Embed Size (px)
Citation preview

Analysis II Daniel Ehrbar, D-BAUG 1
Literaturhinweise: ♦ Taschenbuch der Mathematik, I.N. Bronstein, K.A. Semendjajew, G. Musiol, H. Mühlig, 6.
vollständig überarbeitete und ergänzte Auflage, Verlag Harri Deutsch, 2006.
5. Differentialrechnung für Funktionen mit mehreren Variablen
5.1 Funktionen mit 2 Variablen 5.1.1 Definition einer Funktion von 2 Variablen [Bronstein 2006, S. 120] Die Funktion ),( yxfz = stellt eine Fläche im Raum dar. Das geometrische Bild einer linearen Funktion vom Typ 0=+++ dczbyax ist eine Ebene.
Die Achsenabschnittsform (q, p, r = Achsenabschnitte) einer Ebene lautet: 1=++rz
py
qx
5.1.2 Darstellungsformen einer Funktion [Bronstein 2006, S. 123] 5.1.2.1 Analytische Darstellung z = f(x, y) Explizite Darstellung (die Funktion ist nach einer Variablen – hier z – aufgelöst) F(x, y, z) = 0 Implizite Darstellung (die Funktion ist nicht nach einer der drei Variablen aufgelöst) Bsp.: Explizit dargestellt:
z = 2x + y + 1 ; z = x2 + y2 ; z = 2 ⋅ sin(x – y) Implizit dargestellt:
x2 + y2 + z2 – 1 = 0 ; 2x – 8y + 5z + 3 = 0 5.1.2.2 Graphische Darstellung Eine Funktion z = f(x,y) von zwei unabhängigen Variablen kann in einem dreidimensionalen kartesischen Raum durch eine über dem Definitionsbereich D liegende Fläche dargestellt werden. Der Funktionswert z besitzt dabei die geometrischen Bedeutungen einer Höhenkoordinate. Bsp.: Koordinatenebenen: Bsp.: Parallelebenen:
xy-Ebene: z = 0 Parallelebene zur xy-Ebene: z = konstant xz-Ebene: y = 0 Parallelebene zur xz-Ebene: y = konstant yz-Ebene: x = 0 Parallelebene zur yz-Ebene: x = konstant
Analysis II Daniel Ehrbar, D-BAUG 2
5.1.2.3 Ebenen in allgemeiner Lage
Die räumliche Lage einer Ebene mit der allgemeinen Funktionsgleichung ax + by + cz + d = 0 lässt sich aus ihren Schnittpunkten Sx = (x, 0, 0), Sy = (0, y, 0) und Sz = (0, 0, z) mit den drei Koordinatenachsen bestimmen. So erhalten wir beispielsweise für die Ebene 3x + 6y + 4z = 12 die folgenden drei Achsenschnittpunkte: Sx = (4, 0, 0) ; Sy = (0, 2, 0) ; Sz = (0, 0, 3) 5.1.3 Rotationsflächen [Bronstein 2006, S. 220] Die Funktionsgleichung einer zur z-Achse rotationssymmetrischen Fläche besitzt die allgemeine Form
⎟⎠⎞⎜
⎝⎛ += 22 yxfz
Eine solche Rotationsfläche entsteht durch Drehung der Kurve z = f(x) um die z-Achse. Dabei bewegt sich der (beliebige) Kurvenpunkt (x, z) mit z = f(x) auf einer Kreisbahn um die z-Achse. Die x-Koordinate wird zum Radius r des beschriebenen Kreises, der im räumlichen xyz-Koordinatensystem durch die Gleichungen
x2 + y2 + z2 = r2 ; z = f(r) = konstant
beschrieben werden kann. Mit 22 yxr += erhalten wir aus z = f(r) für a ≤ r ≤ b schliesslich die Gleichung der gesuchten Rotationsfläche:
( ) 22 yxrfz +== 5.1.4 Höhenliniendiagramm (Niveaulinien) [Bronstein 2006, S. 121] Beim Höhenliniendiagramm (Gesamtheit aller Höhenlinien) werden alle auf der Fläche z = f(x, y) gelegenen Punkte gleicher Höhe z = c zu einer Flächenkurve zusammengefasst. Diese Kurve lässt sich auch als Schnitt der Fläche z = f(x, y) mit der zur xy-Ebene parallelen Ebene z = c auffassen. Die Projektion einer solchen „Linie gleicher Höhe“ in die xy-Ebene wird als Höhenlinie bezeichnet. Die Höhenlinie einer Funktion (Fläche) z = f(x,y) ist durch die Gleichung:
f(x, y) = konstant = c definiert. Sie gehorchen damit der folgenden Differentialgleichung:
y
x
ffy −== αtan'
5.2 Funktionen mit 3 oder mehr Variablen [Bronstein 2006, S. 120]
Der Begriff einer partiellen Ableitung 1. Ordnung lässt sich ohne Schwierigkeiten auch auf Funktionen von mehr als zwei unabhängigen Variablen übertragen. Allerdings ist hier eine geometrische Deutung der partiellen Ableitungen nicht mehr möglich.
Analysis II Daniel Ehrbar, D-BAUG 3
Bei einer Funktion u = f(x, y, z) von drei unabhängigen Variablen können wir partiell nach x, y oder z differenzieren, wobei während des Differenzierens jeweils die beiden übrigen Variablen als Parameter festgehalten werden. Es gibt somit drei partielle Ableitungen 1. Ordnung, die wir wie folgt kennzeichnen:
Partielle Ableitung nach x: fx , xf∂∂
Partielle Ableitung nach y: fy , yf∂∂
Partielle Ableitung nach z: fz , zf∂∂
Die Produktregel bei zwei unabhängigen Variablen, d.h. für eine Funktion vom Typ
z = f(x, y) = u(x, y) ⋅ v(x, y) = u ⋅ v lautet wie folgt:
uxvv
xu
xf
xz
⋅∂∂
+⋅∂∂
=∂∂
=∂∂ oder: zx = uxv + vxu
uyvv
yu
yf
yz
⋅∂∂
+⋅∂∂
=∂∂
=∂∂ oder: zy = uyv + vyu
5.3 Partielle Differentiation 5.3.1 Partielle Ableitung 1. Ordnung [Bronstein 2006, S. 408] Die partiellen Ableitungen 1. Ordnung einer Funktion ),( yxfz = erhalten wir, indem wir die Funktion
),( yxfz = nach der ersten Variablen x differenzieren, wobei die zweite Variable y als konstant angenommen wird (partielle Ableitung nach x). Dann wird nach der zweiten Variablen y abgeleitet und die erste Variable x als konstant betrachtet (partielle Ableitung nach y).
Schreibweisen: fDfxff xxx ==∂∂
= , bzw. fDfyff yyy ==∂∂
= ,
Geometrische Deutung der partiellen Ableitungen von z = f(x, y) an der Stelle (x0, y0):
fx(x0, y0): Anstieg der Flächentangente im Flächenpunkt P = (x0, y0, z0) in der x-Richtung fy(x0, y0): Anstieg der Flächentangente im Flächenpunkt P = (x0, y0, z0) in der y-Richtung
Die partiellen Ableitungen 1. Ordnung von z = f(x,y) bestimmen damit den Anstieg der Bildfläche in P in Richtung der x- bzw. y-Achse. Eine Funktion mit mehr als zwei Variablen wird partiell differenziert, indem zuerst alle unabhängigen Variablen bis auf die Differentiationsvariable als konstante Grössen, d.h. als Parameter betrachtet und nach der Differen-tiationsvariablen abgeleitet wird. So wird mit jeder Variablen einzeln verfahren. Bsp.: z = f(x, y) = –4x3y2 + 3xy4 – 3x + 2y + 5
Wir bestimmen die partiellen Ableitungen 1. Ordnung dieser Funktion und berechnen ihre Werte an der Stelle x = 1, y = 2:
Analysis II Daniel Ehrbar, D-BAUG 4
( ) [ ] 331252334, 422423 −+−=++−+−∂∂
= yyxyxxyyxx
yxf x
( ) [ ] 212852334, 33423 ++−=++−+−∂∂
= xyyxyxxyyxy
yxf y
fx(x,y) = –3 ; fy(x,y) = 82
Die im Flächenpunkt P = (1, 3, 38) errichteten Tangenten besitzen somit den folgenden Anstieg bzw. Steigungswinkel:
Tangente in x-Richtung:
mx = tanα = –3 ⇒ α = 1800 + arctan(–3) = 108.40
Tangente in y-Richtung:
my = tanβ = 82 ⇒ β = arctan 82 = 89.30 5.3.2 Nablaoperator und Gradient eines Skalarfeldes 5.3.2.1 Nablaoperator [Bronstein 2006, S. 677] Nablaoperator wird ein symbolischer Vektor ∇ genannt, der zur Darstellung von räumlichen Differential-operationen benutzt wird. In kartesischen Koordinaten gilt:
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
∂∂∂∂∂∂
=∂∂
+∂∂
+∂∂
=∇
zfyfxf
ezfe
yfe
xff zyx
rrr
5.3.2.2 Gradient eines Skalarfeldes [Bronstein 2006, S. 671] Gradient wird ein Vektor grad f = D f genannt, der jedem Punkt eines Skalarfeldes f = f(r) zugeordnet werden kann und wie folgt berechnet wird: Der Gradient steht senkrecht auf den Niveauflächen f = konstant von f und zeigt in die Richtung des steilsten Anstiegs. Der Betrag des Gradienten ist gleich der grössten Steigung. Der absolute Betrag des Gradienten ist also in den Punkten grösser, in deren Umgebung die Feldliniendichte grösser ist. Der Gradient verschwindet, falls sich in dem betrachteten Feldpunkt ein Maximum oder Minimum von f befindet. Rechenregeln für Gradienten: f und g sind skalare Felder, c eine Konstante: (1) gradc = 0 (3) grad(f + g) = gradf + gradg (2) grad(cf) = c · gradf (4) grad(f · g) = g · gradf + f · gradg
fDgradf ∇==

Analysis II Daniel Ehrbar, D-BAUG 5
5.3.3 Richtungsableitung [Bronstein 2006, S. 670] Die Richtungsableitung fDar eines ebenen oder räumlichen Skalarfeldes f in Richtung eines vorgegebenen Richtungsvektors ar ist ein Mass für die Änderung des Funktionswertes von f, wenn man von einem Punkt P aus in Richtung von ar um eine Längeneinheit fortschreitet:
faa
egradfeffD aaa ∇⋅⋅=⋅=⋅∇=r
rrr
r1
Man erhält sie durch Projektion des Gradienten von f auf den normierten Richtungsvektor aa
ear
rr
⋅=1
. Die
Richtungsableitung erreicht ihren grössten Wert in Richtung des Gradienten. Die Richtungsableitung ist das skalare Produkt aus dem Gradienten des Skalarfeldes f und dem normierten Richtungsvektor. Sie verschwindet, wenn man sich längs einer Niveaulinie bzw. einer Niveaufläche bewegt. 5.3.3.1 Normalenvektor
Sei z = f(x,y) und u(x,y,z) := f(x,y) – z = 0. Dann berechnet sich der Normalenvektor n wie folgt:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−=∇==
1),,(),,( y
x
ff
zyxuzyxgradunr
resp. ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−−
=∇==1
),,(),,( y
x
ff
zyxuzyxgradunr
5.3.3.2 Steigung einer Kurve
Eine Kurve, in impliziter Form f(x,y) = const. gegeben, hat folgende Steigung:
y
x
ffm −== αtan
5.3.4 Falllinien Eine Kurve, die überall in Richtung des steilsten An- oder Abstiegs geht, heisst Falllinie. Sie steht damit immer senkrecht zu den Niveaulinien (= Höhenlinien)!
Differentialgleichung der Falllinie x
y
ff
y =' Differentialgleichung der Niveaulinie y
x
ff
y −='
5.3.5 Enveloppe („Einhüllende“) einer Kurvenschar [Bronstein 2006, S. 244] Gegeben sei eine Kurvenschar F(x,y,p) = 0. Der Parameter p ist dabei frei wählbar. Die Gleichung der „Einhüllenden“ kann nun berechnet werden, indem p aus dem folgenden Gleichungssystem eliminiert wird:
1) y = f(x,p) ⇔ F(x,y,p) = 0
2) 0=∂∂
pF
Analysis II Daniel Ehrbar, D-BAUG 6
5.3.6 Partielle Ableitungen höherer Ordnung 5.3.6.1 Partielle Ableitungen höherer Ordnung [Bronstein 2006, S. 411] Auf partielle Ableitungen höherer Ordnung stösst man, wenn man eine Funktion von mehreren unabhängigen Variablen mehrmals nacheinander partiell differenziert. So erhält man beispielsweise aus einer von zwei Variab-len abhängigen Funktion z = f(x,y) nach dem folgenden Schema der Reihe nach zwei partielle Ableitungen 1. Ordnung, vier partielle Ableitungen 2. Ordnung und schliesslich acht partielle Ableitungen 3. Ordnung:
f fx fy 1. Ordnung fxx fxy fyx fyy 2. Ordnung
fxxx fxxy fxyx fxyy fyxx fyxy fyyx fyyy 3. Ordnung Zur Symbolik (1) Die einzelnen Differentiationsschritte sind grundsätzlich in der Reihenfolge, in der die als Indizes
angehängten Differentionsvariablen im Ableitungssymbol auftreten, auszuführen (von links nach rechts) gelesen).
(2) Die Ordnung einer partiellen Ableitung entspricht der Anzahl der Indizes, d.h. der Anzahl der
angehängten Differentiationsvariablen. (3) Schreibweise für partielle Differentialquotienten 2. Ordnung:
2
2
xf
xf
xf xx
∂∂
=⎟⎠⎞
⎜⎝⎛∂∂
∂∂
= ; xyf
yf
xf yx ∂∂
∂=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂∂
=2
yxf
xf
yf xy ∂∂
∂=⎟
⎠⎞
⎜⎝⎛∂∂
∂∂
=2
; 2
2
yf
yf
yf yy
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂
=
5.3.6.2 Satz von Schwarz [Bronstein 2006, S. 411]
Bei einer gemischten partiellen Ableitung k-ter Ordnung darf die Reihenfolge der einzelnen Differentiationsschritte vertauscht werden, wenn die partiellen Ableitungen k-ter Ordnung stetige Funktionen sind.
Bem: Für die gemischten partiellen Ableitungen 2. bzw. 3. Ordnung einer Funktion z = f(x,y) gilt somit
unter den Voraussetzungen des Satzes von Schwarz:
fxy = fyx fxxy = fyxx = fxyx ; fyyx = fxyy = fyxy
Die Anzahl der (verschiedenen) partiellen Ableitungen 2. bzw. 3. Ordnung reduziert sich damit von vier auf drei bzw. von acht auf vier Ableitungen:
2. Ordnung: fxx, fxy, fyy 3. Ordnung: fxxx, fxxy, fxyy, fyyy

Analysis II Daniel Ehrbar, D-BAUG 7
5.4 Das totale oder vollständige Differential einer Funktion 5.4.1 Definition des totalen oder vollständigen Differentials 5.4.1.1 Zwei Variablen [Bronstein 2006, S. 410] Unter dem totalen oder vollständigen Differential einer Funktion z = f(x,y) von zwei unabhängigen Variablen versteht man den linearen Differentialausdruck
dyyfdx
xfdyfdxfdz yx ∂
∂+
∂∂
=+=
Geometrische Deutung eines totalen oder vollständigen Differentials: Bei einer Funktion z = f(x, y) von zwei unabhängigen Variablen beschreibt das totale Differential
dz = fx(x0, y0)dx + fy(x0, y0)dy die Änderung der Höhenkoordinate bzw. des Funktionswertes z auf der im Berührungspunkt P = (x0, y0, z0) errichteten Tangentialebene. Dabei sind die Differentiale dx, dy, dz die Koordinaten eines beliebigen Punktes auf der Tangentialebene, bezogen auf den Punkt P. 5.4.1.2 n Variablen [Bronstein 2006, S. 410] Unter dem totalen oder vollständigen Differential einer Funktion y = f(x1, x2, …, xn) von n unabhängigen Variablen versteht man den linearen Differentialausdruck
nn
nxxx dxxfdx
xfdx
xfdxfdxfdxfdy
n ∂∂
++∂∂
+∂∂
=+++= ...... 22
11
21 21
In einer anderen Schreibweise ausgedrückt lautet das totale Differential für n unabhängige Variablen:
( ) ( ) ( ) ( ) ( )( )yxyxwyxvyxufyxg ,,...,,,,,,, ϕ=
xf
xv
vf
xu
uf
xg
∂ϕ∂
ϕ∂∂
+∂∂
∂∂
+∂∂
∂∂
=∂∂ ,...
Bsp: Ein ideales Gas genügt der Zustandsgleichung p(V,T) = VRT . Das totale Differential dieser Funktion
lautet somit:
dTVRdV
VRTdT
TpdV
Vpdp +−=
∂∂
+∂∂
= 2
5.4.2 Geometrische Bedeutung 5.4.2.1 Gleichung einer Tangentialebene [Bronstein 2006, S. 410] Die Gleichung der Tangentialebene an die Fläche z = f(x,y) im Flächenpunkt P = (x0, y0, z0) mit z0 = f(x0, y0) lautet in symmetrischer Schreibweise wie folgt:
z – z0 = fx(x0, y0) ⋅ (x – x0) + fy(x0, y0) ⋅ (y – y0)
Analysis II Daniel Ehrbar, D-BAUG 8
Bsp: Wir bestimmen die Gleichung der Tangentialebene an die Bildfläche von z = f(x, y) = x2 + y2 im Flächenpunkt P = (1, 1, 2):
fx(x, y) = 2x ⇒ fx(1, 1) = 2 fy(x, y) = 2y ⇒ fy(1, 1) = 2
Die Gleichung der Tangentialebene lautet damit:
z – 2 = 2(x – 1) + 2(y – 1) oder z = 2x + 2y - 2 5.5 Differentiation nach einem Parameter (Kettenregel) 5.5.1 Kettenregel für Funktionen mit einem Parameter [Bronstein 2006, S. 413] Gegeben ist eine mittelbare (zusammengesetzte, verkettete) Funktion u von einer unabhängigen Veränderlichen t:
u = f(x1, x2, x3, …, xn) mit x1 = x1(t), x2 = x2(t), x3 = x3(t), …, xn = xn(t) Das Differential du/dt dieser Funktion u nach dem Parameter t wird wie folgt gebildet:
dtdx
xu
dtdx
xu
dtdx
xu
dtdx
xu
dtdu n
n∂∂
++∂∂
+∂∂
+∂∂
= ...3
3
2
2
1
1
5.5.2 Kettenregel für Funktionen mit zwei Parametern [Bronstein 2006, S. 413] Gegeben ist eine mittelbare (zusammengesetzte, verkettete) Funktion u von mehreren unabhängigen Veränderlichen t, s, …, w:
u = f(x1, x2, …, xn) mit x1 = x1(t, s, …, w), x2 = x2(t, s, …, w), …, xn = xn(t, s, …, w) Diese Funktion u wird folgendermassen differenziert:
wx
xu
wx
xu
wx
xu
wu
sx
xu
sx
xu
sx
xu
su
tx
xu
tx
xu
tx
xu
tu
n
n
n
n
n
n
∂∂
∂∂
++∂∂
∂∂
+∂∂
∂∂
=∂∂
∂∂
∂∂
++∂∂
∂∂
+∂∂
∂∂
=∂∂
∂∂
∂∂
++∂∂
∂∂
+∂∂
∂∂
=∂∂
......
...
...
2
2
1
1
2
2
1
1
2
2
1
1
5.5.3 Differentiation impliziter Funktionen [Bronstein 2006, S. 413] Eine Funktion mit einer Veränderlichen y = f(x) sei implizit gegeben durch die Gleichung F(x,y) = 0. Mittels Differentiation ergibt sich:
y
x
FFy −=' 3
22
)()()(2
''y
yyxxxyxyyx
FFFFFFFF
y−−
=
Analysis II Daniel Ehrbar, D-BAUG 9
5.5.4 Krümmung einer ebenen Kurve [Bronstein 2006, S. 236] Gegeben sei eine ebene Kurve in expliziter Darstellung f(x,y) resp. in Parameterdarstellung (x(t), y(t)). Die Krümmung k berechnet sich nun aus:
3
2xyy
2yxxxyyx
f
fffffff2k
∇
⋅−−⋅= ( ) 232'1
''yyk
+=
( ) 2/322 )()(
)()()()(
tytx
tytxtytxk&&
&&&&&&
+
−=
5.6 Vektoranalysis und Feldtheorie 5.6.1 Skalarfeld und Vektorfeld 5.6.1.1 Skalarfeld [Bronstein 2006, S. 664] Wird jedem Punkt P eines Raumteiles ein Zahlenwert (Skalar) U zugeordnet, so schreibt man
U = U(P) und bezeichnet dies als Skalarfeld. Beispiele für Skalarfelder sind Temperatur oder Potential. 5.6.1.2 Vektorfeld [Bronstein 2006, S. 665]
Wird jedem Punkt P eines Raumteiles ein Vektor V zugeordnet, so schreibt man
)(PVV = und bezeichnet dies als Vektorfeld. Beispiele für Vektorfelder sind Geschwindigkeitsfelder oder Feldstärken-felder. 5.6.2 Divergenz eines Vektorfeldes [Bronstein 2006, S. 674]
Unter der Divergenz eines Vektorfeldes ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
),,(),,(),,(
,,zyxFzyxFzyxF
zyxF
z
y
xr versteht man das skalare Feld:
zF
yF
xFFFdiv zyx
∂∂
+∂
∂+
∂∂
=∇=r
Divergenz wird auch als „Quelldichte“ oder „Quellstärke pro Volumenelement“ bezeichnet. Es gilt: div F > 0: Im Volumenelement befindet sich eine „Quelle“ div F < 0: Im Volumenelement befindet sich eine „Senke“ div F = 0: Im Volumenelement befindet sich weder eine „Quelle“ noch eine „Senke“, das Vektorfeld ist an
dieser Stelle „quellenfrei“. Rechenregeln für Divergenzen: Ar
und Br
sind Vektorfelder, φ ist ein Skalarfeld, ar
ist ein konstanter Vektor und c eine Konstante:

Analysis II Daniel Ehrbar, D-BAUG 10
(1) 0)( =adivr
(2) )()()( AdivAAdivrrr
⋅+⋅∇= φφφ
(3) )()( AdivcAcdivrr
⋅=⋅
(4) )()()( BdivAdivBAdivrrrr
+=+
(5) )()( AdivaAdivrrr
=+ 5.6.3 Rotation eines Vektorfeldes [Bronstein 2006, S. 675] Kleine, in die Strömung gebrachte Kugeln rotieren in Ufernähe infolge des dortigen Geschwindigkeitsgefälles um ihre Achsen und erlauben somit einen anschaulichen Einblick in die Bewegung der dortigen Wasserteilchen. Diese Rotation lässt sich nun in geeigneter Weise durch einen Vektor mit der Bezeichnung „Rotation des Geschwindigkeitsfeldes“ beschreiben.
Unter der Rotation eines Vektorfeldes ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
),,(),,(),,(
),,(zyxFzyxFzyxF
zyxF
z
y
xr versteht man das Vektorfeld
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
∂∂
−∂
∂∂∂
−∂∂
∂
∂−
∂∂
=
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
×
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
∂∂∂∂∂∂
=×∇=
yF
xF
xF
zF
zF
yF
F
F
F
z
y
x
FFrot
xy
zx
yz
z
y
x
rrr
Bei einem ebenen Vektorfeld gilt: zxy e
yF
xF
Frot rr
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂
∂=
Der Vektor rot F wird auch als Wirbeldichte des Feldes F bezeichnet.
Das Vektorfeld rot F wird häufig auch als Wirbelfeld zu F bezeichnet.
Ein Vektorfeld F heisst in einem Bereich wirbelfrei, wenn dort überall rot F = 0 gilt. Rechenregeln für Rotationen: Ar
und Br
sind Vektorfelder, φ ist ein Skalarfeld, ar
ist ein konstanter Vektor und c eine Konstante: (1) 0)( =arot
r
(2) )()()( ArotAArotrrr
⋅+⋅∇=⋅ φφφ
(3) )()( ArotcAcrotrr
⋅=⋅
(4) )()()( BrotArotBArotrrrr
+=+
(5) )()( ArotaArotrrr
=+

Analysis II Daniel Ehrbar, D-BAUG 11
5.6.4 Eigenschaften von Vektorfeldern 5.6.4.1 Quellenfreies Vektorfeld [Bronstein 2006, S. 689]
Ein quellenfreies Vektorfeld Fr
lässt sich stets als Rotation eines Vektorfeldes E darstellen:
0Fdiv =r
⇒ ErotFrr
= E heisst Vektorpotential und ist bis auf den Gradienten einer skalaren Funktion φ eindeutig bestimmt. Umgekehrt ist ein Wirbelfeld ErotF
rr= stets quellenfrei:
ErotFrr
= ⇒ 0Fdiv =r
5.6.4.2 Wirbelfreies Vektorfeld [Bronstein 2006, S. 689]
Ein wirbelfreies Vektorfeld Fr
lässt sich stets als Gradient eines skalaren Feldes φ darstellen:
0Frotrr
= ⇒ φ∇=Fr
Umgekehrt ist eine Gradientenfeld φ∇=Fr
stets wirbelfrei:
φ∇=Fr
⇒ 0Frotrr
= 5.6.5 Laplace-Operator 5.6.5.1 Laplace-Operator ∆ [Bronstein 2006, S. 678] Das Skalarprodukt des Nablaoperators mit sich selbst wird Laplace-Operator ∆ genannt:
2
2
2
2
2
2)(
zyxgraddiv
∂∂
+∂∂
+∂∂
=∇⋅∇==∆rr
Der Laplace-Operator ist kein Vektor. Er schreibt die Summierung der zweiten partiellen Ableitungen vor und kann sowohl auf sich selbst als auch auf vektorielle Funktionen angewandt werden. 5.6.5.2 Laplace´sche Differentialgleichung (Laplace-Gleichung) [Bronstein 2006, S. 557 / 691]
Die Bestimmung des Potentials U eines Vektorfeldes V = gradU, in dem keine Quellen enthalten sind, führt auf folgende Gleichung:
0=∆U d.h. 02
2
2
2
2
2=
∂∂
+∂∂
+∂∂
zU
yU
xU
Die Lösungen dieser homogenen partiellen Differentialgleichung 2. Ordnung werden als harmonische Funk-tionen bezeichnet. Es gibt drei Arten von Randbedingungen. Die Laplace’sche Differentialgleichung ist ein Spezialfall der Poisson- oder Potentialgleichung.
Analysis II Daniel Ehrbar, D-BAUG 12
5.6.5.3 Poisson- oder Potentialgleichung [Bronstein 2006, S. 557 / 691]
Die Bestimmung des Potentials U eines Vektorfeldes V = gradU, in dem Quellen enthalten sind, führt auf folgende Gleichung:
),,( zyxgU =∆ d.h. ),,(2
2
2
2
2
2zyxg
zU
yU
xU
=∂∂
+∂∂
+∂∂
Die Lösungen dieser inhomogenen partiellen Differentialgleichung 2. Ordnung werden als Potentialfunktionen bezeichnet. Es können die gleichen Randbedingungen wie bei der Laplace’schen Differentialgleichung gestellt werden. 5.7 Polarkoordinaten 5.7.1 Darstellung eines Vektors in Polarkoordinaten 5.7.1.1 Umrechnung in’s / vom kartesischen Koordinatensystem [Bronstein 2006, S. 196]
Die Polarkoordinaten r, φ und die kartesischen Koordinaten x, y weisen folgende Zusammenhänge auf, mit denen Koordinatentransformationen vorgenommen werden können:
Polarkkoordinaten → kartesische Koordinaten: Kartesische Koordinaten → Polarkoordinaten:
)sin()cos(
ϕϕ
⋅=⋅=
ryrx
⎟⎠⎞
⎜⎝⎛=
+=
xy
yxr
arctan
22
ϕ
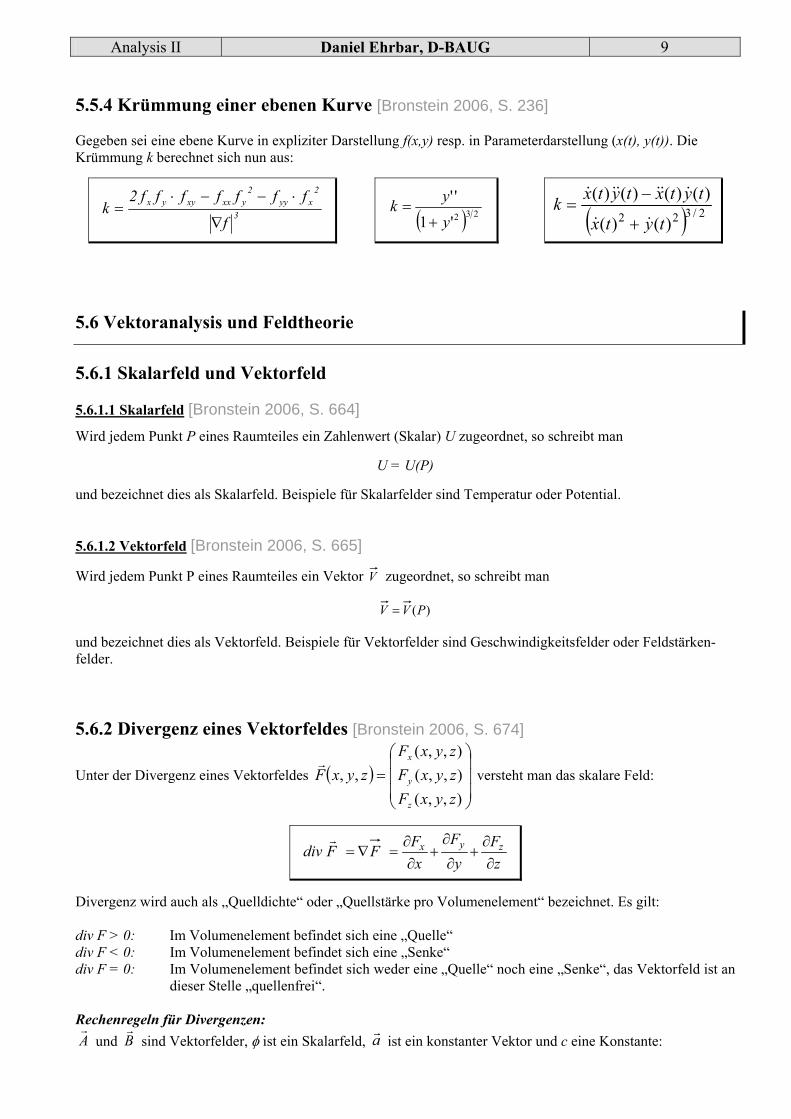
5.7.1.2 Basisvektoren [Bronstein 2006, S. 195] In einem Polarkoordinatensystem werden die folgenden orthogonalen Einheitsvektoren als Basisvektoren verwendet:
rer : Tangenteneinheitsvektor an die r-Koordinatenlinie (radial nach aussen gerichtet)
ϕer : Tangenteneinheitsvektor an die ϕ-Koordinatenlinie (tangential zum Kreis)
πϕ 200≤≤
≥r

Analysis II Daniel Ehrbar, D-BAUG 13
5.7.1.3 Vektordarstellung in der Basis rer , ϕer
Ein Vektor ar lässt sich in diesem Basissystem in der Form
ϕϕ+= eaeaa rrrrr
darstellen. Die (positiven oder negativen) Grössen und sind dabei die Vektorkoordinaten (skalaren Vektorkom-ponenten) des Vektors ar . 5.7.1.4 Transformation in das Polarkoordinatensystem [Bronstein 2006, 196] Beim Übergang von den kartesischen Koordinaten zu den Polarkoordinaten transformieren sich die Basisvektoren sowie die Vektorkoordinaten eines beliebigen Vektors in gleicher Weise. Die orthogonale Transformationsmatrix A besitzt dabei die folgende Gestalt: Der Vektor ar besitzt somit im Polarkoordinatensystem die Vektorkoordinaten
ϕϕ
ϕϕ
ϕ cossin
sincos
yx
yxr
aaa
aaa
+−=
+=
Die Rücktransformation, d.h. der Übergang von den Polarkoordinaten zu den kartesischen Koordinaten, erfolgt über die zu A inverse Matrix A-1. Sie lautet:
⎟⎟⎠
⎞⎜⎜⎝
⎛ −=−
ϕϕϕϕ
cossinsincos1A
5.7.2 Darstellung von Differential, Gradient, Divergenz, Rotation und Laplace-
Operator in Polarkoordinaten 5.7.2.1 Differential in Polarkoordinaten
Gegeben sei die Funktion f(r,φ) in Polarkoordinaten. Das „kartesische“ Differential kann nun aus r und φ folgendermassen hergeleitet werden:
ϕϕϕϕ∂∂
−∂∂
=∂∂ f
rrfrf
xsincos),( und
ϕϕϕϕ∂∂
+∂∂
=∂∂ f
rrfrf
ycossin),(
5.7.2.2 Gradient eines Skalarfeldes [Bronstein 2006, S. 672] Gegeben sei das Skalarfeld U(r,φ) in Polarkoordinaten. Der Gradient dieses Skalarfeldes berechnet sich nun aus:
ϕϕϕ eU
re
rUrUgrad r
rr
∂∂⋅+
∂∂
=1),(
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=ϕϕϕϕ
cossinsincos
A

Analysis II Daniel Ehrbar, D-BAUG 14
5.7.2.3 Divergenz eines Vektorfeldes [Bronstein 2006, S. 674]
Gegeben sei das Vektorfeld ),( ϕrV . Die Divergenz kann nun folgendermassen berechnet werden:
ϕϕ ϕ
∂
∂⋅+⋅
∂∂
⋅=V
rVr
rrrVdiv r
1)(1),(
5.7.2.4 Rotation eines Vektorfeldes [Bronstein 2006, S. 676]
Gegeben sei das Vektorfeld ),( ϕrV . Es existiert nur eine Komponente senkrecht zur xy-Ebene (z-Richtung):
[ ]ϕ
ϕ ϕ ∂∂⋅−⋅
∂∂
⋅= rz
Vr
Vrrr
rVrot 1)(1),(
5.7.2.5 Laplace-Operator [Bronstein 2006, S. 678] Gegeben sei das Skalarfeld U(r,φ). Die Anwendung des Laplace-Operators auf das Skalarfeld ergibt folgendes Resultat (ebenfalls ein Skalar!):
2
2
22
2 11),(ϕ
ϕ∂∂⋅+
∂∂⋅+
∂∂
=∆U
rrU
rrUrU
Für den Spezialfall, dass U eine radialsymmetrische Funktion U = U(r) sein sollte, vereinfacht sich der Laplace-Operator zu:
( ) 2
21''1)(rU
rU
rUr
rrU
∂∂
+∂∂
=⋅=∆
5.8 Kugelkoordinaten 5.8.1 Darstellung eines Vektors in Kugelkoordinaten 5.8.1.1 Umrechnung ins / vom kartesischen Koordinatensystem [Bronstein 2006, S. 216] Die Kugelkoordinaten r, υ, φ und die kartesischen Koordinaten x, y, z weisen folgende Zusammenhänge auf, mit denen Koordinatentransformationen vorgenommen werden können:
Kugelkoordinaten → Kartesische Koordinaten: Kartesische Koordinaten → Kugelkoordinaten:
)cos()sin()sin()cos()sin(
ϑϕϑϕϑ
⋅=⋅⋅=⋅⋅=
rzryrx
⎟⎠⎞
⎜⎝⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
++=⎟
⎠⎞
⎜⎝⎛=
++=
xy
zyx
zrz
zyxr
arctan
arccosarccos222
222
ϕ
ϑ
Analysis II Daniel Ehrbar, D-BAUG 15
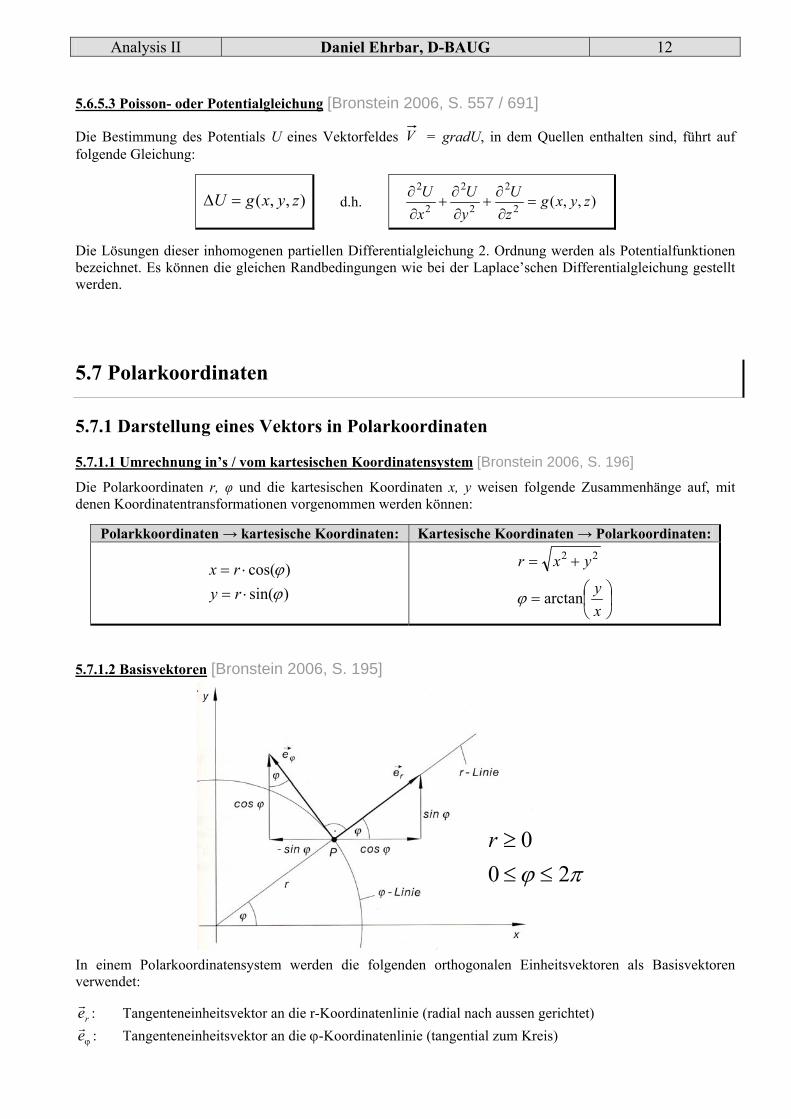
5.8.1.2 Basisvektoren [Bronstein 2006, S. 215]
rer : Tangenteneinheitsvektor an die r-Koordinatenlinie (radial nach aussen gerichtet)
ϑer : Tangenteneinheitsvektor an dieϑ -Koordinatenlinie, d.h. an den Längenkreis
ϕer : Tangenteneinheitsvektor an die ϕ-Koordinatenlinie, d.h. an den Breitenkreis 5.8.1.3 Vektordarstellung in der Basis
Ein Vektor ar lässt sich in diesem Basissystem in der Form
ϕϕϑϑ ++= eaeaeaa rrrrrr
darstellen. Die (positiven oder negativen) skalaren Grössen sind dabei die Vektorkoordinaten (skalaren Vektorkomponenten) des Vektors ar . 5.8.1.4 Transformation in das Kugelkoordinatensystem [Bronstein 2006, S. 216] Beim Übergang von den kartesischen Koordinaten zu den Kugelkoordinaten formieren sich die Basisvektoren sowie die Vektorkoordinaten eines beliebigen Vektors in gleicher Weise. Die orthogonale Transformations-matrix A besitzt dabei die folgende Gestalt:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ϕϕ−ϑ−ϕϑϕϑϑϕϑϕϑ
=0cossin
sinsincoscoscoscossinsincossin
A
Der Vektor ar besitzt somit im Kugelkoordinatensystem die Vektorkoordinaten
ϕ+ϕ−=
ϑ−ϕϑ+ϕϑ=
ϑ+ϕϑ+ϕϑ=
ϕ
ϑ
cosasinaasinasincosacoscosaa
cosasinsinacossinaa
yx
zyx
zyxr
Die Rücktransformation, d.h. der Übergang von den Kugelkoordinaten zu den kartesischen Koordinaten, erfolgt über die zu A inverse Matrix A-1. Sie lautet:
πϕπϑ20
00
≤≤≤≤
≥r

Analysis II Daniel Ehrbar, D-BAUG 16
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ϑ−ϑϕϕϑϕϑϕ−ϕϑϕϑ
=0sincos
cossincossinsinsincoscoscossin
A
5.8.3 Darstellung von Gradient, Divergenz, Rotation und Laplace-Operator in
Kugelkoordinaten 5.8.3.1 Gradient eines Skalarfeldes [Bronstein 2006, S. 672] Gegeben sei das Skalarfeld U(r,υ,φ) in Polarkoordinaten. Der Gradient dieses Skalarfeldes berechnet sich nun aus:
ϕϑ ϕϑϑϕϑ eU
reU
re
rUrUgrad r
rrr
∂∂⋅
⋅+
∂∂⋅+
∂∂
=sin11),,(
5.8.3.2 Divergenz eines Vektorfeldes [Bronstein 2006, S. 674]
Gegeben sei das Vektorfeld ),,( ϕϑrV . Die Divergenz kann nun folgendermassen berechnet werden:
( ) ⎥⎦
⎤⎢⎣
⎡∂
∂+⋅
∂∂
⋅+⋅
∂∂
⋅=ϕ
ϑϑϑ
ϕϑ ϕϑ
VV
rVr
rrrVdiv r sin
sin1)(1),,( 2
2
5.8.3.3 Rotation eines Vektorfeldes [Bronstein 2006, S. 676]
Gegeben sei das Vektorfeld ),,( ϕϑrV . Die Rotation dieses Vektorfeldes berechnet sich nach:
⎭⎬⎫
⎩⎨⎧
∂∂
−⋅∂∂
=
⋅∂∂
−∂∂
⋅=
⎭⎬⎫
⎩⎨⎧
∂∂
−⋅∂∂
⋅=
++=
ϑ
ϕϑ
ϕϑ
ϑϑ
ϕϑ
ϑϕ
ϕϑ
ϑϑ
ϕϕϑϑ
r
r
r
rr
VVrrr
Vrot
Vrrr
Vr
Vrot
VVr
Vrot
eVroteVroteVrotrVrot
)(1
)(1sin1
)(sinsin1
),,(
5.8.3.4 Laplace-Operator [Bronstein 2006, S. 678] Gegeben sei das Skalarfeld U(r,υ,φ). Die Anwendung des Laplace-Operators auf das Skalarfeld ergibt folgendes Resultat (ebenfalls ein Skalar!):
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂⋅+⎟
⎠⎞
⎜⎝⎛
∂∂⋅
∂∂
⋅+⎟⎠⎞
⎜⎝⎛
∂∂⋅
∂∂
=∆ 2
2
22
2 sin1sin
sin11),,(
ϕϑϑϑ
ϑϑϕϑ UU
rUr
rrrU
Analysis II Daniel Ehrbar, D-BAUG 17
Für den Spezialfall, dass U eine radialsymmetrische Funktion U = U(r) sein sollte, vereinfacht sich der Laplace-Operator zu:
2
22
22)''(1)(
rU
rU
rUr
rrU
∂∂
+∂∂
=⋅=∆
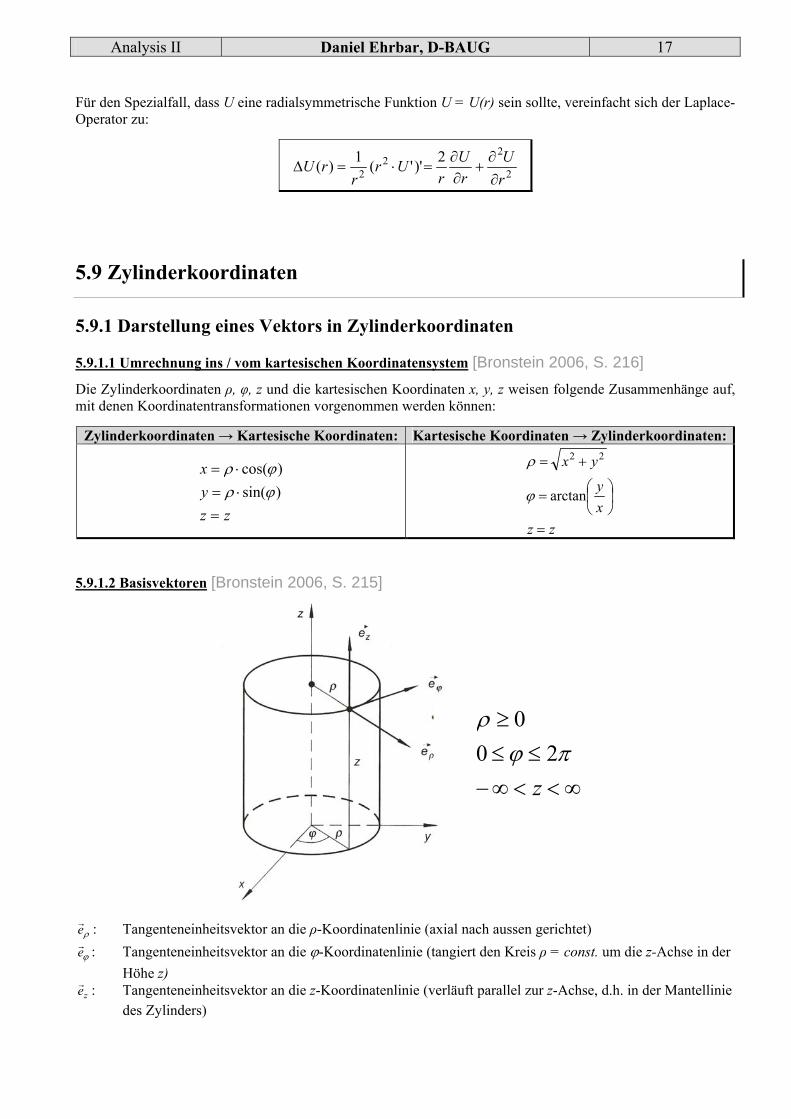
5.9 Zylinderkoordinaten 5.9.1 Darstellung eines Vektors in Zylinderkoordinaten 5.9.1.1 Umrechnung ins / vom kartesischen Koordinatensystem [Bronstein 2006, S. 216] Die Zylinderkoordinaten ρ, φ, z und die kartesischen Koordinaten x, y, z weisen folgende Zusammenhänge auf, mit denen Koordinatentransformationen vorgenommen werden können:
Zylinderkoordinaten → Kartesische Koordinaten: Kartesische Koordinaten → Zylinderkoordinaten:
zzyx
=⋅=⋅=
)sin()cos(
ϕρϕρ
zzxy
yx
=
⎟⎠⎞
⎜⎝⎛=
+=
arctan
22
ϕ
ρ
5.9.1.2 Basisvektoren [Bronstein 2006, S. 215]
ρer : Tangenteneinheitsvektor an die ρ-Koordinatenlinie (axial nach aussen gerichtet)
ϕer : Tangenteneinheitsvektor an die ϕ-Koordinatenlinie (tangiert den Kreis ρ = const. um die z-Achse in der Höhe z)
zer : Tangenteneinheitsvektor an die z-Koordinatenlinie (verläuft parallel zur z-Achse, d.h. in der Mantellinie des Zylinders)
∞<<∞−≤≤
≥
zπϕ
ρ20
0

Analysis II Daniel Ehrbar, D-BAUG 18
5.9.1.3 Vektordarstellung in der Basis
Ein Vektor ar lässt sich in diesem Basissystem in der Form
zzeaeaeaarrrr
++= ϕϕρρ darstellen. Die (positiven oder negativen) skalaren Grössen sind dabei die Vektorkoordinaten (skalaren Vektor-komponenten) des Vektors ar . 5.9.1.4 Transformation in das Zylinderkoordinatensystem [Bronstein 2006, S. 216] Beim Übergang von den kartesischen Koordinaten zu den Zylinderkoordinaten formieren sich die Basisvektoren sowie die Vektorkoordinaten eines beliebigen Vektors in gleicher Weise. Die orthogonale Transformations-matrix A besitzt dabei die folgende Gestalt:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
1000cossin0sincos
ϕϕϕϕ
A
Der Vektor ar besitzt somit im Zylinderkoordinatensystem die Vektorkoordinaten
zz
yx
yx
aa
aaa
aaa
=
+−=
+=
ϕϕ
ϕϕ
ϕ
ρ
cossin
sincos
Die Rücktransformation, d.h. der Übergang von den Zylinderkoordinaten zu den kartesischen Koordinaten, erfolgt über die zu A inverse Matrix A-1. Sie lautet:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −=
1000cossin0sincos
ϕϕϕϕ
A
5.9.2 Darstellung von Gradient, Divergenz, Rotation und Laplace-Operator in
Zylinderkoordinaten 5.9.2.1 Gradient eines Skalarfeldes [Bronstein 2006, S. 672] Gegeben sei das Skalarfeld U(ρ,φ,z) in Polarkoordinaten. Der Gradient dieses Skalarfeldes berechnet sich nun aus:
zezUeUeUzUgradrrr
∂∂
+∂∂⋅+
∂∂
= ϕρ ϕρρϕρ 1),,(
5.9.2.2 Divergenz eines Vektorfeldes [Bronstein 2006, S. 674]
Gegeben sei das Vektorfeld ),,( zV ϕρ . Die Divergenz kann nun folgendermassen berechnet werden:
zVV
VzVdiv z
∂∂
+∂
∂+⋅
∂∂
⋅=ϕρ
ρρρ
ϕρ ϕρ
1)(1),,(r

Analysis II Daniel Ehrbar, D-BAUG 19
5.9.2.3 Rotation eines Vektorfeldes [Bronstein 2006, S. 676]
Gegeben sei das Vektorfeld ),,( zV ϕρ . Die Rotation dieses Vektorfeldes berechnet sich nach:
⎭⎬⎫
⎩⎨⎧
∂
∂−⋅
∂∂
=
∂∂
−∂
∂=
∂
∂−
∂∂
=
++=
ϕρ
ρρ
ρ
ϕρ
ϕρ
ρϕ
ρϕ
ϕρ
ϕϕρρ
VVVrot
Vz
VVrot
zVVVrot
eVroteVroteVrotzVrot
z
z
z
zz
)(1
1
),,(
r
r
r
rrrrrrr
5.9.2.4 Laplace-Operator [Bronstein 2006, S. 678] Gegeben sei das Skalarfeld U(ρ,φ,z). Die Anwendung des Laplace-Operators auf das Skalarfeld ergibt folgendes Resultat (ebenfalls ein Skalar!):
2
2
2
2
211),,(
zUUUzU
∂∂
+∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂⋅
∂∂
=∆ϕρρ
ρρρ
ϕρ
Für den Spezialfall, dass U eine radialsymmetrische Funktion U = U(ρ) sein sollte, vereinfacht sich der Laplace-Operator zu:
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂⋅
∂∂
=∆ρ
ρρρ
ρUU 1)(
5.10 Taylorformel [Bronstein 2006, S. 412] Die Taylor-Formel kann auch für mehr als eine Variable angewendet werden. Für 3 Variablen erhält man folgende Formel:
( )),,(
0000
000
!1,,
zyxk
k
fzy
yx
xk
zzyyxxf ∑ ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∆+∂∂
∆+∂∂
∆=∆+∆+∆+∞
=

Analysis II Daniel Ehrbar, D-BAUG 20
5.11 Extremalwertprobleme 5.11.1 Relative Extremwerte 5.11.1.1 Zwei Variablen [Bronstein 2006, S. 418] Eine Funktion f(x, y) besitzt an der Stelle (x0; y0) mit Sicherheit einen relativen Extremwert, wenn die folgenden Bedingungen zugleich (!) erfüllt sind: 1. Die partiellen Ableitungen 1. Ordnung verschwinden in (x0; y0):
0);( 00 =yxfx und 0);( 00 =yxf y 2. Die partiellen Ableitungen 2. Ordnung genügen der Ungleichung:
0);();();();();();();(
002
00000000
0000 >−⋅==∆ yxfyxfyxfyxfyxfyxfyxf
xyyyxxyyxy
xyxx
Falls ∆ < 0, liegt kein Extremwert vor, sondern ein Sattelpunkt. Für ∆ = 0 kann keine Aussage gemacht werden. Ein relatives Maximum liegt vor, falls fxx(x0; y0) < 0 ist; ein relatives Minimum hingegen liegt vor, falls fxx(x0, y0) > 0. 5.11.1.2 Drei Variablen [Bronstein 2006, S. 418] Gegeben sei eine Funktion f(x,y,z). Ein relativer Extremwert bei (x0; y0; z0) erfüllt folgende notwendige Bedingungen: 1. Der Nabla-Operator nimmt in (x0; y0; z0) den Wert Null an:
0),,( 000 =∇ zyxf 2. Mithilfe der Hesse’schen Matrix kann die Art des Extremwerts bestimmt werden:
fxx(∆x)2 + fyy(∆y)2 + fzz(∆z)2 + 2fxy∆x∆y + 2fxz∆x∆z + 2fyz∆y∆z = Q(∆x, ∆y, ∆z)
( ) ),,(,,
MatrixHesse
zyxQzyx
fffffffff
zyx
zzyzxz
yzyyxy
xzxyxx
∆∆∆=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
∆∆∆
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∆∆∆
−444 3444 21
Falls Q positiv definit (alle Eigenwerte ≥ 0) ist, hat f(x, y, z) in (x0; y0; z0) ein Minimum. Ist Q hingegen negativ definit, so nimmt f(x, y, z) in (x0; y0; z0) ein Maximum an.

Analysis II Daniel Ehrbar, D-BAUG 21
∑=
m
i 1
5.11.1.3 Jacobi-Test
Ob eine Matrix positiv oder negativ definit ist, kann mit dem Jacobi-Test abgeklärt werden: A ist positiv definit, falls gilt: det(A1) ≥ 0, det(A2) ≥ 0, …; d.h. det(Ai) ≥ 0 A ist negativ definit, falls gilt: det(A1) ≤ 0, det(A2) ≥ 0, det(A3) ≤ 0 etc. 5.11.2 Extremwertaufgaben mit Nebenbedingungen 5.11.2.1 Lagrange’sches Multiplikatorverfahren [Bronstein 2006, S. 419] Gegeben sei eine Funktion f(x1, x2, …, xn), welche minimiert werden soll, d.h. man sucht ihre Extremwerte. Die n Variablen x1, x2, …, xn sind voneinander abhängig und durch m sogenannte Neben- oder Kopplungsbedin-gungen φi(x1, x2, …, xn) = 0 miteinander verknüpft. Es muss m < n gelten und die Nebenbedingungen müssen (!) zwingend nach Null aufgelöst sein:
Funktion: y = f(x1, x2, …, xn) Nebenbedingungen: φ1(x1, x2, …, xn) = 0, φ2(x1, x2, …, xn) = 0, …, φm(x1, x2, …, xn) = 0
Die Extremwerte lassen sich nun mit dem Lagrange’schen Multiplikationsverfahren schrittweise wie folgt bestimmen: 1. Man bildet zunächst eine Hilfsfunktion, die sogenannte Lagrange-Funktion:
F(x1, x2, …, xn; λ1, λ2, …, λm) = f(x1, x2, …, xn) + λi · φi(x1, x2, …, xn)
Die noch unbekannten Faktoren λi heissen Lagrange-Multiplikatoren. Sie sind Hilfsgrössen und sollen so bald als möglich wieder eliminiert werden.
2. Nun setzt man die (n + m) partiellen Ableitungen 1. Ordnung der Lagrange-Funktion F gleich Null:
Fx1 = 0, Fx2 = 0, …, Fxn = 0; Fλ1 = 0, Fλ2 = 0, …, Fλm = 0 3. Aus diesen (n + m) Gleichungen lassen sich nun die (n + m) Unbekannten, d.h. die gesuchten Extremwerte
x1, x2, …, xn und die Lagrange-Multiplikatoren λ1, λ2, …, λm, bestimmen. 4. Da dies nur notwendige Bedingungen sind, muss für jeden Fall geprüft werden, ob die gefundenen
Extremwerte tatsächlich alle Gleichungen, d.h. jede Neben- resp. Kopplungsbedingung auch erfüllen!

Analysis II Daniel Ehrbar, D-BAUG 22
6. Integralrechnung 6.1 Mehrfachintegrale 6.1.1 Doppelintegrale 6.1.1.1 Berechnung des Doppelintegrals [Bronstein 2006, S. 489 / 490] Die Berechnung des Doppelintegrals einer Funktion f(u,v) wird auf die Berechnung zweier einfacher Integrale zurückgeführt:
dvduDvufdFvufG
u
u
uv
uv∫ ∫ ∫=
2
1
2
1
)(
)(),(),(
Der Ausdruck dF entspricht dabei dem Flächenelement. Als Grenzen werden die äussersten Grenzen eingesetzt. Je nach Koordinatensystem wird dabei eine andere Funktionaldeterminante verwendet. 6.1.1.2 Funktionaldeterminante oder Jacobi-Matrix [Bronstein 2006, S. 488 / 490] Die Funktionaldeterminante oder Jacobi-Matrix D der Funktionen x(u,v) und y(u,v) wird folgendermassen gebildet:
),(),(
yuyx
yyxx
Dvu
vu
∂∂
== mit vyy
uyy
vxx
uxx vuvu ∂
∂=
∂∂
=∂∂
=∂∂
= ;;;
Ein jedes Flächenelement dF kann nun nach folgender Formel mittels Variablentransformation an das Gebiet angepasst werden:
dudvyyxx
dudvDdFvu
vu ⋅=⋅=
Die Funktionaldeterminante entspricht damit einem Verzerrungsfaktor. 6.1.1.3 Kartesische Koordinaten [Bronstein 2006, S. 489] Die Funktionaldeterminante und damit das Flächenelement in kartesischen Koordinaten lauten:
1==yx
yx
yyxx
D
dxdydF =
6.1.1.4 Polarkoordinaten [Bronstein 2006, S. 490] Die Funktionaldeterminante und damit das Flächenelement in Polarkoordinaten lauten:
x = r · cos(φ) y = r · sin(φ)

Analysis II Daniel Ehrbar, D-BAUG 23
rrr
r
rrrD =
⋅∂∂
⋅∂∂
⋅∂∂
⋅∂∂
=ϕ
ϕϕ
ϕϕ
ϕ
sinsin
coscos
ϕrdrddF =
6.1.1.5 Ellipsenkoordinaten [Bronstein 2006, S. 490] Die Funktionaldeterminante und damit das Flächenelement in Ellipsenkoordinaten lauten:
x = a · t · cos(φ) y = b · t · sin(φ)
(t ist der sog. Streckfaktor: für t = 1: Rand der Ellipse, für t = 0: Mittelpunkt)
tbatbtb
t
tatatD ⋅⋅=
⋅⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
=ϕ
ϕϕ
ϕϕ
ϕ
sinsin
coscos
ϕabtdtddF =
6.1.2 Dreifachintegrale 6.1.2.1 Berechnung des Dreifachintegrals [Bronstein 2006, S. 491] Die Berechnung des Dreifachintegrals einer Funktion f(x,y,z) von drei Variablen über einen dreidimensionalen Bereich erfolgt in Analogie zur Definition des Doppelintegrals. Man schreibt
∫∫∫=∫VV
dwdvduwvufdVwvuf ),,(),,(
Werden keine kartesischen Koordinaten verwendet, muss das Volumenelement dV wiederum mit Hilfe der Funktionaldeterminante ermittelt werden. 6.1.2.2 Funktionaldeterminante oder Jacobi-Matrix [Bronstein 2006, S. 495] Die Funktionaldeterminante oder Jacobi-Matrix D der Funktionen x(u,v,w), y(u,v,w) und z(u,v,w) wird folgendermassen gebildet:
),,(),,(
wvuzyx
zzzyyyxxx
D
wvu
wvu
wvu
∂∂
== mit .;;; etcwxx
vxx
uxx wvu ∂
∂=
∂∂
=∂∂
=
Ein jedes Volumenelement dV kann nun nach folgender Formel mittels Variablentransformation an das Gebiet angepasst werden:
Analysis II Daniel Ehrbar, D-BAUG 24
dudvdwzzzyyyxxx
dudvdwDdV
wvu
wvu
wvu
⋅=⋅=
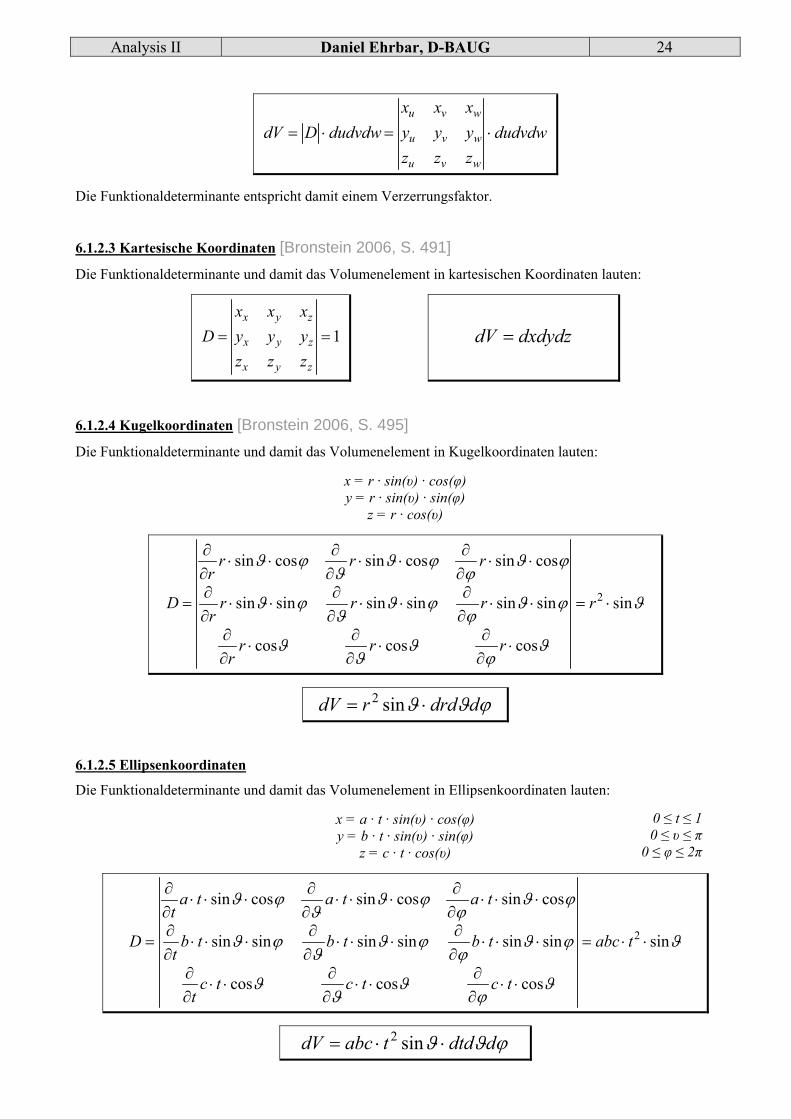
Die Funktionaldeterminante entspricht damit einem Verzerrungsfaktor. 6.1.2.3 Kartesische Koordinaten [Bronstein 2006, S. 491] Die Funktionaldeterminante und damit das Volumenelement in kartesischen Koordinaten lauten:
1==
zyx
zyx
zyx
zzzyyyxxx
D
dxdydzdV =
6.1.2.4 Kugelkoordinaten [Bronstein 2006, S. 495] Die Funktionaldeterminante und damit das Volumenelement in Kugelkoordinaten lauten:
x = r · sin(υ) · cos(φ) y = r · sin(υ) · sin(φ)
z = r · cos(υ)
ϑ
ϑϕ
ϑϑ
ϑ
ϕϑϕ
ϕϑϑ
ϕϑ
ϕϑϕ
ϕϑϑ
ϕϑ
sin
coscoscos
sinsinsinsinsinsin
cossincossincossin
2 ⋅=
⋅∂∂
⋅∂∂
⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
= r
rrrr
rrrr
rrrr
D
ϕϑϑ ddrdrdV ⋅= sin2
6.1.2.5 Ellipsenkoordinaten
Die Funktionaldeterminante und damit das Volumenelement in Ellipsenkoordinaten lauten:
x = a · t · sin(υ) · cos(φ) y = b · t · sin(υ) · sin(φ)
z = c · t · cos(υ)
ϑ
ϑϕ
ϑϑ
ϑ
ϕϑϕ
ϕϑϑ
ϕϑ
ϕϑϕ
ϕϑϑ
ϕϑ
sin
coscoscos
sinsinsinsinsinsin
cossincossincossin
2 ⋅⋅=
⋅⋅∂∂
⋅⋅∂∂
⋅⋅∂∂
⋅⋅⋅∂∂
⋅⋅⋅∂∂
⋅⋅⋅∂∂
⋅⋅⋅∂∂
⋅⋅⋅∂∂
⋅⋅⋅∂∂
= tabc
tctctct
tbtbtbt
tatatat
D
ϕϑϑ ddtdtabcdV ⋅⋅= sin2
0 ≤ t ≤ 1 0 ≤ υ ≤ π
0 ≤ φ ≤ 2π

Analysis II Daniel Ehrbar, D-BAUG 25
6.2 Satz von Steiner Gegeben sei eine Körper mit Masse M. Sein Trägheitsmoment durch den Schwerpunkt S betrage IS. Das Trägheitsmoment Ia bei Rotation um eine Achse a im Abstand d zur Achse durch den Schwerpunkt ist nun gegeben durch:
Sa IMdI +⋅= 2
6.3 Wegintegrale 6.3.1 Ebener Fall 6.3.1.1 Arbeit in einem Kraftfeld
Gegeben sei ein Kraftfeld ⎟⎟⎠
⎞⎜⎜⎝
⎛=
),(),(
2
1
yxKyxK
K . Die Arbeit, die ein Massenpunkt verrichtet, wenn er von A (tA) nach
B (tB) auf der Kurve ⎟⎟⎠
⎞⎜⎜⎝
⎛=
)()(
tytx
C verschoben wird, berechnet sich aus:
dtytytxKxtytxKdttytx
tytxKtytxK
dtsKAB
A
B
A
t
t
t
tG])[],[(])[],[(
)()(
])[],[(])[],[(
212
1 &&&
&o
ro
r⋅∫ +⋅∫ =⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=∫=
6.3.1.2 Potential [Bronstein 2006, S. 683]
Sei UK ∇= , d.h. U sei ein Potential. Es gilt also: K1 = Ux und K2 = Uy. Die Arbeit, welche ein Massenpunkt verrichtet, der von A nach B verschoben wird, ist nun unabhängig vom Weg C, d.h. es gilt die einfache Formel:
A = U(A) – (B) = U(x[tB],y[tB]) – U(x[tA],y[tA])
Ein Kraftfeld hat ein Potential, falls x
Ky
K∂∂
=∂∂ 21 gilt und das Kraftfeld keine Singularität (Unendlichkeitsstelle,
Pol, Ableitung wird unendlich) hat. Falls eine Singularität existiert, ist die Arbeit nur dann wegunabhängig, wenn verschiedene Wege durch Deformation ineinander übergeführt werden können, ohne dass sie die Singularitätsstelle überschreiten müssen! Allgemein, also auch im Raum, muss folgende Bedingung zusätzlich zur Forderung, dass K keine Singularität habe, immer erfüllt sein – ist dies der Fall, so ist die Arbeit immer unabhängig vom Weg!
0)( =⇔∇= KrotUK Kennt man das Kraftfeld und weiss, dass es ein Potential hat, so berechnet man das Potential wie folgt:
∫ +=⇒=∫ +=⇒=
)(),(),(),()(),(),(),(
22
11
xbdyyxKyxUyxKUyadxyxKyxUyxKU
y
x
Die Konstanten a(y) und b(x) (unbestimmte Integrale!) werden durch Vergleichen beider Lösungen bestimmt!
Analysis II Daniel Ehrbar, D-BAUG 26
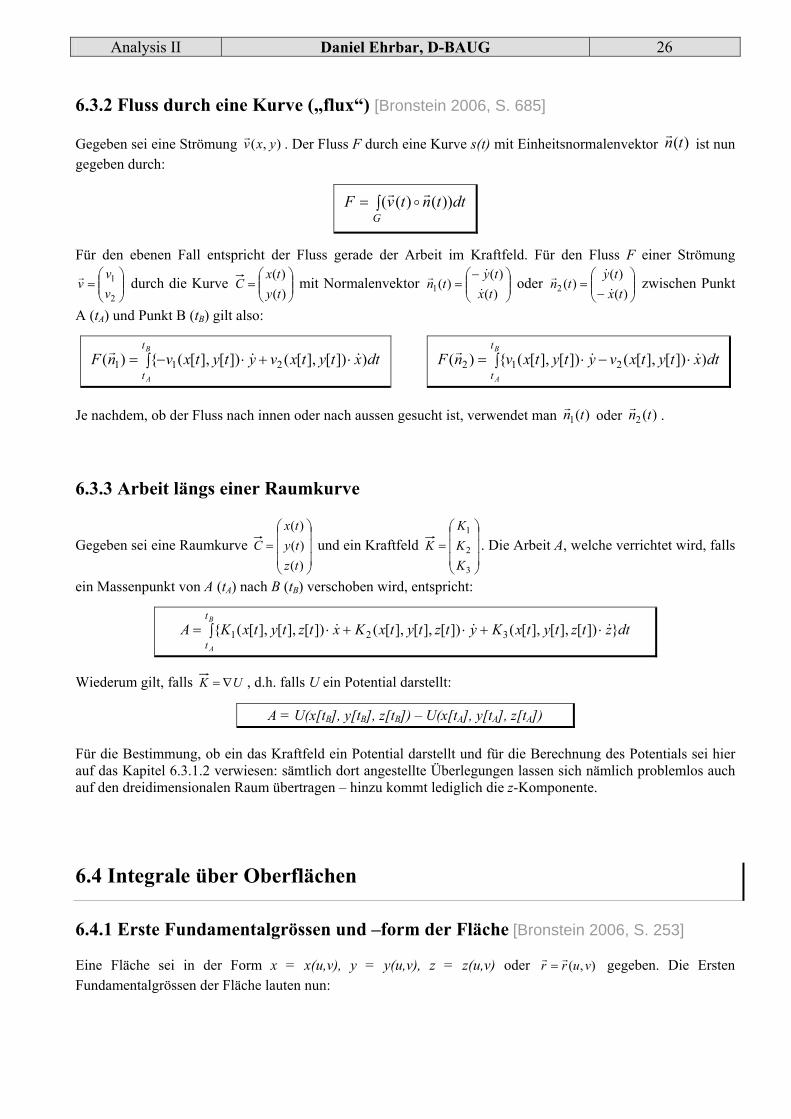
6.3.2 Fluss durch eine Kurve („flux“) [Bronstein 2006, S. 685] Gegeben sei eine Strömung ),( yxv
r . Der Fluss F durch eine Kurve s(t) mit Einheitsnormalenvektor )(tnr
ist nun gegeben durch:
∫=G
dttntvF ))()((r
or
Für den ebenen Fall entspricht der Fluss gerade der Arbeit im Kraftfeld. Für den Fluss F einer Strömung
⎟⎟⎠
⎞⎜⎜⎝
⎛=
2
1
vv
vr durch die Kurve ⎟⎟
⎠
⎞⎜⎜⎝
⎛=
)()(
tytx
C mit Normalenvektor ⎟⎟⎠
⎞⎜⎜⎝
⎛−=
)()(
)(1 txty
tn&
&r oder ⎟⎟⎠
⎞⎜⎜⎝
⎛−
=)(
)()(2 tx
tytn
&
&r zwischen Punkt
A (tA) und Punkt B (tB) gilt also:
∫ ⋅+⋅−=B
A
t
tdtxtytxvytytxvnF )])[],[(])[],[()( 211 &&
r ∫ ⋅−⋅=
B
A
t
tdtxtytxvytytxvnF )])[],[(])[],[()( 212 &&
r
Je nachdem, ob der Fluss nach innen oder nach aussen gesucht ist, verwendet man )(1 tn
r oder )(2 tn
r.
6.3.3 Arbeit längs einer Raumkurve
Gegeben sei eine Raumkurve ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
)()()(
tztytx
C und ein Kraftfeld ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
3
2
1
KKK
K . Die Arbeit A, welche verrichtet wird, falls
ein Massenpunkt von A (tA) nach B (tB) verschoben wird, entspricht:
dtztztytxKytztytxKxtztytxKAB
A
t
t])[],[],[(])[],[],[(])[],[],[( 321 &&& ⋅+⋅+⋅∫=
Wiederum gilt, falls UK ∇= , d.h. falls U ein Potential darstellt:
A = U(x[tB], y[tB], z[tB]) – U(x[tA], y[tA], z[tA]) Für die Bestimmung, ob ein das Kraftfeld ein Potential darstellt und für die Berechnung des Potentials sei hier auf das Kapitel 6.3.1.2 verwiesen: sämtlich dort angestellte Überlegungen lassen sich nämlich problemlos auch auf den dreidimensionalen Raum übertragen – hinzu kommt lediglich die z-Komponente. 6.4 Integrale über Oberflächen 6.4.1 Erste Fundamentalgrössen und –form der Fläche [Bronstein 2006, S. 253] Eine Fläche sei in der Form x = x(u,v), y = y(u,v), z = z(u,v) oder ),( vurr
rr= gegeben. Die Ersten
Fundamentalgrössen der Fläche lauten nun:
Analysis II Daniel Ehrbar, D-BAUG 27
vz
uz
vy
uy
vx
uxrrF
vz
vy
vxrG
zz
uy
uxrE
vu
vu
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
==
⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
==⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
==
)(
)()(222
2222
2
rr
rr
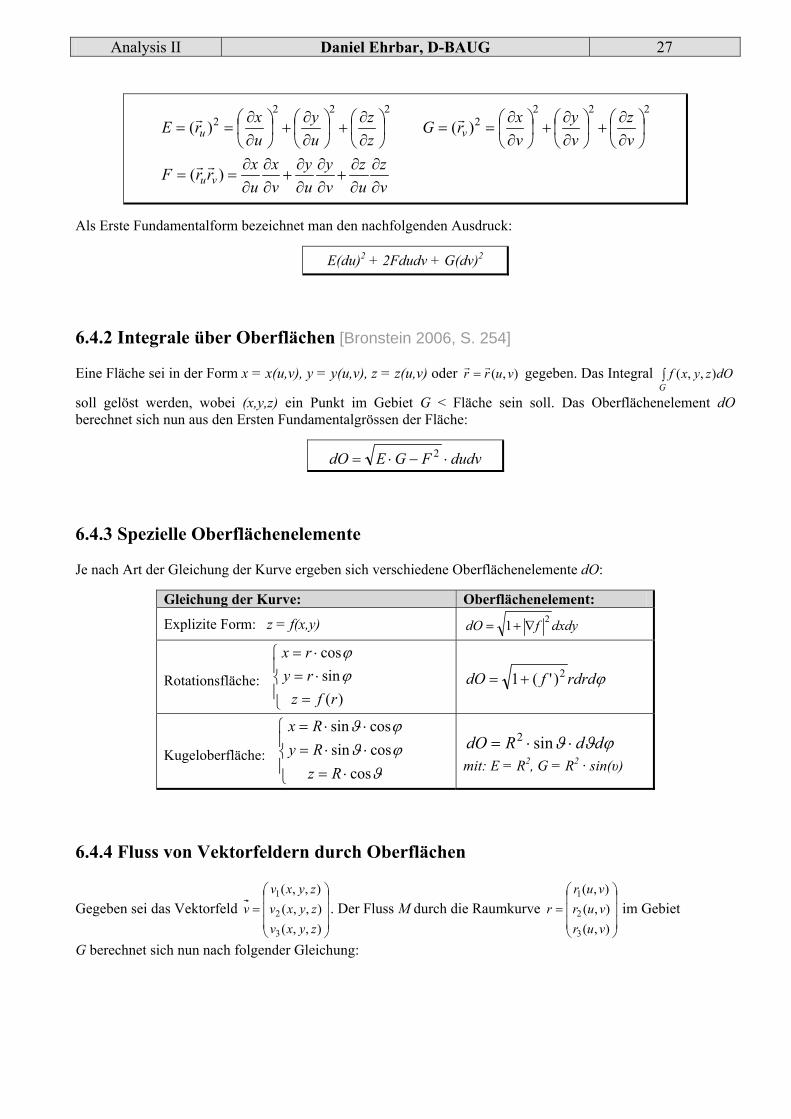
Als Erste Fundamentalform bezeichnet man den nachfolgenden Ausdruck:
E(du)2 + 2Fdudv + G(dv)2 6.4.2 Integrale über Oberflächen [Bronstein 2006, S. 254] Eine Fläche sei in der Form x = x(u,v), y = y(u,v), z = z(u,v) oder ),( vurr
rr= gegeben. Das Integral ∫
GdOzyxf ),,(
soll gelöst werden, wobei (x,y,z) ein Punkt im Gebiet G < Fläche sein soll. Das Oberflächenelement dO berechnet sich nun aus den Ersten Fundamentalgrössen der Fläche:
dudvFGEdO ⋅−⋅= 2 6.4.3 Spezielle Oberflächenelemente Je nach Art der Gleichung der Kurve ergeben sich verschiedene Oberflächenelemente dO:
Gleichung der Kurve: Oberflächenelement:
Explizite Form: z = f(x,y) dxdyfdO 21 ∇+=
Rotationsfläche: ⎪⎩
⎪⎨
⎧
=⋅=⋅=
)(sincos
rfzryrx
ϕϕ
ϕrdrdfdO 2)'(1+=
Kugeloberfläche: ⎪⎩
⎪⎨
⎧
⋅=⋅⋅=⋅⋅=
ϑϕϑϕϑ
coscossincossin
RzRyRx
ϕϑϑ ddRdO ⋅⋅= sin2
mit: E = R2, G = R2 · sin(υ)
6.4.4 Fluss von Vektorfeldern durch Oberflächen
Gegeben sei das Vektorfeld ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
),,(),,(),,(
3
2
1
zyxvzyxvzyxv
v . Der Fluss M durch die Raumkurve ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
),(),(),(
3
2
1
vurvurvur
r im Gebiet
G berechnet sich nun nach folgender Gleichung:
Analysis II Daniel Ehrbar, D-BAUG 28
dudv
rv
rv
rv
ru
ru
ru
vurvvurvvurv
MG∫
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
321
321
332211 ]),[(]),[(]),[(
det
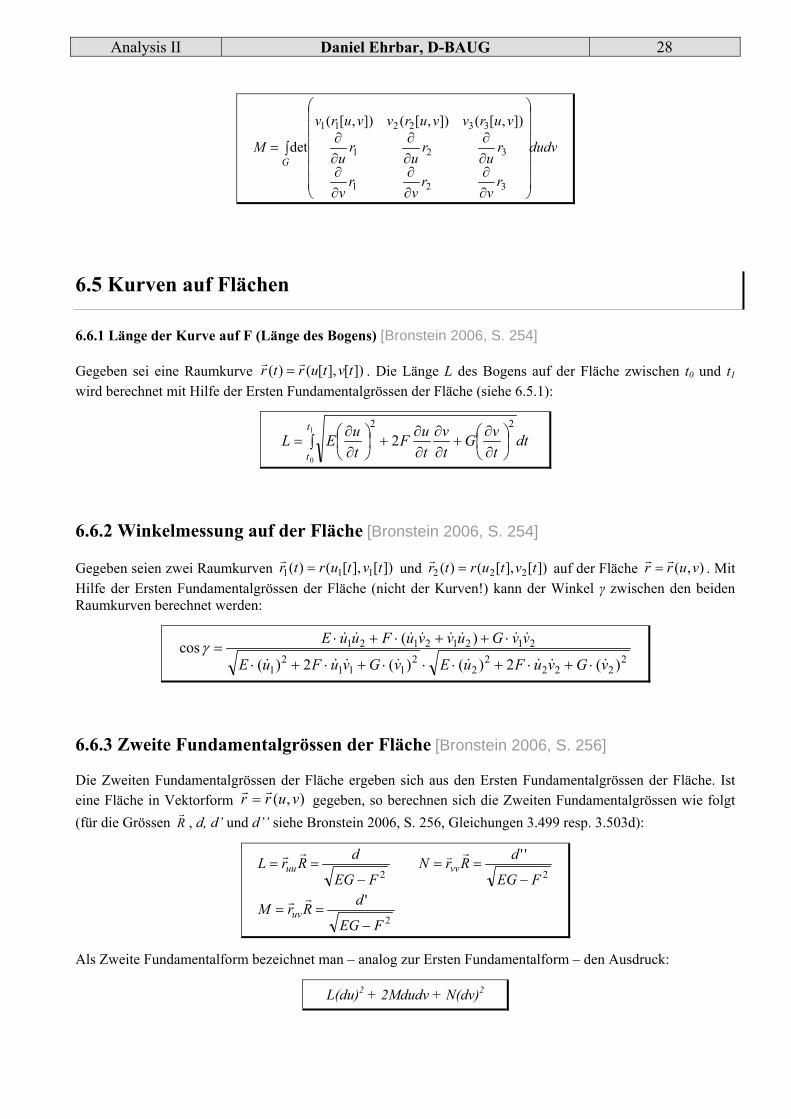
6.5 Kurven auf Flächen 6.6.1 Länge der Kurve auf F (Länge des Bogens) [Bronstein 2006, S. 254] Gegeben sei eine Raumkurve ])[],[()( tvturtr
rr= . Die Länge L des Bogens auf der Fläche zwischen t0 und t1
wird berechnet mit Hilfe der Ersten Fundamentalgrössen der Fläche (siehe 6.5.1):
∫ ⎟⎠⎞
⎜⎝⎛∂∂
+∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
=1
0
22
2t
tdt
tvG
tv
tuF
tuEL
6.6.2 Winkelmessung auf der Fläche [Bronstein 2006, S. 254] Gegeben seien zwei Raumkurven ])[],[()( 111 tvturtr =
r und ])[],[()( 222 tvturtr =
r auf der Fläche ),( vurr
rr= . Mit
Hilfe der Ersten Fundamentalgrössen der Fläche (nicht der Kurven!) kann der Winkel γ zwischen den beiden Raumkurven berechnet werden:
2222
22
2111
21
21212121
)(2)()(2)(
)(cosvGvuFuEvGvuFuE
vvGuvvuFuuE
&&&&&&&&
&&&&&&&&
⋅+⋅+⋅⋅⋅+⋅+⋅
⋅++⋅+⋅=γ
6.6.3 Zweite Fundamentalgrössen der Fläche [Bronstein 2006, S. 256] Die Zweiten Fundamentalgrössen der Fläche ergeben sich aus den Ersten Fundamentalgrössen der Fläche. Ist eine Fläche in Vektorform ),( vurr
rr= gegeben, so berechnen sich die Zweiten Fundamentalgrössen wie folgt
(für die Grössen Rr
, d, d’ und d’’ siehe Bronstein 2006, S. 256, Gleichungen 3.499 resp. 3.503d):
2
22
'
''
FEG
dRrM
FEG
dRrNFEG
dRrL
uv
vvuu
−==
−==
−==
rr
rvrr
Als Zweite Fundamentalform bezeichnet man – analog zur Ersten Fundamentalform – den Ausdruck:
L(du)2 + 2Mdudv + N(dv)2
Analysis II Daniel Ehrbar, D-BAUG 29
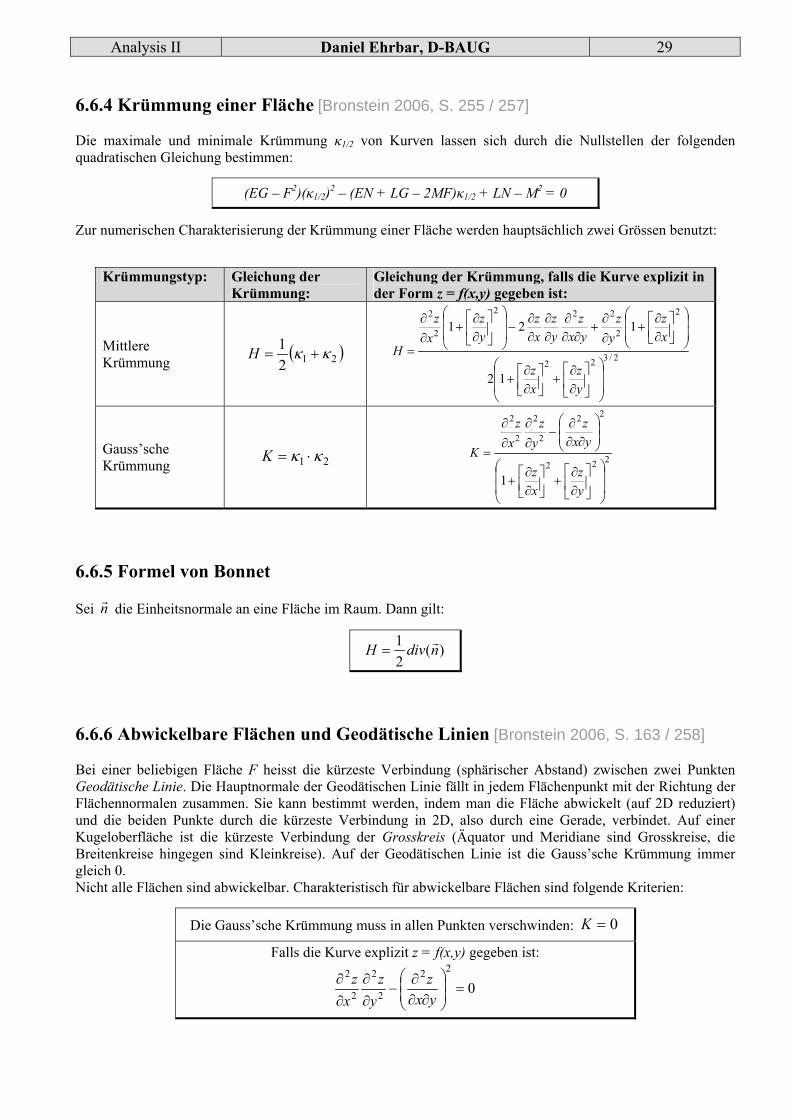
6.6.4 Krümmung einer Fläche [Bronstein 2006, S. 255 / 257] Die maximale und minimale Krümmung κ1/2 von Kurven lassen sich durch die Nullstellen der folgenden quadratischen Gleichung bestimmen:
(EG – F2)(κ1/2)2 – (EN + LG – 2MF)κ1/2 + LN – M2 = 0 Zur numerischen Charakterisierung der Krümmung einer Fläche werden hauptsächlich zwei Grössen benutzt:
Krümmungstyp: Gleichung der Krümmung:
Gleichung der Krümmung, falls die Kurve explizit in der Form z = f(x,y) gegeben ist:
Mittlere Krümmung ( )212
1 κκ +=H 2/322
2
2
222
2
2
12
121
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎥⎦
⎤⎢⎣
⎡∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎥⎦⎤
⎢⎣⎡∂∂
+∂∂
+∂∂
∂∂∂
∂∂
−⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎥⎦
⎤⎢⎣
⎡∂∂
+∂∂
=
yz
xz
xz
yz
yxz
yz
xz
yz
xz
H
Gauss’sche Krümmung 21 κκ ⋅=K 222
22
2
2
2
2
1 ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎥⎦
⎤⎢⎣
⎡∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
+
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂∂
−∂∂
∂∂
=
yz
xz
yxz
yz
xz
K
6.6.5 Formel von Bonnet Sei n
r die Einheitsnormale an eine Fläche im Raum. Dann gilt:
)(21 ndivH
r=
6.6.6 Abwickelbare Flächen und Geodätische Linien [Bronstein 2006, S. 163 / 258] Bei einer beliebigen Fläche F heisst die kürzeste Verbindung (sphärischer Abstand) zwischen zwei Punkten Geodätische Linie. Die Hauptnormale der Geodätischen Linie fällt in jedem Flächenpunkt mit der Richtung der Flächennormalen zusammen. Sie kann bestimmt werden, indem man die Fläche abwickelt (auf 2D reduziert) und die beiden Punkte durch die kürzeste Verbindung in 2D, also durch eine Gerade, verbindet. Auf einer Kugeloberfläche ist die kürzeste Verbindung der Grosskreis (Äquator und Meridiane sind Grosskreise, die Breitenkreise hingegen sind Kleinkreise). Auf der Geodätischen Linie ist die Gauss’sche Krümmung immer gleich 0. Nicht alle Flächen sind abwickelbar. Charakteristisch für abwickelbare Flächen sind folgende Kriterien:
Die Gauss’sche Krümmung muss in allen Punkten verschwinden: 0=K
Falls die Kurve explizit z = f(x,y) gegeben ist:
022
2
2
2
2=⎟
⎟⎠
⎞⎜⎜⎝
⎛
∂∂∂
−∂∂
∂∂
yxz
yz
xz

Analysis II Daniel Ehrbar, D-BAUG 30
6.6 Sätze von Gauss und Stokes 6.7.1 Satz von Gauss [Bronstein 2006, S. 687]
Gegeben sei ein Volumen V, welches von einem Feld Fr
durchsetzt ist. Weiter sei A die geschlossene (!) Fläche, die das Volumen V einschliesst und N
r die nach aussen gerichtete Flächennormale. Dann besteht
folgende Beziehung:
( ) ∫∫∫=∫∫VA
dVFdivdANF )(rr
or
Im Strömungsmodell hat das linke Integral die anschauliche Bedeutung der Flüssigkeitsmenge, die in der Zeiteinheit durch die geschlossene Fläche A fliesst. Das rechte Integral steht für die im Gesamtvolumen V erzeugte bzw. vernichtete Flüssigkeitsmenge. Deshalb ist im quellenfreien Feld der Gesamtfluss durch die geschlossene Oberfläche auch gleich Null! 6.7.2 Satz von Stokes [Bronstein 2006, S. 687] Sei A die Fläche, welche von der Randkurve C beschränkt wird. C soll eine orientierte Randkurve sein, wobei für die positive Umlaufrichtung gilt: ein Beobachter, der in die Richtung der Flächennormalen N
r schaut,
durchläuft die Randkurve so, dass die Fläche links liegen bleibt – d.h. der Umlaufsinn der Berandung bildet mit der der Flächennormalen eine Rechtsschraube. N
r schliesslich sei die Flächennormale. Dann gilt folgender Satz:
∫ ∫∫ ∫∫ ⋅==C A A
dANFrotAdFrotrdFr
orrrr
or
)()(
Das Integral in der Mitte beschreibt den Fluss des Vektors )(Frotr
durch die Fläche A und wird deshalb auch als Wirbelfluss bezeichnet. Der Wirbelfluss durch eine geschlossene Fläche ist gleich Null! 6.7.3 Green’sche Identitäten [Bronstein 2006, S. 688] Die Green’schen Identitäten stellen drei wichtige Beziehungen her:
1) ∫∫∫ ∆⋅∫∫∫ +∇⋅∇=∫∫∂∂
∂ GGGdxuvdxuvdS
nuv
2) ( ) dSnuv
nvudxuvvu
GG∫∫ ⎟
⎠⎞
⎜⎝⎛
∂∂
−∂∂
=∫∫∫ ∆−∆∂
3) falls f = g: ∫ ∫∂∂
+⋅∆⋅−=∫ ∇G GG
dsnffdxffdxf 2
Analysis II Daniel Ehrbar, D-BAUG 31
7. Partielle Differentialgleichungen 7.1 Randwertprobleme 7.1.1 Einfache Randwertprobleme (Torsionsproblem) Bei einfachen Randwertproblemen ist die rechte Seite der Differentialgleichung gleich Null (oder konstant). Das Problem ist meist in einem Kreis oder einer Kugel definiert und kann mit zweimaligem Integrieren gelöst werden. 7.1.1.1 Stationäre Temperaturverteilung in einem Kreis / Kugel / Kugelrinde (mit Radius r)
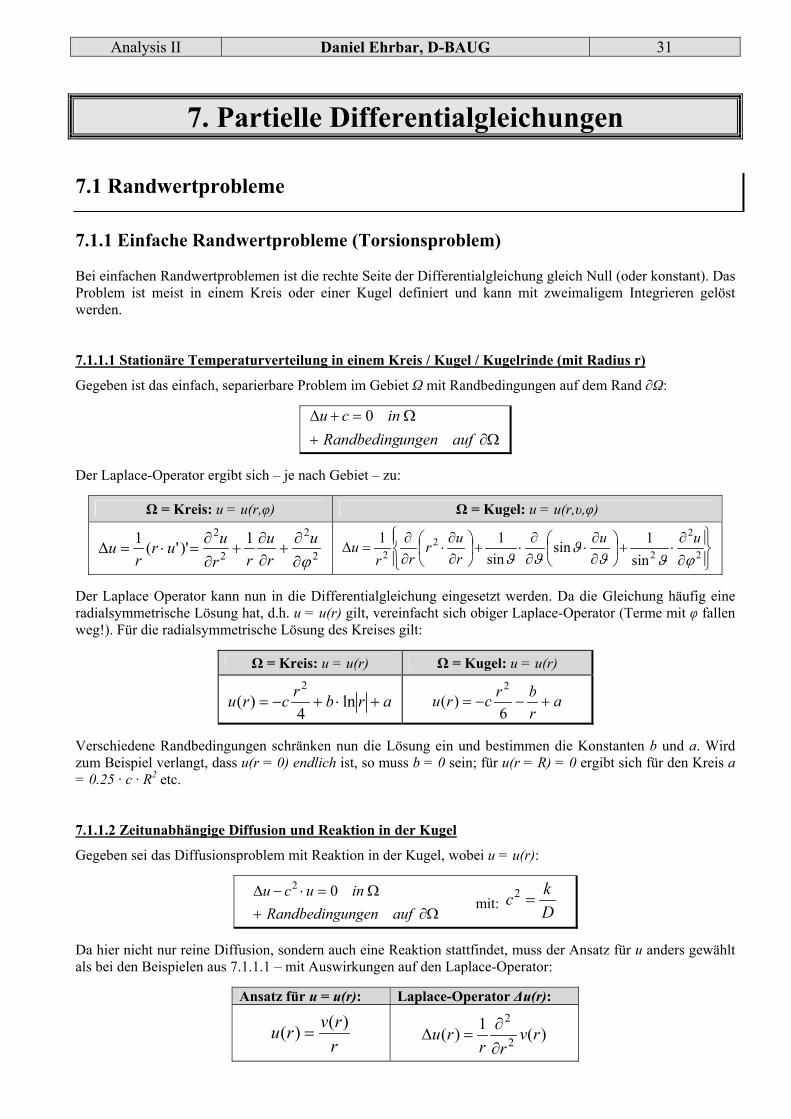
Gegeben ist das einfach, separierbare Problem im Gebiet Ω mit Randbedingungen auf dem Rand ∂Ω:
Ω∂+Ω=+∆
aufungenRandbedingincu 0
Der Laplace-Operator ergibt sich – je nach Gebiet – zu:
Ω = Kreis: u = u(r,φ) Ω = Kugel: u = u(r,υ,φ)
2
2
2
2 1)''(1ϕ∂∂
+∂∂
+∂∂
=⋅=∆u
ru
rruur
ru ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∂∂
⋅+⎟⎠⎞
⎜⎝⎛
∂∂⋅
∂∂
⋅+⎟⎠⎞
⎜⎝⎛
∂∂⋅
∂∂
=∆ 2
2
22
2 sin1sin
sin11
ϕϑϑϑ
ϑϑuu
rur
rru
Der Laplace Operator kann nun in die Differentialgleichung eingesetzt werden. Da die Gleichung häufig eine radialsymmetrische Lösung hat, d.h. u = u(r) gilt, vereinfacht sich obiger Laplace-Operator (Terme mit φ fallen weg!). Für die radialsymmetrische Lösung des Kreises gilt:
Ω = Kreis: u = u(r) Ω = Kugel: u = u(r)
arbrcru +⋅+−= ln4
)(2
arbrcru +−−=
6)(
2
Verschiedene Randbedingungen schränken nun die Lösung ein und bestimmen die Konstanten b und a. Wird zum Beispiel verlangt, dass u(r = 0) endlich ist, so muss b = 0 sein; für u(r = R) = 0 ergibt sich für den Kreis a = 0.25 · c · R2 etc. 7.1.1.2 Zeitunabhängige Diffusion und Reaktion in der Kugel
Gegeben sei das Diffusionsproblem mit Reaktion in der Kugel, wobei u = u(r):
Ω∂+Ω=⋅−∆
aufungenRandbedinginucu 02
mit: Dkc =2
Da hier nicht nur reine Diffusion, sondern auch eine Reaktion stattfindet, muss der Ansatz für u anders gewählt als bei den Beispielen aus 7.1.1.1 – mit Auswirkungen auf den Laplace-Operator:
Ansatz für u = u(r): Laplace-Operator ∆u(r):
rrvru )()( = )(1)( 2
2rv
rrru
∂∂
=∆
Analysis II Daniel Ehrbar, D-BAUG 32
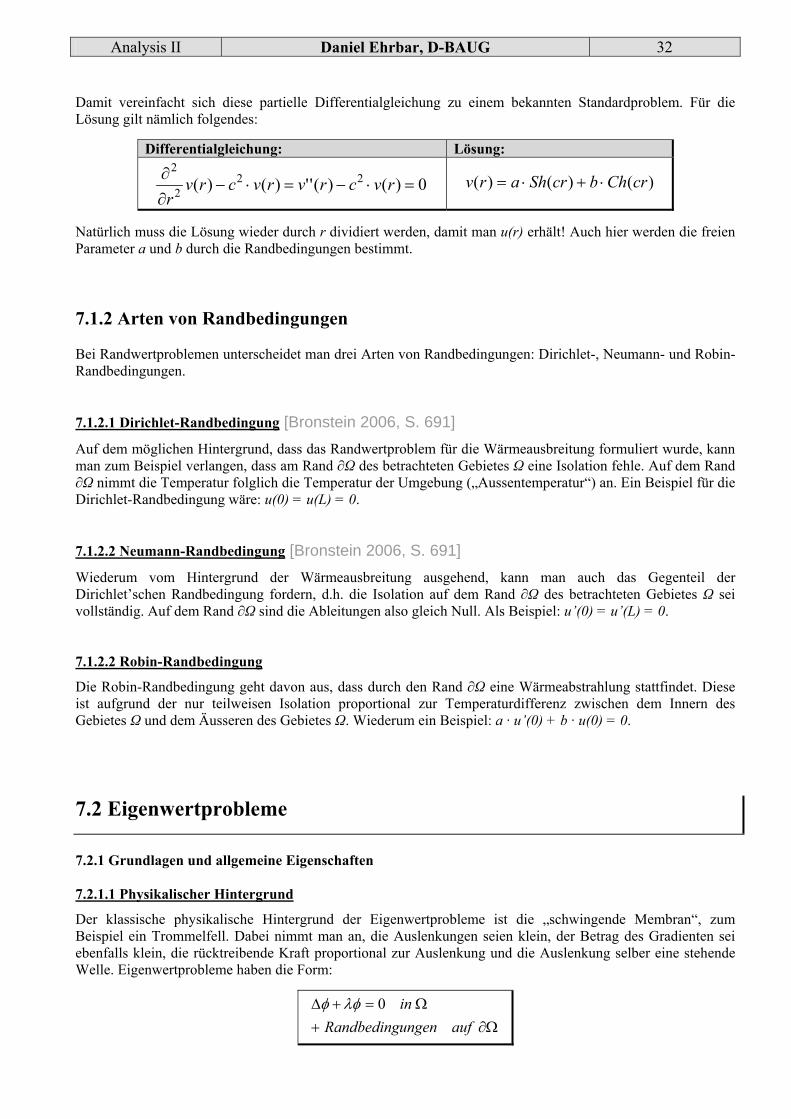
Damit vereinfacht sich diese partielle Differentialgleichung zu einem bekannten Standardproblem. Für die Lösung gilt nämlich folgendes:
Differentialgleichung: Lösung:
0)()('')()( 222
2=⋅−=⋅−
∂∂ rvcrvrvcrvr )()()( crChbcrSharv ⋅+⋅=
Natürlich muss die Lösung wieder durch r dividiert werden, damit man u(r) erhält! Auch hier werden die freien Parameter a und b durch die Randbedingungen bestimmt. 7.1.2 Arten von Randbedingungen Bei Randwertproblemen unterscheidet man drei Arten von Randbedingungen: Dirichlet-, Neumann- und Robin-Randbedingungen. 7.1.2.1 Dirichlet-Randbedingung [Bronstein 2006, S. 691] Auf dem möglichen Hintergrund, dass das Randwertproblem für die Wärmeausbreitung formuliert wurde, kann man zum Beispiel verlangen, dass am Rand ∂Ω des betrachteten Gebietes Ω eine Isolation fehle. Auf dem Rand ∂Ω nimmt die Temperatur folglich die Temperatur der Umgebung („Aussentemperatur“) an. Ein Beispiel für die Dirichlet-Randbedingung wäre: u(0) = u(L) = 0. 7.1.2.2 Neumann-Randbedingung [Bronstein 2006, S. 691] Wiederum vom Hintergrund der Wärmeausbreitung ausgehend, kann man auch das Gegenteil der Dirichlet’schen Randbedingung fordern, d.h. die Isolation auf dem Rand ∂Ω des betrachteten Gebietes Ω sei vollständig. Auf dem Rand ∂Ω sind die Ableitungen also gleich Null. Als Beispiel: u’(0) = u’(L) = 0. 7.1.2.2 Robin-Randbedingung
Die Robin-Randbedingung geht davon aus, dass durch den Rand ∂Ω eine Wärmeabstrahlung stattfindet. Diese ist aufgrund der nur teilweisen Isolation proportional zur Temperaturdifferenz zwischen dem Innern des Gebietes Ω und dem Äusseren des Gebietes Ω. Wiederum ein Beispiel: a · u’(0) + b · u(0) = 0. 7.2 Eigenwertprobleme 7.2.1 Grundlagen und allgemeine Eigenschaften 7.2.1.1 Physikalischer Hintergrund
Der klassische physikalische Hintergrund der Eigenwertprobleme ist die „schwingende Membran“, zum Beispiel ein Trommelfell. Dabei nimmt man an, die Auslenkungen seien klein, der Betrag des Gradienten sei ebenfalls klein, die rücktreibende Kraft proportional zur Auslenkung und die Auslenkung selber eine stehende Welle. Eigenwertprobleme haben die Form:
Ω∂+Ω=+∆
aufungenRandbedingin0λφφ
Analysis II Daniel Ehrbar, D-BAUG 33
Der Term λ steht dabei für die Eigenwerte, welche ermittelt werden können. φ ist die sogenannte Eigen-funktion; sie ist nur bis auf einen konstanten Faktor bestimmt. Eigenfunktion und Eigenwerte sind in der Regel periodisch. Wenn im Folgenden also von der Eigenfunktion oder dem Eigenwert die Rede ist, heisst das immer, dass es sich um unendlich viele Funktionen resp. Werte handelt! 7.2.1.2 Knotenlinien und Knotenliniensatz
Knotenlinien sind Linien (Graphen), auf denen die Eigenfunktionen den Wert Null annimmt. Nach dem Knotenliniensatz von Courant teilt die Knotenlinie zu λn das Gebiet Ω in höchstens n Teilgebiete. Die Knotenlinien können physikalisch sichtbar gemacht werden, wenn z.B. ein Pulver auf ein Trommelfell gestreut wird: das Pulver in den Knotenlinien wird nämlich in Ruhe bleiben, wenn die Membran in Schwingung versetzt wird. Die entstehenden Muster nennt man Chladni’sche Klangfiguren. 7.2.1.3 Bessel’sche Differentialgleichung und Besselfunktion [Bronstein 2006, S. 526] Die Bessel’sche Differentialgleichung ist eine spezielle Differentialgleichung von folgender Form:
0)(''' 222 =⋅−+⋅+⋅ ynxyxyx Die partikuläre Lösung dieser Bessel’schen Differentialgleichung heisst Bessel-Funktion (auch Zylinderfunk-tion n-ter Ordnung 1. Gattung). Sie ist eine Reihe von folgender Form:
für ganzzahlige n: für nichtganzzahlige n: k
k
kn
nx
nkkxxJ
2
0 2)!(!)1()( ⎟
⎠⎞
⎜⎝⎛
∑+
−⋅=∞
=
k
k
k xkk
xxJ2
0 2)1(!)1()( ⎟
⎠⎞
⎜⎝⎛
∑++Γ
−⋅=∞
= νν
ν
Die vielfach wichtigen Nullstellen dieser Bessel-Funktionen sind in [Bronstein 2006] auf Seite 1094f. in Tabelle 21.11 tabelliert. Die Formen der allgemeinen Lösung finden sich auf im gleichen Taschenbuch, auf Seite 526. 7.2.1.4 Gammafunktion [Bronstein 2006, S. 478] Die Gammafunktion ist gewissermassen die Laplace-Transformierte von ts–1 bei p = 1. Sie ist nämlich folgendermassen definiert:
∫=Γ∞
−−
0
1:)( dtets ts
Wichtige, immer wieder vorkommende Werte der Gammafunktion sind: Γ(0) = ∞ , Γ(1) = 1, Γ(2) = 1. Weitere exakte Werte finden sich in [Bronstein 2006] auf Seite 1093. 7.2.1.5 Skalarprodukt und Orthogonalität [Bronstein 2006, S. 328] Gegeben sei ein Funktionenraum C[a,b]. Das „Skalarprodukt“ (f, g) zweier Funktionen f(x) und g(x) ist definiert als:
∫=b
adxxgxfgf )()(),(
f(x) und g(x) stehen genau dann „orthogonal“ (rechtwinklig) zueinander, falls gilt:
(f, g) = 0

Analysis II Daniel Ehrbar, D-BAUG 34
7.2.1.6 Orthogonalität der Eigenfunktionen [Bronstein 2006, S. 533]
Zwei Eigenfunktionen φ 1 und φ 2, die zu den verschiedenen Eigenwerten λ1 und λ2 gehören, stehen orthogonal zueinander. Daraus lässt sich der Schluss ableiten, dass zu p linear unabhängigen Eigenfunktionen (zum selben Eigenwert) immer p zueinander orthogonale Funktionen konstruiert werden können. 7.2.1.7 Normierung
Eigenfunktionen sind immer nur bis auf einen konstanten Faktor bestimmt. Dieser wird so gewählt, dass die Eigenfunktion normiert ist. Eine Funktion f(x) ist normiert, wenn gilt:
[ ]∫ ==Ω
1)()( 22 dxxfxf
7.2.2 Explizite Lösungen 7.2.2.1 Rechteck und Quader: Separation der Variablen
Das Gebiet Ω sei ein Quader im xyz-Koordinatensystem. Dann wird die Funktion u von x, y und z abhängen, d.h. u = u(x,y,z). Um dieses Problem zu lösen, wählt man den Ansatz „Separation der Variablen“, nämlich:
u(x,y,z) = X(x) · Y(y) · Z(z) Setzt man diesen Ansatz ein, so erhält man folgende Gleichung, welche mittels Substitution in ein Standardproblem überführt und somit gelöst werden kann (X’’ bedeutet dabei, dass die Funktion X(x) zweimal nach ihrer einzigenVariablen x abgeleitet wurde):
Differentialgleichung: Substitution: Teillösungen:
λ
λ
−=++
=+++
ZZ
YY
XX
XYZXYZZXYYZX''''''
0''''''
2
22
:''
:'',:''
µ
ην
−=
−=−=
YY
ZZ
XX
)cos()sin()()cos()sin()(
)cos()sin()(
33
22
11
zbzazZybyayY
xbxaxX
ηηµµνν
⋅+⋅=⋅+⋅=⋅+⋅=
Mit den Randbedingungen können wiederum die freien Konstanten ai, bi sowie υ, µ und η bestimmt werden. Die Lösung der Differentialgleichung ist natürlich die Multiplikation aller Teillösungen. Bei der Bestimmung der freien Konstanten muss oft folgendes Problem gelöst werden:
( ) ,...3,2,1,0sin ==⇔= jjx
x παα ( ) ,...2.1,0,2
120cos =⎟⎠⎞
⎜⎝⎛ +
=⇔= kkx
x παα
Die Eigenwerte ergeben sich – gemäss obiger Substitution – einfach aus:
222 ηµυλ ++= Die Lösungen sind infolge der Periodizität der Sinus- und Cosinus-Funktion ebenfalls periodisch und hängen von Laufvariablen (z.B. i, k, l) ab. Falls das Gebiet auf ein Rechteck reduziert sein sollte, vereinfachen sich obige Überlegungen auf 2D, d.h. die Komponenten Z(z) und somit auch η fallen weg!

Analysis II Daniel Ehrbar, D-BAUG 35
7.2.2.2 Kreis: Bessel’sche Differentialgleichung [Bronstein 2006, S. 527] Gegeben sei das Eigenwertproblem für einen Kreis u = u(r, φ). Wiederum wählt man den Ansatz „Separation der Variablen“:
u(r,φ) = R(r) · Φ(φ) Setzt man diesen Ansatz in die Differentialgleichung ein, so vereinfacht sich diese zu:
0''1'1''2 =+ΦΦ
++ λrR
RrR
R
Hier ist nun nur ein einziger Term konstant, nämlich ΦΦ '' . Da das Problem in einem Kreis gestellt ist, muss die
Lösung von Φ(φ) 2π-periodisch sein, d.h. der konstante Term lautet entweder cos(nφ) oder sin(nφ), Ch(nφ) und Sh(nφ) fallen weg. Nun substituiert man den konstanten Term mit –n2 und erhält folgende modifizierte Differentialgleichung, welche sich durch eine Streckung zur Bessel’schen Differentialgleichung mit bekannter Lösung (siehe Kapitel 7.2.1.3) mit ganzzahligem n umformen lässt:
Differentialgleichung ohne Streckung: Bessel’sche Differentialgleichung:
( )
ΦΦ
=−
=−++''::
0'
2
222
nmit
RnrrRRr λ
)(::
0)(''' 222
Streckungrsmit
RnssRRs
⋅=
=−++
λ
7.2.2.3 Kreissektor
In diesem Fall spielt die Bessel-Funktion mit nichtganzzahligem n eine wichtige Rolle (siehe Kapitel 7.2.1.3). Falls das Gebiet Ω ein Kreissektor mit Öffnungswinkel α (eingeführt von der x-Achse nach oben, d.h. im Gegenuhrzeigersinn) ist und die Eigenfunktion auf dem Rand ∂Ω gleich Null ist, gilt für die Eigenfunktion u = u(r,φ) und die zugehörigen Eigenwerte λn
(k):
⎟⎠⎞
⎜⎝⎛⋅⎟
⎠⎞⎜
⎝⎛ ⋅= ϕ
απλϕ ν
nrJru knnk n
sin),( )(
mit:2)(
)(⎟⎟⎠
⎞⎜⎜⎝
⎛=
Rj k
nkn
νλ und απν n
n =
7.2.2.4 Zylinder
Falls das Gebiet ein Zylinder um die z-Achse (Mittelachse = z-Achse) mit Radius R und Höhe H ist, so bildet man den Separationsansatz:
u(r,φ,z) = R(r) · Φ(φ) · Z(z) Für u = 0 auf ∂Ω erhält man damit – in Analogie zu vorhergehenden Beispielen – die Lösungen:
⎟⎠⎞
⎜⎝⎛
⎭⎬⎫
⎩⎨⎧⎟⎟⎠
⎞⎜⎜⎝
⎛= z
Hl
nn
rR
jJzruk
nn
πϕϕ
ϕ sin)cos()sin(
),,()(
22)(
)(, ⎟
⎠⎞
⎜⎝⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛=
Hl
Rj knk
lnπλ
Auch hier wird also die Bessel-Funktion mit ganzzahligem n benötigt.

Analysis II Daniel Ehrbar, D-BAUG 36
7.2.2.5 Kugel
Muss das Eigenwertproblem für eine radialsymmetrische Kugel u = u(r) gelöst werden, so bildet man den bereits bekannten Ansatz:
rrvru )()( =
Daraus ergibt sich die – ebenfalls bekannte – Lösung für u(r) zu:
( ))cos()sin(1)( rbrar
ru ⋅⋅+⋅⋅= λλ
Wird nun bei einer Ganzkugel zum Beispiel gefordert, der Grenzwert von u müsse endlich bleiben, falls r gegen Null strebe, so muss b = 0 gesetzt werden. Wie immer ergeben sich die freien Konstanten aus den Randbedingungen. 7.2.3 Entwicklung nach Eigenfunktionen 7.2.3.1 Kronecker-Symbol [Bronstein 2006, S. 261] Das Kronecker-Symbol hat folgende einfache Definition:
⎩⎨⎧
≠=
=lkfallslkfalls
kl ,0,1
δ
7.2.3.2 Fourier-Entwicklung [Bronstein 2006, S. 534]
Zu jedem Eigenwert λn wird die Eigenfunktion )(xnφ (natürlich kann die Eigenfunktion auch von einer anderen Variablen abhängen!) derart gewählt, dass sie normiert ist, d.h. es gilt:
[ ] 1)()( 22 =∫=Ω
dxxx nn φφ
Von einem Eigenwertproblem kennt man nun die normierte Eigenfunktion )(xnφ . Gesucht wird die Lösungsfunktion f(x). Sie kann im Intervall [a, b] durch ihre Fourier-Reihe ausgedruckt werden. Dabei verwendet man die normierte Eigenfunktion )(xnφ des Randwertproblems:
∑ ⋅=∞
=0)()(
nnn xcxf φ mit ∫ ⋅=
b
ann dxxxfc )()( φ
cn heisst dabei Fourier-Koeffizient. Mit der Fourier-Reihe kann also die Lösung eines Eigenwertproblems durch den Fourier-Koeffizienten und die zughörige Eigenfunktion dargestellt werden! Deshalb kommt der Eigenfunktion auch eine so starke Bedeutung zu! Die Fourier-Reihe konvergiert umso schneller, je glatter die Funktion ist. In einer Sprungstelle gibt sie die Mitte des Sprunges an.
Jeder Term (Quelle, Reaktion usw.) in einer zeitunabhängigen partiellen Differentialgleichung kann mit Hilfe des Fourier-Koeffizienten so umgeformt werden, dass er durch die Eigenfunktion ausgedrückt werden kann! Dies bezeichnet man als das „Entwickeln“ eines Termes.
Analysis II Daniel Ehrbar, D-BAUG 37
7.2.3.3 Laplace-Operator und Eigenfunktionen
Folgende Beziehung zwischen dem Laplace-Operator ∆ und der Eigenfunktion φ bzw. dem Eigenwert λ ist für die Auflösung partieller Differentialgleichungen von essentieller (!) Wichtigkeit:
( ) φλφ ⋅−=∆ Die Dimensionen spielen dabei absolut keine Rolle – diese Beziehung gilt immer! 7.2.4 Anwendung auf Randwertprobleme 7.2.4.1 Allgemeines Randwertproblem
Gegeben sei ein allgemeines Randwertproblem. u = u(x) stelle zum Beispiel die Temperatur dar, während ρ(x) eine Wärmequelle darstellen könnte (sie darf übrigens auch konstant und somit von x unabhängig sein!):
Ω∂=Ω=+∆
aufuinxu
00)(ρ
φ(x) sei die normiert Eigenfunktion. Man macht nun folgenden Ansatz, welcher auf der Theorie der Fourier-Reihe basiert – wichtig zu bemerken ist, dass ρk und uk Konstanten (d.h. Fourier-Koeffizienten) sind:
∑ ⋅=∞
=0)()(
kkk xx ϕρρ und ∑ ⋅=
∞
=0)()(
kkk xuxu ϕ
k
kku
λρ
= ∫ ⋅=Ω
dxxx kk )()( ϕρρ
Die Lösung dieses Randwertproblem ergibt sich damit zu:
)()()(1)()(11
xdxxxxxu kk
kk
kk k
k ϕϕρλ
ϕλρ
⋅∑ ⎥⎦
⎤⎢⎣
⎡∫ ⋅⋅=∑=
∞
= Ω
∞
=
7.2.4.2 Zeitunabhängige Diffusion und Reaktion mit inhomogener Randbedingung
Gegeben sei wiederum das Diffusionsproblem mit Reaktion, diesmal allerdings mit inhomogener Rand-bedingung. Die Randbedingung kann aber leicht mit Hilfe einer Funktion v(x) wie folgt homogenisiert werden:
Ω∂=Ω=∆
aufuinucu
1
2
Homogenisieren:
u(x) =: 1 – v(x) Ω∂=
Ω−=−∆aufv
incvcv0
22
Nun kann wieder der Ansatz mit der Fourier-Reihe gebildet werden; φk(x) steht für die normierte Eigenfunktion:
∑ ⋅⋅=∞
=0
22 )(k
kk xecc ϕ und ∫=Ω
dxxe kk )(ϕ sowie ∑ ⋅=∞
=0)()(
kkk xvxv ϕ
Wiederum kann man diese Grössen in der Differentialgleichung einsetzen und die Koeffizienten der φk’s gleichsetzen. Daraus erhält man die Lösung:
)()(11)(1)(0 2
2
0 22 xdxx
ccx
cecxu kk
k kkk
k
k ϕϕλ
ϕλ
⋅⎥⎦
⎤⎢⎣
⎡∫⋅∑
+⋅−=∑ ⋅
+⋅−=
Ω
∞
=
∞
=
Analysis II Daniel Ehrbar, D-BAUG 38
7.2.4.3 Allgemeines Randwertproblem mit inhomogenen Randbedingungen
Gegeben sei das folgende Problem mit inhomogenen Randbedingungen welche wiederum mit einem geeigneten Ansatz homogenisiert werden:
Ω∂=⋅Ω=+∆
aufxruBinxu
)(0)(ρ
Homogenisieren:
u(x) = v(x) + w(x) Auf ∂Ω: B · v(x) = r(x) und B · w(x) = 0 )()(ˆ:
00)(ˆ
xvxmitaufwB
inxw
ρρ
ρ
+∆=Ω∂=⋅Ω=+∆
Dies führt – wiederum über die Entwicklung der Fourier-Reihe – zu folgendem Resultat mit φk(x) als normierter Eigenfunktion:
)()()(ˆ1)()(ˆ
)()(0 0
xdxxxxvxxvxu kk k
kk
kk
k ϕϕρλ
ϕλρ
⋅∑ ∑ ⎥⎦
⎤⎢⎣
⎡∫ ⋅⋅+=+=
∞
=
∞
= Ω
7.3 Diffusionsprobleme (Anfangs- und Randwertprobleme) 7.3.1 Allgemeine Bemerkungen Diffusionsprobleme haben im Allgemeinen die folgende Form:
)(0)()0,()()(
),(
0 ingungAnfangsbedtbeixuxuungRandbedingaufxruB
intxquDut
==Ω∂=⋅
Ω+∆=
Sie weisen also eine Zeitabhängigkeit auf, weshalb spezielle Lösungsmethoden nötig sind, d.h. es ist nicht mehr möglich, nur mit dem Entwickeln nach Eigenfunktionen die Lösung zu ermitteln. Diffusion kann man auch so verstehen, dass Unterschiede (z.B. in der Temperaturverteilung) nach gewissen Kriterien ausgeglichen werden. Diffusionsprobleme weisen sowohl Rand-, als auch Anfangsbedingungen auf. Die Konstante D wird Diffusionskoeffizient genannt. Die Lösung des Diffusionsproblems ist eindeutig! 7.3.2 Dirac-Funktion [Bronstein 2006, S. 656] Die Dirac-Funktion δ(x,ξ) tritt in verschiedenen Zusammenhängen immer wieder auf. Sie hat folgende Definition:
⎩⎨⎧
=∞≠
=ξξ
ξδxfallsxfalls
x,,0
),( und ∫ =1),( ξξδ dx
7.3.3 Wärmeleitungskern 7.3.3.1 Definition des Wärmeleitungskerns
Bei vielen Diffusionsproblemen kann die Lösung mit dem sogenannten Wärmeleitungskern („heat kernel“ ermittelt werden. Er definiert sich über die normierte Eigenfunktion kφ und über den Eigenwert λk und den Diffusionskoeffizienten D:

Analysis II Daniel Ehrbar, D-BAUG 39
∑ ⋅⋅=∞
=
−
1)()(:),,(
k
tDkk
kextxK λξφφξ
Die physikalische Interpretation des Wärmeleitungskerns ist folgende: Wenn zur Zeit t = 0 bei ξ die Einheitswärmemenge punktquellenähnlich freigesetzt wird, so entspricht der Wärmeleitungskern K(x,ξ,t) der Temperatur bei x zur Zeit t. 7.3.3.2 Eigenschaften des Wärmeleitungskerns
Der Wärmeleitungskern weist folgende Eigenschaften auf:
1. KDt
txKx∆=
∂∂ ),,( ξ
2. ),,(),,( txKtxK ξξ = 3. Ω∈Ω∂∈=⋅ ξξ ,0),,( xtxKBx
4. [ ] [ ]⎩⎨⎧
Ω∉Ω∈
=∫ ⋅=∫ ⋅→→ x
xxfdfxdftxK
tt ,0,)(
)(),(lim)(),,(lim00
ξξξδξξξ
7.3.4 Error-Funktion [Bronstein 2006, S. 478] Vor allem für die Diffusion auf (–∞,∞) ist die Error-Funktion erf[y] und die komplementäre Error-Funktion erfc[y] von Bedeutung. Dabei handelt es sich um Integrale der folgenden Definition:
∫⋅= −y
s dseyerf0
22][π und ∫⋅=
∞−
y
s dseyerfc22][
π
erf[y] + erfc[y] = 1
Diese Integrale finden vor allem in der Statistik häufig Anwendung. 7.3.5 Verschiedene Arten von Diffusionsproblemen Die nachfolgenden Beispiele sind alle auf den eindimensionalen Raum IR1 bezogen; dies wird jeweils mit der Variablen x symbolisiert. Natürlich gelten aber alle Formeln auch für mehrdimensionale Gebiete, d.h. x kann problemlos mit x,y oder x,y,z vertauscht werden. An Stelle von ξ treten dann sinngemäss ξ,η resp. ξ,η,µ; die Differentialausdrücke werden sinngemäss erweitert, d.h. von dξ zu dξdη resp. sogar dξdηdµ. 7.3.5.1 Reine Diffusion mit homogenen Randbedingungen und Anfangsverteilung
Das einfachste Diffusionsproblem hat folgende offensichtliche Form:

Analysis II Daniel Ehrbar, D-BAUG 40
0)()0,(0
0 ==Ω∂=⋅
Ω∆=
txuxuaufuB
inuDut
Die Lösung dieses Problem beinhaltet den Wärmeleitungskern und lautet:
∫ ⋅=Ω
ξξξ dutxKtxu )(),,(),( 0
7.3.5.2 Diffusion mit Wärmequelle ohne Anfangsverteilung
Wiederum sollen die Randbedingungen homogen sein, aber zusätzlich zur reinen Diffusion existiert nun eine Wärmequelle q(x,t) im Gebiet Ω:
00)0,(0
),(
==Ω∂=⋅
Ω+∆=
txuaufuB
intxquDut
Hier muss die Lösung wieder – entsprechend der Theorie der Fourier-Reihe – entwickelt werden. Dabei werden die Eigenfunktionen kφ des Problems benötigt; d.h., man löst als erstes das Eigenwertproblem mit den spezifischen Randbedingungen aus obiger Gleichung:
gleichungDiffusionsderungenRandbeding+=+∆ 0λφφ
Hat man nun die Eigenfunktionen kφ berechnet, so macht man den folgenden Ansatz für die Entwicklung der Quelle und schlussendlich der Lösung:
Entwicklung der Quelle: ∫ ⋅=∑ ⋅=Ω
∞
=dxxtxqtmitxttxq kkk
kk )(),()(:)()(),(
1φβφβ
Entwicklung der Lösung: ∑ ⋅=∞
=1)()(),(
kkk xttxu φα
Während der Term )(tkβ ohne weiteres berechnet werden kann, muss der Term )(tkα durch Einsetzen obiger Terme in die Differentialgleichung bestimmt werden. Dabei ergibt sich meist folgende Differentialgleichung für )(tkα , welche mit einer Laplace-Transformation gelöst werden kann:
Differentialgleichung für αk: )()()( tDttt kkkk αλβα ⋅⋅−=∂∂
Lösung: ∫ ⋅+⋅== −⋅⋅−⋅⋅−t
ktDtD
kk deett kk
0
)( )()0()( ττβαα τλλ
Der Term )0( =tkα ermittelt man aus den Anfangsbedingungen, d.h. bei der Entwicklung der Lösung (siehe
oben) ist nur kα von t abhängig, d.h. man kann die Entwicklung der Lösung gleich Null setzen und erhält so,
dass )0( =tkα gerade gleich Null sein muss! Damit lassen sich nun alle Terme berechnen und die Lösung ist gefunden. Aus der Laplace-Transformation ergibt sich aber auch, dass die Lösung wie folgt berechnet werden kann:

Analysis II Daniel Ehrbar, D-BAUG 41
∫ ∫ ⋅−=Ω
tddqtxKtxu
0),(),,(),( τξτξτξ
Hängt z.B. die Wärmequelle q gar nicht von x ab, d.h. es ist q = q(t), dann wird bei dieser Formel anstelle von q(ξ,τ) nur q(τ) gesetzt! 7.3.5.3 Diffusion mit Wärmequelle und Anfangsverteilung
Dieses Problem ist eine Kombination der geschilderten Probleme unter 7.3.4.1 und 7.3.4.2; es kommt sowohl eine Quelle q(x,t) als auch eine Anfangsverteilung u0(x) vor:
0)()0,(0
),(
0 ==Ω∂=⋅
Ω+∆=
txuxuaufuB
intxquDut
Es erscheint logisch, dass auch die Lösung dieses Problems gewissermassen die Überlagerung der beiden einzeln geschilderten Probleme darstellt. Entsprechend gilt also für die Lösung:
∫ ∫ ⋅−∫ +⋅=ΩΩ
tddqtxKdutxKtxu
00 ),(),,()(),,(),( τξτξτξξξξ
Der erste Term entspricht dabei dem Einfluss der Anfangsverteilung, der zweite beschreibt das Wirken der Wärmequelle. 7.3.5.4 Diffusion mit Quelle, Anfangsverteilung und inhomogenen Randbedingungen
Gegeben sei ein Diffusionsproblem mit Quelle q(x,t) und Anfangsverteilung u0(x), allerdings mit inhomogenen Randbedingungen, d.h. die Randbedingungen ergeben nicht immer Null:
)()0,(),(
),(
0 xuxutxruB
txquDut
==⋅
+∆=
Dieses Problem kann in dieser Form nicht gelöst werden. Darum werden erst die Randbedingungen mittels einem geeigneten Ansatz homogenisiert (= so verändert, dass sie auf dem Rand gleich Null ergeben). Danach wird die homogenisierte Differentialgleichung gelöst:
Ansatz für’s Homogenisieren: ),(:),(),(),( txrvBwobeitxwtxvtxu =⋅+=
Homogenisierte Differentialgleichung: )0,()0,(
0),(
xvxwaufwB
intxqvvDwDw tt
−=Ω∂=⋅
Ω+−∆+∆=
Es ist offensichtlich, dass die Funktion v(x,t) so einfach wie nur möglich gewählt werden soll! Jede Funktion, die obige Bedingungen erfüllt, ist aber zulässig. Die Lösung dieses Problems ergibt sich aus untenstehender Gleichung:
[ ] [ ]
),(
),(),(),(),,()0,()(),,(),(0
txv
ddvvDqtxKdvutxKtxut
t
+
∫ ∫ −∆+⋅−+∫ −⋅=ΩΩ
τξτξτξτξτξξξξξ

Analysis II Daniel Ehrbar, D-BAUG 42
7.3.5.5 Diffusion und lineare Reaktion
Gegeben sei das Diffusionsproblem, wobei eine Quelle q(x,t) und eine Anfangsverteilung u0(x) existieren. Zusätzlich findet nun eine lineare Reaktion γu statt:
)()0,(),(
),(
0 xuxutxruB
txquuDut
==⋅
++∆= γ
Für die lineare Reaktion muss nun ein spezieller Ansatz gewählt werden, damit das Problem auf einen bekannten Standardfall zurückgeführt werden kann:
Ansatz für die lineare Reaktion: ),(),( txvetxu t ⋅= γ
Differentialgleichung: )()0,(
),(
),(
0 xuxvtxrevB
etxqvDvt
tt
=⋅=⋅
⋅+∆=−
−
γ
γ
7.3.5.6 Diffusion auf (– ∞, ∞)
Bei der Diffusion auf (–∞,∞) wird ein spezieller Wärmeleitungskern K(–∞,∞) verwendet. Er ist folgendermassen definiert:
Dtx
eDt
txK 4)(
),(
2
41),,(
ξ
πξ
−−
∞−∞ ⋅=
Die physikalische Interpretation ist exakt dieselbe wie beim „normalen“ Wärmeleitungskern. Die Eigenschaften hingegen ändern sich geringfügig:
1. ),,(),,( ),(2
2
),( txKx
DtxKt
ξξ ∞−∞∞−∞ ∂∂
=∂∂
2. ),,(),,( ),(),( txKtxK ξξ ∞−∞∞−∞ = 3. [ ] ),(),,(lim ),(0
ξδξ xtxKt
=∞−∞→
Gegeben sei nun ein Diffusionsproblem auf dem Intervall (–∞,∞) mit einer Quelle q(x,t) und einer Anfangsverteilung:
)()0,()!(),(
),(),(
0 xuxubeschränktxu
intxqDuu xxt
=±∞
∞−∞+=
Dieses Problem hat nun die Lösung:
∫ ∫ ∫ ⋅−+⋅=∞
∞−
∞
∞−∞−∞∞−∞
tddqtxKdutxKtxu
0),(0),( ),(),,()(),,(),( τξτξτξξξξ
Für den Fall, dass q(x,t) gerade gleich Null ist und u0(x) gleich 1 ist für alle x > 0 und gleich 0 für alle x < 0, ergibt sich die interessante Lösung:
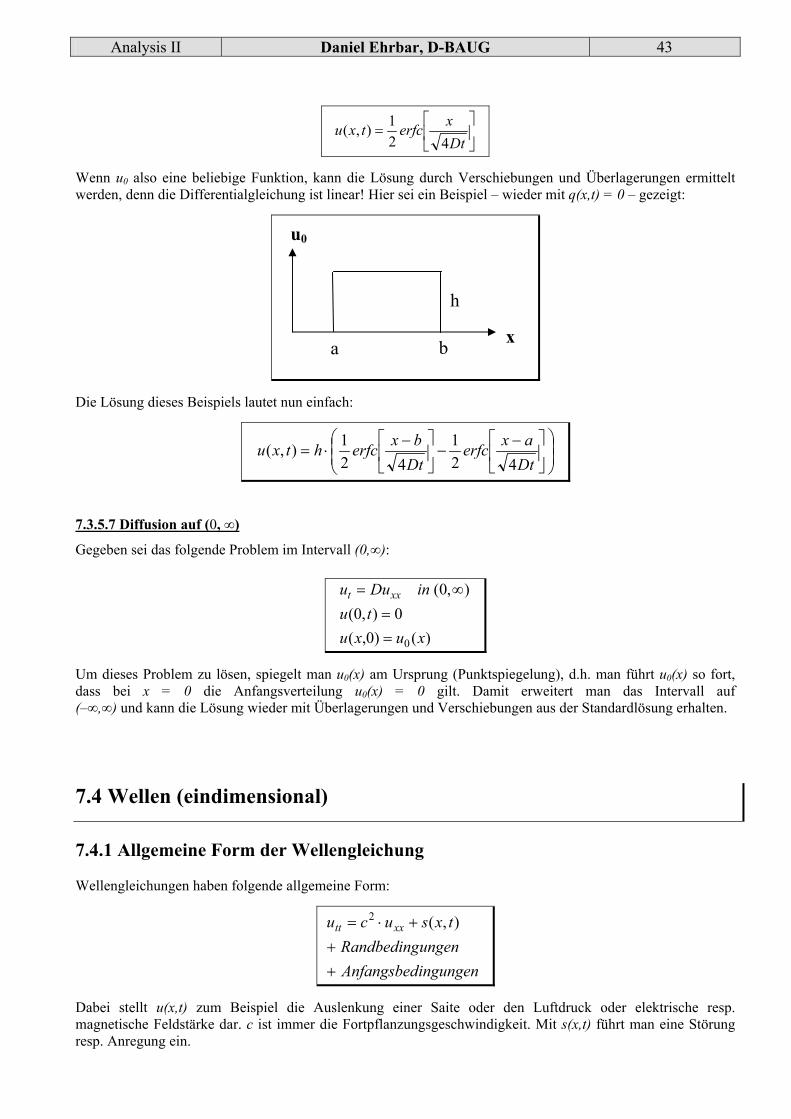
Analysis II Daniel Ehrbar, D-BAUG 43
h
b a
u0
⎥⎦
⎤⎢⎣
⎡=
Dtxerfctxu
421),(
Wenn u0 also eine beliebige Funktion, kann die Lösung durch Verschiebungen und Überlagerungen ermittelt werden, denn die Differentialgleichung ist linear! Hier sei ein Beispiel – wieder mit q(x,t) = 0 – gezeigt:
Die Lösung dieses Beispiels lautet nun einfach:
⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡ −−⎥
⎦
⎤⎢⎣
⎡ −⋅=
Dtaxerfc
Dtbxerfchtxu
421
421),(
7.3.5.7 Diffusion auf (0, ∞)
Gegeben sei das folgende Problem im Intervall (0,∞):
)()0,(0),0(
),0(
0 xuxutu
inDuu xxt
==
∞=
Um dieses Problem zu lösen, spiegelt man u0(x) am Ursprung (Punktspiegelung), d.h. man führt u0(x) so fort, dass bei x = 0 die Anfangsverteilung u0(x) = 0 gilt. Damit erweitert man das Intervall auf (–∞,∞) und kann die Lösung wieder mit Überlagerungen und Verschiebungen aus der Standardlösung erhalten. 7.4 Wellen (eindimensional) 7.4.1 Allgemeine Form der Wellengleichung Wellengleichungen haben folgende allgemeine Form:
ingungenAnfangsbedungenRandbeding
txsucu xxtt
++
+⋅= ),(2
Dabei stellt u(x,t) zum Beispiel die Auslenkung einer Saite oder den Luftdruck oder elektrische resp. magnetische Feldstärke dar. c ist immer die Fortpflanzungsgeschwindigkeit. Mit s(x,t) führt man eine Störung resp. Anregung ein.
x
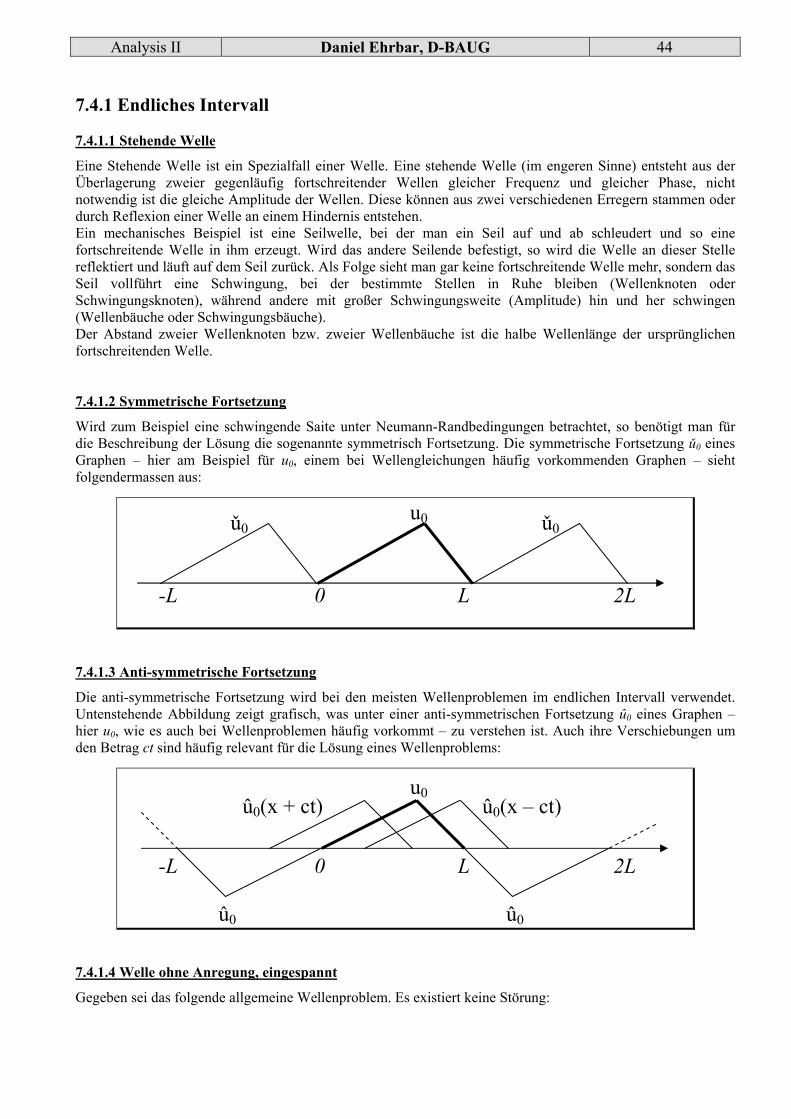
Analysis II Daniel Ehrbar, D-BAUG 44
7.4.1 Endliches Intervall 7.4.1.1 Stehende Welle
Eine Stehende Welle ist ein Spezialfall einer Welle. Eine stehende Welle (im engeren Sinne) entsteht aus der Überlagerung zweier gegenläufig fortschreitender Wellen gleicher Frequenz und gleicher Phase, nicht notwendig ist die gleiche Amplitude der Wellen. Diese können aus zwei verschiedenen Erregern stammen oder durch Reflexion einer Welle an einem Hindernis entstehen. Ein mechanisches Beispiel ist eine Seilwelle, bei der man ein Seil auf und ab schleudert und so eine fortschreitende Welle in ihm erzeugt. Wird das andere Seilende befestigt, so wird die Welle an dieser Stelle reflektiert und läuft auf dem Seil zurück. Als Folge sieht man gar keine fortschreitende Welle mehr, sondern das Seil vollführt eine Schwingung, bei der bestimmte Stellen in Ruhe bleiben (Wellenknoten oder Schwingungsknoten), während andere mit großer Schwingungsweite (Amplitude) hin und her schwingen (Wellenbäuche oder Schwingungsbäuche). Der Abstand zweier Wellenknoten bzw. zweier Wellenbäuche ist die halbe Wellenlänge der ursprünglichen fortschreitenden Welle. 7.4.1.2 Symmetrische Fortsetzung
Wird zum Beispiel eine schwingende Saite unter Neumann-Randbedingungen betrachtet, so benötigt man für die Beschreibung der Lösung die sogenannte symmetrisch Fortsetzung. Die symmetrische Fortsetzung ǔ0 eines Graphen – hier am Beispiel für u0, einem bei Wellengleichungen häufig vorkommenden Graphen – sieht folgendermassen aus:
7.4.1.3 Anti-symmetrische Fortsetzung
Die anti-symmetrische Fortsetzung wird bei den meisten Wellenproblemen im endlichen Intervall verwendet. Untenstehende Abbildung zeigt grafisch, was unter einer anti-symmetrischen Fortsetzung û0 eines Graphen – hier u0, wie es auch bei Wellenproblemen häufig vorkommt – zu verstehen ist. Auch ihre Verschiebungen um den Betrag ct sind häufig relevant für die Lösung eines Wellenproblems:
7.4.1.4 Welle ohne Anregung, eingespannt
Gegeben sei das folgende allgemeine Wellenproblem. Es existiert keine Störung:
u0
û0 û0
L 2L -L 0
û0(x – ct) û0(x + ct)
u0
L 2L -L 0
ǔ0 ǔ0

Analysis II Daniel Ehrbar, D-BAUG 45
0)0,()()0,(
0),(,0),0(
0
2
==
==⋅=
xuxuxu
tLutuucu
t
xxtt
Dieses Problem hat die Lösung:
[ ])(ˆ)(ˆ21),( 00 ctxuctxutxu −++⋅=
Dabei ist û0 die sogenannt anti-symmetrische Fortsetzung, welche z.B. grafisch konstruiert werden kann. 7.4.1.5 Welle ohne Anregung
Gegeben sei folgende Wellengleichung ohne Störung auf einem beschränkten Intervall:
)()0,()()0,(),(),0(
0
0
2
xvxuxuxutLutu
ucu
t
xxtt
===⋅=
V0 sei nun die Stammfunktion von v0, wobei 0V wiederum die anti-symmetrische Fortsetzung von V0 darstellt. Die Lösung dieses Problems ist nun mit diesen Funktionen gegeben als:
[ ] [ ])(ˆ)(ˆ21)(ˆ)(ˆ
21),( 0000 ctxVctxV
cctxuctxutxu −−+⋅+−++⋅=
7.4.1.6 Saite unter Neumann-Bedingungen
Gegeben sei die Wellengleichung einer schwingenden Saite mit Neumann-Randbedingungen:
)()0,()()0,(
)(0),(),0(),0(
0
0
2
xvxuxuxu
ungRandbedingNeumanntLutuLxucu
t
xx
xxtt
==
−==∈⋅=
Die Lösung dieses Problems beinhaltet die symmetrische Fortsetzung, wobei V die Stammfunktion von v darstellt:
⎥⎦
⎤⎢⎣
⎡
⎭⎬⎫
⎩⎨⎧
−−+⋅+++−⋅=∨∨∨∨
)()(21)()(
21),( 0000 ctxVctxV
cctxuctxutxu
7.4.1.7 Welle mit äusserer Anregung
Gegeben ist die folgende Wellengleichung mit äusserer Anregung s(x,t):
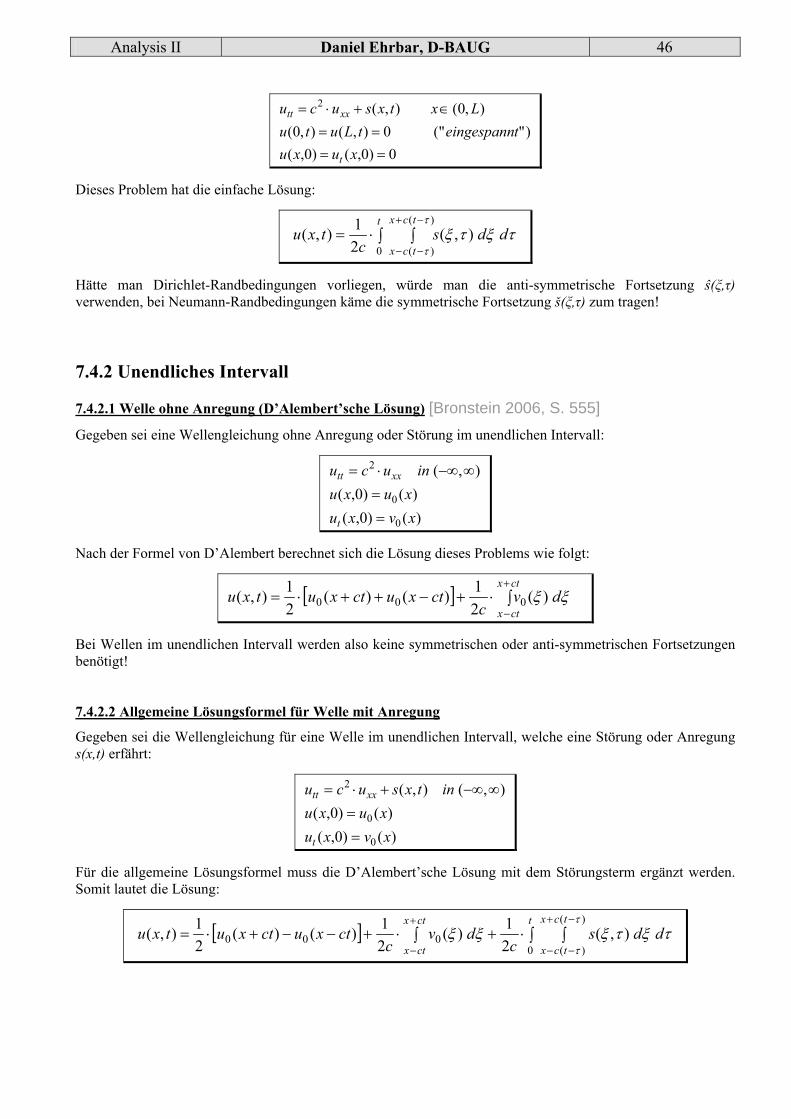
Analysis II Daniel Ehrbar, D-BAUG 46
0)0,()0,()"("0),(),0(
),0(),(2
====
∈+⋅=
xuxuteingespanntLutu
Lxtxsucu
t
xxtt
Dieses Problem hat die einfache Lösung:
∫ ∫⋅=−+
−−
t tcx
tcxdds
ctxu
0
)(
)(),(
21),(
τ
ττξτξ
Hätte man Dirichlet-Randbedingungen vorliegen, würde man die anti-symmetrische Fortsetzung ŝ(ξ,τ) verwenden, bei Neumann-Randbedingungen käme die symmetrische Fortsetzung š(ξ,τ) zum tragen! 7.4.2 Unendliches Intervall 7.4.2.1 Welle ohne Anregung (D’Alembert’sche Lösung) [Bronstein 2006, S. 555] Gegeben sei eine Wellengleichung ohne Anregung oder Störung im unendlichen Intervall:
)()0,()()0,(
),(
0
0
2
xvxuxuxu
inucu
t
xxtt
==
∞−∞⋅=
Nach der Formel von D’Alembert berechnet sich die Lösung dieses Problems wie folgt:
[ ] ∫⋅+−++⋅=+
−
ctx
ctxdv
cctxuctxutxu ξξ )(
21)()(
21),( 000
Bei Wellen im unendlichen Intervall werden also keine symmetrischen oder anti-symmetrischen Fortsetzungen benötigt! 7.4.2.2 Allgemeine Lösungsformel für Welle mit Anregung
Gegeben sei die Wellengleichung für eine Welle im unendlichen Intervall, welche eine Störung oder Anregung s(x,t) erfährt:
)()0,()()0,(
),(),(
0
0
2
xvxuxuxu
intxsucu
t
xxtt
==
∞−∞+⋅=
Für die allgemeine Lösungsformel muss die D’Alembert’sche Lösung mit dem Störungsterm ergänzt werden. Somit lautet die Lösung:
[ ] ∫ ∫ ∫⋅+⋅+−−+⋅=+
−
−+
−−
ctx
ctx
t tcx
tcxdds
cdv
cctxuctxutxu
0
)(
)(000 ),(
21)(
21)()(
21),(
τ
ττξτξξξ





























