Embed Size (px)
Citation preview

Cross-Layer Simulation Analysis ofa High-Precision Radiolocation
System
Simulationsbasierte schichtübergreifende Systemanalyseeines hochpräzisen Mikrowellenortungssystems
Der Technischen Fakultät derUniversität Erlangen-Nürnberg
zur Erlangung des GradesDOKTOR-INGENIEUR
vorgelegt vonRalf Mosshammer
Erlangen – 2010

Als Dissertation genehmigt vonder Technischen Fakultät derUniversität Erlangen-Nürnberg
Tag der Einreichung: 14.1.2010Tag der Promotion: 20.5.2010Dekan: Prof. Dr.-Ing. Reinhard German1. Berichterstatter: Prof. Dr. tech. Mario Huemer2. Berichterstatter: Prof. Dr.-Ing. Jörn Thielecke

Bedecke deinen Himmel, Zeus,Mit Wolkendunst!
Und übe, Knaben gleich,
An Eichen dich und Bergeshöh’n!
Und meinen Herd,Um dessen Glut
Kehrt’ ich mein verirrtes AugeZur Sonne, als wenn drüber wär
Hast du’s nicht alles selbst vollendet,Heilig glühend Herz?
I have of late–but wherefore I know not–lost all my mirth, forgone alindeed it goes so heavily with my disposition that this goodly frame, the earth, seems to me a
sterile promontory, this most excellent canopy, the air, look you, this braveo’erhanging firmament, this majestical roof fretted with golden fire, why, it
appears no other thing to me than a foul and pestilent congregation ofvapours. What a piece of work is a man! how noble in reason! how infinite infaculty! in form and moving how express and admirable! in action how like an
angel! in apprehension how like a god! the beauty of the world! theparagon of animals! And yet, to me, what is this quintessence of dust?
of dust?
of dust
dust


Abstract
In this work, a comprehensive analysis of a competitive and novel, high-precisionlocal positioning system in the 5.8 GHz ISM band is presented.
The RESOLUTION platform is built around a secondary-radar FMCW position-ing system, supported by a commercial communications solution. The modularand flexible design of the platform allows for the support of various topologies andprotocols, which is of supreme interest with regard to the very diverse applicationfields local positioning can serve.
To gain an impression of performance figures with an eye towards actual prod-uct deployment, a cross-layer simulation tool was developed. This software allowsfor analysis of both physical layer properties and network dynamics which occurwhen multiple receivers are served within a fixed infrastructure.
The signal theoretical foundations of secondary Frequency Modulated Contin-uous Wave (FMCW) radar are well established. With regard to this, research onthe physical layer is limited to selected effects, with special attention on multipathpropagation, which constitutes by far the largest error source. For comparativeevaluation, both a model derived from system-specific measurements as well as astandardized model following IEEE 802.15.4a were integrated into simulation.
The performance of Medium Access Control (MAC) layer algorithms for multi-user management have been analyzed along the most relevant parameters, suchas time-to-fix, update rate, infrastructure utilization and efficiency. The seamlessdesign of the physical and MAC layer simulators allows for complete integrationand cross-layer optimization of the platform. Exemplary simulation results areprovided.
Access procedures derived from known communication models and adapted forthe specific needs of positioning systems are described. Utilization of these meth-ods allows for optimal system deployment according to specification parameters.
This thesis constitutes an authoritative reference for the performance of theRESOLUTION local positioning system. Novel algorithms with cross-platform ef-fects are investigated. The innovative simulation engine and the techniques usedin its implementation are detailed. Comparative benchmarking results of variousparameter sets and extreme values are presented and commented.

ZusammenfassungDiese Arbeit präsentiert eine umfassende Analyse eines neuartigen und hochprä-zisen lokalen Positionsbestimmungssystems im ISM-Band bei 5.8 GHz.
Die RESOLUTION Plattform besteht aus einem Positionsbestimmungsmodulnach dem Sekundärradar-FMCW Prinzip, unterstützt von einer kommerziellenKommunikationslösung. Die modulare und flexible Architektur der Plattformunterstützt verschiedene Topologien und Protokolle, was den Einsatz in einembreiten Applikationsfeld ermöglicht.
Mit Hilfe einer schichtübergreifenden Simulationssoftware wurden die Parame-ter und Leistungsgrenzen des Systems bestimmt. Die Software erlaubt sowohl dieAnalyse physikalischer Leistungsparameter als auch der Netzwerkdynamiken, diein Präsenz mehrerer Empfangsmodule auftreten.
Die signaltheoretischen Grundlagen von sekundärem FMCW Radar sind hinrei-chend bekannt. In Hinblick auf diese Tatsache beschränkt sich die Analyse derBitübertragungsschicht auf ausgewählte Effekte mit besonderer Beachtung vonMehrwegeausbreitung, der mit Abstand größten Fehlerquelle im System. ZumZweck einer vergleichenden Wertung wurden sowohl ein aus Messungen abgelei-tetes, systemspezifisches Kanalmodell als auch das standardisierte IEEE 802.15.4aModell in die Simulation eingebunden.
Die Leistungsgrenzen der Algorithmen der MAC-Schicht für Mehrnutzerzugriffwurden anhand relevanter Parameter wie Time-to-fix, Wiederholrate, Auslastungund Effizienz untersucht. Das ineinandergreifende Design der physikalischen undMAC-Schicht Simulatoren ermöglichte eine komplette Integration und schicht-übergreifende Optimierung der Plattform. Dazu werden relevante Ergebnisse prä-sentiert.
Zugriffsverfahren, die von bekannten Modellen aus der Kommunikationstech-nik abgeleitet und für die spezifischen Bedürfnisse der Lokalisierung angepasstwurden werden beschrieben. Die Verwendung dieser Verfahren garantiert eine aufSpezifikationsparameter optimierte Systeminstallation.
Diese Arbeit stellt eine verbindliche Referenz für die Leistungsbewertung desPositionsbestimmungssystems RESOLUTION dar. Neuartige Algorithmen, derenBetrachtung durch den Simulator ermöglicht wurde, werden vorgestellt und be-wertet. Die innovative Simulationsumgebung und die Techniken, die bei der Im-plementierung zum Tragen kamen werden im Detail beschrieben. VergleichendeBewertungen verschiedener Parametersätze und Grenzfälle werden anhand vonSimulationsergebnissen dargestellt und kommentiert.

Contents
1. Introduction 11.1. State of the art . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Goals of the thesis . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3. Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Fundamentals of Wireless Positioning 52.1. Application classes . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2. Measurement principles . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.1. Time of Arrival (ToA) . . . . . . . . . . . . . . . . . . . . 72.2.2. Roundtrip Time of Flight (RToF) . . . . . . . . . . . . . . 82.2.3. Time Difference of Arrival (TDoA) . . . . . . . . . . . . . 82.2.4. Angle of Arrival (AoA) . . . . . . . . . . . . . . . . . . . . 92.2.5. Fringe solutions . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3. Physical layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.1. Non-microwave solutions . . . . . . . . . . . . . . . . . . . 102.3.2. Microwave based solutions and FMCW . . . . . . . . . . . 12
3. The RESOLUTION Platform 153.1. RESOLUTION service requirements . . . . . . . . . . . . . . . . . . 153.2. Hybrid positioning and communication . . . . . . . . . . . . . . . 163.3. RESOLUTION hardware base . . . . . . . . . . . . . . . . . . . . . 18
4. Single Node Architecture and Performance Analysis 214.1. Basic receiver performance . . . . . . . . . . . . . . . . . . . . . . 21
4.1.1. Figures of merit . . . . . . . . . . . . . . . . . . . . . . . . 244.1.2. AWGN performance . . . . . . . . . . . . . . . . . . . . . . 254.1.3. Baseband signal evaluation . . . . . . . . . . . . . . . . . . 28
i

4.2. Hardware impairments . . . . . . . . . . . . . . . . . . . . . . . . 304.2.1. Phase noise . . . . . . . . . . . . . . . . . . . . . . . . . . 304.2.2. Ramp nonlinearity . . . . . . . . . . . . . . . . . . . . . . 32
4.3. Signaling impairments . . . . . . . . . . . . . . . . . . . . . . . . 334.3.1. Multipath propagation . . . . . . . . . . . . . . . . . . . . 344.3.2. Position calculation . . . . . . . . . . . . . . . . . . . . . . 43
5. Network Architecture and Quality of Service Aspects 495.1. Service and network architecture . . . . . . . . . . . . . . . . . . 495.2. The MAC layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.2.1. Static channel access . . . . . . . . . . . . . . . . . . . . . 535.2.2. Dynamic channel access and novel access procedures . . . 54
5.3. Integrated performance assessment . . . . . . . . . . . . . . . . . 575.3.1. Discrete event simulation . . . . . . . . . . . . . . . . . . . 575.3.2. RESOLUTION protocols . . . . . . . . . . . . . . . . . . . . 605.3.3. Timing models . . . . . . . . . . . . . . . . . . . . . . . . 63
5.4. Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.4.1. Basic FIFO and C-ALOHA latencies . . . . . . . . . . . . . . 695.4.2. Secondary performance parameters . . . . . . . . . . . . . 715.4.3. Comparison of positioning protocols . . . . . . . . . . . . . 745.4.4. Update rate . . . . . . . . . . . . . . . . . . . . . . . . . . 755.4.5. MAC layer improvements . . . . . . . . . . . . . . . . . . . 76
6. Conclusion and Outlook 83
A. The Active Reflector 85A.1. Active Pulsed Reflector . . . . . . . . . . . . . . . . . . . . . . . . 86A.2. Medium access . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
B. Object Oriented System Simulation Framework 89B.1. Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91B.2. Deployment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92B.3. Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93B.4. Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
C. Discrete Event Simulation Framework 95
D. Complex Envelope Simulation 99

Acronyms and Abbreviations
ACK Acknowledge (flow control)
AR Active Reflector
A/D Analog to Digital Conversion
AGV Automated Guided Vehicle
ALOHA ALOHA access protocol
AoA Angle of Arrival
AWGN Additive White Gaussian Noise
BER Bit Error Rate
BS Base Station
C-ALOHA Controlled ALOHA
CDF Cumulative Density Function
CIR Channel Impulse Response
CPICH Common Pilot Channel
CSMA Carrier Sense Multiple Access
CSMA/CA Carrier Sense Multiple Access/Collision Avoidance
CTS Clear to Send (flow control)
CW Continuous Wave

iv Contents
DCF Distributed Coordination Function
DFT Discrete Fourier Transform
DIFS Distributed Interframe Space
DTFT Discrete Time Fourier Transform
ECB Equivalent Complex Baseband
EIRP Effective Isotropic Radiated Power
EU European Union
FCC Federal Communications Commission
FDMA Frequency Division Multiple Access
FFT Fast Fourier Transform
FIFO First in/First out
FMCW Frequency Modulated Continuous Wave
FSK Frequency Shift Keying
GALILEO GALILEO satellite system
GEL Global Event List
GPS Global Positioning System
GSM Global System for Mobile Communications
HPLS High-Precision Location System
IEEE Institute of Electrical and Electronics Engineers
IF Intermediate Frequency
IFFT Inverse Fast Fourier Transform
IPDL Idle Periods in Downlink
ISM Industrial, Scientific and Medical
ISO/OSI International Standards Organizsation/Open SystemsInterconnection
LBS Location Based Services

Contents v
LOS Line of Sight
LPM Local Position Measurement
LPR Local-Positioning Radar
MAC Medium Access Control
MLE Maximum Likelihood Estimation
MMD Multi-Modulus Divider
MS Mobile Station
NACK Not Acknowledge (flow control)
NF Noise Figure
NLOS Non-Line of Sight
PCF Position Calculation Function
PDA Personal Digital Assistant
PLL Phase Locked Loop
PRS Public Regulated Service
QoS Quality of Service
RESOLUTION Reconfigurable Systems for Mobile Communication andPositioning
RF Radio Frequency
RFID Radio Frequency Identification
RSS Received Signal Strength
RToF Roundtrip Time of Flight
RTS Request to Send (flow control)
RX Receiver
SAW Surface Acoustic Wave
SIRO Serve in Random Order
SNR Signal to Noise Ratio

vi Contents
TDMA Time Division Multiple Access
TDoA Time Difference of Arrival
ToA Time of Arrival
TX Transmitter
UMTS Universal Mobile Telecommunications System
UWB Ultra-Wideband
VCO Voltage Controlled Oscillator
WAIT Wait command (flow control)
WGN White Gaussian Noise
WLAN Wireless Local Area Network
WSN Wireless Sensor Network

Einleitung
Die Entwicklung der integrierten Schaltung (Integrated Circuit, IC) leitete monu-mentale Veränderungen im Bereich der Datenverarbeitung und Kommunikation ein. Rasch fort-schreitende Verbesserungen in den Bereichen Rechengeschwindigkeit, Komponentenintegrationund Stromverbrauch führten zu einer Welle an Produkten und Konsumgütern, die längst Teilindustrieller Prozesse und des täglichen Lebens sind: das Internet, Mobiltelefonie, Satellitenna-vigation, Fernseh- und Radiosendungen, tragbare Medienwiedergabe, automatisierte Fertigung,Autopiloten, autonome Steuersysteme und Sensornetzwerke.
Die Aussicht auf steigende Profite und anhaltender Absatzdruck führte zu einer zunehmen-den Fokussierung von Forschung und Entwicklung auf die Optimierung von Datendurchsatz,mit dem Ziel, sich der Shannon-Grenze möglichst unter Einhaltung vernünftiger Leistungsauf-nahme zu nähern und die Geräte zeitgleich durch Fortschritte in der Produktionstechnologiezu verkleinern.
Getrieben von einer Vision autonomer Maschinenräume und kontextsensitiver Informationdrängte eine Technologie militärischer Provenienz zunehmend in die öffentliche Wahrnehmung:Positionsbestimmung.
Für manche Experten stellen Sensornetzwerke den ultimativen Konvergenzpunkt von Kom-munikationstechnologien dar: stark dezentralisierte Gruppen von energiesparenden Sensorkno-ten mit verteilten Kommunikationsmöglichkeiten. Eine derartige Technologie könnte breiteAnwendung in Bereichen wie Landwirtschaft, Umweltüberwachung, Gebäudeautomatisierung,Schlachtfeldüberwachung und industrieller Steuerung finden. Für die meisten dieser Applikati-onsfelder ergeben Sensordaten nur im Zusammenhang mit geographischer oder tolopogischenInformation Sinn.
Eine weitere Anwendungsmöglichkeit von Positionsdaten ist die Versorgung von Mobilfunk-kunden mit kontextsensitiven Diensten.
Zuletzt stellt die industrielle Verwertung von Positionsdaten ein für diese Arbeit herausra-gendes Feld dar. Die steigende Komplexität moderner Industrieanlagen schürt das Bedürfnisweiterer Automation von Transport und Verarbeitung.
In dieser Arbeit wird die RESOLUTION Plattform – die Abkürzung steht für “ReconfigurableSystem for Mobile Communication and Positioning” – vorgestellt und analysiert. Hierbei han-delt es sich um ein hybrides Lokalisierungs- und Kommunikationssystem, das sowohl in speziali-sierten Konsumgütern als auch industriellen Umgebung eingesetzt werden kann. Die Plattformumfasst mehrere Konfigurationen, basiert aber in jedem Fall auf dem Prinzip des sekundärenlinearen FMCW (Frequency Modulated Continuous Wave) Radars für Distanzmessungen. Indiesem Fachbereich existiert einiges an Vorarbeit, wie im nächsten Abschnitt dargestellt.
1

Stand der TechnikChirp-Signale als Kommunikations- oder Radarträger sind seit den Mittfünfzigern bekannt.Wegen der niedrigen Detektions- und Abhörwahrscheinlichkeit ist die Technologie vor allem immilitärischen Bereich verbreitet [1].
Lokale Positionsbestimmung kooperativer Ziele, die für diese Arbeit relevante Anwendung,weist einige wichtige Abweichungen zu regulärer Radartechnologie auf. Zum einen versucht dasausgeleuchtete Ziel aktiv, die Detektion zu erleichtern und regeneriert und reflektiert das einfal-lende Signal oder empfängt es und antwortet mit einem neu generierten. Ein breiter Überblicküber diese Klasse von Systemen findet sich in [2, 3].
Das in [2, 4] beschriebene Local-Positioning Radar (LPR) ist ein originäres Systemkonzeptin diesem Bereich. Es verwendet einen aktiven, gepulsten Reflektor um Ziele zu unterscheidenund die Sichtbarkeit zu erhöhen. Eine ähnliche Technik, allerdings mit passiven Strukturen,wurde zuvor in [5, 6] beschrieben. Ein System mit Surface Acoustic Wave (SAW) Referenzfindet sich noch früher in [7]. In jüngerer Zeit erfreuten sich aktive Rückstreumodulatoren undOszillatoren mit switched injection-locking steigender Beliebtheit. So ein Gerät ist als alternativeKonfiguration zu LPR erhältlich und in [8, 9] beschrieben. Der Active Pulsed Reflector, einealternative Konfiguration für die RESOLUTION Plattform übernimmt dieses Prinzip [10].
Variationen des Grundkonzepts – aktive Rückstreumodulation oder Sekundärradar mit Lauf-zeitmessung durch Chirp-Signale – finden sich in großer Menge in der wissenschaftlichen Li-teratur. Meistens handelt es sich hierbei um algorithmische Verbesserungen des Problems derMehrwegeausbreitung, wie in [11–13] beschrieben.
Eine umfassende Arbeit, die das LPR System im 5.8 GHz Industrial, Scientific and Medical(ISM) Band mit einer Bandbreite von 150 MHz beschreibt ist [14], wobei diese Parameter auchfür RESOLUTION gültig sind. Eine anstehende Erweiterung dieses Prinzips ist die Verwendungvon Ultra-Wideband Chirps um die Pfadauflösung und damit die Genauigkeit zu verbessern. Einexperimenteller Prototyp mit vielversprechenden Leistungsdaten wird in [15, 16] beschrieben.
Ein leicht abweichendes Konzept ist Local Position Measurement (LPM), das zwar auf dengleichen physikalischen Prinzipien basiert, jedoch Zeitdifferenzmessungen verwendet. Die Grund-lagen des Systems sind in [17, 18] beschrieben und in [19–21] weiter ausgeführt. Wie das zuvorangesprochene LPR wurde auch dieses System über die Jahre hinweg erweitert und verbessert,vor allem im Bereich der Basisband-Signalverarbeitung [13,22–24]. Ein Mehrwert dieses Systembesteht in der expliziten Verwendung eines Kommunikationskanals für Telemetriedaten [20].
Die Eigenschaften von sekundären FMCW Radar im ISM Band wurden dank jahrelangerForschungsaktivitäten auf diesem Gebiet durch Analyse, Simulation und Messung erschöpfendbeschrieben. Zentrale Bedeutung kommt hierbei dem Mechanismus zur Rampenerzeugung, d.h.dem Synthesizer, zu. Jeder Phasenfehler, den diese Komponente verursacht hat eine direkteabträgliche Wirkung auf die Leistung des Gesamtsystems. Als Folge daraus widmen sich eineVielzahl von Studien möglichen Fehlerquellen und Verbesserungen in diesem Bereich [25–30].
Ein dritter Mitbewerber für hochpräzise Positionsbestimmung in Innenräumen ist das Ubi-sense Echtzeitlokalisierungssystem. Obwohl es den selben Applikationsraum wie die zuvor ge-nannten Systeme und RESOLUTION bedient operiert es unter technisch völlig anderen Vorraus-setzungen, nämlich Ultra-Wideband Pulsradar mit Zeitdifferenz- und Winkelmessung. Infor-mationen über dieses System, welches bereits als kommerzielles Produkt verfügbar ist findensich unter www.ubisense.net (Website zuletzt geladen im Juni 2009).
Allgemein lässt sich sagen, dass sowohl in der Positionsbestimmung als auch bei Drahtlos-netzwerken ein starker Trend in Richtung Ultra-Wideband Signalisierung erkennbar ist. Es istdaher nicht verwunderlich, dass die meisten Arbeiten die Mehrnutzerverwaltung betreffend imKontext von Ultra-Wideband Systemen operieren. Ein guter Überblick über Kanalzugriff inUltra-Wideband Netzwerken findet sich in [31], und im Detail für den IEEE 802.15.4a Standardin [32].
2

Contents
Generell findet sich Literatur zu Mehrnutzerverwaltung im Bereich Positionsbestimmung nurvereinzelt. Der Grund dafür ist, dass die konkurrierenden Systeme in diesem Gebiet, LPR undLPM in den jeweiligen Varianten statischen Kanalzugriff nutzen, was allerdings ebenfalls eineReihe von Nachteilen mit sich bringt, die in dieser Arbeit angesprochen werden. Systeme mitwahlfreiem Zugriff werden in [33, 34] und im Besonderen in [35] besprochen.
ZielsetzungZiel dieser Arbeit ist eine komplette und referenzierbare Leistungsschätzung der RESOLUTION-Plattform, auch in Hinblick auf Produktionsfähigkeit.
In Hinblick auf die ausgiebigen Vorarbeiten, die bereits im Bereich von Sekundärradar mitFMCW-Technik geliefert wurden, besonders und spezifisch im 5.8 GHz ISM band, scheint esvon verschwindendem wissenschaftlichen Wert, die Plattform auf einer rein signaltheoretischenEbene zu analysieren. In dieser Arbeit wurde daher ein zweifacher Zugang zur Thematik ge-wählt: die Integration der klassischen Systemsimulation mit einer zeitdiskreten, ereignisbasier-ten Netzwerksimulation, um einen gesamtheitlichen Eindruck der Leistungsgrenzen des Systemsin verschiedenen Einsatzszenarios zu erhalten. Physikalische Leistungsgrenzen können durchLiteraturstudie abgeleitet werden. Daher wurden die Untersuchungen des Physical Layer wei-testgehend auf Betrachtungen des Problems der Mehrwegeausbreitung eingeschränkt, der beiweitem größten Fehlerquelle im System.
Schätzungen der Netzwerkparameter, wie beispielsweise die Akquisitionszeit bei Mehrnutzer-zugriff, stellen einen von der Systemsimulation komplett separaten Forschungsbereich dar.Nichtsdestoweniger ist es möglich, beide Zugänge der Systemanalyse gewinnbringend zu ver-binden, was die Betrachtung optimierter Protokoll- und Algorithmenansätze über Abstrak-tionsgrenzen hinweg ermöglicht. Das kann als erster Schritt in Richtung echter Cross-LayerOptimierung in Hinblick auf eine Massenproduktion des Systems gesehen werden.
Zum Erreichen dieser Ziele wurde eine umfangreiche Simulationsumgebung programmiert. Indieser Arbeit werden sowohl die Umgebung an sich und Simulationsresultate auf physikalischerEbene und Netzwerkebene dargestellt.
GliederungDer Rest dieser Arbeit ist um zwei zentrale Kapitel aufgebaut, die sich mit der Analyse derphysikalischen und netzwerkbezogenen Parameter des RESOLUTION Systems auseinandersetzen.
In Kapitel 4 werden Simulationsergebnisse für einen einzelnen Empfänger gezeigt. Dabei wer-den ausgewählte Probleme der Hardware und im Besonderen Mehrwegeausbreitung behandelt.
Die Systemanalyse wird in Kapitel 5 auf Netzwerkeigenschaften erweitert. Geeignete Maß-zahlen werden definiert und Protokolloptionen für das RESOLUTION System präsentiert. Dieintegrierte Simulationsumgebung wird vorgestellt, und Ergebnisse für verschiedene Protokoll-optionen dargelegt.
Um eine gemeinsame Basis für das Verständnis der besprochenen Technologien im Allgemei-nen zu schaffen werden in Kapitel 2 Grundlagen der drahtlosen Positionsbestimmung und inKapitel 3 die Architektur der RESOLUTION PLattform besprochen.
Kapitel 6 schließt die Arbeit mit einer Zusammenfassung ab.
3

CHAPTER 1
Introduction
With the advent of the Integrated Circuit came monumental changes to the world of computingand communications. Accelerating improvements in processing speed, component integrationand energy consumption led to the surge of professional and consumer products we all seeintegrated in industry processes and our daily lives: the internet, mobile phones, satellite navi-gation, TV and radio broadcasts, pocket media players, robot factories, autopilots, autonomouscontrol systems, sensor networks.
Driven by market demands and the prospect of increasing profits, scientists and engineershave focussed their efforts on optimizing data throughput, edging ever closer towards the lim-iting Shannon barrier, while maintaining reasonable energy consumption figures and shrinkingdevices through production technology advancements and integration.
More recently, fueled by the vision of autonomous machine spaces and context-aware infor-mation systems, a technology from military provenience – as is often the case – has entered thepublic perception: positioning.
For some experts, the ultimate convergence point in the development of communicationtechnology are sensor networks, strongly decentralized groups of ultra-low power sensing nodeswith distributed communication facilities. Such a technology could find widespread use inagriculture, environmental monitoring, building automation, battlefield management and in-dustrial control. For most of these applications, sensor data makes only sense in context witha geographical or topological reference.
Another legitimation for positioning technology comes from the desire to provide clients ofthe mobile phone network with context-sensitive services.
Lastly, and of outstanding importance for this work, is the field of industrial positioning. Therising complexity and scale of modern industrial environments has bred the desire for furtherautomation of transport and processing.
In this work, the RESOLUTION platform – short for “Reconfigurable System for Mobile Com-munication and Positioning” –, a hybrid positioning and communication system for use in bothspecialized consumer applications and industrial environments is introduced and analyzed. Theplatform operates in various configurations, but always utilizing the principle of secondary lin-ear FMCW radar for distance measurement. In this area, much prior art exists, as outlined inthe next section.
1

1.1. State of the artChirp signals as communication or radar carriers have been known since the mid-fifties. Thetechnology is well established in military due to its low probability of interception and detection[1].
Local positioning of cooperative objects, as relevant for this work, usually shows some deviantproperties when compared to regular radar. That is, the illuminated target actively seeks to bedetected, and either regenerates and reflects the incoming signal or receives it and responds withan originally generated one. A broad overview of this class can be gained by consulting [2, 3].
A seminal system concept in this area is LPR, described in [2, 4]. This system employs anactive, pulsed reflector to distinguish targets and increase visibility. A similar technique, albeitwith passive structures, has been described earlier in [5,6]. A system with SAW reference appearsstill earlier in [7]. Recently, switched injection-locked oscillators as active backscatterers haveseen renewed interest. Such a device is available as alternative receiver configuration in LPR,and its principles have been described in [8, 9]. The Active Pulsed Reflector, an alternativereceiver configuration for RESOLUTION, mirrors this principle [10].
Variations on this basic concept – active backscatter modulation or secondary radar roundtripmeasurements with chirp signals – can be found aplenty in literature. Mostly, algorithmicimprovements to the problem of multipath propagation are shown, as in [11–13].
A comprehensive work describing the LPR system in the 5.8 GHz ISM band and with abandwidth of 150 MHz – parameters which are also valid for the RESOLUTION platform –is [14]. A forthcoming extension to this is the use of ultra-wideband chirps to increase pathprofile resolution and, thus, accuracy. An experimental prototype with promising performancehas been described in [15, 16].
A slightly deviating concept is LPM, which is based around the same physical principles, bututilizes time difference measurements. The basics of this system are described in [17, 18] andelaborated upon in [19–21]. Like the previously discussed LPR, the system has seen a number ofimprovements and extensions over the years, mostly pertaining baseband processing [13,22–24].As added value feature, LPM also explicitly features a communication channel for telemetry datatransmission [20].
Owing to year-long research and refinement of those two competing solutions, the proper-ties of secondary radar FMCW systems in the ISM band have been described very exhaustivelythrough analysis, simulation and also measurement results. Of central importance to the sys-tem performance is the ramp generation mechanism, i.e., the synthesizer. Any phase errorintroduced in this component has direct adverse effects on the achievable performance. Con-sequently, the properties, possible error sources and mitigation methods have been studiedextensively [25–30].
A third competitor for high-precision indoor positioning is the Ubisense real-time locationsystem. Though serving the same application space as the previously mentioned systems andRESOLUTION, it technically operates under a very different premise, namely ultra-widebandpulse radar with time difference and bearing measurements. Information on this system, whichis available as commercial product package, can be found at www.ubisense.net (website re-trieved in June 2009).
In general, both positioning and wireless sensor networks, the two broad research areas mostclosely related to RESOLUTION show a strong trend towards ultra-wideband signaling. It isthus hardly surprising that most works pertaining multi-user access, the second large topicalcomplex of this thesis, operate in the context of ultra-wideband systems. A good overview ofmedium access control topics for ultra-wideband networks is found in [31], and in particular forthe IEEE 802.15.4a standard in [32].
In general, literature specifically treating multi-user access in positioning is few and farbetween. The reason for this is that the prominent competitors, LPR and LPM and their variants
2

CHAPTER 1. INTRODUCTION
utilize static channel access, which, however, comes with a number of drawbacks, which are alsodiscussed in this work. Systems with random access are described in [33, 34] and in particularin [35].
1.2. Goals of the thesisThe goal of this thesis was to provide a complete and comprehensive performance estimation ofthe hardware developed in the RESOLUTION project, with an eye towards production maturity.
With regard to the extensive work done in secondary radar FMCW, especially and specif-ically in the 5.8 GHz ISM band, there is little scientific worth in carrying on analyses on asignal-theoretical level only. Therefore, a two-pronged approach was taken, integrating classi-cal physical layer system simulation with discrete event network simulation to gain a holisticimpression of performance limits in various deployment scenarios. As physical bounds of thesystem can be readily derived from prior art, the investigative focus for the physical layer sim-ulation was multipath propagation, which constitutes by far the largest remaining error sourcein the system.
Estimation of network parameters, such as time-to-fix, under the premise of multi-user chan-nel access, is a completely distinct field of research from system simulation. Nonetheless, bothapproaches can fruitfully be combined, making it possible to investigate optimized protocol andalgorithm options across abstraction layers. This can be viewed as a first step towards truecross-layer optimization of the system shortly prior to mass production and deployment.
To achieve these goals, an extensive simulation framework was implemented. In this thesis,both the framework itself and, more importantly, simulation results both on the direct linklevel and the network level are presented.
1.3. OrganizationThe remainder of this work is centered around the two chapters concerned with the analysis ofthe physical and network properties of the RESOLUTION system.
Chapter 4 presents simulation results for the single receiver, highlighting selected hardwareimpairments and reserving special attention for multipath propagation. Relevant simulationresults are presented and commented.
The system analysis is expanded to network properties in chapter 5. After a discussion ofsuitable figures of merit, several protocol options for RESOLUTION are presented. An integratedsimulation environment is introduced and results for several algorithmic and protocol optionsare given.
To establish common ground and foster understanding of positioning technologies in gen-eral, chapter 2 deals with fundamentals of wireless positioning, and chapter 3 introduces thearchitectural basics of the RESOLUTION platform.
Chapter 6 summarizes and concludes this thesis.
3


CHAPTER 2
Fundamentals of Wireless Positioning
Wireless positioning is a field of engineering with an application scope almost as wide as that ofwireless communications. It is generally understood to comprise any method or technology thatis suitable for automatically determining the position of a target in space by means of wirelesstransmission. Everything else, the transport medium, protocol, topology and operation scope,are open to definition.
This chapter builds the foundation for understanding wireless positioning technology byspotlighting the most important aspects of this engineering field. Given the sheer volumeof solutions available today in industry and academia, it can never be exhaustive. Instead,common ground is established to facilitate understanding of subsequent chapters.
Beforehand, a common language needs to be established and terms defined. The followingattempt loosely adheres to the definitions presented in [36] and [37].
Location in general refers to the semantic understanding of the position of an object inspace, thus answering the question “Where is it?”. Location and position are mostly usedinterchangeably in this thesis. In a more strict sense, position is a technical term, and thequestion for position always results in a set of coordinates, relative to any frame of reference,whereas location typically references topological features.
Positioning thus usually refers to the process of determining the position of an object in 2-or 3-D space, but may also include distance measurement.
Range is often used synonymously with distance in positioning literature, which can lead toconfusion, since used correctly, range denotes a distance limit, e.g., for which communicationstill works.
Triangulation is often defined as the geometric process of finding a position from measure-ments, referring the minimal (triangular) layout of devices in the system. Specifically, angu-lation and lateration are technical terms for finding the position from bearing and distancemeasurements, respectively. In this work, triangulation is taken to include trilateration.
Beacons or, more specifically for terrestrial positioning, base stations, are fixed anchor pointswith known coordinates that serve as measurement reference.
The target, terminal or mobile station is the object of which the position is to be determined.It can either have a passive or active role in the positioning process, but it is always mobilewith respect to the base stations.
Performance figures for positioning systems also merit some attention, which they gain in
5

section 4.1.1. For the current chapter, accuracy is assumed to be the single measure of the“quality” of a positioning system, i.e., its measurement fidelity.
2.1. Application classesWith the advent of near-ubiquitous wireless communications, cheap microprocessors and solid-state frontends came a renewed interest in positioning technology, both for consumer applica-tions and industry solutions [2, 38].
In a first step, positioning efforts can be separated into two broad fields: systems usingexisting infrastructure to provide location information, mostly as add-on or added value tocommunications, and dedicated systems with specialized hardware and software for providingposition information.
The former group includes wireless sensor networks, which by themselves constitute a vastapplication space. Information from wireless sensor nodes often only makes sense in contextwith position information: Which room has the least air humidity? Where is the stress fracture?Which patch of soil needs more water? For comprehensive coverage of wireless sensor networks,including positioning techniques, the reader is referred to literature [39–44].
The principal application class for add-on positioning systems are location based services,which are mostly taken to mean commercial services offered by mobile phone providers [45]. Thecharacteristics of this application class are low cost (mostly only software modifications), pooraccuracy in the tens of meters regime or even worse, excellent coverage through mobile phoneor Wireless Local Area Network (WLAN) infrastructure, and tight coupling with higher-layersemantic processing, such as map projection or location-sensitive billing. Relevant literature iswidely available [46–50].
A hybrid approach which involves both existing infrastructure and dedicated hardware isassisted Global Positioning System (GPS). Here, a regular GPS receiver is built into a mobilephone. Azimuth data and satellite lists are provided via the communications service by the basestations to bootstrap the positioning process. This technology is in widespread use today [51].
The class of dedicated positioning systems is led by regular GPS with dedicated receiversystems, soon to be complemented by the European GALILEO effort [52]. Modern GPS receiversachieve an accuracy in the range of several meters in outdoor scenarios, but are notoriously un-derperforming in indoor situations [53]. Applications are widespread, ranging from the originalmilitary use to fleet management, hiking, sea and air travel and entertainment [54].
Indoor industrial applications, such as factory automation, automated vehicle guidance andheavy equipment steering call for much higher accuracy than can be provided by GPS even underideal conditions. Such scenarios fall under the regime of dedicated positioning solutions, whichare characterized by comparatively high cost (for infrastructure installment and maintenance)and excellent positioning performance. This class of systems has been widely researched andalso seen commercial implementations [2, 15, 17].
The following section will introduce measurement principles which can be found across allapplications classes.
2.2. Measurement principlesSeveral geometric configurations are known which allow for mobile positioning. In literature,those methods are differentiated by the measurement data they use for positioning, that is, thetarget distance ρ, the target bearing (angle) θ, or both [36, 37].
Further distinction comes from the roles the mobile and base stations take on in the measure-ment process. In self-positioning, the mobile unit performs the measurement and calculates its
6

CHAPTER 2. FUNDAMENTALS OF WIRELESS POSITIONING
own position. Conversely, remote-positioning assigns the role of beacon to the mobile, while themeasurement takes place in the base stations, and calculations are processed in a central serverunit. This has the advantage that baseband logic in the mobile can be kept to a minimum,and complex, energy-consuming algorithms can be implemented in the infrastructure withoutregard to battery lifetime.
If an additional communications link is present, the measurement data can be transmittedto the beacon, which is called indirect-self-positioning and indirect-remote-positioning, respec-tively.
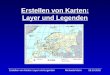
2.2.1. Time of Arrival (ToA)If the distance to several beacons is known, the position can be calculated by means of rho-rhofixing. The principle is illustrated in fig. 2.1.
1 2
3
S1 (x1, y1)
S3 (x3, y3)
S2 (x2, y2)
M1 (xm,1, ym,1)
Figure 2.1.: Illustration of the ToA measurement principle: the mobile M1 lieson the intersection of three or more circles defined by time-of-flightmeasurements to or from fixed beacons Sj with known positions.
The exact way in which the distance is measured is irrelevant for this method, but mostly,Time of Arrival measurements are assumed. If the time of flight to several beacons is known,then the distance from the mobile i to base station Sj is
ρi = (t0,j − t0,i) · c, (2.1)
where c is the signal propagation speed, and t0,j and t0,i the transmission and arrival instants,respectively. Obviously, this mandates exact synchronization between the beacons and themobile stations.
From the distances, circle equations of the form
ρ2i = (x − xi)2 + (y − yi)2 (2.2)
are postulated and solved for the unknown mobile position (x, y), given the beacon coordinates(xi, yi).
The need for over-the-air clock synchronization is a major drawback of ToA, and largelyimpossible to guarantee in real-world deployment scenarios. It can be overcome algorithmicallyby using Roundtrip Time of Flight (RToF) and Time Difference of Arrival (TDoA), described inthe following.
7

2.2.2. Roundtrip Time of Flight (RToF)Instead of directly evaluating the incoming beacon signal, the mobile can use it as synchro-nization reference and respond with its own positioning signal. The need for further clocksynchronization is thus obviated.
Assume the beacon transmits its signal at time t0, and it impinges on the mobile after thetime of flight at t0 + τ . After a fixed wait-time T , which is known system-wide, the mobilereturns its own signal, which arrives at the beacon at t0 + 2τ + T . The time of flight can noweasily be calculated.
2.2.3. Time Difference of Arrival (TDoA)A slightly more intricate approach to solving the synchronization problem is TDoA. Here,instead of absolute times, time differences between beacons are calculated, which leads tohyperbolic equations, as illustrated in fig. 2.2.
S1 (x1, y1)
S3 (x3, y3)
S2 (x2, y2)
M1 (xm,1, ym,1)3 1
2 1
Figure 2.2.: Illustration of the TDoA measurement principle: the mobile calculatesonly runtime differences between beacons, thus eliminating the needfor synchronization between beacons and mobile.
When the initial transmit instant t0 is unknown and the incident times ti and tj are measured,the time difference
Δt = tj − ti = (tj − t0) − (ti − t0) (2.3)
can be calculated, which is proportional to the distance between two beacons Δd = c · (tj − ti).The locus of points whose focal difference is constant describes a hyperbola, expressed as
x2
a2 − y2
b2 = 1, (2.4)
where in the case at hand,
a2 =(
Δd/2)2
b2 =(
Di,j/2)2 − a2. (2.5)
Here, Di,j is the (fixed) distance between two beacons, and it is assumed that the stationslie along the x-axis, which is valid because any such coordinate system can be rotated andtranslated into a more general one.
8

CHAPTER 2. FUNDAMENTALS OF WIRELESS POSITIONING
A set of N base stations givesK = N !
2(N − 2)!(2.6)
time difference sets, of which N − 1 are independent. Compared to ToA, an additional beaconis necessary per dimension to calculate a position fix.
2.2.4. Angle of Arrival (AoA)Directional antennas and beam steering allow for determination of the signal bearing θ. If thisvalue is known for several fixed beacons, Angle of Arrival (AoA) or theta-theta fixing can beused to determine a position.
S1 (0, 0)
1
2
S2 (x2, y2)
M1 (x, y)
x
y
Figure 2.3.: Geometric setup of a 2-D AoA measurement. Angles are always mea-sured with respect to geometric “north”, i.e., the direction of they-axis.
Assuming one beacon at the coordinate origin and the other at (x2, y2), and two angle mea-surements θ1 and θ2 between beacons and mobile, as shown in fig. 2.3, the mobile coordinatesare given by
y = y2 tan (θ2) − x2
tan (θ2) − tan (θ1)x = y · tan (θ1). (2.7)
While AoA by itself is used rarely in contemporary positioning systems, it is fruitfully em-ployed as add-on to distance measurements, a technique which is consequently called rho-thetafixing. Given the distance ρ and angle θ, the mobile coordinates are simply found to be
x = ρ · sin (θ)y = ρ · cos (θ) (2.8)
if the beacon is assumed to lie at the origin.
2.2.5. Fringe solutionsBesides the methods mentioned above, there are a number of specialized solutions which gen-erally utilize existing hardware to determine the position of the mobile.
9

The existing mobile phone infrastructure offers daunting possibilities: coverage in devel-oped countries is almost complete, the signal properties of both Global System for MobileCommunications (GSM) and Universal Mobile Telecommunications System (UMTS) are well-known, and handsets are readily and cheaply available.
The most simplistic approach to locating mobile handsets is cell-ID. Each base station (or“Node B” in the case of UMTS) emits a specific, unique identifier, which can be used by themobile to determine its position within the network. The accuracy of this method is limitedby the cell size, which in dense urban areas can be as low as 100 m, while in rural settings itmay grow to several km in size [55].
There is a standardized method to support cell-ID by RToF measurements. This would fixthe position of the mobile to a circle around the base station. All commonly available handsetslack the possibility to determine the bearing of the base station signal, so rho-theta fixing isgenerally not possible.
In GSM and UMTS, the possibility for real TDoA positioning exists. To overcome the problemof overshouting, the UMTS standard even proposes the introduction of blank times called IdlePeriods in Downlink (IPDL). The Common Pilot Channel (CPICH) signal is correlated withinthe mobile receiver to estimate the time of flight. With this method, accuracies to within theFederal Communications Commission (FCC) limit, i.e., in the range of less than 100 m can beachieved [56].
A common method to make use of existing WLAN infrastructure is Received Signal Strength(RSS). Here, the mobile performs signal strength measurements, a facility which is by defaultincluded in most clients. This information, together with an access point identifier, can serveto get a distance estimate. To this end, a path loss equation is solved for the unknown distanceusing the power measurement. Due to small-scale fading, this method usually leads to verypoor results especially in indoor environments.
A different approach to handling the power measurement is the use of fingerprinting [57,58].The power value from several access points is correlated against a database, which has to bepre-calibrated for the area in question before operation can commence. The mobile is thenassumed to be at the position which yields the closest match.
This method has two drawbacks. First, it is prone to changes in the environment whichaffect the propagation properties and, thus, the power patterns for a specific spot. Second,the database has to be built beforehand, which entails traversing the entire area, taking spotmeasurements and entering the corresponding coordinates. Such an approach is usually notconsidered to be “true” positioning.
In the light of the insights gained so far, tab. 2.1 presents a selection of real-world positioningapplications and solutions, along with approximate performance figures.
2.3. Physical layerThough microwave-based solutions spring to mind when positioning is concerned, there areseveral other options for the physical transport medium, most prominently ultrasound andoptical systems.
2.3.1. Non-microwave solutionsUltrasound, operating with sound waves in the range of 20 kHz–100MHz, offer the principalcharacteristic of not being able to penetrate walls. This can be used to good effect in applicationslike asset location in bureaus and hospitals. However, ultrasound is prone to interference dueto the state of the transport medium.
10

CHAPTER 2. FUNDAMENTALS OF WIRELESS POSITIONING
Application Operatingprinciple
Medium Accuracy Coverage Value
Nintendo Wii ToA, Sen-sor fusion
Optical/Infrared
sonitor — UltrasoundEkahau RSS Microwave,
WLAN ISM
Ubisense AoA, TDoA Microwave,7 GHz UWB
Symeo TDoA Microwave,5.8 GHz
Symeo UWB TDoA Microwave,7.5 GHz UWB
ABATEC TDoA Microwave,5.8 GHz ISM
GPS TDoA Microwave,1227.60 MHz,1575.42 MHz
Galileo TDoA Microwave,1164–1214 MHz,1563–1591 MHz
GSM LBS CELL-ID,RSS, TDoA
Microwave,1800 MHz,1900 MHz
UMTS LBS TDoA Microwave,2100 MHz
A-GPS TDoA, Sen-sor fusion
Microwave
Table 2.1.: Selection of common positioning applications, with a comparison ofutilized technology and rough performance estimates. The “value”column refers to the installation and maintenance cost of the system,so high value means low cost. Sources: [15, 45, 47, 49, 52], productbrochures (partially available online).
Optical systems can either refer to infrared transceivers, such as utilized in the popular Wiigaming console by Nintendo. Here, two infrared beacons mounted to a TV set are evaluated bya hand held controller to calculate a position on a virtual x-y plane.
Laser systems are the second large application class in optical systems. With the extremelysmall wavelengths offered by optical light, very high accuracies are possible.
11

Optical systems are, in addition, prone to interference through external light sources, mostnotably daylight. Also, it is not possible to track multiple targets with a laser, because onlyobjects down its main ray axis can be located.
2.3.2. Microwave based solutions and FMCWMicrowaves, which denote electromagnetic waves in the frequency band from 300 MHz–300 GHz,have a number of advantages compared to ultrasound and optical/laser solutions. They arerobust and resilient against dust particles and air pollution, because their wavelength is muchlarger than typical particles.
Microwave systems offer the possibility of using a broad detection cone to illuminate multipletargets. This advantage is bought with the drawback of multipath propagation and interference,which is the principal error source of microwave positioning systems.
Given the availability of cheap transceivers, the multi-target ability and unparalleled flexi-bility of microwaves, they are the primary choice for real-time 3-D positioning systems.
The principle of FMCW radar has long been known [1]. The advent of solid-state transmittersand, especially, the digital signal processor, has renewed interest in this technique.
Compared to pulse radar, FMCW has several beneficial properties. First, the basic frontendis very simplistic, as shown in fig. 2.4. A Voltage Controlled Oscillator (VCO) generates themodulation signal, which is fed to the antenna and a local mixer. The reflected wave is mixedwith the local signal to produce a phase/frequency difference which is proportional to the targetdistance.
VCO Circulator
Baseband
Figure 2.4.: Basic FMCW circuit. The VCO generates a frequency-modulated sig-nal, which is fed to the antenna and to the mixer. The phase dif-ference of transmitted and incident waves is evaluated in a basebandprocessor.
Second, the target resolution ΔR of FMCW radar is proportional to the inverse of the band-width of the modulated ramp only, and given by
ΔR =c
2B, (2.9)
where B is the bandwidth and c the signal propagation speed.A further advantage, which is of primary interest in military and security applications, is
that the signal time-bandwidth product is typically very high, making it hard to intercept anddetect the transmission.
Modern digital signal processing allows for evaluation of the phase/frequency difference ofthe signal by means of Fast Fourier Transform (FFT), which is trivial compared to more complexcorrelators required for pulse radar.
12

CHAPTER 2. FUNDAMENTALS OF WIRELESS POSITIONING
The aforementioned advantages are also put to use in local positioning, where the FMCWsignal form is mostly used in secondary radar configurations, i.e., where the tracked object isnot passively reflecting, but actively receiving and returning a signal of its own.
Regardless of the operating principle, the basic waveform generated by the FMCW transmitteris written as
sTX(t) = cos ((2πf0 + 1/24πB
T)t + φ), (2.10)
where f0 is the center frequency, φ the phase angle, B the sweep bandwidth and T the totalsweep duration (up- and downsweep), which is much greater than the expected signal runtimeτ . The above and all following statements regarding the FMCW signal form are true within theextent of a half-period (upsweep), so −T/4 ≤ t ≤ T/4.
As can be seen in fig. 2.5, which also summarizes the signal parameters, the time andfrequency differences between transmitted and incident ramp are proportional to each otherwith the ramp steepness.
f
t
B
T
f0
t f
Figure 2.5.: Graphical illustration of the FMCW principle. The time offset experi-enced by the reflected ramp is proportional to a frequency differencein both the up- and downsweep.
If a moving object is the detection target, a Doppler shift occurs, which imposes an additionalfrequency offset on the incident ramp proportional to the movement speed. The frequency shift,given the target velocity v and signal frequency f0, is
fDoppler = f0 · v/c. (2.11)
As can be seen in fig. 2.6, this results in different Intermediate Frequency (IF) values for theup- and downsweep.
The range and velocity of the target can then be found through [59]
fRange = Δf1 + Δf2
2= 2B
cTR. (2.12)
fDoppler = Δf1 − Δf2
2= 2f0
cv. (2.13)
The secondary-radar FMCW principle is of supreme importance for this work, as the posi-tioning module of the RESOLUTION! (Reconfigurable Systems for Mobile Communication andPositioning) platform is built around this technology. The signaling specifics and platform aredescribed in the next chapter.
13

f
t
B
T
f0
f2
f1
Figure 2.6.: Velocity measurement with FMCW ramps. The Doppler shift causesdeviations in the frequency differences on the up- and downsweeps.
14

CHAPTER 3
The RESOLUTION Platform
The previous chapter has provided a glimpse of the multitude and diversity of the field ofpositioning, ranging from aviation radar to mobile phone tracking.
An area of positioning which has attracted enhanced interest from both industry and academiais high-precision local positioning with specialized, dedicated hardware.
The remainder of this work is concerned with the simulative and analytical description andevaluation of such a platform, designed and implemented during the course of the EU-projectReconfigurable Systems for Mobile Communication and Positioning (RESOLUTION) [60–65].The project idiom has become synonymous with the platform itself and is used accordingly inthis work.
The remaining sections of this chapter describe the application field and service requirementstargeted by the RESOLUTION platform, the hardware base, signaling specifics and requirements.Subsequent chapters will then proceed with simulative performance analysis of both hardwareand software aspects of this system.
3.1. RESOLUTION service requirementsThe RESOLUTION platform is conceptually intended to serve a market for high-precision radi-olocation with dedicated hardware. There are three broad application fields which are intendedfor service by the platform:
Person guidance includes all applications in which the receiver of the position information,usually in some sort of processed form, e.g., projected to a map, is a human. De-ployment scenarios for this class include tourist guidance, assisted living for impairedpersons, smart spaces such as large shopping malls, targeted advertising in such confinesand interactive games. Special care must be taken to provide the user with semanticscorresponding to his position, i.e., location-sensitive information. This usually mandatesa comparatively high-bandwidth communication link.
Asset tracking specifically pertains the location of indoor items. High-precision location,due to elevated costs of mobile tags, is clearly not suitable for bulk tracking of goods.This remains a classic area of Radio Frequency Identification (RFID) tags. Possible
15

deployment options usually involve costly, singular pieces of equipment such as medicaland emergency devices in hospitals. Such items are tracked only on-demand, with highreliability requirements.
Robot control is a broad term which is generally taken to mean applications where therecipient of the position information is an automated, usually mobile device such as anAutomated Guided Vehicle (AGV). The classical application is the steering of transportvehicles for containers in a port. In such a scenario, the robots do not receive directposition information, but rather control commands from the infrastructure to avoidcollisions and navigate them to their destination.
Each of these applications obviously has different requirements pertaining the accuracy, numberof position updates per second, energy efficiency, reliability and scale, i.e., number of supportedmobiles per service area. Tab. 3.1 identifies robot control as the most demanding applicationclass. Fig. 3.1 outlines the basic use cases for those applications. The typical use case for the
Application classRequirements
Accuracy Updates Efficiency Reliability ScalePerson guidanceAsset trackingRobot control
Table 3.1.: Requirement map of the application classes supported by theRESOLUTION platform. The size of the rectangle indicates the im-portance of the respective parameter for the application class.
robot control is shown in fig. 3.1a. The infrastructure, which is the controlling instance of theentire system, requests on-demand position from the robots. Position data is then evaluated anda corresponding command is issued. This process is periodically repeated to ensure constanttracking of the robots.
Conversely, in person guidance, the position request is posted by the mobile/user, as seenin fig. 3.1b. Typical for this use case is the evaluation of the position information at the usersite, e.g., in a Personal Digital Assistant (PDA) or similar device. Also, the request intervalis usually unforeseeable, i.e., random: the user pressing a button, moving on to some otherexhibit and so on.
A special case is illustrated in fig. 3.1c. This use case is known from GPS: the infrastructureperiodically provides measurement signals which the user can optionally process or discard.The position semantic is processed at the user site.
It is clear from the above considerations that successful integration of positioning in a wirelessnetwork invariably requires a communications link. At the very least, this link must enable theexchange of control messages. Often, additional semantics such as streaming audio and videoare transferred. Consequently, the RESOLUTION platform is designed as hybrid communicationand positioning solution, with exchangeable communication modules, as detailed in the nextsection.
3.2. Hybrid positioning and communicationThere are several well-established communication standards available which are suitable for usein a sensor network with positioning. For the specific requirements of RESOLUTION, the sought
16

CHAPTER 3. THE RESOLUTION PLATFORM
Position request
Position data
Evaluation/Projection Command Position request
...
(a)
Position request
Position data
Evaluation/Projection Position request
...
(b)
Position data Evaluation/Projection Position data
...
(c)
Figure 3.1.: Use cases and message exchange between infrastructure and mobile.The dashed arrow indicates measurement data exchange. Randomand fixed waiting times are illustrated as clocks with or without ar-row, respectively. (a) “AGV” use case (b) Classical user request (c)Periodic downlink-only measurement
.
after key characteristics were
• compatibility with the positioning subsystem, i.e., minimal interference on both sides,
• reasonable efficiency, so the overall power consumption stays within the bounds dictatedby the application,
• a proper channel contention scheme, independent of positioning operations,
• unlicensed access and
• appropriate data rates.
The question of what is an appropriate data rate can be answered in context with the appli-cation. For simple control or transfer of positioning data, very low data rates are sufficient.Applications such as person guidance might require significantly more bandwidth, however, toprovide context-sensitive data like streaming audio and video.
17

The two prime candidate standards for those requirements are IEEE 802.11 (WLAN) andIEEE 802.15.4 (ZigBee). Both operate in free ISM bands, around 2.4 GHz for ZigBee and from5.25 GHz upwards for WLAN, which is shown in the spectrum allocation plot in fig. 3.2.
f / GHz
Positioning
5.725 5.8755.470
WLAN
2.400
WLAN
5.3502.485
ZigBee/WLAN
5.250
Figure 3.2.: Spectrum allocation of communication standards suitable forRESOLUTION.
There is also an option for WLAN in the 2.4 GHz band. The WLAN sub-standards in questionare characterized in tab. 3.2.
Standard Band Max bit rate802.11a 5 GHz 54 Mbit/s
802.11b 2.4 GHz 11 Mbit/s
802.11g 2.4 GHz 54 Mbit/s
(802.11n) 5 GHz/2.4 GHz 600 Mbit/s
Table 3.2.: Sub-standards of IEEE 802.11 (WLAN) and their characteristics. Notethat 802.11n is a draft standard only at the time of this writing.
To ensure sufficient band isolation between communication and positioning, it is reasonableto select a standard in the 2.4 GHz band. This makes it impossible to use a single, wide-bandantenna for both operations, however, which has an impact on the form factor of the device.
In comparison to the high data rates provided by WLAN, ZigBee supports a data rate ofonly 250 kbit/s. This makes it suitable for transmission of control commands and sparse con-tent packets only. However, ZigBee is optimized for low duty cycle operation and low powerconsumption, a significant advantage over WLAN [66].
Both systems use a Carrier Sense Multiple Access (CSMA) contention scheme to deal withmultiple access. Due to the much higher data rates, contention is generally assumed to be amore critical issue in WLAN.
For the remainder of this work, and especially in chapter 5, WLAN is assumed to be thecommunication standard of choice, because it represents a worst-case lower bound on networkperformance while providing a powerful, high-bandwidth data link. ZigBee remains a viableoption for low-power, machine-to-machine operations.
For a complete rundown of WLAN functionality, the reader is referred to the relevant stan-dards documents [67, 68].
3.3. RESOLUTION hardware baseFig. 3.3 shows the conceptual block diagram of the RESOLUTION hardware platform.
The FMCW-based positioning subsystem HPLS (High-Precision Location System) consistsmainly of the Radio Frequency (RF) front-end, plus baseband logic to evaluate the position.The signal-theoretical foundations of the positioning process are detailed further on.
18

CHAPTER 3. THE RESOLUTION PLATFORM
Commercialcommunication chip(WLAN, ZigBee ...)
Synthesizer
Baseband-FPGA
A
D
Interface
Figure 3.3.: Conceptual block diagram of the RESOLUTION hardware base, in-cluding the HPLS front-end, the communications chip, baseband pro-cessing and interface.
Parameter Shorthand ValueCenter frequency f0 5.8 GHzBandwidth B 150 MHzRamp period T 0.5 msEIRP – max. 14 dBm
Table 3.3.: Central physical layer specifications for the RESOLUTION platform.
Tab. 3.3 lists the central physical layer specifications of HPLS. Operation in the ISM bandat 5.8 GHz allows for a license-free output power of 14 dBm, which guarantees a strong rangeadvantage over current Ultra-Wideband (UWB) systems [16].
The communication and positioning signals are multiplexed via higher-layer flow control toensure minimal interference. The use of separate antennas obviates the need for an antennaswitch or circulator. In the current configuration of the hardware, the communications link isregulated via the interface block in the baseband section.
The central hardware component of the HPLS frontend is the synthesizer, which is responsiblefor generating highly linear frequency ramps.
The synthesizer is based around a fractional-n Phase Locked Loop (PLL) design with ΣΔ-modulated Multi-Modulus Divider (MMD). This design currently achieves phase noise betterthan -117 dBc/Hz at only 100 mW output power. Detailed information can be found in [65, 69].
The measurement process follows the secondary-radar principle with FMCW signals. In thetransmit path, the synthesizer generates a ramp of the form
sTX(t) = cos((ω0 + 1/2μt)t + φ
), (3.1)
where μ is a shorthand for the ramp steepness 4πB/T and φ a constant phase term.
19

Arriving at the receiver, this signal is affected by noise and possibly multipath propagation,an effect which is treated in section 4.3.1. The received signal is thus a sum of multiple copiesof the transmit signal, affected by specific attenuation and time delays. It can be written as
sRX(t) = α0sTX(t − τ0) +Nc−1∑i=1
αisTX(t − τi
)+ n(t). (3.2)
Here, Nc is the total number of path components, with specific amplitudes αi and time delaysτi, and n(t) a Gaussian noise term.
The multipath components also experience phase shifts, which have a destructive effect onthe measurement process. This is elaborated upon in section 4.3.1. Phase terms have beenomitted in (3.2) for sake of simplicity.
After band selection and amplification, this signal is mixed in the receiver with a local copyof the transmit signal. After low-pass filtering to get rid of high-frequency components at 2ω0,
sBB(t) =Nc∑i=0
αi cos((μτi)t + φi
)+ nBB(t) (3.3)
results. Here, αi are the modified amplitudes, now including also the wanted Line of Sight (LOS)signal with index 0, and nBB(t) the filtered noise.
This signal is now fed to Analog to Digital Conversion (A/D) and handed to the basebandprocessor. As can be seen in (3.3), the frequencies of the baseband cosine terms are directlyproportional (with μ) to the respective signal runtimes τi. Frequency analysis in the basebandcan now produce the wanted runtime of the LOS term, τ0, which is easily translated to a distancevalue.
The FFT has long been the preferred method for frequency analysis. It is also the defaultanalysis method in this work, so subsequent discussions of baseband analysis always assumethe FFT as underlying algorithm.
Note that the above observations disregard absolute timing in the system. Generally, themeasurement takes place between two identical stations A and B. Station A produces the rampat the time instant t0,A, which is unknown to station B.
In absolute time, the transmit signal is then
sTX(t) = cos((ω0 + 1/2μ(t − t0,A)) · (t − t0,A) + Φ
), (3.4)
which will make station B produce a measurement which includes the unknown time offset ofstation A.
One approach to resolve this is to use ramp synchronization in a RToF protocol configuration.Here, station B mixes the received ramp with its own, started at the specific time offset t0,B.After a system-wide constant wait time T , it returns a ramp which is frequency shifted toinclude the measurement result t0,B − t0,A as well as the one-way time of flight.
This signal returns to station A, where it is again mixed to produce the runtime, which ispossible because both t0,A as well as the difference t0,B − t0,A are now known at station A.
There are other methods to resolve the timing offset situation, such as the application ofa TDoA protocol. The operation principle remains the same, except that a third station isintroduced which provides the synchronization (reference) ramp. The measuring station thenreceives ramps from one or several other stations which are synchronized to this reference signal.
This approach has several advantages, such as obviating the need for two-way signaling.Details on the protocol implementations and their implications on the system performance arefound in chapter 5.
20

CHAPTER 4
Single Node Architecture and Performance Analysis
This chapter is concerned with the performance analysis of the HPLS positioning hardware.As opposed to the next chapter, the setup under consideration is that of an isolated nodein exchange with a single base station. Suitable figures of merit are defined and the basicperformance under AWGN conditions is given. Selected hardware impairments as well as adversesignaling conditions – multipath propagation being the most prominent – are considered.
4.1. Basic receiver performanceThe primary goal of system simulation is to get an estimate of receiver performance withouthaving to implement actual prototype hardware. To this end, mathematical abstractions ofsystem components are developed and implemented in a suitable simulator or programminglanguage. As models can only be an approximation of real-world behavior, it is importantto have an idea of the question the simulation should be designed to answer. Given currentsimulator technology and conventional server performance, it is unfeasible to run long-timesimulations with very high modeling detail.
Fig. 4.1 illustrates simulation abstraction layers with examples from the structural andfunctional domains. For an initial performance assessment as part of a feasibility study orconcept design, the highest (“conceptual”) abstraction layer will be the correct choice in mostcases. Electronic components are modeled as transfer functions and differential or algebraicequations on this level. To integrate device-specific characteristics later in the prototypingprocess, electrical properties are determined in dedicated physics simulations and implementedas mathematical models [70].
Fig. 4.2 shows the principal setup of a basic system simulation of the HPLS system. Seman-tically, the simulation is organized in three parts:
Transmitter consisting of a synthesizer block for generation of the FMCW ramp, followed byan (ideal) power amplifier block for signal power selection.
Channel which in the most basic configuration adds White Gaussian Noise (WGN) to thesignal and fades the signal power according to an underlying large-scale fading model.
21

Algorithm
Register-Transfer Language
Boolean Equation
Differential Equation
Processor-Memory-Switch
Register-Transfer
Gate
Transistor
Physical
Logical
Behavioral
Conceptual
Voltage, current
Discrete levels, bits
Bit vectors, data blocks
Signals
FunctionalStructural
Simulation domain
Figure 4.1.: Simulation abstraction levels exemplified by structural and functionaldomains. (Adapted from P. J. Ashenden et al.: The System De-signer’s Guide to VHDL-AMS, Morgan Kaufmann Publishers, 2003)
Receiver as the actual component under scrutiny. In a first abstraction, it includes the mixerto downconvert the incoming RF ramp with a local signal replica and the basebandprocessing to evaluate the IF/baseband signal.
DSP
WGN
Path lossPASynthesizer
Figure 4.2.: Conceptual block diagram of the principal system simulation setup.
Nyquist’s theorem suggests that aliasing-free representation of a signal mandates to sample atleast at twice the highest frequency represented in the signal [71]. Assuming a f0 of 5.725 GHz,this would suggest a simulation sampling rate fs of 11.75 GHz, which would yield exceptionallylarge vectors and very long simulation times.
It is thus customary to limit simulation to the band of interest, which in the case of HPLSamounts to the 150 MHz band containing the actual ramp signal, omitting the carrier [70].As the required transformation yields a complex signal, this method is generally known asEquivalent Complex Baseband (ECB) or complex envelope representation.
22

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
The characteristics of this transformation and its application to the FMCW signal are de-scribed in Appendix D. The signal produced by the complex synthesizer is written as
x(t) =√
Aej 12 μt2
, (4.1)
where μ is the ramp steepness defined in (3.1), and A the complex signal power. This signal isboth used as transmit signal xTX(t) and local oscillator output xLO(t) in the mixing process.
As this time-continuous signal can not be represented in a digital computer, sampling is usedto transform it into a digital sequence:
x(t)|t=nTs = x[n]
=√
Aej 12 μ(nTs)2
, (4.2)
where Ts is the sampling period, i.e. the inverse of the sampling frequency fs. As per Nyquist’stheorem, the minimum sampling frequency is given by twice the maximum signal frequency.Nonideal effects in the receiver can, however, lead to an increase in the signal band of interest.Additionally, due to the aperiodic nature of the ramp signal, spectral leakage is to be expected.It is thus customary to radically oversample analog signals for simulation representation. Thesampling frequency for representation of RF signals fs,RF has been chosen as eight times thesignal bandwidth B.
To simulate a specific distance d between transmitter and receiver, the transmit signal isdelayed by the (one-way) time-of-flight τ :
xTX[n − τ ] =√
Aej 12 μ(nTs−τ)2
=√
Aej(( 12 μnTs−μτ)nTs+ 1
2 μτ 2). (4.3)
Note that τ can only be implemented as a discrete sample delay, which theoretically induces anerror in the position fix compared to the continuous signal. However, as the RF sampling ratefs,RF is very large, this error is significantly smaller than the one introduced by the limitedfrequency domain resolution (see 4.1.3).
The minimal effects the channel imposes on the transmit signal are signal power fading (pathloss) and noise. Path loss can in a first approximation be described as
PRX =PTXλ2GTXGRX
(4π)2dn, (4.4)
where PRX and PTX are the received and transmitted signal power; λ the signal wavelength;GTX and GRX the transmit and receive antenna gains; and d the distance between transmitterand receiver. The path loss exponent n is 2 for free space conditions. However, it is knownthat in real environments, especially indoors, this number can be significantly larger [72].
Gaussian noise is added to the signal to account for flat thermal noise in the receiver andother sources [52]. It is generated as a complex sequence of random numbers with normaldistribution and added to the transmit signal:
xCH[n] = AxTX[n] + ν[n]
= AxTX[n] + σN√2
N(0, 1) + jσN√
2N(0, 1). (4.5)
Here, A is the faded signal amplitude, σ2N the desired noise power and N(μ, σ2) a vector of
independent Gaussian random variables with mean μ, standard deviation σ and identical lengthas the transmit signal.
When the signal impinges on the receiver, it is mixed with a local (non-delayed) copy of thetransmit signal xLO to produce an IF signal xIF. Note that in a real RF simulation, the (real)
23

mixing process would yield signals at both IF and the double carrier frequency 2ω0, which wouldrequire subsequent low-pass filtering. In an ECB simulation, complex mixing is applied whichyields only the IF signal and is thus equivalent to RF mixing with subsequent ideal low-passfiltering. The IF signal is then given as
xIF[n] = x[n] ⊗ xCH[n]= x[n] · x∗
CH[n]
= A
2ej((μτ)nTs+Φ) + ν[n], (4.6)
where Φ is a constant phase term and ν[n] the modified noise term.
4.1.1. Figures of meritAn important distinction in the evaluation of positioning systems is between accuracy, precisionand resolution. The latter term describes the ability of the system to perceive two targets asdistincts objects. In HPLS, this is a function of bandwidth and frequency domain resolution,i.e., a purely deterministic parameter, given default detection methods.
Accuracy, on the other hand, describes the deviation of a position fix from the expected(true) value, i.e., the absolute position error (in any dimension). In the trivial case, it is simplythe distance error
ε = |d − dm|, (4.7)
where d and dm are the actual and measured distances, respectively. According to the centrallimit theorem, for a large number of trials, the distribution of the error vector
e = {ε1ε2 . . . εN} (4.8)
will follow a Gaussian distribution N(με, σ2ε ). Barring any systematic errors (i.e. hardware
faults or software glitches), the position measurement will be distributed around the true dis-tance d, and thus, με = 0.
Precision describes the mean deviation of a number of positioning attempts from the truetarget position, quantified by the standard deviation of the underlying probability density.
Due to the limited frequency domain resolution, the error is quantized with the FFT binsize, which makes error histograms impracticable and possibly inaccurate. Furthermore, per-formance analysis usually mandates sweeping design variables, such as the noise power, whichwould yield several histograms for each datapoint.
In radar signal processing, hypothesis testing for the evaluation of signals is commonplace [73].Given a vector of measurements
y = [y0y1 . . . yN−1]t, (4.9)
the N-dimensional joint pdfs py(y|H0) and py(y|H1) are defined with
H0 The measurement is the result of interference
H1 The measurement is the result of interference and target echoes
and
py(y|H0) pdf of y given that the target was not present
py(y|H1) pdf of y given that the target was present
Based on these pdfs, two probabilities are defined:
PD Probability of detection, i.e., a target that is actually present is also declared.
24

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
PF A Probability of a false alarm, i.e., a target is declared which is in fact not present.A radar is constantly “detecting” signals, so the design of criteria for these probabilities is ofvital importance. These parameters are not directly suitable for local positioning, however.The sensor in a local positioning setup only receives specific signals from the beacon within avery limited time frame, so there is no possibility of false alarms. Rather, the probability ofdetection PD and its complementary, the probability of a miss PM = 1 − PD, i.e., a target waspresent but not detected, are suffice to define the performance of a local positioning system.
The trivial definition of H1 would be that the detected signal is within the frequency binknown to contain the (quantized) real distance d. This is, however, impractical because itwould scale PD with the frequency resolution. Thus, while the resolution of path componentssinks with a shorter FFT, the error tolerance rises. This is clearly not ideal from the end-userperspective on accuracy. A more sensible definition is
H0 :ε > εL
H1 :ε ≤ εL, (4.10)
i.e., if the measured error ε is less or equal than a tolerance level εL, the signal is detected. Forthe detection probability, given a vector of measurements y, this means that
PD = P (|y − d| ≤ εL). (4.11)
The actual selected error tolerance εL will be given with the simulation results.Note that the detection probability is a measure of both accuracy and position. However,
effects which shift the mean error from the expected value of zero can produce surprising effectsin the detection probability. Fig. 4.3 illustrates a paradox: despite showing far worse precisionthan fig. 4.3c, the error pdf in fig. 4.3d has a better detection probability due to the fact thatsome values randomly fall into the tolerance limit. This would suggest that the system actuallyperforms better at lower Signal to Noise Ratio (SNR) values, which is counterintuitive. Notethat the extent of this effect hinges on the choice of the tolerance limit, however. If it wasextended to include the bulk of the values in fig. 4.3c, detection probability of this pdf wouldagain be better than in fig. 4.3d.
Compared to an ideal reference, it is clear that additive noise effects will shift the detectionprobability to the right. This amounts to a loss in range, and is thus labeled sensitivity loss.
Non-Gaussian error sources such as multipath propagation can have the additional effectof saturating the detection probability at values lower than one, suggesting that the systemperformance suffers even with no noise present.
4.1.2. AWGN performanceThe most basic impairments experienced by the positioning system are noise and signal powerfading over distance. The combined effect can be conveniently captured as the SNR measuredat the receiver antenna, given as
SNR = σ2S
σ2N
, (4.12)
where σS and σN are the standard deviations of the wanted signal and noise, respectively.If the SNR should be referred to a real hardware, the transmitter and receiver Noise Figure
(NF) must be taken into account. The NF for a two-port is generally defined as [74]
NF = SNRin
SNRout, (4.13)
where SNRin and SNRout are the SNR values at the input and output of the system, respec-tively. The NF can be measured for each element of a circuit, and will usually be given in
25

PDF(e)
e
100%
(a)
PDF(e)
e
60%
(b)
PDF(e)
e
0%
(c)
PDF(e)
e
10%
(d)
Figure 4.3.: Illustration of the effects of mean and variance fluctuations of theerror absolute value e on the detection probability. (a) Very highaccuracy and precision (b) Reduction of precision (e.g. due to noise)leads to lower detection probability (c) Despite high precision, themean value of the error is far off, leading to zero hits (d) Accuracyis again very bad, but due to the worse precision, some values fallwithin the tolerance limit.
the specification. The composite noise figure of an entire system can be derived from the Friisequation [74] as
NFSystem = 1 + (NF1 − 1) + NF2 − 1A1
+ NF3 − 1A1A2
+ . . . + NFm − 1A1 . . . Am−1
. (4.14)
Here, NFm and Am are the noise figure and gain of the mth stage, respectively.In a simulation, it is customary to define the SNR as a sweep parameter. This is equivalent
to iterating over distance values, as the noise power is assumed to be fixed at receiver noisefloor
BN0
2= σ2
N = kT0fs, (4.15)
Where fs is the total signal bandwidth in simulation. Thus, the signal power at the receiverantenna is derived as
σ2S = 10
SNR10 σ2
N . (4.16)A noise vector according to (4.5) is added to the signal, which is then processed through
the baseband chain described in section 4.1.3. The resulting detection probability is shown in
26

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
SNR
P(ε
<ε L
)
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
Figure 4.4.: Detection probability P (ε < 0.15 m) for the reference AWGN case,with FFT signal analysis and brute-force peak search.
fig. 4.4. The detection limit of the reference case is 0.15 m. Tab. 4.1 relates the SNR valuesto distances for different large scale fading exponents, unit antenna gains and 25 mW transmitpower. Recall that n = 2 corresponds to ideal free space propagation, which will hardly everbe the case in an actual application.
SNR / dB Free space Indoor-40 380.31 52.49-35 213.86 35.76-30 120.26 24.36-25 67.63 16.60-20 38.03 11.31-15 21.39 7.70-10 12.03 5.250 3.80 2.44
Table 4.1.: Relation of SNR values to actual distances for two different path lossexponents.
It is hard to make a compelling statement about the range of the system given only fig. 4.4.The detection probability makes no statement on how far a “miss” was away from the actualtarget; there might be algorithms in the baseband to re-request position fix attempts whencertain criteria are met; antenna combining may be in use to utilize multiple signal paths; andso forth.
27

In the following sections, the plot in fig. 4.4 will be shown and referred to as “reference case”.
4.1.3. Baseband signal evaluation
Complex|
RealDFT
Resampling Windowing Detection
xIF[n] xBB[n] xTF[n] X(f)
Figure 4.5.: Detailed signal processing chain in baseband. The incoming IF signalis converted to real, radically downsampled and windowed. AfterDFT, peak detection is performed to evaluated the signal runtime.
Fig. 4.5 shows a more detailed block diagram of the signal processing steps taking placeafter mixing. The IF signal in (4.6) is a complex oscillation with the frequency
ω0 = μτ. (4.17)
Assuming reasonable values for the distance, this signal is in the MHz range and can thus beconverted back to a real signal, yielding
xBB[n] = �{ A
2ej((μτ)nTs+Φ) + ν[n]}
= A
2cos
((μτ)nTs + Φ
)+ �{ν[n]}. (4.18)
Recalling that fs was chosen as 8B to accommodate potential spectral leakage in the RFdomain, xBB[n] is extremely oversampled. This is disadvantageous in frequency domain evalu-ation, as after FFT, the frequency domain resolution is given as
Δf =fs
N. (4.19)
It is thus meaningful to downsample the baseband signal to the lowest possible frequency if Nis held constant. As no further frequency domain leakage can be expected at this point, thiswould amount to
fs,BB ≥ 2μτmax, (4.20)where τmax is the expected maximum time of flight, which can be derived from the systemspecification.
After resampling, the signal is multiplied with a window function to compensate for spectralleakage due to the unknown period length of the cosine in (4.18). Tab. 4.2 lists the parametersof some common window functions. In reality, the choice of this function is of minor interestin the AWGN case, as the observation length of the incoming signal is much larger than thesignal period T0. It becomes crucial for multipath propagation, though (see section 4.3.1). Inthe following, a rectangular window is assumed as the default choice unless stated otherwise.
The windowed signal is fed to an N-point FFT, becoming
xTF = xBB[n]|fs,BB · w[n]
�
X(f) = AW (πT (f − μτ)) + N(f). (4.21)
28

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
Type ΔA / dB Δω / radRect -13 4πfs/Nw
Hanning -32 8πfs/Nw
Hamming -42 8πfs/Nw
Blackman -58 12πfs/Nw
Table 4.2.: Parameters of different window types. ΔA is the sidelobe suppressionrelative to the main lobe height and Δω the width of the main lobe.
Here, w[n] and W (·) is the window function in time and frequency domain, A the modifiedamplitude and N(f) the Fourier transformed noise term. Note that the constant phase term Φfrom (4.18) has been omitted here for simplicity.
An artistic rendition of the squared absolute spectrum |X(f)|2 can be seen in fig. 4.6. Aninherent problem of this approach to frequency analysis is that the underlying spectrum of theDiscrete Time Fourier Transform (DTFT) is only sampled at regular, discrete instants by theDFT. This effect is exaggerated in fig. 4.6, where the actual frequency peak is close to the edgeof bin five. The maximum error from this effect is equal to half the bin size (if the actual peak
1 2 3 4 5 6 7 8 9 10 11 12
df|X(f)|2
f
Figure 4.6.: Illustration of the frequency domain signal |X(f)|2. The underlyingDTFT spectrum is sampled by the DFT, giving an approximation ofthe true frequency content.
is on the outermost edge of the bin) and given by
εFFT,max =πcΔf
μ, (4.22)
where c is the signal velocity.The channel profile in frequency domain is handed to peak detection. In the trivial case,
this is simply a maximum detection, but more complex approaches are possible [75–80]. Fromthe bin index of the peak p, the distance is calculated as
d = 2πcpΔf
μ. (4.23)
To obtain a fix in two or three dimensions, distances from multiple beacons are then processedin the position calculation engine (see sec. 4.3.2).
29

4.2. Hardware impairmentsThe following sections describe impairments to the positioning process which are related tohardware nonidealities or physical limitations.
Of these, the performance of the integrated synthesizer is of special interest. Glitches inthe generation of the frequency ramps have the unpleasant effect of directly affecting the IFmeasurement. These impairments included phase noise, ramp nonlinearity, and possibly syn-chronization.
4.2.1. Phase noiseAn ideal oscillator exhibits a Dirac spectrum at the oscillation frequency f0. Due to nonidealphysical effects, the spectrum of a practical oscillator tends to exhibit a “skirt” spectrum aroundf0, illustrated in fig. 4.7. Mathematically, this is written as
S(f)
f
f0
(a)
S(f)
f
f
f0
(b)
Figure 4.7.: Output spectrum S(f) of an (a) ideal oscillator (b) practical oscilla-tor, which exhibits a phase noise “skirt”.
x(t) = A cos (2πf0t + Φ + φ(t)), (4.24)
where Φ is a constant and φ(t) a time-variant excess phase term.Phase noise is usually quantified as the noise power in a 1 Hz band at an offset Δf from the
carrier, relative to the carrier power [81]:
L|Δf = 10 lg(
noise power in 1 Hz band at f0 + Δf
carrier power
). (4.25)
Fig. 4.8 shows a typical phase noise shape in frequency domain. The phase noise regions aroundthe carrier exhibit different slopes due to different physical mechanisms involved [82]:
1/f3 Related to the physical resonance mechanism of the active oscillator.
1/f2 Caused by white or uncorrelated timing fluctuations in the oscillation period.
1/f Flicker noise added either by physical resonance mechanism or noisy electronics.
30

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
1/f3
1/f2
1/f
f1 f2 f3
log( f)
L
Figure 4.8.: Log-log rendition of the classical phase noise power spectral density.
The modeling of 1/fα noise is the topic of several previous works [81–88]. Only the generalprocess is repeated here for the sake of completion.
Colored noise is generally generated by filtering of white noise. In [86], a technique forusing first order filters to shape different regions of the spectrum is proposed. This method iscomputationally economic and gives good approximation to the ideal spectrum. Fig. 4.9 showsa computation of the one-sided power spectral density of phase noise.
f / Hz
Powe
rsp
ectr
alde
nsity
/dB
c/H
z
102 103 104 105 106-160
-140
-120
-100
-80
-60
-40
-20
Figure 4.9.: One-sided power spectral density of phase noise generated with thetime-domain method. Good approximation to the theoretical curveis achieved.
The effect of phase noise on the secondary FMCW radar employed by HPLS has been subjectto mathematical analysis [65]. It is shown that the error caused by phase perturbation of thefrequency ramp is proportional to the time of flight. However, the variance of the localizationis very low for reasonable values of phase noise.
31

SNR
P(ε
<ε L
)
L|1 MHz = −90 dBc/Hz
L|1 MHz = −120 dBc/Hz
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
Figure 4.10.: Detection Probability P (ε < 0.15 m) with phase noise applied. Asensitivity loss is seen only at very high noise levels.
Fig. 4.10, which shows simulation results using the time-domain phase noise generationdescribed above, confirm the assumption that phase noise has only a minor impact on the HPLSsystem. A low sensitivity loss is seen at a setting of L|1 MHz = −90 dBc/Hz. The integratedsynthesizer developed for the actual system, described in [69, 89], achieves a closed loop L of-117 dBc/Hz, however. Thus, it is concluded that phase noise has only a minor influence onthe system performance, especially when compared to multipath propagation effects.
4.2.2. Ramp nonlinearityIn the ideal system, the frequency ramp generated by the transmit and receive synthesizers areassumed to be perfectly linear over the sweep duration T and bandwidth B.
Hardware nonidealities, however, may give rise to two distinct effects. The first is thedistortion of the ramp away from perfect linearity, which can be seen as the superposition of atime-variant frequency term to the instantaneous frequency, written as
ωFM(t) = ω0 + μt + δωFM(t), (4.26)
where ω0 is the offset frequency. The impact of this effect has seen thorough treatment byanalysis, simulation and measurement in [90], where the authors found that low modulationfrequencies generally cause larger errors.
A second, unrelated effect is the mismatch that might occur between the slopes of thetransmit and receive ramps. This error is very likely to occur in one form or the other, asthe synthesizer generates the ramps based on a crystal oscillator reference, which is prone tovariations due to voltage fluctuation, temperature change and fabrication tolerance.
These fluctuations usually sum up to end in the low ppm range, so it can be said that
fXTAL1 = fXTAL2 (1 +Δp
1e6), (4.27)
32

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
where fXTAL1 and fXTAL2 are the two oscillator frequencies and Δp is the parts deviation inppm.
Assuming they are not used for other timing purposes in the system, the oscillators mustthen time the ramp periodicity T , which will directly be affected by the frequency deviation.
In simulation it is convenient to assume that one oscillator is perfect and the other producesan offset. Thus, the synthesizer phase becomes
φ(t) = 12
11 + 1e6Δp
μt2. (4.28)
This deviation remains as constant term in the IF signal and causes an offset in the frequencyevaluation. Additionally, a residual chirp term will dilute the spectral peak. Thus, this erroreffects not only the precision, but also the accuracy of the result, i.e., causes a shift of the meanerror value. This yields the effect described in fig. 4.3. Fig. 4.11 shows simulation results for
SNR
P(ε
<ε L
) 1 ppm2 ppm3 ppm4 ppm
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
Figure 4.11.: Detection probability in the AWGN case, with various settings foroscillator mismatch. It can be seen that this is a systematic errorwhich shifts the mean away from the detection cone.
various ppm settings. The detection probability breaks down at 4 ppm: here, it can be seenthat the mean value of the error is shifted outside the detection cone. This causes the systemto perform better at lower SNR values.
4.3. Signaling impairmentsImpairments treated in this section do not pertain shortcomings of the physical hardware, butare related to signal properties or signal processing algorithms.
Multipath propagation is generally understood to be the limiting factor in all radiolocationsystems, and is thus given special attention.
33

4.3.1. Multipath propagationPropagation over multiple signal paths is a well known problem in microwave transmission. Incommunications, it accounts for complex receiver structures, but yields the beneficial effect ofallowing communication between terminals which have no LOS connection. In local positioning,
t
|h(t)|2
B/T
Figure 4.12.: Illustration of multipath propagation. The signal emitted from thebeacon reaches the sensor on multiple paths with increasing delays.
multipath propagation is usually by far the largest source of error in the system. Fig. 4.12illustrates the principal mechanism: A radio signal emitted by the beacon reaches the sensor onmultiple signal paths. In local positioning, a LOS connection is essentially mandatory to obtaina meaningful position fix. Multiple secondary rays reach the sensor, each with a specific delayrelative to the LOS path (excess delay) and specific amplitudes. The source of these secondaryrays are given in [72] as:
• Reflection, occurring when the transmit signal impinges on a smooth surface with verylarge dimensions as compared to the wavelength λ.
• Diffraction, which occurs when secondary waves form behind a large obstructing body.
• Scattering refers to the spread of radio waves when the source wave hits small (withrespect to λ) objects.
Mathematically, the transmit signal xTX(t) can be thought of being convolved with thecharacteristic Channel Impulse Response (CIR) h(t), producing
xMP(t) = xTX(t) ∗ h(t). (4.29)
34

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
The CIR generally takes on the form
h(t) =Np∑
n=1cnδ(t − τn), (4.30)
where Np is the total number of path components, cn the complex amplitude of the nth compo-nent with magnitude |cn| and phase θn, and τn the specific delay of the nth component. Notethat while τn gives an absolute time delay value, τe,n is the excess delay of the nth component,with the LOS component delay as reference (τe,LOS = 0).
The exact form of (4.30) is strongly dependent on the actual scenario. Outdoors, a strong LOScomponent may be accompanied by few and widely spaced secondary rays. Indoor scenarios,which are highly relevant for HPLS, are generally more challenging. In factory halls, there is amultitude of highly reflective objects, and ample opportunity for shadowing and scattering.
Measurement-based channel modelMeaningful modeling of a propagation channel can be based on actual channel measurementsfollowed by model abstraction. The following steps are described in [91], in which a project-specific channel model was devloped:
1. Measure the channel transmittance S21 (i.e., the frequency response) with a VectorNetwork Analyzer and suitable antennas with sufficient bandwidth to resolve closelyspaced path components.
2. Perform an Inverse Fast Fourier Transform (IFFT) to obtain the discrete time-domainCIR h[n].
3. Reduce the model order by eliminating low-power or high-delay components.
4. Fit the measurement to a channel model by Maximum Likelihood Estimation (MLE).
Distribution of the component phases θn is assumed to be uniform over (0◦, 360◦). A fittingand flexible model for the magnitudes |cn| is the Nakagami-m distribution. The pdf is given by
pNakagami(x; μ; ω) = 2( μ
ω
)μ 1Γ(μ)
x(2μ−1)e− μω x2
, (4.31)
where μ and ω are called the shape and scale parameters, respectively, and Γ(·) is the gammafunction.
Excess delays τe,n were fitted to a lognormal distribution:
pLognormal(x; μ; σ) =1
xσ√
2πe− (ln x−μ)2
2σ2 (4.32)
Fig. 4.13 illustrates distributions suitable for modeling of the multipath components.In simulation, a set of pre-calculated channels with a very high sampling rate is used. These
are resampled ad-hoc to fit the current simulation bandwidth and convolved with the transmitsignal. This will in the following be called the Warsaw channel model as a reference to its placeof inception.
Alternative channel modelsBased on statistical analysis of empirical data, general channel models including parameterscan be derived for a variety of scenarios. This has a long tradition in mobile communications,where bandwidths are usually very small compared to what is encountered in positioning.
35

μ = 0.5, ω = 1μ = 1, ω = 1μ = 1, ω = 3μ = 2, ω = 1μ = 2, ω = 2
1 1.5 2 2.5 30
0.5
1
1.5
(a)
μ = 0.5, σ = 1μ = 1, σ = 1μ = 1, σ = 3μ = 2, σ = 1μ = 2, σ = 2
2 4 6 8 100
0.2
0.4
(b)
σ = 0.5σ = 1σ = 2σ = 3σ = 4
2 4 6 8 100
0.5
1
(c)
σ = 1, ν = 0σ = 1, ν = 0.5σ = 1, ν = 2σ = 0.25, ν = 1σ = 0.25, ν = 2
0 5 100
0.5
1
(d)
Figure 4.13.: Various distributions suitable for representing parameters ofh(t). (a) Nakagami-m distribution (b) Lognormal distribution (c)Rayleigh distribution (d) Rice distribution.
One of the most widely used model is the Saleh-Valenzuela model for indoor radio channels[92]. It is based on the assumption that the CIR can be separated into clusters of singular rays(path components). Relevant parameters for this model are then the distribution of clusters,the amplitude fading within clusters and the (temporal) distribution of rays within each cluster.
In the Saleh-Valenzuela model, the CIR is written as
h(t) =∞∑
i=0
∞∑j=0
aj,i · ejΦj,i · δ(t − Ti − τj,i). (4.33)
Here, Ti is the arrival time of the ith cluster; τj,i is the delay of the jth component within andrelative to the ith cluster; and aj,i and Φj,i describe the amplitude and phase of the respectivecomponents.
Clusters and rays are assumed to arrive independently, so the arrival times follow a Poissonprocess. This mandates that the interarrival times of clusters are exponentially distributed as
P(Ti|Ti−1) = Λe−Λ(Ti−Ti−1) (4.34)P(τj,i|τj−1,i) = λe−λ(τj,i−τj−1,i). (4.35)
36

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
Amplitude coefficients are assumed to follow a Rayleigh distribution:
P(aj,i) = 2aj,i
a2j,i
e−a2
j,i/a2j,i , (4.36)
and the phase coefficients Φj,i are uniformly distributed in [0, 2π).The Saleh-Valenzuela model, however successful in mobile communications, is not directly
suitable for simulation of wideband or even ultra-wideband positioning systems, which mandatea path resolution of up to 1 ns.
On grounds of the Saleh-Valenzuela model, the IEEE 802.15.4a working group developed amodel for UWB channels which takes frequency-selective path loss into account [93].
The IEEE 802.15.4a channel model for UWB channels defines the CIR in reference to theSaleh-Valenzuela model as
h(t) =K∑
i=0
J∑j=0
aj,i · ejΦj,i · δ(t − Ti − τj,i). (4.37)
The number of clusters is limited and a random variable:
P(L) =L
L
L!e−L, (4.38)
where L is the mean value.Interarrival times between clusters remain unchanged to the Saleh-Valenzuela model, but
interarrival times of rays is now the sum of two exponential functions:
P(τj,i|τj−1,i) = βλ1e−λ1(τj,i−τj−1,i) + (1 − β)λ2e−λ2(τj,i−τj−1,i). (4.39)
For LOS scenarios, the mean energy of the cluster is an exponential function:
E{|a2j,i|} ∝ Ωie
−τj,i/γi , (4.40)
where Ωi is the total energy of the ith cluster, and γi a time constant, which is in turn definedas
γi = kγTi + γ0, (4.41)
where kγ and γo are constant.For Non-Line of Sight (NLOS) scenarios, the cluster energy is
E{|a2j,i|} ∝ (1 − ξe
−τj,i/γrise)e−τj,i/γ1 , (4.42)
where ξ, γrise and γ1 are model-specific parameters, which describe the position of the clustermaximum.
The amplitude coefficients follow a Nakagami-distribution, as described in 4.31.The IEEE 802.15.4a model features different sets of parameters which describe varying sce-
narios, such as office, outdoor and industrial settings. Tabulated parameters for these models,which have been used in simulations, can be found from [93].
System performanceThe ability to resolve closely spaced paths depends on three parameters:
• The system (ramp) bandwidth B,
• the type of window function and
37

• the FFT bin size (frequency domain resolution).In fig. 4.14, the effect of increasing B is illustrated in a noise-free channel scenario (100 dBSNR) with a CIR given by
h[n] =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
1 for n = 0,
0.9 for n = 2,
0.8 for n = 3,
0.5 for n = 9,
0.6 for n = 11,
0 otherwise.
(4.43)
For the sake of brevity, this will henceforth be shortened to a vector of tuples containing excessdelays and relative amplitudes, as in
h[n] = 〈(0, 1), (2, 0.9), (3, 0.8), (9, 0.5), (11, 0.6)〉, (4.44)
with all other amplitudes assumed to be 0. Note that the sampling rate at the channel is fs,RF,which implies a minimal path spacing of 25 cm. The figure shows the expected peak positions
f / Hz
|X(f
)|2
4.9 5 5.1 5.2×105
0
0.5
1
(a)f / Hz
|X(f
)|2
0.99 1 1.01 1.02 1.03 1.04×106
0
0.5
1
(b)
f / Hz
|X(f
)|2
1.66 1.68 1.7 1.72×106
0
0.5
1
(c)f / Hz
|X(f
)|2
3.32 3.34 3.36 3.38 3.4×106
0
0.5
1
(d)
Figure 4.14.: The effect of bandwidth on the separability (resolution) of paths,exemplified on a simplified CIR with 5 multipath components. (a)B = 150 MHz (b) 300 MHz (c) 500 MHz (d) 1 GHz.
of (4.44) as vertical lines. It can be seen that in the 150 MHz case, only two peaks are clearly
38

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
resolved, while the components at n = 2 and n = 3 fuse with the LOS component. This has animmediate impact on the resolution of objects.
The characteristic main- and sidelobes of a closely spaced second path, whose shape andnumber depend on the window function, will perturb the LOS main lobe and cause detectionerrors. This effect is illustrated for the rectangular and Hanning window types in figs. 4.15 and4.16. In both simulations, the applied (real) CIR was given by
h[n] = 〈(0, 1), (i, 0.9)〉, (4.45)
with i = [1, 2, 3, 5, 7, 9]. The plots show how the detected peak pDetected oscillates statisticallyaround the true peak pActual. The impression that the maximum error is larger when using theHanning window is confirmed by fig. 4.17. Here, the error caused by the second path componentat normalized excess delays is plotted for different window types. As can be expected from theparameters in tab. 4.2, wide main lobes cause large errors at narrow path spacings. Therectangular function has the smallest Δω, but the worst sidelobe suppression, which results inconsiderable error values event at 30Δtfs,FE, which corresponds to a target 7.5 m away fromthe second sensor.
A second prominent effect of multipath propagation is the cancellation of incident waveswhich have deviating phase terms. The phase change experienced by a wave is dependent onthe type of reflection (diffraction, scattering, etc.) and the physical properties of the materialthe wave impinges on [72]. In most channel models, the phase is assumed to be uniformlydistributed in the interval [0, 2π).
Fig. 4.18 shows the same sequence of received delay profiles as in fig. 4.14, only with arandom phase shift applied. Thus, the CIR is complex-valued, with
h[n] = 〈(0, 1), (2, 0.9, Φr,1), (3, 0.8, Φr,2), (9, 0.5, Φr,3), (11, 0.6, Φr,4)〉. (4.46)
Each element now corresponds to a triplet (Δτ, |a|,∠a), where Δτ is the excess delay and |a|and ∠a the absolute value and angle of the complex number a. Φr,i represents a uniformlydistributed random phase in [0, 2π).
The detrimental effect of the phase shift is evident as subsequent path components randomlycancel and reinforce each other as well as the LOS path. The increased bandwidth even merits adetrimental effect in this special case, as the last component of the delay profile is now resolvedand, by statistical fluke, has and even greater amplitude than the LOS component. Brute-forcepeak detection would in this case yield a very large distance error.
Fig. 4.19 shows a detection probability plot for multipath propagation according to theWarsaw model, with approximately 10,000 model instances used. In comparison to the referenceAWGN case, two effects are observed. First, a shift towards higher SNR values indicates a loss inprecision due to the aforementioned effects of peak distortion and cancellation. This effectivelyreduces the range of the system and can thus count as example of sensitivity loss.
The second effect is the saturation of the detection probability towards a value of about 0.9.This implies that no matter how little noise is present in the system, there is a limit to theachievable precision due to multipath propagation effects and limited bandwidth. Fig. 4.20compares several settings for the system bandwidth B in the Warsaw model. Following fig.4.14, an increase in bandwidth should mitigate the channel effects. As is evident, this is thecase and has the effect of both improving on the saturation error and the system sensitivity.
The panel in fig. 4.21 shows detection probabilities for various scenarios of the IEEE 802.15.4amodel. They represent environments which may typically be encountered in local positioningapplications.
It is interesting to note that with this channel model applied, the system generally performssignificantly worse than with the Warsaw model, and different scenarios vary widely in theireffect on detection probability. In the face of these facts, the solidity of any argument made
39

Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(a)Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(b)
Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(c)Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(d)
Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(e)Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(f)
Figure 4.15.: Normalized spectrum with LOS and secondary path component at90 % power at different excess delays τe. The solid and dashed linesshow the measured and actual peak positions. A rectangular win-dow function was used. (a) τe = 1Δtfs,FE (b) 2Δtfs,FE (c) 3Δtfs,FE(d) 5Δtfs,FE (e) 7Δtfs,FE (f) 9Δtfs,FE.
about the multipath performance of the system must be called into question. It can be saidwith reasonable certitude that
40

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(a)Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(b)
Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(c)Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(d)
Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(e)Sample index
|X(f
)|2
4000 4050 4100 4150 42000
1
(f)
Figure 4.16.: Normalized spectrum with LOS and secondary path component at90 % power at different excess delays τe. The solid and dashed linesshow the measured and actual peak positions. A Hanning windowfunction was used. (a) τe = 1Δtfs,FE (b) 2Δtfs,FE (c) 3Δtfs,FE (d)5Δtfs,FE (e) 7Δtfs,FE (f) 9Δtfs,FE.
• the system suffers from significant accuracy loss in the face of multipath environments,as compared to the AWGN case.
41

Normalized excess delay Δτe|fs,RF
ε/
m
0 5 10 15 20 25 30-0.5
-0.3
-0.1
0.1
0.3
0.5
(a)Normalized excess delay Δτe|fs,RF
ε/
m
0 5 10 15 20 25 30-0.5
-0.3
-0.1
0.1
0.3
0.5
(b)
Normalized excess delay Δτe|fs,RF
ε/
m
0 5 10 15 20 25 30-0.5
-0.3
-0.1
0.1
0.3
0.5
(c)Normalized excess delay Δτe|fs,RF
ε/
m
0 5 10 15 20 25 30-0.5
-0.3
-0.1
0.1
0.3
0.5
(d)
Figure 4.17.: Error ε caused by a secondary path component with 90 % of the LOSpower at different normalized excess delays τe and different windowtypes. (a) Rectangular (b) Hanning (c) Hamming (d) Blackman.
• fading (cancellation) effects and peak distortion cause a severe loss in detection proba-bility even with almost no noise present.
• there are two distinct effects caused by multipath propagation, namely saturation of themaximum achievable detection probability and sensitivity loss.
• the exact amount of damage caused by adverse channel conditions is strongly dependenton the actual environmental conditions, the room layout, the physical properties of thematerials therein, and so forth.
Every other claim as to the absolute performance of the system in the face of multipath canonly be valid in context with the model that was applied in the channel, which can only be anapproximation of specific physical conditions.
For the application scenarios envisioned by RESOLUTION, the “Industrial” scenarios areprobably closest to actual reality. With suitable distribution of base stations, a LOS link canbe assumed.
Indeed, it seems there is almost no sensitivity loss for lower SNR regions as compared to theWarsaw model. Saturation happens at less than 70% detection probability, however.
42

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
f / Hz
X(f
)
4.9 5 5.1 5.2×105
-1
0
1
2
(a)f / Hz
X(f
)
0.99 1 1.01 1.02 1.03 1.04×106
-1
0
1
2
(b)
f / Hz
X(f
)
1.66 1.68 1.7 1.72×106
-1
0
1
2
(c)f / Hz
X(f
)
3.32 3.34 3.36 3.38 3.4×106
-1
0
1
2
(d)
Figure 4.18.: The effect of a uniformly random phase shift of path componentson the received path profile. Strong cancellation effects becomeevident as the bandwidth increases. (a) B = 150 MHz (b) 300 MHz(c) 500 MHz (d) 1 GHz.
4.3.2. Position calculationThe HPLS system is specified to provide 3D position information. The Position CalculationFunction (PCF) is responsible for converting measured (pseudo)ranges to an actual positionrelative to the beacons (base stations), which can then be projected to a map.
The actual process of position fixing is an art unto itself and outside of the scope of thiswork. Indeed, for most applications, a planar position (i.e, in two dimensions) will be sufficient.The z-coordinate (altitude) is usually ill conditioned, and considerable algorithmic effort mustbe invested to stay within reasonable error bounds.
For the sake of completion, this section provides a quick review over position fixing in threedimensions for distances obtained with RToF positioning.
TDoA positions geometrically correspond to hyperbolas, the intersection of which leads tosets of nonlinear equations which are not easily solved [94]. Some suggestions on algorithmsare found in [95–97].
Each pseudorange measurement from a reference beacon Bi(xi, yi, zi) to the mobile terminalTj(xj , yj , zj) geometrically represents a sphere around Bi, described as
ri =√
(x − xi)2 + (y − yi)2 + (z − zi)2, (4.47)
43

SNR
P(ε
<ε L
)
AWGN Reference
Multipath (Warsaw model)
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
Figure 4.19.: Detection Probability P (ε < 0.15 m) with multipath propagationaccording to the Warsaw model. Even at practically no noisepresent, the detection probability saturates under 90% due to peakdistortion effects.
SNR
P(ε
<ε L
)
AWGN ReferenceB = 150 MHzB = 200 MHzB = 500 MHz
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
Figure 4.20.: Detection Probability P (ε < 0.15 m) with various bandwidth val-ues. It can be seen that both saturation and sensitivity loss can bemitigated by increasing the system bandwidth.
44

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
SNR
P(ε
<ε L
)
ResidentialLOSResidentialNLOS
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
(a)SNR
P(ε
<ε L
)
OfficeLOS
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
(b)
SNR
P(ε
<ε L
)
OutdoorLOSOutdoorNLOS
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
(c)SNR
P(ε
<ε L
)IndustrialLOSIndustrialNLOS
-40 -30 -20 -10 00
0.2
0.4
0.6
0.8
1
(d)
Figure 4.21.: Detection probabilities for various scenarios from the IEEE 802.15.4amodel. The plots include the reference AWGN case (solid line) andthe Warsaw model results (dashed line with no markers). (a) Resi-dential (b) Office (c) Outdoor (d) Industrial.
with ri being the measured distance between Bi and Tj.
The set of equations in (4.47) obtained by measuring multiple ranges from different beaconscan be linearized to obtain
A�x = �b, (4.48)
45

where
A =
⎛⎜⎜⎜⎜⎝
x2 − x1 y2 − y1 z2 − z1
x3 − x1 y3 − y1 z3 − z1...
......
xn − x1 yn − y1 zn − z1
⎞⎟⎟⎟⎟⎠ (4.49)
�x =
⎛⎜⎝
x − x1
y − y1
z − z1
⎞⎟⎠ (4.50)
�b =
⎛⎜⎜⎜⎜⎝
b21
b31...
bn1
⎞⎟⎟⎟⎟⎠ . (4.51)
Here,bi,1 =
12
(r21 − r2
i + d2i,1), (4.52)
where d2i,1 is the distance between beacons i and 1.
This equation can be solved either directly or by application of a linear least squares algo-rithm.
Another option is to solve the nonlinear set of equations in (4.47) directly through numericalmethods. A number of methods are described in [94]. These methods usually require a goodstarting point to converge towards a solution, which can be provided by a linear least squaressolution.
In the presence of measurements affected by i.e. a Gaussian error term, the nonlinear leastsquares solution generally provides the best position estimate. Still, a sensible layout of beaconsis mandatory for reasonable error bounds.
Fig. 4.22 shows the radial error
εr =√
(x − xm)2 + (y − ym)2, (4.53)
with x, y and xm, ym being the real and measured distances, respectively, fitted to a Rayleighpdf. This is allowed if the errors x − xm and y − ym follow Gaussian distributions N(0, σ2).
Beacons were present in all corners (top and bottom) of a room with 300 × 300 × 10 mextension, as well as at the center of the ceiling and floor. The position of the mobile wasrandomized.
It can readily be seen that the nonlinear position calculation performs significantly better inboth mean and standard deviation, and thus is the preferred method if computational intensityis of minor consequence.
46

CHAPTER 4. SINGLE NODE ARCHITECTURE AND PERFORMANCEANALYSIS
Radial error / m
Ray
leig
h(ε r
)
Linear least squares
Nonlinear —
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Figure 4.22.: Comparison of position errors obtained by applying different calcu-lation methods. The radial error εr is fitted to a Rayleigh pdf. Thestandard deviaton of the error in any direction was 0.1 m.
47


CHAPTER 5
Network Architecture and Quality of Service Aspects
This chapter expands the analysis of the HPLS positioning hardware to performance aspectsexperienced in the context of a full-scale network.
In a typical service area, multiple terminals are expected to share a set of base stations.Dependent on the actual deployment scenario, there might be dozens or even hundreds ofnodes present. This calls for careful planning of access and communication procedures.
The term Quality of Service (QoS) is often raised in the context of quantification of the per-formance of communication networks. However, to prepare a positioning system like HPLS fordeployment, end-user service quality also is a major aspect. The following sections investigatethe interconnections between QoS, network and protocol design, and present relevant simulationresults.
As some of the following results have applications and meaning outside of either the HPLSsystem, or indeed local positioning, a more general terminology is adopted. A terminal or nodeis generally a mobile unit, which is served inside a cell consisting of at least one, but generallymultiple beacons. These terms are used interchangably with the established mobile and basestation. The term server is used to denote control logic in the backend/infrastructure ratherthan beacons.
5.1. Service and network architectureFig. 5.1 shows the network architecture of HPLS, which is organized in three layers. A possiblylarge number of mobile stations (nodes) exchanges measurement information with several basestations (beacons). The data obtained from these measurements is processed at a central servingunit, where it is incorporated into higher layer logic (e.g., projected to maps).
End-user service quality is a prevalent topic in mobile communications. It usually refersto metrics which directly influence the experience of the user, e.g., data rates for streamingvideo, audio quality, coverage area and availability [98]. Figures relating to operators such asdeployment cost are also sometimes brought forward.
While local positioning and location based services have gained traction as part of assistedpositioning recently, only satellite-based global navigation – GPS, and the forthcoming GALILEO– provide insight into end-user positioning quality metrics.
49

Infrastructure/Backend
Base station/Beacon
Mobile station/Terminal/Node
Figure 5.1.: Three-tier architecture of the positioning network. Solid arrows in-dicate wired, dashed wireless information transfer. Operations inparentheses are optional.
Especially GALILEO provides a navigation service called Public Regulated Service (PRS),which guarantees error flagging within 10 s. This is achieved by designating special terrestrialmeasurement stations with known locations, which constantly measure the incoming satellitesignals. If they experience significant deviations, a central service station flags the signal ascorrupt, and the satellites broadcast this information to all receivers.
For HPLS, such a metric is neither feasible nor meaningful. The main error source in thesystem is expected to be multipath propagation rather than jamming or catastrohpic hardwarefailure within the base stations.
Quantifying the error severity of a specific fix and displaying a confidence metric to the useris very difficult. Based on SNR and RSS measurements, a tentative estimation of the noise levelcould be derived. However, as shown in section 4.3.1, even with high signal strength, multipathcan completely destroy a position fix. Additionally, the question remains what the user shouldmake of a region of uncertainty reading on his device.
Obviously, accuracy and precision are the central quality metrics for a positioning system.For the system at hand, these terms are formalized as radial error figure, as described in (4.53).
In addition to this figure, the total time-to-fix encompasses several specific metrics dealingwith delays in the positioning process. The average time-to-fix is the total time it takes fromthe instant the position is requested to when it is finally provided.
In literature, the time-to-fix or waiting time is usually given as
Wi = Di + Si, (5.1)
where Di is the delay experienced by the ith terminal until channel contention situations areresolved (queue time), and Si the actual time it takes for service completion [99]. The figures
d = limn→∞
∑ni=1 Di
n(5.2)
50

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
andw = lim
n→∞
∑ni=1 Wi
n(5.3)
describe the steady-state average delay and steady-state average waiting time. In the following,(5.3) is called request latency, as it describes the total time a client waits for the position requestto complete.
The most common measure for latency in positioning literature is the update rate. In thiswork, it is taken to mean the minimum or guaranteed achievable update rate. In a firstassumption, it could be taken to be the inverse of the maximum latency observed during anexperiment:
U = 1max
t(W)
, (5.4)
where W is the vector of individual waiting times observed. However, due to the statisticalnature of time periods involved in obtaining a position fix, this definition has little practicalvalue, as the inverse argumentation – that the system would not break down if each tag madeU requests per second – almost certainly does not hold. The figure in (5.4) is still useful inhighlighting the characteristics of different algorithms when very low latencies are involved.Due to its theoretical nature, it will henceforth be referred to as virtual update rate Uvirtual.
A more useful definition of update rate is tied to the number of position updates actuallydesired by the individual nodes. Dependent on the application scenario, the number of timesper second a request is made might be deterministic or statistical in nature. In queuing theory,the time between two requests is called arrival time A. In the following, it is always assumedto be a statistical measure, and the value of interest is thus the mean (expected) arrival timeE(A). A practical definition of update rate would thus be
Ureal = max{
1E(A)
|max(W)t
≤ E(A)}
. (5.5)
That is, the fastest possible arrival rate for which the maximum latency observed is less orequal the expected arrival rate E(A). In the following, the term update rate without furtherdenotation is taken to mean this value.
The definition of the update rate in (5.5) has a weakness which is tied to the expected valueof the request latency over very long observation times. Due to the fact that service times arepartly statistical, outliers may cause the update rate to converge towards very low values.
While this may be correct in the mathematical sense, it is clearly an impractical definition,especially given the fact that only limited observation times are possible in simulation.
In practice, the update rate has to be tied to a confidence value which is less than 100 %.Simulating this is then feasible: Starting at a very low value of E(A), the simulation is runfor a maximum observation time TObservation, and all request latencies are collected in W. Theupdate rate is 1
E(A) if less or equal than C % of latencies in W are greater than E(A). Thisvalue would be called update rate with C % confidence.
Based on the update rate, a system can be said to exhibit real-time ability when it is fastenough to track a node moving at maximum speed to the highest possible resolution. That is,given the system’s maximum target resolution ρmax and the (expected) maximum movementspeed of a target vmax, the system is real-time if
Ureal ≥ vmax
ρmax(5.6)
holds. For example, if a pedestrian moves at about 1 m/s, with a maximum target resolution ofρmax = 30 cm, about three measurements per second would be sufficient to track every positionof the target down to the maximum resolution supported by the system, and hence, Ureal ≈ 3 Hzwould make the system real-time with respect to this application scenario.
51

Another important figure relating to channel contention is the number of completed individ-ual requests per node. This figure is contrasted to the number of expected requests, i.e., themean number of requests that the node would make if there were no contention situation.
Closely related is the classical term throughput. In communications networks, it describesthe number of (successful) packet transmissions per time unit, summed over all nodes. In thisapplication, it is defined as
S =∑
i
R+i , (5.7)
with i as the running index over all nodes in the cell and R+i the successful positioning attempts
by this node per time unit. Conversely, the rejected requests R−i is an important characteristic
of the MAC algorithm, and R = R+ + R− and indication of the mean service interval.A number of secondary parameters which either indirectly influence the end-user quality, or
are relevant to the system operators are also counted among the figures of merit for systemperformance.Availability In mobile communications, this term is generally taken to mean network coverage
for the user, i.e., if a strong enough signal to support a desired service is provided. Thisis only indirectly related to coverage (see later), as it takes outages, signal shadowingand other effects into account. For positioning, it is meaningful to define availability ofa service at a certain location as a statistical error threshold. The FCC regulations forwireless 911 calls are a good example of availability regulation [100,101].
Scalability The ability of a network to accomodate growing numbers of nodes without “break-ing down” is obviously important in situations where a large unknown number of nodesis expected. The tourist guidance scenario described in section 3.1 is a good exampleof this. The most graceful case for scalability – aside from the ideal case of support foran unlimited number of nodes without performance cost – is a linear increase of requestlatency.
Efficiency For battery-operated terminals, efficiency essentially describes the battery lifetimegiven sustained operation. As the system is expected to always transmit at maximumoutput power, the battery lifetime is a function of the duty cycle, the number of measure-ments required to obtain a fix, the protocol overhead, and the communications protocolemployed.
Base station utilization This parameter describes the time a base station was busy (i.e.,conducting operations related to system operation), as percent value of the total ob-servation time. This value directly relates to the energy consumption of the station,which might be relevant if it is battery-operated as part of an ad-hoc network configura-tion. Furthermore, some margin to exhaustive utilization can be relevant in emergencysituations, where a large number of tags suddenly need quick position information.
Coverage The area that can be serviced by a specific number of base stations, i.e., the cellarea, is a major cost factor of the system. As base station diversity can improve thepositioning performance, there is a tradeoff which needs to be judged according to thedeployment situation. The range of a single base station is largely dependent in thespecific channel scenario encountered and can be inferred from the results presented inchapter 4.
Time to fail This parameter is a relic of classical analysis of mechanical systems, such asconveyor belts. While integrated electronic systems such as the HPLS infrastructure arecertainly prone to failure, the lack of mechanical wear parts makes this paramter onlyinteresting in the long term. In a wider sense, this figure means the average serviceintervals (by human operators) required to uphold constant operation. In this case, itmight be relevant for a battery-operated infrastructure.
52

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
Cost While this parameter seems irrelevant for end-user service quality, it is indeed a majorcontributing factor. Consider that if cost were of no consequence, a very large numberof beacons could be installed to provide maximum spatial diversity. This is clearly anunrealistic scenario, so all considerations towards service quality must always accountfor practical rentability.
5.2. The MAC layerTraditional literature describes the MAC layer as part of the Data Link Layer in the classicalISO/OSI model [102]. It is responsible for handling access to a shared channel, i.e., when N > 1nodes have sending permissions and try to communicate either with each other or with a centralinstance, such as a base station or satellite.
5.2.1. Static channel accessThe classical method to handle this dilemma is to employ static channel access, which meansthat each node is assigned a fixed portion of the shared channel with exclusive usage rights.This kind of multiplexing can generally extend to the frequency (Frequency Division MultipleAccess (FDMA)) or time domain (Time Division Multiple Access (TDMA)), which means thatnode signals are either assigned specific sub-bands (channels) with exclusive communicationrights, or time slots. Other separation domains are possible but mostly not feasible for WirelessSensor Network (WSN) purposes [41].
FDMA
To multiplex nodes in the RToF positioning scheme introduced in section 3.3, each node wouldneed to have a specific and unique modulation frequency ωmod,i which is imprinted on thesynchronized ramp, so the phase of the signal returned to the beacon becomes
Φ(t − τ) = ((ω0 + ωmod,i) + μ(t − τ)) (t − τ). (5.8)
Downconversion in the base station with ω0 would then yield a signal in the channel reservedfor the node, which could be easily found by appropriate bandpass filtering.
To assure that there is no adjacent channel interference, the modulation frequency mustbe higher than the maximum shift expected due to time of flight. Taking power fading intoaccount, the worst-case LOS signal from an adjacent channel has sufficiently decayed afterdmax m. This implies a minimum channel spacing of Δωmin = (dmax/c) ·μ. Given the parametersof the HPLS system and the soft assumption that under multipath conditions, a signal at adistance dmax = 100 m is always significantly weaker than the wanted signal, a channel spacingof of several 100 kHz is required.
It is evident that for a large number of nodes, this would increase the required dynamicrange of the A/D converter in unfavourable ways.
A persisting problem with the FDMA approach for nodes is that some kind of enumerationmechanism must assign unique slots to the nodes upon entering the cell area. Aside from requir-ing significant backend signaling, some architectures might not allow to adjust the modulationfrequency by software. See appendix A for an example of this problem.
An alternative approach would be to multiplex the beacon signals instead of the nodes. Thiswould allow the nodes to simultaneously measure all beacons and relax the A/D specifications.This approach is implemented in the system described in [15].
53

TDMA
Time-domain multiplexing is implemented in the forward TDoA scheme described in section5.3.2. The time-to-fix generally has a lower bound in
Wmax ≥ NBS · Tslot, (5.9)
where NBS is the number of beacons in the cell and Tslot the time slot duration, which willconsist of the actual ramp duration plus some calculation overhead.
In this configuration, a theoretically unlimited number of nodes can be supported, and thereis no need for enumeration: nodes entering the cell simply receive the beacon signals and startcalculating their position. The only channel contention comes from communication access, e.g.,when the nodes need to transmit their position information to the infrastructure. This is,however, hardly expected to be a limiting factor for any reasonable amount of nodes within thecell.
5.2.2. Dynamic channel access and novel access proceduresIf static access schemes are not feasible to implement for any of the reasons outlined in theabove section, random or dynamic channel access ensues. This is generally taken to mean thatall nodes share the system band and peruse it at random times. The channel thus becomes ashared ressource, and invariably, contention situations arise. In this case, MAC layer algorithmsmust be installed to handle concurrent access, or nodes will “overshout” each others signals.
In this work, a number of assumptions are made when dynamic channel access algorithmsare evaluated:
1. There are N > 1 nodes served by a fixed set of beacons in a cell. All nodes are indepen-dent, especially with respect to their request instants.
2. The process of position determination is atomic, i.e., if a node enters into a position-ing process with the infrastructure, this action can not be interrupted by any means,especially not by another node requesting a position.
3. Beacons and infrastructure are viewed as a single entity (“server”) in terms of their status.That is, while a node is involved in a positioning process, all beacons are considered“busy” and unavailable for other requests until this process is finished.
4. The communications channel is always available for status reporting, within the boundsof the selected communications delay model. It is not affected by position measurement.
5. There is no carrier sensing, i.e., nodes can not determine that the channel is occupiedoutside of sending a request to the infrastructure.
6. The system operates in continuous time, and there is no possibility of introducing timeslots, as this would require extremely precise over-the-air synchronization or clocks.
Under these assumptions, the formal procedure to obtain a position is as follows:
1. The position is requested by either the infrastructure or the node itself via the commu-nications channel.
2. The request is either acknowledged or rejected, which would be the case if the noderequests the position from a busy infrastructure. In this case, the attempt is deferred toa later instant by a MAC algorithm.
3. Upon acknowledge, a measurement sequence starts with the ultimate goal of acquiringenough pseudoranges to fix the position of the node in two or three dimensions.
54

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
4. The position is calculated.
5. Optionally, the position is communicated to the other party for further processing.
Obviously, the mean request time is a function of the service interval compared to the averageduration of a measurement, the number of nodes in a cell and the rejection algorithm. Twobasic and useful solutions for this problem are outlined in the following.
ALOHA
The original ALOHA algorithm operates under the assumption of no carrier sensing and randomtransmit intervals. Also, each participant in the network is able to sense destroyed frames andaccordingly re-request a transmission. Fig. 5.2 shows a sample timeline of a communication
A
C
D
B
TBackoff
TBackoff
TBackoff
t
Figure 5.2.: Exemplary transmissions with the ALOHA channel contentionscheme. Four nodes access the channel at random times. If theirpackets collide, they schedule a retry after a random backoff timeTBackoff. (Adapted from Andrew S. Tanenbaum, “Computernetzw-erke”, Pearson Studium, 2000)
between four nodes using the ALOHA protocol. Each node transmits as soon as it has a packetavailable. If the channel is already occupied, or accessed while the frame is still in transmission,the packet is destroyed, the node does not receive an acknowledge, and waits for a time TBackoffbefore re-transmitting. This time must be random, lest nodes would collide ad infinitum.
Fig. 5.3 outlines the classical ALOHA problem of “doomed” frames. Despite starting itstransmission on a free channel, frame A never had a chance, as it would collide with the startof frame B. The critical time the channel must remain free for a transmission to succeed is thus2TFrame.
Several figures of a classical ALOHA system can be derived analytically. Let N(t) = max {i|ti ≤ t}be the number of transmission attempts made at or before time t for t > 0, then {N(t), t ≥ 0}is called an arrival process in queuing theory. In the following, a transmission event by a singlenode will be called arrival.
N(t) is characterised as Poisson process if the following assumptions hold [99]:
1. Nodes arrive one at a time and never in batches.
2. N(t + Δt) − N(t) is independent of {N(u), 0 ≤ u ≤ t}, i.e., there is no memory.
3. The distribution of N(t + Δt) − N(t) is independent of t for all t, s ≥ 0, i.e., there is nodependece on the actual time instant observed.
55

t0
A
TFrame
t
B
C
t0 + TFrame t0 + 2TFrame t0 + 3TFrame
Figure 5.3.: Rendition of the classical “doomed frame” problem in ALOHA: FrameB collides with both frame A and C at their respective tail and frontends. Two frame times must remain free for a successful transmis-sion. (Adapted from Andrew S. Tanenbaum, “Computernetzwerke”,Pearson Studium, 2000)
The termPλ(n) = N(t + Δt) − N(t) = (λΔt)n
n!e−λΔt (5.10)
describes the probability of n arrivals in the time interval (t, t + Δt] given the arrival rate λ.It is customary to refer the observed time interval to the length of a frame, so the probabilityof n arrivals per frame time reduces to
Pλ(n) = λn
n!e−λ. (5.11)
Given this basic result and the observation that two frame durations must remain free for asuccessful transmission, the probability of a successful transmission is equal to the probabilitythat there are no arrivals in two frame durations and thus
Ps(0) = (2gN)0
0!e−2gN , (5.12)
where g is the arrival rate per node and N the total number of nodes in the cell.From this, the probability for successful transmission on the Kth attempt is
P (k = K) = (1 − Ps)k−1Ps, (5.13)
and the normalized average time for succesful transmission is
D =∞∑
k=1
k(1 − Ps)k−1Ps. (5.14)
For direct application in the HPLS system, these results are too simplistic as several assump-tions do not hold. For one, classical ALOHA requires the communication frames to have thesame length. This is not the case in HPLS, primarily because a communication step is alwaysinvolved, which is also subject to channel contention and thus of statistical duration. Addi-tionally, there is the possibility to implement repeat-request algorithms, which would meanthat a variable number of beacons is measured. This mandates the introduction of modifiedaccess schemes to allow for capacity investigations. The following section describes two accessstrategies which are well suited to purposes of the HPLS system.
56

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
Controlled ALOHA
In HPLS, there is also no destruction of frames, as nodes will request a position attempt via thecommunications channel and only send “packets” (i.e., measurement ramps) if a positive replyfrom the infrastructure is received. In this respect, the implementation is probably closer to aCSMA scheme [102].
For energy saving considerations, this is an important distinction. In persistent CSMA, nodesare required to constantly poll the channel, which is energy intensive. Dependent on the exactresults achieved with the Controlled ALOHA (C-ALOHA) scheme, it might be more efficient tobe rejected even multiple times.
FIFO
An alternative approach to handle collision situations is the installation of a central queuewhich handles rejected nodes according to a First in/First out (FIFO) principle. When a nodeis rejected, it is told to stand by and wait for acknowledge. Internally, the infrastructure storesa unique identifier associated with the node in the FIFO. When the infrastructure completesthe current position request, it starts processing the FIFO. This process is not interruptible,e.g., by new positioning requests. As long as there are nodes in the FIFO, queue processing haspriority and new requests will be deferred to the queue.
Queuing theory catergorizes queuing systems by three figures:
• The expected arrival times E(A) or, conversely, the arrival rate λ = 1/E(A), as alludedto in eqn. (5.5).
• The service mechanism, which characterises the time required for one request to theserver to be processed. The service times S1, S2, . . . , Si describe the duration of the ith
mobile’s service time. Accordingly, E(S) is the mean service time, and ω = 1/E(S) theservice rate.
• The queue discipline, i.e., how clients are picked from the queue when one service iscomplete. Usually, FIFO processing is used, but specialized solutions (such as priorityqueues) are possible.
It is common practice to characterize queuing systems by the shorthand GI/G/s, whereGI (general independent) is taken to mean the distribution of arrival times, G (general) thedistribution of service times, and s the number of servers in the system. Common shorthands fordistributions are M for Markovian-type, i.e, exponential distribution, and D for deterministic[103]. The queuing systems treated in this work are almost exclusively M/G/1 or M/D/1queues.
5.3. Integrated performance assessmentTo obtain performance estimates for the previously discussed parameters, an integrated simu-lation environment was developed.
The following sections describe this environment, protocols and timing models. Simulationresults are presented in section 5.4.
5.3.1. Discrete event simulationIt is clear from the description of the system simulation in chapter 4 that classical signal-basedsimulation methods are ill suited to determine the network parameters, which generally evolveover large time scales.
57

Classical system simulation usually covers simulation times in the order of a packet length,the channel coherence time and so on. This is sufficient to determine systematic performanceparamters, such as Bit Error Rate (BER) or mean accuracy, if repeated sufficiently in the contextof a Monte Carlo simulation.
Metrics such as mean request latency, however, comprise much larger durations: measuringmultiple beacons, signaling and communications overhead, position calculation and so on, all ofwhich are in the order of hundreds of microseconds or several miliseconds. Deferral of requestsdue to channel contention can stretch service durations ever further.
Conversely, the simulation sampling rate for this type of analysis will be much coarser thanfor the single node system simulation. While in the latter case, the simulation time step islargely dictated by the sampling theorem, performance metrics for the network as a whole arederived from state variables which change only at discrete points during a simulation.
This obviates the necessity for uniform, small-scale simulation time steps. Instead, the sim-ulation clock is nonlinearily advanced to the next event that takes place, at which point thesystem state is updated and the process repeats until convergence of a metric under consider-ation is achieved.
Such a type of simulation is called discrete event simulation. For analysis of HPLS, a customsimulation engine was implemented which provides interfaces to the system simulation. It isdescribed in the following sections. For implementation details, see appendix C.
Components of the event simulationCertain conceptual components are common to all discrete event simulations, regardless of theexact application or process under scrutiny. The following list is losely based on the one foundin [99].
State The sum of all variables that describe the system at a specific time instant. If all statevariables are saved, the simulation can be stopped and resumed without information lossat a later instant. Examples of state variables are the next service time for mobiles, theircurrent position and movement speed.
Clock The simulation clock keeps track of the current world time (i.e. simulated time, asopposed to simulation time). There are two basic ways to advance the clock: in fixedor variable time increments. In most simulations, the latter approach is feasible. Afterprocessing of an event, the clock is immediately advanced to the time of the next event.This method is fittingly called next-event time-advance approach.
Global Event List (GEL) A FIFO queue where all events in the system are stored in ascend-ing order of their occurence. When an event is completely processed, the next event ispopped from the GEL and the clock advanced to its timestamp. Most event handlersgenerate follow-up events which are again sorted into the GEL.
Statistics The goal of the simulation process is to get an estimate of certain observable prop-erties of the system. Every simulation needs a set of statistical counters and/or lists tokeep track of the change of state variables, durations etc.
Event handler A method which acts according to the specific event type it is tied to. Anexample of an event action in the positioning simulation would be to run the systemsimulation to get a position fix. Most events consume system time and generate newevents in their wake.
Established terminology in discrete event simulation has been touched in section 5.2.2. Thebasic flowchart in fig. 5.4 solidifies the most important concepts. The central processes arearrival and departure, which denote the entering of service, i.e., the request to the server, andthe completion of service, respectively. Arriving clients may find the server busy. They are
58

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
ServerQueueArriving client Departing clientCalling population
Figure 5.4.: Flow chart with basic concepts of discrete event simulation. Clientsrecruited from the calling population arrive at the service queue.After processing, they depart back to the calling population.
then subjected to some kind of deferral mechanism, which may or may not consist of lining upin a FIFO.
A central parameter of such a simulation, alluded to in section 5.2.2, is the arrival processN(t), i.e., the distribution of time intervals between service requests. It is in the followingassumed that the criteria for N(t) to be a Poisson process hold, and the interarrival timesAi = ti − ti−1 are exponentially distributed with the arrival rate λ.
Simulation processFig. 5.5 shows the conceptual flow of the event simulation. From the GEL, events are extractedand dispatched to event handlers, which perform specific actions and generate new events. Each
e1
MS4
e2
MS1
e3
MS2
eN
MS5
t0t1t2tN
t Decode event type
Eventhandler
Add new event to queue
Eventhandler
Associated node
Event type
Timestamp
Figure 5.5.: Conceptual flow graph of the event simulation. From the GEL, eventsare decoded and dispatched to suitable event handlers, which updatestate variables and generate new events.
event is characterised by three attributes:
• The event type, e.g., arrival or departure event.
• The associated (acting) agent, which in case of the positioning simulation is always amobile node.
• The timestamp, i.e., when the event takes place in world time.
59

The simulation engine knows five generic event types, which are listed in tab. 5.1. The transitionfrom one event to the next takes up world time. For example, the request for position usuallyentails a communication handshake between the node and the infrastructure, so the transitionfrom “Arrival (3D)” to “Arrival (1D)” takes up an amount of world time equal to the exchangeof communication packets. The actual measurement process takes place between the “Arrival
Event name Semantic GeneratesArrival (3D) A node requests a posi-
tion fix from the system.Arrival (1D), Leave Queue
Arrival (1D) Setup of a measurementprocess.
Departure (1D)
Departure (1D) Completion of a mea-surement process.
Arrival(1D), Departure (3D)
Departure (3D) Completion of measure-ment sequence, positioncalculation.
Arrival(3D)
Leave Queue Signal node queued inFIFO.
Arrival(1D)
Table 5.1.: List of generic events in the discrete event simulation. Protocol-specific implementations are mapped onto these events.
(1D)” and “Departure (1D)” events. For a large number of simulations, it is sufficient to modelthe measurement process only as the time it consumes to exchange the respective packets. Ifrepeat-request algorithms or other measures to improve the position quality are installed, it isnecessary to compute a real position fix.
To this end, the system simulation can be invoked during the “Departure (1D)” event. Aposition is calculated based on the the current position of the node in relation to the beacons,desired channel conditions and other parameters. The position value is then reported back tothe discrete event simulation, where it can be evaluated by arbitrary algorithms.
5.3.2. RESOLUTION protocolsIn response to the wide diversity of application fields and varying requirements identified inthe specification phase of the RESOLUTION platform, several fitting positioning protocols havebeen defined [104].
In the following descriptions of these protocols, the abbreviations BS1, BSj , I and MSi areused to denote the reference base station, any other base station in the cell, the infrastructureand any mobile station in the cell, respectively.
Forward TDoA
The forward TDoA scheme has been alluded to in 5.2.1, where the lower bound of the positioninglatency was found to depend on the slot duration and the number of base stations the mobilerequires for a fix. Fig. 5.6 illustrates the protocol as a flow diagram. The ramp periodicallysent by the reference base station serves as a time base for the slotted operation of the other
60

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
Transmit reference ramp
Transmit measurement ramp
Communicate position
END OF OPERATION
I
BSj
MSi
BS1Slotted, continuous operation
Figure 5.6.: Protocol flow for the “Forward TDoA” scheme. The acting agent isindicated in the upper left corner of each action. Actions in solid-border boxes consume world time.
base stations. The unknown time of flight τBS1→BSj must be eliminated at the time of systeminstallation.
The timing of the position measurement is as follows:
1. The reference station transmits the synchronization ramp at t = 0, which arrives atthe base stations at time instants τBS1→BSj , and at the mobile at τBS1→MSi . The basestations and mobile mix with coarsely pre-synchronized internal ramps to obtain t0,BSj −τBS1→BSj and t0,MSi − τBS1→MSi , respectively.
2. The base stations send out their ramps at defined time slots Tj . They are pre-synchronizedto cancel the previously calculated mixing product and the known runtime to the refer-ence station.
3. The mobile mixes the received ramp impinging at Tj + τBS,j with an internal rampgenerated at t0,MSi +T . This ramp is pre-synchronized with the mixing product t0,MSi −τBS1→MSi . This mixing process thus yields τBS1→MSi − τBSj
.
Enumeration of mobiles is not necessary unless desired for backend software operations oraccess control. The mobile simply enters the cell and receives the reference ramp and, subse-quently, the ramps from all other stations and calculates a time difference.
While the forward TDoA scheme seems like the ideal solution to the MAC access problem,it has a number of drawbacks. Due to the necessity of calibrating the reference station offsetat deployment, it is not suited for ad-hoc installations. The reference ramp is subject tomultipath propagation and other errors, which affects the time base with an error that adds toany conventional measurement error. Lastly, the position calculation takes place in the mobilestation, which requires significant baseband logic.
61

Reverse TDoA
In an effort to keep the hardware and processing costs in the mobile stations at a minimum, theTDoA operation can also take place in the base stations. The protocol flow is illustrated in fig.5.7. As it is impossible to synchronize the mobile stations to a periodic slotting scheme, access
Request position
System free?
MSi
I
MSi enters queueIssue clear to fix
noyes
I I
Transmit measurement ramp
MSi
Transmit reference ramp
BS1
Communicate time difference
BSj
Calculate 3D position
I
END OF OPERATION
I
Figure 5.7.: Protocol flow for the “Reverse TDoA” scheme. The acting agent isindicated in the upper left corner of each action. Actions in solid-border boxes consume world time.
to base stations happens at random. This entails that the mobile must wait for clearance fromthe base stations before the position fix takes place. The base stations and infrastructure are
62

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
considered “busy” from the moment a clear to fix is issued, creating a contention situation withother mobiles.
The timing of the position measurement is as follows:
1. The mobile sends out its ramp at the time instant t0,MSi . It reaches the reference stationand base stations after a time of flight τMSi→BS1 and τMSi→BSj and is mixed with internalramps generated at t0,BS1 and t0,BSj .
2. The reference station issues a ramp presynchronized with the mixing product after aknown period T , at T +t0,MSi −τMS→BS1 . It reaches the base stations after an additionaltime of flight τBS1→BSj .
3. The base stations mix with internal ramps presynchronized with the mixing productt0,BSj − τMSi→BSj to produce τMSi→BSj − τMSi→BS1 .
The solution to a set of these measurements can again be found by a TDoA algorithm.
RToF
Fig. 5.8 shows the protocol of the classic RToF operation. Following the synchronization ramp,the base stations answer sequentially with their own ramps, allowing the mobile to calculateits position. No dedicated reference base station is necessary.
The timing of the position measurement is as follows:
1. The mobile sends out a ramp at t0,MS which reaches a base station after the time offlight τMSi→BSj . There, it is mixed with an internal ramp generated at t0,BS.
2. The base station generates a new ramp after a known offset time Tj and presynchronizesit with the previously calculated time difference, yielding the time instant Tj + t0,MS +τMSi→BSj .
3. The mobile receives the synchronized ramp after an additional time of flight τMSi→BSj
and mixes with an internal ramp generated at t0,MS + Tj, yielding 2τMSi→BSj .
Another protocol option is to have the synchronization/measurement exchange take place se-quentially between mobile and base station. This would be necessary to facilitate the use oferror estimation/repeat-request techniques. In terms of latency, this would have very littleimpact unless a very large number of stations is measured.
5.3.3. Timing modelsThe goal of the integrated performance analysis by means of discrete event simulation is to giveestimates for a number of system parameters, most of which are in some way concerned withtiming. Examples are the time spent in queue, the time-to-fix, the average busy time of theservers and so on.
The consumption of world time is central to any events that take place within the system.Simulation is necessary due to the fact that some of these events consume a statistical amountof time. Models are required for these timing parameters. Fig. 5.9 revisits the RToF andReverse TDoA protocol modes – which are candidates for simulation due to their dynamicchannel access modes – with an additional perspective on timing. The flow control symbolsused are summarized in tab. 5.2.
The total time for the RToF position fix is seen to be
W RTOF = 2TCOM + 2 · N · TFMCW + TCRTOF, (5.15)
63

Request position
System free?
MSi
I
MSi enters queueIssue clear to fix
noyes
I S
Transmit sync ramp
MSi
Transmit measurement ramp
Communicate position
END OF OPERATION
I
BSj
MSi
Figure 5.8.: Protocol flow for the “RToF” scheme. The acting agent is indicatedin the upper left corner of each action. Actions in solid-border boxesconsume world time.
where for TDoA it is
W TDOA = 2TCOM + 2 · TFMCW + TCTDOA(+TCOM). (5.16)
The timing parameters with their corresponding semantics are summarized in tab. 5.3. Incontention situations, the timings are modified to become
W RTOF,C-ALOHA =Nreject(2TCOM + TBackoff)+2TCOM + 2 · N · TFMCW + TCRTOF. (5.17)
64

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
RTS
CTF
TCOM
TCOM
TFMCW
FMCW
FMCW FMCW
TX position
TCALC
TCOM
...
tTFMCW TFMCW
(a)
RTS
CTF
TCOM
TCOM
TFMCW
FMCW
FMCW TDOA 3D position
TCALC
TCOMt
TFMCW TCOM
(b)
Figure 5.9.: Protocol timings for RToF and Reverse TDoA positioning modes. Ar-rows indicate the transmission direction from transmitter to receiver.Arrow length indicates the duration of the event in world time. (a)RToF (b) TDoA.
Symbol Agent Semantic Followed byRTS MS Request to send; inquire for a
position fix at the infrastructure.CTS, NACK, WAIT
CTS BS Clear to send; acknowledge theattempt to gain a position fix.
FMCW
NACK BS Not acknowledge; in theC-ALOHA protocol, reject theattempt to fix the position.
Backoff
WAIT BS Wait for further instructions; inthe FIFO protocol, this starts thequeue time.
CTS
FMCW MS,BS Send a measurement packet. FMCW
Table 5.2.: Flow control symbols used in the protocol timing descriptions. Notethat FMCW is not an actual flow control command, but included onlyfor the sake of completeness. In this table, the shorthand BS is takento mean the infrastructure including base stations and server.
and
W TDOA,C-ALOHA =Nreject(2TCOM + TBackoff)+2TCOM + 2 · TFMCW + TCTDOA + TCOM. (5.18)
65

Time Semantic Distribution Default valueTMTBS Mean time between sevice. Exponential λ = 2 sTCOM Packet delay for WLAN commu-
nication.Exponential λ = 5 ms
TFMCW Time to complete one measure-ment. This includes packet over-head
const. c = 1.6 ms
TCRTOF Time to calculate a RToF 3D fix. const. c = 3 msTCTDOA Time to calculate a TDoA 3D fix. const. c = 5 msTBackoff ALOHA backoff time. Exponential λ = 1 s
Table 5.3.: System times with their corresponding semantics, distributions andparameters. Parameter values are default settings and may vary forspecific scenarios. Derivations of the modeling characteristics arefound in the respective sections.
for the C-ALOHA algorithm. Here, N and Nreject denote the numbers of beacons measured andthe number of times a mobile is rejected by the infrastructure.
In case of a FIFO implementation, the timings are given as
W RTOF,FIFO = 3TCOM + TQueue + 2 · N · TFMCW + TCRTOF. (5.19)
andW TDOA,FIFO = 3TCOM + TQueue + 2 · TFMCW + TCTDOA + TCOM, (5.20)
where TQueue is the time spent in queue, given by the sum of service times of all other mobilesin the queue. Note that this may also be statistical when repeat-request algorithms or othermeasures which cause nodes to use variable numbers of beacons are in place. The correspondingtiming diagrams are shown in fig. 5.10. Generally, in the C-ALOHA case, the service time isextended by additional request/acknowledge exchanges plus backoff times. In the FIFO case,only a single extra communications step is required, but the entire queue must be processedbefore the fix is completed.
Frame structureTransmission of FMCW ramps is sufficient to determine the position of the receiver. However,some protocol overhead can be exploited for other uses. The HPLS hardware is able to produceFrequency Shift Keying (FSK) encoded signals for short data messages. These can be used fortransmitter identification, which can be necessary for a number of reasons:
• The position is calculated in the mobile (self-positioning), so the identifiers of the mea-sured beacons must be known to calculate a position relative to them.
• In a cell handover situation, only beacons associated with the cell the mobile is currentlyin must be measured.
• A repeat-request algorithm could be installed which repeats measurements of specificbeacson.
66

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
RTS
NACK
TCOM
TCOM
t
RTS
TBACKOFF
CTS
...
(a)
RTS
WAIT
TCOM
TCOM
tTQUEUE
CTS
...
(b)
Figure 5.10.: Extended timing for (a) C-ALOHA and (b) FIFO MAC algorithms.The exchange is applicable to both RToF and Reverse TDoA proto-cols. After the CTS command, the positioning sequence continuesas illustrated in fig. 5.9.
• If a redundant number of beacons is measured, specific ones might be excluded from theposition calculation because of adverse geometric situations (see section 5.4.5).
Using the built-in WLAN transmitter would be too time-consuming. Adversely, the FSK trans-mitter can not be used for handshaking, as this would require the installation of a custom MAClayer. For the purposes mentioned above, this is not necessary, as the beacons will already beflagged busy and thus communicating only with a specific node.
After the FSK sequence, an additonal Continuous Wave (CW) signal of known length istransmitted to compensate for clock drift error [105]. The actual FMCW ramp completes thepacket, which is shown in fig. 5.11. In the following, every measurement process always is
FSK sequence Clock drift compensation FMCW ramp
TFSK TCW TFMCW
t
Figure 5.11.: Contents of a HPLS measurement packet. The FSK sequence is usedfor transmitter identification, the CW signal for clock drift compen-sation.
assumed to entail the complete protocol overhead.The current implementation of the HPLS platform foresees 64 bit identifiers. The FSK trans-
mitter achieves a rate of 10 kbps, so the total packet time is
TFMCW = TFSK + TCW + TFMCW =64 bit/10 kbps + 2 · 0.5 ms ≈ 1.6 ms. (5.21)
67

Communication modelModeling of a complete 802.11 WLAN MAC layer implementation is beyond the scope of thiswork, and also conceivably unnecessary to achieve reasonable modeling accuracy for the com-munications delay.
There is a multitude of excellent analytical studies pertaining the WLAN Distributed Coordi-nation Function (DCF), the fundamental MAC control scheme of the 802.11 standard [106–112].The principal access mechanism is shortly summarized in the following.
Station ADIFS
Station BDIFS
Station ADIFS
0 1 2 4 5 63 7 8
Backoff for Station A
Figure 5.12.: Principal mechanism of the DCF. Two stations compete for thechannel. The backoff of Station A is interrupted by a transmis-sion of Station B. Adapted from Bianchi, “IEEE 802.11 – SaturationThroughput Analysis”, IEEE, 1998.
Distributed Coordination Function The general collision mechanism of WLAN is Car-rier Sense Multiple Access/Collision Avoidance (CSMA/CA), which means that the nodes (“Sta-tions”) determine whether the channel is busy by listening before starting transmissions. Themost competitive time is immediately after one station has ceased its transmission and oneDistributed Interframe Space (DIFS) interval has expired.
The idle period of the channel is then slotted, and Stations are allowed to start their transmis-sions only at the beginning of each slot. The slot lengths are determined by the time needed fora Station to detect a transmission and, thus, a function of propagation delay, RX/TX turnaroundtime and MAC signaling delay.
To avoid collisions at that point, all stations start counting down a backoff time chosen froma uniform interval [0, w − 1). At the outset, w is equal to the minimum contention windowlength W , but is doubled after each unsuccessful transmission.
The backoff counter can be interrupted by incoming transmissions, and is resumed after anadditional DIFS interval.
The mechanism described here is illustrated in the timing diagram in fig. 5.12.
Model derivation Most studies concerning the DCF packet delay, such as [106] specificallytreat the saturation situation, which means that a single node always has packets to send inqueue. This is, however, not a realistic assumption for a typical positioning scenario.
The handshake exchange and transfer of positioning information only happens when anactual position is calculated. It is reasonable to assume that some additional traffic is producedby transfer of position-related information through a Location Based Services (LBS) engine,plus some stray data from fringe network elements which have nothing to do with the actualpositioning system. A reasonable worst-case load assumption for a single node in the system is0.2 Erlang.
In [111], a delay analysis for imperfect channels is presented. Delay values are given independence of the system load. It is difficult to ascertain specific values, however, as there
68

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
are a large number of MAC and other parameters to heed. With the given settings, severalconclusions can be drawn, however:
• For low system loads up to 0.4 Erlang, the delay changes only marginally.
• Also, the BER has little influence in low load situations.
• The packet delay is between 5 and 10 ms for low load situations.
• The service delay approximately follows an exponential distribution, with a mean valueof about 5 ms.
Given these insights, and the exponential backoff increase of the DCF, it is reasonable to assumethat the packet delay will also be exponentially distributed and stable over a large range ofnodes in the system. Per default, a mean value of 5 ms is assumed.
5.4. Simulation resultsThis closing section of the network analysis chapter presents simulation results obtained withthe methods and tools described above.
As is obvious from the above considerations, the parameter space of the network simulationis very large, and blows up even more if the system simulation is integrated.
It is out of the scope of this work to analyse every possible setting in the parameter space,so the following results are a selection which is seen fit to provide a good overview of theperformance and limits of the HPLS system.
The two protocols under consideration, RToF and Reverse TDoA are compared along thebasic parameters, such as update rate and mean latencies. As it makes no sense to mirrorevery algorithm and option in both protocols, these alternative settings are demonstrated onthe RToF protocol only. The results presented in this section have been published in scientificliterature [113–116].
For all simulations, a number of common parameter settings are used, unless indicatedotherwise. These are found in tab. 5.4.
5.4.1. Basic FIFO and C-ALOHA latenciesA basic plot of the mean request latency can be seen in fig. 5.13. Recall that this value denotesthe mean time it takes for a mobile to obtain its position from the infrastructure, includingqueue time.
It can be readily seen that FIFO queuing has a clear advantage over basic C-ALOHA at lownumbers of mobiles: the queue is small, and a rejected mobile simply has to wait for the (low)turnaround time to pass. With C-ALOHA, the system might even be idle while one or severalmobiles wait for their backoff timers to expire. This is clearly a non-ideal situation.
When the request latency is only dependent on the (steady-state) queue length, there isbound to be a point where the turnaround time of the queue becomes longer than the averagebackoff wait time. For basic settings, this happens when about 130 mobiles are served.
A way to ameliorate the idling situation and in consequence the latency values in C-ALOHAis to decrease the backoff timer mean. This has the effect of a linear decrease in the meanrequest time, as is also seen in fig. 5.13. Intuitively, this will also lead to more collisions, aneffect which is elaborated on in section 5.4.2. Fig. 5.14 shows scatterplots of the total numberof requests made. Utilizing the FIFO strategy, the standard deviation is generally much lower,due to the same reasons mentioned above: the turnaround time is nearly deterministic anddependent on the queue size only. Also, the sharp increase in latency that can be seen at a
69

Parameter SettingSimulation (world) time 60 sNumber of mobiles 20–300, in steps of 20Mobile speed 1 m/s (Pedestrian)Position calculation Nonlinear least squaresChannel conditions AWGN
Multipath model (if applicable) WarsawTMTBS Exponential variate, λ = 2 sTCOM Exponential variate, λ = 5 msTRTS TCOM
TCTS TCOM
TFMCW 2 msTCRTOF 1 msTCTDOA 3 msTBackoff Exponential variate, λ = 1 sQueuing strategy C-ALOHA
Positioning mode self- positioningNumber of base stations 9Stations measured for fix 4Room geometry (x, y, z) 300x300x10
Table 5.4.: Common parameter settings applicable to all simulation results shownin this section, unless indicated otherwise.
value of 60 mobiles in fig. 5.13 is also evident in this plot, as the number of requests sharplydrops.
C-ALOHA exhibits a much more haphazard behaviour, as could be expected: the standarddeviation remains almost constant over the number of mobiles. There is no reason a consoli-dation like in the FIFO case should be expected. In terms of successful requests, C-ALOHA ismore resilient to scaling. When a mobile is rejected, this means that another mobile is servedat the moment, and for high numbers of clients in the system, idle times will quickly dwindletowards zero.
This statement is corroborated by the throughput plot seen in fig. 5.15. The FIFO throughputquickly settles towards a saturation value: the system is constantly active serving mobiles fromthe queue, irrespective of how many calling clients there actually are in the system.
The throughput of C-ALOHA is initially hampered by the backoff time, but eventually con-verges towards a higher value than FIFO. This might seem counterintuitive at first, becausethere can be no more activity in the system than the constant processing of the queue. Recall,however, that FIFO requires an additional communications step to notify mobiles that they canleave the queue, atop the normal RTS/CTS handshake. If an C-ALOHA mobile is deferred, acomplete additional handshake is required, but this is of consequence to the individual mobile
70

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
Number of mobiles
Late
ncy
/s
FIFOC-ALOHA, TBackoff = 1 sC-ALOHA, TBackoff = 300 msC-ALOHA, TBackoff = 50 ms
20 60 100 140 180 220 260 3000
1
2
3
4
5
6
7
8
Figure 5.13.: Comparison of FIFO and C-ALOHA MAC strategies in the RToF pro-tocol.
only, not to the throughput statistic.In summary, it can be said that the FIFO strategy exhibits clear latency advantages over
C-ALOHA, especially when there are only a few dozen clients in the system. This advantage canbe made up by implementing quick backoff timers, which is, however, tied to a tradeoff whichwill be illustrated in the next section.
5.4.2. Secondary performance parametersBesides latency, there are secondary parameters which must be taken into account for anysystem analysis to be complete. The base station utilization, which impacts cost and emergencycapacities, is plotted in fig. 5.16 for both access strategies and several backoff timer settings.The figure looks remarkably similar to the throughput, which can of course be expected: highthroughput can only be achieved if utilization of the infrastructure is maximized. The reasonwhy the FIFO utilization never reaches 100 % lies in the transient characteristic experienced atstartup: the queue must fill up. Maximum utilization could only be reached if there was afilled queue to start with at the outset of the observation period. Fig. 5.17 further clarifies thecharacteristics of the C-ALOHA strategy by showing the number of rejected requests as percentof total.
Here, the tradeoff with reducing the backoff timers for lower latency becomes glaringlyobvious. Each rejected request means energy consumption for the nodes, as they must againgo through the handshake sequence with the infrastructure.
Note that this is not the case in FIFO: the nodes perform the handshake once and remainidly listening until the infrastructure grants their request. No further energy is consumed.
With continuing decrease of backoff times, the problem intensifies to the point where therejection ratio for individual nodes reaches 100 %, which would be equal to a total blockingof this specific node due to frenzied traffic in the system, energy costs aside. Such an effectis clearly unaccaptable. A MAC layer algorithm to cope with this would be to implement a
71

Succ
essf
ulre
ques
ts
0
10
20
30
40
50
(a)
Succ
essf
ulre
ques
ts
0
10
20
30
40
50
(b)
Figure 5.14.: Total number of requests made. The vertical sectioning representsone iteration with 20–300 mobiles. The black bars are centered atthe mean value and extend proportional to the standard deviation.The mean expected value without channel contention is 30. (a)FIFO (b) C-ALOHA.
closed-loop feedback mechanism which allows the infrastructure to adjust the global value ofthe backoff timer dynamically.
72

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
Number of mobiles
Thr
ough
put
FIFOC-ALOHA, TBackoff = 1 sC-ALOHA, TBackoff = 500 msC-ALOHA, TBackoff = 300 msC-ALOHA, TBackoff = 100 msC-ALOHA, TBackoff = 50 ms
20 60 100 140 180 220 260 3000
5
10
15
20
25
30
35
40
Figure 5.15.: Throughput (in handled requests per second) for FIFO and C-ALOHAstrategies. Both converge towards values which represent the max-imum system utilization.
Util
izat
ion
/%
ofob
serv
edwo
rldtim
e
Number of mobiles
FIFOC-ALOHA, TBackoff = 1 sC-ALOHA, TBackoff = 500 msC-ALOHA, TBackoff = 300 msC-ALOHA, TBackoff = 100 msC-ALOHA, TBackoff = 50 ms
20 60 100 140 180 220 260 3000
10
20
30
40
50
60
70
80
90
100
Figure 5.16.: Base station (server) utilization as percentage of the total observedworld time. Convergence to a lower value than 100 % is due totransient effects at startup of the simulation.
73

Number of mobiles
Rej
ecte
dre
ques
ts/
%of
tota
l
C-ALOHA, TBackoff = 1 sC-ALOHA, TBackoff = 500 msC-ALOHA, TBackoff = 300 msC-ALOHA, TBackoff = 100 msC-ALOHA, TBackoff = 50 ms
20 60 100 140 180 220 260 3000
10
20
30
40
50
60
70
80
90
100
Figure 5.17.: Rejected requests as percentage of total requests in the C-ALOHAstrategy. The number of futile handshakes with the infrastructureis proportional to the energy consumption of the nodes.
Number of mobiles
Late
ncy
/s
RToF, FIFORToF, C-ALOHA, TBackoff = 1 sTDoA, FIFOTDoA, C-ALOHA, TBackoff = 1 s
20 60 100 140 180 220 260 3000
1
2
3
4
5
6
7
8
Figure 5.18.: Comparative latency plots for FIFO (solid lines) and C-ALOHA(dashed lines). Reverse TDoA generally has a lower turnaround time,as only two measurement packets need to be transmitted.
5.4.3. Comparison of positioning protocolsFig. 5.18 compares the mean latencies of the two protocol and access strategy options. ReverseTDoA wins over RToF because of the generally lower number of exchanges between mobile and
74

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
infrastructure involved, as seen in fig. 5.9. Transmission of measurement data comprises thebulk of the traffic, and is handled via the very efficient WLAN contention system.
Util
izat
ion
/%
ofob
serv
edwo
rldtim
e
Number of mobiles
RToF, FIFORToF, C-ALOHA, TBackoff = 1 sTDoA, FIFOTDoA, C-ALOHA, TBackoff = 1 s
20 60 100 140 180 220 260 3000
10
20
30
40
50
60
70
80
90
100
Figure 5.19.: Comparative base station utilization for both protocols and accessstrategies. The lower turnaround time of Reverse TDoA implies alower strain on base stations.
The shorter turnaround is also reflected in the base station utilization, shown in fig. 5.19,through the effect is less prominent.
For all other settings, such as different backoff timers, Reverse TDoA can generally expectedto follow the behavior illustrated in the plots above. The impact of protocol choice on theupdate rates is spotlighted in the next section.
5.4.4. Update rateRecalling the definition of update rate in (5.5), a coarse estimation can be given as to whichupdate rates are to be expected in the system.
For the reference case of RToF positioning with FIFO access, the timing in (5.19), using actualvalues and mean values instead of variates – which is generally not acceptable, but useful for afirst estimation – becomes
W RTOF,FIFO = 3TCOM + TQueue + 2 · N · TFMCW + TCRTOF
≈ 15 ms + 2 · 4 · 2 ms + 1 ms + TQueue. (5.22)
The average time in queue is proportional to the mobiles that are already queued and are servedfirst. Their service times, in turn, are basically given by (5.22) (without queue time, naturally),so for N mobiles in the system, the estimate for turnaround time assuming the queue is alwaysfull is
W RTOF,FIFO|N ≈ (N − 1) · 32 ms + 32 ms, (5.23)which would imply an update rate of about 6 Hz with 5 mobiles in the system. Because ofstatistical outliers – it is mathematically and practically invalid to replace a distribution withits mean –, the real update rate can be expected to be less than that value.
75

Number of mobiles
Upd
ate
rate
with
90%
confi
denc
e/
Hz
FIFOC-ALOHA, TBackoff = 1 sC-ALOHA, TBackoff = 500 msC-ALOHA, TBackoff = 300 msC-ALOHA, TBackoff = 100 msC-ALOHA, TBackoff = 50 ms
5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
Figure 5.20.: System update rates as defined in (5.5) for all access strategies.Note that the x-scale is significantly shorter than in the previouslyshown plots.
Indeed, fig. 5.20, in which the update rate with 90 % confidence is plotted for all accessoptions, shows even lower values. Following the definition of real-time ability in (5.6), only theFIFO strategy with the lowest number of mobiles can be said to exhibit real-time behavior forpedestrian scenarios.
C-ALOHA access has a strong disadvantage due to the additional backoff timer, which canand will produce statistical outliers which crash the update rate. Indeed, this trend is alreadyhinted at in fig. 5.14, where only single nodes manage to make more than the expected numberof requests in the observation period, while for FIFO, this value is even slightly exceeded at lownode densities.
Fig. 5.21 compares the update rates of the two protocols. Though marginal, the fasterturnaround of Reverse TDoA is again evident in this plot.
5.4.5. MAC layer improvementsThis final section of simulation results presents some algorithmic improvements to the systemperformance.
Selective acquisitionPreviously shown results always assumed that a position fix is declared complete when themobile has acquired enough measurements to fix its position. Position calculation, however,benefits from redundant equations, so measuring additional beacons might turn out to bebenefical in terms of accuracy performance.
Fig. 5.22 shows that this is indeed the case: the error performance for the “greedy” acquisi-tion case, in which all nine beacons available in the system are measured and processed, showsa gain in terms of mean error and standard deviation in the AWGN case.
76

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
Number of mobiles
Upd
ate
rate
with
90%
confi
denc
e/
Hz
RToF, FIFORToF, C-ALOHA, TBackoff = 50 msTDoA, FIFOTDoA, C-ALOHA, TBackoff = 50 ms
5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
Figure 5.21.: Comparison of update rates of both protocols. The slight timingadvantage of Reverse TDoA is again evident.
Number of mobiles
Late
ncy
/s
20 60 100 140 180 220 260 3000
5
10
15
(a)2D error / m
Ray
leig
h(ε)
0 0.1 0.2 0.3 0.4 0.50
2
4
6
8
10
(b)
Figure 5.22.: Comparison of (a) latency and (b) error with regular (“min”, solidlines) and maximum (“greedy”, dashed lines) acquisition. Little isgained in terms of accuracy performance, but latency skyrockets.
This minuscule improvement is tolled by a heavy cost on latency, however: the acquisitiontime nearly doubles as five extra measurements take place.
In multipath environments, greedy acquisition might turn out not to be a good idea at all.The highly statistical nature of multipath error in dynamic environments yields a high chancethat a specific beacon is totally shadowed at the time of measurements, which would induce astatistical outlier that crashes the error performance. There are no methods foreseen in thissystem to mitigate this problem.
The use of greedy acquisition in this basic form is thus questionable for any real-world indoor
77

scenario. The situation might be alleviated by use of selective rejection of bad measurements,a prospect that is discussed in the next section.
Automatic repeat-requestThe possibility of repeating failed position measurements has been mentioned several timesthroughout this work. In general, this is not a trivial task: the quality of the measurement hasto be estimated with the data at hand. Several options are possible:
• Estimating the Rice factor of the spectrum, as described in [117].
• Using Neural Networks trained to indoor profiles to estimate the path distribution inthe profile, a technique demonstrated for error mitigation in [118].
• Tracking mobiles and, given their maximum known movement speed, using a slidingwindow over the spectrum to exclude implausible distances.
• Using sensor fusion techniques to factor in a number of additional parameters, such asknown room geometry, base station positions, received signal strength and SNR into thequality estimate.
An exact algorithm is beyond the scope of this work. The analysis at hand is concerned withthe effect such a quality estimation would have on the latency and error obtained. To this end,perfect error estimation is assumed.
Number of mobiles
Late
ncy
/s
20 60 100 140 180 220 260 3000
2
4
6
8
(a)2D error / m
Ray
leig
h(ε)
0 0.2 0.4 0.6 0.8 10
2
4
6
(b)
Figure 5.23.: Comparison of (a) latency and (b) error for regular (solid line) andrepeat-request measurement (dashed line). While exhibiting verylittle impact on the mean latency, perfect error estimation and mea-surement repetition massively improve accuracy.
Fig. 5.23 shows the latency and error results if an error limit of 0.5 m is enforced. This meansthat if the algorithm detects a larger error, the measurement is repeated after the channel isassumed to have changed.
Note even minuscule changes in the environment, alignment of the receiver etc. can affectthe position fix. As seen in the analysis of the single node performance, a closely spaced secondpath is largely responsible for multipath error. This second reflection can change in phase andruntime very quickly.
To ensure that the channel has changed, all other base stations are measured before thefailed measurement is repeated. In any case, a coherence limit of 10 ms is forced.
78

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
The result in fig. 5.23 shows a dramatic improvement in both mean and standard deviation,at almost no discernable latency cost. Inspection of the simulation report shows that less than10 % of measurements are actually repeated.
For this simulation, it is assumed that after expiration of the coherence limit, the channelhas completely changed. A more realistic, time-variant channel model would be necessary tomore accurately assess performance.
Priority queuesA final, and promising, method to increase the flexibility of the MAC layer is to introducepriority queues.
Up to now, a single FIFO was used to process nodes that were deferred by the infrastructure.In this section, simulation results with several queues and priorization of mobiles are shown.
The basic idea is to use NQ queues, which at the time of a “leave queue” event are selectedaccording to their assigned probabilities. Each queue is thus assigned a probability PQ,n, where
NQueue∑n=1
PQ,n = 1 (5.24)
holds. Queues with higher “pop order” are thus more likely to process their mobiles faster. Tofacilitate discussion of simulation results, the queueing system is described as Q : PQ,1/PQ,2/ . . . /PQ,NQ .
The MAC algorithm must decide in which queue a mobiles is placed when it is rejectedfrom immediate processing. To this end, each mobile gets assigned a probability PM,n whichrepresents its priority. When a reject occurs, the mobile enters the queue with the next highestorder (descending) with probability PM,n. Thus, mobiles with priority PM,n = 1 are alwaysassigned to the highest order queue.
The decision about mobile priorities will usually be made at system deployment. It wouldalso be possible to rotate priorities during system runtime, or assign emergency priorities.
Such considerations are left for future exploration. For purposes of the simulation at hand,priorities are assigned to a fraction of the mobiles at startup. The shorthand notation for thisis M : PM,1(F1)/PM,2(F2)/ . . ., where Fn is the fraction of total mobiles the priority is assignedto. It is assumed that the default priority (i.e., the one all other nodes get) is 0.
Fig. 5.24 shows latency plots for a Q : 0.8/0.2, M : 1(10 %)/0(90 %) simulation. As wouldbe expected from such a setup, the prioritized mobiles are served immediately, and their overalllatency is very low. Conversely, the majority of mobiles suffer a steep latency increase.
There are scenarios where such a tradeoff would be acceptable: when emergency or perish-able goods constitute a small fraction of warehouse stock, or when there are law enforcementpersonnel in a group of people.
Still more interesting is the prospect of giving prioritized mobiles a lower allowed updaterate. Semantically, this would mean that important localization tasks, which happen rarely,are performed with very low turnaround time. Implementation of a dynamic scheme like thisis not explored in this work, however.
An alternative, more complex configuration is shown in fig. 5.25. Three queues with Q :0.6/0.2/0.2 and M : 0.8(10 %)/0.6(20 %)/0.4(20 %)/0(50 %) are employed. The priority queuesshow latency performances equal to or below the mean. The 50 % of nodes with no prioritysuffer a hefty increase in latency.
It is interesting to note that overall latency is down compared to the single queue case. Thereason for this is not trivial to prove analytically. However, some intuitive observations canhelp to get a hold on the phenomenon.
Considering the limit case of one queue for every mobile in the system with equal order andmobile priorities, the system can alternatively be viewed as single queuing system with Serve
79

Number of mobiles
Late
ncy
/s
FIFOPriority queue systemPM,1 = 1(10 %)PM,2 = 0(90 %)
20 60 100 140 180 220 260 3000
5
10
15
Figure 5.24.: Latency results for a basic Q : 0.8/0.2 priority queuing system.Overall latency is slightly down compared to the reference case.
Number of mobiles
Late
ncy
/s
FIFOPriority queue systemPM,1 = 0.8(10 %)PM,2 = 0.6(20 %)PM,3 = 0.4(20 %)PM,4 = 0(50 %)
20 60 100 140 180 220 260 3000
5
10
15
20
Figure 5.25.: Latency results for a Q : 0.6/0.2/0.2 queuing system. The slightdecrease of mean latency is corroborated as a general trend whenmultiple queues are used.
in Random Order (SIRO) service strategy. Such a system is approximated with ten queues withorder 0.1 in fig. 5.26. In this case, every node has a finite chance of being served immediately,i.e., with very low wait time. In the regular FIFO case in steady state, this chance does not
80

CHAPTER 5. NETWORK ARCHITECTURE AND QUALITY OF SERVICEASPECTS
Number of mobiles
Late
ncy
/s
FIFOPriority queue system
20 60 100 140 180 220 260 3000
1
2
3
4
5
6
7
8
Figure 5.26.: Latency of an equal order priority queue system with ten queues.Mobiles are distributed equally across the queues. Overall latencyis down compared to the regular single queue case.
exist: every mobile has to wait until the queue is processed until it is served.The flexibility of the priority queuing system is extremely high, and the explorable parameter
space endless. The configuration of queues would be a typical task to go along with theinfrastructure installation, and should be adapted to the use case at hand.
81


CHAPTER 6
Conclusion and Outlook
The pronounced goal of this work was the simulative analysis of the RESOLUTION hybrid posi-tioning and communication system. A secondary radar FMCW system in the 5.8 GHz ISM band,the fundamental signal-theoretical characteristics, as well as central aspects of its hardware ar-chitecture were already well-known and comprehensively researched at the time of this writing,and thus did merit little further effort.
In chapter 4, some selected interesting aspects of the HPLS physical layer were discussed,with multipath propagation as focal point. A central insight at this stage was the elusivenessof conclusive accuracy data under the premise of mathematical channel models. In spite ofconsiderable engineering efforts, such models, by necessity, remain a coarse approximation ofreality. Barring the use of computationally intensive ray-tracing methods, merely comparativeconclusions can be drawn.
The results presented in chapter 4 are largely based on models derived from actual mea-surements with a broadband receiver setup. This gives the closest possible approximation tohow the actual hardware would behave, although this means that only a finite set of scenarioscan be covered, which may or may not be particularly representative of what the system isconfronted with during deployment.
The simulative analysis of such phenomena still has a decisive advantage over hardwareprototyping: the facility to transcend specification boundaries and investigate fringe parametersettings and extreme values, possibly to the benefit of further incarnations of the system orredesigns. In such a way, the benefit of bandwidth on the path resolution was conclusivelyassessed.
A further important result from chapter 4 was the conclusion that conventional phase noisein the synthesizer has little or no effect on the final detection probability as long as it stayswithin reasonable bounds. These bounds are easily achieved by currently available hardware.
Leaving all possibilities for hardware prototyping behind, the system analysis grew to includenetworks of receivers in chapter 5. Structured investigations as to the quality of service ofpositioning systems were at their infancy at the time of this writing, comprehensive foraysinto this area in communications notwithstanding. The two major commercial competitorsof RESOLUTION, LPR and LPM, both employ forms of static channel access or downlink-onlysetups, bearing with all disadvantages of these approaches.
The RESOLUTION platform offers reconfiguration of the MAC strategy to best suit the de-
83

ployment scenario. From preliminary system analyses, several protocol options took shape,including those with dynamic channel access. A generalized discrete event simulation engineintroduced in this work was used to gain comprehensive insight into network parameters of thesystem, including time-to-fix, update rates and base station utilization, as well as alternativeMAC configurations such as priority queues.
Two basic MAC strategies, C-ALOHA and FIFO queuing were investigated and comparedalong several important figures of merit. In the analysis of these results, several tradeoffs tookshape. The C-ALOHA protocol offers unparalleled ease of installation and good performancecharacteristics if the backoff time is held low. The anarchic mode of access is burdened with aheavy toll on the efficiency of transmitters, however. Here, the use of FIFO offers more control,especially when priority queues are used. The FIFO strategy was also shown to be optimal inconfigurations with a low number of competing transceivers.
The modular design of the simulator allowed for direct tethering of the system simulationengine, thus creating a true cross-layer simulation tool. This tool was used to investigateintegrated effects and algorithms, namely redundant acquisition and repeat-request. It wasshown that the latter brought strong improvements to the overall accuracy and precision of thesystem.
The prospects for further development on these topics are endless. A sensible extension ofthe simulator would be the facility to script events, such as emergencies or the rush arrival ofprioritized goods. From a technical point of view, such an addition would be relatively easy toimplement and could yield valuable insights into system dynamics.
A fruitful further research field would certainly be priority queues. The effects of this tech-nique observed in chapter 5 need further investigation and extension. It could also benefit fromcross-layer optimization, e.g., combined with error estimation and repeat-request: compensat-ing for low accuracy with fast time-to-fix by priorization, deferring repeating clients to lowerpriority queues, or even postponing quality-improving redundant measurements.
This would require deep improvements to both the system and network simulation. Thebase stations are currently treated as a monolithic entity. In the implementation, they existsas separate objects, however, and so ít would be possible to implement this feature with theexisting framework.
As outlined in chapter 2, indoor positioning technology is a relatively young field, with fewserious competitors vying for a broad market. The options for improvement are enormous.Injection-locked oscillator technology certainly merits interesting architectures, especially whenfully integrated and manufacturable at low costs. For more complex systems or base stationtechnology, room for improvements exist in the section of antennas – patch arrays and beamsteering come to mind – and, especially, baseband software, which can be arbitrarily complexto combat multipath effects.
In keeping with the saying that nothing beats bandwidth, the most promising candidatetechnology for next generation radiolocation systems is certainly ultra wideband. It can beexpected that with advances in signal generation and processing, this technology will gain afirm foothold in the market once manufacturing costs have reached a reasonably low level.
This thesis has provided a broad overview of a positioning platform which integrates manyaspects currently considered state of the art in local positioning. As contribution to this par-ticular field of science, the integrated cross-layer simulation engine, and the results obtainedwith it, stand as significant highlight.
84

APPENDIX A
The Active Reflector
The Active Reflector is a specialized, alternative mobile configuration for the HPLS platform,aimed at low-power, low-cost application segments with relaxed accuracy requirements.
System simulation of the Active Reflector (AR) was not part of this work. The systemcharacteristics are described exhaustively in [4]. Nonetheless, the hardware is an importantpart of the platform strategy, so the central system description is included here for sake ofcompleteness.
Figure A.1.: Active Reflector operation principle. Ramps are exchanged between(regular) base stations and the reflector tag.
The operation principle of the AR system is illustrated in fig. A.1. The FMCW ramp sentout by the base station is received, regenerated and reflected.
Assuming the reflector is excited by a base station signal of the form
sTX(t) = A cos ((ω0 + μt)t + φ0), (A.1)
it will respond with a modulated, time-delayed signal given by
sRX(t) = cos(ω0 + 1/2μ(t − τ)(t − τ)
) · cos (ωmodt). (A.2)
These equations are valid within an upsweep period, i.e., −T/4 ≤ t ≤ T/4.Additional NObject reflections from other objects are not modulated and can be written as
sObject(t)|n = cos((ω0 + 1/2μt − μτn)t + 1/2μτ2
n
), (A.3)
where τn is the specific signal runtime.
85

The signal impinging on the transmitter is the sum of the controlled reflection and severalunwanted object reflections. It is mixed with the transmit signal to produce
sm(t) = sRX(t) · sTX(t)= 1/4 cos
((ωmod + μτ)t + ω0τ − 1/2μτ2)
+ 1/4 cos((ωmod − μτ)t + ω0τ − 1/2μτ2)
+ 1/4 cos((2ω0 + μt − μτ − ωmod)t − ω0τ + 1/2μτ2)
+ 1/4 cos((2ω0 + μt − μτ + ωmod)t − ω0τ + 1/2μτ2)
+NObject∑
n=1
[1/2 cos
((2ω0 + μt − μτn)t − ωoτn + 1/2μτ2
n
)
+ 1/2 cos(μτnt + ω0τn − 1/2μτ2
n
)]. (A.4)
(A.5)
To isolate the wanted components which are spread around the modulation frequency ωmodproportional to the runtime τ , this signal is lowpass filtered to eliminate the high-frequencycomponents at 2ω0 and mixed with a low frequency signal ωmod to produce
sFinal(t) = 1/8 cos((ωmod − ωmod + μτ)t − ω0τ + 1/2μτ2)
+ 1/8 cos((ωmod + ωmod + μτ)t + ω0τ + 1/2μτ2)
+ 1/8 cos((ωmod − ωmod − μτ)t − ω0τ + 1/2μτ2)
+ 1/8 cos((ωmod + ωmod − μτ)t + ω0τ + 1/2μτ2)
+NObject∑
n=1
[1/4 cos
((ωmod − μτn)t + 1/2μτ2
n
)
+ 1/4 cos((ωmod + μτn)t − 1/2μτ2
n
)]. (A.6)
It can readily be seen that the wanted components are now centered around the differencefrequency ωmod − ωmod and can be isolated from the noise components by lowpass filtering.
Regular frequency analysis now yields the (double) signal runtime, which can then be trans-formed to a distance figure.
A.1. Active Pulsed ReflectorA drawback of the active reflector principle is that along with the wanted signal, the noiseis also amplified, so no gain in SNR is achieved compared to a regular radar architecture. Inaddition, the precision of the system is limited by the measurement duration, which has a directeffect on the width of the pulses in frequency domain.
The innovative approach of the active pulsed reflector is a switched oscillator, which oscillatesin phase with the incoming signal. Compared to a regular active reflector architecture, thishas the advantage that the incoming signal is not merely amplified, but instead completelyregenerated. Obviously, this has a beneficial effect on the SNR: signal power loss is onlyproportional to r2 and not r4 as in the traditional approach, and the noise level remainsconstant.
In addition, integration of the received signal yields a sinc envelope shape in the time signal.Mathematical proof of this is omitted here. The reader is instead referred to [4, 10] for acomplete derivation of this signal.
86

APPENDIX A. THE ACTIVE REFLECTOR
Transforming the time signal into frequency domain accordingly yields rectangular shapes.Instead of measuring the peaks, the interior flanks of these pulses are now measured, whichyields much higher target resolution.
A.2. Medium accessMultiple reflection signals can be discerned by the infrastructure through use of different mod-ulation frequencies, i.e., FDMA. The number of supported tags is limited only by the samplingfrequency achievable within the base stations.
The spectrum occupied by one tag is dependent on the switching time of the receiver, whichis constant, and the maximum covered distance. Current hardware configuration yields ap-proximately 400 kHz of occupied spectrum for one tag given a maximum coverage range of100 m.
In its current implementation, the Active Pulsed Reflector is a purely analog hardware, whichmakes enumeration (automated frequency slot assignment) to the tags impossible. Deploymentoptions are thus limited, but possible applications would include assisted living, where only oneperson needs to be located, or medical asset tracking, where comparatively few items which aremostly physically separated by some distance need to be located.
Minimal baseband logic would be needed to facilitate enumeration: a transceiver to receivecommands from the infrastructure and a minimal, specialized hardware to validate the com-mand string and program modulation frequency. For the above-mentioned applications, thiswould not be a significant cost factor. The installation of the required infrastructure, setupand maintenance and software distribution for application layer processing of the data wouldgreatly outweigh the hardware costs.
87


APPENDIX B
Object Oriented System Simulation Framework
Signal flow or block diagrams are a common way to visualize conceptual partitioning and dataprocessing within a system. Concept engineering usually starts with a functional sketch of thesystem based on textual specifications.
Translation of a block or signal flow diagram to code is not always a straightforward process.The MATLAB simulation software lends itself to top-down imperative programming, possiblywith utilizing separate functions to represent logical partitioning of the system. SIMULINK,a simulation extension running on top of MATLAB, supports visual system design through ablock-diagram editor. Underlying solver mechanics and signal handling are rather complex andquite different from basic MATLAB.
For the (single node) system simulations presented in this work, a custom framework for di-rect translation of block diagrams to code was devised and implemented. The design guidelinesfor this framework were:
Nativity The framework should be based on pure, native MATLAB code and understandableand usable by anyone with MATLAB skills.
Simplicity The framework should be very light-weight to avoid bogging down potentiallycomplex and long-running simulations with administrative overhead.
Flexibility The framework should be fit to handle any kind of signal flow constellation com-monly drawn in block diagrams, such as (multiple) forks, parallel paths etc.
Scalability The framework should support plugging of existing (sub-)systems into larger de-signs as part of hierarchical, library-based designs.
A sparely used commodity of MATLAB is rudimentary support for object-oriented program-ming. However, representing a specific function in a system as instance of a block class yieldsmany advantages endemic to object orientation, such as capsulation of code and data and dataprotection. Most importantly, readability and refactoring capabilities greatly increase.
A feature commonly supported by system modeling tools is the ability to have heterogenousand arbitrary data ports on any block. The built-in MATLAB type cell supports collections ofheterogenous data types. To accommodate the special needs of a system simulation, a dedicateddata type was built around cell to support easy indexing, merging and information printing.The ultimate goal of the SYM framework was to translate a block diagram such as the one
89

A-1 A-2
B-1
B-2
A-3
Subsystem A
Subsystem B
Complete system
Figure B.1.: Exemplary system block diagram used in the code samples.
shown in fig. B.1 to simple code which reflects the structure of the system itself. The codesample in listing B.1 exemplifies some principal mechanisms of the framework. The calls to
1 % Define nodes2 A_1 = sym_node ( ’A_1 ’ , @core_arith , ’ op ’ , ’+ ’ , ’ const ’ , 1 ) ;3 A_2 = sym_node ( ’A_2 ’ , @core_arith , ’ op ’ , ’+ ’ , ’ const ’ , 1 ) ;4 A_3 = sym_node ( ’A_3 ’ , @core_dump ) ;5 B_1 = sym_node ( ’B_1 ’ , @core_arith , ’ op ’ , ’+ ’ , ’ const ’ , 2 ) ;6 B_2 = sym_node ( ’B_2 ’ , @core_arith , ’ op ’ , ’+ ’ , ’ const ’ , 2 ) ;7
8 % Create ( sub ) systems9 Subsystem_A = sym_system ( ’ Subsystem A ’ , ’ s e r i a lConnect ’ , 1 ) ;
10 Subsystem_B = sym_system ( ’ Subsystem B ’ , ’ s e r i a lConnect ’ , 0 ) ;11 FINAL = sym_system ( ’ Fina l system ’ , ’ s e r i a lConnect ’ , 1 ) ;12
13 % Assemble the systems14 Subsystem_A = connect (Subsystem_A , A_1, A_2 ) ;15 Subsystem_B = connect ( Subsystem_B , B_1, B_2 ) ;16 FINAL = connect (FINAL, Subsystem_A , Subsystem_B , A_3) ;17
18 % Run the s imu la t i on19 output = run (FINAL ) ;
Listing B.1: Constructing and running the system.
sym_node and sym_system construct the respective objects and assign properties, while theconnect function establishes links between nodes (blocks) in a system. Finally, run will invokethe simulation.
For the rest of this chapter, basic familiarity with MATLAB object orientation and functionhandles is assumed.
90

APPENDIX B. OBJECT ORIENTED SYSTEM SIMULATION FRAMEWORK
B.1. ImplementationIn keeping with the design paradigm of simplicity, the entire framework consists of only threeclasses: the unified, heterogenous data container sym_packet, the block class sym_node andthe block container (with data routing information) sym_system.
Common to all three classes are many of the default functions for comparison, propertyassignment and retrieval and display recommended for new MATLAB classes. Also, name tagsare required for each instance, the reason for which lies in clarity as well as the necessity tosupport search and update operations (see later).
The rest of this section describes further implementation details of the framework classes.
sym_packet This is the datatype used for information exchange between nodes and systems.At its core, it is a managed cell array, providing functions for easy access, merging and display.
Attribute Descriptionpayload The actual data carried by the packet. Each entry must be a struct holding
the fields tag (short description), data (the actual data), as well as the meta-information size and type, corresponding to size and class calls, respectively.This information is used in sanity checks when blocks are connected.
Method Descriptionpack Add fields to an empty packet. This function accepts a variable number of
(tag, data) pairs and adds them (along with the meta-data) to the packetpayload. This function is mainly used by the packet constructor.
getfield Retrieves packet payload by tag. This function will return a structure withthe payload entry corresponding to the tag specified.
subsref Retrieve payload by index (range). This overrides the MATLAB “()” and“{}” operators.
combine Merge two packets. This function is primarily used when separate branchesof the system join back together.
sym_node A node represents an encapsulated functionality with an arbitrary number ofinputs and outputs. Nodes can be sources (no input) and sinks (no output).
Attribute Descriptioncore Reference to the processing function. The processing function must take the
input packet (port) and the list of additional properties as arguments. It thenperforms arbitrary operations on the packet payload under the constraintsof the properties. It must return a sym_packet as output data.
properties Additional node properties. These characteristics are automatically handedto the core processing function when the node is invoked in the course ofthe simulation. Note that this is necessary because the core function is notactually part of the object and thus not privy to accessing its data members.
Method Description
91

run Invoke the block. This will call the core function with the input packet andnode properties.
sym_system A system is simply a collection of one or more nodes which are either arrangedin serial or parallel connections. Note that there is no real parallel processing necessary: parallelnodes each receive a copy of the input packet and sequentially perform their computations.When the entire list of blocks is processed, the respective output packets are combined into asingle output port.
In a serial connection, the blocks are simply processed sequentially, with each block receivingits predecessors’ output packet as input.
To comply with the paradigm of hierarchical design, a system looks exactly like a node tothe outside, i.e., it provides a run function which is called in the same way as the regular noderun function and provides an output packet.
Attribute DescriptionnodeList A cell array holding the nodes in this system. For serial connections, the
ordering of the nodes is important, while for parallel connections it is not.
serialConnect Indication of the connection mode. If this flag is cleared, the nodes withinthe system are assumed to operate in parallel.
Method Descriptionconnect Add nodes to the system. This function will simply push node instances
into the nodeList.
update Change a nodes property. To perform parametric sweeps in the simulation,this function searches for a specific node instance identified by its tag andupdates a property within this node to a new value.
run Invoke the system. This has an equivalent interface to the node run function.Internally, it sequentially calls the run functions of all nodes in the nodeList.Note that the nodeList may contain more systems as elements, allowing forarbitrary nesting of systems and nodes.
B.2. Deployment
Listing B.1 shows how a simple system containing serial and parallel connections can be built.Note that the node constructors take two fixed arguments, a (unique) name and the corefunction, and a variable length list of (tag, value) pairs for additional properties. In thisspecific example, the nodes should perform very simple arithmetic operations, i.e., dependenton the operator specified in the property op, add or subtract a constant specified in const. Acore function suitable for this purpose is specified in listing B.2. The last block in the systemhas the sole purpose of dumping the data it receives. The functionality is shown in listing B.3.
Note that the core_dump function generates output to ensure hierarchical compatibility.
92

APPENDIX B. OBJECT ORIENTED SYSTEM SIMULATION FRAMEWORK
1 function outp = core_ar i th ( inp , props )2 % Extrac t the operand from the packe t3 operand = g e t f i e l d ( inp , ’ data ’ ) ; % By tag4
5 % Perform ar i t hme t i c opera t i on6 switch props . op7 case ’+ ’8 % Access f u n c t i on s re turn s t r u c t s9 r = operand . data + props . const ;
10 case ’− ’11 r = operand . data − props . const ;12 end ;13
14 % Pack the output15 % Next b l o c k again e x pe c t s ’ data ’ tag16 outp = sym_packet ( ’ Output ’ , ’ data ’ , r ) ;
Listing B.2: Simple arithmetical core function.
1 function outp = core_dump ( inp , props )2 % l e n g t h g i v e s the number o f f i e l d s in the packe t3 for idx = 1 : length ( inp )4 % Access by index5 fpr intf ( ’ F i e ld %d : %2.2 f \n ’ , idx , inp ( idx ) ) ;6 end ;7
8 % Pass through9 outp = inp ;
Listing B.3: Data dump core function.
B.3. OperationInvocation of the run function will perform a single pass through the entire system. For manysimulations, parametric sweeps are desirable to test different parameter settings. This is madepossible by the update function. An example of its use can be seen in listing B.4. Note that thefirst node in the system expects a packet with a data field. This initial value must be manuallygenerated before the simulation is initiated.
B.4. PerformanceFig. B.2 shows the results of a rudimentary speed comparison between regular imperative pro-gramming style (function use) and SYM employment. The trial code were sequential FFT/IFFToperations on a random data vector with 10e3 elements, with NFFT = 216. For each trial, ialternating operations were chained, with i being the trial index. In the imperative case, this
93

1 % I n i t i a l packe t2 in i t_packet = sym_packet ( ’ I n i t ’ , ’ data ’ , 1 0 ) ;3
4 % Parameter sweep5 for idx = 1:106 FINAL = update (FINAL , ’A_2 ’ , ’ const ’ , idx ) ;7 % Output can be d i scarded8 run (FINAL , in i t_packet ) ;9 end ;
Listing B.4: Example of a parameter sweep.
amounted to alternating calls to FFT/IFFT functions. For the SYM-based simulation a systemwith serially connected blocks having the respective procedure as core function was constructed.The result shows a slow linear increase of the performance gap, which indicates that the over-
Tim
e/
s
0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
0.25
Figure B.2.: Mean execution time of traditional (imperative) programming(dashed line) and framework usage (solid line) code snippets withidentical functionality and increasing structural complexity.
head generated by the framework is probably negligible for all but the most convoluted systemdesigns. In any case, the structural advantages should greatly outweigh the small performanceloss.
94

APPENDIX C
Discrete Event Simulation Framework
The discrete event simulation described at length in chapter 5 was implemented in MATLAB tofacilitate integration of the system simulation framework described in appendix B.
Using object-orientation, the core routines of the event simulation can be held very genericto allow simulation of various protocols, and even arbitrary systems. A central characteristicof such a simulation engine is the need to access shared resources, which indeed reflects itspurpose in its operating principles.
Section 5.3.1 lists the principle components of the discrete event simulation. Simulationtime, obviously, is a piece of (mutable) information which must be shared across the program,for both reading and manipulating. A facility for handling this kind of situation, which iscomplicated by the lack of C-like pointers in MATLAB, are object management libraries.
MATLAB provides for the possibility to hold values of variables across multiple invocations ofa function using the keyword persistent . This property can be exploited to emulate pointer-like behavior: a list of objects is declared as persistent within a library, and managed centrallythrough this variable only. This is visually exemplified in fig. C.1.
A library, for purposes of this text, is a function which returns a structure of data of anykind, including function handles. Typically, a library would be used to store simulation-wideparameters, as well as possibly utility functions. The basic mechanism is illustrated in listingC.1.
Time management in the discrete event simulation, as a simple example of object manage-ment libraries, is illustrated in listing C.2. There are two functions to read time, now (simplygiving the current time) and since (returning a time difference), and some to manipulate it(reset, set and add). Any function, system-wide, which accesses the time library always readsfrom and writes to the single instance of t, which is held only once in memory.
Note that time management is not a true object management library, because strictly speak-ing, t is just a scalar, not an object. An example more true to the denomination would bebase station handling. Across the entire simulation, base stations must be flagged “busy” whenprocessing a positioning request. However, each base station exists as an independent object,with data values such as its position in 3-D space.
Listing C.3 shows the program code of the base station management library. Note that allbase station objects created at the start of the simulations are pushed into the object list, thuscreating copies. It is mandatory to manipulate base stations only through the base station
95

persistentobject_list
...O2O1 ON-1
O1
lib_object
main
write
copy
function A
read
Figure C.1.: Object management library mechanism. Local copies of objects arestored in a persistent variable in the library. Access from variousparts of the program to the objects is through this object list only.
1 function l i b = lib_params ( )2
3 % Exported func t i on4 l i b . pr intID = @printID ;5
6 % Exported data7 l i b . data_A = magic ( 3 ) ;8 l i b . data_B = ’ This i s lib_params ’ ;9
10 function pr intID ( )11 fpr intf ( ’ L ibrary ID %s \n ’ , l i b . data_B ) ;12 end ;13
14 end
Listing C.1: Basic library mechanism.
library from this point on.The above approach is effective in compensating for the lack of pointers or references in
MATLAB. Because it is an add-on mechanism, foolproof operation can not be guaranteed, andthe user of the libraries is responsible for sensible handling. In a distribution environment, itcould be possible to separate object creation and library handling, thus isolating potential errorsources.
96

APPENDIX C. DISCRETE EVENT SIMULATION FRAMEWORK
1 function l i b = lib_time ( )2 % Globa l s imu la t i on time hand l ing3
4 % Time i t s e l f5 p e r s i s t e n t t ;6
7 % I n t e r f a c e8 l i b . reset = @reset ;9 l i b . now = @now;
10 l i b . set = @set ;11 l i b . add = @add ;12 l i b . s i n c e = @since ;13
14 function reset ( )15 t = 0 ;16 end ;17
18 function r e s = now( )19 r e s = t ;20 end ;21
22 function set ( va l )23 t = val ;24 end ;25
26 function r e s = add ( val )27 r e s = t + val ;28 end ;29
30 function r e s = s i n c e ( va l )31 r e s = t − val ;32 end ;33
34 end
Listing C.2: Persistent object management.
97

1 function l i b = l ib_bs ( )2 % Objec t management l i b r a r y3
4 p e r s i s t e n t o b j _ l i s t ;5
6 l i b . bs = o b j _ l i s t ;7
8 l i b . f l u s h = @flush ;9 l i b . add_obj = @add_obj ;
10
11 l i b . set = @lib_set ;12 l i b . get = @lib_get ;13
14 function f l u s h ( )15 o b j _ l i s t = {} ;16 end ;17
18 function add_obj ( obj_constructor , vararg in )19 new_obj = obj_constructor ( vararg in { : } ) ;20 o b j _ l i s t {end + 1} = new_obj ;21 end ;22
23 function l i b _ s e t ( idx , arg , va l )24 i f idx <= length ( o b j _ l i s t )25 obj = o b j _ l i s t { idx } ;26 obj = set ( obj , arg , va l ) ;27 o b j _ l i s t { idx } = obj ;28 end ;29 end ;30
31 function r e s = l ib_get ( idx , arg )32 i f idx <= length ( o b j _ l i s t )33 obj = o b j _ l i s t { idx } ;34 r e s = get ( obj , arg ) ;35 end ;36 end ;37
38 end
Listing C.3: True object management library.
98

APPENDIX D
Complex Envelope Simulation
A phase- and amplitude modulated signal can be represented as
x(t) = |r(t)| cos (2πfct + Φ(t))= �{r(t)ej(2πfct+Φ(t))}= �{r(t)ejΦ(t)ej2πfct}, (D.1)
where fc is an arbitrary (RF) carrier frequency and r(t) and Φ(t) the amplitude- and phasemodulating signals.
It is intuitively obvious that all relevant information is contained in the complex signal
x(t) = r(t)ejΦ(t). (D.2)
This signal is called the complex envelope of x(t). It is a pivotal concept in system simulation,as it allows for much lower simulation frequencies (equal to twice the signal bandwidth B, asopposed to twice the carrier frequency fc) that a true RF simulation would require.
To construct the complex envelope, the preenvelope or analytic signal is formed from x(t)by applying the Hilbert transform H (·) [119]:
x+(t) = x(t) + jH {x(t)}= x(t) + j
1πt
∗ x(t)
= x(t) + j1π
∫ ∞
−∞
x(τ)t − τ
dτ . (D.3)
The complex envelope is obtained by shifting the preenvelope to baseband:
x(t) = x+(t)e−j2πfct. (D.4)
99

X(f)
f
f
f
fRF
fRF
X+(f)
X(f)
A
2A
2A
-fRF
0
~
Figure D.1.: Signal representation in frequency domain. The real-valued signalx(t) is converted to the analytical signal x+(t), which has a one-sided power spectral density and is thus complex. This signal isthen shifted from the RF frequency fRF to the baseband.
Applying these steps to the real-valued RF signal x(t) in Eqn. D.1 yields
x(t) = x+(t)e−j2πfct
= (|r(t)| cos (2πfct + Φ(t)) + jH {x(t)}) e−j2πfct
= (|r(t)| cos (2πfct + Φ(t)) + j|r(t)| sin(2πfct + Φ(t))) e−j2πfct
= |r(t)|ej(2πfct+Φ(t))e−j2πfct
= |r(t)|ejΦ(t)ej2πfcte−j2πfct
= |r(t)|ejΦ(t), (D.5)
which corresponds to the intuitive form obtained from Eqn. D.2.
Fig. D.1 shows x(t), x+(t) and x(t) in the frequency domain. It is obvious that the ECB andRF signals exhibit different power as a consequence of Hilbert transform. To compensate this,a factor 1/
√2 is introduced, so (D.3) reads
x+(t) = 1√2
[x(t) + jH {x(t)}] . (D.6)
Then, X(f) and X(f) as Fourier transforms of x(t) and x(t), respectively, exhibit the same
100

APPENDIX D. COMPLEX ENVELOPE SIMULATION
power ∫ ∞
−∞||X(f)||2df =
∫ ∞
−∞||X(f)||2df. (D.7)
101


Bibliography
[1] A. G. Stove, “Linear FMCW radar techniques,” in IEE Proceedings on Radar and SignalProcessing, vol. 139, Oct. 1992, pp. 343–350.
[2] M. Vossiek, L. Wiebking, P. Gulden, J. Wieghardt, C. Hoffmann, and P. Heide, “Wirelesslocal positioning,” IEEE Microwave Magazine, vol. 4, no. 4, pp. 77–86, Dec. 2003.
[3] M. Vossiek, L. Wiebking, P. Gulden, J. Weighardt, and C. Hoffmann, “Wireless localpositioning - concepts, solutions, applications,” in Proceedings of the Radio and WirelessConference (RAWCON 2003), Boston, MA, Aug. 2003, pp. 219–224.
[4] L. Wiebking, “Entwicklung eines zentimetergenauen mehrdimensionalen Nahbereichs-Navigationssystems,” Ph.D. dissertation, Technische Universität Clausthal, 2003.
[5] J. Thornton and D. J. Edwards, “Modulating retro-reflector as a passive radar transpon-der,” Electronics Letters, vol. 34, pp. 1880–1881, Sep. 1998.
[6] ——, “Range measurement using modulated retro-reflectors in FM radar system,” IEEEMicrowave and Guided Wave Letters, vol. 10, no. 9, pp. 380–382, Sep. 2000.
[7] M. Vossiek, P. Heide, M. Nalezinski, and V. Magori, “Novel FMCW radar system con-cept with adaptive compensation of phase errors,” in Proceedings of the 26th EuropeanMicrowave Conference, vol. 1, Prague, Czech Republic, Oct. 1996, pp. 135–139.
[8] M. Vossiek and P. Gulden, “The switched injection-locked oscillator: A novel versatileconcept for wireless transponder and localization systems,” IEEE Transactions on Mi-crowave Theory and Techniques, vol. 56, no. 4, pp. 859–866, Apr. 2008.
[9] M. Vossiek, T. Schafer, and D. Becker, “Regenerative backscatter transponder using theswitched injection-locked oscillator concept,” in IEEE International Microwave Sympo-sium Digest (IMS 2008), Atlanta, GA, Jun. 2008, pp. 571–574.
[10] S. Wehrli, D. Barras, F. Ellinger, and H. Jäckel, “Integrated active pulsed reflector forFMCW radar localization,” in Proceedings of the IEEE International Microwave Sympo-sium (IMS 2009) (pending), 2009.
[11] S. Max, M. Vossiek, and P. Gulden, “Fusion of FMCW secondary radar signal beatfrequency and phase estimations for high precision distance measurement,” in Proceedingsof the European Radar Conference (EuRAD 2008), Amsterdam, The Netherlands, Oct.2008, pp. 124–127.
103

[12] S. Roehr, M. Vossiek, and P. Gulden, “Method for high precision radar distance mea-surement and synchronization of wireless units,” in Proceedings of the IEEE/MTT-SInternational Microwave Symposium (IMS 2007), Honolulu, HI, Jun. 2007, pp. 1315–1318.
[13] K. Pourvoyeur, P. Scherz, A. Stelzer, and G. Stelzhammer, “State dependent measure-ment equations in local positioning,” in Proceedings of the 6th Workshop on Positioning,Navigation and Communication (WPNC 2009), Hannover, Germany, Mar. 2009, pp. 223–227.
[14] S. Roehr, P. Gulden, and M. Vossiek, “Precise distance and velocity measurement for realtime locating in multipath environments using a frequency-modulated continuous-wavesecondary radar approach,” IEEE Transactions on Microwave Theory and Techniques,vol. 56, no. 10, pp. 2329–2339, Oct. 2008.
[15] B. Waldmann, R. Weigel, and P. Gulden, “Method for high precision local positioningradar using an ultra wideband technique,” in Proceedings of the IEEE International Mi-crowave Symposium (IMS 2008), Atlanta, GA, Jun. 2008, pp. 117–120.
[16] B. Waldmann, R. Weigel, P. Gulden, and M. Vossiek, “Pulsed frequency modulationtechniques for high-precision ultra wideband ranging and positioning,” in Proceedings ofthe IEEE International Conference on Ultra-Wideband (ICUWB 2008), vol. 2, Hannover,Germany, Sep. 2008, pp. 133–136.
[17] A. Stelzer, K. Pourvoyeur, and A. Fischer, “Concept and application of LPM - a novel3-D local position measurement system,” IEEE Transactions on Microwave Theory andTechniques, vol. 52, pp. 2664–2669, 2004.
[18] A. Stelzer, A. Fischer, and M. Vossiek, “A new technology for precise local positionmeasurement - LPM,” 2004 IEEE MTT-S International Microwave Symposium Digest,vol. 2, pp. 655–658, Jun. 2004.
[19] K. Pourvoyeur, A. Stelzer, A. Fischer, and G. Gassenbauer, “Adaptation of a 3-D localposition measurement system for 1-D applications,” in Proceedings of the European RadarConference (EURAD 2005), Paris, France, Oct. 2005, pp. 343–346.
[20] A. Stelzer, K. Pourvoyeur, A. Fischer, and G. Gassenbauer, “A local position measure-ment system with integrated telemetry channel,” in IEEE Radio and Wireless Symposium(RWS 2006), San Diego, CA, Jan. 2006, pp. 91–94.
[21] K. Pourvoyeur, A. Stelzer, S. Schuster, and G. Gassenbauer, “Error propagation of GPSin comparison to the local position measurement system LPM,” in Proceedings of the 9thEuropean Conference on Wireless Technology, Manchester, Great Britain, Sep. 2006, pp.215–218.
[22] K. Pourvoyeur, A. Stelzer, T. Gahleitner, S. Schuster, and G. Gassenbauer, “Effects ofmotion models and sensor data on the accuracy of the LPM positioning system,” inProceedings of the 9th International Conference on Information Fusion, Florence, Italy,Jul. 2006, pp. 1–7.
[23] K. Pourvoyeur, A. Stelzer, and G. Gassenbauer, “Position estimation techniques for thelocal position measurement system LPM,” in Proceedings of the Asia-Pacific MicrowaveConference (APMC 2006), Yokohama, Japan, Dec. 2006, pp. 1509–1514.
[24] K. Pourvoyeur, A. Stelzer, and G. Stelzhammer, “Error estimation for reliable fault detec-tion of a TDOA local positioning system,” in Proceedings of the Tyrrhenian InternationalWorkshop on Digital Communications - Enhanced Surveillance of Aircraft and Vehicles(TIWDC/ESAV 2008), Capri, Italy, Sep. 2008, pp. 1–6.
104

[25] M. Pichler, A. Stelzer, P. Gulden, and M. Vossiek, “Influence of systematic frequency-sweep non-linearity on object distance estimation in FMCW/FSCW radar systems,” inProceedings of the 33rd European Microwave Conference, Munich, Germany, Oct. 2003.
[26] M. Pichler, A. Stelzer, P. Gulden, C. Seisenberger, and M. Vossiek, “Frequency-sweeplinearization for FMCW sensors with high measurement rate,” 2005 IEEE MTT-S Inter-national Microwave Symposium Digest, Jun. 2005.
[27] ——, “Phase-error measurement and compensation in PLL frequency synthesizers forFMCW sensors–I: Context and application,” IEEE Transactions On Circuits AndSystems–I: Regular Papers, vol. 54, no. 5, pp. 1006–1017, May 2007.
[28] ——, “Phase-error measurement and compensation in PLL frequency synthesizers forFMCW sensors–II: Theory,” IEEE Transactions On Circuits And Systems–I: RegularPapers, vol. 54, no. 6, pp. 1224–1235, Jun. 2007.
[29] M. Pichler, A. Stelzer, and C. Seisenberger, “Modeling and simulation of PLL-basedfrequency-synthesizers for FMCW radar,” in Proceedings of the IEEE International Sym-posium on Circuits and Systems (ISCAS 2008), Seattle, WA, May 2008, pp. 1540–1543.
[30] C. Wagner, A. Stelzer, and H. Jäger, “Adaptive frequency sweep linearization basedon phase accumulator principle,” in Proceedings of the IEEE/MTT-S International Mi-crowave Symposium (IMS 2007), Honolulu, HI, Jun. 2007, pp. 1319–1322.
[31] X. Shen, W. Zhuang, H. Jiang, and J. Cai, “Medium access control in ultra-widebandwireless networks,” IEEE Transactions on Vehicular Technology, vol. 54, no. 5, pp. 1663–1677, Sep. 2005.
[32] J. Hund, R. Kraemer, C. Schwingenschlogl, and A. Heinrich, “Overview of MAC layerenhancements for IEEE 802.15.4a,” in Proceedings of the 6th Workshop on Positioning,Navigation and Communication (WPNC 2009), Hannover, Germany, Mar. 2009, pp. 43–49.
[33] L. De Nardis and M. G. Di Benedetto, “Positioning accuracy in ultra wide band low datarate networks of uncoordinated terminals,” in Proceedings of the 2006 IEEE InternationalConference on Ultra-Wideband, Waltham, MA, Sep. 2006, pp. 611–616.
[34] D. Macagnano, G. Destino, F. Esposito, and G. Abreu, “MAC performances for local-ization and tracking in wireless sensor networks,” in Proceedings of the 4th Workshop onPositioning, Navigation and Communication (WPNC 2007), Hannover, Germany, Mar.2007, pp. 297–302.
[35] Z. Li and G. Gielen, “Managing packet collisions in scavenging-based ULP transmit-onlyindoor localization systems,” in Proceedings of the 11th IEEE Singapore InternationalConference on Communication Systems (ICCS 2008), Krakow, Poland, Nov. 2008, pp.133–137.
[36] A. Bensky, Wireless Positioning Technologies and Applications. Artech House, 2008.
[37] B. Hofmann-Wellenhof, K. Legat, and M. Wieser, Navigation — Principles of Positioningand Guidance. Springer-Verlag Wien New York, 2003.
[38] J. Hightower and G. Borriello, “Location systems for ubiquitous computing,” Computer,vol. 34, no. 8, pp. 57–66, Aug. 2001.
[39] D. Culler, D. Estrin, and M. Srivastava, “Guest editors’ introduction: Overview of sensornetworks,” Computer, vol. 37, no. 8, pp. 41–49, Aug. 2004.
105

[40] S. Gezici, Z. Tian, G. B. Giannakis, H. Kobayashi, A. F. Molisch, H. V. Poor, andZ. Sahinoglu, “Localization via ultra-wideband radios: a look at positioning aspects forfuture sensor networks,” IEEE Signal Processing Magazine, vol. 22, no. 4, pp. 70–84, Jul.2005.
[41] H. Karl and A. Willig, Protocols and Architectures for Wireless Sensor Networks. Wiley,2005.
[42] Y. Zhang, W. Liu, Y. Fang, and D. Wu, “Secure localization and authentication in ultra-wideband sensor networks,” IEEE Journal on Selected Areas in Communications, vol. 24,pp. 829–835, Apr. 2006.
[43] I. F. Akyildiz, T. Melodia, and K. R. Chowdury, “Wireless multimedia sensor networks:A survey,” IEEE Wireless Communications, vol. 14, no. 6, pp. 32–39, Dec. 2007.
[44] T.-L. Chin, P. Ramanathan, and K. K. Saluja, “Modeling detection latency with collab-orative mobile sensing architecture,” IEEE Transactions on Computers, vol. 58, no. 5,pp. 692–705, May 2009.
[45] P. Bellavista, A. Kupper, and S. Helal, “Location-based services: Back to the future,”IEEE Pervasive Computing, vol. 7, no. 2, pp. 85–89, Apr./Jun. 2008.
[46] J. J. Caffery and G. L. Stuber, “Overview of radiolocation in CDMA cellular systems,”IEEE Communications Magazine, vol. 36, no. 4, pp. 38–45, Apr. 1998.
[47] C. Drane, M. Macnaughtan, and C. Scott, “Positioning GSM telephones,” IEEE Com-munications Magazine, vol. 36, no. 4, pp. 46–54, Apr. 1998.
[48] M. A. Spirito and A. G. Mattioli, “On the hyperbolic positioning of GSM mobile sta-tions,” in Proceedings of the International Symposium on Signals, Systems, and Electron-ics (ISSSE 1998), Pisa, Italy, Sep. 1998, pp. 173–177.
[49] M. A. Spirito, “Further results on GSM mobile station location,” Electronics Letters,vol. 35, pp. 867–869, May 1999.
[50] J. E. Dobson and P. F. Fisher, “Geoslavery,” IEEE Technology and Society Magazine,vol. 22, no. 1, pp. 47–52, 2003.
[51] S. Feng and C. L. Law, “Assisted GPS and its impact on navigation in intelligent trans-portation systems,” in Proceedings of the IEEE 5th International Conference on Intelli-gent Transportation Systems, Singapore, Singapore, Sep. 2002, pp. 926–931.
[52] H. J. Ehm, Galileo/GPS – Single Shot Radio Receiver Architectures for Mobile Stations.Der Andere Verlag, 2008.
[53] G. Dedes and A. G. Dempster, “Indoor GPS positioning - challenges and opportunities,”in Proceedings of the IEEE 62nd Vehicular Technology Conference (VTCFall 2005), vol. 1,Dallas, TX, Sep. 2005, pp. 412–415.
[54] E. D. Kaplan, Understanding GPS – Principles and Applications. Artech House, 1996.
[55] H. Holma and A. Toskala, Eds., WCDMA for UMTS: HSDPA Evolution and LTE. Wiley& Sons, 2007.
[56] R. Mosshammer, “Terminal based positioning using UMTS-IPDL,” Master’s thesis, Fach-hochschule Hagenberg, 2004.
[57] P. Prasithsangaree, P. Krishnamurthy, and P. Chrysanthis, “On indoor position loca-tion with wireless LANs,” in Proceedings of the 13th IEEE International Symposiumon Personal, Indoor and Mobile Radio Communications (PIMRC 2002), vol. 2, Lisboa,Portugal, Sep. 2002, pp. 720–724.
106

[58] M. Stella, M. Russo, and D. Begusic, “Location determination in indoor environmentbased on RSS fingerprinting and artificial neural network,” in Proceedings of the 9thInternational Conference on Telecommunications (ConTel 2007), Zagreb, Croatia, Jun.2007, pp. 301–306.
[59] M. Hartmann, “Analysis and design of monolithic integrated sige mixer circuits for 77ghz automotive radar,” Ph.D. dissertation, University of Erlangen-Nuremberg, 2008.
[60] R. Mosshammer, M. Huemer, R. Szumny, K. Kurek, J. Hüttner, and R. Gierlich, “A 5.8GHz local positioning and communication system,” in Proceedings of the IEEE Inter-national Microwave Symposium (IMS 2007), IEEE, Ed., Honolulu, HI, June 2007, pp.1237–1240.
[61] F. Ellinger, J. Carls, S. Wehrli, H. Jäckel, C. Kromer, L. Wiebking, A. Dabek, J. Hüttner,R. Roskosch, R. Gierlich, C. Seisenberger, M. Huemer, R. Mosshammer, T. Ußmüller,R. Weigel, V. Subramanian, M. Krcmar, G. Böck, D. Doumenis, A. Kounoudes, K. Kurek,Y. Yashchyshyn, R. Szumny, A. Kalis, E. Avatagelou, A. Garbi, and S. Spiegel, “EUproject RESOLUTION,” in International Conference on Wireless Information Networksand Systems (WINSYS), Setubal, Portugal, August 2006, pp. 362–366.
[62] F. Ellinger, R. Eickhoff, R. Gierlich, J. Hüttner, A. Ziroff, S. Wehrli, T. Ußmüller, J. Carls,V. Subramanian, M. Krcmar, R. Mosshammer, S. Spiegel, D. Doumenis, A. Kounoudes,K. Kurek, Y. Yashchyshyn, C. B. Papadias, P. Tragas, A. Kalis, and E. Avatagelou,“Local positioning for wireless sensor networks,” in Proceedings of the IEEE Global Com-munication Conference (GLOBECOM), Washington, DC, November 2007, pp. 1–6.
[63] P. Tragas, A. Kalis, C. Papadias, F. Ellinger, T. Ußmüller, R. Mosshammer, M. Huemer,R. Eickhoff, A. Dabek, D. Doumenis, and A. Kounoudes, “RESOLUTION: Reconfig-urable systems for mobile local communication and positioning,” in IST Mobile Summit2007, Budapest, Hungary, July 2007.
[64] R. Gierlich, J. Hüttner, R. Mosshammer, and M. Huemer, “Local indoor positioning byFMCW-based TDoA and RToF measurements,” in Proceedings of the FH Science Day,Wels, Austria, October 2007, pp. 38–43.
[65] R. Eickhoff, F. Ellinger, R. Mosshammer, R. Weigel, A. Ziroff, and M. Huemer, “3D-accuracy improvements for TDoA based wireless local positioning systems,” in Proceed-ings of the IEEE GLOBECOM Workshops, New Orleans, LA, Nov. 2008, pp. 1–6.
[66] IEEE Standard for Information Technology – Telecommunications and information ex-change between systems – Local and metropolitan area networks – specific requirementPart 15.4: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifi-cations for Low-Rate Wireless Personal Area Networks (WPANs), IEEE Std.
[67] IEEE Standard for Information technology – Telecommunications and information ex-change between systems – Local and metropolitan area networks-Specific requirements –Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Spec-ifications, IEEE Std.
[68] IEEE Standard for information technology – Telecommunications and information ex-change between systems – Local and metropolitan area networks - Specific requirementsPart 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Spec-ifications Amendment 1: Radio Resource Measurement of Wireless LANs, IEEE Std.
[69] T. Ussmüller and R. Weigel, “Fully integrated voltage controlled oscillator for novel high-precision local positioning system,” in Proceedings of the European Conference on Wire-less Technology (EuWiT 2008), Amsterdam, The Netherlands, Oct. 2008, pp. 218–221.
107

[70] M. C. Jeruchim, P. Balaban, and K. S. Shanmugan, Simulation of Communication Sys-tems. Kluwer Academic / Plenum Publishers, New York, 2000.
[71] D. C. von Grünigen, Digitale Signalverarbeitung. Fachbuchverlag Leipzig, 2004.
[72] B. Sklar, “Rayleigh fading channels in mobile digital communication systems I: Charac-terization,” IEEE Communications Magazine, vol. 35, no. 7, pp. 90–100, July 1997.
[73] M. A. Richards, Fundamentals of Radar Signal Processing. McGraw-Hill Companies,Inc., 2005.
[74] B. Razavi, RF Microelectronics, T. S. Rappaport, Ed. Prentice Hall PTR, 1998.
[75] P. Gulden, M. Vossiek, E. Storck, and P. Heide, “Application of state space frequencyestimation techniques to radar systems,” in Proceedings of the International Conferenceon Acoustics, Speech, and Signal Processing (ICASSP 2001), vol. 5, Salt Lake City, UT,May 2001, pp. 2877–2880.
[76] S. Salous, “On the potential applicability of auto-regressive spectral estimation to HFchirp sounders,” Journal of Atmospheric and Solar-Terrestrial Physics, vol. 59, no. 15,pp. 1961 – 1972, 1997.
[77] M. Chabert, C. Mailhesm, N. Thomas, A. Ducasse, P. Michel, and F. Castani, “On theuse of high resolution spectral analysis methods in radar automotive,” in Proceedingsof the 1st International Workshop on Intelligent Transportation (WIT 2004), Hamburg,Germany, Mar. 2004.
[78] L. Yang, L. Liwan, P. Weifeng, C. Yanqin, and F. Zhenghe, “Performance comparisonof super-resolution estimation algorithms used in real or complex LFMCW systems,”in Proceedings of the 2nd International Conference on Microwave and Millimeter WaveTechnology (ICMMT 2000), Beijing, People’s Republic of China, Sep. 2000, pp. 658–661.
[79] R. Mosshammer, F. Frank, M. Huemer, and R. Szumny, “Neural network based pathdetection for a 5.725 GHz FMCW positioning system,” in Proceedings of the EleventhInternational Converence on Computer Aided Systems Theory, A. Quesada-Arencibia,Ed., Las Palmas, Spain, February 2007, pp. 316–317.
[80] R. Mosshammer, F. Frank, and M. Huemer, “Neural network based path detection for anFMCW positioning system,” Lecture Notes in Computer Science, vol. 4739, pp. 928–935,2007.
[81] R. B. Staszewski, C. Fernando, and P. T. Balsara, “Event-driven simulation and modelingof phase noise of an rf oscillator,” IEEE Transactions on Circuits and Systems, vol. 52,no. 4, pp. 723–733, Apr. 2005.
[82] D. B. Leeson, “A simple model of feedback oscillator noise spectrum,” Proceedings of theIEEE, vol. 54, no. 2, pp. 329–330, Feb. 1966.
[83] N. J. Kasdin, “Discrete simulation of colored noise and stochastic processes and 1/fα
power law noise generation,” Proceedings of the IEEE, vol. 83, no. 5, pp. 802–827, May1995.
[84] A. Demir, A. Mehrota, and J. Roychowdhury, “Phase noise in oscillators: A unifyingtheory and numerical methods for characterization,” IEEE Transactions On CircuitsAnd Systems–I: Fundamental Theory And Applications, vol. 47, no. 5, pp. 655–674, May2000.
[85] T. H. Lee and A. Hajimiri, “Oscillator phase noise: A tutorial,” IEEE Journal of Solid-State Circuits, vol. 35, no. 3, pp. 326–336, Mar. 2000.
108

[86] L. Yang, J. Yue, and H. Ehm, “Time domain phase noise synthesis for system simula-tion,” in Proceedings of the 49th IEEE International Midwest Symposium on Circuits andSystems, vol. 1, San Juan, Puerto Rico, Aug. 2006, pp. 414–418.
[87] J. Park, K. Muhammad, and K. Roy, “Efficient modeling of 1/fα noise using multi-rate process,” IEEE Transactions on Computer-Aided Design of Integrated Circuits andSystems, vol. 25, no. 7, pp. 1247–1256, Jul. 2006.
[88] R. Narasimha, S. P. Bandi, R. M. Rao, and P. R. Mukund, “1/f noise synthesis modelin discrete-time for circuit simulation,” IEEE Transactions on Circuits and Systems-I:Regular Papers, vol. 52, no. 6, pp. 1104–1114, Jun. 2005.
[89] R. Eickhoff, F. Ellinger, T. Ußmüller, and S. Spiegel, “A Highly-Integrated Fractional-N Synthesiser for FMCW Radar,” in Proceedings of the International IEEE Conferenceon Microwaves, Communications, Antennas and Electronic Systems (COMCAS 2008),Tel-Aviv, Israel, May 2008.
[90] S. Scheiblhofer, S. Schuster, and A. Stelzer, “Effects of systematic FMCW radar sweepnonlinearity on bias and variance of target range estimation,” in Microwave SymposiumDigest, 2006.
[91] S. Kozlowski, K. Kurek, R. Szumny, and J. Modelski, “Statistical modeling of widebandpropagation channel in an indoor environment,” in Proceedings of the 17th InternationalConference on Microwaves, Radar and Wireless Communications (MIKON 2008), Wro-claw, Poland, May 2008, pp. 1–4.
[92] A. Saleh and R. Valenzuela, “A statistical model for indoor multipath propagation,”IEEE Journal on Selected Areas in Communications, vol. 5, no. 2, pp. 128–137, Feb.1987.
[93] A. F. Molisch, D. Cassioli, C.-C. Chong, S. Emami, A. Fort, B. Kannan, J. Karedal,J. Kunisch, H. G. Schantz, K. Siwiak, and M. Z. Win, “A comprehensive standardizedmodel for ultrawideband propagation channels,” IEEE Transactions on Antennas andPropagation, vol. 54, pp. 3151–3166, Nov. 2006.
[94] W. H. Press, S. A. Teukolsky, and W. T. Vetterling, Numerical Recipes in C. CambridgeUniversity Press, 1997.
[95] Y. T. Chan and K. C. Ho, “A simple and efficient estimator for hyperbolic location,”IEEE Transactions on Signal Processing, vol. 42, no. 8, pp. 1905–1915, Aug. 1994.
[96] D. J. Torrieri, “Statistical theory of passive location systems,” IEEE Transactions onAerospace and Electronic Systems, vol. 20, no. 2, pp. 183–198, Mar. 1984.
[97] H. C. So and S. P. Hui, “Constrained location algorithm using TDOA measurements,”IEICE Trans. Fundamentals, vol. E86-A, no. 12, pp. 3291–3293, Dec. 2003.
[98] S. Tekinay, E. Chao, and R. Richton, “Performance benchmarking for wireless locationsystems,” IEEE Communications Magazine, vol. 36, no. 4, pp. 72–76, Apr. 1998.
[99] A. M. Law, Simulation Modeling and Analysis, 4th ed., K. E. Case and P. M. Wolfe, Eds.McGraw-Hill, 2007.
[100] J. H. Reed, K. J. Krizman, B. D. Woerner, and T. S. Rappaport, “An overview of thechallenges and progress in meeting the E-911 requirement for location service,” IEEECommunications Magazine, vol. 36, no. 4, pp. 30–37, Apr. 1998.
[101] “FCC acts on wireless carrier and public safety requests regarding enhanced wireless 911services, FCC document WT docket no.94-102,” Oct. 2001.
109

[102] A. S. Tanenbaum, Computernetzwerke. Pearson Studium, 2000.
[103] J. Banks, J. S. Carson, B. L. Nelson, and D. M. Nicol, Discrete-Event System Simulation.Prentice Hall, 2001.
[104] R. Mosshammer, R. Eickhoff, M. Huemer, and R. Weigel, “System topologies and per-formance evaluation of the RESOLUTION embedded local positioning system,” e&i, vol.125, pp. 347–352, 2008.
[105] R. Gierlich, J. Hüttner, and M. Huemer, “Performance analysis of FMCW synchroniza-tion techniques for indoor radiolocation,” in Proceedings of the 2007 European Conferenceon Wireless Technologies (ECWT 2007), Munich, Germany, October 2007, pp. 24–27.
[106] G. Bianchi, “IEEE 802.11 – saturation throughput analysis,” IEEE CommunicationsLetters, vol. 2, no. 12, pp. 318–320, Dec. 1998.
[107] P. Chatzimisios, A. C. Boucouvalas, and V. Vistas, “Packet delay analysis of IEEE 802.11MAC protocol,” Electronics Letters, vol. 39, pp. 1358–1359, 2003.
[108] P. Chatzimisios, A. C. Boucouvalas, and V. Vitsas, “IEEE 802.11 packet delay-a finiteretry limit analysis,” in Proceedings of the IEEE Global Telecommunications Conference(GLOBECOM 2003), vol. 2, San Francisco, CA, Dec. 2003, pp. 950–954.
[109] ——, “Performance analysis of IEEE 802.11 DCF in presence of transmission errors,”in Proceedings of the IEEE International Conference on Communications (ICC 2004),vol. 7, Paris, France, Jun. 2004, pp. 3854–3858.
[110] P. Raptis, V. Vitsas, K. Paparrizos, P. Chatzimisios, and A. C. Boucouvalas, “Packetdelay distribution of the IEEE 802.11 distributed coordination function,” in Proceedings ofthe Sixth IEEE International Symposium on a World of Wireless Mobile and MultimediaNetworks (WoWMoM 2005), Taormina, Italy, Jun. 2005.
[111] Y. Zheng, K. Lu, D. Wu, and Y. Fang, “Performance analysis of IEEE 802.11 DCFin imperfect channels,” IEEE Transactions on Vehicular Technology, vol. 55, no. 5, pp.1648–1656, Sep. 2006.
[112] R. Oliveira, L. Bernardo, and P. Pinto, “IEEE 802.11 delay analysis for multirate variableframe length,” in Proceedings of the IEEE 18th International Symposium on Personal,Indoor and Mobile Radio Communications (PIMRC 2007), Athens, Greece, Sep. 2007,pp. 1–5.
[113] R. Mosshammer, R. Eickhoff, M. Huemer, and R. Weigel, “Integrated system and networksimulation of a 5.8 ghz local positioning system,” in Proceedings of the 12th InternationalConverence on Computer Aided Systems Theory, Las Palmas, Spain, Feb. 2009.
[114] R. Mosshammer, M. Huemer, and R. Weigel, “System capacity analysis for high-precisionradiolocation in the 5.8 ghz ISM band,” in Proceedings of the 2009 IEEE 69th VehicularTechnology Conference Spring (VTCSpring 2009), Barcelona, Spain, Apr. 2009.
[115] R. Mosshammer, B. Waldmann, R. Eickhoff, R. Weigel, and M. Huemer, “A compari-son of channel access concepts for high-precision local positioning,” in 6th Workshop onPositioning, Navigation and Communication (WPNC) 2009, Hannover, Germany, Mar.19–19, 2009, pp. 37–41.
[116] R. Mosshammer, R. Eickhoff, M. Huemer, and R. Weigel, “Integrated system and networksimulation of a 5.8 GHz local positioning system,” Springer Lecture Notes in ComputerScience (accepted for publication), 2009.
110

[117] A. Schmid and A. Neubauer, “Channel estimation technique for positioning accuracyimprovement in multipath propagation scenarios,” in Proceedings of the ION GNSS 17thInternational Technical Meeting of the Satellite Division, Long Beach, CA, Sep. 2004.
[118] A. Götz, “Detektionsalgorithmik und Mehrwegekompensationsverfahren für Local-Positioning-Radar-Systeme,” Master’s thesis, University of Erlangen-Nuremberg, May2008.
[119] B. Girod, R. Rabenstein, and A. Stenger, Einführung in die Systemtheorie. Teubner,2005.
111