Embed Size (px)
Citation preview
Adaptive, entscheidungsbasierteKanalschätzung in mobilenMIMO-OFDM Systemen
Vom Fachbereich Elektrotechnikder Helmut-Schmidt-Universität /
Universität der Bundeswehr Hamburgzur Erlangung des akademischen Grades eines
Doktor-Ingenieursgenehmigte
Dissertation
vorgelegt von
Patric Alain Beinschobaus Hamburg
Hamburg 2010

Gutachter: Prof. Dr.-Ing. Udo Zölzer(Helmut-Schmidt-Universität Hamburg)
Prof. Dr.-Ing. Gerd Scholl(Helmut-Schmidt-Universität Hamburg)
Tag der mündlichen Prüfung: 12.11.2010
Vorwort
Die vorliegende Dissertation ist während meiner Tätigkeit als wissenschaftli-cher Mitarbeiter an der Professur für Allgemeine Nachrichtentechnik an derHelmut-Schmidt-Universität / Universität der Bundeswehr entstanden.
Ich möchte mich bei meinem Betreuer Professor Udo Zölzer bedanken fürdie Möglichkeit diese Arbeit durchzuführen und die Anregungen während mei-nes Forschungsvorhabens und bei der Verschriftlichung. Weiterhin gilt meinDank meinem Diplomarbeitsbetreuer und späteren Kollegen Matthias Liebereifür die wichtigen Forschungsimpulse, fachlichen Ratschläge und Diskussionen.Meine Studenten Markus Muxfeldt, Ken Suto, Kai Thiemrodt und mein spä-terer Kollege Jan Oliver Hinz haben außerdem wichtige Beiträge zu dieserArbeit geleistet. Auch allen weiteren Kollegen aus dem Arbeitsbereich Allge-meine Nachrichtentechnik sei gedankt.
Ich möchte mich bei Professor Robert Fischer bedanken für die wichtigeRückmeldung bei den ITG Fachgruppensitzungen; Professor Gerd Scholl fürdie Übernahme des Zweitgutachtens und Professor Christian Schäffer für dieÜbernahme des Prüfungsvorsitzes.
Mein besonderer Dank gilt meiner Frau Ulrike und meinen Eltern Otto undDanuta Beinschob.
Hamburg, im November 2010
Patric Beinschob
iii

Inhaltsverzeichnis
1. Einführung 11.1. Orthogonal Frequency Division Multiplexing . . . . . . . . . . 41.2. Multiple-Input Multiple-Output . . . . . . . . . . . . . . . . . . 9
1.2.1. Vektorisierte Formulierung der MIMO-Systemgleichung 111.3. Räumliches Kanalmodell . . . . . . . . . . . . . . . . . . . . . . 121.4. Modulationstechniken . . . . . . . . . . . . . . . . . . . . . . . 12
1.4.1. Interleaver . . . . . . . . . . . . . . . . . . . . . . . . . . 141.4.2. Symbolmodulation . . . . . . . . . . . . . . . . . . . . . 151.4.3. Bit Interleaved Coded Modulation . . . . . . . . . . . . 161.4.4. MIMO-OFDM Spatial Multiplexing . . . . . . . . . . . 18
1.5. Kanalcodierung mit LDPC Codes . . . . . . . . . . . . . . . . . 191.5.1. Codierung . . . . . . . . . . . . . . . . . . . . . . . . . . 191.5.2. Konstruktion . . . . . . . . . . . . . . . . . . . . . . . . 201.5.3. Log Likelihood Algebra . . . . . . . . . . . . . . . . . . 221.5.4. L-Werte aus dem AWGN-Kanal . . . . . . . . . . . . . . 241.5.5. LDPC Decodierung . . . . . . . . . . . . . . . . . . . . 251.5.6. Ensemble-Optimierung . . . . . . . . . . . . . . . . . . . 251.5.7. EXIT-Chart . . . . . . . . . . . . . . . . . . . . . . . . . 26
2. MIMO Detektion 312.1. Lineare Detektion . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.1.1. Symboldetektion . . . . . . . . . . . . . . . . . . . . . . 332.2. Sukzessive Interferenzauslöschung . . . . . . . . . . . . . . . . . 34
2.2.1. VBLAST/ZF . . . . . . . . . . . . . . . . . . . . . . . . 352.2.2. VBLAST/MMSE . . . . . . . . . . . . . . . . . . . . . . 35
2.3. Symbolvektor-Detektion . . . . . . . . . . . . . . . . . . . . . . 372.3.1. Maximum Likelihood Symbolvektor-Detektor . . . . . . 382.3.2. Soft Maximum Likelihood-Detektor . . . . . . . . . . . 38
2.4. MIMO Bit-Detektion . . . . . . . . . . . . . . . . . . . . . . . . 392.4.1. Maximum Likelihood Bit-Detektor . . . . . . . . . . . . 402.4.2. Maximum A Posteriori Bit-Detektor . . . . . . . . . . . 40
v
Inhaltsverzeichnis
2.5. Vergleich der Detektionsverfahren . . . . . . . . . . . . . . . . . 412.6. Entzerrer im Zeitbereich . . . . . . . . . . . . . . . . . . . . . . 442.7. Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . 46
3. Adaptive, entscheidungsbasierte Kanalschätzung 493.1. Recursive Least Squares-Kanalschätzung . . . . . . . . . . . . . 513.2. Pilot-Initialisierung . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.2.1. Orthogonale Sequenzen . . . . . . . . . . . . . . . . . . 563.2.2. Nicht-orthogonale Pilotsequenzen . . . . . . . . . . . . . 59
3.3. Entscheidungsrückführung . . . . . . . . . . . . . . . . . . . . . 603.4. Kanalprädiktion . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.4.1. Zero-Order-Prädiktor . . . . . . . . . . . . . . . . . . . 623.4.2. RLS-Prädiktor . . . . . . . . . . . . . . . . . . . . . . . 623.4.3. Exponentielle Vorhersage . . . . . . . . . . . . . . . . . 643.4.4. Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . 653.4.5. Zusammenfassung . . . . . . . . . . . . . . . . . . . . . 67
4. Verbesserung der Kanalschätzung inMIMO-BICM-Systemen 694.1. Verzögerungskritische Systeme . . . . . . . . . . . . . . . . . . 70
4.1.1. Systeme mit Rahmenverschachtelung . . . . . . . . . . . 704.1.2. Beschränkungen OFDM-blockverschachtelter Systeme . 714.1.3. Verbesserung der Kanalschätzung in verzögerungskriti-
schen Systemen durch Rückführung codierter Daten . . 734.1.4. Codegestützte MIMO-Symbolrekonstruktion . . . . . . 76
4.2. Nachbearbeitung der Kanalschätzung . . . . . . . . . . . . . . . 804.2.1. Exponentielle Rahmengewichtung . . . . . . . . . . . . 834.2.2. Rekursives Smoothing . . . . . . . . . . . . . . . . . . . 864.2.3. Glättung der Kanalübertragungsfunktion durch Median-
Filterung . . . . . . . . . . . . . . . . . . . . . . . . . . 904.2.4. Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung 934.3.1. Erweiterte Kanalschätzung durch Turbo Decodierung
mit LDPC-Codes . . . . . . . . . . . . . . . . . . . . . . 974.3.2. Summation der a posteriori LLRs . . . . . . . . . . . . . 1024.3.3. Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . 103
5. Zusammenfassung 107
vi
Inhaltsverzeichnis
Anhang 109
A. Parameter des 3GPP Kanalmodells 111
B. Matrix-Inversionslemma 115
C. Turbo Decoder 117
Symbol- und Abkürzungsverzeichnis 121
Literaturverzeichnis 127
Index 135
Lebenslauf 137
vii

1. Einführung
Spätestens seit Beginn des analog sunset, evident durch das Abschalten derletzten analogen terrestrischen Fernsehsender in Deutschland (2008) und denUSA (2009) ist klar, dass in der digitalen Übertragungstechnik die Zukunftliegt. Paradoxerweise stellt uns aber gerade diese neue Technik vor Probleme,die vorher bereits gelöst waren. So bleibt der Bildschirm in Hochgeschwindig-keitszügen mit handelsüblichen DVB-T Empfängern oft dunkel. Auch Breit-band-Internetverbindungen für Reisende in der Bahn oder in Flugzeugen sindnoch nicht so selbstverständlich wie der DSL-Zugang zu Hause. In der alwayson Wissensgesellschaft ist der Reisende geradezu abgeschnitten von der Welt,in der er sich mit hoher Geschwindigkeit bewegt. Stellt doch die Passagier-Ka-bine ein besonders anspruchsvolles Szenario für ein Kommunikationsnetz dar:Viele Nutzer mit unterschiedlichen Datenanforderungen durch verschiedeneDienste wie E-Mailing, Browsing, Audio/Video Streaming auf engem Raummit hoher Hindernisdichte und einer Vielzahl möglicher Signalausbreitungs-pfade. Zuverlässige, hochratige Kommunikation bei Geschwindigkeiten bis zu350 km/h wurde bereits als Zielvorgabe zukünftiger Mobilfunknetze formuliert[3rd09]. Die vorliegende Arbeit will dazu beitragen, den Zugriff auf Informa-tion für viele Nutzer zu ermöglichen. Dazu wurden Verfahren entwickelt, diespeziell in mobilen Empfängern helfen sollen, den Breitband-Funkkanal mög-lichst genau zu vermessen, um die Übertragungsqualität auch unter widrigenBedingungen auf einem hohem Niveau stattfinden zu lassen. Als Grundlagefür alle diese Verfahren dient eine Technik, die als Schlüsseltechnologie zurUnterstützung von Datenraten-Anforderungen zukünftiger Kommunikations-netzwerke angesehen wird: Unter MIMO (Multiple-Input Multiple-Output) ver-steht man die koordinierte Nutzung mehrerer Sende- und Empfangsantennenzur Funkübertragung.
Eine Steigerung der Kanalkapazität kann in MIMO-Systemen durch ei-ne Erhöhung der rechnerischen Komplexität bzw. des Implementierungsauf-wand erreicht werden, während die Primärressourcen wie Gesamtsendeleis-tung und Kanalbandbreite konstant gehalten werden. Diese Steigerung bil-det die grundsätzliche Motivation, sich mit drahtlosen MIMO-Übertragungs-techniken auseinander zu setzen. Die theoretisch hohen Kapazitäten, die
1
1. Einführung
−30
−20
−10
0
−20 −10 0 10 20f in MHz
Sender
LD
Sin
dB
→
−30
−20
−10
0
−20 −10 0 10 20f in MHzEmpfänger
LD
Sin
dB
→
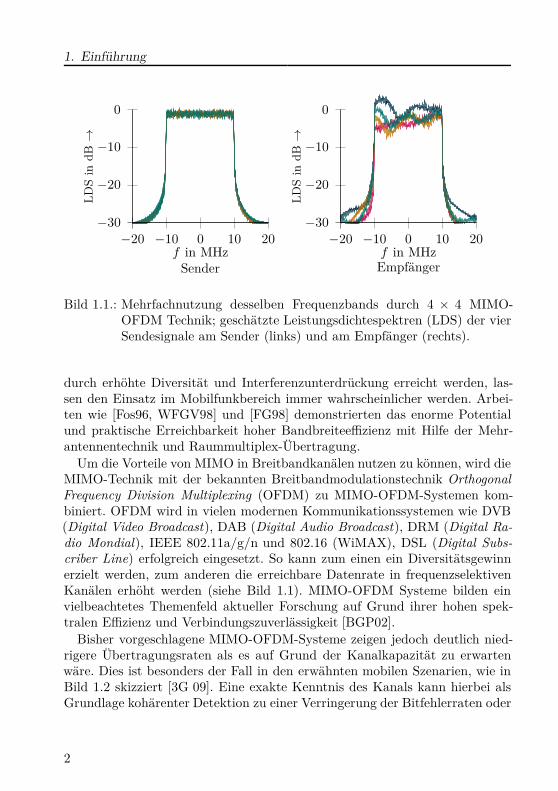
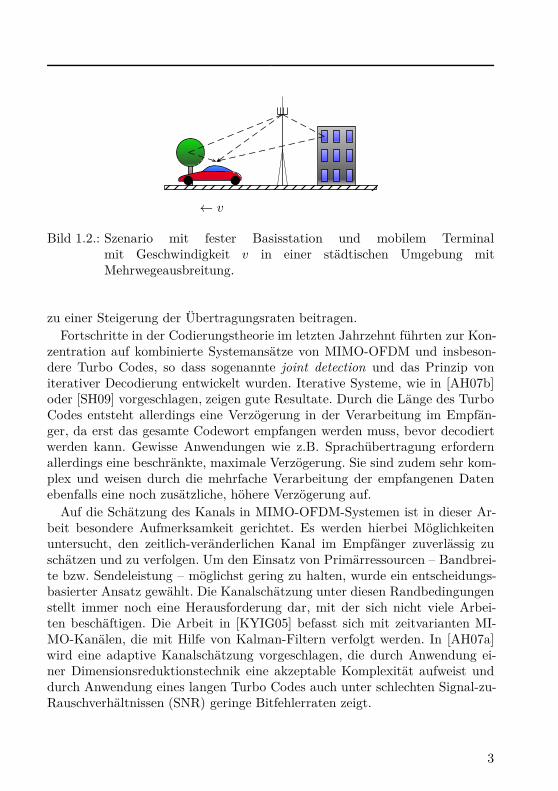
Bild 1.1.: Mehrfachnutzung desselben Frequenzbands durch 4 × 4 MIMO-OFDM Technik; geschätzte Leistungsdichtespektren (LDS) der vierSendesignale am Sender (links) und am Empfänger (rechts).
durch erhöhte Diversität und Interferenzunterdrückung erreicht werden, las-sen den Einsatz im Mobilfunkbereich immer wahrscheinlicher werden. Arbei-ten wie [Fos96, WFGV98] und [FG98] demonstrierten das enorme Potentialund praktische Erreichbarkeit hoher Bandbreiteeffizienz mit Hilfe der Mehr-antennentechnik und Raummultiplex-Übertragung.
Um die Vorteile von MIMO in Breitbandkanälen nutzen zu können, wird dieMIMO-Technik mit der bekannten Breitbandmodulationstechnik OrthogonalFrequency Division Multiplexing (OFDM) zu MIMO-OFDM-Systemen kom-biniert. OFDM wird in vielen modernen Kommunikationssystemen wie DVB(Digital Video Broadcast), DAB (Digital Audio Broadcast), DRM (Digital Ra-dio Mondial), IEEE 802.11a/g/n und 802.16 (WiMAX), DSL (Digital Subs-criber Line) erfolgreich eingesetzt. So kann zum einen ein Diversitätsgewinnerzielt werden, zum anderen die erreichbare Datenrate in frequenzselektivenKanälen erhöht werden (siehe Bild 1.1). MIMO-OFDM Systeme bilden einvielbeachtetes Themenfeld aktueller Forschung auf Grund ihrer hohen spek-tralen Effizienz und Verbindungszuverlässigkeit [BGP02].
Bisher vorgeschlagene MIMO-OFDM-Systeme zeigen jedoch deutlich nied-rigere Übertragungsraten als es auf Grund der Kanalkapazität zu erwartenwäre. Dies ist besonders der Fall in den erwähnten mobilen Szenarien, wie inBild 1.2 skizziert [3G 09]. Eine exakte Kenntnis des Kanals kann hierbei alsGrundlage kohärenter Detektion zu einer Verringerung der Bitfehlerraten oder
2
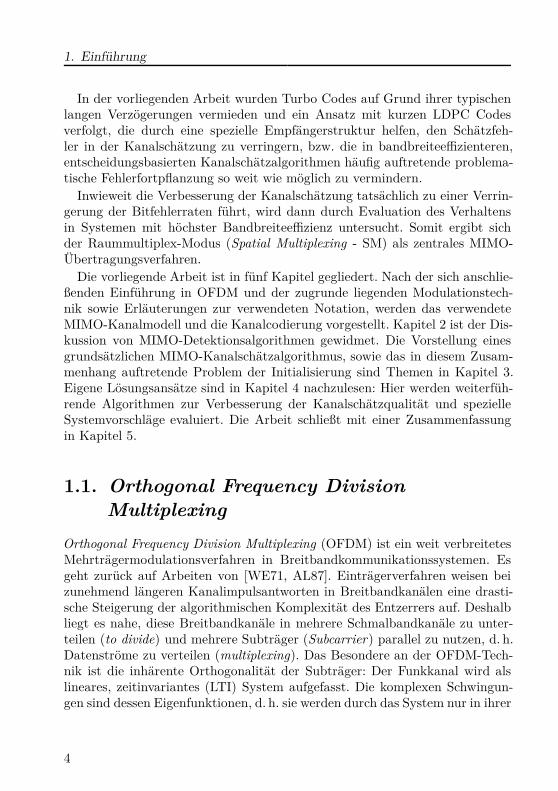
← v
Bild 1.2.: Szenario mit fester Basisstation und mobilem Terminalmit Geschwindigkeit v in einer städtischen Umgebung mitMehrwegeausbreitung.
zu einer Steigerung der Übertragungsraten beitragen.Fortschritte in der Codierungstheorie im letzten Jahrzehnt führten zur Kon-
zentration auf kombinierte Systemansätze von MIMO-OFDM und insbeson-dere Turbo Codes, so dass sogenannte joint detection und das Prinzip voniterativer Decodierung entwickelt wurden. Iterative Systeme, wie in [AH07b]oder [SH09] vorgeschlagen, zeigen gute Resultate. Durch die Länge des TurboCodes entsteht allerdings eine Verzögerung in der Verarbeitung im Empfän-ger, da erst das gesamte Codewort empfangen werden muss, bevor decodiertwerden kann. Gewisse Anwendungen wie z.B. Sprachübertragung erfordernallerdings eine beschränkte, maximale Verzögerung. Sie sind zudem sehr kom-plex und weisen durch die mehrfache Verarbeitung der empfangenen Datenebenfalls eine noch zusätzliche, höhere Verzögerung auf.
Auf die Schätzung des Kanals in MIMO-OFDM-Systemen ist in dieser Ar-beit besondere Aufmerksamkeit gerichtet. Es werden hierbei Möglichkeitenuntersucht, den zeitlich-veränderlichen Kanal im Empfänger zuverlässig zuschätzen und zu verfolgen. Um den Einsatz von Primärressourcen – Bandbrei-te bzw. Sendeleistung – möglichst gering zu halten, wurde ein entscheidungs-basierter Ansatz gewählt. Die Kanalschätzung unter diesen Randbedingungenstellt immer noch eine Herausforderung dar, mit der sich nicht viele Arbei-ten beschäftigen. Die Arbeit in [KYIG05] befasst sich mit zeitvarianten MI-MO-Kanälen, die mit Hilfe von Kalman-Filtern verfolgt werden. In [AH07a]wird eine adaptive Kanalschätzung vorgeschlagen, die durch Anwendung ei-ner Dimensionsreduktionstechnik eine akzeptable Komplexität aufweist unddurch Anwendung eines langen Turbo Codes auch unter schlechten Signal-zu-Rauschverhältnissen (SNR) geringe Bitfehlerraten zeigt.
3
1. Einführung
In der vorliegenden Arbeit wurden Turbo Codes auf Grund ihrer typischenlangen Verzögerungen vermieden und ein Ansatz mit kurzen LDPC Codesverfolgt, die durch eine spezielle Empfängerstruktur helfen, den Schätzfeh-ler in der Kanalschätzung zu verringern, bzw. die in bandbreiteeffizienteren,entscheidungsbasierten Kanalschätzalgorithmen häufig auftretende problema-tische Fehlerfortpflanzung so weit wie möglich zu vermindern.
Inwieweit die Verbesserung der Kanalschätzung tatsächlich zu einer Verrin-gerung der Bitfehlerraten führt, wird dann durch Evaluation des Verhaltensin Systemen mit höchster Bandbreiteeffizienz untersucht. Somit ergibt sichder Raummultiplex-Modus (Spatial Multiplexing - SM) als zentrales MIMO-Übertragungsverfahren.
Die vorliegende Arbeit ist in fünf Kapitel gegliedert. Nach der sich anschlie-ßenden Einführung in OFDM und der zugrunde liegenden Modulationstech-nik sowie Erläuterungen zur verwendeten Notation, werden das verwendeteMIMO-Kanalmodell und die Kanalcodierung vorgestellt. Kapitel 2 ist der Dis-kussion von MIMO-Detektionsalgorithmen gewidmet. Die Vorstellung einesgrundsätzlichen MIMO-Kanalschätzalgorithmus, sowie das in diesem Zusam-menhang auftretende Problem der Initialisierung sind Themen in Kapitel 3.Eigene Lösungsansätze sind in Kapitel 4 nachzulesen: Hier werden weiterfüh-rende Algorithmen zur Verbesserung der Kanalschätzqualität und spezielleSystemvorschläge evaluiert. Die Arbeit schließt mit einer Zusammenfassungin Kapitel 5.
1.1. Orthogonal Frequency Division
Multiplexing
Orthogonal Frequency Division Multiplexing (OFDM) ist ein weit verbreitetesMehrträgermodulationsverfahren in Breitbandkommunikationssystemen. Esgeht zurück auf Arbeiten von [WE71, AL87]. Einträgerverfahren weisen beizunehmend längeren Kanalimpulsantworten in Breitbandkanälen eine drasti-sche Steigerung der algorithmischen Komplexität des Entzerrers auf. Deshalbliegt es nahe, diese Breitbandkanäle in mehrere Schmalbandkanäle zu unter-teilen (to divide) und mehrere Subträger (Subcarrier) parallel zu nutzen, d. h.Datenströme zu verteilen (multiplexing). Das Besondere an der OFDM-Tech-nik ist die inhärente Orthogonalität der Subträger: Der Funkkanal wird alslineares, zeitinvariantes (LTI) System aufgefasst. Die komplexen Schwingun-gen sind dessen Eigenfunktionen, d. h. sie werden durch das System nur in ihrer
4
1.1. Orthogonal Frequency Division Multiplexing
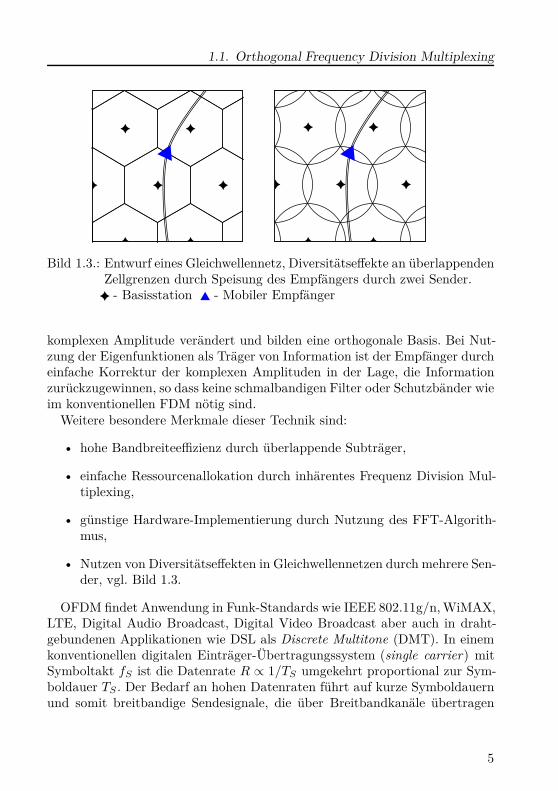
Bild 1.3.: Entwurf eines Gleichwellennetz, Diversitätseffekte an überlappendenZellgrenzen durch Speisung des Empfängers durch zwei Sender.
- Basisstation - Mobiler Empfänger
komplexen Amplitude verändert und bilden eine orthogonale Basis. Bei Nut-zung der Eigenfunktionen als Träger von Information ist der Empfänger durcheinfache Korrektur der komplexen Amplituden in der Lage, die Informationzurückzugewinnen, so dass keine schmalbandigen Filter oder Schutzbänder wieim konventionellen FDM nötig sind.
Weitere besondere Merkmale dieser Technik sind:
• hohe Bandbreiteeffizienz durch überlappende Subträger,
• einfache Ressourcenallokation durch inhärentes Frequenz Division Mul-tiplexing,
• günstige Hardware-Implementierung durch Nutzung des FFT-Algorith-mus,
• Nutzen von Diversitätseffekten in Gleichwellennetzen durch mehrere Sen-der, vgl. Bild 1.3.
OFDM findet Anwendung in Funk-Standards wie IEEE 802.11g/n, WiMAX,LTE, Digital Audio Broadcast, Digital Video Broadcast aber auch in draht-gebundenen Applikationen wie DSL als Discrete Multitone (DMT). In einemkonventionellen digitalen Einträger-Übertragungssystem (single carrier) mitSymboltakt fS ist die Datenrate R ∝ 1/TS umgekehrt proportional zur Sym-boldauer TS . Der Bedarf an hohen Datenraten führt auf kurze Symboldauernund somit breitbandige Sendesignale, die über Breitbandkanäle übertragen
5
1. Einführung
werden müssen. Diese zeichnen sich dadurch aus, dass ihre Kohärenzbandbrei-te BC sehr viel kleiner ist als die Gesamtbandbreite B:
B ≫ BC . (1.1)
Ist Bedingung (1.1) erfüllt, so spricht man von einem frequenzselektiven Kanal.Fasst man den Kanal als Zufallsprozess h(t, τ) in Zeit t und Verzögerung τauf, so erfolgt die Definition der Kohärenzbandbreite über den Kehrwert dermittleren Impulsverbreiterung delay spread, dem zweiten Zentralen Momentdes Zufallsprozesses:
BC =1
∆τ, ∆τ = E
|h(t, τ)|2
. (1.2)
Die Länge der Kanalimpulsantwort ist durch die physikalische Umgebung ge-geben. Die längste Umweglaufzeit τmax, bzw. L + 1 Samples, bestimmt dieKanalordnung L, die durch Abtastung in Symboltakten L+ 1 = fS · τmax be-messen wird. Ist die Kanalimpulsantwort im Vergleich zur Symboldauer lang,1/fS = TS ≫ τmax, so werden am Empfänger verschiedene Versionen des ver-zögerten Sendesignals durch den Kanal überlagert. Die Folge ist eine Störungdes momentanen Symbols durch L vorangegangene Symbole. Dieser Effektwird unter dem Begriff Intersymbolinterferenz (ISI) subsumiert. Durch Kennt-nis der Kanalimpulsantwort ist der Entwurf von Entzerrer-Filtern möglich,die den Einfluss der Interferenz vermindern. Dieser Vorgang wird interferencecancellation genannt. Der Aufwand für die Entzerrung im Empfänger wächstmit der Kanalordnung.
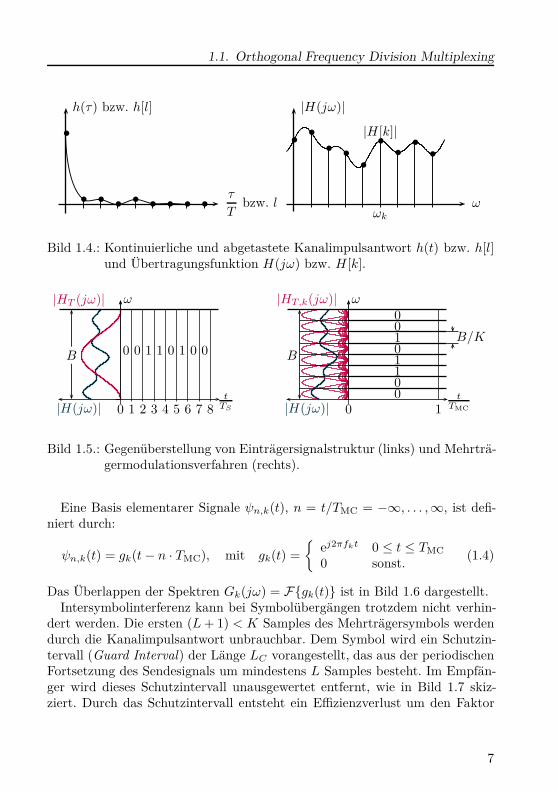
Wird der Breitbandkanal in K Schmalbandkanäle bzw. Subträger aufgeteilt,so dass B/K < BC gilt, kann die Verzerrung des Kanals durch einen komple-xen Faktor, dem Koeffizienten der so abgetasteten Kanalübertragungsfunktion,beschrieben werden. Die Entzerrung wird zur einfachen komplexen Division.Der Sachverhalt ist in Bild 1.4 und 1.5 illustriert. Die Reduzierung der Band-breite verlängert die Mehrträger-Symboldauer (multi-carrier) um den FaktorK, die Anzahl der Subträger:
TMC = K · TS . (1.3)
Unter der Voraussetzung der Orthogonalität der emittierten Subträger isttrotz überlappender Spektren das Ausbleiben von ISI zum Abtastzeitpunktgarantiert. Damit stellt die Orthogonalitätsbedingung eine Verallgemeinerungdes ersten Nyquist-Kriteriums dar.
6
1.1. Orthogonal Frequency Division Multiplexing
τ
Tbzw. l
h(τ) bzw. h[l]
ω
|H(jω)|
|H [k]|
ωk
Bild 1.4.: Kontinuierliche und abgetastete Kanalimpulsantwort h(t) bzw. h[l]und Übertragungsfunktion H(jω) bzw. H [k].
B
ω
|H(jω)|
|HT (jω)|
0 0 1 1 0 1 0 0
tTS0 1 2 3 4 5 6 7 8
B
ω
|H(jω)|
|HT,k(jω)|
001101 B/K00
tTMC0 1
Bild 1.5.: Gegenüberstellung von Einträgersignalstruktur (links) und Mehrträ-germodulationsverfahren (rechts).
Eine Basis elementarer Signale ψn,k(t), n = t/TMC = −∞, . . . ,∞, ist defi-niert durch:
ψn,k(t) = gk(t− n · TMC), mit gk(t) =
ej2πfkt 0 ≤ t ≤ TMC
0 sonst.(1.4)
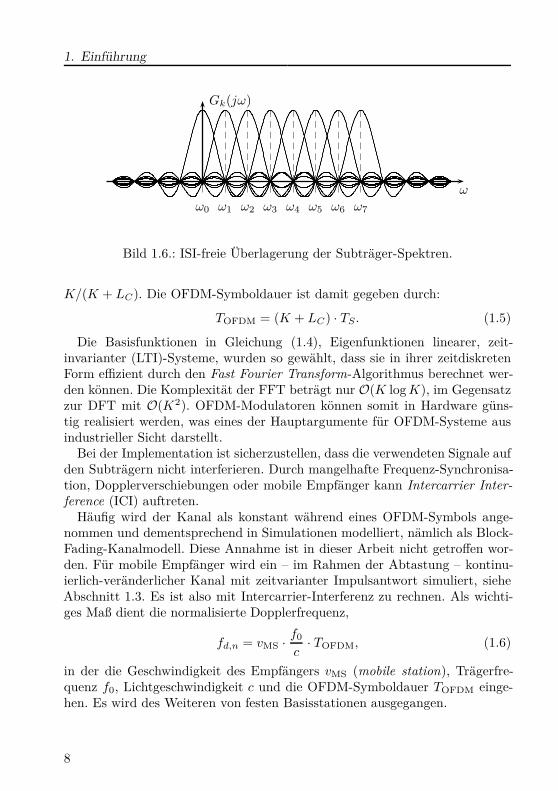
Das Überlappen der Spektren Gk(jω) = Fgk(t) ist in Bild 1.6 dargestellt.Intersymbolinterferenz kann bei Symbolübergängen trotzdem nicht verhin-
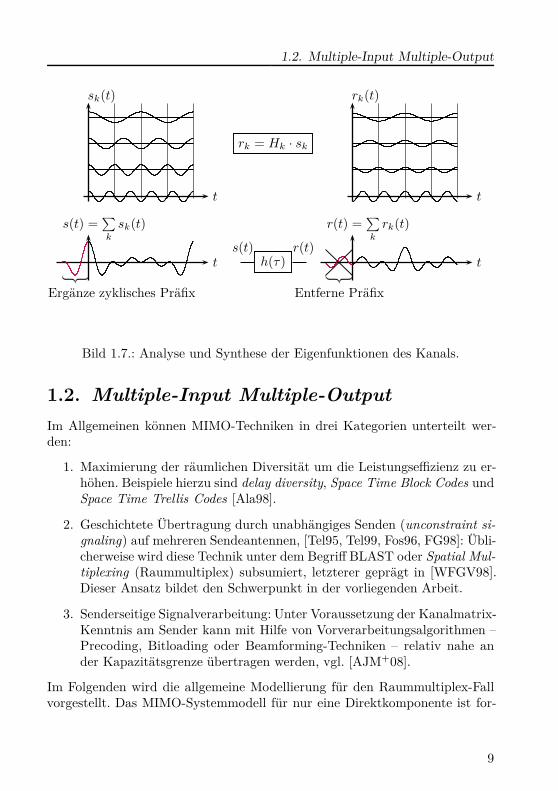
dert werden. Die ersten (L+ 1) < K Samples des Mehrträgersymbols werdendurch die Kanalimpulsantwort unbrauchbar. Dem Symbol wird ein Schutzin-tervall (Guard Interval) der Länge LC vorangestellt, das aus der periodischenFortsetzung des Sendesignals um mindestens L Samples besteht. Im Empfän-ger wird dieses Schutzintervall unausgewertet entfernt, wie in Bild 1.7 skiz-ziert. Durch das Schutzintervall entsteht ein Effizienzverlust um den Faktor
7
1. Einführung
ω
Gk(jω)
ω0 ω1 ω2 ω3 ω4 ω5 ω6 ω7
Bild 1.6.: ISI-freie Überlagerung der Subträger-Spektren.
K/(K + LC). Die OFDM-Symboldauer ist damit gegeben durch:
TOFDM = (K + LC) · TS. (1.5)
Die Basisfunktionen in Gleichung (1.4), Eigenfunktionen linearer, zeit-invarianter (LTI)-Systeme, wurden so gewählt, dass sie in ihrer zeitdiskretenForm effizient durch den Fast Fourier Transform-Algorithmus berechnet wer-den können. Die Komplexität der FFT beträgt nur O(K logK), im Gegensatzzur DFT mit O(K2). OFDM-Modulatoren können somit in Hardware güns-tig realisiert werden, was eines der Hauptargumente für OFDM-Systeme ausindustrieller Sicht darstellt.
Bei der Implementation ist sicherzustellen, dass die verwendeten Signale aufden Subträgern nicht interferieren. Durch mangelhafte Frequenz-Synchronisa-tion, Dopplerverschiebungen oder mobile Empfänger kann Intercarrier Inter-ference (ICI) auftreten.
Häufig wird der Kanal als konstant während eines OFDM-Symbols ange-nommen und dementsprechend in Simulationen modelliert, nämlich als Block-Fading-Kanalmodell. Diese Annahme ist in dieser Arbeit nicht getroffen wor-den. Für mobile Empfänger wird ein – im Rahmen der Abtastung – kontinu-ierlich-veränderlicher Kanal mit zeitvarianter Impulsantwort simuliert, sieheAbschnitt 1.3. Es ist also mit Intercarrier-Interferenz zu rechnen. Als wichti-ges Maß dient die normalisierte Dopplerfrequenz,
fd,n = vMS ·f0
c· TOFDM, (1.6)
in der die Geschwindigkeit des Empfängers vMS (mobile station), Trägerfre-quenz f0, Lichtgeschwindigkeit c und die OFDM-Symboldauer TOFDM einge-hen. Es wird des Weiteren von festen Basisstationen ausgegangen.
8
1.2. Multiple-Input Multiple-Output
t
sk(t)
rk = Hk · sk
t
rk(t)
h(τ)s(t) r(t)
s(t) =∑
k
sk(t)
t
r(t) =∑
k
rk(t)
t
Ergänze zyklisches Präfix Entferne Präfix
Bild 1.7.: Analyse und Synthese der Eigenfunktionen des Kanals.
1.2. Multiple-Input Multiple-Output
Im Allgemeinen können MIMO-Techniken in drei Kategorien unterteilt wer-den:
1. Maximierung der räumlichen Diversität um die Leistungseffizienz zu er-höhen. Beispiele hierzu sind delay diversity, Space Time Block Codes undSpace Time Trellis Codes [Ala98].
2. Geschichtete Übertragung durch unabhängiges Senden (unconstraint si-gnaling) auf mehreren Sendeantennen, [Tel95, Tel99, Fos96, FG98]: Übli-cherweise wird diese Technik unter dem Begriff BLAST oder Spatial Mul-tiplexing (Raummultiplex) subsumiert, letzterer geprägt in [WFGV98].Dieser Ansatz bildet den Schwerpunkt in der vorliegenden Arbeit.
3. Senderseitige Signalverarbeitung: Unter Voraussetzung der Kanalmatrix-Kenntnis am Sender kann mit Hilfe von Vorverarbeitungsalgorithmen –Precoding, Bitloading oder Beamforming-Techniken – relativ nahe ander Kapazitätsgrenze übertragen werden, vgl. [AJM+08].
Im Folgenden wird die allgemeine Modellierung für den Raummultiplex-Fallvorgestellt. Das MIMO-Systemmodell für nur eine Direktkomponente ist for-
9
1. Einführung
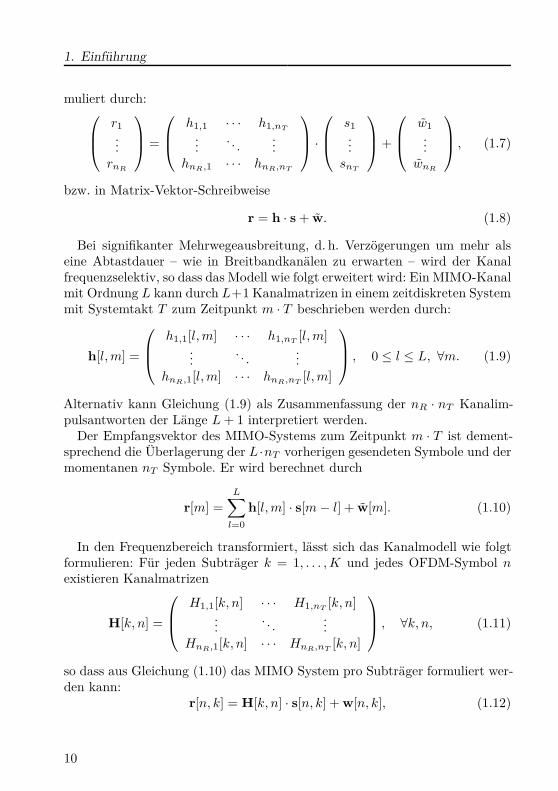
muliert durch:
r1
...rnR
=
h1,1 · · · h1,nT
.... . .
...hnR,1 · · · hnR,nT
·
s1
...snT
+
w1
...wnR
, (1.7)
bzw. in Matrix-Vektor-Schreibweise
r = h · s + w. (1.8)
Bei signifikanter Mehrwegeausbreitung, d. h. Verzögerungen um mehr alseine Abtastdauer – wie in Breitbandkanälen zu erwarten – wird der Kanalfrequenzselektiv, so dass das Modell wie folgt erweitert wird: Ein MIMO-Kanalmit Ordnung L kann durch L+1 Kanalmatrizen in einem zeitdiskreten Systemmit Systemtakt T zum Zeitpunkt m · T beschrieben werden durch:
h[l,m] =
h1,1[l,m] · · · h1,nT[l,m]
.... . .
...hnR,1[l,m] · · · hnR,nT
[l,m]
, 0 ≤ l ≤ L, ∀m. (1.9)
Alternativ kann Gleichung (1.9) als Zusammenfassung der nR · nT Kanalim-pulsantworten der Länge L+ 1 interpretiert werden.
Der Empfangsvektor des MIMO-Systems zum Zeitpunkt m · T ist dement-sprechend die Überlagerung der L ·nT vorherigen gesendeten Symbole und dermomentanen nT Symbole. Er wird berechnet durch
r[m] =L∑
l=0
h[l,m] · s[m− l] + w[m]. (1.10)
In den Frequenzbereich transformiert, lässt sich das Kanalmodell wie folgtformulieren: Für jeden Subträger k = 1, . . . ,K und jedes OFDM-Symbol nexistieren Kanalmatrizen
H[k, n] =
H1,1[k, n] · · · H1,nT[k, n]
.... . .
...HnR,1[k, n] · · · HnR,nT
[k, n]
, ∀k, n, (1.11)
so dass aus Gleichung (1.10) das MIMO System pro Subträger formuliert wer-den kann:
r[n, k] = H[k, n] · s[n, k] + w[n, k], (1.12)
10
1.2. Multiple-Input Multiple-Output
wobei mit w[m] und w[n] unabhängiges, identisch verteiltes, weißes, komplexeszirkulär-symmetrisches normalverteiltes Rauschen (AWGN) gemeint ist. Nachdem zentralen Grenzwertsatz der Stochastik ist w[m] nach der FFT ebenfallsnormalverteilt, mittelwertfrei und mit gleicher Varianz.
1.2.1. Vektorisierte Formulierung der MIMO-Systemgleichung
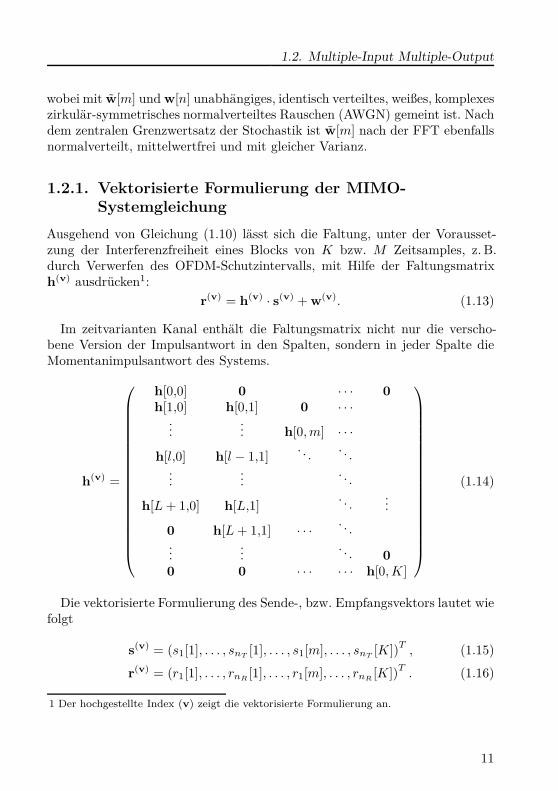
Ausgehend von Gleichung (1.10) lässt sich die Faltung, unter der Vorausset-zung der Interferenzfreiheit eines Blocks von K bzw. M Zeitsamples, z. B.durch Verwerfen des OFDM-Schutzintervalls, mit Hilfe der Faltungsmatrixh(v) ausdrücken1:
r(v) = h(v) · s(v) + w(v). (1.13)
Im zeitvarianten Kanal enthält die Faltungsmatrix nicht nur die verscho-bene Version der Impulsantwort in den Spalten, sondern in jeder Spalte dieMomentanimpulsantwort des Systems.
h(v) =
h[0,0] 0 · · · 0h[1,0] h[0,1] 0 · · ·
...... h[0,m] · · ·
h[l,0] h[l − 1,1]. . .
. . ....
.... . .
h[L+ 1,0] h[L,1]. . .
...
0 h[L+ 1,1] · · · . . ....
.... . . 0
0 0 · · · · · · h[0,K]
(1.14)
Die vektorisierte Formulierung des Sende-, bzw. Empfangsvektors lautet wiefolgt
s(v) = (s1[1], . . . , snT[1], . . . , s1[m], . . . , snT
[K])T, (1.15)
r(v) = (r1[1], . . . , rnR[1], . . . , r1[m], . . . , rnR
[K])T. (1.16)
1 Der hochgestellte Index (v) zeigt die vektorisierte Formulierung an.
11

1. Einführung
1.3. Räumliches Kanalmodell
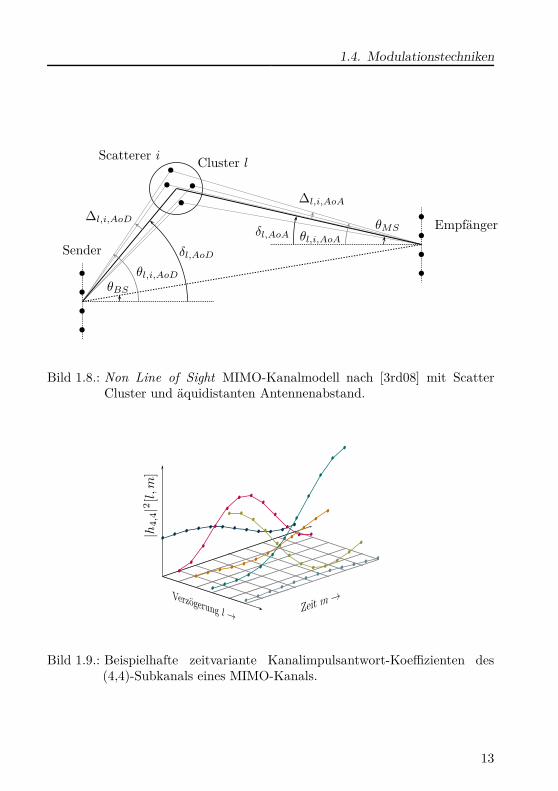
Zur Evaluation der Interferenzunterdrückung in MIMO-Algorithmen ist einrealistisches Kanalmodell nötig, das die Nutzung der Diversitäten in Frequenzund Raum bei quasi-kontinuierlicher Zeitvarianz durch relative Bewegung vonEmpfänger und Sender unterstützt [3rd08].
Die Impulsantworten lassen sich im Non Line of Sight-Szenario für omnidi-rektionale, lineare Antennenarrays mit Abstand λ/2 und Antennengewinn Gberechnen durch
hr,t[l,m] =
√
Pl · σSF
Λ
I∑
i=1
√G exp (j [kdt sin(θl,i,AoD) + Ψl,i])
·√G exp (jkdr sin(θl,i,AoA))
· exp
(
jk‖v‖ cos(θl,i,AoA − θv)m
fS
)
. (1.17)
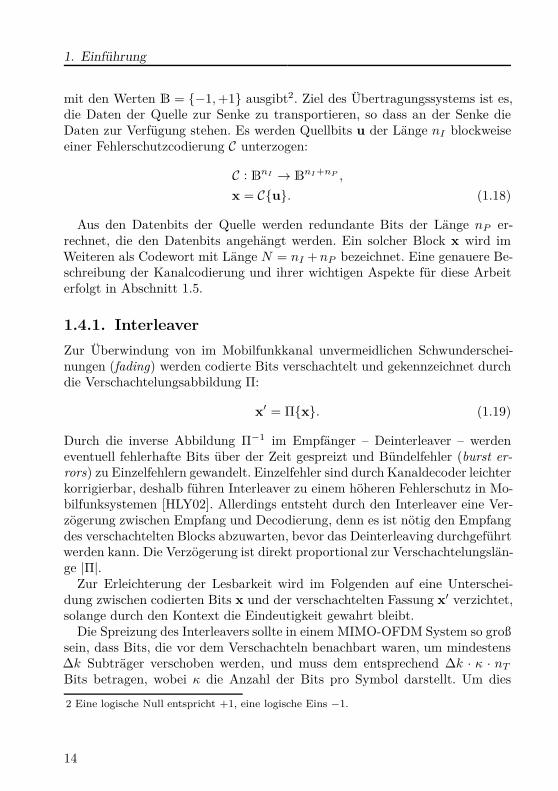
Dabei steht k hier für die Wellenzahl und ist nicht zu verwechseln mit dem Sub-trägerindex k. Das zugrunde liegende Modell wird in Bild 1.8 illustriert. ZurModellierung der Mehrwegeausbreitung werden L sogenannte Scatter-Clustereingeführt, in denen I Scatter zusammengefasst sind. Die Effekte innerhalbeines Clusters l werden summiert zum l-ten Koeffizienten der Kanalimpuls-antwort. Die Parameter wurden aus Messungen von 3GPP bestimmt. DurchModellierung als Zufallsvariablen mit den in den Messungen festgestellten Ver-teilungen werden Parametersätze je nach Zell-Umgebungsszenario erzeugt. Ei-ne genaue Bestimmung der Parameter wird im Anhang A vorgestellt bzw.tabellarisch in Tabelle A.1. Bild 1.9 stellt so erzeugte zeitvariante Kanalimpul-santworten dar.
1.4. Modulationstechniken
Um die bereits in Abschnitt 1.1 vorgestellte OFDM-Modulation durchzufüh-ren, sind weitere Schritte bzw. Subsysteme zur digitalen Übertragung nötig.Sie werden nun im Einzelnen diskutiert, so dass schließlich in Abschnitt 1.4.4eine komplette Übersicht über das in dieser Arbeit zugrunde liegende Über-tragungssystem gegeben werden kann.
Am Eingang dessen steht eine binäre InformationsquelleQ, die unkorrelierteBits u ∈ B mit gleicher Wahrscheinlichkeit P (u = +1) = P (u = −1) = 1/2
12
1.4. Modulationstechniken
Sender
Empfänger
Cluster lScatterer i
∆l,i,AoD
θBS
δl,AoD
θl,i,AoD
δl,AoA
∆l,i,AoA
θl,i,AoA
θMS
Bild 1.8.: Non Line of Sight MIMO-Kanalmodell nach [3rd08] mit ScatterCluster und äquidistanten Antennenabstand.
Verzögerung l →
|h4
,4|2 [l,m
]
Zeit m→
Bild 1.9.: Beispielhafte zeitvariante Kanalimpulsantwort-Koeffizienten des(4,4)-Subkanals eines MIMO-Kanals.
13
1. Einführung
mit den Werten B = −1,+1 ausgibt2. Ziel des Übertragungssystems ist es,die Daten der Quelle zur Senke zu transportieren, so dass an der Senke dieDaten zur Verfügung stehen. Es werden Quellbits u der Länge nI blockweiseeiner Fehlerschutzcodierung C unterzogen:
C : BnI → BnI +nP ,
x = Cu. (1.18)
Aus den Datenbits der Quelle werden redundante Bits der Länge nP er-rechnet, die den Datenbits angehängt werden. Ein solcher Block x wird imWeiteren als Codewort mit Länge N = nI +nP bezeichnet. Eine genauere Be-schreibung der Kanalcodierung und ihrer wichtigen Aspekte für diese Arbeiterfolgt in Abschnitt 1.5.
1.4.1. Interleaver
Zur Überwindung von im Mobilfunkkanal unvermeidlichen Schwunderschei-nungen (fading) werden codierte Bits verschachtelt und gekennzeichnet durchdie Verschachtelungsabbildung Π:
x′ = Πx. (1.19)
Durch die inverse Abbildung Π−1 im Empfänger – Deinterleaver – werdeneventuell fehlerhafte Bits über der Zeit gespreizt und Bündelfehler (burst er-rors) zu Einzelfehlern gewandelt. Einzelfehler sind durch Kanaldecoder leichterkorrigierbar, deshalb führen Interleaver zu einem höheren Fehlerschutz in Mo-bilfunksystemen [HLY02]. Allerdings entsteht durch den Interleaver eine Ver-zögerung zwischen Empfang und Decodierung, denn es ist nötig den Empfangdes verschachtelten Blocks abzuwarten, bevor das Deinterleaving durchgeführtwerden kann. Die Verzögerung ist direkt proportional zur Verschachtelungslän-ge |Π|.
Zur Erleichterung der Lesbarkeit wird im Folgenden auf eine Unterschei-dung zwischen codierten Bits x und der verschachtelten Fassung x′ verzichtet,solange durch den Kontext die Eindeutigkeit gewahrt bleibt.
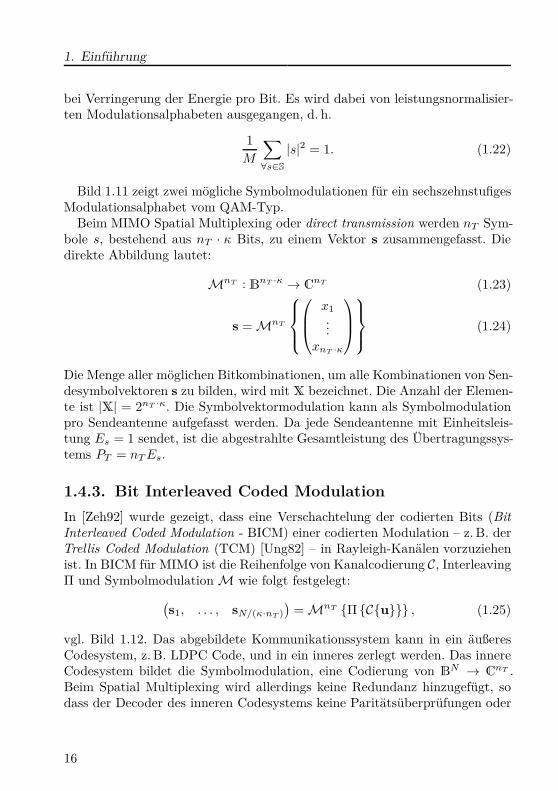
Die Spreizung des Interleavers sollte in einem MIMO-OFDM System so großsein, dass Bits, die vor dem Verschachteln benachbart waren, um mindestens∆k Subträger verschoben werden, und muss dem entsprechend ∆k · κ · nT
Bits betragen, wobei κ die Anzahl der Bits pro Symbol darstellt. Um dies
2 Eine logische Null entspricht +1, eine logische Eins −1.
14

1.4. Modulationstechniken
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
Bild 1.10.: Alternierende Zufallsinterleaver der Länge |Π| = 16.
zu realisieren, werden Zufallsinterleaver eingesetzt, die im Durchschnitt guteSpreizeigenschaften zeigen [SH09]. Im Einzelfall kann es allerdings zu gerin-geren Spreizungen kommen, so dass verschiedene Zufallsinterleaver in einemRahmen angewandt werden, wie in Bild 1.10 gezeigt.
1.4.2. Symbolmodulation
Bei der Symbolmodulation M werden κ Bits zu einem (Sende)-Symbol s ausdem Modulationsalphabet S zusammengefasst, wobei |S| = M = 2κ gilt:
M : Bκ → C, (1.20)
s =M
x1
...xκ
. (1.21)
Dies dient zum einen der Anpassung an den Mobilfunkkanal – Mittelwert-freiheit – und zum Anderen einer möglichen Erhöhung der Bandbreiteeffizienz
15
1. Einführung
bei Verringerung der Energie pro Bit. Es wird dabei von leistungsnormalisier-ten Modulationsalphabeten ausgegangen, d. h.
1
M
∑
∀s∈S
|s|2 = 1. (1.22)
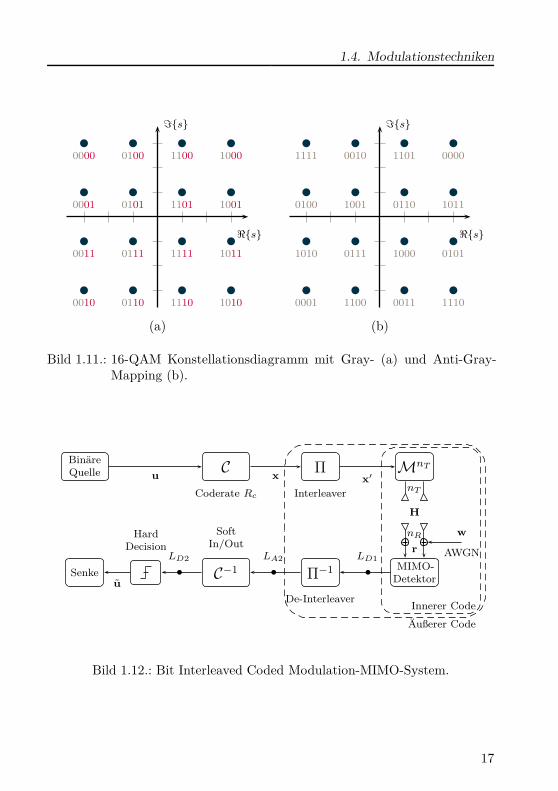
Bild 1.11 zeigt zwei mögliche Symbolmodulationen für ein sechszehnstufigesModulationsalphabet vom QAM-Typ.
Beim MIMO Spatial Multiplexing oder direct transmission werden nT Sym-bole s, bestehend aus nT · κ Bits, zu einem Vektor s zusammengefasst. Diedirekte Abbildung lautet:
MnT : BnT ·κ → CnT (1.23)
s =MnT
x1
...xnT ·κ
(1.24)
Die Menge aller möglichen Bitkombinationen, um alle Kombinationen von Sen-desymbolvektoren s zu bilden, wird mit X bezeichnet. Die Anzahl der Elemen-te ist |X| = 2nT ·κ. Die Symbolvektormodulation kann als Symbolmodulationpro Sendeantenne aufgefasst werden. Da jede Sendeantenne mit Einheitsleis-tung Es = 1 sendet, ist die abgestrahlte Gesamtleistung des Übertragungssys-tems PT = nTEs.
1.4.3. Bit Interleaved Coded Modulation
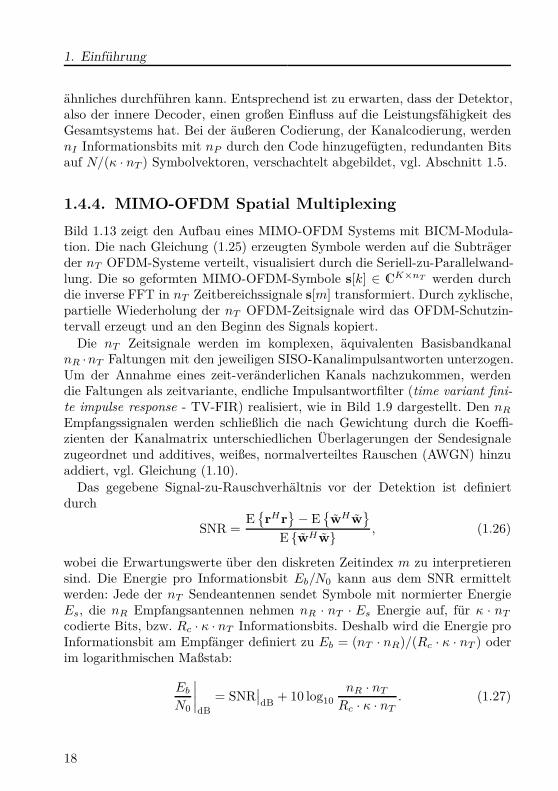
In [Zeh92] wurde gezeigt, dass eine Verschachtelung der codierten Bits (BitInterleaved Coded Modulation - BICM) einer codierten Modulation – z. B. derTrellis Coded Modulation (TCM) [Ung82] – in Rayleigh-Kanälen vorzuziehenist. In BICM für MIMO ist die Reihenfolge von Kanalcodierung C, InterleavingΠ und SymbolmodulationM wie folgt festgelegt:
(s1, . . . , sN/(κ·nT )
)=MnT Π Cu , (1.25)
vgl. Bild 1.12. Das abgebildete Kommunikationssystem kann in ein äußeresCodesystem, z. B. LDPC Code, und in ein inneres zerlegt werden. Das innereCodesystem bildet die Symbolmodulation, eine Codierung von BN → CnT .Beim Spatial Multiplexing wird allerdings keine Redundanz hinzugefügt, sodass der Decoder des inneren Codesystems keine Paritätsüberprüfungen oder
16
1.4. Modulationstechniken
0000 0100 1100 1000
0001 0101 1101 1001
0011 0111 1111 1011
0010 0110 1110 1010
ℜs
ℑs
(a)
1111 0010 1101 0000
0100 1001 0110 1011
1010 0111 1000 0101
0001 1100 0011 1110
ℜs
ℑs
(b)
Bild 1.11.: 16-QAM Konstellationsdiagramm mit Gray- (a) und Anti-Gray-Mapping (b).
BinäreQuelle C Π MnT
nT
H
nR
r
w
AWGNMIMO-
DetektorΠ
−1C−1Senke
u x x′
LD1LA2LD2
u
Coderate Rc Interleaver
De-Interleaver
HardDecision
SoftIn/Out
Innerer Code
Äußerer Code
Bild 1.12.: Bit Interleaved Coded Modulation-MIMO-System.
17
1. Einführung
ähnliches durchführen kann. Entsprechend ist zu erwarten, dass der Detektor,also der innere Decoder, einen großen Einfluss auf die Leistungsfähigkeit desGesamtsystems hat. Bei der äußeren Codierung, der Kanalcodierung, werdennI Informationsbits mit nP durch den Code hinzugefügten, redundanten Bitsauf N/(κ · nT ) Symbolvektoren, verschachtelt abgebildet, vgl. Abschnitt 1.5.
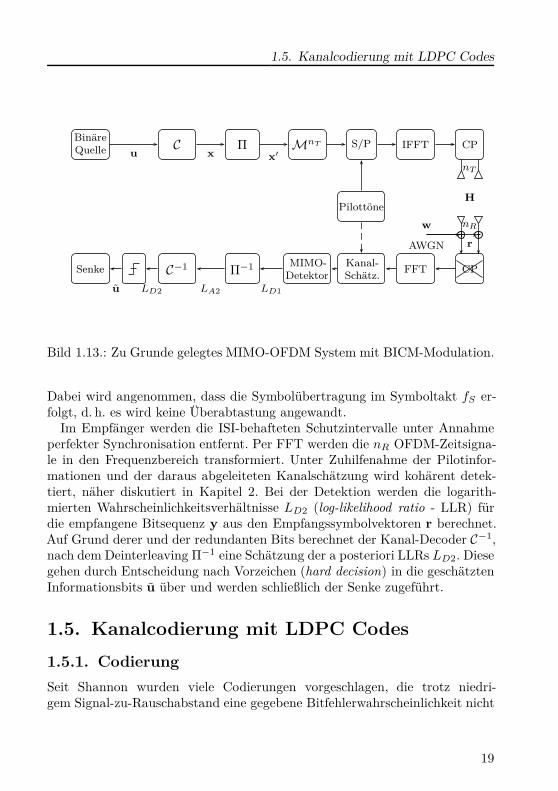
1.4.4. MIMO-OFDM Spatial Multiplexing
Bild 1.13 zeigt den Aufbau eines MIMO-OFDM Systems mit BICM-Modula-tion. Die nach Gleichung (1.25) erzeugten Symbole werden auf die Subträgerder nT OFDM-Systeme verteilt, visualisiert durch die Seriell-zu-Parallelwand-lung. Die so geformten MIMO-OFDM-Symbole s[k] ∈ CK×nT werden durchdie inverse FFT in nT Zeitbereichssignale s[m] transformiert. Durch zyklische,partielle Wiederholung der nT OFDM-Zeitsignale wird das OFDM-Schutzin-tervall erzeugt und an den Beginn des Signals kopiert.
Die nT Zeitsignale werden im komplexen, äquivalenten BasisbandkanalnR ·nT Faltungen mit den jeweiligen SISO-Kanalimpulsantworten unterzogen.Um der Annahme eines zeit-veränderlichen Kanals nachzukommen, werdendie Faltungen als zeitvariante, endliche Impulsantwortfilter (time variant fini-te impulse response - TV-FIR) realisiert, wie in Bild 1.9 dargestellt. Den nR
Empfangssignalen werden schließlich die nach Gewichtung durch die Koeffi-zienten der Kanalmatrix unterschiedlichen Überlagerungen der Sendesignalezugeordnet und additives, weißes, normalverteiltes Rauschen (AWGN) hinzuaddiert, vgl. Gleichung (1.10).
Das gegebene Signal-zu-Rauschverhältnis vor der Detektion ist definiertdurch
SNR =E
rHr− E
wHw
E wHw , (1.26)
wobei die Erwartungswerte über den diskreten Zeitindex m zu interpretierensind. Die Energie pro Informationsbit Eb/N0 kann aus dem SNR ermitteltwerden: Jede der nT Sendeantennen sendet Symbole mit normierter EnergieEs, die nR Empfangsantennen nehmen nR · nT · Es Energie auf, für κ · nT
codierte Bits, bzw. Rc · κ · nT Informationsbits. Deshalb wird die Energie proInformationsbit am Empfänger definiert zu Eb = (nT · nR)/(Rc · κ · nT ) oderim logarithmischen Maßstab:
Eb
N0
∣∣∣∣dB
= SNR∣∣dB
+ 10 log10
nR · nT
Rc · κ · nT. (1.27)
18
1.5. Kanalcodierung mit LDPC Codes
BinäreQuelle C Π MnT S/P IFFT CP
nT
H
nR
r
w
AWGN
Pilottöne
CPFFTKanal-Schätz.
MIMO-DetektorΠ−1C−1Senke
u x x′
LD1LA2LD2u
Bild 1.13.: Zu Grunde gelegtes MIMO-OFDM System mit BICM-Modulation.
Dabei wird angenommen, dass die Symbolübertragung im Symboltakt fS er-folgt, d. h. es wird keine Überabtastung angewandt.
Im Empfänger werden die ISI-behafteten Schutzintervalle unter Annahmeperfekter Synchronisation entfernt. Per FFT werden die nR OFDM-Zeitsigna-le in den Frequenzbereich transformiert. Unter Zuhilfenahme der Pilotinfor-mationen und der daraus abgeleiteten Kanalschätzung wird kohärent detek-tiert, näher diskutiert in Kapitel 2. Bei der Detektion werden die logarith-mierten Wahrscheinlichkeitsverhältnisse LD2 (log-likelihood ratio - LLR) fürdie empfangene Bitsequenz y aus den Empfangssymbolvektoren r berechnet.Auf Grund derer und der redundanten Bits berechnet der Kanal-Decoder C−1,nach dem Deinterleaving Π−1 eine Schätzung der a posteriori LLRs LD2. Diesegehen durch Entscheidung nach Vorzeichen (hard decision) in die geschätztenInformationsbits u über und werden schließlich der Senke zugeführt.
1.5. Kanalcodierung mit LDPC Codes
1.5.1. Codierung
Seit Shannon wurden viele Codierungen vorgeschlagen, die trotz niedri-gem Signal-zu-Rauschabstand eine gegebene Bitfehlerwahrscheinlichkeit nicht
19

1. Einführung
überschreiten. Zwei relativ junge Verfahren sind dabei besonders herausra-gend: Turbo Codes [BG96] und Low Density Parity Check (LDPC) Co-des [Gal62, Gal63, Mac99]. In der vorliegenden Arbeit sollen hauptsächlichLDPC Codes betrachtet werden. Sie gehören zur Klasse linearer Blockcodes.Die Codierung C ist durch eine Matrix-Vektor-Multiplikation im Galois-Feldvon 2, F2, beschreibbar. Ein Codewortvektor x ergibt sich aus einem Bitvektoru wie folgt:
x ≡(
IG
)
· u. (1.28)
Die Relation „≡“ ist gleichbedeutend mit
x =
(IG
)
· u mod 2.
Die Generatormatrix G ∈ BnP ×nI wird gerade so konstruiert, dass gilt
A ·(
IG
)
≡ 0, (1.29)
wobei mit A ∈ BnI ×N eine erzeugte LDPC Paritätsmatrix bezeichnet wird.Aufgrund der Linearität ist dies äquivalent zu
A · xv ≡ 0, ∀v. (1.30)
Jedes mögliche Codewort xv wird durch A auf den Nullvektor abbildet. Da alsojedes Codewort im Nullraum von A sein muss, kann durch Gleichung (1.30)geprüft werden, ob es sich bei einem gegebenen Bitvektor y um ein Codeworthandelt:
A · y ?≡ 0. (1.31)
Wegen Gleichung (1.30) wird die Matrix A Paritätskontrollmatrix genannt.
1.5.2. Konstruktion
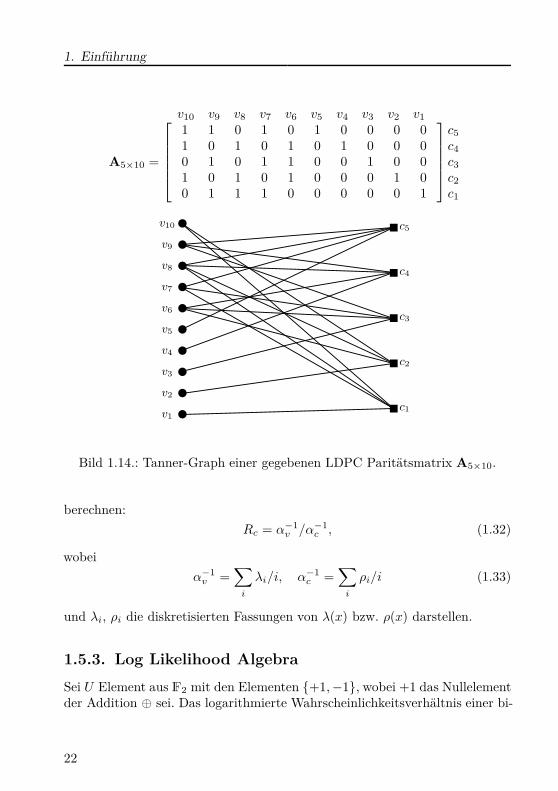
Die Konstruktion von Low Density Parity Check-Codes erfolgt über die Kon-struktion von dünn-besetzten Paritätskontrollmatrizen, daher der Name. InBild 1.14 ist beispielhaft eine Paritätskontrollmatrix A5×10 dargestellt. JedeZeile bildet einen Paritätskontrollknoten ci, dessen Wert die modulo-2-Summe
20

1.5. Kanalcodierung mit LDPC Codes
der Variablenknoten vj ist:
c1 ≡ v1 + v7 + v8 + v9
c2 ≡ v2 + v6 + v8 + v10
c3 ≡ v3 + v6 + v7 + v9
c4 ≡ v4 + v6 + v8 + v10
c5 ≡ v5 + v7 + v9 + v10.
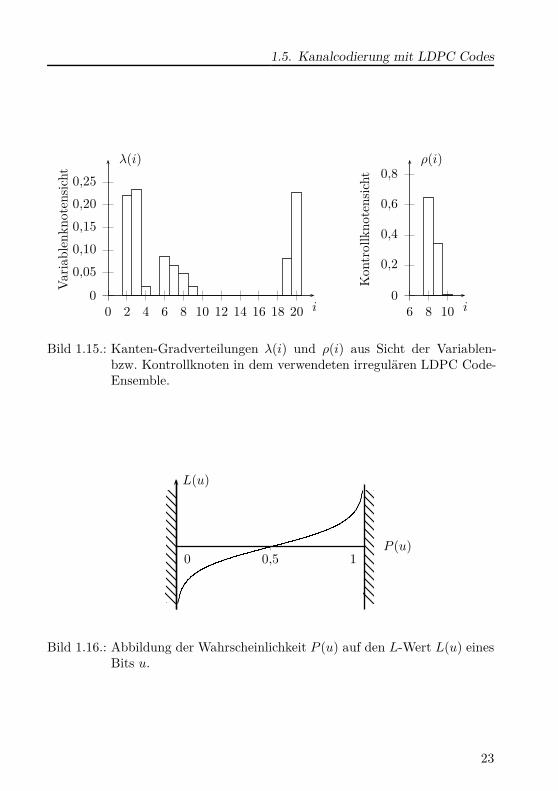
Die Werte der Variablenknoten sind definiert über den gegebenen Bitvektor,bzw. die Variablenknoten vj ∈ V, ∀j sind die Eingangsstellen des zur Prüfungunterliegenden Codewortes, die Kontrollknoten C sind die korrespondieren-den Paritätsstellen. Die Paritätsmatrix kann als Tanner-Graph interpretiertwerden: Die von Null verschiedenen Einträge der Matrix sind die Kanten Ezwischen den zwei Knoten-Mengen, den Variablenknoten V und den Kontroll-knoten ci ∈ C, ∀i. Der Graph ist bipartit, d. h. es existiert keine Kante zwischenzwei Knoten derselben Menge. Im Graphen TG = (V,C, E) ist abzulesen,dass jeder Kontrollknoten mit genau vier Variablenknoten verbunden ist. Diesist identisch mit der Anzahl der Kanten aus Sicht der Kontrollknoten, ebenfallsvier. Das Zeilengewicht ist bei binären Codes die Summe der Zeilen, in demBeispiel konstant vier. In den ursprünglichen Arbeiten über LDPC Codes wer-den Zufallsmatrizen unter Randbedingungen wie konstantem Zeilengewicht –sogenannte reguläre LDPC Codes – erzeugt. Die zugehörige Generatormatrixist durch Gleichung (1.28) gegeben. Diese Codes erreichen das Shannon’scheLimit allerdings nicht, vgl. die Ergebnisse in [LMS+97]. Hier werden für asym-ptotisch unendliche Blocklängen optimale Spalten- und Zeilengewichtsvertei-lungen λ(j) bzw. ρ(i) – sog. irreguläre LDPC Codes – abgeleitet. Codes, diedieselben Kanten-Verteilungen aufweisen werden einem Ensemble zugerech-net. Denn auch wenn die Verteilung gegeben ist, wird die konkrete Erzeugungder Paritätskontrollmatrix in einem Algorithmus vorgenommen, der im erstenSchritt die Kanten (pseudo-) zufällig verteilt.
Optimierte LDPC Code-Ensembles für den Binary Input Additive Whi-te Gaussian Noise (BIAWGN)-Kanal wurden in der Literatur diskutiert, soin [RSU01]. Im Folgenden wird ein dort vorgeschlagenes Code-Ensemble be-trachtet. In Bild 1.15 sind die Gradverteilungen der Kanten von V und Cabgebildet. Mit Hilfe der Verteilungen wurden Paritätsmatrizen A für eineCodelänge N von 1024 und 8192 generiert. Korrespondierende Generatorma-trizen G wurden über Gleichung (1.29) berechnet. Design-Coderate ist 1/2.Die konkrete Coderate Rc lässt sich über die Gewichtsverteilungen wie folgt
21
1. Einführung
v10 v9 v8 v7 v6 v5 v4 v3 v2 v1
A5×10 =
1 1 0 1 0 1 0 0 0 01 0 1 0 1 0 1 0 0 00 1 0 1 1 0 0 1 0 01 0 1 0 1 0 0 0 1 00 1 1 1 0 0 0 0 0 1
c5
c4
c3
c2
c1
v10
v9
v8
v7
v6
v5
v4
v3
v2
v1
c5
c4
c3
c2
c1
Bild 1.14.: Tanner-Graph einer gegebenen LDPC Paritätsmatrix A5×10.
berechnen:
Rc = α−1v /α−1
c , (1.32)
wobei
α−1v =
∑
i
λi/i, α−1c =
∑
i
ρi/i (1.33)
und λi, ρi die diskretisierten Fassungen von λ(x) bzw. ρ(x) darstellen.
1.5.3. Log Likelihood Algebra
Sei U Element aus F2 mit den Elementen +1,−1, wobei +1 das Nullelementder Addition ⊕ sei. Das logarithmierte Wahrscheinlichkeitsverhältnis einer bi-
22
1.5. Kanalcodierung mit LDPC CodesV
aria
ble
nkn
oten
sich
t
0
0,05
0,10
0,15
0,20
0,25
0 2 4 6 8 10 12 14 16 18 20 i
λ(i)
Kon
trol
lknot
ensi
cht
0
0,2
0,4
0,6
0,8
6 8 10 i
ρ(i)
Bild 1.15.: Kanten-Gradverteilungen λ(i) und ρ(i) aus Sicht der Variablen-bzw. Kontrollknoten in dem verwendeten irregulären LDPC Code-Ensemble.
L(u)
0 0,5 1P (u)
Bild 1.16.: Abbildung der Wahrscheinlichkeit P (u) auf den L-Wert L(u) einesBits u.
23

1. Einführung
nären Zufallsvariablen U , LU (u) ist definiert durch
LU = lnPU (u = +1)
PU (u = −1). (1.34)
PU (u) bezeichnet die Wahrscheinlichkeit, dass die Zufallsvariable den Wertu annimmt. Der log-likelihood ratio LU (u) wird LLR oder L-Wert der Zu-fallsvariablen U genannt [HOP96]. Das Vorzeichen von LU (u) ist die harteEntscheidung und der Betrag |LU (u)| die Zuverlässigkeit dieser Entscheidung.Wenn die binäre Zufallsvariable U durch eine andere Zufallsvariable oder einenVektor Y bedingt ist, dann ist der bedingte (a-posteriori) L-Wert LU|Y (u|y)gegeben durch
LU|Y (u|y) = lnPU|Y (u = +1|y)
PU|Y (u = −1|y)(1.35)
= lnPU (u = +1)
PU (u = −1)+ ln
PY |U (y|u = +1)
PY |U (y|u = −1)(1.36)
= LU (u) + LY |U (y|u). (1.37)
Der Term LU (u) wird a priori L-Wert von u genannt und LY |U (y|u) logarith-miertes Verhältnis der Übergangswahrscheinlichkeiten. Solange die Eindeutig-keit gewahrt bleibt, werden die Indizes der L-Werte und Wahrscheinlichkeitenweggelassen. Die L-Werte eines Blocks von Bits u = uvN
v=1 der Länge Nwerden zusammengefasst notiert L(u) = L(uv)N
v=1.
1.5.4. L-Werte aus dem AWGN-Kanal
Aus der Codierung des binären Wertes u mit dem L-Wert L(u) geht ein codier-tes Bit x hervor, mit L-Wert L(x). Für einen (N,nI)-systematischen Code sindnI der x Bits identisch mit den Informationsbits u. Nach einer Übertragungüber einen AWGN-Kanal kann der L-Wert von x bedingt durch den MatchedFilter-Ausgang y wie folgt berechnet werden:
L(x|y) = lnP (x = +1|y)
P (x = −1|y)(1.38)
= ln
(P (y|x = +1)
P (y|x = −1)· P (x = +1)
P (x = −1)
)
(1.39)
= lnexp(−Es
N0(y − 1)2)
exp(−Es
N0(y + 1)2)
+ lnP (x = +1)
P (x = −1). (1.40)
24

1.5. Kanalcodierung mit LDPC Codes
1.5.5. LDPC Decodierung
Im allgemeinen Fall ist die empfangene Bitsequenz y nicht gleich der gesende-ten x, so dass Gleichung (1.28) zu
A · y =: γ. (1.41)
wird. Ist der sog. Syndromvektor γ der Nullvektor, so entspricht das empfan-gene Codewort auf Grund des großen Codewortabstands vgl. [Mac99, RSU01]mit hoher Wahrscheinlichkeit dem gesendeten: y = x. Ein wichtiges Maß beider Decodierung linearer Blockcodes ist die Paritätssumme ‖γ‖, die Hamming-Distanz des Syndromvektors zum Nullvektor. Der Decoder hat ein gültiges Co-dewort gefunden, wenn die Paritätssumme Null ist.
Der Maximum A Posteriori (MAP)-Decodiervorgang erfolgt durch rekursi-ve Berechnung der folgenden drei Größen (Sum-Product-Algorithmus [Gal63,HOP96, Mac99]):
L(rνh) = 2 atanh
∏
h′∈Vν\h
tanh
(1
2L(qh′ν)
)
, (1.42)
L(qhν) = L(uh) +∑
ν′∈Ch\ν
L(rν′h), (1.43)
L(Qh) = L(uh) +∑
ν′∈Ch
L(rν′h). (1.44)
Am Ende jeder Iteration sind in L(Qh) die approximierten a posteriori LLRszusammengefasst. Durch harte Entscheidung gehen die a posteriori LLRsL(Qh) in eine Schätzung der gesendeten Bitsequenz x = sgnL(Qh) über, wo-bei die Informationsbits u =
(x1, . . . , xnI
)sind. Die Decoder-Iteration stoppt,
wenn ‖A · x‖ = 0.
1.5.6. Ensemble-Optimierung
Um die Decodiereigenschaften und damit die Approximationsqualität der aposteriori Wahrscheinlichkeiten zu verbessern, wurden die code-definierendenParitätskontrollmatrizen gezielt nach kurzen Zyklen durchsucht [TJVW04].Als kurzer Zyklus (stopping set) wird ein Untergraph von TG genannt, derisoliert vom restlichen Graph ist. Die Informationen werden nur innerhalb desZyklus ausgetauscht, aber durch fehlende Verknüpfung fließt keine Information
25
1. Einführung
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
0 1 2 3 4
Bit
fehle
rrat
e
Eb/N0 in dB
1024 bit 500 401024 bit 500 88192 bit 500 408192 bit 500 8
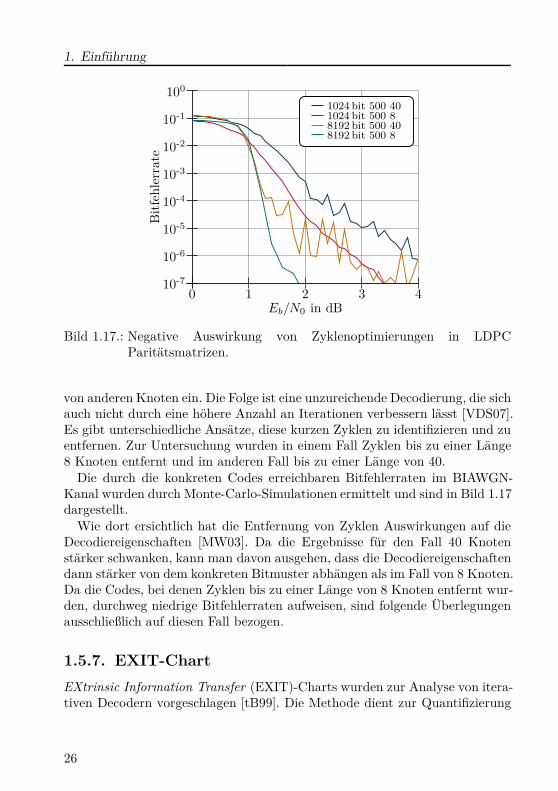
Bild 1.17.: Negative Auswirkung von Zyklenoptimierungen in LDPCParitätsmatrizen.
von anderen Knoten ein. Die Folge ist eine unzureichende Decodierung, die sichauch nicht durch eine höhere Anzahl an Iterationen verbessern lässt [VDS07].Es gibt unterschiedliche Ansätze, diese kurzen Zyklen zu identifizieren und zuentfernen. Zur Untersuchung wurden in einem Fall Zyklen bis zu einer Länge8 Knoten entfernt und im anderen Fall bis zu einer Länge von 40.
Die durch die konkreten Codes erreichbaren Bitfehlerraten im BIAWGN-Kanal wurden durch Monte-Carlo-Simulationen ermittelt und sind in Bild 1.17dargestellt.
Wie dort ersichtlich hat die Entfernung von Zyklen Auswirkungen auf dieDecodiereigenschaften [MW03]. Da die Ergebnisse für den Fall 40 Knotenstärker schwanken, kann man davon ausgehen, dass die Decodiereigenschaftendann stärker von dem konkreten Bitmuster abhängen als im Fall von 8 Knoten.Da die Codes, bei denen Zyklen bis zu einer Länge von 8 Knoten entfernt wur-den, durchweg niedrige Bitfehlerraten aufweisen, sind folgende Überlegungenausschließlich auf diesen Fall bezogen.
1.5.7. EXIT-Chart
EXtrinsic Information Transfer (EXIT)-Charts wurden zur Analyse von itera-tiven Decodern vorgeschlagen [tB99]. Die Methode dient zur Quantifizierung
26

1.5. Kanalcodierung mit LDPC Codes
der Zuverlässigkeit von soft information in Form von L-Werten und den kor-respondierenden logischen Bitwerten. Sie basiert auf Berechnung bzw. Appro-ximation der wechselseitigen Information [tB01].
Ausgehend von einem AWGN-Kanalmodell, kann das diskrete Empfangssi-gnal als Überlagerung des Sendesignals x mit einem Rauschsignal w durch
y = x+ w, (1.45)
und die bedingte Wahrscheinlichkeitsdichtefunktion durch
p(y|X = x) =1√
2πσw
exp
(
− (y − x)2
2σ2w
)
(1.46)
beschrieben werden. Die L-Werte für y, L(y|x) können nach Gleichung (1.39)ermittelt werden:
L(y|x) =2
σ2w
· (x+ w) (1.47)
= µy · x+ wy, wy ∼ N(
0,4
σ2w
)
. (1.48)
Mittelwert µy und Varianz σ2y von L(y|x = ±1) sind durch
µy = ±σ2y
2(1.49)
miteinander verknüpft. Zur Modellierung von a priori Information können dieGleichungen (1.48) und (1.49) wie folgt verwendet werden:
La = µLa· x+ wLa
, wLa∼ N (0, σ2
La), (1.50)
mit µLa= ±σ2
La/2. Daraus folgt die bedingte Wahrscheinlichkeitsdichtefunk-
tion für La
pLa(ξ|X = x) =
1√2πσLa
exp
(
− 1
2σ2La
(
ξ − σ2La
2x
)2)
. (1.51)
Um den „Informationsgehalt“ von a priori Wissen zu messen, wird die mitt-lere wechselseitige Information bzw. mittlere Transinformation zwischen denübertragenen, systematischen Bits X und den L-Werten La betrachtet
Ia =1
2
∑
x∈−1,+1
∞∫
−∞
pLa(ξ|X = x) · log2
2 · pLa(ξ|X = x)
pLa(ξ|X = −1) + pLa
(ξ|X = 1)dξ,
(1.52)
27
1. Einführung
0
0,05
0,10
0,15
0,20
0,25
0,30
0,35
-15 -10 -5 0 5 10 15
p(L
(ξ))
L(ξ)
I1 = 0,25I2 = 0,50I3 = 0,75
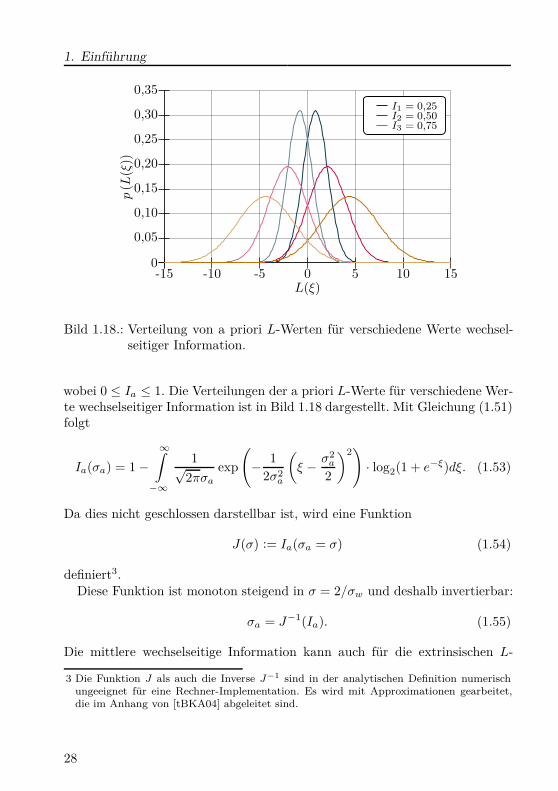
Bild 1.18.: Verteilung von a priori L-Werten für verschiedene Werte wechsel-seitiger Information.
wobei 0 ≤ Ia ≤ 1. Die Verteilungen der a priori L-Werte für verschiedene Wer-te wechselseitiger Information ist in Bild 1.18 dargestellt. Mit Gleichung (1.51)folgt
Ia(σa) = 1−∞∫
−∞
1√2πσa
exp
(
− 1
2σ2a
(
ξ − σ2a
2
)2)
· log2(1 + e−ξ)dξ. (1.53)
Da dies nicht geschlossen darstellbar ist, wird eine Funktion
J(σ) := Ia(σa = σ) (1.54)
definiert3.Diese Funktion ist monoton steigend in σ = 2/σw und deshalb invertierbar:
σa = J−1(Ia). (1.55)
Die mittlere wechselseitige Information kann auch für die extrinsischen L-
3 Die Funktion J als auch die Inverse J−1 sind in der analytischen Definition numerischungeeignet für eine Rechner-Implementation. Es wird mit Approximationen gearbeitet,die im Anhang von [tBKA04] abgeleitet sind.
28
1.5. Kanalcodierung mit LDPC Codes
Werte z. B. aus einem Decoder, quantifiziert werden:
Ie =1
2
∑
x∈−1,+1
∞∫
−∞
pLe(ξ|X = x) · log2
2 · pLe(ξ|X = x)
pLe(ξ|X = −1) + pLe
(ξ|X = 1)dξ,
(1.56)ebenfalls gilt 0 ≤ Ie ≤ 1. Ie kann nun als Funktion von Ia und dem Eb/N0 an-gesehen werden, so dass die extrinsische Übertragungsfunktion (EXIT-Chart)wie folgt definiert werden kann:
Ie = T (Ia, Eb/N0). (1.57)
Um die extrinsische wechselseitige Information zu berechnen muss die Vertei-lungsdichte pLe
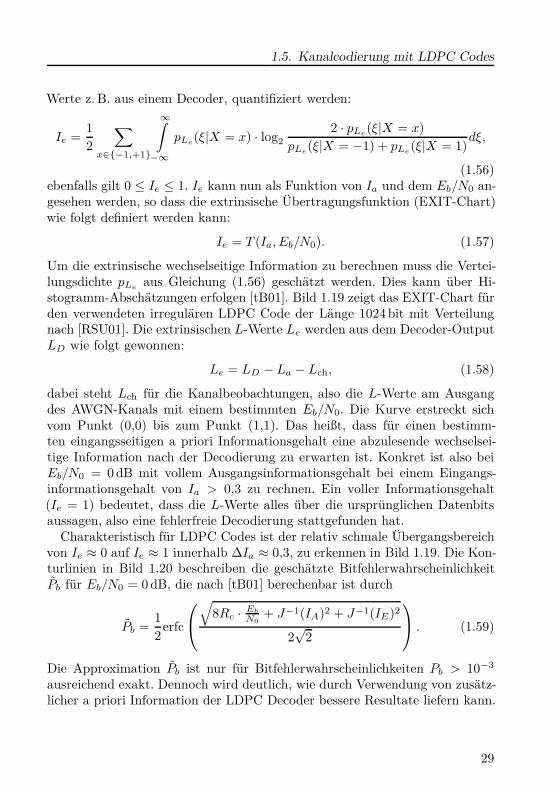
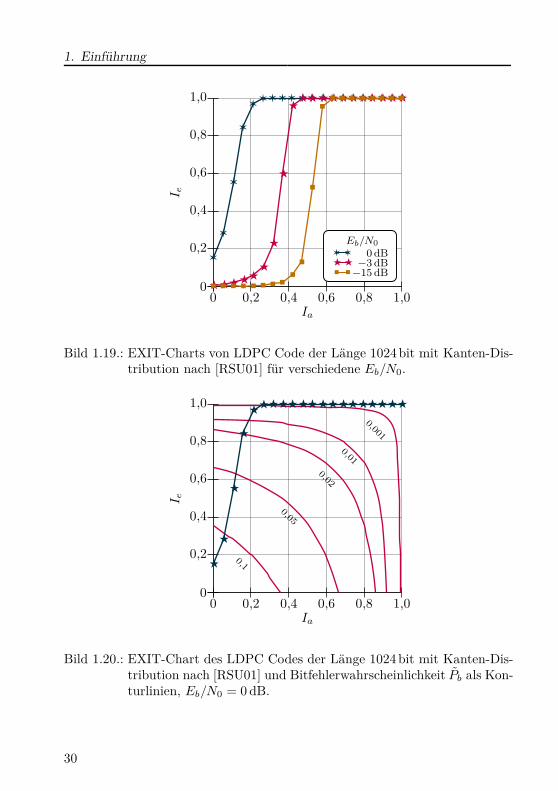
aus Gleichung (1.56) geschätzt werden. Dies kann über Hi-stogramm-Abschätzungen erfolgen [tB01]. Bild 1.19 zeigt das EXIT-Chart fürden verwendeten irregulären LDPC Code der Länge 1024 bit mit Verteilungnach [RSU01]. Die extrinsischen L-Werte Le werden aus dem Decoder-OutputLD wie folgt gewonnen:
Le = LD − La − Lch, (1.58)
dabei steht Lch für die Kanalbeobachtungen, also die L-Werte am Ausgangdes AWGN-Kanals mit einem bestimmten Eb/N0. Die Kurve erstreckt sichvom Punkt (0,0) bis zum Punkt (1,1). Das heißt, dass für einen bestimm-ten eingangsseitigen a priori Informationsgehalt eine abzulesende wechselsei-tige Information nach der Decodierung zu erwarten ist. Konkret ist also beiEb/N0 = 0 dB mit vollem Ausgangsinformationsgehalt bei einem Eingangs-informationsgehalt von Ia > 0,3 zu rechnen. Ein voller Informationsgehalt(Ie = 1) bedeutet, dass die L-Werte alles über die ursprünglichen Datenbitsaussagen, also eine fehlerfreie Decodierung stattgefunden hat.
Charakteristisch für LDPC Codes ist der relativ schmale Übergangsbereichvon Ie ≈ 0 auf Ie ≈ 1 innerhalb ∆Ia ≈ 0,3, zu erkennen in Bild 1.19. Die Kon-turlinien in Bild 1.20 beschreiben die geschätzte BitfehlerwahrscheinlichkeitPb für Eb/N0 = 0 dB, die nach [tB01] berechenbar ist durch
Pb =1
2erfc
√
8Rc · Eb
N0+ J−1(IA)2 + J−1(IE)2
2√
2
. (1.59)
Die Approximation Pb ist nur für Bitfehlerwahrscheinlichkeiten Pb > 10−3
ausreichend exakt. Dennoch wird deutlich, wie durch Verwendung von zusätz-licher a priori Information der LDPC Decoder bessere Resultate liefern kann.
29
1. Einführung
0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1,0
I e
Ia
Eb/N0
0 dB −3 dB −15 dB
Bild 1.19.: EXIT-Charts von LDPC Code der Länge 1024 bit mit Kanten-Dis-tribution nach [RSU01] für verschiedene Eb/N0.
0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1,0
I e
Ia
0,1
0,05
0,02
0,01
0,001
Bild 1.20.: EXIT-Chart des LDPC Codes der Länge 1024 bit mit Kanten-Dis-tribution nach [RSU01] und Bitfehlerwahrscheinlichkeit Pb als Kon-turlinien, Eb/N0 = 0 dB.
30
2. Multiple Input-MultipleOutput Detektion
Aufgabe des Detektors ist es, die Sendesignale, die durch räumliche Überlage-rung gemischt werden, mit Hilfe der Kenntnis des Kanals in der Gegenwartvon Rauschen zu rekonstruieren bzw. möglichst exakte Wahrscheinlichkeitenfür die übertragenen Bits anzugeben. In einem entscheidungsbasierten Kanal-schätzungsansatz ist die möglichst einwandfreie Rekonstruktion der Sendevek-toren von großer Bedeutung, da die Kanalschätzung durch falsch geschätzteSendevektoren verändert wird und die korrekte Detektion nachfolgender Sen-devektoren durch eine schlechtere Kanalschätzung unwahrscheinlicher wird.
Diskutiert wird zunächst eine Gruppe von Detektionsalgorithmen, die fürSchmalbandkanäle entworfen wurden. Im Frequenzbereich operierend sind die-se auf OFDM-Subträgern einsetzbar [BZ10a]. Weitere Voraussetzung ist einsich zeitlich nur langsam veränderlicher Kanal – Rayleigh-Block-Fading-Kanal– mit einer Kohärenzzeit TC ≫ TOFDM, modelliert durch:
r = H · s + w, Hr,t ∼ CN (0,1), ∀r, t. (2.1)
Die Koeffizienten der Kanalmatrix sind also komplexe zirkulär-symmetrischnormalverteilte Zufallsvariablen mit Mittelwert null und Varianz eins. Damitist die Kondition der Matrix ebenfalls eine Zufallsvariable und kann beliebignahe an Null sein.
Im Anschluss daran wird ein lineares Verfahren zur Entzerrung eines Mehr-trägermodulationsverfahrens im Zeitbereich diskutiert, das auch für schnell-veränderliche, breitbandige MIMO-Kanäle geeignet ist.
Eine Möglichkeit zur Bestimmung der gesendeten Daten im Empfänger ist,den Kanaleinfluss rückgängig zu machen und eine Rekonstruktion des Sende-vektors zu erzeugen. Dies kann mittels linearer Operationen geschehen – linea-re Entzerrung – oder durch sukzessive Interferenzauslöschung. Die resultieren-den nT Elemente der Symbolvektoren – QAM-Symbole – können im Anschlusseiner AWGN-Symbolentscheidung unterzogen werden. Dies kann direkt aufentschiedene Bits (hard decision) oder durch Ermittlung der bedingten Wahr-scheinlichkeiten auf L-Werte (soft decision) führen. Wie eingangs erwähnt,
31

2. MIMO Detektion
beruhen die vorgestellten Verfahren auf der Kenntnis des Kanaleinflusses, derKanalmatrix.
2.1. Lineare Detektion
Wird das Rauschen vernachlässigt, kann der optimale1 lineare Entzerrer, auchlinear Zero Forcing (ZF)-Entzerrer genannt, hergeleitet werden: Nach dem Or-thogonalitätsprinzip wird das Minimum Mean Square Error (MMSE)-Kriteri-um E
‖r− r‖2
genau dann erfüllt, wenn
E
HH(r− r)
= 0 (2.2)
für mittelwertfreie r, s und r = H · s [Hay01]. Es gilt
HH · (r−Hs) = 0 (2.3)
HH · r−HHH · s = 0 (2.4)
⇒ s = (HHH)−1HH
︸ ︷︷ ︸
H†
r. (2.5)
Falls H vollen Rang hat, ist H† = (HHH)−1HH die Moore-Penrose-Inversevon H für nT < nR. Die Lösung kann als interferenzunterdrückendes FilterΨZF = H† angesehen werden.
Bei Berücksichtigung des Rauschens ergibt sich der geschätzte Sendevektorder linearen ZF-Lösung wie folgt
sZF = s + (HHH)−1HHw. (2.6)
Einerseits wird in der Abwesenheit von Rauschen der Sendesymbolvektor ex-akt rekonstruiert. Andererseits hängt der Einfluss des Rauschens auf sZF starkvon der Kondition der Kanalmatrix ab: Für kleine Singulärwerte wird das Rau-schen deutlich verstärkt. Die Korrelationsmatrix des Schätzfehlers ist also
E ‖sZF − s‖ = σ2w
(HHH)−1, σ2w
= E
wHw. (2.7)
Um einen Kompromiss zwischen Signalentzerrung und Rauschverstärkungzu treffen, wird die Rauschleistung auf die Diagonalelemente addiert. Dadurch
1 Bezüglich eines dem Empfänger unbekannten Sendealphabetes, auch unconstraint signa-
ling genannt.
32
2.1. Lineare Detektion
wird erreicht, dass die Singulärwerte erhöht werden, und so die Verstärkungbegrenzt wird. Eine perfekte Sendevektorrekonstruktion ist aber mit dem li-nearen MMSE-Entzerrer nicht mehr möglich:
sMMSE = (HHH + σ2w
InT)−1HHr. (2.8)
Der Schätzfehler kann wie folgt angegeben werden:
E ‖sMMSE − s‖ = σ2w
(HHH + σ2w
InR)−1. (2.9)
Die Komplexität – bezogen auf ein MIMO-OFDM-Symbol – dieser Algorith-men ist mit OZF(KnRn
2T ) bzw. OMMSE(KnRn
2T ) vergleichsweise gering.
2.1.1. Symboldetektion
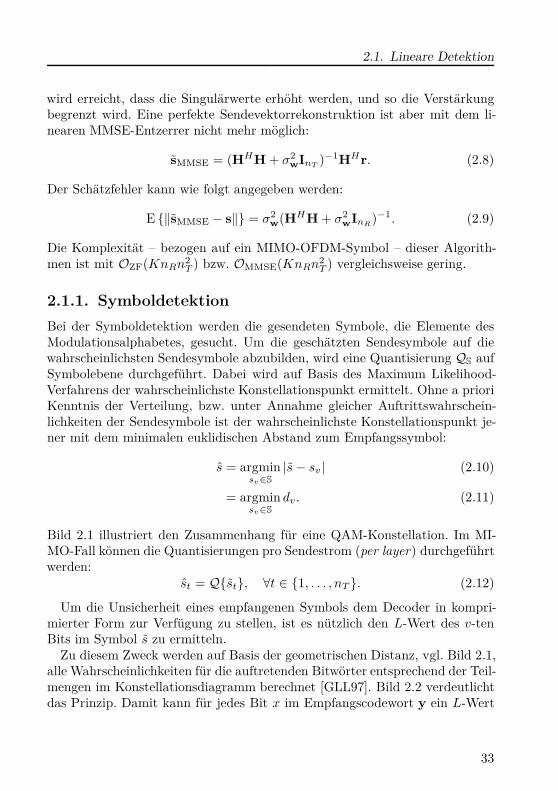
Bei der Symboldetektion werden die gesendeten Symbole, die Elemente desModulationsalphabetes, gesucht. Um die geschätzten Sendesymbole auf diewahrscheinlichsten Sendesymbole abzubilden, wird eine Quantisierung QS aufSymbolebene durchgeführt. Dabei wird auf Basis des Maximum Likelihood-Verfahrens der wahrscheinlichste Konstellationspunkt ermittelt. Ohne a prioriKenntnis der Verteilung, bzw. unter Annahme gleicher Auftrittswahrschein-lichkeiten der Sendesymbole ist der wahrscheinlichste Konstellationspunkt je-ner mit dem minimalen euklidischen Abstand zum Empfangssymbol:
s = argminsv∈S
|s− sv| (2.10)
= argminsv∈S
dv. (2.11)
Bild 2.1 illustriert den Zusammenhang für eine QAM-Konstellation. Im MI-MO-Fall können die Quantisierungen pro Sendestrom (per layer) durchgeführtwerden:
st = Qst, ∀t ∈ 1, . . . , nT . (2.12)
Um die Unsicherheit eines empfangenen Symbols dem Decoder in kompri-mierter Form zur Verfügung zu stellen, ist es nützlich den L-Wert des v-tenBits im Symbol s zu ermitteln.
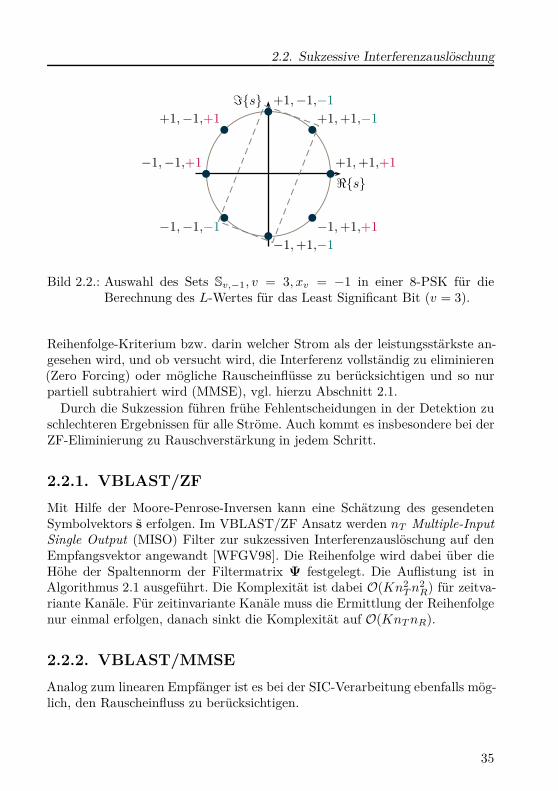
Zu diesem Zweck werden auf Basis der geometrischen Distanz, vgl. Bild 2.1,alle Wahrscheinlichkeiten für die auftretenden Bitwörter entsprechend der Teil-mengen im Konstellationsdiagramm berechnet [GLL97]. Bild 2.2 verdeutlichtdas Prinzip. Damit kann für jedes Bit x im Empfangscodewort y ein L-Wert
33
2. MIMO Detektion
s1 s2
s3 s4
d1
d2
d3
d4
s
ℜs
ℑs
ss
ℜs
ℑs
Bild 2.1.: Entscheidung eines aus dem BIAWGN-Kanal empfangenen Symbolss auf einen Konstellationspunkt einer QAM.
nach Gleichung (1.40) berechnet werden. Es erfolgt eine Maximum Likelihood-Detektion bei nicht näher bekannter a priori Wahrscheinlichkeit, also der An-nahme P (x = +1) = P (x = −1) = 1/2 ⇒ La(x) = 0. Die Übergangswahr-scheinlichkeitsdichtefunktion kann über
p(s|s =Mx) =exp
(
− 1σ2
w|s− s|2
)
πσ2w
(2.13)
berechnet werden. σ2w ist die komplexe Rauschleistung pro Symbol. Für Kon-
stellationsdiagramme höherer Ordnung ist folgende Approximation nützlich:
L(y|xv) = − 1
σ2w
(
mins∈Sv,+1
|s− s|2
− min
s∈Sv,−1
|s− s|2
)
, ∀v ∈ 1, . . . , κ.(2.14)
2.2. Sukzessive Interferenzauslöschung
Eine Gruppe von nichtlinearen Entzerrern wird gebildet durch Algorithmenmit sukzessiver Interferenzauslöschung (SIC). Bei den Vertical Bell-Labs Laye-red Space-Time (VBLAST)-Algorithmen besteht die Kernidee darin, zunächstden Sendestrom mit der größten Leistung zu detektieren und zu quantisierenund dann die Projektion des quantisierten Sendestroms im Empfangsraumvom Empfangsgemisch zu subtrahieren, also die Interferenz, die durch den de-tektierten Sendestrom verursacht wurde, zu eliminieren. Danach wird mit demSendestrom mit der zweitgrößten Leistung dieselbe Prozedur durchgeführt, bisalle nT Ströme detektiert sind. Die Algorithmen unterscheiden sich in dem
34
2.2. Sukzessive Interferenzauslöschung
+1,+1,+1
+1,+1,−1
+1,−1,−1
+1,−1,+1
−1,−1,+1
−1,−1,−1
−1,+1,−1
−1,+1,+1
ℜs
ℑs
Bild 2.2.: Auswahl des Sets Sv,−1, v = 3, xv = −1 in einer 8-PSK für dieBerechnung des L-Wertes für das Least Significant Bit (v = 3).
Reihenfolge-Kriterium bzw. darin welcher Strom als der leistungsstärkste an-gesehen wird, und ob versucht wird, die Interferenz vollständig zu eliminieren(Zero Forcing) oder mögliche Rauscheinflüsse zu berücksichtigen und so nurpartiell subtrahiert wird (MMSE), vgl. hierzu Abschnitt 2.1.
Durch die Sukzession führen frühe Fehlentscheidungen in der Detektion zuschlechteren Ergebnissen für alle Ströme. Auch kommt es insbesondere bei derZF-Eliminierung zu Rauschverstärkung in jedem Schritt.
2.2.1. VBLAST/ZF
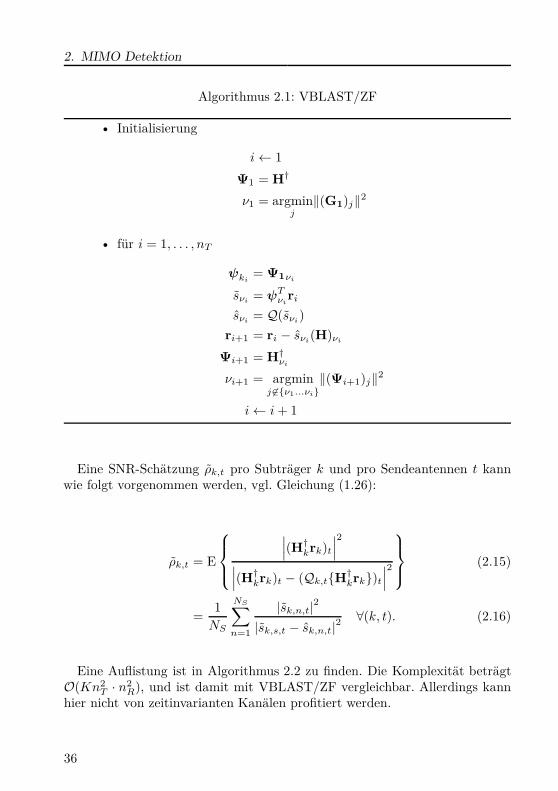
Mit Hilfe der Moore-Penrose-Inversen kann eine Schätzung des gesendetenSymbolvektors s erfolgen. Im VBLAST/ZF Ansatz werden nT Multiple-InputSingle Output (MISO) Filter zur sukzessiven Interferenzauslöschung auf denEmpfangsvektor angewandt [WFGV98]. Die Reihenfolge wird dabei über dieHöhe der Spaltennorm der Filtermatrix Ψ festgelegt. Die Auflistung ist inAlgorithmus 2.1 ausgeführt. Die Komplexität ist dabei O(Kn2
Tn2R) für zeitva-
riante Kanäle. Für zeitinvariante Kanäle muss die Ermittlung der Reihenfolgenur einmal erfolgen, danach sinkt die Komplexität auf O(KnTnR).
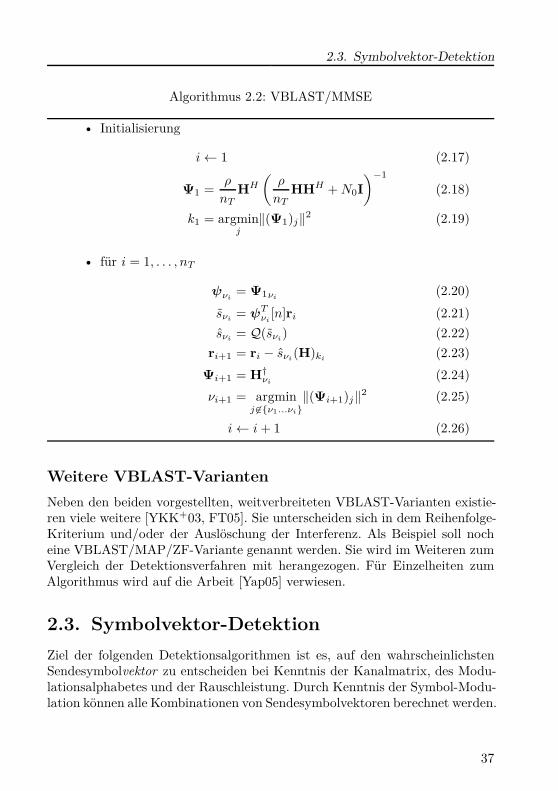
2.2.2. VBLAST/MMSE
Analog zum linearen Empfänger ist es bei der SIC-Verarbeitung ebenfalls mög-lich, den Rauscheinfluss zu berücksichtigen.
35
2. MIMO Detektion
Algorithmus 2.1: VBLAST/ZF
• Initialisierung
i← 1
Ψ1 = H†
ν1 = argminj‖(G1)j‖2
• für i = 1, . . . , nT
ψki= Ψ1νi
sνi= ψT
νiri
sνi= Q(sνi
)
ri+1 = ri − sνi(H)νi
Ψi+1 = H†νi
νi+1 = argminj 6∈ν1...νi
‖(Ψi+1)j‖2
i← i+ 1
Eine SNR-Schätzung ρk,t pro Subträger k und pro Sendeantennen t kannwie folgt vorgenommen werden, vgl. Gleichung (1.26):
ρk,t = E
∣∣∣(H†
krk)t
∣∣∣
2
∣∣∣(H†
krk)t − (Qk,tH†krk)t
∣∣∣
2
(2.15)
=1
NS
NS∑
n=1
|sk,n,t|2
|sk,s,t − sk,n,t|2∀(k, t). (2.16)
Eine Auflistung ist in Algorithmus 2.2 zu finden. Die Komplexität beträgtO(Kn2
T · n2R), und ist damit mit VBLAST/ZF vergleichbar. Allerdings kann
hier nicht von zeitinvarianten Kanälen profitiert werden.
36
2.3. Symbolvektor-Detektion
Algorithmus 2.2: VBLAST/MMSE
• Initialisierung
i← 1 (2.17)
Ψ1 =ρ
nTHH
(ρ
nTHHH +N0I
)−1
(2.18)
k1 = argminj‖(Ψ1)j‖2 (2.19)
• für i = 1, . . . , nT
ψνi= Ψ1νi
(2.20)
sνi= ψT
νi[n]ri (2.21)
sνi= Q(sνi
) (2.22)
ri+1 = ri − sνi(H)ki
(2.23)
Ψi+1 = H†νi
(2.24)
νi+1 = argminj 6∈ν1...νi
‖(Ψi+1)j‖2 (2.25)
i← i+ 1 (2.26)
Weitere VBLAST-Varianten
Neben den beiden vorgestellten, weitverbreiteten VBLAST-Varianten existie-ren viele weitere [YKK+03, FT05]. Sie unterscheiden sich in dem Reihenfolge-Kriterium und/oder der Auslöschung der Interferenz. Als Beispiel soll nocheine VBLAST/MAP/ZF-Variante genannt werden. Sie wird im Weiteren zumVergleich der Detektionsverfahren mit herangezogen. Für Einzelheiten zumAlgorithmus wird auf die Arbeit [Yap05] verwiesen.
2.3. Symbolvektor-Detektion
Ziel der folgenden Detektionsalgorithmen ist es, auf den wahrscheinlichstenSendesymbolvektor zu entscheiden bei Kenntnis der Kanalmatrix, des Modu-lationsalphabetes und der Rauschleistung. Durch Kenntnis der Symbol-Modu-lation können alle Kombinationen von Sendesymbolvektoren berechnet werden.
37
2. MIMO Detektion
Dies unterscheidet die folgenden Algorithmen von der linearen Detektion.
2.3.1. Maximum Likelihood Symbolvektor-Detektor
Ausgehend von dem Empfangsvektor r und Kenntnis der Kanalmatrix H wirdderjenige Sendesymbolvektor s gesucht, der den Abstand minimiert:
argmins
‖r−H · s‖2, ∀s ∈MnT X, (2.27)
wobei MnT X die Menge aller möglichen Sendevektoren darstellt.Im Maximum Likelihood-Ansatz werden alle Sendesymbolkombinationen ge-
testet und derjenige Sendesymbolvektor mit dem niedrigsten Abstand aus-wählt bei impliziter Voraussetzung, dass die Rauschleistung kleiner ist als derAbstand zum nächsten hypothetischen Empfangssymbolvektor.
Dieser Ansatz liefert die optimale Lösung im Sinne von Gleichung (2.27),und es wurde gezeigt, dass dies die Strategie mit der geringsten Symbolfeh-lerwahrscheinlichkeit ist, sofern keine zugrunde liegende Codierung ausgenutztwird, bei exponentieller Komplexität, O(MnT ). Exponentielle Komplexität be-deutet konkret, dass z. B. für ein 8×8 System mit 16-QAMMnT etwa 4 Milliar-den Hypothesen untersucht werden müssten. Es existieren approximative Algo-rithmen, die bei niedrigerer Komplexität die Performanz von Maximum Like-lihood zu erreichen versuchen, wie z. B. das Sphere Decoding [HtB03, VHK04].In Bild 2.4 sind durch Monte-Carlo-Simulationen ermittelte Bitfehlerraten fürVektor-basiertes Maximum Likelihood dargestellt.
2.3.2. Soft Maximum Likelihood-Detektor
Im Falle des Maximum Likelihood-Symbolvektor-Ansatzes wird eine Liste an-gelegt, in der alle MnT Abstände hypothetischer Sendesymbolvektoren si nachder Projektion durch die Kanalmatrix H zum tatsächlich empfangenen Sym-bolvektor r enthalten sind:
d2i = ‖r−H · si‖2. (2.28)
Anstatt nur den wahrscheinlichsten Sendevektor sj , das Minimum dj =argmini di zu betrachten, können Werte in der Nähe des Extremums in dieEntscheidung mit einbezogen werden. Bild 2.3 zeigt Streuung im Empfangs-und Senderaum der Empfangsvektoren um die projizierten Konstellationsvek-
38
2.4. MIMO Bit-Detektion
2
4
−2
−4
2 4−2−4
r1
r2
1
−1
1−1
s1
s2
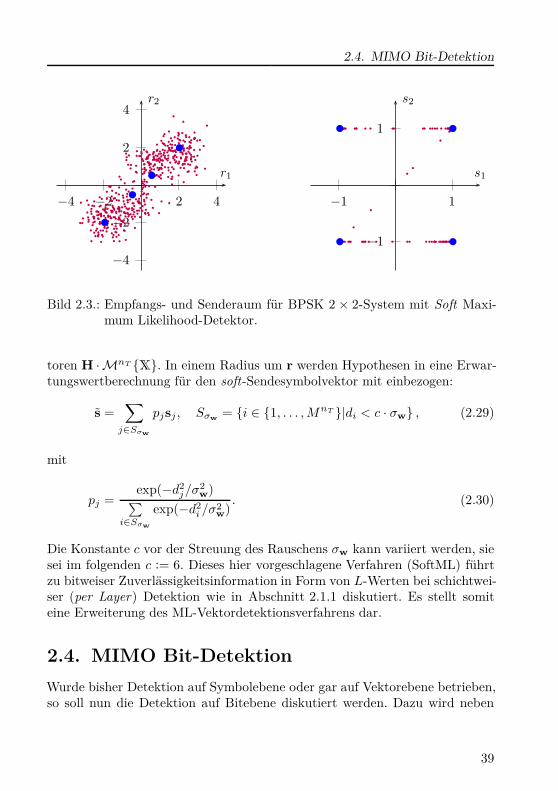
Bild 2.3.: Empfangs- und Senderaum für BPSK 2 × 2-System mit Soft Maxi-mum Likelihood-Detektor.
toren H ·MnT X. In einem Radius um r werden Hypothesen in eine Erwar-tungswertberechnung für den soft-Sendesymbolvektor mit einbezogen:
s =∑
j∈Sσw
pjsj , Sσw= i ∈ 1, . . . ,MnT |di < c · σw , (2.29)
mit
pj =exp(−d2
j/σ2w)
∑
i∈Sσw
exp(−d2i /σ
2w
). (2.30)
Die Konstante c vor der Streuung des Rauschens σw kann variiert werden, siesei im folgenden c := 6. Dieses hier vorgeschlagene Verfahren (SoftML) führtzu bitweiser Zuverlässigkeitsinformation in Form von L-Werten bei schichtwei-ser (per Layer) Detektion wie in Abschnitt 2.1.1 diskutiert. Es stellt somiteine Erweiterung des ML-Vektordetektionsverfahrens dar.
2.4. MIMO Bit-Detektion
Wurde bisher Detektion auf Symbolebene oder gar auf Vektorebene betrieben,so soll nun die Detektion auf Bitebene diskutiert werden. Dazu wird neben
39

2. MIMO Detektion
dem Modulationsalphabet die Kenntnis der Abbildungsfunktion der Bits aufQAM-Symbole, z. B. Gray-Mapping, benötigt. Anhand der Symbolabständewerden für jedes übertragene Bit Bitwahrscheinlichkeiten ermittelt. Für einekompaktere Darstellung werden diese in L-Werte übersetzt. Durch den Betragist eine Zuverlässigkeitsinformation enthalten, die von nachfolgenden Stufengenutzt werden kann. Besonders der LDPC Decoder erzielt durch die Verwen-dung von soft Information bessere Ergebnisse, wie in Bild 1.20 gezeigt.
2.4.1. Maximum Likelihood Bit-Detektor
Die optimale Detektion bezüglich der L-Werte kann nur durch Auswertungder Set-Abstände im Verbund bezüglich der Bits xv, v = 1, . . . , κ ·nT im Sym-bolvektor s erfolgen. Ohne Kenntnis der a priori Auftrittswahrscheinlichkeitenerfolgt die Detektion auf Basis der Likelihood-Funktion p(r|x):
p(r|s =MnT X) =exp
(
− 1σ2
w
· ‖r−H · s||2)
(2πσ2w
)nR. (2.31)
Für die L-Wert-Berechnung ist nur der Exponential-Term relevant:
LD,ML(xv) = ln
∑
x∈Xv,+1
exp(
− 1σ2
w
· ‖r−H · s||2)
∑
x∈Xv,−1
exp(
− 1σ2
w
· ‖r−H · s||2) . (2.32)
Eine übliche Vereinfachung bildet die „max-log“-Approximation [RVH95]:
LD,ML(xv) = maxx∈Xv,+1
− 1
σ2w
‖r−H · s‖
− maxs∈Xv,−1
1
σ2w
‖r−H · s‖
.
(2.33)
2.4.2. Maximum A Posteriori Bit-Detektor
Durch Maximierung der a posteriori Wahrscheinlichkeit wird die Fehlerwahr-scheinlichkeit eines Bits minimiert [HtB03, HOP96]. Der a posteriori L-Wertdes Bits xv, v = 1, . . . , κ · nT , bedingt durch den Empfangsvektor r ist
LD(xv|r) = lnP (xv = +1|r)
P (xv = −1|r). (2.34)
40

2.5. Vergleich der Detektionsverfahren
Unter der Annahme, dass die Bits in x codiert und durch einen Interleaver soverwürfelt wurden, dass die Bits im Vektor untereinander statistisch unabhän-gig sind, kann das Bayes’sche Theorem angewandt werden, um die Verbund-wahrscheinlichkeiten in Produkte der Einzelwahrscheinlichkeiten zu wandeln:
LD,MAP (xk|r) = LA(xv) + ln
∑
x∈Xv,+1
p(r|x) · exp∑
j∈Jv,x
LA(xv)
∑
x∈Xv,−1
p(r|x) · exp∑
j∈Jv,x
LA(xv), (2.35)
mit Xv,+1, der Menge der 2κ·nT −1 Bitvektoren, für die gilt xv = +1, also
Xv,+1 = x|xv = +1, Xv,−1 = x|xv = −1, (2.36)
der j-Index-Menge Jv,x, für die gilt:
Jv,x = j|j = 1, . . . , κ · nT , j 6= v, xj = +1 (2.37)
und der a priori L-Werte
LA(xj) = lnP (xj = +1)
P (xj = −1). (2.38)
2.5. Vergleich der Detektionsverfahren
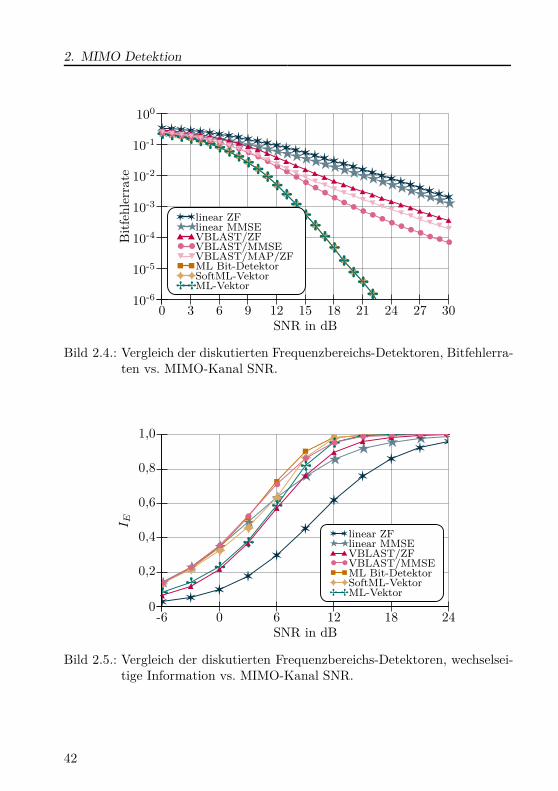
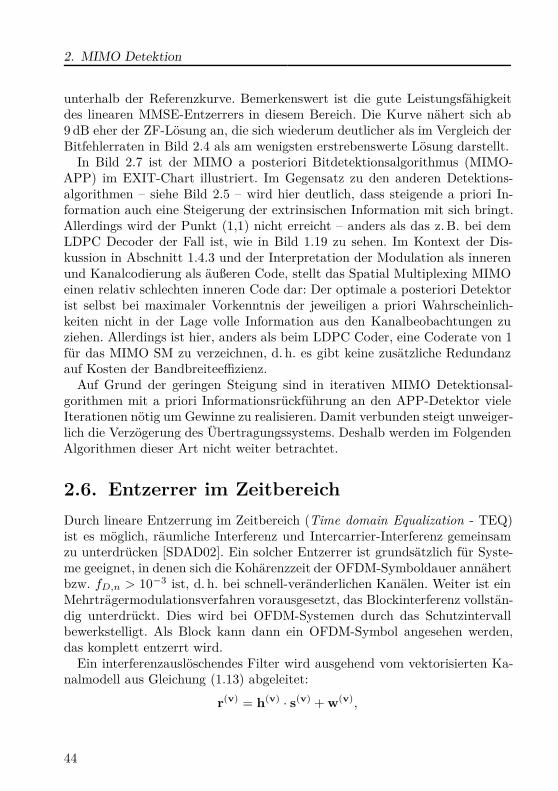
Bild 2.4 zeigt die Bitfehlerraten aus Monte-Carlo-Simulationen für die bisherdiskutierten Verfahren über Variation des SNRs bei 4-QAM Modulation im4× 4 MIMO System. Die ML-basierten Verfahren sind wesentlich leistungsfä-higer als die anderen. Mit einigem Abstand folgen die VBLAST-Algorithmenund schließlich die linearen Detektoren. Da nur uncodierte Bitfehlerraten dar-gestellt sind, ist eine Aussage über die gewonnenen Zuverlässigkeitsinformatio-nen nicht möglich.
Bild 2.5 zeigt die wechselseitige Information von detektierten L-Wertenzur gesendeten Bitsequenz. Der Informationsgehalt gemessen in der mittle-ren wechselseitigen Information ist konstant bezüglich der a priori Information,aber steigt monoton über SNR an. Um Fehlerfortpfanzungseffekte auszuschlie-ßen, sind zur Ermittlung des Informationsgehalt die VBLAST-Algorithmenunter der Annahme untersucht worden, dass keine Fehler bei der Schichtauslö-schung entstehen. Es zeigt sich ein differenzierteres Bild als die in Bild 2.4ersichtlichen Tendenzen: Eine deutliche Abgrenzung in der Leistungsfähig-keit der soft ML-basierten Verfahren, ML Bit-Detektor und SoftML-Vektor
41
2. MIMO Detektion
10-6
10-5
10-4
10-3
10-2
10-1
100
0 3 6 9 12 15 18 21 24 27 30
Bit
fehle
rrat
e
SNR in dB
linear ZF linear MMSE VBLAST/ZF VBLAST/MMSE VBLAST/MAP/ZF ML Bit-Detektor SoftML-Vektor ML-Vektor
Bild 2.4.: Vergleich der diskutierten Frequenzbereichs-Detektoren, Bitfehlerra-ten vs. MIMO-Kanal SNR.
0
0,2
0,4
0,6
0,8
1,0
-6 0 6 12 18 24
I E
SNR in dB
linear ZF linear MMSE VBLAST/ZF VBLAST/MMSE ML Bit-Detektor SoftML-Vektor ML-Vektor
Bild 2.5.: Vergleich der diskutierten Frequenzbereichs-Detektoren, wechselsei-tige Information vs. MIMO-Kanal SNR.
42

2.5. Vergleich der Detektionsverfahren
0
0,2
0,4
0,6
0,8
1,0
-6 0 6 12 18 24
I E
SNR in dB
ideal VBLAST/ZF ideal VBLAST/MMSE VBLAST/ZF VBLAST/MMSE VBLAST/MAP/ZF
Bild 2.6.: Vergleich der wechselseitigen Information von VBLAST-Detektorenhinsichtlich idealer Schichtauslöschung und nicht-idealer maximumlikelihood per layer Entscheidung über MIMO-Kanal SNR.
ist gegenüber der symbolbasierten ML-Vektor-Detektion zu beobachten. AlsReferenz der Leistungsfähigkeit wird dabei das ML Bit-Detektor Verfahrenangesehen, kein Verfahren kann ohne a priori Kenntnis bessere Ergebnisseliefern. Im niedrigen SNR-Bereich ist sowohl das lineare MMSE als auchdas VBLAST/MMSE Verfahren in der Lage, quasi maximalen Informati-onsgehalt aus den Empfangsdaten zu beziehen. Die Kurve für die lineareMMSE-Detektion ist quasi deckungsgleich mit der Referenzkurve des ML Bit-Detektors bis 0 dB; das VBLAST/MMSE ist dagegen bis 6 dB gleich perfor-mant. Für das VBLAST/MMSE Verfahren ist dies erklärbar durch den Ge-winn an Freiheitsgraden durch die Schicht-Auslöschung.
Bild 2.6 zeigt die ermittelte wechselseitige Information für die VBLAST-Algorithmen mit und ohne Fehlerfortpfanzungseffekte durch die Schicht-Aus-löschung im Vergleich. Im nicht-idealen Fall werden die Symbole, wie inAbschnitt 2.1.1 ausgeführt, schichtweise nach Maximum Likelihood entschie-den und die Projektion des entschiedenen Symbols vom Empfangsgemisch sub-trahiert. Im idealen Fall dagegen wird die Projektion des tatsächlich gesende-ten Symbols subtrahiert. Es zeigt sich ein beträchtlicher Abstand zwischenidealer und nicht-idealer SIC-Ausführung.
Der vorgeschlagene SoftML-Algorithmus setzt sich von der Vektor-basier-ten ML-Detektion positiv ab, bleibt allerdings im Bereich von 0 dB bis 12 dB
43
2. MIMO Detektion
unterhalb der Referenzkurve. Bemerkenswert ist die gute Leistungsfähigkeitdes linearen MMSE-Entzerrers in diesem Bereich. Die Kurve nähert sich ab9 dB eher der ZF-Lösung an, die sich wiederum deutlicher als im Vergleich derBitfehlerraten in Bild 2.4 als am wenigsten erstrebenswerte Lösung darstellt.
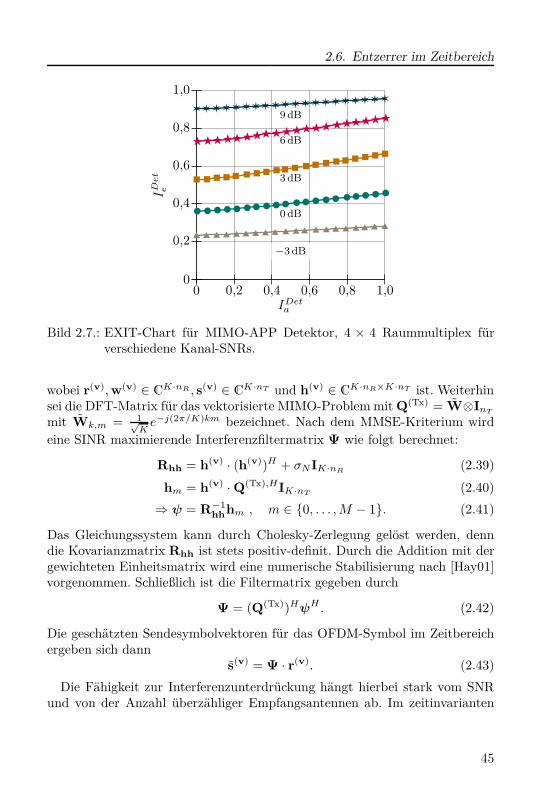
In Bild 2.7 ist der MIMO a posteriori Bitdetektionsalgorithmus (MIMO-APP) im EXIT-Chart illustriert. Im Gegensatz zu den anderen Detektions-algorithmen – siehe Bild 2.5 – wird hier deutlich, dass steigende a priori In-formation auch eine Steigerung der extrinsischen Information mit sich bringt.Allerdings wird der Punkt (1,1) nicht erreicht – anders als das z. B. bei demLDPC Decoder der Fall ist, wie in Bild 1.19 zu sehen. Im Kontext der Dis-kussion in Abschnitt 1.4.3 und der Interpretation der Modulation als innerenund Kanalcodierung als äußeren Code, stellt das Spatial Multiplexing MIMOeinen relativ schlechten inneren Code dar: Der optimale a posteriori Detektorist selbst bei maximaler Vorkenntnis der jeweiligen a priori Wahrscheinlich-keiten nicht in der Lage volle Information aus den Kanalbeobachtungen zuziehen. Allerdings ist hier, anders als beim LDPC Coder, eine Coderate von 1für das MIMO SM zu verzeichnen, d. h. es gibt keine zusätzliche Redundanzauf Kosten der Bandbreiteeffizienz.
Auf Grund der geringen Steigung sind in iterativen MIMO Detektionsal-gorithmen mit a priori Informationsrückführung an den APP-Detektor vieleIterationen nötig um Gewinne zu realisieren. Damit verbunden steigt unweiger-lich die Verzögerung des Übertragungssystems. Deshalb werden im FolgendenAlgorithmen dieser Art nicht weiter betrachtet.
2.6. Entzerrer im Zeitbereich
Durch lineare Entzerrung im Zeitbereich (Time domain Equalization - TEQ)ist es möglich, räumliche Interferenz und Intercarrier-Interferenz gemeinsamzu unterdrücken [SDAD02]. Ein solcher Entzerrer ist grundsätzlich für Syste-me geeignet, in denen sich die Kohärenzzeit der OFDM-Symboldauer annähertbzw. fD,n > 10−3 ist, d. h. bei schnell-veränderlichen Kanälen. Weiter ist einMehrträgermodulationsverfahren vorausgesetzt, das Blockinterferenz vollstän-dig unterdrückt. Dies wird bei OFDM-Systemen durch das Schutzintervallbewerkstelligt. Als Block kann dann ein OFDM-Symbol angesehen werden,das komplett entzerrt wird.
Ein interferenzauslöschendes Filter wird ausgehend vom vektorisierten Ka-nalmodell aus Gleichung (1.13) abgeleitet:
r(v) = h(v) · s(v) + w(v),
44
2.6. Entzerrer im Zeitbereich
0
0,2
0,4
0,6
0,8
1,0
0 0,2 0,4 0,6 0,8 1,0
ID
et
e
IDeta
−3 dB
0 dB
3 dB
6 dB
9 dB
Bild 2.7.: EXIT-Chart für MIMO-APP Detektor, 4 × 4 Raummultiplex fürverschiedene Kanal-SNRs.
wobei r(v),w(v) ∈ CK·nR , s(v) ∈ CK·nT und h(v) ∈ CK·nR×K·nT ist. Weiterhinsei die DFT-Matrix für das vektorisierte MIMO-Problem mit Q(Tx) = W⊗InT
mit Wk,m = 1√Ke−j(2π/K)km bezeichnet. Nach dem MMSE-Kriterium wird
eine SINR maximierende Interferenzfiltermatrix Ψ wie folgt berechnet:
Rhh = h(v) · (h(v))H + σN IK·nR(2.39)
hm = h(v) ·Q(Tx),HIK·nT(2.40)
⇒ ψ = R−1hh
hm , m ∈ 0, . . . ,M − 1. (2.41)
Das Gleichungssystem kann durch Cholesky-Zerlegung gelöst werden, denndie Kovarianzmatrix Rhh ist stets positiv-definit. Durch die Addition mit dergewichteten Einheitsmatrix wird eine numerische Stabilisierung nach [Hay01]vorgenommen. Schließlich ist die Filtermatrix gegeben durch
Ψ = (Q(Tx))HψH . (2.42)
Die geschätzten Sendesymbolvektoren für das OFDM-Symbol im Zeitbereichergeben sich dann
s(v) = Ψ · r(v). (2.43)
Die Fähigkeit zur Interferenzunterdrückung hängt hierbei stark vom SNRund von der Anzahl überzähliger Empfangsantennen ab. Im zeitinvarianten
45
2. MIMO Detektion
10-5
10-4
10-3
10-2
10-1
0 50 100 150 200 250 300
Bit
fehle
rrat
e
Geschwindigkeit des Empfängers v in m/s
30 dB 35 dB 40 dB 45 dB 50 dB
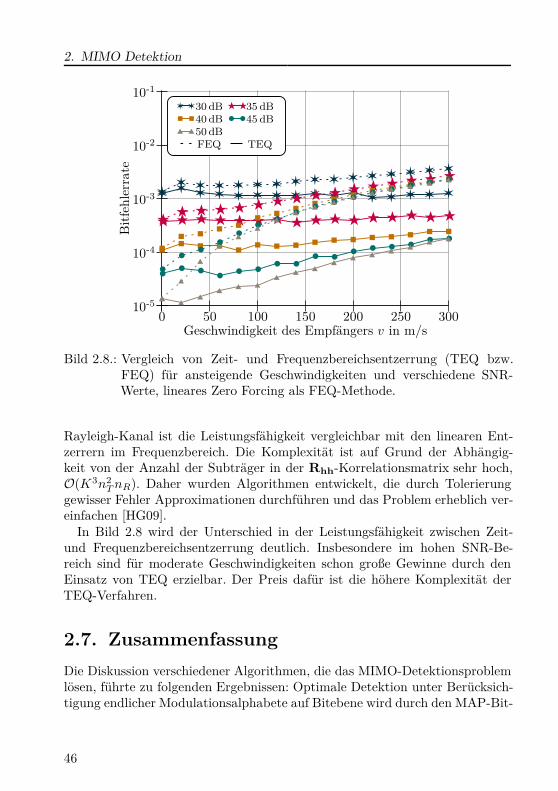
FEQ TEQ
Bild 2.8.: Vergleich von Zeit- und Frequenzbereichsentzerrung (TEQ bzw.FEQ) für ansteigende Geschwindigkeiten und verschiedene SNR-Werte, lineares Zero Forcing als FEQ-Methode.
Rayleigh-Kanal ist die Leistungsfähigkeit vergleichbar mit den linearen Ent-zerrern im Frequenzbereich. Die Komplexität ist auf Grund der Abhängig-keit von der Anzahl der Subträger in der Rhh-Korrelationsmatrix sehr hoch,O(K3n2
TnR). Daher wurden Algorithmen entwickelt, die durch Tolerierunggewisser Fehler Approximationen durchführen und das Problem erheblich ver-einfachen [HG09].
In Bild 2.8 wird der Unterschied in der Leistungsfähigkeit zwischen Zeit-und Frequenzbereichsentzerrung deutlich. Insbesondere im hohen SNR-Be-reich sind für moderate Geschwindigkeiten schon große Gewinne durch denEinsatz von TEQ erzielbar. Der Preis dafür ist die höhere Komplexität derTEQ-Verfahren.
2.7. Zusammenfassung
Die Diskussion verschiedener Algorithmen, die das MIMO-Detektionsproblemlösen, führte zu folgenden Ergebnissen: Optimale Detektion unter Berücksich-tigung endlicher Modulationsalphabete auf Bitebene wird durch den MAP-Bit-
46

2.7. Zusammenfassung
detektor (MIMO APP) ermöglicht. Falls keine a priori Information im Empfän-ger vorliegt, so ist der Algorithmus äquivalent zum ML-Bitdetektor. OptimaleDetektion ohne Kenntnis des Modulationsalphabetes ist der ZF, bzw. MMSE-Empfänger falls SNR-Kenntnis vorliegt. Dies kann sowohl im Frequenzbereichals auch im Zeitbereich erfolgen.
Weiter wurde deutlich, dass nicht nur die resultierende Bitfehlerrate vonInteresse ist, sondern auch das Maß an durch den Detektor gewonnener, wech-selseitiger Information. Unter Vorbehalt idealer Spreizung durch Interleavergibt die wechselseitige Information Einblick, wie sich die BICM-Systemleistungin Abhängigkeit vom Detektor in serieller Konkatenation mit einem soft Ka-naldecoder, wie in Abschnitt 1.5 vorgestellt, verhält. In dieser Hinsicht ist dieHauptaufgabe des MIMO-Detektors und Deinterleavers, die Informationen ausdem Kanal so umzuformen, dass nachfolgende Instanzen – der LDPC Decoder– möglichst parallele Bit-Kanäle vorfinden. Es geht also darum, unabhängigeL-Werte der Kanalbeobachtungen zu berechnen, aus denen der Kanaldecoderdas wahrscheinlichste Codewort zu ermitteln versucht.
Im Verlauf dieser Arbeit soll gezeigt werden, dass eine entscheidungsbasierteKanalschätzung, die auf das wahrscheinlichste Codewort zurückgreifen kann,genauere Schätzungen liefert als reine Sendevektorrekonstruktion.
47

3. Adaptive,entscheidungsbasierteKanalschätzung
Die Kanalschätzung bzw. Systemidentifikation basiert auf einem grundsätzli-chen Zusammenhang der Systemtheorie: Jedes diskrete, lineare, zeitinvarianteSystem kann durch Ermittlung seiner Übertragungsfunktion H(ejΩ) mit Hilfedes Autoleistungsdichtespektrums Suu(ejΩ) des Eingangssignals u[m] und desKreuzleistungsdichtespektrums Suy(ejΩ) des Ausgangssignals y[m] mit demEingangssignal eindeutig identifiziert werden:
H(ejΩ) =Suy(ejΩ)
Suu(ejΩ). (3.1)
Einer praktischen Implementation anhand Gleichung (3.1) steht im Wege,dass selbst bei bekanntem Eingangssignal das Kreuzleistungsdichtespektrumunbekannt ist und erst geschätzt werden muss.
Zur Schätzung des Kreuzleistungsdichtespektrums am Empfänger ist aller-dings die Kenntnis des gesendeten Signals erforderlich. Da dies im Widerspruchzu den Bedingungen eines Kommunikationssystems steht, werden zwei übli-che Herangehensweisen, die mit diesem Widerspruch konstruktiv umgehen,betrachtet: Die pilotbasierte Kanalschätzung und die entscheidungsbasierteKanalschätzung.
Bei einer pilotbasierten Kanalschätzung werden bekannte Symbole, sog. Pi-lotsymbole, in das Sendesignal integriert, die an Stelle der unbekannten In-formation übertragen werden. Der Empfänger hat Kenntnis über die Art derIntegration und ist in der Lage, eine Schätzung gemäß Gleichung (3.1) durch-zuführen. Ein konstanter Anteil der Übertragungsrate wird geopfert, um diePilotsymbole zu transportieren, und steht daher der Informationsübertragungnicht mehr zur Verfügung. Bei blockweiser Schätzung können allerdings Än-derungen im Kanal schnell berücksichtigt werden, da stets Kenntnis aus denPiloten gewonnen werden kann. Die Schätzqualität ist dabei abhängig von derAnzahl der Piloten.
49
3. Adaptive, entscheidungsbasierte Kanalschätzung
Auf Grund der Kenntnis, dass ein endliches Alphabet aus einem Vorrat anSymbolen übertragen wird, kann der Empfänger versuchen, eine Schätzung desKanals anhand entschiedener Symbole durchzuführen. Sukzessiv wird so für je-den Zeitschritt nach der Detektion die Kanalinformation erneuert. Allerdingsbenötigt die Detektion die Kanalinformation für den aktuellen Zeitschritt. Dadie Aktualisierung erst nach der Detektion erfolgt, wird an Stelle derer eineprädizierte Kanalinformation verwendet. Für eine vernünftige Prädiktion isterforderlich, den Kanalverlauf über der Zeit als stochastischen Prozess zu mo-dellieren, der die Bedingung erfüllt, im weiteren Sinne stationär zu sein (WideSense Stationary - WSS).
Im entscheidungsbasierten Ansatz werden zur Ermittlung der Kanalkoef-fizienten bereits detektierte Daten verwendet. Unter der Annahme, dass sierichtig detektiert worden sind, können sie wie Pilotsymbole zur Schätzung desKanals verwendet werden. Falls die Detektion fehlerhaft war, läuft die Kanal-schätzung in die Irre und die Detektion künftiger Symbole basiert auf einerfalschen Kanalschätzung, was wiederum in der Detektion zu falschen Ergebnis-sen führt. Dieser Vorgang wird in der entscheidungsbasierten KanalschätzungFehlerfortpflanzung genannt. In dieser Arbeit werden Strategien aufgezeigt,die eine solche Fehlerfortpflanzung zu unterbinden versuchen, so weit das Si-gnal-zu-Rauschverhältnis (SNR) dies zulässt.
Da die Ermittlung der unabhängigen nT · nR-Kanalmatrix-Koeffizientenaus den nT + nR Koeffizienten der Sende- und Empfangsvektoren ein Rang-defizitäres Problem darstellt, müssen verschiedene Diversitäten herangezogenund ausgenutzt werden. Eine Möglichkeit ist die Bestimmung unter Annah-me eines konstanten Kanalmodells: Ausgehend von dem Kanalmodell r[n] =H · s[n] + w[n] kann die Kanalmatrix durch Kenntnis der Statistik in Formder Autokorrelationsmatrix
Φ = E
s[n] · sH [n]
(3.2)
der gesendeten Symbolvektoren s und der Kreuzkorrelationsmatrix
θ = E
s[n] · rH [n]
(3.3)
50
3.1. Recursive Least Squares-Kanalschätzung
der gesendeten mit den empfangenen Symbolvektoren r berechnet werden:
r = H · s (3.4)
rH = sH ·HH (3.5)
E
s · rH
= E
s · sH·HH (3.6)
θ = Φ ·HH (3.7)
H = (Φ−1θ)H . (3.8)
Wie eingangs erwähnt, ist der Kanal in der Realität selten konstant und dieStatistik, bzw. beide Korrelationsmatrizen, sind a priori nicht bekannt. Ihresimultane, adaptive Schätzung wird in Abschnitt 3.1 vorgestellt, so dass Glei-chung (3.8) den Kern des Kanalschätzalgorithmus bildet.
Zur Initialisierung einer entscheidungsbasierten Kanalschätzung nach Glei-chung (3.8) ist es erforderlich, dem Empfänger so lange bekannte Symbolezu übertragen, bis die Qualität der Schätzung der Korrelationsmatrizen aus-reichend ist, um aus den weiteren empfangenen Symbolen die unbekanntenSendesymbole zuverlässig zu bestimmen. Um also eine entscheidungsbasierteKanalschätzung durchführen zu können, muss also erst eine – evtl. kurze – pi-lotbasierte Schätzung erfolgen. Bild 3.1 zeigt die zugehörige Rahmenstruktur.Nach der Präambel, in der eine pilotbasierte Kanalschätzung betrieben wird,ist die Kanalmatrix soweit bestimmt, dass trotz räumlicher Überlagerung imKanal mit Hilfe der Kanalmatrix für jeden Subträger eine MIMO-Detektion –wie in Kapitel 2 diskutiert – durchgeführt werden kann und somit die weitereKanalschätzung rein entscheidungsbasiert ist. Es werden nach der Präambelkeine Pilotsymbole mehr übertragen. Die volle Bandbreite steht den zu über-tragenen Daten zur Verfügung.
Pilotsymbole können nach verschiedenen Kriterien ausgesucht und imMIMO-OFDM Zeit-, Frequenz- und Raummultiplex vielfältig angeordnet wer-den. Diesen Aspekten und Untersuchungen hinsichtlich der Verwendbarkeit inder adaptiven Kanalschätzung – dem Recursive Least Squares (RLS)-Algorith-mus – ist Abschnitt 3.2 gewidmet.
3.1. Recursive Least Squares-Kanalschätzung
Adaptive MIMO Kanalschätzung wurde zunächst für Schmalbandkanäle inVerbindung mit einem VBLAST/MMSE-Entzerrer vorgeschlagen [BY03]. DieÜbertragung auf den Breitbandkanal erfolgt in OFDM-Systemen subträger-weise [AH07a]. In dem folgenden Abschnitt wird der Subträgerindex k aus
51
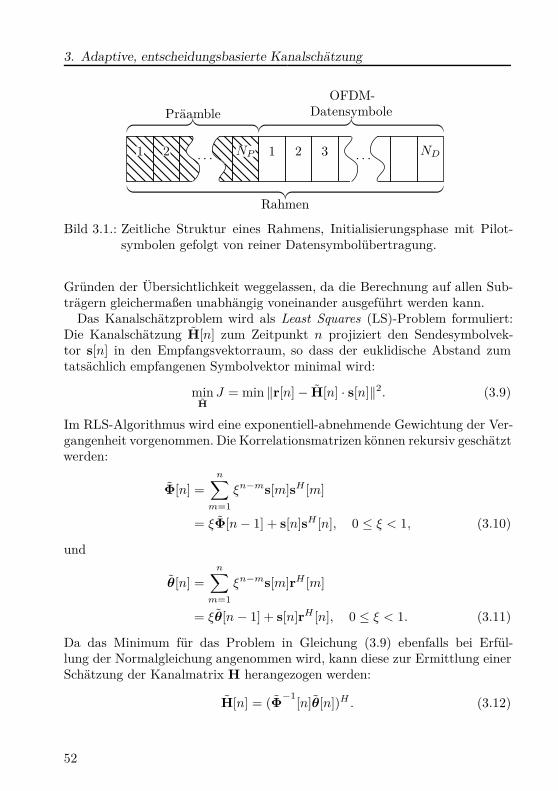
3. Adaptive, entscheidungsbasierte Kanalschätzung
1 2 . . . NP 1 2 3 . . . ND
Präamble
OFDM-Datensymbole
Rahmen
Bild 3.1.: Zeitliche Struktur eines Rahmens, Initialisierungsphase mit Pilot-symbolen gefolgt von reiner Datensymbolübertragung.
Gründen der Übersichtlichkeit weggelassen, da die Berechnung auf allen Sub-trägern gleichermaßen unabhängig voneinander ausgeführt werden kann.
Das Kanalschätzproblem wird als Least Squares (LS)-Problem formuliert:Die Kanalschätzung H[n] zum Zeitpunkt n projiziert den Sendesymbolvek-tor s[n] in den Empfangsvektorraum, so dass der euklidische Abstand zumtatsächlich empfangenen Symbolvektor minimal wird:
minH
J = min ‖r[n]− H[n] · s[n]‖2. (3.9)
Im RLS-Algorithmus wird eine exponentiell-abnehmende Gewichtung der Ver-gangenheit vorgenommen. Die Korrelationsmatrizen können rekursiv geschätztwerden:
Φ[n] =n∑
m=1
ξn−ms[m]sH [m]
= ξΦ[n− 1] + s[n]sH [n], 0 ≤ ξ < 1, (3.10)
und
θ[n] =n∑
m=1
ξn−ms[m]rH [m]
= ξθ[n− 1] + s[n]rH [n], 0 ≤ ξ < 1. (3.11)
Da das Minimum für das Problem in Gleichung (3.9) ebenfalls bei Erfül-lung der Normalgleichung angenommen wird, kann diese zur Ermittlung einerSchätzung der Kanalmatrix H herangezogen werden:
H[n] = (Φ−1
[n]θ[n])H . (3.12)
52
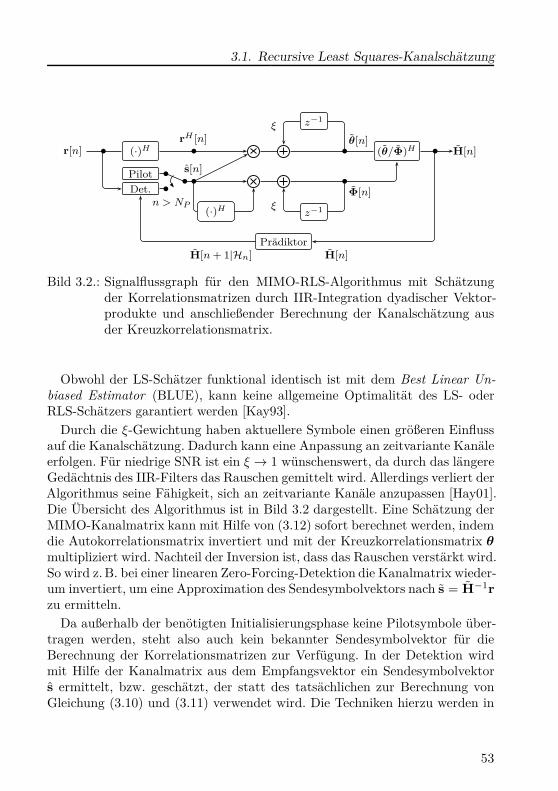
3.1. Recursive Least Squares-Kanalschätzung
r[n] H[n]
z−1
(·)H (θ/Φ)H
Pilot
Det.
n > NP(·)H z−1
Prädiktor
ξrH [n] θ[n]
s[n]
Φ[n]ξ
H[n + 1|Hn] H[n]
Bild 3.2.: Signalflussgraph für den MIMO-RLS-Algorithmus mit Schätzungder Korrelationsmatrizen durch IIR-Integration dyadischer Vektor-produkte und anschließender Berechnung der Kanalschätzung ausder Kreuzkorrelationsmatrix.
Obwohl der LS-Schätzer funktional identisch ist mit dem Best Linear Un-biased Estimator (BLUE), kann keine allgemeine Optimalität des LS- oderRLS-Schätzers garantiert werden [Kay93].
Durch die ξ-Gewichtung haben aktuellere Symbole einen größeren Einflussauf die Kanalschätzung. Dadurch kann eine Anpassung an zeitvariante Kanäleerfolgen. Für niedrige SNR ist ein ξ → 1 wünschenswert, da durch das längereGedächtnis des IIR-Filters das Rauschen gemittelt wird. Allerdings verliert derAlgorithmus seine Fähigkeit, sich an zeitvariante Kanäle anzupassen [Hay01].Die Übersicht des Algorithmus ist in Bild 3.2 dargestellt. Eine Schätzung derMIMO-Kanalmatrix kann mit Hilfe von (3.12) sofort berechnet werden, indemdie Autokorrelationsmatrix invertiert und mit der Kreuzkorrelationsmatrix θmultipliziert wird. Nachteil der Inversion ist, dass das Rauschen verstärkt wird.So wird z. B. bei einer linearen Zero-Forcing-Detektion die Kanalmatrix wieder-um invertiert, um eine Approximation des Sendesymbolvektors nach s = H−1rzu ermitteln.
Da außerhalb der benötigten Initialisierungsphase keine Pilotsymbole über-tragen werden, steht also auch kein bekannter Sendesymbolvektor für dieBerechnung der Korrelationsmatrizen zur Verfügung. In der Detektion wirdmit Hilfe der Kanalmatrix aus dem Empfangsvektor ein Sendesymbolvektors ermittelt, bzw. geschätzt, der statt des tatsächlichen zur Berechnung vonGleichung (3.10) und (3.11) verwendet wird. Die Techniken hierzu werden in
53

3. Adaptive, entscheidungsbasierte Kanalschätzung
Abschnitt 3.3 vorgestellt. Für die Detektion selber wird bereits eine aktuel-le Kanalschätzung benötigt. Da diese erst mit Hilfe des geschätzten Sende-vektors berechnet wird, muss eine prädizierte Kanalmatrix H[n+ 1|Hn] demDetektor zur Verfügung gestellt werden. Prädiktionsalgorithmen werden inAbschnitt 3.4 diskutiert.
Durch Nutzung der Cholesky-Zerlegung ist es möglich, die Rang-1-Matrix,das dyadische Produkt des Sendevektors mit sich selbst, bereits in die Berech-
nung der inversen Autokorrelationsmatrix Φ−1
mit einzubeziehen. Algorith-men, die diese Eigenschaft nutzen, um die Inverse zu berechnen, sind für denSISO-Fall bekannt [Hay01, Kay93]. Mit Hilfe des Matrix-Inversionslemmas, sie-
he Anhang B Gleichung (B.2), kann die inverse Autokorrelationsmatrix Φ−1
ebenfalls rekursiv geschätzt werden: Setzt man nämlich
A = Φ[n] (3.13)
B−1 = ξΦ[n− 1] (3.14)
C = s[n] (3.15)
D = 1, (3.16)
ergibt sich
Φ−1
[n] = ξ−1Φ−1
[n− 1]− ξ−2Φ−1
[n− 1]s[n]sH [n]Φ−1
[n− 1]
1 + ξ−1sH [n]Φ−1
[n− 1]s[n]. (3.17)
Für eine effiziente Berechnung ist Gleichung (3.17) in zwei Größen zu zerlegen:
P[n] = Φ−1
[n] (3.18)
und
g[n] =ξ−1P[n− 1]s[n]
1 + ξ−1sH [n]P[n− 1]s[n]. (3.19)
Mit Hilfe dessen kann Gleichung (3.17) formuliert werden als
P[n] = ξ−1P[n− 1]− ξ−1g[n]sH [n]P[n − 1], (3.20)
so dass Gleichung (3.19) vereinfacht wird:
g[n] = P[n]s[n] = Φ−1
[n] · s[n]. (3.21)
Damit ist der Verstärkungsvektor g durch Gleichung (3.21) definiert. Der kom-plette Algorithmus ist in Algorithmus 3.1 durch (3.24)–(3.29) beschrieben.
54
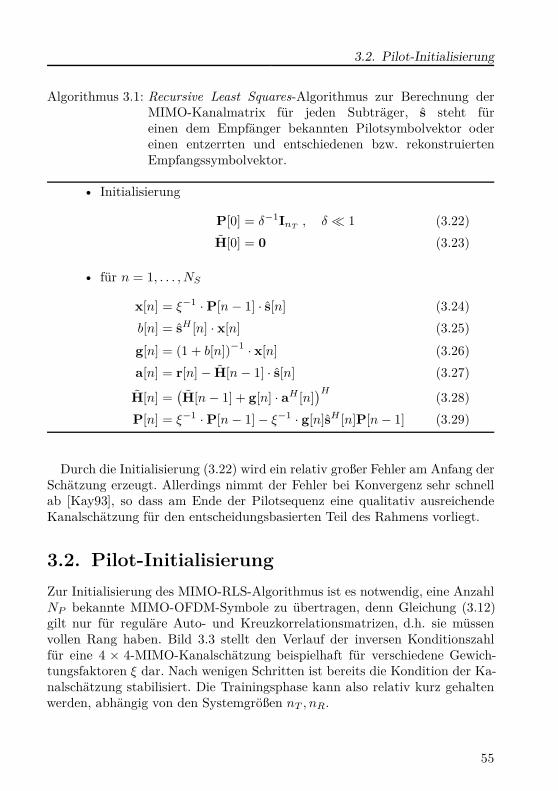
3.2. Pilot-Initialisierung
Algorithmus 3.1: Recursive Least Squares-Algorithmus zur Berechnung derMIMO-Kanalmatrix für jeden Subträger, s steht füreinen dem Empfänger bekannten Pilotsymbolvektor odereinen entzerrten und entschiedenen bzw. rekonstruiertenEmpfangssymbolvektor.
• Initialisierung
P[0] = δ−1InT, δ ≪ 1 (3.22)
H[0] = 0 (3.23)
• für n = 1, . . . , NS
x[n] = ξ−1 ·P[n− 1] · s[n] (3.24)
b[n] = sH [n] · x[n] (3.25)
g[n] = (1 + b[n])−1 · x[n] (3.26)
a[n] = r[n] − H[n− 1] · s[n] (3.27)
H[n] =(H[n− 1] + g[n] · aH [n]
)H(3.28)
P[n] = ξ−1 ·P[n− 1]− ξ−1 · g[n]sH [n]P[n− 1] (3.29)
Durch die Initialisierung (3.22) wird ein relativ großer Fehler am Anfang derSchätzung erzeugt. Allerdings nimmt der Fehler bei Konvergenz sehr schnellab [Kay93], so dass am Ende der Pilotsequenz eine qualitativ ausreichendeKanalschätzung für den entscheidungsbasierten Teil des Rahmens vorliegt.
3.2. Pilot-Initialisierung
Zur Initialisierung des MIMO-RLS-Algorithmus ist es notwendig, eine AnzahlNP bekannte MIMO-OFDM-Symbole zu übertragen, denn Gleichung (3.12)gilt nur für reguläre Auto- und Kreuzkorrelationsmatrizen, d.h. sie müssenvollen Rang haben. Bild 3.3 stellt den Verlauf der inversen Konditionszahlfür eine 4 × 4-MIMO-Kanalschätzung beispielhaft für verschiedene Gewich-tungsfaktoren ξ dar. Nach wenigen Schritten ist bereits die Kondition der Ka-nalschätzung stabilisiert. Die Trainingsphase kann also relativ kurz gehaltenwerden, abhängig von den Systemgrößen nT , nR.
55
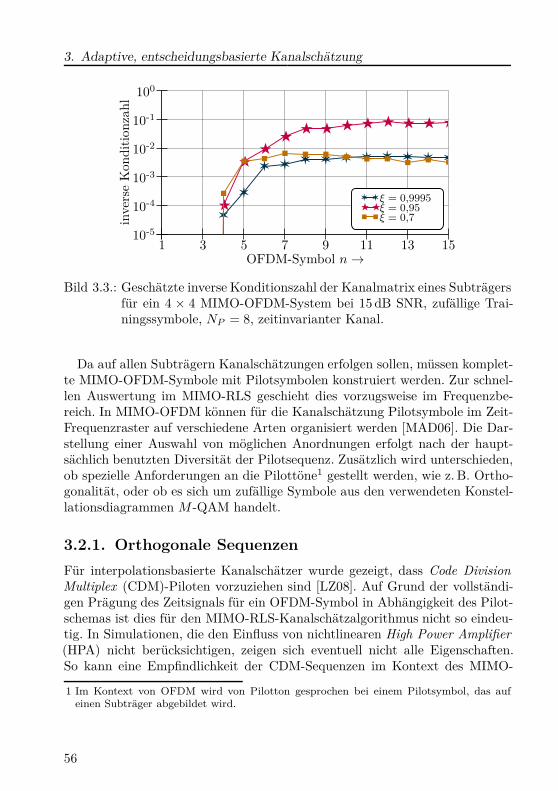
3. Adaptive, entscheidungsbasierte Kanalschätzung
10-5
10-4
10-3
10-2
10-1
100
1 3 5 7 9 11 13 15
inve
rse
Kon
dit
ionza
hl
OFDM-Symbol n→
ξ = 0,9995 ξ = 0,95 ξ = 0,7
Bild 3.3.: Geschätzte inverse Konditionszahl der Kanalmatrix eines Subträgersfür ein 4 × 4 MIMO-OFDM-System bei 15 dB SNR, zufällige Trai-ningssymbole, NP = 8, zeitinvarianter Kanal.
Da auf allen Subträgern Kanalschätzungen erfolgen sollen, müssen komplet-te MIMO-OFDM-Symbole mit Pilotsymbolen konstruiert werden. Zur schnel-len Auswertung im MIMO-RLS geschieht dies vorzugsweise im Frequenzbe-reich. In MIMO-OFDM können für die Kanalschätzung Pilotsymbole im Zeit-Frequenzraster auf verschiedene Arten organisiert werden [MAD06]. Die Dar-stellung einer Auswahl von möglichen Anordnungen erfolgt nach der haupt-sächlich benutzten Diversität der Pilotsequenz. Zusätzlich wird unterschieden,ob spezielle Anforderungen an die Pilottöne1 gestellt werden, wie z. B. Ortho-gonalität, oder ob es sich um zufällige Symbole aus den verwendeten Konstel-lationsdiagrammen M -QAM handelt.
3.2.1. Orthogonale Sequenzen
Für interpolationsbasierte Kanalschätzer wurde gezeigt, dass Code DivisionMultiplex (CDM)-Piloten vorzuziehen sind [LZ08]. Auf Grund der vollständi-gen Prägung des Zeitsignals für ein OFDM-Symbol in Abhängigkeit des Pilot-schemas ist dies für den MIMO-RLS-Kanalschätzalgorithmus nicht so eindeu-tig. In Simulationen, die den Einfluss von nichtlinearen High Power Amplifier(HPA) nicht berücksichtigen, zeigen sich eventuell nicht alle Eigenschaften.So kann eine Empfindlichkeit der CDM-Sequenzen im Kontext des MIMO-
1 Im Kontext von OFDM wird von Pilotton gesprochen bei einem Pilotsymbol, das aufeinen Subträger abgebildet wird.
56
3.2. Pilot-Initialisierung
RLS-Algorithmus erst experimentell an einer Funkstrecke bzw. Laborsystemoder nach Analyse des zum OFDM-Trainingssymbol korrespondierenden Zeit-signals nachgewiesen werden.
Betrachtet man Gleichung (3.12) hinsichtlich der Definition von θ, werdenvermutlich orthogonale Sequenzen von Pilotsymbolen im Sendevektor Vorteilegegenüber nicht-orthogonalen aufweisen. Denn für nT Sequenzen s[n], n =1, . . . , Nseq der Länge Nseq und mit der OFDM-Systemgleichung (1.12), unterVernachlässigung des Rauschterms, lässt sich zeigen, dass
θ = E
s · rH
(3.30)
= E
s · (H · s)H
(3.31)
= E
s · sH︸ ︷︷ ︸
InT
·HH
(3.32)
= E
HH. (3.33)
Eine Schätzung der Kanalmatrix H lässt sich sofort über die Auswertung derKreuzkorrelierten θ nach NP = Nseq OFDM-Symbolen berechnen – unter derVoraussetzung, der Kanal ändert sich nicht während der Schätzung. Bild 3.4zeigt verschiedene orthogonale Pilotsequenzen.
Polyphasen-Sequenzen
Die nT CDM-Sequenzen sind paarweise orthogonal, so dass gegenseitigeInterferenzen verhindert werden. Jede Sendeantenne sendet ihre Code-Se-quenz. Als Beispiel einer Gruppe von orthogonalen Code-Sequenzen werdendie Frank-Zadoff-Chu (FZC)-Folgen auch Polyphasensequenzen genannt be-trachtet [Chu72, ZF05] und ihre Eignung in dem vorgestellten MIMO-RLS-Algorithmus.
Ihre Konstruktion ist für gerade Nseq
s[k] = ejπMk2/Nseq , k = 0, . . . , Nseq − 1, (3.34)
wobei M eine Primzahl kleiner gleich Nseq + 2 ist.Die Verwendung von FZC-Folgen wie in Bild 3.4 dargestellt zu diesem Zweck
führt zu OFDM-Symbolen, die aus K/Nseq wiederholenden Sequenzen s[k]bestehen. Das korrespondierende Zeitbereichssignal des OFDM-Trainingssym-
57
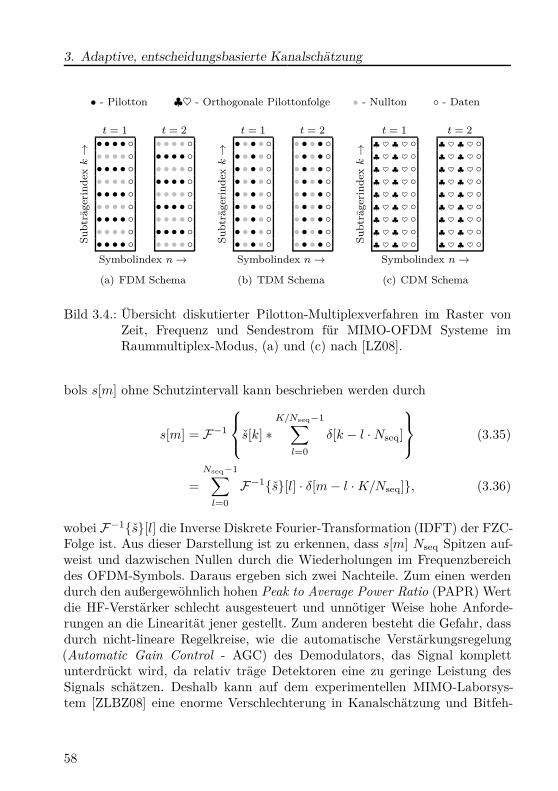
3. Adaptive, entscheidungsbasierte Kanalschätzung
• - Pilotton ♣♥ - Orthogonale Pilottonfolge • - Nullton - Daten
Su
btr
äger
ind
exk
→
t = 1• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
t = 2• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
Symbolindex n →
(a) FDM Schema
Su
btr
äger
ind
exk
→
t = 1• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
t = 2• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
Symbolindex n →
(b) TDM Schema
Su
btr
äger
ind
exk
→
t = 1♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥
t = 2♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥ ♣ ♥
Symbolindex n →
(c) CDM Schema
Bild 3.4.: Übersicht diskutierter Pilotton-Multiplexverfahren im Raster vonZeit, Frequenz und Sendestrom für MIMO-OFDM Systeme imRaummultiplex-Modus, (a) und (c) nach [LZ08].
bols s[m] ohne Schutzintervall kann beschrieben werden durch
s[m] = F−1
s[k] ∗
K/Nseq−1∑
l=0
δ[k − l ·Nseq]
(3.35)
=
Nseq−1∑
l=0
F−1s[l] · δ[m− l ·K/Nseq], (3.36)
wobei F−1s[l] die Inverse Diskrete Fourier-Transformation (IDFT) der FZC-Folge ist. Aus dieser Darstellung ist zu erkennen, dass s[m] Nseq Spitzen auf-weist und dazwischen Nullen durch die Wiederholungen im Frequenzbereichdes OFDM-Symbols. Daraus ergeben sich zwei Nachteile. Zum einen werdendurch den außergewöhnlich hohen Peak to Average Power Ratio (PAPR) Wertdie HF-Verstärker schlecht ausgesteuert und unnötiger Weise hohe Anforde-rungen an die Linearität jener gestellt. Zum anderen besteht die Gefahr, dassdurch nicht-lineare Regelkreise, wie die automatische Verstärkungsregelung(Automatic Gain Control - AGC) des Demodulators, das Signal komplettunterdrückt wird, da relativ träge Detektoren eine zu geringe Leistung desSignals schätzen. Deshalb kann auf dem experimentellen MIMO-Laborsys-tem [ZLBZ08] eine enorme Verschlechterung in Kanalschätzung und Bitfeh-
58
3.2. Pilot-Initialisierung
lerrate im Vergleich zu dem TDM-Pilotschema beobachtet werden.Das TDM-Pilotschema zeichnet sich im Frequenzbereich schon offensichtlich
durch eine um den Faktor 1/nT geringere Signalleistung aus, gegenüber einemvollbesetzten Zeit-Frequenzraster. Es zeigt sich ein im Kern ähnliches Problemwie bei den FZC-Sequenzen: Durch komplette Null-OFDM-Symbole hebt dieAGC das Verstärkungsniveau derart an, dass die Kanalschätzungen an jenenStellen stark verrauscht sind.
Dieses Verhalten führt zu einer schlechteren Gesamtleistungsfähigkeit, dadurch den Gedächtnischarakter des RLS-Filters die Rauschanteile erhaltenbleiben und erst nach und nach durch neue, entschiedene Symbolvektorenersetzt werden, falls die Qualität der Kanalschätzung dazu überhaupt nochausreicht. In einer oberen SNR-Region funktioniert dieses Verfahren sehr gut,wie in Bild 3.5 dargestellt. Unterhalb wird der Fehler zu groß und die Kanal-schätzung divergiert.
3.2.2. Nicht-orthogonale Pilotsequenzen
Alternativ zu den oben diskutierten Pilotsequenzen ist es ebenso möglich, kom-plett zufällig aus dem Modulationsalphabet S Pilotsymbole für diesen Zweckzu beziehen und diese in das Trainingssignal einzubetten. Dieses Trainingssi-gnal wird in doppelter Hinsicht den Anforderungen gerecht: Zum einen wirddas zufällige OFDM-Symbol ein ebenso zufälliges Zeitsignal nach sich ziehen,das ein für OFDM-Systeme durchschnittliches PAPR hat und in der Statistikkeinen Bruch zum zu transportierenden Datensignal aufweist. Zum Boostendes Pilotsignals, wie in OFDM-Systemen üblich, könnten durch lineare Kom-pressionstechniken speziell konstruierte Trainingssignale ermittelt werden, dieeinen niedrigeren PAPR-Wert aufweisen. Zum anderen wird durch das Ver-meiden von Nulltönen die durchschnittliche Signalleistung wie im Datenteilbeibehalten.
Wie bereits festgestellt, ist allerdings ein eventuell längeres Einschwingver-halten durch die Konstruktion von Rang-1 Matrizen als Nachteil zu nennen.Denn sofortige Kanalschätzungen, beruhend auf einer Nseq MIMO-OFDM-Symbol langen Sequenz, können nicht unmittelbar gewonnen werden. Aller-dings hält sich die Auswirkung dieses Nachteils in Grenzen, wie Bild 3.3 illus-triert. Noch innerhalb der Trainingssequenz wird eine Kanalmatrix mit vollemRang identifiziert. Das Einschwingverhalten wird dabei vom Parameter ξ mit-bestimmt. Nichtsdestotrotz ist es möglich, dass „zufällig“NP gleiche Symbolefür alle Sendeantennen aus dem Modulationsalphabet genommen werden. Indiesem Fall würde sich nach Ablauf der Trainingsphase keine Kanalmatrix mit
59
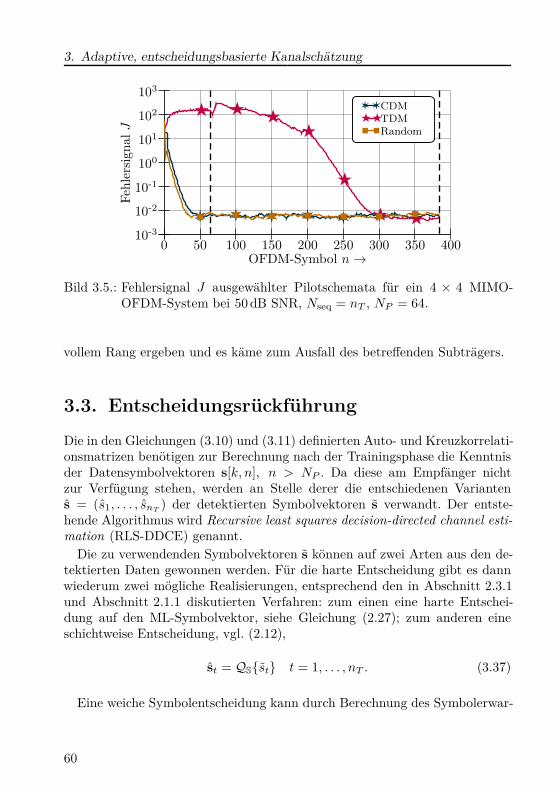
3. Adaptive, entscheidungsbasierte Kanalschätzung
10-3
10-2
10-1
100
101
102
103
0 50 100 150 200 250 300 350 400
Feh
lers
ignalJ
OFDM-Symbol n→
CDM TDM Random
Bild 3.5.: Fehlersignal J ausgewählter Pilotschemata für ein 4 × 4 MIMO-OFDM-System bei 50 dB SNR, Nseq = nT , NP = 64.
vollem Rang ergeben und es käme zum Ausfall des betreffenden Subträgers.
3.3. Entscheidungsrückführung
Die in den Gleichungen (3.10) und (3.11) definierten Auto- und Kreuzkorrelati-onsmatrizen benötigen zur Berechnung nach der Trainingsphase die Kenntnisder Datensymbolvektoren s[k, n], n > NP . Da diese am Empfänger nichtzur Verfügung stehen, werden an Stelle derer die entschiedenen Variantens = (s1, . . . , snT
) der detektierten Symbolvektoren s verwandt. Der entste-hende Algorithmus wird Recursive least squares decision-directed channel esti-mation (RLS-DDCE) genannt.
Die zu verwendenden Symbolvektoren s können auf zwei Arten aus den de-tektierten Daten gewonnen werden. Für die harte Entscheidung gibt es dannwiederum zwei mögliche Realisierungen, entsprechend den in Abschnitt 2.3.1und Abschnitt 2.1.1 diskutierten Verfahren: zum einen eine harte Entschei-dung auf den ML-Symbolvektor, siehe Gleichung (2.27); zum anderen eineschichtweise Entscheidung, vgl. (2.12),
st = QSst t = 1, . . . , nT . (3.37)
Eine weiche Symbolentscheidung kann durch Berechnung des Symbolerwar-
60
3.4. Kanalprädiktion
tungswertes aus den detektierten L-Werten aus dem Kanal abgeleitet werden:
st = E st =∑
c∈S
c · p(st = c), ∀t. (3.38)
Die Symbolwahrscheinlichkeiten p(st = c) erhält man aus den bitweisen L-Werten Lch(uv|s) durch Auflösen von Gleichung (1.34)
p(uv = 0|st) =
(e−Lch(uv |st)/2
1 + e−Lch(uv |st)
)
· eLch(uv|st)/2, (3.39)
p(uv = 1|st) =
(e−Lch(uv |st)/2
1 + e−Lch(uv |st)
)
· e−Lch(uv|st)/2, v = 1, . . . , κ (3.40)
und Kombination zum Symbol
p(st = c) =κ∏
v=1
p(uv = cv|st) · (1 − p(uv = cv|st)), (3.41)
wobei mit cv der Bitwert des Bitworts im Symbol c an der Stelle v gemeintist.
3.4. Kanalprädiktion
Der beschriebene RLS-DDCE-Algorithmus ermittelt im eingeschwungenen Zu-stand zum OFDM-Symbol n− 1 eine Schätzung der Kanalmatrix H[k, n− 1],für alle k sind dies also die diskreten Kanalübertragungsfunktionen der SISO-Subkanäle des MIMO-Systems. Für die Detektion zum Zeitpunkt n steht al-lerdings keine Kanalschätzung zur Verfügung. Durch Kenntnis der Menge dervorherigen Werte Hn−1 wird ein prädizierter Wert H[k, n|Hn−1] berechnet.Der mittlere a posteriori Prädiktionsfehler ε[n] ist die Abweichung des prädi-zierten Wertes vom tatsächlichen Kanal H[k, n] zum prädizierten Zeitpunktn:
ǫ[n] = vecH[k, n]− H[k, n|Hn−1]k, (3.42)
ε[n] =ǫH [n]ǫ[n]
nR · nT ·K. (3.43)
Dieser Fehler ist in realen System nicht ermittelbar, da natürlich der KanalH[k, n] nicht bekannt ist. Es werden im Folgenden verschiedene Prädiktions-algorithmen vorgestellt und mit Hilfe Gleichung (3.43) verglichen. Neben der
61

3. Adaptive, entscheidungsbasierte Kanalschätzung
Prädiktionsqualität ist die Komplexität eine wichtige Kenngröße, da im MI-MO-OFDM-System pro OFDM-Takt nR · nT · K komplexe Koeffizienten zuprädizieren sind. Methoden zur Dimensionsreduktion wurden in diesem Zusam-menhang vorgeschlagen [AH07a, Yan95]. Im günstigsten Fall beeinträchtigensie die Kanalschätzung nicht, tragen aber sonst nicht zur Verbesserung bei,deshalb werden sie in der weiteren Diskussion außer Acht gelassen.
3.4.1. Zero-Order-Prädiktor
Die einfachste Vorhersage besteht darin anzunehmen, dass die Kanalschätzungim nächsten OFDM-Symboltakt dieselbe sein wird wie im aktuellen:
H[k, n|Hn−1] := H[k, n− 1], ∀k. (3.44)
Der entstehende Prädiktionsfehler hängt vom SNR des Systems und von derKohärenzzeit des Kanals ab. Für lange OFDM-Symbole TOFDM ≫ Tc wird derFehler unter Umständen sehr groß, so dass diese Art der Prädiktion ungeeignetwird. Für zeitinvariante bzw. langsam-veränderliche Kanäle ist es allerdingseine sehr günstige Prädiktion, besonders was die arithmetische Komplexitätangeht.
3.4.2. RLS-Prädiktor
Im Kontext von OFDM-Systemen wurde der adaptive RLS-Prädiktor vorge-schlagen [SM05, Hay01]. Zur einfacheren Beschreibung werden die zu prädi-zierenden Kanalkoeffizienten linear indiziert µ = 1, . . . , nR · nT · K. DurchMinimierung der folgenden Kostenfunktion wird der Filterkoeffizientenvektorqµ des µ-ten Kanalkoeffizienten Hµ bestimmt:
J(Hµ) =n∑
i=1
βn−i|Hµ[i+ 1|Hi]− qHµ [n]Hµ[i]|2. (3.45)
Die Vergangenheit des µ-ten Kanalkoeffizienten mit der Gedächtnislänge MP
wird durch
Hµ[n] := (Hµ[n], Hµ[n− 1], . . . , Hµ[n−MP + 1])T (3.46)
beschrieben. Die Rekursion für die Filterkoeffizienten ergibt sich durch
qµ[n] = qµ[n− 1] + gµ[n− 1]e∗µ[n], (3.47)
62

3.4. Kanalprädiktion
wobeieµ[n] = Hµ[n]− qH
µ [n− 1]Hµ[n− 1] (3.48)
der a priori Prädiktionsfehler ist. Außerdem fließt der RLS-Verstärkungsvek-tor
gµ[n] =Pµ[n− 1]Hµ[n]
β + HHµ [n]Pµ[n− 1]Hµ[n]
(3.49)
in die Rekursion mit ein, sowie die rekursiv-berechnete Inverse der Kovarianz-matrix
Pµ[n] =1
β
(
IMP +1 − gµ[n]HHµ [n]
)
Pµ[n− 1]. (3.50)
Der Parameter β ist der Gewichtungsfaktor der Vergangenheit und wird imFolgenden zu β := 0,9 gesetzt, die genaue Wahl hat aber nur einen sehr ge-ringen Einfluss auf die Leistungsfähigkeit [SM05, AH07a]. Der Aufwand steigtproportional zur Anzahl der Subträger, Sende- und Empfangsantennen undder Prädiktions-Gedächtnislänge MP . Damit eine sinnvolle Prädiktion statt-finden kann, müssen bereits Daten im Gedächtnis vorhanden sein, das heißtdie nR ·nT ·K Prädiktoren können erst nach MP vergangenen OFDM-Symbo-len trainiert werden. Da insgesamt eine kurze Trainingsphase angestrebt wird,andererseits aber ein langes Gedächtnis die Genauigkeit des Prädiktorergeb-nisses erhöht, muss hier ein Kompromiss gefunden werden.
Die Initialisierung des RLS-Prädiktionsalgorithmus zum Zeitpunkt n =NP −MP erfolgt mit δ := 0,1 und
qµ[n] = 0 ∈ RMP +1×1,
gµ[n] =Hµ[n]
‖Hµ[n]‖2 + δ,
Pµ[n] =1
δ
(
IMP +1 −Hµ[n]HH
µ [n]
‖Hµ[n]‖2 + δ
)
.
Als Beispiel soll der Verlauf einer determinierten Trajektorie
x[n] =(
1− n
500
)
· ej2π(1−n/500)
in der komplexen Ebene prädiziert werden. Gegeben ist ein mit 20 dB SNRverrauschtes Signal y[n] = x[n] + w[n]. In Bild 3.6(a) ist der Verlauf von y[n]und dem prädizierten xp[n] abgebildet. Nach einem kurzen Einschwingvor-gang liegen beide Linien quasi übereinander. Das Fehlerbetragsquadrat der
63
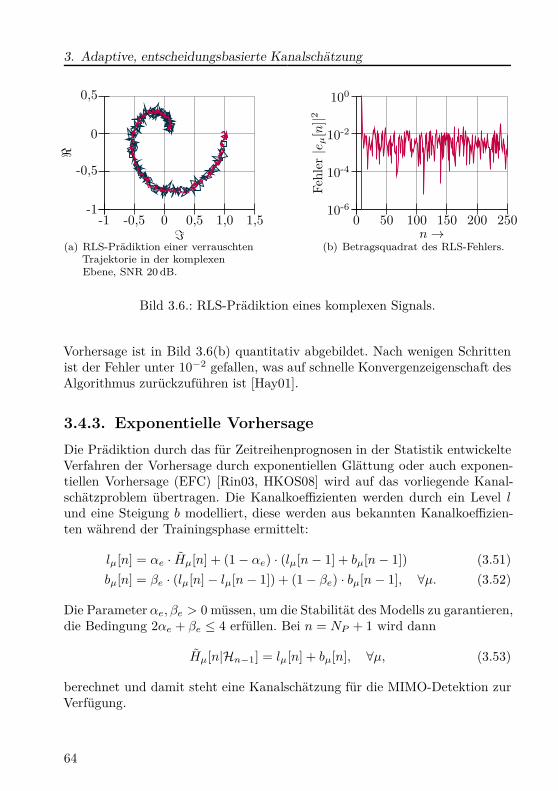
3. Adaptive, entscheidungsbasierte Kanalschätzung
-1
-0,5
0
0,5
-1 -0,5 0 0,5 1,0 1,5
ℜ
ℑ(a) RLS-Prädiktion einer verrauschten
Trajektorie in der komplexenEbene, SNR 20 dB.
10-6
10-4
10-2
100
0 50 100 150 200 250
Feh
ler|e µ
[n]|2
n→(b) Betragsquadrat des RLS-Fehlers.
Bild 3.6.: RLS-Prädiktion eines komplexen Signals.
Vorhersage ist in Bild 3.6(b) quantitativ abgebildet. Nach wenigen Schrittenist der Fehler unter 10−2 gefallen, was auf schnelle Konvergenzeigenschaft desAlgorithmus zurückzuführen ist [Hay01].
3.4.3. Exponentielle Vorhersage
Die Prädiktion durch das für Zeitreihenprognosen in der Statistik entwickelteVerfahren der Vorhersage durch exponentiellen Glättung oder auch exponen-tiellen Vorhersage (EFC) [Rin03, HKOS08] wird auf das vorliegende Kanal-schätzproblem übertragen. Die Kanalkoeffizienten werden durch ein Level lund eine Steigung b modelliert, diese werden aus bekannten Kanalkoeffizien-ten während der Trainingsphase ermittelt:
lµ[n] = αe · Hµ[n] + (1− αe) · (lµ[n− 1] + bµ[n− 1]) (3.51)
bµ[n] = βe · (lµ[n]− lµ[n− 1]) + (1− βe) · bµ[n− 1], ∀µ. (3.52)
Die Parameter αe, βe > 0 müssen, um die Stabilität des Modells zu garantieren,die Bedingung 2αe + βe ≤ 4 erfüllen. Bei n = NP + 1 wird dann
Hµ[n|Hn−1] = lµ[n] + bµ[n], ∀µ, (3.53)
berechnet und damit steht eine Kanalschätzung für die MIMO-Detektion zurVerfügung.
64
3.4. Kanalprädiktion
Detektor ML Bit-DetektorSubträger 128OFDM-Symbole 528Geschwindigkeiten in m/s 3, 30Trägerfrequenz 2,412 GHzBandbreite 20 MHznorm. Dopplerfreq. fd,n 1,62 · 10−4, 1,62 · 10−3
Tabelle 3.1.: Spezifische Simulationsparameter für die exponentielle Vorhersa-ge der geschätzten Kanalübertragungsfunktion.
Optimale Parameter αe und βe können mit Hilfe von geeigneten numerischenVerfahren durch Minimierung von
S(αe, βe, lµ[1], bµ[1]) =NP∑
n=1
‖Hµ[n]− Hµ[n|n− 1]‖2 (3.54)
in der Trainingsphase bestimmt werden.
3.4.4. Ergebnisse
Die spezifischen Simulationsparameter sind in Tabelle 3.1 angegeben. Der MLBit-Detektor mit L-Wert-Berechnung, kombiniert mit dem in Abschnitt 1.5vorgestellten LDPC Code der Länge 1024 bit, integriert in jeweils ein OFDM-Symbol, bilden das grundsätzlich betrachtete System. Der SNR-Bereich be-trägt 3 dB bis 16 dB. Für die Prädiktion der geschätzten Kanalübertragungs-funktion werden zwei Geschwindigkeitsszenarien simuliert. Mit vMS = 3 m/sbzw. v′
MS = 30 m/s sollen kleine, sowie auch große Geschwindigkeiten reprä-sentiert werden. Für die Anzahl von K = 128 Subträgern ergibt sich mit deman die Kanalordnung angepassten, zyklischem Präfix von Lcp = L = 6 einenormierte Dopplerfrequenz von fd,n = 0,162 · 10−3, bzw. f ′
d,n = 1,62 · 10−3.Die Simulationsergebnisse sind in Bild 3.7 dargestellt. Für die Simulatio-
nen mit den betrachteten Geschwindigkeiten ist offenbar die Annahme fürden Zero-Order-Hold (ZOH)-Ansatz gerechtfertigt. Die drei Prädiktoren sindgleichermaßen in der Lage, den Kanalverlauf in ausreichender Weise zu prä-dizieren. Aus den Unterschieden in Bild 3.7(a) zwischen RLS und ZOH bei10 dB bzw. 12 dB SNR kann allenfalls eine geringe Verbesserung durch Einsatzdes RLS-Prädiktors abgelesen werden. In geringem Abstand zu den anderen
65
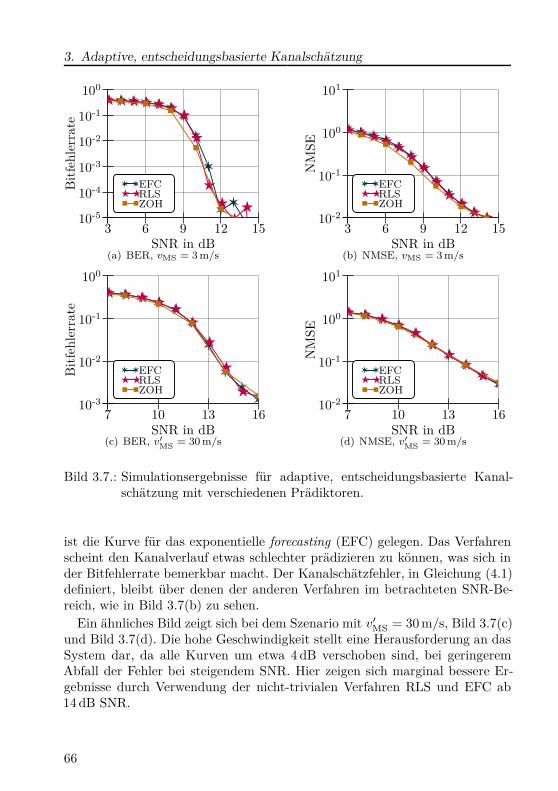
3. Adaptive, entscheidungsbasierte Kanalschätzung
10-5
10-4
10-3
10-2
10-1
100
3 6 9 12 15
Bit
fehle
rrat
e
SNR in dB
EFC RLS ZOH
(a) BER, vMS = 3 m/s
10-2
10-1
100
101
3 6 9 12 15
NM
SE
SNR in dB
EFC RLS ZOH
(b) NMSE, vMS = 3 m/s
10-3
10-2
10-1
100
7 10 13 16
Bit
fehle
rrat
e
SNR in dB
EFC RLS ZOH
(c) BER, v′
MS= 30 m/s
10-2
10-1
100
101
7 10 13 16
NM
SE
SNR in dB
EFC RLS ZOH
(d) NMSE, v′
MS= 30 m/s
Bild 3.7.: Simulationsergebnisse für adaptive, entscheidungsbasierte Kanal-schätzung mit verschiedenen Prädiktoren.
ist die Kurve für das exponentielle forecasting (EFC) gelegen. Das Verfahrenscheint den Kanalverlauf etwas schlechter prädizieren zu können, was sich inder Bitfehlerrate bemerkbar macht. Der Kanalschätzfehler, in Gleichung (4.1)definiert, bleibt über denen der anderen Verfahren im betrachteten SNR-Be-reich, wie in Bild 3.7(b) zu sehen.
Ein ähnliches Bild zeigt sich bei dem Szenario mit v′MS = 30 m/s, Bild 3.7(c)
und Bild 3.7(d). Die hohe Geschwindigkeit stellt eine Herausforderung an dasSystem dar, da alle Kurven um etwa 4 dB verschoben sind, bei geringeremAbfall der Fehler bei steigendem SNR. Hier zeigen sich marginal bessere Er-gebnisse durch Verwendung der nicht-trivialen Verfahren RLS und EFC ab14 dB SNR.
66
3.4. Kanalprädiktion
Zur Analyse des zeitlichen Verhaltens der Algorithmen ist eine Übersichtverschiedener beispielhafter Szenarien in Bild 3.8 gegeben. Die Unterschiedesind wie in den Simulationen angedeutet, gering, es lassen sich jedoch eini-ge Aussagen gewinnen: Tendenziell weisen RLS und ZOH im niedrigen SNR-Bereich geringere Prädiktionsfehler auf als das EFC-Verfahren, siehe 3.8(a)und 3.8(b). Der RLS-Prädiktor weist hierbei den geringsten Fehler auf. Imlangsam-veränderlichen Kanal scheint das EFC-Verfahren keine Verbesserunggegenüber der ZOH-Lösung zu bringen. Erst ab einem sehr hohen SNR von40 dB rückt das EFC-Verfahren zum Verlauf des RLS-Prädiktors auf. Es zeigtsich also, dass im langsam-veränderlichen Kanal (vMS = 3 m/s) das RLS-Ver-fahren den geringsten Prädiktionsfehler aufweist.
Zu hohen Geschwindigkeiten hin wird die Leistungsfähigkeit durch die In-terferenzen der Mobilität beschränkt, nicht so stark durch das SNR: Es zeigtsich im niedrigen SNR-Bereich, dass alle Verfahren ab einem Symbolindex imRahmen divergieren wie in Bild 3.8(b) zu sehen. Hier zeigt das RLS-Verfahrennoch die besten Resultate. Bei höherem SNR ergibt sich für die Geschwindig-keit von v′
MS = 30 m/s eine wesentliche Veränderung im Verhalten des EFC-Prädiktionsverfahrens, wie Bild 3.8(d) und 3.8(f) zeigen. Für dieses Szenariozeigt das EFC-Verfahren den geringsten Fehler, während das RLS-Verfahrennur knapp bessere Ergebnisse erzielt als das simple ZOH.
3.4.5. Zusammenfassung
Aus den Simulationsergebnissen lassen sich zweierlei Schlüsse ziehen: Zumeinen ist der zu erwartende Gewinn an Leistungsfähigkeit des RLS-Prädiktorsim untersuchten Kontext sehr gering. Bei relativ hoher Komplexität lässt sichnur ein kleiner Vorteil gegenüber der ZOH-Variante erkennen, selbst bei hoherGeschwindigkeit. Für langsam-veränderliche Kanäle zeigt sich für das EFC eindeutlich schlechteres Verhalten bei allen SNR-Stufen, was BER, NMSE undPrädiktionsfehler angeht. Im Kontext von mobilen Terminals mit hohen Ge-schwindigkeiten lässt sich eine gute Performanz des EFC-Verfahrens erkennen,was sich in einem niedrigeren Prädiktionsfehler im untersuchten Kontext nie-derschlägt. Da sich beim RLS die hohe Komplexität nicht rechtfertigen lässt,ist somit das ZOH-Verfahren als Prädiktor im untersuchten Bereich vorzuzie-hen. Eine Möglichkeit der Verbesserung der exponentiellen Vorhersage stelltdie Initialisierung der Parameter dar, so dass die Minimierung der quadrati-schen Vorhersagefehler aus Gleichung (3.54) geändert und die Parameter derexponentiellen Vorhersage besser an die geringen Änderungen der Kanalüber-tragungsfunktion angepasst werden.
67
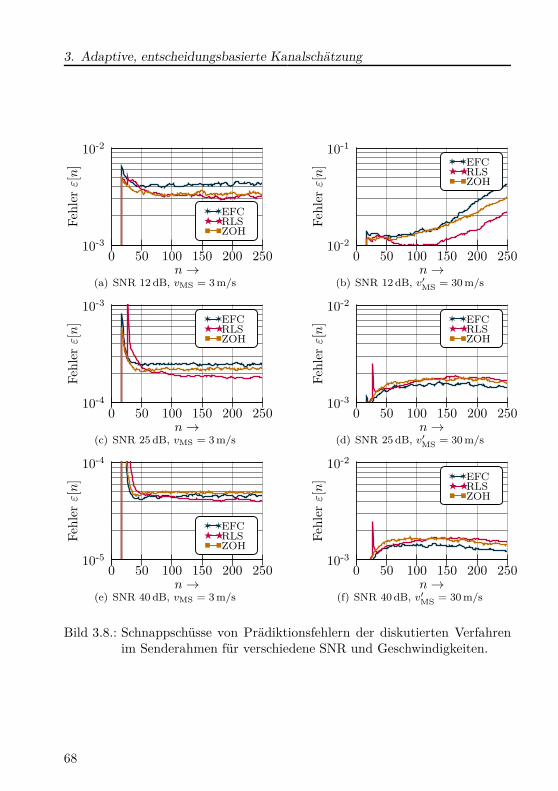
3. Adaptive, entscheidungsbasierte Kanalschätzung
10-3
10-2
0 50 100 150 200 250
Feh
lerε[n
]
n→
EFC RLS ZOH
(a) SNR 12 dB, vMS = 3 m/s
10-2
10-1
0 50 100 150 200 250
Feh
lerε[n
]
n→
EFC RLS ZOH
(b) SNR 12 dB, v′
MS= 30 m/s
10-4
10-3
0 50 100 150 200 250
Feh
lerε[n
]
n→
EFC RLS ZOH
(c) SNR 25 dB, vMS = 3 m/s
10-3
10-2
0 50 100 150 200 250
Feh
lerε[n
]
n→
EFC RLS ZOH
(d) SNR 25 dB, v′
MS= 30 m/s
10-5
10-4
0 50 100 150 200 250
Feh
lerε[n
]
n→
EFC RLS ZOH
(e) SNR 40 dB, vMS = 3 m/s
10-3
10-2
0 50 100 150 200 250
Feh
lerε[n
]
n→
EFC RLS ZOH
(f) SNR 40 dB, v′
MS= 30 m/s
Bild 3.8.: Schnappschüsse von Prädiktionsfehlern der diskutierten Verfahrenim Senderahmen für verschiedene SNR und Geschwindigkeiten.
68
4. Verfahren zur Verbesserungder Kanalschätzung inMIMO-BICM-Systemen
Die in den vorangegangenen Kapiteln beschriebenen allgemeinen Methodenzur adaptiven Kanalschätzung finden nun Anwendung auf Systeme mit Bit-Interleaved Coded Modulation. Waren zuvor keinerlei Einschränkungen derzugrunde liegenden Symbole und Bits getroffen worden, so sollen nun beson-dere Maßnahmen zur Verbesserung der Kanalschätzung und Empfangsquali-tät, also der Bitfehlerrate, beschrieben werden, die gerade die Kenntnis derDatenstruktur und insbesondere der Codierung ausnutzen.
In dem in Kapitel 3 diskutierten RLS-DDCE-Algorithmus werden anstelleder Symbolvektoren s die durch Detektion der korrespondierenden Empfangs-symbolvektoren mit Hilfe der verfügbaren Kanalschätzung s = DetH, rrekonstruierten Sendesymbolvektoren verwendet, siehe Abschnitt 3.3. DieSchätzqualität des adaptiven, entscheidungsbasierten Kanalschätzalgorithmusist direkt von korrekt rekonstruierten Symbolvektoren abhängig. Wenn ersteinmal ein Symbolvektor falsch entschieden wurde, führt dies zu einer Ver-änderung in der adaptiven Kanalschätzung, so dass für weitere Symbole dieWahrscheinlichkeit sinkt, korrekt detektiert zu werden. Dieses Verhalten istzudem noch abhängig vom Gewichtungsfaktor ξ. Betrachtet man einen Subträ-ger, führt dies zu einer zeitlichen Ausbreitung des Fehlers. Eine Rückkehr derKanalschätzung in die Nähe der tatsächlichen Kanalkoeffizienten ist unwahr-scheinlich, eine erneute Initialisierung, z. B. durch Übertragung eines neuenSenderahmens, wird unvermeidbar. Der in [AH07a] beschriebene Algorithmustendiert dazu, die Fehler außerdem noch über die Subträger zu verteilen durchdie Anwendung des PAST-Algorithmus. Dieser schätzt einen korrespondieren-den Signalraum, um die Anzahl der Dimensionen und damit die Komplexitätzu reduzieren.
In diesem Kapitel werden Ansätze vorgestellt, um den Kanalschätzfehler inGegenwart der eben diskutierten Probleme zu verringern und so die Bitfeh-
69
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
lerrate des gesamten Übertragungssystems positiv zu beeinflussen [BLZ09b].Als Maß für die Kanalschätzqualität wird der Kanalschätzfehler in Form desNormalized Mean Square Error (NMSE)
NMSE =
ND∑
n=1
K−1∑
k=0
nT∑
t=1
nR∑
r=1
∣∣Hr,t[NP + n, k]− Hr,t[NP + n, k]
∣∣2
ND∑
n=1
K−1∑
k=0
nT∑
t=1
nR∑
r=1
|Hr,t[NP + n, k]|(4.1)
im Datenteil des Senderahmens quantifiziert.
4.1. Verzögerungskritische Systeme
Hinsichtlich des Systemdesigns ist die primäre Anwendung mit ihren Anforde-rungen maßgeblich zu berücksichtigen. Während z. B. für broadcast SzenarienVerzögerungen unkritisch sind, kann eine zu hohe Latenz in der Sprachkom-munikation das System praktisch unbrauchbar machen. Es werden im Fol-genden Anwendungen der Kanalschätzung für diese zwei Szenarien diskutiert.In einem System mit Rahmenverschachtelung kann das Deinterleaving unddie Decodierung erst nach Empfang und MIMO-Detektion des gesamten Rah-mens erfolgen, also nach TD,R = NS · (K + Lcp)/fS . In einem MIMO-OFDM-System ist die geringste systematische Verzögerung gegeben durch die FFT-Länge: Der Empfänger muss mindestens TD,min = (K + Lcp)/fS warten, be-vor FFT, Detektion und Deinterleaving beginnen können. Diese Betrachtungberücksichtigt nicht die Verzögerung durch die Verarbeitung selbst, da diesean der Implementierung des Empfängers liegt. Die geringste, systematischeVerzögerung führt bei entscheidungsbasierten Systemen, die den Ausgang desDecoders nutzen, zur minimalen Verzögerung von TD,min = TD,R/NS und zueiner maximalen Interleaverlänge von |Π| = nT ·K · κ.
4.1.1. Systeme mit Rahmenverschachtelung
Große Verschachtlerlängen sorgen für bessere Decodierergebnisse und somit zuniedrigeren Fehlerraten in Kanälen mit Fading [VY01]. In diesem Abschnittwerden Systeme mit maximaler Interleaverlänge betrachtet, d. h. sie ist mitder Rahmenlänge identisch:
|Π| = nT ·K ·ND · κ. (4.2)
70
4.1. Verzögerungskritische Systeme
Das Blockschaltbild ist in Bild 1.13 gegeben. Als LDPC Code wird eine Block-länge von nc = 8192 bit gewählt. Die MIMO Detektion wird mit Hilfe desMaximum Likelihood-Bitdetektors realisiert.
Die Ergebnisse sind in Bild 4.1 abgebildet. Trotz des relativ niedrigen Ge-wichtungsfaktors ξ = 0,9 ist der RLS-Algorithmus nicht in der Lage, bei hohenGeschwindigkeiten dem Kanalverlauf zu folgen. Bei 18 dB und 30 m/s beträgtder Abstand zu den 3 m/s Kanalrealisierungen zwei Größenordnungen in derBitfehlerrate. Es sind Plateaus bzw. Bereiche mit geringem Abfall in der Bit-fehlerrate bei den zeitvarianten Kanälen zu beobachten. Beachtlich ist auch derAbstand der Kurven für die Kanalschätzung zu der Detektion mit perfekterKanalkenntnis, 3 dB sind im besten Fall zu verzeichnen, ebenfalls bei 1 · 10−3.Da die Steigung allerdings bei beiden Scharen ähnlich ist, kann man daraufschließen, dass eine Rahmenverschachtelung im MIMO-OFDM bezüglich desGewinns durch die Kanalcodierung nicht besonders vorteilhaft ist. Dies lässtsich durch den Vergleich der Kurvenscharen erklären: Die Kanalschätzung,die auf den direkt empfangenen Symbolen basiert, verhindert die Ausprägungder Wasserfallregion wie bei der perfekten CSI bei 4 dB bis 8 dB. Obwohl derCodegewinn durch die große Interleaverlänge von etwa 200 000bit und derCodewortlänge von 8192 bit hoch ausfällt, wird durch eine mangelhafte Kanal-schätzung eine Verbesserung der Bitfehlerrate bis 15 dB hinausgezögert. Dieswird auch durch das NMSE-Maß in Bild 4.2 bestätigt.
4.1.2. Beschränkungen OFDM-blockverschachtelterSysteme
Systeme, die Anforderungen maximaler Verzögerung genügen sollen, müssenauf hohe Interleaverlängen verzichten. Das macht sie prinzipiell empfindlichgegenüber Fading. Insbesondere entscheidungsbasierte Systeme laufen Gefahrauch bei mittlerem SNR den Kanal nicht zuverlässig schätzen zu können unddamit eine relativ schlechte Bitfehlerrate aufzuweisen. Die Interleaverlänge,die durch |Π| = nT ·K · κ gegeben ist, bestimmt damit die Codewortlänge zu
nI + nP = nT ·K · κ. (4.3)
Diese Beschränkungen sind notwendig, um direkt nach Empfang eines OFDM-Symbols bzw. OFDM-Blocks, also mit niedrigster systematischer VerzögerungTD,min, die Daten zu decodieren und der Senke zuzuführen. Bild 4.3 zeigt denBitfehlerratenverlauf über SNR für ein System, das die Anforderung erfüllt.
71
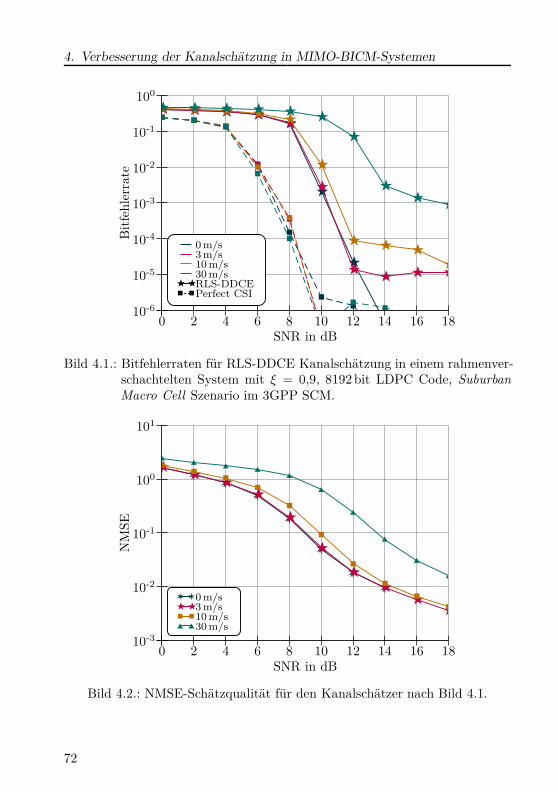
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
10-6
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/s
RLS-DDCE Perfect CSI
Bild 4.1.: Bitfehlerraten für RLS-DDCE Kanalschätzung in einem rahmenver-schachtelten System mit ξ = 0,9, 8192 bit LDPC Code, SuburbanMacro Cell Szenario im 3GPP SCM.
10-3
10-2
10-1
100
101
0 2 4 6 8 10 12 14 16 18
NM
SE
SNR in dB
0 m/s 3 m/s 10 m/s 30 m/s
Bild 4.2.: NMSE-Schätzqualität für den Kanalschätzer nach Bild 4.1.
72
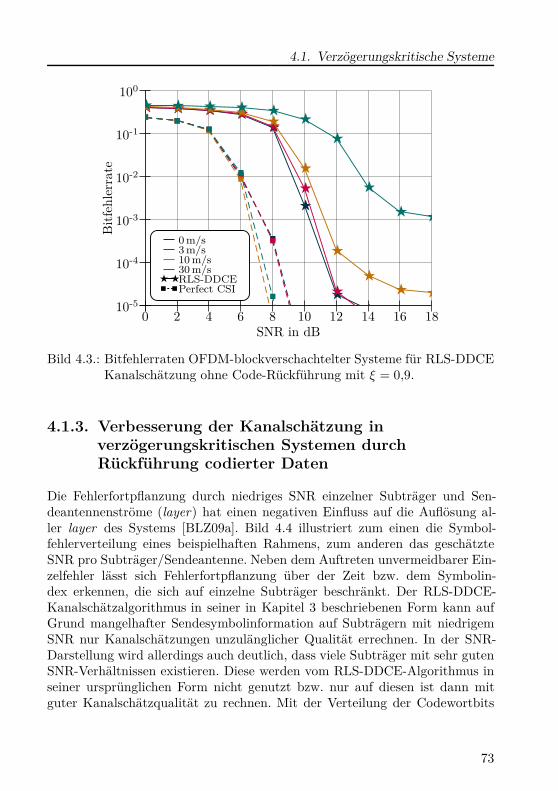
4.1. Verzögerungskritische Systeme
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/s
RLS-DDCE Perfect CSI
Bild 4.3.: Bitfehlerraten OFDM-blockverschachtelter Systeme für RLS-DDCEKanalschätzung ohne Code-Rückführung mit ξ = 0,9.
4.1.3. Verbesserung der Kanalschätzung inverzögerungskritischen Systemen durchRückführung codierter Daten
Die Fehlerfortpflanzung durch niedriges SNR einzelner Subträger und Sen-deantennenströme (layer) hat einen negativen Einfluss auf die Auflösung al-ler layer des Systems [BLZ09a]. Bild 4.4 illustriert zum einen die Symbol-fehlerverteilung eines beispielhaften Rahmens, zum anderen das geschätzteSNR pro Subträger/Sendeantenne. Neben dem Auftreten unvermeidbarer Ein-zelfehler lässt sich Fehlerfortpflanzung über der Zeit bzw. dem Symbolin-dex erkennen, die sich auf einzelne Subträger beschränkt. Der RLS-DDCE-Kanalschätzalgorithmus in seiner in Kapitel 3 beschriebenen Form kann aufGrund mangelhafter Sendesymbolinformation auf Subträgern mit niedrigemSNR nur Kanalschätzungen unzulänglicher Qualität errechnen. In der SNR-Darstellung wird allerdings auch deutlich, dass viele Subträger mit sehr gutenSNR-Verhältnissen existieren. Diese werden vom RLS-DDCE-Algorithmus inseiner ursprünglichen Form nicht genutzt bzw. nur auf diesen ist dann mitguter Kanalschätzqualität zu rechnen. Mit der Verteilung der Codewortbits
73
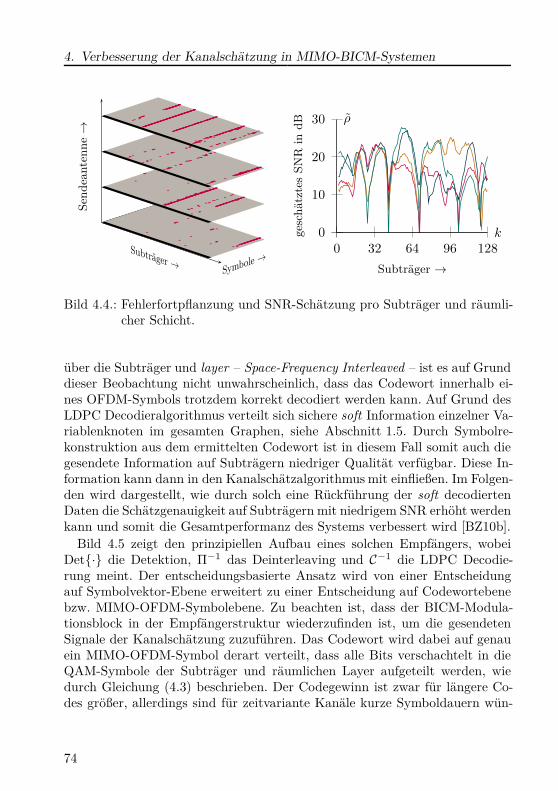
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
Subträger →
Sen
dea
nte
nn
e→
Symbole →
0
10
20
30
0 32 64 96 128k
ρ
Subträger →
ges
chätz
tes
SN
Rin
dB
Bild 4.4.: Fehlerfortpflanzung und SNR-Schätzung pro Subträger und räumli-cher Schicht.
über die Subträger und layer – Space-Frequency Interleaved – ist es auf Grunddieser Beobachtung nicht unwahrscheinlich, dass das Codewort innerhalb ei-nes OFDM-Symbols trotzdem korrekt decodiert werden kann. Auf Grund desLDPC Decodieralgorithmus verteilt sich sichere soft Information einzelner Va-riablenknoten im gesamten Graphen, siehe Abschnitt 1.5. Durch Symbolre-konstruktion aus dem ermittelten Codewort ist in diesem Fall somit auch diegesendete Information auf Subträgern niedriger Qualität verfügbar. Diese In-formation kann dann in den Kanalschätzalgorithmus mit einfließen. Im Folgen-den wird dargestellt, wie durch solch eine Rückführung der soft decodiertenDaten die Schätzgenauigkeit auf Subträgern mit niedrigem SNR erhöht werdenkann und somit die Gesamtperformanz des Systems verbessert wird [BZ10b].
Bild 4.5 zeigt den prinzipiellen Aufbau eines solchen Empfängers, wobeiDet· die Detektion, Π−1 das Deinterleaving und C−1 die LDPC Decodie-rung meint. Der entscheidungsbasierte Ansatz wird von einer Entscheidungauf Symbolvektor-Ebene erweitert zu einer Entscheidung auf Codewortebenebzw. MIMO-OFDM-Symbolebene. Zu beachten ist, dass der BICM-Modula-tionsblock in der Empfängerstruktur wiederzufinden ist, um die gesendetenSignale der Kanalschätzung zuzuführen. Das Codewort wird dabei auf genauein MIMO-OFDM-Symbol derart verteilt, dass alle Bits verschachtelt in dieQAM-Symbole der Subträger und räumlichen Layer aufgeteilt werden, wiedurch Gleichung (4.3) beschrieben. Der Codegewinn ist zwar für längere Co-des größer, allerdings sind für zeitvariante Kanäle kurze Symboldauern wün-
74
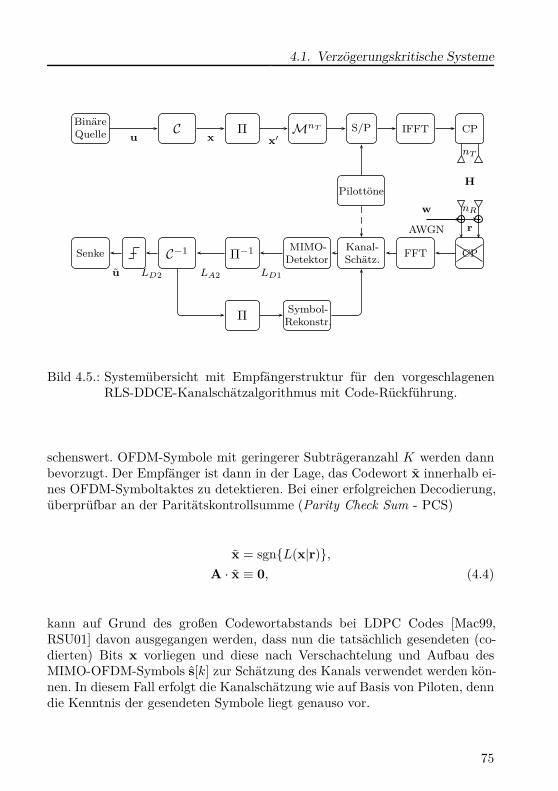
4.1. Verzögerungskritische Systeme
BinäreQuelle C Π MnT S/P IFFT CP
nT
H
nR
r
w
AWGN
Pilottöne
CPFFTKanal-Schätz.
MIMO-DetektorΠ−1C−1Senke
ΠSymbol-
Rekonstr.
u x x′
LD1LA2LD2u
Bild 4.5.: Systemübersicht mit Empfängerstruktur für den vorgeschlagenenRLS-DDCE-Kanalschätzalgorithmus mit Code-Rückführung.
schenswert. OFDM-Symbole mit geringerer Subträgeranzahl K werden dannbevorzugt. Der Empfänger ist dann in der Lage, das Codewort x innerhalb ei-nes OFDM-Symboltaktes zu detektieren. Bei einer erfolgreichen Decodierung,überprüfbar an der Paritätskontrollsumme (Parity Check Sum - PCS)
x = sgnL(x|r),A · x ≡ 0, (4.4)
kann auf Grund des großen Codewortabstands bei LDPC Codes [Mac99,RSU01] davon ausgegangen werden, dass nun die tatsächlich gesendeten (co-dierten) Bits x vorliegen und diese nach Verschachtelung und Aufbau desMIMO-OFDM-Symbols s[k] zur Schätzung des Kanals verwendet werden kön-nen. In diesem Fall erfolgt die Kanalschätzung wie auf Basis von Piloten, denndie Kenntnis der gesendeten Symbole liegt genauso vor.
75
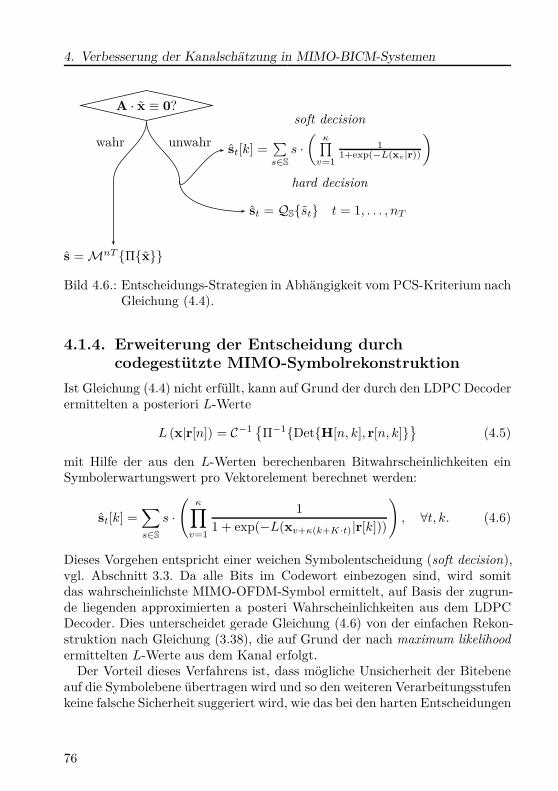
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
A · x ≡ 0?
wahr
s =MnT Πx
unwahrst[k] =
∑
s∈S
s ·(
κ∏
v=1
11+exp(−L(xv|r))
)
soft decision
st = QSst t = 1, . . . , nT
hard decision
Bild 4.6.: Entscheidungs-Strategien in Abhängigkeit vom PCS-Kriterium nachGleichung (4.4).
4.1.4. Erweiterung der Entscheidung durchcodegestützte MIMO-Symbolrekonstruktion
Ist Gleichung (4.4) nicht erfüllt, kann auf Grund der durch den LDPC Decoderermittelten a posteriori L-Werte
L (x|r[n]) = C−1
Π−1DetH[n, k], r[n, k]
(4.5)
mit Hilfe der aus den L-Werten berechenbaren Bitwahrscheinlichkeiten einSymbolerwartungswert pro Vektorelement berechnet werden:
st[k] =∑
s∈S
s ·(
κ∏
v=1
1
1 + exp(−L(xv+κ(k+K·t)|r[k]))
)
, ∀t, k. (4.6)
Dieses Vorgehen entspricht einer weichen Symbolentscheidung (soft decision),vgl. Abschnitt 3.3. Da alle Bits im Codewort einbezogen sind, wird somitdas wahrscheinlichste MIMO-OFDM-Symbol ermittelt, auf Basis der zugrun-de liegenden approximierten a posteri Wahrscheinlichkeiten aus dem LDPCDecoder. Dies unterscheidet gerade Gleichung (4.6) von der einfachen Rekon-struktion nach Gleichung (3.38), die auf Grund der nach maximum likelihoodermittelten L-Werte aus dem Kanal erfolgt.
Der Vorteil dieses Verfahrens ist, dass mögliche Unsicherheit der Bitebeneauf die Symbolebene übertragen wird und so den weiteren Verarbeitungsstufenkeine falsche Sicherheit suggeriert wird, wie das bei den harten Entscheidungen
76
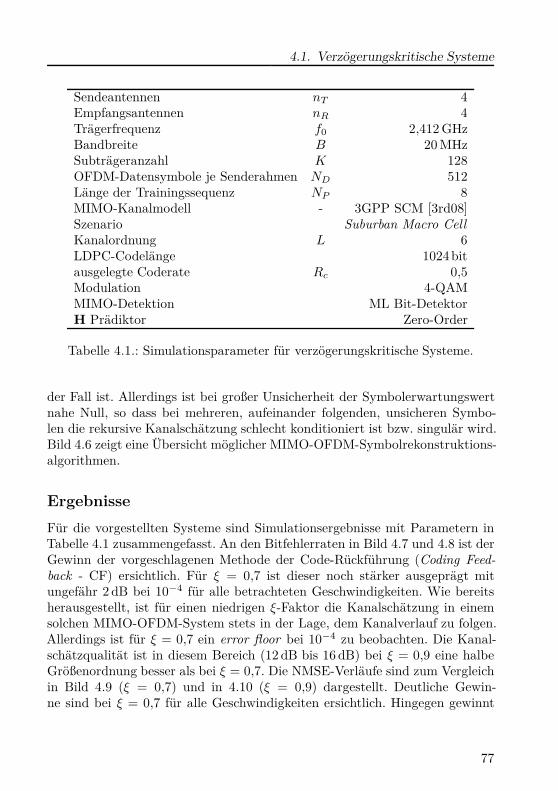
4.1. Verzögerungskritische Systeme
Sendeantennen nT 4Empfangsantennen nR 4Trägerfrequenz f0 2,412 GHzBandbreite B 20 MHzSubträgeranzahl K 128OFDM-Datensymbole je Senderahmen ND 512Länge der Trainingssequenz NP 8MIMO-Kanalmodell - 3GPP SCM [3rd08]Szenario Suburban Macro CellKanalordnung L 6LDPC-Codelänge 1024bitausgelegte Coderate Rc 0,5Modulation 4-QAMMIMO-Detektion ML Bit-DetektorH Prädiktor Zero-Order
Tabelle 4.1.: Simulationsparameter für verzögerungskritische Systeme.
der Fall ist. Allerdings ist bei großer Unsicherheit der Symbolerwartungswertnahe Null, so dass bei mehreren, aufeinander folgenden, unsicheren Symbo-len die rekursive Kanalschätzung schlecht konditioniert ist bzw. singulär wird.Bild 4.6 zeigt eine Übersicht möglicher MIMO-OFDM-Symbolrekonstruktions-algorithmen.
Ergebnisse
Für die vorgestellten Systeme sind Simulationsergebnisse mit Parametern inTabelle 4.1 zusammengefasst. An den Bitfehlerraten in Bild 4.7 und 4.8 ist derGewinn der vorgeschlagenen Methode der Code-Rückführung (Coding Feed-back - CF) ersichtlich. Für ξ = 0,7 ist dieser noch stärker ausgeprägt mitungefähr 2 dB bei 10−4 für alle betrachteten Geschwindigkeiten. Wie bereitsherausgestellt, ist für einen niedrigen ξ-Faktor die Kanalschätzung in einemsolchen MIMO-OFDM-System stets in der Lage, dem Kanalverlauf zu folgen.Allerdings ist für ξ = 0,7 ein error floor bei 10−4 zu beobachten. Die Kanal-schätzqualität ist in diesem Bereich (12 dB bis 16 dB) bei ξ = 0,9 eine halbeGrößenordnung besser als bei ξ = 0,7. Die NMSE-Verläufe sind zum Vergleichin Bild 4.9 (ξ = 0,7) und in 4.10 (ξ = 0,9) dargestellt. Deutliche Gewin-ne sind bei ξ = 0,7 für alle Geschwindigkeiten ersichtlich. Hingegen gewinnt
77
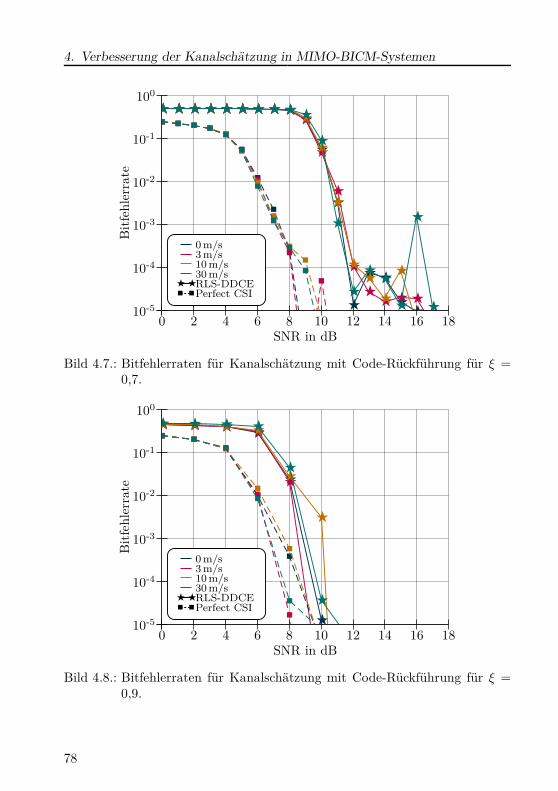
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/s
RLS-DDCE Perfect CSI
Bild 4.7.: Bitfehlerraten für Kanalschätzung mit Code-Rückführung für ξ =0,7.
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/s
RLS-DDCE Perfect CSI
Bild 4.8.: Bitfehlerraten für Kanalschätzung mit Code-Rückführung für ξ =0,9.
78
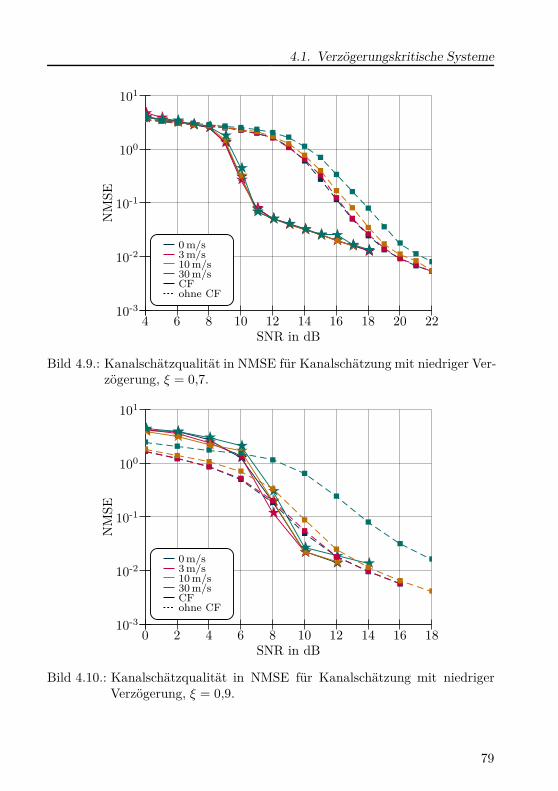
4.1. Verzögerungskritische Systeme
10-3
10-2
10-1
100
101
4 6 8 10 12 14 16 18 20 22
NM
SE
SNR in dB
0 m/s3 m/s10 m/s30 m/sCFohne CF
Bild 4.9.: Kanalschätzqualität in NMSE für Kanalschätzung mit niedriger Ver-zögerung, ξ = 0,7.
10-3
10-2
10-1
100
101
0 2 4 6 8 10 12 14 16 18
NM
SE
SNR in dB
0 m/s3 m/s10 m/s30 m/sCFohne CF
Bild 4.10.: Kanalschätzqualität in NMSE für Kanalschätzung mit niedrigerVerzögerung, ξ = 0,9.
79
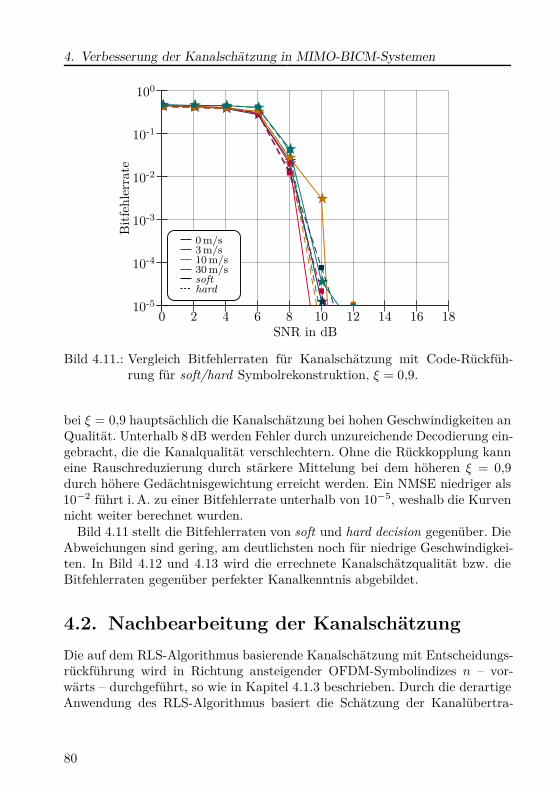
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/ssofthard
Bild 4.11.: Vergleich Bitfehlerraten für Kanalschätzung mit Code-Rückfüh-rung für soft/hard Symbolrekonstruktion, ξ = 0,9.
bei ξ = 0,9 hauptsächlich die Kanalschätzung bei hohen Geschwindigkeiten anQualität. Unterhalb 8 dB werden Fehler durch unzureichende Decodierung ein-gebracht, die die Kanalqualität verschlechtern. Ohne die Rückkopplung kanneine Rauschreduzierung durch stärkere Mittelung bei dem höheren ξ = 0,9durch höhere Gedächtnisgewichtung erreicht werden. Ein NMSE niedriger als10−2 führt i. A. zu einer Bitfehlerrate unterhalb von 10−5, weshalb die Kurvennicht weiter berechnet wurden.
Bild 4.11 stellt die Bitfehlerraten von soft und hard decision gegenüber. DieAbweichungen sind gering, am deutlichsten noch für niedrige Geschwindigkei-ten. In Bild 4.12 und 4.13 wird die errechnete Kanalschätzqualität bzw. dieBitfehlerraten gegenüber perfekter Kanalkenntnis abgebildet.
4.2. Nachbearbeitung der Kanalschätzung
Die auf dem RLS-Algorithmus basierende Kanalschätzung mit Entscheidungs-rückführung wird in Richtung ansteigender OFDM-Symbolindizes n – vor-wärts – durchgeführt, so wie in Kapitel 4.1.3 beschrieben. Durch die derartigeAnwendung des RLS-Algorithmus basiert die Schätzung der Kanalübertra-
80
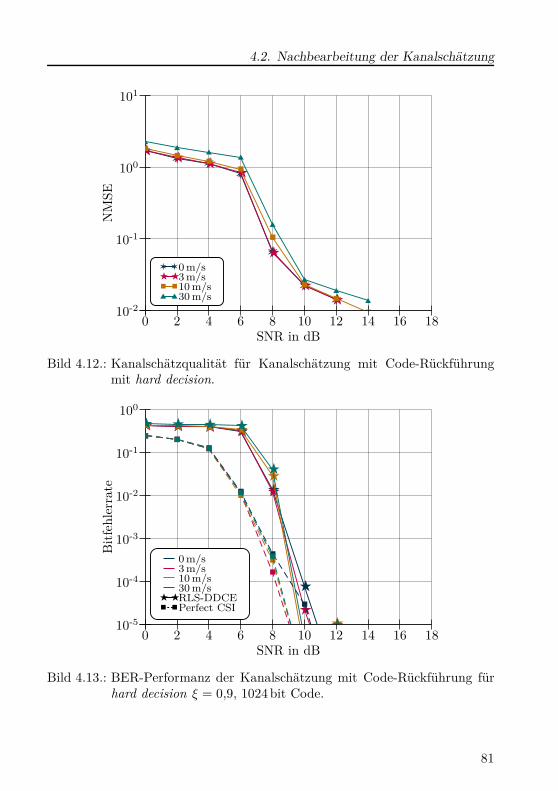
4.2. Nachbearbeitung der Kanalschätzung
10-2
10-1
100
101
0 2 4 6 8 10 12 14 16 18
NM
SE
SNR in dB
0 m/s 3 m/s 10 m/s 30 m/s
Bild 4.12.: Kanalschätzqualität für Kanalschätzung mit Code-Rückführungmit hard decision.
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/s
RLS-DDCE Perfect CSI
Bild 4.13.: BER-Performanz der Kanalschätzung mit Code-Rückführung fürhard decision ξ = 0,9, 1024 bit Code.
81
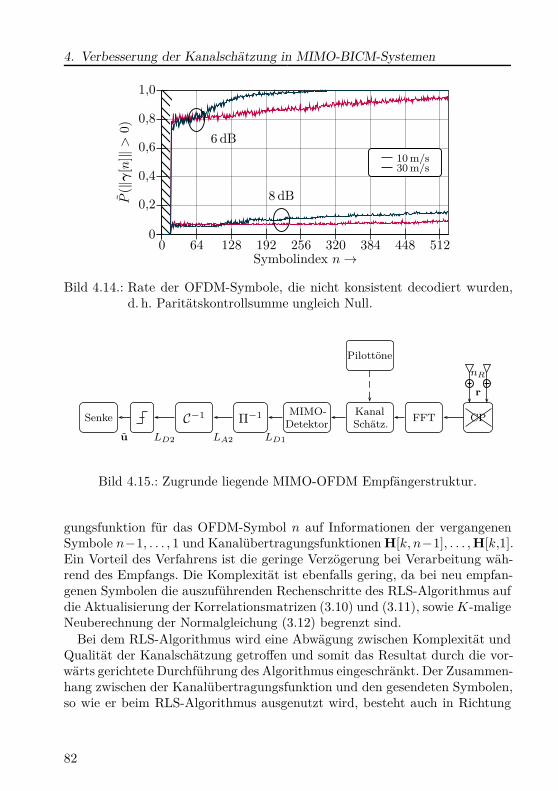
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
0
0,2
0,4
0,6
0,8
1,0
0 64 128 192 256 320 384 448 512
P(‖γ
[n]‖>
0)
Symbolindex n→
8 dB
6 dB
10 m/s30 m/s
Bild 4.14.: Rate der OFDM-Symbole, die nicht konsistent decodiert wurden,d. h. Paritätskontrollsumme ungleich Null.
nR
r
Pilottöne
CPFFTKanalSchätz.
MIMO-DetektorΠ−1C−1Senke
LD1LA2LD2u
Bild 4.15.: Zugrunde liegende MIMO-OFDM Empfängerstruktur.
gungsfunktion für das OFDM-Symbol n auf Informationen der vergangenenSymbole n−1, . . . , 1 und Kanalübertragungsfunktionen H[k, n−1], . . . ,H[k,1].Ein Vorteil des Verfahrens ist die geringe Verzögerung bei Verarbeitung wäh-rend des Empfangs. Die Komplexität ist ebenfalls gering, da bei neu empfan-genen Symbolen die auszuführenden Rechenschritte des RLS-Algorithmus aufdie Aktualisierung der Korrelationsmatrizen (3.10) und (3.11), sowie K-maligeNeuberechnung der Normalgleichung (3.12) begrenzt sind.
Bei dem RLS-Algorithmus wird eine Abwägung zwischen Komplexität undQualität der Kanalschätzung getroffen und somit das Resultat durch die vor-wärts gerichtete Durchführung des Algorithmus eingeschränkt. Der Zusammen-hang zwischen der Kanalübertragungsfunktion und den gesendeten Symbolen,so wie er beim RLS-Algorithmus ausgenutzt wird, besteht auch in Richtung
82
4.2. Nachbearbeitung der Kanalschätzung
absteigender Symbolindizes, also rückwärts. Die verfügbare Information kannfür die Kanalschätzung nutzbar gemacht werden, indem nicht nur die voran-gegangenen Symbole, sondern auch die nachfolgenden Symbole für die Kanal-schätzung des aktuellen OFDM-Symbols verwendet werden.
Bei den Simulationen für den in Abschnitt 4.1.4 vorgestellten Algorithmuswurde die Rate der Symbole ermittelt, deren Codeworte nicht erfolgreich imSinne der Paritätskontrollsumme decodiert werden konnten, bezeichnet mitP (‖γ[n]‖ > 0). Sie ist in Bild 4.14 über die Symbolposition im Rahmen fürzwei Geschwindigkeiten dargestellt. Die Rate steigt bei zunehmendem Abstandvon der Trainingssequenz am Anfang des Rahmens. Dies stimmt auch mit derSymbolfehlerverteilung in Bild 4.4 überein.
Die Einbindung der zusätzlichen Information kann auf Grund der rekursi-ven Struktur des RLS-Algorithmus nicht in den Algorithmus eingebaut wer-den, sondern muss in einer Nachbearbeitung im Anschluss an den RLS-Algo-rithmus durchgeführt werden. Die zugrunde liegende Empfängerstruktur istin Bild 4.15 abgebildet. Dem RLS-DDCE-Algorithmus folgt die Nachbearbei-tung auf Symbolebene – auch Smoothing genannt. Drei verschiedene Ansätzewurden im Rahmen dieser Arbeit entwickelt und untersucht:
• Exponentielle Rahmengewichtung,
• Rekursives Smoothing,
• Nicht-lineare Filterung der Kanalkoeffizienten in der Zeit-Frequenzebene(Median-Filter).
Auf Grund der Betrachtung der Symbolebene wird die zugrunde liegendeCodierung in den folgenden Ansätzen nicht berücksichtigt. Verfahren, die diesegezielt ausnutzen, werden in Abschnitt 4.3 vorgestellt.
Die Nachbearbeitung auf Symbolebene soll zum einen die Kanalschätzungverbessern und zum anderen die Bitfehlerrate verringern. Der Effekt der Nach-bearbeitung auf die empfangenen Symbole wird anhand einer erneuten Detekti-on der empfangenen Symbole mit der durch die Nachbearbeitung gewonnenenKanalübertragungsfunktion gezeigt. Die Verfahren werden in den folgendenAbschnitten 4.2.1 bis 4.2.3 näher diskutiert.
4.2.1. Exponentielle Rahmengewichtung
Die rekursive Struktur des RLS-Algorithmus erfordert die stetige Aktualisie-rung der Korrelationsmatrizen (3.10) und (3.11), so dass diese nicht für jedes
83

4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
OFDM-Symbol gespeichert werden müssen, sondern in jedem Schritt über-schrieben werden können. Eine effiziente Nachbearbeitung der Informationim Anschluss an den RLS-Algorithmus erfordert jedoch den Zugriff auf dieAutokorrelationsmatrix und die Kreuz-Korrelationsmatrix für jedes OFDM-Symbol, wodurch der Speicheraufwand für die Matrizen erheblich erhöht wird.Bezeichnet werden diese Matrizen mit Φ und θ:
Φ[n, k] = s[n, k] · sH [n, k], (4.7)
θ[n, k] = s[n, k] · rH [n, k]. (4.8)
Für ein nT × nR MIMO-OFDM System mit NS OFDM-Symbolen pro Sen-derahmen und K Subträgern pro OFDM-Symbol sind die Korrelationsmatri-zen vierdimensional, nT × nR ×K ×NS . Die Korrelationsmatrizen Φ und θfür jedes OFDM-Symbol können für die Erstellung der KorrelationsmatrizenΦ und θ des RLS-Algorithmus genutzt werden:
Φ[n, k] = ξ ·Φ[n− 1, k] + Φ[n, k], (4.9)
θ[n, k] = ξ · θ[n− 1, k] + θ[n, k]. (4.10)
Der RLS-Algorithmus lässt sich in dieser Form als Matrix-Vektor-Multipli-kation darstellen. Hierfür sind die Vergessensfaktoren ebenfalls als Matrix zuschreiben. Für die exponentiellen Vergessensfaktoren ergibt sich dadurch dieGestalt einer unteren Dreiecksmatrix:
Ξ =
1 0 · · ·ξ 1 0 · · ·ξ2 ξ 1 0 · · ·ξ3 ξ2 ξ 1
. . ....
......
.... . . 0
ξNS−1 ξNS−2 ξNS−3 ξNS−4 · · · 1
. (4.11)
Für jede Kombination aus t, r und k werden nun folgende Matrix-Vektor-Multiplikationen ausgeführt,
84

4.2. Nachbearbeitung der Kanalschätzung
Φ′t,r,k = Ξ · Φt,r,k
=
1 0 · · ·ξ 1 0 · · ·ξ2 ξ 1 0 · · ·ξ3 ξ2 ξ 1
. . ....
......
.... . . 0
ξNS−1 ξNS−2 ξNS−3 ξNS−4 · · · 1
· Φt,r,k
123...
NS − 1NS
,
(4.12)
analog für
θ′t,r,k = Ξ · θr,r,k. (4.13)
Durch die Gleichungen (4.12) und (4.13) werden die Auto-, und Kreuzkor-relationsmatrizen des RLS-Algorithmus für jedes OFDM-Symbol n berechnet.Die Kanalschätzung erfolgt nach der Normalgleichung
H[n, k] =(
Φ′−1
[n, k] · θ′[n, k]
)H
. (4.14)
Aus der Darstellung der Matrix der exponentiellen Vergessensfaktoren inGleichung (4.11) lässt sich die exponentielle Gewichtung vergangener Sym-bole erkennen, sie eignet sich jedoch aus Komplexitätsgründen nicht für dieDurchführung des RLS-Algorithmus. Grundlage der Verbesserung bietet andiesem Punkt eine Veränderung der dem RLS-Algorithmus zugrunde liegen-den Kostenfunktion [KFS06]. Die Kostenfunktion (3.45) wird derart verändert,dass die Summe über den Index n stets über alle OFDM-Symbole eines Sen-derahmens läuft. Ebenso werden die exponentiellen Vergessensfaktoren durchdie Bildung des Betrages der Differenz zwischen maximaler Symbolanzahl undIndex angepasst:
J [n, k] =NS∑
n=1
ξ|NS−n| · eH [n, n, k] · e[n, n, k]. (4.15)
Diese Änderung wirkt sich so auf die Korrelationsmatrizen bzw. exponenti-ellen Vergessensfaktoren aus, dass diese in der Matrixform voll besetzt sind,und die obere Dreieckshälfte eine Spiegelung der unteren Dreieckshälfte an derDiagonalen ist:
85
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
Ξ′ =
1 ξ ξ2 ξ3 · · · ξNS−1
ξ 1 ξ ξ2 · · · ξNS−2
ξ2 ξ 1 ξ · · · ξNS−3
ξ3 ξ2 ξ 1 · · · ξNS−4
......
......
. . ....
ξNS−1 ξNS−2 ξNS−3 ξNS−4 · · · 1
. (4.16)
Aus der vorgestellten Interpretation der Struktur der Matrix der exponen-tiellen Vergessensfaktoren Ξ folgt, dass mit Hilfe von Ξ′ alle OFDM-Symbolefür die Schätzung der Korrelationsmatrizen und somit auch für die Berechnungder Kanalübertragungsfunktion herangezogen werden.
Analog zur Matrix-Vektor-Multiplikation der einfachen RLS-Verarbeitungwerden die Korrelationsmatrizen aus den Gleichungen (4.12) und (4.13) gebil-det,
Φ′′t,r,k = Ξ′ · Φt,r,k, (4.17)
θ′′t,r,k = Ξ′ · θt,r,k, (4.18)
so dass die geschätzte Kanalübertragungsfunktion mit Hilfe der Normalglei-chung berechnet werden kann:
H[n, k] =(
Φ′′−1
[n, k] · θ′′[n, k]
)H
. (4.19)
Der rekursive Aufbau des entscheidungsbasierten RLS-Kanalschätzalgorith-mus macht die Durchführung des RLS-Algorithmus vor der Matrix-Vektor-Multiplikation mit der vollbesetzten Matrix der exponentiellen Gewichtungs-faktoren notwendig, da für die Entscheidungsrückführung in jedem Schritt zu-nächst die Kanalübertragungsmatrix bestimmt werden muss. Nach der Durch-führung der RLS-Kanalschätzung werden die Korrelationsmatrizen Φ und θverwendet, um die Kanalschätzung mittels der Gleichungen (4.17) bis (4.19)durchzuführen. Bild 4.16 zeigt die Empfängerstruktur der durch exponenti-elle Rahmengewichtung modifizierten Kanalschätzung zur Verbesserung derMIMO-Detektion.
4.2.2. Rekursives Smoothing
Ein Ansatz zur Kanalschätzung mit Hilfe des RLS-Algorithmus im Zeitbereichwurde in [KFS06] entwickelt. Darauf aufbauend wurde das Verfahren des rekur-
86
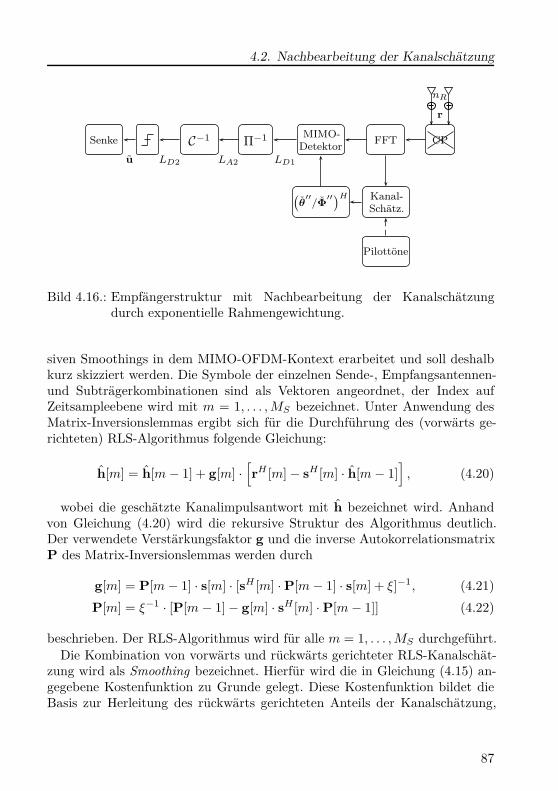
4.2. Nachbearbeitung der Kanalschätzung
Pilottöne
nR
r
CPFFT
Kanal-Schätz.
(θ
′′
/Φ′′)H
MIMO-DetektorΠ−1C−1Senke
LD1LA2LD2u
Bild 4.16.: Empfängerstruktur mit Nachbearbeitung der Kanalschätzungdurch exponentielle Rahmengewichtung.
siven Smoothings in dem MIMO-OFDM-Kontext erarbeitet und soll deshalbkurz skizziert werden. Die Symbole der einzelnen Sende-, Empfangsantennen-und Subträgerkombinationen sind als Vektoren angeordnet, der Index aufZeitsampleebene wird mit m = 1, . . . ,MS bezeichnet. Unter Anwendung desMatrix-Inversionslemmas ergibt sich für die Durchführung des (vorwärts ge-richteten) RLS-Algorithmus folgende Gleichung:
h[m] = h[m− 1] + g[m] ·[
rH [m]− sH [m] · h[m− 1]]
, (4.20)
wobei die geschätzte Kanalimpulsantwort mit h bezeichnet wird. Anhandvon Gleichung (4.20) wird die rekursive Struktur des Algorithmus deutlich.Der verwendete Verstärkungsfaktor g und die inverse AutokorrelationsmatrixP des Matrix-Inversionslemmas werden durch
g[m] = P[m− 1] · s[m] · [sH [m] ·P[m− 1] · s[m] + ξ]−1, (4.21)
P[m] = ξ−1 · [P[m − 1]− g[m] · sH [m] ·P[m− 1]] (4.22)
beschrieben. Der RLS-Algorithmus wird für alle m = 1, . . . ,MS durchgeführt.Die Kombination von vorwärts und rückwärts gerichteter RLS-Kanalschät-
zung wird als Smoothing bezeichnet. Hierfür wird die in Gleichung (4.15) an-gegebene Kostenfunktion zu Grunde gelegt. Diese Kostenfunktion bildet dieBasis zur Herleitung des rückwärts gerichteten Anteils der Kanalschätzung,
87
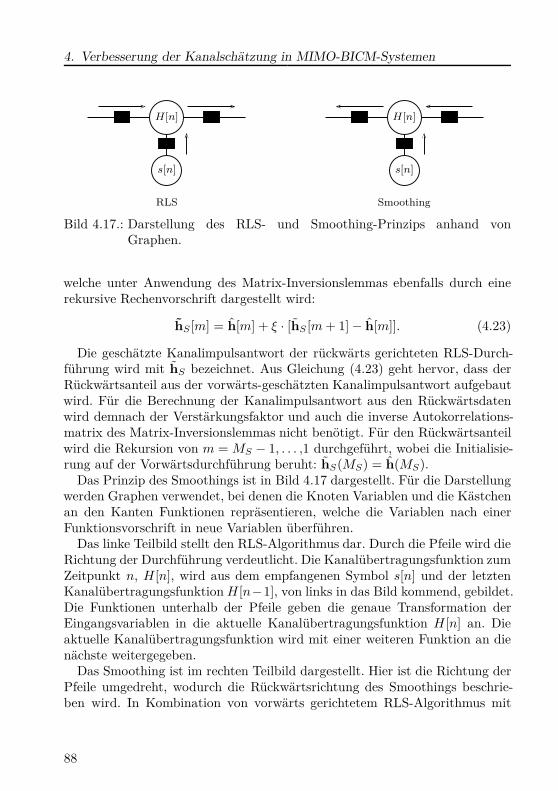
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
H[n]
s[n]
RLS
H[n]
s[n]
Smoothing
Bild 4.17.: Darstellung des RLS- und Smoothing-Prinzips anhand vonGraphen.
welche unter Anwendung des Matrix-Inversionslemmas ebenfalls durch einerekursive Rechenvorschrift dargestellt wird:
hS [m] = h[m] + ξ · [hS [m+ 1]− h[m]]. (4.23)
Die geschätzte Kanalimpulsantwort der rückwärts gerichteten RLS-Durch-führung wird mit hS bezeichnet. Aus Gleichung (4.23) geht hervor, dass derRückwärtsanteil aus der vorwärts-geschätzten Kanalimpulsantwort aufgebautwird. Für die Berechnung der Kanalimpulsantwort aus den Rückwärtsdatenwird demnach der Verstärkungsfaktor und auch die inverse Autokorrelations-matrix des Matrix-Inversionslemmas nicht benötigt. Für den Rückwärtsanteilwird die Rekursion von m = MS − 1, . . . ,1 durchgeführt, wobei die Initialisie-rung auf der Vorwärtsdurchführung beruht: hS(MS) = h(MS).
Das Prinzip des Smoothings ist in Bild 4.17 dargestellt. Für die Darstellungwerden Graphen verwendet, bei denen die Knoten Variablen und die Kästchenan den Kanten Funktionen repräsentieren, welche die Variablen nach einerFunktionsvorschrift in neue Variablen überführen.
Das linke Teilbild stellt den RLS-Algorithmus dar. Durch die Pfeile wird dieRichtung der Durchführung verdeutlicht. Die Kanalübertragungsfunktion zumZeitpunkt n, H [n], wird aus dem empfangenen Symbol s[n] und der letztenKanalübertragungsfunktion H [n−1], von links in das Bild kommend, gebildet.Die Funktionen unterhalb der Pfeile geben die genaue Transformation derEingangsvariablen in die aktuelle Kanalübertragungsfunktion H [n] an. Dieaktuelle Kanalübertragungsfunktion wird mit einer weiteren Funktion an dienächste weitergegeben.
Das Smoothing ist im rechten Teilbild dargestellt. Hier ist die Richtung derPfeile umgedreht, wodurch die Rückwärtsrichtung des Smoothings beschrie-ben wird. In Kombination von vorwärts gerichtetem RLS-Algorithmus mit
88
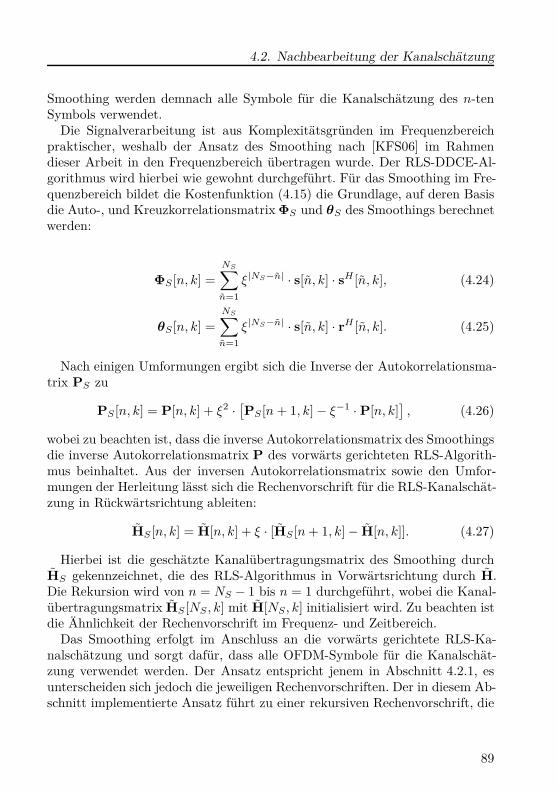
4.2. Nachbearbeitung der Kanalschätzung
Smoothing werden demnach alle Symbole für die Kanalschätzung des n-tenSymbols verwendet.
Die Signalverarbeitung ist aus Komplexitätsgründen im Frequenzbereichpraktischer, weshalb der Ansatz des Smoothing nach [KFS06] im Rahmendieser Arbeit in den Frequenzbereich übertragen wurde. Der RLS-DDCE-Al-gorithmus wird hierbei wie gewohnt durchgeführt. Für das Smoothing im Fre-quenzbereich bildet die Kostenfunktion (4.15) die Grundlage, auf deren Basisdie Auto-, und Kreuzkorrelationsmatrix ΦS und θS des Smoothings berechnetwerden:
ΦS [n, k] =NS∑
n=1
ξ|NS−n| · s[n, k] · sH [n, k], (4.24)
θS [n, k] =NS∑
n=1
ξ|NS−n| · s[n, k] · rH [n, k]. (4.25)
Nach einigen Umformungen ergibt sich die Inverse der Autokorrelationsma-trix PS zu
PS [n, k] = P[n, k] + ξ2 ·[PS [n+ 1, k]− ξ−1 ·P[n, k]
], (4.26)
wobei zu beachten ist, dass die inverse Autokorrelationsmatrix des Smoothingsdie inverse Autokorrelationsmatrix P des vorwärts gerichteten RLS-Algorith-mus beinhaltet. Aus der inversen Autokorrelationsmatrix sowie den Umfor-mungen der Herleitung lässt sich die Rechenvorschrift für die RLS-Kanalschät-zung in Rückwärtsrichtung ableiten:
HS [n, k] = H[n, k] + ξ · [HS [n+ 1, k]− H[n, k]]. (4.27)
Hierbei ist die geschätzte Kanalübertragungsmatrix des Smoothing durchHS gekennzeichnet, die des RLS-Algorithmus in Vorwärtsrichtung durch H.Die Rekursion wird von n = NS − 1 bis n = 1 durchgeführt, wobei die Kanal-übertragungsmatrix HS [NS , k] mit H[NS , k] initialisiert wird. Zu beachten istdie Ähnlichkeit der Rechenvorschrift im Frequenz- und Zeitbereich.
Das Smoothing erfolgt im Anschluss an die vorwärts gerichtete RLS-Ka-nalschätzung und sorgt dafür, dass alle OFDM-Symbole für die Kanalschät-zung verwendet werden. Der Ansatz entspricht jenem in Abschnitt 4.2.1, esunterscheiden sich jedoch die jeweiligen Rechenvorschriften. Der in diesem Ab-schnitt implementierte Ansatz führt zu einer rekursiven Rechenvorschrift, die
89
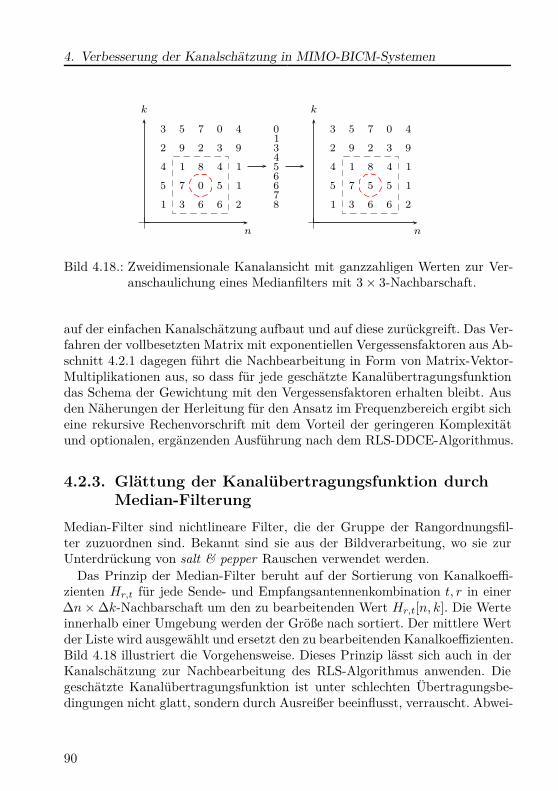
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
n
k
1
5
4
2
3
3
7
1
9
5
6
0
8
2
7
6
5
4
3
0
2
1
1
9
4
876654310
n
k
1
5
4
2
3
3
7
1
9
5
6
5
8
2
7
6
5
4
3
0
2
1
1
9
4
Bild 4.18.: Zweidimensionale Kanalansicht mit ganzzahligen Werten zur Ver-anschaulichung eines Medianfilters mit 3× 3-Nachbarschaft.
auf der einfachen Kanalschätzung aufbaut und auf diese zurückgreift. Das Ver-fahren der vollbesetzten Matrix mit exponentiellen Vergessensfaktoren aus Ab-schnitt 4.2.1 dagegen führt die Nachbearbeitung in Form von Matrix-Vektor-Multiplikationen aus, so dass für jede geschätzte Kanalübertragungsfunktiondas Schema der Gewichtung mit den Vergessensfaktoren erhalten bleibt. Ausden Näherungen der Herleitung für den Ansatz im Frequenzbereich ergibt sicheine rekursive Rechenvorschrift mit dem Vorteil der geringeren Komplexitätund optionalen, ergänzenden Ausführung nach dem RLS-DDCE-Algorithmus.
4.2.3. Glättung der Kanalübertragungsfunktion durchMedian-Filterung
Median-Filter sind nichtlineare Filter, die der Gruppe der Rangordnungsfil-ter zuzuordnen sind. Bekannt sind sie aus der Bildverarbeitung, wo sie zurUnterdrückung von salt & pepper Rauschen verwendet werden.
Das Prinzip der Median-Filter beruht auf der Sortierung von Kanalkoeffi-zienten Hr,t für jede Sende- und Empfangsantennenkombination t, r in einer∆n×∆k-Nachbarschaft um den zu bearbeitenden Wert Hr,t[n, k]. Die Werteinnerhalb einer Umgebung werden der Größe nach sortiert. Der mittlere Wertder Liste wird ausgewählt und ersetzt den zu bearbeitenden Kanalkoeffizienten.Bild 4.18 illustriert die Vorgehensweise. Dieses Prinzip lässt sich auch in derKanalschätzung zur Nachbearbeitung des RLS-Algorithmus anwenden. Diegeschätzte Kanalübertragungsfunktion ist unter schlechten Übertragungsbe-dingungen nicht glatt, sondern durch Ausreißer beeinflusst, verrauscht. Abwei-
90
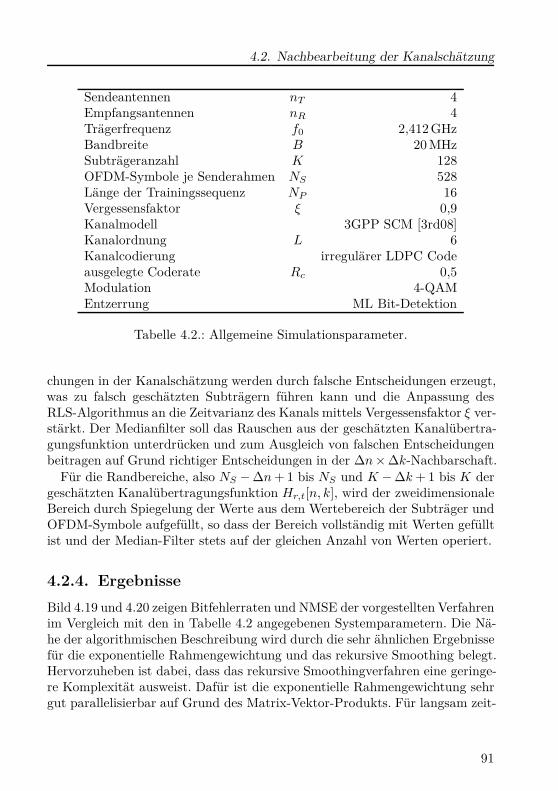
4.2. Nachbearbeitung der Kanalschätzung
Sendeantennen nT 4Empfangsantennen nR 4Trägerfrequenz f0 2,412 GHzBandbreite B 20 MHzSubträgeranzahl K 128OFDM-Symbole je Senderahmen NS 528Länge der Trainingssequenz NP 16Vergessensfaktor ξ 0,9Kanalmodell 3GPP SCM [3rd08]Kanalordnung L 6Kanalcodierung irregulärer LDPC Codeausgelegte Coderate Rc 0,5Modulation 4-QAMEntzerrung ML Bit-Detektion
Tabelle 4.2.: Allgemeine Simulationsparameter.
chungen in der Kanalschätzung werden durch falsche Entscheidungen erzeugt,was zu falsch geschätzten Subträgern führen kann und die Anpassung desRLS-Algorithmus an die Zeitvarianz des Kanals mittels Vergessensfaktor ξ ver-stärkt. Der Medianfilter soll das Rauschen aus der geschätzten Kanalübertra-gungsfunktion unterdrücken und zum Ausgleich von falschen Entscheidungenbeitragen auf Grund richtiger Entscheidungen in der ∆n×∆k-Nachbarschaft.
Für die Randbereiche, also NS −∆n+ 1 bis NS und K −∆k+ 1 bis K dergeschätzten Kanalübertragungsfunktion Hr,t[n, k], wird der zweidimensionaleBereich durch Spiegelung der Werte aus dem Wertebereich der Subträger undOFDM-Symbole aufgefüllt, so dass der Bereich vollständig mit Werten gefülltist und der Median-Filter stets auf der gleichen Anzahl von Werten operiert.
4.2.4. Ergebnisse
Bild 4.19 und 4.20 zeigen Bitfehlerraten und NMSE der vorgestellten Verfahrenim Vergleich mit den in Tabelle 4.2 angegebenen Systemparametern. Die Nä-he der algorithmischen Beschreibung wird durch die sehr ähnlichen Ergebnissefür die exponentielle Rahmengewichtung und das rekursive Smoothing belegt.Hervorzuheben ist dabei, dass das rekursive Smoothingverfahren eine geringe-re Komplexität ausweist. Dafür ist die exponentielle Rahmengewichtung sehrgut parallelisierbar auf Grund des Matrix-Vektor-Produkts. Für langsam zeit-
91
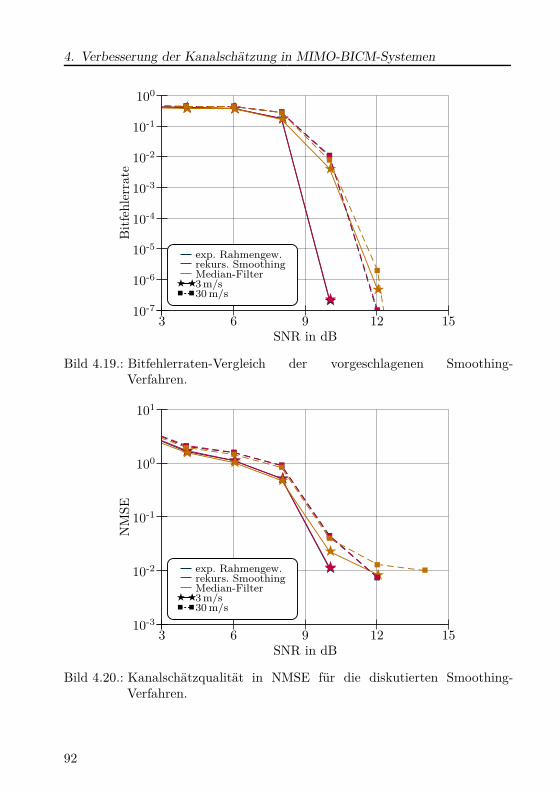
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
3 6 9 12 15
Bit
fehle
rrat
e
SNR in dB
exp. Rahmengew.rekurs. SmoothingMedian-Filter
3 m/s 30 m/s
Bild 4.19.: Bitfehlerraten-Vergleich der vorgeschlagenen Smoothing-Verfahren.
10-3
10-2
10-1
100
101
3 6 9 12 15
NM
SE
SNR in dB
exp. Rahmengew.
rekurs. SmoothingMedian-Filter
3 m/s 30 m/s
Bild 4.20.: Kanalschätzqualität in NMSE für die diskutierten Smoothing-Verfahren.
92
4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung
veränderliche Kanäle zeigen beide Verfahren sehr gute Ergebnisse in BER undNMSE im Vergleich zu den in Abschnitt 4.1.3 diskutierten Algorithmen. Tat-sächlich ist also eine quantifizierbare Verbesserung der Kanalschätzung durchSmoothing in MIMO-OFDM-Systemen mit relativ geringer Komplexität mög-lich.
Die Nachbearbeitung durch den Median-Filter fällt durch eine große Tole-ranz der Geschwindigkeit auf. Die höhere Geschwindigkeit führt zu vernach-lässigbar geringen Einbußen in BER und NMSE, allerdings ist die Median-Filterung insgesamt den ersten beiden Verfahren unterlegen.
4.3. Verbesserung der Kanalschätzung durch
Entscheidungsrückführung in Vorwärts-und Rückwärtsrichtung
Die in Abschnitt 4.2 vorgestellten Ansätze beruhen mehr oder weniger auf derNachbearbeitung der Kanalkenntnis, die durch die RLS-DDCE-Kanalschät-zung in Vorwärtsrichtung gewonnenen wurde. Ein Vorteil des Ansatzes isteindeutig die geringe zusätzliche Komplexität gegenüber der einfachen Kanal-schätzung mit dem RLS-DDCE-Algorithmus. Mit relativ geringer Verzögerungist eine Detektion und Kanalschätzung möglich, die dann auf zukünftigen Sys-temen, z. B. bei detektierten Fehlern, durch die Nachverarbeitung parallel zumweiteren Empfang verbessert werden kann.
Der im Folgenden diskutierte Ansatz basiert nun auf der unabhängigen An-wendung der entscheidungsbasierten RLS-Kanalschätzung in Vorwärts- sowiein Rückwärtsrichtung [MBZ10]. Die rückwärts gerichtete, entscheidungsbasier-te RLS-Verarbeitung schätzt die Korrelationsmatrizen zunächst auf Grundlageder Pilotsequenz am Ende des Senderahmens. Durch Adaption vom Ende desSenderahmens kann bei schnell-veränderlichen Kanälen ein neuer Versuch un-ternommen werden, dem Kanalverlauf zu folgen und basierend auf der neuenKanalschätzung bei der Detektion zusätzliche Information in Form von Kanal-L-Werten zu gewinnen. Diese kann mit der aus dem vorwärts gerichteten RLS-DDCE-Algorithmus ermittelten Information kombiniert werden. Im Hinblickauf steigende Raten von fehlgeschlagener Decodierung zum Ende des Senderah-mens des Kanalschätzalgorithmus in Abschnitt 4.1.3, vgl. Bild 4.14, wird somitein Verbesserungspotential eröffnet. Unter idealen Bedingungen, bzw. einemgroßen Signal-zu-Rauschabstand (SNR), führen die Anwendungen der adap-tiven Kanalschätzungen in beide Richtungen jedoch zu denselben Ergebnis-
93
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
sen. Ziel ist also, eine Verbesserung im niedrigen SNR-Bereich zu erreichen.Den entscheidungsbasierten RLS-Kanalschätzungen folgen eine Bearbeitungund Auswertung der Informationen, so dass die Komplexität der aus diesemAnsatz heraus entwickelten Verfahren größer als bei den bisher vorgestelltenAlgorithmen zur Kanalschätzung ist.
Das Schema dieses Ansatzes ist in Bild 4.21 dargestellt. Die untere Seitestellt die übliche entscheidungsbasierte RLS-Kanalschätzung mit exponentiel-ler Gewichtung der vergangenen Symbole dar. Es werden die empfangenenSymbole aus den Vektoren r genutzt. Diese Verarbeitung resultiert nebender geschätzten Kanalübertragungsfunktion H auch in den a posteriori LLRsLf (x′|r) der Kanaldecodierung:
Lf (x′|r[n]) = ΠC−1
Π−1DetH[n, k], r[n, k]
, (4.28)
wobei Det· die ML-Detektion, Π−1 das Deinterleaving und C−1 die LDPCDecodierung meint, vgl. Gleichung (4.5). Der Index f zeigt den Ursprung ausder Detektion und Decodierung während der vorwärts gerichteten (forward),entscheidungsbasierten RLS-Kanalschätzung an.
Die obere Seite hingegen repräsentiert die RLS-DDCE-Kanalschätzung inRückwärtsrichtung, bei der die a posteriori L-Werte auf Grundlage der zeitlichumgedrehten Empfangssymbole berechnet werden. Der umgedrehte Zeitindexist mit n = (NS)− n gekennzeichnet:
Lb (x′|r[n]) = ΠC−1
Π−1DetH[n, k], r[n, k]
. (4.29)
Die resultierenden L-Werte aus Gleichung (4.28) und (4.29) werden nachden Kanalschätzungen in beide Richtungen einer Nachbearbeitung auf Bi-tebene zugeführt, welche die LLRs auswertet und aus beiden Fassungen vondetektierten Codewörtern als richtig anzunehmende Codewörter herausfiltert.Mit Hilfe dieser wird eine RLS-Kanalschätzung mit der kombinierten Informa-tion ausgeführt. Hierbei werden die auf Grund ihrer Paritätskontrollsumme‖γi[n]‖, i ∈ f, b als richtig angenommenen Codewörter nicht neu entschie-den, sondern die bisherigen Entscheidungen beibehalten. Mit Hilfe der ver-mehrten als richtig angenommenen Codewörter steht der finalen RLS-Kanal-schätzung eine bessere Schätzung der Sendevektoren zur Verfügung, so dasseine Verbesserung der Kanalschätzung zu erwarten ist. Falls die Nachbearbei-tung nicht zu Codewörtern führt, die als richtig angenommenen werden, wirdin dem finalen RLS Durchgang keines der Codewörter neu entschieden, da ei-ne erneute Entscheidung zu den gleichen Ergebnissen wie zuvor führen würde,
94
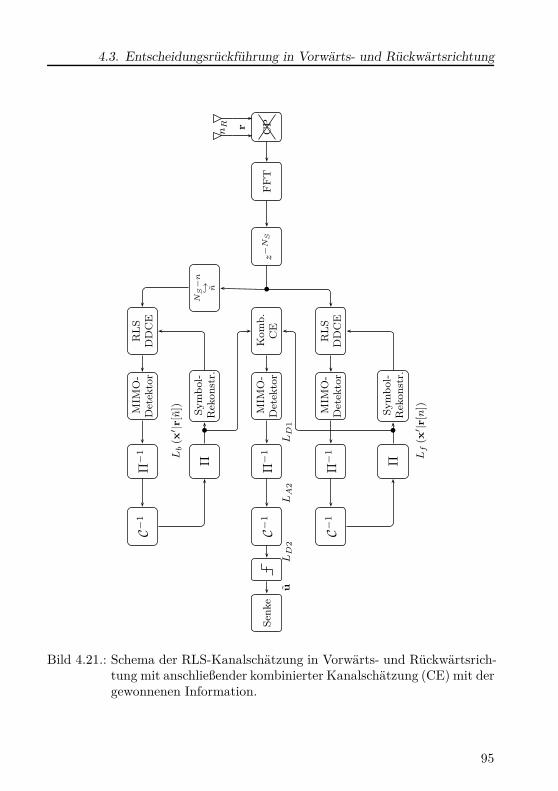
4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung
nR r CP
FF
Tz
−N
S
RL
SD
DC
EM
IMO
-D
etek
tor
Π−
1C−
1
Π
Sym
bol
-R
ekon
str.
NS
−n
→ n
RL
SD
DC
EM
IMO
-D
etek
tor
Π−
1C−
1
Π
Sym
bol
-R
ekon
str.
Kom
b.
CE
MIM
O-
Det
ekto
rΠ
−1
C−1
Sen
ke
LD
1L
A2
LD
2u
Lf
(x′|r
[n])
Lb
(x′|r
[n])
Bild 4.21.: Schema der RLS-Kanalschätzung in Vorwärts- und Rückwärtsrich-tung mit anschließender kombinierter Kanalschätzung (CE) mit dergewonnenen Information.
95
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
und der RLS-Algorithmus wird für die Kanalschätzung durchgeführt. Die Aus-wahl der als richtig angenommenen Codewörtern wird in den Abschnitten 4.3.1und 4.3.2 erläutert.
Für die kombinierte, entscheidungsbasierte Kanalschätzung ist eine Rich-tungsabhängigkeit basierend auf der Nachbearbeitung der RLS-Verarbeitun-gen implementiert, so dass die finale RLS-Verarbeitung in Vorwärts- oderRückwärtsrichtung durchgeführt werden kann. Für den Fall einer erfolgreichenRLS-Verarbeitung in Vorwärtsrichtung sind die als richtig angenommenen Co-dewörter eher zu Beginn des Senderahmens angeordnet – vgl. Diskussion zuBild 4.14. Die RLS-Verarbeitung in Rückwärtsrichtung unterstützt in diesemFall lediglich am Ende des Senderahmens. Dominiert die RLS-Verarbeitung inRückwärtsrichtung, so sind die als richtig angenommenen Codewörter tenden-ziell am Ende des Senderahmens vorzufinden. Im ersten Fall, der Vorwärts-dominanz, wird die letztendliche entscheidungsbasierte RLS-Kanalschätzungebenfalls in Vorwärtsrichtung durchgeführt, so dass der RLS-Algorithmus aufBasis einer größeren Anzahl an als richtig angenommenen Codewörtern auf-baut. Im anderen Fall wird die Rückwärtsrichtung für den finalen RLS-Algo-rithmus verwendet.
Für diesen Ansatz liegt der Fokus besonders auf der Kombination der softInformation, so dass die Entscheidungsrückführung komplett auf soft Informa-tion basiert, wie in Abschnitt 4.1.4 erläutert. Ist die Paritätskontrollsumme‖γi[n]‖ des Codeworts für das MIMO-OFDM-Symbol n gleich Null, so kanndieses Codewort hart entschieden und das MIMO-OFDM-Symbol des Code-worts gebildet werden. Ist die Paritätskontrollsumme dagegen ungleich Null,werden die in Abschnitt 3.3 diskutierten Techniken angewandt.
Die RLS-Verarbeitung für absteigende Symbolindizes n erfordert zur korrek-ten Durchführung eine Trainingssequenz am Ende des Senderahmens, so dassdurch die Summation der Korrelationsmatrizen aus den Gleichungen (3.10)und (3.11) das Problem der Rang-1 Matrizen gelöst wird. Anhand der inBild 4.22 dargestellten Struktur der Senderahmen kann diese Lösung nach-vollzogen werden. Für die rückwärts gerichtete RLS-Verarbeitung wird dieTrainingssequenz des darauffolgenden Senderahmens verwendet. Diese Lösungermöglicht die doppelte Verwendung der vorhandenen Trainingssequenzen, sodass beide RLS-DDCE-Ausführungen korrekt durchgeführt werden können.Zudem resultiert aus dieser Lösung der Gewinn an möglicherweise zusätzli-cher soft Information, ohne weitere Kosten bezüglich Bandbreiteeffizienz inFolge von mehr Pilotsymbolen hervorzurufen.
Für die Nachbearbeitung sind im Rahmen dieser Arbeit zwei Verfahren ent-wickelt und implementiert worden. Das erste basiert auf einem iterativen Aus-
96
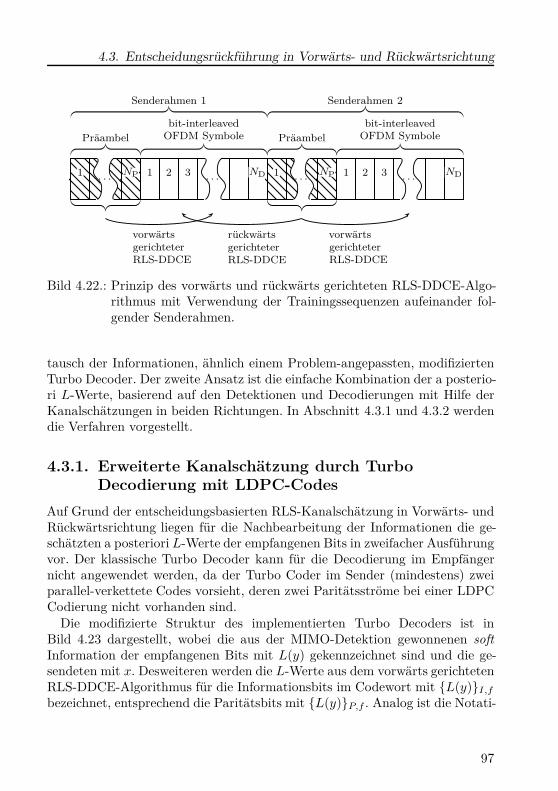
4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung
1 . . . NP 1 2 3 . . . ND 1 . . . NP 1 2 3 . . . ND
Präambel
bit-interleavedOFDM Symbole
Senderahmen 1
Präambel
bit-interleavedOFDM Symbole
Senderahmen 2
vorwärtsgerichteterRLS-DDCE
vorwärtsgerichteterRLS-DDCE
rückwärtsgerichteterRLS-DDCE
Bild 4.22.: Prinzip des vorwärts und rückwärts gerichteten RLS-DDCE-Algo-rithmus mit Verwendung der Trainingssequenzen aufeinander fol-gender Senderahmen.
tausch der Informationen, ähnlich einem Problem-angepassten, modifiziertenTurbo Decoder. Der zweite Ansatz ist die einfache Kombination der a posterio-ri L-Werte, basierend auf den Detektionen und Decodierungen mit Hilfe derKanalschätzungen in beiden Richtungen. In Abschnitt 4.3.1 und 4.3.2 werdendie Verfahren vorgestellt.
4.3.1. Erweiterte Kanalschätzung durch TurboDecodierung mit LDPC-Codes
Auf Grund der entscheidungsbasierten RLS-Kanalschätzung in Vorwärts- undRückwärtsrichtung liegen für die Nachbearbeitung der Informationen die ge-schätzten a posteriori L-Werte der empfangenen Bits in zweifacher Ausführungvor. Der klassische Turbo Decoder kann für die Decodierung im Empfängernicht angewendet werden, da der Turbo Coder im Sender (mindestens) zweiparallel-verkettete Codes vorsieht, deren zwei Paritätsströme bei einer LDPCCodierung nicht vorhanden sind.
Die modifizierte Struktur des implementierten Turbo Decoders ist inBild 4.23 dargestellt, wobei die aus der MIMO-Detektion gewonnenen softInformation der empfangenen Bits mit L(y) gekennzeichnet sind und die ge-sendeten mit x. Desweiteren werden die L-Werte aus dem vorwärts gerichtetenRLS-DDCE-Algorithmus für die Informationsbits im Codewort mit L(y)I,f
bezeichnet, entsprechend die Paritätsbits mit L(y)P,f . Analog ist die Notati-
97
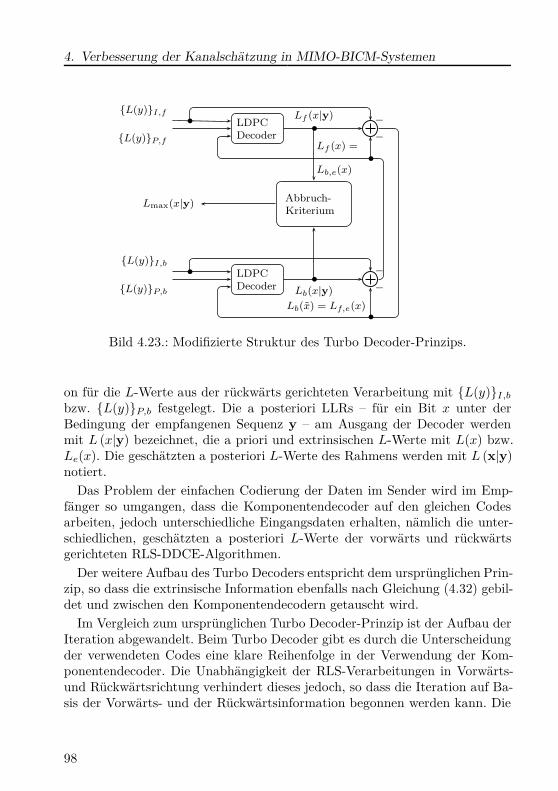
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
LDPCDecoder
Abbruch-Kriterium
LDPCDecoder
−
−
−
−
L(y)I,f
L(y)P,f
Lmax(x|y)
L(y)I,b
L(y)P,b
Lf (x|y)
Lb(x|y)
Lb(x) = Lf,e(x)
Lf (x) =
Lb,e(x)
Bild 4.23.: Modifizierte Struktur des Turbo Decoder-Prinzips.
on für die L-Werte aus der rückwärts gerichteten Verarbeitung mit L(y)I,b
bzw. L(y)P,b festgelegt. Die a posteriori LLRs – für ein Bit x unter derBedingung der empfangenen Sequenz y – am Ausgang der Decoder werdenmit L (x|y) bezeichnet, die a priori und extrinsischen L-Werte mit L(x) bzw.Le(x). Die geschätzten a posteriori L-Werte des Rahmens werden mit L (x|y)notiert.
Das Problem der einfachen Codierung der Daten im Sender wird im Emp-fänger so umgangen, dass die Komponentendecoder auf den gleichen Codesarbeiten, jedoch unterschiedliche Eingangsdaten erhalten, nämlich die unter-schiedlichen, geschätzten a posteriori L-Werte der vorwärts und rückwärtsgerichteten RLS-DDCE-Algorithmen.
Der weitere Aufbau des Turbo Decoders entspricht dem ursprünglichen Prin-zip, so dass die extrinsische Information ebenfalls nach Gleichung (4.32) gebil-det und zwischen den Komponentendecodern getauscht wird.
Im Vergleich zum ursprünglichen Turbo Decoder-Prinzip ist der Aufbau derIteration abgewandelt. Beim Turbo Decoder gibt es durch die Unterscheidungder verwendeten Codes eine klare Reihenfolge in der Verwendung der Kom-ponentendecoder. Die Unabhängigkeit der RLS-Verarbeitungen in Vorwärts-und Rückwärtsrichtung verhindert dieses jedoch, so dass die Iteration auf Ba-sis der Vorwärts- und der Rückwärtsinformation begonnen werden kann. Die
98

4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung
Iteration wird beim modifizierten Turbo Decoder daher in beide Richtungenausgeführt:
Lf (x|y)⇒ Lf,e(x) = Lb(x)⇒ Lb (x|y) , (4.30)
Lb (x|y)⇒ Lb,e(x) = Lf (u)⇒ Lf (x|y) . (4.31)
Zunächst werden dem Decoder die detektierten Daten aus der Vorwärtsrich-tung zugeführt, so dass dieser die zugehörige extrinsische Information
Lf,e(x) = L (u|r)− L(x)− L(y)I (4.32)
berechnet, welche als a priori Information zusammen mit den detektiertenDaten aus der Rückwärtsausführung dem anderen Decoder eingegeben wird.Dieser berechnet die a posteriori Information Lb (x|y), welche bei Abbruchder Iteration für die weitere Bearbeitung verwendet wird. Die zweite Iterati-onsrichtung beginnt mit dem Decoder der Rückwärtsrichtung und resultiert,wie in Gleichung (4.31) angegeben, in der a posteriori Information Lf (x|y).
Als Abbruchbedingung der Iteration dient wie beim Turbo Decoder die Aus-wertung der Varianz der a posteriori LLRs des zweiten Komponentendeco-ders [Rob94]. Unter der Voraussetzung eines Kanals mit additiven, weißenund gaußförmigen Rauschen (AWGN) mit Varianz σ2, Empfangswert y und apriori gleichwahrscheinlichen Werten der Bits x von +1 und −1, gilt für denL-Wert des Bits u:
L (x|y) = log
(P (y|x = −1)
P (y|x = +1)
)
=2
σ2· y ML
= log
(P (x = −1|y)
P (x = +1|y)
)
, (4.33)
wobei die lineare Beziehung zwischen dem LLR L (x|y) und dem empfangenenBit y hervorzuheben ist:
y =σ2
2· L (x|y) . (4.34)
Mit der Darstellung der Wahrscheinlichkeitsdichtefunktion des Bits x und desRauschens ergibt sich die Wahrscheinlichkeitsdichtefunktion des LLR L (x|y),aus welchem die Varianz σ2
L der LLRs bestimmt werden kann. Für die Varianzσ2
L ergibt sich eine quadratische Abhängigkeit von der Varianz σ2 des Kanals.Die einzige Lösung der quadratischen Gleichung lautet:
σ2 =2 + 2 ·
√
1 + σ2L
σ2L
. (4.35)
99
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
Bei dem modifizierten Prinzip wird für beide Iterationsrichtungen die Varianzder a posteriori LLRs berechnet, σ2
L,f und σ2L,b, auf die Varianz des Kanals
geschlossen und anschließend jeweils die Differenz zu der Varianz des letztenIterationsschritts gebildet: ∆σ2
f und ∆σ2b . Unterschreitet die Differenz der Va-
rianzen einen bestimmten Grenzwert, so ist die Änderung der a posterioriLLRs nur noch geringfügig und die Iteration wird abgebrochen.
Zudem wird ein weiteres Abbruchkriterium eingebaut, so dass die Iterationbei guten Kanalbedingungen nicht gestartet wird. Resultiert der vorwärts oderrückwärts gerichtete RLS-DDCE-Algorithmus in
‖γ[n]‖ = 0 , ∀n, (4.36)
so wird die Iteration des modifizierten Turbo Decoders nicht gestartet. In die-sem Fall kann auf Grund des gegebenen LDPC Codes von einer fehlerfreienDecodierung der Codewörter ausgegangen werden, so dass eine weitere Nach-bearbeitung keine Änderungen hervorbringen kann.
Die Paritätskontrollsumme der LDPC Codewörter ist die oben angesproche-ne Bedingung, auf deren Basis die weitere Verarbeitung der a posteriori LLRsnach der Iteration geschieht. LDPC Codes besitzen im Vergleich zu anderenCodes einen großen Codewortabstand, so dass die Wahrscheinlichkeit, bei einerParitätskontrollsumme von Null bei der Decodierung ein falsches Codewort zudecodieren, sehr gering ist [RSU01].
Diese Eigenschaft der LDPC Codes dient als Kriterium für die Bewertungder Codewörter. Ergibt sich durch den Austausch der extrinsischen Informa-tion während der Iteration ein Codewort n mit ‖γ[n]‖ = 0, so wird diesesCodewort als richtig decodiert angenommen und nach Abbruch der Iterationin der finalen RLS-Kanalschätzung nicht erneut entschieden. Bild 4.24 zeigtdas iterative Verhalten des vorgeschlagenen Algorithmus, Austausch der In-formation von Vorwärts- und Rückwärtsdurchlauf und die damit verbundeneEntwicklung der Paritätskontrollsummen mit der Zunahme konsistent deco-dierter Codewörter. Ebenfalls abgebildet ist die Steigerung der tatsächlichfalschen Codewörter durch Decoderkonvergenz zu falschen Codewörtern.
Des Weiteren ist eine geringe Gesamt-Paritätskontrollsumme∑
n ‖γ[n]‖stets mit einer geringen Anzahl von Bitfehlern verbunden. Um die verschie-denen Richtungen der Iteration zu bewerten, wird jeweils die Paritätskontroll-summe über alle Codewörter gebildet. Die a posteriori LLRs am Ausgang deszweiten Komponentendecoders, der Iterationsrichtung mit der geringeren Ge-samt-Paritätskontrollsumme, werden für die weitere Bearbeitung, dem finalenRLS-Durchgang, ausgewählt:
100
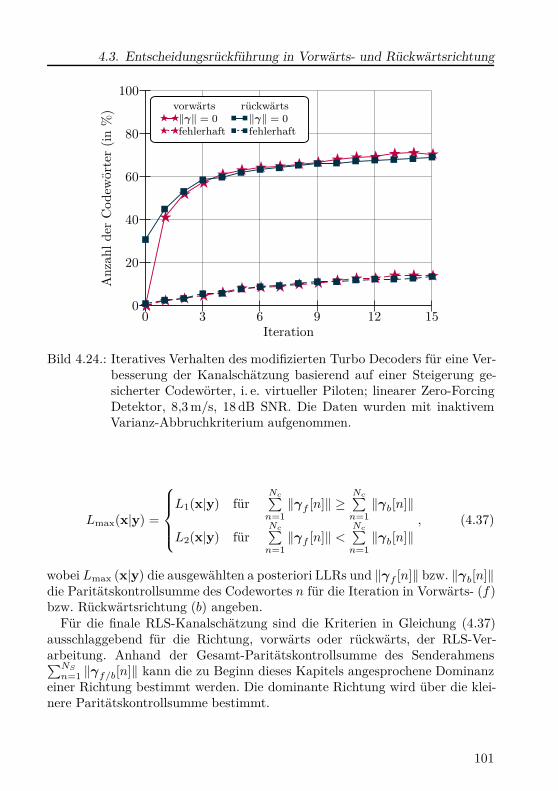
4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung
0
20
40
60
80
100
0 3 6 9 12 15
Anza
hl
der
Cod
ewör
ter
(in
%)
Iteration
vorwärts rückwärts ‖γ‖ = 0 ‖γ‖ = 0 fehlerhaft fehlerhaft
Bild 4.24.: Iteratives Verhalten des modifizierten Turbo Decoders für eine Ver-besserung der Kanalschätzung basierend auf einer Steigerung ge-sicherter Codewörter, i. e. virtueller Piloten; linearer Zero-ForcingDetektor, 8,3 m/s, 18 dB SNR. Die Daten wurden mit inaktivemVarianz-Abbruchkriterium aufgenommen.
Lmax(x|y) =
L1(x|y) fürNc∑
n=1‖γf [n]‖ ≥
Nc∑
n=1‖γb[n]‖
L2(x|y) fürNc∑
n=1‖γf [n]‖ <
Nc∑
n=1‖γb[n]‖
, (4.37)
wobei Lmax (x|y) die ausgewählten a posteriori LLRs und ‖γf [n]‖ bzw. ‖γb[n]‖die Paritätskontrollsumme des Codewortes n für die Iteration in Vorwärts- (f)bzw. Rückwärtsrichtung (b) angeben.
Für die finale RLS-Kanalschätzung sind die Kriterien in Gleichung (4.37)ausschlaggebend für die Richtung, vorwärts oder rückwärts, der RLS-Ver-arbeitung. Anhand der Gesamt-Paritätskontrollsumme des Senderahmens∑NS
n=1 ‖γf/b[n]‖ kann die zu Beginn dieses Kapitels angesprochene Dominanzeiner Richtung bestimmt werden. Die dominante Richtung wird über die klei-nere Paritätskontrollsumme bestimmt.
101
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
Im Vergleich zum nächsten diskutierten Verfahren stellt sich bei dem ebendiskutiertem eine deutlich größere Komplexität ein. Im Anschluss an den RLS-Algorithmus in Vorwärts- bzw. Rückwärtsrichtung und vor der finalen RLS-Verarbeitung wird bei dem Ansatz die Iteration durchgeführt, bei der aufGrund der zwei Iterationsrichtungen für jeden Iterationsschritt die LDPC De-codierung je vier Mal ausgeführt wird. Zudem wird die extrinsische Informati-on berechnet und die Paritätskontrollsumme ausgewertet. Die gesamte Kom-plexität ist von der Anzahl der Iterationen abhängig, welche wiederum durchdie Kanalbedingungen beeinflusst wird. Ist einer der RLS-Durchgänge bereitsfehlerfrei auf Grund guter Kanalbedingungen, wird die Iteration nicht begon-nen.
4.3.2. Summation der a posteriori LLRs
Der zweite Ansatz zur Nachbearbeitung im Anschluss an die RLS-Verarbei-tung in beide Richtungen besteht in der einfachen Summation der a posterioriLLRs. Ein großer Vorteil dieser Lösung ist die geringe Komplexität, da bei derNachbearbeitung zwischen dem finalen RLS Durchgang und den zwei RLS-Verarbeitungen die LLRs von Nc Codewörtern addiert werden und die Pari-tätskontrollsumme ausgewertet wird.
Die Summation der a posteriori L-Werte des gesamten SenderahmensLf (x|y) und Lb (x|y) aus den RLS-Verarbeitungen stellt sich wie folgt dar:
Lmax (x|y) = Lf (x|y) + Lb (x|y) . (4.38)
Wie schon im Abschnitt 1.5.3 diskutiert, handelt es sich bei den a posterioriLLRs um weiche Information, die sich aus Betrag und Vorzeichen zusammen-setzt. Das Vorzeichen der LLRs gibt die Wertigkeit, +1 oder −1, der Bits an,was bei einer harten Entscheidung basierend auf den LLRs von Bedeutung ist.Eine Bewertung der Information ist über den Betrag der LLRs gegeben. DerBetrag ist als eine Wahrscheinlichkeit interpretierbar, die die Richtigkeit desVorzeichens der LLRs angibt. Bei einem großen Betrag ist die Wahrscheinlich-keit, eine richtige harte Entscheidung zu treffen größer als bei einem kleinenBetrag.
Bei der Summation der unabhängig erzeugten a posteriori LLRs Lf (x|y)und Lb (x|y) durch die RLS-Verarbeitung werden zwei Fälle unterschieden.Zum einen können die zu addierenden a posteriori LLRs eines Codeworts dasgleiche Vorzeichen aufweisen. In diesem Fall führt die Summation der LLRs zueiner Addition der Beträge und somit auch zu einer Vergrößerung der Wahr-
102
4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung
scheinlichkeit, bei einer harten Entscheidung eine richtige Entscheidung zutreffen. Dieses ist der Idealfall, bei der die unabhängigen RLS-Verarbeitun-gen zu den gleichen Entscheidungen geführt haben und die Summation der aposteriori LLRs diese Entscheidungen bekräftigt.
Zum anderen können die a posteriori LLRs der entscheidungsbasierten RLS-Kanalschätzung und Detektion in Vorwärts- und Rückwärtsrichtung unter-schiedliche Vorzeichen besitzen. In diesem Fall entscheidet der Betrag dereinzelnen a posteriori LLRs über das resultierende Vorzeichen nach der Sum-mation, wobei der größere Betrag das finale Vorzeichen bestimmt. In einemgewissen Rahmen kann von einer Korrektur von Bitfehlern in diesem Fall aus-gegangen werden, da bei deutlichen Unterschieden im Betrag das LLR mit dergrößeren Wahrscheinlichkeit für eine richtige Entscheidung nicht wesentlichverändert wird. Durch Minderung des Betrages wird der Unsicherheit durchdie zwei verschiedenen Resultate von vorwärts und rückwärts gerichteter Ver-arbeitung Rechnung getragen.
Für den finalen RLS-Durchgang werden die als richtig angenommenen Co-dewörter abweichend vom modifizierten Turbo Decoder bestimmt. Grundlagebildet hierbei wieder die Paritätskontrollsumme, jedoch können nicht analogzu der Summation der a posteriori LLRs auch die Paritätskontrollsummender Codewörter summiert werden, da dieses im Fall von gleichen Entschei-dungen der RLS-Verarbeitungen, jedoch unterschiedlichen Paritätskontroll-summen, ein Codewort mit Paritätskontrollsumme von Null nicht bewertenwürde. Aus diesem Grund werden zunächst die Entscheidungen für jedes Co-dewort ausgewertet, so dass gleiche Vorzeichen der LLRs, basierend auf denunabhängigen RLS-Verarbeitungen, das erste Kriterium für als richtig befun-dene Codewörter sind. Das andere Kriterium ist erfüllt, wenn für eines derbetrachteten Codewörter n ‖γf/b[n]‖ = 0 gilt.
4.3.3. Ergebnisse
Die Simulationsparameter sind Tabelle 4.1 zu entnehmen. Die Trainingsse-quenz wird aufgeteilt, so dass sich am Anfang und am Ende des Senderahmensjeweils acht OFDM-Symbole mit Pilotsymbolen befinden. Wie man Bild 4.25entnehmen kann, ist der modifizierte Turbo Decoder relativ unempfindlich ge-genüber schnell-veränderlichen Kanälen. Durch die Berücksichtigung des Ka-nals in beide Richtungen kann eine optimale Adaption auch für hohe Geschwin-digkeiten stattfinden. Auf Grund der Streuung in der Bitfehlerrate ist keineeindeutige Aussage für BER kleiner 10−3 möglich. Ein error floor Verhaltenkann beobachtet werden, das durch die relativ kurzen LDPC Codes und Inter-
103
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
leaver erklärbar ist. Der Abstand zur Bitfehlerrate mit Kanalkenntnis beträgt4 dB bei 10−1 mit Verringerung auf ca. 2 dB bei 10−3. Der Einfluss von ho-her Mobilität kann in Bild 4.26 für das NMSE beobachtet werden. Hier zeigtsich erst bei 30 m/s eine deutliche Abweichung vom NMSE für den konstantenKanal.
Bild 4.27 zeigt die Bitfehlerrate des Summationsverfahren in vergleichbarenSzenarien wie Bild 4.25. Das Summationsverfahren zeigt bei 10 dB SNR eineschlechtere BER als das modifizierte Turbo Decoder-Verfahren, allerdings beigeringerer Variation. Dieses Verfahren scheint noch unempfindlicher gegenüberhöheren Geschwindigkeiten zu sein: Erst bei 14 dB zeigt sich eine tendenziellschlechtere BER für beweglichere Endgeräte. Dies deckt sich mit dem NMSE inBild 4.28. Auch hier ist eine leichte Abweichung für höhere Geschwindigkeitenerkennbar, ähnlich wie beim modifizierten Turbo Decoder-Verfahren. Für dielangsam-veränderlichen Kanäle wird die 10−2 Marke wie beim modifiziertenTurbo Decoder-Verfahren bei 14 dB erreicht.
Bei erheblich geringerer Komplexität bietet so das Summationsverfahren ei-ne gute Alternative zum modifizierten Turbo Decoder-Verfahren. Der Gewinngegenüber den üblichen Verfahren wird durch die inhärente Verzögerung derVerfahren und auch beim Summationsverfahren die erhöhte Komplexität er-kauft. Trotz allem kann aus den Simulationsergebnissen geschlossen werden,dass mit beiden vorgeschlagenen Verfahren eine sichere, hochratige MIMO-Übertragung im mittleren SNR-Bereich selbst bei relativ hohen Geschwindig-keiten realisiert werden kann.
104
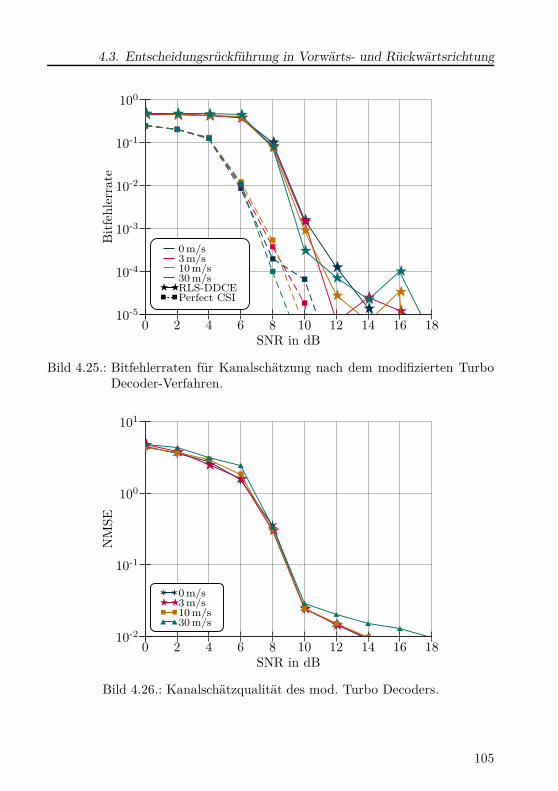
4.3. Entscheidungsrückführung in Vorwärts- und Rückwärtsrichtung
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/s
RLS-DDCE Perfect CSI
Bild 4.25.: Bitfehlerraten für Kanalschätzung nach dem modifizierten TurboDecoder-Verfahren.
10-2
10-1
100
101
0 2 4 6 8 10 12 14 16 18
NM
SE
SNR in dB
0 m/s 3 m/s 10 m/s 30 m/s
Bild 4.26.: Kanalschätzqualität des mod. Turbo Decoders.
105
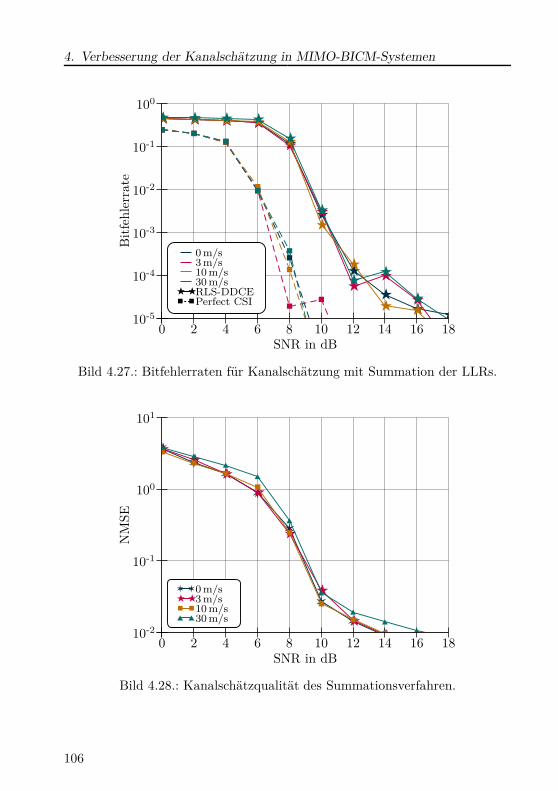
4. Verbesserung der Kanalschätzung in MIMO-BICM-Systemen
10-5
10-4
10-3
10-2
10-1
100
0 2 4 6 8 10 12 14 16 18
Bit
fehle
rrat
e
SNR in dB
0 m/s3 m/s10 m/s30 m/s
RLS-DDCE Perfect CSI
Bild 4.27.: Bitfehlerraten für Kanalschätzung mit Summation der LLRs.
10-2
10-1
100
101
0 2 4 6 8 10 12 14 16 18
NM
SE
SNR in dB
0 m/s 3 m/s 10 m/s 30 m/s
Bild 4.28.: Kanalschätzqualität des Summationsverfahren.
106
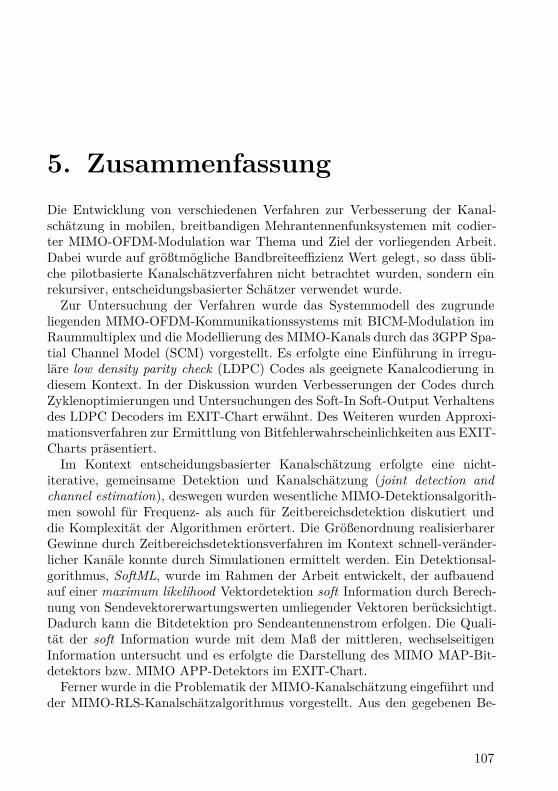
5. Zusammenfassung
Die Entwicklung von verschiedenen Verfahren zur Verbesserung der Kanal-schätzung in mobilen, breitbandigen Mehrantennenfunksystemen mit codier-ter MIMO-OFDM-Modulation war Thema und Ziel der vorliegenden Arbeit.Dabei wurde auf größtmögliche Bandbreiteeffizienz Wert gelegt, so dass übli-che pilotbasierte Kanalschätzverfahren nicht betrachtet wurden, sondern einrekursiver, entscheidungsbasierter Schätzer verwendet wurde.
Zur Untersuchung der Verfahren wurde das Systemmodell des zugrundeliegenden MIMO-OFDM-Kommunikationssystems mit BICM-Modulation imRaummultiplex und die Modellierung des MIMO-Kanals durch das 3GPP Spa-tial Channel Model (SCM) vorgestellt. Es erfolgte eine Einführung in irregu-läre low density parity check (LDPC) Codes als geeignete Kanalcodierung indiesem Kontext. In der Diskussion wurden Verbesserungen der Codes durchZyklenoptimierungen und Untersuchungen des Soft-In Soft-Output Verhaltensdes LDPC Decoders im EXIT-Chart erwähnt. Des Weiteren wurden Approxi-mationsverfahren zur Ermittlung von Bitfehlerwahrscheinlichkeiten aus EXIT-Charts präsentiert.
Im Kontext entscheidungsbasierter Kanalschätzung erfolgte eine nicht-iterative, gemeinsame Detektion und Kanalschätzung (joint detection andchannel estimation), deswegen wurden wesentliche MIMO-Detektionsalgorith-men sowohl für Frequenz- als auch für Zeitbereichsdetektion diskutiert unddie Komplexität der Algorithmen erörtert. Die Größenordnung realisierbarerGewinne durch Zeitbereichsdetektionsverfahren im Kontext schnell-veränder-licher Kanäle konnte durch Simulationen ermittelt werden. Ein Detektionsal-gorithmus, SoftML, wurde im Rahmen der Arbeit entwickelt, der aufbauendauf einer maximum likelihood Vektordetektion soft Information durch Berech-nung von Sendevektorerwartungswerten umliegender Vektoren berücksichtigt.Dadurch kann die Bitdetektion pro Sendeantennenstrom erfolgen. Die Quali-tät der soft Information wurde mit dem Maß der mittleren, wechselseitigenInformation untersucht und es erfolgte die Darstellung des MIMO MAP-Bit-detektors bzw. MIMO APP-Detektors im EXIT-Chart.
Ferner wurde in die Problematik der MIMO-Kanalschätzung eingeführt undder MIMO-RLS-Kanalschätzalgorithmus vorgestellt. Aus den gegebenen Be-
107
5. Zusammenfassung
dingungen ergab sich sofort die Senderahmenstruktur mit strikter (zeitlicher)Trennung von Pilotsymbolen in Präambel und Datenteil (payload). Untersuchtwurde ferner die Verwendung von verschiedenen Pilotschemata zur Initial-schätzung im RLS-Kanalschätzalgorithmus. Dabei spielte das Prinzip der Ent-scheidungsrückführung auf Grund von soft Information durch Berechnung vonSymbolerwartungswerten eine Rolle. Die Diskussion des Prädiktionsproblemsim entscheidungsbasierten Kanalschätzalgorithmus führte zu drei Lösungsan-sätzen, der RLS-Prädiktion und dem Zero-Order-Hold-Verfahren, sowie demVerfahren der exponentiellen Vorhersage (exponential forecasting), welches indieser Arbeit an das Problem angepasst wurde. Ein Vergleich der Prädiktorenerfolgte auf Grund der aus Simulationen ermittelten Kenngrößen wie BER,NMSE und dem a posteriori Prädiktionsfehler.
Die Leistungsfähigkeit der adaptiven, entscheidungsbasierten Kanalschät-zung unter Anforderungen an die maximale Verzögerung des Systems wurdeuntersucht. Der Vergleich eines Systems mit begrenzten Verzögerungseigen-schaften mit einem rahmenverschachtelten System mit längeren Codewörternergab, dass durch die Adaptivität kürzerer Codewörter ein Vorteil in verzöge-rungskritischen Systemen realisiert werden kann, der bei Untersuchungen ohneKanalschätzung nicht auftritt. So konnten signifikante Gewinne in BER undNMSE realisiert werden durch Ausnutzung der Kanalcodierung in der Kanal-schätzung, wie durch Simulationen belegt. Zusätzlich wurde untersucht, inwie-weit durch Adaption des gesamten Rahmens weitere Verringerungen des Kanal-schätzfehlers möglich sind. Der Einsatz von nicht-linearen Rangordnungsfilternwurde in diesem Kontext erprobt, sowie speichereffiziente Smoothing-Techni-ken für den Frequenzbereich im MIMO-Umfeld entwickelt und evaluiert. Die-se Ansätze beruhen auf Filterung der bereits geschätzten Kanalkoeffizienten.Auf der Verbesserung der Kanalschätzung durch Nutzung der Kanalcodierungaufbauend wurde untersucht, inwieweit durch Informationskombinierungsme-thoden die Schätzung der Kanalkoeffizienten verbessert werden kann. Hierzuwurden zwei Verfahren mit unterschiedlicher Komplexität ausgearbeitet: einmodifizierter Turbo Decoder und eine direkte Kombination von soft Informati-on, eine Summation der L-Werte. Es zeigte sich, dass beide Verfahren gut fürrelativ hohe Geschwindigkeiten geeignet sind und mit nur geringem Schätz-qualitätsverlust sich an schnell-veränderliche Kanäle adaptieren können. DasSummationsverfahren weist bei sehr viel geringerer Komplexität einen ähnlichgeringen Kanalschätzfehler über einen weiten SNR-Bereich auf.
Abschließend lässt sich also sagen, dass der Bahnfahrer des 21. Jahrhundertsgute Chancen auf ständiges Fernsehen hat – hoffen wir, dass das gut für ihnist.
108
Anhang
109

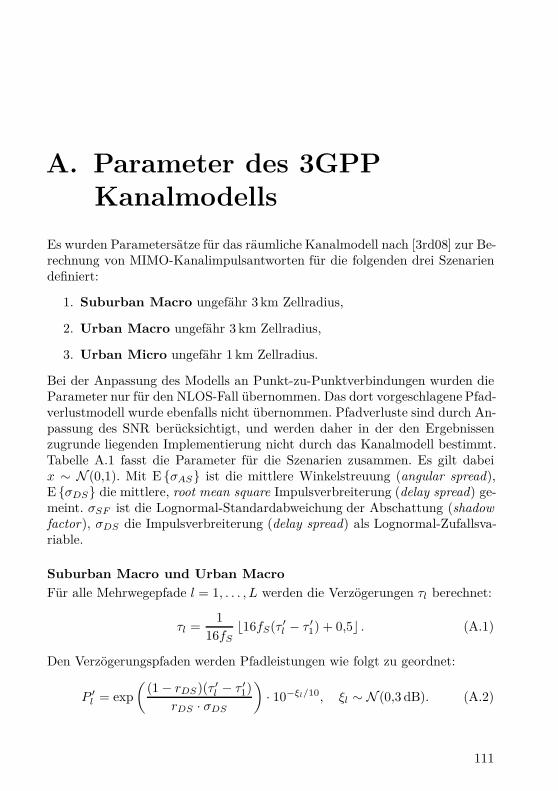
A. Parameter des 3GPPKanalmodells
Es wurden Parametersätze für das räumliche Kanalmodell nach [3rd08] zur Be-rechnung von MIMO-Kanalimpulsantworten für die folgenden drei Szenariendefiniert:
1. Suburban Macro ungefähr 3 km Zellradius,
2. Urban Macro ungefähr 3 km Zellradius,
3. Urban Micro ungefähr 1 km Zellradius.
Bei der Anpassung des Modells an Punkt-zu-Punktverbindungen wurden dieParameter nur für den NLOS-Fall übernommen. Das dort vorgeschlagene Pfad-verlustmodell wurde ebenfalls nicht übernommen. Pfadverluste sind durch An-passung des SNR berücksichtigt, und werden daher in der den Ergebnissenzugrunde liegenden Implementierung nicht durch das Kanalmodell bestimmt.Tabelle A.1 fasst die Parameter für die Szenarien zusammen. Es gilt dabeix ∼ N (0,1). Mit E σAS ist die mittlere Winkelstreuung (angular spread),E σDS die mittlere, root mean square Impulsverbreiterung (delay spread) ge-meint. σSF ist die Lognormal-Standardabweichung der Abschattung (shadowfactor), σDS die Impulsverbreiterung (delay spread) als Lognormal-Zufallsva-riable.
Suburban Macro und Urban Macro
Für alle Mehrwegepfade l = 1, . . . , L werden die Verzögerungen τl berechnet:
τl =1
16fS⌊16fS(τ ′
l − τ ′1) + 0,5⌋ . (A.1)
Den Verzögerungspfaden werden Pfadleistungen wie folgt zu geordnet:
P ′l = exp
((1− rDS)(τ ′
l − τ ′1)
rDS · σDS
)
· 10−ξl/10, ξl ∼ N (0,3 dB). (A.2)
111
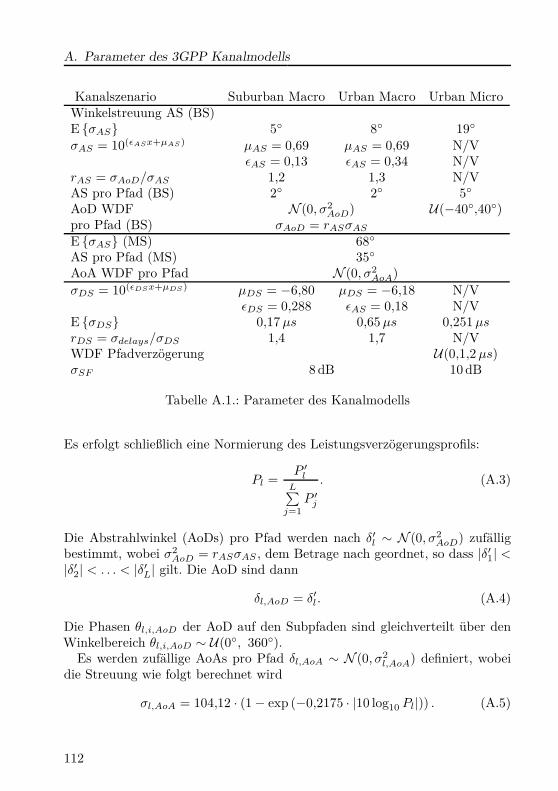
A. Parameter des 3GPP Kanalmodells
Kanalszenario Suburban Macro Urban Macro Urban MicroWinkelstreuung AS (BS)E σAS 5 8 19
σAS = 10(ǫASx+µAS) µAS = 0,69 µAS = 0,69 N/VǫAS = 0,13 ǫAS = 0,34 N/V
rAS = σAoD/σAS 1,2 1,3 N/VAS pro Pfad (BS) 2 2 5
AoD WDF N (0, σ2AoD) U(−40,40)
pro Pfad (BS) σAoD = rASσAS
E σAS (MS) 68
AS pro Pfad (MS) 35
AoA WDF pro Pfad N (0, σ2AoA)
σDS = 10(ǫDSx+µDS) µDS = −6,80 µDS = −6,18 N/VǫDS = 0,288 ǫAS = 0,18 N/V
E σDS 0,17µs 0,65µs 0,251µsrDS = σdelays/σDS 1,4 1,7 N/VWDF Pfadverzögerung U(0,1,2µs)σSF 8 dB 10 dB
Tabelle A.1.: Parameter des Kanalmodells
Es erfolgt schließlich eine Normierung des Leistungsverzögerungsprofils:
Pl =P ′
lL∑
j=1
P ′j
. (A.3)
Die Abstrahlwinkel (AoDs) pro Pfad werden nach δ′l ∼ N (0, σ2
AoD) zufälligbestimmt, wobei σ2
AoD = rASσAS , dem Betrage nach geordnet, so dass |δ′1| <
|δ′2| < . . . < |δ′
L| gilt. Die AoD sind dann
δl,AoD = δ′l. (A.4)
Die Phasen θl,i,AoD der AoD auf den Subpfaden sind gleichverteilt über denWinkelbereich θl,i,AoD ∼ U(0, 360).
Es werden zufällige AoAs pro Pfad δl,AoA ∼ N (0, σ2l,AoA) definiert, wobei
die Streuung wie folgt berechnet wird
σl,AoA = 104,12 · (1− exp (−0,2175 · |10 log10 Pl|)) . (A.5)
112
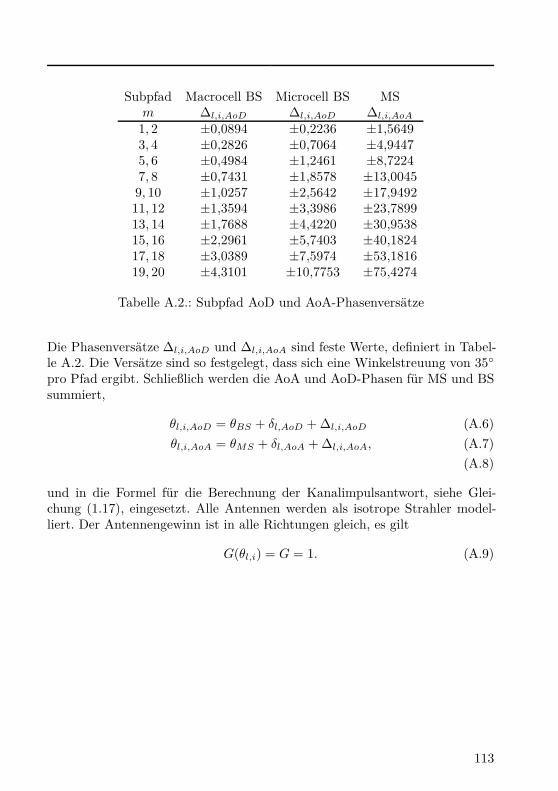
Subpfad Macrocell BS Microcell BS MSm ∆l,i,AoD ∆l,i,AoD ∆l,i,AoA
1, 2 ±0,0894 ±0,2236 ±1,56493, 4 ±0,2826 ±0,7064 ±4,94475, 6 ±0,4984 ±1,2461 ±8,72247, 8 ±0,7431 ±1,8578 ±13,00459, 10 ±1,0257 ±2,5642 ±17,949211, 12 ±1,3594 ±3,3986 ±23,789913, 14 ±1,7688 ±4,4220 ±30,953815, 16 ±2,2961 ±5,7403 ±40,182417, 18 ±3,0389 ±7,5974 ±53,181619, 20 ±4,3101 ±10,7753 ±75,4274
Tabelle A.2.: Subpfad AoD und AoA-Phasenversätze
Die Phasenversätze ∆l,i,AoD und ∆l,i,AoA sind feste Werte, definiert in Tabel-le A.2. Die Versätze sind so festgelegt, dass sich eine Winkelstreuung von 35
pro Pfad ergibt. Schließlich werden die AoA und AoD-Phasen für MS und BSsummiert,
θl,i,AoD = θBS + δl,AoD + ∆l,i,AoD (A.6)
θl,i,AoA = θMS + δl,AoA + ∆l,i,AoA, (A.7)
(A.8)
und in die Formel für die Berechnung der Kanalimpulsantwort, siehe Glei-chung (1.17), eingesetzt. Alle Antennen werden als isotrope Strahler model-liert. Der Antennengewinn ist in alle Richtungen gleich, es gilt
G(θl,i) = G = 1. (A.9)
113


B. Matrix-Inversionslemma
Seien A und B zwei positiv definite, M ×M Matrizen, die folgende Beziehungverbindet
A = B−1 + CD−1CH , (B.1)
wobei D ∈ CN×N ebenfalls positiv definit ist und C eineM×N -Matrix ist. DasMatrix-Inversionslemma besagt, dass die Inverse von A wie folgt formuliertwerden kann:
A−1 = B−BC(D + CHBC)−1CHB. (B.2)
115

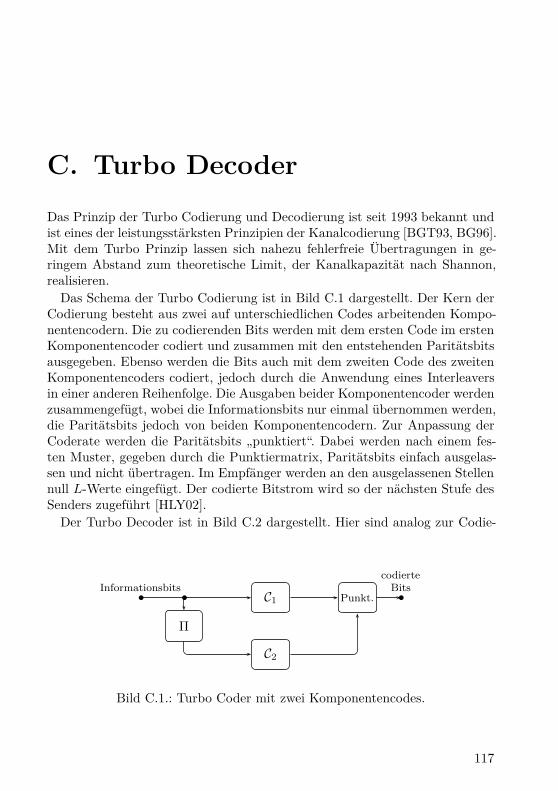
C. Turbo Decoder
Das Prinzip der Turbo Codierung und Decodierung ist seit 1993 bekannt undist eines der leistungsstärksten Prinzipien der Kanalcodierung [BGT93, BG96].Mit dem Turbo Prinzip lassen sich nahezu fehlerfreie Übertragungen in ge-ringem Abstand zum theoretische Limit, der Kanalkapazität nach Shannon,realisieren.
Das Schema der Turbo Codierung ist in Bild C.1 dargestellt. Der Kern derCodierung besteht aus zwei auf unterschiedlichen Codes arbeitenden Kompo-nentencodern. Die zu codierenden Bits werden mit dem ersten Code im erstenKomponentencoder codiert und zusammen mit den entstehenden Paritätsbitsausgegeben. Ebenso werden die Bits auch mit dem zweiten Code des zweitenKomponentencoders codiert, jedoch durch die Anwendung eines Interleaversin einer anderen Reihenfolge. Die Ausgaben beider Komponentencoder werdenzusammengefügt, wobei die Informationsbits nur einmal übernommen werden,die Paritätsbits jedoch von beiden Komponentencodern. Zur Anpassung derCoderate werden die Paritätsbits „punktiert“. Dabei werden nach einem fes-ten Muster, gegeben durch die Punktiermatrix, Paritätsbits einfach ausgelas-sen und nicht übertragen. Im Empfänger werden an den ausgelassenen Stellennull L-Werte eingefügt. Der codierte Bitstrom wird so der nächsten Stufe desSenders zugeführt [HLY02].
Der Turbo Decoder ist in Bild C.2 dargestellt. Hier sind analog zur Codie-
Π
C1
C2
Punkt.
Informationsbitscodierte
Bits
Bild C.1.: Turbo Coder mit zwei Komponentencodes.
117
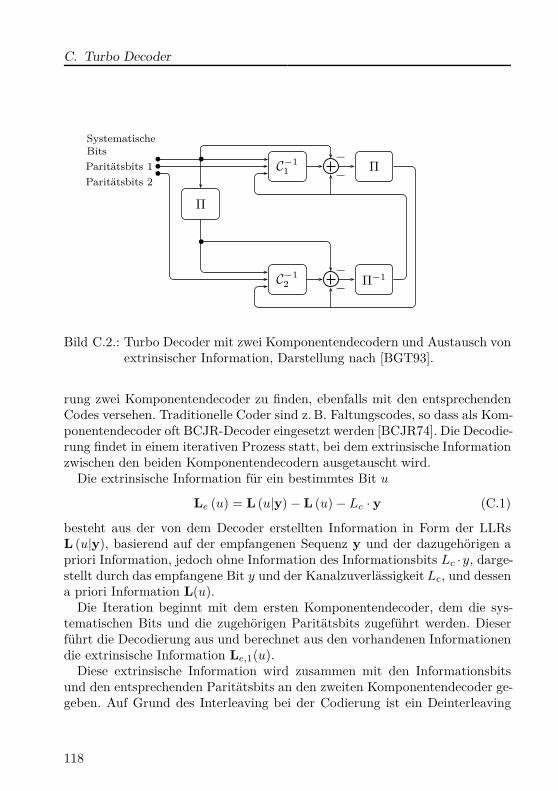
C. Turbo Decoder
Π
C−11 Π
C−12 Π−1
−−
−−
SystematischeBits
Paritätsbits 1
Paritätsbits 2
Bild C.2.: Turbo Decoder mit zwei Komponentendecodern und Austausch vonextrinsischer Information, Darstellung nach [BGT93].
rung zwei Komponentendecoder zu finden, ebenfalls mit den entsprechendenCodes versehen. Traditionelle Coder sind z. B. Faltungscodes, so dass als Kom-ponentendecoder oft BCJR-Decoder eingesetzt werden [BCJR74]. Die Decodie-rung findet in einem iterativen Prozess statt, bei dem extrinsische Informationzwischen den beiden Komponentendecodern ausgetauscht wird.
Die extrinsische Information für ein bestimmtes Bit u
Le (u) = L (u|y)− L (u)− Lc · y (C.1)
besteht aus der von dem Decoder erstellten Information in Form der LLRsL (u|y), basierend auf der empfangenen Sequenz y und der dazugehörigen apriori Information, jedoch ohne Information des Informationsbits Lc ·y, darge-stellt durch das empfangene Bit y und der Kanalzuverlässigkeit Lc, und dessena priori Information L(u).
Die Iteration beginnt mit dem ersten Komponentendecoder, dem die sys-tematischen Bits und die zugehörigen Paritätsbits zugeführt werden. Dieserführt die Decodierung aus und berechnet aus den vorhandenen Informationendie extrinsische Information Le,1(u).
Diese extrinsische Information wird zusammen mit den Informationsbitsund den entsprechenden Paritätsbits an den zweiten Komponentendecoder ge-geben. Auf Grund des Interleaving bei der Codierung ist ein Deinterleaving
118
der Information zwingend notwendig. Der zweite Decoder führt die Decodie-rung aus und berechnet im Anschluss die passende extrinsische InformationLe,2(u), welche nach dem Deinterleaving an den ersten Decoder gegeben wird.
Der Informationsaustausch ist das Kernstück des Turbo Prinzips. Die ex-trinsische Information eines Decoders kann als externe Information bezüglichdes Bits angesehen werden, wodurch die extrinsische Information im anderenDecoder als a priori Information für das jeweilige Bit gilt. Durch diesen In-formationsaustausch werden bei jedem Iterationsschritt Fehler korrigiert. ImAllgemeinen genügen 8 – 12 Iterationen, um die Bitfehlerrate so weit zu ver-ringern, wie es der Kanal und die Code-Eigenschaften zulassen.
119
Symbol- undAbkürzungsverzeichnis
Symbole
A ParitätsmatrixB Binäre MengeC Menge der KontrollknotenC Menge der komplexen ZahlenCN (µ, σ2) komplexe Normalverteilung mit Erwartungswert µ
und Standardabweichung σδi,j Kronecker-DeltaF2 Galois-Feld von 2F Fourier-TransformationF−1 Inverse Fourier-Transformationfd,n normalisierte DopplerfrequenzfS Abtastrate des SendesignalsG LDPC-Generatormatrixg Gain-Vektorγ SyndromvektorH[n, k] MIMO-Kanalmatrix des k-ten Subträgers für
das n-te OFDM-SymbolHk
r,t[n] Vektor der diskreten (r, t)-SISO-Übertragungsfunktionh[m, l] MIMO-Inpulsantwort-Tapmatrix des l-ten Taps für
das m-te Samplehm
r,t[n] Vektor der diskreten (r, t)-SISO-Impulsantworth(v)[n] Vektorisierte MIMO-Kanalmatrix für das
n-te OFDM-Symbol im ZeitbereichK Anzahl der Subträger,K Anzahl der Samples für OFDM-Symbol im Zeitbereich
ohne zykl. Präfixk Subträgerindex
121
Symbol- und Abkürzungsverzeichnis
κ Anzahl der Bits pro (QAM-) Symbol, log2 ML KanalordnungL(x) L-Wert, Log-Likelihood Ratio (LLR)L(x|r) (approx.) a posteriori L-Werte der gesendeten Bitsequenz x
bezüglich des Empfangsvektors rLC OFDM-SchutzintervallLD L-Wert am DecoderausgangLa L-Wert der a priori InformationLch L-Wert der KanalbeobachtungLe extrinsischer L-WertL(y)I,f L-Werte der empfangenen Bitsequenz, nur Informationsbits
des Codeworts aus vorwärts gerichteter KanalschätzungL(y)I,f L-Werte der empfangenen Bitsequenz, nur Informationsbits
des Codeworts aus rückwärts gerichteter KanalschätzungL(y)P,f L-Werte der empfangenen Bitsequenz, nur Paritätsbits
des Codeworts aus vorwärts gerichteter KanalschätzungL(y)P,b L-Werte der empfangenen Bitsequenz, nur Paritätsbits
des Codeworts aus rückwärts gerichteter Kanalschätzungl Kanalimpulsantwort-Tap-Indexλ Kantenverteilung aus Sicht der VariablenknotenM (QAM-) Modulationsordnung, 2κ
m (Zeit-) Sample-IndexM· SymbolmodulationMnT · Vektor-SymbolmodulationN CodewortlängeN0 RauschleistungsdichteNC Anzahl der Codewörter in einem SenderahmenND Anzahl der Daten-OFDM-Symbole in dem SenderahmenNP Anzahl der OFDM-Symbole in der TrainingspräambelNS Anzahl der OFDM-Symbole in einem SenderahmenNseq Länge der PilotsequenzN (µ, σ2) Normalverteilung mit Erwartungswert µ
und Standardabweichung σn OFDM SymbolindexnI Anzahl der Informationsbits in einem CodewortvektornP Anzahl der Paritätsbits in einem CodewortvektornR Anzahl der EmpfangsantennennT Anzahl der SendeantennenO(·) Algorithmische Komplexität
122
Symbol- und Abkürzungsverzeichnis
P WahrscheinlichkeitPT Gesamtleistung des ÜbertragungssystemsPb BitfehlerwahrscheinlichkeitPb geschätzte BitfehlerwahrscheinlichkeitΠ· VerschachtlerΨ Interferenzfiltermatrixψt t-ter Vektor der InterferenzfiltermatrixQ Symbolquantisierer, EntscheiderQS Symbolquantisierer, Entscheider für das Modulationsalphabet S
Rc Coderate Rc = nI/(nP + nI)r Empfangsantennen-Indexr[n, k] Symbolvektor aller Empfangsantennen im Frequenzbereichr[n,m] Symbolvektor aller Empfangsantennen im Zeitbereichrr[n, k] OFDM-Empfangssymbol der r-ten Empfangsantenne zum
Zeitschritt n des k-ten Subträgersrr[n,m] OFDM-Zeitsignal im Empfänger der
r-ten Empfangsantenne zum Zeitschritt nr(v)[n] Vektorisierter MIMO-Empfangsvektor für das
n-te OFDM-Symbol im Zeitbereichrk
r [n] Subträger-Empfangsvektor der r-ten Empfangsantenneρ Kantenverteilung aus Sicht der Kontrollknotenρ geschätztes SNRS (QAM-) Modulationsalphabets[n, k] Symbol-Vektor aller Sendeantennen im Frequenzbereichs[n,m] Symbol-Vektor aller Sendeantennen im Zeitbereichst[n, k] OFDM-Sendesymbol der t-ten Sendeantenne
des k-ten Subträgers zum Zeitschritt nst[n,m] OFDM-Zeitsignal im Sender, für die t-te Antenne
zum Zeitschritt ns(v)[n] Vektorisierter MIMO-Sendevektor für das
n-te OFDM-Symbol im Zeitbereichsk
t [n] Subträger-Sendevektor der t-ten Sendeantennezum Zeitschritt n
σ2w
Leistung des RauschvektorsT SymboldauerTG Tanner-GraphTMC Multi-Carrier-SymboldauerTOFDM OFDM-Symboldauer
123
Symbol- und Abkürzungsverzeichnis
TSC Single-Carrier-Symboldauert Sendeantennen-Indext kontinuierliche Zeit, wie in f(t)U(x0, x1) Gleichverteilung im Intervall von x0 bis x1
u InformationsbitvektorV Menge der VariablenknotenvMS Geschwindigkeit des Empfängersw RauschvektorX Menge aller möglichen Bitkombinationenx (gesendete) Bitsequenzx geschätzte gesendete Bitsequenz nach Decoder, sgnL(x|r)
des Sendesymbolvektorsy empfangene Bitsequenz
Operatoren
|x| Betrag von x ∈ C
xH x hermitesch, i.e. konjugiert-komplex und transponiertxT x transponiertu Negation von u‖x‖p p-Norm von Vektor xx∗ Für x ∈ C konjugiert-komplex⌊x⌋ Untere Gaußklammer, abrunden zur nächsten ganzen Zahl⌈x⌉ Obere Gaußklammer, aufrunden zur nächsten ganzen Zahl
Abkürzungen
3GPP 3rd Generation Partnership ProjectAGC Automatic Gain ControlAoA Einfallsrichtung (Angle of Arrival)AoD Abstrahlwinkel (Angle of Departure)APP A Posteriori ProbabilityAS Angular Spread, Azimuth SpreadBICM Bit Interleaved Coded ModulationBER Bit Error RateBLUE Best Linear Unbiased EstimatorBS Base StationCDM Code Division MultiplexingCE Channel EstimationCF Coding Feedback
124
Symbol- und Abkürzungsverzeichnis
CSI Channel State InformationDDCE Decision-Directed Channel EstimationDet. (MIMO) DetektorDFT Diskrete Fourier-TransformationDS Delay SpreadEFC Exponential ForecastingFDM Frequency Division MultiplexingFFT Fast Fourier TransformFIR Finite Impulse ResponseHD Hard DecisionIIR Infinite Impulse ResponseLDPC Low Density Parity CheckLDS LeistungsdichtespektrumLLR Log-Likelihood RatioLS Least SquaresLTI Linear Time-InvariantMAP Maximum A PosterioriMIMO Multiple-Input Multiple-OutputML Maximum LikelihoodMLSE Maximum Likelihood Sequence EstimationMMSE Minimum Mean Square ErrorMS Mobile Station, terminal, subscriber unitNMSE Normalized Mean Square ErrorOFDM Orthogonal Frequency Division MultiplexingPAPR Peak to Average Power RatioPCS Parity Check SumPred. PredictorRLS Recursive Least SquaresSCM Spatial Channel ModelSF Shadow FadingSM Spatial MultiplexingSISO Single-Input Single-OutputSISO Soft-input Soft-OutputSNR Signal-to-Noise-RatioTDM Time Division MultiplexingWDF WahrscheinlichkeitsdichtefunktionWSS Wide Sense StationaryZF Zero ForcingZOH Zero-Order Hold
125

Literaturverzeichnis
[3G 09] “MIMO transmission schemes for LTE and HSPA networks,”White paper, 3G Americas, LLC, 1750 - 112th Avenue NE,Suite B220, Bellevue, WA 98004 USA, Jun. 2009. [Online].Letzter Zugriff: http://www.3gamericas.org/documents/Mimo_Transmission_Schemes_for_LTE_and_HSPA_Networks_June-2009.pdf
[3rd08] Spatial channel model for Multiple Input Multiple Output (MIMO)simulations, 3rd Generation Partnership Project (3GPP), Techni-cal Specification Group Radio Access Network Technical Report25.996, Rev. Release 8.0.0, 2008.
[3rd09] Requirements for further advancements for Evolved Universal Ter-restrial Radio Access (E-UTRA) (LTE-Advanced), 3rd GenerationPartnership Project (3GPP), Technical Specification Group Ra-dio Access Network Technical Report 36.913, Rev. Release 9, Dez.2009.
[AH07a] J. Akhtman und L. Hanzo, “Advanced channel estimation forMIMO-OFDM in realistic channel conditions,” IEEE Internatio-nal Conference on Communications, ICC ’07, S. 2528–2533, Jun.2007.
[AH07b] ——, “Iterative receiver architectures for MIMO-OFDM,” inIEEE Wireless Communications and Networking Conference,WCNC, März 2007, S. 825–829.
[AJM+08] E. Au, S. Jin, M. McKay, W. H. Mow, X. Gao, und I. Collings,“Analytical performance of MIMO-SVD systems in ricean fadingchannels with channel estimation error and feedback delay,” IEEETransactions on Wireless Communications, Bd. 7, Nr. 4, S. 1315–1325, Apr. 2008.
127
Literaturverzeichnis
[AL87] M. Alard und R. Lassalle, “Principles of modulation andchannel coding for digital broadcasting for mobile receivers,”European Broadcasting Union (EBU) Technical Review, Nr. 224,S. 168–190, Aug. 1987. [Online]. Letzter Zugriff: http://www.ebu.ch/en/technical/trev/trev_frameset-index.html
[Ala98] S. Alamouti, “A simple transmit diversity technique for wirelesscommunications,” IEEE Journal on Selected Areas in Communi-cations, Bd. 16, Nr. 8, S. 1451–1458, Okt. 1998.
[BCJR74] L. Bahl, J. Cocke, F. Jelinek, und J. Raviv, “Optimal decodingof linear codes for minimizing symbol error rate (corresp.),” IEEETransactions on Information Theory, Bd. 20, Nr. 2, S. 284–287,März 1974.
[BG96] C. Berrou und A. Glavieux, “Near optimum error correcting co-ding and decoding: turbo-codes,” IEEE Transactions on Commu-nications, Bd. 44, Nr. 10, S. 1261–1271, Okt. 1996.
[BGP02] H. Bölcskei, D. Gesbert, und A. Paulraj, “On the capacity ofOFDM-based spatial multiplexing systems,” IEEE Transactionson Communications, Bd. 50, Nr. 2, S. 225–234, Feb. 2002.
[BGT93] C. Berrou, A. Glavieux, und P. Thitimajshima, “Near shannon li-mit error-correcting coding and decoding: Turbo-codes (1),” IEEEInternational Conference on Communications, Bd. 2, S. 1064–1070, Mai 1993.
[BLZ09a] P. Beinschob, M. Lieberei, und U. Zölzer, “An error propagati-on prevention method for MIMO-OFDM RLS-DDCE algorithms,”Proc. IEEE International Symposium On Wireless Communicati-on Systems 2009 (ISWCS’09), Siena, S. 31–35, Sep. 2009.
[BLZ09b] P. Beinschob, M. Lieberei, und U. Zölzer, “Improving MIMO-OFDM decision-directed channel estimation by utilizing error-correcting codes,” Advances in Radio Science, Bd. 7, S. 83–88,2009. [Online]. Letzter Zugriff: http://www.adv-radio-sci.net/7/83/2009/
[BY03] A. Benjebbour und S. Yoshida, “Simplified weights update algo-rithm for semi-adaptive ordered successive detection in MIMO
128
Literaturverzeichnis
wireless systems,” in IEEE 57th Vehicular Technology Conference,VTC 2003-Spring, Bd. 2, Apr. 2003, S. 989–993.
[BZ10a] P. Beinschob und U. Zölzer, “MIMO-OFDM equaliser for spatialmultiplexing transmission modes,” Advances in Radio Science,Bd. 8, S. 81–85, 2010. [Online]. Letzter Zugriff: http://www.adv-radio-sci.net/8/81/2010/
[BZ10b] P. Beinschob und U. Zölzer, “Improving low-delay MIMO-OFDMchannel estimation,” in International ITG Workshop on SmartAntennas (WSA), Feb. 2010, S. 257–261.
[Chu72] D. C. Chu, “Polyphase codes with good periodic correlation pro-perties,” IEEE Transactions on Information Theory, Bd. 18, Nr. 4,S. 531–532, 1972.
[FG98] G. J. Foschini und M. J. Gans, “On limits of wireless communica-tions in a fading environment when using multiple antennas,” Wi-reless Personal Communications: An International Journal, Bd. 6,Nr. 3, S. 311–335, März 1998.
[Fos96] G. J. Foschini, “Layered space-time architecture for wireless com-munication in fading environment when using multi-element an-tennas,” Bell Labs Technical Journal, Bd. 1, Nr. 2, S. 41–59, 1996.
[FT05] S. Fard und C. Tellambura, “A new improved detector for theV-BLAST system,” in IEEE Pacific Rim Conference on Commu-nications, Computers and signal Processing, PACRIM, Aug. 2005,S. 49–52.
[Gal62] R. G. Gallager, “Low-density parity-check codes,” IRE Transacti-on on Information Theory, Bd. 8, Nr. 1, S. 21–28, Jan. 1962.
[Gal63] ——, Low Density Parity-Check Codes. Cambridge, MA: MITPress, 1963.
[GLL97] A. Glavieux, C. Loat, und J. Labat, “Turbo equalization over afrequency selective channel,” Proceedings of the International Sym-posium of Turbo Codes, Brest, France, S. 96–102, Sep. 1997.
[Hay01] S. Haykin, Adaptive Filter Theory, 4. Aufl. Prentice Hall, Sep-tember 2001.
129
Literaturverzeichnis
[HG09] K. Hueske und J. Götze, “Ov-OFDM: A reduced PAPR and cyclicprefix free multicarrier transmission system,” in 6th InternationalSymposium on Wireless Communication Systems (ISWCS), Sept.2009, S. 206–210.
[HKOS08] R. Hyndman, A. Koehler, J. Ord, und R. Snyder, Forecasting withExponential Smoothing - The State Space Approach. Berlin: Sprin-ger Verlag, 2008, Bd. 1.
[HLY02] L. Hanzo, T. H. Liew, und B. L. Yeap, Turbo coding, turbo equalisa-tion, and space-time coding for transmission over fading channels.Chichester: Wiley, 2002.
[HOP96] J. Hagenauer, E. Offer, und L. Papke, “Iterative decoding of binaryblock and convolutional codes,” IEEE Transactions on Informati-on Theory, Bd. 42, Nr. 2, S. 429–445, März 1996.
[HtB03] B. Hochwald und S. ten Brink, “Achieving near-capacity on amultiple-antenna channel,” IEEE Transactions on Communicati-ons, Bd. 51, Nr. 3, S. 389–399, März 2003.
[Kay93] S. M. Kay, Estimation Theory, Fundamentals of statistical signalprocessing. Upper Saddle River, NJ: Prentice Hall PTR, 1993,Bd. 1.
[KFS06] T. Kashima, K. Fukawa, und H. Suzuki, “Recursive least squa-res channel estimator with smoothing and removing for iterative-MAP receiver of MIMO-OFDM mobile communications,” in IEEEInternational Conference on Communications, ICC, Bd. 7, Jun.2006, S. 3052–3057.
[KYIG05] K. J. Kim, J. Yue, R. Iltis, und J. Gibson, “A QRD-m/kalmanfilter-based detection and channel estimation algorithm for MIMO-OFDM systems,” IEEE Transactions on Wireless Communicati-ons, Bd. 4, Nr. 2, S. 710–721, März 2005.
[LMS+97] M. Luby, M. Mitzenmacher, A. Shokrollahi, D. Spielman, undV. Stemann, “Practical loss-resilient codes,” Proceedings of the29th annual ACM Symposium on Theory of Computing, S. 150–159, 1997.
130
Literaturverzeichnis
[LZ08] M. Lieberei und U. Zölzer, “MIMO-OFDM on a flexible laboratoryradio system,” Proc. 3rd International Symposium on Communi-cations, Control and Signal Processing (ISCCSP’08), Malta, März2008.
[Mac99] D. MacKay, “Good error-correcting codes based on very sparse ma-trices,” IEEE Transactions on Information Theory, Bd. 45, Nr. 2,S. 399–431, März 1999.
[MAD06] H. Minn und N. Al-Dhahir, “Optimal training signals for MIMOOFDM channel estimation,” IEEE Transactions on Wireless Com-munications, Bd. 5, Nr. 5, S. 1158–1168, Mai 2006.
[MBZ10] M. Muxfeldt, P. Beinschob, und U. Zölzer, “Forward andbackward RLS-DDCE processing in MIMO-OFDM spatialmultiplexing receivers,” Advances in Radio Science, Bd. 8, S. 101–107, 2010. [Online]. Letzter Zugriff: http://www.adv-radio-sci.net/8/101/2010/
[MW03] J. McGowan und R. Williamson, “Loop removal from LDPC co-des,” in Proceedings of IEEE Information Theory Workshop, März2003, S. 230–233.
[Rin03] H. Rinne, Taschenbuch der Statistik, 4. vollständig überarbeiteteund erweiterte Aufl. Verlag Harri Deutsch, 2003.
[Rob94] P. Robertson, “Illuminating the structure of code and decoder ofparallelconcatenated recursive systematic (turbo) codes,” IEEEGlobal Telecommunications Conference, Bd. 3, S. 1298–1303, Nov.1994.
[RSU01] T. J. Richardson, M. A. Shokrollahi, und R. L. Urbanke, “Designof capacity-approaching irregular low-density parity-check codes,”IEEE Transactions on Information Theory, Bd. 47, Nr. 2, S. 619–637, 2001.
[RVH95] P. Robertson, E. Villebrun, und P. Hoeher, “A comparison of op-timal and sub-optimal MAP decoding algorithms operating in thelog domain,” in IEEE International Conference on Communicati-ons, ICC ’95 Seattle, Bd. 2, Jun. 1995, S. 1009–1013.
131
Literaturverzeichnis
[SDAD02] A. Stamoulis, S. Diggavi, und N. Al-Dhahir, “Intercarrier interfe-rence in MIMO OFDM,” IEEE Transactions on Signal Processing,Bd. 50, Nr. 10, S. 2451–2464, Okt. 2002.
[SH09] M. Sellathurai und S. Haykin, Space-Time Layered InformationProcessing for Wireless Communications, 1. Aufl. Chichester:Wiley, 2009.
[SM05] D. Schafhuber und G. Matz, “MMSE and adaptive prediction oftime-varying channels for OFDM systems,” IEEE Transactions onWireless Communications, Bd. 4, Nr. 2, S. 593–602, März 2005.
[tB99] S. ten Brink, “Convergence of iterative decoding,” Electronics Let-ters, Bd. 35, Nr. 10, S. 806–808, Mai 1999.
[tB01] ——, “Convergence behavior of iteratively decoded parallel conca-tenated codes,” IEEE Transactions on Communications, Bd. 49,Nr. 10, S. 1727–1737, Okt. 2001.
[tBKA04] S. ten Brink, G. Kramer, und A. Ashikhmin, “Design of low-density parity-check codes for modulation and detection,” IEEETransactions on Communications, Bd. 52, Nr. 4, S. 670–678, Apr.2004.
[Tel95] I. E. Telatar, “Capacity of multi-antenna gaussian channels,”AT & T Bell Laboratories Internal Technical Memorandum, Tech.Rep., 1995.
[Tel99] ——, “Capacity of multi-antenna gaussian channels,” EuropeanTransactions on Telecommunications, Bd. 10, S. 585–595, 1999.
[TJVW04] T. Tian, C. Jones, J. Villasenor, und R. Wesel, “Selective avoi-dance of cycles in irregular LDPC code construction,” IEEETransactions on Communications, Bd. 52, Nr. 8, S. 1242–1247,Aug. 2004.
[Ung82] G. Ungerboeck, “Channel coding with multilevel/phase signals,”IEEE Transactions on Information Theory, Bd. 28, Nr. 1, S. 55–67, Jan. 1982.
[VDS07] D. Vukobratovic, A. Djurendic, und V. Senk, “ACE spectrum ofLDPC codes and generalized ACE design,” in IEEE Internatio-nal Conference on Communications, 2007. ICC ’07., Jun. 2007, S.665–670.
132
Literaturverzeichnis
[VHK04] H. Vikalo, B. Hassibi, und T. Kailath, “Iterative decoding for MI-MO channels via modified sphere decoding,” IEEE Transactionson Wireless Communications, Bd. 3, Nr. 6, S. 2299–2311, Nov.2004.
[VY01] B. Vucetic und J. Yuan, Turbo codes, Principles and applications.Boston: Kluwer Acad. Publ., 2001.
[WE71] S. Weinstein und P. Ebert, “Data transmission by frequency-division multiplexing using the discrete fourier transform,” IEEETransactions on Communications, Bd. 19, Nr. 5, S. 628–634, Okt.1971.
[WFGV98] P. W. Wolniansky, G. J. Foschini, G. D. Golden, und R. A. Va-lenzuela, “V-BLAST: An architecture for realizing very high datarates over the rich-scattering wireless channel,” Proceedings of theISSSE, S. 295–300, 1998.
[Yan95] B. Yang, “Projection approximation subspace tracking,” IEEETransactions on Signal Processing, Bd. 43, Nr. 1, S. 95–107, Jan.1995.
[Yap05] Y. Yapici, “V-blast/MAP: A new symbol detection algorithm forMIMO channels,” Department of Electrical and Electronics Engi-neering, Bilkent University, 2005.
[YKK+03] Y.-S. Yuk, K. Ko, T. Kim, D. Hong, und C. Rang, “An iterative de-coded V-BLAST system using maximum a posteriori criterion,” inIEEE Global Telecommunications Conference, GLOBECOM ’03,Bd. 2, Dez. 2003, S. 1099–1102.
[Zeh92] E. Zehavi, “8-PSK trellis codes for a rayleigh channel,” IEEETransactions on Communications, Bd. 40, Nr. 5, S. 873–884, Mai1992.
[ZF05] H.-J. Zepernick und A. Finger, Pseudo Random Signal Processing:Theory and Application. San Francisco, Calif.: John Wiley & Sons,Inc, 2005.
[ZLBZ08] C. Zimmermann, M. Lieberei, P. Beinschob, und U. Zölzer,“Broadband MIMO-OFDM system,” Proc. 13th InternationalOFDM-Workshop 2008 (InOWo’08), Hamburg, Aug. 2008.
133

Index
Bandbreiteeffizienz, 4, 7, 15BICM, 16, siehe Bit Interleaved
Coded ModulationBit Interleaved Coded Modulation,
16Blockcodes, lineare, 20BLUE, 53burst errors, 14
CodesLDPC, 20Turbo Codes, 20
Deinterleaver, 14Detektion
kohärent, 2linear Zero Forcing, 32, 53Maximum Likelihood Bit-Detektor,
40MIMO Bit-Detektion, 39per Layer, 39SoftML, 39Zero Forcing, 53
Entzerrerlinear MMSE, 33linear Zero Forcing, 32VBLAST, 34, 36, 41VBLAST/MMSE, 35VBLAST/ZF, 35
Zeitbereich, 44EXIT-Chart, 26, 29, 44Exponentielle Vorhersage, 64
fading, 14Fehlerschutzcodierung, 14
Hamming-Distanz, 25
ICI, siehe Intercarrier InterferenceInformation, wechselseitige, 27Intercarrier Interference, 8Interferenzauslöschung
sukzessive, 34Interleaver, 14, 41Intersymbolinterferenz, 6, 7ISI, siehe Intersymbolinterferenz
KanalRayleigh, 16
Kanalcodierung, 19Kanalkapazität, 2Kanalmodell
3GPP, 12räumliches, 12
Kanalschätzungentscheidungsbasierte, 49MIMO-RLS, 51pilotbasierte, 49
LDPC Codes, 20
135
Index
Log-Likelihood Ratio, 19
Maximum A PosterioriDecodierung, 25Detektion, 40
Median-Filter, 83Mehrträgermodulationsverfahren, 4,
44Mehrwegeausbreitung, 10MIMO-RLS-Kanalschätzung, 51Minimum Mean Square Error, 32MMSE, siehe Minimum Mean Squa-
re ErrorModulationsalphabet, 15, 40Moore-Penrose-Inverse, 32
Non Line of Sight-Szenario, 12
OFDM, siehe Orthogonal Frequen-cy Division Multiplexing
Orthogonal Frequency Division Mul-tiplexing, 4
Orthogonalitätsprinzip, 32
Paritätssumme, 25Pilotsymbole, 49
Code Division Multiplex, 56
Rahmengewichtungexponentielle, 83
Raummultiplex, 9Rayleigh-Kanal, 46Recursive least squares decision-directed
channel estimation, 60
Scatter Cluster, 13Schmalbandkanäle, 51Smoothing, 83, 87Smoothing, rekursives, 83Spatial Multiplexing, 4, 9
Syndromvektor, 25
Tanner-Graph, 21Transinformation, 27Turbo Codes, 20, 97
VBLAST/MMSE, 35VBLAST/ZF, 35
Wide Sense Stationary, 50
136

137
Lebenslauf
Lebenslauf
Persönliche Daten
Patric Alain Beinschob,geboren am 31. August 1983 in Hamburg
Schule & Ausbildung
1995 – 2003 Allgemeine Hochschulreife
Hochschulstudium
10/2003 – 09/2008 Technische Universität Hamburg-Harburg,Studium der ElektotechnikStudienrichtung Nachrichtentechnik
07/2004 – 08/2004 Airbus Deutschland GmbH,Grundpraktikum (Elektrische Grundausbildung)
07/2005 – 08/2005 Airbus Deutschland GmbH,Grundpraktikum (Mechanische Grundausbildung)
10/2005 Vordiplom
09/2007 – 01/2008 Lufthansa Technik AG,Fachpraktikum
08/2008 Diplom-Ingenieur Elektrotechnik
Berufstätigkeit
seit 08/2008 Helmut-Schmidt-Universität /Universität der Bundeswehr Hamburg,Wissenschaftlicher Mitarbeiter an der ProfessurAllgemeine Nachrichtentechnik
03/2010 – 07/2010 Fachhochschule Westküste,Lehrtätigkeit, Vorlesung Kommunikationssysteme
138