Embed Size (px)
Citation preview
86
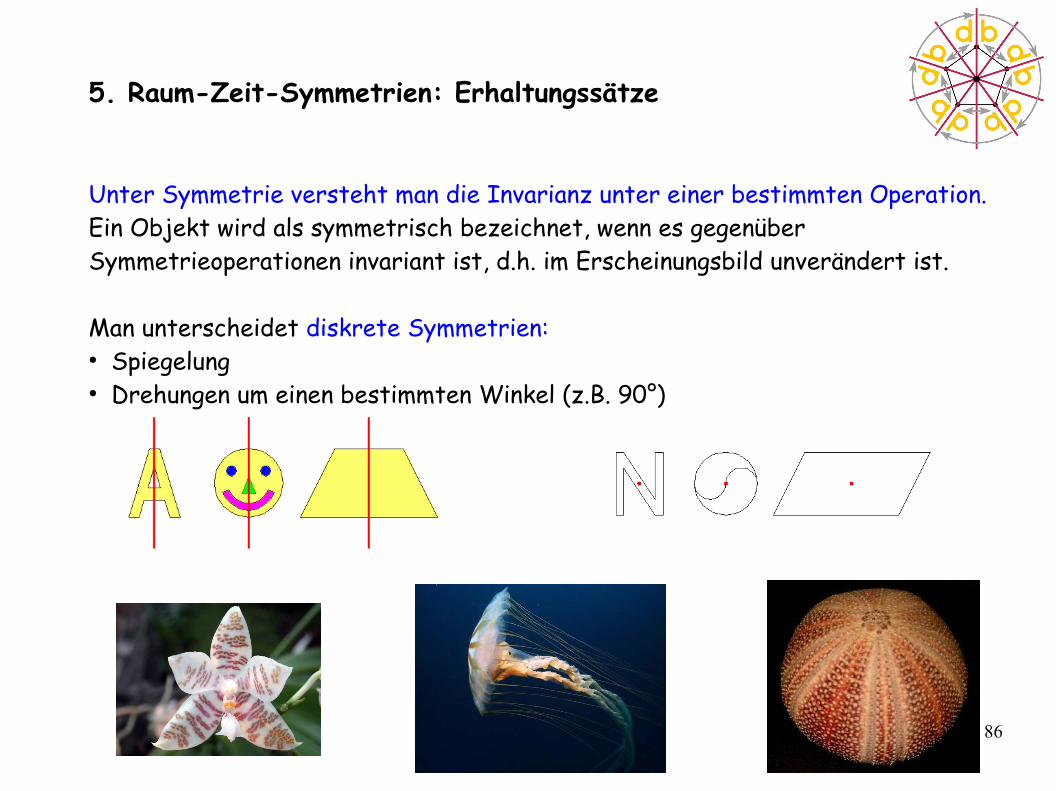
5. Raum-Zeit-Symmetrien: Erhaltungssätze
Unter Symmetrie versteht man die Invarianz unter einer bestimmten Operation. Ein Objekt wird als symmetrisch bezeichnet, wenn es gegenüber Symmetrieoperationen invariant ist, d.h. im Erscheinungsbild unverändert ist.
Man unterscheidet diskrete Symmetrien:● Spiegelung● Drehungen um einen bestimmten Winkel (z.B. 90°)
87
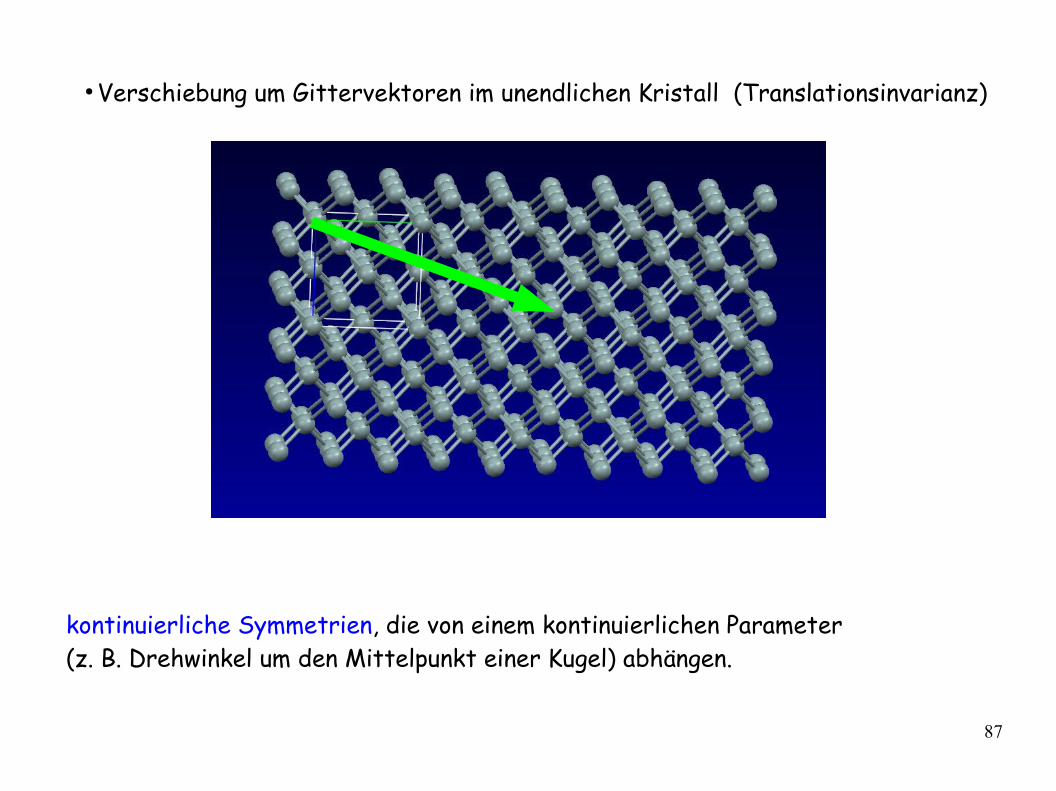
● Verschiebung um Gittervektoren im unendlichen Kristall (Translationsinvarianz)
kontinuierliche Symmetrien, die von einem kontinuierlichen Parameter (z. B. Drehwinkel um den Mittelpunkt einer Kugel) abhängen.
88
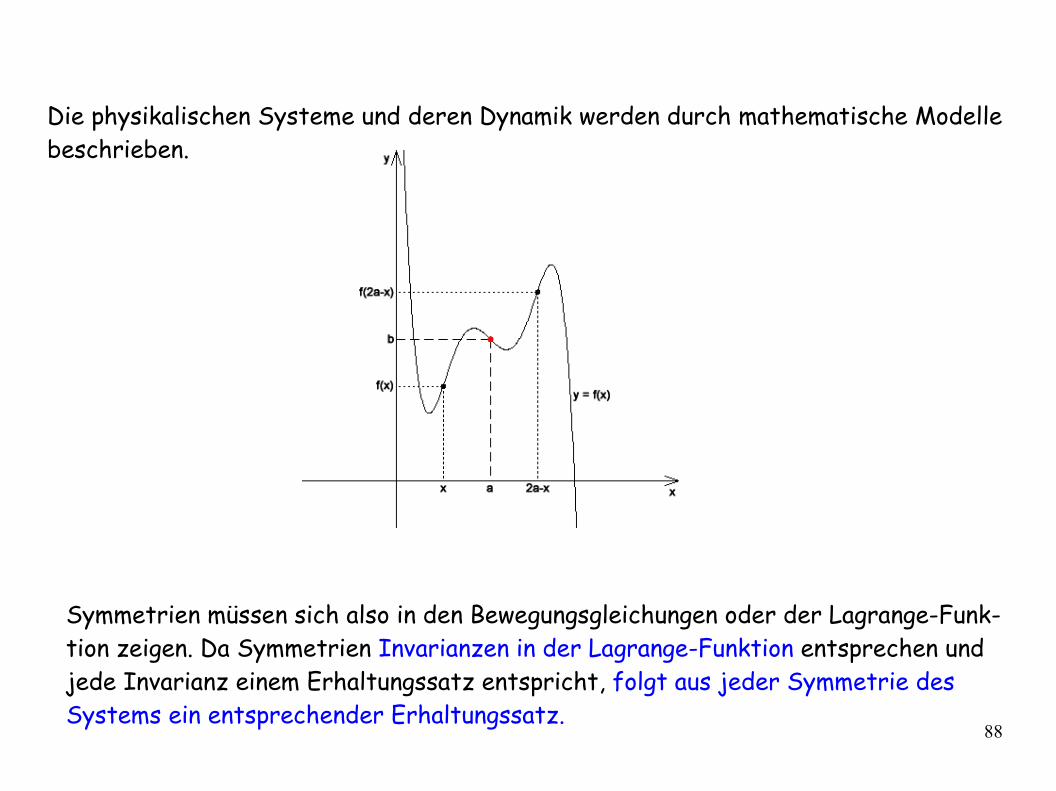
Symmetrien müssen sich also in den Bewegungsgleichungen oder der Lagrange-Funk-tion zeigen. Da Symmetrien Invarianzen in der Lagrange-Funktion entsprechen und jede Invarianz einem Erhaltungssatz entspricht, folgt aus jeder Symmetrie des Systems ein entsprechender Erhaltungssatz.
Die physikalischen Systeme und deren Dynamik werden durch mathematische Modelle beschrieben.
89
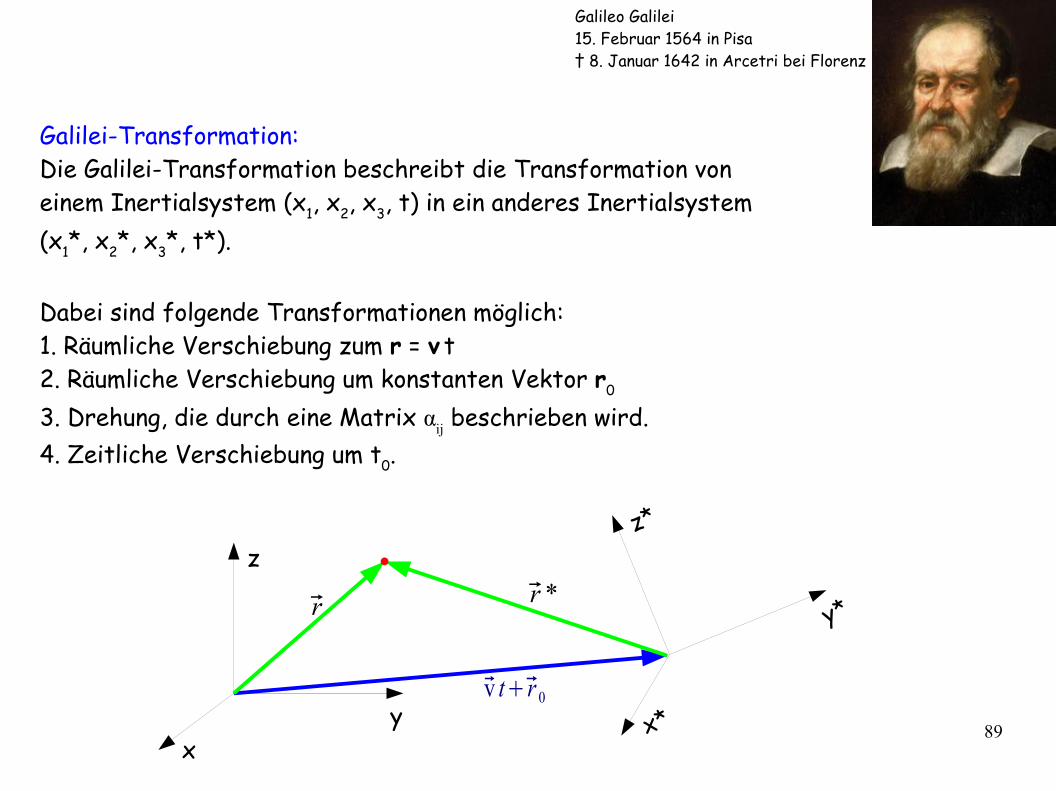
Galilei-Transformation:Die Galilei-Transformation beschreibt die Transformation von einem Inertialsystem (x1, x2, x3, t) in ein anderes Inertialsystem (x1*, x2*, x3*, t*).
Dabei sind folgende Transformationen möglich:1. Räumliche Verschiebung zum r = v t2. Räumliche Verschiebung um konstanten Vektor r0
3. Drehung, die durch eine Matrix αij beschrieben wird.
4. Zeitliche Verschiebung um t0.
Galileo Galilei 15. Februar 1564 in Pisa † 8. Januar 1642 in Arcetri bei Florenz
xy
z
x*
y*
z*
v tr 0
r r *
90
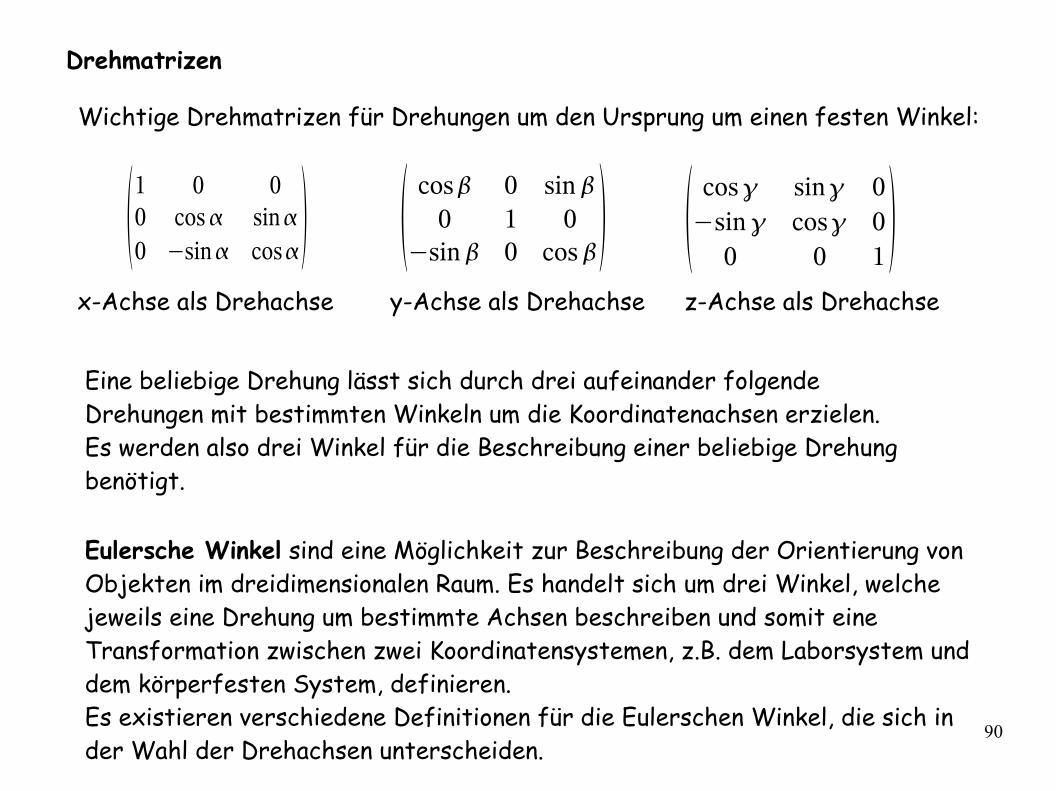
Drehmatrizen
Wichtige Drehmatrizen für Drehungen um den Ursprung um einen festen Winkel:
1 0 00 cos sin0 −sin cos
cos 0 sin 0 1 0
−sin 0 cos cos sin 0−sin cos 00 0 1
x-Achse als Drehachse y-Achse als Drehachse z-Achse als Drehachse
Eine beliebige Drehung lässt sich durch drei aufeinander folgende Drehungen mit bestimmten Winkeln um die Koordinatenachsen erzielen.Es werden also drei Winkel für die Beschreibung einer beliebige Drehung benötigt.
Eulersche Winkel sind eine Möglichkeit zur Beschreibung der Orientierung von Objekten im dreidimensionalen Raum. Es handelt sich um drei Winkel, welche jeweils eine Drehung um bestimmte Achsen beschreiben und somit eine Transformation zwischen zwei Koordinatensystemen, z.B. dem Laborsystem und dem körperfesten System, definieren.Es existieren verschiedene Definitionen für die Eulerschen Winkel, die sich in der Wahl der Drehachsen unterscheiden.
91
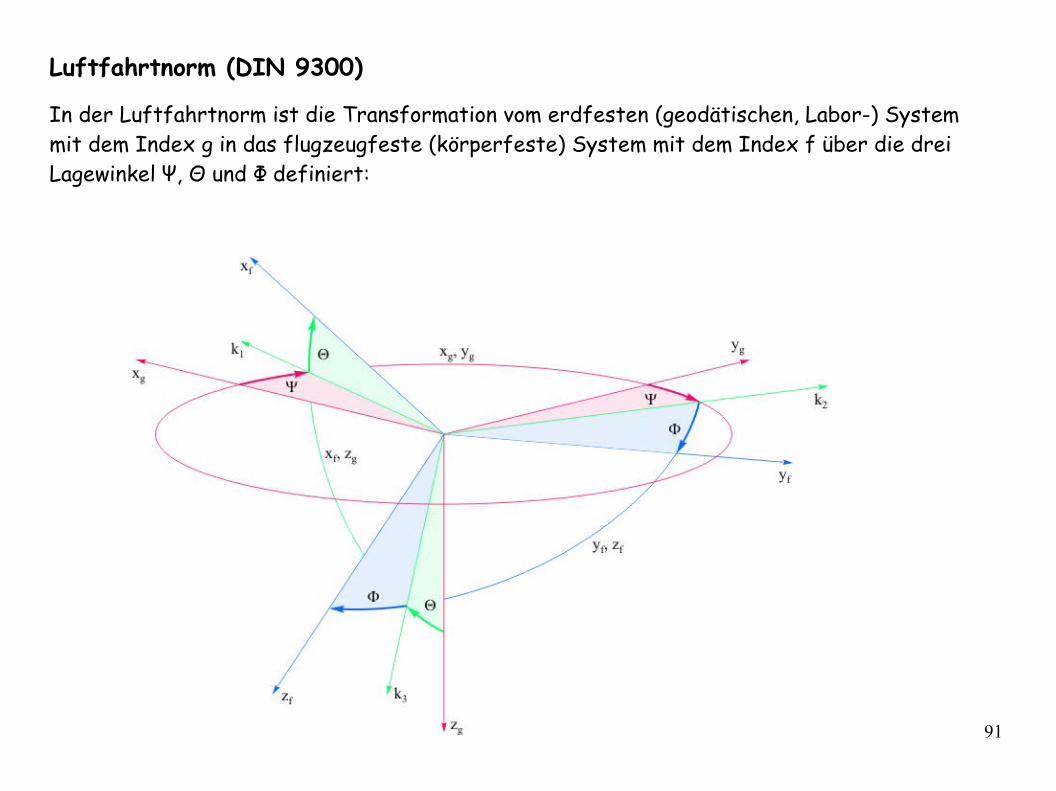
Luftfahrtnorm (DIN 9300)
In der Luftfahrtnorm ist die Transformation vom erdfesten (geodätischen, Labor-) System mit dem Index g in das flugzeugfeste (körperfeste) System mit dem Index f über die drei Lagewinkel Ψ, Θ und Φ definiert:
92
Der Gierwinkel (Steuerkurs, Azimut, heading, azimuth angle) Ψ dreht in der xg-y
g-Ebene um die
zg-Achse. Dabei wird die x
g-Achse in die Knotenachse k
1 und die y
g-Achse in die Knotenachse k
2
überführt.
Der Nickwinkel (Längsneigung, pitch angle, inclination angle) Θ dreht in der xf-z
g-Ebene um die
k2-Achse. Dabei wird die k
1-Achse in die x
f-Achse und die z
g-Achse in die Knotenachse k
3
überführt.
Der Rollwinkel (Querneigung, Hängewinkel, bank angle) Φ dreht in der yf-z
f-Ebene um die x
f-
Achse. Dabei wird die k2-Achse in die y
f-Achse und die k
3-Achse in die z
f-Achse überführt.
Die Transformationsmatrix setzt sich dann aus dem Produkt von drei Einzeldrehmatrizen für die jeweiligen Winkel zusammen. Dabei ist die Drehreihenfolge von rechts nach links zu lesen:
T g f=1 0 00 cos −sin0 sin cos
cos 0 sin0 1 0
−sin 0 coscos −sin 0sin cos 00 0 1
93
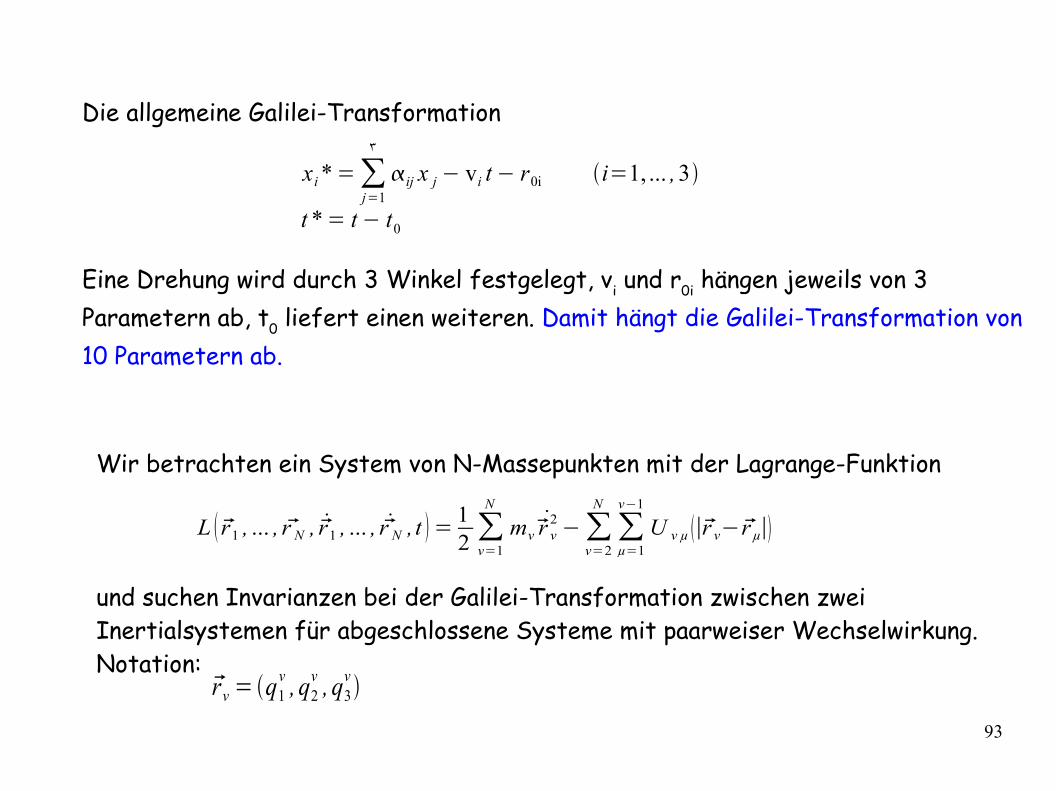
Wir betrachten ein System von N-Massepunkten mit der Lagrange-Funktion
und suchen Invarianzen bei der Galilei-Transformation zwischen zwei Inertialsystemen für abgeschlossene Systeme mit paarweiser Wechselwirkung.Notation:
L r1 , ... , r N , r1 , ... , r N , t =12∑v=1
N
mv r v2−∑
v=2
N
∑µ=1
v−1
U v µ ∣r v−rµ∣
rv=q1v , q2
v , q3v
Die allgemeine Galilei-Transformation
Eine Drehung wird durch 3 Winkel festgelegt, vi und r0i hängen jeweils von 3 Parametern ab, t0 liefert einen weiteren. Damit hängt die Galilei-Transformation von 10 Parametern ab.
xi*=∑j=1
3
ij x j− vi t− r0i i=1, ... ,3
t *= t− t0
94
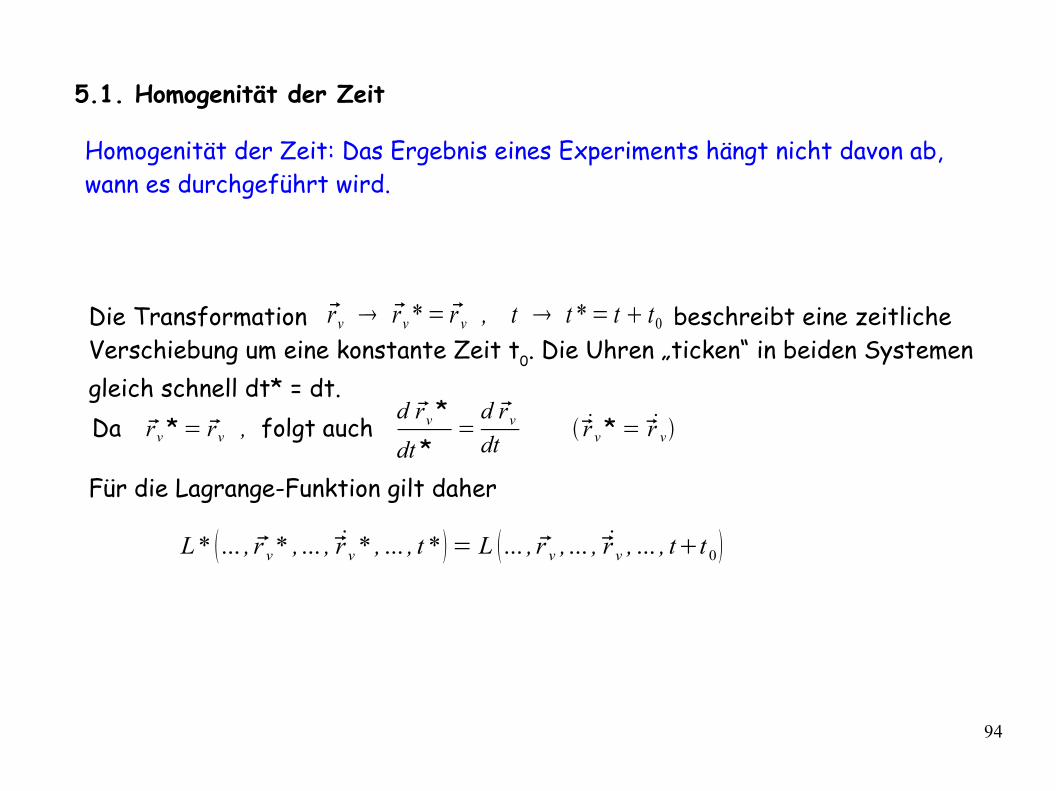
Homogenität der Zeit: Das Ergebnis eines Experiments hängt nicht davon ab, wann es durchgeführt wird.
Die Transformation beschreibt eine zeitliche Verschiebung um eine konstante Zeit t0. Die Uhren „ticken“ in beiden Systemen gleich schnell dt* = dt.
Für die Lagrange-Funktion gilt daher
rv rv*= r v , t t *= t t0
Da rv*= rv , folgt auchd rv*dt *
=d rvdt
r v* = r v
L* ... , r v* , ... , r v* , ... , t * = L ... , r v , ... , r v , ... , tt 0
5.1. Homogenität der Zeit
95
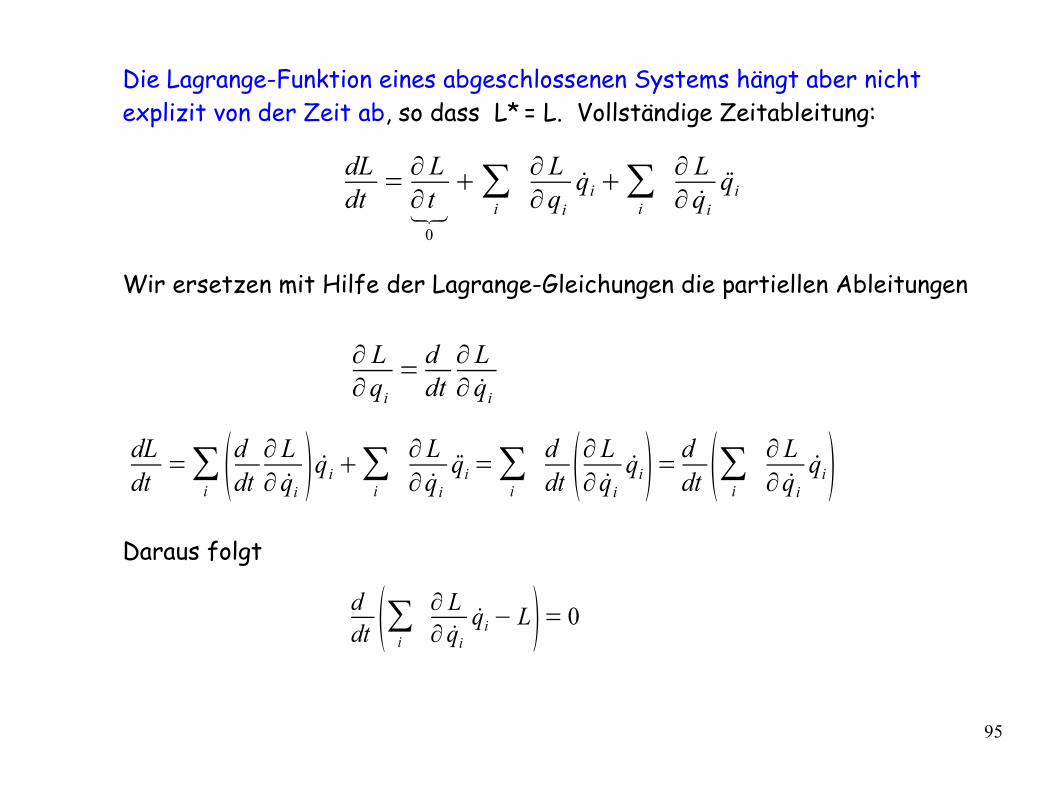
Die Lagrange-Funktion eines abgeschlossenen Systems hängt aber nicht explizit von der Zeit ab, so dass L* = L. Vollständige Zeitableitung:
Wir ersetzen mit Hilfe der Lagrange-Gleichungen die partiellen Ableitungen
Daraus folgt
dLdt
=∂ L∂ t0
∑i
∂ L∂qi
qi∑i
∂ L∂ qi
qi
∂ L∂qi
=ddt
∂ L∂ qi
dLdt
=∑iddt ∂ L∂ qi qi∑i
∂ L∂ qi
qi=∑i
ddt ∂ L∂ qi qi=
ddt ∑i
∂ L∂ qi
qi
ddt ∑i
∂ L∂ qi
qi− L= 0
96
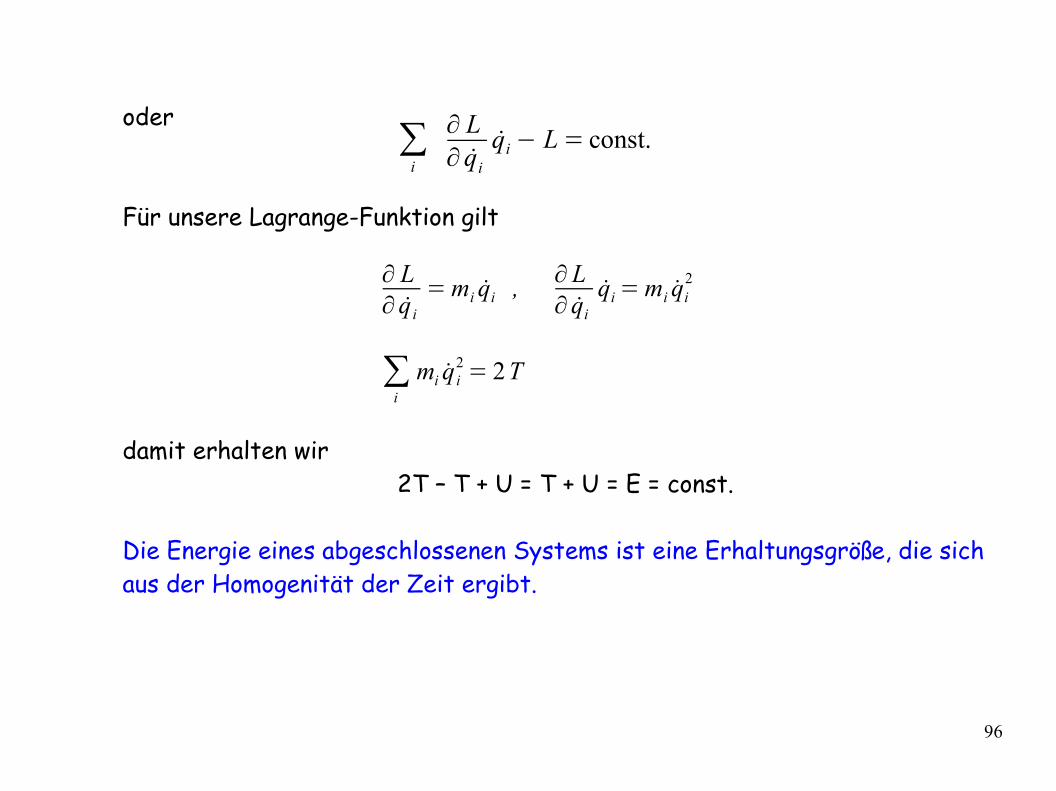
oder
Für unsere Lagrange-Funktion gilt
damit erhalten wir2T – T + U = T + U = E = const.
Die Energie eines abgeschlossenen Systems ist eine Erhaltungsgröße, die sich aus der Homogenität der Zeit ergibt.
∑i
∂ L∂ qi
qi− L= const.
∂ L∂ q i
=mi qi ,∂ L∂ qi
qi=mi qi2
∑i
mi q i2= 2T
97
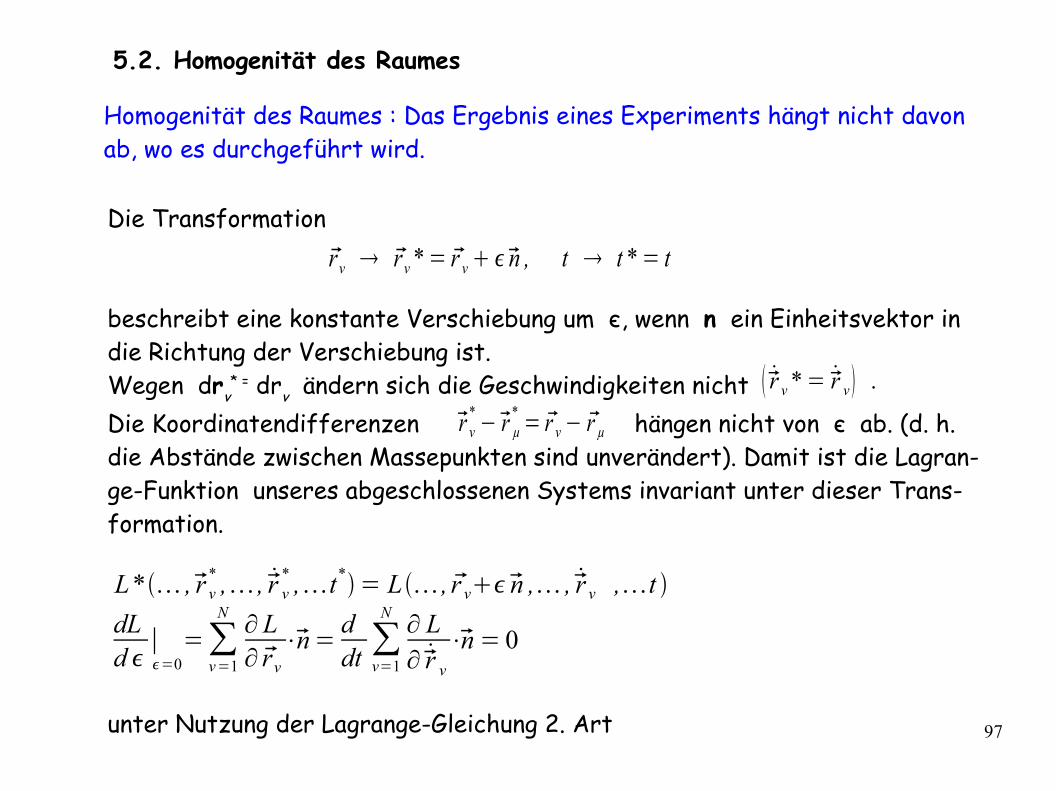
Die Transformation
beschreibt eine konstante Verschiebung um є, wenn n ein Einheitsvektor in die Richtung der Verschiebung ist.Wegen drv
* = drv ändern sich die Geschwindigkeiten nicht Die Koordinatendifferenzen hängen nicht von є ab. (d. h. die Abstände zwischen Massepunkten sind unverändert). Damit ist die Lagran-ge-Funktion unseres abgeschlossenen Systems invariant unter dieser Trans-formation.
unter Nutzung der Lagrange-Gleichung 2. Art
rv rv*= r vn , t t *= t
r v*= r v .r v*−r µ
*= r v− rµ
L* ,r v* , , r v
* ,t* = L , r vn , , r v ,t
dLd
∣=0
=∑v=1
N∂ L∂ rv
⋅n=ddt∑v=1
N∂ L∂r v
⋅n= 0
5.2. Homogenität des Raumes
Homogenität des Raumes : Das Ergebnis eines Experiments hängt nicht davon ab, wo es durchgeführt wird.
98
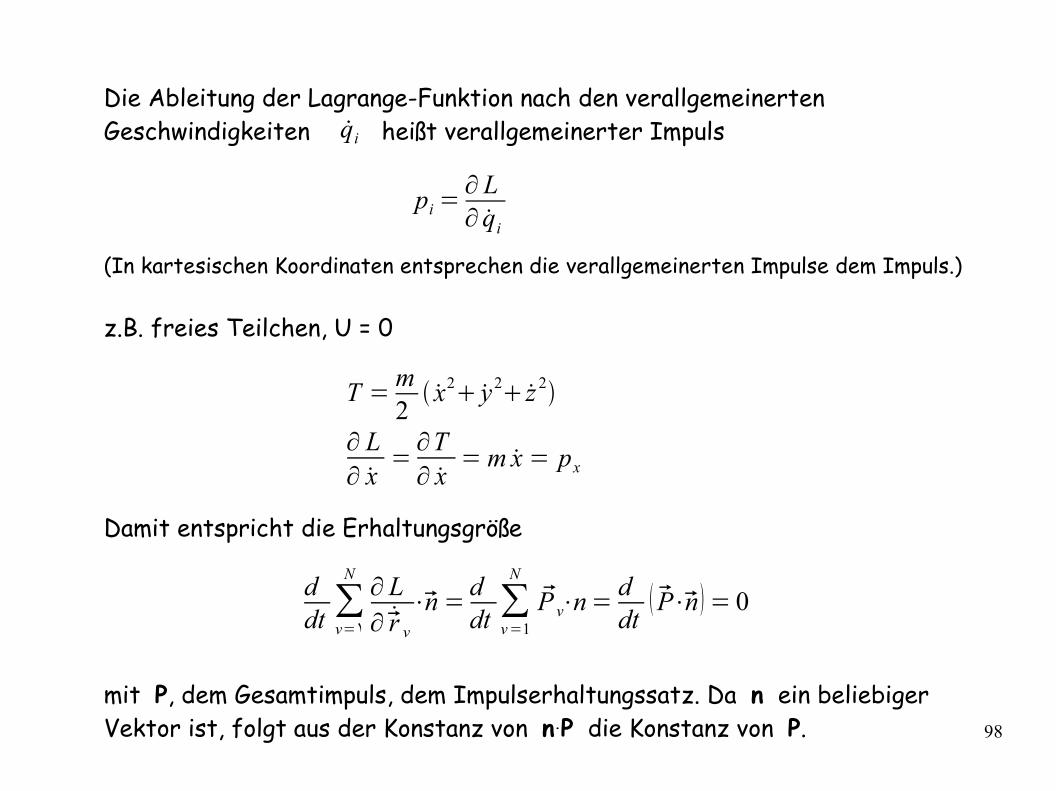
Die Ableitung der Lagrange-Funktion nach den verallgemeinerten Geschwindigkeiten heißt verallgemeinerter Impuls
(In kartesischen Koordinaten entsprechen die verallgemeinerten Impulse dem Impuls.)
z.B. freies Teilchen, U = 0
Damit entspricht die Erhaltungsgröße
mit P, dem Gesamtimpuls, dem Impulserhaltungssatz. Da n ein beliebiger Vektor ist, folgt aus der Konstanz von n.P die Konstanz von P.
qi
pi=∂ L∂ qi
T =m2
x2 y2 z 2
∂ L∂ x
=∂T∂ x
= m x= px
ddt∑v=1
N∂ L∂r v
⋅n=ddt∑v=1
N
P v⋅n=ddt
P⋅n = 0
99
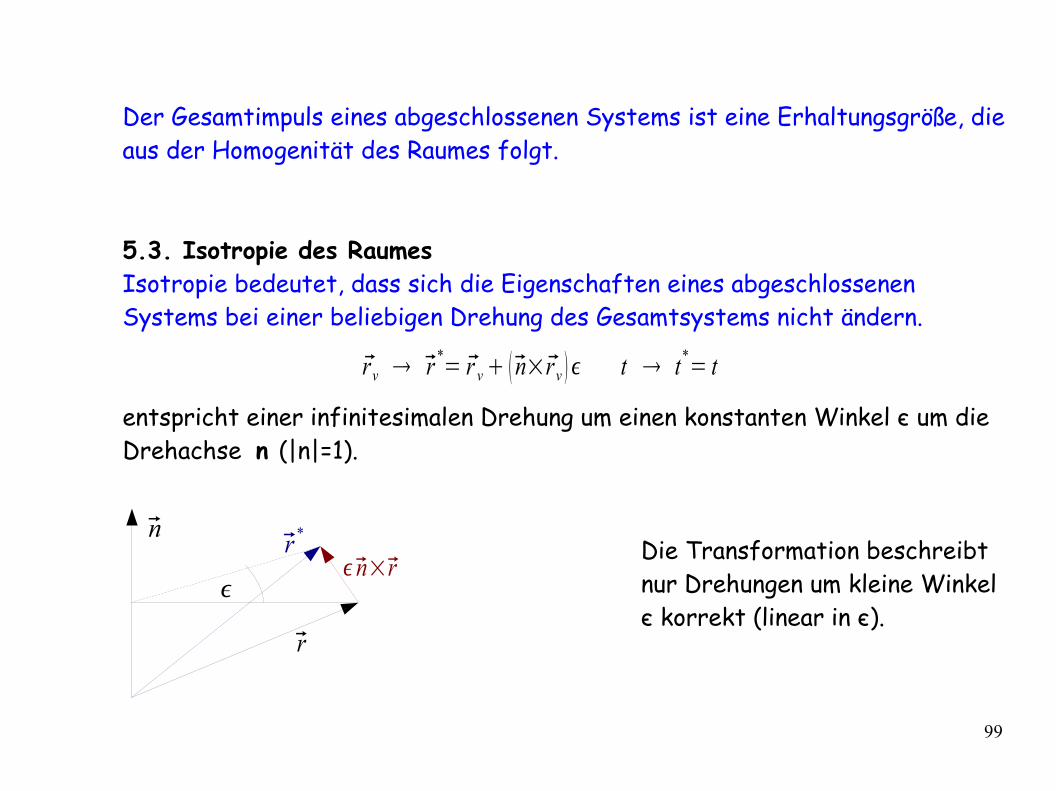
Der Gesamtimpuls eines abgeschlossenen Systems ist eine Erhaltungsgröße, die aus der Homogenität des Raumes folgt.
5.3. Isotropie des RaumesIsotropie bedeutet, dass sich die Eigenschaften eines abgeschlossenen Systems bei einer beliebigen Drehung des Gesamtsystems nicht ändern.
entspricht einer infinitesimalen Drehung um einen konstanten Winkel є um die Drehachse n (|n|=1).
Die Transformation beschreibtnur Drehungen um kleine Winkel є korrekt (linear in є).
rv r *= r v n×rv t t*= t
n×rr *
n
r
100
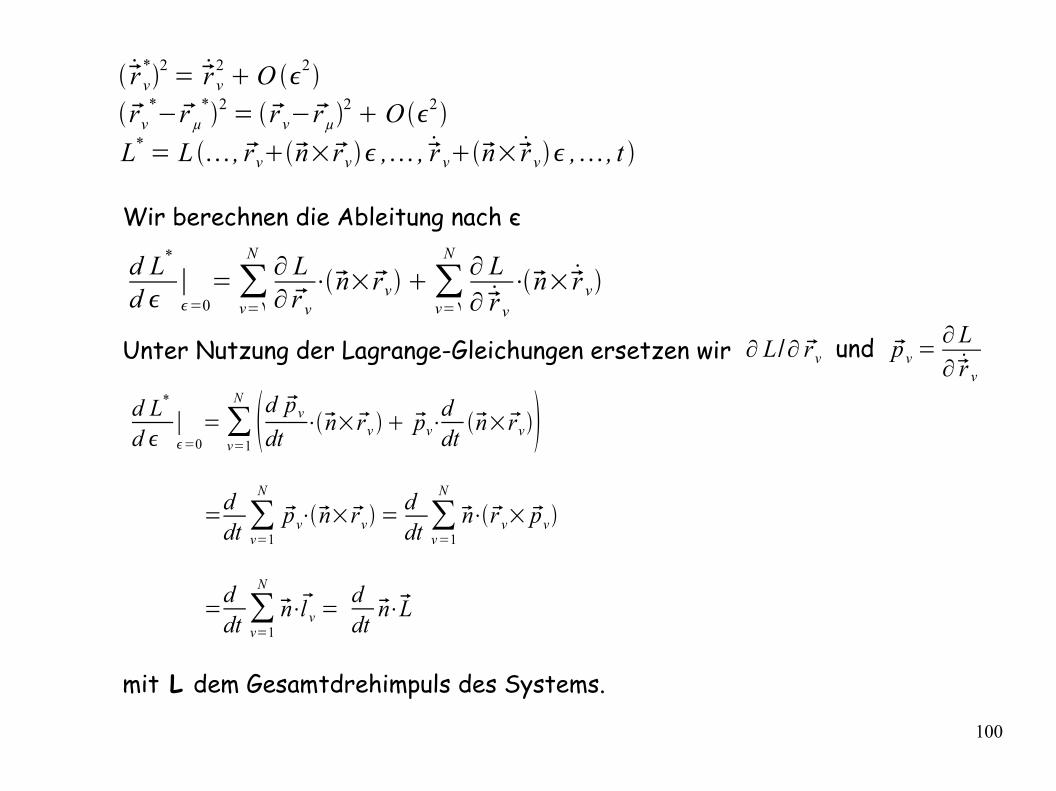
Wir berechnen die Ableitung nach є
Unter Nutzung der Lagrange-Gleichungen ersetzen wir
mit L dem Gesamtdrehimpuls des Systems.
d L*
d ∣=0
=∑v=1
N∂ L∂ r v
⋅n×rv ∑v=1
N∂ L∂ r v
⋅n×r v
∂ L/∂ rv und p v=∂ L∂r v
r v*2= r v
2O
2
rv*−rµ
*2= r v−rµ2 O 2
L*= L , rvn×rv , , r vn×r v , , t
d L*
d ∣=0
=∑v=1
N
d pvdt
⋅n×rv pv⋅ddt
n×rv
=ddt∑v=1
N
pv⋅n×rv =ddt∑v=1
N
n⋅r v× pv
=ddt∑v=1
N
n⋅l v =ddt
n⋅L
101
Da L nur von є2 und höheren Gliedern abhängt, ist die Invarianzbedingung
Da n beliebig ist, folgt die Konstanz von L. Der Gesamtdrehimpuls eines abgeschlossenen Systems ist eine Erhaltungsgröße, die sich aus der Isotropie des Raumes ergibt.
Zusammenfassung
Damit erhalten wir 7 Erhaltungsgrößen, die auch Bewegungsintegrale genannt werden.Homogenität der Zeit --> Energieerhaltung, EHomogenität des Raumes --> Impulserhaltung, pIsotropie des Raumes --> Drehimpulserhaltung, L
Erhaltungssätze sind von der Form und stellen Differenzial-gleichungen 1. Ordnung dar. Sie können die Lösung eines Problems wesentlich erleichtern.
d Ld
∣=0
= 0 =ddt
n⋅L
Q x , x , t = const.
102
Emmy Noether (1882 – 1935): Noether-TheoremJede kontinuierliche Transformation, unter der die Wirkung S invariant ist, führt zu einer Erhaltungsgröße.
Symmetrie Erhaltungsgröße
S* = S --->
Symmetrie ist hier völlig allgemein gefasst und beschränkt sich nicht auf die Galilei-Transformation.(z.B. folgen die Eigenschaften von Elementarteilchen aus den Symmetrien einer unitären Rotationsgruppe SU(3). Murray Gell-Mann postulierte 1964 aufgrund von mathematischen Symmetrien den Aufbau des Protons aus drei Quarks).
Q x , x , t =const .
Der Zusammenhang zwischen Symmetrien und Erhaltungssätzen kann mit dem Hamilton'schen Prinzip viel allgemeiner formuliert werden.
Amalie „Emmy“ Noether * 23. März 1882 in Erlangen † 14. April 1935 in Pennsylvania, USA

























![Kapitel 4 [Kompatibilitätsmodus]Kapitel 4 Konzepte • Die Budgetmenge • Die Budgetbedingung • Nutzenmaximierung • Substutitionsmethode • Lagrange Multiplikator Methode •](https://img.pdfslide.org/doc/110x75/60bb3a147f432d504e015f72/kapitel-4-kompatibilittsmodus-kapitel-4-konzepte-a-die-budgetmenge-a-die.jpg)