Embed Size (px)
Citation preview
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 1
Integration von Schlüsselkomponenten der Fabrikautomation Neue Technologien für Safety-Engineering sowie Roboter und SPS-Integration
Dr. Rainer Baumann, ABB STOTZ-KONTAKT GmbH; Dr. Oliver Becker, ABB Forschungszentrum Deutschland
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 2
Fabrikautomation Einleitung
Fabrikautomation erfordert perfektes Zusammenspiel verschiedenster Automatisierungskomponenten
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 3
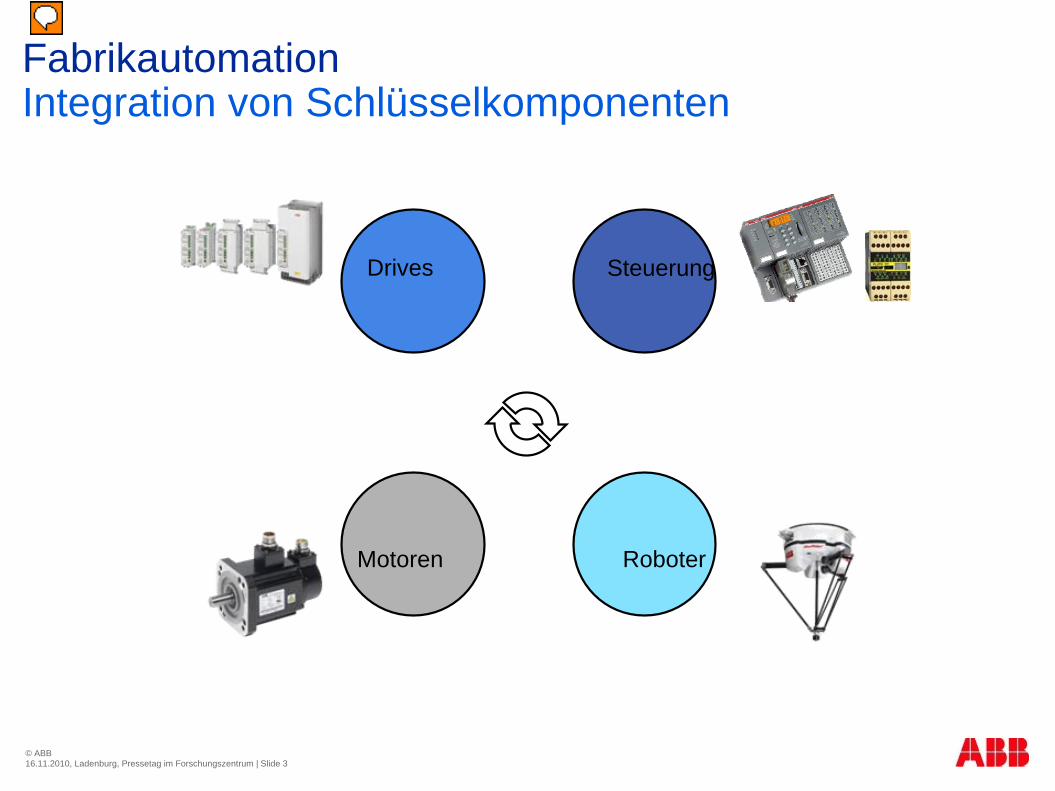
Motoren Roboter
Drives
Fabrikautomation Integration von Schlüsselkomponenten
Steuerung
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 4
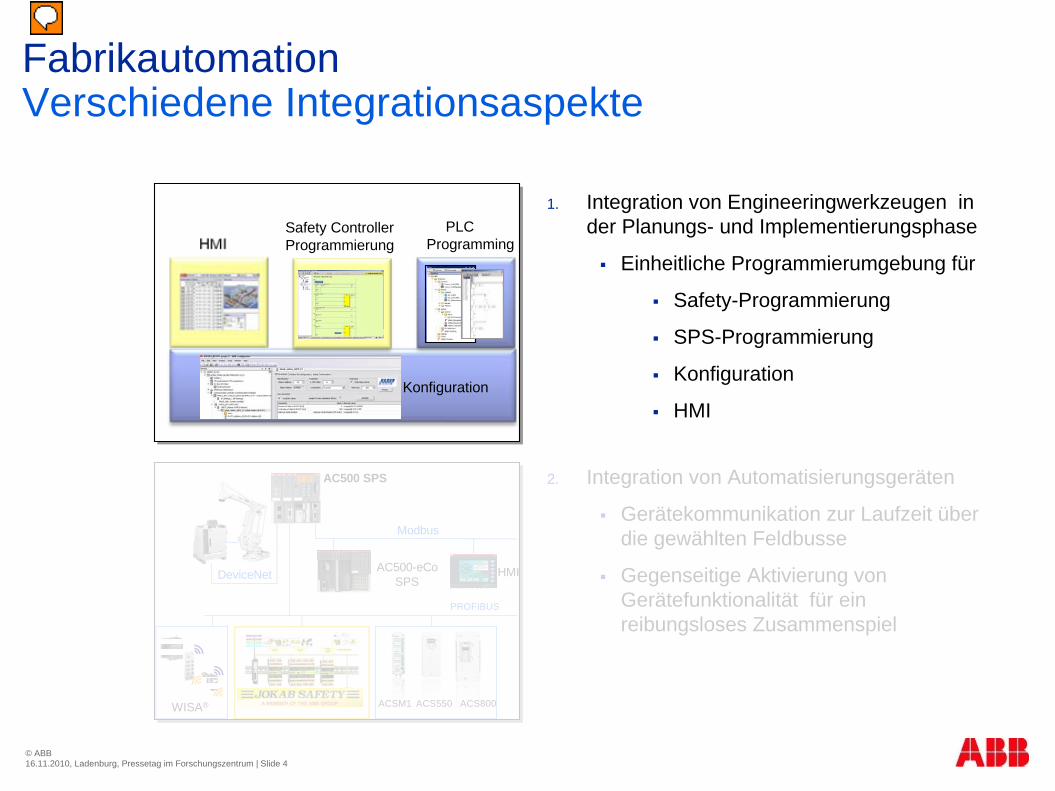
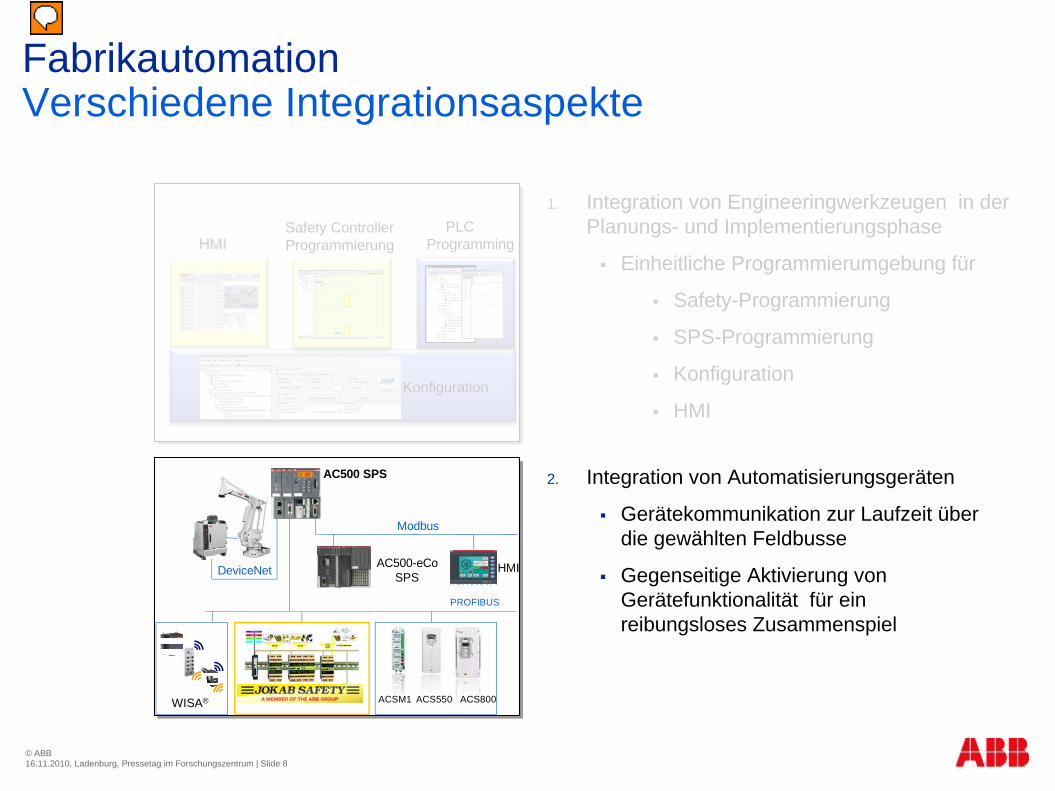
Fabrikautomation Verschiedene Integrationsaspekte
1. Integration von Engineeringwerkzeugen in der Planungs- und Implementierungsphase
Einheitliche Programmierumgebung für
Safety-Programmierung
SPS-Programmierung
Konfiguration
HMI
2. Integration von Automatisierungsgeräten
Gerätekommunikation zur Laufzeit über die gewählten Feldbusse
Gegenseitige Aktivierung von Gerätefunktionalität für ein reibungsloses Zusammenspiel
PLC Programming
PROFIBUS
Modbus
HMIAC500-eCoSPS
AC500 SPS
ACSM1 ACS550 ACS800WISA®
DeviceNet
Safety Controller Programmierung
Konfiguration
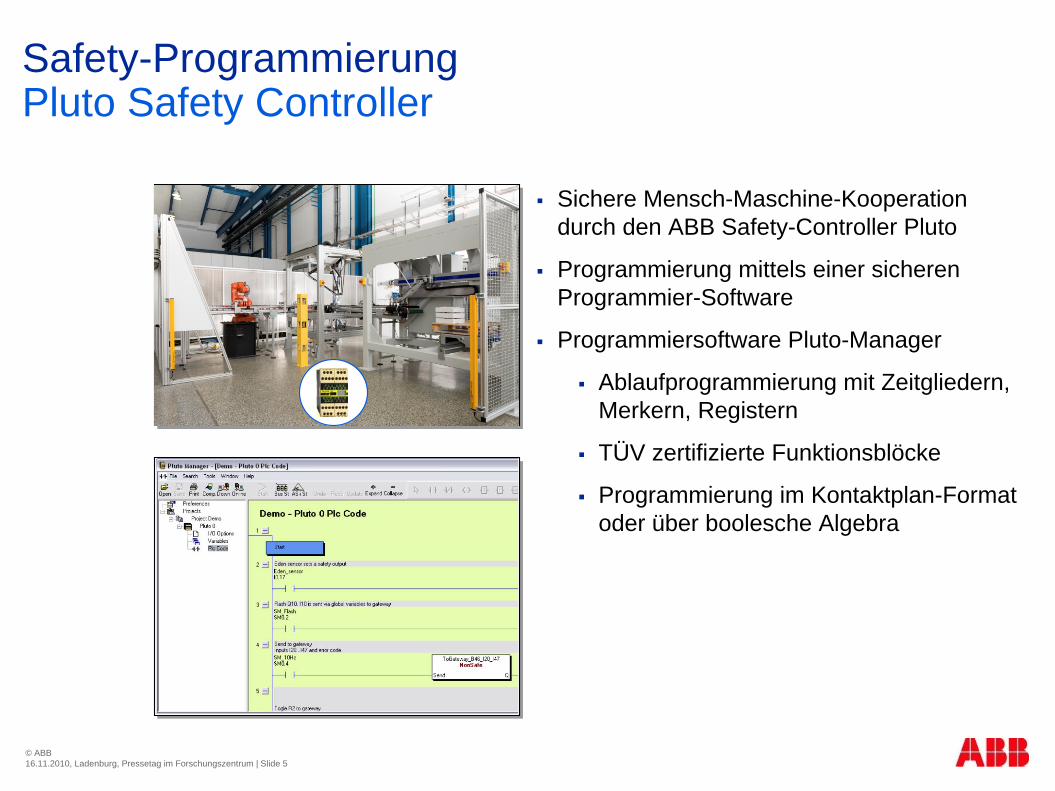
Safety-Programmierung Pluto Safety Controller
Sichere Mensch-Maschine-Kooperation durch den ABB Safety-Controller Pluto
Programmierung mittels einer sicheren Programmier-Software
Programmiersoftware Pluto-Manager
Ablaufprogrammierung mit Zeitgliedern, Merkern, Registern
TÜV zertifizierte Funktionsblöcke
Programmierung im Kontaktplan-Format oder über boolesche Algebra
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 5
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 6
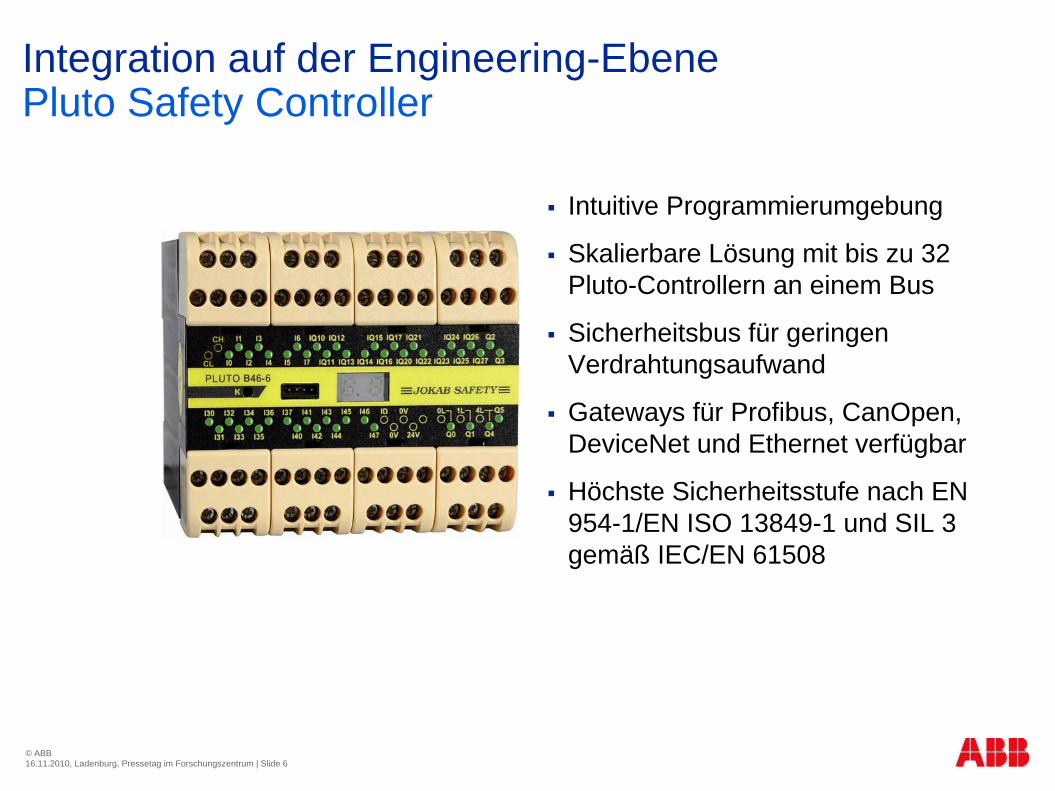
Integration auf der Engineering-Ebene Pluto Safety Controller
Intuitive Programmierumgebung
Skalierbare Lösung mit bis zu 32 Pluto-Controllern an einem Bus
Sicherheitsbus für geringen Verdrahtungsaufwand
Gateways für Profibus, CanOpen, DeviceNet und Ethernet verfügbar
Höchste Sicherheitsstufe nach EN 954-1/EN ISO 13849-1 und SIL 3 gemäß IEC/EN 61508
?
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 7
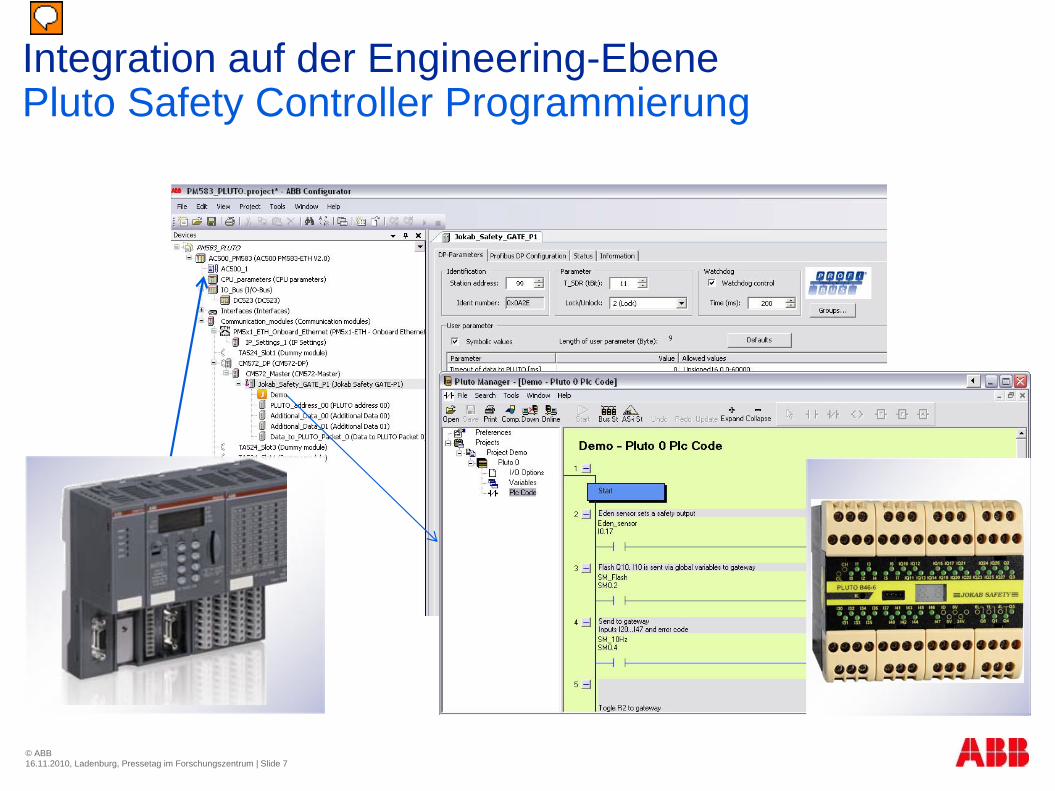
Integration auf der Engineering-Ebene Pluto Safety Controller Programmierung
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 8
Fabrikautomation Verschiedene Integrationsaspekte
1. Integration von Engineeringwerkzeugen in der Planungs- und Implementierungsphase
Einheitliche Programmierumgebung für
Safety-Programmierung
SPS-Programmierung
Konfiguration
HMI
PLC Programming
PROFIBUS
Modbus
HMIAC500-eCoSPS
AC500 SPS
ACSM1 ACS550 ACS800WISA®
DeviceNet
Safety Controller Programmierung
Konfiguration
2. Integration von Automatisierungsgeräten
Gerätekommunikation zur Laufzeit über die gewählten Feldbusse
Gegenseitige Aktivierung von Gerätefunktionalität für ein reibungsloses Zusammenspiel
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 9
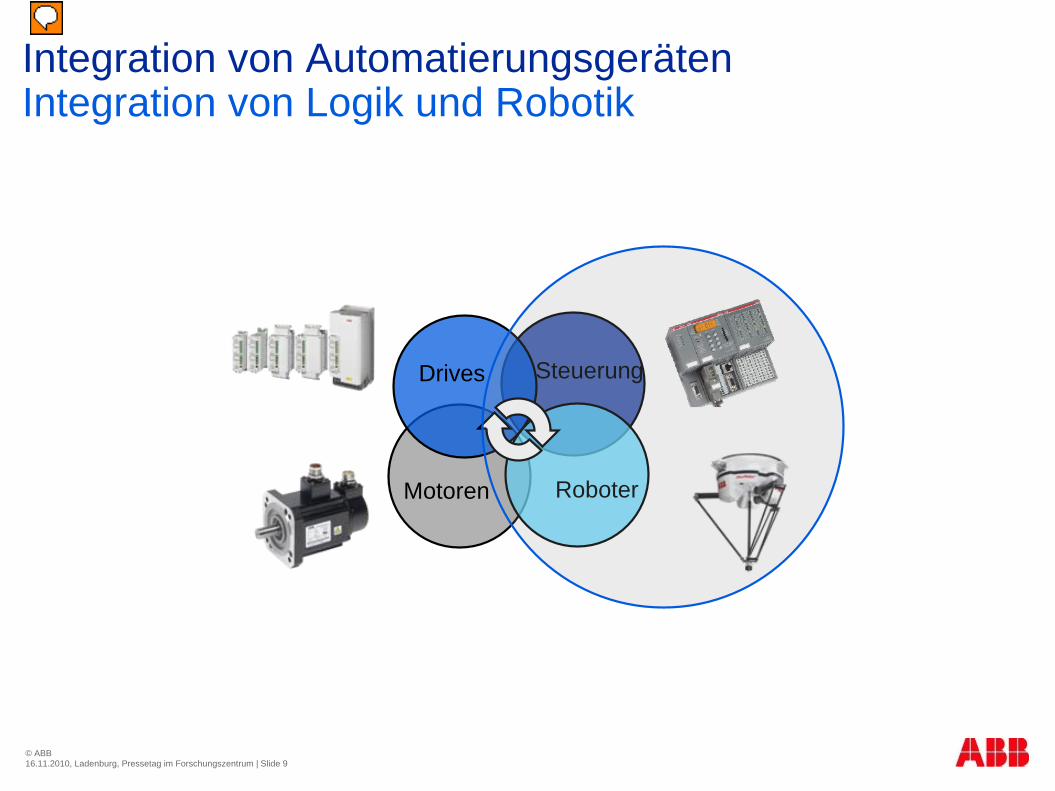
Integration von Automatierungsgeräten Integration von Logik und Robotik
Steuerung
Motoren Roboter
Drives
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 10
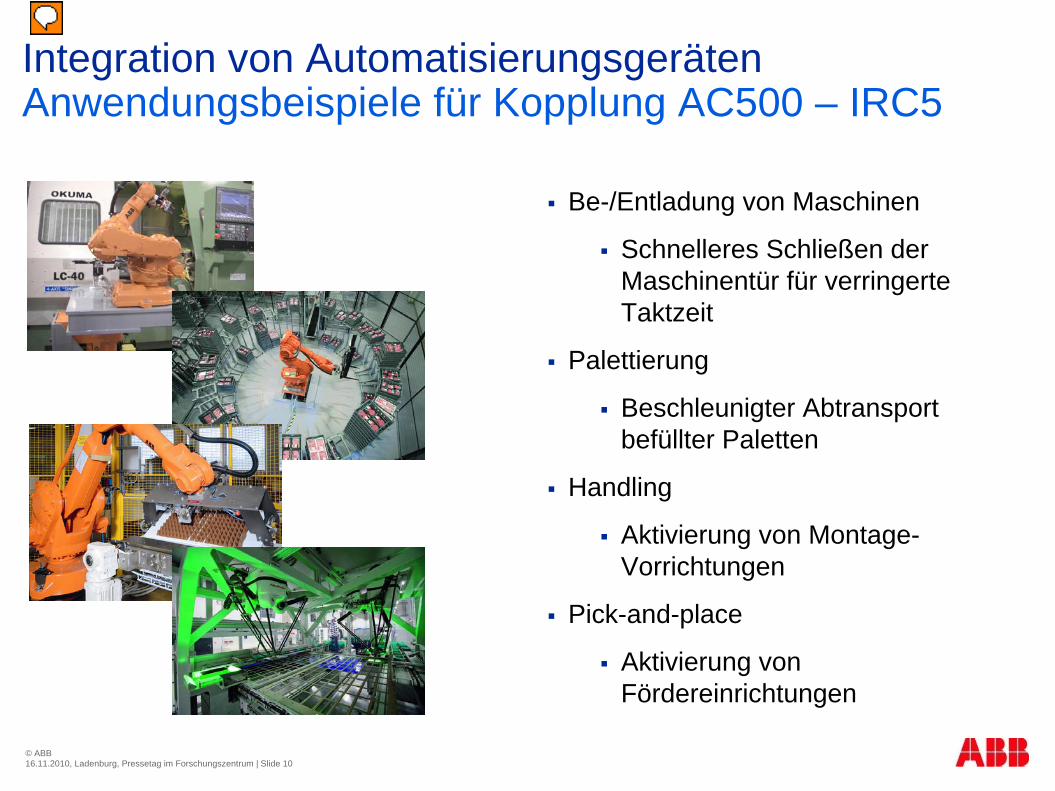
Integration von Automatisierungsgeräten Anwendungsbeispiele für Kopplung AC500 – IRC5
Be-/Entladung von Maschinen
Schnelleres Schließen der Maschinentür für verringerte Taktzeit
Palettierung
Beschleunigter Abtransport befüllter Paletten
Handling
Aktivierung von Montage- Vorrichtungen
Pick-and-place
Aktivierung von Fördereinrichtungen
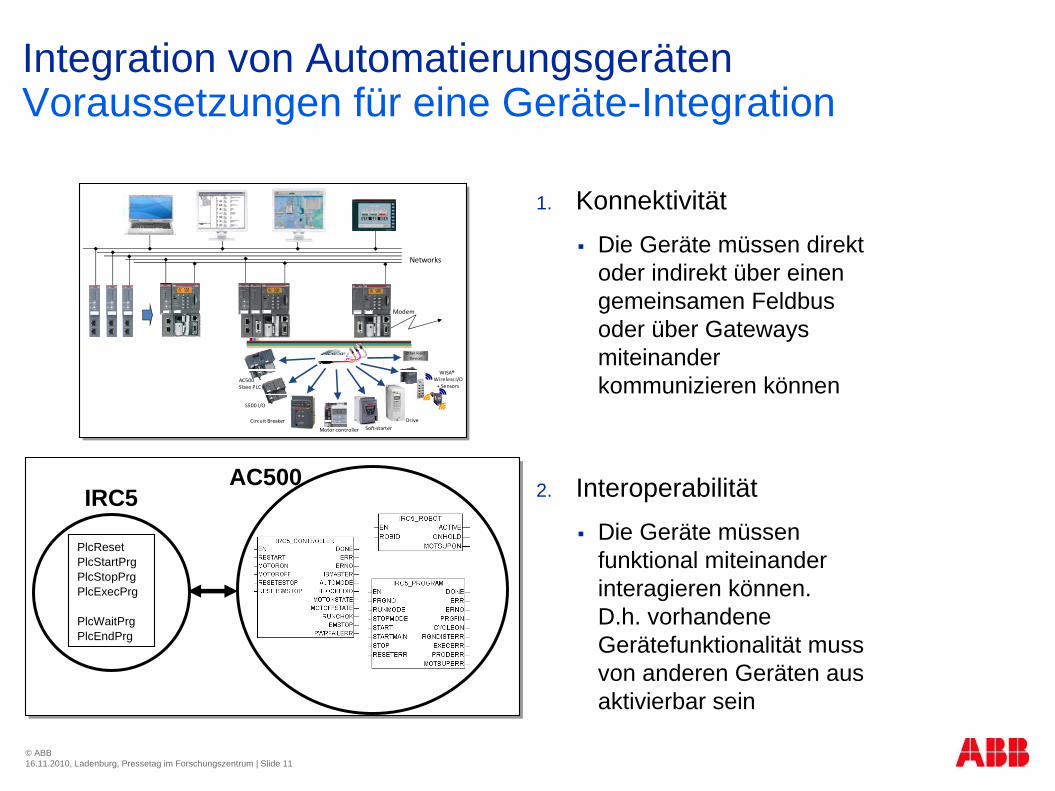
Integration von Automatierungsgeräten Voraussetzungen für eine Geräte-Integration
1. Konnektivität Die Geräte müssen direkt
oder indirekt über einen gemeinsamen Feldbus oder über Gateways miteinander kommunizieren können
2. Interoperabilität Die Geräte müssen
funktional miteinander interagieren können. D.h. vorhandene Gerätefunktionalität muss von anderen Geräten aus aktivierbar sein
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 11
PlcResetPlcStartPrgPlcStopPrgPlcExecPrg
PlcWaitPrgPlcEndPrg
AC500IRC5
Networks
Modem
ModemModem
Circuit BreakerSoft‐starterMotor controller
Other Field Devices
AC500 Slave PLC
S500 I/O
WISA®Wireless I/O+ Sensors
Drive
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 12
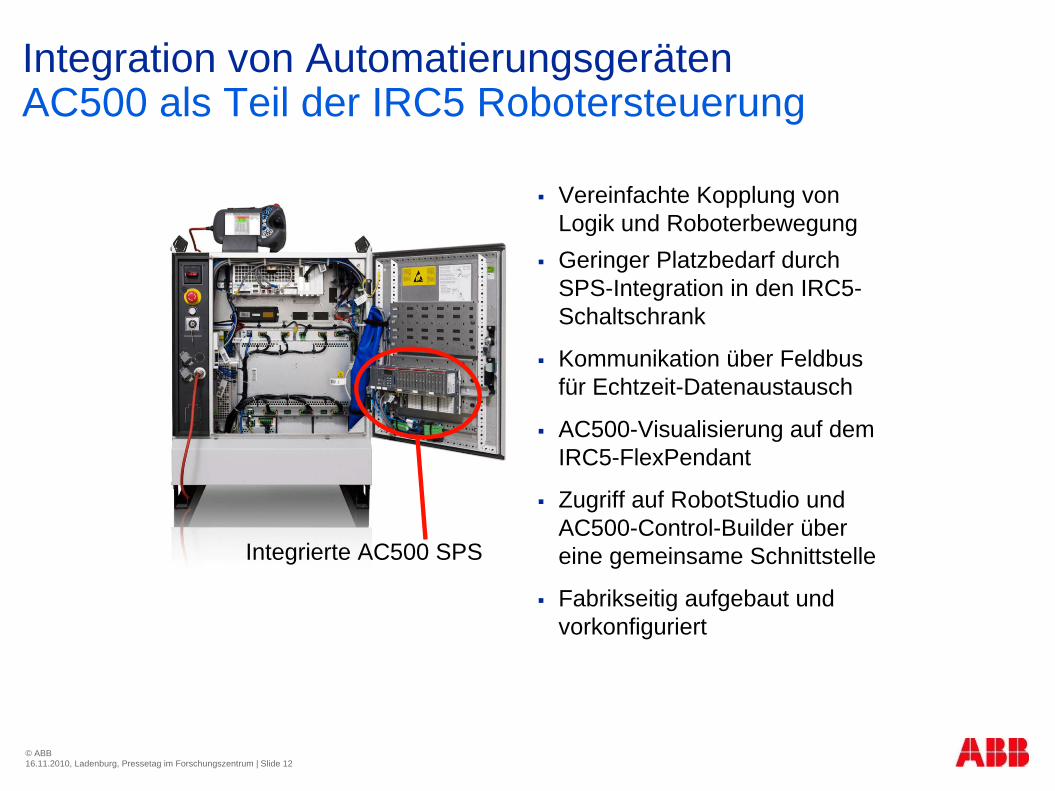
Integration von Automatierungsgeräten AC500 als Teil der IRC5 Robotersteuerung
Integrierte AC500 SPS
Vereinfachte Kopplung von Logik und Roboterbewegung
Geringer Platzbedarf durch SPS-Integration in den IRC5- Schaltschrank
Kommunikation über Feldbus für Echtzeit-Datenaustausch
AC500-Visualisierung auf dem IRC5-FlexPendant
Zugriff auf RobotStudio und AC500-Control-Builder über eine gemeinsame Schnittstelle
Fabrikseitig aufgebaut und vorkonfiguriert
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 13
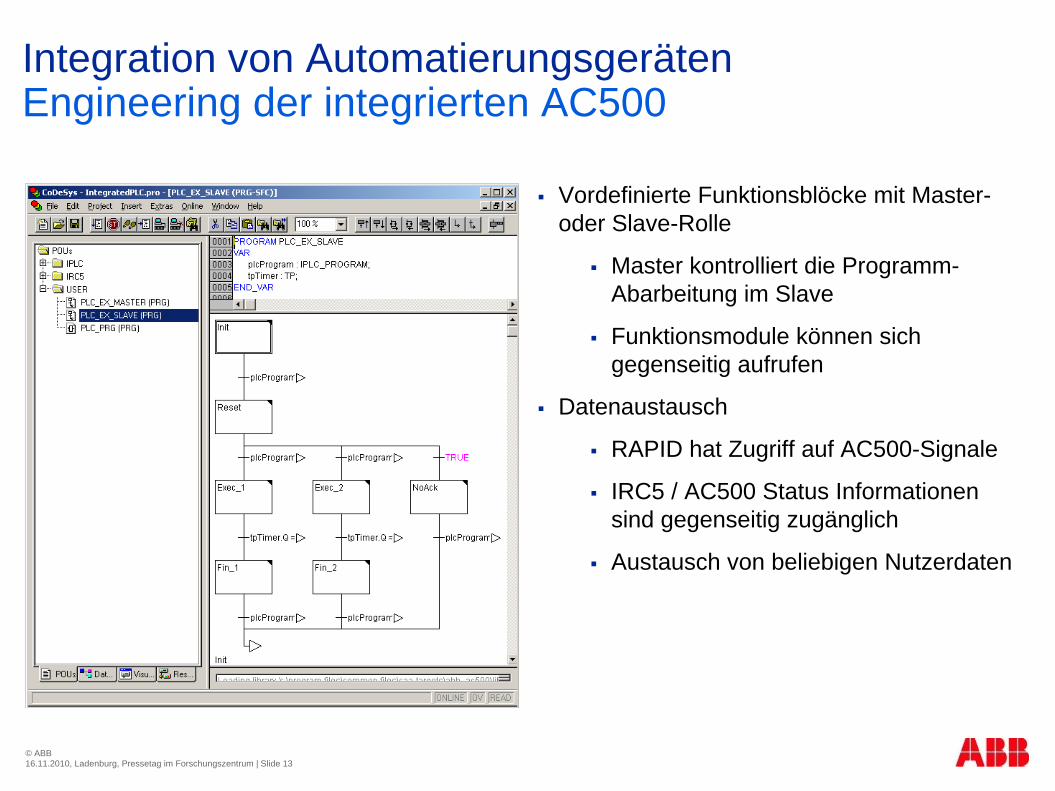
Integration von Automatierungsgeräten Engineering der integrierten AC500
Vordefinierte Funktionsblöcke mit Master- oder Slave-Rolle
Master kontrolliert die Programm- Abarbeitung im Slave
Funktionsmodule können sich gegenseitig aufrufen
Datenaustausch
RAPID hat Zugriff auf AC500-Signale
IRC5 / AC500 Status Informationen sind gegenseitig zugänglich
Austausch von beliebigen Nutzerdaten
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 16
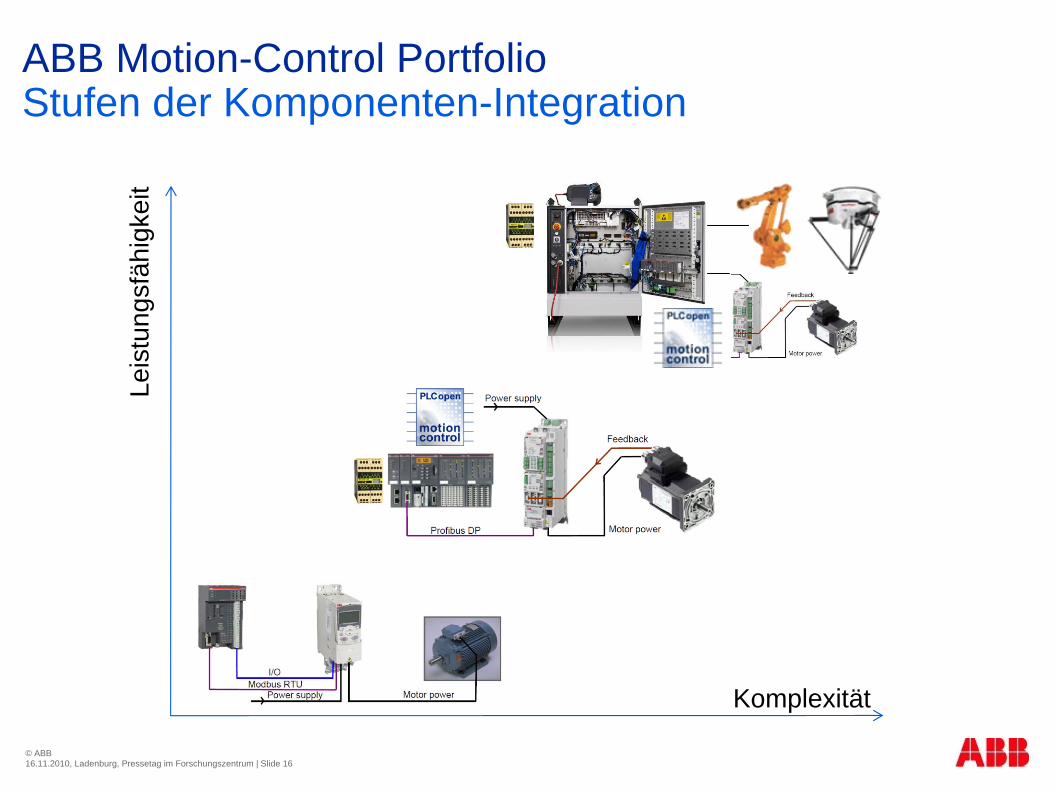
ABB Motion-Control Portfolio Stufen der Komponenten-Integration
Leis
tung
sfäh
igke
it
Komplexität
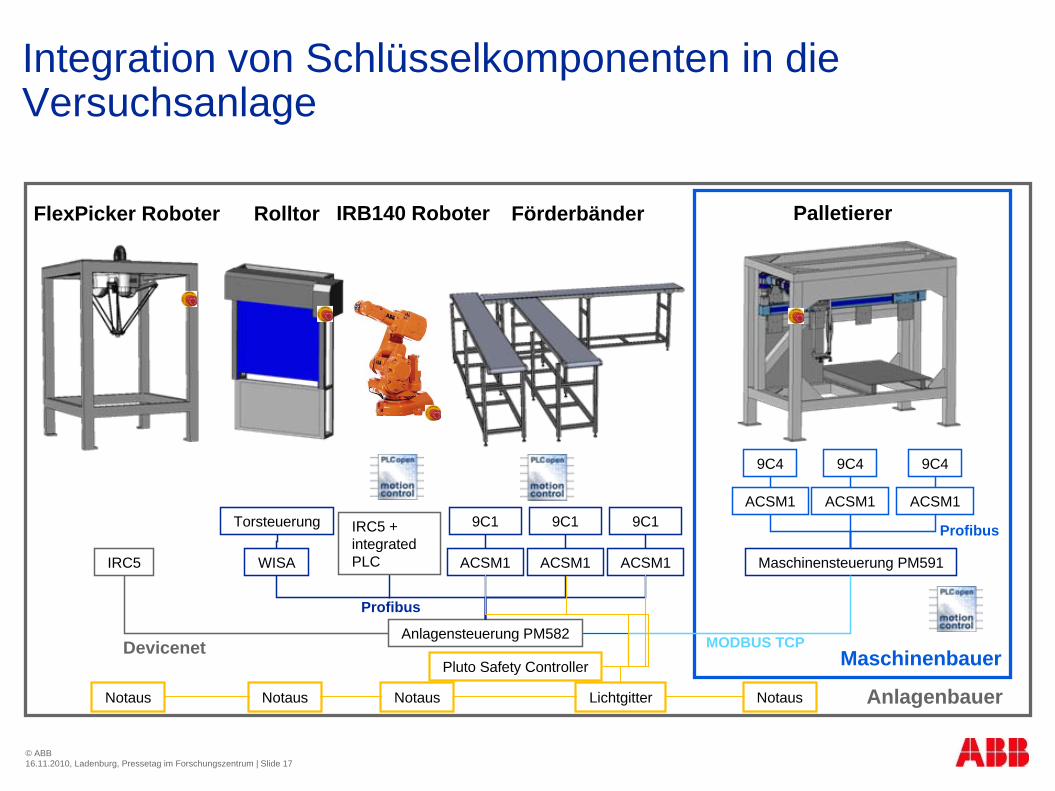
Integration von Schlüsselkomponenten in die Versuchsanlage
© ABB16.11.2010, Ladenburg, Pressetag im Forschungszentrum | Slide 17
FlexPicker Roboter Förderbänder Palletierer
IRC5 Maschinensteuerung PM591
Anlagensteuerung PM582
ACSM1 ACSM1 ACSM1
ACSM1 ACSM1 ACSM1
Profibus
Profibus
Devicenet
Rolltor
Torsteuerung
WISA
9C1 9C1 9C1
9C4 9C4 9C4
Maschinenbauer
Anlagenbauer
MODBUS TCP
IRB140 Roboter
Pluto Safety Controller
Notaus Notaus NotausNotaus Lichtgitter
IRC5 + integrated PLC






























