mit der Einstellung des Getriebeübersetzungsum-schalters unbedingt übereinstimmen (33_ oder 90°).
4. Schalten Sie mit der Betriebsartentaste weiter zur folgendenAnzeige:
Diesen Parameter müssen Sie nur einstellen, wenn Sie am Endeder Initialisierungsphase den ermittelten Gesamthub in mm ange-zeigt bekommen möchten. Dazu wählen Sie in der Anzeige dengleichen Wert, auf den Sie den Mitnehmerstift auf der Skala amHebel gestellt haben, bzw. den nächsthöheren bei Zwischenstel-lungen.
Ablauf der manu-ellen Initialisierungbei Schubantrie-ben
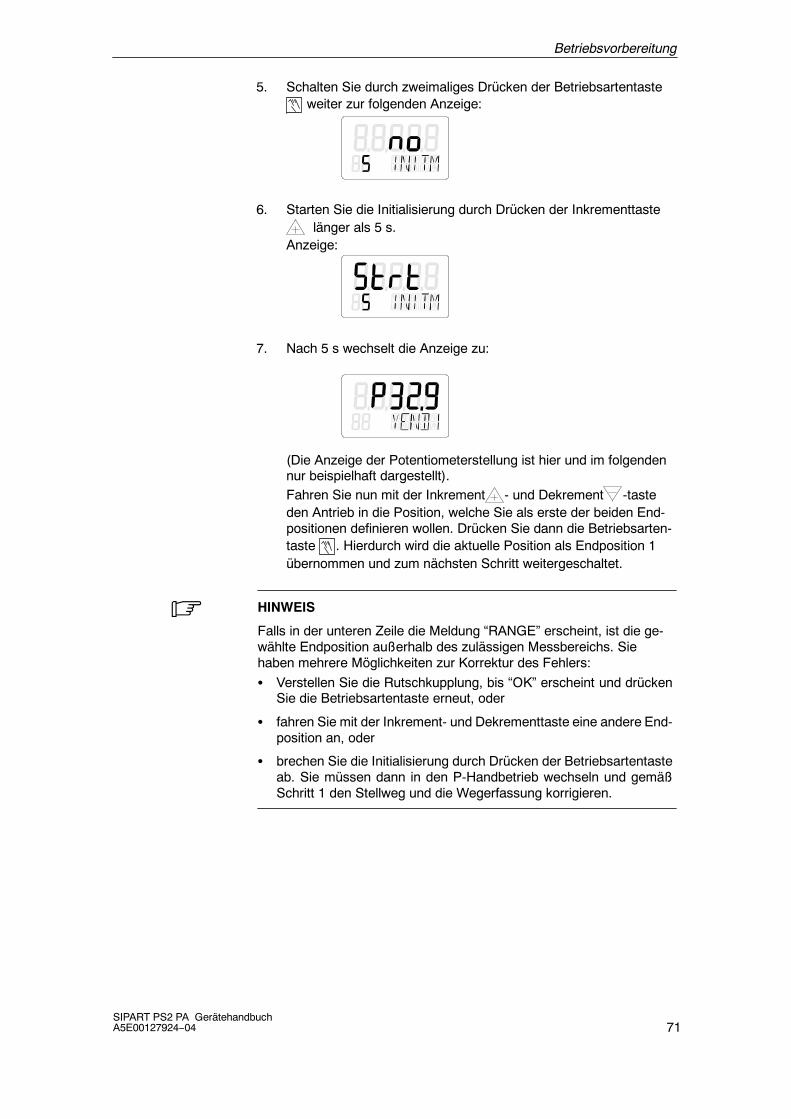
Betriebsvorbereitung
71SIPART PS2 PA GerätehandbuchA5E00127924--04
5. Schalten Sie durch zweimaliges Drücken der Betriebsartentasteweiter zur folgenden Anzeige:
6. Starten Sie die Initialisierung durch Drücken der Inkrementtastelänger als 5 s.
Anzeige:
7. Nach 5 s wechselt die Anzeige zu:
(Die Anzeige der Potentiometerstellung ist hier und im folgendennur beispielhaft dargestellt).Fahren Sie nun mit der Inkrement - und Dekrement -tasteden Antrieb in die Position, welche Sie als erste der beiden End-positionen definieren wollen. Drücken Sie dann die Betriebsarten-taste . Hierdurch wird die aktuelle Position als Endposition 1übernommen und zum nächsten Schritt weitergeschaltet.
. HINWEIS
Falls in der unteren Zeile die Meldung “RANGE” erscheint, ist die ge-wählte Endposition außerhalb des zulässigen Messbereichs. Siehaben mehrere Möglichkeiten zur Korrektur des Fehlers:S Verstellen Sie die Rutschkupplung, bis “OK” erscheint und drücken
Sie die Betriebsartentaste erneut, oder
S fahren Sie mit der Inkrement- und Dekrementtaste eine andere End-position an, oder
S brechen Sie die Initialisierung durch Drücken der Betriebsartentasteab. Sie müssen dann in den P-Handbetrieb wechseln und gemäßSchritt 1 den Stellweg und die Wegerfassung korrigieren.
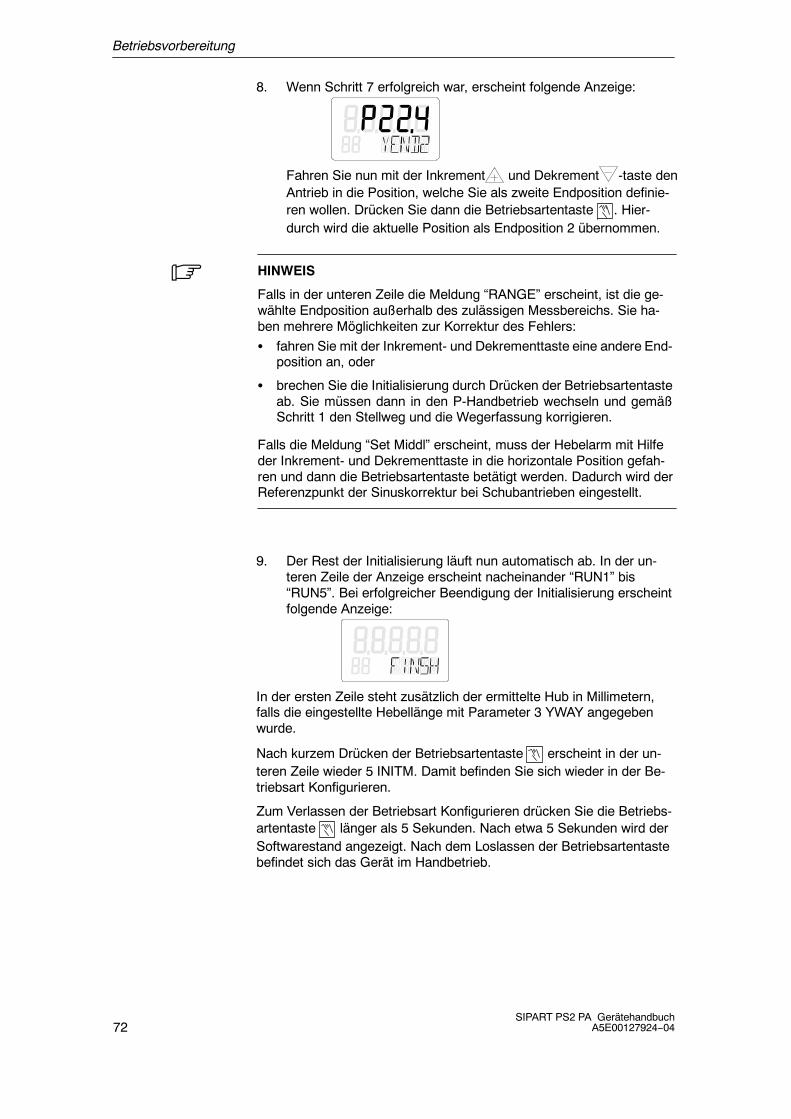
Betriebsvorbereitung
72SIPART PS2 PA Gerätehandbuch
A5E00127924--04
8. Wenn Schritt 7 erfolgreich war, erscheint folgende Anzeige:
Fahren Sie nun mit der Inkrement und Dekrement -taste denAntrieb in die Position, welche Sie als zweite Endposition definie-ren wollen. Drücken Sie dann die Betriebsartentaste . Hier-durch wird die aktuelle Position als Endposition 2 übernommen.
. HINWEIS
Falls in der unteren Zeile die Meldung “RANGE” erscheint, ist die ge-wählte Endposition außerhalb des zulässigen Messbereichs. Sie ha-ben mehrere Möglichkeiten zur Korrektur des Fehlers:S fahren Sie mit der Inkrement- und Dekrementtaste eine andere End-
position an, oder
S brechen Sie die Initialisierung durch Drücken der Betriebsartentasteab. Sie müssen dann in den P-Handbetrieb wechseln und gemäßSchritt 1 den Stellweg und die Wegerfassung korrigieren.
Falls die Meldung “Set Middl” erscheint, muss der Hebelarm mit Hilfeder Inkrement- und Dekrementtaste in die horizontale Position gefah-ren und dann die Betriebsartentaste betätigt werden. Dadurch wird derReferenzpunkt der Sinuskorrektur bei Schubantrieben eingestellt.
9. Der Rest der Initialisierung läuft nun automatisch ab. In der un-teren Zeile der Anzeige erscheint nacheinander “RUN1” bis“RUN5”. Bei erfolgreicher Beendigung der Initialisierung erscheintfolgende Anzeige:
In der ersten Zeile steht zusätzlich der ermittelte Hub in Millimetern,falls die eingestellte Hebellänge mit Parameter 3 YWAY angegebenwurde.
Nach kurzem Drücken der Betriebsartentaste erscheint in der un-teren Zeile wieder 5 INITM. Damit befinden Sie sich wieder in der Be-triebsart Konfigurieren.
Zum Verlassen der Betriebsart Konfigurieren drücken Sie die Betriebs-artentaste länger als 5 Sekunden. Nach etwa 5 Sekunden wird derSoftwarestand angezeigt. Nach dem Loslassen der Betriebsartentastebefindet sich das Gerät im Handbetrieb.
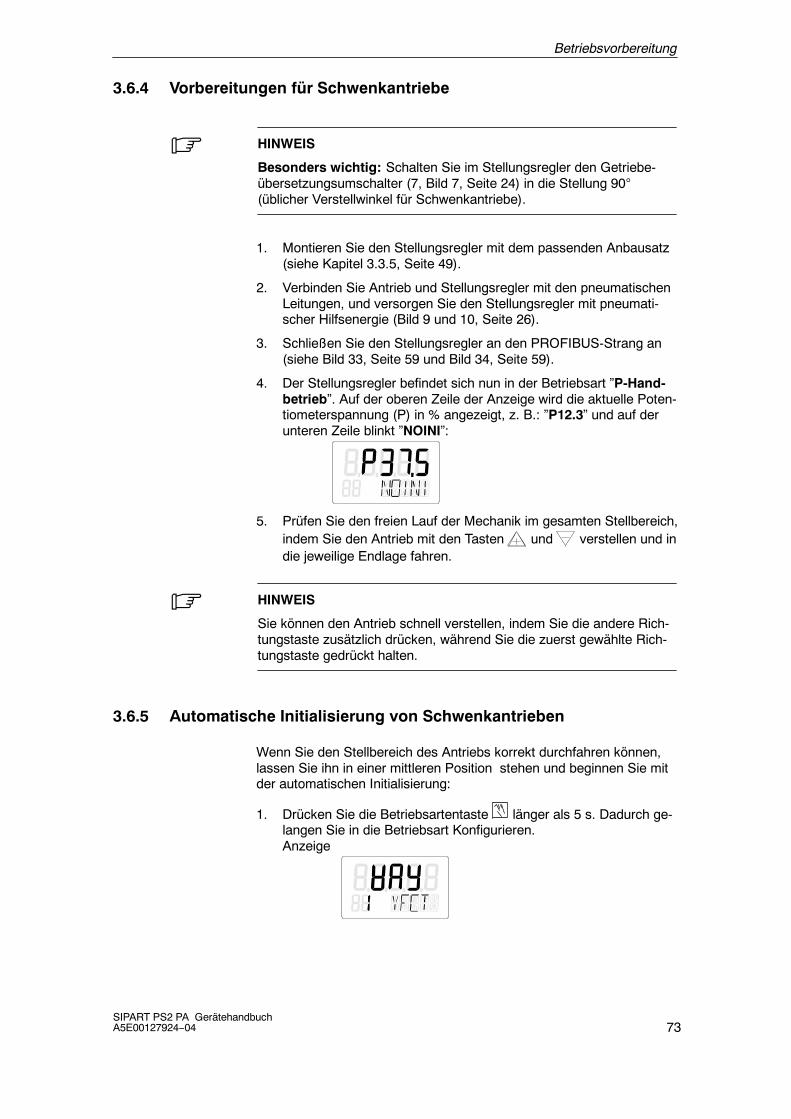
Betriebsvorbereitung
73SIPART PS2 PA GerätehandbuchA5E00127924--04
3.6.4 Vorbereitungen für Schwenkantriebe
. HINWEIS
Besonders wichtig: Schalten Sie im Stellungsregler den Getriebe-übersetzungsumschalter (7, Bild 7, Seite 24) in die Stellung 90°(üblicher Verstellwinkel für Schwenkantriebe).
1. Montieren Sie den Stellungsregler mit dem passenden Anbausatz(siehe Kapitel 3.3.5, Seite 49).
2. Verbinden Sie Antrieb und Stellungsregler mit den pneumatischenLeitungen, und versorgen Sie den Stellungsregler mit pneumati-scher Hilfsenergie (Bild 9 und 10, Seite 26).
3. Schließen Sie den Stellungsregler an den PROFIBUS-Strang an(siehe Bild 33, Seite 59 und Bild 34, Seite 59).
4. Der Stellungsregler befindet sich nun in der Betriebsart ”P-Hand-betrieb”. Auf der oberen Zeile der Anzeige wird die aktuelle Poten-tiometerspannung (P) in % angezeigt, z. B.: ”P12.3” und auf derunteren Zeile blinkt ”NOINI”:
5. Prüfen Sie den freien Lauf der Mechanik im gesamten Stellbereich,indem Sie den Antrieb mit den Tasten und verstellen und indie jeweilige Endlage fahren.
. HINWEIS
Sie können den Antrieb schnell verstellen, indem Sie die andere Rich-tungstaste zusätzlich drücken, während Sie die zuerst gewählte Rich-tungstaste gedrückt halten.
3.6.5 Automatische Initialisierung von Schwenkantrieben
Wenn Sie den Stellbereich des Antriebs korrekt durchfahren können,lassen Sie ihn in einer mittleren Position stehen und beginnen Sie mitder automatischen Initialisierung:
1. Drücken Sie die Betriebsartentaste länger als 5 s. Dadurch ge-langen Sie in die Betriebsart Konfigurieren.Anzeige
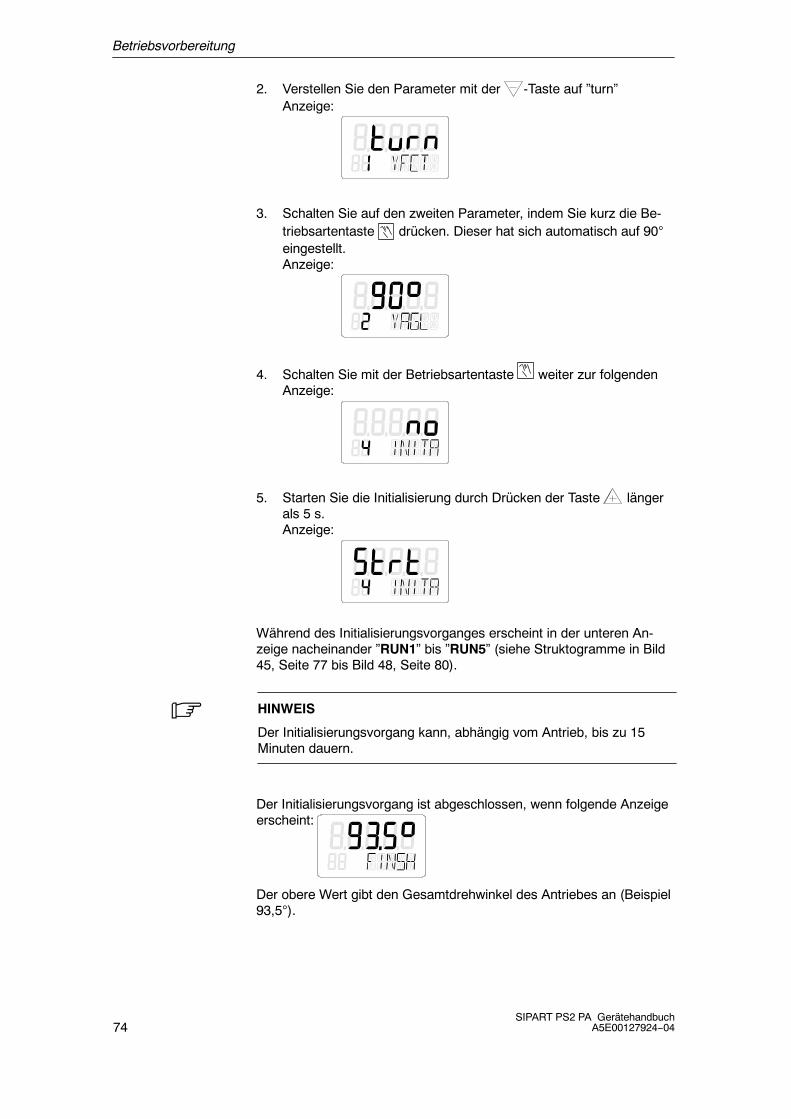
Betriebsvorbereitung
74SIPART PS2 PA Gerätehandbuch
A5E00127924--04
2. Verstellen Sie den Parameter mit der -Taste auf ”turn”Anzeige:
3. Schalten Sie auf den zweiten Parameter, indem Sie kurz die Be-triebsartentaste drücken. Dieser hat sich automatisch auf 90°eingestellt.Anzeige:
4. Schalten Sie mit der Betriebsartentaste weiter zur folgendenAnzeige:
5. Starten Sie die Initialisierung durch Drücken der Taste längerals 5 s.Anzeige:
Während des Initialisierungsvorganges erscheint in der unteren An-zeige nacheinander ”RUN1” bis ”RUN5” (siehe Struktogramme in Bild45, Seite 77 bis Bild 48, Seite 80).
. HINWEIS
Der Initialisierungsvorgang kann, abhängig vom Antrieb, bis zu 15Minuten dauern.
Der Initialisierungsvorgang ist abgeschlossen, wenn folgende Anzeigeerscheint:
Der obere Wert gibt den Gesamtdrehwinkel des Antriebes an (Beispiel93,5°).
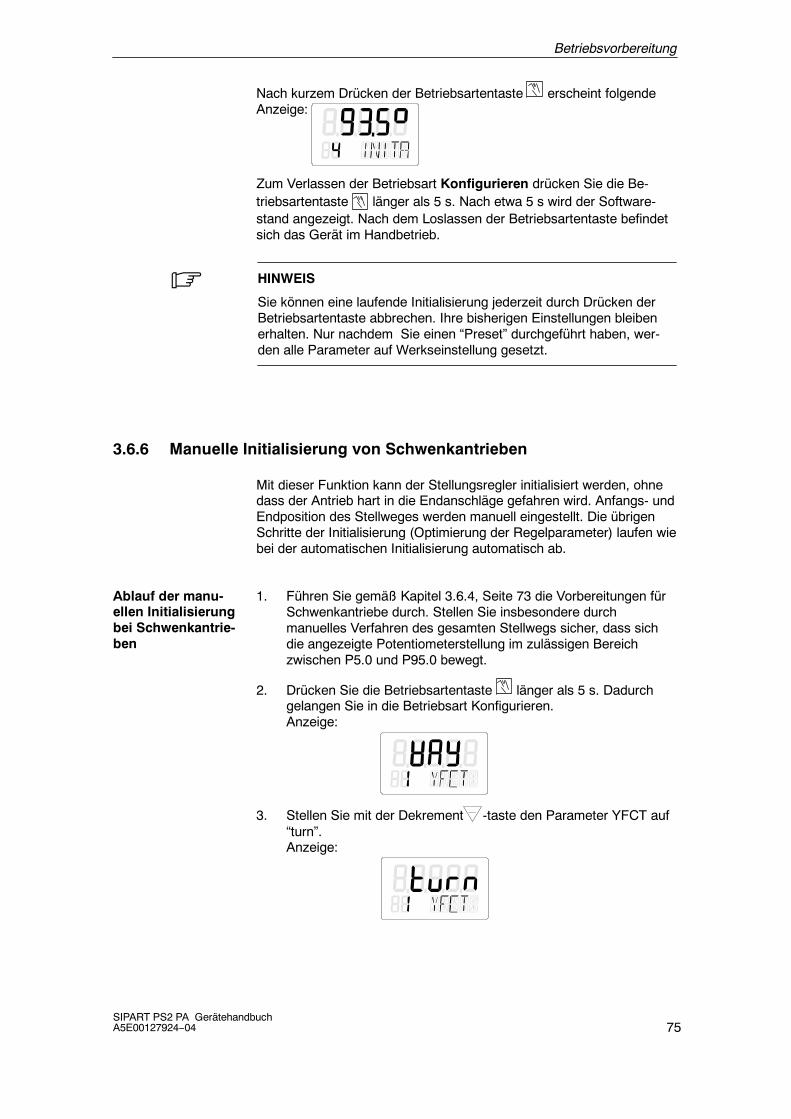
Betriebsvorbereitung
75SIPART PS2 PA GerätehandbuchA5E00127924--04
Nach kurzem Drücken der Betriebsartentaste erscheint folgendeAnzeige:
Zum Verlassen der Betriebsart Konfigurieren drücken Sie die Be-triebsartentaste länger als 5 s. Nach etwa 5 s wird der Software-stand angezeigt. Nach dem Loslassen der Betriebsartentaste befindetsich das Gerät im Handbetrieb.
. HINWEIS
Sie können eine laufende Initialisierung jederzeit durch Drücken derBetriebsartentaste abbrechen. Ihre bisherigen Einstellungen bleibenerhalten. Nur nachdem Sie einen “Preset” durchgeführt haben, wer-den alle Parameter auf Werkseinstellung gesetzt.
3.6.6 Manuelle Initialisierung von Schwenkantrieben
Mit dieser Funktion kann der Stellungsregler initialisiert werden, ohnedass der Antrieb hart in die Endanschläge gefahren wird. Anfangs- undEndposition des Stellweges werden manuell eingestellt. Die übrigenSchritte der Initialisierung (Optimierung der Regelparameter) laufen wiebei der automatischen Initialisierung automatisch ab.
1. Führen Sie gemäß Kapitel 3.6.4, Seite 73 die Vorbereitungen fürSchwenkantriebe durch. Stellen Sie insbesondere durchmanuelles Verfahren des gesamten Stellwegs sicher, dass sichdie angezeigte Potentiometerstellung im zulässigen Bereichzwischen P5.0 und P95.0 bewegt.
2. Drücken Sie die Betriebsartentaste länger als 5 s. Dadurchgelangen Sie in die Betriebsart Konfigurieren.Anzeige:
3. Stellen Sie mit der Dekrement -taste den Parameter YFCT auf“turn”.Anzeige:
Ablauf der manu-ellen Initialisierungbei Schwenkantrie-ben
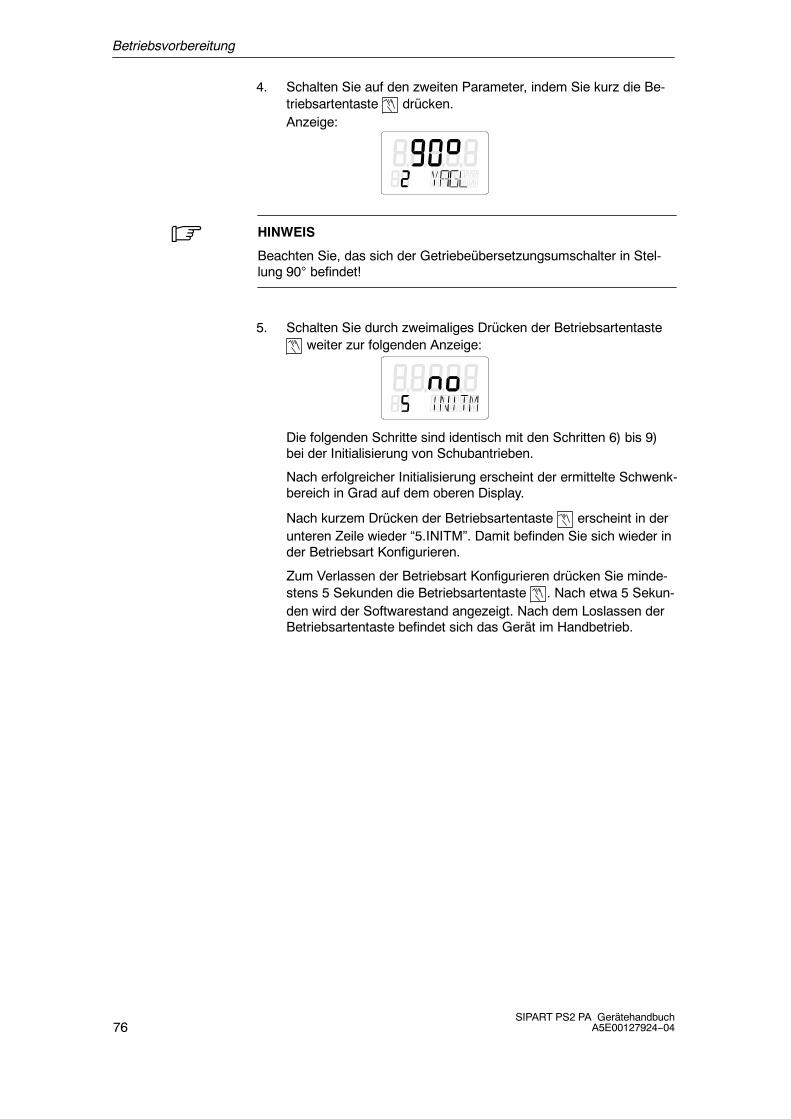
Betriebsvorbereitung
76SIPART PS2 PA Gerätehandbuch
A5E00127924--04
4. Schalten Sie auf den zweiten Parameter, indem Sie kurz die Be-triebsartentaste drücken.Anzeige:
. HINWEIS
Beachten Sie, das sich der Getriebeübersetzungsumschalter in Stel-lung 90° befindet!
5. Schalten Sie durch zweimaliges Drücken der Betriebsartentasteweiter zur folgenden Anzeige:
Die folgenden Schritte sind identisch mit den Schritten 6) bis 9)bei der Initialisierung von Schubantrieben.
Nach erfolgreicher Initialisierung erscheint der ermittelte Schwenk-bereich in Grad auf dem oberen Display.
Nach kurzem Drücken der Betriebsartentaste erscheint in derunteren Zeile wieder “5.INITM”. Damit befinden Sie sich wieder inder Betriebsart Konfigurieren.
Zum Verlassen der Betriebsart Konfigurieren drücken Sie minde-stens 5 Sekunden die Betriebsartentaste . Nach etwa 5 Sekun-den wird der Softwarestand angezeigt. Nach dem Loslassen derBetriebsartentaste befindet sich das Gerät im Handbetrieb.
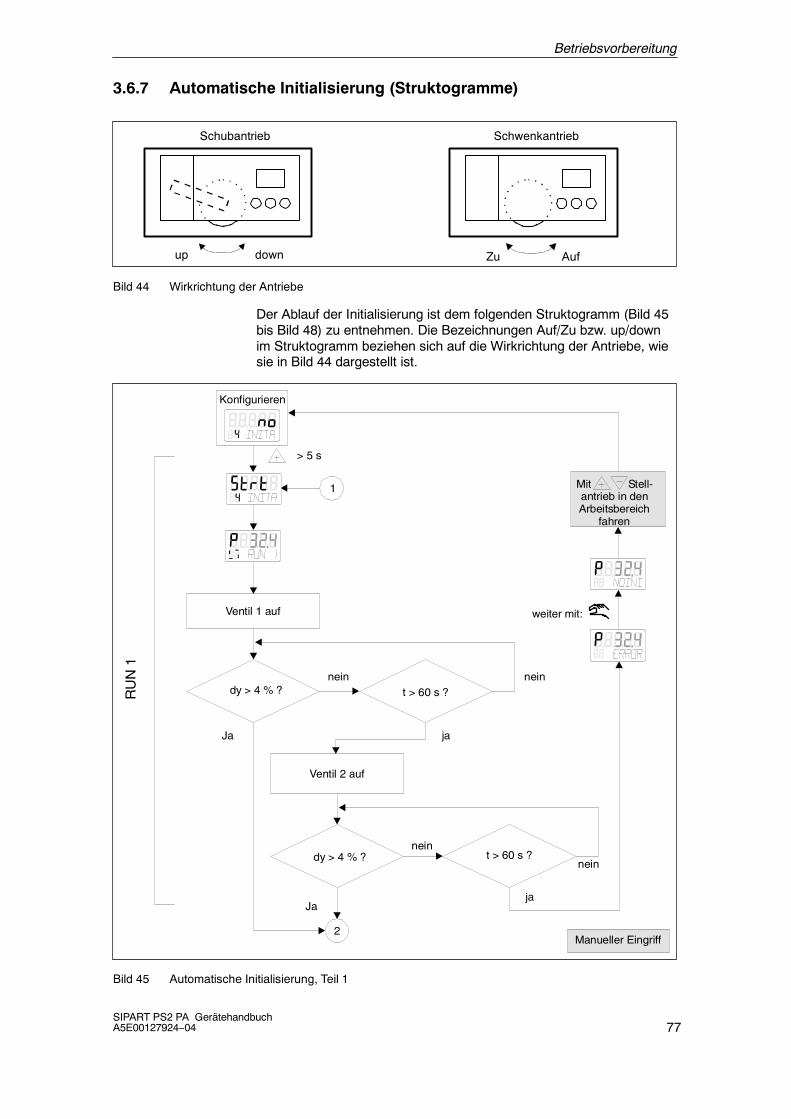
Betriebsvorbereitung
77SIPART PS2 PA GerätehandbuchA5E00127924--04
3.6.7 Automatische Initialisierung (Struktogramme)
AufZuup down
SchwenkantriebSchubantrieb
Bild 44 Wirkrichtung der Antriebe
Der Ablauf der Initialisierung ist dem folgenden Struktogramm (Bild 45bis Bild 48) zu entnehmen. Die Bezeichnungen Auf/Zu bzw. up/downim Struktogramm beziehen sich auf die Wirkrichtung der Antriebe, wiesie in Bild 44 dargestellt ist.
Konfigurieren
Ventil 1 auf
Ventil 2 auf
dy > 4 % ?
dy > 4 % ?
t > 60 s ?
t > 60 s ?
nein
nein
nein
nein
Ja
Ja
ja
ja
Mit Stell-antrieb in den Arbeitsbereich
fahren
weiter mit:
1
2Manueller Eingriff
RU
N 1
> 5 s
Bild 45 Automatische Initialisierung, Teil 1
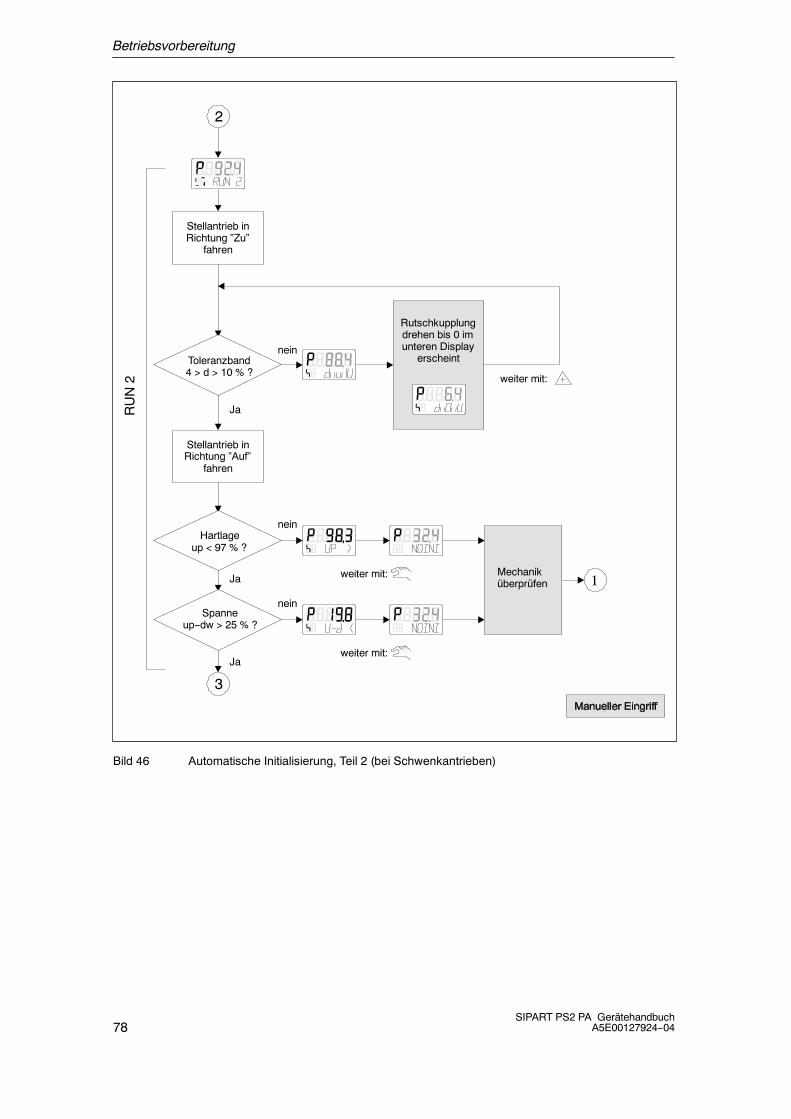
Betriebsvorbereitung
78SIPART PS2 PA Gerätehandbuch
A5E00127924--04
2
3
1
nein
nein
nein
Ja
Ja
Ja
weiter mit:
weiter mit:
Rutschkupplungdrehen bis 0 imunteren Display
erscheint
Stellantrieb inRichtung ”Zu”
fahren
Stellantrieb inRichtung ”Auf”
fahren
Toleranzband4 > d > 10 % ?
Hartlageup < 97 % ?
Spanneup--dw > 25 % ?
RUN2 weiter mit:
Mechaniküberprüfen
Bild 46 Automatische Initialisierung, Teil 2 (bei Schwenkantrieben)
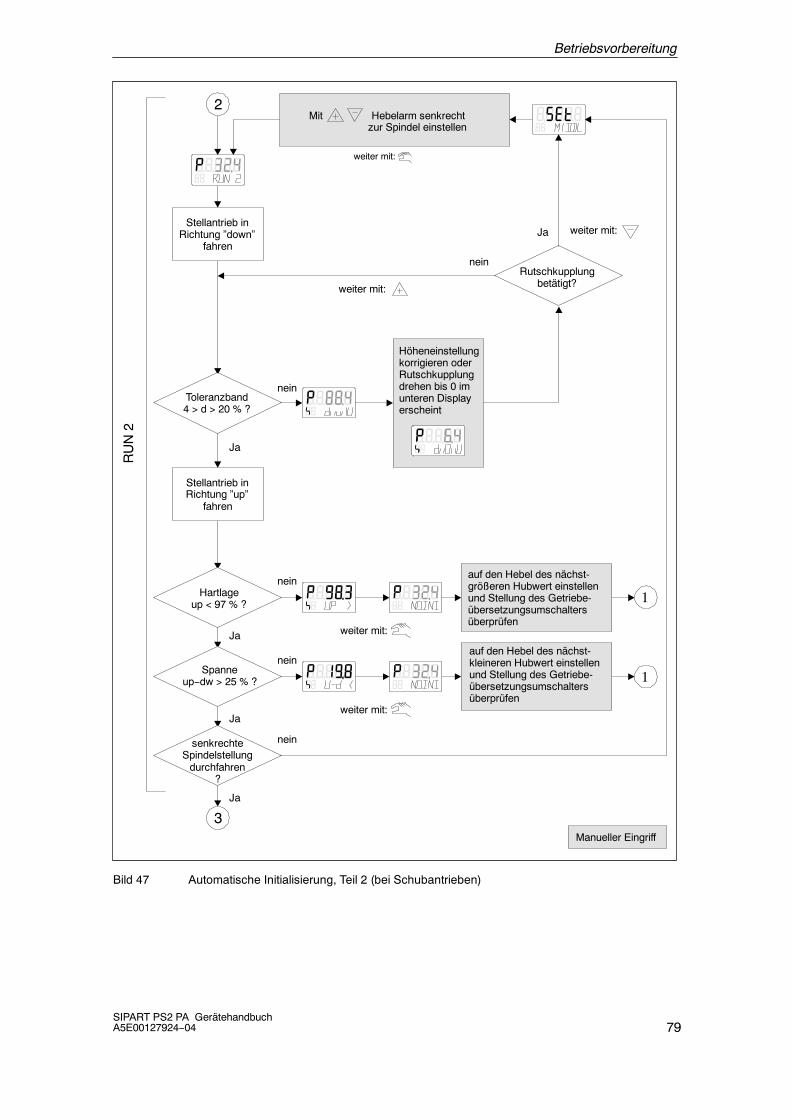
Betriebsvorbereitung
79SIPART PS2 PA GerätehandbuchA5E00127924--04
Manueller Eingriff
2
3
1
1
weiter mit:
weiter mit:
nein
nein
nein
nein
nein
Ja
Ja
Ja
Ja
Ja
weiter mit:
weiter mit:
Stellantrieb inRichtung ”down”
fahren
senkrechteSpindelstellungdurchfahren
?
Mit Hebelarm senkrechtzur Spindel einstellen
RUN2
Stellantrieb inRichtung ”up”
fahren
Toleranzband4 > d > 20 % ?
Hartlageup < 97 % ?
Spanneup--dw > 25 % ?
weiter mit:
auf den Hebel des nächst-größeren Hubwert einstellenund Stellung des Getriebe-übersetzungsumschaltersüberprüfen
auf den Hebel des nächst-kleineren Hubwert einstellenund Stellung des Getriebe-übersetzungsumschaltersüberprüfen
Höheneinstellungkorrigieren oderRutschkupplungdrehen bis 0 imunteren Displayerscheint
Rutschkupplungbetätigt?
Bild 47 Automatische Initialisierung, Teil 2 (bei Schubantrieben)
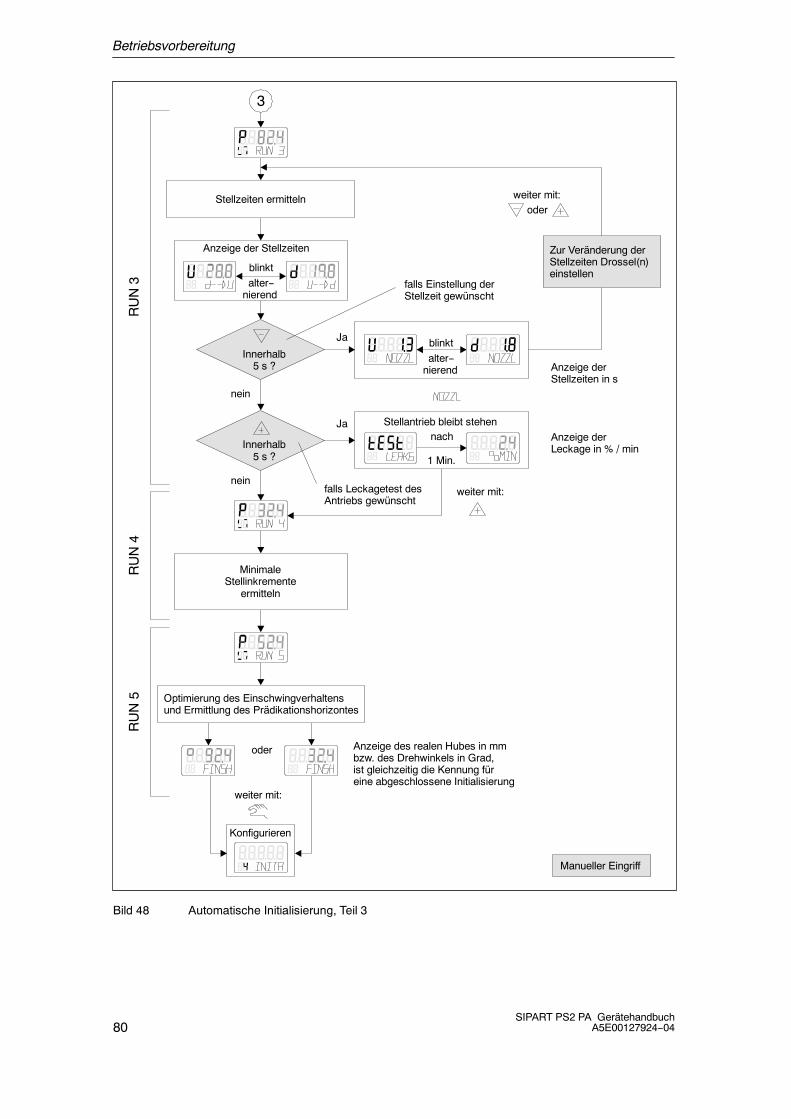
Betriebsvorbereitung
80SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Manueller Eingriff
3
Stellzeiten ermitteln
Innerhalb5 s ?
Innerhalb5 s ?
nein
nein
Ja
Ja
weiter mit:
weiter mit:
weiter mit:
oder
oder
Stellantrieb bleibt stehen
Anzeige der Stellzeiten
MinimaleStellinkremente
ermitteln
Anzeige derLeckage in % / min
Anzeige derStellzeiten in s
RUN3
RUN4
RUN5
nach
1 Min.
alter--nierend
Konfigurieren
blinkt
alter--nierend
blinkt
Zur Veränderung derStellzeiten Drossel(n)einstellen
falls Leckagetest desAntriebs gewünscht
falls Einstellung derStellzeit gewünscht
Optimierung des Einschwingverhaltensund Ermittlung des Prädikationshorizontes
Anzeige des realen Hubes in mmbzw. des Drehwinkels in Grad,ist gleichzeitig die Kennung füreine abgeschlossene Initialisierung
Bild 48 Automatische Initialisierung, Teil 3
Betriebsvorbereitung
81SIPART PS2 PA GerätehandbuchA5E00127924--04
3.7 Kopieren von Initialisierungsdaten (Stellungsreglertausch)
Mit dieser Funktion habe Sie die Möglichkeit, einen Stellungsregler inBetrieb zu nehmen, ohne die Initialisierungsroutine durchzuführen. Dieserlaubt beispielsweise den Tausch eines Stellungsreglers an einer lau-fenden Anlage, bei der die automatische bzw. manuelle Initialisierungnicht durchgeführt werden kann, ohne den Prozess zu stören.
ACHTUNG
Eine Initialisierung (automatisch oder manuell) sollte baldmöglichstnachgeholt werden, da nur so der Stellungsregler optimal an die me-chanischen und dynamischen Eigenschaften des Antriebs angepasstwerden kann.
Folgende Schritte sind für einen Stellungsreglertausch durchzuführen:
1. Geräteparameter und Initialisierungsdaten (bei der Initialisierungermittelt) des auszutauschenden Geräts mit PDM (Process DeviceManager) einlesen und speichern. Dieser Schritt ist nicht nötig,wenn das Gerät mit PDM parametriert wurde und die Daten bereitsgespeichert wurden.
2. Antrieb in seiner momentanen Position fixieren (mechanisch oderpneumatisch).
3. Aktuellen Stellungsistwert vom Display des auszuwechselndenStellungsreglers ablesen und notieren. Falls Elektronik defekt, ak-tuelle Stellung durch Messen am Antrieb oder Ventil ermitteln.
4. Stellungsregler demontieren. Hebelarm des Stellungsreglers amErsatzgerät anbauen. Ersatzgerät an Armatur montieren. Getrie-beumschalter in gleiche Position wie beim defekten Gerät bringen.Gerätedaten und Initialisierungsdaten aus PDM einspielen.
5. Falls der angezeigte Istwert nicht mit dem notierten Wert des de-fekten Stellungsreglers übereinstimmt, korrekten Wert mit derRutschkupplung einstellen.
6. Der Stellungsregler ist nun betriebsbereit.
Die Genauigkeit und das dynamische Verhalten können gegen-über einer korrekten Initialisierung eingeschränkt sein. Insbeson-dere die Position der Hartanschläge und die damit zusammenhän-genden Wartungsdaten können Abweichungen zeigen. Dahermuss bei nächster Gelegenheit eine Initialisierung nachgeholtwerden.

Betriebsvorbereitung
82SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Vorortbedienung am Gerät
83SIPART PS2 PA GerätehandbuchA5E00127924--04
Vorortbedienung am Gerät
Das nachfolgende Kapitel beschreibt die Bedienung des Stellungsreg-lers.
4.1 Display
Das LC-Display ist zweizeilig aufgebaut, wobei die Zeilen unterschied-lich segmentiert sind. Die Elemente der oberen Zeile bestehen aus je-weils 7, die der unteren Zeile aus jeweils 14 Segmenten. Die Anzeigeist abhängig von der gewählten Betriebsart (siehe Kapitel 4.3, Seite86).
. HINWEIS
Wird der Stellungsregler in Bereichen mit Temperaturen unter --10 °Cbetrieben, wird die Flüssigkristallanzeige träge und die Anzeigewieder-holrate vermindert sich deutlich.
Bild 49 zeigt Ihnen die verschiedenen Anzeigemöglichkeiten.
Im Kapitel 4.6, Seite 112 wird die Bedeutung weiterer Anzeigemöglich-keiten erläutert.
4.2 Bedientasten
Die Bedienung des Stellungsreglers erfolgt über drei Tasten (Bild 50,Seite 85), deren Funktion abhängig von der gewählten Betriebsart ist.Beim Stellungsregler in druckfester Ausführung liegen die Bedientastenunter einem Tastendeckel, der nach dem Lösen der Verschluss-schraube aufgeklappt werden kann.
. HINWEIS
Die Bedientasten müssen bei der druckfesten Ausführung mit demTastendeckel abgedeckt sein, um ein Eindringen von Flüssigkeit zuverhindern. Die Schutzart IP65/NEMA4x ist bei geöffnetem Gehäuseoder geöffneter Tastenabdeckklappe nicht gewährleistet.
Zur Bedienung der Tasten bei Stellungsreglern in Normalausführungund in eigensicherer Ausführung muss der Gehäusedeckel entferntwerden.
4
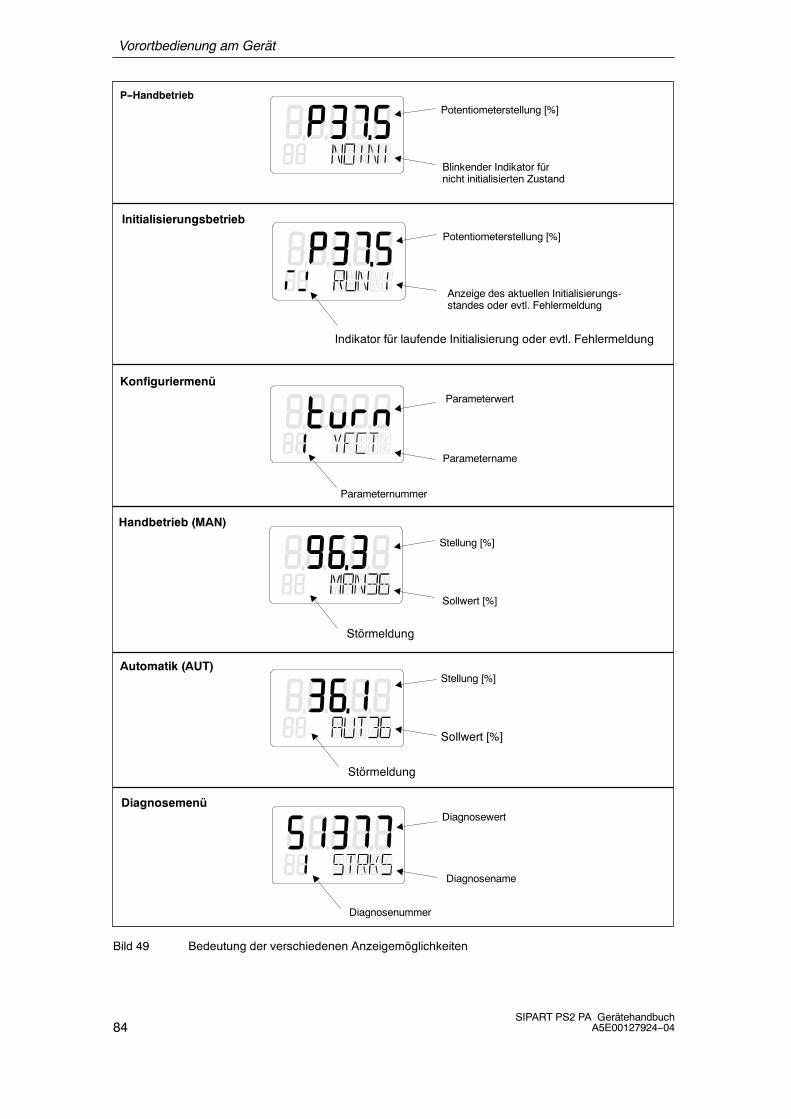
Vorortbedienung am Gerät
84SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Automatik (AUT)
Handbetrieb (MAN)
Stellung [%]
Parameterwert
Diagnosewert
Stellung [%]
Sollwert [%]
Störmeldung
Störmeldung
Parametername
Parameternummer
Indikator für laufende Initialisierung oder evtl. Fehlermeldung
Diagnosenummer
Sollwert [%]
P--Handbetrieb
Initialisierungsbetrieb
Potentiometerstellung [%]
Potentiometerstellung [%]
Konfiguriermenü
Diagnosemenü
Anzeige des aktuellen Initialisierungs-standes oder evtl. Fehlermeldung
Blinkender Indikator fürnicht initialisierten Zustand
Diagnosename
Bild 49 Bedeutung der verschiedenen Anzeigemöglichkeiten
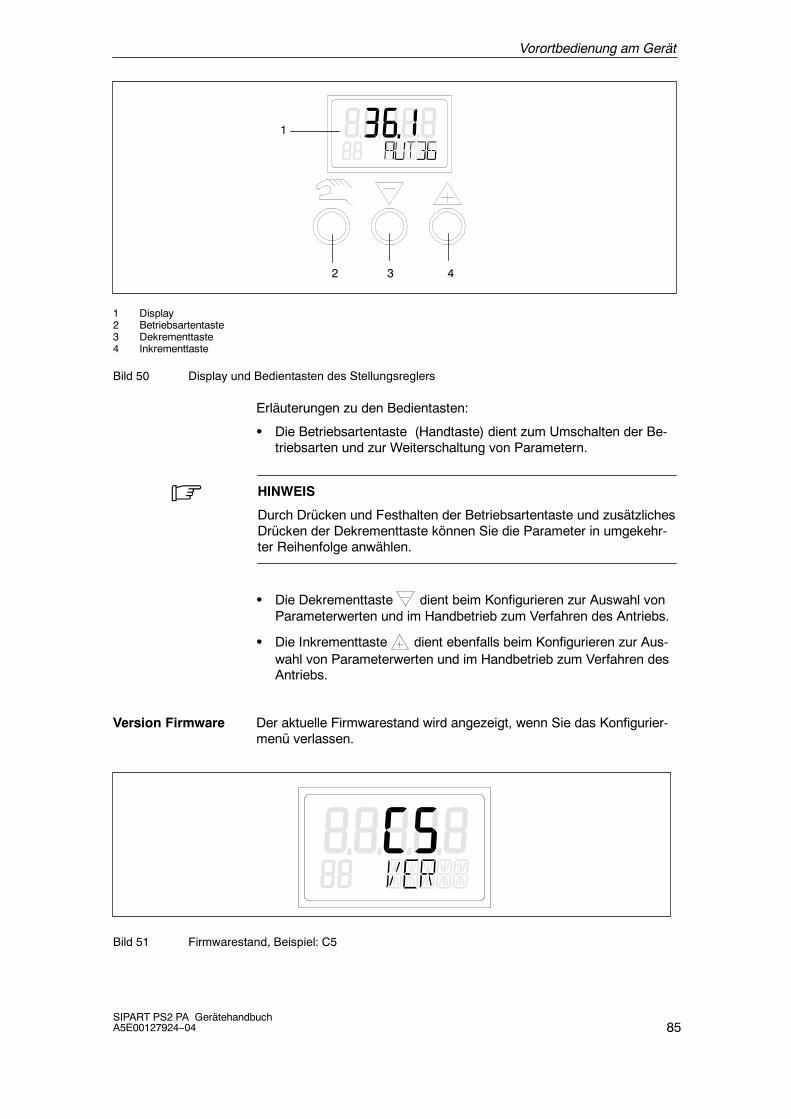
Vorortbedienung am Gerät
85SIPART PS2 PA GerätehandbuchA5E00127924--04
1
2 3 4
1 Display2 Betriebsartentaste3 Dekrementtaste4 Inkrementtaste
Bild 50 Display und Bedientasten des Stellungsreglers
Erläuterungen zu den Bedientasten:
S Die Betriebsartentaste (Handtaste) dient zum Umschalten der Be-triebsarten und zur Weiterschaltung von Parametern.
. HINWEIS
Durch Drücken und Festhalten der Betriebsartentaste und zusätzlichesDrücken der Dekrementtaste können Sie die Parameter in umgekehr-ter Reihenfolge anwählen.
S Die Dekrementtaste dient beim Konfigurieren zur Auswahl vonParameterwerten und im Handbetrieb zum Verfahren des Antriebs.
S Die Inkrementtaste dient ebenfalls beim Konfigurieren zur Aus-wahl von Parameterwerten und im Handbetrieb zum Verfahren desAntriebs.
Der aktuelle Firmwarestand wird angezeigt, wenn Sie das Konfigurier-menü verlassen.
Bild 51 Firmwarestand, Beispiel: C5
Version Firmware
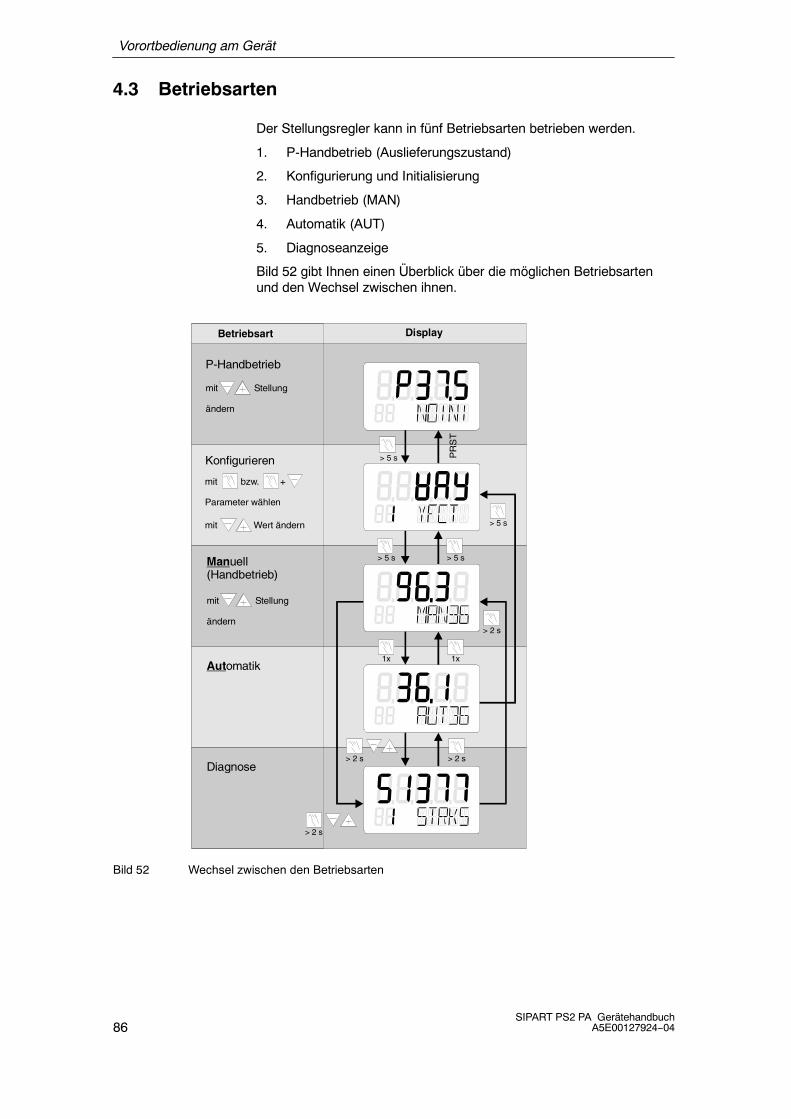
Vorortbedienung am Gerät
86SIPART PS2 PA Gerätehandbuch
A5E00127924--04
4.3 Betriebsarten
Der Stellungsregler kann in fünf Betriebsarten betrieben werden.
1. P-Handbetrieb (Auslieferungszustand)
2. Konfigurierung und Initialisierung
3. Handbetrieb (MAN)
4. Automatik (AUT)
5. Diagnoseanzeige
Bild 52 gibt Ihnen einen Überblick über die möglichen Betriebsartenund den Wechsel zwischen ihnen.
Automatik
Diagnose
Betriebsart
Manuell(Handbetrieb)
P-Handbetrieb
Konfigurieren
mit Stellung
ändern
mit Stellung
ändern
mit Wert ändern
Display
1x 1x
> 5 s > 5 s
> 2 s
> 2 s
> 2 s
> 2 s
> 5 s PR
ST
> 5 s
mit bzw. +
Parameter wählen
Bild 52 Wechsel zwischen den Betriebsarten
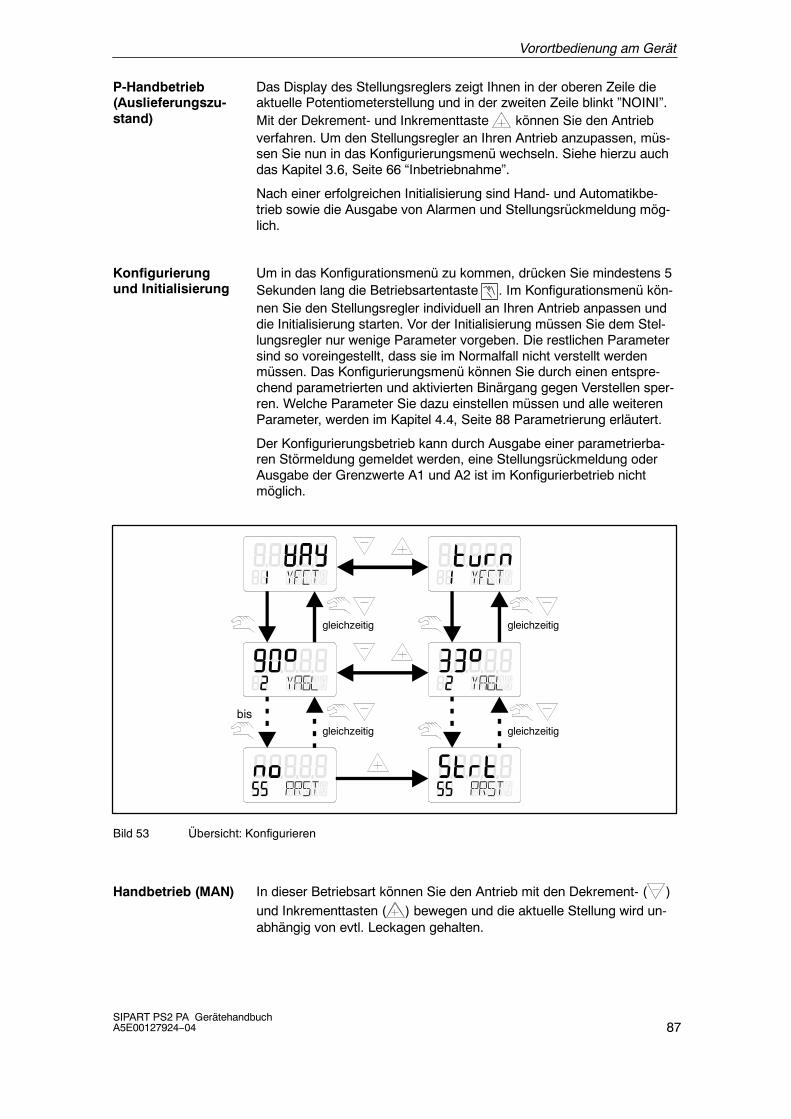
Vorortbedienung am Gerät
87SIPART PS2 PA GerätehandbuchA5E00127924--04
Das Display des Stellungsreglers zeigt Ihnen in der oberen Zeile dieaktuelle Potentiometerstellung und in der zweiten Zeile blinkt ”NOINI”.Mit der Dekrement- und Inkrementtaste können Sie den Antriebverfahren. Um den Stellungsregler an Ihren Antrieb anzupassen, müs-sen Sie nun in das Konfigurierungsmenü wechseln. Siehe hierzu auchdas Kapitel 3.6, Seite 66 “Inbetriebnahme”.
Nach einer erfolgreichen Initialisierung sind Hand- und Automatikbe-trieb sowie die Ausgabe von Alarmen und Stellungsrückmeldung mög-lich.
Um in das Konfigurationsmenü zu kommen, drücken Sie mindestens 5Sekunden lang die Betriebsartentaste . Im Konfigurationsmenü kön-nen Sie den Stellungsregler individuell an Ihren Antrieb anpassen unddie Initialisierung starten. Vor der Initialisierung müssen Sie dem Stel-lungsregler nur wenige Parameter vorgeben. Die restlichen Parametersind so voreingestellt, dass sie im Normalfall nicht verstellt werdenmüssen. Das Konfigurierungsmenü können Sie durch einen entspre-chend parametrierten und aktivierten Binärgang gegen Verstellen sper-ren. Welche Parameter Sie dazu einstellen müssen und alle weiterenParameter, werden im Kapitel 4.4, Seite 88 Parametrierung erläutert.
Der Konfigurierungsbetrieb kann durch Ausgabe einer parametrierba-ren Störmeldung gemeldet werden, eine Stellungsrückmeldung oderAusgabe der Grenzwerte A1 und A2 ist im Konfigurierbetrieb nichtmöglich.
gleichzeitig
gleichzeitig
gleichzeitig
gleichzeitig
bis
Bild 53 Übersicht: Konfigurieren
In dieser Betriebsart können Sie den Antrieb mit den Dekrement- ( )und Inkrementtasten ( ) bewegen und die aktuelle Stellung wird un-abhängig von evtl. Leckagen gehalten.
P-Handbetrieb(Auslieferungszu-stand)
Konfigurierungund Initialisierung
Handbetrieb (MAN)
Vorortbedienung am Gerät
88SIPART PS2 PA Gerätehandbuch
A5E00127924--04
. HINWEIS
Sie können den Antrieb schnell verstellen, indem Sie die andere Rich-tungstaste zusätzlich drücken, während Sie die zuerst gewählte Rich-tungstaste gedrückt halten.
Der Handbetrieb kann durch Ausgabe einer parametrierbaren Störmel-dung gemeldet werden, eine Stellungsrückmeldung oder Ausgabe derGrenzwerte A1 und A2 ist erst im Automatikbetrieb möglich.
. HINWEIS
Der Stellungsregler schaltet nach einem Ausfall der elektrischenHilfsenergie selbständig in den Automatikbetrieb um.
Der Automatikbetrieb ist der übliche Betrieb. In dieser Betriebsart ver-gleicht der Stellungsregler den Sollwert mit der aktuellen Position undverfährt den Antrieb solange, bis die Regelabweichung die parametrier-bare Totzone erreicht. Falls dies aus verschieden Gründen nicht mög-lich ist, werden Fehlermeldungen ausgegeben.
In dieser Betriebsart können Sie sich aktuelle Betriebsdaten (wie Hub-zahl, Anzahl der Richtungsänderungen, Anzahl der Störungsmeldun-gen usw.) anzeigen lassen (siehe Tabelle 1, Seite 104).
Aus dem Automatik- oder Handbetrieb gelangen Sie zur Diagnosean-zeige durch gleichzeitiges Drücken aller drei Tasten für mindestenszwei Sekunden.
Weitere Informationen erhalten Sie im Kapitel 4.5, Seite 103.
. HINWEIS
Die jeweilige Betriebsart (MAN oder AUT) des Stellungsreglers bleibtbei der Umschaltung in die Diagnoseanzeige erhalten, d.h. im Automa-tikbetrieb wird weiterhin auf den vorgegebenen Sollwert geregelt, undim Handbetrieb wird die zuletzt erreichte Stellung gehalten.
4.4 Parameter
In diesem Kapitel sind alle Parameter des Stellungsreglers aufgeführt.Bild 54 zeigt eine Übersicht über die Parameter.
Der Parametername ist einmal als Klartext und einmal wie er im Dis-play erscheint dargestellt. In der Spalte ”Funktion” wird kurz die Funk-tion des Parameters beschrieben. Des Weiteren sind die möglichenParameterwerte, die physikalische Einheit und die Werkseinstellung derParameter dargestellt.
Das Konfigurationsblockschaltbild (Bild 55, Seite 90) zeigt Ihnen dieWirkungsweise der Parameter.
Automatik (AUT)
Diagnoseanzeige
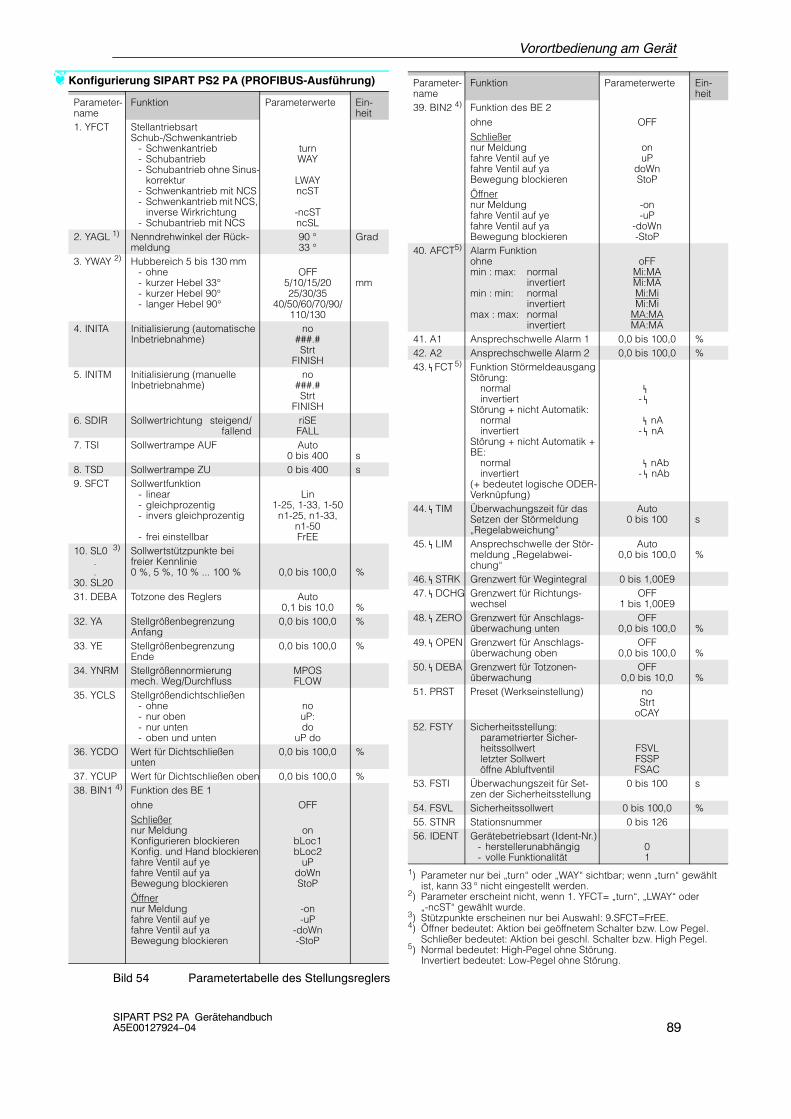
Vorortbedienung am Gerät
89SIPART PS2 PA GerätehandbuchA5E00127924--04
Bild 54 Parametertabelle des Stellungsreglers
Konfigurierung SIPART PS2 PA (PROFIBUS-Ausführung)
Parameter-name
Funktion Parameterwerte Ein-heit
1. YFCT StellantriebsartSchub-/Schwenkantrieb
- Schwenkantrieb- Schubantrieb- Schubantrieb ohne Sinus-
korrektur- Schwenkantrieb mit NCS- Schwenkantrieb mit NCS,
inverse Wirkrichtung- Schubantrieb mit NCS
turnWAY
LWAYncST
-ncSTncSL
2. YAGL 1) Nenndrehwinkel der Rück-meldung
90 °33 °
Grad
3. YWAY 2) Hubbereich 5 bis 130 mm- ohne- kurzer Hebel 33°- kurzer Hebel 90°- langer Hebel 90°
OFF5/10/15/2025/30/35
40/50/60/70/90/110/130
mm
4. INITA Initialisierung (automatische Inbetriebnahme)
no###.#Strt
FINISH5. INITM Initialisierung (manuelle
Inbetriebnahme)no
###.#Strt
FINISH6. SDIR Sollwertrichtung steigend/
fallendriSEFALL
7. TSI Sollwertrampe AUF Auto0 bis 400 s
8. TSD Sollwertrampe ZU 0 bis 400 s9. SFCT Sollwertfunktion
- linear- gleichprozentig- invers gleichprozentig
- frei einstellbar
Lin1-25, 1-33, 1-50
n1-25, n1-33,n1-50FrEE
10. SL0 3)
.
.30. SL20
Sollwertstützpunkte beifreier Kennlinie0 %, 5 %, 10 % ... 100 % 0,0 bis 100,0 %
31. DEBA Totzone des Reglers Auto0,1 bis 10,0 %
32. YA StellgrößenbegrenzungAnfang
0,0 bis 100,0 %
33. YE StellgrößenbegrenzungEnde
0,0 bis 100,0 %
34. YNRM Stellgrößennormierungmech. Weg/Durchfluss
MPOSFLOW
35. YCLS Stellgrößendichtschließen- ohne- nur oben- nur unten- oben und unten
nouP:do
uP do36. YCDO Wert für Dichtschließen
unten0,0 bis 100,0 %
37. YCUP Wert für Dichtschließen oben 0,0 bis 100,0 %38. BIN1 4) Funktion des BE 1
ohneSchließernur MeldungKonfigurieren blockierenKonfig. und Hand blockierenfahre Ventil auf yefahre Ventil auf yaBewegung blockierenÖffnernur Meldungfahre Ventil auf yefahre Ventil auf yaBewegung blockieren
OFF
onbLoc1bLoc2
uPdoWnStoP
-on-uP
-doWn-StoP
1) Parameter nur bei „turn“ oder „WAY“ sichtbar; wenn „turn“ gewähltist, kann 33 ° nicht eingestellt werden.
2) Parameter erscheint nicht, wenn 1. YFCT= „turn“, „LWAY“ oder„-ncST“ gewählt wurde.
3) Stützpunkte erscheinen nur bei Auswahl: 9.SFCT=FrEE.4) Öffner bedeutet: Aktion bei geöffnetem Schalter bzw. Low Pegel.
Schließer bedeutet: Aktion bei geschl. Schalter bzw. High Pegel.5) Normal bedeutet: High-Pegel ohne Störung.
Invertiert bedeutet: Low-Pegel ohne Störung.
Parameter-name
Funktion Parameterwerte Ein-heit
39. BIN2 4) Funktion des BE 2ohneSchließernur Meldungfahre Ventil auf yefahre Ventil auf yaBewegung blockierenÖffnernur Meldungfahre Ventil auf yefahre Ventil auf yaBewegung blockieren
OFF
onuP
doWnStoP
-on-uP
-doWn-StoP
40. AFCT5) Alarm Funktionohnemin : max: normal
invertiertmin : min: normal
invertiertmax : max: normal
invertiert
oFFMi:MAMi:MAMi:MiMi:Mi
MA:MAMA:MA
41. A1 Ansprechschwelle Alarm 1 0,0 bis 100,0 %42. A2 Ansprechschwelle Alarm 2 0,0 bis 100,0 %43. FCT 5) Funktion Störmeldeausgang
Störung:normalinvertiert
Störung + nicht Automatik:normalinvertiert
Störung + nicht Automatik +BE:
normalinvertiert
(+ bedeutet logische ODER-Verknüpfung)
-
nA- nA
nAb- nAb
44. TIM Überwachungszeit für das Setzen der Störmeldung „Regelabweichung“
Auto0 bis 100 s
45. LIM Ansprechschwelle der Stör-meldung „Regelabwei-chung“
Auto0,0 bis 100,0 %
46. STRK Grenzwert für Wegintegral 0 bis 1,00E947. DCHG Grenzwert für Richtungs-
wechselOFF
1 bis 1,00E948. ZERO Grenzwert für Anschlags-
überwachung untenOFF
0,0 bis 100,0 %49. OPEN Grenzwert für Anschlags-
überwachung obenOFF
0,0 bis 100,0 %50. DEBA Grenzwert für Totzonen-
überwachungOFF
0,0 bis 10,0 %51. PRST Preset (Werkseinstellung) no
StrtoCAY
52. FSTY Sicherheitsstellung:parametrierter Sicher-heitssollwertletzter Sollwertöffne Abluftventil
FSVLFSSPFSAC
53. FSTI Überwachungszeit für Set-zen der Sicherheitsstellung
0 bis 100 s
54. FSVL Sicherheitssollwert 0 bis 100,0 %55. STNR Stationsnummer 0 bis 12656. IDENT Gerätebetriebsart (Ident-Nr.)
- herstellerunabhängig- volle Funktionalität
01
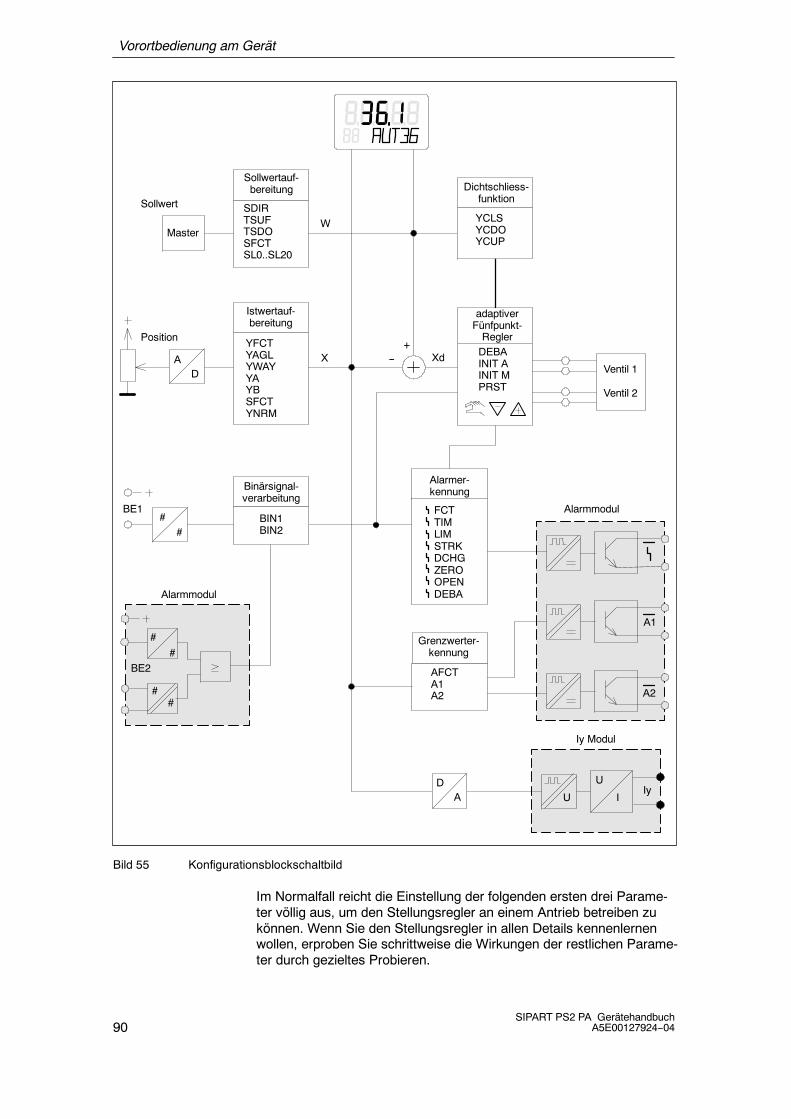
Vorortbedienung am Gerät
90SIPART PS2 PA Gerätehandbuch
A5E00127924--04
##
##
##
AD
DA I
U
UIy
A2
A1
Ventil 1
Ventil 2
Position
Sollwert
Master
BE1
BE2
adaptiverFünfpunkt-ReglerDEBAINIT AINIT MPRST
Istwertauf-bereitung
FCTTIMLIMSTRKDCHGZEROOPENDEBA
Grenzwerter-kennung
Dichtschliess-funktion
YFCTYAGLYWAYYAYBSFCTYNRM
SDIRTSUFTSDOSFCTSL0..SL20
Binärsignal-verarbeitung
BIN1BIN2
AFCTA1A2
Alarmer-kennung
YCLSYCDOYCUP
Alarmmodul
Iy Modul
XdX
W
Sollwertauf-bereitung
Alarmmodul
+--
Bild 55 Konfigurationsblockschaltbild
Im Normalfall reicht die Einstellung der folgenden ersten drei Parame-ter völlig aus, um den Stellungsregler an einem Antrieb betreiben zukönnen. Wenn Sie den Stellungsregler in allen Details kennenlernenwollen, erproben Sie schrittweise die Wirkungen der restlichen Parame-ter durch gezieltes Probieren.
Vorortbedienung am Gerät
91SIPART PS2 PA GerätehandbuchA5E00127924--04
. HINWEIS
Insbesondere wenn Sie den Stellungsregler bereits vorher an einemanderen Antrieb betrieben haben, müssen Sie den Stellungsregler voreiner erneuten Initialisierung immer in die Werkseinstellung bringen.Nur so können Sie von eindeutigen Startbedingungen ausgehen. Dazusteht Ihnen der Parameter ”51 PRST” zur Verfügung.
Dies ist ebenfalls empfehlenswert, wenn Sie viele Parameter auf ein-mal geändert haben, aber deren Wirkung nicht abschätzen könnenund es daraufhin zu ungewollten Reaktionen kommt.
Stellantriebsart
Hiermit passen Sie den Stellungsregler an Ihren jeweiligen Antrieb undggf. den verwendeten Positionssensor an. Ihnen stehen folgende Ein-stellmöglichkeiten zur Verfügung:
S YFCT = turnDiese Einstellung ist für Schwenkantriebe notwendig.
Wenn Sie ”turn” wählen, stellt sich der folgende Parameter ”2.YAGL” automatisch auf 90_ und kann nicht verändert werden.
S YFCT = WAY (Werkseinstellung)Ist bei einem Schubantrieb erforderlich. Der Stellungsregler kom-pensiert dabei die Unlinearität, die durch die Umsetzung der linea-ren Bewegung des Schubantriebes in die Drehbewegung der Rück-meldewelle entsteht. Dazu wurde der Stellungsregler im Werk soeingestellt, dass er zwischen ”P 49.0 und P 51.0” anzeigt, wenn derHebel auf der Rückmeldewelle senkrecht zur Spindel des Schuban-triebes steht.
S YFCT = LWAYMüssen Sie einstellen, wenn Sie ein externes, lineares Potentiome-ter an einem Schubantrieb einsetzen.TIPP: verwenden Sie diese Einstellung ebenfalls bei Schwenkantrie-ben mit umgekehrtem Wirksinn.
S YFCT = ncStBenutzen Sie beim Einsatz eines NCS an einem Schwenkantrieb.
S YFCT = --ncStMüssen Sie einstellen, wenn Sie einen NCS an einem Schwenkan-trieb mit umgekehrtem Wirksinn verwenden.
S YFCT = ncSLMüssen Sie einstellen, wenn Sie einen NCS an einem Schubantriebeinsetzen, bei dem die Stellung direkt (linear) vom NCS gemessenwird.
S YFCT = ncSLLMüssen Sie einstellen, wenn Sie einen NCS an einem Schubantriebeinsetzen, bei dem die Stellung durch einen Hebel in eine Drehbe-wegung umgesetzt wird.
1.YFCT
Vorortbedienung am Gerät
92SIPART PS2 PA Gerätehandbuch
A5E00127924--04
. HINWEIS
Wenn Sie ”LWAY, ncSt, --ncSt, ncSL oder ncSLL” eingestellt haben,werden die beiden folgenden Parameter ”2. YAGL” und ”3. YWAY”nicht angezeigt.
Nenndrehwinkel der Rückmeldungswelle
Bei Schwenkantrieben wird durch 1.YFCT = turn (siehe oben) automa-tisch ein Winkel von 90° voreingestellt. Bei Schubantrieben (1.YFCT =WAY) kann je nach Hubbereich ein Wert von 33° oder 90° gewähltwerden:
S 33° für Hübe ≤ 20 mm
S 90° für Hübe > 20 mm
Bei Verwendung des Hebels bis 35 mm Hub sind beide Drehwinkel(33° und 90°) möglich.
Der lange Hebel (> 35 mm Hub) ist nur für die Drehwinkeleinstellungvon 90° vorgesehen. Er ist nicht Bestandteil des Anbausatzes6DR4004--8V sondern muss unter der Bestell-Nr. 6DR4004--8L separatbestellt werden.
. HINWEIS
Die Einstellung des Getriebeübersetzungsumschalters (7) amStellungsregler (siehe Bild 7 Seite 24 und Bild 8, Seite 25) muss mitdem gewählten Winkelwert 2.YAGL unbedingt übereinstimmen.
Hebelarmübersetzung
Die Auswahl des Hebelarmbereiches dient zur Anzeige des realen Hu-bes in mm nach der Initialisierung. Die Verwendung dieses Parametersist optional. Sie müssen ihn nur einstellen, wenn Sie am Ende der In-itialisierung eines Schubantriebs den ermittelten Weg in mm angezeigtbekommen möchten.Ist hier der Parameterwert ”oFF” gewählt, erfolgt nach der Initialisierungkeine Anzeige des realen Hubes.
. HINWEIS
Die Vorgabe von “YWAY” muss mit der mechanischen Hebelarmüber-setzung übereinstimmen. Der Mitnehmer muss auf den Wert des An-triebshubes bzw., wenn dieser nicht skaliert ist, auf den nächstgröße-ren skalierten Wert eingestellt werden.
2.YAGL
3.YWAY
Vorortbedienung am Gerät
93SIPART PS2 PA GerätehandbuchA5E00127924--04
Automatische Initialisierung (siehe Kapitel 3.6, Seite 66)
Durch Anwahl von “Strt” und durch mindestens 5 Sekunden langesDrücken der Inkrementtaste wird die automatische Initialisierunggestartet. Der Ablauf der Initialisierung wird durch “RUN 1” bis “RUN 5”im Display angezeigt (siehe Bild 45, Seite 77 bis Bild 48, Seite 79).
Manuelle Initialisierung
Durch Anwahl von “Strt” und durch mindestens 5 Sekunden langesDrücken der Inkrementtaste wird die manuelle Initialisierung gestar-tet. Der Ablauf der manuellen Initialisierung wird im Kapitel 3.6.3, Seite70 und Kapitel 3.6.6, Seite 74 beschrieben.
. HINWEIS
Wenn der Stellungsregler bereits initialisiert ist, so kann man ihn beiINITA und INITM durch fünf Sekunden langes Drücken der Dekre-menttaste in den nicht initialisierten Zustand versetzen, ohne dieübrigen Parameter zu verändern.
Sollwertrichtung
Die Einstellung der Sollwertrichtung dient zur Wirksinnumkehr des Soll-wertes. Sie wird hauptsächlich bei einfachwirkenden Antrieben mit derSicherheitsstellung “up” benutzt.
Sollwertrampe AUF undSollwertrampe ZU
Die Sollwertrampe ist im Automatikbetrieb wirksam und begrenzt dieÄnderungsgeschwindigkeit des wirksamen Sollwertes. Bei der Um-schaltung vom Handbetrieb in Automatik wird über die Sollwertrampeder wirksame Sollwert dem am Stellungsregler anliegenden Sollwertangeglichen.
Durch diese stoßfreie Hand/Automatik-Umschaltung werden Druck-überhöhungen bei langen Rohrleitungen vermieden.
In der Stellung TSI = Auto wird für die Sollwertrampe die langsamereder beiden Stellzeiten, die während der Initialisierung ermittelt wurden,verwendet. TSD ist dann wirkungslos.
Sollwertfunktion
Mit dieser Funktion können nichtlineare Ventilkennlinien linearisiert wer-den und bei linearen Ventilkennlinien beliebige Durchflusscharakteristi-ken nachgebildet werden.
4.INITA
5.INITM
6.SDIR
7.TSI8.TSD
9.SFCT
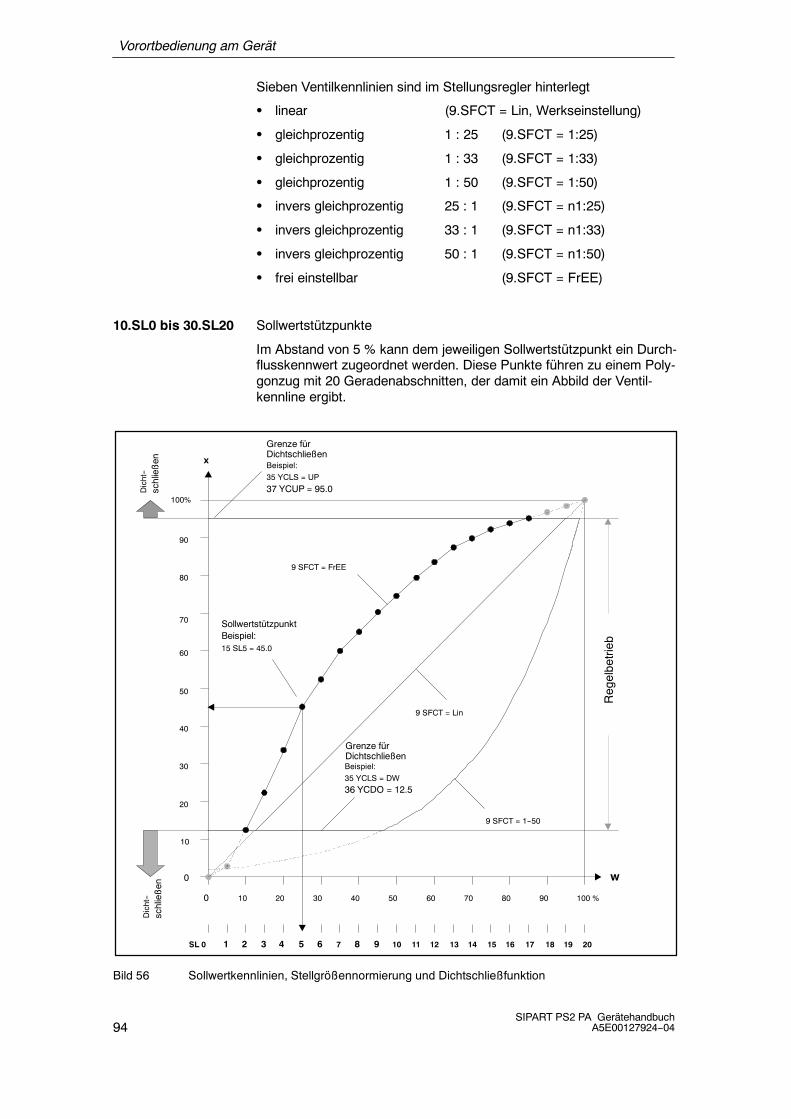
Vorortbedienung am Gerät
94SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Sieben Ventilkennlinien sind im Stellungsregler hinterlegt
S linear (9.SFCT = Lin, Werkseinstellung)
S gleichprozentig 1 : 25 (9.SFCT = 1:25)
S gleichprozentig 1 : 33 (9.SFCT = 1:33)
S gleichprozentig 1 : 50 (9.SFCT = 1:50)
S invers gleichprozentig 25 : 1 (9.SFCT = n1:25)
S invers gleichprozentig 33 : 1 (9.SFCT = n1:33)
S invers gleichprozentig 50 : 1 (9.SFCT = n1:50)
S frei einstellbar (9.SFCT = FrEE)
Sollwertstützpunkte
Im Abstand von 5 % kann dem jeweiligen Sollwertstützpunkt ein Durch-flusskennwert zugeordnet werden. Diese Punkte führen zu einem Poly-gonzug mit 20 Geradenabschnitten, der damit ein Abbild der Ventil-kennline ergibt.
w
Beispiel:35 YCLS = UP
37 YCUP = 95.0
x
10
20
30
40
50
60
70
80
90
100%
100
0
20 30 40 50 60 70 80 90 100 %
2 106 14 194 12 178 161 95 13 183 117 15 20SL 0
9 SFCT = 1--50
Beispiel:35 YCLS = DW36 YCDO = 12.5
SollwertstützpunktBeispiel:15 SL5 = 45.0
9 SFCT = Lin
9 SFCT = FrEE
Dicht--
schließen
Regelbetrieb
Dicht--
schließen
Grenze fürDichtschließen
Grenze fürDichtschließen
Bild 56 Sollwertkennlinien, Stellgrößennormierung und Dichtschließfunktion
10.SL0 bis 30.SL20
Vorortbedienung am Gerät
95SIPART PS2 PA GerätehandbuchA5E00127924--04
Die Eingabe der Sollwertstützpunkte ist nur bei 8.SFCT=FrEE möglich.Sie dürfen nur eine monoton steigende Kennlinie eingeben und zweiaufeinanderfolgende Stützwerte müssen sich um mindestens 0,2 %unterscheiden.
Totzone des Reglers
Bei dEbA = AUto wird die Totzone im Automatikbetrieb ständig den Er-fordernissen des Regelkreises adaptiv angepasst. Beim Erkennen ei-ner Regelschwingung wird die Totzone schrittweise vergrößert. DieRückwärtsadaption erfolgt über ein Zeitkriterium.
In den anderen diskreten Einstellungen wird mit dem fest eingestelltenWert für die Totzone gearbeitet.
Stellgrößenbegrenzung Anfang (siehe Bild 56 und 57)undStellgrößenbegrenzung Ende (siehe Bild 56 und 57)
Mit den Parametern “YA” und “YE” wird der mechanische Stellweg (vonAnschlag zu Anschlag) auf die eingestellten Werte begrenzt. Damitkann der mechanische Stellbereich des Antriebes auf den wirksamenDurchfluss eingeschränkt und die Integralsättigung des führenden Reg-lers vermieden werden.
. HINWEIS
YE muss stets größer als YA eingestellt werden.
Stellgrößennormierung (siehe Bild 56 und 57)
Mit der Einschränkung der Stellgröße (durch “32.YA” und “33.YE”) ent-stehen für die Anzeige im Display und die Stellungsrückmeldung überden Stromausgang zwei unterschiedliche Skalierungen (MPOS bzw.FLOW).
Die MPOS-Skalierung zeigt die mechanische Position (0 bis 100%)zwischen den Hartanschlägen der Initialisierung. Diese wird durch dieParameter “32.YA” und “33.YE” nicht beeinflusst. Die Parameter“32.YA” und “33.YE” werden im MPOS-Maßstab angezeigt.
Der FLOW-Maßstab ist die Normierung (0 bis 100%) auf den Bereichzwischen “32.YA” und “33.YE”. Auf diesen Bereich ist auch immer derSollwert w (0 bis 100%) bezogen. Damit ergibt sich (auch bei Verwen-dung von Ventilkennlinien) eine quasi durchflussproportionale Anzeigeund Stellungsrückmeldung Iy.
Um die Regeldifferenz zu errechnen, wird der Sollwert auf dem Displayebenfalls im entsprechenden Maßstab dargestellt.
31.DEBA
32.YA
33.YE
34.YNRM
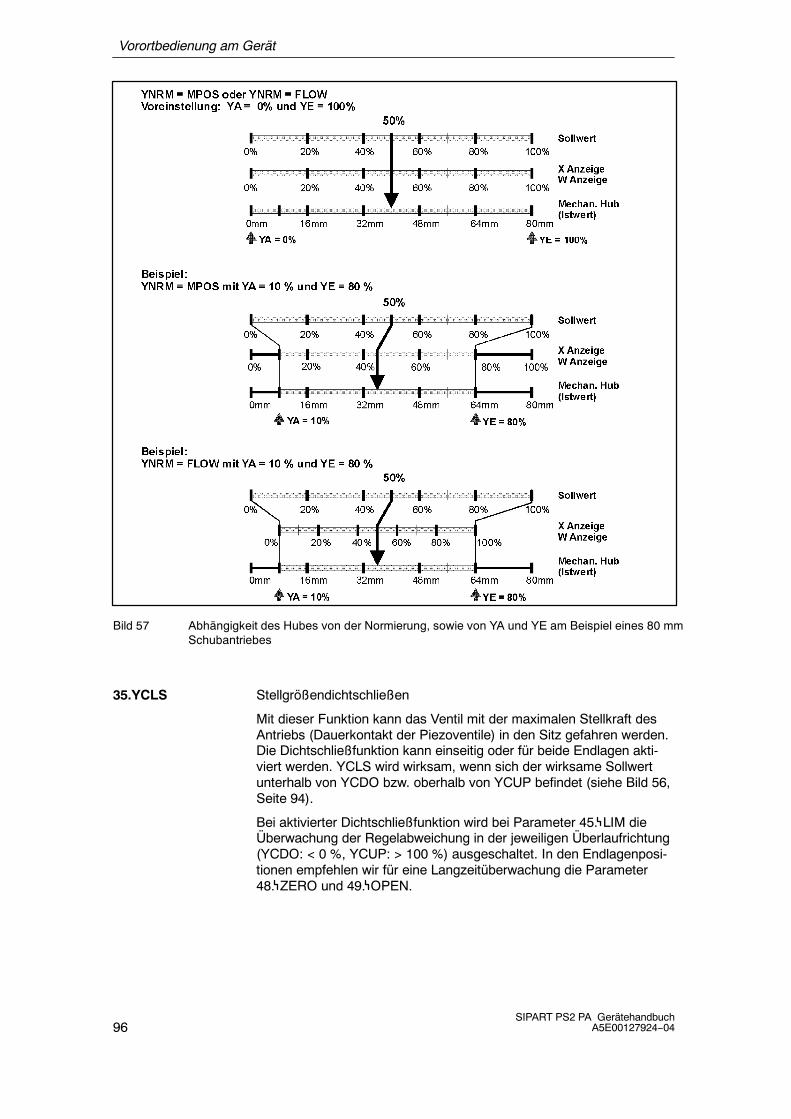
Vorortbedienung am Gerät
96SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Bild 57 Abhängigkeit des Hubes von der Normierung, sowie von YA und YE am Beispiel eines 80 mmSchubantriebes
Stellgrößendichtschließen
Mit dieser Funktion kann das Ventil mit der maximalen Stellkraft desAntriebs (Dauerkontakt der Piezoventile) in den Sitz gefahren werden.Die Dichtschließfunktion kann einseitig oder für beide Endlagen akti-viert werden. YCLS wird wirksam, wenn sich der wirksame Sollwertunterhalb von YCDO bzw. oberhalb von YCUP befindet (siehe Bild 56,Seite 94).
Bei aktivierter Dichtschließfunktion wird bei Parameter 45. LIM dieÜberwachung der Regelabweichung in der jeweiligen Überlaufrichtung(YCDO: < 0 %, YCUP: > 100 %) ausgeschaltet. In den Endlagenposi-tionen empfehlen wir für eine Langzeitüberwachung die Parameter48. ZERO und 49. OPEN.
35.YCLS
Vorortbedienung am Gerät
97SIPART PS2 PA GerätehandbuchA5E00127924--04
Wert für Dichtschließen unten
Wert für Dichtschließen oben
. HINWEIS
YCDO muss immer kleiner als YCUP eingestellt werden.Die Dichtschließfunktion hat eine feste Hysterese von 1 %.
Funktion Binäreingang 1undFunktion Binäreingang 2
Die Parameter “BIN1” und “BIN2” können je nach Verwendungszweckindividuell eingestellt werden. Der Wirksinn kann an einen Schließeroder Öffner angepasst werden.
S BIN1 oder BIN2 = on oder --on
Binäre Meldungen der Peripherie (z.B. Druck- oder Temperatur-schalter) können über die Kommunikationsschnittstelle ausgelesenwerden oder führen durch ODER-Verknüpfung mit anderen Meldun-gen zum Ansprechen des Störmeldeausgangs.
S BIN1 = bLoc1
Die Bedienebene Konfigurieren wird gegen Verstellen verriegelt(z.B. durch eine Drahtbrücke zwischen Klemme 9 und 10).
S BIN1 = bLoc2
Wenn der BE1 aktiviert wurde, ist zusätzlich zur Bedienebene Konfi-gurieren ebenfalls der Handbetrieb blockiert.
S BIN1 oder BIN2 = uP bzw. doWn (Kontakt schließt) oder --uP bzw.--doWn (Kontakt öffnet).
Bei aktiviertem Binäreingang regelt der Stellantrieb im Automatikbe-trieb auf den durch YA und YE vorgegebenen Wert.
S BIN1 oder BIN2 (Kontakt schließt) = StoP oder --StoP (Kontaktöffnet).
Bei aktiviertem Binäreingang werden im Automatikbetrieb die Piezo-ventile blockiert und der Antrieb bleibt in der letzten Stellung stehen.Hiermit können Leckagemessungen ohne Initialisierungfunktiondurchgeführt werden.
S BIN1 oder BIN2 = oFF (Werkseinstellung)
Keine Funktion
Sonderfunktion von BE1: Wenn im P-Handbetrieb der Binäreingang1 durch eine Brücke zwischen den Klemmen 9 und 10 aktiviert ist,wird beim Drücken der Betriebsartentaste der Firmwarestand ange-zeigt.
Werden mit den Parametern “BIN1” und “BIN2” gleichzeitig eine deroben genannten Funktionen angewählt, dann hat “Blockieren” Vorrangvor “Up” und “Up” Vorrang vor “Down”.
36.YCDO
37.YCUP
38.BIN1
39.BIN2
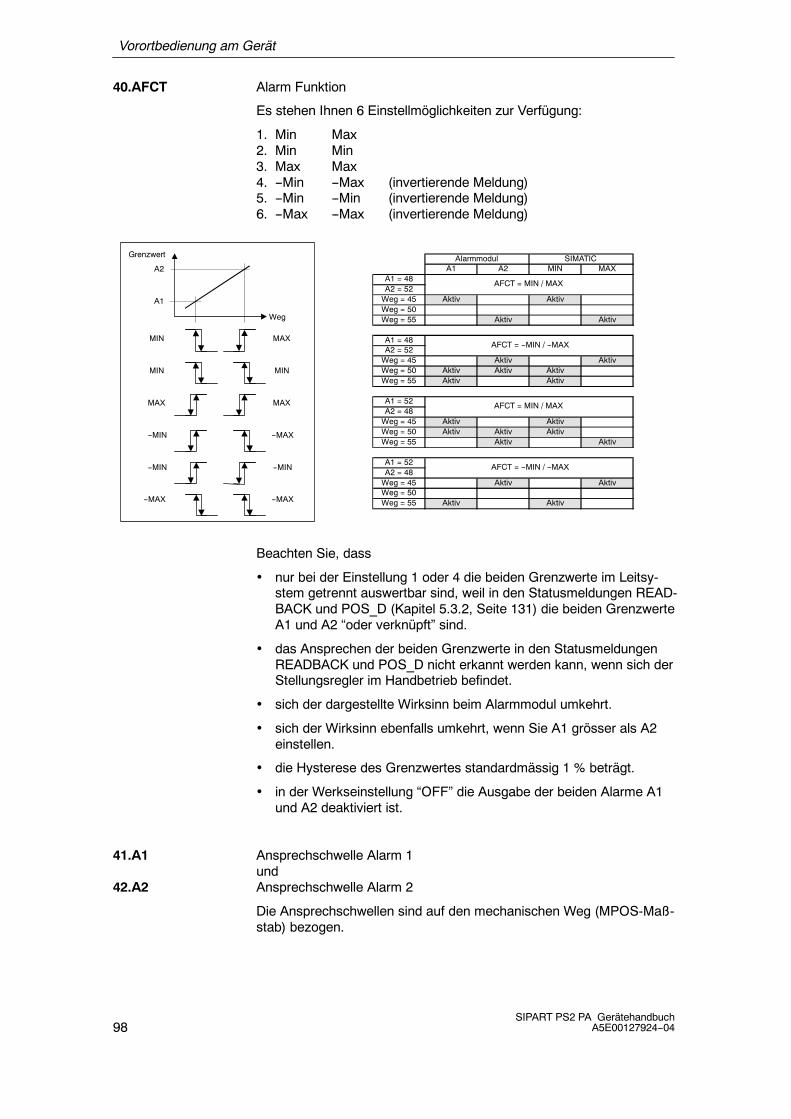
Vorortbedienung am Gerät
98SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Alarm Funktion
Es stehen Ihnen 6 Einstellmöglichkeiten zur Verfügung:
1. Min Max2. Min Min3. Max Max4. --Min --Max (invertierende Meldung)5. --Min --Min (invertierende Meldung)6. --Max --Max (invertierende Meldung)
A2
MAXMIN
A1
MAXMAX
MINMIN
--MAX--MIN
--MAX--MAX
--MIN--MIN
Grenzwert
Weg
A1 A2 MIN MAXA1 = 48A2 = 52Weg = 45 Aktiv AktivWeg = 50Weg = 55 Aktiv Aktiv
A1 = 48A2 = 52Weg = 45 Aktiv AktivWeg = 50 Aktiv Aktiv AktivWeg = 55 Aktiv Aktiv
A1 = 52A2 = 48Weg = 45 Aktiv AktivWeg = 50 Aktiv Aktiv AktivWeg = 55 Aktiv Aktiv
A1 = 52A2 = 48Weg = 45 Aktiv AktivWeg = 50Weg = 55 Aktiv Aktiv
AFCT = MIN / MAX
AFCT = --MIN / --MAX
AFCT = MIN / MAX
SIMATICAlarmmodul
AFCT = --MIN / --MAX
Beachten Sie, dass
• nur bei der Einstellung 1 oder 4 die beiden Grenzwerte im Leitsy-stem getrennt auswertbar sind, weil in den Statusmeldungen READ-BACK und POS_D (Kapitel 5.3.2, Seite 131) die beiden GrenzwerteA1 und A2 “oder verknüpft” sind.
• das Ansprechen der beiden Grenzwerte in den StatusmeldungenREADBACK und POS_D nicht erkannt werden kann, wenn sich derStellungsregler im Handbetrieb befindet.
• sich der dargestellte Wirksinn beim Alarmmodul umkehrt.
• sich der Wirksinn ebenfalls umkehrt, wenn Sie A1 grösser als A2einstellen.
• die Hysterese des Grenzwertes standardmässig 1 % beträgt.
• in der Werkseinstellung “OFF” die Ausgabe der beiden Alarme A1und A2 deaktiviert ist.
Ansprechschwelle Alarm 1undAnsprechschwelle Alarm 2
Die Ansprechschwellen sind auf den mechanischen Weg (MPOS-Maß-stab) bezogen.
40.AFCT
41.A1
42.A2
Vorortbedienung am Gerät
99SIPART PS2 PA GerätehandbuchA5E00127924--04
Funktion der Störungsmeldung
Die Störungsmeldung als Überwachung der Regelabweichung über dieZeit kann zusätzlich noch durch folgende Ereignisse ausgelöst werden:
S Spannungsausfall
S Prozessorstörung
S Antriebsstörung
S Ventilstörung
S Druckausfall
S Ansprechen der Grenzwerte 46 bis 50
Beachten Sie, dass die Störungsmeldung nicht abgeschaltet werdenkann, jedoch wird sie unterdrückt (Werkseinstellung), wenn Sie in den”Kein-Automatik-Betrieb” umschalten. Wollen Sie auch hier eine Stö-rungsmeldung generieren, müssen Sie den Parameter FCT auf ” nA”stellen. Zusätzlich haben Sie noch die Möglichkeit die Störungsmel-dung mit dem Status der Binäreingänge zu ”verodern”. Stellen Sie dazuden Parameter FCT auf ” nAb”.
Wählen Sie die Einstellung ”-- ” wenn Sie die Störungsmeldung inver-tiert auf dem Alarm- oder SIA-Modul ausgeben wollen.
Überwachungszeit für das Setzen der Störungsmeldungen
Der eingestellte Wert (s) dient als Vorgabe für die Zeit innerhalb der derStellungsregler den ausgeregelten Zustands erreicht haben muss. Diezugehörige Ansprechschwelle wird mit “45. LIM” vorgegeben.
Bei Überschreiten der eingestellten Zeit wird der Störmeldeausganggesetzt.
Ansprechschwelle der Störmeldung
Hier kann ein Wert (%) für die zulässigen Größe der Regelabweichungzum Auslösen der Störmeldung eingestellt werden.
Wenn die Parameter 44 und 45 auf ”Auto” (Werkseinstellung) einge-stellt sind, wird die Störmeldung gesetzt, wenn innerhalb einer be-stimmten Zeit die Langsamgangzone nicht erreicht wird. Diese Zeit be-trägt innerhalb von 5 bis 95 % des Stellweges das 2-fache undaußerhalb von 10 bis 90 % das 10-fache der Initialisierungsstellzeit.
Bei aktivierter Dichtschließfunktion wird bei Parameter 45. LIM dieÜberwachung der Regelabweichung in der jeweiligen Überlaufrichtung(YCDO: < 0 %, YCUP: > 100 %) ausgeschaltet. In den Endlagenposi-tionen empfehlen wir für eine Langzeitüberwachung die Parameter48. ZERO und 49. OPEN.
Grenzwert für die Überwachung des Wegintegrals (Anzahl der Hübe)
Hier kann ein Grenzwert für das Wegintegral eingestellt werden. Über-schreitet das Wegintegral den Grenzwert, wird die Störmeldung akti-viert.
Diese Funktion ermöglicht eine vorbeugende Wartung der Armatur, s.a.Kapitel 4.5 “Diagnose”, Seite 103.
Diese Überwachungsfunktion kann nicht deaktiviert werden.
43. FCT
44. TIM
45. LIM
46. STRK
Vorortbedienung am Gerät
100SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Grenzwert für die Überwachung der Richtungswechsel
Hier kann ein Grenzwert für den Richtungswechselzähler eingestelltwerden. Überschreitet dieser Zähler den Grenzwert, wird die Störmel-dung aktiviert.
Diese Funktion ermöglicht eine vorbeugende Wartung der Armatur, s.a.Kapitel 4.5 “Diagnose”, Seite 103.
Mit der Einstellung OFF (Werkseinstellung) kann diese Überwachungs-funktion deaktiviert werden.
Toleranzwert für die Überwachung des unteren Hartanschlags
Mit diesem Wert kann ein Grenzwert (in Prozent bezogen auf den me-chanischen Gesamtweg) für die Überwachung des unteren Hartan-schlags vorgegeben werden. Wird dieser Toleranzwert über- oder un-terschritten, so wird der Störmeldeausgang (Option) aktiviert.
Mit dieser Funktion wird erkannt, wenn der untere Anschlag sich ge-genüber seinem Wert bei der Initialisierung um mehr als den angege-benen Toleranzwert verändert hat. Die Überwachung geschieht, wennsich das Ventil in Dichtschließen unten befindet. Die Aktivierung derDichtschließfunktion unten (Parameter “35.YCLS”) ist daher Vorausset-zung.
Die Störmeldung bleibt aktiviert, bis entweder eine folgende Überwa-chung innerhalb der Toleranz bleibt oder eine Neuinitialisierung erfolgtist.
Mit der Einstellung OFF (Werkseinstellung) kann diese Überwachungs-funktion deaktiviert werden. Siehe auch Kapitel 4.5 “Diagnose”, Seite103.
Toleranzwert für die Überwachung des oberen Hartanschlags
Mit diesem Wert kann ein Grenzwert (in Prozent bezogen auf den me-chanischen Gesamtweg) für die Überwachung des oberen Hartan-schlags vorgegeben werden. Wird dieser Toleranzwert über- oder un-terschritten, so wird der Störmeldung aktiviert.
Mit dieser Funktion wird erkannt, wenn der obere Anschlag sich gegen-über seinem Wert bei der Initialisierung um mehr als den angegebenenToleranzwert verändert hat. Die Überwachung geschieht, wenn sichdas Ventil in Dichtschließen oben befindet. Die Aktivierung derDichtschließfunktion oben (Parameter “35.YCLS”) ist daher Vorausset-zung.
Die Störmeldung bleibt aktiviert, bis entweder eine folgende Überwa-chung innerhalb der Toleranz bleibt oder eine Neuinitialisierung erfolgtist.
Mit der Einstellung OFF (Werkseinstellung) kann diese Überwachungs-funktion deaktiviert werden.
. HINWEIS
Die Überwachungen des unteren und oberen Hartanschlages reagie-ren aber nicht nur auf Fehler des Ventils. Auch eine Dejustage derStellungsrückmeldung wird als Störung erkannt, wenn dadurch dieToleranzwerte überschritten werden.
47. DCHG
48. ZERO
49. OPEN
Vorortbedienung am Gerät
101SIPART PS2 PA GerätehandbuchA5E00127924--04
Grenzwert für die Überwachung der Totzonenanpassung
Mit diesem Wert (%) kann die automatische Anpassung der Totzoneüberwacht werden. Überschreitet die Totzone den eingestellten Wert,so wird die Störmeldung aktiviert.
Voraussetzung für die Funktion ist die Einstellung des Parameters“31.DEBA” = Auto. Mit der Einstellung OFF (Werkseinstellung) kanndiese Überwachungsfunktion deaktiviert werden.
Preset
Herstellen der Werkseinstellung und Rücksetzen der Initialisierung.
. HINWEIS
Nach ”Preset” muss der Stellungsregler neu initialisiert werden. Allebisher ermittelten Wartungsparameter werden gelöscht.
Sicherheitsstellung
Dieser Parameter wird benutzt, um bei einem Ausfall der Kommunika-tion den Antrieb in eine vorgegebene Sicherheitsstellung zu fahren.
Es sind drei Einstellungen möglich
S FSVL
der Antrieb soll mit dem parametrierten Sicherheitssollwert weiterregeln. Dieser Wert wird ebenfalls nach einem Spannungsausfallwirksam.
S FSSP
der Antrieb soll mit dem zuletzt wirksamen Sollwert weiter regeln
S FSAC (Werkseinstellung)
hier wird das Abluftventil geöffnet und der einfachwirkende Antriebfährt durch seine Federkraft in eine Endlage.
Überwachungszeit für das Setzen der Sicherheitsstellung
Bei einem Ausfall der Kommunikation schaltet der Stellungsregler nachAblauf des eingestellten Wertes in die Sicherheitsstellung.
Sicherheitssollwert
Vorgabe für die Sicherheitsstellung.
Beachten Sie, dass sich der Failsafewert FSVL von 0% immer auf diemechanische Stellung bezieht, in der der Antrieb entlüftet ist. Dies istinsbesondere wichtig, wenn Sie den Parameter SDIR auf FALL einge-stellt haben (fallende Kennlinie des Sollwertes) und dann bei 0% Soll-wertvorgabe 100% mechanische Stellung erwarten.
50. DEBA
51.PRST
52.FSTY
53.FSTI
54.FSVL
Vorortbedienung am Gerät
102SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Stationsnummer
Damit die Geräte am Bus getrennt ansprechbar sind, muss an jedemGerät eine eigene Stationsnummer eingestellt werden.
Gerätebetriebsart
Der Stellungsregler SIPART PS2 PA kennt in Bezug auf das Verhaltenzum DP--Master der Klasse1 zwei Gerätebetriebsarten:
[0] profilkonform: austauschbar gegen Stellungsregler anderer Herstel-ler nach PROFIBUS--PA--Profil 3.0
[1] profilkonform mit Erweiterungen: voller Funktionsumfang desSIPART PS2 PA (Auslieferungszustand)
. HINWEIS
Jeder Gerätebetriebsart ist eine bestimmte Gerätestammdatendatei(GSD) zugeordnet.
[0]: pa_9710.GS*
[1]: SIS18079.GS*
Entspricht die Konfiguration Ihres PROFIBUS--PA-Stranges nicht dereingestellten Gerätebetriebsart, wird das Gerät den zyklischenDatenaustausch nicht aufnehmen. Bei laufender Kommunikation miteinem Master der Klasse 1 lassen sich die Stationsnummer und dieGerätebetriebsart nicht verstellen.
Einen erfolgreichen Verbindungsaufbau mit einem zyklischen Master(Kapitel 5.3, Seite 129) erkennen Sie daran, dass der Stellungsreglerauf den Sollwert des Masters reagiert. Am blinkenden Dezimalpunkt inder oberen Zeile der Anzeige des Stellungsreglers ist die Kommunika-tion mit einem azyklischen Master (Kapitel 5.2, Seite 121) erkennbar.
55.STNR
56.IDENT
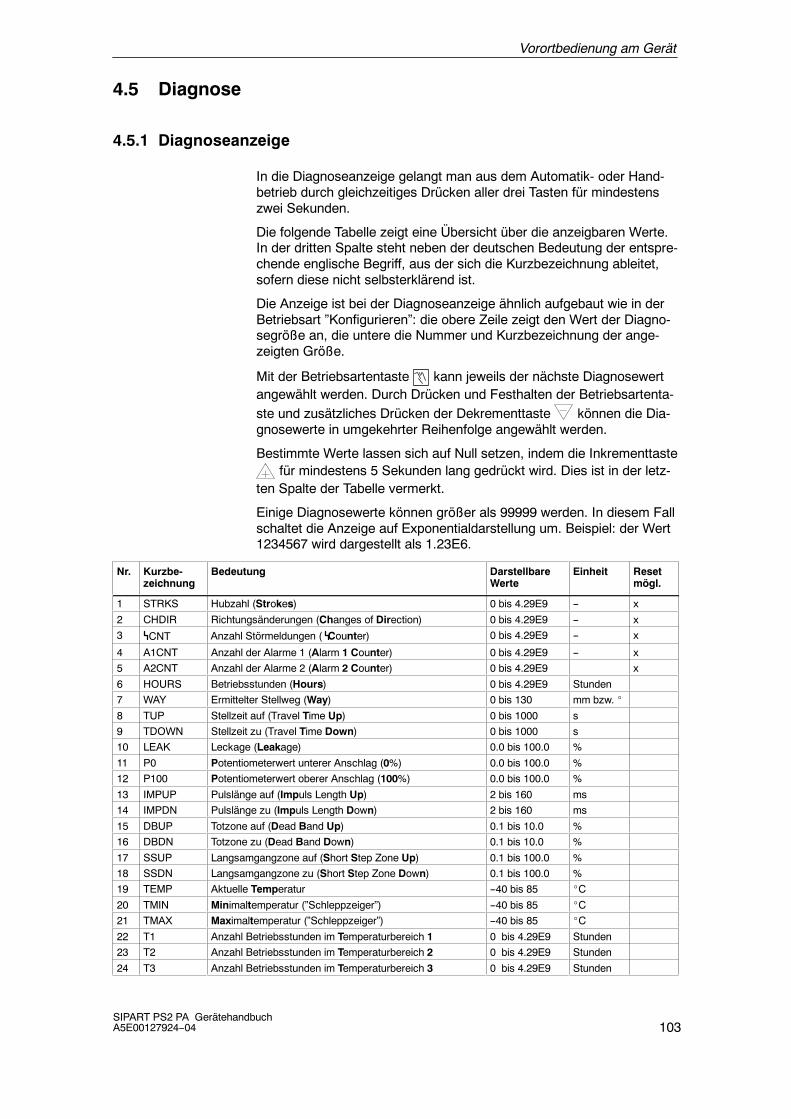
Vorortbedienung am Gerät
103SIPART PS2 PA GerätehandbuchA5E00127924--04
4.5 Diagnose
4.5.1 Diagnoseanzeige
In die Diagnoseanzeige gelangt man aus dem Automatik- oder Hand-betrieb durch gleichzeitiges Drücken aller drei Tasten für mindestenszwei Sekunden.
Die folgende Tabelle zeigt eine Übersicht über die anzeigbaren Werte.In der dritten Spalte steht neben der deutschen Bedeutung der entspre-chende englische Begriff, aus der sich die Kurzbezeichnung ableitet,sofern diese nicht selbsterklärend ist.
Die Anzeige ist bei der Diagnoseanzeige ähnlich aufgebaut wie in derBetriebsart ”Konfigurieren”: die obere Zeile zeigt den Wert der Diagno-segröße an, die untere die Nummer und Kurzbezeichnung der ange-zeigten Größe.
Mit der Betriebsartentaste kann jeweils der nächste Diagnosewertangewählt werden. Durch Drücken und Festhalten der Betriebsartenta-ste und zusätzliches Drücken der Dekrementtaste können die Dia-gnosewerte in umgekehrter Reihenfolge angewählt werden.
Bestimmte Werte lassen sich auf Null setzen, indem die Inkrementtastefür mindestens 5 Sekunden lang gedrückt wird. Dies ist in der letz-
ten Spalte der Tabelle vermerkt.
Einige Diagnosewerte können größer als 99999 werden. In diesem Fallschaltet die Anzeige auf Exponentialdarstellung um. Beispiel: der Wert1234567 wird dargestellt als 1.23E6.
Nr. Kurzbe-zeichnung
Bedeutung DarstellbareWerte
Einheit Resetmögl.
1 STRKS Hubzahl (Strokes) 0 bis 4.29E9 -- x
2 CHDIR Richtungsänderungen (Changes of Direction) 0 bis 4.29E9 -- x3 CNT Anzahl Störmeldungen ( Counter) 0 bis 4.29E9 -- x
4 A1CNT Anzahl der Alarme 1 (Alarm 1 Counter) 0 bis 4.29E9 -- x5 A2CNT Anzahl der Alarme 2 (Alarm 2 Counter) 0 bis 4.29E9 x
6 HOURS Betriebsstunden (Hours) 0 bis 4.29E9 Stunden7 WAY Ermittelter Stellweg (Way) 0 bis 130 mm bzw. _
8 TUP Stellzeit auf (Travel Time Up) 0 bis 1000 s9 TDOWN Stellzeit zu (Travel Time Down) 0 bis 1000 s10 LEAK Leckage (Leakage) 0.0 bis 100.0 %
11 P0 Potentiometerwert unterer Anschlag (0%) 0.0 bis 100.0 %12 P100 Potentiometerwert oberer Anschlag (100%) 0.0 bis 100.0 %
13 IMPUP Pulslänge auf (Impuls Length Up) 2 bis 160 ms14 IMPDN Pulslänge zu (Impuls Length Down) 2 bis 160 ms
15 DBUP Totzone auf (Dead Band Up) 0.1 bis 10.0 %16 DBDN Totzone zu (Dead Band Down) 0.1 bis 10.0 %
17 SSUP Langsamgangzone auf (Short Step Zone Up) 0.1 bis 100.0 %18 SSDN Langsamgangzone zu (Short Step Zone Down) 0.1 bis 100.0 %19 TEMP Aktuelle Temperatur --40 bis 85 _C
20 TMIN Minimaltemperatur (”Schleppzeiger”) --40 bis 85 _C21 TMAX Maximaltemperatur (”Schleppzeiger”) --40 bis 85 _C
22 T1 Anzahl Betriebsstunden im Temperaturbereich 1 0 bis 4.29E9 Stunden23 T2 Anzahl Betriebsstunden im Temperaturbereich 2 0 bis 4.29E9 Stunden
24 T3 Anzahl Betriebsstunden im Temperaturbereich 3 0 bis 4.29E9 Stunden
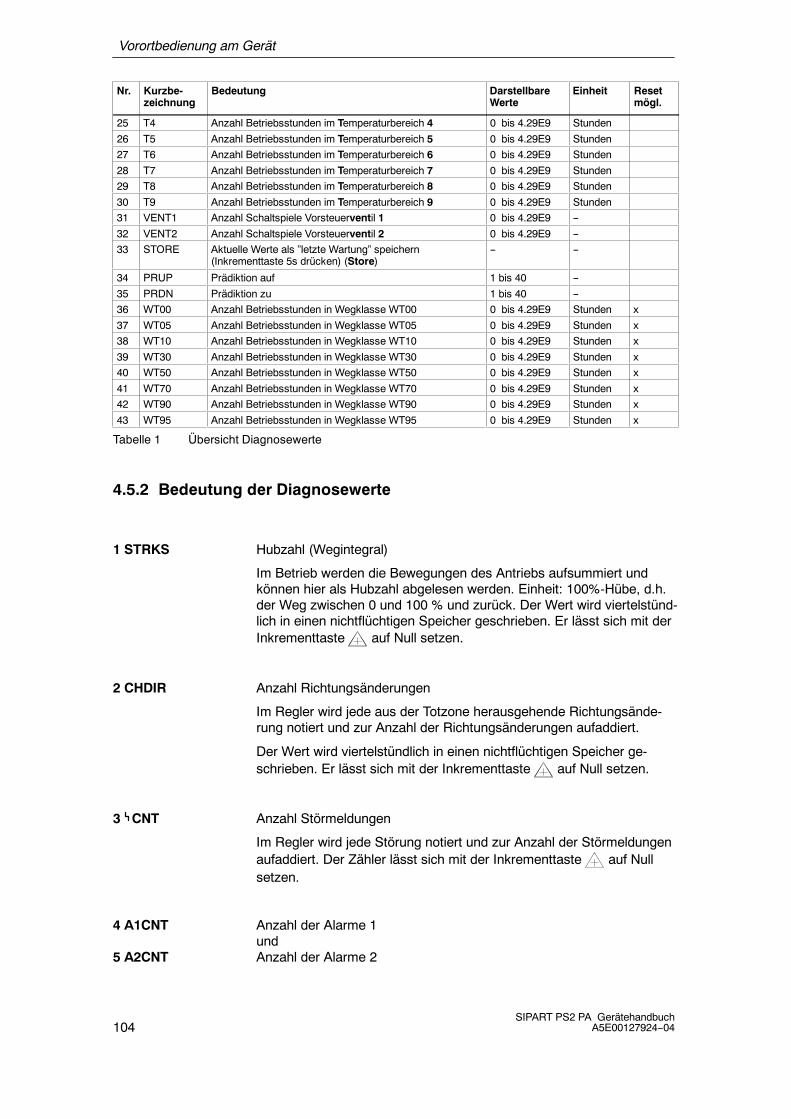
Vorortbedienung am Gerät
104SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Nr. Resetmögl.
EinheitDarstellbareWerte
BedeutungKurzbe-zeichnung
25 T4 Anzahl Betriebsstunden im Temperaturbereich 4 0 bis 4.29E9 Stunden
26 T5 Anzahl Betriebsstunden im Temperaturbereich 5 0 bis 4.29E9 Stunden27 T6 Anzahl Betriebsstunden im Temperaturbereich 6 0 bis 4.29E9 Stunden
28 T7 Anzahl Betriebsstunden im Temperaturbereich 7 0 bis 4.29E9 Stunden29 T8 Anzahl Betriebsstunden im Temperaturbereich 8 0 bis 4.29E9 Stunden
30 T9 Anzahl Betriebsstunden im Temperaturbereich 9 0 bis 4.29E9 Stunden31 VENT1 Anzahl Schaltspiele Vorsteuerventil 1 0 bis 4.29E9 --
32 VENT2 Anzahl Schaltspiele Vorsteuerventil 2 0 bis 4.29E9 --33 STORE Aktuelle Werte als ”letzte Wartung” speichern
(Inkrementtaste 5s drücken) (Store)-- --
34 PRUP Prädiktion auf 1 bis 40 --
35 PRDN Prädiktion zu 1 bis 40 --36 WT00 Anzahl Betriebsstunden in Wegklasse WT00 0 bis 4.29E9 Stunden x
37 WT05 Anzahl Betriebsstunden in Wegklasse WT05 0 bis 4.29E9 Stunden x38 WT10 Anzahl Betriebsstunden in Wegklasse WT10 0 bis 4.29E9 Stunden x
39 WT30 Anzahl Betriebsstunden in Wegklasse WT30 0 bis 4.29E9 Stunden x40 WT50 Anzahl Betriebsstunden in Wegklasse WT50 0 bis 4.29E9 Stunden x
41 WT70 Anzahl Betriebsstunden in Wegklasse WT70 0 bis 4.29E9 Stunden x42 WT90 Anzahl Betriebsstunden in Wegklasse WT90 0 bis 4.29E9 Stunden x
43 WT95 Anzahl Betriebsstunden in Wegklasse WT95 0 bis 4.29E9 Stunden x
Tabelle 1 Übersicht Diagnosewerte
4.5.2 Bedeutung der Diagnosewerte
Hubzahl (Wegintegral)
Im Betrieb werden die Bewegungen des Antriebs aufsummiert undkönnen hier als Hubzahl abgelesen werden. Einheit: 100%-Hübe, d.h.der Weg zwischen 0 und 100 % und zurück. Der Wert wird viertelstünd-lich in einen nichtflüchtigen Speicher geschrieben. Er lässt sich mit derInkrementtaste auf Null setzen.
Anzahl Richtungsänderungen
Im Regler wird jede aus der Totzone herausgehende Richtungsände-rung notiert und zur Anzahl der Richtungsänderungen aufaddiert.
Der Wert wird viertelstündlich in einen nichtflüchtigen Speicher ge-schrieben. Er lässt sich mit der Inkrementtaste auf Null setzen.
Anzahl Störmeldungen
Im Regler wird jede Störung notiert und zur Anzahl der Störmeldungenaufaddiert. Der Zähler lässt sich mit der Inkrementtaste auf Nullsetzen.
Anzahl der Alarme 1undAnzahl der Alarme 2
1 STRKS
2 CHDIR
3 CNT
4 A1CNT
5 A2CNT
Vorortbedienung am Gerät
105SIPART PS2 PA GerätehandbuchA5E00127924--04
Das Ansprechen der Alarme 1 und 2 wird mit diesen beiden Zähler ge-zählt. Voraussetzung ist die Aktivierung der Alarme mit dem Parameter“40.AFCT”. Die Zähler lassen sich mit der Inkrementtaste auf Nullsetzen.
Betriebsstunden
Der Betriebsstundenzähler wird stündlich hochgezählt, sobald der Stel-lungsregler mit elektrischer Hilfsenergie versorgt wird.
Ermittelter Stellweg
Dieser Wert gibt den während der Initialisierung ermittelten Stellwegan, entsprechend der Anzeige am Ende einer Initialisierung. Vorausset-zung bei Hubantrieben: Angabe des Hebelarms mit dem Parameter“3.YWAY”.
Stellzeit aufundStellzeit zu
Diese Werte zeigen die Stellzeiten an, welche während der Initailisie-rung ermittelt wurden. Die Einheit ist Sekunden.
Leckage
Hier können Sie den Wert der Leckagemessung in %/min ablesen.Diese Messung kann während der Initialisierungsphase erfolgen oderhier in diesem Diagnosemenü.
Die Leckagemessung startet, wenn Sie die Inkrementtaste länger als5s gedrückt halten und dann loslassen. Während der Messung wirdabwechselnd der Wert der aktuellen Stellung oder ”tESt” in der oberenZeile des Displays angezeigt. Nach 1 Minute können Sie die Stellungs-änderung in %/Minute ablesen.
Beachten Sie, dass Sie die Leckagemessung nur starten können, wennsich der Stellungsregler im Handbetrieb (”MAN”) befindet. Falls nicht,erscheint die Anzeige ”noMAn” in der oberen Zeile des Displays.
Potentiometerwert unterer AnschlagundPotentiometerwert oberer Anschlag
Diese beiden Werte geben die Messwerte der Wegerfassung (Potentio-meter) am unteren bzw. oberen Hartanschlag an, wie sie bei der auto-matischen Initialisierung ermittelt wurden. Bei manueller Initialisierungstehen hier die Werte der manuell angefahrenen Endpositionen.
6 HOURS
7 WAY
8 TUP
9 TDOWN
10 LEAK
11 P0
12 P100
Vorortbedienung am Gerät
106SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Pulslänge aufundPulslänge zu
Während der Initialisierung werden die kleinsten Pulslängen ermittelt,mit denen eine Bewegung des Antriebs erreicht werden kann. Siewerden getrennt für die “Auf”-Richtung und die “Zu”-Richtung ermitteltund hier angezeigt.
Diese beiden Parameter sind für Spezialanwendungen einstellbar(siehe Kapitel 4.7, Seite 116).
Totzone aufundTotzone zu
Hier wird die Totzone des Reglers in “Auf”-Richtung bzw. in “Zu”-Rich-tung angezeigt. Die Werte entsprechen entweder dem manuell einge-stellten Wert des Parameters “31.DEBA” oder dem automatisch vomGerät adaptierten Wert, wenn “DEBA” auf ”Auto” eingestellt wurde.
Langsamgangzone aufundLangsamgangzone zu
Die Langsamgangzone ist der Bereich des Reglers, in dem pulsförmigeAnsteuersignale ausgegeben werden. Die Pulslänge ist hierbei propor-tional zur Regelabweichung. Liegt die Regelabweichung außerhalb derLangsamgangzone, werden die Ventile im Dauerkontakt angesteuert.
Diese beiden Parameter sind für Spezialanwendungen einstellbar(siehe Kapitel 4.7, Seite 116).
Aktuelle Temperatur
Aktuelle Temperatur im Stellungsreglergehäuse. Der Sensor befindetsich auf der Elektronikleiterplatte.
Die Temperaturanzeige kann durch Druck auf die Dekrementtaste zwi-schen _C und _F umgeschaltet werden.
Minimaltemperatur (Schleppzeiger)undMaximaltemperatur (Schleppzeiger)
Die Minimal- und die Maximaltemperatur im Gehäuseinnern wird lau-fend in Art eines Schleppzeigers ermittelt und gespeichert und kann nurim Werk zurückgesetzt werden.
13 IMPUP
14 IMPDN
15 DBUP
16 DBDN
17 SSUP
18 SSDN
19 TEMP
20 TMIN
21 TMAX
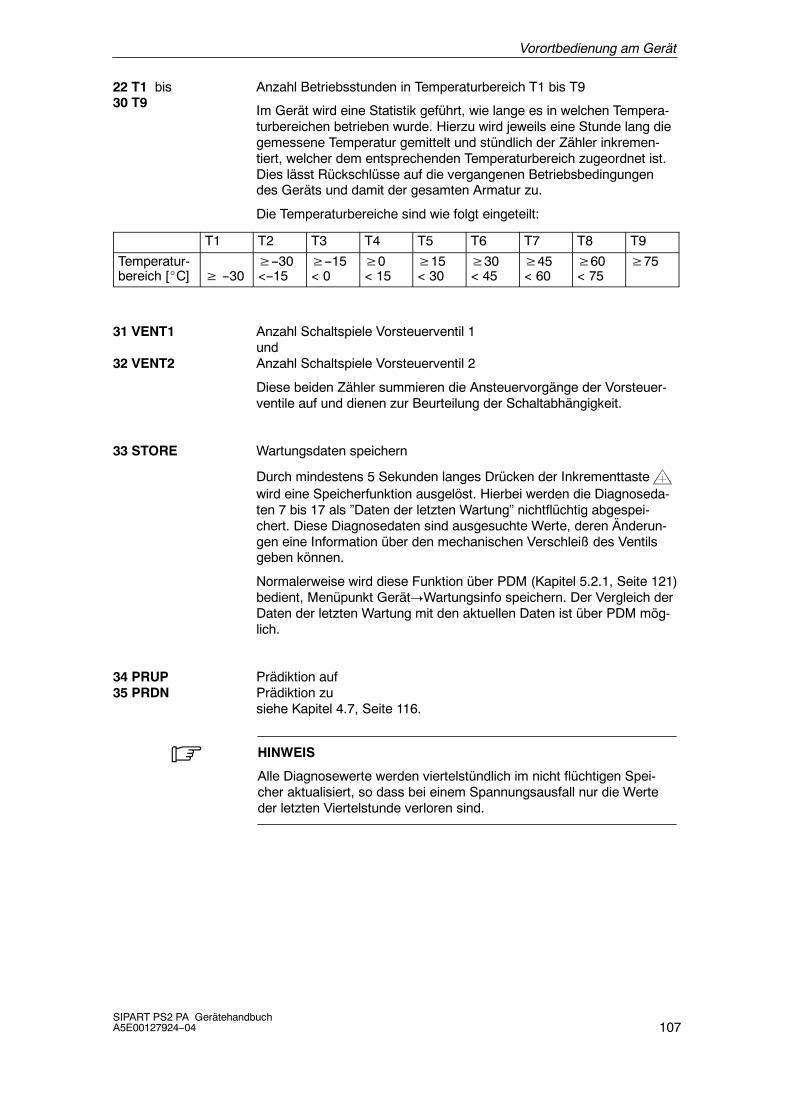
Vorortbedienung am Gerät
107SIPART PS2 PA GerätehandbuchA5E00127924--04
Anzahl Betriebsstunden in Temperaturbereich T1 bis T9
Im Gerät wird eine Statistik geführt, wie lange es in welchen Tempera-turbereichen betrieben wurde. Hierzu wird jeweils eine Stunde lang diegemessene Temperatur gemittelt und stündlich der Zähler inkremen-tiert, welcher dem entsprechenden Temperaturbereich zugeordnet ist.Dies lässt Rückschlüsse auf die vergangenen Betriebsbedingungendes Geräts und damit der gesamten Armatur zu.
Die Temperaturbereiche sind wie folgt eingeteilt:
T1 T2 T3 T4 T5 T6 T7 T8 T9
Temperatur-bereich [_C] ≥ --30
≥--30<--15
≥--15< 0
≥0< 15
≥15< 30
≥30< 45
≥45< 60
≥60< 75
≥75
Anzahl Schaltspiele Vorsteuerventil 1undAnzahl Schaltspiele Vorsteuerventil 2
Diese beiden Zähler summieren die Ansteuervorgänge der Vorsteuer-ventile auf und dienen zur Beurteilung der Schaltabhängigkeit.
Wartungsdaten speichern
Durch mindestens 5 Sekunden langes Drücken der Inkrementtastewird eine Speicherfunktion ausgelöst. Hierbei werden die Diagnoseda-ten 7 bis 17 als ”Daten der letzten Wartung” nichtflüchtig abgespei-chert. Diese Diagnosedaten sind ausgesuchte Werte, deren Änderun-gen eine Information über den mechanischen Verschleiß des Ventilsgeben können.
Normalerweise wird diese Funktion über PDM (Kapitel 5.2.1, Seite 121)bedient, Menüpunkt Gerät!Wartungsinfo speichern. Der Vergleich derDaten der letzten Wartung mit den aktuellen Daten ist über PDM mög-lich.
Prädiktion aufPrädiktion zusiehe Kapitel 4.7, Seite 116.
. HINWEIS
Alle Diagnosewerte werden viertelstündlich im nicht flüchtigen Spei-cher aktualisiert, so dass bei einem Spannungsausfall nur die Werteder letzten Viertelstunde verloren sind.
22 T1 bis30 T9
31 VENT1
32 VENT2
33 STORE
34 PRUP35 PRDN
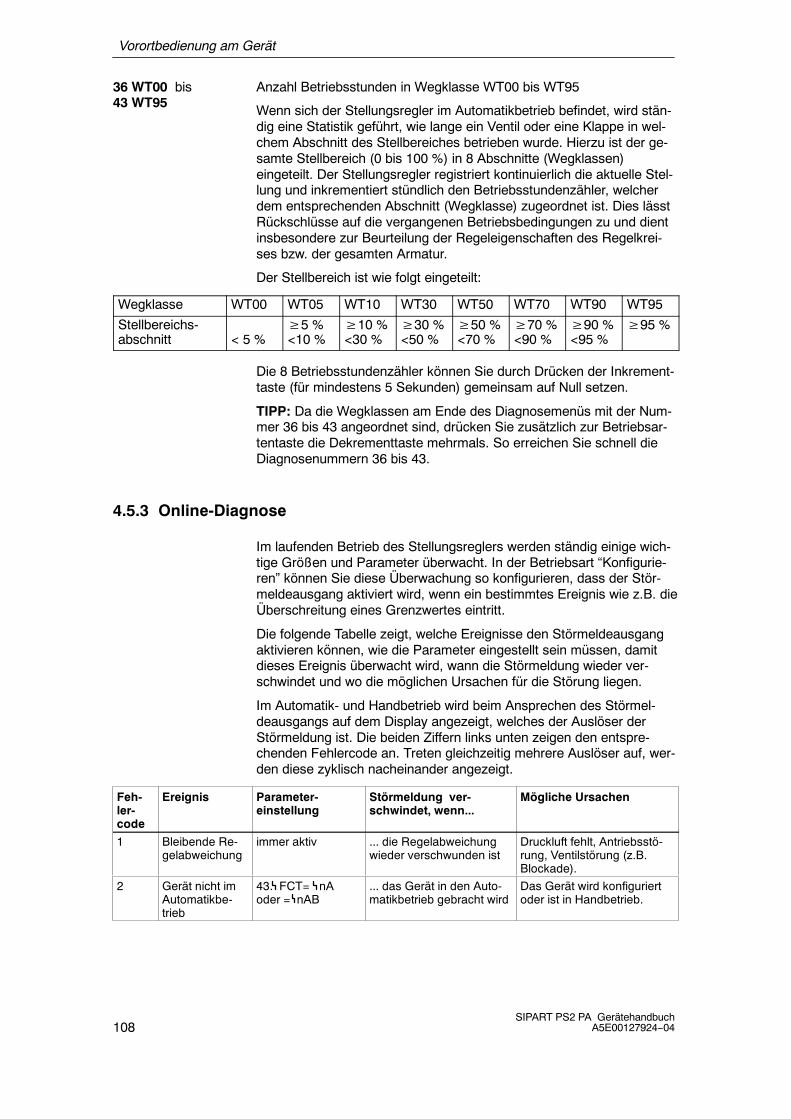
Vorortbedienung am Gerät
108SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Anzahl Betriebsstunden in Wegklasse WT00 bis WT95
Wenn sich der Stellungsregler im Automatikbetrieb befindet, wird stän-dig eine Statistik geführt, wie lange ein Ventil oder eine Klappe in wel-chem Abschnitt des Stellbereiches betrieben wurde. Hierzu ist der ge-samte Stellbereich (0 bis 100 %) in 8 Abschnitte (Wegklassen)eingeteilt. Der Stellungsregler registriert kontinuierlich die aktuelle Stel-lung und inkrementiert stündlich den Betriebsstundenzähler, welcherdem entsprechenden Abschnitt (Wegklasse) zugeordnet ist. Dies lässtRückschlüsse auf die vergangenen Betriebsbedingungen zu und dientinsbesondere zur Beurteilung der Regeleigenschaften des Regelkrei-ses bzw. der gesamten Armatur.
Der Stellbereich ist wie folgt eingeteilt:
Wegklasse WT00 WT05 WT10 WT30 WT50 WT70 WT90 WT95
Stellbereichs-abschnitt < 5 %
≥5 %<10 %
≥10 %<30 %
≥30 %<50 %
≥50 %<70 %
≥70 %<90 %
≥90 %<95 %
≥95 %
Die 8 Betriebsstundenzähler können Sie durch Drücken der Inkrement-taste (für mindestens 5 Sekunden) gemeinsam auf Null setzen.
TIPP: Da die Wegklassen am Ende des Diagnosemenüs mit der Num-mer 36 bis 43 angeordnet sind, drücken Sie zusätzlich zur Betriebsar-tentaste die Dekrementtaste mehrmals. So erreichen Sie schnell dieDiagnosenummern 36 bis 43.
4.5.3 Online-Diagnose
Im laufenden Betrieb des Stellungsreglers werden ständig einige wich-tige Größen und Parameter überwacht. In der Betriebsart “Konfigurie-ren” können Sie diese Überwachung so konfigurieren, dass der Stör-meldeausgang aktiviert wird, wenn ein bestimmtes Ereignis wie z.B. dieÜberschreitung eines Grenzwertes eintritt.
Die folgende Tabelle zeigt, welche Ereignisse den Störmeldeausgangaktivieren können, wie die Parameter eingestellt sein müssen, damitdieses Ereignis überwacht wird, wann die Störmeldung wieder ver-schwindet und wo die möglichen Ursachen für die Störung liegen.
Im Automatik- und Handbetrieb wird beim Ansprechen des Störmel-deausgangs auf dem Display angezeigt, welches der Auslöser derStörmeldung ist. Die beiden Ziffern links unten zeigen den entspre-chenden Fehlercode an. Treten gleichzeitig mehrere Auslöser auf, wer-den diese zyklisch nacheinander angezeigt.
Feh-ler-code
Ereignis Parameter-einstellung
Störmeldung ver-schwindet, wenn...
Mögliche Ursachen
1 Bleibende Re-gelabweichung
immer aktiv ... die Regelabweichungwieder verschwunden ist
Druckluft fehlt, Antriebsstö-rung, Ventilstörung (z.B.Blockade).
2 Gerät nicht imAutomatikbe-trieb
43. FCT= nAoder = nAB
... das Gerät in den Auto-matikbetrieb gebracht wird
Das Gerät wird konfiguriertoder ist in Handbetrieb.
36 WT00 bis43 WT95
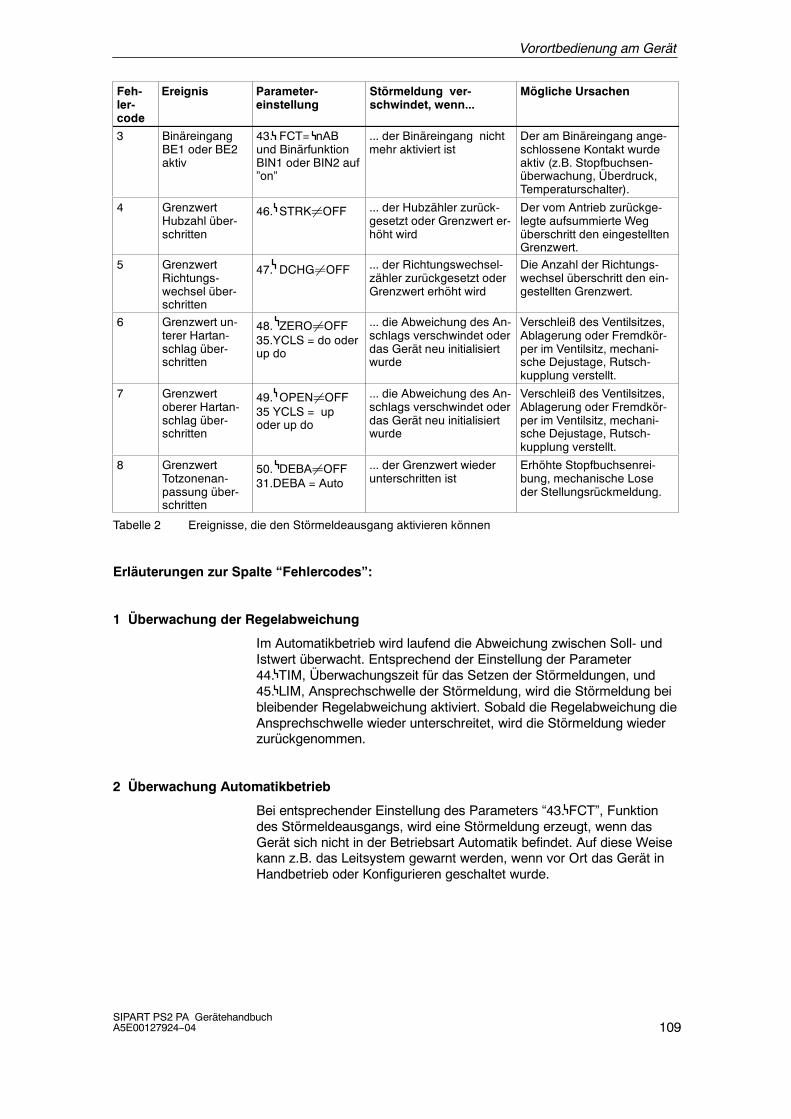
Vorortbedienung am Gerät
109SIPART PS2 PA GerätehandbuchA5E00127924--04
Feh-ler-code
Mögliche UrsachenStörmeldung ver-schwindet, wenn...
Parameter-einstellung
Ereignis
3 BinäreingangBE1 oder BE2aktiv
43. FCT= nABund BinärfunktionBIN1 oder BIN2 auf”on”
... der Binäreingang nichtmehr aktiviert ist
Der am Binäreingang ange-schlossene Kontakt wurdeaktiv (z.B. Stopfbuchsen-überwachung, Überdruck,Temperaturschalter).
4 GrenzwertHubzahl über-schritten
46. STRK¸OFF ... der Hubzähler zurück-gesetzt oder Grenzwert er-höht wird
Der vom Antrieb zurückge-legte aufsummierte Wegüberschritt den eingestelltenGrenzwert.
5 GrenzwertRichtungs-wechsel über-schritten
47. DCHG¸OFF ... der Richtungswechsel-zähler zurückgesetzt oderGrenzwert erhöht wird
Die Anzahl der Richtungs-wechsel überschritt den ein-gestellten Grenzwert.
6 Grenzwert un-terer Hartan-schlag über-schritten
48. ZERO¸OFF35.YCLS = do oderup do
... die Abweichung des An-schlags verschwindet oderdas Gerät neu initialisiertwurde
Verschleiß des Ventilsitzes,Ablagerung oder Fremdkör-per im Ventilsitz, mechani-sche Dejustage, Rutsch-kupplung verstellt.
7 Grenzwertoberer Hartan-schlag über-schritten
49. OPEN¸OFF35 YCLS = upoder up do
... die Abweichung des An-schlags verschwindet oderdas Gerät neu initialisiertwurde
Verschleiß des Ventilsitzes,Ablagerung oder Fremdkör-per im Ventilsitz, mechani-sche Dejustage, Rutsch-kupplung verstellt.
8 GrenzwertTotzonenan-passung über-schritten
50. DEBA¸OFF31.DEBA = Auto
... der Grenzwert wiederunterschritten ist
Erhöhte Stopfbuchsenrei-bung, mechanische Loseder Stellungsrückmeldung.
Tabelle 2 Ereignisse, die den Störmeldeausgang aktivieren können
Erläuterungen zur Spalte “Fehlercodes”:
Im Automatikbetrieb wird laufend die Abweichung zwischen Soll- undIstwert überwacht. Entsprechend der Einstellung der Parameter44. TIM, Überwachungszeit für das Setzen der Störmeldungen, und45. LIM, Ansprechschwelle der Störmeldung, wird die Störmeldung beibleibender Regelabweichung aktiviert. Sobald die Regelabweichung dieAnsprechschwelle wieder unterschreitet, wird die Störmeldung wiederzurückgenommen.
Bei entsprechender Einstellung des Parameters “43. FCT”, Funktiondes Störmeldeausgangs, wird eine Störmeldung erzeugt, wenn dasGerät sich nicht in der Betriebsart Automatik befindet. Auf diese Weisekann z.B. das Leitsystem gewarnt werden, wenn vor Ort das Gerät inHandbetrieb oder Konfigurieren geschaltet wurde.
1 Überwachung der Regelabweichung
2 Überwachung Automatikbetrieb
Vorortbedienung am Gerät
110SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Bei entsprechender Einstellung des Parameters “43. FCT”, Funktiondes Störmeldeausgangs, sowie des Parameters “38.BIN1”, FunktionBinäreingang 1, wird eine Störmeldung erzeugt, wenn der Binäreingangaktiviert wird. Dies kann z.B. ein Schalter zur Stopfbuchsenüber-wachung, ein Temperaturschalter oder Grenzwertschalter sein.
Binäreingang 2 (auf der Option Alarmmodul) kann in gleicher Weisekonfiguriert werden.
Die beiden Werte Hubzahl und Anzahl Richtungsänderungen werdenlaufend mit den Grenzwerten verglichen, die mit den Parametern“46. STRK” und “47. DCHG” vorgegeben werden. Bei Überschreitungspricht der Störmeldeausgang an. Deaktivierbar sind beide Funktionenmit der Parametereinstellung ”OFF”.
Die Überwachung des unteren Hartanschlags wird aktiviert, wenn derParameter “48. ZERO” einen Wert¸OFF hat. Mit dieser Funktion kön-nen z.B. Fehler des Ventilsitzes erkannt werden. Ein Überschreiten desGrenzwertes kann auf Ablagerungen oder Fremdkörper am Ventilsitzhindeuten. Ein Unterschreiten des Grenzwertes kann Ventilsitzver-schleiß als Ursache haben. Auch eine mechanische Dejustierung derStellungsrückmeldung kann diese Fehlermeldung auslösen.
Die Überwachung geschieht jedesmal, wenn sich das Ventil in Dicht-schließposition unten befindet. Dabei wird die aktuelle Position mit derverglichen, die während der Initialisierung als unterer Endanschlag er-mittelt wurde. Die Aktivierung der Dichtschließfunktion unten (Parame-ter “35.YCLS”) ist daher Voraussetzung.
Beispiel: Als Wert wird 3% eingestellt. Bei Dichtschließen unten wird imNormalfall die Stellung 0% eingenommen. Wird stattdessen ein Wert>3% oder <--3% ermittelt, wird eine Störung gemeldet.
Die Störmeldung bleibt aktiviert, bis entweder eine folgende Überwa-chung innerhalb der Toleranz bleibt oder eine Neuinitialisierung erfolgtist. Auch das Deaktivieren der Überwachung (“48. ZERO”=OFF) löschteine eventuell vorhandene Störmeldung.
Diese Überwachungsfunktion liefert keine verwertbaren Ergebnisse,wenn die Anschläge bei der Initialisierung nicht automatisch ermitteltwurden, sondern die Grenzen von Hand eingestellt wurden (manuelleInitialisierung, “5.INITM”).
Eine entsprechende Diagnose wird für den oberen Hartanschlag durch-geführt. Mit dem Parameter”49. OPEN” wird der Grenzwert hierfür ein-gestellt. Die Aktivierung der Dichtschließfunktion oben (Parameter“35.YCLS”) ist Voraussetzung.
3 Binäreingang BE1 oder BE2 aktiv
4 Überwachung der Hubzahl (Wegintegral)5 Überwachung der Anzahl Richtungsänderungen
6 Überwachung des unteren Hartanschlags (Ventilsitz)7 Überwachung des oberer Hartanschlags

Vorortbedienung am Gerät
111SIPART PS2 PA GerätehandbuchA5E00127924--04
Wenn bei automatischer Anpassung der Totzone (Parameter31.DEBA=Auto) sich die Totzone im Betrieb unverhältnismäßig ver-größert, deutet dies auf einen Fehler in der Anlage hin (z.B. stark er-höhte Stopfbuchsenreibung, Spiel in der Wegerfassung, Leckage). Da-her kann für diesen Wert ein Grenzwert angegeben werden(”50. DEBA”, Grenzwert für Totzonenüberwachung), bei dessen Über-schreitung der Störmeldeausgang aktiviert wird.
8 Überwachung der Totzonenanpassung
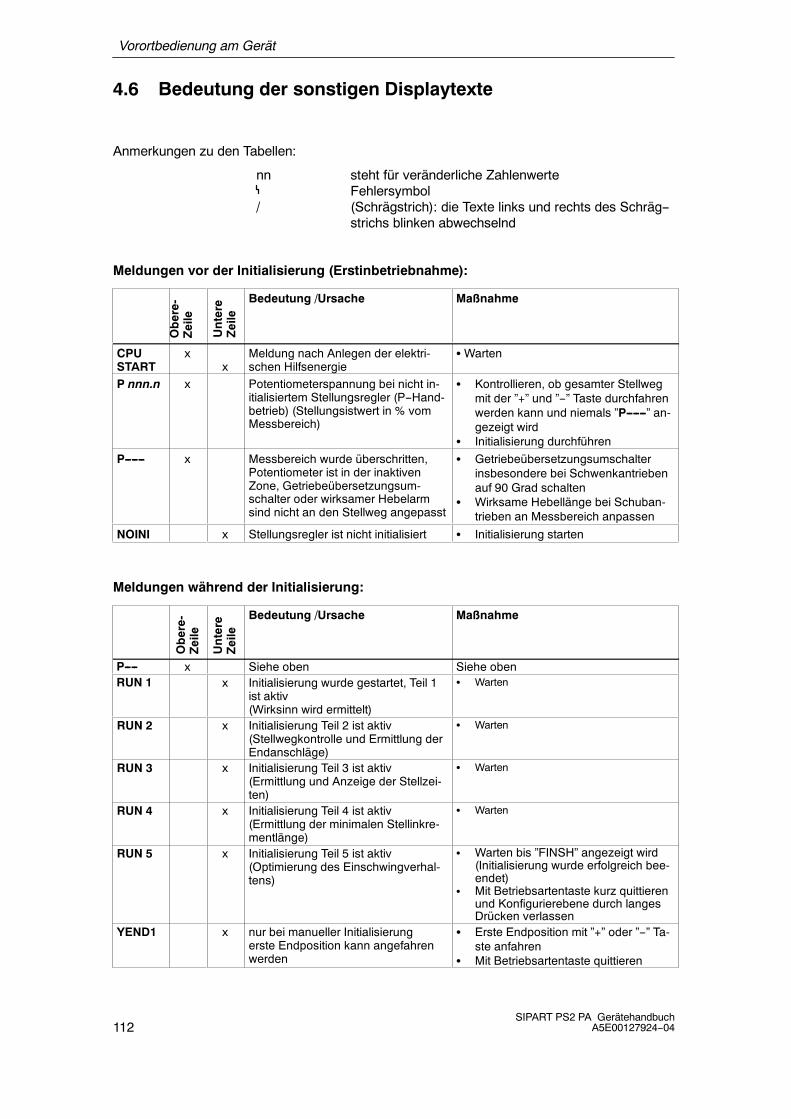
Vorortbedienung am Gerät
112SIPART PS2 PA Gerätehandbuch
A5E00127924--04
4.6 Bedeutung der sonstigen Displaytexte
Anmerkungen zu den Tabellen:
nn steht für veränderliche ZahlenwerteFehlersymbol
/ (Schrägstrich): die Texte links und rechts des Schräg--strichs blinken abwechselnd
Meldungen vor der Initialisierung (Erstinbetriebnahme):
Obere-
Zeile
Untere
Zeile
Bedeutung /Ursache Maßnahme
CPUSTART
xx
Meldung nach Anlegen der elektri-schen Hilfsenergie
SWarten
P nnn.n x Potentiometerspannung bei nicht in-itialisiertem Stellungsregler (P--Hand-betrieb) (Stellungsistwert in % vomMessbereich)
S Kontrollieren, ob gesamter Stellwegmit der ”+” und ”--” Taste durchfahrenwerden kann und niemals ”P------” an-gezeigt wird
S Initialisierung durchführenP------ x Messbereich wurde überschritten,
Potentiometer ist in der inaktivenZone, Getriebeübersetzungsum-schalter oder wirksamer Hebelarmsind nicht an den Stellweg angepasst
S Getriebeübersetzungsumschalterinsbesondere bei Schwenkantriebenauf 90 Grad schalten
S Wirksame Hebellänge bei Schuban-trieben an Messbereich anpassen
NOINI x Stellungsregler ist nicht initialisiert S Initialisierung starten
Meldungen während der Initialisierung:
Obere-
Zeile
Untere
Zeile
Bedeutung /Ursache Maßnahme
P---- x Siehe oben Siehe obenRUN 1 x Initialisierung wurde gestartet, Teil 1
ist aktiv(Wirksinn wird ermittelt)
S Warten
RUN 2 x Initialisierung Teil 2 ist aktiv(Stellwegkontrolle und Ermittlung derEndanschläge)
S Warten
RUN 3 x Initialisierung Teil 3 ist aktiv(Ermittlung und Anzeige der Stellzei-ten)
S Warten
RUN 4 x Initialisierung Teil 4 ist aktiv(Ermittlung der minimalen Stellinkre-mentlänge)
S Warten
RUN 5 x Initialisierung Teil 5 ist aktiv(Optimierung des Einschwingverhal-tens)
S Warten bis ”FINSH” angezeigt wird(Initialisierung wurde erfolgreich bee-endet)
S Mit Betriebsartentaste kurz quittierenund Konfigurierebene durch langesDrücken verlassen
YEND1 x nur bei manueller Initialisierungerste Endposition kann angefahrenwerden
S Erste Endposition mit ”+” oder ”--” Ta-ste anfahren
S Mit Betriebsartentaste quittieren
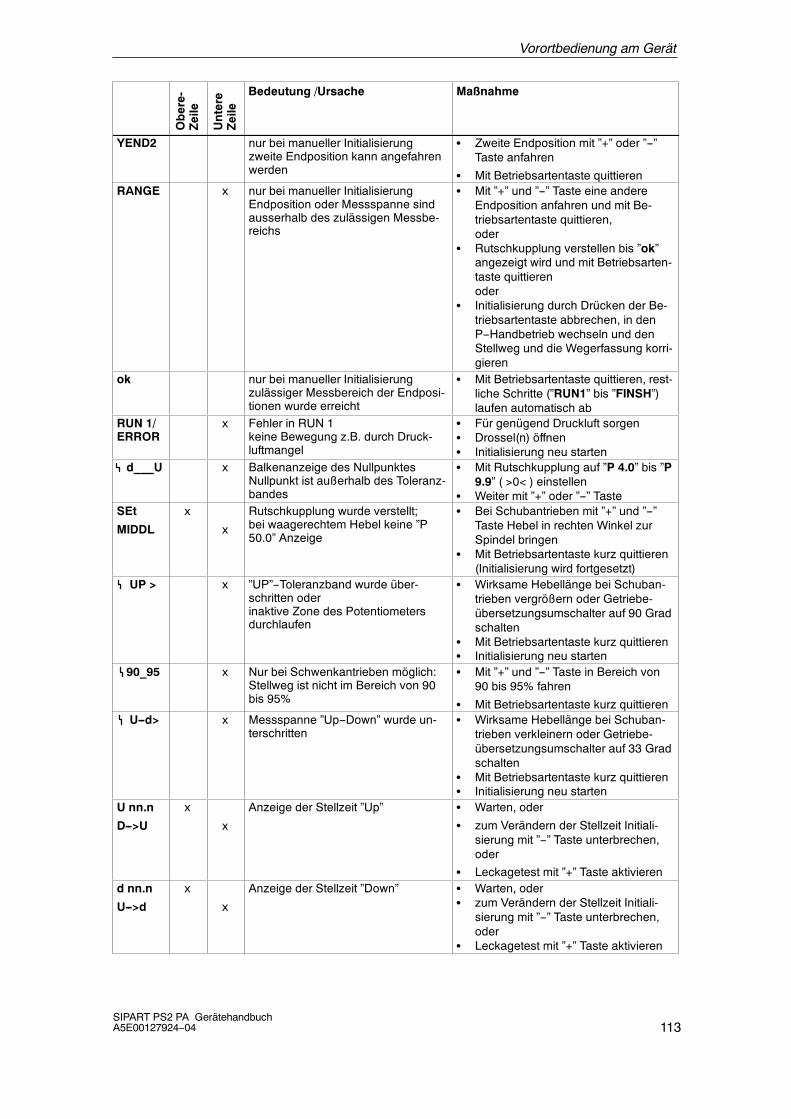
Vorortbedienung am Gerät
113SIPART PS2 PA GerätehandbuchA5E00127924--04
MaßnahmeBedeutung /Ursache
Untere
Zeile
Obere-
Zeile
YEND2 nur bei manueller Initialisierungzweite Endposition kann angefahrenwerden
S Zweite Endposition mit ”+” oder ”--”Taste anfahren
S Mit Betriebsartentaste quittierenRANGE x nur bei manueller Initialisierung
Endposition oder Messspanne sindausserhalb des zulässigen Messbe-reichs
S Mit ”+” und ”--” Taste eine andereEndposition anfahren und mit Be-triebsartentaste quittieren,oder
S Rutschkupplung verstellen bis ”ok”angezeigt wird und mit Betriebsarten-taste quittierenoder
S Initialisierung durch Drücken der Be-triebsartentaste abbrechen, in denP--Handbetrieb wechseln und denStellweg und die Wegerfassung korri-gieren
ok nur bei manueller Initialisierungzulässiger Messbereich der Endposi-tionen wurde erreicht
S Mit Betriebsartentaste quittieren, rest-liche Schritte (”RUN1” bis ”FINSH”)laufen automatisch ab
RUN 1/ERROR
x Fehler in RUN 1keine Bewegung z.B. durch Druck-luftmangel
S Für genügend Druckluft sorgenS Drossel(n) öffnenS Initialisierung neu starten
d___U x Balkenanzeige des NullpunktesNullpunkt ist außerhalb des Toleranz-bandes
S Mit Rutschkupplung auf ”P 4.0” bis ”P9.9” ( >0< ) einstellen
S Weiter mit ”+” oder ”--” TasteSEt
MIDDL
x
x
Rutschkupplung wurde verstellt;bei waagerechtem Hebel keine ”P50.0” Anzeige
S Bei Schubantrieben mit ”+” und ”--”Taste Hebel in rechten Winkel zurSpindel bringen
S Mit Betriebsartentaste kurz quittieren(Initialisierung wird fortgesetzt)
UP > x ”UP”--Toleranzband wurde über-schritten oderinaktive Zone des Potentiometersdurchlaufen
S Wirksame Hebellänge bei Schuban-trieben vergrößern oder Getriebe-übersetzungsumschalter auf 90 Gradschalten
S Mit Betriebsartentaste kurz quittierenS Initialisierung neu starten
90_95 x Nur bei Schwenkantrieben möglich:Stellweg ist nicht im Bereich von 90bis 95%
S Mit ”+” und ”--” Taste in Bereich von90 bis 95% fahren
S Mit Betriebsartentaste kurz quittierenU--d> x Messspanne ”Up--Down” wurde un-
terschrittenS Wirksame Hebellänge bei Schuban-
trieben verkleinern oder Getriebe-übersetzungsumschalter auf 33 Gradschalten
S Mit Betriebsartentaste kurz quittierenS Initialisierung neu starten
U nn.n
D-->U
x
x
Anzeige der Stellzeit ”Up” S Warten, oder
S zum Verändern der Stellzeit Initiali-sierung mit ”--” Taste unterbrechen,oder
S Leckagetest mit ”+” Taste aktivierend nn.n
U-->d
x
x
Anzeige der Stellzeit ”Down” S Warten, oderS zum Verändern der Stellzeit Initiali-
sierung mit ”--” Taste unterbrechen,oder
S Leckagetest mit ”+” Taste aktivieren
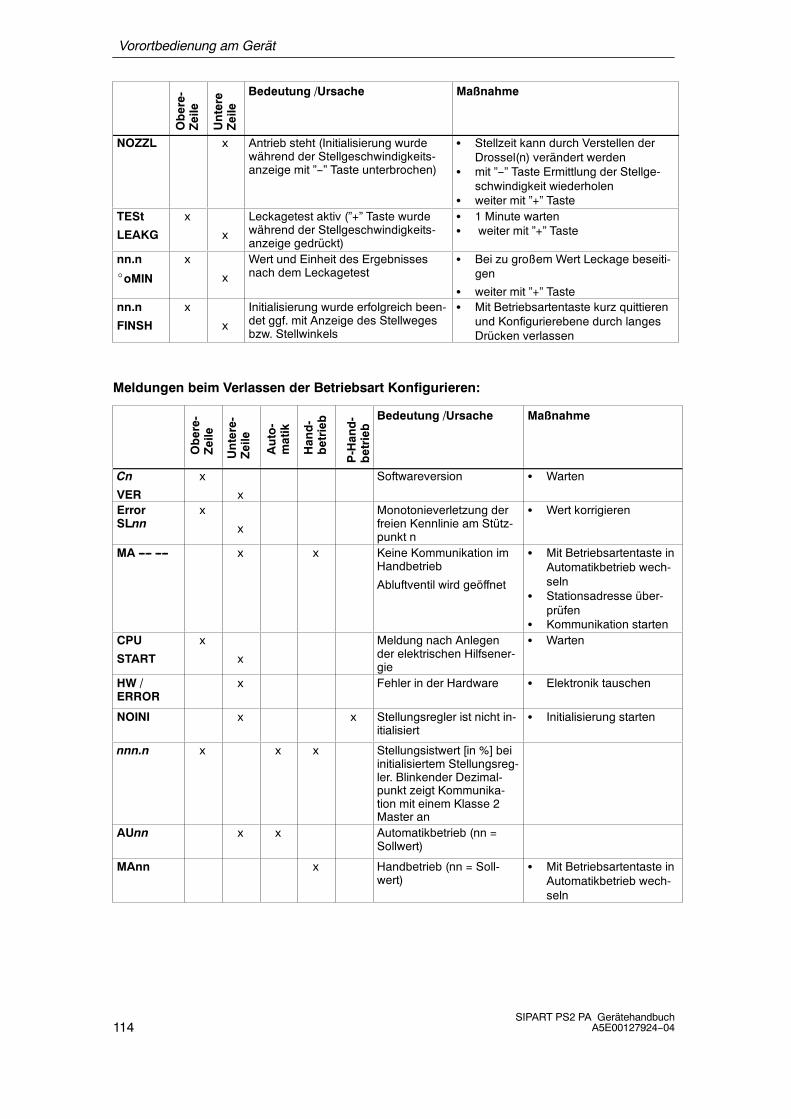
Vorortbedienung am Gerät
114SIPART PS2 PA Gerätehandbuch
A5E00127924--04
MaßnahmeBedeutung /Ursache
Untere
Zeile
Obere-
Zeile
NOZZL x Antrieb steht (Initialisierung wurdewährend der Stellgeschwindigkeits-anzeige mit ”--” Taste unterbrochen)
S Stellzeit kann durch Verstellen derDrossel(n) verändert werden
S mit ”--” Taste Ermittlung der Stellge-schwindigkeit wiederholen
S weiter mit ”+” TasteTESt
LEAKG
x
x
Leckagetest aktiv (”+” Taste wurdewährend der Stellgeschwindigkeits-anzeige gedrückt)
S 1 Minute wartenS weiter mit ”+” Taste
nn.n
_oMIN
x
x
Wert und Einheit des Ergebnissesnach dem Leckagetest
S Bei zu großem Wert Leckage beseiti-gen
S weiter mit ”+” Tastenn.n
FINSH
x
x
Initialisierung wurde erfolgreich been-det ggf. mit Anzeige des Stellwegesbzw. Stellwinkels
S Mit Betriebsartentaste kurz quittierenund Konfigurierebene durch langesDrücken verlassen
Meldungen beim Verlassen der Betriebsart Konfigurieren:
Obere-
Zeile
Untere-
Zeile
Auto-
matik
Hand-
betrieb
P-Hand-
betrieb
Bedeutung /Ursache Maßnahme
Cn
VER
x
x
Softwareversion S Warten
ErrorSLnn
x
x
Monotonieverletzung derfreien Kennlinie am Stütz-punkt n
S Wert korrigieren
MA ---- ---- x x Keine Kommunikation imHandbetrieb
Abluftventil wird geöffnet
S Mit Betriebsartentaste inAutomatikbetrieb wech-seln
S Stationsadresse über-prüfen
S Kommunikation startenCPU
START
x
x
Meldung nach Anlegender elektrischen Hilfsener-gie
S Warten
HW /ERROR
x Fehler in der Hardware S Elektronik tauschen
NOINI x x Stellungsregler ist nicht in-itialisiert
S Initialisierung starten
nnn.n x x x Stellungsistwert [in %] beiinitialisiertem Stellungsreg-ler. Blinkender Dezimal-punkt zeigt Kommunika-tion mit einem Klasse 2Master an
AUnn x x Automatikbetrieb (nn =Sollwert)
MAnn x Handbetrieb (nn = Soll-wert)
S Mit Betriebsartentaste inAutomatikbetrieb wech-seln
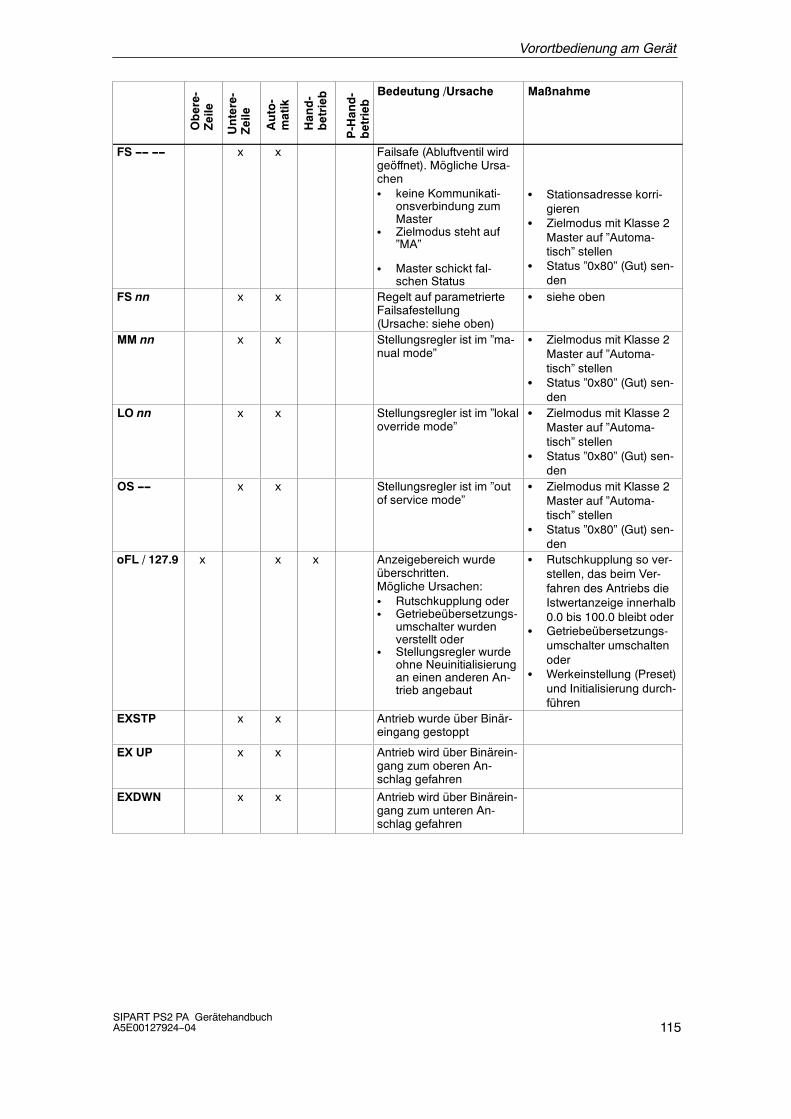
Vorortbedienung am Gerät
115SIPART PS2 PA GerätehandbuchA5E00127924--04
MaßnahmeBedeutung /Ursache
P-Hand-
betrieb
Hand-
betrieb
Auto-
matik
Untere-
Zeile
Obere-
Zeile
FS ---- ---- x x Failsafe (Abluftventil wirdgeöffnet). Mögliche Ursa-chenS keine Kommunikati-
onsverbindung zumMaster
S Zielmodus steht auf”MA”
S Master schickt fal-schen Status
S Stationsadresse korri-gieren
S Zielmodus mit Klasse 2Master auf ”Automa-tisch” stellen
S Status ”0x80” (Gut) sen-den
FS nn x x Regelt auf parametrierteFailsafestellung(Ursache: siehe oben)
S siehe oben
MM nn x x Stellungsregler ist im ”ma-nual mode”
S Zielmodus mit Klasse 2Master auf ”Automa-tisch” stellen
S Status ”0x80” (Gut) sen-den
LO nn x x Stellungsregler ist im ”lokaloverride mode”
S Zielmodus mit Klasse 2Master auf ”Automa-tisch” stellen
S Status ”0x80” (Gut) sen-den
OS ---- x x Stellungsregler ist im ”outof service mode”
S Zielmodus mit Klasse 2Master auf ”Automa-tisch” stellen
S Status ”0x80” (Gut) sen-den
oFL / 127.9 x x x Anzeigebereich wurdeüberschritten.Mögliche Ursachen:S Rutschkupplung oderS Getriebeübersetzungs-
umschalter wurdenverstellt oder
S Stellungsregler wurdeohne Neuinitialisierungan einen anderen An-trieb angebaut
S Rutschkupplung so ver-stellen, das beim Ver-fahren des Antriebs dieIstwertanzeige innerhalb0.0 bis 100.0 bleibt oder
S Getriebeübersetzungs-umschalter umschaltenoder
S Werkeinstellung (Preset)und Initialisierung durch-führen
EXSTP x x Antrieb wurde über Binär-eingang gestoppt
EX UP x x Antrieb wird über Binärein-gang zum oberen An-schlag gefahren
EXDWN x x Antrieb wird über Binärein-gang zum unteren An-schlag gefahren
Vorortbedienung am Gerät
116SIPART PS2 PA Gerätehandbuch
A5E00127924--04
4.7 Optimierung der Reglerdaten
Die während der Initialisierung automatisch ermittelten Daten für dieRegelqualität sind auf kurze Ausregeldauer bei geringem Überschwin-gen optimiert. In speziellen Fällen (z.B. extrem kleine und damit beson-ders schnelle Antriebe oder beim Betrieb mit Boostern) kann es jedochsein, dass Sie diese Daten auf schnelleres Ausregeln oder stärkereDämpfung gezielt verändern möchten. Hierfür stehen Ihnen die folgen-den sechs Parameter zur Verfügung:
Hiermit bestimmen Sie für jede Stellrichtung die kleinsten Pulslängenmit denen der Antrieb sich bewegen soll. Der optimale Wert ist insbe-sondere vom Volumen des Antriebs abhängig.
Kleine Werte führen zu kleinen Stellinkrementen und häufigem Ansteu-ern des Antriebs. Beachten Sie, dass zu kleine Werte keine Bewegungbewirken. Große Werte sind bei großen Antriebsvolumina vorteilhaft.Beachten Sie ebenfalls, dass große Stellinkremente bei kleinen Antrie-ben auch zu großen Bewegungen führen.
Die Langsamgangzone ist der Bereich der Regelabweichung zwischender Schnellgangzone und dem Totband in dem der Antrieb pulsförmigangesteuert wird.
Kleine Werte bewirken bereits bei kleinen Regelabweichungen relativgroße Verstellgeschwindigkeiten und können damit zum Überschwin-gen führen. Große Werte reduzieren insbesondere das Überschwingenbei großen Sollwertänderungen und führen in Nähe des ausgeregeltenZustandes zu langsamen Verstellgeschwindigkeiten.
Dieser Parameter wirkt wie ein Dämpfungsfaktor und dient zur Einstel-lung der Regeldynamik.
Kleine Werte bewirken schnelles Ausregeln mit Überschwingen. GroßeWerte führen zu langsamen Ausregeln ohne Überschwingen.
Es ist empfehlenswert, dass Sie zuerst eine automatische Initialisierung durchführen und erstdanach die vom Stellungsregler ermittelten Parameter an Ihre spezielle Anforderung anpassen.
TIPP: Um eine feste Bezugsgröße zu haben, ist es bei Ihrer speziellen Regleroptimierung vor-teilhaft, wenn Sie für die Totzone (Parameter DEBA) statt ”Auto” einen festen Wert vorgeben.
Die obigen Parameter wählen Sie wie gewohnt im Diagnosemenü aus und Sie aktivieren diegemeinsame Verstellbarkeit durch ein 5s langes drücken der Inkrement- oder derDekrementtaste. Wenn Sie nun den jeweiligen Parameter verstellen, wird der neue Wertunmittelbar wirksam. So können Sie sofort die Auswirkungen der neuen Werte auf dasRegelergebniss testen.
Wenn Sie das Diagnosemenü verlassen, wird die Verstellbarkeit der Parameter wieder deakti-viert.
13 Pulslänge auf14 Pulslänge zu
17 Langsamgangzone auf18 Langsamgangzone zu
34 Prädiktion auf35 Prädiktion zu
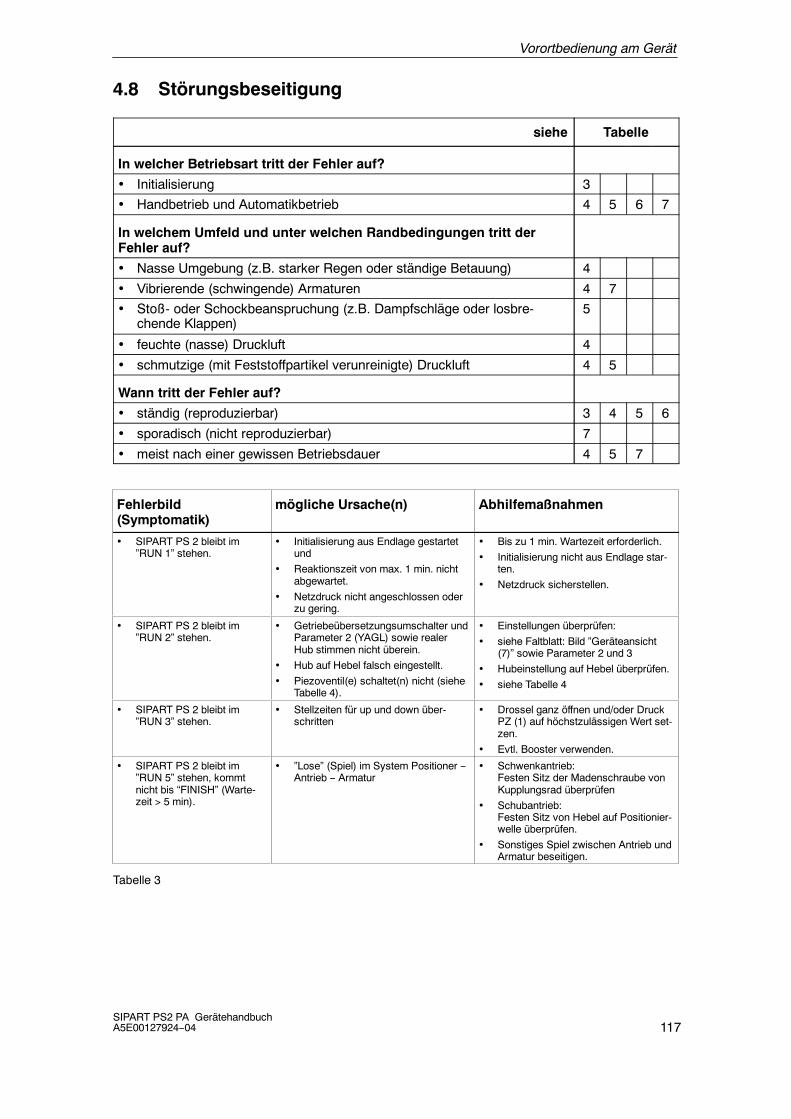
Vorortbedienung am Gerät
117SIPART PS2 PA GerätehandbuchA5E00127924--04
4.8 Störungsbeseitigung
siehe Tabelle
In welcher Betriebsart tritt der Fehler auf?
• Initialisierung 3• Handbetrieb und Automatikbetrieb 4 5 6 7
In welchem Umfeld und unter welchen Randbedingungen tritt derFehler auf?
• Nasse Umgebung (z.B. starker Regen oder ständige Betauung) 4
• Vibrierende (schwingende) Armaturen 4 7• Stoß- oder Schockbeanspruchung (z.B. Dampfschläge oder losbre-
chende Klappen)5
• feuchte (nasse) Druckluft 4
• schmutzige (mit Feststoffpartikel verunreinigte) Druckluft 4 5
Wann tritt der Fehler auf?
• ständig (reproduzierbar) 3 4 5 6
• sporadisch (nicht reproduzierbar) 7
• meist nach einer gewissen Betriebsdauer 4 5 7
Fehlerbild(Symptomatik)
mögliche Ursache(n) Abhilfemaßnahmen
• SIPART PS 2 bleibt im”RUN 1” stehen.
• Initialisierung aus Endlage gestartetund
• Reaktionszeit von max. 1 min. nichtabgewartet.
• Netzdruck nicht angeschlossen oderzu gering.
• Bis zu 1 min. Wartezeit erforderlich.• Initialisierung nicht aus Endlage star-
ten.• Netzdruck sicherstellen.
• SIPART PS 2 bleibt im”RUN 2” stehen.
• Getriebeübersetzungsumschalter undParameter 2 (YAGL) sowie realerHub stimmen nicht überein.
• Hub auf Hebel falsch eingestellt.• Piezoventil(e) schaltet(n) nicht (siehe
Tabelle 4).
• Einstellungen überprüfen:• siehe Faltblatt: Bild ”Geräteansicht
(7)” sowie Parameter 2 und 3• Hubeinstellung auf Hebel überprüfen.• siehe Tabelle 4
• SIPART PS 2 bleibt im”RUN 3” stehen.
• Stellzeiten für up und down über-schritten
• Drossel ganz öffnen und/oder DruckPZ (1) auf höchstzulässigen Wert set-zen.
• Evtl. Booster verwenden.
• SIPART PS 2 bleibt im”RUN 5” stehen, kommtnicht bis “FINISH” (Warte-zeit > 5 min).
• ”Lose” (Spiel) im System Positioner --Antrieb -- Armatur
• Schwenkantrieb:Festen Sitz der Madenschraube vonKupplungsrad überprüfen
• Schubantrieb:Festen Sitz von Hebel auf Positionier-welle überprüfen.
• Sonstiges Spiel zwischen Antrieb undArmatur beseitigen.
Tabelle 3
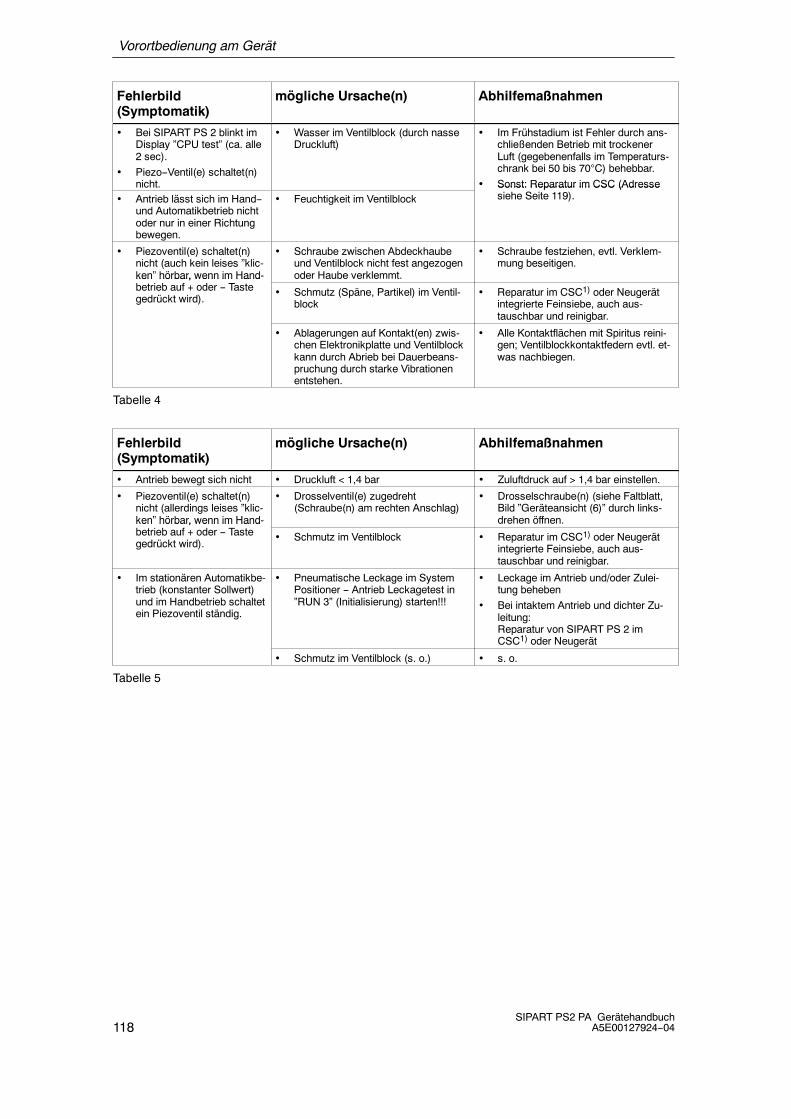
Vorortbedienung am Gerät
118SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Fehlerbild(Symptomatik)
mögliche Ursache(n) Abhilfemaßnahmen
• Bei SIPART PS 2 blinkt imDisplay ”CPU test” (ca. alle2 sec).
• Piezo--Ventil(e) schaltet(n)nicht.
• Wasser im Ventilblock (durch nasseDruckluft)
• Im Frühstadium ist Fehler durch ans-chließenden Betrieb mit trockenerLuft (gegebenenfalls im Temperaturs-chrank bei 50 bis 70°C) behebbar.
• Sonst: Reparatur im CSC (Adresse• Antrieb lässt sich im Hand--
und Automatikbetrieb nichtoder nur in einer Richtungbewegen.
• Feuchtigkeit im VentilblockSonst: Reparatur im CSC (Adressesiehe Seite 119).
• Piezoventil(e) schaltet(n)nicht (auch kein leises ”klic-ken” hörbar, wenn im Hand-
• Schraube zwischen Abdeckhaubeund Ventilblock nicht fest angezogenoder Haube verklemmt.
• Schraube festziehen, evtl. Verklem-mung beseitigen.
ken hörbar, wenn im Handbetrieb auf + oder -- Tastegedrückt wird).
• Schmutz (Späne, Partikel) im Ventil-block
• Reparatur im CSC1) oder Neugerätintegrierte Feinsiebe, auch aus-tauschbar und reinigbar.
• Ablagerungen auf Kontakt(en) zwis-chen Elektronikplatte und Ventilblockkann durch Abrieb bei Dauerbeans-pruchung durch starke Vibrationenentstehen.
• Alle Kontaktflächen mit Spiritus reini-gen; Ventilblockkontaktfedern evtl. et-was nachbiegen.
Tabelle 4
Fehlerbild(Symptomatik)
mögliche Ursache(n) Abhilfemaßnahmen
• Antrieb bewegt sich nicht • Druckluft < 1,4 bar • Zuluftdruck auf > 1,4 bar einstellen.
• Piezoventil(e) schaltet(n)nicht (allerdings leises ”klic-ken” hörbar, wenn im Hand-
• Drosselventil(e) zugedreht(Schraube(n) am rechten Anschlag)
• Drosselschraube(n) (siehe Faltblatt,Bild ”Geräteansicht (6)” durch links-drehen öffnen.ken hörbar, wenn im Hand
betrieb auf + oder -- Tastegedrückt wird).
• Schmutz im Ventilblock • Reparatur im CSC1) oder Neugerätintegrierte Feinsiebe, auch aus-tauschbar und reinigbar.
• Im stationären Automatikbe-trieb (konstanter Sollwert)und im Handbetrieb schaltetein Piezoventil ständig.
• Pneumatische Leckage im SystemPositioner -- Antrieb Leckagetest in”RUN 3” (Initialisierung) starten!!!
• Leckage im Antrieb und/oder Zulei-tung beheben
• Bei intaktem Antrieb und dichter Zu-leitung:Reparatur von SIPART PS 2 imCSC1) oder Neugerät
• Schmutz im Ventilblock (s. o.) • s. o.
Tabelle 5
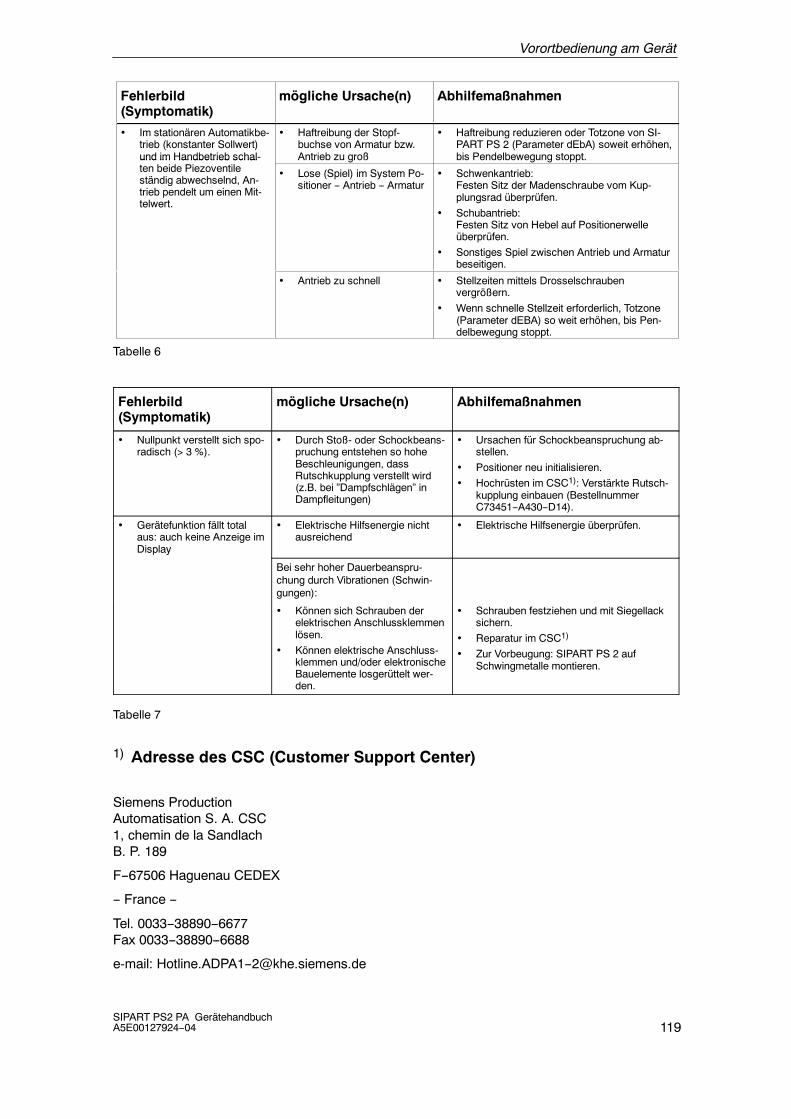
Vorortbedienung am Gerät
119SIPART PS2 PA GerätehandbuchA5E00127924--04
Fehlerbild(Symptomatik)
mögliche Ursache(n) Abhilfemaßnahmen
• Im stationären Automatikbe-trieb (konstanter Sollwert)und im Handbetrieb schal-
• Haftreibung der Stopf-buchse von Armatur bzw.Antrieb zu groß
• Haftreibung reduzieren oder Totzone von SI-PART PS 2 (Parameter dEbA) soweit erhöhen,bis Pendelbewegung stoppt.und im Handbetrieb schal
ten beide Piezoventileständig abwechselnd, An-trieb pendelt um einen Mit-telwert.
• Lose (Spiel) im System Po-sitioner -- Antrieb -- Armatur
• Schwenkantrieb:Festen Sitz der Madenschraube vom Kup-plungsrad überprüfen.
• Schubantrieb:Festen Sitz von Hebel auf Positionerwelleüberprüfen.
• Sonstiges Spiel zwischen Antrieb und Armaturbeseitigen.
• Antrieb zu schnell • Stellzeiten mittels Drosselschraubenvergrößern.
• Wenn schnelle Stellzeit erforderlich, Totzone(Parameter dEBA) so weit erhöhen, bis Pen-delbewegung stoppt.
Tabelle 6
Fehlerbild(Symptomatik)
mögliche Ursache(n) Abhilfemaßnahmen
• Nullpunkt verstellt sich spo-radisch (> 3 %).
• Durch Stoß- oder Schockbeans-pruchung entstehen so hoheBeschleunigungen, dassRutschkupplung verstellt wird(z.B. bei ”Dampfschlägen” inDampfleitungen)
• Ursachen für Schockbeanspruchung ab-stellen.
• Positioner neu initialisieren.• Hochrüsten im CSC1): Verstärkte Rutsch-
kupplung einbauen (BestellnummerC73451--A430--D14).
• Gerätefunktion fällt totalaus: auch keine Anzeige imDisplay
• Elektrische Hilfsenergie nichtausreichend
• Elektrische Hilfsenergie überprüfen.
Bei sehr hoher Dauerbeanspru-chung durch Vibrationen (Schwin-gungen):
• Können sich Schrauben derelektrischen Anschlussklemmenlösen.
• Können elektrische Anschluss-klemmen und/oder elektronischeBauelemente losgerüttelt wer-den.
• Schrauben festziehen und mit Siegellacksichern.
• Reparatur im CSC1)
• Zur Vorbeugung: SIPART PS 2 aufSchwingmetalle montieren.
Tabelle 7
1) Adresse des CSC (Customer Support Center)
Siemens ProductionAutomatisation S. A. CSC1, chemin de la SandlachB. P. 189
F--67506 Haguenau CEDEX
-- France --
Tel. 0033--38890--6677Fax 0033--38890--6688
e-mail: [email protected]

Vorortbedienung am Gerät
120SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Funktionen/Bedienung über PROFIBUS PA
121SIPART PS2 PA GerätehandbuchA5E00127924--04
Funktionen/Bedienung überPROFIBUS PA
5.1 Systemeinbindung
Der Stellungsregler kann durch azyklische und zyklischeDatenübertragung von einem Leitsystem (Master) bedient undbeobachtet werden. Damit der Stellungsregler als Slave mit demMaster kommunizierenkann, müssen Sie vorher seine Adresseeinstellen.
Die PROFIBUS-Adresse ist im Auslieferungszustand auf 126eingestellt. Sie können am Gerät (Kapitel 4.4, Seite 88) oder mit einemParameterwerkzeug wie SIMATIC PDM oder HWKonfig über den Buseinstellen.
5.2 Azyklische Datenübertragung
Die azyklische Datenübertragung dient vorwiegend der Übertragungvon Parametern während der Inbetriebnahme, der Wartung, beiBatchprozessen oder zur Anzeige weiterer Messgrößen, die nicht amzyklischen Nutzdatenverkehr teilnehmen.
Der Datenverkehr findet zwischen einem Klasse-2-Master und demFeldgerät mit sogenannten C2-Verbindungen statt. Damit mehrereKlasse-2-Master zur selben Zeit auf den gleichen Stellungsreglerzugreifen können, unterstützt das Gerät bis zu vier C2-Verbindungen.Allerdings müssen Sie sicher stellen, dass nicht auf die gleichen Datengeschrieben wird.
Die azyklische Datenübertragung erfolgt vorzugsweise mit demSoftwarepaket SIMATIC PDM.
5.2.1 SIMATIC PDM
SIMATIC PDM ist ein Softwarepaket zur Projektierung,Parametrierung, Inbetriebnahme, Diagnose und Wartung desStellungsregler und anderen Prozessgeräten.
SIMATIC PDM enthält eine einfache Prozessbeobachtung derProzesswerte, Alarme und Zustandsinformationen des Geräts.
5
Funktionen/Bedienung über PROFIBUS PA
122SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Mit SIMATIC PDM können Sie Prozessgerätedaten
S anzeigen,
S einstellen,
S ändern,
S vergleichen,
S auf Plausibilität prüfen
S verwalten und
S simulieren
Wir empfehlen generell folgende Vorgehensweise:
S Erst die aktuellen Einstellungen aus dem Gerät lesen indem Sie dieAktion ”Laden in PG/PC” auslösen,
S Kontrollieren Sie die aktuellen Einstellungen,
S Ändern Sie die erforderlichen Einstellungen,
S Laden Sie die Parametereinstellungen ins Gerät und speichern Sieauch die Parametereinstellungen Offline.
In der Menüleiste von PDM sind die Menüs Datei, Gerät, Ansicht,Extras und Hilfe enthalten. In der folgenden Beschreibung wird speziellauf das Gerätemenü eingegangen. In dem Ihnen weitere Untermenüszur Verfügung stehen.
5.2.1.1 Adresse vergeben
Hier können Sie dem Stellungsregler eine neue Adresse vergeben.Beachten Sie, dass dies aber nur möglich ist, wenn der Slave nochnicht in den zyklischen Dienst eingebunden ist.
5.2.1.2 Laden in Gerät
und
5.2.1.3 Laden in PG/PC
Können Sie einfacher durch Anklicken des entsprechenden Symbols
(Icon) in der Menüleiste ausführen .
Mit ”Laden in PG/PC” können Sie die Parameter aus demStellungsregler auslesen, ggf. ändern und dann mit ”Laden in Gerät” anden Stellungsregler senden.
5.2.1.4 Wartungsinformationen lesen
Hier können Sie sich über die aktuellen Werte die während der letztenInitialisierung vom Stellungsregler ermittelt wurden informieren. DurchVergleich mit den Referenzwerten die bei der letzten Wartunggespeichert wurden, können Sie den Zustand der Armatur beurteilen.
Funktionen/Bedienung über PROFIBUS PA
123SIPART PS2 PA GerätehandbuchA5E00127924--04
Um sich die Werte anzeigen zulassen, müssen Sie in das Menü”Gerät” und dann in das Untermenü ”Wartungsinformationen lesen”gehen. Wegen der Vielzahl an Informationen sind diese auf mehrereRegister verteilt:
S Wartungsinformationen 1 und 2Hier werden die Initialisierungswerte wie Nullpunkt P0, EndwertP100, Stellzeiten usw. angezeigt.
S Wartungsdateninformieren Sie über die Anzahl der Hübe, Richtungswechsel,Störmeldungen usw. Zusätzlich können Sie Grenzwerte eingebenund in das Gerät übertragen.
S Einsatztemperaturzeigt Ihnen die minimale, aktuelle und maximale Temperatur an.
S Betriebszeitenzeigen Ihnen die Gesamtbetriebszeit und die Betriebszeiten inverschiedenen Temperaturbereichen an.
S Statische RevisionsnummerDiese Parameter zeigen den Revisionsstand von Daten, die mitdem betreffenden PROFIBUS-Block zusammenhängen. Nach jederParameteränderung wird der Revisionsstand im entsprechendenPROFIBUS-Block inkrementiert.
5.2.1.5 Wartungsinformationen setzen
Hier können Sie Wartungsinformationen speichern und rücksetzen.
Gehen Sie in das Menü ”Gerät” und dann in das Untermenü”Wartungsinformationen setzen”. Dort finden Sie folgende Register:
S Wartungsinformationen speichern / rücksetzenund
S Zähler rücksetzen
Um die aktuellen Initialisierungswerte speichern zu können, müssenSie im Feld ”Datum SIPART--Wartung” ein gültiges Datum eintragenund anschließend den Knopf ”Wartungsinformationen speichern”drücken. Dies führt zu einer zweispaltigen Anzeige derWartungsinformationen im Menü ”Wartungsinformationen lesen” (sieheoben). Wenn Sie später den Stellungsregler erneut initialisieren,werden aktuelle Werte ermittelt und Sie können diese mit den vorhergespeicherten Werten vergleichen.
Wenn Sie den Knopf ”Wartungsinformationen rücksetzen” drücken,wird das Rücksetzen (Nullsetzen) der ’Werte der letzten Wartung’ermöglicht. Das Rücksetzen der Wartungsparameter erfolgt derart,dass das ’Datum der letzten Wartung’ auf einen unsinnigen Wert(1.1.00) gesetzt wird. Damit wird PDM vorgetäuscht, dass noch keine’letzte Wartung’ erfolgt sei.TIPP: wenn Sie wieder ein gültiges Datum eintragen, können Sie sichdie alten Werte erneut anzeigen lassen.
Funktionen/Bedienung über PROFIBUS PA
124SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Erst wenn Sie im Register ”Zähler rücksetzen” den Knopf”Wartungszähler rücksetzen” betätigen, werden die folgendeWartungszähler zurückgesetzt:
S Anzahl 100% Hübe (STRKS)
S Anzahl Richtungswechsel (CHDIR)
S Anzahl Störmeldungen (\CNT)
S Anzahl Alarme 1 und 2 (A1CNT / A2CNT)
5.2.1.6 Betrieb
Folgende Zielmodi (Betriebsarten) sind möglich:
S Automatisch
S Manuell
S Lokale Überlagerung (LO)
S Außer Betrieb (OS)
Beachten Sie, dass sich die Zielmodi auf die Betriebsarten derFunktionsblöcke des PROFIBUS PA Blockmodells beziehen und nichtmit den Betriebsarten Automatik-- und Handbetrieb desStellungsreglers verwechselt werden dürfen.
Die obigen Zielmodi wirken, wenn sich der Stellungsregler imAutomatikbetrieb (AUT) befindet. Ist der Stellungsregler im Handbetrieb(MAN), werden sie erst nach der Vor-Ort-Umschaltung in denAutomatikbetrieb (AUT) wirksam.
Diese Zielmodi werden spannungsausfallsicher im Stellungsreglergespeichert.
Solange wie der Stellungsregler als Slave noch nicht in den zyklischenDienst eingebunden ist, ist es über PDM möglich, ihm zyklisch einenSollwert zu senden.
Nehmen Sie folgende Einstellungen vor:
S Gehen Sie in das Register ”Betriebsart”
S Stellen Sie den Zielmodus auf ”Automatisch”
S Tragen Sie für den gewünschten Sollwert einen Wert zwischen 0und 100%, die Qualität ”Gut” und den Status ”OK” ein.
S Übertragen Sie die Einstellungen in den Stellungsregler.
Der Stellungsregler wird nun solange auf den gewünschten Sollwertregeln, bis ein zyklischer Master die Kommunikation mit diesem Slaveaufnimmt oder Sie den Stellungsregler vor Ort in den Handbetriebnehmen.
Automatisch
Funktionen/Bedienung über PROFIBUS PA
125SIPART PS2 PA GerätehandbuchA5E00127924--04
. HINWEIS
Beachten Sie, dass der Stellungsregler nach dem Senden mit derQualität ”Schlecht” und dem Status ”Wert konstant” antwortet.
Wenn Sie diesen Zielmodus verlassen und kein weiterer Master demStellungsregler einen Sollwert sendet, regelt der Stellungsregler nachAblauf der eingestellten Überwachungszeit auf den parametriertenFailssafewert.
Auch wenn eine zyklische Kommunikation läuft, können Sie über PDMdem Stellungsregler einen Sollwert senden. Sie müssen sich nur vorherVorrang vor dem zyklischen Master verschaffen.
Nehmen Sie folgende Einstellungen vor:
S Gehen Sie in das Register ”Betriebsart”.
S Stellen Sie den Zielmodus auf ”Manuell”.
S Tragen Sie als Ausgangswert einen Wert zwischen 0 und 100%, dieQualität ”Gut” und den Status ”OK” ein.
S Übertragen Sie die Einstellungen in den Stellungsregler.
Der Stellungsregler regelt nun auf den gewünschten Ausgangswert undmeldet diesen manuellen Mode durch ”MM” am Display.
Beachten Sie, dass im manuellen Mode der eingegebeneAusgangswert ohne Skalierung direkt in den Ausgangsblock desStellungsreglers geschrieben wird.
Sie können Stellungsregler vor Ort in den Handbetrieb nehmen undden Antrieb über die Tasten verstellen. Der Sollwert wird dabei demaktuellen Istwert nachgeführt. Nach dem Zurückschalten in denAutomatikbetrieb wird der manuellen Mode und die gerade aktuelleStellung beibehalten.
Nach einem Spannungausfall regelt der Stellungsregler im manuellenMode je nach Wirksinn des Antriebes auf den mit Ya oder Yeeingestellten Wert.
. HINWEIS
Damit die Sollwerte des zyklischen Masters wieder wirken können,müssen Sie den Zielmodus auf ”Automatisch” stellen.
Manuell
Funktionen/Bedienung über PROFIBUS PA
126SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Um den Antrieb auf der aktuellen Position verharren zu lassen, könnenSie den Stellungsregler über PDM auf ”Lokale Überlagerung” stellen. Indiesem Mode werden die Ventile des Stellungsreglers nichtangesteuert. Dadurch können Sie z.B. eine evtl. Leckage erkennen.Nehmen Sie folgende Einstellungen vor:
S Gehen Sie in das Register ”Betriebsart”.
S Stellen Sie den Zielmodus auf ”Lokale Überlagerung (LO)”.
S Übertragen Sie die Einstellungen in den Stellungsregler.
Die erfolgreiche Übertragung wird am Display des Stellungsreglerdurch ”LO” gemeldet.
Fällt die Spannung aus, entlüftet der Antrieb und bleibt auch nachSpannungswiederkehr in dieser Stellung.
. HINWEIS
Damit die Sollwerte des zyklischen Masters wieder wirken können,müssen Sie den Zielmodus auf ”Automatisch” stellen.
Unabhängig von der zyklische Kommunikation können Sie denStellungsregler über PDM außer Betrieb nehmen.
!VORSICHT
Um Körperverletzungen und Sachschäden zu vermeiden, müssen Siebeachten, dass durch diese Aktion der Antrieb entlüftet wird.
Nehmen Sie folgende Einstellungen vor:
S Gehen Sie in das Register ”Betriebsart”.
S Stellen Sie den Zielmodus auf ”Außer Betrieb (O/S)”.
S Übertragen Sie die Einstellungen in den Stellungsregler.
Die erfolgreiche Übertragung wird am Display des Stellungsreglerdurch ”OS ----” gemeldet.
Auch in diesem Zielmodus können Sie Stellungsregler vor Ort in denHandbetrieb nehmen und den Antrieb über die Tasten verstellen. ImDisplay wird dann ”MAN ----” angezeigt.
Nach dem Zurückschalten in den Automatikbetrieb wird der”Außer-Betrieb-Mode” (Anzeige ”OS ----”) beibehalten.
Nach einem Spannungausfall bleibt der Antrieb weiterhin entlüftet.
. HINWEIS
Damit die Sollwerte des zyklischen Masters wieder wirken können,müssen Sie den Zielmodus auf ”Automatisch” stellen.
Lokale Überlage-rung (LO)
Außer Betrieb(O/S)
Funktionen/Bedienung über PROFIBUS PA
127SIPART PS2 PA GerätehandbuchA5E00127924--04
Simulationsfunktionen helfen Ihnen bei der Inbetriebnahme vonAnlagenteilen und des Stellungsreglers. Sie können Prozesswerte ohnedie Ausgabe realer Stellwerte erzeugen. Ebenso werden die Ausgängedes Alarmmoduls und der Stellwert des Iy-Moduls davon nichtbeeinflusst. Der Wertebereich der simulierten Prozesswerte lässt sichvoll ausschöpfen. So ist auch die Simulation von Fehlern möglich.
Nehmen Sie folgende Einstellungen vor:
S Gehen Sie in das Register ”Simulation Istwert”
S Stellen Sie die Simulation auf ”Freigegeben”.
S Tragen Sie für den gewünschten Simulationswert einen Wertzwischen 0 und 100%, die Qualität ”Gut” und den Status ”OK” ein.
S Übertragen Sie die Einstellungen in den Stellungsregler.
Der Stellungsregler regelt nun weiterhin auf den Sollwert des Master, inder Rückmeldung des Istwertes wird jedoch der simulierte Wertangezeigt.
. HINWEIS
Vergessen Sie nicht nach Abschluss der Simulation, diese wieder auf”Gesperrt” zu stellen.
5.2.1.7 Rücksetzen
Sollte der Stellungsregler so verstellt sein, dass er seine Regelaufgabenicht mehr erfüllen kann, können Sie mit dieser Funktion denAuslieferungszustand wieder herstellen. Sie setzt alle Parameter mitAusnahme der PROFIBUS-Adresse auf die Werkseinstellungenzurück.
Das Rücksetzen wird von der Diagnosemeldung ”Neustart ausgeführt”angezeigt. Danach müssen Sie alle Parameter neu einstellen und eineInitialisierung durchführen.
Mit dem Warmstart veranlassen Sie den Stellungsregler, abzuschaltenund sich neu zu starten. Dabei wird die Kommunikation abgebrochenund wieder aufgenommen.
Dieser Wiederanlauf wird von der Diagnosemeldung ”Wiederanlaufdurchgeführt” angezeigt. Solange noch kein Messwertergebnis zurVerfügung steht, liest das Automatisierungs- bzw. Leitsystem denStatus ”Unsicher, Initialwert, Wert konstant” ein.
Hat kein anderes Gerät in Ihrem System die voreingestellte Adresse126, können Sie den PROFIBUS-Strang im laufenden Betrieb desAutomatisierungs- bzw. Leitsystems um Ihren Stellungsreglererweitern. Anschließend müssen Sie die Adresse des neueingebundenen Geräts auf einen anderen Wert ändern.
Simulation Istwert
Rücksetzen in denAuslieferungs-stand
Wiederanlauf(Warmstart)
Rücksetzen derPROFIBUS-Adresse auf 126
Funktionen/Bedienung über PROFIBUS PA
128SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Wenn Sie einen Stellungsregler aus dem PROFIBUS-Strang entfernen,sollten Sie seine Adresse über diese Funktion auf 126 zurücksetzen,damit Sie es nach Bedarf in dieses oder ein anderes System wiedereinbinden können.
Falls bereits ein zyklischer Master mit dem Stellungsreglerkommuniziert, ist ein Rücksetzen der Adresse nicht möglich.
Um nicht ungewollt Änderungen durch einen azyklischen Mastervorzunehmen, können Sie das Schreiben sperren. Übertragen Sie dazuaus dem Menü Schreibverriegelung die Information “Ein” in denStellungsregler.
5.2.1.8 Initialisierungsparameter
In diesem Menü können Sie sich die Initialisierungsparameter anzeigenlassen, aber auch gezielt ändern. Dies sollte jedoch nur vonSpezialisten durchgeführt werden (siehe Kapitel 4.7, Seite 116“Optimierung der Reglerdaten”). Ebenso benötigen Sie diese Funktion,wenn Sie die Elektronik tauschen müssen, aber im Moment keineInitialisierung vornehmen können (siehe Kapitel 3.7, Seite 81).
5.2.1.9 Selbstkalibrierung
Sie haben auch mit SIMATIC PDM die Möglichkeit, eineErstinitialisierung des Stellungsreglers durchführen.
Gehen Sie dazu in das Menü ”Gerät” und dann in das Untermenü”Selbstkalibrierung”. Drücken Sie in dem sich nun öffnenden Fensterdie Taste ”Kalibrierung starten”. Nun erscheint ein Warnhinweis den Sieunbedingt beachten müssen, um Schaden von Personen oder derAnlage anzuwenden. Beachten Sie ebenso, dass Sie dieSelbstkalibrierung jederzeit von dem azklischen Master aus startenkönnen, also auch wenn der Stellungsregler sich im Automatikbetriebbefindet und Sollwerte eines zyklisches Masters erhält.
!WARNUNG
Da Sie sich nicht vor Ort befinden, müssen Sie unbedingt vor demStarten der Selbstkalibrierung entsprechenden Vorsichtsmaßnahmentreffen, damit keine Personen- oder Sachschäden eintreten.
Beachten Sie ebenfalls, dass die Selbstkalibrierung nur am Gerätselbst durch Betätigung der Betriebsartentaste oder Unterbrechungder Energieversorgung abgebrochen werden kann.
Nachdem Sie den Warnhinweis bestätigt haben, wird dieSelbstkalibrierung gestartet. Im Fenster von SIMATIC PDM können Sieden Fortschritt beobachten.
Nachdem die Initialisierung erfolgreich durchlaufen wurde, arbeitet derStellungsregler mit der Betriebsart weiter aus der die Selbstkalibrierunggestartet wurde. Tritt eine Fehlermeldung auf, ist eine Korrektur vor Ortnotwendig.
Bediensperren
Funktionen/Bedienung über PROFIBUS PA
129SIPART PS2 PA GerätehandbuchA5E00127924--04
5.2.1.10 Schreibverriegelung
Nach Abschluss der Inbetriebnahme können Sie durch Setzen derSchreibverriegelung das ungewollte Ändern über einen azyklischenMaster verhindern. Vor Ort können Sie am Stellungsregler dieParameter jedoch nach wie vor ändern.
Übertragen Sie dazu im Untermenü ”Schreibverriegelung” den Wert”EIN” in den Stellungsregler. Falls Sie trotzdem versuchen zuschreiben, zeigt PDM Ihnen dies durch die Meldung”Verbindungsabbruch” an.
. HINWEIS
Wenn Ihnen in dieser Maske ”Hardware Schreibschutz” gleich ”EIN”gemeldet wird, ist im Stellungsregler der Binäreingang 1 auf ”bLoc1”oder ”bLoc2” parametriert und aktiv. Somit wird ebenfalls das Schrei-ben über PDM blockiert.
5.3 Zyklische Datenübertragung
Über die zyklische Datenübertragung werden die für dieProzessautomatisierung relevanten Nutzdaten zwischen demKlasse-1-Master (Leit- oder Automatisierungssystem) und demStellungsregler übertragen.
5.3.1 Konfigurieren
Informationen über Eingangs- und Ausgangsbereich sowie dieKonsistenz der zyklisch übertragenen Daten werden in derGeräteStammDaten-Datei (GSD-Datei) definiert, mit demKonfiguriertelegramm vom Gerät geprüft und ggf. als gültig erklärt.Während des Projektierens wird festgelegt, welche Nutzdaten imzyklischen Betrieb übertragen werden sollen. Damit ist eineOptimierung der zu übertragenden Datenmenge möglich. In denSiemens-Leitsystemen sind die GSD-Dateien aller üblichen Gerätebereits hinterlegt, sie sind aber auch über das Internet zugänglich(www.ad.siemens.de/csi_e/gsd) und können nachträglich importiertwerden.
5.3.1.1 Konfigurieren der Nutzdaten
Die Nutzdaten, die über den PROFIBUS dem Leitsystem bzw. derSteuerung zur Verfügung gestellt werden, richten sich nach derausgewählten Sollkonfiguration.
. HINWEIS
Bei STEP 7 ist das Konfigurierwerkzeug HW-Konfig. Bei STEP 5 ist esCOM_PROFIBUS.
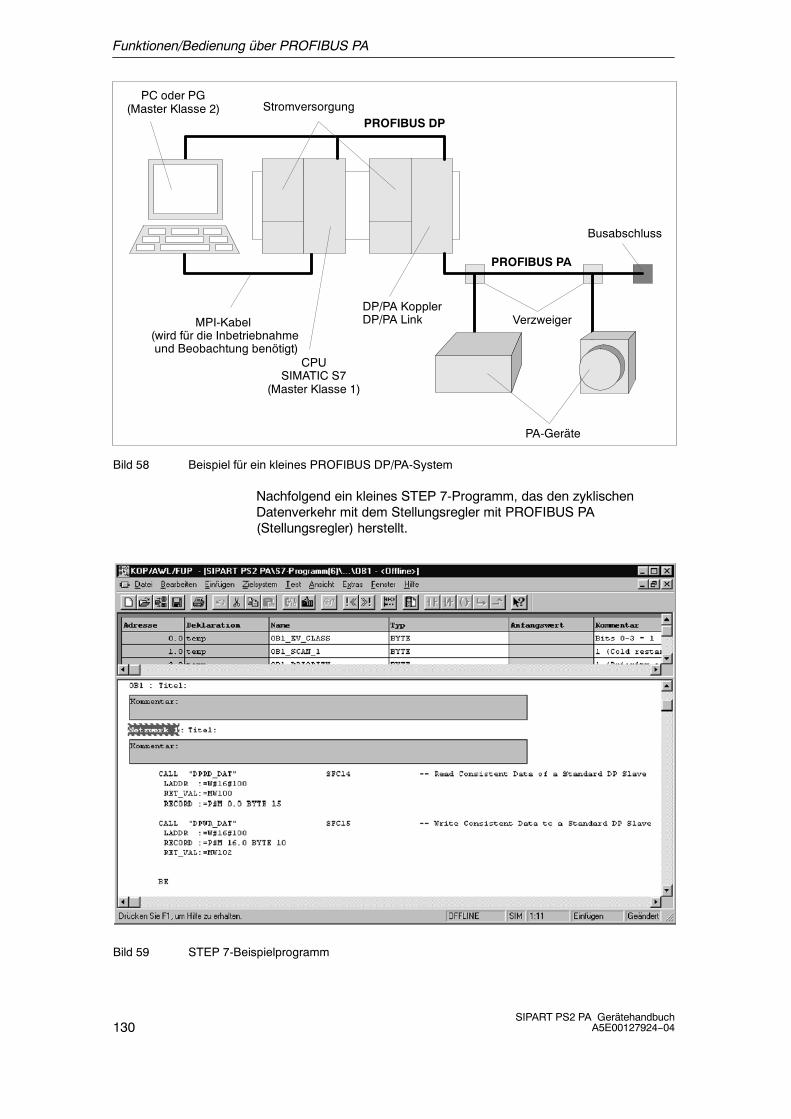
Funktionen/Bedienung über PROFIBUS PA
130SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Stromversorgung
CPUSIMATIC S7
(Master Klasse 1)
DP/PA KopplerDP/PA Link
Busabschluss
PA-Geräte
VerzweigerMPI-Kabel(wird für die Inbetriebnahmeund Beobachtung benötigt)
PC oder PG(Master Klasse 2)
PROFIBUS DP
PROFIBUS PA
Bild 58 Beispiel für ein kleines PROFIBUS DP/PA-System
Nachfolgend ein kleines STEP 7-Programm, das den zyklischenDatenverkehr mit dem Stellungsregler mit PROFIBUS PA(Stellungsregler) herstellt.
Bild 59 STEP 7-Beispielprogramm
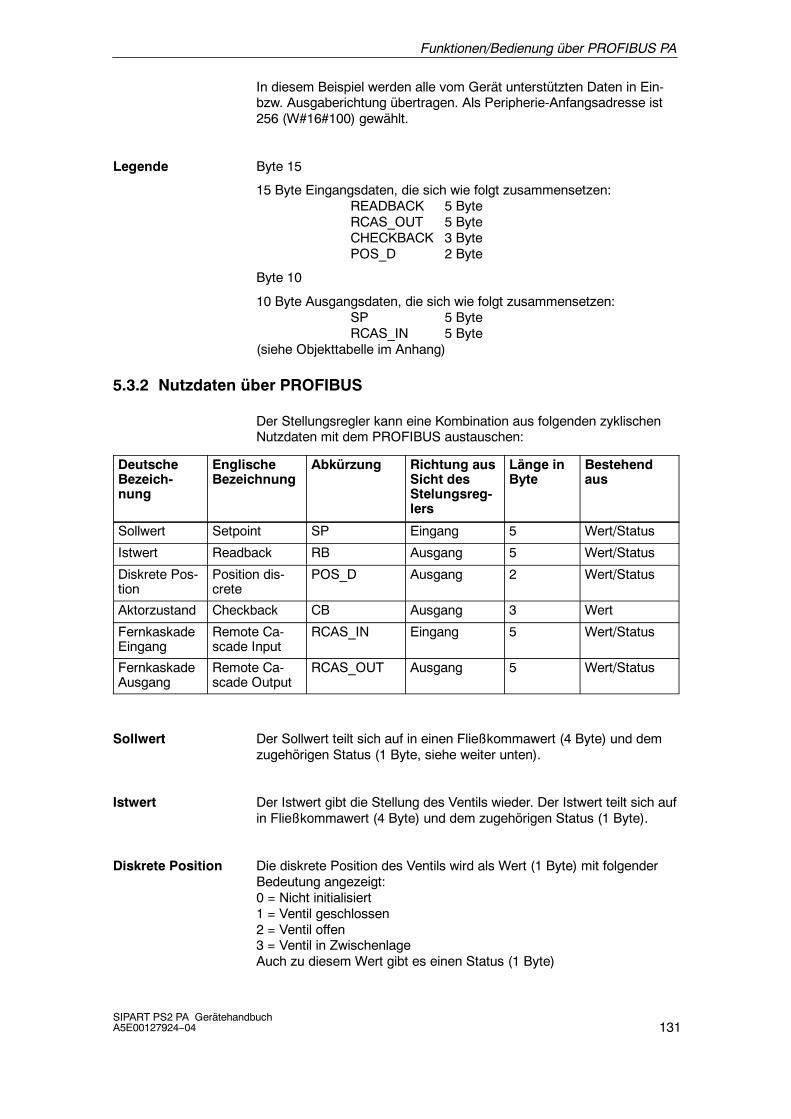
Funktionen/Bedienung über PROFIBUS PA
131SIPART PS2 PA GerätehandbuchA5E00127924--04
In diesem Beispiel werden alle vom Gerät unterstützten Daten in Ein-bzw. Ausgaberichtung übertragen. Als Peripherie-Anfangsadresse ist256 (W#16#100) gewählt.
Byte 15
15 Byte Eingangsdaten, die sich wie folgt zusammensetzen:READBACK 5 ByteRCAS_OUT 5 ByteCHECKBACK 3 BytePOS_D 2 Byte
Byte 10
10 Byte Ausgangsdaten, die sich wie folgt zusammensetzen:SP 5 ByteRCAS_IN 5 Byte
(siehe Objekttabelle im Anhang)
5.3.2 Nutzdaten über PROFIBUS
Der Stellungsregler kann eine Kombination aus folgenden zyklischenNutzdaten mit dem PROFIBUS austauschen:
DeutscheBezeich-nung
EnglischeBezeichnung
Abkürzung Richtung ausSicht desStelungsreg-lers
Länge inByte
Bestehendaus
Sollwert Setpoint SP Eingang 5 Wert/Status
Istwert Readback RB Ausgang 5 Wert/Status
Diskrete Pos-tion
Position dis-crete
POS_D Ausgang 2 Wert/Status
Aktorzustand Checkback CB Ausgang 3 Wert
FernkaskadeEingang
Remote Ca-scade Input
RCAS_IN Eingang 5 Wert/Status
FernkaskadeAusgang
Remote Ca-scade Output
RCAS_OUT Ausgang 5 Wert/Status
Der Sollwert teilt sich auf in einen Fließkommawert (4 Byte) und demzugehörigen Status (1 Byte, siehe weiter unten).
Der Istwert gibt die Stellung des Ventils wieder. Der Istwert teilt sich aufin Fließkommawert (4 Byte) und dem zugehörigen Status (1 Byte).
Die diskrete Position des Ventils wird als Wert (1 Byte) mit folgenderBedeutung angezeigt:0 = Nicht initialisiert1 = Ventil geschlossen2 = Ventil offen3 = Ventil in ZwischenlageAuch zu diesem Wert gibt es einen Status (1 Byte)
Legende
Sollwert
Istwert
Diskrete Position
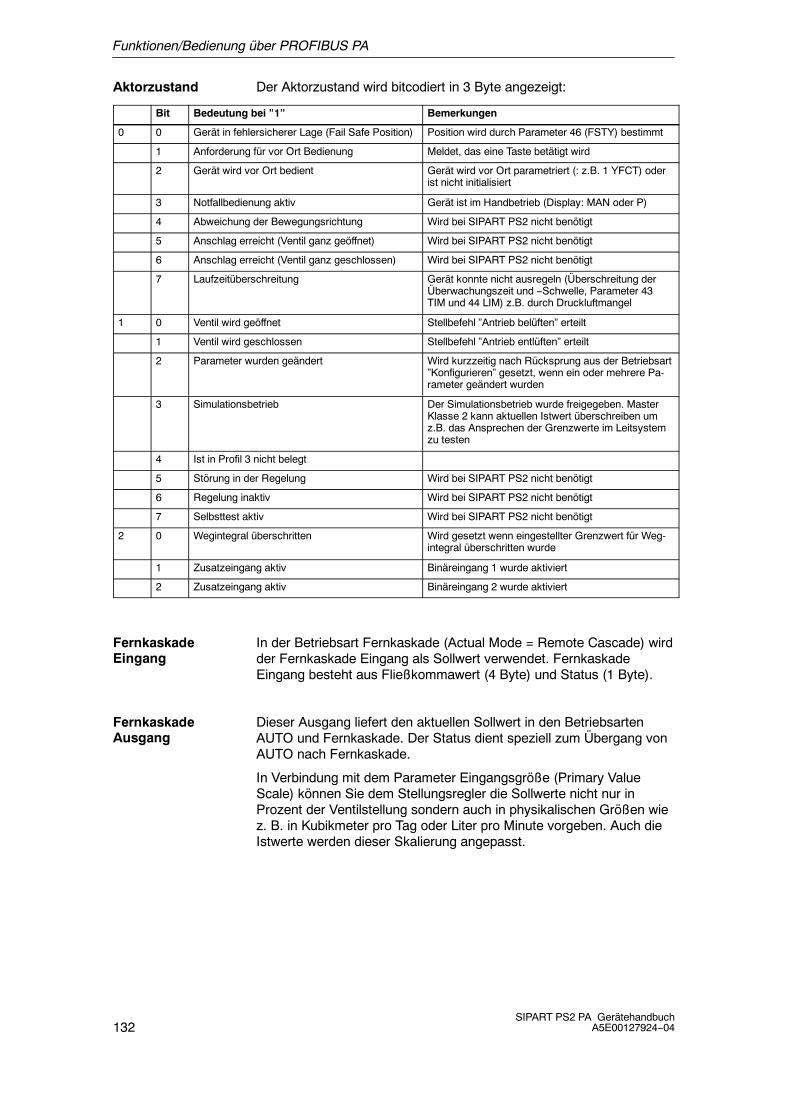
Funktionen/Bedienung über PROFIBUS PA
132SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Der Aktorzustand wird bitcodiert in 3 Byte angezeigt:
Bit Bedeutung bei ”1” Bemerkungen
0 0 Gerät in fehlersicherer Lage (Fail Safe Position) Position wird durch Parameter 46 (FSTY) bestimmt
1 Anforderung für vor Ort Bedienung Meldet, das eine Taste betätigt wird
2 Gerät wird vor Ort bedient Gerät wird vor Ort parametriert (: z.B. 1 YFCT) oderist nicht initialisiert
3 Notfallbedienung aktiv Gerät ist im Handbetrieb (Display: MAN oder P)
4 Abweichung der Bewegungsrichtung Wird bei SIPART PS2 nicht benötigt
5 Anschlag erreicht (Ventil ganz geöffnet) Wird bei SIPART PS2 nicht benötigt
6 Anschlag erreicht (Ventil ganz geschlossen) Wird bei SIPART PS2 nicht benötigt
7 Laufzeitüberschreitung Gerät konnte nicht ausregeln (Überschreitung derÜberwachungszeit und --Schwelle, Parameter 43TIM und 44 LIM) z.B. durch Druckluftmangel
1 0 Ventil wird geöffnet Stellbefehl ”Antrieb belüften” erteilt
1 Ventil wird geschlossen Stellbefehl ”Antrieb entlüften” erteilt
2 Parameter wurden geändert Wird kurzzeitig nach Rücksprung aus der Betriebsart”Konfigurieren” gesetzt, wenn ein oder mehrere Pa-rameter geändert wurden
3 Simulationsbetrieb Der Simulationsbetrieb wurde freigegeben. MasterKlasse 2 kann aktuellen Istwert überschreiben umz.B. das Ansprechen der Grenzwerte im Leitsystemzu testen
4 Ist in Profil 3 nicht belegt
5 Störung in der Regelung Wird bei SIPART PS2 nicht benötigt
6 Regelung inaktiv Wird bei SIPART PS2 nicht benötigt
7 Selbsttest aktiv Wird bei SIPART PS2 nicht benötigt
2 0 Wegintegral überschritten Wird gesetzt wenn eingestellter Grenzwert für Weg-integral überschritten wurde
1 Zusatzeingang aktiv Binäreingang 1 wurde aktiviert
2 Zusatzeingang aktiv Binäreingang 2 wurde aktiviert
In der Betriebsart Fernkaskade (Actual Mode = Remote Cascade) wirdder Fernkaskade Eingang als Sollwert verwendet. FernkaskadeEingang besteht aus Fließkommawert (4 Byte) und Status (1 Byte).
Dieser Ausgang liefert den aktuellen Sollwert in den BetriebsartenAUTO und Fernkaskade. Der Status dient speziell zum Übergang vonAUTO nach Fernkaskade.
In Verbindung mit dem Parameter Eingangsgröße (Primary ValueScale) können Sie dem Stellungsregler die Sollwerte nicht nur inProzent der Ventilstellung sondern auch in physikalischen Größen wiez. B. in Kubikmeter pro Tag oder Liter pro Minute vorgeben. Auch dieIstwerte werden dieser Skalierung angepasst.
Aktorzustand
FernkaskadeEingang
FernkaskadeAusgang
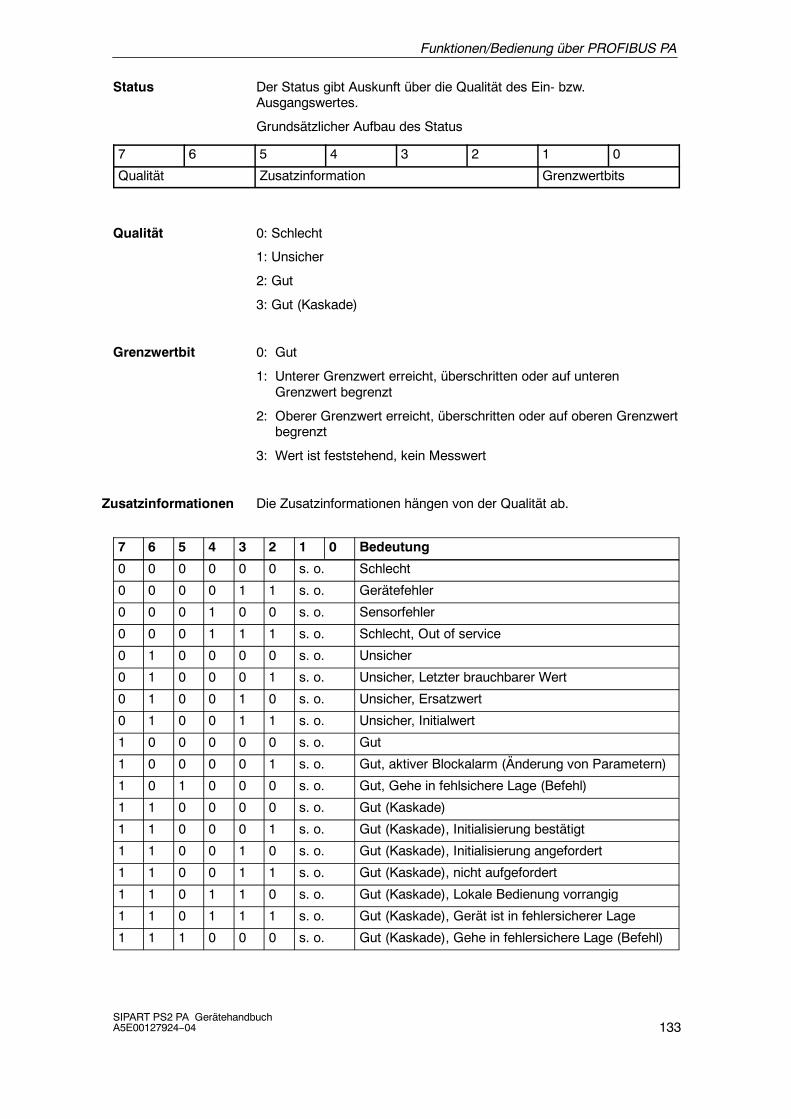
Funktionen/Bedienung über PROFIBUS PA
133SIPART PS2 PA GerätehandbuchA5E00127924--04
Der Status gibt Auskunft über die Qualität des Ein- bzw.Ausgangswertes.
Grundsätzlicher Aufbau des Status
7 6 5 4 3 2 1 0
Qualität Zusatzinformation Grenzwertbits
0: Schlecht
1: Unsicher
2: Gut
3: Gut (Kaskade)
0: Gut
1: Unterer Grenzwert erreicht, überschritten oder auf unterenGrenzwert begrenzt
2: Oberer Grenzwert erreicht, überschritten oder auf oberen Grenzwertbegrenzt
3: Wert ist feststehend, kein Messwert
Die Zusatzinformationen hängen von der Qualität ab.
7 6 5 4 3 2 1 0 Bedeutung
0 0 0 0 0 0 s. o. Schlecht
0 0 0 0 1 1 s. o. Gerätefehler
0 0 0 1 0 0 s. o. Sensorfehler
0 0 0 1 1 1 s. o. Schlecht, Out of service
0 1 0 0 0 0 s. o. Unsicher
0 1 0 0 0 1 s. o. Unsicher, Letzter brauchbarer Wert
0 1 0 0 1 0 s. o. Unsicher, Ersatzwert
0 1 0 0 1 1 s. o. Unsicher, Initialwert
1 0 0 0 0 0 s. o. Gut
1 0 0 0 0 1 s. o. Gut, aktiver Blockalarm (Änderung von Parametern)
1 0 1 0 0 0 s. o. Gut, Gehe in fehlsichere Lage (Befehl)
1 1 0 0 0 0 s. o. Gut (Kaskade)
1 1 0 0 0 1 s. o. Gut (Kaskade), Initialisierung bestätigt
1 1 0 0 1 0 s. o. Gut (Kaskade), Initialisierung angefordert
1 1 0 0 1 1 s. o. Gut (Kaskade), nicht aufgefordert
1 1 0 1 1 0 s. o. Gut (Kaskade), Lokale Bedienung vorrangig
1 1 0 1 1 1 s. o. Gut (Kaskade), Gerät ist in fehlersicherer Lage
1 1 1 0 0 0 s. o. Gut (Kaskade), Gehe in fehlersichere Lage (Befehl)
Status
Qualität
Grenzwertbit
Zusatzinformationen
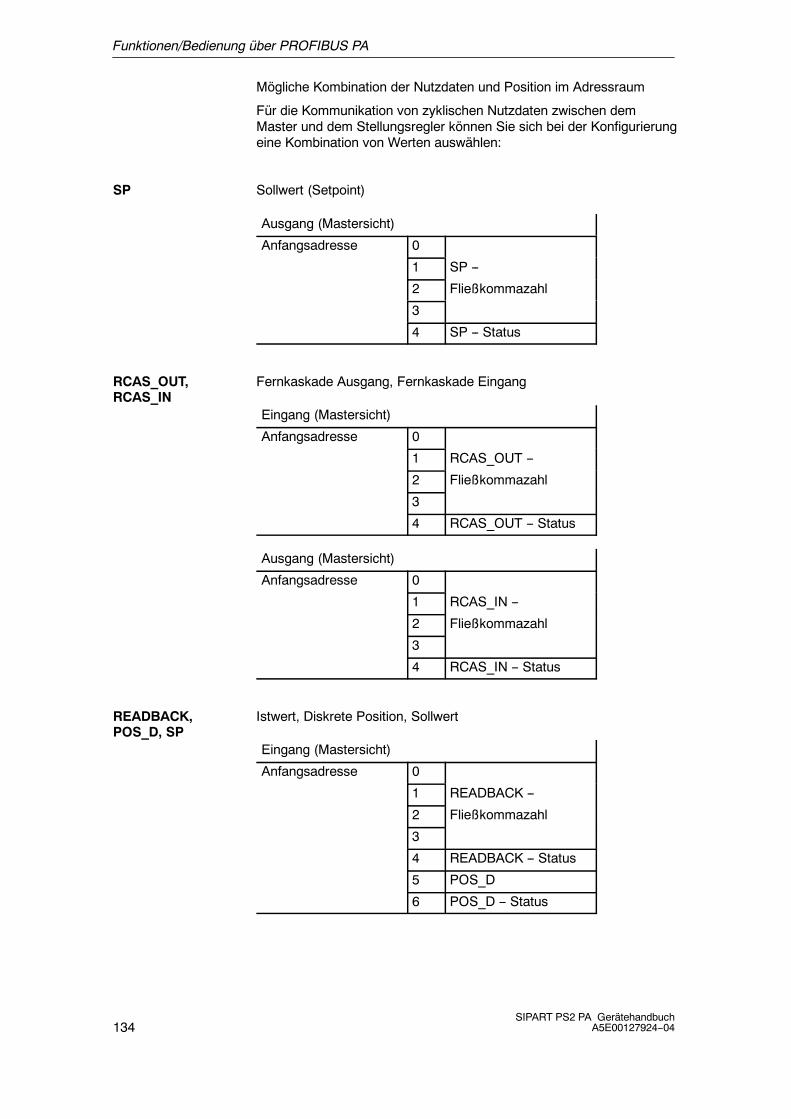
Funktionen/Bedienung über PROFIBUS PA
134SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Mögliche Kombination der Nutzdaten und Position im Adressraum
Für die Kommunikation von zyklischen Nutzdaten zwischen demMaster und dem Stellungsregler können Sie sich bei der Konfigurierungeine Kombination von Werten auswählen:
Sollwert (Setpoint)
Ausgang (Mastersicht)
Anfangsadresse 0
1 SP --
2 Fließkommazahl
3
4 SP -- Status
Fernkaskade Ausgang, Fernkaskade Eingang
Eingang (Mastersicht)
Anfangsadresse 0
1 RCAS_OUT --
2 Fließkommazahl
3
4 RCAS_OUT -- Status
Ausgang (Mastersicht)
Anfangsadresse 0
1 RCAS_IN --
2 Fließkommazahl
3
4 RCAS_IN -- Status
Istwert, Diskrete Position, Sollwert
Eingang (Mastersicht)
Anfangsadresse 0
1 READBACK --
2 Fließkommazahl
3
4 READBACK -- Status
5 POS_D
6 POS_D -- Status
SP
RCAS_OUT,RCAS_IN
READBACK,POS_D, SP
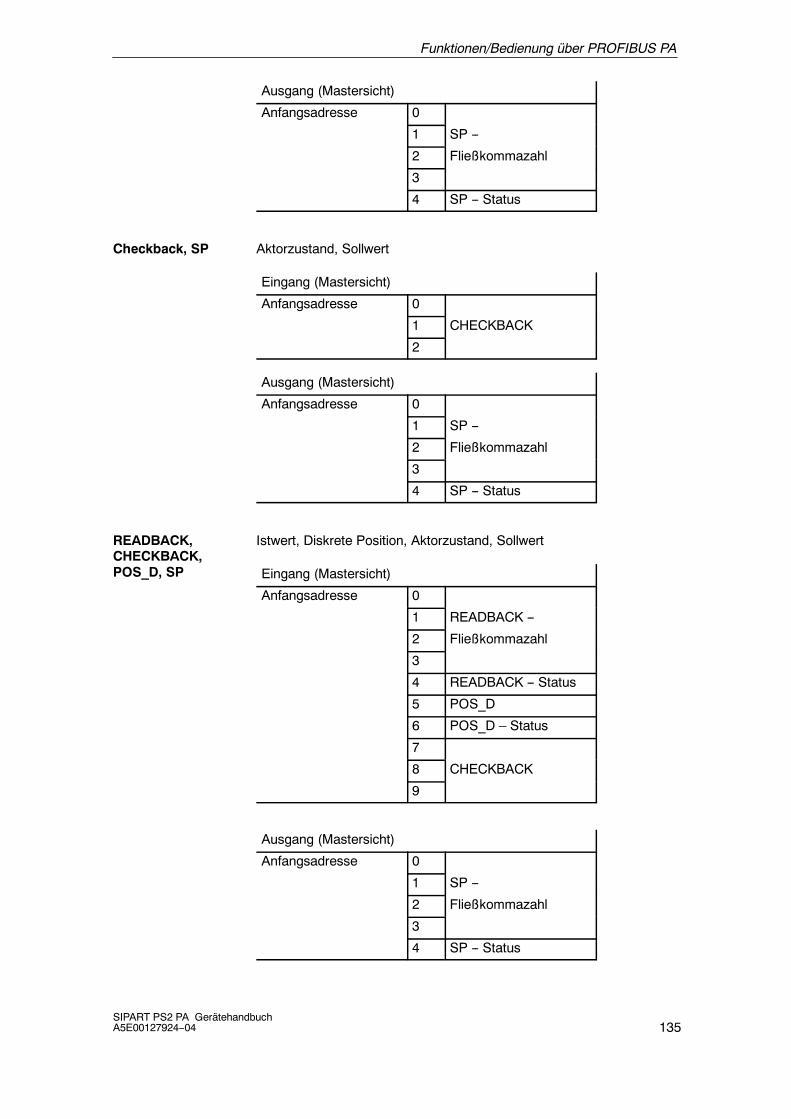
Funktionen/Bedienung über PROFIBUS PA
135SIPART PS2 PA GerätehandbuchA5E00127924--04
Ausgang (Mastersicht)
Anfangsadresse 0
1 SP --
2 Fließkommazahl
3
4 SP -- Status
Aktorzustand, Sollwert
Eingang (Mastersicht)
Anfangsadresse 0
1 CHECKBACK
2
Ausgang (Mastersicht)
Anfangsadresse 0
1 SP --
2 Fließkommazahl
3
4 SP -- Status
Istwert, Diskrete Position, Aktorzustand, Sollwert
Eingang (Mastersicht)
Anfangsadresse 0
1 READBACK --
2 Fließkommazahl
3
4 READBACK -- Status
5 POS_D
6 POS_D – Status
7
8 CHECKBACK
9
Ausgang (Mastersicht)
Anfangsadresse 0
1 SP --
2 Fließkommazahl
3
4 SP -- Status
Checkback, SP
READBACK,CHECKBACK,POS_D, SP
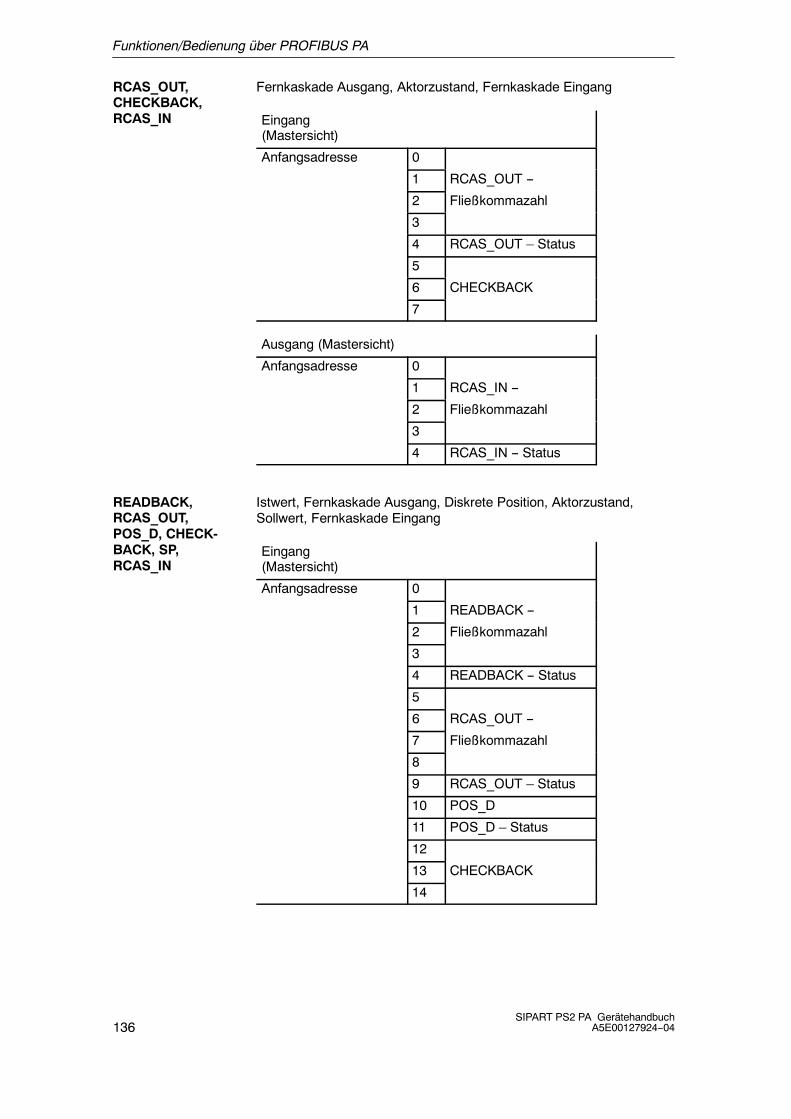
Funktionen/Bedienung über PROFIBUS PA
136SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Fernkaskade Ausgang, Aktorzustand, Fernkaskade Eingang
Eingang(Mastersicht)
Anfangsadresse 0
1 RCAS_OUT --
2 Fließkommazahl
3
4 RCAS_OUT – Status
5
6 CHECKBACK
7
Ausgang (Mastersicht)
Anfangsadresse 0
1 RCAS_IN --
2 Fließkommazahl
3
4 RCAS_IN -- Status
Istwert, Fernkaskade Ausgang, Diskrete Position, Aktorzustand,Sollwert, Fernkaskade Eingang
Eingang(Mastersicht)
Anfangsadresse 0
1 READBACK --
2 Fließkommazahl
3
4 READBACK -- Status
5
6 RCAS_OUT --
7 Fließkommazahl
8
9 RCAS_OUT – Status
10 POS_D
11 POS_D – Status
12
13 CHECKBACK
14
RCAS_OUT,CHECKBACK,RCAS_IN
READBACK,RCAS_OUT,POS_D, CHECK-BACK, SP,RCAS_IN
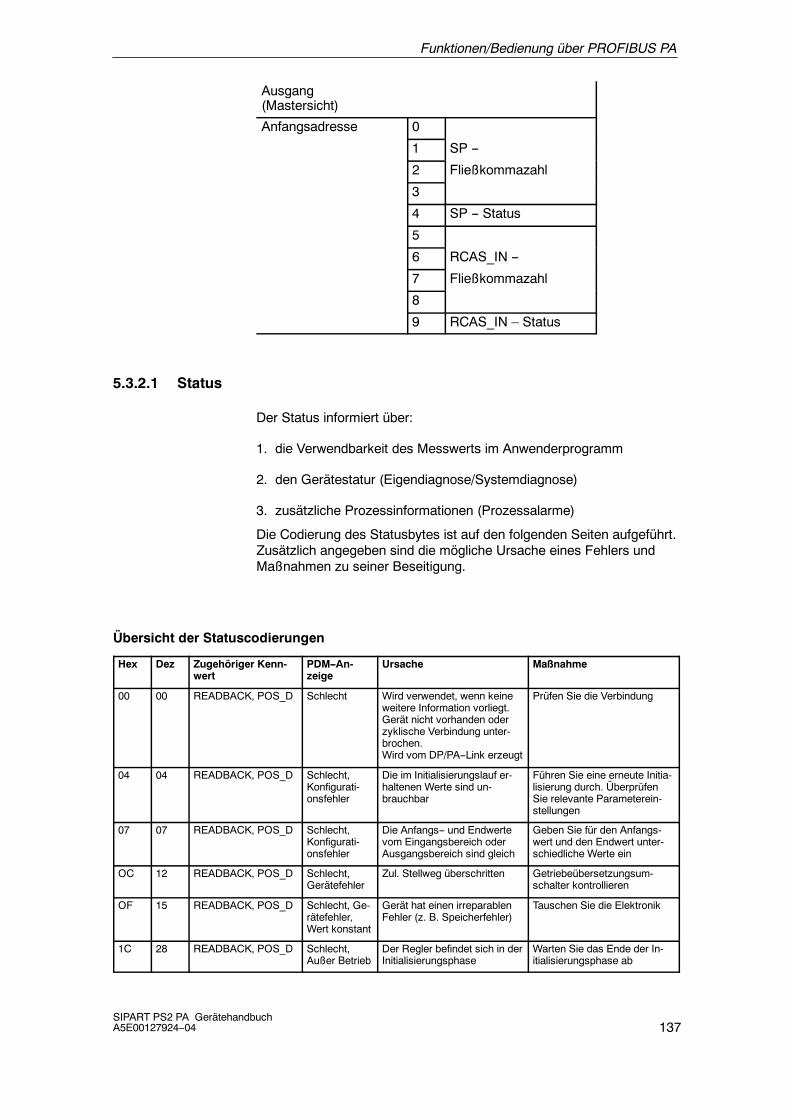
Funktionen/Bedienung über PROFIBUS PA
137SIPART PS2 PA GerätehandbuchA5E00127924--04
Ausgang(Mastersicht)
Anfangsadresse 0
1 SP --
2 Fließkommazahl
3
4 SP -- Status
5
6 RCAS_IN --
7 Fließkommazahl
8
9 RCAS_IN – Status
5.3.2.1 Status
Der Status informiert über:
1. die Verwendbarkeit des Messwerts im Anwenderprogramm
2. den Gerätestatur (Eigendiagnose/Systemdiagnose)
3. zusätzliche Prozessinformationen (Prozessalarme)
Die Codierung des Statusbytes ist auf den folgenden Seiten aufgeführt.Zusätzlich angegeben sind die mögliche Ursache eines Fehlers undMaßnahmen zu seiner Beseitigung.
Übersicht der Statuscodierungen
Hex Dez Zugehöriger Kenn-wert
PDM--An-zeige
Ursache Maßnahme
00 00 READBACK, POS_D Schlecht Wird verwendet, wenn keineweitere Information vorliegt.Gerät nicht vorhanden oderzyklische Verbindung unter-brochen.Wird vom DP/PA--Link erzeugt
Prüfen Sie die Verbindung
04 04 READBACK, POS_D Schlecht,Konfigurati-onsfehler
Die im Initialisierungslauf er-haltenen Werte sind un-brauchbar
Führen Sie eine erneute Initia-lisierung durch. ÜberprüfenSie relevante Parameterein-stellungen
07 07 READBACK, POS_D Schlecht,Konfigurati-onsfehler
Die Anfangs-- und Endwertevom Eingangsbereich oderAusgangsbereich sind gleich
Geben Sie für den Anfangs-wert und den Endwert unter-schiedliche Werte ein
OC 12 READBACK, POS_D Schlecht,Gerätefehler
Zul. Stellweg überschritten Getriebeübersetzungsum-schalter kontrollieren
OF 15 READBACK, POS_D Schlecht, Ge-rätefehler,Wert konstant
Gerät hat einen irreparablenFehler (z. B. Speicherfehler)
Tauschen Sie die Elektronik
1C 28 READBACK, POS_D Schlecht,Außer Betrieb
Der Regler befindet sich in derInitialisierungsphase
Warten Sie das Ende der In-itialisierungsphase ab
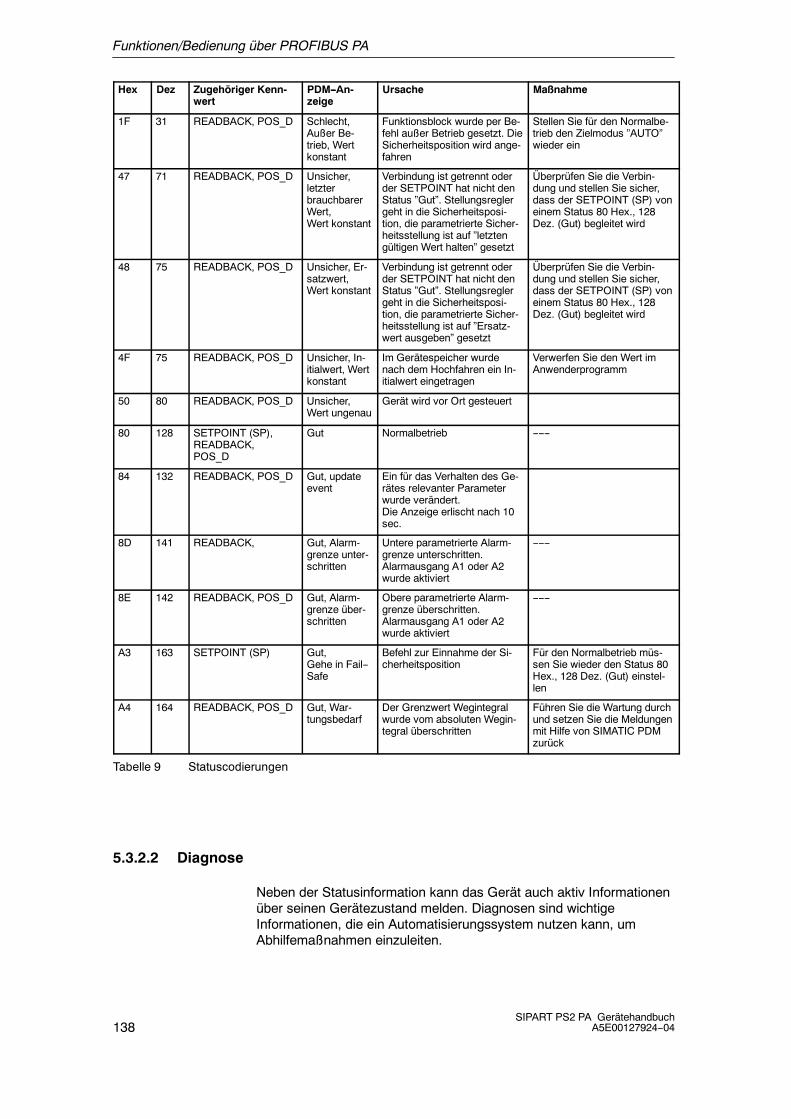
Funktionen/Bedienung über PROFIBUS PA
138SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Hex MaßnahmeUrsachePDM--An-zeige
Zugehöriger Kenn-wert
Dez
1F 31 READBACK, POS_D Schlecht,Außer Be-trieb, Wertkonstant
Funktionsblock wurde per Be-fehl außer Betrieb gesetzt. DieSicherheitsposition wird ange-fahren
Stellen Sie für den Normalbe-trieb den Zielmodus ”AUTO”wieder ein
47 71 READBACK, POS_D Unsicher,letzterbrauchbarerWert,Wert konstant
Verbindung ist getrennt oderder SETPOINT hat nicht denStatus ”Gut”. Stellungsreglergeht in die Sicherheitsposi-tion, die parametrierte Sicher-heitsstellung ist auf ”letztengültigen Wert halten” gesetzt
Überprüfen Sie die Verbin-dung und stellen Sie sicher,dass der SETPOINT (SP) voneinem Status 80 Hex., 128Dez. (Gut) begleitet wird
48 75 READBACK, POS_D Unsicher, Er-satzwert,Wert konstant
Verbindung ist getrennt oderder SETPOINT hat nicht denStatus ”Gut”. Stellungsreglergeht in die Sicherheitsposi-tion, die parametrierte Sicher-heitsstellung ist auf ”Ersatz-wert ausgeben” gesetzt
Überprüfen Sie die Verbin-dung und stellen Sie sicher,dass der SETPOINT (SP) voneinem Status 80 Hex., 128Dez. (Gut) begleitet wird
4F 75 READBACK, POS_D Unsicher, In-itialwert, Wertkonstant
Im Gerätespeicher wurdenach dem Hochfahren ein In-itialwert eingetragen
Verwerfen Sie den Wert imAnwenderprogramm
50 80 READBACK, POS_D Unsicher,Wert ungenau
Gerät wird vor Ort gesteuert
80 128 SETPOINT (SP),READBACK,POS_D
Gut Normalbetrieb ------
84 132 READBACK, POS_D Gut, updateevent
Ein für das Verhalten des Ge-rätes relevanter Parameterwurde verändert.Die Anzeige erlischt nach 10sec.
8D 141 READBACK, Gut, Alarm-grenze unter-schritten
Untere parametrierte Alarm-grenze unterschritten.Alarmausgang A1 oder A2wurde aktiviert
------
8E 142 READBACK, POS_D Gut, Alarm-grenze über-schritten
Obere parametrierte Alarm-grenze überschritten.Alarmausgang A1 oder A2wurde aktiviert
------
A3 163 SETPOINT (SP) Gut,Gehe in Fail--Safe
Befehl zur Einnahme der Si-cherheitsposition
Für den Normalbetrieb müs-sen Sie wieder den Status 80Hex., 128 Dez. (Gut) einstel-len
A4 164 READBACK, POS_D Gut, War-tungsbedarf
Der Grenzwert Wegintegralwurde vom absoluten Wegin-tegral überschritten
Führen Sie die Wartung durchund setzen Sie die Meldungenmit Hilfe von SIMATIC PDMzurück
Tabelle 9 Statuscodierungen
5.3.2.2 Diagnose
Neben der Statusinformation kann das Gerät auch aktiv Informationenüber seinen Gerätezustand melden. Diagnosen sind wichtigeInformationen, die ein Automatisierungssystem nutzen kann, umAbhilfemaßnahmen einzuleiten.
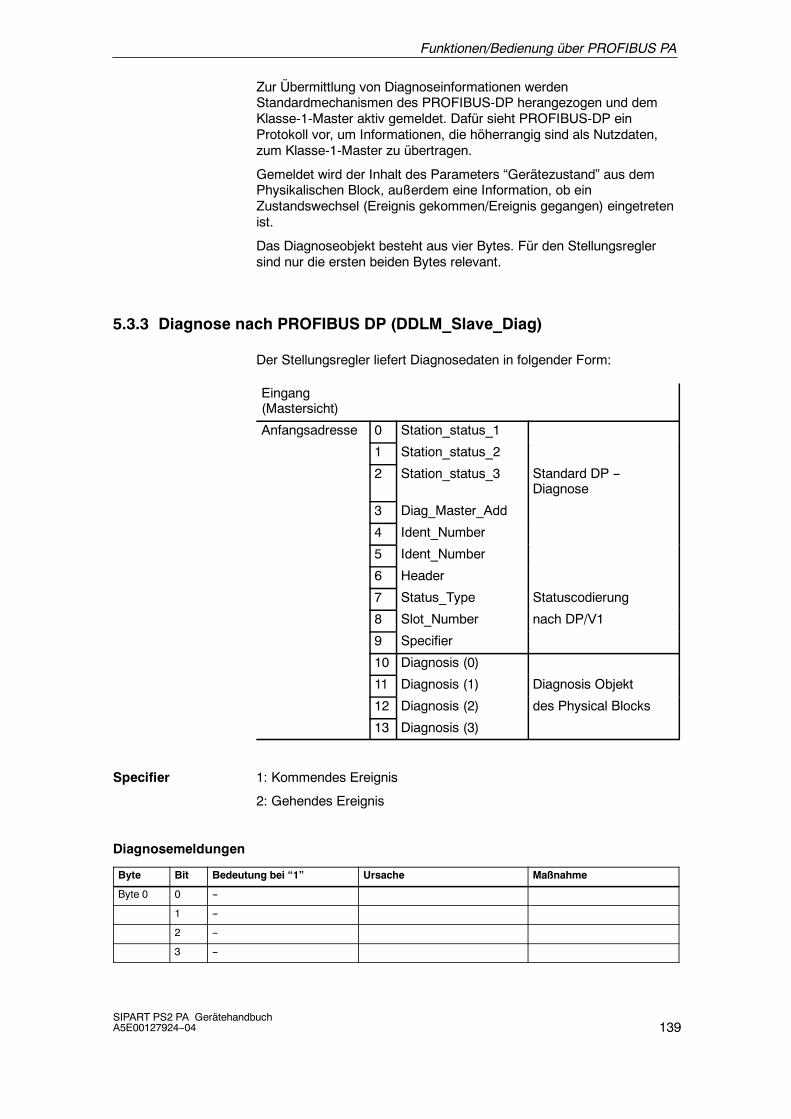
Funktionen/Bedienung über PROFIBUS PA
139SIPART PS2 PA GerätehandbuchA5E00127924--04
Zur Übermittlung von Diagnoseinformationen werdenStandardmechanismen des PROFIBUS-DP herangezogen und demKlasse-1-Master aktiv gemeldet. Dafür sieht PROFIBUS-DP einProtokoll vor, um Informationen, die höherrangig sind als Nutzdaten,zum Klasse-1-Master zu übertragen.
Gemeldet wird der Inhalt des Parameters “Gerätezustand” aus demPhysikalischen Block, außerdem eine Information, ob einZustandswechsel (Ereignis gekommen/Ereignis gegangen) eingetretenist.
Das Diagnoseobjekt besteht aus vier Bytes. Für den Stellungsreglersind nur die ersten beiden Bytes relevant.
5.3.3 Diagnose nach PROFIBUS DP (DDLM_Slave_Diag)
Der Stellungsregler liefert Diagnosedaten in folgender Form:
Eingang(Mastersicht)
Anfangsadresse 0 Station_status_1
1 Station_status_2
2 Station_status_3 Standard DP --Diagnose
3 Diag_Master_Add
4 Ident_Number
5 Ident_Number
6 Header
7 Status_Type Statuscodierung
8 Slot_Number nach DP/V1
9 Specifier
10 Diagnosis (0)
11 Diagnosis (1) Diagnosis Objekt
12 Diagnosis (2) des Physical Blocks
13 Diagnosis (3)
1: Kommendes Ereignis
2: Gehendes Ereignis
Diagnosemeldungen
Byte Bit Bedeutung bei “1” Ursache Maßnahme
Byte 0 0 --
1 --
2 --
3 --
Specifier
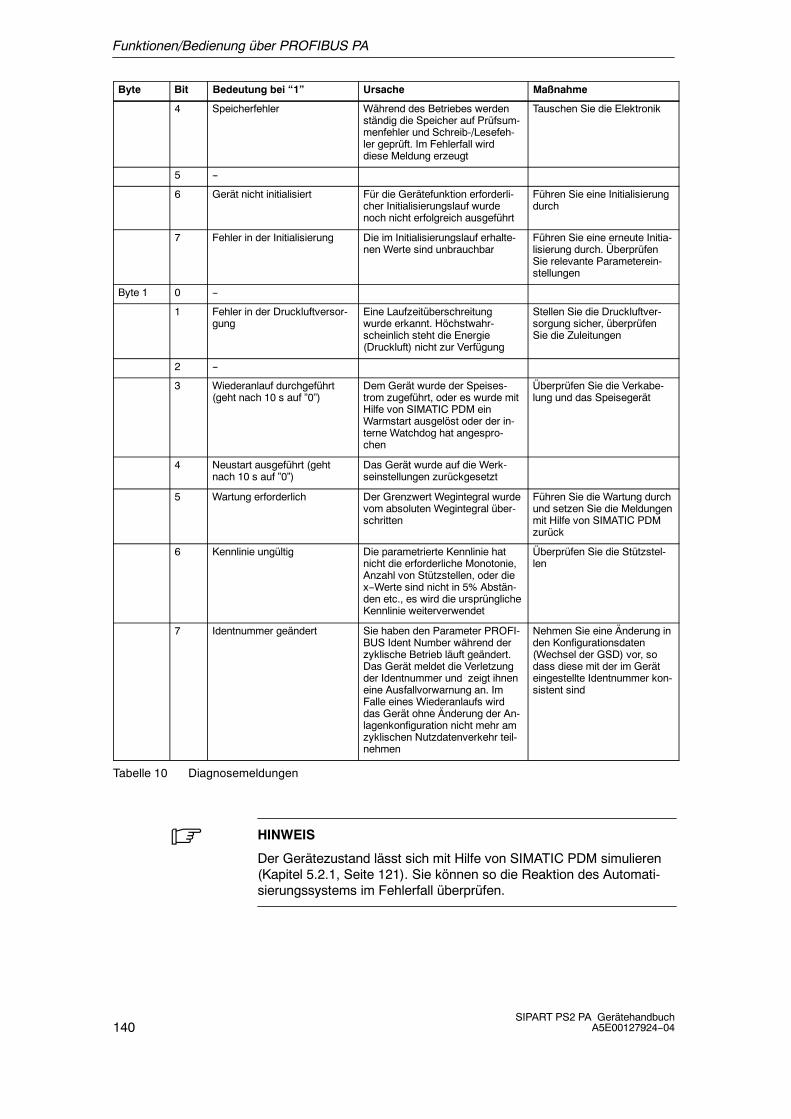
Funktionen/Bedienung über PROFIBUS PA
140SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Byte MaßnahmeUrsacheBedeutung bei “1”Bit
4 Speicherfehler Während des Betriebes werdenständig die Speicher auf Prüfsum-menfehler und Schreib-/Lesefeh-ler geprüft. Im Fehlerfall wirddiese Meldung erzeugt
Tauschen Sie die Elektronik
5 --
6 Gerät nicht initialisiert Für die Gerätefunktion erforderli-cher Initialisierungslauf wurdenoch nicht erfolgreich ausgeführt
Führen Sie eine Initialisierungdurch
7 Fehler in der Initialisierung Die im Initialisierungslauf erhalte-nen Werte sind unbrauchbar
Führen Sie eine erneute Initia-lisierung durch. ÜberprüfenSie relevante Parameterein-stellungen
Byte 1 0 --
1 Fehler in der Druckluftversor-gung
Eine Laufzeitüberschreitungwurde erkannt. Höchstwahr-scheinlich steht die Energie(Druckluft) nicht zur Verfügung
Stellen Sie die Druckluftver-sorgung sicher, überprüfenSie die Zuleitungen
2 --
3 Wiederanlauf durchgeführt(geht nach 10 s auf ”0”)
Dem Gerät wurde der Speises-trom zugeführt, oder es wurde mitHilfe von SIMATIC PDM einWarmstart ausgelöst oder der in-terne Watchdog hat angespro-chen
Überprüfen Sie die Verkabe-lung und das Speisegerät
4 Neustart ausgeführt (gehtnach 10 s auf ”0”)
Das Gerät wurde auf die Werk-seinstellungen zurückgesetzt
5 Wartung erforderlich Der Grenzwert Wegintegral wurdevom absoluten Wegintegral über-schritten
Führen Sie die Wartung durchund setzen Sie die Meldungenmit Hilfe von SIMATIC PDMzurück
6 Kennlinie ungültig Die parametrierte Kennlinie hatnicht die erforderliche Monotonie,Anzahl von Stützstellen, oder diex--Werte sind nicht in 5% Abstän-den etc., es wird die ursprünglicheKennlinie weiterverwendet
Überprüfen Sie die Stützstel-len
7 Identnummer geändert Sie haben den Parameter PROFI-BUS Ident Number während derzyklische Betrieb läuft geändert.Das Gerät meldet die Verletzungder Identnummer und zeigt ihneneine Ausfallvorwarnung an. ImFalle eines Wiederanlaufs wirddas Gerät ohne Änderung der An-lagenkonfiguration nicht mehr amzyklischen Nutzdatenverkehr teil-nehmen
Nehmen Sie eine Änderung inden Konfigurationsdaten(Wechsel der GSD) vor, sodass diese mit der im Geräteingestellte Identnummer kon-sistent sind
Tabelle 10 Diagnosemeldungen
. HINWEIS
Der Gerätezustand lässt sich mit Hilfe von SIMATIC PDM simulieren(Kapitel 5.2.1, Seite 121). Sie können so die Reaktion des Automati-sierungssystems im Fehlerfall überprüfen.
Technische Daten
141SIPART PS2 PA GerätehandbuchA5E00127924--04
Pflege und Wartung
Der Stellungsregler ist weitestgehend wartungsfrei. Zum Schutz gegengrobe Schmutzpartikel sind die Stellungsregler in den pneumatischenAnschlüssen mit Sieben ausgestattet. Dieser Schmutz wird die Siebezwangsweise zusetzen und dann die Funktion des Stellungsreglersbeeinträchtigen. In diesem Fall können die Siebe wie folgt gereinigtwerden:
Stellungsregler im Metallgehäuse und in druckfester Ausführung
1. Pneumatische Hilfsenergie abschalten und Rohrleitungen entfernen.
2. Metallsiebe vorsichtig aus den Bohrungen entfernen und (z.B. mitDruckluft) reinigen.
3. Siebe einsetzen.
4. Rohrleitungen wieder anschließen und pneumatische Hilfsenergiezuführen.
Stellungsregler im Kunststoffgehäuse
Ausbau
1. Pneumatische Hilfsenergie abschalten und Leitungen entfernen.
2. Deckel abschrauben.
3. Die drei Schrauben der pneumatischen Anschlussleiste entfernen.
4. Die hinter der Anschlussleiste liegenden Siebe und O-Ringe heraus-nehmen.
5. Siebe (z.B. mit Druckluft) reinigen.
Einbau
6. Zuerst die Siebe in die Vertiefungen des Kunststoffgehäuses unddann die O-Ringe auf die Siebe legen.
7. Die pneumatische Anschlussleiste auf den beiden Zapfen bündigausrichten und mit den drei selbstschneidenden Schrauben an-schrauben.
6

Pflege und Wartung
142SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Wichtig:Dabei darauf achten, dass der gleiche Gewindegang benutzt wird.Dazu die Schrauben entgegengesetzt dem Uhrzeigersinn solangedrehen, bis sie im Gewindegang spürbar einrasten. Dann erst dieSchrauben fest anziehen.
8. Deckel aufsetzen und festschrauben.
9. Rohrleitungen wieder anschließen und pneumatische Hilfsenergiezuführen.
!GEFAHR
Verhindern Sie in explosionsgefährdeter Umgebung unbedingt elektro-statische Aufladungen. Diese könnten z. B. beim Reinigen des Stel-lungsreglers mit einem trockenen Tuch auftreten.

Technische Daten
143SIPART PS2 PA GerätehandbuchA5E00127924--04
Technische Daten
(siehe folgende Seiten)
7
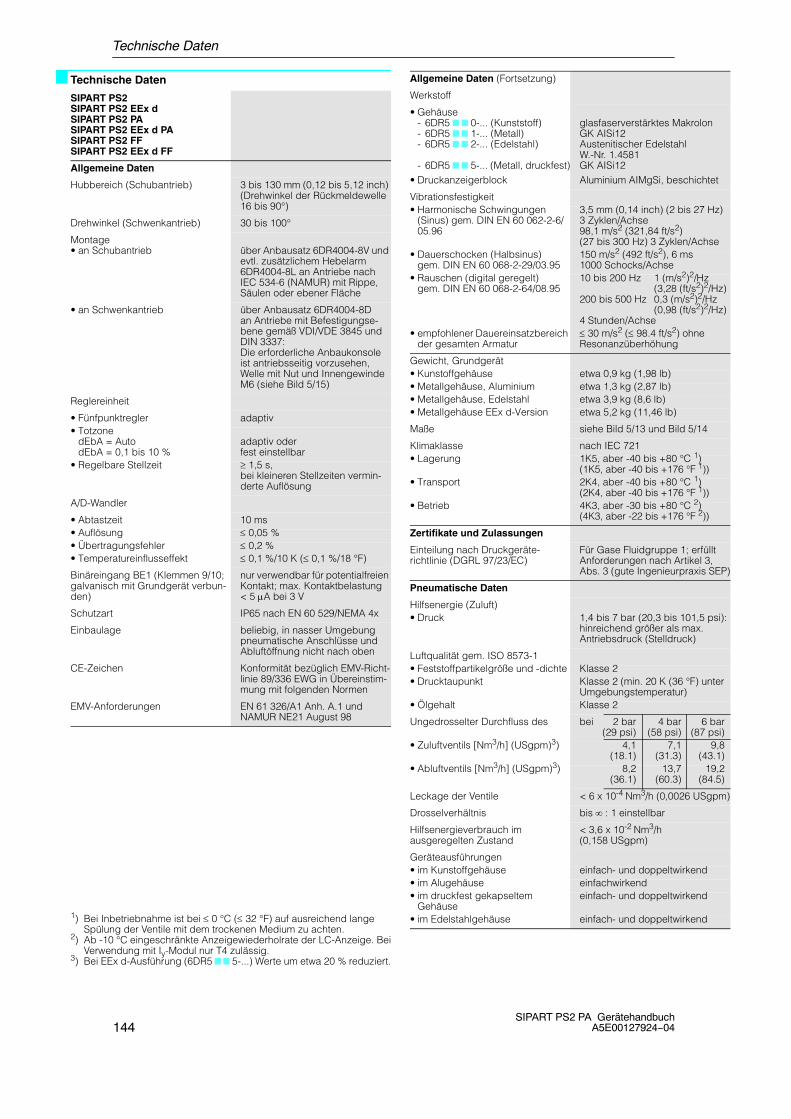
Technische Daten
144SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Technische Daten
1) Bei Inbetriebnahme ist bei ≤ 0 °C (≤ 32 °F) auf ausreichend langeSpülung der Ventile mit dem trockenen Medium zu achten.
2) Ab -10 °C eingeschränkte Anzeigewiederholrate der LC-Anzeige. BeiVerwendung mit Iy-Modul nur T4 zulässig.
3) Bei EEx d-Ausführung (6DR5 7 7 5-...) Werte um etwa 20 % reduziert.
SIPART PS2SIPART PS2 EEx dSIPART PS2 PA SIPART PS2 EEx d PASIPART PS2 FFSIPART PS2 EEx d FF
Allgemeine Daten
Hubbereich (Schubantrieb) 3 bis 130 mm (0,12 bis 5,12 inch) (Drehwinkel der Rückmeldewelle 16 bis 90°)
Drehwinkel (Schwenkantrieb) 30 bis 100°
Montage• an Schubantrieb über Anbausatz 6DR4004-8V und
evtl. zusätzlichem Hebelarm 6DR4004-8L an Antriebe nach IEC 534-6 (NAMUR) mit Rippe, Säulen oder ebener Fläche
• an Schwenkantrieb über Anbausatz 6DR4004-8D an Antriebe mit Befestigungse-bene gemäß VDI/VDE 3845 und DIN 3337: Die erforderliche Anbaukonsole ist antriebsseitig vorzusehen, Welle mit Nut und Innengewinde M6 (siehe Bild 5/15)
Reglereinheit
• Fünfpunktregler adaptiv • Totzone
dEbA = AutodEbA = 0,1 bis 10 %
adaptiv oderfest einstellbar
• Regelbare Stellzeit ≥ 1,5 s, bei kleineren Stellzeiten vermin-derte Auflösung
A/D-Wandler
• Abtastzeit 10 ms• Auflösung ≤ 0,05 %• Übertragungsfehler ≤ 0,2 %• Temperatureinflusseffekt ≤ 0,1 %/10 K (≤ 0,1 %/18 °F)
Binäreingang BE1 (Klemmen 9/10; galvanisch mit Grundgerät verbun-den)
nur verwendbar für potentialfreien Kontakt; max. Kontaktbelastung < 5 µA bei 3 V
Schutzart IP65 nach EN 60 529/NEMA 4x
Einbaulage beliebig, in nasser Umgebung pneumatische Anschlüsse und Abluftöffnung nicht nach oben
CE-Zeichen Konformität bezüglich EMV-Richt-linie 89/336 EWG in Übereinstim-mung mit folgenden Normen
EMV-Anforderungen EN 61 326/A1 Anh. A.1 undNAMUR NE21 August 98
Allgemeine Daten (Fortsetzung)
Werkstoff
• Gehäuse- 6DR5 7 7 0-... (Kunststoff)- 6DR5 7 7 1-... (Metall)- 6DR5 7 7 2-... (Edelstahl)
- 6DR5 7 7 5-... (Metall, druckfest)• Druckanzeigerblock
glasfaserverstärktes MakrolonGK AISi12Austenitischer Edelstahl W.-Nr. 1.4581GK AISi12Aluminium AIMgSi, beschichtet
Vibrationsfestigkeit• Harmonische Schwingungen
(Sinus) gem. DIN EN 60 062-2-6/05.96
3,5 mm (0,14 inch) (2 bis 27 Hz)3 Zyklen/Achse98,1 m/s2 (321,84 ft/s2) (27 bis 300 Hz) 3 Zyklen/Achse
• Dauerschocken (Halbsinus)gem. DIN EN 60 068-2-29/03.95
150 m/s2 (492 ft/s2), 6 ms1000 Schocks/Achse
• Rauschen (digital geregelt)gem. DIN EN 60 068-2-64/08.95
10 bis 200 Hz 1 (m/s2)2/Hz (3,28 (ft/s2)2/Hz)
200 bis 500 Hz 0,3 (m/s2)2/Hz (0,98 (ft/s2)2/Hz)
4 Stunden/Achse• empfohlener Dauereinsatzbereich
der gesamten Armatur≤ 30 m/s2 (≤ 98.4 ft/s2) ohne Resonanzüberhöhung
Gewicht, Grundgerät• Kunstoffgehäuse etwa 0,9 kg (1,98 lb)• Metallgehäuse, Aluminium etwa 1,3 kg (2,87 lb)• Metallgehäuse, Edelstahl etwa 3,9 kg (8,6 lb)• Metallgehäuse EEx d-Version etwa 5,2 kg (11,46 lb)
Maße siehe Bild 5/13 und Bild 5/14
Klimaklasse nach IEC 721• Lagerung 1K5, aber -40 bis +80 °C 1)
(1K5, aber -40 bis +176 °F 1))• Transport 2K4, aber -40 bis +80 °C 1)
(2K4, aber -40 bis +176 °F 1))• Betrieb 4K3, aber -30 bis +80 °C 2)
(4K3, aber -22 bis +176 °F 2))
Zertifikate und Zulassungen
Einteilung nach Druckgeräte-richtlinie (DGRL 97/23/EC)
Für Gase Fluidgruppe 1; erfüllt Anforderungen nach Artikel 3, Abs. 3 (gute Ingenieurpraxis SEP)
Pneumatische Daten
Hilfsenergie (Zuluft)• Druck 1,4 bis 7 bar (20,3 bis 101,5 psi):
hinreichend größer als max. Antriebsdruck (Stelldruck)
Luftqualität gem. ISO 8573-1• Feststoffpartikelgröße und -dichte Klasse 2• Drucktaupunkt Klasse 2 (min. 20 K (36 °F) unter
Umgebungstemperatur)• Ölgehalt Klasse 2
Ungedrosselter Durchfluss des bei 2 bar 4 bar 6 bar(29 psi) (58 psi) (87 psi)
• Zuluftventils [Nm3/h] (USgpm)3) 4,1 7,1 9,8(18.1) (31.3) (43.1)
• Abluftventils [Nm3/h] (USgpm)3) 8,2 13,7 19,2(36.1) (60.3) (84.5)
Leckage der Ventile < 6 x 10-4 Nm3/h (0,0026 USgpm)
Drosselverhältnis bis ∞ : 1 einstellbar
Hilfsenergieverbrauch im ausgeregelten Zustand
< 3,6 x 10-2 Nm3/h (0,158 USgpm)
Geräteausführungen• im Kunstoffgehäuse einfach- und doppeltwirkend• im Alugehäuse einfachwirkend• im druckfest gekapseltem
Gehäuseeinfach- und doppeltwirkend
• im Edelstahlgehäuse einfach- und doppeltwirkend
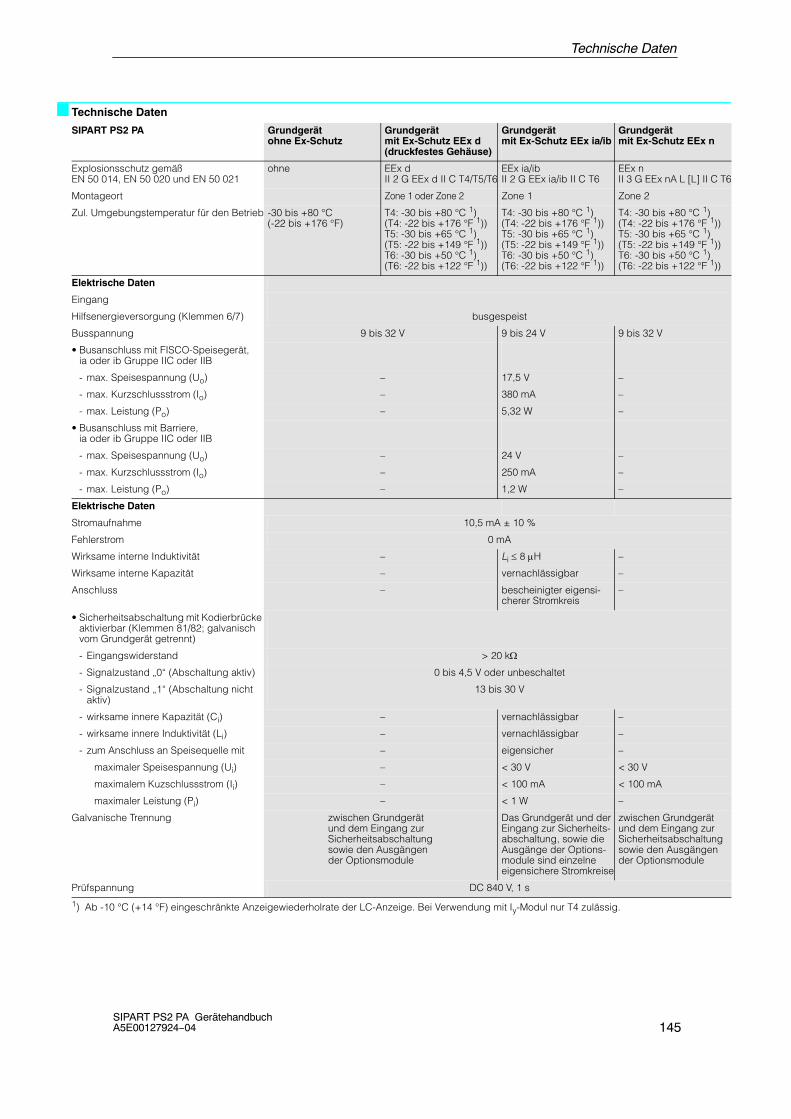
Technische Daten
145SIPART PS2 PA GerätehandbuchA5E00127924--04
Technische Daten
1) Ab -10 °C (+14 °F) eingeschränkte Anzeigewiederholrate der LC-Anzeige. Bei Verwendung mit Iy-Modul nur T4 zulässig.
SIPART PS2 PA Grundgerät ohne Ex-Schutz
Grundgerät mit Ex-Schutz EEx d (druckfestes Gehäuse)
Grundgerät mit Ex-Schutz EEx ia/ib
Grundgerät mit Ex-Schutz EEx n
Explosionsschutz gemäß EN 50 014, EN 50 020 und EN 50 021
ohne EEx dII 2 G EEx d II C T4/T5/T6
EEx ia/ibII 2 G EEx ia/ib II C T6
EEx nII 3 G EEx nA L [L] II C T6
Montageort Zone 1 oder Zone 2 Zone 1 Zone 2
Zul. Umgebungstemperatur für den Betrieb -30 bis +80 °C (-22 bis +176 °F)
T4: -30 bis +80 °C 1)(T4: -22 bis +176 °F 1))T5: -30 bis +65 °C 1)(T5: -22 bis +149 °F 1))T6: -30 bis +50 °C 1)(T6: -22 bis +122 °F 1))
T4: -30 bis +80 °C 1)(T4: -22 bis +176 °F 1))T5: -30 bis +65 °C 1)(T5: -22 bis +149 °F 1))T6: -30 bis +50 °C 1)(T6: -22 bis +122 °F 1))
T4: -30 bis +80 °C 1)(T4: -22 bis +176 °F 1))T5: -30 bis +65 °C 1)(T5: -22 bis +149 °F 1))T6: -30 bis +50 °C 1)(T6: -22 bis +122 °F 1))
Elektrische Daten
Eingang
Hilfsenergieversorgung (Klemmen 6/7) busgespeist
Busspannung 9 bis 32 V 9 bis 24 V 9 bis 32 V
• Busanschluss mit FISCO-Speisegerät,ia oder ib Gruppe IIC oder IIB
- max. Speisespannung (Uo) – 17,5 V –
- max. Kurzschlussstrom (Io) – 380 mA –
- max. Leistung (Po) – 5,32 W –
• Busanschluss mit Barriere,ia oder ib Gruppe IIC oder IIB
- max. Speisespannung (Uo) – 24 V –
- max. Kurzschlussstrom (Io) – 250 mA –
- max. Leistung (Po) – 1,2 W –
Elektrische Daten
Stromaufnahme 10,5 mA ± 10 %
Fehlerstrom 0 mA
Wirksame interne Induktivität – Li ≤ 8 µH –
Wirksame interne Kapazität – vernachlässigbar –
Anschluss – bescheinigter eigensi-cherer Stromkreis
–
• Sicherheitsabschaltung mit Kodierbrücke aktivierbar (Klemmen 81/82; galvanisch vom Grundgerät getrennt)
- Eingangswiderstand > 20 kΩ
- Signalzustand „0“ (Abschaltung aktiv) 0 bis 4,5 V oder unbeschaltet
- Signalzustand „1“ (Abschaltung nicht aktiv)
13 bis 30 V
- wirksame innere Kapazität (Ci) – vernachlässigbar –
- wirksame innere Induktivität (Li) – vernachlässigbar –
- zum Anschluss an Speisequelle mit – eigensicher –
maximaler Speisespannung (Ui) – < 30 V < 30 V
maximalem Kuzschlussstrom (Ii) – < 100 mA < 100 mA
maximaler Leistung (Pi) – < 1 W –
Galvanische Trennung zwischen Grundgerät und dem Eingang zur Sicherheitsabschaltung sowie den Ausgängen der Optionsmodule
Das Grundgerät und der Eingang zur Sicherheits-abschaltung, sowie die Ausgänge der Options-module sind einzelne eigensichere Stromkreise
zwischen Grundgerät und dem Eingang zur Sicherheitsabschaltung sowie den Ausgängen der Optionsmodule
Prüfspannung DC 840 V, 1 s
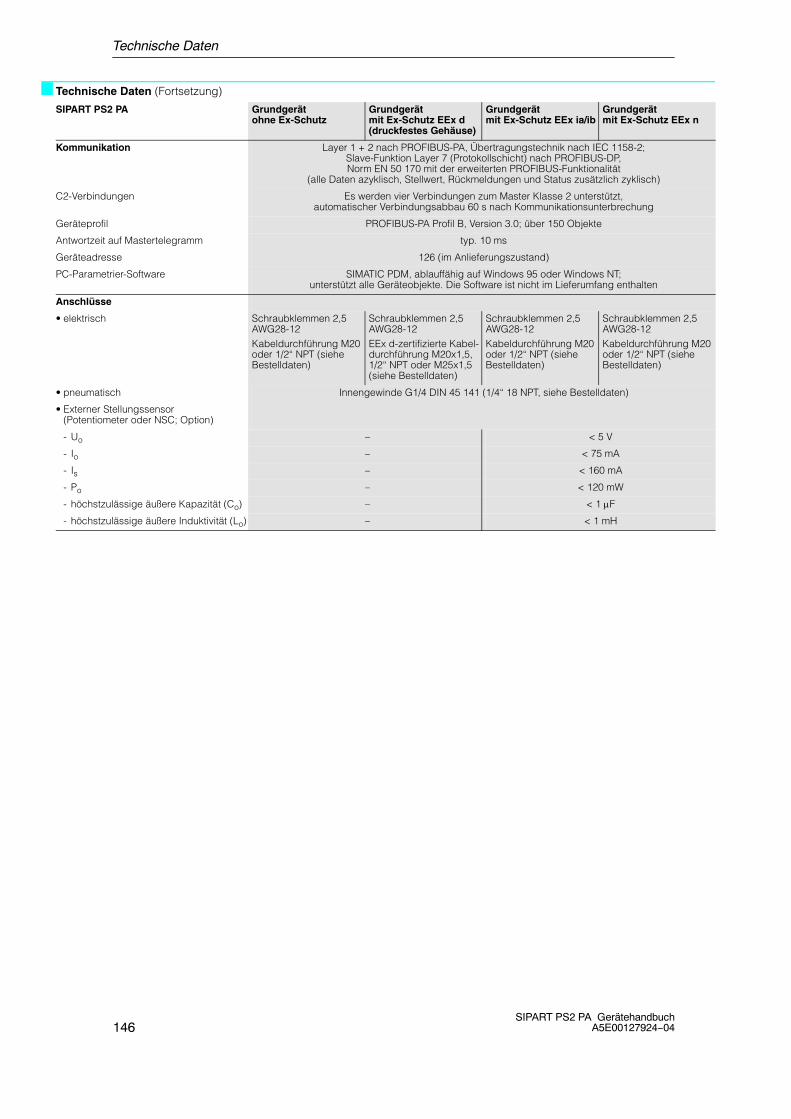
Technische Daten
146SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Technische Daten (Fortsetzung)
SIPART PS2 PA Grundgerät ohne Ex-Schutz
Grundgerät mit Ex-Schutz EEx d (druckfestes Gehäuse)
Grundgerät mit Ex-Schutz EEx ia/ib
Grundgerät mit Ex-Schutz EEx n
Kommunikation Layer 1 + 2 nach PROFIBUS-PA, Übertragungstechnik nach IEC 1158-2;Slave-Funktion Layer 7 (Protokollschicht) nach PROFIBUS-DP,Norm EN 50 170 mit der erweiterten PROFIBUS-Funktionalität
(alle Daten azyklisch, Stellwert, Rückmeldungen und Status zusätzlich zyklisch)
C2-Verbindungen Es werden vier Verbindungen zum Master Klasse 2 unterstützt,automatischer Verbindungsabbau 60 s nach Kommunikationsunterbrechung
Geräteprofil PROFIBUS-PA Profil B, Version 3.0; über 150 Objekte
Antwortzeit auf Mastertelegramm typ. 10 ms
Geräteadresse 126 (im Anlieferungszustand)
PC-Parametrier-Software SIMATIC PDM, ablauffähig auf Windows 95 oder Windows NT;unterstützt alle Geräteobjekte. Die Software ist nicht im Lieferumfang enthalten
Anschlüsse
• elektrisch Schraubklemmen 2,5 AWG28-12Kabeldurchführung M20 oder 1/2“ NPT (siehe Bestelldaten)
Schraubklemmen 2,5 AWG28-12EEx d-zertifizierte Kabel-durchführung M20x1,5, 1/2“ NPT oder M25x1,5 (siehe Bestelldaten)
Schraubklemmen 2,5 AWG28-12Kabeldurchführung M20 oder 1/2“ NPT (siehe Bestelldaten)
Schraubklemmen 2,5 AWG28-12Kabeldurchführung M20 oder 1/2“ NPT (siehe Bestelldaten)
• pneumatisch Innengewinde G1/4 DIN 45 141 (1/4“ 18 NPT, siehe Bestelldaten)
• Externer Stellungssensor(Potentiometer oder NSC; Option)
- Uo – < 5 V
- Io – < 75 mA
- Is – < 160 mA
- Po – < 120 mW
- höchstzulässige äußere Kapazität (Co) – < 1 µF
- höchstzulässige äußere Induktivität (Lo) – < 1 mH
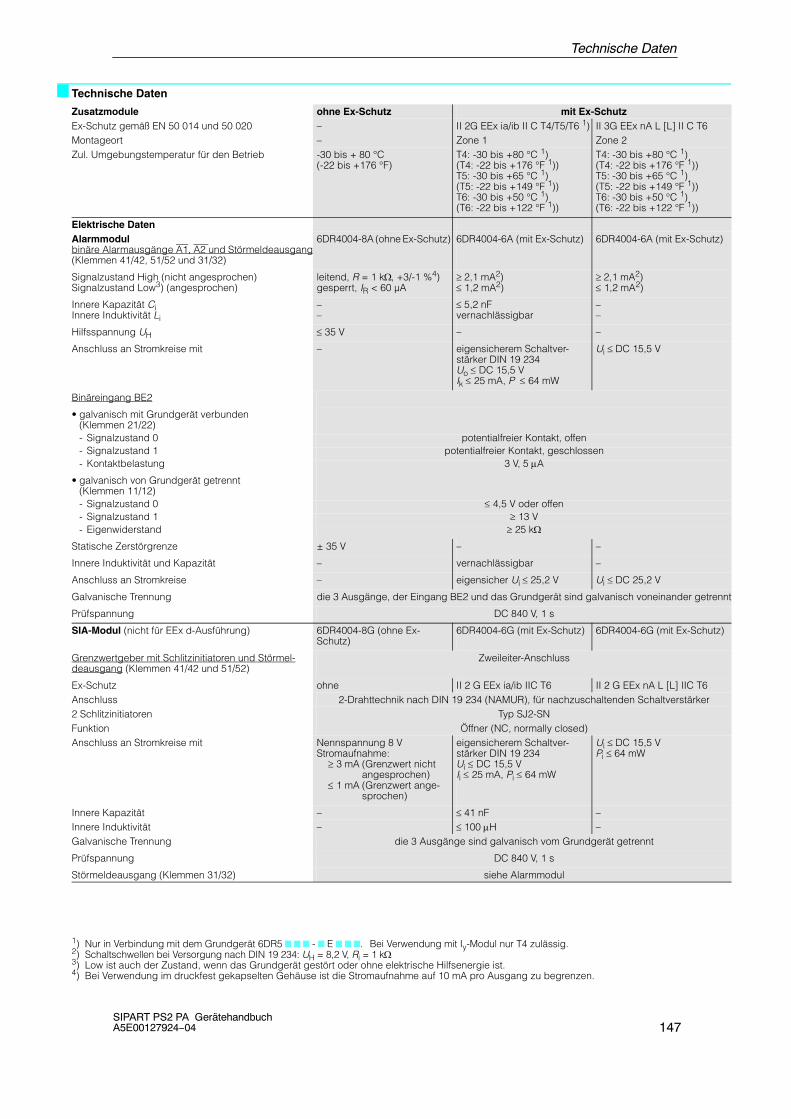
Technische Daten
147SIPART PS2 PA GerätehandbuchA5E00127924--04
Technische Daten
1) Nur in Verbindung mit dem Grundgerät 6DR5 7 7 7 - 7 E 7 7 7. Bei Verwendung mit Iy-Modul nur T4 zulässig. 2) Schaltschwellen bei Versorgung nach DIN 19 234: UH = 8,2 V, Ri = 1 kΩ3) Low ist auch der Zustand, wenn das Grundgerät gestört oder ohne elektrische Hilfsenergie ist.4) Bei Verwendung im druckfest gekapselten Gehäuse ist die Stromaufnahme auf 10 mA pro Ausgang zu begrenzen.
Zusatzmodule ohne Ex-Schutz mit Ex-SchutzEx-Schutz gemäß EN 50 014 und 50 020 – II 2G EEx ia/ib II C T4/T5/T6 1) II 3G EEx nA L [L] II C T6Montageort – Zone 1 Zone 2Zul. Umgebungstemperatur für den Betrieb -30 bis + 80 °C
(-22 bis +176 °F)T4: -30 bis +80 °C 1)(T4: -22 bis +176 °F 1))T5: -30 bis +65 °C 1)(T5: -22 bis +149 °F 1))T6: -30 bis +50 °C 1)(T6: -22 bis +122 °F 1))
T4: -30 bis +80 °C 1)(T4: -22 bis +176 °F 1))T5: -30 bis +65 °C 1)(T5: -22 bis +149 °F 1))T6: -30 bis +50 °C 1)(T6: -22 bis +122 °F 1))
Elektrische DatenAlarmmodulbinäre Alarmausgänge A1, A2 und Störmeldeausgang(Klemmen 41/42, 51/52 und 31/32)
6DR4004-8A (ohne Ex-Schutz) 6DR4004-6A (mit Ex-Schutz) 6DR4004-6A (mit Ex-Schutz)
Signalzustand High (nicht angesprochen)Signalzustand Low3) (angesprochen)
leitend, R = 1 kΩ, +3/-1 %4)gesperrt, IR < 60 µA
≥ 2,1 mA2)≤ 1,2 mA2)
≥ 2,1 mA2)≤ 1,2 mA2)
Innere Kapazität CiInnere Induktivität Li
––
≤ 5,2 nFvernachlässigbar
––
Hilfsspannung UH ≤ 35 V – –
Anschluss an Stromkreise mit – eigensicherem Schaltver-stärker DIN 19 234Uo ≤ DC 15,5 V Ik ≤ 25 mA, P ≤ 64 mW
Ui ≤ DC 15,5 V
Binäreingang BE2
• galvanisch mit Grundgerät verbunden(Klemmen 21/22)- Signalzustand 0 potentialfreier Kontakt, offen- Signalzustand 1 potentialfreier Kontakt, geschlossen- Kontaktbelastung 3 V, 5 µA
• galvanisch von Grundgerät getrennt(Klemmen 11/12)- Signalzustand 0 ≤ 4,5 V oder offen- Signalzustand 1 ≥ 13 V - Eigenwiderstand ≥ 25 kΩ
Statische Zerstörgrenze ± 35 V – –
Innere Induktivität und Kapazität – vernachlässigbar –
Anschluss an Stromkreise – eigensicher Ui ≤ 25,2 V Ui ≤ DC 25,2 V
Galvanische Trennung die 3 Ausgänge, der Eingang BE2 und das Grundgerät sind galvanisch voneinander getrennt
Prüfspannung DC 840 V, 1 s
SIA-Modul (nicht für EEx d-Ausführung) 6DR4004-8G (ohne Ex-Schutz)
6DR4004-6G (mit Ex-Schutz) 6DR4004-6G (mit Ex-Schutz)
Grenzwertgeber mit Schlitzinitiatoren und Störmel-deausgang (Klemmen 41/42 und 51/52)
Zweileiter-Anschluss
Ex-Schutz ohne II 2 G EEx ia/ib IIC T6 II 2 G EEx nA L [L] IIC T6Anschluss 2-Drahttechnik nach DIN 19 234 (NAMUR), für nachzuschaltenden Schaltverstärker2 Schlitzinitiatoren Typ SJ2-SNFunktion Öffner (NC, normally closed)Anschluss an Stromkreise mit Nennspannung 8 V
Stromaufnahme:≥ 3 mA (Grenzwert nicht
angesprochen)≤ 1 mA (Grenzwert ange-
sprochen)
eigensicherem Schaltver-stärker DIN 19 234Ui ≤ DC 15,5 V Ii ≤ 25 mA, Pi ≤ 64 mW
Ui ≤ DC 15,5 V Pi ≤ 64 mW
Innere Kapazität – ≤ 41 nF –Innere Induktivität – ≤ 100 µH –Galvanische Trennung die 3 Ausgänge sind galvanisch vom Grundgerät getrennt
Prüfspannung DC 840 V, 1 s
Störmeldeausgang (Klemmen 31/32) siehe Alarmmodul
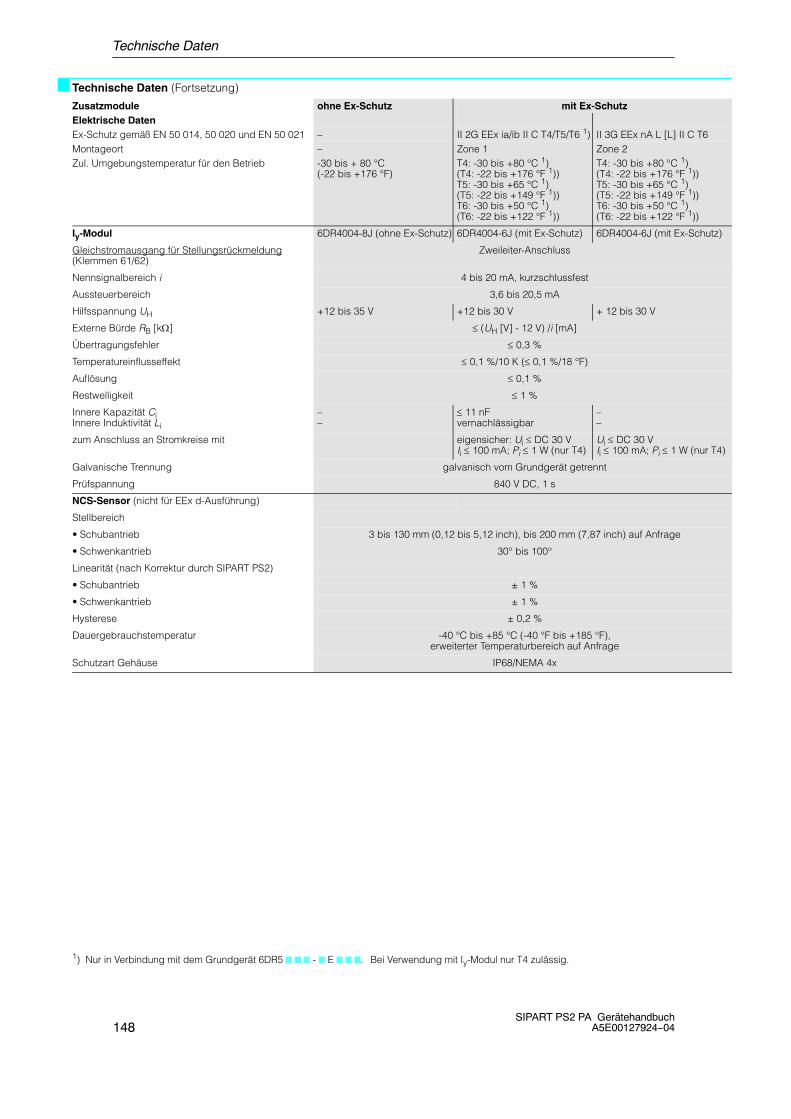
Technische Daten
148SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Technische Daten (Fortsetzung)
1) Nur in Verbindung mit dem Grundgerät 6DR5 7 7 7 - 7 E 7 7 7. Bei Verwendung mit Iy-Modul nur T4 zulässig.
Zusatzmodule ohne Ex-Schutz mit Ex-SchutzElektrische DatenEx-Schutz gemäß EN 50 014, 50 020 und EN 50 021 – II 2G EEx ia/ib II C T4/T5/T6 1) II 3G EEx nA L [L] II C T6Montageort – Zone 1 Zone 2Zul. Umgebungstemperatur für den Betrieb -30 bis + 80 °C
(-22 bis +176 °F)T4: -30 bis +80 °C 1)(T4: -22 bis +176 °F 1))T5: -30 bis +65 °C 1)(T5: -22 bis +149 °F 1))T6: -30 bis +50 °C 1)(T6: -22 bis +122 °F 1))
T4: -30 bis +80 °C 1)(T4: -22 bis +176 °F 1))T5: -30 bis +65 °C 1)(T5: -22 bis +149 °F 1))T6: -30 bis +50 °C 1)(T6: -22 bis +122 °F 1))
Iy-Modul 6DR4004-8J (ohne Ex-Schutz) 6DR4004-6J (mit Ex-Schutz) 6DR4004-6J (mit Ex-Schutz)
Gleichstromausgang für Stellungsrückmeldung(Klemmen 61/62)
Zweileiter-Anschluss
Nennsignalbereich i 4 bis 20 mA, kurzschlussfest
Aussteuerbereich 3,6 bis 20,5 mA
Hilfsspannung UH +12 bis 35 V +12 bis 30 V + 12 bis 30 V
Externe Bürde RB [kΩ] ≤ (UH [V] - 12 V) /i [mA]
Übertragungsfehler ≤ 0,3 %
Temperatureinflusseffekt ≤ 0,1 %/10 K (≤ 0,1 %/18 °F)
Auflösung ≤ 0,1 %
Restwelligkeit ≤ 1 %
Innere Kapazität CiInnere Induktivität Li
––
≤ 11 nFvernachlässigbar
––
zum Anschluss an Stromkreise mit eigensicher: Ui ≤ DC 30 V Ii ≤ 100 mA; Pi ≤ 1 W (nur T4)
Ui ≤ DC 30 V Ii ≤ 100 mA; Pi ≤ 1 W (nur T4)
Galvanische Trennung galvanisch vom Grundgerät getrennt
Prüfspannung 840 V DC, 1 s
NCS-Sensor (nicht für EEx d-Ausführung)
Stellbereich
• Schubantrieb 3 bis 130 mm (0,12 bis 5,12 inch), bis 200 mm (7,87 inch) auf Anfrage
• Schwenkantrieb 30° bis 100°
Linearität (nach Korrektur durch SIPART PS2)
• Schubantrieb ± 1 %
• Schwenkantrieb ± 1 %
Hysterese ± 0,2 %
Dauergebrauchstemperatur -40 °C bis +85 °C (-40 °F bis +185 °F), erweiterter Temperaturbereich auf Anfrage
Schutzart Gehäuse IP68/NEMA 4x

Lieferspektrum
149SIPART PS2 PA GerätehandbuchA5E00127924--04
Lieferspektrum
Der Stellungsregler und seine Optionsmodule werden als getrennteEinheiten und in unterschiedlichen Ausführungen geliefert. Es stehenStellungsregler und Optionsmodule für den Betrieb in explosionsgefähr-deten und nicht explosionsgefährdeten Bereichen zur Verfügung. DieseAusführungen sind jeweils durch ein spezielles Typenschild gekenn-zeichnet.
!WARNUNG
Bei der Zusammenstellung der Komponenten muss sichergestellt sein,dass nur Stellungsregler und Optionsmodule miteinander kombiniertwerden, die für den jeweiligen Einsatzbereich zugelassen sind. Diesgilt insbesondere für den sicheren Betrieb des Stellungsreglers in Be-reichen, in denen die Atmosphäre explosionsfähig werden kann (Zone1 und 2). Hierbei sind unbedingt die Gerätekategorien (2 und 3) desGerätes selbst, sowie die seiner Optionen zu beachten.
8
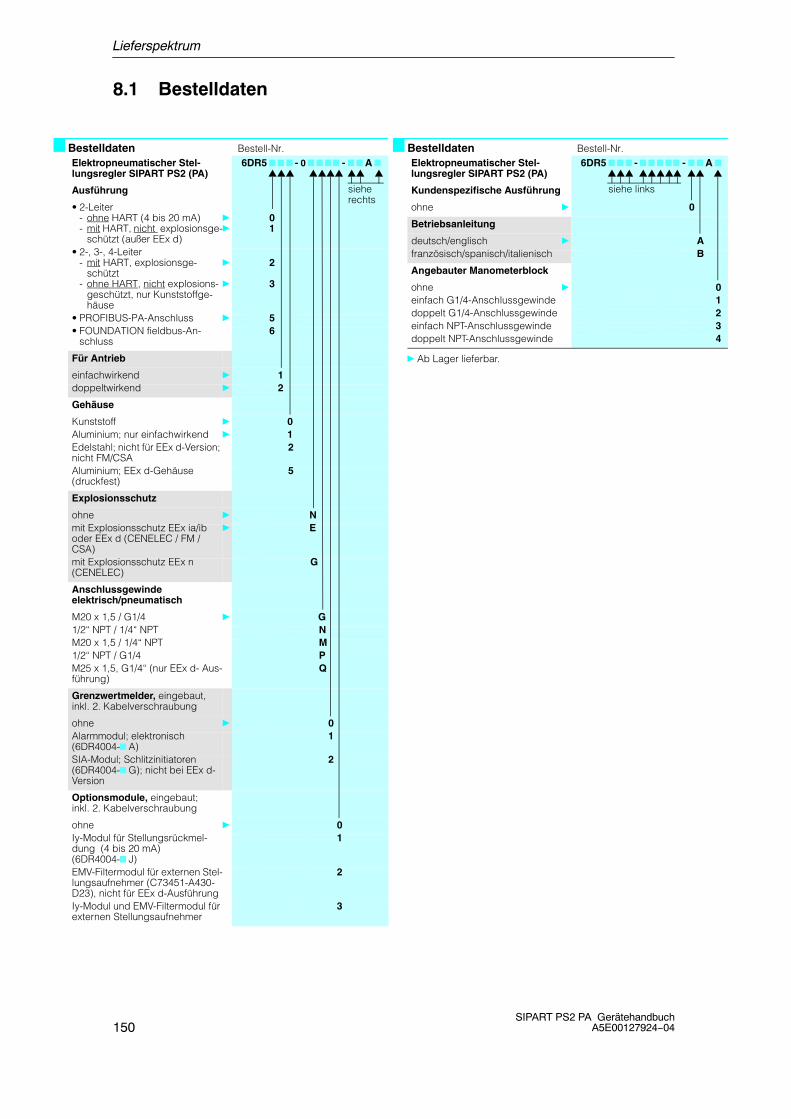
Lieferspektrum
150SIPART PS2 PA Gerätehandbuch
A5E00127924--04
8.1 Bestelldaten
Bestelldaten Bestell-Nr.Elektropneumatischer Stel-lungsregler SIPART PS2 (PA)
6DR5 7 7 7 - 0 7 7 77 - 7 7 A 7
Ausführung
• 2-Leiter- ohne HART (4 bis 20 mA)- mit HART, nicht explosionsge-
schützt (außer EEx d)
6DR5 06DR5 1
• 2-, 3-, 4-Leiter- mit HART, explosionsge-
schützt- ohne HART, nicht explosions-
geschützt, nur Kunststoffge-häuse
6DR5 2
6DR5 36DR5
• PROFIBUS-PA-Anschluss 6DR5 56DR5• FOUNDATION fieldbus-An-
schluss6DR5 66DR5
Für Antrieb
einfachwirkend 6DR5 0 1doppeltwirkend 6DR5 0 2
Gehäuse
Kunststoff 6DR5 0 0 0Aluminium; nur einfachwirkend 6DR5 0 0 1Edelstahl; nicht für EEx d-Version; nicht FM/CSA
6DR5 0 0 2
Aluminium; EEx d-Gehäuse (druckfest)
6DR5 0 0 5
Explosionsschutz
ohne 6DR5 0 0 0 - 0 Nmit Explosionsschutz EEx ia/ib oder EEx d (CENELEC / FM / CSA)
6DR5 0 0 0 - 0 E
mit Explosionsschutz EEx n(CENELEC)
6DR5 0 0 0 - 0 G
Anschlussgewindeelektrisch/pneumatisch
M20 x 1,5 / G1/4 6DR5 0 0 0 - N 0 G1/2“ NPT / 1/4“ NPT 6DR5 0 0 0 - N 0 NM20 x 1,5 / 1/4“ NPT 6DR5 0 0 0 - N 0 M1/2“ NPT / G1/4 6DR5 0 0 0 - N 0 PM25 x 1,5, G1/4“ (nur EEx d- Aus-führung)
6DR5 0 0 0 - N 0 Q
Grenzwertmelder, eingebaut, inkl. 2. Kabelverschraubung
ohne 6DR5 0 0 0 - N 0 G 0Alarmmodul; elektronisch (6DR4004-7 A)
6DR5 0 0 0 - N 0 G 1
SIA-Modul; Schlitzinitiatoren (6DR4004-7 G); nicht bei EEx d-Version
6DR5 0 0 0 - N 0 G 2
Optionsmodule, eingebaut; inkl. 2. Kabelverschraubung
ohne 6DR5 0 0 0 - N 0 G 0 0Iy-Modul für Stellungsrückmel-dung (4 bis 20 mA)(6DR4004-7 J)
6DR5 0 0 0 - N 0 G 0 1
EMV-Filtermodul für externen Stel-lungsaufnehmer (C73451-A430-D23), nicht für EEx d-Ausführung
6DR5 0 0 0 - N 0 G 0 2
Iy-Modul und EMV-Filtermodul für externen Stellungsaufnehmer
6DR5 0 0 0 - N 0 G 0 3
Bestelldaten Bestell-Nr.
Ab Lager lieferbar.
Elektropneumatischer Stel-lungsregler SIPART PS2 (PA)
6DR5 7 7 7 - 7 7 7 77 - 7 7 A 7
Kundenspezifische Ausführung
ohne 6DR5 0 0 0 - N 0 G 0 0 - 0
Betriebsanleitung
deutsch/englisch 6DR5 0 0 0 - N 0 G 0 0 - 0 Afranzösisch/spanisch/italienisch 6DR5 0 0 0 - N 0 G 0 0 - 0 B
Angebauter Manometerblock
ohne 6DR5 0 0 0 - N 0 G 0 0 - 0 A 7 0einfach G1/4-Anschlussgewinde 6DR5 0 0 0 - N 0 G 0 0 - 0 A 7 1doppelt G1/4-Anschlussgewinde 6DR5 0 0 0 - N 0 G 0 0 - 0 A 7 2einfach NPT-Anschlussgewinde 6DR5 0 0 0 - N 0 G 0 0 - 0 A 7 3doppelt NPT-Anschlussgewinde 6DR5 0 0 0 - N 0 G 0 0 - 0 A 7 4
siehe linkssieherechts
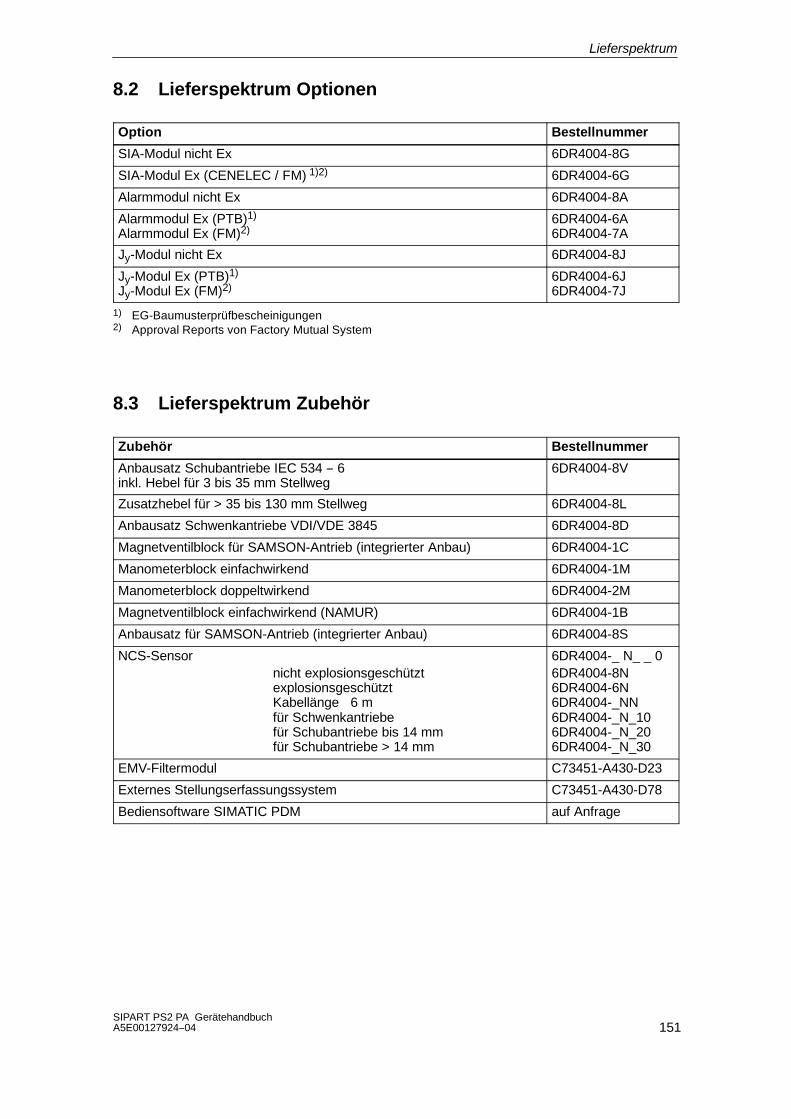
Lieferspektrum
151SIPART PS2 PA GerätehandbuchA5E00127924--04
8.2 Lieferspektrum Optionen
Option Bestellnummer
SIA-Modul nicht Ex 6DR4004-8G
SIA-Modul Ex (CENELEC / FM) 1)2) 6DR4004-6G
Alarmmodul nicht Ex 6DR4004-8A
Alarmmodul Ex (PTB)1)
Alarmmodul Ex (FM)2)6DR4004-6A6DR4004-7A
Jy-Modul nicht Ex 6DR4004-8J
Jy-Modul Ex (PTB)1)
Jy-Modul Ex (FM)2)6DR4004-6J6DR4004-7J
1) EG-Baumusterprüfbescheinigungen2) Approval Reports von Factory Mutual System
8.3 Lieferspektrum Zubehör
Zubehör Bestellnummer
Anbausatz Schubantriebe IEC 534 -- 6inkl. Hebel für 3 bis 35 mm Stellweg
6DR4004-8V
Zusatzhebel für > 35 bis 130 mm Stellweg 6DR4004-8L
Anbausatz Schwenkantriebe VDI/VDE 3845 6DR4004-8D
Magnetventilblock für SAMSON-Antrieb (integrierter Anbau) 6DR4004-1C
Manometerblock einfachwirkend 6DR4004-1M
Manometerblock doppeltwirkend 6DR4004-2M
Magnetventilblock einfachwirkend (NAMUR) 6DR4004-1B
Anbausatz für SAMSON-Antrieb (integrierter Anbau) 6DR4004-8S
NCS-Sensornicht explosionsgeschütztexplosionsgeschütztKabellänge 6 mfür Schwenkantriebefür Schubantriebe bis 14 mmfür Schubantriebe > 14 mm
6DR4004-_ N_ _ 06DR4004-8N6DR4004-6N6DR4004-_NN6DR4004-_N_106DR4004-_N_206DR4004-_N_30
EMV-Filtermodul C73451-A430-D23
Externes Stellungserfassungssystem C73451-A430-D78
Bediensoftware SIMATIC PDM auf Anfrage

Lieferspektrum
152SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Index
153SIPART PS2 PA GerätehandbuchA5E00127924--04
Index
AAlarm Funktion, 98Alarmmodul, 37Alarmmodul
Ex, 62, 63nicht Ex, 60
Allgemeine Hinweise, 7Anbausatz, Schwenkantrieb, 49Arbeitsweise, 23, 29Ausführungen, 13Automatik, Betriebsartenwechsel, 88
BBedientasten, 83Bedienung, 83
über PROFIBUS PA, 121Bestimmungsgemäßer Gebrauch, 11Betriebsart, 86
AUT, 88MAN, 87
Binärausgang, Elektrischer Anschluss, 60,62, 63
Binäreingang, Elektrischer Anschluss, 62, 63
DDiagnose, 103
Anzeige, 103Online, 108
Diagnoseanzeige, Betriebsartenwechsel, 88Diagnosewerte, Bedeutung der ~, 104Display, 83Dokumentation, 11doppelt wirkend, Schwenkantrieb, 15, 16Drosseln, 28
EEinbaulagen, günstige und ungünstige, 43einfach wirkend, 15, 16
Schubantrieb, 15, 16Einsatz
bei starken Beschleunigungen undVibrationen, 44
Stellungsregler in nasser Umgebung, 42
Elektrischer Anschluss, 25, 55mit PROFIBUS PA, 60, 61
FFirmwarestand, 85Funktionen , PROFIBUS PA, 121
GGehäuse, 13Geräteansicht, 24Geräteidentifizierung, 39Gerätestammdatei, 155Gewährleistung, 12GSD, 155
HHandbetrieb
Betriebsartenwechsel, 87P--Handbetrieb, 87
Hebelarmübersetzung, 92
IInbetriebnahme, 66Initialisierung, 93
Automatische ~, 66, 68, 73, 77Struktogramm, 77
Betriebsartenwechsel, 87Kopieren von ~, 66Manuelle ~, 66, 70, 75
Initialisierungsdaten, Kopieren der ~, 81
JJy--Modul, 37, 38
Ex, 61, 63Jy--Modul nicht Ex, 60
KKataloge, 158Konfigurierung, Betriebsartenwechsel, 87
LLieferspektrum, 149
9
Index
154SIPART PS2 PA Gerätehandbuch
A5E00127924--04
Lieferung, 12Literatur, 158
MManometerblock, 38Maßbilder, 39Montage, 41
Verschraubung mit Kuststoffschlauch, 44Montageablauf, 46, 50
Schubantrieb, 48Schwenkantrieb, 51, 52
NNasse Umgebung, 42Normen, 12
OOptionen, 14, 30
PParameter, 88Parametertabelle, 89PDM (Process Device Manager), 81, 107Personal, Qualifikation, 9Pflege, 141Pneumatischer Anschluss, 26, 65Preset, 101
QQualifikation des Personals, 9
RReset, 101Rutschkupplung, Feststelleinrichtung, 45
SSchubantrieb
Anbausatz, 46Automatische Initialisierung, 68einfach wirkend, 15, 16Manuelle Initialisierung, 70
Schubantriebe, Vorbereitung, 67Schwenkantrieb, 15, 53, 54, 56
doppelt wirkend, 16Vorbereitung, 73
SchwenkantriebenAutomatische Initialisierung, 73Manuelle Initialisierung, 75
SIA--ModulElektrischer Anschluss, 61, 62, 64Ex, 62, 64nicht Ex, 61
Sicherheitsabschaltung, 59Sicherheitsstellung, 27Sollwertkennlinie, 94Spülluftumschaltung, 28Stellungsreglertausch, 66, 81Stellwirkung, 27Stromausgang, Elektrischer Anschluss, 60,
61, 63Struktogramme der automatischen
Initialisierung, 77
TTechnische Daten, 143Typenschlüssel, 39
VVibrationen, 44
WWartung, 141Wechsel der, Betriebsart, 86Wegklassen, 108
ZZertifikate;Bescheinigungen, 159Zubehör, 38
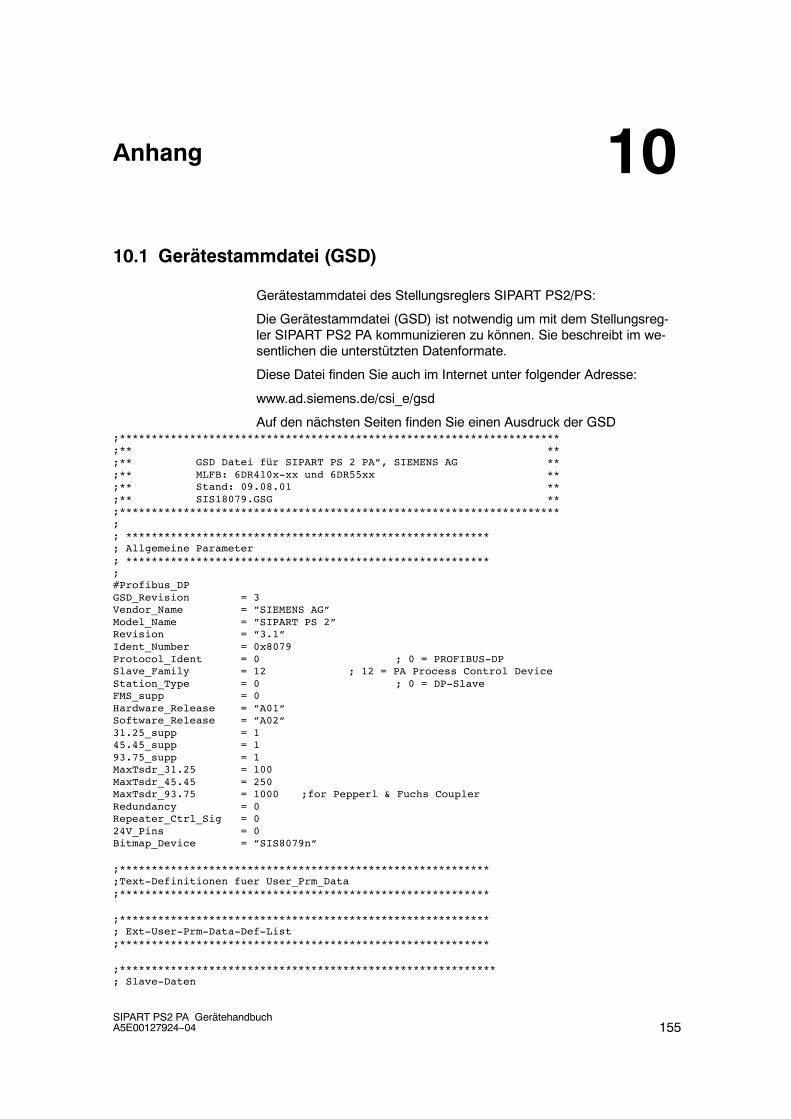
Anhang
155SIPART PS2 PA GerätehandbuchA5E00127924--04
Anhang
10.1 Gerätestammdatei (GSD)
Gerätestammdatei des Stellungsreglers SIPART PS2/PS:
Die Gerätestammdatei (GSD) ist notwendig um mit dem Stellungsreg-ler SIPART PS2 PA kommunizieren zu können. Sie beschreibt im we-sentlichen die unterstützten Datenformate.
Diese Datei finden Sie auch im Internet unter folgender Adresse:
www.ad.siemens.de/csi_e/gsd
Auf den nächsten Seiten finden Sie einen Ausdruck der GSD;*********************************************************************;** **;** GSD Datei für SIPART PS 2 PA”, SIEMENS AG **;** MLFB: 6DR410x-xx und 6DR55xx **;** Stand: 09.08.01 **;** SIS18079.GSG **;*********************************************************************;; *********************************************************; Allgemeine Parameter; *********************************************************;#Profibus_DPGSD_Revision = 3Vendor_Name = ”SIEMENS AG”Model_Name = ”SIPART PS 2”Revision = ”3.1”Ident_Number = 0x8079Protocol_Ident = 0 ; 0 = PROFIBUS-DPSlave_Family = 12 ; 12 = PA Process Control DeviceStation_Type = 0 ; 0 = DP-SlaveFMS_supp = 0Hardware_Release = ”A01”Software_Release = ”A02”31.25_supp = 145.45_supp = 193.75_supp = 1MaxTsdr_31.25 = 100MaxTsdr_45.45 = 250MaxTsdr_93.75 = 1000 ;for Pepperl & Fuchs CouplerRedundancy = 0Repeater_Ctrl_Sig = 024V_Pins = 0Bitmap_Device = ”SIS8079n”
;**********************************************************;Text-Definitionen fuer User_Prm_Data;**********************************************************
;**********************************************************; Ext-User-Prm-Data-Def-List;**********************************************************
;***********************************************************; Slave-Daten
10
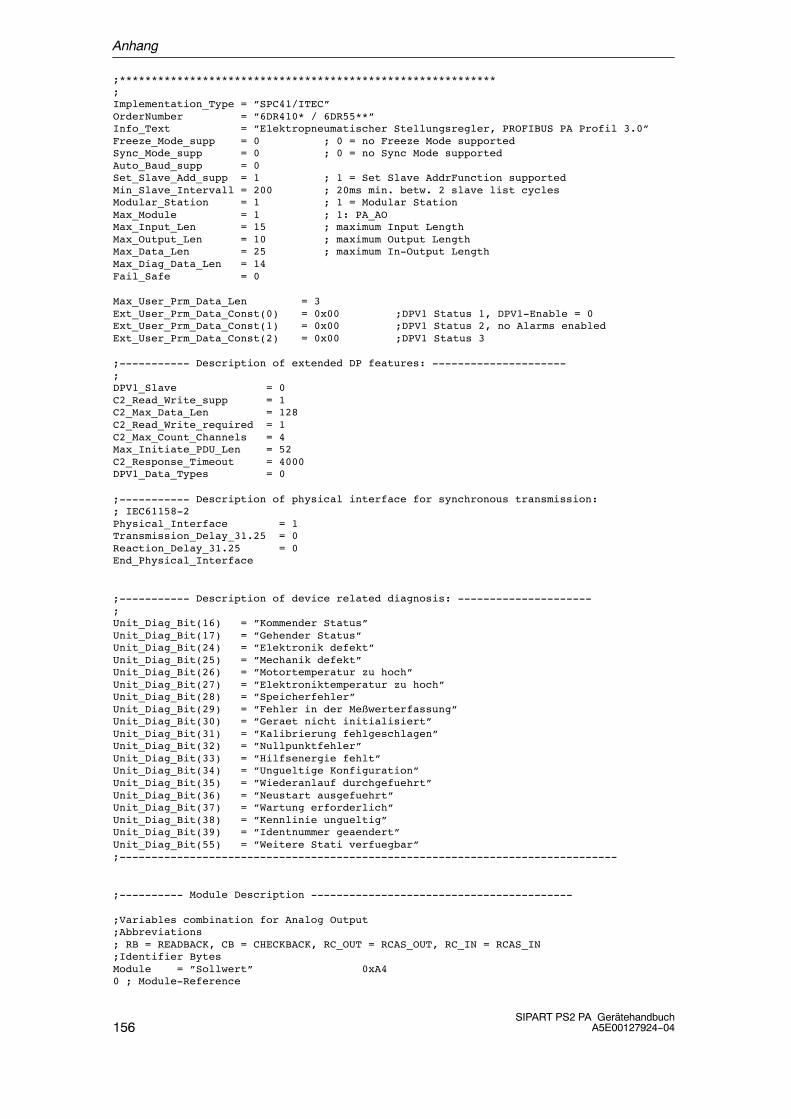
Anhang
156SIPART PS2 PA Gerätehandbuch
A5E00127924--04
;***********************************************************;Implementation_Type = ”SPC41/ITEC”OrderNumber = ”6DR410* / 6DR55**”Info_Text = ”Elektropneumatischer Stellungsregler, PROFIBUS PA Profil 3.0”Freeze_Mode_supp = 0 ; 0 = no Freeze Mode supportedSync_Mode_supp = 0 ; 0 = no Sync Mode supportedAuto_Baud_supp = 0Set_Slave_Add_supp = 1 ; 1 = Set Slave AddrFunction supportedMin_Slave_Intervall = 200 ; 20ms min. betw. 2 slave list cyclesModular_Station = 1 ; 1 = Modular StationMax_Module = 1 ; 1: PA_AOMax_Input_Len = 15 ; maximum Input LengthMax_Output_Len = 10 ; maximum Output LengthMax_Data_Len = 25 ; maximum In-Output LengthMax_Diag_Data_Len = 14Fail_Safe = 0
Max_User_Prm_Data_Len = 3Ext_User_Prm_Data_Const(0) = 0x00 ;DPV1 Status 1, DPV1-Enable = 0Ext_User_Prm_Data_Const(1) = 0x00 ;DPV1 Status 2, no Alarms enabledExt_User_Prm_Data_Const(2) = 0x00 ;DPV1 Status 3
;----------- Description of extended DP features: ---------------------;DPV1_Slave = 0C2_Read_Write_supp = 1C2_Max_Data_Len = 128C2_Read_Write_required = 1C2_Max_Count_Channels = 4Max_Initiate_PDU_Len = 52C2_Response_Timeout = 4000DPV1_Data_Types = 0
;----------- Description of physical interface for synchronous transmission:; IEC61158-2Physical_Interface = 1Transmission_Delay_31.25 = 0Reaction_Delay_31.25 = 0End_Physical_Interface
;----------- Description of device related diagnosis: ---------------------;Unit_Diag_Bit(16) = ”Kommender Status”Unit_Diag_Bit(17) = ”Gehender Status”Unit_Diag_Bit(24) = ”Elektronik defekt”Unit_Diag_Bit(25) = ”Mechanik defekt”Unit_Diag_Bit(26) = ”Motortemperatur zu hoch”Unit_Diag_Bit(27) = ”Elektroniktemperatur zu hoch”Unit_Diag_Bit(28) = ”Speicherfehler”Unit_Diag_Bit(29) = ”Fehler in der Meßwerterfassung”Unit_Diag_Bit(30) = ”Geraet nicht initialisiert”Unit_Diag_Bit(31) = ”Kalibrierung fehlgeschlagen”Unit_Diag_Bit(32) = ”Nullpunktfehler”Unit_Diag_Bit(33) = ”Hilfsenergie fehlt”Unit_Diag_Bit(34) = ”Ungueltige Konfiguration”Unit_Diag_Bit(35) = ”Wiederanlauf durchgefuehrt”Unit_Diag_Bit(36) = ”Neustart ausgefuehrt”Unit_Diag_Bit(37) = ”Wartung erforderlich”Unit_Diag_Bit(38) = ”Kennlinie ungueltig”Unit_Diag_Bit(39) = ”Identnummer geaendert”Unit_Diag_Bit(55) = ”Weitere Stati verfuegbar”;------------------------------------------------------------------------------
;---------- Module Description -----------------------------------------
;Variables combination for Analog Output;Abbreviations; RB = READBACK, CB = CHECKBACK, RC_OUT = RCAS_OUT, RC_IN = RCAS_IN;Identifier BytesModule = ”Sollwert” 0xA40 ; Module-Reference
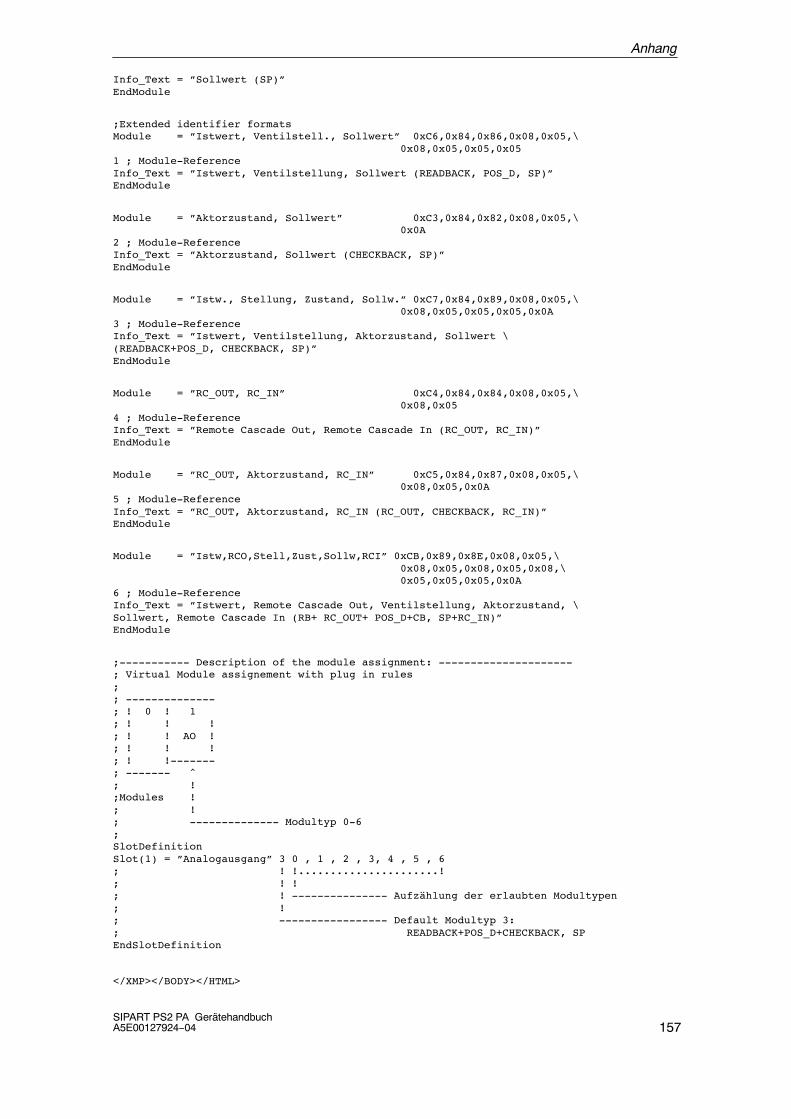
Anhang
157SIPART PS2 PA GerätehandbuchA5E00127924--04
Info_Text = ”Sollwert (SP)”EndModule
;Extended identifier formatsModule = ”Istwert, Ventilstell., Sollwert” 0xC6,0x84,0x86,0x08,0x05,\
0x08,0x05,0x05,0x051 ; Module-ReferenceInfo_Text = ”Istwert, Ventilstellung, Sollwert (READBACK, POS_D, SP)”EndModule
Module = ”Aktorzustand, Sollwert” 0xC3,0x84,0x82,0x08,0x05,\0x0A
2 ; Module-ReferenceInfo_Text = ”Aktorzustand, Sollwert (CHECKBACK, SP)”EndModule
Module = ”Istw., Stellung, Zustand, Sollw.” 0xC7,0x84,0x89,0x08,0x05,\0x08,0x05,0x05,0x05,0x0A
3 ; Module-ReferenceInfo_Text = ”Istwert, Ventilstellung, Aktorzustand, Sollwert \(READBACK+POS_D, CHECKBACK, SP)”EndModule
Module = ”RC_OUT, RC_IN” 0xC4,0x84,0x84,0x08,0x05,\0x08,0x05
4 ; Module-ReferenceInfo_Text = ”Remote Cascade Out, Remote Cascade In (RC_OUT, RC_IN)”EndModule
Module = ”RC_OUT, Aktorzustand, RC_IN” 0xC5,0x84,0x87,0x08,0x05,\0x08,0x05,0x0A
5 ; Module-ReferenceInfo_Text = ”RC_OUT, Aktorzustand, RC_IN (RC_OUT, CHECKBACK, RC_IN)”EndModule
Module = ”Istw,RCO,Stell,Zust,Sollw,RCI” 0xCB,0x89,0x8E,0x08,0x05,\0x08,0x05,0x08,0x05,0x08,\0x05,0x05,0x05,0x0A
6 ; Module-ReferenceInfo_Text = ”Istwert, Remote Cascade Out, Ventilstellung, Aktorzustand, \Sollwert, Remote Cascade In (RB+ RC_OUT+ POS_D+CB, SP+RC_IN)”EndModule
;----------- Description of the module assignment: ---------------------; Virtual Module assignement with plug in rules;; --------------; ! 0 ! 1; ! ! !; ! ! AO !; ! ! !; ! !-------; ------- ^; !;Modules !; !; -------------- Modultyp 0-6;SlotDefinitionSlot(1) = ”Analogausgang” 3 0 , 1 , 2 , 3, 4 , 5 , 6; ! !......................!; ! !; ! --------------- Aufzählung der erlaubten Modultypen; !; ----------------- Default Modultyp 3:; READBACK+POS_D+CHECKBACK, SPEndSlotDefinition
</XMP></BODY></HTML>
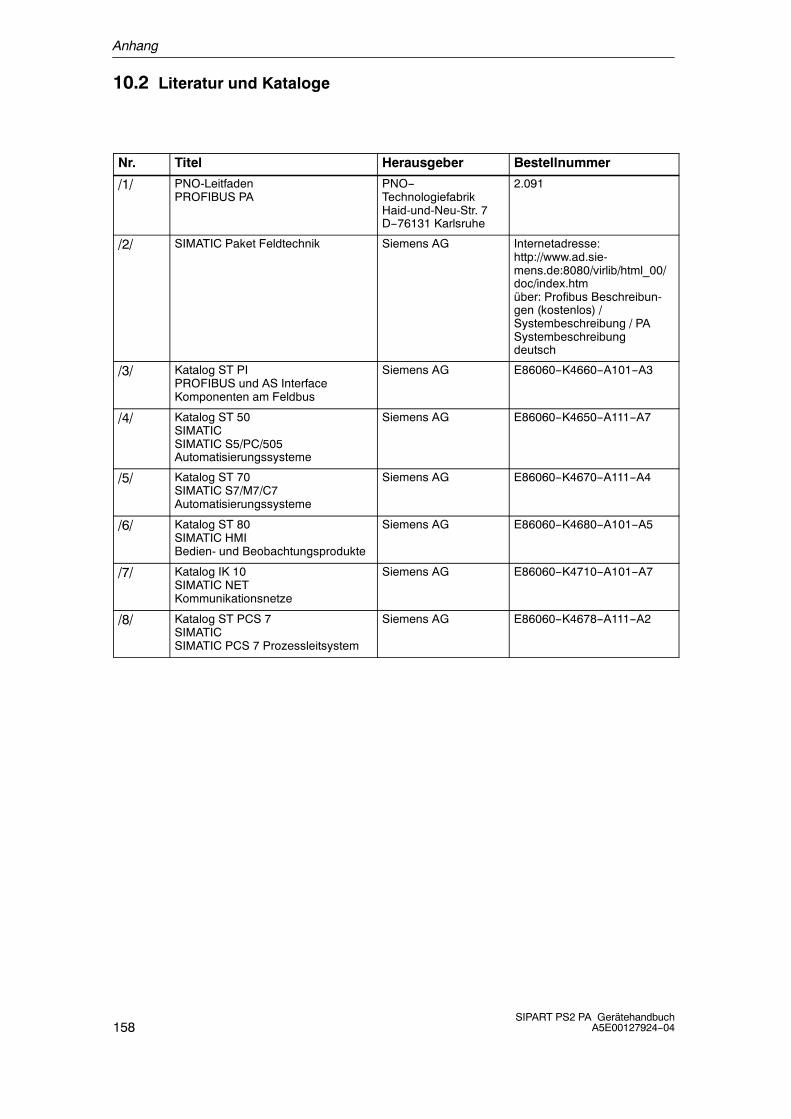
Anhang
158SIPART PS2 PA Gerätehandbuch
A5E00127924--04
10.2 Literatur und Kataloge
Nr. Titel Herausgeber Bestellnummer
/1/ PNO-LeitfadenPROFIBUS PA
PNO--TechnologiefabrikHaid-und-Neu-Str. 7D--76131 Karlsruhe
2.091
/2/ SIMATIC Paket Feldtechnik Siemens AG Internetadresse:http://www.ad.sie-mens.de:8080/virlib/html_00/doc/index.htmüber: Profibus Beschreibun-gen (kostenlos) /Systembeschreibung / PASystembeschreibungdeutsch
/3/ Katalog ST PIPROFIBUS und AS InterfaceKomponenten am Feldbus
Siemens AG E86060--K4660--A101--A3
/4/ Katalog ST 50SIMATICSIMATIC S5/PC/505Automatisierungssysteme
Siemens AG E86060--K4650--A111--A7
/5/ Katalog ST 70SIMATIC S7/M7/C7Automatisierungssysteme
Siemens AG E86060--K4670--A111--A4
/6/ Katalog ST 80SIMATIC HMIBedien- und Beobachtungsprodukte
Siemens AG E86060--K4680--A101--A5
/7/ Katalog IK 10SIMATIC NETKommunikationsnetze
Siemens AG E86060--K4710--A101--A7
/8/ Katalog ST PCS 7SIMATICSIMATIC PCS 7 Prozessleitsystem
Siemens AG E86060--K4678--A111--A2

Anhang
159SIPART PS2 PA GerätehandbuchA5E00127924--04
10.3 Bescheinigungen
Die Zertifikate sind in gesammelter Form als lose Blattsammlung derBetriebsanleitung (bzw. auf der CD) beigelegt.

Anhang
160SIPART PS2 PA Gerätehandbuch
A5E00127924--04

!
"""##$
1P
%&''()(*'*




























