Embed Size (px)
Citation preview

195
Anhang (FORTRAN-Programme)
In diesem Anhang sind einige allgemeingUltige FORTRAN-Programme von Optimierungsalgorithmen, Integrationsverfahren und Steuervariablenstrukturen aufgelistet und erlautert, die bei der Losung der in dieser Abhandlung dargestellten Optimierungsprobleme eingesetzt wurden und die sicherlich auch bei vielen anderen Aufgabenstellungen der Optimierungstechnik nutzbringend angewendet werden konnen.
Folgende Programme werden im einzelnen beschrieben:
Al) FORTRAN-Programm "EXTREM" zur Ermittlung eines lokalen Extremums einer beschrankten multivariablen Funktion ohne Kenntnis ihrer Ab-
Seite
1 ei tungen. . . . . . • . . • . . • . . . . . . . . • • . • . . . . . . . • . . . . . . . . . . . • . . . . . . . . • • . . . . . . . I 96
A2) FORTRAN-Programm "GLOBEX" zur Ermittlung des globalen Extremums einer beschrankten multivariablen Funktion ohne Kenntnis ihrer Ableitungen (in Verbindung mit den Programmen IEXTRH1" und IZNORVl") ••.•...•..•... 206
A3) FORTRAN-Programm IZNORV1" zur Erzeugung normalverteilter Zufallszahlen. 211
A4) FORTRAN-Programm IINTEG4" zur Integration nach Runge-Kutta-Gill........ 212
A5) FORTRAN-Programm TSCH2" eines Tschebyscheff-Po]ynomsystems zur Darstellung mehrerer Kurven in der Ebene bzw. einer mehrdimensionalen Kurve im Raum.............................. .. .•.•.. ..•.•...•..... ..•... 214
A6) FORTRAN-Programm ISPLl2" zur Anpassung mehrerer Kurven in der Ebene bzw. ei ner Kurve im Raum an gegebene Punkte............................ 215
A7) FORTRAN-Programm ITGHYP2" zur Darstell ung von zeitl ich veranderl ichen SteuergroBen durch den Menschen........................................ 218
A8) FORTRAN-Programm ITSCH3" eines Tschebyscheff-Polynomsystems zur Darstellung einer Flache im Raum.......................................... 219
Bemerkung: Die nachfolgend aufgelisteten Programme wurden nicht speziell im Hinblick auf besondere Genauigkeit oder Schnelligkeit ausgelegt, sondern sol len vor allem eine einfache Anwendung ermaglichen.

A 1) FORTRAN-ProgriIJIIII "EXTREM" zur Ennittlung eines lokalen Extremlllls einer beschrankten multivariablen Funktion ohne Kenntnis ihrer Ableitungen *
Dieser Suchalgorithmus (**) kann nicht nur zur Bestimmung optimaler Parameter, sondern auch, in Verbindung mit weiteren FORTRAN-Unterprogrammen (Strukturen von Steuerungsfunktionen, Anhange A 5 bis A 8), zur Berechnung optimaler mehrdimensionaler Kurven und Flachen herangezogen werden (siehe Kapitel 3).
Falls die Moglichkeit mehrerer lokaler Extrema besteht, la6t sich mit Hilfe des Programms "GLOBEX" (Anhang A 2) mit gro6er Wahrscheinlichkeit das globale, d.h. das beste lokale Extremllll ennitteln.
~ - Zusammenfassung - Anleitung Zllll Gebrauch des Algorithmus
- Anweisungen im aufrufenden Programm - Programm zur Berechnung der GUtewerte - Ausdruck der Resultate - Signalflu6plan
- FORTRAN-Programm EXTREM - Hauptmerkmale des Verfahrens - Anwendungsbeispiele
Zusammenfassung:
196 197 197 f 199 200 200 201 f 203 204 f
Der hier prasentierte FORTRAN-Algorithmus zur Ennittlung eines lokalen Extremums einer multivariablen Funktion zeigt folgende Kombination von Merkmalen: einfache Anwendbarkeit, geringer Programm-Umfang (knapp 100 FORTRAN-Anweisungen), wenig Speicherplatzbedarf, Kenntnis der Funktions-Ableitungen nicht erforderlich (auch Extrema von Funktionen mit Unstetigkeitsstellen lassen sich bestimmen), MOglichkeit der BerUcksichtigung von Begrenzungen aller Art, geringe Anzahl von Suchschritten (d.h. GUtefunktionsberechnungen) zur Ennittlung des Extremlllls mit gegebener Prazision (Konvergenz ist jedoch nicht fUr beliebig denkbare Funktionen bewiesen).
* Auszug aus: H.G. Jacob, "FORTRAN-Programm zur Ermittlung eines lokalen Optimlllls einer beschrankten multivariablen GUtefunktion ohne Kenntnis ihrer Ableitungen", Bericht Nr. KFK-PDV 36, Kernforschungszentrum Karlsruhe, April 1975.
**Weiterentwicklung aus: H.G. Jacob, "An Engineering Optimization Method With Application to STOL-Aircraft Approach and Landing Trajector~es", NASA TN D-697B, Washington D.C., 1972.

197
Anleitung zum Gebrauch des Algorithmus (Programm yom 08. Dez. 1980)
Das Unterprogramm EXTREM, das von einem gegebenen Anfangspunkt das nachstgelegene Maximum oder Minimum einer moglicherweise beschrankten und multivariablen Funktion oder eines Funktionals auffindet, kann von einem beliebigen Programm des Benutzers aufgerufen werden.
Anweisungen im aufrufenden Programm
1m aufrufenden Programm mUssen folgende FORTRAN-Anweisungen vorgesehen werden:
EXTERNAL GF DIMENSION U (K), DU (K), S (K, 5)
CALL EXTREM (GF, K, U, DU, S, DFMIN, DUMIN, LMAX, FOPT, IW)
wobei: GF - yom Benutzer geliefertes Unterprogramm, mit dem der GUtewert in Funktion
der Eingangsvariablen berechnet wird und in dem gegebenenfalls nachgeprUft wird, ob die laufenden Werte der Steuer-, Zustands- oder AusgangsgroBen etwaige Grenzen verletzen oder nicht.
K - Zahl der zu optimierenden unabhangigen Ein9angsvariablen
U - eindimensionales Feld, in dem die K geschatzten Anfangswerte Qer Eingangs-variablen enthalten sind, die innerhalb der erlaubten Grenzen liegen mUssen. Am Ende der Optimierungsprozedur liefert dieses Feld die optimalen Werte dieser SteuergroBen.
DU - eindimensionales Feld, das. die K Anfangsschrittweiten der Suchprozedur definiert, alle DU(I) # 0, I = 1 bis K. Die Anfangsschrittweiten sollten so gewahlt werden, daB das gesuchte Extremum ungerahr innerhalb ~ ~ DU liegt. Falls keine a-priori Information Uber die wahrscheinliche Lage des Extremums vorliegt, dUrften Anfangsschrittweiten DU in der GroBenordnung von 10 % der Anfangswerte ~ eine vernUnftige Wahl sein.
1m Algorithmus wird der SteuergroBenvektor implizit auf den Anfangsschrittweitenvektor normiert:
U (I)normiert = U (I) / DU (I) , I = 1 bis K
Dadurch wird gewahrleistet, daB auch Aufgaben gelost werden konnen, bei denen Eingangsvariablen sehr unterschiedlicher GroBenordnung auftreten.

198
S - Zweidimensionaler Arbeitsspeicherplatz (K, 5).
DFMIN - die Optimierungsprozedur wird beendet, sobald die absolute Veranderung der GUtefunktion von Stufe zu Stufe kleiner als DFMIN ist.
DUMIN - Unterbrechung der Optimierung, falls innerhalb der letzten Stufe die absolute Veranderung des normierten SteuergroBenvektors kleiner als DUMIN ist ...
LMAX - die Suche des Extremums wird abgeschlossen, sobald die Anzahl der Optimierungsstufen die Zahl LMAX erreicht.
Das Vorzeichen von LMAX gibt an, ob ein Maximum (positives Vorzeichen) oder ein Minimum (negatives Vorzeichen) gesucht wird.
FOPT - Wert der GUtefunktion am Ende der Optimierungsprozedur.
IW - Schreibbefehl: + 1 kein Ausdrucken von Resultaten (die entsprechenden Werte werden z.B. in das aufrufende Benutzer-Programm UbergefUhrt); + 2 nur Drucken der Endergebnisse; + 3 Resultate am Ende jeder Optimierungsstufe.
Bemerkungen:
z.B.
..
-- Die Optimierung wird unterbrochen, sobald eines der oben genannten Abbruchkritierien anspricht. Unabhangig von den Abbruchkriterien werden mindestens 3 Optimierungsstufen durchgefUhrt. (Ein zu frUhes Abbrechen der Optimierung kann auch durch verrauschte Gutefunktionswerte v.erursacht werden.)
-- Bei verrauschten GUtefunktionen oder solchen mit sehr unregelmaBigen Strukturen(wie z.B. "engen, krummen Talern")ist es oftmals gUnstiger, EXTREM mehrmals nacheinander mit einem entsprechend kleineren Wert von LMAX aufzurufen. (Der Neustart wird dabei jeweils an dem inzwischen erreichten Punkt Q mit den ursprUnglich eingegebenen, nicht veranderten Anfangsschrittweiten DU vollzogen).
anstatt: CALL EXTREM ( ... , DUMIN, 60, FOPT, · .. ) ,
besser: CALL EXTREM ( ... , DUMIN, 20, FOPT, · .. ) CALL EXTREM ( ... , DUMIN, 20, FOPT, · .. ) CALL EXTREM ( ... , DUMIN, 20, FOPT, · .. ) .
d.h.
wobei L = laufende Optimierungsstufe

199
Programm zur Berechnung der GUtewerte
Das vom Benutzer zu liefernde Unterprogramm GF berechnet die den laufend veranderten SteuergroBen entsprechenden GUtewerte und prUft gegebenenfalls, ob diese SteuergrOBen bzw. davon abhangige GroBen innerhalb des erlaubten Gebietes liegen (Begrenzungskontrolle).
wobei:
SUBROUTINE GF (U, F, LI, N) DIMENSION U (K) IF ("logischer Ausdruck") LI IF (LI.NE.O) RETURN
F
N = N + RETURN END
"logischer Ausdruck" - sollte "wahr" sein,
Nur bei Begrenzungen erforderlichj bei Verletzung elner oder mehrerer Grenzen wird der SignalfluB an das Unterprogramm EXTREM zurUckgegeben. Verschiedene Begrenzungen konnen durch verschiedene ganze Zahlen + 0 "nWleriert" werden. Falls die geschatzten Anfangswerte Uti) eine (von m~glicherweise mehreren) Begrenzungen verletzen, druckt in diesem Fall das Unterprogramm EXTREM die entsprechende Begrenzungsnummer aus. So wird die Suche nach derjenigen Variablen erleichtert, welche die Begrenzungsverletzung hervorruft.
falls eine oder mehrere Eingangsvariablen (oder davon abhangige GroBen) im verbotenen Gebiet liegen.
F - GUtefunktionswert N - Anzahl der GUtefunktionsberechnungen
Bemerkung 1: Mogliche Beschrankungen bei Optimierungsproblemen lassen sich sowohl in der eben beschriebenen komfortablen Art und Weise (implizite Schrittweitensteuerung durch Setzen von LI + 0 und RUckgabe des Signalflusses an das Unterprogramm EXTREM) als auch mit Hilfe von anwenderspezifischen Bestrafungsfunktionen berUcksichtigen (explizite Beschwerung der ursprUnglichen GUtefunktion F mit einer Bestrafungsfunktion P beim Oberschreiten der Beschrankung -F: = F + Pl. Wahrend das erste Verfahren besonders bei "harten", d.h. unbedingt einzuhaltenden Begrenzungen vorteilhaft ist, ergibt die Anwendung von moglichst quadratischen Bestrafungsfunktionen eine schnellere Konvergenz bei der BerUcksichtigung von "weichen" Beschrankungen, die nur ungefiihr einzuhalten sind.
Bemerkung 2: Der Benutzer kann das Unterprogramm EXTREM mehrmals zur Ermittlung von Extrema verschiedener Funktionen aufrufen. Die Namen der entsprechenden Unterprogramme (z.B. GF1, GF2, usw.) mUssen vor dem Aufruf unter EXTERNAL deklariert sein.

200
Ausdruck der Resultate
Je nach Wunsch (siehe weiter oben) konnen die Ergebnisse entweder nach jeder Optimierungsstufe, oder nur am Ende der Suchprozedur oder Uberhaupt nicht ausgedruckt werden (Resultate werden in das aufrufende Programm Ubertragen). Folgende Werte kommen gegebenenfalls zum Ausdruck:
STUFE NR. - Anzahl der durchgeruhrten Optimierungsstufen (siehe Abschnitt 3.3) SCHRITT NR. - Anzahl der vollzogenen Suchschritte (GUtefunktionsberechnungen) os
OF
- Veranderung des normierten SteuergroBenvektors wahrend der letzten Stufe
- Veranderung des GUtefunktionswertes von Stufe zu Stufe F - GUtefunktionswert DO 1 - normierte Schritt-Amplitude entlang der Haupt-Suchrichtung
(Anfangsschrittweite DO 1 = fK) DO 2 - normierte Schritt-Amplitude entlang aller Nebenrichtungen
(Anfangsschri ttweite DO 2 = Vi<) (FG) - diese GroBe zeigt an, da8 in nachfolgenden Stufen der Funktions-
U (1)
U (K)
wert F zwar moglicherweise wieder leicht schlechter werden kann, jedoch nicht schlechter als FG
- Amplituden der dem GUtefunktionswert entsprechenden Eingangsvariablen
Signalflu8plan zur Ermittlung der optimal en Parameter U (I), I = 1 bis K
z.B. Einlesen der Schitzwene U I
Suc:hprognmm EXTREM
Systematisc::he Verinderung
der Uj
MatherMtisches Modell mit GUtekriterium. Berechnungvon F = flUj)
nein

201
FORTRAN-Prograll111 "EXTREM"
c c c c c c
c c
11 21
~fiI
C
c
c
e 4fi1
511
8fi1
SUBROUTINE EXTREM (FUNC,K,U;DU,S,DFMIN,DUHIN,LMAX,F2,IN) HaJ II EXTREMWERTSUCHE AN EINER BESCHRAENKTEN HULTIVARIABLEN FUNKTION HaJ ell OHNE KENNTNIS IHRER ABLEITUNGEN (H.G.JACOB, le,DEZ.li81) HGJ ell DIMENSION U(K),OU(K),S(K,5).OO(2) HaJ 11 DOUBLE PRECISION U,OU,S,DO,OFHIN,DUHIN,FI,F2.F3,FF,FFF OHaJ 11 DOUBLE PRECISION EPS,A2,FG,FL,CS,OS,DF,CE,VV,ST,UU,FN DHGJ All DATA FFF,Fl,F3,EPS,IP 10.0,0.0,0.0,I.E-30,181 HGJ 12 DATA FFF,Fl,F3,EPS,IP 1000,000,000,1,0-31,101 DHGJ 12 00(11" SGlRT( FLOAT(K) HGJ 13 OD(11 a OSQRT(OBLE(FLOAT(Kl)1 DHGJ 13 00(21 000Cl) HGJ AI3 KOofil HaJ ... LI0 HaJ IS Noll HGJ eo A2. FLOAT(ISIGN(2,LHAX1) HGJ 17 A2 0 0BLECFLOAT(.SIGNC2,LHAX))) OHaJ 11 LIo, HGJ 1<1 BERECHNUNG OER DEN ANFANGSWERTEN ENTSPRECHENOEN GUETEFUNKTION HGJ ele CALL FUNC(U,F2,LI,Nl HGJ Ii IF (LI.NE,ll WRITE(IP,9~0) LI ~GJ 10 FORMATC39H ANFANGSWERTE VERLETZEN BEGRENZUNG, LII,I3/1X,41C1H*» HGJ 11 FFIF2 HGJ 12 FGoF2 HGJ 13 FLIF2 HGJ 14 DO 11 I ol,K HGJ 15 SCI,51oUCIJ/OU(I)-l, HGJ 18 ca00. HGJ 17 DO 30 I o l,K HGJ 18 S(I,I)'U(ll/OU(Il HGJ 1a S(I,2)oSCI,l)·S(I,~) HGJ 2fi1 S(I,~l00. HGJ 21 S(I,S~ -SCId) HGJ 22 CSaCS-S(I,2)**2 HGJ 23 DSo saRTCCSl HGJ 24 OSaDSQRT(CS) DHGJ 24 DFoF2-FL HGJ 25 If(IW.EO.3)WRITECIP,910)L,N,OS,DF,F2,DD(I),DDe2),FG,el,UeIl,I"l,K) HGJ 26 IF (L.GE.IABS(LMAX).OR.LI.NE.0.AND.L.EQ.0 HGJ 27
l,OR.L,GT.2.ANO.(DS.LT.DUHIN,OR. ABS(OF1,LT,OFHIN» GOTO 181 HGJ F27 l,OR,L.GT.2,ANO.(OS.LT,OUHIN,OR,DABS(OF),LT,DFMIN» GOTO 181 DHGJ P27
IF (CS,LT,EPSl CSol, HGJ 128 FLoF2 HGJ U LoL+l HGJ 31 Jol HGJ 31 OPTIMIERUNG ENTLANG DER K SUCHRICHTUNGEN HGJ C31 DO 170 M-l,K HGJ 32 IF (2~.*OO(Jl,LT,OSl DD(J)loS HGJ 33 CE~... HGJ ~4 YVa SQRTCCSl HGJ 35 VY,OSQRT(CSl OHGJ ~5 ISal HGJ 36 00 ~I I a l,K HGJ 37 U(t)'(S(I,I)+S(I,2)/VY*DD(Jll*oueIl HGJ 38 S(I,3)aUCI)/DUCIl-S(I,ll HGJ ~g LIol HGJ 41 CALL fUNC(U,F3,LI,Nl HGJ '1 IF (LI.NE.0) CEo.CE*I,S HGJ 42 If (Ll.NE.0) GOTO 71 HGJ '3 DO 60 Ial,K HGJ 44 Uell o(S(I,11-S(I,3)*DU(Il HGJ .5 CALL fUNC(U,FI,LI,N) HGJ 46 IF (LI.IIE,Il) CEoCE*0,S HGJ .7

C 71
II
c C III C
e
e III e UI
131 C 141
1111
1111
171 III gil
FFFI ABS(FI-2,*F2+F3) FFF I OABS(FI-2,*F2+F3) ST.0, U"IS+l DO BB I.I,k U(I)IS(I,I)*OU(I) IF CIS,GT,5) GOTO 131 CE •• CE*B,25 DO 118 hl,K U(I).(SCI,I).S(I,3)*CE)*OU(I)
202
IF (FFF,LT,EPS,OR.LI.NE,8) GOTO III PARABOLISCHE EXTRAPOLATION 82W. INTERPOLATION U(I)·CS(I,I)+S(I,S,* ABS(CE)/FFF*CFS-Fl)/A2)*bU(I) UCI)·CS(I,I).S(I,3)*OABS(CE)/FFF*CF3-FI)/A2)*OUCI) ST.ST+(UCI)/OUCI)-S(I,I»**2 . GGF VERKLEINERUNG DES SUCHSCHRITTES IF tld.*ST,LT.DDel'**2) DD(J).DDtl'*8,25 IF CST.LT.4BB,*DD(J)**2,AND.FFF,GT.EPS.OR,LI,NE,I) GOTO 121 00 III l.l,K IF C ARS(S(J,3').LT.EPS.OR. ABS(F3-Fl),LT,EPS) GDTO III IF (OABS(S(I,3».LT,EPS,OR.OABS(F3-FI).LT.EPS) GO TO III U(I)·C5(1,1). SIGN(5(I,3),(F3-F')/S(I,3»*II,*A2* ABS(CE»*DUCI) U(I).(S(I,I).OSIGN(S(I,3),(F3-Fl)/S(I,3»ola,*A2*DABS(CE».OU(I) COtlTINUE GGF] VERGROE8SERUNG DES SUCHSCHRITTES DOt ).oD(l,*2, LJ*' CALL FUNCCU,FN,lJ,N) If (LJ,NE,I,OR.A2*(FN.FG),lT,I,) GO TO 71 F2-FN IF (A2.(FF-F2).LT,I,) FC*(FF.F2).1,5 IF (A2*CFF-F2).LT,I.) FF.f2 IF (M,EQ.K) GOTO 2B GRAM-SCHMIDT ORTHOGONALISIERUNGSPR02EDUR KD-KD-(KD/K)*K.l UU.B. 00 15B I.l,K 8(I,3)*SCl,4)-S(KO,2)/CS*SCI,2) If (I,Ea,KD) SCI,3).S(I,5).I. UU-UUU (I, 3)"2 IF (UU,lT,EPS) GO TO 141 DO 16B l-l,K S(I,I)-uCI)/DU(I) 8(I,2)*SU,3) 5(1,4).S(I,5) 8(KO,4)*S(KD,3)_I. CS-UU J-2 IF(Iw,Ea,e)WRITE(IP,IIII)l,N,DS,Df,F2,DD(I),DD(2),FG,(I,UCI),I'I,K) FORMAT(lllIH 8TUFE NR.,I4,7X,IIHSCHRITT NR.,15,4X,3HDS*,EI5,8,
12X,JHDF.,E15.8/3H F*,EI6.9,2X,4HDDlc,EI4.7,2X,4HDD2.,El.,7, 22X,5H(FG)*,EI3,6/4(3H U(,I2,2H)"E12.5,IX)'
RETURN END
HGJ 48 DHGJ 48
HGJ '11 HGJ 51 HGJ 51 "GJ 112 HGJ 113 "GJ 114 "GJ 115 "GJ 5. "GJ 57 "GJ C57 HGJ 5.
OHGJ 51 HGJ 1111 HGJ CIIII HU II "GJ •• "GJ 82 "U 113
O"GJ '3 "GJ U
O"GJ U "GJ .5 "GJ ces "GJ •• HGJ 87 "GJ •• HGJ •• "GJ 71 HGJ 7' HGJ 7. HGJ 73 HGJ C73 HGJ 74 HGJ 711 "GJ 78 HGJ 77 HGJ 71 HGJ 711 HGJ II HGJ Il HOJ I. HU 13 HGJ 14 HGJ III "GJ IS "GJ 17 HGJ II HGJ It "GJ Fl. "GJ ·flt HUll HGJ III

203
Hauptmerkmale des Verfahrens
1m VerQleich zu den zahlreichen schon vorhandenen Methoden zur Ermittlung eines optimal en Wertes einer Funktion hebt sich das hier vorgeschlagene Verfahren hauptsiichlich durch folgende ~1erkmale hervor:
_einfache Anwendbarkeit (au6er eines Unterprogramms zur Berechnung der entsprechenden GUtewerte sind keine weiteren benutzerspezifischen Pro~ramme notwendig. auch nicht bei BerUcksichtigung von moglichen Begrenzungen);
-breiter Anwendungsbereich (Benutzung nicht auf lineare. quadratische oder konvexe bzw. konkave Funktionen beschrankt);
- geringer Programm-Umfang (knapp 100 FORTRAN-Anweisungen);
-wenig Speicherplatzbedarf (soViohl bezUgl ich des Programmumfangs als auch im Hinblick auf die Anzahl der zu optimierenden Steuervariablen);
- Kenntnis der Funktions-Ableitungen nicht erforderlich (auch Funktionen mit nichtexistierenden Ableitungen - selbst im Extremum - lassen sich behandeln);
-automatische. implizite Normierung bei der Optimierung von GUtefunktionen mit Variablen sehr unterschiedlicher Gro6enordnung;
-Moglichkeit der BerUcksichtigung von Begrenzungen fUr die Eingangsvariablen und fUr Funktionen dieser Variablen (wobei allerdings die Startwerte der Steuervariablen im zulassigen Bereich liegen mUssen);
- geringe Anzahl von Suchschritten. d.h. GUtefunktionsberechnungen. urn das Extremum mit gegebener PrazisiQn zu bestimmen (Konvergenzbeweis fUr beliebig denkbare Funktionen liegt allerdings nicht vorl.
Da das prasentierte Verfahren weniger mit den Ublichen mathematischen Formeln beschrieben wurde (deren Weiterentwicklung zu funktionsfahigen Al~orithmen viel Zeit und MUhe kostet). sondern in Form eines ausgetesteten FORTRAN-Programms aufgelistet werden konnte. dUrfte sich seine Anwendung bereits fUr die Bearbeitung einfacherer Optimierungsaufgaben lohnen.
Bemerkung: Das hier beschriebene Programm EXTREM eignet sich. auf sich allein gestellt. nur zur Ernittlung von lokalen Extrema. D.h .• bei GUtefunktionen mit mehreren extremalen Punkten wird im allgemeinen der dem gewahlten Startpunkt am nachsten liegende Extremwert erreicht.
Entsprechende Zusatzprogramme zur Ermittlung des globalen Extremums sind in den Anhangen A2 und A3 zu finden.

204
Anwendungsbeispiele
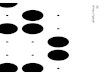
1. Beispiel: Rosenbrock-Funktion (Funktion ohne Beschrankungen)
Diese Funktion beschreibt ein enges, gekrU"'"tes "Tal", Es handelt sich um eine sehr verbreitete Testfunktion fUr Optimierungsalgorithmen.
Startpunkt (Schatzwert) fUr die Optimierungsprozedur ist der Punkt
!!aT = (-1,2; 1,0)
mit Fo = 24,2
Die Funktion hat ihr wah res Minimum be;
T !!apt = (l,O ; 1,0)
mit Fopt = o.
2. Beispiel: (Funktion mit Beschrankungen)
Gleiche Funktion wie oben, jedoch mit folgenden Begrenzungen versehen:
Aufrufendes Progra",":
DIMeNSION U(2),OUlt),ICt,5) [XTERNAL ROSEl , ROSEl U(Ua.I,1 U(I)'I,I DUll)",l OU(I)'I,1 CALL EXTREM CROI[I,I,U,Ou,I,I,[.l.,I,E.II'.~"'O'T,I' U(I)'.I,1 utl)'I,' DU C 1) ",1 DUCI)",I CALL IXTREM CROI[I,I,U,DlJ,.,t,E.I',I,[.I.,.~.,'O'T,I' ITO,. [NO

205
Unterprogramme zur Berechnung der Funktionswerte:
SU8ROUTINE ROSEl CU,F,LI,N) D I MENS%ON U (2) F.SI0 •• CU(2)-UCI) •• 2) •• 2.CS._U[I), •• 2 N·"'.S ~ETURN END
SUBROUTINE ROSE2 (X,F,lI,N, DIMENSION XC2) IF[x(2).LT.0.) LI.l IF(LI.NE.0)RETURN IF(X(1).X(2).GT.l.) lX.2 IF[LI.NE.0)RETURN F·100.*(X(2)-XC1).*2).*2·Cl •• XC1),**2 N"N.l RETURN END
Endergebnis ROSE
STu,e Nil. 211 ,. ..2ee08268!-~0
U( I). .leeemE.'1
8CHAITT NR. 187 DDI. .1381088E-12 U( 2). .le"~£.11
DS. .10173486[-.5 n,. _.17153e25E_I' 002. .2'43502£-.3 (,G). .434825E-.0 U(
F
102 ~95wfortt "I &" -1.2 I u 2 .: 1.0. F.;. 2'. 2
10' ~inimum bpi U 1 .1: u J :; 1.0. F: 0.0
100~~~~ __ ~~~~~~--~~----~~----~~ ~ ~ N
10-'
10-2
10-3
10-'
10-5
Antongsschrittweiten
1) 0.1. 0 .1
2) 0.1, -0.1 3) to, 1.0
') to, -1.0
Konvergenzeigenschaften (unbeschrankte Funktion)
Endergebnis ROSE 2
STun NA. 3. ,. .14588758IE.81 U( 1). ..1112E •• 1
SCHRlfT HA. 117 na. .13115114! •• 4 001* .2157011[-.4 DDR. .1'74883[-.5 u( a,. .31118! •• ' U(
n,. ."' ••• '.! •• ' (,G). .1458.8! •• 1

206
A 2) FORTRAN-prograJlll1 "GLOBEX" zur Ennittlung des globalen Extremums einer, beschrankten multivariablen Funktion ohne Kenntnis ihrer Ableitungen
Mit diesem FORTRAN-Unterprogramm "GLOBE X" ist es einmal moglich, mit groBer Wahrscheinlichkeit das globale Extremum einer multivariablen Funktion zu bestimmen. Zum anderen konnen damit bei beschrankten Funktionen auch Anfangsschatzwerte fUr die Optimierungsvariablen gefunden werden, welche die gegebenen Begrenzungen nicht verletzen.
Ennittlung von globalen Extrema
Das Programm EXTREM eignet sich, auf sich allein gestellt, nur zur Ennittlung von lokalen Extrema. D.h., bei GUtefunktionen mit m~hreren extremal en Punkten wird im allgemeinen der dem gewahlten Startpunkt am nachsten liegende Extremwert erreicht. Zur Bestimmung des globalen Extremums wird anstatt des Programms EXTREM das hier vorgestellte Unterprogramm GLOBEX aufgerufen. In diesem Programm GLOBE X werden in einem erste" Optimierungsabschnitt Schatzwerte durch eine Folge von nonnalverteilten Zufallszahlen festgelegt. Vektorieller Mittelwert dieser nonnalverteilten Punkte ist der yom Anwender eingegebene Anfangsschatzwert U. Die jeweiligen mittleren quadratischen Abweichungen sind durch die Anfangsschrittweiten DU gegeben. An jedem dieser Punkte wird, so fern er innerhalb der evtl. vorhandenen Grenzen liegt, eine Teiloptimierung mit dem Programm EXTREM gestartet. 1m zweiten 0Etimierun~sabschnitt werden urn den bis dahin gefundenen besten Funktionswert herum e enfalls ufalls-Sch~tzwerte ennittelt und an jedem dieser Punkte wird wiederum eine Teiloptimierung gestartet (unter BerUcksichtigung der evtl. Beschrankungen). 1st ein gUnstigerer Funktionswert gefunden worden, so wird dieser Punkt zum neuen r~ittelwert fUr die weitere Zufa11ssuche und die mittleren quadratischen Abweichungen werden mit 0,9 multipliziert (Eingrenzung des globalen Extremums). Der gUnstigste aller in diesen beiden Abschnitten ermittelten Werte wird gespeichert und im dritten Optimierunssabschnitt als Anfangswert fUr die (Haupt-) Optimierung mit dem Programm ExTREH elngesetzt. Zur DurchfUhrung dieses Verfahrens werden die Unterprogramme GLOBEX, EXTREM (siehe Anhang A 1) und ZNORV 1 (Anhang A 3) benotigt, sowie das yom Benutzer zu liefernde Unterprogramm GF zur Berechnung des GUtefunktionswertes (Erlauterungen dazu im Anhang A 1).
Bemerkung 1: Das globale Extremum kann mit diesem Verfahren nicht mit absoluter Sicherheit ermittelt werden. Die Wahrscheinlichkeit, daB es gefunden wird, steigt mit der Anzahl der produzierten Zufalls-Schatzwerte.
Bemerkung 2: Das Programm GLOBEX laBt sich auch beim Auffinden des Extremums von "schwierigen" Funktionen erfolgreich einsetzen ("enge, krumme Taler"; Extremum auf oder in der Nahe mehrerer Begrenzungen).
Bemerkung 3: Das in diesem Anhang aufgelistete Programm ZNORV 1 kann im Ubrigen unabhangig von der Extremwertennittl ung aiJch zur Erzeugung von nonna 1 vertei lten Zufall szahl en bei anderen Aufgabenstellungen benutzt werden.

207
Die Anwendung dieses Verfahrens ist denkbar einfach:
1m aufrufenden Programm ist die Anweisung CALL EXTREM •.. (aus Anhang A 1)
zu ersetzen durch:
CALL GLOBEX (GF ,K,U,DU,S ,DFMIN ,DU~lIN ,LMAX ,FOPT, IW ,L1M,L2t1,LPAR).
AuBerdem ist die Dimension des Speicherplatzes S zu erweitern auf S (K,7), vergl. Anhang A 1. Die zusatzlichen Parameter L1M und L2M geben die Anzahl der in den beiden ersten Abschnitten der Zufallssuche zu bestimmenden Zufallspunkte an. Sie sollten nicht zu klein gewahlt werden, mindestens etwa 10·K, wobei K die Zahl der GUtefunktionsvariablen bezetchnet.
Der Parameter LPAR bestimmt die Anzahl der wahrend jeder Teiloptimierung durchzufUhrenden Optimierungsstufen. Als Richtwert kann etwa O,l·LMAX eingesetzt werden. Falls die Teiloptimierung nicht gewUnscht wird, ist hier "0" einzusetzen. (1m Ubrigen mu!3 LPAR ni cht entsprechend U1AX mit Vorzei chen - zur Suche ei nes '·1ax. oder Mi n. - versehen werden, d.h. Vorzeichen von LPAR beliebig.)
Der Schreibbefehl bewirkt im 3. Optimierungsabschnitt zusatzlich zu seiner Wirkung in EXTREM bei
- IW > 2 Ausdruck des Anfangswertes fUr jeden Abschnitt, - IW > 3 Ausdruck der Werte nach jeder Teiloptimierung (sofern Verbesserung).
Zusatzlich werden bei IW = 3 und Anfangswerten auBerhalb des zulassigen Bereiches die erzeugten Zufallsvektoren solange ausgedruckt, bis ein gUltiger Anfangspunkt gefunden worden ist.
Ermittlung von Anfangsschatzwerten, welche gegebene Beschrankungen nicht verletzen
Der Suchalgorithmus EXTREM berUcksichtigt zwar Beschrankungen, die yom Benutzer einzusetzenden Schatzwerte fUr die Optimierungsvariablen mUssen jedoch im zulassigen Bereich liegen. Bei komplizierteren, undurchsichtigen Problemstellungen sind derartige "zulassigen" Schatzwerte manchmal nicht bekannt und lassen sich durch "Probieren" nur schwer ermitteln. In diesen Fallen ist das Programm "GLOBEX" auch zum automatischen Aufsuchen von Anfangsschatzwerten, welche die zu berUcksichtigenden Beschrankungen nicht verletzen, einzusetzen. Bei Verwendung der Zufallssuche mit dem Programm "GLOBEX" kann namlich mit Schatzwerten U (I), 1=1 bis K, gestartet werden, die auBerhalb der erlaubten Grenzen liegen. Die Suche wird dann, unabhangig von den eingesetzten Parametern L1M und L2M, so lange fortgefUhrt, bis ein Vektor ~ gefunden wird, der keine Grenzverletzung hervorruft.
Falls nur Anfangsschatzwerte gesucht werden sol len, die keine Beschrankungen verletzen, konnen folgende Parameter fUr "GLOBEX" vorgesehen werden:
L1M = 1, L2M = 0, LPAR = O.

208
FORTRAN-Progranm "GLOBEX"
IUBAOUTINE GLOIEX(GF,K,U,OU,S,DFMIN,DUMIN,LMAx,pa,IN,LIM,L2M,LPAR) CGLOBALE EXTAEHNEATSUCHE (H.G. JACOB U. PEB. 118U
EXTEANAL GF DIMENSION U(K),DU(K).SCK,7) DATA IPIlISI LI,I ITAN-l. NH-II lOA-I LPIISIGNCLPAA,LHAX) DO 111 I-I,K In,IS)-Un)
,. ICI,7)-UCI) CALL GF(U,FB,LI,M) M,I IF CLI.EO,I) GO TO 51 NAITE(IP,91') LI
al IF (IN.EQ,3) NAITECIP,911) M,LI,CI.SCI,7),III,K) DO 31 I-I,K CALL ZNOAYICNH,SCI,IS),DUCI),SCI,7» 3. CONTINUE LII. . CALL GFCSCI,7),FB,LI,M) IF (LI.NE,I) GO TO 28 DO "'I II!!I,K ICI,8)-SU,7)
"'. U(I)-SCI,7) s. IF CIH~GE.2) NRITECIP,92') M,FB,STAN,FB,CI,UCI),III,K)
IF (M.GE~LIM+L2M) GOTO III GO TO 91
•• IF (IW.GE.2.AND,CH.EQ,L1M.AND.IDA,EQ.e.DA.M.GE.LIM.LIM» INAITE(IP,921) H,FB,STAN,FB,(!,U(I).III,K) IF CMiEO.LIM) !DR-l
7. IF (M,GE.L1H+L2H) GOTO III DO 81 I.I,K IF (M,LT,ll") CAll ZNORYICNH.SCI,IS),DUCI),S(I,7» IF CH.GE.LIH) CAll ZNORYI(NH,UCI),DUCI),S(I,7»
I. CONTINUE LI-I CALL GF(SC1,7),F2,LI,M) IF (LI.NE,II) GOTO lSI
18 IF CLP.NE.I) CALL EXTAEMCGF,K,S(I,'),DU,I,OFHIN,DUHIN,LP,F2,1' IF (FLOAT(LP).CF2.FB).LE~8.) GOTO 88 IF (IN.GE.3) NAITECIP,928) H,F2,STAN,FB,(1.8eI,,),III,K) Fa-F2 DO 1118 I-I,K IF CH,GT.LIH) .DUCI)-DUC!).8,9
I.. U(I)-SCI,7) IF (H.GT.L1H.AND.M.LT,LIH.L2H) STAN-STAN.8,9 GOTO 81
II. CALL EXTAEH(GF,K,U,DU,S,DFHIN,DUH!N,LHAX,F2,IN) RETURN
••• FORHATe/39H ANFANGSNERTE YEALETZEN BEGRENZUNG, LII,I3/IX,41(IH.,) II' FOAMATe/3H H-,I"',"'H LII,I2/4(3H U(.I2,2H) •• E12,8,IX') 121 FOAHATC/3H M-,I"',3H F.,EI3,1S,8H STANI,EII.3,
14H FB8,EI2.5,1"'(3H U(,I2,2H)I,E12.S,IX» END

209
• Anwendungsbeispiel
•
GUtefunktion: 2 2 F = UI + U2 - cos (I8.UI ) - cos (I8·U2)
Es handelt sich urn einen Paraboloid mit Uberlagerter Cosinus-Funktion. so daB
sehr viele lokale Extrema entstehen.
Beschrankungen:
- 3!S UI ~ 3
- 3 !S U2 53
Anfangs-Schatzwert:
uT ~
(2,5 2,5)
Wahres Minimum: T (0 0) .!:!oPt ,
Fopt - 2
Aufrufendes Programm
DIMENSION U(2),DU(2),S(2,7) EXTERNAL. FeOS U(U a 2.!5 U(2)e2.5 DU(1)=3. OU(2)=3. CALL. GL.OBEX(FCOS,2,U,DU,S,1.E-10,1.E-10,"50,FEX,2,50,50,5) STOP END
W. Krug. S. Schonfeld. C.-D. Wolf "Programmsysteme zur rechnergestUtzten
Optimierung von Konstruktionen".Kalllller der Technik. Karl-Marx-Stadt, 1976.

210
Unterprogramm zur Berechnung des Funktionswertes:
SU8ROUTINE FCOS (U,F,LI,N) DIHEN5ION U(2) N8N.S JFCU(I).LT.-3 •• 0R.U[I).GT.3.'LJ8' JFCU(2).LT.-3 •• 0R.UC2).GT.3.'LI.2 I'(LJ.GT.I)RETURN F8 U(1) •• 2.COSCI8 •• U(I».U(2) •• 2_CDS(18 •• U[2» RETURN END
Resultate:
". • f· .11 •• II.E."'2 ST .... .111£+111 u( I)· .25088E'll U( 2)· .25001£+11
M. III f .... 1 S.Ii.IIEofl\ STAll. .1I1"oIU IJ( I)· .31eUE'11I1I u( 2)· .;U&7IE0011
". 1." f. -.11I951117Eo"'l STAW_ .729E''''1I U( U· • 381155E-n
STUff MR. 3 ,. -.211I1eeeI10E''''1 U( I). -.Ii.Ii.IE .. 16
U( 2) • .1II847E-1
SCHRITT HR. 21 001- .552.272£-12 U( 2). -.21133IE-015
fe. .II •• IIE082 U(
fA- -.15.155E.II u(
f8- -.210el'f+1l1 U(
os. .51122&117£-15 ~D2- .552.272E-02 U(
OF. ..~ee"'8Eo" IFG). -.2C0e2IE+'1
M - Zahl der erzeugten vektoriellen Zufallsschatzwerte Q. F - Aktueller GUtefunktionswert. LI - Verletzung einer Begrenzung (Ausdruck nur bei LI # 0). STAW - Standardabweichung (mittlere quadratische Abweichung) der erzeugten
FB
U( 1) }
U(K)
Zufallsschatzwerte, bezogen auf 1 zu Beginn der Optimierung. Bester GUtefunktionswert.
Aktuelle Werte der Optimierungsvariablen, die zum aktuellen GUtefunktionswert F gehoren.
Die Ubrigen Bezeichnungen im Ausdruck des Programms EXTREM sind im Anhang Al er-1 autert.

211
A 3) FORTRAN-Progralllll "ZNORVl" zur Erzeugung nonnalverteilter Zufallszahlen
SUBROUTINE ZNORYI (NM,GMW,GMQA,ZNV) C C -ERZEUGUNG YON NORMALYERTEILTEN ZU'ALLIZAHLEN MIT GMN ALS C GEWUENICHTEH MITTELWERT UNO GMQA ALS GENUENSCHTER MITTLERER C QUADRATISCHER ABWEICHUNG, C D.H. CA. 71 PRDZENT DER ERZEUGTEN ZAHLEN LIEGEN ZwISCHEN C GMW-GMQA UNO GHW+GMQA (H.G.JACOB, 28.JUNI 18se, C -NH - INITIALISIERUNG OER PERIOOE DER PSEUDD.ZUFALLSZAHLEN C DURCH SET ZEN YON NM-I (REPRODUZXERBARKEIT DER ZAHLENFOLGE) C .GHW. GEWUENSCHTER MITTELWERT C -GHQA- GEWUENSCHTE HITTLERE QUADRATISCHE ABWEICHUNG C -ZNY. NORHALYERTEILTE ZUFALLSZAHL, WDBEI C YARIATIONSBREITE - 12 * GHQA, C D.H. ZNYMIN~- GHW-e*GHQA UND ZNYMAXc- GMw+e*GHQA C
DIMENSION ZUY(12) DATA A,EM,XI/181.,32768.,123.1 IF(NM.EQ.0)XI-123. ZNY-0. DO 2 1-1,12 XI-hXI IF(XI.GT.EM)XI-XI-EM IF(XI,GT.EH)GOTO 1 ZUY(I)-XI/EH NM-NM+l
2 ZNY-ZNY+ZUY(I) ZNY-GHQA*CZNy-e.)+GMW RETURN END
Die vom Progralllll "ZNORVl" Uber die "multiplikative Kongruenzmethode *" erzeugten Zufallszahlen unterliegen einer Periodizitat. deren Lange vom Rechner abhangen kann. Falls bei einem gegebenen Rechner die Periode der "Pseudo"-Zufallszahlen nicht ausreichend lang sein sollte. mUssen die beliebigen. aber moglichst graB zu wahlenden Zahlenwerte A ("Faktor") und EM ("Modul") im Progralllll geandert werden.
* z.B. K. Bauknecht, J. Kohlas, C.A. Zehnder: "Simulationstechnik", Springer-Verlag, Berlin, 1976.

212
A 4) FORTRAN-Progralllll IINTEG4" zur Integration nach Runge-Kutta-Gn 1 ..
Oieses Progralllll eignet skh fUr die Simulation von dynamischen. ggf'. verkoppelten.
nichtlinearen. zeitvarianten Systemen beliebiger Ordnung. In Verbindung mit dem
Progralllll "TOTZ" lassen sich auch Totzeiten berUcksichtigen.
SUBROUTINE INTEG4 (DER,T,TE,DT,X,XP,Q,NDIM' C C INTEGRATION NACH RUNGE-KUTTA-GILL C28.JUNI t.81, C C DER - FORMALER NAME DES UNTERPROGRAMMS MIT AILEITUNIEN C (WIRKLICHER NAME DES U.P. MUSS 1M AU'RU'ENDEN PROIRAMM C UNTER EXTERNAL DEKLARIERT SEIN) C T - UNABH. VARIABLE, Z.8. ZEIT (MIT TI INITIALJIIEREN) C TE - ENOZEIT, BIS ZU DER !NTEGRIERT WIRD C DT - INTEGRATIONS-SCHRITTWEITE C X - YEKTOR DER INTEGR, WERTE (MIT XI INITIALJIJIREN) C XP - vEKTOR DER RECHTEN SEITEN (ABLEITUNGEN) C Q - vEKTOR DES AKKUMULIERTEN FEHLERS (MIT I JNITIALIIIEREN) C NDIM- ZAHL DER DGLN. 1.0RDNUNG C
DIMENSION XP(NDIM),X(NDIM),Q(NDIM) DIMENSION A(4),B(4),CC4) DATA A(1),A(2),A(3),A(4)/,5,.2'28.32,1.717117,.I ••••• 71 DATA 8(1),B(2),8(3),B(4)/2.,1,,1,,2,1 DATA C(1),C(2),C(3),C(4)/,5,.2'28'32,l,717117,,51 DELT-DT
3 MSTEP-l 21 IF(T.DT.GT.TE)DELT-TE-T
IF(A8SCT-TE)-I.E-3*DT)23,23,22 22 CALL DER(X,XP,T,MSTEP)
C RUNGE-KUTTA SCHRITT AJ-ACMSTEP) 8J-8CMSTEP) CJ-CCMSTEP) 0011 I-l,NDIM R I-DEL T*XP (I) R2-AJ*CRl-8J*Q(I» X (1) -X Cn.R2 R2-R2.R2+R2
11 Q(I)-Q'I).R2-CJ*Rl GOTO (1,2,1,3), MSTEP
1 T_T.II,5*DELT 2 MSTEP-MSTEP.1
GOT022 23 RETURN
END
.~ Personliche Mitteilung aus dem Institut fUr MeB- und Regelungstechnik der TU MUnchen. 1975.

213
Das Integrati ons-Unterprogranrn "INTEG4" ruft ei n anwenderspezifi sches Unterprogranrn auf, in dem die Ableitungen i in Funktion der Zustande ~, der EingangsgraBen ~ und beliebiger, evtl. zeitabhangiger Parameter E berechnet werden:
i = i (~,~, E) (Zur Anwendung des Progranrns "INTEG4" mul3 also ein gegebenes Differentialgleichungssystem n-ter Ordnung in n Differentialgleichungen 1. Ordnung umgewandelt werden.)
r SUBROUTINE AAL (X,XP,T,HSTEP) DIMlNsioN X(2) ,XP(2)
C XP(t) - ••• Ft (X,U,P,T) C XP(2)a ••• F2(X,U,P,T) C X,ZUSTANOSGROESSEN C U.STEUERGROESSEN C P.OIVERSE PARAMETER (EVTL. ZEITASH.) C HSTEP NUR BEl TOTZEIT BENOETIGT
RETURN END
FORTRAN-Progranrn "TOTZ" Mit diesem Programm lal3t sich eine Totzeit simulieren, die sich tiber einen Zeitraum erstrecken kann, der ein beliebiges Mehrfaches von DT (z.B. Integrationsschrittweite)
umfal3t. SUBROUTINE TOTI(XE,XA,NOT,MSTEP,INIT)
c C SIMULATION EINER TOTIEIT (AUCH fUER INTEGR."PROGR, INTEG4) C IH.G.JACOB/H.LINOE, 15.JAN.1982) C ·OIE AUSGANGSVARIABLE XA(T) ENTSPRICHT OER U" (NOTeOT) C IEITVERSCHOBENEN EINGAGSVARIABLEN XEIT), NOBEl OT OlE C SIHULATIONSZEIT ZWISCHEN ZNEI AUfRUfEN BEOEUTET C (BIN. INTEGRATIONSSCHRITTWEITE VON INTEG4) C .BEI GEBRAUCH UNABH. VON INTEG4 1ST "STEP-I IU SETZEN C ·INITIALISIERUNG OURCH SET lEN VON INIT-H, NOBEl ALLEN C SPEICHERPLAETZEN SINOT) OER AN~ANGSWERT XE IUGEWIESEN WIRO C .0IHENSION VON 5 MUSS GROESSER GLEICH NOT SEIH C
OIHENSION S(2111) If (INIT.NE.8) GOTO 2 00 1 I-I,NDT S(l)-XE INnol not
2 If ("STEP.GT.l) GOTO 3 SSoS(ll) S (12)'XE Uoll-l If (IZ.Eg.ll) 120NDT XA-SS RETURN
3 IF (HSTEP.LT.4) XAo(SS+SIIZ»/2. IF (HSTEP.Eg.4) XAoSIII) RETURN END
Anwendung im Zusammenhang mit "INTEG4"
Da das von "INTEG4" aufgerufene Unterprogranrn "ABl" zur Berechnung der Ableitungen pro Integrationsschrittweite DT viermal aufgerufen wird, mtissen in diesem Progranrn "ABl" (siehe oben) folgende Anweisungen stehen, falls z.B. das Signal der Zustandsvariablen x(2) urn 6 * DT verzogert werden soll:
CALL TOTZ (X(2),XA,8,HSTEP.INIT) X(2)'U
(Die Initialisierung mit INIT = 0 geschieht tiber einen COMMON-Block in dem Progranrn, das "INTEG4" aufruft.)

214
A 5) FORTRAN-Programm "TSCH2" eines Tschebyscheff-Polynomsystems zur Darstelluns mehrerer Kurven in der Ebene bzw. einer mehrdimensionalen Kurve im Raum
Die Tschebyscheff-Polynomsysteme eignen sich aufgrund ihrer gUnstigen Eigenschaften der schnellen und gleichmaBigen Konvergenz besonders gut zur numerischen Ermittlung und Darstellung optimaler Kurvenverlaufe.
Das Funktionensystem (mehrere Kurven in der Ebene bzw. eine Kurve im mehrdimensionalen Raum) hat den Aufbau
FO = ceo TO(x) + cOl· T1(x) + cO2 • T2(x) +
Fl = clO • To(x) + cll • Tl(x) + c12 • T2(x) +
F2 = c20 • TO(x) + ...• F3 = ...•
wobei die Funktionswerte der Tschebyscheff-Polynome an der Stelle x sich folgendermaBen berechnen lassen (xa = linker Rand, xb = rechter Rand):
x - x To = 1; Tl = 2 xb- x: -1; T2 = 2 Tl • Tl - To
Tn = 2 Tl • Tn-1 - Tn-2 •
IUBROUTINE TICH2 elAB,GA,GB,C,FM,K,N) C C "EHRERER GEN CHTETER C N M " C C C lAB -ARGUMENT C CA -LINKE GRENZE C CB -RECHTE CRENZE C C(K,N)-CENICHTUNCEN C FWCK) -FUNKTIONIWERTE C K -ANZAHL DER KURYEN C N -GRAD DER POLYNOME+l C
DIMENSION CeK,N),Te21),FN(K) IN.2.*elAB-GA)leCa-CA)-1. T(I)-l. TUn-IN DO I I-;',N
I Tel).2.*IN*Tel-I)-Tel-2) DO 12 J-I,K FII(J).I. DO 12 l.l,N
12 FII(J).FNeJl+C(J,I)*TCI) RETURN END
Bemerkung: Da bei FORTRAN nullwertige Indizes nicht zugelassen sind. wurden 1m Program "TSCH2 u alle oben angegebenen Indexwerte um 1 erhiiht.

215
A 6) FORTRAN-Progranm ·SPLI2" zur Anpassung mehrerer Kurven in der Ebene bzw. einer Kurve im Raum an gegebene Punkte
Der Hauptvorteil dieses Kurvensystems liegt in seinem gleichmKBigen Verlauf ohne uOberschwingungen" und insbesondere in seiner Anschaulichkeit begrUndet.
F, (x) I Y, I ~ I Y,41
F2 (x) I 2t \ 13t:! yllV I F, (x)
y. ['" Y12 Y13 I I "Y23 / Y241 I I Y2l Y22 Y23
Y2'" I I I )122: ~(X) I I I I I I
I I I I I
X, X2 X3 X4
Die gegebenen oder von einem Optimierungsalgorithmus gelieferten Elemente Yji fUr die V-Matrix des Progranms "SPLI2" stellen nijml ich expl izit die Funktionswerte der Kurven Fj an den nicht notwendigerweise ijquidistant gesetzten StUtzstellen xi dar (siehe auch Abschnitt 3.2a).
Y14] Y24
Die Kurvenverlijufe zwischen den StUtzstellen xi bestehen aus Polynomen 3.Grades. wobei alle benachbarten Polynome Si bzw. Si-l folgenden Bedingungen genUgen:
Si(xi ) = Si_l(xi ) = Yi
S~(xi) = S~_l(xi) Si(xi ) = S1_l(xi )
gleiche Funktionswerte.
gleiche Ableitungen.
gleiche KrUnmungen.
Auf Wunsch konnen im Progranm "SPLI2" die Ste·igungen an den Anfangs- und Endpunkten der Kurvenverlijufe vorgegeben werden. (Bei freien Steigungen werden die KrUnmungen an den Randpunkten zu Null gesetzt.)
(FORTRAN-Progranm umseitig.)

216
FORTRAN-Progralllll "SP1l2u
SUBROUTINE SPLI2 (XX,IN,X,Y,F_,J,K,YABLIA,YABLIB,M,MSCHR) C C FUNKTIONSHERTE HEHRERER KUBISCHER SPLINE.POLYNO"IYSTE"E C ( H.G~J~COB, 17.0KT.18eB ) C XXaAkTUELLEH X-wERT (FUER ALLE KURVEN GLEICH) C 1~ • B£Ir. EHSlEN AUFRUf YON SPLI2 "IT EINE" GEG. IATZ C YON STUElZPUNKlEN MU5S INa, GESETZT WERDEN C X(J) a X~VEKTOR OER GEGEBENEN ITUETZPUNKTE C (FUER ALLE KURYEN GLEICH) C Y(K,J) a Y-MATRIX (SPALTEN a fW-YEKTOREN DER GEGEBENEN C STUETZPUNKTE) C fM(K) a GESUCHTE fUNKTIONSMERTE IN ABH. YON XX C J • ANJAHL OEM GEGEBENEN STUETZPUNKTE [J.LE.R') C K a AN%AHL OER GEGEBENEN KURYEN 'K~LE.8) C YABL1A(K) • GEWUEMICH'E ITEIGUNGEN 1M ERITEN PUNKT C YABL1B(K) a GEWUENICHTE ITEIGUNGEN 1M LETZTEN PUNKT C [BEl GLEJCHGUELTIGEN ITEIGUNGEN lIND BELIE'IGE MERTE C ANZUGEBEN, DIE JEDOCH IGNORIERT WERDEN) C M(K)al • DIE ITEIGUNGEN lIND 8ELIE81G C M(K)a2 - BEIOE ITEIGUNGEN SIND YORGEGEBEN C "lK) a3 • ITEIGUNGIM ERST EN PUNIT YORGEGElEN,IM LETZTEN IEUnn C "lK)a •• STEIGUNG 1M ERSTEN PUNKT 8ELIEBIG,IM LETZTEN YORGEGEIEN C "ICHR.' • DIE FUNKTIONSWERTE WERDEN IN DAS AUFRUFENDE PROGRA"M C UEBERGEBEN C MSCHR.l - XX-NERT UNO FUNKTIONSNERTE WERDEN AUIGEDRUCKT C UNO IN DAS AUFRUFENDE PROGRAMM UEIERGE8EN C
DIMENS10NFN[K),XlJ),YlK,J),MlK),YABLIACK),YAIL1ICK),YA8Llr',II), lAl8,11),Bl8,11),Cl8,11),MAT(2,1,),MATRll,21),YECCII),VECI(I.,
REAL "AT ,MAT2 1FlIN.NE •• )GOTO II JJaJ-l MAT(2,I)a2.-[X[I)·X(I» MATll,l,aMAT(I,I)/I. MAT(2,J,aR.t(X(J)-X(JJ" DO I 1.2,JJ MAT(I,I).2.*'X'I+I'_X,I_I»
I "ATll,l)aX'I+.).X(I) DO :5 U.I,K VECCI).e.*YABL1ACKK).e.leX'2'.X(I"e'Y'KK,I).Y(KK,1» VEC(J).e.I'X[J).XCJJ»*lY(K,J).Y'K,JJ»we.eYABLIB(KK, DO 2 Ia2,JJ
2 VEC(J).e./(XCI).X(l-I»-CYCKK,I).Y(KK,I •• » 1-6./(Xll+.)-Xll»-[YCKK,I+.).YCKK,I)' If("CKK).Eg.I.OR.MlKK)~EQ.4)GOTO II "AT2e2,I)aMAT(2,1) VEC2CI'.-VECCI'/MATIC2,., Nla. N4.JJ GOTO .4

13 MAT2C2,2).HAT(2,2) VEt2(2).~YEt(2)/MAT2(2,2'
N1-:! UBL2 (KK, 1) -e, N4.J-2
217
1. IF(HCKK),EQ,2,OR,M(KK),EQ,') GOTO 15 N2.J-2 Nh2 UBL2(KK,J)-e, GOTO 16
115 NhJJ N3-1
11 003 I-N1,N2 MAT2(3.1)--MAT(1.1)/MAT2(2,I) MAT2(2.1+1)·MAT(2,1+1)+MAT(1.1)*MAT2(3,I)
J YEt2(I+l).-(YEC(I+.)+MAT(1.I)*VEC2(I»/MATaC2,I.l) IF(H(KK).EQ.2.0R.H(KK).EQ.4)YA8L2(KK,J).VEC2(J) IF(H(KK).EQ.'.OR.M(KK).EQ,3)YA8L2(KK,JJ).VEC2(JJ) 00 4 I-NJ,N4 N-J-I
4 YA8L2(KK,N)-YEC2(N)+MAT2(3,N)*YA8L2CKK,N.l) 00 5 I-l,JJ A(KK.I)-(YABL2CKK,I+1)-YA8L2eKK,I)/(G.*(XCI.l)-X(I») BtKK,I)aYABL2tKK,I)/2.
, C(KK,I).(Y(KK,I+.)-Y(KK,I»/(XCI+1,-XCI))-CX(I.1) l-X(I»*CYA8L2CKK.I+I)+2.*YABL2(KK,I»/I.
IN-I 1-1
al IF (XX.LT.Xel» GOTO G 21 IF (XX.LE.xeI.'» GO TO 7
IF CI.LT.JJ) 1-1+1 IF (I.LT.JJ) GOTO 21 GOTO 7
e IF (I.GT.l) 1-1.1 IF (I.GT.I) GOTO 28
7 XXI-XX·XCI) 00 9 KK-1.K
9 FN(KK)-Y(KK,I)+XX1*(C(KK.I)+XXI*(B(KK,I).XXI*ACKM,!))) IF(MSCHR.NE.0) WRITE(lG,8)XX.(KK.FW(KK),KK-1,K)
8 FORMATe/4H X-,E12.5,/4(5H FW(,Il.2H).,!12.!5» RETURN END

218
A 7) FORTRAN-Progra/1111 "TGHVP2" zur Darstellung von zeHl ich veriinderl ichen SteuergraBen durch den Menschen
Dieses Funktionssystem ist besonders fUr Steuerungen geeignet, die von einem konstanten Wert zu einem anderen konstanten Wert geTuhrt werden, wobei der Obergang nicht sprungartig, sondern allmiihlich erfolgen soll (z.B. Steuerung eines Flugzeuges).Weitere Anwendungshinweise sind im Abschnitt 3.2a enthalten.
FW(1)
e(6,1) e(3,1) x
Je nachdem ob 1, 2, 3 ... Obergiinge Tur die beliebig zahlreichen Kurven (Zahl N) darzustellen sind, mUssen fUr jede Kurve 4,7, 10 •.. Koeffizientenwerte (Zahl K) geliefert werden. Die Koeffizientenmatrix C zur Beschreibung der N Kurven hat also die Dimensionen C (K, N).
c c c c c c c
aUIROUTINf T8HY'2 (X,'W,C,K,N)
'UNKTIONaW.RTf MCHRERER HY'ERIElTANI!N.KURYENaY.T ME (H.i.JACOB, II.JUN! I"" NaZAHl OER ITEUERUNI.KURYEN KIZAHl OER KOE"!!!ENTEN 'RO KURVE (K •• ,',I •••• ) ,wCN)a'UNKTION.WERTE IN A'HAENII'KIIT VON X
OIMENS!ON CCK,N),'W(K, MI CKe7) '1+1 00 I JII,N CIITANH(I.*(X-C(I,J)"AlaCC(I,J)" 'WCJ),CC'*CCCI,J,-C(',J"+CCCI,J).C(',J",'I. I,CN.LE.S' lOTO 2 00 I III,M l.hl C"CC(L-I,J)-CeL+"J,,'I. CI'TANH(I.*CX-CCL,J»)'ASleCCl-S,J)),
, 'WeJ).'WeJ)+CI*eCI-l., I CONTINUE S RETURN
END

219
A 8) FORTRAN-Programn "TSCH3" eines Tschebyscheff-Polynomsystems zur Darstellung einerFlache im Raum
Das Tschebyscheff-Polynomsystem beschreibt eine Funktion z = f(x,y), die man sich als Flache im Raum vorstellen kann. Diese Funktion setzt sich aus einer Kombination von verschieoenen Tschebyscheff-Polynomen (T-Polynome) zusammen.
To = 1
Tl = x
T2 = - 1 + 2 i T3 = - 3x + 4x3
T-Polynom 2.Grades
T-Polynom n.Grades
Nach Bedarf, entsprechend der Form der nachzubildenden Flache, konnen in x-Richtung T-Polynome n~ten Grades und in y-Richtung T-Polynome m-ten Grades vorgesehen werden.
z(x,y) [cooTo(x) + co1T1(x) + ... +conTn(x)] .To(y)
+ [C10To(x) + c11T1(x) + ... +C1nTn(x)] .T1(y)
+ [c20To(x) + c21T1(x) + ..• +C2nTn(x)] oT2(y)
Die Wichtungsfaktoren Cij' die in einer Matrix ~ zusamnengefaBt sind, konnen mit einem Optimierungsprogramn bestimnt werden, das-bekannte StUtzstellen zi(xi , Yi) bewertet. Man erhalt also ein Gleichungssystem der Form
z(x,y) = [~ .!.(xW .!.(y)
wobei die Matrix ~ aus (n+l).(m+l) Koeffizienten besteht. Die Ordnung des Systems wird durch die GUteforderungen an die Tschebyscheff-Funktion bestimmt.
Da im vorhandenen TSCH3-Programn anstatt der Wichtungs-Matrix ~ ein KoeffizientenVektor ~ verwendet wird, muB folgende Transformation vorgenommen werden:
_[~oo '" Con] ~ - . - cmo '" cmn

In FORTRAN IV ist ein laufindex von 0 beginnend nicht maglich. Aus diesem Grund wird jeder Index um 1 erhoht.
Die Eigenschaften einer guten gleichmaBigen Konvergenz der T-Polynome sind nur fUr x- bzw. y-Werte zwischen -1 und +1 gewahrleistet. So wird im FORTRAN-Programm TSCH3 durch die Vorgabe ·der oberen und unteren Grenzen von x und y eine diesbezUgliche automatische Normierung durchgeruhrt.
SUBROUTINE TSCH3 (X,Y,XA,XB,YA,YI,C,Z,NXI,MYI,NC) C C FLAECHE 1M RAUM (NX1-l'*'MY1-l'-TER ORDNUNI Z.'CX,Y) C OARGESTELLT OURCH lIN TICHIIYSCHI"-'DLYNDMIYITIM C H.G.JACOB C21.JUNI ltl') C X,y UNABHEANGJI! VARIABL!N, Z 'UNKYION'WIRT C NXI,MYl IRAO+l IN X,Y-RJCHTUNI CLI.l" C XA,XI UNTER!, OIIR! IR!NZI VON X C YA,YI UNTERE, OIERI IRINZI VON Y C 'ILO C ENTHAILT KOI"IZJINTIN C OIMENSJON VON CI (NX1*MY1,.NC C
DIMINSION C(NC),TXCI.),TY(I') XN,a.*(X-XA)/CXI-X.)-I, YN-2.*CY-YA)/CYI-YA)-I. TxCUel. TXCIU-XN TYUhl. TY cahYN XNI.2 •• XN YN2.2 •• YN DO 1 l.a,NXI TX(I).XN2.TX(I-l)-TXCJ-.) DO • Je3,MY!
2 TYCJ)-YN2*TYCJ-I)-TYCI-.) Z". DO II Uel,MY! U .... IU .. (U-I)*NXI DO a. nel,NXI JHI.Ul+U
2. U.U+CCJHI)*TXCla) l' z.Z+U.TY U I)
RETURN END

Sachverzeichnis
Die unterstrichenen Zahlen weisen auf die Seiten hin, wo der entsprechende Begriff definiert oder schwerpunktmaBig behandelt wird.
Abbruchkriterien (fUr die Optimierung) 198
AbreiBen (einer Stromung) 155 Abtastregelkreis 17 Ableitungen
(von Funktionen) 23, 34, 55, 196, 203, 215
Abweichungen -, aufintegrierte 20 -, gewichtete 20 -, quadratische 20, 99, 206
Abwind 114 Abwindgeschwindigkeit 153 f Abwindverteilung 154 Achsenkreuze 82f, 89f adaptive Regelung 1ITi7 aerodynamisches Koordinaten-
system 90, 94, 123 Airbus A3001T1f aktive Federung 147 d'Alembert'sches Prinzip 78 Algebraisierung
(eines Optimierungsproblems) 21 AllgemeingUltigkeit
(von Optimierungsverfahren) 178 Amplitudenniveau (einer Kurve) 47 Analogrechner 31 Anfahrvorgang 1, 98, 102 f Anfahrzeit 11 ----Anfangsentscheidung 28 Anfangsprofil 63 Anfangsschatzwerte 51, 197, 206f Anfangsschrittweiten 197f, 2~ Anfangszustand 10, 36, 63 Anfangsintervall 22 Anlagen (verfahrenstechnische) 19 Annaherungspolynom 22 Anpassung von Kurven
(an gegebene Punkte) 13 Anregung (der EingangsgriDBen) 20 AnschluB-Steifigkeit 152 Anstellwinkel 155, 83, 89, 111f, 127 Anstellwinkelschwingung-r09 Anstromgeschwindigkeit 149
Antriebskraft 79, 83 Antriebsmoment 88 Anwendungsbereich (bzw. -moglich-
keiten, von Optimierungsverfahren}~, 51, 55, 178, 203
Anwendungsfreundlichkeit (von Optimierungsverfahren) 29, 55, 178, 195, 203
Approximationsstruktur 39, 40 a-priori-Informationen
(oder -Kenntnisse) 10, 15, 18f, 24, 29, 35, 41, 47
Arbeits --- punkt 10, 68f, 83 - kurve TIT, 108f - flache-,r2, 48, 64, 147f
Auflosung von ---- Gleichungssystemen 15 - Randwertproblemen 20
Auftriebsbeiwert 113f, 127, 130, 155, 82f ----
Auftriebskraft 101f, 114f Aufwand (zum Einsatz eines Ver-
fahrens) 6, 20, 28, 73, 179 Aufwind 121f AusgangsgroBen 6, 71, 197 Autopilot 108, 113 Axialkraft 156
Bahnazimutwinkel 89, 111f Bahnfestes Koordinatensystem 123 Bahngeschwindigkeit 123, 127 Bahnneigungswinkel 89, 110, 111f,
123, 127 --Basisstrom 57 Baukastensystem (-prinzip) 178, 180 Bedingungen (notwendige-, fUr
Extremum) 23, 29f, 34 Bedienungselemente 46 Begrenzungen (bzw. Beschrankungen)
If, 6, 11, 25, 26, 27, 31, 36, 54, 119, 126, 196, 199, 203:-206f
Begrenzungskontrolle (bzW:--ver-letzung) 36, 54, 199, 207

Beiwert 83f. 115 Bellman'scnes Optimalitatsprinzip 28 Bellman'sches Verfahren 28. 40 Benutzer- bzw. Anwendungsfreundlich-
keit (von Optimierungsverfahren) 29. 34. 51. 55. 178. 195. 203
beobachtbar 72. 107 Beobachter 8 Beschleunigungskraft 78 Beschleunigungsphase 118 Beschrankung (siehe Begrenzung) Bestrafungsfunktionen 6. 20. 30. 36.
55. 199 Betriebstunrung 10 Betriebskosten 9 Betriebspunkt 1 Betriebsverhalten 2 Betriebszustand 175. 153. 19. 40 Bezugsflache 113 BlattanschluB 148 BlattanschluBkrafte 157 Blatteinstellwinkel 155, 160f Blattgewicht 156 Blattholm 149 Blattumdrehung 165. 170 Blattverwindung 164 BHen 123 Brennkammer 11 BrUckenkonstruktionen 21 Butkovskiy'sche Integralgleichung 31
Chargen-Prozess 10 chemische Reaktionen 60 Computer-Rechenzeit 4. 28. 30. 32.
34. 39. 41. 47, 62. 119. 179 Coriolis-Kra~149. 175
Dampfung 103 Dampfturbine 19 Deformationsenergie 21 Dekomposition (eines Optimierungs-
problems) 32 Derivativ 83 Destillationskolonne 13 deterministische Modelle 37 Deviationsmoment 81 dezentrale Regelung 32 Differentialgleichungssystem
-. Euler-Lagrange'sches 30f -. 1 ineares 70 -. nichtlineares 17. 108. 111f.
213 -. partielles 12. 20. 32. 63 -. Riccati'sches 70
Differenzengleichungssystem 32. 63 Differenzenverfahren 63
Differenzierglied 98 Diffusionsproblem 20 Dimensionierung
(elektrischer Schaltungen) 57 Diode 57 direkte Optimierungsverfahren 23. 29.
30. 34. 177 -Dirichlet'sche Randbedingungen 63 Diskontinuitaten
(von Kurvenverlaufen) 53 diskrete Modelle 37 Diskretisierung 63. 164 Drehl>eschleunigung 80 Drehrichtung 153 Drehstromgenerator 19 Durchsatz (maximaler) II, 14 DurchstartmanHver 108f. 126f DurchfluBgrad 153f dynamische (s)
- BetriebsfUhrung 10 - Optimalsteuerung 10 - Optimierung i,. 28f. 108f - Programmierung 28 - Simulation 117 - Systeme 30. 35 - Verhalten 13. 15. 63. 117, 119
Echtzeiteinsatz 4 Echtzeitsimulation 20 Eigenform 149 Eingangsgr<S6en (-variablen) 5f. 16.
113. 159. 196f Einschwingverhalten 103 Einschwingvorgang 132 EinspritzdUse 11 Einstellwinkel 147. 160. 169 EisenhUttentechnik 1~ elliptische Randwertprobleme 20 Emitter 57 Endbedingungen 39 Endintervall 22 Endzustand n. 36 Energie (eines Flugzeugs) 3
-.kinetische 110. 131. 134. 138 -,potentielle 128.-,r,r1. 134. 138
Energieverbrauch 11 ----Energiezufuhr 11 Entkopplung 19. 73f
-. unvollstandige 20 Entscheidungszeit (eines Piloten) 146 Endbeschleunigung 157 Erregerspannung 19 Euler-Lagrange'sches Differential-
gleichungssystem 30f Eulerwinkel 90 Evolution (biologische) 27

Extrapolation -, 1 ineare 24 -, parabolische (bzw. quadra-
tische) 24, 27, 52, 52, 53, 202
Extrapolationsprinzip 22 extremale Charakteristik 14 Extremum (Optimum)
- globales 29, 39, 203, 206f, 208 --
-, lokales 16, 23f, 26, ,li, 196, 203, 206f
Extremwertregelung 13f
Fahrwerk 115, 128 Federkonstante 149 Federmoment 152, 156 Federsteifigkeit 164 Fermat'sches Prinzip 21 Festigkeitsbeschrankungen 119f Finite-Element-Methode 20 Fibonacci-Suchstrategie 22 Flache (optimale) 1, 12, 48, 171f,
219f --Fletcher-Broyden Methode 58 Flexibilitat (von Optimierungs-
verfahren) 178 Flugbetriebsbeschrankungen 120 Fluggeschwindigke,it 153 Flugbahn (-trajektorie) 109f, 114 Flugwindneigungswinkel 123, 127 Folgekonvergenz 19 -Folgeverhalten 106 FORTRAN-Programme 195f Fortschrittsgrad 153 Freiheitsgrad 148 Frequenz (eines elektrischen
Netzes) 19 - komplexe 98
Frequenzbereich 98 FUhrungsverhalten 17, 99, 103f Funkfeuer 46 Funktion (GUte-) 38, 51, 55, 70, 72,
197, 199 --- beschrankte 196, 206 - monovariable 21 - multivatiable 51, 196f, 206 - quadratische 37, 52, 71f,
203 -Funktional (GUte-) 29, 38, 51, 55,
178, 197 --Funktionaloptimierung 27 Funktionsapproximation 11, 22, 62
Gegenwind 121f, 127 gekoppeltes System 19
223
Genauigkeit (von Verfahren) 1, 15, 22, 195
Generator (fUr elektrisches Netz) 19
geodatisches Koordinatensystem 79, 86, 89f
Geratetrager 68f, 101 Gewichtsmoment 152 Gewichtskraft 156 Ge\~i chtungen, Gewi chtungsfunkti onen
2, 15, 38, 43, 97, III Gierwinke169, 89 GleichgewichtsbEUringungen 79 Gleichgewichtslage 20 Gleichungssysteme (n)
- Losung von, 15 -, tridiagonale 64
globales Optimum (bzw. Extremum) 29, 39, 206f
Gradientenverfahren 24, 4~ 60f Gram-Schmidt-Orthogonalisierung
52, 202 grun~rmonische Schwingung 162f Green'sche Matrix 31 Grenzverl etzung
(siehe auch Begrenzungen) 36, 54, 199, 207
Gro(3anlage 31 Gro(3zeitverhalten 117f Grundschwingung 167 GUtefunktion 38, 70, 72, 199 GUtefunktiona~29f, 38, 178 GUtekriterium If, 35, 37, 97, 109f,
147f, 178 -- konkaves 53, 203
konvexes ~, 203 - 1 ineares '203 - quadratisches 37, ~ 71f,
203 -, vektorielles 55
GUtewert 18, 35, 38, 110, 197, 199, 210 --
Hamilton-Funktion 60 Hamilton'sche Methgde 28, 71 Hamilton'sches Prinzip~l harte Begrenzungen 36, 199f Hauptsuchrichtung 2~ 27, 52, 54, 200 Haupttragheitsachsen 81 -Hesse'sche Matrix 24 heuristische Verfahren der Opti-
mierung 25 hierarchische Steuerungs
strukturen 31 Hohenlinien
(eines GUtegebirges) 51, 72

Hohenregler 98 Hohenruder 124 hoherharmonische Ansteuerung 147,161 hoherharmonische Schwingung 176 Hubschrauber 147f Hubschrauber-Rotorblatt 147, 166 hydrodynamische (s)
- Kraft 79f, 82f - Moment 81 --
hydrostatische (s) - Kraft 79f - Moment 81, 87f
Hyperbeltangens-Funktion ~, 218
implizite Modellfolgeregelung 16 implizite Normierung 55 implizites Regelgesetz 17 Impulssatz 154 indirekte Optimierungsverfahren ll,
28, 29, 177 Initialisierung
(eines Programms) 213 Inselbetrieb
(eines elektrischen Netzes) 19 Integralgleichungen 31 Integrations-Programm (bzw. -Ver
fahren) 62, 81, 118f, 152, illf Integrationsschrittweite 212f Interaktion
(von Optimierungsprozeduren) 33 Interceptionsprobleme 68 Interpolation 26f, 53, 203 Interpolationsgleicnungssystem 115 Iteration (Optimierungs-) 35 iterative Suche 34
Kalman-Gain-Matrix 71f Katalysatoren 9 kinetische Energie (eines Flug
zeugs) 110, 131, 134, 138 Klarschlammbecken-r:r kleinste (n) Quadrate
(Methode der-) 13 Kleinzei tverhal ten 117f kollektiver Einstellwinkel 160 Kollektorstrom 57 Komfortbeschrankungen 119f konjugierte Richtungen 26, 52 konkave Funktion 53, 203 -Konstruktionsparameter
(optimale) 78 kontinuierliche Modelle 37 Konuswinkel 157, 164 Konvergenz 22f, 26, 43, 53, 124,
196, 203, 205, 1f4
224
konvexe Funktion g, 203 Konzentrationen
(chemischer Produkte) 60 konzentrierte Parameter 31f Koordinatensystem 89f
-, aerodynamiscnes 90, 94, 123 - bahnfestes 123 --- blattfestes 150, 156f
geodatisches~, 86, 89f - hydrodynamisches 90f--- korperfestes 80, nf
rotierendes 150, ~6f , rotorfestes ~, 158
Koordinator 32 ----Kopplungen (komplexer Systeme) 19,31 Kopplungselemente
(zur Systementkopplung) 19 korperfestes Koordinatensystem 80,~f Ko-Zustandssystem 60f KrUmmungen (von Kurven) 45, 215 kubische Spline-Polynome.~, 125f,215f Kurve (optimale) 1, 3, 28, ~, 59f,
214 f
Landeanflugkonfiguration 126f Landeanflug 108f Landeklappen 115, 124 Landeklappenwinkel 113f Landegewicht 127 Langsbewegung (eines Flugzeugs) 112 Langsneigungswinkel ~, 111f, 127 Laplace-Variable 98 large scale system 31 Lastvielfaches 120, 128, 130, 135,
137, 140, m Legendre-Polynome 89 lineare Extrapolation 24 lineare (bzw. linearisierte)
Modelle 107f Linearkombination
(von ZustandsgroBen) 20 lokale Extrema 16, 23f, 26, 39, 196,
203, 206f --Luftdi chte 113 Luftkrafte 150, 156f
Machzahleffekt 155 Manipulator 69f Maschinenschlitten 107 Massenschwerpunkt 79 Massentragheitskraft 151, 156 Massentragheitsmoment 81, 164 Massenverteilung 164 "master" 32

mathematisches Modell 37. 111. 148. 159. 178 -- der Warmebehandlung eines
Metallstabes 63f - eines Flugzeugs 111f. 114f.
123 - eines Regelsystems 71.89.100 - eines Rohrreaktors 60 - eines Rotorblattes 148f - eines Scherwindes 121f - eines Schleppkorpersy-
stems 78f - eines Transistors 57 - eines Triebwerkes 117f
Matrix-Ricatti-Differential-gleichung 71
Maximum-Prinzip von Pontrjagin 28 Mehrebenen-Steuerungen 32 '~Mensch im Regelkreis" 97 Me13glieder 14 Metal 1
- block 12 - platte 12 - schiene 12. 48
Mikroprozessor 14. 17. 20. 32. 44 Mittelwerte
(von Rotorkomponenten) 166f Modell (System) 1. 13
-. beschranktes 108.179 -. deterministisches 37 -. dynamisches 20. 31. 35 -. explizites 18 -. kontinuierliches 37 -. lineares 107f -. mathematisches 37. Ill.
148. 178 ---- nichtlineares 37. 108. 179 -. statisches 37 - stochastisches 37 - verteiltparametri sches 12.
30f. 62. 149f ---Modellbildung 13 Modelldifferentialgleichungen 16 Modellfolgeregelung 16f
-. impl izite 16 -. reale 18
Modellreduktion 20 Modellparameter 20 Momente 79. 81 monovariable Funktion 21 multiplikative Kongruenzmethode 211 multivariable Funktion 51. 196f. 206 multizyklische Steuerung 161 Mutations-Selektions-Auslesever-
fahren 27
225
Naherungsstruktur 30 Nebenbedingungen 27. 55 Nebensuchrichtung 25. 27. 52. 54. 200 Nennbetriebspunkt 83 ---Netz (elektrisches ) 19 Neustart (einer Optimierung) 198 Newton-Raphson'sche Methode 24 nichtlineare pifferentialgleichungs-
systeme 17. 108. 111. 213f nichtlineare (n) Gleichungssysteme (n)
(Losung von -) 15 Nichtlinearitaten 16. 106 nichtlineare Modelle 37. 108 Nickwinkel 69. 89. 111f Nominalbetrieb 1T Normalgeschwindigkeit 153 Normalkraftbeiwert 154 normalverteilte Zufallszahlen 206.211 normierter Steuergro13envektor 198 ---Normierung
(der Optimierungsvariablen) 55. 197f. 203
notwenaige Bedingungen (fUr Extremum) 23. 29f. 34. 177
NullauftriebsrichtunQl153
"off-line"-Betrieb 10 okonomische Systeme 28 "on-line"-Betrieb 4. 16. 28 "on-line"-Optimierung 4. 15 Optimierung (Definition) 1. 5 optimale (r. s) --
- An- und Auslaufvorgang 10. 105 - Arbeitsflachen 12. 147f - Arbeitskurven 1n7 108f - Arbeitspunkte lrr. 68f - Chargen-Prozesse 10f - Durchstartmanover 109f.141.126f - Flache 1. 12. 40. 48. 64. ----
147f. 214f ---- Formgebung 11 - FUhrungsverhalten 103f - Funktionsverlauf 40 - Konstruktionsparameter 78 - Konzentrationsverlauf 10 - Kurvenverlaufe 28f. 41f. 59f.
108f. 114f. 214 -- Parametervektor 8. 24, 40.
68f. 196 ---- Profilverlauf 10f. 40. 59 - Proze13 B, 13f - Reglerparameter 8. 68f. 98f - Rohrreaktor 59f - Sauerstoffprofil 12 - Steigen 129. 133, 140, 145 - Steuerung 108~

optimale (r, s) (Forts.) - Steuergro6eneingriffe 111 - Strategie 28 - Steuervektor 10 - Systementkopplung 19 - Temperaturprofil II, 59f 63f - Obergangsverhalten 40:-99 - Unternehmenspolitik 28 - Warmebehandlung 12, 62f
"Optimalitiit" 44 Optimalitatsbedingungen 31, 34 Optimierungsalgorithmus 5, 38, 51,
99, 160, 162, 177, 196f --Optimierungsmethoden ----
(-verfahren) 1 - analytische 6, 23, 28, 29
der biologischenEvolution 27
- der dynamischen Program-mierung 28
- der Mutation-Selektion 27 - der "simultanen Suche" 22 - der Variationsrechnung 28 - der zufalligen Suche 26 - direkte 23, 29, 30, 34, 177
durch FUnktionsapproximation 13, 22 61f
- durch Fun~onsvergleich 22 - durch optimale Zustands-
rUckfUhrung 71 - durch orthogonale Suche 25 - durch Parametdsierung 30,33
dynamische 5, 28f - heuristische 25 - indirekte 23. 28. 29, 177
mit dem Max;mierungsprinzip nach Pontrjagin 28
- monovariable 21f - multivariable 23f - nach Bellman 28 - nach Fibonacci 22 - nach Fletcher-Broyden 58 - nach dem Gradientenver-
fahren 24, 60 - nach Hamilton ~, 71
nach Newton-Raphson 24 - nach Powell 26 - nach Ritz ~f, 177 - nach Rosenbrock 25 - rechnergestUtzte 27, 30, 33 - simultane 22 - statische 5, 23f - suboptimale 4, 39, 41, 69f,
100f. 107 --- Uber Butkovskiy'sche
Integralgleichungen 31
226
Optimierungsmethoden (Forts.) - Uber "hierarchi sche Steue
rungsstrukturen" 31 -, verteiltparametrische 5, 12,
30f Optimieriirigs-Problem
(-Aufgabe) 1 -, dynamisches 5, 28f -, statisches 57 21f - verteiltparametrisches i,
12, 30r" Optimierungsstufe 25, 52, 54, 200 Ordnungsreduktion 20 -orthogonale Suche 25, 27, 52 Orthogonalitat 43 ---
parabolische Extrapolation 24, 27, 52, 53, 202
Paraboloia24 Parameter I, 5, 207 Parameterempfindlichkeit 3 Parameteroptimierung 6, 68, 107, ~ Parameterschatzung 13 Parametervariation 2 Parametrisierung (einer Optimierungs
aufgabe) 30, 33 Partialsumme
(einer Reihenentwicklung) 44 partielle
- Ableitung 83 - Differentialgleichungen 12,
20, 32, 63 --- Randwertprobleme 20
Periodizitat (von Zufallszahlen) 211
Permanentzustand (-betrieb) 10, 19, 97, 105, 162, 164
Phasenebene 117f Phasenverschiebung 161 Pilot 109 Pipeline 69, 97 Polynom 22, 45. 50, 125. 212f Polynomreihenansatz 29 Pontrjagin'sches Maximumprinzip 28 potentielle Energie (eines Flug-
zeugs) 128. 131.134. 138 Potenzreihenansatii1r3. 22 Powell'sches Verfahren 26 Prazision (einer optimal en Losung)
26. 196. 203 Produkte (Eingangs-. Ausgangs-) 11,14 Profildicke 164 Profiltiefe 154, 164 Profilverlauf 10f. 40. 49. 59

Programm-Blacke Sf, 36f, 61, 178 - GUtekriterium:!7 - mathematisches Modell 37 - Optimierungsalgorithmus 38 - Struktur der Eingangs-
graBen 38 Programm-Umfang 26f, 203 Proportionalglied 98 ProzeBoptimierung 8, 13f ProzeBrechner 10, 14, 29, 31 pseudozufallige Signale 1L, 211
quadratische (bzw. parabolische) - GUtefunktion 37, 52, 71f, 203 - Extrapolation 24,~6f, 52,
53, 202 - Interpolation 26f, 53, 202 - Regelflache 97 ---
Qualitatskriterium (siehe auch GUtefunktion)
quasistationarer Betrieb 117 Querkraftbeiwert 82
Radialkraft 156 Rayleigh'sches Prinzip 21 Rampe (einer Funktion) 42 Randbedingungen 20, 30, 31 Randwertprobleme 20 RationalisierungsmaBnahmen 3 Reaktionsrohr 11 Reaktionszeit (eines Piloten) 128 reale Modellfolgeregelung 18 Rechenzeit des Computers (siehe
Computer-Rechenzeit) Rechenzeitersparnis 124 Rechnerschnelligkeit 20 Regelabweichung 97 Regelfehler (-abweichungen) 18, 99 Regelflache (quadratische) 97, 99 Regelgesetz 16 Regelkreis 15 Regelkreisoptimierung 8, 68f Regelstrecke 7lf Regelungssystem 14, 68f
-, dezentrales ~ Regel zeit 103 Reglerparameter 72, 98f Reglerstruktur 68, 74, 107 Rendezvous-Problem 68 Restfehler 15 Riccati-Differentialgleichungs-
system 70 Ritz'sches Naherungsverfahren 29,
30, 177 ---Roboterarm 107 Rohrreaktor 11
227
Rohstoffe 3 Rollwinkel 89, 111f Rosenbrock'$Che Methode 25 rotatorische Momente 148, 174 rotatorische Bewegungen 69, 76, lif,
106 Rotor
- achse 158 - anstellwinkel 153 - blatt 148, 156, 162 - komponenten 149f, 156f, 165f - kopf 148f, 165 ----- umlauf 164, 166 - system 149 f
RUckanstramung 155 RUckfUhr-Koeffizienten-Matrix 71 RUckfUhrungselemente 71f Ruhezustand 11 Runge-Kutta-(Gill)-Integrationsver-
fahren 62, 152, flff
Schatzwert 16, 24, 51f, 126, 138, 197f ---
Scheitelpunkt (einer Parabel) 53 Scherwind 108f, 121, 128, 135 Schiebewinkel 84~9 Schlagbewegung 15117 165 Schlaggelenke 149, 156f Schlagwinkel 153, 165 Schnelligkeit (von Reglern bzw.
Optimierungsverfahren) 15,99,195 Schrittamplitude 24, 54, 200 Schrittweitensteuerun9l27, 54, 60 Schub 117f, 127, 154 ---Schubhebel 117, 127 Schubhebelstellung 112f, 124, 127 Schubrichtungswinkel 75, 88, 89, 105 Schwankungsbreiten ---
(von Rotrokomponenten) 166f Schwenkbewegung 149, 156 Schwenkgelenk 150, 156 Sei 1 krafte 85f Seitenbewegung (eines Flugzeugs) 112 selbstadaptive Gerate 13 Sicherheit (eines Verfahrens) 22, 206 Sicherheitsanforderungen 3 Sicherheitsbeschrankungen 119f SignalfluB (-plan) 19, 56, 200 Simulation 20, 98, 106, 111, 164,
121, 117 Simulationsbereich 17 Simulationsexperimente
(-untersuchungen) 78, 101 Simulationsmodell 33, 78, 106, 161,
167, 172, 175 Sinkgeschwindigkeit 127

sinusformige Ansteuerung 161, 165 Sinusreihe 35, 42 "slave" 32 So 11 schub 118 Sollwerte 14, 32 Sollwertsprung 97 Spannung (elektrische) 19, 57 Speicherplatz (bedarf) 20, 29, 40,
44, 55, 196, 198, 203, 207, 213 Spline-PoTYnom 45, 125f, 215f Spoilerstellung-r13f Sprungantwort 119 Stabilitat 64, 72, 106, 107 statische (s) Optimalsteuerung 10,15
- Madelle 37 - Optimierung 5, 23f - Verhalten 13, 15
Staudruck 83, 113 Stelleinrichtung 74f "steilste" Richtung 24 Ste11g1ieder 14 Stellmotoren 69, 73, 75f Steuerbefehle 18 ---Steuerungsfunktion 40f
-,zeitabhangige 41f, 161 -,zeit- und ortsabhangige 48f,
162 Steuerungsstruktur 40f, 160 Steuerwinkel 164 SteuergrOBe I, 12, 40, 55, 109,
197, 218 ---Steuerkette 15 Steuerung (optimale) I, 9,109f,147f stochastische
- Effekte 15 - Modelle 37 - Zahlen 211
Storungen -, auBere 13, 17 -, unbekannte 14
Straffunktionen (siehe auch Gewichtungsfunktionen) 6.26.30.36,55.199
Strahltriebwerk 119 -Strategie (optimale) 28 Strecke
-. nichtlineare 20 -, Rege 1- 71 f
StrOmungsabriB 138 Stromversorgung 57 Struktur
- der EingangsgroBen 6. 29, 33. 36. 38. 40f
- einer Flache~8f. 171, 219f - von KopplungsgTiedern 20 - von Kurven 41f. 214f
Struktur (Forts.) - von Reglern 68, 73f, 97,
100, 107 - von Steuerungsfunktionen
124. 159 Strukturoptimierung 107 Stufe (Optimierungs-) 52. 56. 198f Stufenfunktion 46 ---StUtzste11en 45. 126". 128f. 215 suboptimale (iUigenaherte) Ver-
fahren 4. 39. 41, 69f, 100f. 107 Sucha 1 gorithmus (-programm) 5. 27,
30. 51f. 178. 196f Suchrichtung 51. 53, 200 Suchschritte (1rutefunktionsbe
rechnungen) 25. 52, 55. 299f System --
- dynamisches 30, 35 - mit konstanten Parametern 31f - mit verteilten Parametern
30f, 35 - okonomisches 28 -, reduziertes 20
systematische Strategie 29 "systematisches" Suchen 23 Systementkopplung 19 Systemmatrix 71 Systemparameter 23
Tangentialgeschwindigkeit 153 Tangentialkraft 156f Tangentialkraftbeiwert 154 Tastintervall 17 Taumelscheibe 160 Taylor-Entwicklung 83 Temperaturprofile 11. 49. 59f Torsionsmoment 156 torsionssteif 149. 156. 175 Totzeit(element) 20. 212f Tragheitskraft 78. 80 Tragheitsmoment 81. 152 Trajektorien 10. 28. 110 Transformationen
(gerichteter GrOBen) 89f Transformationsmatrix 91. 94. ~f Transistor 57 Transition 36. 110 Transitionsmatrix 36 translatorische Bewegungen 69. 76.
79. 106 trans1icitorische Krafte 148, 174 Transversalitatsbedingung 60 Treppenfunktion 46 tridiagonales Gleichungssystem 64 Triebwerk 108f. 117 Triebwerksdynamik 114, 1Jll

trigonometrische Reihe 42 Trimmbehalter 101 Tschebyscheff-Funktionensystem
- einer Kurve 35, 44f, 124f, 161f, 214f ---
- einer Flache~, 162, 219f
OberfUhrungsstrategie 11 Obergangsverhalten 10, 40, 99, 104 Obergangsvorgang 97 OberschallstrOmung 20 Oberschwingen 103, 215 Obertragungsfunktion 68, 98 Umlaufwinkel 153f Umweltschutzbeschrankungen 3 uniforme Konvergenz 43 uniform konvergierende Funktions
systeme 41, 43 Unstetigkeitsstellen
(von Funktionen) 196 Unternehmenspolitik(optimale) 28 Unterwasser-Schleppkorper 68f
Variationsrechnung 3, 28, 30, 71, 177 ---
vektorielles GUtekriterium 55 verfahrenstechnische Anlagen 19 Verhalten (eines Systems)
- dynamisches, statisches 13,15 - nichtlineares 15
VerknUpfungsgleichung 60 verrauschte Funktionswerte 26, ~ Verstarkung 98 verteiltparametrische
- Ansteuerung 171, 176 - Prozesse oder Systeme 12,
30f, 62, 149 ---Vertikalbeschleunigung 131 Verwindung eines Rotorblattes 160
229
Verzogerungsverhalten 117 Verzogerungszeitkonstante 98 Vibrationen 176 vollstandige ZustandsrUckfUhrung
70, 74 Vorfl~elklappen 115 Vorhalt (konstante) 98
Warmebehandlung 12, 62 Warmekapazitat 63 --Warmeleitfahigkeit 63 Warmeleitungsprobleme 20, ~ Warmetauscher 13 Wasserkanal 68, 82, 106 "weiche" Begrenzungen 36, 199 Wendepunkte ---
(in Kurvenverlaufen) 53 Wettbewerbsfahigkeit 3 Widerstandsbeiwert 113f, 155, 127,
130 -----Widerstandskrafte 90, Illf, 114f Windgeschwindigkeit 11~22 Windgradient 122 Windprofil 121 Wirtschaftlichkeit
. (eines Produktionsprozesses) 10
Zeitbereich 98 Zentrifugalkrafte 151 Zufallsschatzwerte 206, 210 Zufallssuche 207 Zufallszahlen 211 "zufall i ges" Suchen 23, Z§. Zuladung 175 Zusatzeinrichtung
(zur Entkopplung) 19 Zustands-Gro8en 6, 20, 62, ~, 109,
197 Zustandssystem 60

Fachberichte Messen, Steuern, Regeln
Band 1: Automatisierungstechnik im Wandel durch Mikroprozessoren INTERKAMA-KongreB 1977 Herausgegeben von M. Syrbe, B.Will X, 675 Seiten, 1977
Band 2: Entwurf digitaler Steuerungen. Ein Kolloquiumsbericht Herausgegeben von K H . Fasol VI , 250 Seiten. 1979
Band 3: M. Cremer: Der VerkehrsfluB auf Schnellstra13en. Modelle, Uberwachung, Regelung. XVI, 203 Seiten. 1979
Band 4: Wege zu sehr fortgeschrittenen Handhabungssystemen Herausgegeben von H. Steusloff VI, 205 Seiten. 1980
Band 5: MeB- und Automatisierungstechnik - Technologien, Verfahren, Ziele TNTERKAMA-Kongre13 1980 Herausgegeben von D. Ernst und M. Thoma Xl , 863 Seiten. 1980
Band 6: H.G. Jacob: Rechnergesti.itzte Optimierung statischer und dynamischer Systeme - Beispiele mit FORTRAN-Programmen. XlI, 229 Seiten. 1982

Lecture N otes in Control and Information Sciences Edited by A. V. Balakrishnan and M. Thoma
Vol. 14: International Symposium on Systems Optimization and Analysis. Rocqueotcourt, December 11 -13,1978; IRIA LABORIA Edited by A. Beosoussan and J. Lions
Vol. 15: Semi-Infinite Programming Proceedings of a Workshop, Bad Honnef, August 30 - September 1, 1978
Vol. 16: Stochastic Control Theory and Stochastic Differential Systems Proceedings of a Workshop of the "Sonderforschungsbereich 72 der Deutschen Forschungsgemeinschaft an der Universitiit Bonn" which took place in January 1979 at Bad Honnef
VoL 17: O. 1. Franksen, P. Falster, F. 1. Evans Qualitative Aspects of Large Scale Systems Developing Design Rules Using APL
VoL 18: Modelling and Optimization of Complex Systems. Proceedings of the IFIP-TC 7 Working Conference. Novosibirsk, USSR, July 3-9, 1978 Edited by G . I. Marchuk
VoL 19: G lobal and Large Scale System Models Proceedings of the Center for Advanced Studies (CAS) International Summer Seminar Dubrovnik, Yugoslavia, August 21-26, 1978 Edited by B. Lazarevic
VoL 20: B. Egardt Stability of Adaptive Controllers
VoL 21: M. B. Zarrop Optimal Experiment Design for Dynamic System Identification
Vol. 22: Optimization Techniques Proceedings of the 9th IF1P Conference on Optimization Techniques, Warsaw, September 4-8,1979 Part 1 Edited by K. lracki, K. Malanowski, S. Walukiewicz
Vol. 23 : Optimization Techniques Proceedings of the 9th lFIP Conference on Optimization Techniques, Warsaw, September 4-8, 1979 Part 2 Edited by K. Iracki, K. Malanowski, S. Walukiewicz
Vol. 24: Methods and Applications in Adaptive Control. Proceedings of an International Symposium Bochum, 1980 Edited by H. Unbehauen
Vol. 25: Stochastic Differential SystemsFiltering and Contro\. Proceedings of the IFIP-WG71l Working Conference, Vilnius, Lithuania, USSR, August 28 - September 2, 1978 Edited by B. Grigelionis
Vo\. 26: D. L. Iglehart, G . S. Shedler Regenerative Simulation of Response Times in Networks of Queues
Vol. 27: D. H. Jacobson, D. H. Martin, M. Pachter, T. Geveci Extensions of Linear -Quadratic Control Theory
Vol. 28: Analysis and Optimization of Systems Proceedings of the Fourth International Conference on Analysis and Optimization of Systems, Versailles, December 16-19, 1980 Edited by A. Bensoussan and J. L. Lions
Vol. 29: M . Vidyasagar, Input..Qutput Analysis of Large-Scale Interconnected Systems -Decomposition, Well-Posedness and Stability
Vol. 30: Optimization and Optimal Control Proceedings of a Conference Held at Oberwolfach, March 16-22, 1980 Edited by A. Aus1ender, W. Oettli, and J. Stoer
Vol. 31: Berc Rus tem Projection Methods in Constrained Optimisation and Applications to Optimal Policy Decisions
Vol. 32: Tsuyoshi Matsuo Realization Theory of Continuous-Time Dynamical Systems
Vol. 33: Peter Drans.field Hydraulic Control Systems -Design and Analysis of Their Dynamics
Vol. 34: H. W. Knobloch Higher Order Necessary Conditions in Optimal Control Theory
VoL 35: Global Modelling Proceedings of the IFIP-WG 711 Working Conference, Dubrovnik, Yugoslavia, September 1-5, 1980 Edited by S. Krcevinac
VoL 36: Stochastic Differential Systems Proceedings of the 3rd lFIP-WG 711 Working Conference Visegnid, Hungary, September 15-20, 1980 Edited by M. Arata, D. Vermes, A. V. Balakrishnan
Vol. 37: Rildiger Schmidt Advances in Nonlinear Parameter Optimization