Embed Size (px)
Citation preview

Dokumentation
CU1128
EtherCAT Sternverteiler
2.010.02.2016
Version:Datum:

Inhaltsverzeichnis
Inhaltsverzeichnis1 Vorwort ....................................................................................................................................................... 4
1.1 Hinweise zur Dokumentation ............................................................................................................ 41.2 Sicherheitshinweise .......................................................................................................................... 51.3 Ausgabestände der Dokumentation ................................................................................................. 61.4 Versionsidentifikation EtherCAT Geräte ........................................................................................... 6
2 Produktübersicht..................................................................................................................................... 102.1 Einführung ...................................................................................................................................... 102.2 Technische Daten........................................................................................................................... 11
3 Grundlagen .............................................................................................................................................. 123.1 Grundlagen zur Funktion ................................................................................................................ 123.2 Funktionsgrundlagen EtherCAT-Abzweige..................................................................................... 14
4 Montage.................................................................................................................................................... 224.1 Montage und Demontage ............................................................................................................... 224.2 Verkabelung.................................................................................................................................... 234.3 Abmessungen................................................................................................................................. 244.4 LED-Anzeigen................................................................................................................................. 25
5 Inbetriebnahme........................................................................................................................................ 265.1 Quick Start ...................................................................................................................................... 265.2 TwinCAT 2.1x ................................................................................................................................. 26
5.2.1 Installation TwinCAT Realtime Treiber ............................................................................... 265.2.2 Hinweise ESI-Gerätebeschreibung..................................................................................... 305.2.3 Offline Konfigurationserstellung (Master: TwinCAT 2.x) ..................................................... 345.2.4 Online Konfigurationserstellung "Scannen" (Master: TwinCAT 2.x) ................................... 405.2.5 Konfiguration mit dem TwinCAT System Manager ............................................................. 49
5.3 Allgemeine Inbetriebnahmehinweise des EtherCAT Slaves........................................................... 575.4 Distributed Clocks Referenzuhr ...................................................................................................... 665.5 Konfiguration der CU1128 im TwinCAT System Manager ............................................................. 68
6 Anhang ..................................................................................................................................................... 746.1 EEPROM Update............................................................................................................................ 746.2 UL Hinweise.................................................................................................................................... 746.3 Support und Service ....................................................................................................................... 76
CU1128 3Version: 2.0
Vorwort
1 Vorwort
1.1 Hinweise zur DokumentationDiese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs- undAutomatisierungstechnik, das mit den geltenden nationalen Normen vertraut ist.Zur Installation und Inbetriebnahme der Komponenten ist die Beachtung der nachfolgenden Hinweise undErklärungen unbedingt notwendig.
Das Fachpersonal hat sicherzustellen, dass die Anwendung bzw. der Einsatz der beschriebenen Produktealle Sicherheitsanforderungen, einschließlich sämtlicher anwendbaren Gesetze, Vorschriften, Bestimmungenund Normen erfüllt.
Disclaimer
Diese Dokumentation wurde sorgfältig erstellt. Die beschriebenen Produkte werden jedoch ständig weiterentwickelt. Deshalb ist die Dokumentation nicht in jedem Fall vollständig auf die Übereinstimmung mit denbeschriebenen Leistungsdaten, Normen oder sonstigen Merkmalen geprüft. Falls sie technische oderredaktionelle Fehler enthält, behalten wir uns das Recht vor, Änderungen jederzeit und ohne Ankündigungvorzunehmen. Aus den Angaben, Abbildungen und Beschreibungen in dieser Dokumentation können keineAnsprüche auf Änderung bereits gelieferter Produkte geltend gemacht werden.
Marken
Beckhoff®, TwinCAT®, EtherCAT®, Safety over EtherCAT®, TwinSAFE®, XFC®und XTS® sind eingetrageneund lizenzierte Marken der Beckhoff Automation GmbH & Co. KG.Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kannzu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen.
Patente
Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen undPatente: EP1590927, EP1789857, DE102004044764, DE102007017835 mit den entsprechendenAnmeldungen und Eintragungen in verschiedenen anderen Ländern.
Die TwinCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen undPatente: EP0851348, US6167425 mit den entsprechenden Anmeldungen und Eintragungen inverschiedenen anderen Ländern.
EtherCAT® ist eine eingetragene Marke und patentierte Technologie lizensiert durch die BeckhoffAutomation GmbH, Deutschland
Copyright
© Beckhoff Automation GmbH & Co. KG, Deutschland.Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sindverboten, soweit nicht ausdrücklich gestattet.Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmuster-oder Geschmacksmustereintragung vorbehalten.
CU11284 Version: 2.0
Vorwort
1.2 Sicherheitshinweise
Sicherheitsbestimmungen
Beachten Sie die folgenden Sicherheitshinweise und Erklärungen!Produktspezifische Sicherheitshinweise finden Sie auf den folgenden Seiten oder in den Bereichen Montage,Verdrahtung, Inbetriebnahme usw.
Haftungsausschluss
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software-Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über diedokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss derBeckhoff Automation GmbH & Co. KG.
Qualifikation des Personals
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-,Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist.
Erklärung der Symbole
In der vorliegenden Dokumentation werden die folgenden Symbole mit einem nebenstehendenSicherheitshinweis oder Hinweistext verwendet. Die Sicherheitshinweise sind aufmerksam zu lesen undunbedingt zu befolgen!
GEFAHR
Akute Verletzungsgefahr!Wenn der Sicherheitshinweis neben diesem Symbol nicht beachtet wird, besteht unmittel-bare Gefahr für Leben und Gesundheit von Personen!
WARNUNG
Verletzungsgefahr!Wenn der Sicherheitshinweis neben diesem Symbol nicht beachtet wird, besteht Gefahr fürLeben und Gesundheit von Personen!
VORSICHT
Schädigung von Personen!Wenn der Sicherheitshinweis neben diesem Symbol nicht beachtet wird, können Personengeschädigt werden!
Achtung
Schädigung von Umwelt oder GerätenWenn der Hinweis neben diesem Symbol nicht beachtet wird, können Umwelt oder Gerätegeschädigt werden.
Hinweis
Tipp oder FingerzeigDieses Symbol kennzeichnet Informationen, die zum besseren Verständnis beitragen.
CU1128 5Version: 2.0
Vorwort
1.3 Ausgabestände der DokumentationVersion Kommentar2.0 - Migration1.0 - Ergänzungen
- 1. Veröffentlichung0.1 - Vorabversion
1.4 Versionsidentifikation EtherCAT Geräte
Bezeichnung
Ein Beckhoff EtherCAT-Gerät verfügt über eine 14stellige technische Bezeichnung, die sich zusammensetztaus
• Familienschlüssel• Typ• Version• Revision
Beispiel Familie Typ Version RevisionEL3314-0000-0016 EL-Klemme
(12 mm, nichtsteckbareAnschlussebene)
3314 (4 kanaligeThermoelementklemme)
0000 (Grundtyp)
0016
CU2008-0000-0000 CU-Gerät 2008 (8 Port FastEthernetSwitch)
0000 (Grundtyp)
0000
ES3602-0010-0017 ES-Klemme(12 mm,steckbareAnschlussebene)
3602 (2 kanaligeSpannungsmessung)
0010(HochpräziseVersion)
0017
Hinweise• die oben genannten Elemente ergeben die technische Bezeichnung, im Folgenden wird das Beispiel
EL3314-0000-0016 verwendet.• Davon ist EL3314-0000 die Bestellbezeichnung, umgangssprachlich bei „-0000“ dann oft nur EL3314
genannt. „-0016“ ist die EtherCAT-Revision.• Die Bestellbezeichnung setzt sich zusammen aus
- Familienschlüssel (EL, EP, CU, ES, KL, CX, .....)- Typ (3314)- Version (-0000)
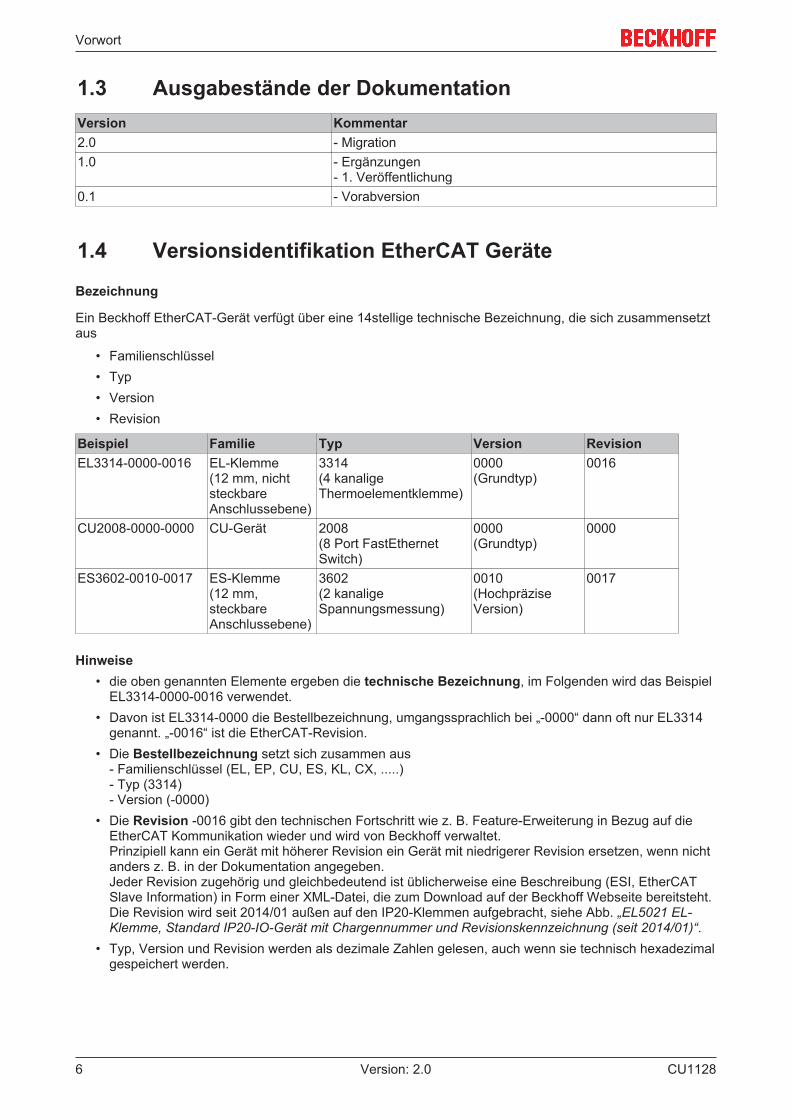
• Die Revision -0016 gibt den technischen Fortschritt wie z. B. Feature-Erweiterung in Bezug auf dieEtherCAT Kommunikation wieder und wird von Beckhoff verwaltet.Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn nichtanders z. B. in der Dokumentation angegeben.Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCATSlave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“.
• Typ, Version und Revision werden als dezimale Zahlen gelesen, auch wenn sie technisch hexadezimalgespeichert werden.
CU11286 Version: 2.0
Vorwort
Identifizierungsnummer
Beckhoff EtherCAT Geräte der verschiedenen Linien verfügen über verschiedene Arten vonIdentifizierungsnummern:
Produktionslos/Chargennummer/Batch-Nummer/Seriennummer/Date Code/D-Nummer
Als Seriennummer bezeichnet Beckhoff im IO-Bereich im Allgemeinen die 8-stellige Nummer, die auf demGerät aufgedruckt oder auf einem Aufkleber angebracht ist. Diese Seriennummer gibt den Bauzustand imAuslieferungszustand an und kennzeichnet somit eine ganze Produktions-Charge, unterscheidet aber nichtdie Module einer Charge..
Aufbau der Seriennummer: KK YY FF HH
KK - Produktionswoche (Kalenderwoche)YY - ProduktionsjahrFF - Firmware-StandHH - Hardware-Stand
Beispiel mit Ser. Nr.: 12063A02: 12 - Produktionswoche 12 06 - Produktionsjahr 2006 3A - Firmware-Stand 3A 02 -Hardware-Stand 02
Ausnahmen können im IP67-Bereich auftreten, dort kann folgende Syntax verwendet werden (siehejeweilige Gerätedokumentation):
Syntax: D ww yy x y z u
D - Vorsatzbezeichnungww - Kalenderwocheyy - Jahrx - Firmware-Stand der Busplatiney - Hardware-Stand der Busplatinez - Firmware-Stand der E/A-Platineu - Hardware-Stand der E/A-Platine
Beispiel: D.22081501 Kalenderwoche 22 des Jahres 2008 Firmware-Stand Busplatine: 1 Hardware StandBusplatine: 5 Firmware-Stand E/A-Platine: 0 (keine Firmware für diese Platine notwendig) Hardware-StandE/A-Platine: 1
Eindeutige Seriennummer/ID, ID-Nummer
Darüber hinaus verfügt in einigen Serien jedes einzelne Modul über eine eindeutige Seriennummer.
Siehe dazu auch weiterführende Dokumentation im Bereich
• IP67: EtherCAT Box
• Safety: TwinSafe• Klemmen mit Werkskalibrierzertifikat und andere Messtechnische Klemmen
CU1128 7Version: 2.0
Vorwort
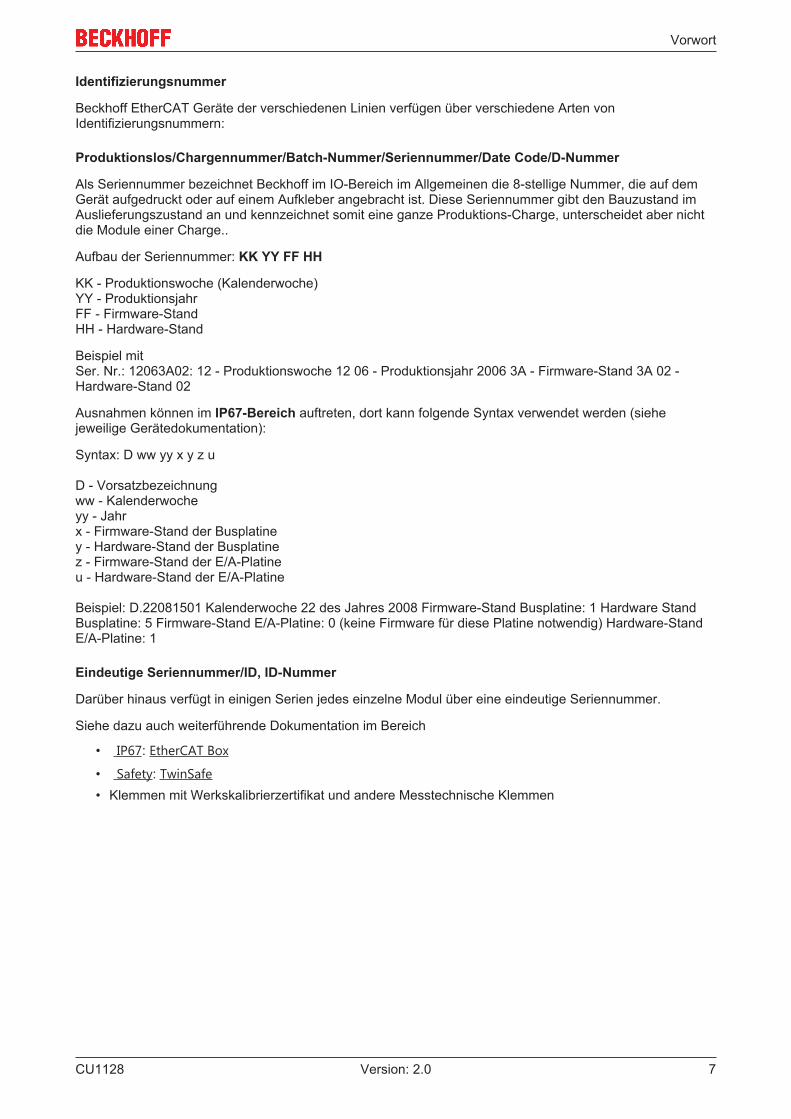
Beispiele für Kennzeichnungen:
Abb. 1: EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung(seit 2014/01)
Abb. 2: EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Chargennummer
Abb. 3: CU2016 Switch mit Chargennummer
CU11288 Version: 2.0
Vorwort
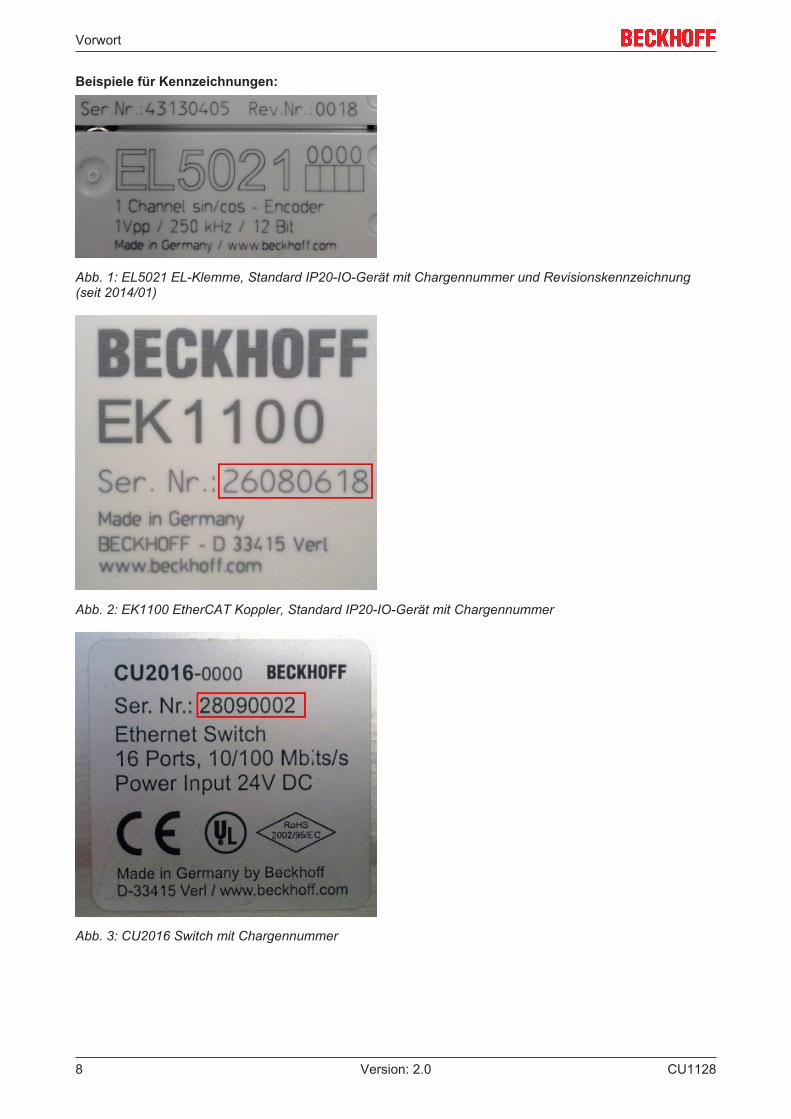
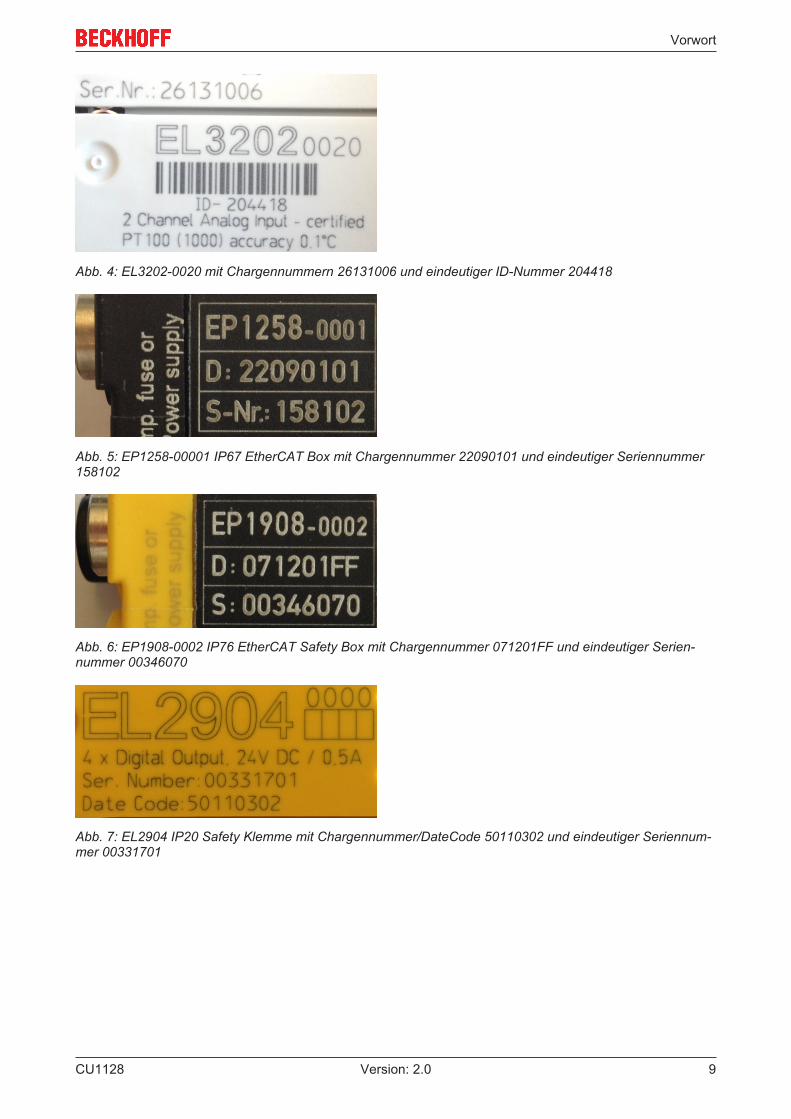
Abb. 4: EL3202-0020 mit Chargennummern 26131006 und eindeutiger ID-Nummer 204418
Abb. 5: EP1258-00001 IP67 EtherCAT Box mit Chargennummer 22090101 und eindeutiger Seriennummer158102
Abb. 6: EP1908-0002 IP76 EtherCAT Safety Box mit Chargennummer 071201FF und eindeutiger Serien-nummer 00346070
Abb. 7: EL2904 IP20 Safety Klemme mit Chargennummer/DateCode 50110302 und eindeutiger Seriennum-mer 00331701
CU1128 9Version: 2.0
Produktübersicht
2 Produktübersicht
2.1 Einführung
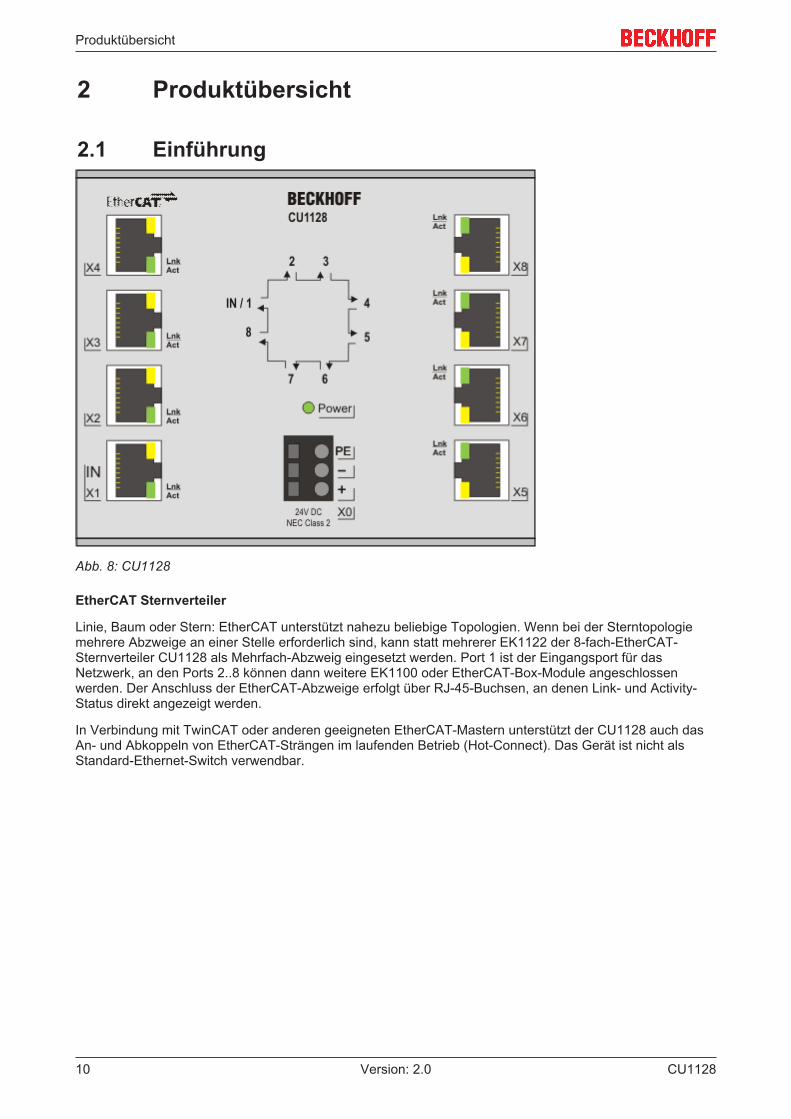
Abb. 8: CU1128
EtherCAT Sternverteiler
Linie, Baum oder Stern: EtherCAT unterstützt nahezu beliebige Topologien. Wenn bei der Sterntopologiemehrere Abzweige an einer Stelle erforderlich sind, kann statt mehrerer EK1122 der 8-fach-EtherCAT-Sternverteiler CU1128 als Mehrfach-Abzweig eingesetzt werden. Port 1 ist der Eingangsport für dasNetzwerk, an den Ports 2..8 können dann weitere EK1100 oder EtherCAT-Box-Module angeschlossenwerden. Der Anschluss der EtherCAT-Abzweige erfolgt über RJ-45-Buchsen, an denen Link- und Activity-Status direkt angezeigt werden.
In Verbindung mit TwinCAT oder anderen geeigneten EtherCAT-Mastern unterstützt der CU1128 auch dasAn- und Abkoppeln von EtherCAT-Strängen im laufenden Betrieb (Hot-Connect). Das Gerät ist nicht alsStandard-Ethernet-Switch verwendbar.
CU112810 Version: 2.0
Produktübersicht
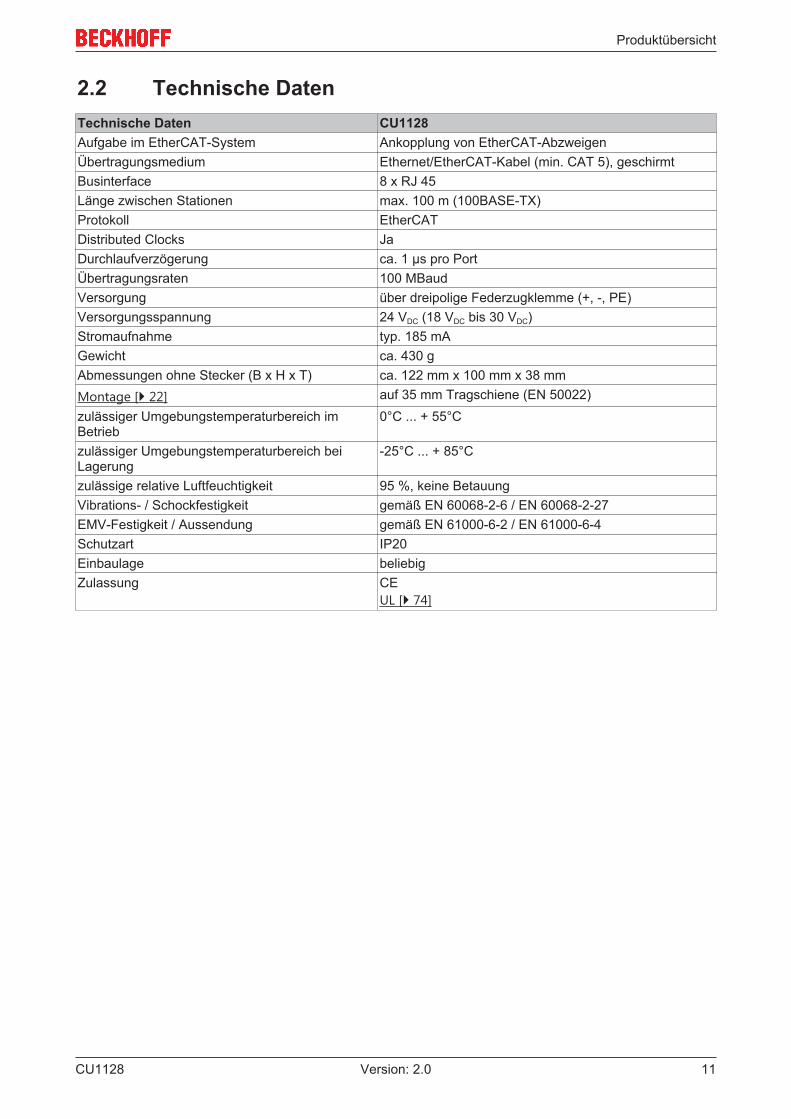
2.2 Technische DatenTechnische Daten CU1128Aufgabe im EtherCAT-System Ankopplung von EtherCAT-AbzweigenÜbertragungsmedium Ethernet/EtherCAT-Kabel (min. CAT 5), geschirmtBusinterface 8 x RJ 45Länge zwischen Stationen max. 100 m (100BASE-TX)Protokoll EtherCATDistributed Clocks JaDurchlaufverzögerung ca. 1 µs pro PortÜbertragungsraten 100 MBaudVersorgung über dreipolige Federzugklemme (+, -, PE)Versorgungsspannung 24 VDC (18 VDC bis 30 VDC)Stromaufnahme typ. 185 mAGewicht ca. 430 gAbmessungen ohne Stecker (B x H x T) ca. 122 mm x 100 mm x 38 mmMontage [} 22] auf 35 mm Tragschiene (EN 50022)zulässiger Umgebungstemperaturbereich imBetrieb
0°C ... + 55°C
zulässiger Umgebungstemperaturbereich beiLagerung
-25°C ... + 85°C
zulässige relative Luftfeuchtigkeit 95 %, keine BetauungVibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4Schutzart IP20Einbaulage beliebigZulassung CE
UL [} 74]
CU1128 11Version: 2.0
Grundlagen
3 Grundlagen
3.1 Grundlagen zur FunktionDer CU1128 ist eine Infrastrukturgerät ohne ansteuerbare Ein-/Ausgangsdaten (I/O). Er ist einsetzbar
• als Abzweigstelle für leitungsgeführtes FastEthernet, um EtherCAT-Klemmenstationen, Antriebe oderbeliebige andere EtherCAT Slaves an Stichleitungen anzuschließen.
• als DistributedClock Referenz-Uhr (siehe Hinweise [} 66]).
Er verfügt über keine I/O und kein CoE-Verzeichnis und ist nicht parametrierbar. Die Kernfunktionen derLinkkontrolle und DistributedClocks-Synchronisierung werden von den ESC abgebildet.
Struktur
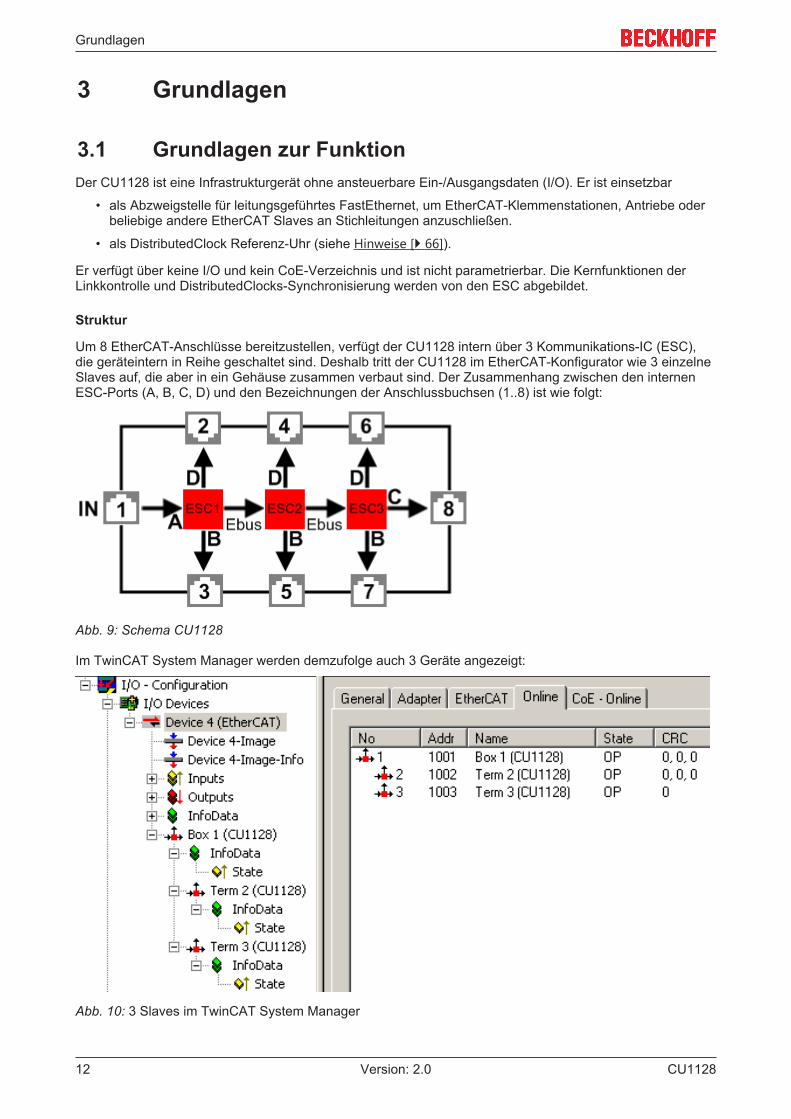
Um 8 EtherCAT-Anschlüsse bereitzustellen, verfügt der CU1128 intern über 3 Kommunikations-IC (ESC),die geräteintern in Reihe geschaltet sind. Deshalb tritt der CU1128 im EtherCAT-Konfigurator wie 3 einzelneSlaves auf, die aber in ein Gehäuse zusammen verbaut sind. Der Zusammenhang zwischen den internenESC-Ports (A, B, C, D) und den Bezeichnungen der Anschlussbuchsen (1..8) ist wie folgt:
Abb. 9: Schema CU1128
Im TwinCAT System Manager werden demzufolge auch 3 Geräte angezeigt:
Abb. 10: 3 Slaves im TwinCAT System Manager
CU112812 Version: 2.0
Grundlagen
Dabei ist zu beachten:
• der Port 1 ist immer der Eingang für den EtherCAT-Verkehr in den CU1128.• die anderen Ports 2..7 sind als Abgänge zu verwenden.• es ist nicht zulässig nach Anlegen des CU1128 Teilgeräte zu löschen.
Zur Unterscheidung siehe auch EEPROM-Update [} 74].
Topologische Anordnung
Beim CU1128 ist besondere Aufmerksamkeit auf die strukturelle Anordnung der EtherCAT-Slaves in Bezugauf die Reihenfolge zu richten. Da der CU1128 über 7 Abzweigports verfügt, muss und kann klar zugeordnetwerden, an welchem Port eine Stichleitung in der Realität angeschlossen ist. Werden hier in derKonfiguration (TwinCAT System Manager Datei *.tsm) falsche Angaben gemacht, kann das System nichtstarten.
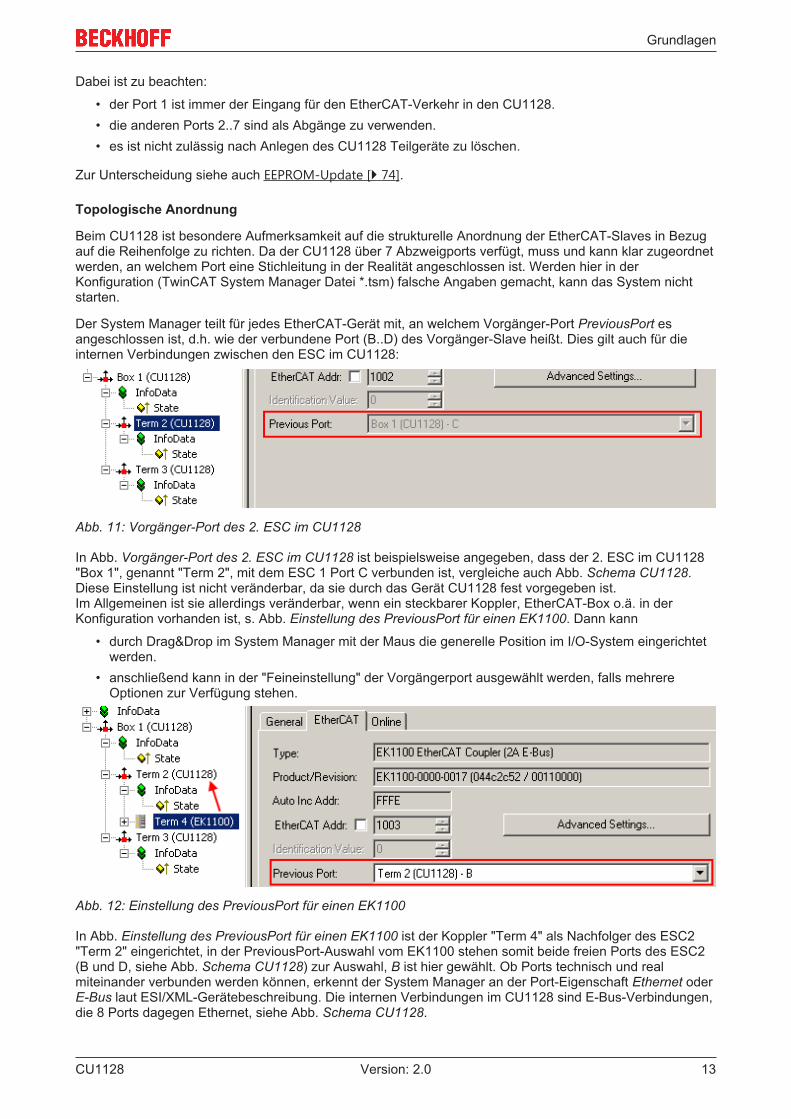
Der System Manager teilt für jedes EtherCAT-Gerät mit, an welchem Vorgänger-Port PreviousPort esangeschlossen ist, d.h. wie der verbundene Port (B..D) des Vorgänger-Slave heißt. Dies gilt auch für dieinternen Verbindungen zwischen den ESC im CU1128:
Abb. 11: Vorgänger-Port des 2. ESC im CU1128
In Abb. Vorgänger-Port des 2. ESC im CU1128 ist beispielsweise angegeben, dass der 2. ESC im CU1128"Box 1", genannt "Term 2", mit dem ESC 1 Port C verbunden ist, vergleiche auch Abb. Schema CU1128.Diese Einstellung ist nicht veränderbar, da sie durch das Gerät CU1128 fest vorgegeben ist.Im Allgemeinen ist sie allerdings veränderbar, wenn ein steckbarer Koppler, EtherCAT-Box o.ä. in derKonfiguration vorhanden ist, s. Abb. Einstellung des PreviousPort für einen EK1100. Dann kann
• durch Drag&Drop im System Manager mit der Maus die generelle Position im I/O-System eingerichtetwerden.
• anschließend kann in der "Feineinstellung" der Vorgängerport ausgewählt werden, falls mehrereOptionen zur Verfügung stehen.
Abb. 12: Einstellung des PreviousPort für einen EK1100
In Abb. Einstellung des PreviousPort für einen EK1100 ist der Koppler "Term 4" als Nachfolger des ESC2"Term 2" eingerichtet, in der PreviousPort-Auswahl vom EK1100 stehen somit beide freien Ports des ESC2(B und D, siehe Abb. Schema CU1128) zur Auswahl, B ist hier gewählt. Ob Ports technisch und realmiteinander verbunden werden können, erkennt der System Manager an der Port-Eigenschaft Ethernet oderE-Bus laut ESI/XML-Gerätebeschreibung. Die internen Verbindungen im CU1128 sind E-Bus-Verbindungen,die 8 Ports dagegen Ethernet, siehe Abb. Schema CU1128.
CU1128 13Version: 2.0
Grundlagen
Siehe auch die Hinweise bei der Konfigurationserstellung [} 68].
3.2 Funktionsgrundlagen EtherCAT-AbzweigeEs sind einige Beckhoff EtherCAT-Geräte verfügbar, die für Abzweige im EtherCAT-Strang verwendetwerden können. Dazu gehören EK1122, EK1521, EP1122 oder auch CU1128. Aufgrund der gleichenSystematik und ähnlichen technischen Eigenschaften dieser Geräte wird in den folgenden Beispielen nur derEK1122 verwendet. test
EtherCAT-Handling in den Slaves
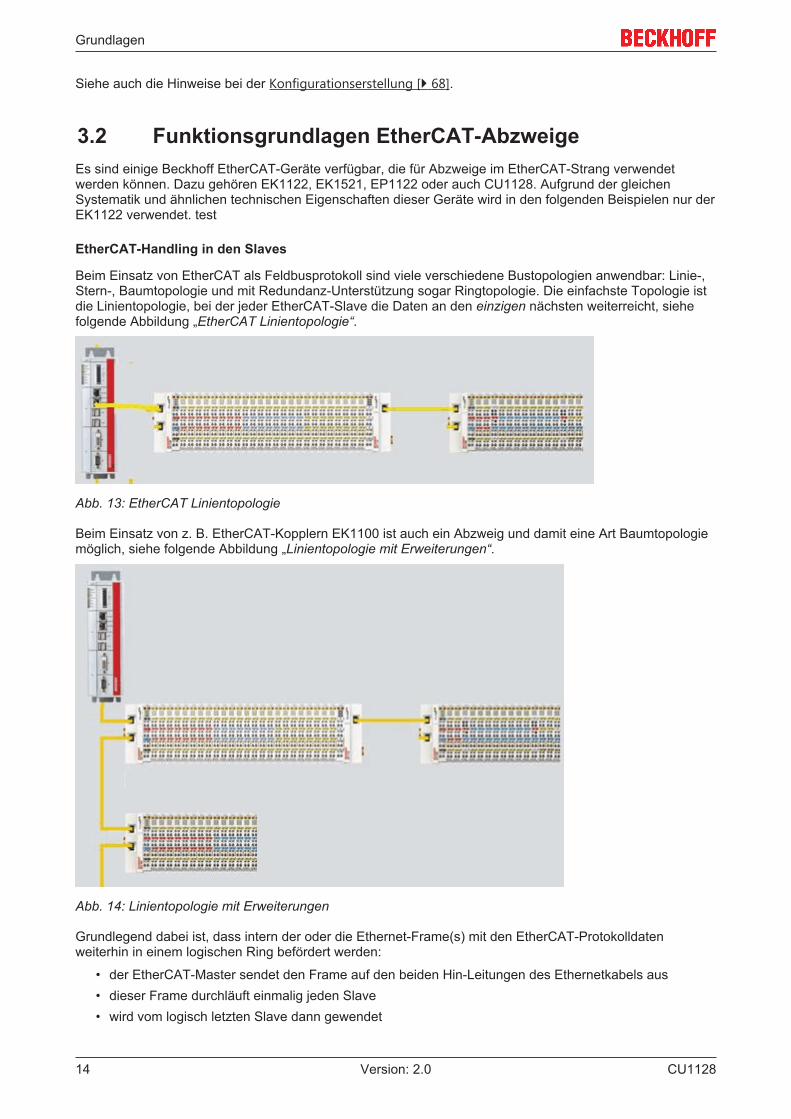
Beim Einsatz von EtherCAT als Feldbusprotokoll sind viele verschiedene Bustopologien anwendbar: Linie-,Stern-, Baumtopologie und mit Redundanz-Unterstützung sogar Ringtopologie. Die einfachste Topologie istdie Linientopologie, bei der jeder EtherCAT-Slave die Daten an den einzigen nächsten weiterreicht, siehefolgende Abbildung „EtherCAT Linientopologie“.
Abb. 13: EtherCAT Linientopologie
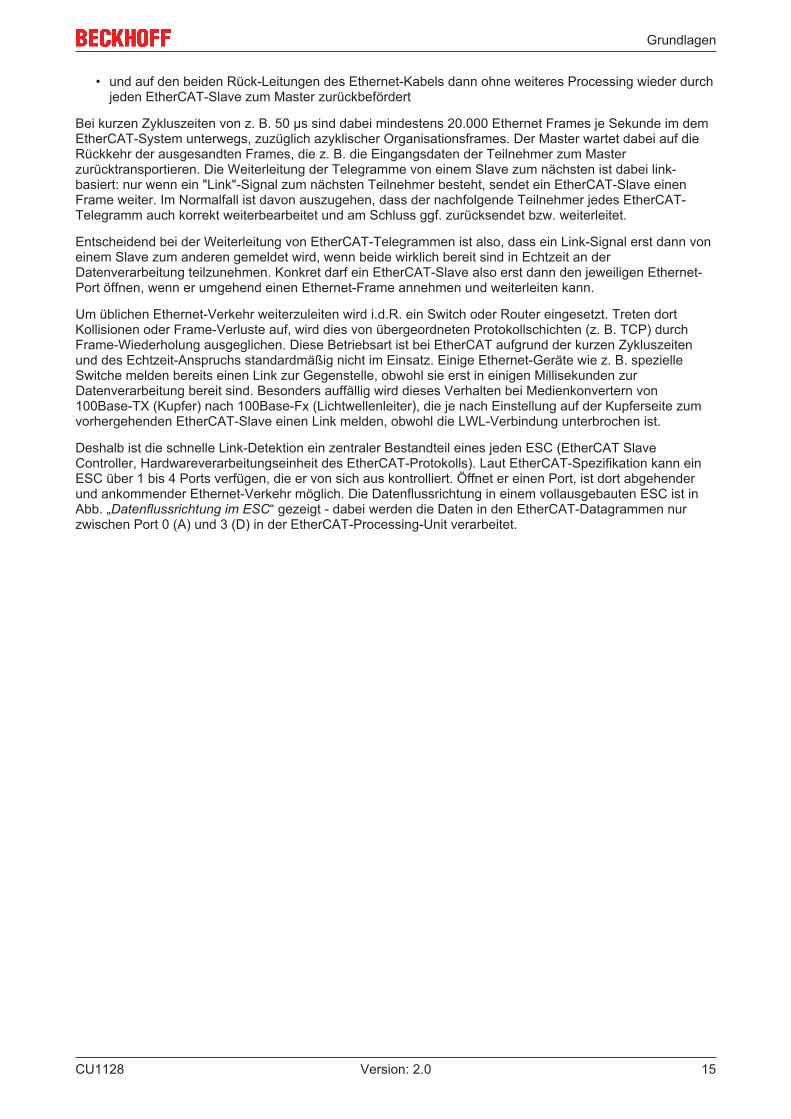
Beim Einsatz von z. B. EtherCAT-Kopplern EK1100 ist auch ein Abzweig und damit eine Art Baumtopologiemöglich, siehe folgende Abbildung „Linientopologie mit Erweiterungen“.
Abb. 14: Linientopologie mit Erweiterungen
Grundlegend dabei ist, dass intern der oder die Ethernet-Frame(s) mit den EtherCAT-Protokolldatenweiterhin in einem logischen Ring befördert werden:
• der EtherCAT-Master sendet den Frame auf den beiden Hin-Leitungen des Ethernetkabels aus• dieser Frame durchläuft einmalig jeden Slave• wird vom logisch letzten Slave dann gewendet
CU112814 Version: 2.0
Grundlagen
• und auf den beiden Rück-Leitungen des Ethernet-Kabels dann ohne weiteres Processing wieder durchjeden EtherCAT-Slave zum Master zurückbefördert
Bei kurzen Zykluszeiten von z. B. 50 µs sind dabei mindestens 20.000 Ethernet Frames je Sekunde im demEtherCAT-System unterwegs, zuzüglich azyklischer Organisationsframes. Der Master wartet dabei auf dieRückkehr der ausgesandten Frames, die z. B. die Eingangsdaten der Teilnehmer zum Masterzurücktransportieren. Die Weiterleitung der Telegramme von einem Slave zum nächsten ist dabei link-basiert: nur wenn ein "Link"-Signal zum nächsten Teilnehmer besteht, sendet ein EtherCAT-Slave einenFrame weiter. Im Normalfall ist davon auszugehen, dass der nachfolgende Teilnehmer jedes EtherCAT-Telegramm auch korrekt weiterbearbeitet und am Schluss ggf. zurücksendet bzw. weiterleitet.
Entscheidend bei der Weiterleitung von EtherCAT-Telegrammen ist also, dass ein Link-Signal erst dann voneinem Slave zum anderen gemeldet wird, wenn beide wirklich bereit sind in Echtzeit an derDatenverarbeitung teilzunehmen. Konkret darf ein EtherCAT-Slave also erst dann den jeweiligen Ethernet-Port öffnen, wenn er umgehend einen Ethernet-Frame annehmen und weiterleiten kann.
Um üblichen Ethernet-Verkehr weiterzuleiten wird i.d.R. ein Switch oder Router eingesetzt. Treten dortKollisionen oder Frame-Verluste auf, wird dies von übergeordneten Protokollschichten (z. B. TCP) durchFrame-Wiederholung ausgeglichen. Diese Betriebsart ist bei EtherCAT aufgrund der kurzen Zykluszeitenund des Echtzeit-Anspruchs standardmäßig nicht im Einsatz. Einige Ethernet-Geräte wie z. B. spezielleSwitche melden bereits einen Link zur Gegenstelle, obwohl sie erst in einigen Millisekunden zurDatenverarbeitung bereit sind. Besonders auffällig wird dieses Verhalten bei Medienkonvertern von100Base-TX (Kupfer) nach 100Base-Fx (Lichtwellenleiter), die je nach Einstellung auf der Kupferseite zumvorhergehenden EtherCAT-Slave einen Link melden, obwohl die LWL-Verbindung unterbrochen ist.
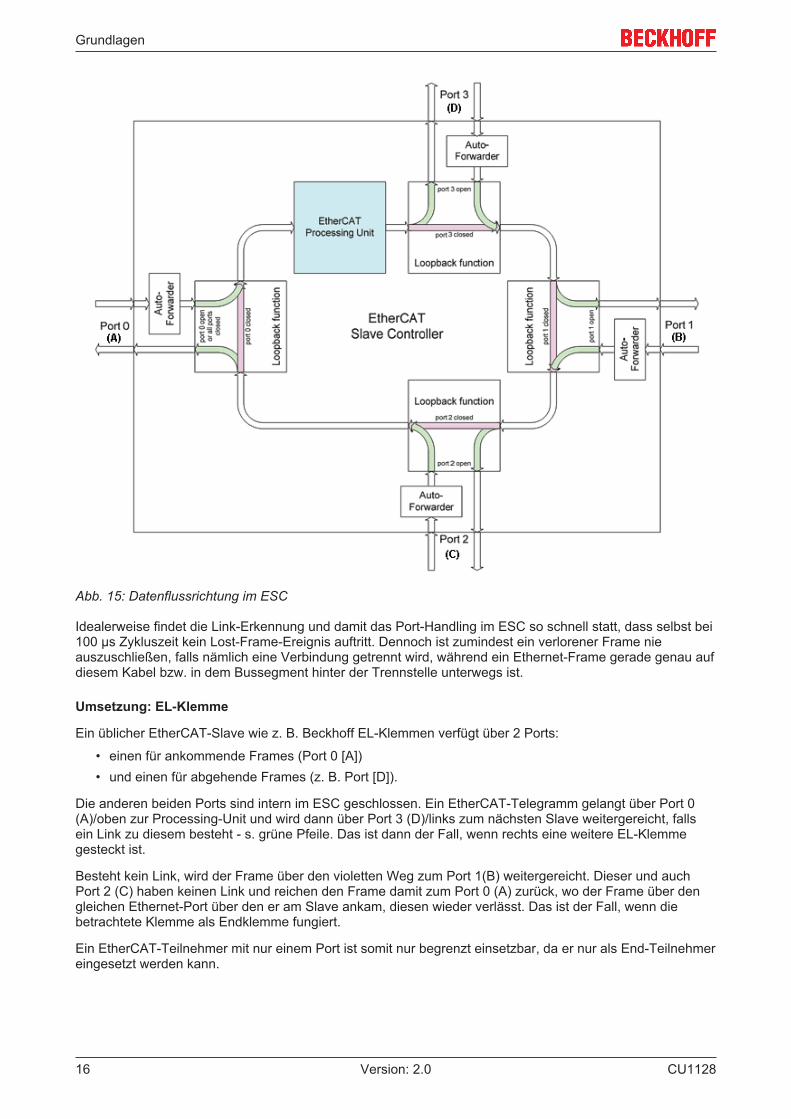
Deshalb ist die schnelle Link-Detektion ein zentraler Bestandteil eines jeden ESC (EtherCAT SlaveController, Hardwareverarbeitungseinheit des EtherCAT-Protokolls). Laut EtherCAT-Spezifikation kann einESC über 1 bis 4 Ports verfügen, die er von sich aus kontrolliert. Öffnet er einen Port, ist dort abgehenderund ankommender Ethernet-Verkehr möglich. Die Datenflussrichtung in einem vollausgebauten ESC ist inAbb. „Datenflussrichtung im ESC“ gezeigt - dabei werden die Daten in den EtherCAT-Datagrammen nurzwischen Port 0 (A) und 3 (D) in der EtherCAT-Processing-Unit verarbeitet.
CU1128 15Version: 2.0
Grundlagen
Abb. 15: Datenflussrichtung im ESC
Idealerweise findet die Link-Erkennung und damit das Port-Handling im ESC so schnell statt, dass selbst bei100 µs Zykluszeit kein Lost-Frame-Ereignis auftritt. Dennoch ist zumindest ein verlorener Frame nieauszuschließen, falls nämlich eine Verbindung getrennt wird, während ein Ethernet-Frame gerade genau aufdiesem Kabel bzw. in dem Bussegment hinter der Trennstelle unterwegs ist.
Umsetzung: EL-Klemme
Ein üblicher EtherCAT-Slave wie z. B. Beckhoff EL-Klemmen verfügt über 2 Ports:
• einen für ankommende Frames (Port 0 [A])• und einen für abgehende Frames (z. B. Port [D]).
Die anderen beiden Ports sind intern im ESC geschlossen. Ein EtherCAT-Telegramm gelangt über Port 0(A)/oben zur Processing-Unit und wird dann über Port 3 (D)/links zum nächsten Slave weitergereicht, fallsein Link zu diesem besteht - s. grüne Pfeile. Das ist dann der Fall, wenn rechts eine weitere EL-Klemmegesteckt ist.
Besteht kein Link, wird der Frame über den violetten Weg zum Port 1(B) weitergereicht. Dieser und auchPort 2 (C) haben keinen Link und reichen den Frame damit zum Port 0 (A) zurück, wo der Frame über dengleichen Ethernet-Port über den er am Slave ankam, diesen wieder verlässt. Das ist der Fall, wenn diebetrachtete Klemme als Endklemme fungiert.
Ein EtherCAT-Teilnehmer mit nur einem Port ist somit nur begrenzt einsetzbar, da er nur als End-Teilnehmereingesetzt werden kann.
CU112816 Version: 2.0
Grundlagen
Umsetzung: EK1100 EtherCAT Koppler
Im EtherCAT-Koppler EK1100 werden 3 von den 4 verfügbaren Ports genutzt und damit ein Anschluss nachrechts zu Klemmen und über eine RJ45-Buchse zu weiteren Kopplern ermöglicht, vgl. Abb. „Linientopologiemit Erweiterungen [} 14]“. Die Processing-Unit wird im EK1100 nicht zum Prozessdatenaustausch genutzt.
Umsetzung: EK1122 EtherCAT Abzweig
Im EK1122 können alle 4 Ports des ESC verbunden werden. Zwei über den klemmeninternen E-Bus undzwei über die RJ45-Buchsen mit Ethernet-Physik. Im TwinCAT System Manager werden die Link-Stati derPorts 0, 1, 2 und 3 über die Online-Anzeige mitgeteilt - dort werden sie mit Port A, B, C und D bezeichnet, s.Abb. „Topologie Anzeige bei unterbrochener Leitung [} 19]“.
Umsetzung: EK1521/EK1521-0010/EK1561 EtherCAT Abzweig
Im o.g. Abzweigen können wie im EK1100 3 Ports des ESC verbunden werden. Zwei über denklemmeninternen E-Bus und einer über die SC-Buchse/Versatile Link per LWL-Leitung/POF-Leitung.
Umsetzung: CU1128 EtherCAT Abzweig
Im CU1128 sind 3 ESC integriert, es können somit insgesamt 8 Ports durch Anwender belegt werden. Die 3ESC sind untereinander über E-Bus verbunden.
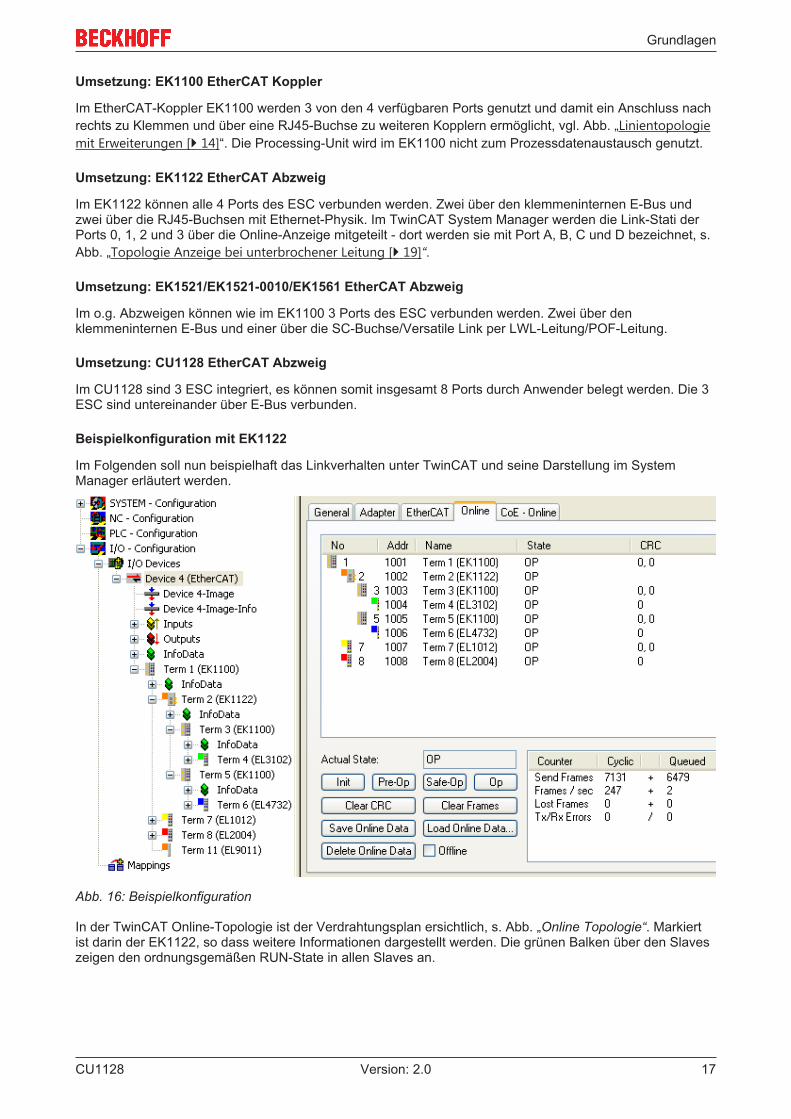
Beispielkonfiguration mit EK1122
Im Folgenden soll nun beispielhaft das Linkverhalten unter TwinCAT und seine Darstellung im SystemManager erläutert werden.
Abb. 16: Beispielkonfiguration
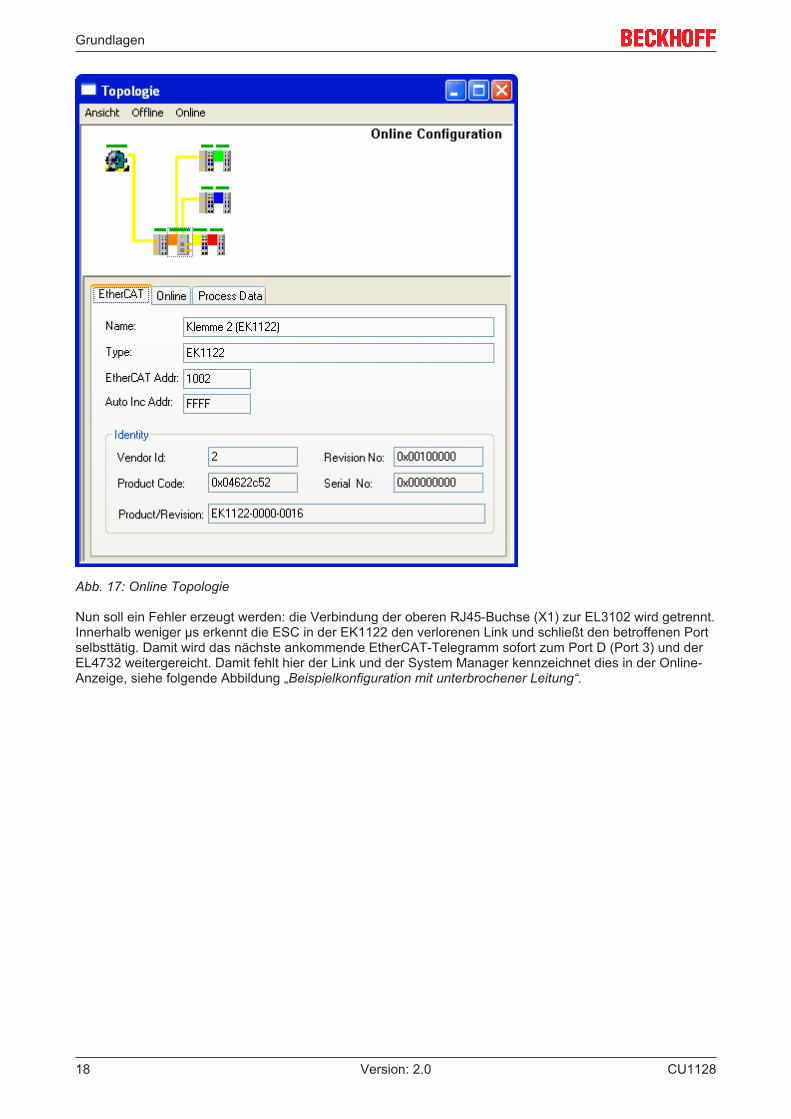
In der TwinCAT Online-Topologie ist der Verdrahtungsplan ersichtlich, s. Abb. „Online Topologie“. Markiertist darin der EK1122, so dass weitere Informationen dargestellt werden. Die grünen Balken über den Slaveszeigen den ordnungsgemäßen RUN-State in allen Slaves an.
CU1128 17Version: 2.0
Grundlagen
Abb. 17: Online Topologie
Nun soll ein Fehler erzeugt werden: die Verbindung der oberen RJ45-Buchse (X1) zur EL3102 wird getrennt.Innerhalb weniger µs erkennt die ESC in der EK1122 den verlorenen Link und schließt den betroffenen Portselbsttätig. Damit wird das nächste ankommende EtherCAT-Telegramm sofort zum Port D (Port 3) und derEL4732 weitergereicht. Damit fehlt hier der Link und der System Manager kennzeichnet dies in der Online-Anzeige, siehe folgende Abbildung „Beispielkonfiguration mit unterbrochener Leitung“.
CU112818 Version: 2.0
Grundlagen
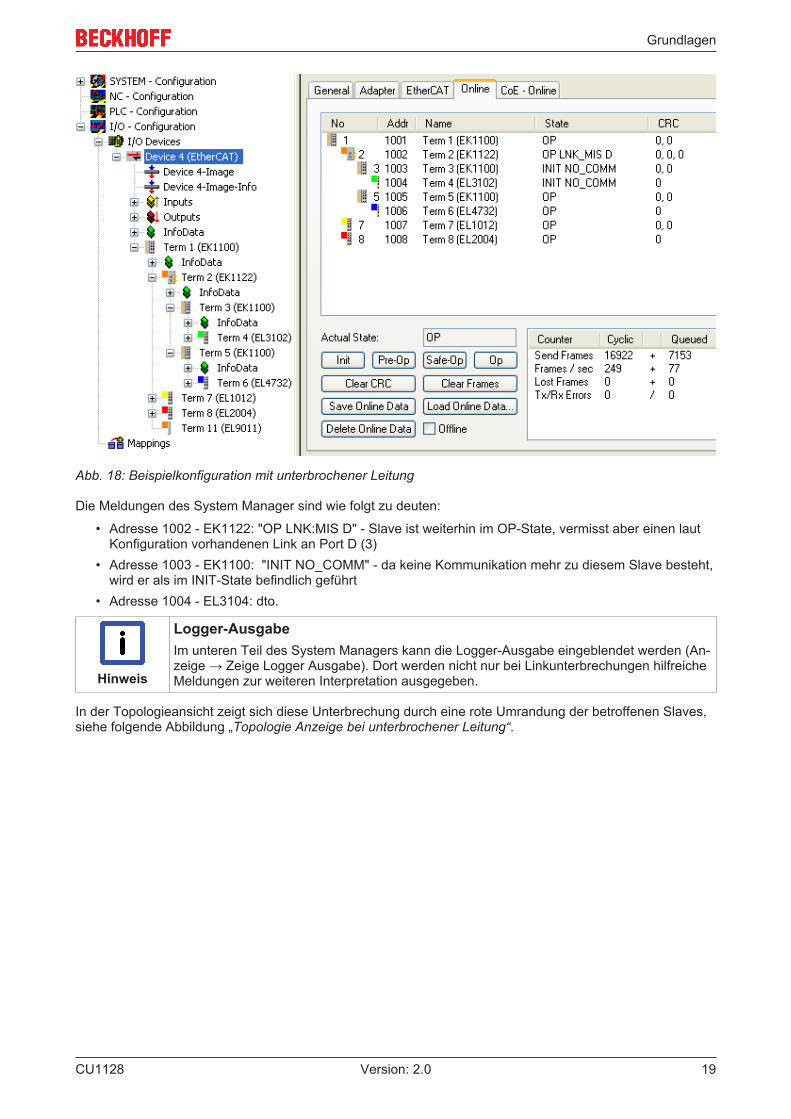
Abb. 18: Beispielkonfiguration mit unterbrochener Leitung
Die Meldungen des System Manager sind wie folgt zu deuten:
• Adresse 1002 - EK1122: "OP LNK:MIS D" - Slave ist weiterhin im OP-State, vermisst aber einen lautKonfiguration vorhandenen Link an Port D (3)
• Adresse 1003 - EK1100: "INIT NO_COMM" - da keine Kommunikation mehr zu diesem Slave besteht,wird er als im INIT-State befindlich geführt
• Adresse 1004 - EL3104: dto.
Hinweis
Logger-AusgabeIm unteren Teil des System Managers kann die Logger-Ausgabe eingeblendet werden (An-zeige → Zeige Logger Ausgabe). Dort werden nicht nur bei Linkunterbrechungen hilfreicheMeldungen zur weiteren Interpretation ausgegeben.
In der Topologieansicht zeigt sich diese Unterbrechung durch eine rote Umrandung der betroffenen Slaves,siehe folgende Abbildung „Topologie Anzeige bei unterbrochener Leitung“.
CU1128 19Version: 2.0
Grundlagen
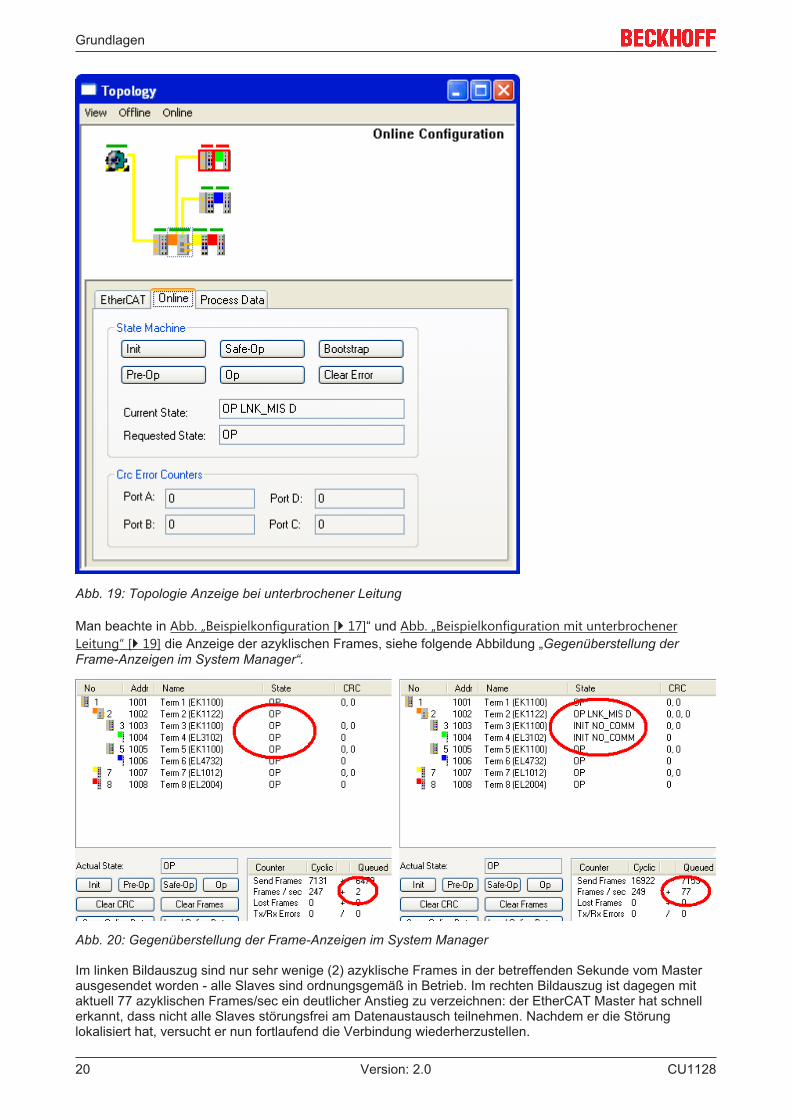
Abb. 19: Topologie Anzeige bei unterbrochener Leitung
Man beachte in Abb. „Beispielkonfiguration [} 17]“ und Abb. „Beispielkonfiguration mit unterbrochenerLeitung“ [} 19] die Anzeige der azyklischen Frames, siehe folgende Abbildung „Gegenüberstellung derFrame-Anzeigen im System Manager“.
Abb. 20: Gegenüberstellung der Frame-Anzeigen im System Manager
Im linken Bildauszug sind nur sehr wenige (2) azyklische Frames in der betreffenden Sekunde vom Masterausgesendet worden - alle Slaves sind ordnungsgemäß in Betrieb. Im rechten Bildauszug ist dagegen mitaktuell 77 azyklischen Frames/sec ein deutlicher Anstieg zu verzeichnen: der EtherCAT Master hat schnellerkannt, dass nicht alle Slaves störungsfrei am Datenaustausch teilnehmen. Nachdem er die Störunglokalisiert hat, versucht er nun fortlaufend die Verbindung wiederherzustellen.
CU112820 Version: 2.0

Grundlagen
Verbindungswiederherstellung
Wird nun in diesem Beispiel die Verbindung wiederhergestellt, meldet der EK1122 an den Master, dass amPort D (3) wieder ein Link anliegt. Der EtherCAT Master wird dann seine Prozessdaten für diesen Abschnittwieder entsprechend bereitstellen. Wenn die Vorbereitungen abgeschlossen sind, wird er den EK1122anweisen, den Port D (3) für den regulären Datenaustausch wieder zu öffnen. Der zyklische und azyklischeDatenverkehr mit den anderen EtherCAT Slaves läuft dabei selbstverständlich weiter.
Hinweis
Externer Zugriff auf die EtherCAT-DiagnoseEs bestehen umfangreiche Möglichkeiten, aus der PLC heraus auf Zustände, Diagnosein-formationen und Funktionen des EtherCAT-Masters zuzugreifen. Auch über ADS sind fastalle Informationen, die der System Manager online darstellt (s. Abbildungen auf dieser Sei-te) abrufbar. Ebenso können Aktionen des System Managers über PLC oder ADS ausge-löst werden. Beachten Sie dazu entsprechende Informationen im Beckhoff Information Sys-tem und Erläuterungen zur EtherCAT Diagnose.
CU1128 21Version: 2.0
Montage
4 Montage
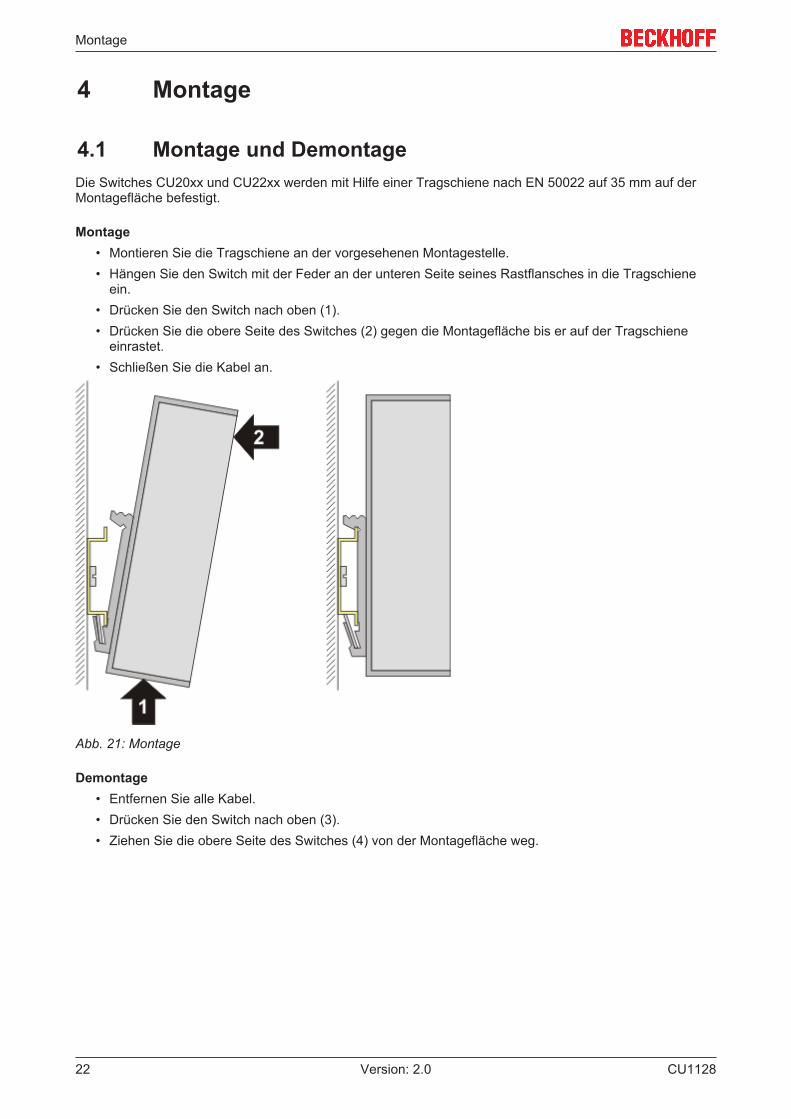
4.1 Montage und DemontageDie Switches CU20xx und CU22xx werden mit Hilfe einer Tragschiene nach EN 50022 auf 35 mm auf derMontagefläche befestigt.
Montage• Montieren Sie die Tragschiene an der vorgesehenen Montagestelle.• Hängen Sie den Switch mit der Feder an der unteren Seite seines Rastflansches in die Tragschiene
ein.• Drücken Sie den Switch nach oben (1).• Drücken Sie die obere Seite des Switches (2) gegen die Montagefläche bis er auf der Tragschiene
einrastet.• Schließen Sie die Kabel an.
Abb. 21: Montage
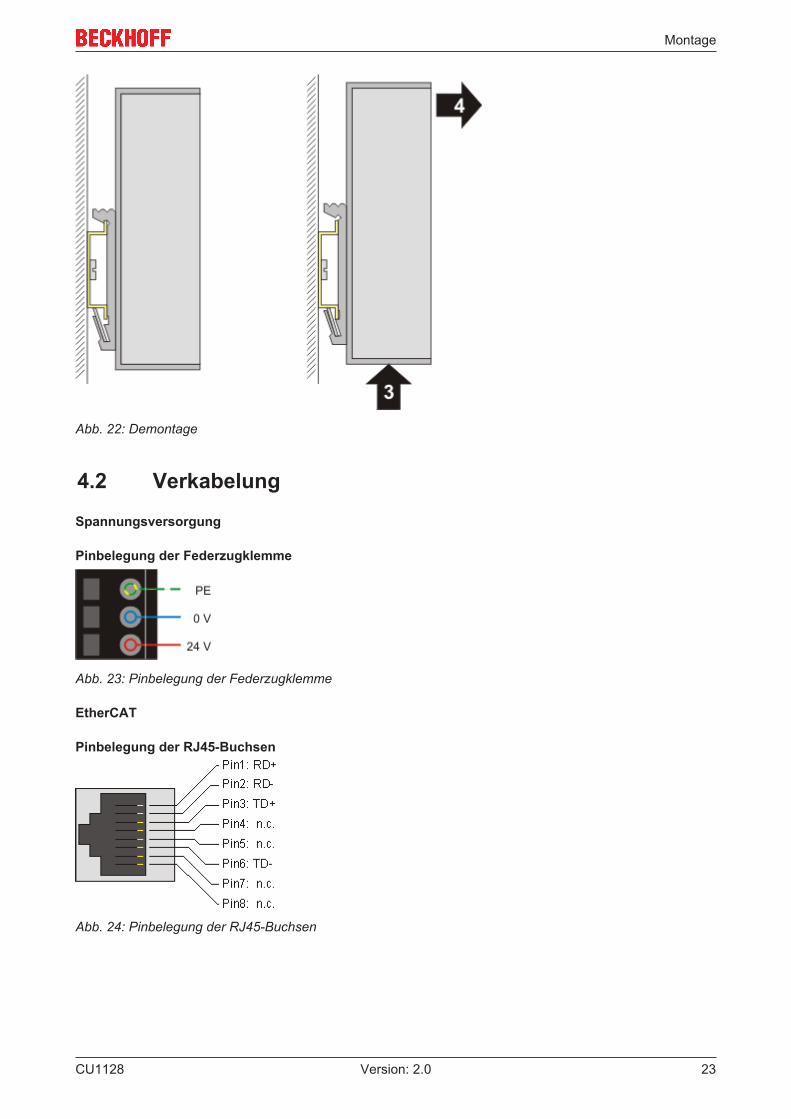
Demontage• Entfernen Sie alle Kabel.• Drücken Sie den Switch nach oben (3).• Ziehen Sie die obere Seite des Switches (4) von der Montagefläche weg.
CU112822 Version: 2.0
Montage
Abb. 22: Demontage
4.2 Verkabelung
Spannungsversorgung
Pinbelegung der Federzugklemme
Abb. 23: Pinbelegung der Federzugklemme
EtherCAT
Pinbelegung der RJ45-Buchsen
Abb. 24: Pinbelegung der RJ45-Buchsen
CU1128 23Version: 2.0
Montage
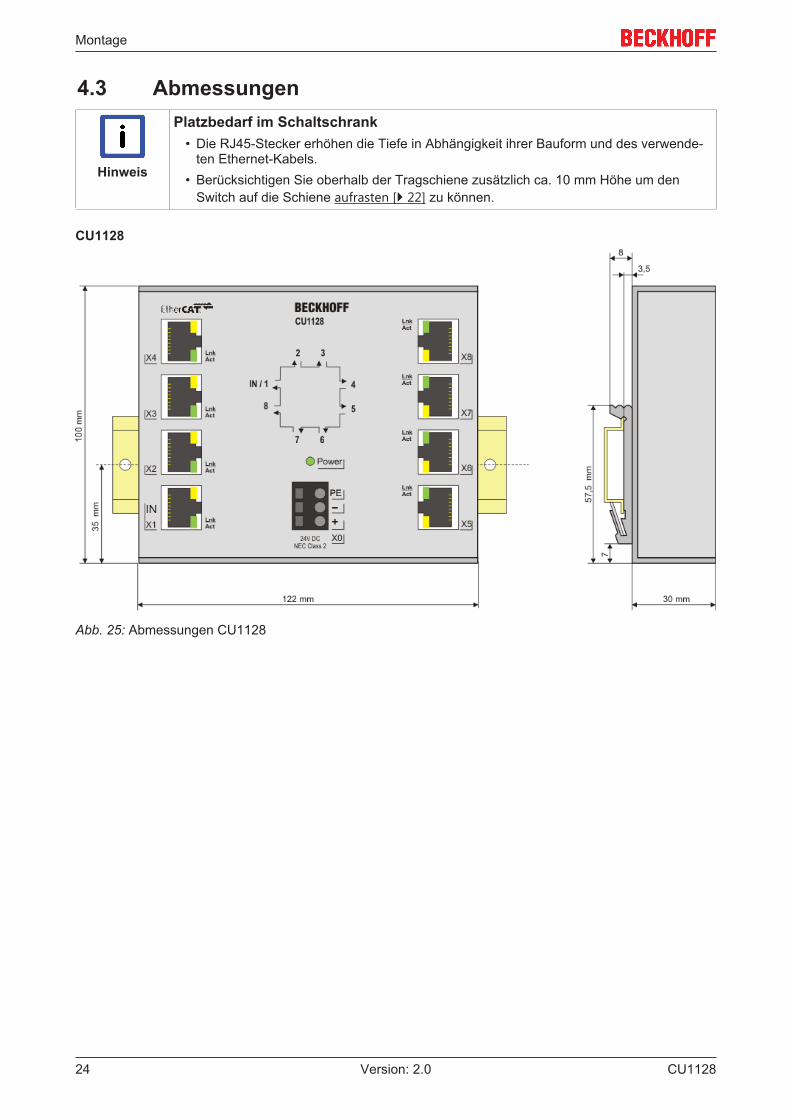
4.3 Abmessungen
Hinweis
Platzbedarf im Schaltschrank• Die RJ45-Stecker erhöhen die Tiefe in Abhängigkeit ihrer Bauform und des verwende-
ten Ethernet-Kabels.• Berücksichtigen Sie oberhalb der Tragschiene zusätzlich ca. 10 mm Höhe um den
Switch auf die Schiene aufrasten [} 22] zu können.
CU1128
Abb. 25: Abmessungen CU1128
CU112824 Version: 2.0
Montage
4.4 LED-Anzeigen
Ethernet
Abb. 26: LEDs
Für jeden Kanal zeigt 1 LED den aktuellen Status an.
Tab. 1: LED-Anzeigen pro Kanal
LED AnzeigeLinkAct
off Keine Verbindungon Verbindung vorhanden (Link)blinkt Datenübertragung (Act)
Versorgungsspannung
Das Anliegen der Versorgungsspannung (24 VDC) wird durch die grüne Power-LED angezeigt.
Abb. 27: Grüne Power-LED
CU1128 25Version: 2.0
Inbetriebnahme
5 Inbetriebnahme
5.1 Quick StartZur Erstinbetriebnahme des CU1128 sind keine besonderen Maßnahmen erforderlich.
Montieren Sie den CU1128 wie im Kapitel Montage und Verdrahtung [} 22] beschrieben.Hinweise zur Konfiguratiionserstellung finden Sie im Kapitel Konfiguration im TwinCAT System Manager[} 68]
5.2 TwinCAT 2.1x
5.2.1 Installation TwinCAT Realtime TreiberUm einen Standard Ethernet Port einer IPC Steuerung mit den nötigen Echtzeitfähigkeiten auszurüsten, istder Beckhoff Echtzeit Treiber auf diesem Port unter Windows zu installieren.
Dies kann auf mehreren Wegen vorgenommen werden, ein Weg wird hier vorgestellt.
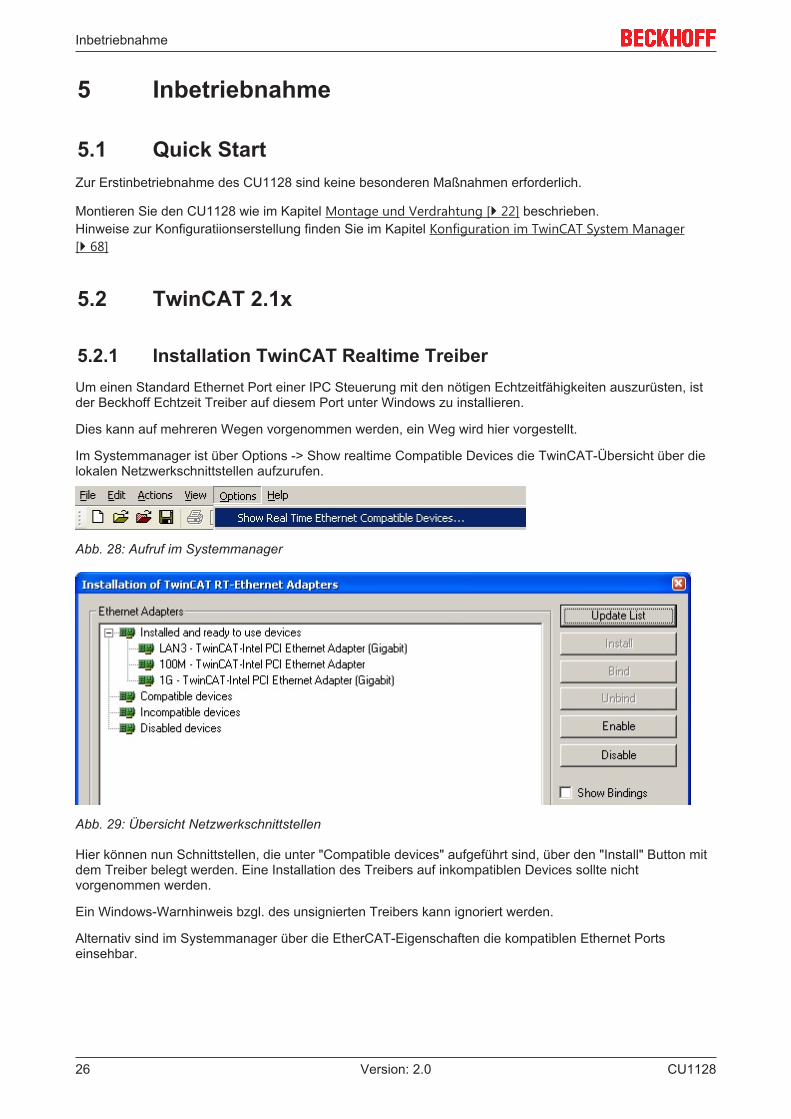
Im Systemmanager ist über Options -> Show realtime Compatible Devices die TwinCAT-Übersicht über dielokalen Netzwerkschnittstellen aufzurufen.
Abb. 28: Aufruf im Systemmanager
Abb. 29: Übersicht Netzwerkschnittstellen
Hier können nun Schnittstellen, die unter "Compatible devices" aufgeführt sind, über den "Install" Button mitdem Treiber belegt werden. Eine Installation des Treibers auf inkompatiblen Devices sollte nichtvorgenommen werden.
Ein Windows-Warnhinweis bzgl. des unsignierten Treibers kann ignoriert werden.
Alternativ sind im Systemmanager über die EtherCAT-Eigenschaften die kompatiblen Ethernet Portseinsehbar.
CU112826 Version: 2.0
Inbetriebnahme
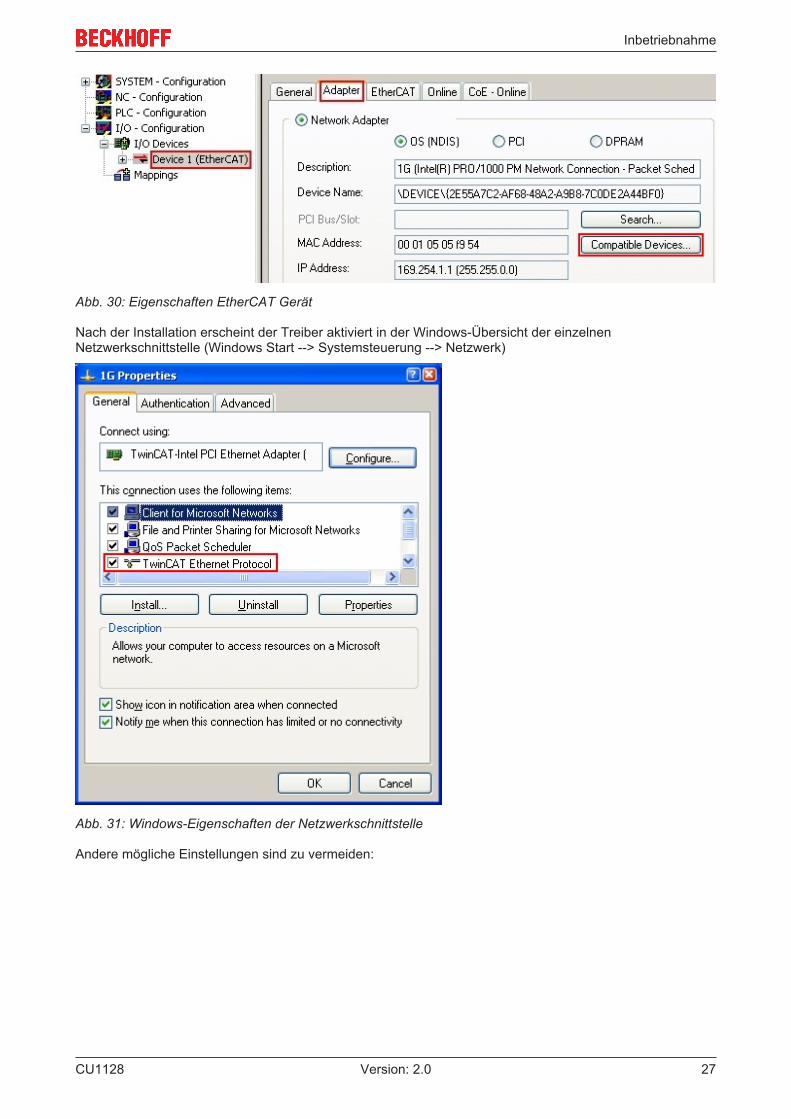
Abb. 30: Eigenschaften EtherCAT Gerät
Nach der Installation erscheint der Treiber aktiviert in der Windows-Übersicht der einzelnenNetzwerkschnittstelle (Windows Start --> Systemsteuerung --> Netzwerk)
Abb. 31: Windows-Eigenschaften der Netzwerkschnittstelle
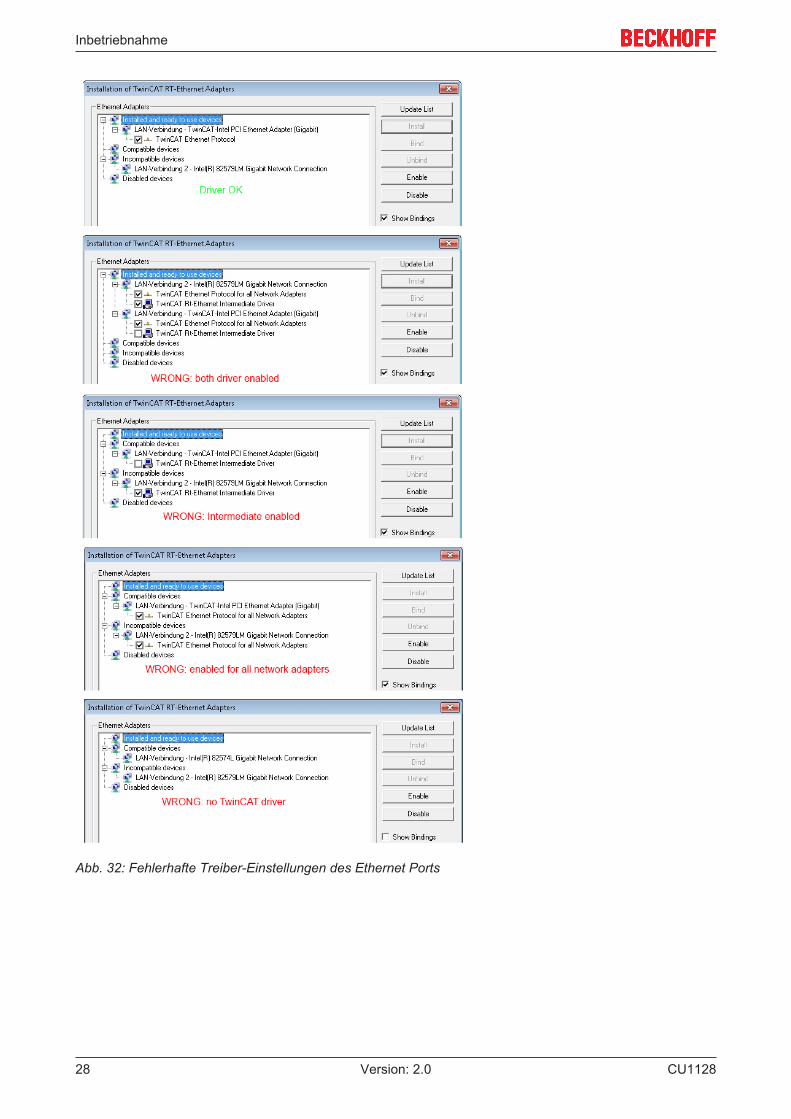
Andere mögliche Einstellungen sind zu vermeiden:
CU1128 27Version: 2.0
Inbetriebnahme
Abb. 32: Fehlerhafte Treiber-Einstellungen des Ethernet Ports
CU112828 Version: 2.0
Inbetriebnahme
IP-Adresse des verwendeten Ports
Hinweis
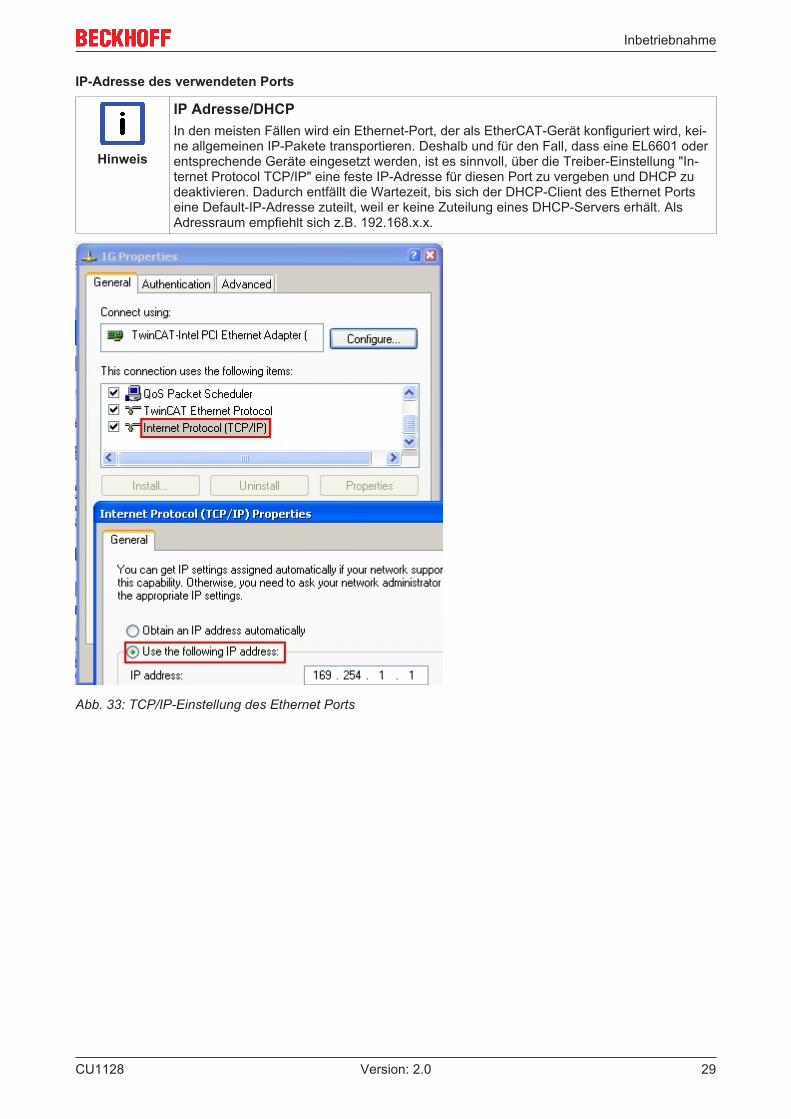
IP Adresse/DHCPIn den meisten Fällen wird ein Ethernet-Port, der als EtherCAT-Gerät konfiguriert wird, kei-ne allgemeinen IP-Pakete transportieren. Deshalb und für den Fall, dass eine EL6601 oderentsprechende Geräte eingesetzt werden, ist es sinnvoll, über die Treiber-Einstellung "In-ternet Protocol TCP/IP" eine feste IP-Adresse für diesen Port zu vergeben und DHCP zudeaktivieren. Dadurch entfällt die Wartezeit, bis sich der DHCP-Client des Ethernet Portseine Default-IP-Adresse zuteilt, weil er keine Zuteilung eines DHCP-Servers erhält. AlsAdressraum empfiehlt sich z.B. 192.168.x.x.
Abb. 33: TCP/IP-Einstellung des Ethernet Ports
CU1128 29Version: 2.0
Inbetriebnahme
5.2.2 Hinweise ESI-Gerätebeschreibung
Installation der neuesten ESI-Device-Description
Der TwinCAT EtherCAT Master/Systemmanager benötigt zur Konfigurationserstellung im Online- undOffline-Modus die Gerätebeschreibungsdateien der zu verwendeten Geräte. Diese Gerätebeschreibungensind die so genannten ESI (EtherCAT Slave Information) in Form von XML-Dateien. Diese Dateien könnenvom jew. Hersteller angefordert werden bzw. werden zum Download bereitgestellt. Eine *.xml-Datei kanndabei mehrere Gerätebeschreibungen enthalten.
Auf der Beckhoff Website werden die ESI für Beckhoff EtherCAT Geräte bereitgehalten.
Die ESI-Dateien sind im Installationsverzeichnis von TwinCAT abzulegen (Standardeinstellung TwinCAT 2:C:\TwinCAT\IO\EtherCAT). Beim Öffnen eines neuen Systemmanager-Fensters werden die Dateieneinmalig eingelesen wenn sie sich seit dem letzten Systemmanager-Fenster geändert haben.
TwinCAT bringt bei der Installation den Satz an Beckhoff-ESI-Dateien mit, der zum Erstellungszeitpunkt desTwinCAT builds aktuell war.
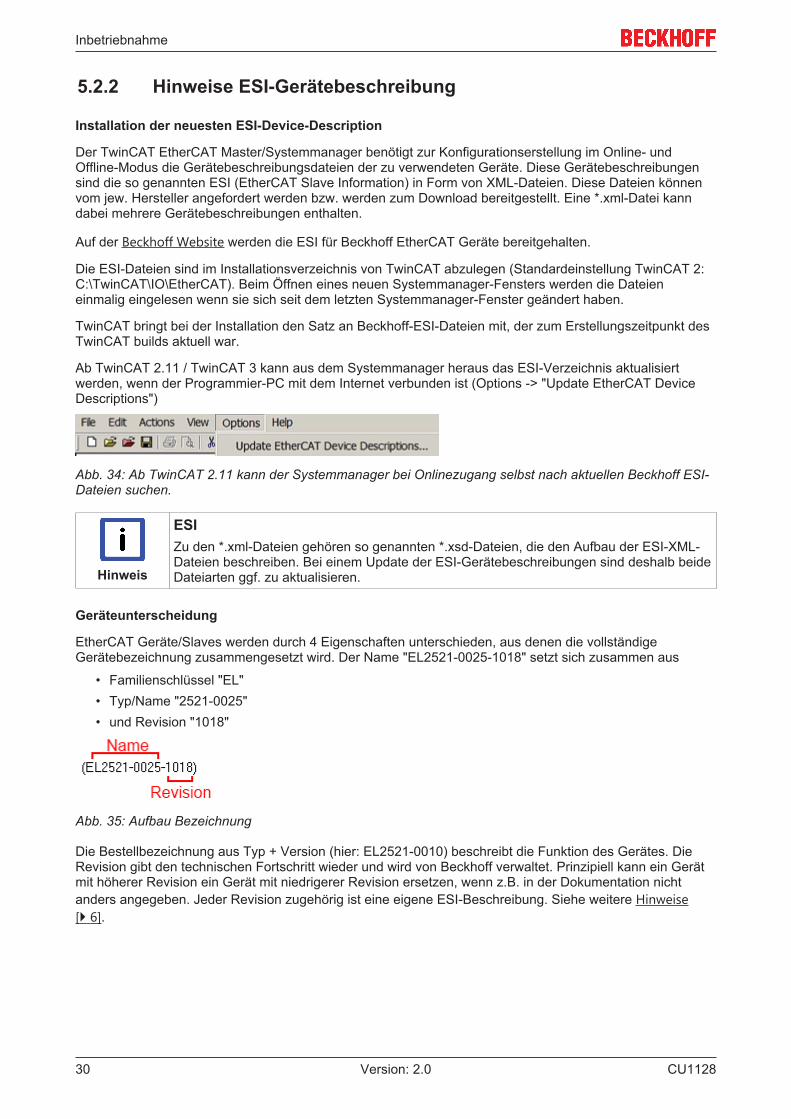
Ab TwinCAT 2.11 / TwinCAT 3 kann aus dem Systemmanager heraus das ESI-Verzeichnis aktualisiertwerden, wenn der Programmier-PC mit dem Internet verbunden ist (Options -> "Update EtherCAT DeviceDescriptions")
Abb. 34: Ab TwinCAT 2.11 kann der Systemmanager bei Onlinezugang selbst nach aktuellen Beckhoff ESI-Dateien suchen.
Hinweis
ESIZu den *.xml-Dateien gehören so genannten *.xsd-Dateien, die den Aufbau der ESI-XML-Dateien beschreiben. Bei einem Update der ESI-Gerätebeschreibungen sind deshalb beideDateiarten ggf. zu aktualisieren.
Geräteunterscheidung
EtherCAT Geräte/Slaves werden durch 4 Eigenschaften unterschieden, aus denen die vollständigeGerätebezeichnung zusammengesetzt wird. Der Name "EL2521-0025-1018" setzt sich zusammen aus
• Familienschlüssel "EL"• Typ/Name "2521-0025"• und Revision "1018"
Abb. 35: Aufbau Bezeichnung
Die Bestellbezeichnung aus Typ + Version (hier: EL2521-0010) beschreibt die Funktion des Gerätes. DieRevision gibt den technischen Fortschritt wieder und wird von Beckhoff verwaltet. Prinzipiell kann ein Gerätmit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn z.B. in der Dokumentation nichtanders angegeben. Jeder Revision zugehörig ist eine eigene ESI-Beschreibung. Siehe weitere Hinweise[} 6].
CU112830 Version: 2.0
Inbetriebnahme
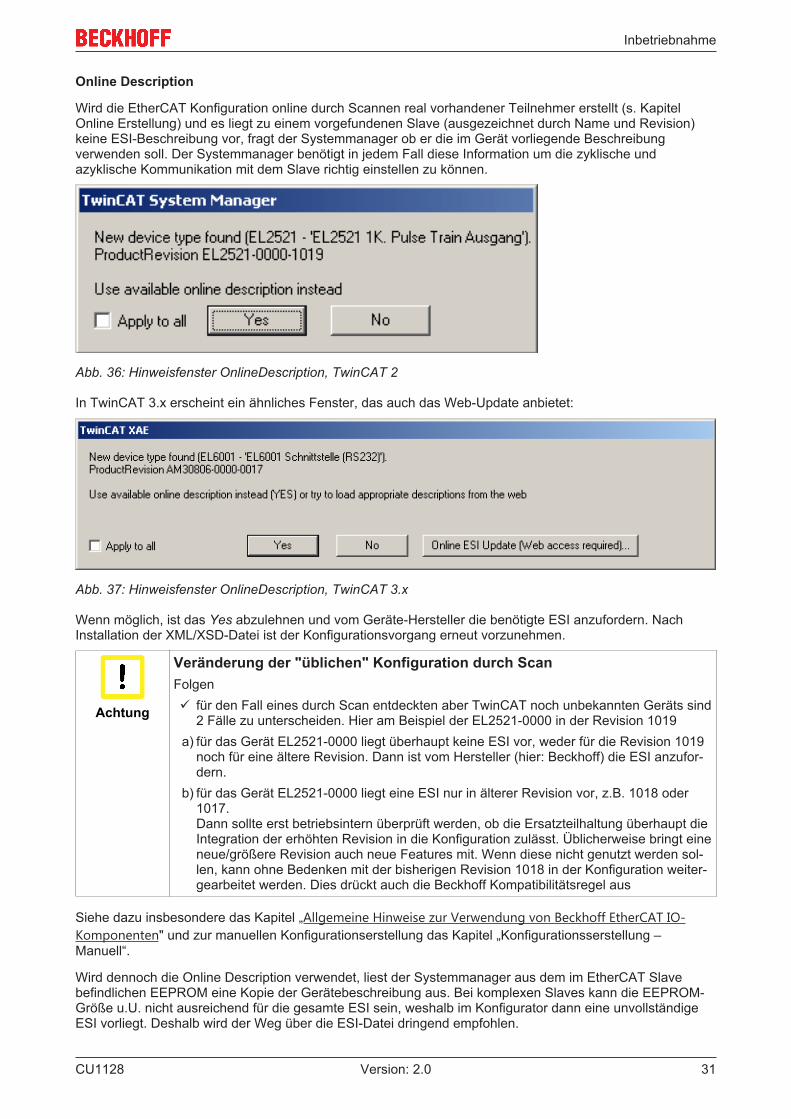
Online Description
Wird die EtherCAT Konfiguration online durch Scannen real vorhandener Teilnehmer erstellt (s. KapitelOnline Erstellung) und es liegt zu einem vorgefundenen Slave (ausgezeichnet durch Name und Revision)keine ESI-Beschreibung vor, fragt der Systemmanager ob er die im Gerät vorliegende Beschreibungverwenden soll. Der Systemmanager benötigt in jedem Fall diese Information um die zyklische undazyklische Kommunikation mit dem Slave richtig einstellen zu können.
Abb. 36: Hinweisfenster OnlineDescription, TwinCAT 2
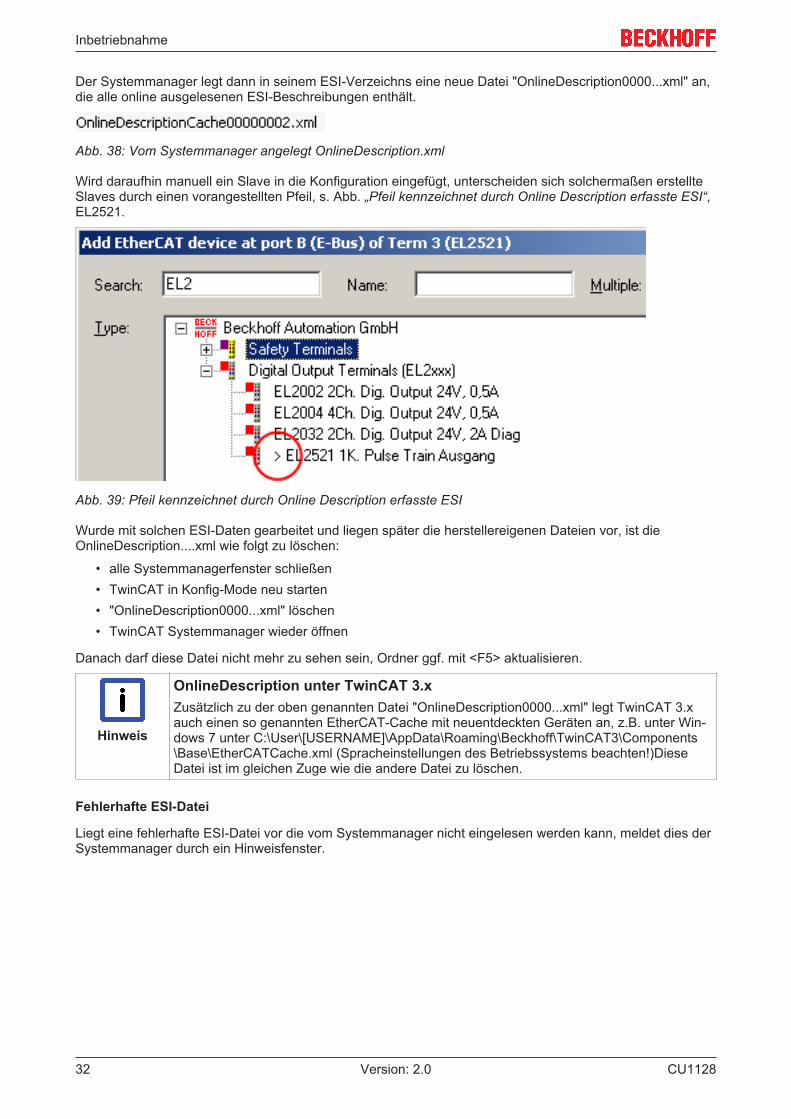
In TwinCAT 3.x erscheint ein ähnliches Fenster, das auch das Web-Update anbietet:
Abb. 37: Hinweisfenster OnlineDescription, TwinCAT 3.x
Wenn möglich, ist das Yes abzulehnen und vom Geräte-Hersteller die benötigte ESI anzufordern. NachInstallation der XML/XSD-Datei ist der Konfigurationsvorgang erneut vorzunehmen.
Achtung
Veränderung der "üblichen" Konfiguration durch ScanFolgenü für den Fall eines durch Scan entdeckten aber TwinCAT noch unbekannten Geräts sind
2 Fälle zu unterscheiden. Hier am Beispiel der EL2521-0000 in der Revision 1019a) für das Gerät EL2521-0000 liegt überhaupt keine ESI vor, weder für die Revision 1019
noch für eine ältere Revision. Dann ist vom Hersteller (hier: Beckhoff) die ESI anzufor-dern.
b) für das Gerät EL2521-0000 liegt eine ESI nur in älterer Revision vor, z.B. 1018 oder1017.Dann sollte erst betriebsintern überprüft werden, ob die Ersatzteilhaltung überhaupt dieIntegration der erhöhten Revision in die Konfiguration zulässt. Üblicherweise bringt eineneue/größere Revision auch neue Features mit. Wenn diese nicht genutzt werden sol-len, kann ohne Bedenken mit der bisherigen Revision 1018 in der Konfiguration weiter-gearbeitet werden. Dies drückt auch die Beckhoff Kompatibilitätsregel aus
Siehe dazu insbesondere das Kapitel „Allgemeine Hinweise zur Verwendung von Beckhoff EtherCAT IO-Komponenten" und zur manuellen Konfigurationserstellung das Kapitel „Konfigurationsserstellung –Manuell“.
Wird dennoch die Online Description verwendet, liest der Systemmanager aus dem im EtherCAT Slavebefindlichen EEPROM eine Kopie der Gerätebeschreibung aus. Bei komplexen Slaves kann die EEPROM-Größe u.U. nicht ausreichend für die gesamte ESI sein, weshalb im Konfigurator dann eine unvollständigeESI vorliegt. Deshalb wird der Weg über die ESI-Datei dringend empfohlen.
CU1128 31Version: 2.0
Inbetriebnahme
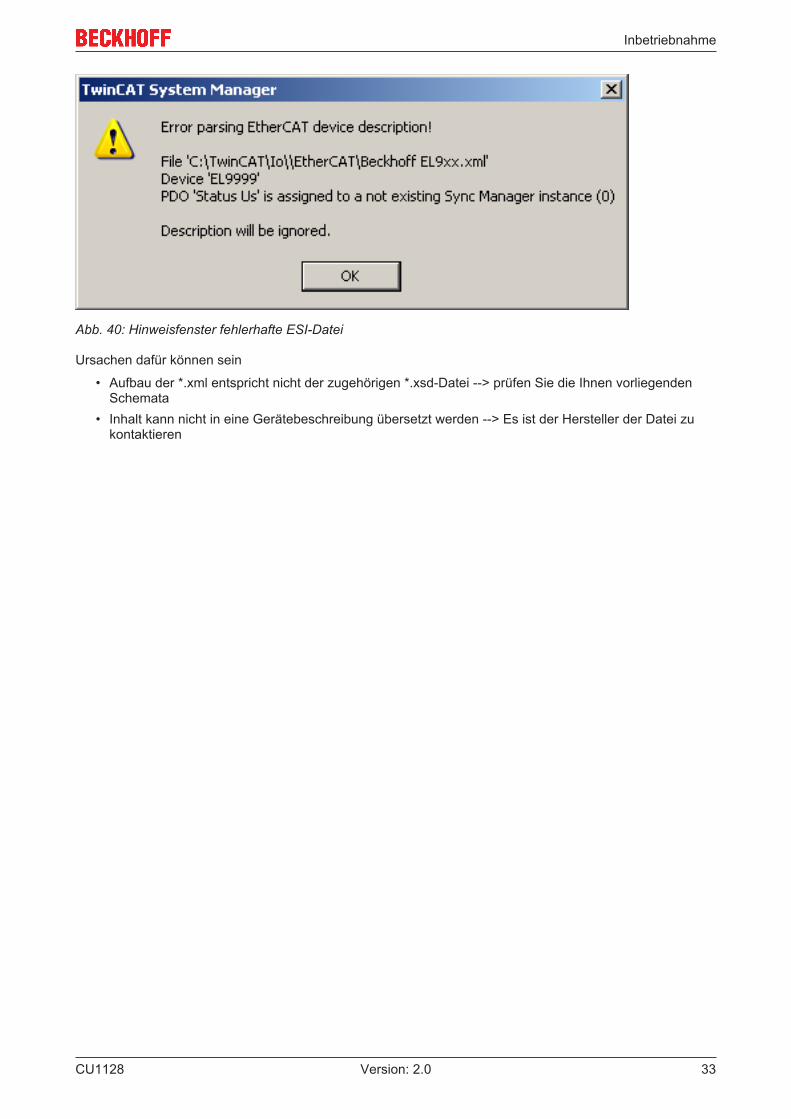
Der Systemmanager legt dann in seinem ESI-Verzeichns eine neue Datei "OnlineDescription0000...xml" an,die alle online ausgelesenen ESI-Beschreibungen enthält.
Abb. 38: Vom Systemmanager angelegt OnlineDescription.xml
Wird daraufhin manuell ein Slave in die Konfiguration eingefügt, unterscheiden sich solchermaßen erstellteSlaves durch einen vorangestellten Pfeil, s. Abb. „Pfeil kennzeichnet durch Online Description erfasste ESI“,EL2521.
Abb. 39: Pfeil kennzeichnet durch Online Description erfasste ESI
Wurde mit solchen ESI-Daten gearbeitet und liegen später die herstellereigenen Dateien vor, ist dieOnlineDescription....xml wie folgt zu löschen:
• alle Systemmanagerfenster schließen• TwinCAT in Konfig-Mode neu starten• "OnlineDescription0000...xml" löschen• TwinCAT Systemmanager wieder öffnen
Danach darf diese Datei nicht mehr zu sehen sein, Ordner ggf. mit <F5> aktualisieren.
Hinweis
OnlineDescription unter TwinCAT 3.xZusätzlich zu der oben genannten Datei "OnlineDescription0000...xml" legt TwinCAT 3.xauch einen so genannten EtherCAT-Cache mit neuentdeckten Geräten an, z.B. unter Win-dows 7 unter C:\User\[USERNAME]\AppData\Roaming\Beckhoff\TwinCAT3\Components\Base\EtherCATCache.xml (Spracheinstellungen des Betriebssystems beachten!)DieseDatei ist im gleichen Zuge wie die andere Datei zu löschen.
Fehlerhafte ESI-Datei
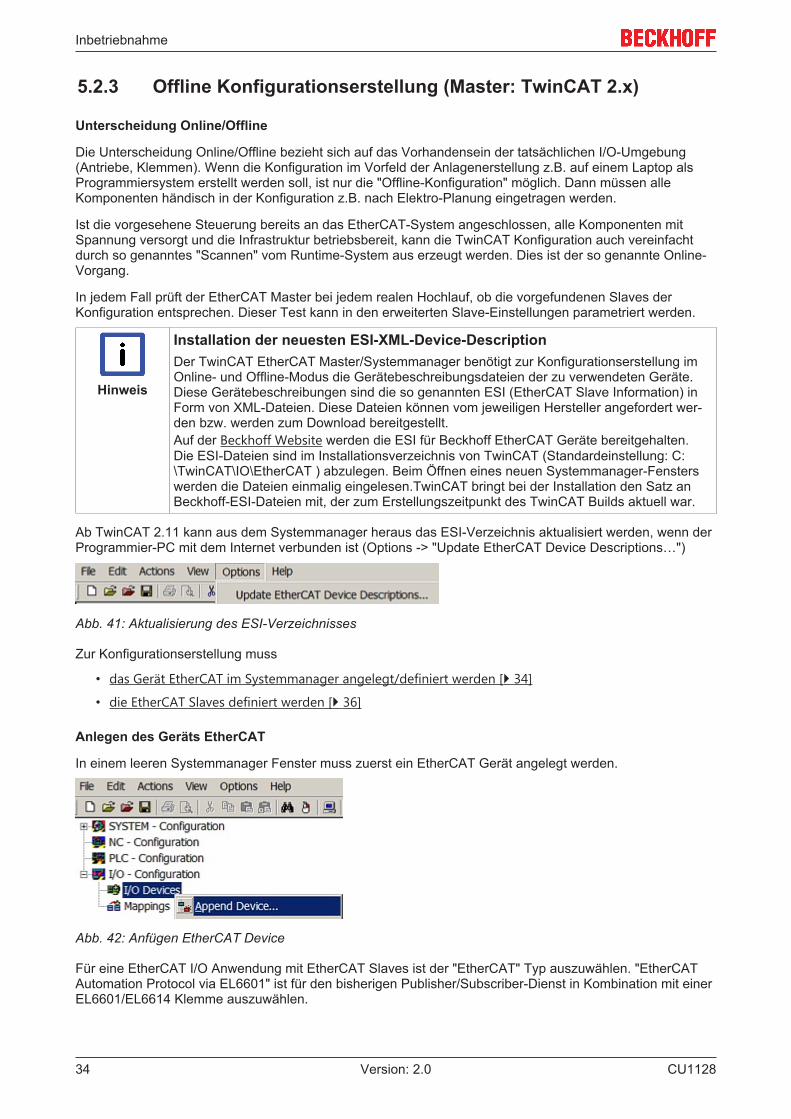
Liegt eine fehlerhafte ESI-Datei vor die vom Systemmanager nicht eingelesen werden kann, meldet dies derSystemmanager durch ein Hinweisfenster.
CU112832 Version: 2.0
Inbetriebnahme
Abb. 40: Hinweisfenster fehlerhafte ESI-Datei
Ursachen dafür können sein
• Aufbau der *.xml entspricht nicht der zugehörigen *.xsd-Datei --> prüfen Sie die Ihnen vorliegendenSchemata
• Inhalt kann nicht in eine Gerätebeschreibung übersetzt werden --> Es ist der Hersteller der Datei zukontaktieren
CU1128 33Version: 2.0
Inbetriebnahme
5.2.3 Offline Konfigurationserstellung (Master: TwinCAT 2.x)
Unterscheidung Online/Offline
Die Unterscheidung Online/Offline bezieht sich auf das Vorhandensein der tatsächlichen I/O-Umgebung(Antriebe, Klemmen). Wenn die Konfiguration im Vorfeld der Anlagenerstellung z.B. auf einem Laptop alsProgrammiersystem erstellt werden soll, ist nur die "Offline-Konfiguration" möglich. Dann müssen alleKomponenten händisch in der Konfiguration z.B. nach Elektro-Planung eingetragen werden.
Ist die vorgesehene Steuerung bereits an das EtherCAT-System angeschlossen, alle Komponenten mitSpannung versorgt und die Infrastruktur betriebsbereit, kann die TwinCAT Konfiguration auch vereinfachtdurch so genanntes "Scannen" vom Runtime-System aus erzeugt werden. Dies ist der so genannte Online-Vorgang.
In jedem Fall prüft der EtherCAT Master bei jedem realen Hochlauf, ob die vorgefundenen Slaves derKonfiguration entsprechen. Dieser Test kann in den erweiterten Slave-Einstellungen parametriert werden.
Hinweis
Installation der neuesten ESI-XML-Device-DescriptionDer TwinCAT EtherCAT Master/Systemmanager benötigt zur Konfigurationserstellung imOnline- und Offline-Modus die Gerätebeschreibungsdateien der zu verwendeten Geräte.Diese Gerätebeschreibungen sind die so genannten ESI (EtherCAT Slave Information) inForm von XML-Dateien. Diese Dateien können vom jeweiligen Hersteller angefordert wer-den bzw. werden zum Download bereitgestellt.Auf der Beckhoff Website werden die ESI für Beckhoff EtherCAT Geräte bereitgehalten.Die ESI-Dateien sind im Installationsverzeichnis von TwinCAT (Standardeinstellung: C:\TwinCAT\IO\EtherCAT ) abzulegen. Beim Öffnen eines neuen Systemmanager-Fensterswerden die Dateien einmalig eingelesen.TwinCAT bringt bei der Installation den Satz anBeckhoff-ESI-Dateien mit, der zum Erstellungszeitpunkt des TwinCAT Builds aktuell war.
Ab TwinCAT 2.11 kann aus dem Systemmanager heraus das ESI-Verzeichnis aktualisiert werden, wenn derProgrammier-PC mit dem Internet verbunden ist (Options -> "Update EtherCAT Device Descriptions…")
Abb. 41: Aktualisierung des ESI-Verzeichnisses
Zur Konfigurationserstellung muss
• das Gerät EtherCAT im Systemmanager angelegt/definiert werden [} 34]
• die EtherCAT Slaves definiert werden [} 36]
Anlegen des Geräts EtherCAT
In einem leeren Systemmanager Fenster muss zuerst ein EtherCAT Gerät angelegt werden.
Abb. 42: Anfügen EtherCAT Device
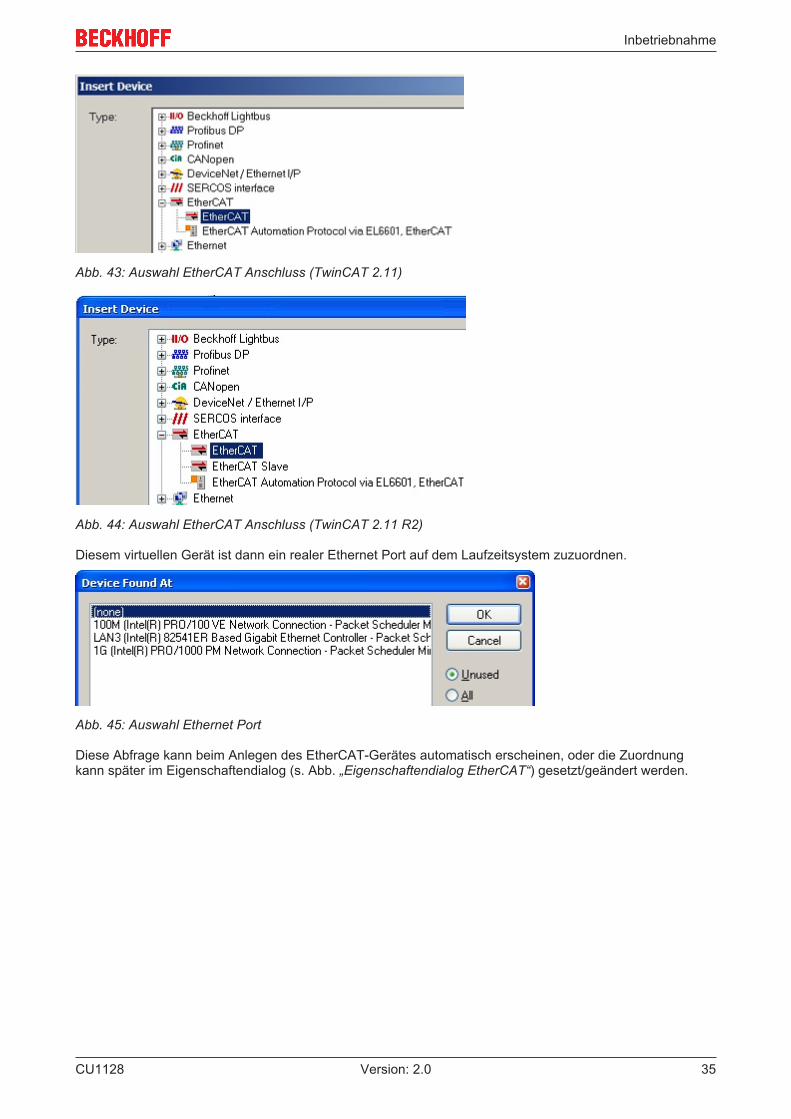
Für eine EtherCAT I/O Anwendung mit EtherCAT Slaves ist der "EtherCAT" Typ auszuwählen. "EtherCATAutomation Protocol via EL6601" ist für den bisherigen Publisher/Subscriber-Dienst in Kombination mit einerEL6601/EL6614 Klemme auszuwählen.
CU112834 Version: 2.0
Inbetriebnahme
Abb. 43: Auswahl EtherCAT Anschluss (TwinCAT 2.11)
Abb. 44: Auswahl EtherCAT Anschluss (TwinCAT 2.11 R2)
Diesem virtuellen Gerät ist dann ein realer Ethernet Port auf dem Laufzeitsystem zuzuordnen.
Abb. 45: Auswahl Ethernet Port
Diese Abfrage kann beim Anlegen des EtherCAT-Gerätes automatisch erscheinen, oder die Zuordnungkann später im Eigenschaftendialog (s. Abb. „Eigenschaftendialog EtherCAT“) gesetzt/geändert werden.
CU1128 35Version: 2.0
Inbetriebnahme
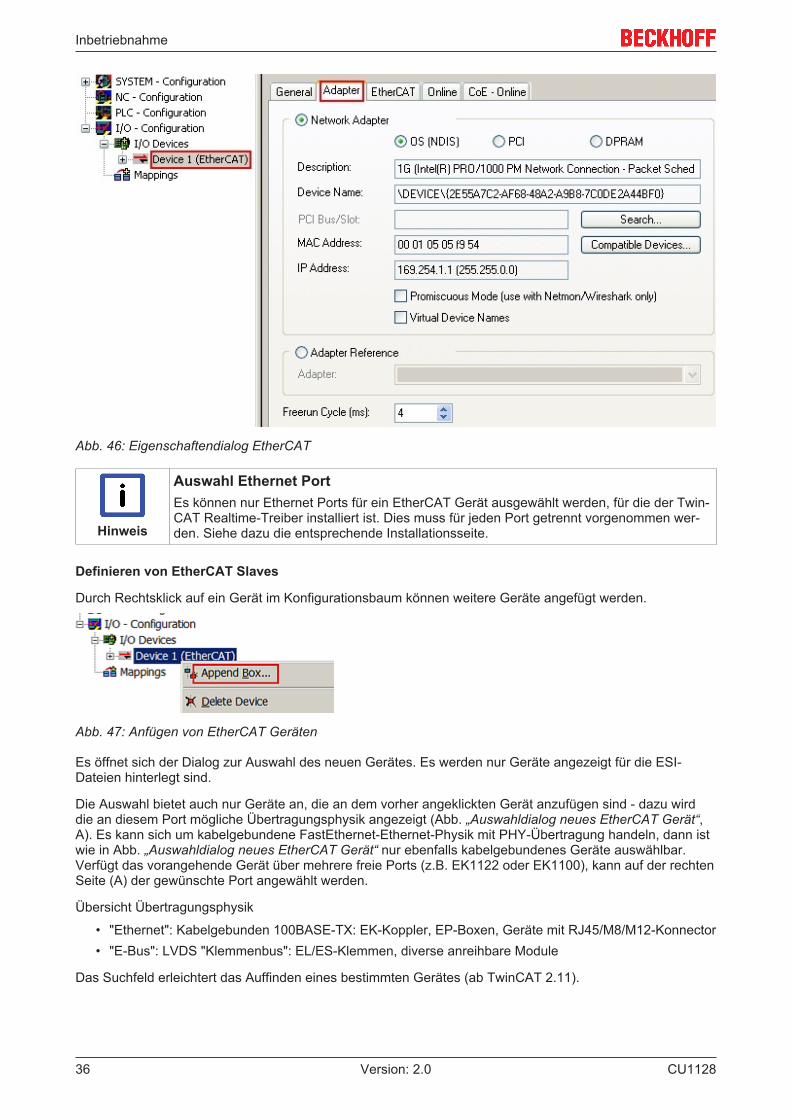
Abb. 46: Eigenschaftendialog EtherCAT
Hinweis
Auswahl Ethernet PortEs können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der Twin-CAT Realtime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen wer-den. Siehe dazu die entsprechende Installationsseite.
Definieren von EtherCAT Slaves
Durch Rechtsklick auf ein Gerät im Konfigurationsbaum können weitere Geräte angefügt werden.
Abb. 47: Anfügen von EtherCAT Geräten
Es öffnet sich der Dialog zur Auswahl des neuen Gerätes. Es werden nur Geräte angezeigt für die ESI-Dateien hinterlegt sind.
Die Auswahl bietet auch nur Geräte an, die an dem vorher angeklickten Gerät anzufügen sind - dazu wirddie an diesem Port mögliche Übertragungsphysik angezeigt (Abb. „Auswahldialog neues EtherCAT Gerät“,A). Es kann sich um kabelgebundene FastEthernet-Ethernet-Physik mit PHY-Übertragung handeln, dann istwie in Abb. „Auswahldialog neues EtherCAT Gerät“ nur ebenfalls kabelgebundenes Geräte auswählbar.Verfügt das vorangehende Gerät über mehrere freie Ports (z.B. EK1122 oder EK1100), kann auf der rechtenSeite (A) der gewünschte Port angewählt werden.
Übersicht Übertragungsphysik
• "Ethernet": Kabelgebunden 100BASE-TX: EK-Koppler, EP-Boxen, Geräte mit RJ45/M8/M12-Konnector• "E-Bus": LVDS "Klemmenbus": EL/ES-Klemmen, diverse anreihbare Module
Das Suchfeld erleichtert das Auffinden eines bestimmten Gerätes (ab TwinCAT 2.11).
CU112836 Version: 2.0
Inbetriebnahme
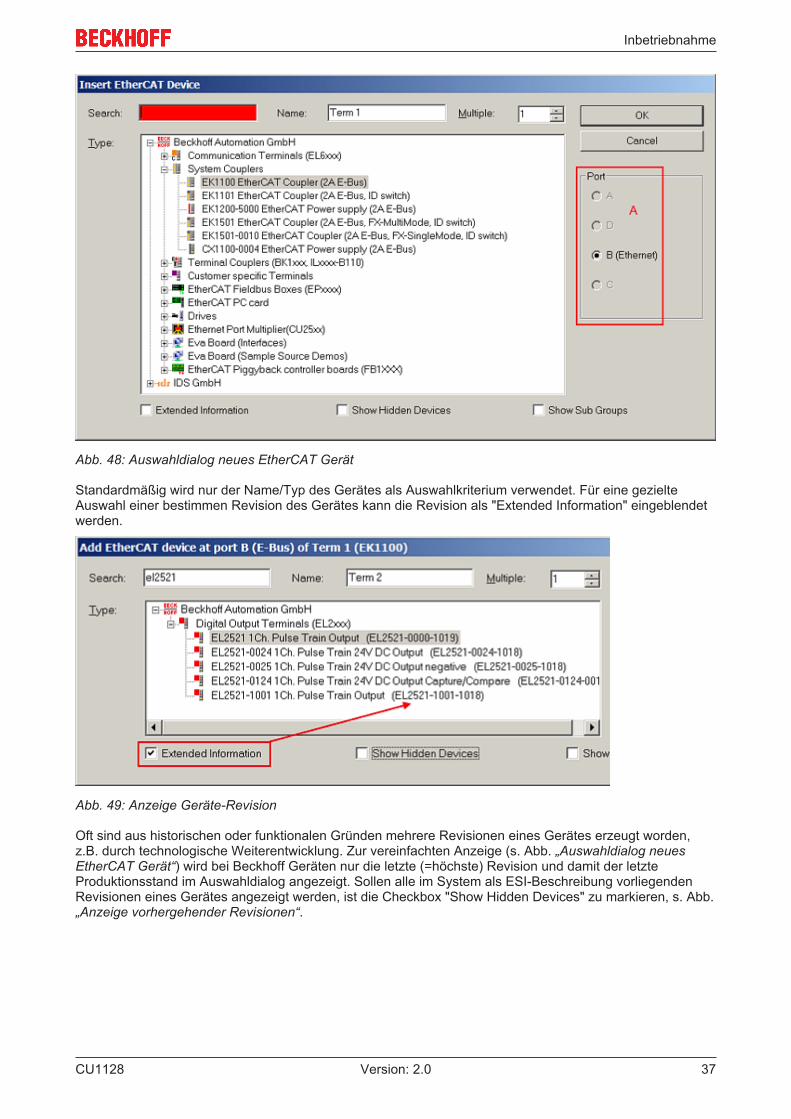
Abb. 48: Auswahldialog neues EtherCAT Gerät
Standardmäßig wird nur der Name/Typ des Gerätes als Auswahlkriterium verwendet. Für eine gezielteAuswahl einer bestimmen Revision des Gerätes kann die Revision als "Extended Information" eingeblendetwerden.
Abb. 49: Anzeige Geräte-Revision
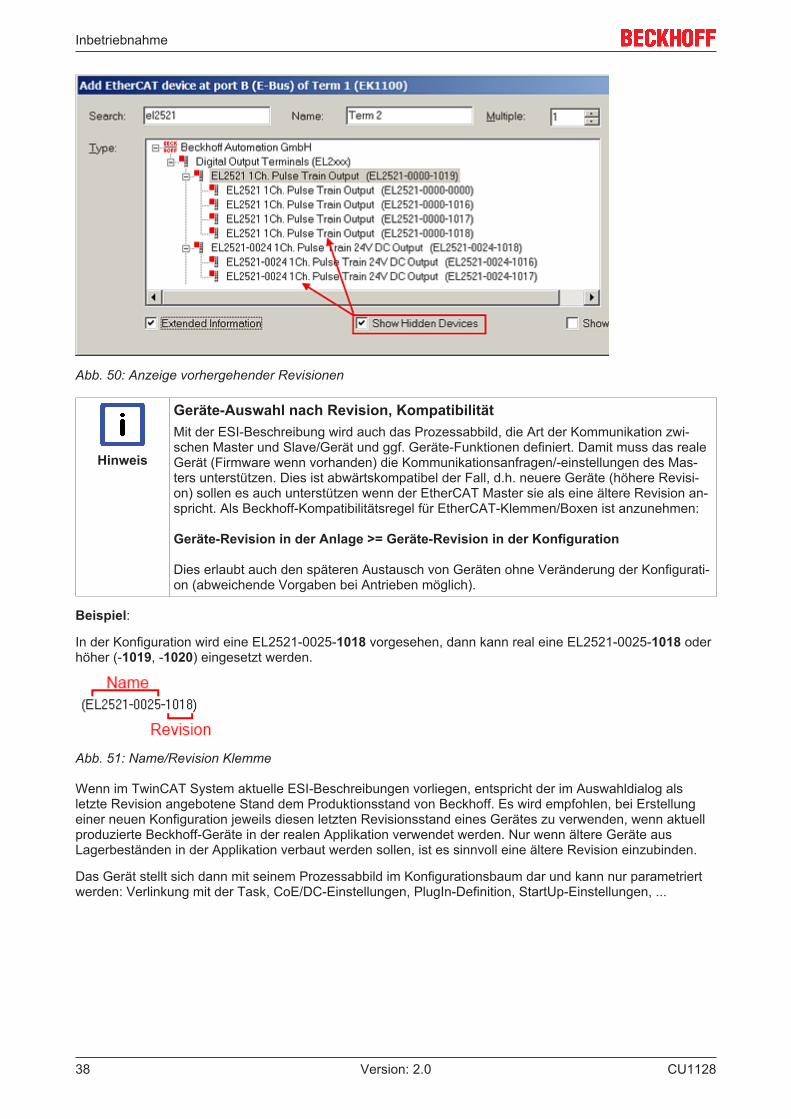
Oft sind aus historischen oder funktionalen Gründen mehrere Revisionen eines Gerätes erzeugt worden,z.B. durch technologische Weiterentwicklung. Zur vereinfachten Anzeige (s. Abb. „Auswahldialog neuesEtherCAT Gerät“) wird bei Beckhoff Geräten nur die letzte (=höchste) Revision und damit der letzteProduktionsstand im Auswahldialog angezeigt. Sollen alle im System als ESI-Beschreibung vorliegendenRevisionen eines Gerätes angezeigt werden, ist die Checkbox "Show Hidden Devices" zu markieren, s. Abb.„Anzeige vorhergehender Revisionen“.
CU1128 37Version: 2.0
Inbetriebnahme
Abb. 50: Anzeige vorhergehender Revisionen
Hinweis
Geräte-Auswahl nach Revision, KompatibilitätMit der ESI-Beschreibung wird auch das Prozessabbild, die Art der Kommunikation zwi-schen Master und Slave/Gerät und ggf. Geräte-Funktionen definiert. Damit muss das realeGerät (Firmware wenn vorhanden) die Kommunikationsanfragen/-einstellungen des Mas-ters unterstützen. Dies ist abwärtskompatibel der Fall, d.h. neuere Geräte (höhere Revisi-on) sollen es auch unterstützen wenn der EtherCAT Master sie als eine ältere Revision an-spricht. Als Beckhoff-Kompatibilitätsregel für EtherCAT-Klemmen/Boxen ist anzunehmen:
Geräte-Revision in der Anlage >= Geräte-Revision in der Konfiguration
Dies erlaubt auch den späteren Austausch von Geräten ohne Veränderung der Konfigurati-on (abweichende Vorgaben bei Antrieben möglich).
Beispiel:
In der Konfiguration wird eine EL2521-0025-1018 vorgesehen, dann kann real eine EL2521-0025-1018 oderhöher (-1019, -1020) eingesetzt werden.
Abb. 51: Name/Revision Klemme
Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog alsletzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellungeiner neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuellproduzierte Beckhoff-Geräte in der realen Applikation verwendet werden. Nur wenn ältere Geräte ausLagerbeständen in der Applikation verbaut werden sollen, ist es sinnvoll eine ältere Revision einzubinden.
Das Gerät stellt sich dann mit seinem Prozessabbild im Konfigurationsbaum dar und kann nur parametriertwerden: Verlinkung mit der Task, CoE/DC-Einstellungen, PlugIn-Definition, StartUp-Einstellungen, ...
CU112838 Version: 2.0
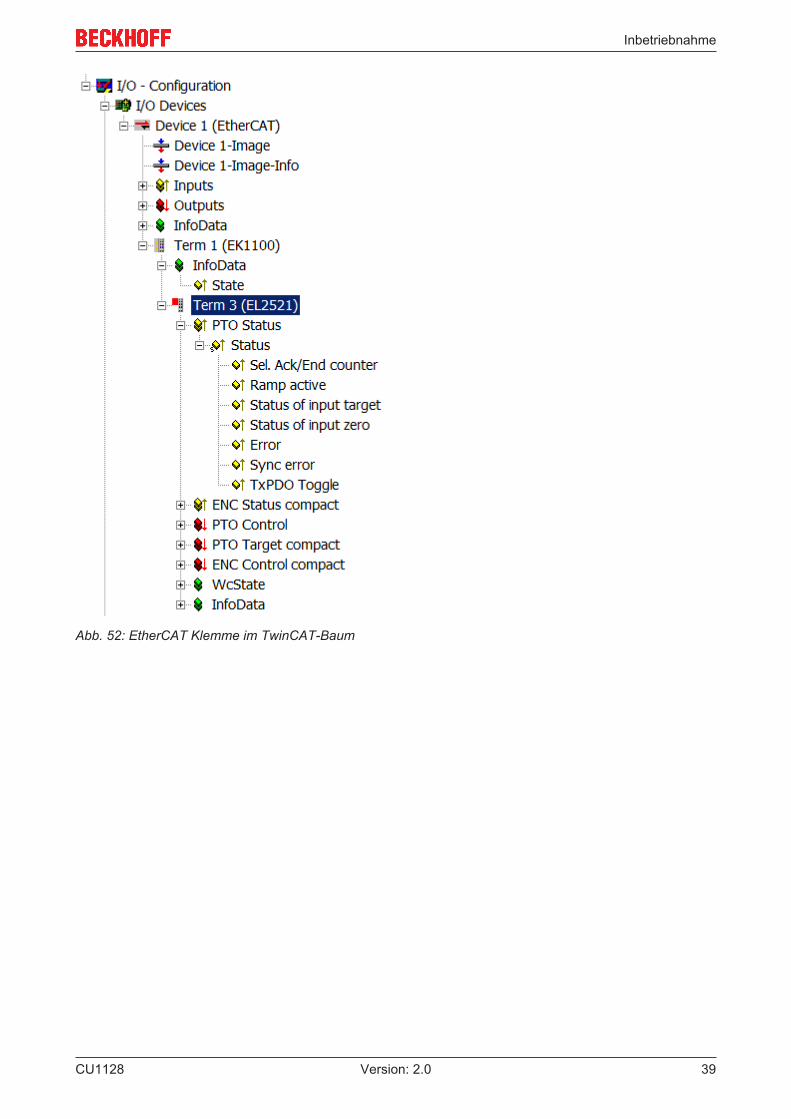
Inbetriebnahme
Abb. 52: EtherCAT Klemme im TwinCAT-Baum
CU1128 39Version: 2.0
Inbetriebnahme
5.2.4 Online Konfigurationserstellung "Scannen" (Master: TwinCAT2.x)
Unterscheidung Online/Offline
Die Unterscheidung Online/Offline bezieht sich auf das Vorhandensein der tatsächlichen I/O-Umgebung(Antriebe, Klemmen). Wenn die Konfiguration im Vorfeld der Anlagenerstellung z.B. auf einem Laptop alsProgrammiersystem erstellt werden soll, ist nur die "Offline-Konfiguration" möglich. Dann müssen alleKomponenten händisch in der Konfiguration z.B. nach Elektro-Planung eingetragen werden.
Ist die vorgesehene Steuerung bereits an das EtherCAT System angeschlossen, alle Komponenten mitSpannung versorgt und die Infrastruktur betriebsbereit, kann die TwinCAT Konfiguration auch vereinfachtdurch das so genannte "Scannen" vom Runtime-System aus erzeugt werden. Dies ist der so genannteOnline-Vorgang.
In jedem Fall prüft der EtherCAT Master bei jedem realen Hochlauf, ob die vorgefundenen Slaves derKonfiguration entsprechen. Dieser Test kann in den erweiterten Slave-Einstellungen parametriert werden.
Hinweis
Installation der neuesten ESI-XML-Device-DescriptionDer TwinCAT EtherCAT Master/Systemmanager benötigt zur Konfigurationserstellung imOnline- und Offline-Modus die Gerätebeschreibungsdateien der zu verwendeten Geräte. Diese Gerätebeschreibungen sind die so genannten ESI (EtherCAT Slave Information) inForm von XML-Dateien. Diese Dateien können vom jeweiligen Hersteller angefordert wer-den bzw. werden zum Download bereitgestellt. Auf der Beckhoff Website werden die ESIfür Beckhoff EtherCAT Geräte bereitgehalten. Die ESI-Dateien sind im Installationsver-zeichnis von TwinCAT (Standardeinstellung: C:\TwinCAT\IO\EtherCAT ) abzulegen. BeimÖffnen eines neuen Systemmanager-Fensters werden die Dateien einmalig eingelesen.TwinCAT bringt bei der Installation den Satz an Beckhoff-ESI-Dateien mit, der zum Erstel-lungszeitpunkt des TwinCAT Builds aktuell war.
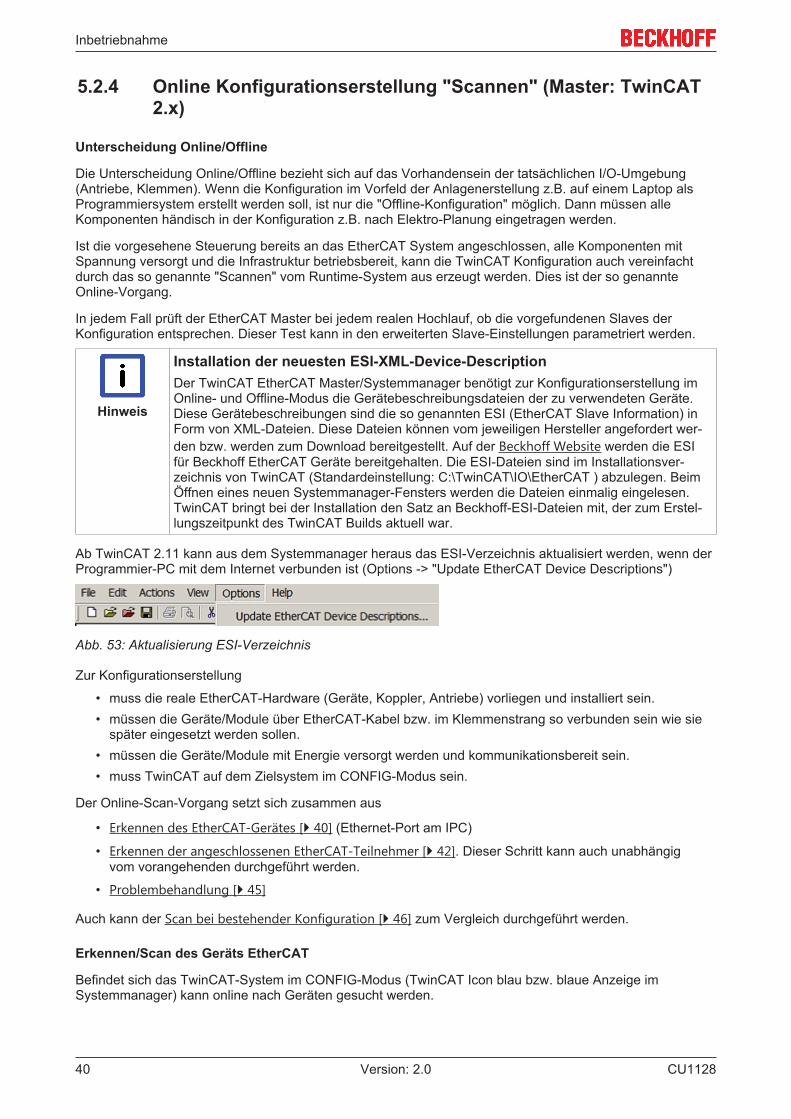
Ab TwinCAT 2.11 kann aus dem Systemmanager heraus das ESI-Verzeichnis aktualisiert werden, wenn derProgrammier-PC mit dem Internet verbunden ist (Options -> "Update EtherCAT Device Descriptions")
Abb. 53: Aktualisierung ESI-Verzeichnis
Zur Konfigurationserstellung
• muss die reale EtherCAT-Hardware (Geräte, Koppler, Antriebe) vorliegen und installiert sein.• müssen die Geräte/Module über EtherCAT-Kabel bzw. im Klemmenstrang so verbunden sein wie sie
später eingesetzt werden sollen.• müssen die Geräte/Module mit Energie versorgt werden und kommunikationsbereit sein.• muss TwinCAT auf dem Zielsystem im CONFIG-Modus sein.
Der Online-Scan-Vorgang setzt sich zusammen aus
• Erkennen des EtherCAT-Gerätes [} 40] (Ethernet-Port am IPC)
• Erkennen der angeschlossenen EtherCAT-Teilnehmer [} 42]. Dieser Schritt kann auch unabhängigvom vorangehenden durchgeführt werden.
• Problembehandlung [} 45]
Auch kann der Scan bei bestehender Konfiguration [} 46] zum Vergleich durchgeführt werden.
Erkennen/Scan des Geräts EtherCAT
Befindet sich das TwinCAT-System im CONFIG-Modus (TwinCAT Icon blau bzw. blaue Anzeige imSystemmanager) kann online nach Geräten gesucht werden.
CU112840 Version: 2.0
Inbetriebnahme
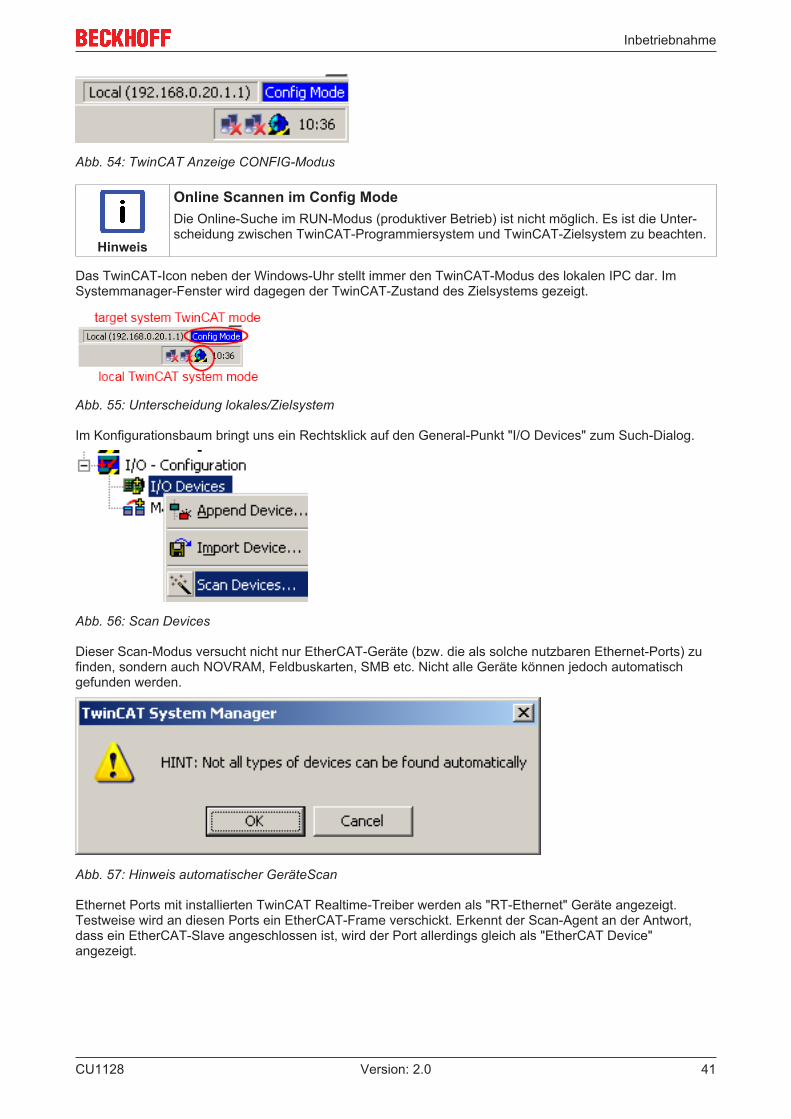
Abb. 54: TwinCAT Anzeige CONFIG-Modus
Hinweis
Online Scannen im Config ModeDie Online-Suche im RUN-Modus (produktiver Betrieb) ist nicht möglich. Es ist die Unter-scheidung zwischen TwinCAT-Programmiersystem und TwinCAT-Zielsystem zu beachten.
Das TwinCAT-Icon neben der Windows-Uhr stellt immer den TwinCAT-Modus des lokalen IPC dar. ImSystemmanager-Fenster wird dagegen der TwinCAT-Zustand des Zielsystems gezeigt.
Abb. 55: Unterscheidung lokales/Zielsystem
Im Konfigurationsbaum bringt uns ein Rechtsklick auf den General-Punkt "I/O Devices" zum Such-Dialog.
Abb. 56: Scan Devices
Dieser Scan-Modus versucht nicht nur EtherCAT-Geräte (bzw. die als solche nutzbaren Ethernet-Ports) zufinden, sondern auch NOVRAM, Feldbuskarten, SMB etc. Nicht alle Geräte können jedoch automatischgefunden werden.
Abb. 57: Hinweis automatischer GeräteScan
Ethernet Ports mit installierten TwinCAT Realtime-Treiber werden als "RT-Ethernet" Geräte angezeigt.Testweise wird an diesen Ports ein EtherCAT-Frame verschickt. Erkennt der Scan-Agent an der Antwort,dass ein EtherCAT-Slave angeschlossen ist, wird der Port allerdings gleich als "EtherCAT Device"angezeigt.
CU1128 41Version: 2.0
Inbetriebnahme
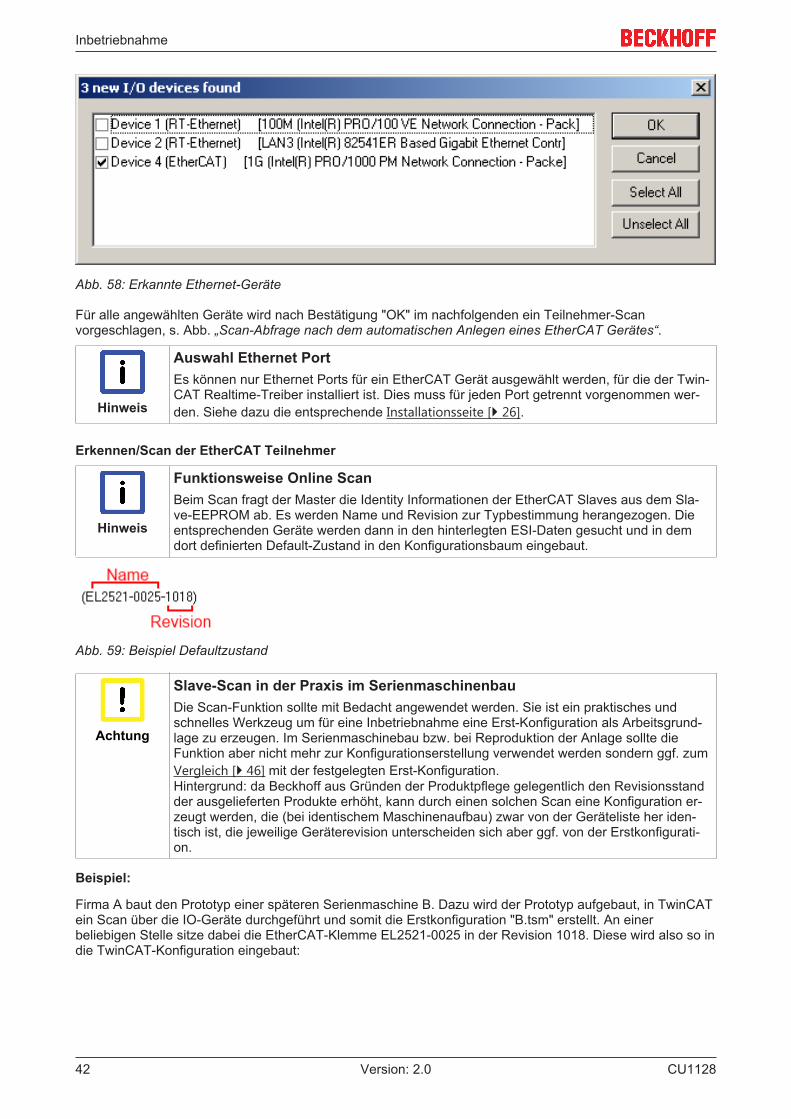
Abb. 58: Erkannte Ethernet-Geräte
Für alle angewählten Geräte wird nach Bestätigung "OK" im nachfolgenden ein Teilnehmer-Scanvorgeschlagen, s. Abb. „Scan-Abfrage nach dem automatischen Anlegen eines EtherCAT Gerätes“.
Hinweis
Auswahl Ethernet PortEs können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der Twin-CAT Realtime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen wer-den. Siehe dazu die entsprechende Installationsseite [} 26].
Erkennen/Scan der EtherCAT Teilnehmer
Hinweis
Funktionsweise Online ScanBeim Scan fragt der Master die Identity Informationen der EtherCAT Slaves aus dem Sla-ve-EEPROM ab. Es werden Name und Revision zur Typbestimmung herangezogen. Dieentsprechenden Geräte werden dann in den hinterlegten ESI-Daten gesucht und in demdort definierten Default-Zustand in den Konfigurationsbaum eingebaut.
Abb. 59: Beispiel Defaultzustand
Achtung
Slave-Scan in der Praxis im SerienmaschinenbauDie Scan-Funktion sollte mit Bedacht angewendet werden. Sie ist ein praktisches undschnelles Werkzeug um für eine Inbetriebnahme eine Erst-Konfiguration als Arbeitsgrund-lage zu erzeugen. Im Serienmaschinebau bzw. bei Reproduktion der Anlage sollte dieFunktion aber nicht mehr zur Konfigurationserstellung verwendet werden sondern ggf. zumVergleich [} 46] mit der festgelegten Erst-Konfiguration.Hintergrund: da Beckhoff aus Gründen der Produktpflege gelegentlich den Revisionsstandder ausgelieferten Produkte erhöht, kann durch einen solchen Scan eine Konfiguration er-zeugt werden, die (bei identischem Maschinenaufbau) zwar von der Geräteliste her iden-tisch ist, die jeweilige Geräterevision unterscheiden sich aber ggf. von der Erstkonfigurati-on.
Beispiel:
Firma A baut den Prototyp einer späteren Serienmaschine B. Dazu wird der Prototyp aufgebaut, in TwinCATein Scan über die IO-Geräte durchgeführt und somit die Erstkonfiguration "B.tsm" erstellt. An einerbeliebigen Stelle sitze dabei die EtherCAT-Klemme EL2521-0025 in der Revision 1018. Diese wird also so indie TwinCAT-Konfiguration eingebaut:
CU112842 Version: 2.0
Inbetriebnahme
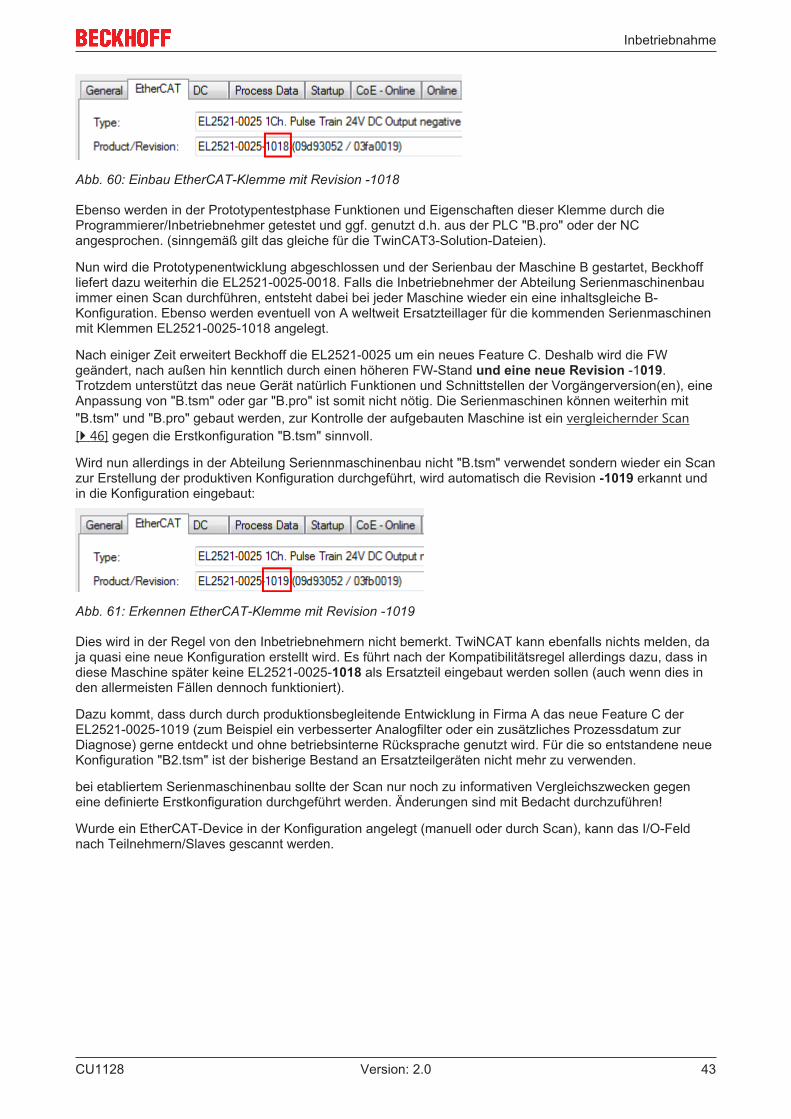
Abb. 60: Einbau EtherCAT-Klemme mit Revision -1018
Ebenso werden in der Prototypentestphase Funktionen und Eigenschaften dieser Klemme durch dieProgrammierer/Inbetriebnehmer getestet und ggf. genutzt d.h. aus der PLC "B.pro" oder der NCangesprochen. (sinngemäß gilt das gleiche für die TwinCAT3-Solution-Dateien).
Nun wird die Prototypenentwicklung abgeschlossen und der Serienbau der Maschine B gestartet, Beckhoffliefert dazu weiterhin die EL2521-0025-0018. Falls die Inbetriebnehmer der Abteilung Serienmaschinenbauimmer einen Scan durchführen, entsteht dabei bei jeder Maschine wieder ein eine inhaltsgleiche B-Konfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinenmit Klemmen EL2521-0025-1018 angelegt.
Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FWgeändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019.Trotzdem unterstützt das neue Gerät natürlich Funktionen und Schnittstellen der Vorgängerversion(en), eineAnpassung von "B.tsm" oder gar "B.pro" ist somit nicht nötig. Die Serienmaschinen können weiterhin mit"B.tsm" und "B.pro" gebaut werden, zur Kontrolle der aufgebauten Maschine ist ein vergleichernder Scan[} 46] gegen die Erstkonfiguration "B.tsm" sinnvoll.
Wird nun allerdings in der Abteilung Seriennmaschinenbau nicht "B.tsm" verwendet sondern wieder ein Scanzur Erstellung der produktiven Konfiguration durchgeführt, wird automatisch die Revision -1019 erkannt undin die Konfiguration eingebaut:
Abb. 61: Erkennen EtherCAT-Klemme mit Revision -1019
Dies wird in der Regel von den Inbetriebnehmern nicht bemerkt. TwiNCAT kann ebenfalls nichts melden, daja quasi eine neue Konfiguration erstellt wird. Es führt nach der Kompatibilitätsregel allerdings dazu, dass indiese Maschine später keine EL2521-0025-1018 als Ersatzteil eingebaut werden sollen (auch wenn dies inden allermeisten Fällen dennoch funktioniert).
Dazu kommt, dass durch durch produktionsbegleitende Entwicklung in Firma A das neue Feature C derEL2521-0025-1019 (zum Beispiel ein verbesserter Analogfilter oder ein zusätzliches Prozessdatum zurDiagnose) gerne entdeckt und ohne betriebsinterne Rücksprache genutzt wird. Für die so entstandene neueKonfiguration "B2.tsm" ist der bisherige Bestand an Ersatzteilgeräten nicht mehr zu verwenden.
bei etabliertem Serienmaschinenbau sollte der Scan nur noch zu informativen Vergleichszwecken gegeneine definierte Erstkonfiguration durchgeführt werden. Änderungen sind mit Bedacht durchzuführen!
Wurde ein EtherCAT-Device in der Konfiguration angelegt (manuell oder durch Scan), kann das I/O-Feldnach Teilnehmern/Slaves gescannt werden.
CU1128 43Version: 2.0
Inbetriebnahme
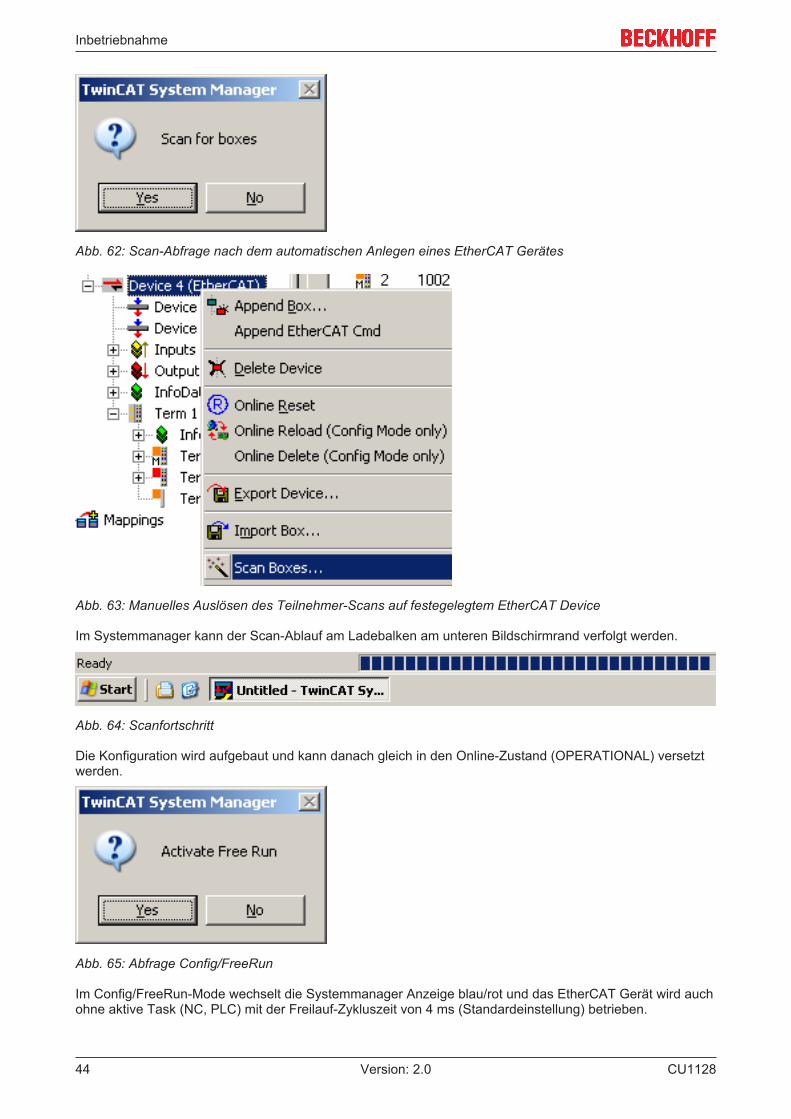
Abb. 62: Scan-Abfrage nach dem automatischen Anlegen eines EtherCAT Gerätes
Abb. 63: Manuelles Auslösen des Teilnehmer-Scans auf festegelegtem EtherCAT Device
Im Systemmanager kann der Scan-Ablauf am Ladebalken am unteren Bildschirmrand verfolgt werden.
Abb. 64: Scanfortschritt
Die Konfiguration wird aufgebaut und kann danach gleich in den Online-Zustand (OPERATIONAL) versetztwerden.
Abb. 65: Abfrage Config/FreeRun
Im Config/FreeRun-Mode wechselt die Systemmanager Anzeige blau/rot und das EtherCAT Gerät wird auchohne aktive Task (NC, PLC) mit der Freilauf-Zykluszeit von 4 ms (Standardeinstellung) betrieben.
CU112844 Version: 2.0
Inbetriebnahme
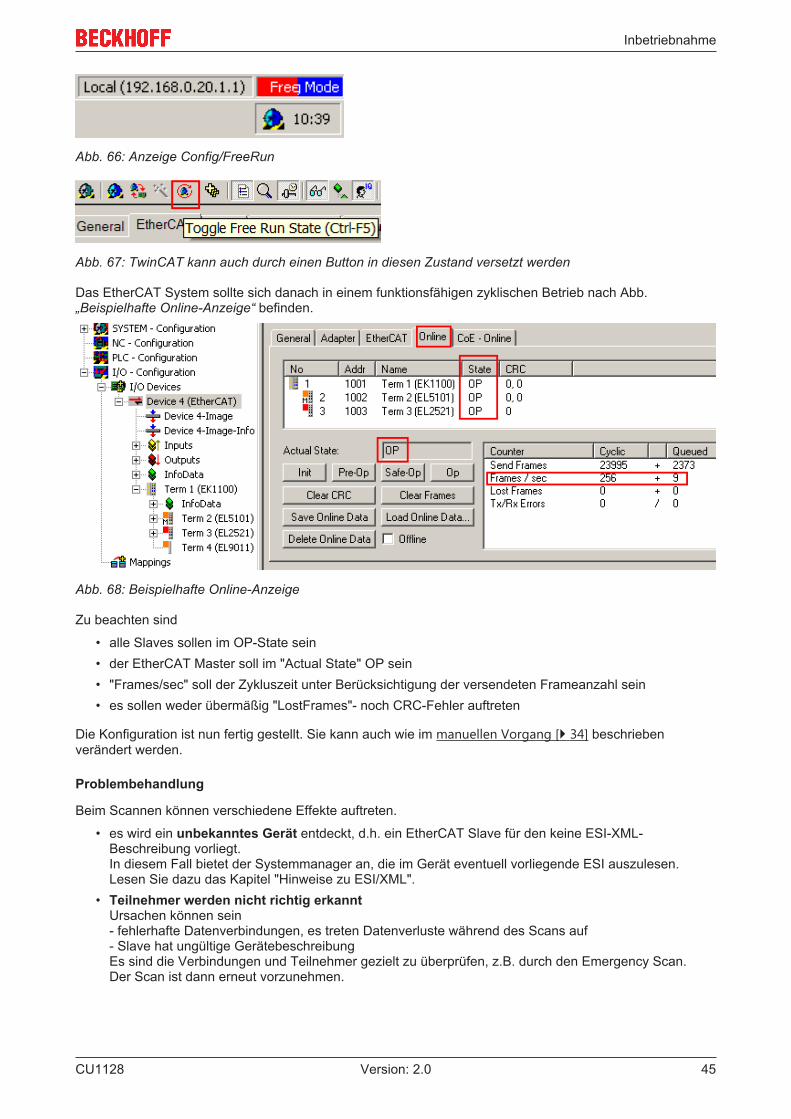
Abb. 66: Anzeige Config/FreeRun
Abb. 67: TwinCAT kann auch durch einen Button in diesen Zustand versetzt werden
Das EtherCAT System sollte sich danach in einem funktionsfähigen zyklischen Betrieb nach Abb.„Beispielhafte Online-Anzeige“ befinden.
Abb. 68: Beispielhafte Online-Anzeige
Zu beachten sind
• alle Slaves sollen im OP-State sein• der EtherCAT Master soll im "Actual State" OP sein• "Frames/sec" soll der Zykluszeit unter Berücksichtigung der versendeten Frameanzahl sein• es sollen weder übermäßig "LostFrames"- noch CRC-Fehler auftreten
Die Konfiguration ist nun fertig gestellt. Sie kann auch wie im manuellen Vorgang [} 34] beschriebenverändert werden.
Problembehandlung
Beim Scannen können verschiedene Effekte auftreten.
• es wird ein unbekanntes Gerät entdeckt, d.h. ein EtherCAT Slave für den keine ESI-XML-Beschreibung vorliegt.In diesem Fall bietet der Systemmanager an, die im Gerät eventuell vorliegende ESI auszulesen.Lesen Sie dazu das Kapitel "Hinweise zu ESI/XML".
• Teilnehmer werden nicht richtig erkanntUrsachen können sein- fehlerhafte Datenverbindungen, es treten Datenverluste während des Scans auf- Slave hat ungültige GerätebeschreibungEs sind die Verbindungen und Teilnehmer gezielt zu überprüfen, z.B. durch den Emergency Scan.Der Scan ist dann erneut vorzunehmen.
CU1128 45Version: 2.0
Inbetriebnahme
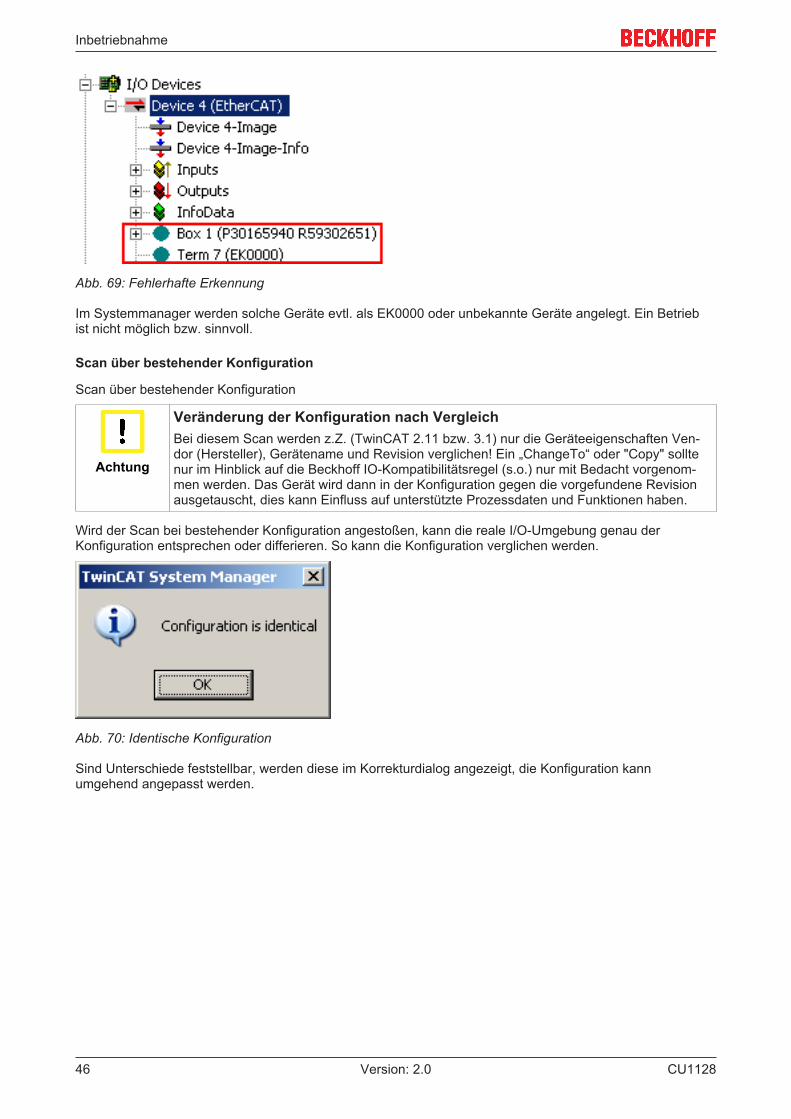
Abb. 69: Fehlerhafte Erkennung
Im Systemmanager werden solche Geräte evtl. als EK0000 oder unbekannte Geräte angelegt. Ein Betriebist nicht möglich bzw. sinnvoll.
Scan über bestehender Konfiguration
Scan über bestehender Konfiguration
Achtung
Veränderung der Konfiguration nach VergleichBei diesem Scan werden z.Z. (TwinCAT 2.11 bzw. 3.1) nur die Geräteeigenschaften Ven-dor (Hersteller), Gerätename und Revision verglichen! Ein „ChangeTo“ oder "Copy" solltenur im Hinblick auf die Beckhoff IO-Kompatibilitätsregel (s.o.) nur mit Bedacht vorgenom-men werden. Das Gerät wird dann in der Konfiguration gegen die vorgefundene Revisionausgetauscht, dies kann Einfluss auf unterstützte Prozessdaten und Funktionen haben.
Wird der Scan bei bestehender Konfiguration angestoßen, kann die reale I/O-Umgebung genau derKonfiguration entsprechen oder differieren. So kann die Konfiguration verglichen werden.
Abb. 70: Identische Konfiguration
Sind Unterschiede feststellbar, werden diese im Korrekturdialog angezeigt, die Konfiguration kannumgehend angepasst werden.
CU112846 Version: 2.0
Inbetriebnahme
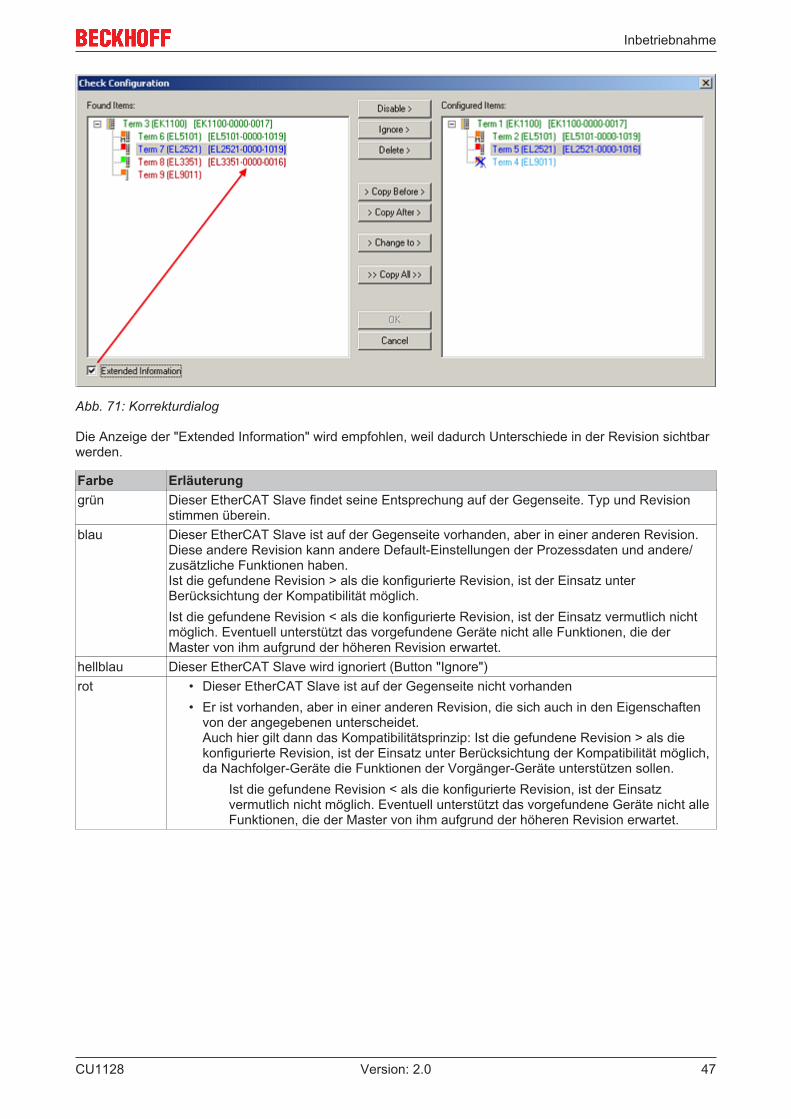
Abb. 71: Korrekturdialog
Die Anzeige der "Extended Information" wird empfohlen, weil dadurch Unterschiede in der Revision sichtbarwerden.
Farbe Erläuterunggrün Dieser EtherCAT Slave findet seine Entsprechung auf der Gegenseite. Typ und Revision
stimmen überein.blau Dieser EtherCAT Slave ist auf der Gegenseite vorhanden, aber in einer anderen Revision.
Diese andere Revision kann andere Default-Einstellungen der Prozessdaten und andere/zusätzliche Funktionen haben.Ist die gefundene Revision > als die konfigurierte Revision, ist der Einsatz unterBerücksichtung der Kompatibilität möglich.Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatz vermutlich nichtmöglich. Eventuell unterstützt das vorgefundene Geräte nicht alle Funktionen, die derMaster von ihm aufgrund der höheren Revision erwartet.
hellblau Dieser EtherCAT Slave wird ignoriert (Button "Ignore")rot • Dieser EtherCAT Slave ist auf der Gegenseite nicht vorhanden
• Er ist vorhanden, aber in einer anderen Revision, die sich auch in den Eigenschaftenvon der angegebenen unterscheidet.Auch hier gilt dann das Kompatibilitätsprinzip: Ist die gefundene Revision > als diekonfigurierte Revision, ist der Einsatz unter Berücksichtung der Kompatibilität möglich,da Nachfolger-Geräte die Funktionen der Vorgänger-Geräte unterstützen sollen.
Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatzvermutlich nicht möglich. Eventuell unterstützt das vorgefundene Geräte nicht alleFunktionen, die der Master von ihm aufgrund der höheren Revision erwartet.
CU1128 47Version: 2.0
Inbetriebnahme
Hinweis
Geräte-Auswahl nach Revision, KompatibilitätMit der ESI-Beschreibung wird auch das Prozessabbild, die Art der Kommunikation zwi-schen Master und Slave/Gerät und ggf. Geräte-Funktionen definiert. Damit muss das realeGerät (Firmware wenn vorhanden) die Kommunikationsanfragen/-einstellungen des Mas-ters unterstützen. Dies ist abwärtskompatibel der Fall, d.h. neuere Geräte (höhere Revisi-on) sollen es auch unterstützen wenn der EtherCAT Master sie als eine ältere Revision an-spricht. Als Beckhoff-Kompatibilitätsregel für EtherCAT-Klemmen/Boxen ist anzunehmen:
Geräte-Revision in der Anlage >= Geräte-Revision in der Konfiguration
Dies erlaubt auch den späteren Austausch von Geräten ohne Veränderung der Konfigurati-on (abweichende Vorgaben bei Antrieben möglich).
Beispiel:
In der Konfiguration wird eine EL2521-0025-1018 vorgesehen, dann kann real eine EL2521-0025-1018 oderhöher (-1019, -1020) eingesetzt werden.
Abb. 72: Name/Revision Klemme
Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog alsletzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellungeiner neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuellproduzierte Beckhoff-Geräte in der realen Applikation verwendet werden. Nur wenn ältere Geräte ausLagerbeständen in der Applikation verbaut werden sollen, ist es sinnvoll eine ältere Revision einzubinden.
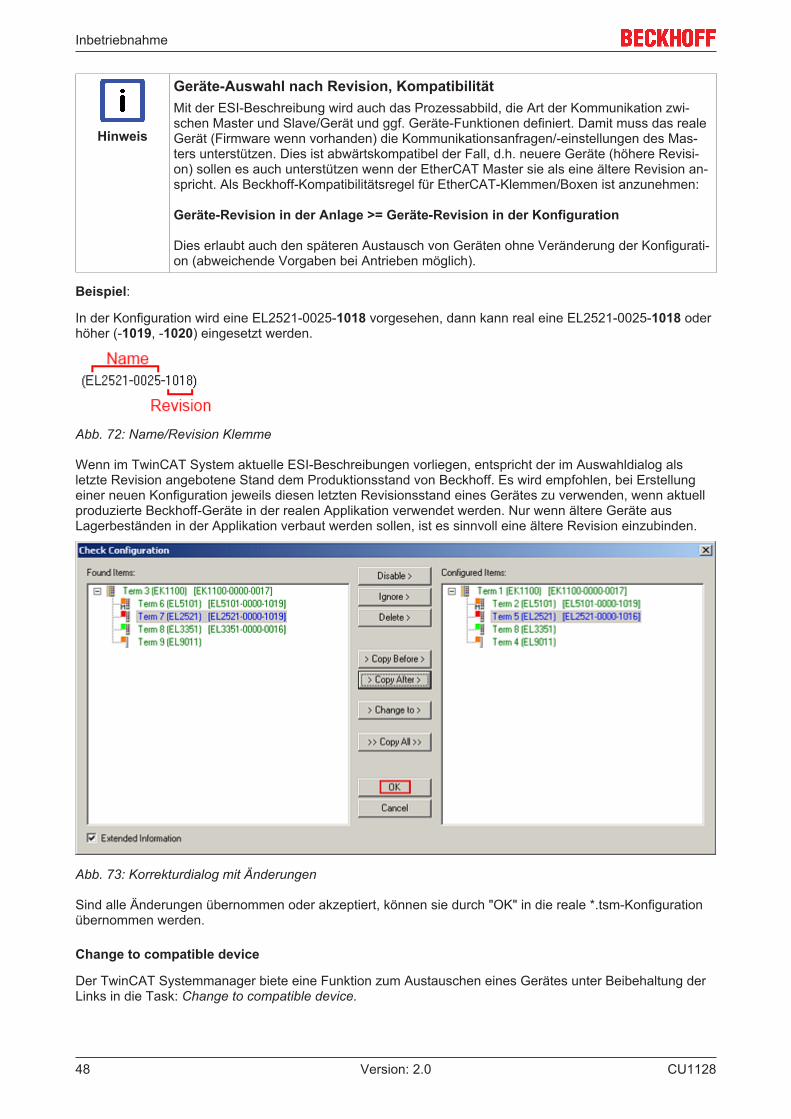
Abb. 73: Korrekturdialog mit Änderungen
Sind alle Änderungen übernommen oder akzeptiert, können sie durch "OK" in die reale *.tsm-Konfigurationübernommen werden.
Change to compatible device
Der TwinCAT Systemmanager biete eine Funktion zum Austauschen eines Gerätes unter Beibehaltung derLinks in die Task: Change to compatible device.
CU112848 Version: 2.0
Inbetriebnahme
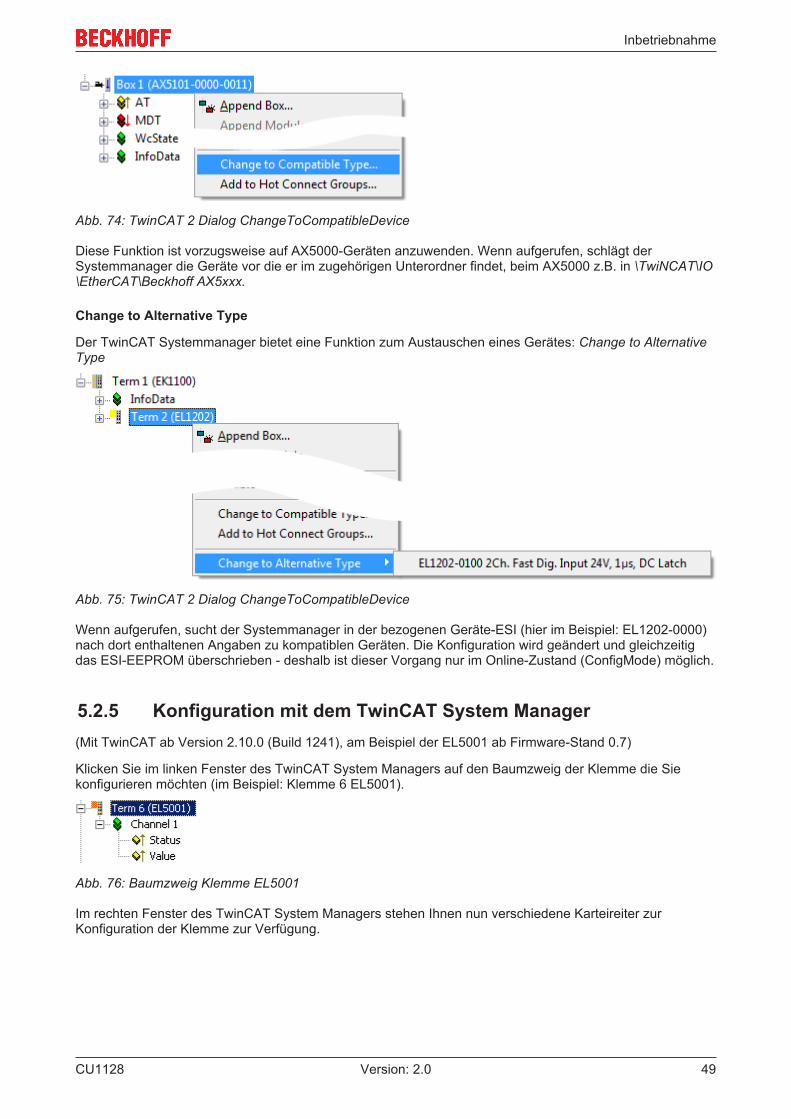
Abb. 74: TwinCAT 2 Dialog ChangeToCompatibleDevice
Diese Funktion ist vorzugsweise auf AX5000-Geräten anzuwenden. Wenn aufgerufen, schlägt derSystemmanager die Geräte vor die er im zugehörigen Unterordner findet, beim AX5000 z.B. in \TwiNCAT\IO\EtherCAT\Beckhoff AX5xxx.
Change to Alternative Type
Der TwinCAT Systemmanager bietet eine Funktion zum Austauschen eines Gerätes: Change to AlternativeType
Abb. 75: TwinCAT 2 Dialog ChangeToCompatibleDevice
Wenn aufgerufen, sucht der Systemmanager in der bezogenen Geräte-ESI (hier im Beispiel: EL1202-0000)nach dort enthaltenen Angaben zu kompatiblen Geräten. Die Konfiguration wird geändert und gleichzeitigdas ESI-EEPROM überschrieben - deshalb ist dieser Vorgang nur im Online-Zustand (ConfigMode) möglich.
5.2.5 Konfiguration mit dem TwinCAT System Manager(Mit TwinCAT ab Version 2.10.0 (Build 1241), am Beispiel der EL5001 ab Firmware-Stand 0.7)
Klicken Sie im linken Fenster des TwinCAT System Managers auf den Baumzweig der Klemme die Siekonfigurieren möchten (im Beispiel: Klemme 6 EL5001).
Abb. 76: Baumzweig Klemme EL5001
Im rechten Fenster des TwinCAT System Managers stehen Ihnen nun verschiedene Karteireiter zurKonfiguration der Klemme zur Verfügung.
CU1128 49Version: 2.0
Inbetriebnahme
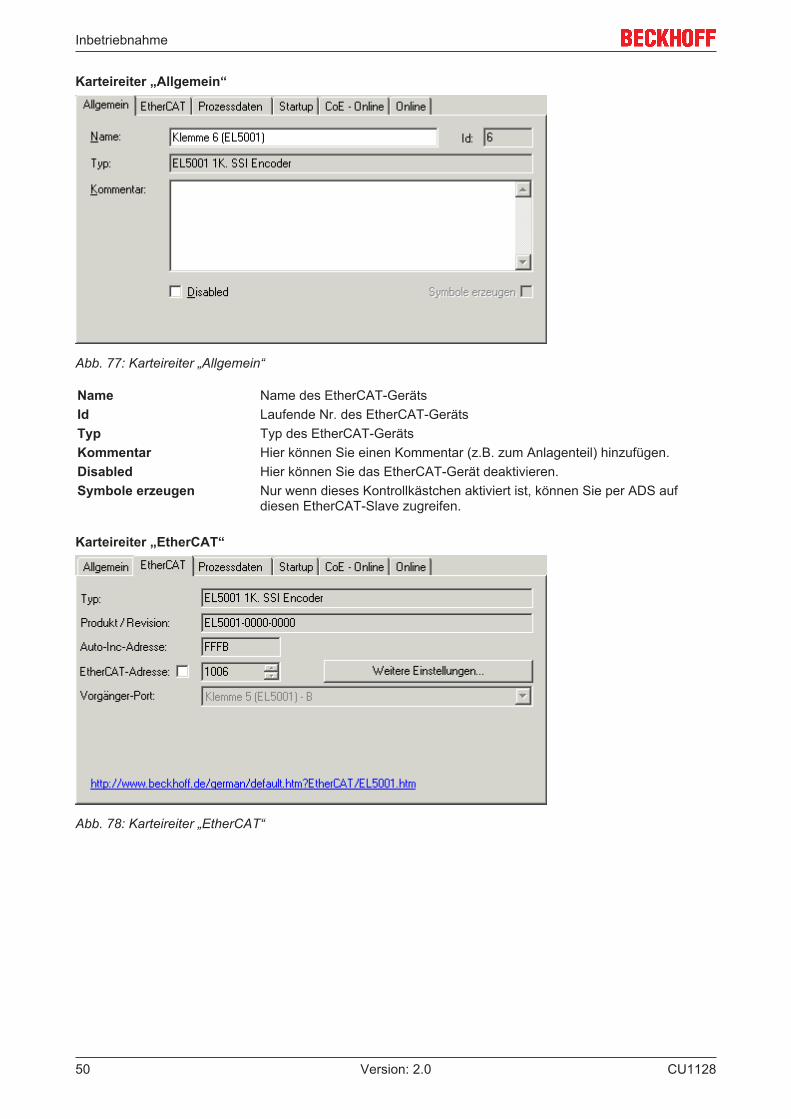
Karteireiter „Allgemein“
Abb. 77: Karteireiter „Allgemein“
Name Name des EtherCAT-GerätsId Laufende Nr. des EtherCAT-GerätsTyp Typ des EtherCAT-GerätsKommentar Hier können Sie einen Kommentar (z.B. zum Anlagenteil) hinzufügen.Disabled Hier können Sie das EtherCAT-Gerät deaktivieren.Symbole erzeugen Nur wenn dieses Kontrollkästchen aktiviert ist, können Sie per ADS auf
diesen EtherCAT-Slave zugreifen.
Karteireiter „EtherCAT“
Abb. 78: Karteireiter „EtherCAT“
CU112850 Version: 2.0
Inbetriebnahme
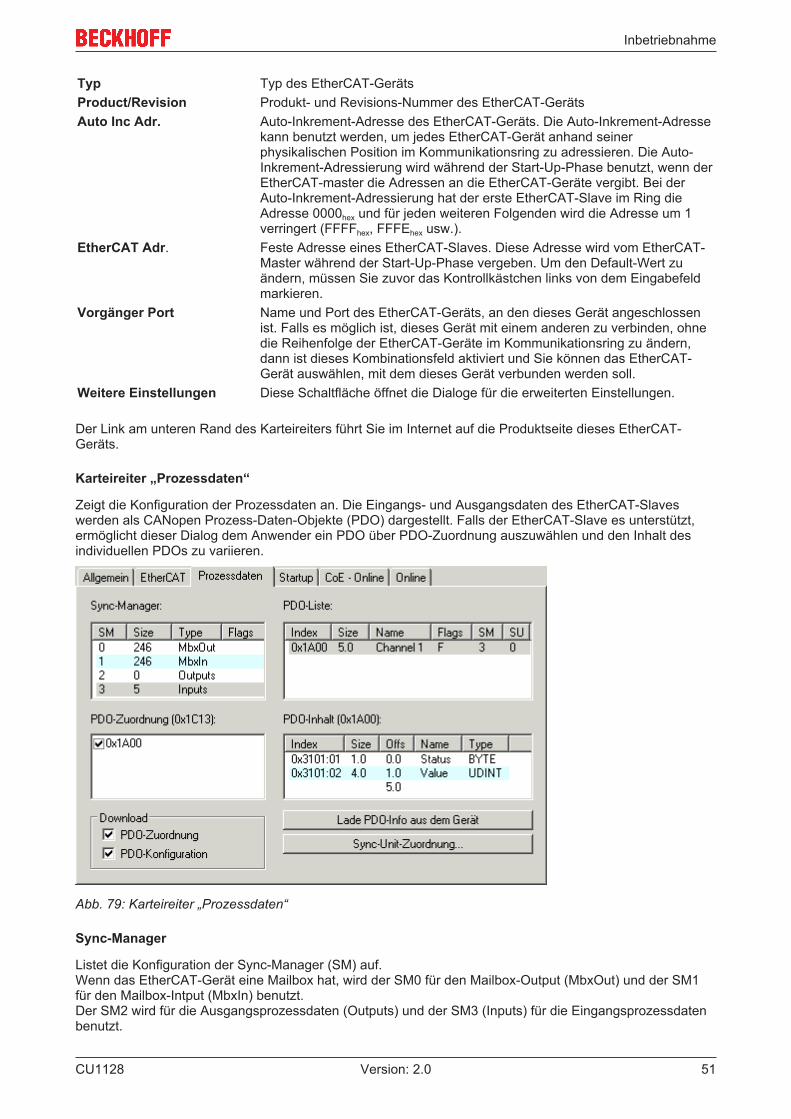
Typ Typ des EtherCAT-GerätsProduct/Revision Produkt- und Revisions-Nummer des EtherCAT-GerätsAuto Inc Adr. Auto-Inkrement-Adresse des EtherCAT-Geräts. Die Auto-Inkrement-Adresse
kann benutzt werden, um jedes EtherCAT-Gerät anhand seinerphysikalischen Position im Kommunikationsring zu adressieren. Die Auto-Inkrement-Adressierung wird während der Start-Up-Phase benutzt, wenn derEtherCAT-master die Adressen an die EtherCAT-Geräte vergibt. Bei derAuto-Inkrement-Adressierung hat der erste EtherCAT-Slave im Ring dieAdresse 0000hex und für jeden weiteren Folgenden wird die Adresse um 1verringert (FFFFhex, FFFEhex usw.).
EtherCAT Adr. Feste Adresse eines EtherCAT-Slaves. Diese Adresse wird vom EtherCAT-Master während der Start-Up-Phase vergeben. Um den Default-Wert zuändern, müssen Sie zuvor das Kontrollkästchen links von dem Eingabefeldmarkieren.
Vorgänger Port Name und Port des EtherCAT-Geräts, an den dieses Gerät angeschlossenist. Falls es möglich ist, dieses Gerät mit einem anderen zu verbinden, ohnedie Reihenfolge der EtherCAT-Geräte im Kommunikationsring zu ändern,dann ist dieses Kombinationsfeld aktiviert und Sie können das EtherCAT-Gerät auswählen, mit dem dieses Gerät verbunden werden soll.
Weitere Einstellungen Diese Schaltfläche öffnet die Dialoge für die erweiterten Einstellungen.
Der Link am unteren Rand des Karteireiters führt Sie im Internet auf die Produktseite dieses EtherCAT-Geräts.
Karteireiter „Prozessdaten“
Zeigt die Konfiguration der Prozessdaten an. Die Eingangs- und Ausgangsdaten des EtherCAT-Slaveswerden als CANopen Prozess-Daten-Objekte (PDO) dargestellt. Falls der EtherCAT-Slave es unterstützt,ermöglicht dieser Dialog dem Anwender ein PDO über PDO-Zuordnung auszuwählen und den Inhalt desindividuellen PDOs zu variieren.
Abb. 79: Karteireiter „Prozessdaten“
Sync-Manager
Listet die Konfiguration der Sync-Manager (SM) auf.Wenn das EtherCAT-Gerät eine Mailbox hat, wird der SM0 für den Mailbox-Output (MbxOut) und der SM1für den Mailbox-Intput (MbxIn) benutzt.Der SM2 wird für die Ausgangsprozessdaten (Outputs) und der SM3 (Inputs) für die Eingangsprozessdatenbenutzt.
CU1128 51Version: 2.0
Inbetriebnahme
Wenn ein Eintrag ausgewählt ist, wird die korrespondierende PDO-Zuordnung in der darunter stehendenListe PDO-Zuordnung angezeigt.
PDO-Zuordnung
PDO-Zuordnung des ausgewählten Sync-Managers. Hier werden alle für diesen Sync-Manager-Typedefinierten PDOs aufgelistet:
• Wenn in der Sync-Manager-Liste der Ausgangs-Sync-Manager (Outputs) ausgewählt ist, werden alleRxPDOs angezeigt.
• Wenn in der Sync-Manager-Liste der Eingangs-Sync-Manager (Inputs) ausgewählt ist, werden alleTxPDOs angezeigt.
Die markierten Einträge sind die PDOs, die an der Prozessdatenübertragung teilnehmen. Diese PDOswerden in der Baumdarstellung das System-Managers als Variablen des EtherCAT-Geräts angezeigt. DerName der Variable ist identisch mit dem Parameter Name des PDO, wie er in der PDO-Liste angezeigt wird.Falls ein Eintrag in der PDO-Zuordnungsliste deaktiviert ist (nicht markiert und ausgegraut), zeigt dies an,das dieser Eintrag von der PDO-Zuordnung ausgenommen ist. Um ein ausgegrautes PDO auswählen zukönnen, müssen Sie zuerst das aktuell angewählte PDO abwählen.
Hinweis
Aktivierung der PDO-Zuordnungü Wenn Sie die PDO-Zuordnung geändert haben, muss zur Aktivierung der neuen PDO-
Zuordnunga) der EtherCAT-Slave einmal den Statusübergang PS (von Pre-Operational zu Safe-
Operational) durchlaufen (siehe Karteireiter Online [} 56])
b) der System-Manager die EtherCAT-Slaves neu laden (Schaltfläche )
PDO-Liste
Liste aller von diesem EtherCAT-Gerät unterstützten PDOs. Der Inhalt des ausgewählten PDOs wird derListe PDO-Content angezeigt. Durch Doppelklick auf einen Eintrag können Sie die Konfiguration des PDOändern.
Spalte BeschreibungIndex Index des PDO.Size Größe des PDO in Byte.Name Name des PDO.
Wenn dieses PDO einem Sync-Manager zugeordnet ist, erscheint es als Variable des Slavesmit diesem Parameter als Namen.
Flags F Fester Inhalt: Der Inhalt dieses PDO ist fest und kann nicht vom System-Managergeändert werden.
M Obligatorisches PDO (Mandatory). Dieses PDO ist zwingend Erforderlich und mussdeshalb einem Sync-Manager Zugeordnet werden! Als Konsequenz können Sie diesesPDO nicht aus der Liste PDO-Zuordnungen streichen
SM Sync-Manager, dem dieses PDO zugeordnet ist. Falls dieser Eintrag leer ist, nimmt dieses PDOnicht am Prozessdatenverkehr teil.
SU Sync-Unit, der dieses PDO zugeordnet ist.
PDO-Inhalt
Zeigt den Inhalt des PDOs an. Falls das Flag F (fester Inhalt) des PDOs nicht gesetzt ist, können Sie denInhalt ändern.
Download
Falls das Gerät intelligent ist und über eine Mailbox verfügt, können die Konfiguration des PDOs und diePDO-Zuordnungen zum Gerät herunter geladen werden. Dies ist ein optionales Feature, das nicht von allenEtherCAT-Slaves unterstützt wird.
CU112852 Version: 2.0
Inbetriebnahme
PDO-Zuordnung
Falls dieses Kontrollkästchen angewählt ist, wird die PDO-Zuordnung die in der PDO-Zuordnungslistekonfiguriert ist beim Startup zum Gerät herunter geladen. Die notwendigen, zum Gerät zu sendendenKommandos können in auf dem Karteireiter Startup [} 53] betrachtet werden.
PDO-Konfiguration
Falls dieses Kontrollkästchen angewählt ist, wird die Konfiguration des jeweiligen PDOs (wie sie in der PDO-Liste und der Anzeige PDO-Inhalt angezeigt wird) zum EtherCAT-Slave herunter geladen.
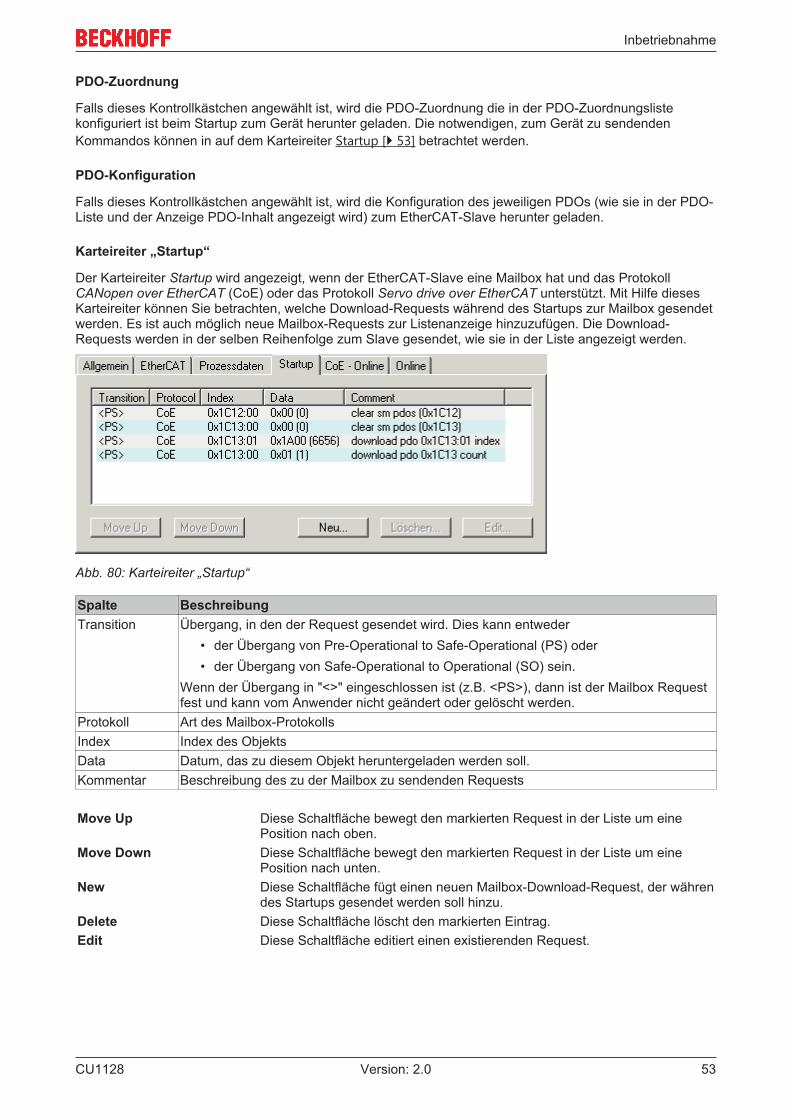
Karteireiter „Startup“
Der Karteireiter Startup wird angezeigt, wenn der EtherCAT-Slave eine Mailbox hat und das ProtokollCANopen over EtherCAT (CoE) oder das Protokoll Servo drive over EtherCAT unterstützt. Mit Hilfe diesesKarteireiter können Sie betrachten, welche Download-Requests während des Startups zur Mailbox gesendetwerden. Es ist auch möglich neue Mailbox-Requests zur Listenanzeige hinzuzufügen. Die Download-Requests werden in der selben Reihenfolge zum Slave gesendet, wie sie in der Liste angezeigt werden.
Abb. 80: Karteireiter „Startup“
Spalte BeschreibungTransition Übergang, in den der Request gesendet wird. Dies kann entweder
• der Übergang von Pre-Operational to Safe-Operational (PS) oder• der Übergang von Safe-Operational to Operational (SO) sein.
Wenn der Übergang in "<>" eingeschlossen ist (z.B. <PS>), dann ist der Mailbox Requestfest und kann vom Anwender nicht geändert oder gelöscht werden.
Protokoll Art des Mailbox-ProtokollsIndex Index des ObjektsData Datum, das zu diesem Objekt heruntergeladen werden soll.Kommentar Beschreibung des zu der Mailbox zu sendenden Requests
Move Up Diese Schaltfläche bewegt den markierten Request in der Liste um einePosition nach oben.
Move Down Diese Schaltfläche bewegt den markierten Request in der Liste um einePosition nach unten.
New Diese Schaltfläche fügt einen neuen Mailbox-Download-Request, der währendes Startups gesendet werden soll hinzu.
Delete Diese Schaltfläche löscht den markierten Eintrag.Edit Diese Schaltfläche editiert einen existierenden Request.
CU1128 53Version: 2.0
Inbetriebnahme
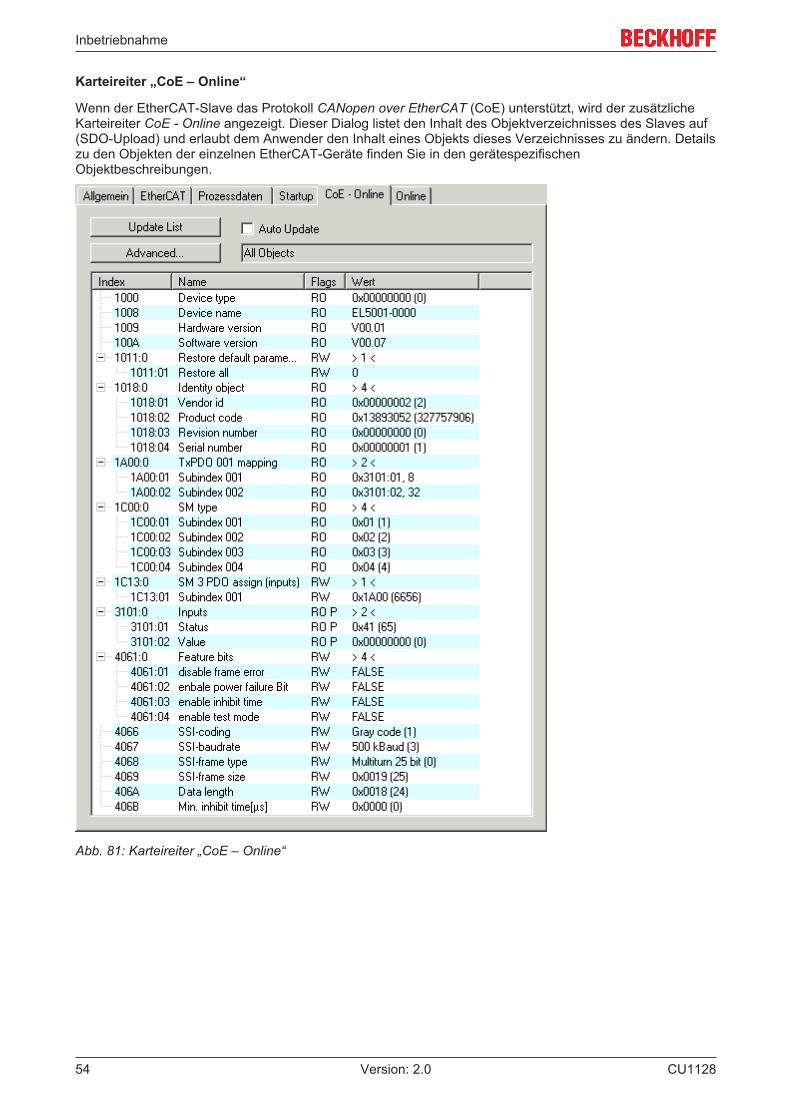
Karteireiter „CoE – Online“
Wenn der EtherCAT-Slave das Protokoll CANopen over EtherCAT (CoE) unterstützt, wird der zusätzlicheKarteireiter CoE - Online angezeigt. Dieser Dialog listet den Inhalt des Objektverzeichnisses des Slaves auf(SDO-Upload) und erlaubt dem Anwender den Inhalt eines Objekts dieses Verzeichnisses zu ändern. Detailszu den Objekten der einzelnen EtherCAT-Geräte finden Sie in den gerätespezifischenObjektbeschreibungen.
Abb. 81: Karteireiter „CoE – Online“
CU112854 Version: 2.0
Inbetriebnahme
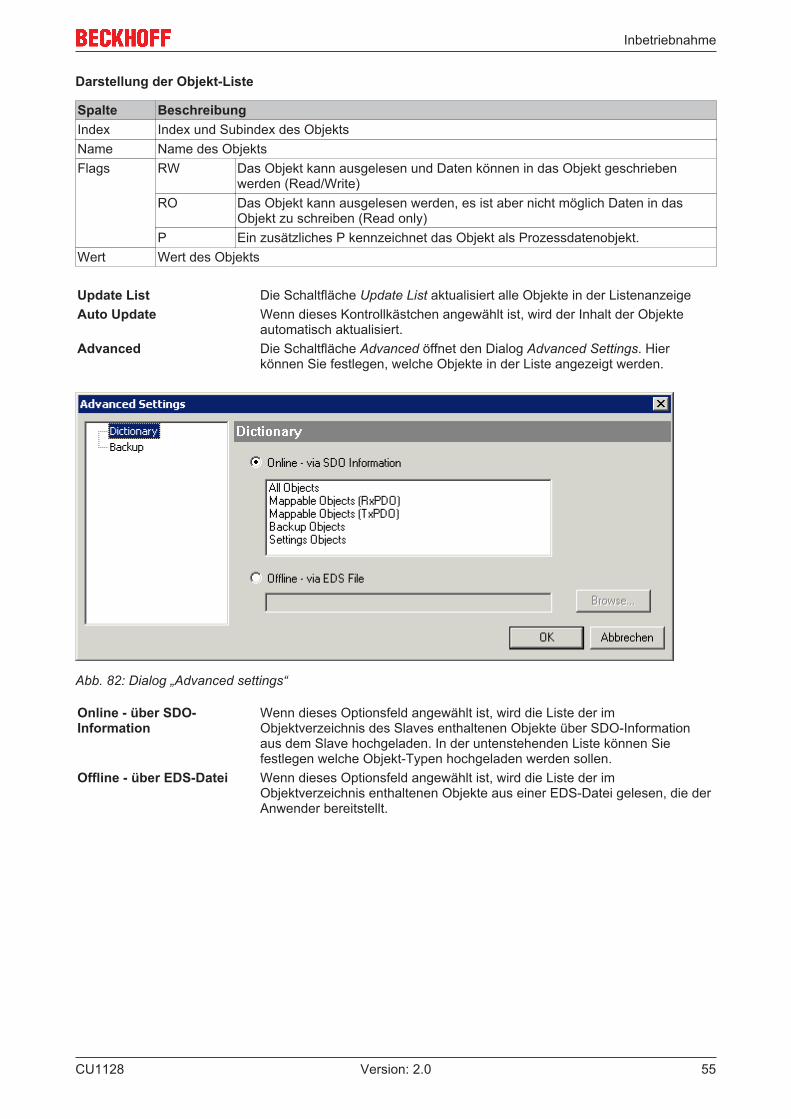
Darstellung der Objekt-Liste
Spalte BeschreibungIndex Index und Subindex des ObjektsName Name des ObjektsFlags RW Das Objekt kann ausgelesen und Daten können in das Objekt geschrieben
werden (Read/Write)RO Das Objekt kann ausgelesen werden, es ist aber nicht möglich Daten in das
Objekt zu schreiben (Read only)P Ein zusätzliches P kennzeichnet das Objekt als Prozessdatenobjekt.
Wert Wert des Objekts
Update List Die Schaltfläche Update List aktualisiert alle Objekte in der ListenanzeigeAuto Update Wenn dieses Kontrollkästchen angewählt ist, wird der Inhalt der Objekte
automatisch aktualisiert.Advanced Die Schaltfläche Advanced öffnet den Dialog Advanced Settings. Hier
können Sie festlegen, welche Objekte in der Liste angezeigt werden.
Abb. 82: Dialog „Advanced settings“
Online - über SDO-Information
Wenn dieses Optionsfeld angewählt ist, wird die Liste der imObjektverzeichnis des Slaves enthaltenen Objekte über SDO-Informationaus dem Slave hochgeladen. In der untenstehenden Liste können Siefestlegen welche Objekt-Typen hochgeladen werden sollen.
Offline - über EDS-Datei Wenn dieses Optionsfeld angewählt ist, wird die Liste der imObjektverzeichnis enthaltenen Objekte aus einer EDS-Datei gelesen, die derAnwender bereitstellt.
CU1128 55Version: 2.0
Inbetriebnahme
Karteireiter „Online“
Abb. 83: Karteireiter „Online“
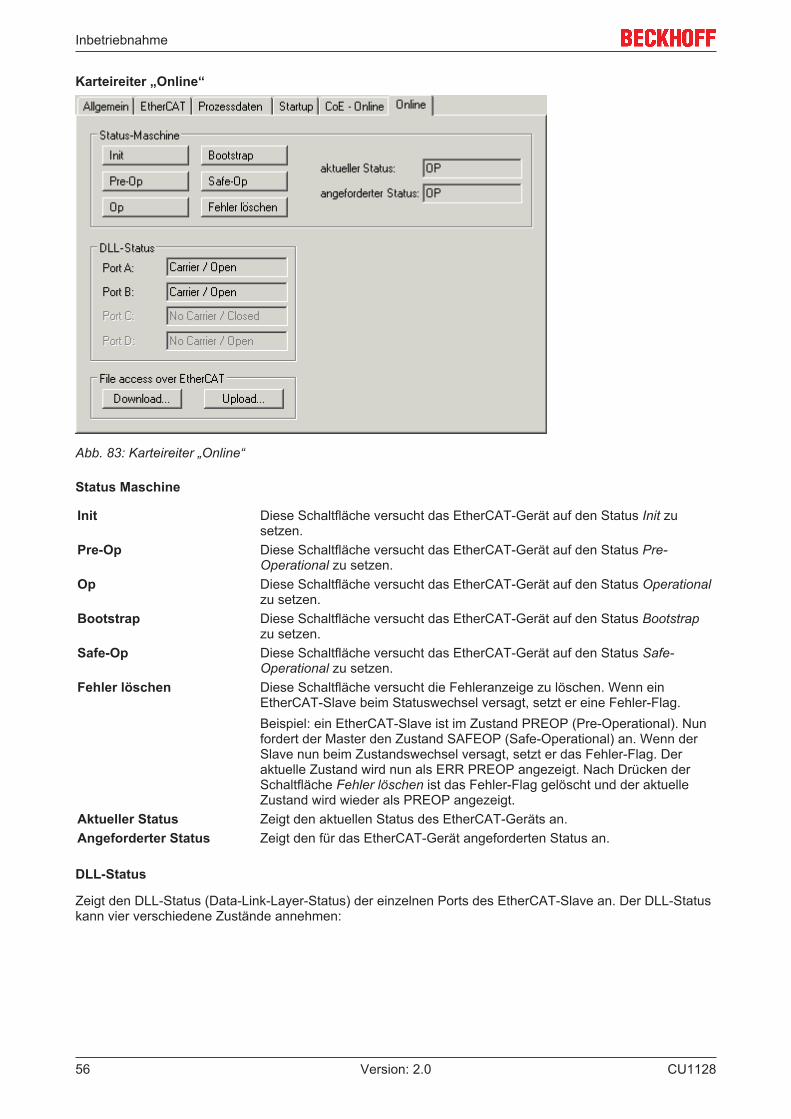
Status Maschine
Init Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Init zusetzen.
Pre-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Pre-Operational zu setzen.
Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Operationalzu setzen.
Bootstrap Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Bootstrapzu setzen.
Safe-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Safe-Operational zu setzen.
Fehler löschen Diese Schaltfläche versucht die Fehleranzeige zu löschen. Wenn einEtherCAT-Slave beim Statuswechsel versagt, setzt er eine Fehler-Flag.Beispiel: ein EtherCAT-Slave ist im Zustand PREOP (Pre-Operational). Nunfordert der Master den Zustand SAFEOP (Safe-Operational) an. Wenn derSlave nun beim Zustandswechsel versagt, setzt er das Fehler-Flag. Deraktuelle Zustand wird nun als ERR PREOP angezeigt. Nach Drücken derSchaltfläche Fehler löschen ist das Fehler-Flag gelöscht und der aktuelleZustand wird wieder als PREOP angezeigt.
Aktueller Status Zeigt den aktuellen Status des EtherCAT-Geräts an.Angeforderter Status Zeigt den für das EtherCAT-Gerät angeforderten Status an.
DLL-Status
Zeigt den DLL-Status (Data-Link-Layer-Status) der einzelnen Ports des EtherCAT-Slave an. Der DLL-Statuskann vier verschiedene Zustände annehmen:
CU112856 Version: 2.0
Inbetriebnahme
Status BeschreibungNo Carrier / Open Kein Carrier-Signal am Port vorhanden, der Port ist aber offen.No Carrier /Closed
Kein Carrier-Signal am Port vorhanden und der Port ist geschlossen.
Carrier / Open Carrier-Signal ist am Port vorhanden und der Port ist offen.Carrier / Closed Carrier-Signal ist am Port vorhanden, der Port ist aber geschlossen.
File Access over EtherCAT
Download Mit dieser Schaltfläche können Sie eine Datei zum EtherCAT-Gerätschreiben.
Upload Mit dieser Schaltfläche können Sie eine Datei vom EtherCAT-Gerät lesen.
5.3 Allgemeine Inbetriebnahmehinweise des EtherCATSlaves
In dieser Übersicht werden in Kurzform einige Aspekte des EtherCAT Slave Betriebs unter TwinCATbehandelt. Ausführliche Informationen dazu sind entsprechenden Fachkapiteln z.B. in der EtherCAT-Systemdokumentation zu entnehmen.
Diagnose in Echtzeit: WorkingCounter, EtherCAT State und Status
Im Allgemeinen bietet ein EtherCAT Slave mehrere Diagnoseinformationen zur Verarbeitung in deransteuernden Task an.
Diese Diagnoseinformationen erfassen unterschiedliche Kommunikationsebenen und damit Quellorte undwerden deshalb auch unterschiedlich aktualisiert.
Eine Applikation, die auf die Korrektheit und Aktualität von IO-Daten aus einem Feldbus angewiesen ist,muss die entsprechend ihr unterlagerten Ebenen diagnostisch erfassen.
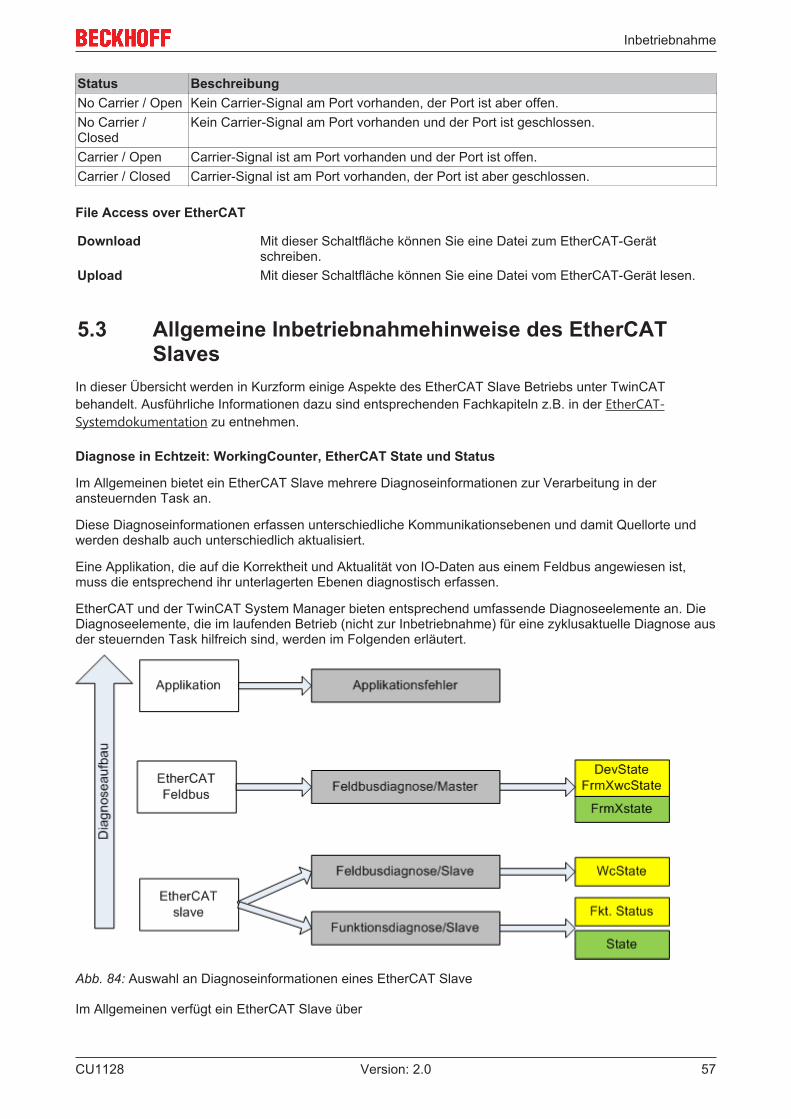
EtherCAT und der TwinCAT System Manager bieten entsprechend umfassende Diagnoseelemente an. DieDiagnoseelemente, die im laufenden Betrieb (nicht zur Inbetriebnahme) für eine zyklusaktuelle Diagnose ausder steuernden Task hilfreich sind, werden im Folgenden erläutert.
Abb. 84: Auswahl an Diagnoseinformationen eines EtherCAT Slave
Im Allgemeinen verfügt ein EtherCAT Slave über
CU1128 57Version: 2.0
Inbetriebnahme
• slave-typische Kommunikationsdiagnose (Diagnose der erfolgreichen Teilnahme amProzessdatenaustausch und richtige Betriebsart)Diese Diagnose ist für alle Slaves gleich.
als auch über• kanal-typische Funktionsdiagnose (geräteabhängig)
Siehe entsprechende Gerätedokumentation
Die Farbgebung in Abb. „Auswahl an Diagnoseinformationen eines EtherCAT Slave“ entspricht auch denVariablenfarben im System Manager, siehe Abb. „Grundlegende EtherCAT Slave Diagnose in der PLC“.
Farbe Bedeutunggelb Eingangsvariablen vom Slave zum EtherCAT Master, die in jedem Zyklus aktualisiert
werdenrot Ausgangsvariablen vom Slave zum EtherCAT Master, die in jedem Zyklus aktualisiert
werdengrün Informationsvariabeln des EtherCAT Masters, die azyklisch aktualisiert werden d.h. in einem
Zyklus eventuell nicht den letztmöglichen Stand abbilden. Deshalb ist ein Auslesen solcherVariablen über ADS sinnvoll.
In Abb. „Grundlegende EtherCAT Slave Diagnose in der PLC“ ist eine Beispielimplementation einergrundlegenden EtherCAT Slave Diagnose zu sehen. Dabei wird eine Beckhoff EL3102 (2 kanalige analogeEingangsklemme) verwendet, da sie sowohl über slave-typische Kommunikationsdiagnose als auch überkanal-spezifische Funktionsdiagnose verfügt. In der PLC sind Strukturen als Eingangsvariablen angelegt, diejeweils dem Prozessabbild entsprechen.
CU112858 Version: 2.0
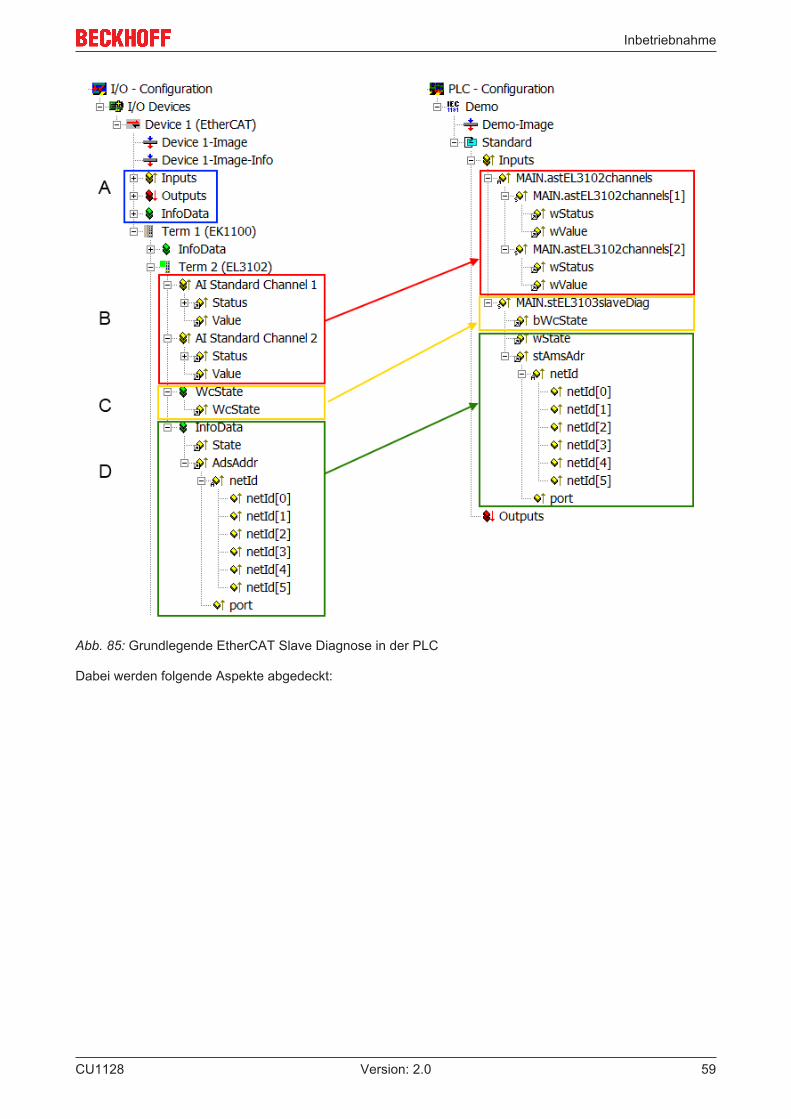
Inbetriebnahme
Abb. 85: Grundlegende EtherCAT Slave Diagnose in der PLC
Dabei werden folgende Aspekte abgedeckt:
CU1128 59Version: 2.0
Inbetriebnahme
Kennzeichen Funktion Ausprägung Anwendung/AuswertungA Diagnoseinformationen des Ether-
CAT Master
zyklisch aktualisiert (gelb) oder azy-klisch bereitgestellt (grün).
Zumindest der DevState ist in derPLC zyklusaktuell auszuwerten.
Die Diagnoseinformationen desEtherCAT Master bieten nochweitaus mehr Möglichkeiten, die inder EtherCAT-Systemdokumentationbehandelt werden. Einige Stichworte:
• CoE im Master zurKommunikation mit/über dieSlaves
• Funktionen ausTcEtherCAT.lib
• OnlineScan durchführenB Im gewählten Beispiel (EL3102) um-
fasst die EL3102 zwei analoge Ein-gangskanäle, die einen eigenenFunktionsstatus zyklusaktuell über-mitteln.
Status
• die Bitdeutungen sind derGerätedokumentation zuentnehmen
• andere Geräte könnenmehr oder keine slave-typischen Angaben liefern
Damit sich die übergeordnete PLC-Task (oder entsprechende Steueran-wendungen) auf korrekte Daten ver-lassen kann, muss dort der Funkti-onsstatus ausgewertet werden. Des-halb werden solche Informationen zy-klusaktuell mit den Prozessdaten be-reitgestellt.
C Für jeden EtherCAT Slave mit zykli-schen Prozessdaten zeigt der Masterdurch einen so genannten Working-Counter an, ob der Slave erfolgreichund störungsfrei am zyklischen Pro-zessdatenverkehr teilnimmt. Dieseelementar wichtige Information wirddeshalb im System Manager zyklus-aktuell
1. am EtherCAT Slave alsauch inhaltsidentisch
2. als Sammelvariable amEtherCAT Master(siehe Punkt A)
zur Verlinkung bereitgestellt.
WcState (Working Counter)
0: gültige Echtzeitkommunikationim letzten Zyklus
1: ungültige Echtzeitkommunikation
ggf. Auswirkung auf die Prozessda-ten anderer Slaves, die in der glei-chen SyncUnit liegen
Damit sich die übergeordnete PLC-Task (oder entsprechende Steueran-wendungen) auf korrekte Daten ver-lassen kann, muss dort der Kommu-nikationsstatus des EtherCAT Slavesausgewertet werden. Deshalb werdensolche Informationen zyklusaktuellmit den Prozessdaten bereitgestellt.
D Diagnoseinformationen des Ether-CAT Masters, die zwar am Slave zurVerlinkung dargestellt werden, abertatsächlich vom Master für den jewei-ligen Slave ermittelt und dort darge-stellt werden. Diese Informationenhaben keinen Echtzeit-Charakter weilsie
• nur selten/nie verändertwerden, außer beimSystemstart
• selbst auf azyklischem Wegermittelt werden (z.B.EtherCAT Status)
State
aktueller Status (INIT..OP) des Sla-ves. Im normalen Betriebszustandmuss der Slave im OP (=8) sein.
AdsAddr
Die ADS-Adresse ist nützlich, umaus der PLC/Task über ADS mitdem EtherCAT Slave zu kommuni-zieren, z.B. zum Lesen/Schreibenauf das CoE. Die AMS-NetID einesSlaves entspricht der AMS-NetIDdes EtherCAT Masters, über denport (= EtherCAT Adresse) ist dereinzelne Slave ansprechbar.
Informationsvariabeln des EtherCATMasters, die azyklisch aktualisiertwerden, d.h. in einem Zyklus eventu-ell nicht den letztmöglichen Stand ab-bilden. Deshalb ist ein Auslesen sol-cher Variablen über ADS möglich.
Achtung
DiagnoseinformationenEs wird dringend empfohlen, die angebotenen Diagnoseinformationen auszuwerten um inder Applikation entsprechend reagieren zu können.
CoE-Parameterverzeichnis
Das CoE-Parameterverzeichnis (CanOpen-over-EtherCAT) dient der Verwaltung von Einstellwerten desjeweiligen Slaves. Bei der Inbetriebnahme eines komplexeren EtherCAT Slaves sind unter Umständen hierVeränderungen vorzunehmen. Zugänglich ist es über den TwinCAT System Manager, s. Abb. „EL3102,CoE-Verzeichnis“:
CU112860 Version: 2.0
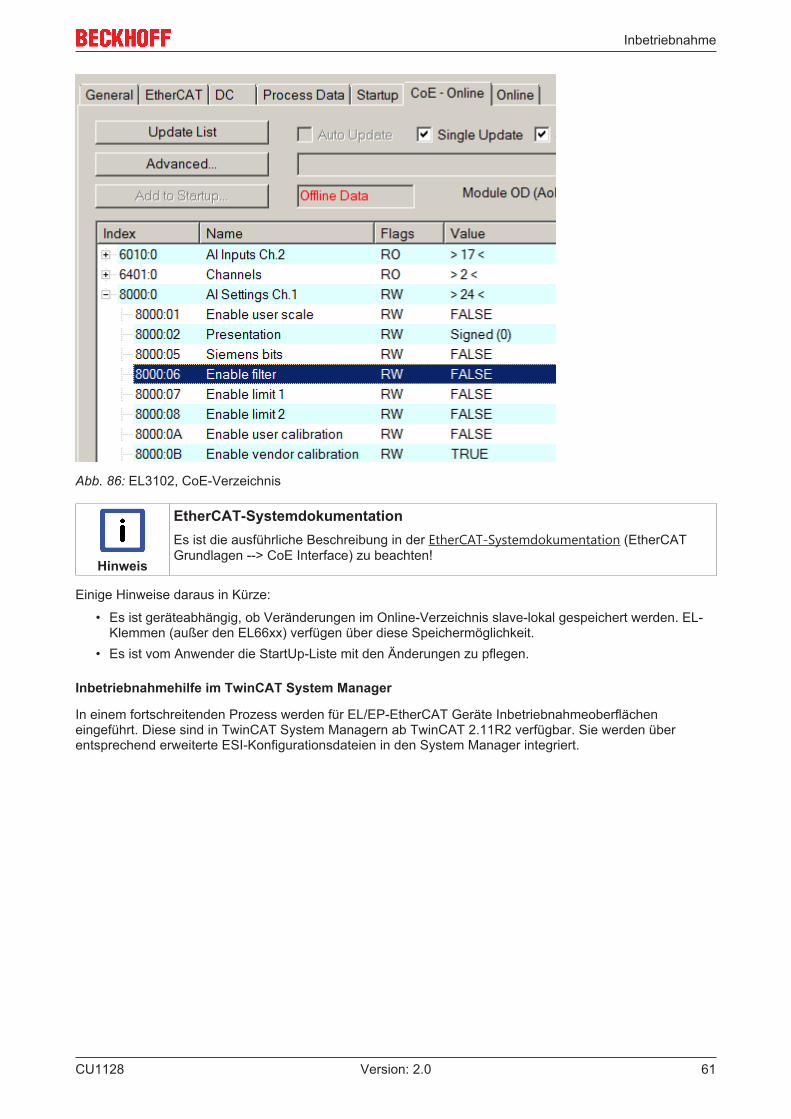
Inbetriebnahme
Abb. 86: EL3102, CoE-Verzeichnis
Hinweis
EtherCAT-SystemdokumentationEs ist die ausführliche Beschreibung in der EtherCAT-Systemdokumentation (EtherCATGrundlagen --> CoE Interface) zu beachten!
Einige Hinweise daraus in Kürze:
• Es ist geräteabhängig, ob Veränderungen im Online-Verzeichnis slave-lokal gespeichert werden. EL-Klemmen (außer den EL66xx) verfügen über diese Speichermöglichkeit.
• Es ist vom Anwender die StartUp-Liste mit den Änderungen zu pflegen.
Inbetriebnahmehilfe im TwinCAT System Manager
In einem fortschreitenden Prozess werden für EL/EP-EtherCAT Geräte Inbetriebnahmeoberflächeneingeführt. Diese sind in TwinCAT System Managern ab TwinCAT 2.11R2 verfügbar. Sie werden überentsprechend erweiterte ESI-Konfigurationsdateien in den System Manager integriert.
CU1128 61Version: 2.0
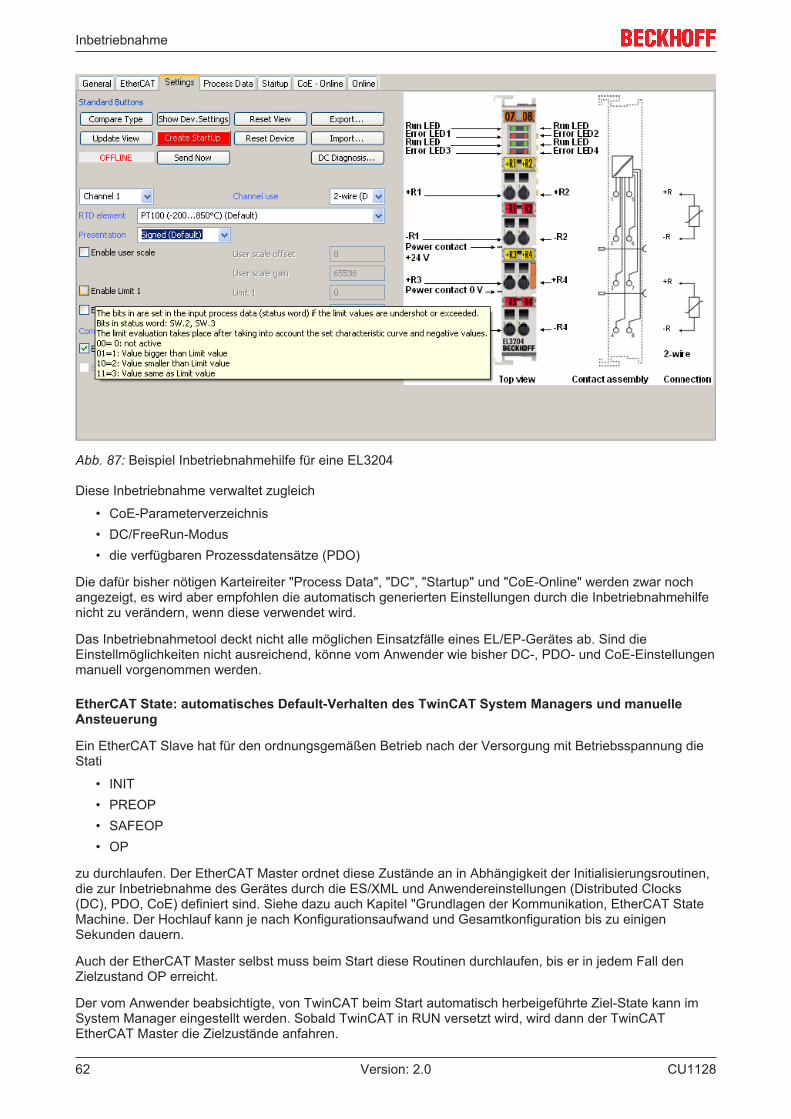
Inbetriebnahme
Abb. 87: Beispiel Inbetriebnahmehilfe für eine EL3204
Diese Inbetriebnahme verwaltet zugleich
• CoE-Parameterverzeichnis• DC/FreeRun-Modus• die verfügbaren Prozessdatensätze (PDO)
Die dafür bisher nötigen Karteireiter "Process Data", "DC", "Startup" und "CoE-Online" werden zwar nochangezeigt, es wird aber empfohlen die automatisch generierten Einstellungen durch die Inbetriebnahmehilfenicht zu verändern, wenn diese verwendet wird.
Das Inbetriebnahmetool deckt nicht alle möglichen Einsatzfälle eines EL/EP-Gerätes ab. Sind dieEinstellmöglichkeiten nicht ausreichend, könne vom Anwender wie bisher DC-, PDO- und CoE-Einstellungenmanuell vorgenommen werden.
EtherCAT State: automatisches Default-Verhalten des TwinCAT System Managers und manuelleAnsteuerung
Ein EtherCAT Slave hat für den ordnungsgemäßen Betrieb nach der Versorgung mit Betriebsspannung dieStati
• INIT• PREOP• SAFEOP• OP
zu durchlaufen. Der EtherCAT Master ordnet diese Zustände an in Abhängigkeit der Initialisierungsroutinen,die zur Inbetriebnahme des Gerätes durch die ES/XML und Anwendereinstellungen (Distributed Clocks(DC), PDO, CoE) definiert sind. Siehe dazu auch Kapitel "Grundlagen der Kommunikation, EtherCAT StateMachine. Der Hochlauf kann je nach Konfigurationsaufwand und Gesamtkonfiguration bis zu einigenSekunden dauern.
Auch der EtherCAT Master selbst muss beim Start diese Routinen durchlaufen, bis er in jedem Fall denZielzustand OP erreicht.
Der vom Anwender beabsichtigte, von TwinCAT beim Start automatisch herbeigeführte Ziel-State kann imSystem Manager eingestellt werden. Sobald TwinCAT in RUN versetzt wird, wird dann der TwinCATEtherCAT Master die Zielzustände anfahren.
CU112862 Version: 2.0
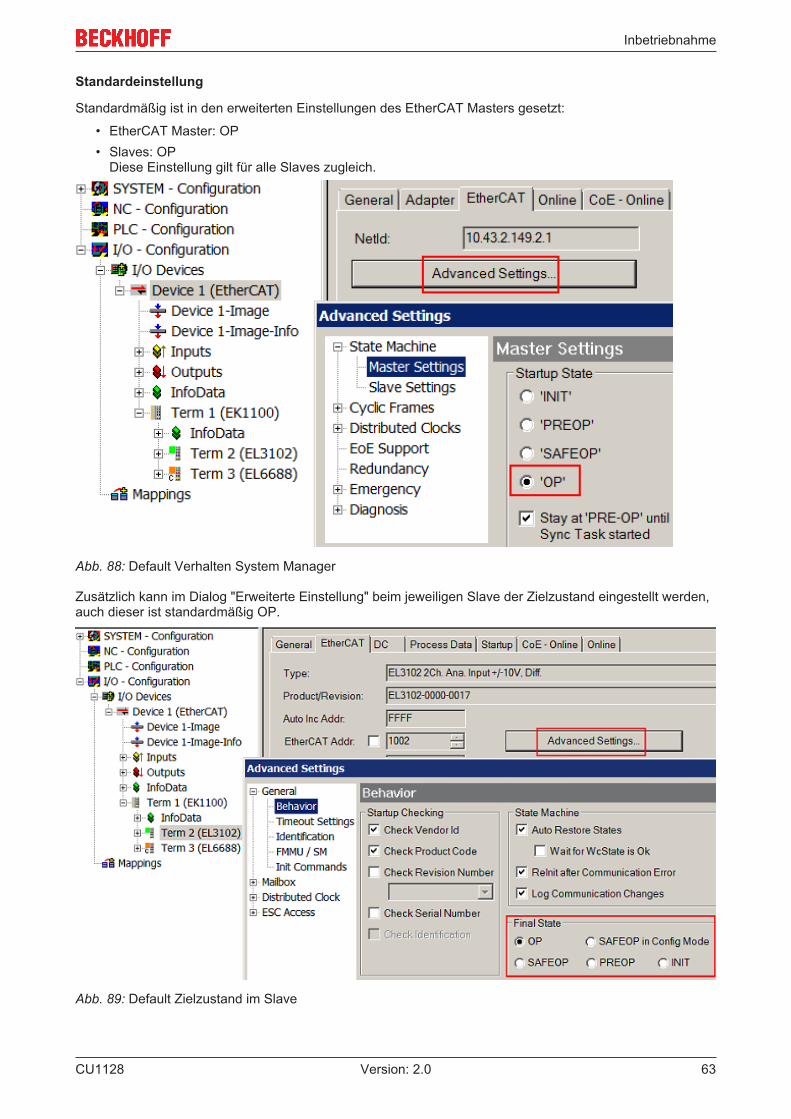
Inbetriebnahme
Standardeinstellung
Standardmäßig ist in den erweiterten Einstellungen des EtherCAT Masters gesetzt:
• EtherCAT Master: OP• Slaves: OP
Diese Einstellung gilt für alle Slaves zugleich.
Abb. 88: Default Verhalten System Manager
Zusätzlich kann im Dialog "Erweiterte Einstellung" beim jeweiligen Slave der Zielzustand eingestellt werden,auch dieser ist standardmäßig OP.
Abb. 89: Default Zielzustand im Slave
CU1128 63Version: 2.0
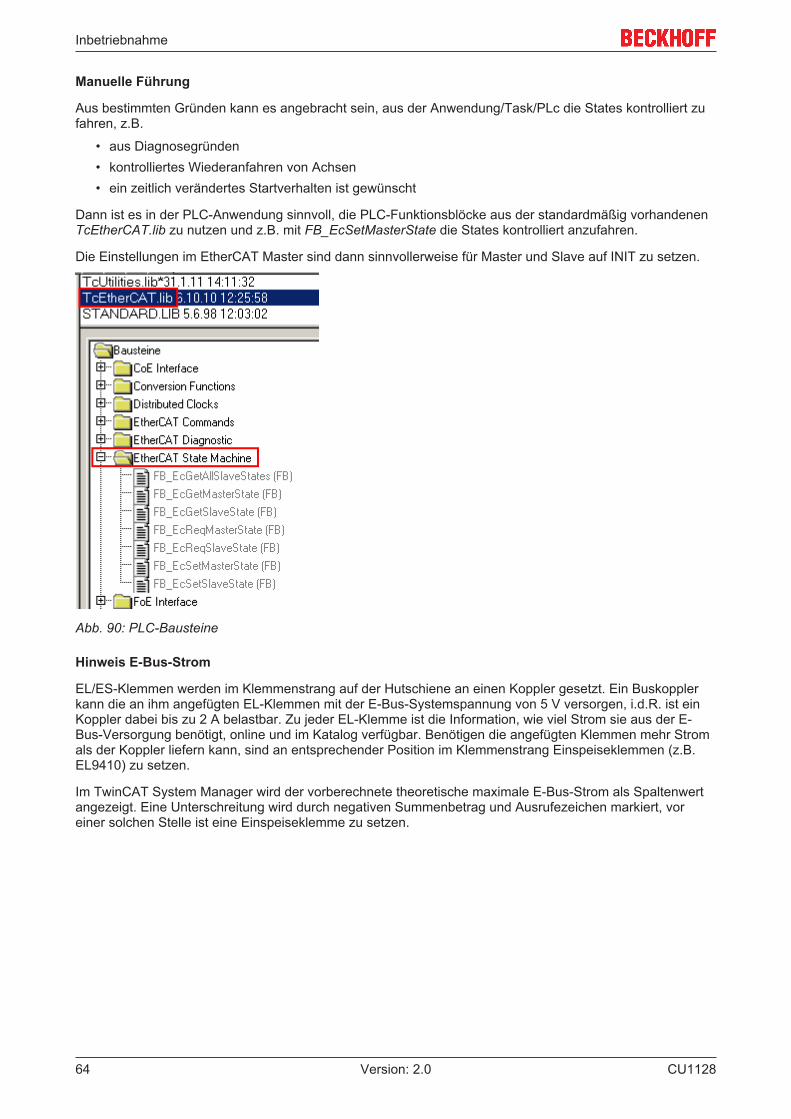
Inbetriebnahme
Manuelle Führung
Aus bestimmten Gründen kann es angebracht sein, aus der Anwendung/Task/PLc die States kontrolliert zufahren, z.B.
• aus Diagnosegründen• kontrolliertes Wiederanfahren von Achsen• ein zeitlich verändertes Startverhalten ist gewünscht
Dann ist es in der PLC-Anwendung sinnvoll, die PLC-Funktionsblöcke aus der standardmäßig vorhandenenTcEtherCAT.lib zu nutzen und z.B. mit FB_EcSetMasterState die States kontrolliert anzufahren.
Die Einstellungen im EtherCAT Master sind dann sinnvollerweise für Master und Slave auf INIT zu setzen.
Abb. 90: PLC-Bausteine
Hinweis E-Bus-Strom
EL/ES-Klemmen werden im Klemmenstrang auf der Hutschiene an einen Koppler gesetzt. Ein Buskopplerkann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, i.d.R. ist einKoppler dabei bis zu 2 A belastbar. Zu jeder EL-Klemme ist die Information, wie viel Strom sie aus der E-Bus-Versorgung benötigt, online und im Katalog verfügbar. Benötigen die angefügten Klemmen mehr Stromals der Koppler liefern kann, sind an entsprechender Position im Klemmenstrang Einspeiseklemmen (z.B.EL9410) zu setzen.
Im TwinCAT System Manager wird der vorberechnete theoretische maximale E-Bus-Strom als Spaltenwertangezeigt. Eine Unterschreitung wird durch negativen Summenbetrag und Ausrufezeichen markiert, voreiner solchen Stelle ist eine Einspeiseklemme zu setzen.
CU112864 Version: 2.0
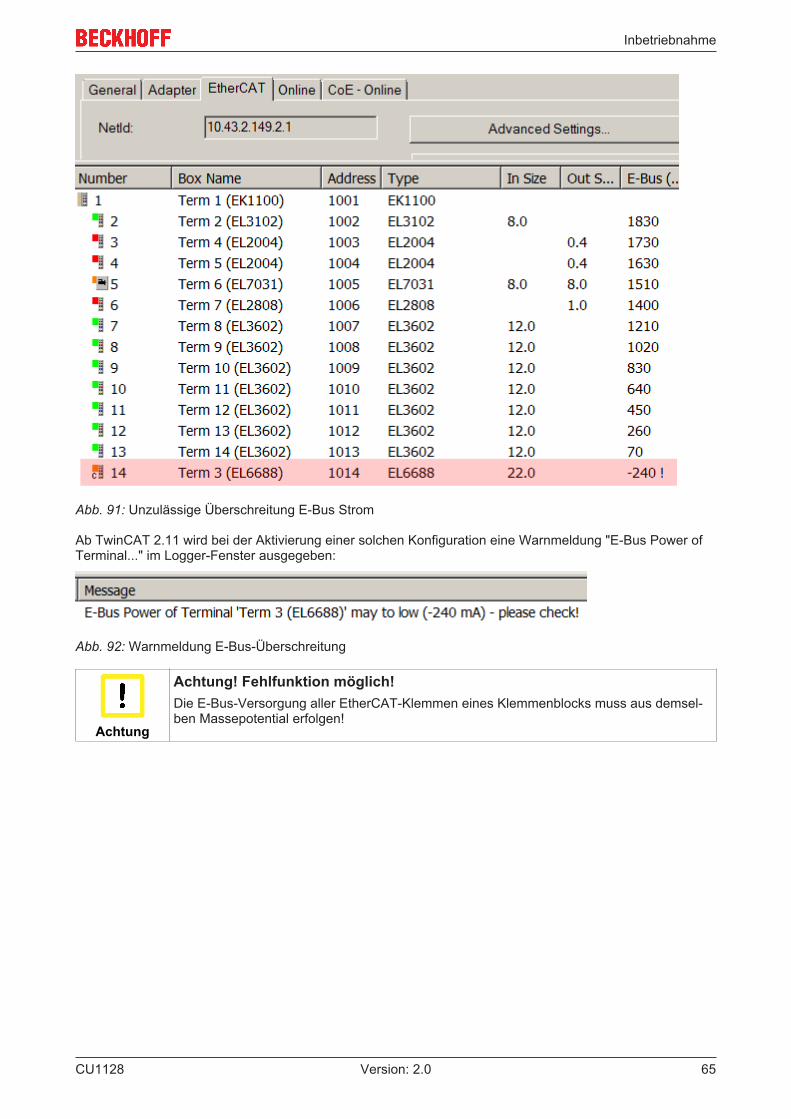
Inbetriebnahme
Abb. 91: Unzulässige Überschreitung E-Bus Strom
Ab TwinCAT 2.11 wird bei der Aktivierung einer solchen Konfiguration eine Warnmeldung "E-Bus Power ofTerminal..." im Logger-Fenster ausgegeben:
Abb. 92: Warnmeldung E-Bus-Überschreitung
Achtung
Achtung! Fehlfunktion möglich!Die E-Bus-Versorgung aller EtherCAT-Klemmen eines Klemmenblocks muss aus demsel-ben Massepotential erfolgen!
CU1128 65Version: 2.0
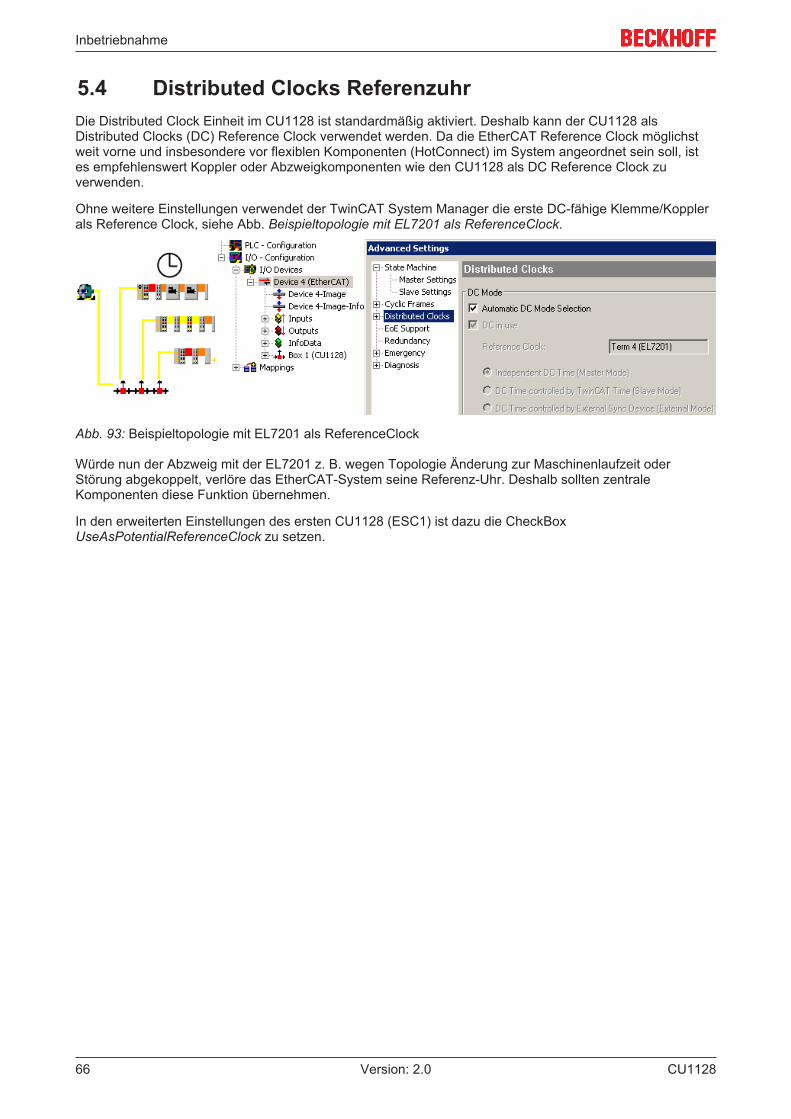
Inbetriebnahme
5.4 Distributed Clocks ReferenzuhrDie Distributed Clock Einheit im CU1128 ist standardmäßig aktiviert. Deshalb kann der CU1128 alsDistributed Clocks (DC) Reference Clock verwendet werden. Da die EtherCAT Reference Clock möglichstweit vorne und insbesondere vor flexiblen Komponenten (HotConnect) im System angeordnet sein soll, istes empfehlenswert Koppler oder Abzweigkomponenten wie den CU1128 als DC Reference Clock zuverwenden.
Ohne weitere Einstellungen verwendet der TwinCAT System Manager die erste DC-fähige Klemme/Kopplerals Reference Clock, siehe Abb. Beispieltopologie mit EL7201 als ReferenceClock.
Abb. 93: Beispieltopologie mit EL7201 als ReferenceClock
Würde nun der Abzweig mit der EL7201 z. B. wegen Topologie Änderung zur Maschinenlaufzeit oderStörung abgekoppelt, verlöre das EtherCAT-System seine Referenz-Uhr. Deshalb sollten zentraleKomponenten diese Funktion übernehmen.
In den erweiterten Einstellungen des ersten CU1128 (ESC1) ist dazu die CheckBoxUseAsPotentialReferenceClock zu setzen.
CU112866 Version: 2.0
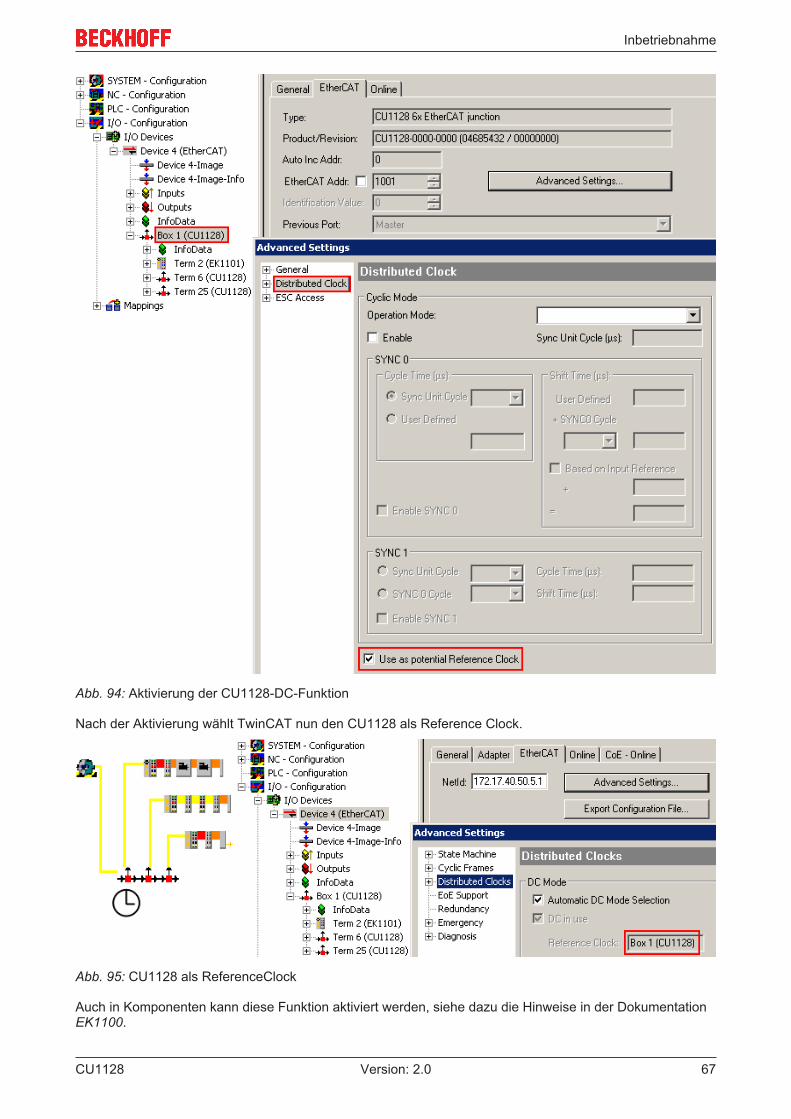
Inbetriebnahme
Abb. 94: Aktivierung der CU1128-DC-Funktion
Nach der Aktivierung wählt TwinCAT nun den CU1128 als Reference Clock.
Abb. 95: CU1128 als ReferenceClock
Auch in Komponenten kann diese Funktion aktiviert werden, siehe dazu die Hinweise in der DokumentationEK1100.
CU1128 67Version: 2.0
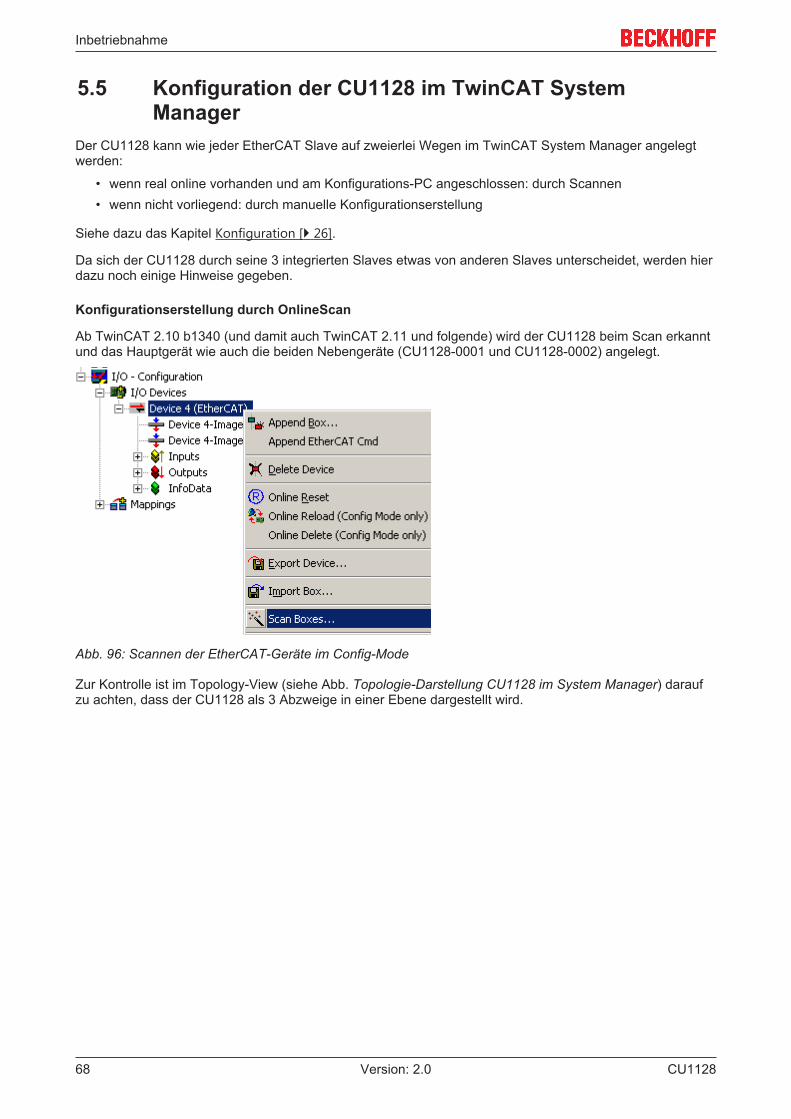
Inbetriebnahme
5.5 Konfiguration der CU1128 im TwinCAT SystemManager
Der CU1128 kann wie jeder EtherCAT Slave auf zweierlei Wegen im TwinCAT System Manager angelegtwerden:
• wenn real online vorhanden und am Konfigurations-PC angeschlossen: durch Scannen• wenn nicht vorliegend: durch manuelle Konfigurationserstellung
Siehe dazu das Kapitel Konfiguration [} 26].
Da sich der CU1128 durch seine 3 integrierten Slaves etwas von anderen Slaves unterscheidet, werden hierdazu noch einige Hinweise gegeben.
Konfigurationserstellung durch OnlineScan
Ab TwinCAT 2.10 b1340 (und damit auch TwinCAT 2.11 und folgende) wird der CU1128 beim Scan erkanntund das Hauptgerät wie auch die beiden Nebengeräte (CU1128-0001 und CU1128-0002) angelegt.
Abb. 96: Scannen der EtherCAT-Geräte im Config-Mode
Zur Kontrolle ist im Topology-View (siehe Abb. Topologie-Darstellung CU1128 im System Manager) daraufzu achten, dass der CU1128 als 3 Abzweige in einer Ebene dargestellt wird.
CU112868 Version: 2.0
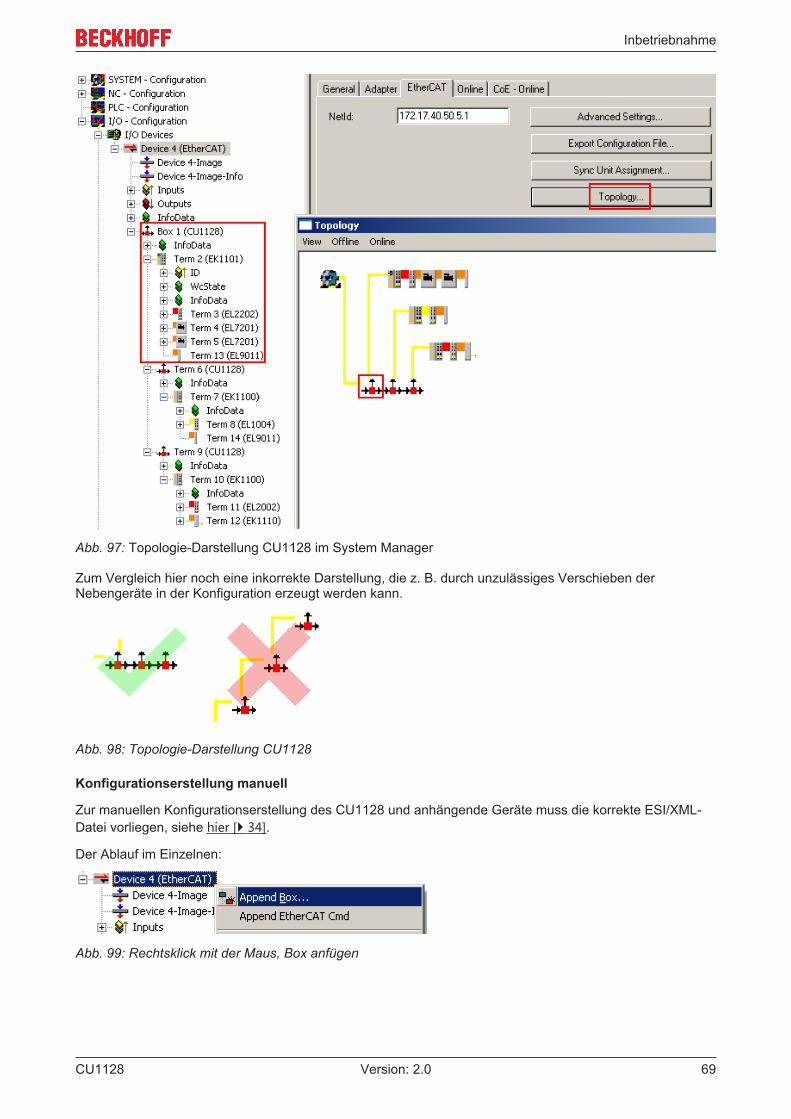
Inbetriebnahme
Abb. 97: Topologie-Darstellung CU1128 im System Manager
Zum Vergleich hier noch eine inkorrekte Darstellung, die z. B. durch unzulässiges Verschieben derNebengeräte in der Konfiguration erzeugt werden kann.
Abb. 98: Topologie-Darstellung CU1128
Konfigurationserstellung manuell
Zur manuellen Konfigurationserstellung des CU1128 und anhängende Geräte muss die korrekte ESI/XML-Datei vorliegen, siehe hier [} 34].
Der Ablauf im Einzelnen:
Abb. 99: Rechtsklick mit der Maus, Box anfügen
CU1128 69Version: 2.0
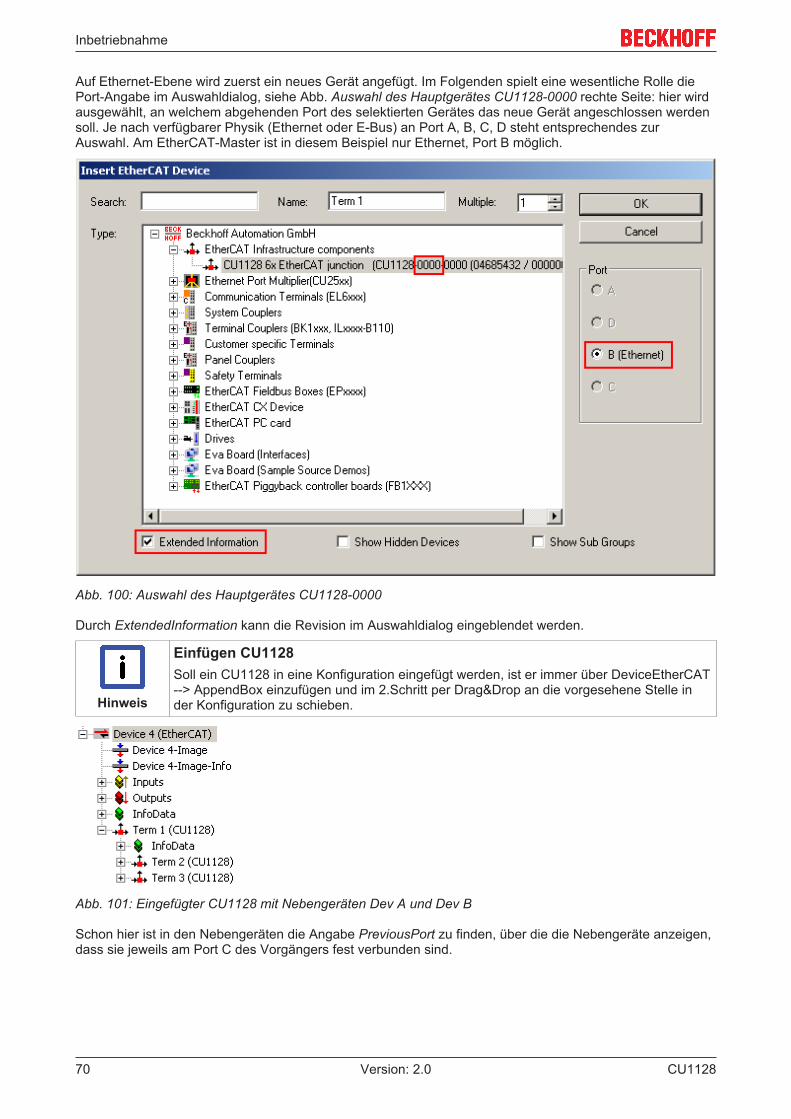
Inbetriebnahme
Auf Ethernet-Ebene wird zuerst ein neues Gerät angefügt. Im Folgenden spielt eine wesentliche Rolle diePort-Angabe im Auswahldialog, siehe Abb. Auswahl des Hauptgerätes CU1128-0000 rechte Seite: hier wirdausgewählt, an welchem abgehenden Port des selektierten Gerätes das neue Gerät angeschlossen werdensoll. Je nach verfügbarer Physik (Ethernet oder E-Bus) an Port A, B, C, D steht entsprechendes zurAuswahl. Am EtherCAT-Master ist in diesem Beispiel nur Ethernet, Port B möglich.
Abb. 100: Auswahl des Hauptgerätes CU1128-0000
Durch ExtendedInformation kann die Revision im Auswahldialog eingeblendet werden.
Hinweis
Einfügen CU1128Soll ein CU1128 in eine Konfiguration eingefügt werden, ist er immer über DeviceEtherCAT--> AppendBox einzufügen und im 2.Schritt per Drag&Drop an die vorgesehene Stelle inder Konfiguration zu schieben.
Abb. 101: Eingefügter CU1128 mit Nebengeräten Dev A und Dev B
Schon hier ist in den Nebengeräten die Angabe PreviousPort zu finden, über die die Nebengeräte anzeigen,dass sie jeweils am Port C des Vorgängers fest verbunden sind.
CU112870 Version: 2.0
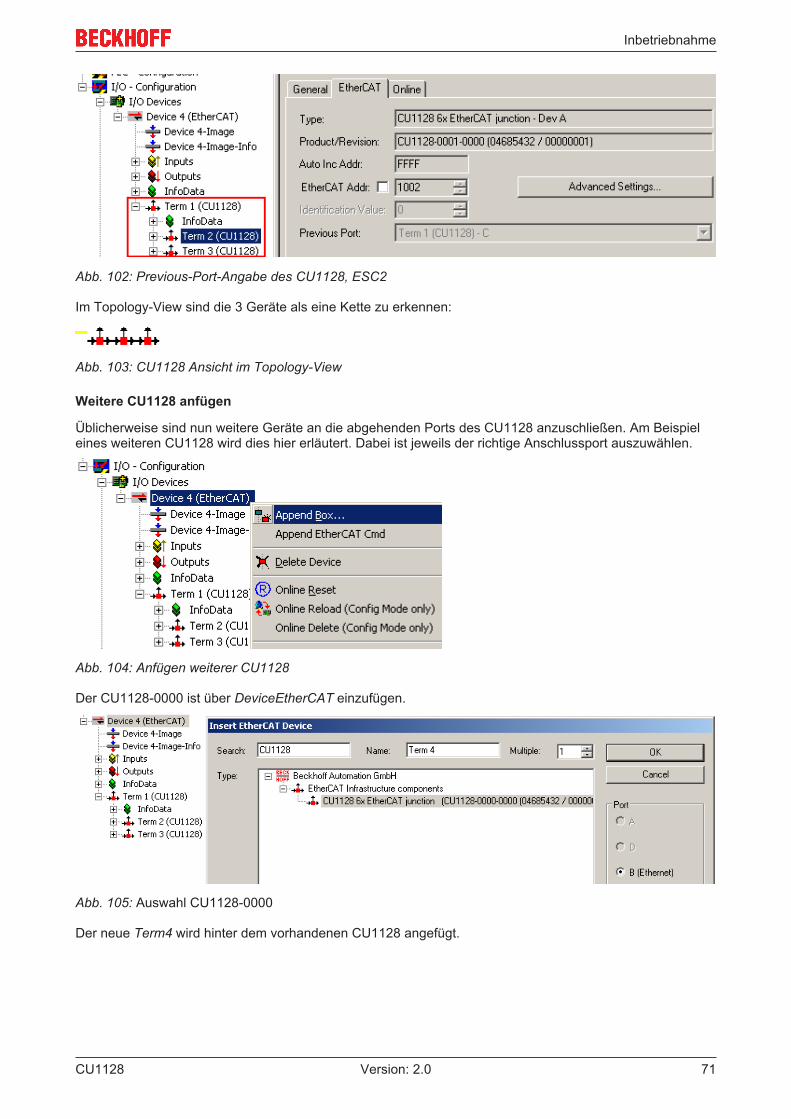
Inbetriebnahme
Abb. 102: Previous-Port-Angabe des CU1128, ESC2
Im Topology-View sind die 3 Geräte als eine Kette zu erkennen:
Abb. 103: CU1128 Ansicht im Topology-View
Weitere CU1128 anfügen
Üblicherweise sind nun weitere Geräte an die abgehenden Ports des CU1128 anzuschließen. Am Beispieleines weiteren CU1128 wird dies hier erläutert. Dabei ist jeweils der richtige Anschlussport auszuwählen.
Abb. 104: Anfügen weiterer CU1128
Der CU1128-0000 ist über DeviceEtherCAT einzufügen.
Abb. 105: Auswahl CU1128-0000
Der neue Term4 wird hinter dem vorhandenen CU1128 angefügt.
CU1128 71Version: 2.0
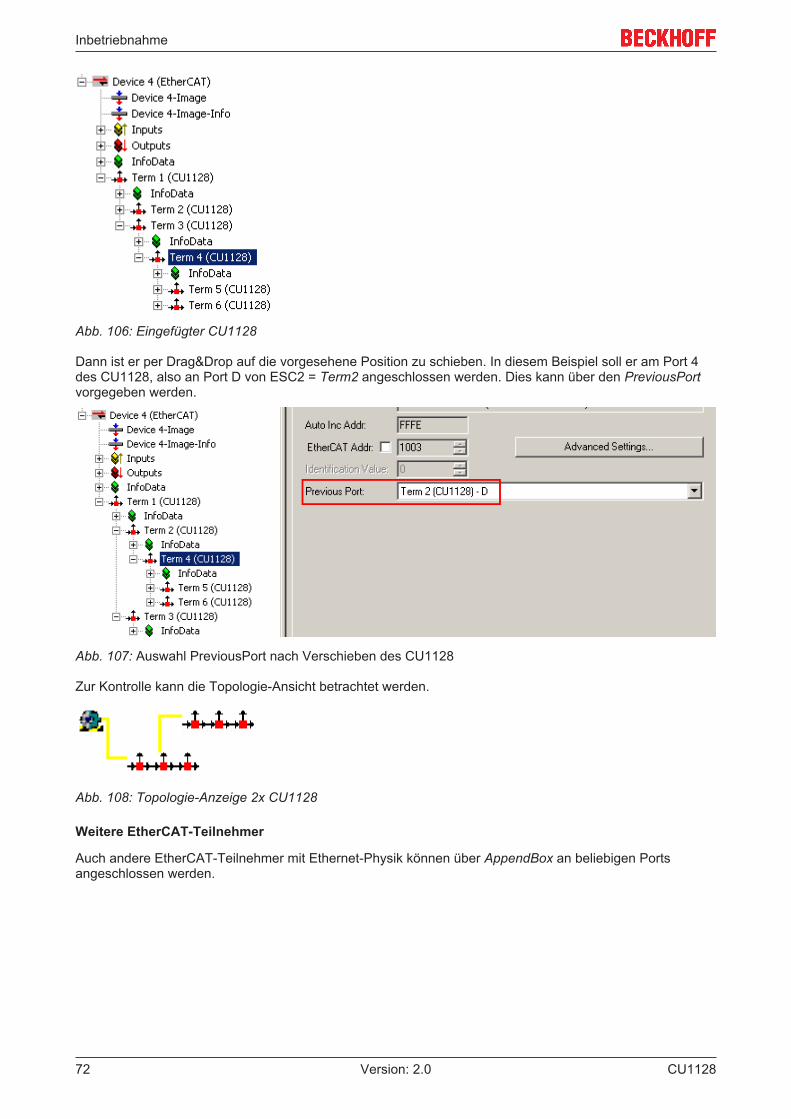
Inbetriebnahme
Abb. 106: Eingefügter CU1128
Dann ist er per Drag&Drop auf die vorgesehene Position zu schieben. In diesem Beispiel soll er am Port 4des CU1128, also an Port D von ESC2 = Term2 angeschlossen werden. Dies kann über den PreviousPortvorgegeben werden.
Abb. 107: Auswahl PreviousPort nach Verschieben des CU1128
Zur Kontrolle kann die Topologie-Ansicht betrachtet werden.
Abb. 108: Topologie-Anzeige 2x CU1128
Weitere EtherCAT-Teilnehmer
Auch andere EtherCAT-Teilnehmer mit Ethernet-Physik können über AppendBox an beliebigen Portsangeschlossen werden.
CU112872 Version: 2.0
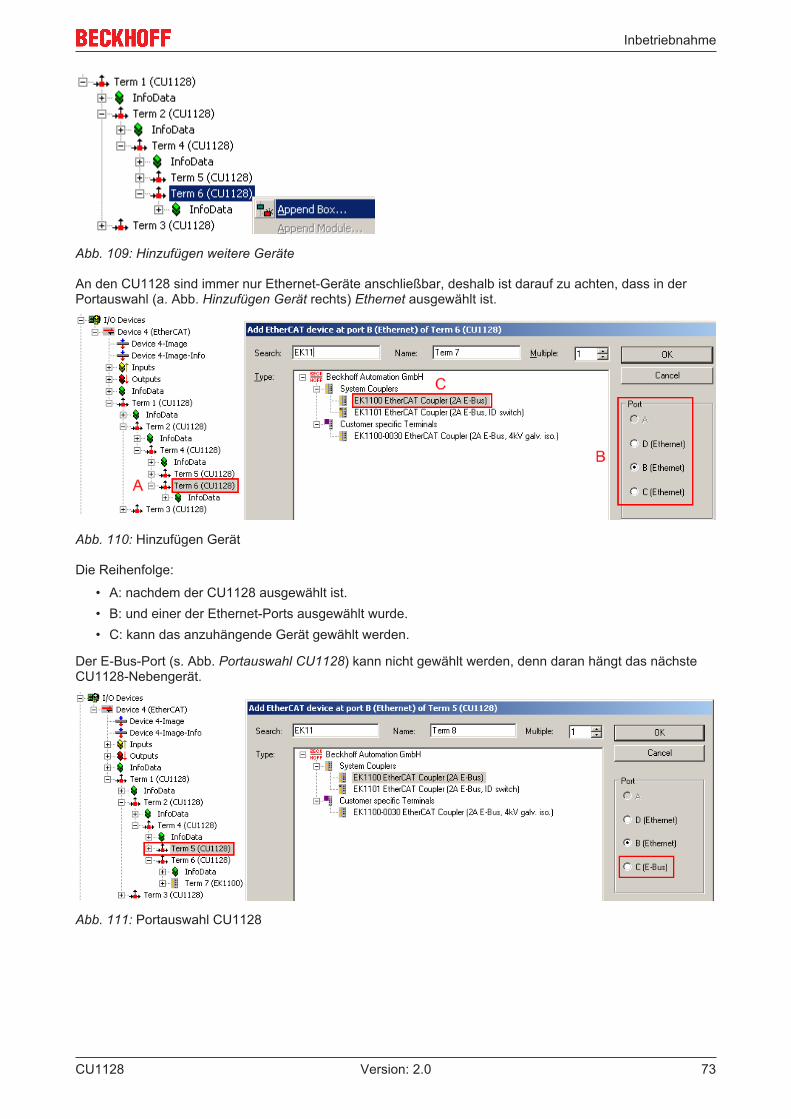
Inbetriebnahme
Abb. 109: Hinzufügen weitere Geräte
An den CU1128 sind immer nur Ethernet-Geräte anschließbar, deshalb ist darauf zu achten, dass in derPortauswahl (a. Abb. Hinzufügen Gerät rechts) Ethernet ausgewählt ist.
Abb. 110: Hinzufügen Gerät
Die Reihenfolge:
• A: nachdem der CU1128 ausgewählt ist.• B: und einer der Ethernet-Ports ausgewählt wurde.• C: kann das anzuhängende Gerät gewählt werden.
Der E-Bus-Port (s. Abb. Portauswahl CU1128) kann nicht gewählt werden, denn daran hängt das nächsteCU1128-Nebengerät.
Abb. 111: Portauswahl CU1128
CU1128 73Version: 2.0
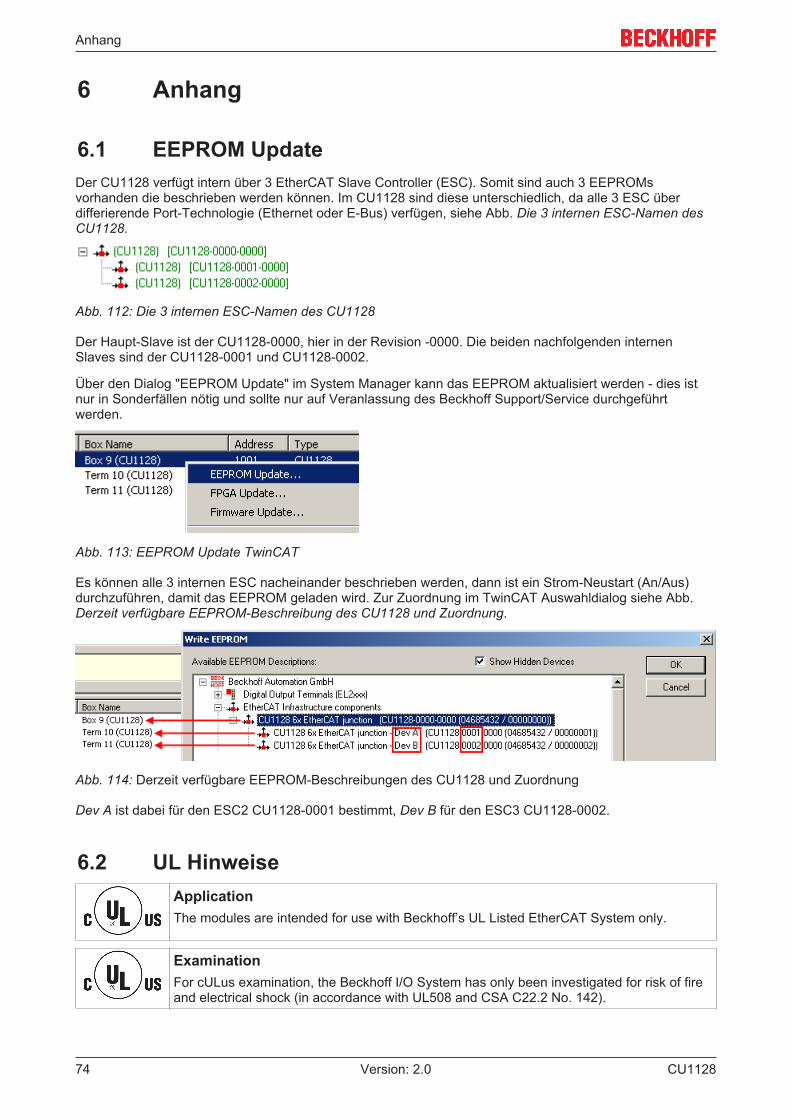
Anhang
6 Anhang
6.1 EEPROM UpdateDer CU1128 verfügt intern über 3 EtherCAT Slave Controller (ESC). Somit sind auch 3 EEPROMsvorhanden die beschrieben werden können. Im CU1128 sind diese unterschiedlich, da alle 3 ESC überdifferierende Port-Technologie (Ethernet oder E-Bus) verfügen, siehe Abb. Die 3 internen ESC-Namen desCU1128.
Abb. 112: Die 3 internen ESC-Namen des CU1128
Der Haupt-Slave ist der CU1128-0000, hier in der Revision -0000. Die beiden nachfolgenden internenSlaves sind der CU1128-0001 und CU1128-0002.
Über den Dialog "EEPROM Update" im System Manager kann das EEPROM aktualisiert werden - dies istnur in Sonderfällen nötig und sollte nur auf Veranlassung des Beckhoff Support/Service durchgeführtwerden.
Abb. 113: EEPROM Update TwinCAT
Es können alle 3 internen ESC nacheinander beschrieben werden, dann ist ein Strom-Neustart (An/Aus)durchzuführen, damit das EEPROM geladen wird. Zur Zuordnung im TwinCAT Auswahldialog siehe Abb.Derzeit verfügbare EEPROM-Beschreibung des CU1128 und Zuordnung.
Abb. 114: Derzeit verfügbare EEPROM-Beschreibungen des CU1128 und Zuordnung
Dev A ist dabei für den ESC2 CU1128-0001 bestimmt, Dev B für den ESC3 CU1128-0002.
6.2 UL HinweiseApplicationThe modules are intended for use with Beckhoff’s UL Listed EtherCAT System only.
ExaminationFor cULus examination, the Beckhoff I/O System has only been investigated for risk of fireand electrical shock (in accordance with UL508 and CSA C22.2 No. 142).
CU112874 Version: 2.0
Anhang
For devices with Ethernet connectorsNot for connection to telecommunication circuits.
Im Beckhoff EtherCAT Produktbereich sind je nach Komponente zwei UL-Zertifikate anzutreffen:1. UL-Zertifikation nach UL508. Solcherart zertifizierte Geräte sind gekennzeichnet durch das Zeichen:
2. UL-Zertifikation nach UL508 mit eingeschränkter Leistungsaufnahme. Die Stromaufnahme durch dasGerät wird begrenzt auf eine max. mögliche Stromaufnahme von 4 A. Solcherart zertifizierte Geräte sindgekennzeichnet durch das Zeichen
Annähernd alle aktuellen EtherCAT Produkte (Stand 2010/05) sind uneingeschränkt UL zertifiziert.
Anwendung
Werden eingeschränkt zertifizierte Klemmen verwendet, ist die Stromaufnahme bei 24 VDC entsprechend zubeschränken durch Versorgung
• von einer isolierten, mit einer Sicherung (entsprechend UL248) von maximal 4 A geschützten Quelle,oder
• von einer Spannungsquelle die NEC class 2 entspricht.Eine Spannungsquelle entsprechend NEC class 2 darf nicht seriell oder parallel mit einer anderen NECclass 2 entsprechenden Spannungsquelle verbunden werden!
Diese Anforderungen gelten für die Versorgung aller EtherCAT Buskoppler, Netzteilklemmen, Busklemmenund deren Power-Kontakte.
CU1128 75Version: 2.0
Anhang
6.3 Support und ServiceBeckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eineschnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zurVerfügung stellt.
Beckhoff Support
Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatzeinzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:
• Support• Planung, Programmierung und Inbetriebnahme komplexer Automatisierungssysteme• umfangreiches Schulungsprogramm für Beckhoff Systemkomponenten
Hotline: +49(0)5246/963-157Fax: +49(0)5246/963-9157E-Mail: [email protected]
Beckhoff Service
Das Beckhoff Service-Center unterstützt Sie rund um den After-Sales-Service:
• Vor-Ort-Service• Reparaturservice• Ersatzteilservice• Hotline-Service
Hotline: +49(0)5246/963-460Fax: +49(0)5246/963-479E-Mail: [email protected]
Weitere Support- und Serviceadressen finden Sie auf unseren Internetseiten unter http://www.beckhoff.de.
Beckhoff Firmenzentrale
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 2033415 VerlDeutschland
Telefon: +49(0)5246/963-0Fax: +49(0)5246/963-198E-Mail: [email protected]
Die Adressen der weltweiten Beckhoff Niederlassungen und Vertretungen entnehmen Sie bitte unserenInternetseiten:http://www.beckhoff.de
Dort finden Sie auch weitere Dokumentationen zu Beckhoff Komponenten.
CU112876 Version: 2.0
Abbildungsverzeichnis
AbbildungsverzeichnisAbb. 1 EL5021 EL-Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeich-
nung (seit 2014/01).................................................................................................................... 8Abb. 2 EK1100 EtherCAT Koppler, Standard IP20-IO-Gerät mit Chargennummer ............................. 8Abb. 3 CU2016 Switch mit Chargennummer ....................................................................................... 8Abb. 4 EL3202-0020 mit Chargennummern 26131006 und eindeutiger ID-Nummer 204418 ............. 9Abb. 5 EP1258-00001 IP67 EtherCAT Box mit Chargennummer 22090101 und eindeutiger Serien-
nummer 158102 ........................................................................................................................ 9Abb. 6 EP1908-0002 IP76 EtherCAT Safety Box mit Chargennummer 071201FF und eindeutiger
Seriennummer 00346070 ......................................................................................................... 9Abb. 7 EL2904 IP20 Safety Klemme mit Chargennummer/DateCode 50110302 und eindeutiger Se-
riennummer 00331701 .............................................................................................................. 9Abb. 8 CU1128...................................................................................................................................... 10Abb. 9 Schema CU1128 ....................................................................................................................... 12Abb. 10 3 Slaves im TwinCAT System Manager .................................................................................... 12Abb. 11 Vorgänger-Port des 2. ESC im CU1128 .................................................................................... 13Abb. 12 Einstellung des PreviousPort für einen EK1100 ........................................................................ 13Abb. 13 EtherCAT Linientopologie.......................................................................................................... 14Abb. 14 Linientopologie mit Erweiterungen............................................................................................. 14Abb. 15 Datenflussrichtung im ESC........................................................................................................ 16Abb. 16 Beispielkonfiguration.................................................................................................................. 17Abb. 17 Online Topologie........................................................................................................................ 18Abb. 18 Beispielkonfiguration mit unterbrochener Leitung...................................................................... 19Abb. 19 Topologie Anzeige bei unterbrochener Leitung ......................................................................... 20Abb. 20 Gegenüberstellung der Frame-Anzeigen im System Manager ................................................. 20Abb. 21 Montage..................................................................................................................................... 22Abb. 22 Demontage ................................................................................................................................ 23Abb. 23 Pinbelegung der Federzugklemme............................................................................................ 23Abb. 24 Pinbelegung der RJ45-Buchsen ................................................................................................ 23Abb. 25 Abmessungen CU1128.............................................................................................................. 24Abb. 26 LEDs .......................................................................................................................................... 25Abb. 27 Grüne Power-LED ..................................................................................................................... 25Abb. 28 Aufruf im Systemmanager ........................................................................................................ 26Abb. 29 Übersicht Netzwerkschnittstellen .............................................................................................. 26Abb. 30 Eigenschaften EtherCAT Gerät ................................................................................................ 27Abb. 31 Windows-Eigenschaften der Netzwerkschnittstelle .................................................................. 27Abb. 32 Fehlerhafte Treiber-Einstellungen des Ethernet Ports .............................................................. 28Abb. 33 TCP/IP-Einstellung des Ethernet Ports ..................................................................................... 29Abb. 34 Ab TwinCAT 2.11 kann der Systemmanager bei Onlinezugang selbst nach aktuellen Beck-
hoff ESI-Dateien suchen. .......................................................................................................... 30Abb. 35 Aufbau Bezeichnung ................................................................................................................. 30Abb. 36 Hinweisfenster OnlineDescription, TwinCAT 2 ......................................................................... 31Abb. 37 Hinweisfenster OnlineDescription, TwinCAT 3.x ....................................................................... 31Abb. 38 Vom Systemmanager angelegt OnlineDescription.xml ............................................................ 32Abb. 39 Pfeil kennzeichnet durch Online Description erfasste ESI ........................................................ 32Abb. 40 Hinweisfenster fehlerhafte ESI-Datei ........................................................................................ 33Abb. 41 Aktualisierung des ESI-Verzeichnisses ..................................................................................... 34
CU1128 77Version: 2.0
Abbildungsverzeichnis
Abb. 42 Anfügen EtherCAT Device ........................................................................................................ 34Abb. 43 Auswahl EtherCAT Anschluss (TwinCAT 2.11) ........................................................................ 35Abb. 44 Auswahl EtherCAT Anschluss (TwinCAT 2.11 R2) .................................................................. 35Abb. 45 Auswahl Ethernet Port .............................................................................................................. 35Abb. 46 Eigenschaftendialog EtherCAT ................................................................................................. 36Abb. 47 Anfügen von EtherCAT Geräten ............................................................................................... 36Abb. 48 Auswahldialog neues EtherCAT Gerät ..................................................................................... 37Abb. 49 Anzeige Geräte-Revision .......................................................................................................... 37Abb. 50 Anzeige vorhergehender Revisionen ........................................................................................ 38Abb. 51 Name/Revision Klemme ............................................................................................................ 38Abb. 52 EtherCAT Klemme im TwinCAT-Baum ..................................................................................... 39Abb. 53 Aktualisierung ESI-Verzeichnis.................................................................................................. 40Abb. 54 TwinCAT Anzeige CONFIG-Modus ........................................................................................... 41Abb. 55 Unterscheidung lokales/Zielsystem ........................................................................................... 41Abb. 56 Scan Devices ............................................................................................................................ 41Abb. 57 Hinweis automatischer GeräteScan ......................................................................................... 41Abb. 58 Erkannte Ethernet-Geräte ......................................................................................................... 42Abb. 59 Beispiel Defaultzustand ............................................................................................................. 42Abb. 60 Einbau EtherCAT-Klemme mit Revision -1018.......................................................................... 43Abb. 61 Erkennen EtherCAT-Klemme mit Revision -1019 ..................................................................... 43Abb. 62 Scan-Abfrage nach dem automatischen Anlegen eines EtherCAT Gerätes ............................ 44Abb. 63 Manuelles Auslösen des Teilnehmer-Scans auf festegelegtem EtherCAT Device .................. 44Abb. 64 Scanfortschritt ........................................................................................................................... 44Abb. 65 Abfrage Config/FreeRun ........................................................................................................... 44Abb. 66 Anzeige Config/FreeRun .......................................................................................................... 45Abb. 67 TwinCAT kann auch durch einen Button in diesen Zustand versetzt werden ........................... 45Abb. 68 Beispielhafte Online-Anzeige .................................................................................................... 45Abb. 69 Fehlerhafte Erkennung .............................................................................................................. 46Abb. 70 Identische Konfiguration ........................................................................................................... 46Abb. 71 Korrekturdialog ......................................................................................................................... 47Abb. 72 Name/Revision Klemme ............................................................................................................ 48Abb. 73 Korrekturdialog mit Änderungen ............................................................................................... 48Abb. 74 TwinCAT 2 Dialog ChangeToCompatibleDevice ...................................................................... 49Abb. 75 TwinCAT 2 Dialog ChangeToCompatibleDevice ...................................................................... 49Abb. 76 Baumzweig Klemme EL5001..................................................................................................... 49Abb. 77 Karteireiter „Allgemein“ .............................................................................................................. 50Abb. 78 Karteireiter „EtherCAT“ .............................................................................................................. 50Abb. 79 Karteireiter „Prozessdaten“........................................................................................................ 51Abb. 80 Karteireiter „Startup“ .................................................................................................................. 53Abb. 81 Karteireiter „CoE – Online“ ........................................................................................................ 54Abb. 82 Dialog „Advanced settings“........................................................................................................ 55Abb. 83 Karteireiter „Online“ ................................................................................................................... 56Abb. 84 Auswahl an Diagnoseinformationen eines EtherCAT Slave ..................................................... 57Abb. 85 Grundlegende EtherCAT Slave Diagnose in der PLC .............................................................. 59Abb. 86 EL3102, CoE-Verzeichnis.......................................................................................................... 61Abb. 87 Beispiel Inbetriebnahmehilfe für eine EL3204 .......................................................................... 62
CU112878 Version: 2.0
Abbildungsverzeichnis
Abb. 88 Default Verhalten System Manager........................................................................................... 63Abb. 89 Default Zielzustand im Slave ..................................................................................................... 63Abb. 90 PLC-Bausteine........................................................................................................................... 64Abb. 91 Unzulässige Überschreitung E-Bus Strom ................................................................................ 65Abb. 92 Warnmeldung E-Bus-Überschreitung ........................................................................................ 65Abb. 93 Beispieltopologie mit EL7201 als ReferenceClock .................................................................... 66Abb. 94 Aktivierung der CU1128-DC-Funktion ....................................................................................... 67Abb. 95 CU1128 als ReferenceClock ..................................................................................................... 67Abb. 96 Scannen der EtherCAT-Geräte im Config-Mode ....................................................................... 68Abb. 97 Topologie-Darstellung CU1128 im System Manager ................................................................ 69Abb. 98 Topologie-Darstellung CU1128 ................................................................................................. 69Abb. 99 Rechtsklick mit der Maus, Box anfügen..................................................................................... 69Abb. 100 Auswahl des Hauptgerätes CU1128-0000 ................................................................................ 70Abb. 101 Eingefügter CU1128 mit Nebengeräten Dev A und Dev B ........................................................ 70Abb. 102 Previous-Port-Angabe des CU1128, ESC2 ............................................................................... 71Abb. 103 CU1128 Ansicht im Topology-View ........................................................................................... 71Abb. 104 Anfügen weiterer CU1128 ......................................................................................................... 71Abb. 105 Auswahl CU1128-0000.............................................................................................................. 71Abb. 106 Eingefügter CU1128 .................................................................................................................. 72Abb. 107 Auswahl PreviousPort nach Verschieben des CU1128............................................................. 72Abb. 108 Topologie-Anzeige 2x CU1128.................................................................................................. 72Abb. 109 Hinzufügen weitere Geräte ........................................................................................................ 73Abb. 110 Hinzufügen Gerät....................................................................................................................... 73Abb. 111 Portauswahl CU1128................................................................................................................. 73Abb. 112 Die 3 internen ESC-Namen des CU1128 .................................................................................. 74Abb. 113 EEPROM Update TwinCAT....................................................................................................... 74Abb. 114 Derzeit verfügbare EEPROM-Beschreibungen des CU1128 und Zuordnung ........................... 74
CU1128 79Version: 2.0