Embed Size (px)
Citation preview
Free Vibration-MDOF 160
มหาวทยาลยเทคโนโลยสรนาร หนา 160
ในบทนจะน าเสนอการวเคราะหการสนทางกลเบองตนส าหรบระบบทมล าดบขนความอสระหลาย
ล าดบ(Multiple degree of freedom systems) จ านวนล าดบขนความอสระของระบบเปนตวก าหนดจ านวน
การเคลอนทของวตถและจ านวนทศทางการเคลอนทของแตละวตถ การทระบบมล าดบข นความอสระ
มากกวาหนงนนจะท าใหระบบมความถธรรมชาตมากกวาหนงเชนกน ดงนนความถทจะท าใหเกดการสนพอง
กจะมเพมขนสมพนธกบจ านวนความถธรรมชาตทมของระบบ บทนจะน าเสนอแนวคดของรปรางการสน
(Mode shape) และวธการวเคราะหโมดอล (Modal analysis) ส าหรบการศกษาการตอบสนองของระบบทม
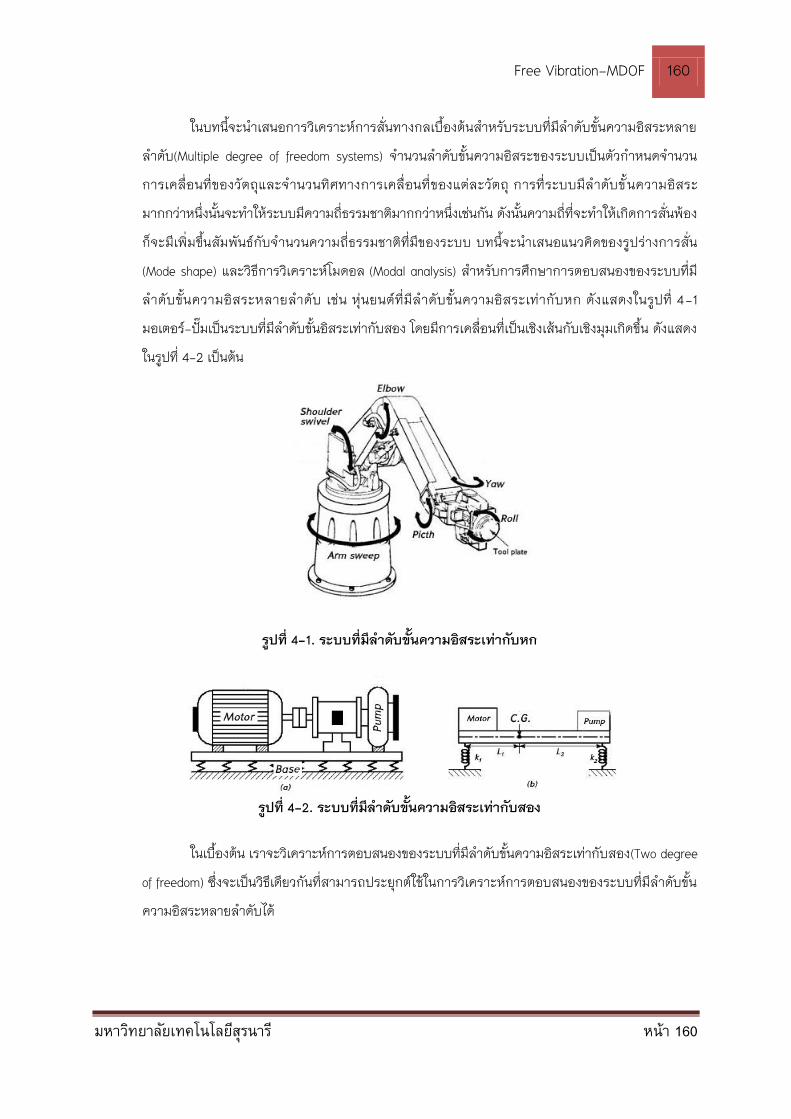
ล าดบขนความอสระหลายล าดบ เชน หนยนตทมล าดบขนความอสระเทากบหก ดงแสดงในรปท 4-1
มอเตอร-ปมเปนระบบทมล าดบขนอสระเทากบสอง โดยมการเคลอนทเปนเชงเสนกบเชงมมเกดขน ดงแสดง
ในรปท 4-2 เปนตน
ในเบองตน เราจะวเคราะหการตอบสนองของระบบทมล าดบขนความอสระเทากบสอง(Two degree
of freedom) ซงจะเปนวธเดยวกนทสามารถประยกตใชในการวเคราะหการตอบสนองของระบบทมล าดบขน
ความอสระหลายล าดบได
รปท 4-2. ระบบทมล าดบขนความอสระเทากบสอง
รปท 4-1. ระบบทมล าดบขนความอสระเทากบหก
Free Vibration-MDOF 161
มหาวทยาลยเทคโนโลยสรนาร หนา 161
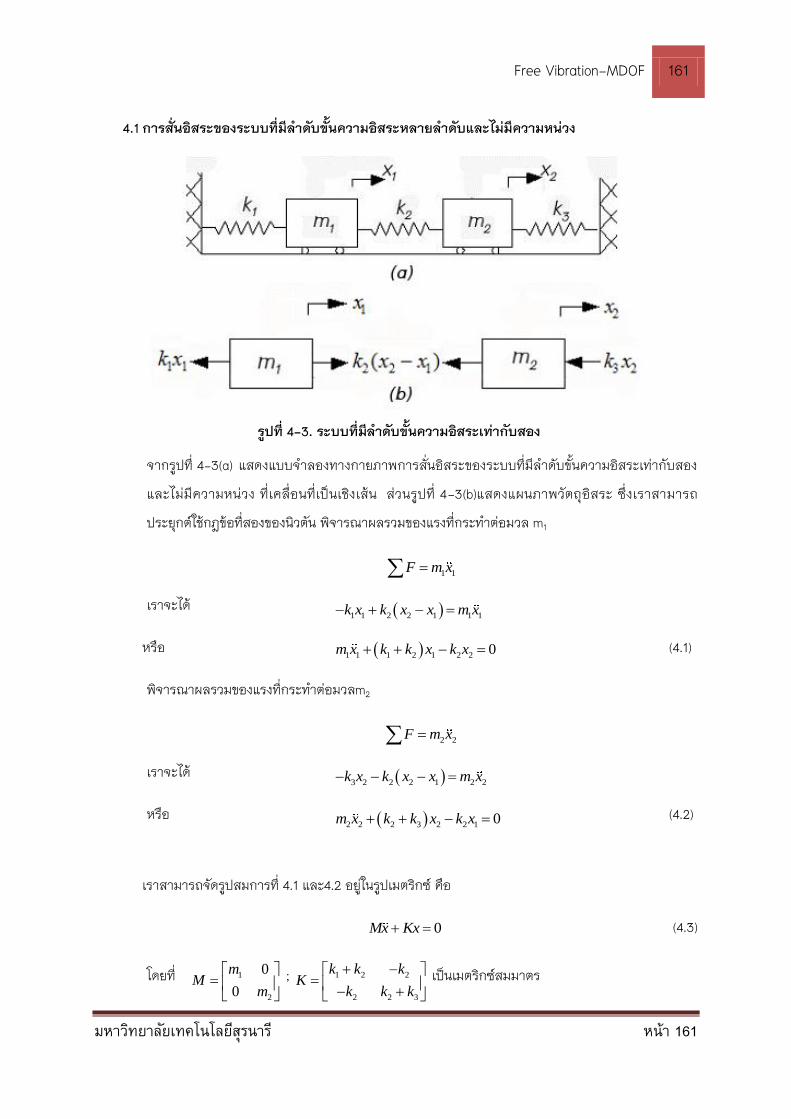
4.1 การสนอสระของระบบทมล าดบขนความอสระหลายล าดบและไมมความหนวง
จากรปท 4-3(a) แสดงแบบจ าลองทางกายภาพการสนอสระของระบบทมล าดบขนความอสระเทากบสอง
และไมมความหนวง ทเคลอนทเปนเชงเสน สวนรปท 4-3(b)แสดงแผนภาพวตถอสระ ซงเราสามารถ
ประยกตใชกฎขอทสองของนวตน พจารณาผลรวมของแรงทกระท าตอมวล m1
1 1F m x
เราจะได 1 1 2 2 1 1 1k x k x x m x
หรอ 1 1 1 2 1 2 2 0m x k k x k x (4.1)
พจารณาผลรวมของแรงทกระท าตอมวลm2
2 2F m x
เราจะได 3 2 2 2 1 2 2k x k x x m x
หรอ 2 2 2 3 2 2 1 0m x k k x k x (4.2)
เราสามารถจดรปสมการท 4.1 และ4.2 อยในรปเมตรกซ คอ
0Mx Kx (4.3)
โดยท 1
2
0
0
mM
m
; 1 2 2
2 2 3
k k kK
k k k
เปนเมตรกซสมมาตร
รปท 4-3. ระบบทมล าดบขนความอสระเทากบสอง

Free Vibration-MDOF 162
มหาวทยาลยเทคโนโลยสรนาร หนา 162
ดงนน 1 2 21 1 1
2 2 32 2 2
00
0
k k km x x
k k km x x
สมมตให ผลเฉลยทสถานะคงตวของสมการท 4.1 และ 4.2
1 1( ) cosx t X t และ 2 2( ) cosx t X t
ส าหรบความเรง
2
1 1 cosx X t และ 2
2 2 cosx X t
แทนสมการดงกลาวลงในสมการท 4.1 เราจะได
2
1 1 1 2 1 2 2cos cos cos 0m X t k k X t k X t (4.4)
และสมการท 4.2
2
2 2 2 1 2 3 2cos cos cos 0m X t k X t k k X t (4.5)
สมการท 4.4 และ 4.5 ท าใหสมการเปนจรง ส าหรบคา t ทกคา ดงนน
2
1 1 1 2 1 2 2 0m X k k X k X (4.6)
และ 2
2 2 2 1 2 3 2 0m X k X k k X (4.7)
สมการท 4.6 และ 4.7 จดอยในรปเมตรกซ
2
11 1 2 2
2
22 2 2 3
0Xm k k k
Xk m k k
(4.8)
จากสมการท 4.8 0X และสมการเปนจรงกตอเมอ det 0A ดงนน เราจะได
2 2
1 1 2 2 2 3 2 2 0m k k m k k k k
หรอ 4 2 2
1 2 1 2 2 2 3 1 1 2 2 3 2 0m m k k m k k m k k k k k (4.9)
สมการท 4.9 เราเรยกวา สมการเฉพาะ ซงจะไดรากสมการ
2 2 1 2 2 2 3 1
1 2
1 2
1,
2
k k m k k m
m m

Free Vibration-MDOF 163
มหาวทยาลยเทคโนโลยสรนาร หนา 163
1
2 22
1 2 2 2 3 1 1 2 2 3 2
1 2 1 2
14
2
k k m k k m k k k k k
m m m m
(4.10)
โดยท1 2, คอความถธรรมชาตของระบบ
คา1X และ
2X นนขนอยกบคา1 และ
2 โดยก าหนดใหคา (1)
1X และคา (1)
2X สมพนธกบ1 สวนคา (2)
1X และ
คา (2)
2X สมพนธกบ2 เมอแทน 2 2
1 และ 2 2
2 ลงในสมการท 4.6 และ 4.7 เราจะได
2(1)1 1 1 22 2
1 (1) 2
1 2 2 1 2 3
m k kX kr
X k m k k
(4.11a)
2(2)1 2 1 22 2
2 (2) 2
1 2 2 2 2 3
m k kX kr
X k m k k
(4.11b)
การสนรปรางโหมดบรรทดฐาน(Normal modes) ของการสนทสมพนธกบคา 2
1 และ 2
2 ทมคาอตราสวนโหมด
(mode ratio)คอ 1r และ
2r
(1) (1)
(1) 1 1
(1) (1)
2 1 1
X XX
X r X
(4.12a)
และ (2) (2)
(2) 1 1
(2) (2)
2 2 1
X XX
X r X
(4.12b)
ดงนน ผลเฉลยของการสนแบบอสระ จากสมการท 5 และ 6 จะไดวา
(1)(1)
1 1 1(1) 1
(1)(1)
1 1 1 12
cos( )( )
cos( )
X tX tx t
r X tX t
=First mode
(2)(2)
1 2 2(2) 1
(2)(2)
2 1 2 22
cos( )( )
cos( )
X tX tx t
r X tX t
=Second mode
ซงคา (1) (2)
1 1 1, ,X X และ2 สามารถหาไดจากเงอนไขเรมตนของระบบ
เงอนไขเรมตน ส าหรบระบบทมล าดบขนความอสระเทากบสองนน จ าเปนตองการเงอนไขเรมตน การกระจดตน
และความเรวตนแตละพกด ซงระบบนสามารถท าใหเกดการสนรปรางโหมดบรรทดฐานไดสองโหมด 1,2i
โดยการแทนคาเงอนไขเรมตน
( )
1 1( 0) ix t X ; 1( 0) 0x t

Free Vibration-MDOF 164
มหาวทยาลยเทคโนโลยสรนาร หนา 164
( )
2 1( 0) i
ix t r X ; 2( 0) 0x t
ผลเฉลยของสมการท 4.1 และ 4.2 สามารถประยกตใช linear superposition ส าหรบสองโหมดบรรทดฐาน
เราจะได 1 1 2 2( ) ( ) ( )x t c x t c x t
โดย c1 และ c2 เปนคาคงท ; ถาเราเลอกคา 1 2 1c c ดงนน
(1) (1) (1) (2)
1 1 2 1 1 1 1 2 2( ) ( ) ( ) cos cosx t x t x t X t X t (4.13a)
(2) (2) (1) (2)
2 1 2 1 1 1 1 2 1 2 2( ) ( ) ( ) cos cosx t x t x t r X t r X t (4.13b)
ซงคา (1) (2)
1 1 1, ,X X และ2 สามารถหาไดจากเงอนไขเรมตน
1 1( 0) (0)x t x ; 1 1( 0) (0)x t x (4.14a)
2 2( 0) (0)x t x ; 2 2( 0) (0)x t x (4.14b)
แทนสมการ4.14a ลงในสมการท4.13a และสมการ4.14b ลงในสมการท4.13 เราจะได
(1) (2)
1 1 1 1 2
(1) (2)
1 1 1 1 2 1 2
(1) (2)
2 1 1 1 2 1 2
(1) (2)
2 1 1 1 1 2 2 1 2
(0) cos cos
(0) sin sin
(0) cos cos
(0) sin sin
x X X
x X X
x r X r X
x r X r X
(4.15)
จากสมการท 4.15 ม 4 สมการยอย ทมตวแปรไมรคา (1) (2) (1) (2)
1 1 1 2 1 1 1 2cos , cos , sin , sinX X X X
ดงนน เราหาผลเฉลยของสมการท 4.15 ได
(1) 2 1 21 1
2 1
(0) (0)cos
r x xX
r r
, (2) 1 1 21 2
2 1
(0) (0)cos
r x xX
r r
(1) 2 1 21 1
1 2 1
(0) (0)sin
r x xX
r r
,
(2) 1 1 21 2
2 2 1
(0) (0)sin
r x xX
r r
ซงผลเฉลยทได
1
2 2 2(1) (1) (1)
1 1 1 1 1cos sinX X X
Free Vibration-MDOF 165
มหาวทยาลยเทคโนโลยสรนาร หนา 165
12 2
2(1) 2 1 21 2 1 2
2 1 1
1 (0) (0)(0) (0)
r x xX r x x
r r
1
2 2 2(2) (2) (2)
1 1 2 1 2cos sinX X X
12 2
2(2) 1 1 21 1 1 2
2 1 2
1 (0) (0)(0) (0)
r x xX r x x
r r
(1)1 11 1 2 1 2
1 (1)
1 1 2 2 1 2
sin (0) (0)tan tan
cos (0) (0)
X r x x
X r x x
(2)1 11 2 1 1 2
2 (2)
1 2 2 1 1 2
sin (0) (0)tan tan
cos (0) (0)
X r x x
X r x x
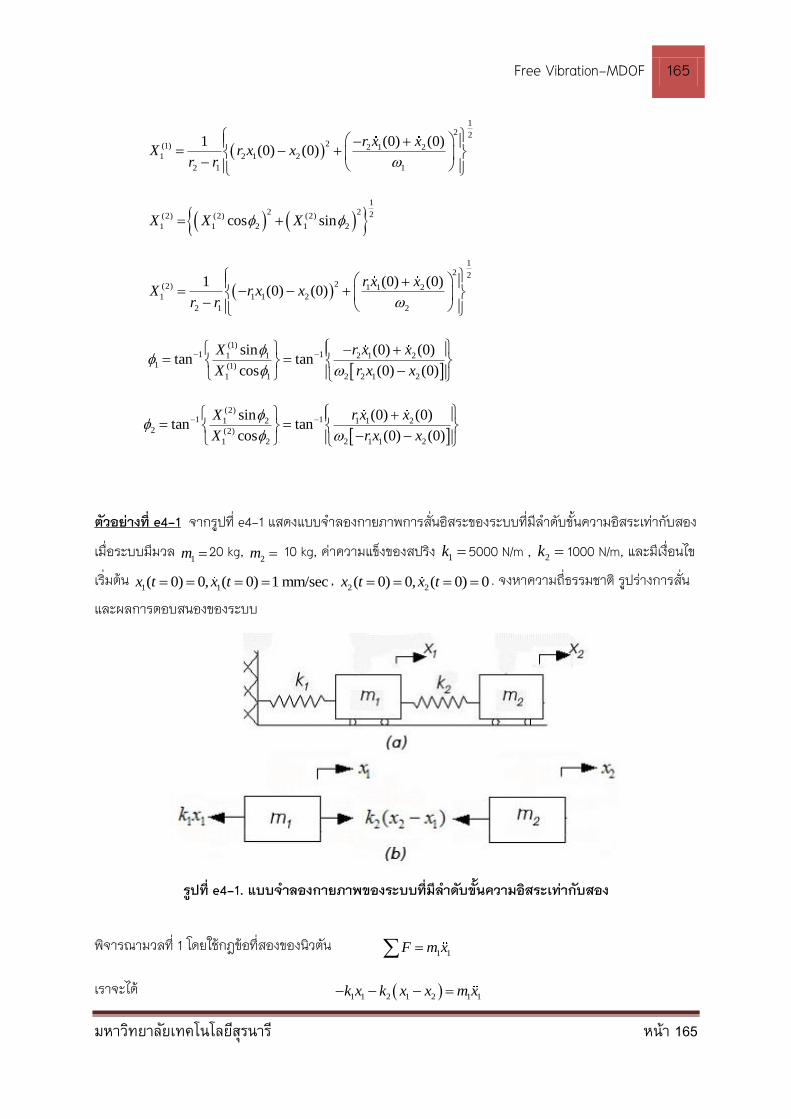
ตวอยางท e4-1 จากรปท e4-1 แสดงแบบจ าลองกายภาพการสนอสระของระบบทมล าดบขนความอสระเทากบสอง
เมอระบบมมวล 1m 20 kg,
2m 10 kg, คาความแขงของสปรง 1k 5000 N/m , 2k 1000 N/m, และมเงอนไข
เรมตน 1 1( 0) 0, ( 0) 1 mm/secx t x t ,
2 2( 0) 0, ( 0) 0x t x t . จงหาความถธรรมชาต รปรางการสน
และผลการตอบสนองของระบบ
พจารณามวลท 1 โดยใชกฎขอทสองของนวตน 1 1F m x
เราจะได 1 1 2 1 2 1 1k x k x x m x
รปท e4-1. แบบจ าลองกายภาพของระบบทมล าดบขนความอสระเทากบสอง

Free Vibration-MDOF 166
มหาวทยาลยเทคโนโลยสรนาร หนา 166
หรอ 1 1 1 2 1 2 2 0m x k k x k x
พจารณามวลท 2 2 2F m x
เราจะได 2 1 2 2 2k x x m x
หรอ 2 2 2 2 2 1 0m x k x k x
น าสมการทงสองทได จดรปเมตรกซ 0Mx Kx
เราจะได 1 1 1 2 2 1
2 2 2 2 2
00
0
m x k k k x
m x k k x
แทนคาทไดตามโจทย 1 1
2 2
20 0 6000 10000
0 10 1000 1000
x x
x x
เราสามารถหาความถธรรมชาตของระบบได จาก 2det - det - 0M K M K 0
โดยท 2 ดงนน 20 0 6000 1000det 0
0 10 1000 1000
20 6000 1000det 0
1000 10 1000
20 6000 10 1000 1000 1000 0
เราจะได 2200 80000 5000000 0
2
1 1 77.5255 rad/sec, 2
2 2 322.4745 rad/sec
ความถธรรมชาตของระบบคอ 1 8.8049 rad/sec, 2 17.9576 rad/sec
ในขนตอนตอไป เราจะหารปรางโหมดการสน โดยแทนคา 2 2
1 และ 2 2
2
2 (1)
1- M K X 0 และ 2 (2)
2- M K X 0
ดงนน 2 (1)
1- M K X 0(1)
1
(1)
2
20 0 6000 100077.5255 0
0 10 1000 1000
X
X
(1)
1
(1)
2
4449.49 10000
1000 224.745
X
X
Free Vibration-MDOF 167
มหาวทยาลยเทคโนโลยสรนาร หนา 167
เราจะได (1) (1) (1) (1)
1 2 2 14449.49 1000 0 4.44949X X X X
หรอ (1) (1) (1) (1)
1 2 2 11000 224.745 0 4.44949X X X X
อตราสวน (1)
21 (1)
1
4.44949X
rX
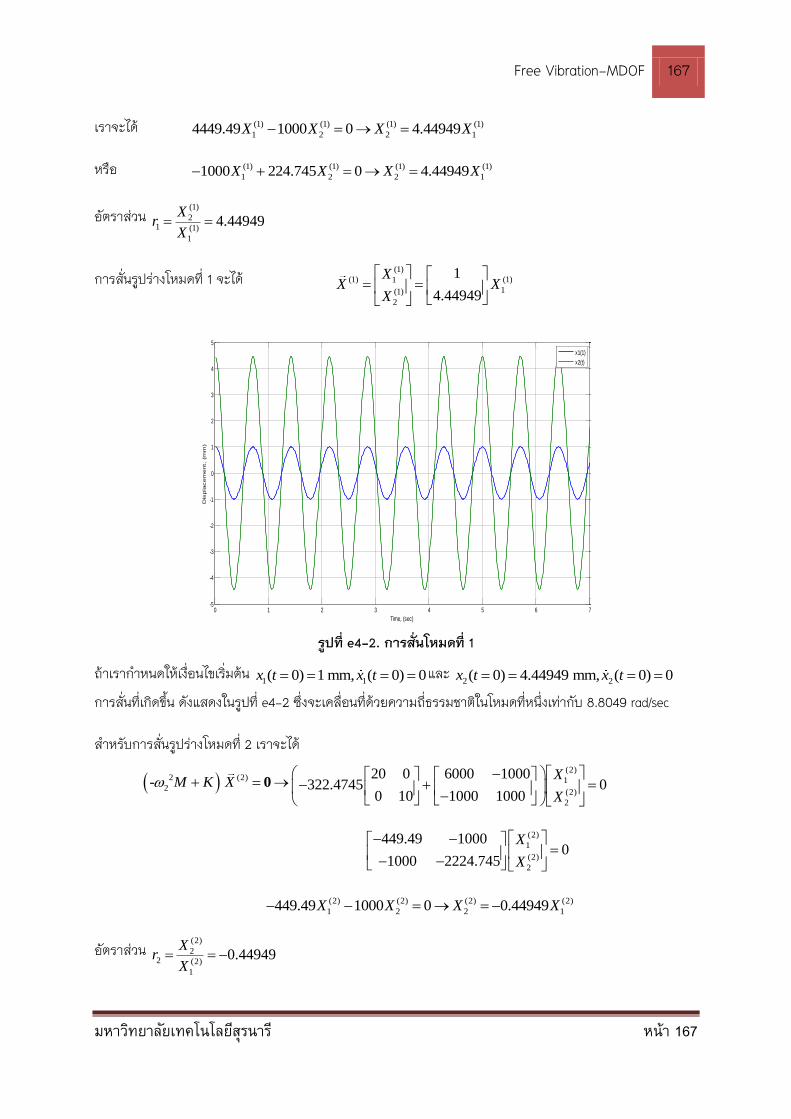
การสนรปรางโหมดท 1 จะได (1)
(1) (1)1
1(1)
2
1
4.44949
XX X
X
ถาเราก าหนดใหเงอนไขเรมตน 1 1( 0) 1 mm, ( 0) 0x t x t และ
2 2( 0) 4.44949 mm, ( 0) 0x t x t
การสนทเกดขน ดงแสดงในรปท e4-2 ซงจะเคลอนทดวยความถธรรมชาตในโหมดทหนงเทากบ 8.8049 rad/sec
ส าหรบการสนรปรางโหมดท 2 เราจะได
2 (2)
2- M K X 0(2)
1
(2)
2
20 0 6000 1000322.4745 0
0 10 1000 1000
X
X
(2)
1
(2)
2
449.49 10000
1000 2224.745
X
X
(2) (2) (2) (2)
1 2 2 1449.49 1000 0 0.44949X X X X
อตราสวน (2)
22 (2)
1
0.44949X
rX
0 1 2 3 4 5 6 7-5
-4
-3
-2
-1
0
1
2
3
4
5
Time, (sec)
Dis
pla
cem
ent,
(m
m)
x1(1)
x2(t)
รปท e4-2. การสนโหมดท 1

Free Vibration-MDOF 168
มหาวทยาลยเทคโนโลยสรนาร หนา 168
การสนรปรางโหมดท 2 จะได (2)
(2) (2)1
1(2)
2
1
0.44949
XX X
X
ถาเราก าหนดใหเงอนไขเรมตน 1 1( 0) 1 mm, ( 0) 0x t x t และ
2 2( 0) 0.44949 mm, ( 0) 0x t x t
การสนทเกดขน ดงแสดงในรปท e4-3 ซงจะเคลอนทดวยความถธรรมชาตในโหมดทสองเทากบ 17.9576 rad/sec
ผลเฉลยของระบบภายใตเงอนไขของโจทยน ซงเราจะไดดงสมการ 4.13a และ4.13b ซงคา (1) (2)
1 1 1, ,X X และ2
สามารถหาไดจากเงอนไขเรมตน
(1)
1 1cos 0X , (2)
1 2cos 0X
(1) 21 1
1 2 1
sin 0.01r
Xr r
,
(2) 11 2
2 2 1
sin 0.05r
Xr r
1
2 2 2(1) (1) (1)
1 1 1 1 1cos sin 0.01X X X
1
2 2 2(2) (2) (2)
1 1 2 1 2cos sin 0.05X X X
(1)1 1 1
1 (1)
1 1
sintan
cos 2
X
X
, (2)
1 1 22 (2)
1 2
sintan
cos 2
X
X
ผลเฉลยการสนในโหมดท 1 จะได
(1)
(1) 1
(1)
2
0.01cos 8.8049 2( )( )
0.04449cos 8.8049 2( )
tX tx t
tX t
0 1 2 3 4 5 6 7-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time, (sec)
Dis
pla
cem
ent,
(m
m)
x1(t)
x2(t)
รปท e4-3. การสนโหมดท 2
Free Vibration-MDOF 169
มหาวทยาลยเทคโนโลยสรนาร หนา 169
ผลเฉลยการสนในโหมดท 2 จะได
(2)
(2) 1
(2)
2
0.05cos 17.9576 2( )( )
0.022cos 17.9576 2( )
tX tx t
tX t
ดงนน ผลเฉลยของระบบ คอ
(1) (1)
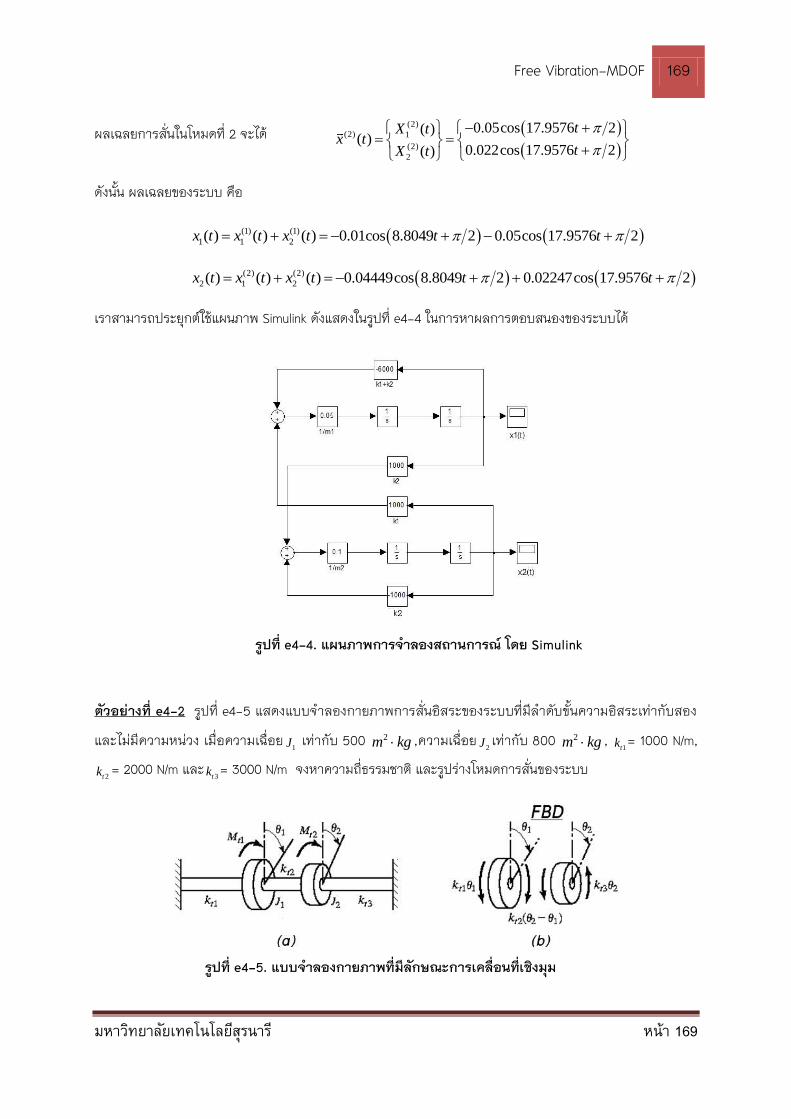
1 1 2( ) ( ) ( ) 0.01cos 8.8049 2 0.05cos 17.9576 2x t x t x t t t
(2) (2)
2 1 2( ) ( ) ( ) 0.04449cos 8.8049 2 0.02247cos 17.9576 2x t x t x t t t
เราสามารถประยกตใชแผนภาพ Simulink ดงแสดงในรปท e4-4 ในการหาผลการตอบสนองของระบบได
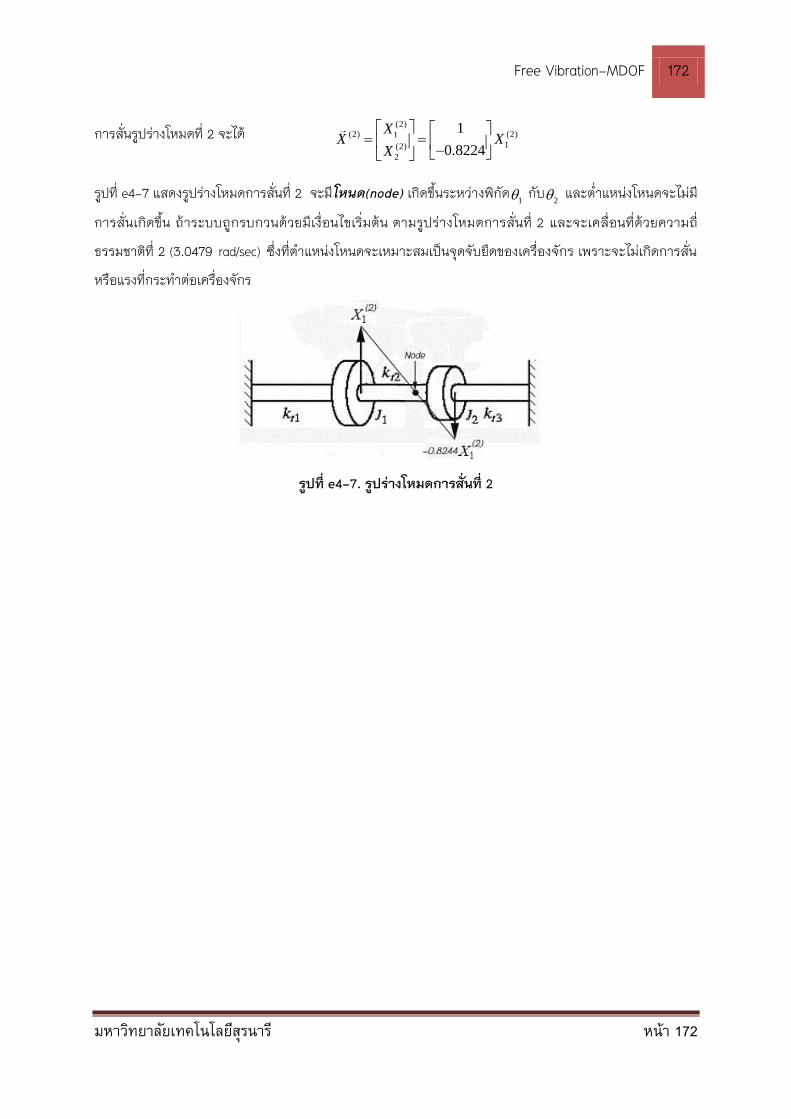
ตวอยางท e4-2 รปท e4-5 แสดงแบบจ าลองกายภาพการสนอสระของระบบทมล าดบขนความอสระเทากบสอง
และไมมความหนวง เมอความเฉอย1J เทากบ 500 2m kg ,ความเฉอย
2J เทากบ 800 2m kg , 1tk = 1000 N/m,
2tk = 2000 N/m และ3tk = 3000 N/m จงหาความถธรรมชาต และรปรางโหมดการสนของระบบ
รปท e4-5. แบบจ าลองกายภาพทมลกษณะการเคลอนทเชงมม
รปท e4-4. แผนภาพการจ าลองสถานการณ โดย Simulink

Free Vibration-MDOF 170
มหาวทยาลยเทคโนโลยสรนาร หนา 170
พจารณาท 1J โดยใชกฎขอทสองของนวตน
1 1M J
เราจะได 1 1 2 2 1 1 1t tk k J
หรอ 1 1 1 2 1 2 2 0t t tJ k k k
พจารณาท 2J
2 2M J
เราจะได 3 2 2 2 1 2 2t tk k J
หรอ 2 2 2 3 2 2 1 0t t tJ k k k
น าสมการทงสองทได จดรปเมตรกซ 0tJ K
เราจะได 1 2 21 11
2 2 32 22
00
0
t t t
t t t
k k kJ
k k kJ
หรอ 11
22
500 0 3000 20000
0 800 2000 5000
เราสามารถหาความถธรรมชาตของระบบได จาก 2det - det - 0M K M K 0
โดยท 2 ดงนน 500 0 3000 2000det 0
0 800 2000 5000
500 3000 2000det 0
2000 800 5000
500 3000 800 5000 2000 2000 0
เราจะได 2400,000 4,900,000 11,000,000 0
2
1 1 2.9603 rad/sec, 2
2 2 9.2897 rad/sec
ความถธรรมชาตของระบบคอ 1 1.7205 rad/sec, 2 3.0479 rad/sec
เราจะหารปรางโหมดการสนบรรทดฐาน โดยแทนคา 2 2
1 และ 2 2
2
2 (1)
1- M K X 0 และ 2 (2)
2- M K X 0

Free Vibration-MDOF 171
มหาวทยาลยเทคโนโลยสรนาร หนา 171
ดงนน 2 (1)
1- M K X 0(1)
1
(1)
2
500 0 3000 20002.9603 0
0 800 2000 5000
X
X
(1)
1
(1)
2
1519.85 20000
2000 2631.76
X
X
เราจะได (1) (1) (1) (1)
1 2 2 11519.85 2000 0 0.7599X X X X
หรอ (1) (1) (1) (1)
1 2 2 12000 2631.76 0 0.7599X X X X
อตราสวน (1)
21 (1)
1
0.7599X
rX
การสนรปรางโหมดท 1 จะได (1)
(1) (1)1
1(1)
2
1
0.7599
XX X
X
รปท e4-6 แสดงรปรางโหมดการสนท 1
ส าหรบการสนรปรางโหมดท 2 เราจะได
2 (2)
2- M K X 0(2)
1
(2)
2
500 0 3000 20009.2897 0
0 800 2000 5000
X
X
(2)
1
(2)
2
1644.85 20000
2000 2431.76
X
X
(2) (2) (2) (2)
1 2 2 11644.85 2000 0 0.8224X X X X
อตราสวน (2)
22 (2)
1
0.8224X
rX
รปท e4-6. รปรางโหมดการสนท 1
Free Vibration-MDOF 172
มหาวทยาลยเทคโนโลยสรนาร หนา 172
การสนรปรางโหมดท 2 จะได (2)
(2) (2)1
1(2)
2
1
0.8224
XX X
X
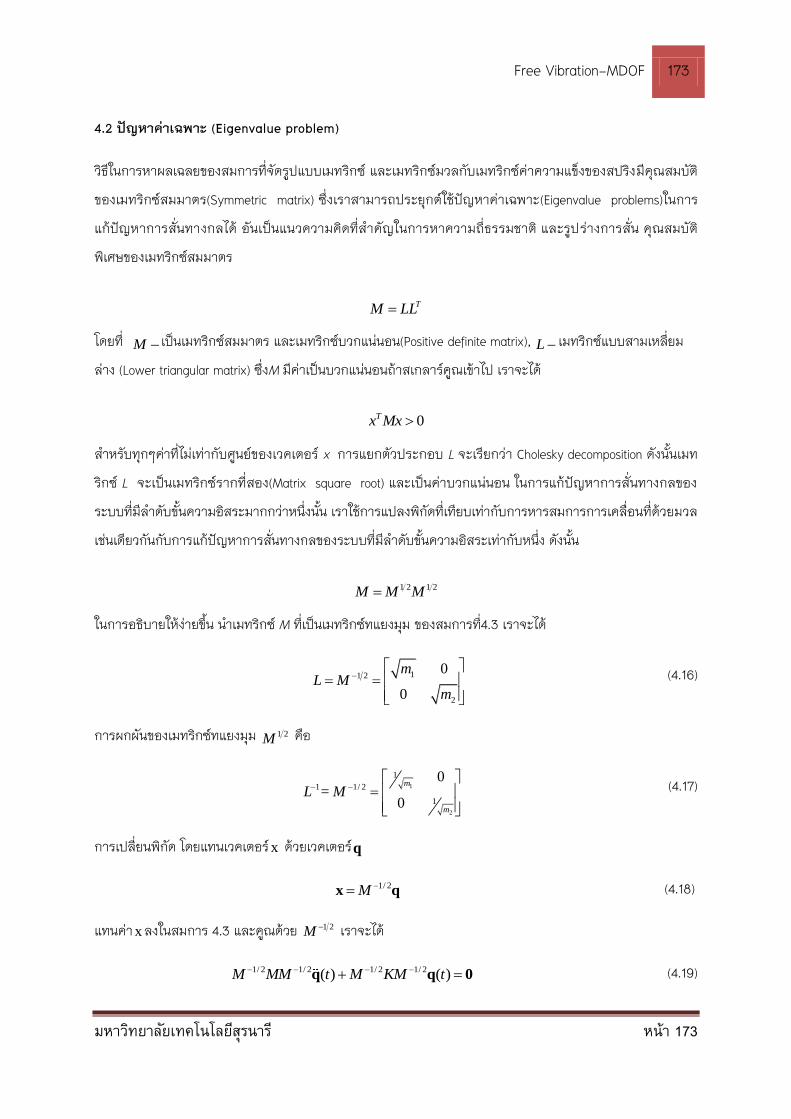
รปท e4-7 แสดงรปรางโหมดการสนท 2 จะมโหนด(node) เกดขนระหวางพกด1 กบ
2 และต าแหนงโหนดจะไมม
การสนเกดขน ถาระบบถกรบกวนดวยมเงอนไขเรมตน ตามรปรางโหมดการสนท 2 และจะเคลอนทดวยความถ
ธรรมชาตท 2 (3.0479 rad/sec) ซงทต าแหนงโหนดจะเหมาะสมเปนจดจบยดของเครองจกร เพราะจะไมเกดการสน
หรอแรงทกระท าตอเครองจกร
รปท e4-7. รปรางโหมดการสนท 2
Free Vibration-MDOF 173
มหาวทยาลยเทคโนโลยสรนาร หนา 173
4.2 ปญหาคาเฉพาะ (Eigenvalue problem)
วธในการหาผลเฉลยของสมการทจดรปแบบเมทรกซ และเมทรกซมวลกบเมทรกซคาความแขงของสปรงมคณสมบต
ของเมทรกซสมมาตร(Symmetric matrix) ซงเราสามารถประยกตใชปญหาคาเฉพาะ(Eigenvalue problems)ในการ
แกปญหาการสนทางกลได อนเปนแนวความคดทส าคญในการหาความถธรรมชาต และรปรางการสน คณสมบต
พเศษของเมทรกซสมมาตร
TM LL
โดยท M เปนเมทรกซสมมาตร และเมทรกซบวกแนนอน(Positive definite matrix), L เมทรกซแบบสามเหลยม
ลาง (Lower triangular matrix) ซงM มคาเปนบวกแนนอนถาสเกลารคณเขาไป เราจะได
0Tx Mx
ส าหรบทกๆคาทไมเทากบศนยของเวคเตอร x การแยกตวประกอบ L จะเรยกวา Cholesky decomposition ดงนนเมท
รกซ L จะเปนเมทรกซรากทสอง(Matrix square root) และเปนคาบวกแนนอน ในการแกปญหาการสนทางกลของ
ระบบทมล าดบขนความอสระมากกวาหนงนน เราใชการแปลงพกดทเทยบเทากบการหารสมการการเคลอนทดวยมวล
เชนเดยวกนกบการแกปญหาการสนทางกลของระบบทมล าดบขนความอสระเทากบหนง ดงนน
1 2 1 2M M M
ในการอธบายใหงายขน น าเมทรกซ M ทเปนเมทรกซทแยงมม ของสมการท4.3 เราจะได
11 2
2
0
0
mL M
m
(4.16)
การผกผนของเมทรกซทแยงมม 1 2M คอ
1
2
1
1 1/ 2
1
0=
0
m
m
L M
(4.17)
การเปลยนพกด โดยแทนเวคเตอรx ดวยเวคเตอรq
1/ 2M x q (4.18)
แทนคาxลงในสมการ 4.3 และคณดวย 1 2M เราจะได
1/ 2 1/ 2 1/ 2 1/ 2( ) ( )M MM t M KM t q q 0 (4.19)
Free Vibration-MDOF 174
มหาวทยาลยเทคโนโลยสรนาร หนา 174
ขณะท 1/2 1/2 I M MM และ 1/ 2 1/ 2K M KM เราเรยกวาคาความแขงของสปรงบรรทดฐานมวล (Mass
normalized stiffness) และเปนเมทรกซสมมาตร เราจะได
( ) ( )I t K t q q 0 (4.20)
สมมตผลเฉลยของสมการ 4.20 คอ ( ) j tt e q v (4.21)
โดยท v เวคเตอรของคาคงท แทนสมการ4.21 ลงในสมการ 4.20 เราจะได
2 j t j te K e v v 0
หรอ 2 0K v v (4.22)
เมอระบบเกดการเคลอนท เราจะได v 0 , สมการท 4.22 จะเปนปญหาคาเฉพาะ(Eigenvalue problem) และ v เรา
เรยกวาเวคเตอรคาเฉพาะ (eigenvector) ประโยชนของการประยกตใชวธปญหาคาเฉพาะสมมาตร (Symmetric
eigenvalue problem) ผลเฉลยของสมการ 4.22 คอคาจ านวนจรง
( ) 0K I v (4.23)
โดยท 2 , ส าหรบค าตอบทมความหมายของสมการ 4.23 หาไดจากหลกพชคณต ถา v 0 เราจะไดคา
det( ) 0K I (4.24)
สมการ 4.24 เราเรยกวาสมการคาเฉพาะ (Characteristic equation)
รปรางของโหมดแตละความถนน จะมคณสมบตทส าคญคอการตงฉากกน (Orthogonal) เมอรปรางของโหมดทตาง
ความถกน จะได
1 2 0T v v (4.24)
เวคเตอรคาเฉพาะสามารถท าใหเปนบรรทดฐานทมความยาวหนงหนวย โดยเราจะไดนอรมของเวคเตอร (Norm of a
vector)
1 2
2
1
nT
i
i
x
x x x (4.24)
และ 1x เราเรยกวาเชงตงฉากปรกต (Orthonormal)

Free Vibration-MDOF 175
มหาวทยาลยเทคโนโลยสรนาร หนา 175
ตวอยางท e4-3 แกปญหาคาเฉพาะส าหรบระบบทมล าดบขนความอสระเทากบสองของตวอยางท e4-1 และท า
เวคเตอรคาเฉพาะใหเปนบรรทดฐาน พรอมทงตรวจสอบการตงฉากกน และเปรยบเทยบกบรปรางการสนในตวอยางท
e4-1
เราสามารถหาคา 12
20 0
0 10M
; 12
0.2236 0
0 0.3162M
;
และ 1 12 2
300 70.7107
70.7107 100K M KM
การค านวณหาคาเฉพาะของ ของสมการ 4.23 คอ
300 70.7107 1 0det 0
70.7107 100 0 1
300 100 70.7107 70.7107 0
2 400 25000 0
เราจะได 2
1 1 77.5255 rad/sec, 2
2 2 322.4745 rad/sec
ความถธรรมชาตของระบบคอ 1 8.8049 rad/sec,
2 17.9576 rad/sec
เวคเตอรคาเฉพาะ v ทสมพนธกนกบ 2
1 1 เราจะได
(1)
1( )v 0K I
(1)
1
(1)
2
300 70.7107 1 077.5255 0
70.7107 100 0 1
v
v
(1)
1
(1)
2
222.4745 70.71070
70.7107 22.4745
v
v
เราจะได (1) (1) (1) (1)
1 2 2 1222.4745 70.7107 0 3.1463v v v v
(1)
(1) (1)1
1(1)
2
1v
3.1463
vv
v
เราท า (1)v เปนบรรทดฐาน โดยก าหนดให (1)v 1

Free Vibration-MDOF 176
มหาวทยาลยเทคโนโลยสรนาร หนา 176
(1) (1) (1)v v v 1T (1) (1)
1 1
11 3.1463 1 0.3029
3.1463v v
ดงนนเราจะได (1)1 0.3029
v 0.30293.1463 0.953
เวคเตอรคาเฉพาะ v ทสมพนธกนกบ 2
2 2 เราจะได
(2)
2( )v 0K I
(2)
1
(2)
2
300 70.7107 1 0322.4745 0
70.7107 100 0 1
v
v
(2)
1
(2)
2
22.4745 70.71070
70.7107 222.4745
v
v
(2) (2) (2) (2)
1 2 2 122.4745 70.7107 0 0.3178v v v v
(2)
(2) (2)1
1(2)
2
1v
0.3178
vv
v
เราท า (2)v เปนบรรทดฐาน โดยก าหนดให (2)v 1
(2) (2) (2)v v v 1T (2) (2)
1 1
11 0.3178 1 0.953
0.3178v v
ดงนนเราจะได (2)1 0.953
v 0.9530.3178 0.3029
พจารณาคณสมบตการตงฉากกนของรปรางทแตกตางโหมดกน (1) (2)v v 0T
0.3029 0.9530
0.953 0.3029
T
จะพบวา (1)v และ (2)v มคณสมบตการตงฉากกน และเชงตงฉากปรกต ดวยเหตผลนเราใชการไมเชอมโยง
(Decouple)ของสมการการเคลอนทส าหรบระบบทไมมความหนวง เราก าหนดให
(1) (2) ( )v v v nP
โดยท ( )v n เวคเตอรคาเฉพาะบรรทดฐาน ทม n ล าดบขนความอสระ และเมทรกซ P ดงนนส าหรบตวอยางน

Free Vibration-MDOF 177
มหาวทยาลยเทคโนโลยสรนาร หนา 177
เราจะได 0.3029 0.953
0.953 0.3029P
และมคณสมบตเปนเมทรกซตงฉากกน (Orthogonal matrices) คอ TP P I ผลของการคณเมทรกซ TP KP เราจะ
ไดเมทรกซทแยงมมทมคาเฉพาะ
( ) T
idiag P KP (4.25)
หรอเรยกวาเมทรกซสเปคตม (Spectral matrix) ของK ซงเราจะได
0.3029 0.953 300 70.7107 0.3029 0.953 77.5255 0
0.953 0.3029 70.7107 100 0.953 0.3029 0 322.4745
TP KP
เราจะพจารณารปรางการสนทไดจากตวอยางท 4-1 เมอก าหนดให (1)
1 1X และ (2)
1 1X เราจะได
(1)1
4.44949X
, (2)1
0.44949X
(1) (2)1
1 4.44949 1 00.44949
TX X
เมอพจาณาพบวา (1)
1X และ (2)
1X ไมมคณสมบตการตงฉากกน และเชงตงฉากปรกต เราสามารถแปลงรปรางโหมดได
ดงน
(1) 1 2 (1)vX M หรอ (1) 1 2 (1)v M X
1 2 (1)20 0 1 0.302920
14.7634.44949 0.95314.070 10
M X
4.3 การวเคราะหโมดอล (Modal analysis)
เมทรกซคาเฉพาะของ P สามารถใชส าหรบสมการทไมเชอมโยงกนของระบบการสนทางกล ซงจะไดสมการยอยๆ
จ านวน n สมการ เทากบจ านวนล าดบขนความอสระของระบบ เราสามารถหาผลเฉลยของแตละสมการไดเชนเดยวกบ
ระบบทมล าดบขนความอสระเทากบหนงทกลาวมาแลวในบทท 2 เมทรกซ P และ 1 2M สามารถใชแปลงผลเฉลย
กลบไปสพกด ( )x t และขนตอนดงกลาวเราเรยกวาการวเคราะหโมดอล เพราะการแปลง 1 2S M P เรยกวาเมทรกซ
โมดอล(Modal matrix) ซงสมพนธกบรปรางการสนของการสนทางกลทศกษา
พจารณาสมการการเคลอนทของระบบทไมมความหนวง M K x x 0

Free Vibration-MDOF 178
มหาวทยาลยเทคโนโลยสรนาร หนา 178
โดยมเงอนไขเรมตนคอ 1 2(0) (0) (0) (0) ,T
nx x xx 1 2(0) (0) (0) (0) ,T
nx x xx
เมอ 1/ 2( ) ( )t M tx q สามารถจดรปสมการการเคลอนทได ( ) ( ) I t K t q q 0 (4.26)
โดยท 1 2 1 2 1/ 2 1/ 2,M MM I K M KM และ 1/ 2( ) ( )t M x tq
ก าหนดพกดทสอง ( )= ( )t P tq r (4.27)
โดยท 1 2 3 nP v v v v และ vคอเวคเตอรคาเฉพาะบรรทดฐาน (Normalized eigenvector)
แทนสมการ 4.26 ลงในสมการ 4.27 และคณดวย TP เราจะได
T TP P P K P I r r r r 0 (4.28)
จากสมการ 4.28 ส าหรบระบบทมล าดบขนความอสระเทากบสอง
21 11
22 22
( ) ( )1 0 00
( ) ( )0 1 00
r t r t
r t r t
(4.29)
เราสามารถเขยนสมการไดในรป
2
1 1 1
2
2 2 2
( ) ( ) 0
( ) ( ) 0
r t r t
r t r t
(4.30)
สมการ 4.30 เราเรยกวาสมการโมดอล (Modal equation) ส าหรบระบบทมล าดบขนความอสระเทากบสอง ซงเราจะ
ไดสมการการสนอสระจ านวน 2สมการ ทมล าดบขนความอสระเทากบหนงแบบไมมความหนวง และไมมความ
เชอมโยงกนเพราะแตละสมการนนขนอยกบพกดเดยวเทานน ถาระบบมเงอนไขเรมตน จะสามารถหาผลเฉลยของ
สมการได
ส าหรบการกระจดเรมตนของพกด ( )tr จะได 101 1/ 2
0 0
202
(0)
(0)
T Trr
P (0)= P Mrr
r q x (4.31)
ส าหรบความเรวตนของพกด ( )tr จะได 101 1/ 2
0 0
202
(0)
(0)
T Trr
P (0)= P Mrr
r q x (4.32)
จากสมการโมดอลและเงอนไขเรมตน เราจะไดผลเฉลยของสมการ 4.30 คอ
Free Vibration-MDOF 179
มหาวทยาลยเทคโนโลยสรนาร หนา 179
2 2 2
11 10 10 1 101 1
1 10
2 2 2
12 20 20 2 202 2
2 20
( ) sin( tan )
( ) sin( tan )
r r rr t t
r
r r rr t t
r
(4.33)
ผลเฉลยของพกด ( )tr ทได ตองแปลงกลบไปทพกดเดม ( )x t
1/ 2 1/ 2( ) ( ) ( )t M t M P t x q r (4.34)
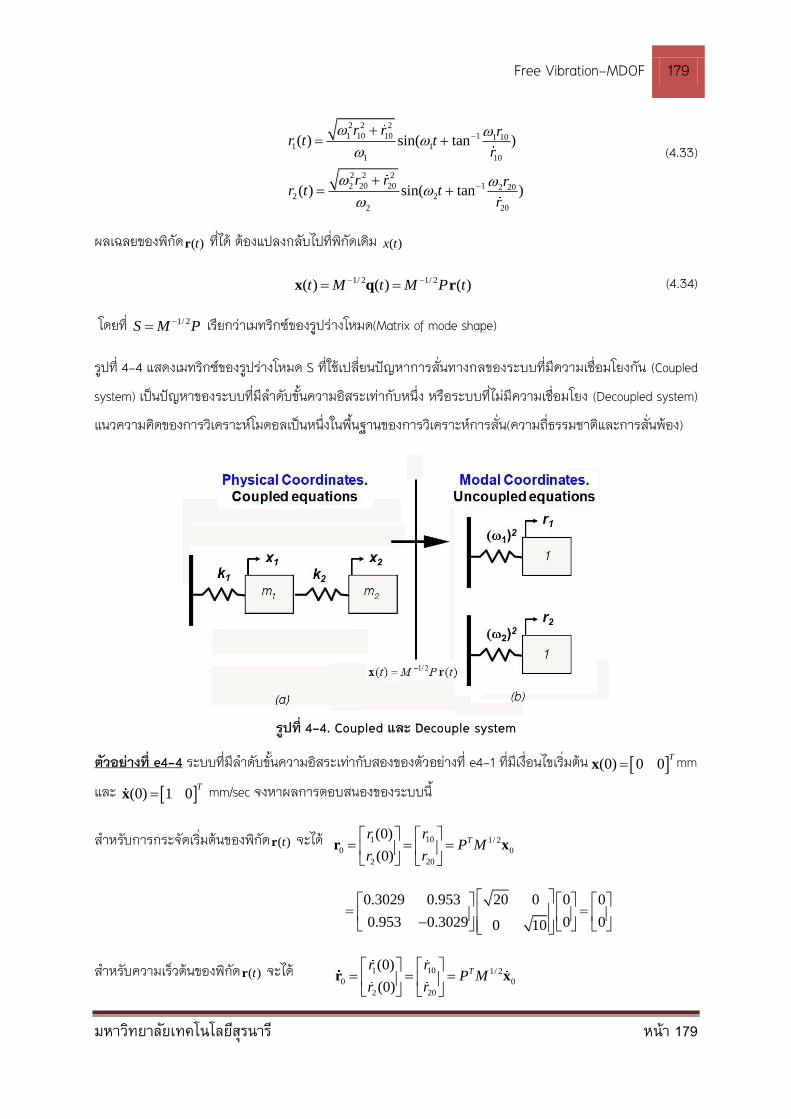
โดยท 1/ 2S M P เรยกวาเมทรกซของรปรางโหมด(Matrix of mode shape)
รปท 4-4 แสดงเมทรกซของรปรางโหมด S ทใชเปลยนปญหาการสนทางกลของระบบทมความเชอมโยงกน (Coupled
system) เปนปญหาของระบบทมล าดบขนความอสระเทากบหนง หรอระบบทไมมความเชอมโยง (Decoupled system)
แนวความคดของการวเคราะหโมดอลเปนหนงในพนฐานของการวเคราะหการสน(ความถธรรมชาตและการสนพอง)
ตวอยางท e4-4 ระบบทมล าดบขนความอสระเทากบสองของตวอยางท e4-1 ทมเงอนไขเรมตน (0) 0 0T
x mm
และ (0) 1 0T
x mm/sec จงหาผลการตอบสนองของระบบน
ส าหรบการกระจดเรมตนของพกด ( )tr จะได 101 1/ 2
0 0
202
(0)
(0)
Trr
P Mrr
r x
0.3029 0.953 20 0 0 0
0.953 0.3029 0 00 10
ส าหรบความเรวตนของพกด ( )tr จะได 101 1/ 2
0 0
202
(0)
(0)
Trr
P Mrr
r x
รปท 4-4. Coupled และ Decouple system
Free Vibration-MDOF 180
มหาวทยาลยเทคโนโลยสรนาร หนา 180
0.3029 0.953 20 0 1 1.3546
0.953 0.3029 0 4.26190 10
เราจะไดผลเฉลยของสมการโมดอล คอ
1
2
1.3546( ) sin(8.8049 ) 0.1756sin(8.8049 )
8.8049
4.2619( ) sin(17.9576 ) 0.2373sin(17.9576 )
17.9576
r t t t
r t t t
หรอ 0.1756sin(8.8049 )r( )
0.2373sin(17.9576 )
tt
t
เราจะไดผลการตอบสนองของ ( )x t
1/ 2( ) ( )t M P tx r0.2236 0 0.3029 0.953 0.1756sin(8.8049 )
0 0.3162 0.953 0.3029 0.2373sin(17.9576 )
t
t
หรอ 0.0119sin(8.8049 ) 0.0506sin(17.9576 )( )
0.0529sin(8.8049 ) 0.0227sin(17.9576 )
t tx t
t t
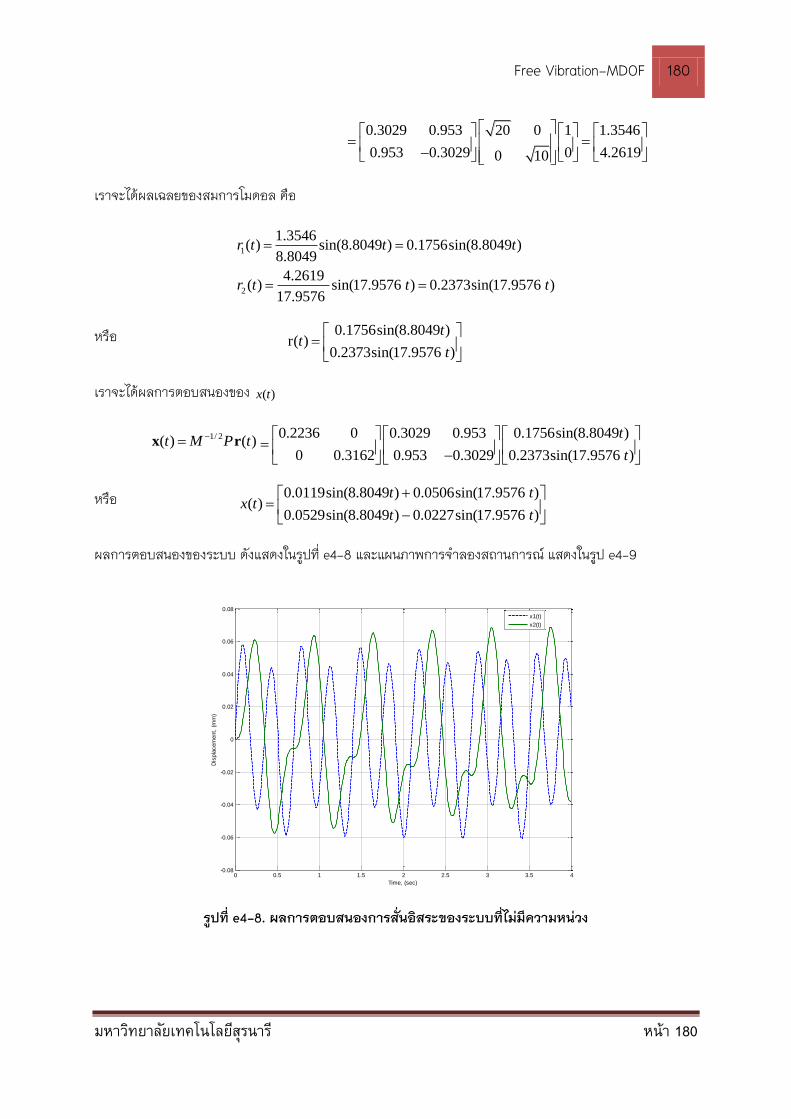
ผลการตอบสนองของระบบ ดงแสดงในรปท e4-8 และแผนภาพการจ าลองสถานการณ แสดงในรป e4-9
0 0.5 1 1.5 2 2.5 3 3.5 4-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Time, (sec)
Dis
pla
cem
ent,
(m
m)
x1(t)
x2(t)
รปท e4-8. ผลการตอบสนองการสนอสระของระบบทไมมความหนวง
Free Vibration-MDOF 181
มหาวทยาลยเทคโนโลยสรนาร หนา 181
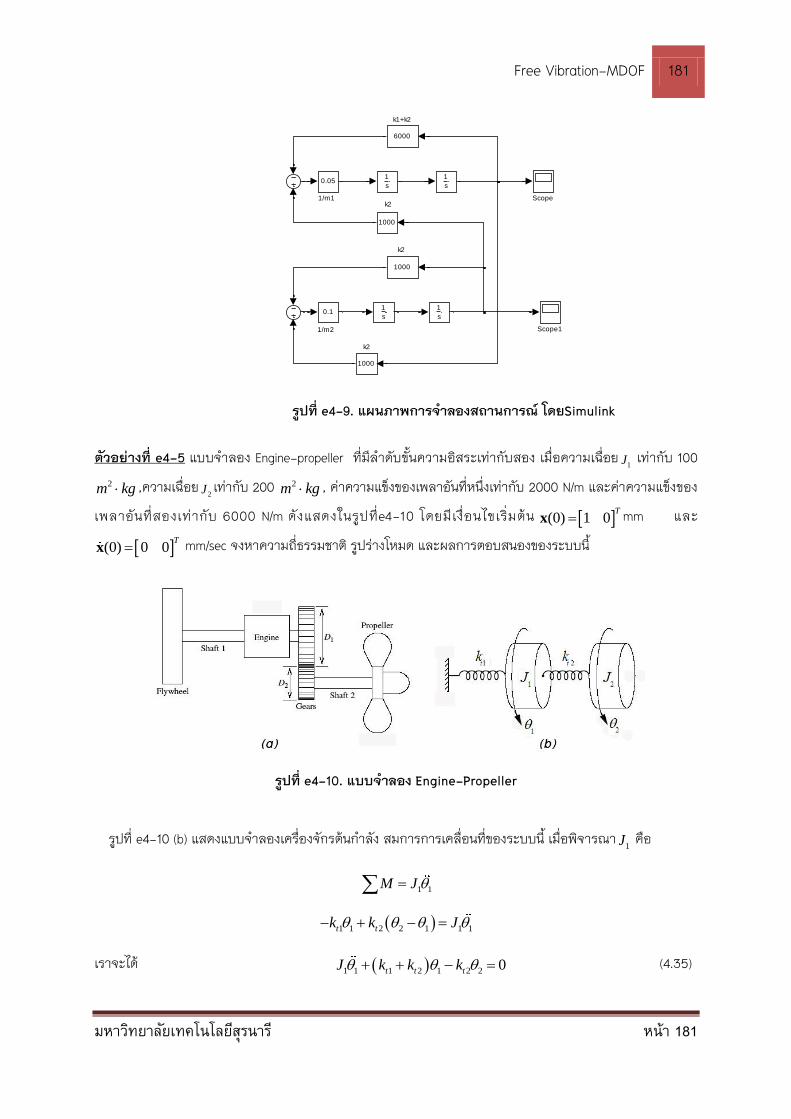
ตวอยางท e4-5 แบบจ าลอง Engine-propeller ทมล าดบขนความอสระเทากบสอง เมอความเฉอย1J เทากบ 100
2m kg ,ความเฉอย2J เทากบ 200 2m kg , คาความแขงของเพลาอนทหนงเทากบ 2000 N/m และคาความแขงของ
เพลาอนทสองเทากบ 6000 N/m ดงแสดงในรปทe4-10 โดยมเงอนไขเรมตน (0) 1 0T
x mm และ
(0) 0 0T
x mm/sec จงหาความถธรรมชาต รปรางโหมด และผลการตอบสนองของระบบน
รปท e4-10 (b) แสดงแบบจ าลองเครองจกรตนก าลง สมการการเคลอนทของระบบน เมอพจารณา1J คอ
1 1M J
1 1 2 2 1 1 1t tk k J
เราจะได 1 1 1 2 1 2 2 0t t tJ k k k (4.35)
1/m2
1/m1
k1+k2
k2
k2
k2
0.1
1000
1000
0.05
6000
1000
Scope1
Scope
1
s
1
s
1
s
1
s
รปท e4-9. แผนภาพการจ าลองสถานการณ โดยSimulink
รปท e4-10. แบบจ าลอง Engine-Propeller

Free Vibration-MDOF 182
มหาวทยาลยเทคโนโลยสรนาร หนา 182
พจารณา2J
2 2M J
เราจะได 2 2 2 2 2 1 0t tJ k k (4.36)
เราสามารถจดรปสมการดงกลาวในรปเมตรกซ คอ
0J K
โดยท 1
2
0 100 0
0 0 200
JJ
J
; 1 2 2
2 2
8000 2000
2000 2000
t t t
t t
k k kK
k k
ดงนน 1 2 21 11
2 22 22
00
0
t t t
t t
k k kJ
k kJ
(4.37)
เราประยกตใชวธวเคราะหโมดอลในการหาผลการตอบสนองของระบบน
สามารถหาคา 12
10 0
0 14.1421M
; 12
0.1 0
0 0.0707M
;
และ 1 12 2
80 14.1421
14.1421 10K M KM
การค านวณหาคาเฉพาะของ ของสมการ 4.23 คอ
80 14.1421 1 0det 0
14.1421 10 0 1
80 10 14.1421 14.1421 0
2 90 600 0
เราจะได 2
1 1 7.2508, 2
2 2 82.7492
ความถธรรมชาตของระบบคอ 1 2.6927 rad/sec,
2 9.0967 rad/sec
เวคเตอรคาเฉพาะ v ทสมพนธกนกบ 2
1 1 เราจะได
(1)
1( )v 0K I
(1)
1
(1)
2
80 14.1421 1 07.2508 0
14.1421 10 0 1
v
v
Free Vibration-MDOF 183
มหาวทยาลยเทคโนโลยสรนาร หนา 183
(1)
1
(1)
2
72.7492 14.14210
14.1421 2.7492
v
v
เราจะได (1) (1) (1) (1)
1 2 2 172.7492 14.1421 0 5.1441v v v v
(1)
(1) (1)1
1(1)
2
1v
5.1441
vv
v
เราท า (1)v เปนบรรทดฐาน โดยก าหนดให (1)v 1
(1) (1) (1)v v v 1T (1) (1)
1 1
11 5.1441 1 0.1908
5.1441v v
ดงนนเราจะได (1)1 0.1908
v 0.19085.1441 0.9816
เวคเตอรคาเฉพาะ v ทสมพนธกนกบ 2
2 2 เราจะได
(2)
2( )v 0K I
(2)
1
(2)
2
80 14.1421 1 082.7492 0
14.1421 10 0 1
v
v
(2)
1
(2)
2
2.7492 14.14210
14.1421 72.7492
v
v
(2) (2) (2) (2)
1 2 2 12.7492 14.1421 0 0.1944v v v v
(2)
(2) (2)1
1(2)
2
1v
0.1944
vv
v
เราท า (2)v เปนบรรทดฐาน โดยก าหนดให (2)v 1
(2) (2) (2)v v v 1T (2) (2)
1 1
11 0.1944 1 0.9816
0.1944v v
ดงนนเราจะได (2)1 0.9816
v 0.98160.1944 0.1908

Free Vibration-MDOF 184
มหาวทยาลยเทคโนโลยสรนาร หนา 184
เราจะได 0.1908 0.9816
0.9816 0.1908P
เมทรกซสเปคตม (Spectral matrix) ของK ซงเราจะได
7.2508 0
0 82.7492
TP KP
เราจะไดสมการโมดอล 1 1
2 2
7.2508 0
82.7492 0
r r
r r
การกระจดเรมตนของพกด ( )tr จะได 101 1/2
0 0
202
(0)
(0)
Trr
P Mrr
r x
0.1908 0.9816 10 0 1 1.908
0.9816 0.1908 0 14.1421 0 9.816
ส าหรบความเรวตนของพกด ( )tr จะได 101 1/ 2
0
202
(0) 0x(0)
(0) 0
Trr
P Mrr
r
เราจะไดผลเฉลยของสมการโมดอล คอ
1
2
( ) 1.908cos 2.6927
( ) 9.816cos 9.0967
r t t
r t t
หรอ
1.908cos 2.6927r( )
9.816cos 9.0967
tt
t
เราจะไดผลการตอบสนองของ ( )x t
1/ 2( ) ( )t M P tx r
1.908cos 2.69270.1 0 0.1908 0.9816
9.816cos 9.09670 0.0707 0.9816 0.1908
t
t
หรอ
1
2
0.0364cos 2.6927 0.9635cos 9.0967( )( )
0.1324cos 2.6927 0.1324cos 9.0967( )
t tx tx t
t tx t
(4.38)
เราสามารถหารปรางโหมดทหนง คอ (1) 1 2 (1)0.1 0 0.1908 0.01908
v0 0.0707 0.9816 0.06939
X M
รปรางโหมดทสอง คอ (2) 1 2 (2)0.1 0 0.9816 0.09816
v0 0.0707 0.1908 0.01348
X M
Free Vibration-MDOF 185
มหาวทยาลยเทคโนโลยสรนาร หนา 185
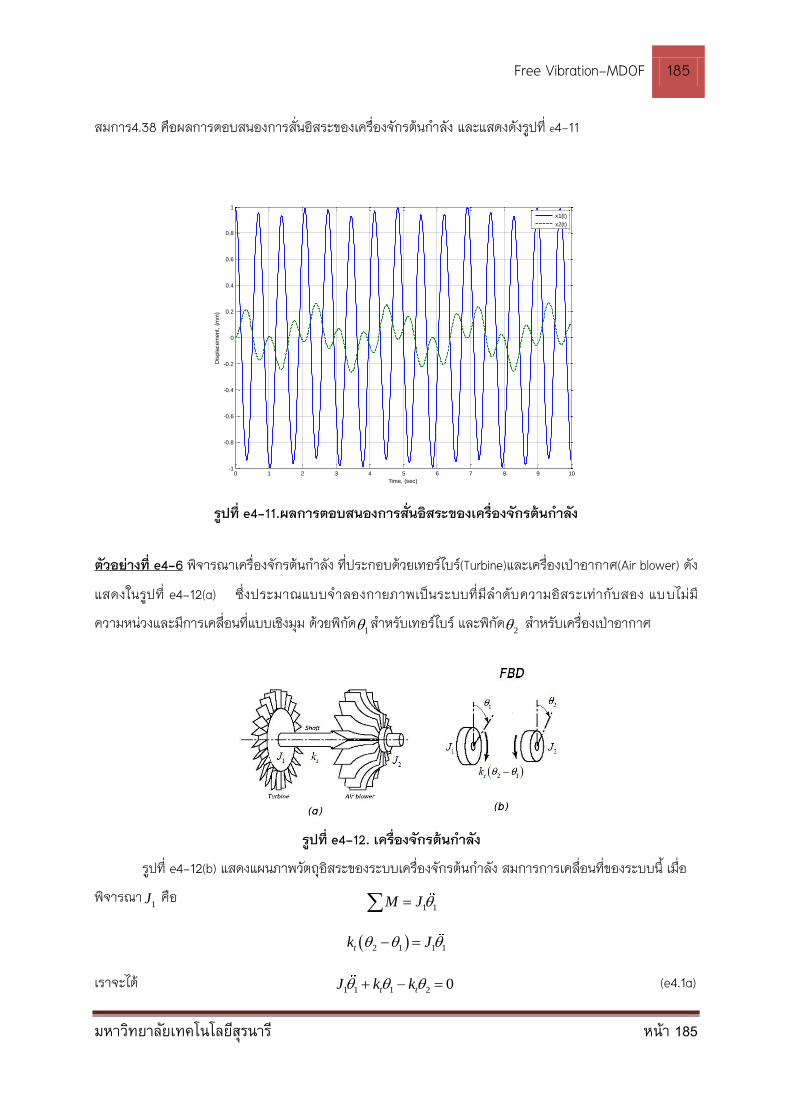
สมการ4.38 คอผลการตอบสนองการสนอสระของเครองจกรตนก าลง และแสดงดงรปท e4-11
ตวอยางท e4-6 พจารณาเครองจกรตนก าลง ทประกอบดวยเทอรไบร(Turbine)และเครองเปาอากาศ(Air blower) ดง
แสดงในรปท e4-12(a) ซงประมาณแบบจ าลองกายภาพเปนระบบทมล าดบความอสระเทากบสอง แบบไมม
ความหนวงและมการเคลอนทแบบเชงมม ดวยพกด1 ส าหรบเทอรไบร และพกด
2 ส าหรบเครองเปาอากาศ
รปท e4-12(b) แสดงแผนภาพวตถอสระของระบบเครองจกรตนก าลง สมการการเคลอนทของระบบน เมอ
พจารณา1J คอ
1 1M J
2 1 1 1tk J
เราจะได 1 1 1 2 0t tJ k k (e4.1a)
0 1 2 3 4 5 6 7 8 9 10-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time, (sec)
Dis
pla
cem
ent,
(m
m)
x1(t)
x2(t)
รปท e4-11.ผลการตอบสนองการสนอสระของเครองจกรตนก าลง
รปท e4-12. เครองจกรตนก าลง

Free Vibration-MDOF 186
มหาวทยาลยเทคโนโลยสรนาร หนา 186
พจารณา2J
2 2M J
เราจะได 2 2 2 1 0t tJ k k (e4.1b)
เราสามารถจดรปสมการดงกลาวในรปเมตรกซ คอ
0J K
โดยท 1
2
0
0
JJ
J
; t t
t t
k kK
k k
ดงนน 1 11
2 22
00
0
t t
t t
k kJ
k kJ
(e4.2)
หาคาความถธรรมชาตของระบบ det - 0M K
2
1 2 1 2 0tJ J k J J (e4.3)
ซงเราจะได 2
1 1 0 และ 2 1 2
2 2
1 2
tk J J
J J
เราพบวาระบบจะมความถธรรมชาตเทากบศนยจ านวนหนงความถ หมายความวาระบบไมมการเคลอนทเกดขน
ระบบจะเคลอนทปราศจากความสมพนธของ1J และ
2J เราเรยกระบบลกษณะนวาระบบกงบวกแนนอน
(Semidefinite system) และเมอแทนคา2 ลงในสมการ e4.1 เราจะได (2)
1X และ (2)
2X มมมเฟสตรงกนขามกน ดงนน
จะม node อยตรงกลางของเพลา
Free Vibration- MDOF 187
มหาวทยาลยเทคโนโลยสรนาร หนา 187
4.4 การสนอสระของระบบทมล าดบขนความอสระหลายล าดบและมความหนวง
การวเคราะหการสนอสระของระบบทมล าดบขนความอสระหลายล าดบและมความหนวง เราสามารถประยกตใช
วธการวเคราะหโมดอลในการหาผลการตอบสนองการสนอสระของระบบไดนน จ าเปนตองพจารณาความเชอมโยงกน
ของเมตรกซความหนวง ถาเมตรกซความหนวงไมมความเชอมโยงกน เราสามารถพจารณาการรวมกนแบบเชงเสน
(linear combination) ของเมตรกซมวลและเมตรกซคาความแขงของสปรงแทนเมตรกซความหนวงได ซงเราจะหา
สมการโมดอลและผลเฉลยของแตละสมการได โดยการจ าแนกความหนวงของระบบ เหมอนกบการสนอสระของ
ระบบทมล าดบขนความอสระเทากบหนงและมความหนวง
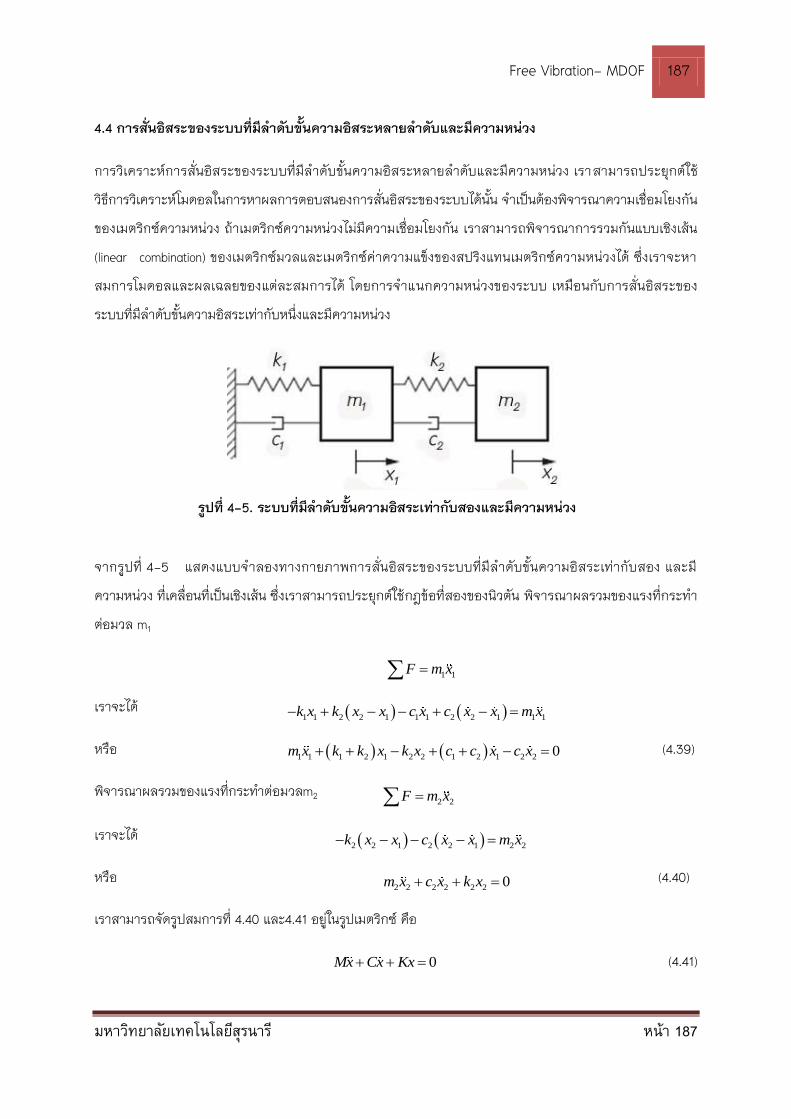
จากรปท 4-5 แสดงแบบจ าลองทางกายภาพการสนอสระของระบบทมล าดบขนความอสระเทากบสอง และม
ความหนวง ทเคลอนทเปนเชงเสน ซงเราสามารถประยกตใชกฎขอทสองของนวตน พจารณาผลรวมของแรงทกระท า
ตอมวล m1
1 1F m x
เราจะได 1 1 2 2 1 1 1 2 2 1 1 1k x k x x c x c x x m x
หรอ 1 1 1 2 1 2 2 1 2 1 2 2 0m x k k x k x c c x c x (4.39)
พจารณาผลรวมของแรงทกระท าตอมวลm2 2 2F m x
เราจะได 2 2 1 2 2 1 2 2k x x c x x m x
หรอ 2 2 2 2 2 2 0m x c x k x (4.40)
เราสามารถจดรปสมการท 4.40 และ4.41 อยในรปเมตรกซ คอ
0Mx Cx Kx (4.41)
รปท 4-5. ระบบทมล าดบขนความอสระเทากบสองและมความหนวง

Free Vibration- MDOF 188
มหาวทยาลยเทคโนโลยสรนาร หนา 188
โดยท 1
2
0
0
mM
m
; 1 2 2
2 2
c c cC
c c
และ 1 2 2
2 2
k k kK
k k
เปนเมตรกซสมมาตร
ดงนน 1 2 21 1 1 2 2 1 1
2 2 32 2 2 2 2 2
00
0
k k km x c c c x x
k k km x c c x x
การแกปญหาระบบทมเมตรกซความหนวง C ดงสมการ 4.41ได กตอเมอ 1 1CM K KM C เพราะระบบจะไมม
ความเชอมโยงกนของเมตรกซความหนวงโดยการแปลงโมดอล S ดงนนการวเคราะหโมดอลสามารถประยกตใช
แกปญหาดงกลาวไดโดยตรง และถาเมตรกซความหนวง C สามารถเขยนอยในรปการรวมแบบเชงเสนของเมตรกซ
มวลและเมตรกซคาความแขงของสปรง คอ
C M K (4.42)
โดยท และ เปนคาคงท, รปแบบเมตรกซความหนวงใหมเราเรยกวา ความหนวงสดสวน(Proportional damping)
แทนสมการ 4.42 ในสมการ 4.41 เราจะได
0Mx M K x Kx (4.43)
แทนสมการ 4.18 และคณดวย 1 2M เราจะไดพกดใหมคอ 0q I K q Kq
แทนสมการ 4.27 และและคณดวย TP เราจะได
( )I I r r r 0 (4.44)
ดงนนเราจะได n สมการโมดอลของระบบทไมมความเชอมโยงกน คอ
22 0i i i i i ir r r (4.45)
โดยท 22 i i i หรอ
2 2
ii
i
, 1,2, ,i n (4.46)
คา และ สามารถหาไดจากการก าหนดคาอตราสวนความหนวงของแตละโหมดได หรอในทางตรงกนขาม ถาเรา
ทราบคา และ กจะหาคาอตราสวนความหนวงไดเชนกน จากสมการโมดอล 4.45
ผลเฉลยส าหรบระบบความหนวงต า 0 1 คอ
( ) sini it
i i di ir t A e t
(4.47)
Free Vibration- MDOF 189
มหาวทยาลยเทคโนโลยสรนาร หนา 189
โดยทคา iA และ
i สามารถหาไดจากเงอนไขเรมตนของระบบ
21di i i ,1/ 2
2 2
0 0 0
2
( ) ( )i i i i i dii
di
r r rA
และ 1 0
0 0
tan i dii
i i i i
r
r r
ผลเฉลยส าหรบระบบความหนวงสง 1 คอ
2 21 1
1 2i i i ii it tt
i i ir(t) e a e a e
(4.48)
เมอ 2
0 0
1 2
1
2 1
i i i i i
i
i i
r ra
, 2
0 0
2 2
1
2 1
i i i i i
i
i i
r ra
ผลเฉลยส าหรบระบบความหนวงวกฤต 1 คอ
1 2( ) i it t
i i ir t a e a te
(4.49)
โดย 1 0i ia r ,
2 0 0i i i ia r r
และแปลงกลบไปพกด x(t) ได คอ 1 1
2 2( ) ( ) ( ) ( )t M t M P t S t
x q r r
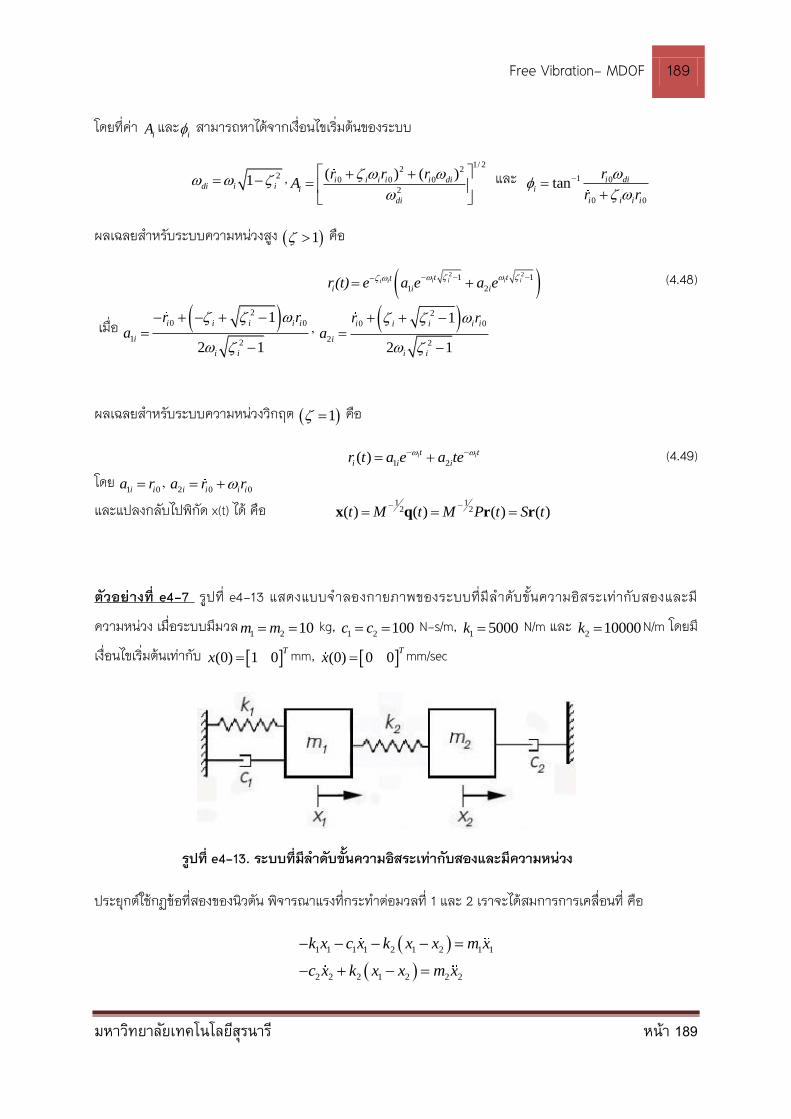
ตวอยางท e4-7 รปท e4-13 แสดงแบบจ าลองกายภาพของระบบทมล าดบขนความอสระเทากบสองและม
ความหนวง เมอระบบมมวล1 2 10m m kg,
1 2 100c c N-s/m, 1 5000k N/m และ
2 10000k N/m โดยม
เงอนไขเรมตนเทากบ (0) 1 0T
x mm, (0) 0 0T
x mm/sec
ประยกตใชกฏขอทสองของนวตน พจารณาแรงทกระท าตอมวลท 1 และ 2 เราจะไดสมการการเคลอนท คอ
1 1 1 1 2 1 2 1 1
2 2 2 1 2 2 2
k x c x k x x m x
c x k x x m x
รปท e4-13. ระบบทมล าดบขนความอสระเทากบสองและมความหนวง

Free Vibration- MDOF 190
มหาวทยาลยเทคโนโลยสรนาร หนา 190
สามารถจดรปเมตรกซ ได
10 0 100 0 15000 10000
00 10 0 100 10000 10000
x x x
พจารณาความไมเชอมโยงกนของเมตรกซความหนวง C
1100 0 0.1 0 15000 10000 10 0 15000 10000
0 100 0 0.1 10000 10000 0 10 10000 10000
150000 100000
100000 100000
CM K
เราพบวาเมตรกซความหนวงเปนเมตรกซสมมาตร ดงนนจงเปนระบบทไมมความเชอมโยงกน ซงเราสามารถ
ประยกตใชวธวเคราะหโมดอลได
ขนตอนท 1 เราหาคา
12
10 0
0 10M
; 12
10 10 0 1 10 0
0 10 10 0 1 10M
1 12 2
1 10 0 15000 10000 1 10 0
10000 100000 1 10 0 1 10
1500 1000
1000 1000
K M KM
ขนตอนท 2 หาคาความถธรรมชาตของระบบ det( ) 0K I
ซงเราไดคา 1 2 1 2219.2; 2280.8 14.8062 rad sec, 47.7575 rad sec
ขนตอนท 3 หาคารปรางโหมดบรรทดฐาน และเมตรกซ P
1 2
0.6154 0.7882v ;v
0.7882 0.6154
1 2
0.6154 0.7882P= v v
0.7882 0.6154
ขนตอนท 4 หาคา S และ S-1
12
1 10 0 0.6154 0.7882 0.1946 0.2493
0.7882 0.6154 0.2493 0.19460 1 10S M P
11 2
0.6154 0.7882 10 0 1.9461 2.4925
0.7882 0.6154 2.4925 1.94610 10
TS P M
ขนตอนท 5 หาคาเงอนไขเรมตนส าหรบสมการโมดอล
11.9461 2.4925 1 1.946
(0) (0)2.4925 1.9461 0 2.4925
r S x
11.9461 2.4925 0 0
(0) (0)2.4925 1.9461 0 0
r S x
ขนตอนท 6 หาคา และ

Free Vibration- MDOF 191
มหาวทยาลยเทคโนโลยสรนาร หนา 191
10 0 15000 10000
0 10 10000 10000
100 0 10 15000 10000
0 100 10000 10 10000
C M K
เราจะได 0; 10 ;
ขนตอนท 7 หาคาอตราสวนความหนวงของแตละโหมด 2 2
ii
i
โหมดท 1 1
100.3377
2(14.8062) ,
2 2
1 1 11 14.8062 1 0.3377 13.9363 rad secd
โหมดท 2 2
100.1047
2(47.7575) ,
2 2
2 2 21 47.7575 1 0.1047 47.495 rad secd
จะพบวาระบบมความหนวงต าทงสองโหมด
ขนตอนท 8 หาผลเฉลยส าหรบสมการโมดอล 2
1 1 1 1 12 0 2(0.3377)(14.8062) 219.2 0r r r r r r 2
2 2 2 2 22 0 2(0.1047)(47.7575) 2280.8 0r r r r r r
หรอ
1 10 219.2 0r r r
2 10 2280.8 0r r r
ผลเฉลยของการสนอสระส าหรบระบบความหนวงต า ดงสมการ 4.47
5
1( ) 2.0674 sin 13.9363 1.2263tr t e t 1/ 2 1/ 2
2 2 2 2
10 1 1 10 10 11 2 2
1
1 110 11
10 1 1 10
( ) ( ) ((0.3377)14.8062( 1.946)) ( 1.946(13.9363))2.0674
(13.9363)
1.946(13.9363)tan tan 1.2263
((0.3377)14.8062( 1.946))
d
d
d
r r rA
r
r r
และ 5
2( ) 2.5062 sin 47.495 1.4659tr t e t
1/ 2 1/ 22 2 2 2
20 2 2 20 20 22 2 2
1
1 120 22
20 2 2 20
( ) ( ) ((0.1047)47.7575( 2.4925)) ( 2.4925(47.495))2.5062
(47.495)
2.4925(47.495)tan tan 1.4659
((0.1047)47.7575( 2.4925))
d
d
d
r r rA
r
r r
หรอ เราจะได
5
1
5
2
( ) 2.0674 sin 13.9363 1.2263( )
( ) 2.5062 sin 47.4975 1.4659
t
t
r t e tr t
r t e t
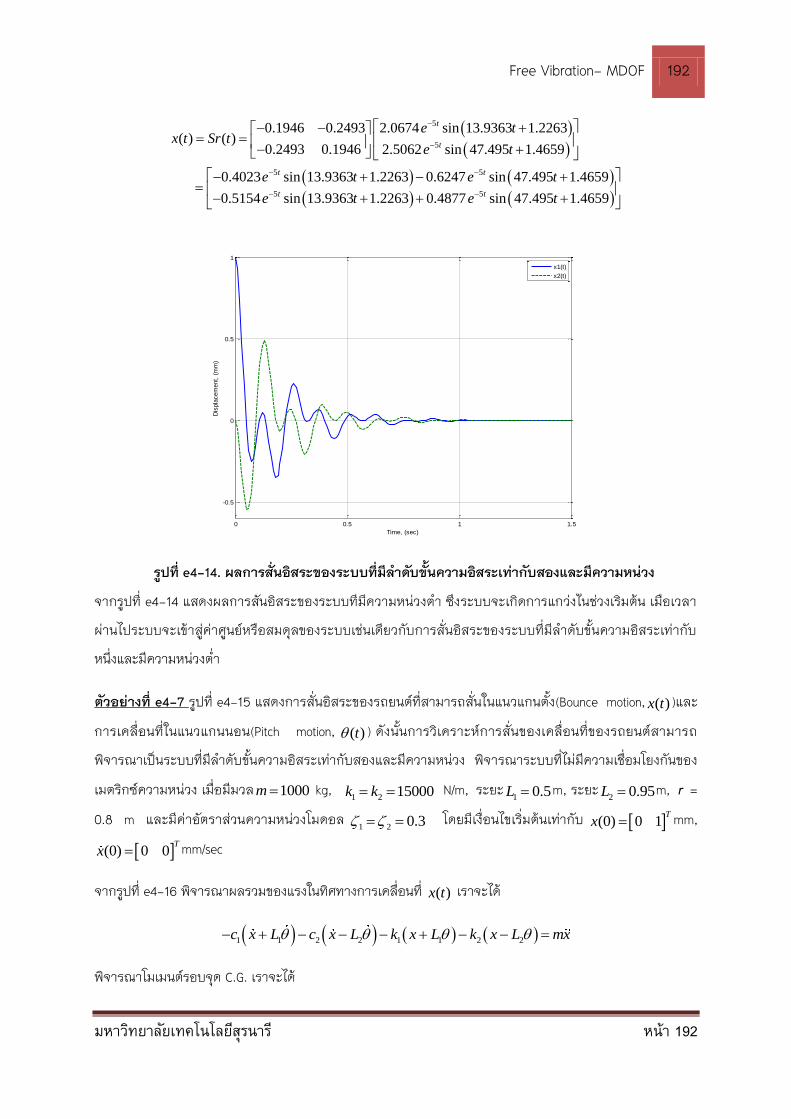
ขนตอนท 9 แปลงพกด ( )r t ใหอยในพกด ( )x t ดงนนผลเฉลยทไดคอ
Free Vibration- MDOF 192
มหาวทยาลยเทคโนโลยสรนาร หนา 192
5
5
5 5
5
0.1946 0.2493 2.0674 sin 13.9363 1.2263( ) ( )
0.2493 0.1946 2.5062 sin 47.495 1.4659
0.4023 sin 13.9363 1.2263 0.6247 sin 47.495 1.4659
0.5154 sin 13.9363 1.2263 0.4877
t
t
t t
t
e tx t Sr t
e t
e t e t
e t e
5 sin 47.495 1.4659t t
จากรปท e4-14 แสดงผลการสนอสระของระบบทมความหนวงต า ซงระบบจะเกดการแกวงในชวงเรมตน เมอเวลา
ผานไประบบจะเขาสคาศนยหรอสมดลของระบบเชนเดยวกบการสนอสระของระบบทมล าดบขนความอสระเทากบ
หนงและมความหนวงต า
ตวอยางท e4-7 รปท e4-15 แสดงการสนอสระของรถยนตทสามารถสนในแนวแกนตง(Bounce motion, ( )x t )และ
การเคลอนทในแนวแกนนอน(Pitch motion, ( )t ) ดงนนการวเคราะหการสนของเคลอนทของรถยนตสามารถ
พจารณาเปนระบบทมล าดบขนความอสระเทากบสองและมความหนวง พจารณาระบบทไมมความเชอมโยงกนของ
เมตรกซความหนวง เมอมมวล 1000m kg, 1 2 15000k k N/m, ระยะ
1 0.5L m, ระยะ2 0.95L m, r =
0.8 m และมคาอตราสวนความหนวงโมดอล 1 2 0.3 โดยมเงอนไขเรมตนเทากบ (0) 0 1
Tx mm,
(0) 0 0T
x mm/sec
จากรปท e4-16 พจารณาผลรวมของแรงในทศทางการเคลอนท ( )x t เราจะได
1 1 2 2 1 1 2 2c x L c x L k x L k x L mx
พจารณาโมเมนตรอบจด C.G. เราจะได
0 0.5 1 1.5
-0.5
0
0.5
1
Time, (sec)
Dis
pla
cem
ent,
(m
m)
x1(t)
x2(t)
รปท e4-14. ผลการสนอสระของระบบทมล าดบขนความอสระเทากบสองและมความหนวง

Free Vibration- MDOF 193
มหาวทยาลยเทคโนโลยสรนาร หนา 193
1 1 1 2 2 2 1 1 1 2 2 2c L x L c L x L k L x L k L x L J
โดยท 2J mr , r- รศมของ gyration สมการทงสองสามารถจดรปเมตรกซได
1 2 1 1 2 2 1 2 1 1 2 2
2 2 2 2
1 1 2 2 2 2 1 1 1 1 2 2 2 2 1 1
00
0
c c c L c L k k k L k Lm x x x
c L c L c L c L k L k L k L k LJ
เมอเราแทนคาเราจะได 1000 0
0 6400M
และ 30000 6750
6750 17288K
1 20.0316 0
0 0.0125M
30 2.6682
2.6682 2.7013K
เราจะได 2
1 1 2.4429 rad/sec, 2
2 2 30.2583 rad/sec
ความถธรรมชาตของระบบคอ 1 1.563 rad/sec,
2 5.5008 rad/sec
เวคเตอรคาเฉพาะ v (1)0.0964
v0.9953
, (2)0.9953
v0.0964
และ 0.0964 0.9953
0.9953 0.0964P
คา S และ S-1
1 20.0316 0 0.0964 0.9953 0.003 0.0315
0 0.0125 0.9953 0.0964 0.0124 0.0012S M P
รปท e4-15. การสนอสระของรถยนต
รปท e4-16. แบบจ าลองกายภาพการสนอสระของ
รถยนต

Free Vibration- MDOF 194
มหาวทยาลยเทคโนโลยสรนาร หนา 194
1 1 20.0964 0.9953 31.6228 0 3.0484 79.624
0.9953 0.0964 0 80 31.4742 7.712
TS P M
คาเงอนไขเรมตนส าหรบสมการโมดอล
10
0
20
3.0484 79.624 0 79.624r
31.4742 7.712 1 7.712
r
r
10
0
20
0
0
r
r
r
เราจะไดสมการโมดอล 2
1 1 1 1 1 1 1 1 12 0.9738 2.4429 0r r r r r r
2
2 2 2 2 2 2 2 2 22 3.3005 30.2583 0r r r r r r
สมการโมดอลเปนสมการของระบบความหนวงต า ดงนนผลเฉลยของสมการโมดอลคอ
1 1 0.4689
1 1 1 1( ) sin 83.4692 sin 1.4909 1.5708t t
dr t A e t e t
โดยท 2
1 1.563 1 (0.3) 1.4909d rad/sec,1/ 2
2 2
1 1 10 10 11 2
1
( ) ( )83.4692d
d
r rA
และ
1 10 11
1 1 10
tan 1.5708dr
r
2 2 1.6502
2 2 2 2( ) sin 8.0844 sin 5.2474 1.2661t t
dr t A e t e t
โดยท 2
2 5.5008 1 (0.3) 5.2474d rad/sec,1/ 2
2 2
2 2 20 20 22 2
2
( ) ( )8.0844d
d
r rA
และ
1 20 22
2 2 20
tan 1.2661dr
r
ดงนน เราจะไดผลเฉลยของสมการโมดอลคอ
0.4689
1.6502
83.4692 sin 1.4909 1.5708( )
8.0844 sin 5.2474 1.2661
t
t
e tt
e t
r
เปลยนพกด r( )t ใหอยในพกดx( )t ดงนนผลเฉลยทไดคอ
0.4689
1.6502
0.003 0.0315 83.4692 sin 1.4909 1.5708( ) ( )
0.0124 0.0012 8.0844 sin 5.2474 1.2661
t
t
e tt S t
e t
x r
หรอ
0.4689 1.6502
0.4689 1.6502
0.2504 sin 1.4909 1.5708 0.2547 sin 5.2474 1.2661( )
1.035 sin 1.4909 1.5708 0.0097 sin 5.2474 1.2661
t t
t t
e t e tt
e t e t
x mm
Free Vibration-MDOF 195
มหาวทยาลยเทคโนโลยสรนาร หนา 195
ตวอยางทายบท
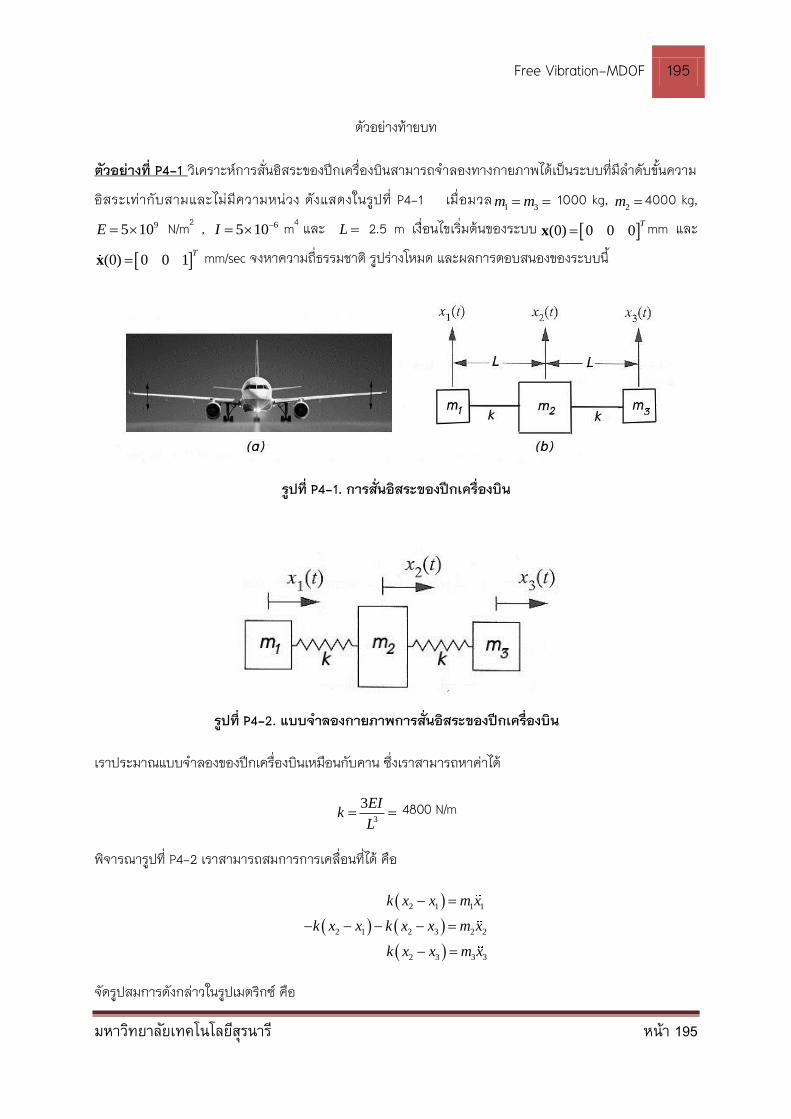
ตวอยางท P4-1 วเคราะหการสนอสระของปกเครองบนสามารถจ าลองทางกายภาพไดเปนระบบทมล าดบขนความ
อสระเทากบสามและไมมความหนวง ดงแสดงในรปท P4-1 เมอมวล1 3m m 1000 kg,
2m 4000 kg, 95 10E N/m2 , 65 10I m4 และ L 2.5 m เงอนไขเรมตนของระบบ (0) 0 0 0
Tx mm และ
(0) 0 0 1T
x mm/sec จงหาความถธรรมชาต รปรางโหมด และผลการตอบสนองของระบบน
เราประมาณแบบจ าลองของปกเครองบนเหมอนกบคาน ซงเราสามารถหาคาได
3
3EIk
L 4800 N/m
พจารณารปท P4-2 เราสามารถสมการการเคลอนทได คอ
2 1 1 1
2 1 2 3 2 2
2 3 3 3
k x x m x
k x x k x x m x
k x x m x
จดรปสมการดงกลาวในรปเมตรกซ คอ
รปท P4-1. การสนอสระของปกเครองบน
รปท P4-2. แบบจ าลองกายภาพการสนอสระของปกเครองบน

Free Vibration-MDOF 196
มหาวทยาลยเทคโนโลยสรนาร หนา 196
1 1 1
2 2 2
3 3 3
0 0 0
0 0 2 0
0 0 0
m x k k x
m x k k k x
m x k k x
โดยท 1000 0 0
0 4000 0
0 0 1000
M
และ 4800 4800 0
4800 9600 4800
0 4800 4800
K
1 2
0.0316 0 0
0 0.0158 0
0 0 0.0316
M
4.8 2.4 0
2.4 2.4 2.4
0 2.4 4.8
K
หาคาความถธรรมชาตของระบบ det( ) 0K I
เราจะได 2
1 1 0, 2
2 2 4.8 และ 2
3 3 7.2
ความถธรรมชาตของระบบคอ 1 0 rad/sec,
2 2.1909 rad/sec และ3 2.6833 rad/sec
เราจะเหนวาระบบมความถพนฐานเทากบศนย หมายถงวาระบบนเปนระบบกงบวกแนนอน
เวคเตอรคาเฉพาะ v ทสมพนธกนกบ 2
1 1 เราจะได (1)
1( )v 0K I
(1)
1
(1)
2
(1)
3
4.8 2.4 0 1 0 0
2.4 2.4 2.4 0 0 1 0 0
0 2.4 4.8 0 0 1
v
v
v
(1)
1
(1)
2
(1)
3
4.8 2.4 0
2.4 2.4 2.4 0
0 2.4 2.4
v
v
v
เราจะได (1) (1) (1) (1)
1 2 2 14.8 2.4 0 2v v v v
และ (1) (1) (1) (1)
2 3 2 32.4 4.8 0 2v v v v
(1) (1) (1) (1)
1 2 2 1222.4745 70.7107 0 3.1463v v v v
(1)
1
(1) (1) (1)
2 1
(1)
3
1
v 2
1
v
v v
v
เราท า (1)v เปนบรรทดฐาน โดยก าหนดให (1)v 1
Free Vibration-MDOF 197
มหาวทยาลยเทคโนโลยสรนาร หนา 197
(1) (1) (1)v v v 1T (1) (1)
1 1
1
1 2 1 2 1 0.4082
1
v v
ดงนนเราจะได (1)
0.4082
v 0.8164
0.4082
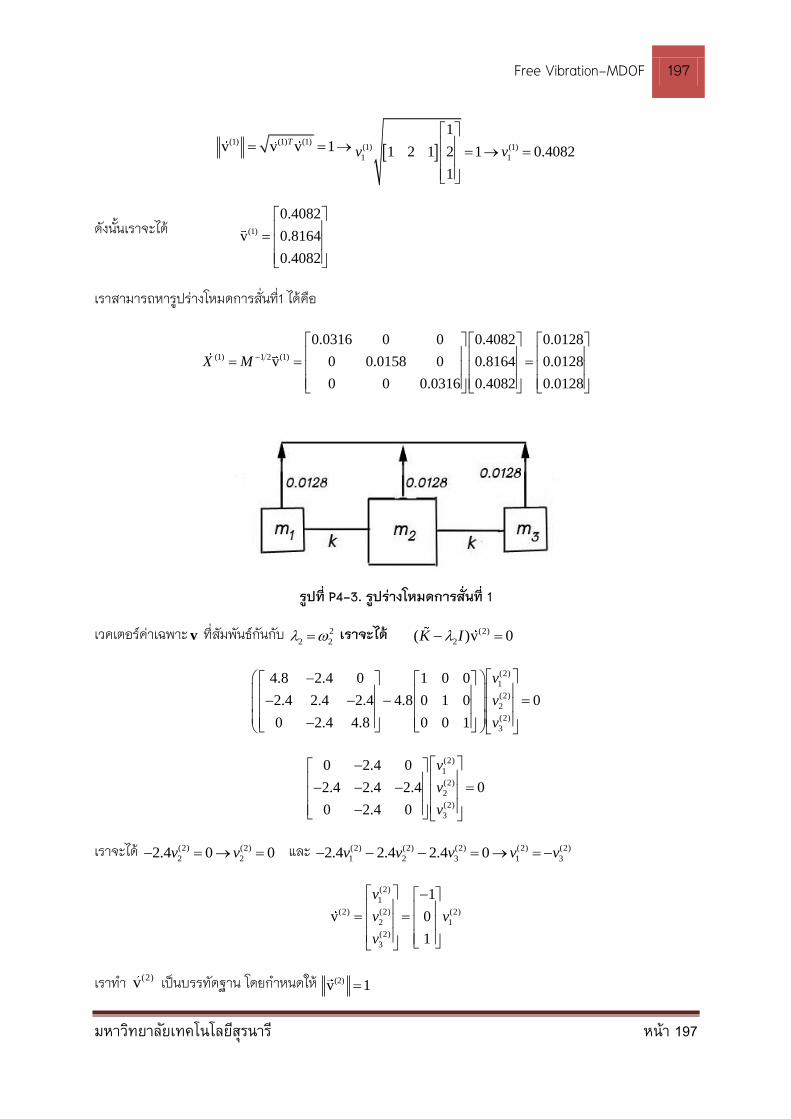
เราสามารถหารปรางโหมดการสนท1 ไดคอ
(1) 1 2 (1)
0.0316 0 0 0.4082 0.0128
v 0 0.0158 0 0.8164 0.0128
0 0 0.0316 0.4082 0.0128
X M
เวคเตอรคาเฉพาะ v ทสมพนธกนกบ 2
2 2 เราจะได (2)
2( )v 0K I
(2)
1
(2)
2
(2)
3
4.8 2.4 0 1 0 0
2.4 2.4 2.4 4.8 0 1 0 0
0 2.4 4.8 0 0 1
v
v
v
(2)
1
(2)
2
(2)
3
0 2.4 0
2.4 2.4 2.4 0
0 2.4 0
v
v
v
เราจะได (2) (2)
2 22.4 0 0v v และ (2) (2) (2) (2) (2)
1 2 3 1 32.4 2.4 2.4 0v v v v v
(2)
1
(2) (2) (2)
2 1
(2)
3
1
v 0
1
v
v v
v
เราท า (2)v เปนบรรทดฐาน โดยก าหนดให (2)v 1
รปท P4-3. รปรางโหมดการสนท 1
Free Vibration-MDOF 198
มหาวทยาลยเทคโนโลยสรนาร หนา 198
(2) (2) (2)v v v 1T (2) (2)
1 1
1
1 0 1 0 1 0.7071
1
v v
ดงนนเราจะได (2)
0.7071
v 0
0.7071
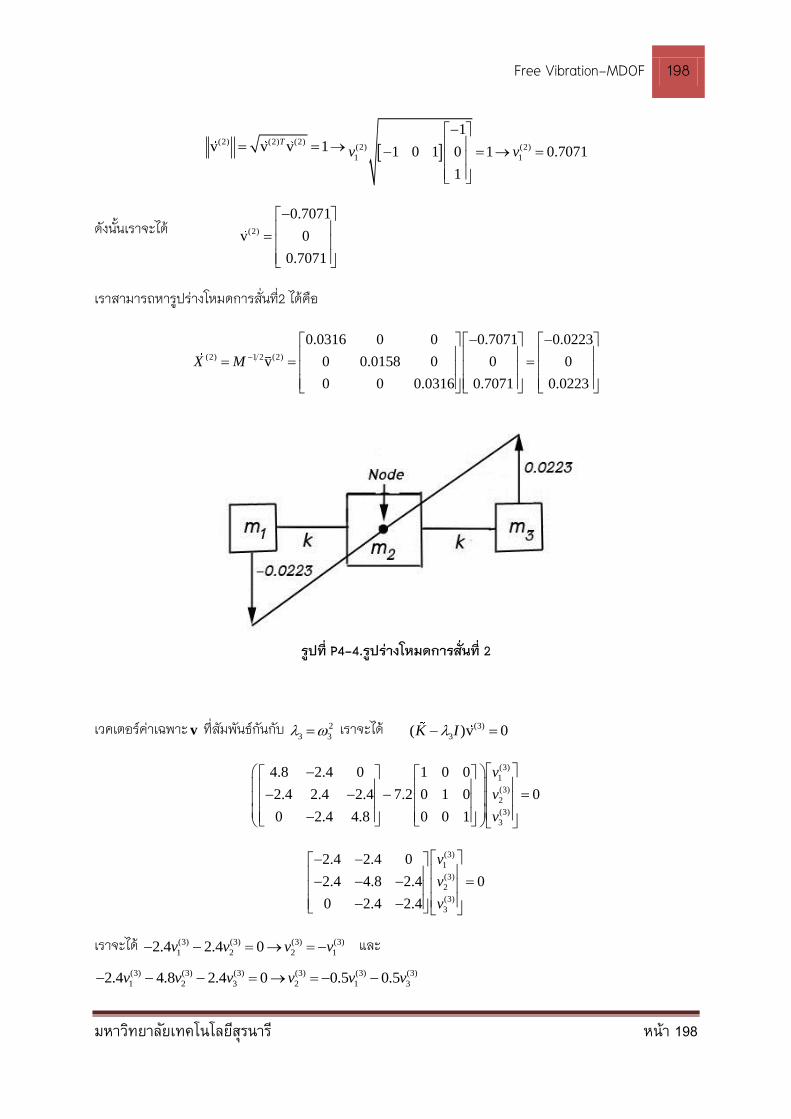
เราสามารถหารปรางโหมดการสนท2 ไดคอ
(2) 1 2 (2)
0.0316 0 0 0.7071 0.0223
v 0 0.0158 0 0 0
0 0 0.0316 0.7071 0.0223
X M
เวคเตอรคาเฉพาะ v ทสมพนธกนกบ 2
3 3 เราจะได (3)
3( )v 0K I
(3)
1
(3)
2
(3)
3
4.8 2.4 0 1 0 0
2.4 2.4 2.4 7.2 0 1 0 0
0 2.4 4.8 0 0 1
v
v
v
(3)
1
(3)
2
(3)
3
2.4 2.4 0
2.4 4.8 2.4 0
0 2.4 2.4
v
v
v
เราจะได (3) (3) (3) (3)
1 2 2 12.4 2.4 0v v v v และ
(3) (3) (3) (3) (3) (3)
1 2 3 2 1 32.4 4.8 2.4 0 0.5 0.5v v v v v v
รปท P4-4.รปรางโหมดการสนท 2
Free Vibration-MDOF 199
มหาวทยาลยเทคโนโลยสรนาร หนา 199
(3)
1
(3) (3) (3)
2 1
(3)
3
1
v 1
1
v
v v
v
เราท า (3)v เปนบรรทดฐาน โดยก าหนดให (3)v 1
(3) (3) (3)v v v 1T (3) (3)
1 1
1
1 1 1 1 1 0.5773
1
v v
ดงนนเราจะได (3)
0.5773
v 0.5773
0.5773
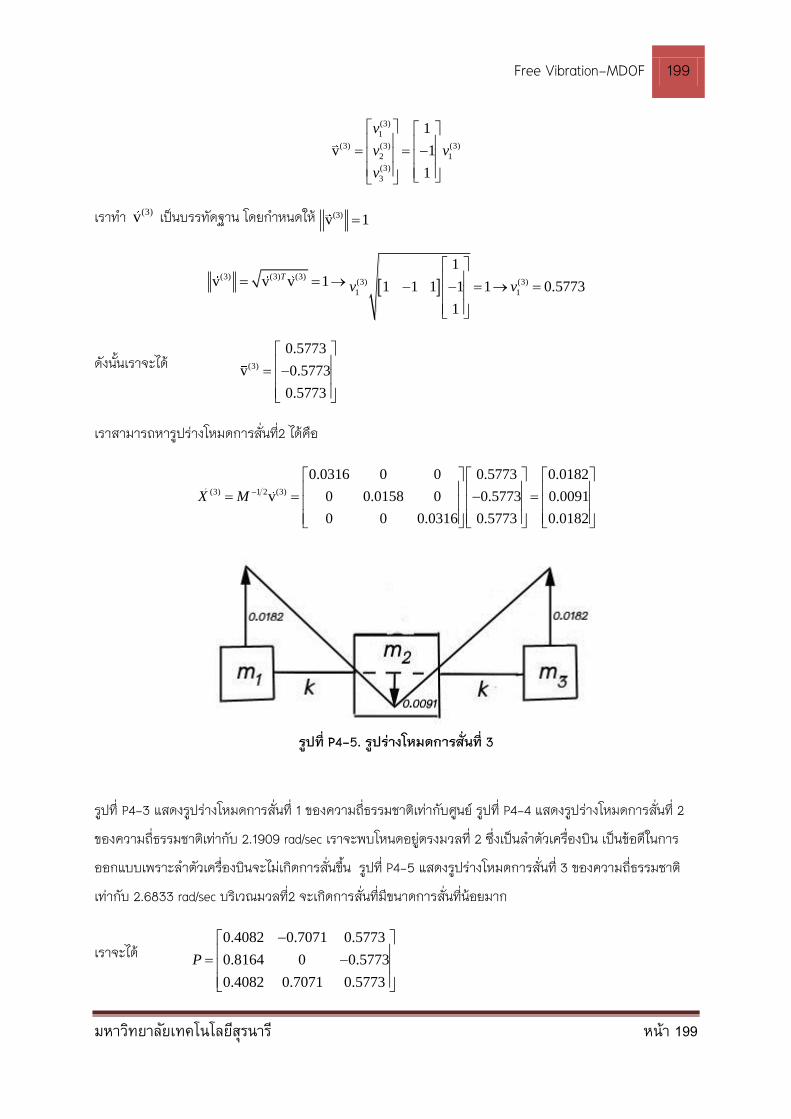
เราสามารถหารปรางโหมดการสนท2 ไดคอ
(3) 1 2 (3)
0.0316 0 0 0.5773 0.0182
v 0 0.0158 0 0.5773 0.0091
0 0 0.0316 0.5773 0.0182
X M
รปท P4-3 แสดงรปรางโหมดการสนท 1 ของความถธรรมชาตเทากบศนย รปท P4-4 แสดงรปรางโหมดการสนท 2
ของความถธรรมชาตเทากบ 2.1909 rad/sec เราจะพบโหนดอยตรงมวลท 2 ซงเปนล าตวเครองบน เปนขอดในการ
ออกแบบเพราะล าตวเครองบนจะไมเกดการสนขน รปท P4-5 แสดงรปรางโหมดการสนท 3 ของความถธรรมชาต
เทากบ 2.6833 rad/sec บรเวณมวลท2 จะเกดการสนทมขนาดการสนทนอยมาก
เราจะได 0.4082 0.7071 0.5773
0.8164 0 0.5773
0.4082 0.7071 0.5773
P
รปท P4-5. รปรางโหมดการสนท 3
Free Vibration-MDOF 200
มหาวทยาลยเทคโนโลยสรนาร หนา 200
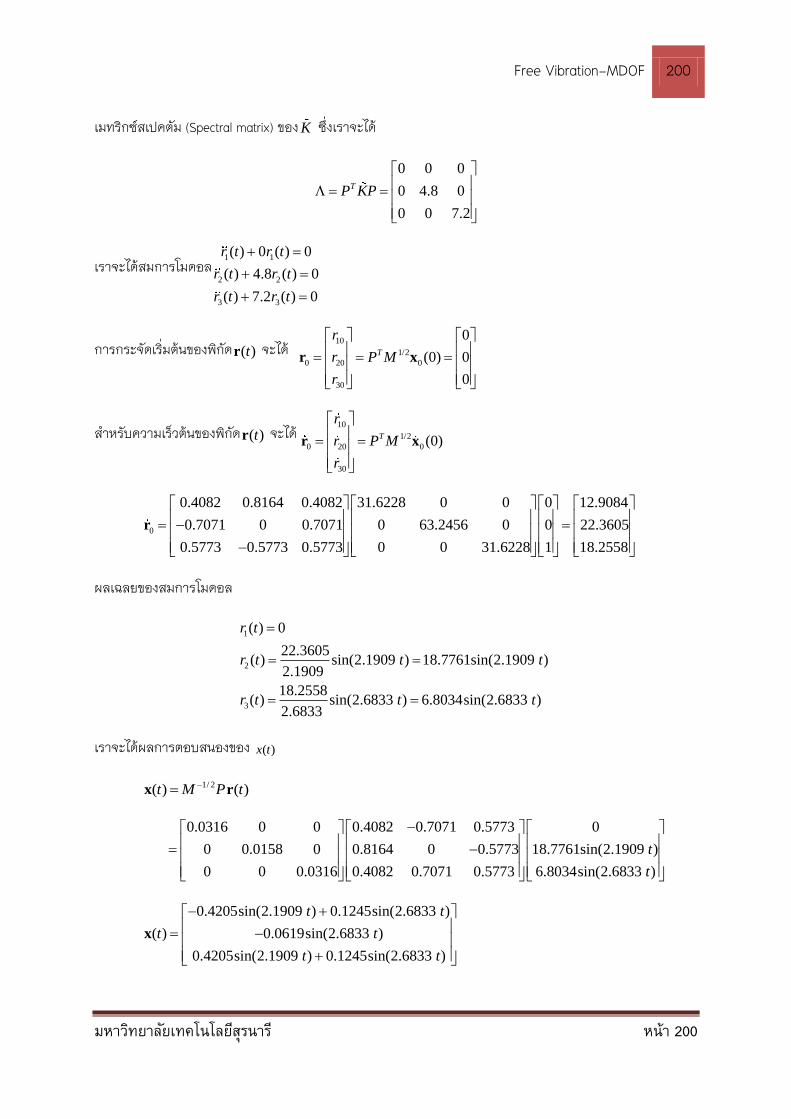
เมทรกซสเปคตม (Spectral matrix) ของK ซงเราจะได
0 0 0
0 4.8 0
0 0 7.2
TP KP
เราจะไดสมการโมดอล1 1
2 2
3 3
( ) 0 ( ) 0
( ) 4.8 ( ) 0
( ) 7.2 ( ) 0
r t r t
r t r t
r t r t
การกระจดเรมตนของพกด ( )tr จะได 10
1/2
0 20 0
30
0
(0) 0
0
T
r
r P M
r
r x
ส าหรบความเรวตนของพกด ( )tr จะได 10
1/2
0 20 0
30
(0)T
r
r P M
r
r x
0
0.4082 0.8164 0.4082 31.6228 0 0 0 12.9084
0.7071 0 0.7071 0 63.2456 0 0 22.3605
0.5773 0.5773 0.5773 0 0 31.6228 1 18.2558
r
ผลเฉลยของสมการโมดอล
1
2
3
( ) 0
22.3605( ) sin(2.1909 ) 18.7761sin(2.1909 )
2.1909
18.2558( ) sin(2.6833 ) 6.8034sin(2.6833 )
2.6833
r t
r t t t
r t t t
เราจะไดผลการตอบสนองของ ( )x t
1/ 2( ) ( )t M P tx r
0.0316 0 0 0.4082 0.7071 0.5773 0
0 0.0158 0 0.8164 0 0.5773 18.7761sin(2.1909 )
0 0 0.0316 0.4082 0.7071 0.5773 6.8034sin(2.6833 )
t
t
0.4205sin(2.1909 ) 0.1245sin(2.6833 )
( ) 0.0619sin(2.6833 )
0.4205sin(2.1909 ) 0.1245sin(2.6833 )
t t
t t
t t
x
Free Vibration-MDOF 201
มหาวทยาลยเทคโนโลยสรนาร หนา 201
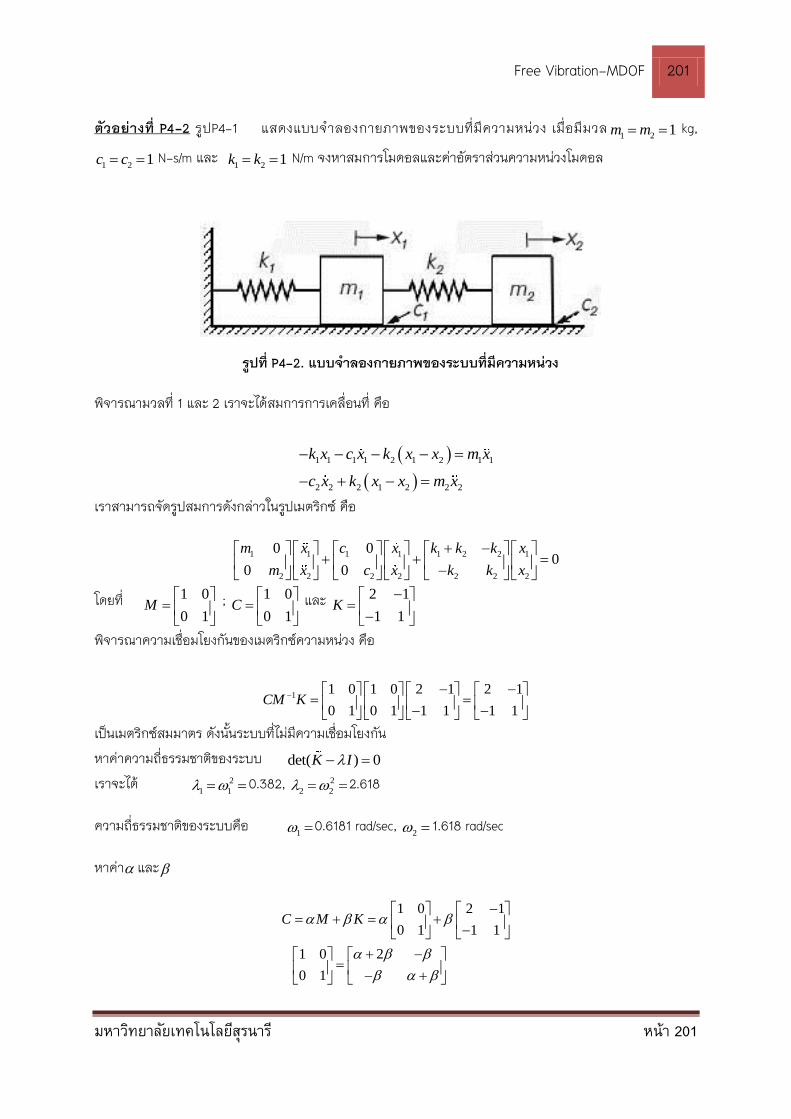
ตวอยางท P4-2 รปP4-1 แสดงแบบจ าลองกายภาพของระบบทมความหนวง เมอมมวล1 2 1m m kg,
1 2 1c c N-s/m และ 1 2 1k k N/m จงหาสมการโมดอลและคาอตราสวนความหนวงโมดอล
พจารณามวลท 1 และ 2 เราจะไดสมการการเคลอนท คอ
1 1 1 1 2 1 2 1 1
2 2 2 1 2 2 2
k x c x k x x m x
c x k x x m x
เราสามารถจดรปสมการดงกลาวในรปเมตรกซ คอ
1 1 1 1 1 2 2 1
2 2 2 2 2 2 2
0 00
0 0
m x c x k k k x
m x c x k k x
โดยท 1 0
0 1M
; 1 0
0 1C
และ 2 1
1 1K
พจารณาความเชอมโยงกนของเมตรกซความหนวง คอ
11 0 1 0 2 1 2 1
0 1 0 1 1 1 1 1CM K
เปนเมตรกซสมมาตร ดงนนระบบทไมมความเชอมโยงกน
หาคาความถธรรมชาตของระบบ det( ) 0K I
เราจะได 2
1 1 0.382, 2
2 2 2.618
ความถธรรมชาตของระบบคอ 1 0.6181 rad/sec,
2 1.618 rad/sec
หาคา และ
1 0 2 1
0 1 1 1
1 0 2
0 1
C M K
รปท P4-2. แบบจ าลองกายภาพของระบบทมความหนวง
Free Vibration-MDOF 202
มหาวทยาลยเทคโนโลยสรนาร หนา 202
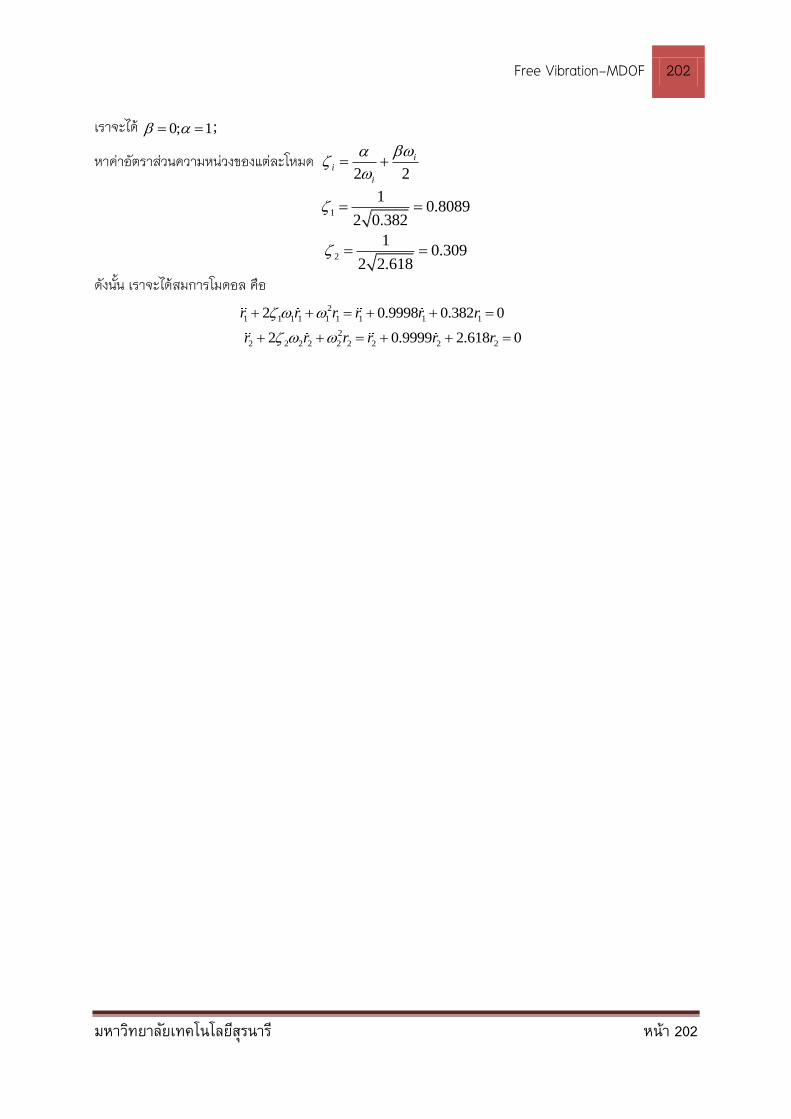
เราจะได 0; 1 ;
หาคาอตราสวนความหนวงของแตละโหมด 2 2
ii
i
1
10.8089
2 0.382
2
10.309
2 2.618
ดงนน เราจะไดสมการโมดอล คอ 2
1 1 1 1 1 1 1 1 12 0.9998 0.382 0r r r r r r
2
2 2 2 2 2 2 2 2 22 0.9999 2.618 0r r r r r r

Force Vibration-MDOF 204
มหาวทยาลยเทคโนโลยสรนาร หนา 204
การสนพองเกดขนเมอความถของแรงทกระท าแบบฮารโมนกสนนเทากบความถธรรมชาตของระบบ ซงจะ
เทากบจ านวนล าดบขนความอสระทมของระบบนนเอง การตอบสนองการสนแบบบงคบของระบบทมล าดบขนความ
อสระหลายล าดบสามารถประยกตใชวธวเคราะหโมดอลและฟงกชนถายโอนได ในบทนเราจะศกษาการสนแบบบงคบ
ของระบบทมล าดบขนความอสระหลายล าดบส าหรบระบบไมมความหนวงและระบบความหนวง โดยพจารณาแรง
แบบฮารโมนกส แรงแบบขนบนได แรงสนทฐาน เปนตน
5.1 การสนแบบบงคบของระบบทมล าดบขนความอสระหลายล าดบและไมมความหนวง
พจารณาสมการการเคลอนทของการสนแบบบงคบระบบทไมมความหนวงคอ
( ) ( ) F( ) M t K t B t x x (5.1)
โดยท F( )t เวคเตอรแรง และB เมตรกซ
เมอ 1/ 2( ) ( )t M tx q สามารถจดรปสมการการเคลอนทได
1 2 ( ) ( ) F( ) I t K t M B t q q (5.2)
โดยท 1 2 1 2 1/ 2 1/ 2,M MM I K M KM และ 1/ 2( ) x( )t M tq
ก าหนดพกดทสอง ( )= ( )t P tq r (5.3)
โดยท 1 2 3 nP v v v v และ vคอเวคเตอรคาเฉพาะบรรทดฐาน (Normalized eigenvector)
แทนสมการ 5.3 ลงในสมการ 5.2 และคณดวย TP เราจะได
1 2 F( )T T TP P P K P P M B t r r
หรอ 1 2 F( )TI P M B t r r (5.4)
เวคเตอร 1 2 F( )TP M B t จะม ( )if t เปนสวนประกอบของแรงทกระท าแตละมวล ดวยเหตนสมการโมดอลทไมม
ความเชอมโยงสามารถเขยนอยในรป
2( ) ( ) ( )i i i ir t r t f t (5.5)
เมอเงอนไขเรมตนเทากบ 10 20 0r(0) (0) (0) (0) ,T
ir r r 10 20 0r(0) (0) (0) (0)T
ir r r และ
การกระจดเรมตนของพกด ( )tr คอ 1/2
0 0
T TP (0)= P Mr q x
ความเรวตนของพกด ( )tr คอ 1/2
0 0
T TP (0)= P Mr q x
Force Vibration-MDOF 205
มหาวทยาลยเทคโนโลยสรนาร หนา 205
ถาแรงทกระท าเปนแบบฮารโมนกส คอ 0( ) cosi i if t f t ผลเฉลยของสมการท 5.5
0 0 00 2 2 2 2
( ) sin cos cosi i ii ni i ni i
ni ni i ni i
r f fr t t r t t
(5.6)
เมอเงอนไขเรมตนเทากบศนย ผลเฉลยของสมการท 5.5 คอ
0 0
2 2 2 2( ) cos cosi i
i i ni
ni i ni i
f fr t t t
(5.7a)
หรอ 0
2 2
2( ) sin sin
2 2
i i ni i nii
ni i
fr t t t
(5.7b)
ถาแรงทกระท าเปนแบบฮารโมนกส คอ 0( ) sini i if t f t ผลเฉลยของสมการท 5.5
0 0 00 2 2 2 2
( ) cos sin sini i ii i ni ni i
ni ni i ni i
r f fr t r t t t
(5.8)
เมอเงอนไขเรมตนเทากบศนย ผลเฉลยของสมการท 5.5 คอ
0 0
2 2 2 2( ) sin sini i
i i ni
ni i ni i
f fr t t t
(5.9a)
หรอ 0
2 2
2( ) cos cos
2 2
i i ni i nii
ni i
fr t t t
(5.9b)
ผลเฉลยของพกด ( )tr ทได แปลงกลบไปพกด x( )t
1/2 1/2( ) ( ) ( )t M t M P t x q r
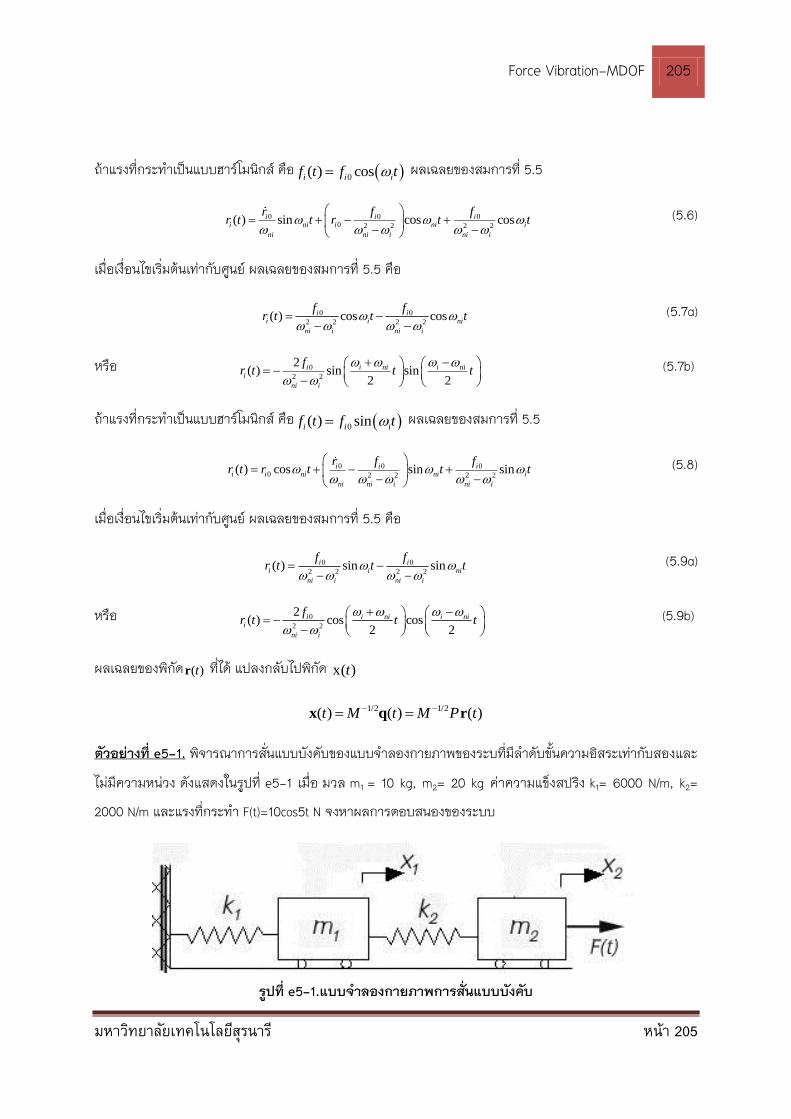
ตวอยางท e5-1. พจารณาการสนแบบบงคบของแบบจ าลองกายภาพของระบทมล าดบขนความอสระเทากบสองและ
ไมมความหนวง ดงแสดงในรปท e5-1 เมอ มวล m1 = 10 kg, m2= 20 kg คาความแขงสปรง k1= 6000 N/m, k2=
2000 N/m และแรงทกระท า F(t)=10cos5t N จงหาผลการตอบสนองของระบบ
รปท e5-1.แบบจ าลองกายภาพการสนแบบบงคบ

Force Vibration-MDOF 206
มหาวทยาลยเทคโนโลยสรนาร หนา 206
ก). เมอระบบมเงอนไขเรมตน (0) 0 0T
x mm และ (0) 1 0T
x mm/sec
พจารณาระบบทมแรง F(t) ทกระท าตอมวลท 2 เราจะไดสมการการเคลอนท ส าหรบมวลท 1
1 1 2 2 1 1 1k x k x x m x
หรอ 1 1 1 2 1 2 2 0m x k k x k x
พจารณาผลรวมของแรงทกระท าตอมวลm2 เราจะได 2 2 1 2 2( )F t k x x m x
หรอ 2 2 2 2 2 1 ( )m x k x k x F t
สมการการเคลอนทของการสนแบบบงคบระบบทไมมความหนวงคอ
( ) ( ) F( ) M t K t B t x x
โดยท 10 0
0 20M
, 8000 2000
2000 2000K
, 0 0
0 1B
และ 0( )
10cos5F t
t
เราสามารถหาคา 1 210 0
0 20M
, 1 20.3162 0
0 0.2236M
,
1 2 1 2800 141.4214
141.4214 100K M KM
,
เราจะได 2
1 1 72.5083 rad/sec, 2
2 2 827.4917 rad/sec
ความถธรรมชาตของระบบคอ 1 8.5152 rad/sec,
2 28.7662 rad/sec
เราจะได (1)0.1908
v0.9816
, (2)0.9816
v0.1908
และ 0.1908 0.9816
0.9816 0.1908P
ดงนน 1 20 0.2195 0 2.195cos5
F( )0 0.0427 10cos5 0.427cos5
Tt
P M B tt t
ดงนนเราจะไดสมการโมดอล คอ
2
1 1 1 1 1 1
2
2 2 2 2 2 2
( ) ( ) ( ) ( ) 72.5083 ( ) 2.195cos5
( ) ( ) ( ) ( ) 827.4917 ( ) 0.427cos5
r t r t f t r t r t t
r t r t f t r t r t t
(e5.1)
ส าหรบการกระจดเรมตนของพกด ( )tr จะได 10 1/2
0 0
20
0
0
Tr
P Mr
r x

Force Vibration-MDOF 207
มหาวทยาลยเทคโนโลยสรนาร หนา 207
ส าหรบความเรวตนของพกด ( )tr จะได 10 1/2
0 0
20
Tr
P Mr
r x
0.1908 0.9816 10 0 1 0.6034
0.9816 0.1908 0 3.10420 20
ผลเฉลยของสมการโมดอล คอ
1
2
( ) 0.0708sin8.5152 0.0462cos8.5152 0.0462cos5
( ) 0.1079sin 28.7662 0.0005cos28.7662 0.0005cos5
r t t t t
r t t t t
ผลการตอบสนองของระบบคอ
1/20.3162 0 0.1908 0.9816
( ) ( ) ( )0 0.2236 0.9816 0.1908
t M P t t
x r r
0.0603 0.3104 0.0708sin8.5152 0.0462cos8.5152 0.0462cos5
0.2195 0.0427 0.1079sin 28.7662 0.0005cos28.7662 0.0005cos5
t t t
t t t
mm
ส าหรบกรณน ผลการตอบสนองของการสนแบบบงคบส าหรบระบบทมล าดบขนความอสระเทากบสองและไมม
ความหนวง ระบบจะสนดวยความถของแรงทกระท ากบความถธรรมชาตทงสองความถ และขนาดการสนสงสดเกดขน
ท m1 ประมาณ 0.04 mm ดงแสดงในรปท e5-2
0 0.5 1 1.5 2 2.5 3-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
Time, (sec)
Dis
pla
cem
ent,
(m
m)
X1(t)
X2(t)
รปท e5-2. ผลการตอบสนองของระบบ กรณ ก.
Force Vibration-MDOF 208
มหาวทยาลยเทคโนโลยสรนาร หนา 208
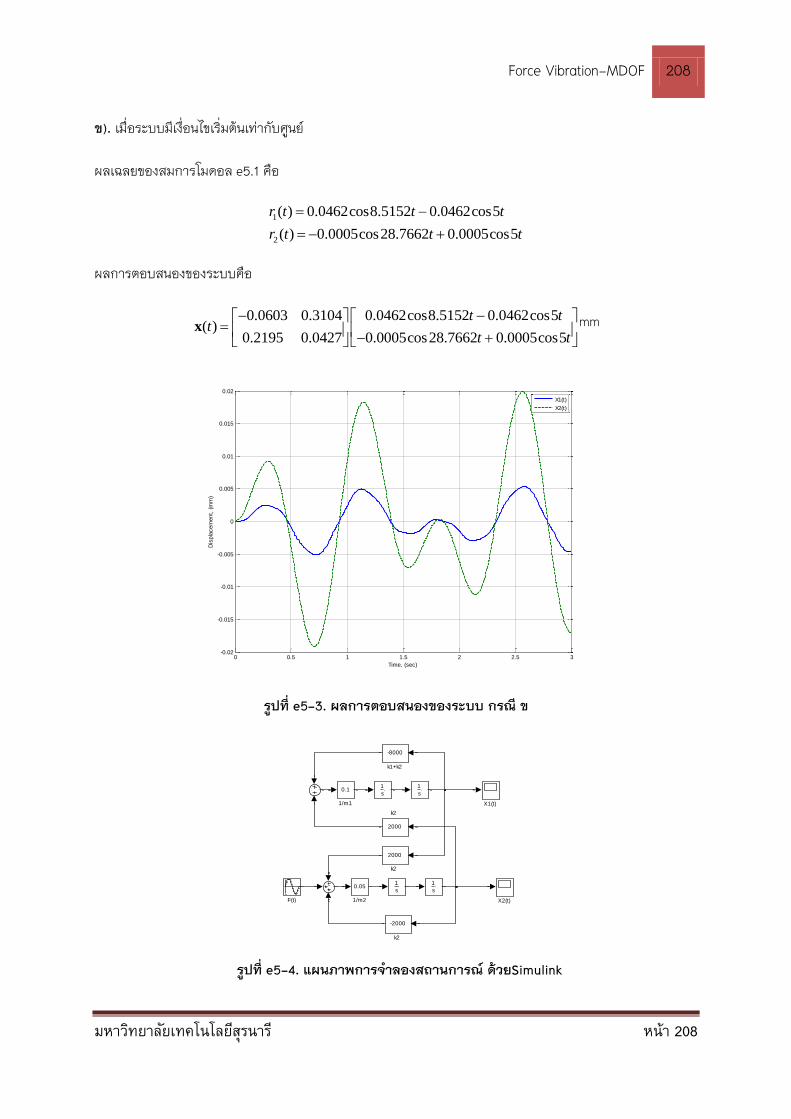
ข). เมอระบบมเงอนไขเรมตนเทากบศนย
ผลเฉลยของสมการโมดอล e5.1 คอ
1
2
( ) 0.0462cos8.5152 0.0462cos5
( ) 0.0005cos28.7662 0.0005cos5
r t t t
r t t t
ผลการตอบสนองของระบบคอ
0.0603 0.3104 0.0462cos8.5152 0.0462cos5( )
0.2195 0.0427 0.0005cos28.7662 0.0005cos5
t tt
t t
x mm
0 0.5 1 1.5 2 2.5 3-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
Time, (sec)
Dis
pla
cem
ent,
(m
m)
X1(t)
X2(t)
รปท e5-3. ผลการตอบสนองของระบบ กรณ ข
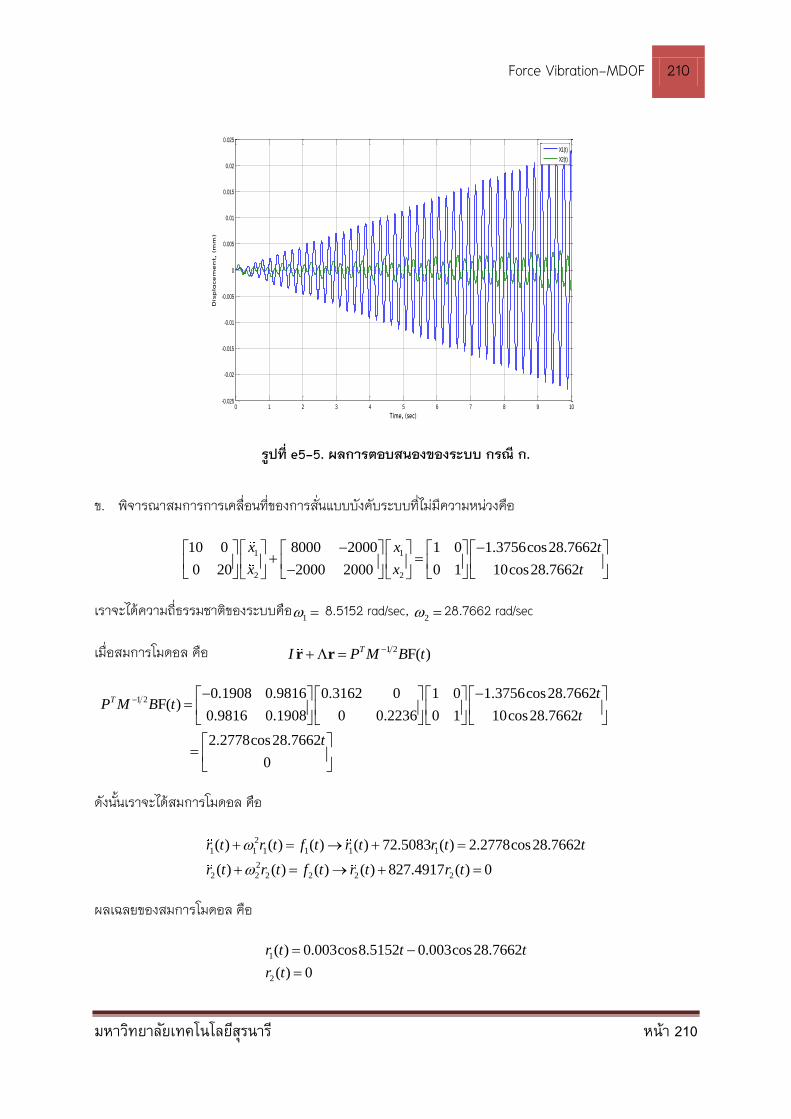
k2
k2
k2
-2000
2000
-8000
k1+k2
2000
X2(t)
X1(t)
1
s
1
s
1
s
1
s
F(t)
0.05
1/m2
0.1
1/m1
รปท e5-4. แผนภาพการจ าลองสถานการณ ดวยSimulink

Force Vibration-MDOF 209
มหาวทยาลยเทคโนโลยสรนาร หนา 209
ตวอยางท e5-2. การสนแบบบงคบของระบบทมล าดบขนความอสระเทากบสองและมความหนวง มเงอนไขเรมตน
เทากบศนย จงพจารณาการสนพอง
ก. พจารณาสมการการเคลอนทของการสนแบบบงคบระบบทไมมความหนวงคอ
1 1
2 2
10 0 8000 2000 0 0 0
0 20 2000 2000 0 1 10cos28.7662
x x
x x t
เราจะไดความถธรรมชาตของระบบคอ1 8.5152 rad/sec,
2 28.7662 rad/sec
เมอสมการโมดอล คอ 1 2 F( )TI P M B t r r
โดยท 1 20 0.2195 0 2.195cos28.7662
F( )0 0.0427 10cos28.7662 0.427cos28.7662
Tt
P M B tt t
ดงนนเราจะไดสมการโมดอล คอ
2
1 1 1 1 1 1
2
2 2 2 2 2 2
( ) ( ) ( ) ( ) 72.5083 ( ) 2.195cos28.7662
( ) ( ) ( ) ( ) 827.4917 ( ) 0.427cos28.7662
r t r t f t r t r t t
r t r t f t r t r t t
ผลเฉลยของสมการโมดอล คอ
1
2
( ) 0.0462cos8.5152 0.0462cos28.7662
( ) 0.0074 cos28.7662
r t t t
r t t t
ผลการตอบสนองของระบบคอ
0.0603 0.3104 0.0462cos8.5152 0.0462cos28.7662( )
0.2195 0.0427 0.0074cos28.7662
t tt
t
x mm
ซงจะได 1( ) 0.0027cos8.5152 0.0027cos28.7662 0.0023 cos28.7662x t t t t t mm
2( ) 0.0101cos8.5152 0.0101cos28.7662 0.0003 cos28.7662x t t t t t mm
แนวความคดของการสนพองส าหรบระบบทมล าดบขนความอสระหลายล าดบเหมอนกนกบระบบทมล าดบขนความ
อสระเทากบหนง ถาความถของแรงฮารโมนกสเทากบความถธรรมชาตของระบบกจะเกดการสนพอง ดงตวอยางจะ
พบวาความถของแรงเทากบ 28.7662 rad/sec ซงเทากบความถธรรมชาตในโหมดทสองจงท าใหขนาดการสนเพมขน
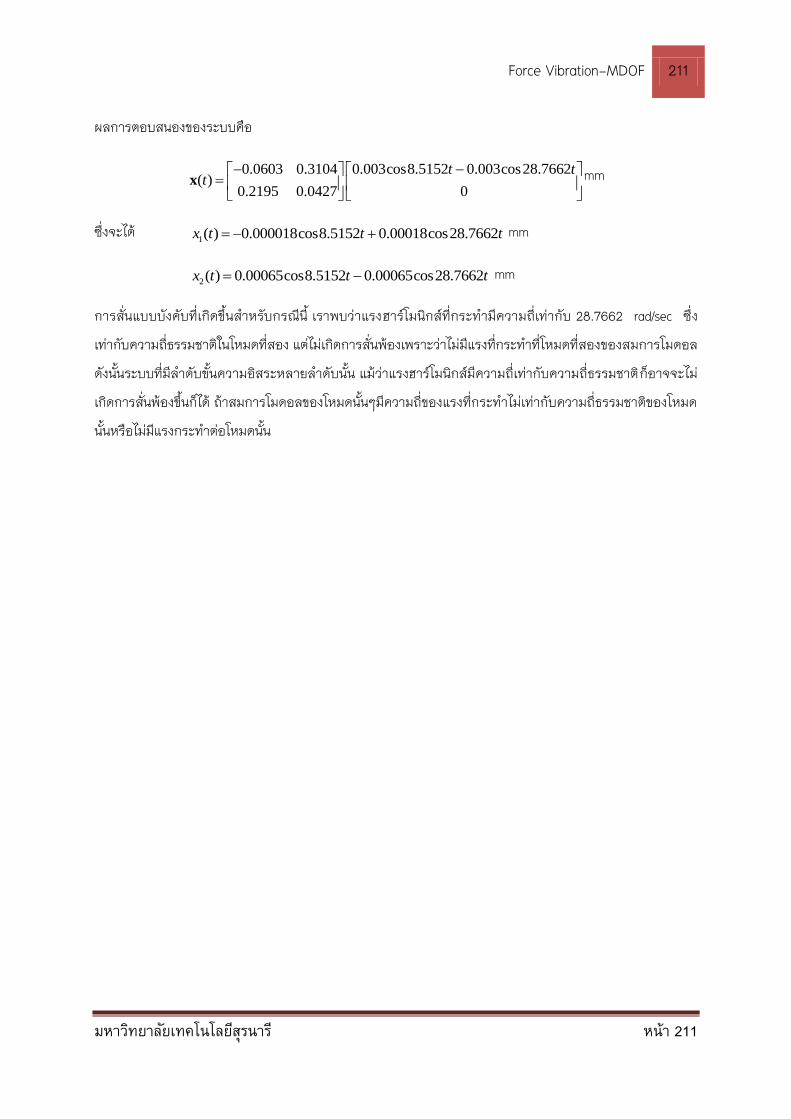
เมอเวลาเพมขน หรอการสนพองกบโหมดทสอง ดงแสดงในรปท e5-5
Force Vibration-MDOF 210
มหาวทยาลยเทคโนโลยสรนาร หนา 210
ข. พจารณาสมการการเคลอนทของการสนแบบบงคบระบบทไมมความหนวงคอ
1 1
2 2
10 0 8000 2000 1 0 1.3756cos28.7662
0 20 2000 2000 0 1 10cos28.7662
x x t
x x t
เราจะไดความถธรรมชาตของระบบคอ1 8.5152 rad/sec,
2 28.7662 rad/sec
เมอสมการโมดอล คอ 1 2 F( )TI P M B t r r
1 2
0.1908 0.9816 0.3162 0 1 0 1.3756cos28.7662F( )
0.9816 0.1908 0 0.2236 0 1 10cos28.7662
2.2778cos28.7662
0
Tt
P M B tt
t
ดงนนเราจะไดสมการโมดอล คอ
2
1 1 1 1 1 1
2
2 2 2 2 2 2
( ) ( ) ( ) ( ) 72.5083 ( ) 2.2778cos28.7662
( ) ( ) ( ) ( ) 827.4917 ( ) 0
r t r t f t r t r t t
r t r t f t r t r t
ผลเฉลยของสมการโมดอล คอ
1
2
( ) 0.003cos8.5152 0.003cos28.7662
( ) 0
r t t t
r t
0 1 2 3 4 5 6 7 8 9 10-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
Time, (sec)
Dis
pla
cem
ent,
(m
m)
X1(t)
X2(t)
รปท e5-5. ผลการตอบสนองของระบบ กรณ ก.
Force Vibration-MDOF 211
มหาวทยาลยเทคโนโลยสรนาร หนา 211
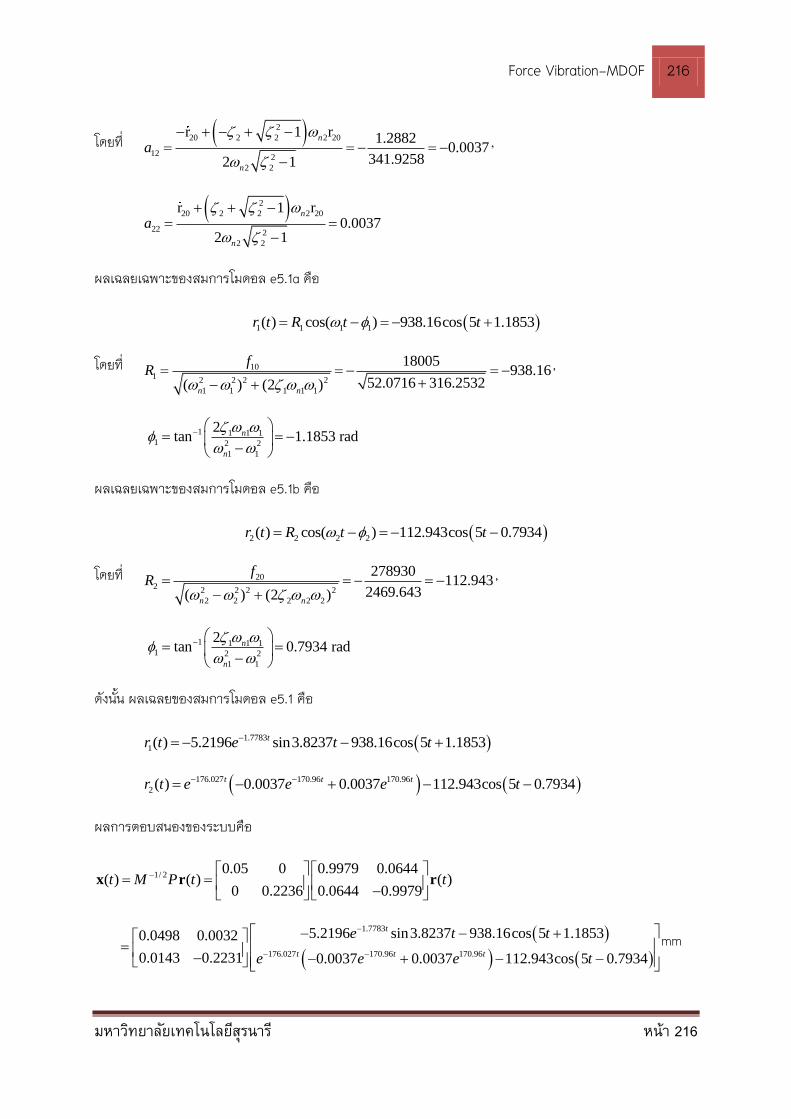
ผลการตอบสนองของระบบคอ
0.0603 0.3104 0.003cos8.5152 0.003cos28.7662( )
0.2195 0.0427 0
t tt
x mm
ซงจะได 1( ) 0.000018cos8.5152 0.00018cos28.7662x t t t mm
2( ) 0.00065cos8.5152 0.00065cos28.7662x t t t mm
การสนแบบบงคบทเกดขนส าหรบกรณน เราพบวาแรงฮารโมนกสทกระท ามความถเทากบ 28.7662 rad/sec ซง
เทากบความถธรรมชาตในโหมดทสอง แตไมเกดการสนพองเพราะวาไมมแรงทกระท าทโหมดทสองของสมการโมดอล
ดงนนระบบทมล าดบขนความอสระหลายล าดบนน แมวาแรงฮารโมนกสมความถเทากบความถธรรมชาตกอาจจะไม
เกดการสนพองขนกได ถาสมการโมดอลของโหมดนนๆมความถของแรงทกระท าไมเทากบความถธรรมชาตของโหมด
นนหรอไมมแรงกระท าตอโหมดนน

Force Vibration-MDOF 212
มหาวทยาลยเทคโนโลยสรนาร หนา 212
5.2 การสนแบบบงคบของระบบทมล าดบขนความอสระหลายล าดบและมความหนวง
พจารณาสมการการเคลอนทของการสนแบบบงคบระบบทไมมความหนวงคอ
( ) ( ) ( ) F( ) M t C t K t B t x x x (5.10)
โดยท F( )t เวคเตอรแรง, B เมตรกซ และสมมตเมตรกซ C มคณสมบตการรวมกนเชงเสน ซงสามารถประยกตใช
วธวเคราะหโมดอลได เมอ 1/ 2( ) ( )t M tx q สามารถจดรปสมการการเคลอนทได
1 2 ( ) ( ) ( ) F( ) I t C t K t M B t q q q (5.11)
โดยท 1 2 1 2 1/ 2 1/ 2,M MM I K M KM , 1/ 2( ) ( )t M x tq และ 1/ 2 1/ 2C M CM
ก าหนดพกดทสอง ( )= ( )t P tq r (5.12)
โดยท 1 2 3 nP v v v v และ vคอเวคเตอรคาเฉพาะบรรทดฐาน (Normalized eigenvector)
แทนสมการ 5.12 ลงในสมการ 5.11 และคณดวย TP เราจะได
1 2( ) ( ) ( ) F( )T T T TP P t P C P t P K P t P M B t r r r
หรอ 1 2
idiag 2 F( )T
niI P M B t r r r (5.13)
เวคเตอร 1 2 F( )TP M B t จะม ( )if t เปนสวนประกอบของแรงทกระท าแตละมวล ดวยเหตนสมการโมดอลทไมม
ความเชอมโยงสามารถเขยนอยในรป
2( ) 2 ( ) ( ) ( )i i ni ni i ir t r t r t f t (5.14)
ผลเฉลยของสมการโมดอลท 5.14 นนประกอบดวย ผลเฉลยเอกพนธกบผลเฉลยเฉพาะ
ผลเฉลยเอกพนธของสมการท 5.14 คอผลเฉลยการสนอสระของระบบทมความหนวงส าหรบกรณเงอนไขเรมตน
เทากบ 0 10 20 0(0) (0) (0) ,T
ir r rr 0 10 20 0(0) (0) (0)T
ir r rr
โดยท 1/ 2
0 0
TP Mr x และ 1/ 2
0 0
TP Mr x ดงนนเราสามารถจ าแนกผลเฉลยเอกพนธตามชนดของระบบได คอ
ส าหรบระบบความหนวงสง 1 จะได
2 21 1
1 2ni i ni ii ni
t tt
i i ir(t) e a e a e
(5.15)

Force Vibration-MDOF 213
มหาวทยาลยเทคโนโลยสรนาร หนา 213
โดยท 2
0 0
1 2
r 1 r
2 1
i i i ni i
i
ni i
a
, 2
0 0
2 2
r 1 r
2 1
i i i ni i
i
ni i
a
ส าหรบระบบความหนวงวกฤต 1 จะได
1 2( ) ni nit t
i i ir t a e a te
(5.16)
โดยท 1 0ri ia ,
2 0 0r ri i ni ia
ส าหรบระบบความหนวงต า 0 1 จะได
sini ni
i
t
i i d ir(t) Ae t
(5.17)
โดยท 2 2 1 00 0 0
0 0
1 rr r r , tan
r r
i dii i i ni i i di i
di i ni i
A ( ) ( )
ผลเฉลยเฉพาะของสมการโมดอลท 5.14 เมอแรงทกระท า คอ 0( ) cosi i if t f t เราจะได
( ) cos( )i i i ir t R t (5.18)
โดยท 0
2 2 2 2( ) (2 )
ii
ni i i ni i
fR
และ 1
2 2
2tan i ni i
i
ni i
ผลเฉลยเฉพาะของสมการโมดอลท 5.14 ส าหรบแรงทก าหนดได (Deterministic force) เชน แรงดล แรงแบบขนบนได
แรงแรม เปนตน เราจะไดผลเฉลยเฉพาะคอ
0
1( ) ( ) sin( ( )i ni i ni
t
t
i i di
di
r t e f e t d
(5.18)
โดยท 21di ni i
ผลเฉลยของพกด ( )tr ทได แปลงกลบไปพกด x( )t
1/2 1/2( ) ( ) ( )t M t M P t x q r

Force Vibration-MDOF 214
มหาวทยาลยเทคโนโลยสรนาร หนา 214
ตวอยางท e5-3. พจารณาระบบกนสนสะเทอนของรถยนตทมแบบจ าลองกายภาพของระบทมล าดบขนความอสระ
เทากบสองและมความหนวง ดงแสดงในรปทe5-6 เมอ มวล m1 = 400 kg, m2= 20 kg คาความแขงสปรง k1= 10000
N/m, k2= 25000 N/m, แรงทกระท า y(t)=50cos5t mm และสมมตใหเมตรกซความหนวงไมมความเชอมโยงกน โดยม
ความหนวงแปรผนตรงกบคา 0 และ 0.2 จงหาผลการตอบสนองของระบบ
ก). เมอระบบมเงอนไขเรมตน (0) 0 0T
x mm และ (0) 1 0T
x mm/sec
พจารณาระบบทมแรง y(t) ทกระท าตอมวลท 2 เราจะไดสมการการเคลอนท ส าหรบมวลท 1
1 2 1 2 1 1 1k x x c x x m x
หรอ 1 1 1 1 1 2 1 2 0m x cx k x cx k x
พจารณาผลรวมของแรงทกระท าตอมวลm2 เราจะได 1 2 1 2 1 2 2 2 2( )k x x c x x k y t x m x
หรอ 2 2 2 1 2 2 1 1 1 2 ( )m x cx k k x cx k x k y t
สมการการเคลอนทของการสนแบบบงคบระบบทมความหนวงคอ
( ) ( ) ( ) ( ) M t C t K t By t x x x
โดยท 400 0
0 20M
, 10000 10000
10000 35000K
, 0 0
0 25000B
และ 0( )
50cos5y t
t
เราสามารถหาคา 1 220 0
0 4.4721M
, 1 20.05 0
0 0.2236M
,
1 2 1 225 111.8
111.8 1750K M KM
,
รปท e5-6. แบบจ าลองกายภาพของระบบกนสนสะเทอนของรถยนต

Force Vibration-MDOF 215
มหาวทยาลยเทคโนโลยสรนาร หนา 215
เราจะได 2
1 1 17.8, 2
2 2 1757.2
ความถธรรมชาตของระบบคอ 1 4.2171 rad/sec,
2 41.9192 rad/sec
เราจะได (1)0.9979
v0.0644
, (2)0.0644
v0.9979
และ 0.9979 0.0644
0.0644 0.9979P
ดงนน 1 20 360.1 0 18005cos5
( )0 5578.6 50cos5 278930cos5
Tt
P M By tt t
หาคาอตราสวนความหนวงของแตละโหมด 2 2
ii
i
โหมดท 1 1
0.2 4.21710.4217
2 เปนระบบความหนวงต า
2
1 4.2171 1 0.4217 3.8237d rad/sec
โหมดท 2 2
0.2 41.91924.1992
2 เปนระบบความหนวงสง
ดงนนเราจะไดสมการโมดอล คอ
2
1 1 1 1 1 1 1 1 1 1( ) 2 ( ) ( ) ( ) ( ) 3.5567 ( ) 1757.2 ( ) 18005cos5r t r t r t f t r t r t r t t (e5.1a)
2
2 2 2 2 2 2 2( ) ( ) ( ) ( ) 352.0542 ( ) 827.4917 ( ) 278930cos5r t r t f t r t r t r t t (e5.1b)
ส าหรบการกระจดเรมตนของพกด ( )tr จะได 10 1/2
0 0
20
0
0
Tr
P Mr
r x
ส าหรบความเรวตนของพกด ( )tr จะได 10 1/2
0 0
20
Tr
P Mr
r x
0.9979 0.0644 20 0 1 19.9585
0.0644 0.9979 0 4.4721 0 1.2882
ผลเฉลยเอกพนธของสมการโมดอล e5.1a ส าหรบระบบความหนวงต า คอ
1 1 1.7783
1 1 1 1sin 5.2196 sin3.8237n t t
dr (t) Ae t e t
โดยท 2 2
1 10 1 1 10 10 1
1
1 19.9585r r r 5.2196
3.8237n d
d
A ( ) ( )
, 1 0
0 0
rtan 0
r r
i dii
i ni i
ผลเฉลยเอกพนธของสมการโมดอล e5.1b ส าหรบระบบความหนวงสง คอ
2 2
2 2 2 22 2 1 1 176.027 170.96 170.96
2 12 22 0.0037 0.0037n nn t tt t t tr (t) e a e a e e e e
Force Vibration-MDOF 216
มหาวทยาลยเทคโนโลยสรนาร หนา 216
โดยท 2
20 2 2 2 20
12 2
2 2
r 1 r 1.28820.0037
341.92582 1
n
n
a
,
2
20 2 2 2 20
22 2
2 2
r 1 r0.0037
2 1
n
n
a
ผลเฉลยเฉพาะของสมการโมดอล e5.1a คอ
1 1 1 1( ) cos( ) 938.16cos 5 1.1853r t R t t
โดยท 101 2 2 2 2
1 1 1 1 1
18005938.16
52.0716 316.2532( ) (2 )n n
fR
,
1 1 1 11 2 2
1 1
2tan 1.1853 radn
n
ผลเฉลยเฉพาะของสมการโมดอล e5.1b คอ
2 2 2 2( ) cos( ) 112.943cos 5 0.7934r t R t t
โดยท 202 2 2 2 2
2 2 2 2 2
278930112.943
2469.643( ) (2 )n n
fR
,
1 1 1 11 2 2
1 1
2tan 0.7934 radn
n
ดงนน ผลเฉลยของสมการโมดอล e5.1 คอ
1.7783
1( ) 5.2196 sin3.8237 938.16cos 5 1.1853tr t e t t
176.027 170.96 170.96
2( ) 0.0037 0.0037 112.943cos 5 0.7934t t tr t e e e t
ผลการตอบสนองของระบบคอ
1/ 20.05 0 0.9979 0.0644
( ) ( ) ( )0 0.2236 0.0644 0.9979
t M P t t
x r r
1.7783
176.027 170.96 170.96
5.2196 sin3.8237 938.16cos 5 1.18530.0498 0.0032
0.0143 0.2231 0.0037 0.0037 112.943cos 5 0.7934
t
t t t
e t t
e e e t
mm
Force Vibration-MDOF 217
มหาวทยาลยเทคโนโลยสรนาร หนา 217
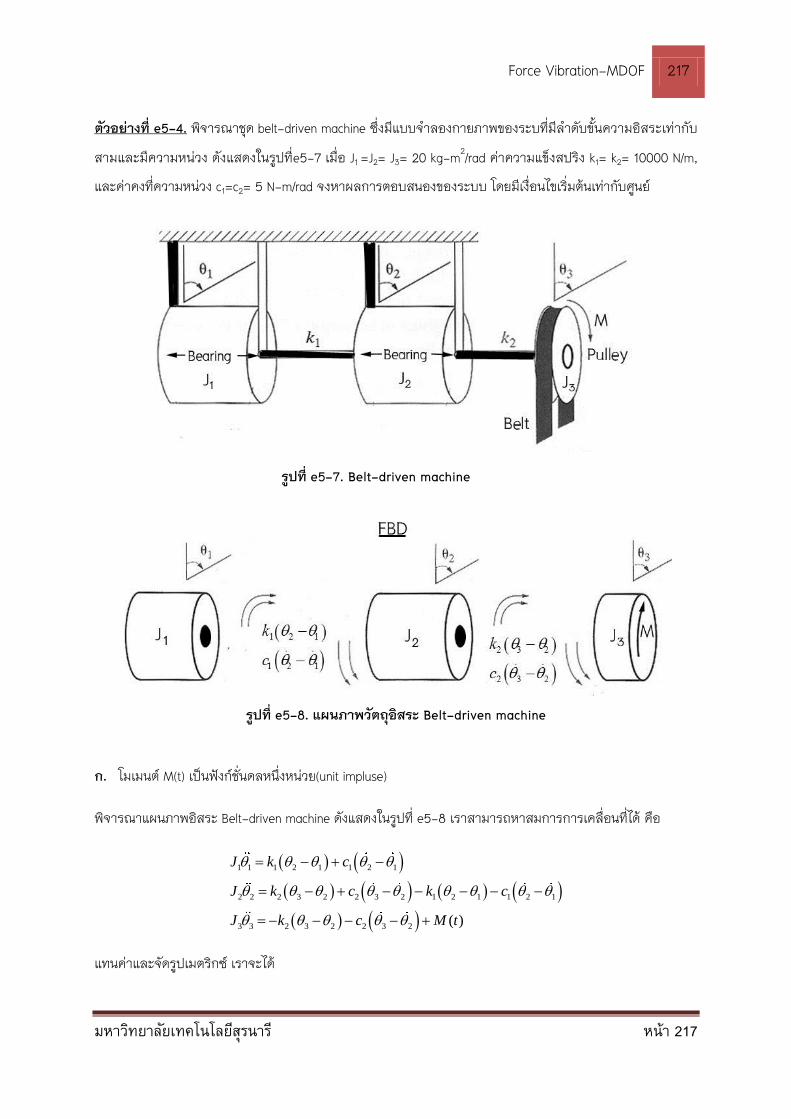
ตวอยางท e5-4. พจารณาชด belt-driven machine ซงมแบบจ าลองกายภาพของระบทมล าดบขนความอสระเทากบ
สามและมความหนวง ดงแสดงในรปทe5-7 เมอ J1 =J2= J3= 20 kg-m2/rad คาความแขงสปรง k1= k2= 10000 N/m,
และคาคงทความหนวง c1=c2= 5 N-m/rad จงหาผลการตอบสนองของระบบ โดยมเงอนไขเรมตนเทากบศนย
ก. โมเมนต M(t) เปนฟงกชนดลหนงหนวย(unit impluse)
พจารณาแผนภาพอสระ Belt-driven machine ดงแสดงในรปท e5-8 เราสามารถหาสมการการเคลอนทได คอ
1 1 1 2 1 1 2 1
2 2 2 3 2 2 3 2 1 2 1 1 2 1
3 3 2 3 2 2 3 2 ( )
J k c
J k c k c
J k c M t
แทนคาและจดรปเมตรกซ เราจะได
รปท e5-7. Belt-driven machine
รปท e5-8. แผนภาพวตถอสระ Belt-driven machine

Force Vibration-MDOF 218
มหาวทยาลยเทคโนโลยสรนาร หนา 218
1 1 1
2 2 2
3 3 3
20 0 0 5 5 0 10000 10000 0 0 0 0 0
0 20 0 5 10 5 10000 20000 10000 0 0 0 0
0 0 20 0 5 5 0 10000 10000 0 0 1 ( )M t
พจารณาความไมเชอมโยงกนของเมตรกซความหนวง C
1
5 5 0 0.05 0 0 10000 10000 0 5000 7500 2500
5 10 5 0 0.05 0 10000 20000 10000 7500 15000 7500
0 5 5 0 0 0.05 0 10000 10000 2500 7500 5000
CM K
เราพบวาเมตรกซความหนวงเปนเมตรกซสมมาตร ดงนนจงเปนระบบทไมมความเชอมโยงกน ซงเราสามารถประยกต
ใชวธวเคราะหโมดอลได
เราจะได 2
1 1 0, 2
2 2 500 และ 2
3 3 1500
ความถธรรมชาตของระบบคอ 1 0 rad/sec,
2 22.3607 rad/sec และ3 38.7298 rad/sec
รปรางโหมดบรรทดฐาน (1)
0.5774
v 0.5774
0.5774
, (2)
0.7071
v 0
0.7071
, (3)
0.4082
v 0.8165
0.4082
และ
0.5774 0.7071 0.4082
0.5774 0 0.8165
0.5774 0.7071 0.4082
P
ดงนน 1 2
0 0 0.1291 0 0.1291 ( )
F( ) 0 0 0.1581 0 0.1581 ( )
0 0 0.0913 ( ) 0.0913 ( )
T
t
P M B t t
t t
หาคา และ
5 5 0 20 0 0 10000 10000 0
5 10 5 0 20 0 10000 20000 10000
0 5 5 0 0 20 0 10000 10000
C M K
เราจะได 0.0005, 0 ;
หาคาอตราสวนความหนวงของแตละโหมด 2 2
ii
i
โหมดท 1 1 0

Force Vibration-MDOF 219
มหาวทยาลยเทคโนโลยสรนาร หนา 219
โหมดท 2 2
0.0005 22.36070.0055
2 เปนระบบความหนวงต า
2
2 22.3607 1 0.0055 22.3603d rad/sec
โหมดท 2 3
0.0005 38.72980.0096
2 เปนระบบความหนวงต า
2
2 38.7298 1 0.0096 38.7261d rad/sec
เราจะไดสมการโมดอล คอ
1( ) 0.1291 ( )r t t
2 2 2( ) 0.2459 ( ) 500 ( ) 0.1581 ( )r t r t r t t
3 3 3( ) 0.7436 ( ) 1500 ( ) 0.0913 ( )r t r t r t t
ผลเฉลยของสมการโมดอลของระบบความหนวงต า ส าหรบแรงดลคอ 2
( ) sin1
i nitnii i di
i
r t f e t
ดงนน ผลเฉลยของสมการโมดอล
1
0.1229
2
0.3718
3
( ) 0
( ) 7.0705 sin 22.3603
( ) 0.0023 sin38.7261
t
t
r t
r t e t
r t e t
ผลการตอบสนองของระบบคอ
1/2
0.2236 0 0 0.5774 0.7071 0.4082
( ) ( ) 0 0.2236 0 0.5774 0 0.8165 ( )
0 0 0.2236 0.5774 0.7071 0.4082
t M P t t
x r r
0.1229
0.3718
00.1291 0.1581 0.0913
( ) 0.1291 0 0.1826 7.0705 sin 22.3603
0.1291 0.1584 0.0913 0.0023 sin38.7261
t
t
t e t
e t
x
หรอ 0.1229 0.3718
1
0.3718
2
0.1229 0.3718
3
( ) 1.1178 sin 22.3603 0.0002 sin38.7261
( ) ( ) 0.0004 sin38.7261
( ) 1.1178 sin 22.3603 0.0002 sin38.7261
t t
t
t t
x t e t e t
t x t e t
x t e t e t
x
Force Vibration-MDOF 220
มหาวทยาลยเทคโนโลยสรนาร หนา 220
ข. โมเมนต M(t) เปนฟงกชนแบบขนบนได(Step function) โดยท M(t)=100 N
ดงนน 1 2
0 0 0.1291 0 12.91
F( ) 0 0 0.1581 0 15.81
0 0 0.0913 100 9.13
TP M B t
เราจะไดสมการโมดอล คอ
1( ) 12.91r t
2 2 2( ) 0.2459 ( ) 500 ( ) 15.81r t r t r t
3 3 3( ) 0.7436 ( ) 1500 ( ) 9.13r t r t r t
ผลเฉลยของสมการโมดอล ส าหรบโมเมนตแบบขนบนไดคอ
10 0
2 2( ) cos tan
1 1
nt
d
F Fx t e t
k k
หรอ 1
2 2
1( ) 1 cos tan
1 1
i ni
i
t ii i d
i i
r t f e t
ดงนน ผลเฉลยของสมการโมดอล
1
0.1229
2
0.3718
3
( ) 0
( ) 15.81 1 0.999 cos 22.3603 0.0055
( ) 9.13 1 0.999 cos 38.7261 0.0096
t
t
r t
r t e t
r t e t
ผลการตอบสนองของระบบคอ
0.1229
0.3718
00.1291 0.1581 0.0913
( ) 0.1291 0 0.1826 15.81 1 0.999 cos 22.3603 0.0055
0.1291 0.1584 0.0913 9.13 1 0.999 cos 38.7261 0.0096
t
t
t e t
e t
x
หรอ
0.1229 0.3718
0.3718
0.1229 0.371
2.499 1 0.999 cos 22.3603 0.0055 0.833 1 0.999 cos 38.7261 0.0096
( ) 1.6671 1 0.999 cos 38.7261 0.0096
2.499 1 0.999 cos 22.3603 0.0055 0.833 1 0.999
t t
t
t
e t e t
t e t
e t e
x
8 cos 38.7261 0.0096t t
Force Vibration-MDOF 221
มหาวทยาลยเทคโนโลยสรนาร หนา 221
ตวอยางทายบท
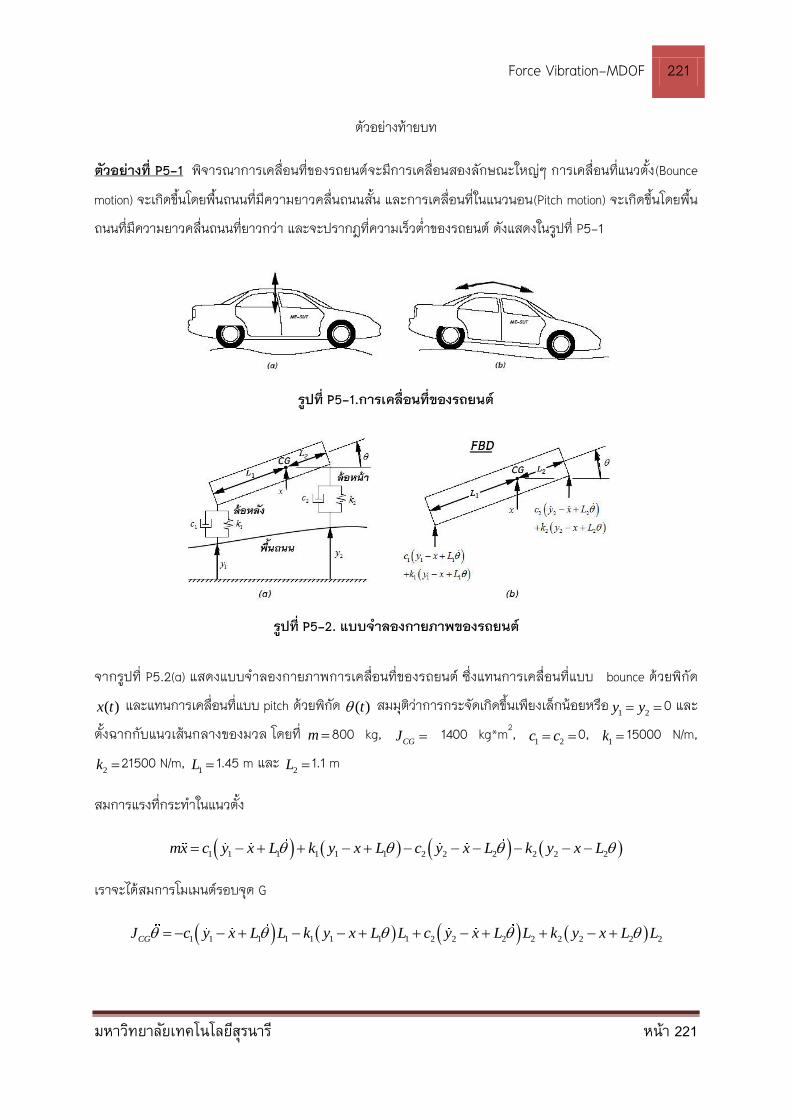
ตวอยางท P5-1 พจารณาการเคลอนทของรถยนตจะมการเคลอนสองลกษณะใหญๆ การเคลอนทแนวตง(Bounce
motion) จะเกดขนโดยพนถนนทมความยาวคลนถนนสน และการเคลอนทในแนวนอน(Pitch motion) จะเกดขนโดยพน
ถนนทมความยาวคลนถนนทยาวกวา และจะปรากฎทความเรวตาของรถยนต ดงแสดงในรปท P5-1
จากรปท P5.2(a) แสดงแบบจาลองกายภาพการเคลอนทของรถยนต ซงแทนการเคลอนทแบบ bounce ดวยพกด
( )x t และแทนการเคลอนทแบบ pitch ดวยพกด ( )t สมมตวาการกระจดเกดขนเพยงเลกนอยหรอ1 2y y 0 และ
ตงฉากกบแนวเสนกลางของมวล โดยท m 800 kg, CGJ 1400 kg*m2,
1 2c c 0, 1k 15000 N/m,
2k 21500 N/m, 1L 1.45 m และ
2L 1.1 m
สมการแรงทกระทาในแนวตง
1 1 1 1 1 1 2 2 2 2 2 2mx c y x L k y x L c y x L k y x L
เราจะไดสมการโมเมนตรอบจด G
1 1 1 1 1 1 1 1 2 2 2 2 2 2 2 2CGJ c y x L L k y x L L c y x L L k y x L L
รปท P5-1.การเคลอนทของรถยนต
รปท P5-2. แบบจ าลองกายภาพของรถยนต
Force Vibration-MDOF 222
มหาวทยาลยเทคโนโลยสรนาร หนา 222
ตามเงอนดงกลาวขางตน เราจะไดสมการการสนอสระ คอ
2 1 1 1 2 2 0mx k k x k L k L
2 2
2 2 1 1 1 1 2 2 0CGJ k L k L k L k L x
ถาเราสมมตใหผลเฉลย1( ) stx t Ae และ
2( ) stt A e เราจะได
2
2 1 1 1 1 2 2 2 0ms k k A k L k L A (p5.1)
2 2 2
1 1 2 2 1 2 2 1 1 2 0CGk L k L A J s k L k L A (p5.2)
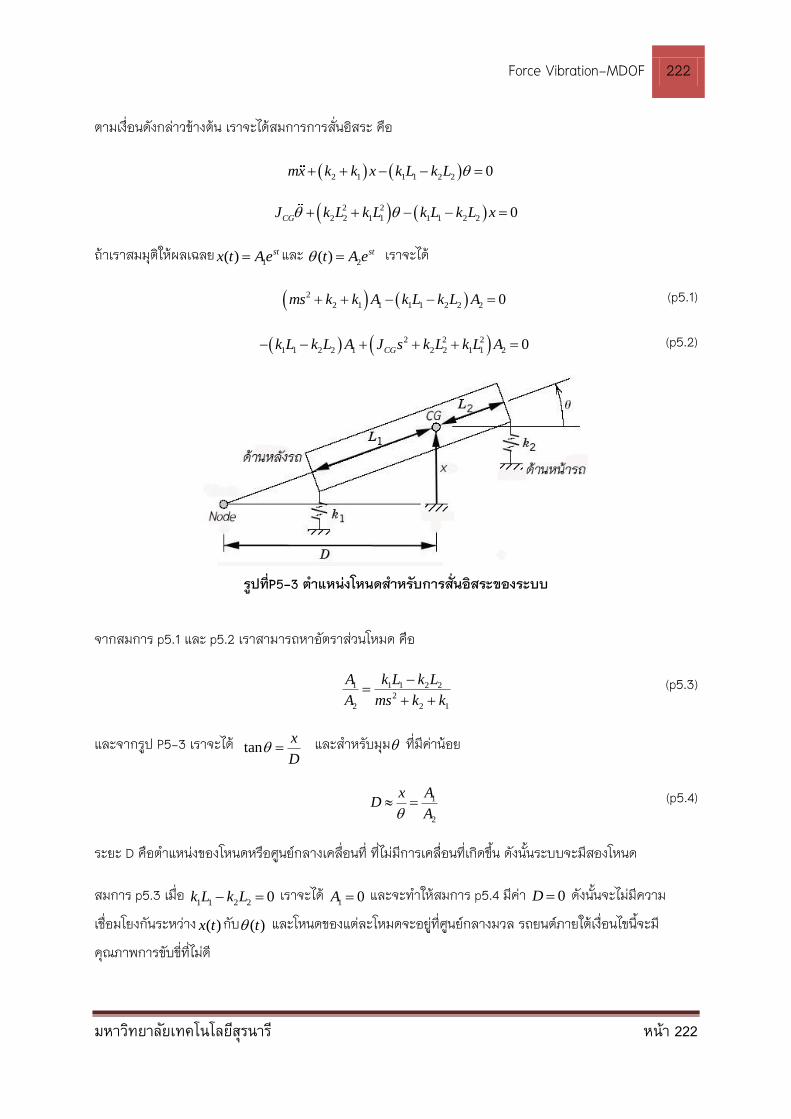
จากสมการ p5.1 และ p5.2 เราสามารถหาอตราสวนโหมด คอ
1 1 1 2 2
2
2 2 1
A k L k L
A ms k k
(p5.3)
และจากรป P5-3 เราจะได tanx
D และสาหรบมม ทมคานอย
1
2
x AD
A (p5.4)
ระยะ D คอตาแหนงของโหนดหรอศนยกลางเคลอนท ทไมมการเคลอนทเกดขน ดงนนระบบจะมสองโหนด
สมการ p5.3 เมอ 1 1 2 2 0k L k L เราจะได
1 0A และจะทาใหสมการ p5.4 มคา 0D ดงนนจะไมมความ
เชอมโยงกนระหวาง ( )x t กบ ( )t และโหนดของแตละโหมดจะอยทศนยกลางมวล รถยนตภายใตเงอนไขนจะม
คณภาพการขบขทไมด
รปทP5-3 ต าแหนงโหนดส าหรบการสนอสระของระบบ

Force Vibration-MDOF 223
มหาวทยาลยเทคโนโลยสรนาร หนา 223
สมการการเคลอนทของการสนอสระของระบบทไมมความหนวงในรปเมตรกซ คอ
800 0 36500 19000
0 1400 1900 57552.5
x x
เราสามารถหาคา 1 228.2843 0
0 37.4166M
, 1 20.0354 0
0 0.0267M
,
1 2 1 245.625 1.7953
1.7953 41.1089K M KM
,
เราจะได 2
1 1 40.4822, 2
2 2 46.2517
ความถธรรมชาตของระบบคอ 1 6.3626 rad/sec,
2 6.8009 rad/sec
เราจะได (1)0.3296
v0.9441
, (2)0.9441
v0.3296
และ 0.3296 0.9441
0.9441 0.3296P
รปรางโหมดท 1 คอ (1) 1 2 (1)0.0354 0 0.3296 0.0117
v0 0.0267 0.9441 0.0252
X M
อตราสวนโหมดท 1 (1)
1
(1)
2
0.4642 mX x
X
โหนดนจะมตาแหนงอยไปดานหนาจาก CG เปนระยะ 0.4642 m เพราะวา 0x
ดงแสดงในรปท P5-4(a) ซงใกลกบ
ตาแหนง CG การสนทเกดขนในโหมดท 1 จะเปนการเคลอนทแบบ pitch และตาแหนงโหนดเราเรยกวา Pitch center ท
เปนศนยกลางของการเคลอนทในโหมดน
รปท P5-4. โหนดของแตละโหมดรปรางการสน

Force Vibration-MDOF 224
มหาวทยาลยเทคโนโลยสรนาร หนา 224
รปรางโหมดท 2 คอ (2) 1 2 (2)0.0354 0 0.9441 0.0334
v0 0.0267 0.3296 0.0088
X M
อตราสวนโหมดท 2 (2)
1
(2)
2
3.795 mX x
X
โหนดนจะมตาแหนงอยไปดานหลง CG เปนระยะ 3.795 m เพราะวา 0x
ดงแสดงในรปท P5-4(a) ซงจะอยไกล
จากตาแหนงCG การสนทเกดขนในโหมดท 2 จะเปนการเคลอนทแบบbounce และตาแหนงโหนดนเราเรยกวา Bounce
center ทเปนศนยกลางของการเคลอนทในโหมดน










![โดยสายการบิน การบินไทย ( TG 59 900€¦ · dme-tg006 หน้า 1 จาก 13 hotline: super save russia [มอสโคว์ -เซนต์ปีเตอร์สเบิร์ก]](https://img.pdfslide.org/doc/110x75/5fba2b9bef14186a042fed23/aaaaaaaaaaaa-aaaaaaaaa-tg-59-900-dme-tg006.jpg)






![Netter Vibration€¦ · Netter Vibration;P eXQaPRXÚ] P[ bTaeXRX^ ST [P X]SdbcaXP • Vibración circular • Especialmente resistentes en condiciones ambientales agresivas •Fuerza](https://img.pdfslide.org/doc/110x75/5ea05bbf6534b70bef53ffc4/netter-vibration-netter-vibrationp-exqaprx-p-btaexrx-st-p-xsdbcaxp-a-vibracin.jpg)










