Embed Size (px)
Citation preview
Norbert Schuster
Simatic Manager STEP 7
04.02.2012
GrundlagenderSPSProgrammierung
Hochschule Augsburg
2
1.Inhaltsverzeichnis
1. Inhaltsverzeichnis ................................................................................................... 2
2. Programmieren mit SIMATIC Manager STEP 7 ..................................................... 4
2.1 SIMATIC Manager öffnen ................................................................................. 4
2.2 Neues Projekt öffnen ......................................................................................... 5
2.3 Hardware konfigurieren ..................................................................................... 6
2.4 Hardwarekonfiguration übertragen .................................................................. 12
2.5 Erstellen eines Bausteins ................................................................................ 14
2.6 FUB / KOP / AWL Ansicht wechseln ............................................................... 16
2.7 Symboltabelle ................................................................................................. 16
2.7 Bausteine auf SPS übertragen ........................................................................ 17
2.8 Simulation ....................................................................................................... 18
2.9 Beobachtungsfunktion ..................................................................................... 19
3. Programmieren in AWL, KOP oder FUP ............................................................... 20
3.1 Programmierverfahren .................................................................................... 22
3.1.1 KOP – Kontaktplan ................................................................................... 22
3.1.2 FUP – Funktionsplan ................................................................................ 23
3.1.3 AWL – Anweisungsliste ............................................................................ 24
3.2 Befehlsübersicht ............................................................................................. 25
3.2.1 KOP .......................................................................................................... 26
3.2.2 FUP .......................................................................................................... 26
3.2.3 AWL .......................................................................................................... 26
4. Einsatz der SPS ................................................................................................... 27
5. Vor- und Nachteile einer SPS ............................................................................... 29
5.1 Vorteile ............................................................................................................ 29
5.2 Nachteile ......................................................................................................... 29
6. Übungen ............................................................................................................... 30
6.1 UND ................................................................................................................ 30
6.2 ODER .............................................................................................................. 30
6.3 Verknüpfungen ................................................................................................ 31
6.4 Flip Flop .......................................................................................................... 32
6.4.1 Vorrangiges Rücksetzen .......................................................................... 32
Hochschule Augsburg
3
6.4.1 Vorrangiges Setzen .................................................................................. 32
6.5 Zähler .............................................................................................................. 33
6.5.1 FUP / KOP ................................................................................................ 33
6.5.2 AWL .......................................................................................................... 33
6.5.3 Übung ....................................................................................................... 34
6.6 Stern - Dreieck - Anlauf ................................................................................... 35
6.7 Behälter-Füllanlage ......................................................................................... 38
Hochschule Augsburg
4
2.ProgrammierenmitSIMATICManagerSTEP7
2.1SIMATICManageröffnen
Zur Programmierung der SPS wird das Programm „SIMATIC Manager STEP 7“ der Firma Siemens verwendet.
In diesem Programm sind folgende Funktionen enthalten:
Projekte anlegen / verwalten (Hardware – Konfiguration, Symboltabellen, Kommentare)
Konfiguration der Hardware S7 – Simulator Verwalten der Bausteine
OB – Operationsbausteine FC – Funktionen FB – Funktionsbausteine DB – Datenbausteine (SFC, SFB)
Programmeditor für KOP – Kontaktplan AWL – Anweisungsliste FUP - Funktionsplan
lädt Daten und Bausteine in die SPS bzw. in den Simulator
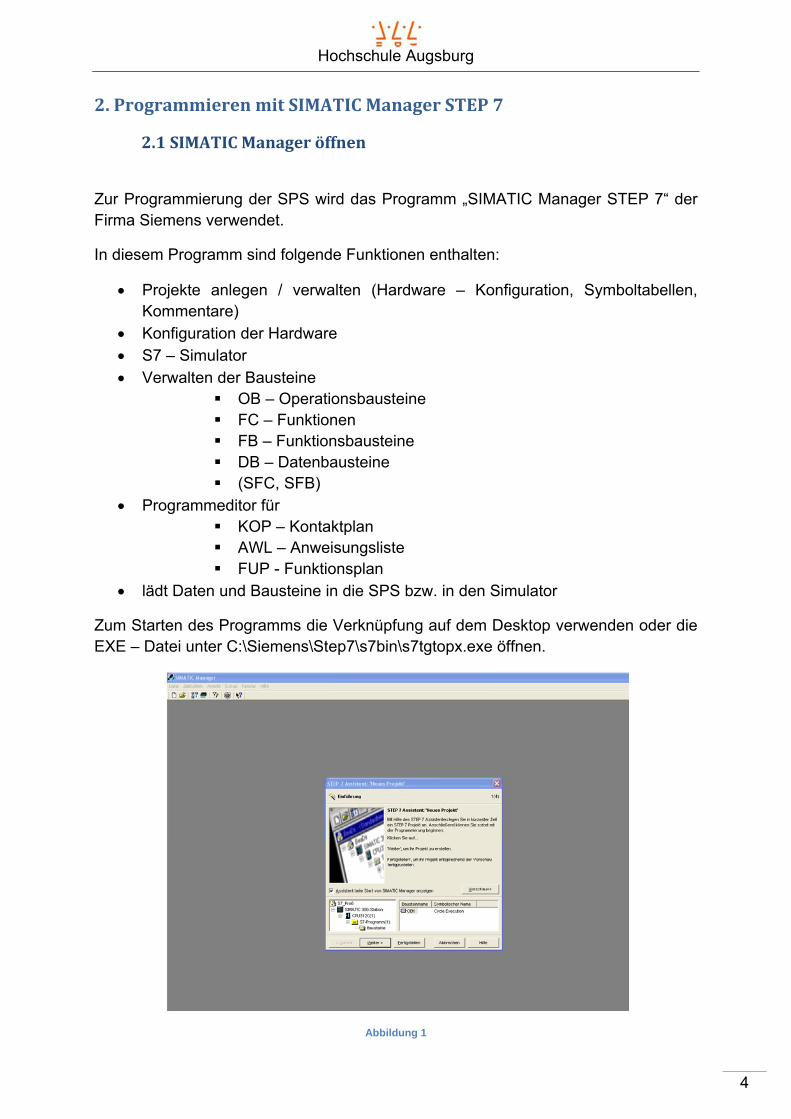
Zum Starten des Programms die Verknüpfung auf dem Desktop verwenden oder die EXE – Datei unter C:\Siemens\Step7\s7bin\s7tgtopx.exe öffnen.
Abbildung 1
Hochschule Augsburg
5
Zum Anlegen eines neuen Projekts wird nicht der Assistent verwendet. Auf Grund dessen wird der STEP7 Assistent abgebrochen.
2.2NeuesProjektöffnen
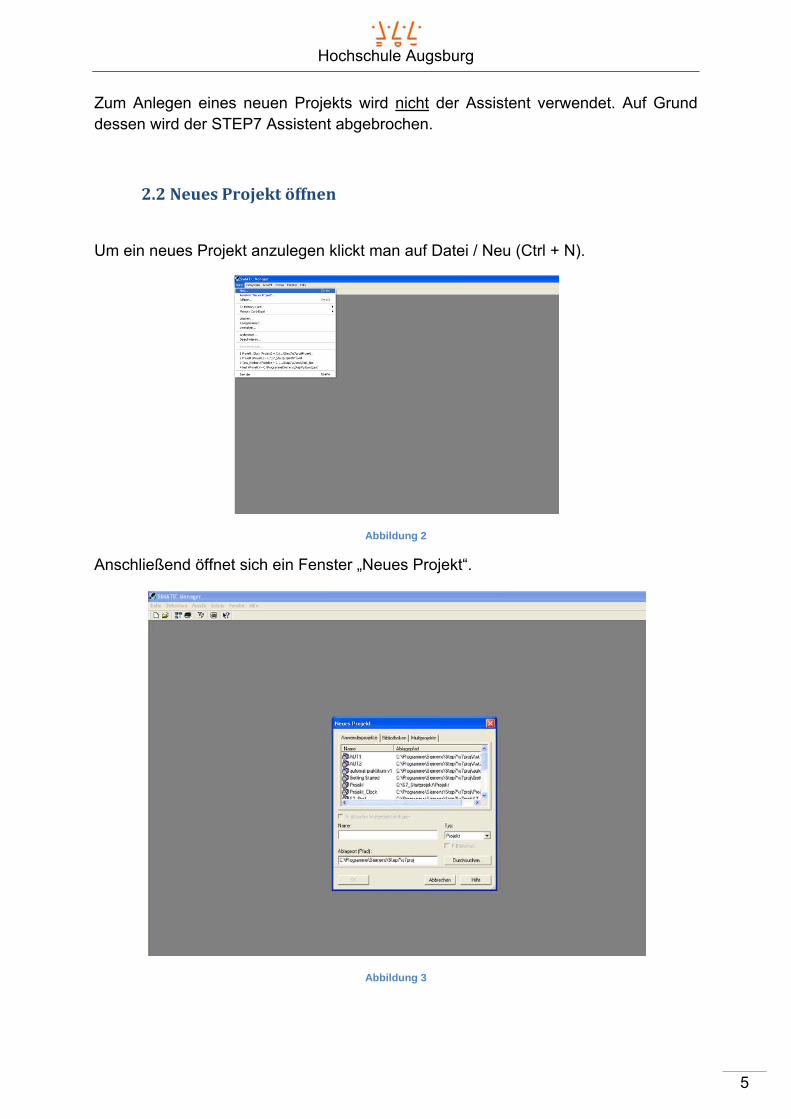
Um ein neues Projekt anzulegen klickt man auf Datei / Neu (Ctrl + N).
Abbildung 2
Anschließend öffnet sich ein Fenster „Neues Projekt“.
Abbildung 3
Hochschule Augsburg
6
Geben Sie in dieses Fenster den Dateinamen (z.B. Übung 1, Stern – Dreieck Umschaltung) und den Speicherort ein.
Beachten Sie dabei, dass der Simatic Manager keine neuen Ordner erstellen kann und somit nur auf bestehende Ordner zugreifen kann.
Ist ein vernünftiger Speichername und –ort gewählt, bestätigen Sie mit OK.
2.3Hardwarekonfigurieren
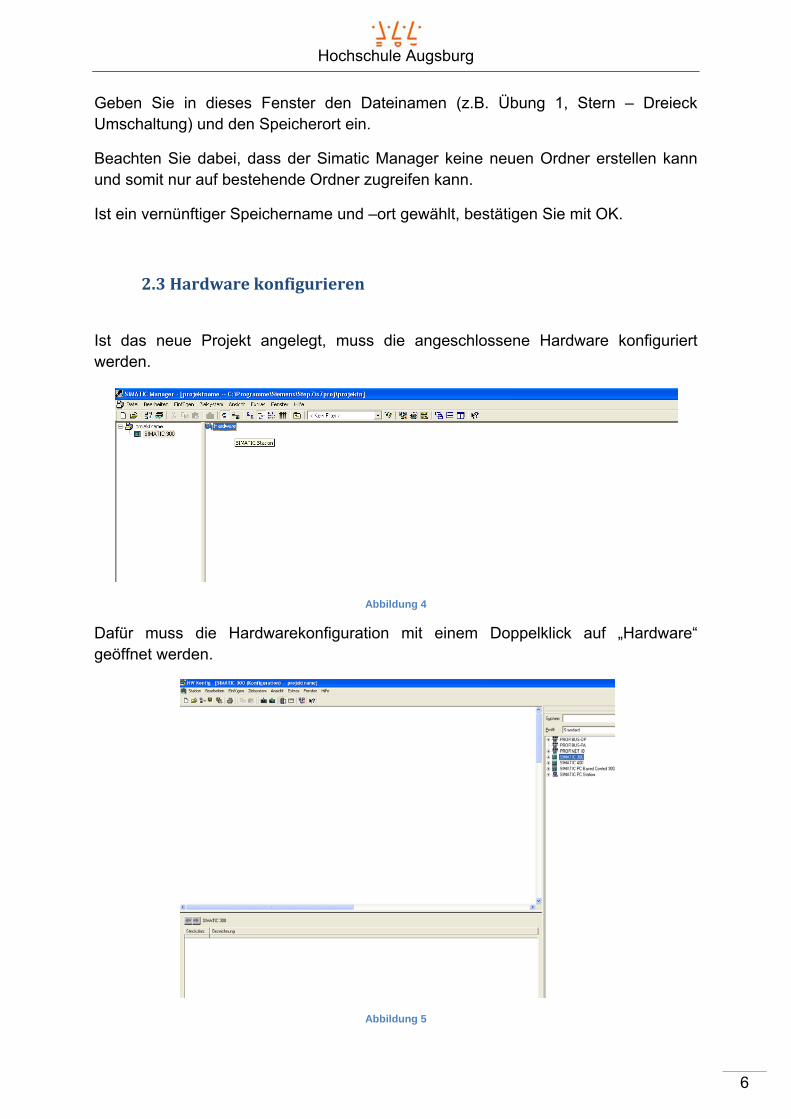
Ist das neue Projekt angelegt, muss die angeschlossene Hardware konfiguriert werden.
Abbildung 4
Dafür muss die Hardwarekonfiguration mit einem Doppelklick auf „Hardware“ geöffnet werden.
Abbildung 5
Hochschule Augsburg
7
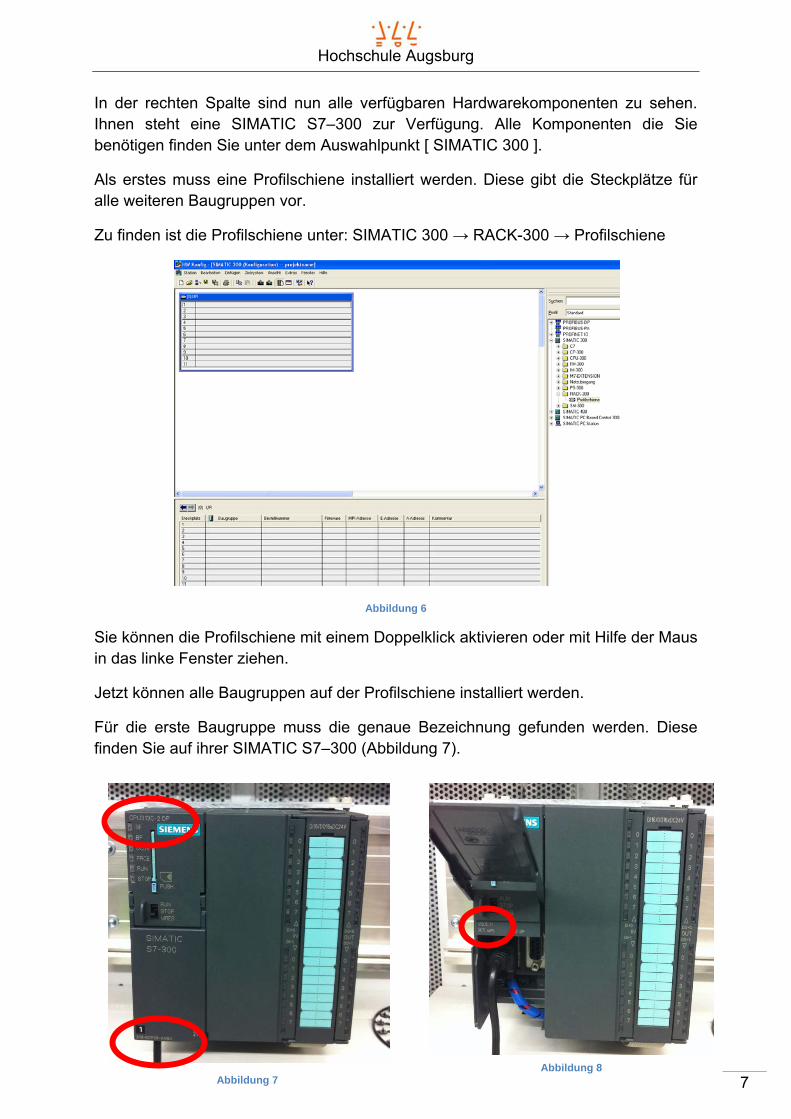
In der rechten Spalte sind nun alle verfügbaren Hardwarekomponenten zu sehen. Ihnen steht eine SIMATIC S7–300 zur Verfügung. Alle Komponenten die Sie benötigen finden Sie unter dem Auswahlpunkt [ SIMATIC 300 ].
Als erstes muss eine Profilschiene installiert werden. Diese gibt die Steckplätze für alle weiteren Baugruppen vor.
Zu finden ist die Profilschiene unter: SIMATIC 300 → RACK-300 → Profilschiene
Abbildung 6
Sie können die Profilschiene mit einem Doppelklick aktivieren oder mit Hilfe der Maus in das linke Fenster ziehen.
Jetzt können alle Baugruppen auf der Profilschiene installiert werden.
Für die erste Baugruppe muss die genaue Bezeichnung gefunden werden. Diese finden Sie auf ihrer SIMATIC S7–300 (Abbildung 7).
Abbildung 7 Abbildung 8
Hochschule Augsburg
8
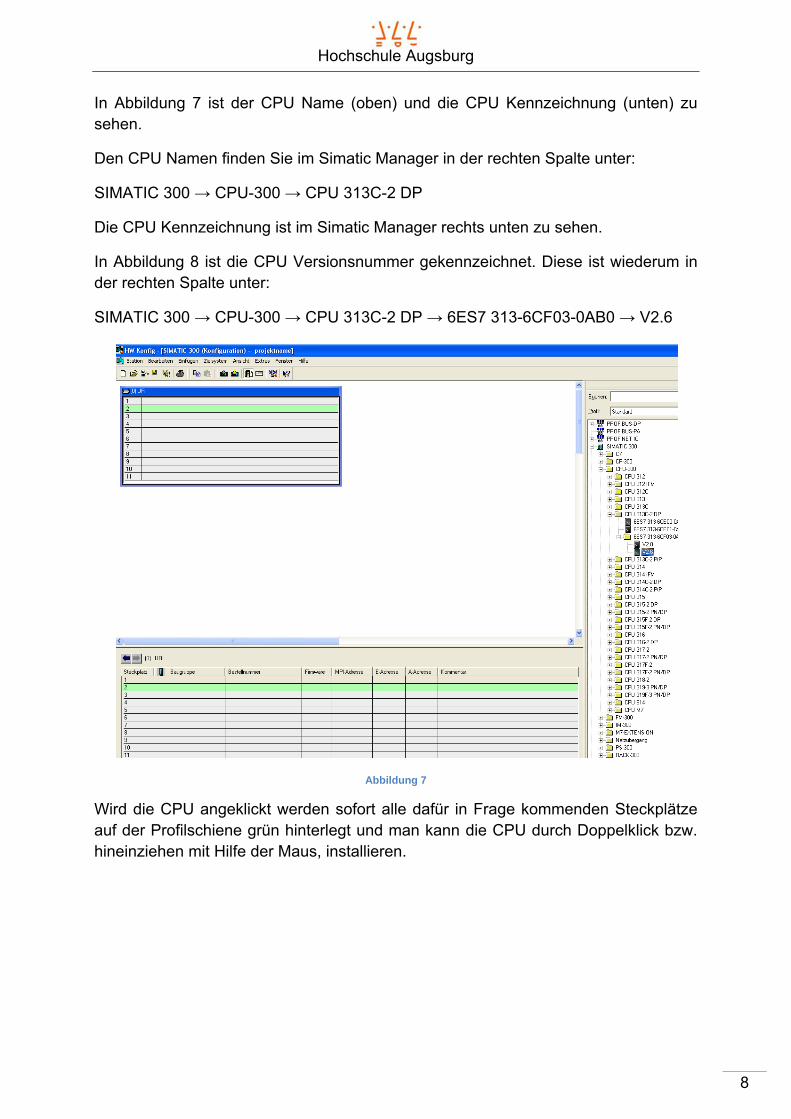
In Abbildung 7 ist der CPU Name (oben) und die CPU Kennzeichnung (unten) zu sehen.
Den CPU Namen finden Sie im Simatic Manager in der rechten Spalte unter:
SIMATIC 300 → CPU-300 → CPU 313C-2 DP
Die CPU Kennzeichnung ist im Simatic Manager rechts unten zu sehen.
In Abbildung 8 ist die CPU Versionsnummer gekennzeichnet. Diese ist wiederum in der rechten Spalte unter:
SIMATIC 300 → CPU-300 → CPU 313C-2 DP → 6ES7 313-6CF03-0AB0 → V2.6
Abbildung 7
Wird die CPU angeklickt werden sofort alle dafür in Frage kommenden Steckplätze auf der Profilschiene grün hinterlegt und man kann die CPU durch Doppelklick bzw. hineinziehen mit Hilfe der Maus, installieren.
Hochschule Augsburg
9
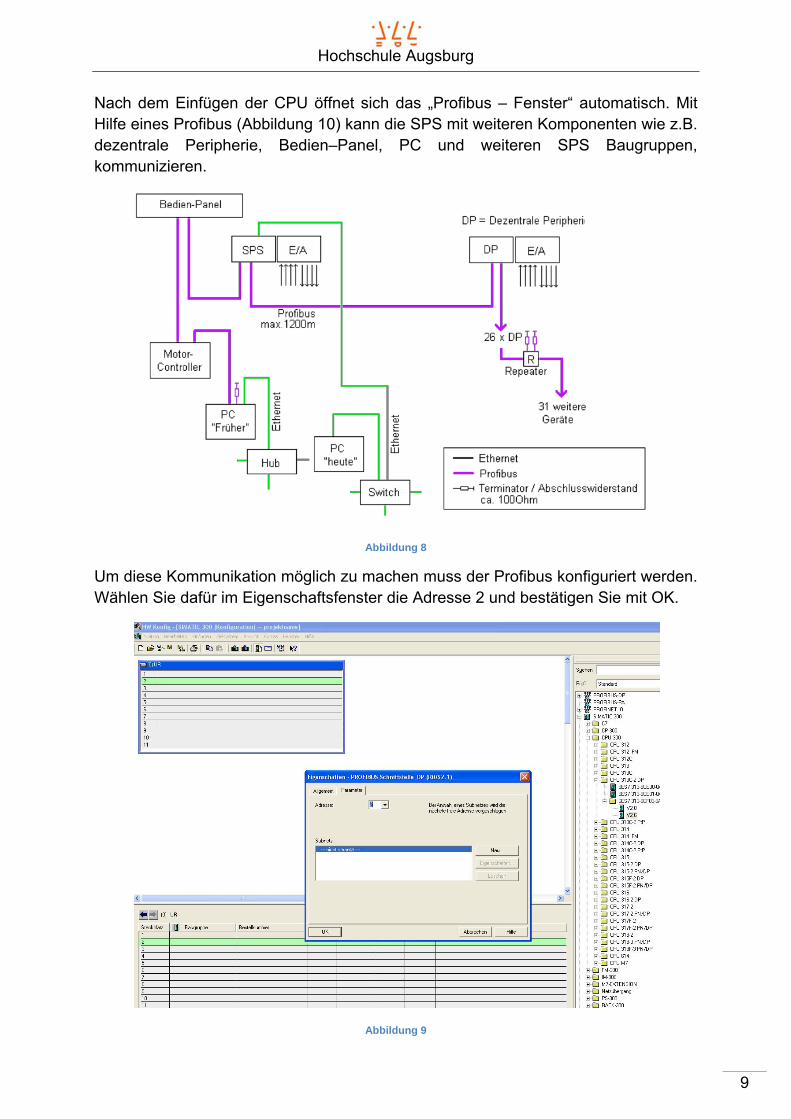
Nach dem Einfügen der CPU öffnet sich das „Profibus – Fenster“ automatisch. Mit Hilfe eines Profibus (Abbildung 10) kann die SPS mit weiteren Komponenten wie z.B. dezentrale Peripherie, Bedien–Panel, PC und weiteren SPS Baugruppen, kommunizieren.
Abbildung 8
Um diese Kommunikation möglich zu machen muss der Profibus konfiguriert werden. Wählen Sie dafür im Eigenschaftsfenster die Adresse 2 und bestätigen Sie mit OK.
Abbildung 9
Hochschule Augsburg
10
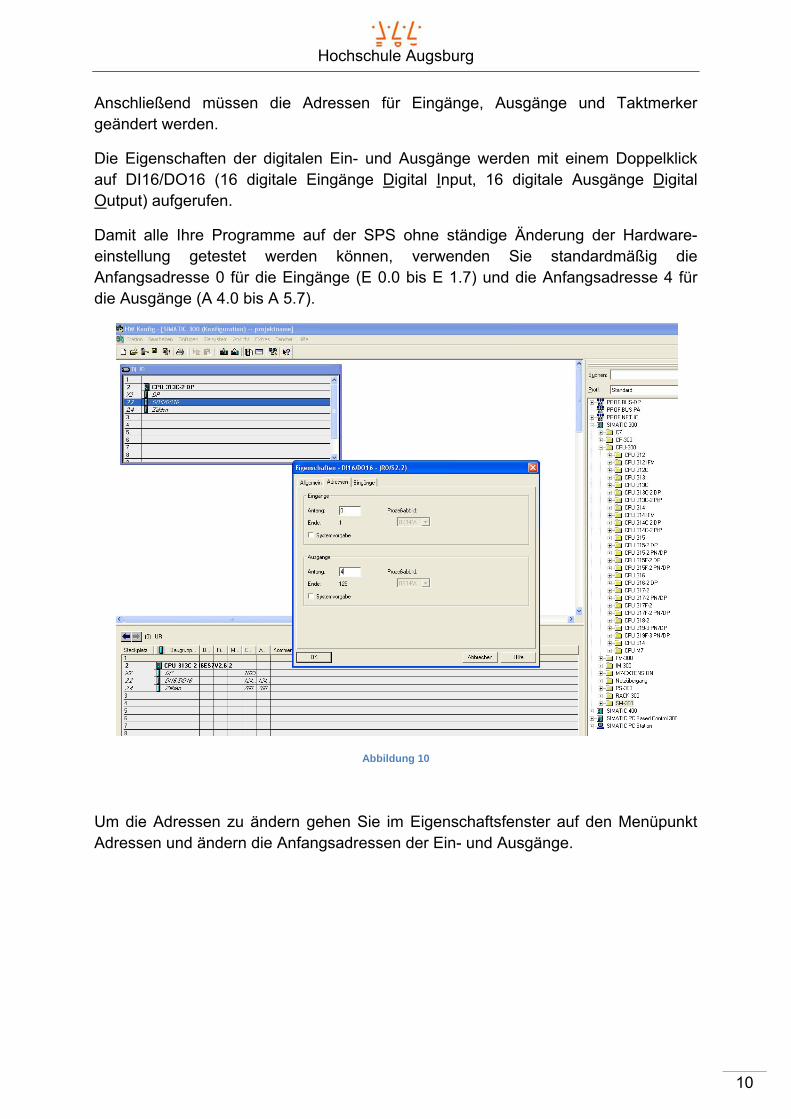
Anschließend müssen die Adressen für Eingänge, Ausgänge und Taktmerker geändert werden.
Die Eigenschaften der digitalen Ein- und Ausgänge werden mit einem Doppelklick auf DI16/DO16 (16 digitale Eingänge Digital Input, 16 digitale Ausgänge Digital Output) aufgerufen.
Damit alle Ihre Programme auf der SPS ohne ständige Änderung der Hardware-einstellung getestet werden können, verwenden Sie standardmäßig die Anfangsadresse 0 für die Eingänge (E 0.0 bis E 1.7) und die Anfangsadresse 4 für die Ausgänge (A 4.0 bis A 5.7).
Abbildung 10
Um die Adressen zu ändern gehen Sie im Eigenschaftsfenster auf den Menüpunkt Adressen und ändern die Anfangsadressen der Ein- und Ausgänge.
Hochschule Augsburg
11
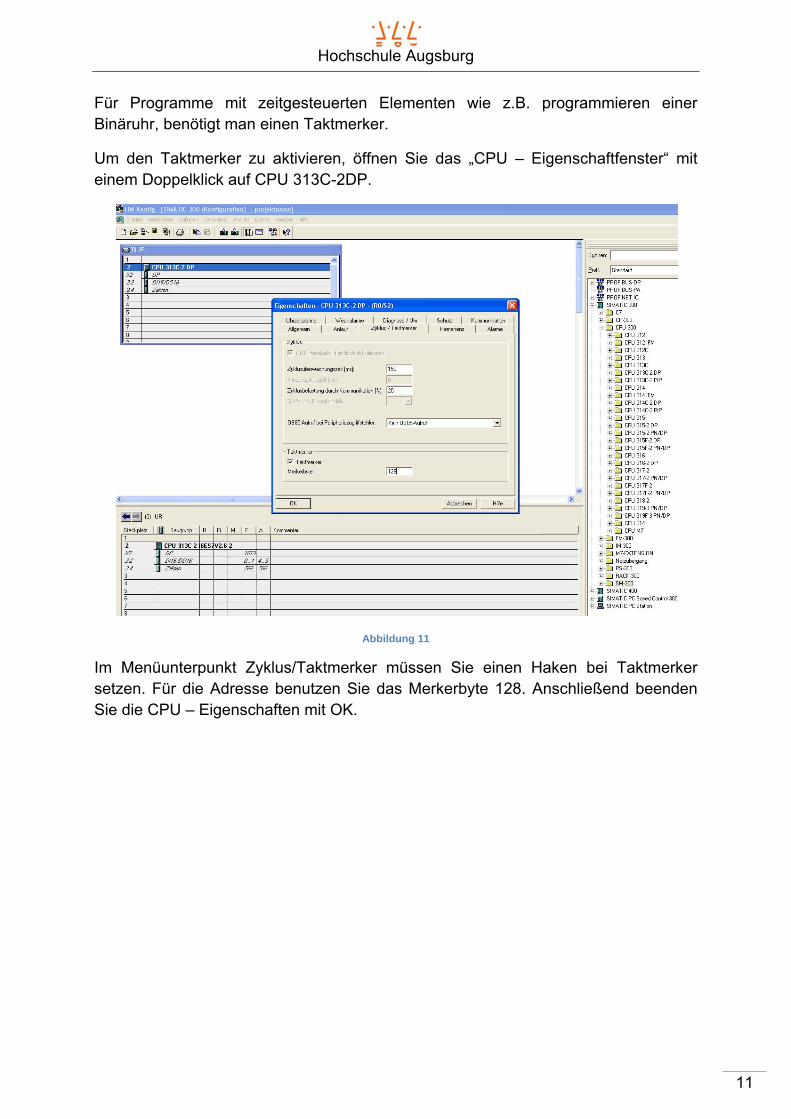
Für Programme mit zeitgesteuerten Elementen wie z.B. programmieren einer Binäruhr, benötigt man einen Taktmerker.
Um den Taktmerker zu aktivieren, öffnen Sie das „CPU – Eigenschaftfenster“ mit einem Doppelklick auf CPU 313C-2DP.
Abbildung 11
Im Menüunterpunkt Zyklus/Taktmerker müssen Sie einen Haken bei Taktmerker setzen. Für die Adresse benutzen Sie das Merkerbyte 128. Anschließend beenden Sie die CPU – Eigenschaften mit OK.
Hochschule Augsburg
12
2.4Hardwarekonfigurationübertragen
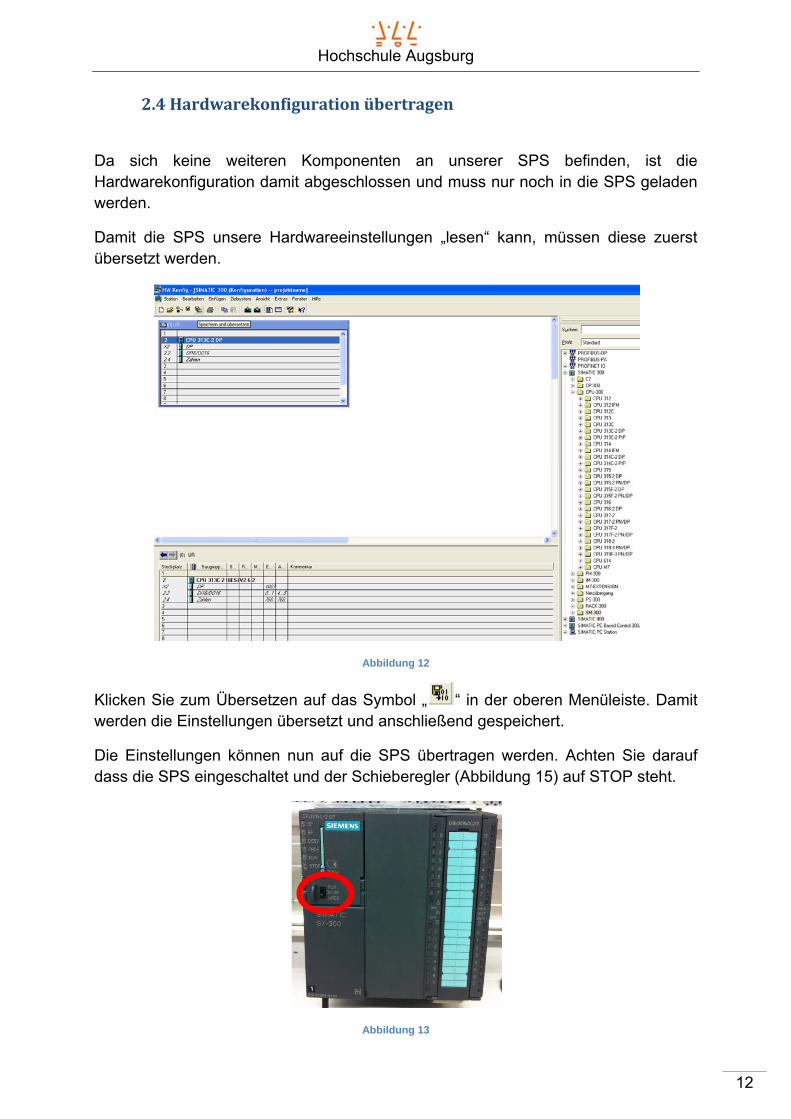
Da sich keine weiteren Komponenten an unserer SPS befinden, ist die Hardwarekonfiguration damit abgeschlossen und muss nur noch in die SPS geladen werden.
Damit die SPS unsere Hardwareeinstellungen „lesen“ kann, müssen diese zuerst übersetzt werden.
Abbildung 12
Klicken Sie zum Übersetzen auf das Symbol „ “ in der oberen Menüleiste. Damit werden die Einstellungen übersetzt und anschließend gespeichert.
Die Einstellungen können nun auf die SPS übertragen werden. Achten Sie darauf dass die SPS eingeschaltet und der Schieberegler (Abbildung 15) auf STOP steht.
Abbildung 13
Hochschule Augsburg
13
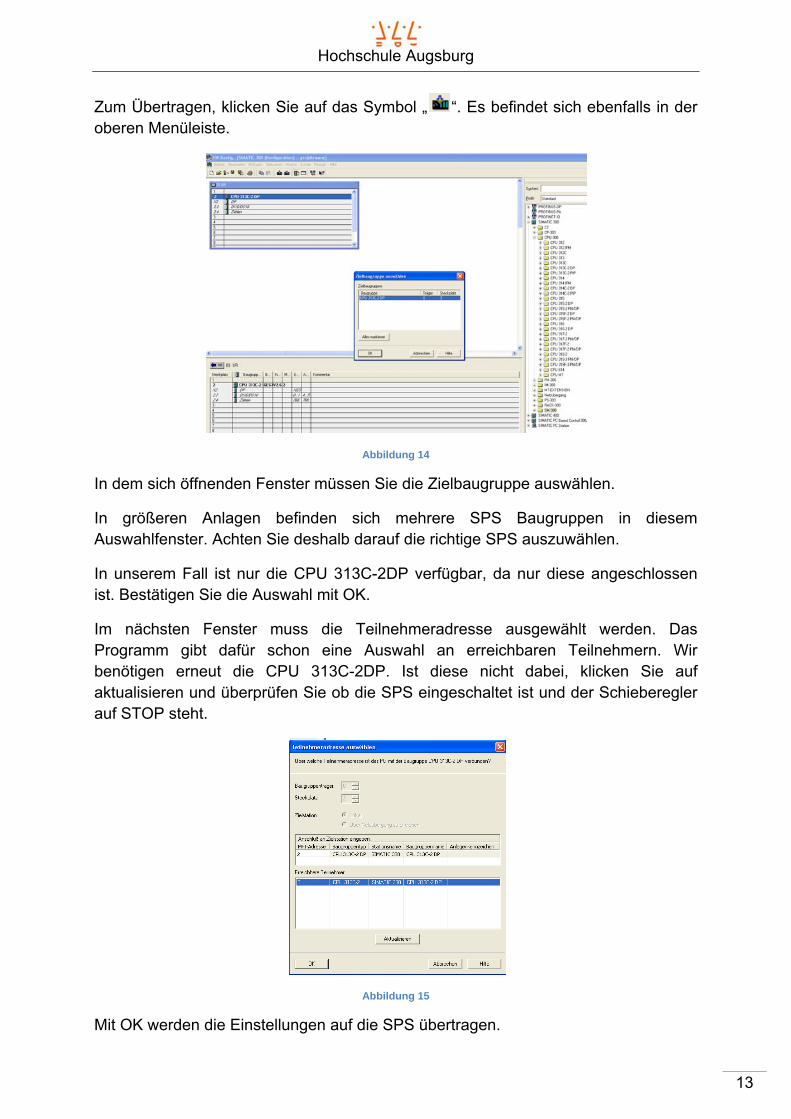
Zum Übertragen, klicken Sie auf das Symbol „ “. Es befindet sich ebenfalls in der oberen Menüleiste.
Abbildung 14
In dem sich öffnenden Fenster müssen Sie die Zielbaugruppe auswählen.
In größeren Anlagen befinden sich mehrere SPS Baugruppen in diesem Auswahlfenster. Achten Sie deshalb darauf die richtige SPS auszuwählen.
In unserem Fall ist nur die CPU 313C-2DP verfügbar, da nur diese angeschlossen ist. Bestätigen Sie die Auswahl mit OK.
Im nächsten Fenster muss die Teilnehmeradresse ausgewählt werden. Das Programm gibt dafür schon eine Auswahl an erreichbaren Teilnehmern. Wir benötigen erneut die CPU 313C-2DP. Ist diese nicht dabei, klicken Sie auf aktualisieren und überprüfen Sie ob die SPS eingeschaltet ist und der Schieberegler auf STOP steht.
Abbildung 15
Mit OK werden die Einstellungen auf die SPS übertragen.
Hochschule Augsburg
14
2.5ErstelleneinesBausteins
Prinzipieller Aufbau eines SPS-Programmes:
Ein SPS-Programm kann und sollte unterteilt werden in Bausteine, die seriell-zyklisch bearbeitet werden:
OB1 - Organisationsbausteine für den Hauptprogrammzyklus. Organisationsbausteine werden nicht vom Anwender, sondern nur vom Betriebssystem aufgerufen. Der OB1 wird immer dann aufgerufen, wenn er einmal durchgelaufen ist.
FCs - Funktionen für einfache Programmteile, ohne eigene statische Daten (sog. Instanzdaten), aber durchaus mit Ein- und Ausgangsparametern.
FBs - Funktionsbausteine für Programmteile, die eigene statische Daten (sog. Instanzdaten) haben können und meistens mit Ein- und Ausgangsparametern verwendet werden. Die Instanzdaten werden in einem dazugehörigen DB (Datenbaustein) gespeichert.
Die Bausteine werden in der Reihenfolge ihres Aufrufes abgearbeitet. Die Bausteinnummern spielen (außer bei OBs, die man aber ohnehin nicht aufrufen kann) keine Rolle.
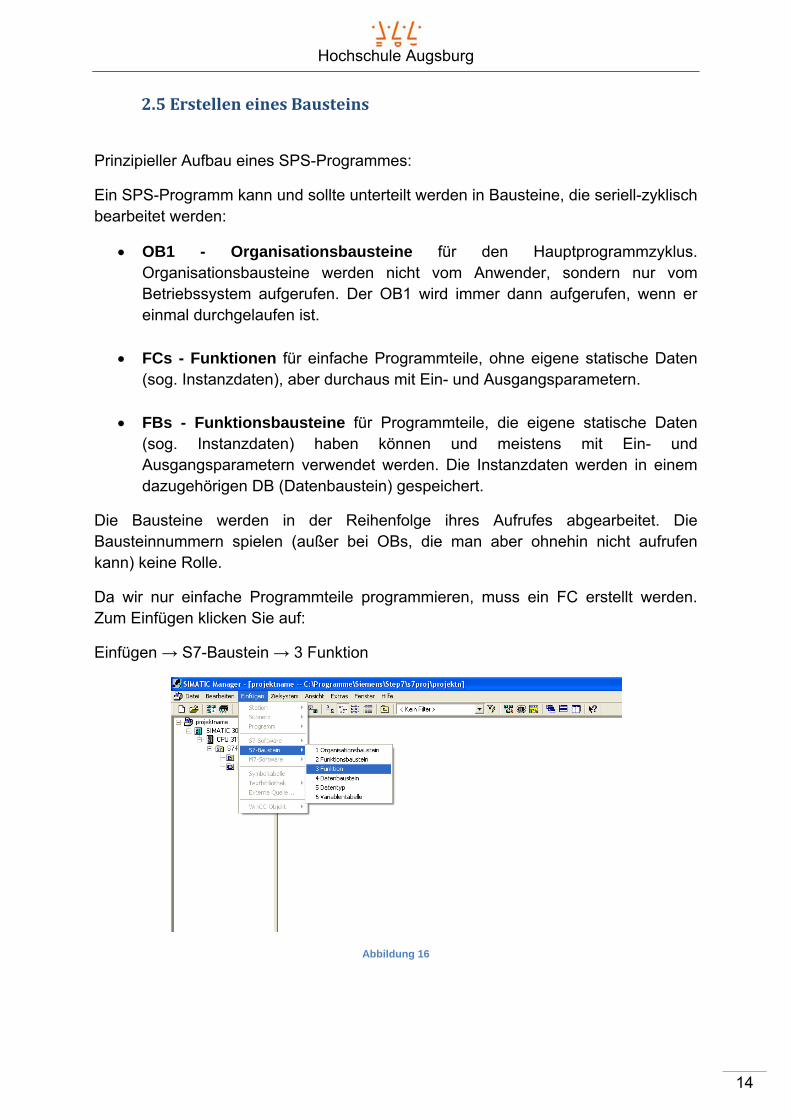
Da wir nur einfache Programmteile programmieren, muss ein FC erstellt werden. Zum Einfügen klicken Sie auf:
Einfügen → S7-Baustein → 3 Funktion
Abbildung 16
Hochschule Augsburg
15
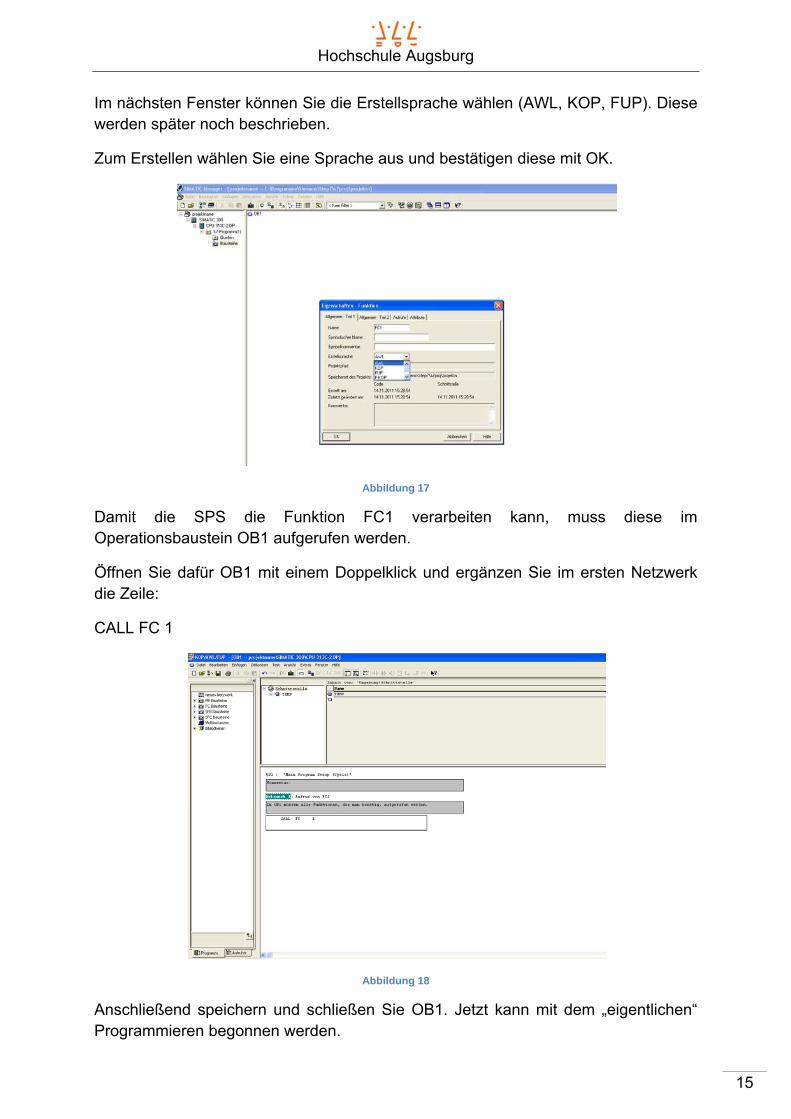
Im nächsten Fenster können Sie die Erstellsprache wählen (AWL, KOP, FUP). Diese werden später noch beschrieben.
Zum Erstellen wählen Sie eine Sprache aus und bestätigen diese mit OK.
Abbildung 17
Damit die SPS die Funktion FC1 verarbeiten kann, muss diese im Operationsbaustein OB1 aufgerufen werden.
Öffnen Sie dafür OB1 mit einem Doppelklick und ergänzen Sie im ersten Netzwerk die Zeile:
CALL FC 1
Abbildung 18
Anschließend speichern und schließen Sie OB1. Jetzt kann mit dem „eigentlichen“ Programmieren begonnen werden.
Hochschule Augsburg
16
2.6FUB/KOP/AWLAnsichtwechseln
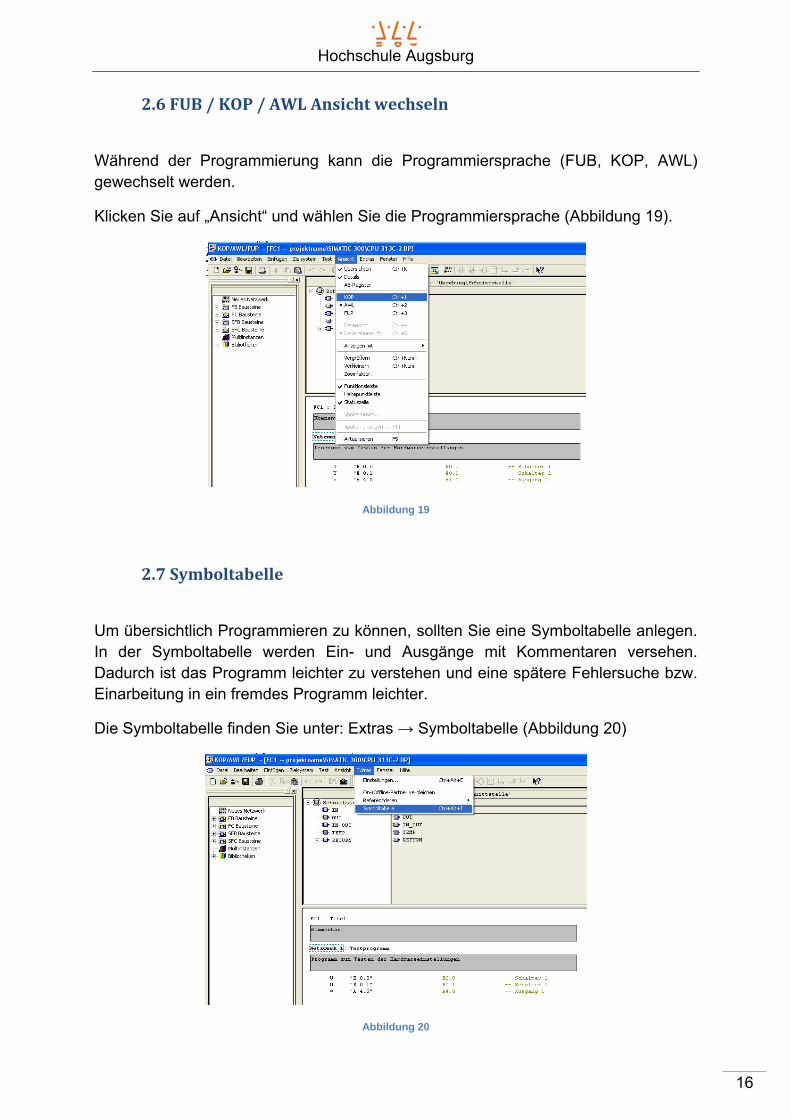
Während der Programmierung kann die Programmiersprache (FUB, KOP, AWL) gewechselt werden.
Klicken Sie auf „Ansicht“ und wählen Sie die Programmiersprache (Abbildung 19).
Abbildung 19
2.7Symboltabelle
Um übersichtlich Programmieren zu können, sollten Sie eine Symboltabelle anlegen. In der Symboltabelle werden Ein- und Ausgänge mit Kommentaren versehen. Dadurch ist das Programm leichter zu verstehen und eine spätere Fehlersuche bzw. Einarbeitung in ein fremdes Programm leichter.
Die Symboltabelle finden Sie unter: Extras → Symboltabelle (Abbildung 20)
Abbildung 20
Hochschule Augsburg
17
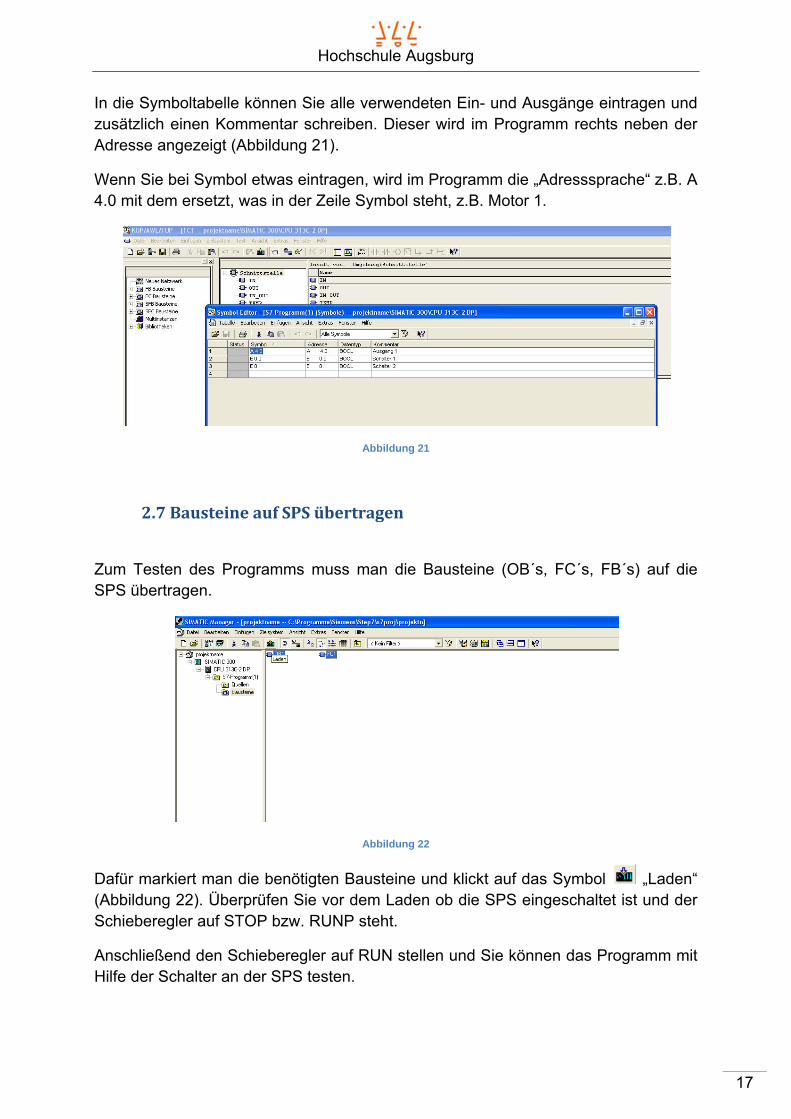
In die Symboltabelle können Sie alle verwendeten Ein- und Ausgänge eintragen und zusätzlich einen Kommentar schreiben. Dieser wird im Programm rechts neben der Adresse angezeigt (Abbildung 21).
Wenn Sie bei Symbol etwas eintragen, wird im Programm die „Adresssprache“ z.B. A 4.0 mit dem ersetzt, was in der Zeile Symbol steht, z.B. Motor 1.
Abbildung 21
2.7BausteineaufSPSübertragen
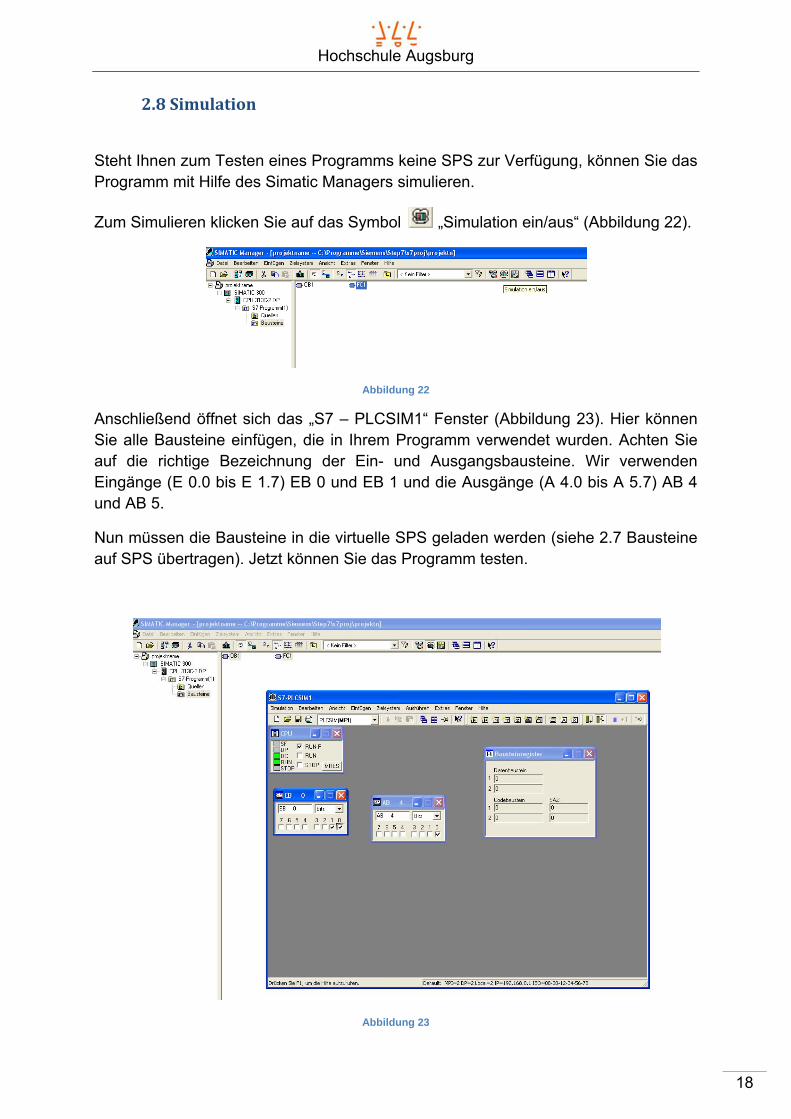
Zum Testen des Programms muss man die Bausteine (OB´s, FC´s, FB´s) auf die SPS übertragen.
Abbildung 22
Dafür markiert man die benötigten Bausteine und klickt auf das Symbol „Laden“ (Abbildung 22). Überprüfen Sie vor dem Laden ob die SPS eingeschaltet ist und der Schieberegler auf STOP bzw. RUNP steht.
Anschließend den Schieberegler auf RUN stellen und Sie können das Programm mit Hilfe der Schalter an der SPS testen.
Hochschule Augsburg
18
2.8Simulation
Steht Ihnen zum Testen eines Programms keine SPS zur Verfügung, können Sie das Programm mit Hilfe des Simatic Managers simulieren.
Zum Simulieren klicken Sie auf das Symbol „Simulation ein/aus“ (Abbildung 22).
Abbildung 22
Anschließend öffnet sich das „S7 – PLCSIM1“ Fenster (Abbildung 23). Hier können Sie alle Bausteine einfügen, die in Ihrem Programm verwendet wurden. Achten Sie auf die richtige Bezeichnung der Ein- und Ausgangsbausteine. Wir verwenden Eingänge (E 0.0 bis E 1.7) EB 0 und EB 1 und die Ausgänge (A 4.0 bis A 5.7) AB 4 und AB 5.
Nun müssen die Bausteine in die virtuelle SPS geladen werden (siehe 2.7 Bausteine auf SPS übertragen). Jetzt können Sie das Programm testen.
Abbildung 23
Hochschule Augsburg
19
2.9Beobachtungsfunktion
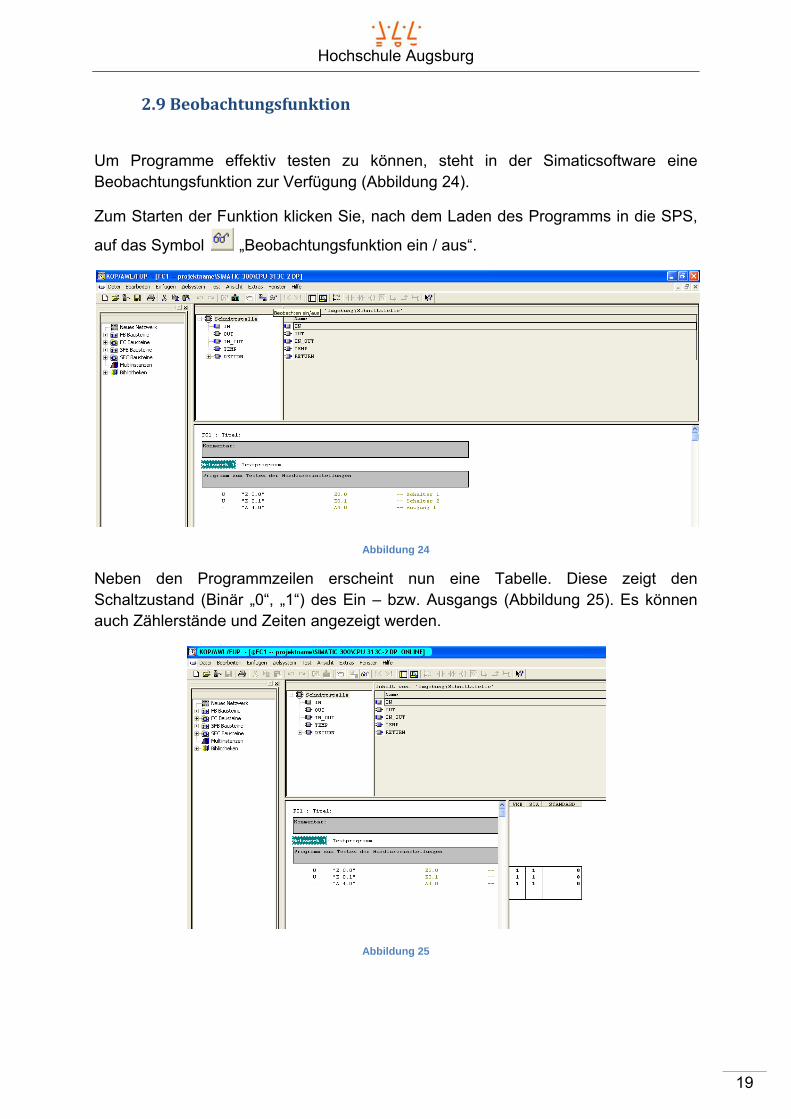
Um Programme effektiv testen zu können, steht in der Simaticsoftware eine Beobachtungsfunktion zur Verfügung (Abbildung 24).
Zum Starten der Funktion klicken Sie, nach dem Laden des Programms in die SPS,
auf das Symbol „Beobachtungsfunktion ein / aus“.
Abbildung 24
Neben den Programmzeilen erscheint nun eine Tabelle. Diese zeigt den Schaltzustand (Binär „0“, „1“) des Ein – bzw. Ausgangs (Abbildung 25). Es können auch Zählerstände und Zeiten angezeigt werden.
Abbildung 25
Hochschule Augsburg
20
3.ProgrammiereninAWL,KOPoderFUP
Der Begriff Speicherprogrammierbare Steuerung wird in der DIN EN 61131-1 (IEC 61131-1) wie folgt definiert:
“Ein digital arbeitendes elektronisches System für den Einsatz in industriellen Umgebungen mit einem programmierbaren Speicher zur internen Speicherung der anwenderorientierten Steuerungsanweisungen zur Implementierung spezifischer Funktionen wie z.B. Verknüpfungssteuerung, Ablaufsteuerung, Zeit-, Zähl- und arithmetische Funktionen, um durch digitale oder analoge Eingangs- und Ausgangssignale verschiedene Arten von Maschinen und Prozesse zu steuern.
Die Speicherprogrammierbare Steuerung und die zugehörigen Peripheriegeräte (das SPS-System) sind so konzipiert, dass sie sich leicht in ein industrielles Steuerungssystem integrieren und in allen ihren beabsichtigten Funktionen einsetzen lassen."
Eine Speicherprogrammierbare Steuerung ist damit nichts anderes, als ein speziell auf Steuerungsaufgaben zugeschnittener Computer.
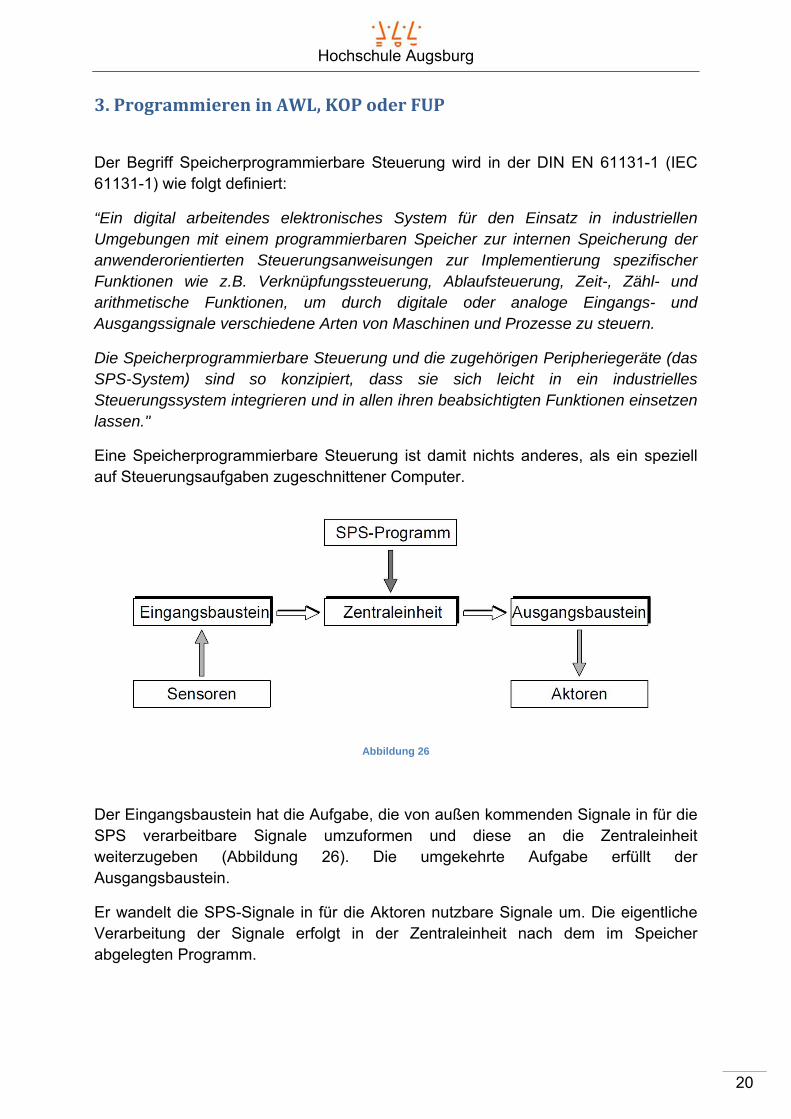
Abbildung 26
Der Eingangsbaustein hat die Aufgabe, die von außen kommenden Signale in für die SPS verarbeitbare Signale umzuformen und diese an die Zentraleinheit weiterzugeben (Abbildung 26). Die umgekehrte Aufgabe erfüllt der Ausgangsbaustein.
Er wandelt die SPS-Signale in für die Aktoren nutzbare Signale um. Die eigentliche Verarbeitung der Signale erfolgt in der Zentraleinheit nach dem im Speicher abgelegten Programm.
Hochschule Augsburg
21
Zum Programmieren einer SPS wird der im Simatic Manager enthaltene KOP / FUP / AWL–Editor verwendet.
Er enthält folgende Funktionen:
Bearbeiten von Bausteinen (OB, FC, FB) Erstellen von Netzwerken FUP und KOP als graphische Darstellung der AWL Bibliotheken aller Standardfunktionen Hilfemenü Kommunikation mit der SPS zur online-Beobachtung
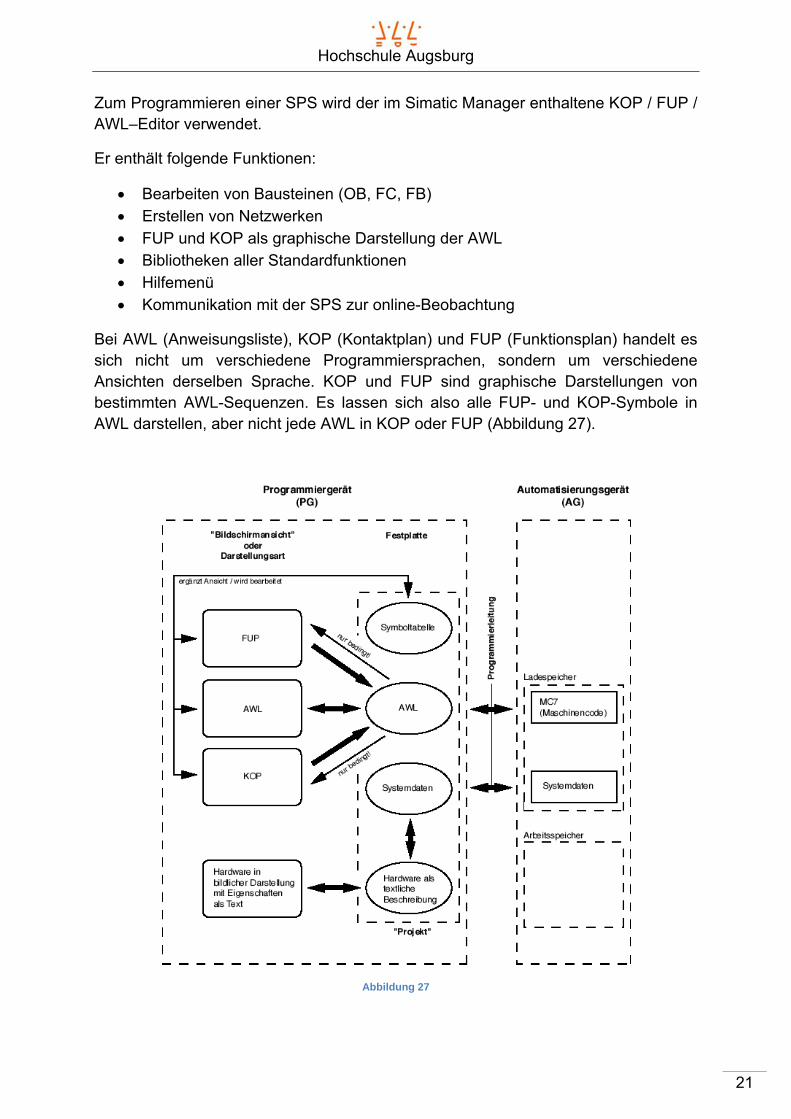
Bei AWL (Anweisungsliste), KOP (Kontaktplan) und FUP (Funktionsplan) handelt es sich nicht um verschiedene Programmiersprachen, sondern um verschiedene Ansichten derselben Sprache. KOP und FUP sind graphische Darstellungen von bestimmten AWL-Sequenzen. Es lassen sich also alle FUP- und KOP-Symbole in AWL darstellen, aber nicht jede AWL in KOP oder FUP (Abbildung 27).
Abbildung 27
Hochschule Augsburg
22
Auf der Festplatte des Programmiergeräts (PC) wird nur AWL gespeichert, dazu die Informationen über Symboltabellen und Kommentare. Das heißt die graphischen Darstellungen in FUP bzw. AWL muss der PC beim Speichern in AWL umwandeln. Beim Öffnen wird die FUP und KOP Darstellung aus der AWL erzeugt.
Das Automatisierungsgerät (SPS) kann nur den Maschinencode MC7 lesen und ab arbeiten. Dieser wird aus der AWL generiert. Auf dem PG liegen also die Quelldaten (AWL-Programm mit Symboltabellen und Kommentaren), in die SPS wird aber nur der lauffähige Maschinencode übertragen. Wenn man aus der SPS ein Programm herunterlädt, für das man die Projekt - Dateien nicht hat stehen keine Kommentare und keine Symboltabelle zur Verfügung, weil diese nur in der ursprünglichen Projekt-Quelle gespeichert sind.
Das Schreiben der Programme wird durch die Programmiersprache geprägt, wodurch die Aufgaben manchmal besser mit der einen oder anderen Programmiersprachen gelöst werden können.
3.1Programmierverfahren
3.1.1KOP–Kontaktplan
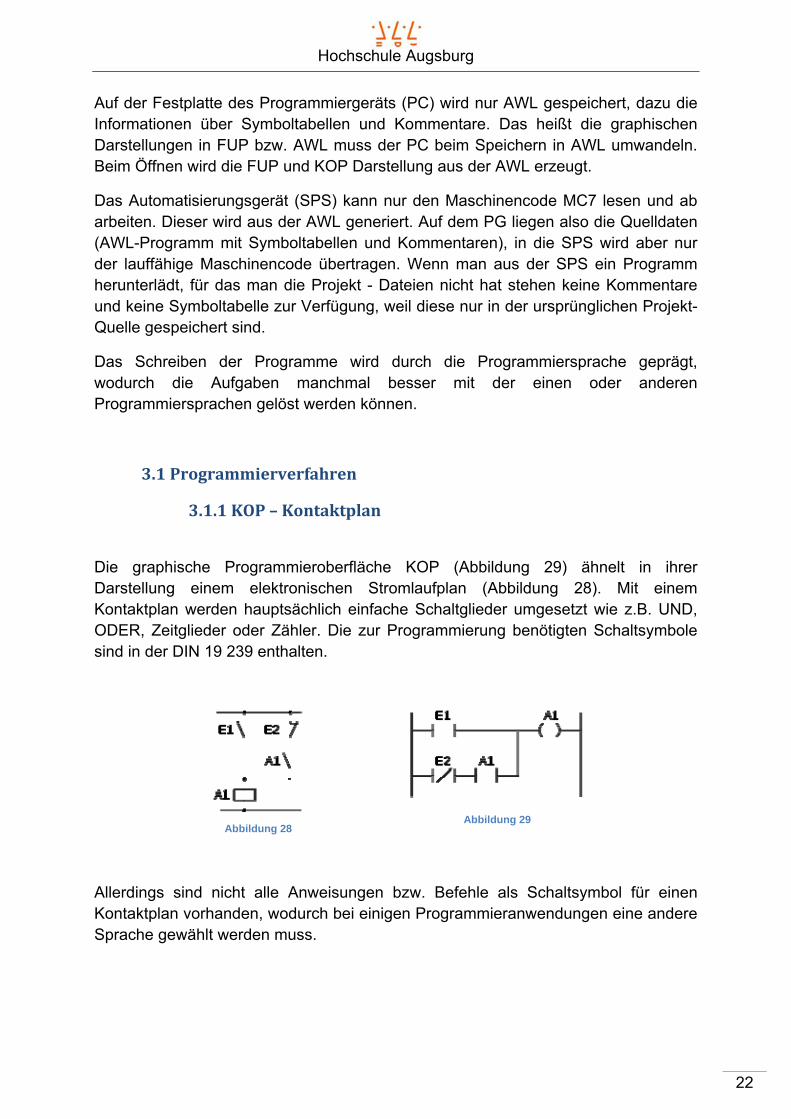
Die graphische Programmieroberfläche KOP (Abbildung 29) ähnelt in ihrer Darstellung einem elektronischen Stromlaufplan (Abbildung 28). Mit einem Kontaktplan werden hauptsächlich einfache Schaltglieder umgesetzt wie z.B. UND, ODER, Zeitglieder oder Zähler. Die zur Programmierung benötigten Schaltsymbole sind in der DIN 19 239 enthalten.
Allerdings sind nicht alle Anweisungen bzw. Befehle als Schaltsymbol für einen Kontaktplan vorhanden, wodurch bei einigen Programmieranwendungen eine andere Sprache gewählt werden muss.
Abbildung 28 Abbildung 29
Hochschule Augsburg
23
3.1.2FUP–Funktionsplan
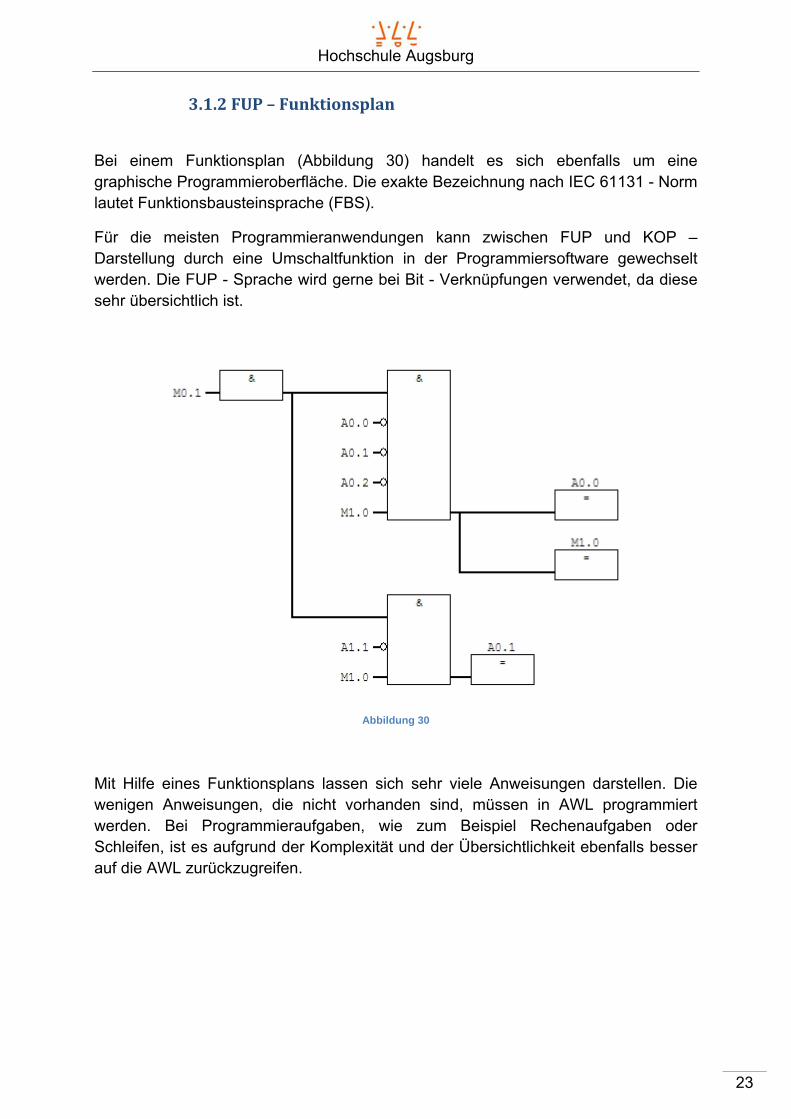
Bei einem Funktionsplan (Abbildung 30) handelt es sich ebenfalls um eine graphische Programmieroberfläche. Die exakte Bezeichnung nach IEC 61131 - Norm lautet Funktionsbausteinsprache (FBS).
Für die meisten Programmieranwendungen kann zwischen FUP und KOP – Darstellung durch eine Umschaltfunktion in der Programmiersoftware gewechselt werden. Die FUP - Sprache wird gerne bei Bit - Verknüpfungen verwendet, da diese sehr übersichtlich ist.
Abbildung 30
Mit Hilfe eines Funktionsplans lassen sich sehr viele Anweisungen darstellen. Die wenigen Anweisungen, die nicht vorhanden sind, müssen in AWL programmiert werden. Bei Programmieraufgaben, wie zum Beispiel Rechenaufgaben oder Schleifen, ist es aufgrund der Komplexität und der Übersichtlichkeit ebenfalls besser auf die AWL zurückzugreifen.
Hochschule Augsburg
24
3.1.3AWL–Anweisungsliste
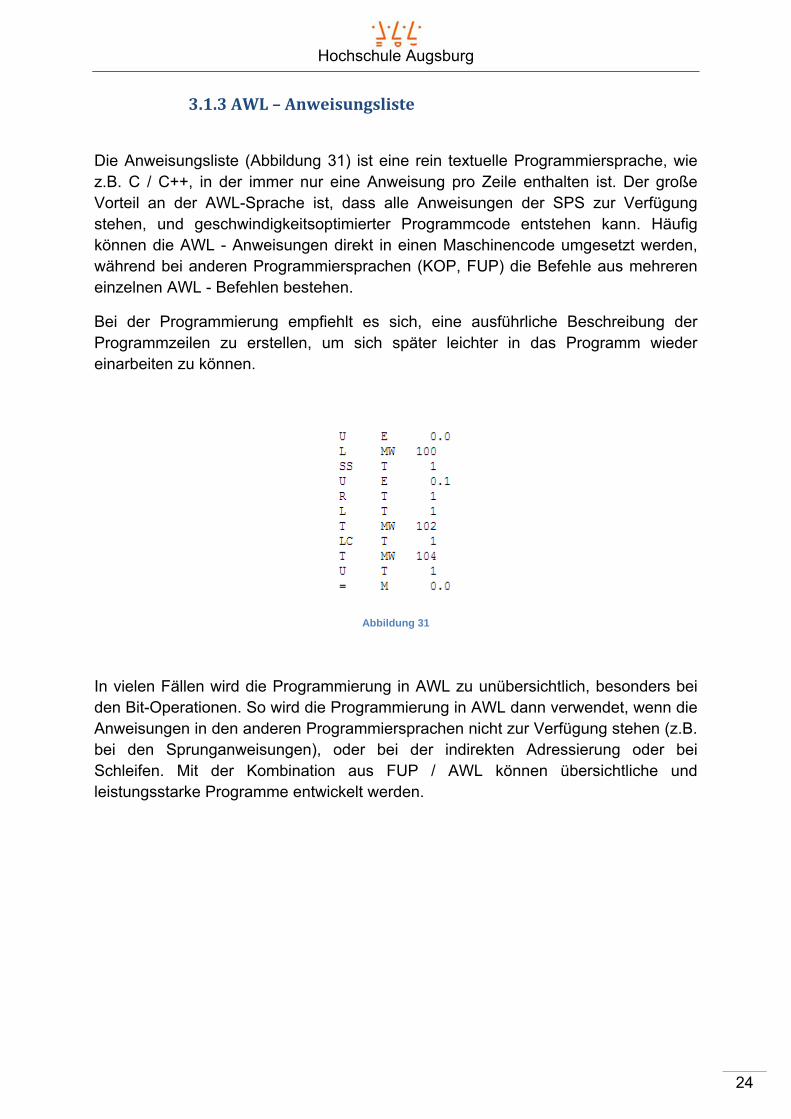
Die Anweisungsliste (Abbildung 31) ist eine rein textuelle Programmiersprache, wie z.B. C / C++, in der immer nur eine Anweisung pro Zeile enthalten ist. Der große Vorteil an der AWL-Sprache ist, dass alle Anweisungen der SPS zur Verfügung stehen, und geschwindigkeitsoptimierter Programmcode entstehen kann. Häufig können die AWL - Anweisungen direkt in einen Maschinencode umgesetzt werden, während bei anderen Programmiersprachen (KOP, FUP) die Befehle aus mehreren einzelnen AWL - Befehlen bestehen.
Bei der Programmierung empfiehlt es sich, eine ausführliche Beschreibung der Programmzeilen zu erstellen, um sich später leichter in das Programm wieder einarbeiten zu können.
Abbildung 31
In vielen Fällen wird die Programmierung in AWL zu unübersichtlich, besonders bei den Bit-Operationen. So wird die Programmierung in AWL dann verwendet, wenn die Anweisungen in den anderen Programmiersprachen nicht zur Verfügung stehen (z.B. bei den Sprunganweisungen), oder bei der indirekten Adressierung oder bei Schleifen. Mit der Kombination aus FUP / AWL können übersichtliche und leistungsstarke Programme entwickelt werden.
Hochschule Augsburg
25
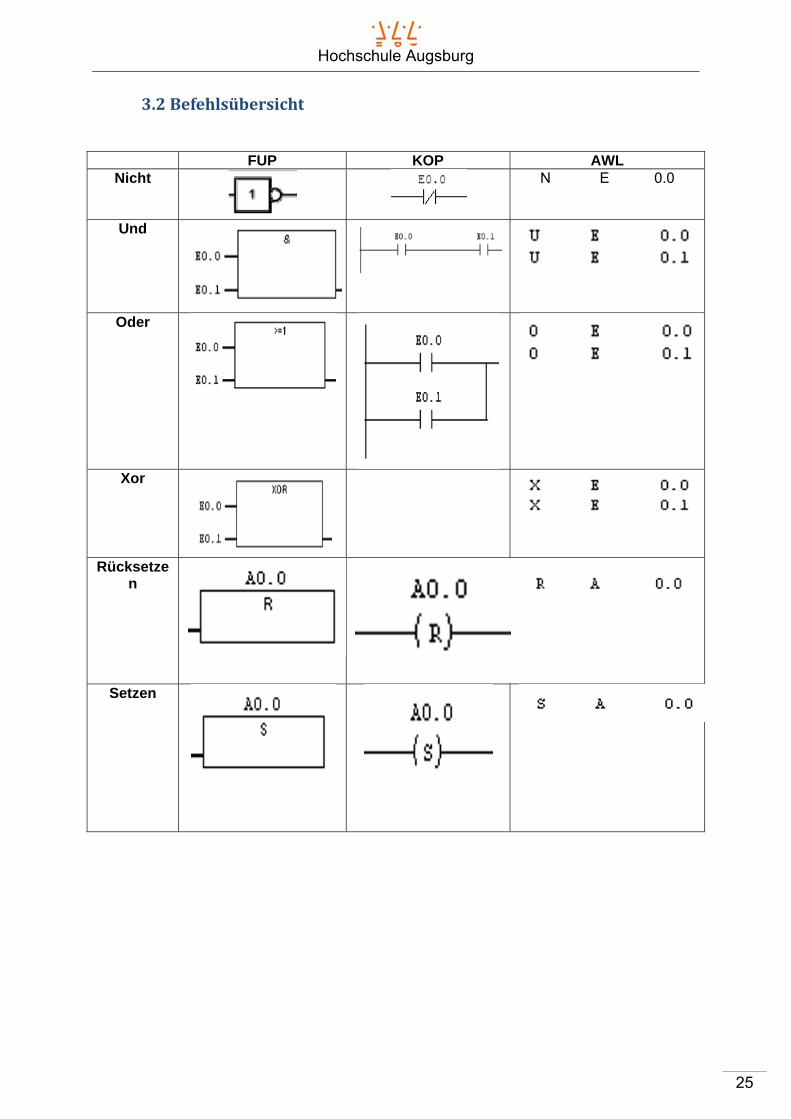
3.2Befehlsübersicht
FUP KOP AWL Nicht
N E 0.0
Und
Oder
Xor
Rücksetzen
Setzen
Hochschule Augsburg
26
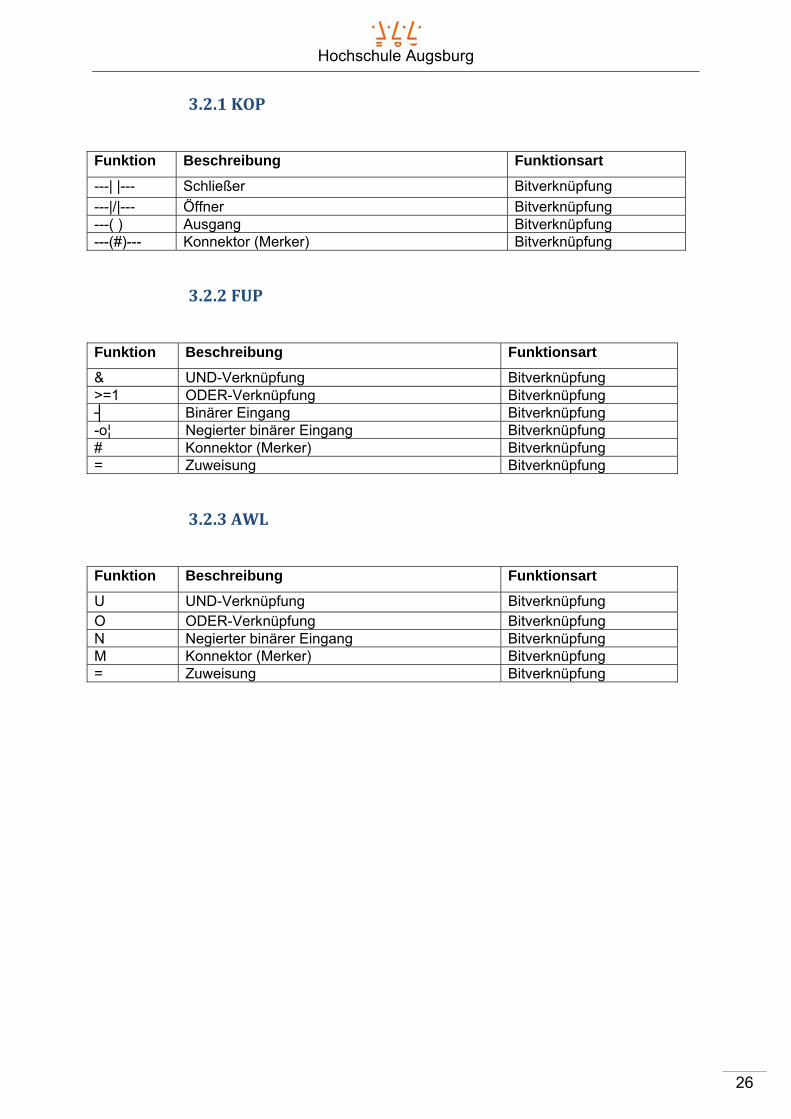
3.2.1KOP
Funktion Beschreibung Funktionsart
---| |--- Schließer Bitverknüpfung
---|/|--- Öffner Bitverknüpfung ---( ) Ausgang Bitverknüpfung ---(#)--- Konnektor (Merker) Bitverknüpfung
3.2.2FUP
Funktion Beschreibung Funktionsart
& UND-Verknüpfung Bitverknüpfung >=1 ODER-Verknüpfung Bitverknüpfung ┤ Binärer Eingang Bitverknüpfung -o¦ Negierter binärer Eingang Bitverknüpfung # Konnektor (Merker) Bitverknüpfung = Zuweisung Bitverknüpfung
3.2.3AWL
Funktion Beschreibung Funktionsart
U UND-Verknüpfung Bitverknüpfung O ODER-Verknüpfung Bitverknüpfung N Negierter binärer Eingang Bitverknüpfung M Konnektor (Merker) Bitverknüpfung = Zuweisung Bitverknüpfung
Hochschule Augsburg
27
4.EinsatzderSPS
Jede Anlage oder Maschine besitzt eine Steuerung. Nach Art der eingesetzten Technik können diese in mechanische, pneumatische, hydraulische, elektrische und elektronische Steuerungen unterschieden werden. Häufig kommen Kombinationen aus verschiedenen Technologien zum Einsatz. Zusätzlich unterscheidet man in verbindungsprogrammierbare (z.B. Verdrahtung von elektromechanischen oder elektronischen Bauelementen) und speicherprogrammierbare Steuerungen. Erstere setzt man vor allem in solchen Fällen ein, in denen eine Umprogrammierung durch den Anwender nicht in Frage kommt und die Losgröße die Entwicklung einer speziellen Steuerung rechtfertigt. Typische Anwendungsfälle solcher Steuerungen finden sich bei Waschautomaten, Videokameras und PKWs.
Erlaubt dagegen die Losgröße nicht die Entwicklung einer speziellen Steuerung bzw. soll dem Anwender eine einfache und selbständige Änderung des Programmes, die Einstellung von Zeiten und Zählern gestattet werden, so wird man den Einsatz einer universellen Steuerung bevorzugen, bei der das Programm in einen elektronischen Speicher geschrieben wird. Die SPS stellt eine solche universelle Steuerung dar. Sie kann für unterschiedlichste Anwendungen genutzt werden und bietet dem Anwender über das in ihrem Speicher abgelegte Programm eine einfache Möglichkeit, Steuerungsprozesse zu ändern, zu erweitern und zu optimieren.
Die ursprüngliche Aufgabe der SPS besteht darin, Eingangssignale nach einem vorgegebenen Programm miteinander zu verknüpfen und für den “Wahr”-Fall den entsprechenden Ausgang zu schalten. Die mathematische Grundlage für diese Verknüpfung bildet die Boolesche Algebra, die für eine Variable genau zwei definierte Zustände kennt: “0" und ”1". Dementsprechend kann ein Ausgang auch nur diese beiden Zustände annehmen. Ein angeschlossener Motor könnte beispielsweise ein- oder ausgeschaltet, also gesteuert werden.
Diese Aufgabe hat den Namen der SPS geprägt: Speicherprogrammierbare Steuerung. Das Ein- und Ausgangsverhalten gleicht dem elektromagnetischer Relais- bzw. pneumatischer Schaltventilsteuerungen. Das Programm ist in einem elektronischen Speicher abgelegt.
Allerdings erweiterten sich die Aufgaben sehr schnell. Zeit- und Zählfunktion, Speicher setzen und rücksetzen oder mathematische Rechenoperationen sind Anwendungen, die heutzutage nahezu jede SPS kann.
Weiter stiegen die Anforderungen an SPS mit ihrer rasanten Verbreitung und der Entwicklung der Automatisierungstechnik. Visualisierung wäre zu nennen, die Darstellung von Maschinenzuständen bzw. des ablaufenden Steuerprogramms auf Display oder Monitor. Ebenso Bedienen, also die Möglichkeit, in Steuerungsprozesse eingreifen zu können oder aber das Eingreifen für Unbefugte unmöglich zu machen. Sehr schnell wurde es auch notwendig, SPS - gesteuerte Einzelanlagen automatisierungstechnisch miteinander zu verknüpfen und aufeinander
Hochschule Augsburg
28
abzustimmen. Über einen Leitrechner ist es somit möglich, mehreren SPS-Anlagen übergeordnete Befehle zur Programmabarbeitung zu erteilen.
Die Vernetzung mehrerer SPS untereinander, wie auch von SPS und Leitrechner, erfolgt über spezielle Kommunikationsschnittstellen. Hierbei sind viele der neueren SPS kompatibel zu offenen, standardisierten Bussystemen, wie Profibus nach DIN 19 245. Durch die enorm gestiegene Leistungsfähigkeit moderner SPS können diese sogar selbst die Aufgabe eines Leitrechners übernehmen.
Ende der 70er Jahre wurden schließlich die binären Ein- und Ausgänge um analoge Ein- und Ausgänge erweitert, da viele technische Anwendungen heute Analogwertverarbeitung erfordern (Kraftmessung, Drehzahlstellen, servopneumatische Positioniersysteme). Zugleich ist mit der Erfassung bzw. Ausgabe analoger Signale ein Istwert- / Sollwert- Vergleich und damit die Realisierung regelungstechnischer Aufgaben möglich, eine Aufgabe, die weit über den im Namen angegebenen Bereich (Speicherprogrammierbare Steuerung) hinausgeht.
Die augenblicklich auf dem Markt angebotenen SPS sind inzwischen so auf Kundenanforderungen abgestimmt, dass es möglich ist, für nahezu jede Anwendung eine besonders geeignete SPS zu kaufen. So gibt es Kleinst - SPS mit wenigen Ein- und Ausgängen schon ab ein paar hundert Euro. Ebenso sind größere SPS mit 128 oder 256 Ein- und Ausgängen erhältlich. Viele SPS sind mit zusätzlichen Ein- bzw. Ausgangs-, Analog-, Positionier- und Kommunikationsbaugruppen erweiterbar. Es gibt spezielle SPS für Aufgaben der Sicherheitstechnik, des Schiff- oder Bergbaus. Andere SPS können wiederum mehrere Programme gleichzeitig ab arbeiten (Multitasking). Schließlich werden SPS mit anderen automatisierungstechnischen Elementen gekoppelt, so dass wesentlich erweiterte Einsatzgebiete entstehen.
Hochschule Augsburg
29
5.Vor‐undNachteileeinerSPS
5.1Vorteile
geringer Verschleiß Zuverlässigkeit einfache Änderung / Umverdrahtung Vervielfältigung von Programmen möglich Kommentarmöglichkeit und Dokumentation Zeitersparnis (wenig Montage- und Verdrahtungsarbeit, paralleles
Programmieren) Fernwartung und Ferndiagnose Vernetzbarkeit mit anderen IT – Anlagen
5.2Nachteile
ungeeignet für kleine bzw. wenig komplexe Anlagen ( zu teuer ) qualifiziertes Personal nötig Lasten können meist nicht direkt angesteuert werden zusätzliche Infrastruktur notwendig (Programmiergeräte bzw. Software,
Datensicherung etc.)
Hochschule Augsburg
30
6.Übungen
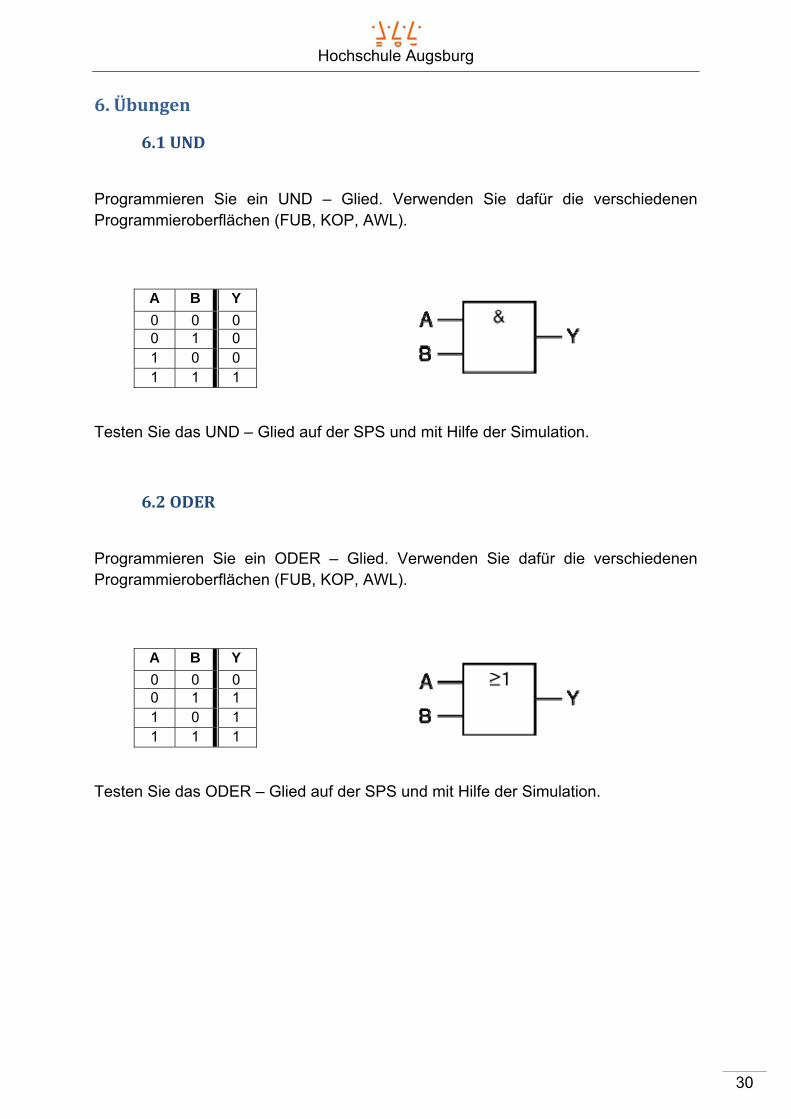
6.1UND
Programmieren Sie ein UND – Glied. Verwenden Sie dafür die verschiedenen Programmieroberflächen (FUB, KOP, AWL).
A B Y
0 0 0 0 1 0 1 0 0 1 1 1
Testen Sie das UND – Glied auf der SPS und mit Hilfe der Simulation.
6.2ODER
Programmieren Sie ein ODER – Glied. Verwenden Sie dafür die verschiedenen Programmieroberflächen (FUB, KOP, AWL).
A B Y
0 0 0 0 1 1 1 0 1 1 1 1
Testen Sie das ODER – Glied auf der SPS und mit Hilfe der Simulation.
Hochschule Augsburg
31
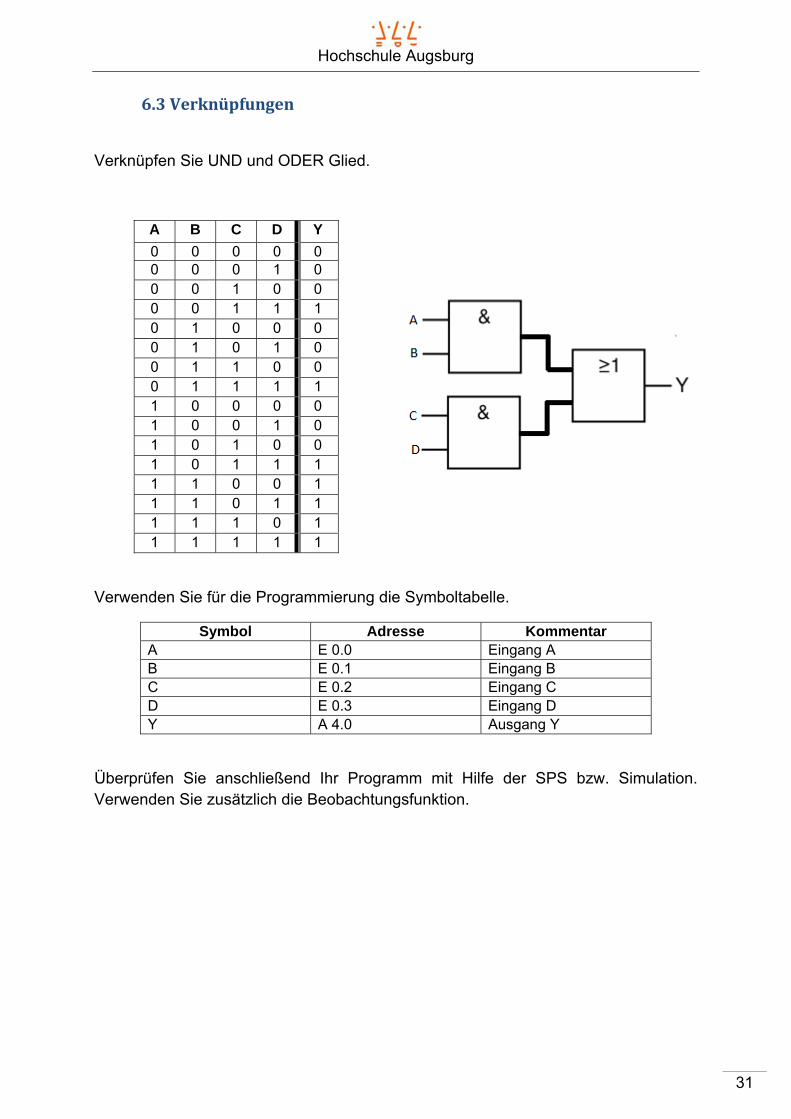
6.3Verknüpfungen
Verknüpfen Sie UND und ODER Glied.
Verwenden Sie für die Programmierung die Symboltabelle.
Symbol Adresse Kommentar A E 0.0 Eingang A B E 0.1 Eingang B C E 0.2 Eingang C D E 0.3 Eingang D Y A 4.0 Ausgang Y
Überprüfen Sie anschließend Ihr Programm mit Hilfe der SPS bzw. Simulation. Verwenden Sie zusätzlich die Beobachtungsfunktion.
A B C D Y
0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 1 1 1 0 1 0 0 0 0 1 0 1 0 0 1 1 0 0 0 1 1 1 1 1 0 0 0 0 1 0 0 1 0 1 0 1 0 0 1 0 1 1 1 1 1 0 0 1 1 1 0 1 1 1 1 1 0 1 1 1 1 1 1
Hochschule Augsburg
32
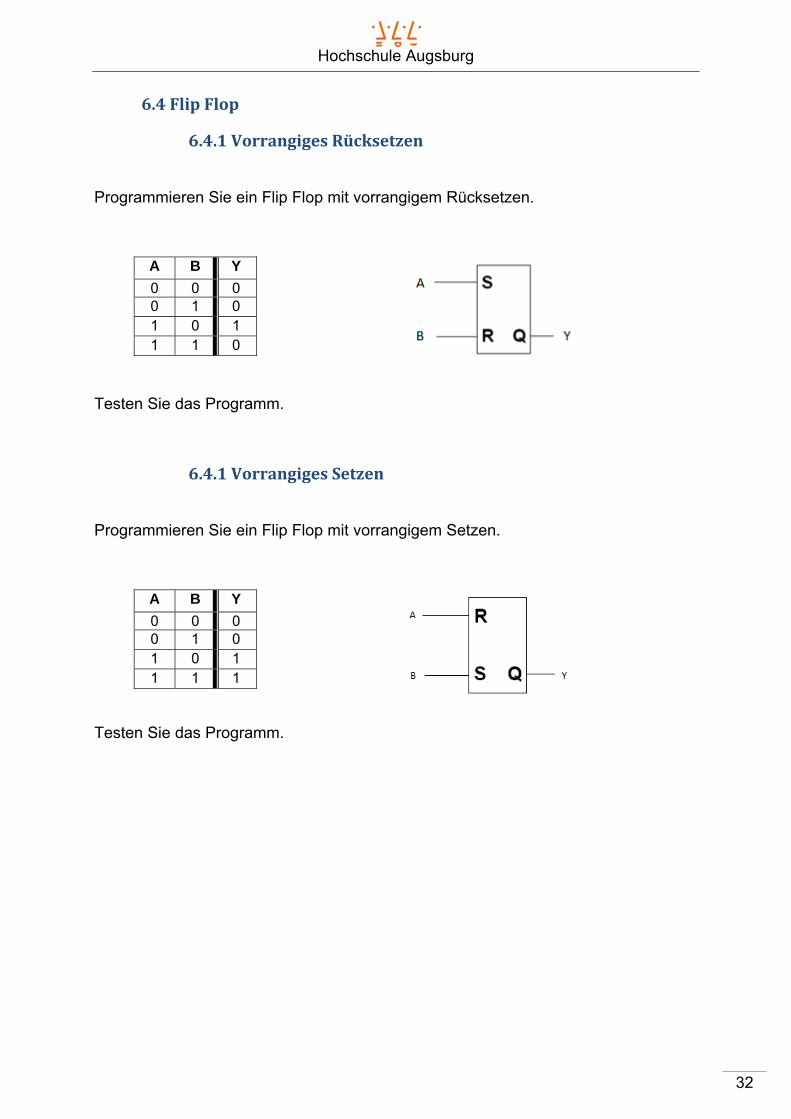
6.4FlipFlop
6.4.1VorrangigesRücksetzen
Programmieren Sie ein Flip Flop mit vorrangigem Rücksetzen.
Testen Sie das Programm.
6.4.1VorrangigesSetzen
Programmieren Sie ein Flip Flop mit vorrangigem Setzen.
A B Y
0 0 0 0 1 0 1 0 1 1 1 1
Testen Sie das Programm.
A B Y
0 0 0 0 1 0 1 0 1 1 1 0
Hochschule Augsburg
33
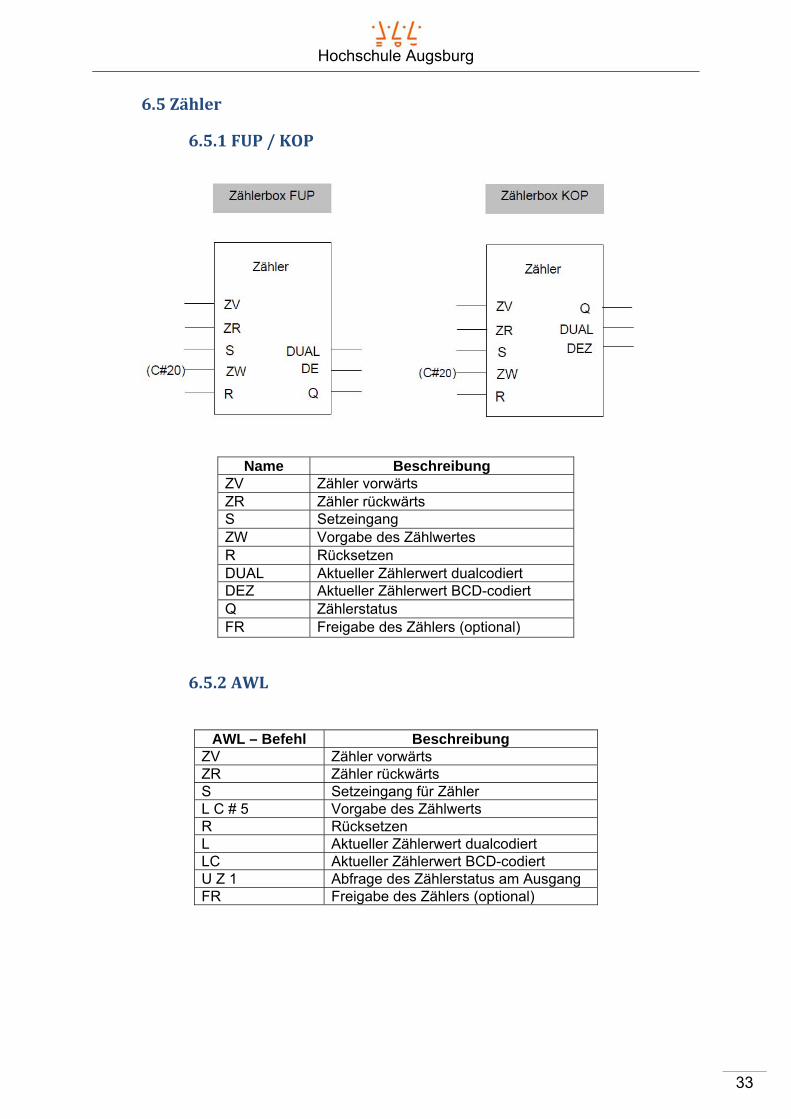
6.5Zähler
6.5.1FUP/KOP
Name Beschreibung ZV Zähler vorwärts ZR Zähler rückwärts S Setzeingang ZW Vorgabe des Zählwertes R Rücksetzen DUAL Aktueller Zählerwert dualcodiert DEZ Aktueller Zählerwert BCD-codiert Q Zählerstatus FR Freigabe des Zählers (optional)
6.5.2AWL
AWL – Befehl Beschreibung ZV Zähler vorwärts ZR Zähler rückwärts S Setzeingang für Zähler L C # 5 Vorgabe des Zählwerts R Rücksetzen L Aktueller Zählerwert dualcodiert LC Aktueller Zählerwert BCD-codiert U Z 1 Abfrage des Zählerstatus am Ausgang FR Freigabe des Zählers (optional)
Hochschule Augsburg
34
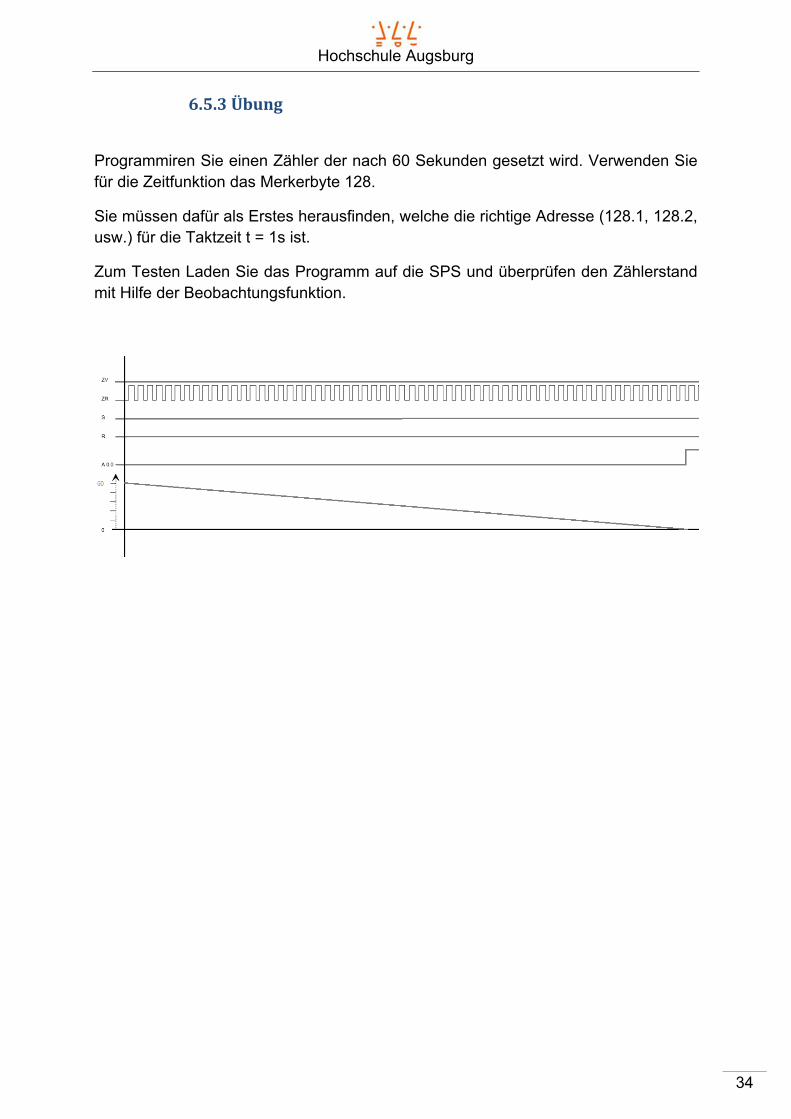
6.5.3Übung
Programmiren Sie einen Zähler der nach 60 Sekunden gesetzt wird. Verwenden Sie für die Zeitfunktion das Merkerbyte 128.
Sie müssen dafür als Erstes herausfinden, welche die richtige Adresse (128.1, 128.2, usw.) für die Taktzeit t = 1s ist.
Zum Testen Laden Sie das Programm auf die SPS und überprüfen den Zählerstand mit Hilfe der Beobachtungsfunktion.
Hochschule Augsburg
35
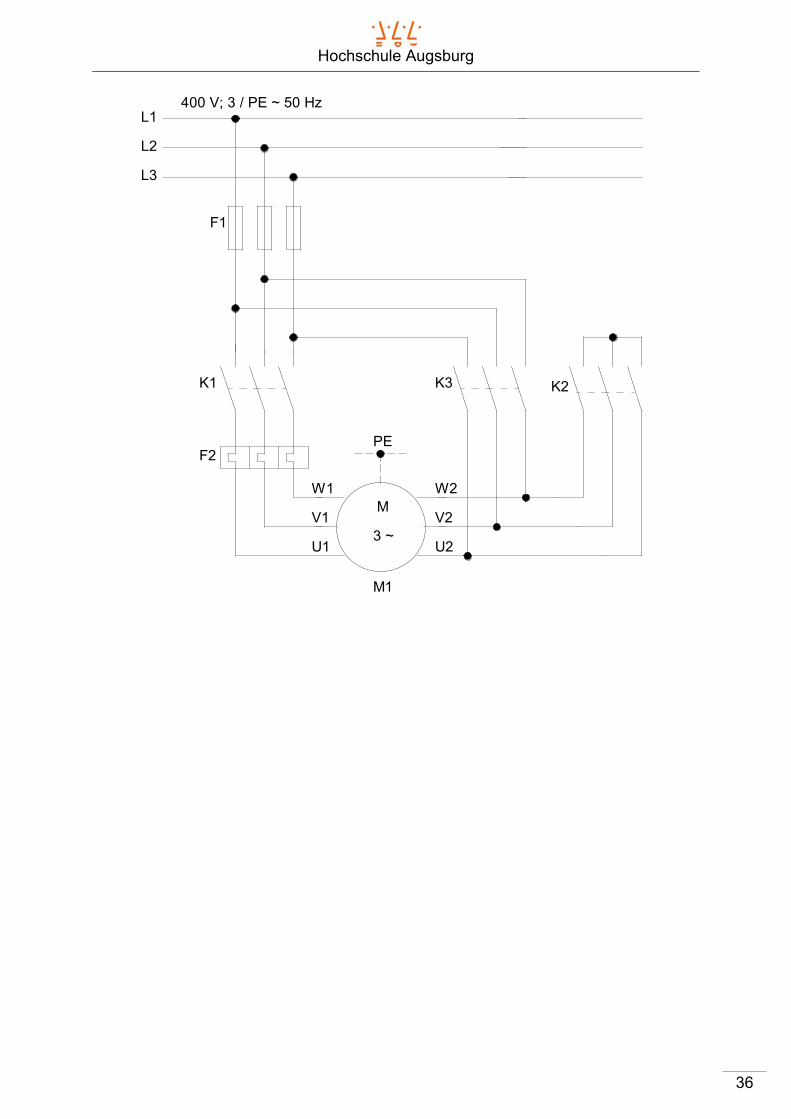
6.6Stern‐Dreieck‐Anlauf
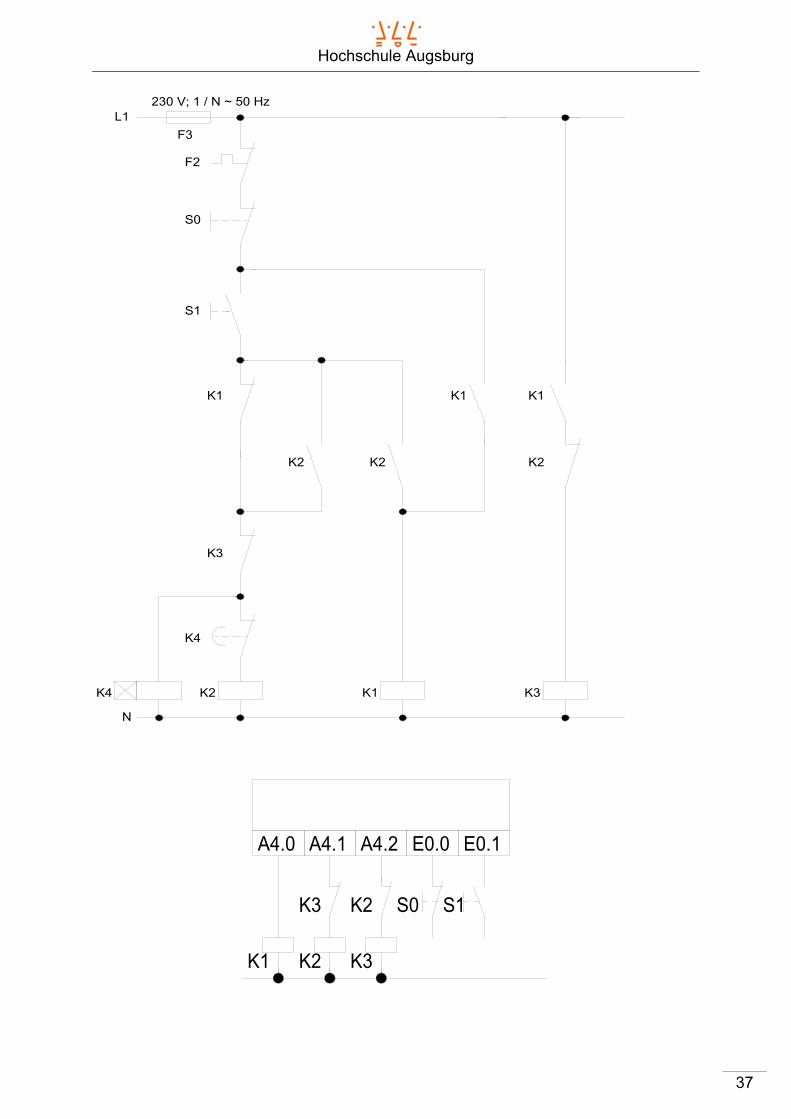
Einschalten
Der Taster S1 betätigt das Sternschütz K2 und das Zeitrelais K4. Der Schließer von K2 betätigt das Netzschütz K1, die Selbsthaltekontakte K1 und K2 schließen. Der Motor läuft in der Sternstufe hoch.
Umschalten
Nach Ablauf der eingestellten Verzögerungszeit (10 Sekunden) öffnet der Öffner von K4 und das Sternschütz K2 wird ausgeschaltet. Wenn der Öffner des Sternschützes K2 schließt, wird das Dreieckschütz K3 eingeschaltet, weil der Schließer des Netzschützes K1 bereits nach dem Einschalten des Netzschützes geschlossen war. Der Motor läuft in der Dreieckstufe. Der Motor soll nach 10 Sekunden von der Sternstufe in die Dreieckstufe umschalten.
Ausschalten
Durch das Betätigen von Taster S0 öffnet das Netzschütz K1. Der Schließer von K1 öffnet sich. Danach werden das Dreieckschütz K3 und der Motor abgeschaltet. Nicht erwähnte Schützkontakte dienen zur Verriegelung zwischen Stern- und Dreieckschütz. Der Motor ist über einen thermischen Überstromauslöser geschützt.
Hochschule Augsburg
36
M1
M
3 ~
PEF2
U1
V1
W1
F1
400 V; 3 / PE ~ 50 Hz
K1
L1
L2
L3
U2
V2
W2
K3 K2
Hochschule Augsburg
37
K2
K4
N
K4
K3
K1
K2
230 V; 1 / N ~ 50 Hz
S1
S0
F2
L1
F3
K1
K2
K1
K3
K2
K1
S0
A4.0 A4.1 A4.2
K1 K2 K3
K3 K2
E0.0 E0.1
S1
Hochschule Augsburg
38
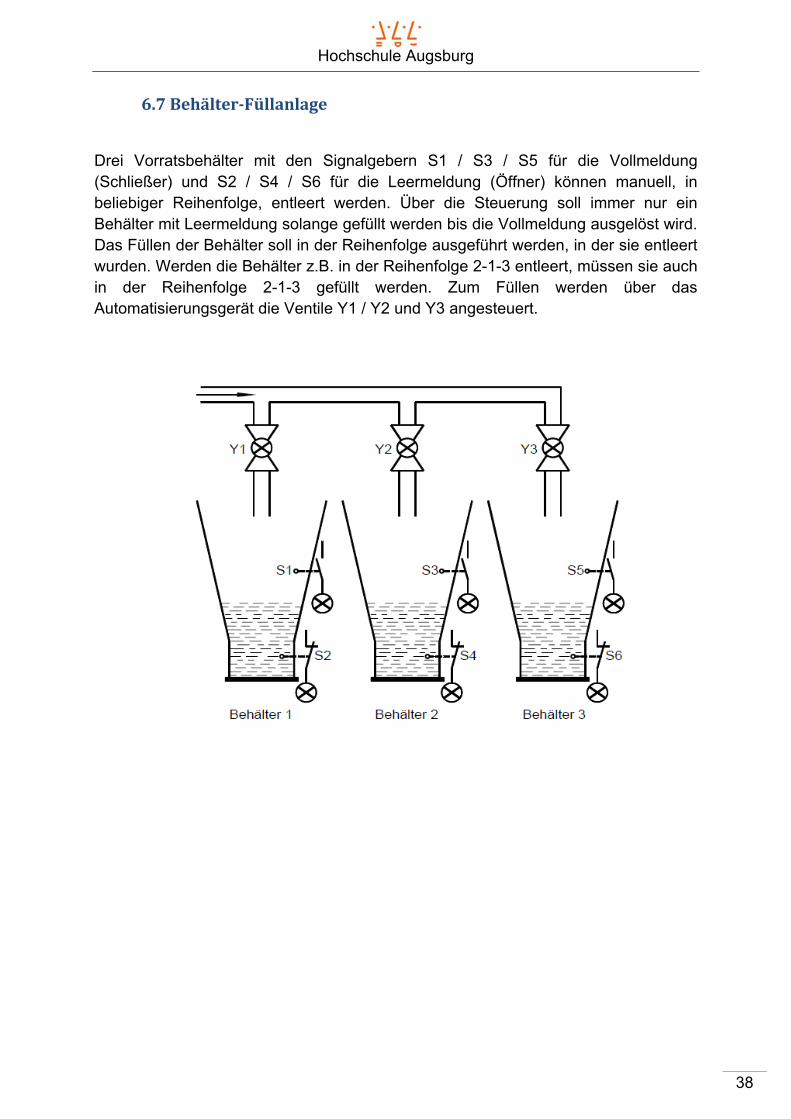
6.7Behälter‐Füllanlage
Drei Vorratsbehälter mit den Signalgebern S1 / S3 / S5 für die Vollmeldung (Schließer) und S2 / S4 / S6 für die Leermeldung (Öffner) können manuell, in beliebiger Reihenfolge, entleert werden. Über die Steuerung soll immer nur ein Behälter mit Leermeldung solange gefüllt werden bis die Vollmeldung ausgelöst wird. Das Füllen der Behälter soll in der Reihenfolge ausgeführt werden, in der sie entleert wurden. Werden die Behälter z.B. in der Reihenfolge 2-1-3 entleert, müssen sie auch in der Reihenfolge 2-1-3 gefüllt werden. Zum Füllen werden über das Automatisierungsgerät die Ventile Y1 / Y2 und Y3 angesteuert.





























