Embed Size (px)
Citation preview
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Einführung in die Robotik
Kinematik
20. 11. 2012
Mohamed OubbatiInstitut für Neuroinformatik
Tel.: (+49) 731 / 50 [email protected]
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Die Klausur findet am 12 März 2013
im H20 um 11h.
Dauer: 90min
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Die Kinematik beschäftigt sich mit der Geometrie und den zeitabhängigen Aspekten der Bewegung, ohne die Kräfte, die die Bewegung verursacht haben.
Was ist die Kinematik ?
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
1.Wie beschreibt man die Bewegung eines Roboters auf Rädern ?
2.Wie kann man anhand der Bewegungen der Räder die Position bestimmen ?
3.Wie müssen sich die Räder bewegen, damit eine bestimmte Position erreicht wird ?
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
• Interne Repräsentation der BewegungBewegung der Räder
• Externe Repräsentation der BewegungPositionsänderung des Roboters
1. Wie beschreibt man die Bewegung eines Roboters auf Rädern ?
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
• Interne Repräsentation der Bewegung
- Momentane Geschwindigkeiten der Räder- Lenkwinkel der Räder
• Externe Repräsentation der Bewegung
- Position in der Bewegungsebene- Richtung der Bewegung
1. Wie beschreibt man die Bewegung eines Roboters auf Rädern ?
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
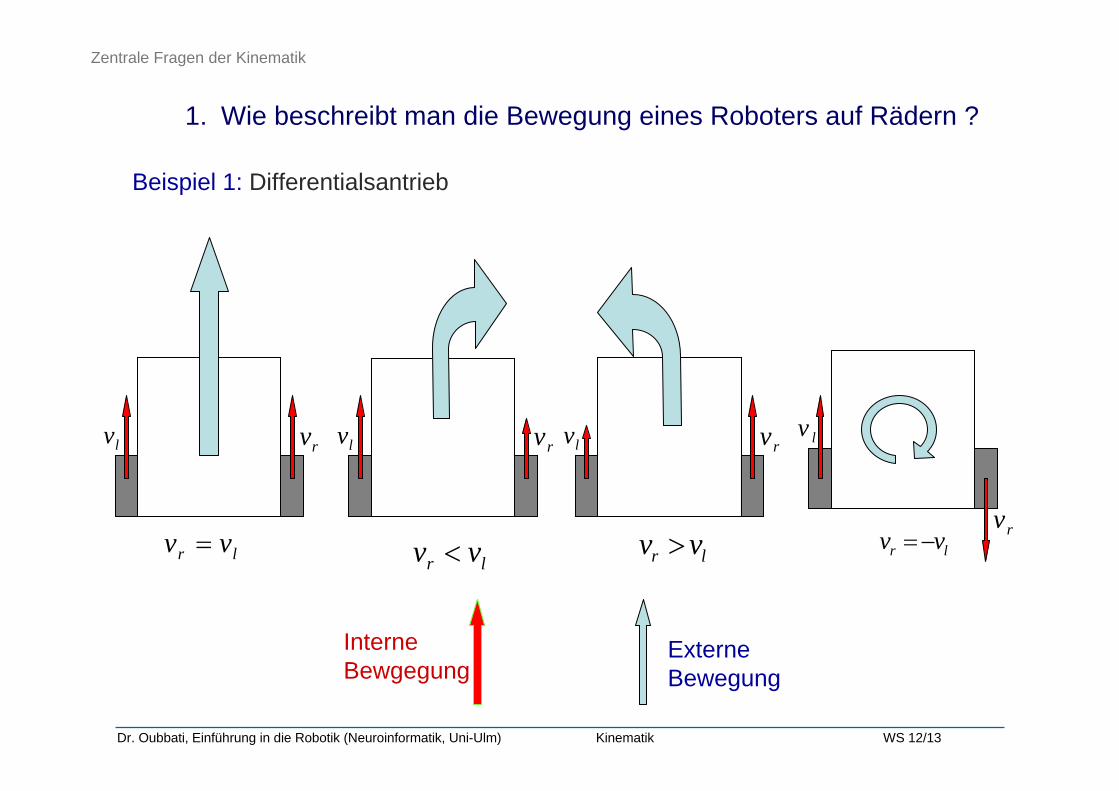
Beispiel 1: Differentialsantrieb
Interne Bewgegung
Externe Bewegung
rvlv
lr vv =
rvlv
lr vv >
rvlv
lr vv <rv
lv
lr vv −=
1. Wie beschreibt man die Bewegung eines Roboters auf Rädern ?
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
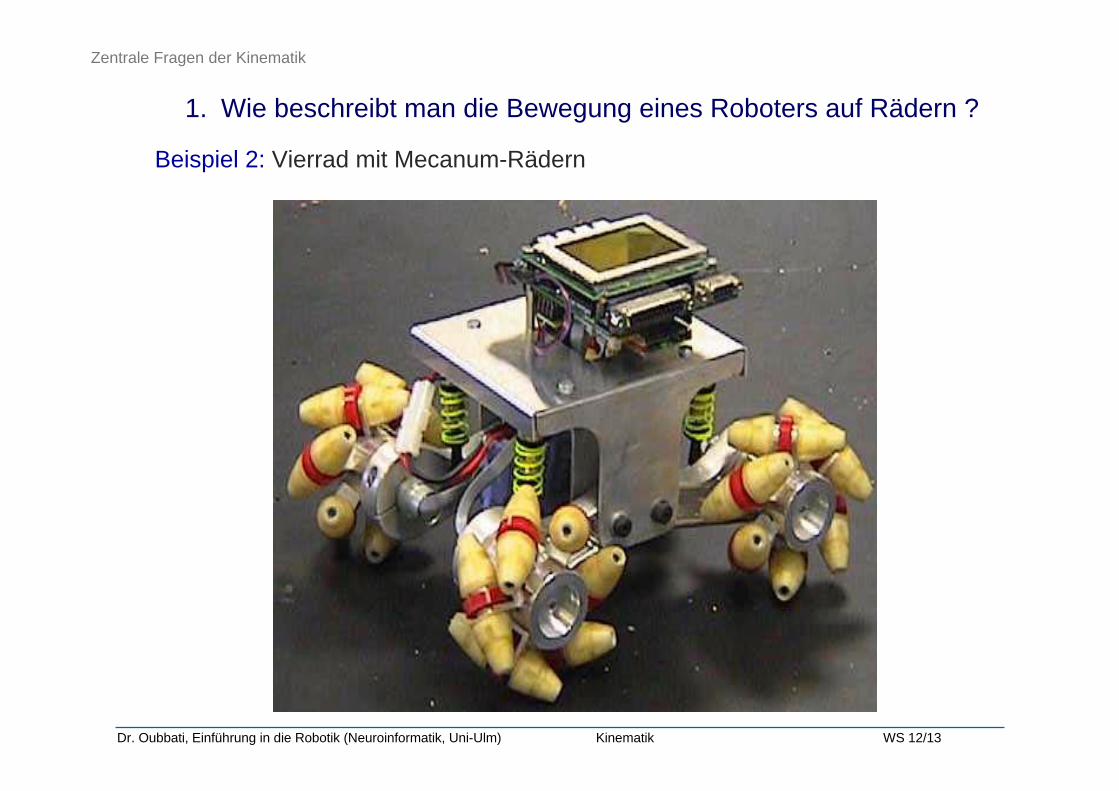
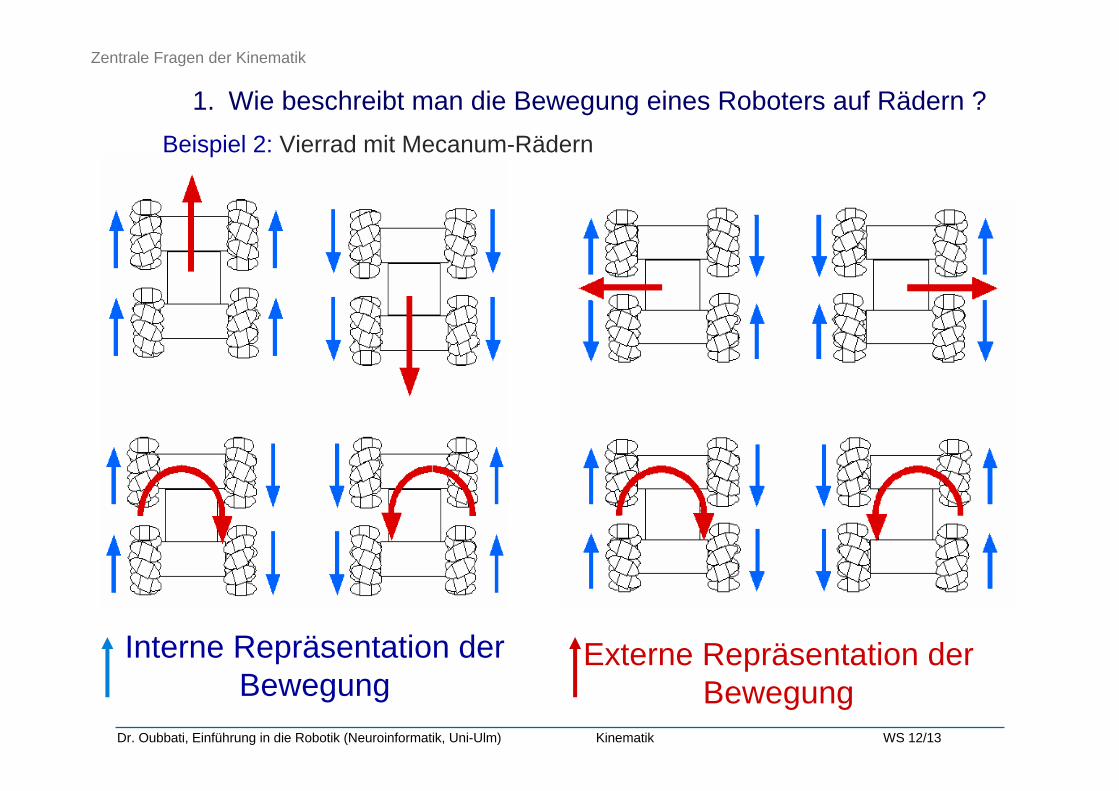
Beispiel 2: Vierrad mit Mecanum-Rädern
1. Wie beschreibt man die Bewegung eines Roboters auf Rädern ?
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Interne Repräsentation der Bewegung
Externe Repräsentation der Bewegung
Beispiel 2: Vierrad mit Mecanum-Rädern
1. Wie beschreibt man die Bewegung eines Roboters auf Rädern ?
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Dies kann man anderes formulieren:
Wie kann man die interne Repräsentation auf die externe Repräsentation abbilden ?
Dieses Problem heißt: Vorwärtskinematik
2. Wie kann man anhand der Bewegungen der Räder die Position bestimmen ?
Vorwärtskinematik
If I do this, what will happen?
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Dies kann man auch anderes formulieren:
Wie kann man die externe Repräsentation auf die interne Repräsentation abbilden ?
Dieses Problem heißt: Rückwärtskinematik
3. Wie müssen sich die Räder bewegen, damit eine bestimmte Position erreicht wird ?
If I want this to happen, what should I do?
Rückwärtskinematik
Zentrale Fragen der Kinematik
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Das Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
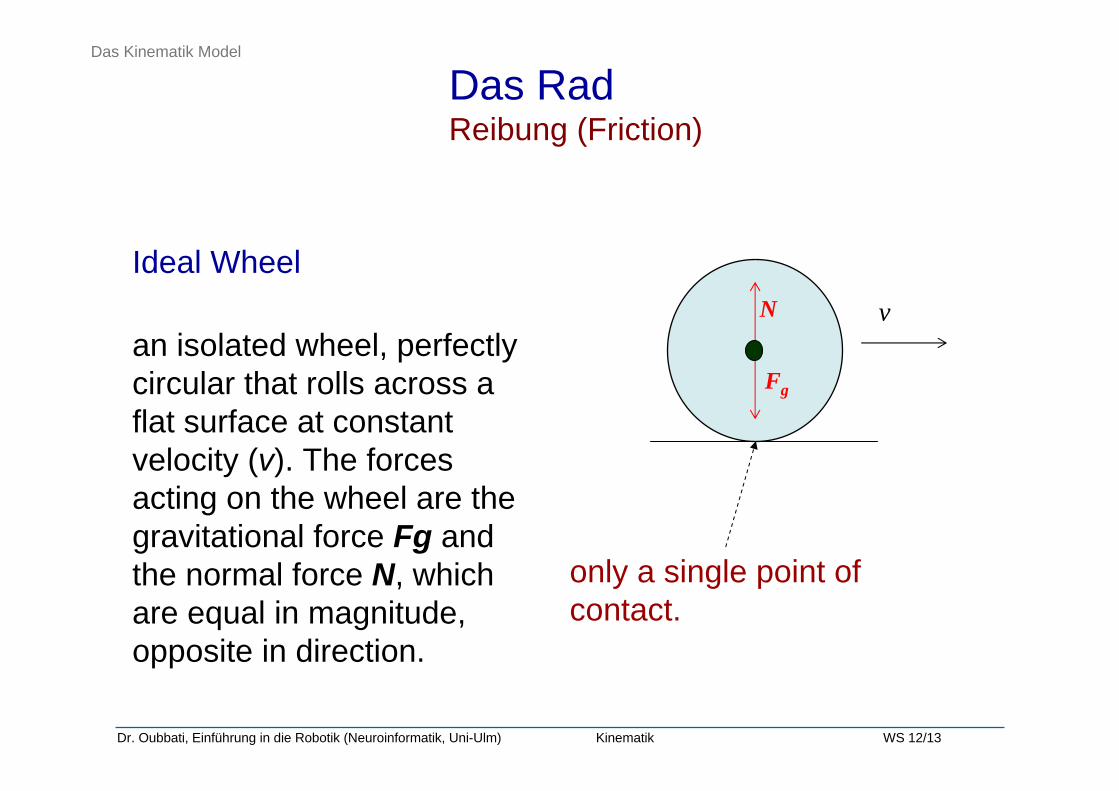
an isolated wheel, perfectly circular that rolls across a flat surface at constant velocity (v). The forces acting on the wheel are the gravitational force Fg and the normal force N, which are equal in magnitude, opposite in direction.
Das RadReibung (Friction)
Fg
N v
only a single point of contact.
Ideal Wheel
Das Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
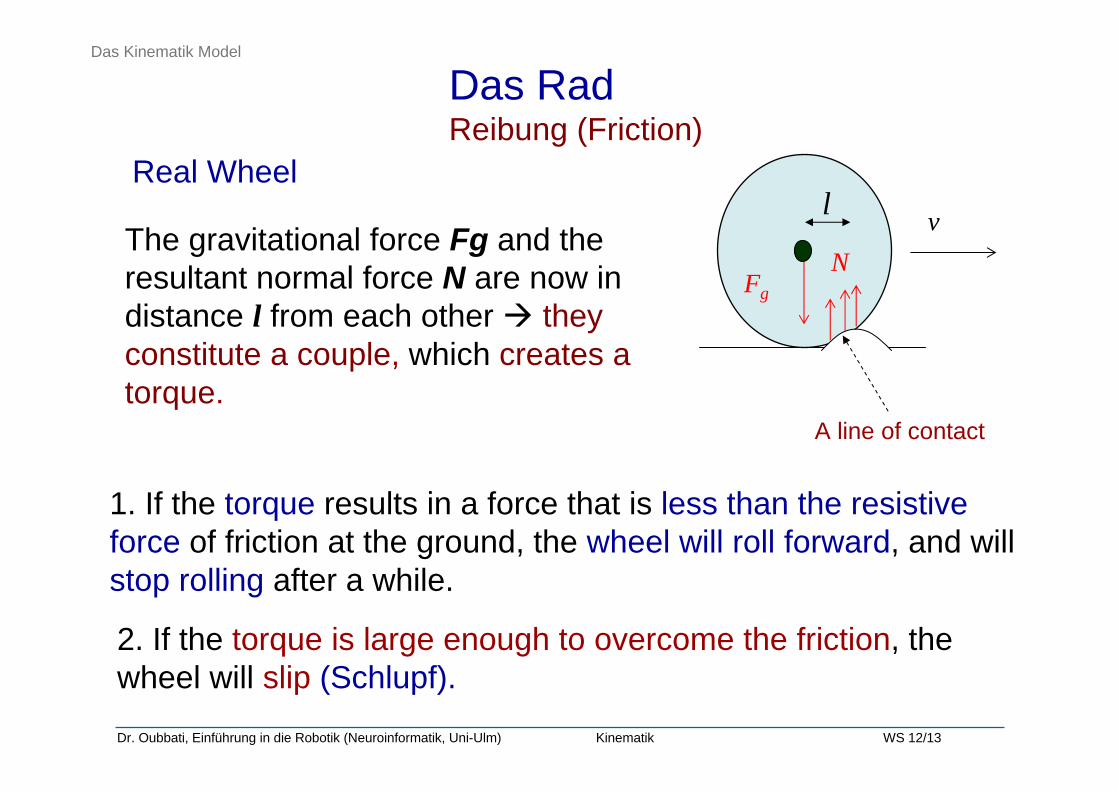
The gravitational force Fg and the resultant normal force N are now in distance l from each other they constitute a couple, which creates a torque.
2. If the torque is large enough to overcome the friction, the wheel will slip (Schlupf).
FgN
v
A line of contact
lReal Wheel
1. If the torque results in a force that is less than the resistive force of friction at the ground, the wheel will roll forward, and will stop rolling after a while.
Das Kinematik Model
Das RadReibung (Friction)
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
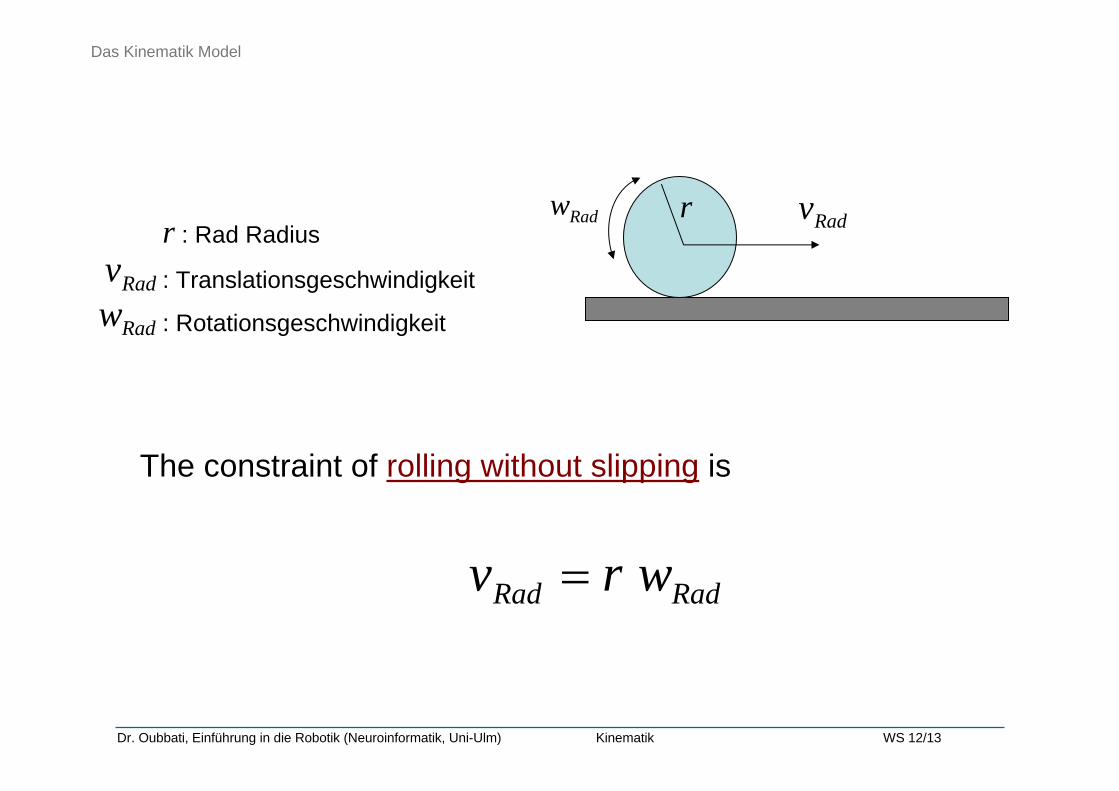
rr : Rad Radius
: Translationsgeschwindigkeit
: Rotationsgeschwindigkeit
Das Kinematik Model
The constraint of rolling without slipping is
RadRad wrv =
Radv
RadvRadw
Radw
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
X
Y
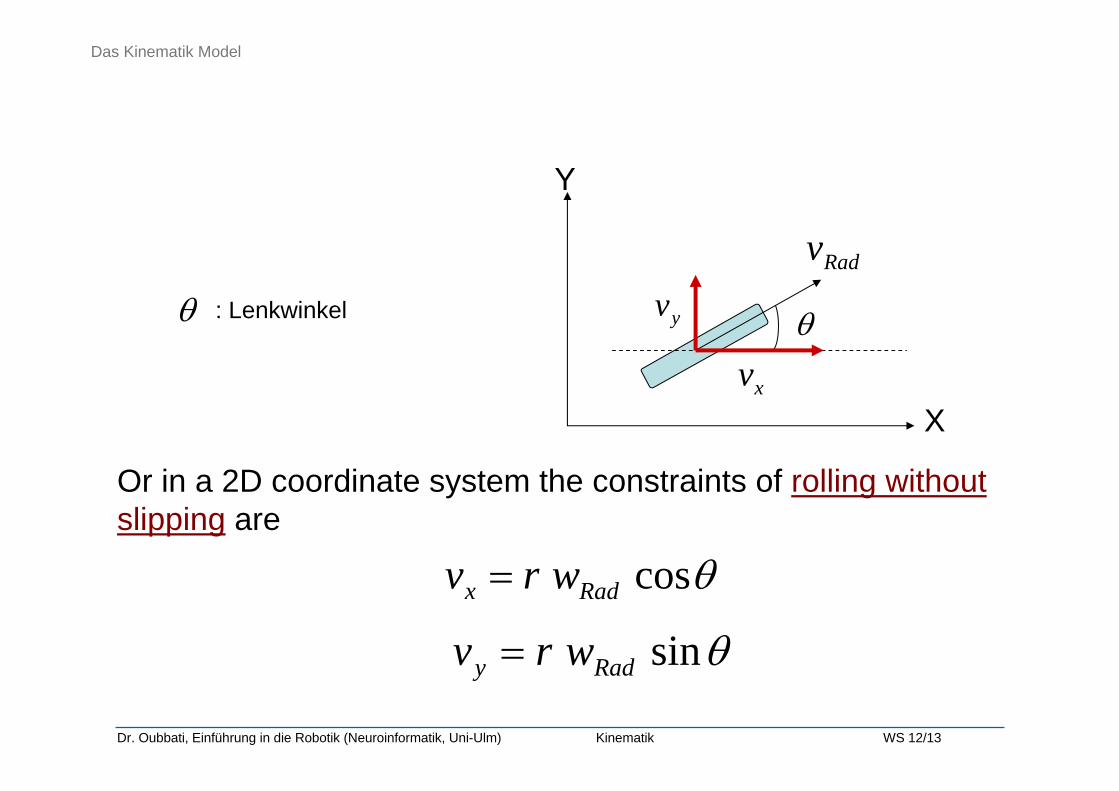
θθ : Lenkwinkel
Das Kinematik Model
xv
yv
Or in a 2D coordinate system the constraints of rolling withoutslipping are
Radv
θcosRadx wrv =
θsinRady wrv =
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
( )ϕ,, yxPose:
x
y
Y
X
ϕ
θy&
x&mobile robot
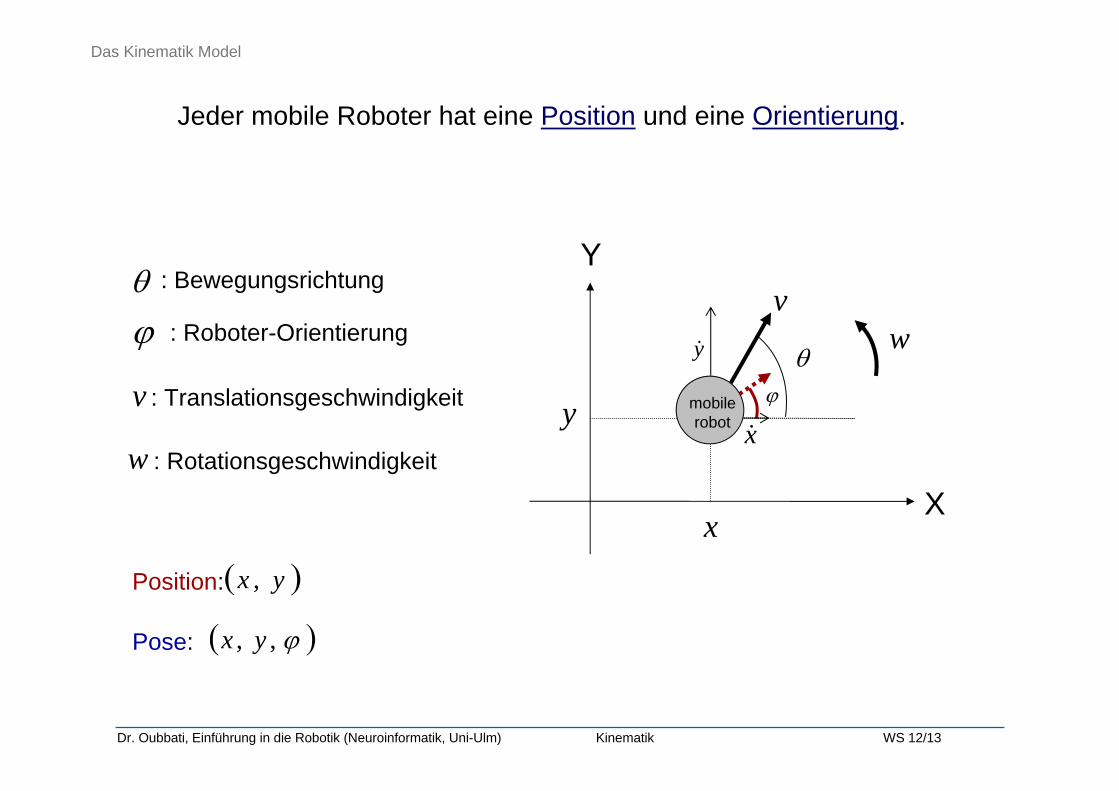
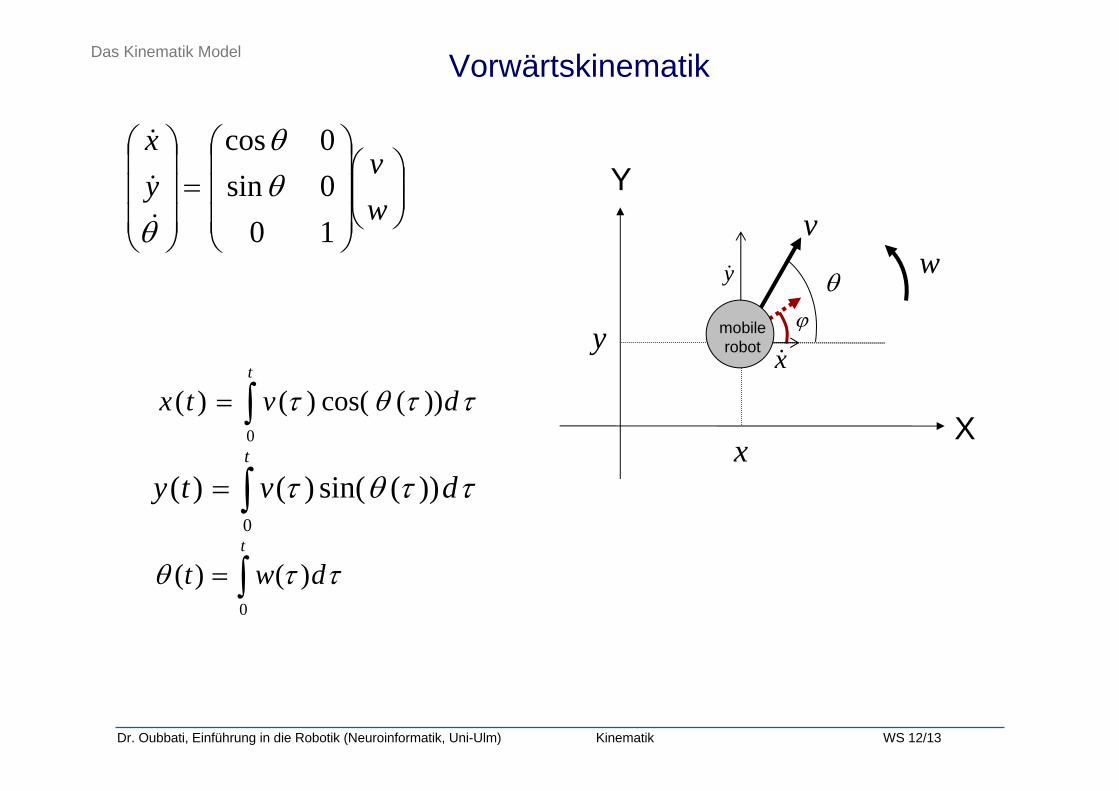
wvθ : Bewegungsrichtung
ϕ : Roboter-Orientierung
v : Translationsgeschwindigkeit
w : Rotationsgeschwindigkeit
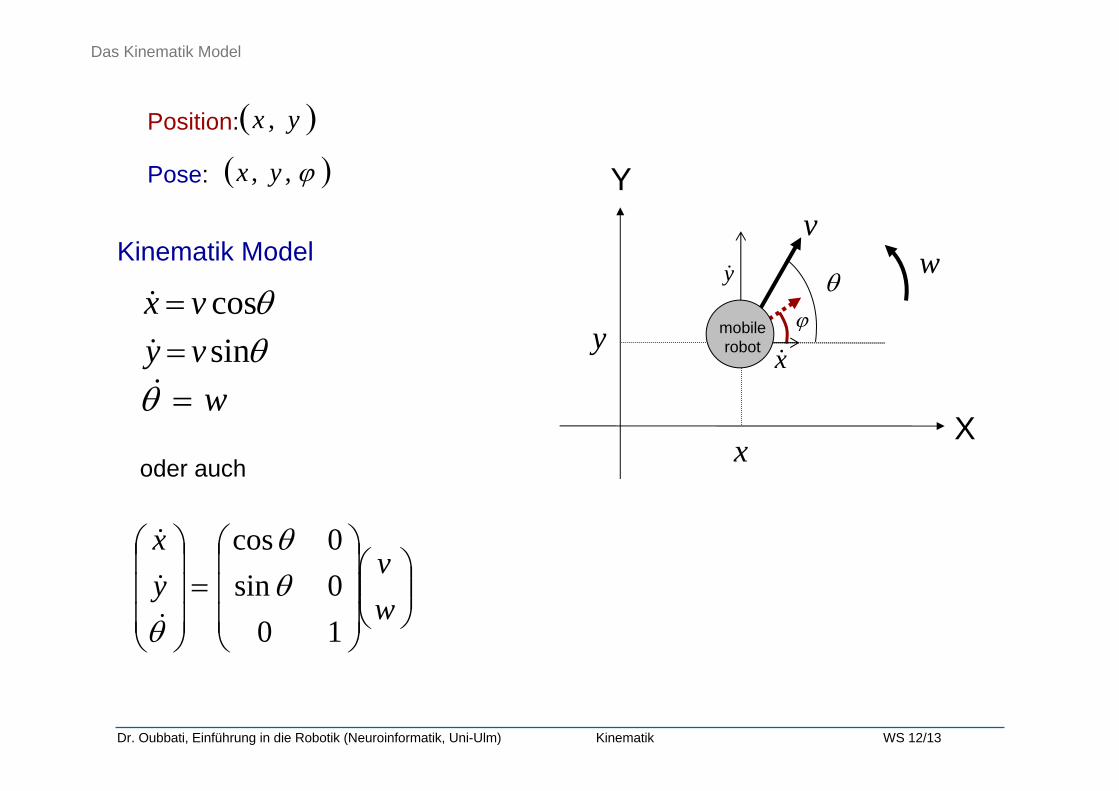
( )yx ,Position:
Das Kinematik Model
Jeder mobile Roboter hat eine Position und eine Orientierung.
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
( )ϕ,, yxPose:
x
y
Y
X
ϕ
θy&
x&mobile robot
wv
( )yx ,Position:
Das Kinematik Model
θcosvx =&θsinvy =&
w=θ&
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
wv
yx
100sin0cos
θθ
θ&&
&
oder auch
Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
x
y
Y
X
ϕ
θy&
x&mobile robot
wv
Das Kinematik Model
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
wv
yx
100sin0cos
θθ
θ&&
&
Vorwärtskinematik
ττθτ dvtxt
∫=0
))(cos()()(
∫=t
dvty0
))(sin()()( ττθτ
∫=t
dwt0
)()( ττθ
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
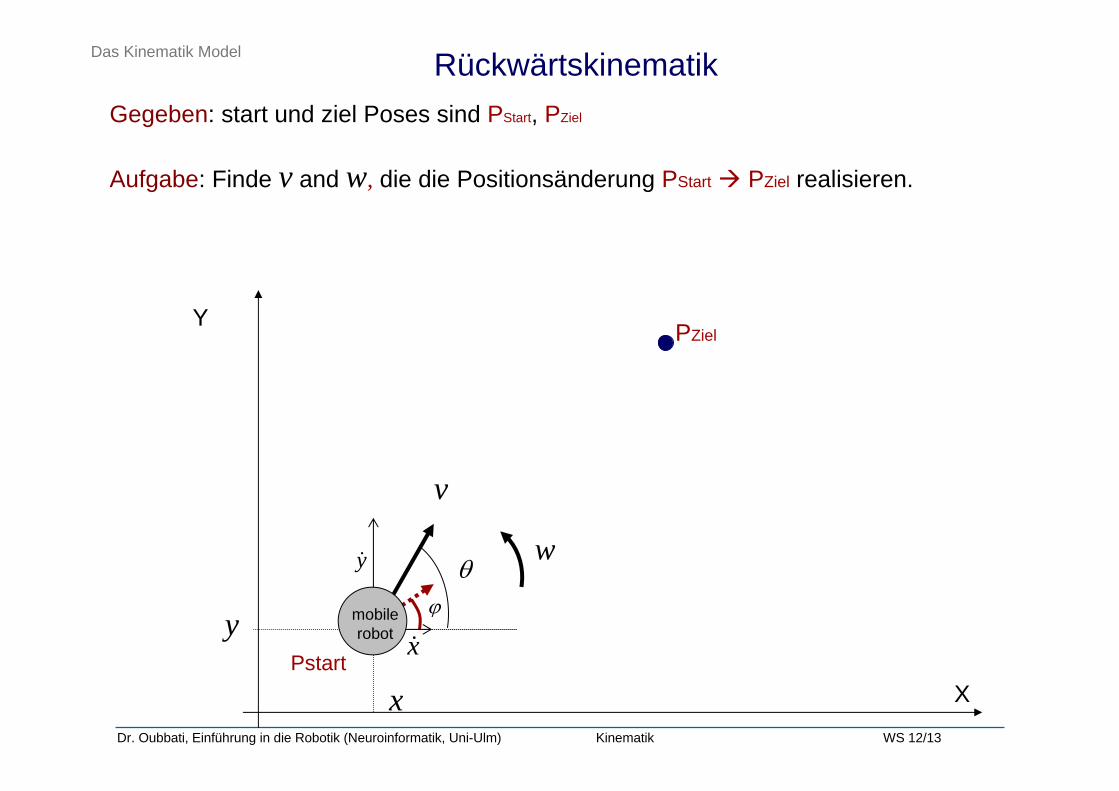
Gegeben: start und ziel Poses sind PStart, PZiel
Aufgabe: Finde v and w, die die Positionsänderung PStart PZiel realisieren.
PZiel
Pstart
Rückwärtskinematik
Y
Xx
yϕ
θy&
x&mobile robot
w
v
Das Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
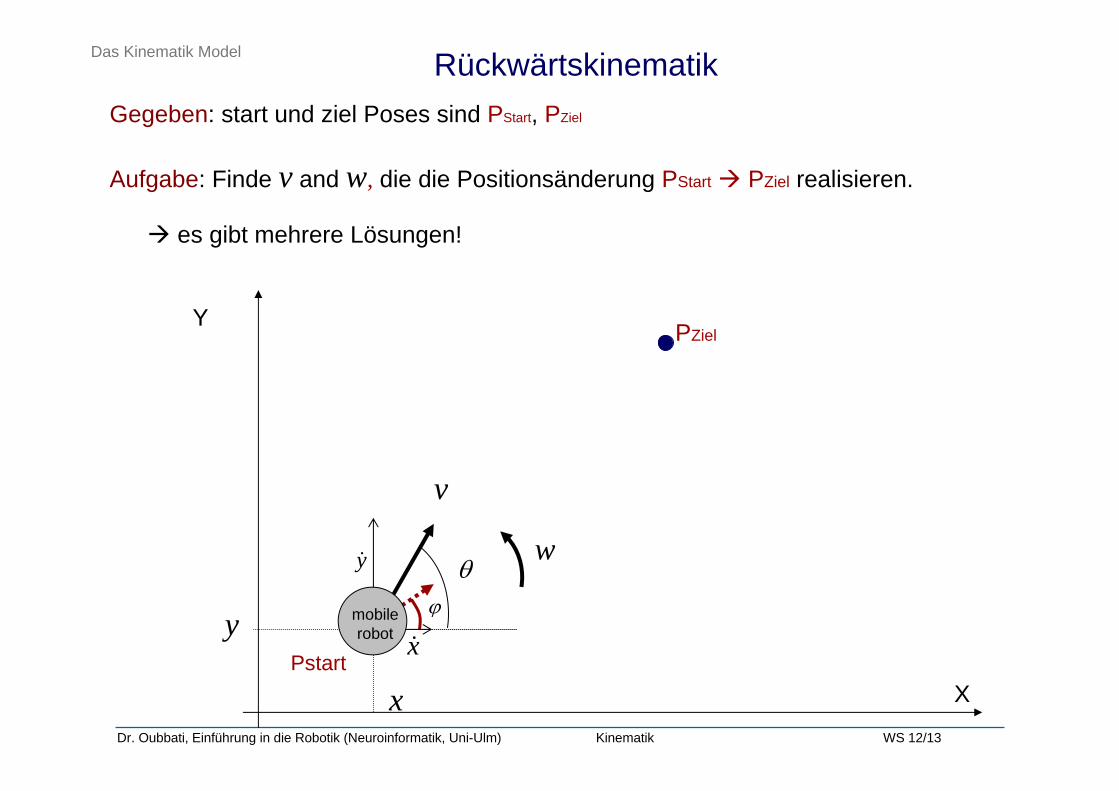
Gegeben: start und ziel Poses sind PStart, PZiel
Aufgabe: Finde v and w, die die Positionsänderung PStart PZiel realisieren.
PZiel
Pstart
Rückwärtskinematik
Y
Xx
yϕ
θy&
x&mobile robot
w
v
es gibt mehrere Lösungen!
Das Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
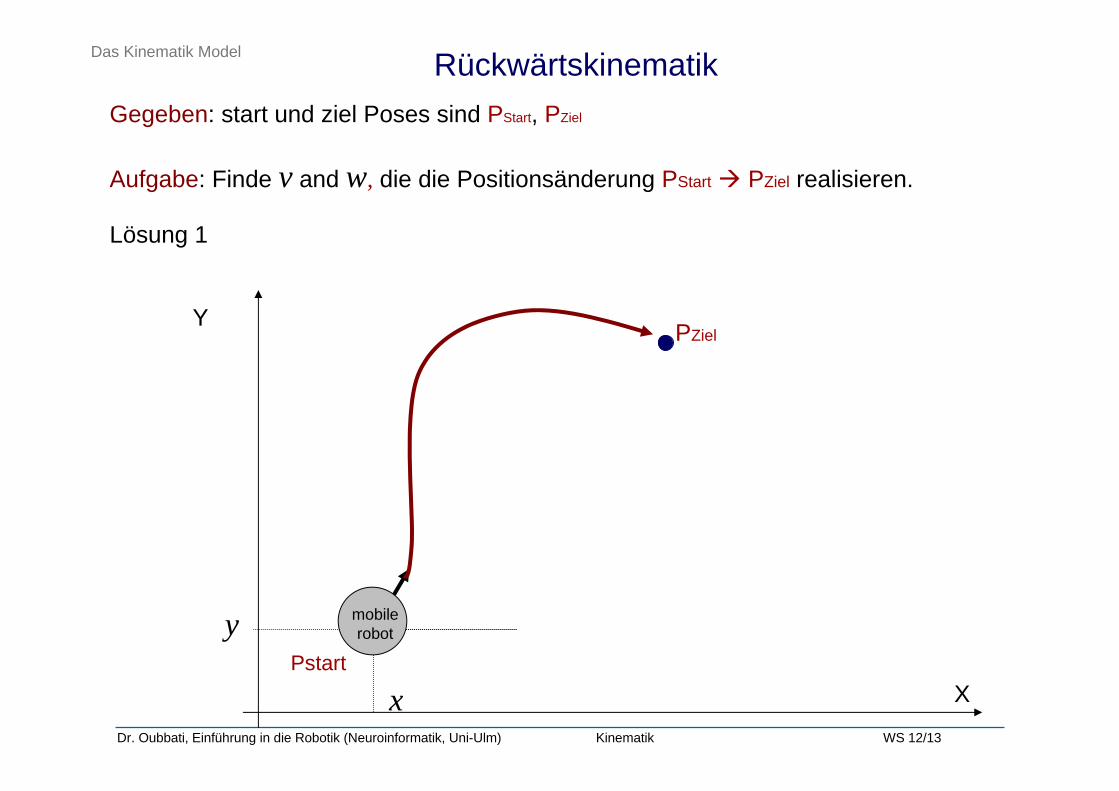
Gegeben: start und ziel Poses sind PStart, PZiel
Aufgabe: Finde v and w, die die Positionsänderung PStart PZiel realisieren.
PZiel
Pstart
Rückwärtskinematik
Y
Xx
y mobile robot
Lösung 1
Das Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Gegeben: start und ziel Poses sind PStart, PZiel
Aufgabe: Finde v and w, die die Positionsänderung PStart PZiel realisieren.
PZiel
Pstart
Rückwärtskinematik
Y
Xx
y mobile robot
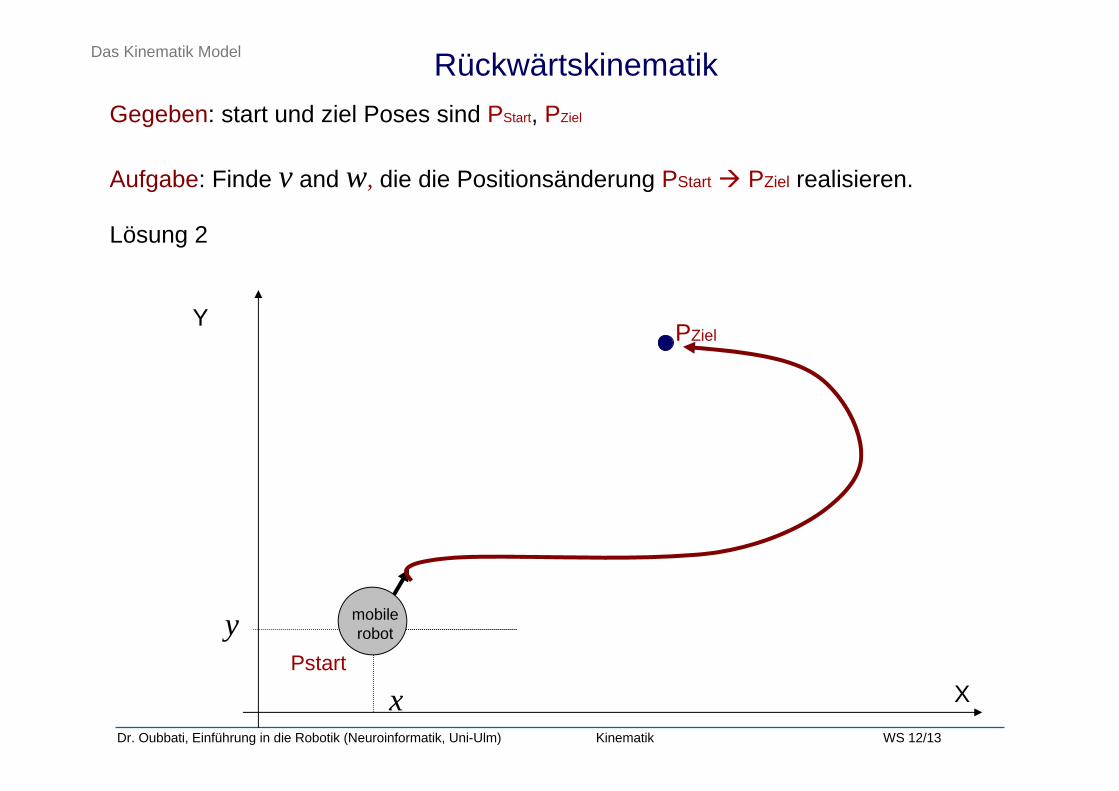
Lösung 2
Das Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Gegeben: start und ziel Poses sind PStart, PZiel
Aufgabe: Finde v and w, die die Positionsänderung PStart PZiel realisieren.
PZiel
Pstart
Rückwärtskinematik
Y
Xx
y mobile robot
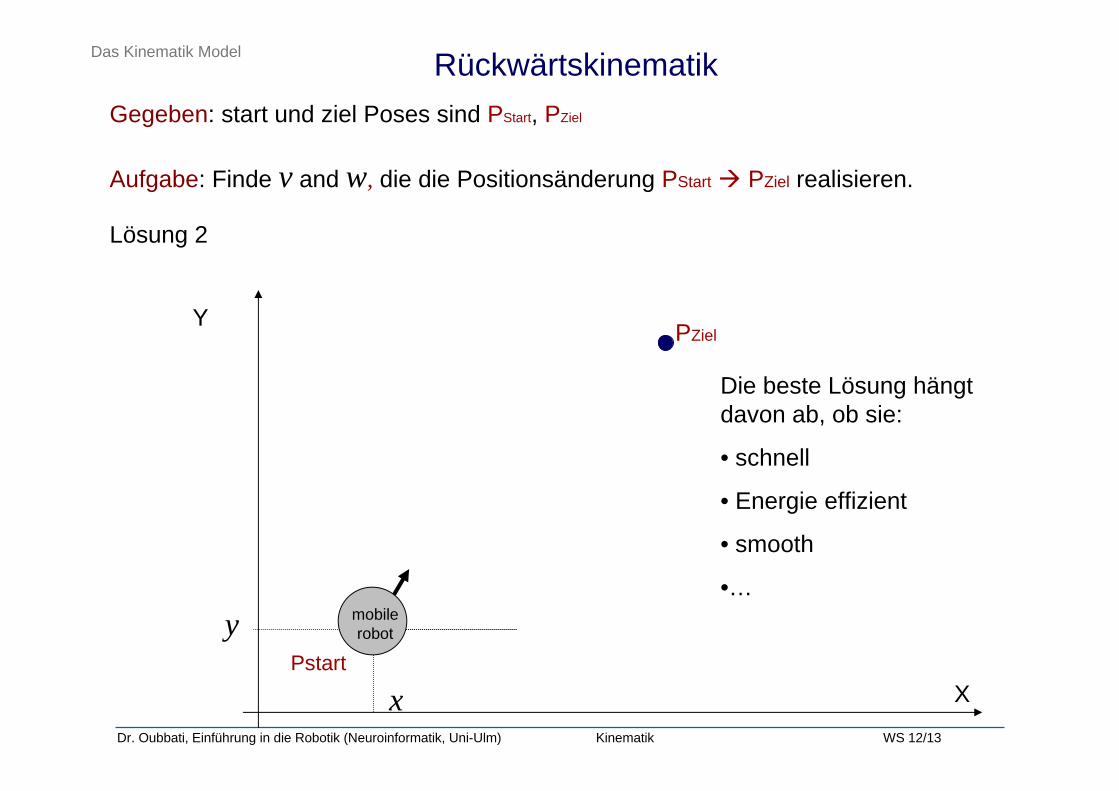
Lösung 2
Die beste Lösung hängt davon ab, ob sie:
• schnell
• Energie effizient
• smooth
•…
Das Kinematik Model
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Holonom vs. Nicht-holonom
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
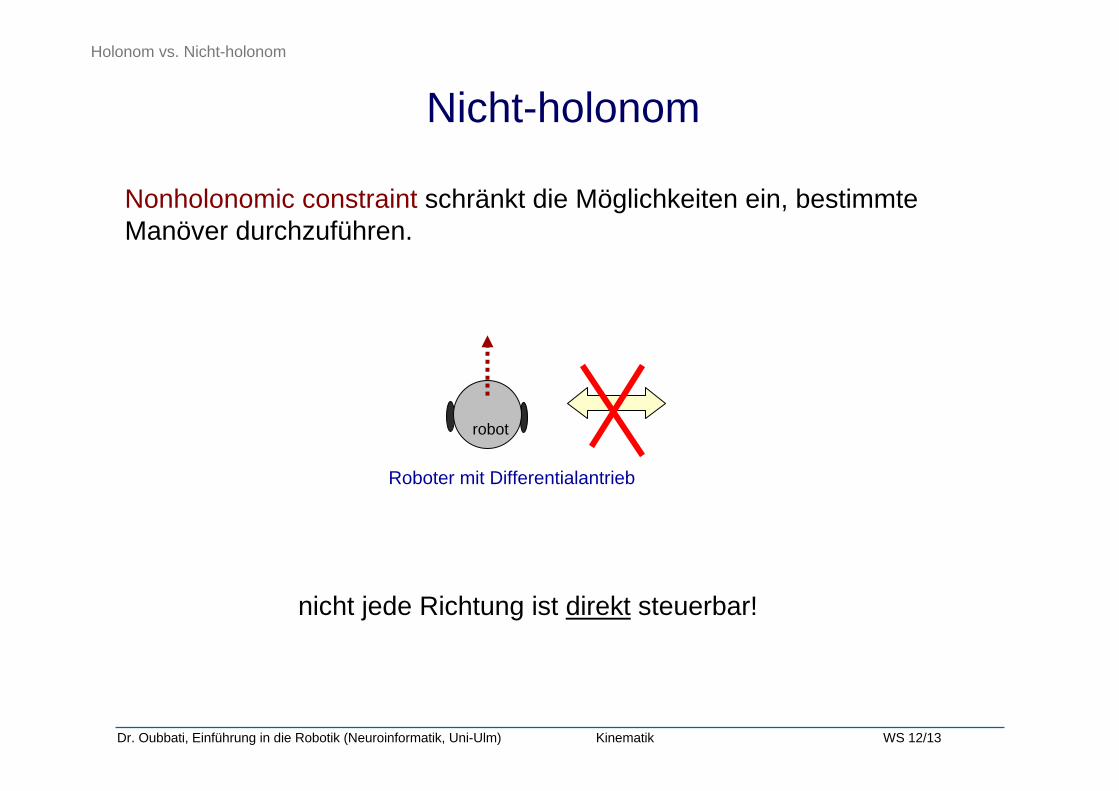
Nonholonomic constraint schränkt die Möglichkeiten ein, bestimmte Manöver durchzuführen.
nicht jede Richtung ist direkt steuerbar!
robot
Roboter mit Differentialantrieb
Holonom vs. Nicht-holonom
Nicht-holonom
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Das Nonholonomic Problem ist beim Auto-Einparkenbemerkbar, in dem man vorwärts und rückwärts fahren muss, um seitwärts einparken zu können.
Holonom vs. Nicht-holonom
Nicht-holonom
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
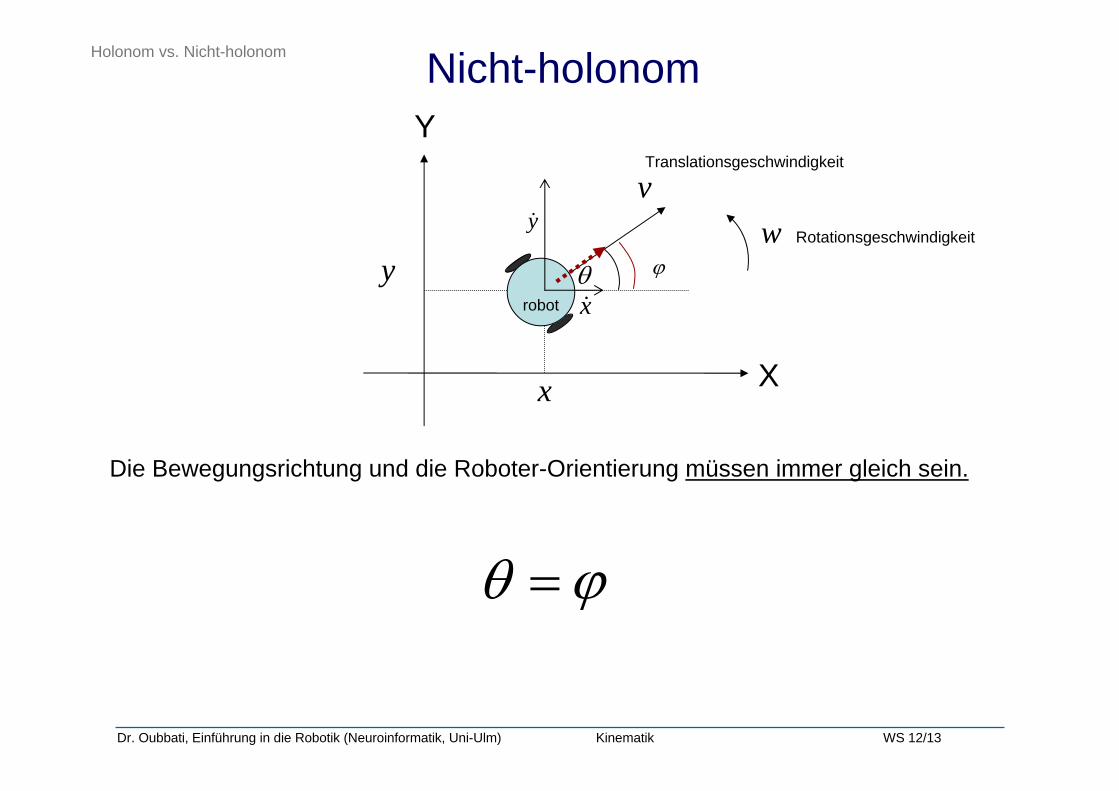
w Rotationsgeschwindigkeit
x
y
Y
X
ϕ
vTranslationsgeschwindigkeit
θx&
y&
robot
Die Bewegungsrichtung und die Roboter-Orientierung müssen immer gleich sein.
Holonom vs. Nicht-holonom Nicht-holonom
ϕθ =
Dr. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Kinematik WS 12/13
Holonom vs. Nicht-holonom
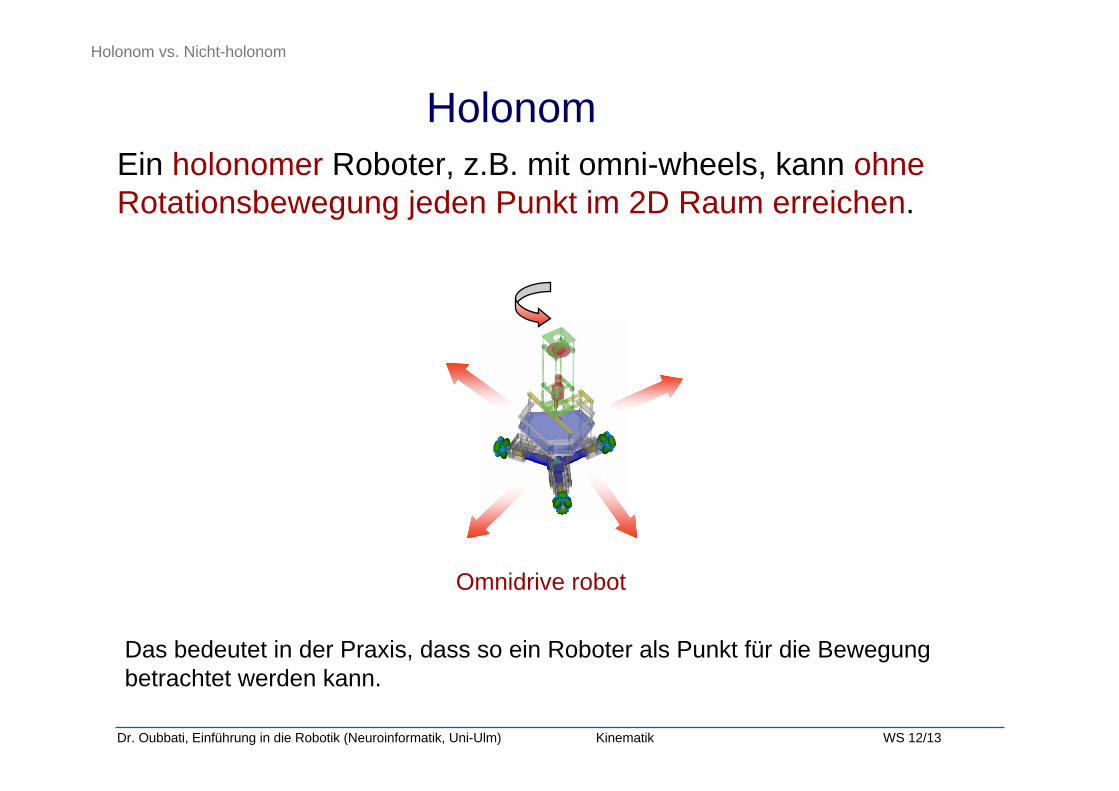
Ein holonomer Roboter, z.B. mit omni-wheels, kann ohne Rotationsbewegung jeden Punkt im 2D Raum erreichen.
Das bedeutet in der Praxis, dass so ein Roboter als Punkt für die Bewegung betrachtet werden kann.
Omnidrive robot
Holonom