Embed Size (px)
Citation preview
Anwendungen der Integralrechnung
8.10 Flächeninhalt und Flächenschwerpunkt . . . . . . . . . . . . . . . 2048.11 Kurvenlänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2078.12 Rotationskörper . . . . . . . . . . . . . . . . . . . . . . . . . . . 2098.13 Wahrscheinlichkeitsverteilungen und Gamma-Funktion . . . . . . . 213
8.10 Flächeninhalt und Flächenschwerpunkt
Es soll der Flächeninhalt und der Flächenschwerpunkt einer Fläche, die von 2Funktionen y1(x) Ø y2(x) begrenzt wird, berechnet werden.
204
8.10. Flächeninhalt und Flächenschwerpunkt
Flächeninhalt
-0,5 0 0,5 1 1,5 2 2,5 3
-1
1
2
3
y2(x)
y1(x)
B
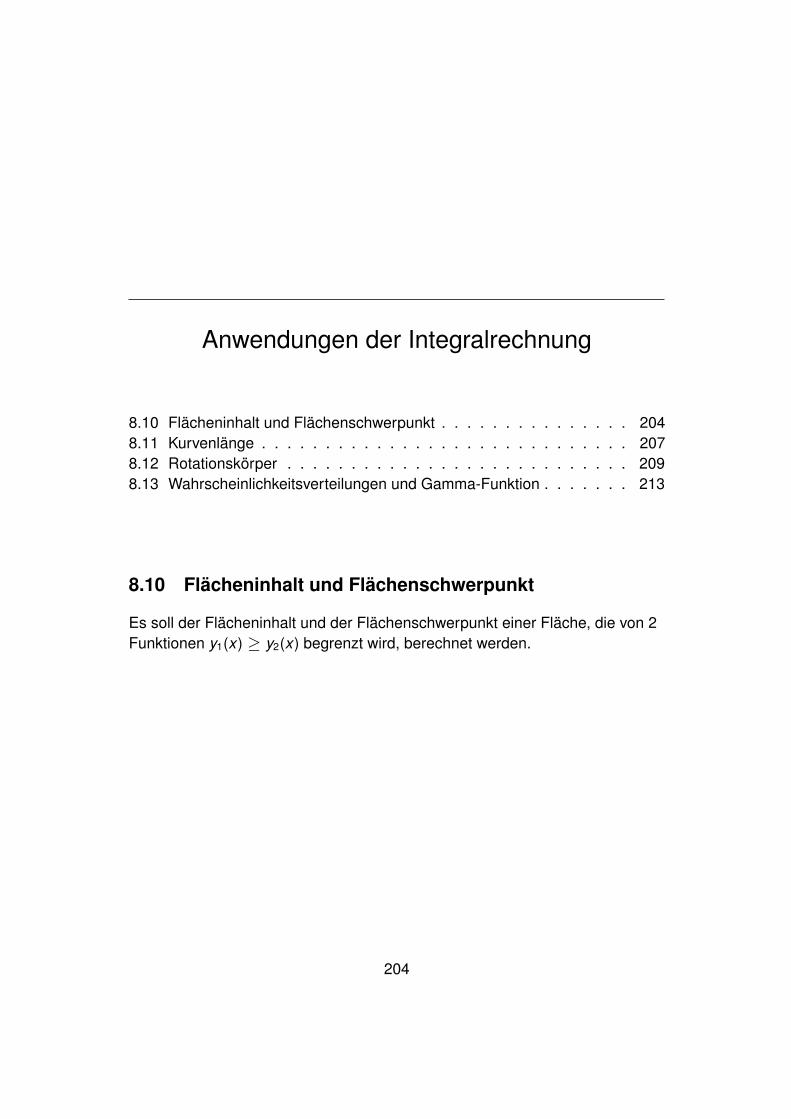
Flächeninhalt des Bereichs B
Da man immer eine Konstante C Ø 0 findet, so dass y1(x) + C Ø 0 undy2(x) + C Ø 0 gilt für alle x , berechnet sich der Flächeninhalt als
⁄ b
a
y1(x) ≠ y2(x)dx .
Flächenschwerpunkt
Für n Massenpunkte berechnet sich der Schwerpunkt wie folgt:
xs =
qni=1 mi xiqn
i=1 mi, ys =
qni=1 mi yiqn
i=1 mi.
Diese Formeln nutzen wir aus, indem wir den Bereich B, der die durch dieFunktion f (x) Ø 0 begrenzt wird, in n Teilrechtecke zerlegen
205
8.10. Flächeninhalt und Flächenschwerpunkt
-1 0 1 2 3 4 5 6 7 8
1
2
3
4
5
a=x0 x1 x2 x3 ... xi ξ xi+1 ... b=xn
y = f(x)
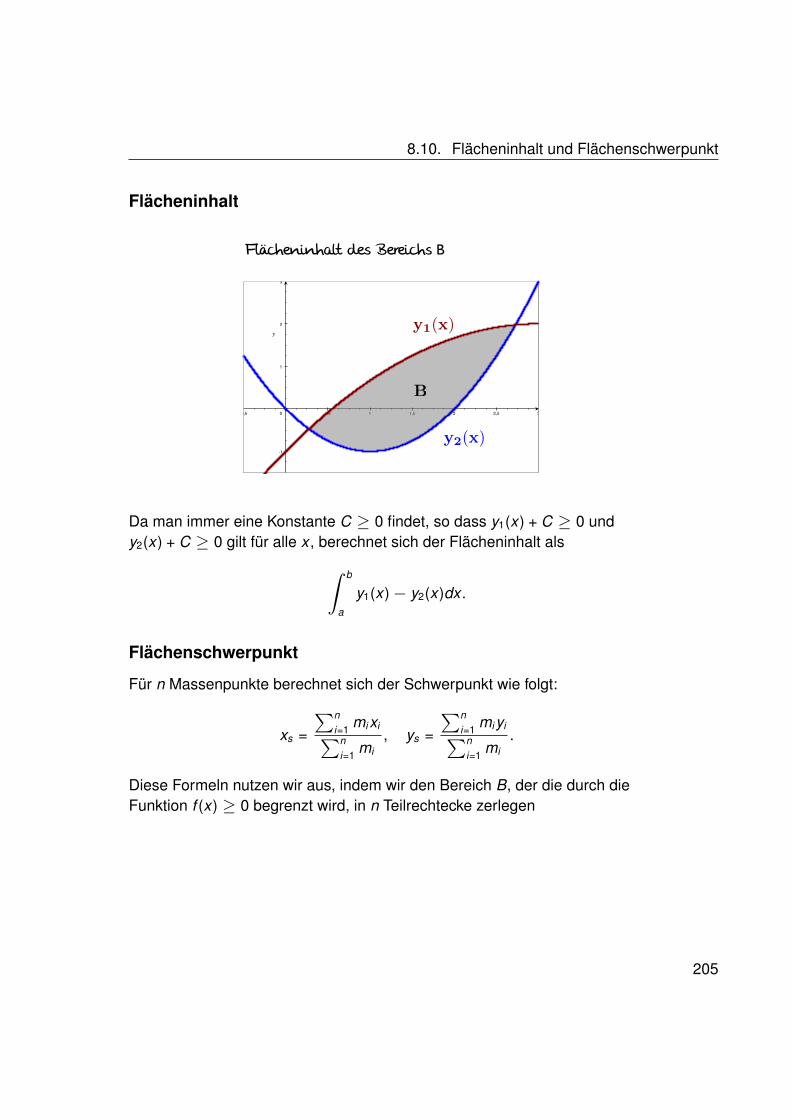
Flächenschwerpunkt
Jedes Rechteck hat den Flächeninhalt
Ai = �xi f (›i ) und die Schwerpunktskoordinaten xs =12
(xi +xi+1) = xi +12�xi , ys =
12
f (›i ).
Somit gilt für den Gesamtschwerpunkt
xs =
qni=1 Ai xs,iqn
i=1 Ai=
qni=1 �xi f (›i ) 1
2 (xi + xi+1)qni=1 �xi f (›i )
sowie
ys =
qni=1 Ai ys,iqn
i=1 Ai=
qni=1 �xi f (›i ) 1
212 f (›i )qn
i=1 �xi f (›i ).
Mit Hilfe des Grenzübergangs n æ Œ, also immer feinerer Zerlegung gehenDifferenzen in Differenziale über und man erhält für dieSchwerpunktskoordinaten
xs =
s b
axf (x)dx
s b
af (x)dx
und ys =12
s b
a(f (x))2dx
s b
af (x)dx
Wird der Bereich B von 2 Funktionen y1(x) Ø y2(x) begrenzt,
206
8.11. Kurvenlänge
-1 0 1 2 3 4 5 6 7 8
1
2
3
4
5
a=x0 x1 x2 x3 ... xi ξ xi+1 ... b=xn
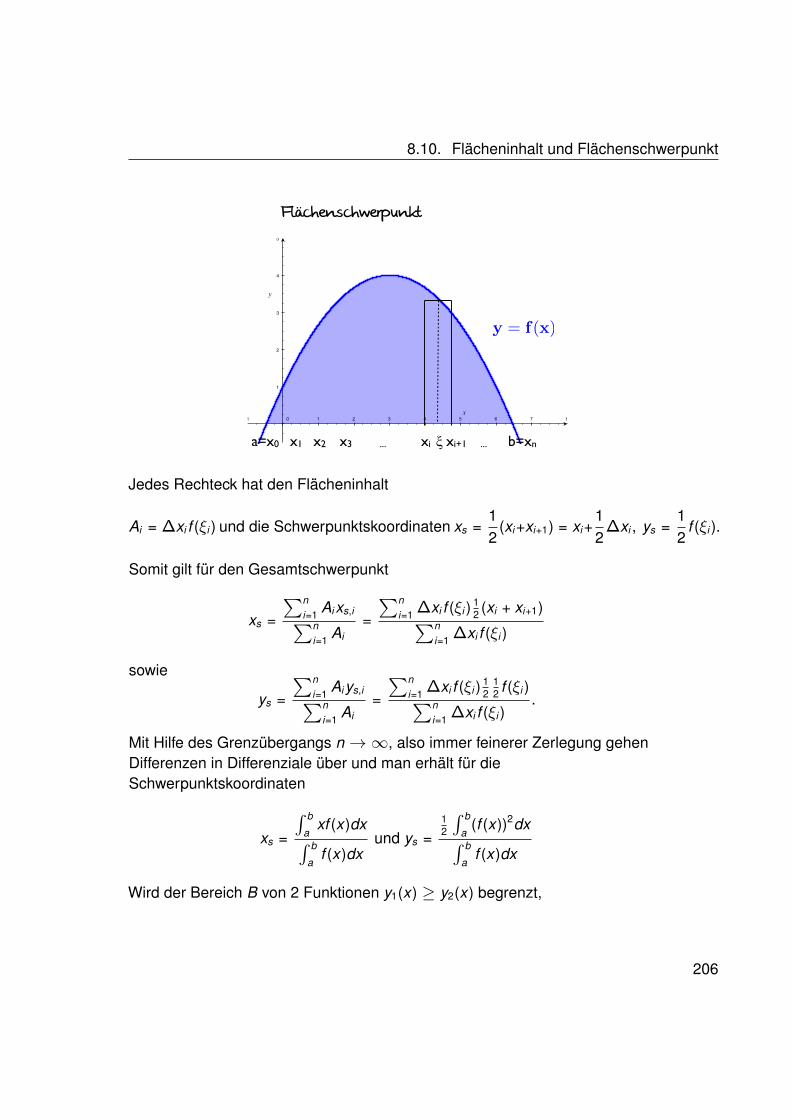
Flächenschwerpunkt
y1(x)
y2(x)y2(�)
y1(�)
B
so berechnet sich der Schwerpunkt aus
xs =
s b
ax(y1(x) ≠ y2(x)dx
s b
ay1(x) ≠ y2(x)dx
und ys =12
s b
a(y1(x))2 ≠ (y2(x))2dx
s b
ay1(x) ≠ y2(x)dx
.
8.11 Kurvenlänge
Die Parameterdarstellung x = x(t), y = y (t) (a Æ t Æ b) einer Kurve heißtregulär, wenn die Funktionen t ‘æ x(t), t ‘æ y (t) über [a, b] stetigdifferenzierbar sind und x(t)2 + y (t)2 ”= 0 für a Æ t Æ b gilt, dabei sind x(a) undx(b) als einseitige Ableitungen zu verstehen.
Satz 8.53 (Kurvenlänge)Es gilt
1. Die Länge eines Kurvenbogens mit regulärer Parameterdarstellungbeträgt
L =⁄ b
a
x(t)2 + y (t)2 dt .
207
8.11. Kurvenlänge
2. Der Graph y = f (x) einer stetig differenzierbaren Funktionf : [a, b] æ R hat die Länge
L =⁄ b
a
1 + f Õ(x)2 dx .
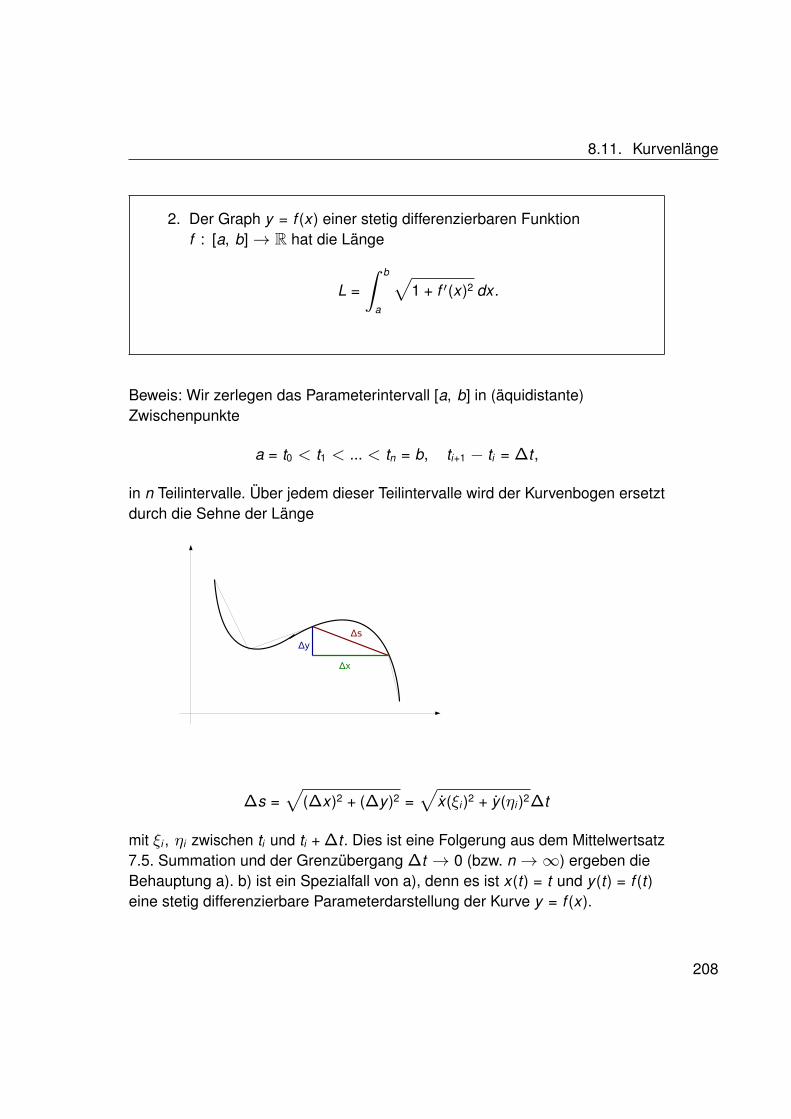
Beweis: Wir zerlegen das Parameterintervall [a, b] in (äquidistante)Zwischenpunkte
a = t0 < t1 < ... < tn = b, ti+1 ≠ ti = �t ,
in n Teilintervalle. Über jedem dieser Teilintervalle wird der Kurvenbogen ersetztdurch die Sehne der Länge
Δx
Δy
Δs
�s =
(�x)2 + (�y )2 =
x(›i )2 + y (÷i )2�t
mit ›i , ÷i zwischen ti und ti + �t . Dies ist eine Folgerung aus dem Mittelwertsatz7.5. Summation und der Grenzübergang �t æ 0 (bzw. n æ Œ) ergeben dieBehauptung a). b) ist ein Spezialfall von a), denn es ist x(t) = t und y (t) = f (t)eine stetig differenzierbare Parameterdarstellung der Kurve y = f (x).
208
8.12. Rotationskörper
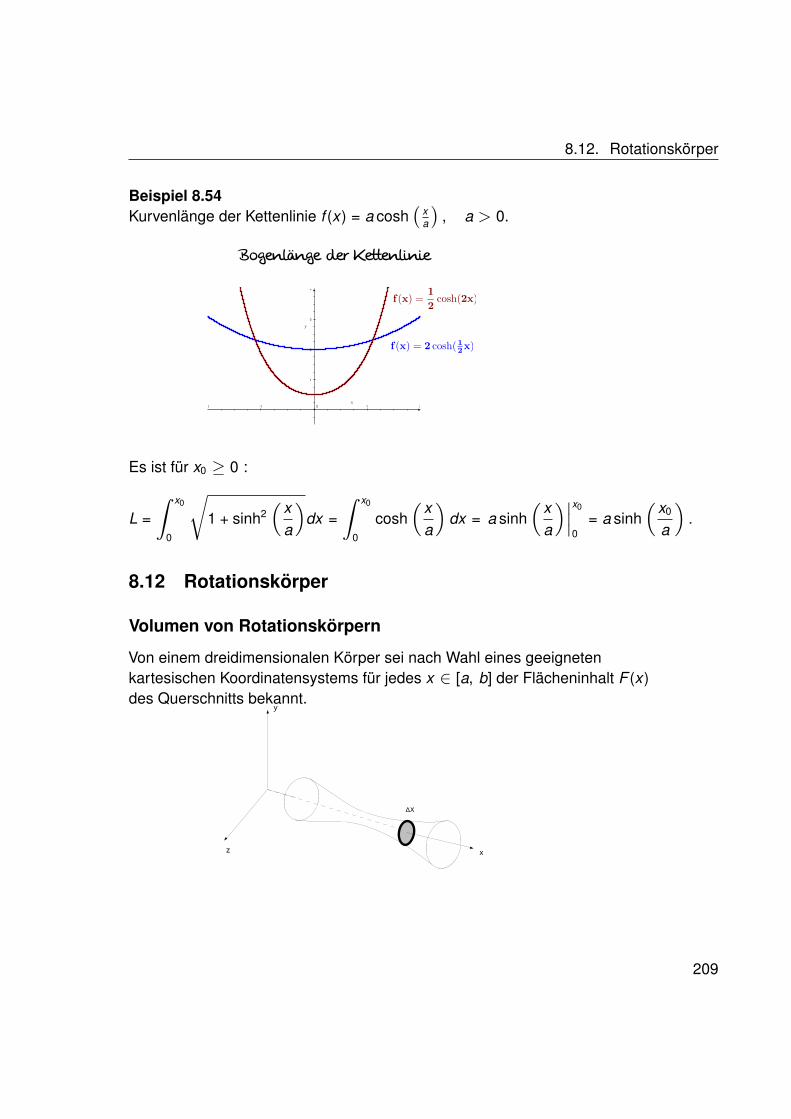
Beispiel 8.54Kurvenlänge der Kettenlinie f (x) = a cosh
!xa
", a > 0.
-2 -1 0 1 2
1
2
3
4
f(x) =1
2cosh(2x)
f(x) = 2 cosh(12x)
Bogenlänge der Kettenlinie
Es ist für x0 Ø 0 :
L =⁄ x0
0
Ú1 + sinh2
1xa
2dx =
⁄ x0
0
cosh1x
a
2dx = a sinh
1xa
2---x0
0= a sinh
1x0
a
2.
8.12 Rotationskörper
Volumen von Rotationskörpern
Von einem dreidimensionalen Körper sei nach Wahl eines geeignetenkartesischen Koordinatensystems für jedes x œ [a, b] der Flächeninhalt F (x)des Querschnitts bekannt.
ΔX
x
y
z
209
8.12. Rotationskörper
Das Volumen der Scheibe der Dicke �x beträgt näherungsweise F (x)�x . InKurzform: dV = F (x)�x ; die Integration ergibt
V =⁄
dV =⁄ b
a
F (x) dx .
Speziell gilt mit F (x) = fi(f (x))2:
Satz 8.55Ein durch Drehung der Kurve (Kontur) y = f (x), a Æ x Æ b, um diex-Achse erzeugter Rotationskörper hat das Volumen
V = fi
⁄ b
a
(f (x))2 dx .
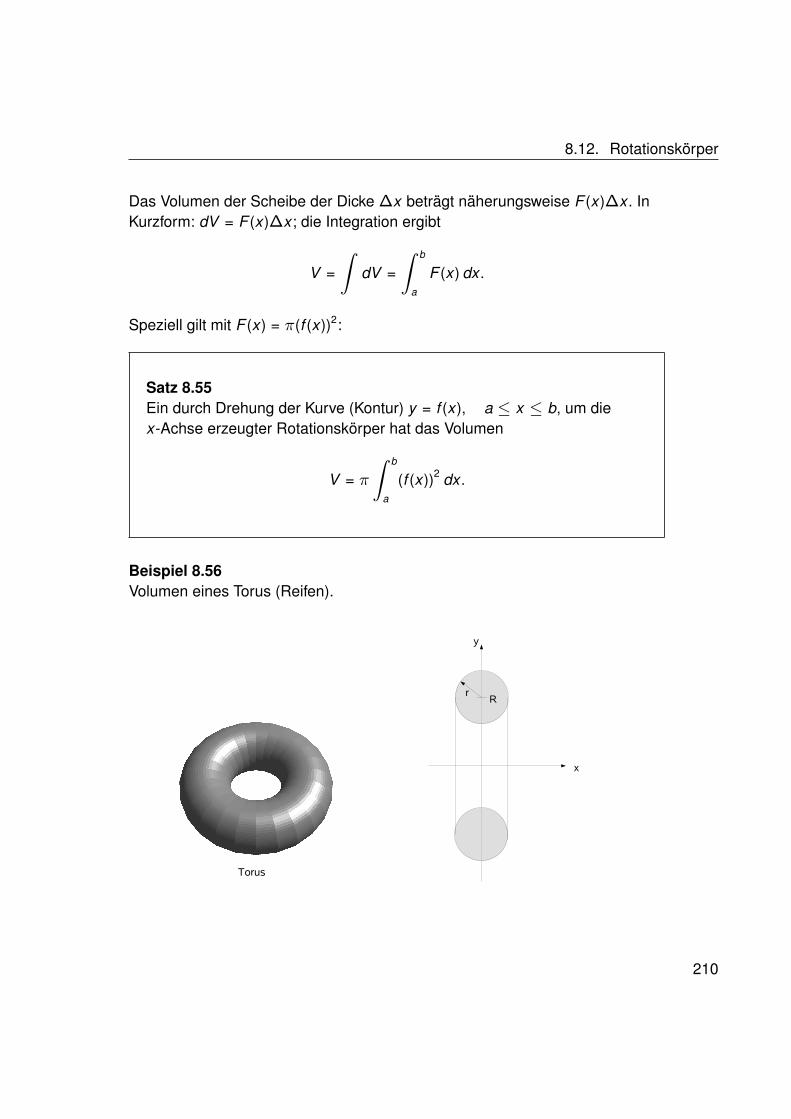
Beispiel 8.56Volumen eines Torus (Reifen).
Torus
Rr
x
y
210

8.12. Rotationskörper
Der Torus entsteht durch Rotation des oberen Halbkreises
y1 = R +
r 2 ≠ x2
um die x-Achse, wobei der „innere Körper“ entfernt wird. Der „innere Körper“entsteht durch die Rotation des unteren Halbkreises
y2 = R ≠
r 2 ≠ x2
um die x-Achse. Damit ergibt sich das Volumen des Torus zu
V = fi
⁄ r
≠r
y21 dx ≠ fi
⁄ r
≠r
y22 dx = fi
⁄ r
≠r
(y21 ≠ y2
2 ) dx
= fi
⁄ r
≠r
(R2 + 2R
r 2 ≠ x2 + r 2 ≠ x2 ≠ R2 + 2R
r 2 ≠ x2 ≠ r 2 + x2 dx
= 4Rfi
⁄ r
≠r
r 2 ≠ x2 dx
Substitution:x = r sin t , dx = r cos t dt , ≠r = r sin t ≈∆ t = ≠ fi
2 , r = r sin t ≈∆ t = fi2
ergibt
= 4Rfi
⁄ fi2
≠ fi2
r 2 ≠ r 2 sin2 t r cos t dt = 4Rfi
⁄ fi2
≠ fi2
Ôr 2 cos2 t r cos t dt
= 4Rr 2fi
⁄ fi2
≠ fi2
cos2 t dt = 4Rr 2fi
⁄ fi2
≠ fi2
cos2 t dt = 2Rr 2fi
⁄ fi2
≠ fi2
cos 2t + 1 dt
= 2Rr 2fi11
2sin 2t + t
2---fi2
≠ fi2
= 2Rr 2fi2.
Mantelfläche
Die Mantelfläche eines Rotationskörpers mit der Kontur y = f (x), a Æ x Æ b,berechnet man dadurch, dass die Mantelfläche dM einer dünnen Scheibe derDicke dx angenähert wird durch die Mantelfläche eines Zylinders mit dem
211

8.12. Rotationskörper
Radius f (x) und der Mantelhöhe ds =
1 + f Õ(x)2 dx (vgl. Satz 8.53). Folglichgilt
dM = 2fi f (x)
1 + f Õ(x)2 dx
und Integration ergibt
M = 2fi
⁄ b
a
f (x)
1 + f Õ(x)2 dx .
Beispiel 8.57Wir möchten die Matelfläche des in Beispiel 8.56 betrachteten Torus berechnen.Die Mantelfläche setzt sich wieder aus der vom oberen Kreisbogeny1 = R +
Ôr 2 ≠ x2 erzeugten Mantelfläche M1 und aus der vom unteren
Kreisbogen y2 = R ≠Ô
r 2 ≠ x2 erzeugten Mantelfläche M2 zusammen. Es giltwegen (y Õ
1)2 = (y Õ2)2
M = M1 + M2 = 2fi
⁄ r
≠r
(y1 + y2)
1 + (y Õ1)2 dx = 4fiR
⁄ r
≠r
1 + (y Õ
1)2 dx
= 4fiR
⁄ r
≠r
Úr 2
r 2 ≠ x2 dx = 4fiRr
⁄ r
≠r
1Ôr 2 ≠ x2
dx
Substitution:x = r sin t , dx = r cos t dt , ≠r = r sin t ≈∆ t = ≠ fi
2 , r = r sin t ≈∆ t = fi2
ergibt
= 4fiRr
⁄ fi2
≠ fi2
r cos tr cos t
dt = 4fi2 R r .
Die Rechung lässt sich erheblich verkürzen, wenn man berücksichtigt, dass⁄ r
≠r
1 + (y Õ
1)2 dx = fir
die Länge des Halbkreisbogens ist.
212

8.13. Wahrscheinlichkeitsverteilungen und Gamma-Funktion
8.13 Wahrscheinlichkeitsverteilungen undGamma-Funktion
Viele uneigentliche Integrale über unbeschränkten Intervallen sind stetigeWahrscheinlichkeitsverteilungen F (x) mit der Wahrscheinlichkeitsdichte f (x),einer Zufallsgröße X , die dieser Verteilung genügt, d.h. die Wahrscheinlichkeit
P(X < x) = F (x) =⁄ x
≠Œf (t) dt =
⁄ x
≠ŒdF (t).
Weitere uneigentliche Integrale sind dann der Erwartungswert
EX :=⁄ Œ
≠Œ|x |f (x) dx
und die Varianz
VX :=⁄ Œ
≠Œx2f (x) dx ≠ (EX )2.
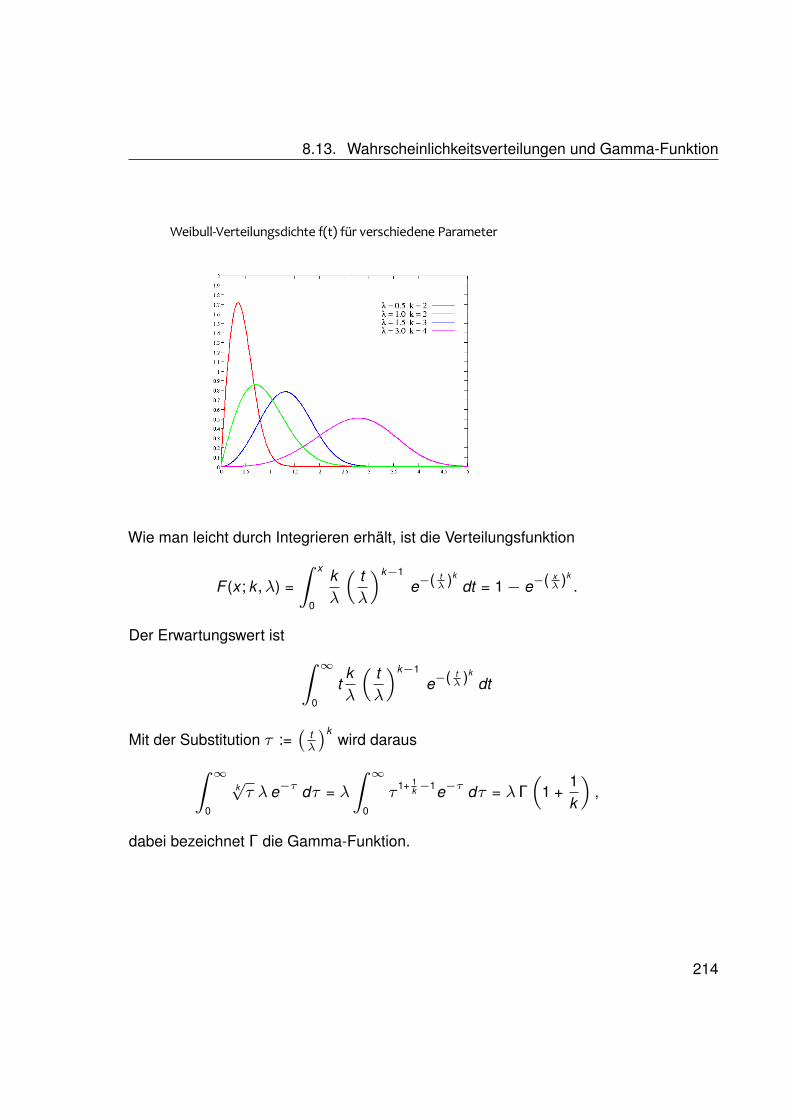
Beispiel 8.582 parametrige Weibull-Verteilung, die verwandt wird bei
• der Untersuchung von Lebensdauern in der Qualitätssicherung,• Materialprüfung bei spröden Werkstoffen.
Für k < 1 nimmt die Ausfallrate mit wachsende Zeit ab, für k > 1 nimmt sie mitwachsende Zeit zu. Die Dichtefunktion ist
f (t) :=
;k⁄
!t⁄
"k≠1e≠( t
⁄ )k, t Ø 0,
0, x < 0.
213
8.13. Wahrscheinlichkeitsverteilungen und Gamma-Funktion
Weibull-Verteilungsdichte f(t) für verschiedene Parameter
Wie man leicht durch Integrieren erhält, ist die Verteilungsfunktion
F (x ; k , ⁄) =⁄ x
0
k⁄
1 t⁄
2k≠1e≠( t
⁄ )k
dt = 1 ≠ e≠( x⁄ )k
.
Der Erwartungswert ist⁄ Œ
0
tk⁄
1 t⁄
2k≠1e≠( t
⁄ )k
dt
Mit der Substitution · :=!
t⁄
"kwird daraus
⁄ Œ
0
kÔ
· ⁄ e≠· d· = ⁄
⁄ Œ
0
· 1+ 1k ≠1e≠· d· = ⁄ �
11 +
1k
2,
dabei bezeichnet � die Gamma-Funktion.
214

8.13. Wahrscheinlichkeitsverteilungen und Gamma-Funktion
Eine weiter Anwendung ist die Existenz uneigentlicher Parameterintegrale, wiez.B. der Gamma-Funktion �(x).
�(x) =⁄ Œ
0
tx≠1 e≠t dt .
Beispiel 8.59Gamma-Funktion.Wir wollen zeigen, dass
• �(x) für alle x > 0 existiert,• �(1) = 1 ist,• �(x + 1) = x�(x) rekursiv berechnet werden kann.
Die Existenz der Gamma-Funktion ergibt sich aus der Abschätzung (für x > 0)
tx e≠t Æ Ce≠ t2 ,
mit einem geeigneten C.Am einfachsten lässt sich �(1) berechnen:
�(1) =⁄ Œ
0
e≠t dt = limAæŒ
⁄ Œ
0
e≠t dt = limAæŒ
≠e≠t--t=A
t=0= lim
AæŒ(≠e≠A + 1) = 1.
Die Rekursionsformel folgt aus der Formel der partiellen Integration
�(x +1) =⁄ Œ
0
tx e≠t dt = ≠e≠t t x--t=Œ
t=0+⁄ Œ
0
xtx≠1e≠t dt = ≠e≠t t x--t=Œ
t=0+x�(x).
Wegen x > 0 ist ≠e≠t t x--
t=0= 0 und
limtæŒ
≠e≠t t x = ≠ limtæŒ
tx
et= ≠ lim
tæŒ
xtx≠1
et= ... = ≠ lim
tæŒ
x(x ≠ 1)(x ≠ 2) ... (x ≠ n + 1)tx≠n
et= 0,
da nach endlicher Anwendung der L’Hospitalschen Regel im Zähler x ≠ n < 0gilt und der Grenzwert deshalb Null ist.
215
8.13. Wahrscheinlichkeitsverteilungen und Gamma-Funktion
. . ..
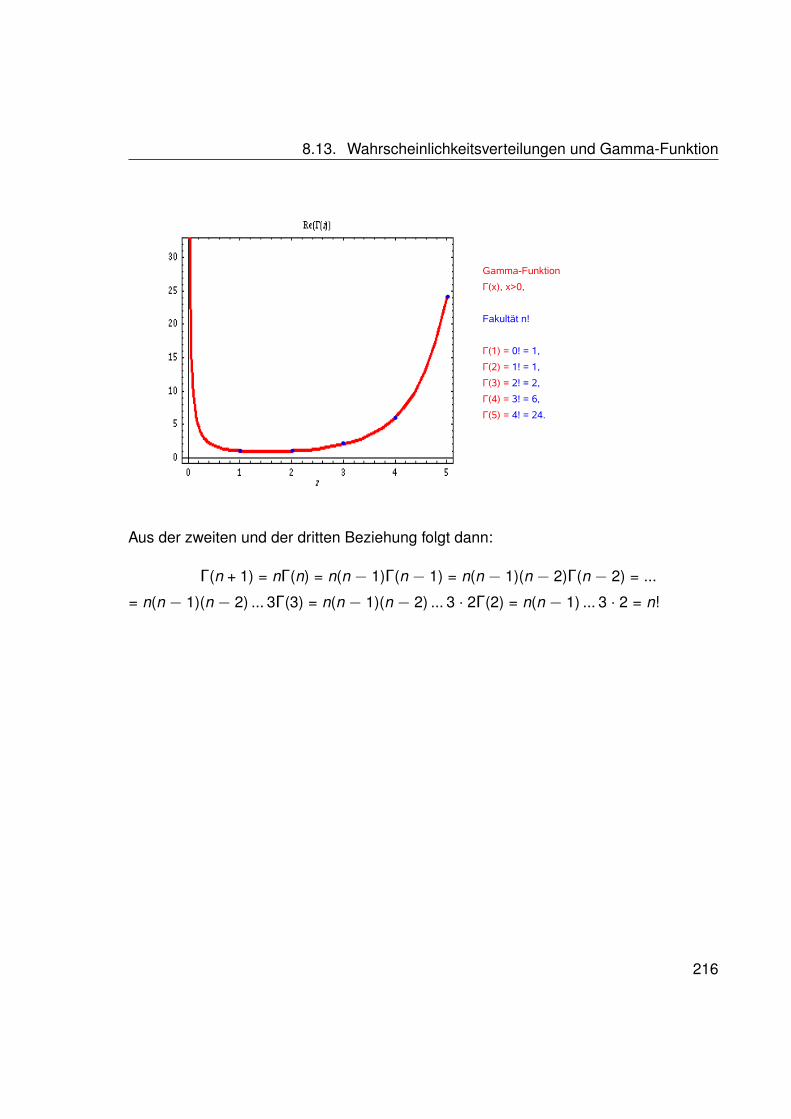
.Gamma-Funktion
Γ(x), x>0,
Fakultät n!
Γ(1) = 0! = 1,
Γ(2) = 1! = 1,
Γ(3) = 2! = 2,
Γ(4) = 3! = 6,
Γ(5) = 4! = 24.
Aus der zweiten und der dritten Beziehung folgt dann:
�(n + 1) = n�(n) = n(n ≠ 1)�(n ≠ 1) = n(n ≠ 1)(n ≠ 2)�(n ≠ 2) = ...
= n(n ≠ 1)(n ≠ 2) ... 3�(3) = n(n ≠ 1)(n ≠ 2) ... 3 · 2�(2) = n(n ≠ 1) ... 3 · 2 = n!
216























![æ q · µu W l lµu ìXí ooP u ]v ̵u oµ( W l lµu æ Å æ](https://img.pdfslide.org/doc/110x75/5e21e38aba7f301ba7539cb0/-q-u-w-l-lu-x-oop-u-v-oeu-o-w-l-lu-.jpg)



![^ Â - D j - ì Ò Á [ Ó æ ] B [ Ó · B B®BoB¦. B_B®B B BrB]. B B^B¥B B . B¤BeBt. BfB®B BsB]. B B B B . ã Ä. U + X o ^ ã1b. . " " Ð TUFS . . U + X o ^ ê y ù â æ](https://img.pdfslide.org/doc/110x75/6022f7bf357d3803107a3b74/-d-j-b-b-bbob-bbb-b-brb-b-bbb-b-bbebt.jpg)