Embed Size (px)
Citation preview
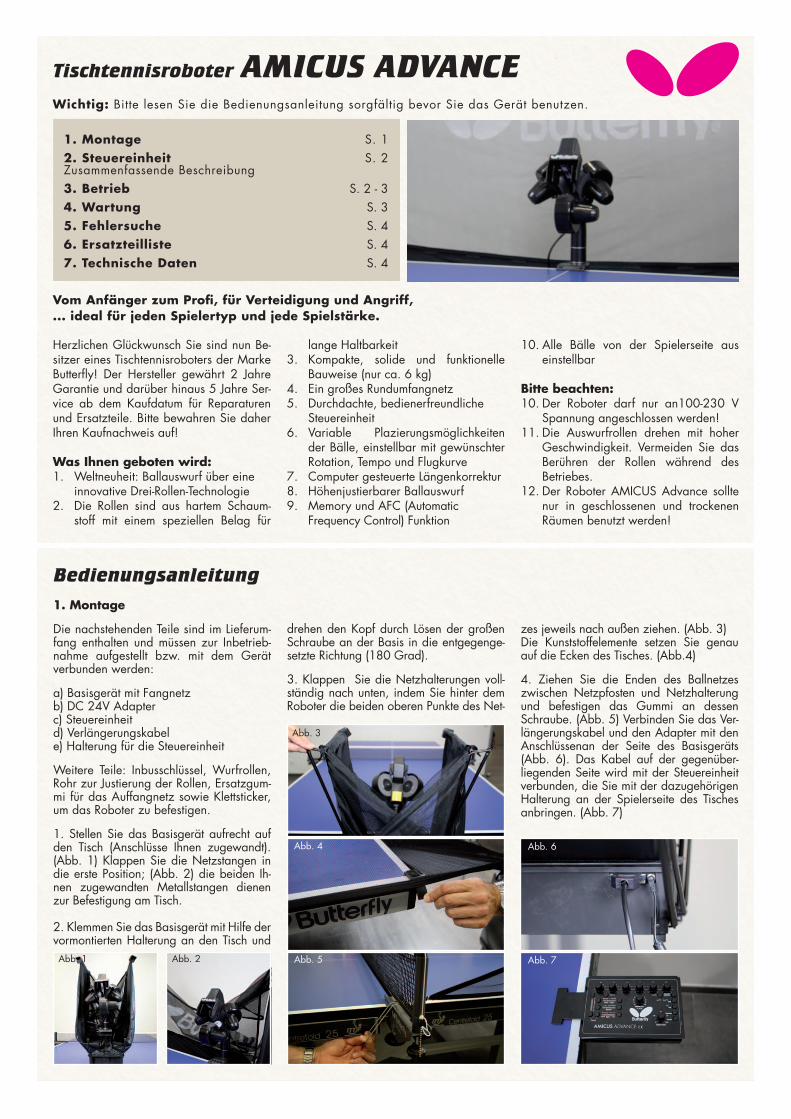
Tischtennisroboter AMICUS ADVANCE
Vom Anfänger zum Profi, für Verteidigung und Angriff,... ideal für jeden Spielertyp und jede Spielstärke.
Herzlichen Glückwunsch Sie sind nun Be-sitzer eines Tischtennisroboters der Marke Butterfly! Der Hersteller gewährt 2 Jahre Garantie und darüber hinaus 5 Jahre Ser-vice ab dem Kaufdatum für Reparaturen und Ersatzteile. Bitte bewahren Sie daher Ihren Kaufnachweis auf!
Was Ihnen geboten wird:1. Weltneuheit: Ballauswurf über eine innovative Drei-Rollen-Technologie2. Die Rollen sind aus hartem Schaum- stoff mit einem speziellen Belag für
lange Haltbarkeit 3. Kompakte, solide und funktionelle Bauweise (nur ca. 6 kg)4. Ein großes Rundumfangnetz5. Durchdachte, bedienerfreundliche Steuereinheit6. Variable Plazierungsmöglichkeiten der Bälle, einstellbar mit gewünschter Rotation, Tempo und Flugkurve7. Computer gesteuerte Längenkorrektur8. Höhenjustierbarer Ballauswurf9. Memory und AFC (Automatic Frequency Control) Funktion
10. Alle Bälle von der Spielerseite aus einstellbar
Bitte beachten:10. Der Roboter darf nur an100-230 V Spannung angeschlossen werden!11. Die Auswurfrollen drehen mit hoher Geschwindigkeit. Vermeiden Sie das Berühren der Rollen während des Betriebes.12. Der Roboter AMICUS Advance sollte nur in geschlossenen und trockenen Räumen benutzt werden!
Wichtig: Bitte lesen Sie die Bedienungsanleitung sorgfältig bevor Sie das Gerät benutzen.
1. Montage S. 12. Steuereinheit S. 2Zusammenfassende Beschreibung3. Betrieb S. 2 - 34. Wartung S. 35. Fehlersuche S. 46. Ersatzteilliste S. 47. Technische Daten S. 4
Bedienungsanleitung
1. Montage
Die nachstehenden Teile sind im Lieferum-fang enthalten und müssen zur Inbetrieb-nahme aufgestellt bzw. mit dem Gerät verbunden werden:
a) Basisgerät mit Fangnetzb) DC 24V Adapter c) Steuereinheit d) Verlängerungskabele) Halterung für die Steuereinheit
Weitere Teile: Inbusschlüssel, Wurfrollen, Rohr zur Justierung der Rollen, Ersatzgum-mi für das Auffangnetz sowie Klettsticker, um das Roboter zu befestigen.
1. Stellen Sie das Basisgerät aufrecht auf den Tisch (Anschlüsse Ihnen zugewandt). (Abb. 1) Klappen Sie die Netzstangen in die erste Position; (Abb. 2) die beiden Ih-nen zugewandten Metallstangen dienen zur Befestigung am Tisch.
2. Klemmen Sie das Basisgerät mit Hilfe der vormontierten Halterung an den Tisch und
drehen den Kopf durch Lösen der großen Schraube an der Basis in die entgegenge-setzte Richtung (180 Grad).
3. Klappen Sie die Netzhalterungen voll-ständig nach unten, indem Sie hinter dem Roboter die beiden oberen Punkte des Net-
zes jeweils nach außen ziehen. (Abb. 3)Die Kunststoffelemente setzen Sie genau auf die Ecken des Tisches. (Abb.4)
4. Ziehen Sie die Enden des Ballnetzes zwischen Netzpfosten und Netzhalterung und befestigen das Gummi an dessen Schraube. (Abb. 5) Verbinden Sie das Ver-längerungskabel und den Adapter mit den Anschlüssenan der Seite des Basisgeräts (Abb. 6). Das Kabel auf der gegenüber-liegenden Seite wird mit der Steuereinheit verbunden, die Sie mit der dazugehörigen Halterung an der Spielerseite des Tisches anbringen. (Abb. 7)
Abb. 1 Abb. 2 Abb. 7Abb. 5
Abb. 3
Abb. 4 Abb. 6
2. Steuereinheit(Zusammenfassung)
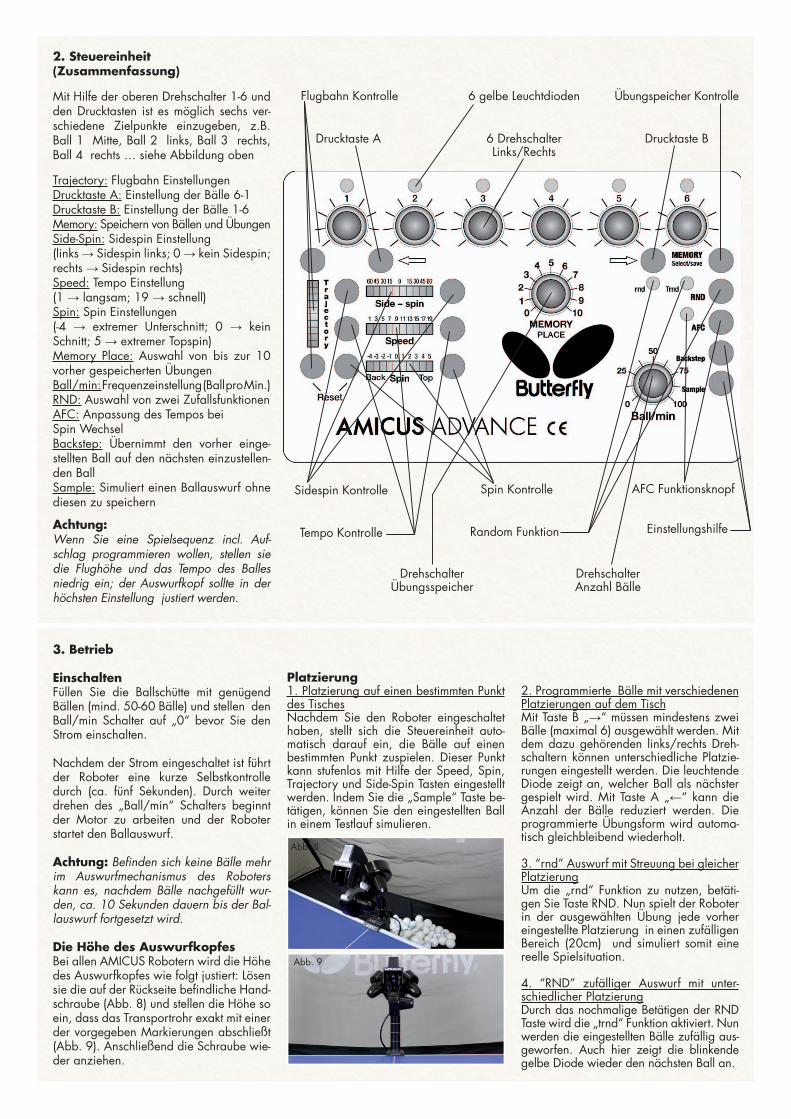
Mit Hilfe der oberen Drehschalter 1-6 und den Drucktasten ist es möglich sechs ver-schiedene Zielpunkte einzugeben, z.B. Ball 1 Mitte, Ball 2 links, Ball 3 rechts, Ball 4 rechts … siehe Abbildung oben
Trajectory: Flugbahn EinstellungenDrucktaste A: Einstellung der Bälle 6-1Drucktaste B: Einstellung der Bälle 1-6Memory: Speichern von Bällen und Übungen Side-Spin: Sidespin Einstellung (links → Sidespin links; 0 → kein Sidespin; rechts → Sidespin rechts)Speed: Tempo Einstellung (1 → langsam; 19 → schnell)Spin: Spin Einstellungen (-4 → extremer Unterschnitt; 0 → kein Schnitt; 5 → extremer Topspin)Memory Place: Auswahl von bis zur 10 vorher gespeicherten ÜbungenBall/min: Frequenzeinstellung (Ball pro Min.) RND: Auswahl von zwei ZufallsfunktionenAFC: Anpassung des Tempos bei Spin WechselBackstep: Übernimmt den vorher einge-stellten Ball auf den nächsten einzustellen-den BallSample: Simuliert einen Ballauswurf ohne diesen zu speichern
Achtung: Wenn Sie eine Spielsequenz incl. Auf-schlag programmieren wollen, stellen sie die Flughöhe und das Tempo des Balles niedrig ein; der Auswurfkopf sollte in der höchsten Einstellung justiert werden.
3. Betrieb
EinschaltenFüllen Sie die Ballschütte mit genügend Bällen (mind. 50-60 Bälle) und stellen den Ball/min Schalter auf „0“ bevor Sie den Strom einschalten.
Nachdem der Strom eingeschaltet ist führt der Roboter eine kurze Selbstkontrolle durch (ca. fünf Sekunden). Durch weiter drehen des „Ball/min“ Schalters beginnt der Motor zu arbeiten und der Roboter startet den Ballauswurf.
Achtung: Befinden sich keine Bälle mehr im Auswurfmechanismus des Roboters kann es, nachdem Bälle nachgefüllt wur-den, ca. 10 Sekunden dauern bis der Bal-lauswurf fortgesetzt wird.
Die Höhe des AuswurfkopfesBei allen AMICUS Robotern wird die Höhe des Auswurfkopfes wie folgt justiert: Lösen sie die auf der Rückseite befindliche Hand-schraube (Abb. 8) und stellen die Höhe so ein, dass das Transportrohr exakt mit einer der vorgegeben Markierungen abschließt (Abb. 9). Anschließend die Schraube wie-der anziehen.
Platzierung 1. Platzierung auf einen bestimmten Punkt des TischesNachdem Sie den Roboter eingeschaltet haben, stellt sich die Steuereinheit auto-matisch darauf ein, die Bälle auf einen bestimmten Punkt zuspielen. Dieser Punkt kann stufenlos mit Hilfe der Speed, Spin, Trajectory und Side-Spin Tasten eingestellt werden. Indem Sie die „Sample“ Taste be-tätigen, können Sie den eingestellten Ball in einem Testlauf simulieren.
2. Programmierte Bälle mit verschiedenen Platzierungen auf dem TischMit Taste B „→“ müssen mindestens zwei Bälle (maximal 6) ausgewählt werden. Mit dem dazu gehörenden links/rechts Dreh-schaltern können unterschiedliche Platzie-rungen eingestellt werden. Die leuchtende Diode zeigt an, welcher Ball als nächster gespielt wird. Mit Taste A „←“ kann die Anzahl der Bälle reduziert werden. Die programmierte Übungsform wird automa-tisch gleichbleibend wiederholt.
3. “rnd” Auswurf mit Streuung bei gleicher PlatzierungUm die „rnd“ Funktion zu nutzen, betäti-gen Sie Taste RND. Nun spielt der Roboter in der ausgewählten Übung jede vorher eingestellte Platzierung in einen zufälligen Bereich (20cm) und simuliert somit eine reelle Spielsituation.
4. “RND” zufälliger Auswurf mit unter-schiedlicher PlatzierungDurch das nochmalige Betätigen der RND Taste wird die „trnd“ Funktion aktiviert. Nun werden die eingestellten Bälle zufällig aus-geworfen. Auch hier zeigt die blinkende gelbe Diode wieder den nächsten Ball an.
Abb. 9
Abb. 8
Sidespin Kontrolle Spin Kontrolle
Tempo Kontrolle
AFC Funktionsknopf
EinstellungshilfeRandom Funktion
Drehschalter Anzahl Bälle
DrehschalterÜbungsspeicher
Flugbahn Kontrolle
Drucktaste A
6 gelbe Leuchtdioden
6 DrehschalterLinks/Rechts
Drucktaste B
Übungspeicher Kontrolle
5. „Trnd“ und „rnd“ zusammen spielenIn dem Sie die RND Taste ein drittes Mal betätigen können Sie „Trnd“ und „rnd“ ge-meinsam nutzen. Die Bälle werden dann auf die jeweilig ausgesuchten Bälle zufäl-lig mit einem 20cm Radius gespielt.
AFC-FunktionDie neue “AFC“ (AutomaticFrequency Control)-Funktion kann ausgewählt wer-den, wennes verschiedene Arten vonBälle-ninnerhalbeiner Übunggleichzeitig ausge-wählt werden. Wenn die AFC-Funktionausgewählt wird passt der ADVANCE automatisch die Zeitintervalle zwischen den einzelnen Bäl-len mit unterschiedlichem Spin an. Diese Funktionberücksichtigt, ob der vorherige Ballschnell oder langsamundmit Unter-schnittoderTopspingespielt wurde, so kön-nen Spielsituationen noch besser simuliert werden.
MemoryDas Programmieren von Ballsequenzen und Übungen ist zeitaufwendig. Damit die Einstellungen beim Ausschalten des Robo-ters nicht verloren gehen, bietet der AMI-CUS ADVANCE Ihnen die Möglichkeit bis zu 10 Übungen abzuspeichern. Diese kön-nen jederzeit wieder aufgerufen werden.
Speichern der Übungen Stellen Sie die „MEMORY“ Drehschalter auf die Position, unter der sie die Übung auf der Steuereinheit (Plätze 0-10) spei-chern wollen. Halten Sie die „MEMORY Save/Select“ Taste (ca.2 Sekunden) ge-drückt, bis das Licht zu blinken beginnt. Die blinkende LED bedeutet, dass die Übung gespeichert wurde.
Abrufen der gespeicherten Übungen aus dem SpeicherWählen Sie zunächst das Programm, indem
Sie die „Memory Place“-Taste betätigen. Durch schnelles Drücken der „MEMORY Se-lect/Save“ Taste, wird die Programm-Num-mer jetzt auf der Steuereinheit angezeigt. Alle Lichter blinken jetzt; dies weist darauf hin, dass der Roboter sich im Speicher-Mo-dus befindet und nun bereit ist eine gespei-cherte Übung zu spielen. Betätigen Sie den „Ball / min“ Drehschalter, um die Übung zu beginnen. Jetzt können nur noch Einstel-lungen an „Ball Placement“, „Ball / min“, „AFC“ und „RND“ verändert werden.
Gespeicherte Bälle anpassenBereits gespeicherte Bälle einer Übung zu ändern ist nur möglich, wenn sich der Ro-boter in dieser Übung befindet und Sie die „Backstep“ Taste drücken. Dann können sie Flugbahn, Spin und Länger der Bälle wie-der frei wählen und die neue Einstellung durch Drücken der Memory Select/Save Taste speichern.
4. Wartung & Reparatur
Wichtig: Bevor Sie Wartungs- oder Repa-raturarbeiten ausführen, unterbrechen Sie unbedingt die Stromzufuhr.
Stellen Sie sicher, dass keine kleinen Teile (z.B. Haare, kaputte Bälle usw.) während des Betriebs in das Ballfangnetz und in die Maschine geraten, da dies zu Ballstaus führen kann.
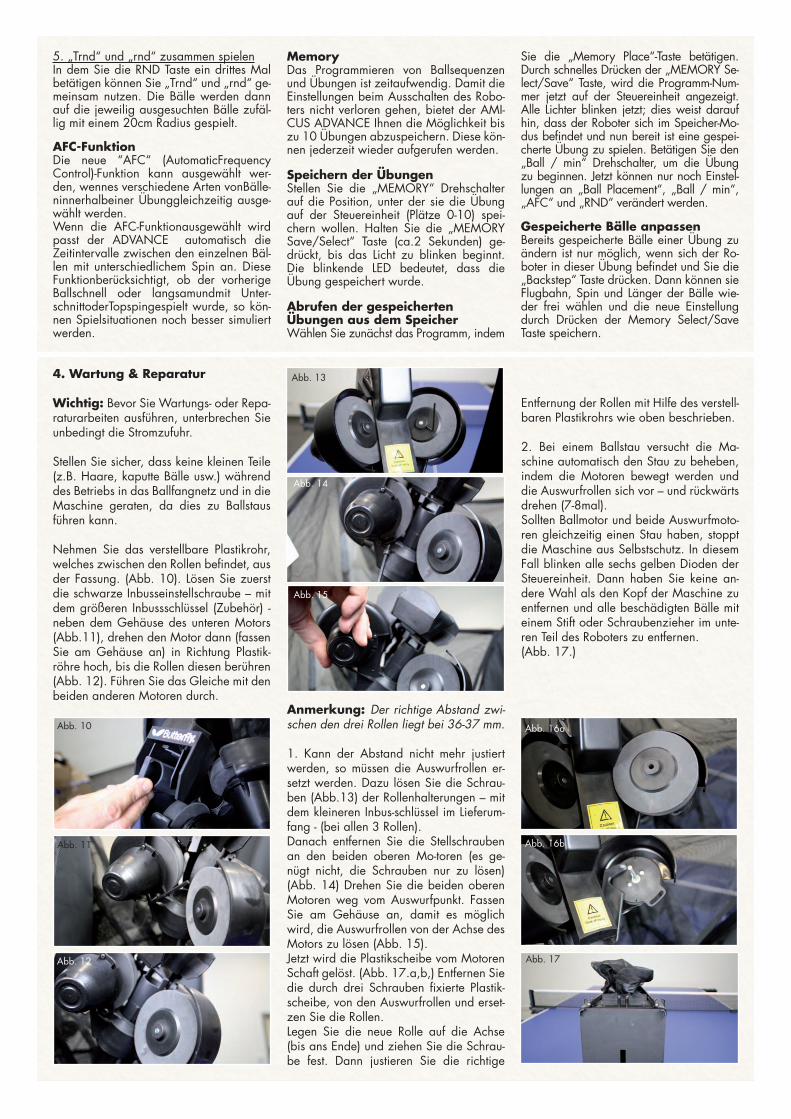
Nehmen Sie das verstellbare Plastikrohr, welches zwischen den Rollen befindet, aus der Fassung. (Abb. 10). Lösen Sie zuerst die schwarze Inbusseinstellschraube – mit dem größeren Inbussschlüssel (Zubehör) - neben dem Gehäuse des unteren Motors (Abb.11), drehen den Motor dann (fassen Sie am Gehäuse an) in Richtung Plastik-röhre hoch, bis die Rollen diesen berühren (Abb. 12). Führen Sie das Gleiche mit den beiden anderen Motoren durch.
Anmerkung: Der richtige Abstand zwi-schen den drei Rollen liegt bei 36-37 mm.
1. Kann der Abstand nicht mehr justiert werden, so müssen die Auswurfrollen er-setzt werden. Dazu lösen Sie die Schrau-ben (Abb.13) der Rollenhalterungen – mit dem kleineren Inbus-schlüssel im Lieferum-fang - (bei allen 3 Rollen).Danach entfernen Sie die Stellschrauben an den beiden oberen Mo-toren (es ge-nügt nicht, die Schrauben nur zu lösen) (Abb. 14) Drehen Sie die beiden oberen Motoren weg vom Auswurfpunkt. Fassen Sie am Gehäuse an, damit es möglich wird, die Auswurfrollen von der Achse des Motors zu lösen (Abb. 15).Jetzt wird die Plastikscheibe vom Motoren Schaft gelöst. (Abb. 17.a,b,) Entfernen Sie die durch drei Schrauben fixierte Plastik-scheibe, von den Auswurfrollen und erset-zen Sie die Rollen.Legen Sie die neue Rolle auf die Achse (bis ans Ende) und ziehen Sie die Schrau-be fest. Dann justieren Sie die richtige
Entfernung der Rollen mit Hilfe des verstell-baren Plastikrohrs wie oben beschrieben.
2. Bei einem Ballstau versucht die Ma-schine automatisch den Stau zu beheben, indem die Motoren bewegt werden und die Auswurfrollen sich vor – und rückwärts drehen (7-8mal). Sollten Ballmotor und beide Auswurfmoto-ren gleichzeitig einen Stau haben, stoppt die Maschine aus Selbstschutz. In diesem Fall blinken alle sechs gelben Dioden der Steuereinheit. Dann haben Sie keine an-dere Wahl als den Kopf der Maschine zu entfernen und alle beschädigten Bälle mit einem Stift oder Schraubenzieher im unte-ren Teil des Roboters zu entfernen. (Abb. 17.)
Abb. 13
Abb. 14
Abb. 15
Abb. 10
Abb. 11
Abb. 12
Abb. 16a
Abb. 16b
Abb. 17
6. Ersatzteilliste
Ersatzteilemobil-100 Basisstation mit Fangnetzmobil-101 RoboterkopAdvance-102 Steuereinheitmobil-103 Halterung für die Steuereinheitmobil-104 DC Adaptermobil-105 Verlängerungskabel
mobil-106 Motor für Ballauswurfmobil-107 Motor für Ballführungmobil-108 Schwingkopf Motormobil-109 Motor für Höheneinstellungmobil-110 Ballwurfscheibemobil-111 Rohr für Ballwurfscheibe
mobil-112 Ball Platzierungsmechanismusmobil-113 Motorgehäuse (3-teilig)
Weitere Ersatzteile auf Anfrage!
7. Technische Daten
Stromspannung: 100-230 V, 50 - 60 H-Transformator, ungefähr 40 WDer Roboter sollte bei Zimmertemperaturen zwischen 0 und 40° C betrieben werden.
Gewicht: 6 kg (inklusive Netz)Gesamtmaße (inklusive Netz): Höhe 0,75 m; Breite 0,28 m; Tiefe 0,25 m
Für den elektrischen Adapter wurde eine Typen Test Prüfung durchgeführt
Übereinstimmung mit Low Voltage directive 73/23/EECzuletzt geändert von EEC Directive 93/68/EECRegistration No.: AN 50091861 0001Report No.: 17004848 001Ersichtlich im Test Report No. NTEK-2010NT1115351Esowie NTEK-2010NT1115353SS
Auf Grund der Testberichte darf der Robo-ter AMICUS Advance das CE – Zeichen tragen
Nähere Informationen und Produktvideo finden Sie unter
butterfly.tt/amicus
5. Fehlersuche
Problem Lösung
Die Maschine reagiert nicht a) keine Stromzufuhr?b) Sicherung defekt → Sicherung in der Steuerbox ersetzen
Kontrollieren Sie, ob alle Stecker richtig mit der Steuerungseinheit verbunden sind
Steht der Drehschalter für Ballfrequenz auf „Null“?
Die Bälle werden mit unregelmäßiger Länge ausgeworfen
a) Kontrollieren Sie den Abstand der Auswurfrollen, sind die Rollen eventuell abgenutzt?b) Falscher Aufbau: Sind alle Rohre und der Roboterkopf fest aufgesetzt? c) Pin für die Regulierung der Ballplatzierung „hängt fest” → etwas mit Silikon schmieren
Die Bälle werden plötzlich unregelmäßig und mit unterschiedlicher Länge ausge-worfen
a) Neustart b) Defekter Ball oder ein anderer Fremdkörper verhindern den Balltransport → entfernen
Ballstau; die gelbe Leuchtdiode auf der Steuereinheit blinkt Defekter Ball oder ein anderer Fremdkörper verhindern den Balltransport → entfernen
Die “Random” Funktion auf der Steue-rung kann nicht eingeschaltet werden, die grüne Leuchtdiode geht nicht an
Es müssen mindestens zwei Bälle aktiviert werden und mindestens zwei gelbe Dioden müssen leuchten
Bälle hängen in den Auswurfrollen fest, die Steuereinheit geht aus
Trennen Sie die Stromzufuhr zum Adapter, entfernen Sie alle Bälle zwischen den Rol-len, stellen Sie den Ball/min Schalter auf “0” um das Spiel fortzusetzen.
Achtung: Sollten Sie das Problem nicht mit Hilfe der Checkliste lösen können, zie-hen sie bitte einen Fachmann hinzu! Setzen Sie sich mit ihrem Fachlieferanten oder direkt mit der Butterfly Service-Stelle (Adresse S. 4) in Verbindung.
Nehmen Sie immer Kontakt mit einem Spezialisten auf, wenn das Stromkabel defekt ist oder die Sicherung sofort wieder durchbrennt, nachdem sie ersetzt wurde. Anderenfalls verlieren Sie ihren Anspruch auf Erstattung während der zweijährigen Garantiezeit.
Pin für Ballwurf-Regulierung
Tamasu Butterfly Europa GmbH · Am Schürmannshütt 30h GERMANY · 47441 Moers · Tel: +49 2841 [email protected] · www.butterfly.tt www.facebook.com/butterfly.deutsch Amicus Video