Embed Size (px)
Citation preview
Offerte zum Forschungsprojekt:
„Exoskelette zur Körperlichen Arbeitsentlastung”
Auftraggeber
SBB AG Arbeitsmarktfähigkeit, Gesundheit & Soziales (HR-AGS)
David Blumer, Leiter Gesundheitsschutz & Prävention
Korrespondenzadresse:
SBB AG Arbeitsmarktfähigkeit, Gesundheit & Soziales (HR-AGS)
David Blumer (Leiter Gesundheitsschutz & Prävention)
Hilfikerstrasse 1, CH-3000 Bern
Mobil +41 (0)79 367 40 34
[email protected] www.sbb.ch
Projektleitung
Zürcher Hochschule für Angewandte Wissenschaften (ZHAW)
Dr. med. Verena Klamroth-Marganska, Forschung und Entwicklung, Institut für
Ergotherapie, Departement Gesundheit
Korrespondenzadresse:
Dr. med. Verena Klamroth-Marganska
Dozentin Forschungsstelle Ergotherapie
Technikumstrasse 81, Postfach
CH-8401 Winterthur
Tel: +41 58 934 43 84
[email protected] www.gesundheit.zhaw.ch
Departement Gesundheit
2
Zusammenfassung
Hintergrund
Trotz des anhaltenden Trends der Automatisierung in der Industrie sind viele Arbeitnehmende immer noch übermässigen körperlichen Belastungen durch Materialtransport, repetitive Bewegungen und Zwangshaltungen ausgesetzt. Ein Ansatz, um das damit verbundene Gesundheitsrisiko zu verringern, ist der Einsatz von Exoskeletten.
Ein Exoskelett kann als eine tragbare, äussere mechanische Struktur definiert werden, die die Kraft einer Person verstärkt. Es existieren Exoskelette zur Unterstützung der oberen
und unteren Extremität sowie des Rumpfes und des ganzen Körpers von Fachkräften bei der Ausübung körperlicher Tätigkeiten.
Ziele
In diesem Projekt werden das Potenzial und die Risiken von Exoskeletten für den Einsatz in der Industrie aus der Sicht der industriellen Leistungsfähigkeit und der Gesundheit der Arbeitnehmer (gesunde Mitarbeitende und solche mit reduzierter Leistungsfähigkeit) dargestellt. Eine Liste der in der Schweiz kommerziell erhältlichen Exoskelette sowie von «marktreifen» Forschungsgeräten für die obere und untere Extremität mit detaillierter technischer Spezifikation, Funktionalität und Komfort wurde erstellt. Es wurden die Einsatz-möglichkeiten und die Kosten der Geräte, sowie der von den Vertreibern angebotene Support ermittelt. Zudem werden die Vorteile und Mängel bei der Akzeptanz
diskutiert, und eine Empfehlung ausgesprochen.
Methodik
Das Projekt ist in drei Teilprojekte untergliedert: (1) Recherche (Literatur, Social Media, Rückfrage bei Herstellern), (2) tabellarische Gegenüberstellung der in der Schweiz
kommerziell erhältlichen Geräte sowie marktreifen Forschungsgeräten (u.a. technische Spezifikationen, Art der körperlichen Entlastung, Einsatzmöglichkeiten, Kosten, Support) und (3) Gesamtbeurteilung und Empfehlungen.
Im Teilprojekt 1 werden der aktuelle Stand und zukünftige Entwicklungen mittels Literatur-, Dokumenten- und Media-Analyse sowie Rückfragen bei Herstellern zum Thema Exoskelette zur körperlichen Arbeitsentlastung erhoben. Auf Basis dieser Ergebnisse wird
in Teilprojekt 2 eine tabellarische Liste mit Spezifikationen der Geräte erstellt. Im Teilprojekt 3 erfolgt eine Gesamtbeurteilung und Auftraggeber spezifische Handlungsempfehlung.
3
Inhalt Artikel I. Recherche 4
Abschnitt 1.01 Klassifizierung 5
(a) Funktionsweise 5
(b) Einsatzgebiete 6
(c) Personen mit reduzierter Leistungsfähigkeit 6
(d) Unterstützte Körperregion 6
Abschnitt 1.02 Arbeitssicherheit 7
(a) Gesetze und Standards 7
Abschnitt 1.03 Ergonomie 9
(a) Arbeitsleistung 9
(b) Biomechanik (Wirkung auf das Muskel-Skelett-System) 10
(c) Diskomfort / Tragkomfort 11
(d) Akzeptanz 11
(e) Usability 12
(f) Körperliche Kurzzeit- und Langzeitrisiken 12
(g) Exemplarische Untersuchungen 13
1.1.1 Ausblick 15
Artikel II. Tabellarische Gegenüberstellung 17
Abschnitt 2.01 Kurzvorstellung in der Schweiz verfügbarer Exoskelette 17
Abschnitt 2.02 Tabelle in der Schweiz verfügbarer Exoskelette 21
Artikel III. Gesamtbeurteilung und Empfehlungen 28
Artikel IV. Referenzen 30
4
Artikel I. Recherche
Exoskelette (Aussenskelett, griechisch exo «aussen» und skeletós «ausgetrockneter Körper» oder «Mumie») sind am Körper getragene Assistenzsysteme, die mechanisch auf den Körper einwirken. Es gibt eine Reihe von verschiedenen Exoskelett-Typen für unterschiedliche Anwendungen, etwa in der Medizin, im Militär oder in der Industrie. Dieser Bericht beschränkt sich auf Exoskelette für industrielle Anwendungen, die zur Entlastung bei körperlicher Arbeit eingesetzt werden. Exoskelette können den ganzen Körper unterstützen oder auf einzelne Körperteile wie den Rumpf oder die Schulter beschränkt sein. Alle diese Systeme haben jedoch eine ähnliche Struktur. Sie bestehen aus einem mechanischen Skelett mit Schnittstellen zum Benutzer, bei aktiven Systemen Aktuatoren (Antriebstechniken), einer Steuereinheit, und mögl. Sensoren zur Erkennung der vom Nutzer beabsichtigten Tätigkeit. Je nach Funktion
können verschiedene Sensoren integriert werden, etwa zum Messen von Wechselwirkungskräften (z.B. Kraft, Drehmoment- und Drucksensoren), Gelenkbewegungen (z.B. Winkelsensoren), und Muskelaktivität (z.B. EMG-Sensoren und Muskelsteifigkeitssensoren).
Ergonomische Aspekte: Je nach Einsatzzweck dienen die Geräte der Leistungsunterstützung, dem Leistungserhalt oder der Beanspruchungsreduktion. Die physische Belastung des Nutzers etwa durch Heben und Tragen schwerer Lasten sowie durch Zwangshaltungen kann reduziert werden. Besonders bei repetitiven, einseitig belastenden Tätigkeiten kann die Unterstützung durch ein Exoskelett physisch entlastend wirken. Wenn die Massnahmen der Arbeitsplatzgestaltung, der Technik und der Arbeitsorganisation ausgeschöpft sind, kann der Einsatz von Exoskeletten in Produktion und Logistik die körperliche Belastung der Mitarbeiter in kritischen Arbeitsabläufen reduzieren und so Muskel-Skelett-Erkrankungen vermeiden ohne die Mitarbeiter zu behindern. Entsprechend werden die Geräte auch als Ergoskelette bezeichnet, da sie «durch eine mechanische Einwirkung auf den Körper die Beanspruchung der Mitarbeiter bei physischer Arbeit optimieren, wenn technische und organisatorische Gestaltungsmittel ausgeschöpft sind“ [1]. Exoskelette könnten im Rahmen des betrieblichen Eingliederungsmanagements bei erkrankten Beschäftigten eingesetzt werden, bis diese ihre volle Leistungsfähigkeit wiedererlangen. Weitere Aspekte: Neben den ergonomischen Auswirkungen auf den Arbeitsprozess haben Exoskelette auch Einfluss auf das Produktionssystem. So sind z.B. Kleinserien industrieller Produktion aufgrund der damit verbundenen Kosten selten automatisiert. Ein Grund ist die eingeschränkte Fähigkeit von Robotern, häufige Produktionsschwankungen zu bewältigen, die sich aus der Nachfrageschwankungen bei der Montage- und Auftragsfertigung ergeben. Daher ist in diesen Bereichen der Mensch weiterhin leistungsfähiger als Roboter. Durch Exoskelette wird eine flexible Automatisierung ermöglicht [2]. Zudem kann die Präzision einer Tätigkeit unter Einsatz eines Exoskeletts verbessert werden. Eine Pilotstudie zeigte z.B. eine um 17% erhöhte Genauigkeit bei Überkopfarbeiten mit einem passiven Exoskelett [3]. Exoskelette können Daten über ihren Träger erzeugen. Dies sind zum Beispiel: Körperbewegungen im Arbeitsablauf, Bewegung im Raum, zeitliche Arbeitsabläufe und Vitaldaten (wie Herzfrequenz, Puls, Körpertemperatur, Atem, Muskelanspannung). Diese Daten können in Systeme integriert, gespeichert und in Echtzeit genutzt werden (zum
5
Beispiel zur Personaleinsatzplanung, zur Arbeitsprozessgestaltung, auf Plattformen des Herstellers)1.
Abschnitt 1.01 Klassifizierung
Eine Klassifizierung von Exoskeletten erfolgt häufig nach Funktionsweise (Antrieb), Einsatzgebiet oder unterstützter Körperregion. Es gibt auch eine Einteilung entsprechend EG-Richtlinien (Abbildung 1).
(a) Funktionsweise
Passive Geräte werden mechanisch angetrieben und funktionieren ohne Energiezufuhr von aussen. Stattdessen wird Energie durch Federn oder Dämpfer beim Beugen (eines Gelenkes oder des Rumpfes) gespeichert und teilweise beim Aufrichten zurückgegeben. Passive Geräte sind auf Grund der fehlenden Antriebstechnik leichter und preiswerter als aktive Geräte. Semiaktive Geräte sind primär passiv, können aber etwa durch Kombination mit aktiven Aktuatoren ausgerüstet sein. Hybride Systeme sind aktive Exoskelette, die mithilfe von Nervensignalen oder bioelektrischen Sensoren gesteuert werden. Aktive Systeme nutzen verschiedenartige Antriebssysteme, um den Menschen in Kraft und Beweglichkeit zu unterstützen: Die Unterstützung kann durch verschiedene Arten von Aktuatoren erreicht werden, die auch unterschiedliche Eigenschaften haben. Man unterscheidet pneumatischen Antrieb, Servoantrieb, elektrischen Antrieb, vollmechanischen Antrieb, Formgedächtnislegierungs-Aktuatoren und Brennstoffzellen [4].
Die elektrische Antriebstechnik ist kostengünstiger als die hydraulischen oder pneumatischen Antriebe. Sie ist sauber, energieeffizient und ermöglicht eine präzise Steuerung von Geschwindigkeit, Beschleunigung und Position. Elektrische Linearantriebe werden häufig eingesetzt, um Lasten gleichmässig an die gewünschte Position zu bewegen.
Pneumatische Antriebe werden genutzt, um Energie aus einer Druckluftversorgung in eine
Dreh- oder eine Linearbewegung zu übersetzen. Pneumatische Antriebe helfen bei Aufgaben wie Platzieren und Werkzeugwechsel. Der pneumatische Antrieb wird zunehmend verbessert hinsichtlich Materialien, Miniaturisierung, Integration der Elektronik und Zustandsüberwachung. Diese Antriebe sind leicht, kostengünstig und erfordern minimale Wartung.
Die Nutzung von Brennstoffzellentechnologie befindet sich noch in der Entwicklung. Es gibt unterschiedliche Arten von Brennstoffzellen, die je nach Elektrolyt, aus dem sie bestehen, bezeichnet werden. Die brennstoffzellenbetriebenen Exoskelette können für
1 Arbeit 4.0: Exoskelette (physisch unterstützende Assistenzsysteme) – Umsetzungshilfe 3.2.4, © Verbundprojekt Prävention 4.0 / Offensi
Mittelstand, Heidelberg 2018
6
Feldanwendungen eingesetzt werden, ohne dass Batterien häufig geladen oder
ausgetauscht werden müssen.
(b) Einsatzgebiete
Viele Arbeitnehmer sind immer noch körperlichen Belastungen durch Materialtransport (über 30 % der Erwerbsbevölkerung in der EU), repetitive Bewegungen (63 %) und ungünstige Körperhaltungen (46 %) ausgesetzt [5]. Ein Ansatz, um das damit verbundene Gesundheitsrisiko zu verringern, ist die Verwendung von Exoskeletten. Grundsätzlich können bei allen Arbeiten, bei denen körperliche Arbeit oder Tätigkeiten in Zwangshaltung nötig sind, Exoskelette eingesetzt werden. Insbesondere bei statischen Arbeiten wie Halte- und Haltungsarbeiten, die mit isometrischer Muskelaktivität verbunden sind, kann die durch die anhaltende Kontraktion verminderte Muskeldurchblutung zu Ermüdungserscheinungen oder Leistungsabbruch führen. Auch Hebearbeiten (mit
aufgrund der gebeugten Körperhaltung ungünstigem Hebelarm) gehen mit einer hohen Belastung im Lendenwirbelbereich einher und können durch Unterstützung mit Exoskeletten erleichtert werden. Stationäre Arbeitsplätze sollten dennoch zunächst technisch, organisatorisch und personenbezogen ergonomisch gestaltet werden, sodass
auf Exoskelette verzichtet werden kann.
Auch ein mobiler Arbeitsplatz soll primär für die Arbeitnehmenden sowie deren Tätigkeit konzipiert und entwickelt werden. Je nach physischer Belastung durch die auszuführende Tätigkeit können jedoch besonders bei mobilen Arbeitsplätzen (z.B. beim Möbeltransport) Exoskelette zum Einsatz kommen.
(c) Personen mit reduzierter Leistungsfähigkeit
Inwieweit Exoskelette bei Arbeitnehmern mit reduzierter Leistungsfähigkeit (auch zur Wiedereingliederung in den Beruf) Einsatz finden könnten, ist unseres Wissens nach bisher nicht Gegenstand systematischer wissenschaftlicher Forschung. Die Firma German Bionics nennt für das Rumpfexoskelett Cray X explizit die Möglichkeit der Inklusion von Personen mit geringeren und nachlassenden Hebefähigkeiten2. Auch das Atlas-Rumpfexoskelett von Japet wirbt damit, dass es bei schmerzhaften Episoden und/oder Rückenbelastungen verwendet werden kann, um die Arbeitsfähigkeit zu ermöglichen und die Rückkehr zur Arbeit zu erleichtern 3.
(d) Unterstützte Körperregion
Exoskelette können unter Berücksichtigung der unterstützten Körperteile klassifiziert
werden: Unterkörper, Oberkörper und Ganzkörper.
Mehr als 40 % der arbeitenden Bevölkerung in der EU leiden unter Schmerzen im unteren Rücken und in der Schulter [5]. Einer der Hauptrisikofaktoren für Beschwerden im unteren Rückenbereich sind Druckkräfte an der Wirbelsäule. Exoskelette zur Rumpfunterstützung am Oberkörper sollen diese Druckkräfte an der Lendenwirbelsäule verringern [6].
Auch die Überkopfarbeit stellt komplexe physiologische und biomechanische Anforderungen an den Körper, v.a. an den Schulterkomplex, und stellt einen Risikofaktor für Schulter-Muskuloskelett-Erkrankungen dar. Ermüdet die Schultermuskulatur, wird
2 https://www.germanbionic.com/crayx/
3 https://www.japet.eu/en/industry/professional/
7
kompensatorisch der Rumpf zurückgeneigt, was zu einem übermässigen Hohlkreuz und
damit einer erhöhten Belastung des Rückens führt. Weiter muss der Kopf angehoben werden, damit die Arbeitsausführung mit den Augen verfolgt werden kann, was zur Überstreckung des Nackens mit erhöhtem Beschwerderisiko einhergeht. Auch hier können Exoskelette unterstützend wirken und die Arbeit erleichtern.
In der unteren Extremität dienen Exoskelette v.a. zum Gehen und Knien. Bei der Entwicklung kann auf extensive Erfahrung aus der Rehabilitation zurückgegriffen werden. Ein Modell (Chairless Chair) wurde zur Entlastung statischen Stehens entwickelt. Die Idee ist dabei, dass Arbeitnehmende durch das Exoskelett wie auf einem Stuhl absitzen können und dadurch die Beine entlasten.
Ganzkörperexoskelette soll annähernd den gesamten Bewegungsraum des menschlichen Körpers erfassen.
Abschnitt 1.02 Arbeitssicherheit
Die sicherheitstechnischen Anforderungen, die Exoskelette beim Einsatz an Arbeitsplätzen erfüllen müssen, sind nicht geklärt. Das Institut für Arbeitsschutz der Deutschen
Gesetzlichen Unfallversicherung (IFA) plant eine Leitlinie zum "Einsatz von Exoskeletten im beruflichen Kontext zur Primär-, Sekundär- und Tertiärprävention von arbeitsassoziierten muskuloskelettalen Beschwerden", deren Publikation Ende 2019 erwartet wird. Im Vorfeld wurde eine Muster-Gefährdungsbeurteilung (PDF, 1,1 MB)4 erstellt, die «das Auffinden und Beurteilen von Gefährdungen im Betrieb erleichtern und somit zum sicheren Einsatz von Exoskeletten in der Praxis beitragen» soll.
Es gibt bisher keine Zuordnung von Exoskeletten zu einer EU Richtlinie. Aktuell werden Exoskelette als personenbezogene bzw. personengebundene Maßnahme eingeordnet [7]. Eine Zuordnung zu RL 2006/42/EG (Maschinenrichtlinie) oder PSA-Verordnung (EU) 2016/425 wäre möglich.
(a) Gesetze und Standards
• Maschinenrichtlinie 2006/42/EG 5 • PSA-Richtlinie 89/686/EWG • PSA-Verordnung (EU) 2016/4256 • Medizinprodukterichtlinie 93/42/EWG7 • Produktsicherheitsgesetz (ProdSG)8 • Neunte Verordnung zum ProdSG (9. ProdSV)
4 https://www.dguv.de/medien/ifa/de/pra/ergonomie/gefaehrdungsbeurteilung_exoskelette.pdf
5 Die Anforderungen der Maschinenrichtlinie 98/37/EG sind unter dem Bundesgesetz über die Sicherheit von Technischen
Einrichtungen und Geräten (STEG, SR 819.1) in einer Verordnung übernommen worden und Gegenstand des bilateralen Abkommens
EG-Schweiz über die gegenseitige Anerkennung von Konformitätsbewertungen. Die Schweiz wird ihre einschlägigen Erlasse an die
neue Richtlinie im gleichen Zeitrahmen wie die EU-Mitgliedstaaten anpassen. Die neue Maschinenrichtlinie 2006/42/EG wurde am
09.06.2006 im Amtsblatt der EU publiziert.
6 Die PSAV ist am 21. April 2018 und somit gleichzeitig mit der Anwendbarkeit der europäischen PSA-Verordnung (EU) 2016/425 in
Kraft getreten und setzt deren Anforderungen um. Für die Marktkontrolle im betrieblichen Bereich ist als Kontrollorgan die SUVA
zuständig. 7
Laut Swissmedic hat dieser Leitfaden nur Gültigkeit für die Gesetzgebung basierend auf den EU-Richtlinien: Richtlinie über aktive
implantierbare medizinische Geräte 90/385/EWG (AIMD), Richtlinie über Medizinprodukte 93/42/EWG (MDD), Richtlinie über In-
vitro-Diagnostika 98/79/EG (IVDD) 8 Mit dem PrSG wurde die Richtlinie 2001/95/EG über die allgemeine Produktsicherheit ins schweizerische Recht umgesetzt.
8
• Medizinproduktegesetz (MPG) 9
Zudem kommen die folgenden Normen zur Anwendung:
• SN EN ISO 10218-1 "Industrieroboter - Sicherheitsanforderungen - Teil 1: Roboter"
• SN EN ISO 13482:2014-06 «Roboter und Robotikgeräte - Sicherheitsanforderungen für nicht-industrielle Roboter - Nichtmedizinische Haushalts- und Assistenzroboter»
• DIN ISO/TS 15066:2017-04; DIN SPEC 5306:2017-04 "Roboter und Robotikgeräte - Kollaborierende Roboter"
• EN ISO 13688 Technische Normen für Persönliche Schutzausrüstungen
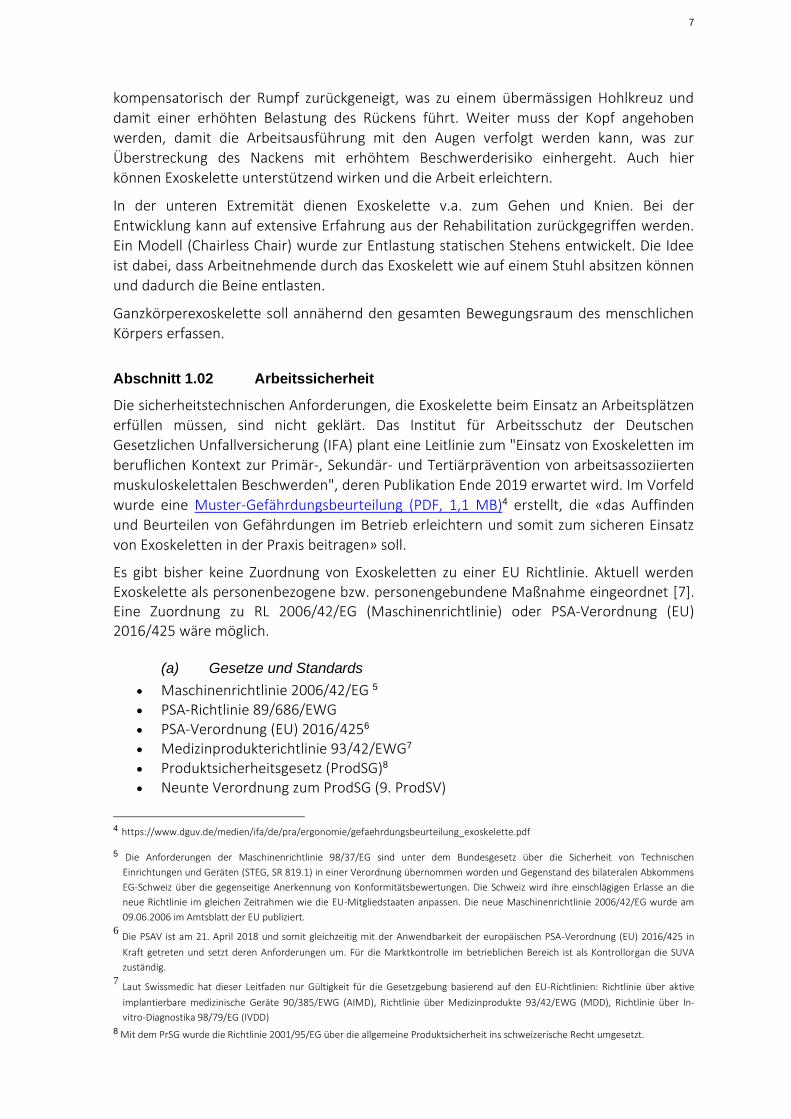
Die deutsche Berufsgenossenschaft Holz und Metall (BGHM) hat eine Fach-Information zum Thema: «Einsatz von Exoskeletten an (gewerblichen) Arbeitsplätzen», herausgegeben, in der Vorschläge zur Einordnung von Exoskeletten hinsichtlich EG-Richtlinien ausgesprochen werden (Abbildung 1).
9 Anders als Arzneimittel durchlaufen die Medizinprodukte keine behördliche Zulassung. Für diese Produkte hat die Schweiz auf der
Basis der bilateralen Verträge das System der Konformitätsbewertung bzw. Zertifizierung der Europäischen Union (EU) übernommen.
Abbildung 1 Vorschlag zur Einordnung von Exoskeletten hinsichtlich EG-Richtlinien:
u. a. EG-Maschinenrichtlinie und Normen
Quelle: Dr. Umbreit, BGHM sowie DGUV Fachbereich Holz und Metall, Sachgebiet MAF, Themenfeld Robotik, 01/2017
9
Die ASTM International (American Society for Testing and Materials) ist eine internationale Standardisierungsorganisation. 2017 wurde der «ASTM-Ausschuss F48 für Exoskelette und Exosuite» gegründet, um freiwillige Konsensstandards für Exoskelette und Exosuits zu entwickeln. Mitglieder befassen sich mit Sicherheit, Qualität, Leistung, Ergonomie und Terminologie für Systeme und Komponenten während des Produktlebenszyklus einschliesslich Sicherheits- und informationstechnischer Aspekte. Die F48-Normen werden im Annual Book of ASTM Standards, Band 15.08, veröffentlicht. 10
Körperlich eingeschränkte Beschäftigte könnten durch Exoskelette zu Tätigkeiten befähigt werden, die sie ohne physisch-technische Assistenz nicht durchführen könnten. Dabei ist zu beachten, dass Exoskelette mit medizinischer Indikation dem Medizinproduktegesetz unterliegen. Im Außeneinsatz müssen Exoskelette wetterbeständig sein und den Anforderungen aus dem Arbeitsumfeld genügen (Hitze, Kälte, Feuchtigkeit, Umgang mit Gefahrstoffen). Der Umgang mit erfassten Daten (siehe 1. «Weitere Aspekte»), Auswirkungen des Einsatzes auf andere Beschäftigte und das Verhalten bei Ausfall der Systeme/ im Notfall muss geklärt werden11.
Abschnitt 1.03 Ergonomie
Zur Beurteilung der Ergonomie können folgende Aspekte angewendet werden:
(a) Arbeitsleistung
Bisherige Studien bestätigen den Nutzen von Exoskeletten zur Arbeitsentlastung. In einer Pilotstudie mit einem passiven Schulter-Exoskelett erhöhte sich bei einer statischen Überkopf-Aufgabe die Ausdauer um über 50% [3].
De Looze et al. untersuchten in einer Übersichtsarbeit mit 40 Publikationen (Einschluss bis August 2014) zu 26 verschiedenen industriellen Exoskeletten (20 Oberkörper-, 4 Ganzkörper- und 2 Unterkörper-Exoskelette; davon 19 aktiv und sieben passiv; alle passiven Exoskelette dienten der Unterstützung des unteren Rückens) [6]. Für 13 Exoskelette wurden die Auswirkungen auf die körperliche Belastung bewertet, vor allem im Hinblick auf die Muskelaktivität (Elektromyographie, EMG). Es wurde eine 10 – 40% Reduktion der Rückenmuskulatur-Aktivität bei dynamischem Heben und statischen Halten
beobachtet. Die Reduzierung der physischen Belastungen scheint bei aktiven Exoskeletten noch grösser zu sein. Sowohl Unterkörper als auch Rumpf und Oberkörper konnten von einer starken Entlastung (um bis zu 80%) profitieren. Somit haben Exoskelette das Potenzial, die Häufigkeit an muskuloskelettalen Erkrankungen deutlich zu reduzieren. Allerdings gibt es einige Bedenken hinsichtlich der potenziell negativen Auswirkungen, die mit einer zunehmenden Aktivität der Beinmuskulatur, hohem Diskomfort und einer Dekonditionierung der Muskeln verbunden sind [8].
10 https://www.astm.org/standardization-news/?q=features/promise-exoskeletons-nd17.html
11 Arbeit 4.0: Exoskelette (physisch unterstützende Assistenzsysteme) – Umsetzungshilfe 3.2.4, © Verbundprojekt Prävention 4.0 /
Offensive Mittelstand, Heidelberg 2018
10
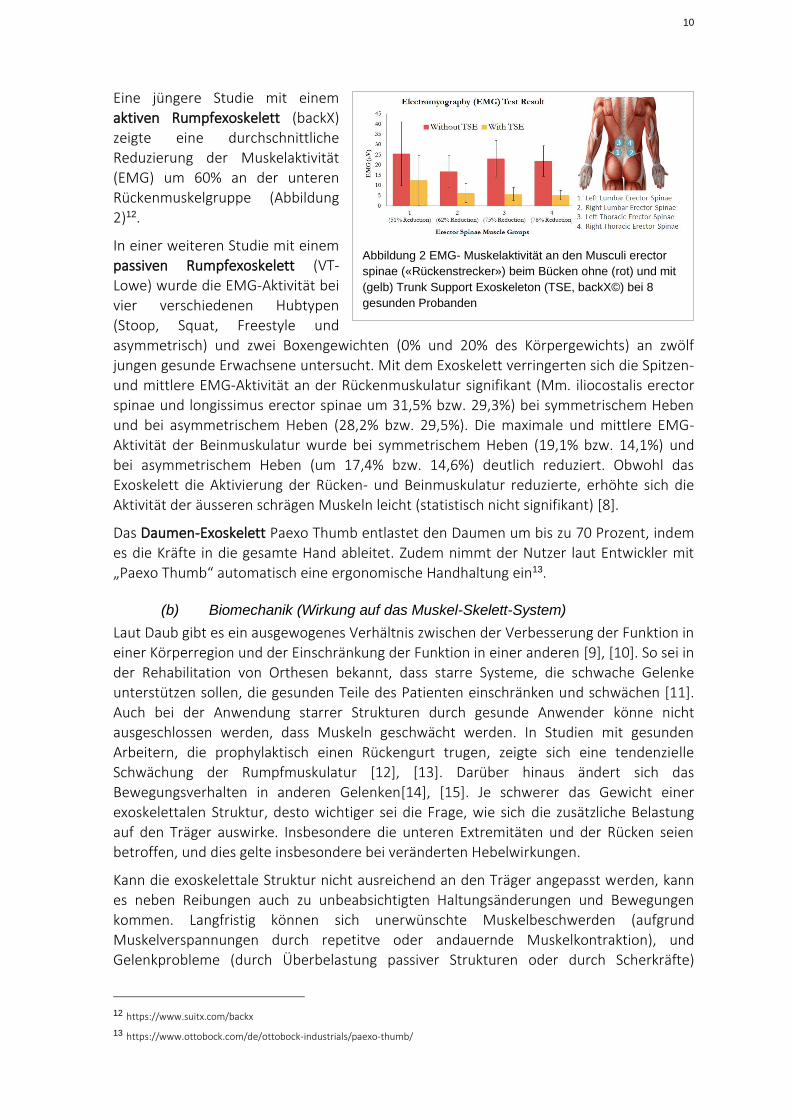
Eine jüngere Studie mit einem
aktiven Rumpfexoskelett (backX) zeigte eine durchschnittliche Reduzierung der Muskelaktivität (EMG) um 60% an der unteren Rückenmuskelgruppe (Abbildung 2)12.
In einer weiteren Studie mit einem passiven Rumpfexoskelett (VT-Lowe) wurde die EMG-Aktivität bei vier verschiedenen Hubtypen (Stoop, Squat, Freestyle und
asymmetrisch) und zwei Boxengewichten (0% und 20% des Körpergewichts) an zwölf jungen gesunde Erwachsene untersucht. Mit dem Exoskelett verringerten sich die Spitzen- und mittlere EMG-Aktivität an der Rückenmuskulatur signifikant (Mm. iliocostalis erector spinae und longissimus erector spinae um 31,5% bzw. 29,3%) bei symmetrischem Heben und bei asymmetrischem Heben (28,2% bzw. 29,5%). Die maximale und mittlere EMG-
Aktivität der Beinmuskulatur wurde bei symmetrischem Heben (19,1% bzw. 14,1%) und bei asymmetrischem Heben (um 17,4% bzw. 14,6%) deutlich reduziert. Obwohl das Exoskelett die Aktivierung der Rücken- und Beinmuskulatur reduzierte, erhöhte sich die Aktivität der äusseren schrägen Muskeln leicht (statistisch nicht signifikant) [8].
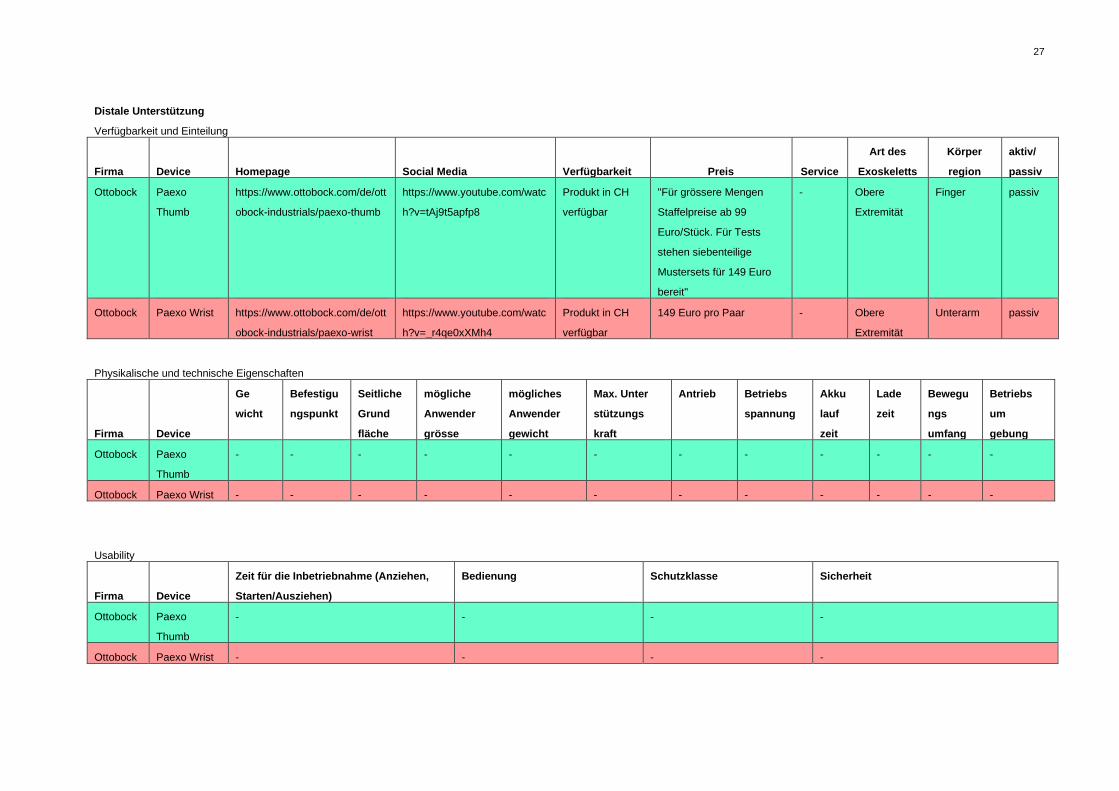
Das Daumen-Exoskelett Paexo Thumb entlastet den Daumen um bis zu 70 Prozent, indem es die Kräfte in die gesamte Hand ableitet. Zudem nimmt der Nutzer laut Entwickler mit
„Paexo Thumb“ automatisch eine ergonomische Handhaltung ein13.
(b) Biomechanik (Wirkung auf das Muskel-Skelett-System)
Laut Daub gibt es ein ausgewogenes Verhältnis zwischen der Verbesserung der Funktion in einer Körperregion und der Einschränkung der Funktion in einer anderen [9], [10]. So sei in der Rehabilitation von Orthesen bekannt, dass starre Systeme, die schwache Gelenke unterstützen sollen, die gesunden Teile des Patienten einschränken und schwächen [11]. Auch bei der Anwendung starrer Strukturen durch gesunde Anwender könne nicht ausgeschlossen werden, dass Muskeln geschwächt werden. In Studien mit gesunden Arbeitern, die prophylaktisch einen Rückengurt trugen, zeigte sich eine tendenzielle Schwächung der Rumpfmuskulatur [12], [13]. Darüber hinaus ändert sich das Bewegungsverhalten in anderen Gelenken[14], [15]. Je schwerer das Gewicht einer
exoskelettalen Struktur, desto wichtiger sei die Frage, wie sich die zusätzliche Belastung auf den Träger auswirke. Insbesondere die unteren Extremitäten und der Rücken seien betroffen, und dies gelte insbesondere bei veränderten Hebelwirkungen.
Kann die exoskelettale Struktur nicht ausreichend an den Träger angepasst werden, kann es neben Reibungen auch zu unbeabsichtigten Haltungsänderungen und Bewegungen kommen. Langfristig können sich unerwünschte Muskelbeschwerden (aufgrund Muskelverspannungen durch repetitve oder andauernde Muskelkontraktion), und Gelenkprobleme (durch Überbelastung passiver Strukturen oder durch Scherkräfte)
12 https://www.suitx.com/backx
13 https://www.ottobock.com/de/ottobock-industrials/paexo-thumb/
Abbildung 2 EMG- Muskelaktivität an den Musculi erector
spinae («Rückenstrecker») beim Bücken ohne (rot) und mit
(gelb) Trunk Support Exoskeleton (TSE, backX©) bei 8
gesunden Probanden
11
einschleichen. Die Verlagerung der Arbeitslast kann v.a. bei repetitiven Arbeiten zu
Reibung an den Auflagepunkten führen. Exoskelette reduzieren dreidimensionale Drehbewegungen, die typischerweise beim Anheben durchgeführt werden, und bieten häufig nur zweidimensionale Unterstützung auch wenn die Arbeit dreidimensionale Bewegung erfordert. Möglicherweise wird der Bewegungsumfang des Menschen also erheblich reduziert.
Zusammengefasst stellen Exoskelette neue und unvorhersehbare Belastungen für den Bewegungsapparat dar. Jeder, der exoskelettale Systeme tragen soll, muss auf diese Gefahren hin sensibilisiert werden.
(c) Diskomfort / Tragkomfort
Das zuweilen hohe Mass an Unbehagen («Diskomfort») beim Tragen eines Exoskeletts beeinträchtigt die Akzeptanz bei Nutzern. Vor allem im Bereich der Körperkontaktstellen an Schultern, Brust und Oberschenkeln ergibt sich, verstärkt durch Schwitzen, Reibung und Druckempfinden, Unbehagen und dies wird durch das Eigengewicht des Systems verstärkt [16]. Der Diskomfort scheint insbesondere bei längerer (bis zu ganzschichtiger) Tragedauer schwerer zu wiegen. Ein wichtiger Aspekt beim Komfort von Exoskeletten ist die kinematische Struktur des Gerätes, die sich am Menschen orientieren sollte. Fehlausgerichtete Gelenke können unerwünschte, das muskuloskelettale System belastende Kräfte und Momente von bis zu 230 N bzw. 1,5 Nm erzeugen [17]. Diese mindern den Tragekomfort eines Gerätes. Da eine gute Ausrichtung der Exoskelettstruktur schwierig ist, kompensieren Geräte oft Fehlausrichtungen, d.h. anstatt zu versuchen, die Exoskelett-Struktur auf den Menschen
auszurichten, wird eine gewisse Fehlausrichtung akzeptiert und mit dem Exoskelett durch die Einführung zusätzlicher Freiheitsgrade kompensiert [18]. Darüber hinaus verhindert die Kompensation der Fehlausrichtung eine Relativbewegung zwischen Gerät und Benutzer und erhöht damit indirekt auch den Komfort [19]. Auch ein Verschieben aufgrund der Schwerkraft kann dazu führen, dass der Anteil der durch das Exoskelett
getragenen Last in der Praxis recht gering ist [9].
(d) Akzeptanz
Exoskelette zur körperlichen Arbeitsentlastung werden eingesetzt, um die Arbeits- und Leistungsfähigkeit der Beschäftigten zu erhalten und zu verbessern. Der wahrgenommene Nutzen und die wahrgenommene Benutzerfreundlichkeit des Systems durch den
Anwender sind subjektiv. Der wahrgenommene Nutzen kann definiert werden als "der Grad, in dem eine Person glaubt, dass die Verwendung eines bestimmten Systems ihre Arbeitsleistung verbessern würde". Die wahrgenommene Benutzerfreundlichkeit bezieht sich dagegen auf "den Grad, in dem eine Person glaubt, dass die Verwendung eines bestimmten Systems ohne Aufwand möglich ist [20].
Auch psychische Aspekte spielen bei der Akzeptanz eine Rolle, sind jedoch in der industriellen Nutzung von Exoskeletten kaum untersucht. Hensel verweist auf Erkenntnisse aus Prothetik und Orthetik und benennt sowohl negative (z.B. Verlust der Selbstwirksamkeitserwartung) als auch positive Effekte (z.B. durch erfolgreiche Inklusion), die mit den Einsatz von Exoskeletten einhergehen können [16].
12
(e) Usability
Neben Akzeptanz und Komfort spielt für den praktischen Einsatz die Usability eine wichtige Rolle, zum einen beim An- und Ablegen, zum anderen bei der Ausführung der zu unterstützenden Haupttätigkeit selbst und bei Nebentätigkeiten. Die Bedingungen in kontrollierten Studien unterscheiden sich vom Arbeitsalltag. So hat sich in einer Feldstudie die Behinderung bei der Ausführung von Nebentätigkeiten als Akzeptanzhindernis herausgestellt [1]. Obwohl bei dem untersuchten Gerät die Usability beim An- und Ablegen relativ stabil blieb (was v.a. ein nicht allzu häufiges An- und Ablegen zurückzuführen war) und der unteren Rücken spürbar entlastet war, sank aufgrund der Behinderung bei Nebentätigkeiten die Gebrauchstauglichkeit und damit die Akzeptanz beim Ausführen der Tätigkeit.
(f) Körperliche Kurzzeit- und Langzeitrisiken
Der Einsatz von Exoskeletten kann zu Fehlbelastungen oder zu Unfällen führen. Mögliche Gefährdungen sind beispielsweise
• Fehlfunktionen der Steuerung
• Fehlbedienung des Exoskeletts
• Einengung
• Fremdsteuerung
• Stolper- oder Sturzunfälle aufgrund des zusätzlichen Gewichts oder der ausladenden mechanischen Komponenten,
• eine fehlende Notbefehlseinrichtung
• mangelhafte ergonomische Anpassung des Exoskeletts an die Anwendenden14
Bisher existieren in der arbeitswissenschaftlichen Begleitforschung zu Exoskeletten keine Längsschnittstudien. Studien beziehen sich nur auf einzelne, ausgewählte Systeme (z.B. [1], [16], [21]). Bei der Vielzahl an unterschiedlichen Exoskeletten zur Arbeitsentlastung ist zu erwarten, dass jedes System unterschiedliche Einflüsse auf den Nutzer hat und nicht von einem Gerät auf das andere geschlossen werden kann. Auch auf unterschiedliche Nutzer wird kaum eingegangen. So fehlen Studien mit Frauen fast vollständig.
Die unterschiedlichen Einflüsse der Systeme auf den Nutzer zeigen sich z.B. bei Exoskeletten zur Unterstützung beim Heben (Rumpfexoskelette). Die relativ grossen Bewegungsbereiche des menschlichen Rumpfes in der Sagittalebene ergeben sich daraus, dass ein Mensch sowohl sein Hüftgelenk als auch das Lendengelenk beugen oder strecken kann. Dies führt zu einer gewissen Redundanz, durch die Objekte aufgenommen werden können. Zwei gängige Methoden sind entweder eine überwiegende Verwendung des Hüftgelenks mit kleinen Lendenwinkeln, die gemeinhin als Kniebeuge bezeichnet wird, oder eine überwiegende Verwendung des Lendengelenks mit relativ kleinen Hüftwinkeln, die als Stoop lift bezeichnet wird [22]. Diese Hebestile haben Auswirkungen auf die Drehmomente im Lumbosacralgelenk: Je nach Hebebedingungen wie Objekthöhe und -grösse können die Momente am L5/S1-Gelenk sehr unterschiedlich sein [22], [23]. Diesen zusätzlichen Freiheitsgrad in der Sagittalebene bieten nur einzelne Geräte (z.B. der Muscle Suit).
14 Institut für angewandte Arbeitswissenschaft
13
Die potenzielle Verringerung von Verletzungen und Überlastungen durch den Einsatz von
Exoskeletten bedarf noch Untersuchungen. Noch stehen technische Herausforderungen und das Fehlen spezifischer Sicherheitsstandards gross angelegten Untersuchungen am Arbeitsplatz entgegen [9]. Dementsprechend lassen sich auch noch keine Aussagen zu etwaigen Langzeitfolgen treffen [16]. Mögliche Langzeitrisiken sind allerdings z.B. durch Lastumverteilung, im Fall von Rumpf-unterstützenden Geräten insbesondere in Brust, Oberschenkel und Knie, zu erwarten. Laut Daub sei deswegen von dauerhafter Nutzung abzuraten, um möglichen negativen Langzeitfolgen entgegenzuwirken [16].
(g) Exemplarische Untersuchungen
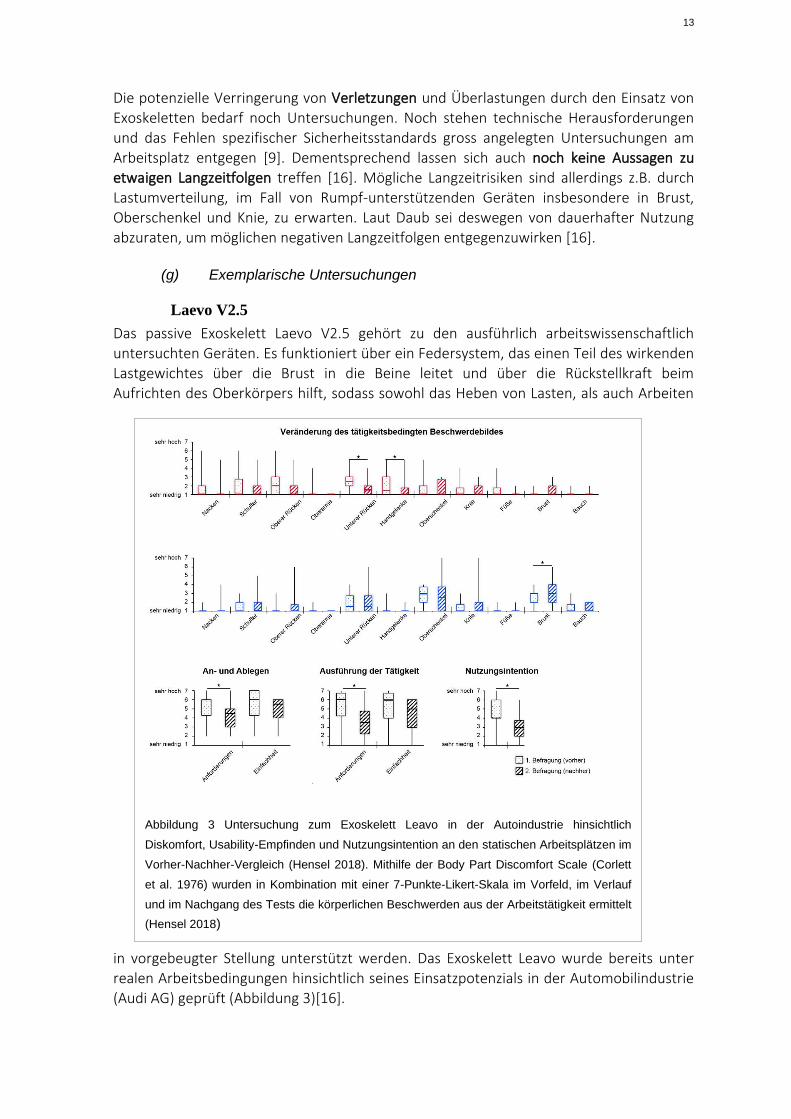
Laevo V2.5
Das passive Exoskelett Laevo V2.5 gehört zu den ausführlich arbeitswissenschaftlich
untersuchten Geräten. Es funktioniert über ein Federsystem, das einen Teil des wirkenden Lastgewichtes über die Brust in die Beine leitet und über die Rückstellkraft beim Aufrichten des Oberkörpers hilft, sodass sowohl das Heben von Lasten, als auch Arbeiten
in vorgebeugter Stellung unterstützt werden. Das Exoskelett Leavo wurde bereits unter realen Arbeitsbedingungen hinsichtlich seines Einsatzpotenzials in der Automobilindustrie (Audi AG) geprüft (Abbildung 3)[16].
Abbildung 3 Untersuchung zum Exoskelett Leavo in der Autoindustrie hinsichtlich
Diskomfort, Usability-Empfinden und Nutzungsintention an den statischen Arbeitsplätzen im
Vorher-Nachher-Vergleich (Hensel 2018). Mithilfe der Body Part Discomfort Scale (Corlett
et al. 1976) wurden in Kombination mit einer 7-Punkte-Likert-Skala im Vorfeld, im Verlauf
und im Nachgang des Tests die körperlichen Beschwerden aus der Arbeitstätigkeit ermittelt
(Hensel 2018)
14
Untersucht wurden Entlastung des unteren Rückens, Diskomfort, Usability und
Nutzungsakzeptanz [24]. Hierfür wurden über vier Wochen mit 30 Probanden an acht verschiedenen Arbeitsplätzen Tätigkeiten mit statischer Haltungsarbeit (in vorgebeugter Körperhaltung) und dynamische Tätigkeiten (Lastenmanipulation) analysiert.
Die Probanden schätzten tätigkeitsbedingte Beschwerden nach Gebrauch des Gerätes niedriger ein. Allerdings berichteten sie über Diskomfort im Bereich von Brust und Oberschenkeln, was als Ausdruck einer Lastumverteilung angesehen werden kann. Dieser Diskomfort trat vor allem bei dynamischen Tätigkeiten auf. Die Gebrauchstauglichkeit und damit einhergehend auch die Nutzerakzeptanz sanken im Verlauf des vierwöchigen Tests «deutlich» [16]. Die Autoren empfehlen weiterführende arbeitsphysiologische Untersuchungen, um den ergonomischen Benefit objektiv anhand arbeitsphysiologischer Parameter zu validieren. «Darüber hinaus wäre es notwendig, auch die Lastumverteilung
zu untersuchen, um Verbesserungspotenzial aufzuzeigen und die Nutzerakzeptanz zu erhöhen»[16].
Bosch et al. untersuchten die Wirkung von Laevo auf Muskelaktivität, Diskomfort und Ausdauer in einer langanhaltenden vorwärts gebeugten Arbeitshaltung. Achtzehn gesunde
Nutzer führten zwei Aufgaben aus: eine simulierte Montageaufgabe mit im Rumpf gebeugter Position, und statisches Halten in gleicher Rumpfposition ohne weitere Aktivität. Gemessen wurde die Muskelaktivität (EMG) an Rücken-, Bauch- und Beinmuskulatur. Diskomfort wurde abgefragt und die Ausdauer bestimmt (Zeit, die die Nutzer ohne Überschreiten einer bestimmten Diskomfortschwelle durchhalten). Bei der Montageaufgabe konnte die Muskelaktivität verringert werden (um 35- 38%) und es trat weniger Diskomfort auf. Zusätzlich war die Aktivität des Hüftstreckmuskels reduziert. Das
Exoskelett führte allerdings wieder zu mehr Diskomfort im Brustbereich. Beim statischen Halten führte der Einsatz von Exoskeletten zu längerer Standzeit (Ausdauer) von durchschnittlich 3,2 auf 9,7 Min. Die beobachtete Einnahme einer überstreckten Knieposition könnte zu Problemen bei der Verwendung des Exoskeletts führen[25].
Chairless Chair
Der Chairless Chair ist, wie der Name schon sagt, eine tragbare Sitzunterlage für Steharbeitsplätze, die es ermöglicht, zwischen einer stehenden und einer sitzenden Haltung zu wechseln. Während der Nutzer sitzt, rastet das Gerät in einer selbstgewählten Höhe ein und bietet Sitzunterstützung. Da der Chairless Chair die Rumpfbeugung durch eine sitzende Haltung ersetzt, verschiebt sich die Aktivität der Muskelgruppen vom Rücken zu den Beinen [26]. In einer arbeitsphysiologischen Laborstudie von Luger et al. (2018)
konnte der Chairless Chair bis zu 70% des Körpergewichtes tragen und dementsprechend zu einer entscheidenden Entlastung der Beine sowie Fuss- und Kniegelenke beitragen [1]
Diskomfort wurde im Bereich der Schultern massgeblich durch starkes Schwitzen unter der Weste des Chairless Chairs ausgelöst. Weiterhin wurde Diskomfort im Bereich der Füsse (durch die stark dorsalextendierte Fussstellung in niedriger Sitzhöhe und der Fixierung der Füsse an den Beinelementen des Exoskelettes) hervorgerufen. Diskomfort trat auch im Kreuz auf. Hensel und Keil (2018) führen diesen Diskomfort in einer anderen Studie (Luger et al. 2018) auf das Arbeiten in niedriger Sitzposition und den dabei weiteren Entfernungsbereich der Hände zum Körper zurück, was mit einer höheren Rückenmuskelaktivität einhergehe [1], [27]. Somit würde der Chairless Chair nicht zu einer Entlastung der Kreuzmuskulatur führen, obwohl diese Tätigkeiten zuvor mit vorgeneigtem
15
Rumpf ausgeführt werden mussten. Arbeiten mit vorgehaltenen Armen belastet das Kreuz
somit etwa gleich stark wie das Arbeiten mit vorgeneigtem Rumpf. Bei der sitzenden Tätigkeit mit vorgehaltenen Armen ist hingegen mit einer erhöhten muskulären Beanspruchung der Schultern und evtl. auch des Nackens zu rechnen. Somit sind hier anderen ergonomischen Prinzipien Vorrang zu geben, nämlich der individuell anpassbaren Arbeitshöhe (bei vorhandenem Fussraum).
Die Usability beim An- und Ablegen fällt bei diesem System eher tief aus (auf der 7-teiligen Likert Skala im Mittel x=̅ 3,8 (SD= 1,4)), hingegen wurde die Usability zur Ausführung der Tätigkeit mit gut (x=̅ 6 (SD= 1,0)) bewertet. Auch die Nutzungsintention wurde gut (auf der 7-teiligen Likert Skala im Mittel x=̅ 5,6 (SD= 1,1)) bewertet.
Hensel und Keil (2018) sehen den Einsatzbereich des Chairless Chair v.a. bei Standarbeitsplätzen ohne nennenswerte repetitiven Armaktivitäten [1]. Bei
Arbeitsplätzen, welche auch längere Gehdistanzen beinhalten, sei von der Nutzung des Systems eher abzuraten. Zudem müsse im Rahmen einer Gefährdungsanalyse noch sichergestellt werden, dass die Gefahr des Stolperns oder Stürzens ausgeschlossen ist. Unstimmigkeiten zwischen der Standardhöhe des Stuhls und der unterschiedlichen Höhe
der Arbeitsaufgaben führen zu Gleichgewichtsproblemen, die eine muskuloskelettale Anspannung verursachen können.
Zu beachten ist, dass bei den wissenschaftlichen Untersuchungen zum Chairless Chair nur einmalige Befragungen der Nutzer durchgeführt wurden und nicht wie beim Laevo-Exoskelett vor- und nach einer gewissen Tragdauer.
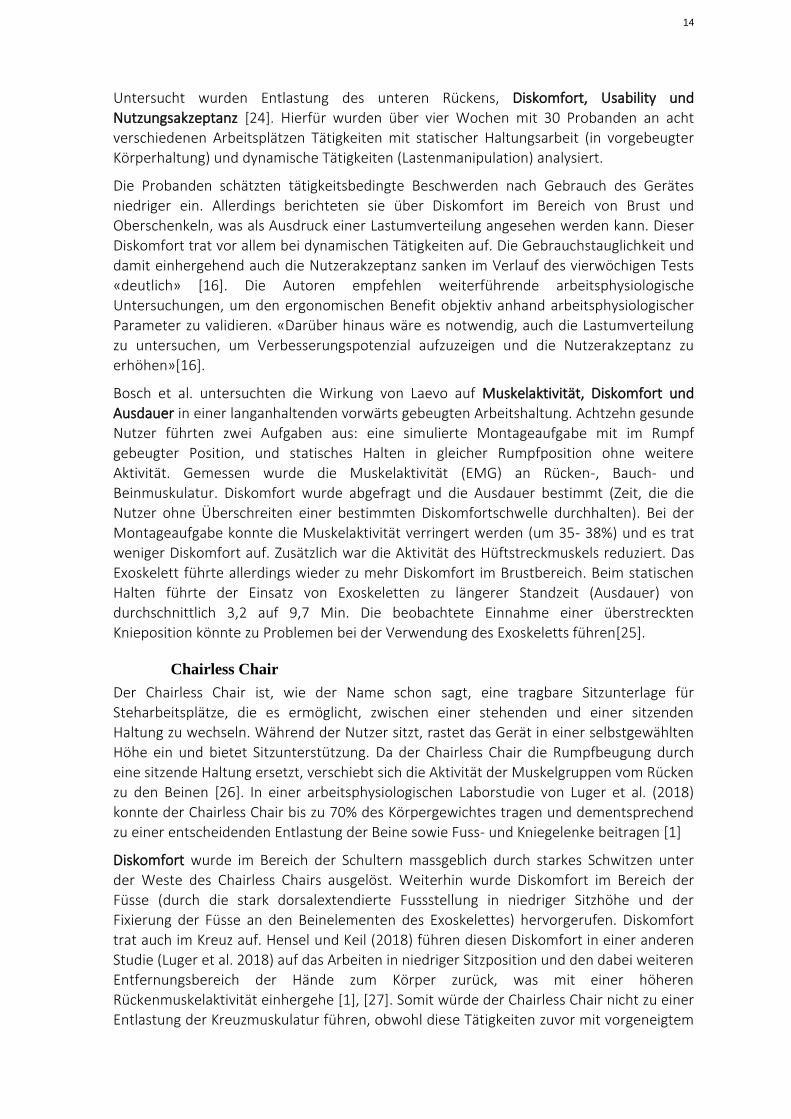
1.1.1 Ausblick
Exoskelette sind bisher nicht in der Fertigungstechnik etabliert, es gibt allerdings Vorhersagen zur Marktentwicklung.
Abbildung 4 Gartner Hype Zyklus 2018 für neue Technologien. Auf der Y-Achse sind die Erwartungen
für die neue Technologie aufgetragen, auf der X-Achse die Zeit seit Bekanntgabe.aus
https://www.gartner.com/smarterwithgartner/5-trends-emerge-in-gartner-hype-cycle-for-emerging-technologies-2018/,
abgerufen am 1.10.2019
Hype-Zyklus für neue Technologien 2018
16
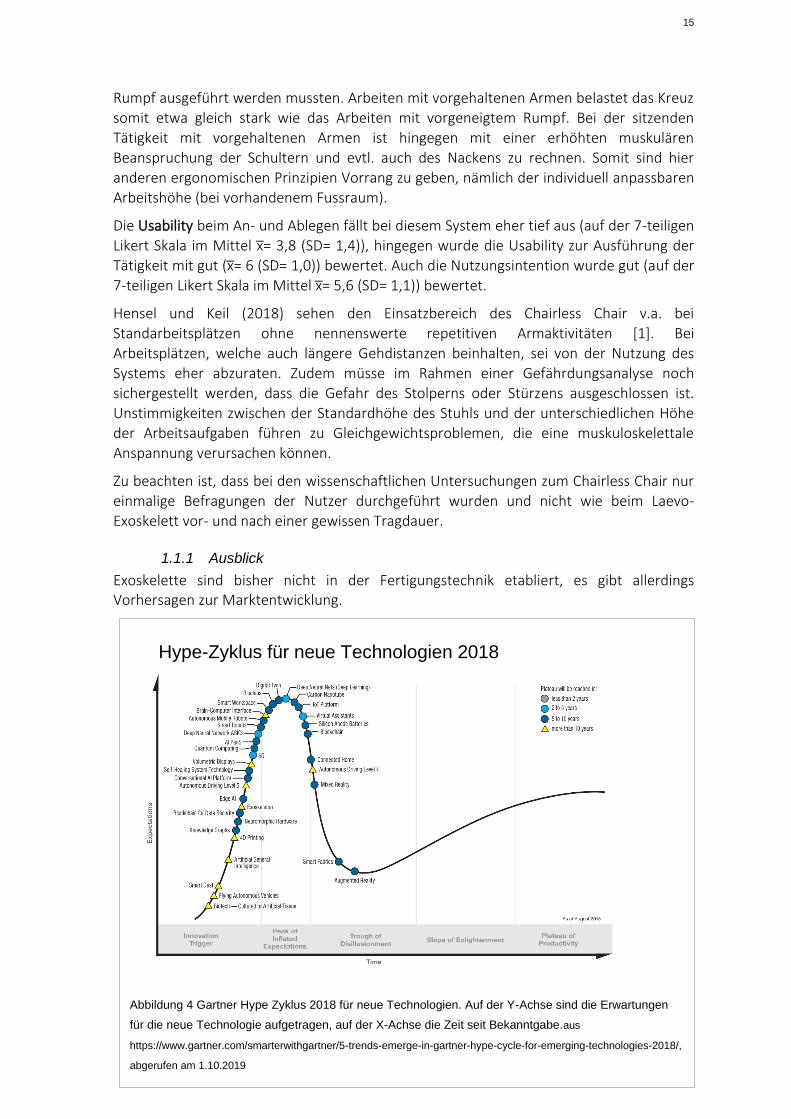
Der Gartner Hype-Zyklus stellt dar, welche Phasen der öffentlichen Aufmerksamkeit eine neue Technologie bei deren Einführung durchläuft. Danach befinden sich Exoskelette in der ersten Phase des Hype-Zyklus: Zu dieser zählen technologische Auslöser («innovation trigger») oder ein Durchbruch, ein Projektbeginn oder ein sonstiges Ereignis, welches auf beachtliches Interesse des Fachpublikums stösst15. Demnach steuern Exoskelette den «Gipfel der überzogenen Erwartungen» («peak of inflated expectations») noch an, sie müssten noch das «Tal der Enttäuschung» ( «trough of disillusionment») überwinden bevor in mehr als zehn Jahren das «Plateau der Produktivität» («plateau of productivity») erreicht sei [28]. Zahlreiche Anbieter drängen auf den Markt um Exoskelette. Auch grössere Unternehmen wie Esko Bionics, Cyberdyne und Lockheed Martin sind 2015 in die Exoskelett-Industrie eingestiegen. Die zunehmende gesundheitliche Belastung durch Arbeitsunfälle und der
zunehmende Automatisierungsbedarf dürfte das Wachstum der Segmente verstärken. So wird die Zahl der weltweit eingesetzten Exoskelette laut ABI Research in den kommenden zwanzig Jahren um etwa 40 % jährlich anwachsen, im Jahr 2028 auf rund 300 000 Exoskelette weltweit, wobei der Grossteil aktive Systeme sein werden.
15 https://de.wikipedia.org/wiki/Hype-Zyklus vom 1.20.2019
Abbildung 5 Vorhersage zum Weltmarkt für Exoskelette 2018-2028,
erstellt von ABI-Research, Quelle: VDI Nachrichten · 16. November 2018 ·
Nr. 46 «Stark durch Technik»

17
Artikel II. Tabellarische Gegenüberstellung
Hier werden die in der Schweiz erhältlichen Geräte in einer Kurzvorstellung sowie mit Spezifikationen tabellarisch beschrieben.
Abschnitt 2.01 Kurzvorstellung in der Schweiz verfügbarer Exoskelette
Die Paexo-Produktgruppe (Abbildung 6) stammt von Ottobock, einer Firma, die in der Prothesen-/Orthesen- Herstellung weltweit etabliert ist.16
Paexo Thumb ist laut Hersteller das kleinste Exoskelett der Welt. Es entlastet den Daumen und wird bei Arbeiten wie Clipsen, Stecken und Stopfen in der Montage und in Lackierereien eingesetzt. Paexo Thumb ist in sieben Grössen erhältlich. Zum Thumb stehen noch keine Studien zur Verfügung. Laut Hersteller sei er allerdings als Serienprodukt schon häufig eingesetzt und die Erfahrungswerte bei kontinuierlicher Nutzung seien positiv. Paexo Wrist unterstützt das Handgelenk beim Heben und Halten schwerer Gegenstände. Es wird präventiv genutzt, um das Handgelenk zu schonen. Anwendungen sind etwa das Halten von Schweissgeräten oder das Versetzen und Montieren von Generatoren oder Anlassern. Paexo Shoulder ist mit nur 1,9 kg Gewicht das leichteste Exoskelett zur Überkopfarbeit. Das Gewicht der erhobenen Arme wird über Armschalen mithilfe einer mechanischen Seilzugtechnik auf die Hüfte abgeleitet. Der Anwender kann mit dem Exoskelett gehen, sitzen und auch Gegenstände aufheben.17 Laut Hersteller wurde das Gerät in mehreren Studien getestet, die jedoch noch nicht publiziert sind und nicht zur Verfügung gestellt werden können.
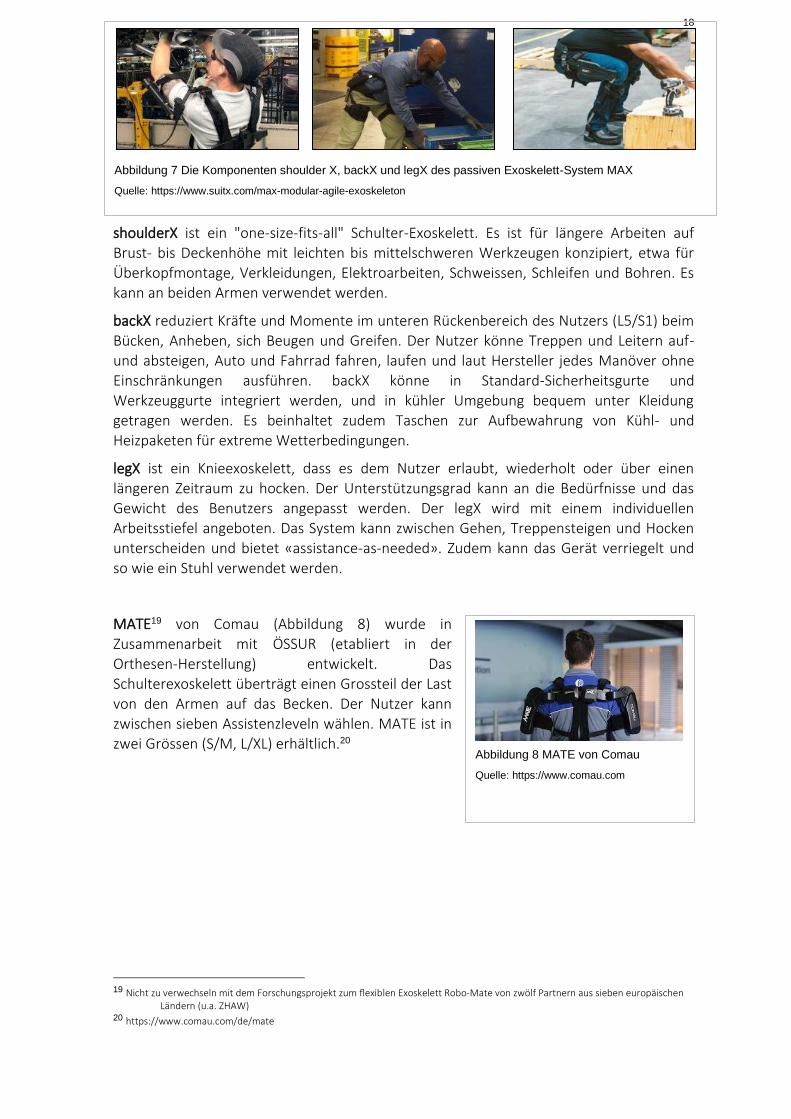
Ein Beispiel für ein modulare System kommt vom Unternehmens suitX (Abbildung 7). Es bietet drei passive Exoskelette für verschiedene Körperregionen an: shoulderX bei Überkopfarbeiten, backX beim Heben von Lasten sowie legX bei im Knie gebeugten Tätigkeiten. Durch ihre modulartige Bauweise können die drei Systeme zum passiven Exoskelett MAX (Modular Agile eXoskeleton) zusammengefügt werden (Abbildung 7).18
16https://www.ottobock.com/de/unternehmen/ottobock-industrials/
17 https://www.elektroniknet.de/markt-technik/automation/das-kleinste-exoskelett-der-welt-163875-Seite-3.html
18 https://www.suitx.com/
Abbildung 6 Paexo- Produktpalette von Ottobock. Von links nach rechts: Paexo Thumb, Paexo Wrist,
Paexo Shoulder Quelle: ottobock
18
shoulderX ist ein "one-size-fits-all" Schulter-Exoskelett. Es ist für längere Arbeiten auf Brust- bis Deckenhöhe mit leichten bis mittelschweren Werkzeugen konzipiert, etwa für Überkopfmontage, Verkleidungen, Elektroarbeiten, Schweissen, Schleifen und Bohren. Es kann an beiden Armen verwendet werden.
backX reduziert Kräfte und Momente im unteren Rückenbereich des Nutzers (L5/S1) beim
Bücken, Anheben, sich Beugen und Greifen. Der Nutzer könne Treppen und Leitern auf- und absteigen, Auto und Fahrrad fahren, laufen und laut Hersteller jedes Manöver ohne Einschränkungen ausführen. backX könne in Standard-Sicherheitsgurte und Werkzeuggurte integriert werden, und in kühler Umgebung bequem unter Kleidung getragen werden. Es beinhaltet zudem Taschen zur Aufbewahrung von Kühl- und Heizpaketen für extreme Wetterbedingungen.
legX ist ein Knieexoskelett, dass es dem Nutzer erlaubt, wiederholt oder über einen längeren Zeitraum zu hocken. Der Unterstützungsgrad kann an die Bedürfnisse und das Gewicht des Benutzers angepasst werden. Der legX wird mit einem individuellen Arbeitsstiefel angeboten. Das System kann zwischen Gehen, Treppensteigen und Hocken unterscheiden und bietet «assistance-as-needed». Zudem kann das Gerät verriegelt und
so wie ein Stuhl verwendet werden.
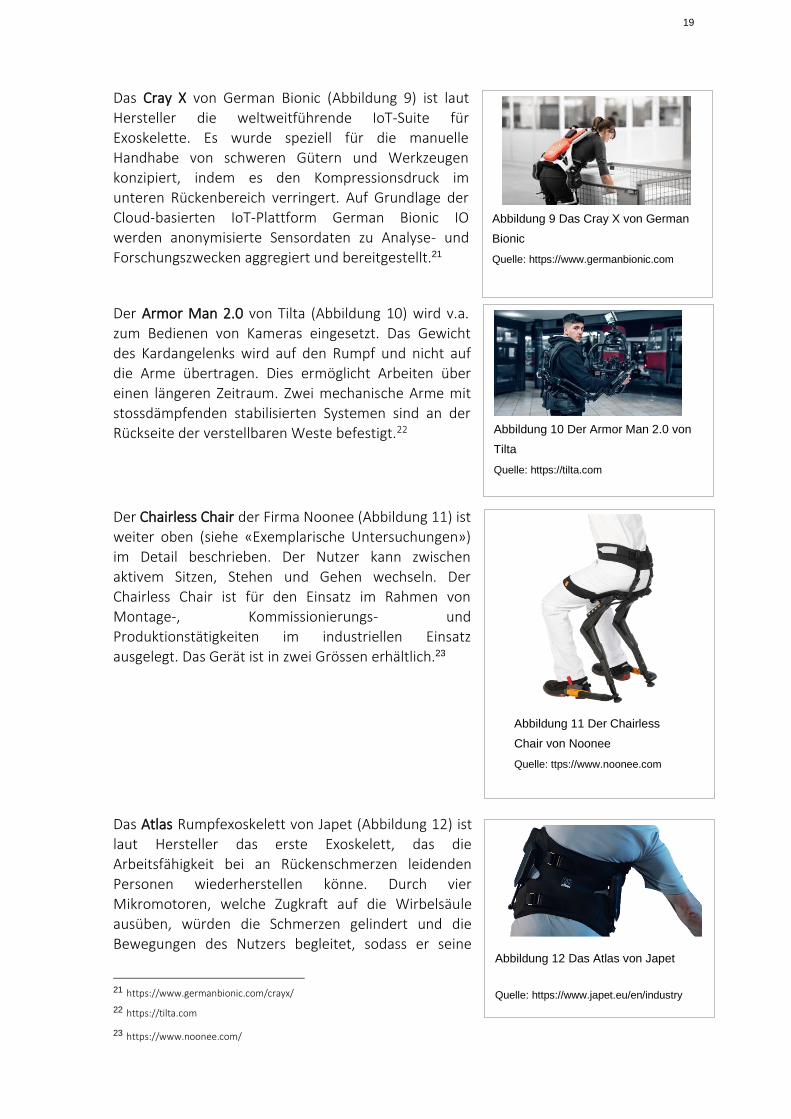
MATE19 von Comau (Abbildung 8) wurde in Zusammenarbeit mit ÖSSUR (etabliert in der Orthesen-Herstellung) entwickelt. Das Schulterexoskelett überträgt einen Grossteil der Last von den Armen auf das Becken. Der Nutzer kann zwischen sieben Assistenzleveln wählen. MATE ist in zwei Grössen (S/M, L/XL) erhältlich.20
19 Nicht zu verwechseln mit dem Forschungsprojekt zum flexiblen Exoskelett Robo-Mate von zwölf Partnern aus sieben europäischen
Ländern (u.a. ZHAW) 20 https://www.comau.com/de/mate
Abbildung 7 Die Komponenten shoulder X, backX und legX des passiven Exoskelett-System MAX
Quelle: https://www.suitx.com/max-modular-agile-exoskeleton
Abbildung 8 MATE von Comau
Quelle: https://www.comau.com
19
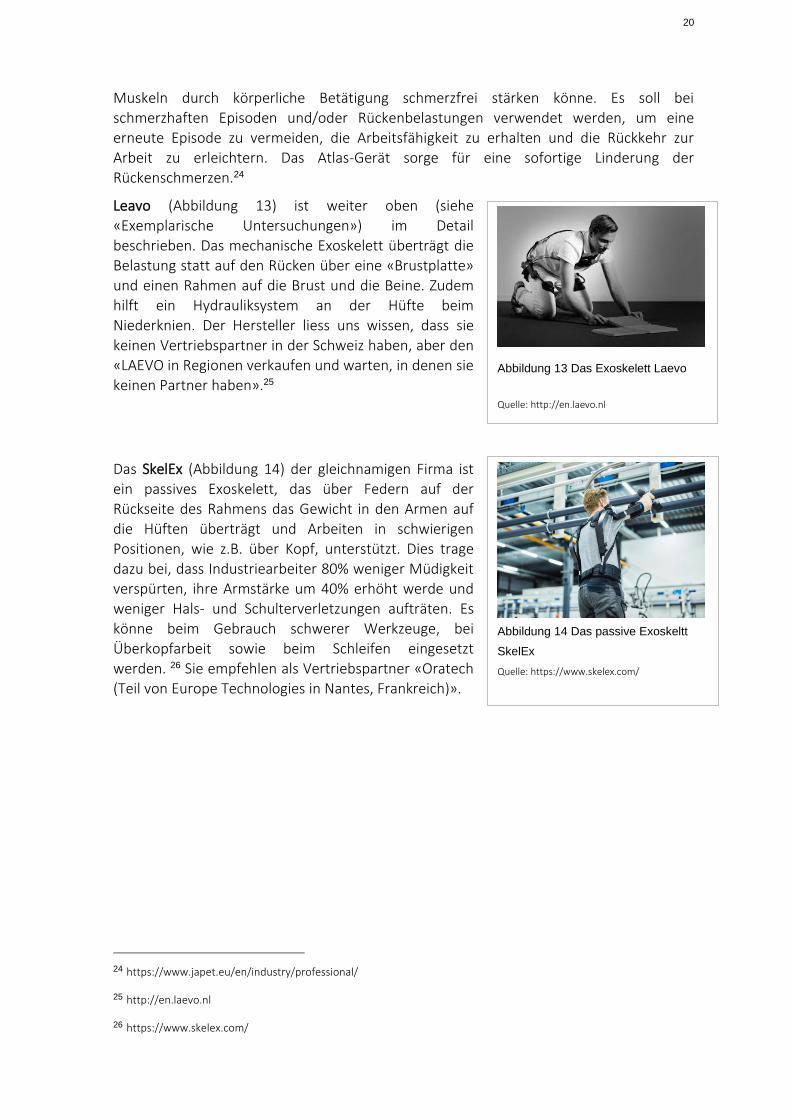
Das Cray X von German Bionic (Abbildung 9) ist laut
Hersteller die weltweitführende IoT-Suite für Exoskelette. Es wurde speziell für die manuelle Handhabe von schweren Gütern und Werkzeugen konzipiert, indem es den Kompressionsdruck im unteren Rückenbereich verringert. Auf Grundlage der Cloud-basierten IoT-Plattform German Bionic IO werden anonymisierte Sensordaten zu Analyse- und Forschungszwecken aggregiert und bereitgestellt.21
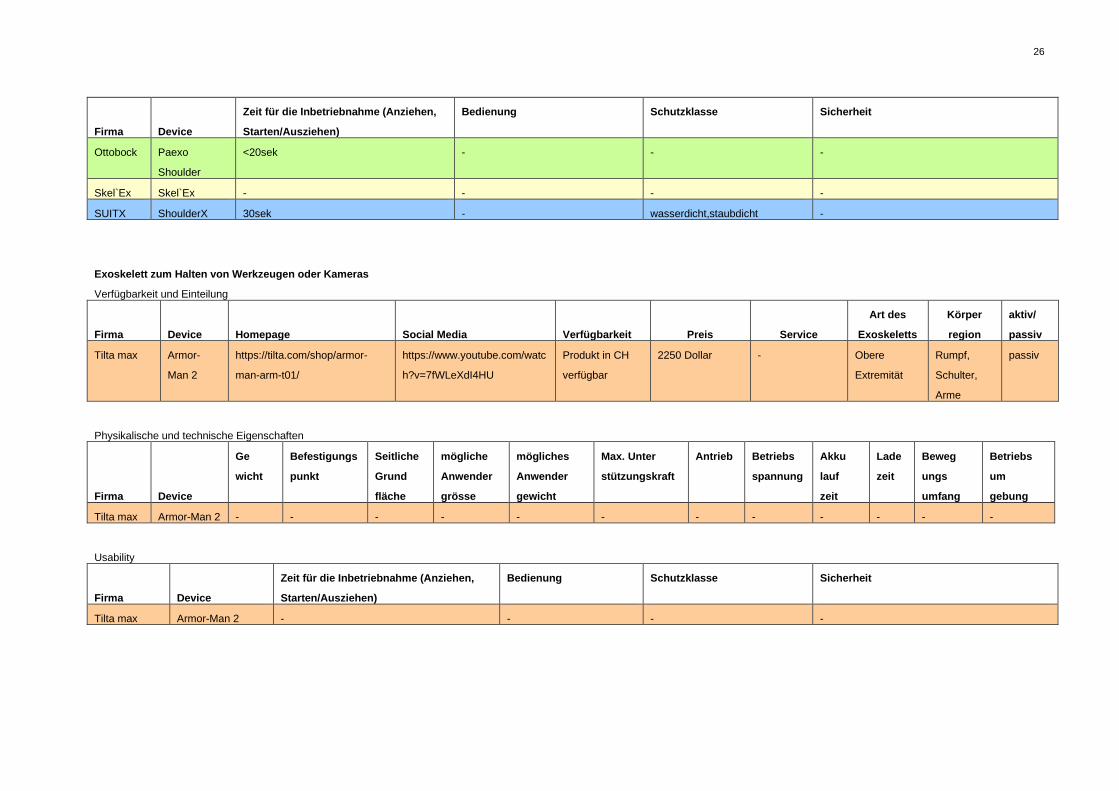
Der Armor Man 2.0 von Tilta (Abbildung 10) wird v.a. zum Bedienen von Kameras eingesetzt. Das Gewicht
des Kardangelenks wird auf den Rumpf und nicht auf die Arme übertragen. Dies ermöglicht Arbeiten über einen längeren Zeitraum. Zwei mechanische Arme mit stossdämpfenden stabilisierten Systemen sind an der
Rückseite der verstellbaren Weste befestigt.22
Der Chairless Chair der Firma Noonee (Abbildung 11) ist weiter oben (siehe «Exemplarische Untersuchungen») im Detail beschrieben. Der Nutzer kann zwischen
aktivem Sitzen, Stehen und Gehen wechseln. Der Chairless Chair ist für den Einsatz im Rahmen von Montage-, Kommissionierungs- und Produktionstätigkeiten im industriellen Einsatz ausgelegt. Das Gerät ist in zwei Grössen erhältlich.23
Das Atlas Rumpfexoskelett von Japet (Abbildung 12) ist laut Hersteller das erste Exoskelett, das die Arbeitsfähigkeit bei an Rückenschmerzen leidenden Personen wiederherstellen könne. Durch vier Mikromotoren, welche Zugkraft auf die Wirbelsäule ausüben, würden die Schmerzen gelindert und die Bewegungen des Nutzers begleitet, sodass er seine
21 https://www.germanbionic.com/crayx/
22 https://tilta.com
23 https://www.noonee.com/
Abbildung 9 Das Cray X von German
Bionic
Quelle: https://www.germanbionic.com
Abbildung 11 Der Chairless
Chair von Noonee
Quelle: ttps://www.noonee.com
Abbildung 10 Der Armor Man 2.0 von
Tilta
Quelle: https://tilta.com
Abbildung 12 Das Atlas von Japet
Quelle: https://www.japet.eu/en/industry
l
20
Muskeln durch körperliche Betätigung schmerzfrei stärken könne. Es soll bei
schmerzhaften Episoden und/oder Rückenbelastungen verwendet werden, um eine erneute Episode zu vermeiden, die Arbeitsfähigkeit zu erhalten und die Rückkehr zur Arbeit zu erleichtern. Das Atlas-Gerät sorge für eine sofortige Linderung der Rückenschmerzen.24
Leavo (Abbildung 13) ist weiter oben (siehe «Exemplarische Untersuchungen») im Detail beschrieben. Das mechanische Exoskelett überträgt die Belastung statt auf den Rücken über eine «Brustplatte» und einen Rahmen auf die Brust und die Beine. Zudem hilft ein Hydrauliksystem an der Hüfte beim Niederknien. Der Hersteller liess uns wissen, dass sie
keinen Vertriebspartner in der Schweiz haben, aber den «LAEVO in Regionen verkaufen und warten, in denen sie keinen Partner haben».25
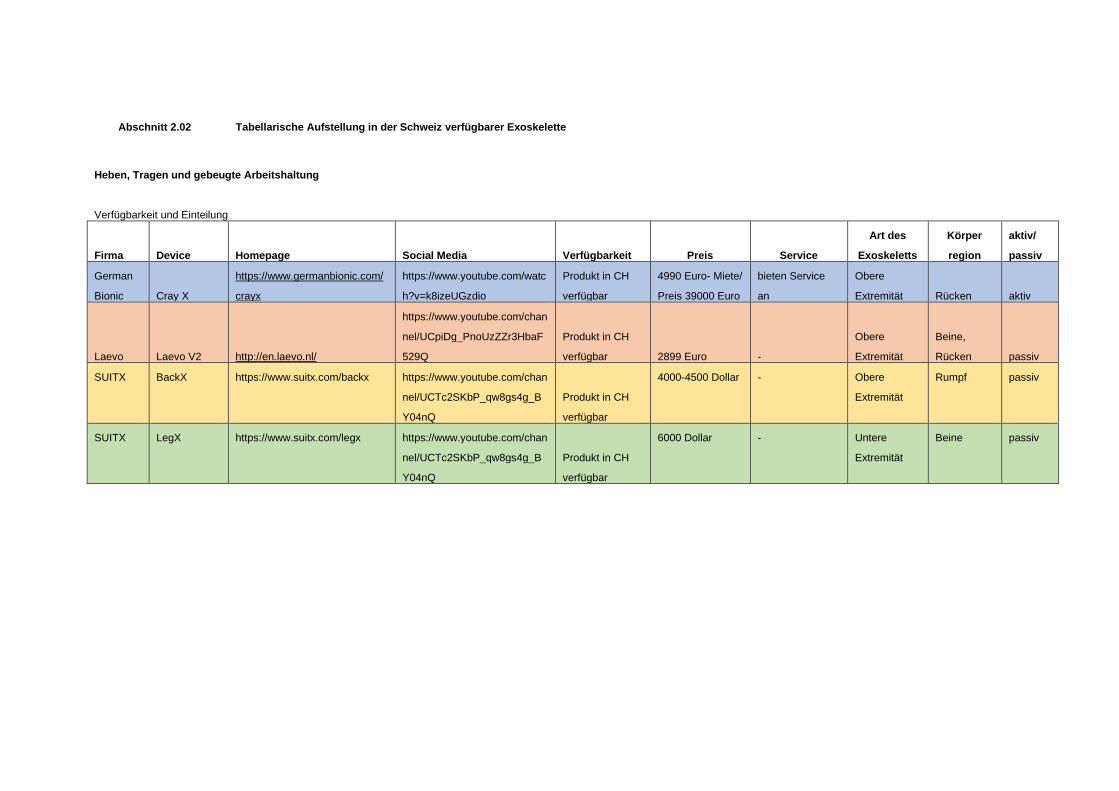
Das SkelEx (Abbildung 14) der gleichnamigen Firma ist ein passives Exoskelett, das über Federn auf der Rückseite des Rahmens das Gewicht in den Armen auf die Hüften überträgt und Arbeiten in schwierigen Positionen, wie z.B. über Kopf, unterstützt. Dies trage
dazu bei, dass Industriearbeiter 80% weniger Müdigkeit verspürten, ihre Armstärke um 40% erhöht werde und weniger Hals- und Schulterverletzungen aufträten. Es könne beim Gebrauch schwerer Werkzeuge, bei Überkopfarbeit sowie beim Schleifen eingesetzt werden. 26 Sie empfehlen als Vertriebspartner «Oratech (Teil von Europe Technologies in Nantes, Frankreich)».
24 https://www.japet.eu/en/industry/professional/
25 http://en.laevo.nl
26 https://www.skelex.com/
Abbildung 13 Das Exoskelett Laevo
Quelle: http://en.laevo.nl
http://en.laevo.nl
Abbildung 14 Das passive Exoskeltt
SkelEx
Quelle: https://www.skelex.com/
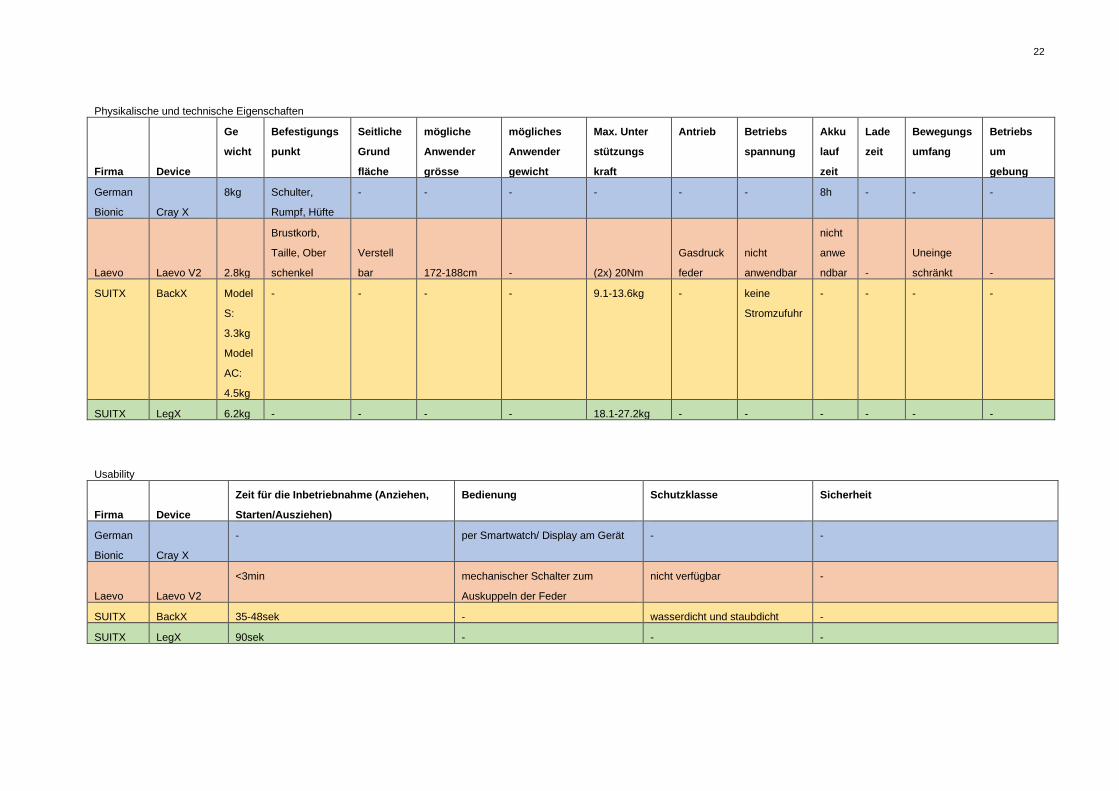
Abschnitt 2.02 Tabellarische Aufstellung in der Schweiz verfügbarer Exoskelette
Heben, Tragen und gebeugte Arbeitshaltung
Verfügbarkeit und Einteilung
Firma Device Homepage Social Media Verfügbarkeit Preis Service
Art des
Exoskeletts
Körper
region
aktiv/
passiv
German
Bionic Cray X
https://www.germanbionic.com/
crayx
https://www.youtube.com/watc
h?v=k8izeUGzdio
Produkt in CH
verfügbar
4990 Euro- Miete/
Preis 39000 Euro
bieten Service
an
Obere
Extremität Rücken aktiv
Laevo Laevo V2 http://en.laevo.nl/
https://www.youtube.com/chan
nel/UCpiDg_PnoUzZZr3HbaF
529Q
Produkt in CH
verfügbar 2899 Euro -
Obere
Extremität
Beine,
Rücken passiv
SUITX BackX https://www.suitx.com/backx https://www.youtube.com/chan
nel/UCTc2SKbP_qw8gs4g_B
Y04nQ
Produkt in CH
verfügbar
4000-4500 Dollar - Obere
Extremität
Rumpf passiv
SUITX LegX https://www.suitx.com/legx https://www.youtube.com/chan
nel/UCTc2SKbP_qw8gs4g_B
Y04nQ
Produkt in CH
verfügbar
6000 Dollar - Untere
Extremität
Beine passiv
22
Physikalische und technische Eigenschaften
Firma Device
Ge
wicht
Befestigungs
punkt
Seitliche
Grund
fläche
mögliche
Anwender
grösse
mögliches
Anwender
gewicht
Max. Unter
stützungs
kraft
Antrieb Betriebs
spannung
Akku
lauf
zeit
Lade
zeit
Bewegungs
umfang
Betriebs
um
gebung
German
Bionic Cray X
8kg Schulter,
Rumpf, Hüfte
- - - - - - 8h - - -
Laevo Laevo V2 2.8kg
Brustkorb,
Taille, Ober
schenkel
Verstell
bar 172-188cm - (2x) 20Nm
Gasdruck
feder
nicht
anwendbar
nicht
anwe
ndbar -
Uneinge
schränkt -
SUITX BackX Model
S:
3.3kg
Model
AC:
4.5kg
- - - - 9.1-13.6kg - keine
Stromzufuhr
- - - -
SUITX LegX 6.2kg - - - - 18.1-27.2kg - - - - - -
Usability
Firma Device
Zeit für die Inbetriebnahme (Anziehen,
Starten/Ausziehen)
Bedienung Schutzklasse Sicherheit
German
Bionic Cray X
- per Smartwatch/ Display am Gerät - -
Laevo Laevo V2
<3min mechanischer Schalter zum
Auskuppeln der Feder
nicht verfügbar -
SUITX BackX 35-48sek - wasserdicht und staubdicht -
SUITX LegX 90sek - - -
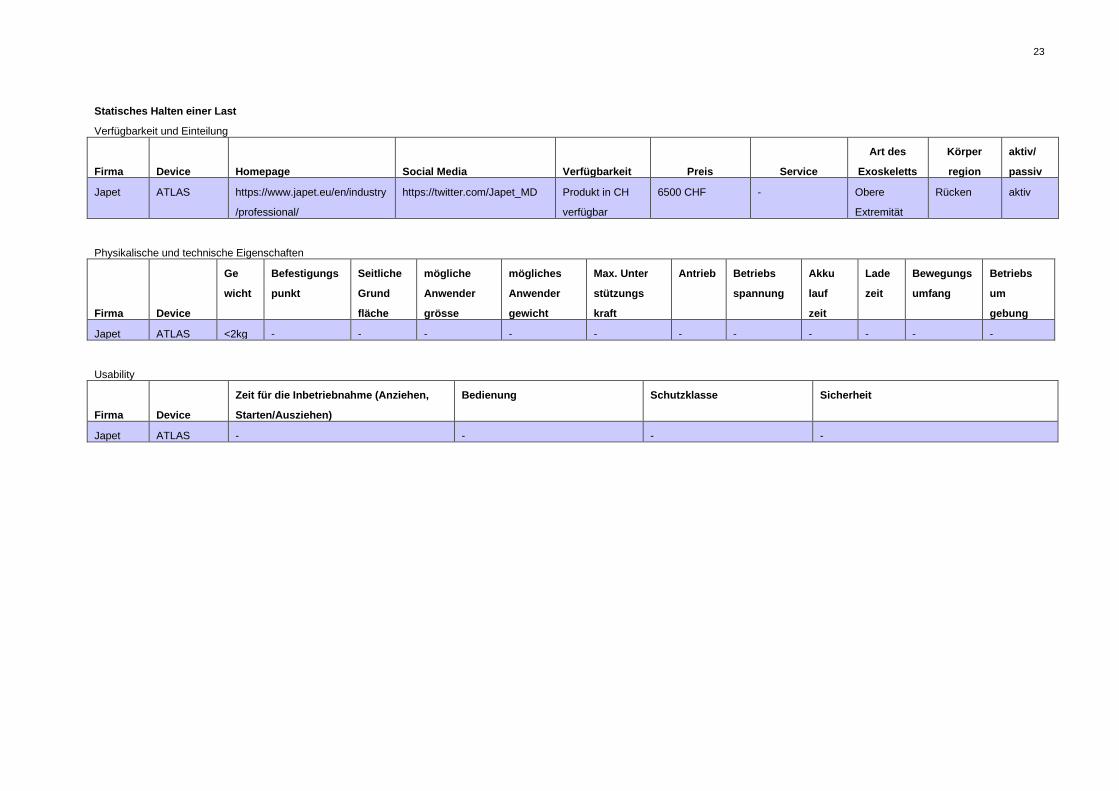
23
Statisches Halten einer Last
Verfügbarkeit und Einteilung
Firma Device Homepage Social Media Verfügbarkeit Preis Service
Art des
Exoskeletts
Körper
region
aktiv/
passiv
Japet ATLAS https://www.japet.eu/en/industry
/professional/
https://twitter.com/Japet_MD Produkt in CH
verfügbar
6500 CHF - Obere
Extremität
Rücken aktiv
Physikalische und technische Eigenschaften
Firma Device
Ge
wicht
Befestigungs
punkt
Seitliche
Grund
fläche
mögliche
Anwender
grösse
mögliches
Anwender
gewicht
Max. Unter
stützungs
kraft
Antrieb Betriebs
spannung
Akku
lauf
zeit
Lade
zeit
Bewegungs
umfang
Betriebs
um
gebung
Japet ATLAS <2kg - - - - - - - - - - -
Usability
Firma Device
Zeit für die Inbetriebnahme (Anziehen,
Starten/Ausziehen)
Bedienung Schutzklasse Sicherheit
Japet ATLAS - - - -
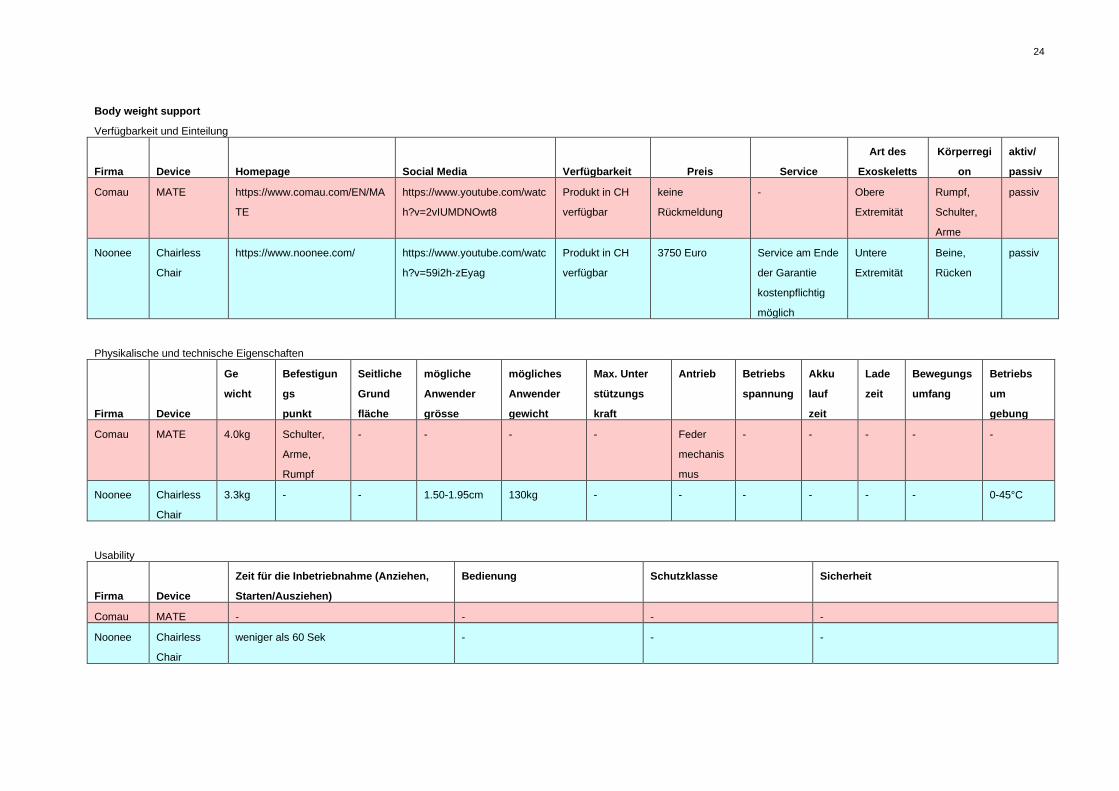
24
Body weight support
Verfügbarkeit und Einteilung
Firma Device Homepage Social Media Verfügbarkeit Preis Service
Art des
Exoskeletts
Körperregi
on
aktiv/
passiv
Comau MATE https://www.comau.com/EN/MA
TE
https://www.youtube.com/watc
h?v=2vIUMDNOwt8
Produkt in CH
verfügbar
keine
Rückmeldung
- Obere
Extremität
Rumpf,
Schulter,
Arme
passiv
Noonee Chairless
Chair
https://www.noonee.com/ https://www.youtube.com/watc
h?v=59i2h-zEyag
Produkt in CH
verfügbar
3750 Euro Service am Ende
der Garantie
kostenpflichtig
möglich
Untere
Extremität
Beine,
Rücken
passiv
Physikalische und technische Eigenschaften
Firma Device
Ge
wicht
Befestigun
gs
punkt
Seitliche
Grund
fläche
mögliche
Anwender
grösse
mögliches
Anwender
gewicht
Max. Unter
stützungs
kraft
Antrieb Betriebs
spannung
Akku
lauf
zeit
Lade
zeit
Bewegungs
umfang
Betriebs
um
gebung
Comau MATE 4.0kg Schulter,
Arme,
Rumpf
- - - - Feder
mechanis
mus
- - - - -
Noonee Chairless
Chair
3.3kg - - 1.50-1.95cm 130kg - - - - - - 0-45°C
Usability
Firma Device
Zeit für die Inbetriebnahme (Anziehen,
Starten/Ausziehen)
Bedienung Schutzklasse Sicherheit
Comau MATE - - - -
Noonee Chairless
Chair
weniger als 60 Sek - - -
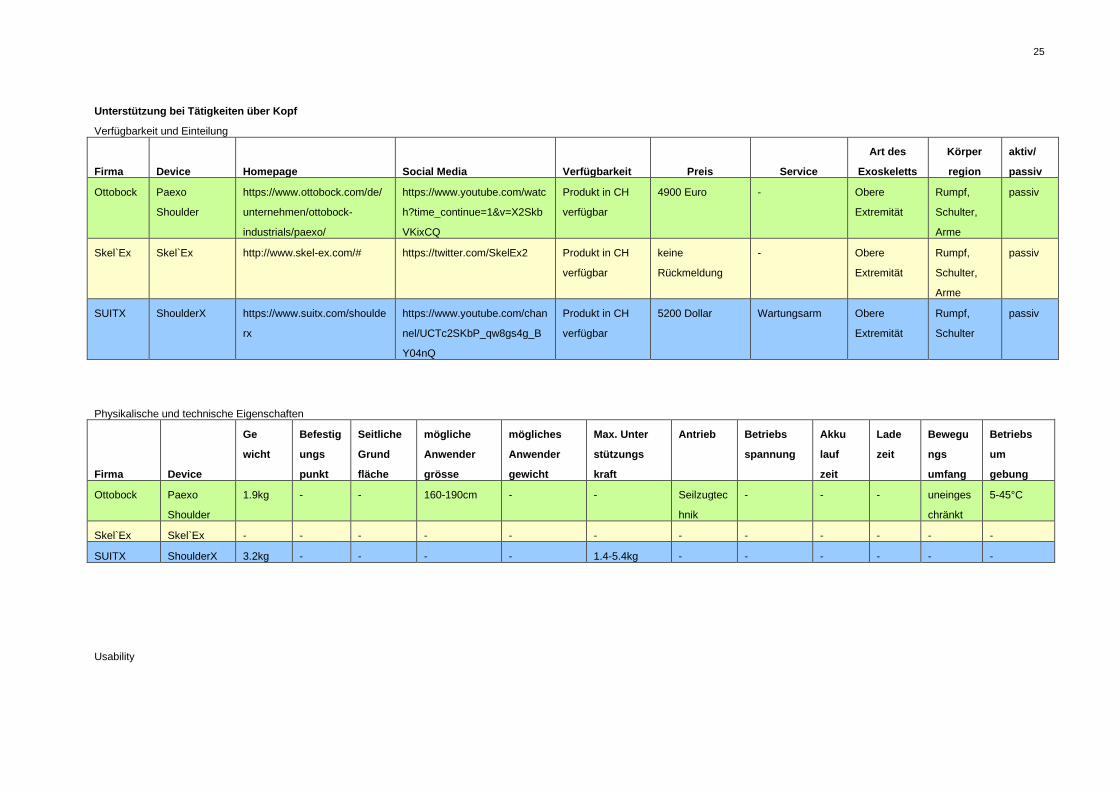
25
Unterstützung bei Tätigkeiten über Kopf
Verfügbarkeit und Einteilung
Firma Device Homepage Social Media Verfügbarkeit Preis Service
Art des
Exoskeletts
Körper
region
aktiv/
passiv
Ottobock Paexo
Shoulder
https://www.ottobock.com/de/
unternehmen/ottobock-
industrials/paexo/
https://www.youtube.com/watc
h?time_continue=1&v=X2Skb
VKixCQ
Produkt in CH
verfügbar
4900 Euro - Obere
Extremität
Rumpf,
Schulter,
Arme
passiv
Skel`Ex Skel`Ex http://www.skel-ex.com/# https://twitter.com/SkelEx2 Produkt in CH
verfügbar
keine
Rückmeldung
- Obere
Extremität
Rumpf,
Schulter,
Arme
passiv
SUITX ShoulderX https://www.suitx.com/shoulde
rx
https://www.youtube.com/chan
nel/UCTc2SKbP_qw8gs4g_B
Y04nQ
Produkt in CH
verfügbar
5200 Dollar Wartungsarm Obere
Extremität
Rumpf,
Schulter
passiv
Physikalische und technische Eigenschaften
Firma Device
Ge
wicht
Befestig
ungs
punkt
Seitliche
Grund
fläche
mögliche
Anwender
grösse
mögliches
Anwender
gewicht
Max. Unter
stützungs
kraft
Antrieb Betriebs
spannung
Akku
lauf
zeit
Lade
zeit
Bewegu
ngs
umfang
Betriebs
um
gebung
Ottobock Paexo
Shoulder
1.9kg - - 160-190cm - - Seilzugtec
hnik
- - - uneinges
chränkt
5-45°C
Skel`Ex Skel`Ex - - - - - - - - - - - -
SUITX ShoulderX 3.2kg - - - - 1.4-5.4kg - - - - - -
Usability
26
Firma Device
Zeit für die Inbetriebnahme (Anziehen,
Starten/Ausziehen)
Bedienung Schutzklasse Sicherheit
Ottobock Paexo
Shoulder
<20sek - - -
Skel`Ex Skel`Ex - - - -
SUITX ShoulderX 30sek - wasserdicht,staubdicht -
Exoskelett zum Halten von Werkzeugen oder Kameras
Verfügbarkeit und Einteilung
Firma Device Homepage Social Media Verfügbarkeit Preis Service
Art des
Exoskeletts
Körper
region
aktiv/
passiv
Tilta max Armor-
Man 2
https://tilta.com/shop/armor-
man-arm-t01/
https://www.youtube.com/watc
h?v=7fWLeXdI4HU
Produkt in CH
verfügbar
2250 Dollar - Obere
Extremität
Rumpf,
Schulter,
Arme
passiv
Physikalische und technische Eigenschaften
Firma Device
Ge
wicht
Befestigungs
punkt
Seitliche
Grund
fläche
mögliche
Anwender
grösse
mögliches
Anwender
gewicht
Max. Unter
stützungskraft
Antrieb Betriebs
spannung
Akku
lauf
zeit
Lade
zeit
Beweg
ungs
umfang
Betriebs
um
gebung
Tilta max Armor-Man 2 - - - - - - - - - - - -
Usability
Firma Device
Zeit für die Inbetriebnahme (Anziehen,
Starten/Ausziehen)
Bedienung Schutzklasse Sicherheit
Tilta max Armor-Man 2 - - - -
27
Distale Unterstützung
Verfügbarkeit und Einteilung
Firma Device Homepage Social Media Verfügbarkeit Preis Service
Art des
Exoskeletts
Körper
region
aktiv/
passiv
Ottobock Paexo
Thumb
https://www.ottobock.com/de/ott
obock-industrials/paexo-thumb
https://www.youtube.com/watc
h?v=tAj9t5apfp8
Produkt in CH
verfügbar
"Für grössere Mengen
Staffelpreise ab 99
Euro/Stück. Für Tests
stehen siebenteilige
Mustersets für 149 Euro
bereit"
- Obere
Extremität
Finger passiv
Ottobock Paexo Wrist https://www.ottobock.com/de/ott
obock-industrials/paexo-wrist
https://www.youtube.com/watc
h?v=_r4qe0xXMh4
Produkt in CH
verfügbar
149 Euro pro Paar - Obere
Extremität
Unterarm passiv
Physikalische und technische Eigenschaften
Firma Device
Ge
wicht
Befestigu
ngspunkt
Seitliche
Grund
fläche
mögliche
Anwender
grösse
mögliches
Anwender
gewicht
Max. Unter
stützungs
kraft
Antrieb Betriebs
spannung
Akku
lauf
zeit
Lade
zeit
Bewegu
ngs
umfang
Betriebs
um
gebung
Ottobock Paexo
Thumb
- - - - - - - - - - - -
Ottobock Paexo Wrist - - - - - - - - - - - -
Usability
Firma Device
Zeit für die Inbetriebnahme (Anziehen,
Starten/Ausziehen)
Bedienung Schutzklasse Sicherheit
Ottobock Paexo
Thumb
- - - -
Ottobock Paexo Wrist - - - -
Artikel III. Gesamtbeurteilung und Empfehlungen
Im Praxiseinsatz sind die Zuordnung möglicherweise passender Exoskelette zur Arbeitsentlastung und die mit dem Einsatz einhergehenden Chancen und Risiken zuweilen eher individuell gefühlt als belegt. Bei der Entscheidung für Exoskelette zur Arbeitsentlastung sollte berücksichtigt werden, dass neben den Kosten der Anschaffung weitere Ausgaben durch Lagerung, benötigten Arbeitsplatz, Training der Anwender, Unterhalt und Ersatzteile entstehen.
Um zu überprüfen, ob eine bestimmte technische Lösung Ihre eigenen Anforderungen erfüllen kann oder nicht, empfehlen wir Ihnen die Anwendung des Clusters von Goehlich [29]. Es bietet einen systematischen Ansatz für den Entscheidungsprozess hinsichtlich der Anwendbarkeit und des ergonomischen Nutzens einzelner Geräte. Ein grosser Vorteil liegt im Einbezug der Nutzer in die Entscheidung. Im ersten Schritt werden quantitative und qualitative Eigenschaften eines Exoskeletts (z.B. unterstütztes Gewicht, Tragekomfort) nach ihrer Bedeutsamkeit in drei Stufen klassifiziert.
Im zweiten Schritt erfolgt eine Erhebung bei potenziellen Nutzern. Der wahrgenommene Nutzen und die wahrgenommene Benutzerfreundlichkeit sollten erfasst werden. Die hier gestellten Fragen bei Goehlich basieren auf der Klassifizierungsliste aus Schritt 1. Um nicht bestimmte Antworten zu erzwingen, sollten v.a. offene Fragen gestellt werden, z.B. «Können Sie die nötigen Handgriffe während des Betriebs beschreiben?».
Die Geräte werden dann aufbauend auf den Ergebnissen geclustert. Die identifizierten Merkmale
von Schritt 1 werden in Gruppen, die aufgrund der Erfahrungen des Autors zusammenpassen, sortiert. «So führt beispielsweise ein Exoskelett, das eine hohe Belastung tragen muss, aber auch ein schmerzfreies Herunterfallen ermöglicht, zu einem robusten Typ.» [29] Im letzten, vierten Schritt erfolgt die Visualisierung der Ergebnisse in einer Portfoliomatrix. Damit soll es möglich sein, zu überprüfen, ob eine bestimmte technische Lösung die Anwendungsanforderungen erfüllt, und welche Designanforderungen erfüllt sein müssen, um ein bestimmtes ergonomisches Problem zu lösen.
Wie empfehlen entsprechend Hensel, «…einem partizipativen Prozess folgend gleichberechtigt Ergonomen, Betriebsmediziner, Arbeitssicherheit, Arbeitnehmervertretung … und vor allem die betroffenen Mitarbeiter frühzeitig in die Pilotierung und den Rollout» einzubeziehen. Ein transparenter Kommunikationsprozess stelle einen wesentlichen Erfolgsfaktor für die Pilotierung
und Implementierung von Exoskeletten dar. Die arbeitsmedizinische Begleitung der Exoskelettnutzer in der Nutzungsphase sei hierbei unerlässlich, da sich aktuell keine Aussagen zu etwaigen Langzeitfolgen treffen lassen [16].
Karvouniari et al. entwickelten ein Entscheidungsinstrument für die Exoskelett-Integration in die Produktion auf Grundlage von Virtueller Realität (VR). Die VR-Anwendung soll bei der Identifizierung der optimalen Anwendungsbereiche und -aufgaben, bei der Feinabstimmung des Exoskeletts (auf Grundlage von Simulationen), und bei der Schulung der Mitarbeiter helfen [30] .
Nach der Implementierung von Exoskeletten im Arbeitsumfeld empfehlen wir eine arbeitsmedizinische Begleitung der Anwender sowohl in der Nutzungs- als auch in der
29
Nachnutzungsphase. Hierbei sollten in Langzeituntersuchungen Erfahrungen zum möglichen Nutzen und auch zu möglichen negativen Langzeitfolgen gesammelt werden. Dadurch können frühzeitig erste Anzeichen negativer gesundheitlicher Folgen v.a. auf das muskuloskelettale System erkannt und ihnen vorgebeugt werden [1].
30
Artikel IV. Referenzen
[1] R. Hensel and M. Keil, ‘Subjektive Evaluation industrieller Exoskelette im Rahmen von Feldstudien an ausgewählten Arbeitsplätzen’, Zeitschrift für Arbeitswissenschaft, vol. 72, no. 4, pp. 252–263, 2018.
[2] C. Dahmen, C. Hölzel, F. Wöllecke, and C. Constantinescu, ‘Approach of Optimized Planning Process for Exoskeleton Centered Workplace Design’, Procedia CIRP, vol. 72, pp. 1277–1282, 2018.
[3] S. Spada, L. Ghibaudo, S. Gilotta, L. Gastaldi, and M. P. Cavatorta, ‘Analysis of exoskeleton introduction in industrial reality: main issues and EAWS risk assessment’, presented at the International Conference on Applied Human Factors and Ergonomics, 2017, pp. 236–244.
[4] Z. Yao, W. Weidner, R. Weidner, and J. Wulfsberg, ‘Human hybrid robot, next-generation support technology for manual tasks: Challenges, perspectives and economic implications’, SAE Technical Paper, 0148–7191, 2015.
[5] European Foundation for the Improvement of Living and Working Conditions, 5th European Working Conditions Survey. Publications Office of the European Union, 2012.
[6] M. P. De Looze, T. Bosch, F. Krause, K. S. Stadler, and L. W. O’Sullivan, ‘Exoskeletons for industrial application and their potential effects on physical work load’, Ergonomics, vol. 59, no. 5, pp. 671–681, 2016.
[7] Berufsgenossenschaft Holz und Metall, ‘Einsatz von Exoskeletten an (gewerblichen) Arbeitsplätzen; BGHM FAQ-Liste.’ 2017.
[8] M. M. Alemi, J. Geissinger, A. A. Simon, S. E. Chang, and A. T. Asbeck, ‘A passive exoskeleton reduces peak and mean EMG during symmetric and asymmetric lifting’, Journal of Electromyography and Kinesiology, vol. 47, pp. 25–34, 2019.
[9] U. Daub, ‘Evaluation aspects of potential influences on human beings by wearing exoskeletal systems’, presented at the 17. Internationales Stuttgarter Symposium, 2017, pp. 1331–1344.
[10] D. Carus, J. Lamb, and G. Johnson, ‘Upper limb orthoses’, Bowker, P., Brader, DL, Pratt, DJ et al, p. 206, 1993.
[11] A. Ferrari and G. Cioni, Infantile Zerebralparese: Spontaner Verlauf und Orientierungshilfen für die Rehabilitation. Springer, 1999.
[12] D. B. Eisinger, R. Kumar, and R. Woodrow, ‘Effect of Lumbar Orthotics on Trunk Muscle Strength1’, American journal of physical medicine & rehabilitation, vol. 75, no. 3, pp. 194–197, 1996.
[13] N. Kurustien, K. Mekhora, W. Jalayondeja, and S. Nanthavanij, ‘Trunk Muscle Performance and Work-Related Musculoskeletal Disorders among Manual Lifting with Back Belt Wearing Workers.’, Journal of the Medical Association of Thailand= Chotmaihet thangphaet, vol. 98, pp. S74-80, 2015.
[14] A. G. Mell, M. A. Friedman, R. E. Hughes, and J. E. Carpenter, ‘Shoulder muscle activity increases with wrist splint use during a simulated upper-extremity work task’, American Journal of Occupational Therapy, vol. 60, no. 3, pp. 320–326, 2006.
[15] I.-G. Yoo, M.-Y. Jung, H.-S. Jeon, and J. Lee, ‘Effects of wrist-extension orthosis on shoulder and scapular muscle activities during simulated assembly tasks’, Industrial health, vol. 48, no. 1, pp. 108–114, 2010.
[16] R. Hensel, M. Keil, B. Mücke, and S. Weiler, ‘Chancen und Risiken für den Einsatz von Exoskeletten in der betrieblichen Praxis’, ASU, vol. 53, no. 2018, pp. 654–661, 2018.
[17] A. Schiele, ‘Ergonomics of exoskeletons: Objective performance metrics’, presented at the World Haptics 2009-Third Joint EuroHaptics conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, 2009, pp. 103–108.
[18] K. Junius, N. Lefeber, E. Swinnen, B. Vanderborght, and D. Lefeber, ‘Metabolic effects induced by a kinematically compatible hip exoskeleton during STS’, IEEE Transactions on Biomedical Engineering, vol. 65, no. 6, pp. 1399–1409, 2017.
[19] A. Schiele and F. C. Van Der Helm, ‘Kinematic design to improve ergonomics in human machine interaction’, IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 14, no. 4, pp. 456–469, 2006.
[20] F. D. Davis, ‘Perceived usefulness, perceived ease of use, and user acceptance of information technology’, MIS quarterly, pp. 319–340, 1989.
31
[21] G. Winter, C. Felten, and J. Hedtmann, ‘Testing of Exoskeletons in the Context of Logistics - Application and Limits of Use’, in HCI International 2019 - Posters, Cham, 2019, pp. 265–270.
[22] I. Kingma, G. S. Faber, and J. H. van Dieen, ‘How to lift a box that is too large to fit between the knees’, Ergonomics, vol. 53, no. 10, pp. 1228–1238, 2010.
[23] M. B. Näf, A. S. Koopman, S. Baltrusch, C. Rodriguez-Guerrero, B. Vanderborght, and D. Lefeber, ‘Passive back support exoskeleton improves range of motion using flexible beams’, Frontiers in Robotics and AI, vol. 5, p. 72, 2018.
[24] E. N. Corlett and R. Bishop, ‘A technique for assessing postural discomfort’, Ergonomics, vol. 19, no. 2, pp. 175–182, 1976.
[25] T. Bosch, J. van Eck, K. Knitel, and M. de Looze, ‘The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work’, Applied ergonomics, vol. 54, pp. 212–217, 2016.
[26] S. Spada et al., ‘Physical and virtual assessment of a passive exoskeleton’, presented at the Congress of the International Ergonomics Association, 2018, pp. 247–257.
[27] T. Luger, T. J. Cobb, R. Seibt, M. A. Rieger, and B. Steinhilber, ‘Subjective Evaluation of a Passive Lower-Limb Industrial Exoskeleton Used During simulated Assembly’, IISE Transactions on Occupational Ergonomics and Human Factors, pp. 1–10, 2019.
[28] I. Gartner, ‘Gartner hype cycle’, Gartner. com, https://www. gartner. com/technology/research/methodologies/hype-cycle. jsp, p. 2018, 2018.
[29] R. Goehlich, I. Krohne, R. Weidner, C. Gimenez, S. Mehler, and R. Isenberg, ‘Exoskeleton Portfolio Matrix’, Technische Unterstützungssysteme, die die Menschen wirklich wollen, p. 147, 2016.
[30] A. Karvouniari, G. Michalos, N. Dimitropoulos, and S. Makris, ‘An approach for exoskeleton integration in manufacturing lines using Virtual Reality techniques’, Procedia CIRP, vol. 78, pp. 103–108, 2018.
















![Die NEUEN NATURTHERAPIEN Internetzeitschrift für Garten ... · Mitlebewesen zur Befriedigung unserer körperlichen Verlangen zu töten. Die Grösse [sic!] und den moralischen Fortschritt](https://img.pdfslide.org/doc/110x75/5e18f28a6cfd9a68914d840d/die-neuen-naturtherapien-internetzeitschrift-fr-garten-mitlebewesen-zur-befriedigung.jpg)











