Embed Size (px)
DESCRIPTION
Skriptum in progress
Citation preview

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 1/22
Mathematik für Physiker IV: Analysis 3
Studentische Mitschrift in LATEXvon Philipp Gadow und Florian Häse
nach Vorlesung von Prof. Spohn
20. Oktober 2011
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 2/22
Inhaltsverzeichnis
1. Integration im Rn 21.1. Versuche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Jordan Volumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3. Transformationseigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4. Riemann-Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.5. Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.6. einfache Integrationstechniken . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
A. Anhang iA.1. Cantor-Menge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
B. Formelsammlung Analysis 2 I
C. Formelsammlung Analysis 3 XI
a
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 3/22
Organisatorisches
Zum Skript:Dieses Skript ist sozusagen durch 2 Studenten, welche die Analysis 3-Vorlesung von Prof.Spohn besuchten, anhand der Vorlesung, des Tafelanschriebs, und der in den Quellen aufge-
führten Materialien entstanden.Dabei kann das Skript durchaus fehlerhaft sein, zumal es eine andere Qualität als das offiziellzu einer Vorlesung vom Dozenten herausgegebene Skript haben mag.Sind Fehler offensichtlich, so ist es im Interesse der Autoren diese alsbald zu beheben, sobitten wir um diesbezügliche Rückmeldung.
Die Vorlesung findet am Dienstag und am Donnerstag von 1015 − 12 Uhr statt.Die Zentralübung zur Vorlesung findet von 1230bis14 Uhr am Dienstag statt.
Klausurtermin: Die Klausur wird am Freitag, den 17.Februar von 830 − 1000 geschrieben.Aller Wahrscheinlichkeit nach wird eine Probeklausur geschrieben werden.
Empfohlene Literatur:Otto Forster: Analysis 3Königsberger: Analysis 2Meyberg, Vachenauer: Höhere Mathematik 3Rudin: AnalysisAmann, Escher: Analysis 3
Ausblick Analysis 3
In der Vorlesung Analysis 3 wird behandelt werden
• Integration im Rn
• Integralsätze
• Funktionentheorie, also analytische Funktionen f : C → C
• Fourieranalysis
• einige lineare partielle Differentialgleichungen aus der Physik
1
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 4/22
1. Integration im Rn
1.1. Versuche
Erinnerung an R/ Versuche in Rn
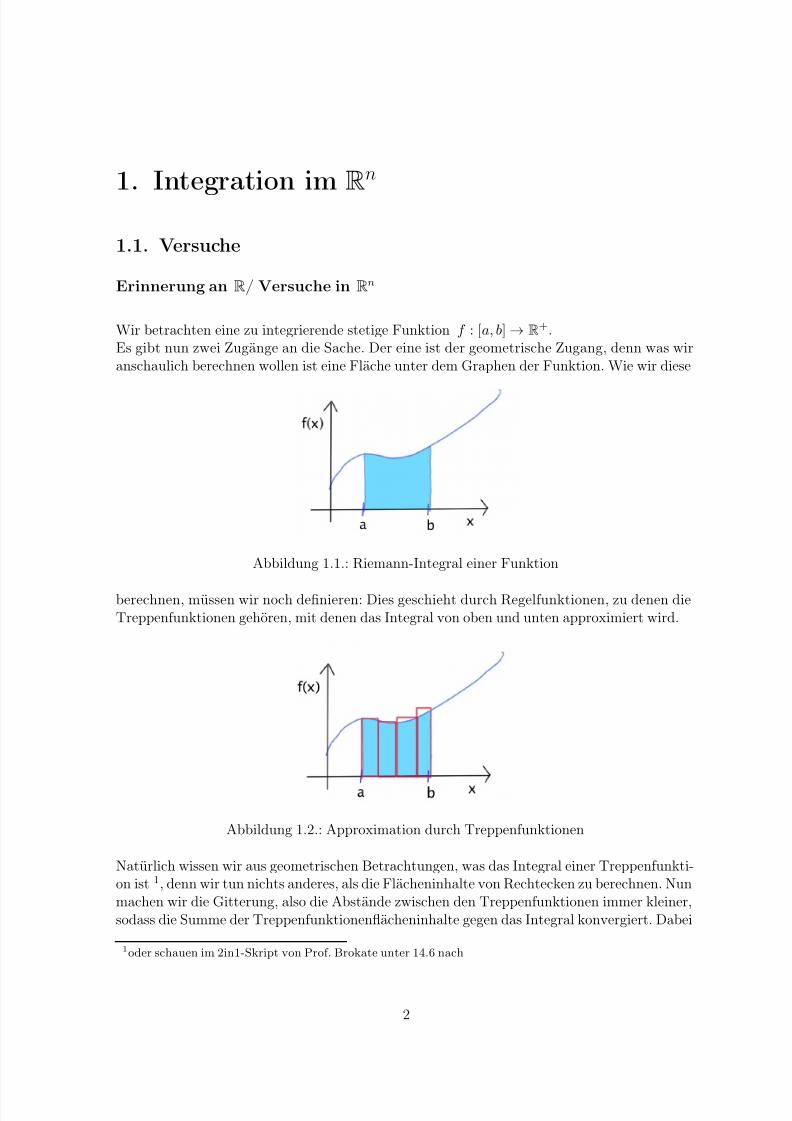
Wir betrachten eine zu integrierende stetige Funktion f : [a, b] → R+.Es gibt nun zwei Zugänge an die Sache. Der eine ist der geometrische Zugang, denn was wiranschaulich berechnen wollen ist eine Fläche unter dem Graphen der Funktion. Wie wir diese
Abbildung 1.1.: Riemann-Integral einer Funktion
berechnen, müssen wir noch definieren: Dies geschieht durch Regelfunktionen, zu denen dieTreppenfunktionen gehören, mit denen das Integral von oben und unten approximiert wird.
Abbildung 1.2.: Approximation durch Treppenfunktionen
Natürlich wissen wir aus geometrischen Betrachtungen, was das Integral einer Treppenfunkti-on ist 1, denn wir tun nichts anderes, als die Flächeninhalte von Rechtecken zu berechnen. Nunmachen wir die Gitterung, also die Abstände zwischen den Treppenfunktionen immer kleiner,sodass die Summe der Treppenfunktionenflächeninhalte gegen das Integral konvergiert. Dabei
1oder schauen im 2in1-Skript von Prof. Brokate unter 14.6 nach
2
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 5/22
können wir die Treppenfunktionen über eine obere und eine untere Grenze der Funktion de-finieren, welche die Obersumme und die Untersumme liefern. Das Riemann-Integral existiert,wenn Ober- und Untersumme übereinstimmen.
Was könenn Hindernisse sein? Wenn wir Funktionen betrachten, die stark oszillieren, dannkönnen Ober- und Untersumme nicht übereinstimmen, das Integral kann also nicht existie-
ren. Stetige Funktionen konvergieren aber so, dass das Riemann-Integral existiert. Für einemathematisch saubere Einführung verweisen wir auf das Skript von O. Matte: Mathematik
für Physiker II, Analysis 1 (WS: 2010/11) ab Seite 1272.
Wollen wir aber nur rechnen und keine geometrische Anschauung benutzen, so definieren wirnun analytisch das Integral.
Hierbei entspricht das Integral dem Inversen der Differentiation.
F (y) =
ˆ ya
f (x)dx
F
(y) = f (y)
Nun betrachten wir den Sachverhalt im Rn. Wollen wir den analytischen Zugang übertragen,ist dies problematisch, da wir zuvor stark die Eindimensionalität des Integrals ausgenutzt ha-ben. Bei vorgegebenen partiellen Ableitungen können wir nicht unbedingt zur Stammfunktionzurückkehren. Es gibt zwar ein Analogon zur analytischen Betrachtung des Integralbegriffs inR, dieses ist aber komplizierter, sodass wir uns im Folgenden auf die geometrische Anschau-ung beschränken wollen. Bei der Behandlung der Integralsätze werden wir auf die analytischeBetrachtung des Integrals im Rn zurückkehren.
Nun wollen wir uns mit der geometrischen Betrachtung befassen:
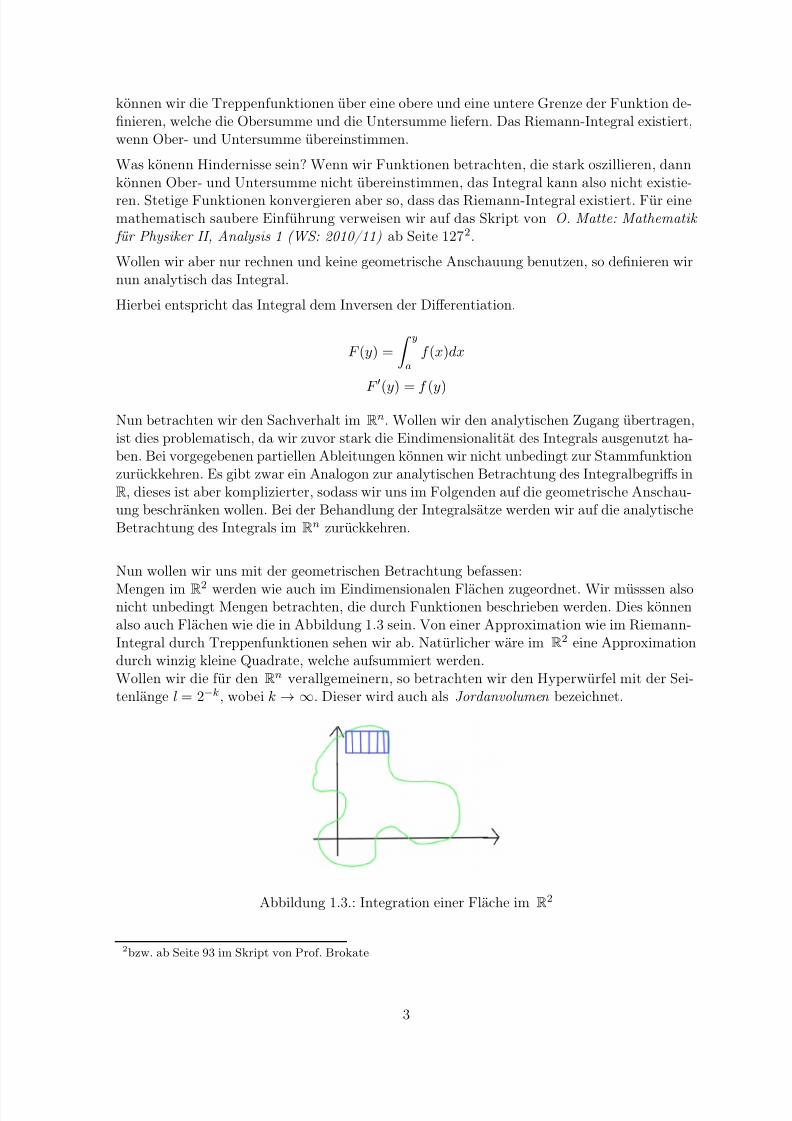
Mengen im R2 werden wie auch im Eindimensionalen Flächen zugeordnet. Wir müsssen alsonicht unbedingt Mengen betrachten, die durch Funktionen beschrieben werden. Dies könnenalso auch Flächen wie die in Abbildung 1.3 sein. Von einer Approximation wie im Riemann-Integral durch Treppenfunktionen sehen wir ab. Natürlicher wäre im R2 eine Approximationdurch winzig kleine Quadrate, welche aufsummiert werden.Wollen wir die für den Rn verallgemeinern, so betrachten wir den Hyperwürfel mit der Sei-tenlänge l = 2−k, wobei k → ∞. Dieser wird auch als Jordanvolumen bezeichnet.
Abbildung 1.3.: Integration einer Fläche im R2
2bzw. ab Seite 93 im Skript von Prof. Brokate
3
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 6/22
Die Verallgemeinerung von´ I f (x)dx ist dann
I → Λ ⊂ Rn
wobei gilt
• Λ ist beschränkt und abgeschlossen (?)• hat ein endliches Volumen
Wir addieren also die Hyperwürfel, also die Säulen auf und hoffen, dass die Riemann-Approximationkonvergiert. Es handelt sich bei den Hyperwürfeln um Würfel mit der Kantenlänge dx.
ˆ Λ
f (x)dnx
Schlägt man nun den Integralbegriff im Rn in einer modernen Lektüre nach, wie im Forster,so sieht man, dass die hier besprochene Art der Integration nur als historische Randnotizaufkommt.
Mathematiker behandeln die Integration im Rn mit dem Lebesgue-Integral, was sich letztend-lich durchgesetzt hat. Interessierte seien hier auf die Vorlesung ”Maß- und Integrationstheorie”verwiesen. Im Rahmen dieser Vorlesung soll das Riemann-Integral behandelt werden, da esextrem einfach zu behandeln und zu verstehen ist.
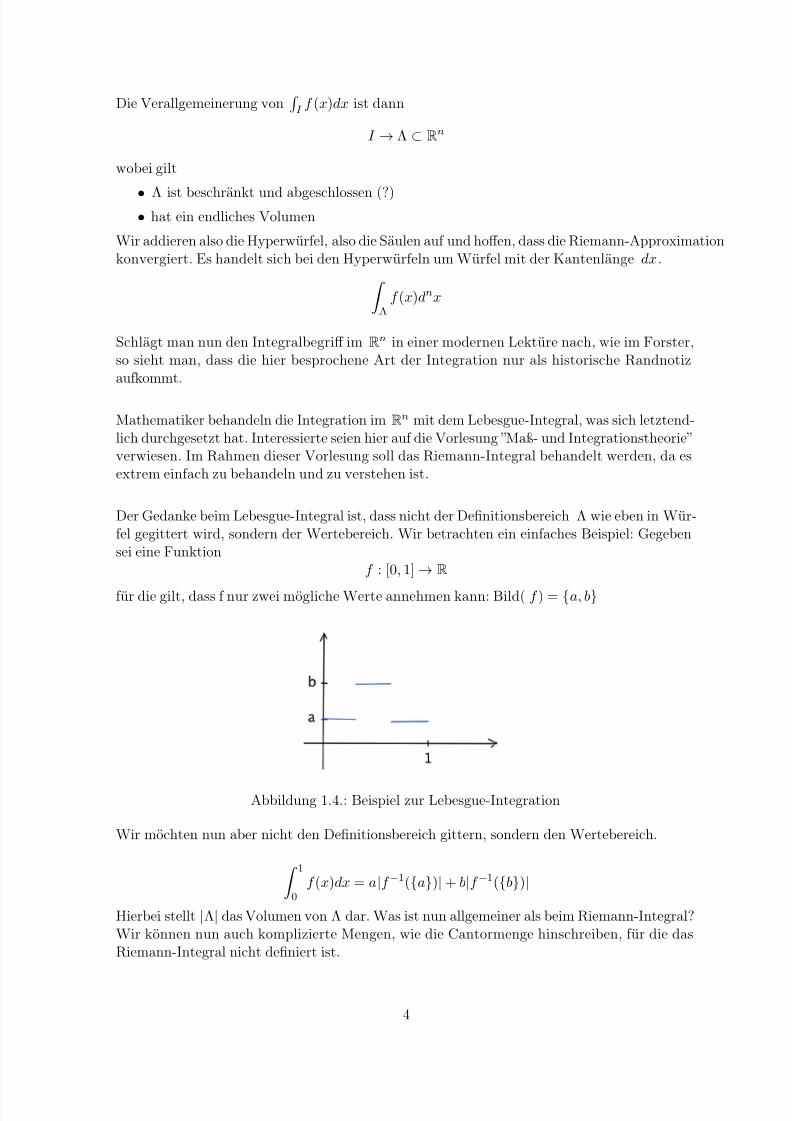
Der Gedanke beim Lebesgue-Integral ist, dass nicht der Definitionsbereich Λ wie eben in Wür-fel gegittert wird, sondern der Wertebereich. Wir betrachten ein einfaches Beispiel: Gegebensei eine Funktion
f : [0, 1] → R
für die gilt, dass f nur zwei mögliche Werte annehmen kann: Bild(f ) = {a, b}
Abbildung 1.4.: Beispiel zur Lebesgue-Integration
Wir möchten nun aber nicht den Definitionsbereich gittern, sondern den Wertebereich.
ˆ 10
f (x)dx = a|f −1({a})| + b|f −1({b})|
Hierbei stellt |Λ| das Volumen von Λ dar. Was ist nun allgemeiner als beim Riemann-Integral?Wir können nun auch komplizierte Mengen, wie die Cantormenge hinschreiben, für die dasRiemann-Integral nicht definiert ist.
4
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 7/22
Ein bekannteste Beispiel dafür ist
f (x) =
1 für x rational0 sonst
Das Lebesgue-Integral existiert hier, das Riemann-Integral funktioniert nicht. Für alltägliche
Dinge, wie die Integration einer Kugel macht es keinen Unterschied, auf welche Weise mannun integriert.Der Vorteil der Lebesgue-Integrals ist, dass es gutmütiger zu Approximationen ist.
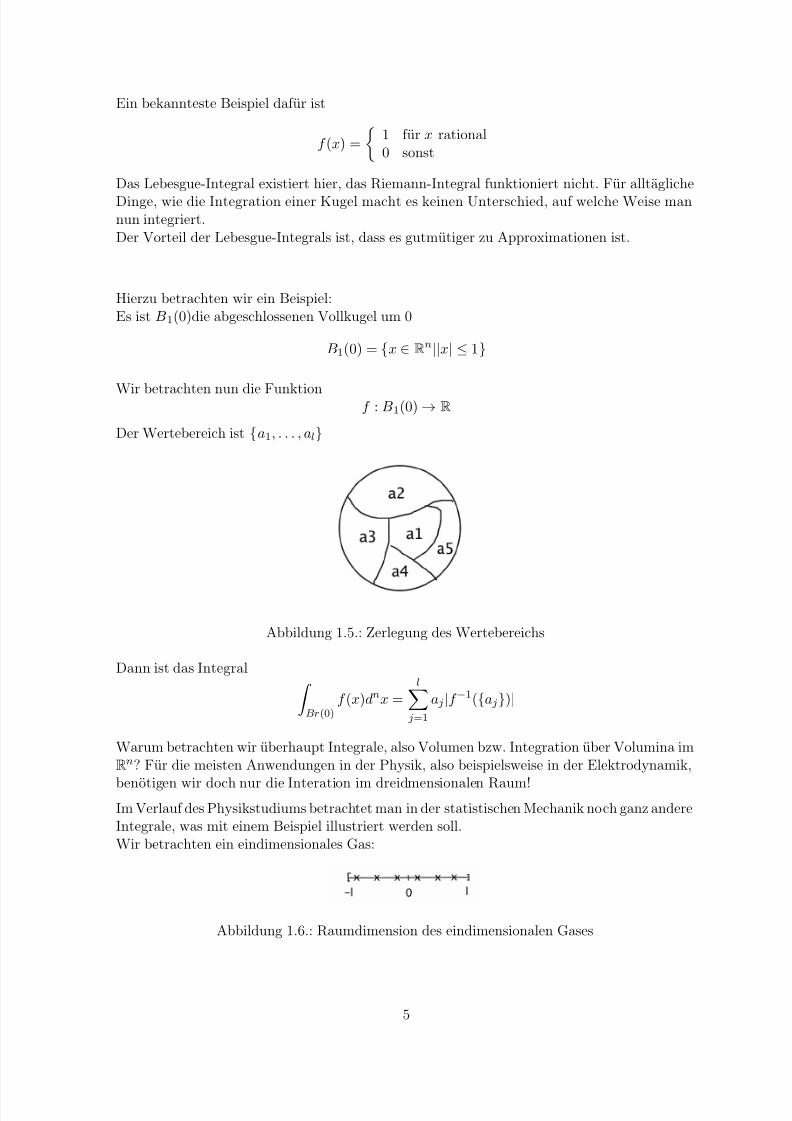
Hierzu betrachten wir ein Beispiel:Es ist B1(0)die abgeschlossenen Vollkugel um 0
B1(0) = {x ∈ Rn||x| ≤ 1}
Wir betrachten nun die Funktionf : B1(0) → R
Der Wertebereich ist {a1, . . . , al}
Abbildung 1.5.: Zerlegung des Wertebereichs
Dann ist das Integral ˆ Br(0)
f (x)dnx =l
j=1
a j |f −1({a j})|
Warum betrachten wir überhaupt Integrale, also Volumen bzw. Integration über Volumina imRn? Für die meisten Anwendungen in der Physik, also beispielsweise in der Elektrodynamik,
benötigen wir doch nur die Interation im dreidmensionalen Raum!
Im Verlauf des Physikstudiums betrachtet man in der statistischen Mechanik noch ganz andereIntegrale, was mit einem Beispiel illustriert werden soll.Wir betrachten ein eindimensionales Gas:
Abbildung 1.6.: Raumdimension des eindimensionalen Gases
5

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 8/22
Es steht im Integral also ein n-dimensionaler Würfel.
ˆ
[−l,l]
exp
−β
n1,j=1
V (xi − x j)
dx1 . . . d xn
wobei V : R → R. Für reale Systeme gilt n = 1023.Sei es nun in der Quantenfeldtheorie oder in der allgemeinen Relativitätstheorie, solche Inte-grale begegnen einem immer wieder in der Physik.Es wird also mit dem Riemann-Integral gearbeitet, das für unsere Zwecke völlig ausreichendist.
1.2. Jordan Volumen
Wir betrachten eine Menge Λ ⊂ Rn. Es gilt nun ein Volumen |Λ| zu definieren.
Dies geschieht durch eine Approximation durch Würfel, allgemeiner gesprochen durch Paral-lelotope.Wir betrachten nun eine Approximation durch einfachste Parallelotope.
Dazu geben wir uns ein Intervall I i ⊂ R, I i = [ai, bi] mit ai ≤ bi, i = 1, . . . , n vor.Es ist dann das Parallelotop P = I 1 × I 2 × · · · × I n.Dann ist das Volumen des Parallelotops |P | =
n j=1 |I j | mit |I j| = b j − a j.
Abbildung 1.7.: Parallelotop P
Für diese Definition des Volumens ist zu beachten:
•
Translationsinvarianz bei einer Verschiebung um
y ∈ Rn τ yP = {x + y, x ∈ P }
• Rotationsinvarianz (?)
• Normierung der Einheitswürfel w = [0, 1]n auf |w| = 1
6

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 9/22
• AdditivitätSind P 1, P 2 Parallelotope, dann ist das Volumen vonP 1 ∪ P 2, wenn sich die Parallelotopenicht überschneiden, also 3 P o1 ∩ P o2 = ∅, dann ist
|P 1 ∪ P 2| = |P 1| + |P 2|
Entsprechend gilt für endlich viele {P α, α = 1, . . . , m} mit P oα ∩ P oβ = ∅ für α = β:
|α=1
P α| =m
α=1
|P α|
Auf einer allgemeinen, beschränkten Menge M definieren wir nun die Jordan-Approximation.Wir konstruieren Würfel der Kantenlänge 2−k, k = 1, 2, . . .
Die Eckpunkte der Würfel müssen auf dem Gitter liegen, die Lage der Würfel ist fest, also(2−k Z)n.Die Würfel sind halboffen, damit wir mit den Würfeln die Menge überdecken können. An-
sonsten könnten die Kantenpunkte zu verschiedenen Würfeln gehören. Wir verwenden alsozur Approximation die halboffenen Einheitswürfel ([0, 1))n.Wir bezeichnen die Würfel als W (k) mit dem Volumen |W (k)| = 2−kn.
Abbildung 1.8.: halboffene Einheitswürfel mit nur zwei Kanten
Wie im Eindimensionalen die Ober- und Untersumme bilden wir nun eine innere Approxima-tion und eine äußere Approximation.
• Die innere Approximation nennen wir ik(M ), welche alle Würfel W (k) umfasst, die inM o enthalten sind ( W (n) ⊂ M ).
• Die äußere Approximation nennen wir ak(M ), welche alle Würfel W (k) umfasst, die M o
schneiden.
Sauber ausgedrückt bedeutet das:
W (k) ∈ ik(M )fallsW (k) ⊂ M o
W (k) ∈ ak(M )fallsW (k) ∩ M = ∅
3Es gilt für eine Menge M : M o: Inneres von M ; M : Abschluss von M ; ΛM = M \M
o: Rand von M
7

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 10/22
Für die Volumina gilt:
|ik(M )| = Zahl der Würfel in ik(M ) × 2−kn
|ak(M )| = Zahl der Würfel in ak(M ) × 2−kn
Definition 1.1 (Jordan-Volumen) Sei M ⊂ Rn eine beschränkte Menge.M hat das Jordan-Volumen |M |, falls mit
|M |i = limn→∞
|i(n)(M )| existiert, weil steigend (1.1)
|M |a = limn→∞
|a(n)(M )| existiert, weil fallend (1.2)
gilt: |M |i = M a(= |M |) (1.3)
Wir einigen uns auf die Sprechweise: Falls |M | existiert, heißt M Jordan messbar .
1.3. Transformationseigenschaften
1.4. Riemann-Integrale
1.5. Eigenschaften
1.6. einfache Integrationstechniken
8

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 11/22
A. Anhang
A.1. Cantor-Menge
Die Cantormenge ist eine Teilmenge der reellen Zahlen mit besonderen Eigenschaften:
• Die Cantormenge ist eine Nullmenge . Dies bedeutet, dass es zu jedem Wert > 0abzählbar viele beschränkte Intervalle J k ⊆ R, k ∈ N, gibt, sodass die Vereinigung all
dieser Intervalle die Menge M überdeckt, also M ⊇∞k=1
J k und dass die Länge der
Vereinigung der Intervalle J k durch ∞
k=1
|J k| ≤ abschätzbar ist.
• Die Cantormenge ist überabzählbar (d.h. es gibt keine Bijektion der Menge auf N.
Die Cantormenge kann konstruiert werden, indem das Intervall [0, 1] gedrittelt wird und dasmittlere Drittel entfernt wird. Die beiden Teilintervalle [01
3 ] und [23 , 1] werden nun wieder ge-drittelt, wobei beiden das mittlere Drittel entfernt wird. Dieser Vorgang wird nun wiederholt,bis im Grenzprozess die Menge zur Cantormenge übergeht.
i
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 12/22
B. Formelsammlung Analysis 2
Der Rn als metrischer Raum
Metrik
1. Definitheit d(x, y) = 0 ⇔ x = y
2. Symmetrie d(x, y) = d(y, x)
3. ∆-Ungleichung d(x, y) + d(y, z) ≥ d(x, z)
Umgebung
B(a) = {x ∈ Rn : d(x, a) < } (B.1)
Konvergenz (Seite ??)
Fast alle xn liegen in B(a):limn→∞
{xn}n∈N = a
falls für jedes > 0 ∃N ∈N
, sodass
{xn}n∈N ∈ B(a) ∀n ≥ N (B.2)
Cauchy-Folge
d(xm, xn) < ∀m, n ≥ N (B.3)
Vollständigkeit
Ein metrischer Raum heißt vollständig, falls jede Cauchyfolge in ihm konvergiert.
Topologie
1. U ⊂ X heißt offen , falls es zu jedem Punkt x ∈ U eine -Kugel B(x) ⊂ U gibt.
2. A ⊂ X heißt abgeschlossen , falls X \A offen ist.
3. Y ⊂ X , dann heißt x ∈ Y Randpunkt von Y , falls jede -Kugel B(x) sowohl Punktevon Y , als auch X \Y enthält.Der Rand ∂Y von Y ist die Menge aller Randpunkte.
I

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 13/22
Stetigkeit
limx→a
f (x) = f (a) (B.4)
oderlimn→∞
dx(xn, a) = 0 ⇒ limn→∞
dy(f (xn), f (a)) = 0 (B.5)
Stetig in x0:∀ > 0∃δ > 0∀x : x ∈ Bδ(x0) ⇒ f (x) ∈ B(f (x0))) (B.6)
Gleichmäßig stetig:
∀ > 0∃δ > 0∀x, x0 : x ∈ Bδ(x0) ⇒ f (x) ∈ B(f (x0)) (B.7)
Lipschitz stetig:|f (x) − f (x0)| ≤ c · |x − x0| (B.8)
Lipschitz stetig ⇒ gleichmäßig stetig ⇒ stetig
Kompaktheit
Eine Menge A ⊂ Rn ist beschränkt, wenn ∃R ∈ R :
A ⊂ BR(0) (B.9)
A ⊂ Rn heißt abgeschlossen, falls {xn}n∈N ∈ A mit limn→∞
{xn}n∈N = x und x ∈ A.
Satz von Bolzano-Weierstrass
K ⊂ Rn kompakt, {xn}n∈N ⊂ K Folge in K
∃{mk}k∈N und a ∈ K , sodasslimk→∞
xmk = a (B.10)
Jede beschränkte Teilfolge hat eine konvergente Teilfolge.
Satz vom Minimum und Maximum
K ⊂ Rn kompakt und f : K → R stetig. f nimmt ihr Minimum und Maximum auf K an.
inf x∈K
f (x) = f (xmin) (B.11)
supx∈K
f (x) = f (xmax) (B.12)
II
5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 14/22
Kurven
Tangentialvektor
d
dtγ (t) = γ (t) (B.13)
begleitendes Zweibein
Tangentialeinheitsvektor: T (s) =γ (s)
γ (s)Hauptnormalenvektor:N (s) =
T (s)
T (s)(B.14)
begleitendes Dreibein
Tangentialeinheitsvektor: T (s) =
γ (s)
γ (s) Hauptnormalenvektor: N (s) =
T (s)
T (s)
Binormalenvektor: B(s) = T (s) × N (s)
Länge einer Kurve (S. ??)
L =
ˆ ba
γ (t)dt (B.15)
Parametertransformation
f : [α, β] → [a, b]
ist glatt, bijektiv und streng monoton steigend.
γ : t → γ (t) wird zu γ : t → γ (t) (B.16)
Bei der Transformation ist die Länge und der Tangentialeinheitsvektor im Gegensatz zumTangentialvektor invariant.
Transformation nach Bogenlänge
1. Bogenlänge berechnen:´ tt0γ (u)du
2. nach t auflösen: s(t) umgestellt zu t = f (s(t))
3. in Kurve einsetzen: γ : s → γ (f (s))
Wegintegral skalarer Funktionen
ˆ ba
f (γ (t)) · γ (t)dt (B.17)
III

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 15/22
Wegintegral von Vektorfeldern
ˆ γ
f (x), dx =
ˆ ba
f (γ (t)), γ (t)dt (B.18)
Flächenberechnung
für ebene Kurve:
F =1
2
ˆ ba
x1(t)x2(t) − x1(t)x2(t)
dt (B.19)
für ebene Kurve in Polarkoordinaten:
F =1
2
ˆ ba
r2φdt (B.20)
allgemein:
F = 12
ˆ ba
f (γ (t)), γ (t)dt (B.21)
Krümmung κ
T (s) = κ(s) · N (s) (B.22)
κ(t) =xy − xy
(x2 + y2)3
2
(t) (B.23)
Torsion τ
B(s) = −τ (s)N (s) (B.24)
τ (s) = −N (s), B(s) = B(s), N (s) (B.25)
Partielle Differentiation
partielle Differentiation
• f heißt partiell differenzierbar am Punkt x ∈ U , falls der Limes
limδ→0
1
δ(f (x + δe j) − f (x)) =
∂
∂x jf (x) (B.26)
existiert für alle Richtungen, also für j = 1,...,n.
• f heißt partiell differenzierbar , falls f partiell differenzierbar ist für alle x ∈ U .
IV

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 16/22
• f heißt stetig partiell differenzierbar am Punkt x ∈ U , falls
x →∂
∂x jf (x) (B.27)
stetig auf U ist für j= 1,...,n.
Gradient
f (x) =
∂ ∂x1
f (x)...
∂ ∂x1
f (x)
= Df T (B.28)
Divergenz
· F (x) =
n j=1
∂ ∂x j
F j(x) (B.29)
Rotation
( × F )i(x) =3
j,k=1
ijk∂
∂x jF k(x) (B.30)
Laplace-Operator
∆f =n
j=1
∂ 2
∂x2 j
f =n
j=1
∂ 2 j f (B.31)
Eine Funktion, für die gilt ∆f = 0 heißt harmonisch.
Satz von Schwarz
Ist f zwei mal stetig partiell differenzierbar, so gilt
∂ j∂ if = ∂ i∂ jf (B.32)
Jacobimatrix
Die Jacobimatrix enthält alle einfachen Ableitungen.
J (f )ij(x) =
∂ 1f 1 · · · ∂ nf 1...
. . ....
∂ 1f m · · · ∂ nf m
(B.33)
V

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 17/22
Hessematrix
Die Hessematrix enthält alle zweifachen Ableitungen und ist symmetrisch.
H (f )ij(x) = ∂ i∂ jf (x) (B.34)
Richtungsableitung
Die Ableitung im Punkt x0 in Richtung des Vektors v ist
limt→0
1
t(f (x0 + v · t) − f (x0)) = v · f (x0) (B.35)
Lineare Approximation
Differenzierbarkeit1. f heißt differenzierbar an der Stelle x ∈ U , falls eine lineare Abildung A(x) : Rn → Rm
existiert mitf (x + ξ) = f (x) + A(x)ξ + ζ (ξ) (B.36)
wobei der Fehlerterm ζ sublinear ist, also
limξ→0
1
ξζ (ξ) = 0
2. f heißt differenzierbar in U , falls f differenzierbar für alle x ∈ U ist.
3. f heißt stetig differenzierbar , falls x → Amn(x) stetig ist, also die lineare Abbildung vonRn → Rm stetig ist.
Aus Differenzierbarkeit folgen Stetigkeit und partielle Differenzierbarkeit. Aus stetig partiellerDifferenzierbarkeit folgt Differenzierbarkeit.
Kettenregel
Df ◦ g(x) = Df (g(x)) · Dg(x) (B.37)
Differentation entlang einer Kurve
d
dtf (γ (t)) = γ (t) · f (γ (t)) (B.38)
VI

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 18/22
Potenzreihenentwicklung und Satz von Taylor
Satz von Taylor
Für eine auf einer offenen Menge definierte Funktion f ∈ C p+1 ist die Taylorentwicklung im
Entwicklungspunkt x0 mit Zwischenwert 0 ≤ θ ≤ 1 in der p-ten Ordnung:
f (x0 + h) =|α|≤ p
1
α!∂ αf (x0)hα +
|α|= p+1
1
α!∂ αf (x0 + θh)hα (B.39)
Multiindex
|α| =n
j=1α j α! =
n j=1
(α j)!
Dαf =n
j=1(∂ j)αj f xα =
n j=1
(x j)αj
Satz von Taylor in 2. Ordnung
f (x + h) = f (x) + f (x), h +1
2h, H (f )h + Restglied (B.40)
Multinomische Formel
(x1 + · · · + xn)k =
α∈Nn0,|α|=k
k!
α!xα (B.41)
Extrema
x0 ist stationärer/kritischer Punkt, wenn
f (x0) = 0 (B.42)
Der stationäre Punkt x0
• ist ein isoliertes Maximum, wenn H (f )(x0) < 0
• ist ein isoliertes Minimum, wenn H (f )(x0) > 0
• ist ein Sattelpunkt, wenn H (f )(x0) indefinit. Bei der Nullmatrix sind weitere Betrach-
tungen nötig.
Koordinatentransformationen
Koordinatentransformationen
Koordinatentransformationen Φ : U → V sind Diffeomorphismen, also bijektiv und glatt.Die j-te Koordinatenlinie durch den Punkt x0 ist in V
t → Φ(x0 + t · e j) (B.43)
VII

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 19/22
lokales n-Bein an der Stelle x = Φ(ξ)
η j = DΦ(ξ)e j j = 1, . . . , n (B.44)
DΦ(ξ) = (η1, η2 . . . ηn)
Lokale Koordinaten erhält man durch normieren des n-Beins.
Umrechnung von Differentialoperatoren
ξ = DΦ(ξ)T x (B.45)
Umrechnung von Bogenlängen
L =
b
ˆ a
˙γ, g(γ (t))
˙γ (t)
1/2
dt (B.46)
mit metrischem Tensor g = DΦ(ξ)T DΦ(ξ).Ein infinitesimales Flächenelement ds ist ds2 = dx, g(x)dx.
Abstand
d(x, y) = minγ
L(γ ) (B.47)
Implizite Funktionen
Vorbetrachtungen
Für die implizite Funktion g gilt:
Dxf + Dyf Dxg = 0
Satz impliziter Funktionen
Eine implizit definierte Funktion F : Rd×Rl → Rm kann dann in einer Umgebung des PunktesP = (x, y) nach y aufgelöst werden, wenn
1. F ∈ C1
2. F (P ) = 0
3. DyF (P ) =
∂F 1∂y1
. . . ∂F 1∂yl
.... . .
...∂F m∂y1
. . . ∂F m∂yl
invertierbar ist.
VIII

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 20/22
Differentiation impliziter Funktionen
Ist eine Funktion f (x, y , z) gegeben, die nach z(x, y) aufgelöst werden kann und ist der Gra-dient z gefragt, so berechnet sich dieser als
∂ xz = −∂ xf (x0, y0, z0)
∂ zf (x0, y0, z0)
∂ y z = −∂ yf (x0, y0, z0)
∂ zf (x0, y0, z0)
Nullstellensatz
Das Newtonverfahren lautet
xn+1 = xn −f (xn)
f (xn)
Variationsrechnung
Variation mit Nebenbedingung
Ist h unter einer Zwangsbedingung f zu extremalisieren, so ist das Extremum von h identischmit dem von F wobei
F λ(x) = h(x) − λ, f (x)
Variation von Funktionalen
Die Euler-Lagrange-Differentialgleichung lautet
∂ 1f (x, x, t) −d
dt(∂ 2f (x, x, t) = 0
Differentialgleichungen
Inverse einer 2 × 2-Matrix
A =
a bc d
→ A−1 = 1
det A
d −b
− c a
Anfangswertproblem
Die Lösung vony = Ay mit y(t0) = y0
ist y(t) = eA(t−t0)y0.
IX

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 21/22
Lipschitz-Stetigkeit
F : Rn × R → Rn ist global Lipschitz stetig, falls ∃L > 0:
F (x, t) − F (y, t) ≤ Lx − y ∀t ∈ R, x , y ∈ Rn
F : Rn×R → Rn heißt lokal Lipschitz stetig, falls es zu jeder Kugel BR(0) und jedem Intervall[−a, a] ein L = LR,a gibt, sodass
F (x, t) − F (y, t) ≤ Lx − y ∀x, y ∈ BR(0), t ≤ a
Kontraktion
Die Abbildung φ : M → M heißt Kontraktion, wenn ∃λ ∈ [0, 1]∀x, y ∈ M :
d(φ(x), φ(y)) ≤ λd(x, y)
X

5/10/2018 Analysis 3 - slidepdf.com
http://slidepdf.com/reader/full/analysis-3-55a0c1c01a1e3 22/22
C. Formelsammlung Analysis 3
XI






![Compiler Construction - Lecture : [1ex] Summer Semester 2017 … · Lecture 3: Lexical Analysis II (Extended Matching Problem) First-Longest-Match Analysis Principle of the Longest](https://img.pdfslide.org/doc/110x75/60040b7ed3b7345cc65dc07c/compiler-construction-lecture-1ex-summer-semester-2017-lecture-3-lexical.jpg)


![Compiler Construction - Lecture : [1ex] Summer Semester ... · Lecture 3: Lexical Analysis II (Extended Matching Problem) Implementation of FLM Analysis (4) The Backtracking DFA I](https://img.pdfslide.org/doc/110x75/60040cae2cef59565b19bc4a/compiler-construction-lecture-1ex-summer-semester-lecture-3-lexical-analysis.jpg)



















