Embed Size (px)
Citation preview
Finite Elemente I 22
2 Variationstheorie
Die FEM wird angewandt auf die sog. Variationsformulierung von Rand-und Anfangswertaufgaben fur Differentialgleichungen.
In diesem Abschnitt stellen wir die wichtigsten Existenz- und Eindeutig-keitssatze bereit und beleuchten die Beziehung zwischen klassischer undVariationsformulierung von Differentialgleichungen.
Die Charakterisierung von Funktionen, fur die ein Funktional stationar wird,als Losung von Differentialgleichungen ist das Thema der Variationsrech-nung, einer mathematischen Disziplin, deren Ausgangspunkt ublicherweiseauf das Jahr 1696 datiert wird, in dem Johann Bernoulli das Brachistochro-nenproblem der mathematischen Weltoffentlichkeit stellte.
2 Variationstheorie TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 23
2.1 Einstimmung: das Brachistochronenproblem
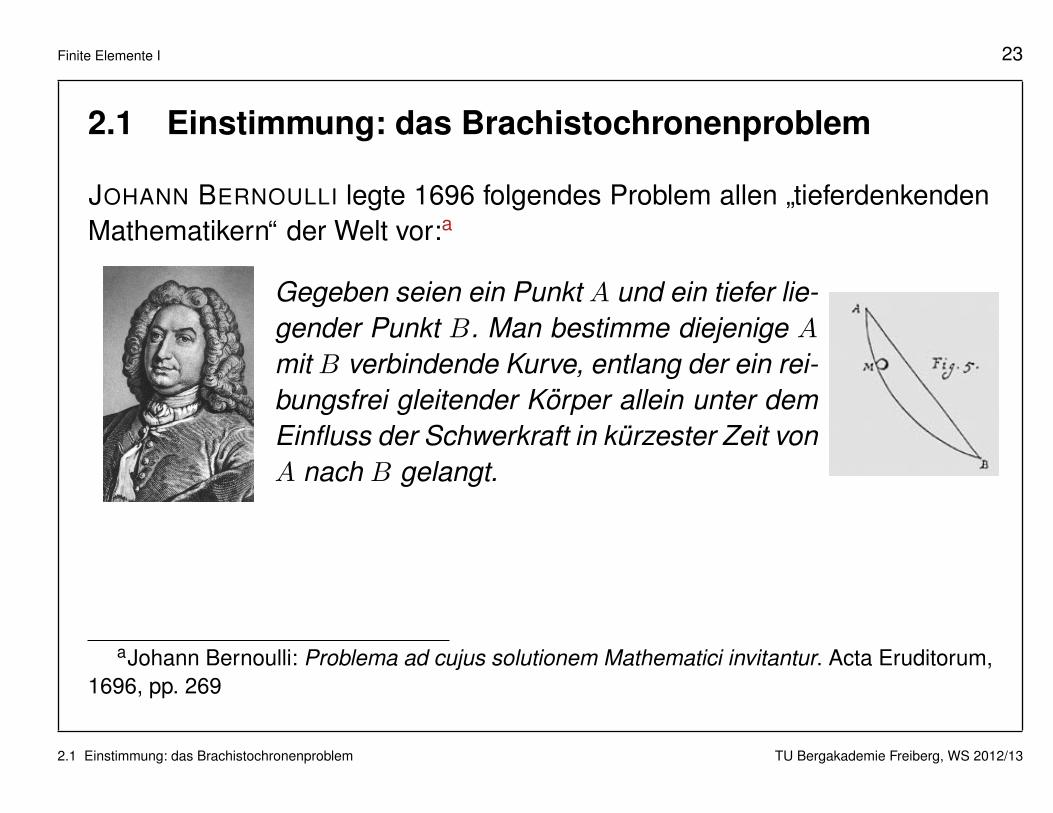
JOHANN BERNOULLI legte 1696 folgendes Problem allen ”tieferdenkendenMathematikern“ der Welt vor:a
Gegeben seien ein Punkt A und ein tiefer lie-gender Punkt B. Man bestimme diejenige Amit B verbindende Kurve, entlang der ein rei-bungsfrei gleitender Korper allein unter demEinfluss der Schwerkraft in kurzester Zeit vonA nach B gelangt.
LEIBNIZ UND NEWTON
Abb. 3 . . . und die Lösung
Johann Bernoullis ,,Kurve kürzester Fallzeit“,eine Zykloide, die Brachistochrone, wie sie genanntwurde, brachte den Stein ins Rollen, im wahrstenSinne des Wortes. Den Stein? Eine Lawine löste sieaus!
Der Streit beginntLeibniz hatte seiner Lösung der Bernoullischen Auf-gabe hinzugefügt, das Problem der Kurve kürzesterFallzeit sei so recht geeignet, die Vorzüge seiner Dif-ferentialrechnung ins rechte Licht zu setzen. Dennnur in dieser Bewanderte können diese Aufgabe glattlösen. Außer denen traue er nur Newton, Huygensund Hudde eine Lösung zu. Das war nicht falsch,aber Leibniz hätte besser nichts geschrieben, dennauf der anderen Seite des Ärmelkanals fühlte mansich tief beleidigt. Nicolas Fatio, ein in Englandlebender Schweizer, Mitglied der Royal Society, er-öffnete als erster den Angriff auf Leibniz. Das kamnicht von ungefähr. Fatio, ein enger Freund Newtons,war vor Jahren von Leibniz einmal herablassend be-handelt worden, und jetzt sprach ihm Leibniz auch
noch die Fähigkeit ab, das Problem der Brachisto-chrone lösen zu können. Fatio nahm Rache. In seiner,,Linea brevissimi descensus investigatio geometricaduplex“ von 1699 schrieb er: Newton sei der ersteund um mehrere Jahre älteste Erfinder dieses Kal-küls. Ob Leibniz, der zweite Erfinder, von Newtonetwas entlehnt hat, sollen andere beurteilen. ... Aberniemanden, der die Dokumente durchstudiert, wirddas Schweigen des allzu bescheidenen Newton oderLeibnizens vordringliche Geschäftigkeit täuschen“.
Der Prioritätsstreit war entbrannt. Den Frontal-angriff Fatios beantwortete Leibniz ein Jahr später,1700, in den Acta Eruditorium. Er schrieb ,,Newtonhabe in den Principia selber die Unabhängigkeit derLeibnizschen Entdeckungen anerkannt“. Möglicher-weise hätten sich die Wogen wieder geglättet, aberLeibniz beging wieder einen strategischen Fehler.1705 in einer Rezension von Newtons ,,Optik“, eineanonyme Rezension zwar, die aber nur von Leibnizstammen konnte, war zu lesen:
. . . Statt der Leibnizschen Differenzen benutztnun Herr Newton, und hat er immer benutzt, Flu-xionen, welche sich so nahe wie möglich wie diein gleichen kleinstmöglichen Zeitteilchen hervor-gebrachten Vermehrungen der Fluenten verhalten.Er hat davon in seinen mathematischen Prinzipiender Naturlehre und in anderen später veröffentlich-ten Schriften einen eleganten Gebrauch gemacht,wie auch später Honoratus Fabri in seiner SynopsisGeometrica .. .
Insgesamt war es eine wohlwollende Rezension,aber Newton und Fabri in einem Atemzug zu nen-nen, das war zu viel! Jetzt war endgültig Feuer imHaus!
Newtons Zorn und die Royal Society1708 ließ Newton durch den Oxforder Professor JohnKeill, der gerade Mitglied der Royal Society gewor-den war, Leibniz der Fälschung zeihen. Keill: Allediese Dinge folgen aus der .. . berühmten Methodeder Fluxionen, deren erster Erfinder Sir Isaac New-ton war, wie jeder leicht feststellen kann ... die selbeArithmetic wurde dann später von Leibniz in denActa Eruditorum veröffentlicht, der dabei nur denNamen und die Art Weise der Bezeichnung wechselte.
Das war eine bösartige Anschuldigung, undLeibniz beging, verlassen von seinem diploma-tischen Geschick und in Überschätzung seinerPosition, den dritten Fehler. Er rief seine heimli-chen Feinde in England in eigener Sache als Richter
aJohann Bernoulli: Problema ad cujus solutionem Mathematici invitantur. Acta Eruditorum,1696, pp. 269
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 24
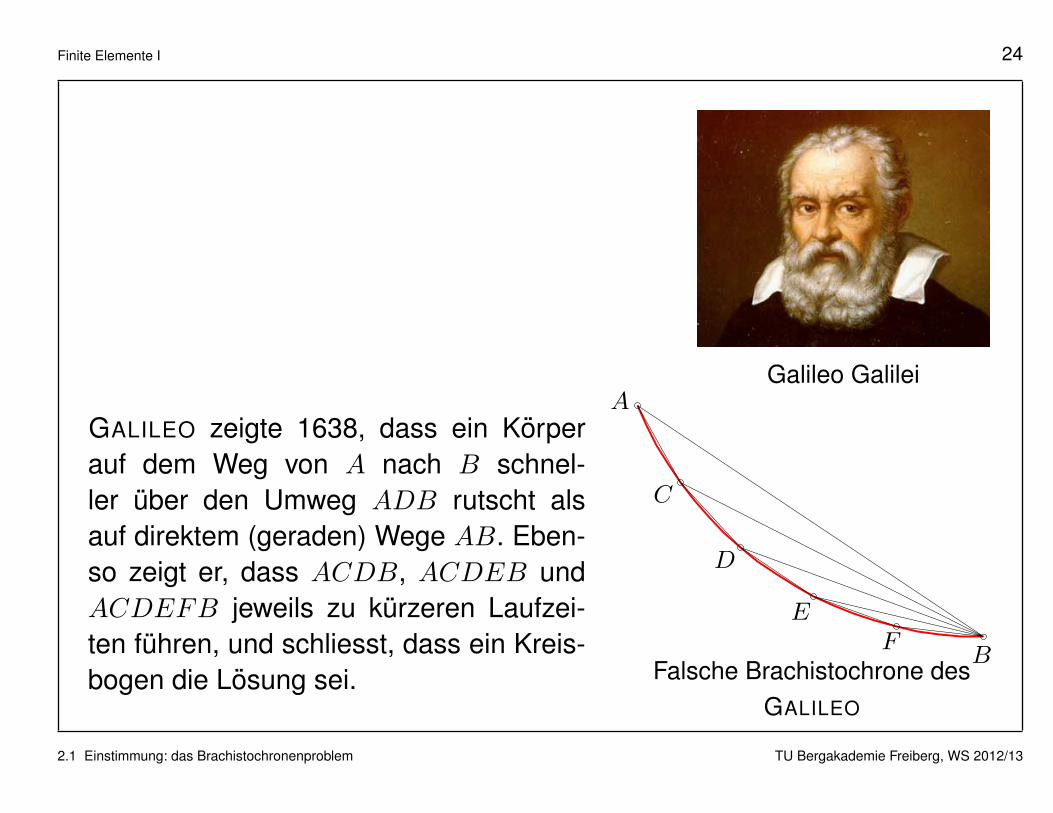
Galileo Galilei
GALILEO zeigte 1638, dass ein Korperauf dem Weg von A nach B schnel-ler uber den Umweg ADB rutscht alsauf direktem (geraden) Wege AB. Eben-so zeigt er, dass ACDB, ACDEB undACDEFB jeweils zu kurzeren Laufzei-ten fuhren, und schliesst, dass ein Kreis-bogen die Losung sei.
A
B
C
D
EF
Falsche Brachistochrone desGALILEO
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 25
Gottfried Wilhelm Leibniz Jacob Bernoulli Leonhard Euler
• 1684, Acta Eruditorum: LEIBNIZens Abhandlung uber Differential- undIntegralrechnung erscheint.
• Die Bruder JAKOB UND JOHANN BERNOULLI bauen diese Ideen syste-matisch zu praktischen und universell einsetzbaren Losungtechnikenaus.
• Spater im 18. Jahrhundert entwickelt dann LEONHARD EULER formaleLosungstechniken fur Variationsprobleme.
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 26
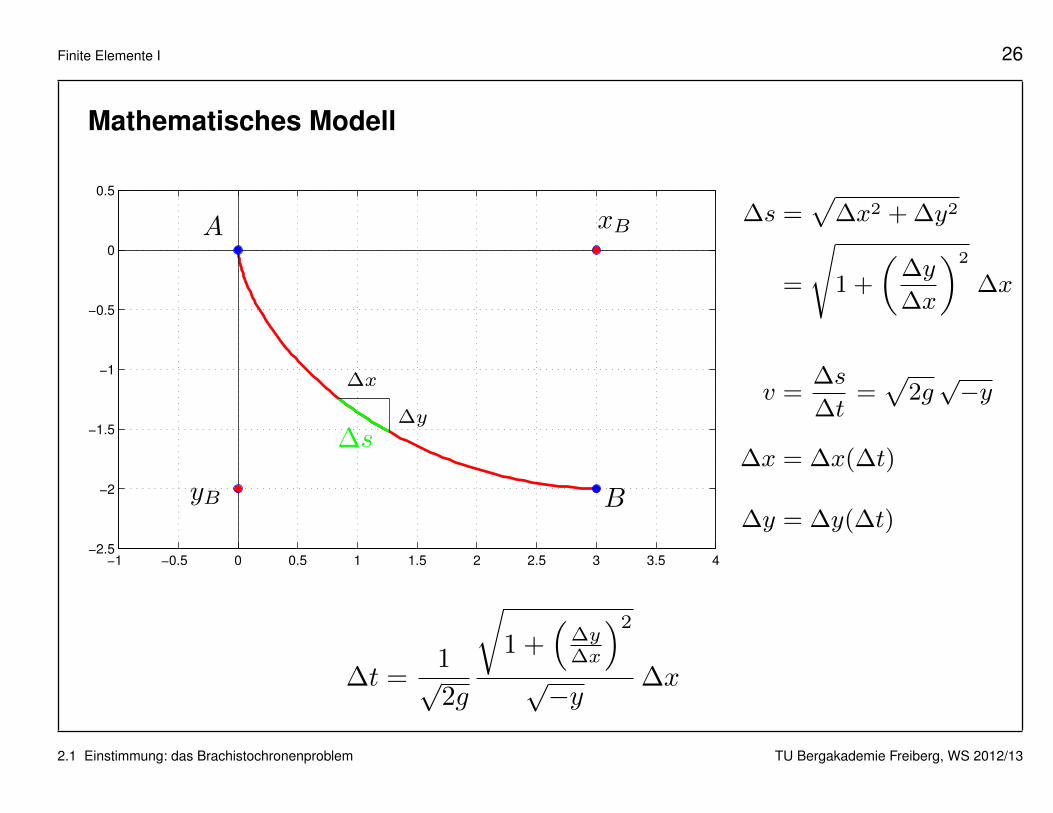
Mathematisches Modell
−1 −0.5 0 0.5 1 1.5 2 2.5 3 3.5 4−2.5
−2
−1.5
−1
−0.5
0
0.5
A
ByB
xB
∆x
∆y
∆s
∆s =√
∆x2 + ∆y2
=
√1 +
(∆y
∆x
)2
∆x
v =∆s
∆t=√
2g√−y
∆x = ∆x(∆t)
∆y = ∆y(∆t)
∆t =1√2g
√1 +
(∆y∆x
)2
√−y
∆x
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 27
Aufsummieren aller Teilzeiten ∆t zur Gesamtzeit T gefolgt vom Grenzuber-gang ∆t→ 0 fuhrt auf den Ausdruck
T =1√2g
∫ xB
0
√1 + y′(x)2√−y(x)
dx,
der die Laufzeit T in Abhangigkeit von der Bahnkurve y angibt.
Variationsproblem: Bestimme unter allen auf dem Intervall [0, xB ] stetigdifferenzierbaren Funktionen y = y(x) mit Randwerten
y(0) = 0, y(xB) = yB
diejenige(n), welche
T (y) :=
∫ xB
0
√1 + y′(x)2√−y(x)
dx
minimieren.
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 28
Das Brachistochronenproblem besitzt folgende allgemeinere Struktur: ge-sucht ist eine zulassige Funktion, (Glattheit, Randbedingungen)
x : [0, tE ]→ Rn, t 7→ x (t),
welche ein Funktional (”Zielfunktional“)
ψ(x ) :=
∫ tE
0
L(t,x (t), x (t)) dt
minimiert, mit einer gegebenen Funktion L : R2n+1 → R.
Beim Brachistochronenproblem:
n = 1, x (t) = x(t), L(t, x, x) =
√1 + x2
√−x
.
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 29
Losungsansatz: Auf EULER und LAGRANGE geht folgender Ansatz zuruck,der notwendige Bedingungen fur das Vorliegen einer Minimallosung liefert:
Zu einer Minimallosung x ?(t) erhalten wir mit einer beliebigen, hinreichendglatten Funktion φ : [0, tE ]→ Rn mit φ(0) = φ(tE) = 0 durch
xε(t) := x ?(t) + εφ(t)
Variationen von x ?, welche ebenfalls fur das Variationsproblem zulassigsind. Insbesondere entspricht x ? = x0.
Einsetzen in das Zielfunktional ψ fuhrt auf eine Funktion J = J(ε) := ψ(xε)
die an der Stelle ε = 0 ein lokales Minimum besitzt, fur die also
0 =dJ(ε)
dε
∣∣∣∣ε=0
=
∫ tE
0
[∂L
∂x(t,x ?(t), x ?(t))− ∂2L
∂t∂x(t,x ?(t), x ?(t))
]φ(t) dt .
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 30
Dieses Integral kann nur dann fur eine hinreichend große Klasse (z.B. C∞)Funktionen verschwinden, wenn auch
∂L
∂x(t,x ?(t), x ?(t))− ∂2L
∂t∂x(t,x ?(t), x ?(t)) = 0 . (2.1)
Gleichung (2.1) heißt Euler-Lagrange-Gleichung des Variationsproblemsund liefert eine notwendige Bedingung fur das Vorliegen einer minimieren-den Funktion x ?(t).
Beim Brachistochronenproblem gilt ∂tL(t, x, x) = 0 (autonomes Problem).
Folge: Fur die Hamilton-Funktion
H(t, x, x) := L(t, x, x)− x∂xL(t, x, x)
gilt
d
dtH(t, x?(t), x?(t)) ≡ 0, d.h. H(t, x?(t), x?(t)) = const ∀t.
Man nennt H daher auch ein erstes Integral von L.
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 31
Speziell beim Brachistochronenproblem erhalt man:
H(t, x, x) =1
√−x√
1 + x2 ≡ C(> 0),
oder aquivalent−x(1 + x2) =: 2r > 0
mit einer neuen Konstanten r.Auflosen nach x unter Beachtung von x(t) < 0 fuhrt auf die AWA
x(t) = −
√2r + x(t)
−x(t), x(0) = 0,
wofur die Methode der Trennung der Veranderlichen auf
t = t(x) = −∫ x
0
√−ξ
2r + ξdξ
fuhrt.
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 32
Die geschickte Substitution
ξ = −2r sin2 ϕ
2, ϕ ∈
[0,π
2
], dξ = −2r sin
ϕ
2cos
ϕ
2dϕ
ξ = 0⇔ ϕ = 0, ξ = x⇔ ϕ = ϑ
fuhrt schließlich auf die parametrisierte Losungsdarstellung
t(ϑ) = r(ϑ− sinϑ), x(ϑ) = −r(1− cosϑ)
bzw., nach Ruckbenennung auf die alten Variablen x und y, auf
x(ϑ) = r(ϑ− sinϑ), y(ϑ) = −r(1− cosϑ), 0 ≤ ϑ ≤ ϑB .
Der Parameterwert ϑB am Endpunkt lasst sich durch Losen der Gleichung
yB(ϑB − sinϑB) + xB(1− cosϑB) = 0 (2.2)
bestimmen; diese ergibt sich durch Elimination von r aus
y(ϑB) = yB und x(ϑB) = xB .
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 33
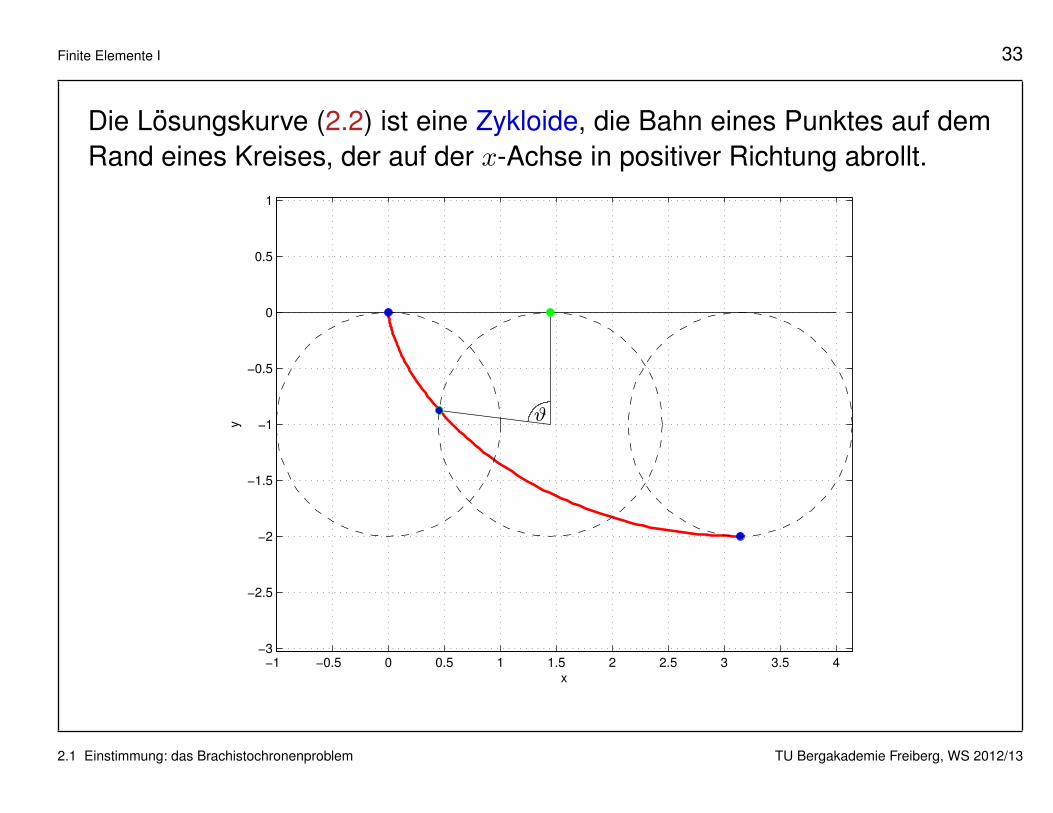
Die Losungskurve (2.2) ist eine Zykloide, die Bahn eines Punktes auf demRand eines Kreises, der auf der x-Achse in positiver Richtung abrollt.
−1 −0.5 0 0.5 1 1.5 2 2.5 3 3.5 4−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
x
y
ϑ
2.1 Einstimmung: das Brachistochronenproblem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 34
2.2 Bilinearformen
Definition 2.1 Sei V ein reeller normierter Vektorraum. Eine Bilinearformist eine Abbildung
a : V × V → R,
welche linear in beiden Argumenten ist. Die Bilinearform a heißt stetig, fallses eine Konstante C gibt mit
|a(u, v)| ≤ C‖u‖‖v‖ ∀u, v ∈ V . (2.3a)
Die Bilinearform a heißt symmetrisch, falls
a(u, v) = a(v, u) ∀u, v ∈ V . (2.3b)
Die Bilinearform a heißt koerziv, falls es eine Konstante α > 0 gibt mit
a(u, u) ≥ α‖u‖2 ∀u ∈ V . (2.3c)
2.2 Bilinearformen TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 35
Bemerkungen 2.2(a) Im Fall eines komplexen Vektorraums V fordert man Antilinearitat
im zweiten Argument und spricht dann von einer Sesquilinearform.Anstelle der Symmetrie fordert man hier a(u, v) = a(v, u) und sprichtvon einer Hermiteschen Sesquilinearform.
(b) Eine koerzive symmetrische [Hermitesche] Bilinearform [Sesquilinear-form] definiert ein Innenprodukt auf dem reellen [komplexen] Vektor-raum V . Oft wird es das zur Bilinearform a(·, ·) gehorende Energie-Innenprodukt genannt.
(c) Die Eigenschaft der Stetigkeit (2.3a) zieht die Stetigkeit der Bilinearforma(·, ·) als Funktion ihrer beiden Argumente nach sich.
2.2 Bilinearformen TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 36
Satz 2.3 Sei a : H ×H → R eine stetige, symmetrische und koerziveBilinearform auf dem reellen Hilbert-Raum H sowie ` : H → R einestetige Linearform. Dann gilt
(a) Die Minimierungsaufgabe
Minimiere J(u) := 12a(u, u)− `(u) unter allen u ∈H (2.4)
besitzt eine eindeutige Losung.
(b) Die Minimierungsaufgabe (2.4) ist aquivalent zur Variationsgleichung
Bestimme u ∈H sodass a(u, v) = `(v) ∀v ∈H . (2.5)
2.2 Bilinearformen TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 37
2.3 Die Dirichletsche RWA fur die Poisson-Gleichung
2.3.1 Die Poissongleichung
Ist k konstant in (1.1), so kann dies in f zusammengefasst werden und es ergibtsich die Poissongleichung
−∆u(x) = f(x), x ∈ Ω. (2.6a)
Den Gebietsrand Γ := ∂Ω zerlegen wir in ΓD und ΓN , Γ = ΓD ∪ ΓN , ΓD ∩ ΓN = ∅und stellen die Randbedingungen
u(x) = g(x) ∀x ∈ ΓD, kurz: u|ΓD= g, (2.6b)
∂u
∂n(x) = h(x) ∀x ∈ ΓN , kurz: ∂nu|ΓN
= h (2.6c)
mit zwei gegebenen, auf ΓD bzw. ΓN definierten Funktionen g und h. Die Randwert-aufgabe (RWA) (2.6) besitzt – unter geeigneten Voraussetzungen an das GebietΩ und die Daten f, g, h – eine eindeutig bestimmte klassische (d.h. in Ω zweimalstetig differenzierbare) Losung.
2.3 Die Dirichletsche RWA fur die Poisson-Gleichung TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 38
Im einfachsten Fall Γ = ΓD erhalten wir die sog. Dirichletsche RWA fur diePoisson-Gleichung
−∆u = f auf Ω, (2.7a)
u = g auf Γ = ∂Ω. (2.7b)
Neben (2.7) betrachten wir die sog. verallgemeinerte RWA
Bestimme u ∈ C2(Ω) mit u = g langs Γ und∫Ω
∇u · ∇v dx =
∫Ω
fv dx ∀v ∈ C∞0 (Ω).(2.8)
Schließlich betrachten wir noch die Minimierungsaufgabe
Minimiere unter allen Funktionen u ∈ C2(Ω) mit u = g langs Γ
das Funktional J(u) :=1
2
∫Ω
|∇u|2 dx−∫
Ω
fu dx.(2.9)
2.3 Die Dirichletsche RWA fur die Poisson-Gleichung TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 39
Satz 2.4 Seien g ∈ C(Γ) sowie f ∈ C(Ω) gegebene Funktionen. Sei ferneru ∈ C2(Ω). Dann gilt
(a) Lost u die Minimierungsaufgabe (2.9), so lost u auch die RWA (2.7).
(b) Die Funktion u ist genau dann Losung der RWA (2.7), wenn u Losungder verallgemeinerten RWA (2.8) ist.
Bemerkung 2.5 Nach Satz 2.4 lost jede hinreichend glatte Losung derVariationsaufgaben (2.8) oder (2.9) auch die RWA (2.7).Schwierigkeit: in vielen Anwendungen tritt der Fall auf, dass keine derartglatte Losung existiert.
2.3 Die Dirichletsche RWA fur die Poisson-Gleichung TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 40
Beispiel: Die Situation entspricht der bei den Minimierungsaufgaben
f(x) −→min x ∈ [a, b] (2.10a)
und f(x) −→min x ∈ [a, b] ∩Q, (2.10b)
wobei −∞ < a < b <∞ und f ∈ C[a, b].
Aufgabe (2.10a) besitzt stets Losungen. Sind diese jedoch allesamt irratio-nale Zahlen, so besitzt Aufgabe (2.10b) keine Losung.
Auf analoge Weise muss im Fall der Variationsaufgaben i.A. der Funk-tionenraum geeignet vervollstandigt werden. Dies fuhrt hier auf die sog.Sobolev-Raume. Weiteres Programm:
(i) Einfuhrung verallgemeinerter Ableitungen,(ii) Definition der Sobolev-Raume,(iii) Beweis der Poincare-Friedrichs-Ungleichung,(iv) Anwendung von Satz 2.3 mit geeignetem Sobolev-Raum.
2.3 Die Dirichletsche RWA fur die Poisson-Gleichung TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 41
2.4 Verallgemeinerte Ableitungen
Sei wieder Ω ⊂ Rd, d ∈ N offen und nicht leer.
Fur u ∈ C1(Ω) und eine ”Testfunktion“ φ ∈ C∞0 (Ω) gilt die partielle Integra-tionsformel ∫
Ω
u ∂jφdx = −∫
Ω
(∂ju)φdx, 1 ≤ j ≤ d.
Mit anderen Worten: fur v := ∂ju gilt die Beziehung∫Ω
u∂jφdx = −∫
Ω
vφ dx ∀φ ∈ C∞0 (Ω). (2.11)
Idee: definiere durch (2.11) die partielle Ableitung auch fur den Fall, dassu nicht (im klassischen Sinn) nach xj differenzierbar.
2.4 Verallgemeinerte Ableitungen TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 42
Definition 2.6 Sei Ω ⊂ Rd, d ∈ N, offen und nicht leer. Gilt fur zweiFunktionen u, v ∈ L2(Ω) die Beziehung (2.11), so nennen wir v die verall-gemeinerte Ableitung von u nach xj und schreiben, wie beim klassischenAbleitungsbegriff, v = ∂ju.
Satz 2.7 Besitzt u ∈ L2(Ω) die verallgemeinerte Ableitung v = ∂ju, so istdiese bis auf Funktionswerte auf einer Menge vom Maß Null definiert.
Beispiel 2.8 Sei u(x) := |x|, x ∈ (−1, 1). Dann ist
vα(x) :=
−1 falls − 1 < x < 0,
α falls x = 0,
1 falls 0 < x < 1
fur beliebige reelle Werte von α die verallgemeinerte Ableitung von u.
2.4 Verallgemeinerte Ableitungen TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 43
2.5 Die Sobolev-Raume H1(Ω) und H10 (Ω)
Definition 2.9 Sei Ω ⊂ Rd, d ∈ N, offen und nicht leer. Der Sobolev-RaumH1(Ω) ist die Menge aller Funktionen u ∈ L2(Ω) mit verallgemeinertenpartiellen Ableitungen erster Ordnung
∂ju ∈ L2(Ω) ∀j = 1, . . . , d.
Fur u, v ∈ H1(Ω) definieren wir
(u, v)1 :=
∫Ω
(uv +∇u · ∇v) dx (2.12)
sowie ‖u‖1 := (u, u)1/21 .
Satz 2.10 Durch (2.12) wird auf dem Sobolev-Raum H1(Ω) ein Innenpro-dukt definiert. Mit diesem versehen ist H1(Ω) ein Hilbert-Raum, sofern manwie bei L2(Ω) Funktionen identifiziert, welche fast uberall ubereinstimmen.
2.5 Die Sobolev-Raume H1(Ω) und H10(Ω) TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 44
Definition 2.11 Sei Ω ⊂ Rd, d ∈ N, offen und nicht leer. Mit H10 (Ω) be-
zeichnen wir den Abschluss der Menge C∞0 (Ω) bezuglich ‖ · ‖1.
Satz 2.12 H10 (Ω) ist ein reeller Hilbert-Raum.
Beispiel 2.13 Sei −∞ < a < b < ∞. Ist u ∈ H10 (a, b), so existiert eine
eindeutig bestimmte Funktion v ∈ C[a, b] mit u(x) = v(x) fast uberall in(a, b) sowie v(a) = v(b) = 0. Ferner gilt die Abschatzung
‖v‖∞ := maxa≤x≤b
|v(x)| ≤ (b− a)1/2
(∫ b
a
(u′(x)2 dx
)1/2
≤ (b− a)1/2‖u‖1.
2.5 Die Sobolev-Raume H1(Ω) und H10(Ω) TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 45
Beispiel 2.14 Sei −∞ < a < b < ∞ und die Funktion u ∈ C[a, b]
stuckweise stetig differenzierbar. Es bezeichne K die Menge der Punk-te, in denen u (im klassischen Sinne) differenzierbar ist sowie w : [a, b]→ Rmit
w(x) =
u′(x) falls x ∈ K,beliebig sonst.
Genauer gesagt: wir nehmen an, dass
(i) u ∈ C[a, b]
(ii) Es existieren endlich viele Punkte xj , a = x0 < x1 < · · · < xn = b
sodass u auf allen Intervallen (xj , xj+1) stetig differenzierbar ist undu′ stetig auf jeweils [xj , xj+1] fortgesetzt werden kann.
Dann gilt:
(a) w ist die verallgemeinerte Ableitung von u.(b) u ∈ H1(a, b).(c) u ∈ H1
0 (a, b)⇔ u(a) = u(b) = 0.
2.5 Die Sobolev-Raume H1(Ω) und H10(Ω) TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 46
Verallgemeinerte Randwerte
Definition 2.15 Sei Ω ⊂ Rd, d ∈ N, offen, nicht leer und beschrankt. BeiFunktionen u ∈ H1
0 (Ω) sagen wir, sie erfullen die Randbedingung
u = 0 langs ∂Ω (2.13)
im verallgemeinerten Sinne.
Bemerkungen 2.16(a) Beachte: C∞0 (Ω) liegt dicht in H1
0 (Ω).
(b) Fur d = 1 gilt (2.13) sogar im klassischen Sinne (vgl. Beispiel 2.13).
(c) Fur d > 1 gilt bei hinreichend glattem Rand Γ = ∂Ω
‖u‖L2(Γ) ≤ C‖u‖1 ∀u ∈ H1(Ω). (2.14)
2.5 Die Sobolev-Raume H1(Ω) und H10(Ω) TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 47
2.6 Die Poincare-Friedrichs-Ungleichung
Mit Blick auf den abstrakten Losungssatz 2.3 stellt die Poincare-Friedrichs-Ungleichung die Koerzivitat der Bilinearform a(·, ·) sicher.
Satz 2.17 Sei Ω ⊂ Rd, d ∈ N, offen, nicht leer und beschrankt. Dann exi-stiert eine Konstante C > 0, sodass die Poincare-Friedrichs-Ungleichung∫
Ω
|u(x)|2 dx ≤ C∫
Ω
|∇u(x)|2 dx ∀u ∈ H10 (Ω) (2.15)
erfullt ist.
2.6 Die Poincare-Friedrichs-Ungleichung TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 48
2.7 Ein Existenzsatz fur das Dirichlet-Problem
Wir betrachten nach den vorangehenden <berlegungen die oben bereitsformulierten Variationsprobleme (vgl. (2.8) und (2.9)) in ihrer vollen Allge-meinheit:
Bestimme u ∈ H1(Ω) mit u− g ∈ H10 (Ω) sodass∫
Ω
∇u · ∇v dx =
∫Ω
fv dx ∀v ∈ H10 (Ω).
(2.16)
Minimiere unter allen Funktionen u ∈ H1(Ω) mit u− g ∈ H10 (Ω),
das Funktional J(u) := 12
∫Ω
|∇u|2 dx−∫
Ω
fu dx.(2.17)
Dabei betrachten wir nur solche Randfunktionen g, welche ins Innere vonΩ zu einer H1-Funktion fortgesetzt werden konnen.
2.7 Ein Existenzsatz fur das Dirichlet-Problem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 49
Satz 2.18 (Dirichlet-Prinzip) Sei Ω ⊂ Rd, d ∈ N, offen, nicht leer sowie be-schrankt. Seien ferner f ∈ L2(Ω) sowie g ∈ H1(Ω) gegebene Funktionen.Dann gelten
(a) Die verallgemeinerte Minimierungsaufgabe (2.17) besitzt eine eindeu-tige Losung u ∈ H1(Ω).
(b) Diese ist auch die eindeutige Losung der verallgemeinerten RWA(2.16).
2.7 Ein Existenzsatz fur das Dirichlet-Problem TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 50
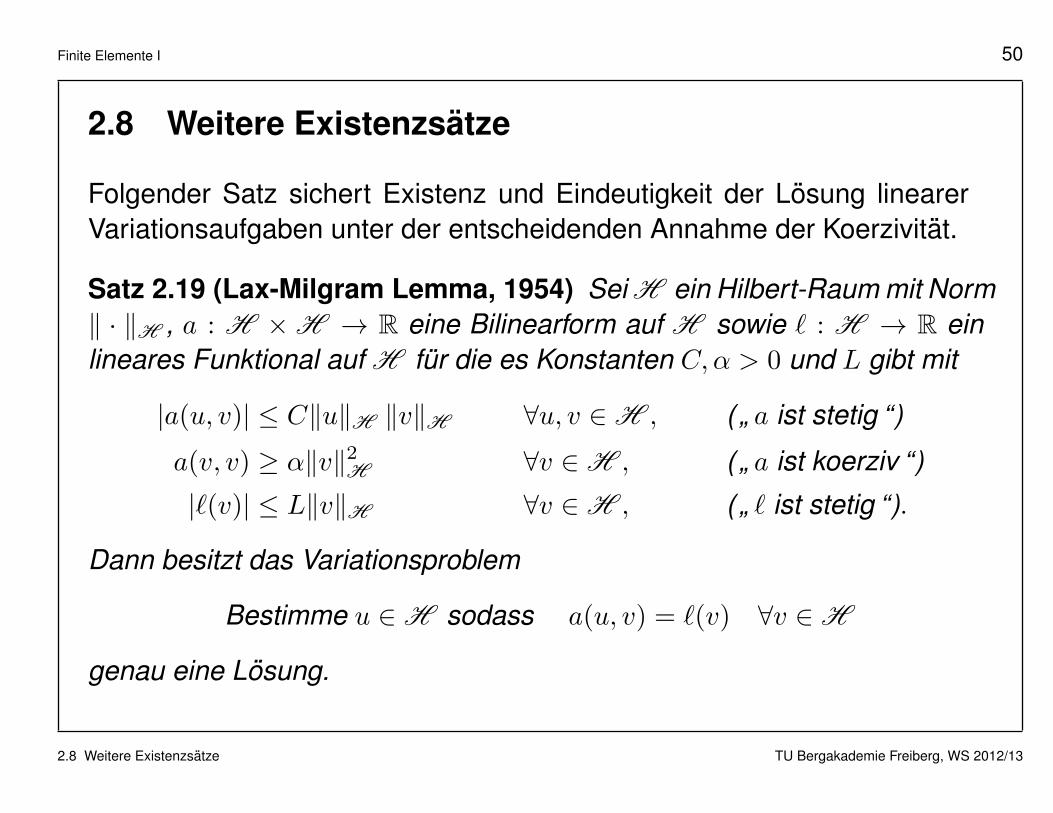
2.8 Weitere Existenzsatze
Folgender Satz sichert Existenz und Eindeutigkeit der Losung linearerVariationsaufgaben unter der entscheidenden Annahme der Koerzivitat.
Satz 2.19 (Lax-Milgram Lemma, 1954) Sei H ein Hilbert-Raum mit Norm‖ · ‖H , a : H ×H → R eine Bilinearform auf H sowie ` : H → R einlineares Funktional auf H fur die es Konstanten C,α > 0 und L gibt mit
|a(u, v)| ≤ C‖u‖H ‖v‖H ∀u, v ∈H , (” a ist stetig “)
a(v, v) ≥ α‖v‖2H ∀v ∈H , (” a ist koerziv “)
|`(v)| ≤ L‖v‖H ∀v ∈H , (” ` ist stetig “).
Dann besitzt das Variationsproblem
Bestimme u ∈H sodass a(u, v) = `(v) ∀v ∈H
genau eine Losung.
2.8 Weitere Existenzsatze TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 51
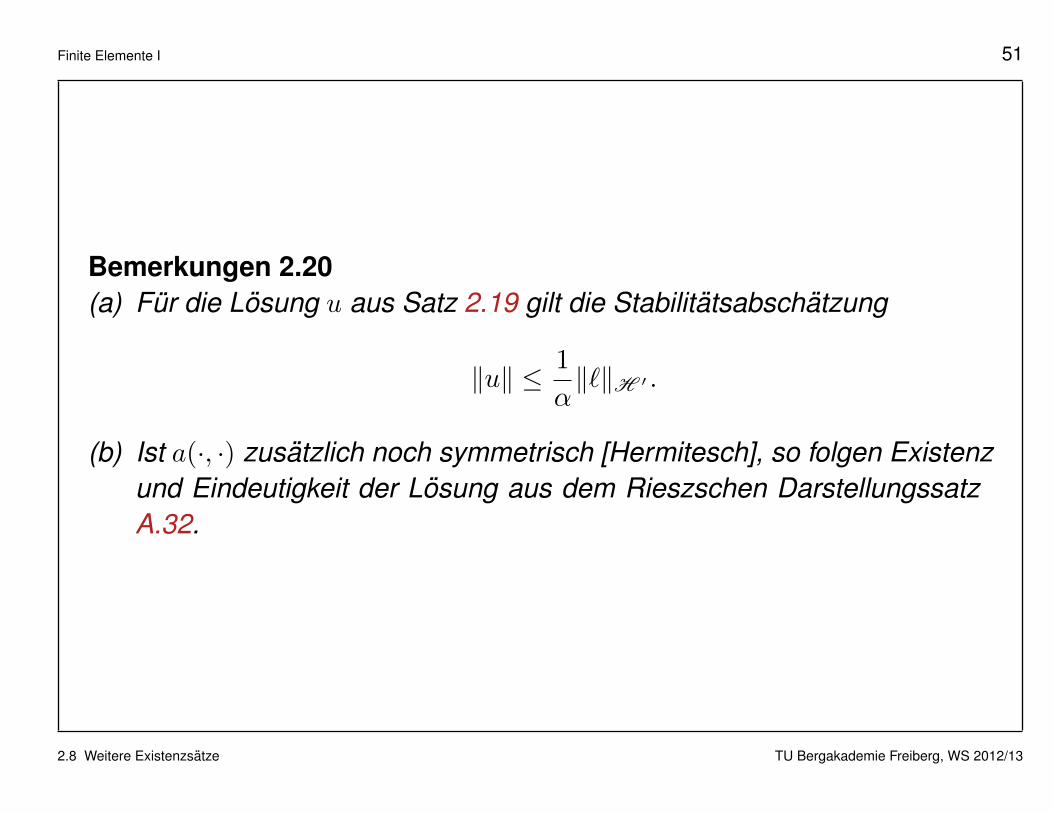
Bemerkungen 2.20(a) Fur die Losung u aus Satz 2.19 gilt die Stabilitatsabschatzung
‖u‖ ≤ 1
α‖`‖H ′ .
(b) Ist a(·, ·) zusatzlich noch symmetrisch [Hermitesch], so folgen Existenzund Eindeutigkeit der Losung aus dem Rieszschen DarstellungssatzA.32.
2.8 Weitere Existenzsatze TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 52
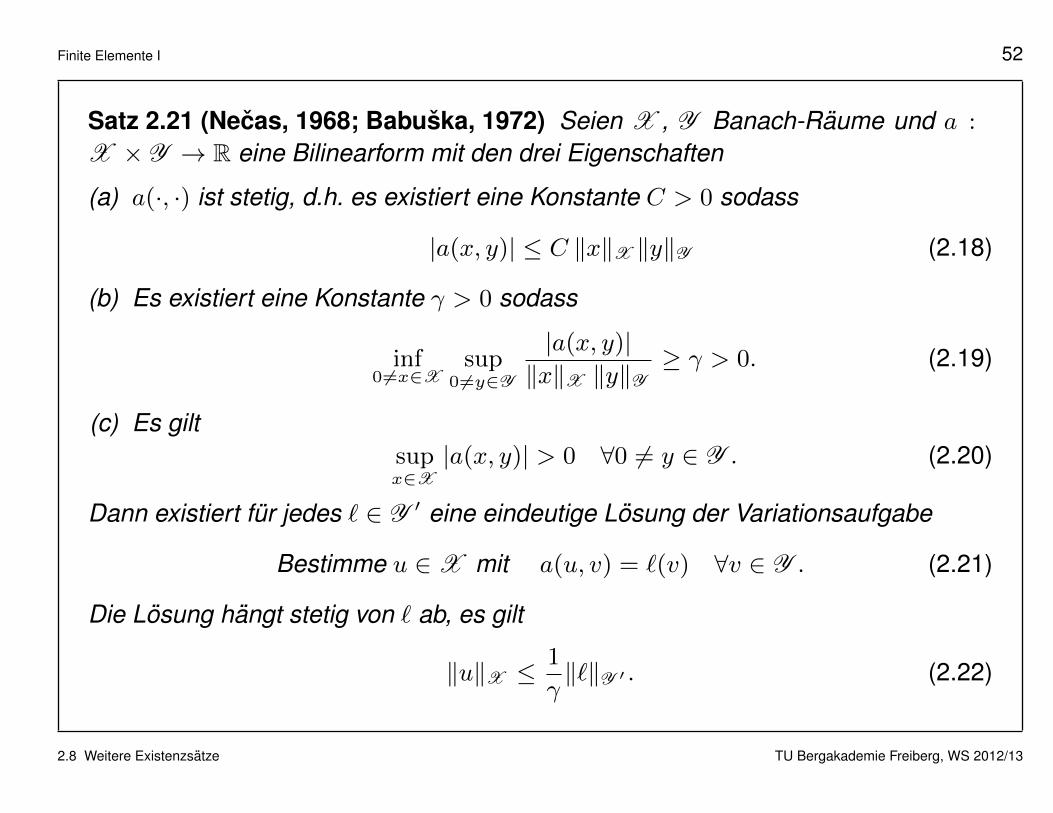
Satz 2.21 (Necas, 1968; Babuska, 1972) Seien X , Y Banach-Raume und a :
X × Y → R eine Bilinearform mit den drei Eigenschaften
(a) a(·, ·) ist stetig, d.h. es existiert eine Konstante C > 0 sodass
|a(x, y)| ≤ C ‖x‖X ‖y‖Y (2.18)
(b) Es existiert eine Konstante γ > 0 sodass
inf0 6=x∈X
sup0 6=y∈Y
|a(x, y)|‖x‖X ‖y‖Y
≥ γ > 0. (2.19)
(c) Es giltsupx∈X
|a(x, y)| > 0 ∀0 6= y ∈ Y . (2.20)
Dann existiert fur jedes ` ∈ Y ′ eine eindeutige Losung der Variationsaufgabe
Bestimme u ∈ X mit a(u, v) = `(v) ∀v ∈ Y . (2.21)
Die Losung hangt stetig von ` ab, es gilt
‖u‖X ≤1
γ‖`‖Y ′ . (2.22)
2.8 Weitere Existenzsatze TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 53
Bemerkung 2.22 Das Lax-Milgram Lemma ist ein Korollar von Satz 2.21
Folgender Zusatz zu Satz 2.21 ist manchmal nutzlich:
Satz 2.23 Werden in Satz 2.21 lediglich (2.18) und (2.19) vorausgesetzt,so ist die Abbildung
A : X → y ∈ Y : a(x, y) = 0 ∀x ∈X ⊥ ⊂ Y ′
ein Isomorphismus. Ferner ist (2.19) aquivalent zu
‖Ax‖Y ′ ≥ γ‖x‖X ∀x ∈X .
2.8 Weitere Existenzsatze TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 54
2.9 Euler-Lagrange-Gleichungen
Auf Euler und Lagrange geht eine Methode zuruck, Funktionen, welche eingegebenes Funktional stationar machen, als Losung einer Differentialglei-chung zu charakterisieren.
Um zumindest das formale Vorgehen zu beschreiben betrachten wir Funk-tionale der Bauart
J(u) =
∫Ω
F (x, u,∇u) dx
mit einem Gebiet Ω ⊂ Rd und einer hinreichend glatten Funktion
F : Ω× R× Rd → R, (x, u,p) 7→ F (x, u,p).
Eine Funktion u ∈ C2(Ω) ist stationarer ”Punkt“ von J gegenuber glattenStorungen εφ, ε ∈ R, φ ∈ C∞0 (Ω) mit kompaktem Trager, wenn
d
dεJ(u+ εφ)
∣∣∣∣ε=0
= 0 ∀φ ∈ C∞0 (Ω).
2.9 Euler-Lagrange-Gleichungen TU Bergakademie Freiberg, WS 2012/13
Finite Elemente I 55
Differentiation im Integral∫Ω
d
dεF (x, u+ εφ,∇u+ ε∇φ)
∣∣ε=0
dx
unter Anwendung der Kettenregel fuhrt auf∫Ω
(Fu(x, u,∇u)φ+
d∑j=1
Fpj (x, u,∇u)φxj (x)
)dx = 0.
Partielle Integration im Summenterm ergibt schließlich unter Beachtung von φ ≡ 0
auf ∂Ω∫Ω
(Fu(x, u,∇u)−
d∑j=1
∂xj [Fpj (x, u,∇u)]
)φdx = 0, ∀φ ∈ C∞
0 (Ω),
was nach dem Variationslemma auf die sog. Euler-Lagrange-Gleichung
Fu(x, u,∇u)−d∑j=1
∂xj [Fpj (x, u,∇u)] = 0, x ∈ Ω, (2.23)
des Funktionals J fuhrt.
2.9 Euler-Lagrange-Gleichungen TU Bergakademie Freiberg, WS 2012/13















![Neues von der Weiterentwicklung im Anticirce-Proca...Im Verlauf der Losung tauchen folgende Arten von Selbstschach auf:¨ R 1.Kg3×Lh2 [Ke1]! (wK springt ins Leere und entschlagt einen](https://img.pdfslide.org/doc/110x75/60b2fb195a619a591d24b4b9/neues-von-der-weiterentwicklung-im-anticirce-proca-im-verlauf-der-losung-tauchen.jpg)










