Embed Size (px)
Citation preview
Die Colin-de-Verdiere-Zahl
Kai Lawonn
Diplomarbeit im Fach MathematikFreie Universitat Berlin
Gutachter: Prof. Dr. Konrad PolthierDr. Carsten Lange
Abgabetermin 1. Marz 2011


Inhaltsverzeichnis
1 Einleitung 2
2 Lineare Algebra 42.1 Grundlegendes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3 Graphentheorie 153.1 Grundlegendes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Die Colin-de-Verdiere-Zahl 284.1 Grundlegendes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.2 Haupteigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .324.3 Cliquensummen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.4 Unterteilung undY-Transformation . . . . . . . . . . . . . . . . . . . . . 644.5 Der Nullraum der MatrixM . . . . . . . . . . . . . . . . . . . . . . . . . 684.6 Kleine Werte furµ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.6.1 Pfade und außerplanare Graphen . . . . . . . . . . . . . . . . . . .724.6.2 Planare Graphen . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.7 Verlinkungsfreie einbettbare Graphen . . . . . . . . . . . . . .. . . . . . 774.7.1 Borsuks Theorem fur antipodale Verlinkungen . . . . . .. . . . . 794.7.2 Der Beweis von Theorem 4.7.7 . . . . . . . . . . . . . . . . . . . 91
5 Vom Permutaeder zur Verdiere-Matrix 1035.1 Grundlegendes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1035.2 Permutaeder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1035.3 Colin-de-Verdiere-Matrix . . . . . . . . . . . . . . . . . . . . . . .. . . . 123
5.3.1 Verdiere-Matrix mit Mathematica . . . . . . . . . . . . . . . .. . 129
6 Ausblick 142
Literaturverzeichnis 143
Eidesstattliche Versicherung 145

Kapitel 1
Einleitung
1990 stellte Y. Colin de Verdiere einen neuen Parameterµ(G) fur einfache Graphen vor,siehe [32] und [31]. Dieser Parameter wurde zunachst bei der Untersuchung von der ma-ximalen Vielfachheit des zweiten Eigenwertes von diskreten Schrodinger Operatoren ver-wendet. Es stellte sich heraus, dass dieser Parameter auch bestimmte Eigenschaften vonGraphen darstellt. Fur eine gewisse Klasse von Matrizen, die zu einem Graphen gehoren,stellt µ(G) die maximale Vielfachheit des zweiten Eigenwertes dieserKlasse von Matri-zen dar. Ein weiterer Vorteil dieses Parameters besteht in der Minormonotonie. Graphen,die als Minoren von anderen Graphen hervorgegangen sind, haben eine kleinere maximaleVielfachheit des zweiten Eigenwertes als die ursprunglichen Graphen. Des Weiteren las-sen sich aus dem Parameterµ(G) Ruckschlusse auf die topologischen Eigenschaften desGraphen schließen. Sofernµ(G) ≤ 3 gilt, ist der Graph ein planarer Graph und lasst sichkreuzungsfrei in die Ebene einbetten. Fur den Fallµ(G) ≤ 4 ist der Graph sogar verlin-kungsfrei einbettbar, siehe [22].
In den ersten Teilen dieser Arbeit sollen die Grundlagen desneuen Parameters erlautertwerden. Das erste Kapitel klart hierbei die Grundlagen undweiterfuhrende Theoreme, diefur die Matrizenrechnungen im spateren Kapitel unausweichlich sein werden. Die wichtigs-ten Eigenschaften, die spater benotigt sind, werden hierbewiesen. Viele Begrifflichkeitenwerden dabei nicht zwingend vorausgesetzt, sind aber erwunscht.
Das dritte Kapitel soll mit den Grundlagen der Graphentheorie vertraut machen. Hiersind ebenfalls einige Begriffe und Kenntnisse erwunscht, diese sind aber wie im vorigenKapitel nicht vorausgesetzt. Wichtige Theoreme werden in diesem Kapitel bewiesen. Al-lerdings ist dieses Kapitel eher dafur gedacht mit den Begriffen, die im Kapitel 4 benutztwerden umgehen zu konnen.
Das vierte Kapitel ist das Herzstuck dieser Arbeit. Es behandelt die Ergebnisse, dieY. Colin de Verdiere entdeckte, siehe [32] und [31] sowie andere Erkenntnisse die vonH. v. d. Holst, L. Lovasz, A. Schrijver [13] und [22] entwickelt wurden. In Anlehnung anden wissenschaftlichen Beitragen von den genannten Personen, arbeitet diese Ausarbeitungihre Resultate heraus und stellt sie neu auf. Das Hauptresultat ist hierbei dieAquivalenz zugewissen topologischen Eigenschaften von Graphen und der zugehorigen Verdiere-Zahl.Diese Ergebnisse werden bewiesen und bieten dabei ein weiteres Spektrum fur eine weitereMoglichkeit Klassen von Graphen zu kategorisieren und zu analysieren.
Im funften Kapitel wird eine Moglichkeit vorgestellt, wie man von einem konvexen Po-lytop eine mogliche Verdiere-Matrix ermitteln kann. Dieses Verfahren ermittelt eine Ver-diere-Matrix fur einen Graphen, welcher das 1-Skelett des dualen Polytops darstellt. Indiesem Kapitel wird dieses Verfahren anhand des Permutaeders vorgestellt. Es wird exem-plarisch vorgefuhrt wie man fur beliebig dimensionale Permutaeder eine Verdiere-Matrixbestimmt. Im Unterkapitel 5.3.1 wird schließlich gezeigt,wie man mit dem Programm Ma-thematica eine Verdiere-Matrix von Permutaedern beliebiger Dimension erhalt.

KAPITEL 1. EINLEITUNG 3
Das sechste Kapitel ist der Abschluss dieser Arbeit. Hier wird Verdieres beruhmteVermutung zu seinem Parameter und der chromatischen Zahl erwahnt, die zu einem al-gebraischen Beweis der 4-Farben-Vermutung hinfuhren konnte. Des Weiteren bietet dasletzte Kapitel einen Einblick in mogliche Fragestellungen, die sich lohnen wurden weiterzu ergrunden. Dort werden neue Probleme aufgeworfen, die noch nicht weiter untersuchtworden sind.

Kapitel 2
Lineare Algebra
2.1 Grundlegendes
Dieses Kapitel soll die grundlegenden Definitionen und Satze erlautern, die in den spaterenKapiteln von wichtiger Bedeutung sein sollen. Zunachst werden fur diese Arbeit aus-schließlich symmetrische Matrizen verwendet. Dabei werden altbekannte Tatsachen, wiedie Existenz von orthogonalen Eigenvektoren zu reellen Eigenwerten, die Erganzung derDimension des Kerns und des Bildes zu der Dimension des Vektorraum und andere Ei-genschaften verwendet. Der corank einer Matrix ist die Dimension des Kerns. Die Spur
”trace“ einer Matrix ist hierbei wie ublich durch die Addition ihrer Diagonaleintrage de-
finiert, womit auch ein Skalarprodukt zweier MatrizenA und B durch die Spur definiertist 〈A, B〉 = trace(ATB). Damit erhalt man auch eine Moglichkeit orthogonale Matrizen zudefinieren. Fur die ubliche Definition von Tangentialraumen uber Matrizen, lassen sich soauch Normalenraume fur Matrizen bestimmen. Abgesehen von der gewohnten Multiplika-tion von Matrizen, soll hier noch eine andere Multiplikation
”“ verwendet werden, das so
genannte Hadamard-Produkt. Fur zwei Matrizen gleicher Dimension ist (A B)i j = ai j · bi j
das direkte Produkt zweier Matrizen. Das Kapitel schließt mit zwei wertvollen Theorem ab.Das Perron-Frobenius-Theorem und Cauchys-Zwischenwert-Theorem werden spater eineentscheidende Rolle spielen.
Definition 2.1.1. (Sn).Es seiSn(R) die Menge aller symmetrischen Matrizen:
Sn(R) = M ∈ Rn×n|MT = M.
Definition 2.1.2. (GL).Es seiGL(n) die Menge aller invertierbaren Matrizen:
GL(n) = M ∈ Rn×n| det(M) , 0.
Satz 2.1.3.(Eigenschaften der Spur).Es seien A und B Matrizen mit A∈ Rm×n und B∈ Rn×m, dann folgt:
trace(AB) = trace(BA).
Beweis. Es gilt: trace(AB) =∑m
i=1∑n
j=1 ai j b ji =∑n
j=1∑m
i=1 bi ja ji = trace(BA).
Definition 2.1.4. (Signatur).Eine Matrix M hat die Signatursign(M) = (p, q, r), wenn p die Anzahl der positiven
Eigenwerte, q die Anzahl der negativen Eigenwerte und r die Anzahl Eigenwerte, die 0sind, ist.

KAPITEL 2. LINEARE ALGEBRA 5
Definition 2.1.5. (diag).Mit diag(a1, a2, . . . , an) wird eine Diagonalmatrix mit den Eintragen a1, a2, . . . , an bezeich-net.
Satz 2.1.6.(Sylvesters Tragheitssatz).Es sei M eine symmetrische Matrix M∈ Sn(R) mit sign(M) = (p, q, r) sowie
E = diag(1, . . . , 1︸ ︷︷ ︸
p
,−1, . . . ,−1︸ ︷︷ ︸
q
, 0, . . . , 0︸ ︷︷ ︸
r
)
eine Matrix. Dann existiert eine Matrix Q∈ GL(n), so dass M= QEQT gilt.
Beweis. Zunachst existiert eine orthogonale MatrixP, so dassM = PDPT gilt, wobeiD =diag(λ1, . . . , λn) eine Diagonalmatrix ist mit den Eigenwerten ausM. Die Eigenwerte lassensich nun so ordnen, dass inD zunachst die positiven, dann die negativen und schließlichder Eigenwert 0 gelistet werden. Dann definiere
λi ≕ α2i
λ j+p ≕ −β2j
λk = 0
mit αi , β j > 0 und i = 1, 2, . . . , p; j = 1, 2, . . . , q; k = p + q + 1, . . . , n. Weiter seiD′ ≔diag(α1, . . . , αp, β1, . . . , βq, 1, . . . , 1). Dann giltD′ = (D′)T und
E = (D′)−1D(D′−1)T .
Daraus folgt schließlich
M = PDPT = PD′E(D′)TPT = PD′︸︷︷︸
≕Q
E(PD′)T = QEQT .
Definition 2.1.7. (SM).Fur eine gegebene Matrix M∈ Rn×n ist SM die Menge aller Matrizen mit der selben Signa-tur:
SM = N ∈ Rn×n| sign(N) = sign(M).
Satz 2.1.8.(Der Tangentialraum von SM).Der TangentialraumTMSM von SM an einer symmetrischen Matrix M∈ Rn×n besteht ausallen Matrizen der Form WM+ MWT also:
TMSM = WM+ MWT |W ∈ Rn×n.
Beweis. Nach Sylvesters Tragheitssatz 2.1.6 existiert zu jeder symmetrischen MatrixM ∈R
n×n eine MatrixS ∈ GL(n) mit M = STΛS, wobeiΛ = diag(1, . . . , 1,−1, . . . ,−1, 0, . . . , 0)und sign(M) = (p, q, r). Betrachte nun eine beliebige differenzierbare AbbildungM :R −→ Rn×n, t 7−→ S(t)TΛS(t) mit der Eigenschaft:M(0) = S(0)TΛS(0) = STΛS = MundS(t) ∈ GL(n) fur alle t ∈ R. Dann istM eine beliebige differenzierbare Kurve im RaumSM, die durchM geht. Und fur die EinheitenT ∈ TMSM des Tangentialraums vonSM anM gilt:
T =ddtM(t)
∣∣∣∣t=0
=ddtS(t)TΛS(t)
∣∣∣∣t=0
= S′(t)TΛS(t) + S(t)TΛS′(t)∣∣∣∣t=0
= S′(0)TΛS(0)+ S(0)TΛS′(0)

KAPITEL 2. LINEARE ALGEBRA 6
AlsoM′(0) = S′(0)TΛS(0)+ S(0)TΛS′(0) und daraus folgt:
M′(0) = S′(0)TΛS(0)+ S(0)TΛS′(0)
= S′(0)T(S(0)T)−1
︸ ︷︷ ︸
=:W
S(0)TΛS(0)︸ ︷︷ ︸
M
+S(0)TΛS(0)︸ ︷︷ ︸
M
(S(0))−1S′(0)
=WM+ MWT
Somit gilt:TMSM = WM+ MWT .
Es bleibt zu zeigen, dassW nun eine beliebige Matrix sein kann. Nach Festlegung istWT = S(0)−1S′(0), worausS(0)WT = S′(0) folgt. Dies lasst sich in eine gewohnlicheMatrixdifferentialgleichungS(t)WT = S′(t) mit S(0) = S umwandeln, die sich fur alleW ∈ Rn×n, t ∈ Rmit der Losung:S(t) = exp(Wt)S losen lasst.
Satz 2.1.9.(Der Normalenraum von SM).Der NormalenraumNMSM von SM an einer symmetrischen Matrix M∈ Rn×n besteht aus:
NMSM = X ∈ Sn(R)|MX = 0.
Beweis. Es seiWM+MWT ∈ TMSM, dann muss furY ∈ NMSM gelten:〈WM+MWT ,Y〉 =0. Es folgt:
〈WM+ MWT ,Y〉 = 〈WM,Y〉 + 〈MWT ,Y〉= trace
(
(WM)TY)
+ trace(
(MWT )TY)
= trace(
MTWTY)
+ trace(
WMTY)
= trace(
YMWT)
+ trace(
WMTY)
= trace(
WMYT)
+ trace(
WMTY)
= trace(
WMYT +WMY)
= trace(
WM(YT + Y))
.
Die Gleichheit trace(
MTWTY)
= trace(
YMWT )
folgt aus Lemma 2.1.3. Und trace(
YMWT )
=
trace(
WMYT)
gilt wegen der Eigenschaft: traceA = traceAT . Nun wahle furW≔ (M(YT+
Y))T und dann folgt: trace(
(M(YT + Y))T M(YT + Y)) ≥ 0. Und es gilt:
trace(
(M(YT + Y))T M(YT + Y))
= 0⇐⇒ M(YT + Y) = 0.
Dann seiX ≔ YT + Y und der Normalenraum besteht aus allenX mit MX = 0 undX ∈Sn(R).
Definition 2.1.10. (VM).Fur eine gegebene Matrix M∈ Rn×n ist VM die Menge aller Matrizen mit den selbenVorzeichen in jedem Eintrag, die von der Diagonalen verschieden sind:
VM = N ∈ Rn×n| sgn(Ni j ) = sgn(Mi j ), i, j ∈ 1, 2, . . . , n, i , j.
Satz 2.1.11.(Der Tangentialraum von VM).Der TangentialraumTMVM von VM an einer symmetrischen Matrix M∈ Rn×n besteht aus:
TMVM = sgn (Mi j ) Ai j |A ∈ Sn(R), i , j.
Der Tangentialraum besteht aus allen Matrizen, die das selbe Muster aus Nullen, wie M,außerhalb der Diagonalen bilden.

KAPITEL 2. LINEARE ALGEBRA 7
Beweis. Betrachte nun eine beliebige differenzierbare AbbildungM : R −→ Sn(R), t 7−→sgnMi j A(t)i j mit i , j, wobei A(t)i j > 0 undM(0) = M. Dann istM eine beliebigedifferenzierbare Kurve im RaumVM, die durchM geht. Und fur die EinheitenT ∈ TMVM
des Tangentialraums vonVM anM gilt:
T =ddtM(t)
∣∣∣∣t=0
=ddt
sgn(Mi j ) A(t)i j
∣∣∣∣t=0
= sgn(Mi j ) A′(0)i j
Dieser Ausdruck gilt fur allei , j und dies ist gerade die Menge aller Matrizen mit denselben Muster aus Nullen, wieM, außerhalb der Diagonale.
Satz 2.1.12.(Der Normalenraum von VM).Der NormalenraumNMVM von VM an einer symmetrischen Matrix M∈ Rn×n besteht aus:
NMVM = X ∈ Sn(R)|Xi j = 0, falls i = j oder Mi j , 0.
Beweis. Es sei sgn(M) A ∈ TMVM, wobei das Signum die Diagonalen ignorieren soll,dann muss furX ∈ NMVM gelten:〈sgn(M) A,X〉 = 0. Daraus folgt dann
〈sgn(M) A,X〉 = trace(
(sgn(M) A)TX)
= trace(
(sgn(M) A)X)
Da A eine beliebige symmetrische Matrix ist, definiereA ≔ X, dann ist trace(
(sgn(M) X)X
) ≥ 0 und dies wird nur 0, wenn bereitsX = 0 ist oder sgn(M) X = 0 gilt. Und diestrifft zu, wennXi j = 0, falls i = j oderMi j , 0.
Definition 2.1.13. (Gewichtete Skalarprodukt).Es seienα, β, ω ∈ Rn drei Vektoren imRn, dann ist das gewichtete Skalarprodukt〈· , ·〉ωdefiniert durch:
〈α, β〉ω =n∑
i=1
αiβiωi .
Satz 2.1.14.Es sei D∈ Sn(R) eine positiv definite, symmetrische Matrix. Dann gilt:
mini(D)ii > 0.
Beweis. Da D eine symmetrische Matrix ist, lasst sie sich diagonalisieren. Es gilt:D =QTΛQ. WobeiΛ eine Diagonalmatrix ist, bestehend aus den Eigenwerten
EWD = λ1, λ2, . . . , λn
von D ist. UndQ ist eine Orthogonalmatrix. FurQ =(
α1 α2 . . . αn
)
mit αi ∈ Rn undi ∈ 1, . . . , n gilt:
ΛQ =
λ1(α1)1 λ1(α2)1 · · · λ1(αn)1
λ2(α1)2 λ2(α2)2 · · · λ2(αn)2...
.... . .
...
λn(α1)n λn(α2)n · · · λn(αn)n
.
Und damit ist dann(QTΛQ)i j = 〈αi , α j〉(λ1,...,λn).

KAPITEL 2. LINEARE ALGEBRA 8
Fur die Diagonaleintrage folgt dann schließlich:
(QTΛQ)ii =
n∑
k=1
(αi)2kλk.
Und damit gilt dann (QTΛQ)ii > 0, da fur mindestens einj gilt: (αi) j , 0 andernfalls wareαi = 0 und die MatrixQ ware keine Orthogonalmatrix. Und fur allei gilt λi > 0, daDpositiv definit ist. Somit ist dann (QTΛQ)ii > 0.
Satz 2.1.15.Es sei D ∈ Sn(R) eine positiv definite, symmetrische Matrix fur die gilt:(D)i j < 0 fur alle i, j mit i , j. Dann folgt(D−1)i j ≥ 0 fur alle i, j.
Beweis. Ohne Beschrankung der Allgemeinheit seien die Diagonaleintrage vonD hochstens1. Also (D)ii ≤ 1 fur alle i. Andernfalls definiereD ≔ 1
maxi (Dii )D. Weiter gilt fur die Dia-gonaleintrage, dass sie großer als 0 sind also (D)ii > 0 fur alle i, siehe Satz 2.1.14. Danndefiniere die MatrixB mit B≔ I − D. Dann gilt (B)i j ≥ 0 fur alle i, j. Aus
0 < (D)ii ≤ 1
folgt−1 < (D)ii − 1 ≤ 0
und daraus wiederum1 > (B)ii ≥ 0.
Und fur den großten Eigenwert vonB gilt: maxi λi(B) = 1−λ1(D), wobeiλ1(D) der kleinsteEigenwert vonD ist. Denn seiv ∈ Rn ein Eigenvektor zum Eigenwertλ1(D), dann gilt:
Bv= (I − D)v = Iv − Dv = v− λ1(D)v = (1− λ1(D))v.
Und seiw ∈ Rn deri-te Eigenvektor zuD, dann gilt:Bw= (1−λi(D))w und es folgt wegenλ1(D) ≤ λi(D), dass 1−λ1(D) ≥ 1−λi(D) gilt. Und somit ist 1−λ1(D) der großte Eigenwertzu D. Da D positiv definit ist, giltλ1(D) > 0 und somit 1− λ1(D) < 1. Es muss gezeigtwerden, dass die Reihe
∞∑
i=0
Bi
konvergiert. Denn falls dies der Fall ist, ist die MatrixD invertierbar, nach dem Prinzipder Neumannschen Reihe [30]. Nach dem Quotientenkriteriummuss gezeigt werden, dasslimm→∞
m√‖Bm‖ < 1 gilt. Fur die von dem Skalarprodukt induzierten Metrik gilt:
‖B‖ =√
〈B, B〉 =√
trace(BTB) =
√√n∑
i=1
λi(BTB).
Es seiv ∈ Rn der i-te Eigenvektor zum Eigenwertλi(B). Dann gilt: BTBv = BT(Bv) =BTλi(B)v. Da B symmetrisch ist, giltBT = B und insgesamt folgt dannBTBv = λi(B)2v.Fur die induzierte Norm folgt dann schließlich:
‖B‖ =
√√n∑
i=1
λi(B)2.

KAPITEL 2. LINEARE ALGEBRA 9
Nun betrachte
limm→∞
m√
‖Bm‖ = limm→∞
m√
trace((Bm)T Bm)
= limm→∞
m√
trace(B2m)
= limm→∞
m
√√n∑
i=1
λi(B)2m
≤ limm→∞
m
√
n ·maxiλi(B)2m
= limm→∞
maxiλi(B)2 m
√n
= limm→∞
maxiλi(B)2nexp(log(−m))
= maxiλi(B)2 lim
m→∞nexp(log(−m))
︸ ︷︷ ︸
=1
= maxiλi(B)2
< 1.
Somit konvergiert∑∞
i=0 Bi und fur die Inverse vonD gilt:
D−1 = (I − B)−1 =
∞∑
i=0
Bi = I + B+ B2 + B3 + . . . .
Da (B)i j ≥ 0 fur alle i, j gilt, folgt daraus, dass (I + B+ B2+ . . .)i j ≥ 0 fur alle i, j gilt. Unddamit auch fur (D−1)i j ≥ 0 fur alle i, j.
Bemerkung: Falls im folgenden von einer Matrix gesprochen wird, die nureinen negati-ven Eigenwert der Vielfachheit 1 hat, ist damit die Eigenschaft gemeint, dass die Matrix nureinen negativen Eigenwert besitzt und dieser hat nur die Vielfachheit 1. Da sonst nicht aus-geschlossen ist, dass die Matrix noch andere negative Eigenwerte haben konnte mit einergroßeren Vielfachheit als 1.
Satz 2.1.16.Es sei M∈ Sn(R) mit der Eigenschaft, dass M nur einen negativen Eigenwertλ1 der Vielfachheit 1 hat. Es sei v1 ∈ Rn ein Eigenvektor zu M mit Eigenwertλ1 und weitersei y∈ Rn mit: 〈y, v1〉=0. Dann folgt:
〈y,My〉 ≥ 0.
Beweis. Da die Eigenvektorenvi von M eine Orthogonalbasis bilden mit zugehorigen Ei-genwertenλi , lasst sichy als Linearkombination dervi darstellen:
y =n∑
i=1
αivi .
Da nun gilt:〈y, v1〉 = 0 impliziert diesα1 = 0, da 0= 〈y, v1〉 =∑n
i=1αi〈vi , v1〉 = α1〈v1, v1〉und〈v1, v1〉 , 0. Weiter folgt nun:
〈y,My〉 =⟨
n∑
i=2
αivi ,Mn∑
i=2
αivi
⟩
=⟨
n∑
i=2
αivi ,
n∑
i=2
αiλivi
⟩
=
n∑
i=2
α2i λi〈vi , vi〉
≥ 0.

KAPITEL 2. LINEARE ALGEBRA 10
Da M nur einen negativen Eigenwertλ1 hat, folgtλi ≥ 0, fur alle i , 1 und somit folgtebenfalls die Behauptung.
Definition 2.1.17. (Permutationsmatrix).Es sei P∈ Rn×n eine Permutationsmatrix, sofern P in jeder Zeile und Spaltegenau einenEintrag 1 hat und sonst nur die 0.
Definition 2.1.18. (Reduzibilitat).Es sei A eine symmetrische Matrix A∈ Sn(R). A heißt reduzibel, falls es eine Permutations-
matrix P ∈ Rn×n gibt, so dass PTAP die Form
(
B C0 D
)
hat, wobei B und D symmetrische
Matrizen sind, sonst heißt A irreduzibel.
Theorem 2.1.19.(Perron-Frobenius Theorem).Es sei A eine symmetrische, irreduzible Matrix A∈ Sn(R) mit Eintragen ai j ≥ 0 fur allei, j = 1, 2, . . . , n und seiλ der großte Eigenwert, weiter seiµ ein anderer Eigenwert, danngilt:
(i) λ > 0,
(ii) der zuλ zugehorige Eigenvektor x, kann so gewahlt werden, dass f¨ur alle Eintragexi > 0 gilt, fur alle i = 1, 2, . . . , n,
(iii) λ hat die Vielfachheit 1,
(iv) λ ≥ |µ|.
Beweis. Der Beweis erfolgt nach [18].
(i) Da die Summe aus allen Eigenwerten einer Matrix gleich der Spur der Matrix ist,folgt trace(A) ≥ 0, daai j ≥ 0 fur alle i, j = 1, 2, . . . , n gilt. Und somit folgtλ ≥ 0. Esseiu ein zuλ zugehoriger Eigenvektor mit der Lange 1. Dann folgt:λu = Au. Danndefiniere einen Vektorx mit (x)i = |(u)i |. Und es folgt:
0 ≤ λ = 〈u,Au〉 ≤ 〈x,Ax〉 ≤ λ.
Die letzte Ungleichung folgt aus dem Variationstheorem. Somit ist x ebenfalls einEigenvektor zum Eigenwertλ: λx = Ax. Angenommenλ ware gleich 0, alsoλ = 0.Dann wurdeai j = 0 fur alle i, j = 1, 2, . . . , n folgen, solange (x) j , 0 ist. NachPermutation der Indizes lasst sich
xi
> 0, fur i = 1, 2, . . . ,m
= 0, fur i > m
schreiben. Dann wurde daraus und ausAx = 0 folgen, dassai j = 0, fur j ≤ m gilt.Was die Reduzibilitat vonA zur Folge hatte. Ein Widerspruch somit folgt:λ > 0.
(ii) Es seix wie oben. Falls (x)i = 0 nach Permutation fur allei > m, dann wurde ausλx = Ax die Gleichung
m∑
j=1
ai j x j = 0
mit i > mfolgen. Und dies hatteai j = 0 fur i > m≥ j zur Folge, was der Reduzibilitatvon A entsprache. Somit gilt (x)i > 0 fur alle i = 1, 2, . . . , n.
(iii) Angenommenλ hatte nicht die Vielfachheit 1. Dann gebe es zwei orthonormale Ei-genvektorenu undv zum Eigenwertλ. Nach [25] schreibt man
λ((u)i + |(u)i |) =∑
j=1
ai j ((u) j + |(u) j |)

KAPITEL 2. LINEARE ALGEBRA 11
und dies impliziert entweder (u)i+|(u)i | = 0 fur allei = 1, 2, . . . , n oder (u)i+|(u)i | > 0fur alle i = 1, 2, . . . , n. Dies wird analog aufv angewendet und daraus folgt, dassuundv nicht orthogonal sein konnen.
(iv) Es seiw ein zum Eigenwertµ zugehoriger Eigenvektor der Lange 1. Es gilt alsoµw = Aw. Nach Voraussetzung istλ > µ. Und nach dem Variationstheorem folgt
λ ≥∑
i, j
ai j |(w)i ||(w) j | ≥ |∑
i, j
ai j (w)i(w) j | = |µ|.
Theorem 2.1.20.(Cauchys-Zwischenwert Theorem).Es sei A eine symmetrische (hermitesche) Matrix A∈ Sn(R) und sei B∈ R(n−1)×(n−1) ei-ne Untermatrix von A. Fur die Eigenwerte von A giltλ1 ≥ λ2 ≥ · · · ≥ λn und fur dieEigenwerte von B gilt ebenfallsµ2 ≥ µ3 ≥ · · · ≥ µn. Dann folgt:
λ1 ≥ µ2 ≥ λ2 ≥ · · · ≥ µn ≥ λn.
Beweis. Der Beweis erfolgt nach [14].Es lasst sich annehmen, dass die UntermatrixB die Reihen und Spalten 2, 3, . . . , n beinhal-tet, ansonsten liesse sich durch Permutation der Reihen undSpalten vonA dies erreichen.A hat also folgende Gestalt:
A =
(
a yT
y B
)
.
Weiter seiD = diag(µ2, µ3, . . . , µn). Da B ebenfalls eine symmetrische Matrix ist, existierteine orthogonale MatrixU mit U ∈ R(n−1)×(n−1), so dassUT BU = D gilt. Und seiUy = z=(z2, z3, . . . , zn)T . Zunachst wird das Theorem fur den speziellen Fallµ2 > µ3 > · · · > µn undzi , 0 fur alle i = 2, 3, . . . , n bewiesen. Sei
V ≔
(
1 0T
0 U
)
,
wobei 0 den Nullvektor entspricht. Dann istV ebenfalls eine symmetrische Matrix und
VT AV =
(
a zT
z D
)
.
Sei f (x) ≔ det(xI − A) = det(xI − VT AV). Dann entwickle die Determinante entlang derersten Zeile nach dem Laplaceschen Entwicklungssatz und man erhalt
f (x) = (x− a)(x− µ2) · · · (x− µn) −n∑
i=2
fi(x),
wobei fi(x) = z2i (x−µ2) · · · (x− µi) · · · (x−µn) fur alle i = 2, 3, . . . , n. Weiterhin gilt fi(µ j) =
0 sofernj , i und
fi(µi) =
> 0, wenni gerade,
< 0, wenni ungerade.
Und damit
f (µi) =
< 0, wenni gerade,
> 0, wenni ungerade.
Fur allei = 2, 3, . . . , n. Da f (x) ein Polynom vom Gradn ist und einen positiven Leitkoeffi-zienten hat, folgt nach dem Zwischenwertsatz die Existenz vonn Nullstellenλ1, λ2, . . . , λn,so dassλ1 > µ2 > λ2 > · · · > µn > λn.

KAPITEL 2. LINEARE ALGEBRA 12
Fur den allgemeinen Fall, seiǫ1, ǫ2, . . . eine positive Nullfolge, so dasszi + ǫk , 0 fur allei = 2, 3, . . . , n undk = 1, 2, . . . und die Diagonaleintrage vonD + ǫk diag(2, 3, . . . , n) sindfur jede Konstantek eindeutig. Furk = 1, 2, . . . sei
Ck ≔
(
a z(ǫk)T
z(ǫk) D(ǫ)
)
,
wobei z(ǫk) = z+ ǫk(1, 1, . . . , 1)T und D(ǫk) = D + ǫk diag(2, 3, . . . , n). Weiter seiAk =
VCkVT , dann istAk symmetrisch undAkk→∞−−−−→ A. Seienλ(k)
1 ≥ λ(k)2 ≥ · · · ≥ λ(k)
n dieEigenwerte vonAk. Dann gilt:
λ(k)1 > µ2 + 2ǫk > λ
(k)2 > · · · > µn + nǫk > λ
(k)n .
Daλ(k)1 , λ
(k)2 , . . . , λ
(n)k die eindeutigen Nullstellen vonfk(x) = det(xI−Ak) fur allek sind und
fk(x) = det(xI−Ak) ausreichend dicht anf (x) = det(xI−A) ist, folgt (λ(k)1 , λ
(k)2 , . . . , λ
(k)n )
k→∞−−−−→(λ1, λ2, . . . , λk) und damit das Theorem.
Satz 2.1.21.Es sei A eine Matrix A∈ Rn×n mit rank(A) = 1. Nach [26] existieren dannzwei Vektoren x, y ∈ Rn, so dass gilt:
A = xyT .
Beweis. Es seiA =(
a1 a2 · · · an
)
mit ai ∈ Rn. Falls rank(A) = 1 gilt, folgt a1 = αiai
mit αi ∈ R. Dann wahlex≔ (1, α2, α3, . . . , αn) undy≔ a1. Und dann giltA = xyT .
Satz 2.1.22.Es sei A eine symmetrische Matrix A∈ Sn(R) mit rank(A) = 1, dann existiertein Vektor y∈ Rn, so dass gilt:
A = sgn(a11)yyT .
Beweis. Es seiA =(
a1 a2 · · · an
)
mit ai ∈ Rn. Falls rank(A) = 1 gilt, folgt a1 = αiai
mit αi ∈ R, sofern nunA symmetrisch ist, folgt ausa1 j = a j1 unda11 = α ja j1 schließlich
α j =a11
a1 j.
Es seiy≔
(√|a11| a12√
|a11|· · · a1n√
|a11|
)
,
wobeia11 , 0, da sonstA = 0 gelten wurde. Es bleibtA = sgn(a11)yyT zu zeigen. Es ist
(sgn(a11)yyT)i j = sgn(a11)a1ia1 j
|a11|.
Weiter istai j =
a1 j
αi=
a1 ja1 j
a11.
Somit folgtai j = (sgn(a11)(yyT))i j , was zu zeigen war.
Satz 2.1.23.Es sei M∈ Sn(R) mit der Eigenschaft, dass M nur einen negativen Eigenwertλ1 der Vielfachheit 1 hat. Es sei v1 ∈ Rn ein Eigenvektor zu M mit Eigenwertλ1. Dann sindfolgende Aussagen aquivalent:
• 〈x, v1〉 = 0 und〈x,Mx〉 = 0
• x ∈ ker(M).

KAPITEL 2. LINEARE ALGEBRA 13
Beweis. Es wird zunachst gezeigt, dass aus〈x, v1〉 = 0 und〈x,Mx〉 = 0, x ∈ ker(M) folgt.Da die Eigenvektorenvi von M eine Orthogonalbasis bilden mit zugehorigen Eigenwertenλi , lasst sichx als Linearkombination darstellen:
x =n∑
i=1
αivi .
Dies impliziert wie im Beweis von Satz 2.1.16:α1 = 0 und〈x,Mx〉 = ∑ni=2α
2i λi〈vi , vi〉 = 0
nach der Voraussetzung. DaM nur einen negativen Eigenwertλ1 hat, folgtλi ≥ 0, fur allei , 1. Um die Gleichung〈x,Mx〉 = 0 zu erfullen, muss es eine TeilmengeI von2, 3, . . . , nalsoI ⊂ 2, 3, . . . , n geben, so dassλI = 0 gilt und damitα2,3,...,n\I = 0 folgt. WobeiλI = 0meint, dass fur allei ∈ I : λi = 0 gilt. Daraus ergibt sich:
x =∑
i∈Iαivi .
Und somit istx eine Linearkombination aus Eigenvektoren mit Eigenwert 0.Und damitfolgt x ∈ ker(M).Es wird nun die verbleibende Ruckrichtung gezeigt. Sei nunx ∈ ker(M), dann folgt〈x, v1〉 =0, da die Eigenvektoren eine Orthogonalbasis bilden. Weiter folgt ausMx = 0 auch〈x,Mx〉 =0.
Satz 2.1.24.Es sei M eine Matrix M∈ Rn×n mit den Eintragen Mi j = −1, dann folgt:
det(M − λI ) = (−1)n(nλn−1 + λn).
Beweis. Fur die Matrix M gilt rank(M) = 1, daraus folgt corank(M) = n − 1. Das cha-rakteristische Polynom ist ein normiertes Polynom mit Nullstellen, die den Eigenwertenentsprechen. Istn ungerade, so ist der Leitkoeffizient−1 andernfalls 1. Seix ∈ Rn ein Ei-genvektor undλ ein von 0 verschiedener Eigenwert vonM zu x, dann giltMx = λx. Darausfolgen furi = 1, 2, . . . , n dien verschiedenen Gleichungen:
λxi = −n∑
k=1
xk.
Durch Addition dieser Gleichungen folgt:
λ
n∑
i=1
xi = −nn∑
k=1
xk.
Da der Eigenwert von 0 verschieden ist folgt∑n
k=1 xk , 0 und daraus folgt wieder:λ = −n.Und somit folgt fur das charakteristische Polynom: (−1)n(λ)n−1(λ + n) = (−1)n(nλn−1 +
λn).
Satz 2.1.25.Es sei M eine symmetrische Matrix M∈ Sn(R) mit
M =
(
0 AAT 0
)
,
wobei A∈ Rp×q mit den Eintragen ai j = −1 und p+ q = n. Dann folgt:
det(M − λI ) = (−1)n(λn − pq · λn−2).
Beweis. Fur die Matrix M gilt rank(M) = 2, daraus folgt corank(M) = n − 2. Das cha-rakteristische Polynom ist ein normiertes Polynom mit Nullstellen, die den Eigenwerten

KAPITEL 2. LINEARE ALGEBRA 14
entsprechen. Istn ungerade, so ist der Leitkoeffizient−1 andernfalls 1. Seix ∈ Rn ein Ei-genvektor undλ ein von 0 verschiedener Eigenwert vonM zu x, dann giltMx = λx. Manerhalt dien verschiedenen Gleichungen:
λxi = −n∑
k=p+1
xk
λx j = −p∑
k=1
xk,
wobei i = 1, 2, . . . , p und j = p + 1, p+ 2, . . . , n gilt. Durch Addition dieser Gleichungenuberi beziehungsweisej folgt:
λ
p∑
i=1
xi = −pn∑
k=p+1
xk
λ
n∑
i=p+1
xi = −qp∑
k=1
xk.
Da der Eigenwert von 0 verschieden ist folgt∑n
k=p+1 xk , 0 sowie∑p
k=1 xk , 0. NachMultiplikation der beiden Gleichungen und Division der Summen folgt dann:
λ2p∑
i=1
xi
n∑
i=p+1
xi = p · qn∑
k=p+1
xk
p∑
k=1
xk
λ2 = p · q.
Und daraus folgt wieder:λ1/2 = ±√
p · q. Und somit folgt fur das charakteristische Poly-nom: (−1)n(λ)n−2(λ2 − pq) = (−1)n(λn − pq · λn−2).

Kapitel 3
Graphentheorie
3.1 Grundlegendes
Dieses Kapitel ist eine weitere Brucke zwischen den Grundlagen der Graphentheorie undden Resultaten aus den spateren Kapitel. Hier werden zunachst einfache Definition wieGraphen, vollstandige Graphen und vollstandig bipartite Graphen geklart. Abgesehen vondiesen grundlegenden Definitionen werden andere Begrifflichkeiten, wie zum Beispiel derGrad eines Knotenu, die Anzahl der zuu adjazenten Knoten, nicht weiter ausgefuhrt.
Definition 3.1.1. (Graph).Ein Graph G ist ein Paar(V,E) aus einer endlichen Menge V= V(G) und einer TeilmengeE = E(G) ⊆
(V2
)
= u, v| u, v ∈ V, u , v. Dabei bezeichnet V die Knoten- und E dieKantenmenge.
Definition 3.1.2. (vollstandige Graphen).Es sei G ein Graph. G ist ein vollstandiger Graph, falls E(G) =
(V2
)
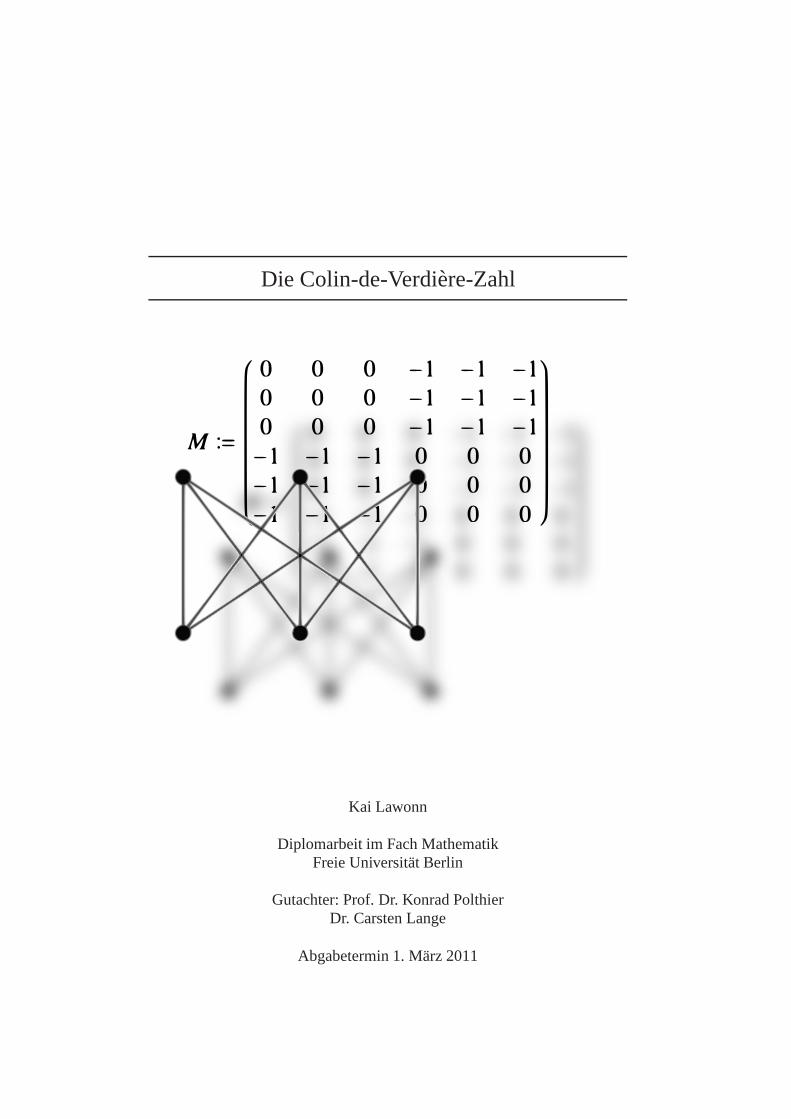
gilt. VollstandigeGraphen mit n Knoten werden mit Kn bezeichnet. Siehe hierzu Abbildung 3.1.
Definition 3.1.3. (Komplementargraphen).Es sei G ein Graph. Der KomplementargraphG ist dabei definiert als
G =
(
V(G),
(
V(G)2
)
\ E(G)
)
.
Der KomplementargraphG besteht aus allen Knoten von G und allen Kanten, die nicht inG liegen, siehe dazu Abbildung 3.2.
Definition 3.1.4. (bipartite Graphen).Es sei G ein Graph. G ist ein bipartiter Graph, falls sich die Knotenmenge in zwei disjunkteMengen aufteilen lasst, so dass innerhalb dieser Menge zwei Knoten nicht adjazent sind.
Definition 3.1.5. (vollstandig bipartite Graphen).Es sei G ein bipartiter Graph. G ist ein vollstandig bipartiter Graph, falls jeweils zweiKnoten aus zwei disjunkten Knotenmengen adjazent sind. Vollstandige bipartite Graphenwerden mit Kn,m bezeichnet, dabei bedeutet m die Machtigkeit der einen Knotenmenge undn die Machtigkeit der anderen Knotenmenge, siehe hierzu Abbildung 3.3.
Definition 3.1.6. (Pfad).Es sei G ein Graph. G ist ein Pfad, falls die Knotenmenge aus einer endlichen Folge vonKantenvi , vi+1 besteht, so dass vi , v j mit i , j und das der Knoten vi nur mit dem Knotenvi−1 und vi+1 adjazent ist. Der erste Knoten v1 der Folge ist dabei nur mit v2 adjazent undder letzte Knoten vn der Folge ist dabei nur mit dem Knoten vn−1 adjazent. Siehe dazuAbbildung 3.4.
KAPITEL 3. GRAPHENTHEORIE 16
Abbildung 3.1: Der vollstandige GraphK30.
(a)G (b) G
Abbildung 3.2: Der GraphG ist in Abbildung (a) dargestellt. Die grauen Kanten re-prasentieren dabei die fehlenden Kanten um einenK6 zu erhalten. Diese bilden dann wiein Abbildung (b) gezeigt, denn KomplementargraphenG.
Abbildung 3.3: Der vollstandig bipartite GraphK17,9.

KAPITEL 3. GRAPHENTHEORIE 17
12
3
n
Abbildung 3.4: Ein Pfad mitn Knoten
Definition 3.1.7. (induzierte Untergraph).Ein Graph H= (W, F) heißt Untergraph von G= (V,E), wenn W⊆ V und F ⊆ E ∩
(W2
)
gilt. Fur W ⊆ V heißt
H =(
W,E ∩(
W2
))
der von W induzierte Untergraph.
Definition 3.1.8. (NachbarN).Es sei G= (V,E) ein Graph. Weiter sei S⊂ V eine Teilmenge der Knoten von G, dannbezeichnet
N(S) ≔ v | v,w ∈ E, v < S, w ∈ Sdie Nachbarn der Teilmenge S .
Definition 3.1.9. (Minor).Ein Graph H heißt Minor von G, falls
• H aus G nach dem Entfernen eines isolierten Knotens oder
• H aus G nach dem Kontrahieren einer Kante oder
• H aus G nach dem Entfernen einer Kante
hervorgegangen ist. Allerdings werden beim Kontrahieren Mehrfachkanten durch eine Kan-te ersetzt.
Definition 3.1.10. (zusammenhangend).Es sei G ein Graph. G ist ein zusammenhangender Graph, fallses fur je zwei seiner Knoteneinen Weg gibt, der beide Knoten verbindet.
Definition 3.1.11. (k-zusammenhangend).Es sei G ein zusammenhangender Graph. G ist k-zusammenhangend, falls|V(G)| > k giltund durch Entfernen von weniger als k Knoten, der Graph zusammenhangend bleibt.
Bemerkung: Dies bedeutet auch, dass es zwischen zwei verschiedenen Knoten mindes-tensk Knoten-disjunkte Pfade geben muss, die beide Knoten verbinden.
Definition 3.1.12. (Brucke).Es sei G ein zusammenhangender Graph. Zwei adjazente Knoten in G bilden eine Brucke,falls durch Entfernen der verbindenden Kante der Graph in zwei Zusammenhangskompo-nenten zerfallt.
Definition 3.1.13. (Block).Es sei G ein Graph. Ein Block ist ein maximal 2-zusammenhangender Untergraph von Goder eine Brucke.
Definition 3.1.14. (Baum).Es sei G ein Graph. G ist ein Baum, falls er zusammenhangend ist und keinen Kreis enthalt.
KAPITEL 3. GRAPHENTHEORIE 18
(a) n = 2
(b) n = 3
(c) n=4
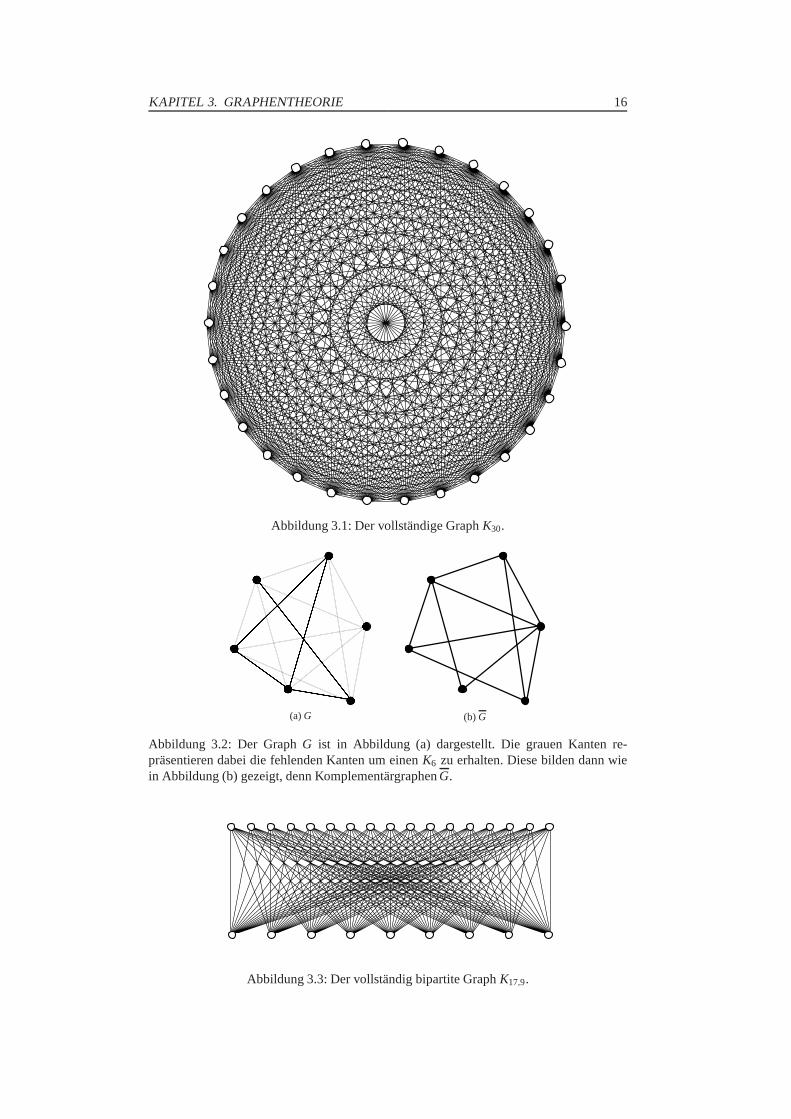
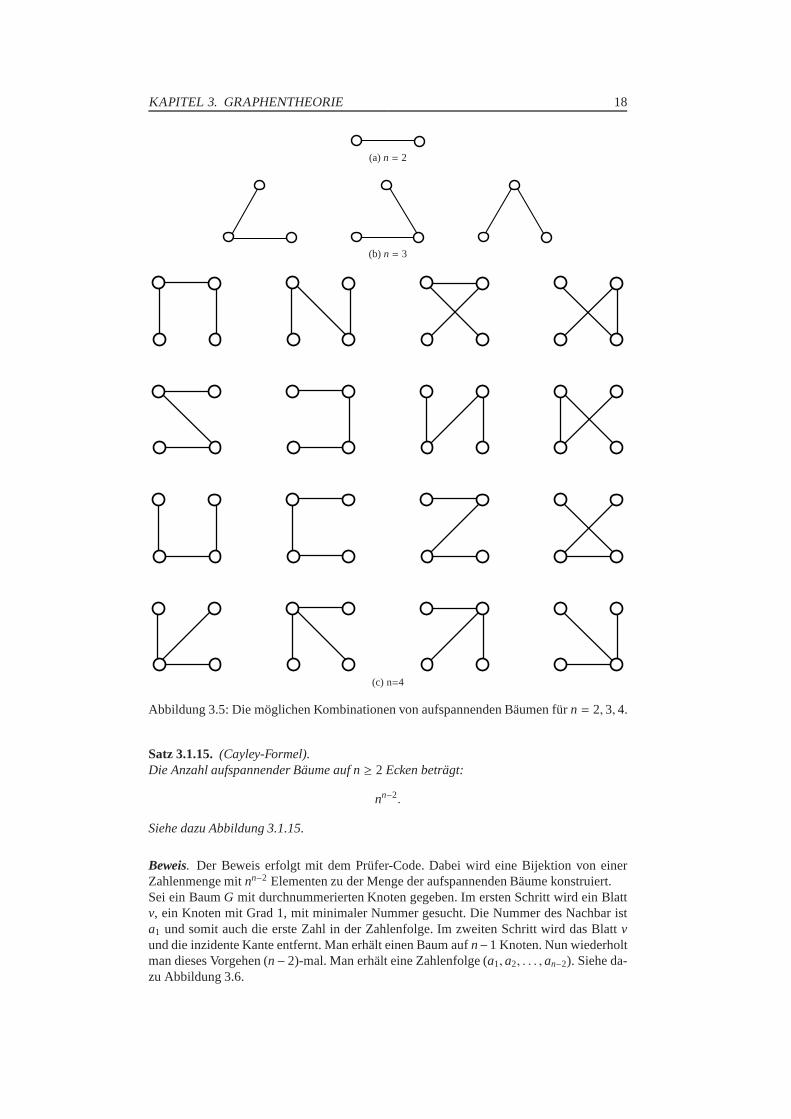
Abbildung 3.5: Die moglichen Kombinationen von aufspannenden Baumen furn = 2, 3, 4.
Satz 3.1.15.(Cayley-Formel).Die Anzahl aufspannender Baume auf n≥ 2 Ecken betragt:
nn−2.
Siehe dazu Abbildung 3.1.15.
Beweis. Der Beweis erfolgt mit dem Prufer-Code. Dabei wird eine Bijektion von einerZahlenmenge mitnn−2 Elementen zu der Menge der aufspannenden Baume konstruiert.Sei ein BaumG mit durchnummerierten Knoten gegeben. Im ersten Schritt wird ein Blattv, ein Knoten mit Grad 1, mit minimaler Nummer gesucht. Die Nummer des Nachbar ista1 und somit auch die erste Zahl in der Zahlenfolge. Im zweiten Schritt wird das Blattvund die inzidente Kante entfernt. Man erhalt einen Baum aufn−1 Knoten. Nun wiederholtman dieses Vorgehen (n− 2)-mal. Man erhalt eine Zahlenfolge (a1, a2, . . . , an−2). Siehe da-zu Abbildung 3.6.

KAPITEL 3. GRAPHENTHEORIE 19
1
2
3 4
5
6
7
(a)
2
3 4
5
6
7
(b)
2
4
5
6
7
(c)
4
5
6
7
(d)
Abbildung 3.6: In Abbildung (a) ist 1 das kleinste nummerierte Blatt und 2 ist der Nachbarvon 1. Deswegen lautet in diesem Schritt die Zahlenfolge (2). Im zweiten Schritt wurdeder Knoten 1 entfernt sowie die inzidente Kante. Das kleinste Blatt ist nun 3 und diesesBlatt ist mit Knoten 2 adjazent. Die aktuelle Zahlenfolge lautet nun: (2, 2). In Abbildungen(c) und (d) sind die kleinsten Blatter rot dargestellt. DieZahlenfolge lautet erst (2, 2, 5) furAbbildung (c) und (2, 2, 5, 6) fur Abbildung (d). Durch weitere Durchfuhrung der Vorschriftlautet die Zahlenfolge am Ende: (2, 2, 5, 6, 5).
Im Folgenden soll nun aus einer gegebenen Zahlenfolge der ursprungliche Baum rekonstru-iert werden. Sei nun eine Zahlenfolge (a1, a2, . . . , an−2) gegeben. Damit erhalt meine eineinverse Zuordnung von der Zahlenfolge zu dem Baum. Im erstenSchritt sucht man dasminimaleb1, welches nicht in der Zahlenfolge (a2, . . . , an−2) enthalten ist. Somit bekommtman eine Kanteb1, a1. Im zweiten Schritt sucht man das minimaleb2 , b1, welchesnicht in der Zahlenfolge vorkommt. Und so erhalt man schließlich die Kanteb2, a2. DieseSchritte werden nun wiederholt. Siehe dazu Abbildung 3.7.Fur Details siehe [1, Kapitel 7].
Definition 3.1.16. (Kantenfarbung).Sei G= (V,E) ein Graph und c eine Abbildung c: E → 1, 2, . . . , n mit n ∈ N, so nenntman c eine Kantenfarbung von G mit n Farben, falls fur zwei benachbarte Kanten e1 unde2 gilt c(e1) , c(e2) und c−1k , ∅ fur alle k ∈ 1, 2, . . . , n.
Definition 3.1.17. (chromatische Zahlχ′).Sei G = (V,E) ein Graph. Das kleinste k∈ N, fur das eine Kantenfarbung c: E →1, 2, . . . , k existiert, nennt man die chromatische Zahl. Das k wird mitχ′(G) bezeichnet.
Definition 3.1.18. (∆, δ).Sei G= (V,E) ein Graph. Dann ist:
• δ(G) ≔ minv∈V |N(v)|,
• ∆(G) ≔ maxv∈V |N(v)|.
Definition 3.1.19. (Regular).Ein Graph G= (V,E) heißt k-regular, falls k= |N(v)| fur alle v∈ V gilt.

KAPITEL 3. GRAPHENTHEORIE 20
1
2
(a)
1
2
3
(b)
1
2
3
5
(c)
1
2
3 4
5
6
7
(d)
Abbildung 3.7: Sei nun umgekehrt die Zahlenfolge (2, 2, 5, 6, 5) gegeben. Die kleinste Zahldie nicht in der Zahlenfolge vorkommt ist die 1. Somit Ist dieerste Kante mit1, 2 gegeben,siehe dazu Abbildung (a). Die Zahlenfolge lautet nun (2, 5, 6, 5). Die kleinste die nicht inder Zahlenfolge vorkommt und nicht 1 ist, lautet 3. Somit wird nun in Abbildung (b) dieKante2, 3 hinzugefugt. Die aktuelle Zahlenfolge ist (5, 6, 5). Die Zahl 2 taucht nicht inder Zahlenfolge auf und ist auch keine der bereits benutztenZahlen 1 und 3. Somit wirdnun die Kante2, 5 hinzugefugt, siehe Abbildung (c). Die Abbildung (d) zeigt, dass nachAusfuhrung der Bildungsvorschrift wieder der ursprungliche Graph zu sehen ist.
(a) (b)
(c)
Abbildung 3.8: In der Abbildung (a) ist ein Graph mit einer Kantenfarbung auf 4 Farbengegeben. In der Abbildung (b) und (c) ist ein bunter Weg der L¨ange 3 und 5 zu sehen.

KAPITEL 3. GRAPHENTHEORIE 21
Definition 3.1.20. (Weg).Sei G= (V,E) ein Graph. Ein Weg in G ist eine Folge(vi , vi+1) von Ecken aus V, so dass vi
und vi+1 adjazent sind.Sei ein Weg W mit der adjazenten Eckenfolge v1, v2, . . . , vn geben, dann hat W die Lange n.
Definition 3.1.21. (bunter Weg).Sei G= (V,E) ein Graph mit einer Kantenfarbung c auf k Farben. Weiter seiein Weg Wder Lange n mit einer Folge(vi , vi+1) von adjazenten Ecken sowie deren Kanten
e1 = v1, v2, e2 = v2, v3, . . . , en−1 = vn−1, vn
gegeben. Der zugehorige Farbraum der Kanten aus W seien durch
CW ≔ c(ei) | 1 ≤ i ≤ k
definiert. Der Weg W heißt bunt, falls|CW| = n− 1 gilt. Siehe dafur Abbildung 3.8.
Bemerkung: Man beachte, dass die Definition des bunten Weges nicht die M¨oglichkeitausschließt, dass auch Kreise enthalten sein konnen.
Theorem 3.1.22.(Vizings Theorem).Fur jeden Graphen G gilt:
∆(G) ≤ χ′(G) ≤ ∆(G) + 1.
Beweis. Der Beweis erfolgt in [7, Kapitel 4] mittels Induktion nach der Anzahl der Kanten.
Theorem 3.1.23.Sei G = (V,E) ein zusammenhangender n-regularer Graph mit einerKantenfarbung c auf n+ 1 Farben. Dann gibt es einen bunten Weg W der Lange n+ 2.
Beweis. Im Folgenden wird gezeigt, dass sich aufgrund der Voraussetzung ein bunter WegW′ der Langen+1 finden lasst. Seie1 = v1, v2 ∈ E eine Kante der Farbec1 ≔ c(e1). Dannfuge die Kantee1 zum WegW′ hinzu. Der zugehorige Farbraum ist dannCW′ = c1. DaG ein n-regularer Graph ist, hat die Eckev2 genaun Nachbarn. Wahle eine Eckev3 , v1,dann hat die Kantee2 = v2, v3 die Farbec2 ≔ c(e2) mit c2 , c1. Die Kantee2 wirddann zuW′ erneut hinzugefugt. Der Farbraum wird durch die Farbec2 erweitert und lautetCW′ = c1, c2. Durch erneutes Anwenden hat die Eckev3 ebenfallsn Nachbarn und somitn− 2 inzidente Kanten mit einer Farbe, die noch nicht im Farbraum liegen. Die Kante wirderneut zuW′ hinzugefugt. Imi-ten Schritt hatW′ genaui − 1 Kanten. Die letzte Kante diehinzugefugt wurde lautetei−1 = vi−1, vi. Der Farbraum ausW′ besteht ausi − 1 Farben.Die Eckevi hat wiederumn Nachbarn. Dann wahle die Kante mit einer Farbe aus, die nochnicht im Farbraum liegt. Soferni < n gilt, kann man immer eine Farbe in den Farbraumhinzufugen, da es immer mehr Nachbarn als bereits verwendete Farben gibt. Im (n − 1)-ten Schritt wurde als letztes die Kanteen−1 = vn−1, vn hinzugefugt und somit besteht derFarbraum ausn− 1 Farben. Die Eckevn hat wiederumn Nachbarn also gibt es eine Kanteen = vn, vn+1, die zuvn inzident ist, mit einer Farbe, die noch nicht inCW′ liegt. Es wurdegezeigt, dass es mindestens einen bunten WegW′ der Langen+ 1 gibt.
Es wird nun angenommen, das der GraphG keinen bunten WegW der Langen + 2enthalt. Sei wieder ein bunter WegW′ der Langen+ 1 gegeben. Weiter gibt es eine Kantee, die zuW′ inzident ist aber nicht inW′ liegt. Dann soll im Folgenden eine Vorschriftvorgestellt werden, wie man einen neuen bunten WegW′′ der Langen + 1 erhalt, der dieKantee enthalt. Sei ein bunter WegW mit deren zugehorigen Kantene1 = v1, v2, e2 =
v2, v3, . . . , en = vn, vn+1 gegeben. Der Farbraum ist durchCW′ = c1, c2, . . . , cn gegeben.Die Kanteesei zuvi inzident. Zunachst wird allerdings gezeigt, dassc(e) , cn+1 sein muss.
Lemma 3.1.24.Sei ein bunter Weg W′ der Lange n+ 1 gegeben, dann kann nach Voraus-setzung keine Kante e existieren, die zu W′ inzident ist und eine Farbe enthalt, die nicht imFarbraum von W′ liegt.
KAPITEL 3. GRAPHENTHEORIE 22
c1 c2c3 ci
cn
cn+1
(a) W′
c3 cicn
c1
c2
cn+1
(b) W′
cicn
c1
c2 c3
ci−1cn+1
(c) W′
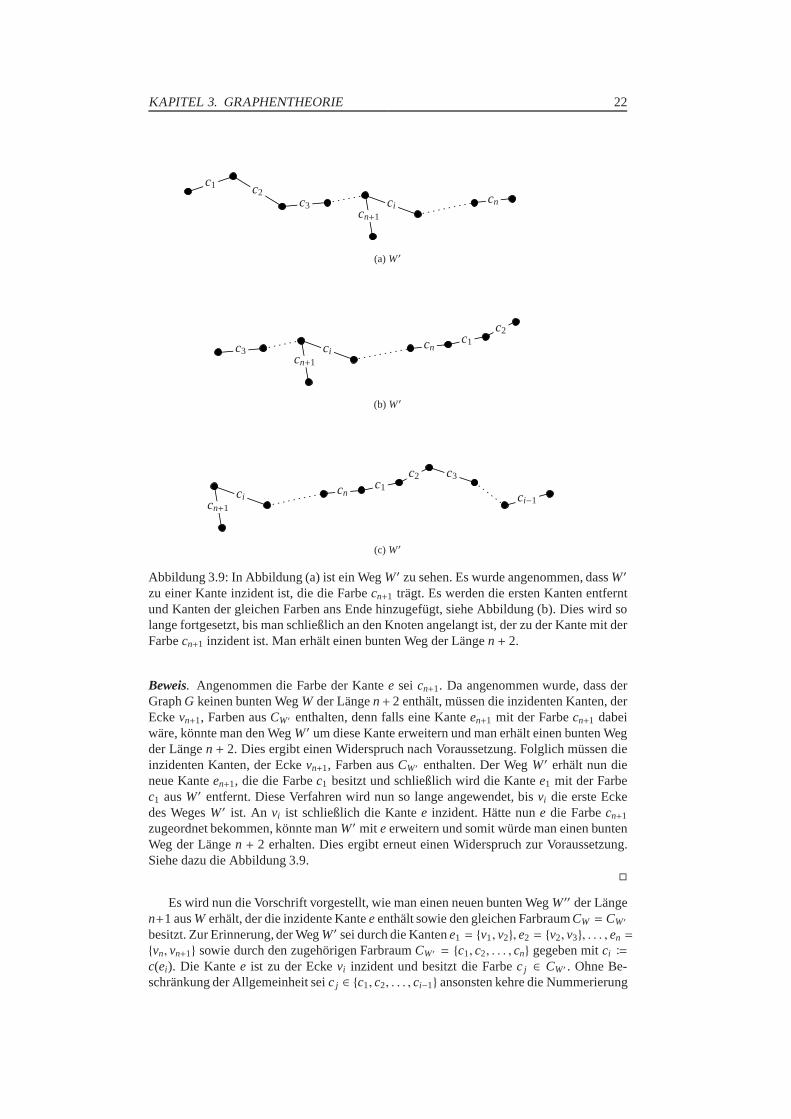
Abbildung 3.9: In Abbildung (a) ist ein WegW′ zu sehen. Es wurde angenommen, dassW′
zu einer Kante inzident ist, die die Farbecn+1 tragt. Es werden die ersten Kanten entferntund Kanten der gleichen Farben ans Ende hinzugefugt, sieheAbbildung (b). Dies wird solange fortgesetzt, bis man schließlich an den Knoten angelangt ist, der zu der Kante mit derFarbecn+1 inzident ist. Man erhalt einen bunten Weg der Langen+ 2.
Beweis. Angenommen die Farbe der Kantee sei cn+1. Da angenommen wurde, dass derGraphG keinen bunten WegW der Langen+ 2 enthalt, mussen die inzidenten Kanten, derEckevn+1, Farben ausCW′ enthalten, denn falls eine Kanteen+1 mit der Farbecn+1 dabeiware, konnte man den WegW′ um diese Kante erweitern und man erhalt einen bunten Wegder Langen+ 2. Dies ergibt einen Widerspruch nach Voraussetzung. Folglich mussen dieinzidenten Kanten, der Eckevn+1, Farben ausCW′ enthalten. Der WegW′ erhalt nun dieneue Kanteen+1, die die Farbec1 besitzt und schließlich wird die Kantee1 mit der Farbec1 ausW′ entfernt. Diese Verfahren wird nun so lange angewendet, bisvi die erste Eckedes WegesW′ ist. An vi ist schließlich die Kantee inzident. Hatte nune die Farbecn+1
zugeordnet bekommen, konnte manW′ mit eerweitern und somit wurde man einen buntenWeg der Langen + 2 erhalten. Dies ergibt erneut einen Widerspruch zur Voraussetzung.Siehe dazu die Abbildung 3.9.
Es wird nun die Vorschrift vorgestellt, wie man einen neuen bunten WegW′′ der Langen+1 ausW erhalt, der die inzidente Kanteeenthalt sowie den gleichen FarbraumCW = CW′
besitzt. Zur Erinnerung, der WegW′ sei durch die Kantene1 = v1, v2, e2 = v2, v3, . . . , en =
vn, vn+1 sowie durch den zugehorigen FarbraumCW′ = c1, c2, . . . , cn gegeben mitci ≔
c(ei). Die Kantee ist zu der Eckevi inzident und besitzt die Farbec j ∈ CW′ . Ohne Be-schrankung der Allgemeinheit seic j ∈ c1, c2, . . . , ci−1 ansonsten kehre die Nummerierung

KAPITEL 3. GRAPHENTHEORIE 23
der Farben um. Nach dem Beweis des Lemmas 3.1.24, lasst sichW′ so abandern, dass andie letzte Eckevn+1 eine Kante hinzugefugt wird, die die Farbec1 tragt. Dann wird dieKanteen+1 hinzugefugt und die Kantee1 entfernt. Dieses Verfahren wird sukzessiv durch-gefuhrt, bis die erste Kanteej in W′ die Farbec j tragt. Die Kantee ist nach Voraussetzungzu den Eckenvi undv < V(W′) inzident. Der WegW′′ soll nun durch Kanten an der Eckev erweitert werden. Der GraphG ist n-regular folglich hat die Eckev genaun Nachbarn.Abzuglich der Kantee lasst sichW′′ durch eine vonn−1 moglichen Kanten anv erweitern.Der WegW′′ besteht im aktuellen Schritt des Verfahrens aus den Kanten
e= v, vi, ei = vi , vi+1, . . . , en = vn, vn+1, en+1 = vn+1, vn+2, . . . , en+ j−1 = vn+ j−1, vn+ j.
Der Farbraum vonW′′ besteht somit aus
1+ (n− i + 1)+ j − 1 = n− i + j + 1
Farben. Schlussfolgernd fehlen nochi − j −1 Farben um einen bunten Weg der Langen+1zu erhalten. Nach Voraussetzung istc j ∈ c1, c2, . . . , ci−1 und somiti − j − 1 ≥ 0. An derEckev gibt esn mogliche Farben, der Farbraum besteht ausn− i+ j+1 Farben des weiterensoll nicht die Farbecn+1 hinzugefugt werden. Somit verbleiben
n− (n− i + j + 1)− 1 = i − j
Farben zur Auswahl. Es gilti − j > 0, wahle eine Kantee′ = v, v′ mit einer verbleibendeFarbe hinzu. An der Eckev′ gibt es nun
n− (n− i + j + 1+ 1)− 1 = i − j − 1
verbleibende Farben zur Auswahl. Es werden immer Kanten einer neuen noch nicht verge-benen Farbe hinzugefugt bis man keine neue Kante anhangenkann. Dann kann man wie-derum die Kante mit der letzten verbleibende Farbe an der Eckevn+ j anhangen. Schließlicherhalt man einen WegW′′ der die Kantee enthalt und den gleichen Farbraum, wieW′
besitzt. Siehe hierfur Abbildung 3.10.Es sei nun wiederum ein bunter WegW′ der Langen+ 1 gegeben. Da die Kanten des
GraphenG mit n+ 1 Farben gefarbt wurden, gibt es mindestens eine Kantee= vi , v j miteiner Farbecn+1 < CW′ . Da der Graph zusammenhangend ist, gibt es mindestens einen WegW von einer Ecke inW′ zu der Eckevi . Der WegW′ wird dann durch das beschriebeneVerfahren durch eine Kantee′, die inzident zuW′ ist und aufW liegt, erweitert. Dies ge-schieht solange, bis die Kantee zu W′ inzident ist. Schließlich lasst sich dann der WegW′
zu einen bunten WegW der Langen+ 2 erweitern.
Theorem 3.1.25.Es sei G ein zusammenhangender Graph. G ist genau dann ein Pfad,wenn G weder einen K1,3 noch einen K3 als Minor enthalt.
Beweis. SeiG ein Pfad. Es wird gezeigt, dassG weder einenK1,3 noch einenK3 als Minorenthalt. Angenommen der GraphG enthalt einenK1,3 oder einenK3 also Minor. Wurde derGraphG einenK1,3 enthalten gebe es einen Knoten vom Grad 3 allerdings ist der Grad beieinem Pfad hochstens 2. Wurde der GraphG denK3 als Minor enthalten, gebe es keinenKnoten vom Grad 1 allerdings gibt es bei einem Pfad genau zweiKnoten mit dem Grad 1.Somit enthalt ein Pfad keinenK1,3 oderK3 als Minor.
AngenommenG ware kein Pfad und enthielte weder einenK1,3 noch einenK3 als Mi-nor. Dann durfteG keinen Knoten enthalten der mindestens einen Grad von 3 besitzt, an-dernfalls hatte dieser dann bereits einenK1,3 als Minor. Des weiteren mussG mindestenseinen Knoten vom Grad 1 haben, andernfalls waren alle Knoten vom Grad 2 und dann warederK3 ein Minor vonG, da sich bis auf drei Kanten, alle anderen Kanten kontrahieren las-sen. Da es keinen Graph mit nur einem Knoten vom Grad 1 geben kann, muss es zweigeben und die restlichen Knoten haben einen Grad 2, somit ware dieser Graph ein Pfadund dies ergibt einen Widerspruch zur Annahme.

KAPITEL 3. GRAPHENTHEORIE 24
c1 c2c3
c4 c5 c6c7
c2
v
v5
(a) W′
c2c3
c4 c5 c6c7 c1
c2
v(b)
c5 c6c7 c1
c2
c4
c3
v(c) W′′
Abbildung 3.10: In Abbildung (a) ist ein bunter WegW′ der Lange 8 zu sehen. Der WegW′ soll nun so erweitert werden, dass er die Kantee= v5, v enthalt. Es werden die erstenKanten entfernt und Kanten der gleichen Farben ans Ende hinzugefugt, siehe Abbildung(b). Dies wird so lange fortgesetzt, bis die erste Kante inW′ die gleiche Farbe wiee tragt.In diesem Beispielc2. Der neue WegW′′ ist rot markiert. Der Knotenv hat 8 Nachbarn. DerWegW′′ besteht bereits aus 5 Farben. Also muss an den Knotenv eine Kante hinzugefugtwerden, die wederc2, c5, c6, c7, c1 nochc8 enthalt. Es werden also 6 Farben ausgeschlossen.Somit gibt es anv noch zwei Kanten mit einer Farbe, die noch nicht im FarbraumCW′′
enthalten ist. Fuge die Kante mit der Farbec4 hinzu. Weiter wird an der letzten Ecke dieKante der Farbec3 hinzugefugt. Man erhalt einen bunten WegW′′ der Lange 8, siehe hierzuAbbildung (c).
u
v1v2
v3
(a)
u
v1
v2
(b)
Abbildung 3.11: Die zwei Falle bilden jeweils einen Minor vom K4 oderK1,3.

KAPITEL 3. GRAPHENTHEORIE 25
Definition 3.1.26. (planarer Graph).Es sei G ein Graph. G ist ein planarer Graph, falls es eine Einbettung des Graphen in dieEbene gibt, so dass die Kanten sich sich außerhalb der Knotennicht schneiden.
Theorem 3.1.27.Es sei G ein Graph. G ist genau dann ein planarer Graph, wenn G wedereinen K3,3 noch einen K5 als Minor enthalt.
Beweis. Fur den Beweis wird auf die Arbeit von Kuratowski [16] gewiesen.
Definition 3.1.28. (außerplanarer Graph).Es sei G ein Graph. G ist ein außerplanarer Graph, falls es eine Einbettung des Graphenin die Ebene gibt, so dass alle Knoten auf einem Kreis liegen und die Kanten sich innerhalbdes Kreises befinden und sich nicht schneiden.
Theorem 3.1.29.Es sei G ein zusammenhangender Graph. G ist genau dann ein außer-planarer Graph, wenn G weder einen K2,3 noch einen K4 als Minor enthalt.
Beweis. Der Beweis erfolgt nach [6].Zunachst kann ein Graph der einenK4 oder einenK2,3 als Minor enthalt kein außerplanarerGraph sein.AngenommenG ist kein außerplanarer Graph, der weder einenK2,3 noch einenK4 alsMinor enthalt. FallsG kein planarer Graph ist, enthaltG nach Kuratowskis Theorem 3.1.27einenK5 oder einenK3,3 als Minor und somit wurde er auch einenK4 oder einenK3,3 alsMinor enthalten. Folglich istG ein planarer Graph. DaG kein außerplanarer Graph ist,muss es einen BlockB mit mehr als zwei Knoten geben, der nicht außerplanar ist. DannbetteB in die Ebene so ein, dass die maximale Anzahl von Knoten auf einem KreisZliegen. DaB nicht außerplanar ist, muss es mindestens einen Knoten geben, der innerhalbdes Kreises liegt, so dass die Kanten sich nicht schneiden. Sei v1 ein Knoten auf dem Kreis,der zu einem Knotenu innerhalb des Kreises adjazent ist. DaB ein Block ist, ist der Gradvon u großer gleich 2. Somit gibt es einen PfadP von u zu einem anderen Knotenv2, derauf dem Kreis liegt. Dann gibt es zwei Falle zu betrachten:1. Fall: Die Knotenv1 undv2 sind adjazent. Dann muss es einen Knotenw auf dem PfadP mit w , v2 geben, der einen Grad von mindestens 3 hat. Andernfalls ließe sich der Pfadauch auf dem Kreis einbetten. Weiterhin gibt es einen Pfad von w zu einem weitere Knotenv3 auf dem Kreis. Und die Knotenv1, v2, v3,w wurden dann einen Minor vomK4 bilden,siehe Abbildung 3.11a.2. Fall: Die Knotenv1 und v2 sind nicht adjazent. Dann bilden die Knotenv1, v2, u einenMinor vom K2,3, siehe dazu Abbildung 3.11b.
Definition 3.1.30. (Cliquensumme).Es sei G ein Graph. G ist eine Cliquensumme aus den Graphen G1 = (V1,E1) und G2 =
(V2,E2), falls V = V1 ∪ V2 und E= E1 ∪ E2 gilt und V1 ∩ V2 ist ein vollstandiger Graphsowohl in G1 als auch in G2, siehe dazu Abbildung 3.12
Definition 3.1.31. (Y- und Y-Transformation).Es sei G ein Graph und v ein Knoten vom Grad 3 mit zugehorigen Nachbarn v1, v2, v3.Die Y-Transformation auf v entfernt diesen Knoten v mit inzidenten Kanten und machtv1, v2, v3 paarweise adjazent.DieY-Transformation ist die Umkehrung dieser der Y-Transformation. Von einem Drei-eck mit den Knoten v1, v2, v3 entfernt man die inzidenten Kanten und fugt einen Knoten vhinzu der zu v1, v2, v3 benachbart ist. Siehe dazu Abbildung 3.13
Definition 3.1.32. (Zyklus).Ein Zyklus in einem Graphen G ist eine kantendisjunkte Vereinigung von Kreisen.

KAPITEL 3. GRAPHENTHEORIE 26
(a)G1 (b) G2
(c) G
Abbildung 3.12: Die beiden GraphenG1 undG2 aus Abbildung (a) und (b) haben beidedenK3 als Untergraphen, in der Abbildung rot dargestellt. Der GraphG aus Abbildung (c)ist dann eine Cliquensumme ausG1 undG2.
v1 v2
v3
v
(a)
v1 v2
v3
(b)
Abbildung 3.13: Von Abbildung (a) zu (b) wurde eine Y-Transformation bezuglichdes Knotensv angewendet. Andersherum von Abbildung (b) zu (a) wurde eineY-Transformation bezuglich der Knotenv1, v2, v3 angewendet.

KAPITEL 3. GRAPHENTHEORIE 27
Definition 3.1.33. (Hamiltonweg, Hamiltonkreis).Es sei G ein Graph. Ein Hamiltonweg in einem Graphen G ist ein Pfad der alle Knotenaus V(G) enthalt. Ein Hamiltonkreis in einem Graphen G ist ein Pfad der alle Knoten ausV(G) enthalt und dessen Anfangs- und Endknoten aufeinander fallen.

Kapitel 4
Die Colin-de-Verdiere-Zahl
4.1 Grundlegendes
Dieses Kapitel behandelt die Ergebnisse, die Y. Colin de Verdiere entdeckte, siehe [32]und [31] sowie andere Erkenntnisse die von H. v. d. Holst, L. Lovasz, A. Schrijver [13] und[22] entwickelt wurden. Hier werden diese Resultate herausgearbeitet und bewiesen. Dabeiwerden einige Satze und Definitionen aus den vorherigen Kapitel benotigt.
Definition 4.1.1. (µ(G)).Es sei G= (V,E) ein ungerichteter Graph und V= 1, 2, . . . , n die zugehorige Ecken-menge. Dann istµ(G) der großtecorank(M) einer Matrix M∈ Sn(R) mit folgenden Eigen-schaften:
M1: Mi, j ∈
R− \ 0, sofern i, j adjazent sind und i, j
0, sofern i und j nicht adjazent sind
R, sofern i= j
M2: M hat genau einen negativen Eigenwert mit der Vielfachheit 1.
M3: Es gibt keine Matrix X∈ Sn(R) mit X , 0 und Xi, j = 0, sofern i= j oder Mi, j , 0,so dass gilt: MX= 0.
Bemerkungen: Fur jeden GraphenG lasst sich eine Matrix finden, die alle oben genann-ten Punkte M1-M3 erfullt. Der erste Punkt ist fur jeden Graphen erfullbar. Der zweite Punktist nach dem Perron-Frobenius-Theorem 2.1.19 ebenfalls erfullt, denn sofern fur die Ma-trixeintrageai, j der Bedingungai, j ≤ 0 genugt, hat die Matrix einen negativen kleinstenEigenwert mit der Vielfachheit 1. Solch eine Matrix lasst sich einfach konstruieren. DennseiA die Adjazenzmatrix zu dem zusammenhangenden GraphenG mit den beiden großtenEigenwertenγ1 > γ2 und seiλ so gewahlt, dass gilt:γ1 > λ > γ2, dann erfulltM ≔ λI − Adie Bedingungen M2 und sogar M3. FallsM eine regulare Matrix ist, ist der Punkt M3sowieso erfullt. Fur den Fall, dassM den corank 1 hat, ist die Bedingung ebenfalls erfullt.DaX einen rank von 1 haben musste wareX darstellbar alsX = uuT mit u ∈ Rn, siehe dafurSatz 2.1.22. Fur die 0-Eintrage in der Diagonalen folgt dannu = 0, 0, . . . , 0 und somit wareX = 0. Ware der rank vonX großer als 1, wurde nichtMX = 0 gelten, daX dann nichtnur einen Spaltenvektor hat der in ker(M) ist und somitMX , 0. FallsG nicht zusam-menhangend ist, lasst sichλ fur jede Komponente einzeln bestimmen und so eine MatrixM konstruieren, so dass M2 und M3 erfullt sind.
Nach M1 sind keinerlei Bedingungen an die Diagonaleintrage geknupft. Falls nunλ,der zweitkleinste Eigenwert zuM ist, lasst sich die MatrixM durchM − λI ersetzen underfullt immer noch M1 und damit kannµ(G) als die maximale Vielfachheit des zweitenEigenwerts definiert werden.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 29
Die dritte Eigenschaft M3 nennt man auch Strong Arnold Hypothesis. Sie basiert aufeiner Transversalitatseigenschaft von V. Arnold [3]. Es gibt einige aquivalente Formulie-rung dazu. Zum einen erfullt eine MatrixM fur einen GraphenG die Bedingung M3, sofernes fur jede symmetrische MatrixB eine MatrixA gibt mit ai j = 0, falls (i, j) ∈ E(G), so dassxT (A− B)x = 0 fur allex ∈ ker(M) gilt, siehe dazu [31] und [21]. Eine weitere aquivalenteBedingung ist, dass sich die MatrizenraumeVM undSM aus der Definition 2.1.7 und 2.1.10in der MatrixM transversal schneiden. DieAquivalenz dieser Bedingung wird im spaterenSatz 4.2.4 bewiesen und findet sich in [13] wieder. Die Bedingung M3 ist trivialerweiseerfullt, wenn die MatrixM regular ist.
Beispiele: Fur den vollstandigen GraphenK4 gilt µ(K4) = 3. Denn es sei
M =
−1 −1 −1 −1−1 −1 −1 −1−1 −1 −1 −1−1 −1 −1 −1
.
Dann erfullt die MatrixM den Punkt M1, da alle Knoten miteinander adjazent sind undsomit die Nichtdiagonaleintrage alle negativ sein mussen. Das charakteristische Polynomder MatrixM lautet:
det(M − λI ) = 4λ3 + λ4.
Und daraus folgt dann fur die Eigenwerte:EW = 0, 0, 0,−4 und damit ist auch M2 erfullt.Der Punkt M3 ist dann ebenfalls gegeben, da aus der Bedingungfur die Matrix X bereitsX = 0 folgt. Alle Matrixelemente vonM sind ungleich 0, woraus sich die Eintrage furXzu 0 erganzen mussen. Somit istµ(K4) = 3.
Satz 4.1.2.(Der vollstandige Graph Kn).Fur den vollstandigen Graphen Kn gilt
µ(Kn) = n− 1.
Beweis. Es seiMi, j = −1 fur alle i, j ∈ 1, 2, . . . , n. Dann ist die Eigenschaft M1 erfullt.Fur das charakteristische Polynom gilt:
det(M − λI ) = (−1)n · (n · λn−1 + λn),
siehe Satz 2.1.24. Somit folgt fur die Eigenwerte:
EW= (0, 0, . . . , 0︸ ︷︷ ︸
n−1
,−n)
und folglich ist auch M2 erfullt. Die Eigenschaft M3 ist ebenfalls erfullt, da aus M3 bereitsX = 0 folgt, siehe dazu das Beispiel fur denK4. Da die MatrixM genaun Eigenwertebesitzt, ist der maximale corank gleichn − 1, da ein Eigenwert aufgrund der EigenschaftM2 negativ sein muss. Somit folgt schließlichµ(Kn) = n− 1.
Satz 4.1.3.(Der Komplementargraph von Kn).Fur den KomplementargraphKn von Kn gilt:
µ(Kn) = 1, fur n≥ 2.
Beweis. SeiM eine zuKn zugehorige Matrix. Die hat dann die MatrixM die Gestalt
M =
a11 0 0 0 · · · 00 a22 0 0 · · · 00 0 a33 0 · · · 00 0 0 a44 · · · 0...
......
.... . .
...
0 0 0 0 · · · ann
.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 30
Die Matrix M hat dann die zugehorigen Eigenwerte:EW = a11, a22, . . . , ann. Es mussennun Bedingungen an die Diagonalelemente gestellt werden, so dass Definition 4.1.1 erfulltwird. M1 ist erfullt, da es keine Kanten in dem GraphenKn gibt und somit die Matrix nuraus Diagonalelementen bestehen muss. Fur den Fall M2 muss fur einen und nur fur einenEintragaii < 0 gelten, da es dann nur einen negativen Eigenwert mit der Vielfachheit 1gibt. Um nun einen moglichst großen corank zu erhalten, mussten die restlichen Diagonal-eintrage 0 sein. Allerdings ist dann der Punkt M3 nicht mehrerfullt. Man kann hochsteneine 0 in ein Diagonalelement einsetzen. Angenommen die Matrix M hat zwei 0 Eintrageauf der Diagonalen also o.B.d.Aa11 = a22 = 0. Dann definiere eine MatrixX ∈ Rn×n mit:
Xi j ≔
1, soferni, j = 1, 20, sonst.
Und daraus folgt:MX = 0. Somit kannM nur eine 0 als Eintrag auf der Diagonalen haben.Seia j j = 0, dann folgt aus der BedingungMX = 0 die Gleichungen:
a11 · xm1 = a22 · xm2 = · · · = a j j · xm j = · · · = ann · xmn = 0,
fur alle m ∈ 1, 2, . . . , n. Daraus folgt dannxmk = 0 fur alle m ∈ 1, 2, . . . , n und k ∈1, 2, . . . , j, . . . , n. Schließlich kannxm j , 0 sein allerdings muss dann ebenfallsx jm , 0wegen der Symmetrie gelten. Dies ergibt allerdings einen Widerspruch, daxmk = 0 furalle m ∈ 1, 2, . . . , n, k ∈ 1, 2, . . . , j, . . . , n gelten muss. Somit istx jk = 0 fur alle k ∈1, 2, . . . , j, . . . , n und laut Voraussetzung mussx j j = 0 gelten und somit ist M3 erfullt.Daraus folgend mussen die Diagonaleintrage vonM einen negativen Eintrag haben sowieeinen Eintrag 0 haben und die restlichen Diagonaleintragemussen großer als 0 sein. Damitsind alle Punkte von Definition 4.1.1 erfullt und es giltµ(Kn) = 1 fur n ≥ 2.
Satz 4.1.4.Der vollstandige Graph G ist der einzige Graph mit n≥ 3 Knoten fur den
µ(G) = n− 1
gilt.
Bemerkung: Der GraphK2 und sein KomplementK2 erfullt die Eigenschaftµ(K2) =µ(K2) = 1.
Beweis. Fur den GraphenKn gilt bereitsµ(Kn) = n− 1, siehe Satz 4.1.2. Es verbleibt alsonoch die Ruckrichtung zu zeigen. Es seiM eine zuG zugehorige Matrix, die Definition4.1.1 und corank(M) = n − 1 erfullt. Daraus folgt, dass rank(M) = 1 und aufgrund derSymmetrie folgt, dass sichM darstellen lasst, als
M = −uuT
fur einen Vektoru ∈ Rn, siehe Satz 2.1.22. Sofern nun fur alle Eintrage ausu gilt: ui ,
0 besitzt die MatrixM ebenfalls keine 0-Eintrage und somit ist der zugehorige Graphvollstandig.
Angenommen der GraphG ist nicht vollstandig, dann muss wegen M1 mindestens einEintrag vonu Null sein, da sonst alle Knoten benachbart waren. Also seiui = 0. Dann ist
M = −uuT =
i’te Spalte
0...
00 · · · 0 0 0 · · · 0
0...
0
.
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 31
Da n ≥ 3 ist, hat die MatrixM einen corank von mindestens 2, das bedeutet, dass dieDimension des Kerns vonM ebenfalls mindestens 2 ist. Aus mindestens 2 linear un-abhangigen Vektorenx1, x2 ∈ ker(M) lasst sich durch Linearkombinationαx1 + βx2 = xmit α, β ∈ R ein α undβ finden, so dassα(x1)i + β(x2)i = 0 gilt und zwar mitβ = −(x2)i
undα = (x1)i . Dann betrachte die MatrixX:
X = xeTi + ei x
T =
i’te Spalte
0 · · · 0 x1 0 · · · 0.... . .
......
.... . .
...
0 · · · 0 xi−1 0 · · · 0x1 · · · xi−1 0 xi+1 · · · xn
0 · · · 0 xi+1 0 · · · 0.... . .
......
.... . .
...
0 · · · 0 xn 0 · · · 0
Und dann gilt:MX = 0 dies ist ein Widerspruch zu M3. Also ist der vollstandige GraphGmit n Knoten der einzige Graph mitµ(G) = n− 1.
Satz 4.1.5.(Pfad mit n Knoten).Fur einen Pfad Pn mit n≥ 2 Knoten gilt:
µ(Pn) = 1.
Beweis. SeiM eine zuPn zugehorige Matrix. Dann hat aufgrund von M1 in der Definition4.1.1 die Matrix die folgende Tridiagonalgestalt:
M =
a11 a12 0 0 · · · 0a21 a22 a23 0 · · · 00 a32 a33 a34 · · · 0
0 0 a43. . .
. . ....
.... . .
. . .. . . a(n−1)(n−1) a(n−1)n
0 · · · 0 an(n−2) an(n−1) ann
.
Es seiM die Matrix die ausM entsteht, wenn man die erste Spalte und die letzte Zeileentfernt:
M =
a12 0 0 · · · 0a22 a23 0 · · · 0
a32 a33 a34 · · ·...
.... . .
. . .. . .
...
0 · · · a(n−1)(n−2) a(n−1)(n−1) a(n−1)n
.
Fur x ∈ Rn−1, folgt ausMx = 0:
x1 = 0 =⇒ x2 = 0 =⇒ · · · =⇒ xn−1 = 0.
Somit kann die MatrixM nach Cauchys-Zwischenwert-Theorem 2.1.20 hochstens einencorank von 1 haben. Solch eine Matrix lasst sich einfach erzeugen, indem manM durchM−λI ersetzt, wobeiλ der zweitkleinste Eigenwert zum Eigenvektorv1 ∈ Rn ist und somitdie neue Matrix einen corank von 1 hat, da
(M − λI )v = Mv− λIv = λv− λv = 0
und genau wie die alte Matrix die Punkte von Definition 4.1.1 erfullt. Der Punkt M1 isterfullt, da die neue Matrix nur die Diagonaleintrage andert. Die Eigenschaft M2 wird eben-falls erfullt, da nur der zweitkleinste Eigenwert auf 0 gesetzt wurde aber der kleinste nach
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 32
wie vor negativ ist und der Punkt M3 ist nach der Bemerkung aufSeite 28 auch erfullt.Somit istµ(Pn)=1.
4.2 Haupteigenschaften
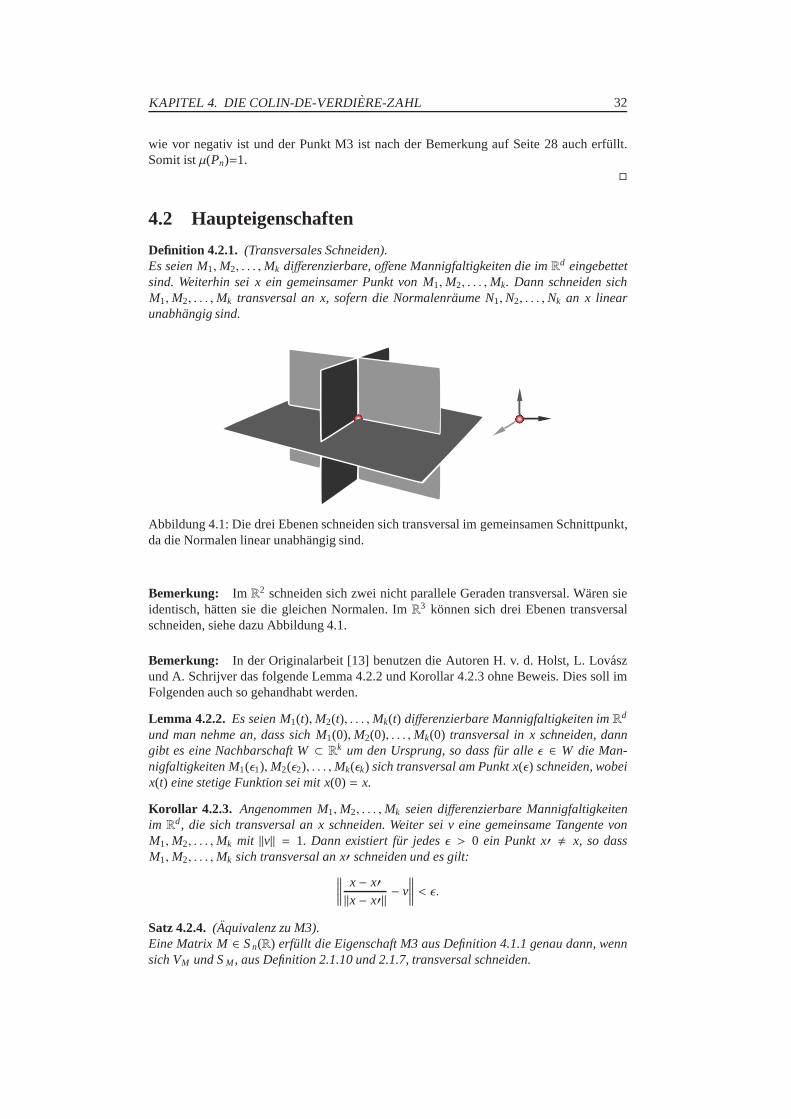
Definition 4.2.1. (Transversales Schneiden).Es seien M1,M2, . . . ,Mk differenzierbare, offene Mannigfaltigkeiten die imRd eingebettetsind. Weiterhin sei x ein gemeinsamer Punkt von M1,M2, . . . ,Mk. Dann schneiden sichM1,M2, . . . ,Mk transversal an x, sofern die Normalenraume N1,N2, . . . ,Nk an x linearunabhangig sind.
Abbildung 4.1: Die drei Ebenen schneiden sich transversal im gemeinsamen Schnittpunkt,da die Normalen linear unabhangig sind.
Bemerkung: Im R2 schneiden sich zwei nicht parallele Geraden transversal. Waren sieidentisch, hatten sie die gleichen Normalen. ImR3 konnen sich drei Ebenen transversalschneiden, siehe dazu Abbildung 4.1.
Bemerkung: In der Originalarbeit [13] benutzen die Autoren H. v. d. Holst, L. Lovaszund A. Schrijver das folgende Lemma 4.2.2 und Korollar 4.2.3ohne Beweis. Dies soll imFolgenden auch so gehandhabt werden.
Lemma 4.2.2. Es seien M1(t),M2(t), . . . ,Mk(t) differenzierbare Mannigfaltigkeiten imRd
und man nehme an, dass sich M1(0),M2(0), . . . ,Mk(0) transversal in x schneiden, danngibt es eine Nachbarschaft W⊂ Rk um den Ursprung, so dass fur alleǫ ∈ W die Man-nigfaltigkeiten M1(ǫ1),M2(ǫ2), . . . ,Mk(ǫk) sich transversal am Punkt x(ǫ) schneiden, wobeix(t) eine stetige Funktion sei mit x(0) = x.
Korollar 4.2.3. Angenommen M1,M2, . . . ,Mk seien differenzierbare Mannigfaltigkeitenim Rd, die sich transversal an x schneiden. Weiter sei v eine gemeinsame Tangente vonM1,M2, . . . ,Mk mit ‖v‖ = 1. Dann existiert fur jedesǫ > 0 ein Punkt x′ , x, so dassM1,M2, . . . ,Mk sich transversal an x′ schneiden und es gilt:
∥∥∥∥∥
x− x′‖x− x′‖ − v
∥∥∥∥∥< ǫ.
Satz 4.2.4.(Aquivalenz zu M3).Eine Matrix M ∈ Sn(R) erfullt die Eigenschaft M3 aus Definition 4.1.1 genau dann,wennsich VM und SM, aus Definition 2.1.10 und 2.1.7, transversal schneiden.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 33
Beweis. Angenommen die MatrixM ∈ Sn(R) erfullt die Eigenschaft M3 aus Definition4.1.1, dann gibt es keine MatrixX ∈ Sn(R) mit X , 0 undXi, j = 0, soferni = j oderMi, j ,
0, so dass gilt:MX = 0. Diese Eigenschaft ist aquivalent zum transversalen Schneiden derbeiden RaumeVM undSM, denn der Normalenraum zuVM, also
NMSM = X ∈ Sn(R)|MX = 0,
siehe hierzu Satz 2.1.9, und der Normalenraum zuSM, also
NMVM = X ∈ Sn(R)|Xi j = 0, falls i = j oderMi j , 0,
siehe hierzu Satz 2.1.12, sind linear unabhangig anM. Weiterhin gibt es keine MatrixX,außer die 0-Matrix, die inNMVM undNMSM liegt. Und falls es keine MatrixX , 0 gibtdie inNMVM undNMSM liegt, also beide linear unabhangig sind, ist die Eigenschaft M3erfullt.
Theorem 4.2.5. (Minormonotonie [31]).Falls der Graph H ein Minor vom Graph G ist, folgtµ(H) ≤ µ(G).
Beweis. Zunachst seiM eine Matrix, die die Definition 4.1.1 fur den GraphenH erfullt.Aus M konstruiere man nun eine MatrixM′, die Definition 4.1.1 fur den GraphenG sowiecorank(M) ≤ corank(M′) erfullt. Dabei teilt sich der Beweis in drei Falle: 1. eine Kantewurde entfernt, 2. ein isolierter Knoten wurde entfernt und3. zwei Knoten wurden kontra-hiert.
• Kante wurde entfernt:H wurde durch die Entfernung der Kantee= vu gewonnen. DaM Definition 4.1.1 erfullt,ist nach Satz 4.2.4 M3 aquivalent zum transversalen Schneiden der beiden RaumeVM undSM. Weiter seiV(t) die Mannigfaltigkeit, die man erhalt, wenn man zu allen Matrizen ausVM die Nullen in der Position (u, v) und (v, u) durch−t ersetzt. Weiter seiS(t) = SM.Dann gibt es nach Lemma 4.2.2 einǫ, so dassS(ǫ) undV(ǫ) sich transversal an einer Ma-trix M′ schneiden. Die MatrixM′ erfullt dann die Eigenschaft M1 der Definition 4.1.1, daM′ ∈ V(ǫ) nach Lemma 4.2.2. Ebenfalls erfullt sie die Eigenschaft M2, daM,M′ ∈ SM sindund somit die gleiche Signatur haben und deswegen gilt auch corank(M′) ≥ corank(M).M3 ist ebenfalls erfullt, da sichSM und V(ǫ) transversal schneiden und somit nach Satz4.2.4 M3 erfullt ist.• Isolierten Knoten wurde entfernt:H wurde durch das Entfernen eines isolierten Knotens gewonnen. Es sei ohne Beschrankungder Allgemeinheit der Knoten 1, der entfernt worden ist, dann gilt fur die neue Eckenmengevon H geradeV(H) = 2, 3, . . . , n. Weiterhin hat die MatrixM′ die Form:
M′ =
1 0 · · · 00... M0
.
Die Matrix M′ erfullt dann die Definition 4.1.1. Die Eigenschaft M1 ist erfullt, da M bereitsM1 erfullt und nur eine Ecke mit dem Eintrag auf der Diagonalen hinzukommt. M2 istebenfalls erfullt, denn angenommen es gabe zwei negativeEigenwerte mit zugehorigenEigenvektorenv,w ∈ Rn, dann ware
M′v =
v1
M
v2...
vn

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 34
und
M′w =
w1
M
w2...
wn
undM hatte ebenfalls zwei negative Eigenwerte, was im Widerspruch zu der Voraussetzungsteht, dassM die Eigenschaft M2 erfullt.M′ erfullt M3, denn gabe es eine MatrixX′, diedie Eigenschaften M3 erfullt und fur die gilt:M′X′ = 0, dann ware sie von der Form:
X′ =
0 vT
v X
fur einv ∈ Rn. Dann wurde aber gelten:
M′X′ =
0 0 · · · 00... MX0
.
Und dann mussteMX = 0 sein, was im Widerspruch zu der Voraussetzung, dassM erfulltden Punkt M3 steht.• Knoten wurde kontrahiert:Es seiH der Graph der durch das Kontrahieren zweier Knotenu undv ausG entstanden ist.Dann ist die Knotenmenge vonH gegeben durchV(H) = 2, 3, . . . , n, wobei 2 der neueKnoten ist. SeiP die Matrix, die man ausM erhalt, wenn man noch eine Zeile und eineSpalte hinzufugt mit den Eintragen 0 außer an PositionP1,1 = 1. Also:
P =
1 0 · · · 00... M0
.
Weiter nehme an, dassu in G adjazent zu den Knoten 3, . . . , r ist. Nun betrachte die fol-genden Matrixmengen:
• Ma =
A ∈ Sn(R)∣∣∣∣
fur i, j > 1 erfullt Ai j die Eigenschaft M1bezuglichH undA1 j = 0, falls j = 2, j > r
.
• Mb = SP = A ∈ Sn(R)| sign(A) = sign(P),
• Mc =
A ∈ Sn(R)∣∣∣∣
rank(A) = 1, A Untermatrix derSpalten 1,2 und der Zeilen 3, . . . , r
.
Im Folgenden sollP ∈ Ma, Mb, Mc gezeigt werden.
• P ∈ Ma, daM genau wieMa 0-Eintrage hat, soferni und j nicht adjazent sind. UndP1 j = 0 ist, falls j ≥ 2.
• P ∈ Mb, da naturlichP die Signatur vonP hat.
• P ∈ Mc, da die erste Spalte mit den Zeilen 3, . . . , r nur aus Nullen besteht und diezweite Spalte vonP mit den Zeilen 3, . . . , r nicht aus Nullen besteht, da der Knoten2 mit 3, . . . , r adjazent sein soll und somit nach Definition 4.1.1 M1 nicht leer seindarf.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 35
Diese drei Mannigfaltigkeiten ausSn(R) enthalten alsoP. Es gilt nun zu zeigen, dass sichdiese drei Mengen auch transversal inP schneiden. Deswegen werden nun die Norma-lenraume anP bestimmt.
• (Der Normalenraum vonMa).
Lemma 4.2.6. (Der Tangentialraum vonMa an P).Der TangentialraumTPMa besteht aus:
TPMa = sgn(Pi j ) Ai j |A ∈ Sn(R), i, j > 1, i , j und A1 j = 0, falls j = 2, j > r.
Der Tangentialraum besteht aus allen Matrizen, die das selbe Muster aus Nullenbilden, wie P und an den Stellen A1 j fur j = 2 und j> r gleich 0 sind.
Beweis. Betrachte eine beliebige differenzierbare AbbildungM : R −→ Sn(R),t 7−→ sgn(P) A(t), wobeiA : R −→ Sn(R) so gewahlt ist, dassM(0) = P gilt und Pdie Form:
P =
1 0 −1T 00−1 sgnP0
hat und1 = (1, 1, . . . , 1) ∈ Rr . Dann istM eine beliebige differenzierbare Kurve imRaumMa, die durchP geht. Und fur die EinheitenT ∈ TPMa des Tangentialraumsvon Ma anP gilt:
T =ddtM(t)
∣∣∣∣t=0
=ddt
sgn(P) A(t)∣∣∣∣t=0
= sgn(P) A′(0)
Dies ist gerade die Menge aller Matrizen mit den selben Muster aus Nullen, wiePund an den StellenA1 j fur j = 2 und j > r gleich 0 sind.
Lemma 4.2.7. (Der Normalenraum vonMa an P).Der NormalenraumNPMa ist definiert durch:
NPMa = X ∈ Sn(R)|Xi j = 0, falls i j ∈ E(H), i = j oder i = 1 und j < 2, r+1, r+2, . . . , n.
Beweis. Es sei sgn(P) A ∈ TPMa, dann muss furX ∈ NPMa gelten:〈sgn(P) A,X〉 = 0. Daraus folgt dann
〈sgn(P) A,X〉 = trace(
(sgn(P) A)TX)
= trace(
(sgn(P) A)X)
DaA eine beliebige symmetrische Matrix ist, definiereA≔ X. Dann ist trace(
(sgn(P)X)X
) ≥ 0 und dies wird nur 0, wenn bereitsX = 0 ist oder sgn(P) X = 0 gilt. Unddies trifft zu, wennXi j = 0, falls i j ∈ E(H) oderi = 1 und j < 2, r + 1, r + 2, . . . , n.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 36
Somit hatNPMa an der StelleP die Form:
NMa(P) =
0 x2 0 · · · 0 xr+1 · · · xn
x2
0...
0 X′
xr+1...
xn
.
• (Der Normalenraum vonMb anP).
Lemma 4.2.8. (Der Normalenraum vonMb an P).Der NormalenraumNPMb vonMb an P besteht aus:
NPMb = X ∈ Sn(R)|PX = 0.
Beweis. Der Beweis wurde bereits im Satz 2.1.9 erbracht.
Mit PX = 0 folgt, dass die erste Zeile vonX 0-Eintrage haben muss und somitwegen der Symmetrie auch die erste Spalte. Wurde dies nichtgelten und ein Eintragin der erste Zeile wurde keine 0 enthalten alsox1, j , 0, dann warePX , 0, da(PX)1, j = x1, j , 0. Somit hatNMb anP die Form:
NMb(P) =
0 0 · · · 00... Y′
0
,
mit MY′ = 0.
• (Der Normalenraum vonMc anP).
Lemma 4.2.9. (Der Tangentialraum vonMc an P).Der TangentialraumTPMc vonMc an P besteht aus:
TPMc = A ∈ Sn(R)|A1 j = λP1 j , λ ∈ R, j = 3, . . . , r
Beweis. Betrachte eine beliebige differenzierbare AbbildungM : R −→ Sn(R),t 7−→ A(t), wobeiA(0) = P und
A(t) =
a11(t) a12(t) γ(t)α(t)T a1,r+1(t) · · · a1,n(t)a21(t) a22(t) α(t)T a2,r+1(t) · · · a2,n(t)γ(t)α(t) α(t)ar+1,1(t) a1,n(t)...
... B(t)an,1(t) an,2(t)
mit α : R −→ Rr−2 und γ : R −→ R mit γ(0) = 0 gilt. Dann istM eine belie-bige Kurve im RaumMc, die durchP geht. Und fur die EinheitenT ∈ TpMc des
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 37
Tangentialraums vonMc anP gilt:
T =ddtM(t)
∣∣∣∣t=0
= A′(0)
=
a′11(0) a′12(0) γ′(0)α(0)T + γ(0)α′(0)T a′1,r+1(0) · · · a′1,n(0)a′21(0) a′22(0) α′(0)T a′2,r+1(0) · · · a′2,n(0)
γ′(0)α(0)+ γ(0)α′(0) α′(0)a′r+1,1(0) a′1,n(0)...
... B′(0)a′n,1(0) a′n,2(0)
=
a′11(0) a′12(0) γ′(0)α(0)T+ a′1,r+1(0) · · · a′1,n(0)a′21(0) a′22(0) α′(0)T a′2,r+1(0) · · · a′2,n(0)γ′(0)α(0) α′(0)a′r+1,1(0) a′1,n(0)...
... B′(0)a′n,1(0) a′n,2(0)
, daγ(0) = 0.
Dies ist gerade die Menge aller Matrizen mitA1 j = λP1 j , λ ∈ R, j = 3, . . . , r.
Lemma 4.2.10. (Der Normalenraum vonMc an P).Der NormalenraumNPMc vonMc an P besteht aus:
NPMc(P) = X ∈ Sn(R)|Xi j = 0, falls i , 1 und j < 3, . . . , r, wobeir∑
j=3
X1 jP2 j = 0.
Beweis. Es seiT ∈ TPMc, dann muss furX ∈ NPMc gelten:〈T,X〉 = 0. Darausfolgt dann
〈T,X〉 = trace
a11 a12 λP2,3 · · · λP2,r a1,r+1 · · · a1,n
a21
λP3,2...
λPr,2 Aar+1,2...
a2,n
· X
DaA eine beliebige Matrix ist, definiereAi j ≔ Xi j fur i, j ∈ 1, 2, . . . , n außer furi =1 und j ∈ 3, . . . , r beziehungsweise außer furj = 1 undi ∈ 3, . . . , r. Dann mussAi j = 0 sein furi, j ∈ 1, 2, . . . , n außer furi = 1 und j ∈ 3, . . . , r beziehungsweiseaußer furj = 1 undi ∈ 3, . . . , r und es muss gelten:λ
∑rj=3 P2 jX1 j = 0. Und dies ist
gerade die Behauptung.
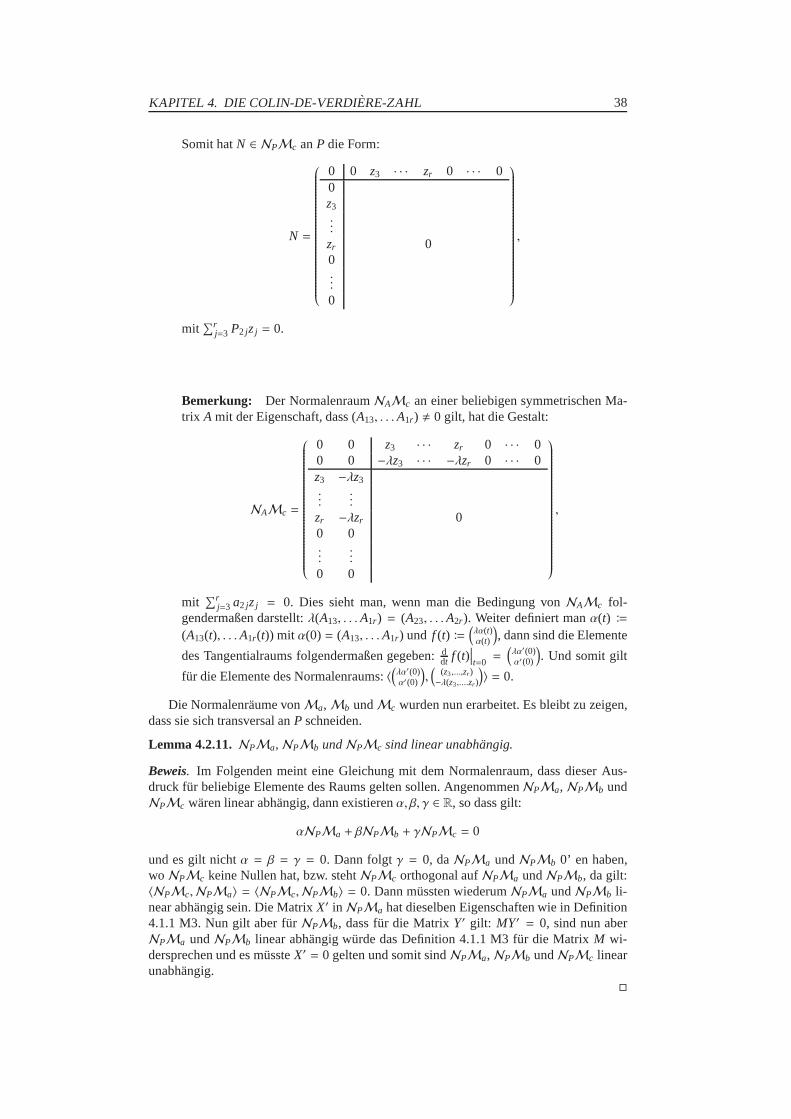
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 38
Somit hatN ∈ NPMc anP die Form:
N =
0 0 z3 · · · zr 0 · · · 00z3...
zr 00...
0
,
mit∑r
j=3 P2 jzj = 0.
Bemerkung: Der NormalenraumNAMc an einer beliebigen symmetrischen Ma-trix A mit der Eigenschaft, dass (A13, . . .A1r ) , 0 gilt, hat die Gestalt:
NAMc =
0 0 z3 · · · zr 0 · · · 00 0 −λz3 · · · −λzr 0 · · · 0z3 −λz3...
...
zr −λzr 00 0...
...
0 0
,
mit∑r
j=3 a2 jzj = 0. Dies sieht man, wenn man die Bedingung vonNAMc fol-gendermaßen darstellt:λ(A13, . . .A1r ) = (A23, . . .A2r ). Weiter definiert manα(t) ≔(A13(t), . . .A1r(t)) mit α(0) = (A13, . . .A1r ) und f (t) ≔
(λα(t)α(t)
)
, dann sind die Elemente
des Tangentialraums folgendermaßen gegeben:ddt f (t)
∣∣∣t=0=
(λα′(0)α′(0)
)
. Und somit gilt
fur die Elemente des Normalenraums:〈(λα′(0)α′(0)
)
,(
(z3,...,zr )−λ(z3,....zr )
)
〉 = 0.
Die Normalenraume vonMa,Mb undMc wurden nun erarbeitet. Es bleibt zu zeigen,dass sie sich transversal anP schneiden.
Lemma 4.2.11.NPMa,NPMb undNPMc sind linear unabhangig.
Beweis. Im Folgenden meint eine Gleichung mit dem Normalenraum, dass dieser Aus-druck fur beliebige Elemente des Raums gelten sollen. AngenommenNPMa,NPMb undNPMc waren linear abhangig, dann existierenα, β, γ ∈ R, so dass gilt:
αNPMa + βNPMb + γNPMc = 0
und es gilt nichtα = β = γ = 0. Dann folgtγ = 0, daNPMa undNPMb 0’ en haben,woNPMc keine Nullen hat, bzw. stehtNPMc orthogonal aufNPMa undNPMb, da gilt:〈NPMc,NPMa〉 = 〈NPMc,NPMb〉 = 0. Dann mussten wiederumNPMa undNPMb li-near abhangig sein. Die MatrixX′ inNPMa hat dieselben Eigenschaften wie in Definition4.1.1 M3. Nun gilt aber furNPMb, dass fur die MatrixY′ gilt: MY′ = 0, sind nun aberNPMa undNPMb linear abhangig wurde das Definition 4.1.1 M3 fur die Matrix M wi-dersprechen und es mussteX′ = 0 gelten und somit sindNPMa,NPMb undNPMc linearunabhangig.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 39
Daraus folgt, dassMa,Mb undMc sich transversal anP schneiden. Nun betrachte dieMatrix T mit:
T = −
0 0 P2,3 · · · P2,r 0 · · · 00
P2,3...
P2,r 00...
0
.
Lemma 4.2.12.Die Matrix T ist eine gemeinsame Tangente vonMa,Mb undMc an derStelle P.
Beweis. Betrachte〈NPMa,T〉. Da die MatrixNPMa genau dort Nullen hat, woT keinehat, gilt: 〈NPMa,T〉 = 0. Betrachte〈NPMb,T〉. Da die MatrixNPMb genau dort Nullenhat, woT keine hat, gilt ebenfalls:〈NPMb,T〉 = 0. Nach dem Beweis vom Lemma 4.2.10gilt ebenfalls〈NPMc,T〉 = 0.
Nach Korollar 4.2.3 gibt es eine MatrixP′ an der sichNPMa, NPMb undNPMc
transversal schneiden. Es wird nun gezeigt, dassP − P′ und T”fast parallel“ sind. Dies
bedeutet, dass die MatrixP′ genau dort keine Nulleintrage hat, an denenP oderT keineNulleintrage, bis auf die Diagonaleintrage, haben. DasP′ das gleiche Muster wieP hat,folgt daraus, dassP′ Element der MatrixmengeMa ist. Die Matrix P′ hat daruber hinauskeine Nulleintrage, an denenT keine Nulleintrage hat. Dies sieht man, wenn man annimmtdasP′1,3 = 0 aberT1,3 , 0 gilt. Schließlich folgt aus
∥∥∥∥∥
P− P′
‖P− P′‖ − T∥∥∥∥∥= T2
1,3 + . . . ≥ T21,3
Und fur ǫ < T21,3 ist das Korollar 4.2.3 nicht mehr erfullt.P′ ist also von der Form:
P′ =
P′1,1 0 P′1,3 · · · P′1,r 0 · · · 00
P′1,3...
P′1,r Q0...
0
.
Da P′ ∈ Ma bedeutet dies, dassQ fur den GraphenH die Definition 4.1.1 M1 erfulltund zusatzlich gilt, da (P1,3, · · · ,P1,r) , 0, dass der Knoten 1 zu 3, . . . , r adjazent ist.Weiterhin istP′ ∈ Mb, was bedeutet, dass corank(P) = corank(P′) ist und der Punkt M2von der Definition 4.1.1 erfullt ist, daP und P′ die gleiche Signatur haben. AusP′ mussnun eine Matrix konstruiert werden, die mindestens den selben corank wieP hat und diedie Definition 4.1.1 furG erfullt.
Es seiS = I − 1λE21 =
1 0 0 · · · 0− 1λ
1 0 · · · 00 0 1......
. . .
0 0 1
, wobeiE21 =
0 0 0 · · · 010... 00
.
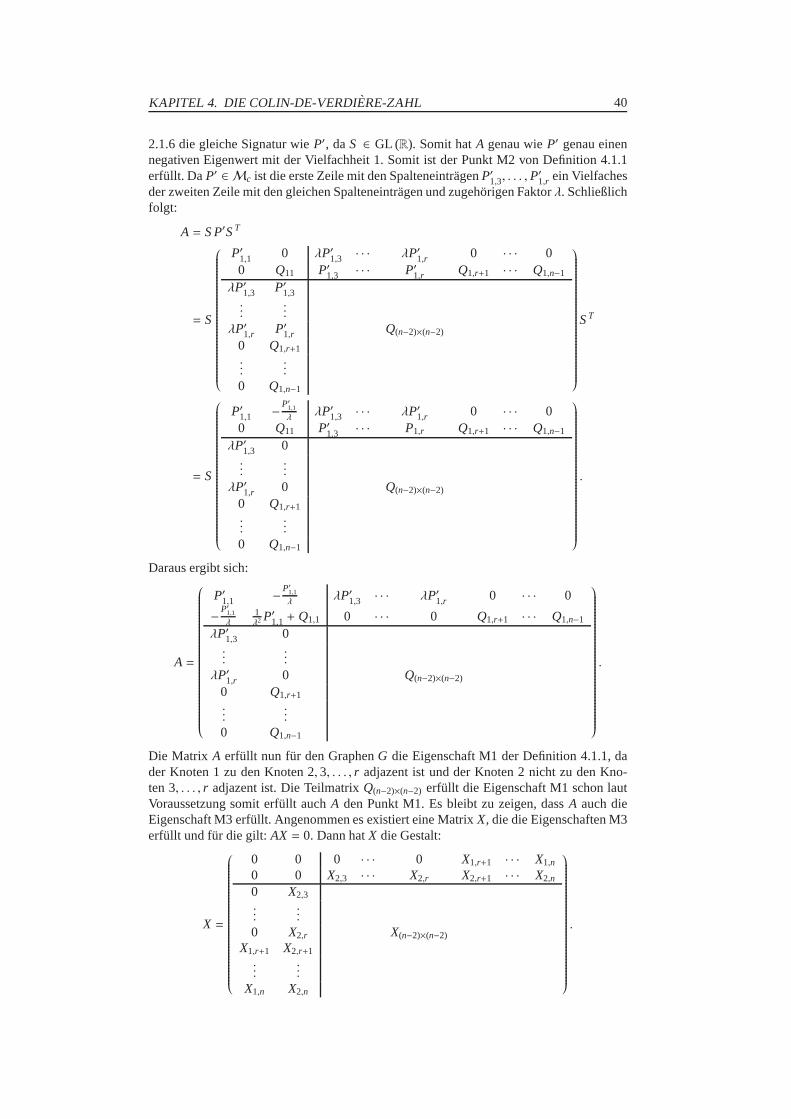
Dann definiereA ≔ S P′ST . Und somit besitztA nach dem Sylvesterschen Tragheitssatz
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 40
2.1.6 die gleiche Signatur wieP′, daS ∈ GL (R). Somit hatA genau wieP′ genau einennegativen Eigenwert mit der Vielfachheit 1. Somit ist der Punkt M2 von Definition 4.1.1erfullt. DaP′ ∈ Mc ist die erste Zeile mit den SpalteneintragenP′1,3, . . . ,P
′1,r ein Vielfaches
der zweiten Zeile mit den gleichen Spalteneintragen und zugehorigen Faktorλ. Schließlichfolgt:
A = S P′ST
= S
P′1,1 0 λP′1,3 · · · λP′1,r 0 · · · 00 Q11 P′1,3 · · · P′1,r Q1,r+1 · · · Q1,n−1
λP′1,3 P′1,3...
...
λP′1,r P′1,r Q(n−2)×(n−2)
0 Q1,r+1...
...
0 Q1,n−1
ST
= S
P′1,1 −P′1,1λ
λP′1,3 · · · λP′1,r 0 · · · 00 Q11 P′1,3 · · · P1,r Q1,r+1 · · · Q1,n−1
λP′1,3 0...
...
λP′1,r 0 Q(n−2)×(n−2)
0 Q1,r+1...
...
0 Q1,n−1
.
Daraus ergibt sich:
A =
P′1,1 −P′1,1λ
λP′1,3 · · · λP′1,r 0 · · · 0
−P′1,1λ
1λ2 P′1,1 + Q1,1 0 · · · 0 Q1,r+1 · · · Q1,n−1
λP′1,3 0...
...
λP′1,r 0 Q(n−2)×(n−2)
0 Q1,r+1...
...
0 Q1,n−1
.
Die Matrix A erfullt nun fur den GraphenG die Eigenschaft M1 der Definition 4.1.1, dader Knoten 1 zu den Knoten 2, 3, . . . , r adjazent ist und der Knoten 2 nicht zu den Kno-ten 3, . . . , r adjazent ist. Die TeilmatrixQ(n−2)×(n−2) erfullt die Eigenschaft M1 schon lautVoraussetzung somit erfullt auchA den Punkt M1. Es bleibt zu zeigen, dassA auch dieEigenschaft M3 erfullt. Angenommen es existiert eine Matrix X, die die Eigenschaften M3erfullt und fur die gilt:AX = 0. Dann hatX die Gestalt:
X =
0 0 0 · · · 0 X1,r+1 · · · X1,n
0 0 X2,3 · · · X2,r X2,r+1 · · · X2,n
0 X2,3...
...
0 X2,r X(n−2)×(n−2)
X1,r+1 X2,r+1...
...
X1,n X2,n
.
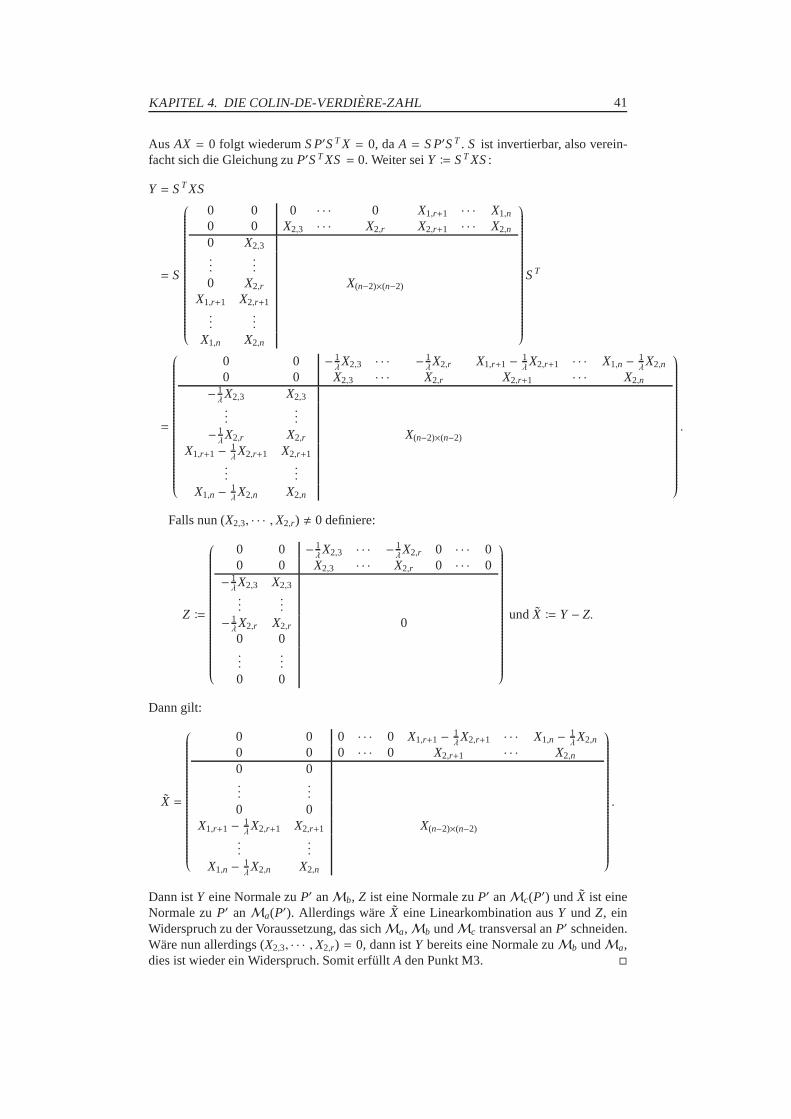
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 41
Aus AX = 0 folgt wiederumS P′STX = 0, daA = S P′ST . S ist invertierbar, also verein-facht sich die Gleichung zuP′STXS = 0. Weiter seiY≔ STXS:
Y = STXS
= S
0 0 0 · · · 0 X1,r+1 · · · X1,n
0 0 X2,3 · · · X2,r X2,r+1 · · · X2,n
0 X2,3...
...
0 X2,r X(n−2)×(n−2)
X1,r+1 X2,r+1...
...
X1,n X2,n
ST
=
0 0 − 1λX2,3 · · · − 1
λX2,r X1,r+1 − 1
λX2,r+1 · · · X1,n − 1
λX2,n
0 0 X2,3 · · · X2,r X2,r+1 · · · X2,n
− 1λX2,3 X2,3...
...
− 1λX2,r X2,r X(n−2)×(n−2)
X1,r+1 − 1λX2,r+1 X2,r+1...
...
X1,n − 1λX2,n X2,n
.
Falls nun (X2,3, · · · ,X2,r) , 0 definiere:
Z ≔
0 0 − 1λX2,3 · · · − 1
λX2,r 0 · · · 0
0 0 X2,3 · · · X2,r 0 · · · 0− 1λX2,3 X2,3...
...
− 1λX2,r X2,r 00 0...
...
0 0
undX ≔ Y− Z.
Dann gilt:
X =
0 0 0 · · · 0 X1,r+1 − 1λX2,r+1 · · · X1,n − 1
λX2,n
0 0 0 · · · 0 X2,r+1 · · · X2,n
0 0...
...
0 0X1,r+1 − 1
λX2,r+1 X2,r+1 X(n−2)×(n−2)...
...
X1,n − 1λX2,n X2,n
.
Dann istY eine Normale zuP′ anMb, Z ist eine Normale zuP′ anMc(P′) und X ist eineNormale zuP′ anMa(P′). Allerdings wareX eine Linearkombination ausY und Z, einWiderspruch zu der Voraussetzung, das sichMa,Mb undMc transversal anP′ schneiden.Ware nun allerdings (X2,3, · · · ,X2,r) = 0, dann istY bereits eine Normale zuMb undMa,dies ist wieder ein Widerspruch. Somit erfulltA den Punkt M3.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 42
Abbildung 4.2: Der GraphG besteht aus drei Komponenten:K2, K3 undK4. Und es gilt:µ(G) = µ(K4).
Theorem 4.2.13.(Komponenten).Es sei G ein Graph mit mindestens einer Kante, dann gilt:
µ(G) = maxKµ(K),
wobei K uber die Komponenten von G geht.
Bemerkung: Besteht der GraphG aus drei Komponenten der vollstandigen GraphenK2,K3 und K4, dann giltµ(G) = µ(K4) = 3, siehe Abbildung 4.2. FallsG keine Kante hat,ist die Aussage falsch. Denn seiG = Kn, dann istµ(Kn) = 1 nach Satz 4.1.3 aber furjede KomponenteK1 von G gilt: µ(K1) = 0 nach Satz 4.1.2 somit istµ(Kn) = 1 , 0 =maxK µ(K) = µ(K1).
Beweis. Nach dem Theorem 4.2.5 gilt:µ(G) ≥ maxK µ(K), da eine Komponente ein Minorvom GraphenG ist. Sei nunM eine Matrix die Definition 4.1.1 fur den GraphenG erfulltund fur die außerdem corankM = µ(G) gilt. Dann hatM die Gestalt:
M =
M1
M2
. . .
Mn
.
SofernG mindestens eine Kante enthalt giltµ(G) > 0, da bereits nach Satz 4.1.2µ(K2) = 1gilt und somitK2 ein Minor vom GraphenG ware und nach Theorem 4.2.5 somitµ(G) ≥µ(K2) > 0 gilt und somit folgt daraus ebenfalls corank(M) > 0. Und dann gilt:
Lemma 4.2.14.Es existiert genau eine Komponente K fur diecorank(MK) > 0 gilt.
Beweis. Angenommen es gabe zwei KomponentenK und L mit corank(MK) > 0 undcorank(ML) > 0 und sei|V(K)| = i und |V(L)| = j. Dann wahle zwei Vektoren aus denKernen der beiden Matrizen:x ∈ ker(MK) und y ∈ ker(ML) mit x , 0, y , 0. Dannnummeriere die Knoten vonG so um, dass gilt:
M =
MK
ML
. . .
Mn
.
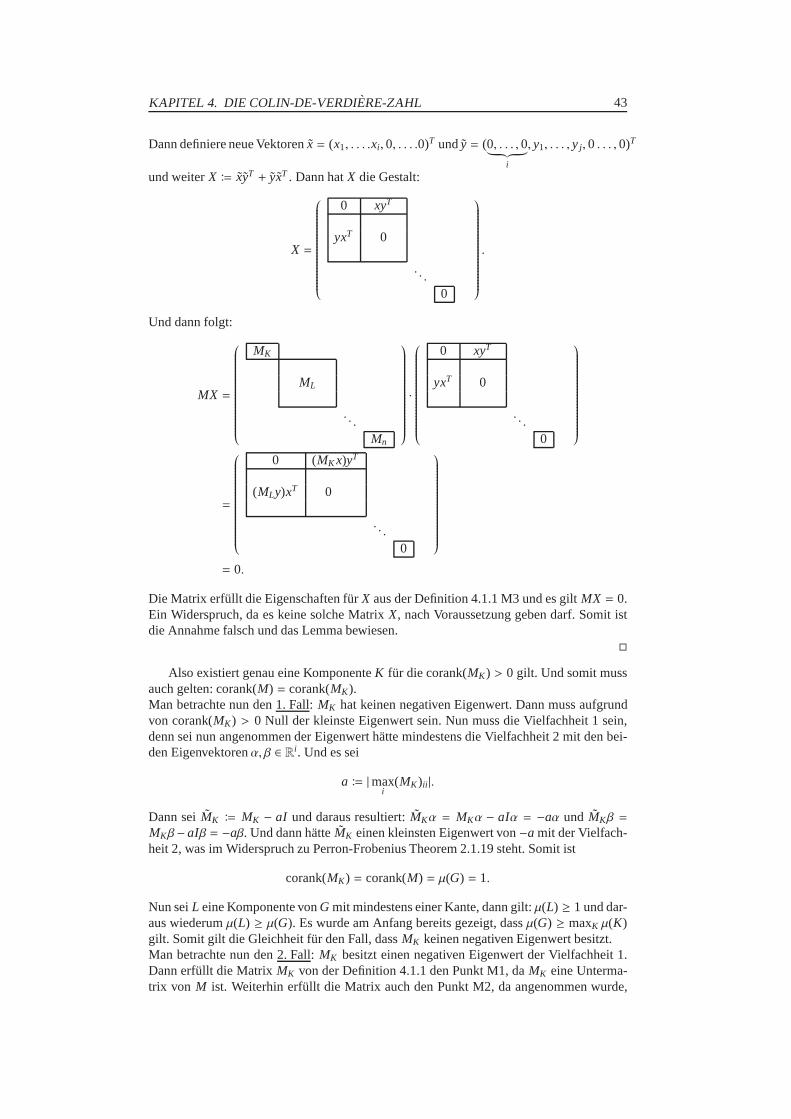
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 43
Dann definiere neue Vektoren ˜x = (x1, . . . .xi , 0, . . . .0)T undy = (0, . . . , 0︸ ︷︷ ︸
i
, y1, . . . , y j, 0 . . . , 0)T
und weiterX ≔ xyT + yxT . Dann hatX die Gestalt:
X =
0 xyT
yxT 0
. . .
0
.
Und dann folgt:
MX =
MK
ML
. . .
Mn
·
0 xyT
yxT 0
. . .
0
=
0 (MK x)yT
(MLy)xT 0
. . .
0
= 0.
Die Matrix erfullt die Eigenschaften furX aus der Definition 4.1.1 M3 und es giltMX = 0.Ein Widerspruch, da es keine solche MatrixX, nach Voraussetzung geben darf. Somit istdie Annahme falsch und das Lemma bewiesen.
Also existiert genau eine KomponenteK fur die corank(MK) > 0 gilt. Und somit mussauch gelten: corank(M) = corank(MK).Man betrachte nun den 1. Fall: MK hat keinen negativen Eigenwert. Dann muss aufgrundvon corank(MK) > 0 Null der kleinste Eigenwert sein. Nun muss die Vielfachheit 1 sein,denn sei nun angenommen der Eigenwert hatte mindestens dieVielfachheit 2 mit den bei-den Eigenvektorenα, β ∈ Ri . Und es sei
a≔ |maxi
(MK)ii |.
Dann seiMK ≔ MK − aI und daraus resultiert:MKα = MKα − aIα = −aα und MKβ =
MKβ− aIβ = −aβ. Und dann hatteMK einen kleinsten Eigenwert von−a mit der Vielfach-heit 2, was im Widerspruch zu Perron-Frobenius Theorem 2.1.19 steht. Somit ist
corank(MK) = corank(M) = µ(G) = 1.
Nun seiL eine Komponente vonG mit mindestens einer Kante, dann gilt:µ(L) ≥ 1 und dar-aus wiederumµ(L) ≥ µ(G). Es wurde am Anfang bereits gezeigt, dassµ(G) ≥ maxK µ(K)gilt. Somit gilt die Gleichheit fur den Fall, dassMK keinen negativen Eigenwert besitzt.Man betrachte nun den 2. Fall: MK besitzt einen negativen Eigenwert der Vielfachheit 1.Dann erfullt die MatrixMK von der Definition 4.1.1 den Punkt M1, daMK eine Unterma-trix von M ist. Weiterhin erfullt die Matrix auch den Punkt M2, da angenommen wurde,
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 44
dassMK einen negativen Eigenwert besitzt. Es bleibt zu zeigen, dass MK die EigenschaftM3 erfullt. Sei X eine Matrix, die die Punkte aus M3 erfullt und fur die gilt:MK X = 0.Dann definiere eine neue MatrixX ∈ Sn(R) mit:
X =
X
0
. . .
0
.
Dann gilt:
MX =
MK
ML
. . .
Mn
·
X
0
. . .
0
=
MK X
0
. . .
0
= 0.
Die ergibt einen Widerspruch zur Annahme, dassM die Eigenschaft M3 erfullt. Somiterfullt MK die Definition 4.1.1 und es giltµ(G) = corank(MK).
Satz 4.2.15.(Alternative Bedingung fur M2). Es sei G ein Graph mit mindestens zweiKnoten, dann kann man aus der Definition 4.1.1 den Punkt M2 durch die Bedingung
M2’: Die Matrix M hochstens einen negativen Eigenwert
ersetzen.
Beweis. Es seiM eine zu den GraphenG zugehorige Matrix mit maximalem corank unterden Bedingungen M1, M3 der Definition 4.1.1 sowie der Bedingung M2’. Angenommendie Matrix M hat keinen negativen Eigenwert, dann wareM positiv semidefinit. Und nachdem Perron-Frobenius-Theorem 2.1.19 hatMK die zugehorige Untermatrix von der Kom-ponenteK dann als kleinsten Eigenwert 0 mit der Vielfachheit 1. Siehedazu den Beweisvon Theorem 4.2.13 mit der MatrixMK . Und weiter ist hochstens eine Untermatrix sin-gular. Also gilt corank(M) = 1 fur M. Und nach den Bemerkungen auf Seite 28 lasst sichdannM durch eine Matrix ersetzen, die dann M2 der Definition 4.1.1 erfullt.
Theorem 4.2.16.(Knoten entfernen).
i. Es sei G= (V,E) ein Graph und sei v∈ V, dann gilt:
µ(G) ≤ µ(G− v) + 1.
ii. Falls v adjazent zu allen anderen Knoten ist und G mindestens eine Kante hat, giltGleichheit.
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 45
Beweis. (Von i.)Nach Theorem 4.2.13 lasst sich annehmen, dassG zusammenhangend ist, fallsG nicht zu-sammenhangend ist, nehme man die KomponenteK fur die gilt:µ(G) = µ(K). Weiter seiMeine zuG zugehorige Matrix, die Definition 4.1.1 erfullt und fur die gilt: µ(G) = corank(M).Weiter seiv = n. Dann definiere die MatrixM′ als die Matrix, die man erhalt, wennman vonM die letzte Zeile und Spalte entfernt. Dann gilt: corank(M′) ≥ corank(M) − 1.Denn seienEWM = −a1, 0, 0, . . . , 0, a2, a3, . . . , am mit corank(M) = k die Eigenwer-te vonM. Nach Cauchys-Zwischenwert-Theorem 2.1.20 gilt demnach fur die EigenwerteEWM′ = b1, b2, . . . , bm+k−1:
−a1 ≤ b1 ≤ 0 ≤ b2 ≤ 0 ≤ · · · ≤ 0 ≤ bk+1 ≤ a2 ≤ · · · ≤ bk+m−1 ≤ am.
Es gibt also mindestensk−1 Eigenwerte vonM′ die 0 sind, namlichb2, b3, . . . , bk. Es mussalso gezeigt werden, dassM′ die Definition 4.1.1 erfullt, daM′ schon eine Matrix fur denGraphenG − v ist. Des Weiteren gilt das Theorem fur den Fallµ(G) ≤ 2. Fallsµ(G) = 1gilt offensichtlich:
µ(G) = 1 ≤ µ(G − v) + 1.
Fallsµ(G) = 2 ist, gilt das Theorem nur dann nicht, wennµ(G − v) = 0 ist und dies ist derFall, wennG − v = K1 ist, siehe dazu Satz 4.1.2. Allerdings ware dann entwederG = K2
oderG = K2 \ eund daraus schlussfolgernd ware aberµ(G) = 1. Siehe fur den FallG = K2
Satz 4.1.2 und fur den FallG = K2 \ eSatz 4.1.3. Somit betrachte nur den Fallµ(G) ≥ 3.
M1: Da die MatrixM den Punkt M1 erfullt undM′ eine symmetrische Untermatrix vonM ist, erfullt M′ die Eigenschaft M1.
M2: Nach Cauchys-Zwischenwert-Theorem 2.1.20 hatM′ hochstens einen negativen Ei-genwertb1 und Satz 4.2.15 impliziert die Eigenschaft M2.
M3: Folgt nach zwei Lemmata.
Es gilt: corank(M′) ≤ corank(M). AngenommenM′ hat einen negativen Eigenwert, dannkonnen nur nochb2, b3, . . . , bk+1 0 sein, alsok-Werte genau wieM. AngenommenM′ istpositiv-semidefinit und hat keinen negativen Eigenwert. Und weiterhin hat jede Unterma-trix von M′, die zu eine Komponente vonG−v gehort, einen corank von hochstens 1. Siehedazu den Beweis von Theorem 4.2.13. Dann ist der corank vonM′ die Anzahl der Unter-matrizen zu den Komponenten, die singular sind. Es wird zunachst das folgenden Lemmagezeigt.
Lemma 4.2.17.Und es gibt hochstens drei solcher Untermatrizen.
Beweis. Angenommen es gabe vier KomponentenK1,K2,K3 und K4. Sei xi ∈ ker(MKi )mit i = 1, 2, 3, 4. Nach dem Perron-Frobenius-Theorem 2.1.19 istxi > 0, d.h. alle Eintragesind positiv fur allei. Dann erweiterexi zu einen Vektor inRn in dem man Nullen hinzu-nimmt und zwar an Stellen an denen die anderen Komponenten vorhanden sind. Weiter seizder Eigenvektor vonM der zum kleinsten Eigenwert gehort. Nach dem Perron-Frobenius-Theorem 2.1.19 gilt auch hier:z > 0 fur alle Eintrage. Somit ist〈z, xi〉 , 0. Skaliere dannxi so, dass〈z, xi〉 = 1 gilt. Dann definiere
X ≔ (x1 − x2)(x3 − x4)T + (x3 − x4)(x1 − x2)T .
Daraus folgt allerdingsMX = 0. Nach Satz 2.1.23 folgt aus:〈x, z〉 = 0 und〈x,Mx〉 = 0,dass ˜x ∈ ker(M) gilt. Dies benutzt man um (x1 − x2), (x3 − x4) ∈ ker(M) zu zeigen. Es seix≔ (x1 − x2), dann gilt:
〈x, z〉 = 〈x1 − x2, z〉= 〈x1, z〉 − 〈x2, z〉= 1− 1
= 0.
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 46
Und weiter:
〈x,Mx〉 = xT
MK1
MK2
aMK3
MK4
. . .
aT
(x1)1...
(x1)m
(x2)1...
(x2)l
0...
0
= xT
MK1 x1
MK2 x2
0...
0〈aT , x〉
=(
(x1)1 · · · (x1)m (x2)1 · · · (x2)l 0 · · · 0)
000...
0〈aT , x〉
= 0.
Somit istM(x1 − x2) = 0 und analogM(x3 − x4) = 0. Die MatrixX erfullt die Eigenschaf-ten M3 der Definition 4.1.1. Es gilt:MX = 0. Dies ergibt einen Widerspruch, daM dieEigenschaft M3 erfullt. Und somit kann es hochstens drei Komponenten geben.
Der Beweis von Teil i. wird nun fortgefuhrt. Da der corank von M′ die Anzahl sin-gularer Komponenten angibt, gilt:
corank(M′) ≤ 3 ≤ corank(M).
Nach Annahme gilt 3≤ corank(M) bereits. Zusatzlich gilt: rank(M′)+ corank(M′) = n− 1und damit
n− 1− rank(M′) = corank(M′)
und analog furM: n− rank(M) = corank(M). Aus corank(M′) ≤ corank(M) folgt dann:
rank(M) − 1 ≤ rank(M′).
Und dies impliziert dann das folgende Lemma, das nun gezeigtwird.
Lemma 4.2.18.Die letzte Spalte von M ist eine Linearkombination aus den ubrigen Spal-ten und dem kanonischen Basisvektor en.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 47
Beweis. Da der corank vonM mindestens 3 ist, gibt es mindestens drei linear unabhangigeVektoren:x1, x2, x3 ∈ ker(M). Dann gilt:
Mx j =
MK1 a1
MK2 a2
MK3 a3
MK4 a4
. . ....
aT1 aT
2 aT3 aT
4 · · · aTn
(x j)1
(x j)2
(x j)3
(x j)4...
(x j)n
= 0.
Daraus folgt schließlich:
MK1(x j)1
MK2(x j)2
MK3(x j)3
MK4(x j)4...
∑n−1i=0 ai · (x j)i
= −
a1 · (x j)n
a2 · (x j)n
a3 · (x j)n
a4 · (x j)n...
an · (x j)n
.
Falls nun einj existiert, so dass (x j)n , 0 gilt, definiere ˜x ≔ − 1(x j )n· x j und fur denn-ten
Eintrag:xn ≔ an und dann gilt:
MK1
MK2
0MK3
MK4
. . .
0 1
· x = a.
Falls nun keinj existiert, so dass (x j)n , 0 gilt, folgt daraus, dass es wegen corank(M′) ≤3 ≤ corank(M) drei voneinander verschiedene Zahlenr, s, t geben muss, so dass
(x j)r , (x j)s, (x j)t , 0
undMKr (x j)r = MKs(x j)s = MKt (x j)t = 0
fur j = 1, 2, 3 gelten muss. Die anderen Falle, dass zum Beispiel fur einj auch (x j)r = 0gelten kann werden dabei analog behandelt. Hierbei meint (x j)r nicht den r-ten Eintrag des
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 48
Vektors x j , sondern die Eintrage fur die zugehorige KomponenteMKr . Da die x j linearunabhangig sind und die UntermatrizenMKr ,MKs,MKt einen corank von eins haben, lasstsich durch Linearkombination derx j drei Vektoren ˜x1, x2 und x3 bilden, so dass
(x1)r , (x2)s, (x3)t,, 0
und
(x1)i = 0, fur i , r
(x2)i = 0, fur i , s
(x3)i = 0, fur i , t,
gilt. Dann gilt Mx1 = Mx2 = Mx3 = 0 und daraus folgt wieder
MKr (x1)r = MKs(x2)s = MKt (x3)t = 0
und〈ar , (x1)r〉 = 〈as, (x2)s〉 = 〈at, (x3)t〉 = 0
somit sind die Zeilen vonMKr und die Zeilear linear abhangig und daraus folgt aufgrundder Symmetrie vonM, dassa eine Linearkombination der Spalten vonM ist.
Der Beweis von Teil i. wird nun zu Ende gefuhrt. Es bleibt zu zeigen, dassM′ dieEigenschaft M3 der Definition 4.1.1 erfullt. Angenommen esgibt eine MatrixX′ ∈ Sn−1(R)die M3 erfullt und das gilt:M′X′ = 0. Dann definiere
X ≔
0
X′...
00 · · · 0 0
= (X1, . . . ,Xn−1, 0).
Dann folgt ausMX:
MX =
M′ a
aT
·
0
X′...
00 · · · 0 0
=
0
M′X′...
0〈a,X1〉 · · · 〈a,Xn−1〉 0
=
0
0...
0〈a,X′1〉 · · · 〈a,X′n−1〉 0
.
WobeiXi die i-te Spalte der MatrixX′ ist. Dann betrachte:〈a,X j〉. Nach Lemma 4.2.18 ista eine Linearkombination aus den Spalten vonM beziehungsweise aus den Zeilen wegender Symmetrie der MatrixM. Somit ist in diesem Fall der Vektora eine Linearkombination

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 49
aus den Spalten vonM′. Daraus folgt:a =∑n−1
i=1 λi M′i fur gewisseλi . Das impliziert dann:
〈a,X j〉 =⟨
n−1∑
i=1
λi M′i ,X j
⟩
=
n−1∑
i=1
λi M′iT · X j
= 0.
Da bereitsM′X′ = 0 gilt, folgt daraus, dassM′iTX′j = 0 gilt und somit auch〈a,X′j〉 = 0.
Somit istMX = 0 ein Widerspruch, daM die Eigenschaft M3 der Definition 4.1.1 erfullensoll. Somit erfullt auchM′ die Definition 4.1.1 und die Behauptung i. von Theorem 4.2.16ist bewiesen.
Beweis. (ii. von Theorem 4.2.16)Es seiv adjazent zu allen anderen Ecken. Dann bleibt zu zeigen, dassµ(G) ≥ µ(G − v) + 1ist. Nach dem Theorem 4.2.13 lasst sich annehmen, dassG−v zusammenhangend ist. Fallsnicht, betrachte einfach die KomponenteK fur die gilt:µ(G) = µ(K). Es seiM′ eine zuG−vzugehorige Matrix, die die Definition 4.1.1 erfullt und f¨ur die gilt: corank(M′) = µ(G− v).Des Weiteren seiz der Eigenvektor vonM′, der zum kleinsten Eigenwertλ1 gehort. Nachdem Perron-Frobenius-Theorem 2.1.19 gilt:z< 0 undz lasst sich so skalieren, dass‖z‖ = 1gilt. Dann definiere die MatrixM so:
M ≔
(
λ−11 zT
z M′
)
.
Sofern nunx ∈ ker(M′) folgt: (0, x)T ∈ ker(M), denn
M · (0, x)T =
(
〈z, x〉M′x
)
=
(
〈z, x〉0
)
.
Aus 〈M′x, z〉 = 0 folgt 〈x, z〉, da
〈M′x, z〉 = 〈x,M′z〉= 〈x, λ1z〉= λ1〈x, z〉= 0.
Somit ist〈x, z〉 = 0. Weiter ist (−λ1, z)T ∈ ker(M), denn
M · (−λ1, z)T =
(
−λ−11 λ1 + 〈z, z〉−λz+ M′z
)
=
(
−1+ 1−λz+ λz
)
= 0.
Daraus folgt: corank(M) ≥ corank(M′) + 1. Folglich hat nach Cauchys-Zwischenwert-Theorem 2.1.20 die MatrixM genau einen negativen Eigenwert. Es sind die Eigenwertevon M′:
EWM′ = λ1, 0, 0, . . . , 0︸ ︷︷ ︸
k
, λk+2, . . . , λk+l

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 50
und die Eigenwerte vonM:
EWM = γ1, γ2, . . . , γk+l+1.Weiter gilt: γi ≤ λi ≤ γi+1. Dann folgt aus: corank(M) ≥ corank(M′) + 1, dassγ j = 0 furj ∈ 2, . . . , k+2. Undγ1 ≤ λ1 und somit ist furM der Punkt M2 der Definition 4.1.1 erfullt.Der Punkt M1 ist ebenfalls erfullt, daM′ eine Untermatrix ist und der Knoten, der entferntwurde, der erste Knoten ist. Da die erste Zeile beziehungsweise die erste Spalte der MatrixM nach Voraussetzung keinen 0-Eintrag enthalt, ist auch derKnoten mit allen anderenKnoten adjazent. Es bleibt zu zeigen, dassM auch den Punkt M3 erfullt. Angenommen esgibt eine MatrixX, die die Eigenschaften aus M3 erfullt. Dann hatteX die Gestalt:
X ≔
0 0 · · · 00... X′
0
.
AngenommenMX = 0 wurde gelten, dann folgt:
MX =
(
λ−11 zT
z M′
)
·
0 0 · · · 00... X′
0
=
0 〈z,X′1〉 · · · 〈z,X′n−1〉0... M′X′
0
.
Und dann musste auchM′X′ = 0 folgen. Ein Widerspruch, daM′ die Eigenschaft M3 derDefinition 4.1.1 erfullen soll.Somit erfulltM die Definition 4.1.1 und es gilt: corank(M) ≥ corank(M′)+1. Somit ist dieAussage bewiesen.
Bemerkung: Im folgenden seienλ1, . . . , λn die nach der Große geordneten Eigenwer-te einer MatrixM. Ist also vonλ1(M) beziehungsweiseλ1(MC) die Rede, meint dies denkleinsten Eigenwert der MatrixM beziehungsweise den kleinsten Eigenwert der Unterma-trix MC von M.
Lemma 4.2.19. Es sei G= (V,E) ein zusammenhangender Graph und M eine zu G zu-gehorige Matrix, die die Definition 4.1.1 erfullt. Weitersei S ⊆ V und C1,C2, . . . ,Cm
Komponenten vom Graphen G− S . Dann gibt es drei Moglichkeiten:
(i) Es existiert ein i mitλ1(MCi ) < 0 undλ1(MC j ) > 0 fur alle j , i.
(ii) Es gilt fur alle i: λ1(MCi ) ≥ 0, corank(M) ≤ |S|+1und es gibt mindestenscorank(M)−|S| + 2 und hochstens drei Komponenten Ci , so dass gilt:λ1(MCi ) = 0.
(iii) Fur alle i gilt: λ1(MCi ) > 0.
Beweis. Es seizder Eigenvektor, der zum kleinsten Eigenwertλ1(M) der MatrixM gehort.Und fur i = 1, . . . ,m sei xi der Eigenvektor, der zum kleinsten Eigenwertλ(MCi ) der Ma-trix MCi gehort. Dann erweitere die Eigenvektorenxi , wie im Beweis vom Theorem 4.2.16,durch Hinzunahme von Nullen zu einem Vektor imR|V|. Nach dem Perron-Frobenius-Theorem 2.1.19 gilt:z > 0 und xi ≥ 0. Bei xi gilt großer gleich 0, da er noch Nullen
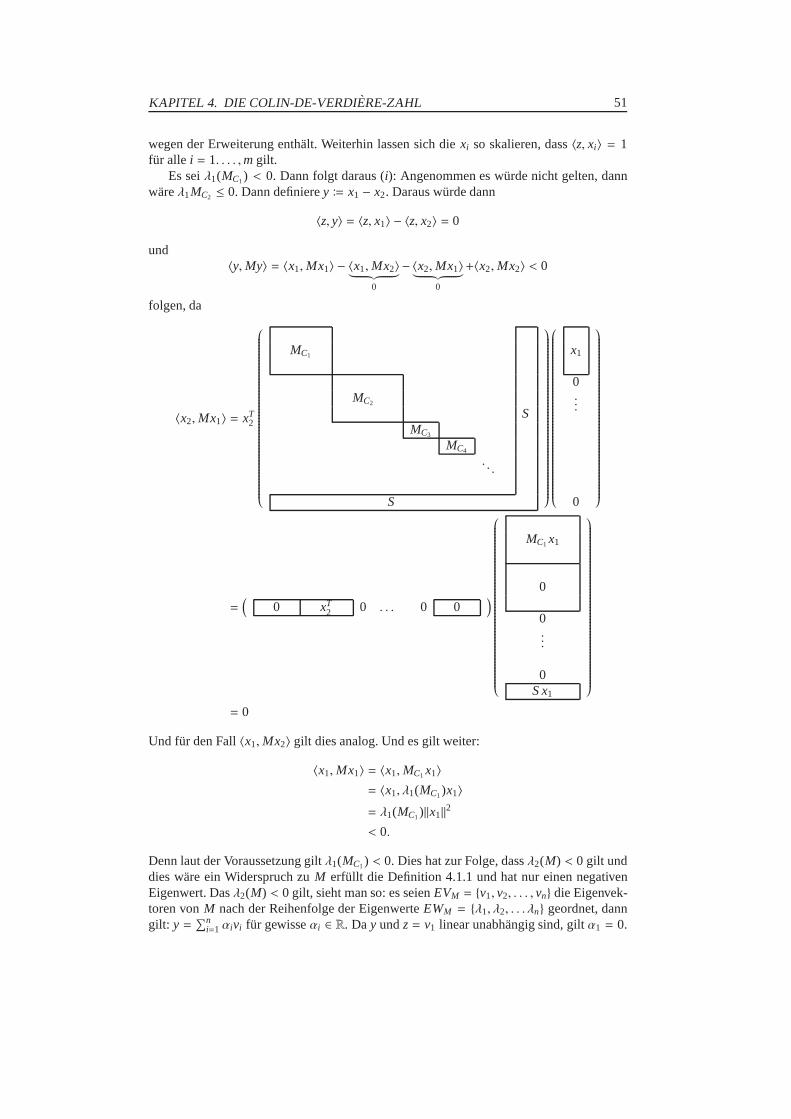
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 51
wegen der Erweiterung enthalt. Weiterhin lassen sich diexi so skalieren, dass〈z, xi〉 = 1fur alle i = 1. . . . ,mgilt.
Es seiλ1(MC1) < 0. Dann folgt daraus (i): Angenommen es wurde nicht gelten, dannwareλ1MC2 ≤ 0. Dann definierey≔ x1 − x2. Daraus wurde dann
〈z, y〉 = 〈z, x1〉 − 〈z, x2〉 = 0
und〈y,My〉 = 〈x1,Mx1〉 − 〈x1,Mx2〉
︸ ︷︷ ︸
0
− 〈x2,Mx1〉︸ ︷︷ ︸
0
+〈x2,Mx2〉 < 0
folgen, da
〈x2,Mx1〉 = xT2
MC1
MC2
SMC3
MC4
. . .
S
x1
0...
0
=(
0 xT2 0 . . . 0 0
)
MC1 x1
0
0...
0S x1
= 0
Und fur den Fall〈x1,Mx2〉 gilt dies analog. Und es gilt weiter:
〈x1,Mx1〉 = 〈x1,MC1 x1〉= 〈x1, λ1(MC1)x1〉= λ1(MC1)‖x1‖2
< 0.
Denn laut der Voraussetzung giltλ1(MC1) < 0. Dies hat zur Folge, dassλ2(M) < 0 gilt unddies ware ein Widerspruch zuM erfullt die Definition 4.1.1 und hat nur einen negativenEigenwert. Dasλ2(M) < 0 gilt, sieht man so: es seienEVM = v1, v2, . . . , vn die Eigenvek-toren vonM nach der Reihenfolge der EigenwerteEWM = λ1, λ2, . . . λn geordnet, danngilt: y =
∑ni=1 αivi fur gewisseαi ∈ R. Day undz= v1 linear unabhangig sind, giltα1 = 0.
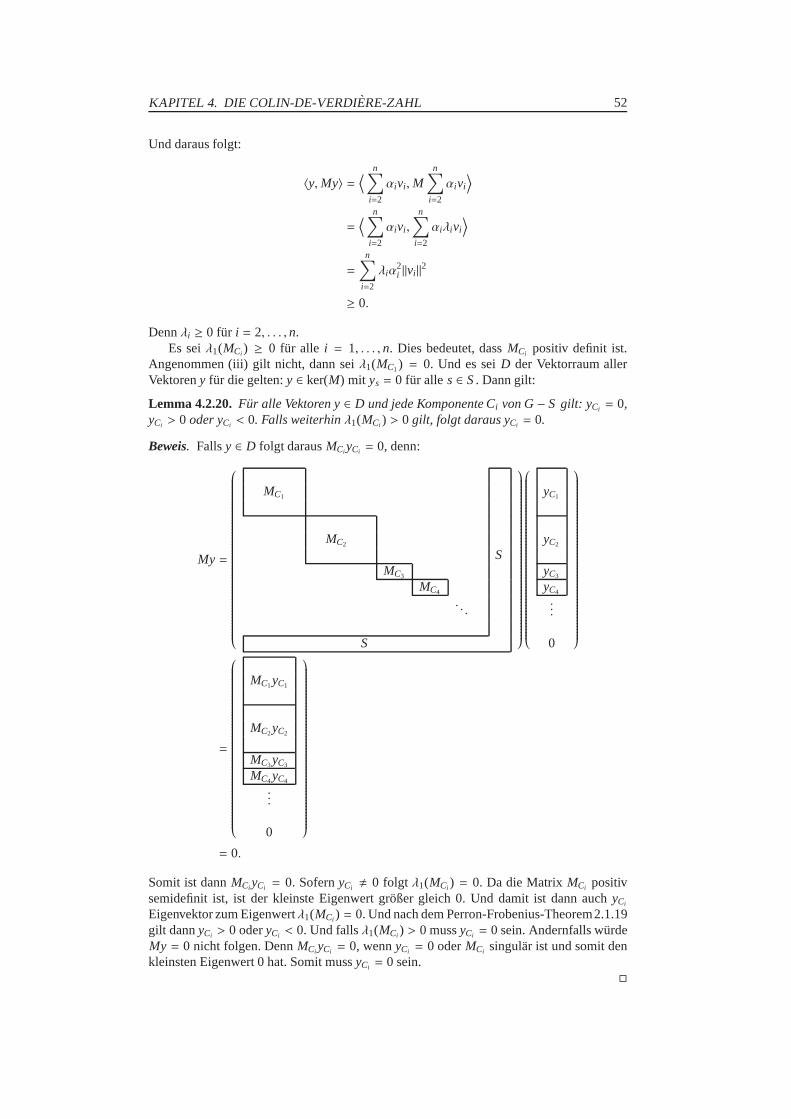
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 52
Und daraus folgt:
〈y,My〉 =⟨
n∑
i=2
αivi ,Mn∑
i=2
αivi
⟩
=⟨
n∑
i=2
αivi ,
n∑
i=2
αiλivi
⟩
=
n∑
i=2
λiα2i ‖vi‖2
≥ 0.
Dennλi ≥ 0 fur i = 2, . . . , n.Es seiλ1(MCi ) ≥ 0 fur alle i = 1, . . . , n. Dies bedeutet, dassMCi positiv definit ist.
Angenommen (iii) gilt nicht, dann seiλ1(MC1) = 0. Und es seiD der Vektorraum allerVektoreny fur die gelten:y ∈ ker(M) mit ys = 0 fur alles ∈ S. Dann gilt:
Lemma 4.2.20.Fur alle Vektoren y∈ D und jede Komponente Ci von G− S gilt: yCi = 0,yCi > 0 oder yCi < 0. Falls weiterhinλ1(MCi ) > 0 gilt, folgt daraus yCi = 0.
Beweis. Fallsy ∈ D folgt darausMCi yCi = 0, denn:
My =
MC1
MC2
SMC3
MC4
. . .
S
yC1
yC2
yC3
yC4
...
0
=
MC1yC1
MC2yC2
MC3yC3
MC4yC4
...
0
= 0.
Somit ist dannMCi yCi = 0. SofernyCi , 0 folgt λ1(MCi ) = 0. Da die MatrixMCi positivsemidefinit ist, ist der kleinste Eigenwert großer gleich 0. Und damit ist dann auchyCi
Eigenvektor zum Eigenwertλ1(MCi ) = 0. Und nach dem Perron-Frobenius-Theorem2.1.19gilt dannyCi > 0 oderyCi < 0. Und fallsλ1(MCi ) > 0 mussyCi = 0 sein. Andernfalls wurdeMy = 0 nicht folgen. DennMCi yCi = 0, wennyCi = 0 oderMCi singular ist und somit denkleinsten Eigenwert 0 hat. Somit mussyCi = 0 sein.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 53
Seim′ die Anzahl der KomponentenCi mit λ1(MCi ) = 0. Dann gilt: dim(D) ≤ m′ − 1.Denn soferny ∈ D folgt daraus, dassy eine Linearkombination ausxi ist, mit MCi xi = 0wobei dannxi durch Hinzunahme von Nullen zu einen Vektor inR|V| erweitert wurde, sieheoben. Weiterhin gilt〈z, y〉 = 0, day ∈ ker(M) undz ebenfalls ein Eigenvektor ist und nachSatz 2.1.23 folgt dann〈z, y〉 = 0. Dann betrachte man den VektorraumD′ mit
D′ =
y ∈ R|V| | y =∑m′
i=1αi xi , αi ∈ R, 〈z, y〉 = 0
.
Es gilt dannD ⊆ D′, denn fur jeden Vektory in D folgt MCi yCi = 0, siehe den Beweis vonLemma 4.2.20. Sei nuny ∈ D′, dann gilty =
∑
αi xi und〈z, y〉 = 0, daraus folgt dann:
〈z, y〉 = 〈z,∑m′
i=1αi xi〉
=∑m′
i=1αi 〈z, xi〉
︸︷︷︸
1
=∑m′
i=1αi
= 0.
Der Vektor xi wurde anfangs so skaliert, dass〈z, xi〉 = 1 gilt. Es folgt somit, dass dieBedingung:y =
∑m′i=1αi xi und 〈z, y〉 = 0 linear unabhangig sind und daraus folgt dann:
dim(D′) = m′ − 1. Und ausD ⊆ D′ folgt wiederum dim(D) ≤ m′ − 1.Sofern nunλ1(MC1) = 0 gilt, existiert ein Vektorw > 0 mit MC1w = 0 nach dem Perron-Frobenius-Theorem 2.1.19. Es seiF eine Menge mit:
F = xs | x ∈ ker(M).
Angenommen es gilt dim(F) = |S|. Und sei j ein Knoten inS der adjazent zu der Kompo-nenteC1 ist. Dann gibt es einen Vektory im Kern vonM alsoy ∈ ker(M) mit: y j = −1 undyi = 0 fur i ∈ S\ j. So ein Vektor existiert, da dim(F) = |S| angenommen wurde und somitdie MengeF, |S| linear unabhangige Vektoren beinhaltet. Daraus lasst sich durch Linear-kombination ein Vektor ermitteln fur den die genannten Eigenschaften zutreffen. Weiterseiu die j-te Spalte der MatrixM. Dann folgtuC1 = MC1yC1. Da aber nach der Definition4.1.1 M1 die MatrixM nur negative Eintrage besitzt außer vielleicht auf der Diagonalengilt: uCi ≤ 0. Da der Knotenj in S aber adjazent zu der KomponenteC1 ist, folgt darausuCi , 0. Allerdings folgt ausuC1 ≤ 0 undw > 0:
0 > 〈uC1 ,w〉= 〈MC1yC1 ,w〉= 〈yC1 ,MC1w〉= 〈yC1 , 0〉= 0.
Ein Widerspruch, somit kann dim(F) = |S| nicht gelten.Also muss dim(F) ≤ |S| − 1 gelten. Und daraus folgt dann:
m′ − 1 ≥ dim(D)
= corank(M) − dim(F)
≥ corank(M) − |S| + 1.
Also m′ ≥ corank(M) − |S| + 2. Das dim(D) = corank(M) − dim(F) gilt, folgt daraus, dassD gerade die Menge aus alleny ∈ ker(M) ist mit ys = 0 fur alle s ∈ S. Um zu sehen, dasses hochstens drei solcher Komponenten gibt mitλ1(MCi ) = 0, nehme man an es gibt viersolcher Komponenten. Und definiere
X ≔ (x1 − x2)(x3 − x4)T + (x3 − x4)(x1 − x2)T .

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 54
Dann wurdeMX = 0 folgen. Ein Widerspruch zur Eigenschaft M3 der Definition 4.1.1.Siehe dafur den Beweis vom Lemma 4.2.17. Somit gibt es hochstens drei Komponentenmit λ1(MC1) = 0 und mindestens corank(M) − |S| + 2. Und insgesamt folgt aus:
corank(M) − |S| + 2 ≤ m′ ≤ 3,
dass corank(M) ≤ |S| + 1 gilt.
4.3 Cliquensummen
Theorem 4.3.1. ([22])Es sei G= (V,E) eine Cliquensumme (siehe Definition 3.1.30) von G1 = (V1,E1) undG2 = (V2,E2). Sei S≔ V1 ∩ V2 eine Clique und t≔ maxµ(G1), µ(G2). Sofernµ(G) > tist, folgt:µ(G) = t + 1 und man kann zwei oder drei Komponenten von G−S kontrahieren,so dass die kontrahierten Knoten mit S einen Kt+3 \ formen.
Beweis. Nach dem Theorem uber die Komponenten 4.2.13 nehme an, dassG1 undG2 zu-sammenhangend seien. Es seiM eine zuG zugehorige Matrix mitµ(G) = corank(M) unddie die Definition 4.1.1 erfullt.Zunachst wird gezeigt, dass fur den kleinsten Eigenwertλ1(MC) von der UntermatrixMC
gilt: λ1(MC) ≥ 0 fur alle KomponentenC von G − S, dies entspricht den Punkt (ii ) desLemmas 4.2.19. Angenommen dies gilt nicht, also entweder (i) λ1(MC) < 0 oder (iii ) furalle KomponentenC gilt: λ1(MC) > 0. Nach Lemma 4.2.19i. folgt dann fur alle Kompo-nentenC′ vonG−S mit C , C′: λ1(MC′ ) > 0. SeiG′ ein Untergraph vonG, der vonC∪Sinduziert wird. Somit istG′ ein Untergraph vonG1 oderG2, daG − S mindestens zweiKomponenten wegen (i) enthalt undC ⊂ G1 oderC ⊂ G2 gilt. Weiter seiL die Vereinigungder anderen Komponenten:
L ≔⋃
C′,C
C′.
Dann folgt:λ1(ML) > 0. Bemerkung: fur den Beweis kann auchλ1(MC) > 0 gelten, wasden Punkt (iii ) des Lemmas 4.2.19 entspricht. Dann hat die MatrixM die Gestalt:
M =
MC UC 0UT
C MS UL
0 UTL ML
.
Weiter sei die MatrixA gleicher Dimension definiert als:
A≔
I 0 00 I −ULM−1
L0 0 I
.
Nach Sylvesters Tragheitssatz 2.1.6 hat die Matrix
AMAT =
MC UC 0UT
C MS − ULM−1L UT
L 00 0 ML
die selbe Signatur wie die MatrixM. Daraus folgt schließlich, dass die MatrixAMAT ge-nau einen negativen Eigenwert wie die MatrixM hat und beide somit den gleichen corankbesitzen. DaML die Vereinigung von KomponentenC′ist, mit der Eigenschaft das fur denkleinste Eigenwertλ1(MC′ ) > 0 gilt, folgt daraus, dassML positiv definit ist und nur posi-tive Eigenwerte besitzt. Daraus folgt dann wiederum, dass die Untermatrix
M′ ≔
(
MC UC
UTC MS − ULM−1
L UTL
)

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 55
genau einen negativen Eigenwert hat wie die MatrixM und den gleichen corank wieM.Es bleibt zu zeigen, dassM′ die Definition 4.1.1 fur den GraphenG′ erfullt. Die MatrixM′ erfullt von der Definition 4.1.1 den Punkt M2, wie eben gezeigt wurde. Der GraphG′
besteht aus der KomponenteC und der CliqueS. Fur die KomponenteC und die Adjazenzzu der CliqueS erfullt die Matrix M′ den Punkt M1, daM bereits den Punkt M1 erfullt.Es muss fur die Vollstandigkeit noch gezeigt werden, dass(MS − UM−1
L UTL )i j < 0 fur alle
i j ∈ E(S) gilt. Zunachst ist (MS)i j < 0 fur alle i, j mit i , j, daS eine Clique ist und somitjeder Knoten inS mit jedem anderen adjazent ist. DaML positiv definit ist und (ML)i j < 0fur alle i, j mit i , j folgt daraus, dass (M−1
L )i j ≥ 0 fur alle i, j gilt, nach Satz 2.1.15. Somitist (MS −UM−1
L UTL )i j < 0 fur alle i j ∈ E(S) undM′ erfullt den Punkt M1. Bleibt noch M3
zu zeigen. SeiX′ eine Matrix die die Eigenschaften vom Punkt M3 erfullt und fur die gilt:M′X′ = 0. Da der GraphG1 aus einer Clique besteht und somit die MatrixM′ auch, lasstsich furX′ schreiben:
X′ =
(
X′C YYT 0
)
.
Man definiere eine MatrixZ mit Z ≔ −YULM−1L , die Inverse vonML existiert, da sie keinen
Eigenwert 0 hat und somit den vollen Rank. Weiter definiere die Matrix X mit:
X ≔
X′C Y ZYT 0 0ZT 0 0
.
Und dann folgt aus M3 fur die MatrixM:
MX =
MC UC 0UT
C MS UL
0 UTL ML
X′C Y ZYT 0 0ZT 0 0
=
MCX′C + UCYT MCY MCZUT
CX′C + MSYT + ULZT UTCY UT
CZUT
L YT + MLZT 0 0
=
MCX′C + UCYT MCY MCZUT
CX′C + MSYT + ULM−1L UT
L YT UTCY UT
CZUT
L YT + MLZT 0 0
.
Im letzten Schritt wurdeZ ≔ −YULM−1L eingesetzt und ausgenutzt, dassMT
L = ML gilt.Sofern nunMX = 0 ist, folgt daraus, dass bereits nach der Eigenschaft M3 dieMatrixX = 0 ist. Und daraus folgt dann furM′X′:
M′X′ =
(
MC UC
UTC MS − ULM−1
L UTL
) (
X′C YYT 0
)
=
(
MCX′C + UCYT MCYUT
CX′C + MSYT − ULM−1L UT
L YT UTCY
)
.
Man erhalt eine Matrix, die bereits beiMX eine Untermatrix war, also:
MX =
M′X′ MCZUT
CZUT
L YT + MLZT 0 0
.
Und daraus folgt, dassX′ = 0 gilt und somit ist M3 auch fur die MatrixM′ erfullt. Insge-samt folgt dann:
µ(G′) ≥ corank(M′)
= corank(M)
= µ(G)
> t.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 56
S S
(a)
S
(b)
Abbildung 4.3: Die Cliquensumme aus Abbildung (b) besteht aus den beiden oberen Gra-phen mit der gemeinsamen Clique, in Abbildung (a) rot dargestellt.
Dies ergibt einen Widerspruch, dat ≔ maxµ(G1), µ(G2) undG′ einen Untergraphen vonG1 oderG2 bildet. Weiterhin folgt nach dem Theorem uber die Minormonotonie 4.2.5, dasst ≥ µ(G′) gilt. Somit erfullt der Graph vom Lemma 4.2.19 nicht (i) und (iii ) sondern es gilt:λ1(MC) ≥ 0 fur alle KomponentenC von G − S. Der Beweis teilt sich nun in zwei Teile.Im ersten Teil wird angenommen, dass die Nachbarn von mindestens einer KomponenteCausG − S nicht die Clique bilden, also N(C) , S fur mindestens einC. Und im zweitenTeil wird angenommen, dass fur alle KomponentenC ausG − S gilt, das die NachbarnSbilden, also N(C) = S fur alleC.1. Fall N(C) , S:Es gilt N(C) , S fur mindestens eine Komponente ausG − S. Dann nehme man ohneBeschrankung der Allgemeinheit an, dassC ein Untergraph vonG1 sei. Dann seiH1 der zuC∪N(C) induzierte Graph und seiH2 der zu den restlichen Komponenten undS induzierteGraph. Dann ist der GraphG ebenfalls eine Cliquensumme aus den GraphenH1 und H2
mit der CliqueS′ ≔ N(C). Da die KomponenteC ausG − S gewonnen wurde undC einUntergraph vonG1 ist, ist C auch inG1 − S enthalten. Daraus folgt, dass der induzierteGraph aus N(C) ein Untergraph vonS ist und somit ebenfalls eine Clique darstellt, dieauch inH2 enthalten ist, daS in H2 enthalten ist. Weiterhin istH2 eine CliquensummeausG1 − C undG2 mit der gemeinsamen CliqueS, daS in G2 enthalten ist und somit inG1 − C. Der Beweis erfolgt mittels Induktion nach|V| + |S|. Der Induktionsanfang startetbei 5, da der Graph fur kleinere Werte ein Pfad ist und der corank= 1 ist. Die Bedingungµ(G) > maxµ(G1), µ(G2) ware dann nicht erfullt.Induktionsanfang: Es sei|V| + |S| = 5.
Als Induktionsanfang sei das Beispiel aus Abbildung 4.3 gewahlt. Dies ist auch daseinzige Beispiel fur|V| + |S| = 5, denn ware|S| = 2 durfte der GraphG nur noch auseinen weitere Knotenv < S bestehen. Dann istv ∈ V und S ⊂ V und |V| + |S| = 5. Indiesem Fall ist der Graph wieder ein Pfad und die Bedingungµ(G) > maxµ(G1), µ(G2)ware nicht erfullt. Bleibt also nur noch der Fall|S| = 1. Fur diesen Fall bietet nur dasBeispiel aus Abbildung 4.3 einen Induktionsanfang. Dann gilt fur den GraphenG1 undG2:µ(G1) = µ(G2) = 1, daG1 undG2 aus Pfaden bestehen und fur Pfade gilt, dass der corankgleich 1 ist. Siehe Satz 4.1.5. Es bleibt zu zeigen, dass furG gilt: µ(G) = 2. Es seiMdefiniert durch:
M ≔
0 0 −1 00 0 −1 0−1 −1 2 −10 0 −1 0
.
Dann erfullt die MatrixM den Punkt M1 der Definition 4.1.1. Das charakteristische Poly-nom lautet dann:
det(M − λI ) = λ4 − 2λ3 − 3λ2.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 57
Mit der entsprechenden Nullstellenmenge:
EWM = −1, 0, 0, 3.
Somit erfullt die MatrixM auch den Punkt M2, es gibt genau einen negativen Eigenwertder Vielfachheit eins. Weiterhin ist der corank(M) = 2. Es bleibt zu zeigen, dassM denPunkt M3 erfullt. Es seiX eine Matrix, die die Eigenschaften aus M3 erfullt. Dann hatXdie Gestalt:
X =
0 a 0 ba 0 0 c0 0 0 0b c 0 0
.
Und dann folgt ausMX:
MX =
0 0 0 00 0 0 0
−a− b −a− c 0 −b− c0 0 0 0
.
Aus−a− b = 0 und−a− c = 0 folgt: b = c. Und aus−b− c = 0 undb = c folgt b = c = 0und damit aucha = 0. Somit muss die MatrixX gleich der Nullmatrix sein und der PunktM3 ist erfullt und der Graph bildet einenK4 \ somit ist der Induktionsanfang wahr.Induktionsvoraussetzung: Die Aussage sei fur|V| + |S| = k mit k ≥ 5 wahr.Induktionsschritt: Es bleibt zu zeigen, dass unter der Induktionsvoraussetzung, die Aussageauch fur|V|+ |S| = k+1 wahr ist. Man betrachte den ersten Unterfall, es gilt:µ(G) = µ(H2).1.1. Fallµ(G) = µ(H2):Es gilt bereitsµ(G) > t ≔ maxµ(G1), µ(G2), daG1 − S ein Untergraph vonG1 ist undnach dem Theorem uber die Minormonotonie 4.2.5 folgt schließlich
t ≔ maxµ(G1), µ(G2) ≥ t′ ≔ maxµ(G1 −C), µ(G2).
Somit gilt dannµ(H2) = µ(G) > maxµ(G1 −C), µ(G2). Dann folgt daraus:
µ(H2) > t′ ≔ maxµ(G1 −C), µ(G2).
Weiter ist|V(H2)| + |S| < |V(G)| + |S| = k+ 1.
Nach Induktionsvoraussetzung gilt damit:µ(H2) = t′ +1 und daraus folgt dann:t < µ(G) =µ(H2) = t′ + 1 ≤ t + 1 und dies impliziertt′ = t alsoµ(G) = t + 1. Weiterhin gibt es fur dieCliqueS, wie im folgenden gezeigt wird, nur zwei Moglichkeiten entweder es gilt:|S| =t + 1 oder|S| = t. Denn nach Lemma 4.2.19ii . gibt es mindestens corank(M) − |S| + 2 undhochstens 3 KomponentenCi fur die gelten:λ1(Ci) = 0. Da es mindestens eine Komponentegeben muss, da sonstiii . gilt, folgt:
1 ≤ corank(M) − |S| + 2 = t + 1− |S| + 2.
Und daraus|S| ≤ t+2. Da die CliqueS in G1 undG2 enthalten ist, folgt nach dem Theoremuber die Minormonotonie 4.2.5µ(G1) ≥ µ(S) = t + 1, sofern|S| = t + 2 ergibt dies einenWiderspruch, da bereitst = maxµ(G1), µ(G2) gilt. Somit kann nur|S| ≤ t + 1 gelten.Weiterhin muss aus Lemma 4.2.19ii . folgen, dass gilt:
corank(M) − |S| + 2 = t + 1− |S| + 2 ≤ 3.
Und man erhaltt ≤ |S|. Somit gibt es fur die CliqueS nur zwei Moglichkeiten entweder esgilt: |S| = t + 1 oder|S| = t.1.1.a. Fall|S| = t + 1:
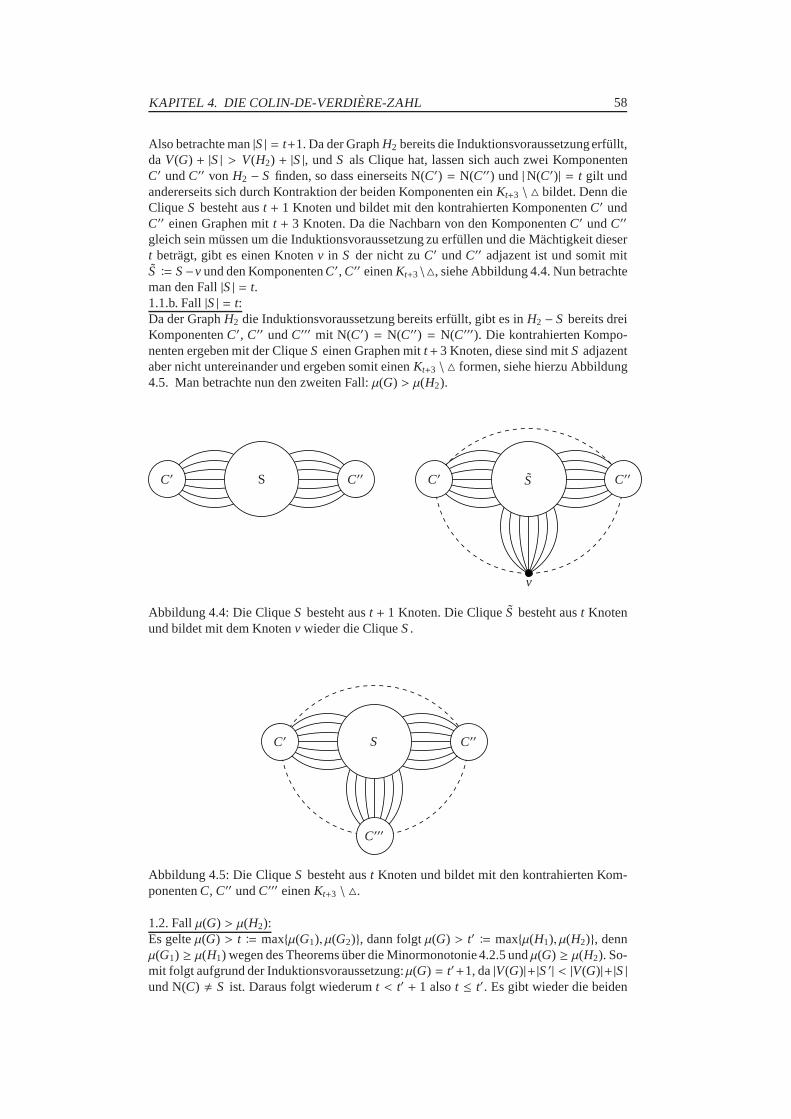
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 58
Also betrachte man|S| = t+1. Da der GraphH2 bereits die Induktionsvoraussetzungerfullt,da V(G) + |S| > V(H2) + |S|, undS als Clique hat, lassen sich auch zwei KomponentenC′ undC′′ von H2 − S finden, so dass einerseits N(C′) = N(C′′) und |N(C′)| = t gilt undandererseits sich durch Kontraktion der beiden Komponenten einKt+3 \ bildet. Denn dieCliqueS besteht aust + 1 Knoten und bildet mit den kontrahierten KomponentenC′ undC′′ einen Graphen mitt + 3 Knoten. Da die Nachbarn von den KomponentenC′ undC′′
gleich sein mussen um die Induktionsvoraussetzung zu erf¨ullen und die Machtigkeit diesert betragt, gibt es einen Knotenv in S der nicht zuC′ undC′′ adjazent ist und somit mitS ≔ S−v und den KomponentenC′, C′′ einenKt+3\, siehe Abbildung 4.4. Nun betrachteman den Fall|S| = t.1.1.b. Fall|S| = t:Da der GraphH2 die Induktionsvoraussetzung bereits erfullt, gibt es inH2 − S bereits dreiKomponentenC′, C′′ undC′′′ mit N(C′) = N(C′′) = N(C′′′). Die kontrahierten Kompo-nenten ergeben mit der CliqueS einen Graphen mitt+3 Knoten, diese sind mitS adjazentaber nicht untereinander und ergeben somit einenKt+3 \ formen, siehe hierzu Abbildung4.5. Man betrachte nun den zweiten Fall:µ(G) > µ(H2).
C′ S C′′ C′ S C′′
v
Abbildung 4.4: Die CliqueS besteht aust + 1 Knoten. Die CliqueS besteht aust Knotenund bildet mit dem Knotenv wieder die CliqueS.
C′ S C′′
C′′′
Abbildung 4.5: Die CliqueS besteht aust Knoten und bildet mit den kontrahierten Kom-ponentenC, C′′ undC′′′ einenKt+3 \ .
1.2. Fallµ(G) > µ(H2):Es gelteµ(G) > t ≔ maxµ(G1), µ(G2), dann folgtµ(G) > t′ ≔ maxµ(H1), µ(H2), dennµ(G1) ≥ µ(H1) wegen des Theorems uber die Minormonotonie 4.2.5 undµ(G) ≥ µ(H2). So-mit folgt aufgrund der Induktionsvoraussetzung:µ(G) = t′+1, da|V(G)|+ |S′| < |V(G)|+ |S|und N(C) , S ist. Daraus folgt wiederumt < t′ + 1 alsot ≤ t′. Es gibt wieder die beiden

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 59
Falle|S′| = t′ oder|S′| = t′+1. Daraus folgt nun|S′| < |S| ≤ t+1 ≤ t′+1. Die Ungleichung|S| ≤ t + 1 folgt, daµ(G) > t vorausgesetzt wurde. Insgesamt impliziert dies dann|S′| = t′
und somit aucht = t′. Es gilt:µ(G) = t + 1. Weiterhin hatG − S′ hat 3 KomponentenC′,C′′ undC′′′ mit N(C′) = N(C′′) = N(C′′′) = S′. Daraus folgt: Es gibt zwei KomponentenC′ undC′′ in G−S mit N(C′) = N(C′′) = S′ und man kann diese kontrahieren, so dass einKt+3 \ entsteht. Es gilt|S′| + 1 = |S|, da |S′| = t′ und |S| ≤ t′ + 1 aber|S′| < |S| damitgibt es einen Knotenv in S der mitC′ undC′′ kontrahiert einenKt+3 \ bildet, siehe dazuwieder Abbildung 4.4.2. Fall N(C) = S:Fur alle Komponenten ausC ausG − S gilt N(C) = S. Des Weiteren seiµ(G) > t ≔maxµ(G1), µ(G2) oder auchµ(G)−1 ≥ t. Falls|S| > t ist, wurde der GraphG1 mindestenseinenKt+1 enthalten. Weiterhin ist die KomponenteC in G1 enthalten. Diese Komponentehat den NachbarnS, da N(C) = S angenommen wurde. Wurde manC zu einem Knotenextrahieren, gabe es inG1 einenKt+2. Und aus dem Theorem uber die Minormonotonie4.2.5 folgt dann:µ(G1) ≥ µ(Kt+2) = t + 1, was der Bedingungt = maxµ(G1), µ(G2) wi-derspricht. Folglich gilt|S| ≤ t. Da µ(G) > µ(G1) gilt, folgt daraus auch:µ(G) > |S|, daes sonst, wie oben, zu einem Widerspruch kommen wurde. Und die Bedingungµ(G) > |S|ziehtµ(G) − |S| + 2 ≥ 3 nach sich. Und nach dem Lemma 4.2.19ii . folgt allerdings:
corank(M) − |S| + 2 = µ(G) − |S| + 2 ≤ 3,
alsoµ(G) − 1 ≤ |S|. Dies ergibt dann:
t ≥ |S| ≥ µ(G) − 1 ≥ t.
Damit folgt µ(G) = t + 1. Nach dem Lemma 4.2.19ii . gibt es drei KomponentenC′, C′′
undC′′′ fur die N(C′) = N(C′′) = N(C′′′) = S gilt. Es gibt mindestens corank(M) − |S|+ 2und hochstens 3 Komponenten mit der Eigenschaftλ1(C) = 0. Es galt bereits corank(M) −|S|+ 2 ≥ 3 und somit gibt es genau drei solcher Komponenten. Und weiterhin bildetS unddie kontrahierten KomponentenC′, C′′ undC′′′ einenKt+2 \ , siehe Abbildung 4.5.
Korollar 4.3.2. Es sei G= (V,E) eine Cliquensumme von den beiden Graphen G1 =
(V1,E1) und G2 = (V2,E2) mit der gemeinsamen Clique S= V1 ∩ V2. Falls nun gilt:µ(G1) , µ(G2) und|S| < µ(G1) und G−S hat hochstens eine Komponente C mitN(C) = S ,folgt daraus:
µ(G) = maxµ(G1), µ(G2).
Beweis. Angenommen es wurde dannµ(G) > t ≔ maxµ(G1), µ(G2 folgen, dann wurdedaraus wiederum nach Theorem 4.3.1 folgen, dass man zwei oder drei Komponenten vonG−S kontrahieren konnte, so dass die kontrahierten Knoten mitS einenKt+3\ bilden. Oh-ne Beschrankung der Allgemeinheit seiµ(G1) > µ(G2), also folgt dannt = µ(G1). Und ausµ(G1) > |S| folgt dannt − 1 ≥ |S|. Gebe es nun eine KomponenteC mit N(C) = S, wurdedie kontrahierte Komponente mit der CliqueS hochstens einenKt formen. Wurde die Aus-sage aus Theorem 4.3.1 gelten, konnte man mit zwei weiterenkontrahierten Komponentenund der CliqueS und der kontrahierten Komponente einenKt+3 \ formen. Allerdingshatte die CliqueS mit den kontrahierten Komponenten dann hochstenst + 2 Knoten. EinWiderspruch, somit mussµ(G) = maxµ(G1), µ(G2) folgen.
Satz 4.3.3.Es sei Kp,q mit p≤ q der vollstandige bipartite Graph, dann gilt:
µ(Kp,q) =
p, wenn q≤ 2,
p+ 1, wenn q≥ 3.
Beweis. Fur den Beweis werden drei Falle unterschieden. Der ersteFall ist q ≤ 2, derzweite Fallq = 3 und der letzte Fall lautetq > 3 Man betrachte den ersten Fall.1. Fallq ≤ 2:
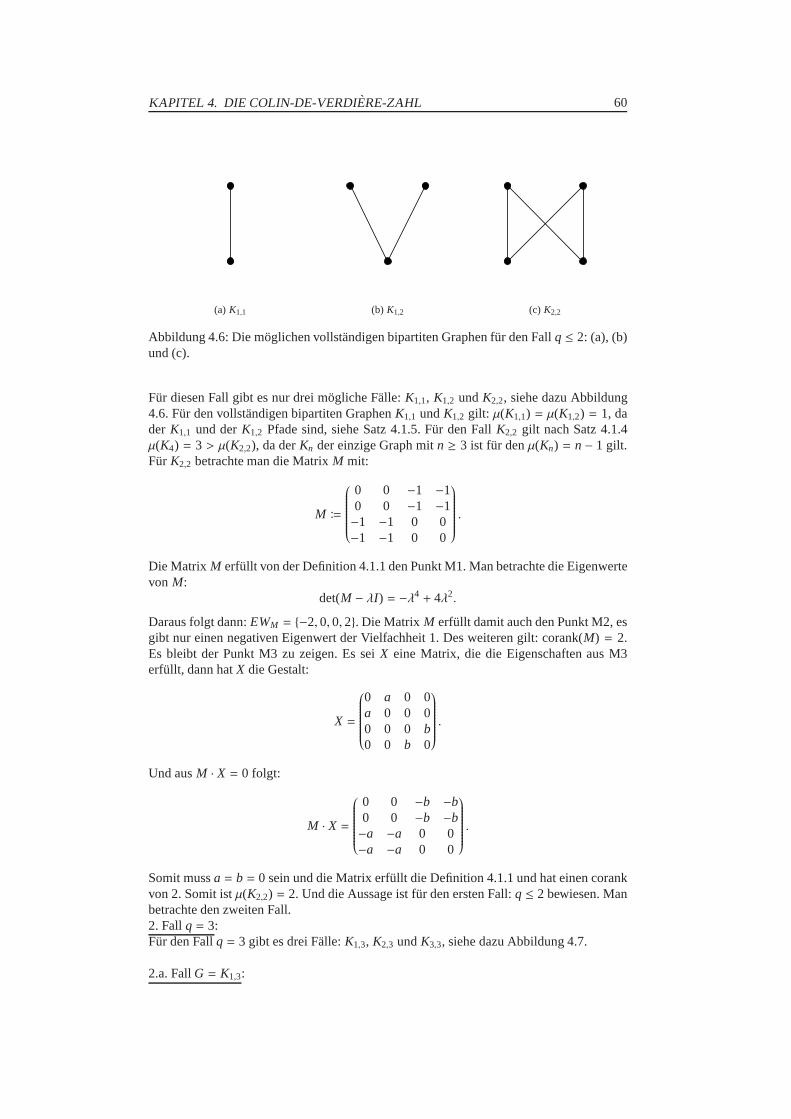
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 60
(a) K1,1 (b) K1,2 (c) K2,2
Abbildung 4.6: Die moglichen vollstandigen bipartiten Graphen fur den Fallq ≤ 2: (a), (b)und (c).
Fur diesen Fall gibt es nur drei mogliche Falle:K1,1, K1,2 undK2,2, siehe dazu Abbildung4.6. Fur den vollstandigen bipartiten GraphenK1,1 undK1,2 gilt: µ(K1,1) = µ(K1,2) = 1, dader K1,1 und derK1,2 Pfade sind, siehe Satz 4.1.5. Fur den FallK2,2 gilt nach Satz 4.1.4µ(K4) = 3 > µ(K2,2), da derKn der einzige Graph mitn ≥ 3 ist fur denµ(Kn) = n− 1 gilt.Fur K2,2 betrachte man die MatrixM mit:
M ≔
0 0 −1 −10 0 −1 −1−1 −1 0 0−1 −1 0 0
.
Die Matrix M erfullt von der Definition 4.1.1 den Punkt M1. Man betrachtedie Eigenwertevon M:
det(M − λI ) = −λ4 + 4λ2.
Daraus folgt dann:EWM = −2, 0, 0, 2. Die Matrix M erfullt damit auch den Punkt M2, esgibt nur einen negativen Eigenwert der Vielfachheit 1. Des weiteren gilt: corank(M) = 2.Es bleibt der Punkt M3 zu zeigen. Es seiX eine Matrix, die die Eigenschaften aus M3erfullt, dann hatX die Gestalt:
X =
0 a 0 0a 0 0 00 0 0 b0 0 b 0
.
Und ausM · X = 0 folgt:
M · X =
0 0 −b −b0 0 −b −b−a −a 0 0−a −a 0 0
.
Somit mussa = b = 0 sein und die Matrix erfullt die Definition 4.1.1 und hat einen corankvon 2. Somit istµ(K2,2) = 2. Und die Aussage ist fur den ersten Fall:q ≤ 2 bewiesen. Manbetrachte den zweiten Fall.2. Fallq = 3:Fur den Fallq = 3 gibt es drei Falle:K1,3, K2,3 undK3,3, siehe dazu Abbildung 4.7.
2.a. FallG = K1,3:

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 61
(a) K1,3 (b) K2,3 (c) K3,3
Abbildung 4.7: Die moglichen vollstandigen bipartiten Graphen fur den Fallq = 3: (a), (b)und (c).
Man betrachte den vollstandigen bipartiten GraphenK1,3, dann gilt:µ(K4) > µ(K1,3), also2 ≥ µ(K1,3), siehe oben und Satz 4.1.4. Man betrachte die MatrixM mit:
M ≔
0 0 0 −10 0 0 −10 0 0 −1−1 −1 −1 0
.
Die Matrix M erfullt den Punkt M1 der Definition 4.1.1. Fur die Eigenwerte gilt nach Satz2.1.25:
det(M − λI ) = λ4 − 3λ2.
Daraus folgt:EWM = −√
3, 0, 0,√
3. Die Matrix M erfullt somit auch den Punkt M2, esgibt nur einen negativen Eigenwert der Vielfachheit 1. Des weiteren gilt: corank(M) = 2.Es bleibt der Punkt M3 zu zeigen. Es seiX eine Matrix, die die Eigenschaften aus M3erfullt, dann hatX die Gestalt:
X =
0 a b 0a 0 c 0b c 0 00 0 0 0
.
Und ausM · X = 0 folgt:
M · X =
0 0 0 00 0 0 00 0 0 0
−a− b −a− c −b− c 0
.
Aus−a− b = 0 und−a− c = 0 folgt: b = c. Aus b = c und−b − c = 0 folgt b = c = 0und damit aucha = 0 und die Matrix erfullt die Definition 4.1.1 und hat einen corank von2. Somit istµ(K1,3) = 1+ 1 = 2.
2.b. FallG = K2,3:Man betrachte den vollstandigen bipartiten GraphenK2,3, dann gilt:µ(K5) > µ(K2,3), also3 ≥ µ(K2,3), siehe oben und Satz 4.1.4. Man betrachte die MatrixM mit:
M ≔
0 0 0 −1 −10 0 0 −1 −10 0 0 −1 −1−1 −1 −1 0 0−1 −1 −1 0 0
.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 62
Die Matrix M erfullt den Punkt M1 der Definition 4.1.1. Fur die Eigenwerte gilt nach Satz2.1.25:
det(M − λI ) = −λ5 + 6λ3.
Daraus folgt:EWM = −√
6, 0, 0, 0,√
6. Die Matrix M erfullt somit auch den Punkt M2, esgibt nur einen negativen Eigenwert der Vielfachheit 1. Des weiteren gilt: corank(M) = 3.Es bleibt der Punkt M3 zu zeigen. Es seiX eine Matrix, die die Eigenschaften aus M3erfullt, dann hatX die Gestalt:
X =
0 a b 0 0a 0 c 0 0b c 0 0 00 0 0 0 d0 0 0 d 0
.
Und ausM · X = 0 folgt:
M · X =
0 0 0 −d −d0 0 0 −d −d0 0 0 −d −d
−a− b −a− c −b− c 0 0−a− b −a− c −b− c 0 0
.
Somit mussd = 0 sein und aus−a − b = 0 und−a− c = 0 folgt: b = c. Aus b = c und−b− c = 0 folgt b = c = 0 und damit aucha = 0 und die Matrix erfullt die Definition 4.1.1und hat einen corank von 3. Somit istµ(K2,3) = 2+ 1 = 3.
2.c. FallG = K3,3:Man betrachte nun den vollstandigen bipartiten GraphenK3,3, dann gilt:µ(K6) > µ(K3,3),also 4≥ µ(K2,3), siehe oben und Satz 4.1.4. Man betrachte die MatrixM mit:
M ≔
0 0 0 −1 −1 −10 0 0 −1 −1 −10 0 0 −1 −1 −1−1 −1 −1 0 0 0−1 −1 −1 0 0 0−1 −1 −1 0 0 0
.
Die Matrix M erfullt den Punkt M1 der Definition 4.1.1. Fur die Eigenwerte gilt nach Satz2.1.25:
det(M − λI ) = λ6 − 9λ4.
Daraus folgt:EWM = −3, 0, 0, 0, 0, 3. Die Matrix M erfullt somit auch den Punkt M2, esgibt nur einen negativen Eigenwert der Vielfachheit 1. Des weiteren gilt: corank(M) = 4.Es bleibt der Punkt M3 zu zeigen. Es seiX eine Matrix, die die Eigenschaften aus M3erfullt, dann hatX die Gestalt:
X =
0 a b 0 0 0a 0 c 0 0 0b c 0 0 0 00 0 0 0 d e0 0 0 d 0 f0 0 0 e f 0
.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 63
Und ausM · X = 0 folgt:
M · X =
0 0 0 −d− e −d− f −e− f0 0 0 −d− e −d− f −e− f0 0 0 −d− e −d− f −e− f
−a− b −a− c −b− c 0 0 0−a− b −a− c −b− c 0 0 0−a− b −a− c −b− c 0 0 0
.
Aus−a− b = 0 und−a− c = 0 folgt: b = c. Ausb = c und−b− c = 0 folgt b = c = 0 unddamit aucha = 0 und furd, e und f analog und die Matrix erfullt die Definition 4.1.1 undhat einen corank von 4. Somit istµ(K3,3) = 3+ 1 = 4. Und die Aussage ist fur den zweitenFall: q = 3 bewiesen. Man betrachte nun den letzten Fall.3. Fallq > 3:Im ersten Schritt des Beweises wirdµ(Kp.q) ≤ p + 1 gezeigt und im zweiten Schritt wirddurch Induktionµ(Kp.q) ≥ p+1 bewiesen woraus schließlich die Gleichheitµ(Kp.q) = p+1folgt.3.a. Fallq > 3 undµ(Kp.q) ≤ p+ 1 :Fur p > 2 ist der vollstandige bipartite GraphKp,q ein Untergraph aus der Cliquensum-me mit den Kopien des vollstandigen GraphenKp+1 und der CliqueS = Kp. Es seiG1 derGraph, der aus der Cliquensumme von den vollstandigen GraphenKp+1 undKp+1 sowie derCliqueS besteht. Dann gilt: maxµ(Kp+1), µ(Kp+1) = p und es folgt:µ(G1) ≤ p+1. Fur denGraphenG1 gilt aufgrund des Theorems uber die Minormonotonie 4.2.5µ(G1) ≥ p und auf-grund des Theorems 4.3.1µ(G1) ≤ p+1. Also kann nurµ(G1) = p oderµ(G1) = p+1 gel-ten. Nun betrachte man den GraphenG2, der aus der Cliquensumme von den vollstandigenGraphenKp+1 undG1 mit der CliqueKp entsteht. Angenommen es giltµ(G1) = p, dannfolgt aufgrund der gleichen Argumentation wie oben:µ(G2) ≤ p+1. Gelte nunµ(G1) = p+1folgt wegen:µ(G1) , µ(Kp+1) und |S| = |K2| = p < µ(G1) = p + 1 undG2 − S enthalthochstens eine KomponenteC mit N(C) = S, denn der GraphG2 besteht aus vollstandigenGraphenKp+1 somit gibt es durch entfernen der Clique immer noch mindestens einen Kno-ten, der mit allen anderen verbunden ist sowie der Clique. Also kannG2−S hochstens eineKomponenteC enthalten mit N(C) = S, somit gilt:µ(G2) = maxµ(G1), µ(Kp+1) = p+ 1aufgrund des Korollars 4.3.2. Daraus folgtµ(G2) ≤ p+1. Die Argumentation lasst sich nunq mal wiederholen, so dass fur den GraphenGq: µ(Gq) ≤ p+ 1 gilt. Des Weiteren bestehtder GraphGq ausq+ p Knoten. Und nach Konstruktion ist der vollstandig bipartite GraphKp,q ein Minorgraph des GraphenGq fur alleq ≥ 3 undp ≥ 1. Das Konstruktionsverfahrenwurde in Abbildung 4.8 fur den Fallq = 4 undp = 3 dargestellt.
Es wurde gezeigt, dass fur den vollstandigen bipartiten GraphenKp,q fur alle q ≥ 3bereitsµ(Kp,q) ≤ p + 1 gilt. Im nachsten Schritt wird gezeigt, dass fur alleq ≥ 3 gilt:µ(Kp,q) ≥ p+ 1. Dies soll mit vollstandiger Induktion nachq gezeigt werden.3.b. Fallq > 3 undµ(Kp.q) ≥ p+ 1 :Induktionsanfang: Es seiq = 3. Der Fallq = 3 wurde bereits oben behandelt und es galt:µ(Kp,3) = p+ 1 ≥ p+ 1. Eine wahre Aussage.Induktionsvoraussetzung: Die Aussage sei furq ≥ 3 wahr.Induktionsschritt: Es bleibt zu zeigen, dass unter der Induktionsvoraussetzung,die Aussageauch furq+ 1 wahr ist. Aus dem vollstandigen GraphenKp,q+1 entsteht durch Kontraktionzweier Knoten aus den disjunkten Eckenmengen ein neuer Graph G, siehe dazu Abbildung4.9. Da der GraphG ein Minorgraph des GraphenKp,q+1 ist, gilt aufgrund des Theoremsuber die Minormonotonie 4.2.5:µ(Kp,q+1) ≥ µ(G). Der kontrahierte Knotenv ist in G zuallen anderen Knoten adjazent. Wird dieser Knoten entfernt, entsteht der GraphKp−1,q ausG heraus. Und es gilt nach dem Theorem uber das Entfernen von Knoten 4.2.16:µ(G) =µ(G− v) + 1 = µ(Kp−1,q) + 1. Nach Induktionsvoraussetzung folgt dann:
µ(G) = (p− 1+ 1)+ 1 = p+ 1

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 64
(a) K3+1 (b) K3+1 (c) G1
(d) G1 (e) K3+1 (f) G2
Abbildung 4.8: Der GraphG1 aus (c) entsteht durch die beiden vollstandigen GraphenK4
aus (a) und (b) als Cliquensumme mit der gemeinsamen CliqueK3 die hier rot dargestelltist. Im nachsten Schritt entsteht der GraphG2 aus (f) als Cliquensumme von den GraphenG1 aus (d) undK4 aus (e).
und damit folgt dann mitµ(Kp,q+1) ≥ p+ 1. Insgesamt folgt daraus dann:µ(Kp,q) = p+ 1fur alleq ≥ 3.
4.4 Unterteilung undY-Transformation
Theorem 4.4.1.Es sei G ein Graph. Weiter sei G′ ein Graph, der durch Unterteilung einerKante aus G entstanden ist. Dann gilt:
(a) µ(G) ≤ µ(G′).
(b) Fallsµ(G) ≥ 3 gilt, folgt µ(G) = µ(G′).
Beweis. Teil (a) folgt aus Theorem 4.2.5 uber die Minormonotonie, daG ein Minor vonG′ ist.Teil (b): SeiG der Graph der aus einer Cliquensumme aus dem ursprunglichen GraphenGund dem vollstandigen GraphenK3 mit gemeinsamer CliqueS = K2 entstanden ist. Fallsµ(G) ≥ 3 gilt, folgt µ(G) ≥ 3 > µ(K3) = 2. Weiterhin giltµ(G) > |S| = 2. Falls nun diezu unterteilende Kante eine Brucke ist, gibt es hochstenseine KomponenteC ausG − S,so dass N(C) = S ist, namlich den Knoten aus den GraphenK3. Siehe dazu Abbildung4.10. Dann folgt aus Korollar 4.3.2µ(G) = µ(G) und aus Theorem 4.2.5 uber die Minor-monotonieµ(G) ≥ µ(G′) ≥ µ(G). Mit µ(G) = µ(G), folgt dann die Behauptung. Falls nundie zu unterteilende Kante keine Brucke ist, gibt es zwei F¨alle fur den GraphenG. FallsG = maxµ(G), µ(K3) folgt die Behauptung, wie oben aus Theorem 4.2.5 uber die Mi-normonotonie. Angenommen es giltµ(G) > t ≔ maxµ(G), µ(K3), dann folgt wegen desTheorems 4.3.1 uber Cliquensummen, dassµ(G) = t + 1 ist und das man zwei oder drei

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 65
(a) Kp,q+1 (b) G
Abbildung 4.9: Im vollstandig bipartite GraphKp,q+1 aus (a) werden die beiden roten Kno-ten kontrahiert und der entstehende Graph istG aus (b).
S
(a)G
S
(b) K3
S
(c) G
Abbildung 4.10: Der GraphG aus (c) ist eine Cliquensumme aus den ursprunglichen Gra-phenG aus (c) und dem vollstandigen GraphenK3 aus (b) mit der CliqueS, die rot darge-stellt sind.
Komponenten ausG− S kontrahieren kann, so dass mit der CliqueS ein Kt+3 \ entsteht.Da µ(G) ≥ 3 nach Voraussetzung gilt, folgtt ≥ 3. Fur die CliqueS gilt nach Annahme|S| = 2 somit brauchte man mindestens 4 Komponenten um mindestens einK6\ entstehenzu lassen. Ein Widerspruch, da maximal drei Komponenten benotigt werden. Somit mussµ(G) = µ(G) und die Behauptung folgt mit Theorem 4.3.1 uber die Cliquensummen.
Theorem 4.4.2. Es sei G ein Graph und G′ der durchY-Transformation entstandeneGraph aus G. Dann gilt, [4]:
(a) µ(G) ≤ µ(G′).
(b) Fallsµ(G) ≥ 4 gilt, folgt µ(G) = µ(G′).
Beweis. Teil (a): Es seiM eine Matrix, die die Eigenschaften aus Definition 4.1.1 furdenGraphenG erfullt und fur die gilt: corank(M) = µ(G). Weiterhin seien 1, 2 und 3 dieKnoten eines Dreiecks, welches dieY-Transformation erfahrt undn sei die Anzahl derKnoten des GraphsG. Dann schreibe die MatrixM als:
M =
(
A BT
B C
)
,
wobeiA eine 3x3-Matrix ist. Es wird gezeigt, dass ein positiver Vektor b ∈ R3 existiert, so

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 66
dassD ≔ A+ bbT eine 3x3-Diagonalmatrix ist. Denn sei:
D = A+ bbT
=
a11 a12 a13
a12 a22 a23
a13 a23 a33
+
b1
b2
b3
(
b1 b2 b3
)
=
a11+ b21 a12+ b1b2 a13+ b1b3
a12+ b1b2 a22+ b22 a23+ b2b3
a13+ b1b3 a23+ b2b3 a33+ b23
.
Aus den Bedingungen:a12 + b1b2 = 0, a13 + b1b3 = 0 unda23 + b2b3 = 0 folgt dann:b1 = −a12/b2 undb2 = −a23/b3. Und weiterb3 = −a13/b1 und mitb1 folgt: b3 = b2a13/a12
und mitb2 folgt: b23 = −a13a23/a12 und damitb3 =
√−a13a23/a12. Da 1, 2 und 3 die Knoten
sind auf denen dieY-Transformation angewendet wird, gilt:a12, a13, a23 < 0 und somitexistiert solch eine Vektorb ∈ R3.Sei 0 der neue Knoten inG′ es seiL eine (n+ 1)× (n+ 1)-Matrix definiert durch:
L ≔
1 0 0−b I 00 0 I
.
Und dann definiere die (n+ 1)× (n+ 1)-Matrix M′ durch:
M′ ≔ L
(
1 00 M
)
LT =
1 −bT 0−b D BT
0 B C
.
Es wird nun gezeigt, dassM′ eine zu dem GraphenG′ zugehorige Matrix ist. Die MatrixM′ erfullt den Punkt M1 der Definition 4.1.1, da die MatrixD eine Diagonalmatrix ist und0 den neuen Knoten darstellt, der mit den Knoten 1, 2 und 3 adjazent ist, siehe Abbildung4.11. Aufgrund von Sylvesters Tragheitssatz 2.1.6 folgt:corank(M) = corank(M′) und
1 2
3
(a)G
1 2
3
0
(b) G′
Abbildung 4.11: Der GraphG′ aus (b) entsteht durchY-Transformation der Knoten 1,2und 3 aus dem GraphenG aus (a). Der neue Knoten 0 ist dann zu den Knoten 1,2 und 3adjazent und die Knoten 1,2 und 3 sind untereinander nicht mehr adjazent.
somit auchµ(G′) ≥ µ(G). Wegen des Perron-Frobenius-Theorems 2.1.19 folgt, dassderPunkt M2 ebenfalls erfullt ist, da alle Matrixeintrage kleiner gleich 0 sind. Es bleibt zuzeigen, dassM′ auch den Punkt M3 erfullt. Angenommen es existiert eine Matrix X mitden Eigenschaften aus M3, fur dieX , 0 undM′X = 0 gilt. Dann lasst sichX schreibenals:
X =
0 0 vT
0 Y ZT
v Z W
.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 67
Da die MatrixL invertierbar ist, folgt aus der GleichungM′X = 0, dass
0 =
(
1 00 M
)
LT X =
0 −bTY vT − bTZT
BTv AY+ BTZ AZT + BTWCv BY+CZ BZT +CW
.
Aus−bTY = 0 folgt:
−bTY = −(
b1 b2 b3
)
0 y12 y13
y12 0 y23
y13 y23 0
= −(
b2y12 + b3y13 b1y12+ b3y23 b1y12 + b2y23
)
= 0.
Aus der zweiten und dritten Spalte folgt fury23:
y23 = −b1
b3y12 = −
b1
b2y13.
Aus der ersten Spalte folgt fury12:
y12 = −b3
b2y13.
Daraus folgt dann:
−b1
b2y13 =
b1
b2y13.
Insgesamt folgt dann:Y = 0. Daraus folgt dann fur die MatrixX:
X =
0 0 vT
0 0 ZT
v Z W
und
M′X =
0 0 vT − bTZT
BTv BTZ AZT + BTWCv CZ BZT +CW
.
SeiX′ die Untermatrix vonX:
X′ ≔
(
0 ZT
Z W
)
.
Dann folgt ausMX′:
MX′ =
(
A BT
B C
) (
0 ZT
Z W
)
=
(
BTZ AZT + BTWCZ BZT +CW
)
.
Da die MatrixM bereits den Punkt M3 fur den GraphenG erfullt, folgt auchX′ = 0 alsoZ =W = 0. Daraus folgt dann furM′X:
M′X =
0 0 vT
BTv 0 0Cv 0 0
.
Dann folgt vT = 0 und somit istX = 0 und die MatrixM′ erfullt den Punkt M3 furden GraphenG′. Damit erfullt die MatrixM′ die Definition 4.1.1 fur den GraphenG′. Da
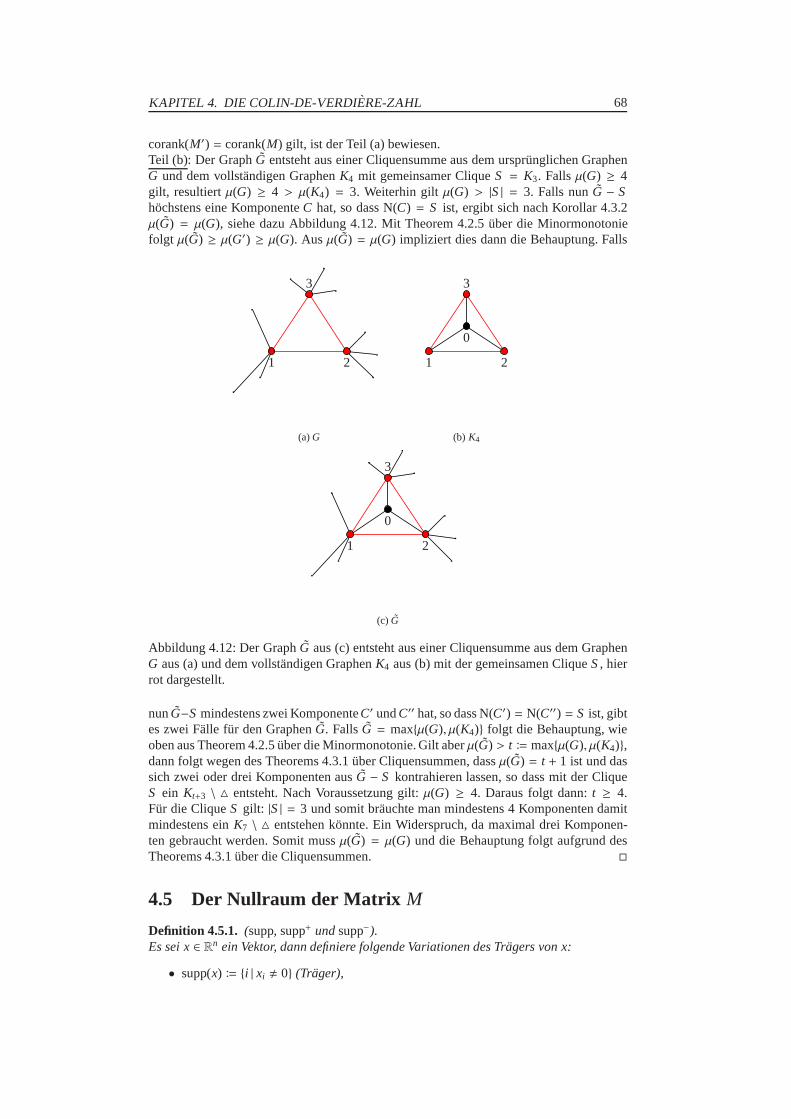
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 68
corank(M′) = corank(M) gilt, ist der Teil (a) bewiesen.Teil (b): Der GraphG entsteht aus einer Cliquensumme aus dem ursprunglichen GraphenG und dem vollstandigen GraphenK4 mit gemeinsamer CliqueS = K3. Fallsµ(G) ≥ 4gilt, resultiertµ(G) ≥ 4 > µ(K4) = 3. Weiterhin giltµ(G) > |S| = 3. Falls nunG − Shochstens eine KomponenteC hat, so dass N(C) = S ist, ergibt sich nach Korollar 4.3.2µ(G) = µ(G), siehe dazu Abbildung 4.12. Mit Theorem 4.2.5 uber die Minormonotoniefolgt µ(G) ≥ µ(G′) ≥ µ(G). Ausµ(G) = µ(G) impliziert dies dann die Behauptung. Falls
1 2
3
(a)G
1 2
3
0
(b) K4
1 2
3
0
(c) G
Abbildung 4.12: Der GraphG aus (c) entsteht aus einer Cliquensumme aus dem GraphenG aus (a) und dem vollstandigen GraphenK4 aus (b) mit der gemeinsamen CliqueS, hierrot dargestellt.
nunG−S mindestens zwei KomponenteC′ undC′′ hat, so dass N(C′) = N(C′′) = S ist, gibtes zwei Falle fur den GraphenG. FallsG = maxµ(G), µ(K4) folgt die Behauptung, wieoben aus Theorem 4.2.5 uber die Minormonotonie. Gilt aberµ(G) > t ≔ maxµ(G), µ(K4),dann folgt wegen des Theorems 4.3.1 uber Cliquensummen, dassµ(G) = t + 1 ist und dassich zwei oder drei Komponenten ausG − S kontrahieren lassen, so dass mit der CliqueS ein Kt+3 \ entsteht. Nach Voraussetzung gilt:µ(G) ≥ 4. Daraus folgt dann:t ≥ 4.Fur die CliqueS gilt: |S| = 3 und somit brauchte man mindestens 4 Komponenten damitmindestens einK7 \ entstehen konnte. Ein Widerspruch, da maximal drei Komponen-ten gebraucht werden. Somit mussµ(G) = µ(G) und die Behauptung folgt aufgrund desTheorems 4.3.1 uber die Cliquensummen.
4.5 Der Nullraum der Matrix M
Definition 4.5.1. (supp, supp+ undsupp−).Es sei x∈ Rn ein Vektor, dann definiere folgende Variationen des Tragers von x:
• supp(x) ≔ i | xi , 0 (Trager),

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 69
• supp+(x) ≔ i | xi > 0 (positiver Trager),
• supp−(x) ≔ i | xi < 0 (negativer Trager),
• supp0(x) ≔ i | xi = 0 (Komplement des Tragers).
Lemma 4.5.2. Es sei M eine Matrix, die fur einen Graphen G die Definition 4.1.1 erfullt.Fur alle Vektoren x∈ ker(M) gilt:
N(supp+(x)) \ supp(x) = N(supp−(x)) \ supp(x).
Beweis. Es seix ∈ ker(M). Dann folgt: N(supp+(x)) = i | ai j , 0, j ∈ supp+(x), j , iund N(supp−(x)) = i | ai j , 0, j ∈ supp−(x), j , i. Dies folgt aus der Eigenschaft M1 derDefinition 4.1.1, da zwei Knoteni, j zueinander adjazent sind, fallsai j < 0 gilt. Insgesamtfolgt dann:
N(supp+(x)) \ supp(x) = i | ai j , 0, j ∈ supp+(x), j , i, i < supp(x)N(supp−(x)) \ supp(x) = i | ai j , 0, j ∈ supp−(x), j , i, i < supp(x).
Zunachst wird gezeigt, dass N(supp+(x)) \ supp(x) ⊆ N(supp−(x)) \ supp(x).gilt Ange-nommen die Aussage sei falsch, dann gabe es eini ∈ N(supp+(x)) \ supp(x) mit i <N(supp−(x)) \ supp(x). Das hieße, es gabe einj ∈ supp+(x), so dassai j , 0 gilt undandererseits existiert keink ∈ supp−(x), so dassaik , 0 gilt. Aus x ∈ ker(M) folgt:
0 =n∑
l=1
ail xl
=∑
j∈supp+(x)
ai j x j +∑
k∈supp−(x)
aikxk
︸ ︷︷ ︸
=0
=∑
j∈supp+(x)
ai j x j .
Die letzte Gleichung∑
k∈supp− ainxn = 0, folgt aus der Tatsache, dass es keink ∈ supp−(x)mit aik , 0 gilt. Aus x j > 0 fur alle j ∈ supp+(x) undai j < 0 fur alle j ∈ supp+(x) mit i , jfolgt wiederum
∑
j∈supp+(x)
ai j x j , 0.
Ein Widerspruch und somit muss auchi ∈ N(supp−(x))\supp(x) sein. Damit ist N(supp+(x))\supp(x) ⊆ N(supp−(x)) \ supp(x) gezeigt. Fur die umgekehrte Inklusion nehme eini ∈N(supp−(x)) \ supp(x) und nehme an, dassi < N(supp+(x)) \ supp(x) gilt. Dann folgt derBeweis analog wie oben.
Lemma 4.5.3. Es sei G ein zusammenhangender Graph und M eine zu G zugehorige Ma-trix, die die Definition 4.1.1 erfullt. Weiter seien x∈ ker(M) und J, K zwei Komponentenvon G| supp+(x). Dann existiert ein y∈ ker(M) mit folgenden Eigenschaften:
• supp+(y) = J,
• supp−(y) = K,
• yJ ist kollinear zu xJ mit einem positiven Skalar und yK ist kollinear zu xK mit einemnegativen Skalar.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 70
Beweis. Es seiL ≔ supp−(x). Zunachst istM j,k = 0 fur j ∈ J undk ∈ K, denn andernfallswarenJ undK zueinander adjazent. Dann gilt:
MJ×JxJ + MJ×K xK + MJ×LxL + MJ×supp0(x)xsupp0(x) = 0
undMK×JxJ + MK×K xK + MK×LxL + MK×supp0(x)xsupp0(x) = 0.
Aus MJ×K = 0, MJ×supp0(x)xsupp0(x) = 0 undMK×supp0(x)xsupp0(x) = 0 folgt schließlich
MJ×JxK + MJ×LxL = 0 und MK×K xK + MK×LxL = 0. (4.1)
Es seiz ein Eigenvektor zu dem negativen Eigenwert vonM. Nach dem Perron-FrobeniusTheorem 2.1.19 kann manz> 0 annehmen. Dann definiere
λ ≔〈zJ, xJ〉〈zK , xK〉
,
mit 〈zK , xK〉 , 0, daz > 0 undxK > 0, weil K ausG| supp+(x). WegenxK , xJ, z > 0 folgtausserdemλ > 0. Nun definierey ∈ Rn mit:
yi ≔
xi , wenni ∈ J,
−λxi , wenni ∈ K,
0, wenni < J ∪ K,
so gilt:
〈z, y〉 = 〈zJ, xJ〉 + 〈zK ,−λxK〉= 〈zJ, xJ〉 − λ〈zK , xK〉
= 〈zJ, xJ〉 −〈zJ, xJ〉〈zK xK〉
〈zK , xK〉
= 0.
Weiter erhalt man:
〈y,My〉 = 〈yJ,MJ×JyJ〉 + 〈yK ,MK×KyK〉= 〈xJ,MJ×JxJ〉 + 〈−λxK ,−MK×KλxK〉= 〈xJ,MJ×JxJ〉 + λ2〈xK ,MK×K xK〉= 〈−xJ,MJ×LxL〉 − λ2〈xK ,MK×LxL〉≤ 0,
wobei die letzte Gleichung aus der Gleichung 4.1 folgt. Die Ungleichung folgt aus derTatsache, dassMJ×L und MK×L nicht-positive Matrizen sind. Dies folgt daraus, dass siekeine Diagonalelemente von der MatrixM enthalten und es gilt:xJ > 0, xK > 0, xL < 0da J,K Komponenten ausG| supp+(x) sind undL ≔ supp−(x). Da z ein Eigenvektor zumkleinsten Eigenwert ist und〈z, y〉 = 0 gilt, folgt die lineare Unabhangigkeit vonzundy und〈y,My〉 ≥ 0, siehe Satz 2.1.16. Insgesamt folgt〈z, y〉 = 0 und〈y,My〉 = 0 und wegen Satz2.1.23 erhalt many ∈ ker(M). Daraus resultiertJ = supp+(y) und K = supp−(y) und essind beide skalare Vielfache mit positiven beziehungsweisen negativen Skalar vonxJ undxK , was zu beweisen war.
Definition 4.5.4. (Minimaler Trager).Es sei x∈ ker(M) mit x, 0. Dann hat x einen minimalen Trager falls fur alle y∈ ker(M)mit y, 0 aussupp(y) ⊆ supp(x) folgt, dasssupp(y) = supp(x) gilt.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 71
Theorem 4.5.5. ([11])Es sei G ein zusammenhangender Graph und die Matrix M eine zuG zugehorige Matrix,die die Definition 4.1.1 fur G erfullt. Weiter hat x∈ ker(M) einen minimalen Trager. Dannsind G| supp+(x) und G| supp−(x) jeweils nicht leer und zusammenhangend.
Beweis. Angenommen die Aussage wurde nicht gelten, dann istG| supp+ oderG| supp−
leer oder nicht zusammenhangend. Es sei ohne Beschrankung der Allgemeinheit zunachstG| supp+ leer. Weiter seiz ein Eigenvektor zum kleinsten Eigenwert, nach dem Perron-Frobenius Theorem 2.1.19 lasst sichz < 0 annehmen. Nach Satz 2.1.23 folgt furx ∈ker(M) sowohl〈z, x〉 = 0 als auch〈x,Mx〉 = 0. Falls supp+(x) leer ist, ergibt dies einenWiderspruch zu〈z, x〉 = 0, daz < 0 undx ≤ 0, x , 0 gelten. DassG| supp− nicht leer seindarf, wird analog behandelt.
Es sei ohne Beschrankung der Allgemeinheit nun angenommen, dassG| supp+ nichtzusammenhangend ist. Dann wurden inG| supp+ mindestens zwei KomponentenJ undKexistieren. Nach Lemma 4.5.3 gabe es einy ∈ ker(M) mit supp+(y) = J und supp−(y) = K.Da yJ und yK skalare Vielfache vonxJ und xK sind folgt supp(y) ⊆ supp(x). Nach derDefinition 4.5.4 des minimalen Tragers folgt daraus supp(y) = supp(x). Dies ergibt einenWiderspruch, da andernfalls supp−(x) leer ist. Das supp−(x) nicht leer sein darf wurde obenbereits behandelt.
Theorem 4.5.6.Es sei G ein Graph und die Matrix M eine zu G zugehorige Matrix, die dieDefinition 4.1.1 fur G erfullt. Es sei x∈ ker(M), so dass G| supp+(x) unzusammenhangendist. Dann gilt:
(i) Es gibt keine Kante, diesupp+(x) undsupp−(x) verbindet,
(ii) G | supp+(x) hat genau zwei Komponenten,
(iii) G | supp−(x) ist zusammenhangend,
(iv) | supp(x)| + corank(M) ≤ |V(G)| + 1,
(v) N(K) = N(supp(x)) fur alle Komponenten aus G| supp(x).
Beweis. Der Beweis erfolgt in vier Schritten:
(i): Angenommen es gibt eine Kante, die eine KomponenteJ von der MengeG| supp+(x)mit G| supp−(x) verbindet. Weiter seiK eine Komponente vonG| supp+(x) mit K ,J. Nach Lemma 4.5.3 existiert dann einy ∈ ker(M), sodass supp+(y) = K undsupp−(y) = J undyK undyJ sind skalare Vielfache vonxK und xJ, alsoyJ = −αxJ
undyK = βxK mit α, β > 0. Dann definierez≔ x+ (1/α)y. Dann istz ∈ ker(M), dax, y ∈ ker(M) sind. Des Weiteren ist
zJ = xJ + (1/α)yJ = xJ + (1/α)αxJ = 2xJ > 0,
zK = xK + (1/α)yK = xK + (1/α)βxK > 0
sowiezsupp−(x) = xsupp−(x) + (1/α)ysupp−(x) = xsupp−(x) < 0.
Somit folgt: supp−(z) = supp−(x) und supp+(z) = supp+(x) \ J. Dann ist aberN(supp−(z)) eine Menge, die einen Knoten ausJ enthalt, da supp−(z) = supp−(x) mitder KomponenteJ durch eine Kante adjazent ist und N(supp−(z)) \ supp(z) enthaltimmer noch diesen Knoten, da supp+(z) = supp+(x) \ J. Allerdings sindK und Jzwei Komponenten und somit nicht adjazent. Daraus folgt, dass supp+(z) nicht denKnoten ausJ enthalt und somit auch nicht N(supp+(z)) \ supp(z). Daraus folgt dann:N(supp−(z)) \ supp(z) , N(supp+(z)) \ supp(z) ein Widerspruch zum Lemma 4.5.2.
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 72
(ii) & (iii): Seien C1, . . . ,Cm Komponenten ausG| supp(x), dann folgtMCi xCi = 0 fur alle i =1, . . . ,m. Nach (i) sind die Komponenten entweder in supp+(x) oder in supp−(x), dasupp+(x) und supp−(x) nicht adjazent sind. Da supp+(x) nach Voraussetzung mindes-tens zwei KomponentenCi undC j enthalt undMCi xCi = MC j xCJ = 0 tritt der Fall (ii)des Lemmas 4.2.19 ein mitS = 1, . . . , n \ supp(x), da der Eigenwert 0 mindestenszweimal auftaucht. Demnach gibt es hochstens drei KomponentenCi , C j undCk, sodassλ1(Ci, j,k) = 0 ist. Allerdings hat supp+(x) bereits zwei KomponentenCi undC j
mit der Eigenschaftλ1(Ci, j) = 0 und supp−(x) ist nicht leer somit hat supp+(x) genauzwei Komponenten und supp−(x) muss zusammenhangend sein.
(iv) Es seiS = 1, . . . , n \ supp(x), dann gilt nach Lemma 4.2.19 (ii):
corank(M) − |S| + 2 ≤ 3
corank(M) ≤ |1, . . . , n \ supp(x)| + 1
| supp(x)| + corank(M) ≤ |1, . . . , n \ supp(x)| + 1+ | supp(x)|| supp(x)| + corank(M) ≤ |V(G)| + 1.
(v) Es seienJ und K zwei Komponenten ausG| supp+(x). Dann gibt es nach Lemma4.5.2 einy ∈ ker(M), sodass supp+(y) = K und supp−(y) = J. Nach Lemma 4.5.2folgt dann:
N(supp+(y)) \ supp(y) = N(supp−(y)) \ supp(y).
DaJ undK nicht adjazent sind, folgt: N(supp+(y)) = N(supp−(y)), also N(K) = N(J).Im Teil (i) wurde gezeigt, wie man einen Vektorz konstruiert, so dass supp−(z) =supp−(x) und supp+(z) = supp+(x)\ J = K. Nach Lemma 4.5.2 folgt dann wiederum:
N(supp+(z)) \ supp(z) = N(supp−(z)) \ supp(z).
Nach (i) sind supp+(x) und supp−(x) nicht adjazent, also folgt: N(supp+(z)) = N(supp−(z)),also N(K) = N(supp−(x)). Und insgesamt:
N(K) = N(J) = N(supp−(x)) = N(J) ∪ N(supp(x)) = N(supp(x)).
4.6 Kleine Werte fur µ
4.6.1 Pfade und außerplanare Graphen
Theorem 4.6.1. Genau dann, wenn G eine Knoten-disjunkte Vereinigung von Pfaden ist,gilt:
µ(G) ≤ 1.
Beweis. Es seiµ(G) ≤ 1. Angenommen der GraphG ware keine Knoten-disjunkte Vereini-gung von Pfaden, dann musste er den vollstandigen GraphenK3 oder den vollstandigen bi-partiten GraphenK1,3 enthalten, siehe Theorem 3.1.25. Allerdings giltµ(K3) = µ(1, 3) = 2und dies ergibt einen Widerspruch zu dem Theorem uber die Minormonotonie 4.2.5.Es seiG eine Knoten-disjunkte Vereinigung von Pfaden, dann gilt nach Satz 4.1.5 be-reits µ(Pn) = 1 und fallsG mehrere Komponenten hat, gilt nach Theorem 4.2µ(G) =maxµ(C) = 1.
Theorem 4.6.2.Genau dann, wenn G ein außerplanarer Graph ist, gilt:
µ(G) ≤ 2.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 73
Beweis. Es seiµ(G) ≤ 2. Angenommen der GraphG ware nicht außerplanar, dann mussteer den vollstandigen GraphenK4 oder den vollstandigen bipartiten GraphenK2,3 enthalten,siehe Theorem 3.1.29. Allerdings giltµ(K4) = µ(2, 3) = 3 und dies ergibt einen Wider-spruch zu dem Theorem uber die Minormonotonie 4.2.5.Es seiG ein außerplanarer Graph und nach Theorem 4.2 seiG zusammenhangend. DerBeweis erfolgt mittels vollstandiger Induktion nach|V|:Induktionsanfang:
(a) Ein Knoten (b) Ein PfadP2
(c) Der vollstandige GraphK3 (d) Ein PfadP3
Abbildung 4.13: Fur|V| = 1 besteht der GraphG aus einem Knoten, siehe Abbildung (a)und es giltµ(G) = 0. Fur |V| = 2 besteht der GraphG aus einem Pfad, siehe Abbildung (b)und es giltµ(G) = 1. Fur|V| = 3 besteht der GraphG aus einem vollstandigen GraphenK3,siehe Abbildung (c) und es giltµ(G) = 2 oder er besteht aus einem Pfad, siehe Abbildung(d) und es giltµ(G) = 1
Fur die ersten vier Falle von|V| siehe Abbildung 4.13.Induktionsvoraussetzung: Die Aussage sei fur|V| = k mit k ≥ 3 wahr.Induktionsschritt: Es bleibt zu zeigen, dass unter der Induktionsvoraussetzung die Aussageauch fur |V| = k + 1 wahr ist. Der GraphG mit |V(G)| = k + 1 sei dann eine Cliquen-summe aus einen GraphenG′ mit |V(G′)| = k und dem vollstandigen GraphenK3 mit dergemeinsamen CliqueK2. Der GraphG′ entsteht ausG durch Entfernen eines Knoten mitdeg(v) ≤ 2, denn angenommen es gibt keinen Knoten mit deg(v) ≤ 2, dann haben alleKnoten mindestens einen Grad von 3 und dann ware der GraphG mit vier Knoten nichtmehr außerplanar, da sonstG = K4 ware. Im Folgenden werden zwei Falle unterschieden.Der erste Fall besagt, dass es einen Knotenv vom Grad 2 gibt und der zweite Fall lau-tet, dass es einen Knotenv vom Grad 1 gibt. Man betrachte den ersten Fall, es gibt einenKnotenv vom Grad 2, der zu den Knotenu undw adjazent ist. Dieser Knotenv wird zuu oderw kontrahiert, so dassu undw zu Nachbarn werden. Der neue Graph wird mitG′
bezeichnet. Anschließend wird ein GraphG aus einer Cliquensumme aus dem GraphenG′
und dem vollstandigen GraphenK3 mit der gemeinsamen CliqueS = (u,w) gebildet, siehe
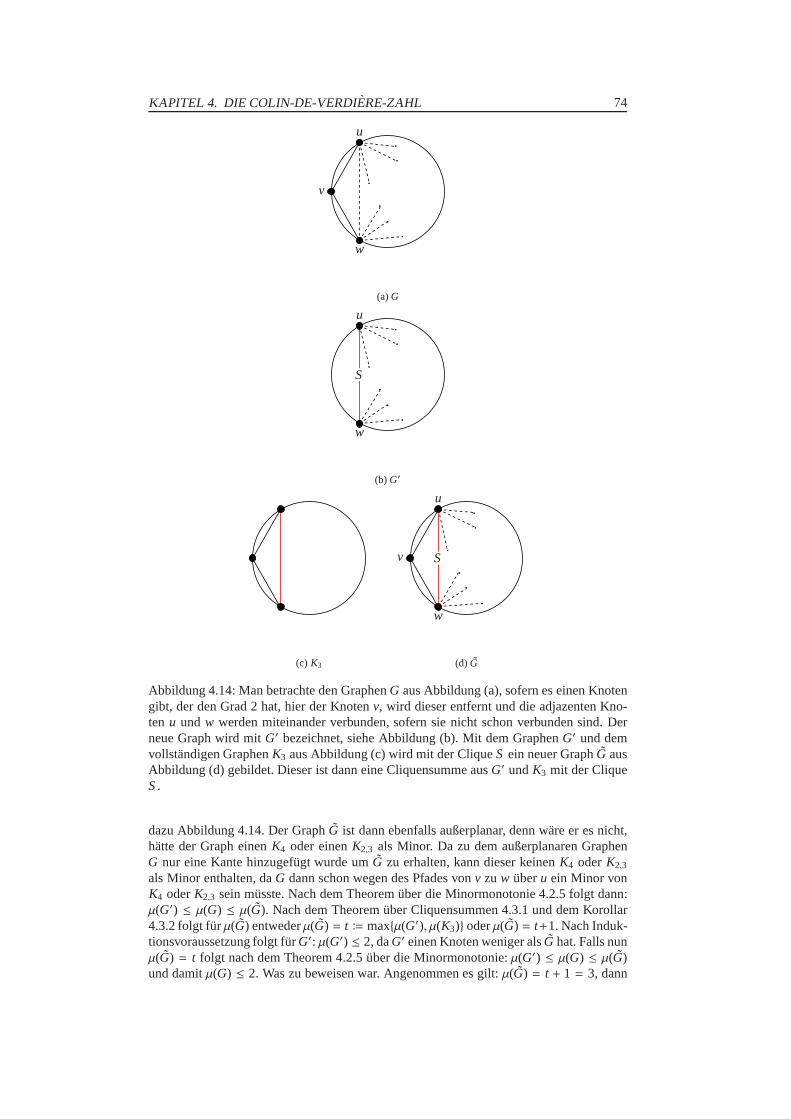
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 74
u
v
w
(a)G
u
w
S
(b) G′
(c) K3
u
v
w
S
(d) G
Abbildung 4.14: Man betrachte den GraphenG aus Abbildung (a), sofern es einen Knotengibt, der den Grad 2 hat, hier der Knotenv, wird dieser entfernt und die adjazenten Kno-ten u und w werden miteinander verbunden, sofern sie nicht schon verbunden sind. Derneue Graph wird mitG′ bezeichnet, siehe Abbildung (b). Mit dem GraphenG′ und demvollstandigen GraphenK3 aus Abbildung (c) wird mit der CliqueS ein neuer GraphG ausAbbildung (d) gebildet. Dieser ist dann eine Cliquensumme ausG′ undK3 mit der CliqueS.
dazu Abbildung 4.14. Der GraphG ist dann ebenfalls außerplanar, denn ware er es nicht,hatte der Graph einenK4 oder einenK2,3 als Minor. Da zu dem außerplanaren GraphenG nur eine Kante hinzugefugt wurde umG zu erhalten, kann dieser keinenK4 oderK2,3
als Minor enthalten, daG dann schon wegen des Pfades vonv zu w uberu ein Minor vonK4 oderK2,3 sein musste. Nach dem Theorem uber die Minormonotonie 4.2.5 folgt dann:µ(G′) ≤ µ(G) ≤ µ(G). Nach dem Theorem uber Cliquensummen 4.3.1 und dem Korollar4.3.2 folgt furµ(G) entwederµ(G) = t ≔ maxµ(G′), µ(K3) oderµ(G) = t+1. Nach Induk-tionsvoraussetzung folgt furG′: µ(G′) ≤ 2, daG′ einen Knoten weniger alsG hat. Falls nunµ(G) = t folgt nach dem Theorem 4.2.5 uber die Minormonotonie:µ(G′) ≤ µ(G) ≤ µ(G)und damitµ(G) ≤ 2. Was zu beweisen war. Angenommen es gilt:µ(G) = t + 1 = 3, dann

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 75
lassen sich zwei oder drei Komponenten ausG−S finden, so dass diese kontrahierten Kom-ponenten mitS einenK5 \ enthalten. Allerdings ist einK5 \ das gleiche wie einK2,3,ein Graph mit funf Knoten und sieben Kanten. Und dies wurdebedeuten, dassG einenK2,3
als Minor hatte, was im Widerspruch zu Außerplanaritat von G steht.
u
v w
(a)G
u
w
S
(b) G′
u
v w
(c) K3
u
v w
S
(d) G
Abbildung 4.15: Man betrachte den GraphenG aus Abbildung (a), sofern es einen Knotengibt, der den Grad 1 hat, hier der Knotenv, wird dieser entfernt, der neue Graph wird mitG′ bezeichnet, siehe Abbildung (b). Mit dem GraphenG′ und dem vollstandigen GraphenK3 aus Abbildung (c) wird mit der CliqueS ein neuer GraphG aus Abbildung (d) gebildet.Dieser ist dann eine Cliquensumme ausG′ undK3 mit der CliqueS.
Man betrachte den zweiten Fall, es gibt einen Knotenv vom Grad 1, der zu den Knotenu adjazent ist, der wiederum zu Knotenw adjazent ist. Dieser Knotenv wird entfernt undder neue Graph wird mitG′ bezeichnet. Dann wird ein GraphG aus einer Cliquensummeaus dem GraphenG′ und dem vollstandigen GraphenK3 mit der gemeinsamen CliqueS =(u,w) gebildet, siehe dazu Abbildung 4.15. Der GraphG ist dann ebenfalls außerplanar,denn ware er es nicht, hatte der Graph einenK4 oder einenK2,3 als Minor. Da zu demaußerplanaren GraphenG nur eine Kante hinzugefugt wurde umG zu erhalten, kann dieserkeinenK4 oderK2,3 als Minor enthalten. Angenommen durch die hinzugefugte Kante ware

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 76
ein K2,3 entstanden, dann musste jeder Kreis gerade sein allerdings gibt es einen Kreis vonv nachv uberu undw der ungerade ist und somit ist der Minor nicht bipartit. Falls durch dasHinzufugen der Kante einK4 entstunde, musstev einen Grad von 3 haben. Dieser Knotenhat dann allerdings einen Grad von 2 und somit kann auch keinK4 entstanden sein. Nachdem Theorem uber die Minormonotonie 4.2.5 folgt dann:µ(G′) ≤ µ(G) ≤ µ(G). Nachdem Theorem uber Cliquensummen 4.3.1 und dem Korollar 4.3.2 folgt fur µ(G) entwederµ(G) = t ≔ maxµ(G′), µ(K3) oderµ(G) = t + 1. Nach Induktionsvoraussetzung folgtfur G′: µ(G′) ≤ 2, daG′ einen Knoten weniger alsG hat. Falls nunµ(G) = t folgt nachdem Theorem uber die Minormonotonie 4.2.5:µ(G′) ≤ µ(G) ≤ µ(G) und damitµ(G) ≤ 2,was zu beweisen war. Gilt hingegenµ(G) = t + 1 = 3, dann lassen sich zwei oder dreiKomponenten ausG − S finden, so dass diese kontrahierten Komponenten mitS einenK5 \ enthalten. Allerdings ist einK5 \ das gleiche wie einK2,3 ein Graph mit funfKnoten und sieben Kanten. Und dies wurde bedeuten, dassG einenK2,3 als Minor hatte,was im Widerspruch zu Außerplanaritat vonG steht.
4.6.2 Planare Graphen
Dieses Theorem ist nun eins der Hauptresultate von Colin de Verdiere [32]. Der Beweisverwendet die Theorie von partiellen Differentialgleichungen. Das auch ein kombinatori-scher Beweis reicht, zeigt van der Holst [11]. Und dieser Beweis soll hier auch verwendetwerden.
Theorem 4.6.3.Genau dann, wenn G ein planarer Graph ist, gilt:
µ(G) ≤ 3.
Beweis. Es seiµ(G) ≤ 3. Angenommen der GraphG ware nicht planar, dann musste erden vollstandigen GraphenK5 oder den vollstandigen bipartiten GraphenK3,3 als Minorenthalten, siehe Theorem 3.1.27. Allerdings giltµ(K5) = µ(3, 3) = 4 und dies ergibt einenWiderspruch zu dem Theorem uber die Minormonotonie 4.2.5.Es seiG ein 3-zusammenhangender planarer Graph. Es seiM eine zuG zugehorige Matrix,die die Definition 4.1.1 furG erfullt. Angenommen, es gelte corank(M) > 3. Weiter seiuvwein Dreieck inG, dann gibt es einx ∈ ker(M) fur dasxu = xv = xw = 0 gilt. Denn der Kernvon M beinhaltet mindestens vier linear unabhangige Vektorenx1, x2, x3, x4 ∈ ker(M).Somit hat das Gleichungssystem:
α1
x1u
x1v
x1w
+ α2
x2u
x2v
x2w
+ α3
x3u
x3v
x3w
+ α4
x4u
x4v
x4w
= 0
mindestens eine nicht triviale Losung furα1, α2, α3, α4 ∈ R. Dann lasst sich einx =α1x1+α2x2+α3x3+α4x4 finden, so dassx einen minimalen Trager hat undxu = xv = xw = 0gilt. Nach dem Theorem 4.5.5 sind dannG| supp+(x) undG| supp−(x) nicht leer und jeweilszusammenhangend. Aufgrund der maximalen Planaritat vonG lassen sich drei verschiede-ne Knoten-disjunkte PfadeP1, P2 undP3 von u, v undw zu supp(x) finden, dies resultiertaus der Bemerkung vom Satz 3.1.11. Weiter seienP′1, P′2 undP′3 die Teile der PfadeP1, P2
undP3, die außerhalb von supp(x) liegen und dort beginnen. Es wird im Folgenden gefol-gert, dass der erste Knoten aus der Menge N(supp(x)) zu einem PfadP′i fur i = 1, 2, 3 inN(supp+(x)) und N(supp−(x)) liegt. Angenommen dies ware nicht so und der erste KnotenP′i (1) von P′i fur i = 1, 2, 3 liegt ohne Beschrankung der Allgemeinheit nur in der Men-ge N(supp+(x)) aber nicht in der Menge N(supp−(x)), dann folgt ausP′i (1) < supp(x) dieAussagen:
Pi(1) ∈ N(supp+(x)) \ supp(x)
P′i (1) < N(supp−(x)) \ supp(x).

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 77
Dies ergibt wiederum einen Widerspruch zum Lemma 4.5.2, da N(supp+(x)) \ supp(x) =N(supp−(x))\supp(x) gelten muss. Kontrahiere jeweils supp+(x) beziehungsweise supp−(x)zu einem Knotent beziehungsweiset′ zusammen, dann habenu, v und w jeweils einenunabhangigen Pfad zut und t′, was der Planaritat vonG, wie im Folgenden noch gezeigtwird, widerspricht, siehe dazu Abbildung 4.16. Angenommender Graph ware planar mit
P′1
P′2
P′3
u
v w
supp−(x)
supp+(x)
Abbildung 4.16: Der GraphG mit supp+(x) und supp−(x). Man konnte nun die PfadeP′1,P′2 undP′3 zu den Endknotenu, v undw kontrahieren.
µ(G) ≥ 4, dann konnte man nach Theorem 2.13 eineY-Transformation aufu, v und wanwenden. Fur den neuen GraphG′ gelteµ(G′) ≥ 4 und die Planaritatseigenschaft wurdeebenfalls gelten, allerdings entstunde dadurch einK3,3, was der Planaritat widersprache.
4.7 Verlinkungsfreie einbettbare Graphen
Definition 4.7.1. (Jordan-Kurve)Eine Jordan-Kurve ist eine geschlossene, stetige, schnittpunktfreie Kurve.
Definition 4.7.2. (verlinkt).Zwei disjunkte Jordan-Kurven A, B ∈ R3 heißen verlinkt, falls es keine topologische 2-Sphare imR3 gibt, die beide Jordan-Kurven trennt und zwar so, dass eine Kurve im Innerenund die andere Außerhalb liegt, siehe Abbildung 4.17.
(a) (b)
Abbildung 4.17: Die beiden Jordan-Kurven aus Abbildung (a)sind nicht verlinkt, da eseine topologische 2-Sphare gibt, die beide Kurven trennt,siehe Abbildung (b).
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 78
Abbildung 4.18: Die beiden Jordan-Kurven haben die ungerade Verlinkungszahl 1, da die2-Scheibe und die Kurve sich in einem Punkt transversal schneiden.
Definition 4.7.3. (Verlinkungszahl).Zwei disjunkte Jordan-Kurven A, B ∈ R3 haben eine ungerade Verlinkungszahl, falls es eineEinbettung der 2-Scheibe mit Rand A gibt, so dass die Anzahl der transversalen Schnittemit dem Bild von B ungerade ist. Siehe Abbildung 4.18.
Bemerkung: Eine ungerade Verlinkungszahl bedeutet, dass beide Jordan-Kurven ver-linkt sind. Die Umkehrung gilt im Allgemeinen nicht.
Definition 4.7.4. (verlinkungsfrei einbettbar).Es sei G ein Graph. G ist verlinkungsfrei einbettbar, falls eine Einbettung des Graphen Gin R3 keine verlinkten Kreise besitzt. Ein Graph ist verlinkungsfrei einbettbar, falls es einesolche Einbettung gibt.
Bemerkung: Ein Graph heißt verlinkbar, falls er nicht verlinkungsfreieinbettbar ist.
Definition 4.7.5. (flache Einbettung).Eine Einbettung eines Graphen G heißt flach, falls es fur alle Kreise C in G eine offeneScheibe gibt, die disjunkt von G ist und den Rand von C hat.
Bemerkung: Jede flache Einbettung ist auch verlinkungsfrei einbettbaraber die Um-kehrung gilt im Allgemeinen nicht, siehe Abbildung 4.19. Robertson, Seymour und Tho-mas [29] bewiesen, dass ein verlinkungsfrei einbettbarer GraphG auch flach einbettbarist. Somit sind die Klassen der verlinkungsfrei und flachen Einbettungen gleich. Weiter-hin ist die Klasse der verlinkungsfrei einbettbaren Graphen invariant unter Y- undY-Transformationen. Somit ist auch die Klasse der verbotenenMinoren von verlinkungs-freien einbettbaren Graphen invariant unter Y- undY-Transformationen. Diese Klassenennt man die Petersen Familie, da ein Graph dem Petersen Graph entspricht, siehe dazuAbbildung 4.20. Robertson, Seymour und Thomas [29] bewiesen folgenden Satz:
Satz 4.7.6.Die Petersen Familie ist eine Klasse von verbotenen Minorenfur verlinkungs-frei einbettbare Graphen.
Theorem 4.7.7.Genau dann, wenn G ein verlinkungsfrei einbettbarer Graph ist, gilt:
µ(G) ≤ 4.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 79
Abbildung 4.19: Wird ein GraphG bestehend aus einem Kreis, wie oben eingebettet, istdie Einbettung nicht mehr flach.
Beweis. Es wird zunachst gezeigt, dassµ(G) ≤ 4 impliziert, dassG ein verlinkungsfrei ein-bettbarer Graph ist. Es seiµ(G) ≤ 4. Angenommen der GraphG ware nicht verlinkungsfreieinbettbar, dann musste er nach Satz 4.7.6 den vollstandigen GraphenK6 beziehungsweiseeinen Graphen der Petersen Familie als Minor enthalten. Es gilt aberµ(K6) = 5, ein Wi-derspruch zu dem Theorem uber die Minormonotonie 4.2.5. Des Weiteren entstehen dieGraphen der Petersen Familie durchY- beziehungsweise Y-Transformationen, worausnach Theorem 4.4.2 dannµ(G) = 5 fur alle GraphenG der Petersen Familie gilt.Die Umkehrung wurde von Robertson, Seymour und Thomas [27] vermutet und in [22]bewiesen. Der Beweis erfolgt hier in Abschnitt 4.7.2.
4.7.1 Borsuks Theorem fur antipodale Verlinkungen
Definition 4.7.8. (konvexe Mengeconv).Sei A∈ Rm×n:
conv(A) ≔
Aλ | λ ∈ Rn+,
n∑
i=1
λ1 = 1
.
Definition 4.7.9. (affine Mengeaff).Sei A∈ Rm×n:
aff(A) ≔
Aλ | λ ∈ Rn,
n∑
i=1
λ1 = 1
.
Definition 4.7.10. (lineare Hullelin).Sei A∈ Rm×n:
lin(A) ≔
Aλ | λ ∈ Rn
.
Definition 4.7.11. (konvexes Polytope).Ein Polytope P imRd ist die konvexe Menge aus endlich vielen Punkten A=
(
v1 . . . vk
)
:
P = convA.
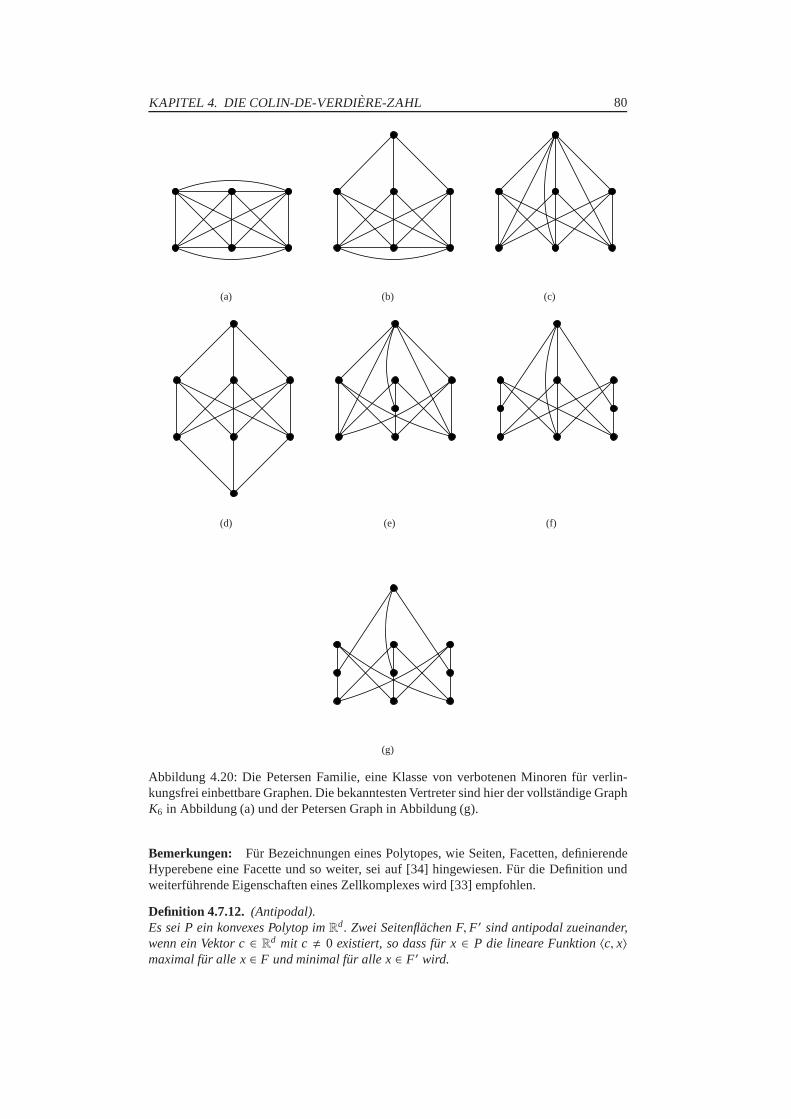
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 80
(a) (b) (c)
(d) (e) (f)
(g)
Abbildung 4.20: Die Petersen Familie, eine Klasse von verbotenen Minoren fur verlin-kungsfrei einbettbare Graphen. Die bekanntesten Vertreter sind hier der vollstandige GraphK6 in Abbildung (a) und der Petersen Graph in Abbildung (g).
Bemerkungen: Fur Bezeichnungen eines Polytopes, wie Seiten, Facetten,definierendeHyperebene eine Facette und so weiter, sei auf [34] hingewiesen. Fur die Definition undweiterfuhrende Eigenschaften eines Zellkomplexes wird [33] empfohlen.
Definition 4.7.12. (Antipodal).Es sei P ein konvexes Polytop imRd. Zwei Seitenflachen F, F′ sind antipodal zueinander,wenn ein Vektor c∈ Rd mit c , 0 existiert, so dass fur x∈ P die lineare Funktion〈c, x〉maximal fur alle x∈ F und minimal fur alle x∈ F′ wird.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 81
Bemerkung: Anschaulich bedeutet dies, dass es zwei parallele HyperebeneH1,H2 gibt,wobeiF ⊂ H1 undF′ ⊂ H2 gilt und das Polytop von beiden Hyperebenen eingeschlossenwird. Siehe dazu Abbildung 4.21.
Abbildung 4.21: Das Polytop mit zwei antipodalen Seitenflachen, die von zwei Hyperebe-nen eingeschlossen werden.
Definition 4.7.13. (generische Abbildung).Es seiφ eine stetige Abbildung von einem Zellkomplex in denRd. Die Abbildung heißtgenerisch, falls die Bilder einer k-Seitenflache und l-Seitenflachen sich nur schneiden fallsk+ l ≥ d und fur k+ l = d die Anzahl der transversalen Schnittpunkte endlich ist.Bemerkung: Zusatzlich soll noch die Bedingung gestellt werden, dass die Bilder unterφrektifizierbar sind.
Bemerkung: Im Folgenden seien die Seitenflachen immer relativ offen.
Definition 4.7.14. (Rand∂P).Es sei P ein konvexes Polytop imRd, dann bezeichne∂P deren Rand.
Definition 4.7.15. (parallel).Zwei Seitenflachen eines Polytops sind parallel, wenn ihreprojektiven Hullen einen nichtleeren Schnitt haben, der in der unendlichen Hyperebene enthalten ist, siehe dazu Abbil-dung 4.22.
Bemerkung: Eine alternative Bedingung fur parallele Seitenflachen ware die folgendeDefinition:
Definition 4.7.16. (parallel).Es sei P ein konvexes Polytop imRd. Zwei Seitenflachen F und F′ von P sind parallel genaudann, wenn ihre affinen Hullen disjunkt sind und es einen Vektor c mit c, 0 und c∈ F − Fund c∈ F′ − F′ gibt.
Definition 4.7.17. (Minkowski-Summe).Es seien A, B Mengen, dann ist die Minkowski-Summe definiert durch: A+ B≔ a+ b| a ∈A, b ∈ B.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 82
Definition 4.7.18. (Minkowski-Differenz).Es seien A, B Mengen, dann ist die Minkowski-Differenz definiert durch: A−B≔ a−b| a ∈A, b ∈ B.
Abbildung 4.22: Zwei Geraden in der Ebene (R2) werden auf die obere Halbkugel projiziertSofern die Geraden parallel sind, haben sie einen Schnittpunkt amAquator.
Theorem 4.7.19.Es sei P ein voll-dimensionales konvexes Polytop imRd und seiφ ei-ne generisch, stetige Abbildung von∂P in denRd−1. Dann existiert ein Paar antipodalerSeitenflachen F und F′ mit dim(F) + dim(F′) = d− 1, so dass|φ(F)∩ φ(F′)| ungerade ist.
Bemerkung: Im Folgenden wird zunachst ein allgemeinerer Satz vorgestellt. Danachwird gezeigt, dass dieser Satz 4.7.20 das Theorem 4.7.19 impliziert. Nach Lemma 4.7.26wird schließlich Theorem 4.7.19 gezeigt.
Satz 4.7.20.Es sei P ein voll-dimensionales konvexes Polytop imRd, das keine parallelenSeitenflachen besitzt und seiφ eine generisch, stetige Abbildung von∂P in denRd−1, dannfolgt:
∑
|φ(F) ∩ φ(F′)|
ist ungerade, wobei uber alle antipodalen Paare(F, F′) summiert wird.
Da die Abbildung generisch ist, genugt es uber alle antipodalen Paare (F, F′) mit dim(F)+dim(F′) = d−1 zu summieren. Falls dim(F)+dim(F′) ≥ d folgt, dass (F, F′) parallel sind.Angenommen sie waren nicht parallel, dann gebe es keinc ∈ F−F, F′−F′, was aber im Wi-derspruch zu dim(F)+dim(F′) ≥ d steht, da die linearen Hullen den RaumRd aufspannen,dann konnten sie aber wiederum nicht in zwei parallelen (nicht schneidende) Hyperebenenliegen.
Satz 4.7.21.Der Satz 4.7.20 impliziert das Theorem 4.7.19.
Beweis. Angenommen das PolytopP hat parallele Seitenflachen. Fur alle Paare Seiten-flachen (E,E′) vonP, deren affine Hulle sich schneiden, seipE E′ ein Punkt, der im Schnittder affinen Hullen liegt. Und fur jedes Paar paralleler Seitenflachen (E,E′) von P, derenprojektive Hulle sich schneiden, seiqE E′ der Fernpunkt, der im Schnitt der projektivenHulle liegt. Weiter seiH eine endliche Hyperebene, die den Raum so teilt, dass alle PunktepE E′ auf einer Seite liegen und die HyperebeneH keinen PunktqF F′ enthalt. Solch eineHyperebene existiert, denn sofern die Anzahl derpE E′ endlich ist, lasst sich eine konve-xe Hulle mit denpE E′ bilden und damit auch eine Hyperebene finden, die außerhalb derkonvexen Hulle liegt und diese nicht schneidet. Da es unendlich viele dieser Hyperebe-nen gibt und nur endlich viele FernpunkteqF F′ , lasst sich ebenso eine Hyperebene finden,die zusatzlich die Fernpunkte meidet. Durch Anwendung einer projektiven Transformati-on, die die Hyperebene auf die uneigentliche Hyperebene abbildet, erhalt man eine neues

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 83
PolytopP′. Diese PolytopP′ enthalt keine parallelen Seitenflachen mehr. Durch die pro-jektive Transformation, bleiben die PunktepE E′ endlich und werden nicht zu Fernpunkten,da kein Punkt auf der Hyperebene liegt. Da die FernpunkteqF F′ ebenfalls nicht auf derHyperebene liegen werden sie nach der projektiven Transformation zu endlichen Punkten.Weiterhin gibt es fur alle antipodalen Seitenflachen (FP′ , F′P′) in P′ ein antipodales Sei-tenflachenpaar inP. Denn dann folgt dim(FP′) + dim(F′P′) ≤ d − 1, andernfalls ware diebeiden Seitenflachen parallel, was nach Konstruktion nicht sein kann. Dann lassen sichzwei HyperebenenH1 und H2 finden, so dassFP′ in H1 und F′P′ in H2 enthalten sind,das PolytopP′ einschließen und das ein gemeinsamer Punkt, der auf der uneigentlichenHyperebene nach der projektiven Transformation liegt, finden. Nach Rucktransformationwurden die beiden HyperebenenFP beziehungsweiseF′P sowie den Punkt, der nun auf deruneigentlichen Hyperebene liegt, enthalten. Somit ware sie auch parallel, da sie einen ge-meinsamen Punkt auf der uneigentlichen Hyperebene haben und weiterhin wurden sie auchP einschließen, da die projektive Transformation bijektiv ist. Siehe auch Abbildung 4.23.Falls nun
∑ |φ(F) ∩ φ(F′)| ungerade ist, bedeutet dies, dass es mindestens ein antipodalesPaar geben muss, welches auch eine ungerade Anzahl an Schnittpunkten besitzt.
(a) (b)
(c)
Abbildung 4.23: Das Sechseck soll, wie im Beweis von Satz 4.7.20, transformiert werden.Zunachst werden die Seitenflachen verlangert und die Schnittpunktep ermittelt, in Bild(a) blau dargestellt. Im nachsten Schritt wird das Sechseck mit den Schnittpunkten und denuneigentlichen Schnittpunktenq aus den parallelen Seitenflachen, in Bild (b) rot dargestellt,auf die obere Halbsphare projiziert. Im Bild (c) wird eine grune Hyperebene dargestellt,die die Punktep auf einer Seite hat und die Punkteq meidet. Anschließend wird dieseHyperebene auf denAquator projiziert, somit wird das Sechseck ebenfalls verzerrt und dieSchnittpunkte liegen nicht mehr auf demAquator.
Definition 4.7.22. (≤).Fur zwei Seitenflachen F, F′ bezeichnet: F≤ F′: F ⊆ F′.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 84
Satz 4.7.23.Seien F, F′ zwei Seitenflachen eines konvexen Polytops P imRd. Dann sinddie beiden Seitenflachen F, F′ genau dann antipodal, wenn F−F′ in einer Seitenflache vonP− P enthalten ist.
Beweis. Es seienF, F′ zwei antipodale Seitenflachen. Nach Definition 4.7.12 gibtes folg-lich ein c ∈ Rd mit c , 0, so dass〈c, x〉 maximal fur allex ∈ F und minimal fur allex ∈ F′ wird. Somit gilt〈c, F〉 ≥ 〈c, x〉 und〈c, F′〉 ≤ 〈c, y〉 fur alle x, y ∈ P. Addition ergibt:〈c, F−F′〉 ≥ 〈c, x−y〉 fur alle x, y ∈ P. Somit istF−F′ eine Seitenflache inP−P, dac demNormalenvektor der Hyperebene entspricht, dieF − F′ enthalt. Da〈c, F − F′〉 ≥ 〈c, x− y〉fur alle x, y ∈ P gilt, kannF − F′ nicht im Inneren vonP− P liegen.Sei nunF − F′ in einer Seitenflache vonP− P enthalten. AngenommenF, F′ waren keineantipodalen Seitenflachen inP, dann gibt es fur allec ∈ Rd ein x ∈ P mit 〈c, x〉 > 〈c, F〉und 〈c, F′〉 < 〈c, x〉. Da F − F′ in einer SeitenflacheS in P − P enthalten ist, enthalt je-deS definierende Hyperebene auchF − F′. Also existiert einc ∈ Rd mit c , 0, so dass〈c, F − F′〉 ≥ 〈c, x〉 fur alle x ∈ P − P gilt. Daraus folgt dann〈c, F〉 ≥ 〈c, x + F′〉 bezie-hungsweise〈c, F′〉 ≤ 〈c, F − x〉 fur alle x ∈ P−P also auchx ∈ P−F oderx ∈ P−F′. Diesergibt somit einen Widerspruch zu der Annahme, dass es fur alle c ∈ Rd ein x ∈ P gibt, sodass〈c, x〉 > 〈c, F〉 beziehungsweise〈c, F′〉 < 〈c, x〉 gilt.
Lemma 4.7.24.Es sei P ein konvexes Polytop ohne parallele Seitenflachen imRd.
i. Sind A, B antipodale Seitenflachen in P, dann ist A− B eine Seitenflache von P− Pund es giltdim(A− B) = dim(A) + dim(B).
ii. Ist F eine Seitenflache von P− P so existiert ein einziges Paar(A, B) antipodalerSeitenflachen in P mit A− B = F.
iii. Fur zwei Paare(A, B) und(A′, B′) von antipodalen Seitenflachen gilt A−B ≤ A′−B′
genau dann, wenn A≤ A′ und B≤ B′ gilt.
Beweis. Nach Voraussetzung besitzt das PolytopP keine parallelen Seitenflachen.
i. SindA, B antipodale Seitenflachen sind, folgt aus Satz 4.7.23, dassA−Beine Seiten-flache vonP−P ist. DaA, B nicht parallele Seitenflache vonP bilden, lassen sie sichals Linearkombination von dim(A) beziehungsweise dim(B) linear unabhangigenVektoren schreiben. Also:A = a+
∑dim(A)i=1 λivi undB = b+
∑dim(B)i=1 γiwi , mit a ∈ A,
b ∈ B,vi,wi ∈ Rd undλi , γi ∈ R. Daraus folgt dann:A − B = a− b+∑dim(A)
i=1 λivi −∑dim(B)
i=1 γiwi . Da A undB nicht parallel sind, sind die linear unabhangigen Vektorenauch untereinander linear unabhangig, so dass dim(A− B) = dim(a) + dim(B) folgt.
ii. Aus dem Satz 4.7.23 folgt bereits, dassA, B antipodale Seitenflachen sein mussen.Seien (A, B) und (A′, B)′ zwei antipodale Seitenflachenpaare mitA − B = F undA′ − B′ = F, dann folgtA− B = A′ − B′ und ausiii . folgt dannA = A′ undB = B′.
iii. Es seien (A, B) und (A′, B′) zwei antipodale Seitenflachenpaare und es giltA − B ≤A′ − B′. Da (A, B) antipodale Seitenflachen sind, existiert einc ∈ Rd mit c , 0 und〈c,A〉 ≥ 〈c, x〉 ≥ 〈c, B〉 fur alle x ∈ P. Daraus folgt dann:〈c,A〉 ≥ 〈c,A′〉 und〈c, B〉 ≤〈c, B′〉. Weiter folgt ausA−B ≤ A′ −B′, dass〈c,A−B〉 = 〈c,A′ −B′〉 gilt, da fur allea ∈ A, b ∈ B zwei Elementea′ ∈ A′, b ∈ B′ mit a− b = a′ − b′ existieren. Gilt nun〈c,A〉 > 〈c,A′〉, dann folgt〈c,A− B〉 > 〈c,A′ − B′〉. Dies ergibt einen Widerspruch,also muss〈c,A〉 = 〈c,A′〉 und 〈c, B〉 = 〈c, B′〉 gelten. Also liegenA,A′ und B, B′
jeweils in der gleichen HyperebeneH1 undH2. Dann seienD,D′ zwei Seitenflachemit D,D′ ⊂ P und A,A′ ≤ D sowieB, B′ ≤ D′. Laut Voraussetzung gilt: Fur allea ∈ A, b ∈ Bexistieren zwei Elementea′ ∈ A′, b ∈ B′, so dassa−b = a′−b′ gilt. Alsofolgt a− a′ = b− b′ unda, a′ ∈ D sowieb, b′ ∈ D′. Wurde nunA 6≤ A′ gelten, danngabe es ein Elementa ∈ A unda < A′ und damit warea−a′ , 0 abera−a′ = b−b′,das wurde bedeuten, dassD − D undD′ − D′ einen von Null verschiedenen Vektor

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 85
gemeinsam hatten. Nach Definition 4.7.16 wurde daraus dieParallelitat vonD undD′ folgen. Ein Widerspruch, daP keine parallelen Seitenflachen hat.Sind (A, B) und (A′, B′) zwei antipodale Seitenflachenpaare mitA ≤ A′ undB ≤ B′,dann folgt darausA−B ≤ A′ −B′. Denn fur allea ∈ A undb ∈ B existiert eina′ ∈ A′
undb′ ∈ B′, so dassa = a′ undb = b′ folgt, also aucha− b = a′ − b′.
Lemma 4.7.25. Es seien(F, F′) ein antipodales Seitenflachenpaar von einem konvexenPolytop P imRd, gilt dim(F) + dim(F′) ≥ d, so sind F und F′ parallel.
Beweis. AngenommenF undF′ ware nicht parallel, dann folgt aus Definition 4.7.16, dasssich die affinen Hullen der SeitenF und F′ schneiden oder das es keinc , 0 gibt mitc ∈ F − F undc ∈ F′ − F′. Da F undF′ antipodale Seitenflachen sind, liegen sie jeweilsin einer HyperebeneF ⊂ H1, F′ ⊂ H2, die parallel zueinander sind. Somit konnen dieaffinen Hullen der beiden Seiten sich nicht schneiden. Wurde es keinc , 0 mit c ∈ F − Fundc ∈ F′ − F′ geben musste eine Basen vonF undF′ denRd aufspannen. In diesem Fallkonnen die HyperebenenH1 undH2 nicht mehr parallel sein. Dies ergibt einen Widerspruchund (F, F′) ist ein antipodales, paralleles Seitenflachenpaar.
Lemma 4.7.26.Es sei P ein konvexes Polytop imRd ohne parallele Seiten. Fur alle Sei-tenflachenpaare(A, B) von P mitdim(A) + dim(B) = d − 2 betragt die Anzahl antipodalerSeitenflachenpaare(F, F′) mit A≤ F, B≤ F′ unddim(F)+dim(F′) = d−1 null oder zwei.
Beweis. Angenommen das Seitenflachenpaar (A, B) ware nicht antipodal, dann wurde dieAnzahl antipodaler Seitenflachenpaare (F, F′) mit A ≤ F, B ≤ F′ und dim(F) + dim(F′) =d− 1 null betragen, da (A, B) nicht in parallelen Hyperebenen liegen und somit wurde sichauch keine (F, F′) finden lassen, die die Bedingung erfullen.Angenommen das Seitenflachenpaar (A, B) ware antipodal, dann wurde die Anzahl anti-podaler Seitenflachenpaare (F, F′) mit A ≤ F, B ≤ F′ und dim(F) + dim(F′) = d − 1zwei betragen. Denn nach Lemma 4.7.24 iii. ist die Anzahl gleich der Anzahl von Facet-ten in P − P, die inzident zu der SeitenflacheA − B waren. Nach Lemma 4.7.24 i. folgt:dim(A − B) = dim(A) + dim(B) = d − 2. Und es gilt, dass sich zwei Seitenflachen derDimensiond − 1 in einer Seitenflache der Dimensiond − 2 schneiden. Somit gibt es zweiFacetten, die inzident zuA − B sind und nach Lemma 4.7.24 ii. gibt es fur die genau einPaar antipodaler Seitenflachen.
Bemerkung: Im Folgenden soll nun der Satz 4.7.20 bewiesen werden.
Beweis. Die Aussage ist wahr fur folgende Abbildungφ: Es wird ein Punktp in der Nahedes Mittelpunkts einer FacetteF bestimmt. Dieser Punkt soll außerhalb des PolytopsPliegen. Anschließend wird∂P auf die FacetteF durch den Punktp projiziert. Dies istdas Prinzip des Schlegeldiagramms, siehe dazu Abbildung 4.24. Da das PolytopP konvexist, wird ∂P auf die FacetteF projiziert ohne das es zu Selbstschnitten kommt. Es wirdgezeigt, dass es nur einen eindeutigen nichttrivialen Schnitt gibt. Dabei schneiden sich nurdie FacetteF und dem Punkt, der am weitesten vonF entfernt liegt. Ware er es nicht,sondern gabe es eine SeitenflacheF′ der Dimensiond ≥ 1, so ware die Seitenflache unddie FacetteF parallel zueinander, da nach Lemma 4.7.25 zwei antipodale Seitenflachenmit einer Dimension dim(F) + dim(F′) ≥ d parallel sind. Der Satz 4.7.20 ist also furdie Abbildungφ richtig, denn der Punktp und dieFacettenbilden den einzigen Schnittantipodaler Seitenflachen.Nun seiφ eine beliebig stetig, generische Abbildung. Um den Satz 4.7.20 zu beweisen, solldie Abbildungφ in die Abbildungφ deformiert werden. Dabei kann man die projiziertenSeitenflachen imRd−1 von der Abbildungφ so in die projizierten Seitenflachen imRd−1
von der Abbildungφ verformen, dass sich zwei Seitenflachenφ(E), φ(E′) mit dim(φ(E)) +

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 86
dim(φ(E′)) ≤ d−3 nicht schneiden. Denn es seiφ(A) eine beliebige projizierte Seitenflachevonφ der Dimensionm≤ d − 3, die in einer SeitenflacheA′ = φ(A) der Dimensionm vonder Abbildungφ uberfuhrt werden soll. Es wird gezeigt, dass sich ein Weg finden lasst,so dassφ(A) zu A′ = φ(A) verformt wird, ohne eine Seitenflache der Dimensionl mitm+l ≤ d−3 zu schneiden. Es seiHφ(A) die Menge aller Hyperebenen durch die Seitenflache
φ(A), da die Dimension von dim(φ(A)) = m≤ d− 3 betragt, gibt es unendlich viele solcherHyperebenen. Weiter seien
Hmi (φ(A)) ∈ Hφ(A)
mit i ∈ I einer beliebige Indexmenge, die Hyperebenen, die durch dieSeitenflacheφ(A)gehen und durch eine Seitenflachenφ(B) der Dimension dim(φ(B)) = l, mit m+ l = d − 3.Diese Hyperebenen existieren, sind allerdings unter Umst¨anden nicht eindeutig bestimmt.Fur jede Seitenflacheφ(B) reicht es sich einen Reprasentanten furHm
i (φ(A)) auszuwahlen.Schließlich gilt dann|Hm
I (φ(A))| < ∞. Weiter seien
Hm−ki (φ(A)) ∈ Hφ(A)
mit i ∈ I ′ einer beliebige Indexmenge, die Hyperebenen die durch alleSeitenflachenφ(S)innerhalb vonφ(A) alsoφ(S) ⊂ φ(A) undφ(S′) gehen, weiter soll dim(φ(S)) = m− k undφ(S′) = l mit m−k+l = d−3 gelten. Diese sind ebenfalls nicht eindeutig bestimmt allerdings
reicht es sich wieder einen Reprasentanten auszuwahlen.Dann ist|⋃mj=0 Hm− j
I ′ (φ(A))| < ∞.Dann geben alle Paare von nicht-parallelen Hyperebenen aus
(
Hφ(A) \(
m⋃
j=0
Hm− jI ′ (φ(A)) ∪ Hm
I (φ(A)))
,HA′ \(
m⋃
j=0
Hm− jI ′ (A′) ∪ Hm
I (A′)))
eine Moglichkeit an vonφ(A) nachA′ zu gelangen. Zunachst uber
Hφ(A) \(
m⋃
j=0
Hm− jI ′ (φ(A)) ∪ Hm
I (φ(A)))
und ab der Schnittmenge von dem Paar zu
HA′ \(
m⋃
j=0
Hm− jI ′ (A′) ∪ Hm
I (A′))
.
Dabei kann es immer noch vorkommen, dass die zuφ(A) adjazenten Seitenflachenφ(B) derDimensionm′ bei der Verschiebung auf Seitenflachen der Dimensionl′ mit m′ + l′ ≤ d− 3
treffen. Dann gehe man wie oben vor und bilde zunachst⋃m′
i=0 Hm′−iI ′′ (φ(B)), betrachte die
Paare (P,P′) mit
P = Hφ(A) \(
m⋃
j=0
Hm− jI ′ (φ(A)) ∪ Hm
I (φ(A))m′⋃
i=0
Hm′−iI ′′ (φ(B))
)
und
P′ = HA′ \(
m⋃
j=0
Hm− jI ′ (A′) ∪ Hm
I (A′)m′⋃
i=0
Hm′−iI ′′ (B′)
)
,
wobeiB′ = φ(B) die zuB korrespondierende Seitenflache der Abbildungφ ist. Dieses Ver-fahren wird solange durchgefuhrt bis man geeignete Hyperebenen gefunden hat, die dieVerformung garantieren ohne das sich zwei Seitenflachen schneiden, sofern sie eine Di-mension haben, die großer ist alsd − 3. Das Prinzip funktioniert, da man aus unendlich

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 87
vielen Hyperebenen immer nur endlich viele herausnimmt undman somit immer noch un-endlich viele zur Auswahl hat. Falls nun durch Verformung der Seitenflacheφ(A), diesedurch eine Seitenflacheφ(B) geht mit dim(φ(A)) + dim(φ(B)) = d − 2, dann gibt es nachLemma 4.7.26 entweder zwei oder gar keine antipodalen Seitenflachen, die die Seiten-flachenφ(A) beziehungsweiseφ(B) enthalten. Und dies wurde die Paritat der Schnittanzahlnicht andern. Somit bleibt die Schnittanzahl von
∑ |φ(F) ∩ φ(F′)| immer ungerade.
(a) (b)
(c)
Abbildung 4.24: Es soll das Schlegeldiagramm des Wurfels konstruiert werden. Dazu neh-me man einen Punkt, der sich zum einen in der Nahe der Mitte einer Facette des Wurfelsund andererseits außerhalb des Wurfels befindet, Abbildung (a). Anschließend werden Ge-raden erstellt, die durch diesen Punkt und einen anderen Punkt des Wurfels gehen. DerSchnittpunkt dieser Geraden mit der Hyperebenen, die auf der Facette liegen, werden ein-getragen und durch die entsprechenden Geraden verbunden, sofern zwei Punkte auch imWurfel adjazent sind. Man erhalt dann Abbildung (b) und als Einbettung imR2 dann Ab-bildung (c).

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 88
Definition 4.7.27. (k-Skelett).Es sei P ein Polytop imRd, dann bezeichne(P)k das k-Skelett von P, wobei das k-Skelettder Zellkomplex mit allen Seitenflachen des Polytop P der Dimension d≤ k ist.
Theorem 4.7.28.Es sei P ein voll-dimensionales konvexes Polytop imR5 und seiφ eineEinbettung von(P)1 in denR3. Dann existiert ein antipodales Seitenflachenpaar(F, F′) derDimension 2 von P, so dassφ(∂F) undφ(∂F′) eine ungerade Verlinkungszahl haben.
Beweis. Zunachst wird die Abbildungφ um eine letzte Koordinate 0 erweitert, alsoφ(x) =(φ(x), 0). Somit erhalt man eine Einbettung des (P)1 in denR4. Dann wird die Abbildungφzu einer generischen Abbildung vonϕ : ∂P→ R4 erweitert, so dass die letzte Koordinatepositiv ist, sofernx ∈ ∂P \ (P)1. Zum Beweis des Theorems 4.7.28 benotigt man noch einLemma.
Lemma 4.7.29.Die Einbettungφ lasst sich zu einer generischen Abbildungϕ erweitern.
Beweis. Da es sich um eine Einbettung handelt, schneiden sich Seitenflachen der Dimen-sion 1 nicht paarweise. Fur eine generische Abbildungϕ mussen die Seitenflachen derDimension 2 so gewahlt werden, dass sie sich paarweise nur in endlich vielen Punktenschneiden. Da sich die Einbettung der Seitenflachen der Dimension 1 nicht schneiden undeine Einbettung einen Homoomorphismus darstellt, lasstsich um die Bilder der Dimension1 eine Rohre konstruieren, die den Radiusǫ besitzt. Innerhalb dieser Rohre lasst sich dannein Polygonzug konstruieren, siehe dazu Abbildung 4.25. F¨ur jedes Bild der SeitenflacheAi der Dimension 2 des PolytopsP, die von der Kurve umrandet wird, konstruiert manKegel. Somit definiere man fur die generische Abbildung einPunktpi , der dann die Spitzefur das Bilde der Seitenflache bildet, wobei die vierte Koordinate des Punktespi positivist. Die Seitenflache der Dimension 2 wird somit aus Dreiecken gebildet, die die gleicheAnzahl haben, wie Kanten des Polygonzuges es begrenzen. Um nun zu gewahrleisten, dasssich die Bilder Seitenflachen der Dimension 2 nur in endlichvielen Punkten schneiden,genugt es diepi geschickt zu wahlen und dabei zu sorgen, dass zwei nicht adjazente belie-bige Dreiecke sich hochstens in endlich vielen Punkten schneiden. Seien also f
l undgk
zwei beliebige nicht adjazente Dreiecke aus den Bildern derSeitenflachenAl undAk. Wei-ter seienpl , ai, a j ∈ f
e und pk, as, at ∈ gk, wobeiai , a j undas, at die Bilder zweier Ecken
sind, die im Urbild durch eine Seitenflache der Dimension 1 verbunden sind undpk, pl dieSpitzen vonAk undAl . Daraus ergibt sich dann:
fl = ai + r1(a j − ai) + r2(pl − ai)
gk = as + t1(at − as) + t2(pk − as)
mit r1, r2, t1, t2 ∈ R+0 und 0≤ r1, r2, t1, t2 ≤ 1 undr1+r2 ≤ 1 sowiet1+t2 ≤ 1. Daai , a j, at, as
Seitenflachen der Dimension 0 sind, haben sich nach der Einbettung oben eine vierte Ko-ordinate 0. Deswegen wird zu Vereinfachung der vierdimensionale Punktai zum Punkt(ai, 0) und auspl wird (pl , αl) mit der vierten Koordinateαl . Fur die Schnittpunktmengeergibt sich aus f
l = gk, dann:
(
ai − as
0
)
=
(
at − as pk − as ai − a j ai − pl
0 αk 0 −αl
)
t1t2r1
r2
.
Aus der letzten Gleichung folgt:t2αk = r2αl also:
r2 =αk
αlt2.
Daraus ergibt sich dann:
(
ai − as
)
=
at − as︸ ︷︷ ︸
I
ai − a j︸ ︷︷ ︸
II
1αl
(αl pk − asαl + αkai − αkpl)︸ ︷︷ ︸
III
t1r1
t2
.
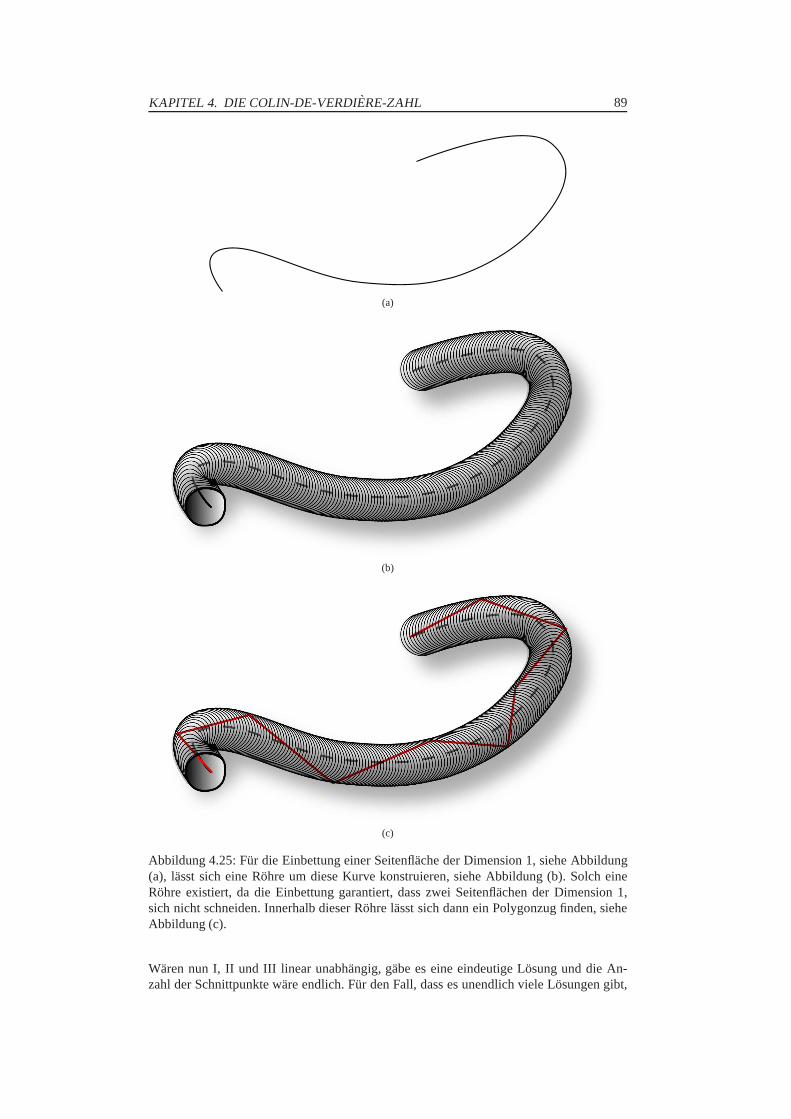
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 89
(a)
(b)
(c)
Abbildung 4.25: Fur die Einbettung einer Seitenflache derDimension 1, siehe Abbildung(a), lasst sich eine Rohre um diese Kurve konstruieren, siehe Abbildung (b). Solch eineRohre existiert, da die Einbettung garantiert, dass zwei Seitenflachen der Dimension 1,sich nicht schneiden. Innerhalb dieser Rohre lasst sich dann ein Polygonzug finden, sieheAbbildung (c).
Waren nun I, II und III linear unabhangig, gabe es eine eindeutige Losung und die An-zahl der Schnittpunkte ware endlich. Fur den Fall, dass esunendlich viele Losungen gibt,

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 90
mussen mindestens zwei Vektoren linear abhangig sein unddas Ergebnis musste im spander Vektoren liegen. Dies ergibt nun Kriterium fur die Wahlder pi fur die Bilder der Sei-tenflachenAi um eine generische Abbildung zu erhalten. Im Folgenden wirdeine rekursiveMoglichkeit vorgestellt, um eine endliche Schnittmenge zu gewahrleisten.Sei p1 = (p1, α1) so gewahlt, dassp1 < span(a1
i ) liegt mit a1i ∈ A1. Man bilde die affinen
Ebenen aus:Et = a2
s + span(p1 − a1j , a
1j − a1
i )
mit t ∈ I einer Indexmenge und fur alle Bilder aus Eckena2s ∈ A2, a1
i , a1j ∈ A1, wobeia1
i
unda1j durch die Bilder einer Seitenflache der Dimension 1 adjazent sind. Die Spitzep2 fur
A2 muss so gewahlt werden, dass sie nicht auf denEt liegt. Fur jedesp j kommen weitereaffine Ebenen hinzu auf denenp j nicht enthalten sein darf:
Et = a js +
j−1∑
k=1
span(pk − akj , a
kj − ak
i ),
mit t ∈ I einer Indexmenge und fur alle Bilder aus Eckena js ∈ A j , ak
i , akj ∈ Ak, wobeiak
i
undakj durch die Bilder einer Seitenflache der Dimension 1 adjazent sind und 1≤ k ≤ j −1
gilt. Diese Konstruktion stellt sicher, dasspk−as, pl −ai undai−a j linear unabhangig sind.Somit konnen I und III beziehungsweise II und III nicht linear abhangig sein. Der zweiteFall, dass I und II linear abhangig sind, soll nun ausgeschlossen werden. Waren sie linearabhangig, wurde zunachst einmalai −as < span(ai −a j) folgen, denn angenommen es warenicht so. Dann warea j = as und mit dem Term I dannat = ai und die beiden Dreieckehatte eine gleiche Seitenflache der Dimension 1. Allerdings ware sie dann adjazent, wasausgeschlossen wurde. Es konnte aberai − as ∈ span(ai − a j , III ) sein. Sei alsop1 wieoben. Dann bilde man alle Ebenen:
Et = (α2
α1(p1 − a1
i ) + span(a1i − a1
j , amk − am
l )) + a2s
fur alle a2s ∈ A2, a1
i , a1j ∈ A1, wobeia1
i unda1j adjazent durch eine Seitenflache der Dimen-
sion 1 sind undamk , a
nl ∈ (P)1 mit am
k , anl , a1
i , a1j . Und p2 muss dann wiederum so gewahlt
werden, dass es nicht auf der EbeneEt liegt. Somit wird verhindert, dass fur den Fall das Iund II linear abhangig sind, II und III keine Ebene aufspannen, auf derai − as liegt. Somithaben zwei beliebige Dreiecke immer nur eine endliche Schnittpunktanzahl. Da die Rohreeinen Radius vonǫ hat und dieser Radius sich beliebig verkleinern lasst, lasst sich der Radi-usǫ des Polygonzuges durch die Bedingung der Rektifizierbarkeit beliebig verkleinern undkonvergiert somit gegen die Kurve der Einbettung. Undφ lasst sich zu einer generischenAbbildung erweitern.
Es sei nunϕ eine generische Einbettung von∂P → R4. Nach dem Theorem 4.7.19hat das PolytopP zwei antipodale SeitenflachenF und F′ mit dim(F) + dim(F′) = 4und |ϕ(F) ∩ ϕ(F′)| ist ungerade. Angenommen dim(F) ≤ 1, dann ist die letzte Koordinatein jedem Punkt inϕ(F) 0, wahrendϕ(F′) eine positive letzte Koordinate hat, somit kanndim(F) ≤ 1 nicht gelten. Aus dim(F)+dim(F′) = 4 folgt dann, dass dim(F) = dim(F′) = 2gelten muss. Damit ist der Rand vonF undF′ eine 1-SphareS1 undS2, die aufgrund derEinbettung disjunkt sein mussen. Die generische Abbildung ϕ erweitert den Rand zu ei-nem 2-Ball in dem positiven Halbraum desR4 und damit schneiden sich die 2-Balle ineiner ungeraden Anzahl von Punkten, dies soll nun durch Widerspruch gezeigt werden.Dies impliziert wiederum die Verlinktheit und eine ungerade Verlinkungszahl. Angenom-men sie hatten eine gerade Verlinkungszahl, dann gibt es eine Erweiterung von∂F zu einerstetigen Abbildungϕ′ mit (ϕ′(F))4 = 0 wobei mit (ϕ′(x))4 die letzte Koordinate gemeintist und die ist fur jeden Punkt im Inneren vonF gleich 0. Undϕ′(F) undϕ(∂F′) schneidensich transversal in einer geraden Anzahl an Punkten, siehe dazu Abbildung 4.26. Anschlie-ßend erweitereϕ′ zu der generischen Abbildung der SeitenflacheF. Man erhalt damit eine

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 91
Abbildung 4.26: Die Spitze der Pyramide besitzt eine positive vierte Koordinate. Die Sei-tenflache, hier rot dargestellt, hat eine vierte Koordinate 0.
geschlossenen 2-Sphare aufϕ(F) ∪ ϕ′(F). Die Abbildungϕ von∂F′ wird nun ebenfalls zuder generischen Abbildungϕ(F′) erweitert und wird nun ebenfalls allerdings in den negati-ven Halbraum der letzten Koordinate desR4 geschlossen. Man erhalt somit zwei 2-Spharendurch . Diese schneiden sich im positiven Halbraum der positiven letzten Koordinate desR4
in einer ungeraden Anzahl an transversalen Schnittpunkten. Fur die letzte Koordinate gleich0 gibt es eine gerade Anzahl an Schnittpunkten, da eine gerade Verlinkungszahl angenom-men wurde und fur eine negative letzte Koordinate gibt es keine Schnittpunkte, da nurF′
dorthin erweitert wurde. Man erhalt somit zwei 2-Spharen, die sich in einer ungeraden An-zahl transversaler Schnittpunkte treffen und dies ergibt wie folgt einen Widerspruch. Dennbeide 2-Spharen ergeben sich als Bilder von SeitenflachenF, F′ der Dimension 2. DieseSeitenflachen sind kompakt und somit auch die 2-Spharen. Nach der Verallgemeinerungdes Jordanschen Kurvensatzes [17] teilt das Komplement dieMenge in zwei Zusammen-hangsmengen. Der Abschluss einer dieser beiden Mengen ist kompakt und hat den Randder 2-Sphare. Somit gibt es ein Inneres der 2-Sphare. Schneidet nun die andere 2-Spharediese, befindet sie sich im Inneren um dieses wider zu verlassen, gibt es einen weiterenSchnittpunkt und somit ist die Anzahl transversaler Schnitte zwischen zwei kompakten2-Spharen immer gerade.
4.7.2 Der Beweis von Theorem 4.7.7
Beweis. Es seiG ein verlinkungsfreie einbettbarer Graph und angenommen, es gilt µ(G) ≥5. Nach [29] lasst sich annehmen, dassG flach einbettbar imR3 ist. Denn jede flacheEinbettung ist verlinkungsfrei, aber die Umkehrung ist im Allgemeinen falsch. Allerdingswurde in [29] gezeigt, dass, sofern es furG eine verlinkungsfreie Einbettung gibt, es aucheine flache Einbettung existiert. Es reicht also zu zeigen, dass der GraphG nicht flacheinbettbar ist fallsµ(G) ≥ 5 gilt. Es soll nun ein Gegenbeispiel konstruiert werden.
Lemma 4.7.30.Es sei G ein verlinkungsfrei einbettbarer Graph mit einer minimalen An-zahl von Knoten, dann folgt, dass G 4-zusammenhangend ist.
Beweis. AngenommenG hat einen minimalen EckenschnittU mit |U | ≤ 3. Das bedeu-tet, dassG − U nicht mehr zusammenhangend ist. Im Folgenden wird ein Graph G kon-struiert. Es wird gezeigt, dassG ein Minor vonG ist. Schließlich wirdµ(G) = 4 gefol-gert, was wegen des Theorems uber die Minormonotonie 4.2.5zum Widerspruch fuhrt, da4 = µ(G) ≥ µ(G) folgt und nach Annahmeµ(G) ≥ 5 ist.Man betrachte eine ZusammenhangskomponenteK von G − U. Dann seiG′1 der Graph,den man ausG − K und der gebildeten Clique aus den Knoten vonU erhalt. Schließlich
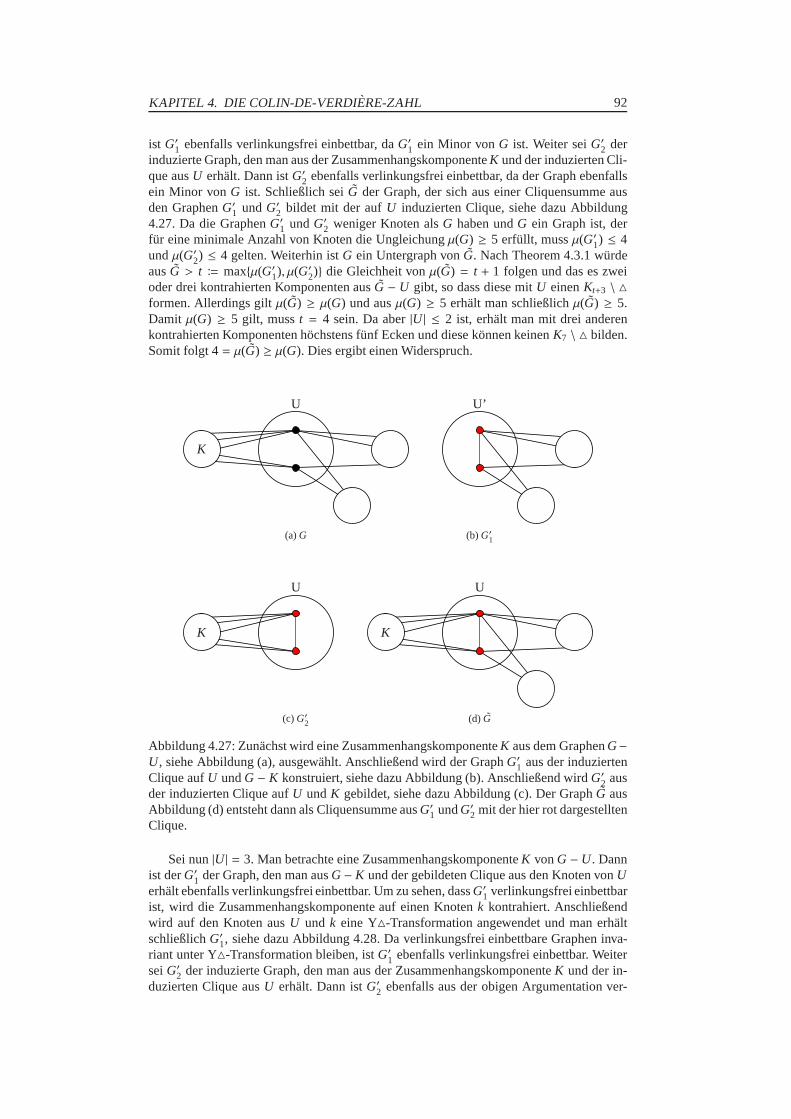
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 92
ist G′1 ebenfalls verlinkungsfrei einbettbar, daG′1 ein Minor vonG ist. Weiter seiG′2 derinduzierte Graph, den man aus der ZusammenhangskomponenteK und der induzierten Cli-que ausU erhalt. Dann istG′2 ebenfalls verlinkungsfrei einbettbar, da der Graph ebenfallsein Minor vonG ist. Schließlich seiG der Graph, der sich aus einer Cliquensumme ausden GraphenG′1 und G′2 bildet mit der aufU induzierten Clique, siehe dazu Abbildung4.27. Da die GraphenG′1 undG′2 weniger Knoten alsG haben undG ein Graph ist, derfur eine minimale Anzahl von Knoten die Ungleichungµ(G) ≥ 5 erfullt, mussµ(G′1) ≤ 4undµ(G′2) ≤ 4 gelten. Weiterhin istG ein Untergraph vonG. Nach Theorem 4.3.1 wurdeausG > t ≔ maxµ(G′1), µ(G′2) die Gleichheit vonµ(G) = t + 1 folgen und das es zweioder drei kontrahierten Komponenten ausG − U gibt, so dass diese mitU einenKt+3 \ formen. Allerdings giltµ(G) ≥ µ(G) und ausµ(G) ≥ 5 erhalt man schließlichµ(G) ≥ 5.Damit µ(G) ≥ 5 gilt, musst = 4 sein. Da aber|U | ≤ 2 ist, erhalt man mit drei anderenkontrahierten Komponenten hochstens funf Ecken und diese konnen keinenK7 \ bilden.Somit folgt 4= µ(G) ≥ µ(G). Dies ergibt einen Widerspruch.
K
U
(a)G
U’
(b) G′1
K
U
(c) G′2
K
U
(d) G
Abbildung 4.27: Zunachst wird eine ZusammenhangskomponenteK aus dem GraphenG−U, siehe Abbildung (a), ausgewahlt. Anschließend wird der GraphG′1 aus der induziertenClique aufU undG − K konstruiert, siehe dazu Abbildung (b). Anschließend wirdG′2 ausder induzierten Clique aufU undK gebildet, siehe dazu Abbildung (c). Der GraphG ausAbbildung (d) entsteht dann als Cliquensumme ausG′1 undG′2 mit der hier rot dargestelltenClique.
Sei nun|U | = 3. Man betrachte eine ZusammenhangskomponenteK vonG − U. Dannist derG′1 der Graph, den man ausG− K und der gebildeten Clique aus den Knoten vonUerhalt ebenfalls verlinkungsfrei einbettbar. Um zu sehen, dassG′1 verlinkungsfrei einbettbarist, wird die Zusammenhangskomponente auf einen Knotenk kontrahiert. Anschließendwird auf den Knoten ausU und k eine Y-Transformation angewendet und man erhaltschließlichG′1, siehe dazu Abbildung 4.28. Da verlinkungsfrei einbettbare Graphen inva-riant unter Y-Transformation bleiben, istG′1 ebenfalls verlinkungsfrei einbettbar. WeiterseiG′2 der induzierte Graph, den man aus der ZusammenhangskomponenteK und der in-duzierten Clique ausU erhalt. Dann istG′2 ebenfalls aus der obigen Argumentation ver-
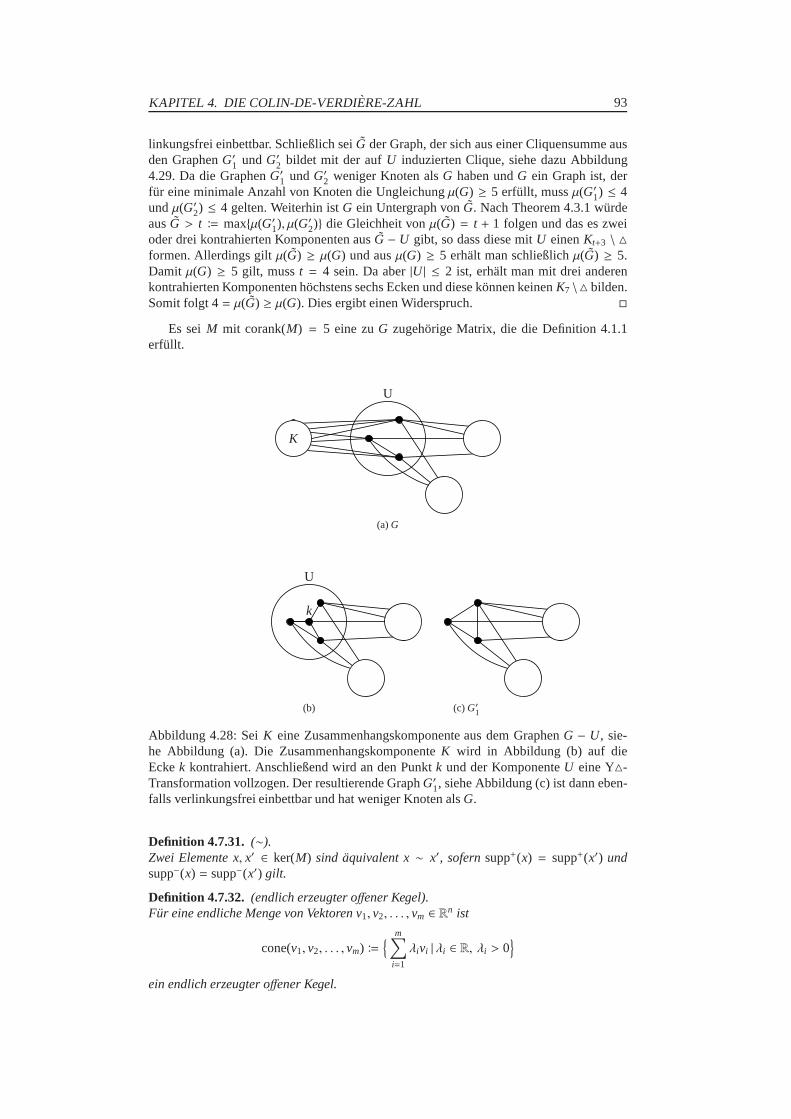
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 93
linkungsfrei einbettbar. Schließlich seiG der Graph, der sich aus einer Cliquensumme ausden GraphenG′1 und G′2 bildet mit der aufU induzierten Clique, siehe dazu Abbildung4.29. Da die GraphenG′1 undG′2 weniger Knoten alsG haben undG ein Graph ist, derfur eine minimale Anzahl von Knoten die Ungleichungµ(G) ≥ 5 erfullt, mussµ(G′1) ≤ 4undµ(G′2) ≤ 4 gelten. Weiterhin istG ein Untergraph vonG. Nach Theorem 4.3.1 wurdeausG > t ≔ maxµ(G′1), µ(G′2) die Gleichheit vonµ(G) = t + 1 folgen und das es zweioder drei kontrahierten Komponenten ausG − U gibt, so dass diese mitU einenKt+3 \ formen. Allerdings giltµ(G) ≥ µ(G) und ausµ(G) ≥ 5 erhalt man schließlichµ(G) ≥ 5.Damit µ(G) ≥ 5 gilt, musst = 4 sein. Da aber|U | ≤ 2 ist, erhalt man mit drei anderenkontrahierten Komponenten hochstens sechs Ecken und diese konnen keinenK7 \ bilden.Somit folgt 4= µ(G) ≥ µ(G). Dies ergibt einen Widerspruch.
Es seiM mit corank(M) = 5 eine zuG zugehorige Matrix, die die Definition 4.1.1erfullt.
K
U
(a)G
k
U
(b) (c) G′1
Abbildung 4.28: SeiK eine Zusammenhangskomponente aus dem GraphenG − U, sie-he Abbildung (a). Die ZusammenhangskomponenteK wird in Abbildung (b) auf dieEckek kontrahiert. Anschließend wird an den Punktk und der KomponenteU eine Y-Transformation vollzogen. Der resultierende GraphG′1, siehe Abbildung (c) ist dann eben-falls verlinkungsfrei einbettbar und hat weniger Knoten alsG.
Definition 4.7.31. (∼).Zwei Elemente x, x′ ∈ ker(M) sind aquivalent x∼ x′, sofernsupp+(x) = supp+(x′) undsupp−(x) = supp−(x′) gilt.
Definition 4.7.32. (endlich erzeugter offener Kegel).Fur eine endliche Menge von Vektoren v1, v2, . . . , vm ∈ Rn ist
cone(v1, v2, . . . , vm) ≔
m∑
i=1
λivi | λi ∈ R, λi > 0
ein endlich erzeugter offener Kegel.
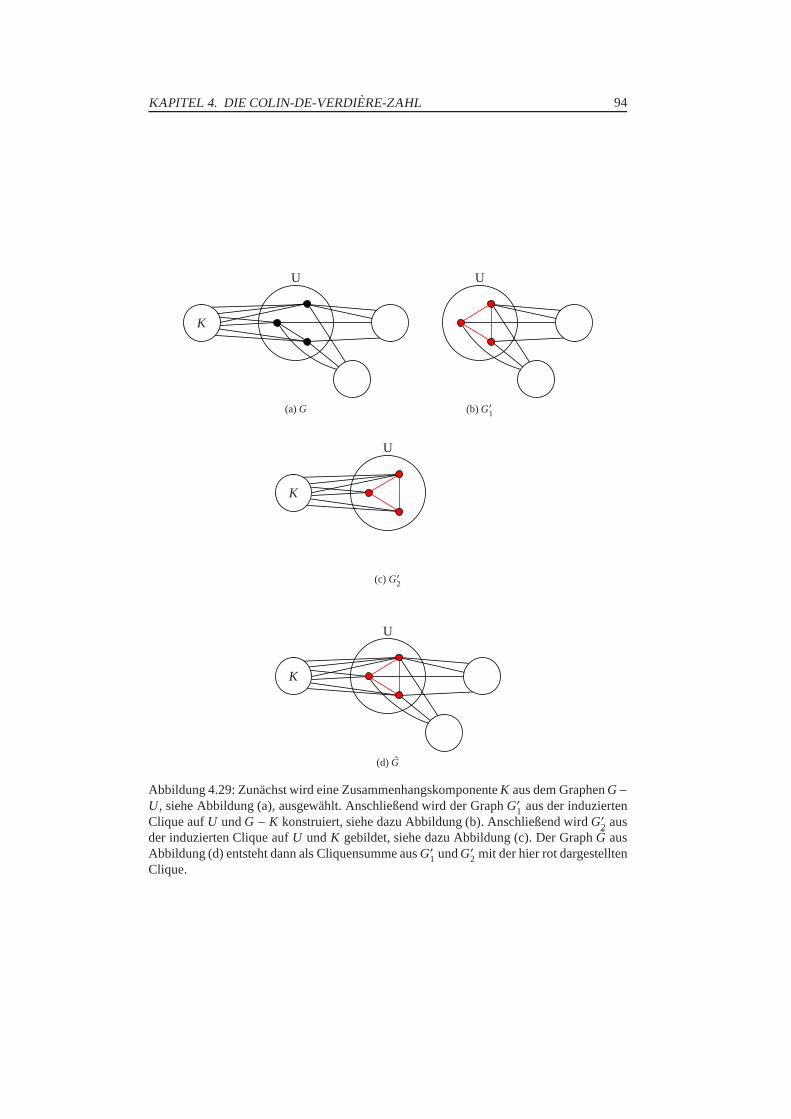
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 94
K
U
(a)G
U
(b) G′1
K
U
(c) G′2
K
U
(d) G
Abbildung 4.29: Zunachst wird eine ZusammenhangskomponenteK aus dem GraphenG−U, siehe Abbildung (a), ausgewahlt. Anschließend wird der GraphG′1 aus der induziertenClique aufU undG − K konstruiert, siehe dazu Abbildung (b). Anschließend wirdG′2 ausder induzierten Clique aufU undK gebildet, siehe dazu Abbildung (c). Der GraphG ausAbbildung (d) entsteht dann als Cliquensumme ausG′1 undG′2 mit der hier rot dargestelltenClique.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 95
Bemerkung: Falls λi ≥ 0 gilt, bezeichnet man den Kegel als einen endlich erzeug-ten abgeschlossen Kegel oder einfach als endlich erzeugtenKegel. Anstatt der Vektorenv1, v2, . . . , vm lasst sich der Kegel auch mit Hilfe einer Matrix definieren.SeiA ∈ Rm×n eineMatrix mit den Spaltenv1, v2, . . . , vm, dann bezeichnet
cone(A) ≔ Aλ, λ ∈ Rn, λ > 0
den gleichen offenen Kegel wie cone(v1, v2, . . . , vm). Weiter ist coneA der Co-Kegel voncone(A) definiert als
coneA ≔ x ∈ Rn |Ax≤ 0.
Satz 4.7.33.Die Aquivalenzklassen[xi ] von ker(M) bilden einen zentralsymmetrischenKomplexP von spitzen polyhedrischen Kegeln.
Beweis. Seienxij ∈ [xi ] fur alle j ∈ J einer Indexmenge linear unabhangig, dann bilden
alle positiven Linearkombinationen vonxij wieder ein Element in [xi ], also
∑
j α j xij ∈ [xi ]
fur endlich vieleα j > 0. Durch die positiven Koeffizienten bleibt sowohl der negative alsauch der positive Trager erhalten. Fur die Linearkombination folgt ebenfalls
∑
j α j xij ∈
ker(M).
Definition 4.7.34. (zerbrochener Kegel).Ein Kegel f vonP heißt zerbrochen, falls G| supp+(x) fur alle x ∈ f unzusammenhangendist.
Satz 4.7.35.Sei x∈ ker(M) mit G| supp+(x) unzusammenhangend. Dann hat G| supp(x)genau 3 Komponenten K1, K2 und K3 mit K1 ∪ K2 = supp+(x) und K3 = supp−(x) undN(Ki) = V \ supp(x) fur i = 1, 2, 3.
Beweis. Aus Theorem 4.5.6 folgt zunachst die Existenz der ZusammenhangskomponentenK1, K2 undK3 mit K1∪K2 = G| supp+(x) undK3 = G| supp−(x). Weiter folgt nach Theorem4.5.6, dass N(Ki) = N(supp(x)) fur alle ZusammenhangskomponentenKi ausG| supp(x)gilt. Daraus folgt dann
N(K1) = N(K2) = N(K3).
Also haben die drei Komponenten die gleichen Nachbarn. Des Weiteren gibt es nach Theo-rem 4.5.6 keine Kante, dieG| supp+(x) undG| supp−(x) verbindet.
Angenommen, die Aussage des Satzes 4.7.35 ware falsch. Dann gabe es eine Kompo-nenteKi , so dass N(Ki) , V \ supp(x) gilt. Dafur gibt es zunachst zwei Falle:
a) es gibt eina ∈ V(G), so dassa ∈ N(Ki) abera < V \ supp(x) gilt oder
b) es gibt eina ∈ V(G), so dassa < N(Ki) abera ∈ V \ supp(x) gilt.
Es wird der Fall a) behandelt. Dieser Fall kann nicht eintreten, denn fallsa ∈ N(Ki) kanna nicht Element vonK j mit i , j sein, da es keine Kante, gibt die jeweils zwei der dreiKomponenten ausG| supp(x) verbindet. Somit mussa ein Element ausV \ supp(x) sein.Es wird der Fall b) behandelt. Fallsa nicht in N(Ki) aber inV \ supp(x) enthalten ist, ist dieMengeV \ (supp(x)∪N(supp(x)) nicht leer unda ist darin enthalten. Da der Graph zusam-menhangend ist, muss die MengeV \ (supp(x)∪N(supp(x)) mit der Menge N(supp(x)) ad-jazent sein. Um die Bedingung fur den 4-zusammenhangenden Graphen zu gewahrleisten,mussen die beiden MengenV \ (supp(x) ∪ N(supp(x)) und N(supp(x)) durch mindestensvier Kanten verbunden sein, siehe dazu Abbildung 4.30. Dieser hat dann allerdings einenUntergraphen der Petersen Familie 4.20d und ware somit nicht verlinkungsfrei einbettbar.Ein Widerspruch, somit gilt die Aussage.
Satz 4.7.36.Jeder zerbrochene Kegel f ist 2-dimensional.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 96
K1K2K3
N(supp(x))
V \ (supp(x) ∪ N(supp(x))
(a)
K1K2K3
N(supp(x))
V \ (supp(x) ∪ N(supp(x))
(b)
K1K2K3
n1 n2 n3 n4
v
(c)
K2 K3
n1 n2 n3
n4
v
K1
(d)
Abbildung 4.30: Nach Kontraktion der KomponentenK1, K2 und K3 auf die gleich-namigen Knoten hat der GraphG die folgende Gestalt (a). Es wurde angenommen,das die Aussage des Satzes 4.7.35 nicht gilt. Dann gibt es noch eine weiteren Men-ge V \ (supp(x) ∪ N(supp(x)), die nicht zu denKi adjazent ist. Um die Bedingung,dass der Graph 4-zusammenhangend ist zu erfullen, muss diese Menge durch mindestensvier Kanten mit N(supp(x)) verbunden sein. Man erhalt den Graphen aus Abbildung (b).In der Abbildung (c) wurde die Menge N(supp(x)) auf vier Knotenn1, n2, n3, n4 sowieV \ (supp(x)∪N(supp(x)) auf den Knotenv kontrahiert. In der Abbildung (d) erkennt man,dass dieser Graph einen Graph aus der Petersen Familie als Minor enthalt, siehe Abbildung4.20d.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 97
Beweis. Es seix ∈ f undK1, K2 undK3 die Komponenten wie in Satz 4.7.35. Furv ∈ ffolgt: supp(v) = supp(x), da x und v in der gleichenAquivalenzklasse liegen. Dann giltMKi vKi = 0 und MKi xKi = 0 fur i = 1, 2, 3, siehe dazu den Beweis von Theorem 4.5.6.Weiterhin gilt xK1 > 0, xK2 > 0 undxK3 < 0. Nach dem Perron-Frobenius-Theorem 2.1.19folgt dann:vKi = λi xKi mit λi > 0. Angenommen dies wurde nicht gelten. Dann definieredso, dassd > maxi |aii | gilt. Schließlich ware (MKi −d · Id)xKi = −d · xKi undxKi ware ein Ei-genvektor mit einem negativen Eigenwert−d und ebensovKi . Nach dem Perron-Frobenius-Theorem 2.1.19 muss aberxKi der einzige Eigenvektor zu einem negativen Eigenwert sein.DennMKi − d · Id hat nur Eintrage, die kleiner als 0 sind. Somit mussvKi ein Vielfachesvon xKi sein.Weiter gibt es nach dem Perron-Frobenius-Theorem2.1.19 einen positiven Vektorzzu demnegativen Eigenwert der MatrixM. Somit folgt dann〈z, v〉 = 〈z, x〉 = 0, da die Eigenvek-toren einer symmetrischen Matrix orthogonal zueinander sind. Sofern fur alle Vektoreny ∈ R|V| die folgenden Bedingungen erfullt sind
• 〈z, y〉 = 0,
• supp+(x) = supp+(y) und supp−(x) = supp−(y),
• yKi = λi xKi , λi > 0,
folgt die Gleichung〈y,My〉 = 0. Nach Satz 2.1.23 folgt danny ∈ ker(M) undy ∈ f sowiedie Umkehrung. Es seien nunw, x, y ∈ f gegeben. Sind nunw, x, y linear abhangig dann istf 2-dimensional. Zum einen ergibt sich:
x =
xK1
xK2
xK3
0...
0
, y =
λ1xK1
λ2xK2
λ3xK3
0...
0
, w =
γ1xK1
γ2xK2
γ3xK3
0...
0
.
Aus der Gleichung〈y, z〉 = 0 folgt:
λ1 =−λ2〈xK2, zK2〉 − λ3〈xK3 , zK3〉
〈xK1 , zK1〉.
Der Bruch ist wohldefiniert, da〈xK1, zK1〉 , 0. Dies sieht man, weilz ein positiver Vektorist und xK1 gerade eine Komponente des Tragers vonx ist. Weiter folgt aus Gleichung〈y, z〉 = 0:
γ1 =−γ2〈xK2, zK2〉 − γ3〈xK3, zK3〉
〈xK1, zK1〉.
Zu zeigen ist nun, dassα1x+ α2y+ α3w = 0
eine nicht-triviale Losung besitzt. Es gibt alsoα1, α2, α3, so dass
α1
xK1
xK2
xK3
0...
0
+ α2
λ1xK1
λ2xK2
λ3xK3
0...
0
+ α3
γ1xK1
γ2xK2
γ3xK3
0...
0
= 0
gilt und nicht alleα j = 0 sind. Aus der ersten Zeile folgt dann:(
α1 + α2
(−λ2〈xK2, zK2〉 − λ3〈xK3 , zK3〉〈xK1 , zK1〉
)
+ α3
(−γ2〈xK2 , zK2〉 − γ3〈xK3, zK3〉〈xK1, zK1〉
))
xK1 = 0.
KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 98
Durch Multiplikation von−〈xK1 , zK1〉 mit der Gleichung folgt dann
A
α1
α2
α3
xK1 = 0
mit:
A≔(
−〈xK1, zK1〉 λ2〈xK2, zK2〉 + λ3〈xK3, zK3〉 γ2〈xK2, zK2〉 + γ3〈xK3 , zK3〉)
Durch Multiplikation von−〈xK2 , zK2〉 mit der zweiten Zeile folgt dann
B
α1
α2
α3
xK1 = 0
mit:B≔
(
−〈xK2 , zK2〉 −λ2〈xK2, zK2〉 −γ2〈xK2, zK2〉)
.
Durch Multiplikation von−〈xK3 , zK3〉 mit der dritten Zeile folgt dann
C
α1
α2
α3
xK1 = 0
mit:C ≔
(
−〈xK3, zK3〉 −λ3〈xK3, zK3〉 −γ3〈xK3, zK3〉)
.
Um zu zeigen, dass es eine nicht-triviale Losung von
ABC
·
α1
α2
α3
= 0
gibt, genugt es, die Determinante von
ABC
zu bestimmen. Schließlich folgt nach Berech-
nung der Determinante
det
ABC
= 0.
Somit ist der Kern mindestens eindimensional und der Rang h¨ochsten zweidimensional. Dadieλi sowie dieγi paarweise verschieden sein konnen folgt, dass der Rang zweidimensionalist und damit auchf .
Weiter zum Beweis von Theorem 4.7.7. Wahle eine Menge von hinreichend endlichvielen Einheitsvektoren aus jedem KegelP in einer zentralsymmetrischen Gestalt. Dies istmoglich, weil aus jedem Einheitsvektorx im Kern der MatrixM auch folgt, dass−x imKern liegt. Weiter seiP die konvexe Hulle dieser Vektoren. Dann istP ein 5-dimensionaleszentralsymmetrisches konvexes Polytop, so dass jede Seitenflache vonP in einem KegelvonP enthalten ist. Die Vektoren lassen sich so dicht wahlen, dass jede Seitenflache vonPhochstens eine Kante, die Teil eines 2-dimensionales Kegels vonP ist, beinhaltet.
Definition 4.7.37. (zerbrochene Kante).Eine Kante von P heißt zerbrochen, falls sie in einem zerbrochenen Kegel inP enthaltenist.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 99
Man definiere nun eine Einbettungφ des 1-Skelett (P)1 von P in denR3. Dazu wirddie verlinkungsfreie EinbettungΩ des GraphenG benutzt. Sei zunachstx eine Ecke vonPundv ∈ supp+(x) eine Ecke des GraphenG. Nun sollφ(x) in der Nahe der Einbettung vonv alsoΩ(v) abgebildet werden. Weiter soll nun die Einbettung der Kanten geklart werden.Jede unzerbrochene Kantee= xy von P wird auf eine Kurve abgebildet, dieφ(x) undφ(y)verbindet. Dabei soll die Kurve in der Nahe der verlinkungsfreien Einbettung der EckenausG| supp+(z) mit z ∈ eabgebildet werden und zwar so, dass die Abbildungφ injektiv ist.Sei nuneeine zerbrochene Kante vonP. Seix ∈ eund seiK1, K2 undK3 wie in Satz 4.7.35und seiT ≔ N(supp(x)).
Lemma 4.7.38.Es gibt eine Kurve C inR3\G, die die Komponente K1 und K2 so verbindet,dass es kein Paar an disjunkten verlinkten Kreise A in G|(K1∪K2∪T)∪C und B in G|(K3∪T)gibt.
Beweis. Es seiH der flach eingebettete Graph vonG nach Kontraktion derKi zu denPunktenvi . Es reicht zu zeigen, dass es eine KurveC gibt, diev1 undv2 verbindet, so dassH∪C verlinkungsfrei einbettbar ist. Denn seiC mit H∪C verlinkungsfrei einbettbar, dannlassen sich dievi langsam zuKi dekontrahieren undC mit zwei beliebigen Punkten inK1
undK2 verbinden. Dann betrachte einen KreisA in G|(K1∪K2∪T)∪C undB in G|(K3∪T)disjunkt vonA. Nach Kontraktion erhalt man disjunkte ZyklenA′ undB′ in H∪C. DaH∪Cverlinkungsfrei einbettbar ist, sindA′ undB′ nicht verlinkt und folglich auchA undB nicht.Siehe hierzu Abbildung 4.31.
K1
K2
CT
(a)
v1
v2
C
T
(b)
Abbildung 4.31: Zunachst betrachtet man einen Kreis inG|(K1∪K2∪T)∪C, in Abbildung(a) rot dargestellt. Nach Kontraktion vonK1 undK2 erhalt man einen Zyklus, ebenfalls rotdargestellt in Abbildung (b).
Weiterhin istH|T ein hamiltonischer Kreis oder ein Teil davon. Im Folgenden soll durcheinen Widerspruchsbeweis gezeigt werden, dassH|T ein hamiltonischer Kreis oder einTeil davon ist. Sei nun angenommenH|T ist weder ein hamiltonischer Kreis noch ein Teildavon. Dann konnen furH|T folgende Falle eintreten:
• H|T enthalt einen KreisC sowie ein Knotenv ∈ T undv < C oder
• H|T besteht aus einem Wald in der mindestens eine KomponenteK kein Pfad ist.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 100
Im ersten Fall lassen sich die Kanten des KreisesC kontrahieren, so dass nur noch ein Drei-eck ubrig bleibt. Die restlichen Knoten bis aufv werden entfernt. Der entstandene Minorist ein Dreieck mit einer isolierten Ecke. Im zweiten Fall lassen sich die Zusammenhangs-komponenten ausserK entfernen. Die KomponenteK enthalt mindestens eine Ecke vomGrad 3, daK kein Pfad ist. Nach Kontraktion vonK erhalt man schließlich einenK1,3. Al-lerdings enthalt in beiden Fallen der GraphH einen Minor der ein Mitglied der PetersenFamilie ist. Dies ergibt einen Widerspruch zum Satz 4.7.6, da H verlinkungsfrei einbettbarist, siehe dazu Abbildung 4.32. Nach Kontraktion der KomponentenKi zu den Eckenvi
sind die Eckenvi mit allen Ecken ausT adjazent. Somit istH isomorph zum vollstandigenbipartiten GraphenK3,|T | mit einigen Kanten inT, die einen hamiltonischen Kreis inT odereinen Teil davon formen. DaH flach einbettbar ist, gibt es fur alle Kantene = t1, t2 vonH|T eine offene Scheibe, die mit den Rand des Dreieckst1t2v3 disjunkt zuH ist. BohmesLemma [5] besagt, dass falls es solche offenen Scheiben gibt, lassen sich ebenfalls offe-ne Scheiben finden, die alle paarweise disjunkt sind. Da die Vereinigung vonH|(v3 ∪ T)mit den offenen Scheibe kontrahierbar ist, lasst sich eine KurveC finden, diev1 und v2
verbindet und keine Scheibe schneidet. Diese Kurve hat die geforderten Bedingungen.
v1v2v3
(a)
v1v2v3
(b)
Abbildung 4.32: Ware inH|T ein Minor mit 4 Knoten enthalten, der einenK1,4, sieheAbbildung (a), oder ein Dreieck mit einem isolierten Punkt,siehe Abbildung (b), enthielte,so entsprachen die Graphen zwei Mitglieder der Petersen Familie, siehe Abbildung 4.20bund 4.20c.
Somit lasst sich fur alle zerbrochenen Kanten eine Einbettungφ in der Nahe vonG|(K1∪K2)∪C finden, so dass diese injektiv ist. Nach jeder zerbrochenen Kante ist die Einbettungφ fertig.
Nach Satz 4.7.28 gibt es fur eine Einbettung zwei antipodale SeitenflachenF undF′ derDimension 2, so dass die Bilder ihrer Rander verlinkt sind.Da P ein zentralsymmetrischesPolytop ist, gibt es eine FacetteD vonP, so dassF ≤ D undF′ ≤ −D. Seiy ∈ D\∂D, dannfolgt das die Bilder der Einbettungφ unter∂F und∂F′ jeweils in der Nahe der verlinkungs-freien EinbettungΩ unter supp+(y) und supp−(y) sind. Dies folgt aus supp+(x) ⊆ supp+(y)und supp−(x) ⊆ supp−(y) und soll im folgenden Lemma bewiesen werden.
Lemma 4.7.39.Seien D, F Seitenflachen eines Polytops P fur die F≤ D gilt. Dann folgtfur alle y ∈ D \ ∂D und x∈ F:
supp+(x) ⊆ supp+(y) und supp−(x) ⊆ supp−(y).
Beweis. Sei y ∈ D \ ∂D und x ∈ F. Dann folgt fur allez ∈ D \ ∂D, dassy ∼ z gilt.Insbesondere gilt fur alleλ ∈ [0, 1) auchy ∼ λx+(1−λ)y, da die Geradeλx+(1−λ)y fur λ ∈[0, 1) im relativen Inneren der SeitenflacheD liegt undD in einem Kegel ausP enthalten

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 101
ist. Es soll nun gefolgert werden, dass supp+(x) ⊆ supp+(y) und supp−(x) ⊆ supp−(y)gilt. Angenommen die Aussage supp+(x) ⊆ supp+(y) ware falsch. Dann gibt es mindestenseinen Indexi ∈ supp+(x) aberi < supp+(y). Nach Voraussetzung isty ∼ λx + (1− λ)y furλ ∈ [0, 1) und somit auchyi ∼ λxi + (1− λ)yi fur λ ∈ [0, 1). Da i < supp+(y) gibt es zweiFalle zu unterscheiden: 1.i ∈ supp−(y) und 2.i ∈ supp0(y).Angenommen der erste Fall tritt ein. Dann istyi < 0 und es musste 0> λxi + (1− λ)yi furalle λ ∈ [0, 1) gelten. Dann seiλ ≔ −yi
xi−yi. Dann istλ in den geforderten Intervall [0, 1), da
−yi > 0. Schließlich folgt
λxi + (1− λ)yi =−yi
xi − yixi +
(
1− −yi
xi − yi
)
yi
=−yi · xi
xi − yi+
(
xi − yi + yi
xi − yi
)
yi
=−yi · xi
xi − yi+
xi · yi
xi − yi
= 0.
Dies ergibt einen Widerspruch, da 0> λxi + (1− λ)yi fur alleλ ∈ [0, 1) gelten soll.Angenommen der zweite Fall tritt ein. Dann istyi = 0 und es musste 0= λxi + (1− λ)yi furalleλ ∈ [0, 1) gelten. Sei nunλ ∈ (0, 1). Dann folgt
λ · xi + (1− λ)yi = λ · xi
> 0.
Dies ergibt einen Widerspruch, da 0> λxi + (1 − λ)yi fur alle λ ∈ [0, 1) gelten soll.Somit folgt supp+(x) ⊆ supp+(y). Der Fall supp−(x) ⊆ supp−(y) folgt analog. Daraus folgtschließlich die Behauptung.
Somit ist das Bild der Einbettungφ auf∂F in der Nahe der EinbettungΩ auf supp+(y)und das Bild der Einbettungφ auf ∂F′ ist in der Nahe der EinbettungΩ auf supp−(y)beziehungsweise auf supp−(y) enthalten.Im Folgenden soll gezeigt werden, dass∂F oder∂F′ eine zerbrochene Kante beinhaltenmussen.
Lemma 4.7.40.Genau ein Rand einer Seitenflache eines antipodalen SeitenflachenpaaresF, F′ muss eine zerbrochene Kante enthalten.
Beweis. Falls∂F und∂F′ keine zerbrochene Kante enthalten, folgt, dassG zwei disjunkteverlinkte Kreise hat. Ein Widerspruch, denn die Ecken vonx, y ∈ ∂F einer unzerbroche-nen Kantee = xy wurden unter der Einbettungφ in der Nahe der Bilder von supp+(x)und supp−(y) unter der EinbettungΩ eingebettet sein. Furz ∈ e ist G| supp+(z) zusam-menhangend und somit gibt es einen Weg vonφ(x) nachφ(y) in der Einbettung vonG, diein der Nahe vonΩ liegt und somit verlinkbar ist. Somit kannΩ nicht eine verlinkungsfreieEinbettung sein. Dies ergibt einen Widerspruch und somit muss es mindestens eine zerbro-chene Kante geben. Also nehme an, dass∂F eine zerbrochene Kante enthalt. Dann ist esdie einzige zerbrochene Kante in∂F, da nach Konstruktion∂D hochstens eine Kante vonP beinhaltet, die Teil eines 2-dimensionalen Kegelf in P ist. Also ist f ein zerbrochenerKegel. Es wird nun gezeigt, dass∂F′ keine zerbrochene Kante enthalt, sofern∂F bereitseine zerbrochene Kante beinhaltet. Angenommen∂F′ enthalt eine zerbrochene Kantee′.Dann ist nach Konstruktione′ Teil eines zerbrochenen Kegelsf ′ in P. DaP zentralsym-metrisch ist, folgt− f = f ′. Aber fur x ∈ f ist G| supp−(x) zusammenhangend. Dann ist−x ∈ f ′ undG| supp+(x) musste unzusammenhangend sein. Also enthalt∂F′ keine zerbro-chene Kante.

KAPITEL 4. DIE COLIN-DE-VERDIERE-ZAHL 102
Nun seix ∈ f und betrachteK1, K2, K3 undT wie in Satz 4.7.38. Aus Satz 4.7.35 folgtdann supp+(x) = K1 ∪ K2 und supp−(x) = K3. Sei nun wiedery ∈ D \ ∂D. Nach Lemma4.7.39 ergibt sichK1 ∪ K2 ⊆ supp+(y) undK3 ⊆ supp−(y). Aus einer weiterenUberlegungfolgt ebenfalls supp+(y) ⊆ K1∪K2∪T und supp−(y) ⊆ K3∪T. Denn nach Satz 4.7.35 folgtT = V \ supp(x) und somit supp+(y) ⊆ K1 ∪ K2 ∪ T und supp−(y) ⊆ K3 ∪ T.
Das Bild von∂F unter der Einbettungφ ist in der Nahe vonG|(K1 ∪ K2 ∪ T) ∪C unterΩ, denn es gilt supp+(y) ⊆ K1∪K2∪T und supp−(y) ⊆ K3∪T. Weiter ist∂F im Bild vonφunter supp+(y) also in der Nahe vonG|(K1∪ K2 ∪ T) ∪C und∂F′ ist im Bild von supp−(y)unterφ also in der Nahe vonG|(K3∪T). Dies ergibt einen Widerspruch zum Lemma 4.7.38,da es keine verlinkten Kreise geben darf.
Kapitel 5
Vom Permutaeder zurVerdi ere-Matrix
5.1 Grundlegendes
L. Lovasz gab in den Publikationen [23] und [20] einen Weg an, wie man aus verschiede-ne Klassen von Graphen mit gegebener Verdiere-Matrix eineEinbettung gewinnt. Dabeiwerden Pfade nachR, ausserplanare Graphen nachR2 und planare Graphen nachR3 einge-bettet. Die Einbettung garantiert, dass sich die Kanten nurin inzidenten Knoten beruhren.Bei der Klasse der planaren Graphen wird die Einbettung so realisiert, dass die Knoten aufdie EinheitssphareS2 abgebildet werden und adjazenten Knoten durch Geodaten verbun-den sind. Des Weiteren gab er noch eine Moglichkeit an, wie man aus einem 3-Polytopeine Verdiere-Matrix konstruiert. Diese Verdiere-Matrix hat einen maximalen Corank furden Graphen, der durch das 1-Skelett des Polytops hervorgegangen ist. I. Izmestiev ver-allgemeinerte in [15] dieses Verfahren. Nach diesem Verfahren ist es moglich eine Ver-diere-Matrix aus einemn-dimensionalen Polytop zu bestimmen, welche dann zu dem Gra-phen des 1-Skelett assoziiert ist. Diese Matrix ist dann eine Verdiere-Matrix mit einemCorank vonn. Allerdings wird nicht garantiert, dass der Corankn der maximale unter al-len moglichen Verdiere Matrizen ist. Im folgenden Kapitel wird dieses Verfahren fur einenbestimmte Klasse von Polytopen, die Permutaeder, untersucht.
5.2 Permutaeder
Definition 5.2.1. (affine Hulle).Fur eine endliche Menge von Vektoren v1, v2, . . . , vm ∈ Rn ist
aff(v1, v2, . . . , vm) ≔
m∑
i=1
λivi | λi ∈ R,m∑
i=1
λi = 1
die affine Hulle erzeugt von den vi .
Definition 5.2.2. (Permutaeder Pn).Das Permutaeder Pn ist die konvexe Hulle aller Punkte, die durch Permutationen σ ∈ Σn
auf der Menge[n] ≔ 1, 2, . . . , n entsteht:
Pn ≔ conv(σ(1), σ(2), . . . , σ(n))T ∈ Rn |σ ∈ Σn.
Hierbei bezeichnetΣn die Menge aller Permutationen auf[n].

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 104
(a) P2 (b) P3
(c) P4
Abbildung 5.1: DerPn mit den Fallenn =2 (a), 3 (b) und 4 (c).
Beispiel: Furn = 2 gibt es nur zwei Permutationen der Menge [2]= 1, 2 namlich (1, 2)und (2, 1). Somit ist
P2 = conv(1, 2)T , (2, 1)T.Der P2 besteht somit nur aus einer Strecke, siehe dazu Abbildung 5.1a. Fur den Falln = 3besteht das PermutaederP3 aus der konvexe Hulle, die von sechs Ecken gebildet wird:
P3 = conv(1, 2, 3)T, (1, 3, 2)T, (2, 1, 3)T, (2, 3, 1)T, (3, 1, 2)T, (3, 2, 1)T.
DerP3 ist somit ein regulares Sechseck, siehe dazu Abbildung 5.1b. Und fur den Falln = 4ist derP4 ein Oktaederstumpf mit 24 Ecken, siehe dazu Abbildung 5.1c.Allgemein lasstsich sagen, dass das PermutaederPn genaun! Ecken besitzt, dies ist genau die Anzahl allermoglichen Permutationen der Zahlen 1, 2, . . . , n.
Lemma 5.2.3. (Farkas Lemma).Fur jede Matrix B∈ Rn×r und b∈ Rn gilt entweder:
• b ∈ cone(B) oder
• es existiert ein a∈ Rn mit aTB ≤ 0 und aTb > 0.
Beweis. Der Beweis wird in [34] erbracht.
Satz 5.2.4.Der Pn befindet sich in der Hyperebene:
n∑
i=1
xi =n(n+ 1)
2.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 105
Beweis. SeiA ∈ Rn×n! mit
A≔
σ1(1) σ2(1) · · · σn!(1)σ1(2) σ2(2) · · · σn!(2)...
.... . .
...
σ1(n) σ2(n) · · · σn!(n)
,
mitσi , σ j ∈ Σn undσi , σ j fur alle verschiedeneni, j ∈ 1, 2, . . . , n. Dann istA die Matrix,deren Spaltenvektoren aus allen Punkten des Permutaeders besteht. Seix ∈ Pn = conv(A),dann existiert einλ ∈ Rn! mit x = Aλ und
∑n!i=1 λi = 1. Es bleibt zu zeigen, dass
(1, 1, . . . , 1)Aλ =n(n+ 1)
2
gilt, was aquivalent zu∑n
i=1 xi =n(n+1)
2 ist. Dann folgt:
(1, 1, . . . , 1)Aλ =
n∑
i=1
σ1(i),n∑
i=1
σ2(i), · · · ,n∑
i=1
σn!(i)
λ
=
n∑
i=1
i,n∑
i=1
i, · · · ,n∑
i=1
i
λ
=
(
n(n+ 1)2,n(n+ 1)
2, · · · , n(n+ 1)
2
)
λ
=
n!∑
i=1
λin(n+ 1)
2
=n(n+ 1)
2
n!∑
i=1
λi
︸︷︷︸
1
=n(n+ 1)
2
Bemerkung: Die Minkowski-Weyl-Dualitat [34] besagt, dass sich jedesPolyederP alsMinkowski-Summe von einer konvexen Menge conv(A) als auch eines endlich erzeugtenKegels cone(B) schreiben lasst alsoP = conv(A)+ cone(B) und das sich jedes Polyeder alsdie Schnittmenge von Halbraumen darstellen lasst.
Satz 5.2.5.Es sei v∈ Pn mit vT = (σ(1), σ(2), . . . , σ(n)) fur einσ ∈ Σn. Dann ist v eineEcke von Pn.
Beweis. Es genugt zu zeigen, dass es eine HyperebenecT x = d gibt, so dasscTv = d giltundcTw < d fur allewT ∈ (σ(1), σ(2), . . . , σ(n)) |σ ∈ Σn mit w , v. Dann definiere:
c≔ v− 12
(n+ 1)(n+ 1)...
(n+ 1)
=
σ(1)σ(2)...
σ(n)
− 12
(n+ 1)(n+ 1)...
(n+ 1)
.
Weiter definiere:
d≔ cTv =n∑
i=1
i2 − 14
n(n+ 1)2.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 106
Nach Definition giltcTv = d. Bleibt nochcTw < d fur allewT ∈ (σ(1), σ(2), . . . , σ(n)) |σ ∈Σn mit w , v zu zeigen. Sei nunwT = (τ(1), τ(2), . . . , τ(n)) mit τ ∈ Σn undτ , σ, dannfolgt
cTw =n∑
i=1
σ(i) · τ(i) − 14
n(n+ 1)2.
Mit d =∑n
i=1 i2 − 14n(n+ 1)2 bleibtcTw < d beziehungsweise
n∑
i=1
i2 >n∑
i=1
σ(i) · τ(i)
zu zeigen. Der Beweis erfolgt mittels Induktion nachn.Induktionsanfang: Es sein = 2. Fur n = 2 besteht das Permutaeder aus einer konvexenHulle, die von zwei Ecken (1, 2) und (2, 1) gebildet wird. Demnach folgt:
∑2i=1 i2 = 12+22 =
5 und∑2
i=1σ(i)τ(i) = 1 · 2+ 2 · 1 = 4. Somit ist die Aussage furn = 2 wahr.Induktionsvoraussetzung: Die Aussage sei furn ≥ 2 wahr.Induktionsschritt: Es bleibt zu zeigen, dass unter der Induktionsvoraussetzung, die Aussageauch furn+ 1 wahr ist, also:
n+1∑
i=1
i2 >n+1∑
i=1
σ(i) · τ(i).
Schließlich ergibt sich:
n+1∑
i=1
i2 =n∑
i=1
i2 + (n+ 1)2
>
n∑
i=1
σ(i) · τ(i) + (n+ 1)2
≥n+1∑
i=1
σ(i) · τ(i).
Die erste Ungleichung ergibt sich aus der Induktionsvoraussetzung. Somit istv eine Eckevon Pn.
Satz 5.2.6.Allgemein gilt dann:
Pn =⋂
I⊂[n]
x ∈ Rn |∑
i∈Ixi ≥|I |(|I | + 1)
2
∩
x ∈ Rn |n∑
i=1
xi =n(n+ 1)
2
.
Bemerkung: Im Folgenden soll der Satz 5.2.6 bewiesen werden. Das Lemma 5.2.7 zeigtdie erste Inklusion wahrend die verbleibende Inklusion durch das Lemma 5.2.15 vollendetwird.
Lemma 5.2.7. Es gilt:
Pn ⊆⋂
I⊂[n]
x ∈ Rn |∑
i∈Ixi ≥|I |(|I | + 1)
2
∩
x ∈ Rn |n∑
i=1
xi =n(n+ 1)
2
.
Beweis. Zunachst muss gezeigt werden, dass∑
i∈I xi ≥ |I |(|I |+1)2 fur alle I ⊂ [n] Facetten von
Pn sind. Mit Pn = conv(σ(1), σ(2), . . . , σ(n))T ∈ Rn |σ ∈ Σn sei nunx ∈ Pn, dann lasstsich x als Konvexkombination der Ecken schreiben:
x =n!∑
i=1
λi
σi(1)σi(2)...
σi(n)
, mitn!∑
i=1
λi = 1.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 107
Dann bleibt zu zeigen, dass furx und eine beliebige TeilmengeI ⊂ [n]
∑
i∈Ixi ≥
|I |(|I | + 1)2
gilt. Nachrechnen ergibt:
∑
i∈Ixi =
n!∑
j=1
λ j
∑
i∈Iσ j(i)
≥n!∑
j=1
λ j
︸︷︷︸
=1
|I |∑
i=1
i
=|I |(|I | + 1)
2.
Somit folgt dann:∑
i∈Ixi ≥|I |(|I | + 1)
2.
Gleichheit folgt fur allex ∈ (σ(1), σ(2), . . . , σ(n))T ∈ Rn |σ ∈ Σn mit
xi ∈ [ I ]
fur i ∈ I . Somit ergibt sich, dass allex ∈ (σ(1), σ(2), . . . , σ(n))T ∈ Rn |σ ∈ Σn aufmindestens einer Facetten liegen. Fur ein gegebenesx ∈ (σ(1), σ(2), . . . , σ(n))T ∈ Rn |σ ∈Σn lassen sich durchIk = i | xi ≤ k mit 1 ≤ k ≤ n− 1 genaun− 1 Facetten konstruieren.Die Eckex liegt dann auf den Facetten:
∑
i∈Ik
xi ≥|Ik|(|Ik| + 1)
2, mit 1 ≤ k ≤ n− 1.
Somit wurde zunachst
Pn ⊆⋂
I⊂[n]
x ∈ Rn |∑
i∈Ixi ≥|I |(|I | + 1)
2
∩
x ∈ Rn |n∑
i=1
xi =n(n+ 1)
2
gezeigt. Es bleibt noch die andere Inklusion zu zeigen.
Definition 5.2.8. Es seiΣn≔ (σ(1), σ(2), . . . , σ(n))T ∈ Rn |σ ∈ Σn.
Definition 5.2.9. (Abbildungτ).Man definiere die Abbildungτ durch:
τ : [n− 1] × Σn −→ Σn.
Sei vT = (σ(1), . . . , σ(n)) und i= σ(k) sowie i+ 1 = σ(l), dann ist
τi v = (σ(1), . . . , σ(k− 1), σ(l), σ(k+ 1), . . . , σ(l − 1), σ(k), σ(l + 1), . . . , σ(n)).
Die Abbildungτi vertauscht die Positionen der Eintrage eines Vektors mit dem Wert i undi + 1.
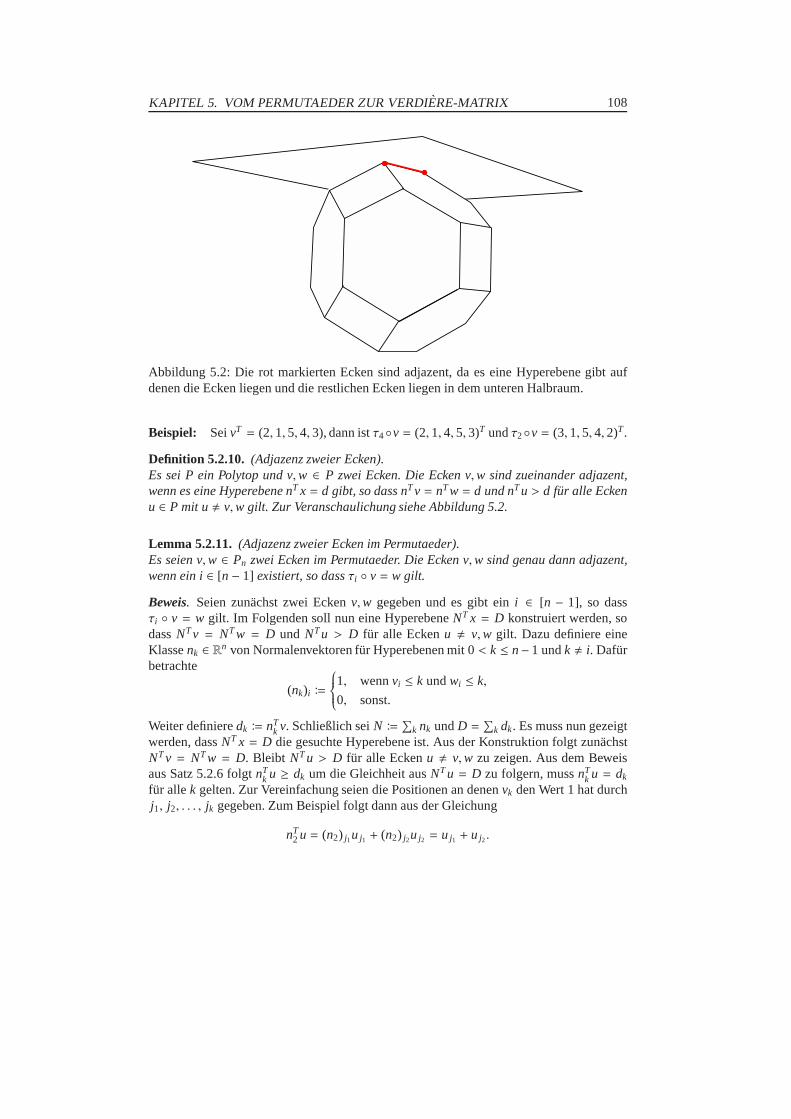
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 108
Abbildung 5.2: Die rot markierten Ecken sind adjazent, da eseine Hyperebene gibt aufdenen die Ecken liegen und die restlichen Ecken liegen in demunteren Halbraum.
Beispiel: SeivT = (2, 1, 5, 4, 3), dann istτ4v = (2, 1, 4, 5, 3)T undτ2v = (3, 1, 5, 4, 2)T.
Definition 5.2.10. (Adjazenz zweier Ecken).Es sei P ein Polytop und v,w ∈ P zwei Ecken. Die Ecken v,w sind zueinander adjazent,wenn es eine Hyperebene nT x = d gibt, so dass nTv = nTw = d und nTu > d fur alle Eckenu ∈ P mit u, v,w gilt. Zur Veranschaulichung siehe Abbildung 5.2.
Lemma 5.2.11. (Adjazenz zweier Ecken im Permutaeder).Es seien v,w ∈ Pn zwei Ecken im Permutaeder. Die Ecken v,w sind genau dann adjazent,wenn ein i∈ [n− 1] existiert, so dassτi v = w gilt.
Beweis. Seien zunachst zwei Eckenv,w gegeben und es gibt eini ∈ [n − 1], so dassτi v = w gilt. Im Folgenden soll nun eine HyperebeneNT x = D konstruiert werden, sodassNTv = NTw = D und NTu > D fur alle Eckenu , v,w gilt. Dazu definiere eineKlassenk ∈ Rn von Normalenvektoren fur Hyperebenen mit 0< k ≤ n− 1 undk , i. Dafurbetrachte
(nk)i ≔
1, wennvi ≤ k undwi ≤ k,
0, sonst.
Weiter definieredk ≔ nTk v. Schließlich seiN ≔
∑
k nk undD =∑
k dk. Es muss nun gezeigtwerden, dassNT x = D die gesuchte Hyperebene ist. Aus der Konstruktion folgt zunachstNTv = NTw = D. Bleibt NTu > D fur alle Eckenu , v,w zu zeigen. Aus dem Beweisaus Satz 5.2.6 folgtnT
k u ≥ dk um die Gleichheit ausNTu = D zu folgern, mussnTk u = dk
fur alle k gelten. Zur Vereinfachung seien die Positionen an denenvk den Wert 1 hat durchj1, j2, . . . , jk gegeben. Zum Beispiel folgt dann aus der Gleichung
nT2 u = (n2) j1u j1 + (n2) j2u j2 = u j1 + u j2.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 109
Schließlich ergibt sich folgendes Gleichungssystem:
u j1 = 1
u j1 + u j2 = 3
u j1 + u j2 + u j3 = 6
...
u j1 + u j2 + u j3 + . . . + u j i−1 =12
(i − 1)i
i+1∑
l=1
u j l =12
(i + 1)(i + 2)
...
n−2∑
l=1
u j l =12
(n− 2)(n− 1).
Losen des Gleichungssystem ergibtu j1 = 1, u j2 = 2, . . .u j i−1 = i − 1. An den Stellenj i , j i+1
mussu gleich i und i + 1 sein. Schließlich sind die Werte vonu eindeutig, bis auf denStellen j i , j i+1, bestimmt. Beide Falle ergeben erneut die Eckev oderw. Dies ergibt einenWiderspruch. Folglich sindv undw adjazent.Sei nun umgekehrt zwei adjazente Eckenv,w gegeben. Es soll gezeigt werden, dass es eini ∈ [n−1] gibt, so dassτiv = w ergibt. Der Beweis erfolgt nun mittels Widerspruch. Sofernv,w adjazente Ecken sind, gibt es eine HyperebenenT x = d, so dassnTv = nTw = d undnTu > d fur alle Eckenu , v,w gilt. Es genugt sich dabei auf den FallvT = (1, 2, 3, . . . , n)zu beschranken. Denn seivT = (σ(1), . . . , σ(n)), dann istnTv =
∑ni=1 niσ(i) = d. Dann sei
v = (1, 2, . . . , n) und wendeσ aufn undw an alsoσn = (nσ(1), nσ(2), . . . , nσ(n)), dann folgt(σ n)T v =
∑ni=1 nσ(i)i =
∑ni=1 niσ(i) = d und furw analog.
Seien nunv1, v2, . . . , vn−1 die Nachbarn vonv, die sich durchτ ergeben. Also istvk ≔
τk v. Nach Voraussetzung istw , vk fur alle k. Es soll nun gezeigt werden, dass die Eckew im aufgespannten Kegel
v+ conev1 − v, v2 − v, . . . , vn−1 − vliegt und somit nach Farkas Lemma 5.2.3 die Eckewnicht zuvadjazent sein kann. Zunachstdefiniere
vk ≔ vk − v,
dann ist
(vk)i ≔
1, wenni = k,
−1, wenni = k+ 1,
0, sonst.
SeivT = (1, 2, . . . , n) undw = (σ(1), σ(2), . . . , σ(n)) es sollen nun gezeigt werden, dass
w = v+n−1∑
i=1
r i vi
fur r i ≥ 0. Setzer i = r i−1 + σ(i) − i
undr0 = 0. Eingesetzt folgt an der Positionk:
(v)k +
n−1∑
i=1
r i(vi)k = k+ rk−1(vk−1)k + rk(vk)k
= k+ (−1) · (rk−1) + 1 · (rk−1 + σ(k) − k)
= σ(k).

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 110
Folglich ist w im Kegel v + conev1, v2, . . . , vn−1 und nach Farkas Lemma 5.2.3 gibt eskeine Hyperebene auf derv undw liegt und die, die anderen Ecken trennt.
Lemma 5.2.12.Die Dimension des Permutaeders Pn betragt n− 1.
Beweis. Es seivT = (1, 2, . . . , n) eine Ecke inPn. Dann definierevk ≔ τk v − v fur1 ≤ k ≤ n− 1. Dann gilt:
(vk)i ≔
1, wenni = k,
−1, wenni = k+ 1,
0, sonst.
Es wird gezeigt, dass die MatrixM, die aus den Spaltenvektorenvk besteht einen nulldi-mensionalen Kern hat. AusM = (v1, v2, . . . , vn) folgt:
1−1 1
−1. . .
. . . 1−1
·
x1
x2
x3...
xn+1
=
000...
0
.
Schließlich folgt aus der ersten Gleichungx1 = 0 daraus folgt wiederumx2 = 0 und soweiter. Folglich istx = 0 und die Dimension des Kerns der MatrixM ist 0. Dementspre-chend ist der Rang volldimensional alson − 1-dimensional. Somit betragt die Dimensiondes Permutaedersn− 1.
Lemma 5.2.13.Es sei F eine Facette des Pn. Weiter seien v1, . . . , vk ∈ Pn alle Ecken aufF, dann gibt es eine F bestimmende Hyperebene nT x = d, so dass(n)i ∈ 0, 1 gilt.
Beweis. Es seiIk ≔ i | (v1)i ≤ k. Es wird gezeigt, dass falls eink < n existiert, so dass(vi)Ik = (vi) j | j ∈ Ik ⊂ [k] fur alle i gilt, gibt es solch eine Hyperebene. Dann setze
(n)i ≔
1, wenni ∈ Ik,
0, sonst.
Weiter definiered ≔ 12 |Ik|(|Ik| + 1). Dann istnT x = d eine F definierende Hyperebe-
ne mit den gewunschten Eigenschaften. Angenommen es gibt nun keink < n , so dass(vi)Ik ∈ [k] fur alle i gilt. Dann gibt es mindestens zwei Eckenu,w auf F, so dass [k] =(u)i1, (u)i2, . . . , (u)ik , (w) j1, (w) j2, . . . , (w) jk fur alle 0 < k ≤ n − 1 gilt. Da das 1-Skelett eines konvexen Polytopes zusammenhangend ist, gibt es einen kurzesten Wegu =v1, v2, . . . , vk = w vonu nachw, wobeivi undvi+1 fur alle 0< i < k adjazent sind. Zur Ver-einfachung nehme man, wie im Beweis von Lemma 5.2.11,uT = (1, 2, . . . , n) an. Es wirdgezeigt, dass der Weg aus mindestensn Knotenpunkten besteht und der Weg die folgendeGestalt hat
u = v1, v2 = τi1 v1, v3 = τi2 τi1 v1, . . . ,w = vk = τik−1 τik−2 · · · τi1 v1,
wobeii1, i2, . . . , ik−1 = [n−1] gilt. Zunachst folgt nach Lemma 5.2.11, dassv j die folgendeGestalt hatv j = τi j−1 τi j · · · τi1 v1, da aufeinanderfolgende Ecken adjazent sein sollen.Durch einen Widerspruchsbeweis soll nun gezeigt werden, dass der Weg aus mindestensnKnotenpunkten besteht. Angenommen der Weg besteht aus weniger Ecken und es gilt
u = v1, v2 = τi1 v1, v3 = τi2 τi1 v1, . . . ,w = vk = τik−1 τik−2 · · · τi1 v1,

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 111
dann folgti1, i2, . . . , ik−1 , [n − 1]. Somit gibt es einj fur das j < i1, i2, . . . , ik−1 aberj ∈ [n− 1] gilt. Dann setze
(n)i ≔
1, wenni ≤ j,
0, sonst.
Da auf dem Weg vonu nachw kein τ j vorkommt, gilt (vi)1, (vi)2, . . . , (vi) j = [ j] furalle 0 < i ≤ k. Dies ergibt einen Widerspruch, danT x = 1
2 j( j + 1) eineF bestimmendeHyperebene ist, fur die (n)i ∈ 0, 1 gilt. Daraus folgt, dass der Weg aus mindestensn Eckenbestehen muss. Aus der gleichen Argumentation folgt ebenfalls, dassi1, i2, . . . , ik−1 =[n− 1] gelten muss.
Man definiere nunej durch:
ej ≔ τi j τi j−1 · · · τi1 u− τi j−1 τi j−2 · · · τi1 u,
wobeiτi0 = id ist. Durch die Definition derej folgt:
vk = u+k∑
i=1
ei .
Im Folgenden soll nun gezeigt werden, dass die Dimension deraffinen Hulle, die von denej aufgespannt werden,n− 1 ist. Daraus folgt, dass die Facette ebenfallsn− 1 dimensionalist und dies ergibt einen Widerspruch, da nach Lemma 5.2.12 der PermutaederPn die Di-mensionn− 1 hat und somit die Facetten− 2 dimensional ist.Der Beweis erfolgt mittels Induktion nachn.Induktionsanfang: Es sein = 2. Mit uT = (1, 2) ergibt sichwT = (2, 1) und somiteT
1 = (1,−1). Die affine Hulle, die vone1 aufgespannt wird, ist 1-dimensional. Somitkonnenu und w nicht in einer Facette liegen. Im Induktionsschritt wird ein Argumentverwendet, welches an dieser Stelle einmal erlautert wird. Falls der Weg aus genaun Eck-punkten besteht, konstruiere man eine MatrixM ∈ R2×1 deren Spaltenvektoren aus denej ’sbestehen. In diesem Fall nur auseT
1 = (1,−1). Weiterhin fugt man der MatrixM eine wei-tere Spalte bestehend aus dem ersten kanonischen Einheitsvektor (1, 0, . . . , 0) hinzu. DieMatrix lautet dann:
M =
(
1 1−1 0
)
.
Die Determinante der MatrixM ergibt dann: det(M) = 1. Somit ist der Rang der MatrixM zweidimensional und insbesondere heißt dies, dass die Dimension der affinen Hulle, dievon denej ’s aufgespannt wird, 1-dimensional sein muss.Induktionsvoraussetzung: Die Aussage sei furn mit n ≥ 2 wahr.Induktionsschritt: Es bleibt zu zeigen, dass unter der Induktionsvoraussetzung, die Aussageauch furn + 1 wahr ist. Hierfur werden zunachst zwei Falle unterschieden. Der erste Fallbeinhaltet den Fall, das der Weg aus genaun + 1 Eckpunkten besteht und der zweite Fallschließt die Moglichkeit ein, dass der Weg aus mehr alsn+ 1 Eckpunkten besteht.Man betrachte zunachst den ersten Fall, der Weg besteht ausn+ 1 Eckpunkten. Man kon-struiere eine MatrixM ∈ R(n+1)×(n), deren Spaltenvektoren aus dene1, e2, . . . , en bestehen.Zu der Matrix fugt man noch eine weitere Spalte mit dem Vektor (1, 0, . . . , 0)T. Der Wegvonu nachw besteht aus einer Kette von Abbildungenτ. Angenommen die Abbildungτn−1
wird vor τn benutzt. Weiter seivl = τn vl−1. Der Wertn+ 1 an dern+ 1. Stelle wird mitnvertauscht. Somit ist (vl)n+1 = n und (vl−1)n+1 = n+ 1 und (el−1)n+1 = −1. Da im Folgendendie Abbildungτn nicht mehr benutzt wird, da der Weg ausn+ 1 Eckpunkte besteht, enthaltdie letzte Zeile der MatrixM nur eine−1. Schließlich berechne man die Determinante derMatrix M. Dazu wende man den Laplaceschen Entwicklungssatz auf die letzte Zeile an,falls τn−1 nachτn angewendet wird, gilt die gleiche Argumentation nur mit dervorletztenZeile. Dann ist:
det(M) =∑
j=1
(−1)n+1+ j(M)n+1, j det(Mn+1, j),

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 112
wobeiMn+1, j dien× n-Untermatrix vonM ist, die durch Streichen dern+ 1-ten Zeile undj-ten Spalte entsteht. Schließlich folgt dann:
det(M) = (−1)n+1+l−1(−1) det(Mn+1,l−1).
Durch das Streichen dern + 1-ten Zeile undj-ten Spalte der MatrixM, ist die MatrixMn+1,l−1 eine mogliche Matrix aus denej ’s fur den Fall, dass die Dimension des Permu-taedersn ist. Nach Induktionsvoraussetzung hatMn+1,l−1 volldimensionalen Rang also istdet(Mn+1,l−1) , 0. Somit ist auch det(M) , 0. Folglich hat auchM einen volldimensiona-len Rang und daraus folgt, dass die Dimension der Facetten sein muss. Dies ergibt einenWiderspruch.Man betrachte nun den zweiten Fall, der Weg besteht ausmEckpunkten mitm> n+ 1. Danach Lemma 5.2.12 die Dimension des Permutaedersn betragt, muss die Dimension derFacetten − 1 sein. Folglich besitzt jede Ecke des 1-Skelett der Facettemindestensn − 1Nachbarn. Es wird nun gezeigt, dass jede Ecke inF genaun− 1 Nachbarn besitzt. Ange-nommen die Ecke sei ohne Beschrankung der AllgemeinheituT = (1, 2, . . . , n + 1) undubesitztn Nachbarn namlichτ1 u, τ2 u, . . . , τn u. Dann definiere:
ωk ≔ τk u− u,
fur 1 ≤ k ≤ n Dann ist
(ωk)i ≔
1, wenni = k,
−1, wenni = k+ 1,
0, sonst.
Im Beweis des Lemmas 5.2.12 wurde gezeigt, dass die MatrixM, die aus den Spalten-vektorenωk besteht, einen nulldimensionalen Kern hat. Dementsprechend ist der Rang derMatrix M volldimensional alson-dimensional. Somit kannF aber keine Facette sein, dasie die Dimensionn−1 haben musste. Daraus folgt, dass jede Ecke inF genaun−1 Nach-barn besitzt. Das 1-Skelett der FacetteF ist somit (n− 1)-regular. Es sei nunG der Graph,der sich durch das 1-Skelett der FacetteF ergibt. Weiter sollen die Kanten des Graphennun gefarbt werden. Falls zwei Eckenv,w benachbart sind und durch die Abbildungτi ineinander ubergehen alsov = τi w gilt, farbe die Kantee= (v,w) mit i. Diese Farbung isteindeutig, da auchw = τi v gilt. Man erhalt schließlich einen (n− 1)-regularen Graphen,dessen Kanten mitn Farben gefarbt wurden. Nach Theorem 3.1.23 gibt es nun einen buntenWeg der Langen+ 1. Somit gibt es keinen zweiten Fall, das der Weg auf der Facette ausmEckpunkten mitm> n+ 1 gilt.
Lemma 5.2.14.Es sei J⊂ N \ 0 eine Teilmenge. Falls
∑
j∈Jj =|J|(|J| + 1)
2
gilt, folgt J = 1, 2, . . . , |J|.
Beweis. Der Beweis erfolgt durch Induktion nach|J|.Induktionsanfang: Es sei|J| = 1. Fur |J| = 1 ergibt sich:|J|(|J|+1)
2 = 1. Daraus folgtJ = 1.Somit ist die Aussage fur|J| = 1 wahr.Induktionsvoraussetzung: Die Aussage sei fur|J| = 1 ≥ 1 wahr.Induktionsschritt: Es bleibt zu zeigen, dass unter der Induktionsvoraussetzung, die Aussageauch fur|J| = 1+ 1 wahr ist, also:
∑
j∈Jj =
(|J| + 1) · (|J| + 2)2
.
Es seijmax≔ maxj∈J j. Es gibt nun drei Falle zu unterscheiden:

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 113
• jmax< |J| + 1,
• jmax= |J| + 1,
• jmax> |J| + 1.
Falls jmax < |J| + 1 gilt, ergibt dies einen Widerspruch, da es noch|J| Zahlen inJ gebenmuss die kleiner alsjmax sind.Falls jmax= |J| + 1 gilt, folgt:
∑
j∈Jj = jmax+
∑
j∈J\ jmax
j
=(|J| + 1) · (|J| + 2)
2
und daraus wiederum∑
j∈J\ jmax
j =|J|(|J| + 1)
2.
Anwendung des Induktionsschrittes ergibt die Behauptung.Falls jmax> |J| + 1 gilt, folgt:
∑
j∈Jj = jmax+
∑
j∈J\ jmax
j
=(|J| + 1) · (|J| + 2)
2
und daraus wiederum∑
j∈J\ jmax
j =(|J| + 1) · (|J| + 2)
2− jmax.
Eine kurze Rechnung soll nun
|J|(|J| + 1)2
>(|J| + 1) · (|J| + 2)
2− jmax
zeigen. Also
|J|(|J| + 1)2
>(|J| + 1) · (|J| + 2)
2− jmax
|J|(|J| + 1)2
>(|J| + 1)|J|
2+ |J| + 1− jmax
jmax> |J| + 1.
Dies ergibt eine wahre Aussage. Selbst wennJ = 1, 2, . . . , |J|, folgt∑
j∈J\ jmax
j >(|J| + 1) · (|J| + 2)
2− jmax
und dies ergibt einen Widerspruch. Fur eine andere Wahl fur J ,mit einer Machtigkeit von|J|, folgt ebenfalls
∑
j∈J\ jmax >(|J|+1)·(|J|+2)
2 − jmax.
Lemma 5.2.15.Es gilt:
Pn ⊇⋂
I⊂[n]
x ∈ Rn |∑
i∈Ixi ≥|I |(|I | + 1)
2
∩
x ∈ Rn |n∑
i=1
xi =n(n+ 1)
2
.
Beweis. Es wurde im Beweis von Lemma 5.2.13 gezeigt, dass fur alle Eckenei auf einerFacetteF es eineF bestimmende HyperebenenT x = d gibt, so dass (n)i ∈ 0, 1 gilt.Im Beweis von Lemma 5.2.13 sowie im Lemma 5.2.14 wurde auch gezeigt, dassd =12 | supp(v)| · (| supp(v)| + 1) sein muss.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 114
Bemerkung: Es wurden die Lemmata 5.2.7 und 5.2.15 gezeigt. Somit ist derSatz 5.2.6bewiesen. Im Folgenden soll noch gezeigt werden, dass keineder Hyperebenen redundantist.
Lemma 5.2.16.Keine der Hyperebenen aus
Pn =⋂
I⊂[n]
x ∈ Rn |∑
i∈Ixi ≥|I |(|I | + 1)
2
∩
x ∈ Rn |n∑
i=1
xi =n(n+ 1)
2
ist redundant.
Beweis. Es sei eine TeilmengeI ⊂ [n] mit dem zugehorigen Halbraum∑
i∈I xi ≥ |I |(|I |+1)2
gegeben. Dann istv mit vI = (1, 2, . . . , |I |) undv[n]\I = (|I | + 1, |I | + 2, . . . , n) eine Ecke desPermutaedersPn. Angenommen der zuI zugehorige Halbraum kann aus derH-Darstellungentfernt werden. Es gilt
∑
i∈Ivi =|I |(|I | + 1)
2
und somit liegtv auf der zuI zugehorigen Hyperebene. Im Folgenden soll nun gezeigtwerden, dass sofern der zuI zugehorige Halbraum aus der H-Darstellung entfernt wird,dieEckev nur aufn−2 Facetten liegt. Somit kannv keine Ecke mehr sein und dies ergibt einenWiderspruch. Aus der gegebenen Eckev ergeben sichn− 1 Facetten aus den Mengen:
Ik ≔ i | vi ≤ k,
fur 1 ≤ k ≤ n− 1. Da der zuI zugehorige Halbraum entfernt wurde undI = I |I | gilt, gibt esmindestensn− 2 Facetten auf denenv liegt. Es soll nun gezeigt werden, dassv nur auf denzu Ik zugehorigen Hyperebene liegt. Sei nun angenommen das es eine MengeJ existiert,so dassJ , Ik fur alle k gilt und dasv auf der zuJ zugehorigen Hyperebene liegt. Dannmuss gelten:
∑
i∈Jvi =|J|(|J| + 1)
2.
Nach Lemma 5.2.14 muss dann(v) j | j ∈ J = 1, 2, . . . , |J| gelten. Dann folgt allerdingswiederumJ = I |J| und dies ergibt einen Widerspruch, daJ , Ik fur alle k angenommenwurde.
Korollar 5.2.17. Der Pn besitzt genau2n − 2 Facetten.
Beweis. Nach Satz 5.2.6 gilt:
Pn =⋂
I⊂[n]
x ∈ Rn |∑
i∈Ixi ≥|I |(|I | + 1)
2
∩
x ∈ Rn |n∑
i=1
xi =n(n+ 1)
2
.
Somit lasst sich derPn als Schnitt von Halbraumen darstellen. Die Halbraume werdendurch Hyperebenen begrenzt, die einen Normalenvektor von der Gestaltv ∈ 0, 1n haben.Auf diese Weise lassen sich 2n Normalenvektoren erzeugen. Die Anzahl der Facetten ergibtsich dann, wenn man die Hyperebene mitv = (1, 1, . . . , 1) und den gesamten Raum mitv = (0, 0, . . . , 0) abzieht. Somit ergeben sich 2n − 2 Facetten.
Satz 5.2.18.(Schwerpunkt des Pn).Der Schwerpunkt des Pn ist:
Sn =
(
n+ 12, . . . ,
n+ 12
)
.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 115
Beweis. Die Zahlen 1, 2, . . . , n sollen aufn Koordinaten verteilt werden. Dafur gibt esn! Kombination und dementsprechendn! Ecken. Wird fur eine Ecke die erste Koordina-te festgehalten also (i, σ(2), σ(3), . . . , σ(i), . . . , σ(n)) mit σ(k) , i, so gibt es genau (n− 1)!Kombinationen fur Ecken bei denen die erste Koordinatei lautet. Somit ergibt sich diej.Schwerpunktkoordinate durch:
(Sn) j =1n!
n!∑
i=1
vi
=1n!
n∑
i=1
i · (n− 1)!
=1n!
(n− 1)!n∑
i=1
i
=1n!
(n− 1)!n(n+ 1)
2
=1n!
(n+ 1)!2
=n+ 1
2.
Schließlich lautet der SchwerpunktSn = ( n+12 , . . . ,
n+12 ).
Satz 5.2.19.Es seien Fi , F j zwei Facetten von Pn mit zugehorigen Normalenvektorenvi , v j ∈ 0, 1n. Dann gelten die aquivalenten Bedingungen:
i. Die Facetten Fi und Fj sind adjazent.
ii. Sei I = supp(vi) und J= supp(v j), dann gilt I⊂ J oder J⊂ I.
Beispiel: Es seienv = (1, 0, 0, 0, 1, 1, 1,0) undw = (1, 0, 1, 0, 1, 1, 1,1) die Normalen-vektoren von den FacettenF undG. Dann istI = supp(v) = 1, 5, 6, 7 und I = supp(v) =1, 3, 5, 6, 7, 8. Schließlich gilt:I ⊂ J und somit sind die FacettenF undG benachbart.
Bemerkung: Anschaulich entspricht der Bedingung ii., das der Normalenvektorvi ent-weder durch das Entfernen oder Hinzufugen von 1’en ausv j gewonnen wird.
Beweis. Es soll zunachst die Implikation aus ii. folgt i. gezeigt werden. Es seienvi undv j
zwei Normalenvektoren die durch das Hinzufugen oder Entfernen von 1’en gewonnen wur-den. Die Positionen der 1’en in den Normalenvektorvi geben Auskunft uber die Positionder Koordinaten von den Ecken desPn, die in der HyperebeneFi liegen. Sei alsoI ⊂ [n]und J ⊂ [n] zwei Teilmengen von [n] fur die gelten:I ≔ supp(vi) und J ≔ [n] \ I . Danngelten fur die Eckenx ∈ (σ(1), σ(2), . . . , σ(n)) ∈ Rn |σ ∈ Sn, die in der HyperebeneFi liegen: (x)i | i ∈ I = 1, 2, . . . , |I |. Weiter seienI ′, J′ ∈ [n] mit: I ′ ≔ supp(v j) undJ′ ≔ [n] \ I . Davi undv j durch das Hinzufugen oder das Entfernen von 1’en hervorgegan-gen ist, folgt:I ∩ I ′ = I , ∅. Folglich gibt esx ∈ (σ(1), σ(2), . . . , σ(n)) ∈ Rn |σ ∈ Sn mit(x)i | i ∈ I = 1, 2, . . . , |I | die sowohl inFi als auchF j liegen und somit sindFi undF j
adjazent.Es soll nun die Implikation aus i. folgt ii. gezeigt werden. Sei nun umgekehrtFi und F j
zwei adjazente Facetten mit zugehorigen Normalenvektorenvi undv j gegeben. Wieder sei-en I , I ′ ⊂ [n] zwei Teilmengen von [n] fur die gelten:I ≔ supp(vi) und I ′ ≔ supp(v j).Also bestimmen die Positionen der 1’en die Positionen der Koordinaten mit den Ein-tragen 1, 2, . . . , |I | beziehungsweise 1, 2, . . . , |I ′|. Somit folgt fur allex ∈ Fi : (x)i | i ∈ I =1, 2, . . . , |I | und fur allex′ ∈ F j : (x′)i | i ∈ I ′ = 1, 2, . . . , |I ′|. Angenommen die Be-hauptung, dassI ⊂ I ′ oderI ′ ⊂ I gilt, ware falsch. Dadurch kann es allerdings keine Ecke

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 116
y geben, die sowohl in der FacetteFi als auchF j enthalten ist, da die Zahlen 1, 2, . . . , |I |beziehungsweise die Zahlen 1, 2, . . . , |I ′| auf die PositionenI beziehungsweiseI ′ verteiltwerden. Sofern nichtI ⊂ I ′ oderI ′ ⊂ I gilt, gibt es keine gemeinsamen Positionen fur dieKoordinaten und somit auch keiny. Dies ergibt einen Widerspruch. Somit mussenFi undF j adjazent sein.
Definition 5.2.20. (Volumen des Pn).Das Volumen des Permutaeders Pn sei mitvol(Pn) bezeichnet.
Satz 5.2.21.Es sei F eine Facette des Pn mit zugehorigen Normalenvektor v∈ 0, 1n.Weiter seien I, J ⊂ [n] zwei Mengen mit: I≔ supp(v) und J≔ [n] \ I. Dann gilt fur dasVolumen der Facette F:
vol(F) = vol(P|I |) · vol(P|J|).
Beweis. Das Volumen der FacetteF berechnet sich durch:
vol(F) =∫
RnχF(x) dnx.
Die FacetteF lasst sich schreiben als:F = convx ∈ Rn | xI ∈ Σ|I |, x′J ∈ Σ|J|, xJ = x′J +(|I |, . . . , |I |).
Und damit folgt:
vol(F) =∫
RnχF(x) dnx
=
∫
RnχP|I |×P|J| (x) dnx
=
∫
R|I |
( ∫
R|J|χP|I | (x
′) · χP|J| (x′′) d|I |x′
)
d|J|x′′
=
∫
R|I |χP|I | (x
′)
( ∫
R|J|χP|J| (x
′′) d|J|x′′)
d|I |x′
= vol(P|J|)∫
R|J|χP|J| (x
′′) d|J|x′′
= vol(P|I |) · vol(P|J|).
Korollar 5.2.22. Es seien F, F′ zwei benachbarte Facetten des Pn mit zugehorigen Norma-lenvektoren v, v′ ∈ 0, 1n. Weiter seien I, I ′ ⊂ [n] zwei Teilmengen von[n] mit: I ≔ supp(v)und I′ ≔ supp(v′). Weiter sei k≔ |I |, beziehungsweise k′ ≔ |I ′| und k> k′. Dann gilt furdas Volumen Fi j des Schnitts aus den Facetten F und F′:
vol(Fi j ) = vol(Pk′) · vol(Pk−k′) · vol(Pn−k).
Beweis. Der Beweis funktioniert analog wie der Beweis vom Satz 5.2.21.
Satz 5.2.23.(Volumen eines Kegels).Es sei G⊂ Rn−1 eine kompakte Menge und h∈ R+. Dann definiert:
Kh(G) ≔ ((1− λ)x, λh) ∈ Rn | x ∈ G, 0 ≤ λ ≤ 1
einen Kegel mit der Grundflache G und der Hohe h, siehe dazu Abbildung 5.3. Und dasVolumen betragt:
vol(Kh) =hn
vol(G).

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 117
h
Rn−1
G
Abbildung 5.3: Ein Kegel mit der GrundflacheG und der Hoheh.
Beweis. Das Volumen berechnet sich durch:
vol(Kh) =
h∫
0
vol
((
1− th
)
G
)
dt
= vol(G)
h∫
0
(
1− th
)n−1
= vol(Kh) =hn
vol(G).
Bemerkung: Im folgenden Verlauf soll das Volumen eines Kegels in einer affinen Hy-perebene berechnet werden. Die Rechnung lassen sich dennoch so fortfuhren, wie die Ab-bildung 5.4 zeigt.
Satz 5.2.24.Es sei F eine Facette des Permutaeders Pn mit zugehorigen Normalenvektorv ∈ 0, 1n. Weiter seien I, J ⊂ [n] zwei Teilmengen von[n] mit: I ≔ supp(v) und J≔ [n]\ I.Weiter sei k≔ |I |. Dann gilt fur den Schwerpunkt der Facette F:
(SF)i =
12(k+ 1), falls i ∈ I ,12(n+ k+ 1), falls i ∈ J.
Beweis. Es seii ∈ [n] gegeben. Zunachst betrachte man den Fall, dassi ∈ I gilt. DiePositionen der 1’en geben wieder Auskunft uber die Positionen der Zahlen: 1, 2, . . . , k. DieFacetteF lasst sich demnach wieder schreiben als:F = convx ∈ Rn | xI ∈ Σ|I |, x′J ∈Σ|J|, xJ = x′J + (|I |, . . . , |I |). Somit gibt es insgesamtk!(n− k)! Ecken inF. Seix ∈ F undgilt an der Stelle (x)i = σ(1) mit σ ∈ Σk, dann gibt es fur die ubrigen Stellen (x)i′ miti′ ∈ I noch (k− 1)! Kombinationen und fur die Stellen (x) j mit j ∈ J gibt es noch (n− k)!

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 118
(a) (b)
(c)
Abbildung 5.4: In der Abbildung (a) ist ein Kegel in einer affinen Hyperebene zu sehen.Zunachst wird die Hyperebene so gedreht und verschoben, dass eine Koordinate 0 wird,wie in Abbildung (b) zu sehen ist. Im Anschluss wird der Kegelnoch so verschoben, dassdie Spitze auf einer Achse liegt, siehe dazu Abbildung (c). Rotation und Translation sindinvariant unter der Volumenberechnung, so dass die Volumender Kegel in der affinen Hy-perebene vor und nach der euklidischen Bewegung ubereinstimmen.
Kombinationen. Somit ergibt sich fur den Schwerpunkt der Facette an der Positioni:
(SF )i =1
k!(n− k)!
k∑
m=1
m · (k− 1)!(n− k)!
=(k− 1)!(n− k)!
k!(n− k)!
k∑
m=1
m
=1k· k(k+ 1)
2
=k+ 1
2.
Es sei nunj ∈ [n] gegeben. Sei nun der andere Fallj ∈ J gegeben. Weiter seix ∈ F und esgilt an der Stelle (x) j = k + τ(1) mit τ ∈ Σn−k, dann gibt es fur die ubrigen Stellenx j′ mitj′ ∈ J noch (n − k − 1)! Kombinationen und fur die Stellen (x)i mit i ∈ I gibt es nochk!

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 119
Kombinationen. Somit ergibt sich fur den Schwerpunkt der Facette an der Positionj:
(SF) j =1
k!(n− k)!
n∑
m=k+1
m · k!(n− k− 1)!
=k!(n− k− 1)!
k!(n− k)!
n∑
m=k+1
m
=1
n− k·(
n(n+ 1)2
− k(k+ 1)2
)
=1
n− k·(
n2 − k2 + n+ k2
)
=1
n− k·(
(n− k)(n+ k+ 1)2
)
=n+ k+ 1
2.
Lemma 5.2.25. Es seien F eine Facetten des Permutaeders Pn mit zugehorigem Norma-lenvektoren v∈ 0, 1n. Weiter seien I, J ⊂ [n] zwei Teilmengen von[n] mit: I ≔ supp(v)und J≔ [n]\I. Weiter sei k≔ |I |. Dann gilt fur einen Normalenvektor w zu F der zusatzlichnoch in der Hyperebene
∑ni=1 xi =
12n(n+ 1) liegen soll:
(w)i =
12(k− n), falls i ∈ I ,12k, falls i ∈ J.
Beweis. Der Normalenvektorw berechnet sich durch die Differenz des Schwerpunkt derFacette mit dem Schwerpunkt desPn. Somit ergibt sich fur den Normalenvektorenw nachSatz 5.2.24 und Satz 5.2.18:
(w)i =
12(k− n), falls i ∈ I ,12k, falls i ∈ J.
Es bleibt zu zeigen, dassw in der Hyperebene∑n
i=1 xi =12n(n+ 1) enthalten ist und damit
∑ni=1 wi = 0 gilt.
n∑
i=1
wi =
k∑
i=1
12
(k− n) +n∑
i=k+1
12
k
=12
k(k− n) +12
(n− k)k
=12
(k2 − kn+ kn− k2)
= 0.
Somit liegt w in der Hyperebene. Weiter muss gezeigt werden, dass die Ecken auf derFacetteF auf der HyperebeneH mit dem zugehorigen Normalenvektorw liegen. Sei also

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 120
x ∈ F eine Ecke:
n∑
i=1
xiwi =
k∑
i=1
12
(k− n) · i +n∑
i=k+1
12
k · i
=14
k(k+ 1)(k− n) +14
k(n(n+ 1)− k(k+ 1))
=14
(k3 − k2n+ k2 − kn+ n2k+ kn− k3 − k2)
=14
(n2k− k2n)
=14
(nk(n− k)).
Der Wert 14(nk(n− k)) hangt nur von den Parameternn undk ab und ist somit unabhangig
von dem Wert der Eckex und somit liegtF auf der Hyperebene.
Satz 5.2.26.Es sei F eine Facetten des Pn mit zugehorigen Normalenvektor v∈ 0, 1n.Weiter sei I eine Teilmenge von[n] mit: I ≔ supp(v). Weiter sei k≔ |I |. Dann gilt fur denAbstand h des Schwerpunktes der Facette F und den Schwerpunkt Sn des Pn:
h =12
√
nk(n− k).
Beweis. Nach Lemma 5.2.25 ergibt sich fur die Differenz des Schwerpunkt der Facette mitdem Schwerpunkt desPn:
(w)i =
12(k− n), falls i ∈ I ,12k, falls i ∈ J.
Wobei J ≔ [n] \ I ist. Damit berechnet sich der Abstand, daw orthogonal zu der Facettesteht, wie folgt:
h = ‖w‖
=12
√√√k∑
m=1
(
n− k)2+
n∑
m=k+1
k2
=12
√
(n− k)2k+ k2(n− k)
=12
√
(n− k)((n− k)k+ k2)
=12
√
nk(n− k).
Satz 5.2.27.Das Volumen des Pn betragt:
vol(Pn) =√
n · nn−2.
Beweis. Der Beweis erfolgt mittels Induktion nachn.Induktionsanfang: Es sein = 2. Furn = 2 besteht das Permutaeder aus einer Strecke mitden Koordinaten: (1, 2) und (2, 1). Die Lange ist demnach
√2. Und aus
√n · nn−2 ergibt
sich durch Einsetzen vonn = 2:√
2 · 22−2 =√
2.Induktionsvoraussetzung: Die Aussage sei furn ≥ 2 wahr.Induktionsschritt: Es bleibt zu zeigen, dass unter der Induktionsvoraussetzung, die Aussageauch furn+ 1 wahr ist.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 121
(a) (b)
Abbildung 5.5: DasPn wird in verschiedenen Kegel aufgeteilt. Dabei bilden die Facettendie Grundflache und die Hohe bildet den Abstand der Facettezu dem Schwerpunkt. DieSumme uber die Volumen der Kegel ist dann das Volumen desPn.
Das PermutaederPn soll zunachst in Kegel geteilt werden. Dabei bilden die Facetten desPn die Grundflache und die Hohe ergibt sich als Abstand der Facette zu dem SchwerpunktdesPn, siehe dazu Abbildung 5.5.
Es seik = i. Dann gibt es genau
#F =
(
nk
)
FacettenF mit zugehorigen Normalenvektorv ∈ 0, 1n. So dass esI , J ⊂ [n] zwei Teil-mengen von [n] mit: I ≔ supp(v) undJ ≔ [n] \ I und |I | = k. Denn auf dien Koordinatengibt es genau
(nk
)
Moglichkeitenk 1’en zu verteilen. Fur den zugehorigen Flacheninhalt giltdann nach Satz 5.2.21:
vol(F) = vol(Pk) · vol(Pn−k).
Damit folgt nach Induktionsvoraussetzung:
vol(F) =√
k · kk−2√
n− k · (n− k)n−k−2.
Die Hohe der Facette zu dem Schwerpunkt desPn betragt nach Satz 5.2.26:
h =12
√
nk(n− k).
Nach Satz 5.2.23 lautet das Volumen des Kegels mit der Hoheh und der FacetteF alsGrundflache:
vol(K) =h
n− 1vol(F).
Man beachte dabei, dass dasPn in einer Hyperebene liegt und somitn− 1 dimensional ist.Damit ergibt sich:
vol(K) =1
2(n− 1)
√
nk(n− k)√
k · kk−2√
n− k · (n− k)n−k−2.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 122
Insgesamt ergibt sich dann durch die Addition der Volumen aller Kegel:
vol(Pn) =n−1∑
k=1
(
nk
) √nk(n− k)
√k · kk−2
√n− k · (n− k)n−k−2
2(n− 1)
=
n−1∑
k=1
(
nk
) √
nk2(n− k)2 · kk−2 · (n− k)n−k−2
2(n− 1)
=√
nn−1∑
k=1
(
nk
)
k(n− k) · kk−2 · (n− k)n−k−2
2(n− 1)
=√
nn∑
k=1
(
nk
)
k(n− k) · kk−2 · (n− k)n−k−2
2(n− 1).
Es bleibt also noch zu zeigen, dass
n∑
k=1
(
nk
)
k(n− k) · kk−2 · (n− k)n−k−2
2(n− 1)= nn−2
gilt. Dies folgt allerdings aus einer kombinatorischen Betrachtungsweise. Die Summe solldie Anzahl der aufspannenden Baume der Eckenanzahln wiedergeben. Dazu wird ein al-ternativer Weg zur Berechnung der Anzahl der aufspannendenBaume vorgestellt. Es seienalson Ecken fur einen Graph gegeben. Dann lasst sich dieser Graph auf
(nk
)
Moglichkeitenaufteilen, so dass der erste TeilgraphT1 genauk und der anderen TeilgraphT2 genaun− kEcken hat. FurT1 gibt es nach Satz 3.1.15 genaukk−2 aufspannende Baume und furT2
gibt es genau (n − k)n−k−2 aufspannende Baume. Um nun einen Baum zu erhalten, dernEcken besitzt. Mussen beide Teilgraphen durch eine Brucke verbunden werden. Dafur gibtes dannk(n− k) Moglichkeiten. Die Summe vonk = 1 bisn− 1 ergibt dann die Zahl deraufspannenden Baume. Allerdings zahlt die Summe zweimal, da
(nk
)
=(
nn−k
)
gilt. Des Wei-teren ist jeder Baumn− 1 mal enthalten, da durch die Verbindung desT1 mit T2 mit einerBrucke auch Baume entstehen, die schon einmal gezahlt wurden, da diese Graphen bereitsdurch die Kombinationen anderer TeilgraphenT′1,T
′2 abgedeckt wurden. Folglich ist
nn−2 =
n−1∑
k=1
(
nk
)
k(n− k) · kk−2 · (n− k)n−k−2
2(n− 1).
Und damit:vol(Pn) =
√n · nn−2.
Satz 5.2.28.Es seien F, F′ zwei benachbarte Facetten des Pn mit zugehorigen Normalen-vektoren v, v′ ∈ 0, 1n. Weiter seien I, I ′ ⊂ [n] zwei Teilmengen von[n] mit: I ≔ supp(v)und I′ ≔ supp(v′). Weiter sei k≔ |I |, beziehungsweise k′ ≔ |I ′| und k> k′ . Dann gilt furden Winkelα zwischen F und F′:
cos(α) = −√
k′(n− k)√
k(n− k′).
Beweis. Nach Lemma 5.2.25 ergeben sich fur die Normalenvektorenw,w′ der FacettenF, F′:
wi =
12(k− n), falls i ∈ I ,12k, falls i ∈ J.
Und
w′i =
12(k′ − n), falls i ∈ I ′,12k′, falls i ∈ J′.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 123
Wobei J ≔ [n] \ I und J′ ≔ [n] \ I ′ ist. Zu Bestimmung des Winkelsα wird folgendeGleichung benutzt:
〈w,w′〉 = ‖w‖ · ‖w′‖ · cos(α).
Fur den Betragw undw′ folgt:
‖w‖ =
√
k
(
k− n2
)2
+ (n− k)
(
k2
)2
=12
√k3 − 2nk2 + kn2 + nk2 − k3
=12
√
nk(n− k).
Und analog furw′:
‖w′‖ = 12
√
nk′(n− k′).
Fur das Skalarprodukt ausw undw′ folgt schließlich:
〈w,w′〉 = 14
(∣∣∣I ∩ I ′
∣∣∣(k− n)(k′ − n) +
∣∣∣J ∩ J′
∣∣∣(kk′) +
(
n−∣∣∣I ∩ I ′
∣∣∣ −
∣∣∣J ∩ J′
∣∣∣)
(k− n)k′)
=14
n
(
(n− k)|I ∩ I ′| + (k− n+ |J ∩ J′|)k′)
.
Schließlich folgt dann mitk′ = |I ∩ I ′| undn− k = |J ∩ J′|:
cos(α) = −√
k′(n− k)√
k(n− k′).
5.3 Colin-de-Verdiere-Matrix
Definition 5.3.1. (Dualitat von Polytopen).Es sei P⊂ Rn ein Polytop mit0 ∈ P, dann ist P∗ das duale Polytop von P definiert durch:
P∗ ≔ y ∈ Rn | xTy ≤ 1, x ∈ P.
Theorem 5.3.2. (Verdiere-Matrix fur konvexe Polytope).Es sei P(x0) = p ∈ Rn |wT
i p ≤ x0i , i ∈ I ein konvexes Polytop. Weiter sei G das 1-Skelett
des P∗. Dann ist die Matrix M definiert durch:
Mi j = −∂2 vol(P(x))∂xi∂x j
∣∣∣∣∣∣x=x0
eine Colin-de-Verdiere-Matrix fur G.
Bemerkung: Der Beweis des Theorems 5.3.2 wird in [15] erbracht. Dort finden sich zweieinfachere zu handhabende Gleichungen furM.Fur i , j folgt:
∂2 vol(P(x))∂xi∂x j
=vol(Fi j (x))
‖wi‖ · ‖w j‖ · sin(αi j ).
Und fur i = j:∂2 vol(P(x))
∂x2i
wi +∑
j,i
∂2 vol(P(x))∂xi∂x j
w j = 0.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 124
WobeiFi j die Seite ist, die aus dem Schnitt vonFi undF j entsteht.Im vorigen Kapitel wurden alle Formeln bewiesen, die zur Berechnung der Verdiere-Matrixbenotigt werden.Die zu berechnenden Werte, die zur Bestimmung der Verdiere-Matrix benotigt werden,hangen nur von der Dimensionn sowie die Anzahl der 1’enki , k j aus dem zughorigenNormalenvektorenvi , v j der FacettenFi , F j ab. Dabei muss beachtet werden, dass das Per-mutaederPn im Rn liegt allerdingsn− 1 dimensional ist. Was zu Folge hat, dass der Nor-malenraum 2-dimensional ist. Hierbei werden zwischen zweiDarstellungen der Normalenunterschieden. Mitvi sind die Normalen mitvi ∈ 0, 1n gemeint, die Auskunft uberk, dieAnzahl der 1’en geben. Mitwi ist die Normale aus Satz 5.2.25 gemeint.Im folgenden soll die Verdiere-Matrix desP4 exemplarisch berechnet werden. Dabei wer-den die benotigten Werte vol(Fi j ), sin(αi j ) und‖wi‖·‖w j‖ in der Tabelle ausgewertet, die je-weils nur von den Wertenn, k, k′ abhangen. Hierbei werden die Facetten immer so gewahlt,dassk > k′ und 4> k > 1 gilt. Fur die Berechnung werden folgende Gleichungen benotigt:
vol(Fi j ) = vol(Pk′) vol(Pk−k′) vol(Pn−k)
=√
k′k′k′−2√
k− k′(k− k′)k−k′−2√
n− k(n− k)n−k−2,
‖wi‖ · ‖w j‖ =14
n√
kk′(n− k′)(n− k),
sin(αi j ) =
√
1− k′(n− k)k(n− k′)
=
√
n(k− k′)k(n− k′)
.
Somit ergibt sich die folgende Tabelle:
n k k′ vol(Fi j ) ‖wi‖ · ‖w j‖ sin(αi j )
4 2 1√
2 2√
3√
23
4 3 1√
2 3 23
√2
4 3 2√
2 2√
3√
23
Fur die MatrixeintrageMi j mit i , j und adjazenteFi , F jergeben sich dann:
(Mi j ) = −12.
Fur die Diagonaleintrage seiF die Facette mitvT = (1, 0, 0, 0). Dann ergeben sich fur dieNachbarfacetten vonF die folgenden Normalenvektoren:
1100
,
1010
,
1001
,
1110
,
1101
,
1011
.
Furv ergibt sich dann der folgende Normalenvektorw: wT = 12(−3, 1, 1, 1) und damit auch
die anderen Normalenvektoren:
12
−2−222
,12
−22−22
,12
−222−2
,12
−1−1−13
,12
−1−13−1
,12
−13−1−1
.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 125
Und fur den Diagonaleintrag zuvT = (1, 0, 0, 0) folgt aus:
∂2 vol(P(x))
∂x2i
wi +∑
j,i
∂2 vol(P(x))∂xi∂x j
w j = 0,
die Gleichung:
0 = M11 ·12
−3111
− 12· 1
2
−2−222
− 12· 1
2
−22−22
− 12· 1
2
−222−2
− 12· 1
2
−1−1−13
− 12· 1
2
−1−13−1
− 12· 1
2
−13−1−1
= M11
−3111
−
−4.51.51.51.5
.
Schließlich ergibt sichM11 =32.
Nun seiF die Facette mitvT = (1, 1, 0, 0). Dann ergeben sich fur die Nachbarfacetten vonF die folgenden Normalenvektoren:
1000
,
0100
,
1110
,
1101
.
Furv ergibt sich dann der folgende Normalenvektorw: wT = (−1,−1, 1, 1) und damit auchdie anderen Normalenvektoren:
12
−3111
,12
1−311
,12
−1−1−13
,12
−1−13−1
.
Und fur den Diagonaleintrag zuvT = (1, 1, 0, 0) folgt dann:
0 = M22 ·12
−1−111
− 12· 1
2
−3111
− 12· 1
2
1−311
− 12· 1
2
−1−1−13
− 12· 1
2
−1−13−1
= M22
−1−111
−
−2−222
.
Schließlich ergibt sichM22 = 2. Die restlichen Diagonaleintrage ergeben sich analog.Sofern eine Facette einen Normalenvektorv hat mit k = 1 oderk = 3 folgt fur denMatrixeintrag 3
2 und fur k = 2 ergibt sich 2. Die Diagonaleintrage sind nun vollstandigbestimmt. Als nachstes mussen noch die Positionen ermittelt werden an welchen Stellensich eine 0 und− 1
2 in der Matrix M ergibt. Dazu muss eine lexikografische Ordnung er-mittelt werden um vonFi auf den Normalenvektor zu schließen und damit festzustellenwelche Facetten mit welchen Facetten adjazent sind. Dazu wird zu jedem Normalenvektorv ∈ 0, 1n die zu dem Binarsystem ausv die entsprechende Dezimalzahl der Facette zu-geordnet. Sei also zum BeispielvT = (1, 1, 0, 0), dann entspricht dies der 12. Facette, da1 ·23+1 ·22+0 ·21+0 ·20 = 12. Zu dem Normalenvektorv wurden die Normalenvektoren

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 126
der benachbarten Facetten bereits ermittelt:
1000
,
0100
,
1110
,
1101
.
Diese Normalenvektoren entsprechen den Facetten: 8,4,14,13. Und somit ergeben sichdann auch die Matrixeintrage:
M12,8 = −12
M12,4 = −12
M12,14 = −12
M12,13 = −12
M12,12 = 2.
Der DiagonaleintragM12,12 = 2, dak = 2 ist. Die Verdiere-Matrix lautet dann wie folgt:
M =12
3 0 −1 0 −1 0 −1 0 −1 0 −1 0 −1 00 3 −1 0 0 −1 −1 0 0 −1 −1 0 0 −1−1 −1 2 0 0 0 −1 0 0 0 −1 0 0 00 0 0 3 −1 −1 −1 0 0 0 0 −1 −1 −1−1 0 0 −1 2 0 −1 0 0 0 0 0 −1 00 −1 0 −1 0 2 −1 0 0 0 0 0 0 −1−1 −1 −1 −1 −1 −1 3 0 0 0 0 0 0 00 0 0 0 0 0 0 3 −1 −1 −1 −1 −1 −1−1 0 0 0 0 0 0 −1 2 0 −1 0 −1 00 −1 0 0 0 0 0 −1 0 2 −1 0 0 −1−1 −1 −1 0 0 0 0 −1 −1 −1 3 0 0 00 0 0 −1 0 0 0 −1 0 0 0 2 −1 −1−1 0 0 −1 −1 0 0 −1 −1 0 0 −1 3 00 −1 0 −1 0 −1 0 −1 0 −1 0 −1 0 3
.
Der corank vonM betragt 3. Die MatrixM ist sogar eine optimale Verdiere-Matrix fur denGraphenG, dass heißt es gibt keine Matrix, die die Definition 4.1.1 fur den Graphen erfulltund einen großeren corank als 3 hat. Der GraphG ist das 1-Skelett des dualen Polytops zuP4. Zur Veranschaulichung siehe Abbildung 5.6 und 5.7.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 127
Abbildung 5.6: Das duale PermutaederP∗4 mit denP4.
Die ermittelte Verdiere-Matrix hat einen Corank von drei und der Graph ist planar so-mit ist diese Matrix sogar eine optimale Verdiere-Matrix.Fur hohere Dimension ist es nichtgewahrleistet, dass die berechnete Matrix optimal ist. L.Lovasz und A. Schrijver gaben inihrer Arbeit [20] einen Beweis an, dass alle ermittelten Verdiere-Matrizen fur dreidimen-sionale konvexe Polytope optimal sind.
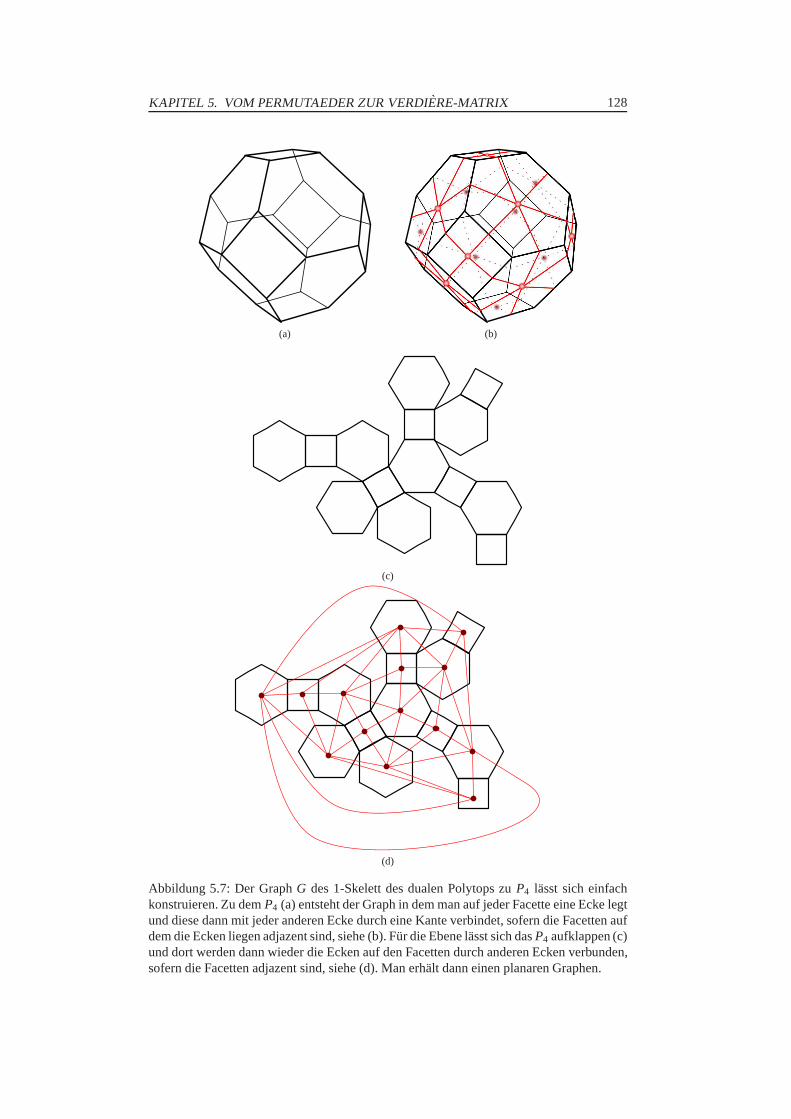
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 128
(a) (b)
(c)
(d)
Abbildung 5.7: Der GraphG des 1-Skelett des dualen Polytops zuP4 lasst sich einfachkonstruieren. Zu demP4 (a) entsteht der Graph in dem man auf jeder Facette eine Ecke legtund diese dann mit jeder anderen Ecke durch eine Kante verbindet, sofern die Facetten aufdem die Ecken liegen adjazent sind, siehe (b). Fur die Ebenelasst sich dasP4 aufklappen (c)und dort werden dann wieder die Ecken auf den Facetten durch anderen Ecken verbunden,sofern die Facetten adjazent sind, siehe (d). Man erhalt dann einen planaren Graphen.
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 129
5.3.1 Verdiere-Matrix mit Mathematica
Diese Kapitel soll die Umsetzung der Berechnungen, aus dem vorigen Kapitel, in Mathe-matica beschreiben. Hierbei mussen die folgenden Prozeduren umgesetzt werden:
• GetAngle,
• GetVolume,
• GetNormLength,
• CheckAdjacencies,
• GetW,
• SetEntry,
• SetDiagonalEntry,
• GetVMatrix.
GetAngle
Die ProzedurGetAnglehangt nur von den Wertenn, k, k′ ab. In dieser Prozedur soll derWinkel zweier benachbarter FacettenF, F′ mit zugehorigen Normalenvektorenv, v′ be-stimmt werden. Hierbei gilt allerdingsk = | supp(v)| und k′ = | supp(v′)|. Eine moglicheMathematica Umsetzung sieht dann so aus:
GetAngle[ n , k1 , k2 ] :=Module [ N1 , K1 , K2 ,N1 = n ;K1 = k1 ;K2 = k2 ;Sqrt [ N1 ( K1 − K2 ) / ( K1 ( N1 − K2 ) ) ]]
Der Aufruf GetAngle[n,k,k’], in Mathematica, ermittelt dann den Winkel der benachbartenFacettenF, F′.
GetVolume
Die ProzedurGetVolumehangt nur von den Wertenn, k, k′ ab. In dieser Prozedur soll dasVolumen aus dem Schnitt zweier benachbarter FacettenF, F′ mit zugehorigen Normalen-vektorenv, v′ bestimmt werden. Hierbei gilt allerdingsk = | supp(v)| undk′ = | supp(v′)|.Eine mogliche Mathematica Umsetzung sieht dann so aus:
GetVolume[ n , k1 , k2 ] :=Module [ N1 , K1 , K2 ,N1 = n ;K1 = k1 ;K2 = k2 ;
Sqrt [ K2 ] K2 ˆ ( K2 − 2)∗Sqrt [ K1 − K2 ] ( K1 − K2 ) ˆ ( K1 − K2 − 2)∗Sqrt [ N1 − K1 ] ( N1 − K1 ) ˆ ( N1 − K1 − 2)]
Der Aufruf GetVolume[n,k,k’], in Mathematica, ermittelt dann das Volumen des Schnittsder benachbarten FacettenF, F′.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 130
GetNormLength
Die ProzedurGetNormLengthhangt nur von den Wertenn, k, k′ ab. Es seienF, F′ zwei be-nachbarte Facetten mit zugehorigen Normalenvektorenv, v′. Dann gibt es zuF undF′ zweiNormalenvektorenw undw′, die in der affinen Hyperebene
∑ni=1 xi =
12n(n+ 1) enthalten
sind. In der ProzedurGetNormLengthsoll der Wert‖w‖ · ‖w′‖ der Normalenvektorenw,w′
ermittelt werden. Hierbei gilt allerdingsk = | supp(v)| undk′ = | supp(v′)|. Eine moglicheMathematica Umsetzung sieht dann so aus:
GetNormLength[ n , k1 , k2 ] :=Module [ N1 , K1 , K2 ,N1 = n ;K1 = k1 ;K2 = k2 ;
1 /4∗ N1∗ Sqrt [ K1 K2 ( N1 − K2 ) ( N1 − K1 ) ]]
Der Aufruf GetNormLength[n,k,k’], in Mathematica, ermittelt dann Wert‖w‖ · ‖w′‖ derNormalenvektorenw,w′.
CheckAdjacencies
Die ProzedurCheckAdjacencieshangt nur von den Vektorenv, v′ ab. In dieser Prozedursoll uberpruft werden, ob zwei FacettenF, F′ mit zugehorigen Normalenvektorenv, v′ zueinander adjazent sind. Hierbei gilt allerdingsk = | supp(v)| und k′ = | supp(v′)|. Einemogliche Mathematica Umsetzung sieht dann so aus:
CheckAd jacenc ies[ v1 , v2 ] :=Module [ V1 , V2 ,V1 = v1 ;V2 = v2 ;
V := V1 − V2 ;p o s i t i v := 0 ;n e g a t i v := 0 ;For [ i = 1 , i <= Length [ V ] , i ++ ,
Which [ V [ [ i ] ] > 0 , p o s i t i v++ , V [ [ i ] ] < 0 ,n e g a t i v++ ] ] ;
temp := p o s i t i v , n e g a t i v ;bool := 0 ;
I f [ ( temp [ [ 2 ] ] > 0 && temp [ [ 1 ] ] == 0) | |( temp [ [ 1 ] ] > 0 &&
temp [ [ 2 ] ] == 0 ) , bool = 1 , bool = 0 ] ;
bool]
Der Aufruf CheckAdjacencies[v,v’], in Mathematica, ermittelt dann, obF, F miteinanderadjazent sind, falls ja gibt er den Wert 1, ansonsten den Wert0 zuruck. Hierbei werden dieVektoren einfach subtrahiertV = v− v′. Falls die Facetten adjazent sind, mussv′ entwederdurch das Entfernen oder das Hinzufugen von 1’en ausv entstanden sein. Sofern der VektorV einen positiven, wie auch negativen Trager hat, konnenF undF′ nicht adjazent sein, dasonst sowohl 1’en entfernt wie auch hinzugefugt wurden.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 131
GetW
Die ProzedurGetW hangt nur von den Vektorenv ab. In dieser Prozedur soll der zu-gehorige Vektorv einer FacetteF in einen Normalenvektorw, der in der affinen Hyper-ebene
∑ni=1 xi =
12n(n+ 1) enthalten ist, umgewandelt werden. Eine mogliche Mathematica
Umsetzung sieht dann so aus:
GetW[ v ] :=Module [ V ,V = v ;W = V ;K := 0 ;
For [ i = 1 , i <= Length [ V ] , i ++ , K += V [ [ i ] ] ] ;For [ i = 1 , i <= Length [ V ] , i ++ ,
I f [ V [ [ i ] ] == 1 ,W[ [ i ] ] = 1 /2 ( K − Length [ V ] ) ,
W[ [ i ] ] = 1 /2 K ] ] ;W]
Der Aufruf GetW[v], in Mathematica, ermittelt dann den Normalenvektorw, der in deraffinen Hyperebene
∑ni=1 xi =
12n(n+ 1) enthalten ist.
SetEntry
Die ProzedurSetEntryhangt nur von den Wertenn, i, j ab. In dieser Prozedur soll der Matri-xeintragi, j der Verdiere-Matrix bestimmt werden. Eine mogliche Mathematica Umsetzungsieht dann so aus:
S e t E n t r y[ n , i , j ] :=Module [ N1 , I , J ,N1 = n ;I = i ;J = j ;k1 := 0 ;k2 := 0 ;v1 = I n t e g e r D i g i t s [ I , 2 , N1 ] ;v2 = I n t e g e r D i g i t s [ J , 2 , N1 ] ;For [ h = 1 , h <= n , h++ , k1 += v1 [ [ h ] ] ] ;For [ h = 1 , h <= n , h++ , k2 += v2 [ [ h ] ] ] ;
I f [ k1 >= k2 , , tempvec = v1 , v1 = v2 ,v2 = tempvec , temp = k1 ,
k1 = k2 , k2 = temp ] ;
temp = 0 ;
I f [ CheckAd jacenc ies[ v1 , v2 ] == 1 , temp = GetVolume[ N1 , k1 , k2 ] ,
temp /= GetNormLength[ N1 , k1 , k2 ] ,temp /= GetAngle[ N1 , k1 , k2 ] ,
temp = 0 ] ;− temp
]
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 132
Der Aufruf SetEntry[n,i,j], in Mathematica, ermittelt dann den Matrixeintragi, j. Der Be-fehl v1 = IntegerDigits[I, 2, N]; wandelt die ZahlI eine Binarzahl der LangeN um. DieLangeN bedeutet, dass entstandene Vektor mit Nullen aufgefullt wird, bis er die LangeN hat. In der nachsten Zeile wird mitFor[h = 1, h ¡= n, h++, k1+= v1[[h]]]; der Wertk = | supp(v1)| ermittelt. Fallsv1 mehr 1’en alsv2 hat, werden im nachsten Schritt dieVektoren getauscht. Anschließend wird uberpruft, ob dieFacetten benachbart sind, falls jawird der Matrixeintrag aus vol(Fi j (x))
‖wi‖·‖w j‖·sin(αi j )bestimmt.
SetDiagonal
Die ProzedurSetDiagonalhangt nur von den Wertenn, i und der Matrixm ab. In dieserProzedur sollen die Diagonaleintrage der Verdiere-Matrix bestimmt werden. Eine moglicheMathematica Umsetzung sieht dann so aus:
Se tD iagona l [n , i , m ] :=Module [ N1 , I , M ,N1 = n ;M = m;I = i ;v = I n t e g e r D i g i t s [ I , 2 , N1 ] ;
w = GetW[ v ] ;tempvec = 0 ;For [ f = 1 , f <= 2ˆ N1 − 2 , f++ ,
I f [ M [ [ I , f ] ] ! = 0 && f ! = I ,tempvec −= M [ [ I , f ] ] ∗
GetW[ I n t e g e r D i g i t s [ f , 2 , N1 ] ] ] ] ;
So lve[w∗x == tempvec , x ] [ [ 1 , 1 , 2 ] ]]
Der AufrufSetDiagonal[n,i,m], in Mathematica, ermittelt dann den MatrixeintragMi,i . DerAufruf For[f = 1,...,tempvec -= M[[I, f]]*GetW[IntegerDigits[f, 2, N1]]]]; berechnet denWert
∑
j,i∂2 vol(P(x))∂xi∂x j
w j . Der Befehl Solve[w*x== tempvec, x][[1, 1, 2]] lost schließlich
das GleichungssystemMi,iwi +∑
j,i∂2 vol(P(x))∂xi∂x j
w j = 0.
GetVMatrix
Die ProzedurGetVMatrixhangt nur von den Wertn ab. In dieser Prozedur wird die Ver-diere-Matrix bestimmt. Eine mogliche Mathematica Umsetzung sieht dann so aus:
GetVMatr ix [ n ] :=Module [ N1 ,N1 = n ;M = I den t i t yMa t r i x [ 2 ˆ N1 − 2 ] ;
For [ f = 1 , f <= 2ˆ N1 − 2 , f++ ,For [ g = f , g <= 2ˆ N 1− 2 , g++ ,
M [ [ f , g ] ] = S e t E n t r y[ N1 , f , g ] ,M [ [ g , f ] ] = M [ [ f , g ] ] ] ] ;
For [ f = 1 , f <= 2ˆ N1 − 2 , f++ ,For [ g = f , g <= 2ˆ N 1− 2 , g++ ,
M [ [ f , g ] ] = S e t E n t r y[ N1 , f , g ] ,M [ [ g , f ] ] = M [ [ f , g ] ] ] ] ;

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 133
For [ h = 1 , h <= 2ˆ N1 − 2 , h++ , M [ [ h , h ] ] =Se tD iagona l [N1 , h , M ] ] ;
M]
Der Aufruf GetVMatrix[n], in Mathematica, ermittelt dann die Verdiere-Matrix furdasPermutaederPn.
Beispiele
Wird nun der BefehlGetVMatrix[5] aufgerufen, erscheint die Verdiere-Matrix fur das 1-Skelett des dualen Polytops vom PermutaederP5. Um sich nun einmal den Graph des 1-Skelett anzuschauen. Ruft man in Mathematica zunachst<< Combinatorica‘auf und gibtanschließend den BefehlGraphPlot[GetVMatrix[5]] ein, es erscheint das folgende Bild5.10. Hierbei wird die Verdiere-Matrix als eine Art Adjazenzmatrix interpretiert. Die An-zahl der Knoten entspricht dann der Zeilen- beziehungsweise der Spaltenanzahl und zweiverschiedene Knoteni und j sind miteinander adjazent, sofern der MatrixeintragVi j derVerdiere-MatrixV eine von Null verschiedene Zahl ist. Im Folgenden sind die Graphen furdie Fallen = 4, 5, 6, 7 in den Abbildungen 5.8, 5.10, 5.12 und 5.14 zu sehen. Weiterhinlasst sich durch Aufruf der FunktionMatrixPlot[GetVMatrix[5]] eine Visualisierung derVerdiere-Matrix darstellen. Es wird ein Gitter mit der gleichen Dimension wie der Matrixerzeugt. Falls fur den MatrixeintragVi j = 0 gilt, folgt dass das Feldi, j eine weiße Far-be erhalt. Die anderen Matrixeintrage werden entsprechend ihres absoluten Wertes durchGraustufen dargestellt. Dementsprechend haben zwei gleiche Farben im Gitter auch dengleichen Matrixeintrag. Die Darstellung der Matrixdarstellungen sind in den Abbildungen5.9, 5.11, 5.13 und 5.15 fur die Fallen = 4, 5, 6, 7 zu sehen.
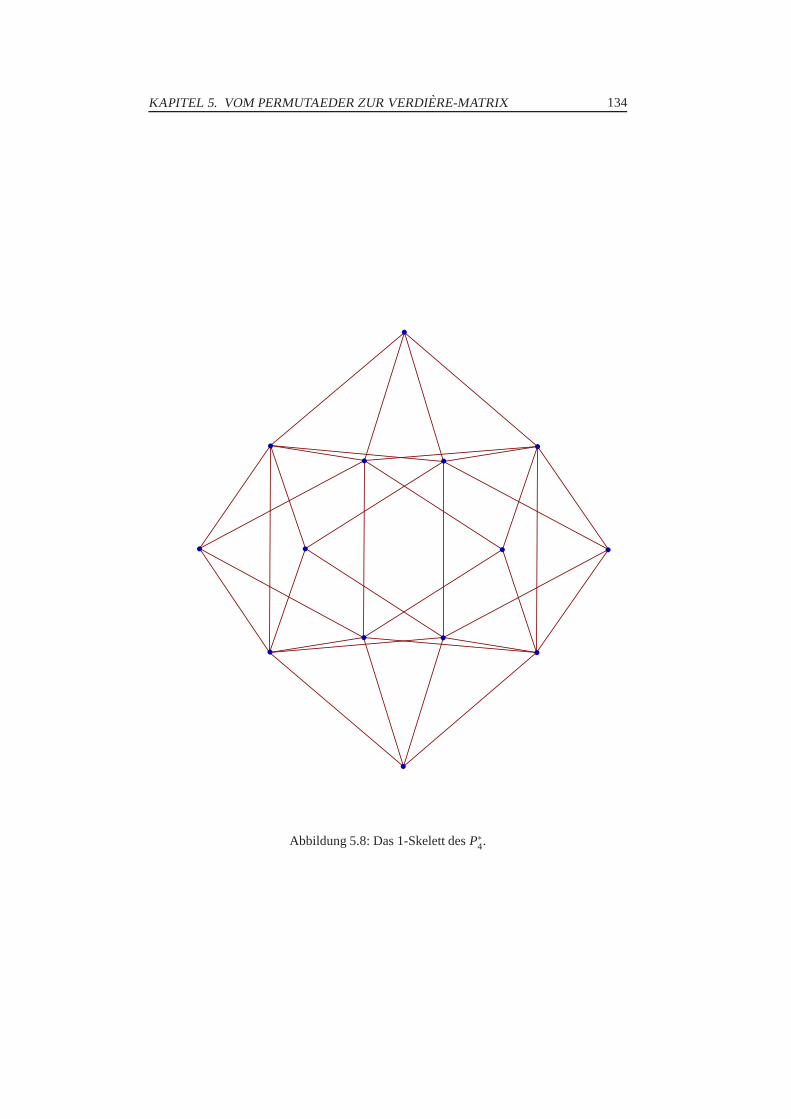
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 134
Abbildung 5.8: Das 1-Skelett desP∗4.
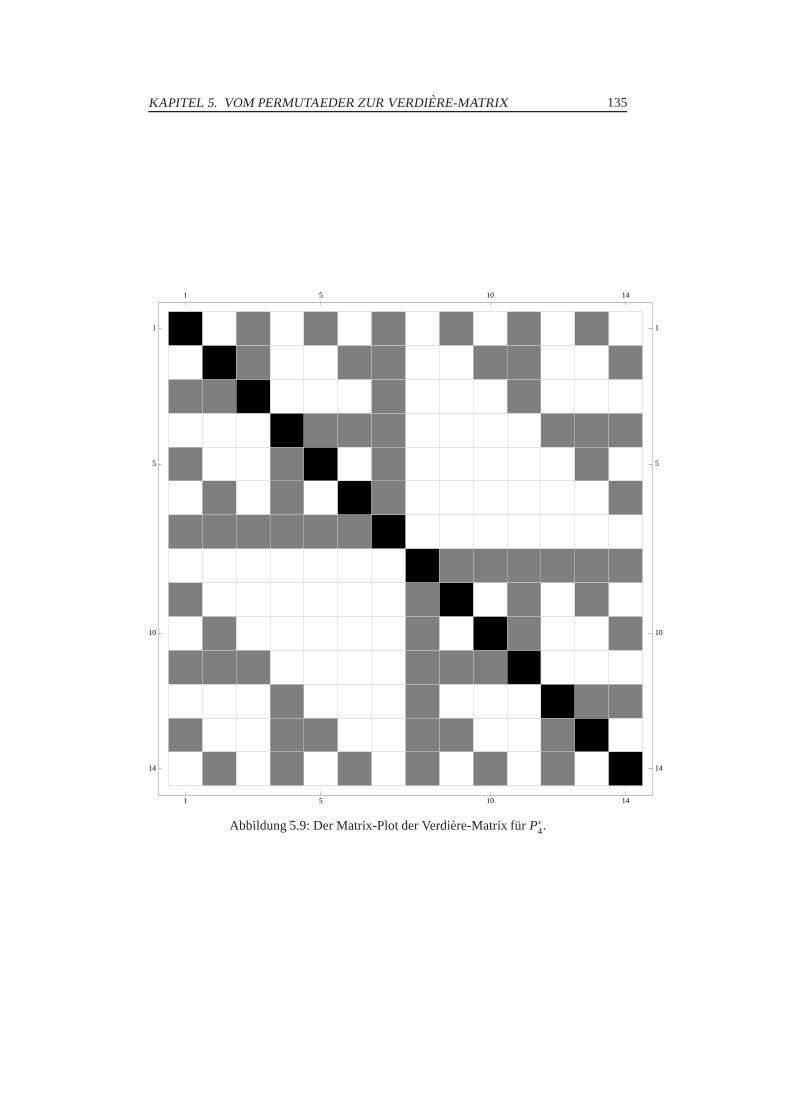
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 135
1 5 10 14
1
5
10
14
1 5 10 14
1
5
10
14
Abbildung 5.9: Der Matrix-Plot der Verdiere-Matrix furP∗4.
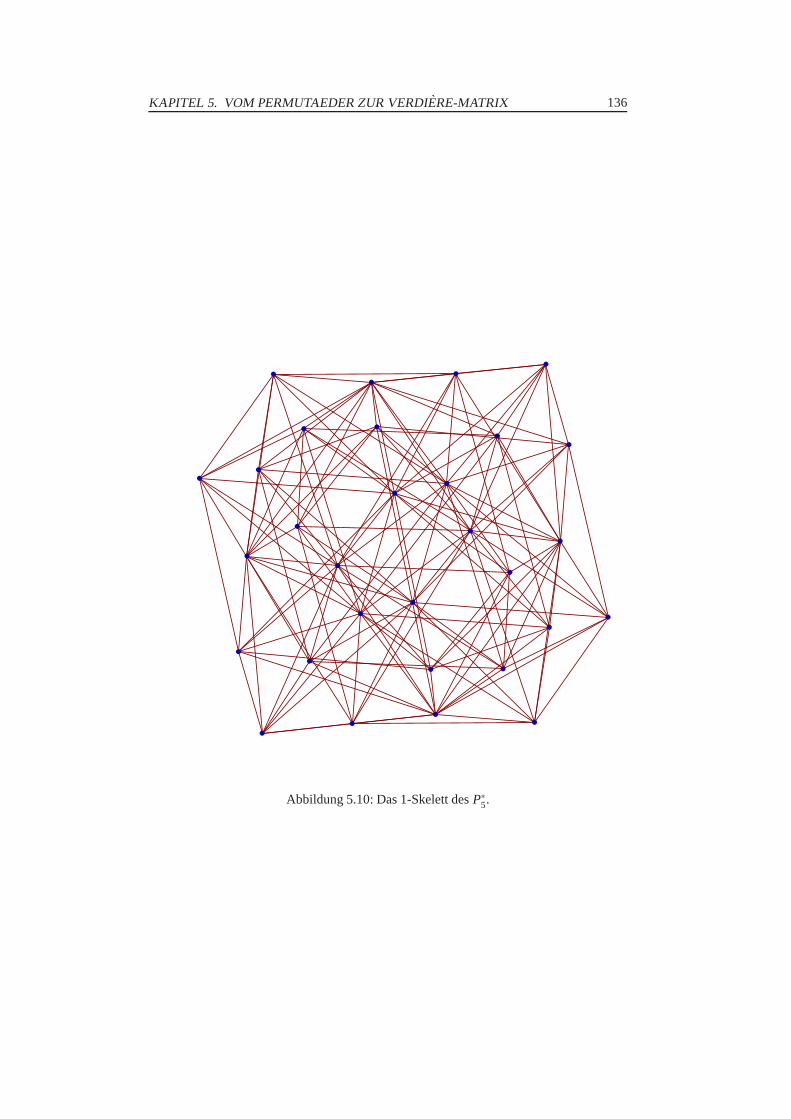
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 136
Abbildung 5.10: Das 1-Skelett desP∗5.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 137
1 10 20 30
1
10
20
30
1 10 20 30
1
10
20
30
Abbildung 5.11: Der Matrix-Plot der Verdiere-Matrix furP∗5.
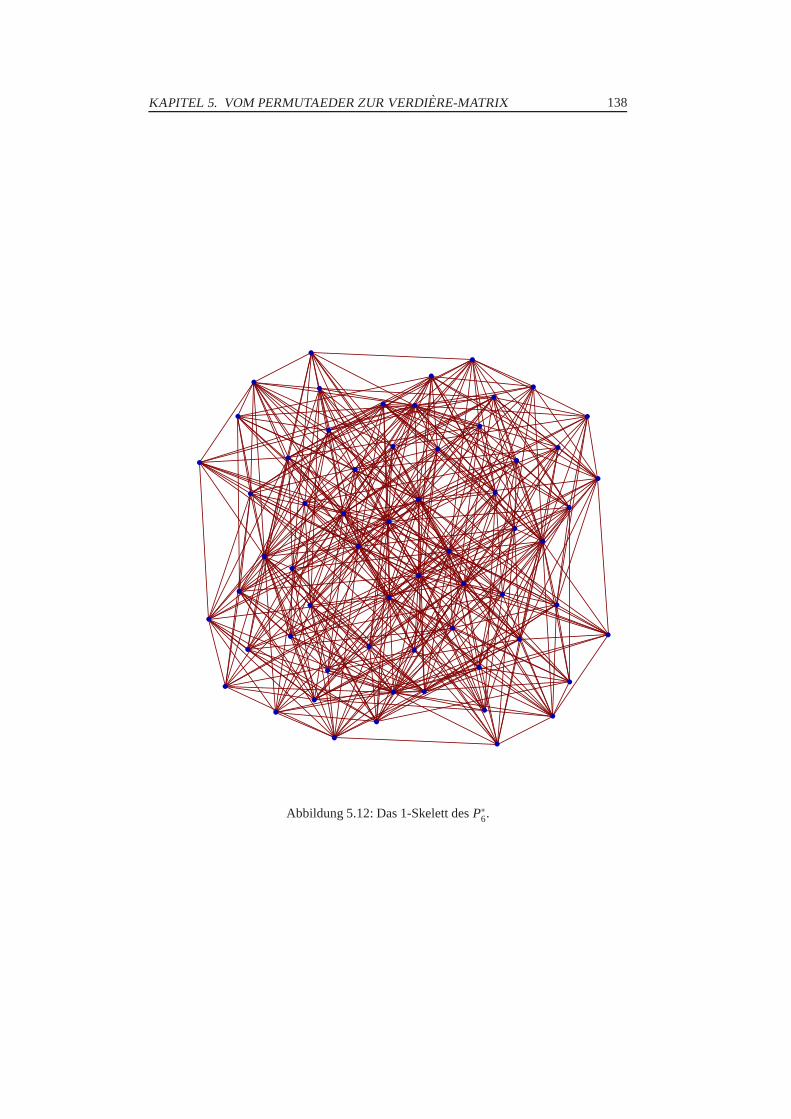
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 138
Abbildung 5.12: Das 1-Skelett desP∗6.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 139
1 20 40 62
1
20
40
62
1 20 40 62
1
20
40
62
Abbildung 5.13: Der Matrix-Plot der Verdiere-Matrix furP∗6.
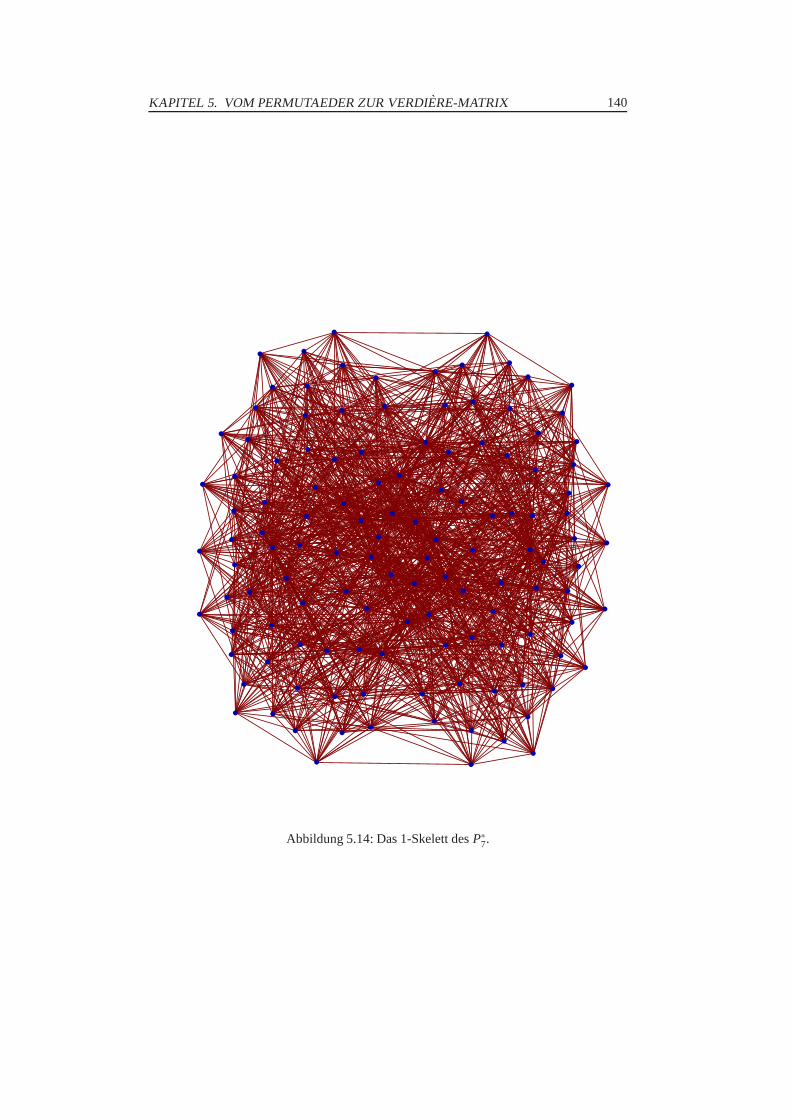
KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 140
Abbildung 5.14: Das 1-Skelett desP∗7.

KAPITEL 5. VOM PERMUTAEDER ZUR VERDIERE-MATRIX 141
1 50 100 126
1
50
100
126
1 50 100 126
1
50
100
126
Abbildung 5.15: Der Matrix-Plot der Verdiere-Matrix furP∗7.
Kapitel 6
Ausblick
Im Rahmen der Recherchen mit dem Thema der Colin-de-Verdiere-Zahl, stellten sich eini-ge Fragestellungen heraus, dessen Untersuchungen sich lohnen wurde weiter zu ergrunden.So ergab sich beispielsweise die Vermutung von Yves Colin deVerdiere, dass die Colin-de-Verdiere-Zahl eines Graphen einen engen Zusammenhang zu der chromatischen Zahl desgleichen Graphen hat. Der Zusammenhang der Vermutung besteht darin, dass die Colin-de-Verdiere-Zahl eines Graphens um die Zahl 1 vermehrt, eine obere Schranke fur diechromatische Zahl des Graphen zu sein scheint:
χ(G) ≤ µ(G) + 1.
Da die Graphenklassen nur fur die ersten vier Zahlen der Verdiere Zahl bekannt sind, lasstsich die Vermutung auch nur fur diese Graphenklassen best¨atigen. Fur die Verdiere-Zahl1 folgt, dass der zugehorige Graph ein Pfad sein muss und somit die chromatische Zahl 2betragt. Fur außerplanare Graphen ergibt sich eine chromatische Zahl von 3 und die Ver-diere-Zahl betragt 2. Die Farbung der planaren Graphen fuhrt auf das Vier-Farben-Problemzuruck. Kazimierz Kuratowski zeigte in seiner Arbeit [16], dass planare Graphen sich mit4 Farben farben lassen. Die zugehorige Verdiere-Zahl betragt 3. Fur die verlinkungsfrei-en einbettbaren Graphen betragt die Verdiere-Zahl 4. Neil Robertson, Paul Seymour undRobin Thomas bewiesen in [28], dass die chromatische Zahl dieser Graphen 5 betragt.Daraus ergibt sich beispielsweise die Frage, ob sich fur die Kneser-Graphen ebenfalls eineMoglichkeit finden lasst, den Verdiere-Graphenparameter zu bestimmen. Aus dem bereitsuntersuchten Farbungsproblem der Kneser-Graphen [19] ließe sich einerseits die Vermu-tung der chromatischen Zahl und der Verdiere-Zahl fur dieKneser-Graphen bestatigen oderwiderlegen und andererseits eine große Klasse von Graphen untersuchen.Das Kapitel 5 fuhrt auch gleich auf die nachste Idee der Untersuchung. Da die Verdiere-Zahl nur fur die Zahlen 1 bis 4 untersucht ist, ergibt sich innaturlicher Weise die Frage,welche Graphenklassen sich hinter den anderen Zahlen verbergen. Eine Vermutung ist die,das Graphen die Verdiere-Zahlk haben, sofern der Graph das 1-Skelett eines einfachenvolldimensionalen Polytops imk-dimensionalen Raum ist. Die Arbeit von Ivan Izmestiev[15] bestatigt eine untere Schranke dieser Vermutung.

Literaturverzeichnis
[1] M. Aigner, Diskrete Mathematik, Vieweg-Teubner, Wiesbaden, 2009
[2] H. Anton, Lineare Algebra, Spektrum Akademischer Verlag, Heidelberg, Berlin,1998
[3] V. Arnold, Modes and quasi-modes, J. Funct. Anal. 6, 1972, 94-101
[4] R. Bacher, Y. C. d. Verdiere,Multiplicites des valeurs propres et transformationsetoile-triangle des graphes, Bulletin de la Societe Mathematique de France 123,1995
[5] T. Bohme,On spatial representations of graphs, Contemporary methodes in graphtheory
[6] G. Chartrand, F. Harary,Planar Permutation Graphs, Annales de l’institut HenriPoincare (B) Probabilites et Statistiques, 3 no. 4, 1967,433-438
[7] R. Diestel,Graphentheorie, Springer-Verlag, Berlin, Heidelberg, 2006
[8] G. Fischer,Lineare Algebra, Vieweg Studium – Grundkurs Mathematik, Wiesba-den, 2005
[9] O. Forster,Analysis 2, Vieweg Studium – Grundkurs Mathematik, Wiesbaden,2006
[10] B. C. Hall,Lie Groups, Lie Algebras, and Representations, Springer-Verlag, NewYork, 2003
[11] H. v. d. Holst,A short proof of the planarity characterization of Colin de Verdiere,Journal of Combinatorial Theory Series B Volume 65 , Issue 2,November 1995,269-272
[12] H. v. d. Holst, L. Lovasz, A. Schrijver,On the Invariance of Colin de Verdiere’sGraph Parameter Under Clique Sums, Linear Algebra and its applications, 1995,226-228;509-517
[13] H. v. d. Holst, L. Lovasz, A. Schrijver,The Colin de Verdiere graph parameter,Graph Theory and Combinatorial Biology, Bolyai Soc. Math. Stud. 7, Budapest,1996, 29-85
[14] S. Hwang,Cauchy’s interlace theorem for eigenvalues of Hermitian matrices,Amer. Math. Monthly 111, 2004, 157-159.
[15] I. Izmestiev, The Colin de Verdiere number and graphs of polytopes, ar-Xiv:0704.0349v3
[16] K. Kuratowski,Sur le probleme des courbes gauches en topologie, Fund Math. 15,1930, 271-283.
LITERATURVERZEICHNIS 144
[17] E. L. Lima,The Jordan-Brouwer Separation Theorem for Smooth Hypersurfaces,The American Mathematical Monthly, Vol. 95, No. 1, 1988, 39-42
[18] K. Y. Lin, An Elementary Proof of the Perron-Frobenius Theorem for Non-Negative Symmetric Matrices, Chinese Journal of Physics, VOL. 15, NO. 4, Win-ter, 1977
[19] L. Lovasz, Kneser’s conjecture, chromatic number, and homotopy, Journal ofCombinatorial Theory, Series A 25, 319-324
[20] L. Lovasz,Steinitz representations of polyhedra and the Colin de Verdiere number,J. Combin. Theory Ser. B, 82(2), 2001, 223-236
[21] L. Lovasz,The Colin de Verdiere number of a graph, based on joint papers with H.van der Holst and A. Schrijver, www.cs.elte.hu/ lovasz/colinnotes.pdf
[22] L. Lovasz, A. Schrijver,A Borsuk theorem for antipodal links and a spectral cha-racterization of linklessly embeddable graphs, Proc. Amer. Math. Soc., 126(5),1998, 1275-1285
[23] L. Lovasz, A. Schrijver,On the null space of a Colin de Verdiere matrix, Annalesde l’institut Fourier, 49 no. 3, 1999, 1017-1026
[24] J. Matousek, J. Nesetril,Diskrete Mathematik, Springer-Verlag, Berlin, Heidel-berg, 2007
[25] F. Ninio, A simple proof of the Perron-Frobenius theorem for positivesymmetricmatrices, J. Phys. A: Math. Gen. 10 1259, 1977
[26] S. M. Osnaga,On rank one matrices and invariant subspaces, Balkan Journal ofGeometry and its Applications, vol. 10, 2005, 145-148
[27] N. Robertson, P. Seymour, R. Thomas,A survey of linkless embeddings, GraphStructure Theory, 1991, 125-136
[28] N. Robertson, P. Seymour, R. Thomas,Hadwiger’s conjecture for K6-free graphs,Combinatorica 13 (3): doi:10.1007/BF01202354, 279-361
[29] N. Robertson, P. Seymour, R. Thomas,Sachs’ linkless embedding conjecture, Jour-nal of Combinatorial Theory Series B Volume 64, Issue 2, 1995, 185-227
[30] D. Werner,Funktionalanalysis, Springer-Verlag, Berlin, Heidelberg, 2007
[31] Y. C. de Verdiere,On a new graph invariant and a criterion for planarity, GraphStructure Theory (N. Robertson, P. Seymour, eds.), Contemporary Mathematics,American Mathematical Society, Providence, Rhode Island,1993, 137-147.
[32] Y. C. de Verdiere,Sur un nouvel invariant des graphes et un critere de planarite,Journal of Combinatorial Theory, Series B 50, 1990, 11-21.
[33] J. H. C. Whitehead,Combinatorial homotopy. I., Bull. Amer. Math. Soc. 55, 1949,213-245
[34] G. M. Ziegler,Lectures on Polytopes, Springer-Verlag, New York, 2007
Eidesstattliche Versicherung
Hiermit versichere ich, dass ich die vorliegende Diplomarbeit selbststandig und ohne un-erlaubte Hilfe angefertigt und andere als die in der Diplomarbeit angegebenen Hilfsmittelnicht benutzt habe. Alle Stellen, die wortlich oder sinngemaß aus anderen Schriften ent-nommen sind, habe ich als solche kenntlich gemacht.
Berlin, den 4. Februar 2011
Kai Lawonn




![ChristophLange:Schriftenverzeichnis Inhaltsverzeichnis · Veröffentlichungen: ChristophLange [JA8] Marco B. Caminati, Manfred Kerber, ChristophLangeund Colin Rowat. „VCG – CombinatorialVickrey-Clarke-GrovesAuctions](https://img.pdfslide.org/doc/110x75/5f633fc6456f93284378b3bd/christophlangeschriftenverzeichnis-inhaltsverzeichnis-verffentlichungen-christophlange.jpg)