Embed Size (px)
Citation preview

Lecture 5:
Comb resonator design (1)
Dong-Il “Dan” Cho
S h l f El i l E i i d C S i School of Electrical Engineering and Computer Science, Seoul National University
Nano/Micro Systems & Controls Laboratory
Email: [email protected]: http://nml.snu.ac.kr
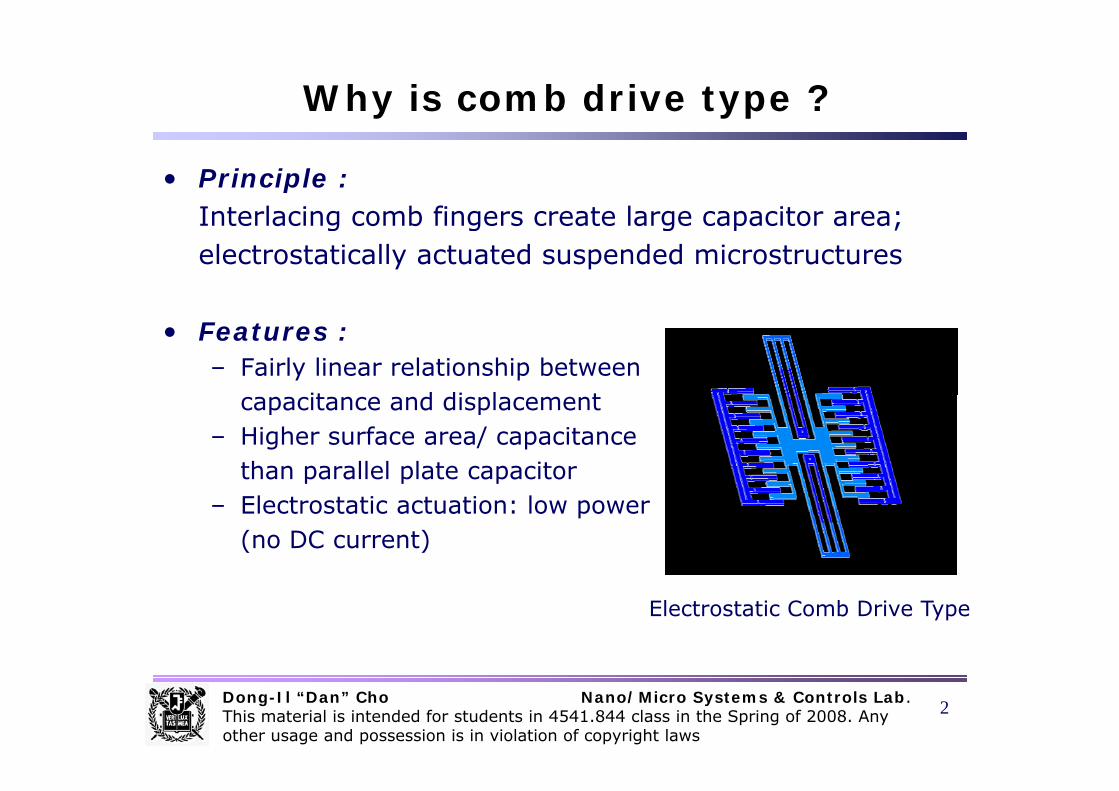
Why is comb drive type ?
• Principle :Interlacing comb fingers create large capacitor area;Interlacing comb fingers create large capacitor area;electrostatically actuated suspended microstructures
• Features :– Fairly linear relationship between
it d di l tcapacitance and displacement– Higher surface area/ capacitance
than parallel plate capacitor– Electrostatic actuation: low power
(no DC current)
Electrostatic Comb Drive Type
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
2
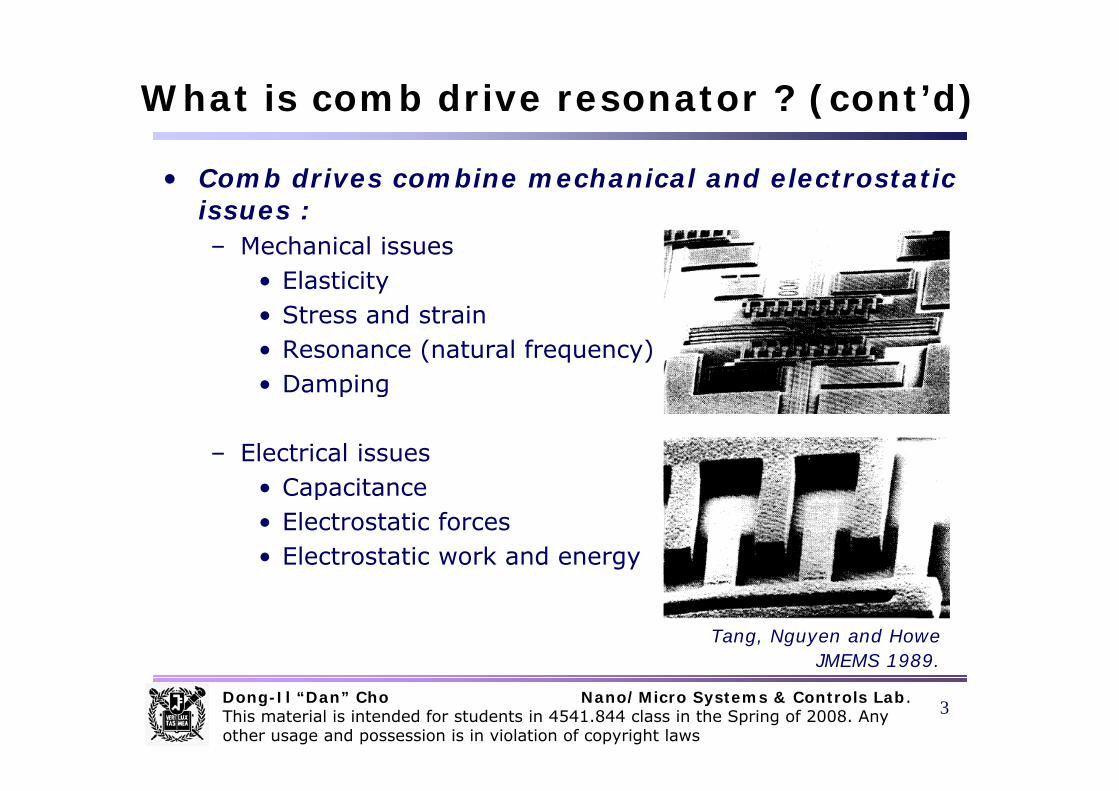
What is comb drive resonator ? (cont’d)
• Comb drives combine mechanical and electrostatic issues :issues :– Mechanical issues
• ElasticityS d i• Stress and strain
• Resonance (natural frequency)• Dampingp g
– Electrical issues• Capacitance• Capacitance• Electrostatic forces• Electrostatic work and energy
Tang, Nguyen and HoweJMEMS 1989.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
3
JMEMS 1989.

Normal Stress and Strain
• Stress: force applied to surface /F Aσ =
measured in N/m2 or Pa,compressive or tensile
/F Aσ =
• Strain: ratio of deformation to length/l lε = ∆
measured in %, ppm,or microstrain
/l lε = ∆
Young’s Modulus:/E σ ε
Hooke’s Law:/E σ ε=
/ /K F l EA l= ∆ =
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
4

Shear Stress and Strain
• Shear Stress: force applied parallel to surface
measured in N/m2 or Pa,
/F Aτ =
• Strain: ratio of deformation to length
/l lγ ∆ /l lγ = ∆
Shear Modulus:/G τ γ=
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
5

Poisson’s Ratio
Tensile stress in x direction results in compressive stress in y and z direction (object becomes longer stress in y and z direction (object becomes longer and thinner)
P i ’ R ti< Materials >• Homogeneous• Poisson’s Ratio:
ν ε ε= − /
t t i / l it di l t i
y x
• Homogeneous– Isotropic– Anisotropic
• Heterogeneous= − transverse strain / longitudinal strain • Heterogeneous
Metals: Rubbers: C k
0.3ν ≈0.5ν ≈
0ν ≈Cork: 0ν ≈
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
6

Mechanical Property for Poly Crystalline SiliconSilicon
• Young’s modulus for different deposition processes
Doping Conditions
PSG diffusion doping POCl3 diffusion doping
Deposition temp
1000℃60min
1050℃30min
1000 ℃120min
850℃180min
850℃210min
850 ℃240min
950℃60min
950℃90min
950 ℃120min
1000℃60min
1000 ℃
90min
Young’s
625℃
605
154.3±2.3
155.1±1.8
151.1±3
149.6±2.6
150.7±2.5
153.1±2.1
149±1.7
151.1±1.1
150.4±1.1
152.6±1.4
148.6±2
159 3 160 5 161 8 162 6 161 9 163 1 161 2 155 6 161 8 157 1 156modulus(GPa)
605℃
585
159.3±3.4
160.5±1.7
161.8±1.4
162.6±0.6
161.9±2.3
163.1±0.4
161.2±2
155.6±5.6
161.8±1.4
157.1±3.7
156±5.9
170.1 169.4 162.4 168.5 162.2 163.5 159 165.6 160.6 159.8 156.6585℃ ±2.2 ±6.2 ±1.6 ±1.9 ±2.6 ±3.1 ±3.3 ±1.4 ±1 ±1 ±2
[Ref] S Lee et al IOP Journal of Micromechanics and Microengineering vol 8 no 4 pp 330-337 Dec 1998
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
7
[Ref] S. Lee et al., IOP Journal of Micromechanics and Microengineering, vol. 8, no. 4, pp. 330 337, Dec. 1998.

Mechanical Property for Single Crystal Silicon
• Silicon Crystallography 면 ( ) { }
방향 < > [ ]
Silicon (100) Silicon (110) Silicon (111)
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
8

Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Young’s modulus
Silicon (100) Silicon (110) Silicon (111)Silicon (100) Silicon (110) Silicon (111)
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
9

Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Shear modulus
Silicon (100) Silicon (110) Silicon (111)Silicon (100) Silicon (110) Silicon (111)
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
10
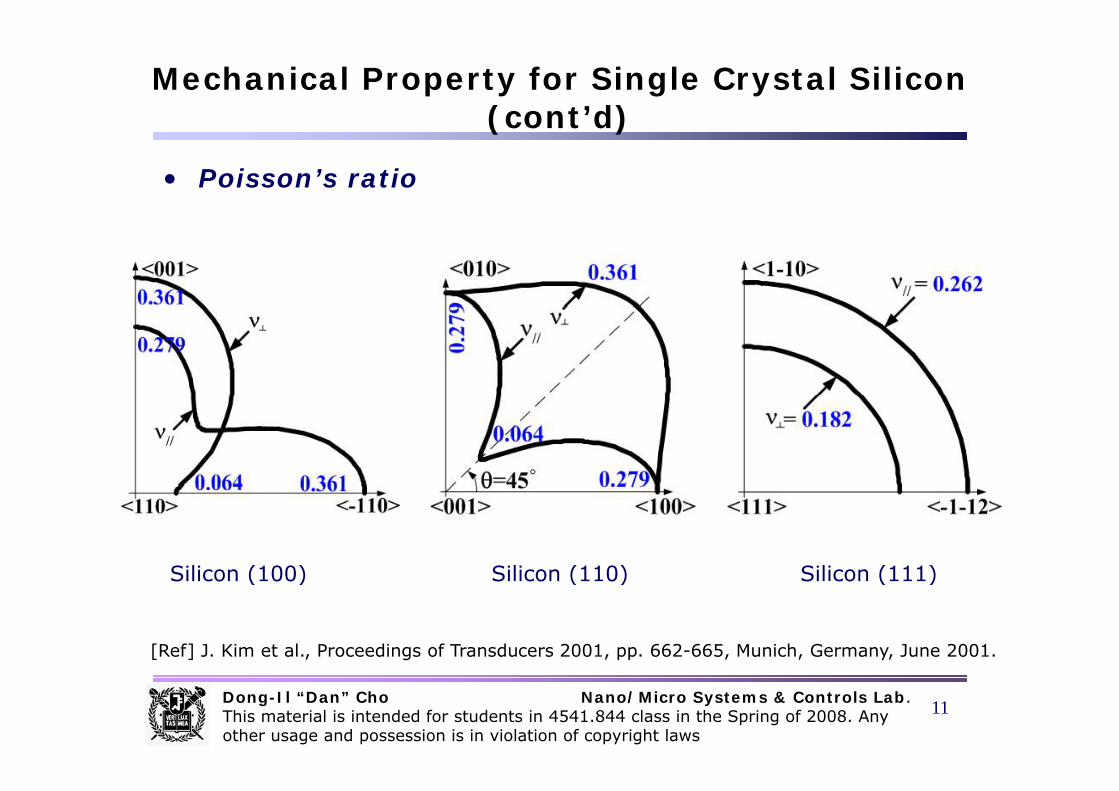
Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Poisson’s ratio
Silicon (100) Silicon (110) Silicon (111)Silicon (100) Silicon (110) Silicon (111)
[Ref] J. Kim et al., Proceedings of Transducers 2001, pp. 662-665, Munich, Germany, June 2001.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
11

Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Torsional stiffness (1)– Schematic of torsional springSchematic of torsional spring
Tz
xy θy θ
The dimension splits of torsional springs
- thickness(t) : 10 ㎛, 20 ㎛
- length(l) : 40 ㎛
- width(w) : 2 ㎛, 4 ㎛
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
12

Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Torsional stiffness (2)– Silicon (110)Silicon (110)
The torsional stiffness on silicon (110) varies from -31.2 % to -26.6 %
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
13
The torsional stiffness on silicon (110) varies from 31.2 % to 26.6 %
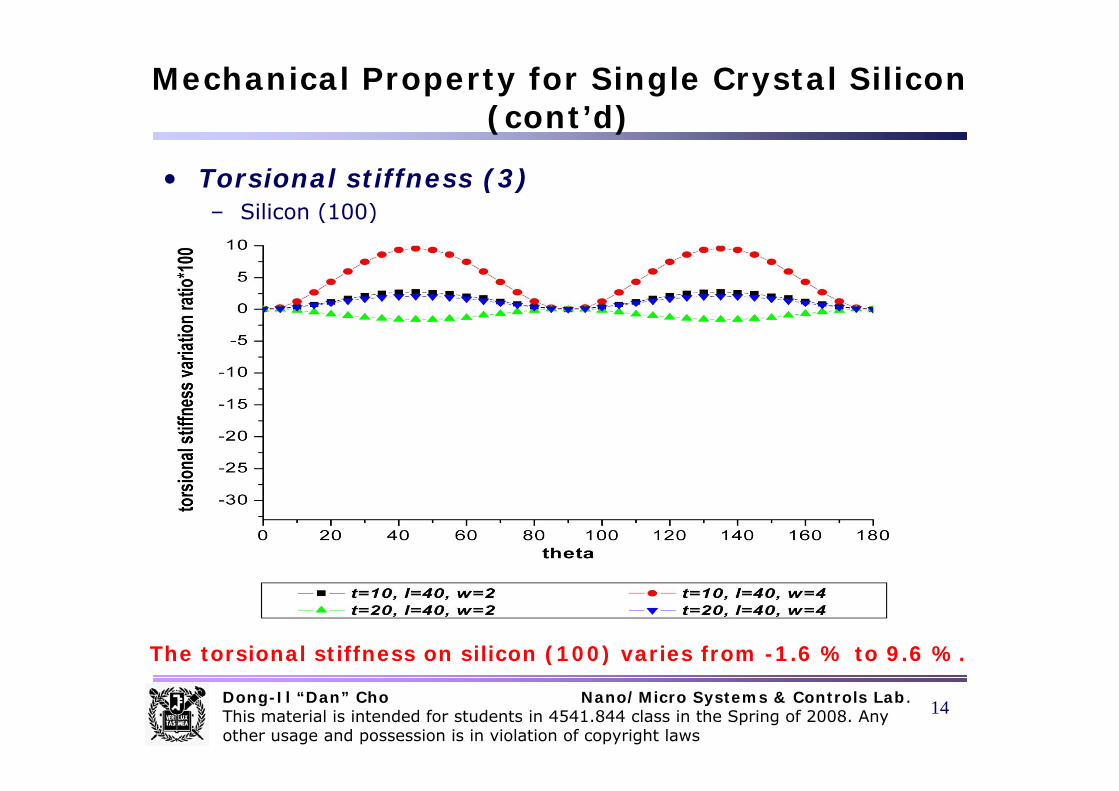
Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Torsional stiffness (3)– Silicon (100)Silicon (100)
The torsional stiffness on silicon (100) varies from -1.6 % to 9.6 %.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
14
( )

Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Torsional stiffness (4)– Silicon (111)Silicon (111)
The torsional stiffness on silicon (111) varies from 1.7 % to 2.3 %.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
15
( )
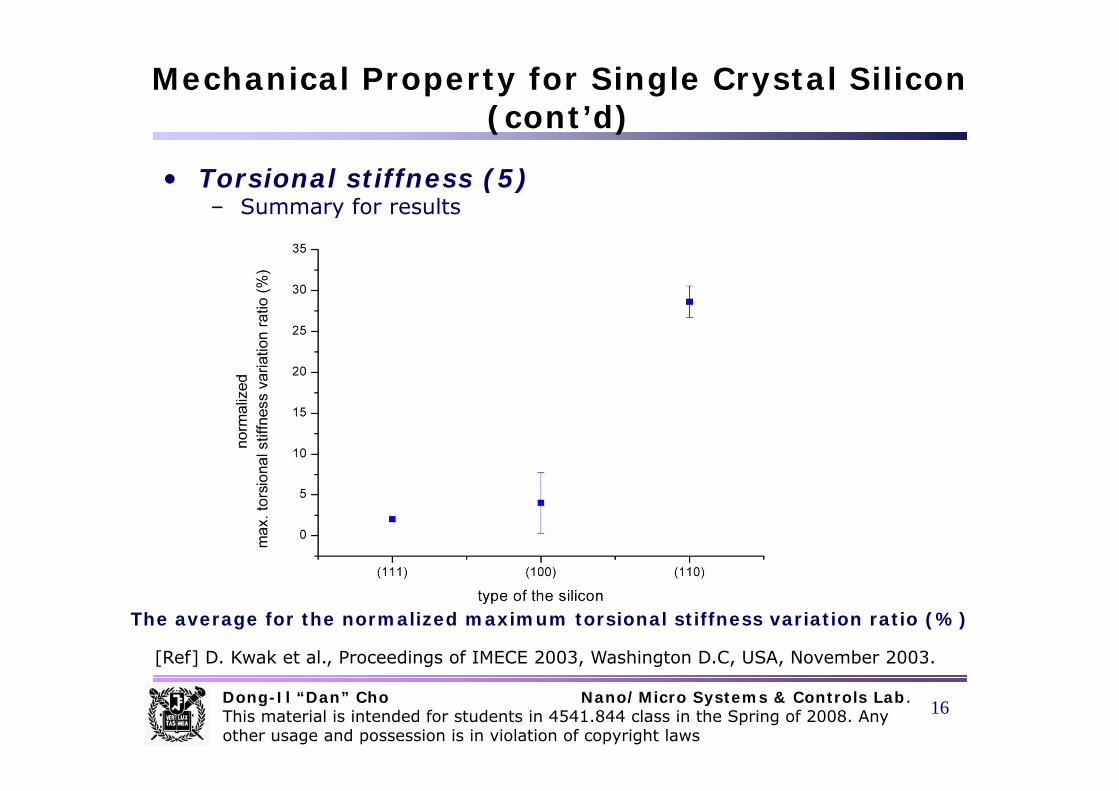
Mechanical Property for Single Crystal Silicon (cont’d)(cont d)
• Torsional stiffness (5)– Summary for resultsy
The average for the normalized maximum torsional stiffness variation ratio (%)
[Ref] D. Kwak et al., Proceedings of IMECE 2003, Washington D.C, USA, November 2003.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
16
[ ] , g , g , ,
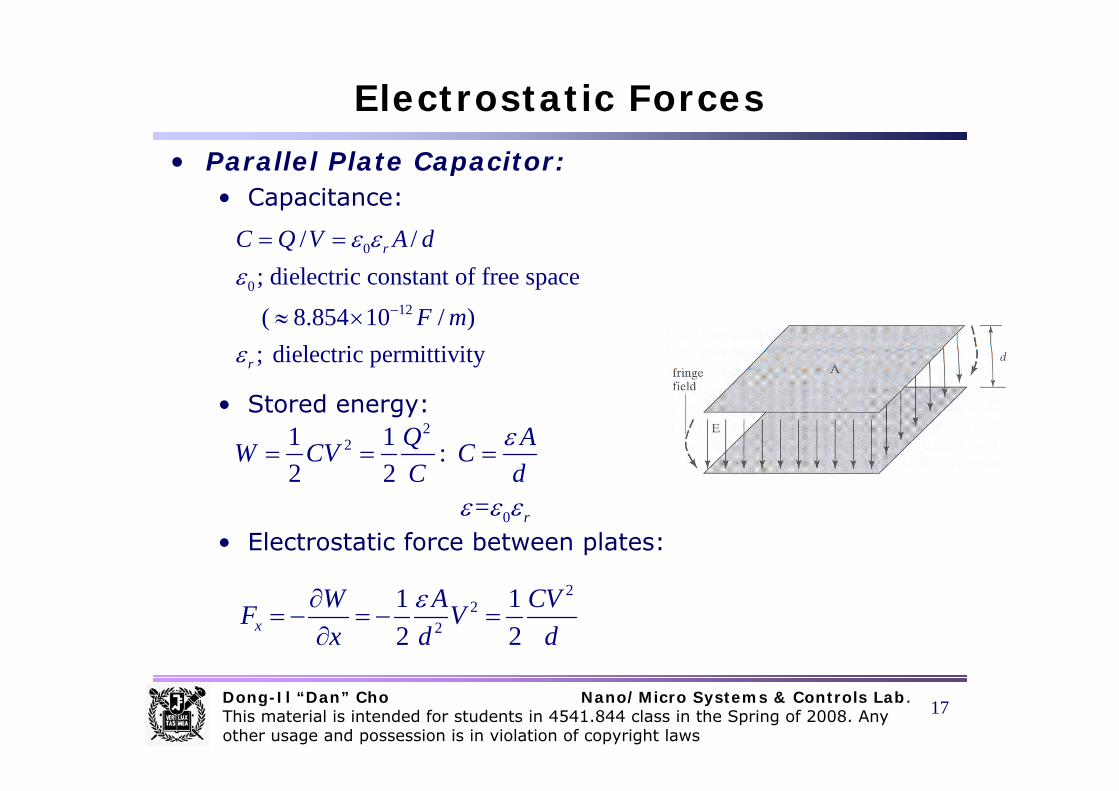
Electrostatic Forces
• Parallel Plate Capacitor:• Capacitance:
0
012
/ /; dielectric constant of free space
rC Q V A dε εε= =
St d
12 ( 8.854 10 / ); dielectric permittivityr
F mε
−≈ ×
• Stored energy:2
21 1 : 2 2
ε= = =
Q AW CV CC d
• Electrostatic force between plates:0 =ε ε ε r
22
2
1 12 2x
W A CVF Vx d d
ε∂= − = − =
∂
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
17

Electrostatic Actuation
• Positioning of capacitor plate:1 ε ε= − <
= − <
2 20
0
1/ 0
2( ) 0
el r
S
F AV x
F K x d
0where :distance at rest
(no applied voltage)
d
• Stable equilibrium when el SF F=
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
18

Pull-In Point
The higher V, the closer the plate is pulled in. Fel → ∞ when d → 0. What is the closest stable distance xmin?min
• Fel and FS must be tangential:3 2
0
2 30
/ , so
/r
r
A x V K
V Kx A
ε ε
ε ε
=
=
• Substitute into Fel=FS to get=min 02 /3x d
can control x only from 2/3d0
to d0
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
19

Electrostatic Comb Drive
ε ε= 0 /rC A d• Capacitance is approximately:
(L>>d)
ε ε= 0 2 /rn lh d(ignore fringing field effect)
• Change in capacitance whenmoving by △x :
/C A dε ε∆ = ∆0
0
/
2 /r
r
C A d
n xh d
ε εε ε
∆ = ∆
= ∆
• Electrostatic force :ε ε= =2 2
01/2 / /el rF V dC dx n h dV Electric field distribution in com-finger gaps
Note: Fel is independent of △x over wide range (fringing field), and quadratic in V.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
20
), q
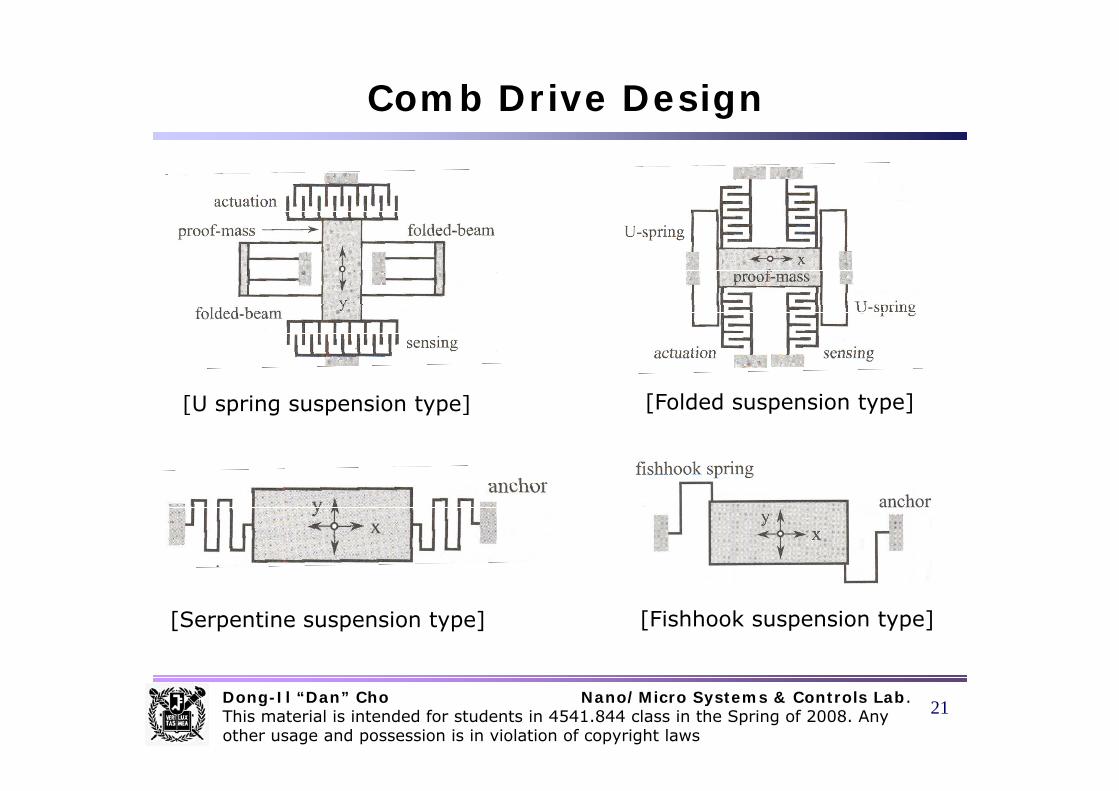
Comb Drive Design
[U i i ] [F ld d i t ][U spring suspension type] [Folded suspension type]
[Serpentine suspension type] [Fishhook suspension type]
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
21

Comb Drive Design (cont’d)
[Bent beam serpentine suspension type] [Spiral spring suspension type]
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
22
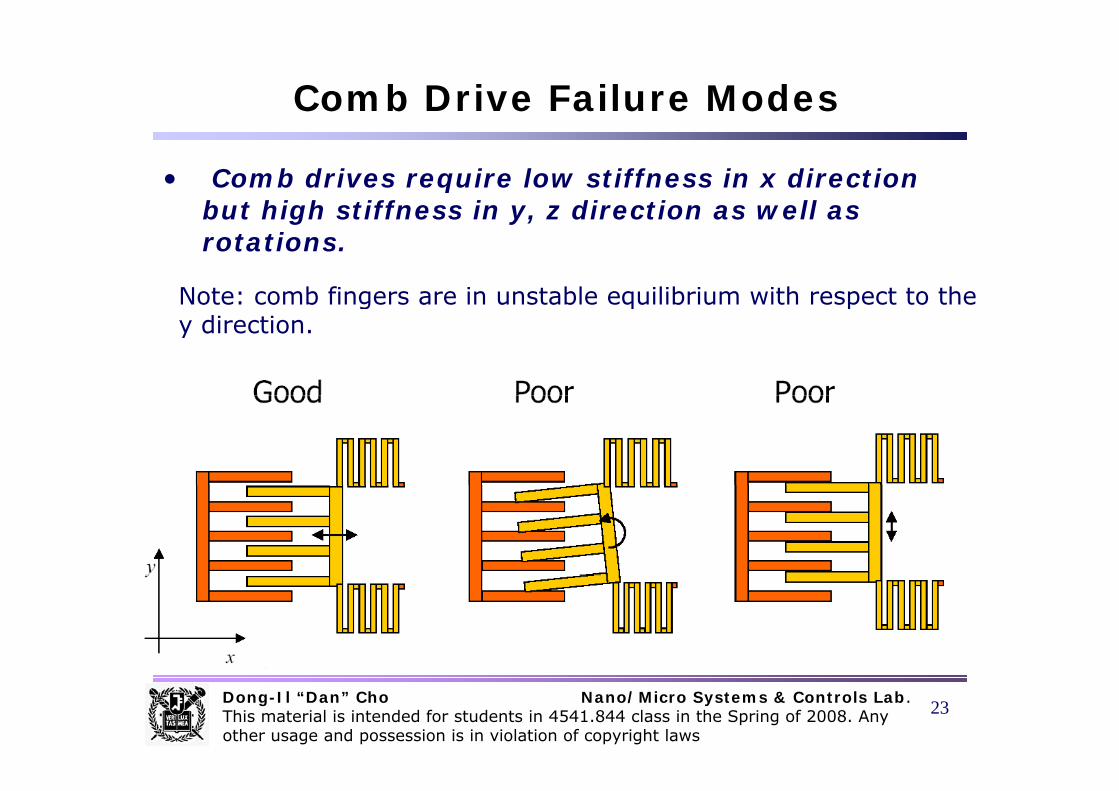
Comb Drive Failure Modes
• Comb drives require low stiffness in x direction but high stiffness in y, z direction as well as but high stiffness in y, z direction as well as rotations.
Note: comb fingers are in unstable equilibrium with respect to the g q py direction.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
23

Summary of Translation motion
• Acceleration, velocity, distancea v x
• Force, momentum= =a v x
F
• Kinetic energy
= =p mv Ft
1
• Dynamic (spring damper mass)
= 212
E mv
• Dynamic (spring, damper, mass)
• Oscillation (assume b=0)
= + +F Kx bx mx
( )
ωπ
=1
( ) =2
K Kf Hz
m m
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
24
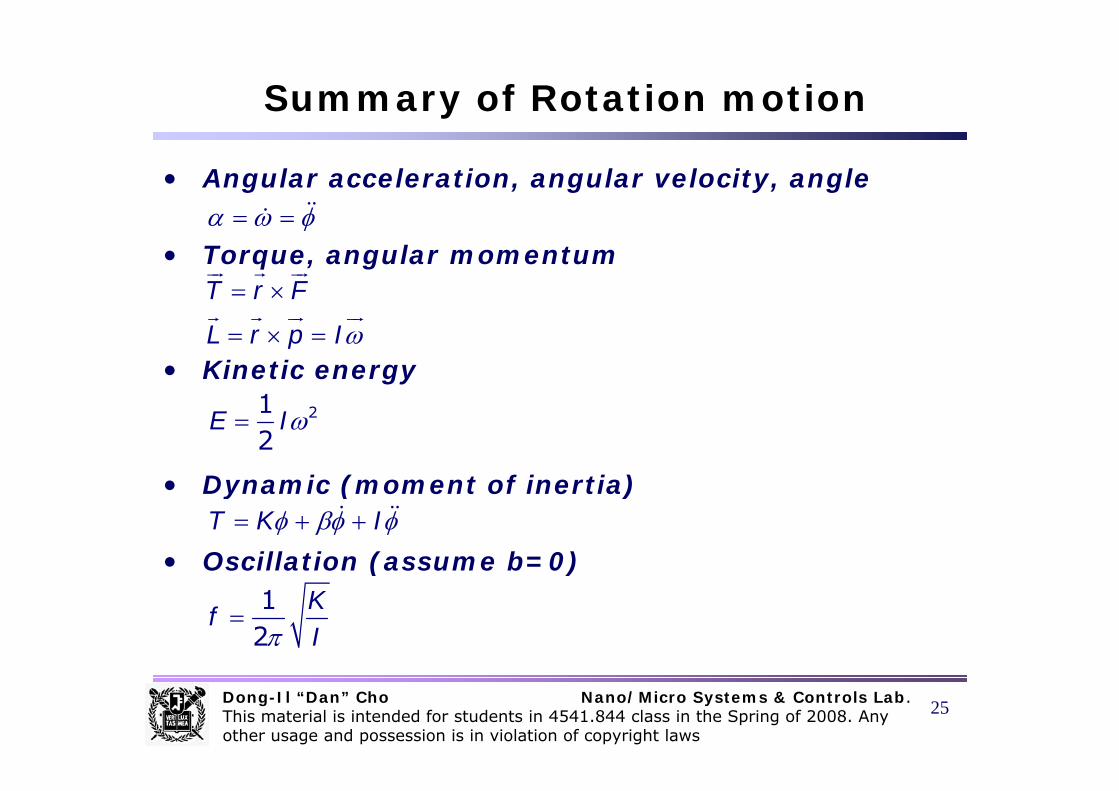
Summary of Rotation motion
• Angular acceleration, angular velocity, angleα ω φ= =
• Torque, angular momentumα ω φ= =
T r F= ×
• Kinetic energyL r p Iω= × =
1
• Dynamic (moment of inertia)
ω= 212
E I
• Dynamic (moment of inertia)
• Oscillation (assume b=0)
φ βφ φ= + +T K I
( )
π=
12
Kf
I
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
25

Lumped-parameter Model
• The dynamic of motion is based on the lumped-parameter model– Input: external fore F, Output: displacement x
+ + = 0( ) ( ) ( ) sin( )mx t bx t Kx t F wt0( ) ( ) ( ) ( )
:mass, :damping, :stiffnesswhere m b K
Schematic microdevice Lumped-parameter model
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
26
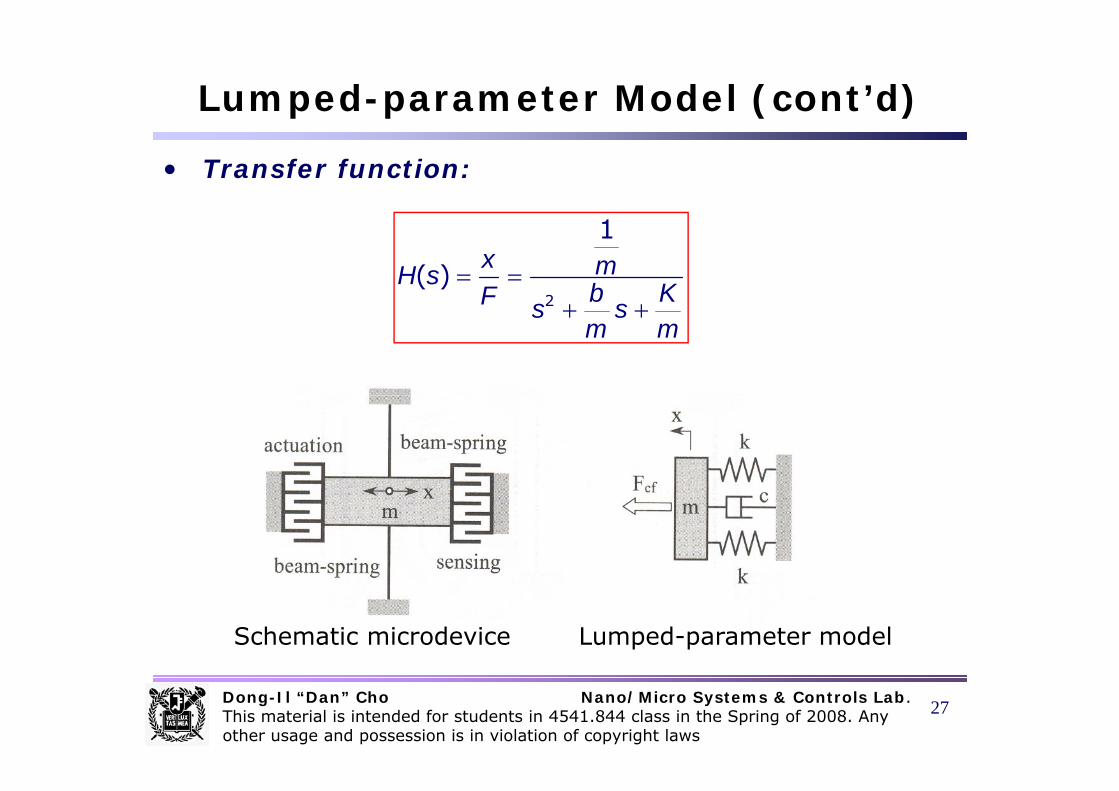
Lumped-parameter Model (cont’d)
• Transfer function:
2
1
( )x mH s
b KF s s= =
+ +2s sm m
+ +
Schematic microdevice Lumped-parameter model
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
27

Resonators
• Analogy between mechanical and electrical system:system:- Mass m – Inductivity L- Spring K – Capacitance 1/C- Damping b – Resistance R
(depending where R is placed in circuit)S l ti t 2nd d diff ti l ti• Solution to 2nd order differential equation:
ω ωω ξω ωω
=+ ++ +
2 20 0
2222 0 0 0
( ) or 2
H ss ss s ξω
ω π
+ +
=
0 00
0 2 :natural frequencyo
s sQ
where f
ω ω
ξ ξ
= =
=
0 0
1 :mechanical system, : electrical system
: quality factor 1 /2 ( : )
Km LC
Q Q damping ratioDong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
28
ξ ξ= : quality factor 1 /2 ( : )Q Q damping ratio

Mechanical Resonators
• Frequency and phase shift under damping:
τ ω ϕ
τ
−= +
=
/21( ) cos( )
: damping time
tx t Ae t
mwhere τ
ω ω ω ω ξ ω= − = − = − =2
21 0 0 02 2
: damping time
1 1 1 1
4 4 d
whereb
bKmω τ
ϕ
2 204 4
: phase shift
Km
• Energy dissipation: /0( ) tE t E e τ−=
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
29

Quality Factor
• Definition: Quality factor (Q factor)– Ratio of stored energy and lost energy:Ratio of stored energy and lost energy:
02 2E
QE T
τπ π ω τ= = =∆
– Mechanical system: 0
m KmQ
b bω= =
– Similar for electric systems: (a) 0
1L LQ
R R Cω= =
(b)
R R C
0
CQ RC R
Lω= =
L
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
30

Quality Factor (cont’d)
• How fast does energy dissipate?Q m
• What is the maximum amplitude for a given 0
(mechanical)Q m
bτ
ω= =
p gfrequency?: At resonance, amplitude is Q times the DC responseresponse
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
31

Summary: Mechanical/Electrical Resonator
• Mechanicalresonator :
( ) ( ) ( ) 0: mass : damping : stiffness
mx t bx t Kx tm b K
+ + =resonator :
0
: mass, : damping, : stiffness
natural frequency / (for small b)
m b K
K mω =
• Torsionalresonator :
( ) ( ) ( ) 0: moment of inertia, : damping, : stiffness
I t b t k tI b kθ θ θ+ + =
• Electrical
0natural frequency /k Iω =
1• Electrical resonator :
1( ) ( ) ( ) 0
: inductivity, : resistance, : capacitance
Lq t Rq t q tC
L R C
+ + =
0natural frequency 1/LCω =
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
32

Measurement
: DC bias
d i i l t PV
V
0
: drive signal at
: output current /d d
P
V
I V dC dt
ω∝
Feedbackvia transimpedance amplifier
Vc carrier signal at cω
Output signal:frequency spectrum includes but also ω ω ω ω±frequency spectrum includes , , but also
basis for frequency transferd c c dω ω ω ω±
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
33

Application of Comb Drive
Accelerometer (NML SNU) Gyroscope (NML SNU)
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
34

Application of Comb Drive
X-Y stage (MiSA SNU)Micromirror (UC Davis & Stanford) g ( )( )
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
35

Reference
• Lee, S. W., Cho, C. H., Kim, J. P., Park, S. J., Yi, S. W., Kim, J. J., and Cho, D. I., "The Effects of Post-deposition Processes on Polysilicon Young's Modulus, IOP Journal of Micromechanics and Microengineering vol 8 no 4 pp 330 337 Dec Journal of Micromechanics and Microengineering, vol. 8, no. 4, pp. 330-337, Dec. 1998.
• Kim, J. P., Cho, D. I., and Muller, R. S., "Why is (111) Silicon a Better Mechanical Material for MEMS," Proceedings of Transducers 2001: 11th International Conference on Solid State Sensors and Actuators pp 662 665 International Conference on Solid State Sensors and Actuators, pp. 662-665, Munich, Germany, June 10-14, 2001.
• Kwak, D. H., Kim, J. P., Park, S. J., Ko, H. H., and Cho, D. I., "Why is (111) Silicon a better Mechanical Material for MEMS: Torsion Case," 2003 ASME International Mechanical Engineering Congress (IMECE 2003) Washington D C International Mechanical Engineering Congress (IMECE 2003), Washington D.C., USA, Nov. 15-21, 2003.
• Lee, S. W., Park, S. J., Yi, S. W., Lee, S. C., Cho, D. I., Ha, B. J., Oh, Y. S., and Song, C. M., "Electrostatic Actuation of Surface/Bulk Micromachined Single-crystal Silicon Microresonators " Proceedings of IEEE/RSJ International crystal Silicon Microresonators, Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 2, pp. 1057-1062, Kyeongju, Korea, Oct. 17-21, 1999.
• Ko, H. H., Kim, J. P., Park, S. J., Kwak, D. H., Song, T. Y., Setiadi, D., Carr, W., B J d Ch D I "A Hi h f X/Y i Mi l t Buss, J., and Cho, D. I., "A High-performance X/Y-axis Microaccelerometer Fabricated on SOI Wafer without Footing Using the Sacrificial Bulk Micromachining (SBM) Process," 2003 International Conference on Control, Automation and Systems (ICCAS 2003), pp. 2187-2191, Gyeongju, Korea, Oct. 22 25 2003
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
36
22-25, 2003.

Reference (cont’d)
• Kim, C. H., Jeong, H. M., Jeon, J. U., Kim, Y. K., “Silicon micro XY-stage with a large area shuttle and no-etching holes for SPM-based data storage”, Journal of Microelectromechanical Systems vol 12 issue 4 pp 470 478 Aug 2003 Microelectromechanical Systems, vol. 12 , issue 4 , pp. 470 - 478, Aug 2003.
• Chang Liu, “Foundations of MEMS”, Pearson, 2006.• Nicolae O. Lobontiu, “Mechanical design of microresonators”, McGraw-Hill, 2006.
Dong-Il “Dan” Cho Nano/Micro Systems & Controls Lab.This material is intended for students in 4541.844 class in the Spring of 2008. Any other usage and possession is in violation of copyright laws
37