Embed Size (px)
Citation preview

Prof. Dr. Helga Baum
Grundkurs Analysis
Skript zur Vorlesung Analysis I* und II*
im Studienjahr 2006/2007
26. Oktober 2009


Vorwort
Dieses Skript dient als begleitendes Lehrmaterial fur meinen Grundkurs Ana-lysis fur die Studienanfanger des Wintersemesters 2006/07. Es soll Ihnen nichtden Gang in die Bibliothek ersetzen. Gehen Sie bei Gelegenheit dort hin undblattern Sie in den vielen dort stehenden Lehrbuchern zum Grundkurs Analy-sis. Sie werden dann selbst feststellen, welches dieser Bucher Ihnen am bestengefallt und Ihnen am meisten hilft. Dieses Skript enthalt den Stoff des Grund-kurses Analysis, so wie ich ihn in den nachsten vier Semestern lesen werde undsoll Ihnen die Nacharbeit der Vorlesung erleichtern. Es soll Sie auf keinen Falldavon abhalten, wahrend der Vorlesung mitzuschreiben. Erfahrungsgemaß istdas Mitschreiben einer Vorlesung (auch dann, wenn man ab einer bestimmtenStelle nicht mehr alles oder nichts mehr versteht) etwas, das vielen von Ihnenam Anfang schwer fallt. Es ist aber eine Fahigkeit, die Sie fur Ihr Studiumbenotigen und lernen mussen.Mathematik lernt man nur, wenn man sich selbst mit ihr beschaftigt. Es reichtalso nicht, sich in die Vorlesung zu setzen. Die wenigsten von Ihnen werdennach den 90 Minuten rausgehen und alles verstanden haben. Das ist vollig nor-mal. Arbeiten Sie die Vorlesung zu Hause an Hand Ihrer Mitschriften nachund versuchen Sie, die nicht verstandenen Stellen zu klaren. Wenn Ihnen dasallein nicht gelingt, nutzen Sie die Ubung und die Sprechstunden dazu. Densicheren Umgang mit dem gelernten Stoff erwerben Sie nur durch das Losender Ubungsaufgaben, die Sie jede Woche bekommen. Die Aufgaben sind nichtnur ein Selbsttest oder ein lastiges Ubel, um den Ubungsschein zu bekommen– sie sind das entscheidende Mittel, mit dem Sie zunehmend Routine im Um-gang mit Mathematik bekommen.
Mochte man verstehen, “was in der Welt vorgeht” und dies genauer analy-sieren, so stellt man schnell fest, daß man dazu die funktionalen Abhangig-keiten von Ursachen und Wirkungen geeignet modellieren muß. Die Analysisbeschaftigt sich mit der Frage, wie man das Anderungsverhalten von Funk-tionen verstehen, beschreiben und beherrschen kann. Sie stellt Begriffe bereit,mit denen man die Anderung einer Funktion “im Kleinen” (also bei gerin-

VIII Vorwort
gen Anderungen ihrer unabhangigen Variablen) erfassen kann und untersucht,wann und auf welche Weise man aus diesen Eigenschaften “im Kleinen” glo-bale Eigenschaften der Funktion bestimmen kann. Das wichtigste und un-verzichtbare Hilfsmittel fur solche Untersuchungen ist der Begriff des Grenz-wertes. Man muß exakt formulieren konnen, was es in dem jeweils benutztenModell bedeutet, daß man sich an einen Punkt annahert.Ich beginne deshalb den Grundkurs Analysis I/II mit dem Studium einerKlasse von Raumen, in denen man einen solchen Grenzwertbegriff formulierenkann, mit den metrischen Raumen. Anschließend werden verschiedene Klas-sen von Funktionen zwischen allgemeinen oder speziellen metrischen Raumenbehandelt, insbesondere die stetigen, die differenzierbaren, die meßbaren, dieintegrierbaren und die holomorphen Funktionen. Als Anwendung der grundle-genden Eigenschaften verschiedener Funktionenklassen wird in Analysis IIIaund IIIb eine Einfuhrung in die Losungstheorie gewohnlicher Differentialglei-chungen, in die Maßtheorie und in die Analysis auf Untermannigfaltigkeitengegeben.
Im Einzelnen werden wir in den 4 Teilen der Vorlesung folgende Schwerpunktebehandeln:
Analysis I* (Wintersemester 2006/07):
• Reelle und komplexe Zahlen• Metrische Raume und ihre topologischen Eigenschaften• Folgen und Reihen in Banachraumen• Stetige Abbildungen zwischen metrischen Raumen
Analysis II* (Sommersemester 2007):
• Differentialrechnung fur Funktionen einer reellen Variablen• Differentialrechnung fur Funktionen mehrerer reeller Variablen• Integralrechnung fur Funktionen einer reellen Variablen
Analysis IIIa (Wintersemester 2007/08):
• Mehrdimensionales Riemann-Integral• Analysis auf Untermannigfaltigkeiten• Gewohnliche Differentialgleichungen
Analysis IIIb (Sommersemester 2008):
• Maß- und Integrationstheorie• Funktionentheorie

Vorwort IX
Einige Lehrbucher zum Analysis-Grundkurs
• H. Amann, J. Escher: Analysis I, II und III, Birkhauser- Verlag• M. Barner, F. Flohr: Analysis I und II, de Gruyter-Verlag• Th. Brocker: Analysis I, II und III, Wissenschaftsverlag Mannheim• J. Dieudonne: Grundzuge der modernen Analysis, Deutscher Verlag der
Wissenschaften• K. Endl, W. Luh: Analysis I, II und III, Aula-Verlag Wiesbaden• O. Forster: Analysis 1, 2 und 3, Vieweg-Verlag• H. Heuser: Lehrbuch der Analysis, Teil 1 und 2, Teubner-Verlag Stuttgart• St. Hildebrandt: Analysis 1 und 2, Springer-Verlag• K. Konigsberger: Analysis 1 und 2, Springer-Verlag• W. Walter: Analysis 1 und 2, Springer-Verlag
Haufig benutzte Bezeichnungen und Abkurzungen
∀ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . fur alle∃ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . es existiert∃! . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . es existiert genau ein⇔ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . genau dann, wenn⇒ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . daraus folgt:= . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ist definiert als (auch :↔)x ∈M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .x ist Element der Menge M∅ . . . . . . . . . . . . . . . . . . . . . . . . . . . leere Menge (Menge, die kein Element enthalt)A ⊂M . . . . . . . . . . . . . . . . . . . . . . .A ist Teilmenge von M , d.h. x ∈ A⇒ x ∈M
A und B seien Mengen.
A ∪B := x | x ∈ A oder x ∈ B heißt die Vereinigung von A und B.
A ∩ B := x | x ∈ A und x ∈ B heißt der Durchschnitt von A und B. FallsA ∩ B = ∅, heißen A und B disjunkt; A∪B bezeichnet dann die disjunkteVereinigung von A und B.
A \B = x | x ∈ A und x /∈ B heißt Differenzmenge.
A×B = (x, y) | x ∈ A und y ∈ B heißt das Produkt von A und B.
Fur eine endliche Menge A bezeichnet ♯A die Anzahl ihrer Elemente.


Inhaltsverzeichnis
1 Reelle und komplexe Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Das Beweisprinzip der vollstandigen Induktion . . . . . . . . . . . . . . 21.2 Die reellen Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Die Korpereigenschaften von R . . . . . . . . . . . . . . . . . . . . . . 71.2.2 Die Anordnungseigenschaften von R . . . . . . . . . . . . . . . . . 81.2.3 Vollstandigkeitseigenschaft der reellen Zahlen . . . . . . . . . 111.2.4 Die Uberabzahlbarkeit der Menge der reellen Zahlen . . . 161.2.5 Wurzeln und Potenzen reeller Zahlen . . . . . . . . . . . . . . . . 19
1.3 Die komplexen Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.4 Die Vektorraume Rn und Cn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2 Metrische Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.1 Definition und Beispiele metrischer Raume . . . . . . . . . . . . . . . . . 392.2 Offene und abgeschlossene Mengen in metrischen Raumen . . . . 422.3 Folgen in metrischen Raumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.3.1 Allgemeine Eigenschaften konvergenter Folgen . . . . . . . . 542.3.2 Spezielle Eigenschaften von konvergenten Folgen im
Vektorraum Ck bzw. Rk . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572.3.3 Spezielle Eigenschaften konvergenter Folgen in R . . . . . . 62
2.4 Vollstandige metrische Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682.5 Kompakte und folgenkompakte Teilmengen metrischer Raume 752.6 Zusammenhangende Teilmengen eines metrischen Raumes . . . . 842.7 Banachraume und Hilbertraume . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3 Reihen in Banachraumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 933.1 Konvergenzkriterien fur Reihen in Banachraumen. . . . . . . . . . . . 943.2 Komplexe Potenzreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1103.3 Exponentialfunktion, Logarithmusfunktion und komplexe
Potenzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113

XII Inhaltsverzeichnis
4 Stetige Abbildungen zwischen metrischen Raumen . . . . . . . . 1194.1 Der Grenzwert einer Abbildung in einem Punkt . . . . . . . . . . . . . 1194.2 Stetige Abbildungen (Definition und Beispiele) . . . . . . . . . . . . . . 1264.3 Eigenschaften stetiger Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . 1354.4 Folgen stetiger Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1424.5 Funktionenreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1454.6 Die trigonometrischen und die Hyperbelfunktionen . . . . . . . . . . 1524.7 Der metrische Raum der stetigen Abbildungen . . . . . . . . . . . . . . 162
5 Differentialrechnung fur Funktionen einer reellenVeranderlichen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1755.1 Differenzierbare Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1755.2 Der Mittelwertsatz der Differentialrechnung . . . . . . . . . . . . . . . . . 1855.3 Differentiation von Funktionenfolgen und -Reihen . . . . . . . . . . . . 1965.4 Taylorreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
6 Differentialrechnung fur Abbildungen mehrerer reellerVariablen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2116.1 Ableitung, Richtungsableitung und Gradient einer Abbildung . 2116.2 Partielle Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2226.3 Die Taylorentwicklung und Extrema fur Funktionen mehrerer
reeller Veranderlicher . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2286.4 Der Satz uber die Umkehrabbildung . . . . . . . . . . . . . . . . . . . . . . . 2326.5 Implizite Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2396.6 Extrema unter Nebenbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . 246
7 Integralrechnung fur Funktionen einer reellen Variablen . . . 2537.1 Stammfunktionen und ihre Berechnung . . . . . . . . . . . . . . . . . . . . . 2537.2 Das Riemannsche Integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2677.3 Hauptsatz der Differential- und Integralrechnung . . . . . . . . . . . . 2827.4 Der Mittelwertsatz der Integralrechnung . . . . . . . . . . . . . . . . . . . . 2867.5 Parameterabhangige Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2897.6 Uneigentliche Riemannsche Integrale . . . . . . . . . . . . . . . . . . . . . . . 2927.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete . 299
Sachverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317

1
Reelle und komplexe Zahlen
Wir gehen davon aus, daß der Aufbau der Zahlbereiche bis zu den reellenZahlen bekannt ist. Man findet dies zum Beispiel in dem Buch von J. Kramer:Zahlen fur Einsteiger (Vieweg-Verlag, 2006).
Wir benutzen in dieser Vorlesung die folgenden Bezeichnungen fur die Zahl-bereiche:N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Menge aller naturlichen Zahlen: 1, 2, 3, . . .N0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .N ∪ 0Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Menge aller ganzen Zahlen: 0, ±1, ±2, . . .Q . . . . . . . . . . . . . . . . . . . . . . . Menge aller rationalen Zahlen: m
n| m ∈ Z, n ∈ N
Q+ . . . . . . . . . . . . . . . . . .Menge der positiven rationalen Zahlen: q ∈ Q | q > 0R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Menge der reellen ZahlenR\Q . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Menge der irrationalen ZahlenC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Menge der komplexen Zahlen
Offensichtlich gilt: N ⊂ Z ⊂ Q ⊂ R.
Die Zahlbereiche werden bekanntlich aus folgendem Grund erweitert:
N ⊂ Z: Die Subtraktion ist durch die Erweiterung immer ausfuhrbar. Seiena, b ∈ N. Die Gleichung x+ a = b ist in Z immer losbar, aber nicht in N.
Z ⊂ Q: Die Division ist durch die Erweiterung immer ausfuhrbar. Seiena, b ∈ Z, a 6= 0. Die Gleichung x ·a = b ist in Q immer losbar, aber nicht in Z.
Q ⊂ R: Die Erweiterung ist notig, damit Wurzeln positiver Zahlen existieren.Sei q ∈ Q+, n ∈ N. Die Gleichung xn = q ist in R immer losbar, aber nicht inQ.
Im Abschnitt 1.1. werden wir zunachst ein wichtiges und oft benutztes Beweis-prinzip wiederholen und an Beispielen demonstrieren: das der vollstandigenInduktion. Im Abschnitt 1.2. fassen wir die grundlegenden, die Menge der re-ellen Zahlen charakterisierenden Eigenschaften (ihre Axiome) zusammen und

2 1 Reelle und komplexe Zahlen
leiten wesentliche, aus den Axiomen folgende Eigenschaften her. Der Abschnitt1.3. enthalt die Definition und die grundlegenden Eigenschaften der komple-xen Zahlen. In Abschnitt 1.4. betrachten wir die Vektorraume Rn und Cn unddefinieren den Abstand von Vektoren in diesen Vektorraumen.
1.1 Das Beweisprinzip der vollstandigen Induktion
Die naturlichen Zahlen werden durch auf Peano zuruckgehende Axiome (diePeano-Axiome) eingefuhrt. Aus diesen Axiomen folgt die Induktionseigen-schaft fur die naturlichen Zahlen, die folgendes besagt:
Ist M ⊂ N0 eine Teilmenge der (um Null erganzten) naturlichen Zahlen, diedie folgenden beiden Eigenschaften erfullt:
(1) n0 ∈M ,(2) Ist k ∈M , so ist auch (k + 1) ∈M .
Dann gilt fur diese Menge: n ∈ N0 | n ≥ n0 ⊂M .
Als Umformulierung dieser Induktionseigenschaft erhalten wir das Beweis-prinzip der vollstandigen Induktion.
Beweisprinzip der vollstandigen Induktion
Sei n0 ∈ N0 eine fixierte naturliche Zahl.Fur jede Zahl n ∈ N0 mit n ≥ n0 sei eine Aussage A(n) gegeben.Wir setzen voraus, dass die folgenden beiden Bedingungen erfullt sind:
(1) A(n0) ist richtig (Induktionsanfang).(2) Falls A(k) richtig ist fur eine Zahl k ≥ n0, so ist auch A(k+1) richtig.
(Induktionsschritt).
Dann ist die Aussage A(n) fur alle Zahlen n ∈ N0 mit n ≥ n0 richtig.
Um einzusehen, dass das Prinzip der vollstandigen Induktion aus der Induk-tionseigenschaft der naturlichen Zahlen folgt, setzen wir
M := n ∈ N0 | Aussage A(n) ist richtig.
Dann gilt:
n0 ∈M (nach Induktionsanfang).
Ist k ∈M , so ist (k + 1) ∈M (nach Induktionsschritt).
Aus der Induktionseigenschaft der naturlichen Zahlen folgt nun, dass A(n) furalle n ≥ n0 richtig ist.

1.1 Das Beweisprinzip der vollstandigen Induktion 3
Beispiel 1:
Satz 1.1 Fur jede naturliche Zahl n ∈ N gilt
n∑
j=1
j = 1 + 2 + ...+ n =n(n+ 1)
2. (Aussage A(n))
Beweis. Durch vollstandige Induktion.
Induktionsanfang: Die Aussage A(1) ist richtig, denn 1 = 1(1+1)2 .
Induktionsschritt : Sei nun eine naturliche Zahl k ≥ 1 gegeben. Wir setzen vor-aus, dass die Aussage A(k) richtig ist (Induktionsvoraussetzung) und behaup-ten, dass dann auch die Aussage A(k+1) richtig ist (Induktionsbehauptung).Induktionsbeweis:
k+1∑
j=1
j =( k∑
j=1
j)
+ (k + 1)A(k)=
k(k + 1)
2+ (k + 1)
= (k + 1)
(k
2+ 1
)=
(k + 1)(k + 2)
2.
⊓⊔Beispiel 2:
Satz 1.2 Fur jede naturliche Zahl n ∈ N gilt
n∑
j=1
(2j − 1) = n2. (Aussage A(n))
Beweis. Durch vollstandige Induktion.Induktionsanfang: A(1) ist richtig, denn 1 = 1.Induktionsschritt :Induktionsvoraussetzung: A(k) sei richtig.Induktionsbehauptung: A(k + 1) ist richtig.Induktionsbeweis:
k+1∑
j=1
(2j − 1) =( k∑
j=1
(2j − 1))
+ (2(k + 1) − 1)A(k)= k2 + 2k + 1 = (k + 1)2.
⊓⊔
Beispiel 3: Die Fakultat einer naturlichen Zahl.
Definition 1.1. Sei n ∈ N. Die Zahl
n! :=n∏
j=1
j = 1 · 2 · 3 · ... · n
heißt n–Fakultat. Weiterhin setzen wir 0! := 1 .

4 1 Reelle und komplexe Zahlen
Satz 1.3 Die Anzahl an aller Anordnungen von n verschiedenen Objekten istn!.
Beweis. Durch vollstandige Induktion.Induktionsanfang: Fur n = 1 gilt a1 = 1 = 1!.Induktionsschritt :Induktionsvoraussetzung: Es gelte ak = k!.Induktionsbehauptung: ak+1 = (k + 1)!.Induktionsbeweis:Wir betrachten (k + 1) Objekte O1, . . . , Ok+1. Die moglichen Anordnungendieser Objekte kann man in (k + 1) Klassen Kj mit j ∈ 1, . . . , k + 1 un-terteilen: Kj sei die Menge derjenigen Anordnungen, in denen Oj als erstesElement steht, das heißt
Kj := (Oj , Oi1 , . . . , Oik) | i1, i2, . . . , ik = 1, . . . , k + 1 \ j .
Zj sei die Anzahl der Elemente in Kj. Folglich ist Zj gleich der Anzahl derAnordnungen der k Objekte O1, . . . , Oj−1, Oj+1, . . . , Ok+1. Nach Induktions-voraussetzung ist aber die Anzahl der Anordnungen von k Objekten gleichak = k! . Also gilt
ak+1 =
k+1∑
j=1
Zj =
k+1∑
j=1
ak =
k+1∑
j=1
k! = (k + 1) · k! = (k + 1)! .
⊓⊔
Beispiel 4: Die Binomialkoeffizienten.
Definition 1.2. Sei x ∈ R und k ∈ N. Die Zahl(x
k
):=
x · (x− 1) · (x− 2) · ... · (x − (k − 1))
k!
(xk
)heißt Binomialkoeffizient. Man nennt sie “x uber k”. Fur k = 0 setzt
man(x0
):= 1.
Satz 1.4 Seien n, k ∈ N und x ∈ R. Dann gilt
(1) Ist k > n, so folgt(nk
)= 0.
(2) Fur 0 ≤ k ≤ n gilt
(n
k
)=
n!
k!(n− k)!=
(n
n− k
).

1.1 Das Beweisprinzip der vollstandigen Induktion 5
(3) Es gilt
(x
k
)+
(x
k − 1
)=
(x+ 1
k
).
Beweis. Ist k > n, so tritt im Zahler 0 als Faktor auf. Folglich ist(nk
)= 0.
(n
k
)=n · (n− 1) · . . . · (n− (k − 1))
k!
=n · (n− 1) · . . . · (n− (k − 1)) · (n− k) · . . . · 2 · 1
k! · (n− k)!=
n!
k! · (n− k)!
=
(n
n− k
).
(x
k
)+
(x
k − 1
)=x · (x− 1) · . . . · (x− (k − 1))
k!+x · (x − 1) · . . . · (x− (k − 2))
(k − 1)!
=x · (x− 1) · . . . · (x− (k − 2))
(k − 1)!·(x− (k − 1)
k+ 1
)
︸ ︷︷ ︸= x−(k−1)+k
k= x+1
k
=x · (x− 1) · . . . · ((x+ 1) − (k − 1))
(k − 1)!· (x+ 1)
k
=(x+ 1) · ((x+ 1) − 1) · ((x + 1) − 2) · . . . · ((x + 1) − (k − 1))
k!
=
(x+ 1
k
).
⊓⊔
Satz 1.5 Seien k und n naturliche Zahlen und sei 1 ≤ k ≤ n. Es bezeichnecnk die Anzahl aller k–elementigen Teilmengen einer n–elementigen Menge.Dann gilt
cnk =
(n
k
).
Insbesondere ist(nk
)∈ N .
Beweis. Der Beweis von Satz 1.5 erfolgt duch vollstandige Induktion uber n.Induktionsanfang: Es gilt c11 = 1 =
(11
), denn aus einer einelementigen Menge
kann nur ein Element ausgewahlt werden.Induktionsschritt :

6 1 Reelle und komplexe Zahlen
Induktionsvoraussetzung: Es gelte cnk =(nk
)∀ k ∈ 1, . . . , n.
Induktionsbehauptung: cn+1k =
(n+1k
)∀ k ∈ 1, · · · , n+ 1.
Induktionsbeweis: Bei der Auswahl einer einelementigen Teilmenge aus einer(n + 1)–elementigen Menge hat man (n + 1) verschiedene Moglichkeiten. Esgilt somit:
cn+11 = (n+ 1) =
(n+ 1
1
).
Betrachtet man die Anzahl aller (n+1)–elementigen Teilmengen einer (n+1)–elementigen Menge, so gilt offensichtlich
cn+1n+1 = 1 =
(n+ 1
n+ 1
).
Es genugt also, die Behauptung fur k ∈ 2, · · · , n zu zeigen. Betrachten wireine Menge M = E1, · · · , En+1 mit (n + 1) Elementen. Dann zerfallen diek–elementigen Teilmengen von M in zwei disjunkte Klassen:
K0 : alle Teilmengen, die En+1 nicht enthalten, undK1 : alle Teilmengen, die En+1 enthalten.
Somit ergibt sich: die Anzahl der k–elementigen Teilmengen in Klasse K0
ist gleich der Anzahl der k–elementigen Teilmengen von E1, · · · , En, alsoentsprechend der Induktionsvoraussetzung gleich cnk =
(nk
). Die Anzahl der
k–elementigen Teilmengen in Klasse K1 ist gleich der Anzahl der (k − 1)–elementigen Teilmengen von E1, · · · , En, also nach Induktionsvorausset-zung gleich cnk−1 =
(nk−1
). Folglich gilt nach Satz 1.4
cn+1k =
(n
k
)+
(n
k − 1
)=
(n+ 1
k
).
⊓⊔
1.2 Die reellen Zahlen
Im Folgenden setzen wir voraus, dass die reellen Zahlen existieren und dasssie dem Leser bereits bekannt sind. Das Ziel dieses Abschnittes besteht darin,noch einmal die grundlegenden, die reellen Zahlen eindeutig charakterisie-renden Eigenschaften (ihre sogenannten “Axiome”) zusammenzustellen unddaraus wichtige Rechenregeln abzuleiten. Diese grundlegenden Eigenschaftensind
• die Korperaxiome,• die Anordnungsaxiome und• das Vollstandigkeitsaxiom.

1.2 Die reellen Zahlen 7
Wir werden in dieser Vorlesung nicht darauf eingehen, ob uberhaupt eineMenge existiert, die die obigen drei Axiome erfullt, und wie und woraus mansie ggf. konstruieren kann. Wir werden auch nicht untersuchen, ob eine Men-ge, die die obigen Axiome erfullt, eindeutig bestimmt ist. Fur diese Fragenverweisen wir auf eines der Bucher
• J. Kramer: Zahlen fur Einsteiger, Vieweg-Verlag, 2006• H.-D. Ebinghaus: Zahlen, Grundwissen Mathematik, Springer, 2. Aufl.
1988• A. Oberschelp: Aufbau des Zahlensystems, Vandenhoeck & Ruprecht,
Gottingen 1976.
1.2.1 Die Korpereigenschaften von R
Man kann reelle Zahlen addieren und multiplizieren:
(x, y) ∈ R × R 7−→ x+ y ∈ R Addition,(x, y) ∈ R × R 7−→ x · y ∈ R Multiplikation.
Addition und Multiplikation haben folgende Eigenschaften K1 - K9:
Addition:
K1: x+ y = y + x ∀ x, y ∈ R (Kommutativgesetz der Addition)K2: (x+y)+z = x+(y+z) ∀ x, y, z ∈ R (Assoziativgesetz der Addition)K3: 0 + x = x+ 0 = x ∀ x ∈ R (0 ist neutrales Element der Addition)K4: Zu zwei reellen Zahlen x, y ∈ R existiert genau eine reelle Zahl z ∈ R, so
dassx+ z = y = z + x.
Diese Zahl z heißt Differenz zwischen x und y, z := y − x. Insbesondereexistiert zu jedem x ∈ R genau ein −x ∈ R mit x + (−x) = 0. (Existenzdes negativen Elements).
Multiplikation:
K5: x · y = y · x ∀ x, y ∈ R (Kommutativgesetz der Multiplikation)K6: (x ·y) ·z = x · (y ·z) ∀ x, y, z ∈ R (Assoziativgesetz der Multiplikation)K7: 1 · x = x · 1 = x ∀ x ∈ R (1 ist das neutrale Element der Multi-
plikation)K8: Zu jedem x ∈ R, x 6= 0 und jedem y ∈ R existiert genau ein z ∈ R mit
x · z = y.
Diese Zahl z heißt Quotient von y und x, z := yx. Insbesondere existiert
zu jedem x 6= 0 ein inverses Element 1x, so dass x · ( 1
x) = 1.
K9: (x+ y) · z = x · z + y · z ∀ x, y, z ∈ R (Distributivgesetz).

8 1 Reelle und komplexe Zahlen
Definition 1.3. Eine Menge K, auf der zwei Operationen + und ·
+ : K × K −→ K · : K × K −→ K
(x, y) 7−→ x+ y (x, y) 7−→ x · y
mit den Eigenschaften K1 bis K9 gegeben sind, heißt Korper.
Wir schreiben den Korper K mit seinen beiden Operationen + und · oft in derForm [K,+, ·]. Der Begriff des Korpers ist ein zentraler algebraischer Begriffund wird in der Algebra-Vorlesung ausfuhrlich behandelt.
Korperaxiom der reellen Zahlen
[ R,+, · ] ist ein Korper.
[ Q,+, · ] ist ebenfalls ein Korper, wahrend [ Z,+, · ] kein Korper ist (zum Bei-spiel besitzt 2 kein multiplikativ inverses Element in Z). Ein Korper mitzwei Elementen ist durch K := 0, 1 und die Operationen 0 + 0 := 0,0+1 = 1+0 := 1, 1+1 := 0, 0 ·0 := 0, 0 ·1 = 1 ·0 := 0 und 1 ·1 := 1 gegeben.
Bezeichnungen: Fur n reelle Zahlen x1, · · · , xn werden die Summe und dasProdukt folgendermaßen abgekurzt:
n∑i=1
xi := x1 + x2 + . . .+ xnn∏i=1
xi := x1 · x2 · . . . · xn
Klammern sind wegen K2 und K6 nicht notig.
Fur zwei Teilmengen A,B ⊂ R sei
A+B := a+ b | a ∈ A, b ∈ B ⊂ R
A ·B := a · b | a ∈ A, b ∈ B ⊂ R
−A := −a | a ∈ A ⊂ R.
1.2.2 Die Anordnungseigenschaften von R
Außer [ R,+, · ] gibt es noch viele andere Korper. Die Korperaxiome K1-K9reichen also nicht aus, um R eindeutig zu beschreiben. Auf dem Korper derreellen Zahlen kann man im Gegensatz zu einigen anderen Korpern zusatzlicheine Anordnung einfuhren.
Anordnungseigenschaften von R
Der Korper der reellen Zahlen [ R,+, · ] enthalt eine Teilmenge von (positiven)reellen Zahlen R+ mit folgenden Eigenschaften:

1.2 Die reellen Zahlen 9
A1: Fur jede reelle Zahl x gilt entweder x = 0 oder x ∈ R+ oder x ∈ −R+,das heißt R ist die disjunkte Vereinigung
R = −R+ ∪ 0 ∪ R+.
A2: Ist x, y ∈ R+, so gilt x+ y ∈ R+ und x · y ∈ R+.
Definition 1.4. Ein Korper [ K,+, · ], in dem eine Teilmenge “positiver Ele-mente” K+ ⊂ K existiert, so dass A1 und A2 gelten, heißt angeordneterKorper.
Anordnungsaxiom der reellen Zahlen
Die reellen Zahlen [R,+ , · ] sind ein angeordneter Korper.
Mittels der Eigenschaften A1 und A2 kann man Elemente von R vergleichen.
Definition 1.5. Man sagt “x ist kleiner gleich y” und schreibt x ≤ y, fallsy − x ∈ R+ ∪ 0.Aus den Anordnungseigenschaften A1 und A2 erhalt man die folgenden Ei-genschaften der Relation ≤:
O1 : Fur alle x, y ∈ R gilt x ≤ y oder y ≤ x.O2 : Fur alle x ∈ R gilt x ≤ x ReflexivitatO3 : Aus x ≤ y und y ≤ x folgt x = y AntisymmetrieO4 : Aus x ≤ y und y ≤ z folgt x ≤ z Transitivitat
Bemerkung: Sei M eine Menge und ≤ eine Relation zwischen Elementenvon M . Gelten O1 −O4 fur ≤, so heißt ≤ reflexive Ordnung auf M . ,
Aus A1 und A2 folgen außerdem folgende Monotonieeigenschaften von ≤:
M1: Aus x ≤ y folgt x+ z ≤ y + z fur alle z ∈ R.M2: Aus x ≤ y folgt x · z ≤ y · z fur alle z ∈ R+.
Bezeichnung:
• Gilt x ≤ y und x 6= y, so schreibt man auch x < y(sprich: “x kleiner als y”).
• x ≥ y :⇐⇒ y ≤ x bzw. x > y :⇐⇒ y < x.
Mittels der Ordnungsrelation konnen wir Intervalle definieren:Fur a ≤ b, a, b ∈ R sei

10 1 Reelle und komplexe Zahlen
[a, b] := x ∈ R | a ≤ x ≤ b (abgeschlossenes Intervall)
[a, b) := x ∈ R | a ≤ x < b (halboffenes Intervall)
(a, b] := x ∈ R | a < x ≤ b (halboffenes Intervall)
(a, b) := x ∈ R | a < x < b (offenes Intervall)
Des Weiteren seien
[a,∞) := x ∈ R | a ≤ x(a,∞) := x ∈ R | a < x
(−∞, a) := x ∈ R | x < a(−∞, a] := x ∈ R | x ≤ a
R := (−∞,∞).
Sei I eines der Intervalle [a, b], (a, b), [a, b), oder (a, b]. Dann heißt die ZahlL(I) := b− a Lange des Intervalls I.
Definition 1.6. Unter dem Betrag einer reellen Zahl x ∈ R versteht man dieZahl
|x| :=
x falls x ≥ 0−x falls x < 0.
Ist I ein Intervall der Lange L, so gilt fur x, y ∈ I : |x− y| ≤ L.
Satz 1.6 Fur den Betrag einer reellen Zahl gelten folgende Eigenschaften:
(1) |x| ≥ 0 ∀ x ∈ R, |x| = 0 ⇔ x = 0.(2) |x · y| = |x| · |y| ∀ x, y ∈ R.(3) |x+ y| ≤ |x| + |y|. (Dreiecksungleichung)(4) ||x| − |y|| ≤ |x+ y|.
Beweis. (1) und (2) folgen unmittelbar aus der Definition des Betrages | · | .Zum Beweis von (3) benutzen wir die Monotonieeigenschaften. Wegen x ≤ |x|und −x ≤ |x| bzw. y ≤ |y| und −y ≤ |y| folgt nach Addition dieserGleichungen x + y ≤ |x| + |y| und −(x + y) ≤ |x| + |y| und folglich|x+ y| ≤ |x| + |y| .Zum Beweis von (4) benutzen wir die Dreiecksungleichung und |x| = | − x|:
|x| = |(x+ y) − y| ≤ |x+ y| + |y|, und daher |x| − |y| ≤ |x+ y|,|y| = |(x + y) − x| ≤ |x+ y| + |x|, und daher |y| − |x| ≤ |x+ y|.
Somit erhalten wir ||x| − |y|| ≤ |x+ y|. ⊓⊔

1.2 Die reellen Zahlen 11
Die bisherigen Eigenschaften (Korpereigenschaften K1-K9, Anordnungseigen-schaften A1-A2) bestimmen [ R,+, · ] noch immer nicht eindeutig. Sie geltenzum Beispiel auch fur den Korper der rationalen Zahlen [ Q,+, · ]. Die reellenZahlen R haben aber eine grundsatzlich andere Eigenschaft als die rationalenZahlen Q : die Vollstandigkeit.
1.2.3 Vollstandigkeitseigenschaft der reellen Zahlen
Es gibt viele verschiedene Moglichkeiten die Vollstandigkeitseigenschaft derreellen Zahlen zu beschreiben. Alle diese sind aquivalent. Wir benutzen hierdie Existenz der Schnittzahl von Dedekindschen Schnitten.
Definition 1.7. Ein Dedekindscher Schnitt von R ist eine ZerlegungR = A∪B der reellen Zahlen in zwei disjunkte, nichtleere Teilmengen A undB mit der Eigenschaft, dass jedes Element a ∈ A kleiner als jedes Elementb ∈ B ist, das heißt
a < b ∀ a ∈ A, ∀ b ∈ B.
Bezeichnung fur Dedekindsche Schnitte: (A | B)
Bemerkung: Die Definition eines Dedekindschen Schnittes ist in jedem an-geordneten Korper moglich, da eine Relation “<” definiert ist; zum Beispielin [Q,+, · ].
Beispiel: Sei a ∈ R eine reelle Zahl.
A = (−∞, a], B = (a,∞)A = (−∞, a), B = [a,∞)
(A | B) Dedekindsche Schnitte.
Definition 1.8. Sei (A | B) ein Dedekindscher Schnitt von R. Eine Zahls ∈ R heißt Schnittzahl von (A | B), falls a ≤ s ≤ b fur alle a ∈ A undb ∈ B.
Wegen R = A∪B , ist s entweder das großte Element von A (falls s ∈ A) oderdas kleinste Element von B (falls s ∈ B).
Vollstandigkeitsaxiom (V) der reellen Zahlen
Jeder Dedekindsche Schnitt (A | B) von R besitzt eine eindeutig bestimmteSchnittzahl
Bemerkungen:Die Vollstandigkeitseigenschaft gilt nicht in jedem angeordneten Korper, zum

12 1 Reelle und komplexe Zahlen
Beispiel nicht im Korper [ Q,+, · ]: Seien namlich A = (−∞,√
2] ∩ Q undB = (
√2,+∞) ∩ Q. Dann gilt Q = A∪B . Somit bilden A und B einen
Dedekindschen Schnitt von Q. Dieser hat aber in Q keine Schnittzahl.(Wir werden noch sehen, dass die Zahl
√2 nicht rational ist).
Definition 1.9. Ein angeordneter Korper [ K,+, · ] mit der Eigenschaft (V),das heißt in dem jeder Dedekindsche Schnitt eine Schnittzahl hat, heißtvollstandig.
Zusammenfassung:
Die reellen Zahlen [R,+, · ] bilden einen vollstandigen, angeordne-ten Korper.
Bemerkung: Zwei vollstandige, angeordnete Korper [ K1,+, · ] und [ K2,+, · ]sind isomorph (dies beweisen wir hier nicht). Somit sind die reellen Zahlen[R,+, ·] (bis auf Isomorphie) der einzige vollstandige, angeordnete Korper.Die reellen Zahlen R sind somit durch die Korpereigenschaften K1-K9, dieAnordnungseigenschaften A1, A2 und die Vollstandigkeitseigenschaft V (bisauf Isomorphie) eindeutig bestimmt.
Wir beweisen nun einige Eigenschaften der reellen Zahlen, die aus der Vollstan-digkeitseigenschaft (V) folgen.
Definition 1.10.
1. Eine Teilmenge A ⊂ R heißt von oben beschrankt, falls eine Zahl M ∈ R
existiert, so dass a ≤ M fur alle a ∈ A gilt. Eine solche Zahl M heißtobere Schranke von A.
2. Eine Teilmenge A ⊂ R heißt von unten beschrankt, falls eine Zahl m ∈ R
existiert, so dass m ≤ a fur alle a ∈ A gilt. Eine solche Zahl m heißtuntere Schranke von A.
3. Eine Teilmenge A ⊂ R heißt beschrankt, falls sie sowohl von unten alsauch von oben beschrankt ist.
Definition 1.11. Sei A ⊂ R.
1. Eine Zahl M0 ∈ R heißt Supremum von A, falls sie die kleinste obereSchranke von A ist, das heißt fallsa) a ≤M0 ∀ a ∈ A ,b) fur jedes ε > 0 existiert ein a ∈ A, so dass M0 − ε < a .
2. Eine Zahl m0 ∈ R heißt Infimum von A, falls sie die großte untere Schran-ke von A ist, das heißt fallsa) m0 ≤ a ∀a ∈ A ,b) fur jedes ε > 0 existiert ein a ∈ A, so dass a < m0 + ε .

1.2 Die reellen Zahlen 13
Bezeichnung: Falls das Supremum bzw. das Infimum einer Menge A ⊂ R
existiert, so bezeichnen wir es mit
supA := Supremum von A inf A := Infimum von A.
Offensichtlich existiert hochstens ein Supremum und hochstens ein Infimumeiner Menge A ⊂ R.
Aus der Vollstandigkeitseigenschaft von R erhalt man die folgende Aussageuber die Existenz von Supremum bzw. Infimum.
Satz 1.7 Jede nach oben beschrankte, nichtleere Menge A ⊂ R besitzt einSupremum. Jede nach unten beschrankte, nichtleere Menge A ⊂ R besitzt einInfimum.
Beweis. (1) Sei A ⊂ R von oben beschrankt. Wir betrachten die Menge
X := M ∈ R | a ≤M ∀ a ∈ A.
Da A von oben beschrankt ist, ist X 6= ∅. Es sei Y := R \X . Dann gilt:
a) R = Y ∪X .b) Sei y ∈ Y und x ∈ X . Da y /∈ X , existiert ein a ∈ Amit y < a. Andererseits
ist a ≤ x nach Definition von X . Folglich gilt y < x fur alle y ∈ Y undx ∈ X .
Also ist (Y | X) ein Dedekindscher Schnitt von R. Nach dem Vollstandig-keitsaxiom (V) von R existiert eine Schnittzahl M0 dieses DedekindschenSchnittes, also eine Zahl M0 ∈ R mit
y ≤M0 ≤ x ∀ y ∈ Y, x ∈ X.
Wir zeigen, dass die Schnittzahl M0 in X liegt. Wir fuhren diesen Beweisindirekt. Wir nehmen an, dass M0 /∈ X und fuhren dies zum Widerspruch.Ist M0 /∈ X , so ist M0 das großte Element von Y . Nach Definition von Y gibtes ein a0 ∈ R mit M0 < a0. Dann ist wegen der Monotonieeigenschaft von <aber auch
M0 <M0 + a0
2<a0
2+a0
2= a0
und folglichM0 + a0
2∈ Y.
Dann kann M0 aber nicht das großte Element von Y sein, d.h. wir erhaltenwir einen Widerspruch. Unsere Annahme war demnach falsch. Folglich istM0 ∈ X , also eine obere Schranke von A. Als Schnittzahl von (Y | X) istM0 das kleinste Element von X , also die kleinste obere Schranke von A. Daszeigt, dass M0 = supA.Der Beweis der 2. Aussage des Satzes wird analog gefuhrt. ⊓⊔

14 1 Reelle und komplexe Zahlen
Definition 1.12.
1. Sei A ⊂ R eine nach oben beschrankte Menge. Liegt das Supremum vonA in A, so nennt man es auch das Maximum von A und schreibt dafurmaxA.
2. Sei A ⊂ R eine nach unten beschrankte Menge. Liegt das Infimum vonA in A, so nennt man es auch das Minimum von A und schreibt dafurminA.
Wir leiten aus Satz 1.7 einige Folgerungen ab.
Folgerung 1.1 (Archimedisches Axiom der reellen Zahlen)Die Menge der naturlichen Zahlen N ⊂ R ist nicht nach oben beschrankt, dasheißt zu jedem x ∈ R existiert ein n ∈ N mit x < n. Das gleiche gilt auch furjede unendliche Teilmenge N von N.
Beweis. Wir fuhren den Beweis indirekt. Angenommen N (bzw. N) ist nachoben beschrankt. Dann existiert nach Satz 1.7 das Supremum M0 = sup N.Es sei M := M0 − 1
2 . Da M0 die kleinste obere Schranke ist, existiert einm ∈ N, mit M0 − 1
2 < m. Folglich ist
M0 < m+1
2< m+ 1.
Da aber m + 1 ∈ N ist, kann M0 keine obere Schranke sein. Dies ergibt denWiderspruch. ⊓⊔
Folgerung 1.2
1. Zu jedem ε ∈ R+ existiert ein n ∈ N mit 1n< ε.
2. Zu jedem q ∈ N, q 6= 1, und ε ∈ R+ existiert ein n ∈ N mit 1qn < ε
Beweis. Zu 1) Zur Zahl 1ε∈ R existiert nach dem Archimedischen Axiom ein
n ∈ N mit 1ε< n. Folglich gilt 1
n< ε.
Zum Beweis der 2. Aussage setzen wir
N := qn | n ∈ N.
N ist eine unendliche Teilmenge von N. Den Beweis kann man dann analogzu 1) fuhren. ⊓⊔
Folgerung 1.3 Sei A ⊂ Z eine nichtleere, nach oben (unten) beschrankteMenge ganzer Zahlen. Dann besitzt A ein Maximum (Minimum).

1.2 Die reellen Zahlen 15
Beweis. Sei A nach unten beschrankt und d = inf A. Nach dem Archimedi-schen Axiom existiert ein n0 ∈ N mit |d| < n0. Das heißt, es gilt −n0 < dund somit 0 < d+ n0 < a+ n0 fur alle a ∈ A. Betrachten wir nun die MengeA0 := a+ n0 | a ∈ A ⊂ N. Wir zeigen, dass diese Menge ein kleinstes Ele-ment besitzt. Sei k ∈ A0 und bezeichne (A0)k := x ∈ A0 |x ≤ k. Die Menge(A0)k ist endlich und besitzt deshalb ein kleinstes Element m0 (siehe Ubungs-aufgabe 5). Dann ist m0 auch das kleinste Element von A0 und m0 − n0 daskleinste Element von A . Folglich gilt m0 − n0 = minA.Ist A von oben beschrankt, so ist maxA = −min(−A). ⊓⊔
Satz 1.8 (Q liegt dicht in R)Seien x, y ∈ R und x < y. Dann existiert eine rationale Zahl q ∈ Q mitx < q < y .
Beweis. Wir wahlen ein n ∈ N mit 1n< y − x und setzen
A := z ∈ Z | z > n · x.
Wiederum nach dem Archimedischen Axiom ist A nicht leer und besitzt, davon unten beschrankt, ein Minimum (Folgerung 1.3). Sei m0 = minA. Danngilt m0 ∈ A und m0−1 /∈ A. Folglich ist m0
n> x und m0−1
n≤ x. Wir erhalten
somit
x <m0
n=m0 − 1
n+
1
n< x+ (y − x) = y
und folglich liegt die rationale Zahl q := m0
nim Intervall (x, y). ⊓⊔
Definition 1.13. Eine Familie abgeschlossener Intervalle In ⊂ R, n ∈ N,heißt Intervallschachtelung, wenn gilt:
1. In ⊂ Im ∀ n > m2. Zu jeder positiven Zahl ε ∈ R+ existiert ein n ∈ N mit L(In) < ε.
Satz 1.9 (Prinzip der Intervallschachtelung)Sei I1 ⊃ I2 ⊃ I3 ⊃ · · · eine Intervallschachtelung. Dann existiert genau einereelle Zahl x ∈ R, so dass x ∈ In fur alle n ∈ N, das heißt
∞⋂
n=1
In = x.
Beweis.1. Existenz: Sei In = [an, bn]. Da In ⊂ Im fur alle n ≥ m, folgt
am ≤ an ≤ bn ≤ bm. (∗)

16 1 Reelle und komplexe Zahlen
Wir betrachten die Menge der unteren Intervallgrenzen
A := an | n ∈ N ⊂ R.
A ist nach oben beschrankt, zum Beispiel durch b1, hat also nach Satz 1.7ein Supremum. Sei x = supA. Wir zeigen, dass x ∈ In fur alle n ∈ N.Nach Definition ist an ≤ x. Es bleibt zu zeigen, dass x ≤ bn fur alle n ∈ N.Angenommen x > bm fur ein m ∈ N. Da x die kleinste obere Schranke vonA ist, kann bm keine obere Schranke von A sein. Somit existiert ein an ∈ A,so dass an > bm. Dies widerspricht aber der Schachtelungseigenschaft (∗).Folglich war die Annahme falsch, das heißt x ≤ bn fur alle n ∈ N und somitgilt an ≤ x ≤ bn, also x ∈ In fur alle n ∈ N.2. Eindeutigkeit: Angenommen es gabe zwei Zahlen x, y ∈ R mit x 6= y undx, y ∈ In fur alle n ∈ N. Sei ε = |x − y| > 0. Dann existiert ein Intervall In0
mit L(In0) < ε. Da |x− y| > L(In0), konnen aber nicht beide Zahlen x, y inIn0 liegen. Damit ist die Eindeutigkeit von x gezeigt. ⊓⊔
Bemerkung: Die Vollstandigkeitseigenschaft eines angeordneten Korperskann man durch das Intervallschachtelungsprinzip oder die Existenz des Su-premums ersetzen.Es gilt: Sei [K,+, ·] ein angeordneter Korper. Dann sind folgende Aussagenaquivalent:
1. Jeder Dedekindsche Schnitt von K besitzt eine Schnittzahl.2. Jede nach oben beschrankte Teilmenge von K besitzt ein Supremum.3. Es gilt das Intervallschachtelungsprinzip und das Archimedische Axiom.
Die Implikation: 1. =⇒ 2. =⇒ 3. haben wir bewiesen. Die Umkehrung werdenwir hier nicht beweisen.
1.2.4 Die Uberabzahlbarkeit der Menge der reellen Zahlen
Wir beweisen mit Hilfe des Vollstandigkeitsaxioms, dass die Menge der reellenZahlen nicht abzahlbar ist.Dazu zunachst einige Definitionen.
Definition 1.14. Seien X und Y zwei nichtleere Mengen. Eine Abbildungf : X −→ Y heißt
• injektiv, falls f(x1) 6= f(x2) fur alle x1, x2 ∈ X mit x1 6= x2.• surjektiv, falls fur jedes y ∈ Y ein x ∈ X mit f(x) = y existiert.• bijektiv, falls f injektiv und surjektiv ist, d.h. falls fur jedes y ∈ Y genau
ein x ∈ X mit f(x) = y existiert.
Definition 1.15. Eine Menge A heißt abzahlbar, wenn es eine bijektive Ab-bildung
f : N −→ A
von der Menge der naturlichen Zahlen auf die Menge A gibt.(Es existiert also zu jedem a ∈ A genau ein n ∈ N mit f(n) = a).

1.2 Die reellen Zahlen 17
Die bijektive Abbildung f liefert uns eine Abzahlvorschrift fur A: Mit derBezeichnung an := f(n) ist namlich
A = a1, a2, a3, . . . mit ai 6= aj fur i 6= j.
Eine Menge A heißt uberabzahlbar, wenn sie weder leer, noch endlich oderabzahlbar ist. Wir sagen, die Menge A ist hochstens abzahlbar, wenn sie leer,endlich oder abzahlbar ist.
Beispiele:
1. Die Menge der naturlichen Zahlen N und die Menge N0 sind abzahlbar.2. Die Menge der ganzen Zahlen Z ist abzahlbar, denn
fZ : N −→ Z
2k 7−→ k2k + 1 7−→ −k
ist eine bijektive Abbildung zwischen N und Z.
Satz 1.10 Die Menge Q der rationalen Zahlen ist abzahlbar.
Beweis. (1. Cantorsches Diagonalisierungsverfahren).Wir geben zunachst eine Abzahlvorschrift der Menge Q+ der positiven ratio-nalen Zahlen an. Jede Zahl q ∈ Q+ sei als Bruch dargestellt:
q =n
m, n,m teilerfremde, naturliche Zahlen.
Wir betrachten das folgende Schema, das die Paare (n,m) als Punkte einesebenen Gitters darstellt. Dabei werden Punkte ausgelassen, fur die m und nnicht teilerfremd sind.

18 1 Reelle und komplexe Zahlen
6
-
m
n
1
2
3
4
5
1 2 3 4 5
- - -
I
6
6
R
R
I
I
IR
R
R
R
I
I
I
I
I
1 2 3 4 5 6
12
13
14
16
15
23
25
32
34
43
52
Die Gitterpunkte werden nun langs des im Gitter gezeichneten Streckenzugesnummeriert. Dadurch erreicht man alle Punkte des konstruierten Gitters underhalt somit eine bijektive Abbildung ϕ : N −→ Q+.Diese Abzahlung beginnt offensichtlich mit:
1, 2,1
2,
1
3, 3, 4,
3
2,
2
3,
1
4,
1
5, 5, · · ·
Wir erweitern nun ϕ zu einer bijektiven Abbildung φ : Z −→ Q mittels
φ(n) :=
ϕ(n) falls n ∈ N
0 falls n = 0−ϕ(−n) falls n ∈ Z, n < 0.
Die Abbildung φ fZ : N −→ Z −→ Q bildet N bijektiv auf Q ab. Somitist Q abzahlbar. ⊓⊔
Satz 1.11 Die Menge R der reellen Zahlen ist uberabzahlbar.
Beweis. Angenommen, es existiert eine Abzahlung von R, d.h. es gilt
R = x1, x2, x3, . . ..
Zu dieser Abzahlung konstruieren wir induktiv eine Intervallschachtelung

1.2 Die reellen Zahlen 19
I1 ⊃ I2 ⊃ I3 ⊃ I4 ⊃ I5 ⊃ . . .
Es sei
I1 := [x1 + 1, x1 +4
3].
Offensichtlich ist x1 /∈ I1 und L(I1) = 13 . Aus einem schon vorhandenen
Intervall In konstruieren wir In+1 wie folgt: Wir teilen In in drei gleichlange,abgeschlossene Intervalle und wahlen als In+1 eines dieser Teilintervalle, dasxn+1 nicht enthalt. Fur die so konstruierte Folge von Intervallen gilt
I1 ⊃ I2 ⊃ I3 ⊃ I4 ⊃ . . .
xn /∈ In
L(I1) = 13 , L(I2) = 1
32 , . . . , L(In) = 13n .
Somit ist I1 ⊃ I2 ⊃ I3 ⊃ . . . eine Intervallschachtelung. Sei nun x ∈∞⋂n=1
In.
Nach Annahme war R = x1, x2, x3, x4, . . .. Es muß also ein k0 ∈ N mitx = xk0 geben. Dann ist xk0 ∈ Ik0 . Dies widerspricht aber der Konstruktionder Intervalle. Somit war die Annahme der Abzahlbarkeit von R falsch. ⊓⊔
Definition 1.16. Zwei Mengen A und B heißen gleichmachtig, falls eine bi-jektive Abbildung f : A −→ B existiert. Die Menge B hat eine großereMachtigkeit als A, falls A zu einer Teilmenge von B gleichmachtig ist, aberB zu keiner Teilmenge von A.
Die Mengen N,Z und Q sind gleichmachtig. Die Menge R hat eine großereMachtigkeit als diese drei Mengen.
Kontinuumshypothese (1878): (Georg Cantor [1845–1918]) Es gibt keineMenge A, deren Machtigkeit großer als die von N und kleiner als die von R
ist.Diese Hypothese leitete die Entwicklung der Mengenlehre ein. Sie ist (auf derBasis der heute zugrundegelegten Axiome der Mengenlehre) weder beweisbarnoch widerlegbar. Solche Fragen werden in den Vorlesungen uber mathema-tische Logik behandelt.
1.2.5 Wurzeln und Potenzen reeller Zahlen
In diesem Abschnitt behandeln wir einige wichtige Gleichungen und Unglei-chungen fur Potenzen und Wurzeln reeller Zahlen.
Sei x ∈ R eine reelle Zahl. Die Potenz xn fur n ∈ N0 definieren wir induktivdurch:
x0 := 1, x1 := x, x2 := x · x , . . . , xn+1 := xn · x.

20 1 Reelle und komplexe Zahlen
Fur x 6= 0 setzen wir
x−n :=1
xn.
Damit ist die k–te Potenz xk fur jede ganze Zahl k ∈ Z und jede reelle Zahlx ∈ R, x 6= 0, definiert. Aus den Korper- und Anordnungseigenschaften derreellen Zahlen folgt sofort
1. Fur x ∈ R mit x 6= 0 und k, l ∈ Z gilt
xk · xl = xk+l , xk·l = (xk)l und (x · y)k = xk · yk.
2. Ist 0 < x < y, dann gilt xn < yn fur alle n ∈ N.
Satz 1.12 (Binomischer Satz) Seien x, y ∈ R. Dann gilt fur jedes n ∈ N
(x+ y)n =n∑
k=0
(n
k
)xk · yn−k.
Beweis. Wir fuhren den Beweis durch vollstandige Induktion uber n:Induktionsanfang: n = 1:
(1
0
)x0 · y1 +
(1
1
)x1 · y0 = x+ y.
Induktionsschritt :Induktionsvoraussetzung: Fur ein fixiertes n ∈ N gilt
(x+ y)n =
n∑
k=0
(n
k
)xk · yn−k.
Induktionsbehauptung:
(x+ y)n+1 =
n+1∑
k=0
(n+ 1
k
)xk · yn−k+1.
Induktionsbeweis:

1.2 Die reellen Zahlen 21
(x+ y)n+1 = (x+ y)n · (x+ y)
IV=
(n∑
k=0
(n
k
)xk · yn−k
)· (x+ y)
=
n∑
k=0
(n
k
)xk · x · yn−k +
n∑
k=0
(n
k
)xk · yn+1−k
=n∑
k=0
(n
k
)xk+1 · yn+1−(k+1) +
n∑
k=0
(n
k
)xk · yn+1−k
=
n+1∑
l=1
(n
l − 1
)xl · y(n+1)−l +
n∑
l=0
(n
l
)xl · y(n+1)−l
=
n∑
l=1
((n
l
)+
(n
l − 1
))xl · y(n+1)−l +
(n
n
)xn+1y0 +
(n
0
)x0yn+1
1.4=
n+1∑
l=0
(n+ 1
l
)xl · y(n+1)−l.
⊓⊔
Aus dem Binomischen Satz 1.12 ergibt sich die
Folgerung 1.4
1. (1 + x)n =n∑k=0
(nk
)xk,
2.n∑k=0
(nk
)= 2n,
3.n∑k=0
(−1)k(nk
)= 0.
Beweis. (1) ist der Binomische Satz fur y = 1, (2) ist der Binomischer Satzfur x = y = 1 und (3) ist der Binomischer Satz fur x = −1, y = 1. ⊓⊔
Satz 1.13 (Bernoullische Ungleichung) Fur jede reelle Zahl x ≥ −1 undfur jedes n ∈ N gilt:
(1 + x)n ≥ 1 + nx.
Beweis. Beweis durch vollstandige Induktion uber n.Induktionsanfang: Die Aussage gilt offensichtlich fur n = 1.Induktionsschritt :Induktionsvoraussetzung: Fur ein fixiertes n ∈ N gilt (1 + x)n ≥ 1 + nx.Induktionsbehauptung: (1 + x)n+1 ≥ 1 + (n+ 1) x.Induktionsbeweis:

22 1 Reelle und komplexe Zahlen
(1+x)n+1 = (1+x)n(1+x)IV
≥ (1+n x)(1+x) = 1+(n+1) x+n x2︸︷︷︸≥0
≥ 1+(n+1) x.
⊓⊔Als Anwendung erhalt man unmittelbar
Folgerung 1.5
1. Sei y ∈ R, y > 1, und r ∈ R+. Dann existiert ein n ∈ N, so daß yn > r.2. Sei y ∈ R, 0 < y < 1 und r ∈ R+. Dann existiert ein n ∈ N mit yn < r.
Beweis. Sei r ∈ R+ und y > 1. Nach dem Archimedischen Axiom fur reelleZahlen existiert eine naturliche Zahl n ∈ N, so daß n > r
y−1 . Dann folgt mitder Bernoullischen Ungleichung
yn = (1 + (y − 1))n ≥ 1 + n (y − 1) ≥ n (y − 1) > r.
Ist 0 < y < 1, so wenden wir das eben Bewiesene auf die reelle Zahl 1y> 1 an
und erhalten eine naturliche Zahl n ∈ N mit ( 1y)n > 1
rund somit yn < r. ⊓⊔
Satz 1.14 (Geometrische Summe) Fur jede reelle Zahl x 6= 1 und jedenaturliche Zahl n gilt:
n∑
k=0
xk =1 − xn+1
1 − x.
Beweis. Beweis durch vollstandige Induktion uber n.Induktionsanfang: n = 1:
1 − x2
1 − x=
(1 − x)(1 + x)
1 − x= 1 + x = x0 + x1.
Induktionsschritt :Induktionsvoraussetzung: Die Behauptung ist fur ein fixiertes n richtig.Induktionsbehauptung:
n+1∑
k=0
xk =1 − xn+2
1 − x.
Induktionsbeweis:
n+1∑
k=0
xk =( n∑
k=0
xk)
+ xn+1
IV=
1 − xn+1
1 − x+ xn+1
=1 − xn+1 + xn+1(1 − x)
1 − x
=1 − xn+2
1 − x.

1.2 Die reellen Zahlen 23
⊓⊔Wir beweisen nun die Existenz der n-ten Wurzel einer positiven reellen Zahl.
Satz 1.15 Sei x ∈ R+ eine positive reelle Zahl und n ∈ N. Dann existiertgenau eine positive reelle Zahl y ∈ R+ mit yn = x.
Bezeichnung: y := n√x heißt die n–te Wurzel aus x.
Beweis. Zum Beweis benutzen wir das Intervallschachtelungsprinzip. Es ge-nugt, den Fall x > 1 zu behandeln. Den Fall x < 1 fuhrt man durch Ubergangzu x′ = 1
xdarauf zuruck.
Wir definieren induktiv die folgende Folge abgeschlossener Intervalle: Wir set-zen I1 := [1, x]. Sei Ik := [ak, bk] bereits konstruiert. Dann definieren wir Ik+1
durch Halbierung von Ik: Sei m = ak+bk
2 der Mittelpunkt von Ik. Wir setzendann
Ik+1 = [ak+1, bk+1] :=
[ak,m] falls mn ≥ x[m, bk] falls mn < x.
Dann gilt nach Konstruktion:
1. I1 ⊃ I2 ⊃ I3 ⊃ . . ..
2. L(Ik) = (x − 1) ·(
12
)k−1fur alle k ∈ N.
3. ank ≤ x ≤ bnk fur alle k ∈ N.
Wir erhalten also ineinander geschachtelte Intervalle, deren Langen nach Fol-gerung 1.2 beliebig klein werden. Nach dem Intervallschachtelungsprinzip exi-stiert genau eine reelle Zahl y ∈ R mit y ∈ Ik fur jedes k ∈ N. Wir zeigennun, dass yn = x gilt.
Dazu betrachten wir die Intervalle
Jk := [ank , bnk ].
Da Ik ⊃ Ik+1, gilt wegen der Monotonie der Potenzen auch Jk ⊃ Jk+1. Furdie Lange von Jk erhalten wir
L(Jk) = bnk − ank
= (bk − ak)(bn−1k + bn−2
k ak + . . .+ bkan−2k + an−1
k )
= L(Ik) · bn−1k
(1 +
akbk
+a2k
b2k+ . . .+
an−1k
bn−1k
)
≤ (x− 1) · 1
2k−1· bn−1
1 · n
Nach Folgerung 1.2 gibt es zu jedem ε > 0 ein k ∈ N mit L(Jk) ≤ ε. Die Folgeder Intervalle Jk ist also eine Intervallschachtelung. Nach Konstruktion giltaber sowohl x ∈ Jk (Eigenschaft 3.) als auch yn ∈ Jk fur alle k ∈ N. Da der
Durchschnitt∞⋂k=1
Jk nur ein Element enthalt, folgt x = yn.
Die Eindeutigkeit der Zahl y ∈ R+ mit yn = x ist klar, denn ist z.B. y1 < y2,so folgt yn1 < yn2 . ⊓⊔

24 1 Reelle und komplexe Zahlen
Bemerkung: Die Gleichung yn = x hat fur gerade n zwei reelle Losungen
y1 = n√x und y2 = − n
√x.
Die Eindeutigkeitsaussage von Satz 1.15 gilt also nur in R+.
Die Gleichung yn = x ist in Q im allgemeinen nicht losbar.
Satz 1.16 Seien n und k naturliche Zahlen. Dann ist n√k genau dann eine
rationale Zahl, falls k die n–te Potenz einer naturlichen Zahl ist, das heißtfalls k = mn fur ein m ∈ N. Insbesondere gilt:
• Fur jede Primzahl p und jedes n > 1 ist die Zahl n√p irrational.
• Wennn√k rational ist, so ist
n√k sogar eine naturliche Zahl.
Beweis.1. (⇐=): Sei k = mn mit m ∈ N. Dann ist per Definition m := n
√k ∈ N ⊂ Q.
2. (=⇒): Sei n√k ∈ Q. Dann existieren teilerfremde Zahlen m, q ∈ N, so dass
n√k = m
q. Nach Definition erhalt man k = (m
q)n = mn
qn und somit kqn = mn.Wir zeigen nun, dass q = 1 gilt. Angenommen q > 1. Dann existiert einePrimzahl p > 1, die q teilt. Folglich teilt p auch kqn = mn, das heißt p teiltauch m. Das ist aber ein Widerspruch dazu, dass q und m teilerfremd sind.Somit ist q = 1 und k = mn fur m ∈ N. ⊓⊔
Wir konnen jetzt die Potenzen mit rationalen Exponenten definieren.
Definition 1.17. Sei x ∈ R+ eine positive reelle Zahl und q ∈ Q eine rationaleZahl mit der Darstellung q = n
m, n ∈ Z,m ∈ N. Dann sei
xq :=(
m√x)n.
Diese Definition ist korrekt, d.h. unabhangig von der Wahl der Darstellungvon q.
Die folgenden Eigenschaften fur die Potenzen mit rationalen Exponenten sindleicht nachzuprufen: Seien p, q ∈ Q und x, y ∈ R+. Dann erhalt man:
1. xq · xp = xp+q , (xq)p = xp·q , xq · yq = (xy)q.2. Sei p < q. Dann gilt xp < xq falls x > 1 und xp > xq falls 0 < x < 1.3. Sei 0 < x < y. Dann gilt xq < yq falls q > 0 und xq > yq falls q < 0.
Wir werden auf die Potenzen und ihre Eigenschaften spater zuruckkommen.
Abschließend beweisen wir eine Ungleichung zwischen dem geometrischen unddem arithmetischen Mittel von n positiven reellen Zahlen.

1.2 Die reellen Zahlen 25
Definition 1.18. Seien a1, a2, . . . , an positive reelle Zahlen. Dann heißen dieZahlen
A(a1, . . . , an) :=a1 + a2 + . . .+ an
narithmetisches Mittel
G(a1, . . . , an) := n√a1 · a2 · . . . · an geometrisches Mittel
von a1, a2, . . . , an.
Satz 1.17 Fur alle positiven reellen Zahlen a1, a2, . . . , an gilt
n√a1 · a2 · . . . · an ≤ a1 + a2 + . . .+ an
n.
Die Gleichheit tritt nur dann auf, wenn a1 = a2 = . . . = an.
Beweis. Das arithmetische und das geometrische Mittel ist homogen, d.h. furein λ ∈ R+ gilt
A(λa1, . . . , λan) = λ · A(a1, . . . , an) und
G(λa1, . . . , λan) = λ ·G(a1, . . . , an).
Es genugt deshalb, den Beweis fur den Fall A(a1, . . . , an) = 1 zu fuhren. (Wirsetzen im anderen Fall λ = A−1).Wir zeigen mit vollstandiger Induktion uber n: Sind a1, . . . , an positive reelleZahlen mit a1 +a2 + . . .+an = n, so gilt a1 ·a2 · . . . ·an ≤ 1 und die Gleichheittritt nur auf, wenn a1 = a2 = . . . = an = 1.Induktionsanfang: n = 1. In diesem Fall gilt die Behauptung offensichtlich.Induktionsschritt :Die Aussage gelte fur ein n ∈ N. Wir mussen sie dann fur n+1 beweisen. Fura1 = a2 = . . . = an+1 = 1 gilt die Aussage. Seien also a1, a2, . . . , an+1 positiveZahlen mit a1 + a2 + . . . + an+1 = n + 1, von denen eine von 1 verschiedenist. OBdA sei a1 < 1 und a2 > 1. Dann ist
0 < (1 − a1)(a2 − 1) = a1 + a2 − 1 − a1 · a2
und somita1 · a2 < a1 + a2 − 1. (∗)
Außerdem gilt(a1 + a2 − 1) + a3 + . . .+ an+1 = n.
Wir wenden die Induktionsvoraussetzung auf die n Summanden der letztenGleichung an und erhalten mit (*)
1 ≥ (a1 + a2 − 1) · a3 · . . . · an+1
(∗)> (a1 · a2) · a3 · . . . · an+1.
Damit ist der Satz bewiesen. ⊓⊔

26 1 Reelle und komplexe Zahlen
1.3 Die komplexen Zahlen
Fur jede von Null verschiedene reelle Zahl x gilt x2 > 0. Man kann im Zahl-bereich der reellen Zahlen also keine Wurzeln aus negativen Zahlen ziehen.Insbesondere gibt es keine reelle Losung der Gleichung x2 = −1.Die komplexen Zahlen sind eine Erweiterung der reellen Zahlen, die es moglichmacht, auch Wurzeln aus negativen Zahlen zu ziehen.Dazu betrachten wir die Menge der Paare reeller Zahlen
R2 := R × R := (a, b) | a, b ∈ R
und fuhren auf dieser Menge eine Addition + : R2 × R2 −→ R2 und eineMultiplikation · : R2 × R2 −→ R2 ein.Zwei Paare z1 = (a1, b1) und z2 = (a2, b2) aus R2 addieren bzw. multiplizierenwir nach folgenden Regeln:
z1 + z2 := (a1, b1) + (a2, b2) = (a1 + a2, b1 + b2) (1.1)
z1 · z2 := (a1, b1) · (a2, b2) = (a1a2 − b1b2, a1b2 + a2b1). (1.2)
Die mit dieser Addition und Multiplikation ausgestattete Menge R2 bezeich-net man mit dem neuen Symbol C, d.h. C := R2, um auszudrucken, dass manaußer der ublichen Addition (1.1) der reellen Paare auch noch die Multiplika-tion (1.2) festgelegt hat. Die Elemente von C heißen komplexe Zahlen.
Satz 1.18 Die komplexen Zahlen [C,+, ·] bilden einen Korper. Es gelten alsofolgende Rechenregeln fur die Addition + und die Multiplikation ·K1: z1 + z2 = z2 + z1 fur alle z1, z2 ∈ C.K2: (z1 + z2) + z3 = z1 + (z2 + z3) fur alle z1, z2, z3 ∈ C.K3: Die komplexe Zahl 0 := (0, 0) ist das neutrale Element der Addition, das
heißt es gilt 0 + z = z + 0 = z fur alle z ∈ C.K4: Zu je zwei komplexen Zahlen z1, z2 ∈ C existiert eine komplexe Zahl
w ∈ C mit w + z2 = z1.K5: z1 · z2 = z2 · z1 fur alle z1, z2 ∈ C.K6: (z1 · z2) · z3 = z1 · (z2 · z3) fur alle z1, z2.z3 ∈ C.K7: Die komplexe Zahl 1 := (1, 0) ist das neutrale Element der Multipli-
kation, das heißt es gilt 1 · z = z · 1 = z fur alle z ∈ C.K8: Zu je zwei komplexen Zahlen z1 und z2 6= 0 existiert eine komplexe Zahl
v ∈ C mit v · z2 = z1 .K9: (z1 + z2) · z3 = z1 · z3 + z2 · z3 fur alle z1, z2, z3 ∈ C.
Beweis. Diese Eigenschaften folgen direkt aus den Korpereigenschaften vonR und den Definitionen von + und ·. Wir uberprufen K4 und K8:Seien z1 = (x1, y1) und z2 = (x2, y2) zwei komplexe Zahlen. Dann gilt furw := (x1 − x2, y1 − y2) die Gleichung w + z2 = z1. Sei zusatzlich z2 6= 0. Wirbetrachten

1.3 Die komplexen Zahlen 27
v :=
(x1x2 + y1y2x2
2 + y22
,y1x2 − x1y2x2
2 + y22
)∈ C.
Man rechnet leicht nach, dass fur diese komplexe Zahl v die Geichung v·z2 = z1erfullt ist. ⊓⊔
Die komplexe Zahl w mit w + z2 = z1, so heißt Differenz von z1 und z2 undwird mit w := z1 − z2 bezeichnet. Die komplexe Zahl v mit v · z2 = z1 heißtQuotient von z1 und z2 und wird mit v := z1
z2bezeichnet. Fur z ∈ C mit
z 6= 0 sei z−1 := 1z. Die Potenzen zn fur n ∈ N seinen induktiv durch z1 := z,
zn+1 := zn · z erklart. Weiterhin sei z−n :=(
1z
)n= 1
zn .
Bemerkung: Im Gegensatz zum Korper der reellen Zahlen ist der Korperder komplexen Zahlen nicht angeordnet (Ubungsaufgabe 15).
Bezeichnungen:Fur den bequemen Umgang mit den komplexen Zahlen eignet sich die nunfolgende Vereinbarung.Nach Definition gilt fur die komplexen Zahlen (a, 0) und (b, 0)
(a, 0) + (b, 0) = (a+ b, 0) und (a, 0) · (b, 0) = (a · b, 0).
Die Zuordnung a ∈ R 7−→ (a, 0) ∈ C ist also eine Einbettung der Mengeder reellen Zahlen in die Menge der komplexen Zahlen, die mit den jewei-ligen Korperoperationen + und · vertraglich ist. Wir konnen deshalb R alsTeilkorper von C auffassen. Dies werden wir in Zukunft tun und die komplexeZahl (a, 0) einfach mit a bezeichnen. Dies rechtfertigt auch die Bezeichnung0 := (0, 0) fur das neutrale Element der Addition und 1 := (1, 0) fur das neu-trale Element der Multiplikation (siehe Satz 1.18).Die komplexe Zahl (0, 1) bezeichnen wir mit i und nennen sie die imaginareEinheit. Fur i = (0, 1) gilt
i2 = (0, 1) · (0, 1) = (−1, 0) = −1.
Die Gleichung x2 = −1 ist also im Korper der komplexen Zahlen losbar.Ist z = (a, b) eine beliebige komplexe Zahl, so gilt mit unseren Vereinbarungen
z = (a, b) = (a, 0) + (0, b) = (a, 0) + (0, 1)(b, 0) = a+ i · b.
Jede komplexe Zahl z ∈ C ist also in der Form
z = a+ ib a, b ∈ R (1.3)
darstellbar. Dies ist die ubliche Darstellung der komplexen Zahlen. Man kanndann mit den komplexen Zahlen wie mit den reellen rechnen, indem mani2 = −1 berucksichtigt. Es gilt also fur z1 = a1 + i b1 und z2 = a2 + i b2

28 1 Reelle und komplexe Zahlen
z1 + z2 = (a1 + ib1) + (a2 + ib2) = (a1 + a2) + i (b1 + b2) (1.4)
z1 · z2 = (a1 + ib1) · (a2 + ib2) = (a1a2 − b1b2) + i (a1b2 + b1a2) (1.5)
Ist z = a+ ib ∈ C, so heißt Re(z) := a der Realteil von z und Im(z) := b derImaginarteil von z. Ist Re(z) = 0, so heißt z rein imaginar, ist Im(z) = 0, soheißt z reell.
Beispiel: Sei z = a+ ib 6= 0 . Dann ist
1
z=
1
a+ ib=
a− ib
(a+ ib)(a− ib)=
a− ib
a2 + b2=
a
a2 + b2− i
b
a2 + b2,
also gilt
Re
(1
z
)=
a
a2 + b2bzw. Im
(1
z
)= − b
a2 + b2.
Definition 1.19. Ist z = a+ ib ∈ C eine komplexe Zahl, so heißt z := a− ibdie konjugiert komplexe Zahl zu z.
Es gelten folgende, leicht zu uberprufende Rechenregeln:
Satz 1.19 Fur alle komplexen Zahlen z und w gilt:
1. z + w = z + w, z · w = z · w, z = z .2. z + z = 2 ·Re(z) , z − z = 2i · Im(z) .3. z = z ⇐⇒ z ∈ R.4. z · z = Re(z)2 + Im(z)2 . Insbesondere ist 0 ≤ z · z ∈ R.
⊓⊔
Definition 1.20. Sei z = a+ ib ∈ C eine komplexe Zahl. Der Betrag von zist die reelle Zahl
|z| :=√a2 + b2 =
√z · z.
Satz 1.20 (Eigenschaften des Betrages komplexer Zahlen)Seien z und w komplexe Zahlen. Dann gilt:
1. |z| ≥ 0 , wobei |z| = 0 genau dann, wenn z = 0.2. |z · w| = |z| · |w|.3. |z + w| ≤ |z|+ |w| (Dreiecksungleichung)4. |z| = |z|5. |Re(z)| ≤ |z|, |Im(z)| ≤ |z|.

1.3 Die komplexen Zahlen 29
Beweis. 1., 4. und 5. folgen trivialerweise aus der Definition. Formel 2. folgtaus
|z · w|2 = (zw)(zw) = zz · ww = |z|2 · |w|2.Die Dreiecksungleichung folgt aus
|z + w|2 = (z + w)(z + w)
= (z + w)(z + w)
= zz + ww + wz + zw
= zz + ww + wz + wz
= |z|2 + |w|2 + 2 · Re(wz)≤ |z|2 + |w|2 + 2 · |wz|= |z|2 + |w|2 + 2 · |w| · |z|= (|z| + |w|)2.
⊓⊔
Die geometrische Interpretation der komplexen Zahlen
Der Darstellung der reellen Zahlen auf einer Geraden entspricht die Darstel-lung der komplexen Zahlen in der Ebene, die man dann oft Gaußsche Zahlen-ebene oder komplexe Zahlenebene nennt.Wir wahlen ein kartesisches Koordinatensystem in der Ebene und stellen diekomplexe Zahl z = (a, b) = a+ ib ∈ C als Punkt der Ebene mit den Koordi-naten (a, b) dar.
-
6
R
iR
3z = (a, b) = a+ bi
a1
i
ib
reelle Achse (x-Achse)
imaginare Achse (y-Achse)
ϕ
|z|
Die reellen Zahlen R entsprechen der x–Achse, die rein imaginaren Zahlen iRder y–Achse.

30 1 Reelle und komplexe Zahlen
Nach dem Satz von Pythagoras ist |z| =√a2 + b2 gleich dem Abstand des
Punktes z = (a, b) zum Ursprung des Koordinatensystems. Die komplexe Zahlz = (a,−b) = a− ib entsteht durch Spiegelung von z an der reellen Achse. Furz 6= 0 sei ϕ der Winkel zwischen der x–Achse und dem Strahl vom Ursprungdurch z, gemessen in positiver Richtung (entgegen dem Uhrzeigersinn). Danngilt im rechtwinkligen Dreieck
cosϕ =a
|z| und sinϕ =b
|z| .
Die Darstellung
z = |z| (cosϕ+ i · sinϕ) (1.6)
heißt trigonometrische Darstellung der komplexen Zahl z 6= 0. Der Winkel ϕheißt Argument von z und wird mit arg(z) bezeichnet. Das Argument ϕ istbis auf ganzzahlige Vielfache von 2π eindeutig bestimmt.
Geometrische Deutung von z1 + z2:Die Summe z1+z2 entspricht dem Endpunkt der vom Nullpunkt ausgehendenDiagonalen im von z1 und z2 gebildeten Parallelogramm.
-
6
R
iR
1
3
a2 a1 a1 + a2
ib1
ib2
i(b1 + b2) z1 + z2 = (a1 + a2, b1 + b2)
z1
z2 z2 = (a2, b2)
z1 = (a1, b1)
Geometrische Deutung von z1 · z2:Wir betrachten die trigonometrische Darstellung von z1 und z2
z1 = |z1|(cosϕ1 + i sinϕ1)z2 = |z2|(cosϕ2 + i sinϕ2)
Nach den Additionstheoremen fur cos und sin gilt

1.3 Die komplexen Zahlen 31
z1 · z2 = |z1||z2| · (cosϕ1 · cosϕ2 − sinϕ1 · sinϕ2)
+ i · (sinϕ1 · cosϕ2 + sinϕ2 · cosϕ1)= |z1 · z2| · (cos(ϕ1 + ϕ2) + i · sin(ϕ1 + ϕ2))
und folglich |z1 · z2| = |z1| · |z2| und arg(z1 · z2) = arg(z1) + arg(z2).Nach diesen Formeln kann z1 · z2 gezeichnet werden.
w
z1 · z2
z1
z2
|w| = |z1 · z2|1
ϕ1
ϕ2
ϕ1 + ϕ2
Fur die Winkel gilt ϕ1 = arg(z1) und ϕ2 = arg(z2). Der Punkt z1 · z2 liegtauf dem vom Ursprung ausgehenden Strahl, der mit der reellen Achse R denWinkel ϕ1 +ϕ2 einnimmt. Mittels des Strahlensatzes erhalt man einen Punktw auf dem Strahl durch den Ursprung und z2 mit |w| = |z1 ·z2|. Man dreht die-sen Punkt w um den Winkel ϕ1 um den Ursprung und erhalt den Punkt z1 ·z2.
Beispiele:
a) Die Abbildung z ∈ C 7−→ iz ∈ C beschreibt die Drehung um den Ursprungum den Winkel π2 (entgegen dem Uhrzeigersinn).
b) Die Abbildung z ∈ C 7−→ rz ∈ C, r ∈ R+, ist die Streckung von z um denFaktor r auf dem durch den Ursprung und z gehenden Strahl.
c) Was bedeutet die Inversion z ∈ C 7−→ z−1 = 1z∈ C geometrisch?
Betrachten wir den Kreis K1 = z ∈ C | |z|2 = 1 vom Radius 1. Sei z ∈ C
ein vom Ursprung verschiedener Punkt. Der Punkt z ∈ C heißt Spiegelpunktvon z an K1, falls z auf dem von 0 ausgehenden Strahl durch z liegt und|z| · |z| = 1 gilt. Dann existiert ein c ∈ R+ mit z = cz. Setzen wir das in|z| · |z| = 1 ein, so erhalten wir c = 1
|z|2 = 1z·z . Folglich ist der Spiegelpunkt
z = 1z
=(
1z
). Die Inversionsabbildung z ∈ C 7−→ z−1 ∈ C ist also die Hinter-
einanderausfuhrung der Spiegelung am Kreis K1 und der Spiegelung an der

32 1 Reelle und komplexe Zahlen
reellen Achse.
z−1
z
R
iR
1
z−1
Wir erklaren nun Wurzeln aus komplexen Zahlen: Wie wir gerade gesehenhaben, gelten fur eine komplexe Zahl z die Formeln
|zn| = |z|n und arg(zn) = n · arg(z).
Daraus folgt
Satz 1.21 Sei w ∈ C eine von Null verschiedene komplexe Zahl mit denBetrag r := |w| und dem Argument ϕ =: arg(w) ∈ [0, 2π). Dann hat dieGleichung zn = w genau n verschiedene komplexe Losungen, namlich
zk := n√r ·(
cos
(ϕ
n+k · 2πn
)+ i sin
(ϕ
n+k · 2πn
))
wobei k ∈ 0, 1, 2, . . . , n− 1.Beweis. Fur die komplexen Zahlen zk gilt nach Definition
|zk| = n√r und arg (zk) =
ϕ
n+
2πk
n=: ϕk.
Hieraus folgt
znk = ( n√r)n︸ ︷︷ ︸
|zk|n
(cos(ϕ+ 2πk︸ ︷︷ ︸n·arg (zk)
) + i sin(ϕ+ 2πk)) = |w|(cosϕ+ i sinϕ) = w.

1.3 Die komplexen Zahlen 33
Wir haben also n verschiedene Losungen der Gleichung zn = w gefunden. Wirzeigen, dass es keine weiteren Losungen gibt. Sei z eine beliebige Losung vonzn = w und z = |z|(cosψ + i · sinψ) die trigonometrische Darstellung von z.Es gilt |z|n = |w| und folglich |z| = n
√|w|. Weiterhin ist n · ψ = ϕ + 2πl, fur
ein l ∈ Z und somit ψ = ϕn
+ 2πln
. Wir teilen l durch n mit Rest: l = k + rn,r ∈ Z und 0 ≤ k ≤ n− 1. Dann gilt ψ = ϕk + r · 2π und folglich z = zk. ⊓⊔
Geometrische Deutung der Wurzeln:Die Losungen zk von zn = w bilden die Ecken eines regelmaßigen n-Ecks aufdem Kreis vom Radius n
√|w|.
-
6
R
iR
1
M
)
N
z0
z1
z2
z3
w
ϕ4
ϕ
π2
n = 4
Wir formulieren abschließend den Fundamentalsatz der Algebra, der eine derwichtigsten Aussagen uber komplexe Zahlen enthalt.
Satz 1.22 (Fundamentalsatz der Algebra)Es seien a0, a1, . . . , an−1 komplexe Zahlen. Dann besitzt die Gleichung
zn + an−1zn−1 + . . .+ a1z + a0 = 0
eine Losung z ∈ C. ⊓⊔

34 1 Reelle und komplexe Zahlen
Der Beweis dieses Satzes fur allgemeine n erfolgt spater. Wir beweisen denFundamentalsatz der Algebra hier zunachst nur fur n = 2. In diesem Fallerhalt man alle komplexen Losungen z der quadratischen Gleichungz2 + a1z + a0 = 0 mittels quadratischer Erganzung. Es gilt
z2 + a1z + a0 = 0
⇐⇒(z +
a1
2
)2
+ a0 −a21
4= 0
⇐⇒ w2 = c wobei w := z +a1
2und c =
a21
4− a0.
Fur c 6= 0 konnen wir die Gleichung w2 = c nach Satz 1.21 losen und erhaltengenau 2 verschiedene komplexe Losungen von z2 + a1z + a0 = 0. Fur c = 0
gilt a0 =a21
4 und deshalb
z2 + a1z + a0 =(z +
a1
2
)(z +
a1
2
).
In diesem Fall ist z = −a1
2 eine 2-fache Losung von z2 + a1z + a0 = 0.
1.4 Die Vektorraume Rn und Cn
Definition 1.21. Mit Rn bezeichnen wir die Menge aller n–Tupel reellerZahlen. Mit Cn bezeichnen wir die Menge aller n–Tupel komplexer Zahlen.Wir addieren zwei n-Tupel x = (x1, . . . , xn) und y = (y1, . . . , yn) aus Rn (Cn)mittels:
x+ y := (x1, . . . , xn) + (y1, . . . , yn) = (x1 + y1, . . . , xn + yn).
Wir multiplizieren ein n-Tupel x = (x1, . . . , xn) ∈ Rn (Cn) mit einer Zahlλ ∈ R (C) mittels:
λ · z := λ · (x1, . . . , xn) = (λx1, . . . , λxn).
Satz 1.23 Rn ist ein n–dimensionaler Vektorraum uber dem Korper der re-ellen Zahlen R. Cn ist ein n–dimensionaler Vektorraum uber dem Korper derkomplexen Zahlen C.
Beweis. Siehe Algebra–Vorlesung ⊓⊔
Die Elemente von Rn und Cn bezeichnet man deshalb auch als Vektoren.

1.4 Die Vektorraume Rn und Cn 35
Definition 1.22. (1) Unter dem Skalarprodukt zweier Vektoren x = (x1, . . . , xn), y =(y1, . . . , yn) aus Rn versteht man die Zahl
〈x, y〉 :=
n∑
j=1
xj · yj ∈ R.
(2) Unter dem Skalarprodukt zweier Vektoren z = (z1, . . . , zn), w = (w1, . . . , wn)aus Cn versteht man die Zahl
〈z, w〉 :=
n∑
j=1
zj · wj ∈ C.
(3) Die Norm eines Vektors x ∈ Rn bzw. z ∈ Cn ist die Zahl
‖x‖ :=√〈x, x〉 =
√√√√n∑
j=1
x2j ∈ R, bzw. ‖z‖ :=
√〈z, z〉 =
√√√√n∑
j=1
|zj|2 ∈ R.
Satz 1.24 (Eigenschaften des Skalarprodukts und der Norm)Seien x, y ∈ Rn, z, w ∈ Cn, λ ∈ R und µ ∈ C. Dann gilt
1. 〈x, y〉 = 〈y, x〉〈z, w〉 = 〈w, z〉.
2. 〈x+ x, y〉 = 〈x, y〉 + 〈x, y〉〈z + z, w〉 = 〈z, w〉 + 〈z, w〉.
3. 〈λx, y〉 = 〈x, λy〉 = λ〈x, y〉〈µz,w〉 = µ〈z, w〉 und 〈z, µw〉 = µ〈z, w〉.
4. ‖x‖ ≥ 0 , wobei ‖x‖ = 0 ⇐⇒ x = (0, . . . , 0).‖z‖ ≥ 0 , wobei ‖z‖ = 0 ⇐⇒ z = (0, . . . , 0).
5. ‖λx‖ = |λ| · ‖x‖‖µz‖ = |µ| · ‖z‖.
6. Cauchy–Schwarzsche Ungleichung (CSU):
|〈x, y〉| ≤ ‖x‖ · ‖y‖ bzw. |〈z, w〉| ≤ ‖z‖ · ‖w‖
Die Gleichheit gilt genau dann, wenn x und y, bzw. z und w linearabhangig sind.
7. Dreiecksungleichung:
‖x+ y‖ ≤ ‖x‖ + ‖y‖ bzw. ‖z + w‖ ≤ ‖z‖ + ‖w‖.
Beweis. Die Aussagen 1.–5. folgen unmittelbar aus der Definition.Beweis der Cauchy-Schwarzschen Ungleichung:Da das Skalarprodukt auf Rn ein Spezialfall desjenigen auf Cn ist, genugt es,

36 1 Reelle und komplexe Zahlen
|〈z, w〉| ≤ ‖z‖ · ‖w‖
fur alle komplexen Vektoren z und w zu beweisen. Da die Norm nichtnegativist, gilt
0 ≤ ‖ ‖w‖2z − 〈z, w〉w ‖2. (∗)Daraus folgt
0 ≤ 〈 ‖w‖2z − 〈z, w〉w, ‖w‖2z − 〈z, w〉w 〉und wir erhalten
0 ≤ ‖w‖4‖z‖2 − 〈z, w〉‖w‖2〈w, z〉 − ‖w‖2〈z, w〉〈z, w〉 + 〈z, w〉〈z, w〉‖w‖2.
Folglich gilt‖w‖4‖z‖2 ≥ |〈z, w〉|2‖w‖2.
OBdA sei w 6= 0, ansonsten ist die Behauptung sofort erfullt. Dann folgt
|〈z, w〉|2 ≤ ‖w‖2‖z‖2
und somit|〈z, w〉| ≤ ‖z‖ · ‖w‖.
Die Gleichheit kann nur gelten, wenn in (*) die Gleichheit steht. Dies ist abergenau dann der Fall, wenn ‖w‖2z − 〈z, w〉w = 0, dh. wenn z und w linearabhangig sind.
Beweis der Dreiecksungleichung: Es genugt abermals ‖z+w‖ ≤ ‖z‖+‖w‖ furalle z, w ∈ Cn zu beweisen. Es gilt
‖z + w‖2 = 〈z + w, z + w〉= 〈z, z〉+ 〈w,w〉 + 〈z, w〉 + 〈w, z〉= ‖z‖2 + ‖w‖2 + 〈z, w〉 + 〈z, w〉= ‖z‖2 + ‖w‖2 + 2Re〈z, w〉≤ ‖z‖2 + ‖w‖2 + 2|Re〈z, w〉|≤ ‖z‖2 + ‖w‖2 + 2|〈z, w〉|≤ ‖z‖2 + ‖w‖2 + 2‖z‖ · ‖w‖= (‖z‖ + ‖w‖)2.
⊓⊔
Definition 1.23. Seien x und y zwei Vektoren aus Rn bzw. Cn. Die Zahl
d(x, y) := ‖x− y‖
heißt Euklidischer Abstand zwischen x und y.

1.4 Die Vektorraume Rn und Cn 37
Satz 1.25 Fur alle Vektoren x, y, u ∈ Rn (Cn) gilt
1. d(x, y) ≥ 0 , wobei d(x, y) = 0 ⇐⇒ x = y.2. d(x, y) = d(y, x).3. d(x, y) ≤ d(x, u) + d(u, y).
Beweis. Die Behauptungen folgen sofort aus Satz 1.24. ⊓⊔
Im folgenden Kapitel betrachten wir Eigenschaften von Rn bzw. Cn, die sichaus der Existenz des Euklidischen Abstandes ergeben. Dabei ist oft nicht wich-tig, dass es sich bei der zugrundeliegenden Menge um Rn oder Cn handelt unddass der Abstand d der konkrete Euklidische Abstand ist. Man benotigt oftnur seine drei in Satz 1.25 formulierten Eigenschaften. Wir konnen deshalbdie gleichen Untersuchungen fur beliebige Mengen X machen, auf denen eineAbstandsfunktion, d.h. eine Funktion d : X ×X −→ R mit den drei in Satz1.25 formulierten Eigenschaften gegeben ist.Eine solche Abstandsfunktion d gibt uns ein Maß dafur, wie weit zwei Punktein X voneinander entfernt sind. Ein solches Abstandsmaß mochte man z.B.auf der Erdoberflache haben, um anzugeben, wie weit zwei Orte voneinanderentfernt sind. Man benotigt solche Abstandsmaße auch fur Funktionenraume,z.B. in der Losungstheorie von Differentialgleichungen, die viele Prozesse derNatur mathematisch beschreiben. Es gibt sehr viele weitere Grunde, sich beiden betrachteten Mengen X nicht auf die Vektorraume Rn und Cn zu be-schranken.


2
Metrische Raume
In diesem Kapitel betrachten wir Mengen X , auf denen ein Abstand d :X × X −→ R mit den Eigenschaften aus Satz 1.25 gegeben ist. Mit Hilfeeines solchen Abstandes konnen wir erklaren, was es bedeutet, dass eine Folgevon Punkten xn ∈ X , n = 1, 2, . . ., gegen einen Punkt x ∈ X konvergiert. DerKonvergenzbegriff ist grundlegend fur das Studium des lokalen Anderungs-verhaltens von Funktionen, die auf der Menge X erklart sind.
2.1 Definition und Beispiele metrischer Raume
Definition 2.1. Ein metrischer Raum ist ein Paar (X, d) bestehend aus einernichtleeren Menge X und einer Abbildung d : X × X −→ R mit folgendenEigenschaften
1. d(p, q) ≥ 0 ∀ p, q ∈ X und d(p, q) = 0 ⇐⇒ p = q (Positivitat),2. d(p, q) = d(q, p) ∀ p, q ∈ X (Symmetrie),3. d(p, q) ≤ d(p, r) + d(r, q) ∀ p, q, r ∈ X (Dreiecksungleichung).
Die Elemente von X heißen Punkte des metrischen Raumes, d(p, q) nennt manAbstand zwischen p und q. Die Abbildung d heißt Metrik (oder Abstandsfunk-tion) auf X .
Beispiel 1: Aus Kapitel 1 wissen wir, dass folgende Raume metrische Raumesind:
• R mit d(x, y) := |x− y| fur x, y ∈ R
• C mit d(z, v) := |z − v| fur z, v ∈ C
• Rn mit d(p, q) := ‖p− q‖ fur p, q ∈ Rn
• Cn mit d(r, s) := ‖r − s‖ fur r, s ∈ Cn,
wobei | · | den Betrag der rellen bzw. komplexen Zahl und ‖ · ‖ die EuklidischeNorm auf Rn bzw. Cn bezeichnen. Diese Metriken nennen wir die Standard-metrik auf R, C, Rn bzw. Cn. Ist nichts anderes vereinbart, so seien R, C, Rn

40 2 Metrische Raume
bzw. Cn mit dieser Metrik versehen.
Beispiel 2: Auf einer Menge konnen verschiedene Metriken existieren:Die folgenden 3 Abbildungen d1, d2, d3 sind z.B. Metriken auf R2:
• Der “Luftlinienabstand“(Standardmetrik):
d1(x, y) := ‖x−y‖ :=√
(x1 − y1)2 + (x2 − y2)2 , wobei x = (x1, x2), y = (y1, y2)
• Die “Mannheimer-Metrik“ (in Mannheim muß man rechtwinklige Straßenlanglaufen, um von einem Punkt zum anderen zu kommen) :
d2(x, y) := |x1 − y1| + |x2 − y2|
• Die “Metrik der franzosischen Eisenbahn“ (um von einer Stadt zur anderenzu kommen, muß man uber Paris fahren): Sei p ein fixierter Punkt.
d3(x, y) :=
d1(x, p) + d1(p, y) falls x 6= y0 falls x = y
Beispiel 3: Auf jeder nichtleeren Menge X existiert eine Metrik.Wir definieren d : X ×X −→ R durch
d(x, y) :=
0 falls x = y1 falls x 6= y.
Dann ist (X, d) ein metrischer Raum. (X, d) heißt diskreter metrischer Raumund d die diskrete Metrik.
Beispiel 4: Sei (X, d) ein metrischer Raum und A ⊂ X eine Teilmenge.Dann ist (A, d|A×A) ebenfalls ein metrischer Raum. Hierbei bezeichnet d|A×Adie Einschrankung der Abbildung d auf die Menge A × A. Sie heißt durch dinduzierte Metrik auf A.
Beispiel 5: Seien (X1, d1), . . . , (Xn, dn) metrische Raume. Wir betrachten dieMenge
X = X1 ×X2 × . . .×Xn = (p1, . . . , pn) | pi ∈ Xi, i ∈ 1, . . . , n

2.1 Definition und Beispiele metrischer Raume 41
und definieren die Produktmetrik
d((p1, . . . , pn), (q1, . . . , qn)) :=
√√√√n∑
j=1
dj(pj , qj)2.
Dann ist (X, d) ein metrischer Raum und heißt das kartesische Produkt dermetrischen Raume (X1, d1), . . . , (Xn, dn).
Beweis : Die Positivitat und Symmetrie sind aus der Definition sofort er-sichtlich. Wir zeigen die Dreiecksungleichung. Seien dazu p = (p1, . . . , pn),q = (q1, . . . , qn) und r = (r1, . . . , rn) drei beliebige Punkte in X . UnterBenutzung der Dreiecksungleichung fur die Metriken dj und der Cauchy-Schwarzschen Ungleichung (CSU, siehe Kapitel 1.4) erhalten wir
d(p, q)2 =
n∑
j=1
dj(pj , qj)2
≤n∑
j=1
(dj(pj , rj) + dj(rj , qj)
)2
=
n∑
j=1
dj(pj , rj)2 + 2dj(pj , rj) · dj(rj , qj) + dj(rj , qj)
2
= d(p, r)2 + d(r, q)2 + 2
n∑
j=1
dj(pj , rj) · dj(rj , qj)
CSU≤ d(p, r)2 + d(r, q)2 + 2
√√√√n∑
j=1
d(pj , rj)2 ·
√√√√n∑
j=1
d(rj , qj)2
= d(p, r)2 + d(r, q)2 + 2 d(p, r) · d(r, q)= (d(p, r) + d(r, q))
2
Da der Abstand nicht-negativ ist, konnen wir in der Ungleichung auf beidenSeiten die Wurzel ziehen und erhalten die Dreiecksungleichung fur d. ⊓⊔Insbesondere gilt Rn = R × . . .× R und Cn = C × . . .× C (versehen mit derStandardmetrik bzw. der Produktmetrik).
Definition 2.2. Zwei metrische Raume (X, d) und (Y, d) heißen isometrisch,wenn eine bijektive Abbildung f : X −→ Y existiert, so dass
d(x, y) = d(f(x), f(y)) ∀ x, y ∈ X
gilt. Die Abbildung f heißt dann Isometrie zwischen (X, d) und (Y, d).

42 2 Metrische Raume
2.2 Offene und abgeschlossene Mengen in metrischenRaumen
Definition 2.3. Sei (X, d) ein metrischer Raum, x ∈ X und ε ∈ R+.Die Menge
K(x, ε) := y ∈ X | d(x, y) < εheißt ε–Kugel in X um x.
Beispiel 1: Sei X = Rn mit der Standardmetrik d(x, y) = ‖x− y‖ versehen.Dann ist
K(0, ε) = x ∈ Rn | ‖x‖ < ε = x ∈ Rn | x21 + . . .+ x2
n < ε2
die Kugel vom Radius ε um den Nullpunkt im Rn ohne ihren Rand.
Ist n = 1, so ist jedes offene Intervall eine ε–Kugel.
-
Rx
( )- ε
K(x, ε) = (x− ε, x+ ε)
-
R
( )a b
a+b2
(a, b) = K(a+b2 , a−b2 )
Fur n = 2 sind die ε–Kugeln gerade die Kreisscheiben vom Radius ε ohneihren Rand.
-
6
R
R
3ε
K(0, ε)
-
6
R
R
•3ε
(a, b)
a
b
K((a, b), ε)
= (x, y) ∈ R2 | (x− a)2 + (y − b)2 < ε2
Beispiel 2: Sei X = R2 mit folgender Metrik versehen:
d((x1, x2), (y1, y2)) = max(|x1 − y1|, |x2 − y2|).

2.2 Offene und abgeschlossene Mengen in metrischen Raumen 43
Dann ist (X, d) ein metrischer Raum (Ubungsaufgaben 16). Die ε–Kugel umden Nullpunkt ist fur diese Metrik ein Quadrat mit der Seitenlange 2ε ohneseinen Rand:
K(0, ε) = (x1, x2) ∈ R2 | |x1| < ε, |x2| < ε.
-
6
R
R
ε
ε
−ε
−ε
Beispiel 3: Sei (X, d) ein diskreter metrischer Raum. Dann gilt fur die ε-Kugeln
K(x, ε) =
x falls ε ≤ 1
X falls ε > 1.
Definition 2.4. Sei (X, d) ein metrischer Raum und A ⊂ X eine Teilmen-ge von X. Ein Punkt x ∈ A heißt innerer Punkt von A, falls eine ε–KugelK(x, ε) um x existiert, die vollstandig in A liegt.Int(A) bezeichne die Menge aller inneren Punkte von A ⊂ X.
A
•x
K(x, ε)
Satz 2.1 (Eigenschaften des Inneren einer Menge)Sei (X, d) ein metrischer Raum und seien A und B Teilmengen von X. Danngilt:
1. Int(X) = X, Int(∅) = ∅.2. Int(A) ⊂ A.3. Int(Int(A)) = Int(A).4. A ⊂ B =⇒ Int(A) ⊂ Int(B) (Monotonie).5. Int(A ∩B) = Int(A) ∩ Int(B) .

44 2 Metrische Raume
6. Fur beliebig viele Teilmengen Ai ⊂ X, i ∈ Λ, gilt
⋃
i∈ΛInt(Ai) ⊂ Int(
⋃
i∈ΛAi)
Beweis. Die Eigenschaften 1. und 2. folgen unmittelbar aus der Definition desInneren einer Menge.Zu 3. Aus der 2. Eigenschaft des Inneren folgt
Int(Int(A)) ⊂ Int(A).
Es bleibt somit nochInt(A) ⊂ Int(Int(A))
zu zeigen. Sei x ∈ Int(A). Nach Definition von Int(A) existiert eine ε–Kugelum x mit K(x, ε) ⊂ A. Wir zeigen nun, dass K(x, ε) ⊂ Int(A) gilt.
A
•x•y
K(x, ε)
•x•y
Rε
K(y, ε− d(x, y))
Sei y ∈ K(x, ε) beliebig gewahlt. Wir betrach-ten die Kugel um y mit dem Radius ε−d(x, y).Dann gilt
K(y, ε− d(x, y)) ⊂ K(x, ε) ⊂ A.
Ist namlich z ∈ K(y, ε− d(x, y)), so gilt
d(y, z) < ε− d(x, y)
und wir erhalten
d(x, z) ≤ d(x, y) + d(y, z) < ε.
Folglich liegt z in K(x, ε).
Nach Definition ist somit jeder Punkt y von K(x, ε) ein innerer Punkt von A,also K(x, ε) ⊂ Int(A). Daraus folgt wiederum, dass x ein innerer Punkt derMenge Int(A) ist. Damit haben wir Int(A) ⊂ Int(Int(A)) bewiesen.
Zu 4. Wir zeigen A ⊂ B =⇒ Int(A) ⊂ Int(B):Sei x ∈ Int(A). Dann existiert eine ε-Kugel K(x, ε) mit K(x, ε) ⊂ A. DaA ⊂ B folgt K(x, ε) ⊂ B. Folglich ist x ∈ Int(B).
Zu 5. Wir zeigen Int(A ∩B) = Int(A) ∩ Int(B):Sei x ∈ Int(A ∩ B). Dann existiert eine ε–Kugel um x mit K(x, ε) ⊂ A ∩ Bund es folgt, dass sowohl K(x, ε) ⊂ A als auch K(x, ε) ⊂ B. Somit ist x ∈Int(A) und x ∈ Int(B) und wir erhalten x ∈ Int(A)∩ Int(B). Es gilt folglichInt(A ∩ B) ⊂ Int(A) ∩ Int(B). Sei nun x ∈ Int(A) ∩ Int(B), das heißtx ∈ Int(A) und x ∈ Int(B). Folglich existieren ε1, ε2 ∈ R+, so dass
K(x, ε1) ⊂ A und K(x, ε2) ⊂ B.
Wir betrachten ε := min(ε1, ε2). Dann ist

2.2 Offene und abgeschlossene Mengen in metrischen Raumen 45
K(x, ε) ⊂ K(x, ε1) ⊂ A, bzw. K(x, ε) ⊂ K(x, ε2) ⊂ B.
Also gilt K(x, ε) ⊂ A ∩B, somit ist x ∈ Int(A ∩B). Dies zeigt, dassInt(A) ∩ Int(B) ⊂ Int(A ∩B).
Zu 6. Wir betrachten eine Familie Aii∈Λ aus beliebig vielen TeilmengenAi ⊂ X . Sei Aj eine fixierte Menge dieser Familie. Dann ist Aj ⊂
⋃i∈Λ
Ai. Aus
der Monotonieeigenschaft des Inneren folgt
Int(Aj) ⊂ Int(⋃
i∈ΛAi).
Da dies fur alle j ∈ Λ gilt, erhalten wir
⋃
j∈ΛInt(Aj) ⊂ Int(
⋃
i∈ΛAi).
⊓⊔
Bemerkung: Im allgemeinen ist
Int(A) ∪ Int(B) 6= Int(A ∪B).
Wir betrachten dazu als metrischen Raum X = R mit der Standardmetrikund die Teilmengen A = Q und B = R \ Q. Dann ist A ∪ B = R undInt(A ∪ B) = R. Da in jedem Intervall sowohl eine eine rationale als aucheine irrationale Zahl liegt, gilt K(x, ε) 6⊆ Q, und K(x, ε) 6⊆ R \ Q. Also istInt(Q) = Int(R \ Q) = ∅.
Definition 2.5. Eine Teilmenge A eines metrischen Raumes (X, d) heißt of-fen, falls Int(A) = A gilt, dh. falls zu jedem x ∈ A eine ε–Kugel K(x, ε)existiert, die vollstandig in A liegt.
Beispiele:
1. Das Innere Int(A) jeder Teilmenge A eines metrischen Raumes ist offen.(Nach Satz 2.1, Punkt 3.).
2. Die ε–Kugeln K(x, ε) eines metrischen Raumes (X, d) sind offen. Istnamlich y ∈ K(x, ε), dann gilt K(y, ε − d(x, y)) ⊂ K(x, ε) (siehe Be-weis von 3. in Satz 2.1).Insbesondere sind die Intervalle (a, b) im metrischen Raum R (mit derStandardmetrik) offen.

46 2 Metrische Raume
Satz 2.2 Die offenen Teilmengen eines metrischen Raumes (X, d) haben fol-gende Eigenschaften:
1. Die Mengen X und ∅ sind offen.2. Der Durchschnitt endlich vieler offener Mengen ist offen.3. Die Vereinigung beliebig vieler offener Mengen ist offen.
Beweis. Zu 1: Siehe Satz 2.1, Punkt 1.Zu 2: Seien U1 und U2 offen. Dann gilt Int(U1) = U1 und Int(U2) = U2. AusSatz 2.1 folgt
Int(U1 ∩ U2) = Int(U1) ∩ Int(U2) = U1 ∩ U2
und somit ist U1 ∩ U2 offen. Induktiv schließt man auf die Behauptung furendlich viele Mengen.Zu 3: Seien Ui, i ∈ Λ, beliebig viele offene Mengen. Dann gilt Int(Ui) = Uifur alle i ∈ Λ. Wegen Satz 2.1 ist
⋃
i∈ΛUi =
⋃
i∈ΛInt(Ui) ⊂ Int(
⋃
i∈ΛUi) ⊂
⋃
i∈ΛUi
und somit⋃i∈Λ
Ui = Int(⋃i∈Λ
Ui). Also ist⋃i∈Λ
Ui offen. ⊓⊔
Beispiele: Sei X = R mit der Standardmetrik d(x, y) = |x− y|.1. Fur jeden Punkt a ∈ R sind (a,∞) und (−∞, a) offen, denn:
(a,∞) =⋃
n∈N
n>a
(a, n), (−∞, a) =⋃
−n∈N
−n<a
(−n, a)
2. Der Durchschnitt beliebig vieler offener Mengen ist im allgemeinen nichtoffen. Sei zum Beispiel
Un = (− 1
n,1
n) , n ∈ N.
Dann ist⋂n∈N
Un = 0 nicht offen in R.
Als nachstes wollen wir beschreiben, wie offenen Mengen in Teilraumen aus-sehen. Ist (X, d) ein metrischer Raum und A ⊂ X eine Teilmenge von X ,so ist die Menge A selbst ein metrischer Raum mit der induzierten Metrikd|A×A : A×A −→ R.

2.2 Offene und abgeschlossene Mengen in metrischen Raumen 47
Satz 2.3 Sei (X, d) ein metrischer Raum und A ⊂ X eine beliebige Teilmen-ge. Eine Menge B ⊂ A ist im metrischen Raum (A, d|A×A) genau dann offen,wenn es in (X, d) eine offene Menge U ⊂ X gibt, so daß B = U ∩A gilt.
Beweis. Wir vergleichen zunachst die Kugeln des metrischen Raumes (A, d|A×A)mit denen des metrischen Raumes (X, d). Es gilt
KA(b, ε) = a ∈ A | d(b, a) < ε = KX(b, ε) ∩A.
(1) Sei B ⊂ A im metrischen Raum (A, d|A×A) offen. Nach Definition existiertfur jedes b ∈ B eine Zahl ε(b) > 0, so dass
KA(b, ε(b)) = KX(b, ε(b)) ∩A ⊂ B.
Wir betrachten die Menge
U :=⋃
b∈BKX(b, ε(b)) ⊂ X.
Da U die Vereinigung von Kugeln in X ist, ist U nach Satz 2.2, Punkt 3. offenin X . Da B ⊂ A und B ⊂ U , ist B ⊂ U ∩A. Andererseits gilt
U ∩A =
(⋃
b∈BKX(b, ε(b))
)∩A
=⋃
b∈B
(KX(b, ε(b)) ∩A
)
=⋃
b∈BKA(b, ε(b)) ⊂ B,
denn jede der Kugeln KA(b, ε(b)) liegt in B. Folglich gilt B = U ∩A.
(2) Sei nun B = U ∩A, wobei U ⊂ X eine offene Menge in (X, d) ist. Es ist zuzeigen, dass B offen im metrischen Raum (A, d|A×A) ist. Sei b ∈ B. Da b ∈ Uund U in (X, d) offen ist, existiert ein ε(b) > 0 mit KX(b, ε(b)) ⊂ U . Folglichgilt
KA(b, ε(b)) = KX(b, ε(b)) ∩A ⊂ U ∩A = B.
Somit ist B offen in (A, d|A×A). ⊓⊔
Definition 2.6. Sei (X, d) ein metrischer Raum und A ⊂ X eine beliebigeTeilmenge. Der Abschluss von A ist die Menge
cl(A) := x ∈ X | ∀ ε > 0 gilt K(x, ε) ∩A 6= ∅.

48 2 Metrische Raume
Beispiel: Sei X = R mit der Standardmetrik d(x, y) = |x− y|.Fur A = [a, b) erhalten wir Int(A) = (a, b) und cl(A) = [a, b].
Satz 2.4 Sei (X, d) ein metrischer Raum. Fur den Abschluss einer TeilmengeA ⊂ X gilt:
cl(A) = X \ Int(X \A).
Beweis. Die Aussage folgt aus folgenden Aquivalenzen:
x ∈ X \ Int(X \A) ⇐⇒ x ∈ X und x /∈ Int(X \A)
⇐⇒ ∀ ε > 0 gilt K(x, ε) 6⊂ X \A⇐⇒ ∀ ε > 0 gilt K(x, ε) ∩A 6= ∅⇐⇒ x ∈ cl(A).
⊓⊔
Satz 2.5 (Eigenschaften des Abschlusses)Sei (X, d) ein metrischer Raum und A, B Teilmengen von X. Dann gilt:
1. cl(∅) = ∅ und cl(X) = X.2. A ⊂ cl(A).3. A ⊂ B ⇒ cl(A) ⊂ cl(B).4. cl(cl(A)) = cl(A).5. cl(A ∪B) = cl(A) ∪ cl(B).6. Seien Ai, i ∈ Λ , beliebig viele Teilmengen von X. Dann gilt
cl( ⋂
i∈ΛAi
)⊂⋂
i∈Λcl(Ai).
Beweis. Das uberlassen wir dem Leser als Ubungsaufgabe 21. Man verwendedazu die Satze 2.4 und 2.1. ⊓⊔
Beispiel: Im allgemeinen gilt nicht cl(A ∩B) = cl(A) ∩ cl(B).Wir betrachten dazu den metrischen Raum X = R mit der Standardmetrik.Fur A = (0, 1) und B = (1, 2) gilt A ∩ B = ∅. Folglich ist cl(A ∩ B) = ∅.Da cl(A) = [0, 1] und cl(B) = [1, 2], erhalt man andererseits den nichtleerenDurchschnitt cl(A) ∩ cl(B) = 1.
Definition 2.7. Sei (X, d) ein metrischer Raum. Eine Teilmenge A ⊂ Xheißt abgeschlossen, falls cl(A) = A gilt.

2.2 Offene und abgeschlossene Mengen in metrischen Raumen 49
Satz 2.6 Sei (X, d) ein metrischer Raum und A ⊂ X. Dann gilt:
1. A ⊂ X ist genau dann abgeschlossen, wenn X \A offen ist.2. X und ∅ sind abgeschlossen.3. Der Durchschnitt beliebig vieler abgeschlossener Mengen ist abgeschlossen.4. Die Vereinigung endlich vieler abgeschlossener Mengen ist abgeschlossen.
Beweis. (1) Wir benutzen Satz 2.4 und erhalten
A ⊂ X ist abgeschlossen ⇐⇒ A = cl(A)
⇐⇒ A = X \ Int(X \A)
⇐⇒ X \A = Int(X \A)
⇐⇒ X \A ist offen
(2)–(4) folgen aus (1), Satz 2.1 und den Beziehungen zwischen Vereinigungund Durchschnitt bei der Komplementbildung:
(2) X = X \ ∅. Da ∅ offen ist, ist X abgeschlossen.∅ = X \X . Da X offen ist, ist ∅ abgeschlossen.
(3) Seien Ai, i ∈ Λ, beliebig viele abgeschlossene Teilmengen von X . Danngilt nach den bekannten Regeln der Mengenlehre
X \( ⋂
i∈ΛAi
)=⋃
i∈Λ(X \Ai). (⋆)
Da Ai abgeschlossen ist, istX\Ai offen. Die Vereinigung beliebig vieler offenerMengen ist offen, folglich ist die rechte Seite von (⋆) ebenfalls offen. Wendenwir (1) auf die linke Seite von (⋆) an, so folgt, dass
⋂i∈ΛAi abgeschlossen
ist.
(4) Es genugt, die Behauptung fur zwei abgeschlossene Mengen zu beweisen.Die Gultigkeit fur endlich viele Teilmengen erhalt man dann durch Induktion.Seien A und B zwei abgeschlossene Teilmengen von X . Nach den bekanntenRegeln der Mengenlehre gilt:
X \ (A ∪B) = (X \A) ∩ (X \B).
Da A und B abgeschlossen sind, sind X \A und X \B offen und somit derenDurchschnitt ebenfalls offen. Dann ist nach (1) aber A∪B abgeschlossen. ⊓⊔
Beispiel: Sei X = R2 mit der Standardmetrik d(x, y) = ‖x− y‖.Fur die Menge A = x ∈ R2 | ‖x‖ < 1 gilt Int(A) = A. Folglich istR2 \A = x ∈ R2 | ‖x‖ ≥ 1 abgeschlossen in R2.
Sei A ⊂ X eine Teilmenge eines metrischen Raumes (X, d). Dann gilt
Int(A) ⊂ A ⊂ cl(A).
Wir wollen nun die Punkte studieren, die in cl(A) \ Int(A) liegen.

50 2 Metrische Raume
Definition 2.8. Sei A ⊂ X eine Teilmenge eines metrischen Raumes (X, d).Unter dem Rand von A versteht man die Menge
∂A := cl(A) \ Int(A).
Ein Punkt x ∈ ∂A heißt Randpunkt von A.
Satz 2.7 (Charakterisierung des Randes)Sei (X, d) ein metrischer Raum und A ⊂ X.
1. ∂A = X \(Int(A) ∪ Int(X \A)
).
Insbesondere ist ∂A abgeschlossen.2. Ein Punkt x ∈ X ist genau dann ein Randpunkt von A, wenn fur alle
ε > 0 giltK(x, ε) ∩A 6= ∅ und K(x, ε) ∩ (X \A) 6= ∅.
Beweis. Sei A ⊂ X . Dann gilt
∂A = cl(A)\ Int(A) = (X \ Int(X \A))\ Int(A) = X \ (Int(X \A)∪Int(A)).
Daraus erhalten wir
x ∈ ∂A ⇐⇒ x /∈ Int(A) und x /∈ Int(X \A)
⇐⇒ ∀ ε > 0 gilt K(x, ε) ∩ (X \A) 6= ∅ und K(x, ε) ∩A 6= ∅.
⊓⊔
Bezeichnung: Sei (X, d) ein metrischer Raum und A ⊂ X eine Teilmenge.Dann bezeichnet Int(A) die inneren Punkte von A. Die Punkte in Int(X \A)nennen wir auch die außeren Punkte Punkt einer Menge von A. Dann sagtuns Satz 2.7 insbesondere, dass sich X in die Menge der inneren Punkte vonA, die Menge der außeren Punkte von A und den Rand von A zerlegt, d.h. esgilt
X = Int(A) ∪ Int(X \A) ∪ ∂A.
Beispiel 1: Sei X = R1 mit der Standardmetrik d(x, y) = |x− y|.Fur A = [a, b) gilt Int(A) = (a, b), Int(X \A) = (−∞, a) ∪ (b,∞) ,cl(A) = [a, b] und ∂A = a ∪ b.Beispiel 2: Sei X eine nichtleere Menge mit der diskreten Metrik d.Im metrischen Raum (X, d) gilt fur die Kugeln von Radius 1/2
K(x,1
2) = x.
Da die Kugeln eines beliebigen metrischen Raumes offene Mengen sind, istim diskreten metrischen Raum (X, d) jede 1-elementige Teilmenge x ⊂ X

2.2 Offene und abgeschlossene Mengen in metrischen Raumen 51
offen. Sei nun A ⊂ X eine beliebige Teilmenge. Da A =⋃x∈Ax und die
Vereinigung beliebig vieler offener Mengen offen ist, ist A offen. Insbesonderegilt A = Int(A). Weiternin ist A = X \ (X \A). Da X \ A offen ist, ist nachSatz 2.5 A auch abgeschlossen. Insbesondere ist cl(A) = A. Daraus folgt dannfur den Rand der Menge A bzgl. der diskreten Metrik
∂A = cl(A) \ Int(A) = A \A = ∅ .
Definition 2.9. Sei (X, d) ein metrischer Raum und A ⊂ X eine Teilmenge.Ein Punkt x ∈ X heißt Haufungspunkt von A, falls in jeder ε-Kugel K(x, ε)ein von x verschiedener Punkt von A liegt, d.h. falls
(K(x, ε) \ x) ∩A 6= ∅.
Die Menge der Haufungspunkte von A wird mit HP (A) bezeichnet.
Satz 2.8 Sei (X, d) ein metrischer Raum und A ⊂ X eine Teilmenge.Dann gilt
1. x ∈ X ist genau dann ein Haufungspunkt von A, wenn in jeder ε-KugelK(x, ε) unendlich viele voneinander verschiedene Punkte von A liegen.
2. cl(A) = A ∪HP (A).3. A ist genau dann abgeschlossen, wenn HP (A) ⊂ A.
Beweis. (1) Sei x ∈ X ein Haufungspunkt vonA und ε > 0 eine beliebig fixier-te Zahl. Wir mussen zeigen, dass die Kugel K(x, ε) unendlich viele voneinan-der verschiedene Punkte von A enthalt. Aus der Definition des Haufungspunk-tes erhalten wir zunachst, dass ein von x verschiedener Punkt a1 ∈ K(x, ε)existiert mit a1 ∈ A. Wir betrachten ε1 := d(x, a1) > 0. Dann ist ε1 < ε.Wiederum aus der Haufungspunkt-Eigenschaft von x, erhalten wir einen wei-teren von a1 und x verschiedenen Punkt a2 ∈ K(x, ε1) mit a2 ∈ A. Wirbetrachten dann ε2 := d(x, a2) und erhalten einen von a1, a2 und x ver-schiedenen Punkt a3 ∈ K(x, ε2) mit a3 ∈ A. Fahren wir so fort, so ergibtsich induktiv eine Folge unendlich vieler voneinander verschiedener Punktea1, a2, a3, a4, . . . ∈ A ∩K(x, ε).
(2) Wir zeigen zuerst, dass A ∪HP (A) ⊂ cl(A):Da A ⊂ cl(A), ist dazu nur zu zeigen, dass HP (A) ⊂ cl(A). Sei x ∈ HP (A).Dann gilt (K(x, ε) \ x) ∩A 6= ∅ fur alle ε > 0. Folglich ist K(x, ε) 6⊂ X \Afur alle ε > 0 und damit x /∈ Int(X \A). Also gilt x ∈ X \Int(X \A) = cl(A).Wir zeigen nun cl(A) ⊂ A ∪HP (A):Sei x ∈ cl(A) \ A. Wir mussen zeigen, dass x ein Haufungspunkt von A ist.Aus Satz 2.4 folgt x /∈ Int(X \ A) ∪ A. Insbesondere gilt fur alle ε-KugelnK(x, ε) 6⊂ X \ A. Somit ergibt sich K(x, ε) ∩ A 6= ∅ und da x 6∈ A ist, gilt(K(x, ε) \ x) ∩A 6= ∅. Also ist x ein Haufungspunkt von A.

52 2 Metrische Raume
(3) A ist genau dann abgeschlossen, wenn A = cl(A), also wegen (2) genaudann wenn A = A∪HP (A). Dies ist aber aquivalent dazu, dass HP (A) ⊂ A.
⊓⊔Definition 2.10. Sei (X, d) metrischer Raum und A ⊂ X Teilmenge. EinPunkt x ∈ A heißt isolierter Punkt von A, falls ein ε > 0 existiert, so daßK(x, ε) ∩A = x gilt.Mit Iso(A) bezeichnen wir die Menge der isolierten Punkte von A.
Beispiel: Sei X = R1 versehen mit der Standardmetrik.Fur die Menge A = (0, 1) ∪ 3
2 ∪ (2, 3) ⊂ R gilt
Iso(A) = 3
2
HP (A) = [0, 1] ∪ [2, 3]
∂A = 0, 1, 32, 2, 3
Int(A) = (0, 1) ∪ (2, 3)
cl(A) = [0, 1] ∪ 3
2 ∪ [2, 3].
Fur die Menge B = 1, 12 ,
13 ,
14 , . . . ⊂ R gilt
Iso(B) = B
HP (B) = 0∂B = cl(B) = B ∪ 0
Int(B) = ∅.
Definition 2.11. Sei (X, d) ein metrischer Raum. Eine Teilmenge A ⊂ Xheißt dicht in X, wenn cl(A) = X gilt.
Satz 2.9 Sei (X, d) ein metrischer Raum und A ⊂ X eine Teilmenge von X.Dann sind die folgenden Aussagen aquivalent:
1. A ist dicht in X.2. A besitzt keine außeren Punkte , d.h. Int(X \A) = ∅.3. X \A enthalt keine ε–Kugel.
Beweis. Es gelten die folgenden aquivalenten Ausagen
A ⊂ X dicht ⇐⇒ cl(A) = X
⇐⇒ X \ Int(X \A) = X
⇐⇒ Int(X \A) = ∅⇐⇒ X \A enthalt keine ε–Kugel.
⊓⊔

2.3 Folgen in metrischen Raumen 53
Beispiel: Wir betrachten wieder X = R mit der Standardmetrik.Die Menge der rationalen Zahlen Q und die Menge der irrationalen ZahlenR \ Q sind dicht in R.Um das einzusehen, erinnern wir uns an Kapitel 1. Wir wissen, dass in jedemIntervall (a, b) eine rationale Zahl liegt. Folglich enthalt R \ Q keine offenenIntervalle, das heißt keine Kugeln des metrischen Raumes R. Somit ist Q nachSatz 2.9 dicht in R. Analog schließen wir fur R \ Q, da jedes offene Intervallauch eine irrationale Zahl enthalt.
Definition 2.12. Sei (X, d) ein metrischer Raum und x ∈ X. Unter einerUmgebung von x verstehen wir eine offene Menge U ⊂ X, die x enthalt.
Bemerkung:
• Jede Kugel K(x, ε) ist eine Umgebung von x.• Jede Umgebung U von x enthalt eine ε–Kugel um x.• Jede Umgebung U von x ist die Vereinigung von Kugeln.
Da U offen ist, existiert namlich fur jedes y ∈ U ein ε(y) > 0, so daßK(y, ε(y)) ⊂ U . Folglich gilt U =
⋃y∈U
K(y, ε(y)).
Man kann deshalb in allen obigen Definitionen (innerer Punkt, Abschluss,Randpunkt, Haufungspunkt, isolierter Punkt, . . .) den Begriff “Kugeln um x”durch “Umgebungen von x” ersetzen.
2.3 Folgen in metrischen Raumen
Definition 2.13. Sei X eine nichtleere Menge. Unter einer Folge in X ver-steht man eine Abbildung
F : N −→ Xn 7−→ F (n) =: xn,
die jeder naturlichen Zahl n einen Punkt xn ∈ X zuordnet.
Eine Folge ist also eine durch die Abbildung F gegebene Aufzahlung vonPunkten in X . Wir geben kunftig lediglich die Bildwerte der Abbildung F anund benutzen fur die Folge die nachstehenden Schreibweisen:
x1, x2, x3, . . . oder (xn)∞n=1 oder kurz (xn).
Definition 2.14. Sei (X, d) ein metrischer Raum und (xn) eine Folge in X.Wir sagen, dass (xn) gegen x ∈ X konvergiert, falls zu jedem ε > 0 ein (vonε-abhangiger) Index n0 ∈ N existiert, so dass xn ∈ K(x, ε) fur alle n ≥ n0.Der Punkt x heißt Grenzwert (GW) der Folge (xn).Besitzt eine Folge (xn) einen Grenzwert, so heißt sie konvergent. Besitzt dieFolge (xn) keinen Grenzwert, so heißt sie divergent.

54 2 Metrische Raume
Bezeichnung: Fur eine gegen x konvergente Folge (xn) schreiben wir
limn→∞
xn = x oder xnn→∞−→ x oder kurz xn −→ x.
Es gilt also
• limn→∞
xn = x ⇐⇒ ∀ ε > 0 ∃ n0 mit d(x, xn) < ε ∀ n ≥ n0.
• Sei speziell X = R mit der Standardmetrik d(x, y) = |x− y|. Dann giltlimn→∞
xn = x ⇐⇒ ∀ ε > 0 ∃ n0 mit | x− xn | < ε ∀ n ≥ n0.
Wir erhalten daraus die folgende Charakterisierung der Konvergenz von Fol-gen
Satz 2.10 Sei (X, d) ein metrischer Raum und (xn) eine Folge in X. Dannkonvergiert die Folge (xn) im metrischen Raum (X, d) genau dann gegenx ∈ X, wenn die Folge der Abstande (d(x, xn)) im metrischen Raum R gegenNull konvergiert:
xn −→ x in (X, d) ⇐⇒ d(x, xn) −→ 0 in R.
2.3.1 Allgemeine Eigenschaften konvergenter Folgen
Satz 2.11 (Eindeutigkeit des Grenzwerts) Konvergiert eine Folge (xn)im metrischen Raum (X, d) gegen x ∈ X und gegen x∗ ∈ X, so gilt x = x∗.
Beweis. Angenommen x 6= x∗. Dann ist ε := d(x, x∗) > 0. Also existieren n0
und n∗0 mit
d(x, xn) <ε
2∀ n ≥ n0, d(x∗, xn) <
ε
2∀ n ≥ n∗
0.
Somit gilt d(x, xn) < ε2 und d(x∗, xn) <
ε2 fur alle n ≥ max(n0, n
∗0). Nach
Dreiecksungleichung folgt
ε = d(x, x∗) ≤ d(x, xn) + d(xn, x∗) <
ε
2+ε
2= ε
Dies ist aber ein Widerspruch. ⊓⊔
Definition 2.15. Sei (X, d) ein metrischer Raum und A ⊂ X. A heißt be-schrankt, falls es eine Kugel K(x0,M) des metrischen Raumes (X, d) gibt,die A enthalt. Eine Folge (xn) in (X, d) heißt beschrankt, wenn die Mengeder Folgenglieder x1, x2, x3, . . . beschrankt ist.
Satz 2.12 Jede konvergente Folge (xn) eines metrischen Raumes (X, d) istbeschrankt.

2.3 Folgen in metrischen Raumen 55
Beweis. Sei (xn) eine konvergente Folge und x = limn→∞
xn. Nach Definition
der Konvergenz existiert ein n0 ∈ N, so dass d(xn, x) < 1 fur alle n ≥ n0.Wir setzen nun M := max( d(x, x1), d(x, x2), . . . , d(x, xn0−1) ) + 1. Dann giltd(x, xn) < M fur alle n ∈ N. Damit liegt die Menge x1, x2, . . . in der KugelK(x,M) und ist somit beschrankt. ⊓⊔
Als nachstes wollen wir ein Kriterium fur die Konvergenz von Folgen in Pro-duktraumen behandeln. Wir erinnern nochmal an die Definition der Produkt-metrik. Seien (X1, d1), (X2, d2), . . . , (Xk, dk) metrische Raume. Das Produktdieser k metrischen Raume ist das Paar (X, d) mit
X : = X1 ×X2 × . . .×Xk
d(a, b) :=
√√√√k∑
j=1
dj(aj , bj)2 wobei a = (a1, . . . , ak), b = (b1, . . . , bk).
Satz 2.13 Seien (X1, d1), . . . , (Xk, dk) metrische Raume und (X, d) das Pro-dukt dieser Raume. Eine Folge (xn = (xn1, . . . , xnk))
∞n=1 von Punkten im
Produktraum X konvergiert genau dann gegen y = (y1, . . . , yk) ∈ X, wennlimn→∞
xnj = yj in (Xj , dj) fur jedes j ∈ 1, . . . , k gilt.
Beweis. Nach Definition der Produktmetrik ist
d((xn1, . . . , xnk)︸ ︷︷ ︸xn
, (y1, . . . , yk)︸ ︷︷ ︸y
) =
√√√√k∑
i=1
di(xni, yi)2 ≥ dj(xnj , yj) (∗)
fur jedes j ∈ 1, . . . , k.Sei nun (xn) gegen y in (X, d) konvergent. Dann existiert fur jedes ε > 0 einn0 ∈ N mit d(y, xn) < ε fur alle n ≥ n0. Nach Abschatzung (*) folgt darausdj(yj , xnj) < ε fur alle n ≥ n0 und jedes j ∈ 1, . . . , k. Somit konvergiertxnj gegen yj in (Xj , dj) fur jedes j ∈ 1, . . . , k.Sei umgekehrt lim
n→∞xnj = yj fur jedes j ∈ 1, . . . , k und ε > 0. Dann existie-
ren n0j ∈ N so dass dj(yj , xnj) <ε√k
fur alle n ≥ n0j . Es folgt
d(xn, y) =
√√√√k∑
j=1
dj(xnj , yj)2 <
√√√√k∑
j=1
ε2
k= ε
fur alle n ≥ m0 = max(n01, . . . , n0k). Also konvergiert xn gegen y im Produk-traum (X, d). ⊓⊔
Wir charakterisieren nun den Abschluß einer Teilmenge eines metrischenRaumes durch konvergente Folgen.

56 2 Metrische Raume
Satz 2.14 Sei A eine beliebige Teilmenge eines metrischen Raumes (X, d).Dann gilt fur den Abschluß von A
x ∈ cl(A) ⇐⇒ Es existiert eine Folge (an) mit an ∈ A, so dass limn→∞
an = x.
Beweis. (=⇒) Sei x ∈ cl(A). Dann gilt K(x, ε) ∩ A 6= ∅ fur alle ε > 0. Sein ∈ N und ε = 1
n. Dann existiert ein Element an ∈ K(x, 1
n)∩A. Wir erhalten
also eine Folge a1, a2, a3 . . . in A mit d(x, an) < 1n
. Die Folge der Abstande(d(x, an)) konvegiert gegen Null (Archimedisches Axiom) , somit konvergiertdie Folge (an) gegen x.(⇐=) Sei (an) eine Folge in A, die gegen x konvergiert und ε > 0. Dannexistiert ein n0 ∈ N, so dass an ∈ K(x, ε) fur alle n ≥ n0. Folglich ist K(x, ε)∩A 6= ∅, also x ∈ cl(A). ⊓⊔
Folgerung 2.1 Sei (X, d) ein metrischer Raum. Dann gilt:
1. Eine Teilmenge A ⊂ X ist genau dann abgeschlossen, wenn der Grenzwertjeder konvergenten, vollstandig in A liegenden Folge gleichfalls in A liegt.
2. Eine Teilmenge A ⊂ X ist genau dann dicht im metrischen Raum (X, d),wenn fur jedes x ∈ X eine Folge (an) von Punkten aus A existiert, diegegen x konvergiert.
Beweis. A ⊂ X ist genau dann abgeschlsooen, wenn cl(A) = A. A ⊂ X istgenau dann dicht, wenn cl(A) = X . Die Charakterisierung von cl(A) aus Satz2.14 liefert dann die Behauptung. ⊓⊔
Definition 2.16. Sei (xn) eine Folge in einer Menge X. Unter einer Teilfolgevon (xn) verstehen wir eine unendliche Auswahl von Elementen dieser Folge,d.h. eine Folge (xnj
)∞j=1, wobei n1, n2, n3, . . . eine Teilmenge vonN mit n1 <n2 < n3 < . . . ist.
Offensichtlich gilt
Satz 2.15 Sei (X, d) ein metrischer Raum und (xn) eine gegen x ∈ X kon-vergente Folge. Dann konvergiert jede Teilfolge von (xn) ebenfalls gegen x.
Definition 2.17. Sei (xn) eine Folge im metrischen Raum (X, d). Ein Punktx ∈ X heißt Haufungspunkt der Folge (xn), wenn es eine Teilfolge (xnj
)∞j=1
von (xn) gibt mit limj→∞
xnj= x.
Die Menge der Haufungspunkte von (xn) bezeichnen wir mit HP (xn).
Beispiele:
1. Sei (X, d) ein metrischer Raum und (xn) eine gegen x ∈ X konvergenteFolge. Dann gilt nach Satz 2.15, dass HP (xn) = x.

2.3 Folgen in metrischen Raumen 57
2. Sei X = R mit der Standardmetrik und (xn) die folgende Folge
xn :=
1n
falls n gerade1 falls n ungerade
Dann gilt HP (xn) = 0, 1.
Satz 2.16 Sei (X, d) ein metrischer Raum und (xn) eine Folge in X. DieMenge der Haufungspunkte von (xn) ist abgeschlossen.
Beweis. Das uberlassen wir dem Leser als Ubungsaufgabe 26. ⊓⊔
2.3.2 Spezielle Eigenschaften von konvergenten Folgen imVektorraum Ck bzw. Rk
In diesem Abschnitt betrachten wir spezielle Eigenschaften konvergenter Fol-gen im Vektorraum Ck bzw. Rk, den wir mit der in Kapitel 1.4 eingefuhrtenStandardmetrik
d(z, w) := ‖z − w‖ :=√|z1 − w1|2 + . . .+ |zk − wk|2
z = (z1, . . . , zk) , w = (w1, . . . , wk) ∈ Ck bzw. Rk
versehen. Da der metrische Raum Rk ein Teilraum des metrischen RaumesCk ist, gelten alle Eigenschaften, die wir im folgenden fur Folgen in Ck for-mulieren, auch fur Folgen in Rk. Aus Satz 2.13 folgt als Spezialfall sofort
Satz 2.17
1. Eine Folge von Vektoren (zn = (zn1, . . . , znk))∞n=1 aus Ck konvergiert ge-
nau dann gegen den Vektor z∗ = (z∗1 , . . . , z∗k) ∈ Ck, wenn die Folge der
Komponenten (znj)∞n=1 fur jedes j ∈ 1, ..., k in C gegen z∗j konvergiert.
2. Eine Folge komplexer Zahlen (wn) konvergiert genau dann gegen w ∈ C,wenn die Folge der Realteile (Re(wn)) gegen Re(w) und die Folge derImaginarteile (Im(wn)) gegen den Imaginarteil Im(w) konvergiert.
3. Eine Folge komplexer Zahlen (wn) konvergiert genau dann gegen w ∈ C,wenn die Folge (wn) gegen w konvergiert.
Der folgende Satz fasst die wichtigsten Rechenregeln fur Folgen in Ck (bzw.in Rk) zusammen.

58 2 Metrische Raume
Satz 2.18 (Rechenregeln fur konvergente Folgen in Ck)
1. Seien (zn) und (wn) zwei konvergente Folgen in Ck mit den Grenzwertenlimn→∞
zn = z ∈ Ck und limn→∞
wn = w ∈ Ck . Dann gilt:
(a) limn→∞
(zn + wn) = limn→∞
zn + limn→∞
wn = z + w
(b) limn→∞
µ · zn = µ · limn→∞
zn = µ · z ∀ µ ∈ C
(c) limn→∞
〈zn, wn〉 = 〈 limn→∞
zn, limn→∞
wn〉 = 〈z, w〉(d) lim
n→∞‖zn‖ = ‖ lim
n→∞zn‖ = ‖z‖.
2. Seien (zn) und (wn) zwei konvergente Folgen komplexer Zahlen mit denGrenzwerten lim
n→∞zn = z und lim
n→∞wn = w in C. Dann gilt:
(a) limn→∞
zn · wn = limn→∞
zn · limn→∞
wn = z · w(b) Ist w 6= 0, so ist auch wn 6= 0 fur alle n großer als ein n0 ∈ N, und es
gilt
limn→∞
znwn
=limn→∞
zn
limn→∞
wn=z
w.
3. Seien (xn) und (yn) zwei konvergente Folgen reeller Zahlen mit den Grenz-werten lim
n→∞xn = x und lim
n→∞yn = y.
(a) Gilt xn ≤ yn fur fast alle1 n ∈ N, so folgt x ≤ y.
(b) Sei (un) eine weitere Folge reeller Zahlen mit xn ≤ un ≤ yn fur fastalle n ∈ N und sei x = y. Dann ist die Folge (un) ebenfalls konvergentund es gilt lim
n→∞un = x.
Beweis. Zu 1. (a) Es gilt
‖(zn + wn) − (z + w)‖ ≤ ‖zn − z‖ + ‖wn − w‖
und fur alle ε > 0 existieren n0, n∗0 ∈ N, so dass
‖zn − z‖ < ε
2∀ n ≥ n0 und ‖wn − w‖ < ε
2∀ n ≥ n∗
0.
Daraus folgt ‖(zn + wn) − (z + w)‖ < ε fur alle n ≥ max(n0, n∗0) und somit
limn→∞
(zn + wn) = (z + w).
(b) Ist µ = 0, so gilt die Behauptung trivialerweise. Sei µ 6= 0. Dann gilt
‖µz − µzn‖ = |µ| · ‖z − zn‖.
Da (zn) gegen z konvergiert, existiert fur ε > 0 ein n0 ∈ N, so dass
1 fur fast alle n ∈ N bedeutet, dass die Aussage mit eventueller Ausnahme vonendlich vielen naurlichen Zahlen gilt

2.3 Folgen in metrischen Raumen 59
‖z − zn‖ <ε
|µ| ∀ n ≥ n0.
Folglich gilt ‖µz − µzn‖ = |µ| · ‖z − zn‖ < ε fur alle n ≥ n0, und somitlimn→∞
µzn = µz.
(c) Mittels der Cauchy-Schwarzschen Ungleichung erhalt man die folgendeAbschatzung
|〈zn, wn〉 − 〈z, w〉| = |〈zn − z, wn〉 − 〈z, wn − w〉|≤ |〈zn − z, wn〉| + |〈z, wn − w〉|≤ ‖zn − z‖ ‖wn‖ + ‖z‖ ‖wn − w‖. (∗)
Da die Folge (wn) konvergiert, ist die Menge w1, w2, . . . beschrankt. Somitexistiert ein M ∈ R+ mit ‖wn‖ ≤ M fur alle n ∈ N. Sei nun ε > 0 gegeben.Dann existieren n0 und n∗
0, so dass
‖z − zn‖ <ε
2M∀ n ≥ n0 und ‖w − wn‖ ≤ ε
2M∀ n ≥ n∗
0.
OBdA sei z 6= 0, denn ansonsten tritt der letzte Summand in (∗) nicht auf.Wir erhalten
|〈zn, wn〉 − 〈z, w〉| ≤ ε
2+ε
2= ε ∀ n ≥ max(n0, n
∗0).
Daraus folgt limn→∞
〈zn, wn〉 = 〈z, w〉.(d) Sei zn −→ z. Aus der Dreiecksungleichung fur die Norm in Ck folgt
| ‖zn‖ − ‖z‖ | ≤ ‖zn − z‖ < ε ∀ n ≥ n0.
Also konvergiert (‖zn‖) gegen ‖z‖.
Zu 2. (a) zn · wn = 〈zn, wn〉(1c)−→ 〈z, w〉 = z · w.
(b) Da w 6= 0 und (wn) gegen w konvergiert, existiert eine positive reelle Zahlη so dass 0 < η < |wn| fur alle n großer als ein n0. Man erhalt
∣∣∣∣znwn
− z
w
∣∣∣∣ =
∣∣∣∣zn · w − wn · z
wn · w
∣∣∣∣ =|(zn − z)w − (wn − w)z|
|wn| · |w|
≤ |zn − z||w| + |wn − w||z||wn| · |w|
.
Daraus folgt
∣∣∣∣znwn
− z
w
∣∣∣∣ ≤ |zn − z| · |w|η|w| + |wn − w| · |z|
η|w| ≤ ε ∀ n ≥ n0.
Also konvergiert die Folge ( zn
wn) gegen z
w.

60 2 Metrische Raume
Zu 3. (a) Angenommen, es ware x > y. Wir setzen ε = x − y > 0. Dannexistiert ein n0 ∈ N, so dass
|xn − x| < ε
2und |yn − y| < ε
2∀ n ≥ n0.
Deshalb ist xn > x − ε2 = y + ε
2 > yn fur alle n ≥ n0. Dies steht aber imWiderspruch zur Voraussetzung und somit ist die Annahme x > y falsch.(b) Den Beweis dieser Aussage uberlassen wir dem Leser als Ubungsaufgabe(Ubungsaufgabe 28). ⊓⊔
Definition 2.18. Eine Folge (zn)∞n=1 in Ck, die gegen den Nullvektor
0 = (0, . . . , 0) konvergiert, heißt Nullfolge.
Bemerkung: Aus Satz 2.18 folgt dann
• Eine Folge von Vektoren (zn) in Ck ist genau dann eine Nullfolge, wenndie Folge der reellen Zahlen (‖zn‖) eine Nullfolge ist.
• Eine Folge von Vektoren (zn) konvergiert genau dann gegen den Vektor z,wenn (zn − z) eine Nullfolge ist.
• Ist (zn) eine Nullfolge von Vektoren und µ ∈ C, so ist auch (µ · zn) eineNullfolge.
• Sind (zn) und (wn) Nullfolgen von Vektoren, so ist auch (zn + wn) eineNullfolge.
• Ist (zn) eine Nullfolge und (wn) eine konvergente Folge von Vektoren, soist die Folge der Skalarprodukte (〈zn, wn〉) ebenfalls eine Nullfolge.
• Ist (yn) eine Nullfolge reller Zahlen und xn eine weitere Folge reeller Zahlenmit 0 ≤ xn ≤ yn fur fast alle n ∈ N, dann ist (xn) ebenfalls eine Nullfolge.
Wichtige Beispiele konvergenter Folgen in R bzw. C:
1. Sei q eine positive rationale Zahl. Dann gilt in R
limn→∞
(1
n
)q= 0.
Dies gilt, da nach dem Archimedischen Axiom zu jedem ε > 0 ein n0 ∈ N
existiert, so dass 1n0
≤ ε1q . Folglich ist |
(1n
)q | < ε fur alle n ≥ n0, woraus dieBehauptung folgt.
2. Sei x eine positive reelle Zahl. Dann gilt in R
limn→∞
n√x = 1.
Um dies einzusehen, betrachten wir zunachst x > 1. Sei xn := n√x− 1. Dann
gilt xn > 0 und aus der Bernoullischen Ungleichung erhalten wir

2.3 Folgen in metrischen Raumen 61
x = (1 + xn)n ≥ 1 + n · xn.
Also gilt 0 < xn ≤ x−1n
. Da (x−1n
) eine Nullfolge ist, konvergiert (xn) ebenfallsgegen Null, und somit ( n
√x) gegen 1.
Ist 0 < x < 1, so folgt 1x> 1 und wir erhalten mittels Satz 2.18 und dem
gerade Bewiesenen limn→∞
n√x = lim
n→∞1
n√
1x
= 1.
3. Im metrischen Raum R gilt
limn→∞
n√n = 1.
Zum Beweis betrachten wir die Folge xn := n√n− 1. Es gilt xn ≥ 0. Aus der
binomischen Formel folgt
n = (1 + xn)n ≥ 1
2n(n− 1)x2
n.
Folglich gilt 0 ≤ xn ≤√
2n−1 . Nach 1. ist (
√2
n−1 ) eine Nullfolge, somit ist
(xn) ebenfalls eine Nullfolge und folglich gilt limn→∞
n√n = 1.
4. Sei z ∈ C mit |z| < 1. Dann gilt im metrischen Raum C
limn→∞
zn = 0.
Dies sieht man folgendermaßen: Da 0 ≤ |z| < 1, existiert fur jedes ε > 0 einn0 ∈ N mit |z|n0 < ε. Da | z | < 1 ist, erhalt man |z|n < |z|n0 fur alle n ≥ n0,das heißt |z|n = |zn| < ε fur alle n ≥ n0. Folglich gilt lim
n→∞zn = 0.
5. Sei k ∈ N eine fixierte naturliche Zahl und z ∈ C mit |z| > 1. Dann gilt immetrischen Raum C
limn→∞
nk
zn= 0.
Dies bedeutet, dass fur |z| > 1 die Folge der Potenzen |z|n schneller wachstals jede noch so große Potenz von n.Zum Beweis setzen wir x := |z| − 1 und wahlen eine naturliche Zahl p > k.Fur jedes n > 2p folgt aus der binomischen Formel
(1 + x)n >
(n
p
)· xp =
p−Faktoren︷ ︸︸ ︷n(n− 1) · . . . · (n− (p− 1))
p!·xp.
Da p < n2 , ist jeder der Faktoren n, (n − 1), . . . , (n − (p − 1)) großer als n
2 .
Es folgt (1 + x)n > (n2 )p · xp
p! und somit
0 <nk
|z|n <2p · p!
xp · np−k ≤ 2p · p!xp︸ ︷︷ ︸
konstant
· 1n.

62 2 Metrische Raume
Auf der rechten Seite steht eine Nullfolge, also ist limn→∞
nk
zn = 0.
2.3.3 Spezielle Eigenschaften konvergenter Folgen in R
In diesem Abschnitt betrachten wir spezielle Eigenschaften von Folgen immetrischen Raum R, der immer mit der Standardmetrik d(x, y) := |x−y| ver-sehen sei. Wir nutzen dabei aus, dass R ein vollstandiger angeordneter Korperist.
Um spater Formulierungen vereinheitlichen zu konnen, betrachten wir zunachsteine spezielle Sorte von divergenten Folgen reeller Zahlen und ordnen diesenden Grenzwert +∞ oder −∞ zu.
Definition 2.19. Sei (xn) eine Folge reeller Zahlen.Wir sagen, dass (xn) gegen +∞ strebt, falls zu jedem M ∈ R ein n0 ∈ N
existiert mit xn ≥M fur alle n ≥ n0.Wir sagen, dass (xn) gegen −∞ strebt, falls zu jedem M ∈ R ein n0 ∈ N
existiert mit xn ≤M fur alle n ≥ n0.
Fur Folgen reeller Zahlen, die gegen +∞ bzw. −∞ streben, benutzen wir dieSchreibweise
limn→∞
xn = +∞ bzw. limn→∞
xn = −∞.
Man nennt diese Sorte divergenter Folgen reeller Zahlen oft auch bestimmt di-vergent oder uneigentlich konvergent (je nach Autor des benutzten Buches)und ±∞ den uneigentlichen Grenzwert.
Beispiele:
• Ist xn = n oder xn = n2, so gilt limn→∞
xn = +∞• Die Folge 1, 0, 2, 0, 3, 0, 4, 0, . . . ist in R divergent und konvergiert
nicht gegen +∞, obwohl sie beliebig große Glieder enthalt.• Aus xn −→ +∞ und yn −→ +∞ folgt xn + yn −→ +∞ und xn · yn −→
+∞.• Aus xn −→ +∞ und yn −→ a fur a > 0 folgt xn + yn −→ +∞ und
xn · yn −→ +∞ .• Wenn xn −→ +∞ , so 1
xn−→ 0 .
• Wenn xn −→ 0 und xn > 0, so 1xn
−→ +∞ .
Bemerkung: Aus xn −→ +∞ und yn −→ 0 kann man i.a. nichts uber dasVerhalten von xn · yn folgern, wie die folgenden Beispiele zeigen.
• Sei xn = n2 und yn = 1n, so gilt xn · yn = n −→ +∞.
• Sei xn = n2 und yn = 1n2 , so gilt xn · yn = 1 −→ 1.

2.3 Folgen in metrischen Raumen 63
• Sei xn = n2 und yn = 1n3 , so gilt xn · yn = 1
n−→ 0.
• Fur xn = n und yn =
1nn gerade
12n n ungerade
gilt
xn · yn =
1 n gerade12 n ungerade
.
Folglich konvergiert xn · yn uberhaupt nicht.
Eine wichtige Folgerung aus dem Vollstandigkeitsaxiom der reellen Zahlen istdie folgende Eigenschaft beschrankter Folgen.
Satz 2.19 (Satz von Bolzano/Weierstraß2) Jede beschrankte Folge reel-ler Zahlen (xn) besitzt einen Haufungspunkt, d.h. eine konvergente Teilfolge.
Beweis. Nach Voraussetzung existiert ein M > 0 mit −M < xn < M fur allen ∈ N. Wir betrachten die folgende Menge A ⊂ R:
A := x ∈ R1 | x ≤ xn fur unendlich viele n.1. A ist nicht leer, da −M ∈ A.2. A ist nach oben beschrankt, da zum Beispiel M eine obere Schranke ist.
Nach dem Satz 1.7 existiert ein Supremum g = supA der Menge A. Sei ε > 0.Aus der Definition des Supremums erhalten wir
(i) g + ε 6∈ A.D.h. fur hochstens endlich viele xn gilt die Ungleichung g + ε ≤ xn.
(ii) Es existiert ein x ∈ A mit g − ε < x.Somit sind unendlich viele Folgenglieder xn großer oder gleich x, alsogroßer als g − ε.
Insgesamt folgt also, dass unendlich viele Glieder der Folge (xn) im Intervall(g − ε, g + ε) liegen.Wir konstruieren jetzt eine Teilfolge (xnk
) von (xn) auf folgende Weise.
ε = 1 =⇒ ∃ xn1 : g − 1 < xn1 < g + 1
ε =1
2=⇒ ∃ xn2 : g − 1
2< xn2 < g +
1
2, n2 > n1,
...
ε =1
k=⇒ ∃ xnk
: g − 1
k< xnk
< g +1
k, nk > nk−1 . . .
Damit haben wir eine Teilfolge (xnk) von (xn) gefunden mit |xnk
− g| < 1k
furalle k ∈ N. Somit ist lim
k→∞xnk
= g. ⊓⊔

64 2 Metrische Raume
Definition 2.20. Eine Folge reeller Zahlen (xn) heißt monoton wachsend,falls
x1 ≤ x2 ≤ x3 ≤ . . .
und monoton fallend, falls
x1 ≥ x2 ≥ x3 ≥ . . .
Eine Folge heißt monoton, wenn sie monoton wachsend oder monoton fallendist.
Satz 2.20 Jede monoton wachsende, nach oben beschrankte Folge reller Zah-len (xn)∞n=1 konvergiert gegen supxn | n ∈ N.Jede monoton fallende, nach unten beschrankte Folge reeller Zahlen (xn)∞n=1
konvergiert gegen infxn | n ∈ N.
Beweis. Sei (xn) monoton wachsend und nach oben beschrankt. Nach Satz1.7 existiert das Supremum g = supxn | n ∈ N. Wir zeigen, dass xn −→ g.Sei ε > 0. Nach Definition des Supremums existiert ein m0 ∈ N mit xm0 >g− ε, also mit xm0 ∈ (g− ε, g]. Da (xn) monoton wachsend ist, gilt xn ≥ xm0
fur alle n ≥ m0. Folglich konvergiert (xn) gegen g.Den Beweis fur monoton fallende, nach unten beschrankte Folgen fuhrt mananalog. ⊓⊔
Das Supremum und das Infimum einer beschrankten Teilmenge A ⊂ R liegtim Abschluss cl(A). Ist A ⊂ R beschrankt und abgeschlossen, so existiert folg-lich das Maximum max(A) und das Minimum min(A) von A.
Sei nun (xn) eine beschrankte Folge reeller Zahlen. Dann ist die Menge derHaufungspunke HP (xn) nicht leer (Satz 2.19) und abgeschlossen (Satz 2.16).Folglich existiert das Maximum maxHP (xn), d.h. ein großter Haufungspunktvon (xn), und das Minimum minHP (xn), d.h. ein kleinster Haufungspunktvon (xn).
Definition 2.21. Sei (xn) eine beschrankte Folge reeller Zahlen. Man nenntden großten Haufungspunkt von (xn) auch limes superior von (xn) und be-zeichnet ihn mit
lim supn→∞
xn := lim xn := maxHP (xn).
Den kleinsten Haufungspunkt von (xn) nennt man auch limes inferior von(xn) und bezeichnet ihn mit
lim infn→∞
xn := lim xn := minHP (xn).

2.3 Folgen in metrischen Raumen 65
Ist (xn) nicht nach oben beschrankt, so setzen wir lim supn→∞
xn := +∞.
Ist (xn) nicht nach unten beschrankt, so setzen wir lim infn→∞
xn := −∞.
Satz 2.21 Sei (xn) eine beschrankte Folge reeller Zahlen. Dann gilt
limn→∞
xn = g ⇐⇒ lim supn→∞
xn = lim infn→∞
xn = g.
Beweis. (1) Sei (xn) gegen g ∈ R konvergent. Dann gilt HP (xn) = g undsomit lim inf
n→∞xn = lim inf
n→∞xn = g.
(2) Sei umgekehrt lim supn→∞
xn = lim infn→∞
xn = g Dann gilt HP (xn) = g, das
heißt jede konvergente Teilfolge von (xn) konvergiert gegen g. Angenommen(xn) wurde nicht gegen g konvergieren. Dann existiert ein ε > 0, so daß gilt
∀ n0 ∃ n ≥ n0 mit |xn − g| ≥ ε.
Wir konstruieren jetzt eine Teilfolge von (xn) folgendermaßen:
n0 = 1 =⇒ ∃ n1 ≥ 1 : |xn1 − g| ≥ ε,
n0 = n1 + 1 =⇒ ∃ n2 > n1 : |xn2 − g| ≥ ε, . . . ,
n0 = nk−1 + 1 =⇒ ∃ nk > nk−1 : |xnk− g| ≥ ε, . . .
Dadurch erhalten wir eine Teilfolge (xnk) von (xn) mit |xnk
− g| ≥ ε, dieebenfalls beschankt ist. Nach Satz von Bolzano–Weierstraß enthalt sie einekonvergente Teilfolge (xnki
), deren Grenzwert g∗ nach Konstruktion von gverschieden ist. Dies ist ein Widerspruch zu unserer Voraussetzung. ⊓⊔
Anwendung: Die Eulerzahl e
Satz 2.22 Die Folge der reellen Zahlen (an) mit
an :=
(1 +
1
n
)n
ist in R konvergent.Der Grenzwert der Folge (an) heißt Eulerzahl e.
Beweis. Wir zeigen, dass (an) eine monoton wachsende, nach oben beschrank-te Folge ist. Nach Satz 2.20 existiert dann ein Grenzwert fur (an).
1. Beschranktheit von (an): Aus der binomischen Formel folgt
an =
(1 +
1
n
)n=
n∑
k=0
(n
k
)·(
1
n
)k.

66 2 Metrische Raume
Wir schatzen den Term(nk
)·(
1n
)kfur 1 ≤ k ≤ n ab:
(n
k
)·(
1
n
)k=
k−Faktoren︷ ︸︸ ︷n(n− 1) · . . . · (n− (k − 1))
k! · n · n · . . . · n︸ ︷︷ ︸k−mal
=1
k!· 1 ·
(1 − 1
n
)·(
1 − 2
n
)· . . . ·
(1 − (k − 1)
n
)
︸ ︷︷ ︸≤1
(∗)
≤ 1
k!
Folglich gilt fur alle n ∈ N
an =
(1 +
1
n
)n
≤ 1 +1
1!+
1
2!+
1
3!+ . . .+
1
n!
= 1 +1
1+
1
2 · 3 +1
2 · 3 · 4 + . . .+1
2 · 3 · . . . · n≤ 1 +
1
20+
1
21+
1
22+
1
23+ . . .+
1
2n−1
= 1 +n−1∑
k=0
(1
2
)k
= 1 +1 − (1
2 )n
12
(geometrische Summe)
< 3.
2. Monotonie von (an): Gleichung (∗) zeigt, dass
(n
k
)·(
1
n
)k<
(n+ 1
k
)·(
1
n+ 1
)k.
Somit gilt an < an+1 fur alle n ∈ N. ⊓⊔
Satz 2.23 Die Folge der rellen Zahlen (bn) mit
bn := 1 +1
1!+
1
2!+
1
3!+ . . .+
1
n!=
n∑
k=0
1
k!
konvergiert in R und es gilt

2.3 Folgen in metrischen Raumen 67
limn→∞
bn = limn→∞
(1 +
1
n
)n= e.
Beweis. Aus dem Beweis von Satz 2.22 folgt an ≤ bn < 3 fur alle n ∈ N.Folglich ist (bn) eine nach oben beschrankte, monoton wachsende Folge. NachSatz 2.20 existiert deshalb ein Grenzwert von (bn) und es gilt
e = limn→∞
an ≤ limn→∞
bn.
Andererseits gilt fur m ≤ n wegen Formel (∗) aus dem Beweis von Satz 2.22
an =
(1 +
1
n
)n=
n∑
k=0
(n
k
)(1
n
)k
= 1 + 1 +(1 − 1
n)
2!+
(1 − 1n)(1 − 2
n)
3!+ . . .+
(1 − 1n) · . . . · (1 − n−1
n)
n!
≥ 1 + 1 +(1 − 1
n)
2!+ . . .+
(1 − 1n) · . . . · (1 − m−1
n)
m!.
Wir halten m fest und gehen in dieser Ungleichung mit n gegen +∞. Dannfolgt
e = limn→∞
an ≥ 1 + 1 +1
2!+ . . .+
1
m!= bm ∀ m ∈ N.
Deshalb gilt limm→∞
bm ≤ e und wir erhalten zusammenfassend e = limn→∞
bn. ⊓⊔
Um die Eulerzahl genauer berechnen zu konnen, beweisen wir die folgendeFehlerabschatzung.
Satz 2.24 Es sei bn =n∑k=0
1k! . Dann gilt fur jedes n ∈ N die folgende
Abschatzung fur die Eulerzahl e:
bn < e < bn +1
n · n!
Beweis. Fur festes n gilt e− bn = limk→∞
(bk − bn) . Fur k > n erhalten wir
bk − bn =1
(n+ 1)!+ . . .+
1
k!
=1
(n+ 1)!
(1 +
1
(n+ 2)+
1
(n+ 2)(n+ 3)+ . . .+
1
(n+ 2) · . . . · k
)
<1
(n+ 1)!
(1 +
1
(n+ 2)+
1
(n+ 2)2+ . . .+
1
(n+ 2)k−n−1
)
=1
(n+ 1)!·1 − ( 1
n+2 )k−n
1 − ( 1n+2 )
(geometrische Summe)
<1
(n+ 1)!· 1
1 − 1n+2
=1
(n+ 1)!· n+ 2
n+ 1=
1
n · n!· n(n+ 2)
(n+ 1)2.

68 2 Metrische Raume
Der Grenzubergang in dieser Ungleichung fur k gegen +∞ liefert
e− bn ≤ 1
n · n!· n(n+ 2)
(n+ 1)2<
1
n · n!∀ n ∈ N.
⊓⊔
Bemerkung: Mittels der Fehlerabschatzung aus Satz 2.24 kann man Nahe-rungswerte fur e angeben. Man erhalt zum Beispiel fur n = 10:
b10 =
10∑
k=0
1
k!= 2.7182815 . . .
1
10 · 10!= 0.00000002 . . .
Folglich ist 2.7182815 < e < 2.7182815 + 0.00000002 und somit
e ≈ 2.7182815 .
Als weitere Anwendung der Fehlerabschatzung beweisen wir
Satz 2.25 Die Eulerzahl e ist irrational.
Beweis. Angenommen e ware eine rationale Zahl. Dann konnen wir e in derForm e = p
qfur p, q ∈ N darstellen. Fur q ∈ N gilt nach Satz 2.24
0 < e− bq <1
q · q! .
Daraus folgt 0 < e · q! − bq · q! < 1q. Da e = p
q, ist e · q! ganzzahlig. Wegen
bq =1
0!+
1
1!+
1
2!+ . . .+
1
q!
ist bq · q! ganzzahlig. Somit ist auch e · q!− bq · q! ganzzahlig. Das ist aber einWiderspruch zu 0 < e · q! − bq · q! < 1
q< 1. ⊓⊔
2.4 Vollstandige metrische Raume
In diesem Abschnitt lernen wir eine Klasse von metrischen Raumen kennen,in denen man die Konvergenz einer Folge uberprufen kann, ohne ihren Grenz-wert zu kennen.

2.4 Vollstandige metrische Raume 69
Definition 2.22. Sei (X, d) ein metrischer Raum. Eine Folge (xn) in (X, d)heißt Cauchy–Folge, wenn zu jedem ε > 0 ein (von ε abhangiges) n0 ∈ N
existiert, so dass d(xn, xm) < ε fur alle n,m ≥ n0.
Satz 2.26 Jede konvergente Folge in einem metrischen Raum ist eine Cauchy–Folge.
Beweis. Sei (xn) eine gegen x konvergente Folge und ε > 0. Dann existiertein n0 ∈ N mit d(xn, x) <
ε2 fur alle n ≥ n0. Fur n,m ≥ n0 folgt dann aus
der Dreiecksungleichung
d(xn, xm) ≤ d(xn, x) + d(x, xm) <ε
2+ε
2= ε.
Somit ist (xn) eine Cauchy-Folge. ⊓⊔
Bemerkung: Die Umkehrung gilt i.a. nicht. Wir betrachten dazu den metri-schen Raum (X, d) mit X = (0, 1) ⊂ R und der Metrik d(x, y) = |x − y|. Seixn := 1
n. Dann existiert fur jedes ε > 0 ein n0 ∈ N mit
d(xn, xm) =
∣∣∣∣1
n− 1
m
∣∣∣∣ ≤1
min (n,m)< ε ∀ n,m ≥ n0.
Die Folge (xn) ist also eine Cauchy-Folge in (X, d). Sie konvergiert aber in(X, d) nicht.
Satz 2.27 Jede Cauchy-Folge in einem metrischen Raum ist beschrankt.
Beweis. Sei ε = 1. Dann existiert ein n0 ∈ N so dass d(xn, xm) < 1 fur allen,m ≥ n0. Insbesondere bedeutet das, dass xn ∈ K(xn0 , 1) fur alle n ≥ n0.Wir setzen
r := max d(xn0 , x1), d(xn0 , x2), . . . , d(xn0 , xn0−1) + 1.
Dann gilt xn ∈ K(xn0 , r) fur alle n ∈ N. Folglich ist die Folge (xn) beschrankt.⊓⊔
Definition 2.23. Ein metrischer Raum (X, d) heißt vollstandig, wenn jedeCauchy–Folge in (X, d) konvergiert.
Bemerkung: In einem vollstandigen, metrischen Raum kann man also dieKonvergenz einer Folge untersuchen, ohne ihren Grenzwert zu kennen. Manpruft dafur die Cauchy–Bedingung
∀ ε > 0 ∃ n0 ∈ N mit d(xn, xm) < ε ∀ n,m ≥ n0.

70 2 Metrische Raume
Satz 2.28 Der metrische Raum (R, d(x, y) = |x− y|) ist vollstandig.
Beweis. Sei (xn) eine Cauchy–Folge reeller Zahlen. Dann ist (xn) beschrankt.Nach dem Satz von Bolzano-Weierstraß existiert eine konvergente Teilfolge(xnk
) von (xn). Sei x = limk→∞
xnkund ε > 0. Dann existieren k0, n0 ∈ N, so
dass|x− xnk
| < ε2 ∀ k ≥ k0
|xn − xm| < ε2 ∀ n,m ≥ n0.
Sei nun n ≥ n0. Wir wahlen ein k ≥ k0 mit nk ≥ n0. Dann folgt aus derDreiecksungleichung
|xn − x| ≤ |xn − xnk| + |xnk
− x| < ε
2+ε
2< ε .
Also konvergiert die Folge (xn) gegen x. ⊓⊔
Bemerkung: Der metrische Raum der rationalen Zahlen Q (mit der Stan-dardmetrik) ist nicht vollstandig.
• Wir betrachten die Folge rationaler Zahlen (xn), definiert durch
x0 := 1 und xn+1 :=1
2
(xn +
2
xn
)∀ n ∈ N.
Wir wissen, dass (xn) in R gegen√
2 konvergiert (siehe Ubungsaufgabe31). Die Folge (xn) ist also eine Cauchy–Folge in R und somit auch in Q.Aber
√2 ist keine rationale Zahl. Folglich konvergiert (xn) nicht in Q.
• Wir betrachten die Folge der rationalen Zahlen yn :=(1 + 1
n
)n. (yn) ist
eine Cauchyfolge in Q, konvergiert aber in Q nicht, da die Eulerzahl eirrational ist.
Satz 2.29 Sind (X1, d1), . . . , (Xk, dk) vollstandige metrische Raume, so istauch das Produkt (X, d) dieser metrischen Raume vollstandig.
Beweis. Sei (xn := (xn1, . . . , xnk)) eine Cauchy–Folge im Produktraum(X = X1 × . . .×Xk, d) und ε > 0. Dann existiert ein n0 ∈ N, so dass
d(xn, xm) =
√√√√k∑
i=1
di(xni, xmi)2 < ε ∀ n,m ≥ n0.
Daraus erhalten wir di(xni, xmi) < ε fur alle n,m ≥ n0 und jedes i ∈1, . . . , k. Folglich sind die Folgen (xni)
∞n=1 Cauchy–Folgen in (Xi, di) fur
jedes i ∈ 1, . . . , k. Da (Xi, di) vollstandige metrische Raume sind, konver-gieren die Folgen (xni)
∞n=1 gegen ein yi ∈ Xi. Somit gilt nach Satz 2.13

2.4 Vollstandige metrische Raume 71
limn→∞
xn = (y1, . . . , yk) ∈ X1 × . . .×Xk.
⊓⊔
Folgerung 2.2 Die metrischen Raume C, Rn und Cn (jeweils mit der Stan-dardmetrik) sind vollstandig.
Satz 2.30 Sei (X, d) ein vollstandiger metrischer Raum und A ⊂ X eineTeilmenge. Dann ist der metrische Raum (A, d|A×A
) genau dann vollstandig,wenn A abgeschlossen ist.
Beweis. (⇐=): Sei A abgeschlossen und (an) eine Cauchy–Folge in (A, d) (ZurAbkurzung bezeichnen wir die Einschrankung von d auf A ×A ebenfalls mitd). Dann ist (an) auch Cauchy–Folge in (X, d), die, da (X, d) vollstandig ist,gegen ein x ∈ X konvergiert. Da A abgeschlossen ist, liegt jeder Grenzwerteiner Folge von Elementen aus A wieder in A. Somit ist x ∈ A, das heißt (an)konvergiert in A. Folglich ist (A, d) ein vollstandiger metrischer Raum.(=⇒): Sei nun (A, d) vollstandig. Wir zeigen, dass dann A abgeschlossen ist.Sei x ∈ cl(A). Dann existiert eine Folge an ∈ A mit lim
n→∞an = x. Damit ist
(an) eine Cauchy–Folge in (A, d) und somit in A konvergent. Das heißt, x liegtin A. Folglich gilt cl(A) ⊂ A. Die Teilmenge A ⊂ X ist also abgeschlossen. ⊓⊔
Folgerung 2.3 Jede abgeschlossene Teilmenge A ⊂ Rn bzw. A ⊂ Cn ist einvollstandiger metrischer Raum (mit Standardmetrik).
Wir wissen, dass nicht jeder metrische Raum vollstandig ist. Man kann aberjeden metrischen Raum vervollstandigen. Abschließend behandeln wir dieseVervollstandigungsprozedur, die uns zeigt, dass man jeden metrischen Raumals dichten Teilraum eines gewissen vollstandigen metrischen Raumes auffas-sen kann. Diese Prozedur wird in der Analysis vielfaltig angewendet.
Satz 2.31 (Vervollstandigung metrischer Raume)Zu jedem metrischen Raum (X, d) gibt es einen vollstandigen metrischen
Raum (X, d) und eine Abbildung ϕ : X −→ X, fur die gilt:
1. ϕ : (X, d) −→ (ϕ(X), d) ist eine Isometrie.
2. ϕ(X) ⊂ X ist dicht.
(X, d) ist bis auf Isometrie eindeutig bestimmt, d.h. ist (X ′, d′) ein weiterervollstandiger metrischer Raum und ϕ′ : X −→ X ′ eine Abbildung mit denEigenschaften 1. und 2., dann existiert eine Isometrie F : (X, d) −→ (X ′, d′)so dass F ϕ = ϕ′.

72 2 Metrische Raume
Definition 2.24. Der metrische Raum (X, d) aus Satz 2.31 heißt Vervollstandi-gung von (X, d).
Beweis. Den Beweis fuhren wir in mehreren Schritten.
1. Schritt: Definition der Menge X.Dazu betrachten wir die Menge CF(X, d) der Cauchy-Folgen des metrischenRaumes (X, d). Zwei Cauchy-Folgen (xn), (yn) ∈ CF(X, d) bezeichnen wir alsaquivalent (symbolisch: (xn) ∼ (yn)), wenn
d(xn, yn) → 0 fur n→ +∞.
Dies definiert eine Aquivalenzrelation auf dem Raum CF(X, d).Aus d(xn, xn) = 0 und d(xn, yn) = d(yn, xn) ergeben sich unmittelbar dieReflexitat und die Symmetrie der Relation ∼. Aus der Dreiecksungleichung
0 ≤ d(xn, zn) ≤ d(xn, yn) + d(yn, zn)
folgt, dass mit d(xn, yn) → 0 und d(yn, zn) → 0 stets d(xn, zn) → 0 gilt. Dies
zeigt die Transitivitat von ∼. Die Menge X sei die Menge der Aquivalenzklas-sen von Cauchy-Folgen bzgl. der Relation ∼:
X := CF(X, d)/ ∼ .
Die Aquivalenzklasse der Cauchy-Folge (xn) ∈ CF(X, d) bezeichnen wir mit[(xn)].
2. Schritt: Definition des Abstandes d auf X.Seien (xn), (yn) ∈ CF(X, d) zwei Cauchy-Folgen von (X, d). Nach der Vier-ecksungleichung gilt
|d(xm, ym) − d(xn, yn)| ≤ d(xm, xn) + d(ym, yn) .
Folglich ist die Folge der reellen Zahlen (d(xn, yn)) eine Cauchy-Folge im me-trischen Raum R. Da R vollstandig ist, konvergiert diese Folge, d.h. es existiertlimn→∞
d(xn, yn) . Wir definieren fur zwei Elemente ξ = [(xn)] und η = [(yn)]
von X den Abstandd(ξ, η) := lim
n→∞d(xn, yn) .
Diese Definition ist korrekt, d.h. sie hangt nicht von der Wahl der Reprasen-tanten (xn) bzw. (yn) in den Aquivalenzklassen ξ bzw. η ab. Sind namlich(xn) ∼ (x′n) und (yn) ∼ (y′n), so gilt nach Vierecksungleichung
|d(x′n, y′n) − d(xn, yn)| ≤ d(x′n, xn) + d(y′n, yn) .
Benutzt man nun die Definition von ∼, so folgt
limn→∞
d(xn, yn) = limn→∞
d(x′n, y′n) .

2.4 Vollstandige metrische Raume 73
Die Abbildung d : X× X → R ist ein Abstand auf X: Die Symmetrie und diePositivitat von d sind offensichtlich wegen der analogen Eigenschaften von d.Die Aquivalenzrelation ∼ auf CF(X, d) ist gerade so definiert, dass
d(ξ, η) = 0 ⇐⇒ limn→∞
d(xn, yn) = 0 ⇐⇒ (xn) ∼ (yn) ⇐⇒ ξ = η.
Die Dreiecksungleichung folgt ebenfalls aus derjenigen von d:Seien ξ = [(xn)], η = [(yn)], ρ := [(wn)]. Dann gilt
d(ξ, η) = limn→∞
d(xn, yn)
≤ limn→∞
(d(xn, wn) + d(wn, yn))
= d(ξ, ρ) + d(ρ, η) .
Damit haben wir einen metrischen Raum (X, d) definiert.
3. Schritt: Definition der Abbildung ϕ:Sei x ∈ X . Wir betrachten die konstante Folge (xn := x) in X und bezeichnen
mit x ∈ X ihre Aquivalenzklasse x := [(xn := x)] in (X, d). Die Abbildung ϕdefinieren wir durch
ϕ : X −→ Xx 7−→ x
Die Abbildung ϕ : X −→ ϕ(X) ist offensichtlich bijektiv und es gilt nachDefinition von d
d(ϕ(x), ϕ(y)) = d(x, y) = limn→∞
d(x, y) = d(x, y).
(X, d) ist also isometrisch zum Teilraum (ϕ(X), d) von (X, d).
4. Schritt: Der metrische Raum (X, d) ist vollstandig.
Sei (ξk)∞k=1 eine beliebige Cauchy-Folge aus (X, d). Wir zeigen, dass (ξk) in
(X, d) konvergiert. Zunachst wahlen wir in jeder Aquivalenzklasse ξk einenReprasentanten (xkn)∞n=1 ∈ CF(X, d). In jeder dieser Cauchy-Folgen wahlenwir dann ein Folgenglied xknk
∈ X so, dass
d(xkn, xknk) <
1
k∀ n > nk . (∗)
Wir zeigen nun, dass die Folge (xknk)∞k=1 eine Cauchy-Folge in (X, d) ist. Aus
der Isometrie zwischen (X, d) und (ϕ(X), d), der Dreiecksungleichung und (∗)folgt
d(xknk, xk′nk′ ) = d(xknk
, xk′nk′ )
≤ d(xknk, ξk) + d(ξk, ξk′) + d(ξk′ , xk′nk′ )
= limn→∞
d(xknkxkn) + d(ξk, ξk′ ) + lim
n→∞d(xk′n, xk′nk′ )
<1
k+ d(ξk, ξk′ ) +
1
k′.

74 2 Metrische Raume
Da (ξk)∞k=1 eine Cauchy-Folge in (X, d) ist, existiert zu vorgegebenem ε > 0
ein Index k0 ∈ N, so dass
d(ξk , ξk′ ) ,1
k,
1
k′<ε
6∀ k, k′ ≥ k0 .
Folglich ist
d(xknk, xk′nk′ ) <
ε
2∀ k, k′ ≥ k0. (∗∗)
und somit (xknk)∞k=1 eine Cauchy-Folge in (X, d). Die Aquivalenzklasse dieser
Folge sei ξ := [(xknk)]. Wir zeigen, dass (ξk) in (X, d) gegen ξ konvergiert.
Aus (∗) und (∗∗) folgt
d(ξk, ξ) ≤ d(ξk, xknk) + d(xknk
, ξ)
= limn→∞
d(xkn, xknk) + lim
k′→∞d(xknk
, xk′nk′ )
< ε ∀ k > k0 .
Folglich konvergiert die Cauchy-Folge (ξk)∞k=1 im Raum (X, d) gegen ξ ∈ X.
5. Schritt: Wir zeigen, dass die Menge ϕ(X) dicht in X ist.
Sei ξ ∈ X ein beliebiges Element und (xn)∞n=1 eine Cauchy-Folge in der Aqui-valenzklasse ξ. Wir betrachten die entsprechende Folge (xn) in ϕ(X). Furε > 0 existiert ein n0 ∈ N mit
d(xn, ξ) = limm→∞
d(xn, xm) < ε ∀ n > n0 .
Folglich konvergiert (xn) gegen ξ und die Dichtheit von ϕ(X) in X ist bewie-sen.
6. Schritt: (X, d) ist bis auf Isometrie eindeutig bestimmt:Sei (X ′, d′) ein weiterer vollstandiger metrischer Raum und ϕ′ : X −→ X ′ eineAbbildung, so dass ϕ′ : (X, d) −→ (ϕ′(X), d′) eine Isometrie und ϕ′(X) ⊂ X ′
dicht ist. Dann definiert die Abbildung
f : ϕ(X) −→ ϕ′(X)
ϕ(x) 7−→ ϕ′(x)
offensichtlich eine Isometrie zwischen den metrischen Raumen (ϕ(X), d) und
(ϕ′(X), d′). Wir erweitern f zu einer Isometrie F zwischen (X, d) und (X ′, d′):
Sei ξ ∈ X und ξ = limn→∞
xn fur eine Folge (xn) aus ϕ(X). Da (xn) eine Cauchy-
Folge in ϕ(X) ist, ist auch ihr Bild (f(xn)) eine Cauchy-Folge in ϕ′(X). Seiξ′ := lim
n→∞f(xn) ∈ X ′. ξ′ ist korrekt definiert, d.h. unabhangig von der Wahl
der Folge (xn). Sei namlich (yn) eine weitere Folge mit ξ = limn→∞
yn, so gilt
d(xn, yn) = d′(f(xn), f(yn)) → 0 , also limn→∞
f(yn) = ξ′. Wir erhalten somit
eine Fortsetzung von f zu einer Abbildung

2.5 Kompakte und folgenkompakte Teilmengen metrischer Raume 75
F : X −→ X ′
ξ = limn→∞
xn 7−→ ξ′ = limn→∞
f(xn) .
F ist offensichtlich bijektiv. Fur ξ = limn→∞
xn ∈ X und η = lim yn ∈ X gilt
d(ξ, η) = limn→∞
d(xn, yn) = limn→∞
d′(f(xn), f(yn)) = d′(ξ′, η′) = d′(F (ξ), F (η)).
Die Abbildung F ist folglich eine Isometrie zwischen (X, d) und (X ′, d′). Ausder Definition von F folgt sofort, dass F ϕ = ϕ′. Damit ist Satz 2.31vollstandig bewiesen. ⊓⊔
Bemerkung: Eine Moglichkeit zur Konstruktion der reellen Zahlen aus denrationalen Zahlen besteht darin, die in Satz 2.31 beschriebene Vervollstandi-gungsprozedur fur die Menge der rationalen Zahlen Q mit dem Abstandd(x, y) = |x − y| auszufuhren. Die entstehende Menge Q erfullt dann dieAxiome der reellen Zahlen aus Kapitel 1.
2.5 Kompakte und folgenkompakte Teilmengenmetrischer Raume
Definition 2.25. Eine Teilmenge A eines metrischen Raumes (X, d) heißtfolgenkompakt, falls jede Folge (an) von Punkten aus A einen Haufungspunktin A hat, d.h. eine in A konvergente Teilfolge besitzt.Ist X ⊂ X folgenkompakt, so nennt man den metrischen Raum (X, d) folgen-kompakt.
Bemerkung: Sei (X, d) ein metrischer Raum und A ⊂ X . Dann ist A ⊂ Xgenau dann folgenkompakt, wenn der metrische Raum (A, d|A×A) folgenkom-pakt ist.
Satz 2.32 Im metrischen Raum R (mit Standardmetrik) ist jede beschrankteund abgeschlossene Menge folgenkompakt.
Beweis. Sei A ⊂ R eine abgeschlossene und beschrankte Menge und (an)eine Folge in A. Dann ist (an) ebenfalls beschrankt. Nach dem Satz vonBolzano-Weierstraß existiert ein Haufungspunkt von (an). Wir zeigen, dass je-der Haufungspunkt von (an) in A liegt. Sei x ∈ HP (an) und (anj
) eine gegenx ∈ R konvergente Teilfolge von (an). Dann gilt x = limsn→+∞an ∈ cl(A).Da A abgeschlossen ist, ist A = cl(A), also liegt x in A. Die Menge A istdemnach folgenkompakt. ⊓⊔

76 2 Metrische Raume
Beispiel: Die abgeschlossenen Intervalle [a, b] ⊂ R sind folgenkompakt.
Satz 2.33 Sei (X, d) das Produkt der metrischen Raume (X1, d1), . . . , (Xk, dk)und seien Aj ⊂ Xj folgenkompakte Mengen, j = 1, . . . k. Dann ist die Pro-duktmenge A := A1 ×A2 × . . .×Ak folgenkompakt in (X, d).
Beweis. Den Beweis uberlassen wir dem Leser als Ubungsaufgabe (Aufgabe36). ⊓⊔
Beispiel: Die ’Wurfel’ W := [a1, b1] × [a2, b2] × . . . × [ak, bk] ⊂ Rk sind fol-genkompakte Teilmengen des metrischen Raumes Rk.
Satz 2.34 Sei (X, d) ein metrischer Raum und B ⊂ X folgenkompakt. IstA ⊂ X abgeschlossen und A ⊂ B, so ist A ebenfalls folgenkompakt.
Beweis. Sei (an) eine beliebige Folge in A. Dann ist (an) auch Folge in B undbesitzt, da B folgenkompakt ist, eine in B konvergente Teilfolge (anj
). Seib = lim
j→∞anj
∈ cl(A). Da A abgeschlossen ist, ist cl(A) = A und somit b ∈ A.
Also enthalt (an) eine in A konvergente Teilfolge. Damit ist A folgenkompakt.⊓⊔
Satz 2.35 Jede folgenkompakte Teilmenge eines metrischen Raumes (X, d)ist beschrankt und abgeschlossen.
Beweis. Sei A ⊂ X folgenkompakt.(1) Angenommen A ware nicht abgeschlossen. Dann existiert ein Punktx ∈ cl(A) \A. Sei (an) eine Folge in A, die gegen x konvergiert. Dann konver-giert jede Teilfolge von (an) ebenfalls gegen x 6∈ A, woraus HP (an) ∩ A = ∅folgt. Dies widerspricht der Vorraussetzung, dass A folgenkompakt ist.(2) Angenommen A ware nicht beschrankt. Wir fixieren einen Punkt x0 ∈ X .Dann gilt A 6⊂ K(x0, n) fur alle n ∈ N. Folglich existiert eine Folge (an) inA, so dass d(x0, an) > n fur alle n ∈ N. Damit ist jede Teilfolge von (an)unbeschrankt und kann folglich nicht konvergieren, d.h. HP (an) = ∅. Dieswiderspricht der Vorraussetzung, dass A folgenkompakt ist. ⊓⊔
Bemerkung: Die Umkehrung von Satz 2.35 gilt im allgemeinen nicht. Umdas einzusehen, betrachten wir eine unendliche Menge X mit der diskretenMetrik
d(x, y) =
0 x = y1 x 6= y.
Jede Teilmenge A ⊂ X ist abgeschlossen und beschrankt. Eine abzahlbar un-endliche Teilmenge A = a1, a2, . . . , ⊂ X ist aber nicht folgenkompakt, da

2.5 Kompakte und folgenkompakte Teilmengen metrischer Raume 77
eine Folge in (X, d) genau dann konvergiert, wenn sie ab einem bestimmtenIndex konstant ist.
Satz 2.36 Eine Teilmenge im metrischen Raum Rn (mit Standardmetrik) istgenau dann folgenkompakt, wenn sie abgeschlossen und beschrankt ist.
Beweis. Wegen Satz 2.35 genugt es zu zeigen, dass eine abgeschlossene, be-schrankte Teilmenge A ⊂ Rn folgenkompakt ist. Da A beschrankt ist, existiertein Wurfel W = [a1, b1] × [a2, b2] × . . . × [an, bn] ⊂ Rn, der A enthalt. W istfolgenkompakt und A abgeschlossen, folglich ist A nach Satz 2.34 folgenkom-pakt. ⊓⊔Beispiele:
• Die n–dimensionale Sphare vom Radius r > 0
Snr := x ∈ Rn+1 | ‖x‖ = r ⊂ Rn+1
ist folgenkompakt.
• Der n–dimensionale Torus T n := S1 × . . .× S1 ⊂ R2n ist folgenkompakt.
• Die abgeschlossene Kugel Dnr = x ∈ Rn | ‖x‖ ≤ r ⊂ Rn ist folgenkom-
pakt.
Wir untersuchen nun weitere Eigenschaften folgenkompakter metrischer Raume.
Definition 2.26. Sei (X, d) ein metrischer Raum und A ⊂ X. A heißt totalbeschrankt, falls es zu jedem ε > 0 endlich viele Punkte x1, x2, . . . , xk ∈ X
gibt mit A ⊂k⋃i=1
K(xi, ε).
Ist die gesamte Menge X total beschrankt, so sagt man, dass der metrischeRaum (X, d) total beschrankt ist.
Satz 2.37 Jeder folgenkompakte metrische Raum ist total beschrankt.
Beweis. Sei (X, d) folgenkompakt. Angenommen (X, d) ware nicht total be-schrankt. Dann existiert ein ε0 > 0, so dass fur alle k ∈ N und fur allex1, . . . , xk ∈ X
K(x1, ε0) ∪ . . . ∪K(xk, ε0) 6= X.
Wir betrachten zunachst k = 1 und x1 ∈ X beliebig. Dann ist K(x1, ε0) 6= X .Wir wahlen einen Punkt x2 ∈ X \ K(x1, ε0). Dann gilt d(x1, x2) ≥ ε0 > 0.Da K(x1, ε0) ∪K(x2, ε0) 6= X , existiert ein x3 ∈ X \ (K(x1, ε0) ∪K(x2, ε0)).Also gilt d(x3, x1) ≥ ε0 > 0 und d(x3, x2) ≥ ε0 > 0 . Wir fuhren diesesVerfahren fort und erhalten eine Folge von Punkten x1, x2, x3, . . . in X mitder Eigenschaft d(xi, xj) ≥ ε0 > 0 fur alle i 6= j. Diese Folge kann aber keinekonvergente Teilfolge enthalten. Dies widerspricht der Folgenkompaktheit von(X, d) ⊓⊔

78 2 Metrische Raume
Definition 2.27. Ein metrischer Raum heißt separabel, falls eine abzahlbare,dichte Teilmenge A ⊂ X existiert.
Beispiele: R, C, Rn und Cn sind separable metrische Raume, denn Q ⊂ R,(Q + iQ) ⊂ C, Qn ⊂ Rn und (Q + iQ)n ⊂ Cn sind jeweils dichte und abzahl-bare Teilmengen.
Satz 2.38 Jeder folgenkompakte metrische Raum (X, d) ist separabel.
Beweis. Sei (X, d) folgenkompakt. Nach Satz 2.37 ist (X, d) total beschrankt.Wir verschaffen uns dadurch abzahlbar viele Punkte von X :
ε = 1 =⇒ ∃ x11, . . . , x1k1 ∈ X : X =k1⋃i=1
K(x1i, 1).
ε = 12 =⇒ ∃ x21, . . . , x2k2 ∈ X : X =
k2⋃i=1
K(x2i,12 ) . . .
ε = 1n
=⇒ ∃ xn1, . . . , xnkn∈ X : X =
kn⋃i=1
K(xni,1n).
Wir betrachten die abzahlbare Menge A :=∞⋃n=1
kn⋃i=1
xni ⊂ X und zeigen, dass
A dicht in X ist. Wir mussen dazu zeigen, dass jedes x ∈ X der Grenzwerteiner Folge von Elementen aus A ist. Sei x ∈ X . Fur jedes n ∈ N gilt x ∈kn⋃i=1
K(xni,1n). Demnach existiert ein in ∈ 1, . . . , kn so dass x ∈ K(xnin ,
1n).
Wir setzen an := xnin ∈ A, und erhalten dadurch eine Folge (an) in A mitd(an, x) <
1n. Die Folge (an) konvergiert somit gegen x. ⊓⊔
Satz 2.39 (Satz von Cantor fur folgenkompakte metrische Raume)Sei (X, d) ein folgenkompakter metrischer Raum und (Fn) eine Familie abge-schlossener Teilmengen von (X, d) mit F1 ⊃ F2 ⊃ F3 ⊃ . . . . Dann gilt
∞⋂
n=1
Fn 6= ∅.
Beweis. Wir wahlen aus jeder Menge Fn einen Punkt xn ∈ Fn. Da (X, d)folgenkompakt ist, existiert eine Teilfolge (xnk
) von (xn), die gegen einen
Punkt x ∈ X konvergiert. Wir zeigen, dass x ∈∞⋂n=1
Fn.
Sei m ∈ N fixiert. Dann gilt xn ∈ Fm fur alle n ≥ m. Insbesondere exisiertein km ∈ N so dass xnk
∈ Fm fur alle k ≥ km. Daraus folgt wegen derAbgeschlossenheit von Fm

2.5 Kompakte und folgenkompakte Teilmengen metrischer Raume 79
x = limk→∞
xnk∈ cl(Fm) = Fm
und somit x ∈∞⋂m=1
Fm. ⊓⊔
Bemerkung: Im Unterschied zum Satz von Cantor fur vollstandige me-trische Raume (Ubungsaufgabe 35) benotigt man nicht die Voraussetzung
diam(Fn) → 0. Die Menge∞⋂n=1
Fn kann aus mehreren Punkten bestehen.
Beispiel (Cantorsches Diskontinuum): Wir definieren die folgende Familievon Teilmengen aus R
C0 := [0, 1], C1 := C0 \ (1
3,2
3), C2 := C1 \ ((
1
9,2
9) ∪ (
7
9,8
9)), . . .
(Es werden also immer die offenen, mittleren Drittel aus den abgeschlossenenIntervallen entfernt). Damit sind die Voraussetzungen des Satzes 2.39 erfullt:X = [0, 1] ist folgenkompakt, C0 ⊃ C1 ⊃ C2 ⊃ . . . und alle Mengen Cn sindabgeschlossen. (Der Durchmesser jeder Menge Cn ist 1). Wir betrachten
C :=
∞⋂
n=1
Cn 6= ∅.
C wird das Cantorsche Diskontinuum genannt. C ist folgenkompakt, da Cbeschrankt und als Durchschnitt abgeschlossener Mengen selbst abgeschlos-sen ist.
Nachdem wir bisher folgenkompakte Teilmengen betrachtet haben, die durchspezielle Eigenschaften von Folgen definiert wurden, betrachten wir im Fol-genden einen Kompaktheitsbegriff, der mit Hilfe von offenen Mengen definiertwird.
Definition 2.28. Sei (X, d) ein metrischer Raum und A ⊂ X eine Teilmenge.Eine Familie U = Uii∈I von Teilmengen von X heißt offene Uberdeckungvon A, falls die folgenden beiden Eigenschaften gelten
(1) Ui ⊂ X ist offen fur alle i ∈ I.(2) A ⊂ ⋃
i∈IUi.
Eine Teilmenge U ⊂ U der Uberdeckung U heißt Teiluberdeckung, wenn
A ⊂⋃
U∈U
U.
Eine Teiluberdeckung heißt endlich, wenn sie endlich viele Elemente enthalt.

80 2 Metrische Raume
Definition 2.29. Sei (X, d) ein metrischer Raum. Eine Teilmenge A ⊂ Xheißt kompakt, wenn man aus jeder offenen Uberdeckung von A eine endlicheTeiluberdeckung auswahlen kann.Ist die gesamte Menge X kompakt, so sagt man, dass der metrische Raum(X, d) kompakt ist.
Es gilt wiederum, dass eine Teilmenge A eines metrischen Raumes (X, d) ge-nau dann kompakt ist, wenn der metrische Raum (A, d|A×A) kompakt ist.
Satz 2.40 Ein metrischer Raum (X, d) ist genau dann kompakt, wenn erfolgenkompakt ist.
Beweis. 1. (X, d) kompakt =⇒ (X, d) folgenkompakt:Sei (X, d) kompakt und (xn) eine Folge in X . Wir betrachten die MengeFn := cl(xn+1, xn+2, . . .). Fn ist abgeschlossen fur alle n ∈ N und es gilt
. . . ⊃ Fn ⊃ Fn+1 ⊃ Fn+2 ⊃ . . .
Dann ist Un := X \ Fn offen und
. . . ⊂ Un ⊂ Un+1 ⊂ Un+2 ⊂ . . . (∗)
Im Folgenden zeigen wir, dass U := Un keine Uberdeckung von X ist. ZumBeweis nehmen wir an, dass U eine Uberdeckung von X ware. Da X kompaktist, wurde eine endliche Teiluberdeckung existieren mit
X = Un1 ∪ . . . ∪ Unk(n1 < n2 < . . . < nk).
Wegen (∗) folgt X = Unk= X \ Fnk
. Also ist Fnkleer. Dies steht aber im
Widerspruch zur Definition der Mengen Fn. Die Annahme war also falsch, dasheißt U = Un ist keine Uberdeckung von X . Es folgt
∞⋃
n=1
Un =∞⋃
n=1
(X \ Fn) = X \ (∞⋂
n=1
Fn) 6= X.
Also gilt∞⋂n=1
Fn 6= ∅. Sei nun x ∈∞⋂n=1
Fn. Dann ist x ∈ Fn fur alle n ∈ N. Wir
konstruieren uns nun eine gegen x konvergente Teilfolge:
x ∈ F1 = cl(x1, x2, . . .) ⇒ ∃ xn1 : d(x, xn1 ) < 1
x ∈ Fn1 = cl(xn1+1, xn1+2, . . .) ⇒ ∃ xn2 : d(x, xn2 ) <12 , n1 < n2
x ∈ Fn2 = cl(xn2+1, xn2+2, . . .) ⇒ ∃ xn3 : d(x, xn3 ) <13 , n2 < n3 . . .
Folgern wir so weiter, so erhalten wir eine Teilfolge (xnk)∞k=1 von (xn)∞n=1 mit
d(x, xnk) < 1
k. Demnach konvergiert (xnk
) gegen x ∈ X . Folglich ist (X, d)

2.5 Kompakte und folgenkompakte Teilmengen metrischer Raume 81
folgenkompakt.
(2) (X, d) folgenkompakt =⇒ (X, d) kompakt:
Sei (X, d) folgenkompakt und U eine offene Uberdeckung von X . Wir mussenzeigen, dass U eine endliche Teiluberdeckung besitzt.
(a) Wir zeigen zunachst, dass U eine abzahlbare Teiluberdeckung enthalt.Nach Satz 2.38 ist (X, d) separabel. Folglich existiert eine abzahlbare Teil-menge A ⊂ X mit cl(A) = X . Wir definieren die Menge
Λ = (a, q) ∈ A× Q+ | ∃ U ∈ U : K(a, q) ⊂ U ⊂ A× Q+.
Λ ist abzahlbar, da A×Q+ abzahlbar ist. Ist (a, q) ∈ Λ, so existiert ein U ∈ Umit K(a, q) ⊂ U . Wir wahlen eine dieser Mengen U und bezeichnen sie mitU(a, q). Dann ist
U∗ := U(a, q)(a,q)∈Λ
eine abzahlbare Teilfamilie von U . Wir zeigen nun, dass U∗ eine Uberdeckungvon X ist, das heißt dass
X =⋃
(a,q)∈ΛU(a, q).
Sei x ∈ X . Da U eine Uberdeckung von X ist, existiert ein U0 ∈ U mitx ∈ U0. Da U0 offen ist, gibt es eine Kugel K(x, ε0) ⊂ U0. Da A ⊂ X dichtliegt, enthalt X \ A keine Kugel. Insbesondere liegt die Kugel K(x, ε03 ) nichtvollstandig in X \ A. Somit existiert ein a ∈ A ∩K(x, ε03 ). Wir wahlen einerationale Zahl q ∈ Q+ mit ε0
3 < q < 23 · ε0. Wir zeigen nun, dass x ∈ U(a, q).
Wegen d(x, a) < ε03 < q folgt x ∈ K(a, q). Sei y ∈ K(a, q) ein beliebiges
Element dieser Kugel. Dann erhalten wir
d(x, y) ≤ d(x, a) + d(a, y) <ε03
+ q <ε03
+2
3· ε0 < ε0.
Demnach gilt y ∈ K(x, ε0) und somit K(a, q) ⊂ K(x, ε0) ⊂ U0.Die Definition von Λ besagt dann, dass (a, q) zu Λ gehort. Folglich istx ∈ K(a, q) ⊂ U(a, q). Damit ist X =
⋃(a,q)∈Λ
U(a, q) bewiesen.
(b) Es bleibt zu zeigen, dass man in jeder abzahlbaren, offenen Uberdeckungeine endliche Teiluberdeckung findet.Sei U = U1, U2, . . . eine abzahlbare, offene Uberdeckung von X . Wir be-trachten
Fn = X \ (U1 ∪ . . . ∪ Un)︸ ︷︷ ︸offen
.
Dann ist F1 ⊃ F2 ⊃ . . . eine absteigende Folge abgeschlossener Mengen. Wirzeigen nun, dass ein n ∈ N existiert mit Fn = ∅. Ware keine dieser MengenFn leer, so hatte man nach dem Satz 2.39

82 2 Metrische Raume
∞⋂
n=1
Fn 6= ∅.
Wegen
∅ 6=∞⋂
n=1
Fn =
∞⋂
n=1
(X \n⋃
i=1
Ui) = X \ (
∞⋃
n=1
n⋃
i=1
Ui) = X \ (
∞⋃
n=1
Un)
ware U dann keine Uberdeckung von X , was im Widerspruch zur Vorausset-zung steht. Folglich ist Fn = ∅ fur ein n ∈ N und es gilt X = U1 ∪ . . . ∪ Un.Wir haben somit eine endliche Teiluberdeckung in U gefunden, das heißt (X, d)ist kompakt. ⊓⊔
Folgerung 2.4 Eine Teilmenge eines metrischen Raumes ist genau dannkompakt, wenn sie folgenkompakt ist. Insbesondere gelten fur kompakte Teil-mengen metrischer Raume die folgenden Eigenschaften:
1. Jede kompakte Menge ist total beschrankt, insbesondere beschrankt.2. Jede kompakte Menge ist abgeschlossen.3. Jede abgeschlossene Teilmenge einer kompakten Menge ist selbst kompakt.4. Eine Teilmenge im metrischen Raum Rn ist genau dann kompakt, wenn
sie beschrankt und abgeschlossen ist.
Weitere Eigenschaften kompakter Mengen findet man in den Ubungsaufgaben.
Folgerung 2.5 (Klassischer Uberdeckungssatz von Heine/Borel)Sei [a, b] ⊂ R ein abgeschlossenes Intervall und U = (ai, bi)i∈I eine Familie(beliebig vieler) offener Intervalle, deren Vereinigung [a, b] uberdeckt:
[a, b] ⊂⋃
i∈I(ai, bi).
Dann existieren endlich viele Intervalle (ai1 , bi1), . . . , (ain , bin) ∈ U , die [a, b]bereits uberdecken, dh.
[a, b] ⊂n⋃
j=1
(aij , bij ).
Wir wissen, dass eine Teilmenge im Rn genau dann kompakt ist, wenn siebeschrankt und abgeschlossen ist. Eine ahnliche Charakterisierung kompakterMengen in allgemeinen metrischen Raumen ist nicht moglich. Man hat aberfur vollstandige metrische Raume das folgende Kriterium fur Kompaktheit.
Satz 2.41 Sei (X, d) ein vollstandiger metrischer Raum. Eine Teilmenge in(X, d) ist genau dann kompakt, wenn sie abgeschlossen und total beschranktist.

2.5 Kompakte und folgenkompakte Teilmengen metrischer Raume 83
Beweis. =⇒ folgt aus den Satzen 2.40, 2.37 und 2.34⇐= findet man z.B. im Buch von Dieudonne: Grundzuge der modernen Ana-lysis, Bd. 1. ⊓⊔
Abschließend sei noch ein Satz erwahnt, der oft als technisches Hilfsmittel beiBeweisen und Konstruktionen in der Topologie benutzt wird.
Satz 2.42 (Die Lebesgue-Zahl einer Uberdeckung)Sei (X, d) ein metrischer Raum, A ⊂ X eine kompakte Teilmenge und U eineoffene Uberdeckung von A. Dann existiert eine reelle Zahl ℓ(U) > 0, so dassfolgendes gilt: Jede Teilmenge B ⊂ A, deren Durchmesser kleiner als ℓ(U) ist,liegt vollstandig in einer der offenen Mengen U ∈ U .ℓ(U) heißt Lebesgue-Zahl der Uberdeckung U .
Beweis. Das uberlassen wir dem Leser als Ubungsaufgabe. ⊓⊔
Bemerkung: Wenn man sich den Satz 2.40 ansieht, fragt man sich naturlich,warum man denn uberhaupt zwei verschiedene Kompaktheitsbegriffe defi-niert, wenn diese dann doch ubereinstimmen. Ein Grund dafur ist, dass mandie kompakten Mengen dadurch auf zwei vollig verschiedene Weisen charak-terieren kann (einmal durch Eigenschaften von Folgen, zum anderen durchEigenschaften offener Uberdeckungen). Beide Varianten haben zum Nachweisvon Kompaktheit in verschiedenen Situationen jeweils Vorteile.Der tieferliegende Grund ist aber der folgende: Die metrischen Raume sindeine spezielle Klasse der sogenannten topologischen Raume, die wir hier kurzerganzend einfuhren wollen:
Sei X eine nichtleere Menge. Eine Topologie auf X ist eine Familie T vonTeilmengen von X , die folgende Eigenschaften hat:
1. X, ∅ ∈ T .2. Die Vereinigung beliebig vieler Teilmengen aus T ist ebenfalls in T .3. Der Durchschnitt endlich vieler Teilmengen aus T ist ebenfalls in T .
Das Paar (X, T ) nennt man dann topologischen Raum. Die Elemente in Theißen die offenen Mengen des topologischen Raumes (X, T ).
Ist (X, d) ein metrischer Raum, so bilden die offenen Mengen des metrischenRaumes nach Satz 2.2 eine Topologie auf X . Jeder metrische Raum ist folglichein spezieller topologischer Raum. In topologischen Raumen kann man kom-pakte und folgenkompakte Mengen auf die gleiche Weise definieren, wie immetrischen Raum. Man kann dann zeigen, dass es sowohl topologische Raumegibt mit kompakten Mengen, die nicht folgenkompakt sind als auch topolo-gische Raume mit folgenkompakten Mengen, die nicht kompakt sind !!. Furtopologische Raume, die zu den Grundstrukturen der Analysis gehoren, fallendie beiden Kompaktheitsbegriffe also nicht mehr zusammen.

84 2 Metrische Raume
2.6 Zusammenhangende Teilmengen eines metrischenRaumes
Definition 2.30. Sei (X, d) ein metrischer Raum. Eine Teilmenge A ⊂ Xheißt zusammenhangend, wenn es keine offenen und zueinander disjunktenTeilmengen U, V ⊂ X gibt, so dass A ⊂ U ∪ V , A ∩ U 6= ∅ und A ∩ V 6= ∅.Ist die Menge X selbst zusammenhangend, so nennt man den metrischenRaum (X, d) zusammenhangend.
Beispiel: Sei X = R2, U, V ⊂ X offene Teilmengen von X und A ⊂ X wieim Bild. Dann ist A nicht zusammenhangend.
A
U
V
Bemerkung: Nach Definition ist ein metrischer Raum (X, d) zusammenhan-gend, wenn er sich nicht in die disjunkte Vereinigung zweier offener nichtleererMengen zerlegt. Man kann wiederum zeigen, dass eine Teilmenge A eines me-trischen Raumes (X, d) genau dann zusammenhangend ist, wenn der metrischeRaum (A, d|A×A) zusammenhangend ist.
Wir beschreiben nun die zusammenhangenden Mengen im metrischen RaumR mit der Standardmetrik d(x, y) = |x− y|.
Satz 2.43 Eine Teilmenge A ⊂ R ist genau dann zusammenhangend, wennsie mit je zwei Punkten a, b ∈ A auch das Intervall [a, b] vollstandig enthalt.Die einzigen zusammenhangenden Teilmengen in R sind folglich R, (−∞, b),(−∞, b], (a,∞), [a,∞), (a, b), [a, b], (a, b], [a, b) und a.
Beweis. (=⇒) Sei A ⊂ R zusammenhangend. Angenommen es existierena, b ∈ A mit [a, b] 6⊂ A. Dann gibt es ein x ∈ [a, b] mit x 6∈ A. Wir be-trachten die Mengen U := (−∞, x) und V := (x,∞). U und V sind disjunkteoffene Teilmengen in R mit A ⊂ U ∪ V = R \ x. Außerdem ist A ∩ U 6= ∅,da a ∈ A ∩ U und A ∩ V 6= ∅, da b ∈ A ∩ V . Dies widerspricht aber derVoraussetzung, dass A zusammenhangend ist.(⇐=) Sei A ⊂ R eine Teilmenge, die mit 2 Punkten a, b ∈ A, a ≤ b, auch dasIntervall [a, b] enthalt. Wir nehmen an, A sei nicht zusammenhangend. Dannexistieren offene disjunkte Teilmengen U, V ⊂ R mit A ⊂ U ∪ V , A ∩ U 6= ∅und A∩V 6= ∅. Wir wahlen a ∈ A∩U und b ∈ A∩V . OBdA gelte a < b. Wirbetrachten z := sup(U ∩ [a, b]). Dann gilt

2.6 Zusammenhangende Teilmengen eines metrischen Raumes 85
z ∈ cl(U ∩ [a, b]) ⊂ cl(R \ V ) = R \ V (da V offen ist),
z ∈ cl(U ∩ [a, b]) ⊂ cl([a, b]) = [a, b] ⊂ A.
Da U ∪ V die Menge A uberdeckt, liegt z in U . Da U offen ist, existiert einε > 0 mit (z − ε, z + ε) ⊂ U . Also gilt (z − ε, z + ε) ∩ [a, b] ⊂ U ∩ [a, b]. Esfolgt minz + ε, b = sup((z − ε, z + ε) ∩ [a, b]) ≤ sup(U ∩ [a, b]) = z. Dannmuss b ≤ z gelten. Da andererseits z ∈ [a, b], folgt b = z und somit z ∈ V . DaU und V disjunkt sind und z ∈ U , kann das nicht gelten. Damit war unsereAnnahme, dass A nicht zusammenhangend ist, falsch. ⊓⊔
Bemerkung: Der analoge Beweis liefert, dass jede Verbindungstecke zwischenzwei Punkten im metrischen Raum Rn zusammenhangend ist.
Weitere zusammenhangende Teilmengen erhalt man durch die folgenden bei-den Satze.
Satz 2.44 Sei (X, d) ein metrischer Raum und A ⊂ X eine zusammenhangen-de Teilmenge. Gilt A ⊂ B ⊂ cl(A), so ist B ebenfalls zusammenhangend.Insbesondere ist der Abschluss einer zusammenhangenden Menge selbst zu-sammenhangend.
Beweis. Angenommen B ware nicht zusammenhangend. Dann existieren of-fene, disjunkte Mengen U, V ⊂ X mit B ⊂ U ∪ V, B ∩U 6= ∅ und B ∩ V 6= ∅.Wir zeigen nun, dass dann A auch nicht zusammenhangend ist. Wegen A ⊂ Bgilt A ⊂ U ∪ V . Es bleibt zu zeigen, dass A ∩ V 6= ∅ und A ∩ U 6= ∅. Wirnehmen A ∩ U = ∅ an. Dann gilt A ⊂ X \ U und somit, da U offen ist,B ⊂ cl(A) ⊂ cl(X \ U) = X \ U . Dann ware B ∩ U = ∅ im Gegensatzzur Wahl von U . Folglich war unsere Annahme, dass A und U disjunkt sind,falsch. Die analogen Betrachtungen beweisen A ∩ V 6= ∅. Somit ist A nichtzusammenhangend, was den Voraussetzungen widerspricht. ⊓⊔
Satz 2.45 Sei (X, d) ein metrischer Raum und Ai, i ∈ I, beliebig viele zu-sammenhangende Teilmengen mit nichtleerem Durchschnitt B :=
⋂i∈I
Ai 6= ∅.Dann ist auch die Vereinigung A :=
⋃i∈I
Ai zusammenhangend.
Beweis. Wir nehmen an, A ware nicht zusammenhangend. Dann existierenoffene, disjunkte Mengen U, V ⊂ X mit A ⊂ U ∪V, A∩U 6= ∅ und A∩V 6= ∅.Fur i ∈ I gilt dann auch Ai ⊂ U ∪ V . Da Ai zusammenhangend ist, mussentweder Ai ∩ U = ∅ oder Ai ∩ V = ∅ gelten. Wir setzen
I1 := i ∈ I | Ai ⊂ V und I2 := i ∈ I | Ai ⊂ U.
Da A ∩ U 6= ∅ und A ∩ V 6= ∅ gilt I1 6= ∅ 6= I2. Wir erhalten

86 2 Metrische Raume
A =⋃
i∈IAi =
( ⋃
i∈I1Ai
)∪( ⋃
i∈I2Ai
)
und ( ⋃
i∈I1Ai
)∩( ⋃
i∈I2Ai
)⊂ V ∩ U = ∅.
Da fur alle i ∈ I gilt ∅ 6= B :=⋂k∈I
Ak ⊂ Ai, folgt
B ⊂( ⋃
i∈I1Ai
)∩( ⋃
i∈I2Ai
)= ∅.
Dies ist ein Widerspruch. Folglich war die Annahme falsch und A ist zusam-menhangend. ⊓⊔
Wir zeigen abschließend, dass sich jeder metrische Raum in disjunkte zusam-menhangende Teilmengen zerlegt.
Definition 2.31. Sei (X, d) ein metrischer Raum und x ∈ X. Die Menge
C(x) :=⋃
A zush.
x∈A
A
heißt die durch x bestimmte Zusammenhangskomponente von X.
Bemerkung:(1) Nach Satz 2.45 ist C(x) zusammenhangend. Somit ist C(x) die großte zu-sammenhangende Teilmenge von X , die x enthalt.
(2) Jede Zusammenhangskomponente von (X, d) ist abgeschlossen.Nach Satz 2.44 ist namlich der Abschluss cl(C(x)) der Zusammenhangskom-ponente C(x) ebenfalls zusammenhangend. Folglich gilt cl(C(x)) ⊂ C(x), alsocl(C(x)) = C(x). Somit ist C(x) abgeschlossen.
(3) Sind x, y ∈ X , so gilt entweder C(x) = C(y) oder C(x) ∩ C(y) = ∅.Wir betrachten den Fall, dass C(x) ∩ C(y) 6= ∅. Dann ist C(x) ∪ C(y) zusam-menhangend (nach Satz 2.45) und enthalt x und y. Folglich gilt C(x)∪C(y) ⊂C(x) und C(x) ∪ C(y) ⊂ C(y) und somit C(x) = C(y) = C(x) ∪ C(y).
Dies beweist den folgenden Satz
Satz 2.46 Sei (X, d) ein metrischer Raum. Dann zerlegt sich X in disjunkteZusammenhangskomponenen, d.h.
X =⋃
i∈ICi,
wobei die Mengen Ci zusammenhangend, abgeschlossen und paarweise disjunktsind.

2.7 Banachraume und Hilbertraume 87
2.7 Banachraume und Hilbertraume
In diesem Abschnitt betrachten wir spezielle vollstandige metrische Raume,deren Basismenge Vektorraume sind und deren Metrik durch eine Norm bzw.durch ein Skalarprodukt gegeben ist.
Definition 2.32. Ein Vektorraum uber dem Korper K (oder ein K-Vektorraum)ist ein Tripel [V,+, ·], wobei V eine nichtleere Menge und + und · zwei Ope-rationen
+ : V × V −→ V (Addition)(v, w) 7−→ v + w
· : K × V −→ V (Multiplikation mit Skalaren)(λ, v) 7−→ λ · v
mit den folgenden Eigenschaften sind:
1. [V,+] ist eine abelsche Gruppe.2. Es gelten die Distributivgesetze:
λ · (v + w) = λ · v + λ · w und (λ+ µ) · v = λ · v + µ · v3. λ · (µ · v) = (λ · µ) · v und 1 · v = v,
wobei λ, µ ∈ K und v, w ∈ V .
Wir werden Vektorraume auch kurz mit V bezeichnen, wenn die Operationen+ und · klar sind. Ist K der Korper der reellen Zahlen, so heißt V reellerVektorraum, ist K der Korper der komplexen Zahlen, so heißt V komplexerVektorraum. Die algebraische Theorie von Vektorraumen wird in der Vorle-sung uber lineare Algebra behandelt. Insbesondere wird dort erklart werden,was die Dimension eines Vektorraumes ist.
Definition 2.33. Sei V ein reeller oder komplexer Vektroraum. Eine Normauf V ist eine Abbildung ‖ · ‖ : V −→ R mit den folgenden Eigenschaften:
1. ‖x‖ ≥ 0 fur alle x ∈ V und ‖x‖ = 0 ⇐⇒ x = 0.2. ‖α · x‖ = |α| · ‖x‖ fur alle α ∈ K und x ∈ V .3. ‖x+ y‖ ≤ ‖x‖ + ‖y‖ (Dreiecksungleichung).
Das Paar (V, ‖ · ‖) heißt normierter Vektorraum.
Beispiele fur normierte Vektorraume:
1. Die Vektorraume Rn bzw. Cn mit den folgenden Normen
‖x‖p :=( n∑
j=1
|xj |p) 1
p
, p ∈ N, und ‖x‖∞ := maxj=1,...,n
|xj | ,

88 2 Metrische Raume
wobei x = (x1, . . . , xn). Die Norm ‖ ·‖2 auf dem Rn bzw. Cn ist die in Kapitel1.4 betrachtete Euklidische Norm.
2. Sei X eine nichtleere Menge und bezeichne Fb(X) den Vektorraum allerbeschrankten reellwertigen Funktionen
Fb(X) := f : X −→ R | f(X) ⊂ R beschrankt.
Die Operationen + und · sind hierbei auf folgende Weise definiert:
Fb(X) ×Fb(X) −→ Fb(X)(f1, f2) 7−→ f1 + f2 mit (f1 + f2)(x) := f1(x) + f2(x)
R ×Fb(X) −→ Fb(X)(λ, f) 7−→ λ · f mit (λ · f)(x) := λ · f(x).
Dann ist durch‖f‖∞ := sup
x∈X|f(x)| , f ∈ Fb(X)
eine Norm auf Fb(X) gegeben.
3. Sei BF(Rn) der Vektorraum aller beschrankten Folgen (xn) von Vektorenim Rn mit den Operationen
(xn) + (yn) := (xn + yn)
λ · (xn) := (λ · xn) ,
wobei λ ∈ R, (xn), (yn) ∈ BF(Rn). Dann ist durch
‖(xn)‖∞ := sup‖xn‖2 | n ∈ N , (xn) ∈ BF(Rn)
eine Norm auf BF(Rn) gegeben.
Auf jedem normierten Vektorraum ist auf kanonische Weise eine Metrik defi-niert, die wir im folgenden auch immer auf normierten Vektorraumen festlegenwerden:
Satz 2.47 Sei (V, ‖ · ‖) ein normierter Raum. Dann ist die Abbildung
d‖·‖ : V × V −→ R
(x, y) 7−→ d‖·‖(x, y) := ‖x− y‖
eine Metrik auf V .
Beweis. Der Beweis wird genauso wie fur die Euklidische Norm in Kapitel1.4. gefuhrt. ⊓⊔

2.7 Banachraume und Hilbertraume 89
Definition 2.34. Ein normierter Vektorraum (V, ‖ · ‖) heißt Banachraum,wenn er (als metrischer Raum) vollstandig ist.
Beispiele:
1. Rn und Cn mit der Euklidischen Norm ‖ · ‖2 sind endlich-dimensionaleBanachraume (siehe Kapitel 2.4).
2. Die Raume der beschrankten reellwertigen Funktionen Fb(X) und der be-schrankten Folgen BF(Rn) sind mit der Supremum-Norm ‖·‖∞ unendlich-dimensionale Banachraume (Ubungsaufgabe 42).
Wir werden nun zeigen, dass die endlich-dimensionalen Vektorraume Rn undCn mit jeder Norm Banachraume sind. Dazu fuhren wir die folgende Aquiva-lenzrelation fur Normen ein:
Definition 2.35. Sei V ein reeller oder komplexer Vektorraum. Zwei Normen‖·‖1 und ‖·‖2 auf V heißen aquivalent, wenn es positive Konstanten a, b ∈ R+
gibt, so dass gilt
a · ‖x‖1 ≤ ‖x‖2 ≤ b · ‖x‖1 ∀ x ∈ V. (∗)
Satz 2.48 Seien ‖·‖1 und ‖·‖2 zwei aquivalente Normen auf dem VektorraumV . Dann stimmen alle topologischen Eigenschaften von (V, ‖·‖1) und (V, ‖·‖2)uberein. Insbesondere gilt fur Folgen (xn) in V und fur Teilmengen A ⊂ V :
1. (xn) −→ x ∈ V bzgl. ‖ · ‖1 gdw. (xn) −→ x ∈ V bzgl. ‖ · ‖2.2. (xn) ist Cauchy-Folge bzgl. ‖ · ‖1 gdw. (xn) ist Cauchy-Folge bzgl. ‖ · ‖2.3. A ist offen bzgl. ‖ · ‖1 gdw. A ist offen bzgl. ‖ · ‖2.4. A ist abgeschlossen bzgl. ‖ · ‖1 gdw. A ist abgeschlossen bzgl. ‖ · ‖2.5. A ist kompakt bzgl. ‖ · ‖1 gdw. A ist kompakt bzgl. ‖ · ‖2.6. A ist zusammenhangend bzgl. ‖ · ‖1 gdw. A ist zusammenhangend bzgl.
‖ · ‖2.
Beweis. Aus (∗) folgen fur die Kugeln Ki(x, ε) bzgl. der Norm ‖ · ‖i die fol-genden Beziehungen
K1(x, ε) ⊂ K2(x, b · ε) , K2(x, ε) ⊂ K1(x,ε
a) ∀ ε > 0.
Da alle topologischen Begriffe fur metrische Raume mittels Kugeln definiertsind, folgen die Behauptungen des Satzes unmittelbar aus diesen Beziehungender Kugeln zueineinander. ⊓⊔
Satz 2.49 Alle Normen auf den Vektorraumen Rn bzw. Cn sind zueinanderaquivalent.

90 2 Metrische Raume
Beweis. Wir beweisen die Behauptung fur den reellen Vektorraum Rn. DerBeweis fur Cn wird analog gefuhrt.Sei ‖ · ‖2 : Rn −→ R die Euklidische Norm auf dem Rn und N : Rn −→ R
eine beliebige Norm. Da die Aquivalenz von Normen eine Aquivalenzrelationist, genugt es zu zeigen, dass die Normen ‖ · ‖2 und N aquivalent sind. Wirmussen also positive reelle Konstanten a und b finden, so dass
a · ‖x‖2 ≤ N(x) ≤ b · ‖x‖2 fur alle x ∈ Rn.
(1) Es existiert ein b ∈ R+ mit N(x) ≤ b · ‖x‖2 fur alle x ∈ Rn:Jeder Vektor x ∈ Rn hat die Form x = (x1, . . . , xn) =
∑nj=1 xjej , wobei
ej = (0, . . . , 0, 1, 0, . . . , 0) mit 1 an der j.-Stelle. Dann gilt wegen der Normei-genschaften und der Cauchy–Schwarzschen Ungleichung (siehe Satz 1.24)
N(x) = N( n∑
j=1
xj · ej)
≤n∑
j=1
N(xj · ej) =
n∑
j=1
|xj | ·N(ej)
≤
√√√√n∑
j=1
|xj |2 ·
√√√√n∑
j=1
N(ej)2
︸ ︷︷ ︸=:b>0
= b · ‖x‖2.
(2) Es existiert ein a ∈ R+ mit a · ‖x‖2 ≤ N(x) fur alle x ∈ Rn:Sei x ∈ Rn ein vom Nullvektor verschiedener Vektor. Dann gilt
N(x) = N(‖x‖2 ·
x
‖x‖2
)= ‖x‖2 ·N
( x
‖x‖2
).
Wir setzen a := infN(y) | ‖y‖2 = 1 ≥ 0 . Dann gilt N(x) ≥ a · ‖x‖2 fur allex ∈ Rn. Es bleibt zu zeigen, dass a > 0.Angenommen a = 0. Sei Sn−1 := y ∈ Rn | ‖y‖2 = 1 die Sphare vomRadius 1 im Rn. Nach Definition von a existiert eine Folge (xn) in Sn−1 mitN(xn) −→ a = 0. Da die Sphare Sn−1 in Rn beschrankt und abgeschlos-sen bzgl. der Euklidischen Norm ‖ · ‖2 ist, ist sie folgenkompakt bzgl. ‖ · ‖2
(siehe Satz 2.36). Folglich existiert eine Teilfolge (xnk) von (xn), die gegen
einen Vektor y0 ∈ Sn−1 bzgl. ‖ · ‖2 konvergiert. Wir erhalten dann aus derDreiecksungleichung fur N und der in (1) bewiesenen Ungleichung
0 ≤ N(y0) ≤ N(y0 − xnk) +N(xnk
) ≤ b · ‖y0 − xnk‖2 +N(xnk
).
Bei k gegen +∞ konvergiert die rechte Seite dieser Ungleichung gegen 0.Folglich ist N(y0) = 0 und somit y0 = 0. Dies widerspricht y0 ∈ Sn−1. Somitist a > 0. ⊓⊔
Da Rn und Cn mit der Euklidischen Norm vollstandig sind, folgt aus den

2.7 Banachraume und Hilbertraume 91
Satzen 2.48 und 2.49, dass die Vektroraume Rn und Cn mit jeder Norm Ba-nachraume sind. In der Vorlesung uber lineare Algebra wird beweisen, dassjeder reelle Vektorraum der Dimension n < +∞ isomorph zu Rn und jederkomplexe Vektorraum der Dimension n < +∞ isomorph zu Cn ist. Dies liefert
Folgerung 2.6 Jeder endlich-dimensionale, reelle oder komplexe normierteVektorraum ist ein Banachraum.
Fur ∞–dimensionale Vektorraume gilt Satz 2.49 und die daraus abgeleite-te Folgerung nicht mehr. Im Laufe der Analysis-Vorlesung werden wir wei-tere vollstandige und unvollstandige unendlich-dimensionale normierte Vek-torraume kennenlernen.Abschließend befassen wir uns mit dem Begriff des Skalarproduktes auf einemVektorraum, den wir bereits in einem Spezialfall in Kapitel 1.4. betrachtet ha-ben.
Definition 2.36. Sei H ein reeller oder komplexer Vektorraum und bezeichneK den dazugehorigen Korper der reellen bzw. komplexen Zahlen. Ein Skalar-produkt auf H ist eine Abbildung 〈·, ·〉 : H ×H −→ K mit
(1) 〈x, y〉 = 〈y, x〉 fur x, y ∈ H,(2) 〈x+ y, z〉 = 〈x, z〉 + 〈y, z〉 fur x, y, z ∈ H,(3) 〈λx, y〉 = λ〈x, y〉 = 〈x, λy〉 fur λ ∈ K und x, y ∈ H,(4) 〈x, x〉 ≥ 0 und 〈x, x〉 = 0 ⇔ x = 0.
Satz 2.50 (Cauchy–Schwarzsche Ungleichung (CSU))Sei 〈·, ·〉 ein Skalarprodukt auf dem Vektorraum H. Dann gilt
|〈x, y〉|2 ≤ 〈x, x〉 · 〈y, y〉
Die Gleichheit tritt genau dann ein, wenn x und y linear abhangig sind.
Beweis. Fur λ ∈ K und x, y ∈ H gilt
0 ≤ 〈x + λy, x+ λy〉 = 〈x, x〉 + λ〈y, x〉 + |λ|2〈y, y〉 + λ〈x, y〉. (∗)
Es genugt, die Behauptung fur y 6= 0 zu beweisen. Fur y = 0 ist sie trivial.
Sei λ := − 〈x,y〉〈y,y〉 . Dann folgt
0 ≤ 〈x, x〉 − 2〈x, y〉〈x, y〉〈y, y〉 +
|〈x, y〉|2〈y, y〉 = 〈x, x〉 − |〈x, y〉|2
〈y, y〉 .
Daraus folgt |〈x, y〉|2 ≤ 〈x, x〉 · 〈y, y〉 . Nach (∗) gilt die Gleichheit genau dannwenn x = −λy. ⊓⊔

92 2 Metrische Raume
Satz 2.51 Ist 〈·, ·〉 ein Skalarprodukt auf H, so ist durch
‖x‖ :=√〈x, x〉
eine Norm und durch
d(x, y) :=√〈x− y, x− y〉 = ‖x− y‖
eine Metrik auf H definiert.
Beweis. Wir mussen die Dreiecksungleichung fur die Norm beweisen, der Restist trivial bzw. schon bekannt.
‖x+ y‖2 = 〈x+ y, x+ y〉= 〈x, x〉 + 〈y, y〉 + 〈x, y〉 + 〈y, x〉= 〈x, x〉 + 〈y, y〉 + 2 · Re〈x, y〉≤ 〈x, x〉 + 〈y, y〉 + 2 · |〈x, y〉|
CSU≤ 〈x, x〉 + 〈y, y〉 +
√〈x, x〉 ·
√〈y, y〉
= (‖x‖ + ‖y‖)2.⊓⊔
Bemerkung: Ein Vektorraum (H, 〈·, ·〉) mit Skalarprodukt ist im Folgendenimmer mit der Topologie der von 〈·, ·〉 erzeugten Norm ‖x‖ =
√〈x, x〉 verse-
hen.
Ist eine Norm gegeben, so mochte man gern wissen, ob diese durch ein Ska-larprodukt wie oben beschrieben definiert ist. Dies ist nicht immer der Fall.Ein Kriterium dafur liefert der Satz
Satz 2.52 Sei (V, ‖·‖) ein normierter Vektorraum. Die Norm ‖·‖ wird genaudann durch ein Skalarprodukt 〈·, ·〉 definiert, wenn das Parallelogrammgesetzgilt:
‖x+ y‖2 + ‖x− y‖2 = 2(‖x‖2 + ‖y‖2) ∀x, y ∈ E.
Beweis. Ubungsaufgabe 43. ⊓⊔
Definition 2.37. Ein Hilbertraum ist ein Vektorraum H mit Skalarprodukt〈·, ·〉, dessen zugehoriger normierter Raum (H, ‖·‖ =
√〈·, ·〉) ein Banachraum
ist.
Beispiele fur Hilbertraume:
• Rn mit dem Skalarprodukt 〈x, y〉 :=n∑j=1
xj · yj
• Cn mit dem Skalarprodukt 〈z, w〉 :=n∑j=1
zj · wj

3
Reihen in Banachraumen
In diesem Kapitel werden wir Reihen in Banachraumen und Kriterien furihre Konvergenz behandeln. Reihen sind eines der wichtigsten Hilfsmittel zurKonstruktion und Darstellung von Funktionen.Im gesamten Kapitel bezeichnet E einen Banachraum uber dem Korper derreellen oder der komplexen Zahlen mit der Norm ‖·‖. Als Spezialfall kann mansich an Stelle von E z.B. die Banachraume R, C, Rn oder Cn (mit beliebigerNorm) vorstellen.
In einem Vektorraum kann man jeder Folge von Vektoren eine neue Folgezuordnen: die Folge der Partialsummen. Sei (xk)
∞k=1 eine Folge von Vektoren
aus E. Wir bilden daraus eine neue Folge
sn := x1 + x2 + · · · + xn =n∑
k=1
xk ∈ E, also
s1 := x1
s2 := x1 + x2
s3 := x1 + x2 + x3
s4 := x1 + x2 + x3 + x4
. . .
Definition 3.1. Die Folge (sn)∞n=1 heißt Reihe in E mit den Gliedern xk.
Man schreibt fur diese Reihe symbolisch
∞∑
k=1
xk oder x1 + x2 + x3 + . . .
Den Vektor sn := x1 + . . .+ xn =n∑k=1
xk nennt man die n-te Partialsumme
der Reihe.

94 3 Reihen in Banachraumen
Eine Reihe∞∑k=1
xk in E heißt konvergent, falls die Folge der Partialsummen
(sn) in E konvergiert. Ist (sn) konvergent, so heißt s := limn→∞
sn Wert der
Reihe und man schreibt
s =
∞∑
k=1
xk.
Eine Reihe, die in E nicht konvergiert, heißt divergent.
Das Symbol∞∑k=1
xk hat also zwei Bedeutungen: es bezeichnet symbolisch die
Folge (sn) der Partialsummen und im Konvergenzfall auch ihren Grenzwert.
Sei speziell E = R. Wenn limn→∞
sn = +∞ oder limn→∞
sn = −∞ , so schreibt
man symbolisch∞∑
k=1
xk = +∞ oder
∞∑
k=1
xk = −∞.
Die Reihe ist in diesem Fall in R divergent. Gilt xk ≥ 0 fur alle k ∈ N, sobedeutet die Schreibweise ∞∑
k=1
xk < +∞,
dass die Reihe in R konvergiert.
Definition 3.2. Eine Reihe∞∑k=1
xk im Banachraum E heißt absolut–konvergent,
wenn die Reihe der reellen Zahlen∞∑k=1
‖xk‖ in R konvergiert.
Im nachsten Abschnitt behandeln wir wichtige Konvergenzkriterien fur Reihenin Banachraumen.
3.1 Konvergenzkriterien fur Reihen in Banachraumen
Satz 3.1 (Cauchy–Kriterium) Eine Reihe∞∑k=1
xk in einem Banachraum
E ist genau dann konvergent, wenn zu jedem ε > 0 ein n0 ∈ N existiert, sodass
‖xn + . . .+ xm‖ < ε ∀ m ≥ n ≥ n0 (∗)gilt.

3.1 Konvergenzkriterien fur Reihen in Banachraumen 95
Beweis. Da der Banachraum E vollstandig ist, konvergiert die Folge der Par-tialsummen sn = x1 + . . . + xn genau dann, wenn sie eine Cauchy-Folge ist.Dies ist nach Definition der Cauchy-Folge genau dann erfullt, wenn zu jedemε > 0 ein n0 ∈ N existiert, so dass fur alle m ≥ n ≥ n0 die Ungleichung‖sm − sn−1‖ < ε gilt, was aquivalent zum Cauchy–Kriterium (∗) ist. ⊓⊔
Der folgende Satz gibt ein nutzliches notwendiges Kriterium fur die Konver-genz einer Reihe an:
Satz 3.2 Ist eine Reihe∞∑k=1
xk im Banachraum E konvergent, so ist die Folge
der Reihenglieder (xk) eine Nullfolge in E.
Beweis. Zum Beweis nutzen wir das Cauchy–Kriterium im Fall m = n. Kon-
vergiert∞∑k=1
xk, dann existiert fur alle ε > 0 ein n0 ∈ N, so dass ‖xn‖ < ε fur
alle n ≥ n0. Daraus folgt limn→∞
xn = 0. ⊓⊔
Die Umkehrung dieses Satzes gilt im allgemeinen nicht.
Beispiel 1: Die harmonische Reihe
Sei E = R. Wir betrachten die harmonische Reihe
∞∑
k=1
1
k= 1 +
1
2+
1
3+
1
4+ . . .
Behauptung: Die harmonische Reihe ist in R divergent und es gilt
∞∑
k=1
1
k= +∞.
Beweis. Sei m ∈ N fixiert. Wir wahlen ein n ∈ N mit n ≥ 2m. Dann gilt
sn = 1 +1
2+ . . .+
1
n
≥ 1 +1
2+ (
1
3+
1
4) + (
1
5+ . . .+
1
8) + . . .+ (
1
2m−1 + 1+ . . .+
1
2m)
︸ ︷︷ ︸2m−1Summanden
≥ 1 +1
2+ 2 · 1
4+ 4 · 1
8+ . . .+ 2m−1 · 1
2m︸ ︷︷ ︸m Summanden
≥ 1 +m
2.
Folglich existiert zu jedem M ∈ R eine Zahl m, so dass sn ≥ 1 + m2 ≥ M fur
alle n ≥ 2m. Somit strebt die Folge der Partialsummen (sn) gegen +∞. ⊓⊔

96 3 Reihen in Banachraumen
Beispiel 2: Die geometrische Reihe
Sei E = C und z ∈ C eine fixierte komplexe Zahl. Wir betrachten die geome-trische Reihe ∞∑
k=0
zk = 1 + z + z2 + z3 + z4 + . . .
Behauptung:
1. Ist |z| < 1, so konvergiert die geometrische Reihe und es gilt∞∑k=0
zk = 11−z .
2. Ist |z| ≥ 1, so divergiert die geometrische Reihe∞∑k=0
zk.
Beweis. Sei |z| < 1. Fur die Partialsumme gilt nach Satz 1.14
sn = 1 + z + . . .+ zn =1 − zn+1
1 − z.
Da |z| < 1, ist (zn+1) eine Nullfolge und somit gilt limn→∞
sn = 11−z .
Im Falle |z| ≥ 1 ist |zk| ≥ 1 und somit (zk) keine Nullfolge. Nach Satz 3.2 ist
deshalb∞∑k=0
zk divergent. ⊓⊔
Satz 3.3 Ist eine Reihe∞∑k=1
xk im Banachraum E absolut–konvergent, so ist
sie auch konvergent und es gilt
∥∥∥∞∑
k=1
xk
∥∥∥ ≤∞∑
k=1
‖xk‖. (∗∗)
Beweis. Sei∞∑k=1
‖xk‖ konvergent. Entsprechend dem Cauchy-Kriterium gibt
es zu jedem ε > 0 ein n0 ∈ N, so dass
‖xn‖ + . . .+ ‖xm‖ < ε fur alle m ≥ n ≥ n0.
Wegen der Dreiecksungleichung fur die Norm
‖xn + . . .+ xm‖ ≤ ‖xn‖ + . . .+ ‖xm‖
gilt dann das Cauchy-Kriterium auch fur die Reihe∑∞
k=1 xk , die folglichkonvergiert. Aus den Grenzwertsatzen (analog zu Satz 2.18) erhalt man fursn = x1 + . . .+ xn
‖ limn→∞
sn‖ = limn→∞
‖sn‖ ≤ limn→∞
(‖x1‖ + . . .+ ‖xn‖) =
∞∑
k=1
‖xk‖.
Dies zeigt die Abschatzung (∗∗). ⊓⊔

3.1 Konvergenzkriterien fur Reihen in Banachraumen 97
Reihen im Banachraum E kann man addieren und mit reellen bzw. komple-xen Zahlen multiplizieren. Im folgenden bezeichnet K den Korper der reellenZahlen, falls E ein reeller Banachraum ist, bzw. den Korper der komplexenZahlen, falls E ein komplexer Banachraum ist.
Satz 3.4 Seien (xk) und (yk) Folgen im Banachraum E und λ, µ ∈ K. Kon-
vergieren die Reihen∞∑k=1
xk und∞∑k=1
yk gegen x bzw. y , so konvergiert die
Reihe∞∑k=1
(λxk + µyk) gegen λx+ µy.
Beweis. Seien
sn :=
n∑
k=1
xk sn :=
n∑
k=1
yk s∗n :=
n∑
k=1
(λxk + µyk).
Dann gilt s∗n = λsn + µsn. Die Behauptung folgt dann aus den Grenz-wertsatzen fur Folgen in Vektorraumen (analog zu Satz 2.18). ⊓⊔
Satz 3.5 (Majorantenkriterium)
Sei∞∑k=1
xk eine Reihe im Banachraum E und (ck) eine Folge reeller Zahlen,
so dass ‖xk‖ ≤ ck fur alle k ∈ N. Konvergiert die Reihe∞∑k=1
ck in R, so ist
die Reihe∞∑k=1
xk in E absolut–konvergent und es gilt
∥∥∥∞∑
k=1
xk
∥∥∥ ≤∞∑
k=1
‖xk‖ ≤∞∑
k=1
ck. (∗ ∗ ∗)
Beweis. Wir nutzen wiederum das Cauchy–Kriterium. Sei∞∑k=1
ck konvergent.
Dann gibt es fur alle ε > 0 ein n0 ∈ N, so dass
cn + . . .+ cm < ε ∀ m ≥ n ≥ n0.
Nach Voraussetzung ist ‖xn‖+ . . .+ ‖xm‖ ≤ cn + . . .+ cm . Folglich gilt das
Cauchy-Kriterium auch fur die Reihe∞∑k=1
‖xk‖ . Somit ist die Reihe∞∑k=1
xk
absolut–konvergent, also auch konvergent. Die Ungleichung (∗ ∗ ∗) folgt wieim Beweis von Satz 3.3. ⊓⊔

98 3 Reihen in Banachraumen
Beispiel 3: Sei E = C. Wir betrachten eine Folge komplexer Zahlen ak ∈ C
mit |ak| ≤ 1 fur alle k ∈ N und z ∈ C mit |z| < 1.
Behauptung: Die Reihe∞∑k=0
akzk ist absolut–konvergent und es gilt:
∣∣∣∣∣
∞∑
k=0
akzk
∣∣∣∣∣ ≤1
1 − |z| .
Beweis. Dies folgt aus dem Majorantenkriterium und der Konvergenz dergeometrischen Reihe, da
|akzk| = |ak| · |z|k ≤ |z|k und
∞∑
k=0
|z|k =1
1 − |z| .
⊓⊔
Satz 3.6 (Wurzelkriterium)
Sei∞∑k=1
xk eine Reihe im Banachraum E und α := lim supk→∞
k√‖xk‖ .
1. Ist α < 1, so ist die Reihe∞∑k=1
xk absolut–konvergent.
2. Ist α > 1, so ist die Reihe∞∑k=1
xk divergent.
Beweis. 1. Sei α = lim supk→∞
k√‖xk‖ < 1. Da α der großte Haufungspunkt der
Folge ( k√‖xk‖) ist, sind hochstens endlich viele dieser Folgeglieder großer als
α. Es existiert folglich ein k0 ∈ N so dass
k√‖xk‖ ≤ α <
1 + α
2< 1 ∀ k ≥ k0.
Somit gilt
‖xk‖ <(
1 + α
2
)k∀ k ≥ k0.
Da 1+α2 < 1, konvergiert die geometrische Reihe
∞∑k=1
(1+α
2
)k. Aus dem Majo-
rantenkriterium folgt dann die absolute Konvergenz der Reihe∞∑k=1
xk.
2. Sei α = lim supk→∞
k√‖xk‖ > 1. Dann existiert eine Teilfolge (xkj
) von (xk) mit
kj
√‖xkj
‖ ≥ 1, also mit ‖xkj‖ ≥ 1. Somit ist (xk) keine Nullfolge und
∞∑k=1
xk
konvergiert nicht (Satz 3.2). ⊓⊔

3.1 Konvergenzkriterien fur Reihen in Banachraumen 99
Satz 3.7 (Quotientenkriterium)
Sei∞∑k=1
xk eine Reihe im Banachraum E, deren Glieder xk alle vom Nullvek-
tor verschieden sind.
1. Ist α := lim supk→∞
‖xk+1‖‖xk‖ < 1, so ist die Reihe
∞∑k=1
xk absolut–konvergent.
2. Ist β := lim infk→∞
‖xk+1‖‖xk‖ > 1, so ist die Reihe
∞∑k=1
xk divergent.
Beweis. 1. Sei α = lim supk→∞
‖xk+1‖‖xk‖ < 1 . Dann existiert ein k0 ∈ N, so dass
‖xk+1‖‖xk‖
≤ α <1 + α
2< 1 ∀ k ≥ k0.
Folglich gilt
‖xk+1‖ ≤(
1 + α
2
)‖xk‖ ∀ k ≥ k0
und somit
‖xk0+j‖ ≤(
1 + α
2
)j‖xk0‖ ∀j ≥ 0.
Da α+12 < 1, konvergiert die geometrische Reihe
∞∑j=0
(α+12 )j . Aus dem Majo-
rantenkriterium folgt dann, dass die Reihe∞∑k=1
xk absolut konvergiert.
2. Sei nun β = lim infk→∞
‖xk+1‖‖xk‖ > 1 . Dann sind hochstens endlich viele der
Zahlen‖xk+1‖‖xk‖ kleiner als 1. Folglich existiert ein k0 ∈ N, so dass 0 < ‖xk‖ ≤
‖xk+1‖ fur alle k ≥ k0 gilt. Also ist (xk) keine Nullfolge. Nach Satz 3.2 ist
deshalb die Reihe∞∑k=1
xk divergent. ⊓⊔
Beispiel 4: Ob man das Wurzel- oder das Quotientenkriterium anwendet,muß man anhand der Gestalt der Reihenglieder entscheiden. Das Wurzel-kriterium ist leistungsfahiger als das Quotientenkriterium. Betrachten wir
z.B. E = R und die Reihe∞∑k=1
xk, wobei xk := 2−k fur gerade k und
xk := 8−k fur ungerades k sei. Das Wurzelkriterium zeigt Konvergenz an,da lim sup k
√xk = 1
2 gilt, wahrend das Quotientkriterium keine Aussage lie-fert, da lim inf xk+1
xk= 0 und lim sup xk+1
xk= +∞ gilt.
Beispiel 5: Fur jede komplexe Zahl z ∈ C ist die Reihe
∞∑
k=0
zk
k!= 1 + z +
z2
2!+z3
3!+z4
4!+ . . .

100 3 Reihen in Banachraumen
absolut–konvergent.
Beweis. Wir benutzen das Quotientenkriterium mit xk = zk
k! :
∣∣∣∣xk+1
xk
∣∣∣∣ =
∣∣∣∣zk+1 · k!
zk · (k + 1)!
∣∣∣∣ =|z|k + 1
−→ 0
Beispiel 6: Sei E = C, z ∈ C eine fixierte komplexe Zahl und p ∈ Q+ einepositive rationale Zahl. Die Reihe
∞∑
k=1
kp
zk
ist fur |z| > 1 absolut-konvergent und fur |z| < 1 divergent.
Beweis. Wir benutzen das Quotientenkriterium mit xk = kp
zk .
∣∣∣∣xk+1
xk
∣∣∣∣ =
∣∣∣∣(k + 1)p · zkkp · zk+1
∣∣∣∣ =(k + 1
k
)p· 1
|z| −→1
|z| .
Es gilt also lim∣∣∣xk+1
xk
∣∣∣ = lim sup∣∣∣xk+1
xk
∣∣∣ = lim inf∣∣∣xk+1
xk
∣∣∣ = 1|z| . Die Behauptung
folgt dann aus dem Quotientenkriterium. ⊓⊔
Beispiel 7: Sei E = C und z ∈ C. Die Reihe
∞∑
k=1
zk
k
ist absolut-konvergent, falls |z| < 1 und divergent, falls |z| > 1.
Beweis. Wir benutzen das Wurzelkriterium. Mit xk := zk
kist k
√|xk| = |z|
k√k
.
Da lim k√k = 1 gilt, konvergiert k
√|xk| gegen |z|. Damit ist lim sup
k→∞k√|xk| = |z|
und das Wurzelkriterium liefert die Behauptung. ⊓⊔Wir interessieren uns naturlich auch dafur, was mit der Konvergenz fur z ∈ C
mit |z| = 1 passiert. Fur z = 1 ist die obige Reihe gerade die harmonischeReihe, also divergent. Um die anderen Falle mit |z| = 1 behandeln zu konnen,beweisen wir ein weiteres Kriterium.

3.1 Konvergenzkriterien fur Reihen in Banachraumen 101
Satz 3.8 (Abel–Dirichlet–Kriterium)Sei x1, x2, x3, . . . eine Folge im Banachraum E, deren Partialsummenfolge
(sn = x1 + x2 + . . .+ xn) beschrankt ist. Sei weiterhin a1, a2, a3, . . . eine mo-noton fallende Nullfolge positiver reeller Zahlen. Dann konvergiert die Reihe
∞∑
k=1
akxk
im Banachraum E.
Beweis. Seien sn = x1 + x2 + . . . + xn und σn = a1x1 + . . . + anxn . NachVoraussetzung existiert eine reelle Zahl C, so dass ‖sn‖ ≤ C fur alle n ∈ N.Fur m > n erhalten wir
σm − σn = an+1xn+1 + an+2xn+2 + . . .+ amxm
= an+1(sn+1 − sn) + an+2(sn+2 − sn+1) + . . .+ am(sm − sm−1)
= −an+1sn + (an+1 − an+2)sn+1 + . . .+ (am−1 − am)sm−1 + amsm.
Da nach Voraussetzung ak − ak+1 ≥ 0 gilt, folgt
‖σm − σn‖ ≤ C ·(an+1 + (an+1 − an+2) + (an+2 − an+3) + . . .
+(am−1 − am) + am
)
= 2C · an+1.
Da (an) eine Nullfolge ist, existiert zu jedem ε > 0 ein n0 ∈ N, so dass‖σm − σn‖ < ε fur alle m > n ≥ n0. Damit ist (σn) eine Cauchy–Folge undkonvergiert im Banachraum E. ⊓⊔
Beispiel 7 (Fortsetzung):
Die Reihe∞∑k=1
zk
kist konvergent fur z ∈ C mit |z| = 1 und z 6= 1.
Beweis. Seien ak := 1k, xk := zk und sn := z + z2 + . . .+ zn . Es gilt
sn = z + z2 + . . .+ zn = z
(1 − zn
1 − z
).
Da |z| = 1, folgt |sn| = |z| · |1−zn||1−z| ≤ 2
|1−z| . Somit ist die Folge der Partial-
summen (sn) beschrankt. Aus dem Abel-Dirichlet-Kriterium folgt dann, dass
die Reihe∞∑k=1
zk
kkonvergiert. ⊓⊔

102 3 Reihen in Banachraumen
Das folgende Bild zeigt das Konvergenzverhalten der Reihe∞∑k=1
zk
k.
-
6
R
iR
1
i
absolut konvergent
divergent konvergent
Spezialfall (z = −1): Die alternierende harmonische Reihe
∞∑
k=1
(−1)k1
k= −1 +
1
2− 1
3+
1
4± . . .
ist konvergent. Wir werden spater sehen, dass ihr Wert ln 2 ist.Als nachstes betrachten wir Reihen reeller Zahlen, die sich so verhalten wiedie alternierende harmonische Reihe.
Definition 3.3. Eine Reihe∞∑k=1
xk reeller Zahlen heißt alternierend, wenn
xk+1 > 0 ⇐⇒ xk < 0 ∀ k ∈ N.
Satz 3.9 (Leibnitz–Kriterium fur alternierende Reihen)Sei (bk) eine monoton fallende Nullfolge positiver reeller Zahlen. Dann gilt:
1. Die alternierende Reihe∞∑k=1
(−1)kbk konvergiert.
2. Es gilt die folgende Fehlerabschatzung fur den Wert s der Reihe∞∑k=1
(−1)kbk :
∣∣∣∣∣s−n∑
k=1
(−1)kbk
∣∣∣∣∣ ≤ bn+1
Beweis. Zum Beweis benutzen wir das Abel–Dirichlet–Kriterium. Wir setzenin Satz 3.8 xk := (−1)k und ak := bk. Dann ist sn = x1 + . . .+ xn ∈ 0,−1,also beschrankt, und (ak) eine monoton fallende Nullfolge. Folglich konvergiertn∑k=1
(−1)kbk . Fur den Wert s dieser Reihe gilt

3.1 Konvergenzkriterien fur Reihen in Banachraumen 103
s = s2m − b2m+1 + b2m+2 − b2m+3 + . . .
= s2m+1 + b2m+2 − b2m+3 + b2m+4 − . . . .
Da die Folge (bk) monoton fallend ist, gilt
s2m+1 < s < s2m
und somit|s− sn| < |sn+1 − sn| = bn+1.
Dies zeigt die Fehlerabschatzung. ⊓⊔
Beispiel 8: Die Leibnitz-ReiheDie Reihe ∞∑
k=0
(−1)k1
2k + 1= 1 − 1
3+
1
5− 1
7+
1
9− . . .
konvergiert nach dem Leibnitz-Kriterium. Wir werden spater sehen, dass derGrenzwert π
4 ist.
Satz 3.10 (Cauchysches Verdichtungskriterium)Sei (xk) eine monoton fallende Folge positiver reeller Zahlen. Dann gilt
∞∑
k=1
xk konvergiert ⇐⇒∞∑
j=0
2jx2j konvergiert.
Beweis. Wir betrachten die Partialsummen beider Reihen
sn := x1 + . . .+ xn
tm := x1 + 2x2 + 4x4 + . . .+ 2mx2m .
Zunachst schatzen wir diese beiden Partialsummen gegeneinander ab. NachVoraussetzung ist die Folge (xk) monoton fallend. Somit gilt fur alle n < 2m+1
sn = x1 + . . .+ xn ≤ x1 + (x2 + x3) + . . .+ (
2m Summanden︷ ︸︸ ︷x2m + . . .+ x2m+1−1)
≤ x1 + 2x2 + . . .+ 2mx2m = tm.
Folglich giltsn ≤ tm ∀ n < 2m+1 (∗).
Andererseits folgt fur n ≥ 2m

104 3 Reihen in Banachraumen
sn = x1 + . . .+ x2k + . . .+ xn
≥ x1 + x2 + (x3 + x4) + . . .+ (
2m−1 Summanden︷ ︸︸ ︷x2m−1+1 + . . .+ x2m)
≥ 1
2x1 + x2 + 2x4 + . . .+ 2m−1x2m =
1
2tm.
Folglich gilt2sn ≥ tm ∀ n ≥ 2m (∗∗).
Nun zum Beweis der behaupteten Aquivalenz:
(=⇒): Sei∞∑k=1
xk konvergent. Dann ist die Folge (sn) konvergent und folglich
beschrankt. Wegen (∗∗) ist dann auch die Folge (tm) beschrankt. Außerdemist (tm) monoton wachsend. Nach Satz 2.20 konvergiert dann die Folge (tm),
also die Reihe∞∑j=0
2jx2j .
(⇐=): Sei∞∑j=0
2jx2j konvergent. Dann ist die Folge (tm) konvergent und folg-
lich beschrankt. Wegen (∗) ist dann auch die Folge (sn) beschrankt. Außerdemist (sn) monoton wachsend. Nach Satz 2.20 konvergiert dann die Folge (sn),
also die Reihe∞∑k=1
xk. ⊓⊔
Beispiel 9: Sei p eine positive rationale Zahl. Die Reihe
∞∑
k=1
1
kp
ist genau dann konvergent, wenn p > 1.
Beweis. Da p > 0, sind die Voraussetzungen von Satz 3.10 erfullt. Dann gilt
∞∑
k=1
1
kpkonvergiert ⇐⇒
∞∑
j=0
2j1
(2j)p=
∞∑
j=0
(2(1−p))j konvergiert.
Die geometrische Reihe∞∑j=0
(2(1−p))j konvergiert genau dann, wenn 2(1−p) < 1
d.h. genau dann, wenn p > 1 gilt. ⊓⊔
Das Cauchy–Produkt von Reihen komplexer Zahlen
Wir haben bereits gesehen, dass man konvergente Reihen in Banachraumenaddieren und mit Skalaren multiplizieren kann. Betrachtet man nur Reihenim Banachraum der komplexen Zahlen (E = C), so kann man sie auch aufbestimmte Weise multiplizieren.

3.1 Konvergenzkriterien fur Reihen in Banachraumen 105
Definition 3.4. Seien∞∑k=0
ak und∞∑k=0
bk zwei Reihen in C. Wir betrachten
eine neue Reihe∞∑k=0
ck mit den Reihengliedern
ck :=
k∑
j=0
aj · bk−j = a0bk + a1bk−1 + · · · + ak−1b1 + akb0
Die Reihe∞∑k=0
ck heißt Cauchy–Produkt der Reihen∞∑k=0
ak und∞∑k=0
bk.
Wir wollen die Frage behandeln, unter welchen Bedingungen aus der Kon-
vergenz der Reihen∞∑k=0
ak und∞∑k=0
bk die Konvergenz des Cauchy-Produktes
∞∑k=0
ck folgt. Im allgemeinen folgt sie nicht.
Beispiel 10: Wir betrachten die alternierenden Reihen
∞∑
k=0
ak =
∞∑
k=0
bk =
∞∑
k=0
(−1)k√k + 1
= 1 − 1√2
+1√3− 1√
4± . . . .
Diese Reihen konvergieren nach dem Leibnitz–Kriterium fur alternierende Rei-
hen. Betrachten wir aber die Folge ck =k∑j=0
ajbk−j , so erhalten wir
ck =
k∑
j=0
(−1)j√j + 1
· (−1)k−j√k − j + 1
=
k∑
j=0
(−1)k√(j + 1)(k − j + 1)
.
Es gilt
(k − j + 1)(j + 1) =
(1
2k + 1
)2
−(
1
2k − j
)2
≤(
1
2k + 1
)2
und folglich
|ck| ≥k + 112k + 1
=2(k + 1)
k + 2−→ 2.
Damit ist (ck) keine Nullfolge und die Reihe∞∑k=0
ck somit divergent.

106 3 Reihen in Banachraumen
Satz 3.11 Seien∞∑k=0
ak und∞∑k=0
bk konvergente Reihen komplexer Zahlen und
sei mindestens eine der beiden Reihen absolut–konvergent. Dann konvergiert
ihr Cauchy–Produkt∞∑k=0
ck und es gilt
∞∑
k=0
ck =
( ∞∑
k=0
ak
)·( ∞∑
k=0
bk
).
Beweis. Sei OBdA∞∑k=0
ak absolut–konvergent. Wir setzen
An =n∑
k=0
ak Bn :=n∑
k=0
bk Cn =n∑
k=0
ck.
Weiterhin bezeichne A := limn→∞
An, B = limn→∞
Bn und βn = Bn − B . Dann
erhalten wir
Cn = c0 + c1 + . . .+ cn
= a0b0 + (a0b1 + a1b0) + . . .+ (a0bn + a1bn−1 + . . .+ anb0)
= a0 ·Bn + a1 ·Bn−1 + . . .+ an ·B0
= a0(βn +B) + a1(βn−1 +B) + . . .+ an(β0 +B)
= An · B + a0βn + a1βn−1 + . . .+ anβ0︸ ︷︷ ︸=:γn
.
Es bleibt somit γn −→ 0 zu zeigen, da An ·B gegen A ·B konvergiert.Sei ε > 0 gegeben. Da Bn gegen B konvergiert, existiert ein n0 ∈ N so dass
|βn| = |Bn −B| < ε ∀ n ≥ n0.
Damit schatzen wir |γn| ab.
|γn| = |a0βn + a1βn−1 + . . .+ anβ0|≤ |a0βn + . . .+ an−n0βn0 | + |an−n0+1βn0−1 + . . .+ anβ0|≤ ε(|a0| + . . .+ |an−n0 |) + |an−n0+1βn0−1 + . . .+ anβ0|
≤ ε ·( ∞∑
k=0
|ak|)
︸ ︷︷ ︸=:A∗
+|an−n0+1||βn0−1| + . . .+ |an||β0|
≤ εA∗ + |an−n0+1||βn0−1| + . . .+ |an||β0| ∀ n ≥ n0.
A∗ ist endlich, da die Reihe∞∑k=0
ak nach Voraussetzung absolut konvergiert.
Da (an) eine Nullfolge ist, erhalten wir

3.1 Konvergenzkriterien fur Reihen in Banachraumen 107
limn→∞
|γn| ≤ εA∗ ∀ ε > 0.
Somit konvergiert γn gegen 0 und Cn = An · B + γn gegen A ·B. ⊓⊔
Satz 3.12 Das Cauchy-Produkt zweier absolut-konvergenter Reihen ist abso-lut konvergent.
Beweis. Ubungsaufgabe. ⊓⊔
Beispiel 11:
∞∑
k=1
k · zk−1 =1
(1 − z)2fur |z| < 1.
Beweis. Wir betrachten die Reihen∞∑k=0
ak und∞∑k=0
bk mit ak = bk = zk.
Dann ist ck =k∑j=0
zj · zk−j = (k + 1) · zk. Also ist das Cauchy–Produkt
∞∑k=0
ck =∞∑k=1
k · zk−1. Da die geometrische Reihe∞∑k=0
zk fur |z| < 1 absolut
konvergiert und ihr Wert 11−z ist, konvergiert das Cauchy–Produkt fur |z| < 1
gegen den oben angegebenen Wert. (Die Konvergenz folgt zwar auch aus demQuotientenkriterium, aber auf diese Weise kann man auch den Wert der Reihebestimmen). ⊓⊔
Der Umordnungssatz
In einer endlichen Summe kann man die Summanden beliebig umordnen, ohneden Wert der Summe zu verandern. Dies ist fur Reihen (“unendliche Sum-men“) nicht mehr der Fall. Abschließend untersuchen wir deshalb die Frage,unter welchen Bedingungen man Reihenglieder umordnen kann, ohne die Kon-vergenz zu verlieren.
Definition 3.5. Sei∞∑k=1
xk eine Reihe im Banachraum E und f : N −→ N
eine bijektive Abbildung. Die Reihe∞∑k=1
xf(k) heißt Umordnung von∞∑k=1
xk.
Man kann die Glieder einer Reihe nicht beliebig umordnen. Betrachten wirz.B. die Reihe
1√1− 1√
1+
1√2− 1√
2+
1√3− 1√
3± . . . (∗)
Die Reihe (∗) ist konvergent, denn fur die Partialsummen gilt

108 3 Reihen in Banachraumen
s2m = 0s2m+1 = 1√
m+1
dh. sm −→ 0.
Betrachten wir nun folgende Umordnung der obigen Reihe (∗)(
1√1
+1√2− 1√
1
)+
(1√3
+1√4− 1√
2
)+
(1√5
+1√6− 1√
3
)+ . . . (∗∗)
Fur die 3n-ten Partialsummen s∗3n dieser Reihe (∗∗) gilt
s∗3n =1√n+ 1
+ . . .+1√2n︸ ︷︷ ︸
n Summanden
≥ 1√2n
+ . . .+1√2n︸ ︷︷ ︸
n Summanden
=n√2n
=
√n
2−→ ∞.
Somit ist diese Reihe (**) nicht konvergent.
Satz 3.13 (Umordnungssatz) Sei∞∑k=1
xk eine absolut–konvergente Reihe
im Banachraum E. Dann ist jede Umordnung von∞∑k=1
xk konvergent und es
gilt∞∑
k=1
xk =
∞∑
k=1
xf(k).
Beweis. Sei∞∑k=1
xf(k) eine Umordnung von∞∑k=1
xk. Nach Voraussetzung ist
∞∑k=1
xk absolut-konvergent, also auch konvergent, d.h. es existiert ein s ∈ E
mit s =∞∑k=1
xk. Es bezeichne
sn := x1 + . . .+ xn und s∗n := xf(1) + . . .+ xf(n).
Sei nun eine Zahl ε > 0 gegeben. Da∞∑k=1
xk absolut konvergiert, existiert nach
dem Cauchy-Kriterium ein n0 ∈ N, so dass
m∑
j=n
‖xj‖ < ε. ∀ m > n ≥ n0 (∗)
Da die Umordnung f : N −→ N bijektiv ist, gibt es ein p0 ∈ N, so dass1, . . . , n0 ⊂ f(1, . . . , p0). Fur p ≥ p0 ergibt sich dann
sp − s∗p = x1 + . . .+ xp − (xf(1) + . . .+ xf(p))
= Summe gewisser xi fur i > n0.

3.1 Konvergenzkriterien fur Reihen in Banachraumen 109
Aus (∗) folgt ‖sp − s∗p‖ < ε ∀ p ≥ p0. Da sp gegen s konvergiert, gibt es auchein n∗
0 ∈ N so dass‖sp − s‖ < ε ∀ p > n∗
0.
Damit erhalten wir
‖s∗n − s‖ ≤ ‖s∗n − sn‖ + ‖sn − s‖ < 2ε ∀ n ≥ maxp0, n∗0.
Folglich konvergiert die Folge (s∗n) gegen s, also gilt∞∑k=1
xf(k) = s. ⊓⊔
Ohne die Voraussetzung der absoluten Konvergenz gilt Satz 3.13 nicht mehr.Es gilt sogar
Satz 3.14 (Riemannscher Umordnungssatz)
Sei∞∑k=1
ak eine konvergente, aber nicht absolut konvergente Reihe reeller Zah-
len und sei s ∈ R eine beliebig (!) vorgegebene Zahl. Dann existiert eine bijekti-
ve Abbildung f : N → N, so dass die Umordnung∞∑k=1
af(k) gegen s konvergiert.
Beweis. Sei oBdA ak 6= 0 fur alle k ∈ N. Wir setzen
a+k :=
|ak| + ak2
=
ak falls ak > 00 falls ak < 0
a−k :=|ak| − ak
2=
0 falls ak > 0
−ak falls ak < 0
Dann gilt ak = a+k −a−k und |ak| = a+
k +a−k . Aus der Voraussetzung des Sat-
zes folgt, dass beide Reihen∞∑k=1
a+k und
∞∑k=1
a−k divergent sind. Ware namlich
eine dieser beiden Reihen konvergent, so wurde wegen der Konvergenz von∞∑k=1
ak auch die andere dieser beiden Reihen konvergieren und die Konver-
genz von∞∑k=1
|ak| folgen (Satz 3.4).
Sei nun (pm) die Teilfolge aller positiven Zahlen von (ak) und (qm) die Teil-folge aller negativen Zahlen von (ak). Offensichtlich entsteht die Folge (pm),wenn man aus der Folge (a+
k ) alle Nullen streicht und (−qm), wenn man ausder Folge (a−k ) alle Nullen streicht. Nach dem oben Gesagten sind die Reihen∞∑m=1
pm und∞∑m=1
qm divergent und es gilt
∞∑
m=1
pm = +∞ ,
∞∑
m=1
qm = −∞ (∗)

110 3 Reihen in Banachraumen
Wir konstruieren nun die gesuchte Umordnung der Reihe∞∑k=1
ak. Wegen (∗)kann man schrittweise eine Folge jeweils kleinster Indizes n0, n1, n2, . . . mitder folgenden Eigenschaft wahlen:
n0 so dassn0∑m=1
pm > s
n1 so dassn0∑m=1
pm +n1∑m=1
qm < s
n2 > n0 so dassn0∑m=1
pm +n1∑m=1
qm +n2∑
m=n0+1pm > s
n3 > n1 so dassn0∑m=1
pm +n1∑m=1
qm +n2∑
m=n0+1pm +
n3∑m=n1+1
qm < s
...
Die Reihe
p1 + . . .+pn0 + q1 + . . .+ qn1 +pn0+1 + . . .+pn2 + qn1+1 + . . .+ qn3 + . . . (∗∗)
ist eine Umordnung von∞∑k=1
ak . Aus der Minimalitatseigenschaft der Wahl
der Indizes nj erhalt man folgende Abschatzung fur die Partialsumme s∗n derReihe (∗∗):
|s− s∗n| ≤ pn2j∀ n2j−1 + n2j ≤ n < n2j + n2j+1
|s− s∗n| ≤ −qn2j+1 ∀ n2j + n2j+1 ≤ n < n2j+1 + n2j+2
Da die Reihe∞∑k=1
ak konvergiert, sind die Teilfolgen (pn2j)∞j=0 und (qn2j+1)
∞j=0
von (an) Nullfolgen. Folglich konvergiert die Folge der Partialsummen (s∗n) derUmordnung (∗∗) gegen s. ⊓⊔
3.2 Komplexe Potenzreihen
Als Anwendung der Konvergenzkriterien aus Kapitel 3.1 betrachten wir indiesem Abschnitt spezielle Reihen im Banachraum der komplexen Zahlen, diesogenannten Potenzreihen.
Definition 3.6. Sei z0 ∈ C und (an) eine Folge komplexer Zahlen. Eine Po-tenzreihe mit dem Zentrum z0 ist eine Reihe komplexer Zahlen der Form
P (z) :=
∞∑
n=0
an(z − z0)n , z ∈ C.

3.2 Komplexe Potenzreihen 111
Wir wollen die Frage untersuchen, fur welche z ∈ C die Potenzreihe P (z)konvergiert. Offensichtlich konvergiert die Potenzreihe P (z) fur z = z0.
Satz 3.15 Sei P (z) =∞∑n=0
an(z − z0)n eine Potenzreihe mit dem Zentrum z0
und sei z1 6= z0.
1. Ist P (z1) konvergent, so ist P (z) fur jedes z ∈ C mit |z − z0| < |z1 − z0|absolut-konvergent.
2. Ist P (z1) divergent, so ist P (z) fur jedes z ∈ C mit |z − z0| > |z1 − z0|divergent.
Beweis. Zu 1: Da die Reihe P (z1) =∞∑n=0
an(z1 − z0)n konvergiert, ist die
Folge (an(z1 − z0)n) eine Nullfolge, also insbesondere beschrankt. Sei C ∈ R
so gewahlt, dass |an(z1 − z0)n| ≤ C fur alle n ∈ N0. Dann gilt
|an(z − z0)n| = |an(z1 − z0)
n|∣∣∣∣z − z0z1 − z0
∣∣∣∣n
≤ C ·∣∣∣∣z − z0z1 − z0
∣∣∣∣n
.
Fur z ∈ C mit |z − z0| < |z1 − z0| folgt | z−z0z1−z0 | < 1. Aus dem Majorantenkri-
terium und dem Grenzwert der geometrischen Reihe erhalt man
∞∑
n=0
|an(z − z0)n| ≤ C
∞∑
n=0
∣∣∣∣z − z0z1 − z0
∣∣∣∣n
= C · 1
1 − | z−z0z1−z0 |
.
Insbesondere ist∞∑n=0
an(z − z0)n absolut-konvergent.
Zu 2: Sei P (z1) divergent und |z − z0| > |z1 − z0|. Ware P (z) konvergent, sowurde aus 1. folgen, dass P (z1) absolut-konvergent ware, was einen Wider-spruch liefert. ⊓⊔
Definition 3.7. Die Zahl R := sup|z−z0 | P (z) ist konvergent ∈ R∪+∞heißt Konvergenzradius der Potenzreihe P (z). Die Kreisscheibe K(z0, R) ⊂ C
heißt Konvergenzkreis von P (z).
Nach Satz 3.15 ist die Potenzreihe P (z) fur z ∈ K(z0, R) absolut-konvergentund fur z ∈ C \ cl(K(z0, R)) divergent. Aus Kapitel 3.1. wissen wir bereits
• Fur P (z) =∞∑n=0
zn ist R = 1.
• Fur P (z) =∞∑n=0
zn
nist R = 1.
• Fur P (z) =∞∑n=0
zn
n! ist R = +∞.

112 3 Reihen in Banachraumen
Die nachsten beiden Satze zeigen, wie man den Konvergenzradius einer Po-tenzreihe bestimmen kann.
Satz 3.16 Sei P (z) =∞∑n=0
an(z − z0)n eine Potenzreihe und
λ := lim supn→∞
n√|an|. Dann gilt fur den Konvergenzradius R von P (z)
R =
1λ
falls λ ∈ R+
0 falls λ = +∞∞ falls λ = 0.
Beweis. Sei
α := lim supn→∞
n√|an(z − z0)n| = lim sup
n→∞n√|an| · |z − z0| = λ · |z − z0|.
Nach dem Wurzelkriterium konvergiert P (z) fur α < 1 und divergiert furα > 1.(1) Sei 0 < λ < +∞. Dann gilt
P (z)
konvergiert fur alle z mit |z − z0| < 1
λ
divergiert fur alle z mit |z − z0| > 1λ
Folglich ist R = 1λ.
(2) Sei λ = 0, dann ist auch α = 0. Somit konvergiert P (z) fur alle z ∈ C undder Konvergenzradius R ist +∞.(3) Sei λ = +∞. Dann gilt
α =
0 z = z0
+∞ z 6= z0.
Die Reihe P (z) divergiert also fur alle z 6= z0. Somit ist R = 0. ⊓⊔
Auf analoge Weise erhalt man aus dem Quotientenkriterium
Satz 3.17 Sei P (z) =∞∑n=0
an(z−z0)n eine Potenzreihe und seien alle an von
Null verschieden. Wir setzen µ := limn→∞
|an+1
an|. Dann gilt fur den Konvergenz-
radius R von P (z)
R =
1µ
falls µ ∈ R+
0 falls µ = +∞∞ falls µ = 0.

3.3 Exponentialfunktion, Logarithmusfunktion und komplexe Potenzen 113
3.3 Exponentialfunktion, Logarithmusfunktion undkomplexe Potenzen
In Kapitel 1.2 haben wir Potenzen aq definiert, wobei a eine positive reelleZahl und der Exponent q eine rationale Zahl bezeichnet. In diesem Abschnittwollen wir Potenzen az fur komplexe Exponenten z ∈ C erklaren und dieEigenschaften dieser Potenzen untersuchen.
Dazu betrachten wir zunachst die folgende komplexe Potenzreihe:
E(z) :=
∞∑
n=0
zn
n!= 1 + z +
z2
2!+z3
3!+ . . .
Die Reihe E(z) hat folgende Eigenschaften:
(1) E(z) ist fur jedes z ∈ C absolut-konvergent.
(2) Es gilt E(0) = 1 und E(1) =∞∑n=0
1n! = e, wobei e die Eulerzahl bezeichnet.
(3) Es gilt E(z1) · E(z2) = E(z1 + z2) fur alle z1, z2 ∈ C.Dies laßt sich mit der Formel fur das Cauchy–Produkt aus Abschnitt3.1 zeigen. Das Cauchy-Produkt der beiden absolut-konvergenten ReihenE(z1) und E(z2) ist
∞∑
n=0
(n∑
k=0
zk1k!
· zn−k2
(n− k)!
)=
∞∑
n=0
1
n!
(n∑
k=0
(n
k
)zk1 · zn−k2
)
=∞∑
n=0
(z1 + z2)n
n!
= E(z1 + z2).
Folglich gilt nach Satz 3.11, dass E(z1 + z2) = E(z1) · E(z2).Insbesondere ist E(z) 6= 0 und E(z) · E(−z) = E(0) = 1 fur alle z ∈ C.
(4) Es gilt E(z) = E(z).
(5) Es gilt |E(z) − 1| ≤ |z|1−|z| fur alle z ∈ C mit 0 < |z| < 1:
Wir benutzen dazu die Konvergenzeigenschaften der geometrischen Reiheund das Majorantenkriterium und erhalten
|E(z) − 1| =
∣∣∣∣∣
∞∑
n=1
zn
n!
∣∣∣∣∣ ≤∞∑
n=1
|z|nn!
≤∞∑
n=1
|z|n = |z|( ∞∑
n=0
|z|n)
=|z|
1 − |z| .
(6) Es gilt E(q) = eq fur alle q ∈ Q:Fur n ∈ N ist
E(n) = E(1 + . . .+ 1︸ ︷︷ ︸n−mal
) = E(1) · . . . ·E(1)︸ ︷︷ ︸n−mal
= e · . . . · e︸ ︷︷ ︸n−mal
= en

114 3 Reihen in Banachraumen
Fur n ∈ −N gilt E(n) = 1E(−n) = 1
e−n = en. Folglich ist E(n) = en fur
alle n ∈ Z. Sei nun q ∈ Q und q = nm
, wobei n ∈ Z und m ∈ N. Dann ist
(eq)m = eq·m = en = E(n) = E(q ·m) = E(q + . . .+ q︸ ︷︷ ︸m−mal
)
= E(q) · . . . · E(q)︸ ︷︷ ︸m−mal
= E(q)m.
Da eq und E(q) positiv sind, folgt eq = E(q).
Die letzte Eigenschaft von E(z) rechtfertigt die folgende Definition:
Definition 3.8. Unter der komplexen Potenz ez der Eulerzahl e verstehenwir den Wert der Potenzreihe E(z), d.h.
ez := E(z) =
∞∑
n=0
zn
n!.
Die Funktionexp : C −→ C
z 7−→ ez
heißt Exponentialfunktion.
Aus den Eigenschaften der Potenzreihe E(z) folgt
Satz 3.18 Die komplexen Potenzen der Eulerzahl erfullen
1. ez+w = ez · ew fur alle z, w ∈ C.
2. |ez − 1| ≤ |z|1−|z| fur alle z ∈ C mit 0 ≤ |z| < 1.
Satz 3.19 Die Abbildung exp|R : R −→ R+ ist streng monoton wachsend undbijektiv. Es gilt
1. 1 ≤ ex fur alle x ∈ R mit x ≥ 0.2. 0 < ex ≤ 1 fur alle x ∈ R mit x ≤ 0.
Beweis. Nach Definition ist ex = E(x) ≥ 1 fur alle x ≥ 0. Da ex·e−x = e0 = 1,folgt daraus 0 < ex ≤ 1 fur alle x ≤ 0.Seien nun x und y zwei reelle Zahlen mit x < y. Dann ist
ey = ex+(y−x) = ex · ey−x > ex.
Somit ist die Funktion exp|R steng monoton wachsend. Insbesondere ist sie
deshalb injektiv. Es bleibt zu zeigen, dass exp|R : R → R+ surjektiv ist.

3.3 Exponentialfunktion, Logarithmusfunktion und komplexe Potenzen 115
Sei y ∈ R+. Wir suchen eine Zahl s ∈ R mit es = y. Dazu betrachten wir diefolgenden Mengen
A = x ∈ R | ex < y und B = x ∈ R | y ≤ ex.
Diese Mengen bilden einen Dedekindschen Schnitt (A|B) von R, denn
• R ist die disjunkte Vereinigung von A und B.
• A und B sind nichtleer, denn ey−1
y < y ≤ ey (Ubungsaufgabe 55 (2)).• Fur a ∈ A und b ∈ B gilt ea < y ≤ eb. Wegen der Monotonie der Expo-
nentialfunktion folgt a < b.
Sei s ∈ R die auf Grund des Vollstandigkeitsaxioms der reellen Zahlen existie-rende Schnittzahl des Dedekindschen Schnittes (A|B). Wir zeigen nun, dasses = y gilt.Wir wissen, dass a ≤ s ≤ b fur alle a ∈ A, b ∈ B. Sei (an) eine Folge in A,die gegen s konvergiert. Dann gilt ean < y und
|es − ean | = |ean ||e(s−an) − 1| < |y| · |s− an|1 − |s− an|
−→ 0.
Daraus folgt limn→∞
ean = es ≤ y.
Sei (bn) eine Folge in B, die gegen s konvergiert. Dann gilt ebn ≥ y und
|ebn − es| = |es||e(bn−s) − 1| ≤ |es| · |bn − s|1 − |bn − s| −→ 0.
Es folgt limn→∞
ebn = es ≥ y. Also ist y = es. ⊓⊔
Definition 3.9. Die Umkehrabbildung von exp|R bezeichnen wir mit
ln : R+ −→ R
und nennen ln(y) den naturlichen Logarithmus von y.
Die Zahl ln(y) ist also eindeutig bestimmt durch die Bedingung eln(y) = y.Daraus ergeben sich folgende Eigenschaften fur den naturlichen Logarithmus:
Satz 3.20 Es seien y, y1, y2 ∈ R+ und q ∈ Q.
1. Die Funktion ln : R+ −→ R ist bijektiv und streng monoton wachsend.2. ln(y1 · y2) = ln(y1) + ln(y2).3. ln(yq) = q · ln(y).4. ln(y1
y2) = ln(y1) − ln(y2).
5. ln(1) = 0, ln(e) = 1.6. ln(y) > 0 fur alle y > 1 und ln(y) < 0 fur alle 0 < y < 1.

116 3 Reihen in Banachraumen
Das folgende Bild zeigt den Funktionsverlauf der reellen Funktionen exp|R undln.
6
-
R
R
. ................................. ..............................................................
.........................................................
..........................
.........................
........................
..........................
...........................
.............................
..............................
................................
..................................
...................................
1
e
1
ex
.
.................................
................................
..............................
.............................
............................
..........................
.........................
........................
..........................
...........................
.............................
..............................................................
..................................................................... ln(x)
Sei a ∈ R+. Dann gilt fur die Potenz ax, x ∈ R, die Formel
ax = eln(a)·x =
∞∑
n=0
(x · ln(a))n
n!.
Dies rechtfertigt die folgende Definition der komplexen Potenzen einer belie-bigen positiven reellen Zahl:
Definition 3.10. Sei a ∈ R+ und z ∈ C. Unter der Potenz az verstehen wirdie komplexe Zahl
az := E(z · ln(a)) =
∞∑
n=0
(z · ln(a))n
n!= ez·ln(a).
Aus den Eigenschaften der Potenzreihe E(z) ergibt sich unmittelbar
Satz 3.21 (Potenzgesetze fur komplexe Potenzen)Es seien a, b ∈ R+, x ∈ R und z, w ∈ C. Dann gilt:
1. 1z = 1 und a0 = 1.2. az · bz = (ab)z.3. az · aw = az+w.4. a−z = 1
az .5. (ax)z = ax·z.
Sei a ∈ R+ \ 1. Dann ist die Abbildung

3.3 Exponentialfunktion, Logarithmusfunktion und komplexe Potenzen 117
expa : R −→ R+
x 7−→ ax
bijektiv, streng monoton wachsend, falls a > 1, und streng monoton fallend,falls 0 < a < 1. Die Umkehrabbildung zu expa bezeichnen wir mit
loga : R+ −→ R
und nennen loga(y) den Logarithmus von y zur Basis a. Aus den Potenzge-setzen folgen dann unmittelbar die Aussagen des folgenden Satzes.
Satz 3.22 Die Funktion loga : R+ −→ R ist bijektiv, streng monoton wach-send, falls a > 1, und streng monoton fallend, falls 0 < a < 1.Es seien x, y ∈ R+, ρ ∈ R und a ∈ R+. Dann gilt:
1. loga x = lnxlna .
2. loga(x · y) = loga x+ loga y.3. loga(x
ρ) = ρ · loga x.4. loga(
xy) = loga(x) − loga(y).
5. loga(1) = 0, loga(a) = 1.


4
Stetige Abbildungen zwischen metrischenRaumen
4.1 Der Grenzwert einer Abbildung in einem Punkt
In diesem Abschnitt bezeichnen (X, dX) und (Y, dY ) metrische Raume, A ⊂ Xeine Teilmenge von X und f : A ⊂ X −→ Y eine auf A definierte Abbildung.
Definition 4.1. Sei x ∈ X ein Haufungspunkt von A. Ein Punkt y ∈ Y heißtGrenzwert der Abbildung f im Punkt x, falls fur jede Folge (an) von Punktenaus A mit an 6= x und an −→ x, die Folge der Bildwerte (f(an)) gegen ykonvergiert. Wir schreiben dafur symbolisch:
y = lima→x
f(a).
Bemerkung: Der Punkt x muss nicht unbedingt im Definitionsbereich A vonf liegen. Wir benotigen lediglich, dass er der Grenzwert einer Folge von Punk-ten aus A ist, d.h. dass x ∈ HP (A).
Beispiel 1: Es sei X = R2, A = R2 \ (0, 0) und Y = R. Wir betrachten dieAbbildung f : A −→ R mit
f(x, y) :=x3 − y3
x2 + y2.
Behauptung: lim(x,y)→(0,0)
f(x, y) = 0.
Beweis. Sei (x, y) 6= (0, 0). Dann gilt
x3 − y3
x2 + y2=
(x− y)(x2 + xy + y2)
x2 + y2= (x− y)(1 +
xy
x2 + y2).
Wegen∣∣∣ xyx2+y2
∣∣∣ ≤ 12 , folgt

120 4 Stetige Abbildungen zwischen metrischen Raumen
|f(x, y)| ≤ 3
2|x− y|.
Sei nun ((xn, yn)) eine beliebige gegen (0, 0) konvergente Folge. Dann giltxn −→ 0 und yn −→ 0 , somit xn − yn −→ 0 und folglich |f(xn, yn)| −→ 0.Also ist lim
n→∞f(xn, yn) = 0 fur alle Folgen (xn, yn) −→ (0, 0) und es gilt
lim(x,y)→(0,0)
f(x, y) = 0. ⊓⊔
Beispiel 2: Es sei X = R2, A = R2 \ (0, 0) und Y = R. Wir betrachten dieAbbildung f : A −→ R mit
f(x, y) =xy2
x2 + y4
Behauptung: lim(x,y)→(0,0)
f(x, y) existiert nicht.
Beweis. Wir betrachten die Folgen (an) und (bn) im R2 mit
an :=( 1
n,1
n
)und bn :=
( 1
n2,1
n
).
Dann gilt
an =( 1
n,1
n
)−→ (0, 0), f(an) =
1n3
1n2 + 1
n4
=n
n2 + 1−→ 0
bn =( 1
n2,1
n
)−→ (0, 0), f(bn) =
1n4
1n4 + 1
n4
=1
2−→ 1
2.
Folglich hat f in (0, 0) keinen Grenzwert. ⊓⊔
Satz 4.1 Sei f : A ⊂ X −→ Y eine Abbildung und x ∈ HP (A). Dann sinddie folgenden Bedingungen aquivalent:
1. lima→x
f(a) = y.
2. Fur alle ε > 0 existiert ein δ > 0, so dass
f(A ∩KX(x, δ) \ x
)⊂ KY (y, ε),
d.h. so dass fur alle a ∈ A mit 0 < dX(x, a) < δ gilt dY (f(a), y) < ε.
Beweis. (1) =⇒ (2): Sei lima→x
f(a) = y. Angenommen 2. gilt nicht, das heißt
es existiert ein ε0 > 0, so dass es zu jedem δ > 0 ein a ∈ A gibt mit0 < dX(x, a) < δ und dY (f(a), y) ≥ ε0. Wir wahlen speziell δ = 1
n. Dann

4.1 Der Grenzwert einer Abbildung in einem Punkt 121
erhalten wir eine Folge (an) in A mit an 6= x, so dass dX(x, an) < 1n
unddY (f(an), y) ≥ ε0 gilt. Daraus folgt an −→ x aber f(an) 6−→ y. Dies stehtaber im Widerspruch zu der Voraussetzung lim
n→∞f(an) = y.
(2) =⇒ (1): Sei 2. erfullt. Wir betrachten eine gegen x konvergente Folge (an)in A mit an 6= x. Sei ε > 0. Nach Voraussetzung existiert ein δ > 0, so dass
f(A ∩KX(x, δ) \ x
)⊂ KY (y, ε).
Da an gegen x konvergiert, existiert ein n0 ∈ N, so dass dX(x, an) < δ fur allen ≥ n0. Folglich ist dY (y, f(an)) < ε fur alle n ≥ n0. Also konvergiert (f(an))gegen y und zwar fur jede Folge (an) in A mit an 6= x und an −→ x. ⊓⊔
Wir betrachten nun den Fall, dass der metrische Raum Y ein Produktraumist.
Satz 4.2 Sei (Y, dY ) das Produkt von metrischen Raumen Y1, Y2, . . . , Yn undf : A ⊂ X −→ Y = Y1 × Y2 × . . .× Yn. Wir bezeichnen mit fj : A −→ Yj diedurch
f(a) = (f1(a), f2(a), . . . , fn(a))
definierten Abbildungen. Dann gilt
lima→x
fj(a) = yj ∀ j ∈ 1, . . . , n ⇐⇒ lima→x
f(a) = (y1, . . . , yn).
Beweis. Die Behauptung folgt aus dem Satz 2.13 uber die Konvergenz vonFolgen in Produktraumen. ⊓⊔
Spezialfall: Sei f : A ⊂ X −→ C eine Abbildung mit komplexen Werten.Dann gilt
lima→x
f(a) = lima→x
Re(f(a)) + i · lima→x
Im(f(a)).
Die speziellen Rechenregeln fur konvergente Folgen im Vektorraum Rn bzw.Cn, siehe Satz 2.18, liefern unmittelbar die folgenden Aussagen uber Grenz-werte von Abbildungen mit Werten in Vektorraumen:
Satz 4.3 (Grenzwerte von Abbildungen mit Werten in Rn bzw. Cn)Sei K der Korper der reellen bzw. der komplexen Zahlen und sei 〈·, ·〉 ein Ska-larprodukt und ‖ · ‖ eine Norm auf Kn.
1. Seien f, g : A −→ Kn zwei Abbildungen, fur die die Grenzwerte lima→x
f(a)
und lima→x
g(a) existieren. Dann gilt:

122 4 Stetige Abbildungen zwischen metrischen Raumen
(a) Es existiert lima→x
(g + f)(a) und es gilt
lima→x
(g + f)(a) = lima→x
g(a) + lima→x
f(a).
(b) Es existiert lima→x
〈f, g〉(a) und es gilt:
lima→x
〈f, g〉(a) = 〈 lima→x
f(a), lima→x
g(a)〉.
(c) Es existiert lima→x
‖f‖(a) und es gilt:
lima→x
‖f‖(a) = ‖ lima→x
f(a)‖.
2. Seien f : A −→ Kn und h : A −→ K zwei Abbildungen, fur die dieGrenzwerte lim
a→xf(a) und lim
a→xh(a) existieren. Dann existiert auch der
Grenzwert lima→x
(h · f)(a) und es gilt
lima→x
(h · f)(a) = lima→x
h(a) · lima→x
f(a).
3. Seien h : A −→ K und p : A −→ K zwei Abbildungen, fur die dieGrenzwerte lim
a→xh(a) und lim
a→xp(a) existieren und sei h(a) 6= 0 fur alle
a ∈ A und lima→x
h(a) 6= 0 . Dann existiert der Grenzwert lima→x
( ph)(a) und
es gilt
lima→x
(ph
)(a) =
lima→x
p(a)
lima→x
h(a).
⊓⊔
Im metrischen Raum R hatten wir außer den konvergenten Folgen auch Fol-gen betrachtet, die gegen +∞ oder −∞ streben und diesen den uneigentlichenGrenzwert ±∞ zugeordnet. Wir betrachten die analoge Situation fur Grenz-werte von Abbildungen f : X −→ Y , wobei X = R oder Y = R ist.
1. Fall: Sei X ein beliebiger metrischer Raum, Y = R undf : A ⊂ X −→ R.
Man sagt, dass der (uneigentliche) Grenzwert von f in x gleich +∞ ist, fallslimn→∞
f(an) = +∞ fur jede gegen x konvergente Folge (an) in A mit an 6= x .
Analog wird lima→x
f(a) = −∞ definiert.
Satz 4.4 Sei f : A ⊂ X −→ R eine Abbildung von einer Teilmenge einesmetrischen Raumes X in die reellen Zahlen. Dann sind folgende Bedingungenaquivalent:
1. lima→x
f(a) = +∞.

4.1 Der Grenzwert einer Abbildung in einem Punkt 123
2. Fur alle M > 0 existiert ein δ > 0 , so dass f(a) > M fur alle a ∈ A mit0 < dX(a, x) < δ.
Beweis. Der Beweis wird analog zum Beweis von Satz 4.1 gefuhrt. ⊓⊔
Beispiel: Wir betrachten die Funktion f : R2 \(0, 0) −→ R definiert durch
f(x, y) =1
x2 + y2.
Dann gilt lim(x,y)→(0,0)
f(x, y) = +∞.
2. Fall: Sei X = R, Y ein beliebiger metrischer Raum undf : (c,+∞) ⊂ R −→ Y .
Man sagt, dass lima→+∞
f(a) existiert und gleich y ∈ Y ist, falls
limn→+∞
f(an) = y fur jede Folge (an) in (c,+∞) mit an −→ +∞.
Wir schreiben in diesem Fall lima→+∞
f(a) = y .
Analog definiert man lima→−∞
f(a) = y.
Satz 4.5 Mit den obigen Bezeichnungen sind folgende Bedingungen aquiva-lent:
1. lima→+∞
f(a) = y.
2. Fur alle ε > 0 existiert ein M > 0 so dass dY (f(a), y) < ε fur alle a > M .
Beweis. Der Beweis wird analog zum Beweis von Satz 4.1 gefuhrt. ⊓⊔
Beispiel: Seien f1, f2 : (0,+∞) ⊂ R −→ C gegeben durch
f1(t) :=1
t(cos t+ i sin t) f2(t) := cos t+ i sin t
Dann gilt limt→+∞
f1(t) = 0 wahrend der GW von f2 fur t gegen +∞ nicht
existiert.
Beweis. Die erste Behauptung folgt, da |f(t)| = 1t. Fur die 2. Behauptung
betrachte man die Folge tn = nπ. Da f2(2kπ) = 1 und f2((2k + 1)π) = −1 ,hat die Bildfolge f(tn) zwei verschiedene Haufungspunkte. ⊓⊔
3. Fall: Seien X = Y = R und f : (c,+∞) ⊂ R −→ R.
Dann gilt lima→+∞
f(a) = ±∞ genau dann, wenn fur alle Folgen (an) in
(c,+∞), die gegen +∞ streben, die Folge f(an) gegen ±∞ strebt.Analog wird der uneigentliche Grenzwert von f fur a gegen −∞ definiert.

124 4 Stetige Abbildungen zwischen metrischen Raumen
Im Fall von reellen Funktionen f : A ⊂ R −→ R kann man einseitige Grenz-werte definieren.
Definition 4.2. Sei f : A ⊂ R −→ R und x ∈ (α, β) ⊂ A.Man sagt, dass der linksseitige Grenzwert von f in x existiert und gleichy ∈ R ist, falls lim
n→∞f(an) = y fur jede gegen x konvergente Folge (an) in A
mit an < x.Wir bezeichnen den linksseitigen Grenzwert mit lim
a→x−f(a) = y.
Man sagt, dass der rechtsseitige Grenzwert von f in x existiert und gleichy ∈ R ist, falls lim
n→∞f(an) = y fur jede gegen x konvergente Folgen (an) in
A mit an > x.Wir bezeichnen den rechtsseitigen Grenzwert mit lim
a→x+f(a) = y.
Satz 4.6 Sei f : (α, β) ⊂ R −→ R eine monoton wachsende Funktion. Dannexistieren fur jedes x ∈ (α, β) die einseitigen Grenzwerte und es gilt
lima→x−
f(a) = supf(t) | α < t < x,
lima→x+
f(a) = inff(t) | x < t < β.
Die analoge Aussage gilt fur monoton fallende Funktionen.
Beweis. Da f monoton wachst, ist die Menge f(t) | α < t < x von obendurch f(x) beschrankt. Folglich existiert das Supremum
y := supf(t) | α < t < x ≤ f(x).
Nach Definition des Supremums gibt es zu jedem ε > 0 ein t∗ ∈ (α, x), so dassy − ε < f(t∗) ≤ y. Da f monoton wachsend ist, gilt desweiteren
y − ε < f(t∗) ≤ f(t) ≤ y ∀ t ∈ (t∗, x) (∗)
Sei nun δ := x − t∗. Dann folgt aus (∗), dass fur alle |x − t| < δ mit t < xdie Abschatzung |y − f(t)| < ε gilt. Somit ist lim
t→x−f(t) = y .
Analog beweist man limt→x+ f(t) = inff(t) | β > t > x. ⊓⊔
Beispiel 1: Sei a > 1 gegeben. Dann gilt limx→+∞
ax
x= +∞.
Beweis. Es ist
ax = ex·ln(a) = 1 + x · ln(a) +x2 · ln2(a)
2!+ . . . .
Fur a > 1 ist ln(a) > 0. Fur x > 0 erhalten wir somit

4.1 Der Grenzwert einer Abbildung in einem Punkt 125
ax
x=
1
x+ ln(a)
︸ ︷︷ ︸>0
+x · ln2(a)
2!+ . . .︸︷︷︸
>0
≥ ln2(a)
2· x.
Da offensichtlich limx→+∞
x = +∞, folgt limx→+∞
ax
x= +∞. ⊓⊔
Beispiel 2: Es gilt limx→0
ln(1+x)x
= 1 .
Beweis. Fur x > −1 gilt nach Ubungsaufgabe 55
x
1 + x≤ ln(1 + x) ≤ x.
Daraus folgt
1
1 + x≤ ln(1 + x)
x≤ 1 falls x > 0.
1
1 + x≥ ln(1 + x)
x≥ 1 falls − 1 < x < 0.
Da limx→0
11+x = 1, folgt aus den Grenzwertsatzen lim
x→0
ln(1+x)x
= 1. ⊓⊔
Beispiel 3: Es gilt limx→0
(1 + x)1x = e und lim
x→+∞(1 + 1
x)x = e .
Beweis. Nach Satz 3.18 gilt
|ex − 1| ≤ |x|1 − |x| ∀ |x| < 1.
Folglich ist limn→∞
ean = 1 fur jede Nullfolge (an). Sei nun (xn) eine beliebige
Nullfolge in R mit xn 6= 0 und zn := ln(1+xn)xn
− 1 . Aus Beispiel 2 ergibt sich,dass (zn) eine Nullfolge ist. Also gilt
1 = limn→∞
ezn = limn→∞
eln (1+xn)· 1xn · e−1 = lim
n→∞(1 + xn)
1xn · e−1
und somitlimn→∞
(1 + xn)1
xn = e.
⊓⊔
Beispiel 4: Es gilt limx→+∞
xln(x) = +∞ .
Beweis. Wir wissen, dass xln(x) = eln(x)
ln(x) . Sei (xn) eine gegen +∞ konvergente
Folge. Dann gilt yn := ln(xn) −→ +∞, da ln streng monoton wachsend und
bijektiv ist. Aus Beispiel 1 erhalten wir limn→+∞
eln(xn)
ln(xn) = +∞. ⊓⊔

126 4 Stetige Abbildungen zwischen metrischen Raumen
4.2 Stetige Abbildungen (Definition und Beispiele)
Definition 4.3. Es seien (X, dX) und (Y, dY ) metrische Raume undf : X −→ Y eine Abbildung.
1. f heißt stetig im Punkt x0 ∈ X, falls zu jedem ε > 0 ein δ > 0 existiert,so dass
f(KX(x0, δ)) ⊂ KY (f(x0), ε).
(Die Große von δ hangt von ε und von x0 ab).2. f heißt folgenstetig im Punkt x0 ∈ X, falls fur jede Folge (xn) in X, die
gegen x0 konvergiert, die Bildfolge (f(xn)) in Y gegen f(x0) konvergiert.3. Die Abbildung f heißt stetig (folgenstetig), wenn sie in jedem Punkt x ∈ X
stetig (folgenstetig) ist.
-
6
X
Y
•
x0
f(x0)6?2ε
graph(f)
Satz 4.7 Sei f : X −→ Y eine Abbildung zwischen metrischen Raumen.Dann sind folgende Bedingungen aquivalent:
1. f : X −→ Y ist in x0 ∈ X stetig.2. f : X −→ Y ist in x0 ∈ X folgenstetig.3. x0 ist ein isolierter Punkt von X oder x0 ist ein Haufungspunkt von X
und es gilt limx→x0
f(x) = f(x0).
Beweis. (1) =⇒ (2) : Sei f : X −→ Y stetig in x0 ∈ X und (xn) eine(beliebige) gegen x0 konvergente Folge in X . Wir mussen zeigen, dass dieFolge (f(xn)) gegen f(x0) konvergiert.Sei ε > 0. Nach Definition der Stetigkeit existiert ein δ > 0 , so dass
f(KX(x0, δ)) ⊂ KY (f(x0), ε).
Da die Folge (xn) gegen x0 konvergiert, existiert ein n0 ∈ N, so dass xn ∈KX(x0, δ) fur alle n ≥ n0. Folglich ist f(xn) ∈ KY (f(x0), ε) fur alle n ≥ n0.

4.2 Stetige Abbildungen (Definition und Beispiele) 127
Also konvergiert (f(xn)) gegen f(x0).
(2) =⇒ (3) : Jeder Punkt x0 ∈ X ist entweder isoliert oder ein Haufungspunktvon X . Ist der Punkt x0 ∈ HP (X), so existiert eine gegen x0 konvergenteFolge (xn) in X mit xn 6= x0. Nach (2) konvergiert dann fur jede dieserFolgen die Bildfolge (f(xn)) gegen f(x0), das heißt es gilt lim
x→x0
f(x) = f(x0).
(3) =⇒ (1) : Wenn x0 ein isolierter Punkt ist, so existiert ein δ > 0, so dassKX(x0, δ) = x0. Dann ist
f(KX(x0, δ)) = f(x0) ⊂ KY (f(x0), ε)
fur alle ε > 0. Somit ist f in x0 stetig.Sei nun x0 ein Haufungspunkt von X und lim
x→x0
f(x) = f(x0). Nach Satz 4.1
existiert fur alle ε > 0 ein δ > 0, so dass
f(KX(x0, δ)) ⊂ KY (f(x0), ε).
Folglich ist f in x0 stetig. ⊓⊔
Als nachstes betrachten wir spezielle Kriterien fur die Stetigkeit reeller Funk-tionen f : A ⊂ R −→ R.
Satz 4.8 Sei f : A ⊂ R −→ R eine reelle Funktion und x0 ∈ (α, β) ⊂ A.Dann ist f in x0 genau dann stetig, wenn die beiden einseitigen Grenzwerteexistieren und
limx→x0
−f(x) = lim
x→x0+f(x) = f(x0).
Beweis. (=⇒) folgt aus Satz 4.7 als Spezialfall.(⇐=) Wir setzen voraus, dass die beiden einseitigen Grenzwerte existierenund dass
limx→x0
−f(x) = lim
x→x0+f(x) = f(x0).
Angenommen, f sei in x0 nicht stetig. Dann existiert ein ε0 > 0, so dass eszu jedem δ > 0 ein x ∈ A gibt mit der Eigenschaft, dass |x0 − x| < δ und|f(x0) − f(x)| ≥ ε0. Wahlen wir speziell δ = 1
n, so erhalten wir eine Folge
xn ∈ A mit |x0 − xn| < 1n
und |f(x0)− f(xn)| ≥ ε0. Insbesondere konvergiertdie Folge (xn) gegen x0 und es existiert eine Teilfolge (xnk
) von (xn) mitxnk
< x0 oder eine Teilfolge (xnk) von (xn) mit xnk
> x0, fur die f(xnk)
nicht gegen f(x0) konvergiert. Betrachten wir diese Teilfolge, so erhalten wireinen Widerspruch zur Voraussetzung lim
x→x0−f(x) = lim
x→x0+f(x) = f(x0). ⊓⊔
Satz 4.8 zeigt, dass es genau drei verschiedene Typen von Unstetigkeitsstelleneiner reellen Funktion gibt. f : A ⊂ R −→ R ist genau dann in x0 ∈ (α, β) ⊂A unstetig, wenn einer der folgenden Falle vorliegt:

128 4 Stetige Abbildungen zwischen metrischen Raumen
(1) Hebbare UnstetigkeitsstelleBeide einseitigen Grenzwerte von f in x0 existieren und stimmen uberein,sind aber ungleich f(x0). In diesem Fall kann man die Unstetigkeit von fin x0 durch Abanderung von f(x0) beheben.
Beispiel:
f(x) :=
0 x = 0
1 x 6= 0
Der Punkt x0 = 0 ist eine heb-bare Unstetigkeitsstelle.
-
6
R
R
) (
•
f
(2) SprungstelleDie beiden einseitigen Grenzwerte von f in x0 existieren, sind aber von-einander verschieden. Unter dem Sprung σ(f, x0) von f in x0 verstehenwir die Differenz der einseitigen Grenzwerte
σ(f, x0) := limx→x0
+f(x) − lim
x→x0−f(x).
Beispiel:
f(x) :=
x+ x
|x| x 6= 0
0 x = 0
Dann ist der Punkt x0 = 0 eineSprungstelle und der Sprungσ(f, x0) = 2.
-
6
R
R
•−1
1 (
)
f
(3) Unstetigkeitsstelle 2. ArtMindestens einer der beiden einseitigen Grenzwerte von f in x0 existiertnicht in R.
Wir betrachten z.B. die Dirichlet-Funktion
h(x) :=
1 x ∈ Q
0 x 6∈ Q
Jeder Punkt x0 ∈ R ist eine Unstetigkeitsstelle zweiter Art von h.

4.2 Stetige Abbildungen (Definition und Beispiele) 129
Sei
f(x) :=
1x
x 6= 0
0 x = 0
Der Punkt x0 = 0 ist eineUnstetigkeitsstelle zweiter Art,denn lim
x→0+f(x) = +∞
und limx→0−
f(x) = −∞.
-
6
R
R
f
Satz 4.9
1. Eine monotone Funktion f : A ⊂ R −→ R ist in x0 ∈ (α, β) ⊂ A genaudann stetig, wenn
limx→x0
+f(x) = lim
x→x0−f(x).
2. Eine monotone Funtion f : (α, β) ⊂ R −→ R, −∞ < α < β < +∞, hathochstens abzahlbar viele Unstetigkeitsstellen. Jede Unstetigkeitsstelle isteine Sprungstelle.
3. Sei A ⊂ R ein (verallgemeinertes) Intervall und f : A ⊂ R −→ R einestreng monotone Funktion. Dann ist f : A −→ f(A) bijektiv und dieUmkehrabbildung f−1 : f(A) −→ A stetig.
Beweis. Ubungsaufgabe 60. ⊓⊔
Als nachstes stellen wir einige Eigenschaften stetiger Abbildungen zwischenmetrischen Raumen zusammen, die sich unmittelbar aus der Definition derStetigkeit, der Aquivalenz zur Folgenstetigkeit und den Rechenregeln fur kon-vergente Folgen ergeben.
Satz 4.10 Seien f : X −→ Y und g : Y −→ Z zwei Abbildungen zwischenmetrischen Raumen, f in x0 ∈ X und g in f(x0) ∈ Y stetig. Dann ist g fin x0 stetig. Insbesondere ist die Verknupfung stetiger Abbildungen ebenfallsstetig.
Beweis. Sei (xn) eine Folge in X , die gegen x0 konvergiert. Da f in x0 stetigund somit folgenstetig ist, konvergiert die Folge (f(xn)) in Y gegen f(x0).Wegen der Stetigkeit von g in f(x0) konvergiert dann die Folge (g(f(xn)) =(g f)(xn)) gegen g(f(x0)) = (g f)(x0). Folglich ist g f in x0 folgenstetigund somit stetig. ⊓⊔

130 4 Stetige Abbildungen zwischen metrischen Raumen
Satz 4.11 Seien (X, dX) und (Y, dY ) metrische Raume und A eine Teilmengevon X. Ist f : X −→ Y stetig, so ist auch die Einschrankung f|A : A −→ Ystetig bzgl. der auf A durch X induzierten Metrik dA := (dX)|A×A.
Beweis. Sei (an) eine Folge in A, die im metrischen Raum (A, dA) gegen a ∈ Akonvergiert. Dann konvergiert (an) auch bzgl. der Metrik dX von X gegen a.Nach Voraussetzung konvergiert (f(an)) gegen f(a) in Y , also ist f|A in afolgenstetig und somit stetig. ⊓⊔
Satz 4.12
1. Sei f : X −→ Y1 × . . . × Yn eine Abbildung in das Produkt metrischerRaume und f = (f1, . . . , fn) die Komponentendarstellung von f . Die Ab-bildung f ist genau dann in x0 stetig, wenn jede Komponentefj : X −→ Yj in x0 stetig ist, j = 1, . . . , n.
2. Sei f : X1 ×X2 −→ Y stetig in (x1, x2) ∈ X1 ×X2. Dann ist
h1 : X1 −→ Y in x1 stetig ,
x 7→ f(x, x2)
h2 : X2 −→ Y in x2 stetig .
x 7→ f(x1, x)
Satz 4.13 Sei X ein metrischer Raum und K der Korper der reellen oderder komplexen Zahlen, 〈·, ·〉 ein Skalarprodukt und ‖ · ‖ eine Norm auf Kn.
1. Seien f, g : X −→ Kn in x0 ∈ X stetig. Dann gilt(a) f + g : X −→ Kn ist in x0 stetig.(b) 〈f, g〉 : X −→ K ist in x0 stetig.(c) ‖f‖ : X −→ R ist in x0 stetig.
2. Seien f : X −→ Kn und h : X −→ K in x0 stetig. Dann ist auchh · f : X −→ Kn in x0 stetig.
3. Seien h, p : X −→ K in x0 stetig und sei p(x0) 6= 0. Dann ist auch dieAbbildung h
p: A = x ∈ X | p(x) 6= 0 ⊂ X −→ K in x0 stetig.
4. Eine Abbildung f : X −→ C ist genau dann in x0 stetig, wenn sowohl derRealteil Re(f) als auch der Imaginarteil Im(f) in x0 stetig sind.f : X −→ C ist genau dann in x0 stetig, wenn die konjugiert-komplexeAbbildung f : X −→ C in x0 stetig ist.

4.2 Stetige Abbildungen (Definition und Beispiele) 131
Wir betrachten nun einige Beispiele fur stetige Abbildungen:
Beispiel 1: Sei (X, d) ein metrischer Raum und x0 ∈ X .
(a) Die identische Abbildung idX : X −→ X , idX(x) := x , ist stetig.(b) Die konstante Abbildung cx0 : X −→ X , cx0(x) := x0 , ist stetig.
Beispiel 2: Sei P (z) =∑nk=0 akz
k ein Polynom mit komplexen Koeffizientena0, a1, . . . , an. Dann ist die polynomiale Funktion
P : C −→ C
z 7→ P (z) = anzn + an−1z
n−1 + . . .+ a1z + a0
stetig.
Beispiel 3: Seien P1 und P2 zwei Polynome mit komplexen Koeffizienten,d.h.
P1(z) = anzn + an−1z
n−1 + . . .+ a1z + a0
P2(z) = bmzm + bm−1z
m−1 + . . .+ b1z + b0
wobei alle aj und bj komplexe Zahlen sind. Dann ist die rationale Funktionf := P1
P2: A := z ∈ C | P2(z) 6= 0 ⊂ C −→ C
f(z) =anz
n + an−1zn−1 + . . .+ a1z + a0
bmzm + bm−1zm−1 + . . .+ b1z + b0
auf A stetig.
Beispiel 4: Die Abbildung ln : R+ −→ R ist stetig.
Beweis. Dies folgt aus Satz 4.9, denn die Logarithmus-Funktion ist die Um-kehrfunktion der bijektiven und monotonen Exponentialfunktion exp : R −→R+. ⊓⊔
Beispiel 5: Die Abbildung
f : R+ × C −→ C
(a, z) 7→ az
ist stetig.
Beweis. Sei (a0, z0) ∈ R+ × C. Wir betrachten eine beliebige gegen (a0, z0)konvergente Folge ((an, zn)). Dann gilt an −→ a0 und zn −→ z0. Da nachBeispiel 4 der naturliche Logarithmus stetig ist, folgt

132 4 Stetige Abbildungen zwischen metrischen Raumen
limn→∞
ln(an) · zn = ln(a0) · z0 .
Aus Satz 3.18 erhalten wir dann fur n hinreichend groß∣∣∣aznn − az00
∣∣∣ =∣∣∣eln(an)·zn − eln(a0)·z0
∣∣∣
=∣∣∣eln(a0)·z0
∣∣∣∣∣∣eln(an)·zn−ln(a0)·z0 − 1
∣∣∣
≤∣∣∣eln(a0)·z0
∣∣∣| ln(an) · zn − ln(a0) · z0|
1 − | ln(an) · zn − ln(a0) · z0|(∗)
Die rechte Seite von (*) konvergiert bei n → +∞ gegen 0 und somit giltlimn→∞
aznn = az00 . Folglich ist f in (a0, z0) folgenstetig, also stetig. ⊓⊔
Beispiel 6: Seien a0 ∈ R+ und z0 ∈ C fixiert. Aus Satz 4.12 und Beispiel 5folgt die Stetigkeit der Abbildungen
expa0: C −→ C und pz0 : R+ −→ C
z 7−→ az0 a 7−→ az0 .
Beispiel 7: Sei (X, d) ein metrischer Raum. Die Abstandsfunktion
d : X ×X −→ R
(x, y) 7→ d(x, y)
ist stetig.
Beweis. Sei (x, y) ∈ X × X und ((xn, yn)) eine Folge, die in X × X gegen(x, y) konvergiert. In einem metrischen Raum gilt die Vierecksungleichung
|d(xn, yn) − d(x, y)| ≤ d(xn, x) + d(yn, y).
Da xn −→ x und yn −→ y, folgt d(xn, x) −→ 0 und d(yn, y) −→ 0 und somitd(xn, yn) −→ d(x, y). ⊓⊔
Beispiel 8: Sei V ein Vektorraum uber dem Korper K der reellen oder derkomplexen Zahlen. Dann ist jede Norm
‖ · ‖ : V −→ R
und jedes Skalarprodukt
〈·, ·〉 : V × V −→ K
stetig bezuglich der von der Norm bzw. vom Skalarprodukt induzierten Me-trik.

4.2 Stetige Abbildungen (Definition und Beispiele) 133
Beweis. Dies folgt aus dem Verhalten des Skalarproduktes und der Normbei konvergenten Folgen (Satz 2.18), welches die Folgenstetigkeit der beidenAbbildungen zeigt. ⊓⊔
Als nachstes definieren wir zwei Stetigkeitsbegriffe, die starker als die gewohn-liche Stetigkeit sind.
Definition 4.4.
1. Eine Abbildung f : X −→ Y heißt gleichmaßig stetig, wenn zu jedem ε > 0ein δ > 0 existiert, so dass
f(KX(x, δ)) ⊂ KY (f(x), ε)
fur alle x ∈ X.(Im Unterschied zur Definition der Stetigkeit hangt hier die Große von δnur von ε, aber nicht von x ab.)
2. Eine Abbildung f : X −→ Y heißt lipschitzstetig, wenn es eine positiveKonstante L ∈ R+ gibt, so dass fur alle x1, x2 ∈ X gilt
dY (f(x1), f(x2)) ≤ L · dX(x1, x2).
L heißt Lipschitz–Konstante von f .
Satz 4.14 Sei f : X −→ Y eine Abbildung zwischen metrischen Raumen.Dann gilt:
1. f ist lipschitzstetig =⇒ f ist gleichmaßig stetig.2. f ist gleichmaßig stetig =⇒ f ist stetig.
Beweis. Stetigkeit folgt per Definition aus gleichmaßiger Stetigkeit. Wir mussenalso nur zeigen, dass jede lipschitzstetige Abbildung gleichmaßig stetig ist.Sei f lipschitzstetig mit Lipschitz–Konstante L und ε > 0. Wir setzen δ := ε
L.
Sei x0 ∈ X fixiert und x ∈ KX(x0, δ), d.h. dX(x, x0) < δ = εL
. Aus derLipschitzstetigkeit folgt dann
dY (f(x), f(x0)) ≤ L · dX(x, x0) < L · δ = ε,
also f(x) ∈ KY (f(x0), ε). Somit ist f gleichmaßig stetig. ⊓⊔
Die folgenden beiden Beispiele zeigen, dass die Umkehrung der Aussagen desSatzes 4.14 nicht gilt.

134 4 Stetige Abbildungen zwischen metrischen Raumen
Beispiel 1:
Die Abbildung
f : R+ −→ R
x 7−→ 1
x
ist stetig, aber nicht gleichmaßigstetig.
6
-
Y
X
.
.........
.........
.........
.........
.
.........
.........
.........
.......
.........
.........
.........
...
.........
.........
.........
.........
.........
......
.........
.........
...
.........
........
..............
...........
........................................................................................................................................................................................................................
....................
..................
.................
..................
...................
( )
ε
δ
Fur ein fixes ε mußδ fur x −→ 0 im-mer kleiner gewahltwerden.
)(δ
ε
Beweis. Sei δ > 0 eine fixierte Zahl und x ∈ R+. Dann gilt
∣∣∣∣f(x+δ
2) − f(x)
∣∣∣∣ =
∣∣∣∣∣1
x+ δ2
− 1
x
∣∣∣∣∣ =δ
2x(x+ δ2 )
(∗)
Die rechte Seite von (∗) konvergiert bei x −→ 0 gegen +∞. Man kann alsofur ein gegebenes ε > 0 kein δ > 0 finden, so dass die rechte Seite von (∗) furjedes x > 0 kleiner als ε bleibt. Folglich ist f nicht gleichmaßig stetig. ⊓⊔
Beispiel 2: Die Abbildung
f : R+ −→ R+
x 7−→ √x
ist gleichmaßig stetig, aber nicht lipschitzstetig.
Beweis. Es gilt
|√x−√y| ≤
√|x− y| ∀ x, y ∈ R+.
(siehe Ubungsaufgabe 10). Fur ε > 0 setzen wir δ := ε2. Ist |x − y| < δ, sofolgt |√x−√
y| ≤ ε. Somit ist f gleichmaßig stetig.Angenommen f ware lipschitzstetig mit der Lipschitz-Konstanten L, das heißt
|√x−√y| ≤ L|x− y| ∀ x, y ∈ R+.
Dann gilt ∣∣∣∣√x−√
y
x− y
∣∣∣∣ =1√
x+√y≤ L ∀ x, y ∈ R+.
Fur hinreichend kleine x und y kann man aber 1√x+
√y
beliebig groß machen.
Dies ergibt den Widerspruch. ⊓⊔

4.3 Eigenschaften stetiger Abbildungen 135
4.3 Eigenschaften stetiger Abbildungen
In einem metrischen Raum sind Teilmengen mit speziellen Eigenschaften aus-gezeichnet, wie offene, abgeschlossene, kompakte oder zusammenhangendeTeilmengen. Wir untersuchen in diesem Abschnitt, was mit diesen Eigenschaf-ten bei stetigen Abbildungen passiert.
Satz 4.15 Sei f : X −→ Y eine Abbildung zwischen metrischen Raumen.Dann sind folgende Bedingungen aquivalent:
1. f ist stetig.2. Das Urbild jeder offenen Menge ist offen.3. Das Urbild jeder abgeschlossenen Menge ist abgeschlossen.
Beweis. (1. =⇒ 2.) Sei f : X −→ Y stetig und U ⊂ Y offen. Wir wollenzeigen, dass das Urbild
f−1(U) := x ∈ X | f(x) ∈ U ⊂ X
dann ebenfalls offen ist. Ist f−1(U) = ∅, so ist die Behauptung erfullt. Seialso f−1(U) 6= ∅ und x0 ∈ f−1(U) ein beliebig gewahlter Punkt. Dann giltf(x0) ∈ U , und da U ⊂ Y offen ist, existiert ein ε > 0 mit KY (f(x0), ε) ⊂ U .Da f in x0 stetig ist, gibt es ein δ > 0, so dass
f(KX(x0, δ)) ⊂ KY (f(x0), ε) ⊂ U.
Wir erhalten daraus durch Betrachten der Urbilder
KX(x0, δ) ⊂ f−1(f(KX(x0, δ))
)⊂ f−1(U).
Somit ist f−1(U) offen in X .
(2. =⇒ 1.) Sei f−1(U) ⊂ X offen fur jede offene Menge U ⊂ Y . Wirwahlen einen beliebigen Punkt x0 ∈ X und ein beliebiges ε > 0. Da dieKugel KY (f(x0), ε) in Y offen ist, ist nach Voraussetzung auch das Urbildf−1(KY (f(x0), ε)) in X offen. Es enthalt den Punkt x0. Folglich existiert einδ > 0, so dass KX(x0, δ) ⊂ f−1(KY (f(x0), ε)). Wenden wir auf diese Inklu-sion f an, so erhalten wir f(KX(x0, δ) ⊂ KY (f(x0), ε). Das bedeutet aber,dass f in x0 stetig ist. Da x0 ∈ X beliebig gewahlt war, ist f stetig.
(2. ⇐⇒ 3.) Um dies einzusehen, erinnern wir uns daran, dass die folgendeBeziehung zwischen offenen und abgeschlossenen Mengen eines metrischenRaumes X gilt:
B ⊂ X ist abgeschlossen ⇐⇒ X \B ⊂ X ist offen .
Desweiteren gilt fur das Urbild einer Komplementmenge

136 4 Stetige Abbildungen zwischen metrischen Raumen
f−1(Y \M) = X \ f−1(M).
Sei nun das Urbild f−1(U) jeder offenen Menge U ⊂ Y offen. Wir betrachteneine beliebige abgeschlossene Menge A ⊂ Y . Dann ist Y \ A offen in Y undfolglich f−1(Y \ A) = X \ f−1(A) offen in X . Dies bedeutet, dass f−1(A)abgeschlossen in X ist. Damit ist 2. =⇒ 3. bewiesen. Die Umkehrung zeigtman analog. ⊓⊔
Wir betrachten als nachstes das Verhalten von zusammenhangenden Mengenbei stetigen Abbildungen:
Satz 4.16 Sei f : X −→ Y eine stetige Abbildung zwischen metrischenRaumen. Dann ist das Bild jeder zusammenhangenden Menge ebenfalls zu-sammenhangend.
Beweis. Sei A ⊂ X eine zusammenhangende Menge. Wir wollen zeigen, dassdann auch das Bild f(A) ⊂ Y zusammenhangend ist. Angenommen f(A) ⊂ Yware nicht zusammenhangend. Dann existieren offene Mengen U, V ⊂ Y mit
• U ∩ V = ∅,• f(A) ⊂ U ∪ V ,• f(A) ∩ U 6= ∅ und f(A) ∩ V 6= ∅.Da f stetig ist, sind nach Satz 4.15 die Urbilder f−1(U) und f−1(V ) ebenfallsoffen. Desweiteren gilt fur diese Urbilder
• f−1(U) ∩ f−1(V ) = f−1(U ∩ V ) = f−1(∅) = ∅,• A ⊂ f−1(f(A)) ⊂ f−1(U ∪ V ) = f−1(U) ∪ f−1(V ),• A∩ f−1(U) 6= ∅ und A∩ f−1(V ) 6= ∅ , da ein a ∈ A mit f(a) ∈ U und ein
b ∈ A mit f(b) ∈ V existieren.
Folglich ist A nicht zusammenhangend, was ein Widerspruch zur Vorausset-zung ist. ⊓⊔
Als Anwendung erhalten wir fur Abbildungen mit reellen Werten:
Satz 4.17 (Zwischenwertsatz) Sei f : X −→ R eine stetige Abbildungvon einem metrischen Raum X in die reellen Zahlen und sei A ⊂ X einezusammenhangende Teilmenge. Seien desweiteren a, b ∈ f(A) Bildpunkte mita < b. Dann gilt [a, b] ⊂ f(A).Insbesondere hat jede reellwertige Abildung, die auf A einen negativen undeinen positiven Wert annimmt, auf A eine Nullstelle, d.h. es existiert einx0 ∈ A mit f(x0) = 0.
Beweis. Nach Satz 4.16 ist f(A) ⊂ R zusammenhangend und deshalb nachSatz 2.43 ein (verallgemeinertes) Intervall. Das heißt mit a, b ∈ f(A) und a < bist auch [a, b] ⊂ f(A). ⊓⊔

4.3 Eigenschaften stetiger Abbildungen 137
Wir definieren nun noch einen weiteren Zusammenhangsbegriff.
Definition 4.5. Sei (X, d) ein metrischer Raum. Eine Teilmenge A ⊂ Xheißt bogenzusammenhangend (oder wegezusammenhangend), falls zu je zweiPunkten a, b ∈ A eine stetige Abbildung ω : [0, 1] ⊂ R −→ A ⊂ X existiert,so dass ω(0) = a und ω(1) = b.Die Abbildung ω heißt Weg in A von a nach b.
Beispiele:
1. Konvexe Mengen im Rn:Eine Teilmenge A ⊂ Rn heißt konvex, wenn mit je zwei Punkten x, y ∈ Aauch die Verbindungsstrecke xy := x+t(y−x) | t ∈ [0, 1] vollstandig inAliegt. Jede konvexe Menge ist bogenzusammenhangend, da die Abbildungω : [0, 1] −→ A
ω(t) := x+ t(y − x)
stetig ist und die Punkte x und y verbindet.Zum Beispiel ist jede Kugel K(x0, r) konvex.
2. Sternformige Mengen im Rn:Eine Teilmenge A ⊂ Rn heißt sternformig, wenn ein Punkt x0 ∈ Aexistiert, so dass fur jeden Punkt x ∈ A die Verbindungsstrecke x0xvollstandig in A liegt. Jede sternformige Menge ist bogenzusammenhan-gend. Sind x, y ∈ A, so ist die Vereinigung der Strecken xx0 ∪ x0y in Aenthalten und man kann sie als Bild eines Weges von x nach y darstellen.
3. Jede bogenzusammenhangende Menge ist auch zusammenhangend (sieheUbungsaufgabe 67). Die Umkehrung gilt nicht. Z.B. ist die Menge Flohund Kamm aus der Ubungsaufgabe 41 zusammenhangend, aber nicht bo-genzusammenhangend. Es gilt jedoch, dass jede offene zusammenhangen-de Menge des Rn auch bogenzusammenhangend ist.
Satz 4.18 Sei f : X −→ Y eine stetige Abbildung. Dann ist das Bild jederbogenzusammenhangenden Teilmenge ebenfalls bogenzusammenhangend.
Beweis. Sei A ⊂ X bogenzusammenhangend. Wir wollen zeigen, dass das Bildf(A) ebenfalls bogenzusammenhangend ist. Seien x, y ∈ f(A) zwei Punkte inf(A). Dann existieren a, b ∈ A mit x = f(a), y = f(b). Da A bogenzusam-menhangend ist, gibt es einen (stetigen) Weg ω : [0, 1] −→ A von a nach b.Wir betrachten die Abbildung f ω : [0, 1] −→ f(A) ⊂ Y . Da f und ω stetigsind, ist f ω ebenfalls stetig. Weiterhin gilt (f ω)(0) = f(ω(0)) = f(a) = xund (f ω)(1) = f(ω(1)) = f(b) = y, d.h. f ω ist ein Weg in f(A) von xnach y. ⊓⊔

138 4 Stetige Abbildungen zwischen metrischen Raumen
Als nachstes beschaftigen wir uns mit dem Verhalten von kompakten Mengenbei stetigen Abbildungen:
Satz 4.19 Sei f : X −→ Y eine stetige Abbildung. Dann ist das Bild jederkompakten Menge ebenfalls kompakt.
Beweis. Sei K ⊂ X eine kompakte Teilmenge. Wir wollen zeigen, dass dannauch das Bild f(K) ⊂ Y kompakt ist. Sei U = Uii∈I eine beliebige offeneUberdeckung von f(K), das heißt die Mengen Ui sind offen in Y und es gilt
f(K) ⊂⋃
i∈IUi.
Da f stetig ist, sind die Urbilder f−1(Ui) in X offen (siehe Satz 4.15). Außer-dem gilt
K ⊂ f−1(f(K)) ⊂ f−1(⋃
i∈IUi
)=⋃
i∈If−1(Ui).
Folglich ist die Mengenfamilie
U∗ := f−1(Ui)i∈Ieine offene Uberdeckung vonK. DaK ⊂ X kompakt ist, existiert eine endlicheTeiluberdeckung von K aus U∗, das heißt es existieren i1, . . . , in ∈ I, so dass
K ⊂ f−1(Ui1) ∪ . . . ∪ f−1(Uin).
Durch Anwenden von f erhalten wir
f(K) ⊂ f(f−1(Ui1) ∪ . . . ∪ f−1(Uin)
)⊂ Ui1 ∪ . . . ∪ Uin .
Somit ist Ui1 , . . . , Uin eine endliche Teiluberdeckung von f(K) aus U . Folg-lich ist f(K) kompakt. ⊓⊔
Die folgenden beiden Satze sind Anwendungen der gerade bewiesenen Eigen-schaft stetiger Abbildungen.
Satz 4.20 (Satz von Weierstraß)Sei f : X −→ R eine stetige Abbildung von einem metrischen Raum X in diereellen Zahlen und sei K ⊂ X eine kompakte Teilmenge. Dann nimmt f aufK ein Maximum und ein Minimum an, d.h. es existieren Punkte a, b ∈ K mitf(a) = minf(x) | x ∈ K und f(b) = maxf(x) | x ∈ K .
Beweis. Sei K ⊂ X kompakt. Dann ist f(K) ⊂ R ebenfalls kompakt, undsomit insbesondere beschrankt und abgeschlossen (Folgerung 2.4). Da f(K) ⊂R beschrankt ist, existieren das Infimum S∗ := inf(f(K)) und das SupremumS∗ := sup(f(K)). Da f(K) abgeschlossen ist, liegen sowohl das SupremumS∗ als auch das Infimum S∗ in f(K). D.h. es existieren Punkte a, b ∈ K mitS∗ = f(a) = minf(x) | x ∈ K und S∗ = f(b) = maxf(x) | x ∈ K . ⊓⊔

4.3 Eigenschaften stetiger Abbildungen 139
Satz 4.21 (Satz von Heine)Sei f : X −→ Y eine stetige Abbildung zwischen metrischen Raumen undK ⊂ X eine kompakte Teilmenge. Dann ist f auf K sogar gleichmaßig stetig.
Beweis. Angenommen f|K : K −→ Y ware nicht gleichmaßig stetig. Dannexistiert ein ε0 > 0, so dass es fur alle δ > 0 einen Punkt xδ ∈ K gibt mitf(KX(xδ, δ) ∩K) 6⊂ KY (f(x), ε0) .Wir setzen δ = 1
n. Dann erhalten wir fur jedes n ∈ N zwei Punkte xn, x
∗n ∈ K
mit
dX(xn, x∗n) <
1
nund dY (f(xn), f(x∗n)) ≥ ε0.
Betrachten wir nun die Folgen (xn) und (x∗n) in K genauer. Da K kompakt,also nach Satz 2.40 folgenkompakt ist, existiert eine Teilfolge (xnk
) von (xn),die gegen einen Punkt x0 ∈ K konvergiert. Wir zeigen, dass die Teilfolge (x∗nk
)von (x∗n) ebenfalls gegen x0 konvergiert. Es gilt
d(x0, x∗nk
) ≤ d(x0, xnk)︸ ︷︷ ︸
→0
+ d(xnk, x∗nk
)︸ ︷︷ ︸
< 1nk
.
Daher gilt x∗nk−→ x0 ∈ K. Da f stetig, also auch folgenstetig ist, konvergieren
dann die Bildfolgen f(xnk) und f(x∗nk
) fur k gegen +∞ gegen f(x0). Somitist
0 < ε0 ≤ d(f(xnk), f(x∗nk
)) ≤ d(f(xnk), f(x0))︸ ︷︷ ︸
→0
+ d(f(x0), f(x∗nk))
︸ ︷︷ ︸→0
.
Dies ist aber ein Widerspruch. ⊓⊔
Wir wenden uns jetzt der folgenden Frage zu:Sei f : X −→ Y eine bijektive stetige Abbildung zwischen metrischen Raumen.Dann existiert die Umkehrabbildung (inverse Abbildung) f−1 : Y −→ X . Istf−1 dann auch stetig? Im Allgemeinen gilt das nicht.
Beispiel: Sei X = (0, 1) ∪ 2 ⊂ R und Y = (0, 1] ⊂ R. Wir betrachten dieAbbildung f : X −→ Y gegeben durch
f(t) :=
t falls t ∈ (0, 1)1 falls t = 2.
f ist stetig und bijektiv, da f|(0,1)= id(0,1) und 2 ∈ X ein isolierter Punkt ist.
Aber f−1 : (0, 1] −→ (0, 1) ∪ 2 ist nicht stetig, da (0, 1] zusammenhangend,aber f−1((0, 1]) = (0, 1) ∪ 2 nicht zusammenhangend ist.

140 4 Stetige Abbildungen zwischen metrischen Raumen
Definition 4.6. Seien X und Y metrische Raume.Eine Abbildung f : X −→ Y heißt Homoomorphismus, wenn f bijektiv istund f und f−1 stetig sind.Die metrischen Raume X und Y heißen homoomorph, falls es einen Homoo-morphismus f : X −→ Y gibt.Bezeichnung: X ≃ Y .
Da die Verknupfung stetiger Abbildungen stetig ist, folgt aus X ≃ Y undY ≃ Z, dass X ≃ Z gilt. Die Homoomorphie ist also eine Aquivalenzrelationauf der Menge der metrischen Raume.
Beispiel : Der Rn ist homoomorph zur Kugel K(x0, r) um einen Punkt x0 ∈Rn vom Radius r. Die folgende Abbildung ist ein Homoomorphismus:
f : K(x0, r) −→ Rn
x 7−→ x−x0
r−‖x−x0‖2
Dabei bezeichnet ‖ · ‖2 die Euklidische Norm auf Rn. (Ubungsaufgabe 68).
Alle topologischen Eigenschaften von Teilmengen bleiben bei Homoomorphis-men erhalten:
Satz 4.22 Sei f : X −→ Y ein Homoomorphismus zwischen metrischenRaumen. Dann gilt:
1. A ⊂ X ist offen (abgeschlossen, kompakt, zusammenhangend bzw. bogen-zusammenhangend) genau dann wenn f(A) ⊂ Y offen (abgeschlossen,kompakt, zusammenhangend bzw. bogenzusammenhangend) ist.
2. Eine Folge (xn) konvergiert in X gegen x0 genau dann, wenn die Bildfolge(f(xn)) in Y gegen f(x0) konvergiert.
Beweis. Dies folgt aus den vorherigen Satzen uber das Verhalten von offe-nen, abgeschlossenen, kompakten, zusammenhangenden bzw. bogenzusam-menhangenden Mengen bei stetigen Abbildungen und aus der Aquivalenz vonStetigkeit und Folgenstetigkeit. ⊓⊔
Will man nachweisen, dass eine bijektive stetige Abbildung ein Homoomor-phismus ist, so muß man die Stetigkeit der inversen Abbildung nachweisen.Ist der Urbildraum kompakt, so kann man sich diesen Nachweis sparen, dennes gilt der folgende Satz:
Satz 4.23 (Satz uber die Stetigkeit der inversen Abbildung)Sei f : X −→ Y eine bijektive stetige Abbildung und X ein kompakter metri-scher Raum. Dann ist die inverse Abbildung f−1 : Y −→ X stetig.

4.3 Eigenschaften stetiger Abbildungen 141
Beweis. Sei U ⊂ X offen. Wir zeigen, dass (f−1)−1(U) = f(U) ⊂ Y offenist. Da U ⊂ X offen ist, ist X\U ⊂ X abgeschlossen. Wir wissen aus Folge-rung 2.4, dass jede abgeschlossene Teilmenge einer kompakten Menge selbstkompakt ist. Nach Vorrausetzung ist X kompakt, folglich ist X \U kompakt.Wegen der Stetigkeit von f ist dann nach Satz 4.19 auch das Bild f(X \U) inY kompakt und insbesondere abgeschlossen (Folgerung 2.4). Nun ist f bijek-tiv und folglich f(X\U) = Y \f(U). Also ist die Teilmenge f(U) ⊂ Y offen.Nach Satz 4.15 ist die Abbildung f−1 deshalb stetig. ⊓⊔
Definition 4.7. Sei X ein metrischer Raum. Eine Abbildung f : X −→ Xheißt kontrahierende Abbildung (oder Kontraktion), wenn sie lipschitzstetigmit einer Lipschitzkonstanten 0 < L < 1 ist, das heißt wenn
d(f(x), f(y)) ≤ L · d(x, y) fur alle x, y ∈ X.
Fur kontrahierende Abbildungen in vollstandigen metrischen Raumen gilt derfolgende sehr nutzliche Fixpunktsatz.
Satz 4.24 (Banach’scher Fixpunktsatz)Sei (X, d) ein vollstandiger metrischer Raum und f : X −→ X eine kontra-hierende Abbildung. Dann existiert genau ein Fixpunkt von f , d.h. genau einPunkt x∗ ∈ X mit f(x∗) = x∗.Sei x0 ∈ X ein beliebiger Punkt und xn := f . . . f︸ ︷︷ ︸
n−mal
(x0) =: fn(x0). Dann
konvergiert die Folge (xn) gegen x∗.
Beweis. (1) Eindeutigkeit des Fixpunktes: Angenommen es existieren zweiFixpunkte x∗ und y∗ von f , dh. es gelte f(x∗) = x∗ und f(y∗) = y∗ . Ausder Kontraktivitat von f erhalt man
d(x∗, y∗) = d(f(x∗), f(y∗)) ≤ L · d(x∗, y∗).
Da aber 0 < L < 1 gilt, folgt d(x∗, y∗) = 0, also x∗ = y∗.
(2) Existenz des Fixpunktes: Sei x0 ∈ X ein beliebig gewahlter Punkt. Wirdefinieren eine Folge von Punkten in X durch
x1 := f(x0),
x2 := f(x1) = f2(x0),
...
xn := f(xn−1) = f2(xn−2) = . . . = fn(x0).
Dann gilt

142 4 Stetige Abbildungen zwischen metrischen Raumen
d(xn+1, xn) = d(f(xn), f(xn−1))
≤ L · d(xn, xn−1) = L · d(f(xn−1), f(xn−2))
≤ L2 · d(xn−1, xn−2) = L2 · d(f(xn−2), f(xn−3))
...
≤ Ln · d(x1, x0).
Fur n > m folgt mit der Dreiecksungleichung und der Formel fur die geome-trische Summe
d(xn, xm) ≤ d(xn, xn−1) + d(xn−1, xn−2) + . . .+ d(xm+1, xm)
≤ (Ln−1 + . . .+ Lm) · d(x0, x1)
= Lm (L0 + L1 + . . .+ Ln−1−m) · d(x0, x1)
= Lm · 1 − Ln−m
1 − L· d(x0, x1)
=Lm − Ln
1 − L· d(x0, x1)
<Lm
1 − L· d(x0, x1).
Da 0 < L < 1, ist (Lm) eine Nullfolge. Somit ist (xn) eine Cauchyfolge inX . Da der metrische Raum X vollstandig ist, konvergiert diese Cauchyfolgegegen einen Punkt x∗ ∈ X .Wir zeigen nun, dass dieser Grenzwert x∗ der gesuchte Fixpunkt von f ist.Dazu betrachten wir
d(f(x∗), x∗) ≤ d(f(x∗), xn) + d(xn, x∗)
= d(f(x∗), f(xn−1)) + d(xn, x∗)
≤ Ld(x∗, xn−1)︸ ︷︷ ︸→0
+ d(xn, x∗)︸ ︷︷ ︸
→0
.
Daraus folgt d(f(x∗), x∗) = 0, also f(x∗) = x∗. ⊓⊔
4.4 Folgen stetiger Abbildungen
In diesem Abschnitt bezeichnen X und Y wiederum metrische Raume mit denMetriken dX bzw. dY . Wir betrachten jetzt Folgen von stetigen Abbildungenfn : X −→ Y , n = 1, 2, 3, . . ., und untersuchen, unter welchen Bedingungenderen Grenzfunktion ebenfalls stetig ist.

4.4 Folgen stetiger Abbildungen 143
Definition 4.8. Die Folge der Abbildungen (fn) heißt punktweise konvergent,falls fur jedes x ∈ X die Folge (fn(x)) in Y konvergiert. Die durch
f(x) := limn→∞
fn(x)
definierte Funktion f : X −→ Y heißt Grenzfunktion von (fn).Schreibweise: fn −→ f .
Im allgemeinen ist die Grenzfunktion einer punktweise konvergenten Folge ste-tiger Abbildungen nicht notwendiger Weise stetig. Wir betrachten dazu dasfolgende Beispiel:
Seien X = [0, 1], Y = R undfn : [0, 1] −→ R die stetigen Funktionenfn(x) := xn. Dann ist die Grenzfunktion
f(x) := limn→∞
fn(x) =
0 falls 0 ≤ x < 11 falls x = 1
offensichtlich nicht stetig.
6
-
R
R
1
1).
..........................................................
............................
............................
............................
............................
...............................
.................................
...................................
.....................................
. ............................ .....................................................
.........................
........................
.......................
........................
..........................
............................
..............................
................................
..................................
. .............................. .......................................................
.................................................
.......................
.....................
.......................
........................
..........................
............................
.............................
...............................f2f3f4
f1
Wir benotigen fur die Stetigkeit der Grenzfunktion f eine starkere Konver-genzeigenschaft der Folge (fn).
Definition 4.9. Die Folge der Abbildungen (fn) konvergiert gleichmaßig ge-gen eine Grenzfunktion f : X −→ Y , falls zu jedem ε > 0 ein n0 ∈ N existiert,so dass dY (fn(x), f(x)) < ε fur alle n ≥ n0 und fur alle x ∈ X.Schreibweise: fn f .
Bei gleichmaßiger Konvergenz, konvergiert die Folge (fn(x)) fur jeden Punktx ∈ X mit der “gleichen Geschwindigkeit“ gegen f(x).Aus gleichmaßiger Konvergenz folgt offensichtlich die Konvergenz der Folge(fn).
Satz 4.25 Seien fn : X −→ Y stetige Abbildungen, n = 1, 2, 3, . . . , und dieFolge (fn) gleichmaßig gegen f : X −→ Y konvergent. Dann ist die Grenz-funktion f stetig.
Beweis. Sei x0 ∈ X beliebig fixiert. Wir zeigen, dass f in x0 stetig ist. Seiε > 0. Da (fn) gleichmaßig gegen f konvergiert, existiert ein n0 ∈ N mit
dY (fn(x), f(x)) <ε
3∀ n ≥ n0 , ∀ x ∈ X.

144 4 Stetige Abbildungen zwischen metrischen Raumen
Die Abbildung fn0 ist in x0 stetig, folglich gibt es ein δ > 0, so dass
fn0(KX(x0, δ)) ⊂ KY (fn0(x0),ε
3).
Fur x ∈ KX(x0, δ) erhalten wir damit
dY (f(x), f(x0)) ≤ dY (f(x), fn0(x)) + dY (fn0(x), fn0(x0)) + dY (fn0(x0), f(x0))
≤ ε
3+ε
3+ε
3= ε.
Somit istf(KX(x0, δ)) ⊂ KY (f(x0), ε),
also f in x0 ∈ X stetig. ⊓⊔
Satz 4.26 (Vertauschbarkeit von Grenzwerten)Seien fn : X −→ Y , n = 1, 2, 3, . . ., stetige Abbildungen und sei die Folge (fn)gleichmaßig konvergent. Dann gilt in jedem Haufungspunkt x0 ∈ X
limx→x0
( limn→∞
fn(x)) = limn→∞
( limx→x0
fn(x)).
Beweis. Sei f die Grenzfunktion der Folge (fn), d.h. f(x) = limn→∞
fn(x). Nach
Satz 4.25 ist f in x0 stetig. Folglich existiert der Grenzwert
f(x0) = limx→x0
f(x) = limx→x0
limn→∞
fn(x).
Da die Abbildungen fn in x0 stetig sind, gilt andererseits
f(x0) = limn→∞
fn(x0) = limn→∞
limx→x0
fn(x).
⊓⊔
Fur spezielle Funktionenfolgen impliziert die punktweise Konvergenz bereitsdie gleichmaßige Konvergenz. Wir wollen jetzt einen solchen Fall betrachten.
Definition 4.10. Eine Folge von Funktionen fn : X → R, n = 1, 2, . . ., heißt
• monoton wachsend, falls fn(x) ≤ fn+1(x) ∀ x ∈ X , ∀ n ∈ N und• monoton fallend, falls fn(x) ≥ fn+1(x) ∀ x ∈ X , ∀ n ∈ N.
Satz 4.27 (Satz von Dini)Sei fn : X −→ R, n = 1, 2, 3, . . ., eine monotone Folge stetiger Funktionen,die punktweise gegen eine stetige Grenzfunktion f : X −→ Y konvergiert, undsei X kompakt. Dann konvergiert (fn) sogar gleichmaßig gegen f .

4.5 Funktionenreihen 145
Beweis. Wir nehmen OBdA an, dass die Funktionenfolge (fn) monoton wach-send ist. Dann gilt f(x) ≥ fn(x) fur alle x ∈ X und alle n ∈ N. Sei ε > 0.Da (fn) gegen f konvergiert, existiert zu jedem Punkt x ∈ X ein Indexn0(x, ε) ∈ N so dass
0 ≤ f(x) − fn(x) < ε fur alle n ≥ n0(x, ε).
Da fn und f stetig sind, ist die Abbildung F := f − fn0(x,ε) : X −→ R inx ∈ X stetig. Folglich gibt es ein δx > 0 mit
0 ≤ F (y) = f(y) − fn0(x,ε)(y) < ε ∀ y ∈ KX(x, δx).
Aus der Monotonie der Funktionenfolge (fn) folgt dann
0 < f(y) − fn(y) < ε ∀ n ≥ n0(x, ε) , ∀ y ∈ KX(x, δx).
Wir betrachten nun die folgende offene Uberdeckung von X
U := KX(x, δx) | x ∈ X.
Da X kompakt ist, gibt es eine endliche Teiluberdeckung, d.h. es existierenendlich viele Punkte x1, x2, . . . , xp ∈ X mit
X = KX(x1, δ1) ∪KX(x2, δ2) ∪ . . . ∪KX(xp, δp).
Wir setzen m0 := maxn0(xj , ε) | j = 1, 2, . . . , p. Sei nun z ∈ X . Dann istz ∈ KX(xj , δxj
) fur ein j ∈ 1, 2, . . . , p und folglich
0 < f(z) − fn(z) < ε ∀ n ≥ m0.
Dies bedeutet, dass die Funktionenfolge (fn) gleichmaßig gegen f konvergiert.⊓⊔
4.5 Funktionenreihen
In diesem Abschnitt wenden wir die im vorigen Abschnitt uber Funktionen-folgen erhaltenen Resultate auf Funktionenreihen an. Insbesondere wollen wirweitere Aussagen uber Potenzreihen machen.
Im folgenden bezeichnet (X, d) einen beliebigen metrischen Raum und (E, ‖·‖)einen Banachraum. Da E ein Vektorraum ist, konnen wir zwei Abbildungenh, f : X −→ E addieren. Die Abbildung f + h : X −→ E ist gegeben durch
(f + h)(x) := f(x) + h(x) ∀ x ∈ X.
Seien fn : X −→ E Abbildungen von X nach E, n = 0, 1, 2, . . .. Wir bildenaus der Folge (fn) eine neue Funktionenfolge durch

146 4 Stetige Abbildungen zwischen metrischen Raumen
s0 := f0
s1 := f0 + f1
s2 := f0 + f1 + f2...
sm := f0 + f1 + f2 + · · · + fm
Definition 4.11. Die Folge(sm :=
m∑n=0
fn
)heißt Funktionenreihe mit den
Gliedern fn. Wir bezeichnen sie symbolisch mit∞∑n=0
fn .
Die Funktionenreihe∞∑n=0
fn heißt punktweise konvergent, falls die Funktionen-
folge (sm) punktweise konvergiert.
Die Funktionenreihe∞∑n=0
fn heißt gleichmaßig konvergent, falls die Funktio-
nenfolge (sm) gleichmaßig konvergiert.
Aus den Satzen 4.25 und 4.26 erhalt man dann sofort
Satz 4.28 Sind fn : X −→ E stetige Abbildungen, n = 0, 1, 2, . . ., und kon-
vergiert die Funktionenreihe∞∑n=0
fn gleichmaßig, so ist die durch
f(x) :=
∞∑
n=0
fn(x) ∀ x ∈ X
definierte Grenzfunktion f : X −→ E stetig. Insbesondere gilt fur jedenHaufungspunkt x0 ∈ X
limx→x0
∞∑
n=0
fn(x) =∞∑
n=0
limx→x0
fn(x).
⊓⊔
Als nachstes beweisen wir ein Kriterium fur die gleichmaßige Konvergenz vonFunktionenreihen.

4.5 Funktionenreihen 147
Satz 4.29 (Weierstraßsches Majorantenkriterium)Seien fn : X −→ E beschrankte Abbildungen, n = 0, 1, 2, . . ., d.h. sei
‖fn(x)‖ ≤Mn ∀ n ∈ N0 und ∀ x ∈ X ,
und sei die Reihe der Schranken∞∑n=0
Mn in R konvergent. Dann ist die Funk-
tionenreihe∞∑n=0
fn gleichmaßig konvergent und die durch f(x) :=∞∑n=0
fn(x)
definierte Grenzfunktion f : X −→ E stetig.
Beweis. Sei ε > 0. Da die Reihe∞∑n=0
Mn konvergiert, gibt es nach dem
Cauchy–Kriterium (Satz 3.1) ein n0 ∈ N0, so dass
Mm+1 +Mm+2 + · · · +Mn < ε fur alle n > m ≥ n0.
Nach Voraussetzung gilt fur alle x ∈ X
‖sn(x) − sm(x)‖ = ‖fn(x) + . . .+ fm+1(x)‖≤ ‖fn(x)‖ + . . . ‖fm+1(x)‖≤ Mn + . . .+Mm+1.
Wir erhalten daraus fur jedes x ∈ X
‖sn(x) − sm(x)‖ < ε ∀ n > m ≥ n0 . (∗)Also ist die Folge (sn(x)) fur jedes x ∈ X eine Cauchy–Folge im BanachraumE. Da E vollstandig ist, konvergiert die Folge (sn(x)). Sei s(x) := lim
n→∞sn(x) .
Die Funktionenreihe∞∑n=0
fn konvergiert somit punktweise gegen die Grenz-
funktion s : X −→ E. Gehen wir in (∗) mit n gegen ∞, so folgt wegen derStetigkeit der Norm
limn→∞
‖sn(x) − sm(x)‖ = ‖s(x) − sm(x)‖ < ε ∀x ∈ X ∀ m > n0
Somit konvergiert die Funktionenreihe∞∑n=0
fn sogar gleichmaßig gegen s. Die
Stetigkeit der Grenzfunktion folgt aus dem vorigen Satz. ⊓⊔
Wir wenden diese Satze nun auf komplexe Potenzreihen an.Sei (an) eine Folge komplexer Zahlen, z0 ∈ C und
P (z) :=
∞∑
n=0
an(z − z0)n, z ∈ C,
die Potenzreihe mit den Koeffizienten an und dem Zentrum z0.R := sup|z − z0| | P (z) konvergiert bezeichne den Konvergenzradius derPotenzreihe P . Aus Kapitel 3.2 wissen wir bereits, dass

148 4 Stetige Abbildungen zwischen metrischen Raumen
1. R =
1
lim supn→∞n√
|an|1
limn→∞
|an+1an
|
falls diese Werte in [0,+∞) ∪ +∞ existieren (siehe Satze 3.16und 3.17).
2. P (z) konvergiert absolut fur alle z ∈ K(z0, R).
3. P (z) divergiert fur z ∈ C \ cl(K(z0, R)).
Wir beweisen nun, dass die durch die Potenzreihe P auf dem Konvergenzkreisdefinierte Funktion stetig ist.
Satz 4.30 Sei P (z) :=∞∑n=0
an(z − z0)n eine Potenzreihe mit dem Konver-
genzradius R. Dann gilt
1. P (z) =∞∑n=0
an(z − z0)n konvergiert gleichmaßig auf jeder kompakten
Teilmenge K ⊂ K(z0, R).
2. Die Abbildung P : z ∈ K(z0, R) 7−→ P (z) ∈ C ist stetig.
Beweis. (1) Sei K ⊂ K(z0, R) kompakt. Dann ist K abgeschlossen. Folglichist
η(K) := sup|z − z0| | z ∈ K < R.
Wir betrachten ein z1 ∈ K(z0, R) mit η(K) < |z1 − z0| < R. Da die Reihe
P (z1) =∞∑n=0
an(z1 − z0)n konvergiert, sind ihre Reihenglieder eine Nullfolge,
also insbesondere beschrankt. Somit existiert eine Zahl M > 0 , so dass|an(z1 − z0)
n| < M fur alle n ∈ N0. Wir erhalten daraus
|an(z − z0)n| =
∣∣∣∣an(z1 − z0)n · (z − z0)
n
(z1 − z0)n
∣∣∣∣ ≤M ·(
η(K)
|z1 − z0|
)n
︸ ︷︷ ︸=:Mn
∀ z ∈ K.
Nach Wahl von z1 ist η(K)|z1−z0| < 1 . Folglich ist die geometrische Reihe
∞∑n=0
Mn
konvergent. Nach Satz 4.29 konvergiert dann P (z) gleichmaßig auf K.
(2) Sei z ∈ K(z0, R) gegeben. Wir wahlen ein ε(z) > 0, so dass
cl(K(z, ε(z))) ⊂ K(z0, R).
Da die Menge cl(K(z, ε(z))) sowohl abgeschlossen als auch beschrankt ist, istsie kompakt. Folglich konvergiert die Funktionenreihe P (z) auf cl(K(z, ε(z)))gleichmaßig und die Grenzfunktion P|cl(K(z,ε(z))) : cl(K(z, ε(z)) −→ C ist

4.5 Funktionenreihen 149
stetig. Da dies fur alle z ∈ K(z0, R) gilt, ist P auf dem gesamten Konvergenz-kreis K(z0, R) stetig. ⊓⊔
Wir betrachten nun eine spezielle Sorte von Potenzreihen P (z). Es sei
P (z) =
∞∑
n=0
an(z − x0)n
eine Potenzreihe mit reellem Zentrum x0 und endlichem Konvergenzradius0 < R < +∞. Dann definiert P eine stetige Funktion
P : (x0 −R, x0 +R) −→ C .x 7−→ P (x)
In den Randpunkten des Definitionsintervalls gilt der
Satz 4.31 (Abelscher Grenzwertsatz)
Sei P (z) =∞∑n=0
an(z−x0)n eine Potenzreihe mit reellem Zentrum x0 ∈ R und
Konvergenzradius 0 < R <∞.
1. Ist P (x0 +R) konvergent, so ist P|(x0−R,x0+R]in x0 +R linksseitig stetig,
d.h. es gilt limx→(x0+R)−
P (x) = P (x0 +R) =∞∑n=0
anRn.
2. Ist P (x0 −R) konvergent, so ist P|[x0−R,x0+R)in x0 −R rechtsseitig stetig,
d.h. es gilt limx→(x0−R)+
P (x) = P (x0 −R) =∞∑n=0
(−1)nanRn.
Beweis. Wir beweisen die erste Behauptung. Der Beweis der zweiten Behaup-tung erfolgt analog. Nach Voraussetzung konvergiert die Folge der Partialsum-
men sm =m∑n=0
anRn gegen s = P (x0 +R). Wir mussen zeigen, dass fur jedes
ε > 0 ein δ > 0 existiert, so dass |P (x)− s| < ε fur alle x ∈ (x0 −R, x0 +R)mit x0 +R − x < δ .Wir setzen y := x− x0. Aus den Eigenschaften der geometrischen Reihe unddem Cauchy–Produkt von Reihen folgt fur alle y mit |y| < R

150 4 Stetige Abbildungen zwischen metrischen Raumen
P (y + x0) =∞∑
n=0
anyn
=(1 − y
R
)(1 − y
R
)−1
·∞∑
n=0
anyn
=(1 − y
R
)·
∞∑
n=0
( yR
)n
︸ ︷︷ ︸abs. konv.
·∞∑
n=0
anyn
︸ ︷︷ ︸abs. konv.
=(1 − y
R
) ∞∑
m=0
m∑
k=0
( yR
)kam−ky
m−k
=(1 − y
R
) ∞∑
m=0
(( yR
)m· sm
).
Außerdem gilt
s =(1 − y
R
)(1 − y
R
)−1
· s =(1 − y
R
) ∞∑
m=0
s ·( yR
)m.
Folglich ist fur |y| < R
P (y + x0) − s =(1 − y
R
) ∞∑
m=0
(sm − s)( yR
)m.
Sei nun ε > 0 gegeben. Da sm gegen s konvergiert, existiert ein n0 ∈ N mit
|sm − s| < ε
2∀ m ≥ n0.
Wir setzen M :=n0−1∑m=0
|sm − s| und δ := minR, ε·R2M . Fur |y| < R mit
R− y < δ gilt
0 < 1 − y
R<
δ
R.
Daraus folgt
|P (y + x0) − s| ≤(1 − y
R
)·(n0−1∑
m=0
|sm − s| ·( yR
)m+
∞∑
m=n0
|sm − s| ·( yR
)m)
<δ
R·n0−1∑
m=0
|sm − s| +(1 − y
R
)· ε2
∞∑
m=n0
( yR
)m
︸ ︷︷ ︸abs. konv.
≤ δ
R·M +
ε
2
≤ ε
2+ε
2= ε.

4.5 Funktionenreihen 151
Somit ist die Funktion P im Punkt x0 +R linksseitig stetig. ⊓⊔
Als Anwendung der Stetigkeit der Grenzfunktion von Potenzreihen beweisenwir abschließend den folgenden Identitatssatz.
Satz 4.32 (Identitatssatz fur Potenzreihen)
Seien P (z) =∞∑n=0
an(z− z0)n und Q(z) =
∞∑n=0
bn(z− z0)n zwei Potenzreihen
mit dem Zentrum z0 ∈ C und den Konvergenzradien RP > 0 bzw. RQ > 0.Es bezeichne R = minRP , RQ.Existiert eine Folge komplexer Zahlen z∗m ∈ K(z0, R)\z0, m ∈ N , mit
1. P (z∗m) = Q(z∗m) fur alle m ∈ N und
2. limm→∞
z∗m = z0,
so gilt an = bn fur alle n ∈ N0, das heißt die Potenzreihen P und Q sindidentisch. Insbesondere sind P und Q identisch, wenn sie auf einer (beliebigkleinen) offenen Umgebung des Zentrums z0 ubereinstimmen.
Beweis. Sei (z∗m) eine Folge in K(z0, R) \ z0 , die gegen z0 konvergiert undfur die P (z∗m) = Q(z∗m) gilt. Wir beweisen an = bn durch Induktion uber denIndex n.Ind.–Anfang: Es ist zu zeigen, dass a0 = b0 gilt. Da z∗m gegen z0 konvergiertund P und Q auf K(z0, R) stetig sind, folgt
a0 = P (z0) = limm→∞
P (z∗m) = limm→∞
Q(z∗m) = Q(z0) = b0.
Ind.–Schritt : Es gelte a0 = b0, a1 = b1, . . . , an = bn. Es ist zu zeigen, dassan+1 = bn+1 gilt. Dazu betrachten wir die Potenzreihen
P1(z) =
∞∑
k=n+1
ak(z − z0)k−(n+1),
Q1(z) =
∞∑
k=n+1
bk(z − z0)k−(n+1).
Die Potenzreihen P1 und Q1 konvergieren auf K(z0, R), denn fur z 6= z0 gilt
P1(z) =
P (z) −n∑k=0
ak(z − z0)k
(z − z0)n+1,
Q1(z) =
Q(z) −n∑k=0
bk(z − z0)k
(z − z0)n+1.

152 4 Stetige Abbildungen zwischen metrischen Raumen
Nach Induktionsvoraussetzung gilt Q1(z∗m) = P1(z
∗m) fur alle m ∈ N . Da Q1
und P1 auf K(z0, R) stetig sind, folgt
an+1 = P1(z0) = limm→∞
P1(z∗m) = lim
m→∞Q1(z
∗m) = Q1(z0) = bn+1.
⊓⊔
4.6 Die trigonometrischen und die Hyperbelfunktionen
Wir betrachten zunachst nochmal die Exponentialfunktion. Wie wir wissen,
konvergiert die Potenzreihe ez =∞∑n=0
zn
n! fur jedes z ∈ C und erfullt
ez+w = ez · ew. (∗)
Die Konvergenz der Exponentialreihe ist gleichmaßig auf jedem kompaktenBereich in C. Folglich ist die Exponentialfunktion exp : z ∈ C 7−→ ez ∈ C
stetig und man kann limz→z0
mit∞∑n=0
vertauschen. Wir erhalten insbesondere
limz→0
ez − 1
z= lim
z→0
∞∑
n=1
zn−1
n!=
∞∑
n=1
limz→0
zn−1
n!= 1. (∗∗)
Wir werden nun sehen, dass die Exponentialfunktion exp : C → C die einzigeFunktion mit den Eigenschaften (∗) und (∗∗) ist. Wir beweisen dazu zunachstfolgendes Lemma
Lemma 4.12. Sei (zn) eine Folge komplexer Zahlen mit limn→∞
zn = z. Dann
gilt
limn→∞
(1 +
znn
)n= ez.
Beweis. Aus Beispiel 3 in Abschnitt 4.1. wissen wir, dass limx→0
(1 + x)1x = e .
Da zn → z gilt zn
n→ 0. Daraus folgt
limn→∞
(1 +
znn
)n= lim
n→∞
[(1 +
znn
) nzn
]zn
=
[limn→∞
(1 +
znn
) nzn
] limn→∞
zn
= ez.
⊓⊔
Daraus erhalten wir die folgende funktionale Charakterisierung der Exponen-tialfunktion.

4.6 Die trigonometrischen und die Hyperbelfunktionen 153
Satz 4.33 Sei f : C −→ C eine Funktion, die die folgenden Eigenschaftenerfullt:
1. f(z + w) = f(z) · f(w) fur alle z, w ∈ C.
2. limz→0
f(z)−1z
= 1.
Dann gilt: f(z) = ez fur alle z ∈ C.
Beweis. Sei z ∈ C. Aus der 1. Eigenschaft von f folgt fur alle n ∈ N:
f(z) = f(n · z
n
)= f
( zn
)n.
Wir betrachten die Folge
zn := n ·(f(z
n) − 1
)
Dann gilt
f(z) = f( zn
)n=(1 +
znn
)n.
Aus der 2. Eigenschaft von f folgt
limn→∞
znz
= limn→∞
f( zn) − 1zn
= 1,
also limn→∞
zn = z. Aus Lemma 4.12 folgt
f(z) = limn→∞
(1 +
znn
)n= ez.
⊓⊔
Mit Hilfe der Exponentialfunktion definieren wir jetzt die trigonometrischenFunktionen. Wir betrachten zunachst die Exponentialfunktion auf der ima-ginaren Achse. Fur eit mit t ∈ R gilt
|eit|2 = eit · eit = eit · e−it = e0 = 1.
Die komplexe Zahl eit liegt also auf der Kreislinie S1 := z ∈ C | |z| = 1. DerRealteil von eit heißt der Cosinus der reellen Zahl t, der Imaginarteil heißtSinus von t. Also ist
cos(t) :=eit + e−it
2und sin(t) :=
eit − e−it
2i.
Dann erhalt man unmittelbar die sogenannte Eulersche Formel
eit = cos(t) + i sin(t)
und wegen |eit| = 1 istcos2(t) + sin2(t) = 1.

154 4 Stetige Abbildungen zwischen metrischen Raumen
-
6
R
iR
eit
1
i
cos t
sin t
t
Wir erweitern die Definition von Sinus und Cosinus auf die komplexen Zahlenund definieren sin, cos : C −→ C durch
cos(z) :=eiz + e−iz
2sin(z) :=
eiz − e−iz
2i∀ z ∈ C.
Dann gilt
sin(z) = z − z3
3!+z5
5!− z7
7!+ . . . =
∞∑
n=0
(−1)nz2n+1
(2n+ 1)!,
cos(z) = 1 − z2
2!+z4
4!− z6
6!. . . =
∞∑
n=0
(−1)nz2n
(2n)!.
Diese Potenzreihen haben Konvergenzradius∞, sind also absolut und gleichmaßigkonvergent auf jeder kompakten Teilmenge von C.
Eigenschaften der trigonometrischen Funktionen sin, cos:
1. sin : C −→ C und cos : C −→ C sind stetige Funktionen.
2. sin2(z) + cos2(z) = 1 ∀ z ∈ C :
sin2(z) + cos2(z) = −1
4(e2iz + e−2iz − 2) +
1
4(e2iz + e−2iz + 2) = 1.
3. eiz = cos(z) + i · sin(z) ∀ z ∈ C (Eulersche Formel):
cos(z) + i · sin(z) =1
2(eiz + e−iz) +
1
2(eiz − e−iz) = eiz.
4. Additionstheoreme: Fur alle z1, z2 ∈ C gilt
sin(z1 + z2) = sin(z1) cos(z2) + sin(z2) cos(z1)
cos(z1 + z2) = cos(z1) cos(z2) − sin(z1) sin(z2).

4.6 Die trigonometrischen und die Hyperbelfunktionen 155
5. Die Funktion sin ist ungerade, die Funktion cos ist gerade, d.h. es gelten
sin(−z) = − sin(z)
cos(−z) = + cos(z) ∀ z ∈ C
6. Fur reelle Zahlen x ∈ R sind auch sin(x) und cos(x) reell und es gilt
| sin(x)| ≤ 1 | cos(x)| ≤ 1.
Warnung: Fur komplexe Zahlen z ∈ C gilt das im allgemeinen nicht mehr.Z.B. ist
limt→∞
| sin(it)| = limt→∞
1
2|e−t − et| = +∞.
Zur Definition der Zahl π:
Fur die stetige Funktion cos|R : R −→ R gilt cos(0) = 1 und cos(2) < − 13 ,
denn
cos(2) =
∞∑
n=0
(−1)n22n
(2n)!
= 1 − 2 +2
3+
∞∑
n=3
(−1)n22n
(2n)!
= −1
3−
∞∑
r=2
(24r−2
(4r − 2)!− 24r
(4r)!
)
= −1
3−
∞∑
r=2
24r−2
(4r − 2)!·(
1 − 4
4r(4r − 1)
)
︸ ︷︷ ︸>0
< −1
3.
Andererseits gilt fur sin|R : R −→ R, dass sin(x) > 0 auf x ∈ (0, 2), denn
sin(x) =
∞∑
n=0
(−1)nx2n+1
(2n+ 1)!
=
∞∑
r=1
(x4r−3
(4r − 3)!− x4r−1
(4r − 1)!
)
=
∞∑
r=1
x4r−3
(4r − 3)!·(
1 − x2
(4r − 1)(4r − 2)
)
︸ ︷︷ ︸>0
> 0 ∀ x ∈ (0, 2).

156 4 Stetige Abbildungen zwischen metrischen Raumen
Satz 4.34 Die Funktion cos|R hat auf dem Intervall (0, 2) genau eine Null-stelle.
Beweis. Da cos(0) = 1 > 0, cos(2) < − 13 < 0 und cos|R : R −→ R stetig ist,
folgt aus dem Zwischenwertsatz, dass ein ξ ∈ (0, 2) mit cos(ξ) = 0 existiert.Es bleibt die Eindeutigkeit von ξ zu zeigen. Seien also ξ1, ξ2 ∈ (0, 2), ξ1 < ξ2mit cos(ξ1) = cos(ξ2) = 0. Dann gilt ξ2±ξ1
2 ∈ (0, 2) und aus den Additions-theoremen folgt
cos(ξ1) − cos(ξ2) = 2 sin(ξ2 − ξ1
2) · sin(
ξ2 + ξ12
) > 0.
Dies steht aber im Widerspruch zu cos(ξ1) = cos(ξ2) = 0. ⊓⊔
Definition 4.13. Die Nullstelle von cos|R auf dem Intervall (0, 2) heißtπ
2.
Es gilt also cos(π2 ) = 0 und sin(π2 ) = 1 , woraus eiπ2 = i, eiπ = −1 und
e2πi = 1 folgt. Insbesondere folgt dann aus den Produkt-Eigenschaften derExponentialfunktion
ei(ρ+π2 ) = eiρ · ei π
2 = i eiρ ei(ρ+π) = eiρ · eiπ = −eiρ.
Die Eulersche Forml liefert dann die folgenden Beziehungen zwischen Sinusund Cosinus:
Folgerung 4.1 Fur alle ρ ∈ R gilt
sin(ρ+π
2) = + cos(ρ) sin(ρ+ π) = − sin(ρ) cos(ρ+ π) = − cos(ρ)
-
6
R
R
π2 π 3
2π 2π
1
−1
sinx

4.6 Die trigonometrischen und die Hyperbelfunktionen 157
-
6
R
R
π2 π 3
2π 2π
1
−1
cosx
Satz 4.35 1. Die Exponentialfunktion ez ist periodisch mit der Periode 2πi,das heißt es gilt
ez = ez+2πi ∀ z ∈ C.
2. Die Funktionen sin : R −→ R und cos : R −→ R sind periodisch mit derkleinsten Periode 2π, das heißt 2π ist die kleinste positive reelle Zahl Lmit
sin(x+ L) = sin(x), cos(x+ L) = cos(x) ∀ x ∈ R.
3. ez = 1 ⇐⇒ z = 2πki fur ein k ∈ Z.4. Zu jedem z ∈ S1 = z ∈ C | |z| = 1 existiert genau eine reelle Zahl
t ∈ [0, 2π) mitz = eit = cos(t) + i sin(t).
Beweis.(1) Nach der Eulerschen Formel gilt e2πi = cos(2π) + i sin(2π) = 1 . Darausfolgt e(z+2πi) = ez · e2πi = ez.(2) Nach (1) ist die Funktion x ∈ R 7−→ eix = cos(x) + i sin(x) ∈ C 2π-periodisch, folglich gilt dies auch fur ihren Realtteil cos(x) und ihren Ima-ginarteil sin(x). Da cos(ρ) > 0 fur alle ρ ∈ (−π
2 ,π2 ) und cos(ρ) < 0 fur alle
ρ ∈ (π2 ,3π2 ) (siehe Folgerung 4.1), gibt es keine kleinere Periode als 2π.
(3) (⇐=) Sei z = 2πki fur ein k ∈ Z. Dann gilt
ez = e2πik = (e2πi)k = 1k = 1.
(=⇒) Sei ez = 1 und z = x+ iy mit x, y ∈ R. Dann gilt
1 = ex+iy = ex · eiy = ex(cos(y) + i sin(y)) und somit
1 = ex| cos(y) + i sin(y)| = ex ·√
cos2(y) + sin2(y)︸ ︷︷ ︸
=1
.
Da die Exponentialfunktion exp|R : R −→ R+ bijektiv ist, folgt x = 0. Somiterhalten wir z = iy und aus 1 = cos(y) + i sin(y) folgt cos(y) = 1, sin(y) = 0.Damit ist y = 2πk, also z = 2πki.

158 4 Stetige Abbildungen zwischen metrischen Raumen
(4) Sei z ∈ S1 = z ∈ C | |z| = 1. Wir wollen zeigen, dass es genau eint ∈ [0, 2π) gibt, mit z = eit = cos(t) + i sin(t). Sei z = x + iy, dann giltx2 +y2 = 1 sowie |x| ≤ 1. Wir beweisen nun durch Fallunterscheidung: (a) Seix = 1. Dann ist y = 0 und t = 0 eindeutige Losung von x = cos t, y = sin t.(b) Sei x = −1. Dann ist y = 0 und t = π eindeutige Losung von x =cos t, y = sin t.(c) Bleibt also noch der Fall x ∈ (−1, 1) zu betrachten. Sei x ∈ (−1, 1). Dannexistieren genau zwei Werte α, β mit
α ∈ (0, 2π), β ∈ (0, 2π), x = cosα = cosβ.
Dabei gilt sinα > 0 und sinβ < 0 und es folgt
|y| =√
1 − x2 =√
1 − cos2 α = | sinα| = | sinβ|.
Ist y > 0, so ist y = sinα und t = α die Losung. Ist y < 0, so ist y = sinβund t = β die Losung. ⊓⊔
Die trigonometrischen Funktionen Tangens und Cotangens
Wir definieren die Funktionen Tangens (tan) und Cotangens (cot) durch
tan : C\π
2+ kπ | k ∈ Z
−→ C
z 7−→ tan(z) :=sin(z)
cos(z)
cot : C\kπ | k ∈ Z
−→ C
z 7−→ cot(z) :=cos(z)
sin(z)
Aus den Eigenschaften der Funktionen Sinus und Cosinus erhalt man diefolgenden Eigenschaften der Tangens und Cotangens-Funktion:
1. tan und cot sind stetige Funktionen.2. tan und cot sind ungerade Funktionen, die π-periodisch sind, denn
sin(z + π) = − sin(z), cos(z + π) = − cos(z).
3. Es gelten folgende Additionstheoreme:
tan(z + w) =tan(z) + tan(w)
1 − tan(z) · tan(w), cot(z + w) =
cot(z) · cot(w) − 1
cot(z) + cot(w).

4.6 Die trigonometrischen und die Hyperbelfunktionen 159
Die Umkehrfunktionen der trigonometrischen Funktionen
Da die trigonometrischen Funktionen auf R betrachtet periodisch sind, existie-ren keine globalen Umkehrfunktionen. Es existieren aber Umkehrfunktionenauf jedem Monotoniebereich der trigonometrischen Funktionen. Nach Satz 4.9sind diese Umkehrfunktionen ebenfalls stetig.
Definition 4.14. Die Umkehrfunktion von sin|[− π2
, π2
]heißt Arcussinus und
wird mit arcsin bezeichnet.
arcsin : [−1, 1] −→ [− π2 ,
π2 ] ist bijektiv, stetig und streng monoton wachsend.
Die Umkehrfunktion von sin|[ 2k−1
2π,
2k+12
π], k ∈ Z , ist nach den Additionstheo-
remenfk(x) = (−1)k · arcsinx+ k · π.
Diese fk(x) werden auch Zweige der Umkehrfunktion von Sinus genannt.
Definition 4.15. Die Umkehrfunktion von cos|[0,π]heißt Arcuscosinus und
wird mit arccos bezeichnet.
arccos : [ − 1, 1] −→ [0, π] ist bijektiv, stetig und streng monoton fallend.Die Umkehrfunktion von cos|[kπ,(k+1)π]
, k ∈ Z, ist nach den Additionstheore-men
gk(x) = (−1)k · arccosx+2k + 1 − (−1)k
2· π.
Definition 4.16. Die Umkehrfunktion von tan|[− π2
, π2
]heißt Arcustangens und
wird mit arctan bezeichnet.
arctan : R −→ [ − π2 ,
π2 ] ist bijektiv, stetig und streng monoton wachsend.
Die Umkehrfunktion von tan|[ 2k−1
2π,
2k+12
π], k ∈ Z, ist nach den Additionstheo-
remenhk(x) = arctanx+ k · π.
Definition 4.17. Die Umkehrfunktion von cot|[0,π]heißt Arcuscotangens und
wird mit arccot bezeichnet.
arccot : R −→ [0, π] ist bijektiv, stetig und streng monoton fallend.Die Umkehrfunktion von cot|[kπ,(k+1)π]
, k ∈ Z, ist nach den Additionstheore-men

160 4 Stetige Abbildungen zwischen metrischen Raumen
ik(x) = arccot x+ k · π.
Die Hyperbelfunktionen
Unter den Hyperbelfunktionen Sinus hyperbolicus sinh : C −→ C und Co-sinus hyperbolicus cosh : C −→ C versteht man die folgenden komplexenFunktionen:
sinh(z) =ez − e−z
2
cosh(z) =ez + e−z
2.
Aus der Reihendarstellung fur ez folgt
sinh(z) =
∞∑
n=0
z2n+1
(2n+ 1)!= z +
z3
3!+z5
5!+ . . .
cosh(z) =
∞∑
n=0
z2n
(2n)!= 1 +
z2
2!+z4
4!+ . . .
Eigenschaften der hyperbolischen Funktionen sinh, cosh
1. Die Funktionen sinh : C −→ C und cosh : C −→ C sind stetig.2. sinh(iz) = i sin(z) und cosh(iz) = cos(z) fur alle z ∈ C.3. cosh2(z) − sinh2(z) = 1 ∀ z ∈ C :
cosh2(z) − sinh2(z) = cos2(−iz) − (i · sin(−iz))2= cos2(−iz) + sin2(−iz)= 1.
4. Additionstheoreme:
cosh(z1 + z2) = cosh(z1) cosh(z2) + sinh(z1) sinh(z2)
sinh(z1 + z2) = sinh(z1) cosh(z2) + cosh(z1) sinh(z2).
5. cosh(z) = cosh(−z), sinh(z) = − sinh(−z).6. Die Funktion sinh|R : R −→ R ist bijektiv und hat nur die Nullstellex = 0. Die Funktion cosh|R : R −→ R nimmt ihre Werte in [1,+∞) anund ist bijektiv von [0,+∞) auf [1,+∞).

4.6 Die trigonometrischen und die Hyperbelfunktionen 161
Definition 4.18. Die Umkehrfunktion von sinh|R : R −→ R heißt Areasinushyperbolicus und wird mit arsinh bezeichnet.Die Umkehrfunktion von cosh|[0,+∞)
: [0,+∞) −→ [1,+∞) heißt Areacosinushyperbolicus und wird mit arcosh bezeichnet.
Die Umkehrfunktionen konnen durch den naturlichen Logarithmus ausge-druckt werden:
arsinh(x) = ln(x +√x2 + 1) x ∈ R
arcosh(x) = ln(x +√x2 − 1) x ≥ 1
Analog definieren wir die Hyperbelfunkionen Tangens hyperbolicus (tanh)und Cotangens hyperbolicus (coth):
tanh : C −→ C
z 7−→ tanh(z) =sinh(z)
cosh(z)=e2z − 1
e2z + 1
coth : C\0 −→ C
z 7−→ coth(z) =cosh(z)
sinh(z)=e2z + 1
e2z − 1
Fur Tangens hyperbolicus gilt das folgenden Additionstheorem
tanh(z + w) =tanh(z) + tanh(w)
1 + tanh(z) · tanh(w).
Die Funktion tanh|R : R −→ (−1, 1) ⊂ R ist streng monoton wachsend undbijektiv. Die Funktion coth|R\0
: R\0 −→ R\[ − 1, 1] ist streng monotonwachsend und bijektiv.
Definition 4.19. Die Umkehrfunktion von tanh|R heißt Areatangens hyper-bolicus artanh : (−1, 1) −→ R .Die Umkehrfunktion von coth|R\0
heißt Areacotangens hyperbolicus arcoth :R\[ − 1, 1] −→ R\0.Es gilt
artanh(x) =1
2ln(1 + x
1 − x
)|x| < 1
arcot(x) =1
2ln(x+ 1
x− 1
)|x| > 1.

162 4 Stetige Abbildungen zwischen metrischen Raumen
4.7 Der metrische Raum der stetigen Abbildungen
In diesem Abschnitt wollen wir die Eigenschaften des Raumes aller stetigenAbbildungen zwischen metrischen Raumen genauer untersuchen. Wir betrach-ten dazu einen kompakten metrischen Raum (X, dX) und einen beliebigen me-trischen Raum (Y, dY ) und bezeichnen mit C(X,Y ) die Menge aller stetigenAbbildungen von X nach Y
C(X,Y ) := f : X −→ Y | f stetig .
Da die Metrik dY stetig ist und eine stetige Abbildung F : X −→ R von einemkompakten metrischen X in die reellen Zahlen immer ein Maximum besitzt,ist fur zwei stetige Abbildungen f, h ∈ C(X,Y ) die Zahl
d∞(f, h) := maxdY (f(x), h(x)) | x ∈ X
korrekt definiert. Aus den Eigenschaften der Metrik dY erhalt man ohne Pro-bleme, dass d∞ eine Metrik auf C(X,Y ) ist.
Ist der Bildraum ein Vektorraum V , so tragt auch die Menge der stetigen Ab-bildungen C(X,V ) eine Vektoraumstruktur. Fur f, h ∈ C(X,V ) und λ ∈ K
definieren wir
(f + h)(x) := f(x) + h(x) und (λ · f)(x) := λ · f(x) ∀ x ∈ X.
Jede Norm ‖ · ‖ auf V liefert dann eine Norm ‖ · ‖∞ auf dem VektorraumC(X,V )
‖f‖∞ := max‖f(x)‖ | x ∈ X.Die durch ‖ · ‖∞ gegebene Metrik auf C(X,V ) stimmt mit der Metrik d∞
uberein, die auf C(X,V ) durch die durch ‖ · ‖ gegebene Metrik d‖·‖ von Vinduziert wird
d∞(f, h) = maxd‖.‖(f(x), h(x)) | x ∈ X= max‖f(x) − h(x)‖ | x ∈ X= ‖f − h‖∞.
Im folgenden sind die Mengen C(X,Y ) bzw. die Vektorraume C(X,V ) immermit der Metrik d∞ bzw. der Norm ‖ · ‖∞ versehen.
Satz 4.36 Sei X ein kompakter metrischer Raum und Y ein beliebiger me-trischer Raum.
1. Sei (fn) eine Folge stetiger Abbildungen fn ∈ C(X,Y ). Die Folge (fn)konvergiert im metrischen Raum C(X,Y ) genau dann gegen f ∈ C(X,Y ),wenn die Funktionenfolge (fn) gleichmaßig gegen f konvergiert.
2. Ist Y vollstandig, so ist C(X,Y ) vollstandig.

4.7 Der metrische Raum der stetigen Abbildungen 163
3. Ist E ein Banachraum, so ist C(X,E) ebenfalls ein Banachraum.
Beweis. (1) Die erste Behauptung folgt aus der Aquivalenz der folgendenBedingungen:
fn −→ f in C(X,Y )
⇐⇒ ∀ ε > 0 ∃ n0 ∈ N so dass d∞(fn, f) < ε ∀ n ≥ n0
⇐⇒ ∀ ε > 0 ∃ n0 ∈ N so dass maxdY (fn(x), f(x)) | x ∈ X < ε ∀ n ≥ n0
⇐⇒ ∀ ε > 0 ∃ n0 ∈ N so dass dY (fn(x), f(x)) < ε ∀ n ≥ n0 ∀ x ∈ X.
⇐⇒ (fn) konvergiert gleichmaßig gegen f .
(2) Sei (Y, dY ) vollstandig. Wir zeigen, dass dann auch (C(X,Y ), d∞) voll-standig ist. Sei (fn) Cauchy–Folge in C(X,Y ) und ε > 0. Dann existiert einn0 ∈ N, so dass fur alle x ∈ X
dY (fn(x), fm(x)) ≤ d∞(fn, fm) < ε ∀ n,m ≥ n0. (∗)
Folglich ist die Folge (fn(x)) fur jedes x ∈ X eine Cauchy–Folge in Y . Da Yvollstandig ist, existiert f(x) := lim
n→∞fn(x) auf X . Da die Metrik dY stetig
ist, folgt aus (∗) fur jedes x ∈ X
limm→∞
dY (fn(x), fm(x)) = dY (fn(x), limm→∞
fm(x))
= dY (fn(x), f(x)) < ε ∀n ≥ n0.
Dies zeigt, dass die Funktionenfolge (fn) gleichmaßig gegen f konvergiert.Nach Satz 4.25 ist f stetig und nach (1) konvergiert die Folge (fn) in C(X,Y )gegen f .
(3) ist ein Spezialfall von (2). ⊓⊔
In verschiedenen Situationen kann man stetige Abbildungen durch “einfache“stetige Abbildungen approximieren. Zunachst betrachten wir Falle, wo manPolynome fur diese Approximation benutzen kann.Dazu sei [a, b] ⊂ R ein kompaktes Intervall und E ein reeller Banachraummit der Norm ‖ ·‖. Wir wollen im Raum der stetigen Abbildungen C([a, b], E)eine Menge von Polynomen finden, die in diesem Raum dicht liegt, mit derenHilfe man also eine beliebige stetige Abbildung f ∈ C([a, b], E) approximierenkann.Wir bezeichnen mit E[x] den Vektorraum der Polynome mit Koeffizienten inE
E[x] :=p(x) =
n∑
k=0
akxk | ak ∈ E
.
Ist p ∈ E[x], so ist die durch p definierte Abbildung

164 4 Stetige Abbildungen zwischen metrischen Raumen
p : [a, b] −→ E
t 7−→ p(t) =n∑k=0
aktk
stetig. Mit P bezeichnen wir die Menge dieser als Abbildungen aufgefasstenPolynome. Es gilt also P ⊂ C([a, b], E).
Satz 4.37 (Weierstraßscher Approximationssatz)Sei E ein reeller Banachraum. Dann ist die Menge der Polynome dicht inC([a, b], E), das heißt, fur jede stetige Funktion f : [a, b] −→ E existiert eineFolge von Polynomen pn : [a, b] −→ E , die auf [a, b] gleichmaßig gegen fkonvergiert.
Beweis. (1) Es genugt, die Behauptung fur das Intervall [0, 1] zu zeigen:Sei die Behauptung fur das Intervall [0, 1] bewiesen und [a, b] ein beliebigesIntervall. Wir betrachten den Homoomorphismus
φ : [0, 1] −→ [a, b]t 7−→ a+ (b− a)t
Die inverse Abbildung φ−1 ist durch
φ−1(x) =x− a
b− a
gegeben. Sei nun f ∈ C([a, b], E) und h := f φ ∈ C([0, 1], E). Nach unsererAnnahme existiert eine Polynomfolge (Pn), die auf [0, 1] gleichmaßig gegenh konvergiert. Dann ist Qn := Pn φ−1 eine Polynomfolge, die gleichmaßiggegen f = h φ−1 konvergiert.
(2) Sei f ∈ C([0, 1], E). Unter dem n-ten Bernstein–Polynom zu f verstehenwir das folgende Polynom n- ten Grades:
B[f ]n(x) :=n∑
k=0
f(kn
)(nk
)(1 − x)n−k · xk
︸ ︷︷ ︸=:βk,n(x)
.
Die Polynome βk,n(x) haben folgende Eigenschaften:
(1) βk,n(x) ≥ 0 ∀ x ∈ [0, 1],
(2)n∑k=0
βk,n(x) = (1 − x+ x)n = 1 ∀ x ∈ [0, 1],
(3)n∑k=0
(k − nx)2 · βk,n(x) = nx(1 − x) ∀ x ∈ [0, 1].
Im folgenden zeigen wir, dass die Bernstein-PolynomeB[f ]n auf [0, 1] gleichmaßiggegen f konvergieren.

4.7 Der metrische Raum der stetigen Abbildungen 165
Da f stetig und [0, 1] kompakt ist, ist f([0, 1]) ⊂ E ebenfalls kompakt, alsoinsbesondere beschrankt. Es existiert also eine Konstante C > 0 so dass
‖f(x)‖ ≤ C fur alle x ∈ [0, 1] . (∗)
Da [0, 1] kompakt ist, ist die Funktion f sogar gleichmaßig stetig. Folglichexistiert zu jedem ε > 0 ein δ > 0 so dass
‖f(x1) − f(x2)‖ <ε
2∀ x1, x2 ∈ [0, 1] mit |x1 − x2| < δ. (∗∗)
Wir setzen n0(ε) := Cε·δ2 und zeigen nun, dass
‖B[f ]n(x) − f(x)‖ < ε ∀ n ≥ n0, ∀ x ∈ [0, 1].
Fur x ∈ [0, 1] und n ∈ N definieren wir die folgenden Mengen
J1,n(x) :=k ∈ 1, 2, . . . , n
∣∣∣∣∣∣k
n− x∣∣∣ < δ
J2,n(x) :=k ∈ 1, 2, . . . , n
∣∣∣∣∣∣k
n− x∣∣∣ ≥ δ
.
Dann erhalten wir
‖B[f ]n(x) − f(x) ‖ (2)=
∥∥∥n∑
k=0
(f(kn
)− f(x)
)· βk,n(x)
∥∥∥
≤∥∥∥
∑
k∈J1,n(x)
(f(kn
)− f(x)
)βk,n(x)
∥∥∥
︸ ︷︷ ︸:=S1(x)
+∥∥∥
∑
k∈J2,n(x)
(f(kn
)− f(x)
)· βk,n(x)
∥∥∥
︸ ︷︷ ︸:=S2(x)
.
Fur den Summanden S1(x) ergibt sich
S1(x)(1)
≤∑
J1,n(x)
∥∥∥f(kn
)− f(x)
∥∥∥ · βk,n(x)
(∗∗)≤ ε
2·∑
J1,n(x)
βk,n(x)
≤ ε
2
n∑
k=0
βk,n(x)(2)=
ε
2.
Ist k ∈ J2,n(x), so gilt ( kn−x)2 ≥ δ2 , also (k−nx)2
n2δ2≥ 1 . Fur den Summanden
S2(x) ergibt sich

166 4 Stetige Abbildungen zwischen metrischen Raumen
S2(x) ≤∑
J2,n(x)
∥∥∥f(kn
)∥∥∥+ ‖f(x)‖· βk,n(x) ·
(k − nx)2
n2δ2︸ ︷︷ ︸≥1
(∗),(3)≤ 2C
n2δ2·n∑
k=0
(k − nx)2βk,n(x)
︸ ︷︷ ︸=nx(1−x)
=2C
nδ2x(1 − x).
Sei nun n ≥ n0 = Cεδ2
. Dann ist 2Cnδ2
< 2ε . Fur x ∈ [0, 1] ist außerdem
x(1 − x) = x− x2 = −(x− 1
2)2 +
1
4<
1
4.
Folglich ist S2(x) <ε2 . Insgesamt erhalten wir
‖B[f ]n(x) − f(x)‖ < ε fur alle n ≥ n0 und x ∈ [0, 1].
Somit konvergiert die Folge der Bernstein-Polynome (B[f ]n) gleichmaßig ge-gen f . ⊓⊔
Wir wollen den Weierstraßschen Approximationssatz nun verallgemeinern.Wir betrachten dazu einen beliebigen kompakten metrischen Raum X undden Banachraum C(X,R) der stetigen reellwertigen Funktionen auf X mitder Norm ‖ · ‖∞.Unter einer Unteralgebra von C(X,R) verstehen wir einen linearen Unter-raum1 R ⊂ C(X,R) mit der zusatzlichen Eigenschaft, dass mit zwei Funk-tionen f, h ∈ R auch das Produkt f ·h, definiert durch (f ·h)(x) = f(x) ·h(x),in R liegt. Ein Beispiel fur eine Unteralgebra ist die im Weierstraßschen Ap-proximationssatz betrachtete Menge der Polynome P ⊂ C([a, b],R).Wir wollen nun Bedingungen dafur angeben, dass eine Unteralgebra R ⊂C(X,R) dicht in C(X,R) liegt. Als Hilfsmittel beweisen wir zunachst folgen-de Lemmata.
Lemma 4.20. Sei X ein kompakter metrischer Raum. Ist R ⊂ C(X,R) eineUnteralgebra im Banachraum der stetigen reellwertigen Funktionen auf X, soist auch der Abschluss cl(R) ⊂ C(X,R) eine Unteralgebra.
Beweis. Seien f, g ∈ cl(R) ⊂ C(X,R) stetige Funktionen, die im Abschlussder Unteralgebra R liegen. Dann existieren Folgen stetiger Funtionen (fn)und (gn) mit fn, gn ∈ R, die bzgl. ‖ · ‖∞ gegen f bzw. g konvergieren. Da R1 d.h. eine Teilmenge von C(X, R), die abgeschlossen gegenuber den Vektorraum-
Operationen ist

4.7 Der metrische Raum der stetigen Abbildungen 167
eine Unteralgebra ist, liegen die stetigen Funktionen fn+ gn, λ ·fn und fn · gnebenfalls in R, wobei λ eine reelle Zahl bezeichnet. Mit den Normeigenschaf-ten sieht man sofort, dass die Folgen (fn + gn) und (λ · fn) bzgl. ‖ · ‖∞ gegenf + g bzw. λ · f konvergieren, somit liegen f + g und λ · f in cl(R). Es bleibtzu zeigen, dass auch f · g in cl(R) liegt.Da die Folge (fn) konvergiert, ist sie beschrankt, d.h. es existiert eine Kon-stante C ∈ R+ mit
|fn(x)| ≤ ‖fn‖∞ ≤ C ∀ n ∈ N ∀ x ∈ X.
Da g stetig und X kompakt ist, hat g auf X ein Maximum. Es existiert alsoeine Konstante M ∈ R+ so dass
|g(x)| ≤ ‖g‖∞ ≤M ∀ x ∈ X.
Damit erhalten wir
‖f · g − fn · gn‖∞ = ‖f · g − fn · g + fn · g − fn · gn‖∞= ‖g(f − fn) + fn(g − gn)‖∞≤ ‖g(f − fn)‖∞ + ‖fn(g − gn)‖∞= max
x∈X|g(x)| ‖f(x) − fn(x)‖ + max
x∈X|fn(x)| ‖g(x) − gn(x)‖
≤ M‖f − fn‖∞ + C‖g − gn‖∞
Da (fn) gegen f und (gn) gegen g konvergiert, folgt aus dieser Ungleichung,dass fn · gn gegen f · g konvergiert. Somit ist f · g ∈ cl(R). ⊓⊔
Lemma 4.21. Sei X ein kompakter metrischer Raum und R ⊂ C(X,R)eine Unteralgebra, die alle konstanten Funktionen enthalt. Dann liegen furzwei Funktionen f, g ∈ R die Funktionen |f | , maxf, g und minf, g imAbschluss cl(R).
Beweis. (1) Sei f ∈ R. Da X kompakt und f stetig ist, besitzt f auf X einMaximum, d.h. es existiert ein C ∈ R+ mit |f(x)| ≤ C fur alle x ∈ X . Wirbetrachten die stetige Funktion w : x ∈ [0, C2] 7−→ √
x ∈ R . Sei Pn eine Folgevon Polynomen, die auf [0, C2] gleichmaßig gegen w konvergiert. Eine solcheFolge existiert nach Satz 4.37. Dann konvergiert die Funktionenfolge (Pnf2)auf X gleichmaßig gegen w f2 = |f | . Folglich konvergiert die Folge (Pn f2)im metrischen Raum (C(X,R), ‖ · ‖∞) gegen |f |. Da R eine Algebra ist, istmit f ∈ R auch jede Potenz f i ∈ R. Seien Pn(x) =
∑ni=0 anix
i die obigenPolynome. Da R alle konstanten Funktionen enthalt, folgt
Pn f2 =
n∑
i=1
ain(f2)i ∈ R.

168 4 Stetige Abbildungen zwischen metrischen Raumen
Somit ist |f | der Grenzwert einer Folge von Elementen aus R und folglich gilt|f | ∈ cl(R).(2) Seien f, g ∈ R. Dann sind f + g und f − g Elemente in R, weil R einUnterraum von C(X,R) ist. Aus (1) folgt |f − g| ∈ cl(R) und |f + g| ∈ cl(R).Daraus erhalten wir
maxf, g = 12 (f + g + |f − g|)
minf, g = 12 (f + g − |f − g|)
∈ cl(R).
⊓⊔
Mit Hilfe dieser Lemmata beweisen wir den folgenden Approximationssatzfur reellwertige Funktionen:
Satz 4.38 (Approximationssatz von Stone–Weierstraß(1))Sei X ein kompakter metrischer Raum und R ⊂ C(X,R) eine Unteralgebra imBanachraum der reellwertigen Funktionen auf X mit folgenden Eigenschaften
1. R enthalt alle konstanten Funktionen,2. R trennt Punkte, d.h. fur beliebige voneinander verschiedene Punkte
x, y ∈ X existiert eine Funktion f ∈ R mit f(x) 6= f(y).
Dann ist R dicht in (C(X,R), ‖.‖∞), d.h. zu jedem f ∈ C(X,R) existierteine Folge von Funktionen f1, f2, . . . ∈ R, die auf X gleichmaßig gegen fkonvergiert.
Beweis. (1) Wir zeigen zunachst die folgende Eigenschaft von R:Sind x0 und y0 zwei verschiedene Punkte in X und r1 und r2 zwei reelleZahlen, so existert eine Funktion h ∈ R mit h(x0) = r1 und h(y0) = r2:Da die Algebra R Punkte trennt, existiert eine Funktion f ∈ R mit f(x0) 6=f(y0). Sei g die stetige Funktion
g :=f − f(x0)
f(y0) − f(x0).
Da R alle konstanten Funktionen enthalt, liegt g in R. Wir betrachten nundie Funktion
h := (r1 − r2) · g + r1 ∈ R.Dann gilt offensichtlich
h(x0) = (r1 − r2)g(x0) + r1 = r1 und h(y0) = (r1 − r2)g(y0) + r1 = r2.
(2) Wir zeigen nun, dass R dicht in C(X,R) liegt.Sei f ∈ C(X,R). Wir mussen zeigen, dass fur jedes ε > 0 ein fε ∈ R existiert,so dass ‖f − fε‖∞ < ε:Seien a, b ∈ X zwei beliebige Punkte. Nach (1) existiert eine Funktion ha,b ∈R mit ha,b(a) = f(a) und ha,b(b) = f(b). (Falls a = b, so setzen wir in (1)

4.7 Der metrische Raum der stetigen Abbildungen 169
x0 = a = b, r1 = f(a) und y0, r2 beliebig). Da f und ha,b stetig sind, ist dieTeilmenge
Ua,b :=x ∈ X | ha,b(x) > f(x) − ε
2
= (ha,b − f)−1
((−ε
2,+∞)
)⊂ X
offen. Nach Definition ist a ∈ Ua,b. Sei b ∈ X ein fixiertes Element. Dann istUb := Ua,ba∈X eine offene Uberdeckung von X . Da X kompakt ist, existierteine endliche Teiluberdeckung U∗
b ⊂ Ub, d.h. es existieren endlich viele Punktea1, a2, . . . , an ∈ X , so dass
X = Ua1,b ∪ Ua2,b ∪ . . . ∪ Uan,b.
Wir betrachten die Funktion
fb := maxha1,b, . . . , han,b.
Nach Lemma 4.21 ist fb ∈ cl(R). Ist x ∈ X , so gilt x ∈ Uaj,b fur einen Indexj ∈ 1, . . . , n. Damit erhalten wir
fb(x) ≥ haj ,b(x) > f(x) − ε
2.
Wir haben zur Funktion f ∈ C(X,R) also zunachst fur jedes b ∈ X eineFunktion fb ∈ cl(R) gefunden, so dass
fb(x) > f(x) − ε
2∀ x ∈ X. (∗)
Da f und fb stetig sind, ist die Teilmenge
Vb :=x ∈ X | fb(x) < f(x) +
ε
2
= (fb − f)−1
((−∞,
ε
2))⊂ X
offen. Aus der Definition der Funktionen ha,b folgt, dass fb(b) = f(b). Folglichist V := Vbb∈X eine offene Uberdeckung vonX . DaX kompakt ist, existierteine endliche Teiluberdeckung V∗ ⊂ V , d.h. es existieren endlich viele Punkteb1, b2, . . . , bk ∈ X , so dass
X = Vb1 ∪ Vb2 ∪ . . . ∪ Vbk.
Wir betrachten die stetige Funktion
g := minfb1, . . . , fbk.
Aus den Lemmata 4.20 und 4.21 folgt g ∈ cl(R). Ist x ∈ X , so gilt x ∈ Vbi
fur einen Index i ∈ 1, . . . , k. Damit erhalten wir
g(x) ≤ fbi(x) < f(x) +
ε
2.
Andererseits existiert fur x ∈ X ein l ∈ 1, . . . , k mit g(x) = fbl(x) und
folglich gilt wegen (∗)

170 4 Stetige Abbildungen zwischen metrischen Raumen
g(x) = fbl(x) > f(x) − ε
2.
Wir haben also eine stetige Funktion g ∈ cl(R) gefunden, so dass
f(x) − ε
2< g(x) < f(x) − ε
2∀ x ∈ X,
also‖f − g‖∞ <
ε
2.
Da g im Abschluss von R liegt, gibt es eine Funktion fε ∈ R mit
‖g − fε‖∞ <ε
2.
Wir erhalten somit
‖f − fε‖∞ ≤ ‖f − g‖∞ + ‖g − fε‖∞ <ε
2+ε
2= ε.
Damit ist bewiesen, dass die Unteralgebra R dicht in C(X,R) liegt. ⊓⊔
Als nachstes beweisen wir einen analogen Approximationssatz fur komplex-wertige Funtionen.
Satz 4.39 (Approximationssatz von Stone–Weierstraß (2))Sei X ein kompakter, metrischer Raum und R ⊂ C(X,C) eine Unteralgebraim Banachraum der stetigen, komplexwertigen Funktionen auf X mit folgen-den Eigenschaften
1. R enthalt alle konstanten Funktionen,2. R trennt Punkte,3. Wenn f ∈ R, so f ∈ R.
Dann gilt cl(R) = C(X,C), das heißt R ist dicht in (C(X,C, ‖.‖∞).
Beweis. Wir betrachten die folgende Teilmenge im Raum der reellwertigenstetigen Funktionen
R∗ := f ∈ R | Im(f) = 0 ⊂ C(X,R).
Dann gilt
1. Da R eine komplexe Unteralgebra in C(X,C) ist, ist R∗ eine reelle Un-teralgebra in C(X,R).
2. Da R alle komplexen Konstanten enthalt, enthalt R∗ alle reellen Kon-stanten.

4.7 Der metrische Raum der stetigen Abbildungen 171
3. R∗ trennt ebenfalls Punkte: Seien x, y ∈ X zwei verschiedene Punkte.Wie im 1. Teil des Beweises von Satz 4.38 zeigt man, dass eine Funktionf ∈ R existiert, so dass f(x) = 0 und f(y) = 1 gilt. Dann gilt fur dieFunktion f∗ = f + f ∈ R∗, dass f∗(x) = 0 und f∗(y) = 2. f∗ trennt alsodie Punkte x und y.
Nach dem Approximationssatz von Stone-Weierstrass fur reellwertige Funk-tionen (Satz 4.38), liegt dann R∗ dicht im Banachraum C(X,R). Folglich istdie Menge der Funktionen R∗ + iR∗ dicht im Banachraum C(X,R). Da Reine (komplexe) Unteralgebra ist und R∗ ⊂ R, gilt R∗ + iR∗ ⊂ R . Darauserhalt man
C(X,C) = cl(R∗ + iR∗) ⊂ cl(R) ⊂ C(X,R),
also cl(R) = C(X,C) . ⊓⊔
Wir wenden nun die Approximationssatze von Stone-Weierstraß auf einigeSpezialfalle an.
Beispiel 1: Approximation reellwertiger Funktionen f ∈ C([a, b],R) durchPolynome mit reellen Koeffizienten.
Wir betrachten die Menge PR aller Polynome mit reellen Koeffinzienten
PR :=P ∈ C([a, b],R)
∣∣∣ P (t) :=n∑
k=0
aktk , ak ∈ R , n ∈ N
.
Wir hatten bereits bemerkt, dass PR eine Unteralgebra von C([a, b],R) ist.Offensichtlich enthalt PR alle konstanten Funktionen (Polynome 0. Grades).PR trennt außerdem Punkte, denn sind x, y ∈ [a, b] verschiedene reelle Zahlen,so gilt p(x) 6= p(y) fur das Polynom p(t) = t.Nach dem Satz von Stone-Weierstraß fur reellwertige Funktionen liegt dieMenge der reellen Polynome PR dicht im BanachraumC([a, b],R), d.h. fur jedestetige Funktion f ∈ C([a, b],R) existiert eine Folge von Polynomen Pn ∈ PR,n ∈ N, die auf [a, b] gleichmaßig gegen die Funktion f konvergiert.
Wir haben dieses Beispiel hier nur als Musterbeispiel angefuhrt. Die Aussageist naturlich als Spezialfall des Approximationssatzes von Weierstraß (Satz4.37) bereits bekannt. Im Beweis von Satz 4.37 haben wir sogar ein konstuk-tives Verfahren fur die approximierende Folge von Polynomen angegeben.
Beispiel 2: Approximation komplexwertiger Funktionen f ∈ C([a, b],C)durch Polynome mit komplexen Koeffizienten.
Wir betrachten die Menge der Polynome mit komplexen Koeffizienten
PC :=P ∈ C([a, b],C)
∣∣∣ P (t) :=
n∑
k=0
aktk , ak ∈ C , n ∈ N
.

172 4 Stetige Abbildungen zwischen metrischen Raumen
Genau wie fur den reellen Fall sieht man leicht, dass PC eine Unteralgebravon C([a, b],C) ist, die alle Voraussetzungen des Satzes 4.39 erfullt. Somiterhalten wir
Folgerung 4.2 Die Menge der komplexen Polynome PC dicht im Banach-raum C([a, b],C), d.h. fur jede stetige Funktion f ∈ C([a, b],C) existiert eineFolge von Polynomen Pn ∈ PC, n ∈ N, die auf [a, b] gleichmaßig gegen dieFunktion f konvergiert.
Beispiel 3: Approximation reellwertiger periodischer stetiger Funktionendurch reelle trigonometrische Polynome.
In diesem Beispiel betrachten wir auf R definierte reellwertige stetige 2π-periodische Funktionen. Wir bezeichen den Vektorraum dieser Funktionenmit
C(R,R)per := f ∈ C(R,R) | f(x+ 2π) = f(x) ∀ x ∈ R.Da die Werte von f ∈ C(R,R)per durch diejenigen von f|[0,2π] vollstandig
bestimmt sind, ist‖f‖∞ := max
x∈R
|f(x)|
definiert und eine Norm auf C(R,R)per .Eine auf R definierte 2π-periodische Funktion kann man als Funktion auf S1
auffassen, wobei
S1 := z ∈ C | |z| = 1 = eit | t ∈ R ⊂ C
die Menge der komplexen Zahlen vom Betrag 1 ist. S1 ist beschrankt und ab-geschlossen in C, also mit der durch C induzierten Metrik ein kompakter me-trischer Raum. Man ordnet f ∈ C(R,R)per dabei die Funktion f∗ ∈ C(S1,R)zu
f∗(eit) := f(t).
Diese Definition ist durch die Periodizitatsbedingung korrekt. Die Abbildung
φ : C(R,R)per −→ C(S1,R)f 7−→ f∗
ist bijekjtiv und erfullt ‖φ(f)‖∞ = ‖f‖∞. Die normierten Vektorraume(C(R,R)per , ‖·‖∞) und (C(S1,R), ‖·‖∞) sind also isometrisch zueinander. Wirkonnen deshalb den Approximationssatz von Stone-Weierstraß (Satz 4.38)auch auf die auf R definierten periodischen Funktionen anwenden.
Definition 4.22. Ein reelles trigonometrisches Polynom ist eine 2π-periodi-sche Funktion f ∈ C(R,R)per mit
f(t) := a0 +
n∑
k=1
(ak cos(kt) + bk sin(kt)
)∀ t ∈ R,
wobei a0, a1, . . . , an, b1, . . . , bn ∈ R und n ∈ N.

4.7 Der metrische Raum der stetigen Abbildungen 173
Wir bezeichnen mit PperR
die Menge der reellen trigonometrischen Polynome.Wegen der Additionstheoreme
cos(kt) · cos(lt) =1
2cos((k + l)t) + cos((l − k)t)
cos(kt) · sin(lt) =1
2sin((k + l)t) + sin((l − k)t)
sin(kt) · sin(lt) =1
2cos((k + l)t) + cos((l − k)t)
ist PperR
eine Unteralgebra von C(R,R)per . Diese Unteralgebra enthalt diekonstanten Funktionen (a1 = . . . = an = b1 = . . . = bn = 0.) Sie trenntauch Punkte. Sind x, y ∈ R und x 6= y + k2π, so ist cos(x) 6= cos(y) odersin(x) 6= sin(y). Dann trennt das trigonometrische Polynom p(t) = cos(t)oder das trigonometrische Polynom p(t) = sin(t) die Punkte x und y. AusSatz 4.38 folgt somit
Folgerung 4.3 Die Menge der reellen trigonometrischen Polynome PperR
istdicht im Banachraum C(R,R)per der auf R definierten stetigen reellwertigen2π-periodischen Funktionen. D.h. fur jede auf R definierte 2π-periodische re-ellwertige stetige Funktion f existiert eine Folge von reellen trigonometrischenPolynomen Pn ∈ Pper
R, n ∈ N, die auf R gleichmaßig gegen die Funktion f
konvergiert.
Beispiel 4: Approximation komplexwertiger periodischer stetiger Funktionendurch komplexe trigonometrische Polynome.
In diesem Beispiel betrachten wir auf R definierte komplexwertige stetige 2π-periodische Funktionen. Wir bezeichnen den Vektorraum dieser Funktionenmit
C(R,C)per := f ∈ C(R,C) | f(x+ 2π) = f(x) ∀ x ∈ R.Wie im letzten Beispiel erhalten wir, dass die Banachraume (C(R,C)per , ‖ ·‖∞) und (C(S1,C), ‖ · ‖∞) isometrisch sind. Wir konnen somit den Approxi-mationssatz von Stone-Weierstraß (Satz 4.39) auf die auf R definierten kom-plexwertigen 2π-periodischen Funktionen anwenden.
Definition 4.23. Ein komplexes, trigonometrisches Polynom ist eine 2π–periodische Funktion f ∈ C(R,C)per mit
f(t) =
N∑
k=−ncke
ikt,
wobei n,N ∈ N0 und ck ∈ C.

174 4 Stetige Abbildungen zwischen metrischen Raumen
Wir bezeichnen die Menge der komplexen trigonometrischen Polynome mitPper
C. Pper
Cist eine Unteralgebra von C(R,C)per , die die konstanten Funktio-
nen enthalt, Punkte trennt und abgeschlossen gegenuber komplexer Konjuga-tion ist. Aus Satz 4.39 erhalten wir deshalb
Folgerung 4.4 Die Menge der komplexen trigonometrischen Polynome PperC
ist dicht im Banachraum C(R,C)per der auf R definierten komplexwerti-gen stetigen 2π-periodischen Funktionen. D.h. fur jede auf R definierte 2π-periodische komplexwertige stetige Funktion f existiert eine Folge von komple-xen trigonometrischen Polynomen Qn ∈ Pper
R, n ∈ N, die auf R gleichmaßig
gegen die Funktion f konvergiert.

5
Differentialrechnung fur Funktionen einerreellen Veranderlichen
Die Grundidee der Differentialrechnung ist die Approximation einer Funktionin der Umgebung eines Punktes durch lineare Abbildungen. Dadurch kannman viele Aussagen uber das lokale Verhalten der Funktion machen.
5.1 Differenzierbare Abbildungen
Sei E ein reeller normierter Vektorraum, U ⊂ R und x0 ∈ U Haufungspunktvon U .
Definition 5.1. Eine Abbildung f : U ⊂ R −→ E heißt differenzierbar imHaufungspunkt x0 ∈ U , falls der Grenzwert
f ′(x0) :=df
dx(x0) := lim
x→x0
f(x) − f(x0)
x− x0
existiert. Dieser Grenzwert heißt Ableitung von f in x0.
Bemerkung: Ist U offen oder ein Intervall, so ist jeder Punkt von U einHaufungspunkt.
Definition 5.2. Sei jeder Punkt der Menge U ⊂ R ein Haufungspunkt.f : U −→ E heißt auf U differenzierbar, falls f in jedem Punkt x0 ∈ Udifferenzierbar ist. In diesem Fall heißt die Abbildung
f ′ : U ⊂ R −→ E
x 7→ f ′(x)
1. Ableitung von f .

176 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Geometrische Interpretation: Die Motivation fur die Entwicklung der Dif-ferentialrechnung durch Leibniz war das Tangentenproblem: Man approximie-re eine gegebene Kurve moglichst gut durch eine Gerade, die durch einen festenPunkt der Kurve geht.
Sei f : U −→ E, x0 ∈ U . Wir betrachtendie Sekante durch P0 = (x0, f(x0)) und P =(x0 + h, f(x0 + h)). Dies ist die Gerade, diedurch die Abbildung
Sh(x) := f(x0) +f(x0 + h) − f(x0)
h︸ ︷︷ ︸Anstieg
·(x− x0)
gegeben ist.
-
6
X
E
• •
x0 x0 + h
f(x0)
graph(Tx0)
graph(Sh)
graph(f)
Was passiert mit den Sekanten Sh bei h → 0 ? Ist f in x0 differenzierbar, sogilt
f ′(x0) = limh→0
f(x0 + h) − f(x0)
h,
das heißt, bei h → 0 konvergieren die Anstiege der Sekanten gegen f ′(x0).Somit konvergieren die Sekanten Sh bei h → 0 gegen die Geraden, die durchdie Funktion
Tx0(x) := f(x0) + f ′(x0)(x− x0)
gegeben sind. Die durch Tx0 definierte Gerade heißt Tangente an die Kur-ve graph(f) im Punkt P0. Tx0 ”
approximiert f in erster Naherung in einerUmgebung um x0 “, das heißt, es gilt
(1) f(x0) = Tx0(x0),
(2) limx→x0
f(x)−Tx0(x0)
x−x0= 0.
Bemerkung: In der Mechanik wurde die Differentialrechnung insbesonderedurch Newton benutzt, um ein mathematisches Modell fur Großen wie dieGeschwindigkeit oder die Beschleunigung zu entwickeln. Sei zum Beispiel Pein Massepunkt und s(t) ∈ R3 gebe den Ort von P zur Zeit t an. Dann ist dieOrtsanderung pro Zeiteinheit
s(t) − s(t0)
t− t0.
Folglich gibt s′(t0) = limt→t0
s(t)−s(t0)t−t0 die Geschwindigkeit von P zur Zeit t = t0
an.
Satz 5.1 Sei f : U ⊂ R −→ E. Ist f in einem Haufungspunkt x0 ∈ Udifferenzierbar, so ist f in x0 stetig.

5.1 Differenzierbare Abbildungen 177
Beweis: Sei (xn) ⊂ U eine Folge die gegen x0 konvergiert. Es ist zu zeigen,dass dann auch (f(xn) gegen f(x0) konvergiert. Es gilt
‖f(xn) − f(x0)‖ = |xn − x0|∥∥∥∥f(xn) − f(x0)
xn − x0
∥∥∥∥n→∞−→ 0 · ‖f ′(x0)‖.
Somit ist f(xn)) gegen f(x0) konvergent. ⊓⊔
Folgerung 5.1 Sei jeder Punkt von U ⊂ R ein Haufungspunkt. Ist f : U −→E differenzierbar, so ist f : U −→ E stetig.
Rechenregeln fur differenzierbare Funktionen
Satz 5.2 Sei K = R,C und E ein normierter K-Vektorraum. Sei weiterhinU ⊂ R und x0 ∈ U sei Haufungspunkt von U . Die Abbildungen f, g : U −→ Eund h : U −→ K seien in x0 differenzierbar. Dann gilt:
(1) – Summenregelf + g : U −→ E ist in x0 differenzierbar und
(f + g)′(x0) = f ′(x0) + g′(x0).
(2) – Produktregelh · f : U −→ E ist in x0 differenzierbar und
(h · f)′(x0) = h′(x0) · f(x0) + h(x0) · f ′(x0).
(3) – QuotientenregelSei weiterhin h(x0) 6= 0. Dann ist f
h: x ∈ U | h(x) 6= 0 → K in x0
differenzierbar und
(f
h
)′(x0) =
f ′(x0)h(x0) − h′(x0)f(x0)
h2(x0).
Insbesondere gilt auch
(1
h
)′(x0) = − h′(x0)
h2(x0).
Beweis: (1) Da f und g in x0 stetig sind, folgt durch Limesbildung aus
f(x) + g(x) − (f(x0) + g(x0))
x− x0=f(x) − f(x0)
x− x0+g(x) − g(x0)
x− x0.
sofort die Behauptung.

178 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
(2) Wegen der Stetigkeit von f und h in x0 folgt auch hier wieder mit Limes-bildung aus
(h · f)(x) − (h · f)(x0)
x− x0= h(x) · f(x) − f(x0)
x− x0+h(x) − h(x0)
x− x0· f(x0).
die Behauptung.
(3) Es gilt
( 1h)(x) − ( 1
h)(x0)
x− x0=
1h(x) − 1
h(x0)
x− x0=h(x0) − h(x)
x− x0· 1
h(x)h(x0)
x→x0−→ −h′(x0) ·1
h2(x0).
Durch Limesbildung folgt dann die zweite Behauptung. Mit Hilfe der Pro-duktregel erhalt man sofort die Quotientenregel. ⊓⊔
Beispiel 5.1Jedes Polynom P (x) = xnan + xn−1an−1 + . . . + a0, ai ∈ E fur alle i ∈0, . . . , n, ist auf R differenzierbar und es gilt
P ′(x) = nanxn−1 + (n− 1)an−1x
n−2 + . . .+ 2a2x+ a1,
denn f(x) = x ist differenzierbar und f ′(x) = 1 nach Definition. Dann ist auchfk(x) = xk = x · . . . · x︸ ︷︷ ︸
k−mal
differenzierbar und nach Satz 5.2 gilt f ′k(x) = k ·xk−1.
Beispiel 5.2Sei
R(x) =P (x)
Q(x)=a0 + a1x+ . . .+ anx
n
b0 + b1x+ . . .+ bmxm
eine rationale Funktion auf R \ x ∈ R | Q(x) = 0 und ai, bj ∈ R oderai, bj ∈ C. Dann ist R : R \ x ∈ R | Q(x) = 0 −→ R (C) differenzierbar.
Satz 5.3 (Kettenregel) Seien U1, U2 ⊂ R, f : U1 −→ E, g : U2 −→ U1
und E ein normierter Vektorraum. Sei g in einem Haufungspunkt x0 ∈ U2
differenzierbar und sei f im Haufungspunkt g(x0) ∈ U1 differenzierbar. Dannist f g : U2 −→ E in x0 differenzierbar und es gilt 1
(f g)′(x0) = g′(x0) · f ′(g(x0)).
1 Die Reihenfolge der Faktoren wurde so gewahlt, weil man die Vektoren aus E
nach Vereinbarung von links mit den Skalaren multipliziert.

5.1 Differenzierbare Abbildungen 179
Beweis: Fur g(x) 6= g(x0) gilt
(f g)(x) − (f g)(x0)
x− x0=g(x) − g(x0)
x− x0· f(g(x)) − f(g(x0))
g(x) − g(x0).
Sei (xn) eine gegen x0 konvergente Folge mit xn 6= x0 fur alle n ∈ N.(1) Sei g(xn) 6= g(x0) fur alle n ≥ n0. Da g in x0 stetig ist, folgt dann
g(xn)n→∞−→ g(x0). Folglich gilt
f(g(xn)) − f(g(x0))
xn − x0
n→∞−→ f ′(g(x0)) · g′(x0).
(2) Es gelte nun g(xn) = g(x0) fur unendlich viele n ∈ N. Da g in x0 und fin g(x0) differenzierbar ist, gilt
g′(x0) = limn→∞
g(xn) − g(x0)
xn − x0= 0,
und wegenf(g(xn)) − f(g(x0))
xn − x0= 0 = g′(x0) · f ′(g(x0))
fur alle n mit g(xn) = g(x0), gilt die Behauptung auch fur den zweiten Fall.⊓⊔
Satz 5.4 (Ableitung der inversen Abbildung) Es seien U1, U2 ⊂ R undf : U1 −→ U2 sei bijektiv. Sei x0 ∈ U1 ein Haufungspunkt von U1 und f(x0) ∈U2 ein Haufungspunkt von U2. Es gelte:
(1) f−1 ist in f(x0) stetig,(2) f ist in x0 differenzierbar und f ′(x0) 6= 0.
Dann ist f−1 : U2 −→ U1 in f(x0) differenzierbar und es gilt
(f−1)′(f(x0)) =1
f ′(x0).
Beweis: Fur y ∈ U2 mit y = f(x) gilt
f−1(y) − f−1(f(x0))
y − f(x0)=
x− x0
f(x) − f(x0)=
1f(x)−f(x0)
x−x0
.
Sei nun (yn) = (f(xn)) eine Folge in U2, die gegen f(x0) konvergiert. Da f−1
in f(x0) stetig ist, konvergiert xn = f−1(yn) gegen x0 = f−1(f(x0)). Da f inx0 differenzierbar ist, folgt dann
f−1(yn) − f−1(f(x0))
yn − f(x0)
n→∞−→ 1
f ′(x0).
⊓⊔

180 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Bemerkung: Satz 5.4 gilt nicht ohne die Voraussetzung f ′(x0) 6= 0, denn seizum Beispiel
f : R −→ R
x 7→ x3.
Dann ist f bijektiv und differenzierbar. Es gilt f(0) = 0 und f ′(0) = 0. Dieinverse Abbildung
f−1 : R −→ R
x 7→ 3√x
ist in 0 nicht differenzierbar, denn der Grenzwert fur x gegen 0 von
f−1(x) − f−1(0)
x=
3√x
x=
13√x2
existiert nicht in R.
Ableitungen elementarer Funktionen
(1) Die Exponentialfunktion
exp : R −→ R
x 7→ ex =
∞∑
n=0
xn
n!
ist differenzierbar und es gilt (ex)′ = ex.
Beweis: Die Potenzreihe
eh − 1
h=
∞∑
n=1
hn−1
n!= 1 +
h
2!+h2
3!+ . . .
ist auf cl(K(0, 1)) gleichmaßig konvergent. Deswegen sind lim und∑
ver-tauschbar und es gilt
limh→0
eh − 1
h= 1
und folglich
exp′(x0) = limh→0
ex0+h − ex0
h= lim
h→0ex0 · e
h − 1
h= ex0 .
2

5.1 Differenzierbare Abbildungen 181
(2) Die Logarithmusfunktion
ln : R+ −→ R
x 7→ ln(x)
ist differenzierbar und es gilt ln′(x) = 1x.
Beweis: ln ist die Umkehrfunktion von exp : R −→ R+, ln ist stetig, expist differenzierbar und exp′(x) = exp(x) 6= 0 fur alle x ∈ R. Somit sind dieVoraussetzungen des Satzes 5.4 erfullt und es folgt
ln′(ex) =1
(ex)′=
1
ex.
Somit ist
ln′(y) =1
y∀ y ∈ R+.
2
(3) Die Potenzfunktion
Wir betrachten fur a ∈ R die Funktion
pa : R+ −→ R
x 7→ xa = eln(x)·a.
pa ist differenzierbar und p′a(x) = a · xa−1.
Beweis: Nach der Kettenregel (Satz 5.3) gilt:
p′a(x) = exp′(ln(x) · a) · a · ln′(x) = eln(x)·a · a · 1
x=xa
x· a = a · xa−1.
2
(4) Die Exponentialfunktion zur Basis a
Die Funktion
expa : R −→ R+
x 7→ ax = eln(a)·x
ist fur a ∈ R+ differenzierbar und es gilt
(expa)′(x) = eln(a)·x · ln(a) = ln(a) · ax.
2

182 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
(5) Sinus-und Cosinusfunktion
Die Funktionen cos, sin : R −→ R sind differenzierbar und es gilt
cos′(x) = − sin(x), sin′(x) = cos(x).
Beweis: Die Reihen∞∑n=0
(−1)n x2n+1
(2n+1)! = sin(x) und∞∑n=0
(−1)n x2n
(2n)! = cos(x)
sind gleichmaßig konvergent auf jeder kompakten Menge. Es folgt
limh→0
sin(h)
h=
∞∑
n=0
(−1)n1
(2n+ 1)!· limh→0
h2n = 1
und
limh→0
cos(h) − 1
h=
∞∑
n=1
(−1)n limh→0
h2n+1
(2n)!= 0.
Daher gilt
sin(x+ h) − sin(x)
h=
sin(x) cos(h) + cos(x) sin(h) − sin(x)
h
= cos(x)sin(h)
h+ sin(x)
cos(h) − 1
hh→0−→ cos(x)
und
cos(x+ h) − cos(x)
h=
cos(x) cos(h) − sin(x) sin(h) − cos(x)
h
= cos(x)cos(h) − 1
h− sin(x)
sin(h)
hh→0−→ − sin(x).
2
(6) Die Funktionen sinh und cosh
Die Funktionen sinh, cosh : R −→ R sind differenzierbar und es gilt(sinh)′(x) = cosh(x), (cosh)′(x) = sinh(x).
Beweis: Nach Definition gilt
sinh(x) =1
2
(ex − e−x
)und cosh(x) =
1
2
(ex + e−x
)
Daraus folgt sofort

5.1 Differenzierbare Abbildungen 183
(sinh)′(x) =1
2(ex + e−x) = cosh(x),
(cosh)′(x) =1
2(ex − e−x) = sinh(x).
2
Definition 5.3. Sei f : U ⊂ R −→ E differenzierbar und x0 ∈ U einHaufungspunkt von U . f heißt in x0 2-mal differenzierbar, falls die Ableitungvon f ′ : U −→ E in x0 existiert.
Bezeichnung: limh→0
f ′(x0+h)−f ′(x0)h
=: f ′′(x0)
Bemerkung: Allgemein definiert man die n–te Ableitung f (n)(x0) als Ab-leitung (f (n−1))′(x0), falls die (n− 1)–te Ableitung f (n−1) : U −→ E existiert(und differenzierbar ist).
Bezeichnung: f (n)(x0) = dnfdxn (x0).
Definition 5.4. Eine Abbildung f : U ⊂ R −→ E heißt stetig differenzierbar,wenn f auf U differenzierbar und f ′ : U −→ E stetig ist. f : U ⊂ R −→ Eheißt n–mal stetig differenzierbar, falls alle Ableitungen f (1), f (2), . . . , f (n)
existieren und stetig sind.Eine Abbildung f : U ⊂ R −→ E heißt glatt, wenn sie beliebig oft differenzier-bar ist, das heißt, wenn fur alle n ∈ N die Ableitungen f (n) existieren (undstetig sind).
Bezeichnung: C(k)(U ;E) bezeichne den Vektorraum aller k-fach stetig dif-ferenzierbaren Abbildungen von U nach E. C∞(U ;E) bezeichne den Vektor-raum aller glatten Abbildungen von U nach E.
Beispiel 5.1Wir betrachten die Funktion f : R −→ R, defniert durch
f(x) :=
x2 sin
(1x
), x 6= 0
0, x = 0.
Die Funktion f ist differenzierbar und f ′ ist in 0 unstetig: Wenn x 6= 0 ist,dann ist
f ′(x) = 2x · sin(
1
x
)+ x2 · cos
(1
x
)·(− 1
x2
)= 2x · sin
(1
x
)− cos
(1
x
).
Sei nun x = 0. Dann gilt

184 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
f(h) − f(0)
h=h2 · sin( 1
h)
h= h · sin
(1
h
)
︸ ︷︷ ︸beschrankt
h→0−→ 0
und daher f ′(0) = 0. Da cos( 1x) fur x gegen 0 keinen Grenzwert hat, hat auch
f ′ keinen Grenzwert in x = 0. Somit ist f ′ nicht stetig in x = 0. Insbesondereist f nicht 2–mal differenzierbar in x = 0.
Beispiel 5.2Folgende Betrachtungen (Tagaki, 1903) liefern uns eine auf ganz R stetige,aber nirgends differenzierbare Funktion. Wir betrachten die stuckweise lineareFunktion f0 : R −→ R definiert durch
f0(x) :=
x− [x] falls x ∈ [[x], [x] + 1
2 ]
1 − x+ [x] falls x ∈ [[x] + 12 , [x] + 1]
, (5.1)
wobei [x] wie ublich das kleinste Ganze von x bezeichnet (Gaußklammer-Funktion) .
-
6
R
R
12
12 1− 1
2−1
f0
f1
Die Funktion f0 hat also die Periode 1. Wir definieren nun
fn(x) := 4−nf0(4n · x).
Dann hat fn die Periode 4−n. Sei weiterhin f :=∞∑n=0
fn. Dann gilt
(1) fn : R −→ R ist stetig.(2) Es gilt |fn(x)| ≤ 1
24−n = Mn fur alle x ∈ R. Aus den Eigenschaften dergeometrischen Reihe folgt
∞∑
n=0
Mn =1
2
∞∑
n=0
(1
4
)n=
2
3<∞.
Somit ist∞∑n=0
fn gleichmaßig konvergent auf R.

5.2 Der Mittelwertsatz der Differentialrechnung 185
Aus (1) und (2) folgt, dass f : R −→ R stetig ist. Trotzdem ist f nirgendsdifferenzierbar.
Beweis: Sei x ∈ R beliebig gegeben. Sei n ∈ N und hn := 14 · 4−n oder
hn := − 14 ·4−n, so dass fn zwischen x und x+hn linear ist. Nach Konstruktion
ist fk fur alle k ≤ n zwischen x und x+hn linear. Da die linearen Abschnittevon fn den Anstieg ±1 haben, folgt
fk(x+ hn) − fk(x)
hn= ±1 ∀ k ≤ n.
Fur k > n ist hn = 4−(n+1) eine Periode von fk. Folglich ist fk(x+hn)−fk(x)hn
= 0fur alle k > n und daher gilt
f(x+ hn) − f(x)
hn=
n∑
k=0
fk(x+ hn) − fk(x)
hn=
n∑
k=0
±1,
und diese Partialsummenfolge kann nicht (fur n→ ∞) konvergent sein, denn
die Basisfolge ist keine Nullfolge. Somit existiert f ′(x) = limn→∞
f(x+hn)−f(x)hn
nicht. ⊓⊔
5.2 Der Mittelwertsatz der Differentialrechnung
Definition 5.5. Sei f : [a, b] −→ R. Man sagt: f nimmt in x0 ∈ (a, b) einlokales Maximum (bzw. Minimum) an, falls ein ε > 0 existiert, so dass furalle y ∈ [a, b] mit |y − x0| < ε gilt
f(y) ≤ f(x0) bzw. (f(y) ≥ f(x0)).
6
-
R
R
lok. Maximum
lok. Minimum
f(x01)
f(x02)
x01 x02a b
Satz 5.5 Ist f : [a, b] −→ R differenzierbar und hat f in x0 ∈ (a, b) einlokales Maximum (Minimum), so gilt f ′(x0) = 0.

186 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Beweis: Sei f(x0) lokales Maximum von f . Dann existiert einerseits ein ε > 0,so dass fur alle x > x0 mit |x− x0| < ε
f(x) − f(x0)
x− x0≤ 0
gilt und somit
limx→x+
0
f(x) − f(x0)
x− x0≤ 0. (⋆)
Andererseits einerseits ein ε > 0, so dass fur alle x < x0 mit |x− x0| < ε
f(x) − f(x0)
x− x0≥ 0
gilt und daher
limx→x−
0
f(x) − f(x0)
x− x0≥ 0. (⋆⋆)
Da f ′(x0) = limx→x0
f(x)−f(x0)x−x0
existiert, muss gelten
f ′(x0) = limx→x+
0
f(x) − f(x0)
x− x0= lim
x→x−0
f(x) − f(x0)
x− x0.
Aus (⋆) und (⋆⋆) folgt dann, dass f ′(x0) = 0 ist. ⊓⊔
Bemerkung: Aus f ′(x0) = 0 folgt im Allgemeinen nicht, dass f in x0 einlokales Maximum oder Minimum hat. Wir betrachten zum Beispiel f(x) = x3.Dann ist f ′(0) = 0, aber 0 ist kein lokaler Extremwert von f .
Satz 5.6 (Satz von Rolle) Sei f : [a, b] −→ R stetig und f : (a, b) −→ R
differenzierbar. Weiterhin gelte f(a) = f(b). Dann existiert ein Punkt x0 ∈(a, b) mit f ′(x0) = 0.
Beweis: Ist f konstant auf [a, b], so ist die Behauptung trivial. Ist f nichtkonstant, so existiert ein x1 ∈ (a, b), so dass entweder
f(x1) > f(a) = f(b)
oderf(x1) < f(a) = f(b)
gilt. Wir betrachten zunachst den ersten Fall. Da f : [a, b] −→ R stetig und[a, b] kompakt ist, nimmt f auf [a, b] ein globales Maximum und ein globa-les Minimum an. Das Maximum liegt wegen obiger Aussage nicht auf denRandpunkten. Folglich existiert ein x0 ∈ (a, b)
f(x0) = maxf(x) | x ∈ [a, b].Nach Satz 5.5 folgt dann f ′(x0) = 0. Der Beweis fur den zweiten Fall istanalog. ⊓⊔

5.2 Der Mittelwertsatz der Differentialrechnung 187
Satz 5.7 (Verallg. Mittelwertsatz der Diff.-rechnung von Cauchy) Seienf, g : [a, b] −→ R stetig und auf (a, b) differenzierbar. Dann existiert einx0 ∈ (a, b) mit
(f(b) − f(a)) · g′(x0) = (g(b) − g(a)) · f ′(x0).
Beweis: Wir betrachten die Funktion
h(x) = [f(b) − f(a)] · g(x) − [g(b) − g(a)] · f(x).
Dann ist h stetig in [a, b] und differenzierbar in (a, b) und es gilt
h(a) = f(b)g(a) − g(b)f(a) = h(b).
Nach dem Satz von Rolle existiert ein x0 ∈ (a, b) mit h′(x0) = 0. Wir erhaltensomit
0 = h′(x0) = (f(b) − f(a))g′(x0) − (g(b) − g(a))f ′(x0).
⊓⊔
Satz 5.8 (Mittelwertsatz von Lagrange) Sei f : [a, b] −→ R stetig undin (a, b) differenzierbar. Dann existiert ein x0 ∈ (a, b), so dass
f(b) − f(a)
b− a= f ′(x0).
Beweis: Folgt aus Satz 5.7 mit g(x) := x. ⊓⊔
Geometrische Bedeutung:Es existiert ein x0 ∈ (a, b), so dass der Anstiegder Tangente in (x0, f(x0)) gleich dem Anstiegder Sekante durch (a, f(a)) und (b, f(b)) ist.
-
6
R
R
a b
•
•
•
x0
Anwendung des Mittelwertsatzes auf den Kurvenverlauf der durchf definierten Kurve
Satz 5.9 Sei f : (a, b) −→ R differenzierbar, a, b ∈ R ∪ ±∞. Dann gilt:
(1) Ist f ′(x) ≥ 0 fur alle x ∈ (a, b), so ist f monoton wachsend. Ist f ′(x) > 0fur alle x ∈ (a, b), so ist f streng monoton wachsend.
(2) Ist f ′(x) ≤ 0 (< 0) fur alle x ∈ (a, b), so ist f (streng) monoton fallend.(3) Ist f ′ ≡ 0 auf (a, b), so ist f konstant.

188 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Beweis: Seien x1, x2 ∈ (a, b), x1 < x2. Wir wenden den Mittelwertsatz vonLagrange auf f |[x1,x2] an. Dann existiert ein y ∈ (x1, x2), so dass
f ′(y) =f(x2) − f(x1)
x2 − x1.
Da x2 − x1 > 0, folgen die Behauptungen aus Satz 5.8. ⊓⊔
Anwendung:
Seien c, A ∈ R gegebene Konstanten. Dann existiert genau eine differenzier-bare Funktion f : R −→ R mit f ′ = c · f und f(0) = A. Diese Funktion istgegeben durch f(x) = Aecx. Zum Beweis setzen wir F (x) = f(x) · e−cx. Danngilt
F ′(x) = f ′(x) · e−cx − c · f(x) · e−cx = (cf − cf)e−cx = 0.
Somit ist F konstant. Da F (0) = A ist, gilt A = f(x) · e−cx. Folglich istf(x) = Aecx. 2
Satz 5.10 Sei f : (a, b) −→ R differenzierbar. Weiterhin sei f in x0 ∈ (a, b)2–mal differenzierbar und es gelte
(1) f(x0) = 0,(2) f ′′(x0) < 0 (bzw. f ′′(x0) > 0).
Dann hat f in x0 ein isoliertes lokales Maximum (Minimum), das heißt, esexistiert ein ε > 0, so dass fur alle x mit 0 < |x− x0| < ε
f(x) < f(x0) (bzw. f(x) > f(x0)).
gilt.
Beweis: Wir beweisen nur den Fall f ′′(x0) < 0. (f ′′(x0) > 0 analog.) Aus
f ′′(x0) = limx→x0
f ′(x) − f ′(x0)
x− x0< 0
folgt, dass ein ε > 0 existiert, so dass fur alle x mit 0 < |x− x0| < ε
f ′(x) − f ′(x0)
x− x0< 0
gilt. Da f ′(x0) = 0 ist, erhalt man
f ′(x) < 0, fur alle x > x0 mit x− x0 < ε
undf ′(x) > 0, fur alle x < x0 mit x0 − x < ε.
Nach Satz 5.9 ist daher f |(x0−ε,x0) streng monoton wachsend, wahrend f |(x0,x0+ε)
streng monoton fallend ist. Somit hat f in x0 ein isoliertes lokales Maximum.⊓⊔

5.2 Der Mittelwertsatz der Differentialrechnung 189
Definition 5.6. Sei D ⊂ R offenes Intervall. Eine Funktion f : D −→ R
heißt
(1) konvex, falls
f(λx1 + (1 − λ)x2) ≤ λf(x1) + (1 − λ)f(x2) ∀x1, x2 ∈ D, λ ∈ (0, 1),
(2) konkav, falls
f(λx1 + (1 − λ)x2) ≥ λf(x1) + (1 − λ)f(x2) ∀x1, x2 ∈ D, λ ∈ (0, 1).
Geometrische Bedeutung:
Ist f konvex, so liegt die Kurve graph(f) unterhalb der Geraden durch(x1, f(x1)) und (x2, f(x2)) fur beliebige x1, x2 ∈ D. Ist f konkav, so liegtgraph(f) oberhalb der Geraden durch (x1, f(x1) und (x2, f(x2)) fur beliebigex1, x2 ∈ D.
-
6
R
R
•
•
x1 x2
f ist konkav
f(x1)
f(x2)
-
6
R
R
•
•
x1 x2
f ist konvex
f(x1)
f(x2)
Satz 5.11 Sei D ⊂ R ein offenes Intervall und f : D −→ R zweimal diffe-renzierbar. Dann gilt:
(1) f ist genau dann konvex, wenn f ′′(x) ≥ 0 fur alle x ∈ D.(2) f ist genau dann konkav, wenn f ′′(x) ≤ 0 fur alle x ∈ D.
Beweis: Wir zeigen nur die Behauptung (1). Der Beweis der Behauptung (2)ist analog.(⇐)Sei f ′′(x) ≥ 0 fur alle x ∈ D. Nach Satz 5.9 ist f ′ auf D monoton wachsend.Seien x1, x2 ∈ D, λ ∈ (0, 1). Wir setzen x := λx1 + (1 − λ)x2 mit x1 < x2.Dann ist x1 < x < x2. Nach dem Mittelwertsatz existieren ein ξ1 ∈ (x1, x)und ein ξ2 ∈ (x, x2), so dass
f(x) − f(x1)
x− x1= f ′(ξ1) ≤ f ′(ξ2) =
f(x2) − f(x)
x2 − x.
Da x− x1 = (1 − λ)(x2 − x1) und x2 − x = λ(x2 − x1) gilt, erhalten wir

190 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
f(x) − f(x1)
1 − λ≤ f(x2) − f(x)
λ.
Daraus folgtf(x) ≤ λf(x1) + (1 − λ)f(x2).
Somit ist f konvex.
(⇒)Sei f konvex. Wir nehmen an, dass ein x0 ∈ D existiert mit f ′′(x0) < 0.Sei c := f ′(x0) und ϕ := f(x) − c(x − x0) fur x ∈ D. Dann ist ϕ zweimaldifferenzierbar und es gilt ϕ′(x0) = 0, ϕ′′(x0) < 0. Nach Satz 5.10 hat daherϕ in x0 ein isoliertes lokales Maximum, das heißt, es existiert ein h > 0 mit[x0 − h, x0 + h] ⊂ D, so dass
ϕ(x0 − h) < ϕ(x0), wahrend ϕ(x0 + h) < ϕ(x0)
ist. Deshalb gilt
f(x0) = ϕ(x0) >1
2(ϕ(x0 − h) + ϕ(x0 + h)) =
1
2(f(x0 − h) + f(x0 + h)).
Mit λ = 12 , x1 = x0 − h und x2 = x0 + h folgt, dass f nicht konvex ist. ⊓⊔
Definition 5.7. Sei D ⊂ R ein offenes Intervall und f : D −→ R stetig. DerPunkt x0 ∈ D heißt Wendepunkt, wenn eine Umgebung (x0 − ε, x0 + ε) ⊂ Dvon x0 existiert, so dass entweder f |(x0−ε,x0) konkav und f |(x0,x0+ε) konvexist oder Umgekehrtes gilt.
Satz 5.12 Sei f : (a, b) ⊂ R −→ R zweimal stetig differenzierbar. Ist x0 ∈(a, b) ein Wendepunkt von f , so gilt f ′′(x0) = 0.
Beweis: Folgerung aus Satz 5.11 ⊓⊔
Bemerkung: Der Mittelwertsatz der Differentialrechnung gilt nicht fur vek-torwertige Funktionen. Wir betrachten dazu die Funktion
f : [0, 2π] −→ R2
t 7→ f(t) = (cos(t), sin(t)).
Es gilt f(2π)− f(0) = (0, 0), also f(2π)−f(0)2π−0 = 0. Betrachten wir aber die Ab-
leitung f ′, dann erhalten wir f ′(t) = (− sin(t), cos(t)). Somit ist |f ′(t)| = 1,d.h. f ′(t) 6= 0 fur alle t ∈ [0, 2π]. 2

5.2 Der Mittelwertsatz der Differentialrechnung 191
Satz 5.13 (Mittelwertsatz fur Vektorfunktionen) Sei (E, ‖·‖) ein nor-mierter Vektorraum, f : [a, b] −→ E stetig und auf (a, b) differenzierbar. Dannexistiert ein Punkt x0 ∈ (a, b), so dass gilt
‖f(b) − f(a)‖ ≤ (b − a)‖f ′(x0)‖.
Zum Beweis des Satzes benotigen wir das folgende Lemma:
Lemma 5.8. Sei f : [a, b] −→ E in x0 ∈ (a, b) differenzierbar, seien
(αk), (βk) ⊂ [a, b] Folgen mit αk < x0 < βk, αkk→∞−→ x0, und βk
k→∞−→ x0
fur alle k ∈ N. Dann gilt
limk→∞
f(βk) − f(αk)
βk − αk= f ′(x0).
Beweis: Wir betrachten yk := βk−x0
βk−αk∈ (0, 1). Es gilt
f(βk) − f(αk)
βk − αk− f ′(x0)
= yk︸︷︷︸beschr.
(f(βk) − f(x0)
βk − x0− f ′(x0)
)
︸ ︷︷ ︸k→∞−→0
+ (1 − yk)︸ ︷︷ ︸beschr.
(f(αk) − f(x0)
αk − x0− f ′(x0)
)
︸ ︷︷ ︸k→∞−→0
.
Damit folgt die Behauptung. ⊓⊔
Beweis:[des Satzes 5.13]Sei L := b−a
3 und M := ‖f(b) − f(a)‖. Wir betrachten die Funktion g :[a, a+ 2L] ⊂ R −→ E, definiert durch g(s) := f(s+ L) − f(s). Dann folgt
g(a) + g(a+ L) + g(a+ 2L) = f(b) − f(a)
und somitM ≤ ‖g(a)‖ + ‖g(a+ L)‖ + ‖g(a+ 2L) (⋆).
Wir zeigen zunachst, dass ein s1 ∈ (a, a + 2L) mit ‖g(s1)‖ ≥ 13M existiert.
Wir nehmen an, dass fur alle s1 ∈ (a, a + 2L) gilt ‖g(s1)‖ < 13M . Da g :
[a, a+ 2L] −→ E stetig ist, erhalten wir auch
‖g(a)‖ ≤ 1
3M, ‖g(a+ 2L)‖ ≤ 1
3M,
im Widerspruch zu (⋆). Sei nun t1 := s1 + L ∈ (a, b). Dann gilt
(1) a < s1 < t1 < b und t1 − s1 = L =b− a
3,
(2) ‖g(s1)‖ = ‖f(t1) − f(s1)‖ ≥ 1
3M.

192 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Wir wiederholen nun diese Konstruktion, indem wir statt des Intervalls [a, b]das Intervall [s1, t1] betrachten. Dadurch erhalten wir Folgen (sn) und (tn),so dass gilt
tn − sn =1
3n(b− a), ‖f(tn) − f(sn)‖ ≥ 1
3n·M, [sn, tn] ⊂ [sn−1, tn−1].
Wir haben also eine Intervallschachtelung In := [sn, tn], bei der die Lange derIntervalle In gegen 0 konvergiert. Nach dem Satz uber die Intervallschachte-
lung existiert dann ein x0 ∈ R mit∞⋂n=1
In = x0. Es gilt somit
sn −→ x0, tn −→ x0, sn < x0 < tn
und‖f(tn) − f(sn)‖
tn − sn≥ M
(tn − sn) · 3n=
M
b − a.
Aus Lemma 5.8 folgt nun
f ′(x0) = limn→∞
f(tn) − f(sn)
tn − sn
und damit
‖f ′(x0)‖ = ‖ limn→∞
f(tn) − f(sn)
tn − sn‖ = lim
n→∞‖f(tn) − f(sn)‖
tn − sn
≥ M
b− a=
‖f(b)− f(a)‖b− a
.
⊓⊔
Satz 5.14 Sei f : [a, b] −→ E stetig–differenzierbar. Dann ist f Lipschitz-stetig.
Beweis: Nach Voraussetzung ist f ′ ∈ C([a, b], E). Folglich existiert
‖f ′‖∞ := max‖f ′(x)‖E | x ∈ [a, b] ∈ R.
Seien x1, x2 ∈ [a, b] und o.B.d.A. x1 > x2. Dann folgt aus Satz 5.13, dass einξ ∈ [x2, x1] existiert, so dass
‖f(x1) − f(x2)‖ ≤ ‖f ′(ξ)‖E · |x1 − x2| ≤ ‖f ′‖∞︸ ︷︷ ︸=:L
·‖x1 − x2‖.
Dies aber bedeutet, dass f Lipschitz-stetig mit der Lipschitz-Konstanten List. ⊓⊔

5.2 Der Mittelwertsatz der Differentialrechnung 193
Die Regeln von L’Hospital
Satz 5.15 Sei [a, b] ⊂ R ein beschranktes Intervall und x0 ∈ [a, b]. Es seienf, g : (a, b) \ x0 −→ R differenzierbare Funktionen mit
(1) limx→x0
f(x) = limx→x0
g(x) ∈ 0,±∞,(2) g′(x) 6= 0 fur alle x ∈ (a, b) \ x0,(3) lim
x→x0
f ′(x)g′(x) = c ∈ R ∪ ±∞.
Dann gilt limx→x0
f(x)g(x) = c.
Beweis: 1. Fall: limx→x0
f(x) = limx→x0
g(x) = 0.
Wir setzen f und g in x0 durch f(x0) := g(x0) := 0 fort. Dann sindf, g : (a, b) −→ R stetig in x0. Wir betrachten nun eine Folge (xn), diegegen x0 konvergiert, wobei xn 6= x0 fur alle n ∈ N gelten soll. Dann sindf, g : [xn, x0] −→ R stetig und in (xn, x0) differenzierbar, falls xn < x0 (an-sonsten betrachten wir [x0, xn]). Weiterhin gilt f(x0) = g(x0) = 0. Nachdem verallgemeinerten Mittelwertsatz (5.7) existiert ein ξn ∈ (xn, x0) (bzw.ξn ∈ (x0, xn)), so dass gilt
f(xn)g′(ξn) = g(xn)f′(ξn).
Nach dem Satz von Rolle (5.6) ist g(xn) 6= 0 = g(x0). Anderenfalls existier-
te ein ξn ∈ (xn, x0) (bzw. ein ξn ∈ (x0, xn)), so dass g′(ξn) = 0 ware, imWiderspruch zur Voraussetzung (1). Damit folgt
f(xn)
g(xn)=f ′(ξn)
g′(ξn).
Da (xn) gegen x0 konvergiert, ist auch (ξn) gegen x0 konvergent und wirerhalten
limn→∞
f(xn)
g(xn)= lim
n→∞f ′(ξn)
g′(ξn)= limx→x0
f ′(x)
g′(x)= c.
2. Fall: limx→x0
g(x) = +∞ und limx→x0
f ′(x)g′(x) = 0.
Es sei ε > 0 und (xn) eine gegen x0 konvergente Folge mit xn < x0. Dannexistiert ein x⋆ ∈ (a, x0), so dass fur alle x ∈ (x∗, x0) gilt
g(x) > 0, und
∣∣∣∣f ′(x)
g′(x)
∣∣∣∣ < ε.
Weiterhin gilt
f(xn)
g(xn)=f(x⋆)
g(xn)+f(xn) − f(x⋆)
g(xn) − g(x⋆)·(
1 − g(x⋆)
g(xn)
). (⋆)

194 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Ab einem Index n0 ist jedes xn ∈ (x⋆, x0). Durch Anwendung des verallge-meinerten Mittelwertsatzes auf das Intervall [x⋆, xn] erhalten wir daher, dassfur alle n ≥ n0 ein ξn ∈ (x⋆, xn) existiert, so dass
f(xn) − f(x⋆)
g(xn) − g(x⋆)=f ′(ξn)
g′(ξn).
Eingesetzt in Gleichung (⋆), ergibt dies
∣∣∣∣f(xn)
g(xn)
∣∣∣∣ ≤∣∣∣∣f(x⋆)
g(xn)
∣∣∣∣+∣∣∣∣f ′(ξn)
g′(ξn)
∣∣∣∣︸ ︷︷ ︸
<ε
∣∣∣∣1 − g(x⋆)
g(xn)
∣∣∣∣
und damit ∣∣∣∣f(xn)
g(xn)
∣∣∣∣ ≤∣∣∣∣f(x∗)
g(xn)
∣∣∣∣+ ε
∣∣∣∣1 − g(x∗)
g(xn)
∣∣∣∣ .
Da g(xn) gegen +∞ fur xnn→∞−→ x0 konvergiert, folgt
∣∣∣∣f(x⋆)
g(xn)
∣∣∣∣ −→ 0, limn→∞
g(x⋆)
g(xn)= 0
und somit
lim supn→∞
∣∣∣∣f(xn)
g(xn)
∣∣∣∣ < ε.
ε kann beliebige Werte annehmen kann, deshalb erhalten wir
limn→∞
∣∣∣∣f(xn)
g(xn)
∣∣∣∣ = 0
fur alle Folgen (xn) mit xn −→ x0,xn < x0.Analog behandelt man Folgen xn −→ x0 mit xn > x0. Somit gilt fur alleFolgen (xn) mit xn −→ x0
limn→∞
f(xn)
g(xn)= 0,
also
limx→x0
f(x)
g(x)= 0.
3. Fall: limx→x0
g(x) = +∞ und limx→x0
f ′(x)g′(x) = c ∈ R beliebig, aber endlich.
Wir betrachten die Funktion f1(x) := f(x) − c · g(x). Dann ist
limx→x0
f ′1(x)
g′(x)= limx→x0
f ′(x)
g′(x)− c = 0.
Da limx→x0
g(x) = ∞ ist, konnen wir den Fall 2 anwenden und erhalten

5.2 Der Mittelwertsatz der Differentialrechnung 195
limx→x0
f1(x)
g(x)= 0.
Daraus folgt
limx→x0
f(x)
g(x)= c+ lim
x→x0
f1(x)
g(x)= c.
4. Fall: limx→x0
f(x) = limx→x0
g(x) = +∞ und limx→x0
f ′(x)g′(x) = ∞.
Dann gilt limx→x0
g′(x)f ′(x) = 0 und aus Fall (2) folgt sofort lim
x→x0
g(x)f(x) = 0. Da f(x)
und g(x) fur x −→ x0 gegen +∞ konvergieren, sind f und g positiv in einer
Umgebung von x0. Folglich gilt limx→x0
f(x)g(x) = +∞.
5. Fall: limx→x0
f(x) = limx→x0
g(x) = +∞.
Dann ist limx→x0
f ′(x)g′(x) = −∞ unmoglich, denn sonst ware f oder g in einer
Umgebung von x0 eine monoton fallende Funktion. ⊓⊔
Satz 5.16 Seien f, g : (a,∞) −→ R differenzierbar und g′(x) 6= 0 fur alle
x ∈ (a,∞). Ist limx→∞
f(x) = limx→∞
g(x) ∈ 0,±∞ und limx→∞
f ′(x)g′(x) = c ∈
R ∪ ±∞, so gilt
limx→∞
f(x)
g(x)= c.
Beweis: O.B.d.A. sei a > 0. Wir betrachten die Funktionen f1(x) = f( 1x)
und g1(x) = g( 1x) auf dem Intervall (0, 1
a). Dann gilt
f ′1(x) = − 1
x2f ′(
1
x
)und g′1(x) = − 1
x2g′(
1
x
)6= 0
und daher
limx→0
f ′1(x)
g′1(x)= limx→0
f ′( 1x)
g′( 1x)
Vor.= c
Mit Satz 5.15 folgt dann
limx→∞
f(x)
g(x)= lim
x→0
f1(x)
g1(x)= c.
⊓⊔Beispiele:
(1) limx→0
ln(1+x)x
= limx→0
11+x
1 = 1,
(2) limx→0
ex−1x
= limx→0
ex
1 = 1,
(3) limx→0
(cosx)1x = lim
x→0e
1x
ln(cosx) = elimx→0
1x
ln(cosx)= e
limx→0
1cos x
·(− sin x)= e0 =
1.

196 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
5.3 Differentiation von Funktionenfolgen und -Reihen
Sei fn : [a, b] −→ R eine Folge differenzierbarer Funktionen, die gleichmaßiggegen eine Funktion f konvergiert. Dann muß (f ′
n) im Allgemeinen nichtkonvergieren. Sei zum Beispiel fn(x) = 1
nsin(nx). Dann konvergiert (fn)
gleichmaßig auf [0, 2π] gegen 0, aber f ′n(x) = cos(nx) konvergiert in keinem
Punkt x 6= 0. Fur x = π gilt z.B.
f ′k(π) =
1, k gerade
−1, k ungerade.
Satz 5.17 Sei E ein Banachraum, fn : [a, b] ⊂ R −→ E differenzierbar furalle n ∈ N und gelte(1) ∃ x0 ∈ [a, b] : (fn(x0)) konvergiert in E,(2) (f ′
n) konvergiert gleichmaßig auf [a, b].Dann konvergiert auch (fn) gleichmaßig auf [a, b] gegen eine Funktionf : [a, b] −→ E. f ist differenzierbar und es gilt
f ′(x) = limn→∞
f ′n(x).
Das heißt: lim und ddx
sind vertauschbar.
Beweis: (1) Sei ε > 0. Da (fn(x0)) konvergent ist, existiert ein n0 ∈ N, sodass fur alle m ≥ n ≥ n0
‖fn(x0) − fm(x0)‖ <ε
2(A)
gilt. Weil (f ′n) gleichmaßig konvergiert, gibt es ein n0 ∈ N, so dass fur alle
t ∈ [a, b] und fur alle m ≥ n ≥ n0
‖f ′n(t) − f ′
m(t)‖ < ε
2(b− a). (B)
gilt. Wir wenden den Mittelwertsatz fur Vektorfunktionen auf fn − fm :[a, b] −→ E an: Fur zwei Werte x, t ∈ [a, b] existiert ein ϑm,n ∈ [x, t] (bzw.∈ [t, x]) mit
‖fn(x) − fm(x) − fn(t) + fm(t)‖ ≤ |x− t| · ‖f ′n(ϑm,n) − f ′
m(ϑm,n)‖.
Mit (A) folgt dann ∀m ≥ n ≥ n0 und ∀x, t ∈ [a, b]
‖fn(x) − fm(x) − fn(t) + fm(t)‖ ≤ |x− t| · ε
2(b− a)≤ ε
2. (C)
Daher ist fur t = x0 mit (C) und (A)
‖fn(x) − fm(x)‖ ≤ ‖fn(x) − fm(x) − fn(x0) + fm(x0)‖ + ‖fn(x0) − fm(x0)‖<ε
2+ε
2= ε. (D)

5.3 Differentiation von Funktionenfolgen und -Reihen 197
fur alle m ≥ n ≥ n0 und fur alle x, t ∈ [a, b]. Somit ist (fn(x)) eine(gleichmaßige) Cauchyfolge in E. Da E vollstandig ist, existiert eine Funk-tion f : [a, b] −→ E, so dass
f(x) = limn→∞
fn(x) ∀x ∈ [a, b].
Gehen wir in (D) mit m gegen ∞, so folgt
∀x ∈ [a, b] ∀n ≥ n0 : ‖fn(x) − f(x)‖ < ε.
Daher konvergiert (fn) gleichmaßig gegen f auf [a, b].
(2) Es ist zu zeigen, dass f differenzierbar ist und f ′(x) = limn→∞
f ′n(x) gilt.
Sei x ∈ [a, b] fest. Wir definieren ϕn : [a, b] −→ E durch
ϕn(t) :=
fn(t)−fn(x)
t−x x 6= t
f ′n(x) x = t.
Da fn stetig und limt→x
fn(t)−fn(x)t−x = f ′
n(x) existiert, ist ϕn : [a, b] −→ E stetig.
Fur x 6= t gilt mit (C)
‖ϕn(t) − ϕm(t)‖ =1
|t− x| ‖fn(t) − fm(t) − fn(x) + fm(x)‖
≤ ε
2(b− a)∀n,m ≥ n0.
Da ϕn − ϕm stetig ist, haben wir auch eine Abschatzung fur x = t. Also ist
‖ϕn(t) − ϕm(t)‖ ≤ ε
2(b− a)∀n,m ≥ n0 ∀ t ∈ [a, b].
Somit konvergiert die Folge (ϕn) gleichmaßig auf [a, b] fur festes x ∈ [a, b].Wir setzen ϕ(t) = lim
n→∞ϕn(t). Da ϕn stetig ist fur alle n ∈ N und die Folge
(ϕn) gleichmaßig gegen ϕ konvergiert, ist auch ϕ stetig. Wir erhalten
ϕ(x) = limt→x
ϕ(t) = limt→x
limn→∞
ϕn(t)
= limt→x
(limn→∞
fn(t) − fn(x)
t− x
)= lim
t→x
f(t) − f(x)
t− x.
Folglich ist f in x ∈ [a, b] differenzierbar und es gilt
f ′(x) = ϕ(x) = limn→∞
ϕn(x) = limn→∞
f ′n(x).
⊓⊔Als Anwendung erhalten wir

198 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Satz 5.18 Sei E ein Banachraum und fn : [a, b] −→ E eine Folge differen-zierbarer Funktionen mit
(1)∞∑n=1
fn(x0) konvergiert fur mindestens ein x0 ∈ [a, b].
(2)∞∑n=1
f ′n konvergiert gleichmaßig auf [a, b].
Dann konvergiert∞∑n=1
fn gleichmaßig auf [a, b], die Grenzfunktion
f(x) :=
∞∑
n=1
fn(x)
ist differenzierbar und
f ′(x) =d
dx
( ∞∑
n=1
fn(x)
)=
∞∑
n=1
f ′n(x).
Anwendung auf Potenzreihen
Satz 5.19 Sei E ein Banachraum und P (x) =∞∑n=0
an(x− x0)n eine Potenz-
reihe mit dem Zentrum x0 ∈ R, dem Konvergenzradius R und an ∈ E. Dannist P : (x0 −R, x0 +R) ⊂ R −→ E differenzierbar und es gilt
P ′(x) =
∞∑
n=1
ann(x− x0)n−1.
Beweis: Sei fn(x) := an(x − x0)n. Nach Satz 5.18 ist fn : R −→ E differen-
zierbar und es gilt
f ′n(x) = ann(x− x0)
n−1, f ′0(x) = 0.
Offensichtlich konvergiert P (x) fur x = x0. Wir betrachten nun die Reihe
Q(x) :=
∞∑
n=1
n · an(x− x0)n−1 =
∞∑
n=0
f ′n(x).
und berechnen den Konvergenzradius der Potenzreihe Q:
λ := lim supn→∞
n√n‖an‖ = lim sup
n→∞n√‖an‖ =
1
R,
wobei R der Konvergenzradius von P ist. Folglich ist R auch der Konvergenz-radius von Q.

5.3 Differentiation von Funktionenfolgen und -Reihen 199
Nach Satz 4.30 konvergiert Q gleichmaßig auf jedem kompakten Teilintervalldes Konvergenzintervalls (x0 −R, x0 +R).P ist also fur alle ε > 0 auf dem Intervall Iε = [x0 − R + ε, x0 + R − ε]differenzierbar und es gilt
P ′(x) =
∞∑
n=1
nan(x − x0)n−1 ∀x ∈ Iε.
Mit ε gegen 0 folgt die Behauptung. ⊓⊔
Anwendung: Berechnung von π.
Dazu betrachten wir arctan : R −→ (−π2 ,
π2 ).
-
6
R
R
1
π4
π2
−π2
•
arctan
Einerseits gilt arctan′(x) = 11+x2 (Ubungsaufgabe). Andererseits folgt aus
der geometrischen Reihe fur x ∈ (−1, 1), dass∞∑k=0
(−x2)k = 11+x2 . Folglich
gilt arctan′(x) =∞∑k=0
(−1)kx2k fur alle x ∈ (−1, 1). Die Reihe∞∑k=0
(−1)kx2k
konvergiert auf (−1, 1) und ist die Ableitung der auf (−1, 1) konvergentenPotenzreihe
Q(x) =
∞∑
k=0
(−1)kx2k+1
2k + 1.
Folglich ist arctan′(x) = Q′(x) auf (−1, 1) und es gilt
arctan(x) = Q(x) + C, Q(0) = 0, arctan(0) = 0
Daher ist C = 0 und damit
arctan(x) =∞∑
k=0
(−1)kx2k+1
2k + 1, fur alle |x| < 1.
Nach dem Leibnizkriterium fur alternierende Reihen ist Q(1) = 1 − 13 + 1
5 −17 ± . . . konvergent und es gilt Q(−1) = −Q(1).Nach dem abelschen Grenzwertsatz (Satz 4.31) ist damit Q in x = ±1 (ein-seitig) stetig und
Q(±1) = limx→±1
Q(x) = limx→±1
arctan(x) = arctan(±1).
Wir erhalten

200 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
arctanx =∞∑k=0
(−1)k x2k+1
2k+1 ∀ |x| ≤ 1.
Da arctan(1) = π4 ist, gilt die Leibnizformel
π
4= 1 − 1
3+
1
5− 1
7± . . . .
Diese Reihe konvergiert sehr langsam gegen π4 . Man benotigt 1000 Summan-
den, um π auf 3 Stellen genau zu erhalten. Schneller konvergente Reihen erhaltman folgendermaßen:
Durch Umkehrung der Additionstheoreme folgt
arctan(x) + arctan(y) = arctan
(x+ y
1 − x · y
)(x · y 6= 1)
und daher mit x = y = 15
2 arctan
(1
5
)= arctan
(5
12
),
bzw. mit x = y = 512
2 arctan
(5
12
)= arctan
(120
119
).
Einsetzen von x = 1 und y = 1239 in obige Formel liefert
arctan(1) + arctan
(1
239
)= arctan
(120
119
).
Daraus folgt
π
4= arctan(1)
= 4 · arctan1
5− arctan
1
239(∗)
= 4 ·∞∑
k=0
(−1)k
2k + 1
(1
5
)2k+1
−∞∑
k=0
(−1)k
2k + 1
(1
239
)2k+1
. (⋆⋆)
(∗) heißt die Machinsche Formel. Ist∞∑k=0
(−1)kak eine alternierende Reihe mit
monoton fallender Nullfolge (ak), ak > 0 fur alle k ∈ N0, dann erhalt man furden Fehler bei der Naherungsrechnung (nach Satz 3.9)
|s−n∑
k=0
(−1)kak| ≤ an+1.

5.4 Taylorreihen 201
Fur den Fehler F1 bei Addition von 8 Reihengliedern der ersten Reihe in (⋆⋆)gilt
F1 ≤ 4
17· 1
517︸ ︷︷ ︸=a8
< 4 · 10−13.
Fur den Fehler F2 bei Addition von 2 Reihengliedern der zweiten Reihe in(⋆⋆) gilt
F2 ≤ 1
5· 1
2395︸ ︷︷ ︸a2
< 3 · 10−13.
Somit ist der Fehler bei Addition der ersten 8 Reihenglieder kleiner als 3·10−12
und wir erhalten eine Naherung fur π:
π = 3.1415926535+R, |R| < 10−11.
5.4 Taylorreihen
Das Ziel dieses Abschnitts ist die Approximation von Funktionen durch Po-lynome und die Entwicklung von Funktionen in Reihen. Dazu werden wirzunachst zur Abkurzung einige Bezeichnungen einfuhren.
Die Landau-Symbole
Sei h : I ⊂ R → E eine Funktion mit Werten in einem reellen normiertenVektorraum E, g : I ⊂ R → R eine reellwertige Funktion und x0 ∈ I.
• h(x) = o(g(x)) fur x→ x0 , ist die Abkurzung fur die Eigenschaft
limx→x0
h(x)
g(x)= 0.
• h(x) = O(g(x)) fur x → x0 , ist die Abkurzung dafur, dass es eineKonstante C > 0 und ein Intervall (x0 − ε, x0 + ε) gibt mit
‖h(x)‖ ≤ C |g(x)| fur alle x ∈ (x0 − ε, x0 + ε) ∩ I.• h1(x) = h2(x)+o(g(x)) fur x→ x0 , ist die Abkurzung fur h1(x)−h2(x) =
o(g(x)) fur x→ x0 . Analog fur O(g(x)).• Insbesondere heißt h(x) = o((x − x0)
n) fur x→ x0 , dass
limx→x0
h(x)
(x− x0)n= 0.
h(x) geht fur x → x0 also schneller gegen 0 als (x − x0)n. Man sagt auch
”h verschwindet in x0 von hoherer als n-ter Ordnung “.
Fur h1(x) = h2(x) + o((x − x0)n) fur x → x0, sagt man auch
”h2 appro-
ximiert h1 in x0 von hoherer als n-ter Ordnung “.

202 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
• Zur Eigenschaft h(x) = O((x − x0)n) fur x→ x0 , d. h.
‖h(x)‖ ≤ C |x− x0|n, fur alle x ∈ (x0 − ε, x0 + ε) ∩ I
sagt man auch”h wachst in x0 von hochstens n-ter Ordnung “.
Definition 5.9. Sei U ⊂ R offen und E ein normierter Vektorraum. EineAbbildung
f : U ⊂ R −→ E
heißt reell–analytisch in x0 ∈ U , falls eine Potenzreihe∞∑k=0
ak(x − x0)k, mit
ak ∈ E fur alle k ∈ N0, Zentrum x0 ∈ R und positivem Konvergenzradiusρ(x0) > 0 existiert, so dass gilt
f(x) =
∞∑
k=0
ak(x − x0)k, ∀x ∈ U ∩ (x0 − ρ, x0 + ρ).
Bemerkung:(1) Man sagt auch: f ist in einer Umgebung von x0 in eine Potenzreihe ent-wickelbar.(2) f : U ⊂ R −→ E heißt reell–analytisch, wenn f in jedem Punkt x0 ∈ Ureell–analytisch ist.(3) Cw(U ;E) bezeichne den Vektorraum der reell–analytischen Funktionen.
Beispiele
(1) Jede Potenzreihe f(x) :=∞∑k=0
ak(x − x0)k mit Konvergenzradius ρ > 0 ist
in x0 reell–analytisch.(2) exp, sin, cos, sinh, cosh sind reell–analytisch auf R.
Satz 5.20 Sei E ein Banachraum und f : U ⊂ R −→ E reell–analytischin x0 ∈ U . Dann ist f in einer Umgebung U von x0 unendlich oft stetigdifferenzierbar und es gilt:
f(x) =
∞∑
n=0
f (n)(x0)
n!· (x − x0)
n, ∀x ∈ U .
Beweis: Sei f(x) =∞∑k=0
ak(x − x0)k fur alle x ∈ U ∩ (x0 − ρ, x0 + ρ) =: U .
Nach Satz 5.19 existiert f ′ auf U und
f ′(x) =
∞∑
k=1
k · ak(x − x0)k−1, ∀x ∈ U .

5.4 Taylorreihen 203
Diese Potenzreihe hat den gleichen Konvergenzradius wie f . Nach Satz 5.19existiert wiederum f ′′(x) mit
f ′′(x) =
∞∑
k=2
k(k − 1)ak(x− x0)k−2, ∀x ∈ U .
Durch weiteres Anwenden des Satzes 5.19 erhalten wir alle Ableitungen vonf in der Umgebung U von x0:
f (n)(x) =∞∑
k=n
k(k − 1) · . . . · (k − n+ 1)ak(x− x0)k−n.
Da offensichtlich fur jedes n ∈ N0
f (n)(x0) = n! · an
gilt, folgt die Behauptung. ⊓⊔
Wir suchen nun nach einer hinreichenden Bedingung dafur, dass eine Funkti-on f : U ⊂ R −→ E in einem Punkt x0 reell–analytisch ist.
Definition 5.10. Sei I ⊂ R ein beliebiges Intervall, x0 ∈ I und f : I −→ En–mal in x0 differenzierbar. Dann heißt
Tn(f, x0)(x) :=n∑
k=0
f (k)(x0)
k!(x− x0)
k
n–tes Taylorpolynom von f in x0.
Sei f : I ⊂ R −→ E unendlich oft differenzierbar in x0 ∈ U . Dann heißt dieReihe
T (f, x0)(x) :=
∞∑
k=0
f (k)(x0)
k!(x− x0)
k
Taylorreihe von f in x0 (formale Reihe).
Bemerkung:(a) Tn(f, x0)(x) ist n–te Partialsumme von T (f, x0)(x).(b) Tn(f, x0) ist n–mal differenzierbar und es gilt
dl
dxlTn(f, x0)(x0) = f (l)(x0), ∀ l ≤ n

204 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Definition 5.11. Sei f : I → E (I ⊂ R Intervall, E Banachraum) n-fachdifferenzierbar. Dann heißt
Rn(f, x0) := f − Tn(f, x0) ∈ C(n)(I, E)
das n-te Restglied von f in x0.
Rn beschreibt also die Abweichung des n-ten Taylorpolynoms von f .
Satz 5.21 Sei f : I ⊂ R −→ E n–mal differenzierbar, x0 ∈ I. Dann gilt
(1)d(l)
(dx)(l)(Rn(f, x0))(x0) = 0, ∀ l ∈ 0, . . . , n,
(2) limx→x0
‖Rn(f, x0)(x)‖|x− x0|n
= 0.
Beweis: Wir beweisen den Satz durch Induktion uber n:Ind.–Anfang: Sei n = 1. Dann definiert T1(f, x0) die Tangente an den Graphengraph(f) der Funktion f in (x0, f(x0)), das heißt, die Behauptung ist erfullt.Ind.–Voraussetzung: Die Behauptung sei fur n richtig.Ind.–Behauptung: Die Behauptung ist fur n+ 1 richtig.Ind.–Beweis: Sei f : I ⊂ R −→ E (n+ 1)–mal differenzierbar. Dann ist
Rn+1 := Rn+1(f, x0) = f − Tn+1(f, x0)
(n+ 1)–mal differenzierbar und R(l)n+1(x0) = 0 fur alle l ∈ 0, . . . , n+ 1. Wir
betrachten nun die Funktion R′n+1 : I −→ E. Offensichtlich ist R′
n+1 n–mal
differenzierbar und es gilt (R′n+1)
(l)(x0) = 0 fur alle l ∈ 0, . . . , n. Folglichist Tn(R
′n+1, x0) ≡ 0 auf I und es gilt nach Induktionsvoraussetzung
limx→x0
‖R′n+1(x)‖
|x− x0|n= 0.
Folglich existiert fur alle ε > 0 ein δ > 0, so dass
‖R′n+1(x)‖
|x− x0|n< ε fur alle x mit 0 < |x− x0| < δ (⋆).
Sei x ∈ I mit 0 < |x − x0| < δ. Dann ist Rn+1 auf [x, x0] bzw. [x0, x] dif-ferenzierbar und nach dem Mittelwertsatz fur Vektorfunktionen existiert einξ ∈ (x, x0) bzw. ξ ∈ (x0, x), so dass gilt
‖Rn+1(x) −Rn+1(x0)︸ ︷︷ ︸=0
‖E ≤ ‖R′n+1(ξ)‖E |x− x0|
(⋆)< ε · |x− x0|n+1.
Wir erhalten ‖Rn+1(x)‖|x−x0|n+1 < ε fur alle x mit 0 < |x− x0| < δ und somit

5.4 Taylorreihen 205
limx→x0
‖Rn+1(f, x0)(x)‖|x− x0|n+1
= 0.
⊓⊔Eigenschaft (2) von Satz 5.21 besagt, dass Tn(f, x0) die Funktion f in derUmgebung von x0 in hoherer als n–ter Ordnung approximiert:
f(x) = Tn(f, x0) + o((x− x0)n) fur x→ x0.
Die Taylorreihe T (f, x0)(x) konvergiert nicht in jedem Fall und wenn sie estut, muss sie nicht notwendigerweise gegen die Funktion f konvergieren:
Beispiel 5.1Die Taylorreihe kann den Konvergenzradius 0 haben. Wir zitieren dazu denSatz von Borel:Seien c0, c1, c2, . . . beliebige reelle Zahlen. Dann existiert eine C∞–Funktionf : R −→ R mit
T (f, 0) =
∞∑
n=0
cnxn.
Diese Reihe ist im Allgemeinen nicht konvergent. Der Beweis dieses Satzeskann z.B. in
”R. Narasimham: Analysis on real and complex manifolds, Nord
Holland, 1968“, nachgelesen werden.
Beispiel 5.2Die Taylorreihe T (f, x0) kann den Konvergenzradius ρ = ∞ haben, aber esgilt T (f, x0)(x) 6= f(x). Sei zum Beispiel
f(x) :=
e−
1x2 fur x > 0
0 fur x ≤ 0.
Dann ist f (k)(0) = 0 fur alle k ∈ N0 und f eine C∞–Funktion (siehe Ubungs-aufgabe 94). Also ist T (f, 0)(x) ≡ 0, aber f(x) 6= 0 fur alle x > 0.
Wir mochten nun untersuchen, wann die Taylorreihe T (f, x0)(x) konvergiertund insbesondere, wann sie gegen f(x) konvergiert.
Satz 5.22 Sei f : I ⊂ R −→ E eine C∞–Funktion und x0 ∈ I. Wenn furx ∈ I gilt
limn→∞
‖Rn(f, x0)(x)‖E = 0,
so konvergiert T (f, x0)(x) und es gilt f(x) = T (f, x0)(x).
Beweis: Fur alle n ≥ 0 ist f(x) = Tn(f, x0)(x) +Rn(f, x0)(x). Folglich gilt
‖f(x) − Tn(f, x0)(x)‖ = ‖Rn(f, x0)(x)‖ n→∞−→ 0,

206 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
und daherlimn→∞
Tn(f, x0)(x) = T (f, x0)(x) = f(x).
⊓⊔Im Fall f : I −→ R kann man das Restglied explizit angeben:
Satz 5.23 Sei I ⊂ R ein beliebiges Intervall, x0 ∈ I, f : I −→ R (n+1)–maldifferenzierbar und Rn(f, x0) := f − Tn(f, x0) das Restglied. Dann existierenϑ, θ ∈ (0, 1), so dass gilt
Rn(f, x0)(x) =f (n+1)(x0 + ϑ(x − x0))
(n+ 1)!(x− x0)
n+1 Lagrange-Form
des Restgliedes
Rn(f, x0)(x) =f (n+1)(x0 + θ(x − x0))
n!(1 − θ)n(x− x0)
n+1 Cauchy-Form
des Restgliedes.
Beweis: Sei x ∈ I fest. Wir definieren eine differenzierbare Funktion g : I −→R durch g(y) := f(x) − Tn(f, y)(x). Dann ist g(x) = 0, g(x0) = Rn(f, x0)(x)und
g′(y) = − d
dy
(n∑
k=0
f (k)(y)
k!(x − y)k
)
= −n∑
k=0
(f (k+1)(y)
k!(x− y)k − f (k)(y)
k!k(x− y)k−1
)
= − (x− y)n
n!f (n+1)(y).
(2) Nach dem Mittelwertsatz der Differentialrechnung existiert ein θ ∈ (0, 1),so dass
g(x) − g(x0) = g′(
=y︷ ︸︸ ︷x0 + θ(x− x0)) · (x − x0)
= − (x− x0)n+1(1 − θ)n
n!f (n+1)(x0 + θ(x− x0)).
Folglich ist
Rn(f, x0)(x) =(1 − θ)n(x− x0)
n+1
n!f (n+1)(x0 + θ(x− x0)).
(1) Wir betrachten zusatzlich die differenzierbare Funktion h : I −→ R, de-finiert durch h(y) := (x − y)n+1. Dann gilt h(x) = 0, h(x0) = (x − x0)
n+1
und

5.4 Taylorreihen 207
h′(y) = −(n+ 1)(x− y)n.
Nach dem verallgemeinerten Mittelwertsatz existiert daher ein ϑ ∈ (0, 1), sodass
(g(x) − g(x0))h′(x0 + ϑ(x− x0)) = (h(x) − h(x0))g
′(x0 + ϑ(x − x0)).
Fur das Restglied folgt
Rn(f, x0)(x) · (n+ 1)(x− x0)n(1 − ϑ)n
= (x− x0)n+1 (x− x0)
n(1 − ϑ)n
n!f (n+1)(x0 + ϑ(x− x0)).
und somit
Rn(f, x0)(x) =(x− x0)
n+1
(n+ 1)!f (n+1)(x0 + ϑ(x− x0)).
⊓⊔Bemerkung: Satz 5.23 ermoglicht die Abschatzung des Fehlers bei der Ap-proximation von f(x) durch Tn(f, x0).
Beispiel 5.1Die Taylorentwicklung von f(x) = ln(1 + x) in x = 0 auf (−1, 1] ist
ln(1 + x) =∞∑n=1
(−1)n+1 · xn
n.
Insbesondere gilt fur die alternierende, harmonische Reihe
∞∑n=1
(−1)n+1
n= ln(2).
Beweis: Die Abbildung f(x) := ln(x + 1) ist auf (−1,∞) beliebig oft diffe-renzierbar und es gilt f(0) = 0 sowie
f (n)(x) =(n− 1)!(−1)n+1
(1 + x)n, ∀n > 0.
Folglich ist T (f, 0)(x) =∞∑n=1
(−1)n+1 · xn
ndie Taylorreihe von f in x0 = 0.
T (f, 0)(x) konvergiert fur alle x ∈ (−1, 1). Zum Beweis betrachten wir dieCauchy–Form des Restgliedes:
∃ θ ∈ (0, 1) : Rn(f, 0)(x) =f (n+1)(θx)
n!(1 − θ)nxn+1 =
(−1)nxn+1
(1 + θx)n+1(1 − θ)n
Ist |x| < 1, so gilt 1−θ1−θ|x| < 1. Folglich erhalten wir

208 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
|Rn(f, 0)(x)| = |x|n+1 (1 − θ)n
|1 + θx|n+1.
Es gilt 1 + θx ≥ 1 − θ|x| > 1 − |x| fur alle |x| < 1 und somit folgt
|Rn(f, 0)(x)| < |x|n+1
1 − |x| ·(
1 − θ
1 − θ|x|
)n<
|x|n+1
1 − |x|n→∞−→ 0, ∀ |x| < 1.
Nach Satz 5.22 konvergiert die Taylorreihe in x0 = 0 fur x ∈ (−1, 1) gegenf(x):
ln(1 + x) =
∞∑
n=1
(−1)n+1
nxn, ∀ |x| < 1.
Nach dem Leibnizkriterium (Satz 3.9) existiert T (f, 0)(1) = 1 − 12 + 1
3 ± . . ..Wenden wir nun den Satz von Abel (Satz 4.31) an, so gilt wegen der Stetigkeitvon ln
limx→1
ln(1 + x) = limx→1
T (f, 0)(x) = T (f, 0)(1).
Somit gilt ln(1 + x) = T (f, 0)(x) auch in x = 1.
Beispiel 5.2Sei α ∈ R. Dann gilt fur x ∈ (−1, 1):
(1 + x)α =∞∑k=0
(αk
)xk.
Die Reihe∞∑k=0
(αk
)xk heißt auch Binomialreihe.
Beweis: (1) f(x) = (1 + x)α ist auf (−1,∞) beliebig oft differenzierbar undes gilt f(0) = 1 sowie
f (k)(x) = α(α− 1) · . . . · (α− k + 1)(1 + x)α−k,
und daherf (k)(0)
k!=α(α − 1) · . . . · (α− k + 1)
k!=
(α
k
)
Die Taylorreihe in x0 = 0 ist damit
T (f, 0)(x) =∞∑
k=0
(α
k
)xk
(2) Wo konvergiert diese Reihe und gegen welchen Wert konvergiert sie? Wirbetrachten dazu die Cauchy–Form des Restgliedes

5.4 Taylorreihen 209
Rn(f, 0)(x) =f (n+1)(θx)
n!(1 − θx)nxn+1
=α(α − 1) · . . . · (α − n)
n!(1 + θx)α−n−1(1 − θ)nxn+1
= α ·(α− 1
n
)(1 − θ)nxn+1(1 + θx)α−n−1
= α ·(α− 1
n
)(1 − θ
1 + θx
)n
︸ ︷︷ ︸<1 fur |x|<1
xn+1(1 + θx)α−1
Daher gilt fur |x| < 1
|Rn(f, 0)(x)| ≤∣∣∣∣(α− 1
n
)xn∣∣∣∣ · |αx(1 + θx)α−1|︸ ︷︷ ︸
=M unabh. von n
.
Die BinomialreiheBα−1(x) =∞∑k=0
(α−1n
)xk ist konvergent fur alle |x| < 1 (siehe
Ubungsaufgabe 62). Folglich gilt (nach Satz 3.2)∣∣∣∣(α− 1
n
)xn∣∣∣∣n→∞−→ 0
und somit |Rn(f, 0)(x)| n→∞−→ 0 ∀ |x| < 1. Nach Satz 5.22 konvergiert dieTaylorreihe fur |x| < 1 gegen f(x) = (1 + x)α, das heißt
(1 + x)α =
∞∑
k=0
(α
k
)xk.
Anwendung auf Extremwertaufgaben
Satz 5.24 (Hinreichende Bedingung fur lokalen Extremwert) Sei f :(a, b) −→ R n–mal differenzierbar, n ≥ 2, x0 ∈ (a, b) und sei
f (1)(x0) = f (2)(x0) = . . . = f (n−1)(x0) = 0, f (n)(x0) 6= 0.
Dann gilt:Ist n ungerade, so hat f in x0 keinen lokalen Extremwert.Ist n gerade und f (n)(x0) > 0, so hat f in x0 ein isoliertes lokales Minimum.Ist n gerade und f (n)(x0) < 0, so hat f in x0 ein isoliertes lokales Maximum.
Beweis: Sei zunachst f (n)(x0) > 0. Es gilt
f (n)(x0) = limx→x0
f (n−1)(x) − f (n−1)(x0)
x− x0= lim
x→x0
f (n−1)(x)
x− x0> 0

210 5 Differentialrechnung fur Funktionen einer reellen Veranderlichen
Deshalb gibt es ein δ > 0, so dass fur alle x mit 0 < |x− x0| < δ gilt
f (n−1)(x)
x− x0> 0.
Daraus folgt
f (n−1)(x) < 0 auf (x0 − δ, x0),
f (n−1)(x) > 0 auf (x0, x0 + δ).
Nach Voraussetzung ist
f(x) = Tn−2(f, x0) +Rn−2(f, x0)
5.23= f(x0) +
1
(n− 1)!f (n−1)(
ξ︷ ︸︸ ︷x0 + θ(x − x0))(x− x0)
n−1 fur ein θ ∈ (0, 1).
Ist n gerade, so ist f (n−1)(ξ)(x − x0)n−1 > 0 fur alle x mit 0 < |x − x0| < δ.
Somit ist f(x) > f(x0) fur alle x mit 0 < |x − x0| < δ und f hat in x0 einlokales Minimum. Ist n nun ungerade, so gilt
f (n−1)(ξ)(x − x0)n−1
> 0 auf (x0, x0 + δ)< 0 auf (x0 − δ, x0).
Folglich hat f in x0 keinen lokalen Extremwert. Analog behandelt manf (n)(x0) < 0. ⊓⊔
Bemerkung:(1) Ist f in x0 ∈ (a, b) ∞-oft differenzierbar und f (n)(x0) = 0 fur alle n, sokann man keine Aussage machen.(2) Sollen die Extrema von f auf [a, b] bestimmt werden, so sind außer denStellen x0 ∈ (a, b) mit f ′(x0) = 0 auch noch die Intervallenden zu untersuchen.

6
Differentialrechnung fur Abbildungen mehrererreeller Variablen
6.1 Ableitung, Richtungsableitung und Gradient einerAbbildung
Sei E ein reeller, normierter Vektorraum, U ⊂ Rn offen und f : U ⊂ Rn −→ Eeine Abbildung.
Erinnerung:f : U ⊂ R −→ E heißt differenzierbar in x0 ∈ U falls der Grenzwert
limh→0
f(x0 + h) − f(x0)
h=: f ′(x0)
existiert. Das lasst sich auch schreiben als
f(x0 + h) − f(x0) = L(h) + o(h) (h → 0)
wobei die lineare Abbildung L : R → E definiert ist durch
L(h) := f ′(x0) · h.
Das motiviert die folgende
Definition 6.1. f : U ⊂ Rn → E heißt in x0 differenzierbar, falls eine lineareAbbildung L : Rn −→ E existiert, so dass
f(x0 + h) − f(x0) = L(h) + o(‖h‖) (h→ 0) (⋆).
Das ist aquivalent zu
limh→0
f(x0 + h) − f(x0) − L(h)
‖h‖ = 0.

212 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Die lineare Abbildung L : Rn −→ E heißt Ableitung von f in x0 (auch:Differential von f in x0, Linearisierung von f in x0).f : U ⊂ Rn → E heißt differenzierbar, falls f in jedem x0 ∈ U differenzierbarist.
Symbol: L =: Df(x0)
Satz 6.1 (1) Ist f : U ⊂ Rn −→ E in x0 ∈ U differenzierbar, so ist dielineare Abbildung L : Rn −→ E aus (⋆) eindeutig bestimmt.(2) Ist f : U ⊂ Rn −→ E in x0 ∈ U differenzierbar, so ist f in x0 stetig.
Beweis: (1) Seien L, L : Rn −→ E linear mit
f(x0 + h) − f(x0) = L(h) + o(‖h‖)= L(h) + o(‖h‖) (h→ 0).
Dann folgt
limh→0
L(h) − L(h)
‖h‖ = 0.
Sei nun x ∈ Rn\0 und t ∈ R. Betrachten wir die Folgen h := tx fur t→ 0+,
so erhalten wir wegen der Linearitat von L und L
0 = limt→0+
L(tx) − L(tx)
|t| · ‖x‖ = limt→0+
|t||t|L(x) − L(x)
‖x‖
=L(x) − L(x)
‖x‖ .
Also ist L(x) = L(x) fur alle x ∈ Rn.
(2) Sei f : U ⊂ Rn −→ E in x0 ∈ U differenzierbar und xn eine gegen x0
konvergente Folge. Dann gilt
‖f(xn)−f(x0)‖E ≤ ‖f(xn) − f(x0) − L(xn − x0)‖E‖xn − x0‖︸ ︷︷ ︸
→0
· ‖xn − x0‖︸ ︷︷ ︸→0
+ ‖L(xn − x0)‖E︸ ︷︷ ︸→0
.
Da jede lineare Abbildung L : Rn −→ E stetig ist, konvergiert f(xn) gegenf(x0). Somit ist f in x0 folgenstetig, also auch stetig. ⊓⊔
Definition 6.2. Sei f : U ⊂ Rn −→ E eine Abbildung, a ∈ Rn. Man sagt: fbesitzt in x0 ∈ U eine Ableitung in Richtung a ∈ Rn, falls folgender Grenzwertexistiert
limt→0
f(x0 + ta) − f(x0)
t, t ∈ R.

6.1 Ableitung, Richtungsableitung und Gradient einer Abbildung 213
∇af(x0) := limt→0
f(x0+ta)−f(x0)t
heißt die Richtungsableitung von f in Richtung
a an der Stelle x0.
f wird also nur entlang der Geraden x0 + ta | t ∈ R betrachtet, das heißt,es gilt ∇af(x0) = h′(0), wobei h die Funktion h(t) := f(x0 + ta) ist.
Satz 6.2 Ist f : U ⊂ Rn −→ E in x0 differenzierbar, so besitzt f in x0 injeder Richtung a die Richtungsableitung und es gilt
Df(x0)(a) = ∇af(x0).
Beweis: Sei f in x0 differenzierbar und L = Df(x0), L : Rn −→ E. Wirbetrachten h = ta. Dann gilt nach Definition der Differenzierbarkeit
limt→0
‖f(x0 + ta) − f(x0) − L(ta)‖E|t| · ‖a‖ = 0.
Da L linear ist, folgt
limt→0
‖f(x0 + ta) − f(x0)
t− L(a)‖ = 0.
Damit existiert
∇af(x0) = limt→0
f(x0 + ta) − f(x0)
t= L(a) = Df(x0)(a).
⊓⊔
Eine Funktion kann aber in einem Punkt x0 eine Richtungsableitung besitzen,ohne in diesem Punkt differenzierbar zu sein:
Beispiel 6.1Die Abbildung f : R2 −→ R1
f(x, y) =
xy2
x2+y4 (x, y) 6= (0, 0)
0 (x, y) = (0, 0),
ist in x0 = (0, 0) nicht stetig (also auch nicht differenzierbar, siehe Beispielin Abschnitt 4.1), obwohl in x0 in jeder Richtung die Richtungsableitung exi-stiert:Sei a = (a1, a2) ∈ R2 ein beliebiger Vektor. Dann gilt
f(x0 + ta) − f(x0)
t=f(ta)
t=
t3a1a22
t(t2a21 + t4a4
2)=
a1a22
a21 + t2a4
2
t→0−→
a22
a1a1 6= 0
0 a1 = 0.
Somit existiert ∇af(x0) fur alle a = (a1, a2) ∈ R2.

214 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Beispiel 6.2Sei L : Rn −→ E eine lineare Abbildung. Dann ist L in jedem Punkt x0 ∈ Rn
differenzierbar und es gilt DL(x0) = L, denn aufgrund der Linearitat von List
limh→0
‖L(x0 + h) − L(x0) − L(h)‖E‖h‖ = lim
h→0
‖0‖‖h‖︸︷︷︸=0
= 0.
Beispiel 6.3Sei f : Rn1 × . . . × Rnk −→ E eine multilineare Abbildung. Dann ist f injedem Punkt x0 differenzierbar und es gilt
Df(x1, . . . , xk)(a1, . . . ,ak) =
k∑
j=i
f(x1, . . . , xj−1,aj , xj+1, . . . , xk).
Beweis: (1) Jede multilineare Abbildung f : Rn1 × . . .×Rnk −→ E ist stetig.Insbesondere existiert ein δ > 0, so dass ‖x1‖, . . . , ‖xk‖ ≤ δ gilt
‖f(x1, . . . , xk)‖E ≤ 1.
Folglich ist fur alle xj ∈ Rnj mit xj 6= 0
‖f(x1, . . . , xk)‖E =‖x1‖δ
· . . . · ‖xk‖δ
∥∥∥∥f(δ x1
‖x1‖, . . . ,
δ xk‖xk‖
)∥∥∥∥
≤ 1
δk‖x1‖ · . . . · ‖xk‖.
Somit existiert fur jede multilineare Abbildung f : Rn1 × . . .×Rnk −→ E eineKonstante C > 0 mit
‖f(x1, . . . , xk)‖E ≤ C · ‖x1‖ · . . . · ‖xk‖.(2) Zur Differenzierbarkeit:
f(x1 + a1, . . . , xk + ak) − f(x1, . . . , xk)
−k∑
j=1
f(x1, . . . , xj−1, aj , xj+1, . . . , xk)
︸ ︷︷ ︸L(a)
=∑
j1<j2
f(x1, . . . , aj1 , . . . , aj2 , . . . , xk)
+∑
j1<j2<j3
f(x1, . . . , aj1 , . . . , aj2 , . . . , aj3 , . . . , xk)
+ . . . + f(a1, . . . , ak).

6.1 Ableitung, Richtungsableitung und Gradient einer Abbildung 215
Folglich gilt wegen (1)
‖f(x1 + a1, . . . , xk + ak) − f(x1, . . . , xk) − L(a)‖≤C
( ∑
j1<j2
‖x1‖ · . . . · ‖aj1‖ · . . . · ‖aj2‖ · . . . · ‖xk‖
+∑
j1<j2<j3
(. . .) + . . .+ ‖a1‖ · . . . · ‖ak‖).
Da ‖aj1‖·‖aj2‖ ≤ 12 (‖aj1‖2+‖aj2‖2) ≤ 1
2‖a‖2 gilt, kann man alle Summandendurch ‖a‖2 abschatzen und es folgt
lima→0
‖f(x + a) − f(x) − L(a)‖E‖a‖ ≤ lim
a→0C(x) · ‖a‖ = 0.
⊓⊔
Satz 6.3 (Rechenregeln fur Ableitungen und Richtungsableitungen)Seien f, h : U ⊂ Rn −→ E, g : U ⊂ Rn −→ R. Dann gilt
(1) Sind f und h in x0 differenzierbar, so ist f + h in x0 differenzierbar undes gilt
D(f + h)(x0) = Df(x0) +Dh(x0).
Existieren ∇af(x0) und ∇ah(x0), so existiert ∇a(f + h)(x0) und es gilt
∇a(f + h)(x0) = ∇af(x0) + ∇ah(x0).
(2) Sind f und g in x0 differenzierbar, so gilt
D(g · f)(x0) = Dg(x0) · f(x0) +Df(x0) · g(x0).
Existieren ∇af(x0) und ∇ag(x0), so gilt
∇a(g · f)(x0) = ∇ag(x0) · f(x0) + ∇af(x0) · g(x0).
(3) Sind f, g : U ⊂ Rn −→ R in x0 differenzierbar und g(x0) 6= 0, so ist fg
ineiner Umgebung von x0 definiert, in x0 differenzierbar und es gilt
D
(f
g
)(x0) =
g(x0)Df(x0) − f(x0)Dg(x0)
g(x0)2.
(4) Kettenregel: Ist f : U ⊂ Rn −→ V ⊂ Rm in x0 differenzierbar und g :V ⊂ Rm −→ E in f(x0) differenzierbar, so ist g f : U ⊂ Rn −→ E in x0
differenzierbar und es gilt
D(g f)(x0) = Dg(f(x0)) Df(x0).

216 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
(5) Sei f = (f1, f2) : U ⊂ Rn −→ E1 × E2. Die Abbildung f ist genau dannin x0 differenzierbar, wenn f1, f2 in x0 differenzierbar sind. Dann gilt
Df(x0) = (Df1(x0), Df2(x0)).
Beweis: Die Aussagen (1)–(3) sowie Aussage (5) folgen direkt aus der Defi-nition.(4) Seien y0 = f(x0), L = Df(x0) und L = Dg(f(x0)). Wir betrachten dieAbbildungen
ϕ(x) := f(x) − f(x0) − L(x− x0), ψ(y) = g(y) − g(y0) − L(y − y0)
sowie(x) := (g f)(x) − (g f)(x0) − (L L)(x− x0).
Nach Voraussetzung gilt
ϕ(x) = o (‖x− x0‖) , furx→ x0 und ψ(y) = o (‖y − y0‖) , fury → y0.
Es ist zu zeigen, dass (x) = o (‖x− x0‖) gilt, d.h. dass limx→x0
‖(x)‖‖x−x0‖ = 0 ist.
Da
(x) = g(f(x)) − g(f(x0)) − L(L(x− x0))
= g(f(x)) − g(y0) − L(f(x) − f(x0) − ϕ(x))
= (g(f(x)) − g(y0) − L(f(x) − y0)) + L(ϕ(x))
= ψ(f(x)) + L(ϕ(x)),
genugt es zu zeigen, dass limx→x0
‖ψ(f(x))‖‖x−x0‖ = lim
x→x0
‖L(ϕ(x))‖‖x−x0‖ = 0 ist.
(a) Da L : Rm −→ E linear ist, gilt
‖L(ϕ(x))‖E ≤ C‖ϕ(x)‖Rm .
Folglich ist
0 ≤ limx→x0
‖L(ϕ(x))‖‖x− x0‖
≤ C · limx→x0
‖ϕ(x)‖‖x− x0‖︸ ︷︷ ︸=0
= 0.
(b) Sei ε > 0 gegeben. Da limy→y0
‖ψ(y)‖‖y−y0‖ = 0 ist, existiert ein δ > 0, so dass aus
‖f(x) − y0‖ < δ folgt, dass ‖ψ(f(x))‖ < ε‖f(x) − y0‖ gilt. Da f in x0 stetigist, existiert ein δ1 > 0, so dass aus ‖x− x0‖ < δ1 folgt, dass ‖f(x)− y0‖ < δ.Fur ‖x− x0‖ < δ1 gilt also
‖ψ(f(x))‖ ≤ ε‖f(x)− y0‖ = ε‖ϕ(x)+L(x− x0)‖ ≤ ε‖ϕ(x)‖+ ε ·CL‖x−x0‖,
und damit

6.1 Ableitung, Richtungsableitung und Gradient einer Abbildung 217
‖ψ(f(x))‖‖x− x0‖
≤ ε‖ϕ(x)‖‖x− x0‖︸ ︷︷ ︸
x→x0→ 0
+ε · CL ∀|x − x0| < δ1.
Daher gilt
0 ≤ limx→x0
‖ψ(f(x))‖‖x− x0‖
≤ ε · CL ∀ε > 0.
Daraus folgt
limx→x0
‖ψ(f(x))‖‖x− x0‖
= 0,
womit die Kettenregel bewiesen ist.(3) f
g: U ⊂ Rn −→ R ist die Verknupfung folgender Abbildungen
ψ : Rn −→ R2 mit ψ(x) = (f(x), g(x)), ϕ : R2 −→ R1 mit ϕ(x, y) =x
y.
(a) Es gilt Dψ(x0) = (Df(x0), Dg(x0)).(b) Sei a = (a1, a2). Dann gilt Dϕ(x, y)(a) = ya1−xa2
y2 , denn
lima→0
|ϕ(x + a1, x+ a2) − ϕ(x, y) − ya1−xa2
y2 |‖a‖ = lim
a→0
|x+a1
y+a2− x
y− ya1−xa2
y2 |‖a‖
= lima→0
1
‖a‖ · y2|y + a2||xy2 + a1y
2 − xy2 − xya2 − y2a1 − ya1a2 + xya2 + xa22|
= lima→0
1
‖a‖ · y2|y + a2||a2| |xa2 − ya1| ≤ lim
a→0
|a2|‖a‖√x2 + y2
y2|y + a2| · ‖a‖= 0.
(c) Nach der Kettenregel gilt
D
(f
g
)(x0) = D(ϕ ψ)(x0) = Dϕ(ψ(x0)) Dψ(x0)
= Dϕ(f(x0), g(x0)) (Df(x0), Dg(x0))
(b)=
g(x0) ·Df(x0) − f(x0) ·Dg(x0)
g(x0)2.
⊓⊔
Wir betrachten eine lineare Abbildung L : Rn −→ R. Aus der Algebra istbekannt, dass ein eindeutig bestimmter Vektor vL ∈ Rn existiert, so dass gilt
L(x) = 〈x, vL〉Rn ∀x ∈ Rn.
Definition 6.3. Sei f : U ⊂ Rn −→ R eine in x0 ∈ U differenzierbareFunktion. Der Gradient von f in x0 ist der Vektor grad f(x0) ∈ Rn, definiertdurch
Df(x0)(a) = ∇af(x0) = 〈grad f(x0),a〉 ∀a ∈ Rn.

218 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Satz 6.4 Sei f : U ⊂ Rn −→ R1 in x0 ∈ Rn differenzierbar. Der Gradientgrad f(x0) gibt diejenige Richtung an, in der die Funktion im Punkt x0 amschnellsten wachst, das heißt die Richtung der großten Richtungsableitung.
Beweis: Sei a ∈ Rn, ‖a‖ = 1. Dann gilt mit der Cauchy-Schwarz-Ungleichung
∇af(x0) = 〈grad f(x0),a〉 ≤ ‖grad f(x0)‖ · ‖a‖ = ‖grad f(x0)‖.
Die Gleichheit gilt genau dann, wenn a = grad f(x0)‖grad f(x0)‖ . ⊓⊔
Die geometrische Bedeutung des Gradienten
Sei f : U ⊂ Rn −→ R differenzierbar, c ∈ Im(f) und
Mc := x ∈ U | f(x) = c ⊂ Rn
Dann heißt Mc Niveauflache von f zum Niveau c.
Beispiel 6.4Wir betrachten die Abbildung
f : U ⊂ R2 −→ R
(x, y) 7→ Hohe des Ortes uber dem Meeresspiegel.
x
y
z
Mc
grad f(x0)
Beispiel 6.5Sei f gegeben durch
f : R3 −→ R
(x, y, z) 7→ x2 + y2 + z2.
Dann ist Mc = (x, y, z) ∈ R | x2 + y2 + z2 = c die Sphare vom Radius√c
in R3.

6.1 Ableitung, Richtungsableitung und Gradient einer Abbildung 219
grad f(p)
p p+ TpMc
r
Mr2
grad f(p)
p p+ TpMc
Definition 6.4. Der Tangentialraum von Mc im Punkt p ∈Mc ist die Mengeder Vektoren
TpMc := X ∈ Rn | ∃ differenzierbare Kurve γ : (−ε, ε) −→Mc ⊂ Rnmit
γ(0) = p, γ′(0) = X.
Die Vektoren X heißen Tangentialvektoren und p+ TpMc heißt Tangential-ebene in p ∈Mc.
Satz 6.5 Sei f : U ⊂ Rn → R differenzierbar und sei p ∈ Mc. Dann gilt furjeden Tangentialvektor X ∈ TpMc
grad f(p)⊥X.
Beweis: Sei γ : (−ε, ε) −→Mc eine differenzierbare Kurve mit γ(0) = p undγ′(0) = X . Da Mc die Niveauflache zum Funktionswert c ist, gilt f(γ(t)) = cfur alle t ∈ (−ε, ε). Nach der Kettenregel ist dann
0 = D(f γ)(0) = Df(γ(0))(γ′(0)) = Df(p)(X) = 〈grad f(p), X〉.
Also ist grad f(p)⊥X . ⊓⊔
Bemerkung: Ist p ∈ U ein regularer Punkt von f , das heißt grad f(p) 6= 0,so gilt
TpMc = (grad f(p))⊥ := X ∈ Rn | 〈grad f(p), X〉 = 0.
Somit ist TpMc ⊂ Rn ein (n − 1)–dimensionaler Unterraum, den man als(grad f(p))⊥ berechnen kann. (Der Beweis folgt spater.)

220 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Satz 6.6 (MWS fur Funktionen mehrerer Veranderlicher) Sei f : U ⊂Rn −→ R differenzierbar. Seien x, y ∈ U und die Strecke xy zwischen x, y ∈ Uliege in U . Dann existiert ein ξ ∈ xy mit ξ 6= x, ξ 6= y, so dass gilt
f(y) − f(x) = 〈grad f(ξ), (y − x)〉Rn = Df(ξ)(y − x).
Beweis: Wir betrachten die Abbildung h : [0, 1] → R, h(t) := f(x+ t(y−x)).Nach Voraussetzung ist h auf [0, 1] differenzierbar. Da-her existiert nach dem Mittelwertsatz von Lagrange einθ ∈ (0, 1) mit
h(1) − h(0) = h′(θ) · (1 − 0) = h′(θ).x
y
U ⊂ Rn
Nach Definition von h und aufgrund der Kettenregel ist dies aquivalent zu
f(y) − f(x) = Df(x+ θ(y − x))(y − x) =: Df(ξ)(y − x).
⊓⊔
Satz 6.7 Sei U ⊂ Rn offen und bogenzusammenhangend und f : U −→ Edifferenzierbar. Dann ist f genau dann konstant auf U , wenn Df(x) = 0 furalle x ∈ U gilt. Ist f reellwertig, so ist Df(x) = 0 aquivalent zu grad f(x) = 0.
Beweis: (1) Wenn die Abbildung f konstant ist folgt sofort
0 = f(x0 + h) − f(x0) = Df(x0)︸ ︷︷ ︸=0, linear
+ o(‖h‖)︸ ︷︷ ︸=0
(2) Sei Df(x) = 0 fur alle x ∈ U und sei x ∈ U fix. Da U offen ist, existiertein ε(x) > 0, so dass gilt K(x, ε(x)) ⊂ U . Fur a ∈ Rn, ‖a‖ = 1 ist
x
a
U
ϕa : (−ε(x), ε(x)) −→ R
t 7→ ϕa(t) = f(x+ ta)
wohldefiniert und differenzierbar, wobei gilt
ϕ′a(t) = Df(x+ ta)(a) ≡ 0 ∀t ∈ (−ε(x), ε(x)).
Folglich ist ϕa auf (−ε(x), ε(x)) konstant. Da aber ϕa(0) = f(x) fur allea ∈ Rn, ‖a‖ = 1 gilt, ist f auf K(x, ε(x)) konstant. Seien nun x, y ∈ Ubeliebig, aber fest. Da U bogenzusammenhangend ist, existiert eine stetige

6.1 Ableitung, Richtungsableitung und Gradient einer Abbildung 221
Abbildung σ : [0, 1] −→ U ⊂ Rn mit σ(0) = x, σ(1) = y. Wir betrachten dieoffene Uberdeckung K(σ(t), ε(σ(t))t∈[0,1] von σ([0, 1]).
x
y
x1
x2
x3
x4
σ
U
Da [0, 1] kompakt und σ stetig ist, ist auch σ([0, 1]) kompakt und es existierteine endliche Teiluberdeckung K(σ(t1), ε1), . . . ,K(σ(tr), εr) von σ([0, 1]). Aufjeder dieser offenen Mengen gilt aber
f|K(σ(tj ),εj)= konst. = f(σ(tj)).
Daraus folgt
f(x) = f(σ(t1)) = f(x1) = f(σ(t2)) = f(x2) = . . . = f(σ(t2)) = f(y),
mit xi ∈ K(σ(ti), εi) ∩K(σ(ti+1), εi+1). Folglich ist f auf U konstant. ⊓⊔
Bemerkung: Sei X ein metrischer Raum und sei A ⊂ X bogenzusam-menhangend. Dann ist nach Kapitel 2, die Menge A auch zusammenhangend.Die Umkehrung gilt im Allgemeinen nicht.Fur U ⊂ Rn offen gilt hingegen ist A genau dann bogenzusammenhangend,wenn A zusammenhangend ist. Satz (6.7) gilt somit fur offene, zusam-menhangende Mengen U ⊂ Rn.

222 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
6.2 Partielle Ableitungen
Wir betrachten zunachst reellwertige Funktionen f : U ⊂ Rn −→ R. Seie = (e1, . . . , en) die Standardbasis des Rn.
Definition 6.5. Die i–te partielle Ableitung von f in u ∈ U ist
∂f
∂xi(u) := (∇ei
f)(u) = Df(u)(ei) = limt→0
f(u+ tei) − f(u)
t∈ R.
Beispiel 6.6Wir betrachten die Abbildung
f : R2 −→ R
(x, y) 7→ f(x, y) = sin(xy2).
Die partiellen Ableitungen sind dann
∂f
∂x(x, y) = y2 cos(xy2) und
∂f
∂y(x, y) = 2xy cos(xy2).
Bemerkung: Sei f : U ⊂ Rn −→ R in u ∈ U differenzierbar. Dann istDf(u) : Rn −→ R eine lineare Abbildung. Diese entspricht bei Fixieren derBasis e in Rn der (1, n)–Matrix
M(Df(u)) := (Df(u)(e1), . . . , Df(u)(en)) =:
(∂f
∂x1(u), . . . ,
∂f
∂x1(u)
).
Ist b =n∑j=1
bjej, so gilt
Df(u)(b) =
n∑
j=1
bjDf(u)(ej) =
(∂f
∂x1(u), . . . ,
∂f
∂xn(u)
) (b1, . . . , bn)
⊤.
Insbesondere gilt fur den Gradienten von f :
grad f(u) =
(∂f
∂x1(u), . . . ,
∂f
∂xn(u)
).
Satz 6.8 (Hinreichende Bedingung fur Differenzierbarkeit) Sei U ⊂Rn offen und f : U −→ R eine Abbildung. Falls alle partiellen Ableitungen∂f∂x1
, . . . , ∂f∂xn
: U ⊂ Rn −→ R existieren und stetig sind, so ist f auf Udifferenzierbar.

6.2 Partielle Ableitungen 223
Beweis: Sei u ∈ U und h ∈ Rn. Dann gilt
f(u+ h) − f(u) = f (u1 + h1, u2, . . . , un) − f (u1, . . . , un)
+f(u1 + h1, u2 + h2, u3, . . . , un) − f(u1 + h1, u2, . . . , un) + . . .
+f (u1 + h1, . . . , un + hn) − f (u1 + h1, . . . , un−1 + hn−1, un) .
Wir betrachten die Funktion g(x) := f(x, u2, . . . , un). Nach Voraussetzungexistiert die Ableitung g′(x) = ∂f
∂x1(x, u2, . . . , un). Wenden wir den Mittel-
wertsatz auf g an, so erhalten wir ein ξ ∈ [u1, u1 + h1], so dass gilt
f (u1 + h1, u2, . . . , un) − f (u1, . . . , un) = h1 ·∂f
∂x1(ξ1, u2, . . . , un) .
Analog existiert fur alle j ∈ 1, . . . , n ein ξj ∈ [uj , uj + hj ], so dass gilt
f (u1 + h1, . . . , uj + hj, uj+1, . . . , un)−f (u1 + h1, . . . , uj−1 + hj−1, uj , . . . , uj)
= hj ·∂f
∂xj(u1 + h1, . . . , uj−1 + hj−1, ξj , uj+1, . . . , un) =: hj ·
∂f
∂xj(cj) .
mit cj ∈ Rn. Folglich gilt
∣∣∣∣∣f(u+ h) − f(u) −n∑j=1
∂f∂xj
(u)hj
∣∣∣∣∣‖h‖ =
∣∣∣∣∣n∑j=1
(∂f∂xj
(cj) − ∂f∂xj
(u))hj
∣∣∣∣∣√h2
1 + . . .+ h2n
CSU≤
√√√√n∑
j=1
(∂f
∂xj(cj) −
∂f
∂xj(u)
)2
.
Fur h = (h1, . . . , hn) −→ 0 konvergiert aber cj gegen u fur alle j ∈ 1, . . . , n.Da alle partiellen Ableitungen stetig sind, erhalten wir ∂f
∂xj(cj)
h→0−→ ∂f∂xj
(u)
und somit
limh→0
∣∣∣∣∣f(u+ h) − f(u) −n∑j=1
∂f∂xj
(u)hj
∣∣∣∣∣‖h‖ = 0.
Folglich ist f differenzierbar und es gilt
Df(u)(h) =
n∑
j=1
∂f
∂xj(u)hj
⊓⊔
Bemerkung: Die Stetigkeit der partiellen Ableitungen ist nicht notwendigfur die Differenzierbarkeit. Sei zum Beispiel

224 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
f : R2 −→ R
(x, y) 7→ f(x, y) =
(x2 + y2) sin( 1√
x2+y2) x2 + y2 > 0
0 x = y = 0.
f ist in (0, 0) differenzierbar, aber ∂f∂x
und ∂f∂y
sind in (0, 0) nicht stetig
(Ubungsaufgabe).
Bemerkung: Sei f : U ⊂ Rn −→ R gegeben und es existiere ∂f∂xi
auf U .
Existiert die partielle Ableitung der Funktion ∂f∂xi
: U ⊂ Rn −→ R nach derj-ten Koordinate, so bezeichnet man sie mit
∂2f
∂xj∂xi:=
∂
∂xj
(∂f
∂xi
).
Auf diese Weise entstehen partielle Ableitungen hoherer Ordnung. Die Funk-tion
∂kf
∂xi1 · · · ∂xik:=
∂
∂xi1
(∂k−1f
∂xi2 · · · ∂xik
): U ⊂ Rn −→ R
heißt (falls sie existiert) k–te partielle Ableitung von f nach den Variablenxi1 , . . . , xik .
Bezeichnung: ∂lf∂xi...∂xi
=: ∂lf
∂xli
.
Beispiel 6.7Wir betrachten die Funktion f : R2 −→ R mit f(x, y) = x3y2. Dann erhaltenwir die partiellen Ableitungen erster und zweiter Ordnung
∂f
∂x= 3x2y2,
∂f
∂y= 2x3y sowie
∂2f
∂y∂x= 6x2y =
∂f
∂x∂y= 6x2y.
Beispiel 6.8Wir betrachten die Funktion f : R2 −→ R, definiert durch
f(x, y) =
xy · x2−y2
x2+y2 (x, y) 6= (0, 0)
0 (x, y) = (0, 0).
Dann konnen wir wieder die partiellen Ableitungen erster und zweiter Ord-nung berechnen und erhalten
∂f
∂x= y
x4 + 4x2y2 − y4
(x2 + y2)2,
∂f
∂y= x
x4 − 4x2y2 − y4
(x2 + y2)2.
In diesem Fall kann man die Reihenfolge der Ableitungen nicht vertauschen,denn

6.2 Partielle Ableitungen 225
∂2f
∂y∂x(0, 0) = lim
h→0
1
hh · −h
4
h4 = −1
aber∂2f
∂x∂y(0, 0) = lim
h→0
1
hh · h
4
h4 = 1.
Wir wollen nun untersuchen, wann man die Reihenfolge der partiellen Ablei-tungen vertauschen kann. Dazu benotigen wir die folgende
Definition 6.6. Eine Funktion f : U ⊂ Rn −→ R heißt von der Klasse Ck,k ∈ N, falls alle partiellen Ableitungen von f der Ordnung ≤ k existieren undstetig sind. Es bezeichne Ck(U,R) := f : U −→ R | f von der Klasse Ck.Offensichtlich gilt fur k ∈ N
C0(U,R) ⊃ Ck−1(U,R) ⊃ Ck(U,R).
Satz 6.9 (Satz von Schwarz) Sei f ∈ Ck(U,R). Dann sind alle partiellenAbleitungen der Ordnung ≤ k unabhangig von der Reihenfolge der Differen-tiation. Insbesondere gilt fur f ∈ C2(U,R)
∂2f
∂xi∂xj=
∂2f
∂xj∂xi.
Beweis: Es genugt zu zeigen, dass fur jede C2–Funktion f : U ⊂ R2 −→ R
gilt∂2f
∂x1∂x2=
∂2f
∂x2∂x1.
Auf Behauptung die fur partielle Ableitungen hoherer Ordnung schließt mandann induktiv.Wir betrachten u = (u1, u2) ∈ U . Seien h = (h1, h2) 6= 0 so gewahlt, dass gilt
[u1 − h1, u1 + h1] × [u2 − h2, u2 + h2] ⊂ U.
Nun betrachten wir ϕ(x) := f(x, u2 + h2) − f(x, u2). Dann ist die Funktionϕ auf [u1, u1 + h1] differenzierbar. Nach dem Mittelwertsatz existiert ein ξ1 ∈[u1, u1 + h1], so dass gilt
ϕ(u1 + h1) − ϕ(u1) = h1 · ϕ′(ξ1).
Sei nun
F (h1, h2) := f(u1 + h1, u2 + h2)− f(u1 + h1, u2)− f(u1, u2 + h2) + f(u1, u2).
Dann gilt

226 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
F (h1, h2) = ϕ(u1 + h1) − ϕ(u1) = h1 · ϕ′(ξ1)
= h1
(∂f
∂x1(ξ1, u2 + h2) −
∂f
∂x1(ξ1, u2)
)
︸ ︷︷ ︸=:(⋆)
.
Nach dem Mittelwertsatz angewendet auf den Ausdruck (⋆) an, das heißt auf∂f∂x1
(ξ1, ·), existiert ein ξ2 ∈ [u2, u2 + h], so dass
F (h1, h2) = h1 · h2 ·∂2f
∂x2∂x1(ξ1, ξ2) (⋆⋆).
Verfahrt man analog mit der Funktion ψ(x) := f(u1 + h1, x) − f(u1, x), soexistieren nach dem Mittelwertsatz ein ξ1 ∈ [u1, u1+h1] und ein ξ2 ∈ [u2, u2+h2], so dass
F (h1, h2) = h1 · h2 ·∂2f
∂x1∂x2(ξ1, ξ2) (⋆ ⋆ ⋆).
Da h1, h2 6= 0 gilt, folgt mit (⋆⋆) und (⋆ ⋆ ⋆)
∂2f
∂x1∂x2
(ξ1, ξ2
)=
∂2f
∂x2∂x1(ξ1, ξ2) ,
wobei ξ1, ξ1 ∈ [u1, u1 + h1] und ξ2, ξ2 ∈ [u2, u2 + h2] sind. Da ∂2f∂x1∂x2
und∂2f
∂x2∂x1in (u1, u2) nach Voraussetzung stetig sind, folgt fur h = (h1, h2) −→ 0
∂2f
∂x1∂x2(u) =
∂2f
∂x2∂x1(u).
⊓⊔Bemerkung: Oft wird die folgende Bezeichnung benutzt
fx :=∂f
∂x, fxy :=
∂
∂y
(∂f
∂x
)=
∂2f
∂x∂y.
Der Satz von Schwarz zeigt, dass die Reihenfolge der Indizes fur f ∈ Ck egalist.
Satz 6.10 Sei f : U ⊂ Rn −→ Rm in u ∈ U differenzierbar und f =(f1, . . . , fm). Dann ist die Matrix Df(u) : Rn −→ Rm in den Standardba-sen e, e des Rn bzw. Rm gegeben durch
M(Df(u)) =
∂f1∂x1
(u) . . . ∂f1∂xn
(u)
: :∂fm
∂x1(u) . . . ∂fm
∂xn(u)
,

6.2 Partielle Ableitungen 227
das heißt, fur b =n∑1biei ∈ Rn gilt
Df(u)(b) =
∂f1∂x1
(u) . . . ∂f1∂xn
(u)
: :∂fm
∂x1(u) . . . ∂fm
∂xn(u)
b1:bn
=:
(∂f
∂x1(u), . . . ,
∂f
∂xn(u)
)
︸ ︷︷ ︸Spaltenvektoren
b1:bn
.
Beweis: Ist e = (e1, . . . , en) die Standardbasis des Rm und e = (e1, . . . , en)die Standardbasis des Rn und identifiziert man
a =
m∑
j=1
aj ej mit
a1
...am
sowie b =
n∑
i=1
biei mit
b1...bn
so gilt
M(Df(u)) = (〈ej , Df(u)(ei)〉Rm)j∈1,...,m (Zeilen), i∈1,...,n (Spalten).
Da Df(u) = Df1(u)e1 + . . .+Dfm(u)em und Dfk(u)(ei) = ∂fk
∂xi(u), gilt
M(Df(u)) =
(∂fj∂xi
(u)
)
j∈1,...,m, i∈1,...,n.
⊓⊔Satz 6.11 (Kettenregel fur partielle Ableitungen)Seien g1, . . . , gm : U ⊂ Rn −→ R und f : Rm −→ R differenzierbar. SeiF (x) := f (g1(x), . . . , gm(x)) : U ⊂ Rn −→ R. Dann gilt
∂F
∂xi(x) =
m∑
j=1
∂f
∂yj(g1(x), . . . , gm(x)) · ∂gj
∂xi(x).
Beweis: Wir betrachten φ : U −→ Rm, definiert durch φ(x) = (g1(x), . . . , gm(x)).Dann gilt F = f φ und DF (x) = Df(φ(x)) Dφ(x). Gehen wir zu denMatrizen uber, die diesen linearen Abbildungen entsprechen, so erhalten wireinerseits
M(DF (x)) = M(Df(φ(x))) M(Dφ(x)),
mit
M(Df(φ(x))) =
(∂f
∂y1(g1(x), . . . , gm(x)) , . . . ,
∂f
∂ym(g1(x), . . . , gm(x))
),
M(Dφ(x)) =
∂g1∂x1
(x) . . . ∂g1∂xn
(x)
: :∂gm
∂x1(x) . . . ∂gm
∂xn(x)
.

228 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Andererseits gilt
M(DF (x)) =
(∂F
∂x1(x), . . . ,
∂F
∂xn(x)
).
Vergleicht man die i–ten Spalten, so erhalt man
∂F
∂xi(x) =
n∑
j=1
∂f
∂yj(g1(x), . . . , gm(x)) · ∂gj
∂xi(x).
⊓⊔
Folgerung 6.1 Sei U ⊂ Rn offen. Sind g1, . . . , gm ∈ Ck(U,R) und f ∈Ck(Rm,R), so gilt F := f(g1(·), . . . , gm(·)) ∈ Ck(U,R).
Folgerung 6.2 Sei f : U ⊂ Rn −→ Rm aus C(1)(U,Rm). Dann ist
Df : U ⊂ Rn −→ L(Rn,Rm)
x 7→ Df(x)
stetig.
6.3 Die Taylorentwicklung und Extrema fur Funktionenmehrerer reeller Veranderlicher
Definition 6.7. Ein Multiindex α = (α1, . . . , αn) ist ein n–Tupel von naturli-chen Zahlen αj ∈ N0.|α| := α1 + . . . αn heißt die Ordnung des Multiindex und wir definierenα! := (α1!) · . . . · (αn!). Fur y = (y1, . . . , yn) ∈ Rn bezeichne
yα := yα11 · . . . · yαn
n .
Fur eine Funktion f : U ⊂ Rn −→ R bezeichne (sofern existent)
∂|α|f
∂xα:=
∂|α|f
(∂x1)α1 · · · (∂xn)αn.
Satz 6.12 (Taylorformel) Sei U ⊂ Rn offen, f ∈ Ck(U,R). Seien x, y ∈ Uzwei Punkte, so dass die Strecke xy in U liegt. Dann existiert ein ξ ∈ xy, sodass gilt
f(y) =∑
|α|≤k−1
1
α!
∂|α|f
∂xα(x)(y − x)α +
∑
|α|=k
1
α!
∂kf
∂xα(ξ)(y − x)α.

6.3 Die Taylorentwicklung und Extrema fur Funktionen mehrerer reeller Veranderlicher 229
Beweis: Wir betrachten die Funktion g : [0, 1] −→ R mit g(t) := f(x +t(y− x)). Dann ist g ∈ Ck und nach der Taylorformel fur Funktionen in einerVariablen gilt
g(1) =k−1∑
r=0
1
r!g(r)(0) +
1
k!g(k)(t0)
︸ ︷︷ ︸Restglied
fur ein t0 ∈ (0, 1).
Dabei ist
g(0)(0) = g(0) = f(x)
g(1)(0) =
n∑
i=1
∂f
∂xi(x) · (yi − xi) =
∑
|α|=1
∂αf
∂xα(x) · (y − x)α
g(2)(0) =
n∑
i,j=1
∂2f
∂xi∂xj(x) · (yi − xi) · (yj − xj) (∗)
=∑
|α|=2
∂2f
∂xα(x)(y − x)α · 2!
α!(∗∗).
Der Faktor 2!α! in (∗∗) ist notwendig, da in (∗) ∂2f
∂xi∂xj= ∂2f
∂xj∂xizweimal auftritt,
wahrend ∂2f
∂x2i
in (∗∗) nur einmal vorhanden ist. Analog erhalt man durch
mehrfaches Anwenden der Kettenregel und etwas Kombinatorik
g(j)(0) =∑
|α|=j
j!
α!
∂|α|f
∂xα(x) · (y − x)α.
Damit folgt
f(y) =∑
|α|≤k−1
1
α!
∂|α|f
∂xα(x) · (y − x)α +
∑
|α|=k
1
α!
∂kf
∂xα(ξ) · (y − x)α
mit ξ := x+ t0(y − x). ⊓⊔
Definition 6.8. Sei U ⊂ Rn offen, f : U ⊂ Rn −→ R differenzierbar.
(1) f nimmt in x0 ∈ U ein lokales Minimum an, falls ein ε > 0 existiert, sodass f(x) ≥ f(x0) fur alle x mit ‖x− x0‖ < ε.
(2) f hat in x0 ∈ U ein lokales Maximum, falls ein ε > 0 existiert, so dassf(x) ≤ f(x0) fur alle x mit ‖x− x0‖ < ε.
(3) x0 ∈ U heißt kritischer Punkt von f , falls Df(x0) = 0, das heißt, es gilt∂f∂xi
(x0) = 0 fur alle i ∈ 1, . . . , n.

230 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Definition 6.9. Sei f : U ⊂ Rn −→ R von der Klasse C2 und sei x0 ∈ U einkritischer Punkt von f . Die symmetrische Bilinearform Hfx0 : Rn×Rn −→ R
Hfx0(a,b) :=
n∑
j,i=1
∂2f
∂xi∂xj(x0) ai · bj
heißt Hessesche Form von f in x0.
Bezeichnung: Sei A : Rn × Rn −→ R eine symmetrische Bilinearform,
A(a,b) =n∑i,j
Aijaibj und sei EW (Aij) die Menge der Eigenwerte von (Aij).
Dann vereinbaren wir die folgenden Bezeichnungen:
(1) A > 0 :⇔ A positiv definit ⇔ fur alle a 6= 0 ist A(a,a) > 0⇔ fur alle λ ∈ EW (Aij) : λ > 0,
(2) A < 0 :⇔ A negativ definit ⇔ fur alle a 6= 0 ist A(a,a) < 0⇔ fur alle λ ∈ EW (Aij) : λ < 0,
(3) A ≥ 0 :⇔ A positiv semidefinit ⇔ fur alle a ist A(a,a) ≥ 0⇔ fur alle λ ∈ EW (Aij) : λ ≥ 0,
(4) A ≤ 0 :⇔ A negativ semidefinit ⇔ fur alle a ist A(a,a) ≤ 0⇔ fur alle λ ∈ EW (Aij) : λ ≤ 0.
Satz 6.13 Sei U ⊂ Rn offen, f ∈ C3(U,R).
(1) Hat f in x0 ∈ U ein lokales Maximum (lokales Minimum), so ist x0 kriti-scher Punkt von f und Hfx0 ist negativ semidefinit (positiv semidefinit).
(2) Ist x0 ∈ U ein kritischer Punkt von f und Hfx0 negativ definit (positivdefinit), so hat f in x0 ein isoliertes lokales Maximum (isoliertes lokalesMinimum).
Beweis: (1) f habe in x0 ∈ U ein lokales Maximum. Sei a ∈ Rn. Dann hatg : (−ε, ε) −→ R mit g(t) := f(x0+ta) ein lokales Maximum in t = 0. Folglichgilt wegen g(1)(0) = 0 und g(2)(0) ≤ 0
〈grad f(x0),a〉Rn =
n∑
i=1
∂f
∂xi(0) · ai = 0
und
Hfx0(a,a) =
n∑
i,j=1
∂2f
∂xi∂yj(0)aiaj ≥ 0.
Da a beliebig ist, folgt daraus grad f(x0) = 0 und Hfx0 ≤ 0. Fur ein lokalesMinimum lauft der Beweis analog.

6.3 Die Taylorentwicklung und Extrema fur Funktionen mehrerer reeller Veranderlicher 231
(2) Sei x0 ∈ U ein kritischer Punkt und Hfx0 < 0. Sei ε > 0, so dassK(x0, ε) ⊂ U . Da f ∈ C3(U,R) ist, gilt fur y ∈ K(x0, ε) die Taylorformel
f(y) = f(x0) +1
2
n∑
i,j=1
∂2f
∂xi∂xj(x0) · (yi − x0i
) · (yj − x0j)
+∑
|α|=3
1
α!
∂3f
∂xα(ξ) · (y − x0)
α
= f(x0) +1
2Hfx0(y − x0, y − x0) +
∑
|α|=3
1
α!
∂3f
∂xα(ξ) · (y − x0)
α,
wobei ξ ∈ x0y. Sei λ1 der großte Eigenwert von Hfx0 (λ1 < 0). Dann gilt
Hfx0(y − x0, y − x0) ≤ λ1‖y − x0‖2
und folglich
f(y) − f(x0) ≤1
2λ1‖y − x0‖2 +
∑
|α|=3
1
α!
∂3f
∂xα(ξ) · (y − x0)
α.
Sei 0 < µ < ε und 0 < ‖y − x0‖ < µ. Fur jeden Multiindex α mit |α| = 3 gilt
|(y − x0)α|
‖y − x0‖2≤ µ.
Damit folgt
2 · f(y) − f(x0)
‖y − x0‖2≤ λ1 + 2
∑
|α|=3
1
α!
∂3f
∂xα(ξ) · (y − x0)
α
‖y − x0‖2
︸ ︷︷ ︸|...|< |λ1|
µ·µ
. (∗)
Sei nun 0 < µ < ε so gewahlt, dass
µ <|λ1|
2∑
|α|=3
sup
∣∣∣∣∂3f
∂xα(z)
∣∣∣∣ | z ∈ K(x0, ε)
︸ ︷︷ ︸existiert, da ∂3f
∂xα stetigist
gilt. Wegen (∗) gilt fur 0 < ‖y − x0‖ < µ
2 · f(y) − f(x0)
‖y − x0‖2< λ1︸︷︷︸
<0
+|λ1| = 0
und somit

232 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
f(y) < f(x0), ∀ y ∈ K(x0, µ)\x0.Folglich hat f in x0 ein lokales isoliertes Maximum. Analog beweist man denFall Df(x0) = 0, Hfx0 > 0. ⊓⊔
Bemerkung (1) Sei A ∈MR(2, 2) eine symmetrische 2×2–Matrix. Dann gilt
(a) A > 0 ⇔ det(A) > 0 und A11 > 0,(b)A < 0 ⇔ det(A) > 0 und A11 < 0.
(2) Sei A ∈MR(n, n) und definiere A(v) durch
A(v) :=
A11 . . . A1v
......
Av1 . . . Avv
.
Dann gilt
(a’)A > 0 ⇔ det(A(v)) > 0 ∀v ∈ 1, . . . , n,(b’)A < 0 ⇔ (−1)vdet(A(v)) > 0 ∀v ∈ 1, . . . , n.
Beispiel 6.9Wir betrachten die Funktion f : R3 −→ R mit
f(x, y, z) := 35 − 6x+ 2z + x2 − 2xy + 2y2 + 2yz + 3z2.
In welchen Punkten hat f lokale Extrema? Die Bedingung Df(x, y, z) = 0 istnur im Punkt
(x, y, z) = (8, 5,−2) =: x0
erfullt. In diesem Punkt ist die Hesse-Matrix
Hfx0 =
2 −2 0−2 4 20 2 6
.
Da det(Hfx0) = 16 > 0 ist, hat f in x0 ein lokales Minimum.
6.4 Der Satz uber die Umkehrabbildung
Definition 6.10. Seien U, V ⊂ Rn offene Teilmengen. Eine Abbildung f : U −→ Vheißt Ck–Diffeomorphismus (k ≥ 1), wenn gilt1) f ist bijektiv,2) f und f−1 sind Ck–Abbildungen.

6.4 Der Satz uber die Umkehrabbildung 233
Bemerkung: Ein Diffeomorphismus heißt auch Koordinatentransformationund vereinfacht oft die Berechnung von Integralen oder das Losen von Diffe-rentialgleichungen.
Beispiel 1: Polarkoordinaten in der Ebe-ne
f : (0,∞) × (0, 2π) −→ R2\[0,∞) × 0(r, ϕ) 7→ (r cosϕ, r sinϕ)
(r, ϕ) heißen die Polarkoordinaten von(x, y). -
6
R
R
(x, y) = f(r, ϕ)
x
y
ϕ
r
•
Beispiel 2: Zylinderkoordinaten im R3
f : (0,∞) × (0, 2π)︸ ︷︷ ︸Polarkoordinaten
×R −→ (R2\[0,∞) × 0)× R
(r, ϕ, z) 7→ (r cosϕ, r sinϕ, z)
-
6
y
z
+
x
•
• Pr
z
ϕ
Zylinderkoordinaten
Beispiel 3: Kugelkoordinaten im R3
f : (0,∞) × (−π2,π
2) × (0, 2π) −→ R3\([0,∞) × 0 × R)
(r, u, v) 7→ (r cos v cosu, r sin v cosu, r sinu)

234 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
-
6
y
z
+
x
•
•P
vu
r
Kugelkoordinaten
Satz 6.14 Ist f : U ⊂ Rn −→ V ⊂ Rn ein Diffeomorphismus, so ist fur allex0 ∈ U die Abbildung Df(x0) : Rn −→ Rn ein Isomorphismus und es gilt
(Df(x0))−1 = (Df−1)(f(x0)).
Beweis: Da f f−1 = idV und f−1 f = idU gilt, folgt nach der Kettenregel
Df(f−1(y0))Df−1(y0) = D(id)(y0) = idRn
undDf−1(f(x0))Df(x0) = D(id)(x0) = idRn .
Ist nun y0 = f(x0), so folgt Df−1(y0) = (Df(x0))−1. ⊓⊔
Bemerkung: Fur Funktionen in R gilt: Ist U ⊂ R offen und zusam-menhangend, f : U −→ R eine C1–Abbildung und f ′(x) 6= 0 fur alle x ∈ U ,so ist V = f(U) ⊂ R offen und zusammenhangend, f : U −→ f(U) bijektivund ein Diffeomorphismus. In hoheren Dimensionen gilt dies nicht!
Beispiel 6.10Wir betrachten die Abbildung f : R2 −→ R2 mit f(x, y) := (ex cos y, ex sin y).Dann ist f eine C1–Abbildung und wir konnen det(Df(x, y)) berechnen:
det(Df(x, y)) = det
(ex cos y −ex sin yex sin y ex cos y
)= e2x > 0.
Folglich ist Df(x, y) : R2 −→ R2 ein Isomorphismus fur alle (x, y) ∈ R2. Aberf ist nicht injektiv. Somit existiert f−1 nicht global sondern nur lokal.

6.4 Der Satz uber die Umkehrabbildung 235
Wir wollen nun untersuchen, unter welchen Bedingungen eine C1–Abbildungf : Rn −→ Rn eine lokale Umkehrfunktion besitzt.
Lemma 6.11. Sei f : U ⊂ Rn −→ Rn eine C1–Abbildung, W ⊂ U ein Wurfelund es gelte ∣∣∣∣
∂fi∂xj
(u)
∣∣∣∣ ≤M ∀u ∈ W.
Dann folgt
‖f(b)− f(a)‖ ≤ n32M‖b− a‖ ≤ n2M‖b− a‖ ∀a, b ∈ W.
Beweis: Es gilt
fi(b) − fi(a) =
n∑
j=1
(fi(b1, . . . , bj, aj+1, . . . , an) − fi(b1, . . . , bj−1, aj , . . . , an)).
Wenden wir den Mittelwertsatz von Lagrange auf die Funktion fi in der j–tenVariablen an, so erhalten wir ein ξj ∈ [aj , bj] mit
fi(b) − fi(a) =
n∑
j=1
(bj − aj)∂fi∂xj
(b1, . . . , bj−1, ξj , aj+1, . . . , an)︸ ︷︷ ︸∈W
.
Daraus folgt
|fi(b) − fi(a)| ≤n∑
j=1
|bj − aj | ·M ≤ n ·M · ‖b− a‖
und damit
‖f(b) − f(a)‖ =
(n∑
i=1
|fi(b) − fi(a)|2) 1
2
≤√n · n2 ·M2 · ‖b− a‖2
= n32M‖b− a‖.
⊓⊔
Satz 6.15 (Satz uber die Umkehrabbildung) Sei U ⊂ Rn offen, f :U −→ Rn von der Klasse Ck, k ≥ 1, x0 ∈ U und es gelte det(Df(x0)) 6= 0,das heißt Df(x0) ist Isomorphismus. Dann existieren offene Umgebungen Uvon x0 und offene Umgebungen V von f(x0), so dass gilt
(1) V = f(U),(2) f|U : U −→ V ist bijektiv,
(3) (f|U )−1 : V −→ U ist Ck–Abbildung.

236 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Beweis: (1) OBdA kann man Df(x0) = id annehmen: Betrachten wir dielineare, bijektive Abbildung L := Df(x0)
−1 : Rn −→ Rn. Gilt der Satz furL f : U −→ Rn, so gilt er auch fur f (lineare Abbildungen sind C∞) und esgilt
D(L f)(x0) = DL(f(x0)) Df(x0) = L Df(x0) = id.
(2) Sei f : U −→ Rn eine C1–Abbildung und Df(x0) = id, das heißt∂fi
∂xj(x0) = δij . Wir wahlen einen Wurfel K mit x0 ∈ Int(K) ⊂ K ⊂ U ,
so dass gilt
(i) det(Df(x)) 6= 0 ∀x ∈ K,
(ii)∣∣∣ ∂fi
∂xj(x) − ∂fi
∂xj(x0)
∣∣∣ < 12n2 ∀x ∈ K, ∀i, j ∈ 1, . . . , n.
Im Folgenden zeigen wir, dass f auf K injektiv ist. Wir betrachten dazu dieAbbildung g(x) = f(x) − x. Dann ist g eine C1–Abbildung und es folgt
∣∣∣∣∂gi∂xj
(x)
∣∣∣∣ =
∣∣∣∣∂fi∂xj
(x) − δij
∣∣∣∣ =
∣∣∣∣∂fi∂xj
(x) − ∂fi∂xj
(x0)
∣∣∣∣ <1
2n2∀x ∈ K.
Aus dem Lemma 6.11 folgt dann
‖g(b)− g(a)‖ < n2 · 1
2n2· ‖b− a‖ =
1
2‖b− a‖ ∀a, b ∈ K.
Mit Hilfe der Dreiecksungleichung erhalten wir dann
‖b− a‖− ‖f(b)− f(a)‖ ≤ ‖f(b)− b− (f(a)− a)‖ = ‖g(b)− g(a)‖ ≤ 1
2‖b− a‖.
oder kurz‖b− a‖ ≤ 2‖f(b)− f(a)‖ ∀a, b ∈ K. (∗)
Somit ist f auf K injektiv. Da x0 ∈ Int(K) ist, gilt insbesondere, dassf(x0) 6∈ f(∂K).(3) Definition der Umgebung V (f(x0)): Da K kompakt ist, ist auch ∂K kom-pakt. Aus der Stetigkeit von f folgt dann, dass f(∂K) kompakt ist. Wegenf(x0) 6∈ f(∂K) folgt
inf‖f(x0) − f(x)‖ | x ∈ ∂K = d > 0.
Wir definieren nun die Umgebung V (f(x0)) := y ∈ Rn | ‖y − f(x0)‖ < d2.
Damit erhalten wir
‖y − f(x0)‖ < ‖y − f(x)‖ ∀ y ∈ V , x ∈ ∂K. (∗∗)
U
x0
x
K
f
f(K)
f(∂K)
Vf (x0)
f(x)
d

6.4 Der Satz uber die Umkehrabbildung 237
(4) Definition der Umgebung U(x0): Die Behauptung ist, dass fur alle y ∈ Vgenau ein x ∈ Int(K) mit f(x) = y existiert. Die Eindeutigkeit wurde bereitsin (2) gezeigt. Sei nun y ∈ V gegeben. Wir betrachten die Abbildung
gy : K −→ R.
x 7→ gy(x) = ‖y − f(x)‖2 = 〈y − f(x), y − f(x)〉
Da K kompakt und gy stetig ist, nimmt gy auf K das absolute Minimum an.Da nach (∗∗) gy(x0) < gy(x) fur alle x ∈ ∂K gilt, liegt das absolute Minimumnicht auf ∂K. Das heißt, es existiert ein u0 ∈ Int(K), in dem gy sein absolutesMinimum annimmt. Wir zeigen nun, dass f(u0) = y gilt. Es ist
0 = Dgy(u0) = −2Df(u0)(y − f(u0)) = −2〈y − f(u0), grad f(u0)︸ ︷︷ ︸6=0
〉.
Da u0 ∈ Int(K) und Df(u0) ein Isomorphismus ist, folgt y = f(u0). Wirsetzen nun U := (Int(K)) ∩ f−1(V ). Dann ist U eine offene Umgebung vonx0 und f|U : U −→ V ist bijektiv.
(5) Wir zeigen nun, dass (f|U )−1 : V −→ U stetig ist. Aus (∗) erhalten wirdie Ungleichung
‖f−1(x) − f−1(y)‖ ≤ 2‖x− y‖ ∀x, y ∈ V .
Folglich ist f−1 auf V Lipschitz-stetig, also stetig.
(6) Es ist zu zeigen, dass f−1 : V −→ U differenzierbar ist. Sei dazuy = f(x) ∈ V , x ∈ U und Lx := Df(x). Es genugt zu zeigen, dass f−1 in ydifferenzierbar ist und dass
Df−1(y) = L−1x = (Df(x))−1.
Da f in x differenzierbar ist, gilt fur x+ h ∈ U
f(x+ h) − f(x) = Lx(h) + o(h)
wobei limh→0
‖o(h)‖‖h‖ = 0. Daraus folgt
L−1x (f(x+ h) − f(x)) = h+ L−1
x (o(h)).
Sei y1 = f(x+ h). Dann ist f−1(y1) − f−1(y) = x+ h− x = h und es folgt
L−1x (y1 − y) = h+ L−1
x (o(h)).
Daraus erhalt man f−1(y1) − f−1(y) − L−1x (y1 − y) = −L−1
x (o(h)). Da L−1x
linear ist, gilt ‖L−1x (z)‖ ≤ C‖z‖ fur alle z. Folglich ist

238 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
limy1→y
‖f−1(y1) − f−1(y) − L−1x (y1 − y)‖
‖y1 − y‖
≤ limy1→y
C‖o(h)‖‖y1 − y‖ = C lim
h→0
‖o(h)‖‖f(x+ h) − f(x)‖
= C limh→0
‖o(h)‖‖h‖ · ‖h‖
‖f(x+ h) − f(x)‖︸ ︷︷ ︸≤2 nach (∗)
≤ 2C limh→0
‖o(h)‖‖h‖ = 0.
Somit ist f−1 differenzierbar und es gilt Df−1(f(x)) = (Df(x))−1.
(7) Es ist zu zeigen, dass wenn f ∈ Ck gilt, auch f−1 ∈ Ck ist. Sei dazu
f = (f1, . . . , fn) : U −→ V , f−1 = (g1, . . . , gn) : V −→ U .
Dann gilt fi(g1(y), . . . , gn(y)) = yi. Mit der Kettenregel erhalten wir wegen
n∑
k=1
∂fi∂xk
(f−1(y)) · ∂gk∂yj
(y) = δij
dass (∂gk∂yj
(y)
)
kj
=
(∂fi∂xk
(f−1(y)
)−1
ik
gilt. Aus der Formel fur die inverse Matrix folgt dann, dass ∂gk
∂yjfur alle i, k ∈
1, . . . , n eine rationale Funktion Qkj von ∂fi
∂xk(f−1(y)) ist. Da f−1 stetig
und Qkj ∈ C∞ ist, folgt aus f ∈ C1, dass f−1 ∈ C1 ist. Ist f ∈ C2, sofolgt f−1 ∈ C2, denn in der zweiten Ableitung von f−1 sind nur Ableitungenbis zur Ordnung 2 von f und Ableitungen der Ordnung 1 von f−1 enhalten(usw). ⊓⊔
Folgerung 6.3 Sei U ⊂ Rn offen, f : U −→ Rn eine C1–Abbildung und furalle x ∈ U sei Df(x) ein Isomorphismus. Dann gilt(1) f(U) ist offen.(2) Ist f zusatzlich injektiv, so ist f : U −→ f(U) ein Diffeomorphismus.
Beweis: (1) Nach dem Umkehrsatz existiert fur alle x ∈ U eine UmgebungUx, so dass f(Ux) offen ist. Somit ist auch f(U) =
⋃x∈U
f(Ux) offen.
(2) Ist f injektiv, so ist f : U −→ f(U) bijektiv. Folglich ist f|Ux: Ux −→
f(Ux) ein Diffeomorphismus fur alle Ux ⊂ U und daher f : U −→ f(U) einDiffeomorphismus. ⊓⊔

6.5 Implizite Funktionen 239
6.5 Implizite Funktionen
1) Wir betrachten eine “Flache” im R3, die durch eine Gleichung gegeben ist:
M = (x, y, z) ∈ R3 | F (x, y, z) = 0,
wie z.B. die Sphare (x2+y2+z2−1 = 0), das Paraboloid (x2
a2 + y2
b2−z = 0) oder
das Hyperboloid (x2
a2 + y2
b2− z2
c2− 1 = 0). Sei p ∈M . Kann man M lokal um p
als Graph einer Funktion darstellen ? Existiert z.B. eine Funktion z = z(x, y)mit F (x, y, z(x, y)) = 0, d.h. graph(z) = M (lokal) ? Falls ja, kann man mitHilfe des Gradienten dieser Funktion leicht den Tangentialraum TpM an denPunkt p bestimmen. (−→ Ubungsaufgabe)
p
gradF (p)
graph z
2) Wir betrachten das lineare Gleichungssystem
f1(x) = a11x1 + . . .+ a1nxn = 0...
......
fm(x) = am1x1 + . . .+ amnxn = 0.
(∗)
Das lasst sich auch schreiben als Ax⊤ = 0 wobei
A =
a11 . . . a1n
......
am1 . . . amn.
und x⊤ der transponierte Vektor zu x = (x1, x2, . . . , xn) ∈ Rn ist. Sind dieSpalten (a1, . . . , an) von A linear unabhangig, so ist das Gleichungssystem mitden Variablen x1, . . . , xm auflosbar, d.h., es existieren lineare Funktionen
x1 = x1(xm+1, . . . , xn),...
...xm = xm(xm+1, . . . , xn),
die (∗) losen.
Verallgemeinerung auf beliebige Gleichungssysteme
Gegeben sei eine beliebige Ck-Funktion f : Rn −→ Rm, m ≤ n. Wir betrach-ten das Gleichungssystem

240 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
f1(x1, . . . , xn) = 0,
f2(x1, . . . , xn) = 0,
...
fm(x1, . . . , xn) = 0,
d.h. (x1, . . . , xn) = 0. Kann man dieses Gleichungssystem nach einer odermehreren Variablen auflosen ? D.h.,
1) Existiert eine Abbildung ϕ : Rn−m −→ Rm, so dass
f(x1, . . . , xn−m, ϕ1(x1, . . . , xn−m)︸ ︷︷ ︸=:y1
, . . . , ϕm(x1, . . . , xn−m)︸ ︷︷ ︸=:ym
) = 0
gilt?2) Ist ϕ eindeutig bestimmt?3) Falls f differenzierbar ist und ϕ existiert, ist dann auch ϕ differenzierbar?
Beispiel 6.11Wir betrachten die Abbildung
f : R2 −→ R
(x, y) 7→ f(x, y) = x2 + y2 − 1x
f(x, y) = 0
Die Gleichung fur ϕ(x) lautet dann x2 + ϕ(x)2 − 1 = 0, das heißtϕ(x) = ±
√1 − x2. Somit ist ϕ nicht eindeutig bestimmt und nur lokal auf
[ − 1, 1] definiert.
Beispiel 6.12Wir betrachten die Abbildung
f : Rn −→ R
(x1, . . . , xn) 7→ f(x1, . . . , xn) = x21 + . . .+ x2
n−1
Rn−1
xn
f ≡ 0
Dann existiert kein ϕ mit f(x1, . . . , xn−1︸ ︷︷ ︸x
, ϕ(x)) = 0.

6.5 Implizite Funktionen 241
Beispiel 6.13Wir betrachten die Abbildung
f : R2 −→ R
(x, y) 7→ f(x, y) = x− y3
Dann lost ϕ(x) = 3√x die Gleichung f(x, ϕ(x)) = 0, aber ϕ ist in x = 0 nicht
differenzierbar.
Satz 6.16 (Satz uber implizite Funktionen) Sei U ⊂ Rn(x1,...,xn)
× Rm(y1,...,ym)
offen und f : U −→ Rm eine C1–Abbildung. Sei (a, b) ∈ U ein Punkt mit1) f(a, b) = 0, d.h., es existiert eine Losung (a, b) von f(x, y) = 0 und2)
det
∂f1∂y1
∂f1∂y2
. . . ∂f1∂ym
......
...∂fm
∂y1
∂fm
∂y2. . . ∂fm
∂ym
(a, b) =: det
(∂f⊤
∂y1(a, b) ∂f⊤
∂y2(a, b) . . . ∂f
⊤
∂ym(a, b)
)6= 0.
Dann existieren eine offene, zusammenhangende Umgebung A(a) ⊂ Rn von aund eine eindeutig bestimmte Abbildung ϕ : A −→ Rm mit
i) f(x, ϕ(x)) = 0 undii) ϕ(a) = b,d.h., in einer Umgebung des Punktes (a, b) istdie Losungsmenge der Gleichung f(x, y) = 0der Graph der Funktion ϕ.
a
bS1
Weiterhin gilt:iii) ϕ : A −→ Rm ist differenzierbar.iv) Falls f ∈ Ck ist, so ist auch ϕ ∈ Ck und
(∂ϕl∂xi
(x)
)
︸ ︷︷ ︸∈Rm×n
= −(∂fk∂yl
(x, ϕ(x))
)−1
︸ ︷︷ ︸∈Rm×m
(∂fk∂xi
(x, ϕ(x))
)
︸ ︷︷ ︸∈Rm×n
.
Beweis: 1) Existenz von ϕ (Auflosung der Gleichung f(x, y) = 0 nach(y1, . . . , ym):Wir definieren F : U ⊂ Rn × Rm −→ Rn × Rm durch F (x, y) = (x, f(x, y)).Dann ist F eine C1-Funktion und nach Vorausetzung ist

242 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
det(DF (a, b)) = det
1n 0∂f1∂y1
. . . ∂f1∂ym
(∗)...
...∂fm
∂y1. . . ∂fm
∂ym
(a, b) 6= 0
Nach dem Satz uber die Umkehrabbildung (Satz 6.15) existieren eine offe-ne Umgebung U(a, b) ⊂ U und eine offene Umgebung V ⊂ Rn × Rm vonF (a, b) = (a, 0), so dass F|U : U −→ V ein C1-Diffeomorphismus ist.
Da (a, 0) ∈ V ist, konnen wir eine zusammenhangende offene UmgebungA(a) ⊂ Rn und einen offenen Wurfel (−ε, ε)m ⊂ Rm wahlen, so dassV ′ := A× (−ε, ε)m ⊂ V ist.Sei nun U ′ := F−1(V ′) ⊂ U ⊂ Rn × Rm. Dann ist F|U′ : U ′ −→ V ′ ein
Ck-Diffeomorphismus. Wir betrachten F−1 : V ′ −→ U ′ ⊂ Rn × Rm mitF−1 =: (F1
↑Rn
, F2↑
Rm
). Dann erhalten wir
(x, y) = FF−1(x, y) = F (F1(x, y), F2(x, y))Def.= (F1(x, y), f(F1(x, y), F2(x, y))).
Damit gilt
F1(x, y) = x
f(x, F2(x, y)) = y, ∀ (x, y) ∈ V ′. (∗)
Weiterhin gilt F (a, b) = (a, f(a, b)) = (a, 0) und daher
(a, b) = F−1(a, 0) = (F1(a, 0), F2(a, 0)) = (a, F2(a, 0)).
Also istb = F2(a, 0). (∗∗)
Wir definieren nun ϕ : A ⊂ Rn −→ Rm durch ϕ(x) = F2(x, 0). Dann istϕ(a) = b wegen (∗∗) und f(x, ϕ(x)) = 0 wegen (∗) fur alle x ∈ A.
2) Eindeutigkeit von ϕ.Angenommen ϕ : A ⊂ Rn −→ Rm ware eine weitere Funktion mit ϕ(a) = bund f(x, ϕ(x)) = 0 fur alle x ∈ A. Dann ware einerseits
F (x, ϕ(x))Def.= (x, f(x, ϕ(x))) = (x, 0),
aber andererseits ware auch
F (x, ϕ(x))Def.= (x, f(x, ϕ(x))) = (x, 0).
Da F auf U injektiv ist, folgt ϕ(x) = ϕ(x) fur alle x ∈ A.

6.5 Implizite Funktionen 243
3) Wenn f eine Ck-Funktion ist, dann ist nach Definition auch F eine Ck-Funktion und daher nach dem Umkehrsatz auch F−1 Ck. Nach Definition istdann auch F2 C
k und wegen ϕ(x) = F2(x, 0) ist auch ϕ eine Ck-Funktion. Daf mindestens C1 ist, ist ϕ auf jeden Fall differenzierbar.
4) Zur Formel fur die partiellen Ableitungen:Wir wenden die Kettenregel fur partielle Ableitungen an auf
f(x, ϕ(x)) = f(x1, . . . , xn, ϕ1(x1, . . . , xn), . . . , ϕm(x1, . . . , xn)) = 0
und erhalten
0 =∂
∂xi(fk(x, ϕ(x)))
=
n∑
j=1
∂fk∂xj
(x, ϕ(x)) · ∂xj∂xi︸︷︷︸=δij
+
m∑
l=1
∂fk∂yl
(x, ϕ(x)) · ∂ϕl∂xi
(x)
=∂fk∂xi
(x, ϕ(x)) +
m∑
l=1
∂fk∂yl
(x, ϕ(x)) · ∂ϕl∂xi
(x),
oder in Matrixschreibweise
−(∂fk∂xi
(x, ϕ(x))
)=
(∂fk∂yl
(x, ϕ(x))
)(∂ϕl∂xi
(x)
).
Daher gilt fur die Ableitungen von ϕ
(∂ϕl∂xi
(x)
)= −
(∂fk∂yl
(x, ϕ(x))
)−1
(∂fk∂xi
(x, ϕ(x))
).
⊓⊔
Beispiel 6.14Wir betrachten die Funktion f : R2 −→ R mit f(x, y) = x2 + y2 − 1. Dann
erhalten wir (x, y) ∈ R2 | f(x, y) = 0 = S1 und ∂f∂y
= 2y. Man kann den
Satz uber implizite Funktionen auf (x0, y0) ∈ S1 und y0 6= 0 anwenden.
(1) Ist y0 > 0, so existiert ϕ : (−1, 1) −→ R, ϕ(x) :=√
1 − x2, so dassf(x, ϕ(x)) = 0 und ϕ(x0) = y0.
(2) Ist y0 < 0, so existiert ϕ : (−1, 1) −→ R, ϕ(x) = −√
1 − x2, so dass wie in(1) f(x, ϕ(x)) = 0 und g(x0) = y0.

244 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Anwendung
Erinnerung:Der Tangentialraum TpM an einen Punkt p der Flache M ⊂ Rn ist folgen-dermaßen definiert:
TpM := v ∈ Rn | ∃ differenzierbare Kurve γ : (−ε, ε) →M mit γ(0) = p
und γ′(0) = v.
Satz 6.17 Sei F : U ⊂ Rn → R eine differenzierbare Funktion und Mc =x ∈ U | F (x) = c ⊂ Rn eine Niveauflache von F . Ist gradF (p) 6= 0 fur allep ∈Mc, so gilt fur den Tangentialraum
TpMc = gradF (p)⊤ = v ∈ Rn | 〈v, gradF (p)〉 = 0
fur alle p ∈Mc.
Beweis: Sei p ∈Mc. Nach Voraussetzung ist gradF (p) 6= 0. Deshalb existierteine Koordinate xj mit ∂F
∂xj(p) 6= 0. OBdA sei dies die n-te Koordinate, es sei
also xj = xn (sonst kann man die Koordinaten umsortieren). Wir definierenp durch p = (p, pn) und x durch x = (x, xn). Nach dem Satz uber impliziteFunktionen kann man F (x) = c nach der Variable xn auflosen, d.h., es exi-stieren eine Umgebung A(p) und eine differenzierbare Funktion ϕ : A(p) → R
mitF (x1, . . . , xn−1, ϕ(x1, . . . , xn−1)) = c, ∀ x ∈ A(p).
Daher existiert eine Umgebung Mc(p) ⊂Mc mit
Mc(p) = graph(ϕ) = (x, ϕ(x)) | x ∈ A
und aufgrund der lokalen Definition des Tangentialraums durch Kurven gilt
TpMc = TpMcUA= (v, vn) | v ∈ Rn−1, vn = 〈v, gradϕ〉
= (v1, . . . , vn−1,
n−1∑
i=1
vi ·∂ϕ
∂xi(p))
︸ ︷︷ ︸vn
.
Wir werden nun zeigen, dass v = (v1, . . . , vn) genau dann in TpMc enthaltenist, wenn 〈v, gradF (p)〉 = 0 ist. Wie im Beweis von Satz 6.16 folgt aus derKettenregel
∂F
∂xi(p) · 1 +
∂F
∂xn(p) · ∂ϕ
∂xi(p) = 0,
bzw.

6.5 Implizite Funktionen 245
∂
∂xi(p) = − 1
∂F∂xn
(p)· ∂F∂xi
(p)
fur alle i = 1, . . . , n− 1. Eingesetzt in den obigen Ausdruck fur vn ergibt sich
vn =
n−1∑
i=1
vi ·∂ϕ
∂xi(p) = − 1
∂F∂xn
(p)·n−1∑
i=1
vi ·∂F
∂xi(p).
Daraus folgt
0 = vn · 1∂F∂xn
(p)+
n−1∑
i=1
vi ·∂F
∂xi(p) = 〈v, gradF (p)〉.
Also giltTpMc = v ∈ Rn | 〈v, gradF (p)〉 = 0.
⊓⊔Beispiel 6.15Kann man die Gleichung
f(x, y, z) = x2 + y2 + z2 + 3xyz + x3z2 + yz4 = 1
in einer Umgebung von p = (0, 0, 1) nach z auflosen ? Wie sieht grad z(0, 0)aus ? Genauer: Existiert eine differenzierbare Funktion z(x, y) mit
z(0, 0) = 1,
f(x, y, z(x, y)) = 1, (∗)und falls ja, was ist grad z(0, 0) = ( ∂z
∂x(0, 0), ∂z
∂y) ?
1) Wir berechnen die partielle Ableitung von f nach z
∂f
∂z(x, y, z) = 2z + 3xy + 2zx3 + 4yz3
Also ist ∂f∂z
(0, 0, 1) = 2 6= 0. Da auch f(0, 0, 1) = 1 gilt, existiert also eineFunktion z : U(0, 0) ⊂ R2 → R mit (∗).
2) Mit Hilfe der in Satz 6.16,iv) angegebenen Formel folgt fur den Gradientenvon z an der Stelle (x, y) = (0, 0)
grad z(0, 0) =
(∂z
∂x(0, 0),
∂z
∂y(0, 0)
)
= −(∂f
∂z(0, 0, 1)
)−1
·(∂f
∂x(0, 0, 1),
∂f
∂y(0, 0, 1)
)
= −1
2
(2x+ 3xy + 3x2z, 2y2 + 3xz + z4
)(0, 0, 1)
=
(0,−1
2
)

246 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
3) Wir betrachten nun die Hyperflache M = f(x, y, z) = 1.grad f =
(2x+ 3yz + 3x2z2, 2y + 3xz + z4, 2z + 3xy + 2x3z + 4yz3
).
Also istgrad f(0, 0, 1) = (0, 1, 2).
Daher ist grad f(x, y, z) 6= 0 in einer Umgebung von p = (0, 0, 1) und derTangentialraum TpM an M im Punkt p ist die Menge aller Vektoren v ∈ R3,die orthogonal zu grad f(0, 0, 1) sind:
TpM := v ∈ R3 | 〈v, (0, 1, 2)〉 = 0
= span
100
,
02−1
Es gibt aber auch eine andere Moglichkeit, TpM zu bestimmen: Wie wir gese-hen haben, ist M in einer Umgebung des Punktes p = (0, 0, 1) als Graph derFunktion z : U(0, 0) ⊂ R2 → R darstellbar. Der Tangentialraum TpM ist nuncharakterisiert durch
TpM = (v1, v2, v3) | v1, v2 ∈ R, v3 = 〈(v1v2
), grad z(0, 0)〉
= (v1, v2,−1
2v2) | v1, v2 ∈ R
= span
100
,
02−1
.
6.6 Extrema unter Nebenbedingungen
Sei f : U ⊂ Rn −→ R eine Funktion. Oft benotigt man das Extremwertver-halten von f , wenn die Variablen einer Nebenbedingung unterworfen sind. Seizum Beispiel K ⊂ U ⊂ R3 ein Gegenstand und f : U → R eine Temperatur-verteilung. Dann konnen wir untersuchen, welches die großte Temperatur ist,die auf K angenommen wird und in welchem Punkt aus K dieser Maximal-wert angenommen wird, dh. wir suchen maxf(x) | x ∈ K.
Die Nebenbedingungen seien in der Form eines Gleichungssystems
g1(x1, . . . , xn) = 0
...
gm(x1, . . . , xn) = 0
gegeben, d.h. die Nebenbedingungen seien charakterisiert durch die Nullstel-lenmenge der Funktion g = (g1, . . . , gm) : U ⊂ Rn −→ Rm.

6.6 Extrema unter Nebenbedingungen 247
Definition 6.12. f nimmt in einem Punkt p ∈ Ng := x ∈ U | g(x) = 0 einlokales Maximum (Minimum) unter der Nebenbedingung g(x) = 0 an, fallsein ε > 0 existiert, so dass
f(x) ≤ f(p) (f(x) ≥ f(x0)) ∀x ∈ K(p, ε) ∩ Ng.
Erinnerung: Hat f : U ⊂ Rn −→ R, f ∈ C1, ein lokales Extremum in p ∈ U ,so ist grad f(p) = 0.
Satz 6.18 (Notwendige Bed. fur Extrema unter Nebenbedingungen)Seien f : U ⊂ Rn −→ R und g : U ⊂ Rn −→ Rm, m ≤ n, C1-Funktionen undp ∈ U mit
rang (Dg(p)) = rang
(∂gj∂xi
(p)
)= m.
Hat f in p ein lokales Extremum unter der Nebenbedingung g(x) = 0, dannexistieren Konstanten λ1, . . . , λm ∈ R, so dass
grad f(p) = λ1grad g1(p) + . . .+ λmgrad gm(p)
gilt. Die (λ1, . . . , λm) heißen Lagrange–Multiplikatoren.
Beweis: Da rg(Dg(p)) = m ist, konnen wir OBdA voraussetzen, dass
det
∂g1∂x1
(p) . . . ∂g1∂xm
(p)...
...∂gm
∂x1(p) . . . ∂gm
∂xm(p)
6= 0,
ist. (Anderenfalls ordnen wir die (x1, . . . , xn) so um, dass die ersten m Spaltenvon Dg(p) linear unabhangig sind.) Dann hat das lineare Gleichungssystem
m∑
v=1
λv ·∂gv∂xi
(p) =∂f
∂xi(p), i = 1, . . . ,m, (1)
genau eine Losung (λ1, . . . , λm) ∈ Rm. Dies ist ein Teil (er enthalt die erstenm der insgesamt n Komponenten von grad f) der gesuchten Gleichung
grad f(p) =
m∑
v=1
λv · grad gv(p) (∗).
Es ist noch zu zeigen, dass (1) auch fur die Komponenten i = m + 1, . . . , nerfullt ist.Wir definieren p =: (p, p′) mit p = (p1, . . . , pm) und p′ = (pm+1, . . . , pn) undanalog x =: (x, x′) mit x = (x1, . . . , xm) und x′ = (xm+1, . . . , xn). Nach demSatz uber implizite Funktionen kann man

248 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
g(x1, . . . , xm︸ ︷︷ ︸x
, xm+1, . . . , xn︸ ︷︷ ︸x′
) = 0
in einer Umgebung A(p′) nach x1, . . . , xm auflosen, d.h., es existieren C1-Funktionen
ϕ1, . . . , ϕm =: ϕ : A(p′) −→ Rm
mit
g(ϕ1(xm+1, . . . , xn), . . . , ϕm(xm+1, . . . , xn), xm+1, . . . , xn) = 0
und ϕ(p′) = p. Dann gilt nach der Kettenregel fur ∂∂xµ
0 =
m∑
i=1
∂gvxi
(p) · ∂ϕi∂xµ
(p′) +∂gvxµ
(p),
bzw.∂gvxµ
(p) = −m∑
i=1
∂gvxi
(p) · ∂ϕi∂xµ
(p′). (2)
Wir betrachten nun die folgende Funktion F : A(p′) → R
F (xm+1, . . . , xn) := f(ϕ1(x′), . . . , ϕm(x′), xm+1, . . . , xn︸ ︷︷ ︸
x′
).
Nach Voraussetzung hat f in p = (ϕ(p′), p′) ein lokales Extremum und daher Fin p′ ein lokales Extremum. Folglich ist gradF (p′) = 0 und mit der Kettenregelfolgt
0 =∂F
∂xµ(p′) =
m∑
i=1
∂f
∂xi(p) · ∂ϕi
∂xµ(p′) +
∂f
∂xµ(p) = 0, ∀µ = m+ 1, . . . , n.
bzw.
∂f
∂xµ(p) = −
m∑
i=1
∂f
∂xi(p) · ∂ϕi
∂xµ(p′), ∀µ = m+ 1, . . . , n. (3)
Mit (1) und (2) nacheinander in (3) eingesetzt, ergibt sich
∂f
∂xµ(p) = −
m∑
i=1
m∑
v=1
λv ·∂gv∂xi
(p) · ∂ϕi∂xµ
(p′)
=
m∑
v=1
λv ·∂gv∂xµ
(p) ∀µ = m+ 1, . . . , n.
Die letzte Gleichung und Gleichung (1) zusammen liefern
grad f(p) =
m∑
v=1
λv · grad gv(p).
⊓⊔

6.6 Extrema unter Nebenbedingungen 249
Anwendung
Wir betrachten die C1-Funktion g : U ⊂ Rn → Rm, m ≤ n und einen Punktp ∈ Ng = x ∈ U | g(x) = 0, so dass rang(Dg(p)) = m ist. Sei ein lokalerExtremwert von f : U ⊂ Rn −→ R unter der Nebenbedingung g(x) = 0, soexistiert ein (λ1, . . . , λm) ∈ Rm, so dass
(p1, . . . , pn︸ ︷︷ ︸p
, λ1, . . . , λm) ∈ Rn × Rm
eine Losung des folgenden Gleichungssystems ist
∂f
∂xj(p) =
m∑
v=1
λv ·∂gv∂xj
(p) ∀ j = 1, . . . , n
g1(p) = 0,
...
gm(p) = 0.
Dieses Gleichungssystem mit n + m–Gleichungen und n + m–Unbekanntenheißt Lagrangesches Gleichungssystem. Betrachtet man die Funktion
F (x1, . . . , xn, λ1, . . . , λm) := f(x) −m∑
i=1
λigi(x),
dann ist das Lagrangesche Gleichungssystem aquivalent zum Gleichungssy-stem
∂F
∂xi(p, λ) = 0 ∀i = 1, . . . , n,
∂F
∂λj(p, λ) = 0, ∀j = 1, . . . ,m. (∗).
Man findet also die lokalen Extrema von f unter der Nebenbedingung g(x) = 0unter den Losungen des Lagrangeschen Gleichungssystems (∗).
Aber nicht jede Losung (p, λ) des Lagrangeschen Gleichungssystems liefert einlokales Extremum p von f unter der Nebenbedingung g(x) = 0. Man muss furjede Losung (p, λ) des Lagrangeschen Gleichungssystems extra untersuchen,ob p tatsachlich ein lokales Extremum ist.
Ist die Nullstellenmenge Ng = x ∈ U | g(x) = 0 kompakt, so existierenmax f|Ng
und min f|Ng. Somit mussen zwei der Losungen des Lagrangeschen
Gleichungssystems diese Punkte liefern.

250 6 Differentialrechnung fur Abbildungen mehrerer reeller Variablen
Beispiel 6.16Wir bestimmen Maxima und Minima von f(x, y) = x · y auf S1 = (x, y) ∈R2 | x2 + y2 = 1.1) Die Nebenbedingung lautet also g(x, y) = x2 + y2 − 1 = 0 und wir erhalten
Dg =
(∂g
∂x,∂g
∂y
)= (2x, 2y) 6= 0 auf S1.
Daraus folgt rang(Dg)(p) = 1 fur alle p ∈ S1.
2) Nun bestimmen wir die Losungen des Lagrangeschen Gleichungssystemsfur die Funktion
F (x, y, λ) := f(x, y) − λg(x, y) = x · y − λx2 − λy2 + λ.
Das Lagrangesche Gleichungssystem lautet daher
∂F
∂x= y − 2λx = 0
∂F
∂y= x− 2λy = 0,
∂F
∂λ= −x2 − y2 + 1 = 0.
Wir multiplizieren die erste Gleichung mit x, die zweite Gleichung mit y undsubtrahieren die zweite der entstehenden Gleichungen von der ersten. Dasergibt λx2 = λy2. λ muss ungleich 0 sein, denn sonst ware (x, y) = (0, 0) 6∈ S1.Somit gilt x2 = y2 und daher |x| = |y|. Mit der Nebenbedingung g(x, y) = 0
ergibt sich 2x2 = 2y2 = 1. Folglich ist x = ±√
12 und y = ±
√12 . Damit sind
die einzig moglichen Punkte fur die lokalen Extrema
(x0, y0) ∈(
1√2,
1√2
),
(1√2,− 1√
2
),
(− 1√
2,
1√2
),
(− 1√
2,− 1√
2
)
mit den Funktionswerten
f(x, y) =
12 (x, y) = ±
(1√2, 1√
2
)
− 12 (x, y) = ±
(1√2,− 1√
2
).
Da S1 kompakt ist, existieren max(f|S1) und min(f|S1
). Somit ist
max(f|S1) =
1
2und wird angenommen in
(1√2,
1√2
),
(− 1√
2,− 1√
2
),
min(f|S1) = −1
2und wird angenommen in
(− 1√
2,
1√2
),
(1√2,− 1√
2
).
Weitere lokale Extremwerte treten nicht auf.

6.6 Extrema unter Nebenbedingungen 251
Beispiel 6.17Wir bestimmen den Punkt auf der Ebene E = (x, y, z) ∈ R3 | z = x + y,der den kleinsten Abstand zum Punkt P = (1, 0, 0) hat. Dazu betrachten wirdas Quadrat der Abstandsfunktion
f(x, y, z) := d((x, y, z), P )2 = ‖(x− 1, y, z)‖2 = (x− 1)2 + y2 + z2
mit der Nebenbedingung g(x, y, z) = z − (x+ y) = 0. Es gilt
(Dg)(x, y, z) =
(∂g
∂x,∂g
∂y,∂g
∂z
)= (−1,−1, 1) 6= 0 ∀ (x, y, z) ∈ E.
Wir definieren die Abbildung
F (x, y, z) := f(x, y, z) − λg(x, y) = f(x, y, z)− λ(z − (x+ y))
= (x − 1)2 + y2 + z2 − λz + λx+ λy.
Dann ergibt sich als Lagrangesches Gleichungssystem
(1)∂F
∂x= 2(x− 1) + λ = 0
(2)∂F
∂y= 2y + λ = 0
(3)∂F
∂z= 2z − λ = 0
(4)∂F
∂λ= x+ y − z = 0.
Aus den Gleichungen (2) und (3) folgt y+ z = 0. Daher folgt aus der Neben-bedingung (4), dass y = −x
2 gelten muss und daher λ = x, woraus x = 23 folgt.
Die einzige Losung des Lagrangeschen Gleichungssystems ist somit (x, y, z, λ) =(23 ,− 1
3 ,13 ,
23
). Da E abgeschlossen ist, existiert ein PunktQ ∈ E mit d(P,Q) =
d(P,E). Wir haben diesen Punkt Q = (23 ,− 1
3 ,13 ) gefunden.
Bemerkung: In diesem Beispiel ist die Nebenbedingung schon in explizi-ter Form gegeben als z = x + y. Dadurch konnte man hier auch einfachervorgehen und die Nebenbedingung z = x + y gleich in die zu minimierendeFunktion f(x, y, z) = (x− 1)2 + y2 + z2 einsetzen und dann das Minimum derentstehenden Funktion
h(x, y) := f(x, y, x+ y) = (x− 1)2 + y2 + (x+ y)2
untersuchen.


7
Integralrechnung fur Funktionen einer reellenVariablen
Die Integralrechnung wird durch zwei verschiedene Problemstellungen moti-viert:
1. Die Umkehrung der Differentialrechnung: Gegeben sei f : I ⊂ R −→ Eund gesucht wird F : I ⊂ R −→ E, so dass F ′ = f gilt. Wie kann manzum Beispiel den Bewegungsablauf F eines Massepunktes ermitteln, wennman dessen Geschwindigkeit f kennt?
2. Wie kann man den Flacheninhalt von Teilmengen von Rn definieren undberechnen?
7.1 Stammfunktionen und ihre Berechnung
Definition 7.1. Sei E ein normierter Vektorraum, I ⊂ R ein beliebiges In-tervall und f : I ⊂ R −→ E eine Abbildung. Eine Abbildung F : I ⊂ R −→ Eheißt Stammfunktion von f auf I, falls F differenzierbar ist und F ′ = f gilt.
Satz 7.1 Sei F : I ⊂ R −→ E eine Stammfunktion von f : I ⊂ R −→ E.Dann ist F : I ⊂ R −→ E genau dann eine Stammfunktion von f , wenn einkonstanter Vektor c ∈ E existiert, so dass gilt F = F + c.
Beweis: (⇐) Ist F = F + c, so ist F differenzierbar und es gilt F ′ = F ′ = f .(⇒) Sei F eine Stammfunktion von f . Dann ist F − F differenzierbar und(F − F )′ = 0. Mit dem Mittelwertsatz folgt dann, dass F − F eine konstanteFunktion ist. ⊓⊔
Definition 7.2.
S(I;E) := f : I ⊂ R −→ E | f besitzt eine Stammfunktion auf I.

254 7 Integralrechnung fur Funktionen einer reellen Variablen
Beispiel 7.1Die Existenz einer Stammfunktion ist vom Intervall I abhangig. Betrachtenwir zum Beispiel die Funktion
f : R −→ R
x 7→ f(x) =
1x
x 6= 0
0 x = 0.
Auf R existiert keine Stammfunktion: Angenommen, F sei eine Stammfunk-tion von f auf R. Da (lnx)′ = 1
xgilt, wurde fur F folgen
F|(0,∞)= lnx+ c, F|(−∞,0)
= ln(−x) + c, c, c ∈ R.
Ware F auf ganz R definiert, so musste F in x = 0 stetig sein, aber lnxkonvergiert fur x gegen 0 gegen −∞.Aber fur jedes Intervall I mit 0 6= I ist F (x) = ln |x|+ c eine Stammfunktionvon f auf I.
Bemerkung: Spater (siehe Satz 7.10) werden wir zeigen, dass jede stetigeFunktion f : [a, b] −→ E, wobei E ein Banachraum ist, eine Stammfunktionhat, das heißt C([a, b];E) ⊂ S([a, b];E).
Definition 7.3. Sei f ∈ S(I;E). Unter dem unbestimmten Integral von fauf I versteht man die Menge aller Stammfunktionen von f .
Bezeichnung:
∫f(x) dx := F : I ⊂ R −→ E | F Stammfunktion von f auf I
f heißt der Integrand und x die Integrationsvariable. Ist F eine Stammfunk-tion von f , so benutzt man die Schreibweise
∫f(x) dx = F (x) + c auf I.
Beispiel 7.2Ist f : I ⊂ R −→ E differenzierbar, so besitzt f ′ eine Stammfunktion, dasheißt f ′ ∈ S(I;E) und es gilt
∫f ′(x) dx = f(x) + c auf I.

7.1 Stammfunktionen und ihre Berechnung 255
Wichtige Grundintegrale (Beweis durch Ableiten der Stammfunktion):
(1)
∫xα dx =
1
α+ 1xα+1 + c. Dies gilt fur α ∈ N auf R, α ∈ −N\−1 auf
(−∞, 0) sowie (0,∞) und α ∈ R\Z auf (0,∞),
(2)
∫1
xdx = ln |x| + c auf (0,∞) und (−∞, 0),
(3)
∫ex dx = ex + c auf R,
(4)
∫cosxdx = sinx+ c,
∫sinxdx = − cosx+ c auf R,
(5)
∫coshxdx = sinhx+ c,
∫sinhxdx = coshx+ c auf R,
(6)
∫1
1 + x2dx = arctanx+ c auf R,
(7)
∫1
1 − x2dx =
1
2ln
∣∣∣∣1 + x
1 − x
∣∣∣∣+ c =
artanh(x) + c auf (−1, 1)
arcoth(x) + c auf (−∞,−1) ∪ (1,∞),
(8)
∫1√
1 + x2dx = arsinh(x) + c auf R,
(9)
∫1√
1 − x2dx = arcsinx+ c auf (−1, 1),
(10)
∫1√
x2 − 1dx = ln |x+
√x2 − 1| + c =
arcosh(x) + c auf (1,∞)
−arcosh(−x) + c auf (−∞,−1)
(11)
∫e(a+ib)x dx =
e(a+ib)x
(a+ ib)+ c auf R fur a+ ib 6= 0,
(12)
∫dx
(x− (a+ ib))= ln |x− (a+ ib)| + i · arctan
(x− a
b
)+ c fur b 6= 0,
(13)
∫dx
(x− (a+ ib))n= − 1
n− 1· 1
(x− (a+ ib))n−1+ c fur n ∈ N, n > 1.
Satz 7.2 (Rechenregeln fur unbestimmte Integrale)(1) Sei f, g ∈ S(I;E), µ, λ ∈ R. Dann ist auch λf + µg ∈ S(I;E) und es gilt
∫(λf(x) + µg(x)) dx = λ
∫f(x) dx+ µ
∫g(x) dx.
(2) Partielle Integration: Seien f, g : I ⊂ R −→ E differenzierbar und f · g′ ∈S(I;E). Dann gilt f ′ · g ∈ S(I;E) und

256 7 Integralrechnung fur Funktionen einer reellen Variablen
∫f(x)g′(x) dx +
∫f ′(x)g(x) dx = f(x)g(x) + c.
(3) Substitutionsregel: g ∈ S(I;E) habe die Stammfunktion G, f : J ⊂ R −→I ⊂ R sei differenzierbar. Dann hat (g f) · f ′ : J ⊂ R −→ E die Stamm-funktion G∗ = G f , das heißt
∫g(f(x)︸︷︷︸
y
) · f ′(x) dx︸ ︷︷ ︸dy
=
∫g(y) dy
∣∣y=f(x) .
(Formal schreibt man: y = f(x), dy = f ′(x) dx.)(4) f = (f1, f2) ∈ S(I;E1 × E2) gilt genau dann, wenn fi ∈ S(I;Ei) fur
i ∈ 1, 2 ist, und es gilt dann
∫f(x) dx =
(∫f1(x) dx,
∫f2(x) dx
).
Beweis: Folgt aus den Rechenregeln fur die Ableitung (Produktregel, Ket-tenregel, komponentenweises Differenzieren). ⊓⊔
Beispiel 7.3Sei f : I ⊂ R −→ R eine differenzierbare Funktion ohne Nullstellen auf I.Dann gilt ∫
f ′(x)
f(x)dx = ln |f(x)|,
denn nehmen wir die Substitution y = f(x), dy = f ′(x) dx vor, so erhaltenwir ∫
f ′(x)
f(x)dx =
∫dy
y
∣∣y=f(x)
= ln |y|∣∣y=f(x)
= ln |f(x)|.
So ist zum Beispiel
∫tanxdx =
∫sinx
cosxdx = − ln (cosx) + c auf
(−π
2,π
2
).
Beispiel 7.4Gelgentlich ist das Einfugen einer 1 nutzlich:
∫ln(x) dx =
∫ln(x) · 1 dx part. Int.
= −∫
ln′(x)︸ ︷︷ ︸= 1
x
·xdx+ ln(x) · x+ c
= −x+ x · ln(x) + c auf (0,∞).

7.1 Stammfunktionen und ihre Berechnung 257
Beispiel 7.5Um
∫dx
1+ex zu berechnen, substituieren wir y = ex, dy = ex dx = y dx. Dannist
∫dx
1 + ex=
∫1
1 + y
1
ydy =
∫ (1
y− 1
1 + y
)dy∣∣y=ex
= ln y − ln (y + 1) + c∣∣y=ex = ln ex︸︷︷︸
=x
− ln ex + 1 + c
= x− ln ex + 1 + c auf R.
Beispiel 7.6Wie wird In :=
∫sinn xdx berechnet?
In = −∫
sinn−1 x · cos′ xdx
part. Int.= − sinn−1 x · cosx+
∫d
dxsinn−1 x · cosxdx
= − sinn−1 x · cosx+ (n− 1)
∫sinn−2 x
(1 − sin2 x
)dx
= − sinn−1 x · cosx− (n− 1)In + (n− 1)In−2.
Es folgt
In = − 1
n
(sinn−1 x · cosx
)+n− 1
nIn−2 fur n ≥ 2.
wobei I0 = x+ c und I1 = − cosx+ c ist.
Fur Jn :=∫
cosn xdx berechnet man analog
Jn =1
ncosn−1 x · sinx+
n− 1
nJn−2 fur n ≥ 2
mit J0 = x+ c und J1 = sinx+ c.
Integrale rationaler Funktionen
Seien P,Q ∈ C[z] Polynome, Q 6≡ 0. Wir betrachten ein Intervall I ⊂ R, aufdem Q keine Nullstelle hat und definieren
f : I ⊂ R −→ C.
x 7→ f(x) :=P (x)
Q(x)
Dann heißt f komplexe rationale Funktion. Sind speziell P,Q ∈ R[z] ⊂ C[z]Polynome uber R, so heißt f reelle, rationale Funktion.
Unser Ziel ist nun die Berechnung von∫ P (x)Q(x) dx.

258 7 Integralrechnung fur Funktionen einer reellen Variablen
Satz 7.3 (Fundamentalsatz der Algebra) Jedes komplexe Polynom Q ∈C[z] vom Grad > 0 hat mindestens eine Nullstelle, das heißt, es existiert einξ ∈ C mit Q(ξ) = 0.
Beweis: Sei Q ∈ C[z] mit Grad Q = n ≥ 1 gegeben. Dann gilt
Q(z) = anzn+an−1z
n−1+ . . .+a1z+a0, an 6= 0, aj ∈ C ∀ j ∈ 1, . . . , n.
(1) Sei α > 0 gegeben. Zuerst zeigen wir, dass ein r > 0 existiert, so dass fur
alle |z| ≥ r die Abschatzung |Q(z)| ≥ α gilt. Wir definieren dazu Q(x) durch
Q(z) = anzn
(1 +
an−1
an
1
z+ . . .+
a0
an
1
zn︸ ︷︷ ︸=: eQ(z)
), z 6= 0.
Sei nun β := 1 +∣∣∣an−1
an
∣∣∣+ . . .+∣∣∣ a0
an
∣∣∣ ≥ 1. Fur |z| ≥ 2β folgt dann
|Q(z)| ≤∣∣∣∣an−1
an
∣∣∣∣1
|z| + . . .+
∣∣∣∣a0
an
∣∣∣∣1
|z|n ≤(∣∣∣∣an−1
an
∣∣∣∣+ . . .+
∣∣∣∣a0
an
∣∣∣∣)
1
|z|
≤ β · 1
|z| ≤1
2.
Es folgt |1 + Q(x)| ≥ 12 und
|Q(z)| = |anzn| · |1 + Q(z)| ≥ 1
2|an| · |z|n fur alle |z| ≥ 2β.
Setzen wir r := max2β,(
2α|an|
) 1n , dann folgt aus |z| ≥ r, dass |Q(z)| ≥ α gilt.
(2) Wir zeigen, dass ein ξ ∈ C existiert, so dass Q(ξ) = 0. Sei A :=|Q(z)| | z ∈ C ⊂ R. Da |Q(z)| ≥ 0 gilt, ist A von unten beschrankt.Somit existiert µ := inf A ≥ 0. Nach (1) existiert ein r > 0, so dass gilt
|Q(z)| ≥ µ+ 1 ∀ |z| ≥ r.
Also ist µ = inf|Q(z)| | z ∈ C = inf|Q(z)| | |z| ≤ r. Da K(0, r) ⊂ C
kompakt ist und die Funktion
q : C −→ R
z 7→ |Q(z)|
stetig ist, existiert ein Minimum von q auf K(0, r), das heißt, es existiert einξ ∈ K(0, r) mit |Q(ξ)| = µ. Wir zeigen, dass Q(ξ) = 0 gilt. Wir nehmen an,dass Q(ξ) 6= 0 ist und betrachten das Polynom in z vom Grad n
H(z) :=Q(z + ξ)
Q(ξ).

7.1 Stammfunktionen und ihre Berechnung 259
Da |Q(ξ)| = min|Q(z)| | z ∈ C ist, gilt H(0) = 1 und |H(z)| ≥ 1 fur allez ∈ C, und es folgt
H(z) = bnzn + . . .+ bmz
m + 1, bm 6= 0, m ≥ 1, bj ∈ C ∀ j ∈ m, . . . , n.
Fur die komplexe Zahl w := − |bm|bm
der Norm 1 existiert ein ψ ∈ R, so dass
gilt w = eimψ , das heißt bmeimψ = −|bm|. Wir betrachten nun H auf den
komplexen Zahlen der Form z = · eiψ mit > 0. Dann gilt
|H( · eiψ)| ≤ |bn| · n + . . .+ |bm+1| · m+1 + |1 + bmm · eimψ |︸ ︷︷ ︸
=|1−|bm|·m|
.
Sei nun so klein gewahlt, dass m < 1|bm| ist. Dann ist 1 − |bm|m > 0 und
damit
|H( · eiψ)| ≤ 1 − |bm| · m + |bm+1| · m+1 + . . .+ |bn| · n= 1 − m(|bm| − |bm+1| · − . . .− |bn| · n−m︸ ︷︷ ︸
>0 fur hinreichend klein
).
Somit ist |H( ·eiψ)| < 1 fur hinreichend kleine . Dies ist ein Widerspruch zu|H(z)| ≥ 1 fur alle z ∈ C. Somit ist unsere Annahme falsch und Q(ξ) = 0. ⊓⊔
Satz 7.4 (Zerlegungssatz fur komplexe Polynome) Sei Q ∈ C[z] einPolynom vom Grad n ≥ 1 und seien ξ1, . . . , ξm ∈ C alle verschiedenen Null-stellen von Q. Dann gilt
Q(z) = anzn + . . .+ a1z + a0 = an(z − ξ1)
ν1 · (z − ξ2)ν2 · . . . · (z − ξm)νm ,
wobei νj ∈ N eindeutig bestimmte naturliche Zahlen sind und n = ν1+. . .+νm.
Bemerkung: νj heißt die Vielfachheit der Nullstelle ξj . Q hat genau n Null-stellen (gezahlt mit Vielfachheit).
Beweis: Sei Q(ξ1) = 0. Wir betrachten das Polynom
qk(z) := zk−1 + zk−2 · ξ1 + . . .+ z · ξk−21 + ξk−1
1 .
Dann gilt zk − ξk1 = (z − ξ1) · qk(z) und folglich
Q(z) = Q(z) −Q(ξ1) = a1(z − ξ1) + a2(z2 − ξ21) + . . .+ an(z
n − ξn1 )
= (a1q1(z) + . . .+ anqn(z)) · (z − ξ1)
=: Q1(z) · (z − ξ1), mit deg(Q1) = n− 1.
Ist n− 1 ≥ 1, so hat Q1 eine weitere Nullstelle und wir konnen einen weiterenLinearfaktor von Q abspalten. Dies funktioniert n–mal. ⊓⊔

260 7 Integralrechnung fur Funktionen einer reellen Variablen
Satz 7.5 (Partialbruchzerlegung komplexer rationaler Funktionen)Sei f(z) = P (z)
Q(z) eine komplexe, rationale Funktion, wobei P,Q ∈ C[z] Polyno-
me mit deg(P ) < deg(Q) sind. Q habe die verschiedenen Nullstellen ξ1, . . . , ξmmit der Vielfachheit ν1, . . . , νm. Dann existieren Konstanten cjk ∈ C fur allej ∈ 1, . . . ,m, k ∈ 1, . . . , νj, so dass gilt
f(z) =
m∑
j=1
νj∑
k=1
cjk(z − ξj)k
=
m∑
j=1
(cj1
z − ξj+
cj2(z − ξj)2
+ . . .+cjνj
(z − ξj)νj
).
Beweis: Wir fuhren den Beweis durch Induktion nach deg(Q).Ind.–Anfang: Sei deg(Q) = 1. Da nach Voraussetzung deg(P ) < deg(Q) gilt,ist deg(P ) = 0 und somit P ≡ a0 =konstant. Ist ξ1 Nullstelle von Q, so er-halten wir f(z) = a0
b1(z−ξ1) , das heißt c11 := a0
b1.
Ind.–Voraussetzung: Die Behauptung sei fur alle f =ePeQ
mit deg(Q) ≤ n − 1
bewiesen.Ind.–Behauptung: Die Behauptung gilt fur f = P
Qmit deg(Q) = n.
Ind.–Beweis: Sei ξ1 eine Nullstelle von Q mit Vielfachheit ν1. Dann folgtQ(z) = (z − ξ1)
ν1 · S(z), wobei S(z) ∈ C[z] mit deg(S) = n − ν1 < n und
S(ξ1) 6= 0 gilt. Sei a := P (ξ1)S(ξ1)
. Dann gilt
P (z)
Q(z)− a
(z − ξ1)ν1=
P (z) − a · S(z)
(z − ξ1)ν1 · S(z). (∗)
Nach Definition von a gilt P (ξ1) − aS(ξ1) = 0. Ist P − aS ≡ 0, so gilt dieBehauptung. Sei nun P − aS 6≡ 0. Dann kann man nach dem Zerlegungssatzden Linearfaktor (z − ξ1) abspalten, das heißt P (z) − aS(z) = (z − ξ1)S(z).Es folgt
P (z)
Q(z)
(∗)=
a
(z − ξ1)ν1+
S(z)
(z − ξ1)ν1−1 · S(z).
Da deg(S(z) · (z − ξ1)ν1−1) = deg(S) + ν1 − 1 = n − 1 ist, kann man nach
Ind.–Voraussetzung den zweiten Summanden entsprechend der Behauptungzerlegen. Da Q(z) = (z− ξ1)
ν1S(z) kommen alle Nullstellen von Q vor und ξ1mit einer Vielfachheit kleiner. ⊓⊔
Bemerkung(Methoden zur Berechnung der Koeffizienten in derPartialbruchzerlegung):Sei f komplexe, rationale Funktion, das heißt
f(z) =P (z)
Q(z)=
m∑
j=1
νj∑
k=1
cjk(z − ξj)k
. (∗∗)
(1) Multiplizieren wir f(z) mit Q(z), so konnen wir durch Koeffizientenver-gleich die Konstanten cjk fur j ∈ 1, . . . ,m, k ∈ 1, . . . , νj berechnen.

7.1 Stammfunktionen und ihre Berechnung 261
(2) Indem wir n spezielle Werte fur z einsetzen und das dadurch entstehendelineare Gleichungssystem fur cjk losen, erhalten wir ebenfalls die Koeffizien-ten.(3) Multiplizieren wir (∗∗) mit (z − ξj)
νj , so erhalten wir
cjνj= limz→ξj
(P (z)
Q(z)· (z − ξj)
νj
).
Die restlichen Koeffizienten lassen sich wie in (1) oder (2) berechnen oder wirbetrachten
P (z)
Q(z)− cjνj
(z − ξj)νj
(∗∗)=
S(z)
Q(z),
das heißt, Q hat ξj als (νj − 1)–fache Nullstelle. Dann lassen sich die cjνj−1
analog bestimmen.
Beispiel 7.7Wir betrachten die komplexe rationale Funktion
f(z) =z + 1
z4 − z3 + z2 − z=P (z)
Q(z).
Dann sind offensichtlich ξ1 = 0, ξ2 = 1 Nullstellen von Q und es folgt
Q(z)
z(z − 1)=
(z4 − z3 + z2z)
(z2 − z)= z2 + 1.
Somit sind die weiteren Nullstellen von Q gleich ±i und es gilt
f(z) =c1z
+c2
z − 1+
c3z − i
+c4z + i
.
Zur Berechnung der Koeffizienten wenden wir Methode (3) an, das heißt
c1 = limz→0
(z + 1
(z − 1)(z − i)(z + i)
)=
1
−1 · (−i) · i = −1,
c2 = limz→1
(z + 1
z(z − i)(z + i)
)= 1.
Durch analoges Rechnen erhalt man c3 = i2 und c4 = − i
2 . Somit gilt
f(z) = −1
z+
1
z − 1+
i
2(z − i)− i
2(z + i).
Satz 7.6 (Partialbruchzerlegung von reellen rationalen Funktionen)Seien P,Q ∈ R[z] Polynome mit reellen Koeffizienten, deg(Q) > deg(P ).(1) Ist ξ ∈ C eine echt–komplexe Nullstelle von Q mit der Vielfachheit ν, so

262 7 Integralrechnung fur Funktionen einer reellen Variablen
ist auch ξ eine Nullstelle von Q mit der Vielfachheit ν, das heißt:Die reellen Nullstellen von Q sind
x1, . . . , xs mit Vielfachheit µ1, . . . , µs.
Die echt-komplexen Nullstellen von Q sind
ξ1, . . . , ξr mit Vielfachheit ν1, . . . , νr
ξ1, . . . , ξr mit Vielfachheit ν1, . . . , νr,
mit n = µ1 + . . .+ µs + 2(ν1 + . . .+ νr).
(2) Die Partialbruchzerlegung von f(z) = P (z)Q(z) hat die Form:
f(z) =
s∑
j=1
µj∑
k=1
cjk(z − xj)k
+
r∑
l=1
νl∑
k=1
(Alk
(z − ξl)k+
Alk
(z − ξl)k
), cjk ∈ R.
Beweis: (1) Sei ξ ∈ C eine echt–komplexe Nullstelle von Q und Q ∈ R[z].Dann ist Q(ξ) = 0 und Q(ξ) = 0 = Q(ξ). Folglich ist ξ Nullstelle von Q.Spaltet man (z − ξ)(z − ξ) von Q ab, so folgt durch die Betrachtung desRestpolynoms die Behauptung.(2) Aus der Partialbruchzerlegung folgt fur x ∈ R, x 6= xj
f(x) =P (x)
Q(x)=
s∑
j=1
µj∑
k=1
cjk(x− xj)k
+r∑
l=1
νl∑
k=1
(Alk
(x− ξl)k+
Blk
(x− ξl)k
).
Da f(x) = f(x) ist, gilt fur x 6= xj , ξj , ξj
∑
j,k
cjk(x− xj)k
+∑
l,k
(Alk
(x− ξl)k+
Blk
(x− ξ)k
)
=∑
j,k
cjk(x− xj)k
+∑
l,k
(Alk
(x− ξl)k+
Blk(x − ξl)k
).
Nun erhalt man aus dem Identitatssatz fur Potenzreihen: Seien λ1, . . . , λmverschiedene komplexe Zahlen, ajk ∈ C und fur alle x ∈ R mit x 6= λj (j ∈1, . . . ,m) gelte
m∑
j=1
νj∑
k=1
ajk(x − λj)k
= 0.
Daraus folgt ajk = 0. Die Anwendung dieses Identitatssatzes liefert cjk =cjk ∈ R und Alk = Blk. ⊓⊔

7.1 Stammfunktionen und ihre Berechnung 263
Anwendung auf die Berechnung des Integrals rationalerFunktionen
(1) Seien P,Q ∈ C[z], NS(Q)∩I = ∅ und f eine komplexe, rationale Funktionauf I, das heißt
f : I ⊂ R −→ C
x 7→ P (x)
Q(x).
Gesucht ist∫f(x) dx auf I.
(a) Dividieren wir P durchQ so erhalten wir den Rest P2 ∈ C[z] mit deg(P2) <deg(Q), das heißt, es gilt
f(x) = P1(x) +P2(x)
Q(x).
(b) Nun nehmen wir die Partialbruchzerlegung von P2(x)Q(x) vor.
(c) Auf I gilt
∫1
x− ξdx = i arctan
(x− a
b
)+ ln |x− ξ| + c fur ξ = a+ ib, b 6= 0,
∫1
z − ξdz = ln |x− ξ| + c fur ξ ∈ R,
∫1
(x − ξ)ndx = − 1
n− 1
1
(x− ξ)n−1+ c fur n ∈ N, n > 1.
Folglich kann man∫f(x) dx vollstandig berechnen.
(2) Seien P,Q ∈ R[z], NS(Q) ∩ I = ∅ und f eine reelle rationale Funktionauf I, das heißt
f : I ⊂ R −→ R
x 7→ P (x)
Q(x).
Wir nehmen die gleichen Schritte vor wie in (1) und fassen am Schluss diekomplexen Ausdrucke zu einem reellen zusammen. Dann gilt mit ξ ∈ C echt–komplex und ξ = a+ bi
c
∫1
x− ξdx+ c
∫1
x− ξdx = c i arctan
(x− a
b
)+ c i arctan
(x− a
−b
)
+c ln |x− ξ| + c ln |x− ξ|.
Wegen |x− ξ| = |x− ξ| gilt
c ln |x− ξ| + c ln |x− ξ| = 2Re(c) · ln√
(x− a)2 + b2.

264 7 Integralrechnung fur Funktionen einer reellen Variablen
Mit arctan(x−a−b
)= − arctan
(x−ab
)folgt daher
ci arctan
(x− a
b
)+ ci arctan
(x− a
−b
)= −2Im(c) arctan
(x− a
b
).
Daraus folgt∫ (
c
x− ξ+
c
x− ξ
)dx = 2Re(c)·ln
√(x− a)2 + b2−2Im(c)·arctan
(x− a
b
)
und∫ (
c
(x− ξ)k+
c
(x− ξ)k
)dx = − 1
k − 1
(c
(x− ξ)k−1+
c
(x− ξ)k−1
)+ const.
= − 1
k − 1
(c(x− ξ)k−1 + c(x− ξ)k−1
(x2 − 2x · a+ |ξ|2)k−1
)+ const.
Beispiel 7.8Berechnung des Integrals von f(x) = 2x3+2x2+2x−2
(x2+1)2 :
Q(x) = (x2 + 1)2 = (x− i)2(x+ i)2.
Folglich sind ξ1 = i und ξ2 = −i zweifache Nullstellen von Q und es folgt
f(z) =c11
(z − i)+
c12(z − i)2
+c21
(z + i)+
c22(z + i)2
c12 = limz→i
2z3 + 2z2 + 2z − 2
(z + i)2=
−2i− 2 + 2i− 2
4i2= 1
c22 = limz→−i
2z3 + 2z2 + 2z − 2
(z − i)2=
2i− 2 − 2i− 2
4i2= 1.
Setzen wir dann zum Beispiel x = 0, x = 1, erhalten wir ein Gleichungssy-stems fur c11, c21. Dann ist c11 = c21 = 1. Oder wir multiplizieren mit Q(x)und nehmen einen Koeffizientenvergleich vor:
2x3 + 2x2 + 2x− 2 = c11(x− i)(x+ i)2 + 1 · (x+ i)2 + c21(x− i)2(x+ i)
+1 · (x− i)2.
Folglich ist c11 = c21 = 1. Nun konnen wir∫f(x) dx berechnen:
∫f(x) dx =
∫ (1
(x− i)+
1
(x + i)
)dx+
∫ (1
(x − i)2+
1
(x+ i)2
)dx
= 2 ln√x2 + 1 − 1
(x− i)− 1
(x+ i)︸ ︷︷ ︸=− 2x
x2+1
+ const. auf R
= 2 ln√x2 + 1 − 2x
x2 + 1+ const. auf R.

7.1 Stammfunktionen und ihre Berechnung 265
Bemerkung: Oft lassen sich Integrale durch Substitution auf Integrale ratio-naler Funktionen zuruckfuhren. Seien u1, . . . , un : I ⊂ R −→ C Funktionen.Dann definieren wir
R(u1, . . . , un) :=
∑α
αi1...inuα11 · . . . · uαn
n
∑β
βi1...inuβ1
1 · . . . · uβnn
, αI , βI ∈ C.
Verschiedene Integrale der Form∫
R(.) dx und oft geeigneteSubstitutionen:
(1)∫R(eax) dx. Geeignete Substitution: y = eax.
(2)∫R(x, n
√ax+bcx+d) dx Geeignete Substitution: y = n
√ax+bcx+d .
(3)∫R(cosx, sinx) dx. Geeignete Substitution: y = tan x
2 . Ist R(u, v) =R(−u,−v), so ist eine geeignete Substitution y = tanx.
(4)∫R(coshx, sinhx) dx. Geeignete Substitution: y = tanh x
2 . Alternativkann man die Hyperbelfunktionen durch eix darstellen und dann (1) an-wenden.
(5)∫R(x,
√ax2 + bx+ c) dx. Geeignete Substitution: y = ax+b√
|b2−ax|. Dann
weiter substitutieren t = sinh y, t = cosh y oder t = cos y.
Nicht jedes Integral ist durch eine elementare Funktion darstellbar, auch wenndie Stammfunktion existiert. Zum Beispiel sind elliptische Integrale, das heißtIntegrale der Form
∫R(x,
√P (x)) dx, wobei P (x) Polynom vom Grad 3 oder
4 ohne mehrfache Nullstellen ist, nicht durch eine elementare Funktion dar-stellbar.
Definition 7.4. Sei f ∈ S(I;E) und a, b ∈ I. Sei F : I ⊂ R −→ E eineStammfunktion von f . Unter dem bestimmten Integral von f von a nach bversteht man den Vektor (bzw. fur E = R oder C die Zahl):
b∫
a
f(x) dx := F (b) − F (a) ∈ E.
Bezeichnung: F (b) − F (a) =: F (x)|ba

266 7 Integralrechnung fur Funktionen einer reellen Variablen
Satz 7.7 (Rechenregeln fur das bestimmte Integral)(1) Sei f ∈ S(I;E) und a, b ∈ I. Dann gilt
a∫
a
f(x) dx = 0,
b∫
a
f(x) dx = −a∫
b
f(x) dx,
b∫
a
f(x) dx+
c∫
b
f(x) dx =
c∫
a
f(x) dx.
(2) Seien f, g ∈ S(I;E), λ, µ ∈ R (C) und a, b ∈ I. Dann gilt
λ
b∫
a
f(x) dx+ µ
b∫
a
g(x) dx =
b∫
a
(λf(x) + µg(x))(x) dx.
(3) Sei f ∈ S(I, E1 × E2) und f = (f1, f2). Dann gilt
b∫
a
f(x) dx =
b∫
a
f1(x) dx,
b∫
a
f2(x) dx
.
(4) Partielle Integration:Seien f, g : I ⊂ R −→ E differenzierbar, a, b ∈ I, f · g′ ∈ S(I;E). Dann gilt
b∫
a
f(x)g′(x) dx +
b∫
a
f ′(x)g(x) dx = f(b)g(b) − f(a)g(a).
(5) Substitutionsregel:Sei g ∈ S(I;E) und f : J ⊂ R −→ I ⊂ R differenzierbar. Dann gilt
b∫
a
g(f(x))f ′(x) dx =
f(b)∫
f(a)
g(y) dy.
Beweis: Folgt aus Satz 7.2. ⊓⊔
Beispiel 7.9Es ist fur n ∈ N, n > 1
π2∫
0
sinn xdx =
1·3·...·(2k−1)
2·4·...·2k · π2 n = 2k2·4·...·2k
3·5·...·(2k+1) n = 2k + 1.
Beweis: Wir wissen, dass fur In =∫
sinn xdx gilt I0 = x, I1 = − cosx, und
In = − 1
nsinn−1 x · cosx+
n− 1
n· In−2 fur n ∈ N, n > 1.
Somit erhalten wir

7.2 Das Riemannsche Integral 267
In(0) =n− 1
n· In−2(0), und In
(π2
)=n− 1
n· In−2
(π2
)
sowie
I0(0) = 0, I1(0) = −1, und I0
(π2
)=π
2, I1
(π2
)= 0.
Daraus folgt
I2k(0) =2k − 1
2k· I2k−2(0) =
(2k − 1)(2k − 3)
(2k)(2k − 2)· I2k−4(0)
= . . . =(2k − 1)(2k − 3) · . . . · 3 · 1
2k(2k − 2) · . . . · 2 · I0(0) = 0.
Analog findet man
I2k
(π2
)=
(2k − 1) · . . . 3 · 12k · . . . · 4 · 2 · I0
(π2
)=
(2k − 1) · . . . 3 · 12k · . . . · 4 · 2
π
2
und es folgt
I2k+1(0) =(2k) · . . . · 4 · 2
(2k + 1)(2k − 1) · . . . · 3 · 1 · I1(0)︸ ︷︷ ︸=−1
I2k+1
(π2
)=
(2k) · . . . · 4 · 2(2k + 1)(2k − 1) · . . . · 3 · 1 · I1
(π2
)
︸ ︷︷ ︸=0
= 0.
7.2 Das Riemannsche Integral
Wie kann man Teilmengen A ⊂ R2 einen sinnvollen Flacheninhalt µ(A) ⊂R+ ∪ ∞ zuordnen?
Bedingungen:
(1) µ(A) ≥ 0,
(2) µ([a1, b1] × . . .× [an, bn]) =n∏i=1
(bi − ai),
(3) Int(A1) ∩ Int(A2) = ∅ ⇒ µ(A1 ∪A2) = µ(A1) + µ(A2),(4) A ⊂ B ⇒ µ(A) ≤ µ(B).

268 7 Integralrechnung fur Funktionen einer reellen Variablen
Wir betrachten Teilmengen A ⊂ Rn der Form
Diese Teilmengen kann man zerlegen in Teile der Form
a b
f(x)
Nun versuchen wir den Flacheninhalt von Mengen der Form
A = (x, y) ∈ R2 | x ∈ [a, b], 0 ≤ y ≤ f(x),
wobei f : [a, b] −→ R+ ∪ 0 ist, zu definieren.
Definition 7.5. Sei I = [a, b] ⊂ R ein kompaktes Intervall. Unter einer Zer-legung von I versteht man eine Menge von Punkten P = x0, x1, . . . , xn mita = x0 < . . . < xn = b. Dann heißt Ik := [xk−1, xk] k–tes Teilintervall von P,L(Ik) := xk − xk−1 Lange von Ik und ‖P‖ := maxk∈1,...,n L(Ik) Norm der
Zerlegung P. Eine Zerlegung P heißt Verfeinerung der Zerlegung P (P ≥ P),
falls zu jedem Teilintervall Iµ von P ein Teilintervall Iν von P mit Iµ ⊂ Iνexistiert.
Wir definieren im Folgenden das Riemannsche Integral fur Funktionen f :[a, b] −→ E, wobei E Banachraum uber R oder C ist.
Definition 7.6. Sei f : [a, b] −→ E eine Funktion, P = x0, . . . , xn eineZerlegung von [a, b] und ξ = (ξ1, . . . , ξn) ∈ Rn ein Tupel von Zahlen mitξk ∈ Ik fur alle k ∈ 1, . . . , n. Dann heißt
S(f,P , ξ) :=
n∑
k=1
f(ξk) · L(Ik)
Riemannsche Summe fur f bzgl. der Zerlegung P und der Stutzstellen ξ =(ξ1, . . . , ξn).
Definition 7.7. Sei f : [a, b] −→ E. Der Vektor e ∈ E heißt Grenzwert allerRiemannschen Summen fur f , falls fur alle ε > 0 eine Zerlegung Pε existiert,so dass gilt
‖S(f,P , ξ) − e‖ < ε ∀ P ≥ Pε und fur alle Stutzstellen ξ von P .

7.2 Das Riemannsche Integral 269
Bezeichnung: e := limPS(f,P , ξ)
Bemerkung: Der Grenzwert der Riemannschen Summen ist, falls er existiert,eindeutig bestimmt.
Beweis: Seien e1, e2 ∈ E zwei Vektoren mit e1 = limPS(f,P , ξ) und e2 =
limPS(f,P , ξ). Sei ε > 0. Dann gilt
∃ P1 : ‖S(f,P , ξ) − e1‖ ≤ ε
2∀P ≥ P1,
∃ P2 : ‖S(f,P , ξ) − e2‖ ≤ ε
2∀P ≥ P2.
Sei P0 die Zerlegung von [a, b], die durch die Teilpunkte von P1 und P2 gebildetwird, dass heißt, P0 := P1 ∪ P2. Dann gilt P0 ≥ P1 und P0 ≥ P2. Sei nun ξ0eine beliebige Stutzstelle von P0. Dann erhalten wir
‖e1 − e2‖ ≤ ‖S(f,P0, ξ0) − e1‖ + ‖S(f,P0, ξ0) − e2‖ ≤ ε
2+ε
2= ε.
Da ε beliebig ist, folgt e1 = e2. ⊓⊔Definition 7.8. Eine Abbildung f : [a, b] −→ E heißt Riemann-integrierbaruber [a, b], falls die Riemannschen Summen fur f einen Grenzwert besitzen.
Bezeichnung: Mit
(R) −b∫
a
f(x) dx := limPS(f,P , ξ)
bezeichnen wir das Riemann-Integral von f uber [a, b].
Bemerkung:(1) Wir werden in Abschnitt 7.3 zeigen, dass jede stetige Funktion f : [a, b] −→E eine Stammfunktion hat und Riemann-integrierbar ist, und dass
(R) −b∫
a
f(x) dx =
b∫
a
f(x) dx
gilt. Wir lassen deshalb im Folgenden (R)− vor dem∫
weg. In den Abschnit-ten 7.2 und 7.3 sei mit
∫immer das Riemann–Integral gemeint.
(2) Ist f : [a, b] −→ R Riemann–integrierbar, f ≥ 0 und A gegeben durch
A := (x, y) ∈ R2 | a ≤ x ≤ b, 0 ≤ y ≤ f(x).
Dann entspricht µ(A) =b∫a
f(x) dx dem Flacheninhalt von A.

270 7 Integralrechnung fur Funktionen einer reellen Variablen
Beispiel 7.10Wir betrachten die Funktion
f(x) =
−1 x ∈ [ − 1, 0)
0 x = 0
1 x ∈ (0, 1].
f ist Riemann–integrierbar, hat aber keine Stammfunktion.
Bemerkung: Jede Treppenfunktion ist Riemann–integrierbar.
Vereinbarung: Ist f eine beliebige Funktion und sind a, b ∈ R mit a < bgegeben, so gelte
(R) −a∫
a
f(x) dx := 0, (R) −a∫
b
f(x) dx := −(R) −b∫
a
f(x) dx.
Bezeichnung: Wir bezeichnen die Menge aller Riemann–integrierbaren Funk-tionen von [a, b] in E mit R([a, b];E).
Satz 7.8 Ist f : [a, b] −→ E Riemann–integrierbar, so ist f beschrankt.
Beweis: Sei e :=b∫a
f(x) dx. Nach Definition existiert eine Zerlegung P von
[a, b], so dass fur beliebige Stutzstellen ξ von P gilt
‖S(f,P , ξ)− e‖ < 1.
Sei Iν ein Teilintervall von P und ξµ ∈ Iµ fix fur µ 6= ν. Dann definieren wir
Mν :=∑
µ6=νf(ξµ)L(Iµ) ∈ E.
Fur jedes x ∈ Iν gilt ‖f(x) · L(Iν) +Mν − e‖ < 1. Daraus folgt
|‖f(x)‖ − ‖Mν − e‖L(Iν)︸ ︷︷ ︸
=a
| < ‖f(x) +Mν − e
L(Iν)‖ < 1
L(Iν)︸ ︷︷ ︸=r
,
das heißt, ‖f(x)‖ liegt im Intervall [a− r, a+ r). Folglich gilt fur alle x ∈ Iν
‖f(x)‖ < ‖Mν − e‖L(Iν)
+1
L(Iν)=
1
L(Iν)(1 + ‖Mν − e‖).
Sei nun M := maxν∈1,...,n
1L(Iν) (1 + ‖Mν − e‖). Dann ist ‖f(x)‖ ≤ M fur alle
x ∈ [a, b]. ⊓⊔

7.2 Das Riemannsche Integral 271
Satz 7.9 (Cauchy–Integrierbarkeitskriterium) Sei f : [a, b] ⊂ R −→ E,E Banachraum. Dann gilt f ∈ R([a, b];E) genau dann, wenn zu jedem ε > 0
eine Zerlegung Pε von [a, b] existiert, so dass fur beliebige Verfeinerungen P , Pvon Pε und Stutzstellen ξ, ξ von P bzw. P gilt
‖S(f,P , ξ)− S(f, P , ξ)‖ < ε.
Beweis: (1) Sei f ∈ R([a, b];E) und ε > 0 gegeben. Dann existieren e ∈ Eund Pε, so dass gilt
‖S(f,P , ξ) − e‖ < ε
2∀P ≥ Pε.
Seien P , P ≥ Pε. Dann gilt
‖S(f,P , ξ)− S(f, P , ξ)‖ ≤ ‖S(f,P , ξ) − e‖ + ‖S(f, P, ξ) − e‖ ≤ ε.
(2) Fur jedes ε > 0 existiere eine Zerlegung Pε von [a, b], so dass fur beliebige
Verfeinerungen P , P von Pε und Stutzstellen ξ, ξ von P bzw. P gilt
‖S(f,P , ξ)− S(f, P , ξ)‖ < ε.
Es ist zu zeigen, dass f ∈ R([a, b];E) ist. Sei εn > 0 eine Folge, die gegen 0konvergiert. Nach Voraussetzung folgt dann
∀n ∈ N ∃ Pn : ‖S(f,P , ξ)− S(f, P , ξ)‖ < εn ∀P , P ≥ Pn. (∗)Wir bilden nun sukzessive die folgenden Zerlegungen Un von [a, b]:
U1 := P1, U2 := P1 ∪ P2 = U1 ∪ P2,
U3 := P1 ∪ P2 ∪ P3 = U2 ∪ P3, . . . ,Un := P1 ∪ . . . ∪ Pn = Un−1 ∪ Pn.Folglich ist Pn ≤ Un ≤ Un+1 ≤ . . .. Zu jeder Zerlegung Un wahlen wir nun einTupel von Stutzstellen ξn. Sei ε > 0 gegeben. Dann existiert ein n0 ∈ N mitεn0 <
ε2 fur alle n0 ≥ n, so dass gilt
‖S(f,Un, ξn) − S(f,Um, ξm)‖ < εn0 <ε
2∀n,m ≥ n0. (∗∗)
Folglich bilden die Vektoren S(f,Un, ξn)∞n=1 eine Cauchy–Folge im Banach-raum E. Da E vollstandig ist, existiert e := lim
n→∞S(f,Un, ξn). Gehen wir in
(∗∗) mit m gegen ∞, so folgt
‖S(f,Un, ξn) − e‖ < ε
2∀n ≥ n0.
Sei nun P eine beliebige Zerlegung mit P ≥ Un0 . Dann ist wegen
‖S(f,P , ξ) − e‖ ≤ ‖S(f,P , ξ)− S(f,Un0 , ξn0)‖ + ‖S(f,Un0 , ξn0) − e‖(∗)≤ εn0 +
ε
2< ε,
die Funktion f ∈ R([a, b], E). ⊓⊔

272 7 Integralrechnung fur Funktionen einer reellen Variablen
Satz 7.10 Sei E ein Banachraum. Dann ist jede stetige Abbildung f : [a, b] ⊂R −→ E Riemann-integrierbar.
Beweis: Da f stetig und [a, b] kompakt ist, ist f gleichmaßig stetig, das heißt,fur alle ε > 0 existiert ein δ > 0, so dass fur alle x1, x2 ∈ [a, b] gilt
|x1 − x2| < δ ⇒ ‖f(x1) − f(x2)‖ <ε
2(b− a).
Sei P0 eine Zerlegung von [a, b] mit ‖P0‖ < δ. Dann gilt fur alle P ≥ P0 =
x0, x1, . . . , xn, wobei P = y0, y1, . . . , yN die xi enthalt, Folgendes
‖S(f, P, ξ) − S(f,P0, ξ0)‖ = ‖N∑
l=1
f(ξl)(yl − yl−1) −n∑
k=1
f(ξk)(xk − xk−1)‖
= ‖N∑
l=1
(f(ξl) − f(ξkl))(yl − yl−1)‖
fur diejenigen ξk mitIl ⊂ Ik
≤N∑
l=1
‖f(ξl) − f(ξkl)‖︸ ︷︷ ︸
< ε2(b−a)
(yl − yl−1)
=ε
2(b− a)· (b− a) =
ε
2.
Seien nun P, ˜P ≥ P0. Dann gilt
‖S(f,˜P, ˜ξ) − S(f, P , ξ)‖ ≤ ‖S(f,
˜P, ˜ξ) − S(f,P0, ξ)‖+‖S(f, P, ξ) − S(f,P0, ξ)‖
< ε.
Nach Satz 7.9 ist f Riemann–integrierbar. ⊓⊔
Satz 7.11 Sei f ∈ R([a, b];E) und Pn eine Folge von Zerlegungen von[a, b] mit ‖Pn‖ −→ 0. Die Stutzstellen von Pn seien ξn. Dann gilt
b∫
a
f(x) dx = limn→∞
S(f,Pn, ξn).
Beweis: Nach Satz 7.8 ist f beschrankt, das heißt, ‖f(x)‖ ≤ M fur allex ∈ [a, b]. Sei ε > 0 fix. Dann existiert ein P0, so dass fur alle P ≥ P0 gilt
‖S(f,P , ξ) − e‖ < ε2 , wobei e =
∫ baf(x) dx ist. Die Zerlegung P0 habe r
Teilintervalle. Da ‖Pn‖ gegen 0 konvergiert, existiert ein n0 ∈ N, so dass gilt

7.2 Das Riemannsche Integral 273
2M r ‖Pn‖ <ε
2∀n ≥ n0.
Seien J1, J2, . . . , Jl diejenigen Teilintervalle von Pn fur n ≥ n0, die nicht inP0 ∪ Pn vorkommen, das heißt diejenigen, die durch Punkte von P0 zerlegtwerden. Dann ist l ≤ r. Wir fugen nun zu den Stutzstellen ξn von Pn neueStutzstellen hinzu, so dass Stutzstellen von ξn von P0 ∪Pn entstehen. Damiterhalten wir fur alle n ≥ n0
‖S(f,Pn, ξn) − S(f,Pn ∪ P0, ξn)‖ ≤ 2M
l∑
v=1
L(Jl) ≤ 2Ml‖Pn‖ ≤ 2Mr‖Pn‖
<ε
2.
Da Pn ∪ P0 ≥ P0 ist, folgt fur n ≥ n0
‖S(f,Pn, ξn) − e‖ ≤ ‖S(f,Pn, ξn) − S(f,Pn ∪ P0, ξn)‖+‖S(f,Pn ∪ P0, ξn) − e‖
≤ ε
2+ε
2= ε.
Somit ist limn→∞
S(f,Pn, ξn) = e. ⊓⊔
Bemerkung Satz 7.11 ist gut geeignet, um
(1) Rechenregeln fur Riemann–Integrale zu beweisen,(2) Abschatzungen fur Summen auf Abschatzungen fur Integrale zu ubertra-
gen,(3) Grenzwerte zu berechnen.
Beispiel 7.11Zu (3): Wir wollen den Grenzwert
limn→∞
1α + 2α + . . .+ nα
nα+1= lim
n→∞
n∑
k=1
kα
nα· 1
n, α > 0
berechnen. Sei f(x) := xα auf [0, 1] und Pn = 0, 1n, 2n, . . . , n−1
n, 1. Dann ist
f( kn) = kα
nα und ‖Pn‖ = 1n
konvergiert gegen 0 fur n gegen ∞. Somit erhaltenwir unter Benutzung der Stetigkeit von f und Satz 7.18 (siehe unten)
1∫
0
f(x) dx =1
α+ 1= lim
n→∞
n∑
k=1
f
(k
n
)· 1
n.
Satz 7.12 (Rechenregeln fur das Riemann–Integral)

274 7 Integralrechnung fur Funktionen einer reellen Variablen
(1) Seien f, g ∈ R([a, b];E) und µ, λ ∈ K. Dann ist µf +λg ∈ R([a, b];E) undes gilt
b∫
a
(µf + λg)(x) dx = µ
b∫
a
f(x) dx + λ
b∫
a
g(x) dx.
(2) Ist E = C und f ∈ R([a, b]; C), so ist auch f ∈ R([a, b]; C) und es gilt
b∫
a
f(x) dx =
b∫
a
f(x) dx.
(3) Ist f ∈ R([a, c];E) ∪R([c, b];E), so ist f ∈ R([a, b];E) und es gilt
b∫
a
f(x) dx =
c∫
a
f(x) dx+
b∫
c
f(x) dx.
(4) Ist f ∈ R([a, b];E), [α, β] ⊂ [a, b], so ist f ∈ R([α, β];E).
(5) Sei E = E1 × E2 mit der Produktnorm ‖(e1, e2)‖ :=√‖e1‖2
E1+ ‖e2‖2
E2
versehen und sei f = (f1, f2) : [a, b] −→ E1 ×E2. Dann ist f ∈ R([a, b];E)genau dann, wenn fi ∈ R([a, b];Ei) ist fur i ∈ 1, 2 und es gilt
b∫
a
f(x) dx =
b∫
a
f1(x) dx,
b∫
a
f2(x) dx
.
(6) Seien f, g ∈ R([a, b];E), f ≤ g. Dann gilt
b∫
a
f(x) dx ≤b∫
a
g(x) dx.
(7) Seien f, g ∈ R([a, b];E). Stimmen f und g auf einer dichten Teilmenge von[a, b] uberein, so gilt
b∫
a
f(x) dx =
b∫
a
g(x) dx.
(8) Ist f ∈ C([a, b];E), dann gilt
‖b∫
a
f(x) dx‖ ≤b∫
a
‖f(x)‖ dx ≤ ‖f‖∞ · (b− a).
Dies ist die Fundamentalungleichung fur Riemann–Integrale.

7.2 Das Riemannsche Integral 275
Beweis: Ubungsaufgabe. ⊓⊔
Satz 7.13 Sei fn mit fn : [a, b] −→ E eine Folge Riemann–integrierbarerFunktionen und konvergiere fn gleichmaßig gegen f . Dann ist f Riemann–integrierbar und es gilt
b∫
a
f(x) dx = limn→∞
b∫
a
fn(x) dx.
Beweis: Da fn gleichmaßig gegen f konvergiert, existiert fur alle ε > 0 einn0 ∈ N, so dass fur alle n ≥ n0 und fur alle x ∈ [a, b]
‖f(x) − fn(x)‖ <ε
4· 1
b− a. (∗)
gilt.(1) Wir zeigen, dass f ∈ R([a, b];E) gilt. Da fn0 ∈ R([a, b];E) ist, existiert
eine Zerlegung P0, so dass fur alle Zerlegungen P , P ≥ P0
‖S(fn0 ,P , ξ) − S(fn0 , P , ξ)‖ <ε
2.
gilt. Damit folgt
‖S(f,P , ξ) − S(f, P, ξ)‖≤ ‖S(f,P , ξ) − S(fn0 ,P , ξ)‖ + ‖S(fn0 ,P , ξ) − S(fn0 , P , ξ)‖
+‖S(fn0 , P, ξ) − S(f, P, ξ)‖≤ ‖
∑
k
(f(ξk) − fn0(ξk))L(Ik)‖ +ε
2+ ‖
∑
l
(f(ξl) − fn0(ξl))L(Il)‖
(∗)≤ 2 · ε
4· 1
b− a· (b − a) +
ε
2= ε.
Folglich ist f ∈ R([a, b];E).
(2) Sei Pm eine Folge von Zerlegungen, ‖Pm‖ konvergiere gegen 0 undξm seien Stutzstellen von Pm. Dann folgt mit Satz 7.11
∀m ≥ m0 : ‖b∫
a
f(x) dx− S(f,Pm, ξm)‖ < ε
4,
∀m ≥ m0(n) : ‖b∫
a
fn(x) dx − S(fn,Pm, ξm)‖ < ε
4.

276 7 Integralrechnung fur Funktionen einer reellen Variablen
Sei nun n ≥ n0 und m ≥ maxm0,m0(n). Dann folgt
‖b∫
a
f(x) dx −b∫
a
fn(x) dx‖
≤ ‖b∫
a
f(x) dx− S(f,Pm, ξm)‖ + ‖S(f,Pm, ξm) − S(fn,Pm, ξm)‖
+‖b∫
a
fn(x) dx − S(fn,Pm, ξm)‖
≤ ε
4+ε
4+ε
4< ε.
Somit gilt limn→∞
b∫a
fn(x) dx =b∫a
f(x) dx. ⊓⊔
Folgerung 7.1 Falls die Funktionen fn ∈ R([a, b];E) sind und f(x) =∞∑n=1
fn(x) gleichmaßig konvergent ist, so ist f ∈ R([a, b];E) und es gilt
b∫
a
f(x) dx =
∞∑
n=1
b∫
a
fn(x) dx.
Anwendung auf die Integralberechnung
Oft sind Integrale nicht durch elementare Funktionen auszudrucken, wie zumBeispiel elliptische Integrale. Dann kann man sie durch eine Reihendarstellungnaherungsweise berechnen.
Beispiel 7.12Wir betrachten die Funktion f(x) = 1√
1−k2 sin2 xfur k2 < 1 und mochten
I =
π2∫0
f(x) dx zumindest naherungsweise berechnen. I existiert, da f(x) ein
stetige Funktion ist. Fur |y| < 1 gilt
1√1 + y
= 1 − 1
2y +
1 · 32 · 4y
2 − 1 · 3 · 52 · 4 · 6y
3 ± . . .
und daher
1√1 − k2 sin2 x
= 1 +1
2k2 sin2 x+
1 · 32 · 4k
4 sin4 x+ . . .

7.2 Das Riemannsche Integral 277
Diese Reihe hat fur |k| < 1 eine konvergente Majorante (die Reihe mit demGrenzwert 1√
1−k2). Nach dem Weierstraßschen Majorantenkriterium ist die
Reihe gleichmaßig konvergent. Mit Satz 7.13 folgt daher
I =
π2∫
0
dx√1 − k2 sin2 x
=
π2∫
0
dx +
∞∑
n=1
π2∫
0
1 · 3 · . . . · (2n− 1)
2 · 4 · . . . · (2n)k2n sin2n xdx
=π
2+
∞∑
n=1
1 · 3 · . . . · (2n− 1)
2 · 4 · . . . · (2n)k2n
π2∫
0
sin2n x dx
=π
2
(1 +
∞∑
n=1
(1 · 3 · . . . · (2n− 1)
2 · 4 · . . . · (2n)
)2
k2n
).
Wir leiten nun spezielle Integrierbarkeitskriterien fur reellwertige Funktionenher. Sei f : [a, b] −→ R eine beschrankte Funktion und P = x0, . . . , xn eineZerlegung von [a, b]. Wir definieren
mk := inff(x) | x ∈ Ik und Mk := supf(x) | x ∈ Ik
sowie
S(f,P) :=
n∑
k=1
mk · L(Ik) Untersumme von f bzgl. P ,
S(f,P) :=n∑
k=1
Mk · L(Ik) Obersumme von f bzgl. P .
Offensichtlich folgt dann:
(1) Sind ξ beliebige Stutzstellen von P , so gilt S(f,P) ≤ S(f,P , ξ) ≤ S(f,P).
(2) Gilt P ≥ P , so folgt
inf f · (b− a) ≤ S(f,P) ≤ S(f, P) ≤ S(f, P) ≤ S(f,P) ≤ sup f · (b− a).
(3) Seien P , P beliebige Zerlegungen. Dann gilt S(f,P) ≤ S(f, P).
Folglich existieren
b∫
a
f(x) dx := supPS(f,P) unteres Riemann Integral,
b∫
a
f(x) dx := infPS(f,P) oberes Riemann-Integral

278 7 Integralrechnung fur Funktionen einer reellen Variablen
und es giltb∫
a
f(x) dx ≤b∫
a
f(x) dx.
Satz 7.14 (Riemannsches Integrierbarkeitskriterium) Sei f : [a, b] −→R beschrankt. Dann gilt
(1) f ∈ R([a, b]; R) genau dann, wenn fur alle ε > 0 eine Zerlegung P existiertmit
S(f,P) − S(f,P) < ε.
(2) f ∈ R([a, b]; R) genau dann, wenn
b∫
a
f(x) dx =
b∫
a
f(x) dx,
und es gilt dannb∫a
f(x) dx =b∫a
f(x) dx =b∫a
f(x) dx.
Beweis: (1) (⇒) Sei f ∈ R([a, b]; R). Nach Satz 7.9 existiert dann fur alleε > 0 eine Zerlegung P mit
S(f,P , ξ) − S(f,P , ξ) < ε
2, (∗)
wobei ξ, ξ beliebige Stutzstellen sind, so dass gilt f(ξk) ≥ f(ξk). Wir wahlen
nun ξkn und ξkn, so dass fur n gegen ∞ f(ξkn) gegen Mk und f(ξkn)gegen mk konvergieren. Dann folgt mit (∗)
S(f,P) − S(f,P) ≤ ε
2< ε.
(⇐) Fur alle ε > 0 existiere eine Zerlegung P0, so dass gilt S(f,P0) −S(f,P0) < ε. Fur P ≥ P0 und beliebige Stutzstellen ξ gilt
S(f,P0) ≥ S(f,P) ≥ S(f,P , ξ) ≥ S(f,P0)
und daher
|S(f,P , ξ) − S(f, P, ξ)| ≤ S(f,P0) − S(f,P0) < ε ∀P , P ≥ P0.
Nach Satz 7.9 ist dann f ∈ R([a, b]; R).
(2) (⇒) Sei f ∈ R([a, b]; R). Nach Teil (1) existiert dann eine Folge Pn mit
S(f,Pn) − S(f,Pn) <1
n.

7.2 Das Riemannsche Integral 279
Es gilt aber auch
S(f,Pn) ≤b∫
a
f(x) dx ≤b∫
a
f(x) dx ≤ S(f,Pn).
und damitb∫
a
f(x) dx−b∫
a
f(x) dx <1
n∀n ∈ N
woraus folgtb∫
a
f(x) dx =
b∫
a
f(x) dx.
(⇐) Ist andererseits∫ baf(x) dx =
∫ baf(x) dx = e, so existieren fur alle ε > 0
Zerlegungen P , P mit
S(f,P) > e− ε
2, und S(f, P) < e+
ε
2.
Folglich ist S(f, P) − S(f,P) < ε. Sei nun P0 = P ∪ P. Dann gilt
S(f,P0) − S(f,P0) ≤ S(f, P) − S(f,P) < ε.
Somit ist f ∈ R([a, b]; R). ⊓⊔Unser Ziel ist es nun, zu zeigen, dass f : [a, b] −→ R genau dann Riemann–integrierbar ist, wenn f beschrankt und “fast uberall” stetig ist.
Definition 7.9. Eine Teilmenge A ⊂ R hat das Lebesgue–Maß Null (Symbolµ(A) = 0), wenn fur alle ε > 0 eine Folge von Intervallen I1, I2, . . . existiert,so dass gilt
(1) A ⊂∞⋃
n=1
Int(In),
(2)∞∑
n=1
L(In) < ε.
Bemerkung Offensichtlich gilt dann Folgendes
(1) Ist B ⊂ A und µ(A) = 0, so ist auch µ(B) = 0.(2) Sei A ⊂ [a, b] eine Nullmenge, d.h., A hat das Lebesque-Maß Null. Dann ist
[a, b]\A ⊂ [a, b] eine dichte Teilmenge. (Angenommen, [a, b]\A ware nichtdicht. Dann gabe es ein offenes Intervall (c, d) ⊂ A mit L(c, d) = d−c = ε.Dann aber ließe A sich nicht durch Intervalle, deren Gesamtlange kleinerals ε ist, uberdecken.

280 7 Integralrechnung fur Funktionen einer reellen Variablen
(3) Es gilt µ(x) = 0.
Satz 7.15(1) Seien A1, A2, . . . ⊂ R Mengen vom Lebesgue–Maß Null. Dann ist
µ
( ∞⋃
n=1
An
)= 0.
(2) Jede abzahlbare Menge A ⊂ R hat Lebesgue–Maß Null.
Beweis:(1) Sei ε > 0. Da µ(An) = 0 fur alle n ∈ N gilt, existieren Intervalle In1, In2, . . .mit
An ⊂∞⋃
i=1
Int(Ini), und∞∑
i=1
L(Ini) <ε
2i.
Daraus folgt
A =
∞⋃
n=1
An ⊂∞⋃
i=1
∞⋃
n=1︸ ︷︷ ︸abzahlbar
Int(Ini)
und ∞∑
n=1
∞∑
i=1
L(Ini) < ε ·∞∑
i=1
1
2i= ε · 1
2· 1
1 − 12
= ε.
(2) Folgt aus (1), da µ(x) = 0. ⊓⊔
Satz 7.16 (Lebesguesches Integrierbarkeitskriterium)f ∈ R([a, b]; R) genau dann, wenn gilt
(1) f ist beschrankt.(2) Die Menge der Unstetigkeitsstellen von f hat das Maß Null, das heißt, f
ist “fast uberall stetig”.
Beweis:(⇐) Sei f : [a, b] ⊂ R −→ R beschrankt und fast uberall stetig, das heißt|f(x)| < c fur alle x ∈ [a, b] und
A := x0 ∈ [a, b] | f in x0 nicht stetig
hat Lebesgue–Maß Null. Sei ε > 0. Dann existieren Intervalle J1, J2, . . ., sodass
A ⊂∞⋃
n=1
Int(Jn), und
∞∑
n=1
L(Jn) < ε.
Wir betrachten die Oszillation von f in x0 ∈ [a, b]:

7.2 Das Riemannsche Integral 281
o(f, x0) := limδ→0+
(supf(x) | |x− x0| < δ − inff(x) | |x− x0| < δ) .
Es gilt, dass f in x0 genau dann stetig ist, wenn o(f, x0) = 0 ist. Das heißt,fur x0 ∈ [a, b]\A existiert ein δ(x0), so dass gilt
supf(x) | |x− x0| < δ(x0) − inff(x) | |x− x0| < δ(x0) < ε.
Die Familie U = Int(Jn) | n ∈ N ∪ K(x0, δ(x0)) | x0 ∈ [a, b]\A ist eineoffene Uberdeckung der kompakten Menge [a, b]. Somit existiert eine endlicheTeiluberdeckung
U∗ = Int(Jn1), . . . , Int(JnN), K(x1, δ(x1)), . . . ,K(x, δ(x))
von [a, b]. Wir wahlen eine Zerlegung P = x0, x1, . . . , xn von [a, b], derenTeilintervalle Ik in Int(Jnj
) oder in K(xi, δ(xi)) liegen fur i ∈ 1, . . . , , j ∈1, . . . , N. Nun sei J∗ die Menge der Teilintervalle, die in einem Jnj
liegenund J∗∗ bestehe aus den restlichen Teilintervallen von P . Dann gilt wegen|f(x)| ≤ c die folgende Ungleichung
S(f,P) − S(f,P) =∑
Ik∈J∗
(Mk −mk) L (Ik) +∑
Ik∈J∗∗
(Mk −mk) L (Ik)
≤ 2c∑
Ik∈J∗
L (Ik)
︸ ︷︷ ︸<ε
+ε∑
Ik∈J∗∗
L (Ik)
︸ ︷︷ ︸<b−a
= (2c+ (b − a)) · ε.
Nach Satz 7.14 ist dann f ∈ R([a, b]; R).
(⇒) Sei f ∈ R([a, b]; R). Dann ist f beschrankt und es bleibt zu zeigen, dassµ(A) = 0 gilt. Sei Aε := x ∈ [a, b] | o(f, x) ≥ ε. Da f in x genau dann stetigist, wenn o(f, x) = 0, folgt A = A1 ∪ A 1
2∪ A 1
3∪ . . .. Nach Satz 7.15 genugt
es zu zeigen, dass µ(A 1n) = 0 ist fur alle n ∈ N. Sei n fix und ε > 0 gegeben.
Nach Voraussetzung existiert dann eine Zerlegung P mit
S(f,P) − S(f,P) <ε
2n.
Sei J∗ die Menge der Teilintervalle Ik von P mit Int(Ik) ∩ A 1n
6= ∅. NachDefinition der Oszillation folgt dann fur x0 ∈ Ik ∩A 1
n
Mk −mk = sup f|Ik− inf f|Ik
≥ o(f, x0) ≥1
n.
Daraus folgt
1
n
∑
Ik∈J∗
L (Ik) ≤∑
Ik∈J∗
(Mk −mk)L (Ik) ≤ S(f,P) − S(f,P) <ε
2n.

282 7 Integralrechnung fur Funktionen einer reellen Variablen
Außerdem wahlen wir Intervalle Ik um die Teilungspunkte von P mitm∑k=1
L(Ik) <
ε2 . Nach Wahl von J∗ folgt dann
A 1n⊂
⋃
Ik∈J∗
Int(Ik) ∪m⋃
k=1
Int(Ik), und∑
Ik∈J∗
L(Ik)+
m∑
k=1
L(Ik) <ε
2+ε
2= ε.
Folglich ist µ(A 1n) = 0. ⊓⊔
Folgerung 7.2
(1) Ist f : [a, b] −→ R eine beschrankte Funktion mit abzahlbar vielen Unste-tigkeitsstellen, so ist f Riemann–integrierbar.
(2) Ist f : [a, b] −→ R eine monotone Funktion, so ist f Riemann-integrierbar.(3) Sei f : [a, b] −→ Rn. Dann ist f ∈ R([a, b]; Rn) genau dann, wenn f
beschrankt und fast uberall stetig ist, wobei fur f = (f1, . . . , fn) gilt
f ∈ R([a, b]; Rn) ⇔ fi ∈ R([a, b]; R), f ∈ C([a, b]; Rn) ⇔ fi ∈ C([a, b],R).
Analoges gilt fur Funktionen mit Werten in Cn.(4) Ist f ∈ R([a, b]; Rn), so ist auch ‖f‖ ∈ R([a, b]; R) und es gilt
‖b∫
a
f(x) dx‖ ≤b∫
a
‖f(x)‖ dx.
(5) Sind f, g ∈ R([a, b]; C), so ist auch f · g ∈ R([a, b]; C).(6) Ist f ∈ R([a, b]; Rn) und h ∈ C(Rn; Rm), so ist h f ∈ R([a, b]; Rm).
Beispiel 7.13Sei f : [0, 1] −→ R gegeben durch
f(x) =
1 x rational
0 x irrational.
f ist in keinem Punkt aus [0, 1] stetig und f 6∈ R([a, b]; R). Spater fuhren wirdas Lebesgue–Integral ein und werden sehen, dass f Lebesgue–integrierbarist.
7.3 Hauptsatz der Differential- und Integralrechnung
Alle in diesem Abschnitt auftretenden Integrale sind als Riemann–Integraleaufzufassen.
Satz 7.17 Sei f : [a, b] ⊂ R −→ E stetig. Wir definieren F : [a, b] ⊂ R −→ E
durch F (x) :=x∫a
f(t) dt. Dann gilt

7.3 Hauptsatz der Differential- und Integralrechnung 283
(1)F : [a, b] −→ E ist Lipschitz-stetig,(2)F ist differenzierbar und es gilt F ′ = f .
Beweis:(1) Da f ∈ C([a, b];E) ⊂ R([a, b];E), ist F definiert. Es gilt mit Satz 7.12
‖F (x) − F (y)‖ = ‖x∫
a
f(t) dt−y∫
a
f(t) dt‖ = ‖y∫
x
f(t) dt‖
≤ |y∫
x
‖f(t)‖ dt| ≤ |y − x| · ‖f‖∞.
(2) Sei ε > 0. Da f in x0 ∈ [a, b] stetig ist, existiert ein δ > 0, so dass fur allet mit |t− x0| < δ gilt, dass ‖f(t) − f(x0)‖ < ε ist (∗). Also ist
∥∥∥∥F (t) − F (x0)
t− x0− f(x0)
∥∥∥∥ =
∥∥∥∥∥∥1
t− x0·
t∫
x0
f(u) du− f(x0)
∥∥∥∥∥∥
=
∥∥∥∥∥∥1
t− x0
t∫
x0
(f(u) − f(x0)) du
∥∥∥∥∥∥
≤ 1
|t− x0|
t∫
x0
‖f(u) − f(x0)‖ du
(∗)≤ 1
|t− x0|· ε|t− x0| = ε
fur alle |t− x0| < δ. Folglich ist
limt→x0
F (t) − F (x0)
t− x0= F ′(x0) = f(x0).
⊓⊔Bemerkung Ist dimE <∞, so gilt
(1) Ist f ∈ R([a, b];E), so ist F Lipschitz-stetig.(2) Ist f in x0 stetig, so ist auch F in x0 stetig.
Satz 7.18 (Hauptsatz der Differential- und Integralrechnung)f : [a, b] ⊂ R −→ E sei stetig. Dann gilt
(1) F (x) := (R) −x∫a
f(t) dt ist diejenige Stammfunktion von f mit F (a) = 0.

284 7 Integralrechnung fur Funktionen einer reellen Variablen
(2) Ist F : [a, b] −→ E eine beliebige Stammfunktion von f , so gilt
(R) −b∫
a
f(t) dt = F (b) − F (a) =
∫ b
a
f(t) dt
︸ ︷︷ ︸best. Integral
.
Das heißt, jede stetige Funktion hat eine Stammfunktion und fur jede stetigeFunktion stimmt das Riemann–Integral mit dem bestimmten Integral uberein.
Beweis:(1) folgt aus Satz 7.17.
(2) Sei F eine beliebige Stammfunktion von f . Dann ist F = F + e, wobei e
konstant ist. Somit ist F (a) = e und es folgt
b∫
a
f(t) dt = F (b) − F (a) = F (b) + e− (F (a) + e) = F (b) = (R) −b∫
a
f(t) dt.
⊓⊔
Anwendung: Als Anwendung beweisen wir zwei Eigenschaften der Zahl π.
(1) Die Zahl π ist irrational.Es genugt zu zeigen, dass π2 irrational ist. Angenommen, π2 ware rational.Dann wurden a, b ∈ N existieren, so dass π2 = a
bgilt. Wir wahlen ein n ∈ N
so groß , dass 2an
n! < 1 (∗) gilt und betrachten die Funktion
f(x) :=1
n!xn(1 − x)n =
1
n!
2n∑
k=n
ckxk, ck ∈ Z.
Ist v < n oder v > 2n, so gilt f (v)(0) = 0. Ist v ∈ n, . . . , 2n, so ist f (v)(0) =v!n!cv ∈ Z. Folglich ist f (v)(0) ∈ Z fur alle v ∈ N0. Da f(x) = f(1 − x) gilt, ist
auch f (v)(1) ∈ Z fur alle v ∈ N0. Wir betrachten die Funktion
F (x) := bn(π2nf(x) − π2n−2f (2)(x) + π2n−4f (4)(x) − . . .+ (−1)nf (2n)(x)
).
Da nach Annahme π2(n−k) = an−k
bn−k gilt, sind auch F (0), F (1) ∈ Z und es gilt
d
dx(F ′(x) sin πx− πF (x) cos πx) = (F (2)(x) + π2F (x)) sin πx
= bnπ2n+2f(x) sinπx
= anπ2f(x) sinπx.
Daraus folgt

7.3 Hauptsatz der Differential- und Integralrechnung 285
I := π
1∫
0
anf(x) sinπx dx
=1
π(F ′(1) sinπ − πF (1) cosπ − F ′(0) sin 0 + πF (0) cos 0)
= F (1) + F (0) ∈ Z.
Da auf (0, 1) die Abschatzung 0 < f(x) < 1n! gilt, folgt
0 < I <πan
n!
1∫
0
sinπxdx
︸ ︷︷ ︸= 2
π
=2an
n!
(∗)< 1.
Dies aber widerspricht I ∈ Z. Folglich ist π2 irrational.
(2) Wir wollen die Wallissche Formel π2 = lim
n→∞
∏nk=1
4k2
4k2−1 beweisen. Dazu
definieren wir
An :=
π2∫
0
sinn xdx =
1·3·...·(2k−1)2·4·...·(2k)
π2 n = 2k ≥ 2 (∗∗)
2·4·...·(2k)1·3·...·(2k+1) n = 2k + 1 ≥ 3.
Fur x ∈ [0, π2 ] gilt sin2n+2 x ≤ sin2n+1 x ≤ sin2n x. Da sinn stetig ist, giltauerdem
π2∫
0
sinn xdx = (R) −
π2∫
0
sinn xdx.
Aus der Monotonie des Riemann–Integrals folgt A2n+2 ≤ A2n+1 ≤ A2n. Dar-aus folgt mit (∗∗)
1 = limn→∞
A2n
A2n≥ limn→∞
A2n+1
A2n≥ lim
n→∞A2n+2
A2n= limn→∞
2n+ 1
2n+ 2= 1.
Wir haben also in der Tat in der letzten Ungleichung uberall ein Gleichheits-zeichen. Damit folgt
1 = limn→∞
A2n+1
A2n
(∗∗)= lim
n→∞2 · 4 · . . . · (2n)
1 · 3 · . . . · (2n+ 1)· 2 · 4 · . . . · (2n)
1 · 3 · . . . · · · (2n− 1)· 2
π
= limn→∞
n∏
k=1
(2k)2
(2k + 1)(2k − 1)· 2
π.
Folglich gilt π2 = lim
n→∞
∏nk=1
(2k)2
(2k+1)(2k−1) .

286 7 Integralrechnung fur Funktionen einer reellen Variablen
7.4 Der Mittelwertsatz der Integralrechnung
Satz 7.19 (1. Mittelwertsatz der Integralrechnung) Sei f : [a, b] −→R stetig, g : [a, b] −→ R Riemann–integrierbar und g ≥ 0. Dann existiert einξ ∈ [a, b] mit
b∫
a
f(x)g(x) dx = f(ξ) ·b∫
a
g(x) dx.
Beweis:
1. Fall: Seib∫a
g(x) dx = 0. Es ist zu zeigen, dass dannb∫a
f(x)g(x) dx = 0 gilt.
Da f : [a, b] −→ R stetig und [a, b] kompakt ist, existieren m := min f undM := max f . Es folgt
m · g(x) ≤ f(x) · g(x) ≤M · g(x) ∀x ∈ [a, b]. (∗)
Nach Integration ergibt sich 0 =b∫a
f(x)g(x) dx.
2. Fall: Seib∫a
g(x) dx > 0. Dann gilt nach (∗)
m ≤
b∫a
f(x)g(x) dx
b∫a
g(x) dx
≤M.
Sei m := f(xmin), M := f(xmax). Da f stetig ist, folgt aus dem Zwischen-wertsatz, dass ein ξ ∈ [xmin, xmax] ⊂ [a, b] existiert, so dass gilt
f(ξ) =
b∫a
f(x)g(x) dx
b∫a
g(x) dx
.
⊓⊔
Folgerung 7.3 Ist f : [a, b] −→ R stetig, dann existiert ein ξ ∈ [a, b], so dassgilt
b∫
a
f(x) dx = f(ξ) · (b − a).
Beweis: Folgt aus Satz 7.19 mit g ≡ 1. ⊓⊔

7.4 Der Mittelwertsatz der Integralrechnung 287
Folgerung 7.4 Sei f : [a, b] −→ R stetig, f ≥ 0 undb∫a
f(x) dx = 0. Dann ist
f ≡ 0.
Beweis: Sei c ∈ [a, b] fixiert. Wir betrachten Folgen (xn), (yn) mit a ≤ xn <c < yn ≤ b und xn −→ c, yn −→ c. Da f : [xn, yn] −→ R stetig ist und f ≥ 0ist, gilt
0 ≤yn∫
xn
f(x) dx ≤b∫
a
f(x) dx = 0.
Daraus folgt
0 =
yn∫
xn
f(x) dx = f(ξn)(yn − xn), ξn ∈ [xn, yn].
Folglich ist f(ξn) = 0. Lassen wir n gegen ∞ laufen, so konvergiert ξn gegen c.Da f stetig ist, konvergiert daher f(ξn) gegen f(c). Folglich ist f(c) = 0. ⊓⊔
Satz 7.20 (2. Mittelwertsatz der Integralrechnung)Sei f : [a, b] −→ R stetig, g : [a, b] −→ R monoton wachsend und stetigdifferenzierbar. Dann existiert ein ξ ∈ [a, b], so dass gilt
b∫
a
f(x)g(x) dx = g(a)
ξ∫
a
f(x) dx+ g(b)
b∫
ξ
f(x) dx.
Beweis: Sei F eine Stammfunktion von f mit F (a) = 0. Da g monotonwachsend und differenzierbar ist, gilt g′ ≥ 0. Wenden wir den 1. MWS derIntegralrechnung auf F · g′ an, so erhalten wir ein ξ ∈ [a, b], so dass gilt
b∫
a
F (x)g′(x) dx = F (ξ) ·b∫
a
g′(x) dx = F (ξ) · (g(b) − g(a)), (∗)
Da F eine Stammfunktion von f ist, gilt
b∫
a
f(x)g(x) dx =
b∫
a
F ′(x)g(x) dx = F (x)g(x)∣∣ba −
b∫
a
F (x)g′(x) dx.
Mit (∗) folgt nun

288 7 Integralrechnung fur Funktionen einer reellen Variablen
b∫
a
f(x)g(x) dx = F (b)g(b) − F (a)g(a) + F (ξ)g(a) − F (ξ)g(b)
= g(a)(F (ξ) − F (a)) + g(b)(F (b) − F (ξ))
= g(a)
ξ∫
a
f(x) dx + g(b)
b∫
ξ
f(x) dx.
⊓⊔
Beispiel 7.14Sei 0 < a < b <∞. Dann gilt
limn→∞
b∫
a
sinnx
xdx = 0.
Beweis: Es genugt zu zeigen, dass
∣∣∣∣∣∣
b∫
a
sin(rx)
xdx
∣∣∣∣∣∣≤ 4
ra
fur alle r > 0 gilt. Setzen wir f(x) = sin rx und g(x) = − 1x, dann folgt mit
dem 2. Mittelwertsatz
−b∫
a
sin (rx)
xdx = −1
a
ξ∫
a
sin (rx) dx− 1
b
b∫
ξ
sin (rx) dx
=1
arcos (rx)
∣∣∣∣ξ
a
+1
brcos (rx)
∣∣∣∣b
ξ
.
Daraus folgt sofort
∣∣∣∣∣∣
b∫
a
sin (rx)
xdx
∣∣∣∣∣∣≤ 1
ar| cos (rξ) − cos (ar)|︸ ︷︷ ︸
≤2
+1
br| cos (rb) − cos (rξ)|︸ ︷︷ ︸
≤2
≤ 2
ar+
2
br<
4
ar.
⊓⊔

7.5 Parameterabhangige Integrale 289
7.5 Parameterabhangige Integrale
Wir werden nun untersuchen, wann Integral und Ableitung vertauschbar sind.
Satz 7.21 Sei [a, b] ⊂ R ein kompaktes Intervall, U ⊂ Rn offen, f : [a, b] ×U ⊂ Rn+1 −→ R eine stetige Funktion. Sei F : U −→ R definiert durch
F (x) :=
b∫
a
f(t, x) dt.
Dann gilt
(1)F : U ⊂ Rn −→ R ist stetig.(2) Existiert ∂f
∂xiund ist ∂f
∂xi: [a, b]× U −→ R stetig, so ist F : U −→ R nach
xi stetig differenzierbar und es gilt
∂F
∂xi(x) =
b∫
a
∂f
∂xi(t, x) dt.
Beweis: F ist definiert, da f(., x) stetig ist.(1) Sei x ∈ U fixiert und W (x) ⊂ U eine kompakte Umgebung von x. NachVoraussetzung ist f|[a,b]×W
stetig. Da [a, b] × W kompakt ist, ist f|[a,b]×W
gleichmaßig stetig, das heißt, fur alle ε > 0 existiert ein δ > 0, so dass fur allet ∈ [a, b] und fur alle |h| < δ gilt
|f(t, x+ h) − f(t, x)| < ε
|b− a| .
Es folgt
|F (x+ h) − F (x)| =
∣∣∣∣∣∣
b∫
a
f(t, x+ h) − f(t, x) dt
∣∣∣∣∣∣≤
b∫
a
|f(t, x+ h) − f(t, x)| dt
≤b∫
a
ε
|b− a| dt = ε.
Folglich ist F stetig in x und es gilt
b∫
a
f(t, x) dt = F (x) = limh→0
F (x+ h) = limh→0
b∫
a
f(t, x+ h) dt
=
b∫
a
limh→0
f(t, x+ h) dt.

290 7 Integralrechnung fur Funktionen einer reellen Variablen
(2) Sei x ∈ U fixiert, h ∈ R hinreichend klein. Wir definieren
g : [a, b] × U × (−ε, ε) −→ R
(t, x, h) 7→ g(t, x, h) :=
f(t,x+hei)−f(t,x)
hh 6= 0
∂f∂xi
(t, x) h = 0.
Fur h 6= 0 ist g stetig, da f stetig ist. Die Funktion g ist auch fur h = 0 stetig,denn wenden wir den Mittelwertsatz der Differentialrechnung an, so erhaltenwir
g(t, x, h) =∂f
∂xi(t, x+ ϑh · hei) fur ein ϑh ∈ [0, 1].
Nach Voraussetzung ist ∂f∂xi
stetig. Somit konvergiert x+ϑhhei gegen x0, wenn(x, t, h) gegen (x0, t0, 0) geht und es folgt
g(x, t, h) =∂f
∂xi(t, x+ ϑhhei) −→
∂f
∂xi(t0, x0) = g(t0, x0, 0).
Folglich ist g auch fur h = 0 stetig. Wenden wir nun (1) auf g an, so erhaltenwir
∂F
∂xi(x) = lim
h→0
F (x+ hei) − F (x)
h= limh→0
b∫
a
f(t, x+ hei) − f(t, x)
hdt
= limh→0
b∫
a
g(t, x, h)︸ ︷︷ ︸stetig
dt =
b∫
a
limh→0
g(t, x, h) dt =
b∫
a
g(t, x, 0) dt
=
b∫
a
∂f
∂xi(t, x) dt.
⊓⊔
Sei f : [a, b] × [c, d] ⊂ R2 −→ R stetig differenzierbar und seieng0, g1 : [c, d] ⊂ R −→ [a, b] ⊂ R differenzierbar. Wir betrachten die AbbildungG : [c, d] ⊂ R −→ R, definiert durch
G(x) :=
g1(x)∫
g0(x)
f(t, x) dt.
Wie kann man die Ableitung von G berechnen? Sind g0, g1 konstant, so kannman dazu Satz 7.21 verwenden.
Satz 7.22 Die Abbildung G : [c, d] ⊂ R −→ R ist differenzierbar und es gilt

7.5 Parameterabhangige Integrale 291
G′(x) =
g1(x)∫
g0(x)
∂f
∂x(t, x) dt + g′1(x)f(g1(x), x) − g′0(x)f(g0(x), x).
Beweis: Wir betrachten die Abbildungen
F (x) :=
b∫
a
f(t, x) dt, F0(y, x) :=
y∫
a
f(t, x) dt, F1(y, x) :=
b∫
y
f(t, x) dt
Dann gilt G(x) = F (x) − F0(g0(x), x) − F1(g1(x), x). (1) Nach Satz 7.21existiert F ′(x) und es gilt
F ′(x) =
b∫
a
∂f
∂x(t, x) dt.
(2) Nach dem Hauptsatz der Differential- und Integralrechnung ist F0(y, x) furfestes x eine Stammfunktion von f(·, x). Das heißt, fur x fest gilt ∂F0
∂y(y, x) =
f(y, x). Nach Satz 7.21 gilt außerdem fur festes y
∂F0
∂x(y, x) =
y∫
a
∂f
∂x(t, x) dt.
Aus der Kettenregel folgt
d
dx(F0(g0(x), x)) =
∂F0
∂y(g0(x), x))g
′0(x) +
∂F0
∂x(g0(x), x))
= f(g0(x), x)g′0(x) +
g0(x)∫
a
∂f
∂x(t, x) dt.
(3) Analog gilt
d
dx(F1(g1(x), x)) = −f(g1(x), x)) · g′1(x) +
b∫
g1(x)
∂f
∂x(t, x) dt.
Insgesamt erhalten wir
G′(x) =
g1(x)∫
g0(x)
∂f
∂x(t, x) dt + g′1(x) · f(g1(x), x) − g′0(x) · f(g0(x), x).
⊓⊔

292 7 Integralrechnung fur Funktionen einer reellen Variablen
7.6 Uneigentliche Riemannsche Integrale
Sei f : [a,∞) −→ E eine Abbildung und sei f auf jedem kompakten Intervall
[a, x] Riemann–integrierbar. Dann kann man F (x) :=x∫a
f(t) dt bilden.
Definition 7.10. f : [a,∞) ⊂ R −→ E heißt auf [a,∞) uneigentlichRiemann–integrierbar, falls
∞∫
a
f(t) dt := limx→∞
x∫
a
f(t) dt ∈ E
existiert. Analog definiert man∫ a−∞ f(t) dt fur eine Funktion f : (−∞, a] −→ R,
die auf jedem Intervall [x, a] Riemann–integrierbar ist.
Definition 7.11. Sei f : R −→ E auf jedem kompakten Intervall Riemann–integrierbar. Dann heißt f auf R uneigentlich Riemann–integrierbar, falls∫∞0f(t) dt und
∫ 0
−∞ f(t) dt existieren. Wir verwenden die Bezeichnung
∞∫
−∞
f(t) dt :=
0∫
−∞
f(t) dt+
∞∫
0
f(t) dt.
Bemerkung: Fur die uneigentlichen Integrale gelten die gleichen Rechenre-geln wie fur die Riemann–Integrale, zum Beispiel Additivitat, partielle Inte-gration, usw.
Beispiel 7.15∫∞0 sin t dt existiert nicht, denn es gilt
x∫
0
sin t dt = − cosx+ cos 0 = − cosx+ 1
und limx→∞
cosx existiert nicht.
Beispiel 7.16Es gilt
∞∫
0
dx
(1 + x2)n=
1 · 3 · . . . · (2n− 3)
2 · 4 · . . . · (2n− 2)· π
2.
Zum Beweis betrachten wirx∫0
1(1+t2)n dt. Mit der Substitution t = cotϕ = cosϕ
sinϕ
und dt = −(1 + cot2 ϕ) dϕ erhalten wir

7.6 Uneigentliche Riemannsche Integrale 293
x∫
0
1
(1 + t2)ndt = −
arccot(x)∫
arccot(0)
(1 + cot2 ϕ
)(1 + cot2 ϕ
)n dϕ.
Daraus folgt
π2∫
arccot(x)
1
(1 + cot2 ϕ)n−1dϕ =
π2∫
arccot(x)
(sin2 ϕ
sin2 ϕ+ cos2 ϕ
)n−1
dϕ
=
π2∫
arccot(x)
(sinϕ)2n−2 dϕ.
Wegen arccot(x) → 0 fur x→ ∞ folgt
∞∫
0
1
(1 + x2)ndx =
π2∫
0
(sinϕ)2n−2 dϕ =1 · 3 · . . . · (2n− 3)
2 · 4 · . . . · (2n− 2)· π
2.
Sei nun f : (a, b) ⊂ R −→ E eine Abbildung, die auf jedem Intervall [α, β] ⊂(a, b) Riemann–integrierbar ist.
Definition 7.12. f heißt auf (a, b) uneigentlich Riemann–integrierbar, fallsdie Grenzwerte
limα→a+
x0∫
α
f(t) dt, limβ→b−
β∫
x0
f(t) dt
fur ein beliebiges aber festes x0 ∈ (a, b) existieren. Wir verwenden die Be-zeichnung
b∫
a
f(t) dt := limα→a+
x0∫
α
f(t) dt+ limβ→b−
β∫
x0
f(t) dt.
Beispiel 7.17 (Die Gamma–Funktion (Verallgemeinerung von n!))Sei x ∈ R+ gegeben. Die Gamma–Funktion ist definiert durch
Γ (x) :=
∞∫
0
tx−1e−t dt.
Dieses Integral konvergiert:(1) Fur t > 0 gilt 0 < tx−1e−t < tx−1 und es folgt

294 7 Integralrechnung fur Funktionen einer reellen Variablen
0 <
1∫
α
tx−1e−t dt ≤1∫
α
tx−1 dt = [1
xtx]
1α =
1
x− αx
x<
1
x(x, α > 0).
Da g(α) =∫ 1
αtx−1e−t dt bei α −→ 0 monoton wachsend und durch 1
xbe-
schrankt ist, existiert der Grenzwert
limα→0
1∫
α
tx−1e−t dt =
1∫
0
tx−1e−t dt.
(2) Es gilt tx−1e−t = tx+1
et · 1t2
und limt→∞
tx+1
et = 0. Das heißt, es existiert ein
M > 0, so dass
tx−1e−t ≤ 1
t2∀ t ≥M.
Daraus folgtβ∫
M
tx−1e−t dt ≤β∫
M
1
t2dt = [ − 1
t]βM ≤ 1
M.
Da h(β) =β∫M
tx−1e−t dt bei β −→ ∞ monoton wachsend und durch 1M
be-
schrankt ist, existiert
∞∫
M
tx−1e−t dt = limβ→∞
β∫
M
tx−1e−t dt.
Folglich gilt
∞∫
0
tx−1e−t dt = limα→0
1∫
α
tx−1e−t dt+
M∫
1
tx−1e−t dt+ limβ→∞
β∫
M
tx−1e−t dt = Γ (x).
Satz 7.23 (Eigenschaften der Γ–Funktion)Γ hat folgende Eigenschaften
(1) Γ (x+ 1) = x · Γ (x) ∀x > 0,(2) Γ (1) = 1,(3) Γ (n) = (n − 1)! ∀n ∈ N, das heißt, die Γ–Funktion verallgemeinert die
Fakultat,(4) Γ ist logarithmisch–konvex, das heißt lnΓ ist konvex,(5) Γ (x) = lim
n→∞n!·nx
x(x+1)·...·(x+n) (Gaußsche Definition der Γ–Funktion),
(6) Γ (12 ) =
√π.

7.6 Uneigentliche Riemannsche Integrale 295
Beweis:(1) Es gilt
Γ (x+1) =
∞∫
0
txe−t dt =
∞∫
0
−tx(e−t)′ dt =
∞∫
0
x·tx−1·e−t dt = x·Γ (x), ∀x > 0.
(2) Es gilt
Γ (1) =
∞∫
0
e−t dt = −e−t|∞0 = − limt→∞
1
et+ e0 = 1.
(3) folgt aus (1) und (2) durch Induktion.
(4) Wir zeigen, dass die Γ–Funktion logarithmisch–konvex ist. Dazu ist zuzeigen, dass fur x ∈ (0, 1) gilt
lnΓ (x · a+ (1 − x) · b) ≤ x · lnΓ (a) + (1 − x) lnΓ (b) ∀ a, b ∈ R+,
bzw., dass gilt
Γ (x · a+ (1 − x) · b) ≤ Γ (a)x · Γ (b)1−x ∀x ∈ (0, 1), a, b ∈ R+.
Wir benutzen nun die Holder–Ungleichung fur Integrale.
r∫
ε
f(t)g(t) dt ≤
r∫
ε
f(t)p
1p
·
r∫
ε
g(t)q
1q
,
wobei p, q > 0 und 1p
+ 1q
= 1 gelten. Sei p = 1x, q = 1
1−x , das heißt, es gilt
1p
+ 1q
= 1. Sei f(t) := ta−1
p e−tp und g(t) := t
b−1q e−
tq . Dann folgt
r∫
ε
tap+ b
q−1e−t dt ≤
r∫
ε
ta−1e−t dt
x (∫ r
ε
tb−1e−t dt
)1−x.
Lassen wir nun ε gegen 0 und r gegen ∞ konvergieren, so erhalten wir
Γ (xa+ (1 − x)b) ≤ Γ (a)x · Γ (b)1−x.
(5) Fur x = 1 ist die angegebene Formel offensichtlich erfullt. Sei nun x ∈(0, 1). Dann gilt fur alle n ∈ N, dass (n+ x) = (1 − x)n+ x(n+ 1) ist. Daherist
Γ (n+ x) ≤ Γ (n)1−x · Γ (n+ 1)x = Γ (n)1−x · Γ (n)x · nx = (n− 1)! · nx (∗)

296 7 Integralrechnung fur Funktionen einer reellen Variablen
Des Weiteren gilt fur x ∈ (0, 1) und n ∈ N, dass
n+ 1 = x(n+ x) + (1 − x)(n + 1 + x)
ist und folglich
Γ (n+ 1) ≤ Γ (n+ x)x · Γ (n+ 1 + x)1−x = Γ (n+ x) · (n+ x)1−x.
Es folgtn!(n+ x)x−1 ≤ Γ (n+ x) (∗∗)
Nach (1) gilt Γ (n+ x) = Γ (x) · x · (x+ 1) · . . . · (x+ n− 1). Mit (∗) und (∗∗)folgt dann
n!(n+ x)x−1
x(x + 1) · . . . · (x+ n− 1)︸ ︷︷ ︸=:an(x)
≤ Γ (x) ≤ (n− 1)!nx
x(x+ 1) · . . . · (x+ n− 1)︸ ︷︷ ︸=:bn(x)
und damit
limn→∞
an(x)
bn(x)= lim
n→∞n(n+ x)x−1
nx= lim
n→∞
(n+ x
n
)x−1
= limn→∞
(1 +
x
n
)x−1
= 1.
Daher ist
Γ (x) = limn→∞
(n− 1)!nx
x(x + 1) · . . . · (x+ n− 1)
= limn→∞
n!nx
x(x + 1) · . . . · (x+ n)
(x+ n
n
)
︸ ︷︷ ︸−→1
= limn→∞
n!nx
x(x + 1) · . . . · (x+ n)∀x ∈ (0, 1).
Somit gilt die Formel aus (5) fur x ∈ (0, 1]. Es bleibt zu zeigen, dass, falls (5)fur x gilt, (5) auch fur x + 1 erfullt ist. Die Formel aus (5) gelte nun fur einx. Dann folgt
Γ (x+ 1) = x · Γ (x) = limn→∞
n!nx
x(x+ 1) · . . . · (x+ n)· x
= limn→∞
n!nx+1
(x+ 1) · . . . · (x+ 1 + n)· x+ 1 + n
n︸ ︷︷ ︸−→1
= limn→∞
n!nx+1
(x+ 1) · . . . · (x+ 1 + n).
(6) Aus (5) folgt

7.6 Uneigentliche Riemannsche Integrale 297
Γ
(1
2
)= lim
n→∞n!√n
12 (1
2 + 1) · . . . · (12 + n)
= limn→∞
n!√n
(1 − 12 )(2 − 1
2 ) · . . . · (n− 12 )(n+ 1
2 ).
Daher folgt mit der Wallisschen Formel
Γ
(1
2
)2
= limn→∞
n · (n!)2
12 (n+ 1
2 ) ·∏nk=1(k − 1
2 )(k + 12 ))
= 2 · limn→∞
n∏
k=1
k2
k2 − 14
= 2 · π2.
Somit gilt Γ (12 ) =
√π. ⊓⊔
Zusammenhang zwischen der Konvergenz von Reihen und derExistenz uneigentlicher Integrale
Satz 7.24 Sei f : [a,∞) −→ R stetig, positiv und monoton fallend. Dannexistiert der Grenzwert
limN→∞
N∑
n=0
f(a+ n) −N+1∫
a
f(x) dx
=: (∗)
und es gilt 0 ≤ (∗) ≤ f(a). Insbesondere konvergiert∞∑n=0
f(a+n) genau dann,
wenn das uneigentliche Integral∞∫a
f(x) dx existiert.
Beweis: Da f monoton fallend ist, gilt
f(a+ n+ 1) ≤ f(x) ≤ f(a+ n) ∀x ∈ [a+ n, a+ n+ 1].
Folglich ist
f(a+ n+ 1) ≤a+n+1∫
a+n
f(x) dx ≤ f(a+ n) (∗)
und
N∑
n=0
f(a+ n+ 1) =
N+1∑
n=1
f(a+ n) ≤a+N+1∫
a
f(x) dx ≤N∑
n=0
f(a+ n). (∗∗)
Sei nun
bN :=N∑
n=0
f(a+ n) −a+N+1∫
a
f(x) dx.

298 7 Integralrechnung fur Funktionen einer reellen Variablen
Da f positiv ist, gilt mit (∗∗)
0 ≤ bN ≤N∑
n=0
f(a+ n) −N+1∑
n=1
f(a+ n) = f(a) − f(a+N + 1) ≤ f(a).
Desweiteren gilt
bN = bN−1 + f(a+N) −a+N+1∫
a+N
f(x) dx
︸ ︷︷ ︸≥0 wegen (∗)
≥ bN−1 ∀N ∈ N.
Folglich ist bN eine monoton wachsende, beschrankte Folge. Somit existiertb = lim
N→∞bN und es gilt 0 ≤ b ≤ f(a). ⊓⊔
Beispiel 7.18Die Riemannsche Zeta–Funktion ζ(x) :=
∞∑n=1
1nx .
Wir wissen bereits, dass ζ(x) fur x > 1 konvergiert und fur x ≤ 1 divergiert.Mit Hilfe von Satz 7.24 konnen wir nun einen neuen Beweis dafur angeben:Sei f(t) := 1
tx. Dann ist ζ(x) =
∑∞k=0 f(1 + k). Die Funktion f ist monoton
fallend auf [1,∞) und es gilt
∞∫
1
1
txdt = lim
r→∞
r∫
1
t−x dt = limr→∞
(1
−x+ 1t−x+1 |r1
)=
1
x− 1( limr→∞
(1− r1−x)).
Folglich existiert∞∫1
1txdt = 1
x−1 fur x > 1, aber∞∫1
1txdt existiert nicht fur
x ≤ 1. Aus Satz 7.24 folgt nun, dass ζ(x) genau dann konvergiert, wenn x > 1ist und
0 ≤ ζ(x) − 1
x− 1≤ 1.
gilt.
Beispiel 7.19 (Die Euler–Konstante.)Behauptung: Es existiert
CEuler := limn→∞
(1 +
1
2+ . . .+
1
n− ln(n)
),
das heißt, die Partialsummen der harmonischen Reihe wachsen wie ln(n). ZumBeweis betrachten wir die Funktion f(t) = 1
tauf [1,∞). f ist monoton fallend
und f ≥ 0. Folglich gilt nach Satz 7.24, dass CEuler existiert und

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 299
0 ≤ limN→∞
N−1∑
n=0
f(1 + n) −N∫
1
1
xdx
︸ ︷︷ ︸(1+ 1
2+...+ 1N
−ln(N))
≤ f(1) = 1
gilt.
7.7 Die Lange von Kurven und die Flacheninhalteebener Gebiete
Definition 7.13. Sei I ⊂ R ein beliebiges Intervall. Eine parametrisierteKurve im Rn ist eine stetige Abbildung γ : I −→ Rn.
γ(t)
Wir betrachten also mit γ : I −→ Rn nicht nur das Bild der Kurve, sondernauch, wie die Kurve (z.B. mit welcher Geschwindigkeit) durchlaufen wird. Wirwerden nun untersuchen, wie man die Lange der Kurve γ bestimmen kann.
Sei P = x0 < x1 < . . . < xmeine Zerlegung von I = [a, b]. Danngibt
L(γ,P) :=
m∑
k=1
‖γ(xk) − γ(xk−1)‖•γ(a)
•γ(x1) •
γ(x2)
•γ(x3)
•γ(b)
die Lange des durch P definierten Polygonzuges uber γ(x0), γ(x1), . . . , γ(xm)
an. Nach der Dreiecksungleichung folgt aus P ≥ P , dass L(γ, P) ≥ L(γ,P)gilt.
Definition 7.14. Eine Kurve γ : [a, b] −→ Rn heißt rektifizierbar, falls
L(γ) := supP
L(γ,P)
existiert. L(γ) heißt Lange von γ.

300 7 Integralrechnung fur Funktionen einer reellen Variablen
Beispiel 7.20Ist γ : [a, b] −→ Rn Lipschitz-stetig, so ist γ rektifizierbar, denn es gilt fur allet, s ∈ [a, b], dass ‖γ(t)− γ(s)‖ ≤ L(t− s) ist. Folglich ist fur alle ZerlegungenP
L(γ,P) =
m∑
k=1
‖γ (xk) − γ (xk−1) ‖ ≤ L
m∑
k=1
(xk − xk−1) = L(b− a).
Beispiel 7.21Nicht jede stetige Kurve ist rektifizierbar. Zum Beispiel ist γ : [0, 1] → R2,
γ(t) :=
(t, t · cos
(πt
))t ∈ (0, 1]
0 t = 0
stetig, schwankt aber bei t → 0 zu oft hin und her und ist deshalb nichtrektifizierbar (Ubungsaufgabe).
0, 2 0, 4 0, 6 0, 8 1
0, 5
−0, 5
−1
f(x) = x cos(πx
)
Definition 7.15. Sei f : [a, b] → R eine Funktion. f heißt von beschrankterVariation , falls eine Konstante C existiert, so dass fur jede Zerlegung P =a = x0, x1, . . . , xm = b von [a, b] gilt
V (f,P) :=
m∑
k=1
‖f (xk) − f (xk−1) ‖ ≤ C.

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 301
V (f,P) misst also wie stark die Funktion f schwankt. Weiterhin definierenwir die totale Variation von f
V f := supPV (f,P).
Man kann folgendes zeigen:
Satz 7.25 γ : [a, b] → Rn ist genau dann rektifizierbar, wenn jede Kompo-nente von γ eine beschrankte Variation hat.
Definition 7.16. Eine parametrisierte Kurve γ : I −→ Rn heißt genau dannvon der Klasse Ck bzw. Ck–Kurve, wenn γ k–mal stetig differenzierbar ist.Sei γ : I −→ Rn eine C1–Kurve. γ heißt genau dann regular, wenn γ′(t) 6= 0fur alle t ∈ I gilt.
Definition 7.17. Sei Γ ⊂ Rn eine Teilmenge. Eine parametrisierte Kurveγ : I −→ Rn mit Im(γ) = Γ heißt Parametrisierung von Γ .
Beispiel 7.22Die Kurve γ : [0, 2π] −→ R2 ≃ C, gegeben durch γ(t) = (r cos t, r sin t) = reit,beschreibt den Kreis vom Radius r.
Beispiel 7.23Die Schraubenkurve γ : R −→ R3, gegeben durchγ(t) = (r cos t, r sin t, ct), beschreibt die Bewegung ei-nes Punktes, der sich mit konstanter Winkelgeschwin-digkeit auf einem Zylinder vom Radius r nach obenbewegt.
6?c · 2π
Fur C1–Kurven γ : [a, b] −→ Rn kann man L(γ) mit Hilfe des Riemann–Integrals berechnen.
Satz 7.26 Sei γ : [a, b] −→ Rn eine C1–Kurve. Dann ist γ rektifizierbar undes gilt
L(γ) =
b∫
a
‖γ′(t)‖︸ ︷︷ ︸stetig
dt.
Bemerkung: Infinitesimal gilt also: Weg = Geschwindigkeit · Zeit.
Beweis:(1) Da γ eine C1-Funktion ist, ist γ auch Lipschitz-stetig und damit rektifi-
zierbar (siehe Beispiel 7.20). Wir zeigen zuerst, dass L(γ) ≤∫ ba‖γ′(s)‖ ds gilt.
Sei P = a = x0 < x1 < . . . < xm = b eine beliebige Zerlegung von [a, b]. Daγ differenzierbar ist, gilt dann

302 7 Integralrechnung fur Funktionen einer reellen Variablen
L(γ,P) =
m∑
k=1
‖γ(xk) − γ(xk−1)‖ =
m∑
k=1
‖xk∫
xk−1
γ′(s) ds‖
≤m∑
k=1
xk∫
xk−1
‖γ′(s)‖ ds =
b∫
a
‖γ′(s)‖ ds.
Also ist
L(γ) = supPL(γ,P) ≤
b∫
a
‖γ′(s)‖ ds, (∗).
(2) Nun zeigen wir, dass in (∗) Gleichheit gilt. Wir betrachten dazu die Hilfs-funktion l : [a, b] → [0, L(γ)],
t 7→ l(t) := L(γ|[a,t]
)= sup
PL(γ|[a,t],P
).
Sei t ∈ [a, b), h > 0 und t+ h ∈ [a, b]. Dann ist
L(γ|[t,t+h]
)≥ ‖γ(t+ h) − γ(t)‖︸ ︷︷ ︸
kurzeste Lange zw. den EPγ(t)
γ(t + h)
Wir wenden (∗) auf γ|[t,t+h] an und erhalten
‖γ(t+ h) − γ(t)‖ ≤ L(γ|[t,t+h]
)≤
t+h∫
t
‖γ′(s)‖ ds.
Es gilt L(γ|[a,b]
)= L
(γ|[a,t]
)+ L
(γ|[t,b]
)und daher
L(γ|[t,t+h]
)= L
(γ|[a,t+h]
)− L
(γ|[a,t]
)= l(t+ h) − l(t).
Deshalb ist
∥∥∥γ(t+ h) − γ(t)
h
∥∥∥ ≤ l(t+ h) − l(t)
h≤ 1
h
t+h∫
t
‖γ′(s)‖ ds
=1
h(F (t+ h) − F (t)) ,
wobei F die Stammfunktion von γ bezeichnet. Durch Limesbildung limh→0
folgtnun
‖γ′(t)‖ ≤ limh→0
l(t+ h) − l(t)
h≤ F ′(t) = ‖γ′(t)‖.
Also ist

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 303
l′(t) = limh→0
l(t+ h) − l(t)
h= ‖γ′(t)‖.
Nun folgt sofort
L(γ) = l(b) − l(a) =
b∫
a
l′(t) dt =
b∫
a
‖γ′(t)‖ dt.
⊓⊔
Definition 7.18. Sei I ⊂ R ein beliebiges Intervall und γ : I −→ Rn eineC1–Kurve. Dann heißt
L(γ) :=
∫
I
‖γ′(t)‖ dt,
Lange von γ.
Hierbei handelt es sich unter Umstanden um ein uneigentliches Integral.
Definition 7.19. Sei γ : I ⊂ R → Rn stuckweise C1, d.h., γ ist stetig und esexistieren endlich viele Punkte a = t0 < t1 < t2 < . . . < tm = b, tj ∈ I, sodass γ auf (ti, ti+1) C
1 ist. Dann nennen wir
L(γ) :=m∑
k=1
tk∫
tk−1
‖γ′(s)‖ ds
Lange von γ.
Beispiel 7.24 (Kreislinie)Wir betrachten die Kreislinie γ : [0, 2π] −→ R2,definiert durch γ(t) = (r cos t, r sin t). Dann istγ′(t) = (−r sin t, r cos t) und ‖γ′(t)‖ = r. Folg-lich erhalten wir fur die Lange
L(γ) =
2π∫
0
r dt = 2πr.
tr
γ(t)
Fur die Kurve γ(t) = (cos t, sin t) mit t ∈ [0, φ] ergibt sich
L(γ) =
φ∫
0
1 dt = φ.

304 7 Integralrechnung fur Funktionen einer reellen Variablen
Beispiel 7.25 (Schraubenlinie)Wir betrachten die Schraubenlinieγ : [0, 2π] −→ R3, gegeben durchγ(t) = (r cos t, r sin t, ct). Dannist γ′(t) = (−r sin t, r cos t, c) und‖γ′(t)‖ =
√r2 + c2. Folglich erhalten
wir fur die Lange der Schraubenlinie beieiner Umdrehung L(γ) = 2π
√r2 + c2.
γ(2π)
γ(0)c
r
Beispiel 7.26 (Umfang der Ellipse)Eine Ellipse wird durch Punkte (x, y) ∈ R3
beschrieben, fur die gilt x2
a2 + y2
b2= 1, wobei
a, b ∈ R\0 sind. Es gelte a > b und es sei
k2 := 1 − b2
a2 < 1. Wir parametrisieren dieEllipse durch die Kurve γ : [0, 2π) −→ R2 mitγ(t) = (a cos t, b sin t). Dann gilt
x
y
a
b
t
γ(t)
γ′(t) = (−a sin t, b cos t), ‖γ′(t)‖ =√a2 sin2 t+ b2 cos2 t,
und wir erhalten
L(γ) = a
2π∫
0
√sin2 t+
b2
a2cos2 t dt = a
2π∫
0
√1 − k2 cos2 t dt.
Dies ist ein elliptisches Integral, das heißt, es ist nicht durch elementare Funk-tionen ausdruckbar. Durch Reihenentwicklung von
√1 − x (wie in Beispiel
7.12) erhalten wir
L(γ) = 2a
1 +
∞∑
j=1
(12
j
)(−1)j k2j 1 · 3 · . . . · (2j − 1)
2 · 4 · . . . · (2j) · π
.
Falls a = b = r ist (es sich also um eine Kreisbahn handelt), folgt k = 0 unddamit L(γ) = 2πr.
Beispiel 7.27 (Lange eines Graphen)Sei f : [a, b] → Rn eine C1–Kurve undΓ = graph(f) = (x, f(x)) ⊂ Rn+1 ihrGraph.
Rn
xa b
Γ
Wir parametrisieren den Graphen Γ durch die Kurve γ : [a, b] → Rn+1 mitγ(x) := (x, f(x)). Dann ist

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 305
γ′(x) = (1, f ′(x)) = (1, f ′1(x), . . . , f
′n(x)), ‖γ′(x)‖ =
√1 + ‖f ′(x)‖2,
und
L(γ) =
b∫
a
√1 + ‖f ′(x)‖2 dx =
b∫
a
√1 + f ′
1(x)2 + . . .+ f ′
n(x)2 dx
Beispiel 7.28 (In Polarkoordinaten gegebene Kurven)Sei
γ(t) = r(t)eiϕ(t) = (r(t) cosϕ(t), r(t) sinϕ(t)) ∈ C.
Dann ist
γ′(t) = (r′(t) cosϕ(t) − r(t) sinϕ(t) · ϕ′(t), r′(t) sinϕ(t) + r(t) cosϕ(t) · ϕ′(t))
und‖γ′(t)‖ =
√r′(t)2 + r(t)2 · ϕ′(t)2.
Damit ergibt sich fur die Lange der Kurve
L(γ) =
b∫
a
√r′(t)2 + r(t)2 · ϕ′(t)2 dt.
Ist hingegen ϕ der Parameter der Kurve, also γ(ϕ) = r(ϕ)eiϕ mit r = r(ϕ),so ist
L(γ) =
ϕ2∫
ϕ1
√r′(ϕ)2 + r(ϕ)2 dϕ.
Zum Beispiel gilt fur die logarithmische Spirale mit r(ϕ) = ecϕ, c ∈ R,
L(γ) =
2π∫
0
√c2 + 1 · ecϕ dϕ
=√c2 + 1 · 1
c
(e2πc − 1
).
r
ϕ
reiϕ

306 7 Integralrechnung fur Funktionen einer reellen Variablen
Eigenschaften der Lange von C1-Kurven
Sei γ : I ⊂ R −→ Rn eine C1–Kurve und Γ := Im(γ) das Bild von γ. Mankann Γ auf verschiedene Weisen (z.B. mit unterschiedlicher Geschwindigkeit)durchlaufen:
Definition 7.20. Sei γ : I ⊂ R −→ Rn eine C1–Kurve und τ : I → I eineParametertransformation, d.h., ein C1-Diffeomorphismus. Dann heißt
γ := γ τ : I → Rn
Umparametrisierung von γ.
Es gilt also Γ = Im(γ) = Im(γ). Sinnvollerweise sollten geometrische Eigen-schaften wie die Lange der Kurve nicht von der Parametrisierung abhangen,so wie die Lange eines Weges unabhangig davon ist, wie schnell man ihnzurucklegt.
Satz 7.27 Sei γ : [a, b] → Rn eine C1–Kurve.
1) Ist γ = γ τ : [a, b] → Rn eine Umparametrisierung von γ, so giltL(γ) = L(γ).2) Ist R : Rn → Rn eine Euklidische Bewegung, d.h., R(x) = Ax + x0 mitA ∈ O(n), x0 ∈ Rn, so gilt L(γ) = L(R γ).
Beweis:1) Aus γ(s) = γ(τ(s)) folgt γ′(s) = γ′(τ(s)) · τ ′(s) und damit
L (γ) =
bb∫
ba
∥∥∥γ′(s)∥∥∥ ds =
bb∫
ba
∥∥∥γ′(τ(s))∥∥∥ · |τ ′(s)| ds.
Wir substituieren t := τ(s). Dann ist dt = τ ′(s)ds.
a) Falls τ ′(s) > 0 ist, ist τ monoton wachsend, d.h., es gilt τ(a) = a und
τ(b) = b. Weiterhin ist |τ ′(s)| = τ(s) und es folgt
L (γ) =
b∫
a
∥∥∥γ′(t)∥∥∥dt = L(γ).
b) Falls τ ′(s) < 0 ist, ist τ monoton fallend, d.h., es gilt τ(a) = b und τ(b) = a.Weiterhin ist |τ ′(s)| = −τ(s) und es folgt
L (γ) = −a∫
b
∥∥∥γ′(t)∥∥∥dt =
b∫
a
∥∥∥γ′(t)∥∥∥dt = L(γ).
2) Sei die Kurve δ : [a, b] → Rn definiert durch δ(t) := R · γ(t) = Aγ(t) + x0.Dann ist δ′(t) = Aγ′(t) und daher

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 307
‖δ′(t)‖ = ‖Aγ′(t)‖ = ‖γ′(t)‖, da A ∈ O(n).
Also ist L(δ) = L(γ). ⊓⊔
Definition 7.21. Sei γ : I ⊂ R −→ Rn eine C1–Kurve. γ heißt regular, fallsγ′(t) 6= 0 fur alle t ∈ I gilt.
Regulare Kurven besitzen in jedem Punkt eine Tangente.
γ(t)
γ′(t)
Tantγ = γ(t) + Rγ′(t) Imγ = Γ
Oft wahlt man Parametrisierungen, bei denen die Kurve mit konstanter Ge-schwindigkeit durchlaufen wird, z.B. mit der Geschwindigkeit 1, d.h.‖γ′(t) = 1‖.
Definition 7.22. Eine C1-Kurve γ : I ⊂ R → Rn+1 heißt “durch ihre Bo-genlange parametrisiert”, falls
L(γ|[α,β]
)= β − α, ∀ [α, β] ⊂ I.
Satz 7.281) Die Kurve γ : I → Rn ist genau dann durch ihre Bogenlange parametrisiert,wenn ‖γ′(t)‖ ≡ 1 ist fur alle t ∈ I.2) Ist γ : I → Rn eine regulare Kurve, so existiert eine Umparametrisierungγ = γ τ mit ‖γ′(t)‖ ≡ 1 fur alle t ∈ I (d.h., γ ist durch ihre Bogenlangeparametrisiert).
Beweis:1) (=⇒) Wie im Beweis von Satz 7.26 betrachten wir die Hilfsfunktionl : [a, b] → [0, L(γ)],
t 7→ l(t) := L(γ|[a,t]
)=
t∫
a
‖γ′(s)‖ ds.
Dann gilt nach Voraussetzung l(t) = t − a und offensichtlich ist l′(t) = 1.Andererseits ist nach dem Hauptsatz der Differential- und Integralrechnungl′(t) = ‖γ′(t)‖. Daraus folgt ‖γ′(t)‖ = 1 fur alle t ∈ I.(⇐=) Wenn ‖γ′(t)‖ = 1 ist fur alle t ∈ I, dann ist

308 7 Integralrechnung fur Funktionen einer reellen Variablen
L(γ[α,β]
)=
β∫
α
‖γ′(t)‖ dt = β − α ∀ [α, β] ∈ I,
d.h., γ : I → Rn ist durch ihre Bogenlange parametrisiert.
2) Wir betrachten wieder die Hilfsfunktion l aus 1). Wenn γ regular ist, dannist l′(t) = ‖γ′(t)‖ > 0 und l ist stetig differenzierbar und streng monotonwachsend. Deshalb existiert eine differenzierbare Umkehrfunktion τ von l
τ : [0, L] → [a, b]
s 7→ τ(s) mit l(τ(s) = s)
und es gilt τ ′(s) = 1l′(τ(s)) > 0. Sei γ := γ τ . Dann gilt
γ′(s) = γ′(τ(s)) · τ ′(s) =γ′(τ(s))
l′(τ(s))=
γ′(τ(s))
‖γ′(τ(s))‖ .
Also ist ‖γ′(s)‖ ≡ 1. ⊓⊔
Der Flacheninhalt ebener Gebiete
Definition 7.23. Eine stetige Kurve γ : [a, b] → Rn heißt
• geschlossen, falls γ(a) = γ(b) gilt.• einfach, falls γ : (a, b) → Rn injektiv ist.
Eine einfache geschlossene Kurve γ : [a, b] → R2 heißt positiv-orientiert, fallssie entgegen dem Uhrzeigersinn durchlaufen wird.
Sei nun γ : [a, b] → R2 eine einfache, geschlossene und positiv-orientierteKurve:
γ(a) = γ(b)
Γ = Imγn = 2
Ω
Sei Ω das von Γ := Im(γ) umschlossene Gebiet. Wie berechnet man dannseinen Flacheninhalt Area(Ω) ?

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 309
Satz 7.29 Sei γ : [a, b] → R2 eine (stuckweise) C1-Kurve, einfach, geschlos-sen und positiv-orientiert. Sei Ω ⊂ R2 das von Γ := Im(γ) umschlosseneGebiet. Weiterhin seien x, y : [a, b] → R die Koordinatenfunktionen von γ,d.h., γ(t) =: (x(t), y(t)). Dann gilt
Area(Ω) = −b∫
a
y(t)x′(t) dt.
Da γ geschlossen ist, folgt mit partieller Integration
Area(Ω) =
b∫
a
y′(t)x(t) dt =1
2
b∫
a
(x(t)y′(t) − y(t)x′(t)) dt.
Area(Ω) wird also durch die Randkurve ausgedruckt. Dies ist ein Spezialfalldes Satzes von Stokes.
Beweis: 1) Wir betrachten zunachst Kurven γ, bei denen das Bild der Kurveaus zwei zur y-Achse parallelen Geraden und zwei Bogen, die Graphen vonFunktionen f1, f2 sind, besteht.
x1 x2
f1(x)
f2(x)
γ (t1)
γ (t2)γ (t3)
γ(a) = γ(b)Ω
f1, f2 > 0
Nach Definition des Riemann–Integrals ist
Area(Ω) =
x2∫
x1
f1(x) dx −x2∫
x1
f2(x) dx. (∗)
Fur die obige Kurve γ(t) = (x(t), y(t)) gilt
(x(t), y(t)) =
(x(t), f1(x(t))) , t ∈ [a, t1]
(x1, y(t)) , t ∈ [t1, t2]
(x(t), f2(x(t))) , t ∈ [t2, t3]
(x2, y(t)) , t ∈ [t3, b].

310 7 Integralrechnung fur Funktionen einer reellen Variablen
Die Koordinatentransformation x = x(t), dx = x′(t)dt mit x1 = x(t1) undx2 = x(a) liefert fur das erste Integral in (∗)
x2∫
x1
f1(x) dx =
a∫
t1
f1(x(t)) · x′(t) dt = −t1∫
a
y(t)x′(t) dt.
Analog ergibt sich mit x = x(t), dx = x′(t)dt sowie x1 = x(t2) und x2 = x(t3)fur das zweite Integral in (∗)
x2∫
x1
f2(x) dx =
t3∫
t2
y(t)x′(t) dt.
Damit ergibt sich insgesamt
Area(Ω) = −
t1∫
a
y(t)x′(t) dt+
t3∫
t2
y(t)x′(t) dt
= −
b∫
a
y(t)x′(t) dt,
da x(t) = const fur t ∈ [t1, t2] und t ∈ [t3, b].
2) Wir betrachten nun den allgemeinen Fall.
γ(a) = γ(b)
γ (t1)γ (t4)
γ (t5)
γ (t8)
γ (t9)
γ (t11)
γ (t13)Ω1 Ω2
Ω3
Ω4
Ω5
Ω6Ω7
E
KS geeignet legen
Beh.: Man kann Ω in eine endliche Zahl von Gebieten zerlegen, die die Formaus 1) haben. Sei E die y-Achse und Γ liege im positiven Quadranten. Wirbetrachten die stetig differenzierbare Abbildung
(t) = dist(E, γ(t)) = x(t).
Da das Intervall [a, b] kompakt ist, hat nur endlich viele lokale Maxima undMinima. Wie zeichnen in diesen Punkten, wie im Bild dargestellt, die zu Eparallelen Geraden. Dann zerlegt sich Ω in Gebiete der Form 1).Wenn x′(t) 6= 0 ist, ist x′ > 0 oder x′ < 0. Daher ist x(t) zwischen den

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 311
kritischen Punkten von x(t) monoton wachsend oder monoton fallend. Deshalbexistiert eine Umkehrfunktion t = t(x) und die Teilstucke von γ sind Grapheneiner Funktion: γ(t) = (x(t), y(t)) mit y = y(t) = y(t(x)) =: f(x). Nun konnenwir die Flache von Ω leicht berechnen:
Area(Ω) =
m∑
i=1
Area (Ωi)
= −( t1∫
a
y(t)x′(t) dt+
b∫
t13
y(t)x′(t) dt+
t2∫
t1
y(t)x′(t) dt
+
t3∫
t12
y(t)x′(t) dt+ . . .)
= −b∫
a
y(t)x′(t) dt,
wobei wir im letzten Schritt benutzt haben, dass alle Parameterabschnitte[ti, ti+1] genau einmal auftreten. ⊓⊔
Folgerung 7.5 Ist die Randkurve γ in Polarkoordinaten gegeben, d.h.,
γ(t) = r(t)eiϕ(t) = (r(t) cosϕ(t), r(t) sinϕ(t)),
so ist
Area(Ω) =1
2
b∫
a
r2(t)ϕ′(t) dt.
Folgerung 7.6 (Leibnitzsche Sektorformel) Das Gebiet Ω sei begrenztdurch die Strahlen Lα und Lβ mit den Winkeln α bzw. β zur x-Achse undeine Kurve r = r(ϕ), wobei der Winkel ϕ streng monoton wachsend ist.
γ(a) = γ(b)
αβ γ (t1)
γ (t2) Lα
Lβ r(ϕ)eiϕ
Ω
Dann gilt
Area(Ω) =1
2
β∫
α
r2(ϕ) dϕ.

312 7 Integralrechnung fur Funktionen einer reellen Variablen
Beweis: Wir parametrisieren die Randkurve durch γ(t) = r(t)eiϕ(t), t ∈ [a, b],
ϕ(t) =
α, t ∈ [a, t1]
ϕ(t), t ∈ [t1, t2]
β, t ∈ [t2, b]
Aus Folgerung 7.5 erhalten wir
Area(Ω) =1
2
t2∫
t1
r2(t)ϕ′(t) dϕ.
Da α und β konstant sind und ϕ auf [t1, t2] monoton wachsend ist, istϕ′(t) > 0. Deshalb existiert eine Umkehrfunktion t = t(ϕ) und wir konnen rin Abhangigkeit von ϕ darstellen: r = r(ϕ). Mit dϕ = ϕ′(t)dt folgt
Area(Ω) =1
2
β∫
α
r2(ϕ) dϕ.
⊓⊔
Beispiel 7.29 (Flacheninhalt einer Ellipse)Sei Ω die von einer Ellipse mit den Halbachsen a und b eingeschlossene Flache.
x
y
a
b
Ω
x2
a2+ y2
b2≤ 1
Wir parametrisieren die Ellipse durch die Kurve γ(t) = (a cos t, b sin t) =:(x(t), y(t)) mit t ∈ [0, 2π]. Dann ist nach Satz 7.29
Area(Ω) =1
2
2π∫
0
(x(t)y′(t) − y(t)x′(t)) dt =1
2
2π∫
0
ab·(cos2 t+ sin2 t
)dt = πab.

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 313
Beispiel 7.30 (Flacheninhalt der Sternkurve (Astroide))Ein Kreis vom Radius r = R
4 rolle auf der Innenseite eines Kreises vom RadiusR entlang.
R
r
P
P
PΩ
Der Weg, den der feste Punkt P wahrend des Rollens zurucklegt, wird Astroidegenannt und ist bestimmt durch die Gleichung x
23 + y
23 = R
23 . Wir konnen
die Astroide parametrisieren durch γ(t) = R(cos3 t, sin3 t
). Dann folgt fur den
Flacheninhalt des Gebietes Ω, das durch die Astroide begrenzt wird
Area(Ω) =1
2R2
2π∫
0
(cos3 t · 3 sin2 t · cos t+ 3 cos2 t · sin t · sin3 t
)dt
=3
2R2
2π∫
0
sin2 t cos2 t(cos2 t+ sin2 t
)dt
=3
2R2
2π∫
0
(sin t cos t)2 dt =3
2R2
2π∫
0
(1
2sin 2t
)2
dt
=3
8R2
2π∫
0
sin2 2t dt, x := 2t, dx = 2dt
=3
16R2
4π∫
0
sin2 xdx =3
16R2 · 8
π2∫
0
sin2 xdx
︸ ︷︷ ︸UA= π
4
=3
8πR2.

314 7 Integralrechnung fur Funktionen einer reellen Variablen
Beispiel 7.31 (Archimedische Spirale)Die archimedische Spirale ist in Polarkoordinaten gegeben durch die Kurve
γ(t) = r(t)eiϕ(t) = (r(t) cosϕ(t), r(t) sinϕ(t)) ∈ C, wobei r(ϕ) = c ϕ mit einerKonstanten c ∈ R ist.
π2c
πc 2πc
Ω
Nach der Leibnitzschen Sektorformel ist dann
Area(Ω) =1
2
2π∫
0
r2(ϕ) dϕ =1
2c2
2π∫
0
ϕ2 dϕ =1
2c2 · 1
38π3 =
4
3π3c2.
Beispiel 7.32 (Kleeblatt)Der Rand des n-blattrigen Kleeblatts ist gegeben durch die Kurve γ(t) =
r(t)eiϕ(t) = (r(t) cosϕ(t), r(t) sinϕ(t)) ∈ C, mit r(ϕ) = R · | sin(n2ϕ)|, wobei
ϕ ∈ [0, 2π] und R ∈ R ist.
n = 3
r
n = 4
r
r(ϕk) = 0 genau dann, wenn n2ϕk = kπ mit k ∈ N ist, d.h., wenn
ϕk = 0, 2π · 1n, 2π · 2
n, . . . , 2π · n−1
ngilt.
r(ϕ) = r genau dann, wenn n2ϕ = π
2 + kπ gilt, wobei k ∈ N ist.
Beh.: Unabhangig von der Anzahl n der einzelnen Blatter ist die Flache desvon der Kurve γ umschlossenen Gebietes Kn halb so groß wie die Flache derKreisscheibe vom Radius R, d.h.,

7.7 Die Lange von Kurven und die Flacheninhalte ebener Gebiete 315
Area (Kn) =1
2πR2 fur alle n.
Nach der Leibnitzschen Sektorformel ist
Area (Kn) =1
2R2
2π∫
0
sin2(n
2ϕ)dϕ, t :=
n
2, dt =
n
2dϕ
=1
2R2 · 2
n
nπ∫
0
sin2 t dt =R2
n· n
π∫
0
sin2 t dt =1
2πR2.


Sachverzeichnis
−A, 8A ∩ B, IXA · B, 8
A \ B, IXA + B, 8
A ∪ B, IXA ⊂ M , IXA × B, IX
B[f ]n(x), 164C, 26
C(R, C)per, 173C(R, R)per, 172C(X, R), 166
Ck, 225Ck(U, R), 225
C(k)(U ; E), 183Cn, 34C∞(U ; E), 183
Df , 212E, 93
E(z), 113E[x], 163F (x)|ba, 265
HP (A), 51HP (xn), 56
Hfx0 , 230Int(A), 43, 50Iso(A), 52
K(x, ε), 42K(z0, R), 111
L(I), 10L(γ), 299, 301Mc, 218
Ng, 247O, 201PC, 172
PperC
, 174PR, 171
PperR
, 173R, 111R, 10
R, 166Rn, 34
S(f,P , ξ), 268T (f, x0), 203Tn(f, x0), 203
TpMc, 219Tx0(x), 176
V , 87V (f,P), 300X, 39
az, 116arccos, 159
arccot, 159arcosh, 161arcoth, 161
arcsin, 159arctan, 159
arg(z), 30arsinh, 161artanh, 161
cl(A), 47cos, 154
cosh, 160cot, 158coth, 161

318 Sachverzeichnis
d, A × A40d, 39d(p, q), 39d∞, 162e, 65, 114ez, 114
exp, 114f ′, 175f ′′, 183f ′(x0), 175f + h, 145f (n), 183fn −→ f , 143fn f , 143gradf , 217graph(f), 176i, 27inf A, 13lim
n→∞
xn, 54
lima→x
f(a), 119
lima→x+
f(a), 124
lima→x−
f(a), 124
lim inf, 64lim sup, 64ln, 115max A, 14min A, 14n!, 3o, 201p + TpMc, 219sin, 154sinh, 160supA, 13tan, 158tanh, 161x uber k, 4xq, 24xn, 19xn −→ x, 54xn
n→∞−→ x, 54yα, 228z, 28Γ , 306Ω, 308α!, 228∂A, 50π, 156
(−∞, a), 10
(−∞, a], 10(A | B), 11
(λ · f)(x), 162
(R) −b
R
a
, 269
(a,∞), 10(a, b), 10
(a, b], 10(f + h)(x), 162(xnj )
∞
j=1, 56
(xn), 53(xn)∞n=1, 53
[V, +, ·], 87[K, +, ·], 8
[x], 184〈·, ·〉, 91
〈x, y〉, 35[a,∞), 10
[a, b), 10[a, b], 10`
x
k
´
, 4`
x
0
´
, 4:=, IX
:↔, IX⇔, IX
⇒, IX∅, IX
∃!, IX∃, IX
∀, IX∂f
∂xi(u), 222
∂kf
∂xi1···∂xik
, 224
dnf
dxn , 183df
dx(x0), 175
R
f(x) dx, 254R a
−∞f(t) dt, 292
∞R
a
, 292
bR
a
, 265
≤, 9∇af(x0), 213nQ
i=1
xi, 8
♯A, IX≃, 140

Sachverzeichnis 319
n√
x, 23n
P
i=1
, 8
∞P
n=0
fn, 146
∞P
k=1
xk, 93
Abel–Dirichlet–Kriterium, 101Abelscher Grenzwertsatz, 149abgeschlossen, 48Ableitung, 175
der inversen Abbildung, 179erste, 175n-te, 183partielle, 222
Abschluss einer Menge, 47absolut–konvergente Reihe, 94Abstand, 39
Euklidischer, 36Abstandsfunktion, 39abzahlbar, 16Additionstheoreme, 154, 158, 160, 161aquivalente Normen, 89außerer Punkt, 50alternierende harmonische Reihe, 102angeordneter Korper, 9Anordnungsaxiom der reellen Zahlen, 9Approximationssatz
von Stone–Weierstraß(1), 168von Stone–Weierstraß(2), 170Weierstraßscher, 164
archimedische Spirale, 313Archimedisches Axiom der reellen
Zahlen, 14Arcuscosinus, 159Arcuscotangens, 159Arcussinus, 159Arcustangens, 159Areacosinus hyperbolicus, 161Areacotangens hyperbolicus, 161Areasinus hyperbolicus, 161Areatangens hyperbolicus, 161arithmetisches Mittel, 25Astroide, 313
Banach’scher Fixpunktsatz, 141Banachraum, 89Bernoullische Ungleichung, 21
Bernstein–Polynom, 164beschrankt, 12
von oben, 12von unten, 12
beschrankte Folge, 54beschrankte Teilmenge, 54beschrankter Variation, Funktion von,
300bestimmt divergent, 62bestimmtes Integral, 265Betrag einer komplexen Zahl, 28Betrag einer reellen Zahl, 10bijektive Abbildung, 16Binomialkoeffizient, 4Binomialreihe, 208Binomischer Satz, 20Bogenlange, durch ihre ∼ parametri-
sierte Kurve, 307bogenzusammenhangend, 137
Cantorsches Diagonalisierungsverfah-ren, 17
Cantorsches Diskontinuum, 79Cauchy–Bedingung, 69Cauchy–Folge, 69Cauchy–Kriterium, 94Cauchy–Produkt von Reihen, 105Cauchy–Schwarzsche Ungleichung, 35,
91Cauchy-Integrierbarkeitskriterium, 271Cauchysches Verdichtungskriterium,
103Ck–Diffeomorphismus, 232Ck-Funktion, 225Ck–Kurve, 301Cosinus, 153Cosinus hyperbolicus, 160Cotangens, 158Cotangens hyperbolicus, 161
Dedekindscher Schnitt von R, 11Diagonalisierungsverfahren von Cantor,
17dichte Teilmenge, 52Diffeomorphismus, 232Differential, 212differenzierbar, 175, 211Differenzierbarkeit
hinreichende Bedingung fur, 222

320 Sachverzeichnis
Differenzmenge, IXdisjunkte Mengen, IXdisjunkte Vereinigung, IXdiskrete Metrik, 40diskreter metrischer Raum, 40divergente Folge, 53divergente Reihe, 94Dreiecksungleichung, 10, 28, 35, 39
einfache Kurve, 308Ellipse
Flacheninhalt, 312Umfang, 304
endliche Teiluberdeckung, 79ε–Kugel, 42Euklidischer Abstand, 36Euler–Konstante, 298Eulersche Formel, 154Eulerzahl, 65Exponentialfunktion, komplexe, 114Extrema unter Nebenbedingungen, 247
notwendige Bedingungen fur, 247
Fakultat, 3Fixpunktsatz, Banach’scher, 141Floh und Kamm-Menge, 137Folge, 53
bestimmt divergente, 62der Partialsummen, 93divergente, 53konvergente, 53monoton fallende, 64monoton wachsende, 64monotone, 64uneigentlich konvergente, 62
Folge, nach ±∞ strebend, 62folgenkompakt, 75folgenstetig, 126folgenstetig in einem Punkt, 126Fundamentalsatz der Algebra, 33, 258Fundamentalungleichung, 274Funktionenreihe, 146
Gaußklammer-Funktion, 184Gaußsche Zahlenebene, 29geometrische Reihe, 22, 96geometrische Summe, 22geometrisches Mittel, 25geschlossene Kurve, 308
glatte Abbildung, 183gleichmaßig konvergente
Folge von Abbildungen, 143Funktionenreihe, 146
gleichmaßig stetig, 133gleichmachtige Mengen, 19Gradient, 217Graph
Lange eines, 304Grenzfunktion, 143Grenzwert
Eindeutigkeit, 54einer Folge, 53einer Funktion, 119linksseitiger, 124rechtsseitiger, 124uneigentlicher, 62
Grenzwert aller Riemannschen Summen,268
GrenzwerteVertauschbarkeit, 144
Grenzwertsatz, Abelscher, 149
Haufungspunkt einer Folge, 56Haufungspunkt einer Menge, 51hochstens abzahlbar, 17harmonische Reihe, 95
alternierende, 102, 207Hauptsatz der Differential- und
Integralrechnung, 283Hebbare Unstetigkeitsstelle, 128Hessesche Form, 230Hilbertraum, 92homoomorph, 140Homoomorphismus, 140homogen, 25Hyperbelfunktionen, 160
Identitatssatz fur Potenzreihen, 151imaginare Achse, 29imaginare Einheit, 27implizite Funktionen
Satz uber, 241Induktion, vollstandige, 2induzierte Metrik, 40Infimum, 12injektive Abbildung, 16innerer Punkt, 43Integral

Sachverzeichnis 321
bestimmtes, 265unbestimmtes, 254
Integrand, 254Integration
partielle, 255, 266Integrationsvariable, 254Integrierbarkeitskriterium
Cauchysches, 271Lebesguesches, 280Riemannsches, 278
Intervallabgeschlossenes, 10halboffenes, 10Lange, 10offenes, 10
Intervallschachtelung, 15isolierter Punkt, 52Isometrie, 41isometrische metrische Rume, 41
K-Vektorraum, 87Korper, 8
angeordneter, 9vollstandiger angeordneter, 12
Korperaxiom der reellen Zahlen, 8kartesisches Produkt metrischer Raume,
41Kettenregel, 178, 215
fur partielle Ableitungen, 227Kleeblatt, 314kleiner gleich, 9kompakte Menge, 80komplexe Potenz der Eulerzahl, 114komplexe rationale Funktion, 257komplexe Zahl, 26
n-te Wurzelgeometrische Bedeutung, 33
Argument, 30Betrag, 28geometrische Interpretation, 29n-te Wurzel, 32trigonometrische Darstellung, 30
komplexe ZahlenDreiecksungleichung, 28geometrische Deutung der Addition,
30geometrische Deutung der Multipli-
kation, 30komplexe Zahlenebene, 29
konjugiert komplex, 28konkave Funktion, 189Kontinuumshypothese, 19kontrahierende Abbildung, 141Kontraktion, 141konvergente Folge, 53konvergente Reihe, 94Konvergenzkreis einer Potenzreihe, 111Konvergenzradius, 111, 112konvexe Funktion, 189konvexe Menge, 137Koordinatentransformation, 233Kreislinie, 303kritischer Punkt, 229k-te partielle Ableitung, 224Kugelkoordinaten, 233Kurve
durch ihre Bogenlange parametrisier-te, 307
einfache, 308geschlossene, 308in Polarkoordinaten, 305parametrisierte, 299positiv-orientierte, 308regulare, 301, 307
Kurve von der Klasse Ck, 301
L’Hospitalsche Regeln, 193Lange
einer C1-Kurve, 303einer rektifizierbaren Kurve, 299einer stuckweisen C1-Kurve, 303eines Intervalls, 268
Lagrange-Multiplikatoren, 247Lagrangesches Gleichungssystem, 249Landau-Symbole, 201Lebesgue–Maß Null, 279Lebesgue-Zahl einer Uberdeckung, 83Lebesguesches Integrierbarkeitskriteri-
um, 280Leibnitz–Kriterium fur alternierende
Reihen, 102Leibnitz-Reihe, 103Leibnitzsche Sektorformel, 311Leibnizformel, 200limes inferior, 64limes superior, 64Linearisierung, 212linksseitiger Grenzwert, 124

322 Sachverzeichnis
Lipschitz–Konstante, 133lipschitzstetig, 133logarithmische Spirale, 305Logarithmus
naturlicher, 115lokaler Extremwert
hinreichende Bedingung, 209lokales Maximum, 185, 229lokales Minimum, 185, 229Luftlinienabstand, 40
Machtigkeit, großere, 19Machinsche Formel, 200Majorantenkriterium, 97Majorantenkriterium, Weierstraßsches ,
147Mannheimer-Metrik, 40Maximum, 14
lokales, 229Maximum,lokales, 185Metrik, 39
der franzosischen Eisenbahn, 40diskrete, 40durch Skalarprodukt erzeugte, 92induzierte, 40
metrische Raumeisometrische, 41kartesisches Produkt, 41
metrischer Raum, 39abgeschlossene Teilmenge, 48dichte Teilmenge, 52diskreter, 40innerer Punkt, 43kompakter, 80offene Teilmenge, 45Rand einer Teilmenge, 50separabler, 78total beschrankter, 77Vervollstandigung, 72zusammenhangender, 84
Minimum, 14lokales, 185, 229
Mittelwertsatzder Integralrechnung
erster, 286zweiter, 287
fur Funktionen mehrerer Veranderli-cher, 220
fur Vektorfunktionen, 191
von Lagrange, 187monoton fallende Folge, 64monoton fallende Funktionenfolge, 144monoton wachsende Folge, 64monoton wachsende Funktionenfolge,
144monotone Folge, 64Multiindex, 228
Ordnung eines, 228
Nebenbedingungen, 246Niveauflache, 218Norm, 87
durch Skalarprodukt erzeugte, 92Norm der Zerlegung eines Intervalls,
268Norm eines Vektors, 35Normen
aquivalente, 89normierter Vektorraum, 87n-te Ableitung, 183Nullfolge, 60
oberes Riemann-Integral, 278Obersumme, 277offen, 45offene Uberdeckung, 79offenen Menge, 83Ordnung, reflexive, 9
Parametertransformation, 306parametrisierte Kurve, 299Parametrisierung einer Kurve, 301Partialbruchzerlegung
komplexer rationaler Funktionen, 260reeller rationaler Funktionen, 261
Partialsumme, 93Partialsummen, Folge der, 93partielle Ableitung, 222
der Ordnung k, 224hoherer Ordnung, 224
partielle AbleitungenKettenregel, 227Vertauschbarkeit, 225
partielle Integration, 255, 266pi
Berechnung, 199π, 156Polarkoordinaten, 233

Sachverzeichnis 323
in ∼ gegebene Kurve, 305polynomiale Funktion, 131positiv-orientierte Kurve, 308Positivitat, 39Potenz, 19
mit rationalem Exponent, 24Potenz, komplexe, 116
der Eulerzahl, 114Potenzreihe, 110Prinzip der Intervallschachtelung, 15Produkt von Mengen, IXProduktmetrik, 41Produktregel, 177punktweise konvergente
Folge von Abbildungen, 143Funktionenreihe, 146
Quotientenkriterium, 99Quotientenregel, 177
Rand einer Menge, 50Randpunkt einer Menge, 50rationale Funktion, 131, 257rechtsseitiger Grenzwert, 124reell–analytisch, 202reelle Zahlen, 6
Anordnungsaxiom, 9Korperaxiom, 8Vollstandigkeitsaxiom, 11
reelle, rationale Funktion, 257reflexive Ordnung, 9regulare Kurve, 301, 307regularer Punkt, 219Reihe, 93
absolut–konvergente, 94divergente, 94geometrische, 96harmonische, 95konvergente, 94Partialsumme, 93Wert einer Reihe, 94
rektifizierbare Kurve, 299Restglied, 204Richtungsableitung, 213Riemann–integrierbar
uneigentlich, 292uneigentlich , 293
Riemann-Integral, 269Riemann-integrierbar, 269
Riemannsche Summe, 268
Riemannsche Zeta–Funktion, 298Riemannscher Umordnungssatz, 109Riemannsches Integrierbarkeitskriteri-
um, 278
Satz uberdie Stetigkeit der inversen Abbildung,
140die Umkehrabbildung, 235implizite Funktionen, 241
Satz vonBolzano/Weierstraß, 63Borel, 205Cantor fur folgenkompakte metrische
Raume, 78Dini, 144Heine, 139
Heine/Borel, 82Rolle, 186Schwarz, 225Weierstraß, 138
Schnittzahl von (A | B), 11Schranke
obere, 12untere, 12
Schraubenlinie, 304Sektorformel,Leibnitzsche, 311separabler Raum, 78
Sinus, 153Sinus hyperbolicus, 160Skalarprodukt, 35, 91Spirale,archimedische, 313
Spirale,logarithmische, 305Sprungstelle, 128Stammfunktion, 253Standardmetrik, 39
sternformige Menge, 137Sternkurve, 313stetig, 126
stetig differenzierbar, 183n–mal, 183
stetig in einem Punkt, 126Substitutionsregel, 256, 266
Summenregel, 177Supremum, 12surjektive Abbildung, 16Symmetrie, 39

324 Sachverzeichnis
Tangens, 158Tangens hyperbolicus, 161Tangente, 176Tangentialebene, 219Tangentialraum, 219Tangentialvektoren, 219Taylorformel
mehrdimensionale, 228Taylorpolynom, 203Taylorreihe, 203Teiluberdeckung, 79
endliche, 79Teilfolge, 56Teilintervall, 268Topologie, 83topologischer Raum, 83total beschrankte Menge, 77total beschrankter metrischer Raum, 77trigonometrische Funktionen, 153trigonometrisches Polynom
komplexes, 173reelles, 172
uberabzahlbar, 17Uberdeckung
Lebesgue-Zahl einer, 83offene, 79
Uberdeckungssatz von Heine/Borel, 82Umgebung eines Punktes, 53Umkehrfunktion
Ableitung der, 234Umkehrsatz, 235Umordnung von Reihengliedern, 107Umordnungssatz, 107, 108Umparametrisierung einer Kurve, 306unbestimmtes Integral, 254uneigentlich konvergente Folge, 62uneigentlich Riemann–integrierbar, 292,
293uneigentlicher Grenzwert, 62, 122Unstetigkeitsstelle
2. Art, 128hebbare, 128Sprungstelle, 128
Unteralgebra, 166unteres Riemann Integral, 278Untersumme, 277
VektorNorm, 35
Vektoren, 34Vektorraum, 87
normierter, 87Verallgemeinerter Mittelwertsatz der
Differentialrechnung von Cauchy,187
VerdichtungskriteriumCauchysches, 103
Verfeinerung der Zerlegung einesIntervalls, 268
Vertauschbarkeit von Grenzwerten, 144Vervollstandigung metrischer Raume,
71Vielfachheit einer Nullstelle, 259vollstandige Induktion, 2vollstandiger angeordneter Korper, 12vollstandiger metrischer Raum, 69Vollstandigkeitsaxiom der reellen
Zahlen, 11
Weg, 137wegezusammenhangend, 137Weierstraßscher Approximationssatz,
164Weierstraßsches Majorantenkriterium,
147Wendepunkt, 190Wert einer Reihe, 94Wurzel, n-te, 23Wurzelkriterium, 98
Zentrum einer Potenzreihe, 110Zerlegung eines Intervalls, 268Zerlegungssatz fur komplexe Polynome,
259Zeta–Funktion
Riemannsche, 298zusammenhangende Teilmenge, 84zusammenhangender metrischer Raum,
84Zusammenhangskomponente, 86zweimal differenzierbar, 183zweite Ableitung, 183Zwischenwertsatz, 136Zylinderkoordinaten, 233








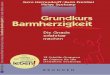



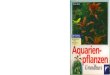













![Bobath Grundkurs 1 [IBITA anerkannt] Bewegungsanalyse ... · Bobath Grundkurs 1 [IBITA anerkannt] Grundkurs über „Befundaufnahme und Behandlung Erwachsener mit neurologischen Erkrankungen](https://img.pdfslide.org/doc/110x75/5e17a21ccba0b14c6c338fd2/bobath-grundkurs-1-ibita-anerkannt-bewegungsanalyse-bobath-grundkurs-1-ibita.jpg)