Embed Size (px)
Citation preview
Zur Statik von dünnen
Flugzeug -Tragflächen
VON DK IS
EIDGENÖSSISCHEN TECHNISCHEN HOCHSCHULE IN ZÜRICH
ZUR ERLANGUNG DER
WÜRDE EINES DOKTORS DER TECHNISCHEN WISSENSCHAFTEN
GENEHMIGTE
PROMOTIONSARBEIT
VORGELEGT VON
H. SCHÜRCH
von Rohrbach (Be)
Referent: Herr Prof. E. Amstutz
Korreferent: Herr Prof. Dr. H. Ziegler
TÄ\ J
ZÜRICH 1950 DISSERTÄTIONSDRUOKEREI LEEMANN AG.
Erscheint als Mitteilung Nr. 2
aus dem Institut für Flugzeugstatik und Flugzeugbau an der
Eidgenössischen Technischen Hochschule in Zürich
Verlag Leemann Zürich
Vorwort
Die vorhegende Arbeit wurde im Frühjahr 1947, auf Anregung von Herrn
Prof. E. Amstutz begonnen.
Um die immer mehr anwachsenden Schwierigkeiten bei der statischen
Berechnung von modernen Flugzeug-Tragflächen zu überwinden, wurde nach
einer Erweiterung der statischen Methoden auf grundsätzlich flächenhaft aus¬
gedehnte Bauelemente gesucht. Dazu schien die Theorie der im Bauwesen ver¬
wendeten Flächentragwerke (Platten) die geeignete Grundlage zu sein.
An dieser Stelle möchte ich Herrn Prof. E. Amstutz für seine Anregungen
und für sein großes Interesse an der Arbeit danken. Das Institut für Flugzeug¬
statik an der E. T. H. stellte seine Versuchseinrichtungen für die experimen¬
tellen Untersuchungen zur Verfügung. Herrn Stämpfli bin ich für die Her¬
stellung der Versuchsmodelle, Herrn EgU für die druckfertige Ausführung
der Zeichnungen und Kurvenblätter zu Dank verpflichtet.
3
Leer - Vide - Empty
Inhalt
Zusammenstellung der verwendeten Zeichen 7
I. Einleitung 9
1. Grundsätzliche Überlegungen 9
2. Problemstellung 10
II. Theorie der Tragflächen mit kontinuierlichem Schubverband 11
A. Erweiterung der Plattentheorie 11
1. Voraussetzungen 11
2. Die Differentialgleichung des Schichtträgers 12
B. Einführen von statischen Schnittwerl en 15
1. Allgemeines 15
2. Krümmung des Schichtträgers 16
3. Verdrehung des Schichtträgers 19
4. Berechnung der Verformung bei gegebener Belastung 24
C. Einfluß des unvollkommenen Schubverbandes 26
1. Funktion des Schubverbandes 26
2. Diskrete Rippen 27
3. Diskrete Stege 29
D. Einfluß der Querverformung 31
1. Das querverformende Kräftesystem 31
2. Angenäherte Berechnung der Querverformung 31
3. Zusätzliche Verformung schiefachsiger Träger 34
III. Anwendungen und Versuchsergebnisse 35
A. Lösungsmethoden und Versuchstechnik 35
1. Analytische Lösung 35
2. Numerische Lösung 36
3. Versuehsanordnung 39
B. Beispiele 40
1. Verschiedene Torsionsfälle eines rechtkantigen Trägers 40
2. Berechnung des Rumpfeinflusses bei durchlaufender Torsion 43
3. Torsion eines symmetrisch verjüngten Trägers 44
4. Verschiedene Beanspruchungsfälle eines Pfeilflügels 45
5. Torsion eines Deltaflügels mit nachgiebigem Schubverband 47
Zusammenfassung 49
Summary 51
Anhang:
Tafeln I—XI 53
Literaturverzeichnis 62
5
Leer - Vide - Empty
Zusammmensteüung der verwendeten Zeichen
ax, a2, a3... Integrationskonstanten
a(x)> hx) Koeffizientenfunktionen
b [cm] Flügeltiefe, Trägerbreite
Cx [cm5] DeviationsträgheitsmomentD [cm • kg] Torsionsmoment
E [kg • cm-2] Elastizitätsmodul der Deckscheiben
Ex, Ev [kg • cm"2] Elastizitätsmodul der Stringer in x- bzw. in «/-Richtung
e [°m] Abstand des Schubmittelpunktes von der aj-Achse
F [cm2] Querschnittsfläche
/ [cm] Durchsenkung der x-Achse
/SM [cm] Durchsenkung der Schubmittelpunkte
G [kg • cm--2] Schubmodul
g [kg • cm-2] Anteil der Flächenlast, welcher die Querverformung des
Trägers hervorruft
h [cm] Trägerhöhe
Jx, Jy [cm4] Biegeträgheitsmoment in x- bzw. in «/-Richtung
Js [cm4] Schubträgheitsmoment
Jw [cm6] WölbträgheitsmomentK [cm2 • kg] Torsionsgrößek [cm • kg] Lokale Biegesteifigkeit des Trägers ohne Stringer
kr, ky [cm • kg] Lokale Biegesteifigkeit des Trägers in x- bzw. in «/-Rich¬
tung
l [cm] Spannweite, Trägerlänge
mx, my [kg] Biegemoment pro Längeneinheit, entstehend aus Nor¬
malspannungen in x- bzw. «/-Richtung
mx>r mv* [kg] Torsionsmoment pro Längeneinheit
Mx, My [cm-kg] Biegemoment in Schnitten normal zur x- bzw. «/-Achse
P [kg • cm-1] Querlast pro Längeneinheit
]> [kg • cm-2] Flächenbelastung
qx, qy [kg cm1] Scherkräfte pro Längeneinheit in z-Richtung und in
Schnitten normal zur x- bzw. «/-Achse wirkend
S [cm • kg] Schubmoment
SM SchubmittelpunktT [kg] Torsionslast pro Längeneinheit
7
U [cm2 • kg] Schubgrößeu [cm] UmfangskoordinateV [cm2 • kg] Wölbgröße
vx, vv [cm] Verschiebung in x- bzw. »/-Richtung infolge elastischer
Verformung des TrägersW [cm • kg] Wölbmoment
w [cm] Durchsenkung der elastischen Fläche
x, y, z Raumkoordinaten
Y Lösung einer DifferentialgleichungZ Störungsfunktiony Schubwinkel der Deckscheiben
A [cm] kleine Länge, Intervall
S [cm] Wandstärke
ex, ey Dehnung in x- bzw. »/-Richtungi/t Verdrehwinke]
ififtM Verdrehwinkel der Flächentangente am Schubmittel¬
punkt
<p [cm-1] Verdrehwinkel pro Längeneinheitk SteifigkeitsverhältniszahlX [cnr1] Torsionsziffer
ix Querkontraktionskoeffizient
ax,av [kg • cm'2] Normalspannung in x- bzw. »/-RichtungTxy> ryx [kg-cm-2] Schubspannung in den Deckscheiben, wirkend in Schnit¬
ten normal zur x- bzw. «/-RichtungT.rz> rgz [kg • cm-2] Schubspannung im Schubverband wirkend in Schnitten
normal zur x- bzw. »/-Richtung£, 7j [cm] Koordinaten der Trägerberandung£ Partikuläre Lösung einer Differentialgleichung
In runde Klammern gesetzte Indizes bezeichnen das Argument der betreffendenFunktion:
z.B. V{jm)'- Flächenbelastung p in Funktion der Koordinaten x und y.
In eckige Klammern gesetzte Zahlen beziehen sich auf das Literaturverzeichnisam Schluß der Arbeit.
8
I. Einleitung
1. Grundsätzliche Überlegungen
Dem Statiker stellt sich die Aufgabe, für gegebene Tragwerke bei be¬
stimmten äußeren Lasten, Materialbeanspruchung und Formänderung zu be¬
stimmen. Zur Lösung dieser Aufgabe stehen ihm zwei grundsätzlich ver¬
schiedene Wege offen:
Erstens. Das vorhegende Tragwerk kann durch gedachte Schnitte geteilt
werden. Die inneren Kräfte der Konstruktion kommen an der Schnittstelle
an die Oberfläche, werden somit zu äußeren Kräften und können dann ermit¬
telt werden durch Betrachten des Kräftegleichgewichtes (und, bei statisch un¬
bestimmtem Aufbau, der elastischen Verschiebung). Aus den so ermittelten
inneren Kräften können die elastischen Formänderungen mit Hilfe des Elasti¬
zitätsgesetzes anschließend bestimmt werden.
Dies ist im wesentlichen die Methode der Baustatik. Ihr Vorteil ist Ein¬
fachheit und logisch klarer Aufbau. Nachteilig ist, daß den baustatischen Me¬
thoden immer vereinfachende Annahmen zugrunde liegen (wie Annahmen
über Spannungsverteilung, Vernachlässigen von SchubVerformung und Quer¬
dehnung, Beschränken des Untersuchungsbereiches auf Stellen außerhalb von
Krafteinleitungen usw.). Dabei ist der Einfluß dieser Vereinfachungen bei ver¬
wickelten statischen Systemen, wie sie im modernen Schalenbau üblich sind,
nicht immer ohne weiteres abzuschätzen.
Zweitens. Die andere Methode, eine statische Aufgabe rechnerisch zu
lösen besteht darin, für das vorliegende physikalische Problem zunächst eine
mathematische Formulierung, nämlich die beherrschende Differentialgleichung
für Spannungsverlauf und Formänderung zu suchen. Aus den Lösungen dieser
Differentialgleichung sind sodann diejenigen herauszulesen, welche den vor¬
liegenden Randbedingungen entsprechen.Unter „Randbedingungen" haben wir dabei einerseits die mathematische
Formulierung des konstruktiven Aufbaus des zu untersuchenden Tragwerks
zu verstehen, nämlich die geometrischen Randbedingungen, anderseits werden
die Randbedingungen vorgegeben durch die äußeren Lasten.
Diese Betrachtungsweise ist Inhalt der Elastostatik. Der Grund, weshalb
sie in der Praxis kaum angwendet wird liegt darin, daß die mathematischen
Schwierigkeiten, insbesondere beim Aufsuchen der den Randbedingungen
entsprechenden Lösungen oft sehr groß sind.
9
2. Problemstellung
Der moderne Flugzeugbau verwendet Konstruktionselemente, auf welche
die herkömmlichen Methoden der Baustatik nicht ohne weiteres anwendbar
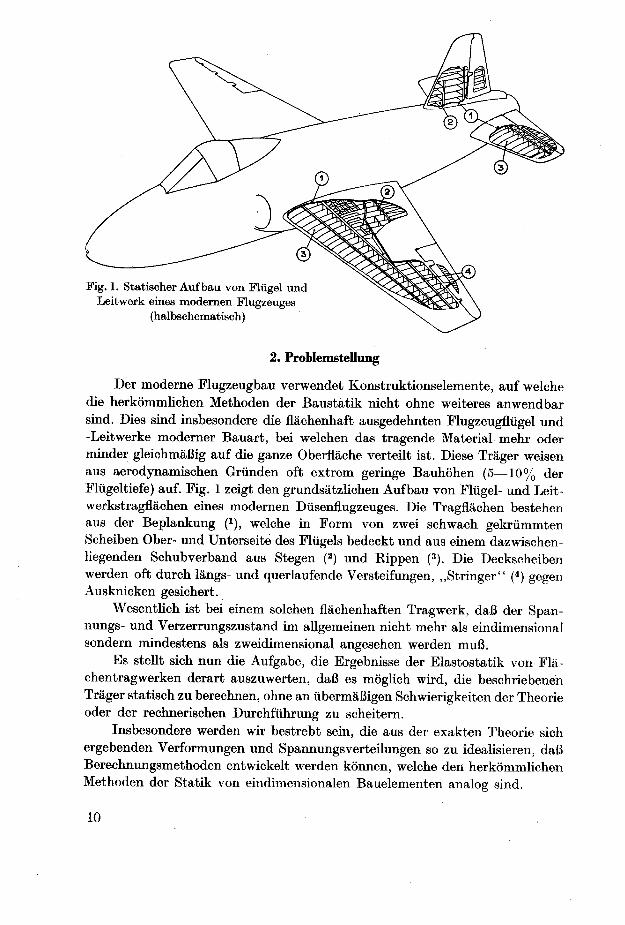
sind. Dies sind insbesondere die flächenhaft ausgedehnten Flugzeugflügel und
-Leitwerke moderner Bauart, bei welchen das tragende Material mehr oder
minder gleichmäßig auf die ganze Oberfläche verteilt ist. Diese Träger weisen
aus aerodynamischen Gründen oft extrem geringe Bauhöhen (5—10% der
Flügeltiefe) auf. Fig. 1 zeigt den grundsätzlichen Aufbau von Flügel- und Leit¬
werkstragflächen eines modernen Düsenflugzeuges. Die Tragflächen bestehen
aus der Beplankung (1), welche in Form von zwei schwach gekrümmtenScheiben Ober- und Unterseite des Flügels bedeckt und aus einem dazwischen¬
liegenden Schubverband aus Stegen (2) und Rippen (3). Die Deckscheiben
werden oft durch längs- und querlaufende Versteifungen, „Stringer" (4) gegenAusknicken gesichert.
Wesentlich ist bei einem solchen flächenhaften Tragwerk, daß der Span-nungs- und Verzerrungszustand im allgemeinen nicht mehr als eindimensional
sondern mindestens als zweidimensional angesehen werden muß.
Es stellt sich nun die Aufgabe, die Ergebnisse der Elastostatik von Flä-
chentragwerken derart auszuwerten, daß es möglich wird, die beschriebenen
Träger statisch zu berechnen, ohne an übermäßigen Schwierigkeiten der Theorie
oder der rechnerischen Durchführung zu scheitern.
Insbesondere werden wir bestrebt sein, die aus der exakten Theorie sich
ergebenden Verformungen und Spannungsverteilungen so zu idealisieren, daß
Berechnungsmethoden entwickelt werden können, welche den herkömmlichen
Methoden der Statik von eindimensionalen Bauelementen analog sind.
10
II. Theorie der Tragflächen mit kontinuierlichem Schubverband
(Schichtträger)
A. ERWEITERUNG DER PLATTENTHEORIE
1. Voraussetzungen
Angelehnt an die Elastostatik der massiven Platten, [1], [2], [3] können
die Differentialgleichungen von Flächentragwerken abgeleitet werden, die den
im Flugzeugbau vorkommenden statischen Systemen von Flügeln und Leit¬
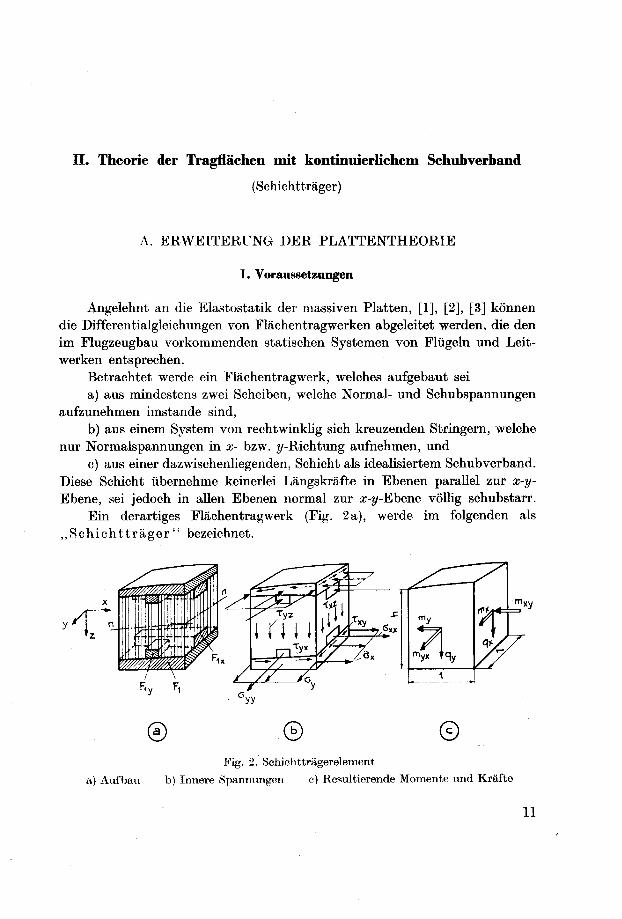
werken entsprechen.Betrachtet werde ein Flächentragwerk, welches aufgebaut sei
a) aus mindestens zwei Scheiben, welche Normal- und Schubspannungenaufzunehmen imstande sind,
b) aus einem System von rechtwinklig sich kreuzenden Stringern, welche
nur Normalspannungen in x- bzw. »/-Richtung aufnehmen, und
c) aus einer dazwischenliegenden, Schicht als idealisiertem Schubverband.
Diese Schicht übernehme keinerlei Längskräfte in Ebenen parallel zur x-y-
Ebene, sei jedoch in allen Ebenen normal zur z-y-Ebene völlig schubstarr.
Ein derartiges Flächentragwerk (Fig. 2a), werde im folgenden als
„Schichtträger" bezeichnet.
© © ©
Fig. 2. Schichtträgerelement
a) Aufbau b) Innere Spannungen c) Resultierende Momente und Kräfte
11
Im weitern werden vom Schichtträger die in der Plattentheorie gebräuch¬lichen Voraussetzungen gemacht, nämlich:
a) Die belastenden äußeren Kräfte sollen normal zur Mittelebene des
Trägers wirken.
b) Die Dicke der Deckscheiben soll so klein sein, daß in diesen mit ge¬
nügender Annäherung mit einem zweidimensionalen Spannungszustand ge¬rechnet werden kann, andrerseits soll die Gesamtdicke des Trägers so großsein, daß sich unter Querbelastung kein Membranspannungszustand einstellt.
c) Die Neigung der Deckscheiben und Stringer gegenüber der ^-«/-Ebene
(Mittelebene) sei überall so gering, daß die z-Komponenten ihrer Spannungenvernachlässigbar klein bleiben.
d) Die Flächennormale soll bei der Deformation erhalten bleiben (dieseBedingung erfordert den schubstarren, kontinuierlichen Schubverband).
e) Es wird vorausgesetzt, der Schichtträger enthalte eine neutrale Fläche
(nn), welche bei jeder Querbelastung unverzerrt bleibe.
Endlich werden die üblichen Voraussetzungen der klassischen Elasto-
statik getroffen, nämlich:
f) Homogenes, isotropes Material.
g) Proportionalität von Spannung und Dehnung (Hook'sches Gesetz).
2. Die Differentialgleichung des Schichtträgers
Die folgenden Ableitungen sind analog zu den Überlegungen, welche zur
Formulierung der Plattengleichung führen.
Die an einem Element von der Seitenlänge dx = dy — 1 des Schichtträgersangreifenden Spannungen (Fig. 2b) lassen sich zu Spannungsmomenten und
Querkräften zusammenfassen (Fig. 2 c):
Die Spannungsmomente, bezogen auf die Längeneinheit, lauten:
mr = $zardz + \zaxrdz
»>„ =Szavdz + jza dz \ (1)f\
'
Fh)
mxy = m'/.r = J z Txy ^zFi
dabei bedeuten:
Fx : Querschnittsfläche der Deckscheiben pro LängeneinheitFlx: Querschnittsfläche der in ^-Richtung laufenden Stringerpro LängeneinheitFly: Querschnittsfläche der in ^-Richtung laufenden Stringer pro Längeneinheiterr, ay, ttv bzw. <jxa., ayy: Spannungen in den Deckscheiben bzw. Stringern.
12
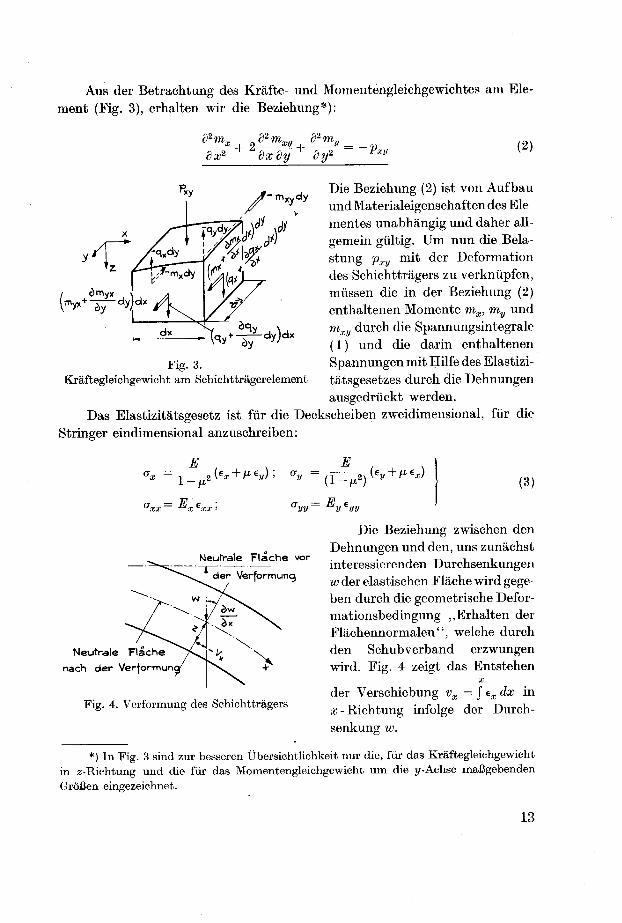
Aus der Betrachtung des Kräfte- und Momentengleichgewichtes am Ele¬
ment (Fig. 3), erhalten wir die Beziehung*):
d2mT n82m„. b2m„—
*_|_ 2 ^ h v-
= — p8x2 dxdy 8y2
x(2)
('dmyx
•yx"
Die Beziehung (2) ist von Aufbau
undMaterialeigenschaftendes Ele -
mentes unabhängig und daher all¬
gemein gültig. Um nun die Bela¬
stung fxy mit der Deformation
des Schichtträgers zu verknüpfen,müssen die in der Beziehung (2)
enthaltenen Momente mx, my und
mxy durch die Spannungsintegrale
(1) und die darin enthaltenen
Spannungen mitHilfe des Elastizi¬
tätsgesetzes durch die Dehnungen
ausgedrückt werden.
Das Elastizitätsgesetz ist für die Deckscheiben zweidimensional, für die
Stringer eindimensional anzuschreiben:
Fig. 3.
Kräftegleichgewicht am Schichtträgerelement
E,(ex + fiey); ay
E
(1-M2(ey + Pex)
.= E„ .= E„
(3)
Neutrale Flache vor
Verformung
Neutrale
nach der Verformury
Fig. 4. Verformung des Schichtträgers
Die Beziehung zwischen den
Dehnungen und den, uns zunächst
interessierenden Durchsenkungen
w der elastischen Fläche wird gege¬
ben durch die geometrische Defor¬
mationsbedingung „Erhalten der
Flächennormalen", welche durch
den Schubverband erzwungen
wird. Fig. 4 zeigt das Entstehen
X
der Verschiebung vx = f ex dx in
x- Richtung infolge der Durch¬
senkung w.
*) In Fig. 3 sind zur besseren Übersichtlichkeit nur die, für das Kräftegleichgewicht
in z-Richtung und die für das Momentengleichgewicht um die ?/-Achse maßgebenden
Größen eingezeichnet.
13
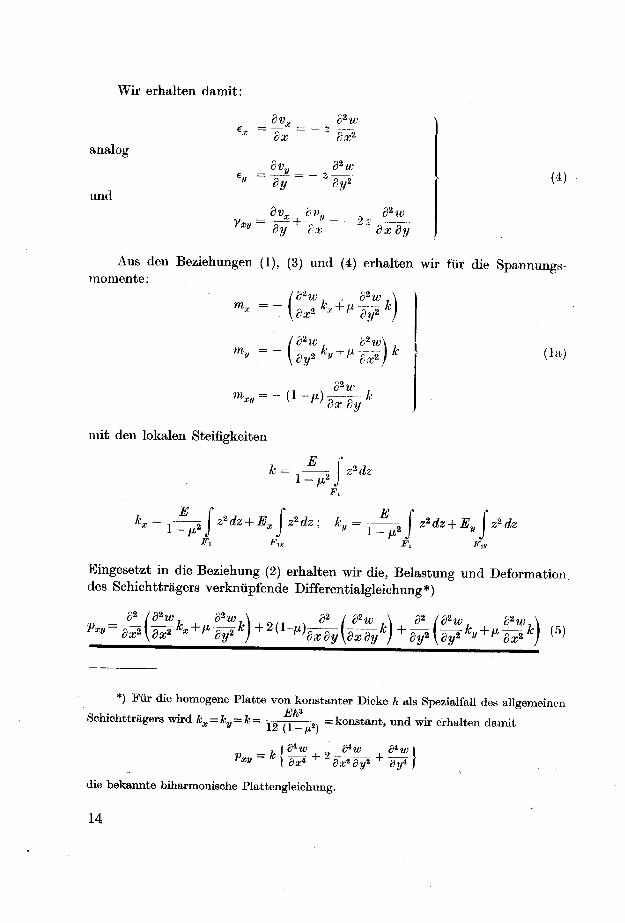
Wir erhalten damit:
analog
und
8x
dy
(
82w
8x2
82w
Jy2
8vr bv„^
d2wrxy "
dy 8x~~
~~
"~
dxJy
(4)
Aus den Beziehungen (1), (3) und (4) erhalten wir für die Spannungs¬momente:
dy2m,. 8x2k' + V »Ql2k)!
/8%w o2w\ ,
n \8*w
i
l(la)
mit den lokalen Steifigkeiten
Fi
Jcx = YZTiZ*dz + Ex z*dz; ky = —-~2
z2dz + Ey z2dz
Eingesetzt in die Beziehung (2) erhalten wir die, Belastung und Deformationdes Schichtträgers verknüpfende Differentialgleichung*)
82 (82w1 82wAn/1 ,
82 ( 82w ,\ d2 (B^w, 82w1\ ,„
*) Für die homogene Platte von konstanter Dicke h als Spezialfall des allgemeinen
Schichtträgers wird kx = k =k=.
2= konstant, und wir erhalten damit
die bekannte biharmonische Plattengleichung.
14
B. EINFÜHREN VON STATISCHEN SCHNITTWERTEN
1. Allgemeines
Die Schichtträgergleichung (5) gibt den Zusammenhang zwischen Be¬
lastung p^y) und der Deformation w^y Bei bekannten Randbedingungen
(Einspannungsverhältnissen) kann zu jeder Belastung die zugehörige Defor¬
mation durch Auflösen von (5) gefunden werden. Aus der Verformung w
können die Spannungsmomente mx, my, mXIJ nach (la) berechnet und aus
diesen die an jeder Stelle wirkenden Spannungen ermittelt werden. Damit ist
die statische Aufgabe „Berechnung von Verformung und Beanspruchung für
eine vorgegebene Belastung" gelöst.Es zeigt sich nun, daß eine direkte Lösung der partiellen Differential¬
gleichung (5) welche von 4. Ordnung ist und im allgemeinen nichtkonstante
Koeffizienten aufweist, praktisch außerordentUch zeitraubend und schwierigist. Es versagen insbesondere auch die numerischen Methoden der Differen¬
zenrechnung, wie sie in der Plattenberechnung mit Erfolg angewendet werden
[Marcus], da bei den praktisch vorkommenden Randbedingungen und Sym¬metrieverhältnissen von Plugzeugtragflächen sehr umfangreiche Gleichungs¬
systeme entstehen.
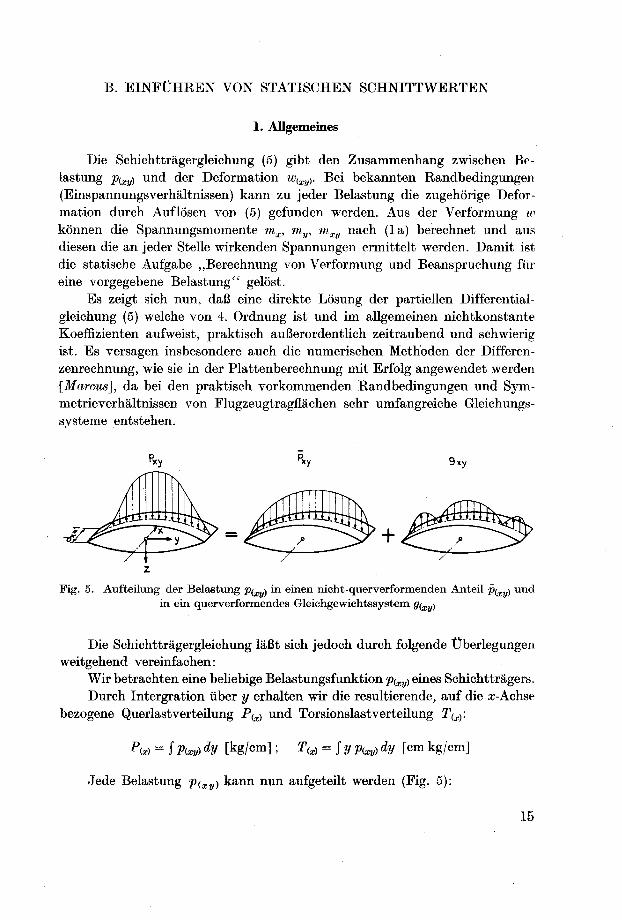
Fig. 5. Aufteilung der Belastung p^) in einen nicht-querverformenden Anteil Pi^y) und
in ein querverformendes Gleichgewichtssystem g^ )
Die Schichtträgergleichung läßt sich jedoch durch folgende Überlegungenweitgehend vereinfachen:
Wir betrachten eine beliebige Belastungsfunktion p^ eines Schichtträgers.Durch Intergration über y erhalten wir die resultierende, auf die x-Achse
bezogene Querlastverteilung P^ und Torsionslastverteilung T(x):
p(x) = fPwdy [kg/cm]; T(x) = f </ p^dy [cm kg/cm]
Jede Belastung P(xy) kann nun aufgeteilt werden (Fig. 5):
15
a) in eine Belastung pixy) welche gleiche Quer- und Torsionslast-Vertei¬
lung wie p^y) aufweist und außerdem die Eigenschaft hat, keine Krümmungdes Trägers in ^-Richtung hervorzurufen und
b) in eine Belastung g^ für welche P(a.) und T^ verschwinden, welche
demnach über jeden, durch zwei benachbarte Schnitte x = konst. begrenztenStreifen, Gleichgewichtssystem bildet. *)
Es ist anzunehmen, daß der Einfluß des querverformenden Gleichgewichts¬systems g^y) auf die mittlere Durchsenkung und Verdrehung der einzelnen
Querschnitte in vielen Fällen gering ist. Dieser Einfluß soll daher vorderhand
vernachlässigt werden. Die Auswirkung der Querverformung wird im Ab¬
schnitt HD gesondert behandelt werden.
Mit dieser Vereinfachung wird die elastische Fläche w^y) des Trägers zu
einer Regelfläche und die partielle Differentialgleichung (5) zwischen Flächen¬
last und Durchsenkung kann in nicht-partielle Differentialgleichungen über¬
geführt werden. Es ist naheliegend, die nunmehr durch Unverformbarkeit
ausgezeichneten Querschnitte x = konstant als Bezugsquerschnitte zu wählen,und die in ihnen enthaltenen statisch wirksamen Flächen zu geeigneten sta¬
tischen Schnitt-Größen zusammenzufassen. In gleicher Weise sollen die in
diesen Querschnitten wirkenden Spannungen zu Schnittkräften und Schnitt¬
momenten zusammengefaßt werden. Dabei ist es zweckmäßig, Krümmungund Verdrehung des Trägers gesondert zu betrachten.
2. Krümmung des Schichtträgers
Als elastische Fläche des gekrümmten Trägers wird eine Regelfläche an¬
genommen, deren Erzeugende parallel zur y-Achse verlaufen (Fig. 6). Die
Durchsenkungen f^) sind damit von y unabhängig, die elastische Fläche wird
beschrieben durch den Ansatz:
w = /(,,) (7)
*) Dabei ist zu bemerken, daß die Flächenlasten P(xy\, V{xV) und 9(xU) sieb an den
Rändern des Trägers zu Eckkräften, Randscherkräften und Randtorsions- und Biege¬momenten „verdichten" können, wenn die lokale Steifigkeit des Trägers bzw. deren Ab¬
leitungen an der Berandung endliche Werte annehmen. Diese Randbedingungen sind
somit in den Belastungssystemen P(xy), V(Xy) un^ 9(xy) bereits enthalten und bedürfen
daher nicht einer gesonderten Untersuchung wie sie in der Theorie der Platten von kon¬
stanter Dicke üblich ist. Bei der Berechnung der einzelnen Belastungssysteme müssen
dann allerdings die Unstetigkeitsstellen durch Grenzübergänge überdrückt werden,
(siehe z. B. Seiten 17, 20, 32).Es läßt sich im übrigen leicht verifizieren, daß die, durch Grenzübergang an den
Hand-Unstetigkeiten eines Trägers von konstanter Steifigkeit kx = k erhaltenen Rand¬
belastungen aus P(xyy genau mit denn bekannten Eckkräften, Randscherkräften und
Randmomenten der Plattentheorie übereinstimmen.
16
Mit diesem Ansatz erhalten wir für die Flächenlast aus (5):
PM-irhY+nr-o.« (8)
(Im folgenden wird der Akzent ' als Abkürzung für — verwendetdx
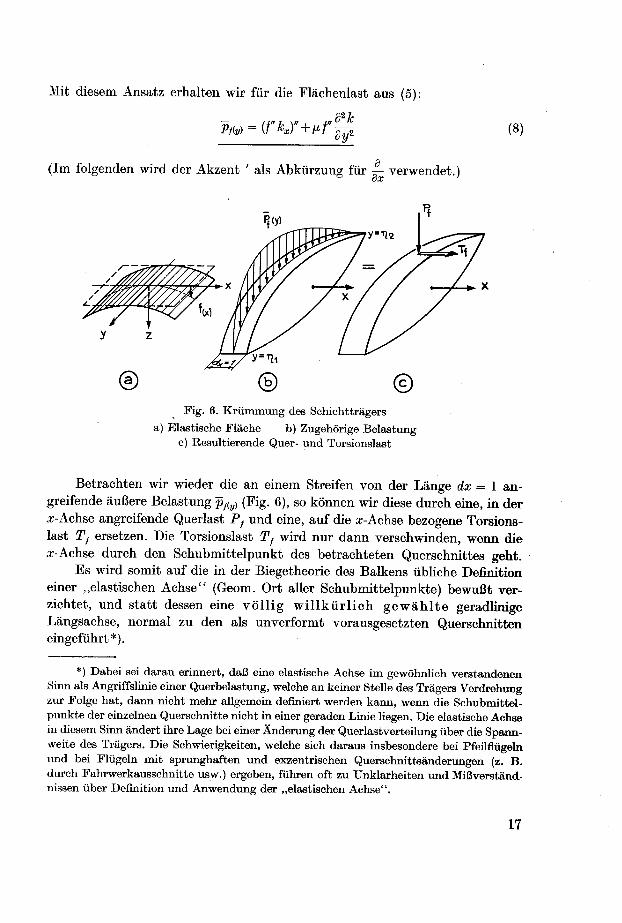
Fig. 6. Krümmung des Schichtträgers
a) Elastische Fläche b) Zugehörige Belastungc) Resultierende Quer- und Torsionslast
Betrachten wir wieder die an einem Streifen von der Länge dx = 1 an¬
greifende äußere Belastung p~f(y) (Fig. 6), so können wir diese durch eine, in der
x-Achse angreifende Querlast Pf und eine, auf die cc-Achse bezogene Torsions¬
last Tf ersetzen. Die Torsionslast Tf wird nur dann verschwinden, wenn die
x-Achse durch den Schubmittelpunkt des betrachteten Querschnittes geht.Es wird somit auf die in der Biegetheorie des Balkens übliche Definition
einer „elastischen Achse" (Geom. Ort aller Schubmittelpunkte) bewußt ver¬
zichtet, und statt dessen eine völlig willkürlich gewählte geradlinigeLängsachse, normal zu den als unverformt vorausgesetzten Querschnitten
eingeführt*).
*) Dabei sei daran erinnert, daß eine elastische Achse im gewöhnlich verstandenen
Sinn als Angriffslinie einer Querbelastung, welche an keiner Stelle des Trägers Verdrehungzur Folge hat, dann nicht mehr allgemein definiert werden kann, wenn die Schubmittel¬
punkte der einzelnen Querschnitte nicht in einer geraden Linie liegen. Die elastische Achse
in diesem Sinn ändert ihre Lage bei einer Änderung der Querlastverteilung über die Spann¬weite des Trägers. Die Schwierigkeiten, welche sich daraus insbesondere bei Pfeilflügelnund bei Flügeln mit sprunghaften und exzentrischen Querschnittsänderungen (z. B.
durch Fahrwerkausschnitte usw.) ergeben, führen oft zu Unklarheiten und Mißverständ¬
nissen über Definition und Anwendung der „elastischen Achse".
17
Durch Integration*) über y erhalten wir die bei „reiner Krümmung" ent¬
stehende Querlastverteilung
Pf =lfto)dy = (f'h.dy)" = (f'EJJ (9)Vi Vi
und die Torsionslastverteilung
T, =]ypMdy = {i")ykxdy)" = (f'EGJ' (10)Vi Vi
Als für die Querbelastung maßgebende statische Größe erhalten wir somit
die Biegesteifigkeit des Schichtträgers:
EJX Jfkxdy =^J zHF + Ex J z*dFx [kg-cm*]Vi i--^ F Fx
wobei -F die Querschnittsfläche der Deckscheiben, Fx die der Stringer im be¬
trachteten Querschnitt bedeuten (s. auch Fig. 2a).Diese unterscheidet sich von der gebräuchlichen Biegesteifigkeit E E- J
des Balkens nur durch den Faktor = = beim Anteil der Deckscheiben. Dieser
Faktor stellt die Zunahme der Steifigkeit infolge behinderter Querverformungdar.
Für die aus reiner Krümmung entstehende Torsionslast erhalten wir eine
neu zu definierende „Deviationssteifigkeit"
E Cx = ]' y kx dy = —2 Syz*dF + Ex$y z* dFx [kg • cm»]V* 1-/* F Fx
Diese charakterisiert die Abweichung des Schwerpunktes der &X-Verteilungvon der gewählten «-Achse (siehe auch Fig. 8). Der Schwerpunkt der Trägheits¬
momentenverteilung kx entspricht dem gebräuchlichen Schubmittelpunkt.
Liegt der Schubmittelpunkt in der «-Achse, so wird ECX = 0.
*) Der zweite Ausdruck der rechten Seite von (8) verschwindet bei der Integra-dk dVc
tion über die Grenzen, innerhalb welchen Je, ,-und
-,—5 einen endlichen Wert aufweisen.dy dy1
Bei der Integration ist zu beachten, daß diese über evtl. Unstetigkeiten in k oder
,am Rand hinausgeführt werden muß, da in solchen Fällen konzentrierte Randmomente
oder Randscherkräfte entstehen welche einen Teil der Belastungsfunktion p(xy)bilden.
Durch ein «Ausrunden» der Je-Verteilung an den Unstetigkeitsstellen in einem be-
d2fcliebig kleinen Bereich wird die Funktion
-=—^ integrierbar, ohne daß dadurch ein, für das
statische Verhalten des Trägers wesentlicher Eingriff gemacht würde. Das Verschwin-
>h+ d^fo 1i+ flfcden der Integrale f -=—= dy und f -=- dy wird damit offensichtlich.
18
Durch Integration der Lasten Pf bzw. Tf über die Längsachse,' von einem
zweckmäßig gewählten Nullpunkt x0 aus, erhalten wir in bekannter Weise
Querkraft Q und Biegemoment M bzw. das Torsionsmoment D:
(IIa)
(IIb)
(12a)
bzw.:
Q, = - J" Ptdx = -(f"EJx)'
Mt =
X
$ Qtdx = -f"EJx
Dt = -]Ttdx = -(f'ECJ
Es erweist sich als zweckmäßig, eine zum Biegemoment analoge Größe
X
K =\Ddx zu definieren, welche als Torsionsgröße bezeichnet und vorerst
rein formal eingeführt sei:
Kf = ]Dfdx = -f"ECx (12b)
3. Verdrehung des Schichtträgers
Die nämUchen Überlegungen, die zur Behandlung des gekrümmten Trägers
führen, können auch auf Torsionsprobleme angewendet werden.
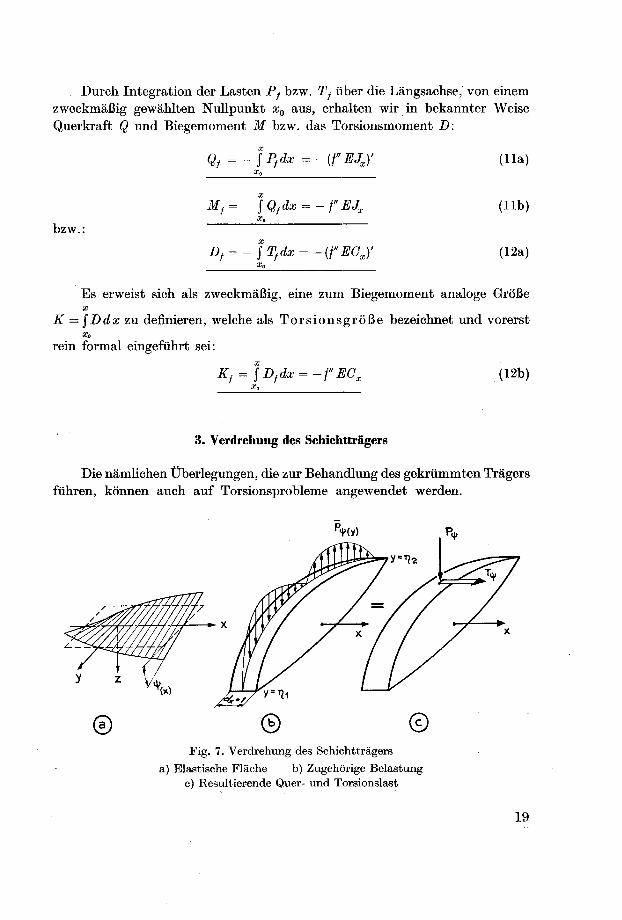
Fig. 7. Verdrehung des Schichtträgers
a) Elastische Fläche b) Zugehörige Belastung
c) Resultierende Quer- und Torsionslast
19
Die elastische Fläche des verdrehten Trägers wird wieder als Regelfläche
angesetzt von der Form
w = y4>M (Fig. 7a) (13)
Es wird demnach als „reine Verdrehung" eine Verformung bezeichnet, bei
welcher die Punkte einer wiederum beliebig gewählten, geradlinigen Längs¬
achse keine Durchsenkung erfahren, d. h. es wird die gewählte x-Achse als
Drehachse vorgeschrieben.
Mit dem Ansatz (13) erhalten wir aus (5):
p*w = (^y*.)"+2(i-/*)(f^)' + /*(2^+^y^) (i*)
Die Belastung p^ am Streifen (Fig. 7 b, c) kann wieder reduziert werden
auf eine Querlast P^ und eine Torsionslast T^ infolge der reinen Verdrehung tfnx).
Die Integration über y ergibt:
p+ =1 n^y = (f? yhdyy = (yEcxy (15)
3V =]2/^)%= (-A"]2/2^^)"-2(l-^)(f?*dy)' = (ftfJw)*-(f GW (16)
Wie beim gekrümmten Träger können die die Steifigkeit charakterisieren¬
den Integrale als Produkt aus einem Flächenträgheitsmoment und einer
Elastizitätskonstanten angeschrieben werden, nämlich:
Die Wölbtorsionssteifigkeit
EJW = T 2/2 K dy = j^—t J */2 z2 dF + EJ y* z* dFx [kg/cm*]
und die Schubtorsionssteifigkeit
.Vi E
ÖJ8 = 2(l-^)/fcdy = 2(l-^)- ^zUF^AG^zHF [kg/cm2]
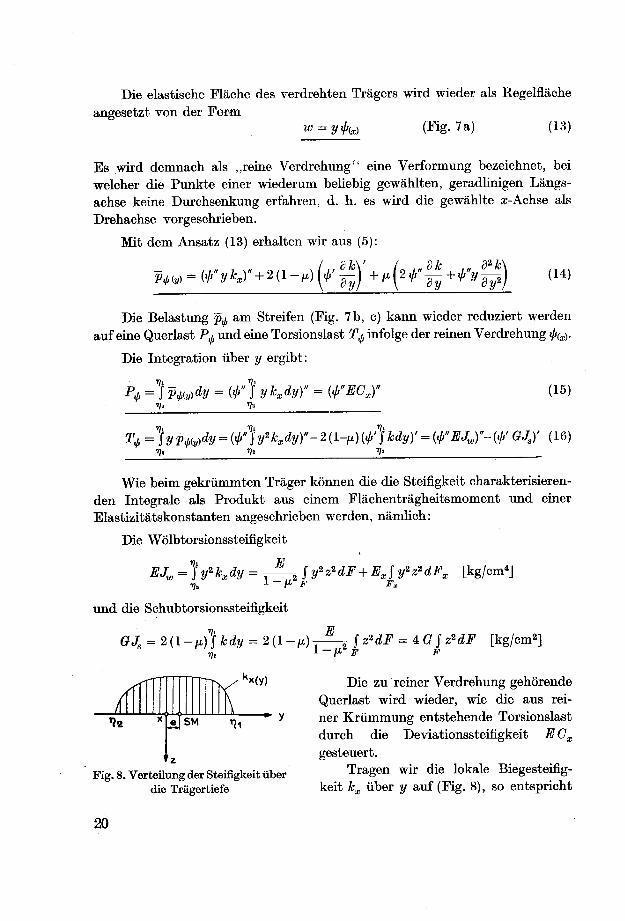
Fig. 8. Verteilung der Steifigkeit über
die Trägertiefe
Die zu reiner Verdrehung gehörende
Querlast wird wieder, wie die aus rei¬
ner Krümmung entstehende Torsionslast
durch die Deviationssteifigkeit EGX
gesteuert.
Tragen wir die lokale Biegesteifig-keit kx über y auf (Fig. 8), so entspricht
20
Vi
EJX — J kxdy der Fläche von k^17.
ECX = ] ykxdy dem statischen Moment von k^y)
EJW — ] y2kxdy dem Trägheitsmoment von kx(y)V'
Der Schwerpunkt der ^-Verteilung entspricht dabei dem Schubmittel¬
punkt SM des Querschnittes. Das Schubtorsionsträgheitsmoment Js entspricht
dem Bredt'sehen Trägheitsmoment für die Torsion bei unbehinderter Quer¬
schnittsverwölbung .
Durch Integration über die Längsachse erhalten wir wieder Querkraft
und Biegemoment bzw. Torsionsmoment und Torsionsgröße:
bzw.,
-\P4ldx =
X
J" Q^dx =
-(<I»'ecxy (17a)
(17b)
D* = -JT+dx=--WEJJ +#QJS (18a)
Kj, —X
$Dj,dx= --FEJ„+Jil,'GJadxXq
(18b)
Das in einem Querschnitt übertragene Torsionsmoment D^ setzt sich
somit in verschiedener Weise ab, einmal als
Schubmoment S = ifi' GJS andrerseits als
Wölbmoment W+ = - (f E Jw)'
In analoger Weise besteht die Torsionsgröße K aus zwei Komponenten,
derX X
Schubgröße U = J Sdx = J" i/t' GJsdx und der
Xq Xff
Wölbgröße V+ = ]wdx= -f EJWXq
Fig. 9 und 10 veranschaulichen die physikalische Bedeutung der hier
eingeführten Begriffe an zwei verschiedenartig wirkenden Torsionsträgern.
Bei beiden handelt es sich um einseitig eingespannte Träger, welche an ihrem
freien Ende durch ein Torsionsmoment D beansprucht werden.
21
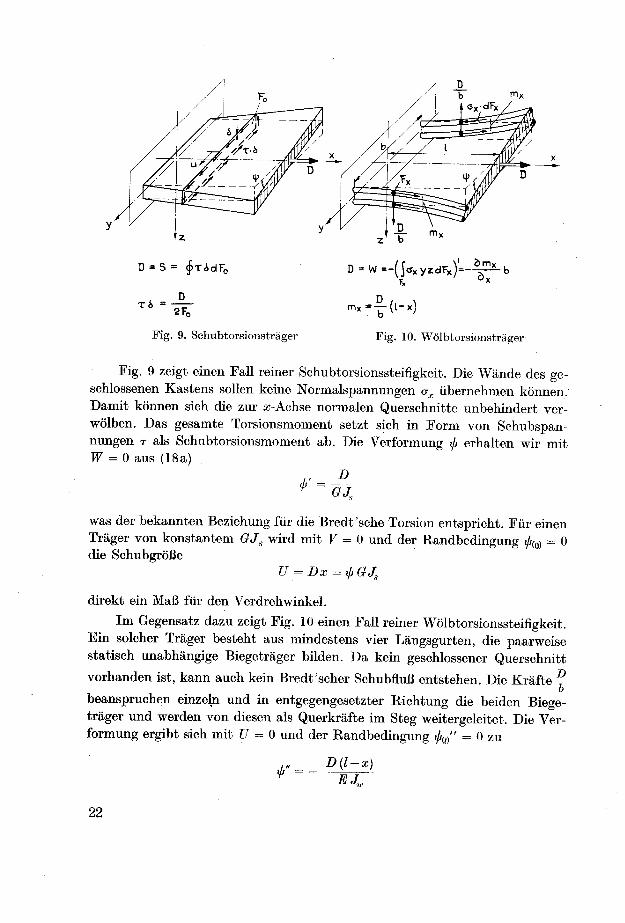
D = S = <j>TidF0
D
D = W =-( jtfx yzdFx)'=~^- b
Ti2FQ
mx =_jr(l~x)
Fig. 9. Sohubtorsionsträger Fig. 10. Wölbtorsionsträger
Fig. 9 zeigt einen Fall reiner Schubtorsionssteifigkeit. Die Wände des ge¬schlossenen Kastens sollen keine Normalspannungen ax übernehmen können.
Damit können sich die zur x-Achse normalen Querschnitte unbehindert ver¬
wölben. Das gesamte Torsionsmoment setzt sich in Form von Schubspan¬nungen t als Schubtorsionsmoment ab. Die Verformung ip erhalten wir mit
W = 0 aus (18a)
was der bekannten Beziehung für die Bredt'sehe Torsion entspricht. Für einen
Träger von konstantem GJS wird mit V = 0 und der Randbedingung ^(0) = 0
die Schubgrößeü = Dx = ijj G Js
direkt ein Maß für den Verdrehwinkel.
Im Gegensatz dazu zeigt Fig. 10 einen Fall reiner Wölbtorsionssteifigkeit.Ein solcher Träger besteht aus mindestens vier Längsgurten, die paarweisestatisch unabhängige Biegeträger bilden. Da kein geschlossener Querschnitt
vorhanden ist, kann auch kein Bredt'scher Schubfluß entstehen. Die Kräfte,
beanspruchen einzeln und in entgegengesetzter Richtung die beiden Biege¬träger und werden von diesen als Querkräfte im Steg weitergeleitet. Die Ver¬
formung ergibt sich mit U = 0 und der Randbedingung 0Ö)" = 0 zu
fD(l-x)
22
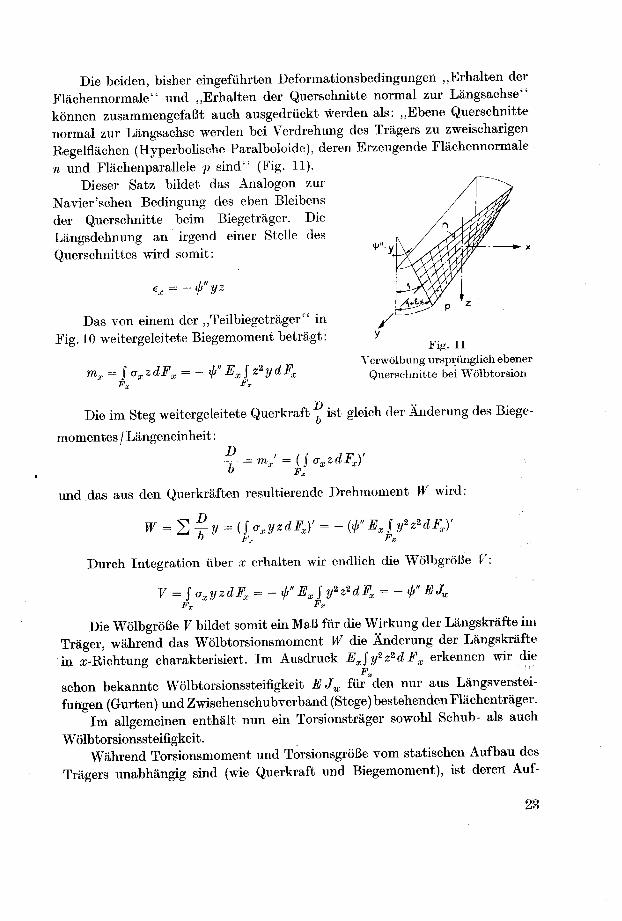
Die beiden, bisher eingeführten Deformationsbedingungen „Erhalten der
Flächennormale" und „Erhalten der Querschnitte normal zur Längsachse"
können zusammengefaßt auch ausgedrückt werden als: „Ebene Querschnitte
normal zur Längsachse werden bei Verdrehung des Trägers zu zweischarigen
Regelflächen (Hyperbolische Paralboloide), deren Erzeugende Flächennormale
n und Flächenparallele f sind"' (Fig. 11).
Dieser Satz bildet das Analogon zur
Navier'sehen Bedingung des eben Bleibens
der Querschnitte beim Biegeträger. Die
Längsdehnung an irgend einer Stelle des
Querschnittes wird somit:
ex = -</<" yz
Das von einem der „Teilbiegeträger" in
Fig. 10 weitergeleitete Biegemoment beträgt:
mx = J axzdFx = - f Ex\z*ydFxFx Fx
Die im Steg weitergeleitete Querkraft -, ist gleich der Änderung des Biege¬
momentes / Längeneinheit:
u=mx' = (^xzdFx)'o Fx
und das aus den Querkräften resultierende Drehmoment W wird:
^ = Sy!/ = {fwzdFJ = - WExSy*z*dFJ0 F, Fx
Durch Integration über x erhalten wir endlich die Wölbgröße V:
V = J oxyzdFr = - f Ex J y*z*dFx = - f EJWFx Fx
Die Wölbgröße V bildet somit ein Maß für die Wirkung der Längskräfte im
Träger, während das Wölbtorsionsmoment W die Änderung der Längskräfte
in x-Richtung charakterisiert. Im Ausdruck Ex\yizidFx erkennen wir die
Fx
schon bekannte Wölbtorsionssteifigkeit EJW für den nur aus Längsverstei¬
fungen (Gurten) und Zwischenschubverband (Stege)bestehendenFlächenträger.
Im allgemeinen enthält nun ein Torsionsträger sowohl Schub- als auch
Wölbtorsionssteifigkeit.Während Torsionsmoment und Torsionsgröße vom statischen Aufbau des
Trägers unabhängig sind (wie Querkraft und Biegemoment), ist deren" Auf-
y
Fig. 11
Yerwölbuiig ursprünglich ebener
Quersel mitte bei Wölbtorsion
23
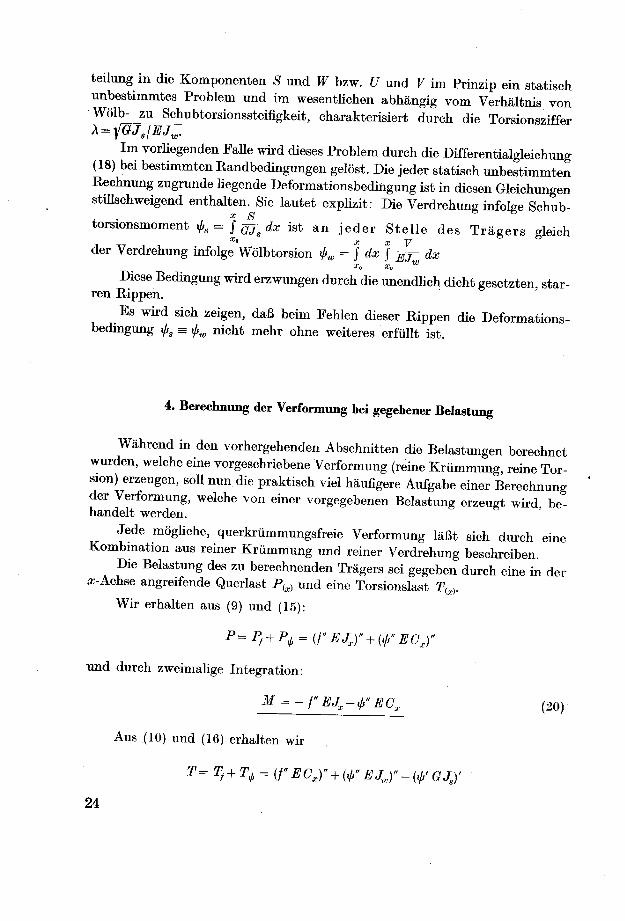
teilung in die Komponenten 8 und W bzw. U und V im Prinzip ein statischunbestimmtes Problem und im wesentlichen abhängig vom Verhältnis von
Wölb- zu Schubtorsionssteifigkeit, charakterisiert durch die Torsionsziffer
Im vorliegenden Falle wird dieses Problem durch die Differentialgleichung(18) bei bestimmten Randbedingungen gelöst. Die jeder statisch unbestimmtenRechnung zugrunde liegende Deformationsbedingung ist in diesen Gleichungenstillschweigend enthalten. Sie lautet explizit: Die Verdrehung infolge Schub-
x Storsionsmoment ifis = \ qJ dx ist an jeder Stelle des Trägers gleich
«oS
X x Vder Verdrehung infolge Wölbtorsion *fiw - j dx f jjj^ dx
Xq Xq
Diese Bedingung wird erzwungen durch die unendlich dicht gesetzten, star¬ren Rippen.
Es wird sich zeigen, daß beim Fehlen dieser Rippen die Deformations-bedingung ips = ifiw nicht mehr ohne weiteres erfüllt ist.
4. Berechnung der Verformung bei gegebener Belastung
Während in den vorhergehenden Abschnitten die Belastungen berechnetwurden, welche eine vorgeschriebene Verformung (reine Krümmung, reine Tor¬sion) erzeugen, soll nun die praktisch viel häufigere Aufgabe einer Berechnungder Verformung, welche von einer vorgegebenen Belastung erzeugt wird, be¬handelt werden.
Jede mögliche, querkrümmungsfreie Verformung läßt sich durch eineKombination aus reiner Krümmung und reiner Verdrehung beschreiben.
Die Belastung des zu berechnenden Trägers sei gegeben durch eine in der«-Achse angreifende Querlast P^ und eine Torsionslast T(xy
Wir erhalten aus (9) und (15):
p=pt + Pt = (t"EJxy + w ecxy
und durch zweimalige Integration:
M = -f'EJx-pEC1 (20)
Aus (10) und (16) erhalten wir
t= t,+t^ = (f"Ecxy+(yEjwy-wGjsy
24
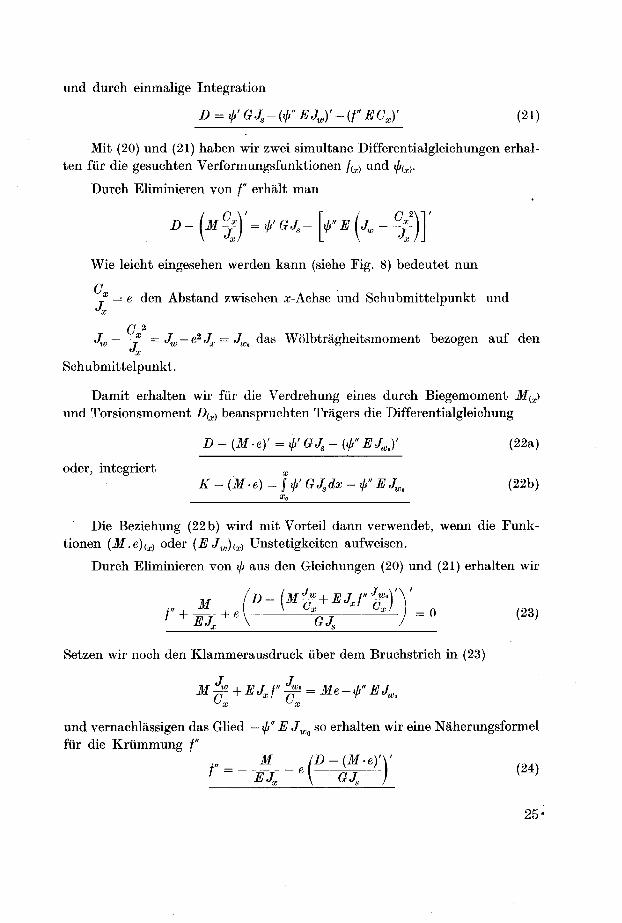
und durch einmalige Integration
D = VQJa-WEJJ-(f'ECx)' (21)
Mit (20) und (21) haben wir zwei simultane Differentialgleichungen erhal¬
ten für die gesuchten Verformungsfunktionen /<x) und ip(xy
Durch Eliminieren von /" erhält man
D- (M°£j'=fGJs- \^"e(jw - °£jWie leicht eingesehen werden kann (siehe Fig. 8) bedeutet nun
~Y= e den Abstand zwischen x-Achse und Schubmittelpunkt und
Jx
G 2
Jw — -y-= Jw — e2Jx = Jm das Wölbträgheitsmoment bezogen auf den
Schubmittelpunkt.
Damit erhalten wir für die Verdrehung eines durch Biegemoment M(x>und Torsionsmoment Z>(x) beanspruchten Trägers die Differentialgleichung
D-(M.ey = >lj'GJs-(fEJwJ' (22a)
oder, integriert x
K - (M • e) = ff GJsdx - f E Ju:a (22b)
Die Beziehung (22b) wird mit Vorteil dann verwendet, wenn die Funk¬
tionen (M.e)^) oder (EJw)(x) Unstetigkeiten aufweisen.
Durch Eliminieren von <fs aus den Gleichungen (20) und (21) erhalten wir
M (D-{MJ<fx+EJ*f"Wf"+Ejx+e\- gjs——;=° (23)
Setzen wir noch den Klammerausdruck über dem Bruchstrich in (23)
M^+EJxf''^ = Me-yEJWavx vx
und vernachlässigen das Glied — */i" E Jv;o so erhalten wir eine Näherungsformelfür die Krümmung /"
25'
Im allgemeinen wird man jedoch so vorgehen, daß zunächst die Ver¬
drehung ifj aus (22) berechnet wird. Bei einmal bekanntem ifi" kann die Durch-
ssnkung / aus (20) ermittelt werden.
C. EINFLUSS DES UNVOLLKOMMENEN SCHUBVERBANDES
1. Funktion des SchubVerbandes
Die Belastung des Tragflügels besteht im wesentlichen aus den Luft¬
kräften, welche normal zur Oberfläche der Deckscheiben wirken. Diese Luft¬
kräfte werden zunächst in den Schubverband übergeleitet. Besteht der Schub¬
verband aus einzelnen Stegen und Rippen (diskreter Schubverband), so er¬
halten die Deckscheiben dabei die sekundäre Aufgabe, die Flächenlasten der
Luftkraftverteilung durch Membran- oder Plattenwirkung auf Stege und Rip¬
pen zu übertragen.Der Schubverband hat nun eine doppelte Funktion. Er muß einmal die
aus der Belastung entstehenden Querkräfte qx und qu in Form von Schub¬
spannungen txz und ryz weiterleiten (siehe Fig. 2). Dabei entstehen Biege- und
Torsionsmomente, welche sich hauptsächlich als Längs- und Schubkräfte in
den Deckscheiben äußern. Diese Kräfte werden aufgebaut, durch die Schub¬
flüsse, welche der Schubverband in die Deckscheiben einleiten muß und die
zusammen mit den weitergeleiteten Querkräften die Gleichgewichtsbedingungfür die Elemente des SchubVerbandes erfüllen.
Diese beiden Funktionen „Weiterleiten der Querkräfte"' und „Einleiten
von Schubflüssen in die Deckscheiben" können vom Schubverband, je nach
seiner konstruktiven Ausbildung in mehr oder weniger vollkommener Weise
erfüllt werden*).Betrachten wir zunächst die erste der genannten Aufgaben. Die im vor¬
hergehenden entwickelte Theorie des Schichtträgers setzte einen schubstarren,d. h. durch Querkräfte unverformbaren Schubverband voraus. Dies bedeutet
eine Idealisierung, welche in Wirklichkeit kaum erreicht wird, wird doch der
Schubverband aus Gewichtsgründen meist so bemessen, daß er die zu über¬
tragenden Schubspannungen gerade noch aushält. Immerhin ist in den prak¬tisch vorkommenden Lastfällen, insbesondere bei sehr dünnen Tragflächen,der Anteil der Querkraft-Verformung im Schubverband gegenüber der Ver¬
formung der Deckscheiben gering, wie auch bei einem schlanken Biegeträger,
*) Der Schubverband kann dabei in dem Sinn unvollkommen sein, als er entweder
nicht schubstarr, d. h. schubverforrnbar ist, oder nicht kontinuierlich, d. h. daß er aus
einzelnen, diskreten Stegen und Rippen besteht.
26
dessen Schubverformung gegenüber der Verformung durch Biegemomenteim allgemeinen vernachlässigt werden kann. Die Verformung des Schubver
bandes kann übrigens, bei einmal bekannter Querkraftverteilung näherungs¬weise berechnet und der Verformung des idealisierten Trägers mit starrem
Schubverband überlagert werden.
Dies ist allerdings nur zulässig, wenn die Verformung im Schubverband
die Querkraft- und MomentenVerteilung nur unwesentlich beeinflußt.
Das Einleiten von Schubflüssen in die Deckscheiben bietet bei unvollkom¬
menem Schubverband ein bedeutend verwickelteres Problem.
Es wurde für den idealen Schubverband angenommen, daß er aus unendlich
dicht gesetzten („kontinuierlichen") Stegen und Rippen bestehe. Da bei den
bisher bekannt gewordenen Konstruktionen Stege und Rippen immer aus
einzelnen Schubblechen oder Fachwerken bestehen, ist diese Bedingung von
vorn herein nicht erfüllbar. Immerhin werden bei den üblichen Bauweisen aus
Gründen der Profilformerhaltung die Rippen meist außerordentlich dicht ge¬
setzt (siehe z. B. Fig. 1), so daß die Annahme kontinuierlicher Rippen an¬
nähernd erfüllt ist. Es sind jedoch in letzter Zeit Bestrebungen bekannt gewor¬
den, die Anzahl der Rippen aus herstellungstechnischen Gründen radikal zu
vermindern (Beispiel Republic-Sea Bee, Planet Satellite), wobei aber dann
eine biegesteife Beplankung die Wirkung der Rippe z. T. ersetzt.
Ebenfalls aus herstellungstechnischen Gründen, z. T. aber auch aus der
Tradition der älteren ein- oder zweiholmigen Bauweise der Flugzeugtrag¬flächen heraus, wird die Anzahl der eingebauten Stege oft sehr beschränkt. Es
werden daneben aber auch Flügel mit vielen Stegen gebaut, bei welchen die
Stege u. a. zur Aussteifung der Deckscheiben gegen Ausknicken herangezogenwerden.
Dadurch, daß die Schubflüsse lokal durch einen diskreten Schubverband
in die Deckscheiben eingeleitet werden, ergeben sich für Verformung und Be¬
anspruchung der Tragfläche neue Gesichtspunkte, welche im folgenden unter¬
sucht werden sollen.
2. Diskrete Rippen
Die Aufgabe der Rippen besteht darin, die Schubverformung der Quer¬
schnitte zu verhindern. Bei Biegung ist damit keine wesentliche statische Funk¬
tion verbunden. Bei Torsion hingegen spielen die Rippen eine Rolle im tra¬
genden Verband des Flügels, indem sie die Schubkräfte auf Deckscheiben und
Stege in richtiger Weise zu verteilen haben.
FehlendieRippenvollständig, so führt dieFragenach derAufteilungdesTor¬
sionsmomentes in Schub-undWölbtorsion nichtmehraufein statisch unbestimm¬
tes Problem wie beim idealen Schichtträger. Die Aufteilung hängt in dem Fall
27
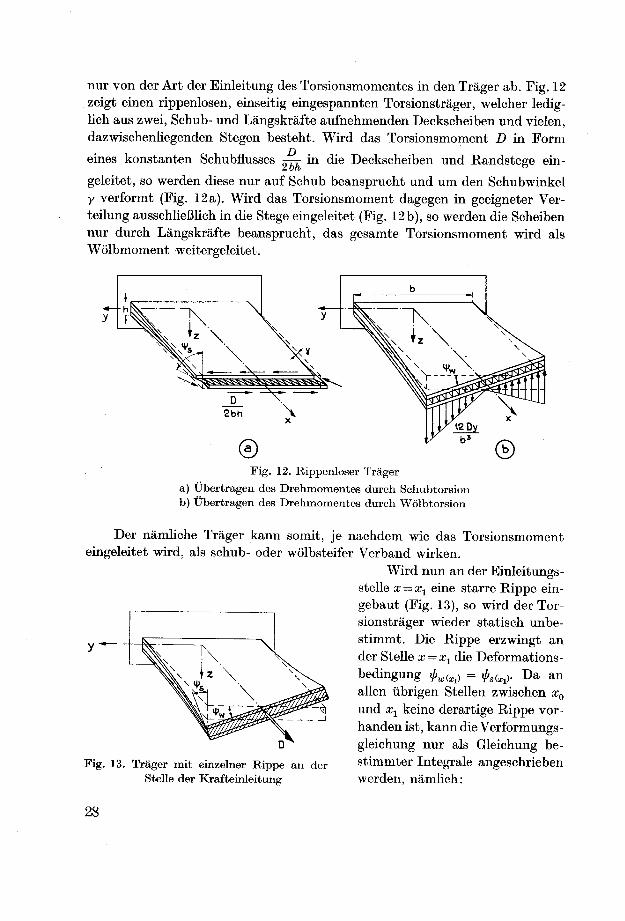
nur von der Art der Einleitung des Torsionsmomentes in den Trager ab. Fig. 12
zeigt einen rippenlosen, einseitig eingespannten Torsionsträger, welcher ledig¬lich aus zwei, Schub- und Längskräfte aufnehmenden Deckscheiben und vielen,
dazwischenliegenden Stegen besteht. Wird das Torsionsmoment D in Form
eines konstanten Schubflusses srr in die Deckscheiben und Randstege ein¬zog
°
geleitet, so werden diese nur auf Schub beansprucht und um den Schubwinkel
y verformt (Fig. 12a). Wird das Torsionsmoment dagegen in geeigneter Ver¬
teilung ausschließlich in die Stege eingeleitet (Fig. 12b), so werden die Scheiben
nur durch Längskräfte beansprucht, das gesamte Torsionsmoment wird als
Wölbmoment weitergeleitet.
©Fig. 12. Rippenloser Trager
a) Übertragen des Drehmomentes durch Schubtorsion
b) Übertragen des Drehmomentes durch Wolbtorsion
Der nämliche Träger kann somit, je nachdem wie das Torsionsmoment
eingeleitet wird, als schub- oder wölbsteifer Verband wirken.
Wird nun an der Einleitungs¬stelle x = xx eine starre Rippe ein¬
gebaut (Fig. 13), so wird der Tor¬
sionsträger wieder statisch unbe¬
stimmt. Die Rippe erzwingt an
der Stelle x = x1 die Deformations-
bedingung i/>w(xi) = «/»s(xi). Da an
allen übrigen Stellen zwischen x0
und xx keine derartige Rippe vor¬
handen ist, kann die Verformungs¬gleichung nur als Gleichung be-
Fig. 13. Träger mit einzelner Rippe an der stimmter Integrale angeschriebenStelle der Krafteinleitung werden, nämlich:
28
lAafeO = J -Qjdx = "/W) = ~ \dx\ ^^dx• 3C$ Xq X[
und mit S = (K-V)'
cj=~~ \dx\ frdx*} *25*
Aus (25) läßt sich V noch nicht vollständig berechnen. Dazu ist noch eine
weitere Aussage über den Verlauf der Längskräfte notwendig. Die Aufgabe wird
lösbar, wenn z. B. der Schubfluß in den Stegen zwischen zwei Rippen konstant
ist, so daß die Längskräfte zwischen zwei Rippen linear zu- oder abnehmen.
Ist einmal V über die ganze Spannweite bekannt, so läßt sich sofort U = K — V
berechnen, woraus sich dann i/j^ und i/fs(x) ergibt. Damit ist die statisch unbe¬
stimmte Aufgabe gelöst. Bei Trägern mit wenigen Rippen kann das Torsions -
problem selbstverständlich auch mit den üblichen Methoden der statisch un¬
bestimmten Rechnung gelöst werden.
3. Diskrete Stege
Die bei Biegung und Wölbtorsion in den Deckscheiben aufzubauenden
Längskräfte werden durch Schubflüsse aus den Stegen eingeleitet, und müssen
sich von den Anschlußlinien der Stege aus über die ganze Ausdehnung der
tragfähigen Deckscheiben ausbreiten. Dazu wird die Schubsteifigkeit der
Deckscheiben in Anspruch genommen. Da diese nicht als schubstarr angenom¬
men werden können, ergibt sich daraus eine zusätzliche Verformung der Quer¬
schnitte. Die damit entstehende Spannungsverteilung kann durch die exakte
Scheibentheorie mit Hilfe der Airy'sehen Spannungsfunktion in einfachen Fäl¬
len ermittelt werden.
*) Für den idealen Schichtträger gilt die Gleichung der unbestimmten Inte¬
grale <l>s(x) — <l>w(x) oder ausgeschrieben:
X O X X TT
Diese Gleichung kann zweimal differenziert werden und ergibt
mit S=fGJs und F=Z-{ OJs f dx
K=jGJgTVdx-TVEJw
die von früher bekannte Gleichung des verdrehten Schichtträgers (18b).
29
Im Rahmen dieser Arbeit soll nicht weiter auf diese Fragen eingegangenwerden. Es sei jedoch festgehalten, daß die in Rechnung zu setzende Biege-und Wölbtorsionssteifigkeit namentUch bei gedrungenen Trägern beträchtlich
kleinere Werte annehmen können, als sich aus den Werten von EJx und EJV.ergibt.
Eine zusammenfassende Darstellung der sich bei Biegung ergebendenProbleme bei verschiedenen Randbedingungen findet sich bei E. Ghwalla [4].In analoger Weise können die Spannungsverteilungen und Verformungen bei
Wölbtorsion ermittelt werden (siehe auch Ebner [5]). Eine allgemeine Lösungdes Problems der Wölbtorsion für dünnwandige Hohlquerschnitte wurde von
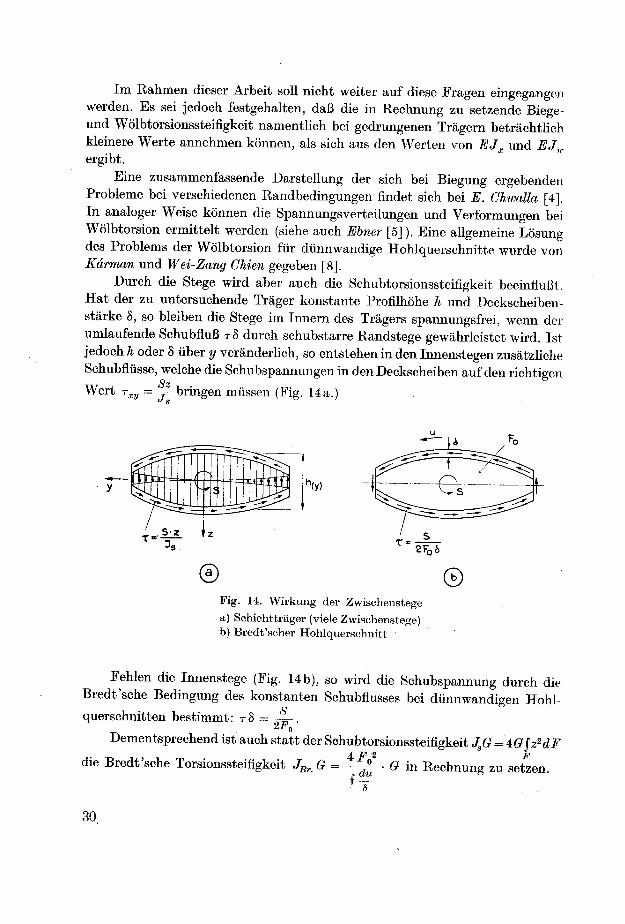
Kärman und Wei-Zang Chien gegeben [8].Durch die Stege wird aber auch die Schubtorsionssteifigkeit beeinflußt.
Hat der zu untersuchende Träger konstante Profilhöhe h und Deckscheiben -
stärke 8, so bleiben die Stege im Innern des Trägers spannungsfrei, wenn derumlaufende Schubfluß tS durch schubstarre Randstege gewährleistet wird. Ist
jedoch h oder S über y veränderlich, so entstehen in den Innenstegen zusätzliche
Schubflüsse, welche die Schubspannungen in den Deckscheiben auf den richtigenSz
Wert t =
-j- bringen müssen (Fig. 14a.)
2F0&
© ©Fig. 14. Wirkung der Zwischenstege
a) Schichtträger (viele Zwischenstege)b) Bredt'scher Hohlquerschnitt
Fehlen die Innenstege (Fig. 14b), so wird die Schubspannung durch dieBredt'sche Bedingung des konstanten Schubflusses bei dünnwandigen Hohl-
querschnitten bestimmt: rS =2F„
Dementsprechend ist auch statt der Schubtorsionssteifigkeit JSG = 4G$z2dFdie Bredt'sche Torsionssteifigkeit JBr G =
du
T
G in Rechnung zu setzen.
30
D. EINFLUSS DER QUERVERFORMUNG
1. Das querverformende Kräftesystem gxy
Die im bisherigen entwickelten Berechnungsmethoden für den Schicht¬
träger haben strenge Gültigkeit nur für Belastungssysteme pxy, für welche das
abgespaltete Kräftesystem gxy verschwindet (s. Fig. 5), oder für Schichtträger
mit unendhch steifen Rippengurten (ky))) kx). Im folgenden soll nun der
Einfluß des Kräftesystems gxy auf einen Schichtträger mit endlicher Quer-
biegesteifigkeit ky untersucht werden.
Für eine beliebige Belastung pxy erhalten wir
"xy Pxy Pxy
und mit den Beziehungen (8) und (14)
^ = ^~|[M/"+2/f')]" + 2(l-/*)8k
A<r+vr)j£+*rgl*) (26>m
gxy läßt sich wieder in zwei Kräftesysteme spalten, welche sich durch ihre Ent¬
stehung unterscheiden, nämlich in ein „inneres" System
I - fök f)k(27)
welches die Poisson'sche Querkontraktion repräsentiert und in ein „äußeres"
System
9a = Pxy- \[kx(f" + y>l>")l" + 2(1-1*) (28)
welches die Rippenbelastung durch pxy darstellt.
Sowohl gt als auch ga bilden naturgemäß wieder in Rippenrichtung einzeln
geschlossene Gleichgewichtssysteme.
2. Angenäherte Berechnung der Querverformung
Die zusätzliche Verformung wq des Schichtträgers unter der Belastung
gxy müßte streng genommen wieder durch Anwenden der allgemeinen Schicht-
*) Die qnergestrichenen Werte f und ^ sollen im folgenden die Verformung des Trä¬
gers bei vollständig behinderter Querverformung bedeuten.
31
trägergleichung (5) berechnet werden. Der Umstand aber, daß gxy über alle,normal zur z-Achse aus dem Träger geschnittenen Streifen, geschlosseneGleichgewichtssysteme bildet, erlaubt eine Näherungsmethode anzuwenden,welche praktisch hinreichend genaue Ergebnisse liefert.
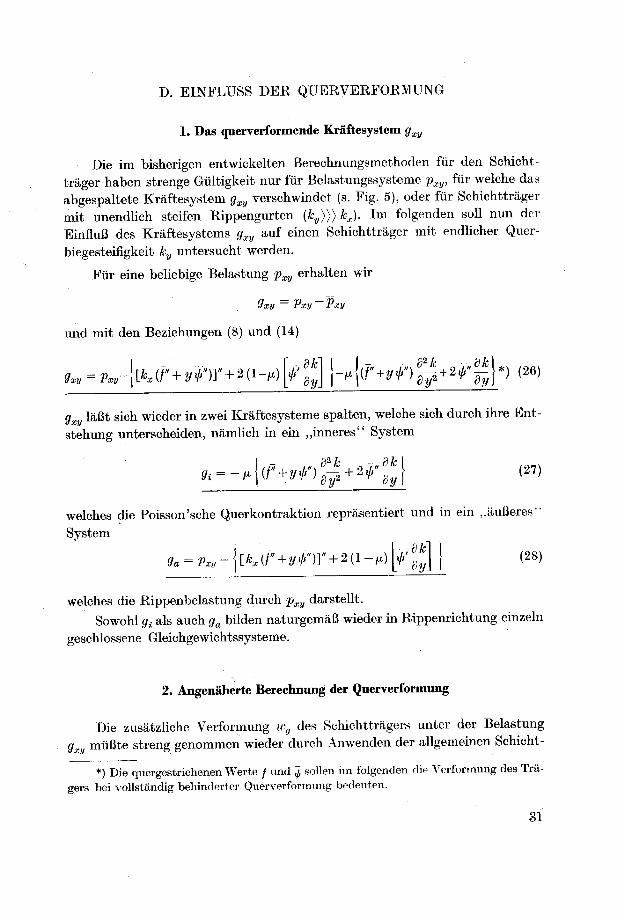
Denken wir uns zunächst den Schichtträger durch Schnitte normal zur
a;-Achse in viele Querstreifen von der Breite dx = 1 zerschnitten. Die die
einzelnen Streifen verformenden Biegemomente my* erhalten wir aus zwei¬
maliger Integration der Belastung gxy über y. Für das innere System erhalten
wir dabei aus (27)
"fr=-nMy' = /*fe(/'+yf') (27a)
Das aus dem äußeren System entstehende Querbiegemoment muß von
Fall zu Fall aus der Belastung ga ermittelt werden. Eine besondere Schwierigkeitergibt sich dabei bei schiefwinklig berandeten Trägern, welche am Rande
endliche Steifigkeit und somit unstetige Ableitungen von k und kx aufweisen.
Ersetzen wir die sprunghafte Steifigkeitsänderung am Rand durch einen
stetigen Ansatz, welcher im Bereich A den Sprung annähert (Fig. 15). Durch
einen Grenzübergang A —.> 0 erhalten wir die aus dem äußeren System ent¬
stehenden Querkräfte und Biegemomente an einer beliebigen, stetigen Be-
randungskurve r/^ für einen Träger von konstanter Steifigkeit kx und k:
C(l/) = %rW2f'+ 2 V'(f'"+ vf) + v'(r+vV)] + 2(1-H-)W (28a)
K^v) =m»lv) + Kv'*(r + vV)~ 2(l-MJiVf (28b)
Fig. 15.
Randscherkraft und Randbiegemoment bei
beliebiger Berandungskurve tj^j
Fig. 16. Angenäherte Bestimmung des
Querbiegemomentes aus der äußeren
Belastung durch Streifenmethode
32
Die ersten Glieder der rechten Seiten von (28a) und (28b) stellen dabei die
tatsächlich wirkenden Randbelastungen aus pxy dar (z. B. Auflagerkräfteund Einspannmomente).
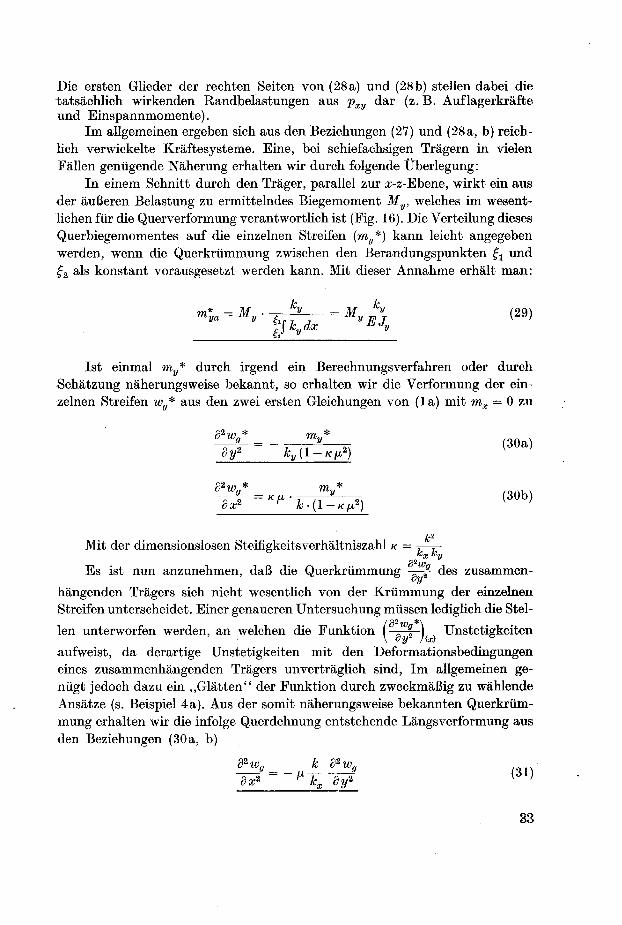
Im allgemeinen ergeben sich aus den Beziehungen (27) und (28a, b) reich¬
lich verwickelte Kräftesysteme. Eine, bei schiefachsigen Trägern in vielen
Fällen genügende Näherung erhalten wir durch folgende Überlegung:In einem Schnitt durch den Träger, parallel zur x-z-Ebene, wirkt ein aus
der äußeren Belastung zu ermittelndes Biegemoment My, welches im wesent¬
lichen für die Querverformung verantwortlich ist (Fig. 16). Die Verteilung dieses
Querbiegemomentes auf die einzelnen Streifen (my*) kann leicht angegebenwerden, wenn die Querkrümmung zwischen den Berandungspunkten £x und
£2 als konstant vorausgesetzt werden kann. Mit dieser Annahme erhält man:
<a = My-l~~r=My-EVj <29>
Ist einmal my* durch irgend ein Berechnungsverfahren oder durch
Schätzung näherungsweise bekannt, so erhalten wir die Verformung der ein¬
zelnen Streifen wg* aus den zwei ersten Gleichungen von (la) mit mx = 0 zu
82wg* my*8y2 ky(l-Kfj?)
(30a)
82wa*** -"-k^J) (30b)
k'Mit der dimensionslosen Steifigkeitsverhältniszahl k = j—r
x">y
Es ist nun anzunehmen, daß die Querkrümmung -~ des zusammen¬
hängenden Trägers sich nicht wesentlich von der Krümmung der einzelnen
Streifen unterscheidet. Einer genaueren Untersuchung müssen lediglich die Stel¬
len unterworfen werden, an welchen die Funktion ( . % I Unstetigkeiten
aufweist, da derartige Unstetigkeiten mit den Deformationsbedingungeneines zusammenhängenden Trägers unverträglich sind, Im allgemeinen ge¬
nügt jedoch dazu ein „Glätten" der Funktion durch zweckmäßig zu wählende
Ansätze (s. Beispiel 4a). Aus der somit näherungsweise bekannten Querkrüm¬
mung erhalten wir die infolge Querdehnung entstehende Längsverformung aus
den Beziehungen (30a, b)
8x*~~ *kx 8y*
[öl>
33
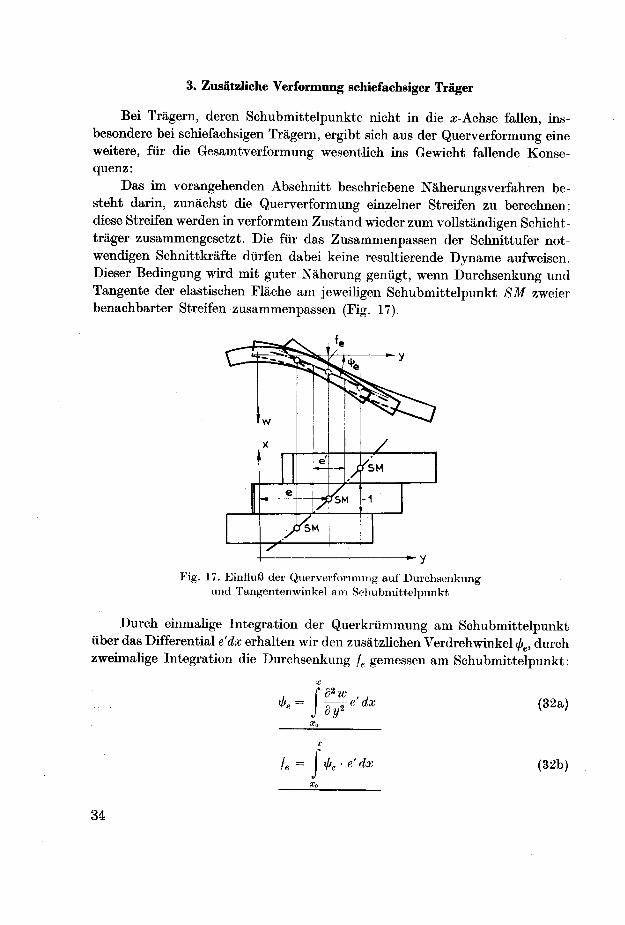
3. Zusätzliche Verformung schiefachsiger Träger
Bei Trägern, deren Schubmittelpunkte nicht in die £-Achse fallen, ins¬
besondere bei schiefachsigen Trägern, ergibt sich aus der Querverformung eine
weitere, für die Gesamtverformung wesentlich ins Gewicht fallende Konse¬
quenz :
Das im vorangehenden Abschnitt beschriebene Näherungsverfahren be¬
steht darin, zunächst die Querverformung einzelner Streifen zu berechnen:
diese Streifen werden in verformtem Zustand wieder zum vollständigen Schicht¬
träger zusammengesetzt. Die für das Zusammenpassen der Schnittufer not¬
wendigen Schnittkräfte dürfen dabei keine resultierende Dyname aufweisen.
Dieser Bedingung wird mit guter Näherung genügt, wenn Durchsenkung und
Tangente der elastischen Fläche am jeweiHgen Schubmittelpunkt SM zweier
benachbarter Streifen zusammenpassen (Fig. 17).
Fig. 17. Einfluß der Querverformung auf Durchsenkungund Tangentenwinkel am Schubmittelpnnkt
Durch einmalige Integration der Querkrümmung am Schubmittelpunktüber das Differential e'dx erhalten wir den zusätzlichen Verdrehwinkel i[ie, durch
zweimalige Integration die Durchsenkung fe gemessen am Schubmittelpunkt:
'f'e = ]jy2e dx (32a)
fe=\^e-e'dx (32b)
34
III. Anwendungen und Versuchsergebnisse
A. RECHNERISCHE LÖSUNGSMETHODEN UND
VERSUCHSTECHNIK
1. Analytische Lösungsmethoden
Die zur statischen Berechnung eines Schichtträgers aufzulösenden Glei¬
chungen lassen sich für das Torsionsproblem auf lineare Differentialgleichungen
2. Ordnung zurückführen. Die Berechnung der Durchsenkung führt bei ein¬
mal bekanntem Verdrehwinkel nur noch auf einfache Integrationen bekannter
Funktionen.
Die aus der Torsionsgleichung (22) sich ergebenden Differentialgleichungen
werden besonders einfach bei prismatischen Trägern, d. h. bei konstanten
GJS und EJW. Wir erhalten z. B. aus (22a):
mit dem rel. Verdrehwinkel <p = tjj'Inf
wobei die Torsionsziffer A0 = 1/ „ Ts die Wurzel aus dem Verhältnis von
Schub- und Wölbsteifigkeit angibt.
Diese Gleichung wird gelöst durch einen hyperbolischen Ansatz:
<p = ax Cos A0 x + a2 Sin A0 x + ^
wobei die Integrationskonstanten ax und a2 durch die Randbedingungen be¬
stimmt werden und ^ eine partikuläre Lösung darstellt. Für den Fall „Sym¬
metrische Torsion einer rechteckigen Platte" im Beispiel Bla erhalten wir
für die rechte Trägerhälfte:
DX=D = konst.
Mx = 0
und die Randbedingungen
9(o) = 0 (Symmetriebedingung)
f'(U2) — 0 (verschwindende Wölbgröße am freien Ende)
35
Damit ergibt sich aus obenstehendem Ansatz der rel. Verdrehwinkel
9><z)= ^j(l-CosA0a; + TgA0Z/2SinA0a;)
Durch differenzieren erhalten wir daraus die Wölbgröße:
D)
A3V(x) = <p'EJw= D^ (- Sin A0 x + Tg A0 Z/2 Cos X0x)
Ist einmal die Wölbgröße bekannt, so können daraus alle weiteren inter¬
essierenden Werte abgeleitet werden, nämlich:
Wölbmoment W& = V{X)
Schubgröße U(x) = K(x) ~ V(x)
Schubmoment 8(x) = U[x)
Verdrehwinkel <f(x) _
u(x)
GJS
Längsspannung °xV(x)
Schubspannung Txy_
U{x)-
Jz
2. Numerische Lösungsmethoden
In praktischen Fällen ist die Steifigkeit des Tragflügels meist so verteilt,daß die Funktionen GJS, EJX und EJW unstetig sind (z. B. infolge Ausschnitten
für Einbauten, sprunghafter Änderung der Beplankungsblechstärke usw.) undsich daher für analytische Näherungsmethoden wenig eignen. Derartige Pro¬
bleme werden besser mit Hilfe der numerischen Differenzenrechnung behandelt.
Zunächst wird das Integrationsintervall (Spannweite) in eine zweckmäßigeAnzahl von kleinen Differenzlängen A geteilt. Die allgemein geschriebene Dif¬
ferentialgleichung 2. Ordnung
Y" + a(x)Y' + b(x)Y + Z(x) = 0
kann dann näherungsweise als Differenzengleichung geschrieben werden:
•*(n+l)~ 21(m) + l(w_x) Y
n+1)— X(n_u
J2+ a(xn) 2~Ä ^a) (n) in)
=
Diese ergibt, nach F(m+1> aufgelöst, eine Rekursionsformel, womit jederWert von Y aus den zwei vorangehenden berechnet werden kann. Eine ver-
36
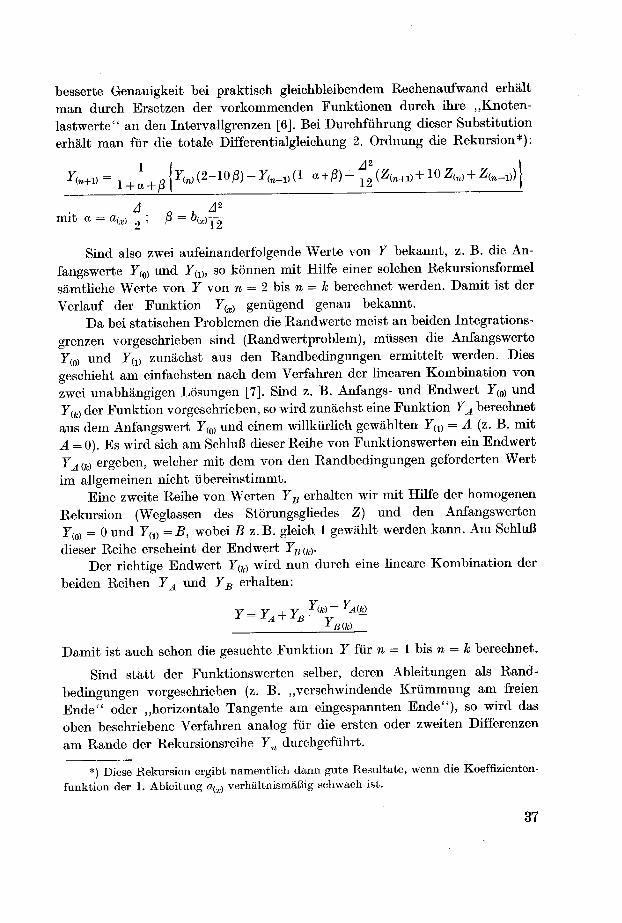
besserte Genauigkeit bei praktisch gleichbleibendem Rechenaufwand erhält
man durch Ersetzen der vorkommenden Funktionen durch ihre „Knoten¬
lastwerte" an den Intervallgrenzen [6]. Bei Durchführung dieser Substitution
erhält man für die totale Differentialgleichung 2. Ordnung die Rekursion*):
Y(n+i)=1 + l+ß\Yin)(2-l0ß)~Y(n_1)(l-a +ß)-A^(Zu+1)+l0ZM + Z{n^
A A2mit a = a{x)
2; ß = b(x)j2
Sind also zwei aufeinanderfolgende Werte von Y bekannt, z. B. die An¬
fangswerte F(0) und y(1), so können mit Hilfe einer solchen Rekursionsformel
sämtliche Werte von Y von n = 2 bis n = k berechnet werden. Damit ist der
Verlauf der Funktion F(x) genügend genau bekannt.
Da bei statischen Problemen die Randwerte meist an beiden Integrations¬
grenzen vorgeschrieben sind (Randwertproblem), müssen die Anfangswerte
F(0) und F(1) zunächst aus den Randbedingungen ermittelt werden. Dies
geschieht am einfachsten nach dem Verfahren der linearen Kombination von
zwei unabhängigen Lösungen [7]. Sind z. B. Anfangs- und Endwert F(0) und
Yfä der Funktion vorgeschrieben, so wird zunächst eine Funktion YA berechnet
aus dem Anfangswert r(0) und einem willkürlich gewählten Y^ = A (z. B. mit
A = 0). Es wird sich am Schluß dieser Reihe von Funktionswerten ein Endwert
YAik) ergeben, welcher mit dem von den Randbedingungen geforderten Wert
im allgemeinen nicht übereinstimmt.
Eine zweite Reihe von Werten YB erhalten wir mit Hilfe der homogenen
Rekursion (Weglassen des Störungsgliedes Z) und den Anfangswerten
r(0) = 0 und r(1) =B, wobei B z. B. gleich 1 gewählt werden kann. Am Schluß
dieser Reihe erscheint der Endwert YB(kyDer richtige Endwert Y(k) wird nun durch eine lineare Kombination der
beiden Reihen YA und YB erhalten:
y_ v , v <fe>_ A(k)
1 ~ XA + JS vxBUc)
Damit ist auch schon die gesuchte Funktion Y für n = 1 bis n = k berechnet.
Sind statt der Funktionswerten selber, deren Ableitungen als Rand¬
bedingungen vorgeschrieben (z. B. „verschwindende Krümmung am freien
Ende" oder „horizontale Tangente am eingespannten Ende"), so wird das
oben beschriebene Verfahren analog für die ersten oder zweiten Differenzen
am Rande der Rekursionsreihe Yn durchgeführt.
*) Diese Rekursion ergibt namentlich dann gute Resultate, wenn die Koeffizienten-
funktion der 1. Ableitung a^ verhältnismäßig schwach ist.
37
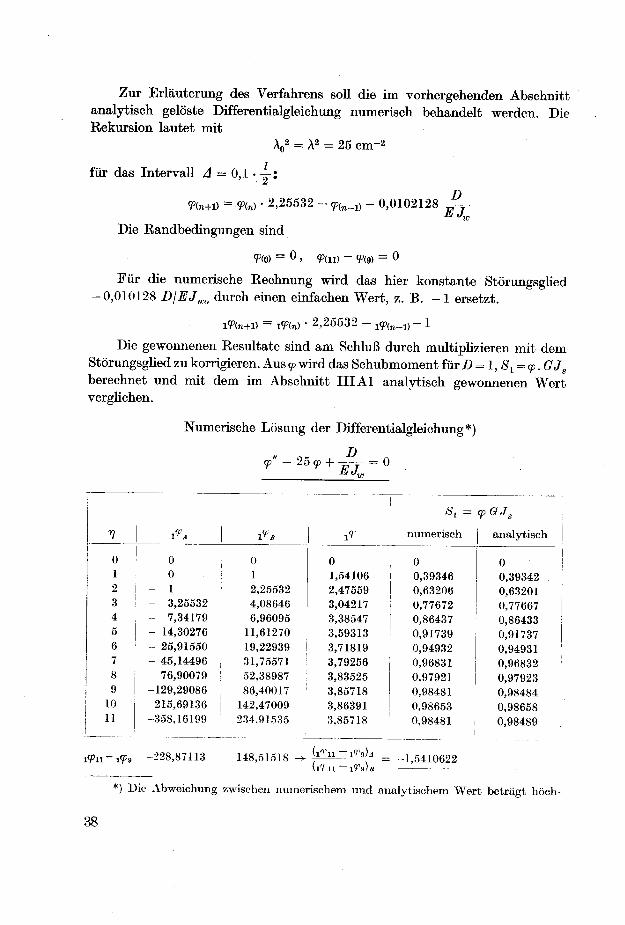
Zur Erläuterung des Verfahrens soll die im vorhergehenden Abschnitt
analytisch gelöste Differentialgleichung numerisch behandelt werden. Die
Rekursion lautet mit
A02 = A2 = 25 cm-2
lfür das Intervall A = 0,1
2*
ttn+ü = 9W • 2-25532 - «n-tf- 0,0102128
D
E J,„
Die Randbedingungen sind
V(o)~ °
> 9><ii) ~ «P(») = °
Für die numerische Rechnung wird das hier konstante Störungsglied— 0,010128 DjEJW0 durch einen einfachen Wert, z. B. —1 ersetzt.
i«P(n+i) = r?M• 2,25532 - ^(„„d- 1
Die gewonnenen Resultate sind am Schluß durch multiplizieren mit dem
Störungsglied zu korrigieren. Aus<p wird das Schubmoment fürD = l,S1 = cp. GJSberechnet und mit dem im Abschnitt IIIAI analytisch gewonnenen Wert
verglichen.
Numerische Lösung der Differentialgleichung*)
D<p" - 25 * + *jT°
_
s, = <pGJs
0
^ ! t** i' numerisch analytisch
0 0 0 0 0
1 0 1 1,54106 0,39346 0,393422 - 1 2,25532 2,47559 0,63206 0,63201 I3 - 3,25532 4,08646 3,04217 0,77672 0,776674 - 7,34179 6,96095 3,38547 0,86437 0,864335 - 14,30276 11,61270 3,59313 0,91739 0,917376 - 25,91550 19,22939 3,71819 0,94932 0,949317 - 45,14496 31,75571 3,79256 0,96831 0,968328 - 76,90079 52,38987 3,83525 0,97921 0,979239 -129,29086 86,40017 3,85718 0,98481 0,9848410 -215,69136 142,47009 3,86391 0,98653 0,9865811 -358,16199
-228,87113
234,91535
148,51518 ->
3,85718 0,98481 0,98489
i<Pn-
i<pa(1^11 - if »)^
1,5410622(i'/u-iWn
*) Die Abweichung zwischen numerischem und analytischem Wert beträgt hoch-
38
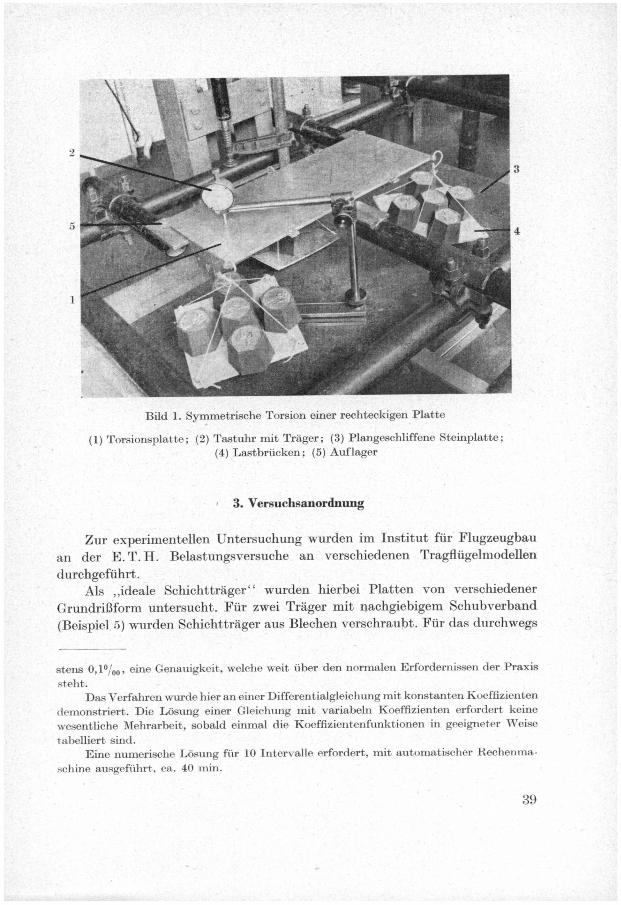
Bild 1. Symmetrische Torsion einer rechteckigen Platte
(1) Torsionsplatte, (2) Tastuhr mit Trager, (3) Plangeschhffene Steinplatte,
(4) Lastbrucken, (5) Auflager
'< 3. Versuchsanordnung
Zur experimentellen Untersuchung wurden im Institut für Flugzeugbau
an der E T H Belastungsversuche an verschiedenen Tragflugelmodellen
durchgeführtAls „ideale Schichttrager" wurden hierbei Platten von verschiedener
Grundrißform untersucht. Für zwei Trager mit nachgiebigem Schubverband
(Beispiel 5) wurden Schichttrager aus Blechen verschraubt Für das durchwegs
stens 0,l°/00, eine Genauigkeit, welohe weit über den normalen Erfordernissen der Praxis
steht
Das ^ erfahren wurde hier an einer Differentialgleichung mit konstanten Koeffizienten
demonstriert Die Losung einer Gleichung mit \ariabeln Koeffizienten erfordert keine
wesentliche Mehrarbeit, sobald einmal die Koeffizientenfunktionen in geeigneter Weise
tabelhert sind
Eine numerische Losung für 10 Tnter\ alle erfordert, mit automatischer Kechenma-
schine ausgeführt, ca 40 min
39
£**tsa£*ammtk
verwendete Material, Anticorodal A, wurden zunächst folgende Material¬
eigenschaften durch einen Zugversuch bestimmt:
E = 7,160-105 kg/cm-2 Elastizitätsmodul
fj, = 0,333 Querdehnungskoefflzientap = 1850 kg/cm-2 ProportionalitätsgrenzeG = 2,685 • 105 kg/cm-2 Schubmodul, berechnet aus E und n
Die aufgebrachten Beanspruchungen blieben überall unterhalb der Pro¬
portionalitätsgrenze.Die Träger wurden jeweils an drei Punkten auf Kugeln statisch bestimmt
gelagert und durch an Haken aufgehängte Lastbrücken mit Gewichten be¬lastet (Bild 1). Gemessen wurden dabei Längs- und Schubspannungen mit
mechanischen und elektrischen Tensometern, Verdrehwinkel mit aufgesetztenKlinometern und Durchsenkungen mit einer Tastuhr.
Um die Durchsenkung verschiedener Punkte mit derselben Tastuhr mes¬
sen zu können, wurde diese auf einen Träger montiert, welcher auf einer plan-geschliffenen Steinplatte frei verschiebbar war (s. Bild 1).
B. BEISPIELE
Als Anwendung der im theoretischen Teil abgeleiteten Formeln werden im
folgenden einige charakteristische Beispiele von verschiedenen Trägern und
Belastungsformen untersucht. Die rechnerisch gewonnenen Ergebnisse sindim Anhang in Form von Kurven dargestellt. Wo zur Kontrolle experimentelleUntersuchungen durchgeführt wurden, sind die Resultate als Meßpunkte indie berechneten Kurven eingetragen.
Um die Darstellung von Werten von verschiedener Dimension in der
gleichen Tafel zu vereinfachen, wurde im allgemeinen darauf verzichtet, Ma߬stäbe anzugeben, welche von Belastungsstufe und von der absoluten Größeder Modelle, für die Spannungsmessungen außerdem von der Meßstelle ab¬
hängig sind.
1. Verschiedene Torsionsfälle eines rechteckigen Trägers
Für einen Schichtträger von konstanter Steifigkeit kx = ky — k (homogenePlatte) und von rechteckigem Grundriß mit den Abmessungen l = 50 cm.
b = 20 cm, h = 0,498 cm, wurden die in Fig. ] 8 schematisch dargestellten vierLastfälle untersucht. Fig. 18 zeigt neben den Belastungsformen die entstehende
Torsionslast-, Drehmoment- und Torsionsgrößenverteilung. Für die Fälle a,
40
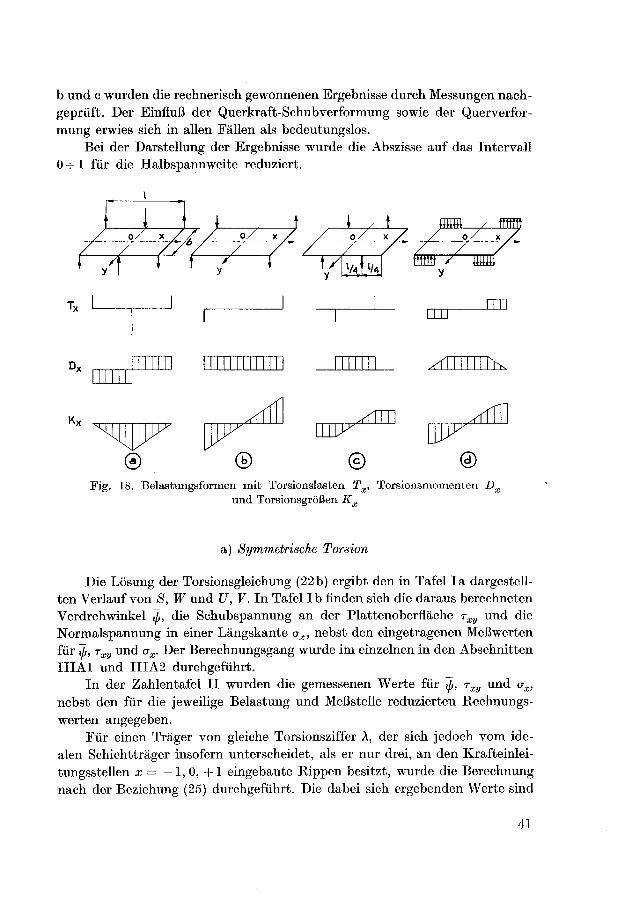
b und c wurden die rechnerisch gewonnenen Ergebnisse durch Messungen nach¬
geprüft. Der Einfluß der Querkraft-Schubverformung sowie der Querverfor¬
mung erwies sich in allen Fällen als bedeutungslos.Bei der Darstellung der Ergebnisse wurde die Abszisse auf das Intervall
0-^-1 für die Halbspannweite reduziert.
im
Kx
^L Ib.
m^^ qjjf^0 © © ®
Fig. 18. Belastungsformen mit Torsionslasten Tx, Torsionsmomenten Dxund Torsionsgrößen Kx
a) Symmetrische Torsion
Die Lösung der Torsionsgleichung (22b) ergibt den in Tafel Ia dargestell¬ten Verlauf von 8, W und U, V. In Tafel Ib finden sich die daraus berechneten
Verdrehwinkel tf,, die Schubspannung an der Plattenoberfläche rxy und die
Normalspannung in einer Längskante ax, nebst den eingetragenen Meßwerten
für tjj, rxy und ax. Der Berechnungsgang wurde im einzelnen in den Abschnitten
IIIA1 und IIIA2 durchgeführt.In der Zahlentafel II wurden die gemessenen Werte für tj), Txy und ax,
nebst den für die jeweilige Belastung und Meßstelle reduzierten Rechnungs¬werten angegeben.
Für einen Träger von gleiche Torsionsziffer A, der sich jedoch vom ide¬
alen Schichtträger insofern unterscheidet, als er nur drei, an den Krafteinlei¬
tungsstellen x = — 1, 0, + 1 eingebaute Rippen besitzt, wurde die Berechnungnach der Beziehung (25) durchgeführt. Die dabei sich ergebenden Werte sind
41
zum Vergleich mit dünnerem Strich ebenfalls in die Tafel Ia und Ib eingetragen.Wie aus dem Vergleich hervorgeht, ist die Verformung beim Einbau konti¬
nuierlicher Rippen für das angegebene Steifigkeitsverhältnis ca. 10% geringer.Andererseits ist die Beanspruchungsspitze bei x = 0 für den Träger mit kon¬
tinuierlichen Rippen beträchtlich höher. Man beachte ferner die Abweichungim Verlauf von Schub- und Wölbwinkel beim Träger mit Einzelrippen.
b) Durchlaufende Torsion
Für die Antimetriebedingung <p(0)' = 0 wird die Lösung von (22b) trivial:
D
Die aus den Verdrehwinkelmessungen erhaltenen Resultate dienten zur
Kontrolle des, aus Zugversuch mit Querdehnungsmessung bestimmten Schub-
moduls. Es ergab sich keine meßbare Abweichung zwischen den beiden Ver¬
suchsergebnissen. Der Torsionsversuch an einer rechteckigen Platte eignet sich
zur direkten Bestimmung des Schubmoduls.
c) Idealisierter Querruderfall
Dieser Fall unterscheidet sich von (b) durch die wölbversteifende Wir¬
kung der Trägerteile außerhalb des durchgeleiteten Drehmomentes. Der Trä¬
ger bleibt, zum Unterschied vom vorher behandelten Fall, nicht frei von Längs¬
spannungen ax. Für die analytische Berechnung müssen zwei hyperbolischeAnsätze verwendet werden, deren insgesamt vier Integrationskonstanten durch
Rand- und Antimetriebedingung sowie durch die zwei Übergangsbedingungen
•Wo.s+o)= Wo.s-o)! 9'(0,5+0) = 9'(0,5-0)
bestimmt werden. Die Rechnungsergebnisse wurden in den Tafeln IIIa, b
zusammengestellt, wieder mit den eingetragenen Meßwerten in Tafel III b.
d) Querruderfall mit verteiltem Rudermoment
Dieser Fall gibt eine bessere Annäherung an einen in Wirklichkeit vor¬
kommenden Belastungsfall, indem das Rudermoment als im äußeren Viertel
der Spannweite gleichmäßig verteilt angenommen wird. Die Rechnungsergeb¬nisse finden sich in Tafel IV. Messungen wurden für diesen Fall nicht durch¬
geführt. Da die Längskräfte in diesem Fall sehr klein werden, wurden die Werte
von W lOmal, die Werte von V lOOmal überhöht dargestellt.
42
2. Flügel mit Versteifung durch Rumpfanschluß
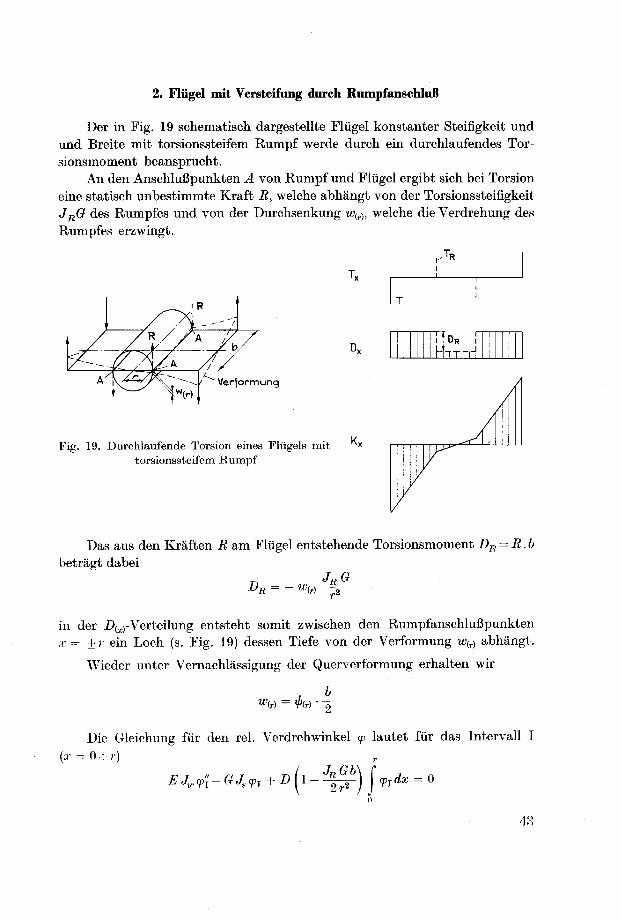
Der in Fig. 19 schematisch dargestellte Flügel konstanter Steifigkeit und
und Breite mit torsionssteifem Rumpf werde durch ein durchlaufendes Tor¬
sionsmoment beansprucht.An den Anschlußpunkten A von Rumpf und Flügel ergibt sich bei Torsion
eine statisch unbestimmte Kraft B, welche abhängt von der Torsionssteifigkeit
JB0 des Rumpfes und von der Durchsenkung wM, welche die Verdrehung des
Rumpfes erzwingt.
Verformung
1/
Fig. 19. Durchlaufende Torsion eines Flügels mit ^*
torsionssteifem Rumpf
H-TTn-1
Das aus den Kräften R am Flügel entstehende Torsionsmoment DB = R.b
beträgt dabei
DR = -w(r)RJBG
in der D(a.)-Verteilung entsteht somit zwischen den Rumpfanschlußpunkten
x = + r ein Loch (s. Fig. 19) dessen Tiefe von der Verformung ww abhängt.
Wieder unter Vernachlässigung der Querverformung erhalten wir
7b
Die Gleichung für den rel. Verdrehwinkel <p lautet für das Intervall T
EJ^-GJ^ + D^l-^jj <Pi dx = 0
43

und für das Intervall II (x = r-=-1)
EJiB<ph-GJs<Pn + D = 0
Die einzusetzenden Rand- und Übergangsbedingungen lauten:
•Pico) = <Piiö) = °
<Pi<r)~
"Piito 5 9>iM = 9>iim
Die obenstehende Gleichung wurde für folgende Annahmen gelöst und die
Rechnungsergebnisse in Tafel V aufgetragen:
b = 0,4; l = 2; EJJOJ, = 0,01, r = 0,1; JRjJs = 5
Messungen wurden nicht durchgeführt.
3. Torsion eines symmetrisch verjüngten Trägers
Für einen Schichtträger von konstanter Steifigkeit kx — ky = h und von
doppeltrapezförmigem Grundriß wurde die Verformung unter einem durch¬
laufenden Torsionsmoment numerisch berechnet.
Der Träger hat die Abmessungen
l = 50 cm, b0 = 20 cm, b± = 10 cm, h = 0,500 cm
(Bezeichnungen in der Nebenfigur von Tafel VI).Es zeigt sich dabei, daß die schwächeren Partien des Außenflügels auf
Kosten des Flügelmittelstückes entlastet werden. Darstellung der Ergebnisseund der Meßwerte in Tafel Via und b.
4. Verschiedene Beanspruchungsfälle eines gepfeilten Flügels
Ein stark gepfeilter Flügel konstanter Steifigkeit gemäß Fig. 20 soll auf
durchlaufende Torsion, symmetrische Torsion und Querkraftbiegung bean¬
sprucht werden. Die Torsionsmomente und Querkräfte sollen dabei als kon-
zentierte Lasten an den Punkten B1 und B2 eingeleitet werden, die Reaktions¬
kräfte in den Fällen b und c sollen in den Punkten xi1 und A2 angreifen. Der
untersuchte Flügel hat folgende Abmessungen und statische Werte:
l = 30 cm, 6 = 15 cm, h = 0,408 cm
JXE = 0,684.105 kg-cm2
Jfi = 0,913.105 kg-cm2JW0E = 12,82.105 kg-cm4
Pfeilungswinkel ß = 60°
44
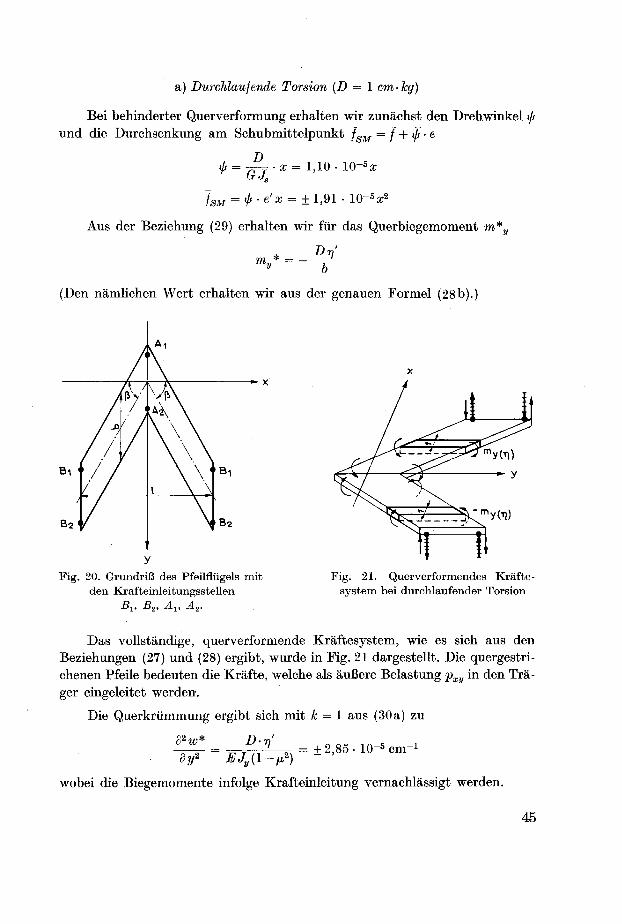
a) Durchlaufende Torsion (D = 1 cm kg)
Bei behinderter Querverformung erhalten wir zunächst den Drehwinkel >pund die Durchsenkung am Schubmittelpunkt fSM — f + ijj- e
,/, = _- • x = 1,10 • 10-5«
]SM = ]f,. e'x = ± 1,91 • 10-5x2
Aus der Beziehung (29) erhalten wir für das Querbiegemoment m*y
mv* =
--£
(Den nämlichen Wert erhalten wir aus der genauen Formel (28b).)
Fig. 20. Grundriß des Pfeilflügels mit
den Krafteinleitungsstellen
Bi, B2, Alt A2.
Fig. 21. Querverformendes Kräfte¬
system bei durchlaufender Torsion
Das vollständige, querverformende Kräftesystem, wie es sich aus den
Beziehungen (27) und (28) ergibt, wurde in Fig. 21 dargestellt. Die quergestri¬chenen Pfeile bedeuten die Kräfte, welche als äußere Belastung Pxy m den Trä¬
ger eingeleitet werden.
Die Querkrümmung ergibt sich mit k = 1 aus (30a) zu
ü!f = ^L~- = + 2,85 • 10-« cm-'
wobei die Biegemomente infolge Krafteinleitung vernachlässigt werden.
45
82w*Da t)' bei x = ü das Vorzeichen wechselt, hat der Verlauf von -«—a- an
dieser Stelle eine Unstetigkeit.Zur Berechnung der Verformung wird angenommen, daß die Unstetigkeit
sich nach beiden Seiten um je-die halbe Flügeltiefe b auswirkt. In diesem Be¬
reich wird ein Übergang der tatsächlichen Querkrümmung -z i von plus auf
minus nach einem Sinus-Gesetz angenommen (s. Tafel Via).Für die Verformung infolge Querkrümmung erhalten wir aus den Bezie¬
hungen (32):
^ = 1'732Jä^da"
fe = 3 \dx\ ^^ dx
0 0
82w
8y2
Durch zweimahge Integration von (31) erhalten wir die Wirkung der
Querdehnung auf die Durchsenkung:
f^-^jdxj—dx'
82w
Die mit den oben getroffenen Annahmen für den Verlauf von -„- „be-
rechneten Verformungen wurden in Tafel VII aufgetragen*).Zum Vergleich mit den Meßergebnissen an der gepfeilten Platte wurde
der Querschnitt durch die elastische Fläche an drei Stellen (x = 0, 7,5, 13,5)berechnet und in Tafel VII zusammen mit den Meßpunkten eingetragen.
Die errechnete Verformung zeigt, trotz der recht rohen Annahme über
den Querkrümmungsverlauf, gute Übereinstimmung mit den Meßwerten.
AuffälMg ist der enorme Anteil der Verformung infolge Querkrümmung (bis80% der Gesamtverformung).
b) Symmetrische Torsion (D = 1 cm-kg)
Verdrehung und Durchsenkung unter Vernachlässigung der Querver¬
formung erhalten wir aus den Beziehungen (22) und (20). Die Querkrümmungaus (30a) hat im symmetrischen Fall keine Unstetigkeit und kann daher ohne
Korrektur verwendet werden. Das gesamte, querverformende Kräftesystem,
*) Die Verformung am Schubmifctelpunkt besteht dabei aus der Summe der Einzel-
VerformungenfsM = fii + fsit+fe
46
wie es sich aus den Beziehungen (27 a) und (28, a b) ergibt, besteht aus ins¬
gesamt sechs, einzeln im Gleichgewicht sich befindenden Systemen von Kräf¬
ten, deren Gesamtwirkung sich jedoch nicht wesentlich vom Näherungswert
aus (29) unterscheidet.
Die, analog zum Fall (a) berechneten Verformungsanteile, sowie die
Querschnitte durch die elastische Fläche an drei Stellen nebst Meßpunkten
wurden in den Tafeln Villa und b dargestellt.
c) Querkraftbiegung (Q = 1 kg)
Die Berechnung wurde, gleich wie im Fall (b), ohne Korrektur des Quer-
krümmungsverlaufes durchgeführt und die Ergebnisse in den Tafeln IX a
und b dargestellt. Die Abweichung der Meßwerte von den Rechnungsergeb¬
nissen liegt, wie auch in den vorhergehenden Fällen größtenteils innerhalb
der Meßgenauigkeit.
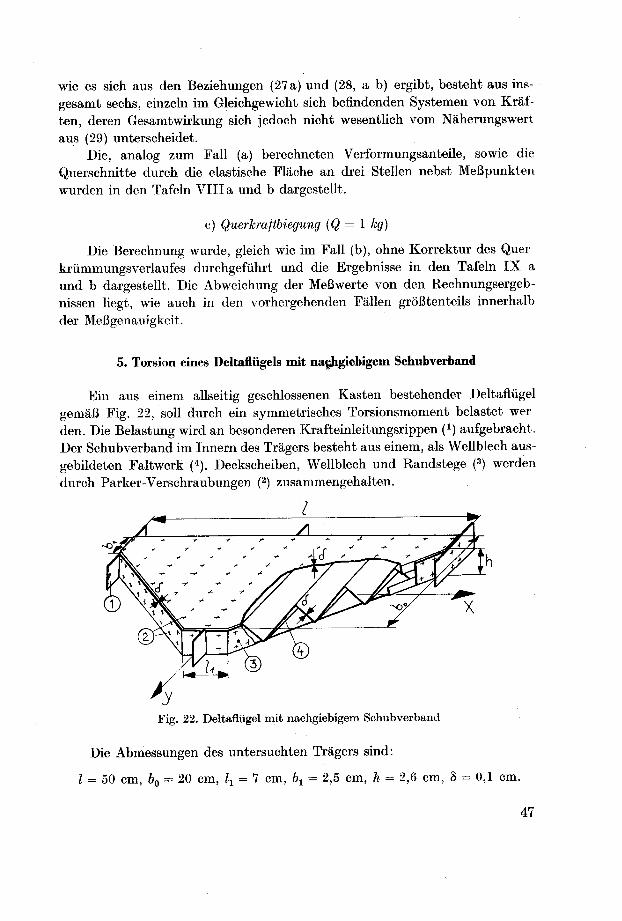
5. Torsion eines Deltaflügels mit nachgiebigem Schubverband
Ein aus einem allseitig geschlossenen Kasten bestehender Deltaflügel
gemäß Fig. 22, soll durch ein symmetrisches Torsionsmoment belastet wer¬
den. Die Belastung wird an besonderen Krafteinleitungsrippen (x) aufgebracht.
Der Schubverband im Innern des Trägers besteht aus einem, als Wellblech aus¬
gebildeten Faltwerk (4). Deckscheiben, Wellblech und Randstege (3) werden
durch Parker-Verschraubungen (2) zusammengehalten.
Fig. 22. Deltaflügel mit nachgiebigem Schubverband
Die Abmessungen des untersuchten Trägers sind:
l = 50 cm, bQ — 20 cm, lx = 7 cm, bx = 2,5 cm, h = 2,6 cm, § = 0,1 cm.
47
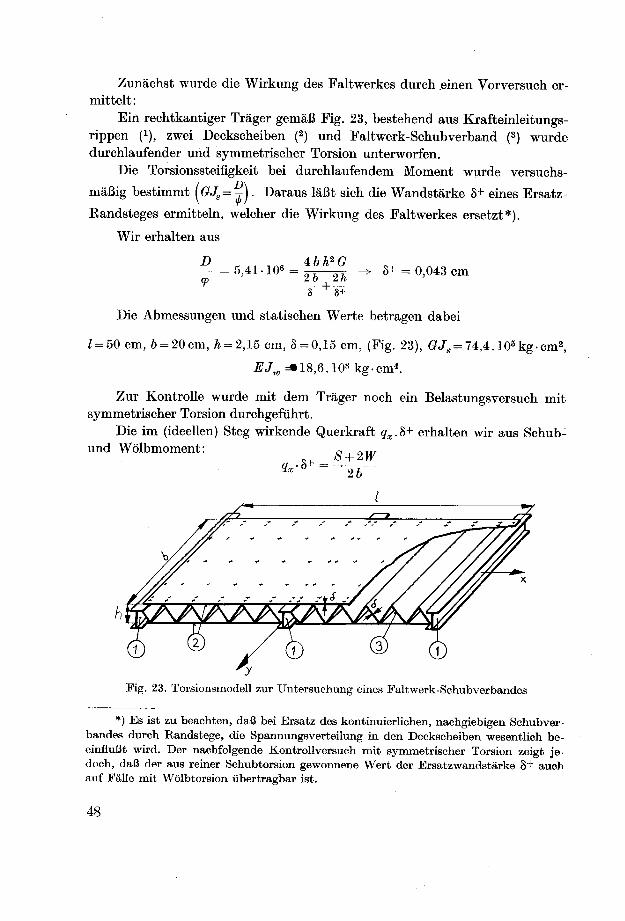
Zunächst wurde die Wirkung des Faltwerkes durch einen Vorversuch er¬
mittelt:
Ein rechtkantiger Träger gemäß Fig. 23, bestehend aus Krafteinleitungs¬rippen (*), zwei Deckscheiben (2) und Faltwerk-Schubverband (3) wurde
durchlaufender und symmetrischer Torsion unterworfen.
Die Torsionssteifigkeit bei durchlaufendem Moment wurde versuchs¬
mäßig bestimmt (GJs=j). Daraus läßt sich die Wandstärke 8+ eines Ersatz -
Randsteges ermitteln, welcher die Wirkung des Faltwerkes ersetzt*).
Wir erhalten aus
— = 5,41 • 10« =.,
-^ -> 8+ = 0,043 cm2 b 2h '
+ -
9S 8+
Die Abmessungen und statischen Werte betragen dabei
Z = 50cm, 6 = 20cm, Ä = 2,15om> 8 = 0,15 cm, (Fig. 23), £JS = 74,4.105kg-cm2,
^Jw=«18,6.108kg-cm4.
Zur Kontrolle wurde mit dem Träger noch ein Belastungsversuch mit
symmetrischer Torsion durchgeführt.Die im (ideellen) Steg wirkende Querkraft qx. 8+ erhalten wir aus Schub-
und Wölbmoment:
<z.*-s+8 + 2W
26"
Fig. 23. Torsionsmodell zur Untersuchung eines Faltwerk-Schubverbandes
*) Es ist zu beachten, daß bei Ersatz des kontinuierlichen, nachgiebigen Schubver¬
bandes durch Randstege, die Spannungsverteilung in den Deckscheiben wesentlich be¬
einflußt wird. Der nachfolgende Kontrollversuch mit symmetrischer Torsion zeigt je¬doch, daß der aus reiner Schubtorsion gewonnene Wert der Ersatzwandstärke 8+ auch
auf Fälle mit Wölbtorsion übertragbar ist.
48
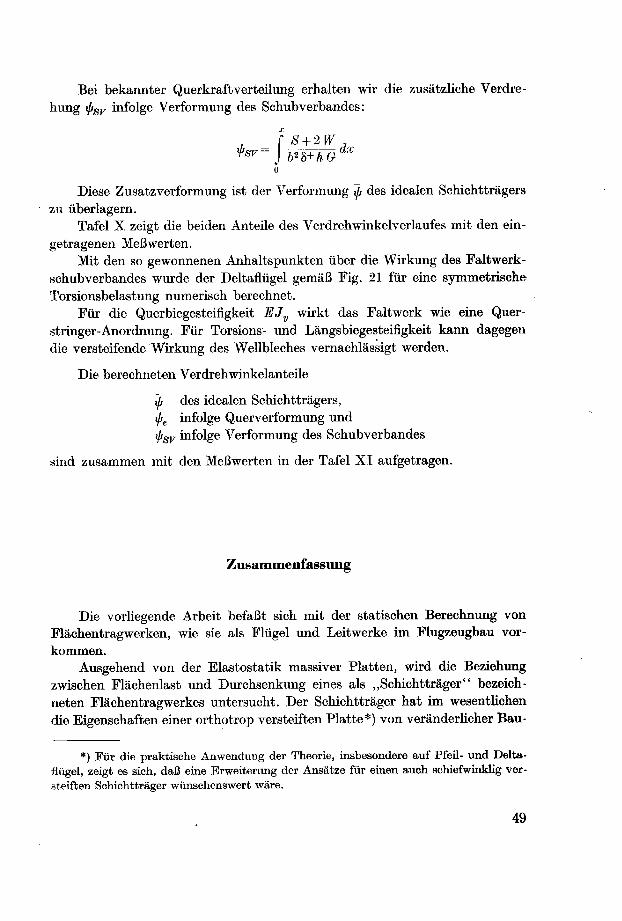
Bei bekannter Querkraftverteilung erhalten wir die zusätzliche Verdre¬
hung ifi8r infolge Verformung des Schubverbandes:
_
f S + 2W,
u
Diese Zusatzverformung ist der Verformung ^ des idealen Schichtträgerszu überlagern.
Tafel X zeigt die beiden Anteile des Verdrehwinkelverlaufes mit den ein¬
getragenen Meßwerten.
Mit den so gewonnenen Anhaltspunkten über die Wirkung des Faltwerk-
schubverbandes wurde der Deltaflügel gemäß Fig. 21 für eine symmetrische
Torsionsbelastung numerisch berechnet.
Für die Querbiegesteifigkeit EJy wirkt das Faltwerk wie eine Quer¬
stringer-Anordnung. Für Torsions- und Längsbiegesteifigkeit kann dagegendie versteifende Wirkung des Wellbleches vernachlässigt werden.
Die berechneten Verdrehwinkelanteile
ift des idealen Schichtträgers,
ifte infolge Querverformung und
i/rSF infolge Verformung des Schubverbandes
sind zusammen mit den Meßwerten in der Tafel XT aufgetragen.
Zusammenfassung
Die vorliegende Arbeit befaßt sich mit der statischen Berechnung von
Flächentragwerken, wie sie als Flügel und Leitwerke im Flugzeugbau vor¬
kommen.
Ausgehend von der Elastostatik massiver Platten, wird die Beziehungzwischen Flächenlast und Durchsenkung eines als „Schichtträger" bezeich¬
neten Flächentragwerkes untersucht. Der Schichtträger hat im wesentlichen
die Eigenschaften einer orthotrop versteiften Platte*) von veränderlicher Bau-
*) Für die praktische Anwendung der Theorie, insbesondere auf Pfeil- und Delta¬
flügel, zeigt es sich, daß eine Erweiterung der Ansätze für einen auch schiefwinklig ver¬
steiften Schichtträger wünschenswert wäre.
49
höhe und unterscheidet sich von den gebräuchlichen Tragflächenkonstruk¬tionen des Flugzeugbaus namentlich durch einen kontinuierlichen und starren
Schubverband.
Durch vereinfachende Annahmen über die Verformung (Regelfläche), ge¬
lingt es, die, Verformung und Belastung des Schichtträgers verknüpfendeDifferentialgleichung zu vereinfachen und deren rechnerische Auflösung all¬
gemein zu ermöglichen. Es entstehen dabei, als Erweiterung der bisher ge¬bräuchlichen statischen Größen wie Biegesteifigkeit und Bredt'sche Torsions-
steifigkeit, neue Größen, welche geeignet sind, das statische Verhalten der
untersuchten Träger vollständiger zu charakterisieren. Insbesondere wird die
Wirkung der Querschnittsverwölbung durch verhältnismäßig einfach zu hand¬
habende Werte, „Wölbgröße" und „Wölbtorsionssteifigkeit", der Berech¬
nung zugänglich gemacht.In den anschließenden Abschnitten wird der Einfluß der Verformung eines
nicht-idealen SchubVerbandes sowie der Querkrümmung (Abweichung der
elastischen Fläche von einer Regelfläche) untersucht, und Näherungsmethodenzur Berechnung dieser Einflüsse entwickelt.
Im praktischen Teil werden verschiedene Beispiele von Schichtträgernrechnerisch und z. T. versuchsmäßig untersucht. Zur Auflösung der, im theo¬
retischen Teil angegebenen Verformungsdifferentialgleichungen, wird ein
numerisches Verfahren angegeben. Die untersuchten Beispiele erhärten die
praktische Brauchbarkeit der im Vorhergehenden abgeleiteten Theorie, ins¬
besondere für die Berechnung der Wölbspannungen und für die Untersuchungschiefachsiger Träger, welche mit den bisher üblichen Methoden z. T. auf großeSchwierigkeiten stieß.
Mit den beschriebenen Methoden der Verformungsberechnung lassen sich
auch Näherungsverfahren für Schwingungsberechnungen, insbesondere auch
für Pfeil- und Deltaflügel durchführen. Solche, dynamische Untersuchungenwurden jedoch in der vorliegenden Arbeit, welche sich auf rein statische Fragenbeschränkt, nicht angeführt.
50
SummaryThis paper, entitled
' A Contribution to the Structural Analysis of thin AircraftWings"
deals with the structural analysis of flat structures, similar to those, encountered
in the wing and tailplane design of modern aircraft.
A sandwich type flat structure is considered. This structure is assumed
to be built up of two faces, carrying normal and shearing loads and of a core
of pure shearing rigidity normal to its center plane. The faces are assumed to be
stiffened by an orthogonal system of stringers. Due to the stringers, the local
bending rigidity of the flat structure is variable in different surface directions.
An arbitrary Variation of these bending rigidities is taken into account.
Thus, the considered structure has essentially the properties of an ortho-
tropic plate of variable thickness and differs from the usual aircraft wing
design mainly by the assumption of a continuos and rigid system of ribs and
webs, represented by the core.
The relation between load and elastic deformation of such a flat structure
is developed, starting from the theory of solid plates. Analysis yields a partialdifferential equation of fourth order with variable coefficients as an extension
of the biharmonic equation for the deformation of solid plates of uniform
thickness.
By suppressing the rib bending, the said differential equation is linearized
and a numerical Computing becomes possible. Hence, a theory of a two-dimen-
sional flat structure can be developed, as an extension of the bending and
twisting theory of the simple, one-dimensional beam.
In addition to the usual structural terms such as „bending moments"
and „torsional moments", „bending rigidity" and „St. Venants torsional
rigidity", new terms are introduced, characterizing the warping of cross sectiocs
due to non-uniform twist. These terms, „warping moment" and „warping rigi¬
dity" enable to consider warping as a bending problem of higher order and to
solve it in an analogeous manner to the problem of simple bending of a beam.
Special attention is paid to the torsional problem. By assuming continuous
distribution of ribs, this problem generally shows infinite redundancy. It can,
however, be reduced to a linear differential equation of second order and solved
by numerical methods. A numerical method to solve the torsional differential
equation with arbitrary coefficients is mentioned.
By assuming a finite number of ribs, the said equation degenerates into
a system of equations of finite integrals.In most cases, the deformation of the shear resisting system, represented
by the core, can be approximately computed and added to the deformation
of the ideal structure with rigid core.
The effect of rib bending, initially neglected, is small for the flat structure
with straight axis and considerable aspect ratio, but shows to be of great
importance for structures with sweep-back or delta shape. This effect can still
be computed with a satisfactory degree ofaccuracy by the use ofa strip method.
Experimental investigation deals with a wing-fuselage combination and
with wing modeis of rectangular, trapezoidal, swept-back and delta planformunder various loadings. Results agree well with the theory of flat structures
as developed.
51
Leer - Vide - Empty
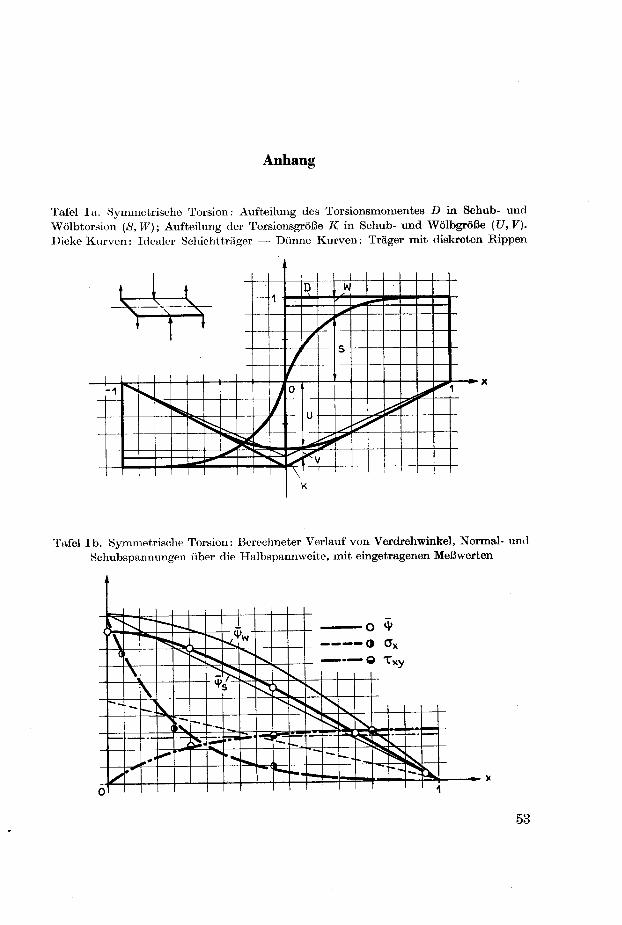
Anhang
Tafel la. Symmetrische Torsion: Aufteilung des Torsionsmomentes D in Schub- und
Wölbtorsion {8, W); Aufteilung der Torsionsgröße K in Schub- und Wölbgröße (XJ, V).
Dicke Kurven: Idealer Schichtträger — Dünne Kurven: Träger mit diskreten Rippen
, t I
vW - -
D,W
v-V^ : S
1S
i i
'
-1 "^^ j0
^^. ~y
^^ j5t wl
K
I
Tafel Ib. Symmetrische Torsion: Berechneter Verlauf von Verdrehwinkel, Normal- und
Schubspannungen über die Halbspannweite, mit eingetragenen Meßwerten
X\
<n
\^
^fcss*
O 4>
O 0X
O T;xy
53
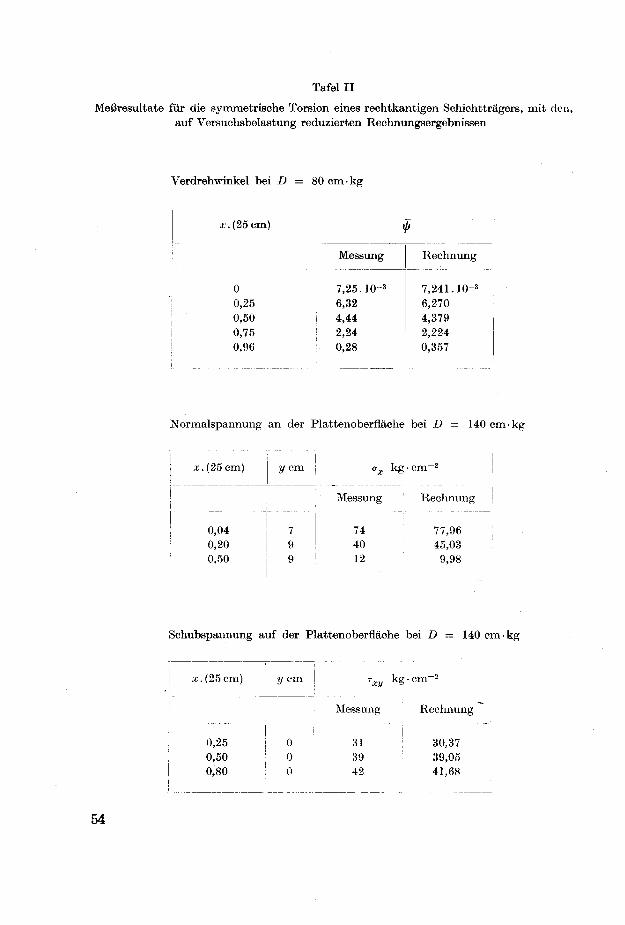
Tafel II
Meßresultate für die symmetrische Torsion eines rechtkantigen Schichtträgers, mit den
auf Versuchsbelastung reduzierten Rechnungsergebnissen
Verdrehwinkel bei D = 80 cm-kg
a.(25cm)
0
0,25
0,50
0,75
0,96
Messung
7,25 10~3
6,32
4,44
2,24
0,28
Rechnung
7,241.10"3
6,270
4,379
2,224
0,357
Normalspannung an der Plattenoberflache bei D = 140 cm-kg
(25 cm) y cm "* kg-cm2
iMessung Rechnung
0,04 7 74 77,96
0,20 9 40 45,03
0,50 9 12 9,98
Schubspannung auf der Plattenoberflache bei D = 140 cm-kg
| £.(25 cm) y cm Txy
Messung
31
39
42
kg cm2
0
0
0
Rechnun
0,25
0,50
0,80
30,37
39,05
41,68
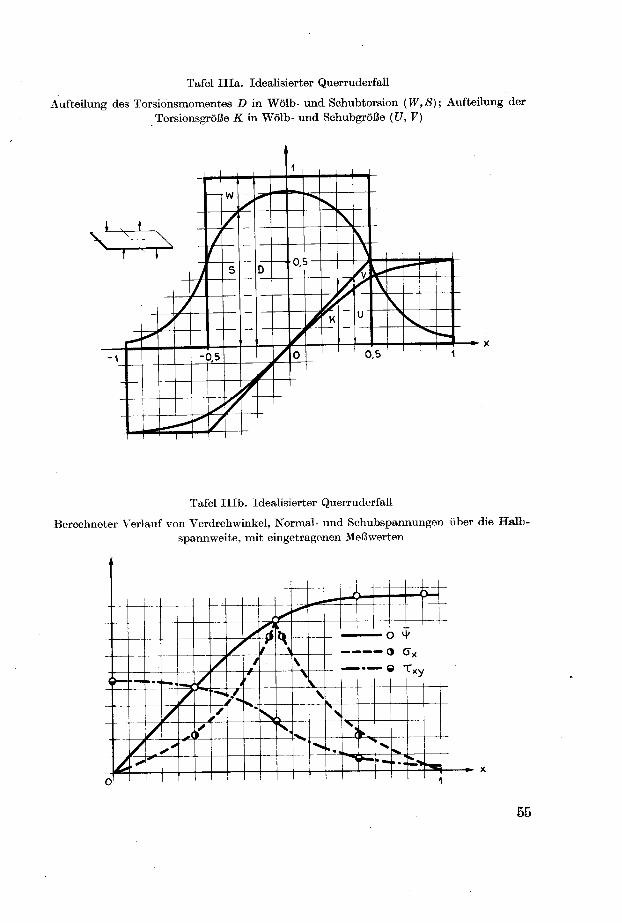
Tafel lila. Idealisierter Querruderfall
Aufteilung des Torsionsmomentes D in Wölb- und Schubtorsion (W,S); Aufteilung der
Torsionsgröße K in Wölb- und Schubgröße (U, V)
_l l
,
Lx
W-
s D0.'
y ^
uK
-1 -0,5 0 0,5' '
*
- ü/f
Tafel Illb. Idealisierter Querruderfall
Berechneter Verlauf von Verdrehwinkel, Normal- und Schubspannungen über die Halb¬
spannweite, mit eingetragenen Meßwerten
-1
. M)— —i:>-
—
|fk t*
'1 ^
> O Gx/ \
o— ... 4'
\V
-xy
/
«,
\
/' V \
.*<yv
>.
*
»'y^
-s'-J,
>»^u
,<* ^•^
=5^er
55
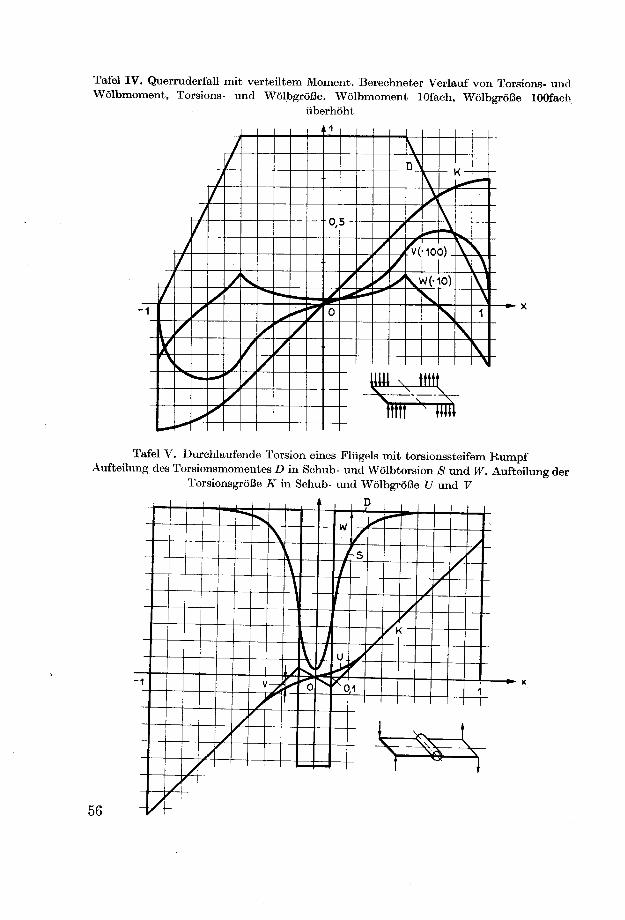
Tafel IV. Querruderfall mit verteiltem Moment. Berechneter Verlauf von Torsions- und
Wölbmoment, Torsions- und Wölbgröße. Wölbmoment lOfach, Wölbgröße lOOfach
überhöht
Tafel V. Durchlaufende Torsion eines Flügels mit torsionssteifem RumpfAufteilung des Torsionsmomentes D in Schub- und Wölbtorsion S und W. Aufteilung der
Torsionsgröße K in Schub- und Wölbgröße ü und V
D
56
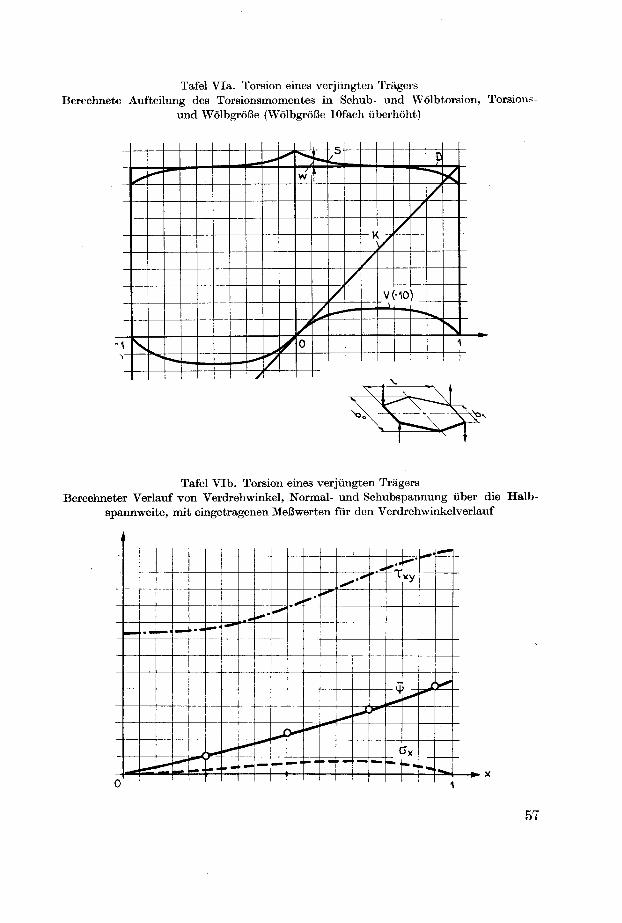
Tafel Via. Torsion eines verjüngten TrägersBerechnete Aufteilung des Torsionsmomentes in Schub- und Wölbtorsion,
und Wölbgröße (Wölbgröße lOfach überhöht)
Torsions
5D
w
V(-10)"
\
-1 0 1
"1 I
.N.
/
Tafel VIb. Torsion eines verjüngten Trägers
Berechneter Verlauf von Verdrehwinkel, Normal- und Schubspannung über die Halb¬
spannweite, mit eingetragenen Meßwerten für den Verdrehwinkelverlauf
I
-—•!
.«V-"
^•> T
xy
+•'
*»•*•*
• -—...
—
yr
CJx
.——
\- ^m • '"'" — -1
0\ —I —1
1
-»- X
57
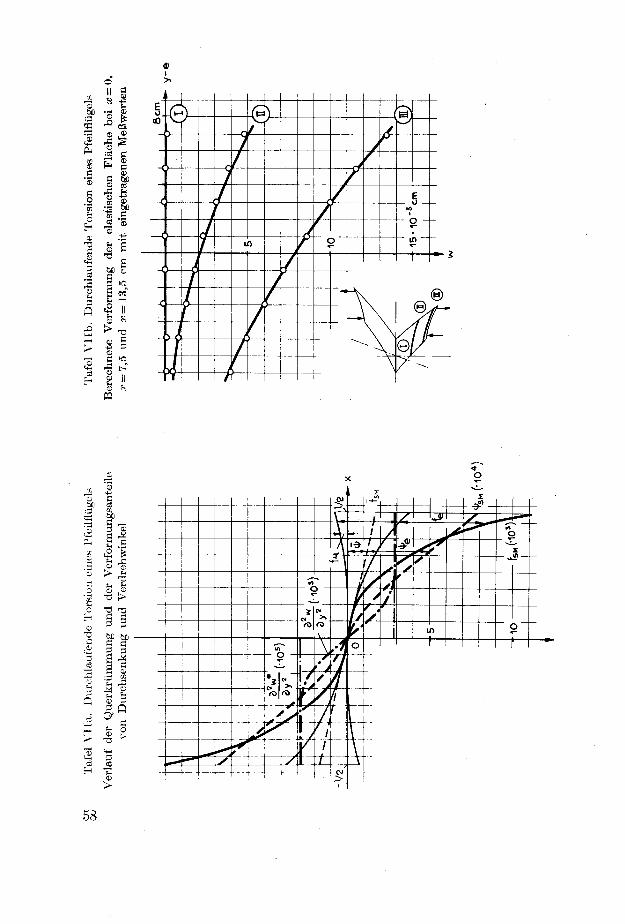
Tafel
Vlla.
DurchlaufendeTorsioneines-, Pfeilfl
ügels
Verlauf
der
Querkrümmungu
nd
der
Verformungsanteile
von
Durchsenkungu
nd
Verdrehwinkel
Tafel
VILb.
DurchlaufendeTorsioneines
Pfeilflügels
Berechnete Verformung
der
elastischenFläche
beix=
0,
x=7,5
und
»=13,5
cm
mit
eingetragenen
Meßwerten
y-e
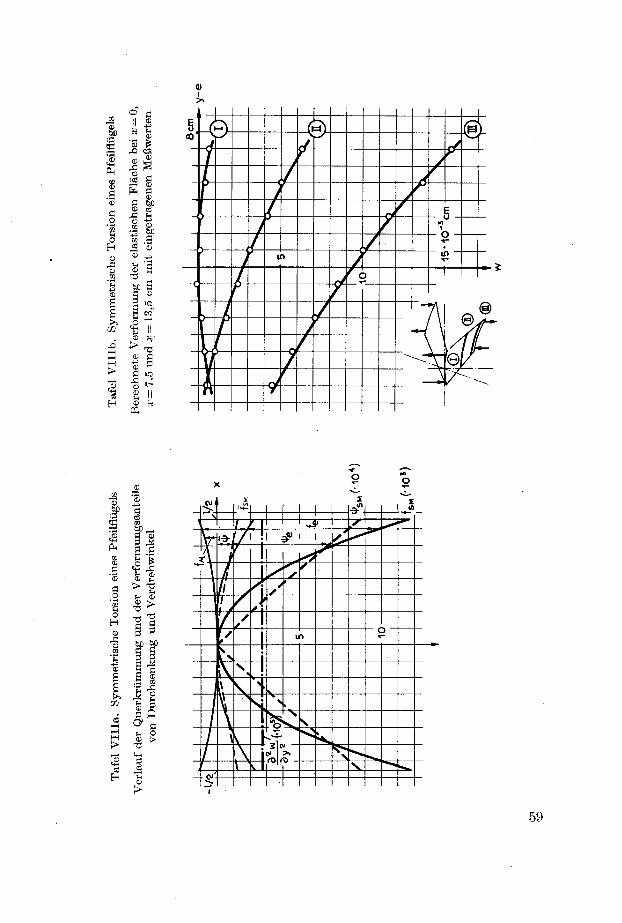
TafelVilla.Symmetrische
Torsioneines
Pfeilflügels
Verlaufd
er
Querkrümmungu
nd
der
Verformungsanteile
von
Durchsenkungu
nd
Verdrehwinkel ><W
-io4)
f,MHos)
Ol
SO
Tafel
VTIIb.SymmetrischeTo
rsioneines
Pfeilflügels
Berechnete Verformung
der
elastischenFläche
beix=
0,
x=
7,5undx=
1
3
,
5
cm
mit
eingetragenenMeßw
erten
10 -
15-10"scm
w
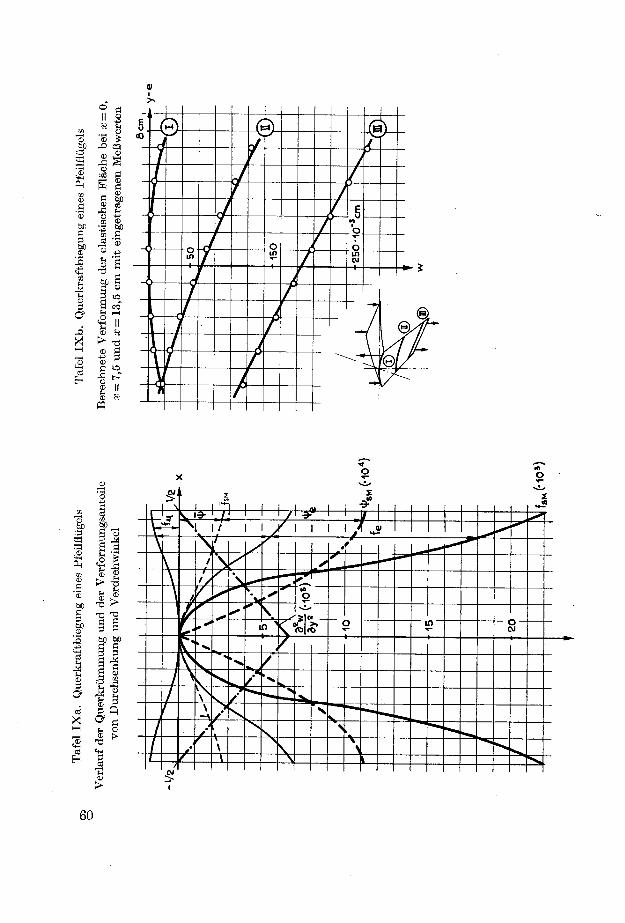
TafelI
X
a
.
Querkraftbiegunge
ines
Pfeilflügels
TafelI
X
b
.
Querkraftbiegunge
ines
Pfeilflügelso
Verlaufd
er
Querkrümmungu
ndder
Verformungsanteile
Berechnete Verformungd
er
elastischenFläche
beix—
0,
von
Durchsenkungu
nd
Verdrehwinkel
x=
7,5undx=
1
3
,
5
cm
mit
eingetragenen
Meßwerten
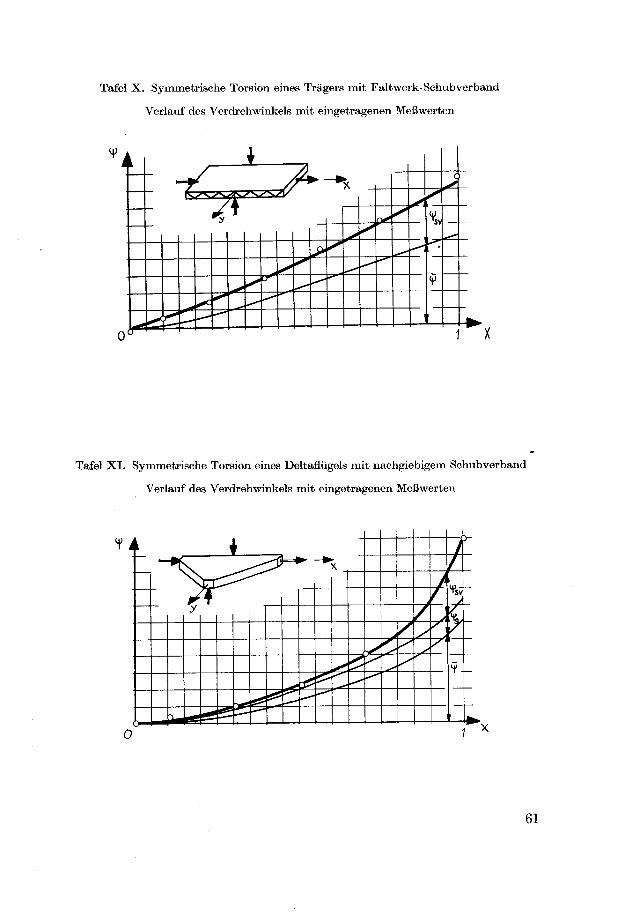
Tafel X. Symmetrische Torsion eines Trägers mit Faltwerk-Schubverband
Verlauf des Verdrehwinkels mit eingetragenen Meßwerten
Tafel XI. Symmetrische Torsion eines Deltaflügels mit nachgiebigem Schubverband
Verlauf des Verdrehwinkels mit eingetragenen Meßwerten
61
Literaturverzeichnis
[1] Girkmann K. Flächentragwerke. Wien, Springer 1946.
[2] Marcus H. Die Theorie elastischer Gewebe und ihre Anwendung auf die Berechnungbiegsamer Platten. Berlin, Springer 1924.
[3] Nadai A. Elastische Platten. Berlin, Springer 1925.
[4] Chwalla E. Die Formeln zur Berechnung der voll mittragenden Breite dünner Gurt-
und Rippenplatten. Stahlbau 9, 73 (1936).[5] Ebner H. Die Beanspruchung dünnwandiger Kostenträger auf Drillung bei behin¬
derter Querschnittsverwölbung. ZFM. 23 (1933).
[6] Stüßi F. Vorlesungen über Baustatik an der E.T.H. Zürich.
[7] Richardson L. F. The approximate arithmetical Solution by finite differences of
physical problems involving differential equations, with an applieation to the
Stresses in a masonry dam. Phil. Trans. Roy. Soc. Ser. A, Vol. 210.
[8] Karman T. v. und Wei-Zang Chien. Torsion with variable twist. Journal of the
Aer. Sc. 10. 1946.
62
Lebenslauf
Am 26. März 1921 wurde ich in Bern geboren. Ebenfalls in Bern besuchte
ich die Primär- und Mittelschulen bis zur Maturitätsprüfung in technisch¬
naturwissenschaftlicher Richtung.
Tm Herbst 1940 begann ich mein Studium an der Abteilung für Maschinen¬
ingenieurwesen an der E.T.H. in Zürich. Nach mehrmaligen, längeren und
kürzeren Unterbrüchen infolge Aktivdienstes, erwarb ich im Herbst 1946
das Diplom als Maschineningenieur.Anschließend wurde ich, als Angestellter der Studienkommission für
Luftfahrt, wissenschaftlicher Mitarbeiter am Institut für Flugzeugstatik an
der E.T.H., wo es mir, dank dem freundlichen Entgegenkommen von Herrn
Prof. E. Amstutz ermöglicht wurde, die vorliegende Promotionsarbeit aus¬
zuführen.









![herzig/MAT327- w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d 1 w [ ] 0 d](https://img.pdfslide.org/doc/110x75/5aff3ea07f8b9a68498f725d/herzigmat327-lecturenotes21pdf2011-12-011-w-0-d-1-w-0-d-1-w-0-d-1.jpg)




![SNB160(W) | SNB200(W) | SUB300(W) | SBB200(W ... de] Installations- und Bedienungsanleitung 2 [it] Istruzioni](https://img.pdfslide.org/doc/110x75/5b19054c7f8b9a3c258c4b0d/snb160w-snb200w-sub300w-sbb200w-de-installations-und-bedienungsanleitung.jpg)














