Embed Size (px)
Citation preview

18 H. Buffer und H. Neuber: Fahrstabilit/it einer Lokomotive Ingenieur-Archiv
Fahrstabilit/it einer Lokomotive mit zwei Drehgestellen bei Geradeausfahrt
Von H. Bufler und H. Neuber
{]bersicht: Es wird der Einflul3 verschiedener Parameter (Schlupfkoeffizienten, effektive Konizit/it, Achs- abstand, Federsteifigkeiten) auf die Fahrstabflit/it einer Lokomotive mit zwei Drehgestellen untersucht. Das zugrunde gelegte Ersatzsystem hat acht Freiheitsgrade.
Summary: The influence of some parameters (creep coefficients, effective conicity, axle spacing, elastic stiffness coefficients) on the dynamic stability of a locomotive with two pivot mountings is investigated. The considered dynamical model has eight degrees of freedom.
1. Einleitung. Wie die Erfahrung zeigt, stellt sich bei bestimmten Geschwindigkeiten ein instabiles Fahrverhalten yon Lokomotiven ein, das sich in heftigen Horizontalbewegungen cluer zur Fahrtrichtung /iugert. Das Ziel der vorliegenden Untersuchung ist es, den EinfluB verschie- dener GrSgen (effektive Konizit~it, Koeffizienten des L/ings- und Querschlupfes zwischen Rad und Schiene, Radstand der Drehgestelle, Federsteifigkeiten, Verdrehungssteifigkeit des Lokomotiv- kSrpers) auf die kritische Geschwindigkeit zu erforschen. Zu diesem Zweck werden die Differential- gleichungen der StSrbewegungen aufgestellt, die ffir kleine Aus!enkungen aus der ungestSrten Bahn linear sind. Wegen der Existenz der Schlupfkrafte ist das Problem nichtkonservativ. Bei m/il3iger Geschwindigkeit klingen die StSrbewegungen exponentiell mit der Zeit ab; als kritische Geschwin- digkeit wird die kleinste Geschwindigkeit bezeichnet, bei der eine unged/impfte St5rbewegung mSglich ist. Die Ergebnisse der numerischen Berechnungen sind ffir ein typisches Beispiel in einem iibersichtlichen Diagramm zusammengestellt.
Die bisher vorliegende einschl~gige Literatur [1], [2], [3], [4] beschr/inkt sich entweder auf einen einzelnen Radsatz oder auf ein einzelnes DrehgesteU bzw. zweiachsiges Fahrzeug; eine aus- fiihrliche Information fiber die geschichtliche Entwicklung des Problems ist in [2] enthalten. Lediglich in [5] wird eine vollst/indige Lokomotive zugrunde gelegt, fiir welche die Einlaufvorg/inge, nicht aber die Fahrstabiht/it, studiert werden. De Pater [6] befaBt sich mit dem nichtlinearen Problem der Stabilit~it der sinusffrmigen Bewegung eines zweiachsigen Wagens bei groBen seit- lichen Auslenkungen.
'3~+Arlr q~ 0m
5/
S Abb. 1. Beziehung fiir die ~nderung der Laufkreisradien in Abh/ingigkeit
yon der seitlichen Auslenkung ~/ eines Radsatzes.
2. Geometrische und physikalisehe Grundbeziehungen. Lenkt man einen mittig im Gleis laufen- den Radsatz um den Betrag ~ seitlich aus, so vergrSBert sich der Laufkreisradius r des einen Rades I gegenfiber der Lage ~ = 0 um den Betrag drz, w/ihrend sich der Laufkreisradius des anderen Rades I I nm Alrii verringert. Ffir ein verschlissenes Radkranzprofil gilt, wie aus Messungen bekannt ist, die in Abb. 1 gegebene Abhangigkeit zwischen A ri ~- A rzz und der Auslenkung ~. Man liest hieraus fiir den Bereich ~ < 0,5 cm die lineare Beziehung
A rz ~- d riz = 2 7 ~7 (1)
ab, wobei y = 0,375 ist. Bei neuen Profilen gilt ebenfalls die Abh/ingigkeit (1) mit anderen Werten fiir die effektive Konizit~it y.
39. Band 1970 H. Buffer und H. Neuber: Fahrstabilit/it einer Lokomotive 19
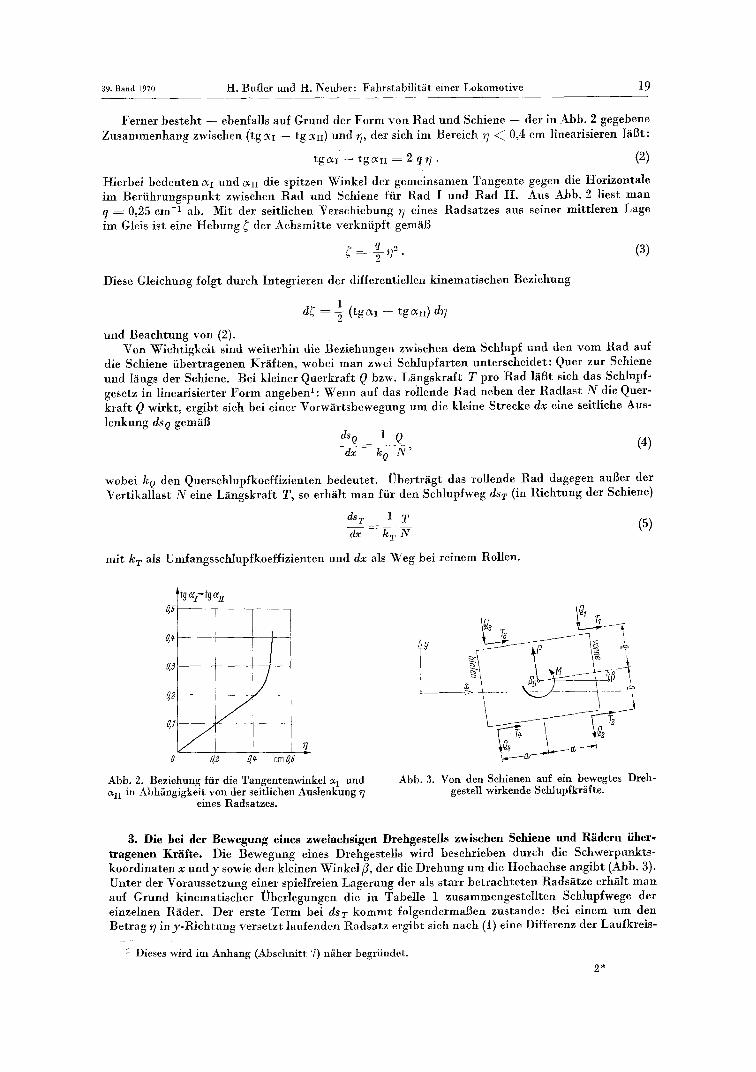
Ferner besteht -- ebenfalls auf Grund der Form yon Rad und Schiene -- der in Abb. 2 gegebene Zusammenhang zwischen ( tgai -- tgaii) und ~, der sich im Bereich ~? < 0,4 cm linearisieren ]~igt:
tga i ~ tga l i = 2 q ~.]. (2)
Hierbei bedeuten ~I und c~ii die spitzen Winkel der gemeinsamen Tangente gegen die Horizontale im Berfihrungspunkt zwischen Rad und Schiene fiir Had I und Rad II. A.s Abb. 2 liest man q = 0~25 cm -1 ab. Mit der seitlichen Verschiebung ~ eines Radsatzes aus seiner mittleren Lage im Gleis ist eine Hebung ~ der Achsmitte verkniipft gemfiI3
q 2 r = ~ . (3)
D'iese Gleichung folgt durch Integrieren der differentiellen kinematischen Beziehung
1 d~ = ~- ( tgai -- tg~ii) d~?
und Beachtung yon (2). Von Wichtigkeit sind weiterhin die Beziehungen zwischen dem Schlupf und den vom Had auf
die Schiene iibertragenen Krfiften, wobei man zwei Schlupfarten unterscheidet: Quer zur Schiene und lfings der Schiene. Bei kleiner Querkraft Q bzw. L~ngskraft T pro Rad lfiBt sich das Schlupf- gesetz in linearisierter Form angeben 1 : Wenn auf das roilende Had neben der Radlast N die Quer- kraft Q wirkt, ergibt sich bei einer Vorw~rtsbewegung um die kleine Strecke dx eine seitliche Aus- lenkung dsQ gcmfif~
dsQ 1 Q (4) dx kQ. N '
wobei k e den Quersch]upfkoeffizienten bedeutet. Ubertr/igt das rollende Rad dagegen aul3er der Yertikallast N eine L~ngskraft T, so erhMt man fiir den Schlupfweg dST (in Richtung der Schiene)
d,T_ 1 T (5) dx k T N
mit k T als Umfangsschlupfkoeffizienten und dx als Weg bei reinem Rollen.
lfg r % 0,s I
o,~
0,3
O,Z
0
- - !
qz g3- cm O,f
Abb, 2. Beziehung fiir die Tangentenwinkel a I und a n in Abh~ingigkeit yon der seitlichen Auslenkung ~?
eines Radsatzes.
I Y
Abb. 3. Von den Schienen auf ein bewegtes Dreh- gestell wirkende Schlupfkr/ifte.
3. Die bei der Bewegung eines zweiachsigen Drehgestelis zwischen Schiene und R/idern iiber- tragenen Kriifte. Die Bewegung eines Drehgestells wird beschrieben dutch die Schwerpunkts- koordinaten x undy sowie den kleinen Winkel/~, der die Drehung um die Hochachse angibt (Abb. 3). Unter der Voraussetzung einer spielfreien Lagerung der als start betrachteten Rads~itze erhMt man auf Grund kinematischer 13berlegungen die in Tabelle 1 zusammengestellten Schlupfwege der einzelnen R/ider. Der erste Term bei dST kommt folgendermaBen zustande: Bei einem urn den Betrag ~ iny-Richtung versetzt ]aufenden Radsatz ergibt sich nach (1) eine Differenz der Laufkreis-
1 Dieses wird im Anhang (Abschnitt 7) n~iher begriindet. 2*

20 H. Buffer und H. Neuber: Fahrstabilit/it einer Lokomotive Ingenieur-Arehlv
Tabelle 1. Schlupfwege dsq und ds T der vier Riider eines Drehgestells bei den infinitesimalen Verschiebungen dx, dy, d~ aus der Lage x, y, ~ heraus
v o r n e hinten
dsQ
ds T
links
dy . ~ dx + a d~
~ ( y + a~)dx + bd~5
rechts
dy -- I~ dx + a d~
_ L ( y + ~ ) _ ~d~ r
links I rechts
L dy - -~dx - - ad~ _ dy--t~dx-- adt3
1 Ari + ArlI radien, die bei der Vorwiirtsbe'wegung um dx zurn Schlupfweg 2 dx ~ 7 r ~dx r
pro Rad fiihrt; r ist dabei der rnittlere Radius und der Gesamtschlupfweg wurde gleichmaBig auf die beiden R~der aufgeteilt.
Die gem/iB &bb. 3 yon den Schienen auf die R/ider wirkenden Schlupfkr/ifte Qi und T i (i = 1, 2, 3, 4) errechnen sich naeh (4) und (5). Ihnen ist die resultierende Kraft P und das resul- tierende Moment M/iquivalent. Setzt man gleiche Vertikalbelastung N der einzelnen Riider vor- aus 2, so folgt:
M = - - 4 N { k T b ( - ~ y +b~x ) + kQa2~x }. (7)
l~ach Einfiihrung der Fahrgeschwindigkeit v--- dx/dt erh/ilt man schlieBlich
P -= -- (4 N kQ/v) ~ + (4 N kQ)/3, (S)
M = -- (4 N k T ~ b/r) y -- {4N (M kT + a ~ kd/v ) ~ , (9)
worin die Zeitableitung durch einen Punkt gekennzeichnet ist. Da P und Mallein ,con den Schlupf- kr/iften herriihren, existiert hierfiir kein Potential.
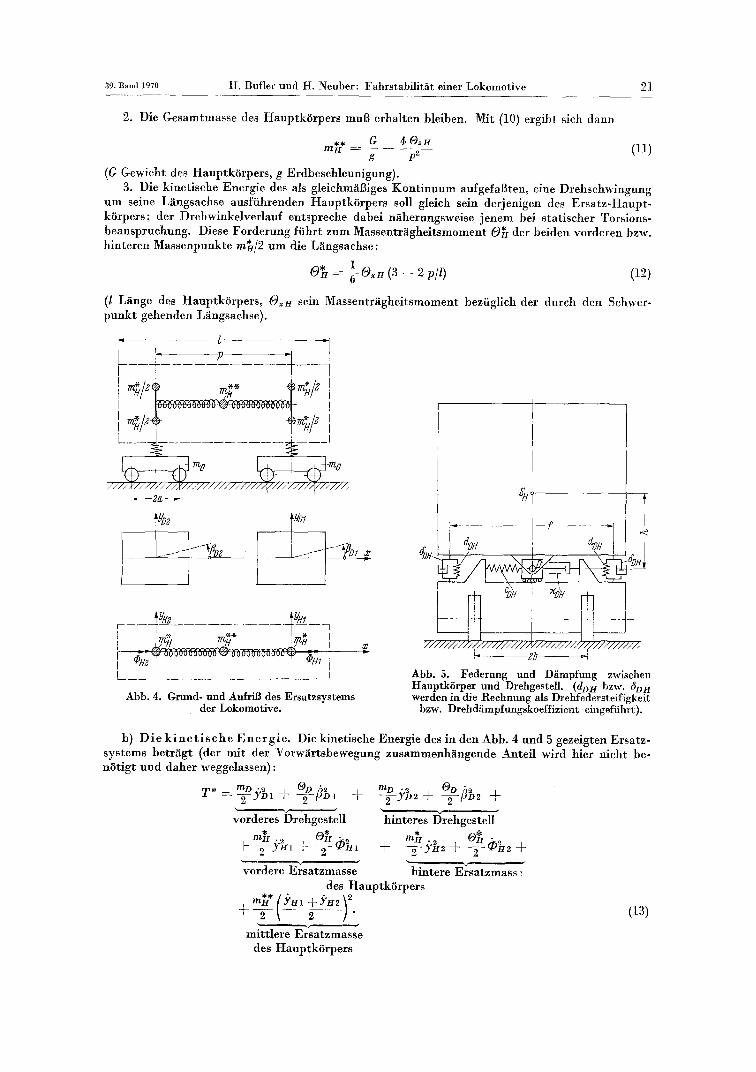
4. AufstellungderBewegungsgleiehungenderLokomotive. a )Das der R e c h n u n g z u g r u n d e l i e g e n d e E r s a t z s y s t e m . Dieses ist in den Abb. 4 und 5 dargestellt. Bei gegebener Vorw/irts- bewegung x(t) liegen acht Freiheitsgrade des Ersatzsystems vor; dernentsprechend werden acht Koordinaten eingefiihrt: Die seitlichen Schwerpunktsauslenkungen der Drehgestelle yD 1, yD 2 und ihre Drehungen urn die Hochachse/~D 1,/~D 2, ferner die seitlichen Auslenkungeny~ 1, yH2 der Schwer- punkte des vorderen und hinteren Ersatzrnassenpaares sowie die Drehungeu q~ l , q ) ~ um die Lokomotivl/ingsachse. In vertikaler Richtung ist keine Federung und darnit kein weiterer Freiheits- grad vorgesehen, daes bei der Untersuchung des Fahrverhaltens haupts/ichlich auf die Horizontal- bewegungen ankornmt. Die Drehgestelle des Ersatzsystems (Masse eines Drehgestelles roD, Tr/ig- heitsmoment urn die Hochachse OD) sind daher gegen die Rads/itze nicht abgefedert. Die bei der wirklichen Ausfiihrung vorhandene Federung Drehgestell-Radsatz kann bei der Dretffederung zwischen Hauptk~rper und Drehgestell n/iherungsweise beriicksichtigt werden.
Der Lokomotivhauptk6rper sei um seine L/ingsachse drehbar (die Drehsteifigkeit der Federung zwischen einern Drehgestell und dem Lokomotivkfirper sei dD~z, die entspreehende als viskos voraus- gesetzte D/impfung ~D~) und seitlich verschiebbar (Federsteifigkeit zwischen einem Drehgestell und dem Hauptkt~rper CDn, entsprechende Dampfung ~DU), siehe Abb. 5. Beziiglich seiner L/tngs- achse ist er tordierbar. Fiir die Rechnung ist es zweckrn/iBig, ihn durch fiinf Punktrnassen und die Torsionsfeder rnit der Steifigkeit dH gem~B Abb. 4 zu ersetzen. Die Ersatzrnassen werden auf- grund foigender drei Bedingungen festgelegt:
1. Das Ersatzsystem soll dasselbe Massentr/igheitsrnoment um die Hochachse durch den Schwer- punkt besitzen wie der HauptkSrper. Daraus folgt:
rn~ - - 2 0 ~ p~ (10)
(6)~n Tr/igheitsrnoment urn die Hochaehse des Hauptk6rpers, p Abstand der Drehgestellsehwer- punkte).
Diese Voraussetzung bedeutet die bei kleinen Auslenkungen y und t3 gerechtfertigte Vernachl/issigung des Einflusses der Triigheitskr/ifte, also auch des Kreiseleffekts der R/ider, auf N.
39. Band 1970 H. Buffer und H. Neuber: Fahrstabilit/it einer Lokomotive 21
2. Die Gesamtmasse des Hauptk~irpers muB erhalten bleiben. Mit (10) ergibt sich dann
m~* - - G 4 @zH g pZ (11)
(G Gewicht des HauptkSrpers, g Erdbeschleunigung). 3. Die kinetische Energie des als gleichm~iBiges Kontinuum aufgefaBten, eine Drehschwingung
um seine Lingsachse ausfiihrenden Hauptktirpers soll gleich sein derjenigen des Ersatz-Haupt- kfrpers; der Drehwinkelverlauf entspreche dabei naherungsweise jenem bei statischer Torsions- beanspruchung. Diese Forderung ffihrt zum Massentr~igheitsmoment 0 ~ der beiden vorderen bzw. hinteren Massenpunkte m~z/2 um die L/ingsachse:
o * 1 =- ~ OxH (3 -- 2 p/l) (12)
(1 L~inge des HauptkSrpers, Oxn sein Massentr/igheitsmoment beziiglich der dutch den Schwer- punkt gehenden Langsachse).
i ~-- t "-I
j,n~, i
~3
_J- ~/r
t ~,,, ' " M O W . '-"r I] I ~M~ - r " I L [
Abb. 4. Grund- und AufriB des Ersatzsystems der Lokomotive.
v17// . dD/. /
Abb. 5. Federung und D/impfung zwisehen HauptkSrper und Drehgestell. (don bzw. ~DH werden in die Reehnung als Drehfedersteifigkeit
bzw. Drehd/impfungskoeffizient eingefiihrt).
b) Die k i n e t i s c h e Energ ie . Die kinetische Energie des in den Abb. 4 und 5 gezeigten Ersatz- systems betr~igt (der mit der Vorw/irtsbewegung zusammenh/ingende Anteil wird hier nicht be- nStigt und daher weggelassen) :
T* mo"2 ~-t~ = -2-y~1 + 5~ +
vorderes" ~rehgestell
§ ~ - y z l + ~ -
~ordere Ersatzma's~e
m o o -~- y b 2 -~- ~-
'hinteres D~ehgeste~
mH �9 2
hintere Ersa tzmas~ des HauptkSrpers
_~_ _~_ m~/* (~'H 1 ~ YH2 ) 2 __ _
mittlere Ersatzmasse des HauptkSrpers
(13)

22 H. Buffer und H. Neuber: Fahrstabilitfit einer Lokomotive Ingenleur-Archiv
c) Die p o t e n t i e l l e E n e r g i e u n d d i e D i s s i p a t i o n s f u n k t i o n . Die Streckungbzw. Ver- drehung der einzelnen Federn betr/igt (siehe Abb. 4 und 5) :
Federn mit der Steifigkeit CD~: y~rl + h q)~l - - yDI (vorne) bzw. yH2 ~- h ~5t/2 -- yD2 (hinten); Drehfeder mit der Drehsteifigkeit dH: ~b~l -- ~b~z; Drehfedern mit der Drehsteifigkeit dDH:qbH1 (vorne) und q)H2 (hinten).
Mithin folgt fiir die in den Federn gespeicherte elastische Energie
CDH , CDH,, UF = - ~ - ( y H t -~-h ~bH1--yD1) 2 - ] - T (yH2 -~ h (Tf)H2 - - y D 2 ) 2 ~-
dD H t-~2
Das Potential der ~iuBeren eingepragten Kr~fte, v0n denen auf jede Achse die als zeitlich kon- stant angenommene Vertikalkraft 2 N entf/dlt, ist
U E ---- 2 N q (y51 + y 5 2 ~- a2f151 ~- a2r52) �9 (15)
Denn die seitliche Verschiebung ~ (~]v----Yl) + arid beim vorderen bzw. ~h-~ Y D - arid beim hinteren Radsatz eines Drehgestells) erzwingt eine Hebung der jeweiligen Achsmitte gem~l] (3), so dab auf ein Drehgestell der Anteil 2 N (q/2) (~v 2 + ~ ) entf~llt.'
Die gesamte potentielle Energie lautet:
U = U F + U~. (16)
Bei Voraussetzung einer geschwindigkeitsproportionalen D~impfung kann man folgende Dissipa- tionsfunktion definieren :
~DH z" ~4DH F = T ( y H 1 ~ - h ( ~ H I - - y D 1 ) 2 At- ~ - - ( y H 2 ~- h~bH2--yD2) 2 2 7
~DH " . ~DH (~ 2 �9 + - ~ - ~ + ~ - ~2 (17)
Aus ihr lassen sieh die D~mpfungskr~ifte herleiten.
d) Die B e w e g u n g s d i f f e r e n t i a l g l e i e h u n g e n . Diese folgen aus den Lagrangesehen Glei- ehungen zweiter Art
d [OT*] bT* OU OF ~ T q ~ / - -67q~ + ~ + ~ = Q~ (~ = 1, 2 . . . . . 8) (18)
mit den verallgemeinerten Koordinaten
ql = yH1 , q2 =- ~)H1, qa = yH2 , q4 = ~H2 ,
q~ = y D 1, qs = r id 1 , q7 = y D 2 , q8 : r D 2
und den verallgemeinerten Krfiften nach (8) und (9) :
Q~ = - (4 Nkr yD1 + (4 NkQ) rD~,
Q~ = - (4 N kT 7 b/r) yD1 -- {4 N (b 2 k T + a 2 kq)/v )/~D1,
Q~ ---- - (4 N kq/V) ~D2 -~- (4 N kp) rD2 ,
Q~ -= - (4 N kT y b/r) yD2 -- {4 N (b ~ k T + a ~ kr [~D2 .
Die iibrigen Krafte Q* sind null. Einsetzen yon (13), (16) und (17) in (18) liefert das folgende lineare Differentialgleichungs-
system, das bei gleichmaBiger Fahrgeschwindigkeit v konstante Koeffizienten hat:
a ~ 1 -4- B d 1 + C q = 0. (19)
Hierin bedeutet q den Spaltenvektor der verallgemeinerten Koordinaten mit seiner Transponierten
q ~ = [yH i, q~H 1, y t t ~, qDH2, YD 1, f lo 1, yD 2, f~19 2], (20)
feruer A die Massen-, B die D/impfungs- und C die Steifigkeitsmatrix gem~iB
B ==
C __
A
=
--
1 m
~*
i l
**
i !
-
1 **
m
~t ~
- 1
m~*
i
-mH
....
....
....
....
....
:
....
....
..
i ...
....
....
....
. i .
....
....
....
....
....
....
....
....
....
....
:
....
....
. //
't D
......
......
......
......
.....
i ....
......
. i .
......
......
......
......
...
! ...
....
: .....
......
......
......
......
......
. ...
......
i i
i m
Di
h~
DH
i
h 2
ZD
H
-~-
(~D
H
i --
h~
DH
2~D
H
i h
~D
...
....
..
H
: ..
....
....
....
....
..
::. ..
....
....
....
....
....
. --
~D
H
h ~
D t
I h
2 n
D
H
-~-
6D
H
: --
h
~D
H
....
....
....
. i
....
....
....
....
....
....
....
....
..
....
....
....
....
....
....
..
' ..
....
....
....
....
..
: .
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
.
--~
4DH
:
--h
~D
H
~tD
H-[
-4N
kQ_/
v
4 N
(b~
kT
~- a
!kQ
)/V
....
....
....
....
....
....
....
....
....
....
....
....
--~
DH
i
--h
~D
H
....
....
....
....
....
....
....
....
....
....
....
:
~D
z+4N
ko/v
i. ~
4 N
@,
r +
~ kq
)/v
_ _
i
m
--
CD
H
h C
DH
--
C
DH
h C
vH
h2
CD
H-~
-dD
H~
dH
--
d
H
--
h C
DH
CD
H
h C
DH
--
C
DH
-- d
H
hC
DH
h
2cD
ij~
-dD
ii'~
-dH
--
hC
DH
..
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
..
o
--C
DH
--
hCD
H
CD
H-~
-4N
q --
4Nkq
i
i h
CD
n~
-4N
q i
--4N
ko
: "-
- C
DH
:
--
CD
H
:
....
....
....
....
..
. 4
~u
..
....
..
....
....
....
...
a2
..
..
: i
(21)
(22)
(23)
�9
b,9
24 tt. Bufler und H. Neuber: Fahrstabilit/it einer Lokomotive Ingenieur-Arehiv
Die vom Sehwerepotential herriihrenden, mit dem Faktor q behafteten Glieder leisten einen Bei- trag zur Steifigkeit. Sie sind einer seitlichen Federung zwischen Rad und Schiene ~iquivalent. Die Schlupfkr~ifte wirken sich einerseits in der D/impfungsmatrix aus (Glieder mit k T und kQ); sie dampfen die Bewegung der Drehgestelle umgekehrt proportional zur Fahrgeschwindigkeit der Lokomotive. Sie spielen aber auch in der Steifigkeitsmatrix die sie wegen ihres nichtkonservativen Charakters unsymmetrisch machen, eine Rolle.
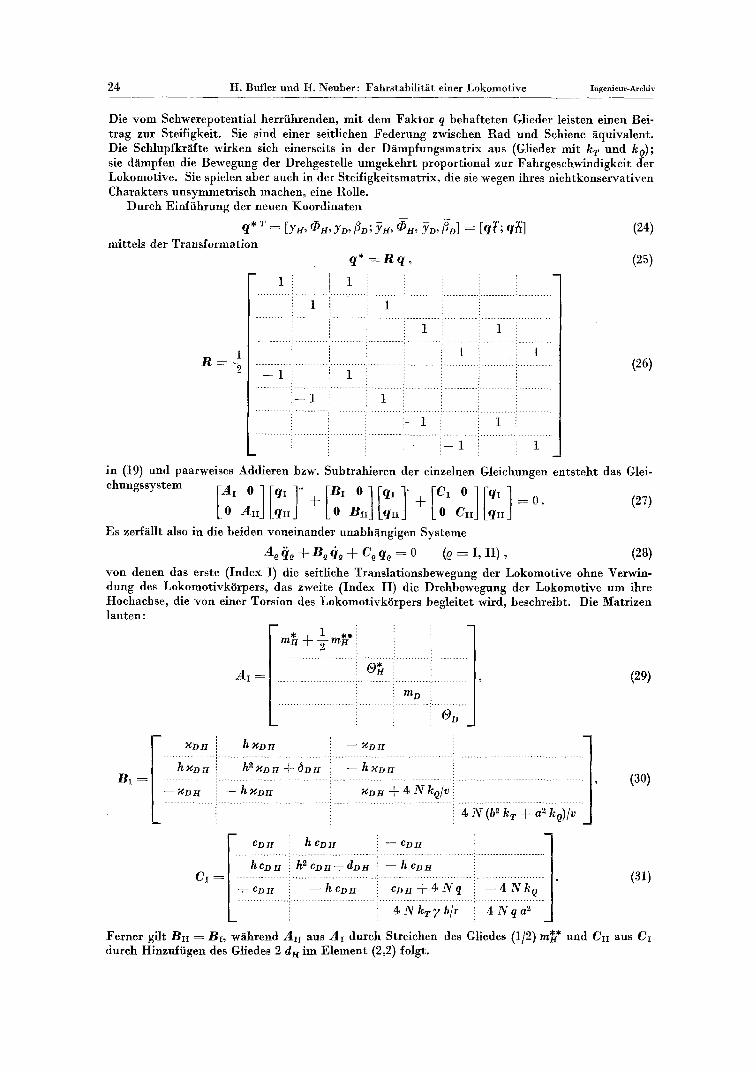
Durch Einfiihrung der neuen Koordinaten
q . T = [yn, qD~r, yo,~o;g,z, ~ , Yo, ~o] = [q~; q~] (24) mittels der Transformation
q* = i t /q , (25) I u
1 1
1 1
1 1
1 1 1 R = -2- .......................................... : .............................................. (26)
- -1 1
............ i ............ i . . . . . . . . . . i .......... i i . . . . . . . . . . . ' ..... i i ........... . . . . . . . . . . . . . . . . . . . . . . ! . . . . . . . . . . . i . . . . . . . . . . . i . . . . . . . . . . . . • . . . . . . . . . . . . . . . . i . . . . . i . . . . .
in (19) und paarweises Addieren bzw. Subtrahieren der einzelnen Gleiehungen entsteht das Glei-
chungssystem [AI A~I] [q:i] " ' + [~I B~I] [q: i ] "d- [ : I C~I] [q: i ] = 0 " (27,
Es zerfallt also in die beiden voneinander unabhangigen Systeme
Ae ~e + B 0 q0 d- C 0 q0 = 0 (e = I, I I ) , (28) yon denen das erste (Index I) die seitliche Translationsbewegung der Lokomotive ohne Verwin- dung des Lokomotivkfrpers, das zweite (Index II) die Drehbewegung der Lokomotive um ihre Hochachse, die yon einer Torsion des LokomotivkSrpers begleitet wird, beschreibt. Die Matrizen lauten:
I
m~r d- y . mn
A~ : O~ (29)
m D
OD m
f i
BI I - -~DH i --h~Dn i ~o~d-4Nkq/v i . . . . . . . . . . . I (30)
CI (31) I~...~.D~..., ....... --..h.cD.~ .... i....~.~..~:.4..N.q....',..--.~'.N.k.Q.. I L 4NkTxb l r 4NqaZ -]
Ferner gilt B~ = B~, w~hrend AH aus A~ dutch Streichen des Gliedes (112) m** und CH aus C~ dutch Hinzufiigen des Gliedes 2 dn im Element (2,2) folgt.
39. ]Band 1970 H. Bufler und H. Neuber: Fahrstabilit/it einer Lokomotive 25
5. Ermit t lung der kritisehen Fahrgesehwindigkeit. Die ungest6rte Bewegung der Lokomotive ist gegeben dutch q~ = 0. Der L6sungsansatz qe = co e~t (o = I, I~) fiir die gest f r te Bewegung fiihrt in Verbindung mit (28) auf das Eigenwertproblem
(~2 Ae -k ,~ B e -k C~) c a -~ 0 (o = I, IT) . (32)
Bei kleiner Fahrgeschwindigkeit v ist die D/impfung infolge der Schlupfkr/ifte sehr grol], wie man aus (30) erkennt, so dab hier die St6rbewegungen schnell abklingen. Bei gr6Beren Geschwindig- kei ten ist das nicht der Fall. Als kritische Geschwindigkeit Vkrit wird nun jene kleinste Geschwin- digkeit definiert, bei der mindestens eine station/ire St~rbewegung m6glich ist; maBgebend hierfiir ist die yon v abh/ingige erste Nullstelle eines Realteils der jeweils acht aus
det ()~ A~ + ,~ B e + C~) = 0 (~ = I, I I ) (33)
)~* # ~ . Fiir die vor- ermittelbaren, im allgemeinen komplexen Eigenwerte 2k = ~ + i , ~ * mi t i = liegende Untersuchung wurde das Stabili t / i tskriterium yon Routh [7] herangezogen. Aus der der
}~krit 1/iBt sich sodann die Wellenl/inge kritischen Geschwindigkeit Vkrit zugeo~dneten Kreisfrequenz ** der harmonischen St~irbewegung
2z~ Wkrlt = ~ - ~ Vkrit (34)
errechnen.
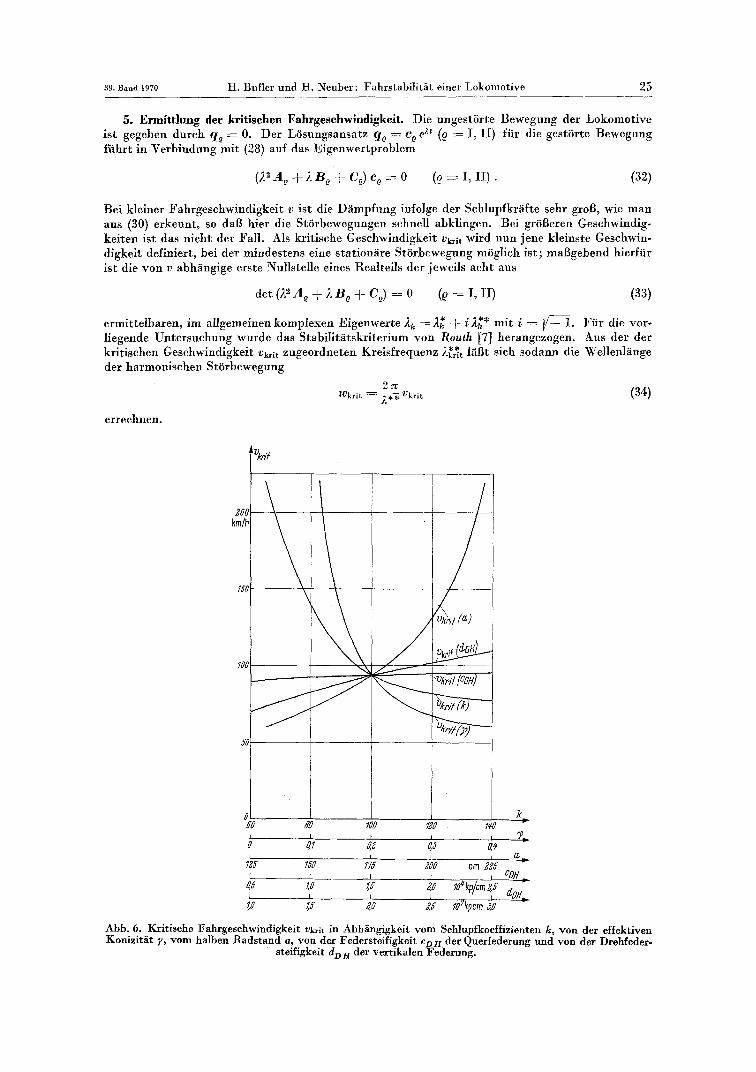
km/l~
150 ~Pit
loo .%
0 60 80 100 120 l~a
I _ ~ r ~ ~ CDH p_
e,y i,~ ,,~ zp 1o ~kr~l~z ~s I . . . . I I I d ' ~ H p . 1A ~ 2,a 3,5 loZkpcm 8,o
Abb. 6. Kritische Fahrgeschwindigkeit Vkrit in Abh/ingigkeit vom Sehlupfkoeffizienten k, vonder effektiven Konizit/it ?, vom halben Radstand a, yon der Federsteifigkeit cDn der Querfederung mad yon der Drehfeder.
steifigkeit d D tt der vertikalen Federung.

26 H. Buffer und H. Neuber: Fahrstabilit~it einer Lokomotive Ingenieur-Archiv
6. Numerisehe Durchfiihrung und Ergebnisse. Hierfiir wurden folgende Daten zugrunde gelegt:
N ~-- 9000 kp, m D ~-- 16 kp s 2 cm
0 D = 4,6 �9 105 kps 2 cm,
m~ = 31 kp s2 , m~* = 16 kp s 2 cm cm
2 a ~-- 350 cm, 2 b = 144 cm,
O~ --~ 277.105 kps 2 cm;
r ---- 48 cm, h = 97 cm;
CD~_ ~-- 1~5 �9 104 kp/cm, dDH ~-- 2,0 �9 107 cmkp, d H = 5,0 �9 10 l~ cmkp;
XD~ = 0, 5D~ = 0; 7 = 0,2, k T = kQ = k =- 100, q = 0,25 cm -1.
Diese Daten bezieheu sich auf eine Lokomotive, deren Drehgestelle mit drei Achsen ausgestattet sind; da den beiden mittleren Achsen keine Ffihrungsfunktion zukommt, kanu das Ersatzsystem nach Abb. 4 verwendet werden, wenn man beachtet, dab die Achslast 2 N ein Sechstel des Gesamt- gewichts betr~gt.
Es wurden folgende Parameter variiert: Der (ffir die Lfings- und Querrichtung als gleich ange- nommene) Schlupfkoeffizient k, die effektive Konizitiit y, der Achsstand 2 a (Abstand der iiuBeren Achsen eines Drehgestells), die Querfedersteifigkeit CDH und die Drehfedersteifigkeit dDH.
Das Ergebnis der Rechnung, die auf dem Digitalrechner PERM der Technischen Hochschule Mfinchen ausgeffihrt wurde, findet sich in Abb. 68. Bemerkenswert ist der Befund, dab die seit- liche Translationsbewegung der Lokomotive (Fall ~o = I in (28)) ffir die kritische Geschwindigkeit maBgebend ist; die yon einer Verwindung des Lokomotivkfrpers begleitete ungediimpfte Dreh- bewegung um die Hochachse ist dagegen erst bei bedeutend hSheren Geschwindigkeiten mSglich.
Die kritische Fahrgeschwindigkeit nimmt zu:
1. mit fallenden SchlupfkoeHizienten, 2. mit kleiner werdender effektiver Konizitiit, 3. mit zunehmendem Achsstand, 4. mit grSBer werdender Drehfedersteifigkeit dt)H (d. h. mit steifer werdender Vertikalfederung
und grSf~erem seitlichen Federabstand).
Dagegen liefert die Rechnung praktisch keinen EinfluB der Querfederung (Federsteifigkeit CDz)
auf die kritische Fahrgeschwindigkeit. Fiir die Grunddaten, denen der Schnittpunkt in Abb. 6 entspricht, ergibt sich nach (34) die Wellenlange
Wkri t ~ - 30,54 m .
I m Hinblick auf die der Rechnung zugrunde liegenden Vereinfachungen (Linearisierung des Schlupf- gesetzes, Gleichsetzung der Schlupfkoeffizienten kQ und kT , spielfreie Achslagerungen der iiuBeren Achsen usw.) muf~ den gewonnenen Ergebnissen in erster Linie qualitative Bedeutung beigemessen werden.
7. Anhang: Zur Linearisierung des Sehlupfgesetzes. Die Theorie ffir eine auf ebener Unterlage abrollende und eine Tangentialkraft T iibertragende Walze vom Radius r liefert -- gleiches Ma- terial vorausgesetzt - - beim ebenen Verzerrungszustand die nichtlineare Beziehung (s. z. B. [8], Gleichung (61) oder [9], Gleiehung (4,29))
W ( V S T = 1 -- v z N __ E r # 1 - (a)
(E Elastizitlitsmodul, v Querdehnzahl, # Gleitreibungskoeffizient, N Vertikalkraft pro Liingen- einheit der Walzenachse). Fiir T / # N ~ 1 kann man diese Gleichuug linearisieren; dabei fMlt # heraus, d. h. das Beriihrgebiet ist im wesentlichen Haftgebiet. Der Vergleich mit (5),
dsT 1 T S T ~ - ~ x = kT N "
ergibt den Koeffizienten des L/iugsschlupfes:
1 dST ~ 2 1 - - v ~ _N-
- - d ~ ) TIN = 0 = ~ E r (b)
a Die Verfasser danken Herrn Dipl.-Ing. F. Kief l l ing fiir die Ubernahme der Programmierungsarbeiten.

39. Band 1970 H. Buffer und It. Neuber: Fahrstabilitfit einer Lokomotive 27
Nach der durch Heinrich und Desoyer gegebenen Theorie folgt fiir eine sehr lange Walze, die unter l~bertragung einer Querkraft Q auf einer ebenen Unterlage aus gleichem Material abrollt, die zu (a) vSllig analoge Beziehung (s. [9], dort (4,38))
s ~ = ~ - ~ 1 + ~ 1 ~ ( 1 - V ~ - 9 ~ ) 1 ~ ; �9 (~
Linearisieren und Vergleich mit (4), 1
liefert den Koeffizienten des Querschlupfes
1 dSQ ! ~ / 2 1 + ~ 1 N
iQ/N = o
(d)
Dami t ist nachgewiesen, dab ffir rollende Walzen bei kleinen Tangential- bzw. Querkr~iften die linearen Schlupfgesetze (4) und (5) zutreffen. Da in diesem Fall prakt isch das gesamte Berfihr- gebiet Haf tgebiet und mithin der Schlupf als Formiinderungsschlupf zu interpret ieren ist, wird man in erster N/iherung diese Formeln auch bei gleichzeitiger Anwesenheit yon Q und T anwenden diirfen. Bei gr6Beren Werten yon Q und T existiert jedoch ein endliches Gleitgebiet, und Umfangs- schlupf sowie Seitenschlupf sind abh~ngig sowohl yon Q/(t ~ N) als auch yon T/(# N) , wie im einzel- hen die numerische Auswertung in [9] zeigt. Bei einer mit der (konstanten) Kra f t To, die in den nicht- linearen Bereich des Gesetzes (a) fiihrt, angetriebenen Walze gilt fiir den zns/itzlichen Langsschlupf infolge einer kleinen Erh6hung yon T Oum den Betrag T anstelle yon (b)
1 = dS~ i = i 1 L k~o d ~ TO > kT'
# N
(b')
d. h. man kann mit dem , ,Tangentenmodul" arbeiten. Die Rechnung ist bier also mi t einem klei- neren Umfangsschlupfkoeffizienten auszufiihren. Wirkt aul3erdem eine kleine Querkraft Q, so kann man t ro tzdem (c) belassen, weil - - wie die numerischen Ergebnisse in [9] zeigen -- fiir kleine Quer. krfifte Q die GrSl3e SQ nur unwesentlich yon T o beeinflul3t wird.
Die ffir Walzen giiltigen Formeln diirfen s t renggenommen nicht auf den Rollvorgang eines Eisenbahnrades angewendet werden, da es sich dabei um ein rfiumliches Kontak tp rob lem handelt . Untersuchungen hierzu liegen yon Vermeulen und Johnson [10] vor. Ihre N~iherungsrechnung liefert Beziehungen, die sich yon (a) und (c) im wesentlichen dadurch unterscheiden, dab dort anstelle der Quadratwurzel im Klammerausdruck die kubische Wurzel vo rkommt ; fiir kleine Werte yon Q bzw. T ergeben sich wiederum lineare Abh~ingigkeiten.
Literatur
1. C. Th. Miiller, Glasers Annalen 82 (1958) S. 31. 2. A. H. Wickens, Internat. J. Solids Structures 1 (1965) S. 319 u. S. 385. 3. C. P. Keizer, Glasers Annalen 90 (1966) S. 244 u. S. 358. 4. F. BShm, Ing.-Arch. 38 (1969) S. 161. 5. G. Borgeaud, Schweiz. Bau-Ztg. 80 (1962) Beilage. 6. A. D. de Pater, Appl. Sc. Res. A 10 (1961) S. 205 7. R. Zurmiihl, Praktische Mathematik, 3. Aufl., Berlin-G6ttingen-Heidelberg 1961. 8. H. Buffer, Forsch. Ing.-Wes. 27 (1961) S. 121. 9. G. Heinrich und K. Desoyer, Ing.-Arch. 36 (1967) S. 48.
10. P.J . Vermeulen and X. L. Johnson, J. Appl. Mech. 31 (1964) S. 338.
(Eingegangen am 19. Dezember 1968)
Anschriften der Verfasser: Prof. Dr.-Ing. 1t. Bufler~ Lehrstuhl II fiir Mechanik der Fakult/it fiir Bauwesen, Universit/it Stuttgart (TH), 7 Stuttgart 1, Keplerstr. 11;
Prof. Dr.-Ing. Dr. rer. nat. h. c. H. Neuber, Lehrstuhl A ffir Mechanik, Technische ttochschule Miinchen, 8 Miinchen 2, Arcisstr. 21.