Embed Size (px)
Citation preview

CAN-Viewer Bedienungsanleitung
446 301 585 0 (de)446 301 599 0 (en)

ssssssssssssssssssssssssssss
ddddddddddddddddddddddddd
CAN-Viewer446 301 585 0 (de)446 301 599 0 (en)ab Version 1.10
Bedienungsanleitung
2. Ausgabe
Diese Druckschrift unterliegt keinem Änderungsdienst.Neue Versionen finden Sie in INFORM unter www.wabco-auto.com
© 2010 WABCO
Änderungen bleiben vorbehaltenVersion 002/03.10
8150201183 815 020 118 3(de)
2
CAN-Viewer
Inhaltsverzeichnis
1 Allgemeine Sicherheitshinweise 3
2 Einführung 4
2.1 CAN-Viewer 4
2.2 CAN-Bus 4
3 Programmoberfläche 5
4 Anwendung des CAN-Viewers 8
4.1 Aufbau der Kabelverbindung zum Fahrzeug über ISO 763 (7-polig) 8
4.2 Aufbau der Kabelverbindung zum Fahrzeug über ISO 12098 (15-polig) 8
4.3 Software-Installation und -Aktivierung 9
4.4 Anzeigen der Botschaften aus der Motorwagen-Anhängerschnittstelle (ISO 11992-2 oder 11992-3) 9
4.5 Anzeigen der Botschaften von einem beliebigen CAN-Bus 10
4.6 Anzeigen von einer oder mehreren bestimmten CAN-Botschaften 10
4.7 Filtern der angezeigten CAN-Botschaften (Identifier Konfiguration) 11
4.8 Erstellen / Bearbeiten eines Identifiers 11
4.9 Erstellen einer Konfigurationsdatei mit eigenen Einstellungen 12
4.10 Laden einer eigenen Konfigurationsdatei 12
4.11 Aufzeichnen und Speichern von einem Protokoll mit CAN-Botschaften in eine Datei 12
5 Administration 135.1 Programmeinstellungen 13
5.2 Erstellen einer Konfigurationsdatei zum Aufschlüsseln von CAN-Botschaften im Klartext 13
5.2.1 Bereich [FileInfo] 145.2.2 Bereich [Config] 145.2.3 Bereich [Identifier] 15
6 Weiterführende Informationen zum CAN-Bus 186.1 Übertragungsverfahren 18
6.2 Übertragungsrate und Leitungslänge 18
6.3 Objektidentifier 19
6.4 Arbitrierung (Aushandeln des Medienzugriffs), Priorität 19
6.5 Frame-Aufbau 19
Erläuterungen zur Symbolik
Zusätzliche Hinweise, Informationen oder Tipps,die Sie unbedingt beachten müssen.
• Aufzählung
– Handlungsschritt
!
Inhaltsverzeichnis

3
CAN-Viewer
1 Allgemeine Sicherheitshinweise
Mit dem CAN-Viewer darf nur geschultes und qualifi-ziertes Fachpersonal arbeiten.
Leisten Sie den Vorgaben und Anweisungen des Fahr-zeugherstellers unbedingt Folge.
Halten Sie die Unfallverhütungsvorschriften des Betrie-bes sowie nationale Vorschriften ein.
Der Arbeitsplatz muss trocken sowie ausreichend be-leuchtet und belüftet sein.
Stellen Sie sicher, dass das Getriebe auf „Neutral“ ge-schaltet und die Handbremse betätigt ist. Bei Arbeitenan der Bremsanlage muss das Fahrzeug zusätzlich ge-gen Wegrollen gesichert werden.
Tragen Sie, soweit erforderlich, geeignete Schutzklei-dung.
Allgemeine Sicherheitshinweise 1
4
CAN-Viewer
2 Einführung
2.1 CAN-Viewer
Mit dem CAN-Viewer können auf einfache Weise CAN-Botschaften von einem beliebigen CAN-Bus ausgele-sen, in Klartext aufgelöst und gespeichert werden. Dieserfolgt ohne komplizierte Messtechnik und zur Laufzeit.
Haupteinsatzgebiet des CAN-Viewers ist die Verfol-gung des Nachrichtenflusses des EBS CAN-Bus an derAnhängerschnittstelle.
Durch die Sichtbarmachung der Kommunikationzwischen Motorwagen und Anhänger kann dieFunktion des Datenaustausches überprüft werden,was zu den Sorgfaltspflichten bei der Fahrzeugab-nahme gehört.
2.2 CAN-Bus
Controller Area Network (CAN) BusBeim CAN-Bus handelt es sich um ein asynchrones(zeitlich versetztes), serielles Bussystem, das 1983von Bosch für die Vernetzung von Steuergeräten imAutomobil entwickelt wird und 1985 zusammen mit In-
tel vorgestellt wurde, um die Kabelbäume zu reduzie-ren und dadurch Gewicht zu sparen. [Quelle: www.wikipedia.de - Die freie Enzyklopädie(03/2006)]
Anstelle der Verwendung eines elektrischen Schaltkrei-ses je übertragendem Signal basiert der „Bus“ auf einerKommunikationsplattform, die die Übergabe von Bot-schaften zwischen einzelnen Geräten übernimmt.
Praktisch gesehen kann man sich das so vorstellen:Während das Einschalten des Rücklichts mittels Be-stromung eines Kabels zum Rücklicht erfolgte, über-bringt das Bussystem nur noch eine Meldung: „Licht-schalter an Rücklicht: Einschalten!“.
Durch die Umsetzung aller Steuersignale in Botschaf-ten ist eine „größere Intelligenz“ der verbundenen Ge-räte erforderlich, dafür können aber viele Geräte quasigleichzeitig Informationen über wenige Kabelverbin-dungen austauschen. Bei Systemen wie z. B. EBS kön-nen auch viel komplexere Informationen ausge-stauscht werden, wie z. B. zum aktuellenBelagverschleiß oder zu einzelnen Radgeschwindig-keiten im ABS-Fall.
!
2 Einführung
5
CAN-Viewer
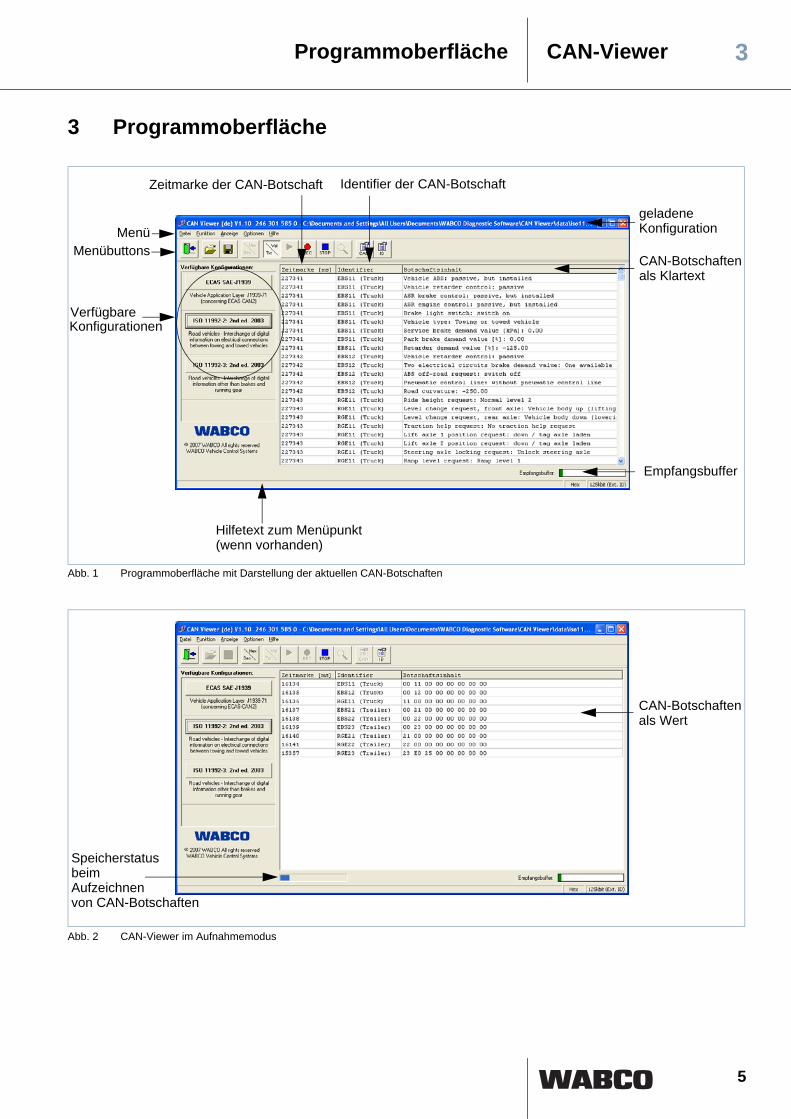
3 Programmoberfläche
Abb. 1 Programmoberfläche mit Darstellung der aktuellen CAN-Botschaften
Abb. 2 CAN-Viewer im Aufnahmemodus
MenüMenübuttons
VerfügbareKonfigurationen
Zeitmarke der CAN-Botschaft Identifier der CAN-Botschaft
geladeneKonfiguration
CAN-Botschaftenals Klartext
Empfangsbuffer
Hilfetext zum Menüpunkt(wenn vorhanden)
CAN-Botschaftenals Wert
SpeicherstatusbeimAufzeichnenvon CAN-Botschaften
Programmoberfläche 3
6
CAN-Viewer
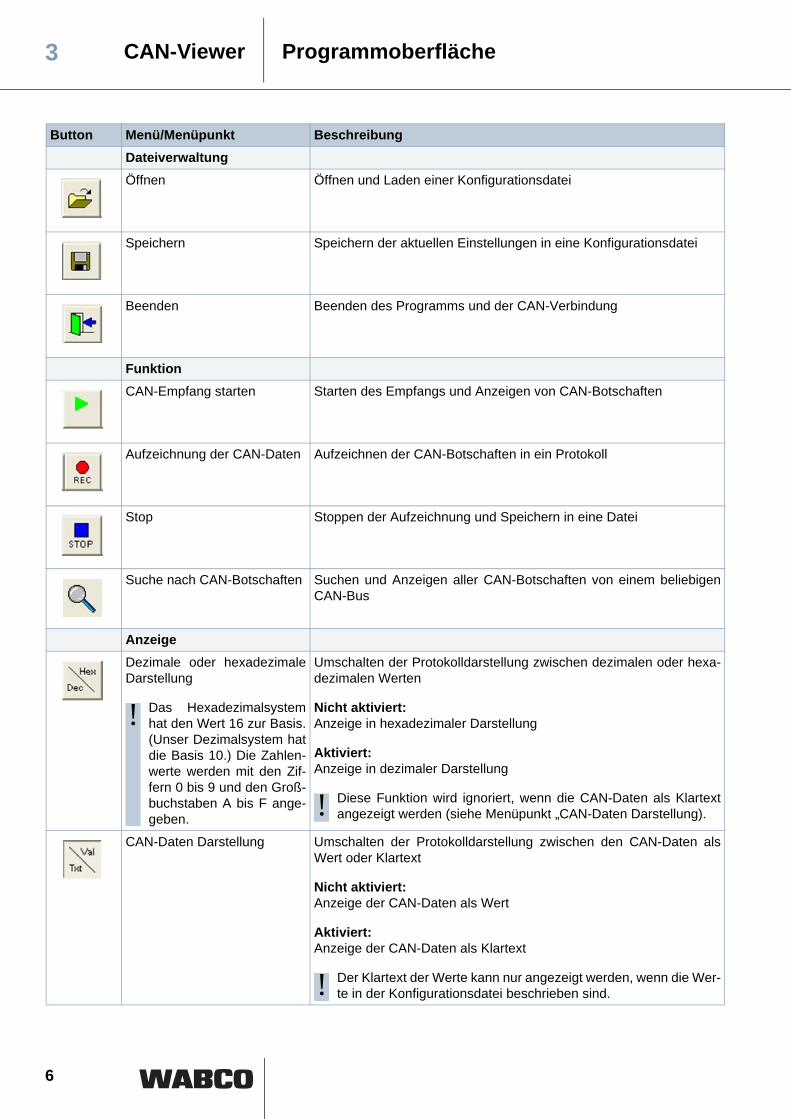
Button Menü/Menüpunkt BeschreibungDateiverwaltungÖffnen Öffnen und Laden einer Konfigurationsdatei
Speichern Speichern der aktuellen Einstellungen in eine Konfigurationsdatei
Beenden Beenden des Programms und der CAN-Verbindung
FunktionCAN-Empfang starten Starten des Empfangs und Anzeigen von CAN-Botschaften
Aufzeichnung der CAN-Daten Aufzeichnen der CAN-Botschaften in ein Protokoll
Stop Stoppen der Aufzeichnung und Speichern in eine Datei
Suche nach CAN-Botschaften Suchen und Anzeigen aller CAN-Botschaften von einem beliebigenCAN-Bus
AnzeigeDezimale oder hexadezimaleDarstellung
Das Hexadezimalsystemhat den Wert 16 zur Basis.(Unser Dezimalsystem hatdie Basis 10.) Die Zahlen-werte werden mit den Zif-fern 0 bis 9 und den Groß-buchstaben A bis F ange-geben.
Umschalten der Protokolldarstellung zwischen dezimalen oder hexa-dezimalen Werten
Nicht aktiviert:Anzeige in hexadezimaler Darstellung
Aktiviert:Anzeige in dezimaler Darstellung
Diese Funktion wird ignoriert, wenn die CAN-Daten als Klartextangezeigt werden (siehe Menüpunkt „CAN-Daten Darstellung).
CAN-Daten Darstellung Umschalten der Protokolldarstellung zwischen den CAN-Daten alsWert oder Klartext
Nicht aktiviert:Anzeige der CAN-Daten als Wert
Aktiviert:Anzeige der CAN-Daten als Klartext
Der Klartext der Werte kann nur angezeigt werden, wenn die Wer-te in der Konfigurationsdatei beschrieben sind.
!
!
!
Programmoberfläche3
7
CAN-Viewer
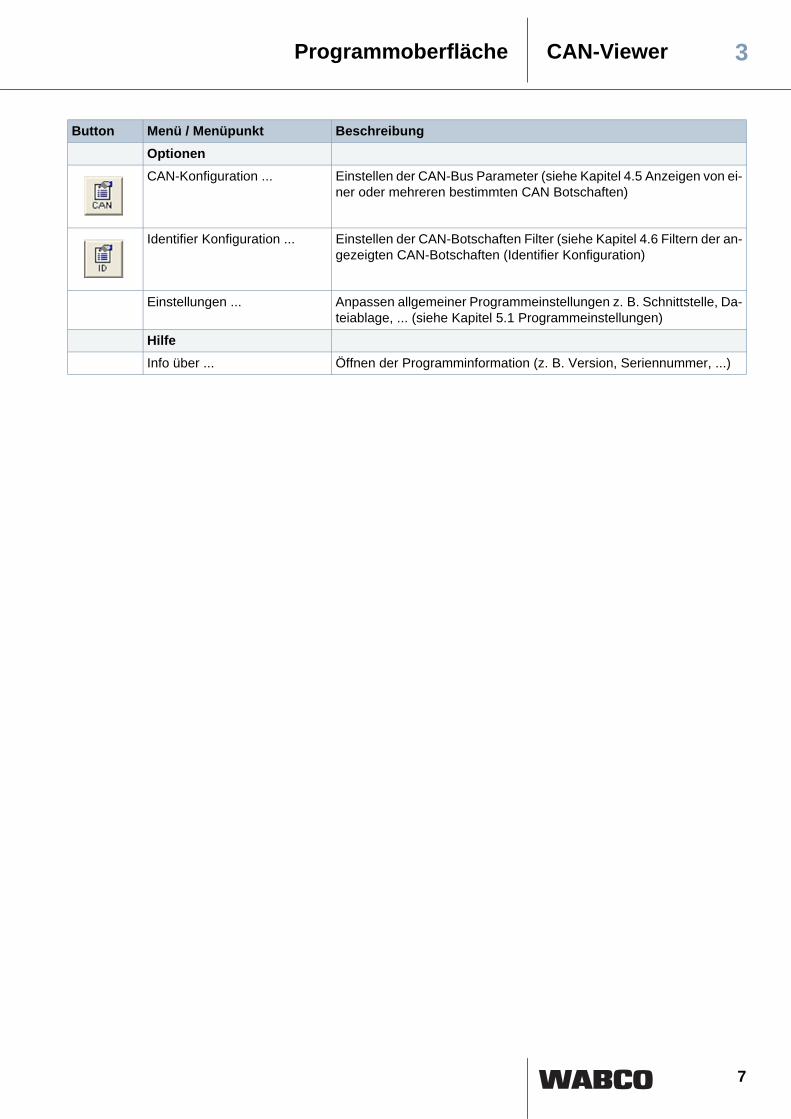
Button Menü / Menüpunkt BeschreibungOptionenCAN-Konfiguration ... Einstellen der CAN-Bus Parameter (siehe Kapitel 4.5 Anzeigen von ei-
ner oder mehreren bestimmten CAN Botschaften)
Identifier Konfiguration ... Einstellen der CAN-Botschaften Filter (siehe Kapitel 4.6 Filtern der an-gezeigten CAN-Botschaften (Identifier Konfiguration)
Einstellungen ... Anpassen allgemeiner Programmeinstellungen z. B. Schnittstelle, Da-teiablage, ... (siehe Kapitel 5.1 Programmeinstellungen)
HilfeInfo über ... Öffnen der Programminformation (z. B. Version, Seriennummer, ...)
Programmoberfläche 3
8
CAN-Viewer
4 Anwendung
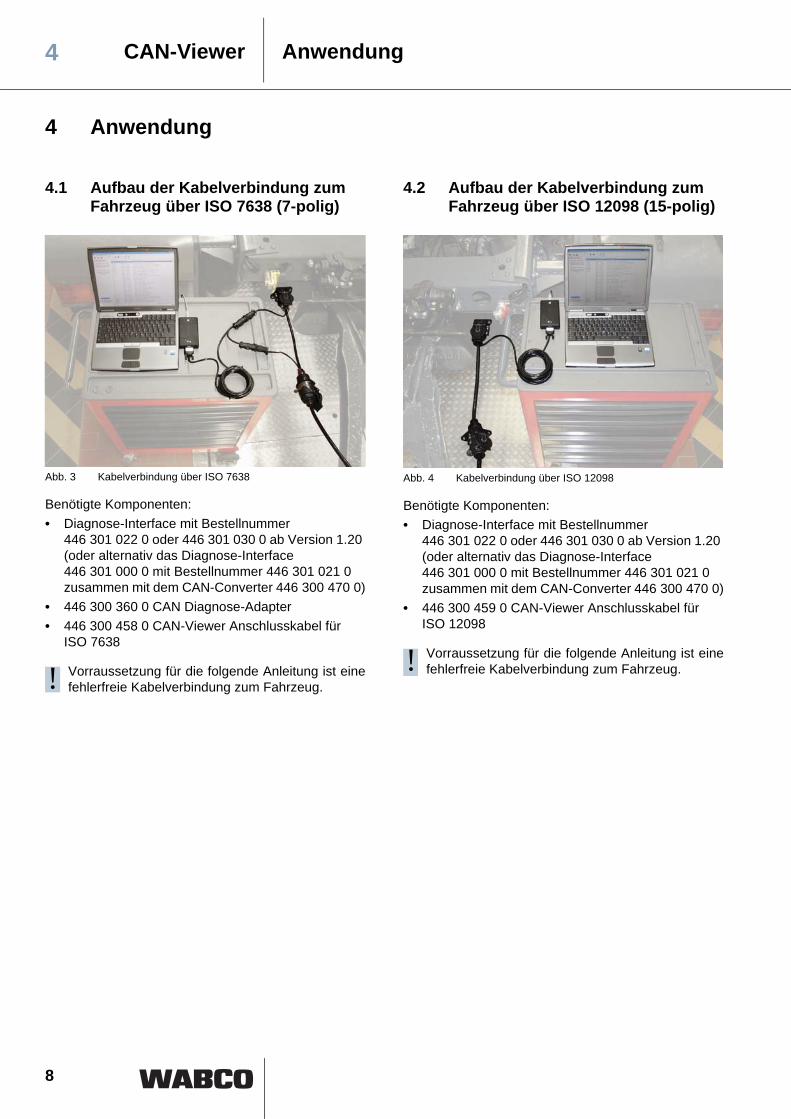
4.1 Aufbau der Kabelverbindung zum Fahrzeug über ISO 7638 (7-polig)
Abb. 3 Kabelverbindung über ISO 7638
Benötigte Komponenten:• Diagnose-Interface mit Bestellnummer
446 301 022 0 oder 446 301 030 0 ab Version 1.20 (oder alternativ das Diagnose-Interface 446 301 000 0 mit Bestellnummer 446 301 021 0 zusammen mit dem CAN-Converter 446 300 470 0)
• 446 300 360 0 CAN Diagnose-Adapter• 446 300 458 0 CAN-Viewer Anschlusskabel für
ISO 7638
Vorraussetzung für die folgende Anleitung ist einefehlerfreie Kabelverbindung zum Fahrzeug.
4.2 Aufbau der Kabelverbindung zum Fahrzeug über ISO 12098 (15-polig)
Abb. 4 Kabelverbindung über ISO 12098
Benötigte Komponenten:• Diagnose-Interface mit Bestellnummer
446 301 022 0 oder 446 301 030 0 ab Version 1.20 (oder alternativ das Diagnose-Interface 446 301 000 0 mit Bestellnummer 446 301 021 0 zusammen mit dem CAN-Converter 446 300 470 0)
• 446 300 459 0 CAN-Viewer Anschlusskabel für ISO 12098
Vorraussetzung für die folgende Anleitung ist einefehlerfreie Kabelverbindung zum Fahrzeug.! !
Anwendung4
9
CAN-Viewer
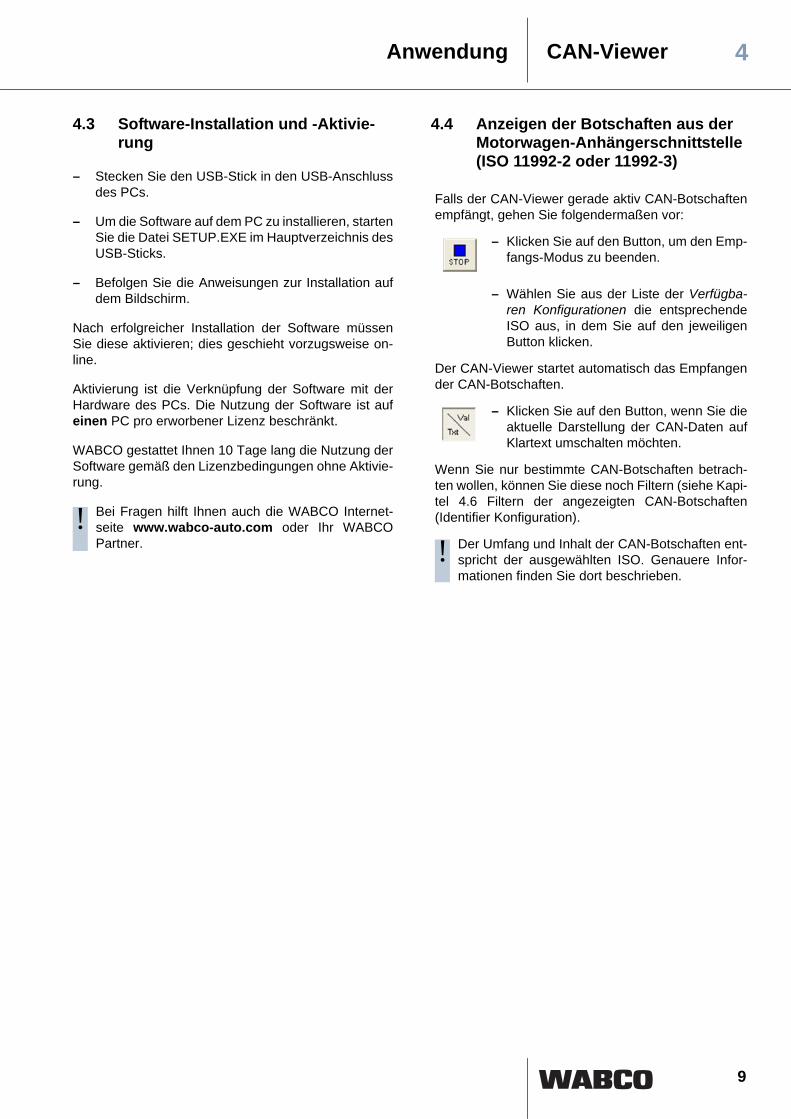
4.3 Software-Installation und -Aktivie-rung
– Stecken Sie den USB-Stick in den USB-Anschlussdes PCs.
– Um die Software auf dem PC zu installieren, startenSie die Datei SETUP.EXE im Hauptverzeichnis desUSB-Sticks.
– Befolgen Sie die Anweisungen zur Installation aufdem Bildschirm.
Nach erfolgreicher Installation der Software müssenSie diese aktivieren; dies geschieht vorzugsweise on-line.
Aktivierung ist die Verknüpfung der Software mit derHardware des PCs. Die Nutzung der Software ist aufeinen PC pro erworbener Lizenz beschränkt.
WABCO gestattet Ihnen 10 Tage lang die Nutzung derSoftware gemäß den Lizenzbedingungen ohne Aktivie-rung.
Bei Fragen hilft Ihnen auch die WABCO Internet-seite www.wabco-auto.com oder Ihr WABCOPartner.
4.4 Anzeigen der Botschaften aus der Motorwagen-Anhängerschnittstelle (ISO 11992-2 oder 11992-3)
!
Falls der CAN-Viewer gerade aktiv CAN-Botschaftenempfängt, gehen Sie folgendermaßen vor:
– Klicken Sie auf den Button, um den Emp-fangs-Modus zu beenden.
– Wählen Sie aus der Liste der Verfügba-ren Konfigurationen die entsprechendeISO aus, in dem Sie auf den jeweiligenButton klicken.
Der CAN-Viewer startet automatisch das Empfangender CAN-Botschaften.
– Klicken Sie auf den Button, wenn Sie dieaktuelle Darstellung der CAN-Daten aufKlartext umschalten möchten.
Wenn Sie nur bestimmte CAN-Botschaften betrach-ten wollen, können Sie diese noch Filtern (siehe Kapi-tel 4.6 Filtern der angezeigten CAN-Botschaften(Identifier Konfiguration).
Der Umfang und Inhalt der CAN-Botschaften ent-spricht der ausgewählten ISO. Genauere Infor-mationen finden Sie dort beschrieben.
!
Anwendung 4
10
CAN-Viewer
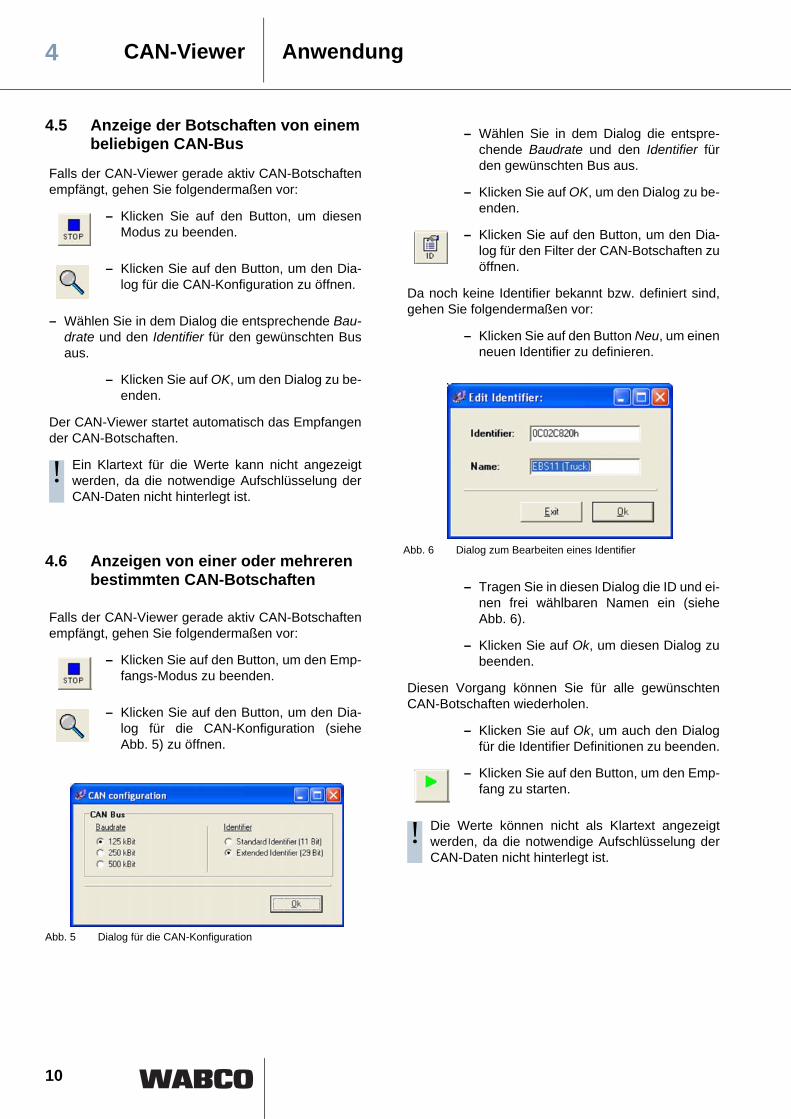
4.5 Anzeige der Botschaften von einem beliebigen CAN-Bus
4.6 Anzeigen von einer oder mehreren bestimmten CAN-Botschaften
Abb. 5 Dialog für die CAN-Konfiguration
Abb. 6 Dialog zum Bearbeiten eines Identifier
Falls der CAN-Viewer gerade aktiv CAN-Botschaftenempfängt, gehen Sie folgendermaßen vor:
– Klicken Sie auf den Button, um diesenModus zu beenden.
– Klicken Sie auf den Button, um den Dia-log für die CAN-Konfiguration zu öffnen.
– Wählen Sie in dem Dialog die entsprechende Bau-drate und den Identifier für den gewünschten Busaus.
– Klicken Sie auf OK, um den Dialog zu be-enden.
Der CAN-Viewer startet automatisch das Empfangender CAN-Botschaften.
Ein Klartext für die Werte kann nicht angezeigtwerden, da die notwendige Aufschlüsselung derCAN-Daten nicht hinterlegt ist.
Falls der CAN-Viewer gerade aktiv CAN-Botschaftenempfängt, gehen Sie folgendermaßen vor:
– Klicken Sie auf den Button, um den Emp-fangs-Modus zu beenden.
– Klicken Sie auf den Button, um den Dia-log für die CAN-Konfiguration (sieheAbb. 5) zu öffnen.
!
– Wählen Sie in dem Dialog die entspre-chende Baudrate und den Identifier fürden gewünschten Bus aus.
– Klicken Sie auf OK, um den Dialog zu be-enden.
– Klicken Sie auf den Button, um den Dia-log für den Filter der CAN-Botschaften zuöffnen.
Da noch keine Identifier bekannt bzw. definiert sind,gehen Sie folgendermaßen vor:
– Klicken Sie auf den Button Neu, um einenneuen Identifier zu definieren.
– Tragen Sie in diesen Dialog die ID und ei-nen frei wählbaren Namen ein (sieheAbb. 6).
– Klicken Sie auf Ok, um diesen Dialog zubeenden.
Diesen Vorgang können Sie für alle gewünschtenCAN-Botschaften wiederholen.
– Klicken Sie auf Ok, um auch den Dialogfür die Identifier Definitionen zu beenden.
– Klicken Sie auf den Button, um den Emp-fang zu starten.
Die Werte können nicht als Klartext angezeigtwerden, da die notwendige Aufschlüsselung derCAN-Daten nicht hinterlegt ist.
!
Anwendung4
11
CAN-Viewer
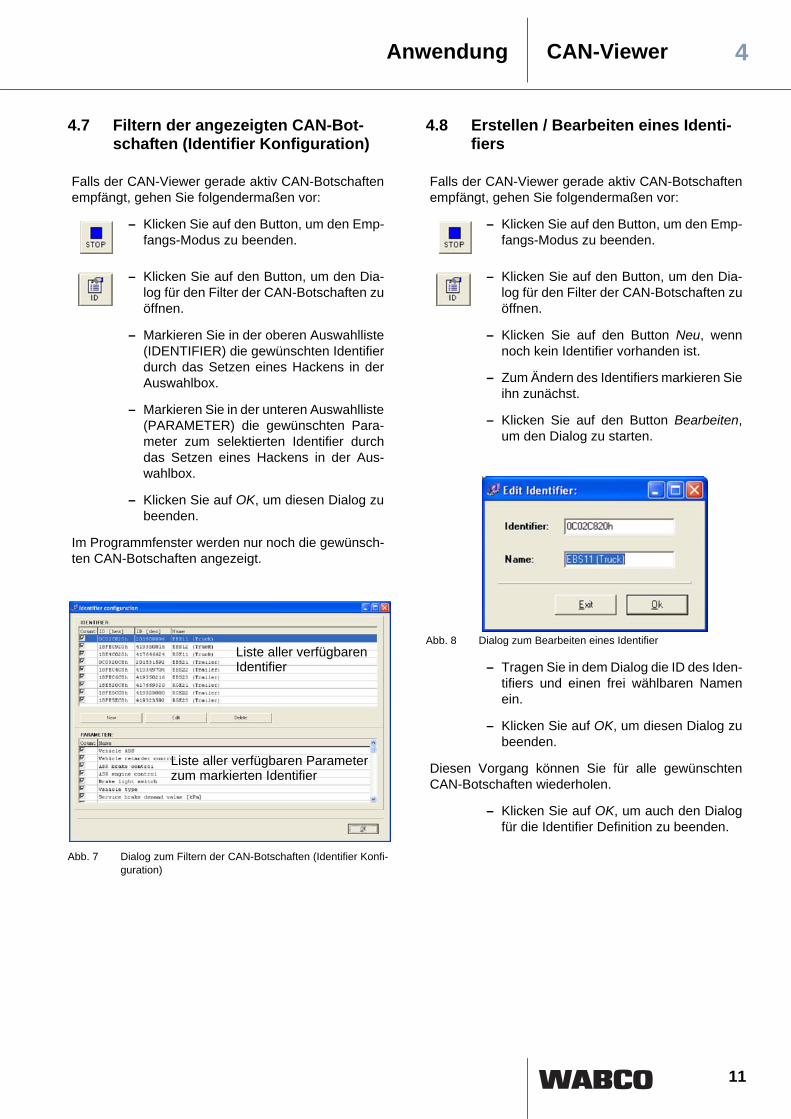
4.7 Filtern der angezeigten CAN-Bot-schaften (Identifier Konfiguration)
Abb. 7 Dialog zum Filtern der CAN-Botschaften (Identifier Konfi-guration)
4.8 Erstellen / Bearbeiten eines Identi-fiers
Abb. 8 Dialog zum Bearbeiten eines Identifier
Falls der CAN-Viewer gerade aktiv CAN-Botschaftenempfängt, gehen Sie folgendermaßen vor:
– Klicken Sie auf den Button, um den Emp-fangs-Modus zu beenden.
– Klicken Sie auf den Button, um den Dia-log für den Filter der CAN-Botschaften zuöffnen.
– Markieren Sie in der oberen Auswahlliste(IDENTIFIER) die gewünschten Identifierdurch das Setzen eines Hackens in derAuswahlbox.
– Markieren Sie in der unteren Auswahlliste(PARAMETER) die gewünschten Para-meter zum selektierten Identifier durchdas Setzen eines Hackens in der Aus-wahlbox.
– Klicken Sie auf OK, um diesen Dialog zubeenden.
Im Programmfenster werden nur noch die gewünsch-ten CAN-Botschaften angezeigt.
Liste aller verfügbaren
Liste aller verfügbaren Parameterzum markierten Identifier
Identifier
Falls der CAN-Viewer gerade aktiv CAN-Botschaftenempfängt, gehen Sie folgendermaßen vor:
– Klicken Sie auf den Button, um den Emp-fangs-Modus zu beenden.
– Klicken Sie auf den Button, um den Dia-log für den Filter der CAN-Botschaften zuöffnen.
– Klicken Sie auf den Button Neu, wennnoch kein Identifier vorhanden ist.
– Zum Ändern des Identifiers markieren Sieihn zunächst.
– Klicken Sie auf den Button Bearbeiten,um den Dialog zu starten.
– Tragen Sie in dem Dialog die ID des Iden-tifiers und einen frei wählbaren Namenein.
– Klicken Sie auf OK, um diesen Dialog zubeenden.
Diesen Vorgang können Sie für alle gewünschtenCAN-Botschaften wiederholen.
– Klicken Sie auf OK, um auch den Dialogfür die Identifier Definition zu beenden.
Anwendung 4

12
CAN-Viewer
4.9 Erstellen einer Konfigurationsdatei mit eigenen Einstellungen
4.10 Laden einer eigenen Konfigurations-datei
4.11 Aufzeichnen und Speichern von einem Protokoll mit CAN-Bot-schaften in eine Datei
– Passen Sie sich die Anzeige der CAN-Botschaften wie gewünscht an.
– Klicken Sie auf den Button, um den Dia-log für das Speichern einer Konfigurati-onsdatei zu öffnen.
– Passen Sie den Speicherort und den Na-men für die Konfigurationsdatei an.
– Klicken Sie auf den Button Speichern, umdiesen Dialog zu beenden.
Beim Speichern der Konfigurationsdatei gehendie Informationen zur Klartext Aufschlüsselungverloren.
– Klicken Sie auf den Button, um den Dia-log zu öffnen.
– Selektieren Sie die gewünschte Konfigu-rationsdatei.
– Klicken Sie auf den Button Öffnen, umdiesen Dialog zu beenden.
Der CAN-Viewer startet automatisch das Empfangender CAN-Botschaften.
!
Wenn der CAN-Viewer noch keine CAN-Botschaftenempfängt, gehen Sie folgendermaßen vor:
– Klicken Sie auf den Button, um den Emp-fang zu starten.
– Klicken Sie auf den Button, um den Auf-nahmemodus zu starten.
– Klicken Sie auf den Button, um die Auf-zeichnung nach der gewünschten Zeit zubeenden.
Nach dem Beenden der Aufzeichnung wird automa-tisch der Dialog zum Speichern der Aufzeichnungsda-tei geöffnet.
– Passen Sie den Speicherort und den Na-men für die Aufzeichnungsdatei an.
– Klicken Sie auf den Button Speichern, umdiesen Dialog zu beenden.
Der CAN-Viewer kann nur eine begrenzte Anzahlvon CAN-Botschaften aufzeichnen. Den aktuellenSpeicherstatus können Sie unten links im Pro-grammfenster sehen (siehe Abb. 2).
Wenn der Speicher voll ist, wird die Aufzeichnung au-tomatisch beendet und der Dialog zum Speichern ge-öffnet.
Die Voreinstellung der Anzahl der empfangbarenCAN-Botschaften kann im Menü unter Optionen/Ein-stellungen zwischen 10.000 und max. 1.000.000 ge-ändert werden. Um dies zu erlangen sind Eingabenvon Werten zwischen 10 und 1.000 nötig.
Der Inhalt der CAN-Botschaften wird nur als Wertund nicht als Klartext gespeichert.
!
!
Anwendung4
13
CAN-Viewer
5 Administration
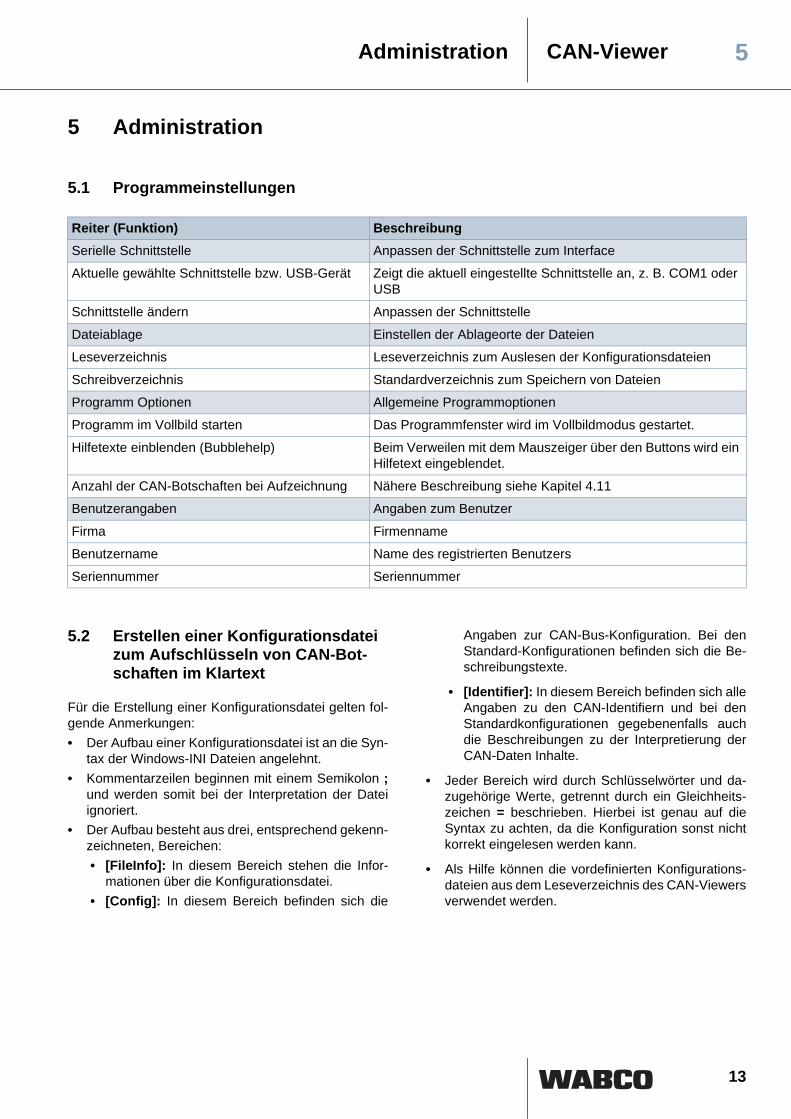
5.1 Programmeinstellungen
5.2 Erstellen einer Konfigurationsdatei zum Aufschlüsseln von CAN-Bot-schaften im Klartext
Für die Erstellung einer Konfigurationsdatei gelten fol-gende Anmerkungen:• Der Aufbau einer Konfigurationsdatei ist an die Syn-
tax der Windows-INI Dateien angelehnt.• Kommentarzeilen beginnen mit einem Semikolon ;
und werden somit bei der Interpretation der Dateiignoriert.
• Der Aufbau besteht aus drei, entsprechend gekenn-zeichneten, Bereichen:• [FileInfo]: In diesem Bereich stehen die Infor-
mationen über die Konfigurationsdatei.• [Config]: In diesem Bereich befinden sich die
Angaben zur CAN-Bus-Konfiguration. Bei denStandard-Konfigurationen befinden sich die Be-schreibungstexte.
• [Identifier]: In diesem Bereich befinden sich alleAngaben zu den CAN-Identifiern und bei denStandardkonfigurationen gegebenenfalls auchdie Beschreibungen zu der Interpretierung derCAN-Daten Inhalte.
• Jeder Bereich wird durch Schlüsselwörter und da-zugehörige Werte, getrennt durch ein Gleichheits-zeichen = beschrieben. Hierbei ist genau auf dieSyntax zu achten, da die Konfiguration sonst nichtkorrekt eingelesen werden kann.
• Als Hilfe können die vordefinierten Konfigurations-dateien aus dem Leseverzeichnis des CAN-Viewersverwendet werden.
Reiter (Funktion) BeschreibungSerielle Schnittstelle Anpassen der Schnittstelle zum Interface
Aktuelle gewählte Schnittstelle bzw. USB-Gerät Zeigt die aktuell eingestellte Schnittstelle an, z. B. COM1 oder USB
Schnittstelle ändern Anpassen der Schnittstelle
Dateiablage Einstellen der Ablageorte der Dateien
Leseverzeichnis Leseverzeichnis zum Auslesen der Konfigurationsdateien
Schreibverzeichnis Standardverzeichnis zum Speichern von Dateien
Programm Optionen Allgemeine Programmoptionen
Programm im Vollbild starten Das Programmfenster wird im Vollbildmodus gestartet.
Hilfetexte einblenden (Bubblehelp) Beim Verweilen mit dem Mauszeiger über den Buttons wird ein Hilfetext eingeblendet.
Anzahl der CAN-Botschaften bei Aufzeichnung Nähere Beschreibung siehe Kapitel 4.11
Benutzerangaben Angaben zum Benutzer
Firma Firmenname
Benutzername Name des registrierten Benutzers
Seriennummer Seriennummer
Administration 5
14
CAN-Viewer
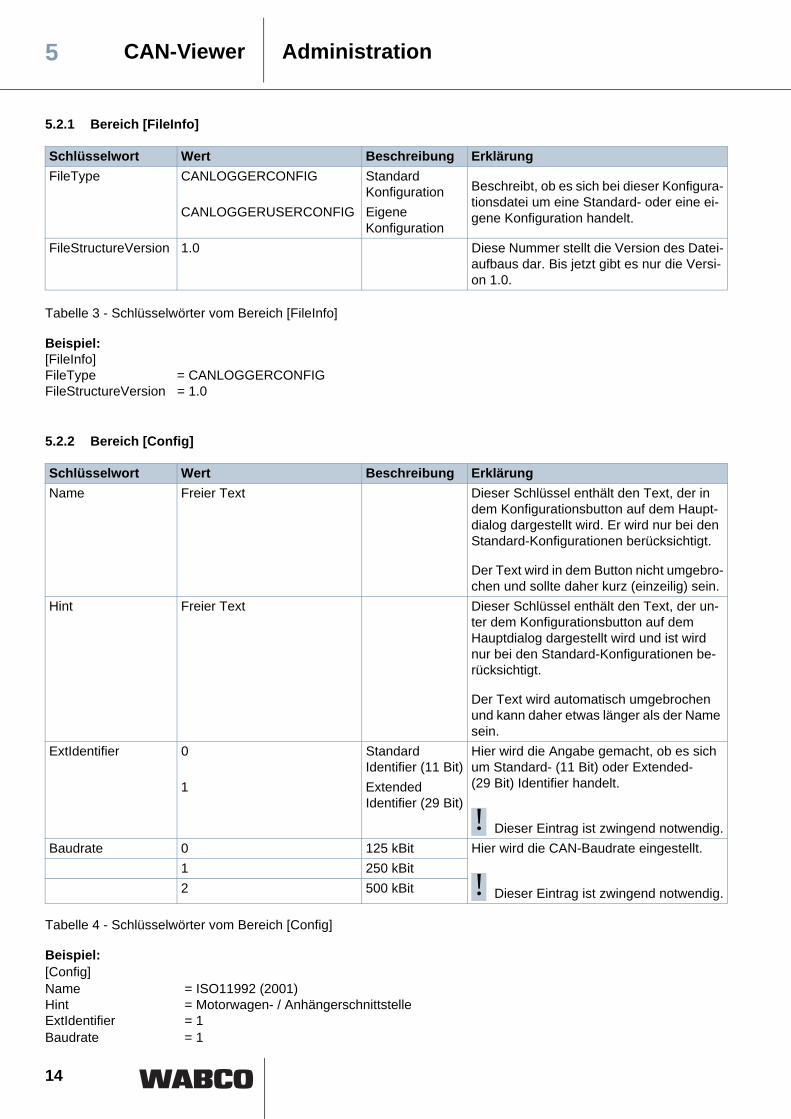
5.2.1 Bereich [FileInfo]
Tabelle 3 - Schlüsselwörter vom Bereich [FileInfo]
Beispiel:[FileInfo]FileType = CANLOGGERCONFIGFileStructureVersion = 1.0
5.2.2 Bereich [Config]
Tabelle 4 - Schlüsselwörter vom Bereich [Config]
Beispiel:[Config]Name = ISO11992 (2001)Hint = Motorwagen- / AnhängerschnittstelleExtIdentifier = 1Baudrate = 1
Schlüsselwort Wert Beschreibung ErklärungFileType CANLOGGERCONFIG Standard
Konfiguration Beschreibt, ob es sich bei dieser Konfigura-tionsdatei um eine Standard- oder eine ei-gene Konfiguration handelt.CANLOGGERUSERCONFIG Eigene
KonfigurationFileStructureVersion 1.0 Diese Nummer stellt die Version des Datei-
aufbaus dar. Bis jetzt gibt es nur die Versi-on 1.0.
Schlüsselwort Wert Beschreibung ErklärungName Freier Text Dieser Schlüssel enthält den Text, der in
dem Konfigurationsbutton auf dem Haupt-dialog dargestellt wird. Er wird nur bei den Standard-Konfigurationen berücksichtigt.
Der Text wird in dem Button nicht umgebro-chen und sollte daher kurz (einzeilig) sein.
Hint Freier Text Dieser Schlüssel enthält den Text, der un-ter dem Konfigurationsbutton auf dem Hauptdialog dargestellt wird und ist wird nur bei den Standard-Konfigurationen be-rücksichtigt.
Der Text wird automatisch umgebrochen und kann daher etwas länger als der Name sein.
ExtIdentifier 0 Standard Identifier (11 Bit)
Hier wird die Angabe gemacht, ob es sich um Standard- (11 Bit) oder Extended- (29 Bit) Identifier handelt.
Dieser Eintrag ist zwingend notwendig.
1 Extended Identifier (29 Bit)
Baudrate 0 125 kBit Hier wird die CAN-Baudrate eingestellt.
Dieser Eintrag ist zwingend notwendig.
1 250 kBit2 500 kBit
!
!
Administration5
15
CAN-Viewer
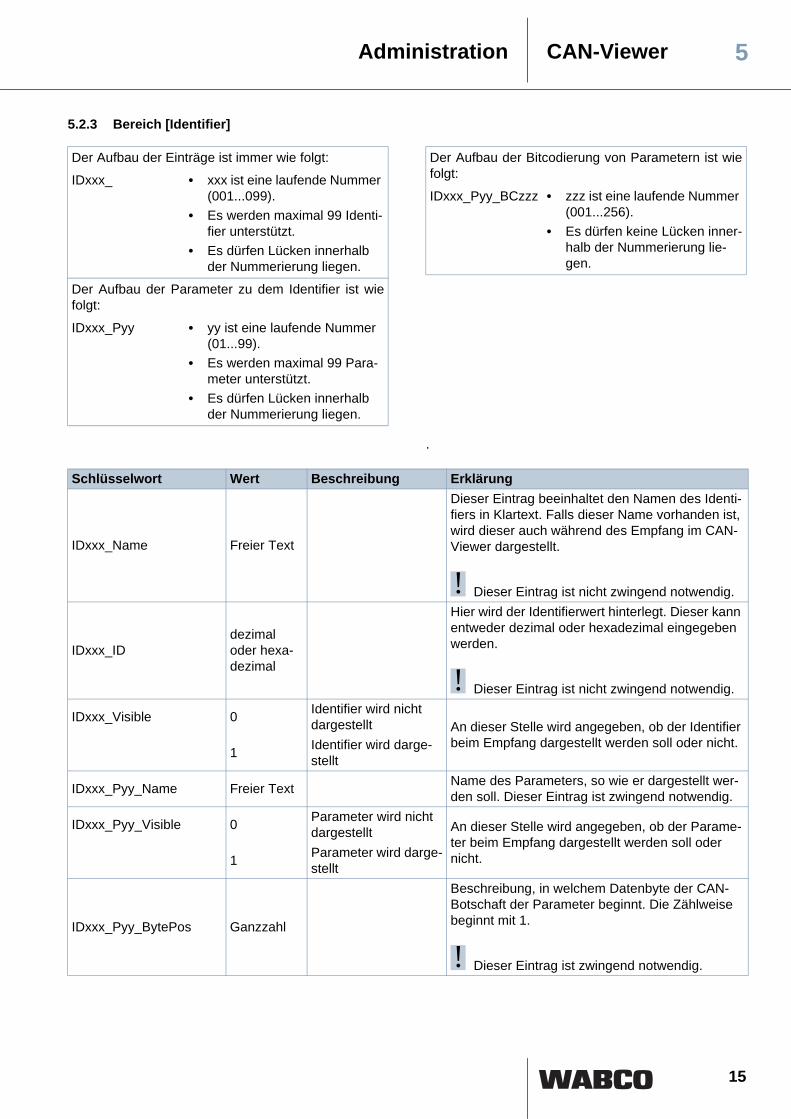
5.2.3 Bereich [Identifier]
.
Der Aufbau der Einträge ist immer wie folgt:
IDxxx_ • xxx ist eine laufende Nummer (001...099).
• Es werden maximal 99 Identi-fier unterstützt.
• Es dürfen Lücken innerhalb der Nummerierung liegen.
Der Aufbau der Parameter zu dem Identifier ist wiefolgt:
IDxxx_Pyy • yy ist eine laufende Nummer (01...99).
• Es werden maximal 99 Para-meter unterstützt.
• Es dürfen Lücken innerhalb der Nummerierung liegen.
Der Aufbau der Bitcodierung von Parametern ist wiefolgt:
IDxxx_Pyy_BCzzz • zzz ist eine laufende Nummer (001...256).
• Es dürfen keine Lücken inner-halb der Nummerierung lie-gen.
Schlüsselwort Wert Beschreibung Erklärung
IDxxx_Name Freier Text
Dieser Eintrag beeinhaltet den Namen des Identi-fiers in Klartext. Falls dieser Name vorhanden ist, wird dieser auch während des Empfang im CAN-Viewer dargestellt.
Dieser Eintrag ist nicht zwingend notwendig.
IDxxx_IDdezimal oder hexa-dezimal
Hier wird der Identifierwert hinterlegt. Dieser kann entweder dezimal oder hexadezimal eingegeben werden.
Dieser Eintrag ist nicht zwingend notwendig.
IDxxx_Visible 0 Identifier wird nicht dargestellt An dieser Stelle wird angegeben, ob der Identifier
beim Empfang dargestellt werden soll oder nicht.1 Identifier wird darge-
stellt
IDxxx_Pyy_Name Freier Text Name des Parameters, so wie er dargestellt wer-den soll. Dieser Eintrag ist zwingend notwendig.
IDxxx_Pyy_Visible 0 Parameter wird nicht dargestellt An dieser Stelle wird angegeben, ob der Parame-
ter beim Empfang dargestellt werden soll oder nicht.1 Parameter wird darge-
stellt
IDxxx_Pyy_BytePos Ganzzahl
Beschreibung, in welchem Datenbyte der CAN-Botschaft der Parameter beginnt. Die Zählweise beginnt mit 1.
Dieser Eintrag ist zwingend notwendig.
!
!
!
Administration 5
16
CAN-Viewer
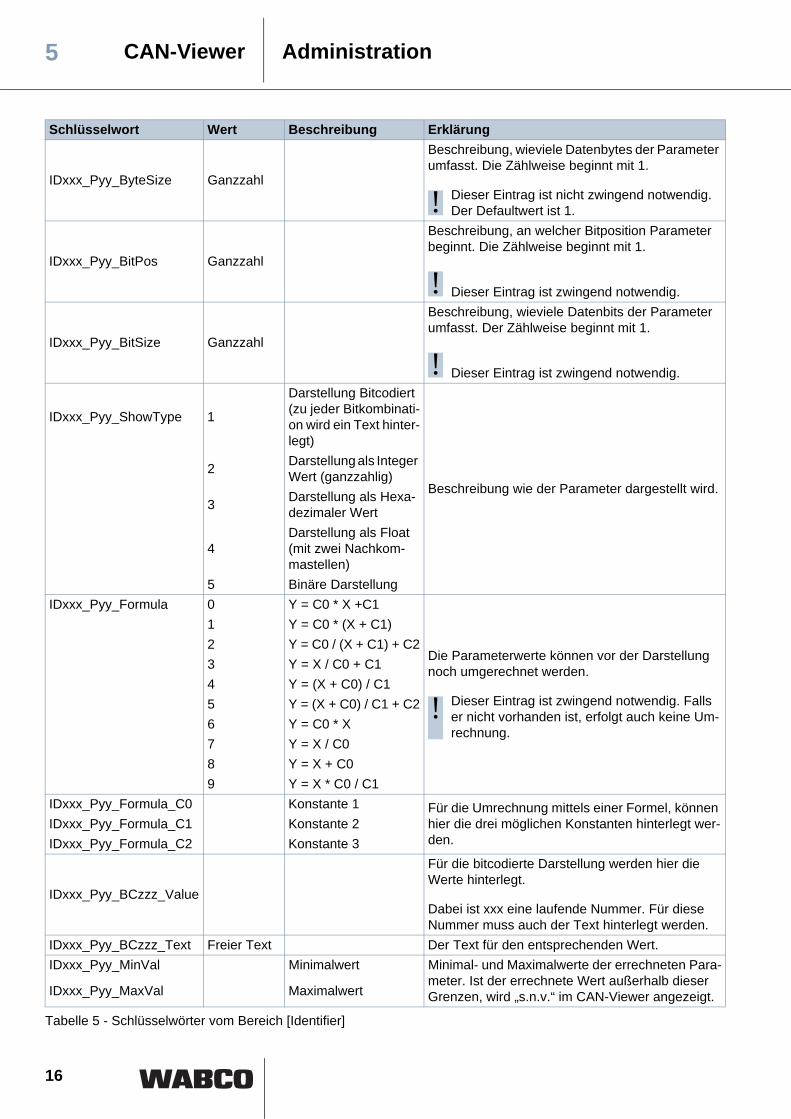
Tabelle 5 - Schlüsselwörter vom Bereich [Identifier]
Schlüsselwort Wert Beschreibung Erklärung
IDxxx_Pyy_ByteSize Ganzzahl
Beschreibung, wieviele Datenbytes der Parameter umfasst. Die Zählweise beginnt mit 1.
Dieser Eintrag ist nicht zwingend notwendig. Der Defaultwert ist 1.
IDxxx_Pyy_BitPos Ganzzahl
Beschreibung, an welcher Bitposition Parameter beginnt. Die Zählweise beginnt mit 1.
Dieser Eintrag ist zwingend notwendig.
IDxxx_Pyy_BitSize Ganzzahl
Beschreibung, wieviele Datenbits der Parameter umfasst. Der Zählweise beginnt mit 1.
Dieser Eintrag ist zwingend notwendig.
IDxxx_Pyy_ShowType 1
Darstellung Bitcodiert (zu jeder Bitkombinati-on wird ein Text hinter-legt)
Beschreibung wie der Parameter dargestellt wird.2 Darstellung als Integer
Wert (ganzzahlig)
3 Darstellung als Hexa-dezimaler Wert
4Darstellung als Float (mit zwei Nachkom-mastellen)
5 Binäre DarstellungIDxxx_Pyy_Formula 0 Y = C0 * X +C1
Die Parameterwerte können vor der Darstellung noch umgerechnet werden.
Dieser Eintrag ist zwingend notwendig. Falls er nicht vorhanden ist, erfolgt auch keine Um-rechnung.
1 Y = C0 * (X + C1)2 Y = C0 / (X + C1) + C23 Y = X / C0 + C14 Y = (X + C0) / C15 Y = (X + C0) / C1 + C26 Y = C0 * X7 Y = X / C08 Y = X + C09 Y = X * C0 / C1
IDxxx_Pyy_Formula_C0 Konstante 1 Für die Umrechnung mittels einer Formel, können hier die drei möglichen Konstanten hinterlegt wer-den.
IDxxx_Pyy_Formula_C1 Konstante 2IDxxx_Pyy_Formula_C2 Konstante 3
IDxxx_Pyy_BCzzz_Value
Für die bitcodierte Darstellung werden hier die Werte hinterlegt.
Dabei ist xxx eine laufende Nummer. Für diese Nummer muss auch der Text hinterlegt werden.
IDxxx_Pyy_BCzzz_Text Freier Text Der Text für den entsprechenden Wert.IDxxx_Pyy_MinVal Minimalwert Minimal- und Maximalwerte der errechneten Para-
meter. Ist der errechnete Wert außerhalb dieser Grenzen, wird „s.n.v.“ im CAN-Viewer angezeigt.IDxxx_Pyy_MaxVal Maximalwert
!
!
!
!
Administration5
17
CAN-Viewer
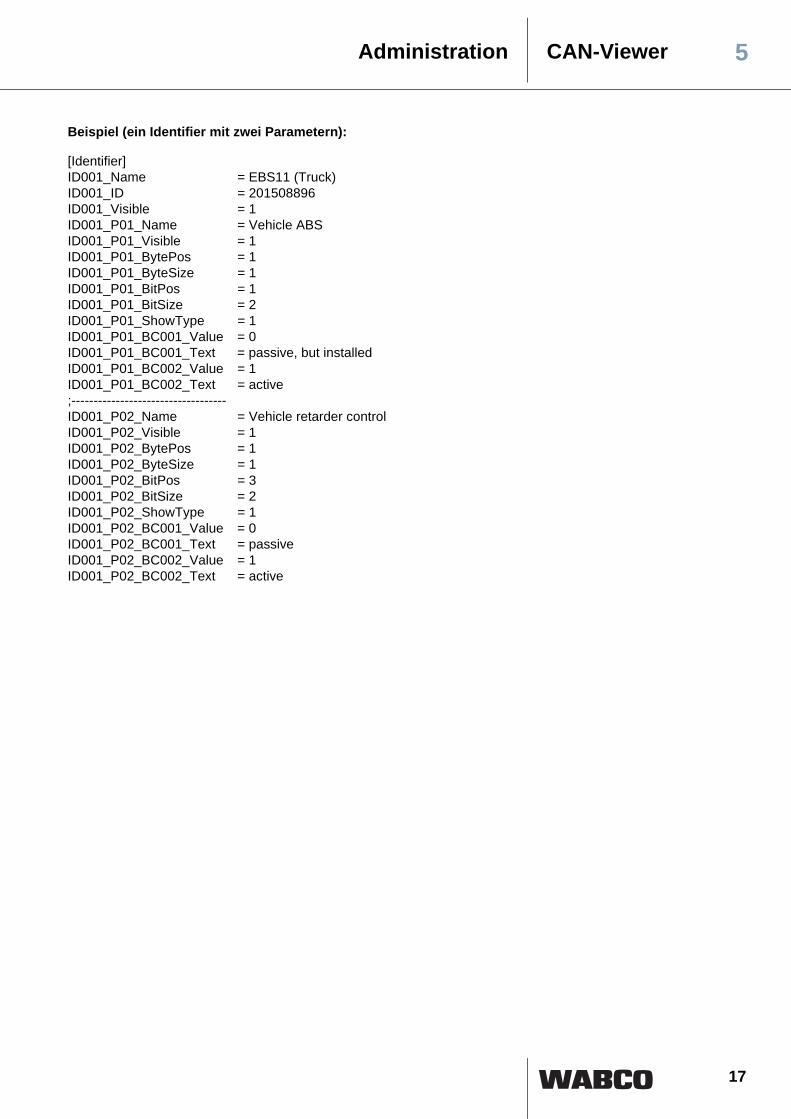
Beispiel (ein Identifier mit zwei Parametern):
[Identifier]ID001_Name = EBS11 (Truck)ID001_ID = 201508896ID001_Visible = 1ID001_P01_Name = Vehicle ABSID001_P01_Visible = 1ID001_P01_BytePos = 1ID001_P01_ByteSize = 1ID001_P01_BitPos = 1ID001_P01_BitSize = 2ID001_P01_ShowType = 1ID001_P01_BC001_Value = 0ID001_P01_BC001_Text = passive, but installedID001_P01_BC002_Value = 1ID001_P01_BC002_Text = active;-----------------------------------ID001_P02_Name = Vehicle retarder controlID001_P02_Visible = 1ID001_P02_BytePos = 1ID001_P02_ByteSize = 1ID001_P02_BitPos = 3ID001_P02_BitSize = 2ID001_P02_ShowType = 1ID001_P02_BC001_Value = 0ID001_P02_BC001_Text = passiveID001_P02_BC002_Value = 1ID001_P02_BC002_Text = active
Administration 5
18
CAN-Viewer
6 Weiterführende Informationen zum CAN-Bus
6.1 Übertragungsverfahren
Der CAN-Bus ist entweder mit Kupferleitungen oderüber Glasfaser ausgeführt. Zur schnellen Datenüber-tragung zwischen den Steuergeräten wird das CAN-Bussystem verwendet. Der CAN-Bus arbeitet nachdem "Multi-Master-Prinzip": Mehrere gleichberechtigteSteuergeräte (= Busteilnehmer) sind durch eine topolo-gische Anordnung miteinander verbunden.
Bei Kupferleitungen arbeitet der CAN-Bus mit Diffe-renzsignalen. Er wird normalerweise mit 3 Leitungenausgeführt: • CAN_HIGH• CAN_LOW• CAN_GND (Masse)
CAN_LOW enthält den komplementären Pegel vonCAN_HIGH gegen Masse. Dadurch können Gleichtakt-störungen unterdrückt werden, da ja die Differenzgleich bleibt.
Die Übertragung der Daten erfolgt so, dass ein Bit, jenach Zustand, entweder dominant oder rezessiv aufden Busleitungen wirkt. Ein dominantes überschreibtdabei ein rezessives.
6.2 Übertragungsrate und Leitungs-länge
Der CAN-Bus wird zwischen einem High-speed und ei-nem Low-speed Bus unterschieden. Bei einem High-speed Bus beträgt die maximale Datenübertragungsra-te 1 Mbit/s, bei einem Low-speed Bus 125 kBit/s.
Die maximale (theoretische) Leitungslänge beträgtz. B. bei 1 Mbit/s 40 m, bei 500 kBit/s 100 m und bei125 kBit/s 500 m. Diese Maximalwerte beruhen darauf,dass die Zeit, die ein Signal am Bus anliegt (Bitzeit, Bit/Sekunde), umso kürzer ist, je höher die Übertragungs-rate ist. Mit zunehmender Leitungslänge steigt jedochdie Zeit, die ein Signal braucht, bis es am anderenEnde des Busses angekommen ist. Daher darf die Zeit,die ein Signal am Bus liegt, nicht kürzer sein als dieZeit, die ein Signal braucht, um sich auszubreiten.
Die maximale Teilnehmeranzahl auf physikalischerEbene hängt von den verwendeten Bustreiberbaustei-nen ab. Mit gängigen Bausteinen sind 32, 64 oder biszu 110 (mit Einschränkungen bis zu 128) Teilnehmerpro Leitung möglich.
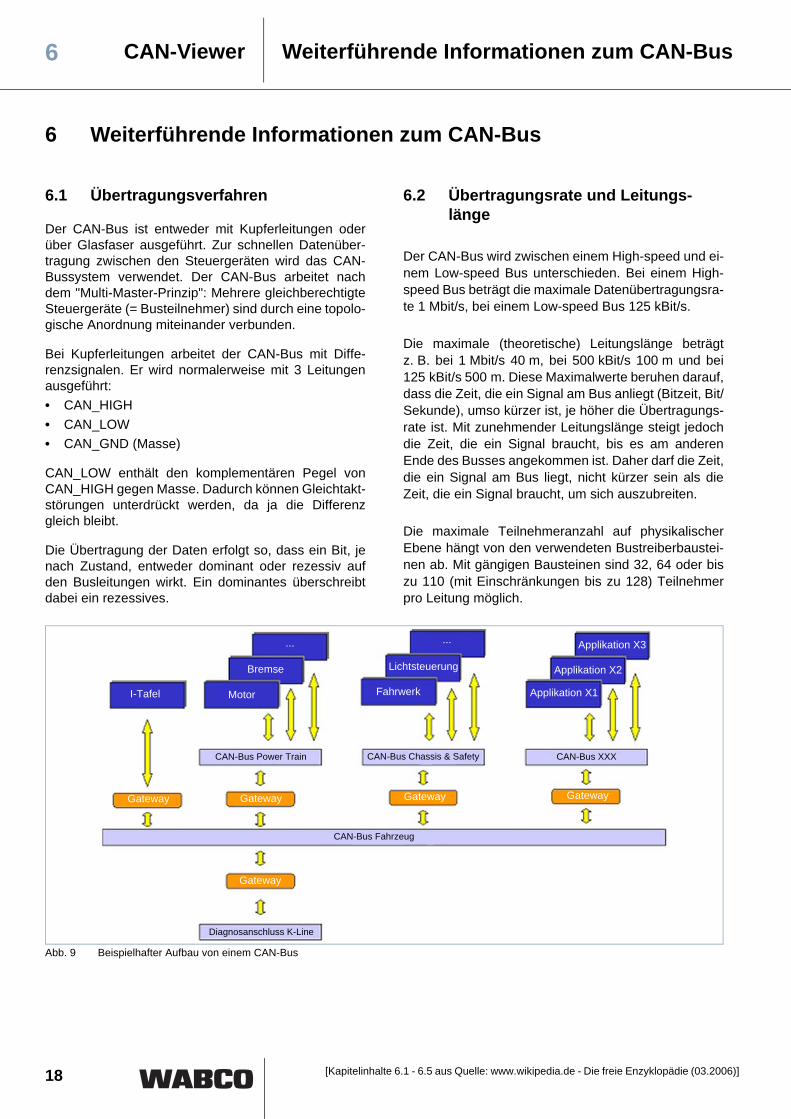
Abb. 9 Beispielhafter Aufbau von einem CAN-Bus
I-Tafel Motor
Bremse
... ...
Lichtsteuerung
Fahrwerk
Applikation X3
Applikation X2
Applikation X1
CAN-Bus Power Train CAN-Bus Chassis & Safety CAN-Bus XXX
Gateway Gateway Gateway Gateway
CAN-Bus Fahrzeug
Diagnosanschluss K-Line
Gateway
Weiterführende Informationen zum CAN-Bus6
[Kapitelinhalte 6.1 - 6.5 aus Quelle: www.wikipedia.de - Die freie Enzyklopädie (03.2006)]
19
CAN-Viewer
6.3 Objektidentifier
Der Objektidentifier kennzeichnet den Inhalt der Nach-richt, nicht das Gerät. Zum Beispiel kann in einemMesssystem den Parametern Temperatur, Spannung,Druck jeweils ein eigener Identifier zugewiesen sein.Die Empfänger entscheiden anhand des Identifiers, obdie Nachricht für sie relevant ist oder nicht. Zudem dientder Objektidentifier auch der Priorisierung der Nach-richten.
Die Spezifikation definiert zwei verschiedene Identifier-Formate:• 11-bit Identifier, auch „Base frame format“ genannt.• 29-bit Identifier, auch „Extended frame format“ ge-
nannt.Ein Teilnehmer kann Empfänger und Sender vonNachrichten mit beliebig vielen Identifiern sein, aberumgekehrt darf es zu einem Identifier immer nur maxi-mal einen Sender geben (damit die Arbitrierung funktio-niert).
6.4 Arbitrierung (Aushandeln des Medi-enzugriffs), Priorität
Der Buszugriff wird verlustfrei mittels der bitweisen Ar-bitrierung (möglichst gerechte Zuteilung von Ressour-cen auf verschiedenen Geräte) auf Basis der Identifierder zu sendenden Nachrichten aufgelöst. Dazu sen-siert jeder Sender den Bus, während er gerade denIdentifier sendet. Senden zwei Teilnehmer gleichzeitig,so überschreibt das erste dominante Bit eines der bei-den, das entsprechend rezessive des anderen, welcher
dieses erkennt und seinen Übertragungsversuch been-det, damit der andere seine Daten übertragen kann.Verwenden beide Teilnehmer den gleichen Identifierwird ein Error-Frame erzeugt (siehe Kapitel 6.5 Frame-Aufbau). Daher empfiehlt der Standard, dass ein Iden-tifier auch nur von maximal einem Teilnehmer verwen-det werden soll.
Durch dieses Verfahren ist auch eine Hierarchie derNachrichten untereinander gegeben. Die Nachricht mitdem niedrigsten Identifier darf "immer" übertragen wer-den. Für die Übertragung von zeitkritischen Nachrich-ten kann also ein Identifier hoher Priorität (= niedrigeID, z. B. 0) vergeben werden, um ihnen so Vorrang beider Übertragung zu gewähren. Dennoch kann selbstbei hochprioren Botschaften der Sendezeitpunkt zeit-lich nicht genau vorher bestimmt werden (nichtdetermi-nistisches Verhalten).
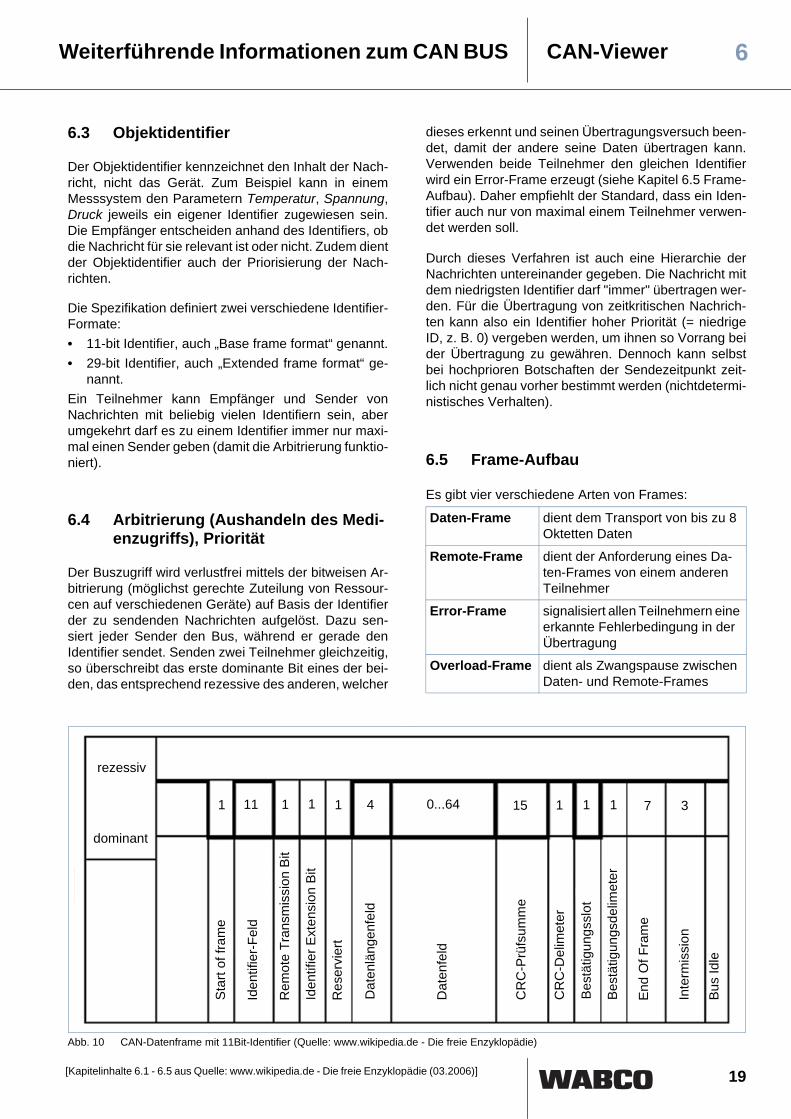
6.5 Frame-Aufbau
Es gibt vier verschiedene Arten von Frames:
Abb. 10 CAN-Datenframe mit 11Bit-Identifier (Quelle: www.wikipedia.de - Die freie Enzyklopädie)
Daten-Frame dient dem Transport von bis zu 8 Oktetten Daten
Remote-Frame dient der Anforderung eines Da-ten-Frames von einem anderen Teilnehmer
Error-Frame signalisiert allen Teilnehmern eine erkannte Fehlerbedingung in der Übertragung
Overload-Frame dient als Zwangspause zwischen Daten- und Remote-Frames
rezessiv
dominant
1 1 1 111 4 0...64 15 1 1 1 7 3
Sta
rt of
fram
e
Iden
tifie
r-Fe
ld
Rem
ote
Tran
smis
sion
Bit
Iden
tifie
r Ext
ensi
on B
it
Res
ervi
ert
Dat
enlä
ngen
feld
Dat
enfe
ld
CR
C-P
rüfs
umm
e
CR
C-D
elim
eter
Bes
tätig
ungs
slot
Bes
tätig
ungs
delim
eter
End
Of F
ram
e
Inte
rmis
sion
Bus
Idle
Weiterführende Informationen zum CAN BUS 6
[Kapitelinhalte 6.1 - 6.5 aus Quelle: www.wikipedia.de - Die freie Enzyklopädie (03.2006)]

20
CAN-Viewer Notizen

ssssssssssssssssssssssssssss
ddddddddddddddddddddddddd

WABCO WORLD-WIDE
WABCO Vehicle Control Systems (NYSE: WBC) ist einer der weltweit führenden Anbieter für Sicherheits- und Regelsysteme für Nutzfahr-zeuge. Seit mehr als 140 Jahren ist WABCO federführend in der Entwicklung von elektronischen, mechanischen und mechatronischen
Technologien für Brems-, Stabilitäts-, Federungs- und automatische An-triebssysteme für schwere Nutzfahr-zeuge. Zu unseren Kunden gehören die führenden Lkw-, Anhänger- und Bushersteller der Welt. WABCO hat seinen Hauptsitz in Brüssel, Belgien.www.wabco-auto.com





























