Embed Size (px)
Citation preview
572 7 Gleichspannungswandler (Gleichstromsteller)
Für eine direkte industrielle Realisierung ist die direkte AC-Stromeinprägungder Einprägung von zwei DC-Strömen und einer Strominjektion vorzuziehen,da die dann in 60◦-Schritten erforderliche Umschaltung des Injektionsnetzwerkspotentiell zu Verzerrungen der Phasenströme führt. Weiters sind aktive Gleich-richtersysteme nicht auf rein ohmsches Grundschwingungsnetzverhalten einge-schränkt, womit z.B. die kapazitive Blindleistung eines EMV-Filters (teilweise)kompensiert werden kann bzw. allgemein eine höhere Flexibilität der Strom-regelung gegeben ist.
Für die vergleichende Gegenüberstellung in Kap.. 7.8.6.2 werden daher nurder Δ-Switch Rectifier, der Vienna Rectifier und der Active Six-Switch Boost-Type PFC Rectifier berücksichtigt. Mit Blick auf die Systemkomplexität könntehier der Δ-Switch Rectifer auch weggelassen werden. Allerdings kann für dasSystem bei Fehlsteuerung der Leistungstransistoren strukturbedingt kein Kurz-schluss der Ausgangsspannung auftreten, womit hinsichtlich Betriebssicherheitein Vorteil gegenüber dem Active Six-Switch Boost-Type PFC Rectifier gegebenist. Weiters erscheint eine Bewertung des Systems auch im Sinne der Vollstän-digkeit als sinnvoll.
7.8.4.2 Systeme mit Tiefsetzsteller-CharakteristikDa Einphasen-Tiefsetz-AC/DC-Konverter nicht erlauben über die gesamteNetzperiode einen Sinusstrom einzuprägen [490], muss die Entwicklung derSchaltungsstrukturen direkt ausgehend von der in Abb. 7.71b gezeigten Drei-phasen-Diodengleichrichterschaltung mit, entsprechend einer Tiefsetzsteller-topologie, ausgangsseitiger Induktivität erfolgen. Die Diodenbrücke ist dabei mitRücksicht auf Phasen- und Brückensymmetrie so durch abschaltbare Elementezu erweitern, dass die mit der Gleichspannungsseite verbundenen Netzphasen frei(spannungsunabhängig) gewählt werden können. Alternativ kann bezugnehmendauf Kap.. 7.8.4.1 auch ein System nach dem Injektionsprinzip konzipiert werden.
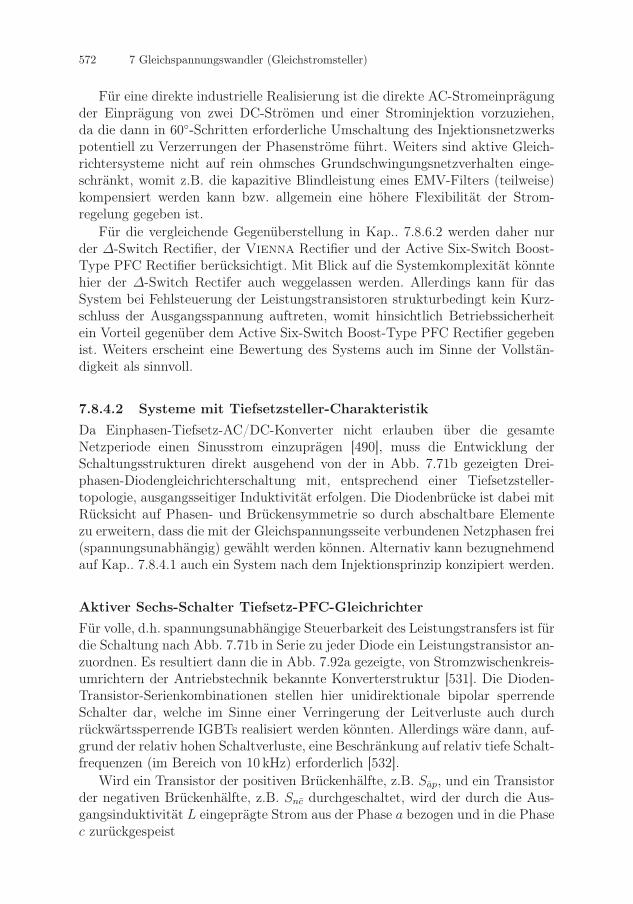
Aktiver Sechs-Schalter Tiefsetz-PFC-GleichrichterFür volle, d.h. spannungsunabhängige Steuerbarkeit des Leistungstransfers ist fürdie Schaltung nach Abb. 7.71b in Serie zu jeder Diode ein Leistungstransistor an-zuordnen. Es resultiert dann die in Abb. 7.92a gezeigte, von Stromzwischenkreis-umrichtern der Antriebstechnik bekannte Konverterstruktur [531]. Die Dioden-Transistor-Serienkombinationen stellen hier unidirektionale bipolar sperrendeSchalter dar, welche im Sinne einer Verringerung der Leitverluste auch durchrückwärtssperrende IGBTs realisiert werden könnten. Allerdings wäre dann, auf-grund der relativ hohen Schaltverluste, eine Beschränkung auf relativ tiefe Schalt-frequenzen (im Bereich von 10 kHz) erforderlich [532].
Wird ein Transistor der positiven Brückenhälfte, z.B. Sap, und ein Transistorder negativen Brückenhälfte, z.B. Snc durchgeschaltet, wird der durch die Aus-gangsinduktivität L eingeprägte Strom aus der Phase a bezogen und in die Phasec zurückgespeist

7.8 Dreiphasige Pulsgleichrichtersysteme 573
b
c
a
upn
n
p
Cu
a
b
c
uaN
b)
N
a)
CF
CF
L
ia
i
ia
a
b
c
a
b
c
Abb. 7.92: a) Schaltungstopologie des aktiven Sechs-Schalter-Tiefsetz-PFC-Gleichrich-ters (Active Six-Switch Buck-Type PFC Rectifer). b) Ersatzschaltbild des AC-seitigenSystemteils. Anmerkung: Falls nur in der positiven oder in der negativen BrückenhälfteLeistungstransistoren vorgesehen würden, würde eine zu Abb. 7.90a analoge Schaltungresultieren, welche aufgrund der beschränkten Steuerbarkeit wieder keine, über die ge-samte Netzperiode, sinusförmige Einprägung der Eingangsströme erlauben würde.
ia = +I
ib = 0 (7.216)
ic = −I
(siehe Abb. 7.92b). Weiters wird die Aussenleiterspannung uac an den Ausganggeschaltet bzw. zur Bildung der Ausgangsspannung herangezogen,
upn = uaN − ucN = uac = uac . (7.217)
Sind beide Transistoren eines Brückenzweiges durchgeschaltet, gilt ia = ib = ic =0 und u = 0, d.h. es liegt ein Freilauf vor. Für eine Reduktion der Leitverlusteim Freilaufzustand kann eine explizite Freilaufdiode vorgesehen werden.
Durch entsprechende Taktung der Transistoren kann also der Ausgangs-strom i so auf die Phasen verteilt werden, dass nach Filterung der pulsfrequent
574 7 Gleichspannungswandler (Gleichstromsteller)
diskontinuierlichen Eingangsströme ia, ib, ic sinsuförmige Netzströme resultie-ren (in Abb. 7.92a sind nur die Filterkondensatoren CF des netzseitigen EMV-Tiefpassfilters gezeigt). Weiters ist die Ausgangsspannung, welche durch Tief-passfilterung von u mittels der Ausgangsinduktivität L und der Ausgangskapa-zität C gebildet wird, über die relative Dauer des Freilaufzustandes ausgehendvon Null bis zu einem Maximalwert
Upn <
√3
2UN,ll,rms (7.218)
einstellbar.Der Ausgangsspannungsbereich erklärt sich daraus, dass, um allen Netzpha-
sen Strom zuzuführen, in jedem Pulsintervall zwei Aussenleiterspannung für dieBildung der Ausgangsspannung herangezogen werden müssen. Um eine mög-lichst hohe Ausgangsspannung zu erreichen, werden hierbei jeweils die grösstenSpannungen, z.B. uac und uab gewählt [gültig innerhalb eines 60◦-Intervalls derNetzperiode, ϕN = (−30◦, 30◦)]. Beide Spannungen weisen eine Phasendifferenzvon 60◦ auf. Für das beim Schnittpunkt beider Spannungen liegende Pulsinter-vall stehen damit nur Spannungswerte uac = uab =
√3/2UN,ll,rms zur Verfügung
AC
DC
Sektor-detektion
Trägersignal
3
uiN
N
� ��Upn*upn PWMij
upn
i*
i
K (s)U K (s)I
sij�u *LogiK
i u
u*�i
CF
�upn
CL
ÛN
Upn*32
uiN
��
12
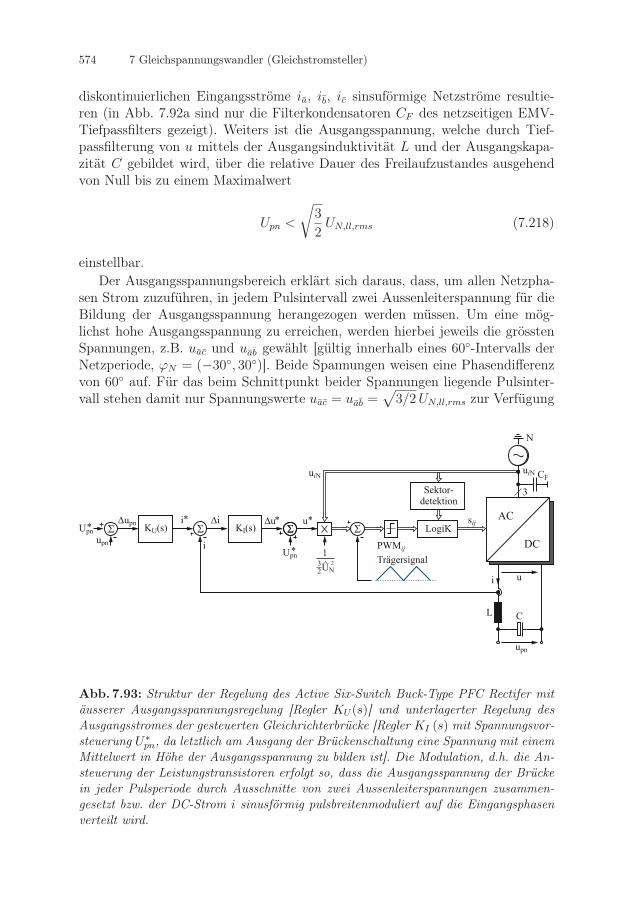
Abb. 7.93: Struktur der Regelung des Active Six-Switch Buck-Type PFC Rectifer mitäusserer Ausgangsspannungsregelung [Regler KU (s)] und unterlagerter Regelung desAusgangsstromes der gesteuerten Gleichrichterbrücke [Regler KI (s) mit Spannungsvor-steuerung U∗
pn, da letztlich am Ausgang der Brückenschaltung eine Spannung mit einemMittelwert in Höhe der Ausgangsspannung zu bilden ist]. Die Modulation, d.h. die An-steuerung der Leistungstransistoren erfolgt so, dass die Ausgangsspannung der Brückein jeder Pulsperiode durch Ausschnitte von zwei Aussenleiterspannungen zusammen-gesetzt bzw. der DC-Strom i sinusförmig pulsbreitenmoduliert auf die Eingangsphasenverteilt wird.
7.8 Dreiphasige Pulsgleichrichtersysteme 575
a)
b)
ib ia
ic
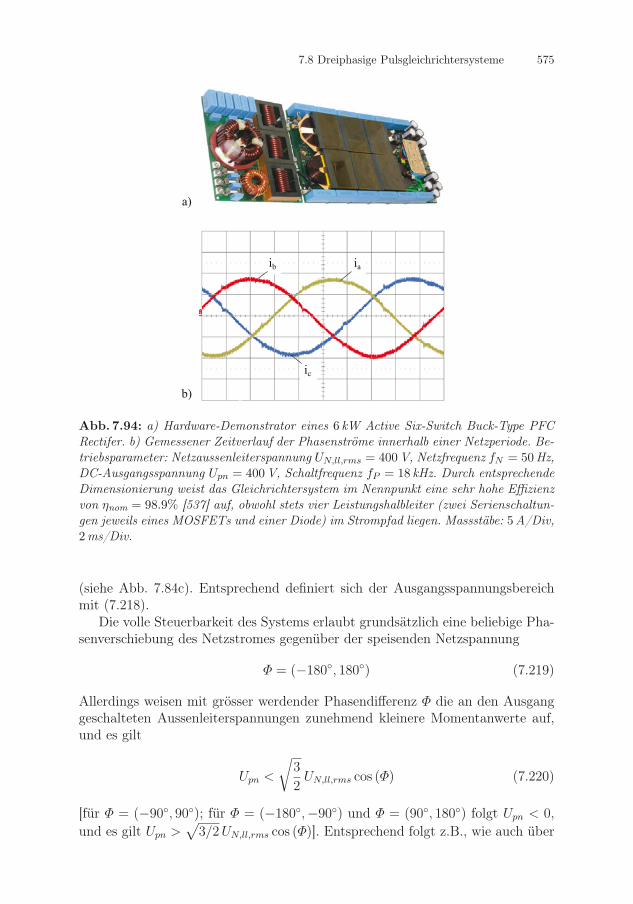
Abb. 7.94: a) Hardware-Demonstrator eines 6 kW Active Six-Switch Buck-Type PFCRectifer. b) Gemessener Zeitverlauf der Phasenströme innerhalb einer Netzperiode. Be-triebsparameter: Netzaussenleiterspannung UN,ll,rms = 400V, Netzfrequenz fN = 50Hz,DC-Ausgangsspannung Upn = 400V, Schaltfrequenz fP = 18 kHz. Durch entsprechendeDimensionierung weist das Gleichrichtersystem im Nennpunkt eine sehr hohe Effizienzvon ηnom = 98.9% [537] auf, obwohl stets vier Leistungshalbleiter (zwei Serienschaltun-gen jeweils eines MOSFETs und einer Diode) im Strompfad liegen. Massstäbe: 5A/Div,2ms/Div.
(siehe Abb. 7.84c). Entsprechend definiert sich der Ausgangsspannungsbereichmit (7.218).
Die volle Steuerbarkeit des Systems erlaubt grundsätzlich eine beliebige Pha-senverschiebung des Netzstromes gegenüber der speisenden Netzspannung
Φ = (−180◦, 180◦) (7.219)
Allerdings weisen mit grösser werdender Phasendifferenz Φ die an den Ausganggeschalteten Aussenleiterspannungen zunehmend kleinere Momentanwerte auf,und es gilt
Upn <
√3
2UN,ll,rms cos (Φ) (7.220)
[für Φ = (−90◦, 90◦); für Φ = (−180◦,−90◦) und Φ = (90◦, 180◦) folgt Upn < 0,und es gilt Upn >
√3/2UN,ll,rms cos (Φ)]. Entsprechend folgt z.B., wie auch über

576 7 Gleichspannungswandler (Gleichstromsteller)
eine Leistungsbilanz zwischen AC- und DC-Seite unmittelbar einsichtig, für Φ =90◦ der Wert Upn = 0. Der Ausgangsspannungsbereich (7.218) ist also nur für Φ =0◦ gültig, bzw. ist für die Sicherstellung eines weiten Ausgangsspannungsbereichesdie Phasenverschiebung Φ auf kleine Werte zu begrenzen [533].
Anmerkung: Gemäss (7.220) ist für die Schaltung nach Abb. 7.92a eine Um-kehr der Leistungsflussrichtung mit einer Umkehr der Ausgangsspannungspolari-tät verbunden. Eine Umkehr der Energierichtung bei Beibehaltung der Ausgangs-spannungspolarität ist nur bei Erweiterung der Schaltungsstruktur durch anti-parallel zu den Dioden liegende Transistoren möglich [534].
Für die Regelung des Systems wird ein überlagerter Ausgangsspannungsreglermit unterlagertem Ausgangsstromregler eingesetzt (siehe Abb. 7.93), wobei ge-gebenenfalls noch eine aktive Dämpfung des Eingangsfilters vorzusehen ist [535].Nachteilig ist dabei, dass im Gegensatz zu Hochsetzsteller-PFC-Systemen derNetzstrom nicht direkt durch eine Regelung eingeprägt, sondern nur durch Puls-breitenmodulation ohne Rückführung aus einem geregelten Strom gebildet wird.Schwankungen des DC-Stromes, parasitäre Schaltzeitfehler oder Verzerrungenan den Sektorgrenzen [536] werden daher nicht unmittelbar korrigiert. Tiefsetz-PFC-Gleichrichtersysteme weisen daher in der Praxis, insbesondere bei hohenNetzfrequenzen eine geringere Eingangsstromqualität als Hochsetzstellersystemeauf. Erste Überlegungen zu einer direkten Regelung der Netzströme sind [535]zu entnehmen.
Ein Demonstrator des Gleichrichtersystems nach Abb. 7.92 ist in Abb. 7.94gezeigt [537]. Der Wirkungsgrad des mit 900V Super-Junction-MOSFETs und1200V SiC-Schottky-Dioden realisierten Systems (fP = 18 kHz) beträgt imNennpunkt 98.9%. Dies zeigt klar, dass bei entsprechendem Halbleiteraufwandtrotz Realisierung der Schalter als Dioden-Leistungstransistor-Serienkombinationextreme Wirkungsgrade erreichbar sind.
Aktiver Drei-Schalter-Tiefsetz-PFC-Gleichrichter
Alternativ zu Abb. 7.92 ist eine Auswahl der jeweils stromführenden Phasen auchdurch AC-seitige Vierquadrantenschalter möglich, welche wie in Abb. 7.95a–cgezeigt, in die Brückeinzweigstruktur integriert werden können. Es resultiert dannder in Abb. 7.95d angegebene aktive Drei-Schalter-Tiefsetz-PFC-Gleichrichter(Active Three-Switch Buck-Type PFC Rectifier).
Zufolge der Verringerung der Schalterzahl treten einerseits höhere Durchlass-verluste auf, andererseits wird die installierte Chipfläche der Leistungs-transistoren besser genutzt. Allerdings konzentrieren sich nun die Verluste aufdrei Schalter, wodurch die thermische Auslegung erschwert wird. Des Weiterenwird durch die geringere Schalterzahl die Steuerbarkeit gegenüber der Schaltungnach Abb. 7.92 eingeschränkt. Insbesondere ist, wie über Abb. 7.95a unmittelbardeutlich wird, keine Möglichkeit einer Umkehr der Richtung des Leistungsflussesgegeben. Zusätzlich sind nicht direkt die stromführenden Dioden, sondern nurdie stromführenden Brückenzweige definierbar. Der Leitzustand stellt sich da-

7.8 Dreiphasige Pulsgleichrichtersysteme 577
a a a
ppp
nnn
p
n
iaa b c
L
CF CF CF
upnCu
i
a) b) c)
d)
Abb. 7.95: Ableitung der Schaltungsstruktur eines aktiven Tiefsetz-PFC-Gleichrichter-systems mit Sinuseingangsstrom und nur drei Leistungstransistoren (Active Three-S-witch Buck-Type PFC Rectifier). In a) wird AC-seitig in jeder Phase ein, durch eineEinphasen-Diodenbrücke und einen, zwischen deren Ausgangsklemmen liegenden Leis-tungstransistor realisierter Vierquadrantenschalter eingefügt. Nach Zusammenfassungvon in Serie liegenden Dioden [siehe b)] und Umzeichnung resultiert die in c) gezeigteBrückenzweigstruktur bzw. die Schaltungstopologie des Dreiphasensystems in d).
her abhängig von der Polarität der an den aktiven Brückenzweigen anliegendenSpannungen ein.
Wie eine nähere Analyse zeigt, resultiert damit eine Einschränkung des Be-triebsbereiches auf
Φ = (−30◦, 30◦) , (7.221)
welche jedoch aufgrund des, zufolge (7.220), bevorzugt ohmschen Betriebes vongeringer Bedeutung ist. Eine anschauliche Erklärung von (7.221) ist gleich wiefür den Δ-Switch Rectifier über die ±30◦-Phasendifferenz zwischen Phasengrös-sen und Aussenleitergrössen möglich, soll hier jedoch aus Gründen der Kürzeunterbleiben.
578 7 Gleichspannungswandler (Gleichstromsteller)
Für den Ausgangsspannungsbereich gilt für Φ = 0◦ nach wie vor
Upn <
√3
2UN,ll,rms . (7.222)
Die in Abb. 7.93 gezeigte Regelstruktur ist auch für das Drei-Schalter-Systemeinsetzbar. Die Ansteuersignale der Schalter sind dann über Oder-Verknüpfungder Schaltsignale der Transistoren des zugeordneten Brückenzweiges der Sechs-Schalter-Variante zu bilden.
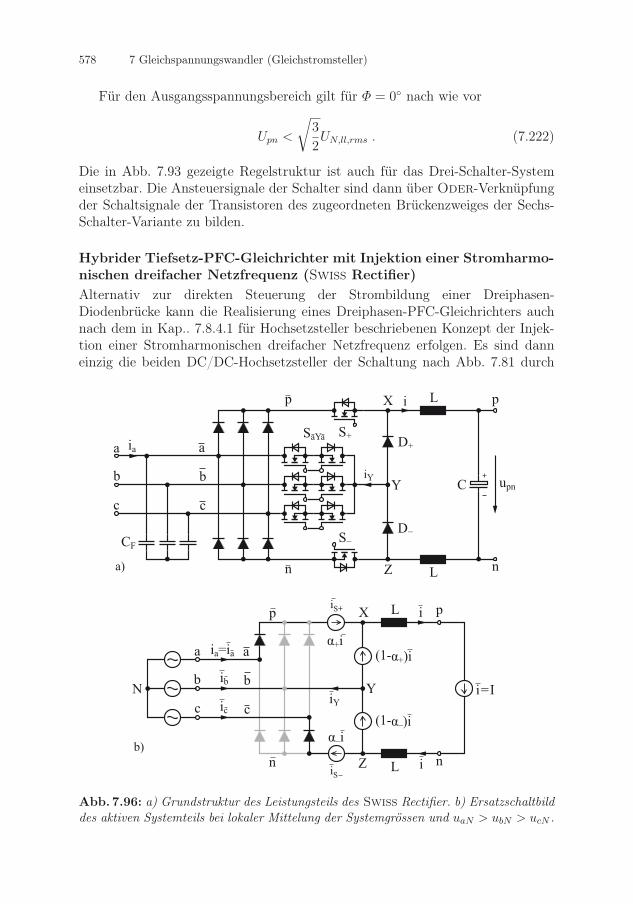
Hybrider Tiefsetz-PFC-Gleichrichter mit Injektion einer Stromharmo-nischen dreifacher Netzfrequenz (Swiss Rectifier)Alternativ zur direkten Steuerung der Strombildung einer Dreiphasen-Diodenbrücke kann die Realisierung eines Dreiphasen-PFC-Gleichrichters auchnach dem in Kap.. 7.8.4.1 für Hochsetzsteller beschriebenen Konzept der Injek-tion einer Stromharmonischen dreifacher Netzfrequenz erfolgen. Es sind danneinzig die beiden DC/DC-Hochsetzsteller der Schaltung nach Abb. 7.81 durch
n
a
b
c
iY
p
ia
upnY
SaYa D+
C
S+
S_D_
CF
X
Z
p
n
a
b
c
iYN
α+i
α_i
iS+
iS
Y
p
n
i
a
b
c
i =ia a
ib
ic
b)
i=I
iL
L
a)
L
L
a
b
c
X
Zn
p
(1- )iα+
(1- )iα_
i
Abb. 7.96: a) Grundstruktur des Leistungsteils des Swiss Rectifier. b) Ersatzschaltbilddes aktiven Systemteils bei lokaler Mittelung der Systemgrössen und uaN > ubN > ucN .

7.8 Dreiphasige Pulsgleichrichtersysteme 579
Tiefsetzsteller zu ersetzen. Die resultierende Schaltung ist in Abb. 7.96a gezeigt.Nach Kenntnis der Autoren wurde dieses System, vermutlich aufgrund der all-gemeinen Konzentration der Forschung auf Systeme mit Hochsetzsteller-Charak-teristik bisher in der Literatur noch nicht beschrieben. Im Weiteren wird dieSchaltungstopologie daher als Swiss Rectifier bezeichnet.
Im Gegensatz zu den Schaltungen nach Kap.. 7.8.4.2 und Kap.. 7.8.4.2werden die Dioden nicht pulsfrequent kommutiert, entsprechend können dieDurchlassverluste durch Einsatz von Bauelementen mit geringem Durchlass-spannungsabfall verringert werden; die dann höhere Sperrverzugszeit ist hierproblemlos in Kauf zu nehmen. Die Stromrückführung erfolgt wieder über Vier-quadrantenschalter in die Phase jeweils kleinsten Spannungsbetrages. Hier ist an-zumerken, dass auch mittels eines passiven Injektionsnetzwerks eine Stromrück-führung allerdings nur in alle drei Phasen möglich wäre. Ein derartiges Systemwurde in [481] vorgeschlagen und ist, wie in Kap.. 7.8.4.1 erwähnt, auch für Hoch-setzstellersysteme bekannt. Aufgrund der Baugrösse des Injektionsnetzwerks unddes höheren Injektionsstroms wird dieses Konzept hier jedoch nicht weiter be-trachtet.
Für den Nachweis der sinusförmigen Regelbarkeit der Netzströme wird wiederein 60◦-Intervall der Netzperiode mit uaN > ubN > ucN bzw. ϕN = (0◦, 60◦)betrachtet. Der in diesem Netzausschnitt aktive Schaltungsteil ist in Abb. 7.96bgezeigt.
Durch das Gleichrichtersystem soll ein symmetrischer dreiphasiger ohmscherVerbraucher mit einem Phasenleitwert G∗ repräsentiert werden. Entsprechendhat für die lokalen Mittelwerte der (pulsfrequent diskontinuierlichen) Eingangs-ströme
ia = G∗uaN
ib = G∗ubN (7.223)
ic = G∗ucN
zu gelten. Für den durch den Tiefsetzsteller einzuprägenden Sollwert I∗ des Aus-gangsstromes folgt dann unter Annahme eines symmetrischen Dreiphasennetzes
I∗ =3
2G∗ U
2N
Upn
(7.224)
(UN bezeichnet die Phasenspannungsamplitude, Upn die Ausgangsspannung). Fürdie weiteren Überlegungen soll ein idealer Ausgangsstromregler und damit i =I = I∗ angenommen werden. Die Ströme in den Phasen a und c werden überentsprechende Taktung von S+ und S− eingeprägt,
α+I = ia , α−I = −ic , (7.225)
wobei für die Tastverhältnisse mit (7.223), (7.224) und (7.225)
580 7 Gleichspannungswandler (Gleichstromsteller)
α+I =2
3
Upn
U2N
uaN und α−I = −2
3
Upn
U2N
ucN (7.226)
gilt. Unter Berücksichtigung der Stromverzweigung im Schaltungsknoten Y undvon ia + ib + ic = 0 bzw. ia + ib + ic = 0 resultiert dann der Injektionsstrom
iY = (1− α−) I − (1− α+) I = ia + ic = −ib . (7.227)
Es wird also der korrekte Strom in die dritte Phase (hier Phase b) eingeprägt.Für die Bildung der Ausgangsspannung ist
uXZ = α+uaN + (1− α+)ubN − (α−ucN + (1− α−)ubN
)(7.228)
massgebend. Nach Vereinfachung folgt
uXZ = α+uab − α−ucb (7.229)
und nach Multiplikation von (7.229) mit I,
uXZI = iauab + icucb = p = P , (7.230)
resultiert die Momentanleistung p, welche entsprechend der Annahme einer sym-metrischen ohmschen Belastung des Netzes einen konstanten Wert p = P auf-weist. Demgemäss wird bei konstantem Strom I auch eine konstante Spannunguxz und damit aufgrund von uL = 0 eine konstante Ausgangsspannung upn = Upn
gebildet.Für die vorgehende Ableitung wurde für den der Betrieb des Systems rein
ohmsches Grundschwingungsnetzverhalten
Φ = 0◦ (7.231)
angenommen [siehe (7.223)]. Der Ausgangsspannungsbereich ist dann durch denMinimalwert der sechspulsigen Ausgangsspannung der Diodenbrücke nach obenbeschränkt
Upn <
√3
2UN,ll,rms (7.232)
und damit ident mit jenem für den Active Six-Switch Buck-Type PFC Rec-tifier. Wie eine nähere Analyse zeigt, ist über entsprechende Ansteuerung derLeistungshalbleiter, d.h. bei Pulsbetrieb auch der Injektionsschalter, auch ei-ne Phasenverschiebung Φ = (−30◦, 30◦) des Eingangsstromes gegenüber derEingangsspannung einstellbar. Aus Gründen der Kürze soll hier auf diesen prak-tisch wenig bedeutenden Fall jedoch nicht näher eingegangen werden.
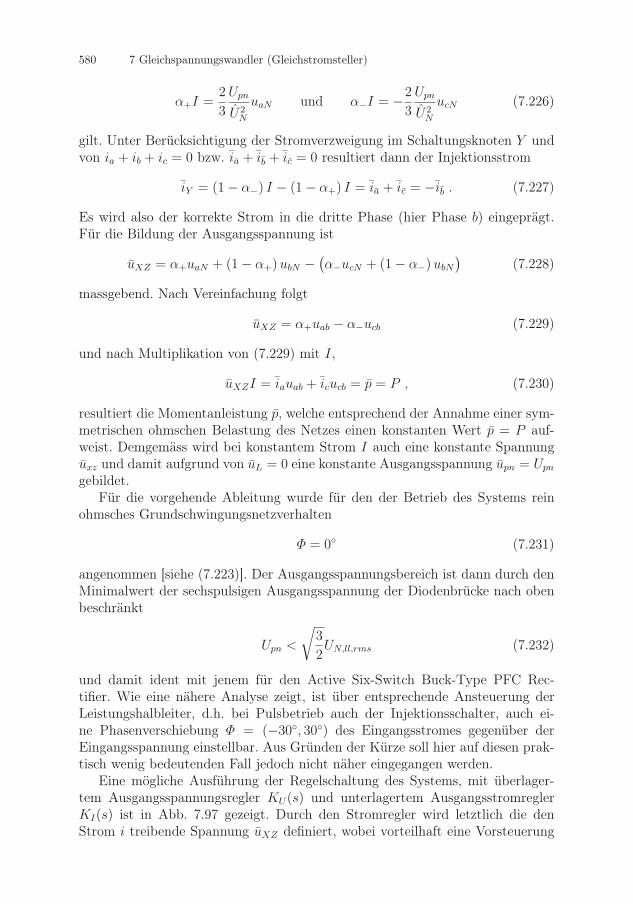
Eine mögliche Ausführung der Regelschaltung des Systems, mit überlager-tem Ausgangsspannungsregler KU(s) und unterlagertem AusgangsstromreglerKI(s) ist in Abb. 7.97 gezeigt. Durch den Stromregler wird letztlich die denStrom i treibende Spannung uXZ definiert, wobei vorteilhaft eine Vorsteuerung
7.8 Dreiphasige Pulsgleichrichtersysteme 581
der Ausgangsspannung u∗pn = U vorgenommen wird. Die Einstellung von uXZ
erfolgt über entsprechende Wahl des Aussteuergrads der Pulsbreitenmodulationder Transistoren S+ und S− [siehe (7.225)]. Als Modulationsfunktionen werdendabei die (normierten) Spannungen upN und unN herangezogen (siehe Abb. 7.97).
Die Pulsbreitenmodulation von S+ und S− kann gleichphasig oder gegen-phasig erfolgen. Für gleichphasige Trägersignale uD+ und uD− wird die schalt-frequente Schwankung von iY minimiert, allerdings tritt ein maximaler Rippeldes Ausgangsstromes auf. Für gegenphasige Trägersignale resultiert ein minima-ler Ausgangsstromrippel, jedoch ein maximaler Rippel von iY , welcher bei derAuslegung der eingangsseitigen Filterkondensatoren CF zu berücksichtigen ist.
Anzumerken ist, dass ein hybrider 3rd Harmonic Injection PFC Recti-fier auch durch Kombination eines Active-Filter-Type 3rd Harmonic InjectionPFC Rectifer und einer einfachen DC/DC-Tiefsetzstellerstufe gebildet werdenkann (siehe Abb. 7.98). Die z.B. auf konstanten Ausgangsstrom oder konstan-te Ausgangsspannung geregelte Tiefsetzstellerstufe stellt dann unabhängig vonder Sechspulsigkeit der Spannung upn eine konstante Ausgangsleistung sicher.
PWM
a
b
c
p
n
Sektor-detektion
K (s)I
K (s)U
PWM+
�
��
unN
CiY
Y �
*Upn
*i
i
uD+
uD
ia
�upn
D+
S+
S_
D_CF
�
*Upn
X
Z
p
n
a
b
c
SaYa
L
L
ÛN32
12
*u �u*upN
upn
Abb. 7.97: Struktur der Regelung des Swiss Rectifier mit äusserer (überlagerter) Aus-gangsspannungsregelung [Regler KU (s)] und innerer (unterlagerter) Regelung des Aus-gangsspeisestromes i [Regler KI(s)] und Vorsteuerung der Ausgangsspannung. Die zurRegelung von i erforderliche Spannung wird durch entsprechende pulsbreitenmodulierteAnsteuerung von S+ und S− derart gebildet, dass die lokalen Mittelwerte der dann inden beiden die positive und die negative Schiene p bzw. n speisenden Dioden auftre-tenden schaltfrequent pulsierende Ströme einen, den zugeordneten Phasenspannungenproportionalen Verlauf zeigen. Durch die Sektorerkennung (Sector Detection) wird in-nerhalb von 60◦-breiten Intervallen der Netzperiode jeweils der mit der Phase kleinstenBetrages des Spannungsmomentanwerts verbundene Vierquadrantenschalter durchge-schaltet und so der Strom iY in diese Phase injiziert.

582 7 Gleichspannungswandler (Gleichstromsteller)
Vorteilhaft liegt dann nur mehr ein Leistungstransistor im Hauptstrompfad,d.h. es treten insbesondere bei hohen Ausgangsspannungen, d.h. bei relativkurzen Freilaufdauern, geringere Durchlassverluste auf. Weiters ist die nega-tive Ausgangs-Gleichspannungsklemme stets über eine der Dioden der unterenBrückenhälfte des Diodengleichrichters mit dem Netz verbunden. Es tritt al-so keine schaltfrequente Gleichtaktspannung des Ausgangs auf. Der Gleichtakt-EMV-Filteraufwand kann somit verringert werden, bzw. sind nur mehr die pa-rasitären Kapazitäten der Leistungshalbleiter gegenüber dem Kühlkörper fürdie Gleichtakt-Störaussendung verantwortlich (vergleiche entsprechende Über-legungen zu Hochsetz-PFC-Gleichrichtersystemen in [522]).
DiskussionDie Netzstromeinprägung der vorstehend betrachteten PFC-Gleichrichter-systeme erfolgt nach dem Stand der Technik ausschliesslich indirekt, d.h.durch Pulsbreitenmodulation des geregelten Ausgangsstromes. Im Gegensatz zuHochsetz-PFC-Gleichrichterschaltungen (siehe Kap.. 7.8.4.1) sind daher auf demInjektionskonzept basierende Konzepte und direkt aktive Systeme als hinsichtlichder erreichbaren Netzstromqualität gleichwertig zu sehen.
Für die in Kap.. 7.8.6.3 gegebene vergleichende Gegenüberstellung werdendaher beide Konzepte, d.h. der Active Six-Switch Buck-Type PFC Rectifier undder Swiss Rectifier berücksichtigt. Der Active Three-Switch Buck-Type PFCRectifier wird aufgrund der höheren Leitverluste im Vergleich zum Six-Switch-System und der ungünstigeren Verlustverteilung weggelassen.
7.8.4.3 Systeme mit Hoch- und Tiefsetzsteller-CharakteristikWie Abb. 7.73 zeigt, schliesst der Ausgangsspannungsbereich von Hochsetz-PFC-Gleichrichtersystemen nicht unmittelbar an jenen der Tiefsetzstellerschaltungenan. Spannungen im Bereich√
3
2UN,ll,rms < Upn <
√2UN,ll,rms (7.233)
können daher nur durch einen Tiefsetz-PFC-Gleichrichter mit nachgeschal-tetem DC/DC-Hochsetzsteller oder über Kombination eines Hochsetz-PFC-Gleichrichters mit einem nachgeordneten DC/DC-Tiefsetzsteller gebildet werden.
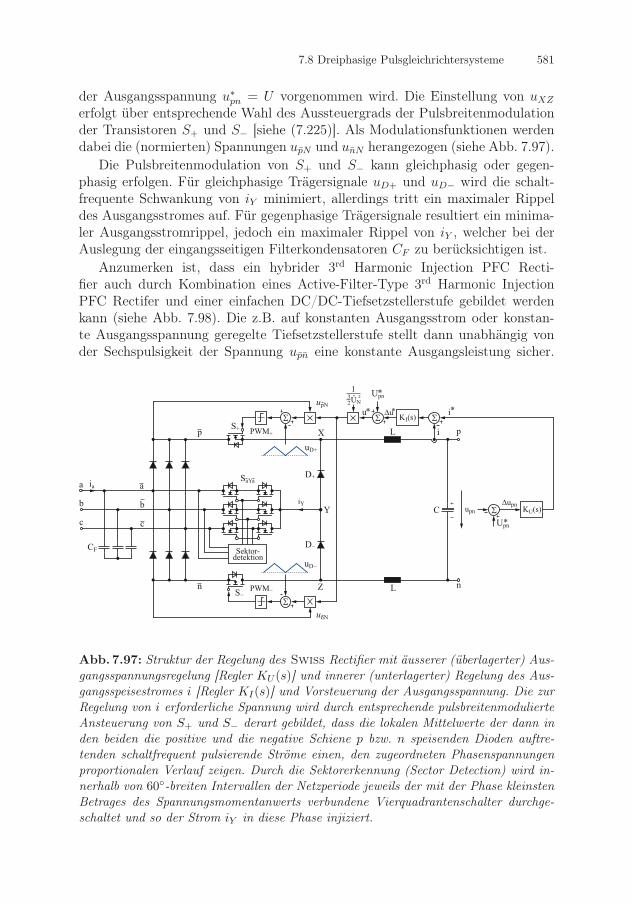
Eine mögliche Realisierung eines derartigen DC/DC-Konvertersystem istin Abb. 7.99 gezeigt. Das bidirektionale, d.h. abhängig von der Energiefluss-richtung als Hochsetz- oder Tiefsetzsteller einsetzbare System ist für eine Aus-gangsleistung von 10 kW und eine Spannungsübersetzung von U1 = 350V aufU2 = 0V . . . 350V ausgelegt und weist drei phasenversetzt getaktete Teilsystemeauf. Der diskontinuierliche Betrieb der Teilsysteme [538] erlaubt Schaltverlus-te zu eliminieren bzw. eine hohe Taktfrequenz von fP = 48 kHz zu wählen. Eskann somit eine sehr hohe Effizienz von η = 99% und eine Leistungsdichte vonρ = 18.5 kW/dm3 erreicht werden.

7.8 Dreiphasige Pulsgleichrichtersysteme 583
S+
a
b
ciYLY
Y
p
n
upnC
SaYaia
CF
L
a
b
c S_
p
n
Abb. 7.98: Kombination eines Active-Filter-Type 3rd Harmonic Current InjectionPFC Rectifier und eines DC/DC-Tiefsetzstellers zu einem aktiven Tiefsetz-PFC–Gleichrichtersystem. Das System ist durch eine minimale Zahl von Leistungshalblei-tern im Hauptstrompfad und durch einen nur niederfrequent (mit dreifacher Netzfre-quenz) variierende Gleichtaktspannung des Ausgangs gekennzeichnet. Vorteilhaft wirdder DC/DC-Konverter durch phasenversetzte Parallelschaltung mehrerer Teilsystemerealisiert.
Alternativ zur expliziten Anordnung eines DC/DC-Konverters könnte eineDC/DC-Hochsetz-Konverterstufe auch in den Ausgangsteil eines Tiefsetz-PFC-Gleichrichtersystems integriert werden; die Ausgangsinduktivität kann dann un-mittelbar auch als Hochsetzsteller-Induktivität herangezogen werden [539, 540].
7.8.5 Dimensionierung der Leistungshalbleiter und EMV-Filterung
Um eine praktische Realisierung der vorstehend beschriebenen Schaltungen zuunterstützen, werden nachfolgend kurz die Strom- und Spannungsbeanspruchun-gen der in Kap.. 7.8.4.1 und Kap.. 7.8.4.2 ausgewählten Systeme zusammen-gestellt. Weiters wird die Grundstruktur des netzseitig vorzuschaltenden EMV-Filters mit Fokus auf die Gleichtaktfilterung diskutiert.
584 7 Gleichspannungswandler (Gleichstromsteller)
A
n
p
a)
L
uAnC
upnC
n
L
L
Abb. 7.99: a) Schaltungsstruktur eines (bidirektionalen) 6 kW Triangular Current Mo-de (TCM) Zero Voltage Switching (ZVS) Buck-Type DC/DC Converter. Das Systemwird durch drei phasenversetzt getaktete Teilsysteme gebildet. b) Ultra-effizienter und ul-tra-kompakter Hardware-Demonstrator mit einer Nennpunkteffizienz von η = 99% undeiner Leistungsdichte von ρ = 18.5 kW/dm3. Spezifikationen: Eingangsnennspannung:Upn = 350V, Ausgangsspannungsbereich UAn = 0V . . . 350V, AusgangsnennleistungP2 = 10 kW (max. Ausgangsstrom 30A), Schaltfrequenz jeder Stufe bei Nennlast undUAn = 230V: fP = 48 kHz.
7.8 Dreiphasige Pulsgleichrichtersysteme 585
p
n
upnC
a
b
c
Lia
b)
L
L
a
b
c
upn
p
n
M
ia
c)
L
L
L
a
b
cupn
n
ia
a)
L
CL
L
p
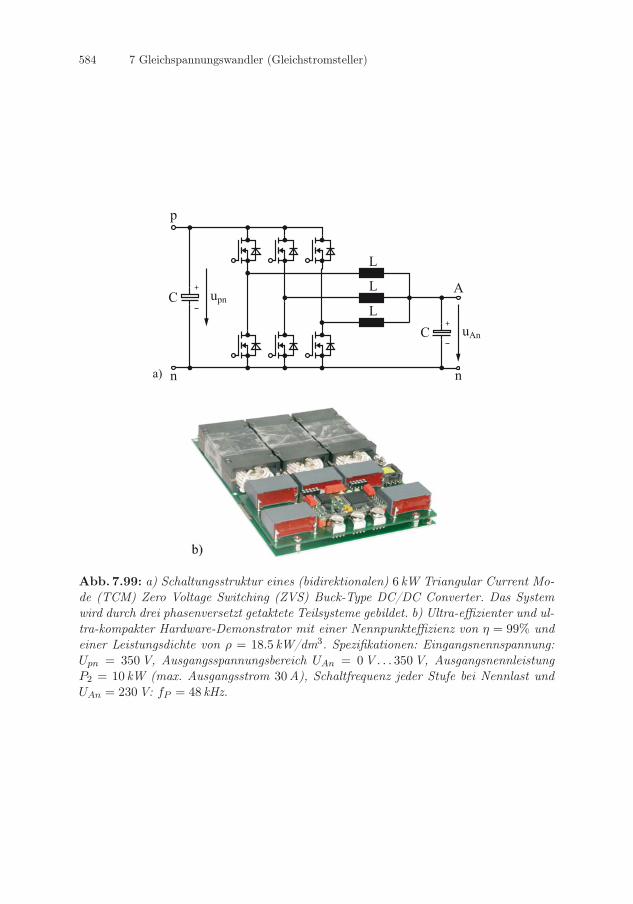
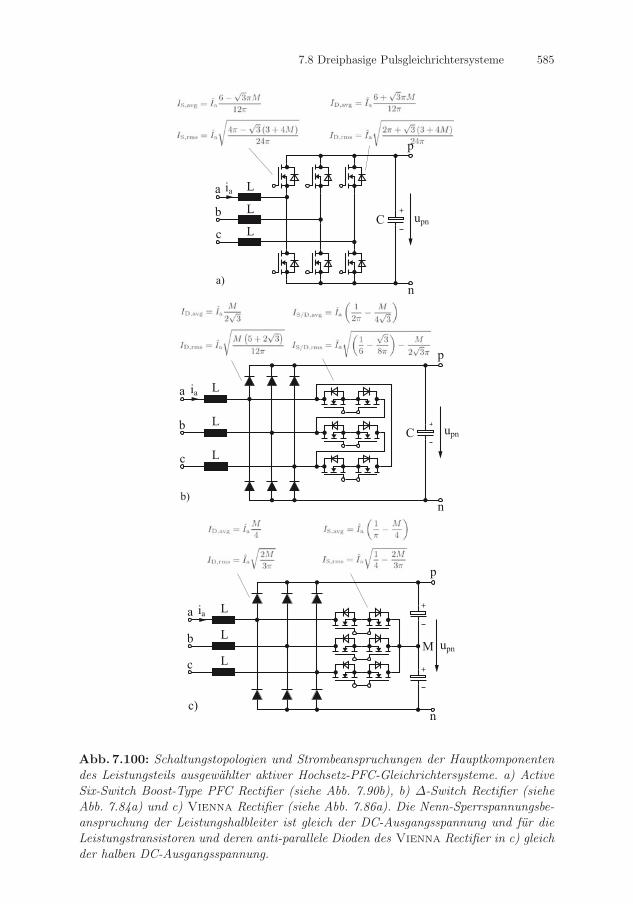
Abb. 7.100: Schaltungstopologien und Strombeanspruchungen der Hauptkomponentendes Leistungsteils ausgewählter aktiver Hochsetz-PFC-Gleichrichtersysteme. a) ActiveSix-Switch Boost-Type PFC Rectifier (siehe Abb. 7.90b), b) Δ-Switch Rectifier (sieheAbb. 7.84a) und c) Vienna Rectifier (siehe Abb. 7.86a). Die Nenn-Sperrspannungsbe-anspruchung der Leistungshalbleiter ist gleich der DC-Ausgangsspannung und für dieLeistungstransistoren und deren anti-parallele Dioden des Vienna Rectifier in c) gleichder halben DC-Ausgangsspannung.

586 7 Gleichspannungswandler (Gleichstromsteller)
7.8.5.1 Dimensionierung der LeistungshalbleiterDie Strombeanspruchungen der Leistungshalbleiter eines PFC-Gleichrichter-systems werden vielfach mittels Simulation für einen definierten Betriebspunktermittelt. Alternativ kann eine Berechnung mit guter Genauigkeit auch rein ana-lytisch erfolgen. Es resultieren dann einfache mathematische Ausdrücke, welcheüber den gesamten Betriebsbereich gültig sind und somit eine ausgezeichneteGrundlage für die Analyse der Bauelementebeanspruchungen bzw. der Verlustefür verschiedene Lastpunkte oder Ein- und/oder Ausgangsspannungen bilden.
Ausgangspunkt der Berechnung sind die relativen Einschaltzeiten derLeistungshalbleiter, welche bei bekanntem Modulationsverfahren für die gesamteNetzperiode direkt analytisch angegeben werden können. Verbleibender Parame-ter ist der Modulationsindex M , der die Amplitude des AC-seitig zu erzeugendenDreiphasenspannungs- oder -stromsystems und die DC-Ausgangsspannung bzw.den DC Ausgangsstrom ins Verhältnis setzt,
M =UU
12Upn
M =IUI
, (7.234)
(UU ≈ UN bezeichnet die Amplitude der Phasenspannungs-Grundschwingungam Gleichrichtereingang eines Hochsetzstellersystems, IU die Amplitude derPhasenstrom-Grundschwingung am Gleichrichtereingang eines Tiefsetzstellersys-tems). Mit der relativen Einschaltzeit und dem Eingangsstrom (für Hochsetz-Konverter) bzw. dem Ausgangsstrom (für Tiefsetz-Konverter) ist die lokaleStromführung der Leistungshalbleiter definiert, und es können durch Mitte-lung über eine Pulsperiode lokale Mittelwerte berechnet werden, auf deren Ba-sis anschliessend durch Mittelung über eine Netzperiode die eigentlich inter-essierenden globalen Mittel- und Effektivwerte der Bauelementeströme ermit-telt werden [541]. Die hierbei für die einzelnen Schaltungen resultierenden For-meln sind in Abb. 7.100 und Abb. 7.101 gemeinsam mit den Werten der Nenn-Sperrspannungsbeanspruchung angegeben.
7.8.5.2 Gegentakt- und Gleichtakt-EMV-FilterDie Eingangsinduktivitäten der in den vorgehenden Abschnitten diskutiertenHochsetz-PFC-Gleichrichtersysteme sind wie die Eingangsfilterkondensatorender Systeme mit Tiefsetzsteller-Charakteristik als erste Stufe eines netzseitigvorgeschalteten mehrstufigen EMV-Filters zu sehen. Durch dieses Filter wirddie Störaussendung soweit verringert, dass die Vorschriften bezüglich leitungsge-bundener Störaussendung im Frequenzbereich 150 kHz . . . 30MHz (z.B. CISPR11) eingehalten werden. Gegebenenfalls ist auch gleichspannungsseitig ein EMV-Filter erforderlich [542, 543], welches hier jedoch aus Gründen der Kürze nichtnäher behandelt wird.
Dreiphasen-Gleichrichterschaltungen weisen prinzipbedingt eine Gleichtakt-spannung zwischen dem Ausgangsspannungsmittelpunkt und Erde auf. Die Ver-hältnisse für eine passive Gleichrichterschaltung mit AC-seitiger Induktivität
7.8 Dreiphasige Pulsgleichrichtersysteme 587
b
c
a
upn
n
p
Cu
a)
CF
Li
n
a
b
c
iY
p
ia
upnY C
CF
a
b
ciYLY
uL
Y
n
ia
upn PoC
SaYa
c)
b)
L
p
i
L
ia
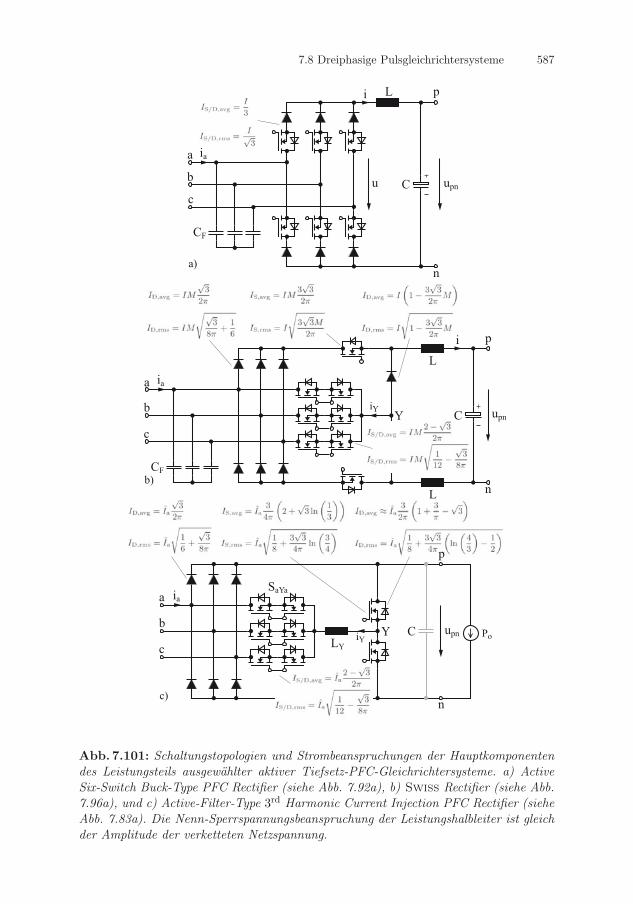
Abb. 7.101: Schaltungstopologien und Strombeanspruchungen der Hauptkomponentendes Leistungsteils ausgewählter aktiver Tiefsetz-PFC-Gleichrichtersysteme. a) ActiveSix-Switch Buck-Type PFC Rectifier (siehe Abb. 7.92a), b) Swiss Rectifier (siehe Abb.7.96a), und c) Active-Filter-Type 3rd Harmonic Current Injection PFC Rectifier (sieheAbb. 7.83a). Die Nenn-Sperrspannungsbeanspruchung der Leistungshalbleiter ist gleichder Amplitude der verketteten Netzspannung.

588 7 Gleichspannungswandler (Gleichstromsteller)
sind in Abb. 7.102a dargestellt. Für aktive Gleichrichterschaltungen zeigt dieGleichtaktspannung einen pulsfrequenten Verlauf (siehe Abb. 7.102b und c), wo-mit über parasitäre Erdkapazitäten Gleichtakt-Störströme resultieren.
a)
0-400
0
200400
u CM
(V)
b)
-200
5 10 15 20t (ms)
0-400
0
200400
u CM
(V)
c)
-200
5 10 15 20t (ms)
0-400
0
200400
u CM
(V)
-200
5 10 15 20t (ms)
Abb. 7.102: Zeitverlauf der Gleichtaktspannung des Ausgangs dreiphasiger Gleichrich-tersysteme (Spannung zwischen Ausgangsspannungsmittelpunkt und geerdetem Netz-sternpunkt). a) Passiver Diodengleichrichter mit gleichspannungsseitiger Glättungsin-duktivität (siehe Abb. 7.71b). b) Vienna Rectifier (siehe Abb. 7.86a). c) Active Six-S-witch Buck-Type PFC Rectifier (siehe Abb. 7.92a).
Für voll aktive Hochsetzstellersysteme, z.B. den Vienna Rectifier, begrün-det sich die Gleichtaktspannung unmittelbar damit, dass sich die zur Strom-einprägung verwendeten Spannungen (ausser für den Schaltzustand saM = sbM =scM = 1) im Zeitaugenblick i. Allg. nicht zu Null ergänzen. Wie in Kap.. 7.8.3.1für den Y-Rectifier gezeigt, tritt damit zwischen dem Ausgangsspannungsmittel-punkt und dem (geerdeten) Netzsternpunkt eine Gleichtaktspannung
uMN = −1
3(uaM + ubM + ucM) = uCM (7.235)
auf,
uCM = uCM + uCM,∼ , (7.236)
7.8 Dreiphasige Pulsgleichrichtersysteme 589
welche gegebenenfalls eine niederfrequente Komponente uCM , in jedem Fall je-doch eine schaltfrequente Komponente uCM,∼ beinhaltet (siehe für den ViennaRectifier auch [522], Fig. 3.4 and Fig 5.73). Eine Filterung von uCM,∼ kann nuneinfach dadurch erfolgen, dass M über einen Kondensator CCM,M mit einemdurch Filterkondensatoren in Sternschaltung gebildeten (Erdpotential repräsen-tierenden) künstlichen Sternpunkt N ′ verbunden und eine Gleichtaktinduktivi-tät LCM,1 in Serie zu den Hochsetzsteller-Induktivitäten gelegt wird (siehe Abb.7.103a). Eine niederfrequente Potentialänderung von M wird dadurch nicht be-hindert. Weiters treten im Gegensatz zur Anordnung von Filterkondensatorengegen Erde keine Ableitströme auf. Für die Filterung der zufolge parasitärerKoppelkapazitäten der Leistungshalbleiter gegenüber dem Kühlkörper auftre-tenden Störströme ist dann netzseitig eine weitere Gleichtakt-Filterstufe vorzu-sehen [522].
Für voll aktive Tiefsetz-PFC-Gleichrichtersysteme werden für dieAusgangsspannungsbildung und die Verteilung des Ausgangsstromes aufdie Netzphasen innerhalb jeder Pulsperiode zwei Netz-Aussenleiterspannungenan den Gleichrichterausgang geschaltet, womit wieder ein pulsfrequenterGleichtaktspannungsanteil uCM,∼ auftritt. (Eine Gleichtaktspannung währendder Freilaufphase kann durch symmetrisches Aufteilen der Ausgangsinduktivitätauf die positive und negative Ausgangsspannungsschiene vermieden werden.) ZurFilterung von uCM,∼ ist vorteilhaft wieder das vorstehend für Hochsetzstellerbeschriebene Konzept heranzuziehen, wobei die Gleichtaktinduktivität nunjedoch DC-seitig anzuordnen ist (siehe Abb. 7.103b).
Für die Ermittlung des, für die Auslegung der Gegentaktfilterung massgebli-chen, schaltfrequenten Anteils der Gegentaktspannung ist für Hochsetzstellersys-teme die Eingangsstrombildung zu betrachten. Z.B. gilt für Phase a
Ldiadt
= uaN − (uaM + uCM) = uaN − uaN (7.237)
= uaN − uaN − uaN,∼ , (7.238)
wobei sich der Phasenstrom aus einem grundfrequenten Anteil und einem schalt-frequenten Anteil zusammensetzt,
ia = ia + ia,∼ , (7.239)
bzw. die Stromgrundschwingung ia gemäss
Ldiadt
= uaN − uaN (7.240)
gebildet wird, womit der durch Gegentaktfilterung zu unterdrückendeSpannungs- bzw. Stromanteil zu
Ldia,∼dt
= uaN,∼ = uDM,∼ (7.241)

590 7 Gleichspannungswandler (Gleichstromsteller)
resultiert. Die Filterung von uDM,∼ erfolgt über die Hochsetzsteller-Induktivitäten und zwischen den Phasen liegende Filterkondensatoren CDM,1,wobei typischerweise wieder zwei Filterstufen vorzusehen sind (siehe Abb.7.103a). Weiters sind mit Rücksicht auf die regelungstechnische Stabilität desSystems Dämpfungselemente für eine Verringerung der Resonanzüberhöhungendes Filters anzuordnen [544], durch welche auch eine Anregung des Filters durchOberschwingungen der Netzspannung verhindert wird.
a
b
c
p
n
M
iaL
L
L
CCM,1CDM,1
LCM,1
LDM,1d
LDM,1
RDM,1d
CCM,2
ZNaN
bN
cN
CDM,2
LCM,2
CCM,M
C = CDM,1 F
LDM,1d
LDM,1RDM,1d
CCM,2
ZNaN
bN
cN
CDM,2
LCM,2
b
c
a
n
p
CCM,1
L
ia
i
C
L LCM,1
LCM,1
CCM,n
C
CCM,p
CM
Abb. 7.103: Beispiel der Struktur des EMV-Filters eines a) Active Boost-Type PFCRectifier System (Vienna Rectifier, siehe Abb. 7.86a) und eines b) Active Six-SwitchBuck-Type PFC Rectifier (siehe Abb. 7.92a). In kommerziellen EMV-Filtern werdenam netzseitigen Eingang typisch Filterkondensatoren eingesetzt, die in Verbindung mitder inneren Netzimpedanz ZN (welche zur Begrenzung von Kurzschlussströmen viel-fach absichtlich erhöht wird) eine weitere Filterstufe bilden. Überstromschutzelemente(Sicherungen), Überspannungsbegrenzungen, Entladewiderstände und der Vorladekreiszum Aufbau der Ausgangsspannung bei Inbetriebnahme sind nicht dargestellt. Anmer-kung: Optional können die Gleichtaktkondensatorstufen auch mit den Gegentakt-Filter-kondensatoren kombiniert werden; es ist dann nur ein Y-Kondensator zwischen demSternpunkt der Gegentakt-Kondensatoren und Erde anzuordnen.
Für Tiefsetzstellersysteme ist die Gegentaktstörung durch den pulsfrequentenAnteil der Gleichrichtereingangsströme bedingt und wird über die Eingangsfilter-kondensatoren CF und vorgeschaltete Filterinduktivitäten LDM,1 bzw. eine vor-geschaltete zweite Filterstufe gedämpft.
Hinsichtlich des Bauvolumens des EMV-Filters ist allgemein anzumerken,dass durch Pulsbreitenmodulation z.B. für Hochsetzstellersysteme eine konstanteSpannung spektral zerlegt, d.h. in einen netzfrequenten Grundschwingungsanteil
7.8 Dreiphasige Pulsgleichrichtersysteme 591
und Harmonische (mit Seitenbändern) bei Vielfachen der Schaltfrequenz aufge-spalten wird. Für die Einprägung des Netzstromes wird hierbei nur die Grund-schwingung genutzt, d.h. die schaltfrequenten Harmonischen müssen durch einEMV-Filter unterdrückt werden. Da der Oberschwingungsanteil, d.h. letztlich dieDifferenz zwischen konstanter Ausgangsspannung Upn und dem eigentlich zu bil-denden niederfrequenten Spannungsanteil (Grundschwingungsanteil), z.B. uaN ,ähnliche Effektivwerte aufweisen und das EMV-Filter den Eingangsstrom desKonverters zu führen hat, ist aus Sicht der Bauleistung jedenfalls ein massgebli-cher Anteil des EMV-Filters am Konvertervolumen zu erwarten. Dies wird durchpraktisch realisierte Systeme bestätigt, welche ein Bauvolumen des EMV-Filtersvon typ. 30% bis 50% des gesamten Konverters aufweisen (Abb. 7.90a). Weiterssei darauf hingewiesen, dass gestützt auf die vorstehend beschriebene spektraleAufspaltung der Spannung eine Berechnung der erforderlichen Filterdämpfungsehr einfach analytisch erfolgen kann [545–547].
7.8.6 Vergleichende Gegenüberstellung
In den vorgehenden Abschnitten wurden die für einen industriellen Einsatzin Frage kommenden Hoch- und Tiefsetz-PFC-Gleichrichtersysteme identifiziertund kurz diskutiert. Um die Vor- und Nachteile der einzelnen Konzepte deutlichzu machen bzw. die Auswahl einer Schaltung für eine konkrete Anwendung zuerleichtern, wird nachfolgend eine vergleichende Gegenüberstellung ausgewähl-ter Systeme hinsichtlich Effizienz, Bauvolumen und Realisierungsaufwand unddamit letztlich der Realisierungskosten gegeben.
Die Kennwerte werden dabei ausgehend von Kap. 7.8.6.1 für jede Systemartgleichen Spezifikationen berechnet:
• Nennleistung Po = 10 kW;
• Netzspannung UN,ll,rms = 400V;
• Ausgangsgleichspannung Uo = 700V (Hochsetzsteller-Systeme), Uo =400V (Tiefsetzstellersysteme);
• Leistungstransistoren: 1200V SiC-JFETs (Infineon/SiCED, in Kaskode-Konfiguration, d.h. mit „Normally-Off“-Charakteristik);
• Leistungsdioden: 1200V SiC-Schottky-Dioden (Infineon, ThinQ2,Kommutierungs- und Freilaufdioden), 1200V Si-EmCon4-Dioden (Infine-on, Gleichrichterdioden des Swiss Rectifier);
• Schaltfrequenz: fP = 48 kHz;
• Thermische Randbedingungen: mittlere Sperrschichttemperatur der Halb-leiter TJ,avg = 125◦C, Kühlkörpertemperatur TS = 85◦C, Umgebungstem-peratur TA = 45◦;
592 7 Gleichspannungswandler (Gleichstromsteller)
• DC-Ausgangskondensatoren: Elektrolytkondensatoren (B43501-Serie, EP-COS), 400V Kondensatoren für die Hochsetzsteller-Systeme (zwei in Serie),500V Kondensatoren für die Tiefsetzstellersysteme, Dimensionierung füreine mittlere Zeit bis zum Eintreten eines Fehlers (Mean Time-To-Failure,MTTF) von 50′000 h hinsichtlich der Belastung durch den Stromeffektiv-wert, die angenommene Kondensatortemperatur beträgt 65◦C;
• Hochsetzsteller-Induktivitäten (Hochsetzstellersysteme) und DC-Induktivitäten (Tiefsetzstellersysteme): Pulverkernmaterial (HF60,Ringkerne, Magnetics, Induktivitätsmodelle siehe [546]), auf schaltfre-quenten Stromrippel (Spitze-zu-Spitze) ΔiL,pp/IN = ΔiL,pp/I = 20%dimensioniert;
• AC-Filterkondensatoren (Tiefsetzstellersysteme): Folienkondensatoren(MKP, 305V AC, X2, B3277x-Serie, EPCOS, Kondensatormodellesiehe [546]), auf schaltfrequenten Spannungsrippel (Spitze-zu-Spitze)ΔuC,pp/UN = 10% dimensioniert.
Die Nennleistung von 10 kW stellt einen für Stromversorgungen mit dreipha-siger Speisung typischen Wert dar. Da die zu vergleichenden Hochsetzsteller-schaltungen Zwei- oder Dreipunktcharakteristik, d.h. Nenn-Sperrspannungsbe-anspruchungen von 700V oder 350V aufweisen, werden die Leistungstransisto-ren durch SiC-JFETs realisiert. Dies erlaubt in beiden Fällen dieselbe Bauele-menteart einzusetzen und in Verbindung mit SiC-Schottky Freilaufdioden fürbeide Konverterarten eine relativ hohe Schaltfrequenz als Kompromiss zu wäh-len (für das Sechs-Schalter-PFC-Gleichrichtersystem werden anstelle expliziterFreilaufdioden die JFET-internen parasitären Dioden genutzt). Alternativ wä-re eine Ausführung des Dreipunkt-Konverters (Vienna Rectifier) mit Si-Super-Junction-MOSFETs und der Zweipunkt-Konverter mit 1200V IGBTs möglich.Weiters finden SiC-JFETs auch für die Tiefsetzstellersysteme Einsatz, wel-che eine mit Zweipunkt-Hochsetzsteller-Systemen vergleichbare Sperrspannungs-belastung der Halbleiter zeigen. Einzig für den Swiss Rectifier wird die Eingangs-gleichrichtung im Sinne hohen Wirkungsgrades durch Si und nicht SiC Diodenausgeführt.
Im Zuge der Dimensionierung wird die benötigte Chipfläche der Halbleiterbasierend auf einem thermischen Modell eines typischen Halbleitermoduls (Eco-noPACK, Infineon, [546]) und einer Kühlertemperatur von TS = 85◦C so fest-gelegt, sodass eine mittlere Sperrschichttemperatur von TJ,avg = 125◦C resul-tiert. Zur Bestimmung der Halbleiterverluste werden die Leiteigenschaften (Wi-derstand im eingeschalteten Zustand, Dioden Vorwärts-Charakteristik) und dieSchaltverluste ausgehend von Datenblatt- und Messwerten von kommerziellenKomponenten [546] berechnet. Zusätzlich wird für die Auslegung der Halbleiterdie maximale Schwankung der Sperrschichttemperatur (mit Netzfrequenz) aufWerte beschränkt, welche, ausgehend von typischen Fehlerraten [548], eine mitt-lere Betriebszeit bis zum Eintreten eines Fehlers von 50′000 h ermöglichen, wie

7.8 Dreiphasige Pulsgleichrichtersysteme 593
dies auch für die Dimensionierung der Elektrolytkondensatoren berücksichtigtwird.
Anzumerken ist, dass die relativ hohe, für alle Leistungshalbleiter gleicheSperrschichttemperatur insbesondere aufgrund der eingesetzten unipolaren Bau-elemente zwar eine hohe Ausnutzung garantiert, jedoch andererseits relativ hoheLeitverluste bedingt. Um einen hohen Wirkungsgrad zu erreichen wären also vorallem für Komponenten mit hoher Strombeanspruchung grössere Halbleiterchip-flächen einzusetzen bzw. tiefere Sperrschichttemperaturen zu wählen.
7.8.6.1 Definition der KennwerteUm eine möglichst allgemein gültige Aussage zu erreichen, werden für den Ver-gleich der Systeme normierte, d.h. von der konkreten Dimensionierung weit-gehend unabhängige Kenngrössen herangezogen. Als Bezugsgrössen dienen dieAusgangsleistung Po oder der Laststrom Io.
Mit Referenz auf [477] erfolgt die Charakterisierung des Halbleiteraufwandesüber die bezogene, fiktive Gesamtschaltleistung und die bezogenen Durchlass-und Schaltverlusten.
Gesamte relative Transistor- und DiodenschaltleistungGesamte relative Transistorschaltleistung:
μ−1S =
∑n uS,max,n iS,max,n
Po
; (7.242)
Gesamte relative Diodenschaltleistung:
μ−1D =
∑n uD,max,n iD,max,n
Po
(7.243)
(uS,max,n und uD,max,n kennzeichnen die maximale Nenn-Sperrspannungsbe-anspruchung, iS,max,n und iD,max,n den Wert des Spitzenstromes des n-ten Bau-elementes; μS und μD wurden in [477] zur Bewertung der Transistor- und Di-odenausnutzung definiert).
Gesamte relative Transistor- und DiodenleitverlusteGesamte relative Transistorleitverluste:
τC =
∑n IS,rms,n
Io; (7.244)
Gesamte relative Diodenleitverluste:
δC =
∑n ID,avg/rms,n
Io. (7.245)
Wie vorstehend erwähnt, wird für die Transistoren (SiC-JFETs) die Halb-leiterfläche mit der Strombelastung bzw. Verlustleistung so skaliert, dass eine

594 7 Gleichspannungswandler (Gleichstromsteller)
gleiche (mittlere) Sperrschichttemperatur gegeben ist. Entsprechend steigen dieLeitverluste nur linear und nicht quadratisch mit der Strombeanspruchung.
Abhängig davon, ob in der Schaltungstopologie eine diskrete SiC-Schottky-Diode oder der Kanal des SiC-JFETs als Freilaufpfad verwendet wird, istals Kenngrösse für die relativen Diodenleitverluste entweder der entsprechendeStrommittelwert oder -effektivwert ID,avg/rms,n zu verwenden.
Gesamte relative Transistor- and DiodenschaltverlusteDie Schaltverluste werden basierend auf experimentell bestimmten Schaltverlust-daten aus [546] berechnet und linear als Funktion der geschalteten Spannungund des geschalteten Stromes für eine Sperrschichttemperatur von TJ = 125◦Capproximiert. Für die gesamten relativen Transistor- und Diodenschaltverlustegilt
τP =
∑n PS,P,n
Po
, (7.246)
δP =
∑n PD,P,n
Po
. (7.247)
Relatives umhüllendes Volumen der Induktivitäten und Kondensato-renHinsichtlich der passive Leistungskomponenten werden für Hochsetzsteller nurdie Hochsetzsteller-Induktivitäten (ausgeführt mit Eisenpulverkernen) und dieAusgangs-(Elektrolyt)-Kondensatoren und für die Tiefsetzstellerstrukturen nurdie Ausgangsinduktivitäten (ebenfalls ausgeführt mit Eisenpulverkernen) und dieeingangsseitigen Filterkondensatoren (Folienkondensatoren X2-Typ) berücksich-tigt und durch das Bauvolumen (umgebende Rechteckbox) charakterisiert. Dieentsprechenden Kenngrössen sind wie folgt definiert
Induktivitäten ρ−1L =
∑i VL,i
Po
; (7.248)
Kondensatoren ρ−1C =
∑i VC,i
Po
. (7.249)
Leitungsgebundene Gegentakt- und Gleichtakt-StöraussendungDie Beurteilung des EMV-Verhaltens bzw. des zur Erfüllung der Vorschriftenerforderlichen EMV-Filteraufwandes erfolgt für die Hochsetzstellersysteme überdie Gegentaktkomponente uDM und Gleichtaktkomponente uCM der Störspan-nung am Eingang des Gleichrichterteils,
unoise = uDM,∼ + uCM,∼ . (7.250)
Die Gegentaktstörspannung uDM wird dabei bezugnehmend auf [545] verein-facht als Gesamteffektivwert der den schaltfrequenten Rippel des Stromes in

7.8 Dreiphasige Pulsgleichrichtersysteme 595
der Hochsetzsteller-Induktivität einer Phase bildenden Spannung berechnet(uaN,rms ≈ uaN,rms)
uDM,a,∼,rms =√u2aN,rms − u2
aN,rms = uDM,∼,rms (7.251)
(gezeigt am Beispiel der Phase a). Für die Gleichtaktspannung gilt
uCM = −1
3(uaM + ubM + ucM) (7.252)
[siehe (7.186)], wobei M den (fiktiven) Mittelpunkt der Ausgangsspannung be-zeichnet. Die Gleichtakt-Störspannung folgt dann nach Subtraktion des nieder-frequenten Anteils uCM über
uCM,∼,rms =√
u2CM,rms − u2
CM,rms . (7.253)
Für die Tiefsetzsteller-PFC-Systeme gilt
uCM =1
2(upN + unN) , (7.254)
bzw. wieder (7.253). Anstelle von uDM,∼ [siehe (7.241)] wird hier der Effektivwertdes schaltfrequenten Anteils der diskontinuierlichen Eingangsströme zur Berech-nung der benötigten Gegentaktdämpfung bzw. zur Bewertung des Gegentakt-Filteraufwandes herangezogen
iDM,a,∼,rms =√i2a,rms − i2a,rms , (7.255)
(gezeigt am Beispiel von Phase a). Die Störspannung kann dann durch Multipli-kation mit dem Eingangswiderstand eines EMV-Messverstärkers, welcher typischR = 50Ω beträgt, berechnet werden.
EffizienzDie Effizienz der Systeme wird über die relativen Verluste,
PL
Po
=PN − Po
Po
=1
η− 1 =
1− η
η≈ 1− η , (7.256)
dargestellt, wobei neben den Verlusten der Leistungshalbleiter und Haupt-leistungskomponenten auch eine Hilfsversorgung (Mess- und Regelschaltungen,Gate-Treiber, Lüfter) von insgesamt Paux = 30W berücksichtigt wird.
Volumen des KühlsystemsAusgehend von den relativen Verlusten (1− η), dem Kennwert des Kühlsystems[549]
596 7 Gleichspannungswandler (Gleichstromsteller)
CSPI =Gth,S−A
VS
(7.257)
(Cooling System Performance Index ; Gth,S−A bezeichnet die benötigte thermischeLeitfähigkeit (W/K) zwischen der Kühleroberfläche und der Umgebung) undeiner gegebenen zulässigen Temperaturdifferenz ΔTS−A) kann das Volumen deserforderlichen Luftkühlers (mit Lüfter) gemäss [550] zu
VS =Gth,s−a
CSPI=
PL
ΔTs−aCSPI≈ Po
ΔTs−aCSPI(1− η) (7.258)
berechnet werden. Für kommerzielle Kühlerprofile ist dabei von typ.CSPI = 5 . . . 7W/(Kdm3) und für optimierte Kühlerprofile von CSPI =12 . . . 15W/(Kdm3) auszugehen. Im vorliegenden Fall wird CSPI =12W/(Kdm3) angenommen.
7.8.6.2 Vergleich des Active Six-Switch Boost-Type PFC Rectifier,des Δ-Switch Rectifier und des Vienna Rectifier
In Abb. 7.104 ist basierend auf den in Kap.. 7.8.6.1 definierten Kennwerten einVergleich des Active Six-Switch Boost-Type Rectifier, des Δ-Switch Rectifierund des Vienna Rectifier gezeigt. Die Darstellung ist so gewählt, dass bei hoherSystemperformance nur eine geringe Fläche überdeckt wird.
Alle Systeme zeigen einen ähnlichen Gesamtchipflächenbedarf, näherungs-weise gleiche relative Verluste und näherungsweise gleiche Gegentakt- undGleichtakt-Störpegel und erlauben eine Fortsetzung des Betriebes bei Ausfalleiner Netzphase. Als wesentlicher Vorteil der Dreipunkt-Charakteristik des Vi-enna Rectifier wird das gegenüber den Zweipunktstrukturen wesentlich gerin-gere Bauvolumen der Hochsetzsteller-Induktivitäten deutlich. Hinsichtlich desBauvolumens der Ausgangskapazität ist nur ein geringer Unterschied der Syste-me gegeben, da aufgrund der relativ hohen Ausgangsspannung von Upn = 700Vin jedem Fall eine Serienschaltung von zwei Elektrolytkondensatoren einzusetzenist bzw. ein Mittenabgriff der Kondensatoren verfügbar ist und für die Zwei- undDreipunktkonverter ähnliche Effektivwerte der Kondensatorströme auftreten.
Zusammenfassend zeichnet sich der Active Six-Switch Boost-Type PFC Rec-tifier durch eine sehr einfache Struktur des Leistungsteils und der Vienna Rec-tifier durch ein relativ geringes Bauvolumen bzw. eine hohe Leistungsdichte aus.Weiters ist für den Vienna Rectifier (wie auch für den Δ-Switch Rectifier) keineMöglichkeit eines Brückenkurzschlusses bei Fehlsteuerung gegeben, und es kön-nen auch Leistungstransistoren mit relativ langsamer parasitärer anti-parallelerDiode eingesetzt werden.
Der hinsichtlich Schaltungsstruktur und Steuerung relativ komplexe Δ-SwitchRectifier ist demgegenüber nur dann zu rechtfertigen, wenn eine Dreipunkttopo-logie aufgrund einer relativ geringen Netzspannung keine wesentlichen Vorteilebietet oder bereits aufgrund der Schaltungsstruktur und nicht nur über eine ent-sprechende Steuerung eine Rückspeisung von Energie in das Netz unterbundenwerden soll. Stromversorgungen in Flugzeugen können hier als Beispiel dienen.

8.3 U–Umrichter mit variabler Zwischenkreisspannung 625
8.3.4 VSC zu Back to Back Umrichter (BBC) –Orientierungs-Kapitel
In diesem Kapitel werden umfassend die unterschiedlichen Aufgabenstel-lungen und die Lösungen mittels Querverweisen für U-Wechselrichter undBack-to-Back-Umrichter beschrieben.
In den folgenden Ausführungen wird zuerst vom VSC in der Brücken-schaltung ausgehend die Entwicklung zum BBC dargestellt, und es wer-den die verschiedenen Fragestellungen abgehandelt, beispielsweise wie ist derZwischenkreis-Kondensator auszulegen oder welche Regelungsstruktur wähltman? Die VSC-Stellglied-Konfiguration ist die Standardlösung bei drehzahlvaria-blen AC-Antrieben, wird aber auch in der Netztechnik (FACTs und StatComs)eingesetzt. Es folgt in Kapitel 8.3.4.9 eine zusammenfassende Abhandlung überdie ein- und drei-phasigen PFC-Gleichrichter, die ausführlich in Kapitel 7.8 er-folgte. Abschließend werden Sondereffekte abgehandelt und praktische Hinweisegegeben, um vorzeitige Ausfälle zu vermeiden.
Dieses Kapitel ist essentiell, da in ihm die fachspezifischen Fragestellungenund Lösungen der drei Bücher „Leistungselektronische Bauelemente, Leistungs-elektronische Schaltungen und Elektrische Antriebe Regelung von Antriebssys-temen“ komprimiert mittels Querverweisen zusammengefasst werden.
8.3.4.1 GrundlagenIn Kapitel 8.1 – Abb. 8.1 – wurde die Grundschaltung des Zwei-Punkt-Wechselrichters (VSC, Voltage Source Converter) dargestellt und die prinzipielleFunktion erläutert. Da zu Beginn der Entwicklung dieser Topologie nur Thy-ristoren verfügbar waren, die nicht mit einem negativen Gatestrom-Impuls ab-schaltbar waren, wurden Löschschaltungen entwickelt, die in den Kapiteln 8.2.3sowie 8.3.2 prinzipiell und Kapitel 8.8 im Detail erläutert werden.Inzwischen sind abschaltbare Leistungshalbleiter wie der MOSFET, der IGBToder der IGCT verfügbar, so dass die Topologie in Abb. 8.1 direkt realisiertwerden kann. Die Entwicklung ist inzwischen weiter gegangen und die in denKapiteln 8.9 sowie 7.3 beschriebenen Beschaltungen sind ersetzt worden durchdie in Kapitel 8.6.2.2 vereinfachte Klemmschaltung (clamp circuit) beim IGCTbzw. keiner Beschaltung beim IGBT aber einer geeigneten Führung der Span-nung uGE, Kapitel 8.6.2.3.In Kapitel 8.5 werden ausgehend vom VSC die Mehr-Punkt-U-Wechselrichtervorgestellt und in Kapitel 8.6.1 kritisch bewertet. Bei allen diesen Schaltungenmuß die Wechselrichter-Schaltung um eine Einspeise-Schaltung erweitert wer-den, die den Zwischenkreis-Kondensator C beim Startvorgang auflädt (beachteden Stoßstrom [704] [713] [723] [736] [740] [742] und die Stoßstrom-Vermeidung[695] [697] [698] [737] [741] [742]) und während des Betriebs die Zwischenkreis-
Spannung Ud konstant hält. Da die Spannung Ud beim VSC und den Mehr-Punkt-Wechselrichtern konstant sein soll, kann als Einspeise-Schaltung eine Di-

626 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
odenbrücke verwendet werden, wie es in den Abbildungen 8.125 bis 8.129 in Ka-pitel 8.6.1.6 und 8.6.1.7 dargestellt ist. Die Diodenbrücken haben relativ günstigeDaten: Grundschwingungsgehalt Netzseite gi = IN(1)/IN , Winkel ϕ =ü/2, Leis-tungsfaktor λ = gicos(ϕ), Gleichspannungswelligkeit wud = Ud∼/ |Udiα|. wud (p =6) = 0,042, wud (p = 12) = 0,0103, wud(p = 18) = 0,0046, wud(p =24) = 0,0025und gi (p = 6) = 0,955, gi (p = 12) = 0,989, gi (p = 18) = 0,995, gi (p = 24) =0,997 (detaillierte Erläuterungen siehe Kap. 2.7.4). Bei ausgeführten Industrie-Stromrichtern sind die obigen Werte nicht erreichbar, da i.A die Diodenbrückedirekt mit dem Zwischenkreiskondensator - ohne DC-Drosselspule - verbundenist. Der Strom ist deshalb i.A lückend und verzerrt.
Aus diesen Zahlenwerten ist zu entnehmen, daß aufgrund des Steuerwinkelsα = 0◦ bei den Diodenbrücken mit steigender Pulszahl p akzeptable Daten sowohlauf der AC- als auch auf der DC-Seite festzustellen sind. Wenn dagegen einbidirektionaler Energiefluß besteht, d. h. sowohl vom Netz zur Last als auchumgekehrt, dann muß beachtet werden, daß die antiparallele Thyristorbrückebei einem Lastwechsel im Wechselrichter-Betrieb arbeiten muß und damit derSteuerwinkel α ein Überschreiten von alpha >150◦ nur unter Berücksichtigungder Überlappung ü = f (Id) und der Freiwerdezeit der Thyristoren möglich ist.Dies bedeutet ungünstigere Verhältnisse bezüglich des Leistungsfaktors.
Bei dem I-Wechselrichter ist im Kapitel 6.5.1 in der Abb. 6.34 der Strompfaddargestellt. Zu beachten ist, daß die Wechselrichter-Ventile blockier- undsperrfähig sein müssen. Diese Forderung kann inzwischen durch sperr- undblockierfähige IGCTs erfüllt werden, es entfallen damit die in Kapitel 6.5.3 -Abb. 6.41 und Abb. 6.43 - gezeigten Beschaltungen für asymmetrisch sperrendeSchalter. Es ist jedoch generell festzustellen, dass für alle „neueren“ Si-bzw.SiC-Halbleiter die Forderung nach Rückwärts-Sperrfähigkeit die Verlust-Minimierung und die Technologie des Randabschlusses ungünstig beeinflussen.Der in Abbildung 6.34 dargestellte I - Antrieb hat als Eingangsschaltung eineThyristorbrücke, die sowohl eine positive als auch eine negative Spannung beipositivem Zwischenkreis-Strom Id bereitstellen kann. Diese Eingangsschaltunggenügt für einen Vierquadrant-Antrieb.
Die netzseitige Thyristorbrücke und die Zwischenkreis-Induktivität LD
wirken als Stromquelle. Entsprechend der Lastspannung muß die Zwischenkreis-Spannung Ud und entsprechend dem Lastmoment der Zwischenkreis-Strom Idnachgeführt werden Dies bedeutet, daß der Winkel ϕ = α+ü/2 zeitvariant ist,d.h. das Netz wird entsprechend dieser Aussteuerung und dem Zwischenkreis-Strom mit Blindleistung belastet, ein deutlicher Nachteil.
Die Blindleistungs-Belastung kann verringert werden, wenn ein Ein-Quadrant-Betrieb wie bei Pumpen und Lüftern gefordert ist. Bei diesen Anwen-dungen können Blindleistungssparende Schaltungen - Kapitel 2.9 - eingesetztwerden. Dieser Nachteil kann vollständig durch einen I-BBC vermieden werden.Der vom Lastmoment abhängige Zwischenkreis-Strom Id hat den Vorteil, daß auf
8.3 U–Umrichter mit variabler Zwischenkreisspannung 627
der Lastseite aufgrund der Kondensator-Anordnung und der Last-Induktivitätein Filter 2ter Ordnung besteht und dieses Filter wird mit dem variablen Last-strom beaufschlagt, geringe Spannungs-Oberschwingungen und noch geringereLaststrom-Oberschwingungen sind die Folge.
Der I-Wechselrichter und damit auch der I-BBC haben einen weiteren Vor-teil gegenüber dem U-Wechselrichter und somit auch gegenüber dem U-BBC. InKapitel 8.11 werden inhärente Schwierigkeiten beim U-Wechselrichter und damitauch beim U-BBC aufgrund der steilen Spannungsflanken diskutiert. Diese stei-len Spannungsflanken erzeugen aufgrund von Reflexionen auf der Versorgungslei-tung zwischen dem Wechselrichter und der Last Spannungs-Überhöhungen, diezu Schäden der Isolation führen können. Weiterhin werden kapazitive Erdströ-me bedingt durch parasitäre Erdkapazitäten nicht zu vermeiden sein. Beispielewerden in den Kapiteln 8.11 und 8.6.5 genannt. Um diese unerwünschten Aus-wirkungen zu verringern bzw. zu vermeiden, werden du/dt- und Sinus-Filternotwendig. Diese Problematik besteht bei den I-Wechselrichtern nicht, da derWechselrichterstrom das im Dreieck geschaltete Kondensatorfilter lädt und ent-lädt, das du/dt der Lastspannung ist somit auf niedrige Werte - siehe Kapitel6.5.1, Abbildungen 6.35 und 6.38 - begrenzt. Da der Zwischenkreisstrom undsomit der Wechselrichterstrom mit der Drehmoment-Anforderung variabel ist,verringern sich die du/dt-Werte in weiten Bereichen nochmals.
Aus den Ausführungen in den Kapiteln 10.7, 11.2, 11.3 ist zu entnehmen,daß sowohl U- als auch I-Umrichter als Blindleistungsquelle und als Oberschwin-gungsfilter betrieben werden können. Wenn somit die Dioden bzw. die Thyristor-brücken als Einspeisungssystem durch Umrichter auf der Netzseite ersetzt wer-den, dann ist der netzseitige Nachteil der Blindleistungs- und Oberschwingungs-Belastung insbesondere bei den Thyristorbrücken, vermieden. Die Abbildung8.13 zeigt die beiden Schaltkreise, der obere Schaltkreis ist der Back to BackU-Umrichter (U-BBC), der untere Schaltkreis der Back to Back I-Umrichter (I-BBC), statt BBC wird auch häufig die Bezeichnung Active Front End verwendet.Es bestehen nun mehrere Fragenkomplexe. Die erste Frage ist, ab welchem Wertder Zwischenkreis-Kapazität C sind die beiden U-Wechselrichter leistungselek-tronisch und regelungstechnisch entkoppelt, bzw. welche Auswirkungen sind auf-grund der Feststellungen in Kapitel 8.6.4.4 wie zu beachten? Eine entgegenge-setzte Frage ist, ob der Zwischenkreis-Kondensator C nicht erheblich reduziertwerden kann, so dass das C nur noch zur Begrenzung der Schaltüberspannun-gen der Halbleiter sowie zur „Verkürzung“ der Kommutierungsdauern dient. Ver-gleichbare Fragestellungen bestehen bei den I-BBC.
In diesem Zusammenhang müssen auch die direkten Umrichter wie der Di-rektumrichter, Kapitel 3.1 bis 3.7, oder die Matrix-Umrichter (Matrix-ConverterMC), Kapitel 3.8.1 bis 3.8.11, in die Überlegungen mit einbezogen werden. Hin-sichtlich des Direktumrichters sind die Begrenzung der Ausgangsfrequenz aufniedrige Frequenzen (etwa 20 % bis 30 % der Netzfrequenz), die ungleichmäßigeBelastung der Thyristoren bei höheren Ausgangsfrequenzen und die unerwünsch-
628 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
ten Netzbelastungen ein erheblicher Nachteil, so daß der Direktumrichter nichtweiter betrachtet werden soll.
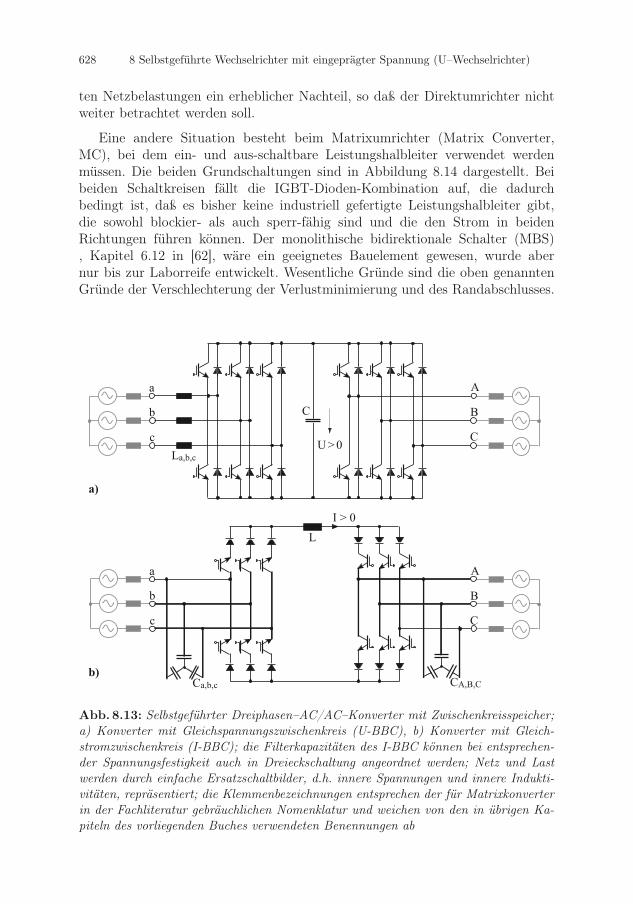
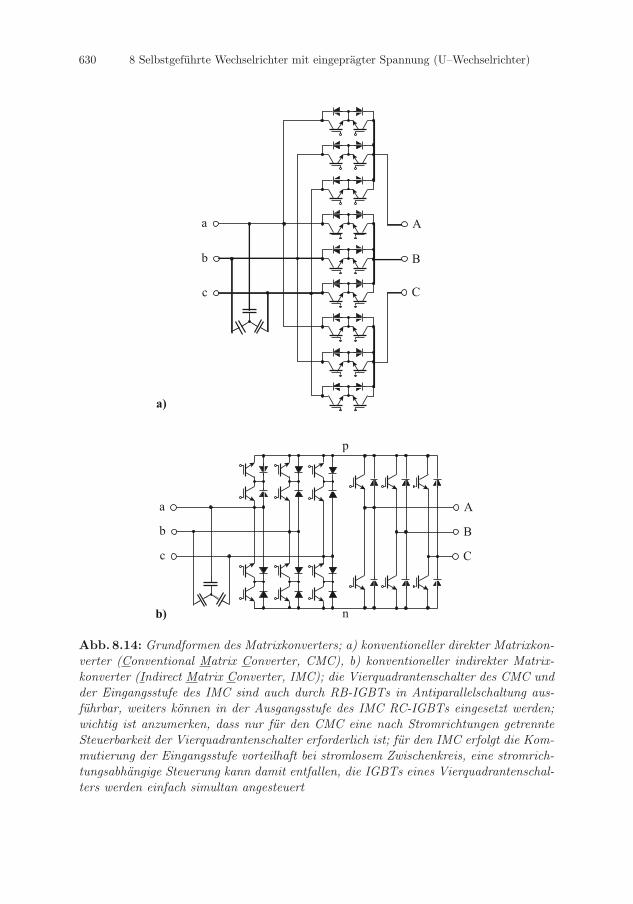
Eine andere Situation besteht beim Matrixumrichter (Matrix Converter,MC), bei dem ein- und aus-schaltbare Leistungshalbleiter verwendet werdenmüssen. Die beiden Grundschaltungen sind in Abbildung 8.14 dargestellt. Beibeiden Schaltkreisen fällt die IGBT-Dioden-Kombination auf, die dadurchbedingt ist, daß es bisher keine industriell gefertigte Leistungshalbleiter gibt,die sowohl blockier- als auch sperr-fähig sind und die den Strom in beidenRichtungen führen können. Der monolithische bidirektionale Schalter (MBS), Kapitel 6.12 in [62], wäre ein geeignetes Bauelement gewesen, wurde abernur bis zur Laborreife entwickelt. Wesentliche Gründe sind die oben genanntenGründe der Verschlechterung der Verlustminimierung und des Randabschlusses.
a
b
c
A
B
C
A
B
C
a)
b)
La,b,c
a
b
c
I > 0L
C
Ca,b,c CA,B,C
U > 0
Abb. 8.13: Selbstgeführter Dreiphasen–AC/AC–Konverter mit Zwischenkreisspeicher;a) Konverter mit Gleichspannungszwischenkreis (U-BBC), b) Konverter mit Gleich-stromzwischenkreis (I-BBC); die Filterkapazitäten des I-BBC können bei entsprechen-der Spannungsfestigkeit auch in Dreieckschaltung angeordnet werden; Netz und Lastwerden durch einfache Ersatzschaltbilder, d.h. innere Spannungen und innere Indukti-vitäten, repräsentiert; die Klemmenbezeichnungen entsprechen der für Matrixkonverterin der Fachliteratur gebräuchlichen Nomenklatur und weichen von den in übrigen Ka-piteln des vorliegenden Buches verwendeten Benennungen ab

8.3 U–Umrichter mit variabler Zwischenkreisspannung 629
Es verbleibt somit bei der obigen Darstellung der IGBT-Dioden-Kombination.
In Kapitel 3.8 werden außerordentlich detailiert die verschiedenen Varian-ten der Matrixumrichter beschrieben. Außer dem konventionellen, direkten MC(CMC), dem indirektem MC (IMC) in der Abbildung 8.14, werden der F
3EC
(Fundamental Frequency Front End Converter), der Sparse Matrix Converter(SMC), der Ultra Sparse MC (USMC) und der Very Sparse MC (VSMC) be-schrieben. Die Beschreibung umfaßt die Funktion, die Auslegung, die Modu-lationsverfahren jeweils in der U- sowie der I-Variante und den Vergleich un-tereinander. Im Vergleich von U- und I-BBC in Bezug zu den MC-Variantenwird ausgeführt: Der Ausgangsspannungsbereich der MC ist gegenüber den BBCeingeschränkt, der Ausgangsspannungsbereich beträgt beim MC nur 86.6% desEingangsspannungsbereichs – beim VSC, bei den MehrPunkt-Wechselrichternund somit auch bei den BBC ist dagegen die boost-Funktion enthalten – Netz-störungen engen den Bereich beim MC weiter ein. Laststöße werden beim MCnahezu direkt an das Netz weitergegeben. Die Modulations-Verfahren sind beimMC komplexer, die Lastströme sind geregelt aber die Netzströme nur gesteuert,bei Netzausfall ist keine Notbremsung möglich.Weiterhin sind bei den U-BBC 12 ein- und ausschaltbare Leistungshalbleiter (nurblockierfähig) und 12 Dioden oder 12 RC-IGBTs (reverse conducting-IGBTs)bzw. 12 RC-IGCTs notwendig. Beim I-BBC sind es ebenso nur 12 ein- und aus-schaltbare Leistungshalbleiter, die sperr- und blockierfähig sein müssen. BeimCMC und IMC sind es beispielsweise 18 IGBTs und 18 Dioden. Aus allen diesenVergleichsmerkmalen ergab sich die kritische Beurteilung, daß die MCs wahr-scheinlich nur eine Nischenfunktion erreichen werden. Bisher hat nur die FirmaYaskawa MCs im Angebot. Damit verbleiben als Lösungsansatz zur Zeit nur derU- oder der I-BBC. Da die meisten Halbleiter-Hersteller aber nur auf den IGBTgesetzt haben, wird der U-BBC die meist verwendete Lösung sein.
8.3.4.2 Zwischenkreis-AuslegungIn der Dissertation [689] wird u.a. die Auslegung des Zwischenkreis-KondensatorsC diskutiert. Grundsätzlich gilt die Kondensator-Gleichung:
Δud = TswiLC
(8.20)
Mit Tsw der betreffenden Einschaltdauer der beteiligten Schalter und iL demLaststrom. Im vorliegenden Fall muß (8.20) angepaßt werden zu
Δud =
[1− ed
ud
]Tsw
iLC
(8.21)
ed ist die Amplitude der netzseitigen Spannung, die über die beteiligten Schalterauf der DC-Seite wirksam ist. Mit der DC-Leistung PL der Last.
PL = ud · iL (8.22)
630 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
a
b
c
A
B
C
a)
b)
a
b
c
p
n
A
B
C
Abb. 8.14: Grundformen des Matrixkonverters; a) konventioneller direkter Matrixkon-verter (Conventional Matrix Converter, CMC), b) konventioneller indirekter Matrix-konverter (Indirect Matrix Converter, IMC); die Vierquadrantenschalter des CMC undder Eingangsstufe des IMC sind auch durch RB-IGBTs in Antiparallelschaltung aus-führbar, weiters können in der Ausgangsstufe des IMC RC-IGBTs eingesetzt werden;wichtig ist anzumerken, dass nur für den CMC eine nach Stromrichtungen getrennteSteuerbarkeit der Vierquadrantenschalter erforderlich ist; für den IMC erfolgt die Kom-mutierung der Eingangsstufe vorteilhaft bei stromlosem Zwischenkreis, eine stromrich-tungsabhängige Steuerung kann damit entfallen, die IGBTs eines Vierquadrantenschal-ters werden einfach simultan angesteuert

8.3 U–Umrichter mit variabler Zwischenkreisspannung 631
ergibt sich
C ≥ TswPL
Δudud
[1− ed
ud
](8.23)
Δud ist die vorzugebende zulässige Spannungserhöhung. Nach Einschätzung inder Dissertation könnte der Kapazitätswert von C zu hoch sein, es wird des-halb eine weitere Abschätzung vorgenommen. Ausgehend von dem transientenVerhalten des betreffenden Wechselrichters wird angenommen, dass durch dieRegelung die Stellgrenze erreicht wird. Das System verhält sich während die-ser Zeit wie ein System zweiter Ordnung. Mit diesem Ansatz wird die folgendeGleichung [689] ermittelt. Wie weiter ausgeführt wird, ergeben sich vergleichbareVerhältnisse, wenn eine einseitige Netz-Unterbrechung auftritt. In diesem Fallwird das verbleibende Wechselrichter-System den Zwischenkreis-Kondensator Csolange aufladen bis der Fehler ermittelt wird. Wenn eine zulässige Spannungs-erhöhung Δud vorgegeben wird, dann ergibt sich:
C =L(P0Ud − P ∗ ·Ed)
2
E2dU
2d [(ud − Ed)2 − (Ud − Ed)2]
(8.24)
P0 ist die Leistung beim Beginn des Fehlerfalls, Ed = ed. Mit P0 = PN undP ∗ = −PN ergibt sich endgültig.
C =LP 2
N(Ud + Ed)2
E2dU
2d [(ud − Ed)2 − (Ud − Ed)2]
(8.25)
Eine weitere Abschätzung für den Kapazitätswert von C ist in Kap. 8.10.8 zufinden. Weiterhin werden in dieser Arbeit Analyse-Methoden, die Auslegung dernetzseitigen Filterinduktivitäten beim M2C-Wechselrichter, die Regelung sowieein experimenteller Aufbau dargestellt.
Eine kritische Analyse der Topologien erfolgt in Kap. 8.6.1, in Kap. 8.6.2.1werden die Beschaltungen der Halbleiter diskutiert und diese werden - unter Be-achtung der Rückwirkungen duch eine geeignete Ansteuerung, siehe Kap 8.3.4.3und 8.6.2.3 - minimiert. In Kap. 8.6.3 werden die Ansteuerungs-Schaltungen dar-gestellt. Weitere wesentliche Fragestellungen sind die Beanspruchungen der Halb-leiter während der Schaltvorgänge - Kap. 8.6.4.1 und die thermische Auslegung,Kap. 8.6.5. Aufgrund der thermischen Belastungen dehnen sich die verschiedenenSchichten im Gehäuse der Leistungshalbleiter unterschiedlich aus. Dies führt zumechanischen Spannungen zwischen den Schichten und beeinflusst die Lebens-dauer negativ. In „Aufbau- und Verbindungstechniken in der Leistungselektronik“werden diese Aspekte in Kapitel 10 in [62] ausführlich dargestellt. Typische Fra-gestellungen sind die Zuverlässigkeit - Kap. 10.2.3, TO-Familie - Kap. 10.3.1.1,Scheibenzellen (Presspack) - Kap. 10.3.1.2, Leistungs-Module Kap. 10.3.2. Eswerden aber auch Effekte wie die PETT-Schwingungen aufgrund der parasitärenInduktivitäten und Kapazitäten sowie der parallelen Anordnung der Chips imModul diskutiert. Eine orientierende Auslegung eines U-Wechselrichters erfolgtin Kap. 8.10.
632 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
8.3.4.3 Ansteuerungen
Ein wesentlicher Schritt bei der Realisierung von U-Wechselrichtern bzw. U-BBCist die Auslegung der Ansteuerung, denn durch die Ansteuerung wird einerseitsdie Spannungsbeanspruchung und andererseits die Verlustleistung für die Halb-leiter bei Schaltvorgängen vorgegeben. In Kapitel 8.6.2.1 wird u.a. auf diesenPunkt eingegangen. Eine wichtige, erste Aussage ist, daß bei Halbleitern aufSilizium-Basis das dynamische Verhalten der antiparallelen Freilaufdioden FWDimmer kritischer ist als das dynamische Verhalten der IGCTs bzw. der IGBTs.Eine weitere Aussage ist, bei den IGCTs wird vom Hersteller die Gate-unit vonden Daten immer so eingestellt, daß die erste Aussage sicher eingehalten wird,weiterhin ist die Gate-unit mit dem IGCT integriert.
Eine völlig andere Situation besteht bei den IGBTs. Bei den IGBTs gilt dieobige Aussage hinsichtlich der FWD ebenso. Die besondere Situation ist aber,daß der von außen gesehene IGBT- und der Dioden-Baustein aus parallel geschal-teten Chips kleinerer Stromtragfähigkeit im Inneren besteht. Die Chips haben imzulässigen Streubereich unterschiedliche Daten und durch die Unterschiede in derräumlichen Führung der bond-Drähte ebenso unterschiedliche Daten hinsichtlichder parasitären Induktivitäten und Widerstände. Die annähernd gleichmäßigeStromaufteilung wird mittels angepasster Gatevorwiderstände für die parallelenChips im Modul so gut wie möglich sichergestellt. Aufgrund dieser Ausgangslagegibt es die folgenden Vorschläge für die Realisierung der IGBT-Ansteuerung.
Die Ausführungen in Kapiteln 7.4.3 in [62], sowie insbesondere in 8.6.2.3geben einen vertieften Einblick in die Problematik für den IGBT.
Ein erster Vorschlag zur Ansteuerung ist: Die Grenze für den minimalen Gate-Widerstand RGon wird so gewählt, daß einerseits die maximale Recovery-Leistungder antiparallelen Diode FWD nicht überschritten wird und gleichzeitig anderer-seits auch die Ströme im Modul selbst sich gleichmäßig genug auf die ggf. zurErhöhung der Stromtragfähigkeit parallel geschalteten Chips verteilt wird. DieGate-Spannung UGE beträgt typisch im eingeschalteten Zustand +15V, weil da-durch im Zusammenspiel mit der Threshold-Spannung von typisch 6V bis 8Vder Entsättigungs-Strom begrenzt wird und damit das SCSOA definiert werdenkann.
Ein zweiter Vorschlag ist in den Kapiteln 8.6.4.2 „Schaltbelastung beim Ab-schalten von IGBT“ und 8.6.4.3 „Schaltbelastung beim Reverse Recovery von Di-oden“, Abb. 8.194 Ladungsträgerverläufe, Abb. 8.191 interne Größen im IGBT,Abb. 8.197 Optimierungsverläufe und Abb. 8.199 Feldaufsteilung sehr ausführ-lich und angemessen begründet. Der Vorschlag lautet: finde einen Kompromißzwischen der Minimierung der Schaltverluste durch schnelles Erreichen des int-rinsischen Schaltzustandes einerseits und der dadurch bedingten Erhöhung derFeldaufsteilung andererseits. Um diesen Kompromiss zu finden sollte allerdingsein geeignetes Simulations-Modell der Halbleiter vorliegen. Wie in dem Unterka-pitel „Simulation“ aber bereits hingewiesen, sind diese Modelle aber leider nichtallgemein verfügbar. Es verbleibt somit nur, durch experimentelle Messungendiesen Kompromiß – siehe die oben genannten Abbildungen – zu finden.
8.3 U–Umrichter mit variabler Zwischenkreisspannung 633
Damit verbleibt beim ersten und zweiten Vorschlag die Problematik der in-ternen Stromaufteilung zwischen den Chips im Modul; siehe auch Kap. 6.7.2,Abb. 6.41 in [62], dynamische Stromaufteilung bei Parameter-Streuung.
Ein dritter Vorschlag ist indirekt in Kapitel 8.6.3.2 zu finden. Aus den Darstel-lungen des umfangreichen Kapitels 8.6.3 ist - wie auch beim ersten Vorschlag hin-gewiesen - zu entnehmen, daß die parasitären Effekte durch die Parallel-Schaltungder Chips im Modul beachtet werden müssen, dies ist aber in letzter Konsequenznur dem Halbleiter-Hersteller oder einem spezialisiertem Unternehmen möglich.Der dritte indirekt vormulierte Vorschlag lautet somit: Nutze die Kenntnisse ei-nes Unternehmens, welches den IGBT-Modul und die Ansteuerung als Einheitfür die vorgesehene Anwendung zur Verfügung stellt.
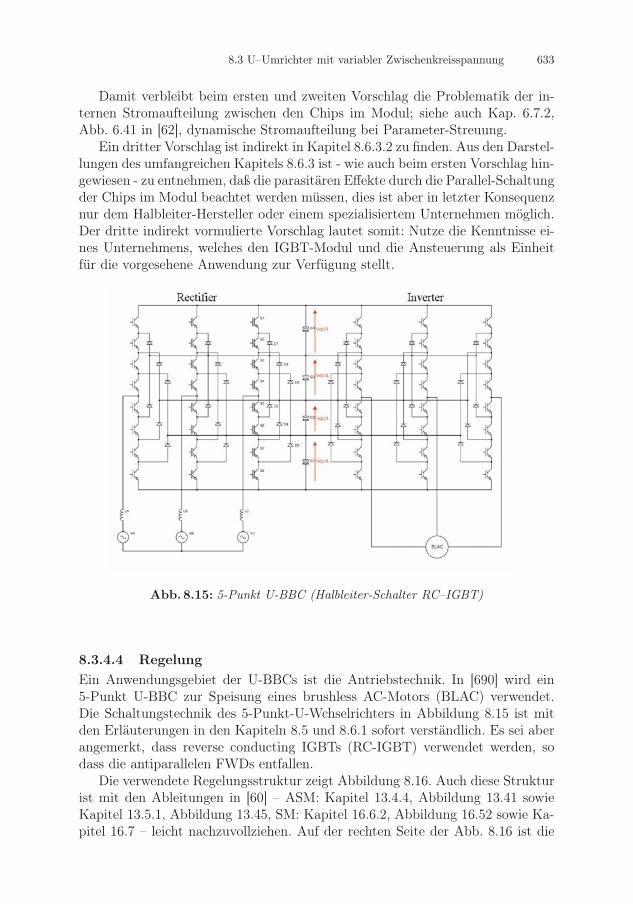
Abb. 8.15: 5-Punkt U-BBC (Halbleiter-Schalter RC–IGBT)
8.3.4.4 RegelungEin Anwendungsgebiet der U-BBCs ist die Antriebstechnik. In [690] wird ein5-Punkt U-BBC zur Speisung eines brushless AC-Motors (BLAC) verwendet.Die Schaltungstechnik des 5-Punkt-U-Wchselrichters in Abbildung 8.15 ist mitden Erläuterungen in den Kapiteln 8.5 und 8.6.1 sofort verständlich. Es sei aberangemerkt, dass reverse conducting IGBTs (RC-IGBT) verwendet werden, sodass die antiparallelen FWDs entfallen.
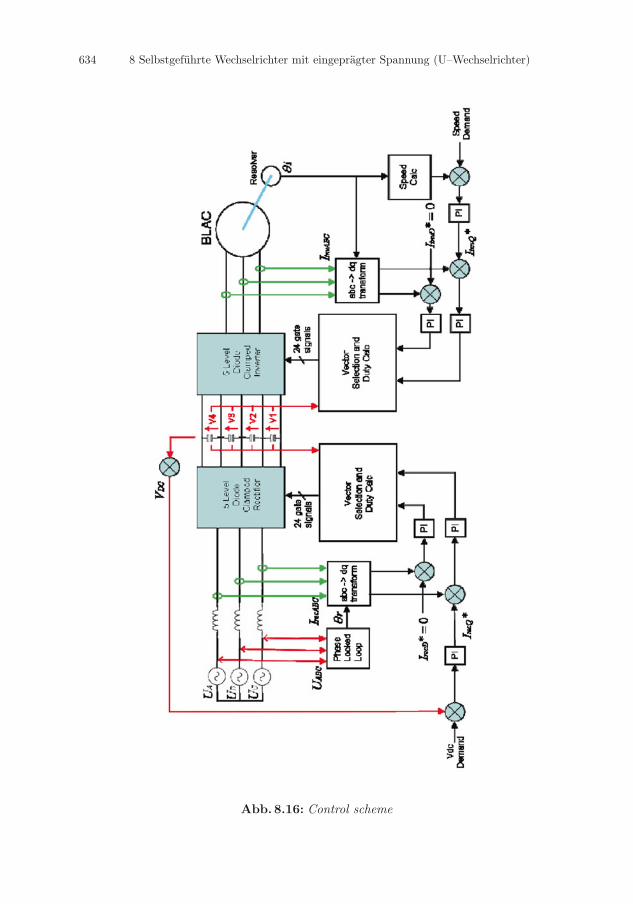
Die verwendete Regelungsstruktur zeigt Abbildung 8.16. Auch diese Strukturist mit den Ableitungen in [60] – ASM: Kapitel 13.4.4, Abbildung 13.41 sowieKapitel 13.5.1, Abbildung 13.45, SM: Kapitel 16.6.2, Abbildung 16.52 sowie Ka-pitel 16.7 – leicht nachzuvollziehen. Auf der rechten Seite der Abb. 8.16 ist die
634 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
Abb. 8.16: Control scheme
8.3 U–Umrichter mit variabler Zwischenkreisspannung 635
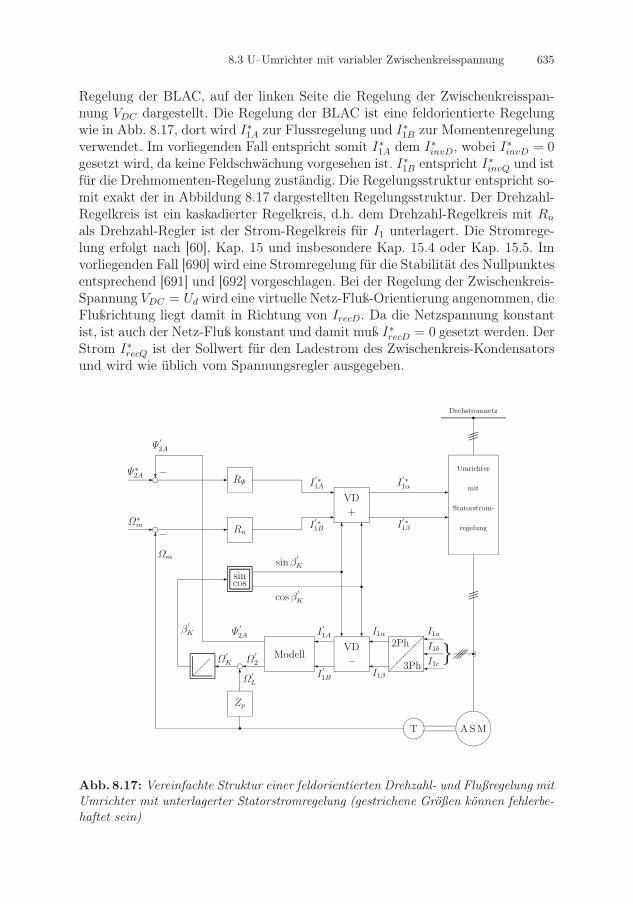
Regelung der BLAC, auf der linken Seite die Regelung der Zwischenkreisspan-nung VDC dargestellt. Die Regelung der BLAC ist eine feldorientierte Regelungwie in Abb. 8.17, dort wird I∗1A zur Flussregelung und I∗1B zur Momentenregelungverwendet. Im vorliegenden Fall entspricht somit I∗1A dem I∗invD, wobei I∗invD = 0gesetzt wird, da keine Feldschwächung vorgesehen ist. I∗1B entspricht I∗invQ und istfür die Drehmomenten-Regelung zuständig. Die Regelungsstruktur entspricht so-mit exakt der in Abbildung 8.17 dargestellten Regelungsstruktur. Der Drehzahl-Regelkreis ist ein kaskadierter Regelkreis, d.h. dem Drehzahl-Regelkreis mit Rn
als Drehzahl-Regler ist der Strom-Regelkreis für I1 unterlagert. Die Stromrege-lung erfolgt nach [60], Kap. 15 und insbesondere Kap. 15.4 oder Kap. 15.5. Imvorliegenden Fall [690] wird eine Stromregelung für die Stabilität des Nullpunktesentsprechend [691] und [692] vorgeschlagen. Bei der Regelung der Zwischenkreis-Spannung VDC = Ud wird eine virtuelle Netz-Fluß-Orientierung angenommen, dieFlußrichtung liegt damit in Richtung von IrecD. Da die Netzspannung konstantist, ist auch der Netz-Fluß konstant und damit muß I∗recD = 0 gesetzt werden. DerStrom I∗recQ ist der Sollwert für den Ladestrom des Zwischenkreis-Kondensatorsund wird wie üblich vom Spannungsregler ausgegeben.
��
sincos
������
������
RΨ
Rn
ModellVD
−
VD
+
Zp
2Ph
3Ph
Umrichter
mit
Statorstrom-
regelung
�
�
�
�
�
�
�
�
�
� �
�
�
�
�
�
�
�
�
� �
�
�
�
� �
�
�
�I
′1B
I′1A
I′∗1B
I′∗1A
I1β
I1α
I′∗1β
I′∗1α
sin β′K
cos β′K
I1c
I1b
I1a
Drehstromnetz
A S MT
Ω′K Ω
′2
Ω′L
Ωm
Ω∗m
Ψ ∗2A
Ψ′2A
−
−
Ψ′2A
β′K
}������
����
����
��
�
Abb. 8.17: Vereinfachte Struktur einer feldorientierten Drehzahl- und Flußregelung mitUmrichter mit unterlagerter Statorstromregelung (gestrichene Größen können fehlerbe-haftet sein)
636 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
Im Allgemeinen wird angenommen, dass das vom Umrichter gespeiste Sys-tem ein unverkoppeltes Einzelsystem ist, d.h. es finden keine Verkopplungen mitanderen ähnlichen oder identischen Systemen statt. Diese Annahme kann u.U.falsch sein. In [773] [774] wird der so genannte „Züri Fäscht-Effekt“ beschrieben.Im vorliegenden Fall waren mehrere mit Umrichter gespeiste Lokomotiven inZürich auf Grund des Fäschtes räumlich konzentriert. Dadurch bedingt bestandeine Kopplung der Lokomotiven-Umrichter über die Bahnspannungsleitung, dadie Eingangsimpedanz des Netzes hoch war. Es zeigte sich, dass nach einer relativkurzen Zeit bei allen Lokomotiven die Zwischenkreis-Spannungs-Regelung insta-bil wurde. Die Zwischenkreisspannung Ud war daher nicht mehr konstant, sondernes zeigte sich eine tieffrequente Schwingung von ca. 7 Hz. Dies beinträchtigte dasgesamte Antriebssystem. Um diesen unerwünschten Effekt zu analysieren, wur-de das Nyquist-Kriterium in abgewandeter Form durch die Berücksichtigung vonSeitenlinien nach dem Prinzip der harmonischen Transfer Matrizen (HTM) ver-wendet. Mit diesem Ansatz konnten Stabilitätsaussagen und Abhilfemaßnahmenerarbeitet werden.
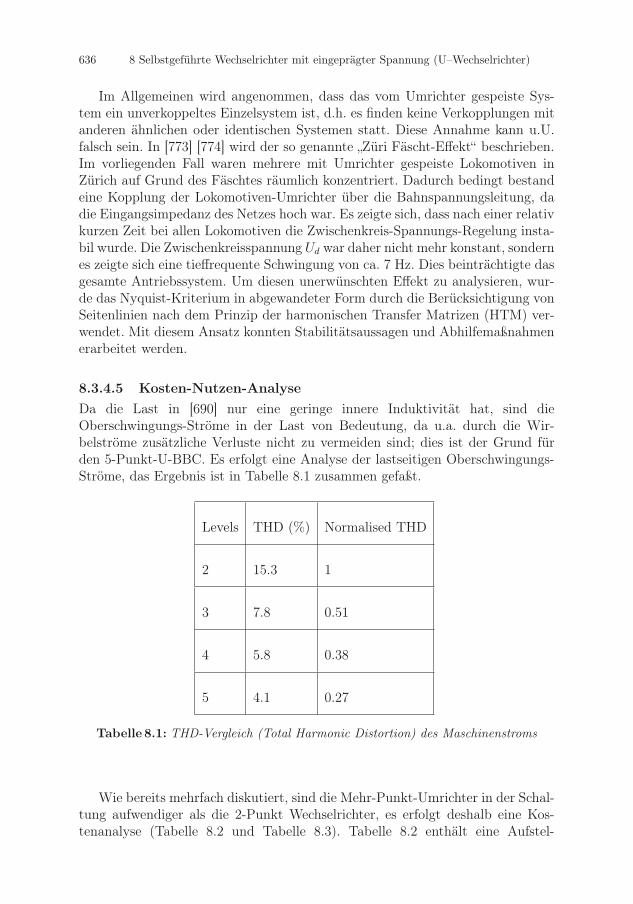
8.3.4.5 Kosten-Nutzen-AnalyseDa die Last in [690] nur eine geringe innere Induktivität hat, sind dieOberschwingungs-Ströme in der Last von Bedeutung, da u.a. durch die Wir-belströme zusätzliche Verluste nicht zu vermeiden sind; dies ist der Grund fürden 5-Punkt-U-BBC. Es erfolgt eine Analyse der lastseitigen Oberschwingungs-Ströme, das Ergebnis ist in Tabelle 8.1 zusammen gefaßt.
Levels THD (%) Normalised THD
2 15.3 1
3 7.8 0.51
4 5.8 0.38
5 4.1 0.27
Tabelle 8.1: THD-Vergleich (Total Harmonic Distortion) des Maschinenstroms
Wie bereits mehrfach diskutiert, sind die Mehr-Punkt-Umrichter in der Schal-tung aufwendiger als die 2-Punkt Wechselrichter, es erfolgt deshalb eine Kos-tenanalyse (Tabelle 8.2 und Tabelle 8.3). Tabelle 8.2 enthält eine Aufstel-

8.3 U–Umrichter mit variabler Zwischenkreisspannung 637
lung der Komponenten und der normierten Kosten von 2 bis zum 5-Punkt-U-Wechselrichtern, d.h. einer Schaltung entsprechend Abbildung 8.1. Tabelle8.3 entspricht der Tabelle 8.2 für U-BBC-Umrichter. Die Kosten der Regelungsind nicht enthalten, es sei aber darauf hingewiesen, dass die Kosten für dieSpannungs-Aufteilung und -Stabilisierung ab dem 3-Punkt-Wechselrichter sehransteigen – siehe auch die Kapitel 8.5.2, 8.5.6.1 sowie 8.6.1.7. In Abbildung 8.18werden die normierten Kosten für die theoretisch maximalen Stromoberschwin-gungen für die Varianten U-Wechselrichter und BBC-Umrichter gegenüber ge-stellt. Es zeigt sich, dass für die doppelten Kosten eine Verringerung um denFaktor 4 hinsichtlich der Strom-Oberschwingungen erreichbar ist und dass einU-BBC etwa doppelt so teuer ist wie ein U-Wechselrichter (siehe auch Kap.8.5.6.1 und Kap. 8.6.1.7, Tabelle 8.14). Es ist jedoch anzumerken, dass die Kos-tenaufstellung nach Art der Tabelle 8.2 in der Zukunft immer mehr durch eineGesamtbetrachtung der Systemkosten bzw. der Life-Cycle-Kosten ergänzt wer-den muss. Ausserdem dominieren zukünftig die Kosten der passiven Komponen-ten wie der EMV-Filter, der Kühlanlagen oder der Schaltgeräte bei weitem dieKosten des Stromrichters an sich.
Con
vert
erLe
vels
IGB
Ts
Cla
mpi
ngD
iode
s
DC
Link
Cap
acit
ors
Gat
eD
rive
Cir
cuit
s
Vol
tage
Tran
sduc
ers
Cur
rent
Tran
sduc
ers
Nor
mal
ized
Cos
t
2 6 0 1 6 0 3 1
3 12 6 2 12 1 3 1.23
4 18 12 3 18 2 3 1.65
5 24 18 4 24 3 3 2.21
Tabelle 8.2: Anzahl der Hauptkomponenten und Kostenabschätzung für einen U-Wech-selrichter
Weiterhin werden die folgenden experimentellen Ergebnisse gezeigt: Phasen-ströme der BLAC bei hoher Induktivität in Abbildung 8.19 und Vergleich derNetzströme 2-Punkt und 5-Punkt U-System in Abbildung 8.20 bei geringer In-duktivität. Aus diesen experimentellen Ergebnissen wurde eine Reduzierung der

638 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
Con
vert
erLe
vels
IGB
Ts
Cla
mpi
ngD
iode
s
DC
Link
Cap
acit
or
Gat
eD
rive
Cir
cuit
s
Vol
tage
Tran
sduc
ers
Cur
rent
Tran
sduc
ers
Nor
mal
ized
Cos
t
2 12 0 1 12 4 6 1.98
3 24 12 2 24 5 6 2.50
4 36 24 3 36 6 6 3.31
5 48 36 4 48 7 6 4.24
Tabelle 8.3: Anzahl der Hauptkomponenten und Kostenabschätzung für „back-to-backUmrichter“, U-BBC
Abb. 8.18: Vergleich der Anzahl der Ebenen, Wandlerkosten in Relation zur theoreti-schen Stromwelligkeit
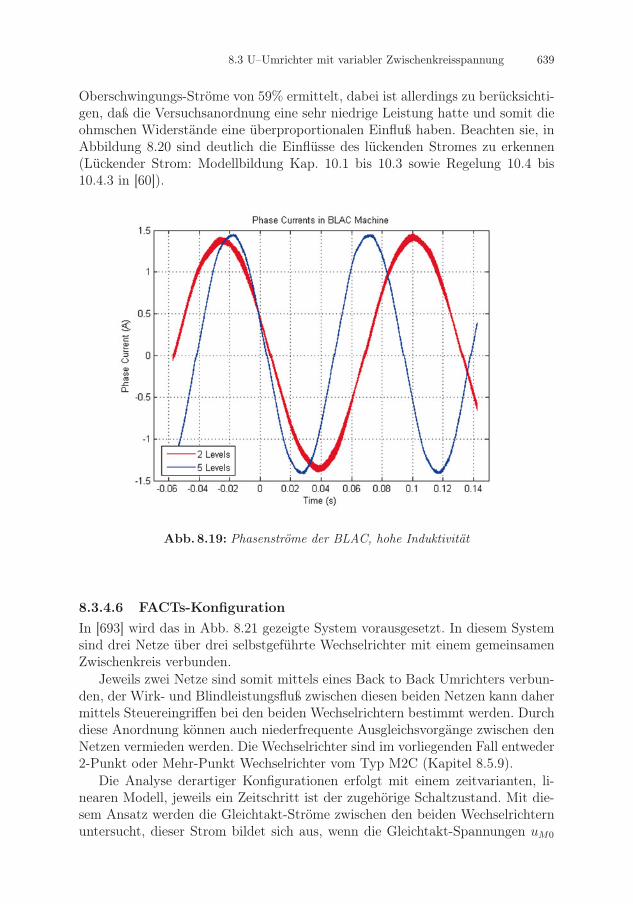
8.3 U–Umrichter mit variabler Zwischenkreisspannung 639
Oberschwingungs-Ströme von 59% ermittelt, dabei ist allerdings zu berücksichti-gen, daß die Versuchsanordnung eine sehr niedrige Leistung hatte und somit dieohmschen Widerstände eine überproportionalen Einfluß haben. Beachten sie, inAbbildung 8.20 sind deutlich die Einflüsse des lückenden Stromes zu erkennen(Lückender Strom: Modellbildung Kap. 10.1 bis 10.3 sowie Regelung 10.4 bis10.4.3 in [60]).
Abb. 8.19: Phasenströme der BLAC, hohe Induktivität
8.3.4.6 FACTs-KonfigurationIn [693] wird das in Abb. 8.21 gezeigte System vorausgesetzt. In diesem Systemsind drei Netze über drei selbstgeführte Wechselrichter mit einem gemeinsamenZwischenkreis verbunden.
Jeweils zwei Netze sind somit mittels eines Back to Back Umrichters verbun-den, der Wirk- und Blindleistungsfluß zwischen diesen beiden Netzen kann dahermittels Steuereingriffen bei den beiden Wechselrichtern bestimmt werden. Durchdiese Anordnung können auch niederfrequente Ausgleichsvorgänge zwischen denNetzen vermieden werden. Die Wechselrichter sind im vorliegenden Fall entweder2-Punkt oder Mehr-Punkt Wechselrichter vom Typ M2C (Kapitel 8.5.9).
Die Analyse derartiger Konfigurationen erfolgt mit einem zeitvarianten, li-nearen Modell, jeweils ein Zeitschritt ist der zugehörige Schaltzustand. Mit die-sem Ansatz werden die Gleichtakt-Ströme zwischen den beiden Wechselrichternuntersucht, dieser Strom bildet sich aus, wenn die Gleichtakt-Spannungen uM0
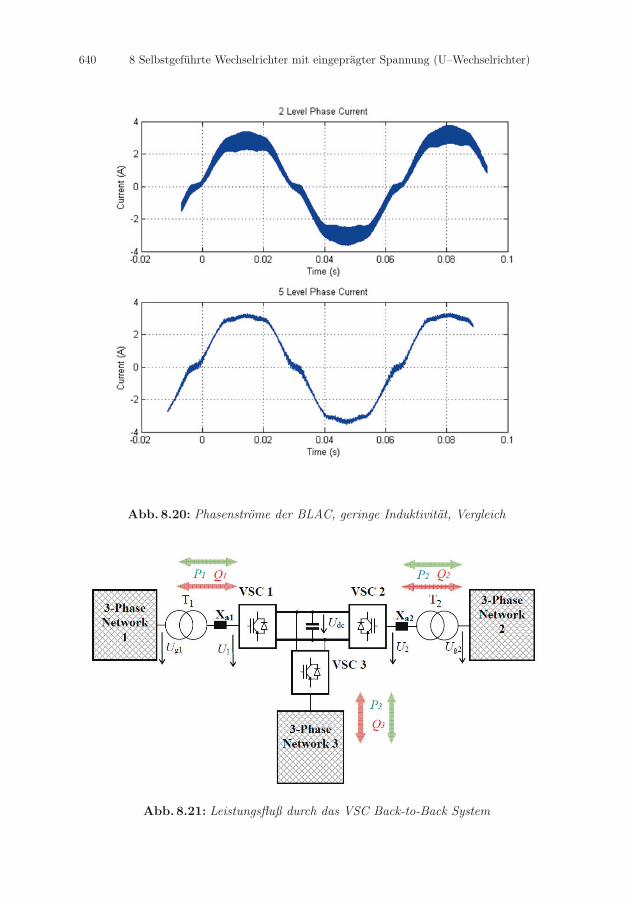
640 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
Abb. 8.20: Phasenströme der BLAC, geringe Induktivität, Vergleich
Abb. 8.21: Leistungsfluß durch das VSC Back-to-Back System
8.3 U–Umrichter mit variabler Zwischenkreisspannung 641
unterschiedlich sind. Weiteren Einfluß haben unterschiedliche Schaltfrequenzender Wechselrichter und unterschiedliche Schaltzeiten der verwendeten Leistungs-halbleiter (Hier sei auf die Verkopplung der Wechselrichter aufgrund parasitär-er Induktivitäten in den Zwischenkreis–Kondensatoren und der Verschienungdes Zwischenkreises hingewiesen; dies wird in Kap. 8.6.4.4 diskutiert, und eswird auf mögliche erhebliche Erhöhungen der Halbleiter-Beanspruchungen hin-gewiesen). Eine weitere Methode zur Analyse nutzt den Frequenzbereich, umdie Oberschwingungen zu bestimmen. Ein- und Ausschaltvorgänge der Wechsel-richter werden mittels der Flußregelung realisiert, bei der der Flußzustand desTransformators berücksichtigt wird. Um derartige komplexe Aufgabenstellungenbearbeiten zu können wird die Simulation eingesetzt. Es gibt dabei zwei un-terschiedliche Bereiche der Simulation, die im nächsten Unterkapitel dargestelltwerden.
8.3.4.7 SimulationsverfahrenEs gibt zwei unterschiedliche Aufgabenstellungen bei der Simulation, die Simu-lation des Stellglieds an sich und die Simulation des Stellglieds im betrachteten,umgebenden System, beispielsweise einem drehzahlvariablen Antrieb oder einemaktiven Filter oder bei FACTs von mehreren Stellgliedern und den gespeistenNetzen.
Bei der ersten Aufgabenstellung ist das allgemeine Ziel eine Optimierung desStellglieds an sich zu erreichen. Dies bedeutet, es sollen nachvollziehbare Aus-sagen über die statischen und dynamischen Beanspruchungen der Komponentendes Stellglieds, der Sicherheitsabstände zu den zulässigen Grenzwerten, der Ver-luste, der Schaltzeiten etc. bei normalem Betrieb aber auch bei Fehlfunktionenbeispielsweise fehlerhaften Ansteuerungen oder Störungen von außen, die einenfehlerhaften Betriebszustand bewirken, zum Beispiel einen Kurzschluß - sieheKapitel 8.6.4.4 bis 8.6.4.7 - zu erarbeiten sein.
Wesentlich ist weiterhin, daß mittels dieses Vorgehens auch eine Variationder veränderbaren Daten der betreffenden Komponenten möglich ist, um eineAnalyse und somit eine Optimierung zu erreichen. Diese Aufgabenstellung wirdin [62], Kapitel 11 ausführlich dargestellt. In diesem Kapitel werden die Mo-delle der Leistungsdiode, des MOSFET, des IGBT und des IGCT vorgestellt.Die physikalischen Modelle basieren auf der Halbleiterphysik und nützen dieseGleichungen insbesondere für die statischen und dynamischen Zustände in derdrift-Zone (Auf- und Abbau der Plasma-Verteilung sowie der Raumladungszo-ne mit der Feldstruktur). Anzumerken ist in diesem Zusammenhang, daß bei dervorliegenden Modellbildung die Beweglichkeits-Theorie von Mnatsakanov - Kapi-tel 1.5.4.2 in [62] - verwendet wurde. Die Theorie berücksichtigt den zwischen denLöchern und den Elektronen bestehenden „drag-Effekt“. Durch den drag-Effektwird die räumliche Verteilung des Plasmas beeinflußt und damit die Verläufe vonSpannung und Strom bei Schaltvorgängen aber auch im stationären Zustand.Die Versuchs- und Simulations-Bedingungen setzten außerdem eine Testsitua-tion ohne Beschaltung voraus. Dies ist die „härteste“ Randbedingung, da bei

642 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
dieser Voraussetzung das dynamische Verhalten der Halbleiter - und nicht dasder Beschaltung - das sichtbare Schaltverhalten vom Halbleiter bestimmt. Beider Validierung der Simulationsergebnisse gegenüber den realen Messergebnis-sen ist eine sehr gute Übereinstimmung festzustellen, wenn berücksichtigt wird,daß die genauen Halbleiter-physikalischen Daten des Meß-Halbleiters nicht genaubekannt sind. Aus den Ausführungen zur Modellbildung ist allerdings auch zuentnehmen, daß nur eine physikalische Modellbildung derartig genaue Ergebnisseerzielen kann. Eine physikalische Modellbildung setzt aber insbesondere eine sehraufwändige Modellierung der Driftzone des Halbleiters voraus und dies bedeu-tet weiterhin, es müssen vom Hersteller des Halbleiters möglichst genaue - unddaher sehr sensible - Information gegeben werden. Die Verknüpfung - Aufwandbei der physikalischen Modellbildung und sensible Daten des betreffenden Halb-leiters - ist eine gewisse Herausforderung, die im allgemeinen nicht angenommenwird. Aufgrund dieser komplexen Ausgangs-Situation sind nur in Sonderfällenderartige, sehr hilfreiche Modelle verfügbar. Es ist aber zu hoffen, daß in derZukunft derartige wichtige und hilfreiche Modelle vom Halbleiter-Hersteller ver-fügbar sind; die sensiblen Daten können in diesem Fall verschlüsselt werden.
Im zweiten Simulationsziel soll das Stellglied in seiner Umgebung dargestelltwerden, um die gegenseitigen Beeinflussungen zu erkennen. Beispielsweise wer-den das genützte PWM-Verfahren einerseits und das Lastverhalten (ohmsch-induktiv, Gegenspannung) andereseits die Strom-Oberschwingungen bestimmen.Für derartige Fragestellungen gibt es inzwischen eine Vielzahl von der Aufga-benstellung angepaßten Simulationsprogrammen, die im Folgenden aufgezähltwerden:
In der Dissertation [693] wird auch eine Aufstellung des Standes der Tech-nik hinsichtlich der Situation von Wechselrichtern in Versorgungsnetzen gegeben.Simulations-Verfahren, im Zeitbereich [694] [700] [703]; iterativ [696] [719] [720];netzgeführte Stellglieder im Zustandsbereich [712] [713]; im Frequenzbereich[726]; mittels Fourier-Ansatz [733]; mittels Mittelwert-Ansatz [725]; Regelungmittels Prädiktion [747]; mit virtuellem Fluß-Ansatz [727] [748]; bei Hysterese-Ansatz [732]; Mehr-Punkt-Wechselrichter: Elimination Oberschwingungen [699];NPC [724]; PWM-Methoden [731] [738]; kaskadierte Wechselrichter [694] [714](nicht für U-BBC); M2M [728] [729] [730] und [705] [706] [707] sowie Kapitel 8.5.9;Einschalt-Stoßstrom Lit. [704] [713] [723] [736] [740] [742]; Einschalt-Stromstoß-Vermeidung [695] [697] [698] [737] [741]; Serienschaltung VSC [734]; FACTS [735][749]; Lastverteilung mehrere U-Wechselrichter [722] [749]. HVDC [717]; Netzeund Mehrpunkt-Wechselrichter [739].
8.3.4.8 Regelung - RealisierungIn den obigen Darstellungen wurde die Entwicklung der VSC bis zum BBC hin-sichtlich der Schaltungstechnik komprimiert abgehandelt. Ein wesentlicher Punktder Abhandlungen war ein Vergleich der 2-Punkt- und Mehrpunkt-Wechselrichterhinsichtlich der THD und der Kosten, dieser Vergleich umfaßte sowohl dieWechselrichter- als auch der BBC-Versionen. Ein wichtiger Aspekt bei der Reali-
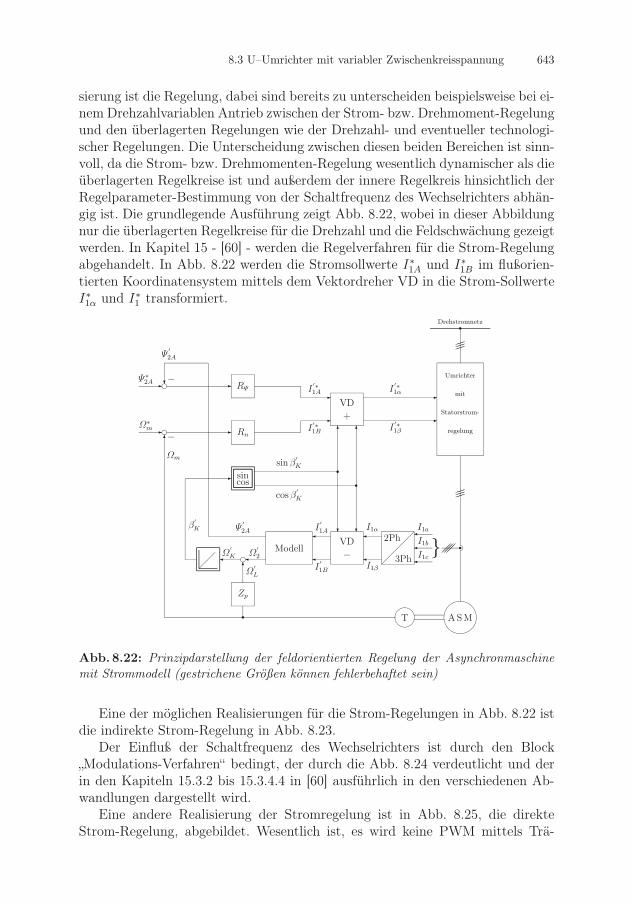
8.3 U–Umrichter mit variabler Zwischenkreisspannung 643
sierung ist die Regelung, dabei sind bereits zu unterscheiden beispielsweise bei ei-nem Drehzahlvariablen Antrieb zwischen der Strom- bzw. Drehmoment-Regelungund den überlagerten Regelungen wie der Drehzahl- und eventueller technologi-scher Regelungen. Die Unterscheidung zwischen diesen beiden Bereichen ist sinn-voll, da die Strom- bzw. Drehmomenten-Regelung wesentlich dynamischer als dieüberlagerten Regelkreise ist und außerdem der innere Regelkreis hinsichtlich derRegelparameter-Bestimmung von der Schaltfrequenz des Wechselrichters abhän-gig ist. Die grundlegende Ausführung zeigt Abb. 8.22, wobei in dieser Abbildungnur die überlagerten Regelkreise für die Drehzahl und die Feldschwächung gezeigtwerden. In Kapitel 15 - [60] - werden die Regelverfahren für die Strom-Regelungabgehandelt. In Abb. 8.22 werden die Stromsollwerte I∗1A und I∗1B im flußorien-tierten Koordinatensystem mittels dem Vektordreher VD in die Strom-SollwerteI∗1α und I∗1 transformiert.
��
sincos
������
������
RΨ
Rn
ModellVD
−
VD
+
Zp
2Ph
3Ph
Umrichter
mit
Statorstrom-
regelung
�
�
�
�
�
�
�
�
�
� �
�
�
�
�
�
�
�
�
� �
�
�
�
� �
�
�
�I
′1B
I′1A
I′∗1B
I′∗1A
I1β
I1α
I′∗1β
I′∗1α
sin β′K
cos β′K
I1c
I1b
I1a
Drehstromnetz
A S MT
Ω′K Ω
′2
Ω′L
Ωm
Ω∗m
Ψ ∗2A
Ψ′2A
−
−
Ψ′2A
β′K
}������
��
��
����
��
�
Abb. 8.22: Prinzipdarstellung der feldorientierten Regelung der Asynchronmaschinemit Strommodell (gestrichene Größen können fehlerbehaftet sein)
Eine der möglichen Realisierungen für die Strom-Regelungen in Abb. 8.22 istdie indirekte Strom-Regelung in Abb. 8.23.
Der Einfluß der Schaltfrequenz des Wechselrichters ist durch den Block„Modulations-Verfahren“ bedingt, der durch die Abb. 8.24 verdeutlicht und derin den Kapiteln 15.3.2 bis 15.3.4.4 in [60] ausführlich in den verschiedenen Ab-wandlungen dargestellt wird.
Eine andere Realisierung der Stromregelung ist in Abb. 8.25, die direkteStrom-Regelung, abgebildet. Wesentlich ist, es wird keine PWM mittels Trä-

644 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
I1K
Ud
ASM
Modulations-
verfahren
kI1K*
I1S
StromreglerU
1S*
VD
+
U1K*
Entkopplung
�K
VD
-
�K
I1K
Abb. 8.23: Indirekte Stromregelung in einem flußfesten Koordinatensystem
U1
S* U1a*
U1c*
Abb. 8.24: Signalflußplan des Unterschwingungsverfahrens
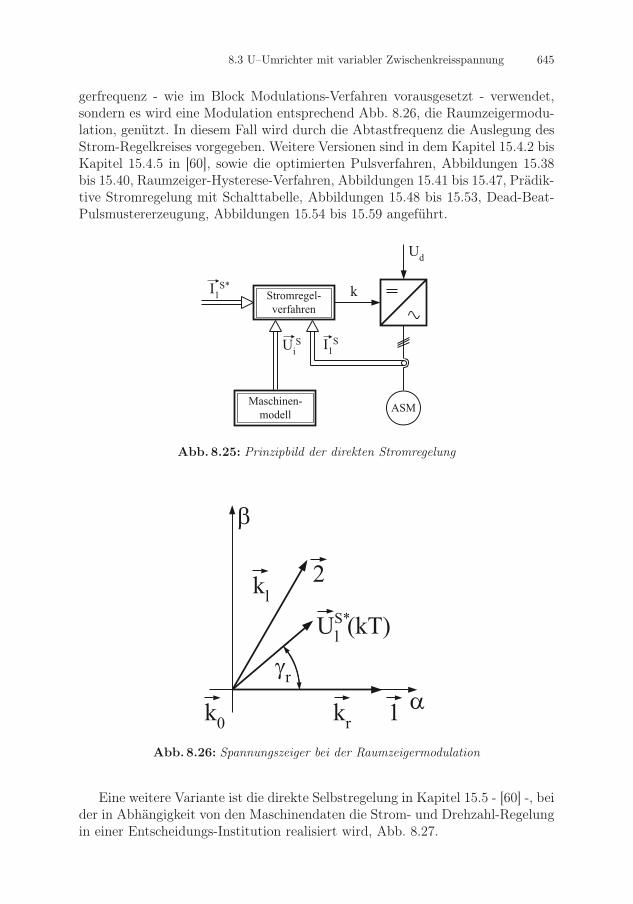
8.3 U–Umrichter mit variabler Zwischenkreisspannung 645
gerfrequenz - wie im Block Modulations-Verfahren vorausgesetzt - verwendet,sondern es wird eine Modulation entsprechend Abb. 8.26, die Raumzeigermodu-lation, genützt. In diesem Fall wird durch die Abtastfrequenz die Auslegung desStrom-Regelkreises vorgegeben. Weitere Versionen sind in dem Kapitel 15.4.2 bisKapitel 15.4.5 in [60], sowie die optimierten Pulsverfahren, Abbildungen 15.38bis 15.40, Raumzeiger-Hysterese-Verfahren, Abbildungen 15.41 bis 15.47, Prädik-tive Stromregelung mit Schalttabelle, Abbildungen 15.48 bis 15.53, Dead-Beat-Pulsmustererzeugung, Abbildungen 15.54 bis 15.59 angeführt.
ASM
Stromregel-
verfahren
Ud
k
I1S
I1S*
Maschinen-
modell
UiS
Abb. 8.25: Prinzipbild der direkten Stromregelung
�
�
�r
kl
kr
k0
1
2
US*
l(kT)
Abb. 8.26: Spannungszeiger bei der Raumzeigermodulation
Eine weitere Variante ist die direkte Selbstregelung in Kapitel 15.5 - [60] -, beider in Abhängigkeit von den Maschinendaten die Strom- und Drehzahl-Regelungin einer Entscheidungs-Institution realisiert wird, Abb. 8.27.

646 8 Selbstgeführte Wechselrichter mit eingeprägter Spannung (U–Wechselrichter)
Us�
Motormodell
Us�
Rs Rs
��
��
2/3-
KW
� -Regler
��a
��b
��c
NAA
S a
S b
S c
Ud
3~
I sab
Ud
S a,b,c
IM
3/2-
WR-Mod.
Is�
Is�
Us�
Us�
M
M*
F*T
�*
Id
F - ReglerT
�m
SA
M-Regler
Mi
KW
Abb. 8.27: Blockschaltbild der Direkten Selbstregelung (DSR)
Die Zeitkonstanten im mechanischen und im technologischen Systemen sindim allgemeinen wesentlich größer als die Zeitkonstanten bzw. Totzeiten im Strom-bzw. Drehmomenten-Regelkreis. Aufgrund dieser Sachlage - der geringeren An-forderungen an das Rechnersystem - wurden die Drehzahl- bzw. technologischenRegelkreise praktisch immer in software realisiert. Dies hat außerdem den Vor-teil der Entkopplung von hardware-Arbeiten, d.h. es konnten jederzeit nochÄnderungen in der Regelungsstruktur oder den Regelparametern vorgenommenwerden. Demgegenüber waren die Anforderungen an den inneren Strom- bzw.Drehmomenten-Regelkreis wesentlich höher, da zusätzlich zu beachten ist, daßdie realisierte Dynamik des geschlossenen, inneren Strom-Regelkreises die er-reichbare Dynamik der äußeren, überlagerten Regelkreises bestimmt - siehe bei-spielsweise Kapitel 3.1, 3.2 und 4.1 bis 4.4 in [60].
Die hohen regelungstechnischen Anforderungen werden aber noch übertroffenvon den in Kapitel 13.9 in [60] gestellten Forderungen. Bei der flußorientiertenRegelung von AC-Maschinen wird immer vorausgesetzt, daß das reale Flußsys-tem in der Maschine und das Abbild in dem elektronischen Regelsystem identischsind, damit die Entkopplung zwischen Fluß- und Drehmoment-Regelkreis sicher-gestellt ist. Leider benötigen die A/D- und D/A-Wandungen eine gewisse Zeitfür die Wandlung, die Meßgrößen müssen vorher gefiltert werden, um aliasingzu vermeiden, es erfolgt eine Abtastung der Signale, es gibt Rechenzeiten in derSignalverarbeitung, d.h. es müssen bei der digitalen Signalverarbeitung zeitlicheEinschränkungen beachtet werden. Diese Einschränkungen führen zu einer Diffe-renz in den Fluß-Orientierungen . Wenn beispielsweise eine Winkeldifferenz von
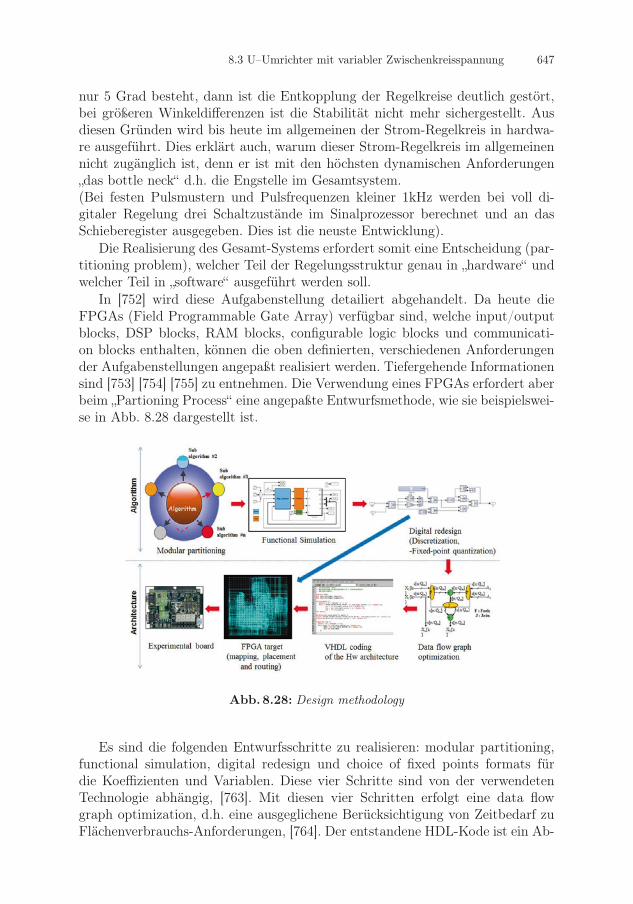
8.3 U–Umrichter mit variabler Zwischenkreisspannung 647
nur 5 Grad besteht, dann ist die Entkopplung der Regelkreise deutlich gestört,bei größeren Winkeldifferenzen ist die Stabilität nicht mehr sichergestellt. Ausdiesen Gründen wird bis heute im allgemeinen der Strom-Regelkreis in hardwa-re ausgeführt. Dies erklärt auch, warum dieser Strom-Regelkreis im allgemeinennicht zugänglich ist, denn er ist mit den höchsten dynamischen Anforderungen„das bottle neck“ d.h. die Engstelle im Gesamtsystem.(Bei festen Pulsmustern und Pulsfrequenzen kleiner 1kHz werden bei voll di-gitaler Regelung drei Schaltzustände im Sinalprozessor berechnet und an dasSchieberegister ausgegeben. Dies ist die neuste Entwicklung).
Die Realisierung des Gesamt-Systems erfordert somit eine Entscheidung (par-titioning problem), welcher Teil der Regelungsstruktur genau in „hardware“ undwelcher Teil in „software“ ausgeführt werden soll.
In [752] wird diese Aufgabenstellung detailiert abgehandelt. Da heute dieFPGAs (Field Programmable Gate Array) verfügbar sind, welche input/outputblocks, DSP blocks, RAM blocks, configurable logic blocks und communicati-on blocks enthalten, können die oben definierten, verschiedenen Anforderungender Aufgabenstellungen angepaßt realisiert werden. Tiefergehende Informationensind [753] [754] [755] zu entnehmen. Die Verwendung eines FPGAs erfordert aberbeim „Partioning Process“ eine angepaßte Entwurfsmethode, wie sie beispielswei-se in Abb. 8.28 dargestellt ist.
Abb. 8.28: Design methodology
Es sind die folgenden Entwurfsschritte zu realisieren: modular partitioning,functional simulation, digital redesign und choice of fixed points formats fürdie Koeffizienten und Variablen. Diese vier Schritte sind von der verwendetenTechnologie abhängig, [763]. Mit diesen vier Schritten erfolgt eine data flowgraph optimization, d.h. eine ausgeglichene Berücksichtigung von Zeitbedarf zuFlächenverbrauchs-Anforderungen, [764]. Der entstandene HDL-Kode ist ein Ab-
http://www.springer.com/978-3-642-30103-2
























![Antidepressant and Antiaging Effects of Açaí (Euterpe ...€¦ · pathophysiology of unipolar and bipolar depression [16]. In parallel to oxidative stress, immunoinflammatory mecha-nisms](https://img.pdfslide.org/doc/110x75/5f35ec8467a8e700807ec0ea/antidepressant-and-antiaging-effects-of-aa-euterpe-pathophysiology-of-unipolar.jpg)



