Embed Size (px)
Citation preview

Effiziente RDE-Entwicklung mittels Engine-in-the-Loop-PrüfstandBosch Engineering hat eine Entwicklungsstrategie auf Basis eines Engine-in-the-Loop(EiL)-Motorprüf-
stands umgesetzt, die speziell auf RDE-Anforderungen abgestimmt ist. Sie lässt sich sehr gut in Front -
loading-Ansätze integrieren, da sie schon früh im Entwicklungsprozess belastbare Ergebnisse liefert.
Die Dauer eines typischen Entwicklungsprojekts kann damit deutlich verkürzt und die Belegung der
Prototypenfahrzeuge um bis zu 85 % reduziert werden.
RDE
TITELTHEMA RDE
18

© B
osch
ENTWICKLUNGSMETHODEN STOSSEN AN GRENZEN
Die neue RDE-Gesetzgebung (Real Dri-ving Emissions), die Emissionstests von Fahrzeugen mittels realer Straßenfahrten voraussetzt, kommt einem Paradigmen-wechsel bei der Messung und Bewertung der Abgasemissionen gleich. Anders als bei bisherigen Prüfungen sind Parameter wie Motorlast oder Fahrzeuggeschwin-digkeit mit RDE nicht mehr durch ein festes Muster vorgegeben, sondern wer-den weitgehend vom Verkehrsgeschehen, Fahrerverhalten und dem Streckenver-lauf bestimmt.
Darauf müssen sich die Automobil-hersteller einstellen, sowohl bei der Kon-zeption, Konstruktion und Applikation abgasrelevanter Bauteile und Systeme, als auch bei der Organisation der entspre-chenden Entwicklungsprozesse. Denn mit Standardentwicklungsmethoden kann eine RDE-Prüfung erst erfolgen, wenn Prototypenfahrzeuge für die Unter-suchungen mit dem mobilen Messgerät (Portable Emission Measurement System, PEMS) zur Verfügung stehen. Der Grund dafür liegt insbesondere in der zuneh-menden Vernetzung der einzelnen Kom-ponenten des Fahrzeugs, was zwar in der Entwicklung weitere Möglichkeiten zur Verbesserung des Gesamtsystems bietet, aber auch bedeutet, dass die Optimierung des Emissionsverhaltens nicht mehr allein auf Detail- beziehungsweise Bauteilebene untersucht werden kann. Vielmehr muss das Gesamtsystem im Zusammenwirken von Motor- und Getriebesteuerung, Abgasnachbehandlung, Fahrereinfluss und Umgebungsbedingungen im Real-fahrzeug analysiert werden.
Das RDE-Testprogramm der klassi-schen Entwicklungsmethode mit PEMS-Messungen besteht aus diversen Prüf-fahrten auf unterschiedlichen Strecken mit verschiedenen Fahrern, um statis-tisch eine größtmögliche Bandbreite von Bedingungen abzudecken [1]. Wird eine relevante Emissionsabweichung festge-stellt, ist das oftmals mit einer kostenin-tensiven Iteration zurück in die Brenn-verfahrensentwicklung verbunden und, aufgrund des schon fortgeschrittenen Projektstands, im ungünstigsten Fall mit einer Verschiebung des SOP (Start of Production). Das widerspricht dem Ansatz moderner Frontloading-Metho-den, die darauf basieren, schon frühzei-tig im Entwicklungsprozess belastbare
Ergebnisse zu generieren, um späteren Änderungsaufwand zu vermeiden.
Erschwert wird die Entwicklungsauf-gabe durch die geringe Reproduzierbar-keit der RDE-Tests: Da es nahezu unmög-lich ist, bei Realtests auf der Straße zwei Messungen mit vergleichbaren Bedin-gungen durchzuführen, lassen sich die Auswirkungen von Modifikationen an Antrieb oder Fahrzeug nicht gezielt mit dem Basiszustand vergleichen, was Aus-sagen über deren Wirksamkeit schwierig macht. Eine weitere sowohl logistische als auch wirtschaftliche Herausforde-rung ist die große Anzahl von Prototy-penfahrzeugen und PEMS-Messeinhei-ten, die notwendig sind, um ausreichend viele RDE-Tests für eine repräsentative
AUTOREN
Jan Gerstenbergist Product Owner für RDE- Engineering bei der Bosch
Engineering GmbH in Abstatt.
Dr. Christian Schyrist Projektmanager bei der AVL List GmbH in Graz (Österreich).
Dr. Sandra Sterzing-Oppelist Systemingenieurin für den Antriebsstrang bei der Bosch
Engineering GmbH in Abstatt.
Dennis Trenkleist Applikationsingenieur
für Ottomotoren bei der Bosch Engineering GmbH in Abstatt.
RDE
19MTZ 06|2017 78. Jahrgang

Aussage über das Emissionsverhalten durchführen zu können.
Untersuchungen auf dem Rollenprüf-stand bieten zwar eine reproduzierbare Testumgebung, spiegeln die Realität jedoch nicht vollständig wider, da sehr dynamisches Fahrverhalten nicht repro-duzierbar abgebildet werden kann. Hier-für käme nur ein Fahrroboter infrage, der wiederum auf das Fahrverhalten angelernt werden müsste und mit hohen Kosten verbunden wäre. Beispielsweise wird kurzzeitiges dynamisches „Durch-treten“ oder „Lupfen“ des Gaspedals auf dem Rollenprüfstand nicht berücksich-tigt. Das ist jedoch ein für RDE wichtiger Faktor, da es einen nervösen Fahrer cha-rakterisiert und Fahrer damit im alltägli-chen Straßenverkehr auf Bodenwellen oder Schlaglöcher reagieren. Zudem sind auch Rollenprüfstandsuntersuchungen kostenintensiv, an die Verfügbarkeit von Prototypenfahrzeugen gebunden und in ihren Kapazitäten beschränkt.
RDE-UNTERSUCHUNG MITTELS EIL-MOTORPRÜFSTAND
Bosch Engineering hat eine innovative Entwicklungsstrategie auf Basis eines Engine-in-the-Loop(EiL)-Motorprüf-stands umgesetzt, die speziell auf RDE-Anforderungen abgestimmt ist und sich in Frontloading-Ansätze integrieren lässt, BILD 1. Der Motorprüfstand bietet den Vorteil, dass Komplettfahrzeuge nur wenige Tage zur Modellvalidierung benötigt werden. Um zu aussagekräfti-gen RDE-Ergebnissen zu kommen, reicht vielmehr der Motor samt Peripherie aus. Er ist konditionierbar, beispielsweise las-sen sich Zuluft-, Ladeluft-, Fahrtwind-
und Motortemperatur in weiten Berei-chen konfigurieren. Damit liefert er hochreproduzierbare Ergebnisse, sodass sowohl in der Entwicklung, als auch während der Applikation und der Vali-dierung verschiedene Lösungen exakt verglichen und die Auswirkungen von Änderungen im Gesamtsystemverbund getestet werden können. Zur Effizienz-steigerung des Testprogramms tragen eine Schnellkühlung für verkürzte Vor-bereitungszeiten und eine Prüfstands-automatisierung, die einen Testablauf über Nacht zulässt, bei. Damit lassen sich auch Fahrzeugbaureihen mit hoher Variantenanzahl wirtschaftlich unter-suchen [2]. Die Rüstzeit des Motors und damit die Belegungsdauer des
Prüfstands werden durch ein innovatives Schnellwechselsystem minimiert.
VERGLEICH DES ZEITLICHEN AUFWANDS
TABELLE 1 zeigt den zeitlichen Aufwand, den die unterschiedlichen Prüfmethoden für die RDE-Entwicklung in einem reprä-sentativen Fahrzeugprojekt verursachen. Für eine zuverlässige Entwicklung der RDE-Eigenschaften sind als Erfahrungs-wert pro Variante (Kombination aus Motor, Getriebe und Fahrzeug) 200 Tests zu veranschlagen. Bei ausschließlicher Nutzung von PEMS-Messungen muss man mit einer Testdauer von 200 Tagen rechnen, an denen PEMS-Geräte und
BILD 1 RDE-Entwicklungsstrategien (© Bosch)
Aufgabe
Fahrzeug, PEMS, Ingenieur
Fahrzeug, PEMS, Ingenieur, Rollenprüfstand
Fahrzeug, PEMS, Ingenieur, Rollenprüfstand, RDE-Motorenprüfstand
Validierung auf der Straße mit PEMS
Straßenfahrt (PEMS) 200 Tests | 200 Tage 100 Tests | 100 Tage 20 Tests | 20 Tage × Straßentests (PEMS)
Rollenprüfstand –100 Tests | 50 Tage* (100 Tests | 100 Tage)
10 Tests | 5 Tage –
RDE-Motorenprüfstand – – 170 Tests | 29 Tage** –
Dauer [Tage] 200 15064 (inkl. 10 Tage Wartung, Stillstand)
–
Kapazität PEMS 100 % 51 % 11 % –
Rollenprüfstand Kapazität
1 % 25 – 50 % 3 % –
Fahrzeug Kapazität 100 % 100 % 15 % –
* Zwei-Schicht-Betrieb / ** 24 h/6 automatisierte Testreihen
TABELLE 1 Beispielrechnung eines RDE-Ent-wicklungsprojekts (© Bosch)
TITELTHEMA RDE
20

Prototypen zu 100 % ausgelastet sind. Hinzu kommt ein geringer Aufwand von 1 % Rollenprüfstandskapazitäten, um die PEMS-Geräte zu kalibrieren.
Teilt man den Gesamtprüfaufwand hälftig auf Testfahrten und Rollenprüf-standsmessungen auf, beträgt die Test-dauer auf der Straße nur noch 100 Tage. Mit einem Rollenprüfstand ist im Ein-schichtbetrieb pro Tag eine Messung möglich, im Mehrschichtbetrieb sind es maximal zwei, sodass sich die prüf-standsbezogene Testdauer auf 50 Tage halbiert. Im Bestfall müssen demnach in der Addition 150 Projekttage eingeplant werden. Damit lässt sich der Bedarf an PEMS-Geräten reduzieren, allerdings werden nach wie vor auch für die Rollen-prüfstandstests Prototypenfahrzeuge benötigt, die einerseits ein Hauptkosten-treiber sind und andererseits oftmals nur sehr beschränkt zur Verfügung stehen.
Nutzt man die Straßenmessung mit PEMS-Geräten in erster Linie zur Validie-rung der Ergebnisse und stützt sich in der Entwicklungsphase auf Motorprüfstands-
untersuchungen sowie Rollentests für Höhen- und Klimauntersuchungen, ergibt sich folgendes Bild in der Beispiel-rechnung: Vor und nach den Motorprüf-standsuntersuchungen werden beispiels-weise zur Analyse jeweils zehn Messun-gen mit PEMS-Geräten durchgeführt. Der Hauptteil der Untersuchungen entfällt auf die Motorprüfstandsuntersuchungen. Durch die Schnellkühlung zwischen den Messungen können damit bis zu sechs Tests in 24 h abgearbeitet werden, sodass für 170 Messungen nur 29 Tage benötigt werden. Damit sinkt der hier geplante Testaufwand auf 64 Tage. In Summe reduzieren Motorprüfstandsuntersuchun-gen die Testdauer in diesem Beispiel um 70 % und die Belegung der Prototypen-fahrzeuge um 85 %; zudem schaffen sie freie Kapazitäten bei PEMS-Geräten und Rollenprüfständen. Notwendige Anpas-sungen des Systems im weiteren Verlauf der Entwicklung können durch Iteratio-nen der Testreihen schnell untersucht werden. Nach der parallelen Entwicklung auf dem Motorprüfstand und dem Höhen-
beziehungsweise Klimarollenprüfstand kann zur „Validierung auf der Straße“ übergegangen werden.
PRÜFSTANDSAUFBAU
Der von Bosch Engineering aufgebaute EiL-Motorprüfstand, BILD 2, besteht im Wesentlichen aus dem Verbrennungsmo-tor inklusive Abgasnachbehandlung auf dem Schnellwechselgestell und dem Dynamometer als elektrische Bremse, die dem Motor die Last entgegenstellt. Die Bremse ist über eine Echtzeitschnittstelle an die Prüfstandsautomatisierung ange-bunden, in diesem Fall das System AVL Puma. Der eigentliche Kern der Simula-tion – das Modell von Fahrzeug (unter anderem Längs- und Querbeschleuni-gung, Raddrehzahl, Lenkwinkel, Rei-bungsverluste), Getriebe, Strecke sowie der Verkehrssituation (beispielsweise Stau) – wird im System „AVL In Motion powered by Car Maker“ generiert. Eine Interface-Box übernimmt die Restbus-Simulation, mit der etwa fahrzeugseitige
MTZ 06|2017 78. Jahrgang 21
Powered by
INTERNATIONALTHERMPROCESSSUMMIT
The Key Event for Thermo Process Technology
InterContinental Hotel
Düsseldorf, Germany
27-28 June 2017
www.itps-online.com
Organized by

Sensor- und Aktuatorsignale oder kom-plette Getriebefunktionen nachgebildet werden. Die Daten der „in the Loop“ betriebenen Motorsteuerung werden über ein Etas-Modul ausgelesen. Eine entsprechende Abgasmesstechnik zur Emissionsuntersuchung ergänzt die Toolkette. Die früher verwendete Über-nahme einer Fahrspur auf den Motor-prüfstand ist nicht mehr erforderlich.
Ein zentraler Baustein des Testver-fahrens ist die Methodik, mit der reale Fahrsituationen auf der Simulationsumge-bung generiert werden. Sie gewährleistet, dass sich die Emissionen auf verschiede-nen Strecken und Verkehrsbedingungen mit unterschiedlichen Fahrerprofilen reproduzieren lassen. Entscheidend dafür sind die Modelle der Fahrstrecke inklu-sive Stauplanung und die zu parametrie-renden Eigenschaften des Fahrers.
Als Vorbereitung der Tests muss zunächst das Profil der Strecke, auf der
das RDE-Verhalten geprüft werden soll, einmalig mittels GPS aufgezeichnet und in das System eingespeist werden. Diese Daten stehen danach für alle weiteren Messungen zur Verfügung und sind bei-spielsweise auch für Nachfolgeprojekte weiter verwendbar. Während des Test-laufs bildet die Simulationsumgebung diese Strecke mit allen Steigungen und Gefällen als Drehmomentvorgabe ab, die dann vom Motor in Echtzeit abgefordert wird, BILD 3. Überlagert werden diese Signale durch Simulationen, die beispiels-weise Staus, Stop-and-go-Verkehr und Wartephasen an einer roten Ampel berücksichtigen. Die Unterschiede im Fahrerverhalten werden anhand des cha-rakteristischen Beschleunigungsprofils der einzelnen Fahrergruppen – beispiels-weise mild, normal, aggressiv, nervös – berücksichtigt. Synchron zum Ablauf der Untersuchung wird der aktuelle Strecken-punkt auf einer Straßenkarte angezeigt
und eine Filmaufnahme der Strecke ein-gespielt. Zudem werden die GPS-Koordi-naten inklusive Steigungen und Gefälle angegeben. Damit kann der Testingenieur, beispielsweise bei Auffälligkeiten der Emissionen, auf die reale Strecke referen-zieren beziehungsweise diese exakt einem Ereignis zuordnen. Speziell in der Engi-neering-Phase empfiehlt es sich, verschie-dene Strecken, Stausituationen und Fah-rerprofile in einer Matrix zu kombinieren und zu testen, um die RDE-Robustheit mit einer großen Anzahl an Variationen abzu-prüfen. Das Ergebnis besteht aus einem multidimensionalen Emissionsraum, der die Robustheit des Gesamtsystems über den Streckenprofilen darstellt [3].
In einer solchen Umgebung können die spezifischen Eigenschaften und die Wechselwirkungen des Gesamtsystems verstanden werden [4] und der Applikati-onsingenieur bekommt ein geeignetes Werkzeug an die Hand, um sich frühzei-tig mit Herausforderungen wie beispiels-weise RDE beschäftigen zu können [5].
Die RDE-Tests stellen hohe Anforderun-gen an die Zusammensetzung von Strecke und Fahrsituation. Ungültig im Sinne der RDE-Untersuchungen sind etwa Fahrten, bei denen Beschleunigungen zu stark oder sanft, Stillstandzeiten an Ampeln oder im Stau zu lang oder die Durchschnittsge-schwindigkeiten in der Stadt zu hoch oder gering waren. Mit konventionellen Ent-wicklungsmethoden lassen sich diese Streichergebnisse nicht vermeiden, da konzeptbedingt erst am Ende des Test-durchlaufs sichtbar ist, ob alle Parameter im Sinne der RDE-Konformität erfüllt sind. Bosch Engineering hat daher den neuen Ansatz der prädiktiven Simulati-onsparametrierung entwickelt. Dabei kann die Fahrt zunächst als reine Rech-nersimulation in Car Maker abgearbeitet werden, ohne den realen Verbrennungs-motor zu integrieren. Auf diese Weise las-sen sich Randbedingungen wie Fahreigen-schaften, Stau und Fahrgeschwindigkeit gezielt so parametrieren, dass eine bezüg-lich RDE gültige Fahrsituation entsteht, auch wenn Grenzszenarien wie eine maximal aggressive oder milde Fahrt angenommen werden. Dabei nähert sich das Programm iterativ an die richtigen Parametereinstellungen heran. Erst wenn die Fahrsituation optimiert ist, wird der eigentliche Prüfstandstest mit dem Ver-brennungsmotor durchgeführt. Das spart wertvolle Entwicklungszeit und -kosten, da der Prüfstand nur für relevante Tests in BILD 3 Aufbau der RDE-Strecken (© Bosch)
BILD 2 Prüfstandsaufbau (© Bosch)
TITELTHEMA RDE
22
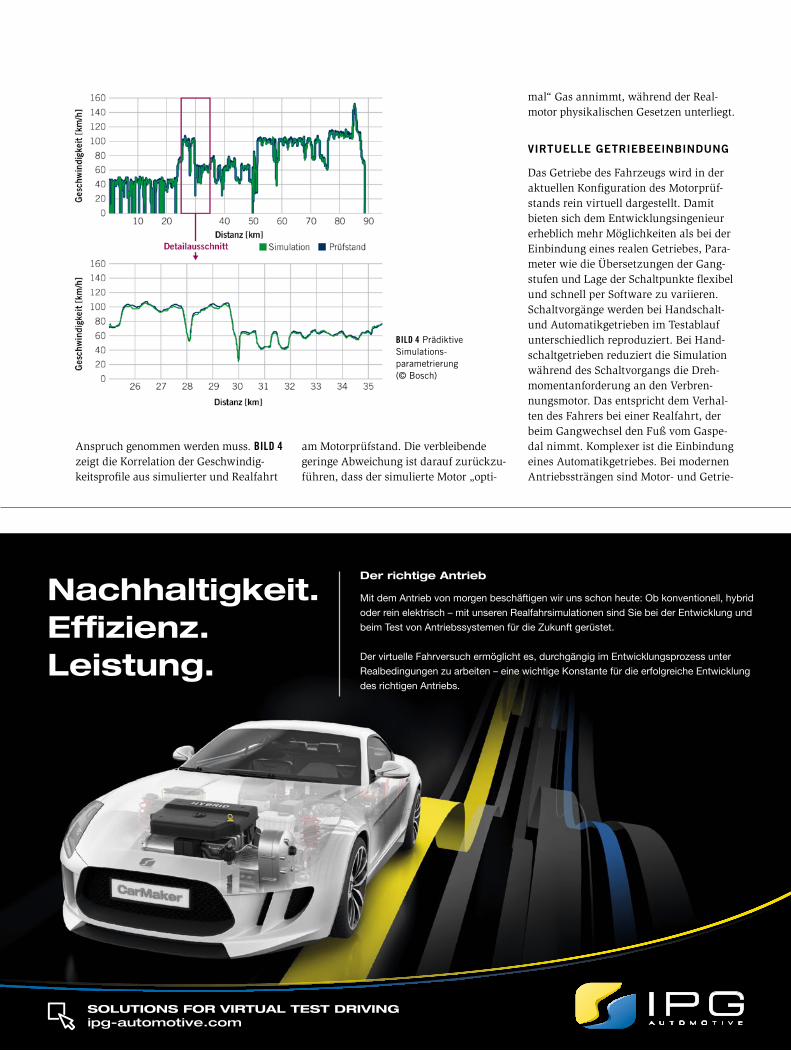
Anspruch genommen werden muss. BILD 4 zeigt die Korrelation der Geschwindig-keitsprofile aus simulierter und Realfahrt
am Motorprüfstand. Die verbleibende geringe Abweichung ist darauf zurückzu-führen, dass der simulierte Motor „opti-
mal“ Gas annimmt, während der Real-motor physikalischen Gesetzen unterliegt.
VIRTUELLE GETRIEBEEINBINDUNG
Das Getriebe des Fahrzeugs wird in der aktuellen Konfiguration des Motorprüf-stands rein virtuell dargestellt. Damit bieten sich dem Entwicklungsingenieur erheblich mehr Möglichkeiten als bei der Einbindung eines realen Getriebes, Para-meter wie die Übersetzungen der Gang-stufen und Lage der Schaltpunkte flexibel und schnell per Software zu variieren. Schaltvorgänge werden bei Handschalt- und Automatikgetrieben im Testablauf unterschiedlich reproduziert. Bei Hand-schaltgetrieben reduziert die Simulation während des Schaltvorgangs die Dreh-momentanforderung an den Verbren-nungsmotor. Das entspricht dem Verhal-ten des Fahrers bei einer Realfahrt, der beim Gangwechsel den Fuß vom Gaspe-dal nimmt. Komplexer ist die Einbindung eines Automatikgetriebes. Bei modernen Antriebssträngen sind Motor- und Getrie-
BILD 4 Prädiktive Simulations-parametrierung (© Bosch)
MTZ 06|2017 78. Jahrgang 23Mehr Informationen unter:www.ipg-automotive.com
SOLUTIONS FOR VIRTUAL TEST DRIVING ipg-automotive.com
Der richtige Antrieb
Mit dem Antrieb von morgen beschäftigen wir uns schon heute: Ob konventionell, hybrid
oder rein elektrisch – mit unseren Realfahrsimulationen sind Sie bei der Entwicklung und
beim Test von Antriebssystemen für die Zukunft gerüstet.
Der virtuelle Fahrversuch ermöglicht es, durchgängig im Entwicklungsprozess unter
Realbedingungen zu arbeiten – eine wichtige Konstante für die erfolgreiche Entwicklung
des richtigen Antriebs.
Nachhaltigkeit. Effizienz.Leistung.
besteuerung eng vernetzt. Damit die Motorsteuerung auf dem Prüfstand so arbeitet, wie sie es im Fahrzeug tun würde, wird sie in einer Restbus-Simu-lationsumgebung betrieben. Dort wird auch die komplette Steuerung des Auto-matikgetriebes nachgebildet. Wie im rea-len Fahrzeug berechnet diese die Dreh-momentreduktion beim Wechsel der Gangstufen individuell anhand der aktu-ellen Fahrsituation, sodass beispielsweise unterschiedliche Drehmomenteingriffe bei Bergauf- und Bergabfahrt berücksich-tigt werden können.
Die in der Restbus-Simulation abgebil-dete Getriebesteuerung umfasst auch die Schaltstrategie. Abhängig von der jeweili-gen Ausrichtung des Testprogramms und den Wünschen des Projektpartners sind zwei unterschiedliche Arten möglich, wie diese berücksichtigt werden kann: einer-seits anhand von Basiskennfeldern und andererseits durch die Umsetzung des realen Getriebeverhaltens in die Simulati-onsumgebung. Basiskennfelder sind aus Erfahrungswerten beziehungsweise der Vorgänger-Software generiert und ermög-lichen die dezidierte Untersuchung des Emissionsverhaltens mit dieser einen Schaltstrategie. Tests mit weiteren Schalt-kennlinien können im Anschluss durch-geführt werden. Damit eignen sich Basis-kennfelder vor allem für breit angelegte Messreihen in einer frühen Entwicklungs-phase, etwa um grundsätzliche Schwach-punkte der Komponenten im Systemver-bund zu untersuchen oder verschiedene Hard- oder Softwarekonfigurationen mit-einander zu vergleichen, auch wenn die finale Getriebesteuerungssoftware noch nicht verfügbar ist.
In der Entwicklung lässt sich zu einem späteren Zeitpunkt eine Simulation des kompletten Getriebeverhaltens einset-zen. Der Vorteil dieses Ansatzes ist eine sehr exakte Spiegelung der Ist-Situation des Fahrzeugs auf der Straße, sodass er insbesondere für Validierungsaufgaben in der Spätphase des Entwicklungspro-zesses seine Stärken entfaltet. Beispiels-weise können kurzfristige Updates in der Motor- oder Getriebesoftware auf das System „geflashed“ und auf ihren RDE-Einfluss geprüft werden oder Details einer spezifischen Systemkonfiguration optimiert werden.
BILD 5 zeigt als Beispiel eine typische vom Motorprüfstand initiierte Fahrzeug-beschleunigung von 0 auf 100 km/h mit den entsprechenden Schaltvorgängen. Die
BILD 5 Beschleunigung mit Getriebesimulation für einen Ottomotor (© Bosch)
BILD 6 Übereinstimmung zwischen Straßenfahrt und Motorprüfstands-untersuchung (© Bosch)
TITELTHEMA RDE
24

Drehzahlsprünge beim Schaltvorgang sind in schwarz aufgetragen. Die Modellierung des Getriebes gibt beim Gangwechsel den Befehl an das Motorsteuergerät, das Dreh-moment zu reduzieren (violett). Wie im Realfahrzeug gibt die Getriebesimulation über den Restbus dabei alle relevanten Information an die Motorsteuerung, worauf die geforderte Reduktion des Dreh-moments mittels Zündeingriffen und Ein-spritzausblendungen umgesetzt wird.
GENAUIGKEIT DER METHODIK
Vor der ersten aussagekräftigen Messung muss das Modell des Fahrzeugs mit allen Verlusten validiert werden. Das Feature „vTarget“ ermöglicht es, eine Straßenmes-sung auf dem Motorprüfstand ohne den Einfluss eines Fahrers auf Simulations-seite nachzufahren. Wenn der in der Vali-dierung über dem Steuergerät ermittelte Verbrauch dem der Straßentests gleich ist, sind alle Grundlasten ausreichend präzise parametriert. In BILD 6 sind die Ergeb-nisse einer PEMS-Messung auf der Straße und einer Motorprüfstandsuntersuchung gegenübergestellt. Sowohl bei innerem Drehmoment als auch bei CO2-Emissionen ist die Übereinstimmung zwischen Stra-ßen- und Prüfstandsmessung gegeben. Das System ist bereit für die RDE-Tests.
Im Testverlauf müssen für Fahrzeuge mit Diesel- und Ottomotor unterschiedli-che Strategien angewandt werden. Diesel-motoren werden auf aggressive, nervöse und besonders milde Fahrsituationen hin überprüft, um das Zusammenspiel von Rohabgasentwicklung und der Funktion des Abgasnachbehandlungssystems zu untersuchen. Oft werden Tests hier nur einmalig gefahren, da das für eine klare Aussage des Systemverhaltens ausreicht. Bei der ottomotorischen Untersuchung liegt momentan der Schwerpunkt auf dem
nervösen beziehungsweise aggressiven Fahrer und Fahrsituationen, um auf tem-poräre mögliche Gemischabweichungen als Worst-Case-Situation hin zu über-prüfen. Allerdings verhalten sich Otto-motoren in ihrem Emissionsverhalten sensibler als Dieselmotoren, was auf starke Einflüsse durch die Kraftstoff-zusammen setzung, Abgasgegendrücke und die Betriebshistorie zurückzuführen ist. Daher müssen gleiche Tests mehrfach wiederholt werden, um ein voll stän diges Bild der Abgasrobustheit zu erhalten.
RDE-MESSUNG AM DIESELMOTOR
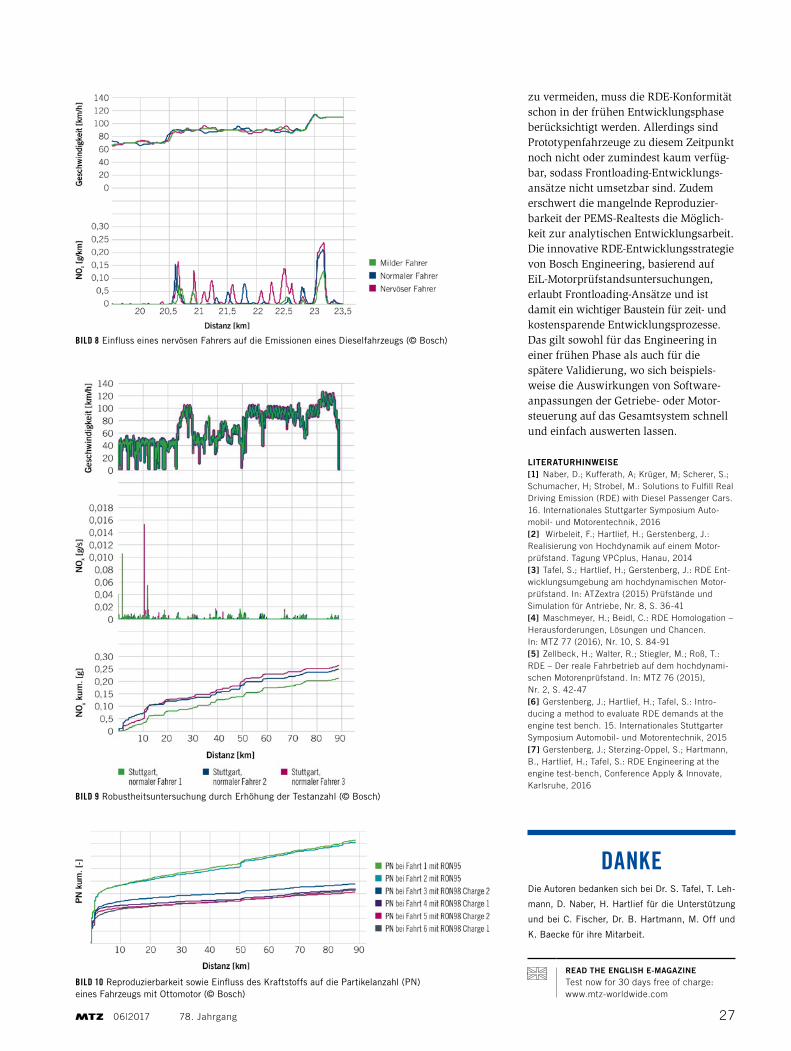
Als Beispiele charakteristischer Fahrsitua-tionen, die bei der Untersuchung des RDE-Verhaltens mit Dieselmotoren zu Optimie-rungsaufwand führen können, sind im Folgenden einige Ergebnisse aus aktuellen Projekten skizziert. BILD 7 (links) zeigt dazu die Auswertung einer Messung mit einem Dieselmotor. Aufgetragen ist die Fahrt im Stop-and-go-Verkehr auf einer Strecke mit 700 m langem Gefälle, in der sich der Motor im Schubbetrieb befindet. Die Light-off-Temperatur des Dieseloxida-tionskatalysators wird mit 75 °C dabei sowohl beim als „mild“ als auch „aggres-siv“ eingeordneten Fahrer unterschritten. Um die Funktion des Katalysators auch in dieser kritischen Situation zu gewährleis-ten, ist eine zusätzliche Heizstrategie in Betracht zu ziehen.
In BILD 7 (rechts) sieht man den Einfluss einer Stausituation auf das SCR-System. In beiden skizzierten Fällen wird das Fah-rerprofil „aggressiv“ hinterlegt, auch die Strecke ist identisch. Allerdings prägt die Simulation beim zweiten Test (grün) einen Stau auf. Zu erkennen ist, dass die Tem-peratur im SCR-Katalysator in dieser Phase erheblich abnimmt und der Wir-kungsgrad des Systems sinkt. Nach dem
Stau fahren beide Fahrer zwar mit dersel-ben Geschwindigkeit, die NOx-Emissionen entwickeln sich jedoch unterschiedlich: Das Auskühlen des SCR-Katalysators führt bei der Staufahrt zu erhöhten NOx-Emis-sionen („Tailpipe“), obwohl die NOx-Roh-emissionen geringer sind als ohne Stau [6].
Aus BILD 8 geht der Einfluss des Fahrers auf das Emissionsverhalten eines unter-suchten Fahrzeugs mit Dieselmotor her-vor. Erwartungsgemäß wirkt sich eine „milde“ Fahrweise positiv auf die Emissio-nen aus. Der „normale“ Fahrer verursacht rund 10 % mehr NOx-Emissionen. Der Fokus der RDE-Entwicklung muss in die-sem Fall jedoch auf den „nervösen“ Fahrer gelegt werden, der mit seiner Fahrweise immer wieder NOx-Spitzen verursacht. Das kann in der Summenbilanz zu erhöh-ten NOx-Emissionen im RDE-Test führen.
RDE-MESSUNG AM OTTOMOTOR
BILD 9 stellt die Testergebnisse dreier RDE-Messungen mit vergleichbaren Rand-bedingungen an einem Ottomotor auf dem Motorprüfstand dar. Obwohl Fahrer- und Streckenprofil in allen Fällen gleich sind, unterscheiden sich die NOx-Emissionen erheblich. Zwar laufen die Summenemis-sionen der einzelnen Messungen weitest-gehend parallel, jedoch sorgen einzelne Emissionsspitzen in den Messungen 1 (grün) und 3 (rot) zu einer Verschiebung des Emissionsniveaus. Das ist ein Indiz für eine mangelnde Robustheit des Systems gegenüber Einflüssen, die im realen Fahrbetrieb auftreten können. Punkte mit erhöhten NOx-Emissionen treten beim Ottomotor in der Regel auf, wenn die Abgaszusammensetzung das Lambda=1-Fenster verlässt, zum Beispiel weil die Füllung durch spülenden Ladungs-wechsel (Scavenging) erhöht wird. Zwar sind einzelne kurzfristige Emissionsaus-
MTZ 06|2017 78. Jahrgang 25www.fev.com
FIT FÜR DIE REAL DRIVING EMISSIONSOTTO- & DIESELMOTORENENTWICKLUNG UND -KALIBRIERUNG
Weniger Verbrauch und Schadstoffausstoß bei konventionellen Verbrennungsmotoren: Otto- und Dieselmotoren bieten noch einige Optimierungspotenziale. FEV ist Ihr Turn-
unserer umfangreichen Erfahrung – auch bei zukunftsweisenden Technologien.
Unsere Erfahrung umfasst: > Wassereinspritzung bei
Ottomotoren > Variables Verdichtungsverhältnis (VCR-Pleuel) bei Otto- und Dieselmotoren > 48 Volt E-Charging > Zukunftssichere Abgasnachbehandlungs- konzepte für Dieselmotoren > RDE-Prüfung und -Optimierung > Motor-Applikation und -Kalibrierung > Downsizing
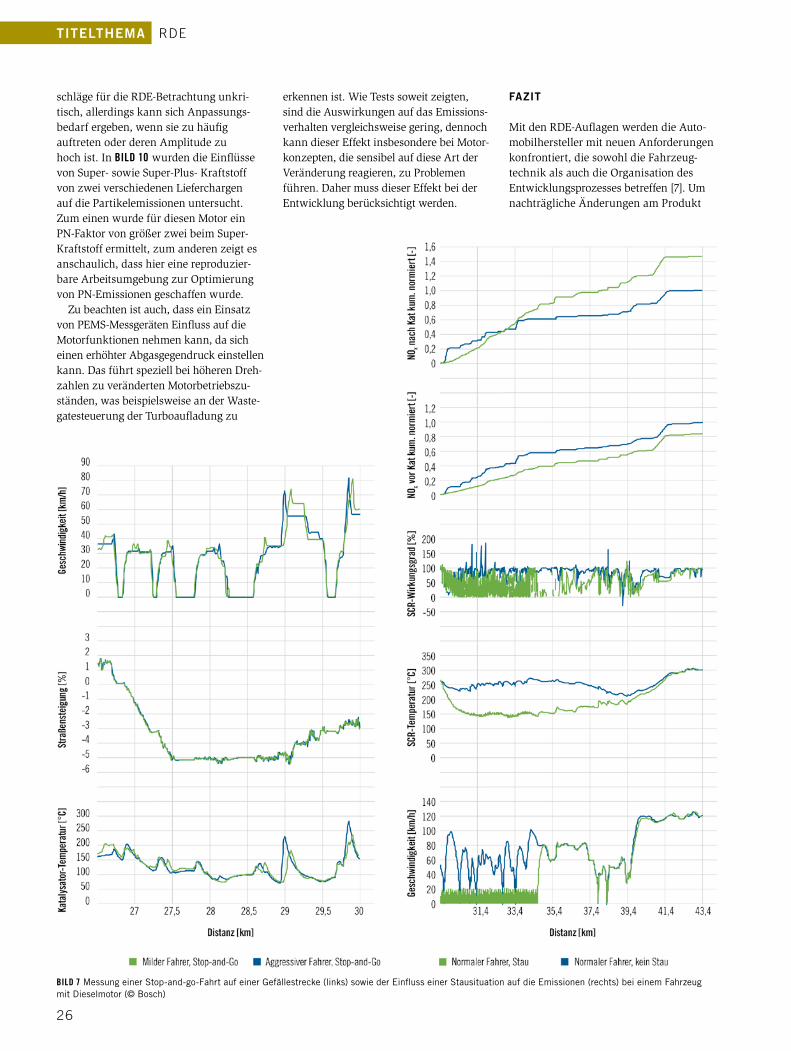
BILD 7 Messung einer Stop-and-go-Fahrt auf einer Gefällestrecke (links) sowie der Einfluss einer Stausituation auf die Emissionen (rechts) bei einem Fahrzeug mit Dieselmotor (© Bosch)
schläge für die RDE-Betrachtung unkri-tisch, allerdings kann sich Anpassungs-bedarf ergeben, wenn sie zu häufig auf treten oder deren Amplitude zu hoch ist. In BILD 10 wurden die Einflüsse von Super- sowie Super-Plus- Kraftstoff von zwei verschiedenen Lieferchargen auf die Partikel emissionen untersucht. Zum einen wurde für diesen Motor ein PN-Faktor von größer zwei beim Super-Kraftstoff ermittelt, zum anderen zeigt es anschaulich, dass hier eine reproduzier-bare Arbeits umgebung zur Optimierung von PN-Emissionen geschaffen wurde.
Zu beachten ist auch, dass ein Einsatz von PEMS-Messgeräten Einfluss auf die Motorfunktionen nehmen kann, da sich einen erhöhter Abgasgegendruck einstellen kann. Das führt speziell bei höheren Dreh-zahlen zu veränderten Motorbetriebszu-ständen, was beispielsweise an der Waste-gatesteuerung der Turboaufladung zu
erkennen ist. Wie Tests soweit zeigten, sind die Auswirkungen auf das Emissions-verhalten vergleichsweise gering, dennoch kann dieser Effekt insbesondere bei Motor-konzepten, die sensibel auf diese Art der Veränderung reagieren, zu Problemen führen. Daher muss dieser Effekt bei der Entwicklung berücksichtigt werden.
FAZIT
Mit den RDE-Auflagen werden die Auto-mobilhersteller mit neuen Anforderungen konfrontiert, die sowohl die Fahrzeug-technik als auch die Organisation des Entwicklungsprozesses betreffen [7]. Um nachträgliche Änderungen am Produkt
TITELTHEMA RDE
26
zu vermeiden, muss die RDE-Konformität schon in der frühen Entwicklungsphase berücksichtigt werden. Allerdings sind Prototypenfahrzeuge zu die sem Zeitpunkt noch nicht oder zumindest kaum verfüg-bar, sodass Frontloading-Entwicklungs-ansätze nicht umsetzbar sind. Zudem erschwert die mangelnde Reprodu zier-barkeit der PEMS-Realtests die Möglich-keit zur analytischen Entwicklungs arbeit. Die innovative RDE-Entwicklungsstrategie von Bosch Engineering, basierend auf EiL-Motorprüfstandsuntersuchungen, erlaubt Front loading-Ansätze und ist damit ein wichtiger Baustein für zeit- und kostensparende Entwicklungsprozesse. Das gilt sowohl für das Engineering in einer frühen Phase als auch für die spätere Validierung, wo sich beispiels-weise die Auswirkungen von Software-anpassungen der Getriebe- oder Motor-steuerung auf das Gesamtsystem schnell und einfach auswerten lassen.
LITERATURHINWEISE[1] Naber, D.; Kufferath, A; Krüger, M; Scherer, S.; Schumacher, H; Strobel, M.: Solutions to Fulfill Real Driving Emission (RDE) with Diesel Passenger Cars. 16. Internationales Stuttgarter Symposium Auto-mobil- und Motorentechnik, 2016[2] Wirbeleit, F.; Hartlief, H.; Gerstenberg, J.: Realisierung von Hochdynamik auf einem Motor-prüfstand. Tagung VPCplus, Hanau, 2014[3] Tafel, S.; Hartlief, H.; Gerstenberg, J.: RDE Ent-wicklungsumgebung am hochdynamischen Motor-prüfstand. In: ATZextra (2015) Prüfstände und Simulation für Antriebe, Nr. 8, S. 36-41[4] Maschmeyer, H.; Beidl, C.: RDE Homologation – Herausforderungen, Lösungen und Chancen. In: MTZ 77 (2016), Nr. 10, S. 84-91[5] Zellbeck, H.; Walter, R.; Stiegler, M.; Roß, T.: RDE – Der reale Fahrbetrieb auf dem hochdynami-schen Motorenprüfstand. In: MTZ 76 (2015), Nr. 2, S. 42-47[6] Gerstenberg, J.; Hartlief, H.; Tafel, S.: Intro-ducing a method to evaluate RDE demands at the engine test bench. 15. Internationales Stuttgarter Symposium Automobil- und Motorentechnik, 2015[7] Gerstenberg, J.; Sterzing-Oppel, S.; Hartmann, B., Hartlief, H.; Tafel, S.: RDE Engineering at the engine test-bench, Conference Apply & Innovate, Karlsruhe, 2016
BILD 8 Einfluss eines nervösen Fahrers auf die Emissionen eines Dieselfahrzeugs (© Bosch)
BILD 9 Robustheitsuntersuchung durch Erhöhung der Testanzahl (© Bosch)
BILD 10 Reproduzierbarkeit sowie Einfluss des Kraftstoffs auf die Par tikelanzahl (PN) eines Fahrzeugs mit Ottomotor (© Bosch)
DANKEDie Autoren bedanken sich bei Dr. S. Tafel, T. Leh-
mann, D. Naber, H. Hartlief für die Unterstützung
und bei C. Fischer, Dr. B. Hartmann, M. Off und
K. Baecke für ihre Mitarbeit.
27MTZ 06|2017 78. Jahrgang
READ THE ENGLISH E-MAGAZINETest now for 30 days free of charge: www.mtz-worldwide.com





























