Embed Size (px)
Citation preview
Universitätsstrasse 150, D-44780 Bochum
SS2010
SS 2010
1. Auflage
MASTERPraktikum
RUHR-UNIVERSITÄT BOCHUM

Allgemeine Hinweise
Das Master-Praktikum Kommunikationstechnik gliedert sich in vier Versuche, welche die
Inhalte der Vorlesungen „Schaltungstheorie“ und „Nachrichtentechnik“ weiter vertiefen.
Die Praktikumsversuche sind jeweils drei Phasen untergliedert:
1. Vorbereitung auf den theoretischen Teil des Versuchs anhand der Unterlagen.
2. Praktische Durchführung des Versuchs und Erstellung eines Messprotokolls.
3. Schriftliche Auswertung der Versuchsergebnisse.
Vor dem Praktikum ist der theoretische Teil zu erlernen und die gestellten Vorbereitungs-
aufgaben sind vollständig zu bearbeiten. Werden zu Beginn der Versuchsdurchführung bei
einem Studierenden grobe inhaltliche oder formale Mängel in der schriftlichen Vorbereitung
festgestellt oder sind essentielle Verständnislücken vorhanden, so kann der Versuch nicht
durchgeführt werden. Es wird dann ein Ersatztermin gegen Ende des Semesters angeboten,
der beispielsweise auch im Falle einer Krankheit in Anspruch genommen werden kann. Für
das gesamte Praktikum wird nur ein Ersatztermin angeboten.
Bei der Vorbereitung, Protokollierung und Auswertung sind gewisse Grundregeln des
wissenschaftlichen und ingenieurgemäßen Arbeitens einzuhalten, wie ein sauberes Schriftbild
in geordneten Zeilen und mit einem Lineal gezogene Linien. Wer hierbei Schwierigkeiten hat,
kann die Unterlagen auch in Maschinenschrift anfertigen. Die Vorbereitungsaufgaben sind
von jedem Teilnehmer einzeln anzufertigen, bei Protokollierung und Auswertung genügt eine
Anfertigung je Gruppe. Die Schriftstücke sind geordnet und strukturiert mit Datum und
Namen des Schreibers bzw. der Gruppe abzugeben. Insbesondere ist die in den Praktikums-
unterlagen vorgegebene Nummerierung einzuhalten. Der Auswertung ist das Messprotokoll
beizufügen und alle gemessenen Verläufe sind zu beurteilen und zu kommentieren. Ein
schwer wiegender Verstoß gegen diese Regeln führt zur Nichterteilung des Testates. Liegt die
schriftliche Auswertung nicht spätestens drei Wochen nach der Durchführung des Versuchs
in einer bewertbaren Form vor, so wird das Testat ebenfalls nicht erteilt. Sind Korrekturen
in der Ausarbeitung erforderlich, so müssen diese innerhalb von zwei Wochen eingearbeitet
werden.
Sollten sich bei der Bearbeitung der Aufgaben Unklarheiten oder Probleme ergeben, die
der Studierende nicht selbstständig lösen kann, helfen die Betreuer des jeweiligen Prakti-
kums – innerhalb ihrer Sprechstunden – gerne weiter. Gleiches gilt natürlich auch für die
Auswertung der Versuchsergebnisse.

Versuchsverzeichnis
Fernmeldekabel NT-V1
Nichtlineare Verzerrungen NT-V2
Reaktanzeintore NT-V3
Reaktanzzweitore NT-V4

Versuch NT-V1: Fernmeldekabel
Inhaltsverzeichnis
1 Einleitung 2
2 Die Leitungsgleichungen 2
2.1 Leitungsarten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.2 Ersatzschaltbild . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3 Verhalten der Leitung bei sinusförmiger Anregung 5
3.1 Entkopplung des DGL-Systems . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.2 Die Lösung der gewöhnlichen Differentialgleichungen . . . . . . . . . . . . . 7
3.3 Fortpflanzungskonstante und Wellenübertragungsmaß . . . . . . . . . . . . . 9
3.4 Reflexionsfaktor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.5 Näherungslösungen für verschiedene Frequenzbereiche . . . . . . . . . . . . . 11
3.6 Kettenmatrix der Leitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.7 Eingangsimpedanz einer Leitung . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.8 Messung von Leitungskenngrößen . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Verhalten der elektrischen Leitung bei impulsförmiger Anregung 19
4.1 Bestimmung des Typs und der Entfernung einer Störstelle . . . . . . . . . . 23
5 Nebensprechen 24
5.1 Kopplungsarten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2 Berechnung der kapazitiven Kopplung . . . . . . . . . . . . . . . . . . . . . . 26
5.3 Berechnung der induktiven Kopplung . . . . . . . . . . . . . . . . . . . . . . 27
6 Messaufgaben 28
6.1 Messungen bei pulsförmigem Signal . . . . . . . . . . . . . . . . . . . . . . . 28
6.2 Messungen im eingeschwungenen Zustand . . . . . . . . . . . . . . . . . . . 29
Literaturverzeichnis 33
NT-V1 - 1
1 Einleitung
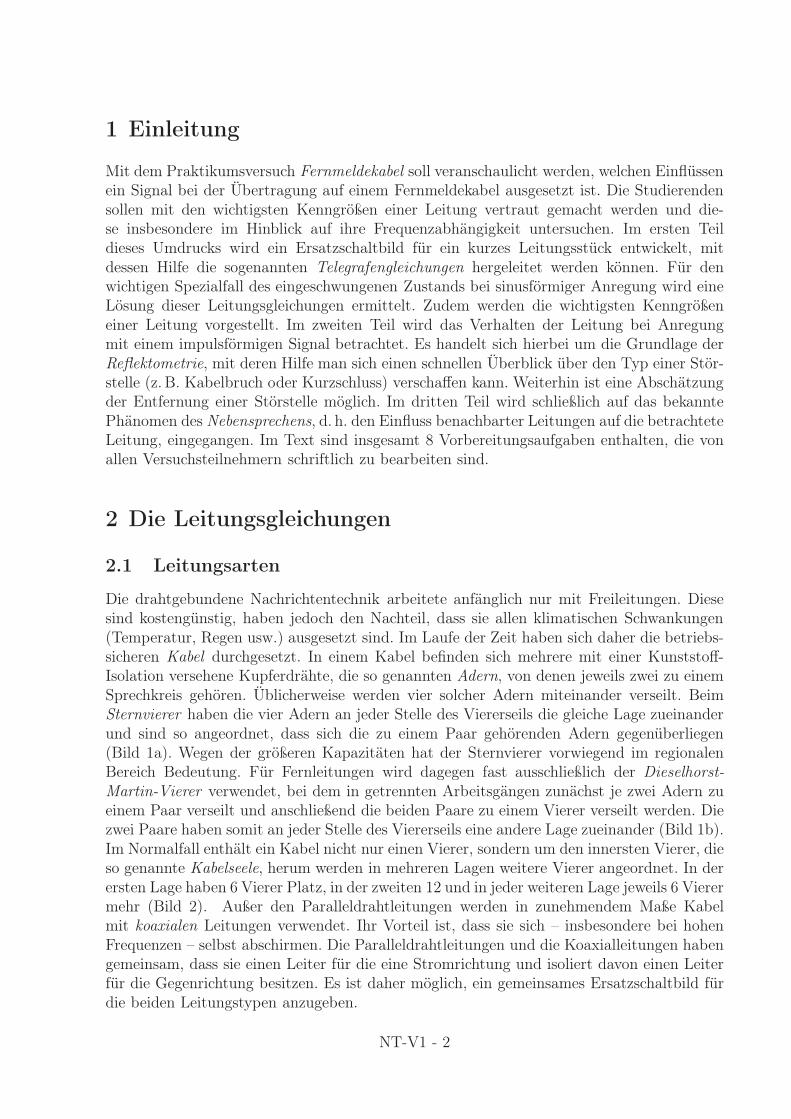
Mit dem Praktikumsversuch Fernmeldekabel soll veranschaulicht werden, welchen Einflüssen
ein Signal bei der Übertragung auf einem Fernmeldekabel ausgesetzt ist. Die Studierenden
sollen mit den wichtigsten Kenngrößen einer Leitung vertraut gemacht werden und die-
se insbesondere im Hinblick auf ihre Frequenzabhängigkeit untersuchen. Im ersten Teil
dieses Umdrucks wird ein Ersatzschaltbild für ein kurzes Leitungsstück entwickelt, mit
dessen Hilfe die sogenannten Telegrafengleichungen hergeleitet werden können. Für den
wichtigen Spezialfall des eingeschwungenen Zustands bei sinusförmiger Anregung wird eine
Lösung dieser Leitungsgleichungen ermittelt. Zudem werden die wichtigsten Kenngrößen
einer Leitung vorgestellt. Im zweiten Teil wird das Verhalten der Leitung bei Anregung
mit einem impulsförmigen Signal betrachtet. Es handelt sich hierbei um die Grundlage der
Reflektometrie, mit deren Hilfe man sich einen schnellen Überblick über den Typ einer Stör-
stelle (z. B. Kabelbruch oder Kurzschluss) verschaffen kann. Weiterhin ist eine Abschätzung
der Entfernung einer Störstelle möglich. Im dritten Teil wird schließlich auf das bekannte
Phänomen des Nebensprechens, d. h. den Einfluss benachbarter Leitungen auf die betrachtete
Leitung, eingegangen. Im Text sind insgesamt 8 Vorbereitungsaufgaben enthalten, die von
allen Versuchsteilnehmern schriftlich zu bearbeiten sind.
2 Die Leitungsgleichungen
2.1 Leitungsarten
Die drahtgebundene Nachrichtentechnik arbeitete anfänglich nur mit Freileitungen. Diese
sind kostengünstig, haben jedoch den Nachteil, dass sie allen klimatischen Schwankungen
(Temperatur, Regen usw.) ausgesetzt sind. Im Laufe der Zeit haben sich daher die betriebs-
sicheren Kabel durchgesetzt. In einem Kabel befinden sich mehrere mit einer Kunststoff-
Isolation versehene Kupferdrähte, die so genannten Adern, von denen jeweils zwei zu einem
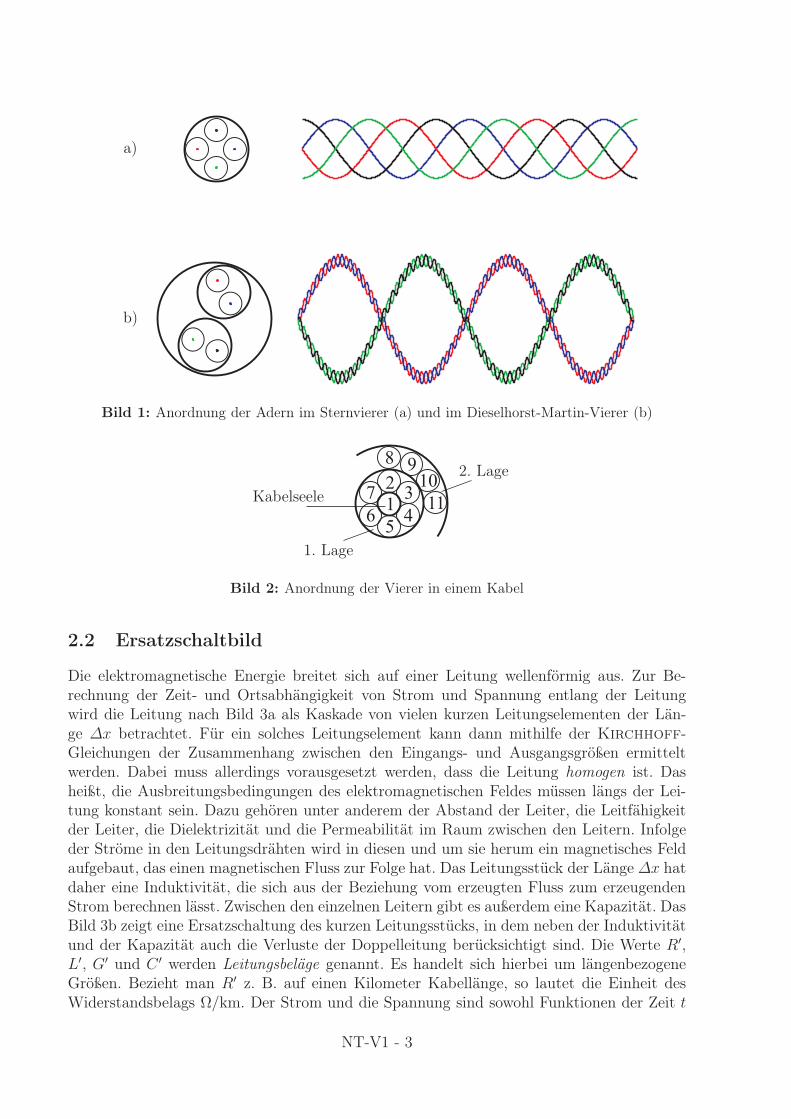
Sprechkreis gehören. Üblicherweise werden vier solcher Adern miteinander verseilt. Beim
Sternvierer haben die vier Adern an jeder Stelle des Viererseils die gleiche Lage zueinander
und sind so angeordnet, dass sich die zu einem Paar gehörenden Adern gegenüberliegen
(Bild 1a). Wegen der größeren Kapazitäten hat der Sternvierer vorwiegend im regionalen
Bereich Bedeutung. Für Fernleitungen wird dagegen fast ausschließlich der Dieselhorst-
Martin-Vierer verwendet, bei dem in getrennten Arbeitsgängen zunächst je zwei Adern zu
einem Paar verseilt und anschließend die beiden Paare zu einem Vierer verseilt werden. Die
zwei Paare haben somit an jeder Stelle des Viererseils eine andere Lage zueinander (Bild 1b).
Im Normalfall enthält ein Kabel nicht nur einen Vierer, sondern um den innersten Vierer, die
so genannte Kabelseele, herum werden in mehreren Lagen weitere Vierer angeordnet. In der
ersten Lage haben 6 Vierer Platz, in der zweiten 12 und in jeder weiteren Lage jeweils 6 Vierer
mehr (Bild 2). Außer den Paralleldrahtleitungen werden in zunehmendem Maße Kabel
mit koaxialen Leitungen verwendet. Ihr Vorteil ist, dass sie sich – insbesondere bei hohen
Frequenzen – selbst abschirmen. Die Paralleldrahtleitungen und die Koaxialleitungen haben
gemeinsam, dass sie einen Leiter für die eine Stromrichtung und isoliert davon einen Leiter
für die Gegenrichtung besitzen. Es ist daher möglich, ein gemeinsames Ersatzschaltbild für
die beiden Leitungstypen anzugeben.
NT-V1 - 2
a)
b)
Bild 1: Anordnung der Adern im Sternvierer (a) und im Dieselhorst-Martin-Vierer (b)
1
2
89
10
113
45
6
7Kabelseele
1. Lage
2. Lage
Bild 2: Anordnung der Vierer in einem Kabel
2.2 Ersatzschaltbild
Die elektromagnetische Energie breitet sich auf einer Leitung wellenförmig aus. Zur Be-
rechnung der Zeit- und Ortsabhängigkeit von Strom und Spannung entlang der Leitung
wird die Leitung nach Bild 3a als Kaskade von vielen kurzen Leitungselementen der Län-
ge ∆x betrachtet. Für ein solches Leitungselement kann dann mithilfe der Kirchhoff-
Gleichungen der Zusammenhang zwischen den Eingangs- und Ausgangsgrößen ermittelt
werden. Dabei muss allerdings vorausgesetzt werden, dass die Leitung homogen ist. Das
heißt, die Ausbreitungsbedingungen des elektromagnetischen Feldes müssen längs der Lei-
tung konstant sein. Dazu gehören unter anderem der Abstand der Leiter, die Leitfähigkeit
der Leiter, die Dielektrizität und die Permeabilität im Raum zwischen den Leitern. Infolge
der Ströme in den Leitungsdrähten wird in diesen und um sie herum ein magnetisches Feld
aufgebaut, das einen magnetischen Fluss zur Folge hat. Das Leitungsstück der Länge ∆x hat
daher eine Induktivität, die sich aus der Beziehung vom erzeugten Fluss zum erzeugenden
Strom berechnen lässt. Zwischen den einzelnen Leitern gibt es außerdem eine Kapazität. Das
Bild 3b zeigt eine Ersatzschaltung des kurzen Leitungsstücks, in dem neben der Induktivität
und der Kapazität auch die Verluste der Doppelleitung berücksichtigt sind. Die Werte R′,
L′, G′ und C ′ werden Leitungsbeläge genannt. Es handelt sich hierbei um längenbezogene
Größen. Bezieht man R′ z. B. auf einen Kilometer Kabellänge, so lautet die Einheit des
Widerstandsbelags Ω/km. Der Strom und die Spannung sind sowohl Funktionen der Zeit t
NT-V1 - 3
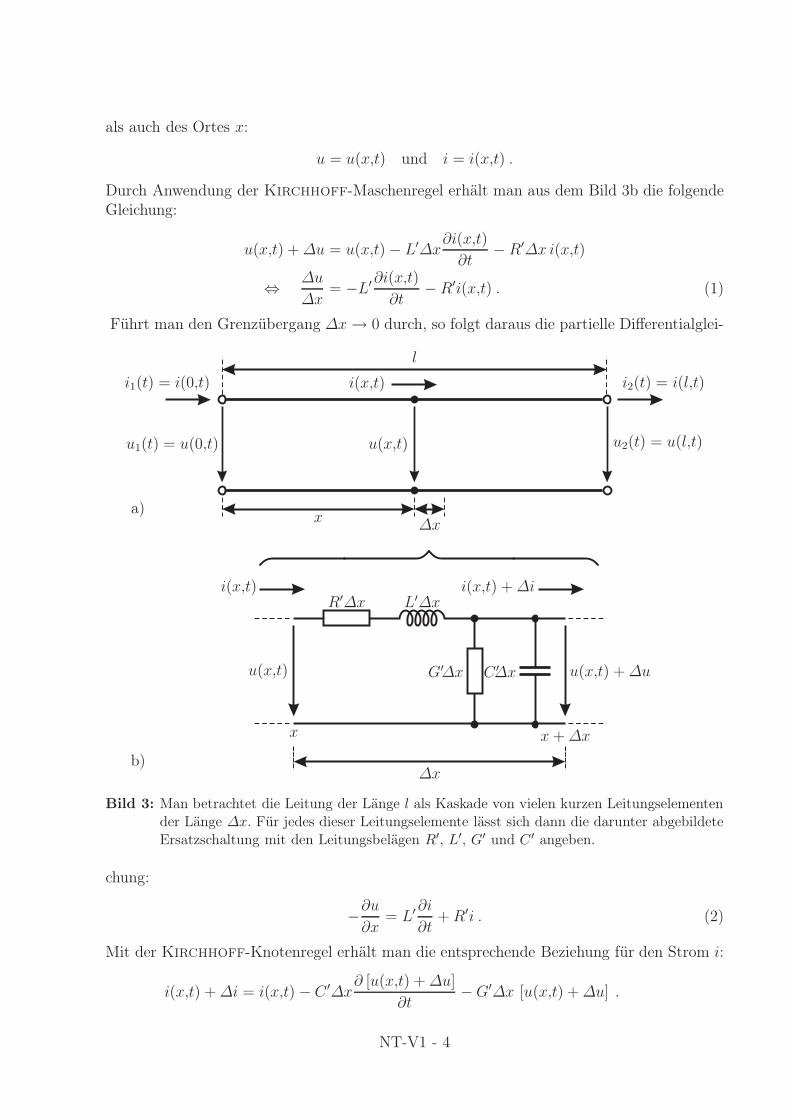
als auch des Ortes x:
u = u(x,t) und i = i(x,t) .
Durch Anwendung der Kirchhoff-Maschenregel erhält man aus dem Bild 3b die folgende
Gleichung:
u(x,t) +∆u = u(x,t) − L′∆x∂i(x,t)
∂t−R′∆x i(x,t)
⇔ ∆u
∆x= −L′
∂i(x,t)
∂t− R′i(x,t) . (1)
Führt man den Grenzübergang ∆x → 0 durch, so folgt daraus die partielle Differentialglei-
a)
b)
i1(t) = i(0,t) i2(t) = i(l,t)
u1(t) = u(0,t) u2(t) = u(l,t)
l
x
x
∆x
∆x
u(x,t)
u(x,t)
i(x,t)
i(x,t) i(x,t) +∆iR′∆x L′∆x
G′∆x C ′∆x u(x,t) +∆u
x+∆x
Bild 3: Man betrachtet die Leitung der Länge l als Kaskade von vielen kurzen Leitungselementender Länge ∆x. Für jedes dieser Leitungselemente lässt sich dann die darunter abgebildeteErsatzschaltung mit den Leitungsbelägen R′, L′, G′ und C ′ angeben.
chung:
−∂u∂x
= L′∂i
∂t+R′i . (2)
Mit der Kirchhoff-Knotenregel erhält man die entsprechende Beziehung für den Strom i:
i(x,t) +∆i = i(x,t) − C ′∆x∂ [u(x,t) +∆u]
∂t−G′∆x [u(x,t) +∆u] .
NT-V1 - 4

Wird diese Gleichung durch ∆x dividiert und Gleichung (1) eingesetzt, so ergibt sich:
∆i
∆x= −C ′
∂u(x,t)
∂t−G′u(x,t)
+∆x
C ′L′∂2i(x,t)
∂t2+ [C ′R′ +G′L′]
∂i(x,t)
∂t+G′R′i(x,t)
.
Hieraus folgt mit dem Übergang ∆x→ 0
− ∂i
∂x= C ′
∂u
∂t+G′u. (3)
Die Gleichungen (2) und (3) stellen zusammen ein System partieller Differentialgleichungen
1.Ordnung dar. Leitet man nun in (2) auf beiden Seiten nach x und in (3) nach t ab, so
ergeben sich die Beziehungen
−∂2u
∂x2= L′
∂2i
∂t∂x+R′
∂i
∂x(4)
und − ∂2i
∂t∂x= C ′
∂2u
∂t2+G′
∂u
∂t. (5)
Setzt man nun Gleichung (5) in (4) ein, so erhält man:
⇒ ∂2u
∂x2= L′C ′
∂2u
∂t2+ L′G′
∂u
∂t− R′
∂i
∂x
In diese Gleichung wird anschließend Gleichung (3) eingesetzt, so dass folgende partielle
Differentialgleichung 2.Ordnung entsteht:
∂2u
∂x2= L′C ′
∂2u
∂t2+ [L′G′ +R′C ′]
∂u
∂t+R′G′u . (6)
Diese Differentialgleichung stellt eine der beiden Telegrafengleichungen dar. Die andere Te-
legrafengleichung ist die entsprechende Differentialgleichung 2.Ordnung, welche man erhält,
wenn man die Beziehungen (2) und (3) in Abhängigkeit vom Strom i(x,t) zusammenfasst.
3 Verhalten der Leitung bei sinusförmiger Anregung
Im vergangenen Abschnitt konnte man sehen, dass das Verhalten der Spannung auf einer Lei-
tung durch eine lineare partielle Differentialgleichung zweiter Ordnung beschrieben werden
kann. Wie man im vorherigen Abschnitt sehen konnte, lässt sich für die homogene Leitung
eine lineare Ersatzschaltung angeben. Da ferner die Leitung bei sinusförmiger Anregung
im eingeschwungenen Zustand betrachtet werden soll, kann die komplexe Wechselstrom-
rechnung verwendet werden. Die Gleichungen (2) und (3) lassen sich in komplexer Form
durch
−∂U∂x
= jωL′I +R′I (7)
und
−∂I∂x
= jωC ′U +G′U (8)
darstellen.
NT-V1 - 5

3.1 Entkopplung des DGL-Systems
Zur Lösung des Systems gekoppelter Differentialgleichungen (7) und (8) werden die Glei-
chungen entkoppelt. Hierzu werden zwei neue komplexwertige und ortsabhängige Variablen
A(x) und B(x) mit der Dimension einer Spannung eingeführt
A : = U + ZI (9)
B : = U − ZI . (10)
In Matrizenschreibweise lauten die Gleichungen (9) und (10)
[AB
]
=
[1 Z1 −Z
] [UI
]
. (11)
Die inverse Darstellung dieser Transformation ist
[UI
]
=1
2
[1 11Z
− 1Z
] [AB
]
. (12)
Das DGL-System in den Gleichungen (7) und (8) mit p = jω
− ∂
∂x
[UI
]
=
[0 R′ + pL′
G′ + pC ′ 0
] [UI
]
(13)
geht mit Gleichung (12) über in
− ∂
∂x
[UI
]
= −1
2
[1 11Z
− 1Z
]∂
∂x
[AB
]
=1
2
[0 R′ + pL′
G′ + pC ′ 0
] [1 11Z
− 1Z
] [AB
]
.
Hierbei haben wir die komplexe Größe Z, die auch als Wellenwiderstand bezeichnet wird,
als vom Ort x unabhängig angenommen. Die letzte Gleichung führt unmittelbar auf die
Beziehung
− ∂
∂x
[AB
]
=1
2
[1 Z1 −Z
] [0 R′ + pL′
G′ + pC ′ 0
] [1 11Z
− 1Z
] [AB
]
.
Die Auswertung des dreifachen Matrizenproduktes bringt zunächst
[R′+pL′
Z−R′+pL′
Z
G′ + pC ′ G′ + pC ′
]
und dann
1
2
R′+pL′
Z+ (G′ + pC ′)Z (G′ + pC ′)Z − R′+pL′
Z
R′+pL′
Z− (G′ + pC ′)Z −(R
′+pL′
Z+ (G′ + pC ′)Z)
. (14)
NT-V1 - 6

Die Bedingung für die gewünschte Entkopplung beider Gleichungen ist
(G′ + pC ′)Z − R′ + pL′
Z= 0 (15)
oder Z2 =R′ + pL′
G′ + pC ′. (16)
Wird für Z die positive Wurzel gewählt, so ergibt sich:
Z =
√
R′ + pL′
G′ + pC ′. (17)
Die Festlegung der Größe Z in dieser Weise leistet mit den Transformationsgleichungen die
erwünschte Entkopplung des DGL-Systems. Als Quotient von Impedanz- zu Admittanzbelag
ist Z2 bei einer homogenen Leitung eine örtlich konstante Größe, die freilich von der Frequenz
abhängig ist. Übrig bleibt dann der Ausdruck
γ :=1
2
(
(G′ + pC ′)Z +R′ + pL′
Z
)
= (G′ + pC ′)Z =√
(R′ + pL′)(G′ + pC ′) . (18)
Die Größe γ wird auch als Fortpflanzungskonstante bezeichnet. Als Produkt aus Admittanz-
und Impedanzbelag ist γ bei einer homogenen Leitung ebenfalls eine örtlich konstante,
jedoch frequenzabhängige Größe.
Damit lauten die entkoppelten Differentialgleichungen
− ∂
∂x
[AB
]
=
[γ 0
0 −γ
] [AB
]
. (19)
3.2 Die Lösung der gewöhnlichen Differentialgleichungen
Beide Differentialgleichungen (DGLn) sind gewöhnlich, linear, homogen und besitzen längs
der Leitung den konstanten Koeffizienten γ. Somit kann man die Lösung einer DGL auf die
andere übertragen.
Bei Trennung der Variablen ergibt sich aus der ersten Differentialgleichung
A(x)∫
A(0)
dA
A= − γ
∫ x
0
d ζ
lnA(x)
A(0)= − γ(x)
A(x) = A(0)e−γx . (20)
Entsprechend wird die zweite DGL durch Gleichung (21) gelöst
B(x) = B(0)e+γx . (21)
NT-V1 - 7

In der übersichtlichen Matrixschreibweise gewinnen wir
[A(x)B(x)
]
=
[e−γx 0
0 eγx
] [A(0)
B(0)
]
. (22)
Im stationären Zustand erhalten wir den Zeitverlauf a(x,t) aus der Gleichung
a(x,t) = Re A(x) ept . (23)
Für sinusförmige Schwingungen an jedem Ort x der Leitung setzen wir p = jω und benutzen
aus Gleichung (22)
A(x) = e−γxA(0) . (24)
Wir erhalten nun
a(x,t) = Re A(0) e−γx ejωt . (25)
Für die rücklaufende Welle b(x,t) gehen wir ähnlich vor, und erhalten zunächst
b(x,t) = Re B(x) ept . (26)
Setzen wir nun Gleichung (21) ein, so ergibt sich
b(x,t) = Re B(0) eγx ejωt . (27)
Die Spannung u(x,t) längs der Leitung ergibt sich zu
2u(x,t) = a(x,t) + b(x,t) . (28)
In diese Beziehung werden die Gleichungen (25) und (27) eingesetzt und man erhält
u(x,t) =1
2Re
A(0) e−γx ejωt +B(0) eγx ejωt
. (29)
Diese Spannung u(x,t) setzt sich aus dem Spannungsanteil der hinlaufenden Welle uh(x,t)und dem Spannungsanteil aus der rücklaufenden Welle ur(x,t) zusammen. Es ist also:
u(x,t) = uh(x,t) + ur(x,t) , (30)
wobei
uh(x,t) =1
2a(x,t) =
1
2Re A(0) e−γx ejωt = Re
Uhe−γx ejωt
(31)
und
ur(x,t) =1
2b(x,t) =
1
2Re B(0) eγx ejωt = Re
Ure
γx ejωt. (32)
NT-V1 - 8

Hierbei ist Uh die komplexe Amplitude des Spannungsanteils der hinlaufenden und Ur die
komplexe Amplitude des Spannungsanteils der rücklaufenden Welle. Zwischen den komple-
xen Amplituden der Spannungsanteile und den komplexen Amplituden der Wellengrößen
bestehen also folgende Zusammenhänge:
Uh =1
2A(0) , (33)
Ur =1
2B(0) . (34)
Die komplexe Amplitude der Spannung kann man auch als
U(x) = Uhe−γx + Ureγx (35)
schreiben. Bildet man die Differenz aus (9) und (10), so ergibt sich
2ZI(x) = A(x) − B(x) .
Eine Division durch 2Z führt auf
I(x) =1
2Z(A(x) − B(x)) .
In diese Gleichung wird nun (22) eingesetzt und man erhält
I(x) =1
2Z
(e−γxA(0) − eγxB(0)
). (36)
Unter Ausnutzung der Gleichungen (33) und (34) ergibt sich
I(x) =1
Z
(e−γxUh − eγxUr
). (37)
Dies kann durch
I(x) = e−γxIh − eγxIr (38)
mit
Ih =Uh
Z, Ir =
Ur
Z(39)
ausgedrückt werden.
3.3 Fortpflanzungskonstante und Wellenübertragungsmaß
Wie stark die Welle gedämpft wird, lässt sich anhand des Eigenwertes γ aus Gleichung (18)
ermitteln, welcher auch Fortpflanzungskonstante1 heißt:
γ =√
[jωL′ +R′][jωC ′ +G′] = α + jβ .
1Tatsächlich ist γ eine Funktion von jω, die aber bezüglich des Ortes x konstant ist. Zur Entlastung derSchreibweise wird im Folgenden auf die korrektere Schreibweise γ(jω) verzichtet und lediglich γ verwendet.Entsprechend wird auch beim Real- und Imaginärteil von γ verfahren.
NT-V1 - 9

Der Realteil von γ wird Dämpfungskonstante α und der Imaginärteil Phasenkonstante βgenannt. Wie man durch Einsetzen in die hinlaufende Welle uh(x,t) erkennt, entspricht
nämlich das Produkt aus α und der Länge x der Dämpfung a(x) und das Produkt aus βund x der Phasendrehung b(x):
uh(x,t) = ReUh e−γxejωt = ReUh e−[α+jβ]xejωt= ReUh e−[a(x)+jb(x)]ejωt = ReUh e−a(x)ej[ωt+b(x)] .
(40)
Das Produkt der Fortpflanzungskonstante γ mit der Länge x heißt Wellenübertragungsmaß
und wird mit g(x) bezeichnet. Es gilt
g(x) = γx = aNp(x) + jbph(x) . (41)
Da γ von ω abhängt, sind sowohl die Dämpfung als auch die Phasendrehung frequenz-
abhängig. Aus (40) folgt, dass die Dämpfung aNp(x) dem logarithmierten Verhältnis aus
der Amplitude der Spannung uh(0,t) am Leitungsanfang und der Amplitude der Spannung
uh(x,t) an der Stelle x entspricht:
aNp(x) = αx = lnmax |uh(0,t)|max |uh(x,t)|
in Np .
Die Einheit dieser Dämpfung heißt Neper. Heutzutage wird die Dämpfung häufiger in Dezibel
angegeben, welche man erhält, wenn anstelle des natürlichen Logarithmus der dekadische
Logarithmus lg verwendet wird:
adB(x) = 20 lgmax |uh(0,t)|max |uh(x,t)|
in dB .
Vorbereitungsaufgabe 3.1:
Laut CCI (Comité Consultatif International) ist für eine Fernsprechleitung eine Dämpfung
von aNp(x) = 4.6 Neper noch zulässig [Artu57].
a) Auf wie viel Prozent ihres Sendewertes max |uh(0,t)| ist die Spannung max |uh(x,t)|abgesunken, wenn sie um 4.6 Neper gedämpft worden ist?
b) Wie groß ist diese Dämpfung in dB?
3.4 Reflexionsfaktor
Der Reflexionsfaktor (l) gibt das Verhältnis der komplexen Amplitude des Strom- bzw.
Spannungsanteils der reflektierten Welle zur entsprechenden komplexen Amplitude der ein-
fallenden Welle am Leitungsende x = l an:
(l) =Ure
γl
Uhe−γl=
Ireγl
Ihe−γl.
Durch Einsetzen in die Gleichungen (35) bzw. (38) erhält man daraus die Beziehungen:
U(l) = Uhe−γl + Ureγl = Uhe−γl[1 + (l)]
bzw. I(l) = Ihe−γl − Ireγl = Ihe−γl [1 − (l)] .
NT-V1 - 10
Wenn die Leitung am Ende mit dem Widerstand ZA abgeschlossen ist, gilt
ZA =U(l)
I(l)=Uhe−γl[1 + (l)]
Ihe−γl[1 − (l)]= Z
1 + (l)
1 − (l),
wobei Z der Wellenwiderstand aus (17) ist. Diese Beziehung lässt sich in eine Bestimmungs-
gleichung für den Reflexionsfaktor (l) umformen:
(l) =ZA − Z
ZA + Z.
Vorbereitungsaufgabe 3.2:
Welchen Wert nimmt der Reflexionsfaktor (l) bei
a) Leerlauf (ZA → ∞),
b) Anpassung (ZA = Z) und
c) Kurzschluss (ZA → 0)
an?
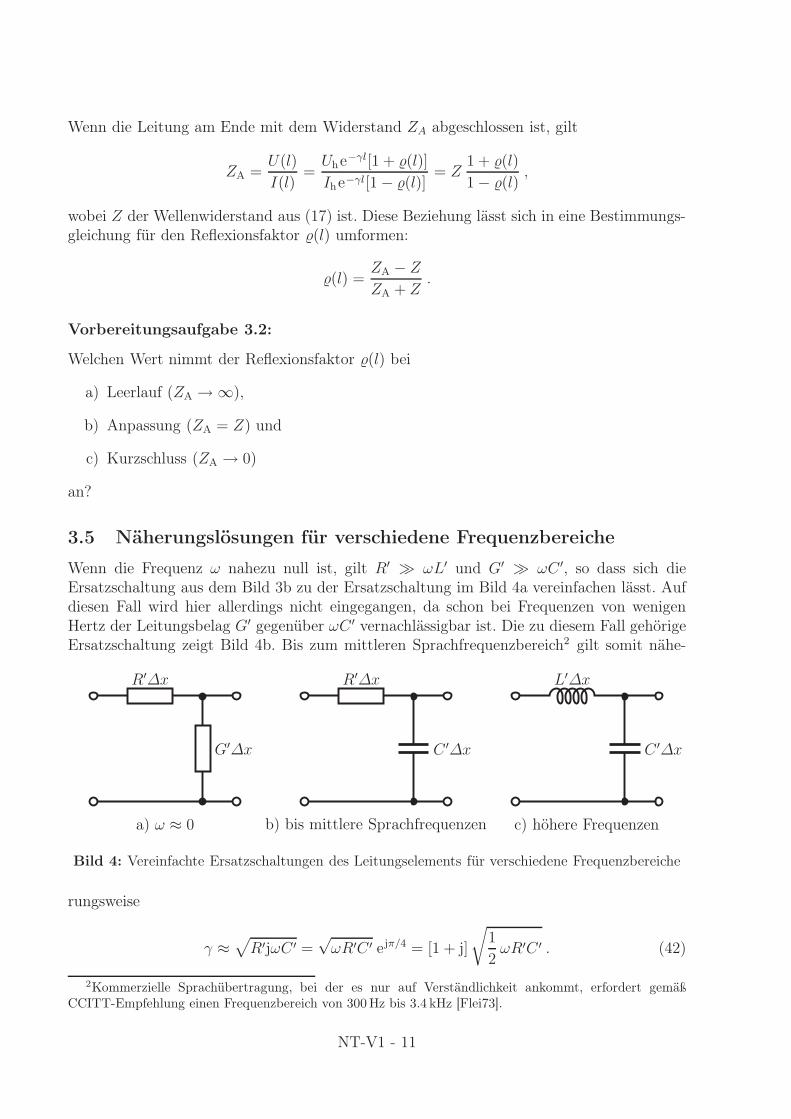
3.5 Näherungslösungen für verschiedene Frequenzbereiche
Wenn die Frequenz ω nahezu null ist, gilt R′ ≫ ωL′ und G′ ≫ ωC ′, so dass sich die
Ersatzschaltung aus dem Bild 3b zu der Ersatzschaltung im Bild 4a vereinfachen lässt. Auf
diesen Fall wird hier allerdings nicht eingegangen, da schon bei Frequenzen von wenigen
Hertz der Leitungsbelag G′ gegenüber ωC ′ vernachlässigbar ist. Die zu diesem Fall gehörige
Ersatzschaltung zeigt Bild 4b. Bis zum mittleren Sprachfrequenzbereich2 gilt somit nähe-
a) ω ≈ 0 b) bis mittlere Sprachfrequenzen c) höhere Frequenzen
R′∆xR′∆x
G′∆x C ′∆xC ′∆x
L′∆x
Bild 4: Vereinfachte Ersatzschaltungen des Leitungselements für verschiedene Frequenzbereiche
rungsweise
γ ≈√
R′jωC ′ =√ωR′C ′ ejπ/4 = [1 + j]
√
1
2ωR′C ′ . (42)
2Kommerzielle Sprachübertragung, bei der es nur auf Verständlichkeit ankommt, erfordert gemäßCCITT-Empfehlung einen Frequenzbereich von 300 Hz bis 3.4 kHz [Flei73].
NT-V1 - 11

Daraus folgt für die Dämpfungskonstante α und die Phasenkonstante β
α ≈ β ≈√
1
2ωR′C ′ . (43)
Der Wellenwiderstand Z vereinfacht sich mit den Annahmen R′ ≫ ωL′ und ωC ′ ≫ G′ zu
Z ≈√
R′
jωC ′=
√
R′
ωC ′e−jπ/4 . (44)
Wird ein Kabel bei höheren Frequenzen genutzt, so macht sich der induktive Widerstand
zunehmend bemerkbar, und es gilt das Ersatzschaltbild im Bild 4c. Die Bestimmung der
Näherungslösung für die Konstanten γ, α und β erfordert einige Zwischenschritte. Zunächst
stellt man das Quadrat der Fortpflanzungskonstante γ mit Betrag und Phase dar:
γ2 = [R′ + jωL′][G′ + jωC ′] =√
[R′2 + ω2L′2][G′2 + ω2C ′2] ej[ϕL+ϕC ]
mit ϕL = arctan
(ωL′
R′
)
und ϕC = arctan
(ωC ′
G′
)
.
Für die Fortpflanzungskonstante γ gilt somit
γ = 4
√
[R′2 + ω2L′2][G′2 + ω2C ′2] ej[ϕL+ϕC ]/2
= 4
√
[R′2 + ω2L′2][G′2 + ω2C ′2]
[
cos
(ϕL + ϕC
2
)
+ j sin
(ϕL + ϕC
2
)]
= α + jβ .
Wegen ωL′ ≫ R′ und ωC ′ ≫ G′ ist es sinnvoll, die Winkel ϕL und ϕC in der folgenden
Weise auszudrücken:
ϕL =π
2− arctan
(R′
ωL′
)
bzw. ϕC =π
2− arctan
(G′
ωC ′
)
.
Für kleine Argumente gelten die Näherungen
arctan
(R′
ωL′
)
≈ R′
ωL′und arctan
(G′
ωC ′
)
≈ G′
ωC ′.
Mit
cos
(ϕL + ϕC
2
)
≈ cos
(π
2−
[R′
2ωL′+
G′
2ωC ′
])
= sin
(R′
2ωL′+
G′
2ωC ′
)
≈ R′
2ωL′+
G′
2ωC ′
erhält man somit für den Realteil von γ, d. h. für die Dämpfungskonstante α, die Approxi-
mation
α =4√ω2L′2ω2C ′2 cos
(ϕL + ϕC
2
)
≈ 2√ω2L′C ′
[R′
2ωL′+
G′
2ωC ′
]
=R′
2
√
C ′
L′+G′
2
√
L′
C ′,
die sich wegen der bei Kabeln gültigen Beziehung R′ ≫ G′ weiter zu
α ≈ R′
2
√
C ′
L′(45)
vereinfachen lässt.
NT-V1 - 12
Vorbereitungsaufgabe 3.3:
Erläutern Sie anhand der Beziehung (45), weshalb es durch den Einsatz konzentrierter
Induktivitäten möglich ist, die Reichweite von Kabelverbindungen zu erhöhen. Welchen
Nachteil hat dieses Verfahren, das auch als Pupinisierung bezeichnet wird?
Der Imaginärteil von γ, d. h. die Phasenkonstante β, ergibt sich bei hohen Frequenzen
wegen
sin
(ϕL + ϕC
2
)
≈ cos
(R′
2ωL′+
G′
2ωC ′
)
≈ 1 (46)
näherungsweise zu
β =4√ω2L′2ω2C ′2 sin
(ϕL + ϕC
2
)
≈ 2√ω2L′C ′ = ω
√L′C ′ . (47)
Die Näherungslösung der Fortpflanzungskonstante γ lautet somit für hohe Frequenzen
γ ≈ R′
2
√
C ′
L′+ jω
√L′C ′ . (48)
Der Wellenwiderstand Z nimmt mit ωL′ ≫ R′ und ωC ′ ≫ G′ den Wert
Z ≈√
jωL′
jωC ′=
√
L′
C ′. (49)
an. Bei hohen Frequenzen ist der Wellenwiderstand Z folglich näherungsweise reell und
konstant. Die angegebene Näherung ist im Fall R′ = 0 und G′ = 0 sogar exakt, der
Wellenwiderstand einer verlustfreien Leitung folglich stets reell.
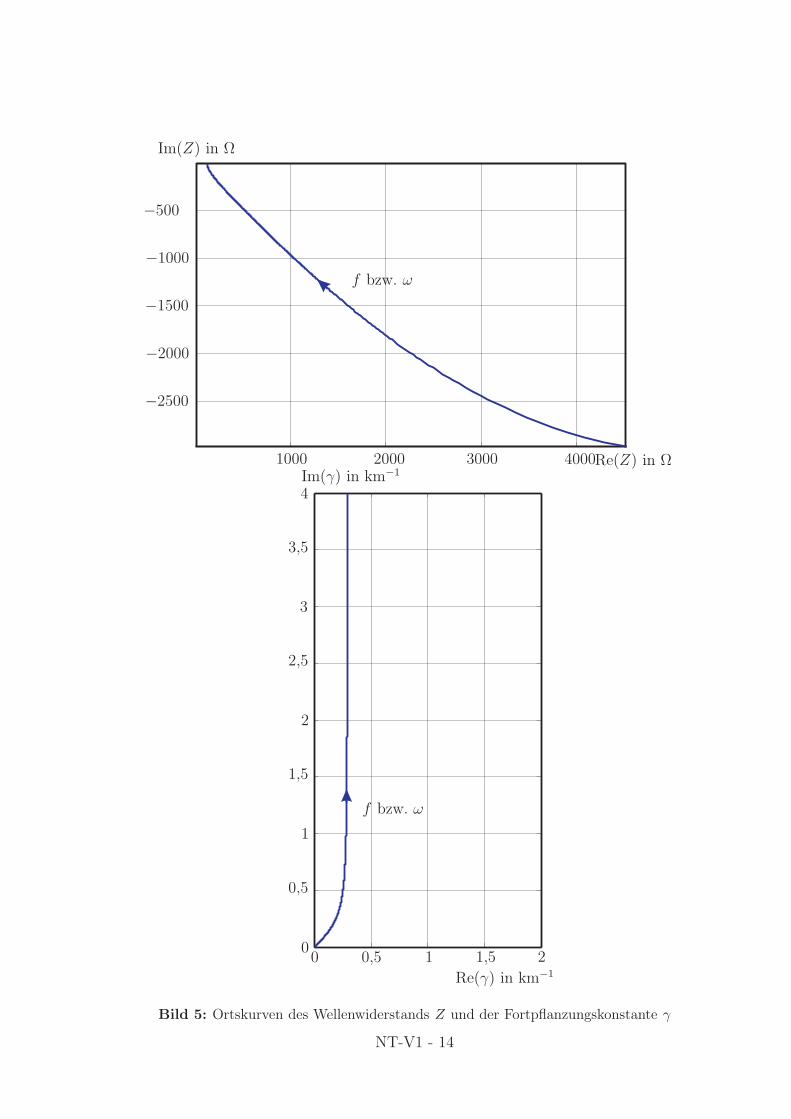
Vorbereitungsaufgabe 3.4:
Im Bild 5 sind die Ortskurven des Wellenwiderstands Z und der Fortpflanzungskonstante γeiner Leitung mit den Leitungsbelägen
R′ = 74 Ω/km , L′ = 600µH/km , C ′ = 37 nF/km und G′ = 1µS/km
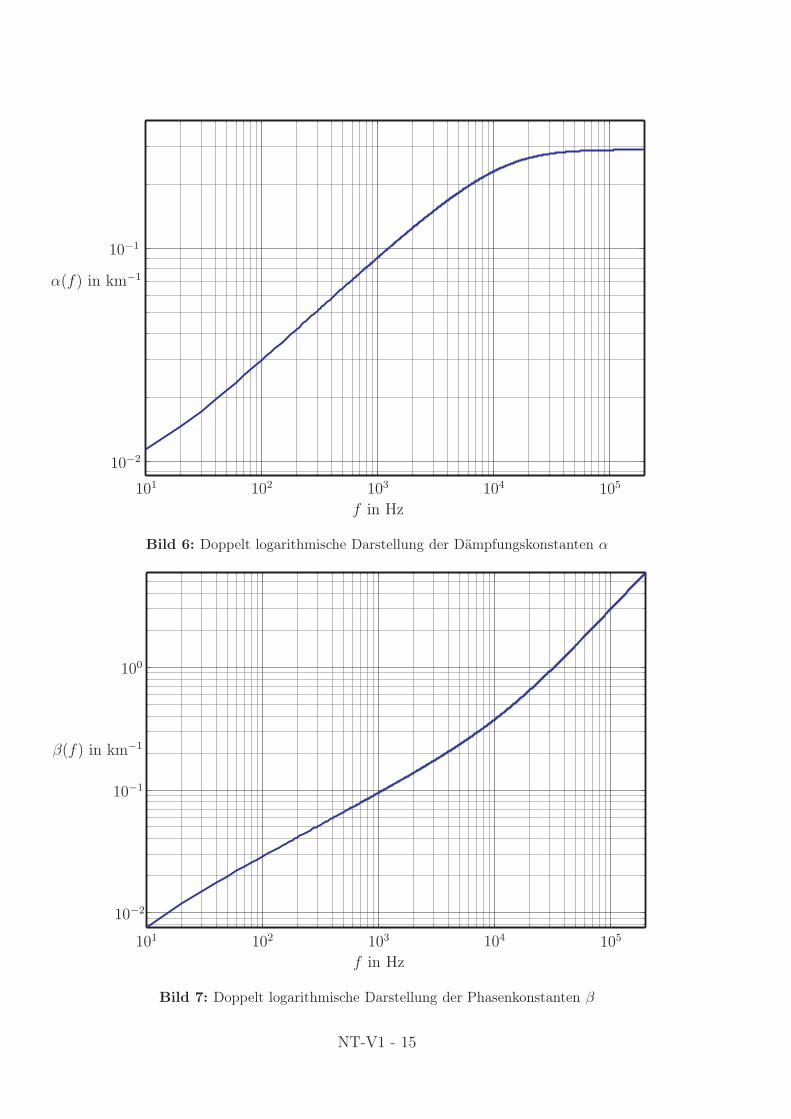
abgebildet. In den Bildern 6 und 7 sind die zugehörige Dämpfungskonstante α und die
Phasenkonstante β in Abhängigkeit von der Frequenz f doppelt logarithmisch dargestellt.
1. Zeichnen Sie in die obere Teilgrafik des Bildes 5 die Näherungslösung (44) für den
mittleren Frequenzbereich. Berechnen und markieren Sie außerdem den Wert√
L′/C ′,
gegen den die Ortskurve bei hohen Frequenzen strebt.
2. Zeichnen Sie die Näherungslösungen (42) und (48) der Ortskurve der Fortpflanzungs-
konstante γ in die untere Teilgrafik des Bildes 5 .
3. Zeichnen Sie die Näherungslösungen (43) und (45) bzw. (43) und (47) in die Bilder 6
und 7.
4. Stellen die berechneten Näherungslösungen gute Approximationen der Kurven dar?
NT-V1 - 13
Im(Z) in Ω
f bzw. ω
Re(Z) in Ω
−500
−1000
−1500
−2000
−2500
1000 2000 3000 4000
0 0,5 1 1,5 20
0,5
1
1,5
2
2,5
3
3,5
4Im(γ) in km−1
Re(γ) in km−1
f bzw. ω
Bild 5: Ortskurven des Wellenwiderstands Z und der Fortpflanzungskonstante γ
NT-V1 - 14
α(f) in km−1
f in Hz
10−1
10−2
101 102 103 104 105
Bild 6: Doppelt logarithmische Darstellung der Dämpfungskonstanten α
β(f) in km−1
f in Hz
100
10−1
10−2
101 102 103 104 105
Bild 7: Doppelt logarithmische Darstellung der Phasenkonstanten β
NT-V1 - 15
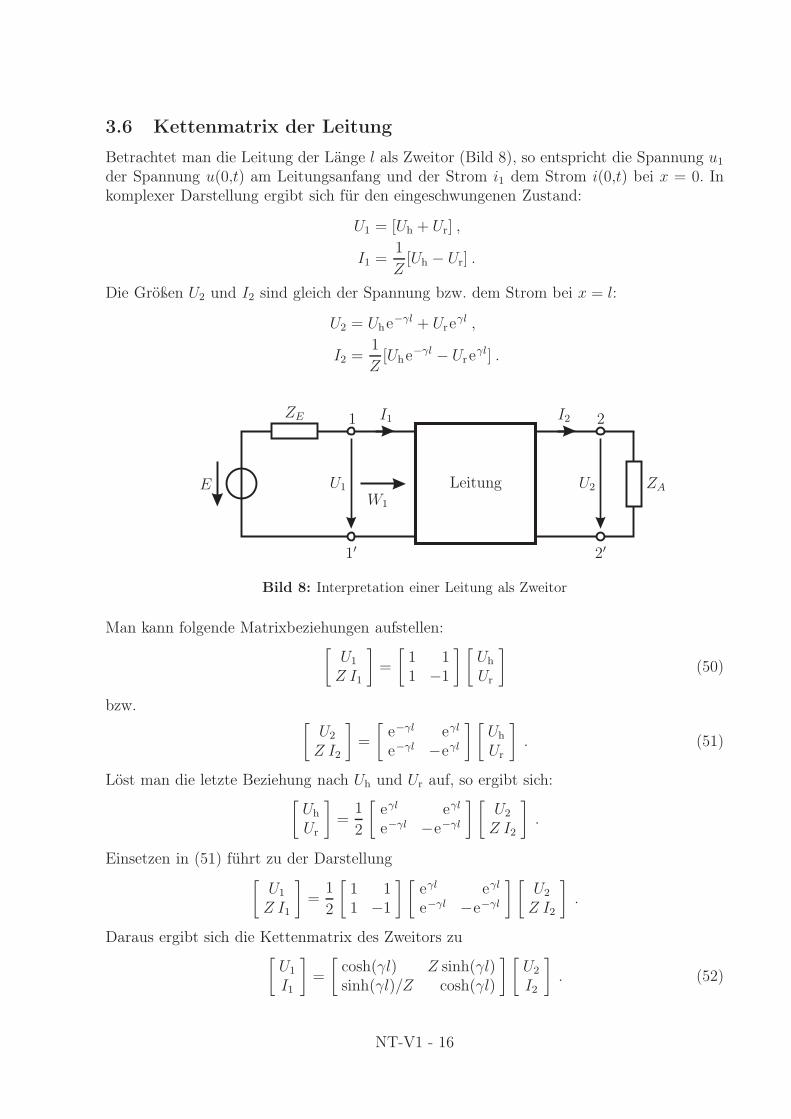
3.6 Kettenmatrix der Leitung
Betrachtet man die Leitung der Länge l als Zweitor (Bild 8), so entspricht die Spannung u1
der Spannung u(0,t) am Leitungsanfang und der Strom i1 dem Strom i(0,t) bei x = 0. In
komplexer Darstellung ergibt sich für den eingeschwungenen Zustand:
U1 = [Uh + Ur] ,
I1 =1
Z[Uh − Ur] .
Die Größen U2 und I2 sind gleich der Spannung bzw. dem Strom bei x = l:
U2 = Uhe−γl + Ureγl ,
I2 =1
Z[Uhe−γl − Ure
γl] .
r
E
ZE 1 2
1′ 2′
U1 U2
I1 I2
ZAW1
Leitung
Bild 8: Interpretation einer Leitung als Zweitor
Man kann folgende Matrixbeziehungen aufstellen:[U1
Z I1
]
=
[1 1
1 −1
] [Uh
Ur
]
(50)
bzw.[U2
Z I2
]
=
[e−γl eγl
e−γl −eγl
] [Uh
Ur
]
. (51)
Löst man die letzte Beziehung nach Uh und Ur auf, so ergibt sich:[Uh
Ur
]
=1
2
[eγl eγl
e−γl −e−γl
] [U2
Z I2
]
.
Einsetzen in (51) führt zu der Darstellung[U1
Z I1
]
=1
2
[1 1
1 −1
] [eγl eγl
e−γl −e−γl
] [U2
Z I2
]
.
Daraus ergibt sich die Kettenmatrix des Zweitors zu[U1
I1
]
=
[cosh(γl) Z sinh(γl)sinh(γl)/Z cosh(γl)
] [U2
I2
]
. (52)
NT-V1 - 16

3.7 Eingangsimpedanz einer Leitung
Die Eingangsimpedanz der Leitung im Bild 8 ist
W1 =U1
I1. (53)
Aus (52) erhält man die Beziehungen
U1 = U2 cosh(γl) + I2Z sinh(γl)
I1 = I2 cosh(γl) +U2
Zsinh(γl) .
Daraus folgt mit ZA = U2/I2 die Eingangsimpedanz
W1 =U2 cosh(γl) + I2Z sinh(γl)
I2 cosh(γl) +U2
Zsinh(γl)
= Z
U2
I2+ Z
sinh(γl)
cosh(γl)
Z +U2
I2
sinh(γl)
cosh(γl)
= ZZA + Z tanh(γl)
Z + ZA tanh(γl). (54)
Wie bei der Reflexion sind auch bei der Eingangsimpedanz die folgenden Sonderfälle von
besonderem Interesse:
• Leerlauf: ZA → ∞ W1L = Z coth(γl)• Anpassung: ZA = Z W1 = Z• Kurzschluss: ZA → 0 W1K = Z tanh(γl)
.
Vorbereitungsaufgabe 3.5:
Der Wellenwiderstand Z und die Dämpfung a(l) = α l einer Leitung sind bekannt. Bestim-
men Sie die Kurzschluss-Eingangsimpedanz W1K in Abhängigkeit von Z und a(l), wenn die
Länge der Leitung
a) l = λ/2 bzw.
b) l = λ/4
beträgt.
Hinweis:
Nutzen Sie die Zusammenhänge
λ =2π
βund tanh(γl) =
tanh(αl) + j tan(βl)
1 + tanh(αl)j tan(βl).
3.8 Messung von Leitungskenngrößen
Der Betrag und die Phase der Leerlauf-Eingangsimpedanz und der Kurzschluss-Eingangs-
impedanz sind leicht messbar. Die Beziehungen
W1L = |W1L|ejϕL = Z coth(γl)
und W1K = |W1K|ejϕK = Z tanh(γl)
NT-V1 - 17
werden deswegen häufig zur Bestimmung des Wellenwiderstandes Z verwendet. Dieser ent-
spricht dem geometrischen Mittel aus W1L und W1K:
Z =√
|W1L||W1K| ej[ϕL+ϕK]/2 = |Z|ejϕz . (55)
Die Dämpfung a(l) und die Phase b(l) können ebenfalls aus den gemessenen Eingangsimpe-
danzen bei Leerlauf und Kurzschluss ermittelt werden. Dazu werden die Beziehungen
tanh(g(l)) = tanh(γl) =
√
|W1K||W1L|
ej[ϕK−ϕL]/2 = Mg ejψg (56)
und
g(l) = aNp(l) + jbph(l)
verwendet. Führt man die Leerlauf- und Kurzschlussmessungen für mehrere Frequenzen
durch, so kann man Z und g(l) bzw. aNp(l) und bph(l) in Abhängigkeit von den interessie-
renden Frequenzen bestimmen.
Bisher wurden die Leitungsbeläge wie konstante Größen behandelt. Tatsächlich hängen
R′, L′, G′ und C ′ jedoch von der Frequenz ab. R′ steigt – bedingt durch den Skineffekt –
mit zunehmender Frequenz an. Dasselbe gilt für G′, da bei höheren Frequenzen auch die
dielektrischen Verluste ansteigen. Der Induktivitätsbelag L′ nimmt bei steigender Frequenz
leicht ab. Der Grund hierfür ist die Stromverdrängung durch den Skin-Effekt, vgl. [ZB86].
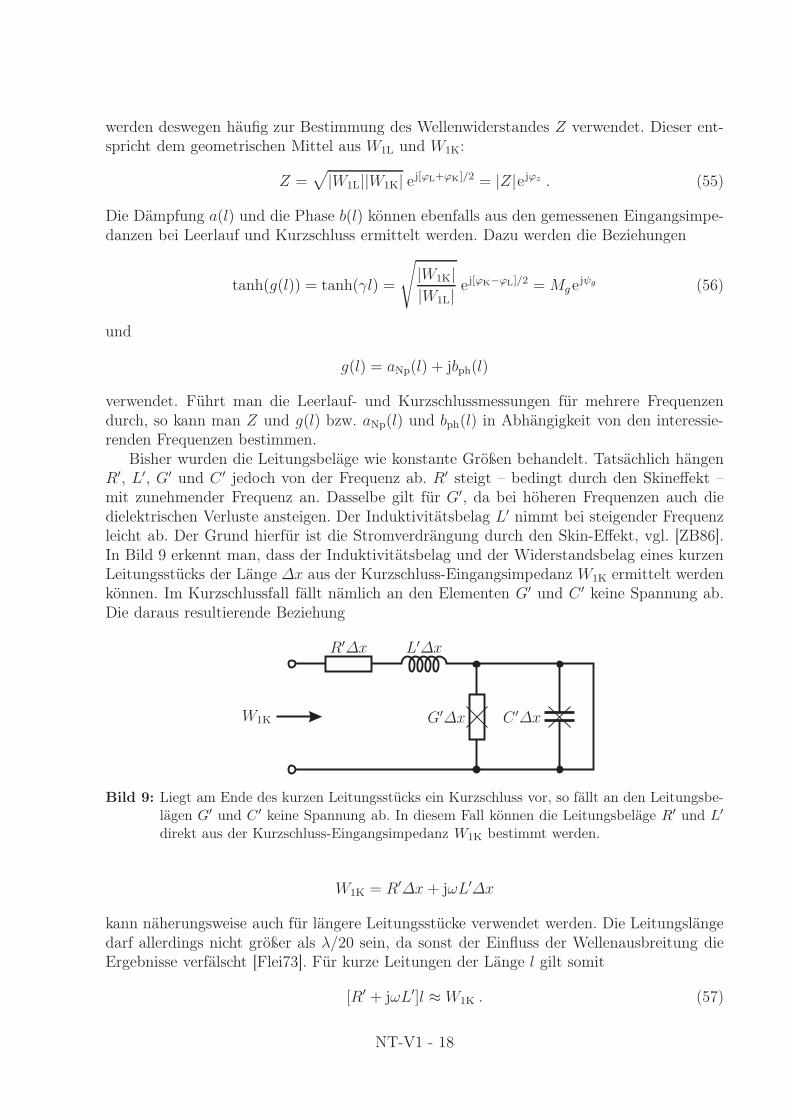
In Bild 9 erkennt man, dass der Induktivitätsbelag und der Widerstandsbelag eines kurzen
Leitungsstücks der Länge ∆x aus der Kurzschluss-Eingangsimpedanz W1K ermittelt werden
können. Im Kurzschlussfall fällt nämlich an den Elementen G′ und C ′ keine Spannung ab.
Die daraus resultierende Beziehung
R′∆x L′∆x
G′∆x C ′∆xW1K
Bild 9: Liegt am Ende des kurzen Leitungsstücks ein Kurzschluss vor, so fällt an den Leitungsbe-lägen G′ und C ′ keine Spannung ab. In diesem Fall können die Leitungsbeläge R′ und L′
direkt aus der Kurzschluss-Eingangsimpedanz W1K bestimmt werden.
W1K = R′∆x+ jωL′∆x
kann näherungsweise auch für längere Leitungsstücke verwendet werden. Die Leitungslänge
darf allerdings nicht größer als λ/20 sein, da sonst der Einfluss der Wellenausbreitung die
Ergebnisse verfälscht [Flei73]. Für kurze Leitungen der Länge l gilt somit
[R′ + jωL′]l ≈W1K . (57)
NT-V1 - 18

Vorbereitungsaufgabe 3.6:
Eine 2-mm-Kabelleitung der Länge l = 5 km hat bei einer Frequenz von f = 1,4 kHz eine
Kurzschlussimpedanz von W1K = [58,5 + j26,4] Ω.
a) Wie groß ist die Ausbreitungsgeschwindigkeit v der elektromagnetischen Welle auf der
Leitung, wenn εr = 1,95 und µr = 1 gilt?
b) Bestimmen Sie die Wellenlänge λ.
c) Bis zu welcher Leitungslänge lmax gilt die Näherung (57)?
d) Ermitteln Sie die Leitungsbeläge R′ und L′.
4 Verhalten der elektrischen Leitung bei impulsförmiger
Anregung
In den folgenden Abschnitten wird nicht mehr der eingeschwungene Zustand betrachtet,
sondern es wird untersucht, was geschieht, wenn die Leitung mit einem Spannungsimpuls
angeregt wird. Hierzu betrachten wir zunächst noch einmal die Gleichungen (2) und (3), die
sich umgestellt zu
∂u
∂x+ L′
∂i
∂t+R′i = 0 , (58)
∂i
∂x+ C ′
∂u
∂t+G′u = 0 (59)
ergeben. Stellt man die Spannung und den Strom durch
u(x,t) =1
2(a+ b)
und
i(x,t) =1
2Z(a− b)
dar, so ergibt sich für Gleichung (59):
∂a
∂x− ∂b
∂x+ C ′Z
(∂a
∂t+∂b
∂t
)
+ ZG′(a+ b) = 0 , (60)
Auf ähnliche Weise erhält man für Gleichung (58):
∂a
∂x+∂b
∂x+L′
Z
(∂a
∂t− ∂b
∂t
)
+R′
Z(a− b) = 0 . (61)
Die Addition der beiden Gleichungen (60) und (61) ergibt
2∂a
∂x+
(
C ′Z+L′
Z
)∂a
∂t+
(
ZG′+R′
Z
)
a+
(
C ′Z−L′
Z
)∂b
∂t+
(
ZG′−R′
Z
)
b = 0. (62)
NT-V1 - 19

Subtrahiert man hingegen diese beiden Gleichungen, so erhält man
2∂b
∂x−
(
C ′Z+L′
Z
)∂b
∂t−
(
ZG′+R′
Z
)
b−(
C ′Z−L′
Z
)∂a
∂t−
(
ZG′−R′
Z
)
a = 0. (63)
Eine Entkopplung der Gleichungen erhält man, wenn man den Fall einer verlustfreien
Leitung (R′ = 0 = G′) betrachtet. Die Gleichung (17) vereinfacht sich hierbei zu
Z =
√
L′
C ′. (64)
Ferner wird
v : =1√L′C ′
(65)
gewählt. Es ergibt sich somit:
C ′Z =√L′C ′ =
1
v=
√L′C ′ =
L′
Z.
Die Gleichungen (62) und (63) vereinfachen sich damit zu:
∂a
∂x+
1
v
∂a
∂t= 0 , (66)
∂b
∂x− 1
v
∂b
∂t= 0 . (67)
Diese partiellen Differentialgleichungen können wir in gewöhnliche Differentialgleichungen
umwandeln, indem wir zunächst die neuen Variablen
ξ = x+ vt und η = x− vt
sowie deren Ableitung nach x und t einführen.
∂ξ
∂x=∂η
∂x= 1 und
∂ξ
∂t= −∂η
∂t= v.
Für die Größe a ergibt sich hierbei zunächst
da
dx=∂a
∂ξ
dξ
dx︸︷︷︸
=1
+∂a
∂η
dη
dx︸︷︷︸
=1
(68)
und
da
dt=∂a
∂ξ
dξ
dt︸︷︷︸
=v
+∂a
∂η
dη
dt︸︷︷︸
=−v
. (69)
NT-V1 - 20

Dividiert man die Gleichung (69) durch v und addiert diese zu Gleichung (68), so ergibt
sich unter Verwendung von Gleichung (66) folgende gewöhnliche DGL:
2∂a
∂ξ=
da
dx+
1
v
da
dt= 0 . (70)
Auf ähnliche Weise verfährt man, um eine gewöhnliche DGL nach b zu erhalten. Hierbei gilt
wieder:
db
dx=∂b
∂ξ+∂b
∂η(71)
und
db
dt= v
(∂b
∂ξ− ∂b
∂η
)
. (72)
Nun dividiert man die Gleichung (72) durch v und subtrahiert diese von Gleichung (71).
Mit Hilfe der Gleichung (67) führt dies auf folgende gewöhnliche DGL:
2∂b
∂η=
db
dx− 1
v
db
dt= 0 . (73)
Integriert man die Gleichungen (70) und (73) so erhält man:
a(ξ,η) = 2f(η) = 2f(x− vt) ,
b(ξ,η) = 2h(η) = 2h(x+ vt) .
Die Spannung und dem Strom kann man nun sehr leicht durch
u(x,t) =1
2(a+ b) = f(x− vt) + h(x+ vt) = uh(x− vt) + ur(x+ vt) ,
i(x,t) =1
2Z(a− b) =
1
Z[f(x− vt) − h(x+ vt)] =
1
Z[uh(x− vt) − ur(x+ vt)]
bestimmen, wobei
uh(x− vt) = f(x− vt)
der Spannungsanteil der hinlaufenden und
ur(x+ vt) = h(x+ vt)
der Spannungsanteil der rücklaufenden Welle ist. Schließt man die verlustfreie Leitung mit
einem ohmschen Widerstand RA ab, so folgt aus den obigen Beziehungen
u(l,t) = RAi(l,t) ⇐⇒ RA [uh(l − vt) − ur(l + vt)] = Z [uh(l − vt) + ur(l + vt)]
NT-V1 - 21

bzw.
ur(l + vt) =RA − Z
RA + Zuh(l − vt) = (l) uh(l − vt) ,
wobei (l) der schon bekannte Reflexionsfaktor ist. Gibt man nun einen Spannungsimpuls
auf die Leitung, so läuft dieser zunächst zum Ende der Leitung und entspricht in dieser Zeit
der hinlaufenden Welle uh(x − vt). Am Leitungsende wird er – mit dem Reflexionsfaktor
gewichtet – reflektiert und läuft danach wieder zurück zum Anfang der Leitung. Ist der
Abschlusswiderstand RA kleiner als der Wellenwiderstand Z, so gilt für den Reflexionsfaktor
(l) =RA − Z
RA + Z= −|(l)| .
Da beide Widerstände RA und Z positiv sind, gilt hierbei
|(l)| < 1 .
In diesem Fall hat die reflektierte Welle ur(x+ vt) somit die entgegengesetzte Polarität von
uh(x−vt) und eine kleinere Amplitude. Ist der Spannungsimpuls wieder am Leitungsanfang
angekommen, wird er dort erneut reflektiert und läuft anschließend wieder in entgegenge-
setzter Richtung auf das Leitungsende zu.
u(x,t)
u(x,t)
u(x,t)
x = 0
x = 0
x = 0
uh(x− vt)
ur(x+ vt)l
l
l
x
x
x
RA < Z
Bild 10: Ist der Abschlusswiderstand RA kleiner als der Wellenwiderstand Z, so hat die reflektierteWelle ur(x + vt) eine kleinere Amplitude als die hinlaufende Welle uh(x − vt) sowie dieentgegengesetzte Polarität.
NT-V1 - 22
In den drei Sonderfällen Leerlauf, Anpassung und Kurzschluss gilt:
• Leerlauf: (l) → 1 ur(l + vt) = uh(l − vt) ⇒ gleiche Polarität,
gleiche Amplitude
• Anpassung: (l) = 0 ur(l + vt) = 0 ⇒ es wird kein Spannungs-
impuls reflektiert
• Kurzschluss: (l) → −1 ur(l + vt) = −uh(l − vt) ⇒ entgegengesetzte Polarität,
gleiche Amplitude.
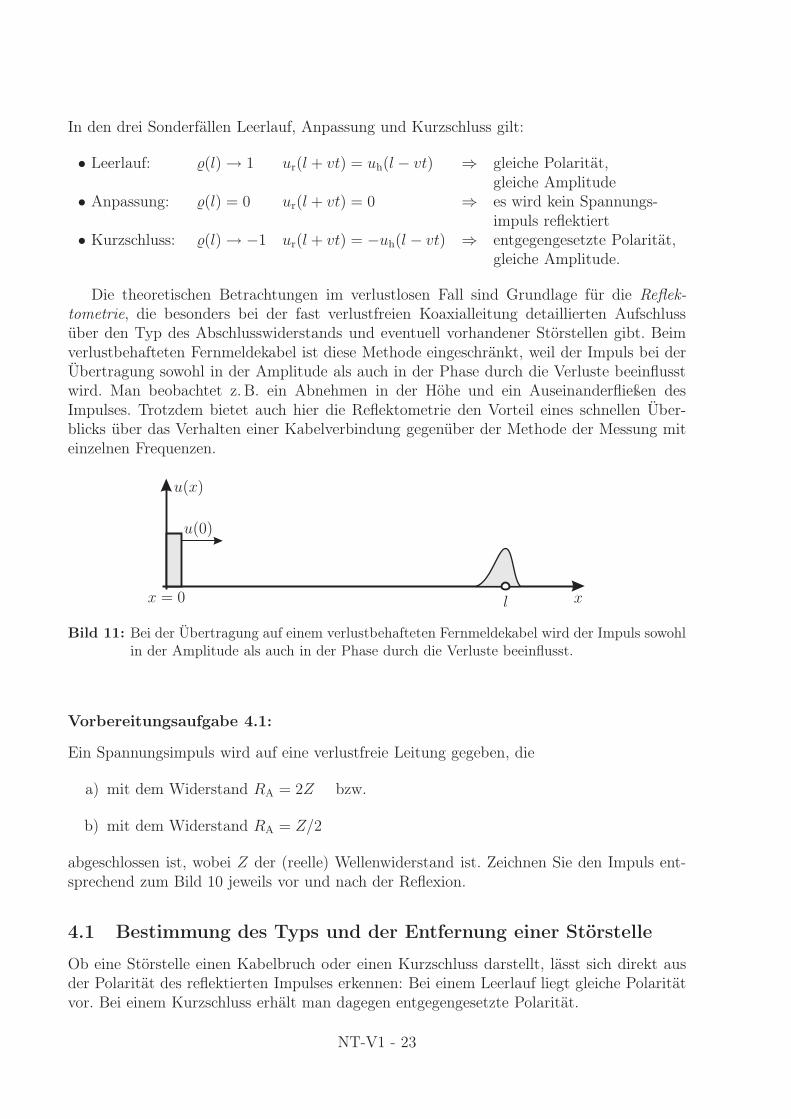
Die theoretischen Betrachtungen im verlustlosen Fall sind Grundlage für die Reflek-
tometrie, die besonders bei der fast verlustfreien Koaxialleitung detaillierten Aufschluss
über den Typ des Abschlusswiderstands und eventuell vorhandener Störstellen gibt. Beim
verlustbehafteten Fernmeldekabel ist diese Methode eingeschränkt, weil der Impuls bei der
Übertragung sowohl in der Amplitude als auch in der Phase durch die Verluste beeinflusst
wird. Man beobachtet z. B. ein Abnehmen in der Höhe und ein Auseinanderfließen des
Impulses. Trotzdem bietet auch hier die Reflektometrie den Vorteil eines schnellen Über-
blicks über das Verhalten einer Kabelverbindung gegenüber der Methode der Messung mit
einzelnen Frequenzen.
u(x)
x = 0
u(0)
l x
Bild 11: Bei der Übertragung auf einem verlustbehafteten Fernmeldekabel wird der Impuls sowohlin der Amplitude als auch in der Phase durch die Verluste beeinflusst.
Vorbereitungsaufgabe 4.1:
Ein Spannungsimpuls wird auf eine verlustfreie Leitung gegeben, die
a) mit dem Widerstand RA = 2Z bzw.
b) mit dem Widerstand RA = Z/2
abgeschlossen ist, wobei Z der (reelle) Wellenwiderstand ist. Zeichnen Sie den Impuls ent-
sprechend zum Bild 10 jeweils vor und nach der Reflexion.
4.1 Bestimmung des Typs und der Entfernung einer Störstelle
Ob eine Störstelle einen Kabelbruch oder einen Kurzschluss darstellt, lässt sich direkt aus
der Polarität des reflektierten Impulses erkennen: Bei einem Leerlauf liegt gleiche Polarität
vor. Bei einem Kurzschluss erhält man dagegen entgegengesetzte Polarität.
NT-V1 - 23
Zur Bestimmung der Entfernung einer Störstelle misst man mit einem Oszilloskop die
Zeit t0 zwischen dem Eingangsimpuls und dem reflektierten Impuls. Wegen des Auseinander-
fließens des Impulses sollte man die Zeit an den Vorderflanken der beiden Impulse messen.
Die Entfernung s bis zum Reflexionspunkt ergibt sich aus den Beziehungen
s =vt02
und v =1√µε
,
wobei v die Fortpflanzungsgeschwindigkeit der Grundwelle des Impulses auf der Leitung
bezeichnet.
5 Nebensprechen
Nebensprechen ist eine ungewollte Energieübertragung von einem Adernpaar auf ein be-
nachbartes Adernpaar. Dabei leidet nicht nur die Übertragungsgüte im gestörten Adernpaar,
sondern auch die Güte im störenden Adernpaar, da das Nebensprechen für dieses Adernpaar
einen Energieverlust darstellt. Je nachdem, ob sich der störende Sender und der gestörte
Empfänger am gleichen oder am entgegengesetzten Ende des Übertragungssystems befinden,
spricht man von Nahnebensprechen oder Fernnebensprechen.
Die Nebensprechdämpfung entspricht dem logarithmierten Verhältnis aus der vom stö-
renden Adernpaar gesendeten Leistung P1 und der vom gestörten Adernpaar am Messpunkt
Un,Nah bzw. Un,Fern empfangenen Leistung Pn:
aNp =1
2ln
(P1
Pn
)
bzw. adB = 10 lg
(P1
Pn
)
. (74)
Um die Nebensprechdämpfung weiter umformen zu können, wird im Folgenden von der
Annahme ausgegangen, dass die Wellenwiderstände der Leitungen reell sind.3 Das heißt, es
werden verzerrungsfreie Leitungen vorausgesetzt, welche die Beziehung R′C ′ = G′L′ erfüllen.
Diese Annahme gilt für den gesamten Abschnitt 5.
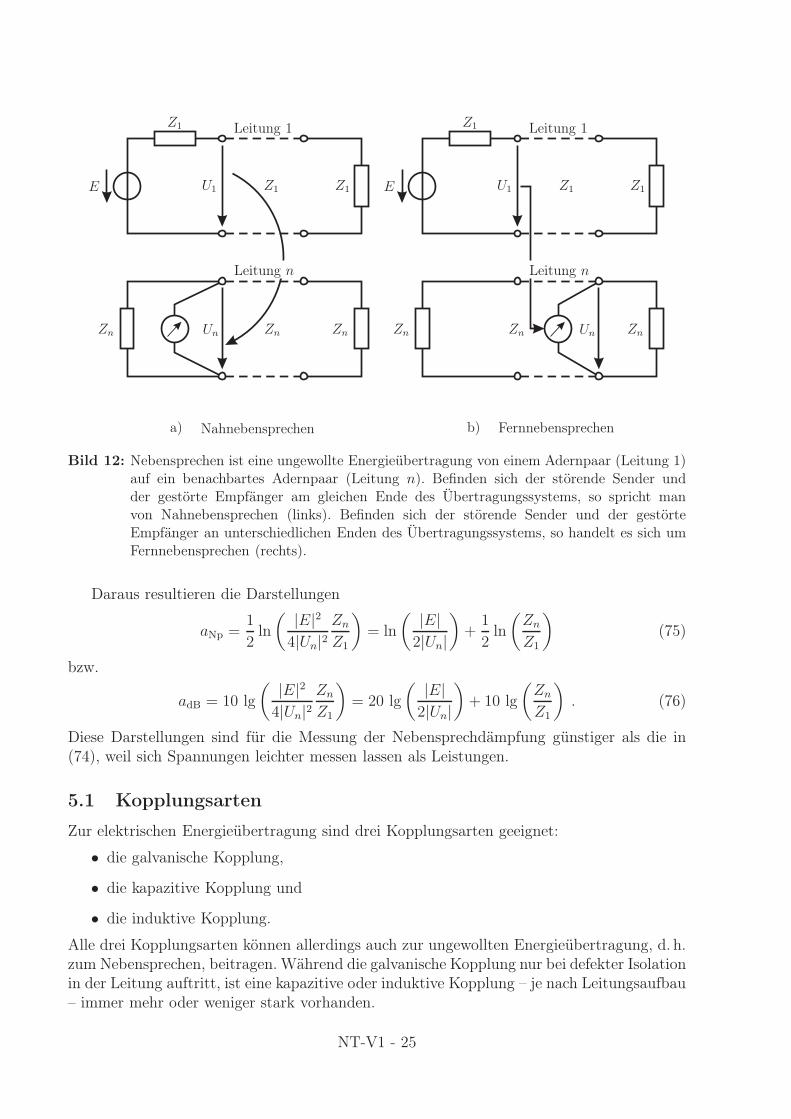
Sind die Abschlusswiderstände, wie im Bild 12 dargestellt, gleich den Wellenwiderständen
der Leitungen4, so entspricht die gesendete Leistung P1 der Maximalleistung
Pmax =|E|24Z1
,
und die empfangene Leistung ergibt sich zu
Pn =|Un|2Zn
.
3Diese Vorgehensweise ist auch in der Literatur üblich, siehe z.B. [Schm76].4Wenn die Wellenwiderstände der Leitungen nicht reell sind, müssen die Innenwiderstände der Span-
nungsquellen gleich den Wellenwiderständen und die Abschlusswiderstände konjugiert komplex zu denWellenwiderständen sein, damit Leistungsanpassung vorliegt. Die Maximalleistung entspricht in diesemFall dem Ausdruck
Pmax =|E|2
4 Re Z1
.
NT-V1 - 24
a) b)
EE U1U1 Z1Z1 Z1Z1
Z1Z1
ZnZn ZnZn ZnZn UnUn
Leitung 1Leitung 1
Leitung nLeitung n
Nahnebensprechen Fernnebensprechen
Bild 12: Nebensprechen ist eine ungewollte Energieübertragung von einem Adernpaar (Leitung 1)auf ein benachbartes Adernpaar (Leitung n). Befinden sich der störende Sender undder gestörte Empfänger am gleichen Ende des Übertragungssystems, so spricht manvon Nahnebensprechen (links). Befinden sich der störende Sender und der gestörteEmpfänger an unterschiedlichen Enden des Übertragungssystems, so handelt es sich umFernnebensprechen (rechts).
Daraus resultieren die Darstellungen
aNp =1
2ln
( |E|24|Un|2
ZnZ1
)
= ln
( |E|2|Un|
)
+1
2ln
(ZnZ1
)
(75)
bzw.
adB = 10 lg
( |E|24|Un|2
ZnZ1
)
= 20 lg
( |E|2|Un|
)
+ 10 lg
(ZnZ1
)
. (76)
Diese Darstellungen sind für die Messung der Nebensprechdämpfung günstiger als die in
(74), weil sich Spannungen leichter messen lassen als Leistungen.
5.1 Kopplungsarten
Zur elektrischen Energieübertragung sind drei Kopplungsarten geeignet:
• die galvanische Kopplung,
• die kapazitive Kopplung und
• die induktive Kopplung.
Alle drei Kopplungsarten können allerdings auch zur ungewollten Energieübertragung, d. h.
zum Nebensprechen, beitragen. Während die galvanische Kopplung nur bei defekter Isolation
in der Leitung auftritt, ist eine kapazitive oder induktive Kopplung – je nach Leitungsaufbau
– immer mehr oder weniger stark vorhanden.
NT-V1 - 25
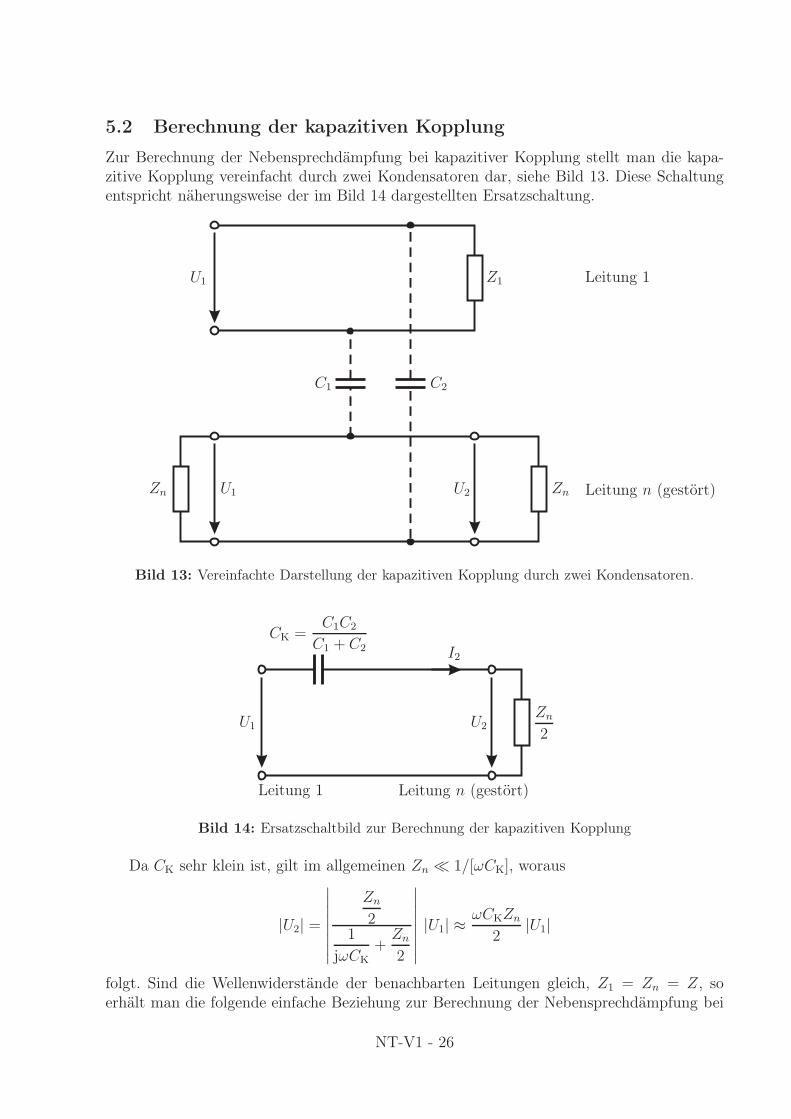
5.2 Berechnung der kapazitiven Kopplung
Zur Berechnung der Nebensprechdämpfung bei kapazitiver Kopplung stellt man die kapa-
zitive Kopplung vereinfacht durch zwei Kondensatoren dar, siehe Bild 13. Diese Schaltung
entspricht näherungsweise der im Bild 14 dargestellten Ersatzschaltung.
U1
U1
U2
Z1
Zn Zn
C1 C2
Leitung 1
Leitung n (gestört)
Bild 13: Vereinfachte Darstellung der kapazitiven Kopplung durch zwei Kondensatoren.
U1
CK =C1C2
C1 + C2 I2
U2Zn2
Leitung 1 Leitung n (gestört)
Bild 14: Ersatzschaltbild zur Berechnung der kapazitiven Kopplung
Da CK sehr klein ist, gilt im allgemeinen Zn ≪ 1/[ωCK], woraus
|U2| =
∣∣∣∣∣∣∣∣
Zn2
1
jωCK
+Zn2
∣∣∣∣∣∣∣∣
|U1| ≈ωCKZn
2|U1|
folgt. Sind die Wellenwiderstände der benachbarten Leitungen gleich, Z1 = Zn = Z, so
erhält man die folgende einfache Beziehung zur Berechnung der Nebensprechdämpfung bei
NT-V1 - 26
kapazitiver Kopplung:
aC,Np =1
2ln
(P1
Pn
)
=1
2ln
( |U1|2|U2|2
ZnZ1
)
= ln
( |U1||U2|
)
≈ ln
(2
ωCKZ
)
.
Sind die Wellenwiderstände Z1 und Zn dagegen nicht gleich, so wird als Näherung der
Wellenwiderstand Z =√Z1Zn verwendet.
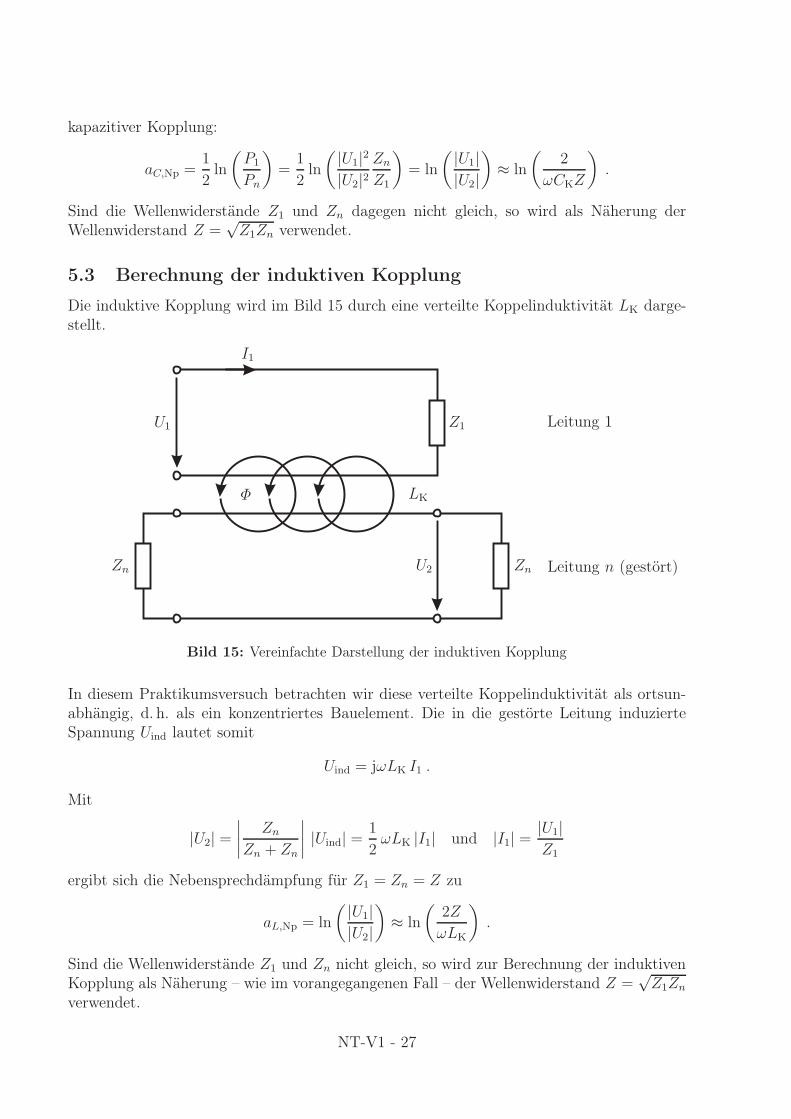
5.3 Berechnung der induktiven Kopplung
Die induktive Kopplung wird im Bild 15 durch eine verteilte Koppelinduktivität LK darge-
stellt.
U1
I1
Z1
Zn ZnU2
LKΦ
Leitung 1
Leitung n (gestört)
Bild 15: Vereinfachte Darstellung der induktiven Kopplung
In diesem Praktikumsversuch betrachten wir diese verteilte Koppelinduktivität als ortsun-
abhängig, d. h. als ein konzentriertes Bauelement. Die in die gestörte Leitung induzierte
Spannung Uind lautet somit
Uind = jωLK I1 .
Mit
|U2| =
∣∣∣∣
ZnZn + Zn
∣∣∣∣|Uind| =
1
2ωLK |I1| und |I1| =
|U1|Z1
ergibt sich die Nebensprechdämpfung für Z1 = Zn = Z zu
aL,Np = ln
( |U1||U2|
)
≈ ln
(2Z
ωLK
)
.
Sind die Wellenwiderstände Z1 und Zn nicht gleich, so wird zur Berechnung der induktiven
Kopplung als Näherung – wie im vorangegangenen Fall – der Wellenwiderstand Z =√Z1Zn
verwendet.
NT-V1 - 27
Φ
ΦI
IIA
B
C
D
Z2 = 10 kΩ
Z2 = 10 kΩ
Z1 = 350 ΩZ1
Z2
E
U
Z2
350 Ω
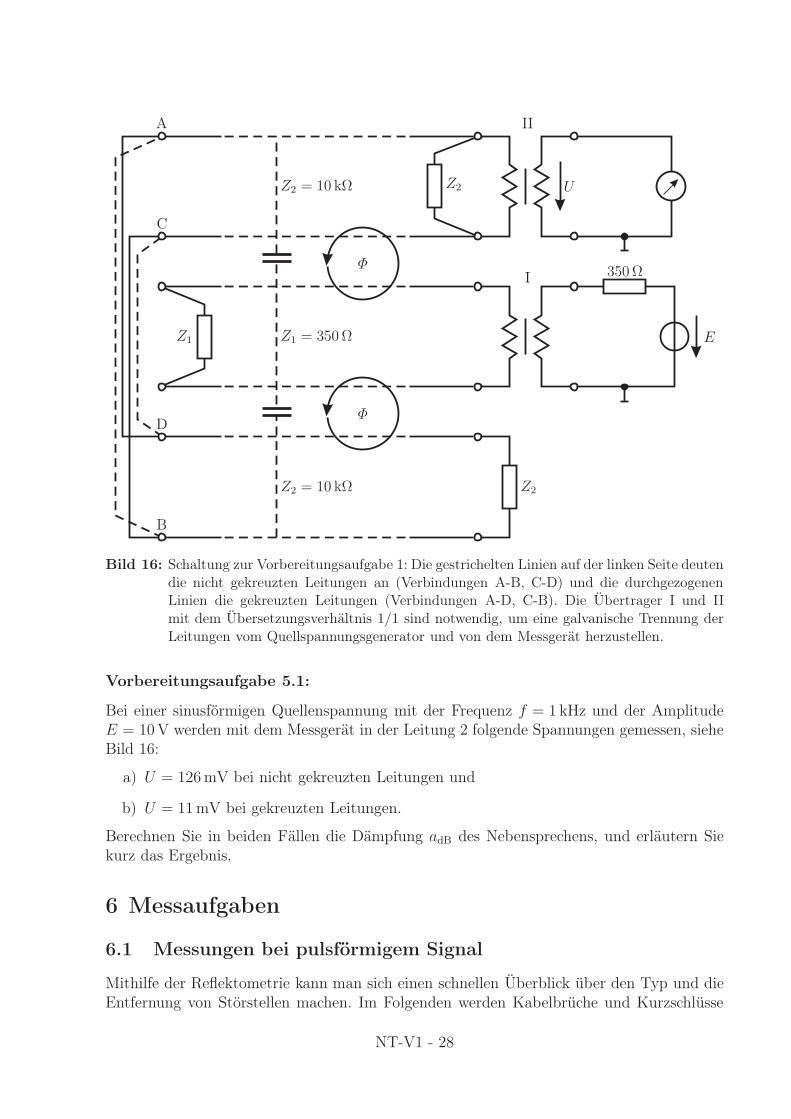
Bild 16: Schaltung zur Vorbereitungsaufgabe 1: Die gestrichelten Linien auf der linken Seite deutendie nicht gekreuzten Leitungen an (Verbindungen A-B, C-D) und die durchgezogenenLinien die gekreuzten Leitungen (Verbindungen A-D, C-B). Die Übertrager I und IImit dem Übersetzungsverhältnis 1/1 sind notwendig, um eine galvanische Trennung derLeitungen vom Quellspannungsgenerator und von dem Messgerät herzustellen.
Vorbereitungsaufgabe 5.1:
Bei einer sinusförmigen Quellenspannung mit der Frequenz f = 1 kHz und der Amplitude
E = 10 V werden mit dem Messgerät in der Leitung 2 folgende Spannungen gemessen, siehe
Bild 16:
a) U = 126 mV bei nicht gekreuzten Leitungen und
b) U = 11 mV bei gekreuzten Leitungen.
Berechnen Sie in beiden Fällen die Dämpfung adB des Nebensprechens, und erläutern Sie
kurz das Ergebnis.
6 Messaufgaben
6.1 Messungen bei pulsförmigem Signal
Mithilfe der Reflektometrie kann man sich einen schnellen Überblick über den Typ und die
Entfernung von Störstellen machen. Im Folgenden werden Kabelbrüche und Kurzschlüsse
NT-V1 - 28
im Fernmeldekabel simuliert, indem das vorhandene Kabel gezielt an verschiedenen Stellen
mit einem Leerlauf oder Kurzschluss versehen wird. Verwenden Sie für die Messungen eine
Pulsfrequenz von 1 kHz, eine Pulsbreite von 2µs und eine Pulsamplitude von 1 V.
1. Zeichnen Sie schematisch den Messaufbau zur Messung des reflektierten Impulses.
2. Skizzieren Sie die Schirmbilder des Oszilloskops, wenn sich der Funktionsgenerator
und das Oszilloskop
a) am Leitungsanfang befinden und ein Leerlauf am Leitungsende ist,
b) am Leitungsanfang befinden und ein Kurzschluss am Leitungsende ist,
c) am Leitungsanfang befinden und ein Kurzschluss an der gelben Buchse ist,
d) an der gelben Buchse befinden, ein Leerlauf am Leitungsanfang und ein Kurz-
schluss am Leitungsende ist,
e) an der gelben Buchse befinden, ein Kurzschluss am Leitungsanfang und ein
Leerlauf am Leitungsende ist.
Erläutern Sie Ihre Beobachtungen. Welche Erscheinungen sind auf das Nebensprechen
benachbarter Leitungen zurückzuführen?
3. Bestimmen Sie die Gesamtlänge lges des Kabels, sowie die Kabellänge lgelb vom Lei-
tungsanfang bis zur gelben Buchse (εr = 1,95, µr = 1).
6.2 Messungen im eingeschwungenen Zustand
Im Folgenden sollen einige Kenngrößen des Fernmeldekabels im Hinblick auf ihre Frequenz-
abhängigkeit untersucht werden. Zunächst werden Messdaten aufgenommen, mit denen die
Ortskurven des Wellenwiderstands Z und des Wellenübertragungsmaßes g sowie die Dämp-
fung aNp und das Phasenmaß bph als Funktionen der Frequenz f skizziert werden können.
Anschließend wird die Frequenzabhängigkeit der Leitungsbeläge R′ und L′ untersucht.
Wellenwiderstand, Wellenübertragungsmaß, Dämpfung und Phasenmaß
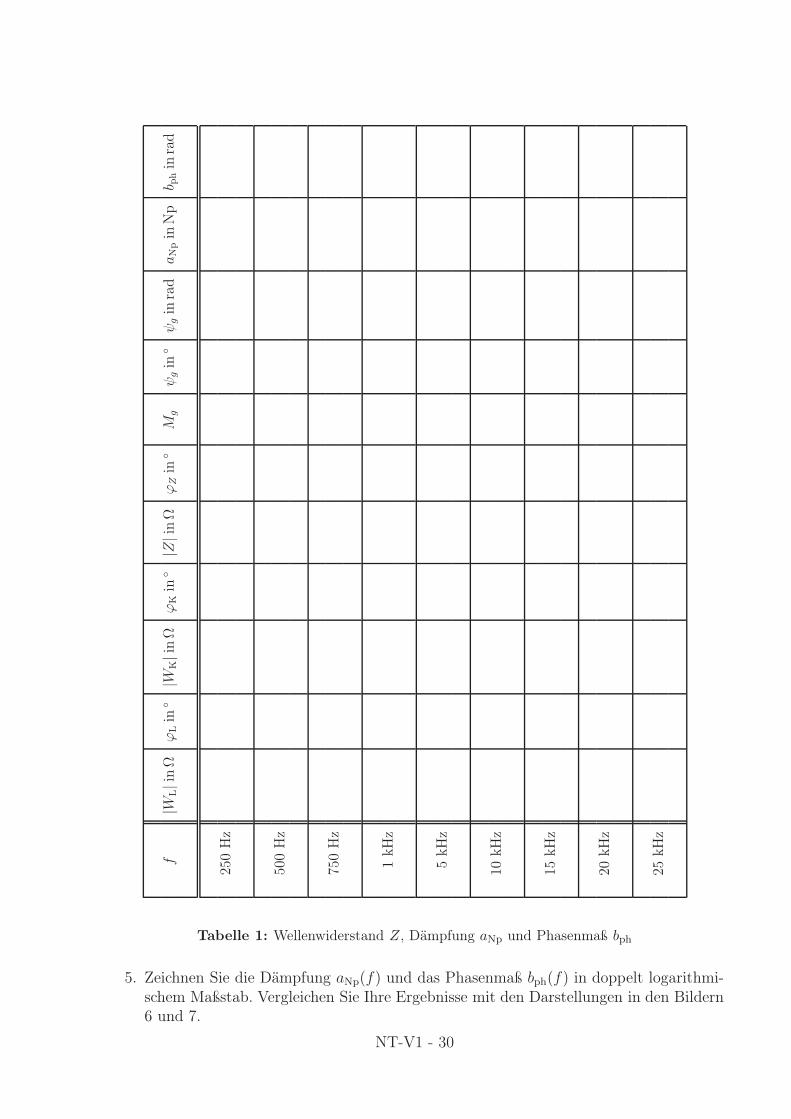
1. Messen Sie den Betrag und die Phase der Leerlauf-Eingangsimpedanz WL und der
Kurzschluss-Eingangsimpedanz WK für die Frequenzen in Tabelle 1.
2. Berechnen Sie aus den gemessenen Werten alle noch fehlenden Werte in der Tabelle 1.
Hinweis:
Nutzen Sie dazu die Gleichungen (55) und (56).
3. Zeichnen Sie die Ortskurve des Wellenwiderstands Z(f) für den unter 1. gemessenen
Frequenzbereich, und tragen Sie in das Diagramm eine Gerade mit dem Winkel −45
ein. Vergleichen Sie die gemessene Kurve mit der Näherungslösung.
4. Zeichnen Sie die Ortskurve des Wellenübertragungsmaßes g(f) für den unter 1. ge-
messenen Frequenzbereich und tragen Sie in das Diagramm eine Gerade mit dem
Winkel +45 ein. In welchem Frequenzbereich stimmt die gemessene Kurve mit der
Näherungslösung überein?
NT-V1 - 29
f|W
L|i
nΩ
ϕL
in
|WK|i
nΩ
ϕK
in
|Z|i
nΩ
ϕZ
in
Mg
ψgin
ψgin
rad
aN
pin
Np
b ph
inra
d
250
Hz
500
Hz
750
Hz
1kH
z
5kH
z
10
kH
z
15
kH
z
20
kH
z
25
kH
z
Tabelle 1: Wellenwiderstand Z, Dämpfung aNp und Phasenmaß bph
5. Zeichnen Sie die Dämpfung aNp(f) und das Phasenmaß bph(f) in doppelt logarithmi-
schem Maßstab. Vergleichen Sie Ihre Ergebnisse mit den Darstellungen in den Bildern
6 und 7.
NT-V1 - 30

Leitungsbeläge
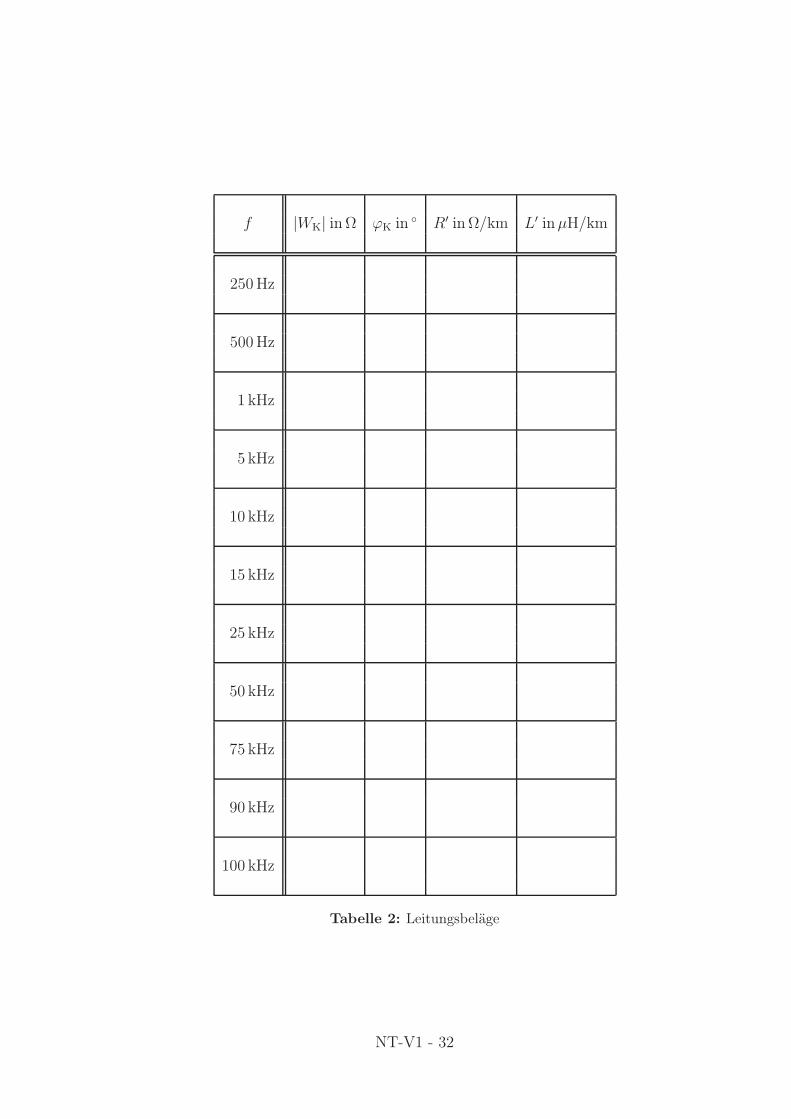
1. Erzeugen Sie einen Kurzschluss an der gelben Buchse, und messen Sie die Kurzschluss-
Eingangsimpedanz WK dieser verkürzten Leitung für die Frequenzen in Tabelle 2.
2. Bestimmen Sie die Leitungsbeläge R′(f) und L′(f) und tragen Sie die Werte in die
Tabelle 2 ein.
Hinweis:
Wegen der relativ kurzen Leitungslänge kann die Näherung [R′ + jωL′]lgelb ≈ WK
verwendet werden.
3. Zeichnen Sie die Funktionen R′(f) und L′(f) in einfach logarithmischem Maßstab.
Erläutern Sie Ihr Ergebnis.
NT-V1 - 31
f |WK| in Ω ϕK in R′ in Ω/km L′ inµH/km
250 Hz
500 Hz
1 kHz
5 kHz
10 kHz
15 kHz
25 kHz
50 kHz
75 kHz
90 kHz
100 kHz
Tabelle 2: Leitungsbeläge
NT-V1 - 32
Literatur
[Artu57] W. Artus: Einführung in die elektrische Nachrichtentechnik. Oldenbourg, Mün-
chen, 1957.
[Flei73] H. Fleischer: Lehrbuch der Fernmeldetechnik. Schiele & Schön, Berlin, 1973.
[FLS71] H. Fricke, K. Lamberts, W. Schuchardt: Elektrische Nachrichtentechnik, Teil 1.
Teubner, Stuttgart, 1971.
[Küpf73] K. Küpfmüller: Einführung in die Theoretische Elektrotechnik. Springer, Berlin,
1973.
[MG86] M. Meinke, F. W. Gundlach: Taschenbuch der Hochfrequenztechnik. Springer,
Berlin, 1986.
[Schm76] H. Schmid: Theorie und Technik der Nachrichtenkabel. Hüthig, Heidelberg, 1976.
[ZB86] O. Zinke, H. Brunswick: Lehrbuch der Hochfrequenztechnik. Springer, 1986.
NT-V1 - 33

Versuch NT-V2: Nichtlineare Verzerrungen
Inhaltsverzeichnis
1 Übersicht 2
2 Arten nichtlinearer Verzerrungen 2
2.1 Reguläre nichtlineare Verzerrungen . . . . . . . . . . . . . . . . . . . . . . . 2
2.2 Unregelmäßige nichtlineare Verzerrungen . . . . . . . . . . . . . . . . . . . . 2
2.3 Sonstige nichtlineare Verzerrungen . . . . . . . . . . . . . . . . . . . . . . . . 4
3 Quasilineare Systeme mit aussteuerungsunabhängiger Kennlinie 5
3.1 Beschreibung durch Taylor-Reihe . . . . . . . . . . . . . . . . . . . . . . . 5
3.2 Erregung durch eine sinusförmige Schwingung . . . . . . . . . . . . . . . . . 5
3.3 Erregung durch mehrere sinusförmige Schwingungen . . . . . . . . . . . . . . 6
4 Definition von Klirrfaktoren und Intermodulationsfaktoren 9
5 Messung von nichtlinearen Verzerrungen 11
6 Nichtlineare Verzerrungen in Zweitoren und Verstärkern 12
6.1 Allgemeine Berechnungsverfahren . . . . . . . . . . . . . . . . . . . . . . . . 12
6.2 Herabsetzung der nichtlinearen Verzerrungen durch Gegenkopplung . . . . . 12
7 Wirkungen nichtlinearer Verzerrungen 14
8 Vorbereitung 15
9 Aufgaben 16
10 Hinweise und Protokolle 18
10.1 Kennlinien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
10.2 Klirrdämpfungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.3 Intermodulationsdämpfungen . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Literaturverzeichnis 26
NT-V2 - 1
1 Übersicht
Neben den stets auftretenden linearen Verzerrungen beeinflussen die prinzipiell ebenso
unvermeidlichen nichtlinearen Verzerrungen die Übertragungsgüte eines Nachrichtensys-
tems. Nichtlineare Verzerrungen entstehen, wenn zwei Übertragungsgrößen einander nicht
proportional sind. Sie treten z. B. dadurch auf, dass einige Bauelemente, wie Spulen und
Übertrager, stets eine gewisse Nichtlinearität aufweisen. Auch Widerstände und Kondensa-
toren sind nie exakt linear. Besonders auffällig ist das Auftreten von Nichtlinearitäten in
aktiven Bauelementen, wie Röhren und Transistoren. Durch Einstellen eines geeigneten Ar-
beitspunktes ist jedoch bei Übertragungsschaltungen (z. B. Verstärkern) eine Linearisierung
möglich. Eine nach dieser statischen Linearisierung verbleibende Nichtlinearität lässt sich
z. B. durch Gegenkopplung noch weiter herabsetzen. Wird der Arbeitspunkt im Rhythmus
einer vorgegebenen Spannung gesteuert, so kann die Schaltung vom Standpunkt des Signals
aus als linear betrachtet werden, falls das Signal so klein ist, dass es praktisch keinen
Einfluss auf die Arbeitspunktverschiebung hat. Bei dieser dynamischen Linearisierung ist
die Schaltung nicht mehr zeitlich konstant, sondern sie verhält sich zeitvariabel. Zeitvariante
Systeme werden in diesem Versuch nicht behandelt.
Das besondere Kennzeichen der nichtlinearen Verzerrung ist das Auftreten von Fre-
quenzkomponenten am Ausgang des Systems, die im Eingangsspektrum nicht enthalten
sind und die sich nicht durch Zeitvarianz ergeben. Das Überlagerungsgesetz ist nicht mehr
anwendbar.
2 Arten nichtlinearer Verzerrungen
Falls ein Übertragungssystem sich durch eine eindeutige zeitunabhängige und nicht von der
Aussteuerung abhängige Kennlinie beschreiben lässt, kann man die Abhängigkeit zwischen
Eingangs- und Ausgangsgröße des Systems durch eine Taylor-Reihe darstellen.
2.1 Reguläre nichtlineare Verzerrungen
Enthält das Ausgangssignal nur Glieder niederer Ordnung, so spricht man von regulären
nichtlinearen Verzerrungen, wie z. B. quadratische oder kubische Verzerrungen. Vom Stand-
punkt der Übertragung interessieren häufig nur Systeme mit geringen regulären nichtlinearen
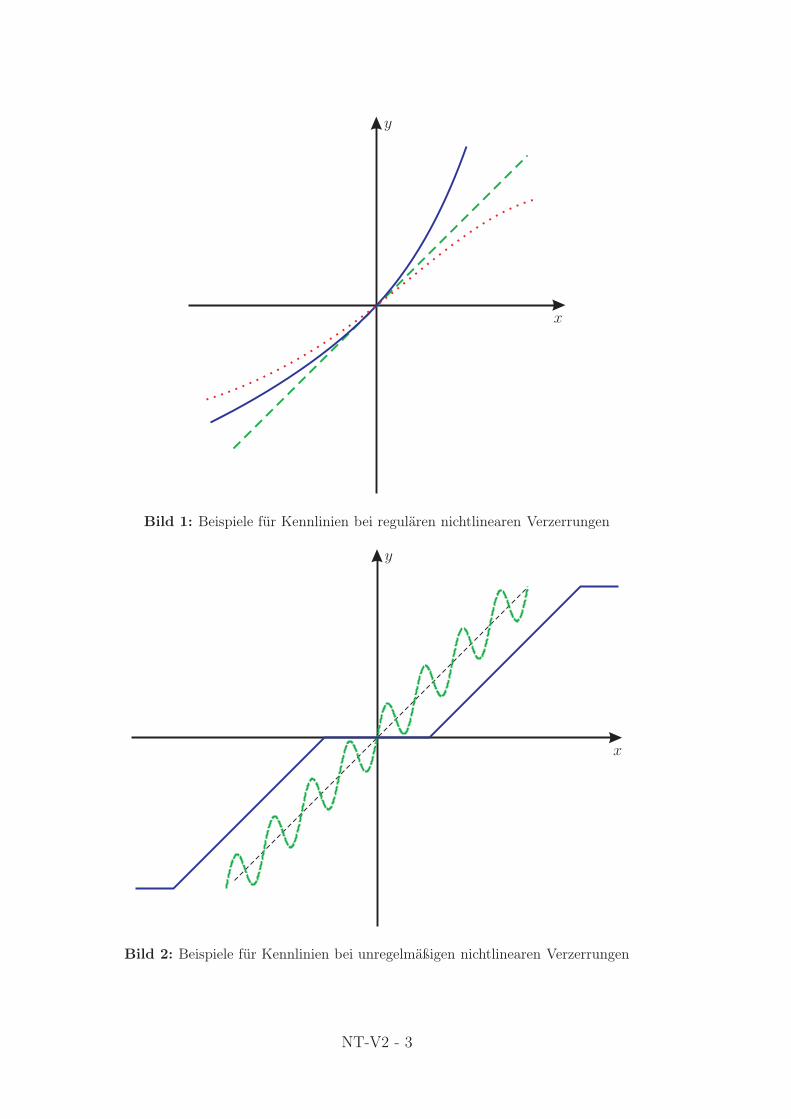
Verzerrungen, auch quasilineare Systeme genannt. Im Bild 1 sind Beispiele für Kennlinien bei
regulären nichtlinearen Verzerrungen angegeben. Reguläre nichtlineare Verzerrungen treten
z. B. auf bei Kohlemikrofonen, elektromagnetischen und elektrodynamischen Lautsprechern,
Übertragern, Verstärkern und Mischern.
2.2 Unregelmäßige nichtlineare Verzerrungen
Bildet die Kennlinie keine glatte Kurve, sondern weist sie innerhalb des Betriebsbereichs
Schwankungen oder Unregelmäßigkeiten auf, d. h. enthält das Ausgangssignal auch Glieder
höherer Ordnung von nennenswerter Größe, so spricht man von unregelmäßigen nichtli-
nearen Verzerrungen, siehe Bild 2. Sie treten weniger häufig auf als reguläre nichtlineare
Verzerrungen.
NT-V2 - 2
y
x
Bild 1: Beispiele für Kennlinien bei regulären nichtlinearen Verzerrungen
y
x
Bild 2: Beispiele für Kennlinien bei unregelmäßigen nichtlinearen Verzerrungen
NT-V2 - 3
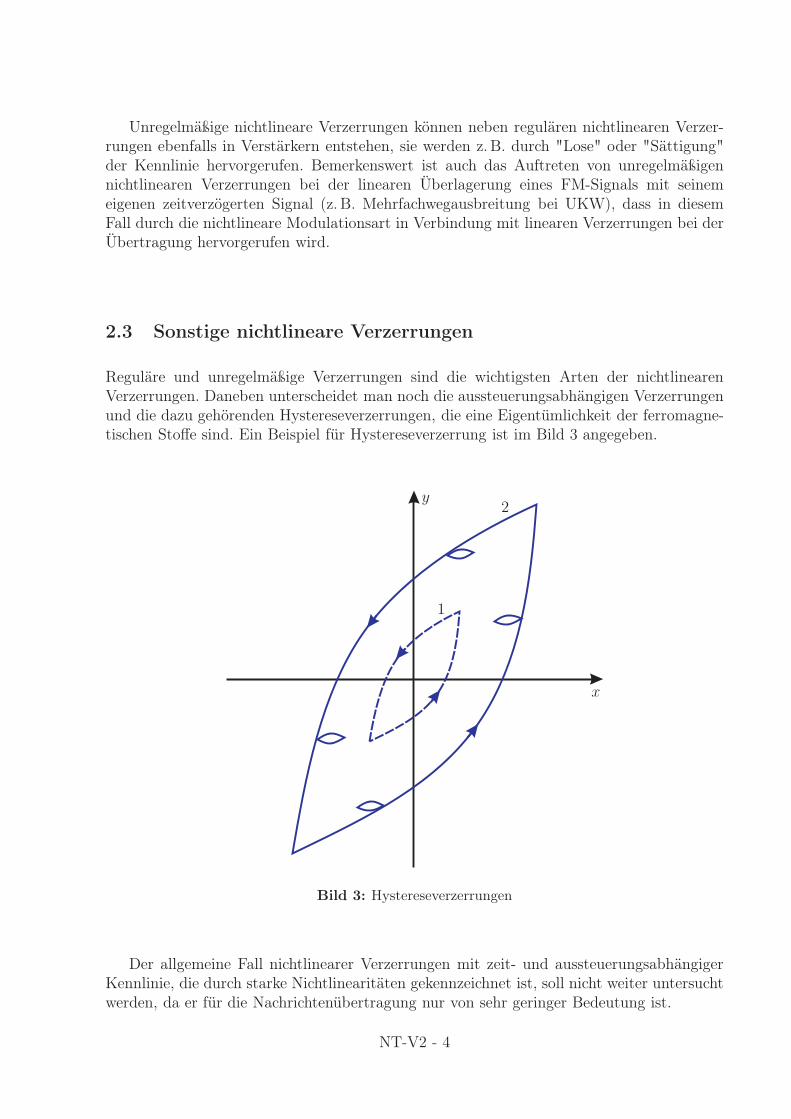
Unregelmäßige nichtlineare Verzerrungen können neben regulären nichtlinearen Verzer-
rungen ebenfalls in Verstärkern entstehen, sie werden z. B. durch "Lose" oder "Sättigung"
der Kennlinie hervorgerufen. Bemerkenswert ist auch das Auftreten von unregelmäßigen
nichtlinearen Verzerrungen bei der linearen Überlagerung eines FM-Signals mit seinem
eigenen zeitverzögerten Signal (z. B. Mehrfachwegausbreitung bei UKW), dass in diesem
Fall durch die nichtlineare Modulationsart in Verbindung mit linearen Verzerrungen bei der
Übertragung hervorgerufen wird.
2.3 Sonstige nichtlineare Verzerrungen
Reguläre und unregelmäßige Verzerrungen sind die wichtigsten Arten der nichtlinearen
Verzerrungen. Daneben unterscheidet man noch die aussteuerungsabhängigen Verzerrungen
und die dazu gehörenden Hystereseverzerrungen, die eine Eigentümlichkeit der ferromagne-
tischen Stoffe sind. Ein Beispiel für Hystereseverzerrung ist im Bild 3 angegeben.
y
x
1
2
Bild 3: Hystereseverzerrungen
Der allgemeine Fall nichtlinearer Verzerrungen mit zeit- und aussteuerungsabhängiger
Kennlinie, die durch starke Nichtlinearitäten gekennzeichnet ist, soll nicht weiter untersucht
werden, da er für die Nachrichtenübertragung nur von sehr geringer Bedeutung ist.
NT-V2 - 4

3 Quasilineare Systeme mit aussteuerungsunabhängiger
Kennlinie
3.1 Beschreibung durch Taylor-Reihe
Ein zeitinvariantes System mit aussteuerungsunabhängiger Kennlinie lässt sich durch eine
Taylor-Reihe darstellen
y = a0 + a1x + a2x2 + a3x
3 + a4x4 + a5x
5 + · · · (1)
Hierbei entspricht x dem Eingangs- und y dem Ausgangssignal. Das konstante Glied a0 trägt
nicht zur Nichtlinearität bei und kann fortgelassen werden, weil man bereits im linearen Fall
mit einer einfachen Proportionalität zwischen x und y rechnet. Da das System als quasilinear
vorausgesetzt wurde, sind die Koeffizienten höherer Ordnung sehr klein, so dass man häufig
mit folgendem Ansatz auskommt
y = a1x + a2x2 + a3x
3 . (2)
3.2 Erregung durch eine sinusförmige Schwingung
Wir betrachten das Signal
x = A cos(ωt) , ω = konst.
Dann ergibt sich mit Gleichung (2) das Ausgangssignal zu
y = a1A cos(ωt) + a2A2 cos2(ωt) + a3A
3 cos3(ωt) . (3)
Mit
cos2(α) =1
2[1 + cos(2α)] (4a)
cos3(α) =1
4[3 cos(α) + cos(3α)] (4b)
folgt
y = a1A cos(ωt) + a2A2
2[1 + cos(2ωt)] + a3
A3
4[3 cos(ωt) + cos(3ωt)]
=1
2a2A
2 + [a1A +3
4a3A
3] cos(ωt) +1
2a2A
2 cos(2ωt) +1
4a3A
3 cos(3ωt) .
(5)
Durch die Nichtlinearität treten außer einem konstanten Anteil auch Komponenten im Aus-
gangssignal auf, deren Frequenzen ein Vielfaches der ursprünglichen Frequenz ω sind, die also
Oberschwingungen darstellen. Diese stören besonders, wenn sie in den Übertragungsbereich
fallen, da dann eine Elimination durch Filterung unmöglich ist. Es fällt auf, dass das Glied
a2x2 weder Einfluss auf die Stärke der Grundschwingung noch auf die der Oberschwingung
3.Ordnung hat. Andererseits hat das Glied a3x3 weder Einfluss auf den konstanten Anteil
NT-V2 - 5
y = x2
1
−1 1 x t
t
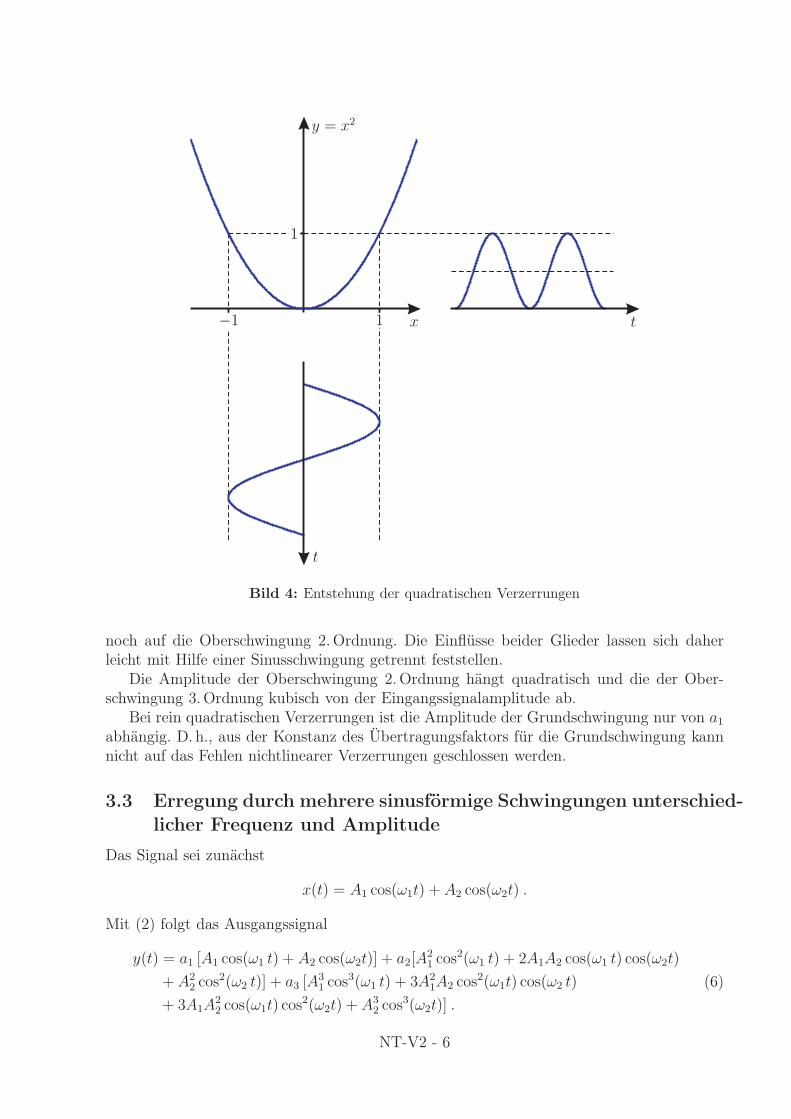
Bild 4: Entstehung der quadratischen Verzerrungen
noch auf die Oberschwingung 2.Ordnung. Die Einflüsse beider Glieder lassen sich daher
leicht mit Hilfe einer Sinusschwingung getrennt feststellen.
Die Amplitude der Oberschwingung 2.Ordnung hängt quadratisch und die der Ober-
schwingung 3.Ordnung kubisch von der Eingangssignalamplitude ab.
Bei rein quadratischen Verzerrungen ist die Amplitude der Grundschwingung nur von a1
abhängig. D. h., aus der Konstanz des Übertragungsfaktors für die Grundschwingung kann
nicht auf das Fehlen nichtlinearer Verzerrungen geschlossen werden.
3.3 Erregung durch mehrere sinusförmige Schwingungen unterschied-
licher Frequenz und Amplitude
Das Signal sei zunächst
x(t) = A1 cos(ω1t) + A2 cos(ω2t) .
Mit (2) folgt das Ausgangssignal
y(t) = a1 [A1 cos(ω1 t) + A2 cos(ω2t)] + a2[A21 cos2(ω1 t) + 2A1A2 cos(ω1 t) cos(ω2t)
+ A22 cos2(ω2 t)] + a3 [A3
1 cos3(ω1 t) + 3A21A2 cos2(ω1t) cos(ω2 t)
+ 3A1A22 cos(ω1t) cos2(ω2t) + A3
2 cos3(ω2t)] .
(6)
NT-V2 - 6
y = x3
−1
1
−1 1 x t
t
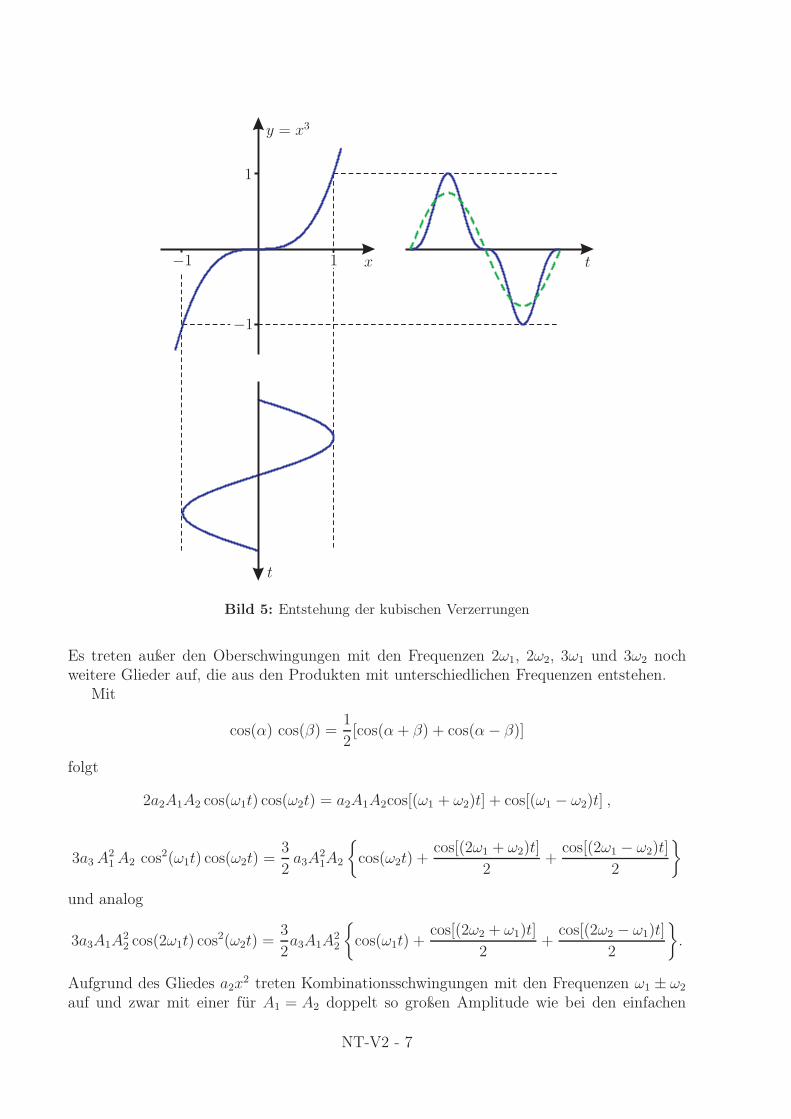
Bild 5: Entstehung der kubischen Verzerrungen
Es treten außer den Oberschwingungen mit den Frequenzen 2ω1, 2ω2, 3ω1 und 3ω2 noch
weitere Glieder auf, die aus den Produkten mit unterschiedlichen Frequenzen entstehen.
Mit
cos(α) cos(β) =1
2[cos(α + β) + cos(α − β)]
folgt
2a2A1A2 cos(ω1t) cos(ω2t) = a2A1A2cos[(ω1 + ω2)t] + cos[(ω1 − ω2)t] ,
3a3 A21 A2 cos2(ω1t) cos(ω2t) =
3
2a3A
21A2
cos(ω2t) +cos[(2ω1 + ω2)t]
2+
cos[(2ω1 − ω2)t]
2
und analog
3a3A1A22 cos(2ω1t) cos2(ω2t) =
3
2a3A1A
22
cos(ω1t) +cos[(2ω2 + ω1)t]
2+
cos[(2ω2 − ω1)t]
2
.
Aufgrund des Gliedes a2x2 treten Kombinationsschwingungen mit den Frequenzen ω1 ± ω2
auf und zwar mit einer für A1 = A2 doppelt so großen Amplitude wie bei den einfachen
NT-V2 - 7
Oberschwingungen 2.Ordnung. Ebenso treten aufgrund des Gliedes a3x3 Kombinations-
schwingungen mit den Frequenzen 2ω1±ω2 und 2ω2 ± ω1 auf und zwar mit einer für A1 = A2
dreimal so großen Amplitude wie die einfachen Oberschwingungen 3.Ordnung. Die Schäd-
lichkeit dieser Kombinationsschwingungen liegt aber nicht nur an der erhöhten Amplitude,
sondern vor allem an der Tatsache, dass Differenzfrequenzen wie z. B. 2ω1 − ω2 von der
gleichen Größenordnung wie ω1 und ω2 sein können und nicht durch Filterung eliminierbar
sind. Das Auftreten solcher Kombinationsschwingungen kennzeichnet man auch durch den
Begriff Intermodulation. Nimmt man an, dass in A1 und A2 auch die Information einer
eventuellen Amplitudenmodulation der Signale enthalten sein kann, so erkennt man, dass,
durch das Glied a3x3 verursacht, eine gegenseitige Modulationsübernahme erfolgt. Diese
Tatsache wird als Kreuzmodulation bezeichnet.
• Intermodulationsanteile:
3
4a3A
21A2 cos[(2ω1 ± ω2)t], (7)
3
4a3A1A
22 cos[(2ω2 ± ω1)t] (8)
• Kreuzmodulationsanteile:
3
2a3A
21A2 cos(ω2t), (9)
3
2a3A1A
22 cos(ω1t) . (10)
Intermodulation und Kreuzmodulation sind proportional zu a3, d. h., falls die Taylor-
Reihe nur aus einem linearen Glied und aus einem quadratischen Glied besteht, treten
beide Effekte nicht auf. Man erkennt, dass für A1 = A2 = A die Intermodulation kubisch
mit der Eingangssignalamplitude steigt und dass die Kreuzmodulation quadratisch mit der
Amplitude des zweiten Eingangssignal wächst.
Bei Erregung mit mehr als zwei Sinusschwingungen entstehen noch weitere Kombinati-
onsschwingungen mit den Frequenzen
ωk = n1ω1 ± n2ω2 ± n3ω3 ± · · · . (11)
Hierbei sind die ni ganze positive Zahlen. Das Spektrum wird umso komplizierter, je höher
die Ordnungszahl der Verzerrung und je mehr Sinusschwingungen im Eingangsspektrum
enthalten sind.
Bei einem allgemeinen, d. h. durch ein Fourier-Integral darstellbaren Eingangssignal,
lässt sich der Einfluss der Nichtlinearitäten ebenfalls berechnen, da sich beispielsweise die
zu x2 und x3 gehörigen Spektralfunktionen durch Faltung im Frequenzbereich ausdrücken
lassen.
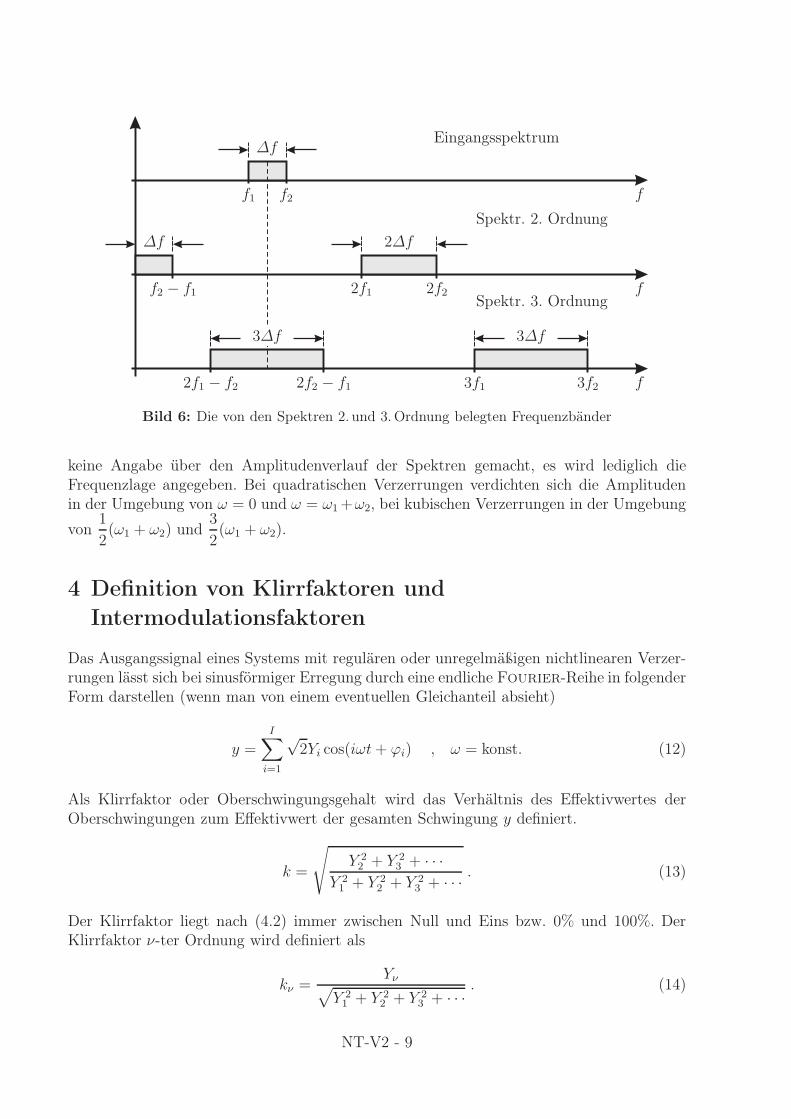
Liegt das Eingangsspektrum im Bereich zwischen f1 und f2, so gibt Bild 6 einen Überblick
über die von den Spektren 2. und 3.Ordnung belegten Frequenzbänder.
Das erste Frequenzband des Spektrums 3.Ordnung fällt zum Teil immer mit dem Ein-
gangsspektrum zusammen, unabhängig von der Größe von f1 bzw. f2. Im Bild 6 wird
NT-V2 - 8
∆f
∆f
2∆f
3∆f3∆f
f
f
f
f1 f2
2f1 2f2
3f1 3f2
f2 − f1
2f1 − f2 2f2 − f1
Eingangsspektrum
Spektr. 2. Ordnung
Spektr. 3. Ordnung
Bild 6: Die von den Spektren 2. und 3.Ordnung belegten Frequenzbänder
keine Angabe über den Amplitudenverlauf der Spektren gemacht, es wird lediglich die
Frequenzlage angegeben. Bei quadratischen Verzerrungen verdichten sich die Amplituden
in der Umgebung von ω = 0 und ω = ω1 +ω2, bei kubischen Verzerrungen in der Umgebung
von1
2(ω1 + ω2) und
3
2(ω1 + ω2).
4 Definition von Klirrfaktoren und
Intermodulationsfaktoren
Das Ausgangssignal eines Systems mit regulären oder unregelmäßigen nichtlinearen Verzer-
rungen lässt sich bei sinusförmiger Erregung durch eine endliche Fourier-Reihe in folgender
Form darstellen (wenn man von einem eventuellen Gleichanteil absieht)
y =
I∑
i=1
√2Yi cos(iωt + ϕi) , ω = konst. (12)
Als Klirrfaktor oder Oberschwingungsgehalt wird das Verhältnis des Effektivwertes der
Oberschwingungen zum Effektivwert der gesamten Schwingung y definiert.
k =
√
Y 22 + Y 2
3 + · · ·Y 2
1 + Y 22 + Y 2
3 + · · · . (13)
Der Klirrfaktor liegt nach (4.2) immer zwischen Null und Eins bzw. 0% und 100%. Der
Klirrfaktor ν-ter Ordnung wird definiert als
kν =Yν
√
Y 21 + Y 2
2 + Y 23 + · · ·
. (14)
NT-V2 - 9

Da man bei geringen Verzerrungen den Ausdruck im Nenner näherungsweise durch Y1
ersetzen kann, erhält man unter dieser Voraussetzung mit Gleichung (1)
kν ≈ Yν
Y1
≈ 1
2ν−1
aν
a1
Aν−1 . (15)
Setzt man bei geringen regulären nichtlinearen Verzerrungen die Eingangssignalamplitude
auf die Hälfte herab, dann nimmt der Klirrfaktor mindestens um die Hälfte ab. Die Klirr-
dämpfung wird definiert durch
Akν= 20 lg
(1
kν
)
in dB (16)
bzw.
Ak = 20 lg
(1
k
)
in dB . (17)
Wird ein System mit regulären oder unregelmäßigen nichtlinearen Verzerrungen durch zwei
sinusförmige Schwingungen mit gleichen Amplituden A und unterschiedlichen Frequenzen
ω1, ω2 erregt, so enthält das Ausgangssignal neben Oberschwingungen und einfachen Diffe-
renzschwingungen unter anderem auch spezielle Kombinationsschwingungen der Form√
2Yn,n−1 cos [nω1 − (n − 1)ω2]t und√
2Yn,n−1 cos [nω2 − (n − 1)ω1]t (18)
mit n = 2, 3, . . ., deren Frequenzen in der Nähe der Eingangsfrequenzen ω1, ω2 liegen. Diese
werden durch die ungeraden Koeffizienten a3, a5, a7,· · · der Taylor-Reihe hervorgerufen.
Der Intermodulationsfaktor ν-terOrdnung wird definiert als
iν=2n−1 =Yn,n−1
Y1
mit n = 2, 3, . . . (19)
AA
ω1ω1
ω2ω2 ωω
y(t) =∞∑
k=1
akx(t)k
x(t) y(t)
4ω
1−
3ω
2
3ω
1−
2ω
2
2ω
1−
ω2
4ω
2−
3ω
1
3ω
2−
2ω
1
2ω
2−
ω1
Y1Y1
Y21Y21
Y32Y32
Y43Y43
Bild 7: Beispiel eines Intermodulationsspektrums
Als Intermodulationsdämpfung bezeichnet man das logarithmische Maß
Aiν = 20 log
(1
iν
)
in dB . (20)
NT-V2 - 10
In der Literatur findet man stellenweise geringfügig von (19), (20) abweichende Definitionen.
Die Intermodulationschwingungen werden dabei auf 2Y1 bezogen. Bei quasilinearen Syste-
men entspricht dies der Erregung des Systems mit nur einer sinusförmigen Schwingung auf
den gleichen Spitzenwert wie bei der Erregung durch zwei sinusförmige Signale gleicher
Amplitude. Die Intermodulationsfaktoren sind dann nur halb so groß; die Intermodulati-
onsabstände vergrößern sich um 6 dB.
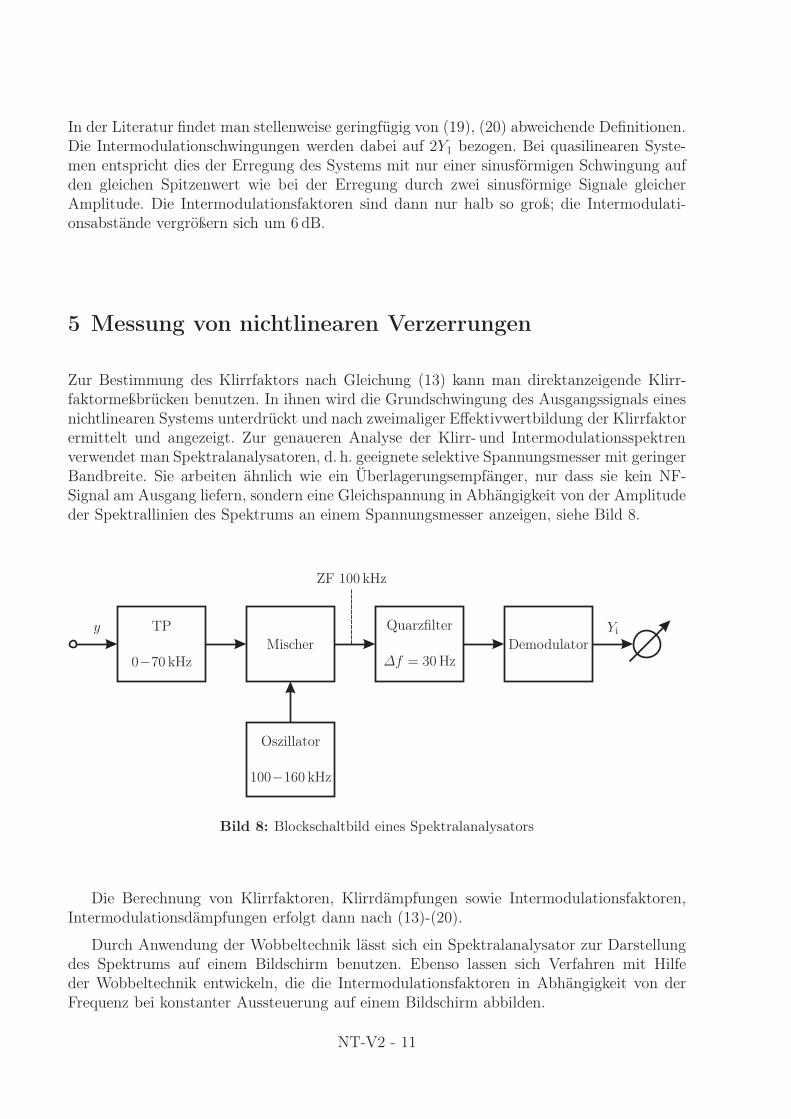
5 Messung von nichtlinearen Verzerrungen
Zur Bestimmung des Klirrfaktors nach Gleichung (13) kann man direktanzeigende Klirr-
faktormeßbrücken benutzen. In ihnen wird die Grundschwingung des Ausgangssignals eines
nichtlinearen Systems unterdrückt und nach zweimaliger Effektivwertbildung der Klirrfaktor
ermittelt und angezeigt. Zur genaueren Analyse der Klirr- und Intermodulationsspektren
verwendet man Spektralanalysatoren, d. h. geeignete selektive Spannungsmesser mit geringer
Bandbreite. Sie arbeiten ähnlich wie ein Überlagerungsempfänger, nur dass sie kein NF-
Signal am Ausgang liefern, sondern eine Gleichspannung in Abhängigkeit von der Amplitude
der Spektrallinien des Spektrums an einem Spannungsmesser anzeigen, siehe Bild 8.
TP
0−70 kHz
Mischer
ZF 100 kHz
Quarzfilter
∆f = 30 Hz
Demodulator
Oszillator
100−160 kHz
y Yi
Bild 8: Blockschaltbild eines Spektralanalysators
Die Berechnung von Klirrfaktoren, Klirrdämpfungen sowie Intermodulationsfaktoren,
Intermodulationsdämpfungen erfolgt dann nach (13)-(20).
Durch Anwendung der Wobbeltechnik lässt sich ein Spektralanalysator zur Darstellung
des Spektrums auf einem Bildschirm benutzen. Ebenso lassen sich Verfahren mit Hilfe
der Wobbeltechnik entwickeln, die die Intermodulationsfaktoren in Abhängigkeit von der
Frequenz bei konstanter Aussteuerung auf einem Bildschirm abbilden.
NT-V2 - 11
6 Nichtlineare Verzerrungen in Zweitoren und
Verstärkern
6.1 Allgemeine Berechnungsverfahren
Die nichtlinearen Erscheinungen in Zweitoren sind infolge der Anwesenheit von Impedanzen
stark frequenzabhängig. Man kann also im Allgemeinen keine einfachen Kennlinien zur
Beschreibung der Nichtlinearitäten benutzen. Bei geringen Nichtlinearitäten, wie sie in der
Nachrichtentechnik häufig auftreten, kann man die Betrachtungen dadurch vereinfachen,
dass man die nichtlinearen Wirkungen durch von der Grundschwingung gesteuerte Quellen
ersetzt, so dass das Netzwerk selbst als linear angesehen werden kann [Küpf68, Phil71].
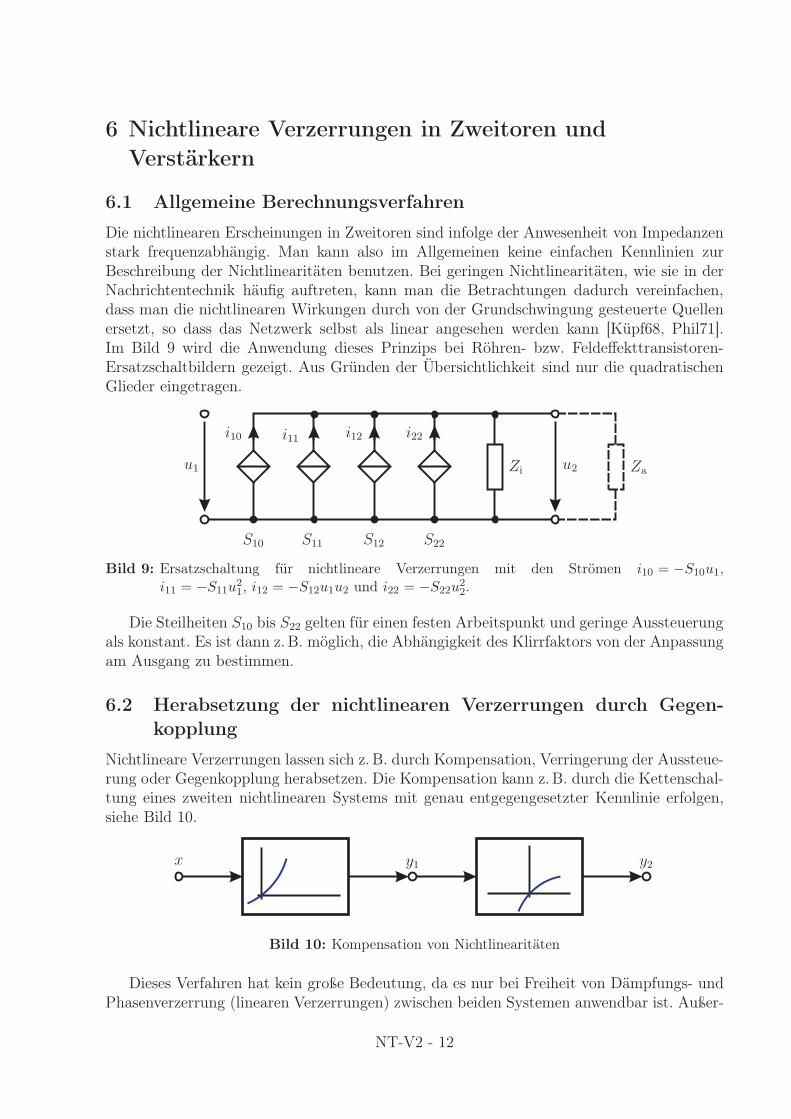
Im Bild 9 wird die Anwendung dieses Prinzips bei Röhren- bzw. Feldeffekttransistoren-
Ersatzschaltbildern gezeigt. Aus Gründen der Übersichtlichkeit sind nur die quadratischen
Glieder eingetragen.
u1
i10 i11 i12 i22
Zi u2 Za
S10 S11 S12 S22
Bild 9: Ersatzschaltung für nichtlineare Verzerrungen mit den Strömen i10 = −S10u1,i11 = −S11u
21, i12 = −S12u1u2 und i22 = −S22u
22.
Die Steilheiten S10 bis S22 gelten für einen festen Arbeitspunkt und geringe Aussteuerung
als konstant. Es ist dann z.B. möglich, die Abhängigkeit des Klirrfaktors von der Anpassung
am Ausgang zu bestimmen.
6.2 Herabsetzung der nichtlinearen Verzerrungen durch Gegen-
kopplung
Nichtlineare Verzerrungen lassen sich z. B. durch Kompensation, Verringerung der Aussteue-
rung oder Gegenkopplung herabsetzen. Die Kompensation kann z.B. durch die Kettenschal-
tung eines zweiten nichtlinearen Systems mit genau entgegengesetzter Kennlinie erfolgen,
siehe Bild 10.
x y1 y2
Bild 10: Kompensation von Nichtlinearitäten
Dieses Verfahren hat kein große Bedeutung, da es nur bei Freiheit von Dämpfungs- und
Phasenverzerrung (linearen Verzerrungen) zwischen beiden Systemen anwendbar ist. Außer-
NT-V2 - 12
dem ist es schwierig, Systeme mit vorgegebener nichtlinearer Kennlinie herzustellen. Eine
Herabsetzung der Aussteuerung führt zu einer starken Verringerung der Ausgangsleistung
und ist deshalb nicht immer anwendbar. Daneben führt eine Verringerung der Aussteue-
rung bei unregelmäßigen nichtlinearen Verzerrungen nicht unbedingt zur Herabsetzung der
Verzerrungen.
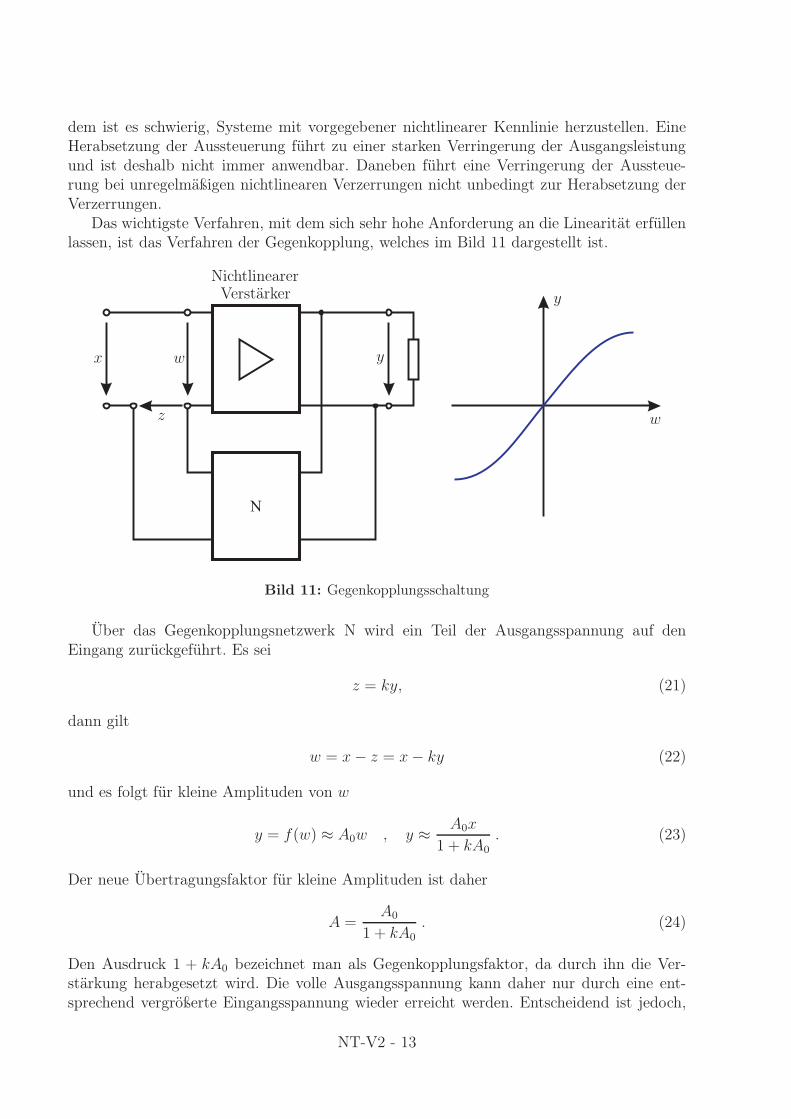
Das wichtigste Verfahren, mit dem sich sehr hohe Anforderung an die Linearität erfüllen
lassen, ist das Verfahren der Gegenkopplung, welches im Bild 11 dargestellt ist.
N
x
y
y
w
w
z
NichtlinearerVerstärker
Bild 11: Gegenkopplungsschaltung
Über das Gegenkopplungsnetzwerk N wird ein Teil der Ausgangsspannung auf den
Eingang zurückgeführt. Es sei
z = ky, (21)
dann gilt
w = x − z = x − ky (22)
und es folgt für kleine Amplituden von w
y = f(w) ≈ A0w , y ≈ A0x
1 + kA0
. (23)
Der neue Übertragungsfaktor für kleine Amplituden ist daher
A =A0
1 + kA0. (24)
Den Ausdruck 1 + kA0 bezeichnet man als Gegenkopplungsfaktor, da durch ihn die Ver-
stärkung herabgesetzt wird. Die volle Ausgangsspannung kann daher nur durch eine ent-
sprechend vergrößerte Eingangsspannung wieder erreicht werden. Entscheidend ist jedoch,
NT-V2 - 13
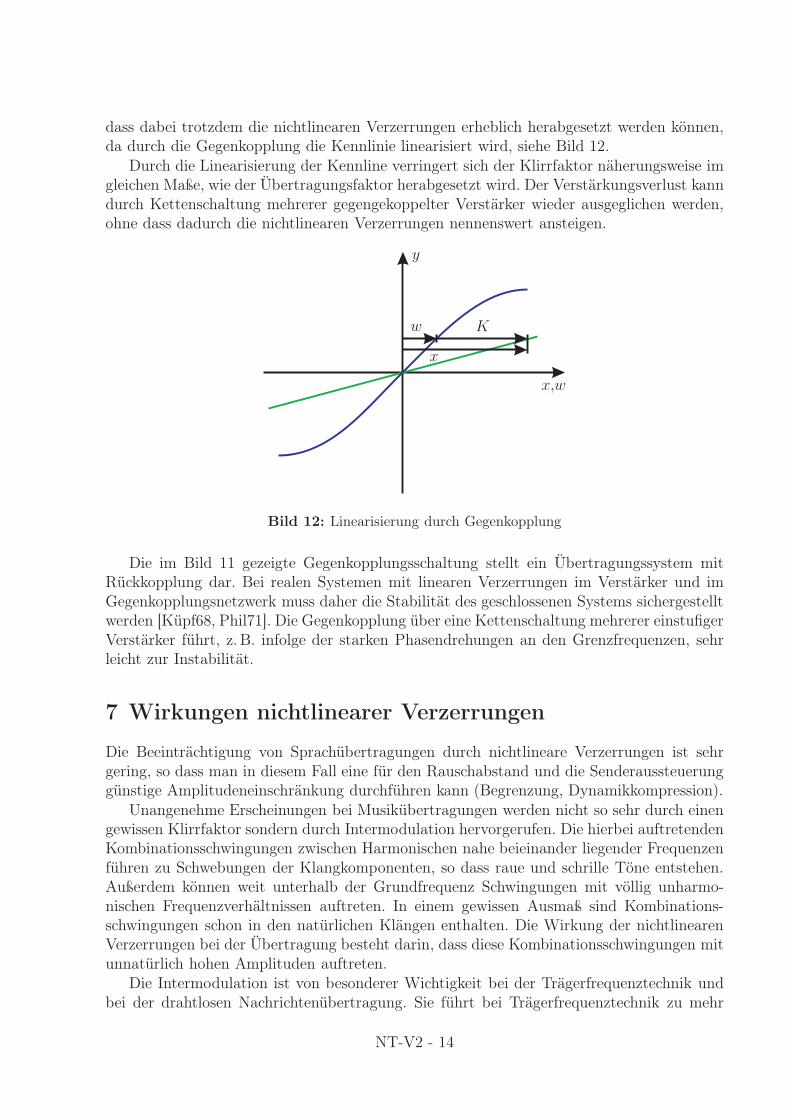
dass dabei trotzdem die nichtlinearen Verzerrungen erheblich herabgesetzt werden können,
da durch die Gegenkopplung die Kennlinie linearisiert wird, siehe Bild 12.
Durch die Linearisierung der Kennline verringert sich der Klirrfaktor näherungsweise im
gleichen Maße, wie der Übertragungsfaktor herabgesetzt wird. Der Verstärkungsverlust kann
durch Kettenschaltung mehrerer gegengekoppelter Verstärker wieder ausgeglichen werden,
ohne dass dadurch die nichtlinearen Verzerrungen nennenswert ansteigen.
x
y
w
x,w
K
Bild 12: Linearisierung durch Gegenkopplung
Die im Bild 11 gezeigte Gegenkopplungsschaltung stellt ein Übertragungssystem mit
Rückkopplung dar. Bei realen Systemen mit linearen Verzerrungen im Verstärker und im
Gegenkopplungsnetzwerk muss daher die Stabilität des geschlossenen Systems sichergestellt
werden [Küpf68, Phil71]. Die Gegenkopplung über eine Kettenschaltung mehrerer einstufiger
Verstärker führt, z. B. infolge der starken Phasendrehungen an den Grenzfrequenzen, sehr
leicht zur Instabilität.
7 Wirkungen nichtlinearer Verzerrungen
Die Beeinträchtigung von Sprachübertragungen durch nichtlineare Verzerrungen ist sehr
gering, so dass man in diesem Fall eine für den Rauschabstand und die Senderaussteuerung
günstige Amplitudeneinschränkung durchführen kann (Begrenzung, Dynamikkompression).
Unangenehme Erscheinungen bei Musikübertragungen werden nicht so sehr durch einen
gewissen Klirrfaktor sondern durch Intermodulation hervorgerufen. Die hierbei auftretenden
Kombinationsschwingungen zwischen Harmonischen nahe beieinander liegender Frequenzen
führen zu Schwebungen der Klangkomponenten, so dass raue und schrille Töne entstehen.
Außerdem können weit unterhalb der Grundfrequenz Schwingungen mit völlig unharmo-
nischen Frequenzverhältnissen auftreten. In einem gewissen Ausmaß sind Kombinations-
schwingungen schon in den natürlichen Klängen enthalten. Die Wirkung der nichtlinearen
Verzerrungen bei der Übertragung besteht darin, dass diese Kombinationsschwingungen mit
unnatürlich hohen Amplituden auftreten.
Die Intermodulation ist von besonderer Wichtigkeit bei der Trägerfrequenztechnik und
bei der drahtlosen Nachrichtenübertragung. Sie führt bei Trägerfrequenztechnik zu mehr
NT-V2 - 14
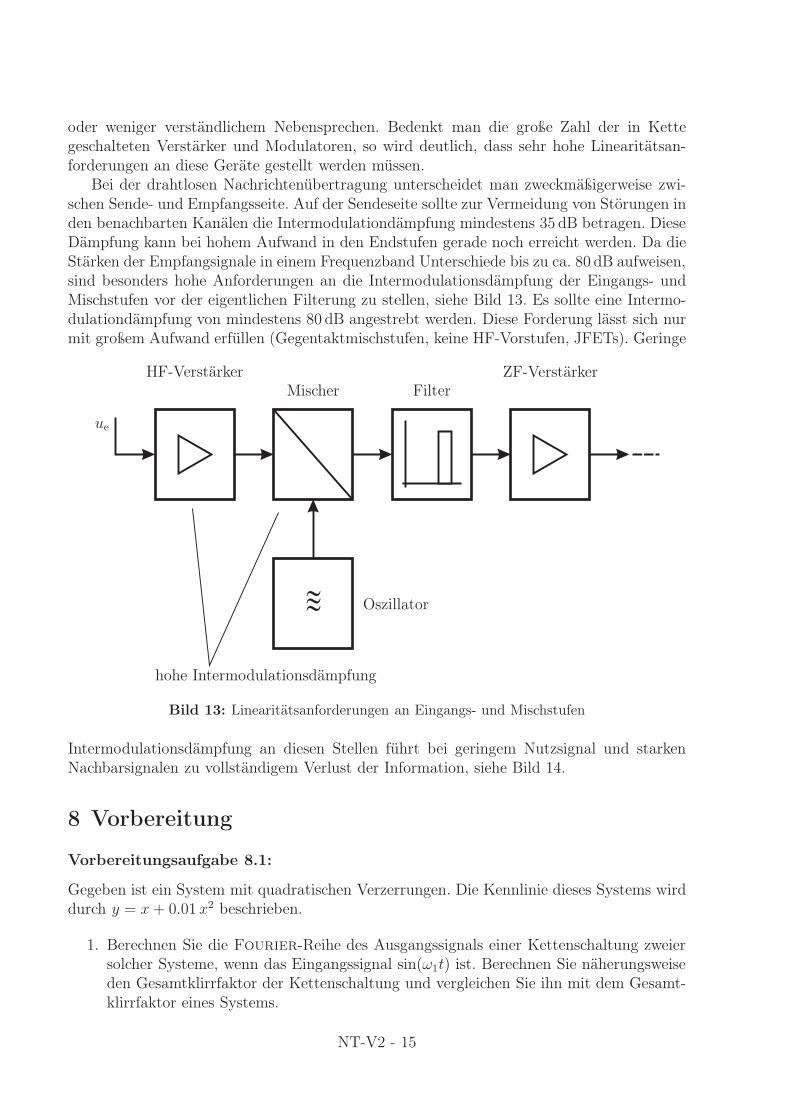
oder weniger verständlichem Nebensprechen. Bedenkt man die große Zahl der in Kette
geschalteten Verstärker und Modulatoren, so wird deutlich, dass sehr hohe Linearitätsan-
forderungen an diese Geräte gestellt werden müssen.
Bei der drahtlosen Nachrichtenübertragung unterscheidet man zweckmäßigerweise zwi-
schen Sende- und Empfangsseite. Auf der Sendeseite sollte zur Vermeidung von Störungen in
den benachbarten Kanälen die Intermodulationdämpfung mindestens 35 dB betragen. Diese
Dämpfung kann bei hohem Aufwand in den Endstufen gerade noch erreicht werden. Da die
Stärken der Empfangsignale in einem Frequenzband Unterschiede bis zu ca. 80 dB aufweisen,
sind besonders hohe Anforderungen an die Intermodulationsdämpfung der Eingangs- und
Mischstufen vor der eigentlichen Filterung zu stellen, siehe Bild 13. Es sollte eine Intermo-
dulationdämpfung von mindestens 80 dB angestrebt werden. Diese Forderung lässt sich nur
mit großem Aufwand erfüllen (Gegentaktmischstufen, keine HF-Vorstufen, JFETs). Geringe
~~~
ue
HF-Verstärker
Mischer Filter
ZF-Verstärker
hohe Intermodulationsdämpfung
Oszillator
Bild 13: Linearitätsanforderungen an Eingangs- und Mischstufen
Intermodulationsdämpfung an diesen Stellen führt bei geringem Nutzsignal und starken
Nachbarsignalen zu vollständigem Verlust der Information, siehe Bild 14.
8 Vorbereitung
Vorbereitungsaufgabe 8.1:
Gegeben ist ein System mit quadratischen Verzerrungen. Die Kennlinie dieses Systems wird
durch y = x + 0.01 x2 beschrieben.
1. Berechnen Sie die Fourier-Reihe des Ausgangssignals einer Kettenschaltung zweier
solcher Systeme, wenn das Eingangssignal sin(ω1t) ist. Berechnen Sie näherungsweise
den Gesamtklirrfaktor der Kettenschaltung und vergleichen Sie ihn mit dem Gesamt-
klirrfaktor eines Systems.
NT-V2 - 15
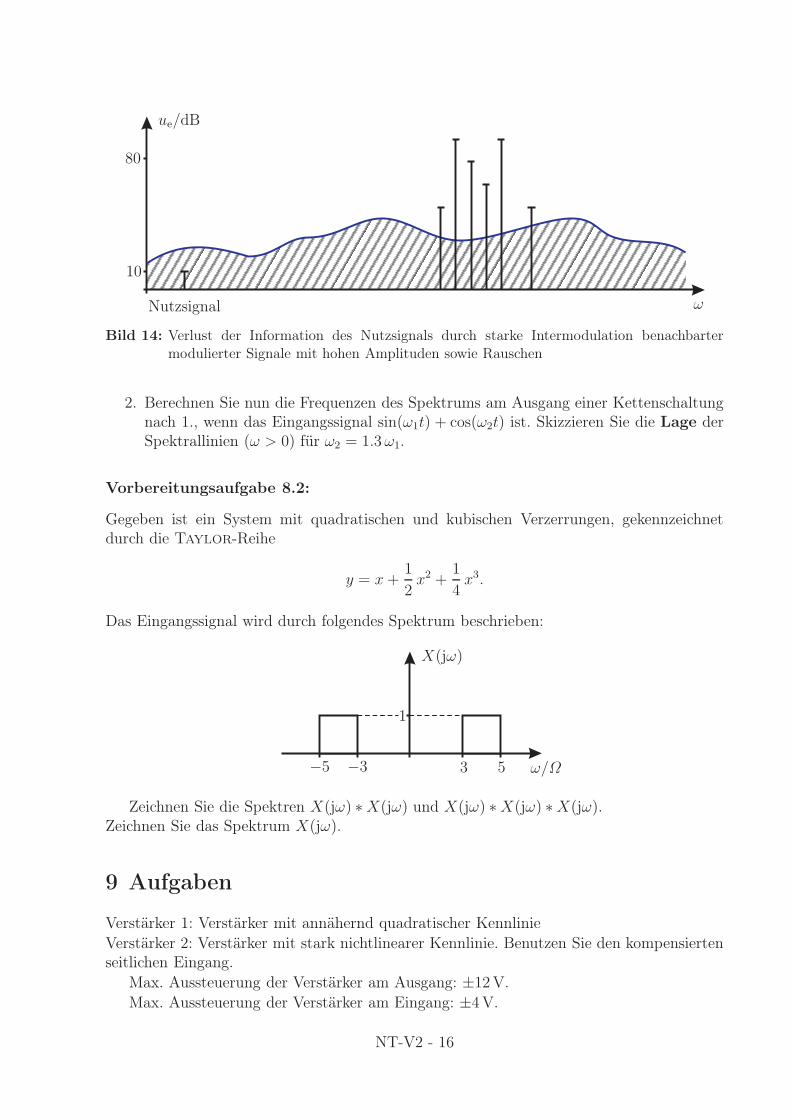
ue/dB
Nutzsignal ω
10
80
Bild 14: Verlust der Information des Nutzsignals durch starke Intermodulation benachbartermodulierter Signale mit hohen Amplituden sowie Rauschen
2. Berechnen Sie nun die Frequenzen des Spektrums am Ausgang einer Kettenschaltung
nach 1., wenn das Eingangssignal sin(ω1t) + cos(ω2t) ist. Skizzieren Sie die Lage der
Spektrallinien (ω > 0) für ω2 = 1.3 ω1.
Vorbereitungsaufgabe 8.2:
Gegeben ist ein System mit quadratischen und kubischen Verzerrungen, gekennzeichnet
durch die Taylor-Reihe
y = x +1
2x2 +
1
4x3.
Das Eingangssignal wird durch folgendes Spektrum beschrieben:
X(jω)
ω/Ω
1
−5 −3 3 5
Zeichnen Sie die Spektren X(jω) ∗ X(jω) und X(jω) ∗ X(jω) ∗ X(jω).
Zeichnen Sie das Spektrum X(jω).
9 Aufgaben
Verstärker 1: Verstärker mit annähernd quadratischer Kennlinie
Verstärker 2: Verstärker mit stark nichtlinearer Kennlinie. Benutzen Sie den kompensierten
seitlichen Eingang.
Max. Aussteuerung der Verstärker am Ausgang: ±12 V.
Max. Aussteuerung der Verstärker am Eingang: ±4 V.
NT-V2 - 16
Kennlinien
1. Bestimmen Sie die Kennlinien y = f(x) von Verstärker 1 und Verstärker 2 bei den
Gegenkopplungseinstellungen "0" und "4". Tragen Sie Ihre Messergebnisse in Tabelle
1 und 2 ein.
2. Tragen Sie die Kennlinien in ein Diagramm ein. Kennzeichnen Sie die Kennlinien des
Verstärkers 2 durch die Gegenkopplungseinstellungen.
3. Stellen Sie die Kennlinien auf dem Oszillographen dar. Entwerfen Sie hierzu zunächst
eine zweckmäßige Schaltung.
Wie verändert sich die Kennlinie des Verstärkers 2 bei einer Veränderung der Gegen-
kopplung?
Klirrdämpfungen
1. Bestimmen Sie bei dem Verstärker 1 die Klirrdämpfungen ν-terOrdnung bei einer
Grundfrequenz von 1 kHz. Die Aussteuerung soll dabei so gewählt werden, dass die
Spitzenspannung Us am Ausgang 10 V beträgt. Tragen Sie Ihre Messergebnisse in
Tabelle 3 ein.
Hinweis:
Der Klirranalysator ist hierbei nicht genau auf die Frequenzen 1 kHz, 2 kHz usw.
einzustellen, sondern es ist der maximale Zeigerausschlag des Messgerätes in der
Nähe der betrachteten Frequenz zu suchen. Dies wird dadurch gerechtfertigt, dass das
Spektrum nur bei Harmonischen überhaupt Energieanteile besitzen kann. Eventuelle
Skalenungenauigkeiten bei der Frequenzeinstellung werden somit ausgeglichen.
Intermodulationsdämpfungen
1. Der Verstärker 2 (Gegenkopplungseinstellungen "0" und "4") soll jetzt durch zwei
sinusförmige Spannungen mit den Frequenzen 3 kHz und 7 kHz von gleicher Ampli-
tude so angesteuert werden, dass die Spitzenspannung Us am Ausgang 10 V beträgt.
Die Zusammenschaltung der zwei Generatoren soll dabei über ein aus zwei auf die
Frequenzen 3 kHz und 7 kHz abgestimmten Serienschwingkreisen bestehendes Ankopp-
lungsnetzwerk erfolgen. (Weshalb?)
Messen Sie das Ausgangsspektrum im Frequenzbereich 1 . . . 20 kHz. Tragen Sie Ihre
Messergebnisse in Tabelle 4 und 5 ein.
2. Tragen Sie das Spektrum in logarithmischem Maßstab in ein Diagramm ein. Normieren
Sie, damit die stärksten Anteile 0 dB entsprechen.
Diskussion der Messergebnisse
NT-V2 - 17
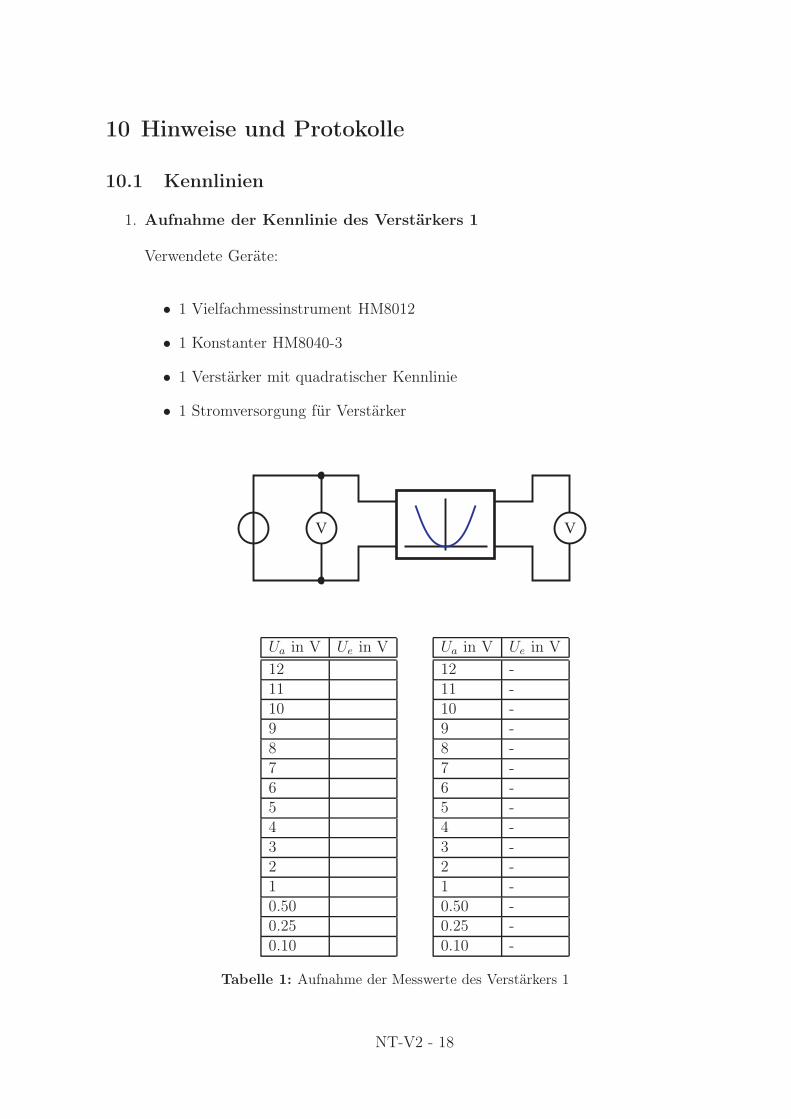
10 Hinweise und Protokolle
10.1 Kennlinien
1. Aufnahme der Kennlinie des Verstärkers 1
Verwendete Geräte:
• 1 Vielfachmessinstrument HM8012
• 1 Konstanter HM8040-3
• 1 Verstärker mit quadratischer Kennlinie
• 1 Stromversorgung für Verstärker
V V
Ua in V Ue in V
12
11
10
9
8
7
6
5
4
3
2
1
0.50
0.25
0.10
Ua in V Ue in V
12 -
11 -
10 -
9 -
8 -
7 -
6 -
5 -
4 -
3 -
2 -
1 -
0.50 -
0.25 -
0.10 -
Tabelle 1: Aufnahme der Messwerte des Verstärkers 1
NT-V2 - 18
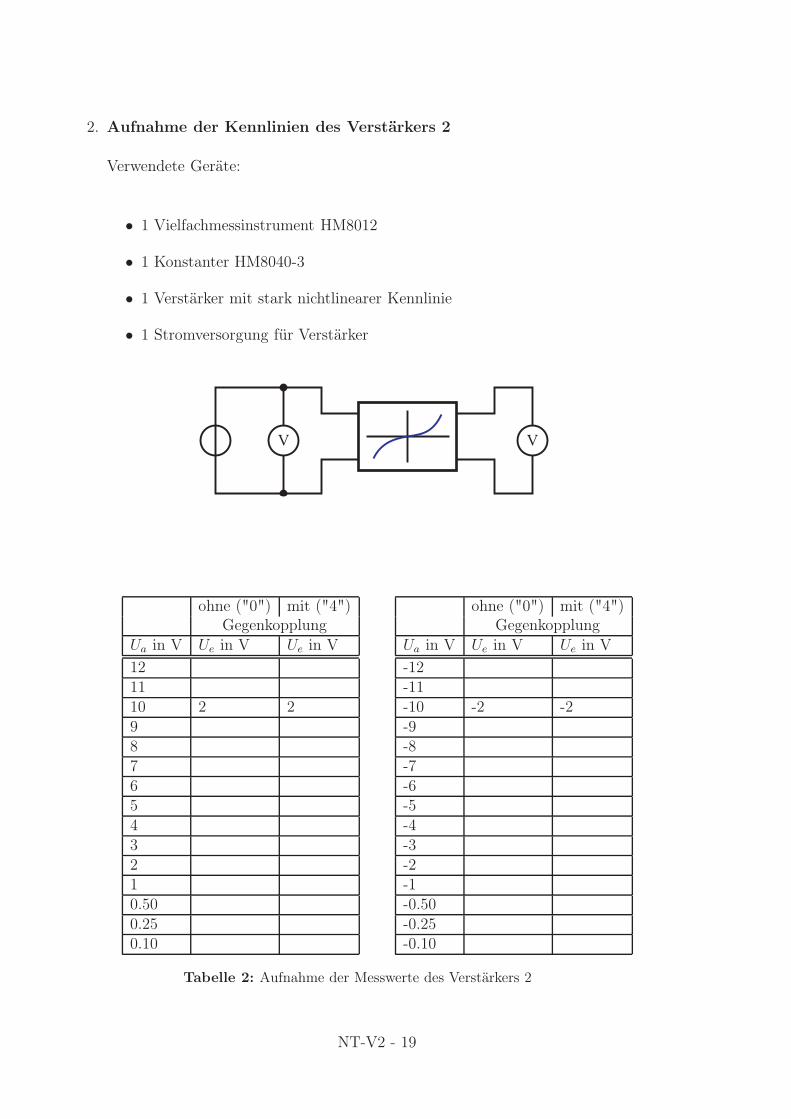
2. Aufnahme der Kennlinien des Verstärkers 2
Verwendete Geräte:
• 1 Vielfachmessinstrument HM8012
• 1 Konstanter HM8040-3
• 1 Verstärker mit stark nichtlinearer Kennlinie
• 1 Stromversorgung für Verstärker
V V
ohne ("0") mit ("4")
Gegenkopplung
Ua in V Ue in V Ue in V
12
11
10 2 2
9
8
7
6
5
4
3
2
1
0.50
0.25
0.10
ohne ("0") mit ("4")
Gegenkopplung
Ua in V Ue in V Ue in V
-12
-11
-10 -2 -2
-9
-8
-7
-6
-5
-4
-3
-2
-1
-0.50
-0.25
-0.10
Tabelle 2: Aufnahme der Messwerte des Verstärkers 2
NT-V2 - 19
3. Darstellung der Kennlinien
Ua/V
Ue/V
2
2
4
4
6
8
10
12
−2−4
NT-V2 - 20
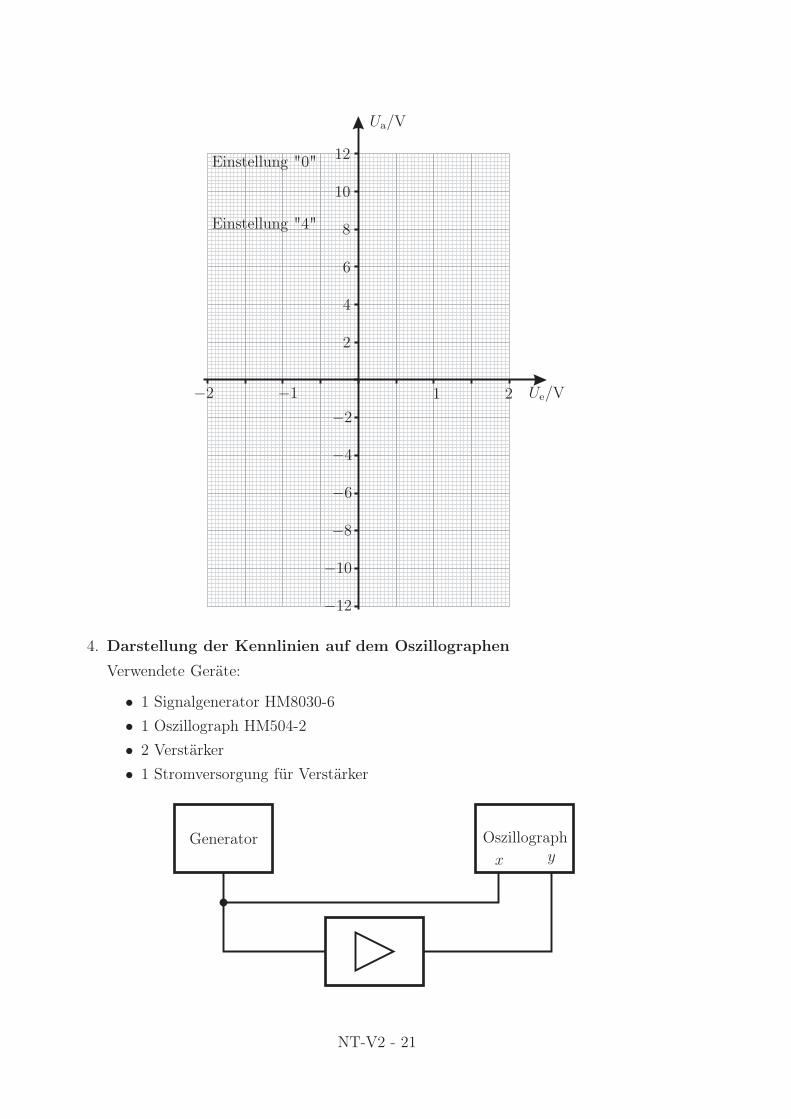
Ua/V
Ue/V
Einstellung "0"
Einstellung "4"
2
2
4
6
8
10
12
−2
−2
−4
−6
−8
−10
−12
1−1
4. Darstellung der Kennlinien auf dem Oszillographen
Verwendete Geräte:
• 1 Signalgenerator HM8030-6
• 1 Oszillograph HM504-2
• 2 Verstärker
• 1 Stromversorgung für Verstärker
Generator Oszillograph
x y
NT-V2 - 21
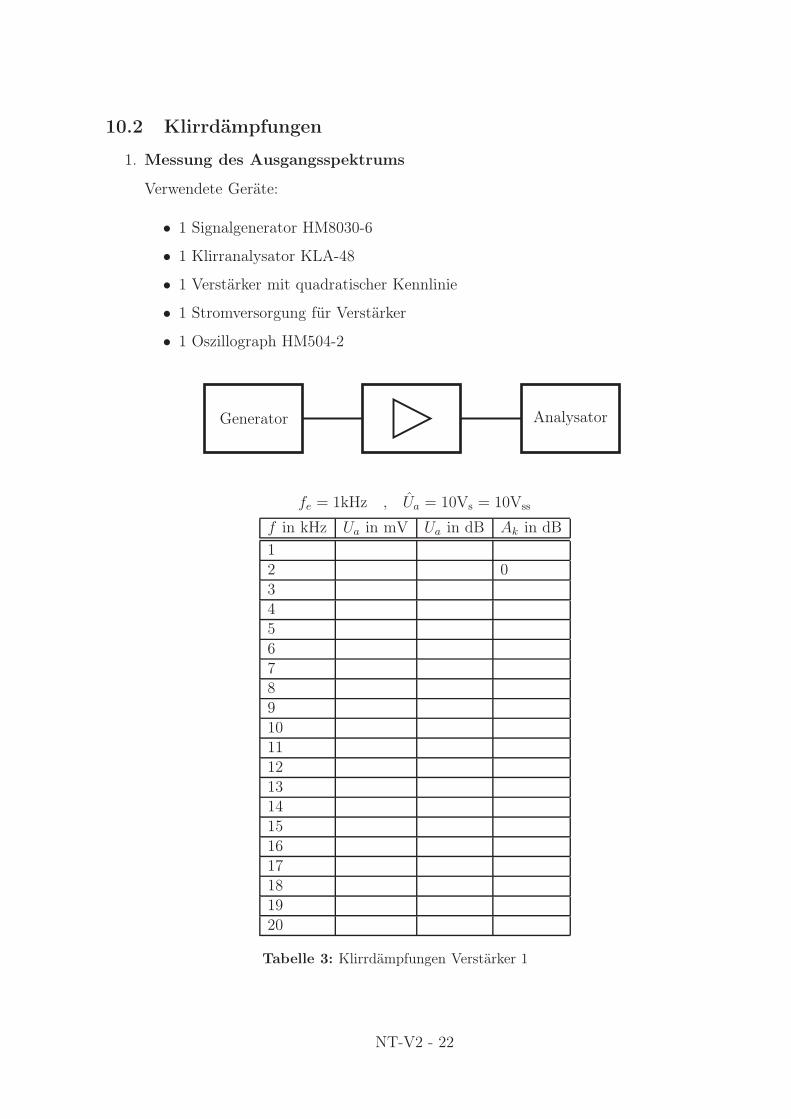
10.2 Klirrdämpfungen
1. Messung des Ausgangsspektrums
Verwendete Geräte:
• 1 Signalgenerator HM8030-6
• 1 Klirranalysator KLA-48
• 1 Verstärker mit quadratischer Kennlinie
• 1 Stromversorgung für Verstärker
• 1 Oszillograph HM504-2
Generator Analysator
fe = 1kHz , Ua = 10Vs = 10Vss
f in kHz Ua in mV Ua in dB Ak in dB
1
2 0
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Tabelle 3: Klirrdämpfungen Verstärker 1
NT-V2 - 22
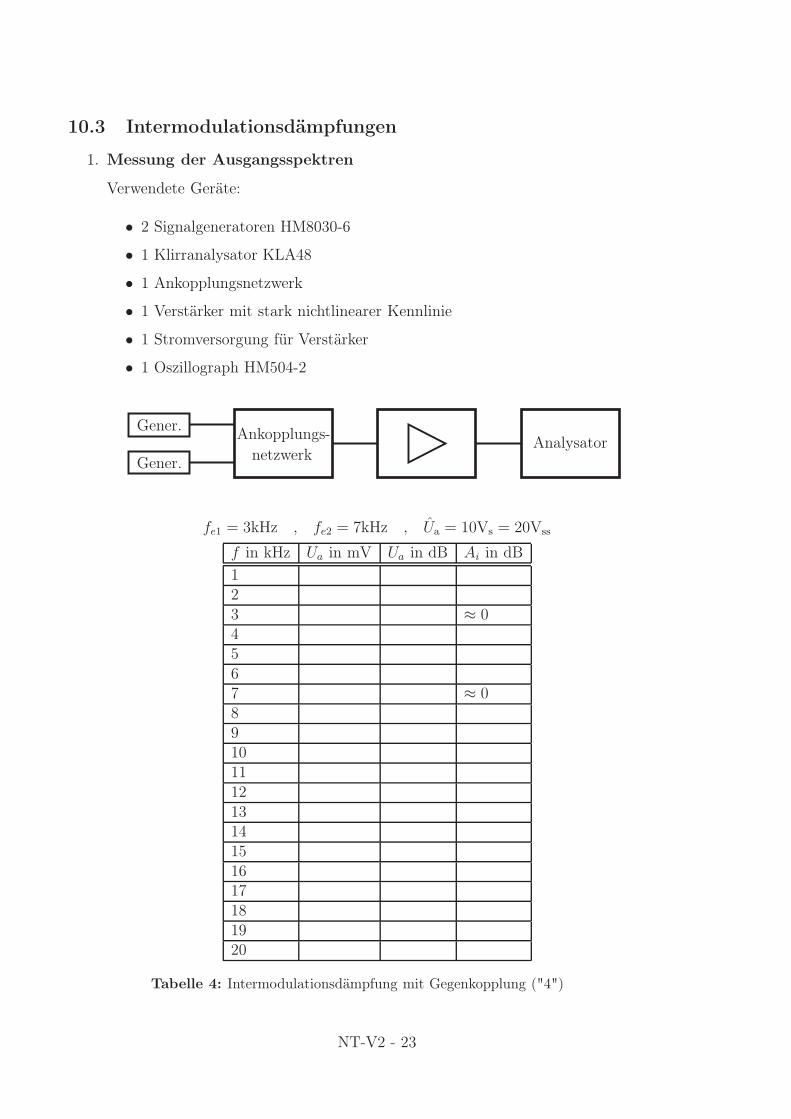
10.3 Intermodulationsdämpfungen
1. Messung der Ausgangsspektren
Verwendete Geräte:
• 2 Signalgeneratoren HM8030-6
• 1 Klirranalysator KLA48
• 1 Ankopplungsnetzwerk
• 1 Verstärker mit stark nichtlinearer Kennlinie
• 1 Stromversorgung für Verstärker
• 1 Oszillograph HM504-2
Ankopplungs-
netzwerkAnalysator
Gener.
Gener.
fe1 = 3kHz , fe2 = 7kHz , Ua = 10Vs = 20Vss
f in kHz Ua in mV Ua in dB Ai in dB
1
2
3 ≈ 0
4
5
6
7 ≈ 0
8
9
10
11
12
13
14
15
16
17
18
19
20
Tabelle 4: Intermodulationsdämpfung mit Gegenkopplung ("4")
NT-V2 - 23
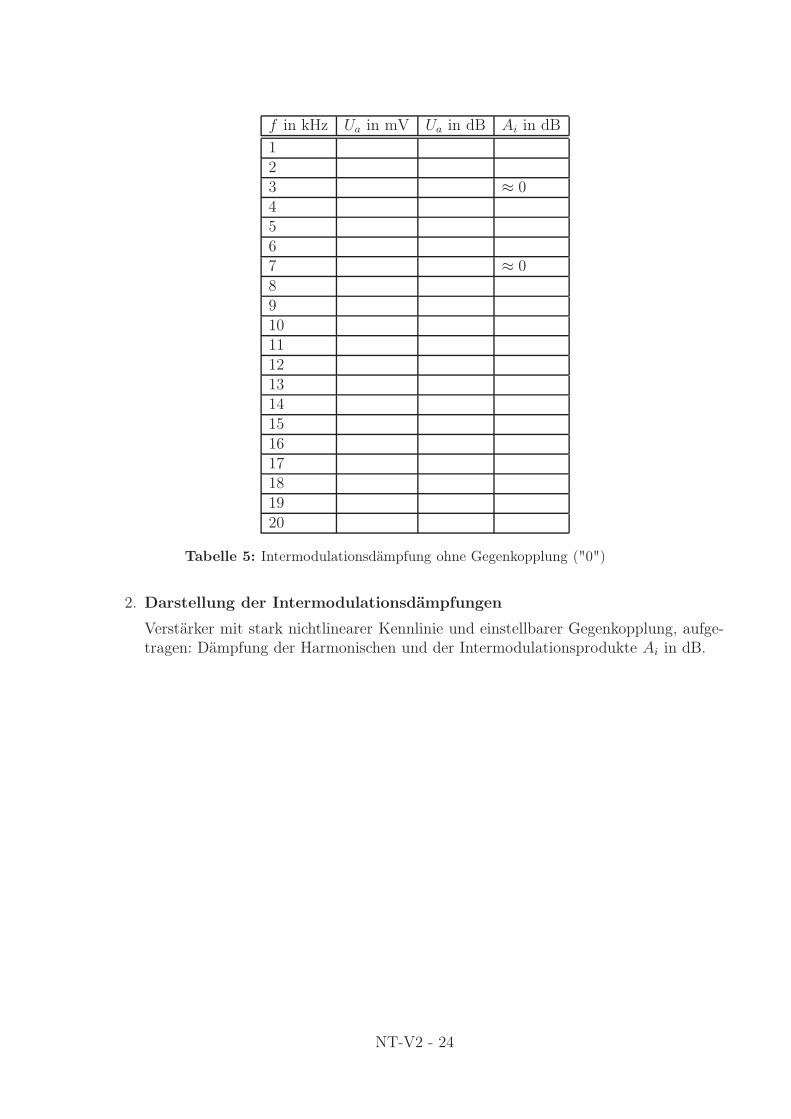
f in kHz Ua in mV Ua in dB Ai in dB
1
2
3 ≈ 0
4
5
6
7 ≈ 0
8
9
10
11
12
13
14
15
16
17
18
19
20
Tabelle 5: Intermodulationsdämpfung ohne Gegenkopplung ("0")
2. Darstellung der Intermodulationsdämpfungen
Verstärker mit stark nichtlinearer Kennlinie und einstellbarer Gegenkopplung, aufge-
tragen: Dämpfung der Harmonischen und der Intermodulationsprodukte Ai in dB.
NT-V2 - 24
100
50
0
0 2 4 6 8 10 12 14 16 18 20
Ai/dB
f/kHz
NT
-V2
-25

Literatur
[Küpf68] K. Küpfmüller: Die Systemtheorie der elektrischen Nachrichtenübertragung. Hir-
zel, Stuttgart, 1968.
[Phil71] E. Philippow: Nichtlineare Elektrotechnik. Geest & Portig, Leipzig, 1971.
NT-V2 - 26
Versuch NT-V3: Reaktanzeintore
Inhaltsverzeichnis
1 Passive Eintore 2
1.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Rationale positive Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Verlustfreie Eintore 4
2.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Foster-Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Synthese verlustfreier Eintore . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Beispiele 10
3.1 Widerstandspartialbruchschaltung erster Art . . . . . . . . . . . . . . . . . . 10
3.2 Berechnung der Kettenbruchschaltung zweiter Art . . . . . . . . . . . . . . . 12
4 Vorbereitung 14
4.1 Versuchseinarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.2 Versuchsvorbereitungsaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . 17
5 Versuchsdurchführung 19
Literaturverzeichnis 21
NT-V3 - 1
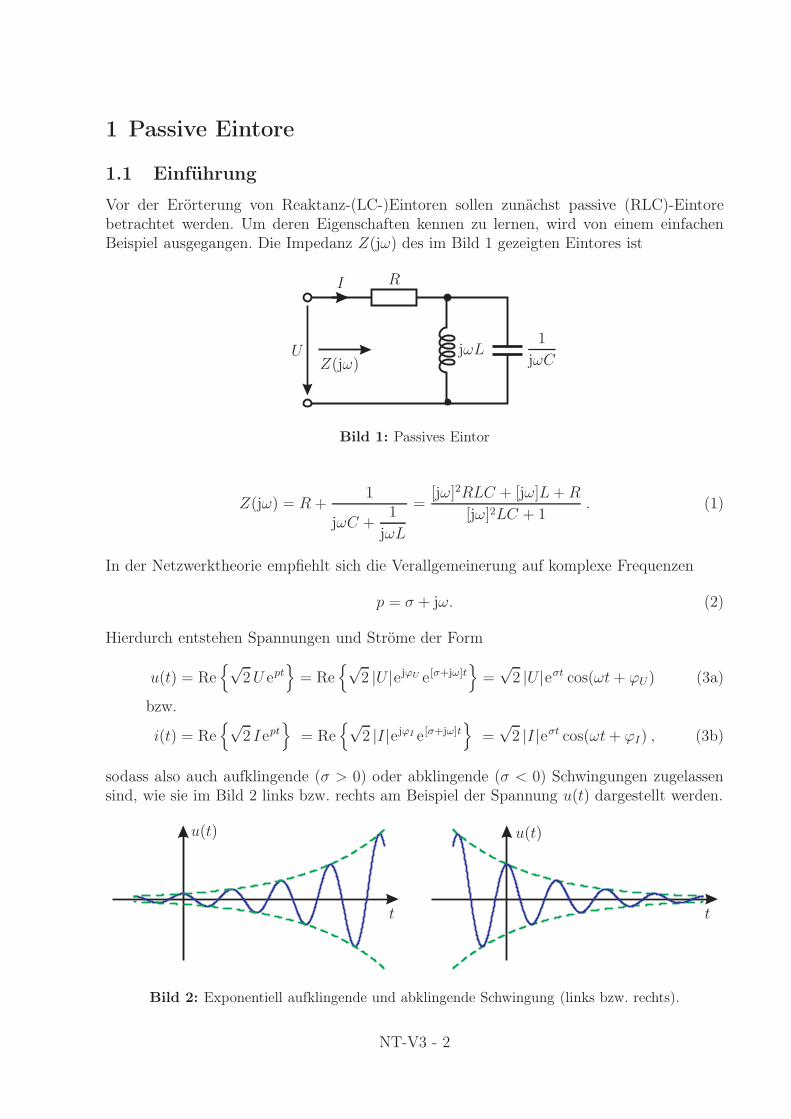
1 Passive Eintore
1.1 Einführung
Vor der Erörterung von Reaktanz-(LC-)Eintoren sollen zunächst passive (RLC)-Eintore
betrachtet werden. Um deren Eigenschaften kennen zu lernen, wird von einem einfachen
Beispiel ausgegangen. Die Impedanz Z(jω) des im Bild 1 gezeigten Eintores ist
1
jωCjωL
RI
UZ(jω)
Bild 1: Passives Eintor
Z(jω) = R +1
jωC +1
jωL
=[jω]2RLC + [jω]L + R
[jω]2LC + 1. (1)
In der Netzwerktheorie empfiehlt sich die Verallgemeinerung auf komplexe Frequenzen
p = σ + jω. (2)
Hierdurch entstehen Spannungen und Ströme der Form
u(t) = Re√
2U ept
= Re√
2 |U |ejϕU e[σ+jω]t
=√
2 |U |eσt cos(ωt + ϕU) (3a)
bzw.
i(t) = Re√
2 I ept
= Re√
2 |I|ejϕI e[σ+jω]t
=√
2 |I|eσt cos(ωt + ϕI) , (3b)
sodass also auch aufklingende (σ > 0) oder abklingende (σ < 0) Schwingungen zugelassen
sind, wie sie im Bild 2 links bzw. rechts am Beispiel der Spannung u(t) dargestellt werden.
u(t)
t
u(t)
t
Bild 2: Exponentiell aufklingende und abklingende Schwingung (links bzw. rechts).
NT-V3 - 2

Zwischen den komplexen Amplituden der Spannung und des Stromes besteht der Zusam-
menhang U = Z(p)I, wobei die Impedanz Z(p) des in Bild 1 dargestellten Eintores konkret
durch
Z(p) =p2RLC + pL + R
p2LC + 1
gegeben ist, die man aus (1) erhält, wenn man jω durch p ersetzt. Man stellt fest, dass Z(p)
eine rationale Funktion in der Variablen p ist, die aufgrund der reellen Bauelementwerte R,
L und C ausschließlich reelle Koeffizienten besitzt. Betrachtet man den Realteil
ReZ(p) = Re
R [p2LC + 1] + pL
p2LC + 1
= R + Re
pL [p∗2LC + 1]
|p2LC + 1|2
= R +|p|2L2C + L
|p2LC + 1|2 σ ,
so findet man, dass
Re Z(p) > 0 für alle σ = Rep > 0 (4)
gilt, wenn R, C und L sämtlich positiv sind. Z(p) wird dann als positive Funktion bezeichnet.
Wie man zeigen kann [Wuns61] , muss die Impedanz Z(p) und die Admittanz Y (p) eines
jeden Netzwerkes, bestehend aus positiven Widerständen, Induktivitäten und Kapazitäten,
eine reell rationale1 und positive Funktion sein. Umgekehrt kann man aber auch für jede reell
rationale positive Funktion Eintorschaltungen aus positiven Widerständen, Induktivitäten
und Kapazitäten angeben, deren Impedanz oder Admittanz gerade diese Funktion ergibt.
1.2 Rationale positive Funktionen
Betrachtet wird die Funktion
F (p) =ampm + am−1p
m−1 + · · ·+ a0
bnpn + bn−1pn−1 + · · ·+ b0
, (5)
von der angenommen wird, dass sie reell rational und positiv ist. Nach dem Fundamentalsatz
der Algebra kann die rationale Funktion alternativ als
F (p) = K[p − p01][p − p02] · · · [p − p0m]
[p − p∞1][p − p∞2] · · · [p − p∞n]mit K =
am
bn(6)
geschrieben werden, wobei p0ν und p∞ν die Nullstellen bzw. Pole der rationalen Funktion
F (p) in der komplexen p−Ebene, siehe Bild 3, sind.
1Eine rationale Funktion in einer komplexen Variablen bezeichnet man als reell rational, wenn sämtlicheKoeffizienten reell sind. Setzt man insbesondere einen reellen Wert für die komplexe Variable ein, so ist derWert der reell rationalen Funktion immer reell.
NT-V3 - 3
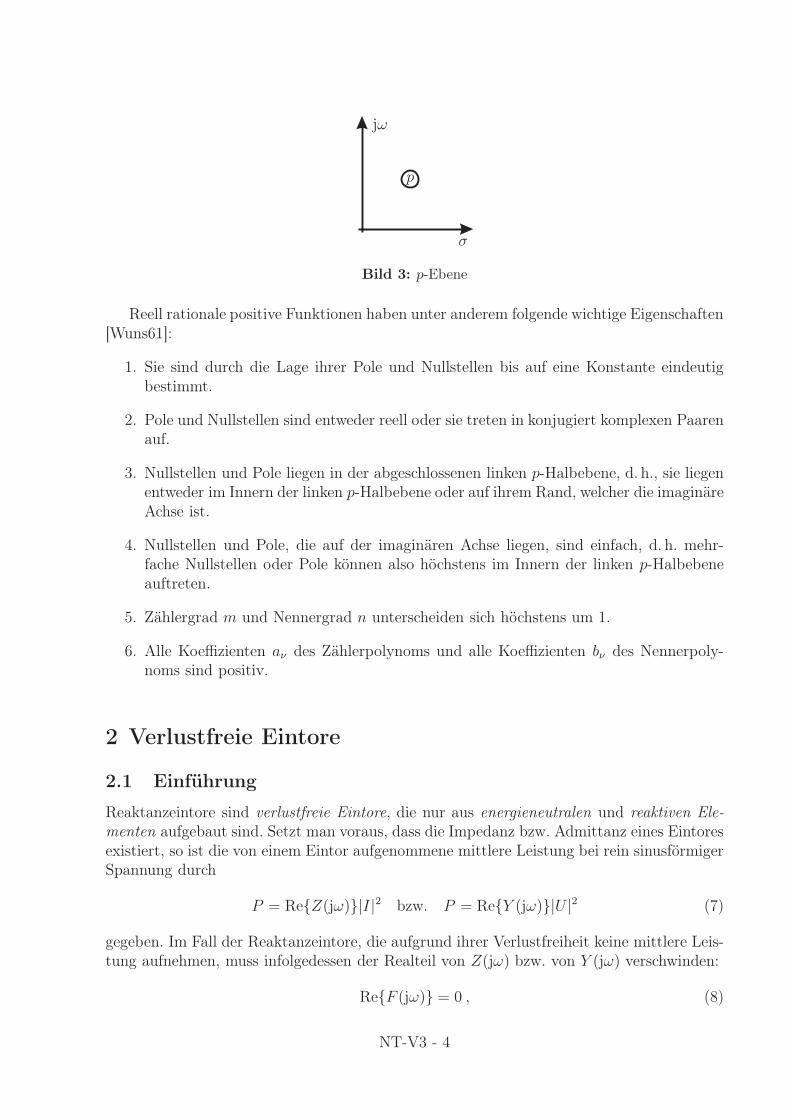
jω
σ
p
Bild 3: p-Ebene
Reell rationale positive Funktionen haben unter anderem folgende wichtige Eigenschaften
[Wuns61]:
1. Sie sind durch die Lage ihrer Pole und Nullstellen bis auf eine Konstante eindeutig
bestimmt.
2. Pole und Nullstellen sind entweder reell oder sie treten in konjugiert komplexen Paaren
auf.
3. Nullstellen und Pole liegen in der abgeschlossenen linken p-Halbebene, d. h., sie liegen
entweder im Innern der linken p-Halbebene oder auf ihrem Rand, welcher die imaginäre
Achse ist.
4. Nullstellen und Pole, die auf der imaginären Achse liegen, sind einfach, d. h. mehr-
fache Nullstellen oder Pole können also höchstens im Innern der linken p-Halbebene
auftreten.
5. Zählergrad m und Nennergrad n unterscheiden sich höchstens um 1.
6. Alle Koeffizienten aν des Zählerpolynoms und alle Koeffizienten bν des Nennerpoly-
noms sind positiv.
2 Verlustfreie Eintore
2.1 Einführung
Reaktanzeintore sind verlustfreie Eintore, die nur aus energieneutralen und reaktiven Ele-
menten aufgebaut sind. Setzt man voraus, dass die Impedanz bzw. Admittanz eines Eintores
existiert, so ist die von einem Eintor aufgenommene mittlere Leistung bei rein sinusförmiger
Spannung durch
P = ReZ(jω)|I|2 bzw. P = ReY (jω)|U |2 (7)
gegeben. Im Fall der Reaktanzeintore, die aufgrund ihrer Verlustfreiheit keine mittlere Leis-
tung aufnehmen, muss infolgedessen der Realteil von Z(jω) bzw. von Y (jω) verschwinden:
ReF (jω) = 0 , (8)
NT-V3 - 4

wobei F (jω) stellvertretend für die betrachtete Impedanz bzw. Admittanz steht. Damit eine
Funktion F (p) Impedanz oder Admittanz eines Reaktanzeintores ist, ist es notwendig und
hinreichend, dass die Funktion reell rational und positiv ist und dass ihr Realteil bei rein
imaginärem p verschwindet [Wuns61] . Man bezeichnet eine derartige Funktion als reelle
Reaktanzfunktion oder auch Foster-Funktion.
2.2 Foster-Funktionen
Reelle Reaktanzfunktionen besitzen außer den in Abschnitt 1.2 aufgeführten Eigenschaften
noch zusätzliche Eigenschaften [Wuns61]:
1. F (p) ist eine ungerade Funktion in p:
F (p) = −F (−p). (9)
2. Die Graddifferenz m − n zwischen Zähler und Nenner beträgt 1 oder −1. Der Fall
m = n ist hier also ausgeschlossen.
3. Alle Pole und Nullstellen liegen auf der jω-Achse.
4. Bei p = 0 und p = ∞ liegt entweder ein Pol oder eine Nullstelle.
5. F (p) lässt sich in Partialbrüche der Form
F (p) =N(p)
D(p)= A∞p +
A0
p+∑
λ
Aλp
p2 + ω2λ
(10)
entwickeln mit
A∞ = limp→∞
1
p
N(p)
D(p)=
am/bn für m > n
0 für m ≤ n, (11)
A0 = limp→0
pN(p)
D(p)mit A0 = lim
p→0
pN ′(p) + N(p)
D′(p)=
N(0)
D′(0)für D(0) = 0 , (12)
Aλ = 2N(jωλ)
D′(jωλ). (13)
Dabei ist N(p) der Zähler und D(p) der Nenner von F (p) der Gleichung (5), wobei
A∞, A0 sowie alle Aλ nicht negativ sind. Die einzelnen Summanden in Gleichung (10)
sind ebenfalls Reaktanzfunktionen.
6. Wegen Gleichung (8) ist F (jω) rein imaginär, sodass die durch
X(ω) = −jF (jω) (14)
definierte Funktion für alle ω reell ist. X(ω) ist eine streng monoton steigende Funk-
tion, denn ihre Ableitung ist bezüglich ω stets positiv:
dX(ω)
dω> 0 . (15)
NT-V3 - 5

7. Die Nullstellen und Pole von X(ω) alternieren entlang der ω-Achse.
8. Es gilt die Ungleichung
dX(ω)
dω≥ X(ω)
ω, (16)
wobei das Gleichheitszeichen nur dann gilt, wenn das Netzwerk ausschließlich aus
Induktivitäten oder aus Kapazitäten aufgebaut ist. Die Steigung einer beliebigen
Reaktanzfunktion in einem Punkt ω ist also größer als die einer einfachen Induktivität
oder Kapazität mit derselben Reaktanz in diesem Punkt.
2.3 Synthese verlustfreier Eintore
Im Folgenden wird davon ausgegangen, dass F (p) in der konkreten Form
F (p) = A∞p +A0
p+
ℓ∑
λ=1
Aλp
p2 + ω2λ
(17)
gegeben ist. Subtrahiert man den Ausdruck A∞p von F (p), so erhält man wiederum eine
Reaktanzfunktion,
F1(p) =A0
p+
ℓ∑
λ=1
Aλp
p2 + ω2λ
, (18)
weil die Summe aus reell rationalen positiven Funktionen wieder eine reell rationale positive
Funktion ergibt und ReF1(jω) = 0 gilt. F1(p) hat keinen Pol mehr bei p = ∞ und ist
offensichtlich von niedrigerem Grad als F (p). Man sagt, dass der Pol bei p = ∞ abgespalten
worden ist. Ebenso kann man den Pol bei p = 0 oder ein konjugiert komplexes Polpaar bei
p = ±jων oder auch mehrere Pole bzw. Polpaare abspalten.
Wegen der in Abschnitt 1.2 genannten Eigenschaft 2 müssen die Pole und Nullstellen
auf der imaginären Achse spiegelbildlich zu p = 0 liegen. Es genügt also, nur die Pole
und Nullstellen für ω ≥ 0 zu betrachten. Nach Gleichung (17) sind für einen Pol bei
endlichen Frequenzen ωλ > 0 je zwei Elemente und für einen Pol bei p = ∞ oder p = 0 je ein
Element notwendig. In Bild 4 sind die vier prinzipiell möglichen Pol-Nullstellen-Verteilungen
angegeben, wobei die Pole und Nullstellen gemäß der Eigenschaft 7 aus dem Abschnitt 2.2
alternieren.
Man überzeugt sich schnell davon, dass die Zahl der notwendigen Elemente gleich der
um eins verminderten Zahl der Pole und Nullstellen im Intervall 0 ≤ ω ≤ ∞ ist. Die Zahl
der notwendigen Elemente ist übrigens auch gleich dem Grad2 der Funktion F (p), wie man
mithilfe von Gleichung (19) beweisen kann.
2Der Grad von F (p) = N(p)/D(p) ist gleich dem Maximum vom Grad des Zählerpolynoms N(p) unddem Grad des Nennerpolynoms D(p).
NT-V3 - 6
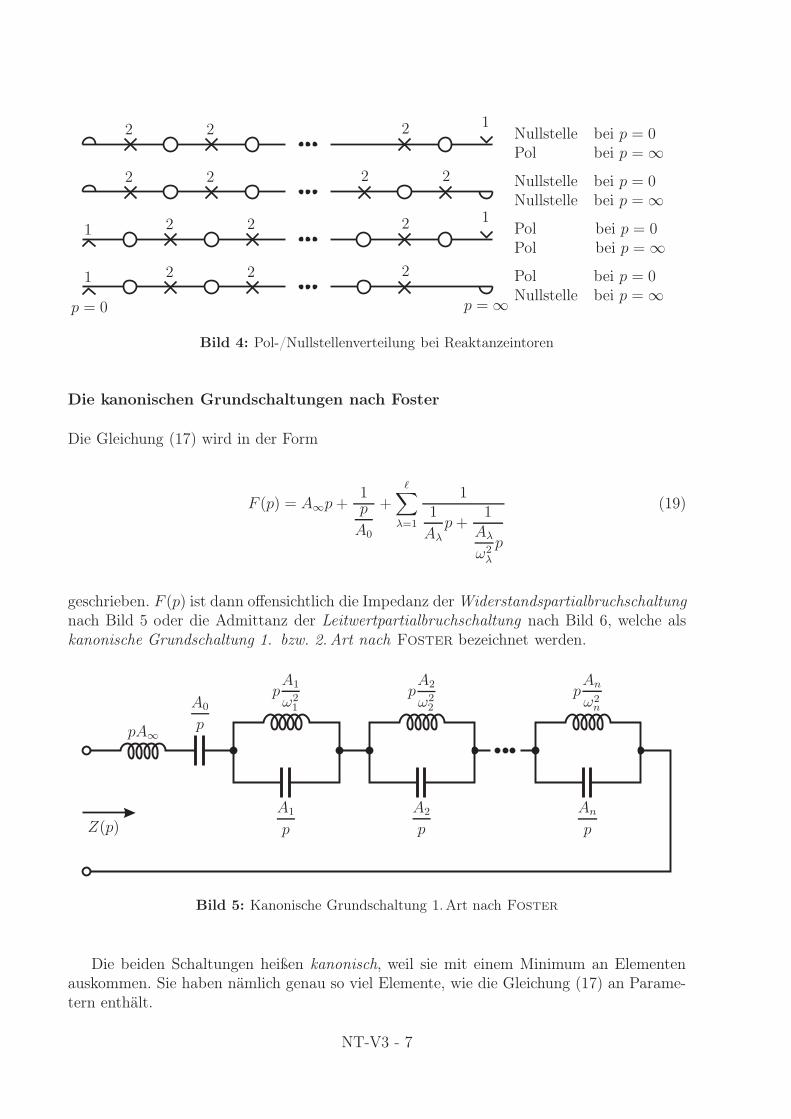
1
1
1
1
2
2
2
2
2
2
2
2 2
2
2
2
2
Nullstelle bei p = 0
Pol bei p = ∞Nullstelle bei p = 0
Nullstelle bei p = ∞Pol bei p = 0
Pol bei p = ∞Pol bei p = 0
Nullstelle bei p = ∞p = 0 p = ∞
Bild 4: Pol-/Nullstellenverteilung bei Reaktanzeintoren
Die kanonischen Grundschaltungen nach Foster
Die Gleichung (17) wird in der Form
F (p) = A∞p +1p
A0
+
ℓ∑
λ=1
1
1
Aλ
p +1
Aλ
ω2λ
p
(19)
geschrieben. F (p) ist dann offensichtlich die Impedanz der Widerstandspartialbruchschaltung
nach Bild 5 oder die Admittanz der Leitwertpartialbruchschaltung nach Bild 6, welche als
kanonische Grundschaltung 1. bzw. 2. Art nach Foster bezeichnet werden.
A1
p
A2
p
An
p
A0
ppA∞
pA1
ω21
pA2
ω22
pAn
ω2n
Z(p)
Bild 5: Kanonische Grundschaltung 1.Art nach Foster
Die beiden Schaltungen heißen kanonisch, weil sie mit einem Minimum an Elementen
auskommen. Sie haben nämlich genau so viel Elemente, wie die Gleichung (17) an Parame-
tern enthält.
NT-V3 - 7
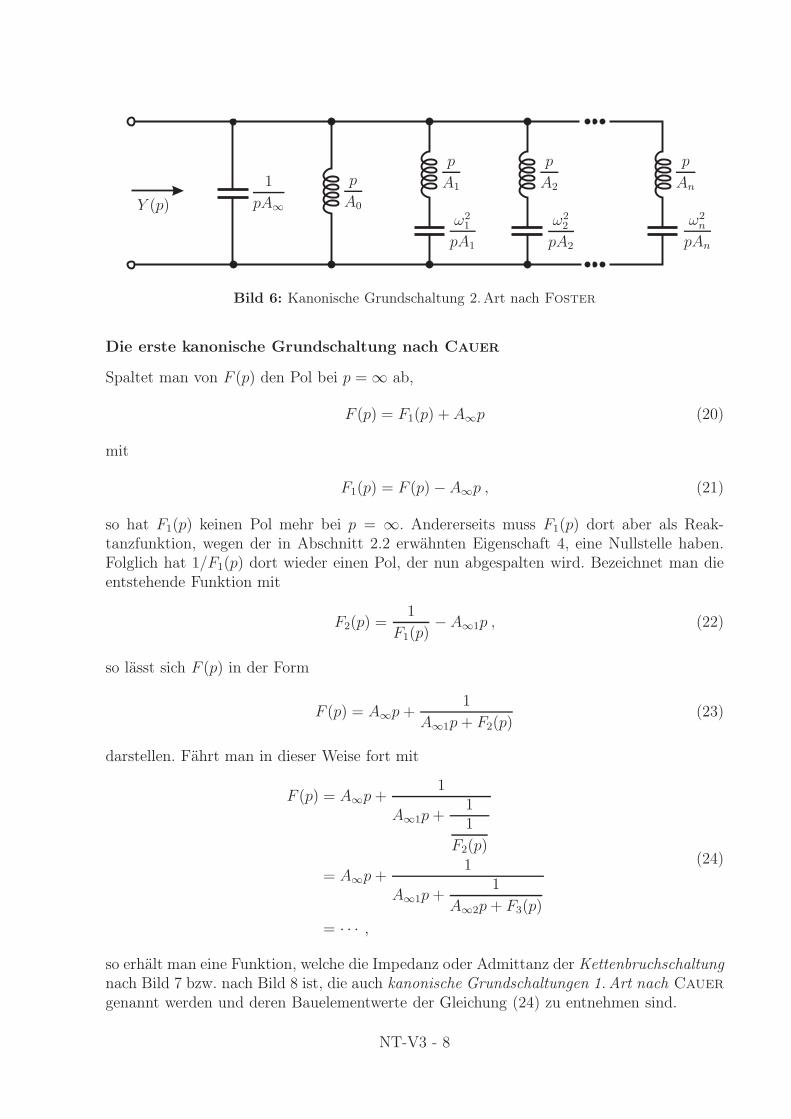
ω21
pA1
ω22
pA2
ω2n
pAn
1
pA∞
p
A1
p
A2
p
Anp
A0Y (p)
Bild 6: Kanonische Grundschaltung 2.Art nach Foster
Die erste kanonische Grundschaltung nach Cauer
Spaltet man von F (p) den Pol bei p = ∞ ab,
F (p) = F1(p) + A∞p (20)
mit
F1(p) = F (p) − A∞p , (21)
so hat F1(p) keinen Pol mehr bei p = ∞. Andererseits muss F1(p) dort aber als Reak-
tanzfunktion, wegen der in Abschnitt 2.2 erwähnten Eigenschaft 4, eine Nullstelle haben.
Folglich hat 1/F1(p) dort wieder einen Pol, der nun abgespalten wird. Bezeichnet man die
entstehende Funktion mit
F2(p) =1
F1(p)− A∞1p , (22)
so lässt sich F (p) in der Form
F (p) = A∞p +1
A∞1p + F2(p)(23)
darstellen. Fährt man in dieser Weise fort mit
F (p) = A∞p +1
A∞1p +1
1
F2(p)
= A∞p +1
A∞1p +1
A∞2p + F3(p)
= · · · ,
(24)
so erhält man eine Funktion, welche die Impedanz oder Admittanz der Kettenbruchschaltung
nach Bild 7 bzw. nach Bild 8 ist, die auch kanonische Grundschaltungen 1. Art nach Cauer
genannt werden und deren Bauelementwerte der Gleichung (24) zu entnehmen sind.
NT-V3 - 8
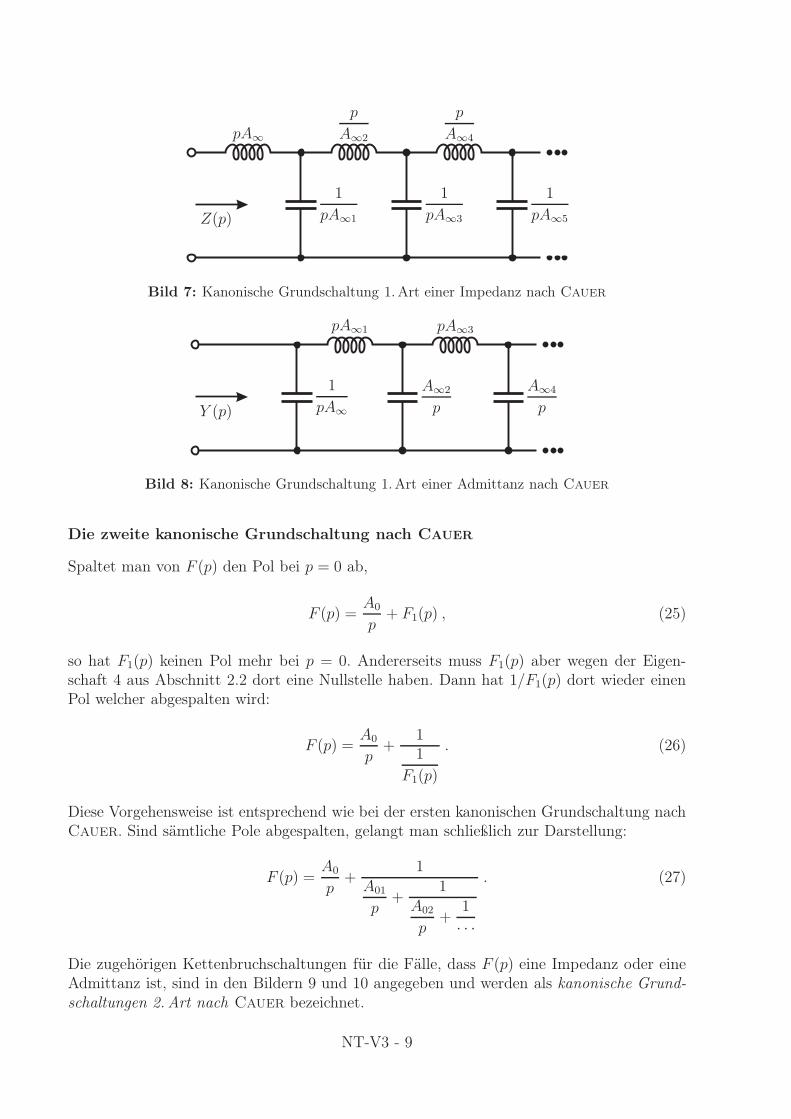
1
pA∞1
1
pA∞3
1
pA∞5
pA∞
p
A∞2
p
A∞4
Z(p)
Bild 7: Kanonische Grundschaltung 1.Art einer Impedanz nach Cauer
1
pA∞
A∞2
p
A∞4
p
pA∞1 pA∞3
Y (p)
Bild 8: Kanonische Grundschaltung 1.Art einer Admittanz nach Cauer
Die zweite kanonische Grundschaltung nach Cauer
Spaltet man von F (p) den Pol bei p = 0 ab,
F (p) =A0
p+ F1(p) , (25)
so hat F1(p) keinen Pol mehr bei p = 0. Andererseits muss F1(p) aber wegen der Eigen-
schaft 4 aus Abschnitt 2.2 dort eine Nullstelle haben. Dann hat 1/F1(p) dort wieder einen
Pol welcher abgespalten wird:
F (p) =A0
p+
1
1
F1(p)
. (26)
Diese Vorgehensweise ist entsprechend wie bei der ersten kanonischen Grundschaltung nach
Cauer. Sind sämtliche Pole abgespalten, gelangt man schließlich zur Darstellung:
F (p) =A0
p+
1
A01
p+
1
A02
p+
1
· · ·
. (27)
Die zugehörigen Kettenbruchschaltungen für die Fälle, dass F (p) eine Impedanz oder eine
Admittanz ist, sind in den Bildern 9 und 10 angegeben und werden als kanonische Grund-
schaltungen 2. Art nach Cauer bezeichnet.
NT-V3 - 9
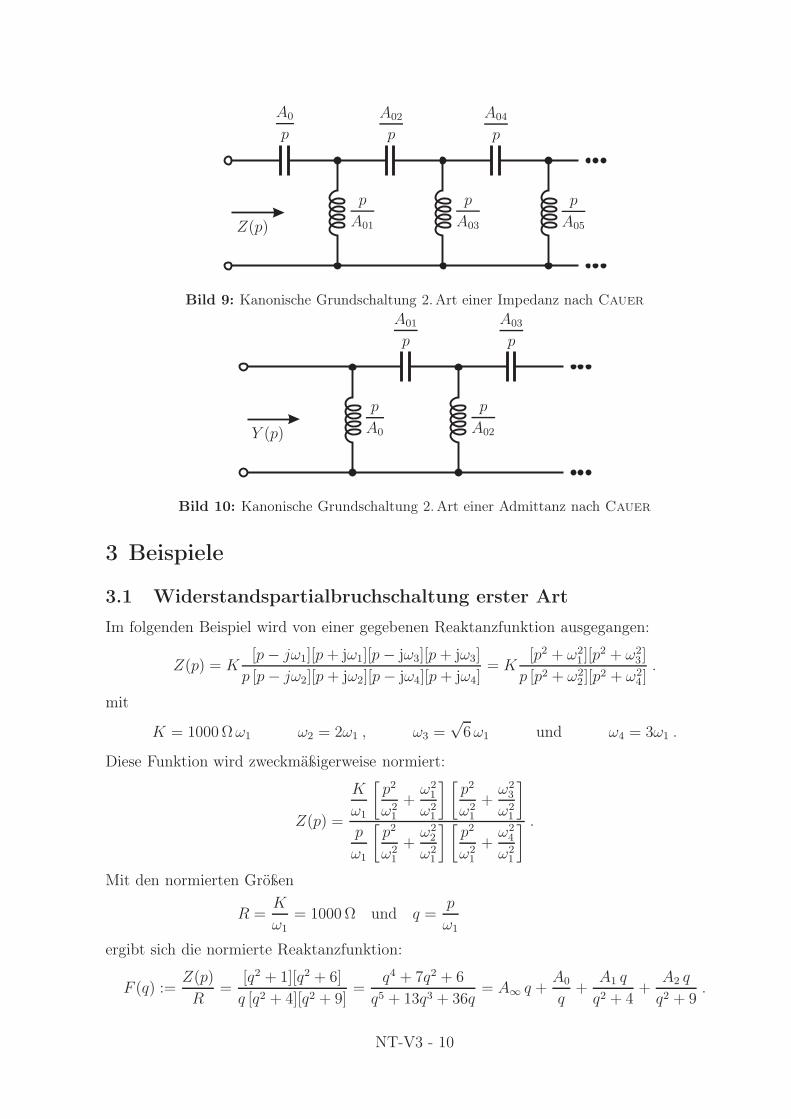
A0
p
A02
p
A04
p
p
A01
p
A03
p
A05Z(p)
Bild 9: Kanonische Grundschaltung 2.Art einer Impedanz nach Cauer
A01
p
A03
p
p
A0
p
A02Y (p)
Bild 10: Kanonische Grundschaltung 2.Art einer Admittanz nach Cauer
3 Beispiele
3.1 Widerstandspartialbruchschaltung erster Art
Im folgenden Beispiel wird von einer gegebenen Reaktanzfunktion ausgegangen:
Z(p) = K[p − jω1][p + jω1][p − jω3][p + jω3]
p [p − jω2][p + jω2][p − jω4][p + jω4]= K
[p2 + ω21][p
2 + ω23]
p [p2 + ω22][p
2 + ω24]
.
mit
K = 1000 Ωω1 ω2 = 2ω1 , ω3 =√
6ω1 und ω4 = 3ω1 .
Diese Funktion wird zweckmäßigerweise normiert:
Z(p) =
K
ω1
[p2
ω21
+ω2
1
ω21
] [p2
ω21
+ω2
3
ω21
]
p
ω1
[p2
ω21
+ω2
2
ω21
] [p2
ω21
+ω2
4
ω21
] .
Mit den normierten Größen
R =K
ω1= 1000 Ω und q =
p
ω1
ergibt sich die normierte Reaktanzfunktion:
F (q) :=Z(p)
R=
[q2 + 1][q2 + 6]
q [q2 + 4][q2 + 9]=
q4 + 7q2 + 6
q5 + 13q3 + 36q= A∞ q +
A0
q+
A1 q
q2 + 4+
A2 q
q2 + 9.
NT-V3 - 10
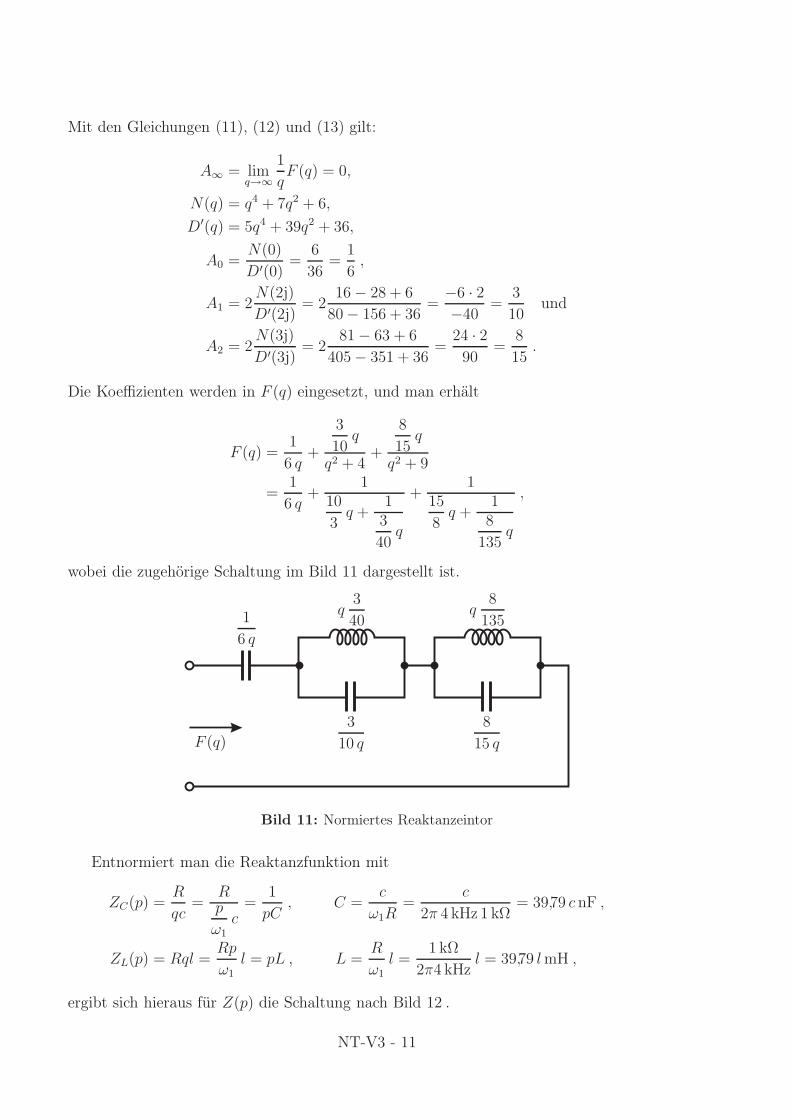
Mit den Gleichungen (11), (12) und (13) gilt:
A∞ = limq→∞
1
qF (q) = 0,
N(q) = q4 + 7q2 + 6,
D′(q) = 5q4 + 39q2 + 36,
A0 =N(0)
D′(0)=
6
36=
1
6,
A1 = 2N(2j)
D′(2j)= 2
16 − 28 + 6
80 − 156 + 36=
−6 · 2−40
=3
10und
A2 = 2N(3j)
D′(3j)= 2
81 − 63 + 6
405 − 351 + 36=
24 · 290
=8
15.
Die Koeffizienten werden in F (q) eingesetzt, und man erhält
F (q) =1
6 q+
3
10q
q2 + 4+
8
15q
q2 + 9
=1
6 q+
1
10
3q +
1
3
40q
+1
15
8q +
1
8
135q
,
wobei die zugehörige Schaltung im Bild 11 dargestellt ist.
1
6 q
3
10 q
8
15 q
q3
40q
8
135
F (q)
Bild 11: Normiertes Reaktanzeintor
Entnormiert man die Reaktanzfunktion mit
ZC(p) =R
qc=
Rp
ω1c
=1
pC, C =
c
ω1R=
c
2π 4 kHz 1 kΩ= 39,79 c nF ,
ZL(p) = Rql =Rp
ω1l = pL , L =
R
ω1l =
1 kΩ
2π4 kHzl = 39,79 l mH ,
ergibt sich hieraus für Z(p) die Schaltung nach Bild 12 .
NT-V3 - 11
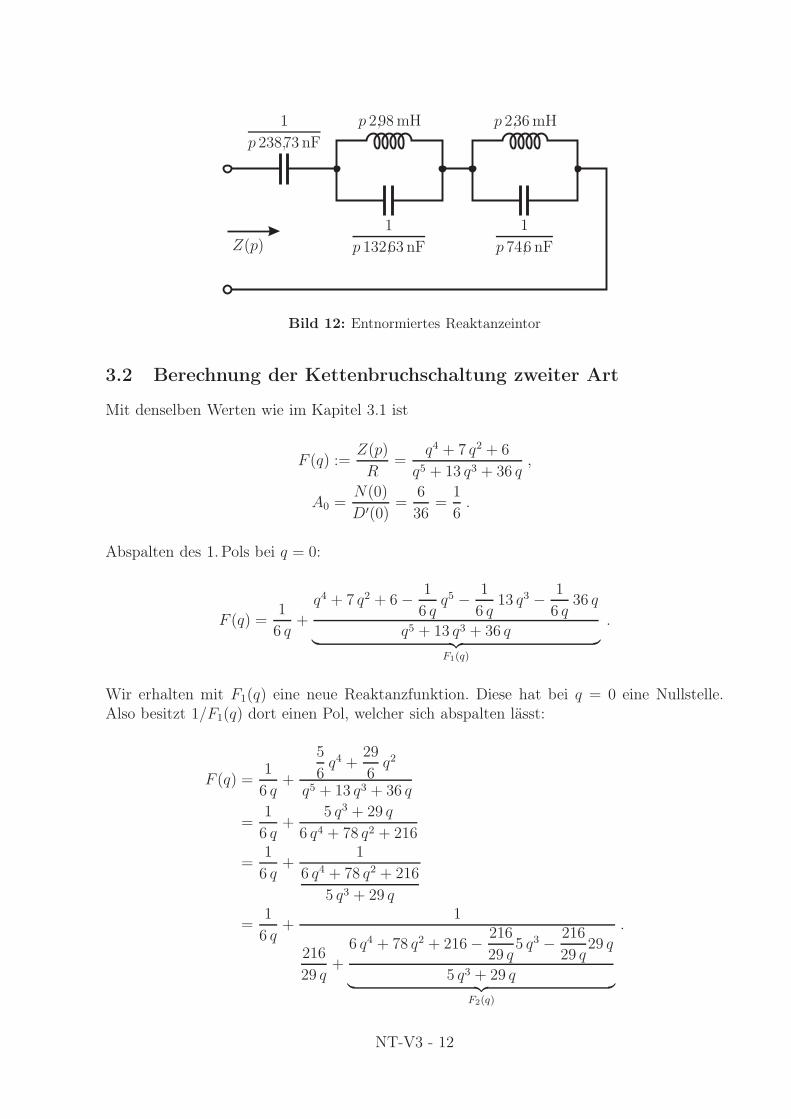
1
p 238,73 nF
1
p 132,63 nF
1
p 74,6 nF
p 2,98 mH p 2,36 mH
Z(p)
Bild 12: Entnormiertes Reaktanzeintor
3.2 Berechnung der Kettenbruchschaltung zweiter Art
Mit denselben Werten wie im Kapitel 3.1 ist
F (q) :=Z(p)
R=
q4 + 7 q2 + 6
q5 + 13 q3 + 36 q,
A0 =N(0)
D′(0)=
6
36=
1
6.
Abspalten des 1. Pols bei q = 0:
F (q) =1
6 q+
q4 + 7 q2 + 6 − 1
6 qq5 − 1
6 q13 q3 − 1
6 q36 q
q5 + 13 q3 + 36 q︸ ︷︷ ︸
F1(q)
.
Wir erhalten mit F1(q) eine neue Reaktanzfunktion. Diese hat bei q = 0 eine Nullstelle.
Also besitzt 1/F1(q) dort einen Pol, welcher sich abspalten lässt:
F (q) =1
6 q+
5
6q4 +
29
6q2
q5 + 13 q3 + 36 q
=1
6 q+
5 q3 + 29 q
6 q4 + 78 q2 + 216
=1
6 q+
1
6 q4 + 78 q2 + 216
5 q3 + 29 q
=1
6 q+
1
216
29 q+
6 q4 + 78 q2 + 216 − 216
29 q5 q3 − 216
29 q29 q
5 q3 + 29 q︸ ︷︷ ︸
F2(q)
.
NT-V3 - 12

Es verbleibt eine Reaktanzfunktion F2(q), von welcher der nächste Pol abgespalten werden
kann:
F (q) =1
6 q+
1
216
29 q+
6 q4 +1182
29q2
5 q3 + 29 q
=1
6 q+
1
216
29 q+
174 q3 + 1182 q
145 q2 + 841
=1
6 q+
1
1
29
216q
+1
145 q2 + 841
174 q3 + 1182 q
.
Der Kehrwert 1/F2(q) besitzt wieder eine Polstelle bei q = 0:
F (q) =1
6 q+
1
1
29
216q
+1
841
1182 q+
145 q2 + 841 − 841
1182 q174 q3 − 841
1182 q1182 q
174 q3 + 1182 q
.
Die verbleibenden Pole bzw. Nullstellen werden nach der gleichen Vorgehensweise wie zuvor
abgespalten:
F (q) =1
6 q+
1
1
29
216q
+1
841
1182 q+
4176
197q2
174 q3 + 1182 q
=1
6 q+
1
1
29
216q
+1
841
1182 q+
4176 q
34278q2 + 232854
=1
6 q+
1
1
29
216q
+1
1
1182
841q
+1
34278 q2 + 232854
4176 q
.
Es entsteht schließlich ein Kettenbruch, von dem alle Bauelementwerte in normierter Form
abzulesen sind:
F (q) =1
6 q+
1
1
29
216q
+1
1
1182
841q
+1
1
696
38809q
+1
1
197
24q
.
NT-V3 - 13
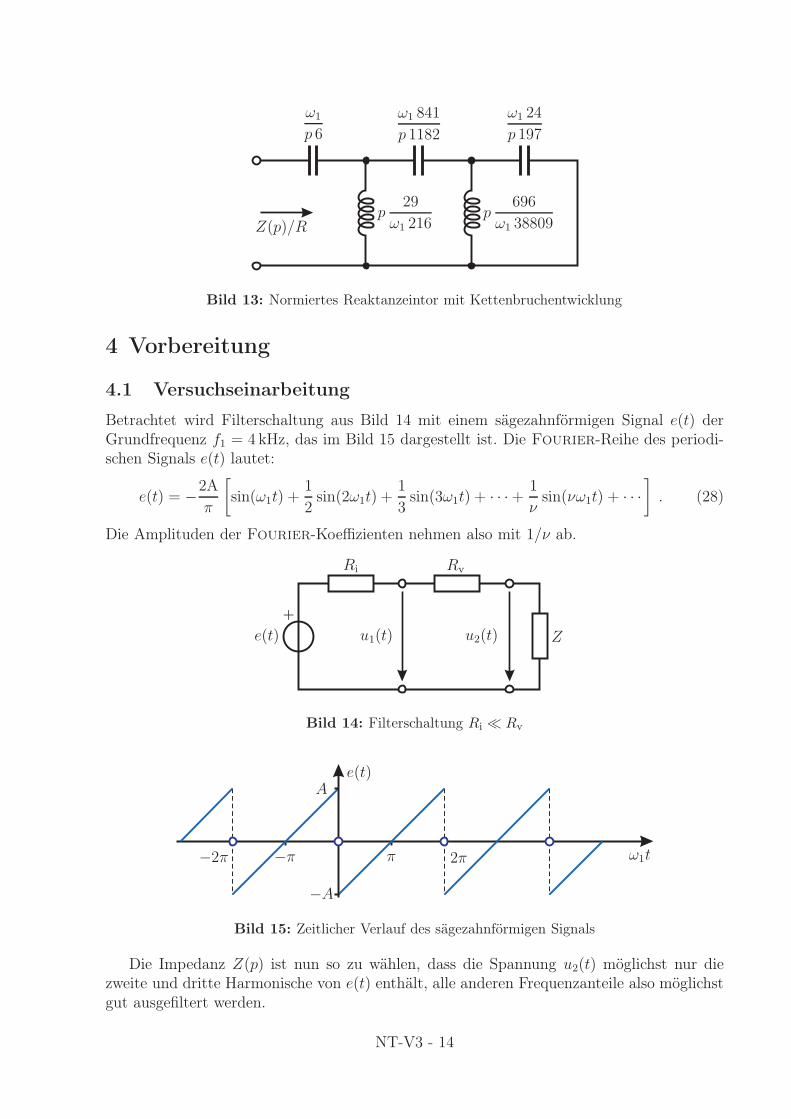
ω1
p 6
ω1 841
p 1182
ω1 24
p 197
p29
ω1 216p
696
ω1 38809Z(p)/R
Bild 13: Normiertes Reaktanzeintor mit Kettenbruchentwicklung
4 Vorbereitung
4.1 Versuchseinarbeitung
Betrachtet wird Filterschaltung aus Bild 14 mit einem sägezahnförmigen Signal e(t) der
Grundfrequenz f1 = 4 kHz, das im Bild 15 dargestellt ist. Die Fourier-Reihe des periodi-
schen Signals e(t) lautet:
e(t) = −2A
π
[
sin(ω1t) +1
2sin(2ω1t) +
1
3sin(3ω1t) + · · · + 1
νsin(νω1t) + · · ·
]
. (28)
Die Amplituden der Fourier-Koeffizienten nehmen also mit 1/ν ab.
+
Ri Rv
Ze(t) u1(t) u2(t)
Bild 14: Filterschaltung Ri ≪ Rv
−2π −π π 2π ω1t
A
−A
e(t)
Bild 15: Zeitlicher Verlauf des sägezahnförmigen Signals
Die Impedanz Z(p) ist nun so zu wählen, dass die Spannung u2(t) möglichst nur die
zweite und dritte Harmonische von e(t) enthält, alle anderen Frequenzanteile also möglichst
gut ausgefiltert werden.
NT-V3 - 14
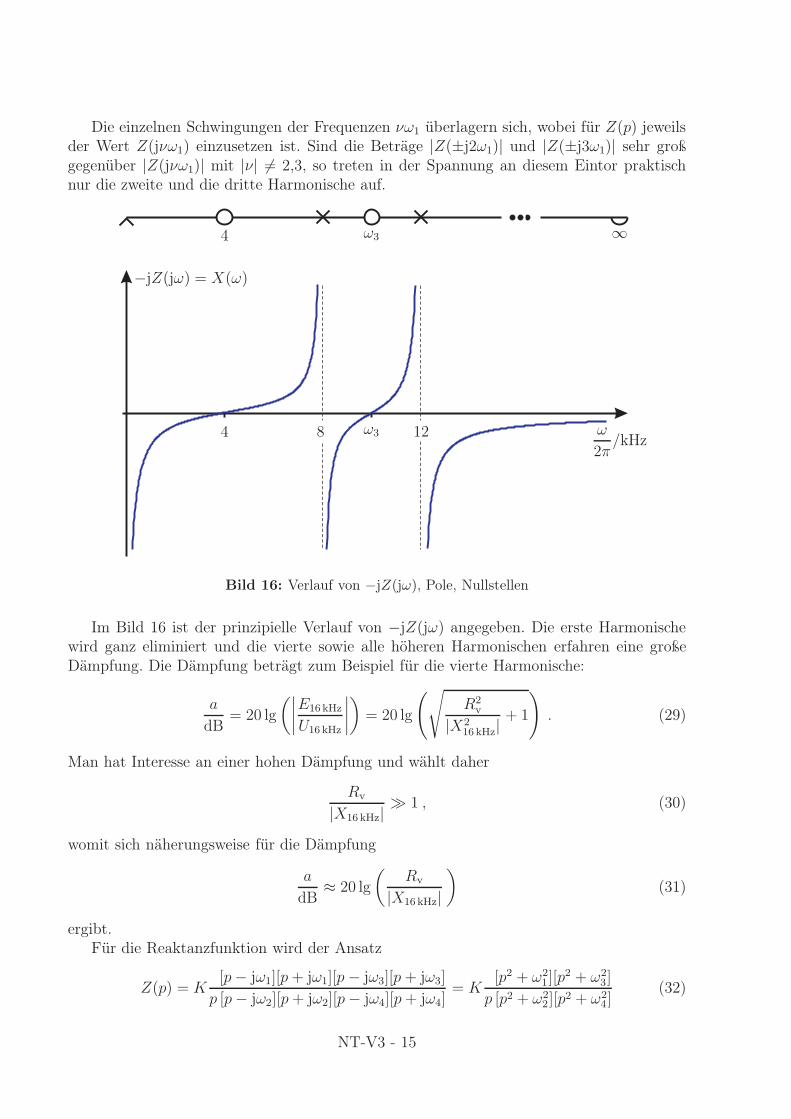
Die einzelnen Schwingungen der Frequenzen νω1 überlagern sich, wobei für Z(p) jeweils
der Wert Z(jνω1) einzusetzen ist. Sind die Beträge |Z(±j2ω1)| und |Z(±j3ω1)| sehr groß
gegenüber |Z(jνω1)| mit |ν| 6= 2,3, so treten in der Spannung an diesem Eintor praktisch
nur die zweite und die dritte Harmonische auf.
4
4
ω3
ω3
8
∞
12 ω
2π/kHz
−jZ(jω) = X(ω)
Bild 16: Verlauf von −jZ(jω), Pole, Nullstellen
Im Bild 16 ist der prinzipielle Verlauf von −jZ(jω) angegeben. Die erste Harmonische
wird ganz eliminiert und die vierte sowie alle höheren Harmonischen erfahren eine große
Dämpfung. Die Dämpfung beträgt zum Beispiel für die vierte Harmonische:
a
dB= 20 lg
(∣∣∣∣
E16 kHz
U16 kHz
∣∣∣∣
)
= 20 lg
(√
R2v
|X216 kHz|
+ 1
)
. (29)
Man hat Interesse an einer hohen Dämpfung und wählt daher
Rv
|X16 kHz|≫ 1 , (30)
womit sich näherungsweise für die Dämpfung
a
dB≈ 20 lg
(Rv
|X16 kHz|
)
(31)
ergibt.
Für die Reaktanzfunktion wird der Ansatz
Z(p) = K[p − jω1][p + jω1][p − jω3][p + jω3]
p [p − jω2][p + jω2][p − jω4][p + jω4]= K
[p2 + ω21][p
2 + ω23]
p [p2 + ω22][p
2 + ω24]
(32)
NT-V3 - 15

gewählt, wobei K festgelegt ist, die Nullstelle ω1 sowie die Polstellen ω2 und ω4 direkt dem
Reaktanzverlauf des Bildes 16 entnommen werden können und der verbleibende Parameter
ω3 noch zu bestimmen ist. Zweckmäßigerweise normiert man die Funktion F (p) wieder:
Z(p) =
K
ω1
[p2
ω21
+ω2
1
ω21
] [p2
ω21
+ω2
3
ω21
]
p
ω1
[p2
ω21
+ω2
2
ω21
] [p2
ω21
+ω2
4
ω21
] . (33)
Mit den normierten Größen
K
ω1= R,
p
ω1= q, ω2 = 2ω1, ω3 = Ω3ω1, ω4 = 3ω1 (34)
ergibt sich die normierte Reaktanzfunktion
Z(p)
R=
[q2 + 1][q2 + Ω23 ]
q [q2 + 4][q2 + 9], (35)
in der nun Ω3 als freier Parameter auftritt. Für rein imaginäre q = jΩ mit Ω = ω/ω1 gilt
Z(jω)
R= −j
[Ω2 − 1][Ω2 − Ω23 ]
Ω[Ω2 − 4][Ω2 − 9]= j
X(Ωω1)
R. (36)
Um die normierte Frequenz Ω3 zu bestimmen, wird nun die Reaktanzfunktion an der Stelle
f = 16 kHz betrachtet:
|X16 kHz| = R[16 − 1][16 − Ω2
3 ]
4[16 − 4][16 − 9]=
5
112R[16 − Ω2
3 ]
⇐⇒ Ω23 = 16 − 112
5
|X16 kHz|R
.
Mit der Gleichung (31) erhält man Ω3 in Abhängigkeit der Dämpfung
Ω23 = 16 − 112
5
Rv
R10
−
1
20
a
dB (37)
oder umgekehrt
a
dB= 20 lg
(112
5
Rv
R
1
16 − Ω23
)
. (38)
Sind also R und Rv vorgegeben, so lässt sich durch die Lage von Ω3 die Dämpfung abeeinflussen, da mit größer werdendem Ω2
3 auch a größer wird. Für ω3 gibt es natürlich die
Schranken
8 kHz <ω3
2π< 12 kHz,
2 < Ω3 < 3 ,
4 < Ω23 < 9 ,
NT-V3 - 16
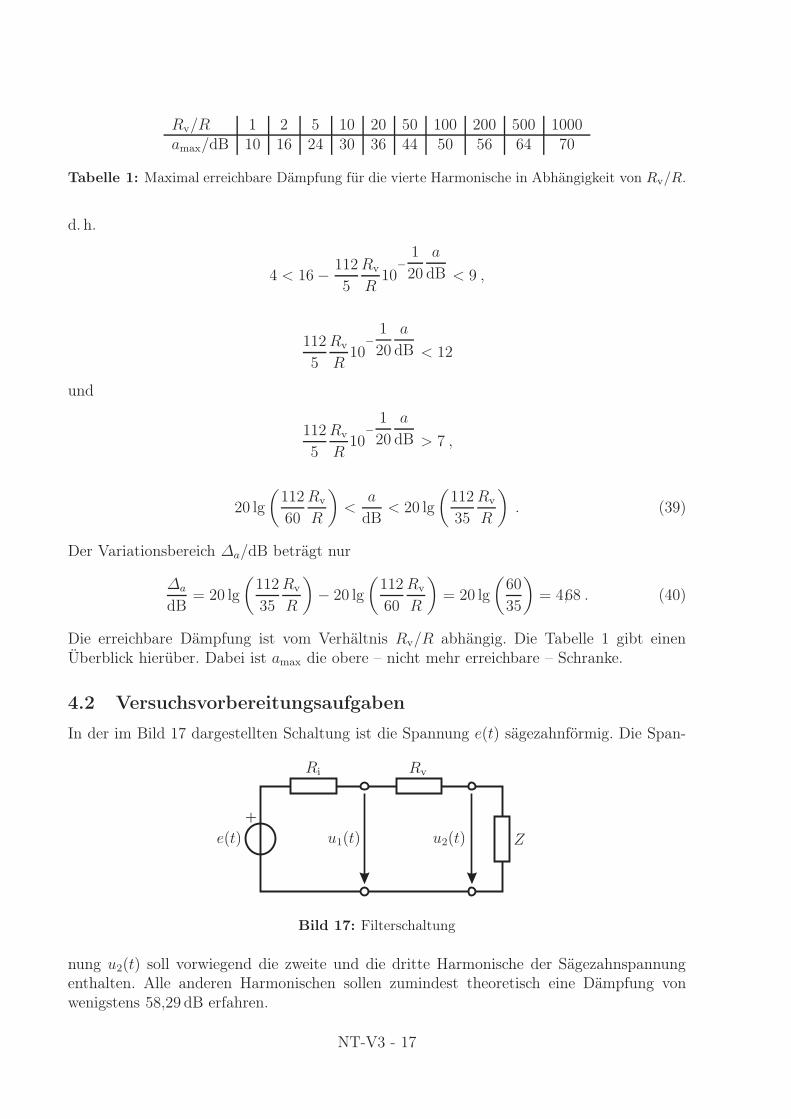
Rv/R 1 2 5 10 20 50 100 200 500 1000
amax/dB 10 16 24 30 36 44 50 56 64 70
Tabelle 1: Maximal erreichbare Dämpfung für die vierte Harmonische in Abhängigkeit von Rv/R.
d. h.
4 < 16 − 112
5
Rv
R10
−
1
20
a
dB < 9 ,
112
5
Rv
R10
−
1
20
a
dB < 12
und
112
5
Rv
R10
−
1
20
a
dB > 7 ,
20 lg
(112
60
Rv
R
)
<a
dB< 20 lg
(112
35
Rv
R
)
. (39)
Der Variationsbereich ∆a/dB beträgt nur
∆a
dB= 20 lg
(112
35
Rv
R
)
− 20 lg
(112
60
Rv
R
)
= 20 lg
(60
35
)
= 4,68 . (40)
Die erreichbare Dämpfung ist vom Verhältnis Rv/R abhängig. Die Tabelle 1 gibt einen
Überblick hierüber. Dabei ist amax die obere – nicht mehr erreichbare – Schranke.
4.2 Versuchsvorbereitungsaufgaben
In der im Bild 17 dargestellten Schaltung ist die Spannung e(t) sägezahnförmig. Die Span-
+
Ri Rv
Ze(t) u1(t) u2(t)
Bild 17: Filterschaltung
nung u2(t) soll vorwiegend die zweite und die dritte Harmonische der Sägezahnspannung
enthalten. Alle anderen Harmonischen sollen zumindest theoretisch eine Dämpfung von
wenigstens 58,29 dB erfahren.
NT-V3 - 17
Zahlenwerte3: Grundfrequenz der Sägezahnspannung e(t): f1 = 4 kHz, Rv = 330 kΩ,
K
2πf1= R = 1 kΩ.
Das Reaktanzeintor soll vom Grade 5 sein.
Vorbereitungsaufgabe 4.1:
Geben Sie eine geeignete Pol-Nullstellen-Verteilung an, und berechnen Sie die Lage der Pole
und Nullstellen.
Vorbereitungsaufgabe 4.2:
Skizzieren Sie für diese Pol-Nullstellen-Verteilung vier kanonische Schaltungen.
Vorbereitungsaufgabe 4.3:
Berechnen Sie die Leitwertpartialbruchschaltung 2.Art nach Foster, und geben Sie die
entnormierten Bauelelementwerte an.
Vorbereitungsaufgabe 4.4:
Berechnen Sie die Kettenbruchschaltung 1. Art nach Cauer, und geben Sie die entnormier-
ten Bauelementwerte an.
Vorbereitungsaufgabe 4.5:
Bereiten Sie zu den Aufgabenpunkten der Versuchsdurchführung 3 , 4 und 5 Messprotokolle
vor. Die Messprotokolle sollten alle relevanten Versuchsdaten beinhalten, insbesondere auch
das Datum, die Namen der durchführenden Personen und den Namen des Protokollführers.
Die Messprotokolle sind mit dokumentenechten Stiften auszufüllen und am Ende vom Be-
treuer unterschreiben zu lassen. Erfolgt dies nicht, sind später Zweifel an der Authentizität
der Messwerte möglich. Eventuell müsste dann der Versuch wiederholt werden. Zweifelhafte
Messwerte sollten bei der Auswertung gekennzeichnet und diskutiert werden, damit eine
Wiederholung des Versuchs vermieden werden kann.
Vorbereitungsaufgabe 4.6:
Bereiten Sie sich auf die folgenden Themenbereiche vor (nicht schriftlich), die Sie zu Beginn
der Durchführung des Versuchs ihren Kommilitonen in Form eines Kurzreferates (2 Minuten)
näherbringen sollen (Hilfsmittel Tafel). Die Themenvergabe erfolgt durch Auslosung.
• Schaltung nach Bild 17 im Hinblick auf das Ziel erläutern und begründen.
• Herleitung der Gleichung (29) aus der Schaltung.
• Mathematische Form einer Reaktanzfunktion, aus der die Pole und Nullstellen direkt
ablesbar sind; drei Eigenschaften einer Reaktanzfunktion.
3Die Zahlenwerte sind so gewählt, dass man mit gebrochen rationalen Zahlen rechnen kann.
NT-V3 - 18
• Weitere vier Eigenschaften einer Reaktanzfunktion.
• Idee des Syntheseverfahrens nach Foster.
• Idee des Syntheseverfahrens nach Cauer.
• Fosterschaltung 1. und 2.Art, Cauerschaltung 1. und 2.Art, mathematische Form und
Anordnung der Bauelemente.
5 Versuchsdurchführung
1. Kurzvorträge
2. Verschaffen Sie sich einen Überblick über den Messaufbau. Notieren Sie sich insbeson-
dere die technischen Daten der Messgeräte wie z. B. Ein- und Ausgangwiderstände,
relative Fehler, Messbereiche usw.
Zunächst wird die Schaltung nicht mit der Sägezahnspannung, sondern mit einer sinusförmi-
gen Spannung betrieben, um das Verhalten der frequenzabhängigen Impedanz Z(jω) gezielt
bei einer Frequenz zu erfassen. Hierzu ist der Effektivwert der Spannung e(t) bei 20 Hz auf
4 V einzustellen und fortan nicht mehr zu verändern.
3. Messen Sie die Spannungen u1(t) und u2(t) im Leerlauf ohne Z(p) bei 20 Hz und
20 kHz. Diskutieren Sie die Messergebnisse.
4. Messen Sie den Verlauf von |U2(jω)| im Bereich von 20–20000 Hz für die Foster- und
für die Cauer-Schaltung. Ermitteln Sie dabei insbesondere die Minima und Maxima
von |U(jω)|. Es sind 30–35 Messpunkte zu wählen, die sinnvollerweise nicht äquidistant
sein sollten. Zeichnen Sie den Verlauf der Spannung in Abhängigkeit von der Frequenz
in das vorbereitete Diagramm ein.
Nun wird eine sägezahnförmige Spannung angelegt. Gemessen wird mit einem frequenz-
selektiven Messgerät, dessen Frequenzbereich einstellbar ist. Stellen Sie die Frequenz des
Sägezahngenerators so ein, dass sich das Maximum der Spannung E am Messgerät bei
4 kHz ergibt. Diese Einstellung ist fortan nicht mehr zu ändern.
5. Messen Sie die Amplituden der ersten 6 Harmonischen der Sägezahnspannung e(t).Messen Sie bei den gleichen Frequenzen die Amplituden des Spektrums von u2(t) der
beiden Schaltungen.
Hinweis:
Das Messgerät ist hierbei nicht genau auf 8 kHz, 12 kHz usw. einzustellen, sondern auf
die Frequenzen, bei denen sich das Maximum ergibt. Dies wird dadurch gerechtfertigt,
dass das Spektrum nur bei den Harmonischen überhaupt Energieanteile besitzen kann.
Eventuelle Skalenungenauigkeiten bei der Frequenzeinstellung werden somit ausgegli-
chen.
NT-V3 - 19
Validation:
6. Vergewissern Sie sich, dass alle Messergebnisse plausible Werte ergaben. Berechnen Sie
auch die Dämpfungen der ersten sechs Harmonischen bei zumindest einer Schaltung.
Vermeiden Sie so, dass Sie bei fehlerhaften Werten einen weiteren Termin zu Kon-
trollmessungen wahrnehmen müssen. Lassen Sie sich alle Seiten des Protokolls vom
Betreuer unterschreiben.
Ausarbeitung:
7. Berechnen sie aus den gemessenen Werten |U2(jω)| die Impedanz Z(jω).
8. Stellen Sie die ermittelten Werte für Z(p) mit linearer Abszissen- und logarithmischer
Ordinatenskalierung, die Spannungen |U |, |E| aus 5 , sowie die ermittelten Dämpfun-
gen der ersten 6 Harmonischen in einer geeigneten Form grafisch dar. In welchem
Verhältnis stehen die Amplituden der Harmonischen von e(t) zueinander?
9. Prüfen Sie, ob der Messaufbau bezüglich der eingesetzten Messgeräte, Signalgene-
ratoren usw. geeignet war, um die relevanten Größen des Eintores zu bestimmen.
Skizzieren Sie dazu den Messaufbau, und stellen Sie entsprechende Überlegungen und
Berechnungen an. Beachten Sie dabei im Besonderen die Messungen aus 3. Hätte man
ideale Messgeräte zur Verfügung, würde sich dann der berechnete Verlauf von |Z(p)|von dem in 7. nennenswert unterscheiden? Nennen Sie weitere Fehlerquellen.
NT-V3 - 20
Literatur
[Bode55] H. W. Bode: Network analysis and Feedback Amplifier Design. van Norstrand,
New York, 1955.
[Caue54] W. Cauer: Theorie der linearen Wechselstromschaltungen. Akademieverlag, Ber-
lin, 1954.
[Chen64] W. H. Chen: Linear Network Design and Synthesis. Mc Graw-Hill, New York,
1964.
[Wuns61] G. Wunsch: Theorie und Anwendung linearer Netzwerke. Geest & Portig, Leipzig,
1961.
NT-V3 - 21
Versuch NT-V4: Reaktanzzweitore
Inhaltsverzeichnis
1 Einleitung 2
2 Herleitung 2
2.1 Verhalten von Zweitoren in Betriebsschaltung . . . . . . . . . . . . . . . . . 2
2.2 Reaktanzzweitore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Streumatrix mit kanonischen Polynomen, Realisierbarkeit . . . . . . . . . . . 4
2.4 Betriebsdämpfung und -phase . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.5 Verzerrungsfreie Übertragung . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.6 Reaktanzfilter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.7 Digitalfilter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.8 Wellendigitalfilter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 Vorbereitung 35
4 Versuchsdurchführung 36
4.1 Syntheseaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Durchführung und Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . 38
Literaturverzeichnis 39
NT-V4 - 1

1 Einleitung
In der Nachrichtentechnik tritt oftmals das Problem auf, aus einem Signal bestimmte Fre-
quenzanteile entfernen zu müssen. Dies kann zum Beispiel bei der Modulation/Demodulation
von Signalen, vor der Abtastung von Signalen zwecks digitaler Weiterverarbeitung oder zur
Entfernung von Störungen nötig sein.
Es existiert dann häufig ein Frequenzbereich, in dem die erwünschten Signalkomponenten
liegen, der Durchlassbereich, und ein Frequenzbereich, der unterdrückt werden soll, der
Sperrbereich. Zwischen diesen beiden Bereichen befindet sich ein Übergangsbereich. Für
den Durchlassbereich wird gefordert, dass das Signal höchstens mit der Durchlassdämpfung
Amax gedämpft werden soll, im Sperrbereich hingegen soll das Signal mindestens um die
Sperrdämpfung Amin gedämpft werden. Ziel der Filtersynthese ist es nun, ein System zu
entwerfen, das diesen Anforderungen gerecht wird.
Zur Lösung dieser Aufgabe bieten sich speziell Reaktanzzweitore in der so genannten Be-
triebsschaltung an, d.h. verlustlose Zweitore, die zwischen resistiven Abschlüssen betrieben
werden. Dies liegt darin begründet, dass so ein analytischer Entwurf von Reaktanzzweito-
ren mithilfe der charakteristischen Funktion Ψ möglich ist. Diese Filtersynthese ist eines
der wenigen Gebiete der Ingenieurwissenschaften, in denen eine komplett mathematische
Problemlösung ausgehend von Spezifikationen bis hin zum fertigen System möglich ist!
Der Versuch hat die Synthese von Reaktanzzweitoren und die Untersuchung der synthe-
tisierten Strukturen zum Inhalt. Die Reaktanzzweitore werden jedoch nicht als Schaltungen
realisiert, sondern mithilfe von digitalen Systemen simuliert. Hierdurch kann die Untersu-
chung des Verhaltens der Reaktanzzweitore flexibler gestaltet und an Rechnern durchgeführt
werden.
Zur Simulation von Reaktanzzweitoren bieten sich Wellendigitalfilter an, die eine diskrete
Approximation passiver Analogfilter darstellen. Die theoretischen Grundlagen der Wellen-
digitalfilter sind ebenfalls Teil des Versuchs.
Dieser Umdruck ist wie folgt gegliedert: Zunächst werden einige Eigenschaften der Reak-
tanzzweitore wiederholt, die aus der Vorlesung „Schaltungstheorie und Signalverarbeitung“
bekannt sein sollten. Danach folgt die Behandlung der charakteristischen Funktion und ihr
Einsatz beim Entwurf von Tiefpässen. Es werden Butterworth-, Tschebyscheff- und
Cauer-Tiefpässe behandelt. Danach wird kurz auf die Tiefpass-Hochpass-Transformation
eingegangen. Im Anschluss werden die Grundlagen der Wellendigitalfilter behandelt, soweit
sie für den Versuch relevant sind. Es werden digitale Elemente für die reaktiven Elemente
hergeleitet und angegeben, wie die analoge Schaltungsstruktur auf einem Rechner umgesetzt
werden kann. Den Abschluss des Umdrucks bilden die Vorbereitungsaufgaben.
2 Herleitung
2.1 Verhalten von Zweitoren in Betriebsschaltung
Wie bereits in der Vorlesung „Schaltungstheorie und Signalverarbeitung“ behandelt [FH92],
können Zweitore durch die Impedanzmatrix Z, die Admittanzmatrix Y , die Kettenmatrix
K oder die Hybridmatrizen G und H beschrieben werden, falls die jeweiligen Matrizen exis-
tieren. Diese Beschreibungen benutzen die Torspannungen bzw. die Torströme, beziehen aber
NT-V4 - 2
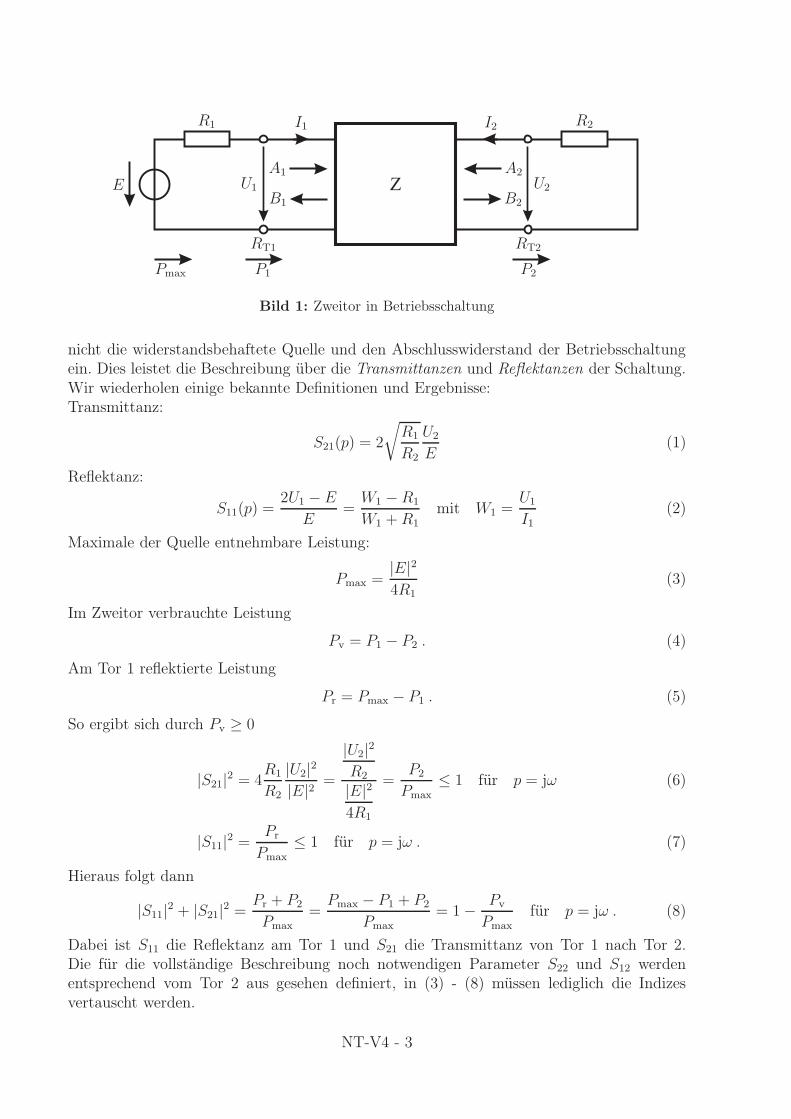
Z
A1
B1
E
R1 I1 I2 R2
U2
RT1 RT2
A2
B2
U1
Pmax P1 P2
Bild 1: Zweitor in Betriebsschaltung
nicht die widerstandsbehaftete Quelle und den Abschlusswiderstand der Betriebsschaltung
ein. Dies leistet die Beschreibung über die Transmittanzen und Reflektanzen der Schaltung.
Wir wiederholen einige bekannte Definitionen und Ergebnisse:
Transmittanz:
S21(p) = 2
√
R1
R2
U2
E(1)
Reflektanz:
S11(p) =2U1 − E
E=W1 −R1
W1 +R1mit W1 =
U1
I1(2)
Maximale der Quelle entnehmbare Leistung:
Pmax =|E|24R1
(3)
Im Zweitor verbrauchte Leistung
Pv = P1 − P2 . (4)
Am Tor 1 reflektierte Leistung
Pr = Pmax − P1 . (5)
So ergibt sich durch Pv ≥ 0
|S21|2 = 4R1
R2
|U2|2|E|2 =
|U2|2R2
|E|24R1
=P2
Pmax
≤ 1 für p = jω (6)
|S11|2 =Pr
Pmax
≤ 1 für p = jω . (7)
Hieraus folgt dann
|S11|2 + |S21|2 =Pr + P2
Pmax
=Pmax − P1 + P2
Pmax
= 1 − Pv
Pmax
für p = jω . (8)
Dabei ist S11 die Reflektanz am Tor 1 und S21 die Transmittanz von Tor 1 nach Tor 2.
Die für die vollständige Beschreibung noch notwendigen Parameter S22 und S12 werden
entsprechend vom Tor 2 aus gesehen definiert, in (3) - (8) müssen lediglich die Indizes
vertauscht werden.
NT-V4 - 3
Streumatrix
Das Betriebsverhalten eines Zweitors lässt sich besonders gut mithilfe der Streumatrix
S =
[S11 S12
S21 S22
]
(9)
beschreiben. Diese beschreibt die Verknüpfung der einfallenden Wellen A =[A1,A2
]Tund
der ausfallenden - gestreuten - Wellen B =[B1,B2
]Tdurch B = SA. Dieser Zusammen-
hang wird im Bild 1 dargestellt, wobei
Aν =Uν +RTνIν
2√RTν
und Bν =Uν − RTνIν
2√RTν
(10)
gilt. Die Torwiderstände RTν sind zunächst frei wählbare Bezugswiderstände, allerdings
stimmen die Streuparameter aus Gleichung (9) nur mit den in 2.1 definierten Transmittanzen
und Reflektanzen überein, wenn man RT1 = R1 und RT2 = R2 wählt, vgl. [FH92].
2.2 Reaktanzzweitore
Nachrichtentechnische Übertragungssysteme bestehen oft aus der Kettenschaltung von Zwei-
toren wie zum Beispiel von Filtern, Übertragern, Modulatoren und Verstärkern. Reak-
tanzzweitore eignen sich hervorragend für die Synthese von Filtern, da bei vorgegebenem
Dämpfungsverlauf die Bauelementwerte analytisch berechenbar sind. Die in der Praxis in
den Bauelementen auftretenden Verluste können nach dem Entwurf des idealen Zweitores
durch eine Störungsrechnung berücksichtigt werden.
Ein Reaktanzzweitor ist ein Zweitor, das verlustfrei und reziprok ist (d.h. Pv = 0 bzw.
S12 = S21). Hieraus folgen die sog. Feldtkeller-Gleichungen:
|S11|2 + |S21|2 = 1 , |S22|2 + |S12|2 = 1 für p = jω . (11)
Wegen S12 = S21 gilt weiterhin
|S11| = |S22| für p = jω . (12)
2.3 Streumatrix mit kanonischen Polynomen, Realisierbarkeit
Bei verlustfreien Zweitoren kann die oben eingeführte Streumatrix auch mithilfe der so
genannten kanonischen Polynome dargestellt werden [Bele68]:
S =1
g
[h σf∗f −σh∗
]
(13)
Dabei bezeichnet man die Funktion h∗(p) als die Parakonjugierte von h(p), die durch
h∗(p) = h∗(−p∗) definiert ist. Im Falle eines reellen Polynoms, d. h. h(p) = h∗(p∗), geht
die Parakonjugation in h∗(p) = h(−p) über.
Die Polynome f , g und h heißen kanonische Polynome. Die Bedingungen dafür, dass S
die Streumatrix eines reellen Reaktanzzweitores ist, lauten
NT-V4 - 4

• f , g und h sind reelle Polynome in p, d.h. alle Koeffizienten sind reell.
• g ist ein so genanntes Hurwitz-Polynom, d.h., alle Nullstellen des Polynoms haben
einen negativen Realteil. Dies lässt sich wie folgt begründen: Die Parameter Sij sind
Wirkungsfunktionen einer passiven Schaltung, so dass sie nur in der linken Halbebene
oder auf der jω-Achse Pole haben können. Auf der jω-Achse gilt jedoch |Sij| ≤ 1,
so dass hier keine Pole möglich sind. Daher kann das Nennerpolynom, hier g, nur
Nullstellen mit negativem Realteil haben und ist somit ein Hurwitz-Polynom.
• Das Polynom f ist entweder gerade oder ungerade und es gilt (Reziprozität und (13)):
σf∗ = f mit σ =
+1 für f gerade
−1 für f ungerade(14)
• Die Polynome f , g und h sind durch
gg∗ = hh∗ + ff∗ = hh∗ + σf 2 ∀p (15)
miteinander verknüpft: Für p = jω gilt f∗ = f ∗, g∗ = g∗ und h∗ = h∗, da die Polynome
nach Voraussetzung reell in p sind. Damit erhält man aus (11):
|g|2 = |h|2 + |f |2 für p = jω . (16)
Der Grund für den obigen Ansatz (15) ist, dass man für allgemeine p analytische (holomor-
phe) Funktionen haben möchte, eine Forderung, die eine konjugiert komplexe Funktion
nicht erfüllt, wohl aber f∗ = f(−p). Für p = jω erhält man dennoch die gewünschte
Beziehung (16).
2.4 Betriebsdämpfung und -phase
Definition
Die Transmittanz kann für p = jω auch mithilfe des Betriebsübertragungsmaßes Γ (ω) bzw.
der Betriebsdämpfung A(ω) und der Betriebsphase B(ω) ausgedrückt werden:
S21(jω) = e−Γ (ω) = e−(A(ω)+jB(ω)) (17a)
A(ω) = ln
(1
|S21(jω)|
)
=1
2ln
(Pmax
P2
)
in Neper bzw. (17b)
AdB(ω) = 20 lg
(1
|S21(jω)|
)
= 10 lg
(Pmax
P2
)
in dB (17c)
B(ω) = arg
1
S21(jω)
= − arg S21(jω) . (17d)
Da für Reaktanzzweitore S21(jω) und S12(jω) gleich sind, sind deren Betriebsübertragungs-
maße ebenfalls gleich.
NT-V4 - 5
Symmetrie
Da S21 reell in p ist, besitzen A(ω) und B(ω) die Symmetrieeigenschaften:
A(−ω) = A(ω) bzw. B(−ω) = −B(ω) .
Die Betriebsdämpfung ist also eine gerade, die Betriebsphase eine (per Definition) ungerade
Funktion in ω, vgl. [Fett90].
2.5 Verzerrungsfreie Übertragung
Die Signale am Ausgang des Zweitores sollen im Durchlassbereich möglichst unverzerrt
sein. Ideal für den Durchlassbereich eines Filters wäre beispielsweise U2 = E, d.h., Dämp-
fung und Phase sind im interessierenden Bereich identisch null. Natürlich kann man diese
Forderung nicht erfüllen. Unverzerrt bleibt das Signal aber auch, wenn alle Spektralanteile
gleich gedämpft und um die gleiche Zeit verzögert werden. Setzen wir als Ziel also ein
Übertragungsverhalten
u2(t) = Ke(t− t0) .
Diese Beziehung lautet im Frequenzbereich
U2(jω) = K e−jωt0E(jω) .
Unter Verwendung der Definition der Transmittanz (1) erhält man
U2(jω) =1
2
√R2
R1S21(jω)E(jω) =
1
2
√R2
R1e−A(ω)−jB(ω)E(jω) .
Das Zweitor erfüllt die Bedingung, wenn
|S21(jω)| = e−A(ω) = konst. und B(ω) = ωt0
gilt. Für eine verzerrungsfreie Übertragung muss das Zweitor im Durchlassbereich also eine
konstante Dämpfung und eine lineare Phase haben.
2.6 Reaktanzfilter
Filter werden in großer Zahl in fast allen Übertragungssystemen eingesetzt, um Frequenzan-
teile aus einem Frequenzgemisch auszufiltern. Die Übertragung mehrerer Signale über einen
Übertragungskanal wird sowohl per Zeitmultiplex als auch per Frequenzmultiplex realisiert,
letzteres erfordert eine anschließende Trennung der Signale durch Filterung. Filter bleiben
für unzählige Anwendungen z.B. in der HF-Technik unersetzlich.
Ideale Filter
Um den gewünschten Frequenzbereich verzerrungsfrei zu übertragen, muss, wie wir im
Abschnitt 2.5 gesehen haben, die Betriebsdämpfung des Filters konstant und die Phase
linear sein. Im Interesse einer möglichst verlustfreien Übertragung fordert man also für
NT-V4 - 6
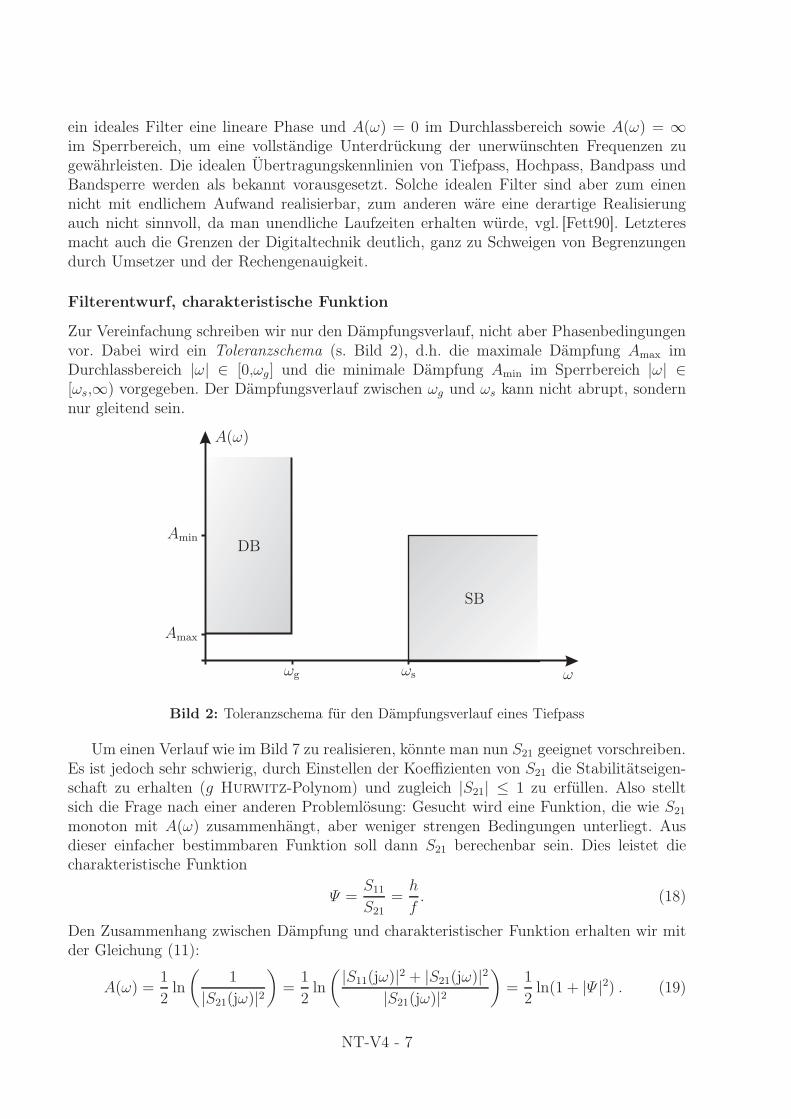
ein ideales Filter eine lineare Phase und A(ω) = 0 im Durchlassbereich sowie A(ω) = ∞im Sperrbereich, um eine vollständige Unterdrückung der unerwünschten Frequenzen zu
gewährleisten. Die idealen Übertragungskennlinien von Tiefpass, Hochpass, Bandpass und
Bandsperre werden als bekannt vorausgesetzt. Solche idealen Filter sind aber zum einen
nicht mit endlichem Aufwand realisierbar, zum anderen wäre eine derartige Realisierung
auch nicht sinnvoll, da man unendliche Laufzeiten erhalten würde, vgl. [Fett90]. Letzteres
macht auch die Grenzen der Digitaltechnik deutlich, ganz zu Schweigen von Begrenzungen
durch Umsetzer und der Rechengenauigkeit.
Filterentwurf, charakteristische Funktion
Zur Vereinfachung schreiben wir nur den Dämpfungsverlauf, nicht aber Phasenbedingungen
vor. Dabei wird ein Toleranzschema (s. Bild 2), d.h. die maximale Dämpfung Amax im
Durchlassbereich |ω| ∈ [0,ωg] und die minimale Dämpfung Amin im Sperrbereich |ω| ∈[ωs,∞) vorgegeben. Der Dämpfungsverlauf zwischen ωg und ωs kann nicht abrupt, sondern
nur gleitend sein.
A(ω)
ωωg ωs
Amin
Amax
DB
SB
Bild 2: Toleranzschema für den Dämpfungsverlauf eines Tiefpass
Um einen Verlauf wie im Bild 7 zu realisieren, könnte man nun S21 geeignet vorschreiben.
Es ist jedoch sehr schwierig, durch Einstellen der Koeffizienten von S21 die Stabilitätseigen-
schaft zu erhalten (g Hurwitz-Polynom) und zugleich |S21| ≤ 1 zu erfüllen. Also stellt
sich die Frage nach einer anderen Problemlösung: Gesucht wird eine Funktion, die wie S21
monoton mit A(ω) zusammenhängt, aber weniger strengen Bedingungen unterliegt. Aus
dieser einfacher bestimmbaren Funktion soll dann S21 berechenbar sein. Dies leistet die
charakteristische Funktion
Ψ =S11
S21=h
f. (18)
Den Zusammenhang zwischen Dämpfung und charakteristischer Funktion erhalten wir mit
der Gleichung (11):
A(ω) =1
2ln
(1
|S21(jω)|2)
=1
2ln
( |S11(jω)|2 + |S21(jω)|2|S21(jω)|2
)
=1
2ln(1 + |Ψ |2) . (19)
NT-V4 - 7

Offensichtlich fallen die Nullstellen und Pole von Ψ mit denen von A zusammen
A(ω) = 0 ⇔ Ψ = 0
A(ω) → ∞ ⇔ Ψ → ∞
und A und Ψ weisen gleiches Steigungsverhalten auf. Die charakteristische Funktion unter-
liegt nach Abschnitt 2.3 geringeren Anforderungen als die Transmittanz:
• Ψ muss reell und rational in p sein.
• Das Nennerpolynom f muss entweder eine gerade oder ungerade Funktion sein.
Man konstruiert Ψ nach den gewünschten Dämpfungspolen und -nullstellen und kennt
damit auch h und f . Für die Streumatrix fehlt noch g, welches man über Gleichung (16)
bestimmen kann. Man setzt
hh∗ + ff∗ = 0 (20)
und erhält g aus den Nullstellen mit negativem Realteil. Bild 3 zeigt ein solches Nullstel-
lenschema in der komplexen Ebene.
Imp
Rep
Nullstellen von g(p) Nullstellen von g∗(p)
Bild 3: Nullstellenschema in der komplexen Ebene
Nun kennt man die Streumatrix und kann den Dämpfungs- und Phasenverlauf aus
der Transmittanz bestimmen. Zur Erfüllung einer zusätzlichen Phasenbedingung kann dem
Tiefpass noch ein Allpass nachgeschaltet werden.
Normierung
Zur Vereinfachung der folgenden Rechnungen werden die Frequenzen auf die Grenzfrequenz
ωg und die Impedanzen auf den Widerstand R1 normiert,
Ω =ω
ωg, Ωs =
ωs
ωg, pN =
p
ωg, lν = Lν
ωg
R1und cν = CνR1ωg . (21)
NT-V4 - 8
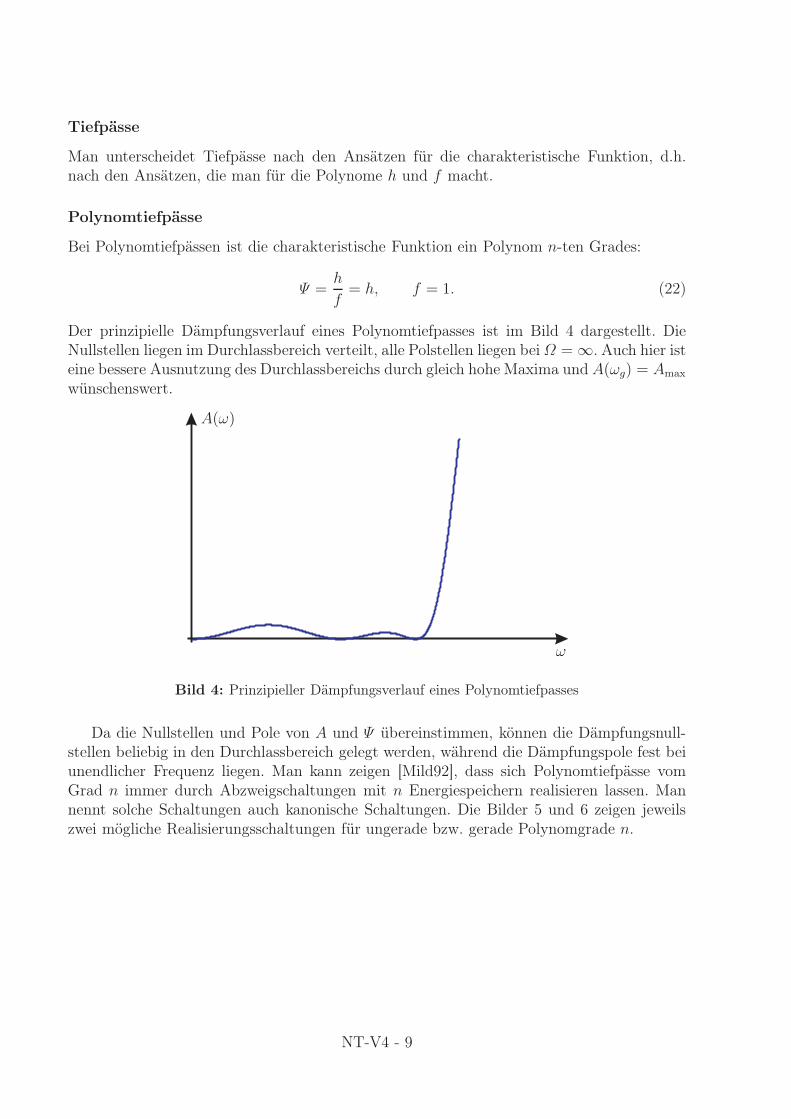
Tiefpässe
Man unterscheidet Tiefpässe nach den Ansätzen für die charakteristische Funktion, d.h.
nach den Ansätzen, die man für die Polynome h und f macht.
Polynomtiefpässe
Bei Polynomtiefpässen ist die charakteristische Funktion ein Polynom n-ten Grades:
Ψ =h
f= h, f = 1. (22)
Der prinzipielle Dämpfungsverlauf eines Polynomtiefpasses ist im Bild 4 dargestellt. Die
Nullstellen liegen im Durchlassbereich verteilt, alle Polstellen liegen beiΩ = ∞. Auch hier ist
eine bessere Ausnutzung des Durchlassbereichs durch gleich hohe Maxima und A(ωg) = Amax
wünschenswert.
A(ω)
ω
Bild 4: Prinzipieller Dämpfungsverlauf eines Polynomtiefpasses
Da die Nullstellen und Pole von A und Ψ übereinstimmen, können die Dämpfungsnull-
stellen beliebig in den Durchlassbereich gelegt werden, während die Dämpfungspole fest bei
unendlicher Frequenz liegen. Man kann zeigen [Mild92], dass sich Polynomtiefpässe vom
Grad n immer durch Abzweigschaltungen mit n Energiespeichern realisieren lassen. Man
nennt solche Schaltungen auch kanonische Schaltungen. Die Bilder 5 und 6 zeigen jeweils
zwei mögliche Realisierungsschaltungen für ungerade bzw. gerade Polynomgrade n.
NT-V4 - 9
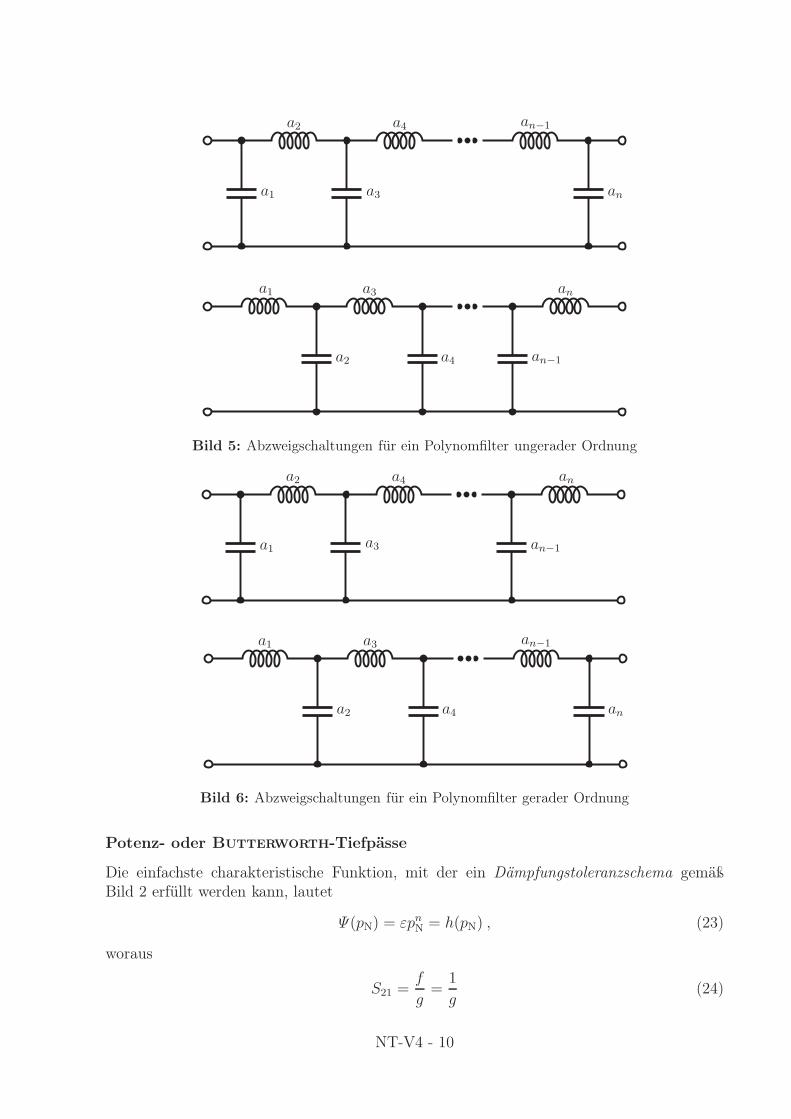
a1
a2
a3
a4 an−1
an
a1
a2
a3
a4
an
an−1
Bild 5: Abzweigschaltungen für ein Polynomfilter ungerader Ordnung
a1
a2
a3
a4
an−1
an
a1
a2
a3
a4
an−1
an
Bild 6: Abzweigschaltungen für ein Polynomfilter gerader Ordnung
Potenz- oder Butterworth-Tiefpässe
Die einfachste charakteristische Funktion, mit der ein Dämpfungstoleranzschema gemäß
Bild 2 erfüllt werden kann, lautet
Ψ (pN) = εpnN = h(pN) , (23)
woraus
S21 =f
g=
1
g(24)
NT-V4 - 10
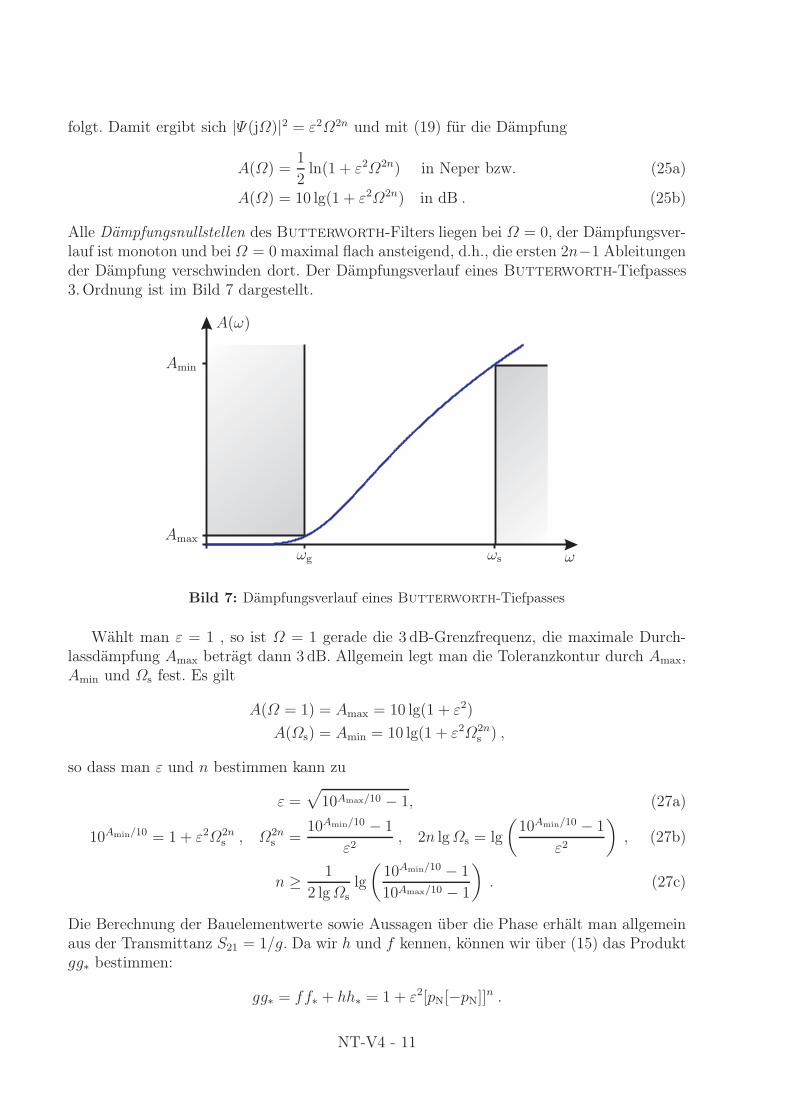
folgt. Damit ergibt sich |Ψ (jΩ)|2 = ε2Ω2n und mit (19) für die Dämpfung
A(Ω) =1
2ln(1 + ε2Ω2n) in Neper bzw. (25a)
A(Ω) = 10 lg(1 + ε2Ω2n) in dB . (25b)
Alle Dämpfungsnullstellen des Butterworth-Filters liegen bei Ω = 0, der Dämpfungsver-
lauf ist monoton und bei Ω = 0 maximal flach ansteigend, d.h., die ersten 2n−1 Ableitungen
der Dämpfung verschwinden dort. Der Dämpfungsverlauf eines Butterworth-Tiefpasses
3.Ordnung ist im Bild 7 dargestellt.
A(ω)
ωωg ωs
Amin
Amax
Bild 7: Dämpfungsverlauf eines Butterworth-Tiefpasses
Wählt man ε = 1 , so ist Ω = 1 gerade die 3 dB-Grenzfrequenz, die maximale Durch-
lassdämpfung Amax beträgt dann 3 dB. Allgemein legt man die Toleranzkontur durch Amax,
Amin und Ωs fest. Es gilt
A(Ω = 1) = Amax = 10 lg(1 + ε2)
A(Ωs) = Amin = 10 lg(1 + ε2Ω2ns ) ,
so dass man ε und n bestimmen kann zu
ε =√
10Amax/10 − 1, (27a)
10Amin/10 = 1 + ε2Ω2ns , Ω2n
s =10Amin/10 − 1
ε2, 2n lgΩs = lg
(10Amin/10 − 1
ε2
)
, (27b)
n ≥ 1
2 lgΩslg
(10Amin/10 − 1
10Amax/10 − 1
)
. (27c)
Die Berechnung der Bauelementwerte sowie Aussagen über die Phase erhält man allgemein
aus der Transmittanz S21 = 1/g. Da wir h und f kennen, können wir über (15) das Produkt
gg∗ bestimmen:
gg∗ = ff∗ + hh∗ = 1 + ε2[pN[−pN]]n .
NT-V4 - 11

Entwickelt man gg∗ nach seinen Nullstellen, so ergibt sich g als das Produkt der Nullstellen
pNk mit Re pNk < 0, da g ein Hurwitz-Polynom sein soll. Für ungerade n erhält man die
komplexen Nullstellen aus
gg∗ = 1 − ε2p2nN = 0 , pNν =
1n√ε
ejνπ/n mit 0 ≤ ν ≤ 2n− 1 ,
d.h., die Nullstellen liegen regelmäßig auf einem Kreis in der komplexen Ebene mit dem
Radius
r =1
n√ε.
Für ν = 0 und ν = n liegen die Nullstellen bei ±1/ n√ε auf der reellen Achse, auf der
imaginären Achse liegen keine Nullstellen. Gerade n werden im Folgenden aus Gründen der
Einfachheit nicht betrachtet.
Das Polynom g ergibt sich nun durch Multiplikation der Nullstellenterme mit negativem
Realteil und des Zusammenhanges S21(0) = ±1 zu
g(pN) = ±n∏
ν=1
[1 − pN/pNν ] ,
womit man die Transmittanz
S21(pN) =1
g(pN)=
±1n∏
ν=1
[1 − pN/pNν ]
=
±n∏
ν=1
[−pNν ]
n∏
ν=1
[pN − pNν ]
(28)
erhält und pNν die Polstellen mit negativem Realteil sind. Die Nullstellen von gg∗ eines
Butterworth-Filters ungerader Ordnung sind im Bild 8 dargestellt.
Im p
Re p
Bild 8: Nullstellen von gg∗ für ein Butterworth-Filter der Ordnung n = 3
Für die Phase betrachten wir nur den Fall S21(0) = 1. Dabei berücksichtigt man, dass∏n
ν=1[−pNν ] positiv ist, da genau ein pNν negativ ist und alle weiteren pNν konjugiert komplex
NT-V4 - 12

zu einem anderen pNν sind, folglich ihr Produkt positiv ist, vgl. Bild 8. Die Phase ergibt
sich dann zu
B(Ω) = − arg S21(jΩ) =
n∑
ν=1
arg jΩ − pNν =
n∑
ν=1
arctan
(ImpNν −Ω
RepNν
)
. (29)
Bei Ω = 0 heben sich die Argumente der konjugiert komplex auf dem Kreis liegenden
Polstellen auf, und das Argument des verbleibenden positiven Anteils verschwindet, so dass
man
B(0) = 0
erhält. Für Ω → ∞ werden, wegen limξ→∞ arctan(ξ) = π/2, alle Argumente gleich π/2, so
dass
B(∞) = nπ
2
gilt. Die allgemeine Berechnung zur Realisierung eines bekannten S21 durch Reaktanzzweito-
re ist recht aufwändig [Mild92]. Für den Spezialfall der Butterworth-Tiefpässe kann man
aber eine Formel, die hier nicht bewiesen wird, für die Bauelementwerte angeben [Boss63]:
aν = 2 sin
([2ν − 1]π
2n
)
2n√
10Amax/10 − 1 mit 1 ≤ ν ≤ n . (30)
Dabei ist aν je nach Lage in der Schaltung eine normierte ideale Spule oder ein idealer
Kondensator gemäß Bild 5. Es ergibt sich eine Symmetrie a1 = an, a2 = an−1, . . .
Tschebyscheff-Tiefpässe
Da bei den Butterworth-Tiefpässen alle Dämpfungsnullstellen bei Ω = 0 liegen, hat man
eine schlechte Ausnutzung des Toleranzbandes im Durchlassbereich: Die Dämpfung erreicht
nur am Punkt Ω = 1 den Maximalwert Amax. Da Amax normalerweise recht klein ist und
die Steigung der Dämpfung nur langsam zunimmt, erreicht man im Übergangsbereich auch
nur kleine Steigungen, d.h., für steile Butterworth-Filter benötigt man hohe Ordnungen,
was gleichbedeutend mit einer aufwändigen Realisierung ist.
Einen stärkeren Anstieg der Dämpfung oberhalb der Grenzfrequenz kann man dadurch
erzielen, dass man die Nullstellen auseinander zieht. Eine optimale Ausnutzung der Toleranz
im Durchlassbereich liegt vor, wenn alle Maxima im Bild 4 genau Amax erreichen und die
Dämpfung bei Ω = 1 ebenfalls Amax beträgt.
Für die charakteristische Funktion wird also ein Polynom gesucht, bei dem alle Nullstel-
len im Bereich |Ω| < 1 liegen und die Extrema dazwischen gleich hoch sind. Für |Ω| > 1 soll
der Betragsverlauf stark ansteigen. Diese Aufgabe lösen die Tschebyscheff-Polynome.
Ein Tschebyscheff-Polynom Tn(Ω) wird durch die Parameterdarstellung
Tn(Ω) =
cos(nγ) mit Ω = cos(γ) für |Ω| ≤ 1
cosh(nγ) mit Ω = cosh(γ) für |Ω| ≥ 1(31)
beschrieben. Man kann auch folgende Rekursionsformel angeben:
T0 = 1, T1 = Ω und Tn+1(Ω) = 2ΩTn(Ω) − Tn−1(Ω) .
NT-V4 - 13
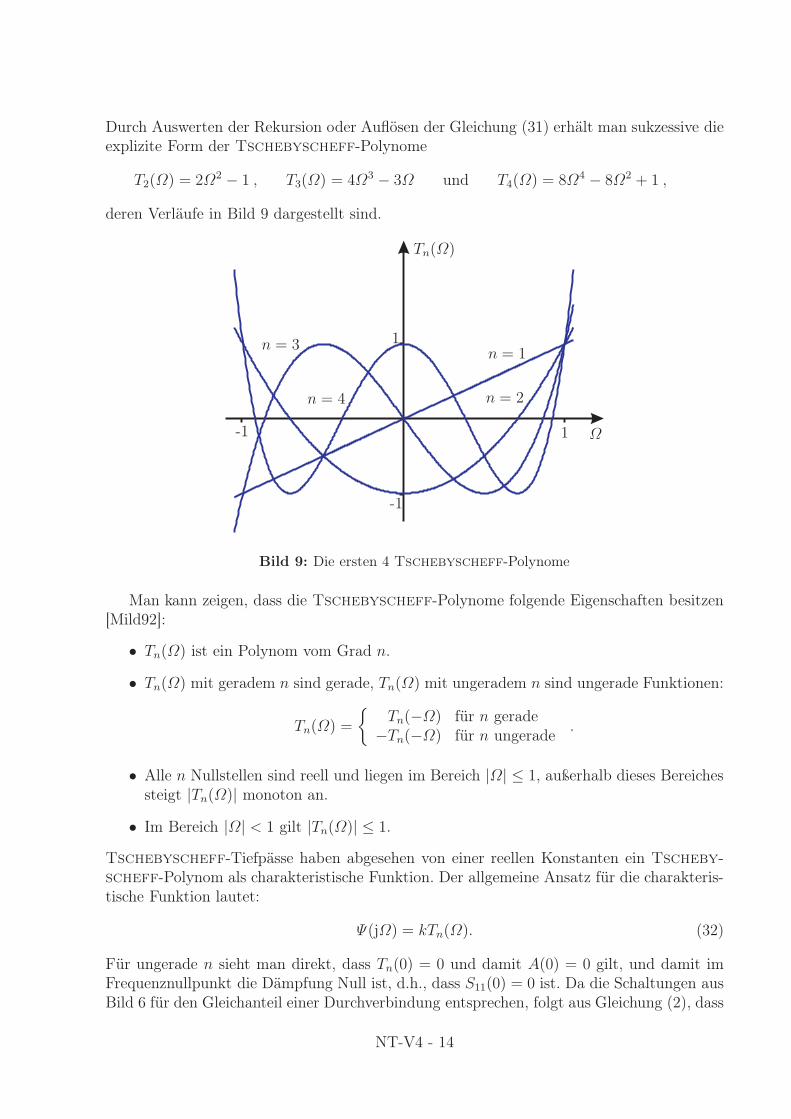
Durch Auswerten der Rekursion oder Auflösen der Gleichung (31) erhält man sukzessive die
explizite Form der Tschebyscheff-Polynome
T2(Ω) = 2Ω2 − 1 , T3(Ω) = 4Ω3 − 3Ω und T4(Ω) = 8Ω4 − 8Ω2 + 1 ,
deren Verläufe in Bild 9 dargestellt sind.
Tn(Ω)
Ω
n = 1
n = 2
n = 3
n = 4
1
1-1
-1
Bild 9: Die ersten 4 Tschebyscheff-Polynome
Man kann zeigen, dass die Tschebyscheff-Polynome folgende Eigenschaften besitzen
[Mild92]:
• Tn(Ω) ist ein Polynom vom Grad n.
• Tn(Ω) mit geradem n sind gerade, Tn(Ω) mit ungeradem n sind ungerade Funktionen:
Tn(Ω) =
Tn(−Ω) für n gerade
−Tn(−Ω) für n ungerade.
• Alle n Nullstellen sind reell und liegen im Bereich |Ω| ≤ 1, außerhalb dieses Bereiches
steigt |Tn(Ω)| monoton an.
• Im Bereich |Ω| < 1 gilt |Tn(Ω)| ≤ 1.
Tschebyscheff-Tiefpässe haben abgesehen von einer reellen Konstanten ein Tscheby-
scheff-Polynom als charakteristische Funktion. Der allgemeine Ansatz für die charakteris-
tische Funktion lautet:
Ψ (jΩ) = kTn(Ω). (32)
Für ungerade n sieht man direkt, dass Tn(0) = 0 und damit A(0) = 0 gilt, und damit im
Frequenznullpunkt die Dämpfung Null ist, d.h., dass S11(0) = 0 ist. Da die Schaltungen aus
Bild 6 für den Gleichanteil einer Durchverbindung entsprechen, folgt aus Gleichung (2), dass
NT-V4 - 14

R1 = R2 gelten muss (Anpassung). Für gerade n gilt Tn(0) = ±1 und damit A(0) = Amax,
d.h., die Widerstände der Betriebsschaltung müssen unterschiedlich sein. Wir wollen uns
daher auf ungerade Ordnungen n beschränken. Möchte man im Ausdruck für die Dämp-
fung nicht das Quadrat eines Tschebyscheff-Polynoms haben, kann man sich zunutze
machen, dass die T 2n bis auf eine additive und eine multiplikative Konstante genau den T2n
entsprechen. Mit cos2(x) = [1 + cos(2x)]/2 folgt:
|kTn(Ω)|2 = k2 cos2(n arccos(Ω)) =k2
2[1 + cos(2n arccos(Ω))] = ε+ εT2n(Ω)
mit ε =k2
2.
Die obige Gleichung für den Durchlassbereich kann mit cosh2(x) = [1+cosh(2x)]/2 genauso
für den Sperrbereich aufgestellt werden:
|Ψ (jΩ)|2 = ε+ εT2n(Ω) ,
1 + |Ψ (jΩ)|2 = e2A(Ω) =1
|S21(jΩ)|2 = 1 + ε+ εT2n(Ω) .
Wie bei den Butterworth-Filtern gibt man wieder Amax, Amin und Ωs vor. Damit lässt
sich die Durchlassdämpfung wie folgt angeben:
A(Ω) =1
2ln (1 + ε+ εT2n(Ω)) in Neper bzw. (33a)
A(Ω) = 10 lg (1 + ε+ εT2n(Ω)) in dB . (33b)
Die Konstante ε lässt sich aus der vorgegebenen Durchlassdämpfung Amax bestimmen. Da
im Durchlassbereich T2n(Ω) ≤ 1 gilt, ist dort die maximale Dämpfung
Amax = 10 lg(1 + 2ε) bzw. ε =1
2
[10Amax/10 − 1
]mit k =
√
10Amax/10 − 1 . (34)
Nun lässt sich auch die für die Anforderungen benötigte Filterordnung bestimmen. Weil
die Dämpfung außerhalb des Durchlassbereichs monoton steigt, gilt für die minimale Sperr-
dämpfung:
Amin = 10 lg(1 + ε+ εT2n(Ωs)) . (35)
Aus der Parameterdarstellung der Tschebyscheff-Polynome (31) entnimmt man für den
Sperrbereich T2n(Ωs) = cosh(2n arcosh(Ωs)) und setzt in (35) ein:
10Amin/10 − 1 − ε
ε= T2n(Ωs) = cosh(2n arcosh(Ωs)).
Man erhält für die Filterordnung
n ≥arcosh
(1
ε
[10Amin/10 − 1 − ε
])
2 arcosh(Ωs)=
arcosh
(√
10Amin/10 − 1
10Amax/10 − 1
)
arcosh(Ωs). (36)
NT-V4 - 15

Für die zugelassenen Grade n = 1, 3, 5, 7, . . . gilt stets T2n(0) = ±1 . Mit (33a) sieht
man sofort, dass dann gilt A(0) = 0 und |S21(0)| = 1. Auch für Tschebyscheff-Tiefpässe
können direkt Formeln zur Bauteilberechnung angegeben werden. Im Folgenden sind Dämp-
fungen in dB einzusetzen.
Zunächst bestimmt man einige Hilfsgrößen:
φ =π
2n,
d2n = tanh
(Amax
17.3718 dB
)
,
ω0 =ωg
2
[
d+1
d
]
,
a1 = 1 − d2,
aν = 1 − 2d2 cos(4[ν − 1]φ) + d4 mit 2 ≤ ν ≤ n,
bν = 2[1 + d2] sin([2ν − 1]φ) mit 1 ≤ ν ≤ n .
Für die Schaltung für ungerade n im Bild 5 erhält man
a) b)
C1 =1
Rω0
b1a1
L1 =R
ω0
b1a1
L2 =R
ω0
a1
a2b2 C2 =
1
Rω0
a1
a2b2
C3 =1
Rω0
a2
a1a3b3 L3 =
R
ω0
a2
a1a3b3
L4 =R
ω0
a1a3
a2a4
b4 C4 =1
Rω0
a1a3
a2a4
b4
......
(37)
Dabei ist – aufgrund der ungeraden Ordnung – die Gleichheit der Widerstände R1 und R2
vorausgesetzt. Der Dämpfungsverlauf eines Tschebyscheff-Tiefpasses 5.Ordnung ist im
Bild 10 dargestellt.
Um Aussagen über die Phase machen zu können, muss S21 bestimmt werden. Man
entwickelt wie bei den Butterworth-Filtern die Transmittanz nach den Nullstellen von
gg∗ = 1 + ε+ εT2n mit negativem Realteil. Die Gleichung 1 + ε+ εT2n = 0 ist geschlossen
lösbar und man erhält – ohne Beweis – die 2n Nullstellen
pNν = sin(νπ
2n
)
sinh(b) + j cos(νπ
2n
)
cosh(b) mit ν = 1, 3, · · · , 4n− 1 ,
wobei
b =1
2nln(
c+√c2 − 1
)
mit c =1 + ε
ε
gilt. Die Polstellen von S21 liegen auf einer Ellipse in der komplexen p-Ebene, siehe Bild 11.
NT-V4 - 16
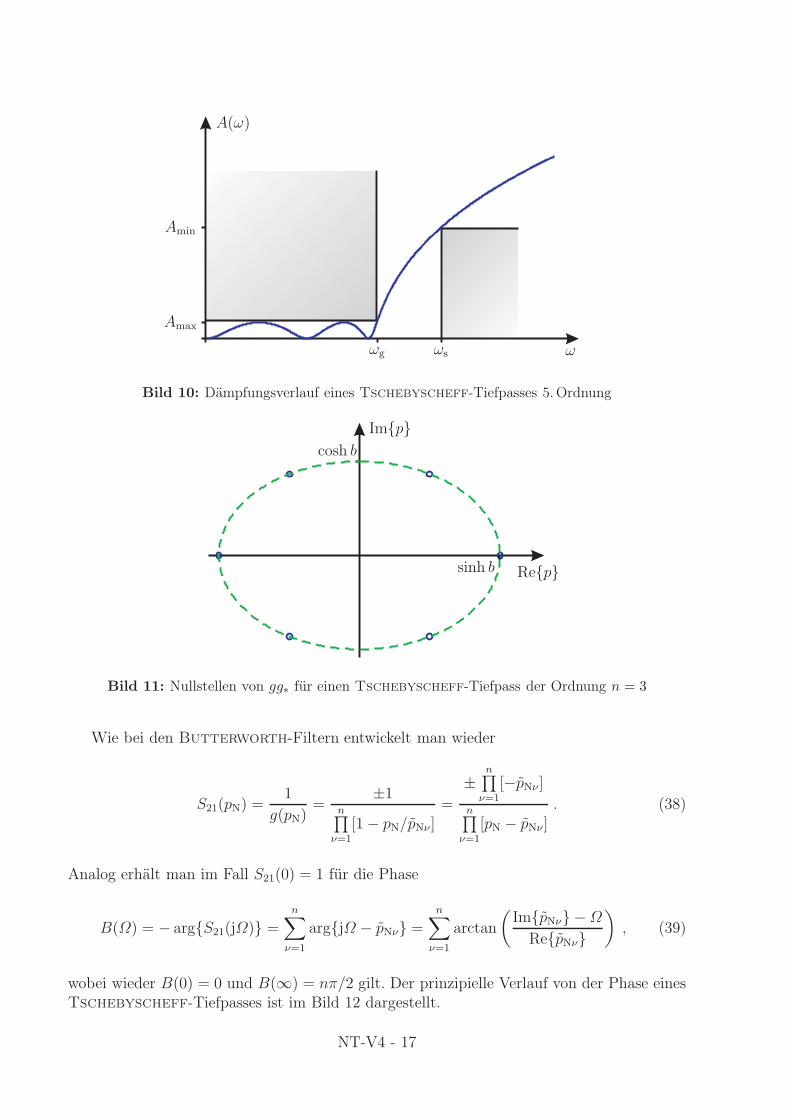
A(ω)
ω
Amin
Amax
ωg ωs
Bild 10: Dämpfungsverlauf eines Tschebyscheff-Tiefpasses 5.Ordnung
Imp
Repsinh b
cosh b
Bild 11: Nullstellen von gg∗ für einen Tschebyscheff-Tiefpass der Ordnung n = 3
Wie bei den Butterworth-Filtern entwickelt man wieder
S21(pN) =1
g(pN)=
±1n∏
ν=1
[1 − pN/pNν ]
=
±n∏
ν=1
[−pNν ]
n∏
ν=1
[pN − pNν ]
. (38)
Analog erhält man im Fall S21(0) = 1 für die Phase
B(Ω) = − argS21(jΩ) =
n∑
ν=1
argjΩ − pNν =
n∑
ν=1
arctan
(ImpNν −Ω
RepNν
)
, (39)
wobei wieder B(0) = 0 und B(∞) = nπ/2 gilt. Der prinzipielle Verlauf von der Phase eines
Tschebyscheff-Tiefpasses ist im Bild 12 dargestellt.
NT-V4 - 17
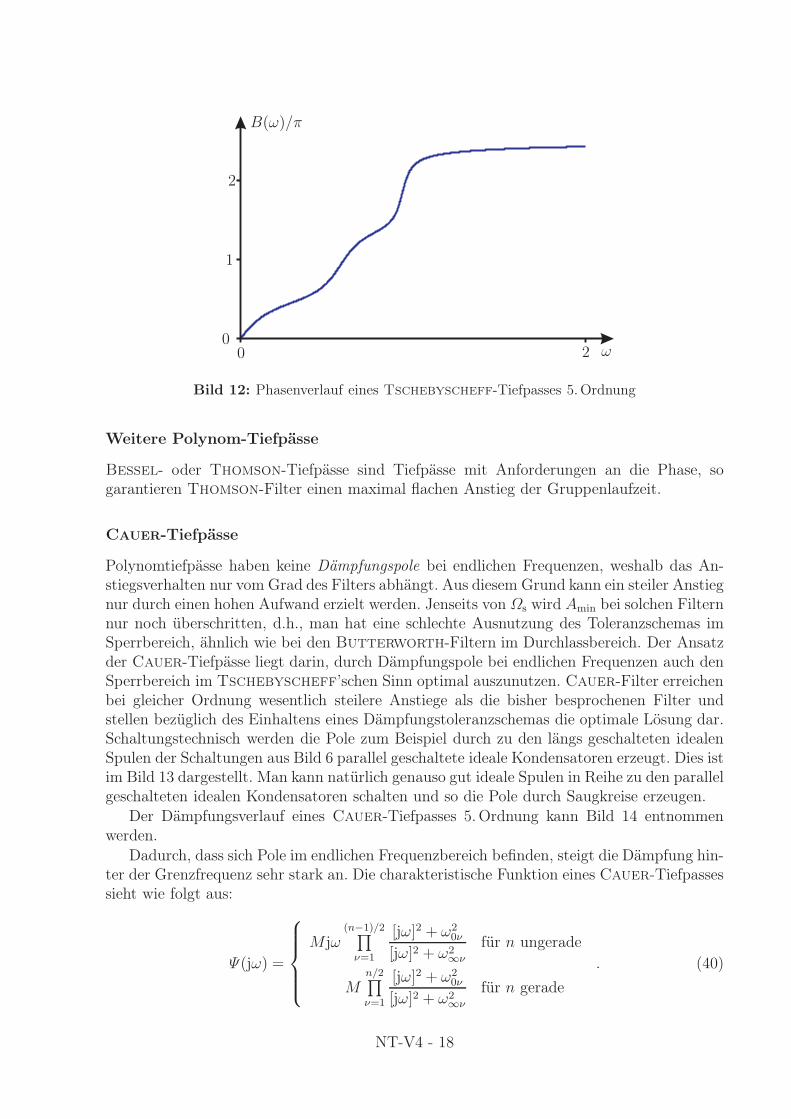
B(ω)/π
ω
1
2
20
0
Bild 12: Phasenverlauf eines Tschebyscheff-Tiefpasses 5.Ordnung
Weitere Polynom-Tiefpässe
Bessel- oder Thomson-Tiefpässe sind Tiefpässe mit Anforderungen an die Phase, so
garantieren Thomson-Filter einen maximal flachen Anstieg der Gruppenlaufzeit.
Cauer-Tiefpässe
Polynomtiefpässe haben keine Dämpfungspole bei endlichen Frequenzen, weshalb das An-
stiegsverhalten nur vom Grad des Filters abhängt. Aus diesem Grund kann ein steiler Anstieg
nur durch einen hohen Aufwand erzielt werden. Jenseits von Ωs wird Amin bei solchen Filtern
nur noch überschritten, d.h., man hat eine schlechte Ausnutzung des Toleranzschemas im
Sperrbereich, ähnlich wie bei den Butterworth-Filtern im Durchlassbereich. Der Ansatz
der Cauer-Tiefpässe liegt darin, durch Dämpfungspole bei endlichen Frequenzen auch den
Sperrbereich im Tschebyscheff’schen Sinn optimal auszunutzen. Cauer-Filter erreichen
bei gleicher Ordnung wesentlich steilere Anstiege als die bisher besprochenen Filter und
stellen bezüglich des Einhaltens eines Dämpfungstoleranzschemas die optimale Lösung dar.
Schaltungstechnisch werden die Pole zum Beispiel durch zu den längs geschalteten idealen
Spulen der Schaltungen aus Bild 6 parallel geschaltete ideale Kondensatoren erzeugt. Dies ist
im Bild 13 dargestellt. Man kann natürlich genauso gut ideale Spulen in Reihe zu den parallel
geschalteten idealen Kondensatoren schalten und so die Pole durch Saugkreise erzeugen.
Der Dämpfungsverlauf eines Cauer-Tiefpasses 5.Ordnung kann Bild 14 entnommen
werden.
Dadurch, dass sich Pole im endlichen Frequenzbereich befinden, steigt die Dämpfung hin-
ter der Grenzfrequenz sehr stark an. Die charakteristische Funktion eines Cauer-Tiefpasses
sieht wie folgt aus:
Ψ (jω) =
M jω(n−1)/2∏
ν=1
[jω]2 + ω20ν
[jω]2 + ω2∞ν
für n ungerade
Mn/2∏
ν=1
[jω]2 + ω20ν
[jω]2 + ω2∞ν
für n gerade
. (40)
NT-V4 - 18
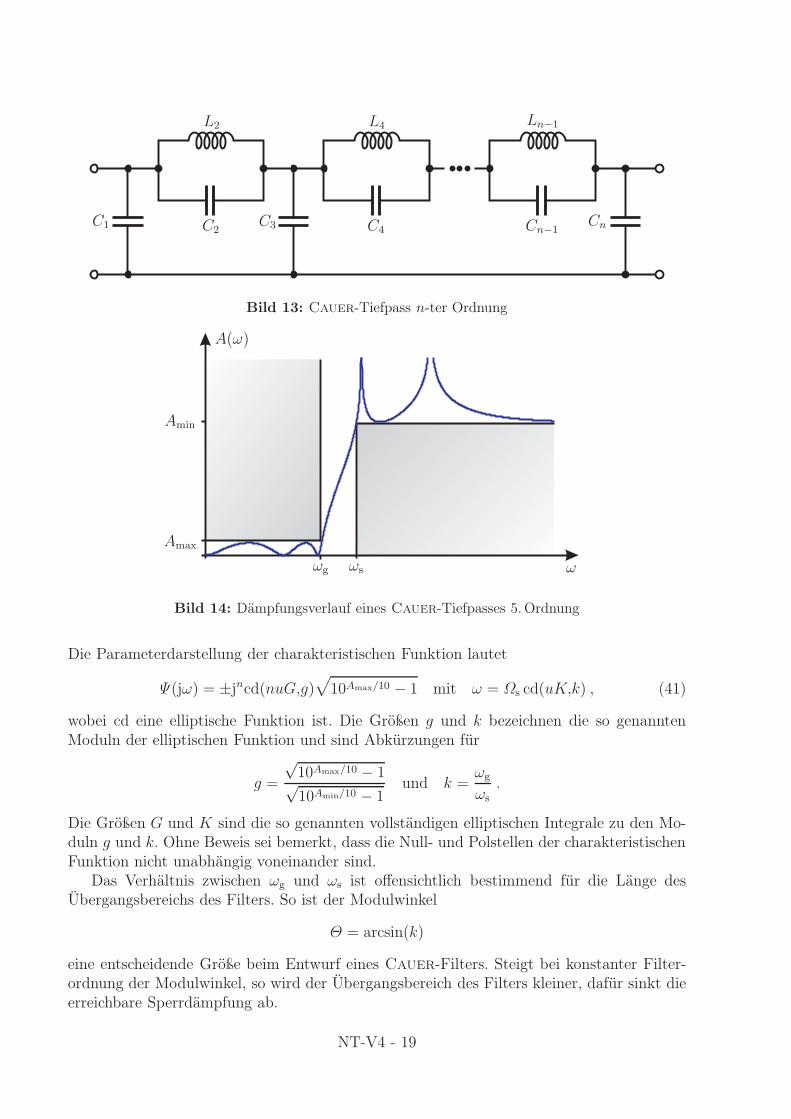
ts
C1 C2
L2
C3
L4
C4
Ln−1
Cn−1Cn
Bild 13: Cauer-Tiefpass n-ter Ordnung
A(ω)
ω
Amin
Amax
ωg ωs
Bild 14: Dämpfungsverlauf eines Cauer-Tiefpasses 5.Ordnung
Die Parameterdarstellung der charakteristischen Funktion lautet
Ψ (jω) = ±jncd(nuG,g)√
10Amax/10 − 1 mit ω = Ωs cd(uK,k) , (41)
wobei cd eine elliptische Funktion ist. Die Größen g und k bezeichnen die so genannten
Moduln der elliptischen Funktion und sind Abkürzungen für
g =
√10Amax/10 − 1√10Amin/10 − 1
und k =ωg
ωs
.
Die Größen G und K sind die so genannten vollständigen elliptischen Integrale zu den Mo-
duln g und k. Ohne Beweis sei bemerkt, dass die Null- und Polstellen der charakteristischen
Funktion nicht unabhängig voneinander sind.
Das Verhältnis zwischen ωg und ωs ist offensichtlich bestimmend für die Länge des
Übergangsbereichs des Filters. So ist der Modulwinkel
Θ = arcsin(k)
eine entscheidende Größe beim Entwurf eines Cauer-Filters. Steigt bei konstanter Filter-
ordnung der Modulwinkel, so wird der Übergangsbereich des Filters kleiner, dafür sinkt die
erreichbare Sperrdämpfung ab.
NT-V4 - 19
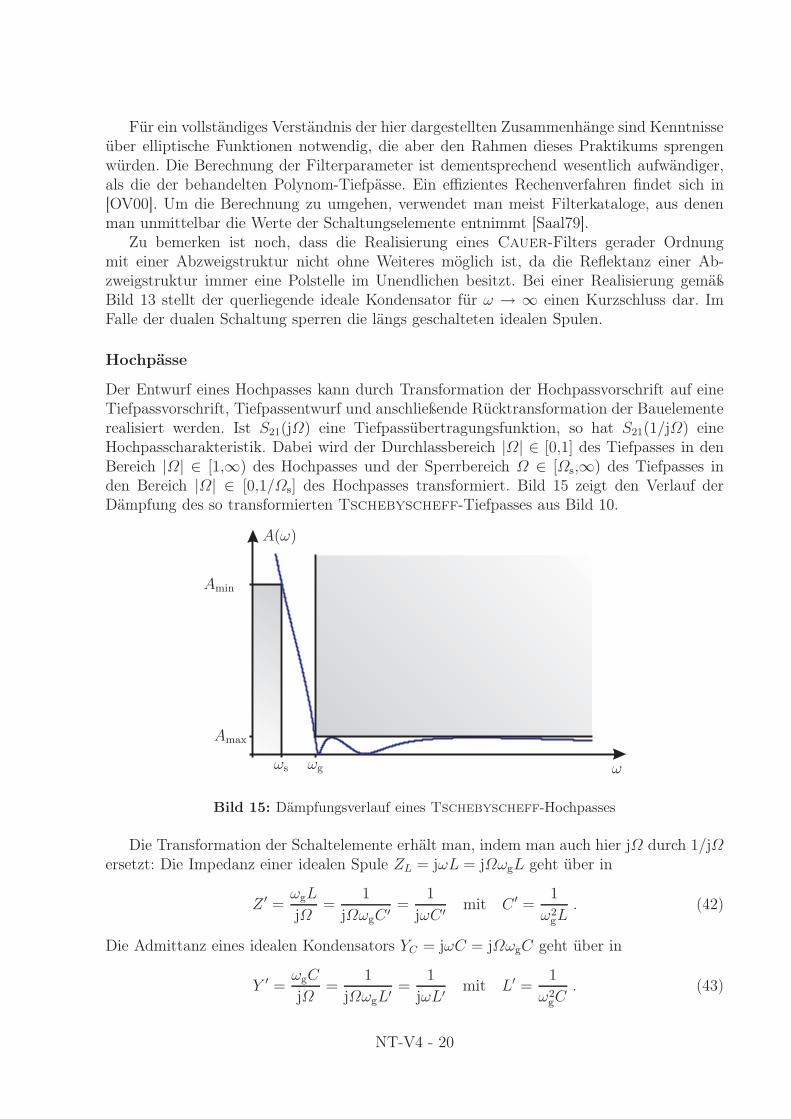
Für ein vollständiges Verständnis der hier dargestellten Zusammenhänge sind Kenntnisse
über elliptische Funktionen notwendig, die aber den Rahmen dieses Praktikums sprengen
würden. Die Berechnung der Filterparameter ist dementsprechend wesentlich aufwändiger,
als die der behandelten Polynom-Tiefpässe. Ein effizientes Rechenverfahren findet sich in
[OV00]. Um die Berechnung zu umgehen, verwendet man meist Filterkataloge, aus denen
man unmittelbar die Werte der Schaltungselemente entnimmt [Saal79].
Zu bemerken ist noch, dass die Realisierung eines Cauer-Filters gerader Ordnung
mit einer Abzweigstruktur nicht ohne Weiteres möglich ist, da die Reflektanz einer Ab-
zweigstruktur immer eine Polstelle im Unendlichen besitzt. Bei einer Realisierung gemäß
Bild 13 stellt der querliegende ideale Kondensator für ω → ∞ einen Kurzschluss dar. Im
Falle der dualen Schaltung sperren die längs geschalteten idealen Spulen.
Hochpässe
Der Entwurf eines Hochpasses kann durch Transformation der Hochpassvorschrift auf eine
Tiefpassvorschrift, Tiefpassentwurf und anschließende Rücktransformation der Bauelemente
realisiert werden. Ist S21(jΩ) eine Tiefpassübertragungsfunktion, so hat S21(1/jΩ) eine
Hochpasscharakteristik. Dabei wird der Durchlassbereich |Ω| ∈ [0,1] des Tiefpasses in den
Bereich |Ω| ∈ [1,∞) des Hochpasses und der Sperrbereich Ω ∈ [Ωs,∞) des Tiefpasses in
den Bereich |Ω| ∈ [0,1/Ωs] des Hochpasses transformiert. Bild 15 zeigt den Verlauf der
Dämpfung des so transformierten Tschebyscheff-Tiefpasses aus Bild 10.
A(ω)
ω
Amin
Amax
ωgωs
Bild 15: Dämpfungsverlauf eines Tschebyscheff-Hochpasses
Die Transformation der Schaltelemente erhält man, indem man auch hier jΩ durch 1/jΩersetzt: Die Impedanz einer idealen Spule ZL = jωL = jΩωgL geht über in
Z ′ =ωgL
jΩ=
1
jΩωgC ′=
1
jωC ′mit C ′ =
1
ω2gL
. (42)
Die Admittanz eines idealen Kondensators YC = jωC = jΩωgC geht über in
Y ′ =ωgC
jΩ=
1
jΩωgL′=
1
jωL′mit L′ =
1
ω2gC
. (43)
NT-V4 - 20
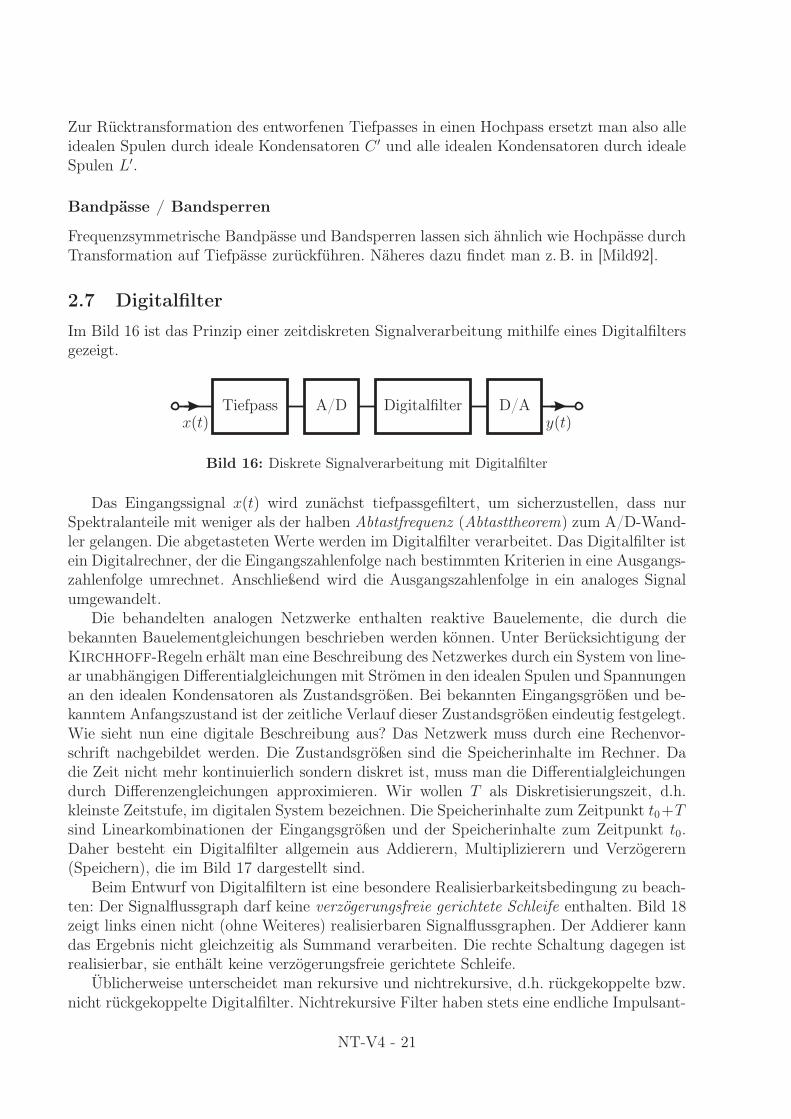
Zur Rücktransformation des entworfenen Tiefpasses in einen Hochpass ersetzt man also alle
idealen Spulen durch ideale Kondensatoren C ′ und alle idealen Kondensatoren durch ideale
Spulen L′.
Bandpässe / Bandsperren
Frequenzsymmetrische Bandpässe und Bandsperren lassen sich ähnlich wie Hochpässe durch
Transformation auf Tiefpässe zurückführen. Näheres dazu findet man z.B. in [Mild92].
2.7 Digitalfilter
Im Bild 16 ist das Prinzip einer zeitdiskreten Signalverarbeitung mithilfe eines Digitalfilters
gezeigt.
x(t)Tiefpass A/D Digitalfilter D/A
y(t)
Bild 16: Diskrete Signalverarbeitung mit Digitalfilter
Das Eingangssignal x(t) wird zunächst tiefpassgefiltert, um sicherzustellen, dass nur
Spektralanteile mit weniger als der halben Abtastfrequenz (Abtasttheorem) zum A/D-Wand-
ler gelangen. Die abgetasteten Werte werden im Digitalfilter verarbeitet. Das Digitalfilter ist
ein Digitalrechner, der die Eingangszahlenfolge nach bestimmten Kriterien in eine Ausgangs-
zahlenfolge umrechnet. Anschließend wird die Ausgangszahlenfolge in ein analoges Signal
umgewandelt.
Die behandelten analogen Netzwerke enthalten reaktive Bauelemente, die durch die
bekannten Bauelementgleichungen beschrieben werden können. Unter Berücksichtigung der
Kirchhoff-Regeln erhält man eine Beschreibung des Netzwerkes durch ein System von line-
ar unabhängigen Differentialgleichungen mit Strömen in den idealen Spulen und Spannungen
an den idealen Kondensatoren als Zustandsgrößen. Bei bekannten Eingangsgrößen und be-
kanntem Anfangszustand ist der zeitliche Verlauf dieser Zustandsgrößen eindeutig festgelegt.
Wie sieht nun eine digitale Beschreibung aus? Das Netzwerk muss durch eine Rechenvor-
schrift nachgebildet werden. Die Zustandsgrößen sind die Speicherinhalte im Rechner. Da
die Zeit nicht mehr kontinuierlich sondern diskret ist, muss man die Differentialgleichungen
durch Differenzengleichungen approximieren. Wir wollen T als Diskretisierungszeit, d.h.
kleinste Zeitstufe, im digitalen System bezeichnen. Die Speicherinhalte zum Zeitpunkt t0+Tsind Linearkombinationen der Eingangsgrößen und der Speicherinhalte zum Zeitpunkt t0.Daher besteht ein Digitalfilter allgemein aus Addierern, Multiplizierern und Verzögerern
(Speichern), die im Bild 17 dargestellt sind.
Beim Entwurf von Digitalfiltern ist eine besondere Realisierbarkeitsbedingung zu beach-
ten: Der Signalflussgraph darf keine verzögerungsfreie gerichtete Schleife enthalten. Bild 18
zeigt links einen nicht (ohne Weiteres) realisierbaren Signalflussgraphen. Der Addierer kann
das Ergebnis nicht gleichzeitig als Summand verarbeiten. Die rechte Schaltung dagegen ist
realisierbar, sie enthält keine verzögerungsfreie gerichtete Schleife.
Üblicherweise unterscheidet man rekursive und nichtrekursive, d.h. rückgekoppelte bzw.
nicht rückgekoppelte Digitalfilter. Nichtrekursive Filter haben stets eine endliche Impulsant-
NT-V4 - 21
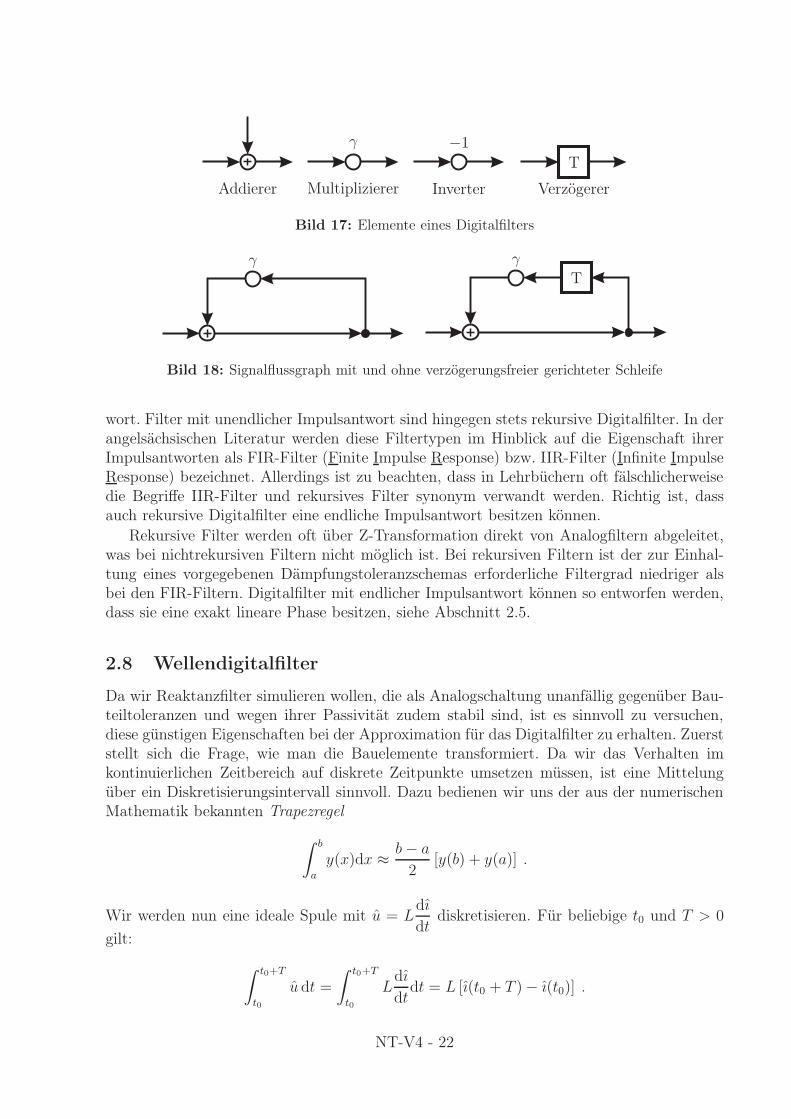
Addierer Multiplizierer Inverter Verzögerer
γ −1
T
Bild 17: Elemente eines Digitalfilters
γT
γ
Bild 18: Signalflussgraph mit und ohne verzögerungsfreier gerichteter Schleife
wort. Filter mit unendlicher Impulsantwort sind hingegen stets rekursive Digitalfilter. In der
angelsächsischen Literatur werden diese Filtertypen im Hinblick auf die Eigenschaft ihrer
Impulsantworten als FIR-Filter (Finite Impulse Response) bzw. IIR-Filter (Infinite Impulse
Response) bezeichnet. Allerdings ist zu beachten, dass in Lehrbüchern oft fälschlicherweise
die Begriffe IIR-Filter und rekursives Filter synonym verwandt werden. Richtig ist, dass
auch rekursive Digitalfilter eine endliche Impulsantwort besitzen können.
Rekursive Filter werden oft über Z-Transformation direkt von Analogfiltern abgeleitet,
was bei nichtrekursiven Filtern nicht möglich ist. Bei rekursiven Filtern ist der zur Einhal-
tung eines vorgegebenen Dämpfungstoleranzschemas erforderliche Filtergrad niedriger als
bei den FIR-Filtern. Digitalfilter mit endlicher Impulsantwort können so entworfen werden,
dass sie eine exakt lineare Phase besitzen, siehe Abschnitt 2.5.
2.8 Wellendigitalfilter
Da wir Reaktanzfilter simulieren wollen, die als Analogschaltung unanfällig gegenüber Bau-
teiltoleranzen und wegen ihrer Passivität zudem stabil sind, ist es sinnvoll zu versuchen,
diese günstigen Eigenschaften bei der Approximation für das Digitalfilter zu erhalten. Zuerst
stellt sich die Frage, wie man die Bauelemente transformiert. Da wir das Verhalten im
kontinuierlichen Zeitbereich auf diskrete Zeitpunkte umsetzen müssen, ist eine Mittelung
über ein Diskretisierungsintervall sinnvoll. Dazu bedienen wir uns der aus der numerischen
Mathematik bekannten Trapezregel
∫ b
a
y(x)dx ≈ b− a
2[y(b) + y(a)] .
Wir werden nun eine ideale Spule mit u = Ldı
dtdiskretisieren. Für beliebige t0 und T > 0
gilt:
∫ t0+T
t0
u dt =
∫ t0+T
t0
Ldı
dtdt = L [ı(t0 + T ) − ı(t0)] .
NT-V4 - 22

Mithilfe der Trapezregel erhält man
∫ t0+T
t0
u dt ≈ T
2[u(t0 + T ) + u(t0)] .
Wir ersetzen die exakten Größen u, ı durch approximierte Größen u, i. Gleichsetzen der
letzten beiden Beziehungen, multiplizieren mit 2/T und sortieren nach den Zeitpunkten t0und t0 + T , liefert
T
2[u(t0 + T ) + u(t0)] = L [i(t0 + T ) − i(t0)]
⇐⇒ u(t0 + T ) − 2L
Ti(t0 + T ) = −
[
u(t0) +2L
Ti(t0)
]
.
Bezeichnen wir noch die Größe 2L/T , welche offensichtlich die Dimension eines Widerstands
hat, als
R =2L
T, (44)
so ergibt dies
u(t0 + T ) −Ri(t0 + T ) = − [u(t0) +Ri(t0)] . (45)
Die Ausdrücke auf beiden Seiten der Gleichung sehen den Wellengrößen a und b aus (10) sehr
ähnlich, es wird lediglich nicht durch 2√R geteilt. Während die Wellen aus Abschnitt 2.1 die
Dimension der Wurzel aus einer Leistung hatten, haben unsere Größen die einer Spannung.
Anstelle der Beschreibung durch Ströme und Spannungen oder Leistungswellen in unseren
Speichern erscheint eine Beschreibung durch Spannungswellen einfacher [Fett86]:
a = u+Ri und b = u−Ri . (46)
N
i
u
R
a
b
Bild 19: Eintorbeschreibung
Setzen wir diese Definition in den obigen Ausdruck ein und ersetzen t0 durch t, so erhalten
wir für die ideale Spule
b(t+ T ) = −a(t) . (47)
Eine ideale Spule lässt sich danach also als eine Kaskadenschaltung von Inverter und Verzö-
gerer darstellen, wenn wir als Speicherinhalte Spannungswellen benutzen. Den Widerstand
NT-V4 - 23

R bezeichnet man als Tor(bezugs-)widerstand. Umgekehrt kann man eindeutig Strom und
Spannung aus den Wellengrößen bestimmen:
u =a+ b
2und i =
a− b
2R. (48)
Wie sieht die Approximation der Bauelemente nun im Frequenzbereich aus? Transformiert
man Gleichung (47), die das diskrete System beschreibt, in den Frequenzbereich, so erhält
man
B(p)epT = −A(p)
[U(p) − RI(p)] epT = −U(p) − RI(p)
bzw.
U(p) = RepT − 1
epT + 1I(p) =
2L
T
epT/2 − e−pT/2
epT/2 + e−pT/2I(p) = L
2
Ttanh
(
pT
2
)
I(p) . (49)
Üblicherweise verwendet man die Bezeichnungen
z = epT und ψ =z − 1
z + 1. (50)
Wegen des Zusammenhanges zwischen den approximierten Größen U(p) = RψI(p) und den
exakten Größen U(p) = pLI(p) wird offensichtlich eine Approximation der Frequenz p durch
p ≈ 2
Ttanh(pT/2) =
2
Tψ (51)
vorgenommen. Mit tanh(jx) = j tan(x) ergibt sich die Näherung, bei Betrachtung rein
imaginärer Frequenzen, wie folgt
jω ≈ j2
Ttan(ωT/2) = j
2
Tϕ . (52)
Dabei stellt ϕ den Imaginärteil von ψ dar. Die Auswirkungen der Frequenztransformation
auf den Dämpfungsverlauf eines Cauer-Filters ist im Bild 20 dargestellt. Wie gut ist nun
diese Approximation? Entwickelt man den Tangens in eine Taylor-Reihe, sieht man, dass
gilt
U(jω) = jL2
Ttan
(
ωT
2
)
I(jω) = jL2
T
[
ωT
2+
1
24ω3T 3 + · · ·
]
I(jω),
also
U(jω) = jωL
[
1 +1
12ω2T 2 + · · ·
]
I(jω) ≈ jωLI(jω) .
Ein Vergleich mit U(jω) = jωLı(jω) zeigt, dass der auftretende Fehler von 2.Ordnung in ωist, d.h., das diskrete System approximiert das kontinuierliche System im Frequenzbereich
mit 2.Ordnung.
NT-V4 - 24
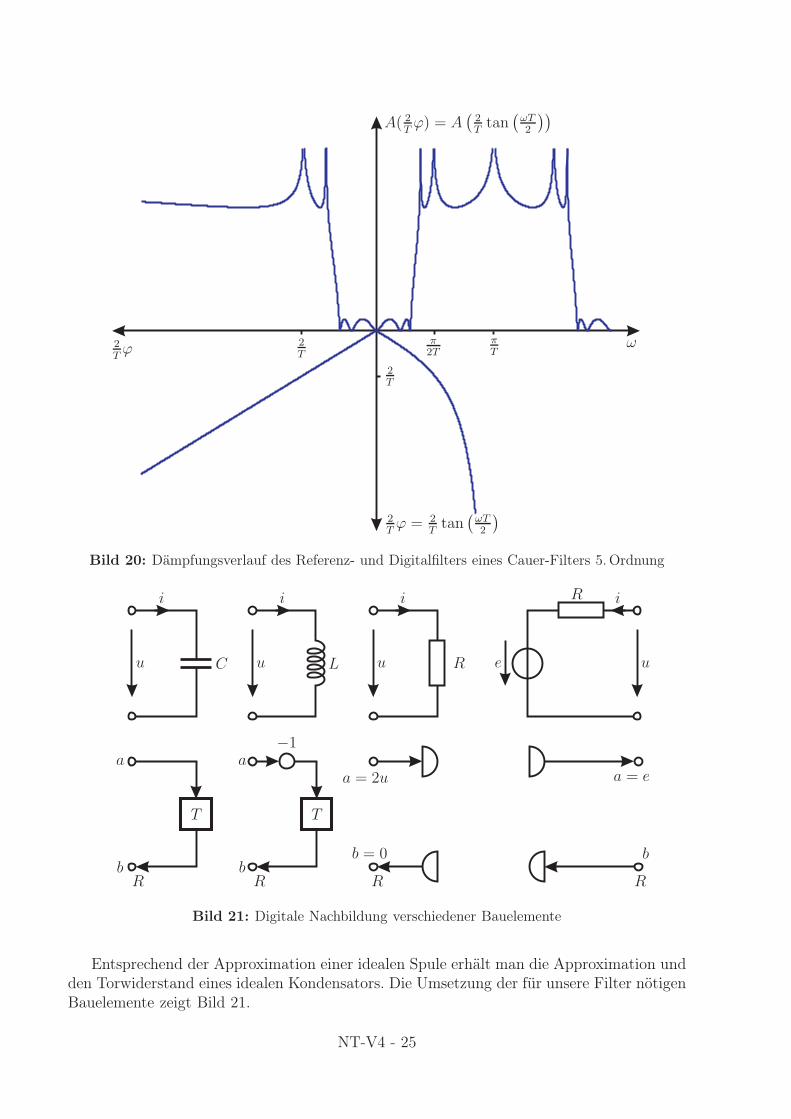
2Tϕ ω
A( 2Tϕ) = A
(2T
tan(
ωT2
))
2Tϕ = 2
Ttan(
ωT2
)
2T
2T
π2T
πT
Bild 20: Dämpfungsverlauf des Referenz- und Digitalfilters eines Cauer-Filters 5.Ordnung
C L
a
bR
a
bR
a = 2u
b = 0
R
a = e
b
R
R
−1
T T
e uuuu
iiii R
Bild 21: Digitale Nachbildung verschiedener Bauelemente
Entsprechend der Approximation einer idealen Spule erhält man die Approximation und
den Torwiderstand eines idealen Kondensators. Die Umsetzung der für unsere Filter nötigen
Bauelemente zeigt Bild 21.
NT-V4 - 25
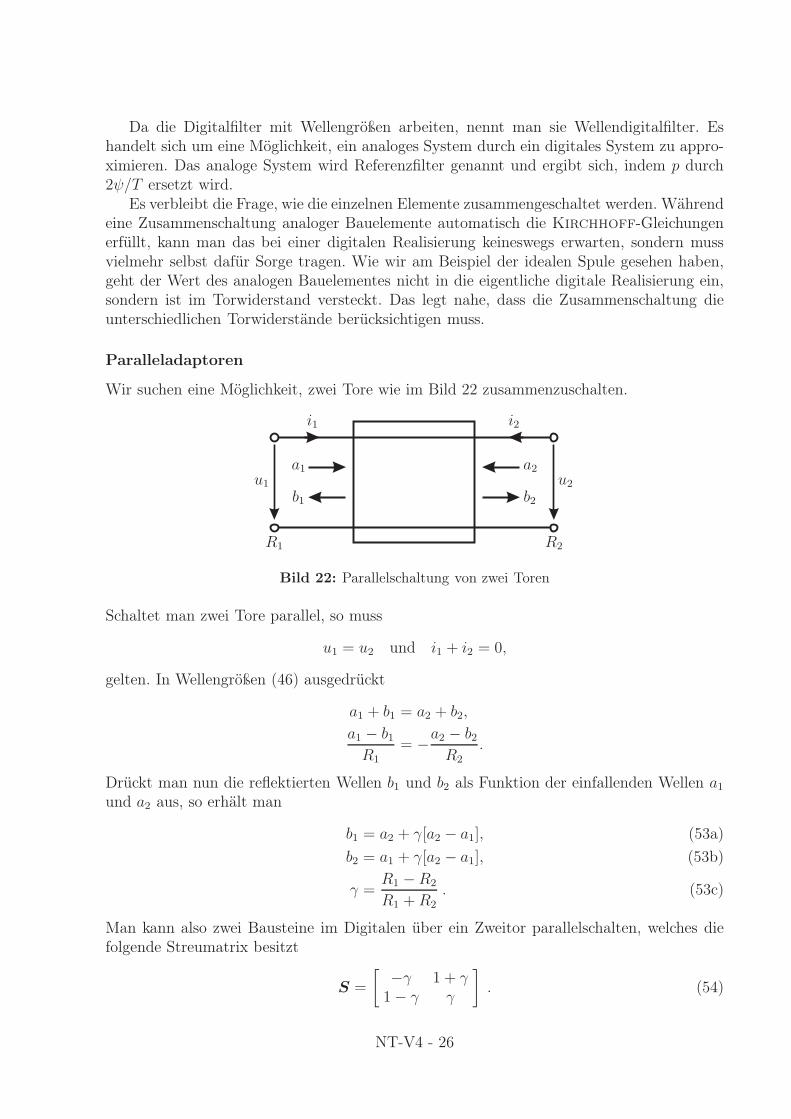
Da die Digitalfilter mit Wellengrößen arbeiten, nennt man sie Wellendigitalfilter. Es
handelt sich um eine Möglichkeit, ein analoges System durch ein digitales System zu appro-
ximieren. Das analoge System wird Referenzfilter genannt und ergibt sich, indem p durch
2ψ/T ersetzt wird.
Es verbleibt die Frage, wie die einzelnen Elemente zusammengeschaltet werden. Während
eine Zusammenschaltung analoger Bauelemente automatisch die Kirchhoff-Gleichungen
erfüllt, kann man das bei einer digitalen Realisierung keineswegs erwarten, sondern muss
vielmehr selbst dafür Sorge tragen. Wie wir am Beispiel der idealen Spule gesehen haben,
geht der Wert des analogen Bauelementes nicht in die eigentliche digitale Realisierung ein,
sondern ist im Torwiderstand versteckt. Das legt nahe, dass die Zusammenschaltung die
unterschiedlichen Torwiderstände berücksichtigen muss.
Paralleladaptoren
Wir suchen eine Möglichkeit, zwei Tore wie im Bild 22 zusammenzuschalten.
u1
i1
u2
i2
a1 a2
b1 b2
R1 R2
Bild 22: Parallelschaltung von zwei Toren
Schaltet man zwei Tore parallel, so muss
u1 = u2 und i1 + i2 = 0,
gelten. In Wellengrößen (46) ausgedrückt
a1 + b1 = a2 + b2,
a1 − b1R1
= −a2 − b2R2
.
Drückt man nun die reflektierten Wellen b1 und b2 als Funktion der einfallenden Wellen a1
und a2 aus, so erhält man
b1 = a2 + γ[a2 − a1], (53a)
b2 = a1 + γ[a2 − a1], (53b)
γ =R1 −R2
R1 +R2. (53c)
Man kann also zwei Bausteine im Digitalen über ein Zweitor parallelschalten, welches die
folgende Streumatrix besitzt
S =
[−γ 1 + γ
1 − γ γ
]
. (54)
NT-V4 - 26
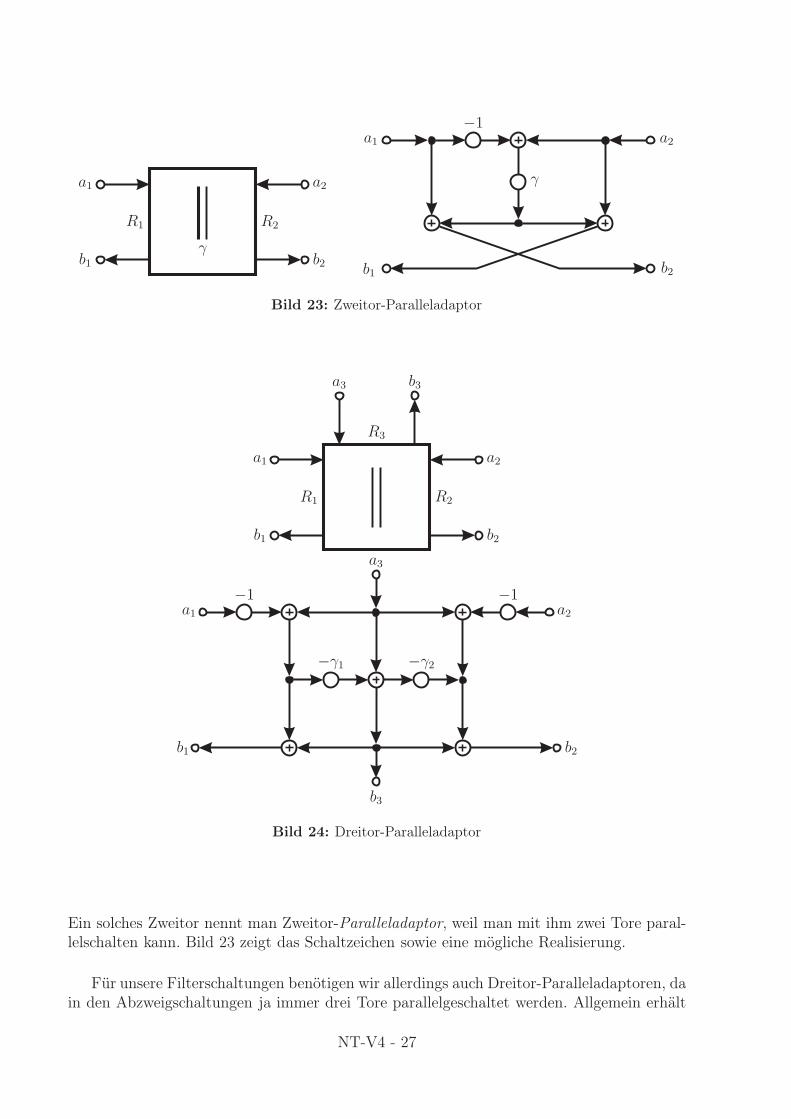
a1 a2
b1 b2
R1 R2
γ
a1 a2
b1 b2
γ
−1
Bild 23: Zweitor-Paralleladaptor
a1 a2
b1 b2
a3 b3
R1 R2
R3
−γ1 −γ2
−1−1a1 a2
b1 b2
a3
b3
Bild 24: Dreitor-Paralleladaptor
Ein solches Zweitor nennt man Zweitor-Paralleladaptor, weil man mit ihm zwei Tore paral-
lelschalten kann. Bild 23 zeigt das Schaltzeichen sowie eine mögliche Realisierung.
Für unsere Filterschaltungen benötigen wir allerdings auch Dreitor-Paralleladaptoren, da
in den Abzweigschaltungen ja immer drei Tore parallelgeschaltet werden. Allgemein erhält
NT-V4 - 27
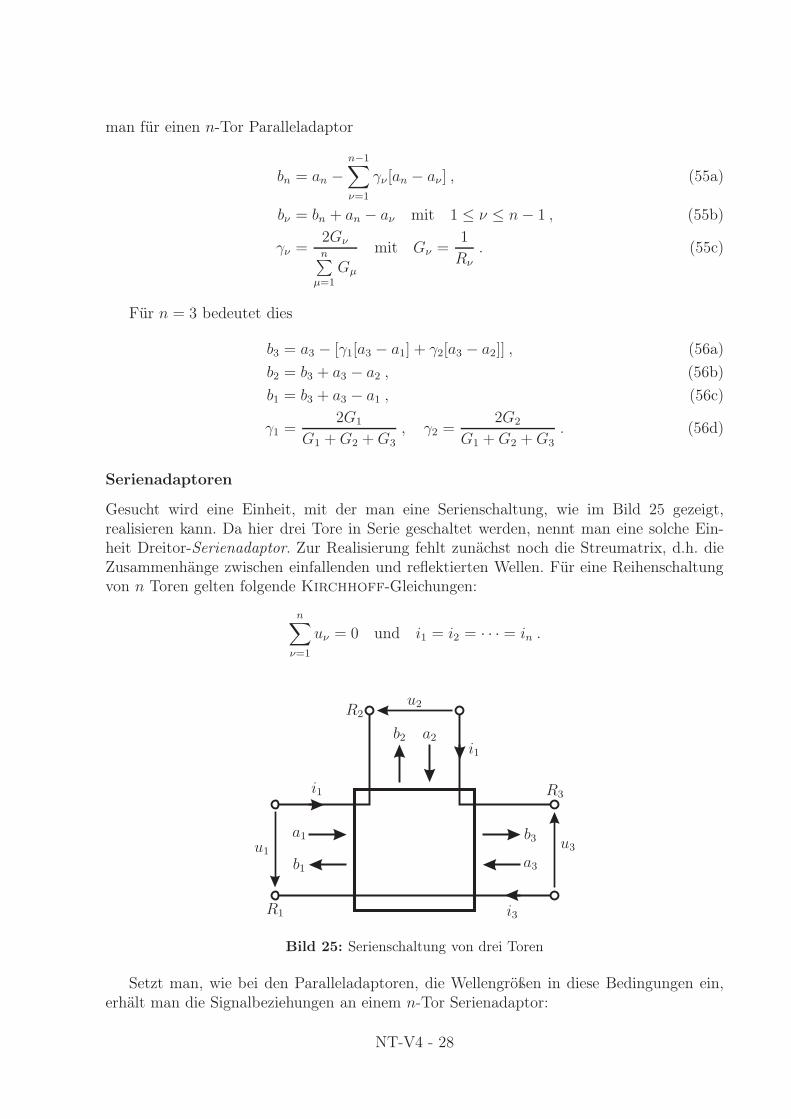
man für einen n-Tor Paralleladaptor
bn = an −n−1∑
ν=1
γν [an − aν ] , (55a)
bν = bn + an − aν mit 1 ≤ ν ≤ n− 1 , (55b)
γν =2Gνn∑
µ=1
Gµ
mit Gν =1
Rν
. (55c)
Für n = 3 bedeutet dies
b3 = a3 − [γ1[a3 − a1] + γ2[a3 − a2]] , (56a)
b2 = b3 + a3 − a2 , (56b)
b1 = b3 + a3 − a1 , (56c)
γ1 =2G1
G1 +G2 +G3, γ2 =
2G2
G1 +G2 +G3. (56d)
Serienadaptoren
Gesucht wird eine Einheit, mit der man eine Serienschaltung, wie im Bild 25 gezeigt,
realisieren kann. Da hier drei Tore in Serie geschaltet werden, nennt man eine solche Ein-
heit Dreitor-Serienadaptor. Zur Realisierung fehlt zunächst noch die Streumatrix, d.h. die
Zusammenhänge zwischen einfallenden und reflektierten Wellen. Für eine Reihenschaltung
von n Toren gelten folgende Kirchhoff-Gleichungen:
n∑
ν=1
uν = 0 und i1 = i2 = · · · = in .
a1
a2
b1
b2
a3
b3
R1
R2
R3
i1
i1
i3
u1
u2
u3
Bild 25: Serienschaltung von drei Toren
Setzt man, wie bei den Paralleladaptoren, die Wellengrößen in diese Bedingungen ein,
erhält man die Signalbeziehungen an einem n-Tor Serienadaptor:
NT-V4 - 28
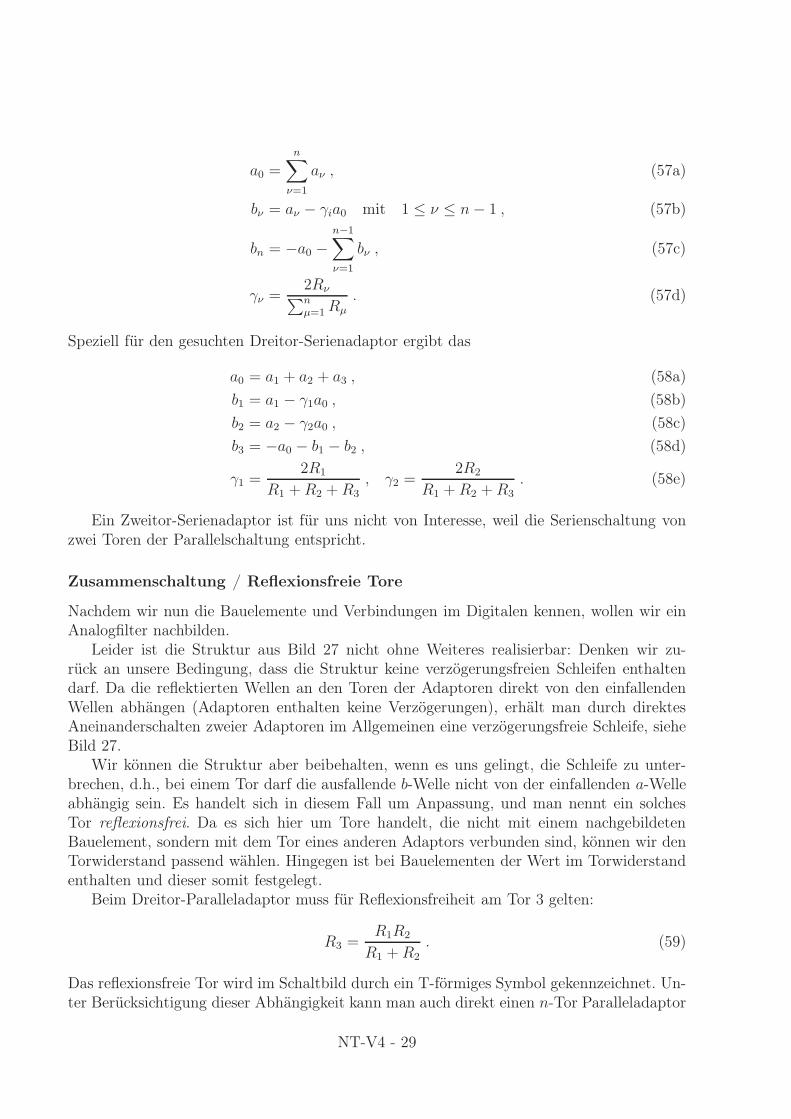
a0 =
n∑
ν=1
aν , (57a)
bν = aν − γia0 mit 1 ≤ ν ≤ n− 1 , (57b)
bn = −a0 −n−1∑
ν=1
bν , (57c)
γν =2Rν
∑nµ=1Rµ
. (57d)
Speziell für den gesuchten Dreitor-Serienadaptor ergibt das
a0 = a1 + a2 + a3 , (58a)
b1 = a1 − γ1a0 , (58b)
b2 = a2 − γ2a0 , (58c)
b3 = −a0 − b1 − b2 , (58d)
γ1 =2R1
R1 +R2 +R3, γ2 =
2R2
R1 +R2 +R3. (58e)
Ein Zweitor-Serienadaptor ist für uns nicht von Interesse, weil die Serienschaltung von
zwei Toren der Parallelschaltung entspricht.
Zusammenschaltung / Reflexionsfreie Tore
Nachdem wir nun die Bauelemente und Verbindungen im Digitalen kennen, wollen wir ein
Analogfilter nachbilden.
Leider ist die Struktur aus Bild 27 nicht ohne Weiteres realisierbar: Denken wir zu-
rück an unsere Bedingung, dass die Struktur keine verzögerungsfreien Schleifen enthalten
darf. Da die reflektierten Wellen an den Toren der Adaptoren direkt von den einfallenden
Wellen abhängen (Adaptoren enthalten keine Verzögerungen), erhält man durch direktes
Aneinanderschalten zweier Adaptoren im Allgemeinen eine verzögerungsfreie Schleife, siehe
Bild 27.
Wir können die Struktur aber beibehalten, wenn es uns gelingt, die Schleife zu unter-
brechen, d.h., bei einem Tor darf die ausfallende b-Welle nicht von der einfallenden a-Welle
abhängig sein. Es handelt sich in diesem Fall um Anpassung, und man nennt ein solches
Tor reflexionsfrei. Da es sich hier um Tore handelt, die nicht mit einem nachgebildeten
Bauelement, sondern mit dem Tor eines anderen Adaptors verbunden sind, können wir den
Torwiderstand passend wählen. Hingegen ist bei Bauelementen der Wert im Torwiderstand
enthalten und dieser somit festgelegt.
Beim Dreitor-Paralleladaptor muss für Reflexionsfreiheit am Tor 3 gelten:
R3 =R1R2
R1 +R2
. (59)
Das reflexionsfreie Tor wird im Schaltbild durch ein T-förmiges Symbol gekennzeichnet. Un-
ter Berücksichtigung dieser Abhängigkeit kann man auch direkt einen n-Tor Paralleladaptor
NT-V4 - 29
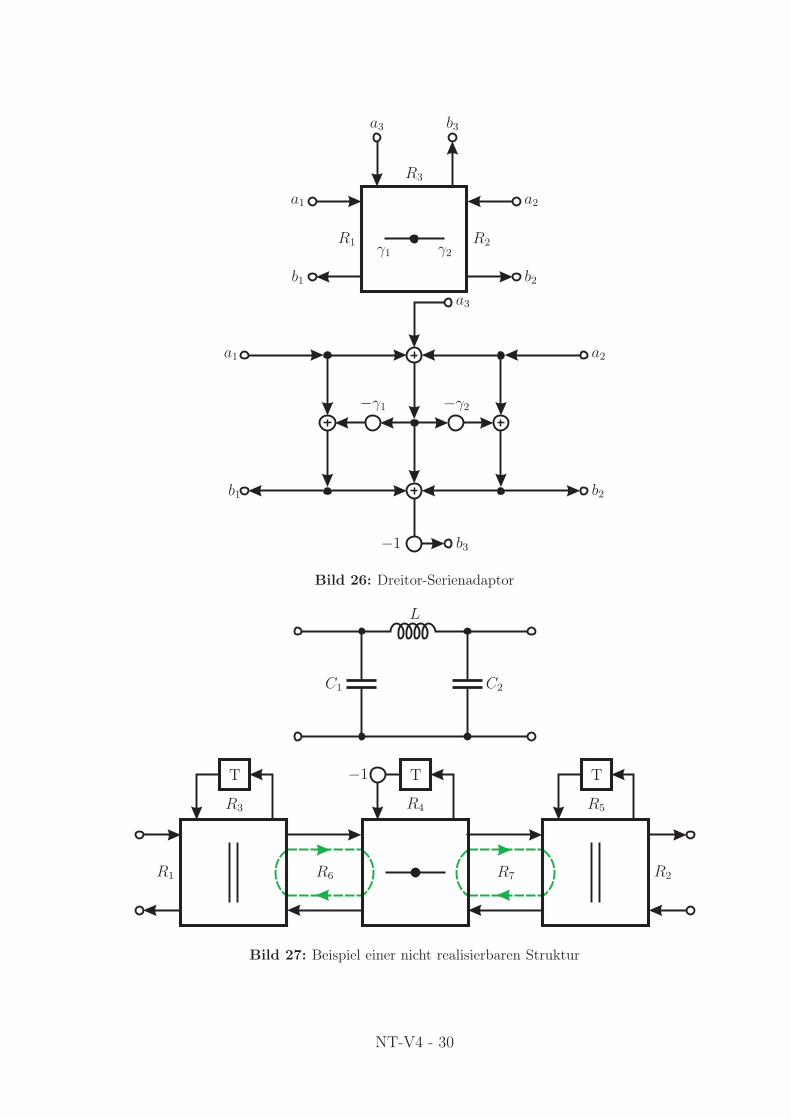
a1 a2
b1 b2
a3 b3
R1 R2
R3
γ1 γ2
−γ1 −γ2
−1
a1 a2
b1 b2
a3
b3
Bild 26: Dreitor-Serienadaptor
C1 C2
L
−1 T TT
R1 R2
R3 R4 R5
R6 R7
Bild 27: Beispiel einer nicht realisierbaren Struktur
NT-V4 - 30
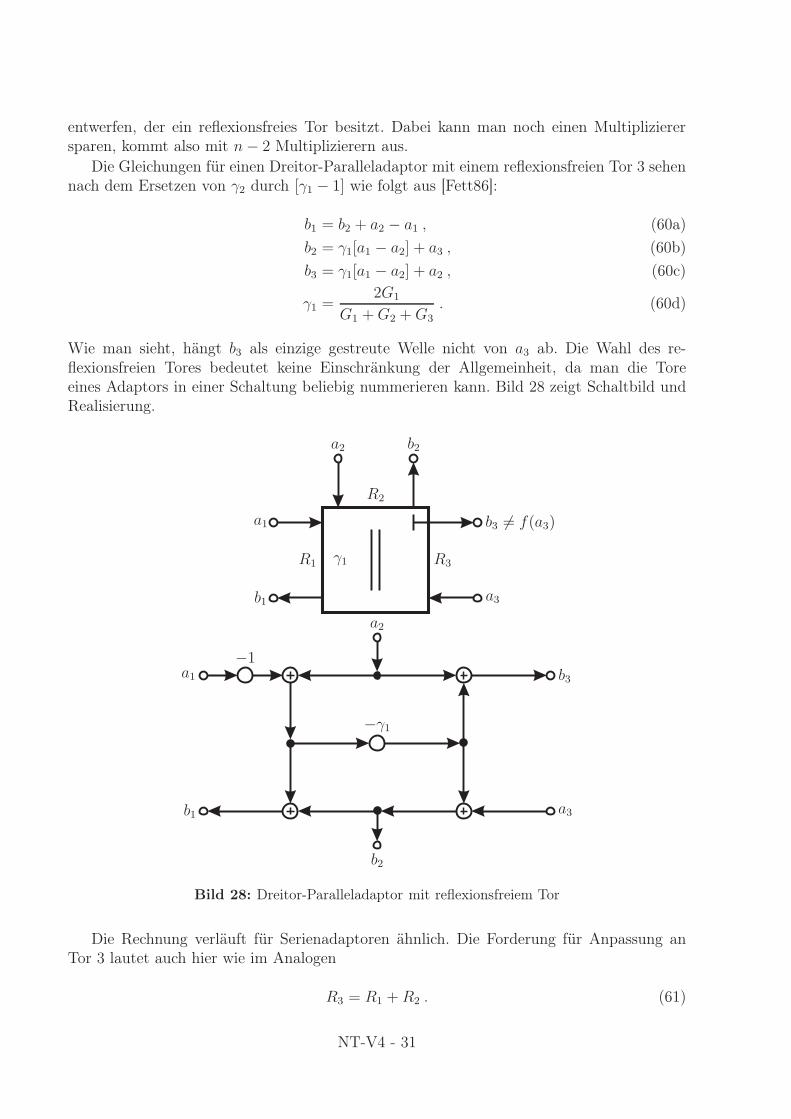
entwerfen, der ein reflexionsfreies Tor besitzt. Dabei kann man noch einen Multiplizierer
sparen, kommt also mit n− 2 Multiplizierern aus.
Die Gleichungen für einen Dreitor-Paralleladaptor mit einem reflexionsfreien Tor 3 sehen
nach dem Ersetzen von γ2 durch [γ1 − 1] wie folgt aus [Fett86]:
b1 = b2 + a2 − a1 , (60a)
b2 = γ1[a1 − a2] + a3 , (60b)
b3 = γ1[a1 − a2] + a2 , (60c)
γ1 =2G1
G1 +G2 +G3
. (60d)
Wie man sieht, hängt b3 als einzige gestreute Welle nicht von a3 ab. Die Wahl des re-
flexionsfreien Tores bedeutet keine Einschränkung der Allgemeinheit, da man die Tore
eines Adaptors in einer Schaltung beliebig nummerieren kann. Bild 28 zeigt Schaltbild und
Realisierung.
a1
a2
b1
b2
b3 6= f(a3)
a3
R1
R2
R3γ1
−γ1
−1a1
a2
b1
b2
a3
b3
Bild 28: Dreitor-Paralleladaptor mit reflexionsfreiem Tor
Die Rechnung verläuft für Serienadaptoren ähnlich. Die Forderung für Anpassung an
Tor 3 lautet auch hier wie im Analogen
R3 = R1 +R2 . (61)
NT-V4 - 31
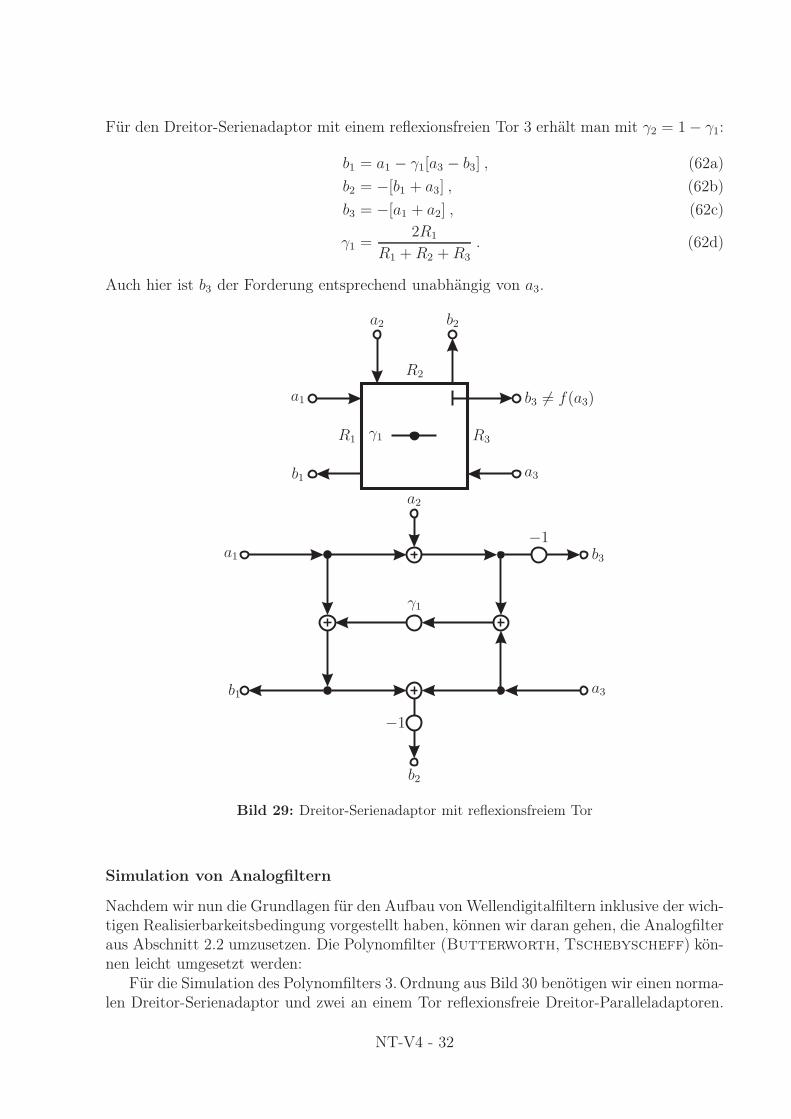
Für den Dreitor-Serienadaptor mit einem reflexionsfreien Tor 3 erhält man mit γ2 = 1 − γ1:
b1 = a1 − γ1[a3 − b3] , (62a)
b2 = −[b1 + a3] , (62b)
b3 = −[a1 + a2] , (62c)
γ1 =2R1
R1 +R2 +R3
. (62d)
Auch hier ist b3 der Forderung entsprechend unabhängig von a3.
a1
a2
b1
b2
a3
b3 6= f(a3)
R1
R2
R3γ1
γ1
−1
−1a1
a2
b1
b2
a3
b3
Bild 29: Dreitor-Serienadaptor mit reflexionsfreiem Tor
Simulation von Analogfiltern
Nachdem wir nun die Grundlagen für den Aufbau von Wellendigitalfiltern inklusive der wich-
tigen Realisierbarkeitsbedingung vorgestellt haben, können wir daran gehen, die Analogfilter
aus Abschnitt 2.2 umzusetzen. Die Polynomfilter (Butterworth, Tschebyscheff) kön-
nen leicht umgesetzt werden:
Für die Simulation des Polynomfilters 3.Ordnung aus Bild 30 benötigen wir einen norma-
len Dreitor-Serienadaptor und zwei an einem Tor reflexionsfreie Dreitor-Paralleladaptoren.
NT-V4 - 32
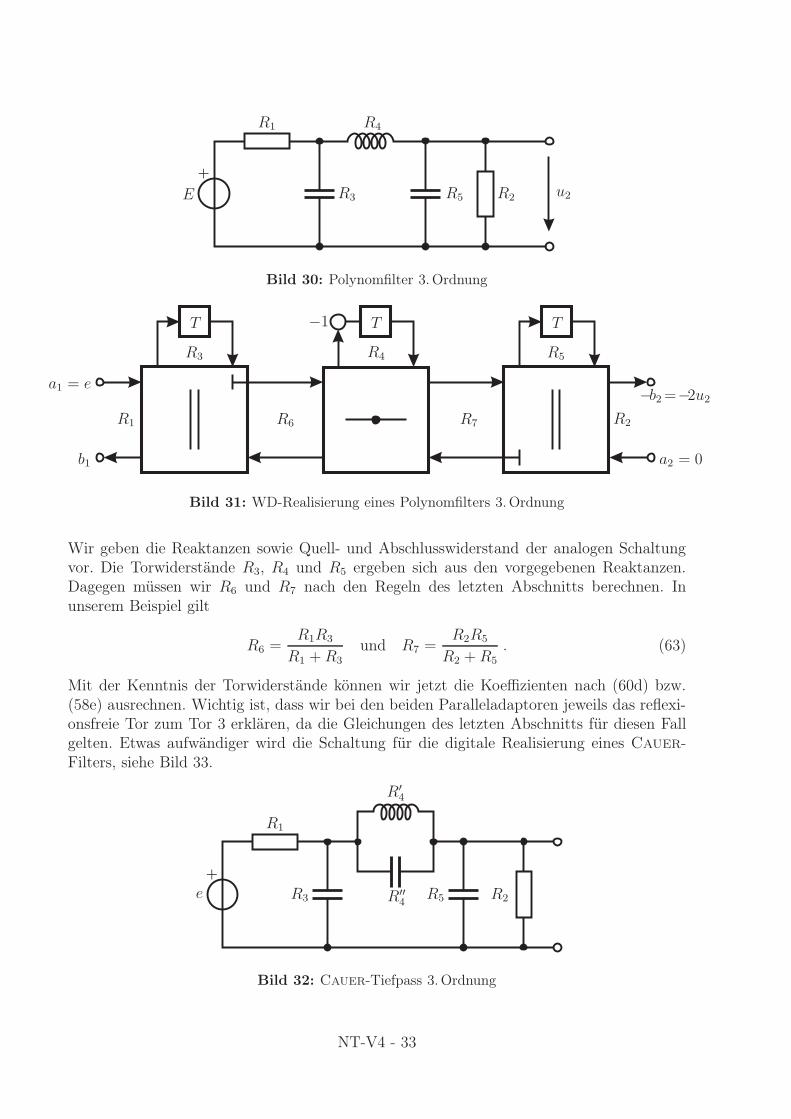
+
E
R1
R3
R4
R5 R2 u2
Bild 30: Polynomfilter 3.Ordnung
R1 R2
R3 R4 R5
R6 R7
−1
a1 = e
b1
−b2 =−2u2
a2 = 0
T TT
Bild 31: WD-Realisierung eines Polynomfilters 3.Ordnung
Wir geben die Reaktanzen sowie Quell- und Abschlusswiderstand der analogen Schaltung
vor. Die Torwiderstände R3, R4 und R5 ergeben sich aus den vorgegebenen Reaktanzen.
Dagegen müssen wir R6 und R7 nach den Regeln des letzten Abschnitts berechnen. In
unserem Beispiel gilt
R6 =R1R3
R1 +R3
und R7 =R2R5
R2 +R5
. (63)
Mit der Kenntnis der Torwiderstände können wir jetzt die Koeffizienten nach (60d) bzw.
(58e) ausrechnen. Wichtig ist, dass wir bei den beiden Paralleladaptoren jeweils das reflexi-
onsfreie Tor zum Tor 3 erklären, da die Gleichungen des letzten Abschnitts für diesen Fall
gelten. Etwas aufwändiger wird die Schaltung für die digitale Realisierung eines Cauer-
Filters, siehe Bild 33.
+
e
R1
R3
R′
4
R′′
4R5 R2
Bild 32: Cauer-Tiefpass 3.Ordnung
NT-V4 - 33
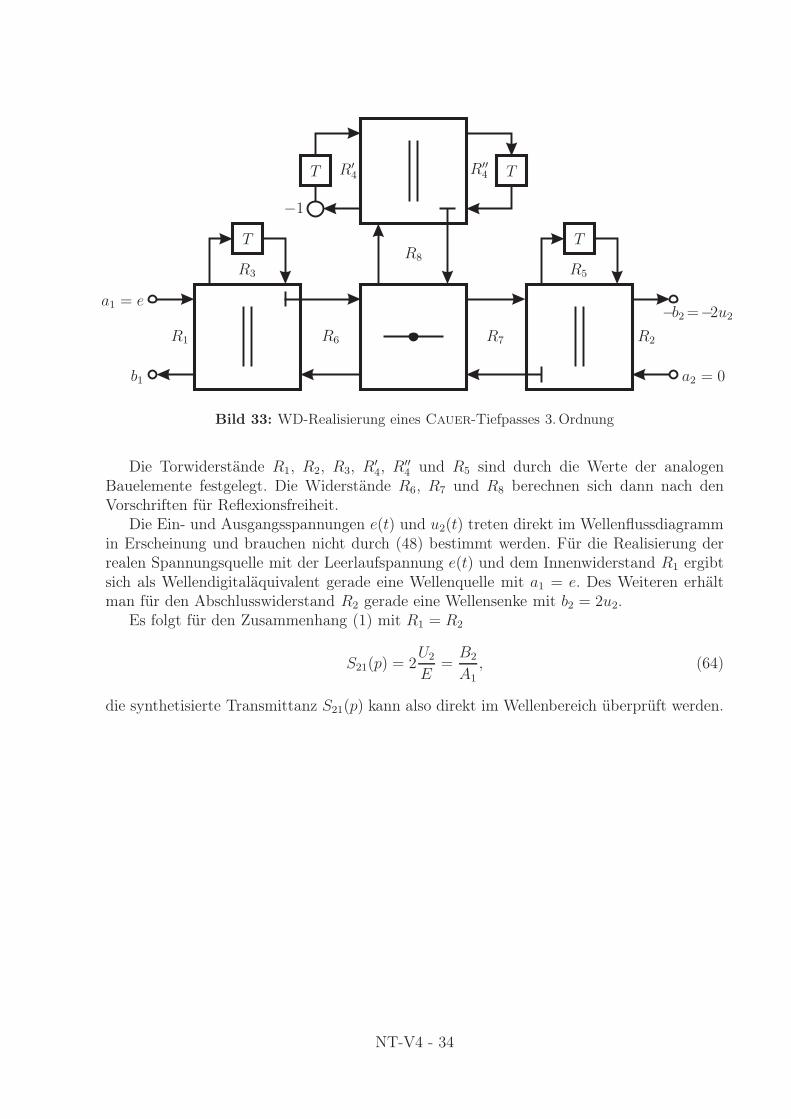
R1 R2
R3
R′
4
R5
R6 R7
R8
R′′
4
−1
T T
TT
a1 = e
b1
−b2 =−2u2
a2 = 0
Bild 33: WD-Realisierung eines Cauer-Tiefpasses 3.Ordnung
Die Torwiderstände R1, R2, R3, R′
4, R′′
4 und R5 sind durch die Werte der analogen
Bauelemente festgelegt. Die Widerstände R6, R7 und R8 berechnen sich dann nach den
Vorschriften für Reflexionsfreiheit.
Die Ein- und Ausgangsspannungen e(t) und u2(t) treten direkt im Wellenflussdiagramm
in Erscheinung und brauchen nicht durch (48) bestimmt werden. Für die Realisierung der
realen Spannungsquelle mit der Leerlaufspannung e(t) und dem Innenwiderstand R1 ergibt
sich als Wellendigitaläquivalent gerade eine Wellenquelle mit a1 = e. Des Weiteren erhält
man für den Abschlusswiderstand R2 gerade eine Wellensenke mit b2 = 2u2.
Es folgt für den Zusammenhang (1) mit R1 = R2
S21(p) = 2U2
E=B2
A1, (64)
die synthetisierte Transmittanz S21(p) kann also direkt im Wellenbereich überprüft werden.
NT-V4 - 34
3 Vorbereitung
Vorbereitungsaufgabe 3.1:
Geben Sie die Struktur der Betriebsschaltung für Reaktanzzweitore an! Mithilfe welcher
Übertragungsfunktion beschreibt man sinnvoll die Signalübertragung von Tor 1 zu Tor 2?
Vorbereitungsaufgabe 3.2:
Skizzieren Sie die Übertragungsfunktion und den Dämpfungsverlauf eines idealen Tiefpasses!
Warum ist ein idealer Tiefpass nicht realisierbar?
Vorbereitungsaufgabe 3.3:
Skizzieren Sie den Dämpfungsverlauf eines realen Tiefpasses, der mithilfe der Schaltung
aus Aufgabe 3.1 realisiert werden kann. Welche Bedeutung hat das Toleranzschema für den
Filterentwurf? Durch welche Größen wird es definiert? Zeichnen Sie ein Toleranzschema in
die Skizze.
Vorbereitungsaufgabe 3.4:
Warum verwendet man für den Filterentwurf nicht direkt die Transmittanz? Welche Vorteile
bietet der Entwurf über die charakteristische Funktion?
Vorbereitungsaufgabe 3.5:
Welcher Zusammenhang besteht zwischen Dämpfung und charakteristischer Funktion (Pole,
Nullstellen, ...)? Wo in der komplexen Ebene liegen Pole und Nullstellen der charakteristi-
schen Funktion?
Vorbereitungsaufgabe 3.6:
Bestimmen Sie die Streumatrix eines verlustlosen Zweitors zu der charakterischen Funktion
Ψ = p/ωg (zwei verschiedene Lösungen)! Im Weiteren sollen gleiche Torwiderstände ange-
nommen werden. Bestimmen Sie unter Verwendung der Reflektanz an Tor 1 zu jeder Lösung
für die Streumatrix ein mögliches Reaktanzzweitor (Zeichnung der zwei Schaltungen)! Be-
rechnen Sie die Bauelementwerte. Verwenden Sie bei der Bearbeitung dieser Aufgabe nicht
die Gleichungen für den Butterworth-, Tschebyscheff- oder Cauer-Tiefpass!
Vorbereitungsaufgabe 3.7:
Skizzieren Sie den Dämpfungsverlauf eines Tiefpasses 5.Ordnung nach Butterworth,
Tschebyscheff und Cauer. Geben Sie das prinzipielle Aussehen der charakteristischen
Funktion mithilfe der Pole und Nullstellen an. Worin unterscheiden sich die drei Ansätze?
Vorbereitungsaufgabe 3.8:
Leiten Sie die Wellendigital-Realisierung eines idealen Kondensators her. Welchen Torwi-
derstand hat dieses Element?
NT-V4 - 35
Vorbereitungsaufgabe 3.9:
Skizzieren Sie den Verlauf der Reaktanz einer idealen Spule und deren diskreter Nachbil-
dung über der Frequenz ω. Erläutern Sie die Unterschiede. In welchem Bereich sollten die
Frequenzen der Signale liegen, mit denen man das System erregt, wenn man eine möglichst
gute Nachbildung des kontinuierlichen Systems anstrebt? Wie sollte die Abtastfrequenz
zweckmäßigerweise gewählt werden?
Vorbereitungsaufgabe 3.10:
Skizzieren Sie die folgenden Dämpfungsverläufe eines Cauer-Filters 5.Ordnung
1.) Ordinate A(ω) , Abszisse ω
2.) Ordinate A(ϕ2/T ) , Abszisse ϕ2/T
3.) Ordinate A(ϕ2/T ) , Abszisse ω
und zeichnen Sie für die ersten beiden Punkte eine entsprechende Schaltung. Zum Punkt 3.)
fertigen Sie ein Signalflussdiagramm an. Achten Sie in allen Fällen auf die korrekte Beschrif-
tung der Signale.
4 Versuchsdurchführung
Beim ersten Termin des Versuchs Reaktanzzweitore erhalten die Gruppen die Spezifikation
der zu synthetisierenden Filter. Die Filtersynthese ist von den Gruppen jeweils gemeinsam
bis zum zweiten Termin durchzuführen. Hat eine Gruppe die Syntheseaufgaben nicht zum
zweiten Termin vollständig und größtenteils richtig durchgeführt, kann sie nicht zur Ver-
suchsdurchführung zugelassen werden. Eine Woche nach dem zweiten Termin muss jede
Gruppe eine Ausarbeitung abgeben, die die Lösung der Syntheseaufgaben, sowie die Ergeb-
nisse der Versuchsdurchführung enthält. Die Rücksprache zu der Ausarbeitung ist spätestens
zwei Wochen nach dem zweiten Termin oder nach Vereinbarung vorzunehmen.
4.1 Syntheseaufgaben
Bei Digitalfiltern pflanzen sich die Rundungsfehler sehr stark fort. Sie sollten daher bei allen
numerischen Rechnungen mindestens mit 6 Nachkommastellen rechnen.
1. Vorgegeben sind die Dämpfungsanforderungen für den Butterworth-Tiefpass.
a) Berechnen Sie die notwendige Filterordnung für den Butterworth-Tiefpass.
Wählen Sie die nächsthöhere ungerade Ordnung für das Filter.
b) Zeichnen Sie das dazugehörige Schaltbild (spulenarme Realisierung!)
c) Berechnen Sie alle auftretenden entnormierten Bauelemente.
d) Zeichnen Sie die zur Simulation des Filters notwendige Wellendigital-Struktur.
Der nicht reflexionsfreie Dreitoradaptor sollte in die Mitte der Struktur gesetzt
werden. Die Koeffizienten und Torwiderstände müssen wie im Umdruck numme-
riert werden.
NT-V4 - 36
e) Berechnen Sie alle Torwiderstände.
f) Berechnen Sie die im diskreten System einzustellenden Frequenzen, wenn Sie das
Butterworth-Filter bei seiner Grenzfrequenz bzw. Sperrfrequenz betrachten
wollen.
2. Vorgegeben sind die Dämpfungsanforderungen für den Tschebyscheff-Tiefpass.
a) Berechnen Sie die notwendige Filterordnung für den Tschebyscheff-Tiefpass.
Wählen Sie die nächsthöhere ungerade Ordnung für das Filter.
b) Zeichnen Sie das dazugehörige Schaltbild (spulenarme Realisierung!)
c) Berechnen Sie alle auftretenden entnormierten Bauelemente.
d) Zeichnen Sie die zur Simulation des Filters notwendige Wellendigital-Struktur.
Der nicht reflexionsfreie Dreitoradaptor sollte in die Mitte der Stuktur gesetzt
werden. Die Koeffizienten und Torwiderstände müssen wie im Umdruck numme-
riert werden.
e) Berechnen Sie alle Torwiderstände.
f) Berechnen Sie die im diskreten System einzustellenden Frequenzen, wenn Sie das
Tschebyscheff-Filter bei seiner Grenzfrequenz bzw. Sperrfrequenz betrachten
wollen.
3. Vorgegeben sind die Dämpfungsanforderungen für den Cauer-Tiefpass.
a) Bestimmen Sie die notwendigen Hilfsgrößen zur Berechnung der Bauelemete eines
Cauer-Filters 3.Ordnung aus dem Filterkatalog.
b) Zeichnen Sie das dazugehörige Schaltbild (spulenarme Realisierung!)
c) Berechnen Sie alle auftretenden entnormierten Bauelemente.
d) Zeichnen Sie die zur Simulation des Filters notwendige Wellendigital-Struktur.
Der nicht reflexionsfreie Dreitoradaptor sollte in die Mitte der Struktur gesetzt
werden. Die Koeffizienten und Torwiderstände müssen wie im Umdruck numme-
riert werden.
e) Berechnen Sie alle Torwiderstände.
f) Berechnen Sie die im diskreten System einzustellenden Frequenzen, wenn Sie das
Cauer-Filter bei seiner Grenzfrequenz bzw. Sperrfrequenz betrachten wollen.
4. Berechnen Sie die Filterordungen, die für einen Butterworth- bzw. einen Tsche-
byscheff-Tiefpass notwendig wären, um die Dämpfungsspezifikation des Cauer-
Tiefpasses zu erfüllen.
5. Skizzieren Sie die erwarteten Dämpfungsverläufe für den Butterworth-, Tsche-
byscheff- und Cauer-Tiefpass.
6. Bei welchen Filterordnungen müssen Sie einen Inverter hinter die dem Umdruck ent-
sprechende WD-Struktur schalten, damit Ein- und Ausgangssignal gleiches Vorzeichen
haben? (Betrachten Sie den Spannungsumlauf am Dreitor-Serienadaptor).
NT-V4 - 37
4.2 Durchführung und Auswertung
I. Butterworth-Tiefpass
1. Bauen Sie die WD-Realisierung des Butterworth-Filters auf.
2. Geben Sie einen Einheits-Impuls (Feldlänge 128) auf den Eingang und stellen Sie die
Impulsantwort dar.
3. Mit dem Modul „Dämpfung und Phase“ können Sie den Dämpfungs- und Phasen-
verlauf über eine Fourier-Transformation aus der Impulsantwort bestimmen. Die
Dämpfung wird in Dezibel und die Phase in Radiant ausgegeben. Die Verläufe sollen
skizziert und die Frequenzachse grob skaliert werden.
4. Verwenden Sie jetzt das gleiche Filter. Legen Sie ein Sinussignal (Feldlänge 2048) der
Grenzfrequenz Ω = 1 bzw. der Sperrfrequenz Ω = ΩS an und überprüfen Sie durch
Messung der Ausgangsamplitude die Werte von Amax und Amin.
II. Tschebyscheff-Tiefpass
1. Bauen Sie die WD-Realisierung des Tschebyscheff-Tiefpasses auf.
2. Messen und skizzieren Sie Dämpfung und Phase für einen Einheits-Impuls mit der
Feldlänge 128.
3. Geben Sie ein Rechteck mit sinnvoller Breite (Feldlänge 128, Delay 10) auf den Eingang
des Filters und skizzieren Sie das Ausgangssignal. (Erklärung?)
III. Cauer-Tiefpass
1. Bauen Sie die Struktur zur WD-Realisierung des Cauer-Tiefpasses auf.
2. Messen und skizzieren Sie wieder Dämpfung und Phase (Einheits-Impuls: Feldlänge
256).
3. Bestimmen Sie die markanten Punkte der Dämpfung. Messen Sie mithilfe eines Sinus-
signals (Feldlänge 2048) die Frequenz dieser Punkte, um den oben gemessenen Verlauf
zu skalieren (Umrechnung der Frequenz !). Orientieren Sie sich dabei an der Sperr-
und Grenzfreqeunz.
4. Testen Sie, ob das Filter gegen Bauteilschwankungen empfindlich ist. Verwenden Sie als
Eingangssignal einen Delta-Impuls (Feldlänge 2048) und betrachten Sie die Dämpfung
und Phase. Mit welchen Größen im Wellendigitalfilter können Bauteilschwankungen
simuliert werden?
NT-V4 - 38
Literatur
[Bahe84] H. Baher: Synthesis of Electrical Networks. John Wiley & Sons, 1984.
[Bele68] V. Belevitch: Classical Network Theory. CA: Holden-Day, 1968.
[Boss63] G. Bosse: Synthese elektrischer Siebschaltungen. Hirzel, 1963.
[Fett86] A. Fettweis: “Wave digital filters: Theory and practice”. The Institute of Electrical
and Electronics Engineers 74(2), February 1986, S. 270–326.
[Fett90] A. Fettweis: Elemente nachrichtentechnischer Systeme. Geest & Portig, 1990.
[FH92] A. Fettweis, G. Hemetsberger: Grundlagen der Theorie elektrischer Schaltungen.
Universitätsverlag Dr. N. Brockmeyer, 1992.
[Mild92] O. Mildenberger: Entwurf analoger und digitaler Filter. Vieweg, 1992.
[OV00] K. Ochs, M. Vollmer: “An extension of Darlington’s algorithm for the design of
elliptic filters”. IEEE Transactions on Signal Processing 48(9), September 2000,
S. 2709–2712.
[Saal79] R. Saal: Handbuch zum Filterentwurf. AEG-Telefunken, 1979.
NT-V4 - 39





























