Embed Size (px)
Citation preview

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
Navigation eines LEGO™-Roboters mit Künstlicher Intelligenz
Gymnasium Thun Schadau 2007
Maturaarbeit von
Pascal Alexander Hager
Betreut durch
Ralf Kretzschmar

0.020.040.060.080
.02
0.0
40
.06
0.0
8
Navigation eines LEGO™-Roboters mit Künstlicher Intelligenz
Maturaarbeit von
Pascal Alexander Hager
Betreut durch
Ralf Kretzschmar
Gymnasium Thun Schadau 2007

0.020.040.060.080
.02
0.0
40
.06
0.0
8
Übersicht
• Roboter vorstellen• Programm erläutern• Problematik und Ergebnisse• Diskussion

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
0.02 0.04 0.06
Roboter
Übersicht

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
0.02 0.04 0.06
Roboter
Fahrwerk

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
0.02 0.04 0.06
Roboter
Fahrgestell - Lenkung

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
Software
Kommunikation
Programm
Roboter Computer
Kamerabild
Steuerungssignale

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
SoftwareFunktionsweise des Programms
Folgen der schwarzen
Linie

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
Neuronale Netze
Grundprinzip
Neuronales NetzEingaben
Ausgaben

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
Neuronale Netze
Lernen
Eingaben
Ausgaben
Neuronales Netz
Eingaben
Ausgaben
Ausgaben
Vergleich

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
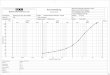
Neuronale Netze
Funktionsapproximation
-1-0
.8
-0.6
0000
0000
00...
-0.4
-0.2 0
0.2
0.4
0.60
0000
0000
0000
10.
8 1
-8
-6
-4
-2
0
2
4
6
8
Position der Linie im
Kamerabild
Ste
ueru
ng
swin
kel

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
Vorführung

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
SoftwareFunktionsweise des Programms
Folgen der schwarzen
Linie
Abbiegung
Signal suchen
Signal erkennen

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
Merkmalsbasierte Erkennung
Vorverarbeitung
Objekt Kamerabild Kanten

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
Merkmalsbasierte Erkennung
Auswertung
Kanten
Buchstabe A
Buchstabe B
DatenbankeinträgeVergleiche
n

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
Vorführung

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06
SoftwareFunktionsweise des Programms
Folgen der schwarzen
Linie
Abbiegung
Signal suchen
Signal erkennen
Abbiegen

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
Vorführung

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
Problematik und Ergebnisse

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
Diskussion

0.020.040.060.080
.02
0.0
40
.06
0.0
8
0.02 0.04 0.06 0.08
Danke für ihre Aufmerksamkeit






![Rspamd - Heinlein Support · Rspamd Detail - IPScore IP_SCORE(4.28) [ip: (9.91), ipnet: 89.163.128.0/17(7.24), asn: 24961(4.28), country: DE(-0.04)] Mitlernende persönliche IP-Reputationsdatenbank](https://img.pdfslide.org/doc/110x75/6062da69d81a0f35e7522698/rspamd-heinlein-support-rspamd-detail-ipscore-ipscore428-ip-991-ipnet.jpg)



![TRAPEZSPINDEL – LINEARANTRIEB CLA 20 · - 27 - CLA 20 1-gängige Trapezspindel Tr 13.5×3 Motor 0.06 kW - 2 polig UNTER-SETZUNG LAST [N] V HUB [mm/s] RN1 1500 11 RL1 2000 5.5 2-gängige](https://img.pdfslide.org/doc/110x75/6060d0f89befb017bd4684f7/trapezspindel-a-linearantrieb-cla-20-27-cla-20-1-gngige-trapezspindel-tr.jpg)












![HettCube 200 / 200 R HettCube 400 / 400 R HettCube 600 / 600 R · 2019-10-14 · kWh[LAZ4] 0.04 kWh Innenvolumen 150 l Umgebungsbedingungen (EN / IEC 61010-1) Aufstellungsort nur](https://img.pdfslide.org/doc/110x75/5e616be933e84431125cbe8e/hettcube-200-200-r-hettcube-400-400-r-hettcube-600-600-r-2019-10-14-kwhlaz4.jpg)




