Embed Size (px)
Citation preview

Institut furEntwerfen von Schiffen und SchiffssicherheitProf. Dr.-Ing. Stefan Kruger
Aufzeichungen zur Schiffssicherheit
Hendrik Dankowski
12. Februar 2014

Dieses Dokument ist als private Mitschrift von mir zu sehen und ist keinVorlesungsskript. Daher wird auch keinerlei Gewahr auf Richtigkeitoder Vollstandigkeit gegeben. Fur Anmerkungen und Kritik bin ichoffen.
Hendrik DankowskiHamburg, den 12. Februar 2014

Inhaltsverzeichnis
Inhaltsverzeichnis
1 Sicherheitskonzepte 11.1 Organe der Schiffssicherheit . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Geschichtliches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Organe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.3 IMO Begriffe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.4 Beispiele fur Vorschriften der IMO . . . . . . . . . . . . . . . . . . 2
1.2 Arten von Konzepten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2.1 Deterministische Konzepte . . . . . . . . . . . . . . . . . . . . . . 21.2.2 Probabilistische Konzepte . . . . . . . . . . . . . . . . . . . . . . . 31.2.3 Trend . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.4 Begriff des Risikos . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.5 Die Risikomatrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Entstehung einer Vorschrift - FSA . . . . . . . . . . . . . . . . . . . . . . 4
2 Freibord-Konvention 72.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Begriffsbestimmungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Lange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2.2 Lote . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.3 Mittschiffs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2.4 Breite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Weitere Begriffe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4 Deckstrich und Freibordmarke . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.1 Deckstrich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4.2 Freibordmarke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.3 Lademarken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Bedingungen fur die Erteilung des Freibordes . . . . . . . . . . . . . . . . 102.6 Schiffstypen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.7 Korrekturen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.7.1 Korrektur fur kleine Schiffe . . . . . . . . . . . . . . . . . . . . . . 112.7.2 Korrektur fur vollige Schiffe . . . . . . . . . . . . . . . . . . . . . . 122.7.3 Korrektur fur Seitenhohe . . . . . . . . . . . . . . . . . . . . . . . 122.7.4 Korrektur fur Aufbauten und Trunks . . . . . . . . . . . . . . . . . 122.7.5 Korrektur fur Sprung . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.8 Bughohe und Reserveauftrieb . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Intaktstabilitat 143.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2 Allgemeine Kriterien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 Flachenkriterien . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.2 Anfangs-Metazentrum . . . . . . . . . . . . . . . . . . . . . . . . . 16
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de I

Inhaltsverzeichnis
3.2.3 Mindest- und maximaler Hebel . . . . . . . . . . . . . . . . . . . . 163.2.4 Hebelarmumfang . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.3 Krangende Momente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.3.1 Passagiermoment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3.2 Drehkreismoment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3.3 Winddruckmoment . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3.4 Zusatzliche Forderungen der See-BG . . . . . . . . . . . . . . . . . 193.3.5 Maximaler Gewichtsschwerpunkt . . . . . . . . . . . . . . . . . . . 19
3.4 Das Wetterkriterium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.4.1 Krangende Hebelarme durch Wind . . . . . . . . . . . . . . . . . . 203.4.2 Rollwinkel durch Quersee . . . . . . . . . . . . . . . . . . . . . . . 213.4.3 Berechnung der Winkel und Hebelarme . . . . . . . . . . . . . . . 233.4.4 Forderungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.4.5 Einschrankungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.4.6 Kritik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Transport von Schuttgut 264.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.2 Ubergehen der Ladung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3 Der
”Grain Code“ der IMO . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.3.1 Forderungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3.2 Annahmen fur den krangenden Hebel . . . . . . . . . . . . . . . . 29
5 Dynamische Stabilitat 325.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2 Freie Rollschwingung im glatten Wasser . . . . . . . . . . . . . . . . . . . 325.3 Rollen in regelmaßiger Quersee . . . . . . . . . . . . . . . . . . . . . . . . 345.4 Parametrisches Rollen in Langssee . . . . . . . . . . . . . . . . . . . . . . 36
6 Deterministische Leckrechnung 386.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386.2 Flutbare Langen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.2.1 Flutbarkeiten fur die Schottenkurve . . . . . . . . . . . . . . . . . 386.3 Zulassige Abteilungslange und Abteilungsstatus . . . . . . . . . . . . . . . 396.4 Leckausdehnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396.5 Stabilitatsforderungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
7 Probabilistische Leckrechnung 417.1 Einfuhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417.2 Vorschriften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417.3 Konzept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7.3.1 Auftretenswahrscheinlichkeiten . . . . . . . . . . . . . . . . . . . . 427.3.2 Seitenbeschadigung . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de II

Abbildungsverzeichnis
Abbildungsverzeichnis
1 Risikomatrix nach FSA . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 FSA nach IMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Verlauf des Tafelfreibords . . . . . . . . . . . . . . . . . . . . . . . . . . . 114 Hebelarmkurve des Wetterkriteriums . . . . . . . . . . . . . . . . . . . . . 245 Schuttkegel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266 Verschiebung des Ladungsschwerpunktes . . . . . . . . . . . . . . . . . . . 277 Flachenkriterium Getreide Code . . . . . . . . . . . . . . . . . . . . . . . 298 Zur Bestimmung der Leerraumhohe . . . . . . . . . . . . . . . . . . . . . 309 Umlagerung bei unzureichender Begrenzung . . . . . . . . . . . . . . . . . 3010 Krangender Hebel nach Grain Code . . . . . . . . . . . . . . . . . . . . . 3111 Momente im glatten Wasser . . . . . . . . . . . . . . . . . . . . . . . . . . 3312 Moment in Quersee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3513 Schwankungen der Hebelarmkurve (nach Walter Abicht (1970)) . . . . . . 3714 Schottenkurve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3815 Vorschriftensituation nach Einfuhrung der neuen (=Harmonized) Regeln
fur RoRo- Passagierschiffe. Quelle: C. Ortloff, FSG, in: Designs 06, Ship-Pax Information, Goteborg . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de III

1 Sicherheitskonzepte
1.1 Organe der Schiffssicherheit
1.1.1 Geschichtliches
• begonnen hat alles mit dem Untergang der TITANIC
• danach: Grundung der SOLAS (November 1913) durch UN-Konvention, Interna-tional Convention for the Safety Of Life At Sea. Erste internationale Vorschrift,vorher nur nationale wie zum Beispiel von der Dampfschifffahrts-Behorde.
• IMO: International Maritime Organization, Grundung 1959, erarbeitet die Vor-schriften unter anderem auch die SOLAS. Letzte Auflage der SOLAS von 2009.
1.1.2 Organe
• IMO: international, erarbeitet und veroffentlicht die Vorschriften (in Untergrup-pen)
– MSC: Maritime Safety Committee
– MEPC: Marine Environment Protection Committee
– SLF: Sub-committee on Stability and Load Lines and on Fishing Vessels Sa-fety
• Flaggenstaatsbehorde: setzt die Vorschriften national um, in Deutschland das Bun-desverkehrsministerium
• BG Verkehr: Berufsgenossenschaft, Dienststelle Schiffssicherheit hat den Auftragder Flaggenstaatsbehorde, die Sicherheitsvorschriften national umzusetzen (fruher:See-BG)
• Klassifikationsgesellschaft: hat eigene Klasse-Bauvorschriften, kann im Auftrag derBG Verkehr agieren als Recognized Organization (RO’s)
1.1.3 IMO Begriffe
• consolidated text : geltende Vorschriften, ratifiziert von mindestens 50 Mitglieds-staaten
• mandatory : bindend, ist einzuhalten
• amendment : Neuerungen
• zahlreiche weitere
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 1/44

1.2 Arten von Konzepten
1.1.4 Beispiele fur Vorschriften der IMO
Hier ein paar wichtige Vorschriften:
• SOLAS: Sicherheitsausrustung wie Rettungsmittel, aber auch Leckrechnung
• Load Lines: Freibordvorschrift, hat Gesetzesstatus in Deutschland
• Intact Code 2008: Stabilitatskriterien fur das intakte, nicht leckgeschlagende Schiff,ab 2010 auch ein mandatory Teil A
• MARPOL: Umweltsschutz wie Schutz vor Olausfluss bei Tankern
• zahlreiche weitere fur spezielle Schiffstypen wie Schuttgutfrachter
1.2 Arten von Konzepten
Im wesentlichen werden zwei verschiedene Arten von Konzepten unterschieden. DieseHauptgruppen werden nochmals genauer unterteilt:
1. beschreibende, deterministische Konzepte
• Vorgabe von Hardware: Typzulassung (z.B. Sicherheitsgurt, Lichter an Bord)
• Vorgabe eines Konstruktionsprinzips: Bauvorschriften (z.B. Plattendicke Dop-pelboden)
2. anfordernde, probabilistische Konzepte
• Risikobasierte Konzepte: noch akzeptables Risiko bzw. zu erreichendes Sicher-heitsniveau (z.B. neue Leckrechnung)
• Konzept der Aquivalenznachweise: durch Vergleich gleiche Sicherheit nach-weisbar
1.2.1 Deterministische Konzepte
englisch: goal-based design
• Vorgabe von Hardware/Bauausfuhrung
– bestimmte Bauteile oder Komponenten werden konkret vorgegeben (bzw. de-ren Ausfuhrung)
– Typzulassung: vorgeschriebene Komponenten, die verwendet werden mussen,erhalten eine allgemeine Betriebserlaubnis (ABE)
Beispiele: Sicherheitsgurt im Auto, Ausrustungteile von Schiffen (wie Anker)
• Vorgabe eines Konstruktionsprinzips oder einer/s Berechnungsmethodik/-verfahren
– Bauvorschriften von einer Klassifikationsgesellschaft (z.B. Germanischer Lloyd,Det Norske Veritas), Variablen gegeben
– Know-How liegt bei der Klasse
Beispiele: Plattendicke im Doppelboden, Spantauslegung
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 2/44

1.2 Arten von Konzepten
Vor- und Nachteile
⊕ sehr effizient, da mit minimalen Aufwand maximaler Gewinn an Sicherheit erzieltwerden kann
⊕ einfach umzusetzen, dadurch gunstig
⊕ kein Fachwissen erforderlich, auch fur kleinere Betriebe moglich
empirisch, kann nur bekannte Probleme regeln
neue Konstruktionen sind nicht bewertbar
aus Werftsicht:
– weniger Freiraum
– Gefahr des Know-How-Transfers ins Ausland (durch Bauvorschriften)
– nicht innovationsfordernd, da keine Vorteile durch besseres Design
1.2.2 Probabilistische Konzepte
englisch: risk or performance based design
• Risikobasierte Konzepte: Vorgabe eines Sicherheitsniveaus (Ergebnis ist gegeben)
• Konzept der Aquivalenznachweise: Neue Konstruktionen (Schiffe) mussen mindes-tens existierende Sicherheitsniveaus erfullen
Beispiel : Ausfallwahrscheinlichkeit eines AKW
Vor- und Nachteile
⊕ mehr Freiraum fur das Design (Werft)
Sicherheitsniveau ist teilweise nicht bekannt oder schwierig festzulegen
politisch bzw. subjektiv, daher ist eine unabhangige Prufbehorde erforderlich
1.2.3 Trend
• Ubergang vom deterministischen hin zu mehr probabilistischen Vorschriften
• es wird in naher Zukunft immer eine Mischung geben, keines der beiden Konzeptefunktioniert allein
1. beschreibend: praktisch gut, theoretisch schlecht
2. anfordernd: praktisch schwierig, theoretisch gut
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 3/44

1.3 Entstehung einer Vorschrift - FSA
1.2.4 Begriff des Risikos
Es wird ein Sicherheitsniveau in Form eines akzeptablen Risikos gefordert. Das Risikoist definiert durch:
R = P · C ≤ Rtol (1.1)
logR = logP + logC ≤ logRtol (1.2)
Als Einheiten werden fur das Risiko R haufig [e] oder [e/Zeit], fur die Konsequenz C[e] und fur die Wahrscheinlichkeit P keine [-] oder eine [Zeiteinheit] verwendet.
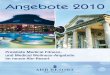
1.2.5 Die Risikomatrix
Die Risikomatrix zeigt den Zusammenhang zwischen Auftretenswahrscheinlichkeit/Hau-figkeit (frequency), Konsequenz (consequence oder severity) und daraus resultierendemRisiko (risk).
FIGURE 3
RISK MATRIX
Frequent
ReasonablyProbable
Remote
ExtremelyRemote
Insignificant Minor Major Catastrophic
ALARP = As Low As Reasonably PracticableNote: Risk level boundaries (Negligible/ALARP/Intolerable) are purely illustrative
Intolerable
ALARP
Negligible
FREQUENCY
CONSEQUENCE
MSC/Circ.829 & MEPC/Circ.335ANNEX 1
Page 15
I:\CIRC\MSC\829.
Abbildung 1: Risikomatrix nach FSA
1.3 Entstehung einer Vorschrift - FSA
Wie entsteht eine Vorschrift nach dem Risikokonzept? Dies ist reguliert im sogenanntenFSA - Formal Safety Assessment der IMO:
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 4/44

1.3 Entstehung einer Vorschrift - FSA
MSC/Circ.1023 MEPC/Circ.392 ANNEX Page 18
I:\CIRC\MSC\1023-MEPC392.doc
Step 1 Hazard Identification
Step 2 Risk Analysis
Step 3 Risk Control Options
Step 4 Cost Benefit Assessment
Step 5 Recommendations for
Decision Making
FIGURE 4
INCORPORATION OF HUMAN RELIABILITY ANALYSIS INTO THE FSA PROCESS
FSA PROCESS TASKS REQUIRED TO INCORPORATE HRA
Human related hazards (Appendix 1 5.2) High level task analysis (Appendix 1 5.2) Preliminary description of outcome (Appendix 1 5.3)
Detailed task analysis for critical tasks (Appendix 1 6.2) Human error analysis (Appendix 1 6.3) Human error quantification (Appendix 1 6.4) Risk control options for human element (Appendix 1 7.2)
Abbildung 2: FSA nach IMO
Die folgenden funf Schritte werden in einem solchen Prozess durchlaufen:
1. Gefahren-Identifizierung - HAZID
• Was kann in einer bestimmten Situation (z.B. schweres Wetter) passieren(hazard)?
• wird durchgefuhrt von einer Expertenrunde, ermittelt die hazards
• sortieren nach Wichtigkeit, Hilfsmittel ist die Risikomatrix
• Region der Risikomatrix: ALARP - As Low As Reasonable Practical, Zustan-de konnen nicht verhindert werden, aber das Risiko muss so weit wie moglichreduziert werden
• Einteilung der Konsequenzen und der Haufigkeit ist ebenfalls geregelt im FSA
2. Risiko-Analyse
• genauere Analyse von Ursache und Konsequenz eines bestimmten Hazardsz.B. mit Hilfe eines Ereignis- oder Fehlerbaums
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 5/44

1.3 Entstehung einer Vorschrift - FSA
• Quantifizierung von Haufigkeiten P und Konsequenzen C z.B. in e oder auchMenschenleben
3. Kontrolloptionen - Risk Control Options: hier erfolgt die eigentliche Entwicklungvon Kriterie, wie kann das Risiko verringert werden, wo es notwendig ist (ersichtlichaus Risikomatrix)
a) Verhindern: genugend Stabilitat vorhalten
b) Verringern: Konsequenzen verkleinern, z.B. in der Leckrechnung durch erhohteUnterteilung des Schiffes
4. Bilanz ziehen - Cost Benefit Analysis: Kosten-Nutzen, lohnt sich eine neue Vor-schrift uberhaupt? Beispiel Containerschiff: ein neues Intaktkriterium gegen pa-rametrisches Rollen, da 500 Container verloren gehen. Lohnt sich aber nicht, daVersicherung bezahlt, damit wurden Reedereien die neue Vorschrift nicht akzep-tieren.
5. Entscheidung treffen - Decision making: Die eigentliche Erstellung der Vorschrift
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 6/44

2 Freibord-Konvention
Im folgenden ist die internationale Freibord-Konvention (International Load Lines Con-vention - ILLC ) in der neuesten Fassung (Stand 2003) erlautert. Die Erlauterungensind beschrankt auf ein normales Schiff, bauliche Besonderheiten sind hier nicht nahererlautert. Diese Besonderheiten sind gegebenenfalls dem Originaltext der Vorschrift zuentnehmen.
Ausdrucklich sei an dieser Stelle nochmal darauf hingewiesen, dass keine Gewahr furRichtigkeit und erst recht nicht Vollstandigkeit der folgenden Ausfuhrungen gegebenwird. Das Durcharbeiten des Originaltextes der Vorschrift ist unbedingt erforderlich!
2.1 Allgemeines
1. alteste und erste international verbindliche Vorschrift
2. seit 1930 Mindestfreibord, 1966 erste Load Lines, letzte Uberarbeitung (Amend-ment) 2003, gilt fur Schiffe mit Kiellegung seit dem 1. Januar 2005.
3. hat Gesetzesstatus, da ratifiziert
Zweck der Vorschrift
• basiert auf Freibordschiff, welches als sicher angenommen wurde
• definiert Mindestabstand vom obersten, wasserdichten Deck bis zur Wasserlinie
• Reserveverdrangung definiert ein erstes Basis-Sicherheitsniveau fur alle Schiffe (24 m≥Lm)
• Ergebnis: Freibordmarke, maximal zulassiger Tiefgang
2.2 Begriffsbestimmungen
In Regel 3 sind die zu verwendenen Begriffsbestimmungen wie Lange, Breite und Ahn-liches erlautert.
2.2.1 Lange
Die Lange LWL85 wird auf einer Wasserlinie bei dl = 0.85Dmin bestimmt. Es ist diegeringste Seitenhohe Dmin (von Oberkante Kiel) zu verwenden.
L = max(0.96LWL85, LPP85) (2.1)
Aufbau und Besonderheiten:
1. Definition
2. ohne Ruderschaft (L = max(0.96LWL85)
3. konkave Stevenkontur
4. mit Kielfall (dl)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 7/44

2.2 Begriffsbestimmungen
2.2.2 Lote
Das vordere Lot xf ist der Schnittpunkt des Stevens mit der Wasserlinie bei dl und dasvordere Ende der Lange L. Die Position des hintere Lotes xa ist das hintere Ende:
xa = xf − L (2.2)
Der Ursprung des Koordinatensystems sollte am ursprunglichen hinteren Lot verbleiben.
2.2.3 Mittschiffs
Mittschiffs bedeutet die Mitte der Lange L
xm = L2 (2.3)
2.2.4 Breite
Die BreiteB wird mittschiffs auf Mallkante gemessen. Bei anderen Aussenhaut-Werkstoffenals Stahl wird die Breite inklusiv Außenhaut gemessen.
Seitenhohe Die Seitenhohe D0 ist der senkrechte Abstand von Oberkante Kiel bisOberkante des Freiborddecksbalkens.
Aufbau und Besonderheiten:
1. Definition, Holz- und Kompositschiffe, hohler Verlauf der Schiffsform, verstarkteKielgange
2. abgerundeter Schergang
3. Stufe im Freiborddeck
Hohe fur den Freibord Die zu verwendene Freibord-Hohe ist die mittschiffs gemesseneSeitenhohe D0 vermehrt um die Dicke des Freiborddecks tFD an der Bordseite:
D = H + tFD (2.4)
Aufbau und Besonderheiten:
1. Definition
2. abgerundeter Schergang oder ungewohnliche Form der Außenhaut
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 8/44

2.3 Weitere Begriffe
Volligkeitsgrad Der Volligkeitsgrad Cb wird auf dem Konstruktionstiefgang d1 be-stimmt:
Cb =∇
L ·B · d1(2.5)
Die Verdrangung ∇ ist hier auf Spanten ohne Schiffsanhange auf dem Tiefgang d1 zubestimmen. Bei anderen Aussenhaut-Werkstoffen als Stahl wird die Verdrangung aufAußenhaut verwendet.
Aufbau und Besonderheiten:
1. Definition und Verdrangung
2. Mehrkorperschiff
2.3 Weitere Begriffe
Alle weiteren, noch benotigten Begriffe sind direkt in der Vorschrift zu finden. Diese sindunter anderem:
• Freibord
• Freiborddeck
• Aufbau
• Aufbaudeck
• Glattdeckschiff
• Wetterdicht
• Wasserdicht
• Well
2.4 Deckstrich und Freibordmarke
Die genaue Definition der den Freibord kennzeichnenden Striche ist in Regel 4-9 festge-legt.
2.4.1 Deckstrich
Der Deckstrich ist ein waagerechter Strich und ist mittschiffs an jeder Seite des Schiffesanzumarken. Seine Oberkante kennzeichnet den Schnittpunkt der Oberkante des Frei-borddecks mit der Aussenhaut. Der Deckstrich kann auch auf einer anderen Hohe liegen,wenn der Freibord entsprechend korrigiert wird.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 9/44

2.5 Bedingungen fur die Erteilung des Freibordes
2.4.2 Freibordmarke
Die Freibordmarke besteht aus einem Ring und einem waagerechten Strich. Dieser liegtmittschiffs, im Abstand des erteilten Sommerfreibordes unterhalb des Deckstriches.
2.4.3 Lademarken
Folgende zusatzliche Lademarken in Form von waagerechten Strichen sollen angebrachtwerden:
a) Sommer S
b) Winter W
c) Winter-Nordatlantik WNA
d) Tropen T
e) Frischwasser F
f) Tropen-Frischwasser TF
Wird zusatzlich ein Holzfreibord erteilt, sind die entsprechenden Lademarken seperatanzubringen.
2.5 Bedingungen fur die Erteilung des Freibordes
In Kapitel II sind Bedingungen an das Schiff genannt, welche erfullt werden mussen,damit uberhaupt ein Freibord erteilt wird. Diese betreffen unter anderem die Lage undden Verschluss von Offnungen, sowie eine Auslegung der Lukensulle. Weitere Details sindin der Vorschrift zu finden.
2.6 Schiffstypen
Der sogenannte Tafelfreibord richtet sich nach dem Typ des Schiffes. Dabei werden nachRegel 27 zwei Schiffstypen unterschieden:
1. Schiff vom Typ “A”: Tanker
2. Schiff vom Typ “B”: Frachtschiffe
3. Schiff vom Typ “B-60”: Frachtschiffe mit reduziertem Freibord
Fur Schiffe vom Typ B-60 ist eine zusatzliche, deterministische Leckrechnung gefordert.Nach dieser Unterscheidung richtet sich der Tafelfreibord, welcher im Folgenden nochum verschiedene Faktoren korrigiert wird. Die Tabellen zum Tafelfreibord sind ebenfallsin Regel 27 gegeben, eine graphische Darstellung ist in Abbildung 3 zu finden.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 10/44

2.7 Korrekturen
0
1000
2000
3000
4000
5000
6000
0 50 100 150 200 250 300 350 400
Taf
elfr
eibo
rd F 0
[mm
]
Länge L [m]
Tafelfreibord nach Regel 28
Typ A: TankerTyp B: andere
Abbildung 3: Verlauf des Tafelfreibords
2.7 Korrekturen
Die Korrekturen fur Schiffe, welche vom Freibord-Schiff abweichen, sind in den Regeln29-38 zu finden. Der Mindest-Freibord ergibt sich aus dem Tafelfreibord F0 und denKorrekturen f0:4 wie folgt:
F = (F0 + f0) · f1 + f2 + f3 + f4 (2.6)
Die Faktoren f0 bis f4 sind im Folgenden naher erlautert.
2.7.1 Korrektur fur kleine Schiffe
Fur Typ B-Schiffe mit einer Freibordlange 24 m≤ L <100 m wird der Tafelfreibord nachRegel 29 wie folgt vergroßert:
e1 = min(E1
L, 0.35) (2.7)
f0 =
7.5 (100− L) (0.35− e1) 24 m ≤ L < 100 m
0 sonst(2.8)
Die wirksame Lange der Aufbauten E1 ohne Trunks ist in Regel 35 definiert. Aus derKonstruktion dieser Korrektur wird klar, dass hier nur mehr Freibord gefordert wird,eine Verringerung durch eine große Lange der Aufbauten ist nicht moglich.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 11/44

2.7 Korrekturen
2.7.2 Korrektur fur vollige Schiffe
Der Freibord fur vollige Schiffe wird nach Regel 30 um folgenden Faktor erhoht:
Cb = min(Cb, 1.0) (2.9)
f1 =
Cb+0.68
1.36 Cb > 0.68
1 sonst(2.10)
Dieser Faktor ist in jedem Fall f1 ≥ 1, somit ist hier ebenfalls nur eine Erhohung moglich.
2.7.3 Korrektur fur Seitenhohe
Fur eine große Seitenhohe wird der erforderliche Freibord nach Regel 31 korrigiert:
R =
L
0.48 L < 120 m
250 L ≥ 120 m(2.11)
f2 =
(D − L
15
)R D > L
15
0 D ≤ L15
(2.12)
Ein Abzug fur D ≤ L15 erfolgt nur fur Schiffe mit langen Aufbauten, wie genau, ist in
der Vorschrift nachzulesen.
2.7.4 Korrektur fur Aufbauten und Trunks
In Regel 37 ist festgelegt, welchen Einfluss Aufbauten auf den geforderten Freibordhaben. Diese Korrektur bezieht sich allerdings auf die vorherigen Regeln 33-35. DerKorrekturfaktor f3 wird uber Tabellen ermittelt.
2.7.5 Korrektur fur Sprung
Auch eine Abweichung des vorhandenen Deckssprungs vom”Normalsprung“ hat einen
Einfluss auf den Freibord. Fur den vereinfachten Fall, dass kein Sprung vorhanden istund als Aufbauten nur Back und Poop zu berucksichtigen sind, kann dieser Faktor wiefolgt ermittelt werden:
z = (h− hn) (2.13)
s =z ·min(l,0.5L)
3L(2.14)
f4 = −(
0.75− S
2L
)· (ms + s1 + s2) (2.15)
ms =
(L
3+ 10
)· 200.1
16(2.16)
Dabei ist S die Gesamtlange der geschlossenen Aufbauten ohne Trunks. Die Faktorens ergeben sich aus der Differenz z zur Normalhohe hn und der Lange l, jeweils fur alleAufbauten.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 12/44

2.8 Bughohe und Reserveauftrieb
2.8 Bughohe und Reserveauftrieb
Eine weitere Forderung betrifft den Verdrangungskorper des Vorschiffs. Es ist eine Min-destbughohe Fb gefordert und zusatzlich in Regel 41.5 eine Mindestflache der Bugseite.Weitere Details hierzu in der Vorschrift.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 13/44

3 Intaktstabilitat
3.1 Allgemeines
Die Intaktstabilitatskriterien fur Schiffe fanden sich bislang in der IMO ResolutionA.749(18)
”Code on Intact Stability“. Diese Resolution war nicht bindend, wobei al-
lerdings viele Hafenstaatsbehoren eine Einhaltung der Kriterien verlangen. In der Regelist also eine Uberprufung der Kriterien erforderlich.
Ab dem Juli 2010 werden zumindest Teile des Codes bindend fur alle Schiffe mit einerLange großer 24 m. Die Neustrukturierung der Vorschrift ist bereits 2008 abgeschlossenund wird als International Code on Intact StabilityIMO (2009a) oder kurz IS Code be-zeichnet. Der Teil A wird die bindenden Kriterien enthalten und Teil B die empfohlenen.Die Inhalte werden aber zunachst nicht verandert. Im Folgenden werden exemplarischAuszuge aus dem IS Code naher erlautert. Der IS Code enthalt Richtlinien zu den fol-genden Themen, wobei exemplarisch einige wichtige Unterpunkte aufgefuhrt sind:
1. Allgemeines
- Begriffsbestimmungen
2. Stabilitatsunterlagen und allgemeine Vorkehrungen gegen Kentern
- Stabilitatshandbuch
- Vorgaben im schweren Wetter
3. Entwurfskriterien fur alle Schiffe
- Allgemeine Intaktkriterien
- Wetterkriterium
- Einfluss freier Oberflachen
- Standardladefalle
4. Besondere Schiffstypen
- Holzdecksladung
- Offshore-Versorger
- Bewegliche Offshore-Bohrplattformen (MODU, mobile offshore drilling units)
- Containerschiffe großer 100 m
5. Vereisung
6. Wasserdichtigkeit
7. Bestimmung von Leerschiffsmasse und Schwerpunkt
- Krangungsversuch
- Anhang: Rollzeitversuch
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 14/44

3.2 Allgemeine Kriterien
Zusatzlich zu den Intaktkriterien der IMO hat die See-BG weitere Forderungen in der
”Bekanntmachung uber Intaktstabilitat“. Diese Forderungen sind teilweise etwas restrik-
tiver und werden daher bei der weiteren Erlauterung beispielhaft erwahnt.
3.2 Allgemeine Kriterien
Die wichtigsten, zu untersuchenden Stabilitatskriterien sollen im Folgenden genauer er-lautert werden. Aus den Anforderungen dieser Kriterien folgt ein maximal zulassigerGesamtgewichtsschwerpunkt KGmax.
3.2.1 Flachenkriterien
Es sind fur die Flache unter der resultierenden Hebelarmkurve Mindestwerte gefordert.Diese Flache soll die Energie reprasentieren, die das Schiff aufnehmen kann.
Flache in (m rad) Integrationsgrenzen
A30 ≥ 0,055 [0, ϕ1 = 30]A40 ≥ 0,090 [0, ϕ2 = min(40,ϕf )]
A43 = A40 −A30 ≥ 0,030 [ϕ1, ϕ2]
Der Winkel ϕf ist genau der Winkel, bei dem nicht wetterdichte Offnungen zu Wasserkommen (angle of downflooding). Die Berechnung dieser Flachen kann mit numerischerIntegration der Hebelarmkurve h erfolgen, wobei die Integration aufgeteilt werden kann:
h(ϕ) = w(ϕ)−KG · sin(ϕ) (3.1)
A30 =
∫ 30
0hdϕ =
∫ 30
0w dϕ−
∫ 30
0KG · sin(ϕ) dϕ (3.2)
=
∫ 30
0w dϕ+ KG · (cos(30)− 1) ≈
∫ 30
0w dϕ−KG · 0,134
b30 =
∫ 30
0w dϕ =
3
8· 10
π
180· (w0 + 3w10 + 3w20 + w30) (3.3)
A30 ≈ 0,0655 · (w0 + 3w10 + 3w20 + w30)−KG · 0,134 (3.4)
Analog erfolgt dies fur die Flache A40, diesmal aber mit der 1. Simpson-Formel, da einegerade Anzahl an Stutzstellen gegeben ist.
b40 =
∫ 40
0w dϕ =
1
3· 10
π
180· (w0 + 4w10 + 2w20 + 4w30 + w40) (3.5)
Die Differenzflache A43 ergibt sich wie folgt:
A43 = A40 −A30 =
∫ 40
0hdϕ−
∫ 30
0hdϕ (3.6)
= b40 − b30 + KG · (cos(40)− cos(30))
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 15/44

3.2 Allgemeine Kriterien
Ist der Winkel ϕf zu verwenden, sind die Werte am Ende nicht mehr aquidistant undes muss entsprechend ein anderes numerisches Integrationsverfahren verwendet werdenwie zum Beispiel die Trapezregel.
Diese Formeln konnen nach KG umgestellt werden, womit sich die ersten drei Anfor-derungen fur den maximalen Gewichtsschwerpunkt ergeben:
KG1 =b30 − 0,055
1− cos(30)(3.7)
KG2 =b40 − 0,090
1− cos(40)(3.8)
KG3 =(b40 − b30)− 0,030
cos(30)− cos(40)(3.9)
3.2.2 Anfangs-Metazentrum
Das Anfangs-Metazentrum GM0 unter Berucksichtigung freier Flussigkeitsoberflachenin Tanks ( dGM) soll großer 15 cm sein. Diese Forderung ist relativ leicht zu definieren,wenn der Einfluss freier Oberflachen bekannt ist. Wie dieser Einfluss nach Vorschriftberucksichtigt werden soll, wird zu einem spateren Zeitpunkt genauer erlautert.
GM0 ≥ 0,15 m (3.10)
GM0 = GM− dGM = KM−KG− dGM (3.11)
KG4 = KM− 0,15 m− dGM (3.12)
3.2.3 Mindest- und maximaler Hebel
Zwei weitere Forderungen hangen relativ eng miteinander zusammen. Zum einen sollder maximale Hebelarm bei uber 25 Grad, besser 30 Grad liegen. Außerdem soll derHebelarm bei 30 Grad oder mehr mindestens 0,2 m betragen. Fur den Mindesthebel istdie Forderung der See-BG noch von der Schiffsgroße abhangig. Die See-BG fordert dabeiauch explizit, dass der Hebel bei genau 30 Grad großer einem Mindestwert sein soll, dieA.749 fordert lediglich, dass dieser Hebel irgendwo jenseits der 30 Grad einmal erreichtwird. Eine Anforderung an das KG kann nur mit Vereinfachungen ermittelt werden.Es soll daher konservativ angenommen werden, dass dieser Mindesthebel nach A.749ebenfalls genau bei 30 Grad erreicht wird.
h30 ≥ 0,2 m (3.13)
KG5 =w30 − 0,2
sin(30)(3.14)
Die See-BG-Forderung kann wie folgt formuliert werden:
h30 ≥ 0,2 m L ≤ 100 m (3.15)
h30 ≥ 0,002 · L 100 m <L ≤ 200 m (3.16)
h30 ≥ 0,4 m L > 100 m (3.17)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 16/44

3.3 Krangende Momente
Ob der maximale Hebel jenseits von 30 Grad liegt kann mit Hilfe eines Differenzenquo-tienten abgeschatzt werden:
∂h30
∂ϕ=∂w30
∂ϕ−KG · cos(ϕ) ≥ 0 (3.18)
∂w30
∂ϕ=w40 − w30
10· 180
π−KG · cos(30) ≥ 0 (3.19)
KG6 =∂w30
∂ϕ· 1
cos(30)(3.20)
Meist sind diese Kriterien allerdings nicht entscheidend und konnen am besten am Endegraphisch mit Hilfe der Hebelarmkurve fur KGmax uberpruft werden.
3.2.4 Hebelarmumfang
Als eine weitere implizite Forderung der See-BG soll ein bestimmter Hebelarmumfanggegeben sein. Der Hebelarmumfang ist der großte Winkelbereich der Hebelarmkurve, beidem der Hebel positiv ist. Als Stabilitatsumfang wird nach See-BG der Winkel verwendet,bei dem die Hebelarmkurve negativ wird. In Einzelfallen ist dies nicht eindeutig, da eineHebelarmkurve mehrere dieser Abwarts-Nullstellen haben kann. Der Stabilitatsumfangϕu muss mindestens 50 Grad betragen, liegt dieser zwischen 50 und 60 Grad, so soll dergeforderte Hebelarm bei 30 Grad vergroßert werden:
ϕu ≥ 50 (3.21)
dϕ = max(60 − ϕu, 0) (3.22)
h30 = h30 + dϕ · 0,01(m
)(3.23)
Praktisch uberpruft man zunachst, ob h(60) ≥ 0 m ist:
h60 = w60 −KG · sin(60) ≥ 0 (3.24)
KG7 =w60
sin(60)(3.25)
3.3 Krangende Momente
Zusatzlich zu den genannten expliziten Anforderungen an die Hebelarmkurve sollen furPassagierschiffe (Anzahl Passagiere np > 12) krangende Momente angenommen werden.
- Passagiermoment
- Drehkreismoment
- Winddruckmoment (nur See-BG)
Das Winddruckmoment ist nur nach See-BG gefordert, nach A.749 wird dies im spaternoch zu beschreibenden
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 17/44

3.3 Krangende Momente
3.3.1 Passagiermoment
Das Passagiermoment wird verursacht durch die Versammlung aller Passagiere an derungunstigsten Stelle an Bord, also auf dem obersten Deck und weit außen. Es wirdgefordert, dass durch dieses krangende Moment Mk1(10) keine Krangung großer als 10Grad entsteht:
Mk1(10)−M10 ≥ 0 (3.26)
Mk1
∆− M10
∆=Mk1
∆− h10 ≥ 0 (3.27)
hk1 =Mk1
∆≥ h10 (3.28)
Das krangende Moment ist von der Position (y1, z1) und der Masse der Passagiere mp
abhangig:
Mk1(10) = m · (y1 · cosϕ+ z1 · sinϕ) (3.29)
(3.30)
Fur die Masse m1 und den Schwerpunkt eines Passagiers dz1 soll folgender”Norm-
mensch“ angenommen werden:
m1 = 75 kg (60 kg) (3.31)
dz1 = 1 m (0,3 m) (3.32)
Der Wert in Klammern beim Gewicht ist ein Mindestwert, der verwendet werden darf,wenn dies von der Verwaltung genehmigt wird. Beim Schwerpunkt entspricht der Wertin Klammern dem einer sitzenden Person. Die
”Packungsdichte“ von Normmenschen
wird mit 4 Personen pro Quadratmeter angenommen. Bei einer kleinen Anzahl vonPassagieren konnen sich alle an der Bordwand versammeln, der Abstand zur Bordwandbetragt also dy1 = 0,5 m. Vereinfacht ergeben sich folgende Schwerpunkte der Passagieremit der Hohe des obersten Decks hD und der Schiffsbreite B:
y1 =B
2− dy1 (3.33)
z1 = hD + dz1 (3.34)
Im Allgemeinen muss die Verteilung der Passagiere unter den gegebenen Annahme dif-ferenzierter betrachtet werden. Die Passagiere konnten sich auch auf mehrere Decks ver-teilen und es werden sich auch nicht alle an der Bordwand verteilen. Ein Gesamtschwer-punkt ist aber in jedem Fall zu ermitteln. Ein limitierendes KG berechnet sich wie folgt:
hk1 =Mk1
∆≥ h10 (3.35)
hk1 = w10 −KG · sin(10) (3.36)
KG8 =w10 − hk1
sin(10)(3.37)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 18/44

3.3 Krangende Momente
3.3.2 Drehkreismoment
Das Drehkreismoment wird verursacht, wenn das Schiff in einer Notsituation schnell denKurs andern muß. Bedingt durch die Tragheit entsteht so ein krangendes Moment, derresultierende Krangungswinkel darf wiederum nicht großer 10 Grad werden:
MR ≤M10 = h10 ·∆ (3.38)
MR = 0,196 · v20
L∆
(KG− T
2
)(kN m) (3.39)
Dabei ist als Lange L die Schiffslange in der Wasserlinie LWL auf dem Tiefgang T zuverwenden. Das Deplacement ∆ ist in (t) zu verwenden, die Dienstgeschwindigkeit v0 in(m/s). Diese Behandlung der Einheiten ist naturlich nicht sonderlich konsistent. Beimkrangenden Moment in (t m), wie auch bei der See-BG angegeben, andert sich nur derFaktor, da einfach durch g = 9,807 m/s2 geteilt wird. Umgestellt nach KG ergibt sichwieder ein limitierendes KG:
MR = 0,02 · v20
L∆
(KG− T
2
)(t m) (3.40)
hR = 0,02 · v20
L
(KG− T
2
)(3.41)
hR = h10 (3.42)
0,02 · v20
L
(KG− T
2
)= w10 −KG · sin(10) (3.43)
KG9 =0,02 · v
20L + w10
0,02 · v20L + sin(10)
(3.44)
3.3.3 Winddruckmoment
Das Winddruckmoment wird im folgenden Unterabschnitt 3.4 naher betrachtet.
3.3.4 Zusatzliche Forderungen der See-BG
Bei den Intaktvorschriften der See-BG gibt es zusatzliche Forderungen fur die krangendenMomente bei Passagierschiffen bei etwas anderen Annahmen fur das Passagiermoment.Dies ist in der Vorschrift im Abschnitt 3.2.4 zu finden.
3.3.5 Maximaler Gewichtsschwerpunkt
Der maximal zulassige vertikale Gewichtsschwerpunkt KGmax nach den Intaktkriterienergibt sich damit als maximaler Wert der Teilforderung:
KGmax = KG(1:9) (3.45)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 19/44

3.4 Das Wetterkriterium
3.4 Das Wetterkriterium
Das Wetterkriterium soll die Fahigkeit eines Schiffes sicherstellen, kombinierte kran-gende Momente aus Wind und (seitlich einkommendem) Seegang zu widerstehen. Esverfolgt dabei einen auf der Energiebilanz basierenden Ansatz (idealisiert durch die Fla-che unter der Hebelarmkurve). Bei Schiffen mit großer Seitenlateralflache (z.B. großeKreuzfahrtschiffe, Autotransporter) ist das Wetterkriterium das bestimmende Intakt-stabilitatskriterium, welches in manchen Fallen sogar strenger ist als die Leckrechnung.Ein eindeutiges KGmax lasst sich fur das Wetterkriterium nicht bestimmen, dies kannnur iterativ ermittelt werden bzw. ein gegebener Schwerpunkt kann uberpruft werden.Folgendes Szenario soll nach dem Wetterkriterium ertragen werden:
1. stetiger Wind von der Seite bedingt den Winkel ϕ0
2. seegangsbedingtes Rollen des Schiffes in Windrichtung um den Winkel ϕ1
3. zusatzlich wirkende Bo bedingt den Winkel ϕc
3.4.1 Krangende Hebelarme durch Wind
Fur die krangenden Hebelarme des Windes wird ein konstanter Hebel angenommen furalle Winkel:
lw1 =P AZ
1000 g∆(3.46)
lw2 = 1.5 lw1 (3.47)
Der zweite Hebel lw2 soll eine zusatzliche Windbo berucksichtigen, die auf das Schiffwirkt, nachdem es um den Winkel ϕ1 von ϕ0 in Windrichtung gerollt ist.
P = 504 Pa WinddruckA m2 projizierte Lateralflache des SchiffesZ m Hebelarm des Windmomentes∆ t Deplacement
g = 9.81 m/s2 Erdbeschleunigung
Tabelle 1: Verwendete Symbole fur den Winddruck
Diese einfache Formel ist abgeleitet aus der allgemeinen Formel fur den WiderstandR eines umstromten Korpers. Dabei kann die winkelabhangige Veranderung des Wider-standes und des Hebelarms der Kraft Z berucksichtigt werden. Die Winkelabhangigkeitder Lateralflache A(ϕ) wird damit ebenfalls berucksichtigt.
R = Cwρ
2u2A (3.48)
M = RZ (0.25 + 0.75 cos3(ϕ)) (3.49)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 20/44

3.4 Das Wetterkriterium
Der Cw-Wert ist naherungsweise aus Versuchen bekannt. Zusammen mit der Dichte derLuft ρ und einer angenommenen Windgeschwindigkeit u ergibt sich ein anzunehmenderWinddruck P :
P = Cwρ
2u2 (3.50)
M = Cwρ
2u2AZ (0.25 + 0.75 cos3(ϕ)) (3.51)
M = P AZ (0.25 + 0.75 cos3(ϕ)) (3.52)
Der anzunehmende Winddruck laut Vorschrift betragt P = 504 Pa oder 0.504 kN/m2,was in etwa einer Windgeschwindigkeit von 8-10 Beaufort entspricht. Der winkelabhan-gige Teil der obigen Formel wird in den Vorschriften vernachlassigt. Fur Schiffe mit ein-geschranktem Fahrtgebiet kann weniger Winddruck angenommen werden. Die deutschenSee-BG Vorschriften geben fur die verschiedenen Fahrtgebiete folgende Winddrucke an:
Fahrtgebiet Kuste klein groß
Winddruck pw in kN/m2 0.3 0.6 1.0Windstarke in Beaufort 8 10 12
Die Windgeschwindigkeit in der Beaufort-Skala ub kann umgerechnet werden in die SI-Einheit Meter pro Sekunde1:
u = 0.836 · u32b (3.53)
ub = e23
ln( u0.836) (3.54)
Rechnet man die angegebenen Drucke mit den zugehorigen Geschwindigkeiten um inCw-Werte bei einer Dichte der Luft von ρ = 1.2 kg/m3:
pw = Cwρ
2u2 (3.55)
Cw =2 pwρ u2
(3.56)
ergibt sich ein mittlerer Wert von Cw = 1.4. Dieser Wert ist sicher etwas hoch angesetzt,Werte aus Versuchen liegen eher bei Cw = 0.7.
3.4.2 Rollwinkel durch Quersee
Die Berechnung des Rollwinkels ϕ1 soll die Rolleigenschaften des Schiffes in Querseeberucksichtigen. Zu diesem Zweck werden mit Hilfe empirischer Formeln mehrere Fak-toren fur die Rolleigenschaften des Schiffes bestimmt. Weitere erforderlichen Faktorensind Tabelle 2 und Tabelle 3 zu entnehmen:
ϕ1 = 109 k · x1 · x2 ·√r · s (3.57)
OG = zG − d = KG− T (3.58)
r = 0.73 + 0.6OG
d(3.59)
1Stewart, Introduction To Physical Oceanography
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 21/44

3.4 Das Wetterkriterium
Der Faktor s fur die Rollbeschleunigungen ist in Abhangigkeit von der Rollzeit T inTabelle 3 angegeben. Die Rollzeit wird wiederum uber einen Faktor C fur den Rolltrag-heitsradius und das GM abgeschatzt:
C = 0.373 + 0.023B
d− 0.043
L
100(3.60)
T =2C ·B√
GM(3.61)
Die Rollzeit kann genauer uber einen Rollzeitversuch bestimmt werden. Die Durchfuh-rung eines solchen Versuchs im Bordbetrieb ist in den See-BG Intaktvorschriften zufinden. Die Formel fur die Rollperiode T leitet sich wie folgt her, wobei der obige FaktorC ·B eine empirische Approximation des Rolltragheitsradius k′ ist:
T =2π k′√g ·GM
=2 k′√GM
mitπ√g≈ 1 (3.62)
k Faktor fur die Rolldampfung der Kimm: k = 1 fur einen sehr grossemKimmradius ohne Schlingerkiele (geringste Rolldampfung), k = 0.7fur eine eckige Kimm (Ponton, großte Rolldampfung). Sonst wird derFaktor nach Tabelle 3 bestimmt.
T s mittlere Rollperioder Faktor fur den krangenden Hebel der Windlasts Faktor fur die Große der auftretenden Beschleunigungen in Abhangig-
keit der mittleren Rollperiode TOG m vorzeichenbehaftete Koordinate des Gewichtsschwerpunktes uber Was-
serlinieC Faktor fur den RolltragheitsradiusL m Lange der WasserlinieB m Breite auf Spantend m TiefgangCB Volligkeitsgrad der Verdrangung ∆Ak m2 zusatzlich wirkende Flache fur die Rolldampfung: dazu zahlt im we-
sentlichen die Gesamtflache der Schlingerkiele und die projizierte La-teralflache eines Balkenkiels bzw. die Summe von beiden
GM m metazentrische Hohe korrigiert um den Effekt freier Oberflachen
Tabelle 2: Verwendete Symbole fur den Rollwinkel
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 22/44

3.4 Das Wetterkriterium
Bd x1 CB x2
Ak 100L·B k T s
≤ 2.4 1.00 ≤ 0.45 0.75 0.0 1.00 ≤ 6 0.1002.5 0.98 0.50 0.82 1.0 0.98 7 0.0982.6 0.96 0.55 0.89 1.5 0.95 8 0.0932.7 0.95 0.60 0.95 2.0 0.88 12 0.0652.8 0.93 0.65 0.97 2.5 0.79 14 0.0532.9 0.91 ≥ 0.70 1.00 3.0 0.74 16 0.0443.0 0.90 3.5 0.72 18 0.0383.1 0.88 ≥ 4.0 0.70 ≥ 20 0.0353.2 0.863.3 0.843.4 0.82
≥ 3.5 0.80
Tabelle 3: Faktoren fur den Rollwinkel ϕ1
3.4.3 Berechnung der Winkel und Hebelarme
Fur den Nachweis des Kriteriums sind nun folgende Winkel und Hebelarme zu berechnen,siehe hierzu auch Abbildung 4:
h(ϕ0) = lw1 (3.63)
h(ϕb) = lw2 (3.64)
h(ϕc) = lw2 (3.65)
ϕa = ϕ0 − ϕ1 (3.66)
ϕ2 = min(ϕf ,ϕc,50) (3.67)
Die Berechnung von ϕ0, ϕb und ϕc erfolgt uber eine Nullstellensuche, von Hand jedocham einfachsten uber eine lineare Interpolation in einer gegebenen Hebelarmkurve.
3.4.4 Forderungen
Das Wetterkriterium fordert nun, dass die Flache b gleich oder großer als die Flache ain Abbildung 4 sein soll. In Formeln bedeutet dies konkret:
a =
∫ ϕb
ϕa
(lw2 − h(ϕ)) dϕ = −∫ ϕb
ϕa
(h(ϕ)− lw2) dϕ (3.68)
b =
∫ ϕ2
ϕb
(h(ϕ)− lw2) dϕ (3.69)
b ≥ a → b− a ≥ 0 (3.70)
Außerdem soll der Krangungswinkel ϕ0 bedingt durch das Windmoment nicht großerals 16 Grad oder 80% des Winkels bei dem Seite Deck zu Wasser kommt sein.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 23/44

3.4 Das Wetterkriterium
Die Integration erfolgt manuell am besten abschnittsweise mit einer passenden Inte-grationsformel. Durch Zusammenfassen der Integrale kann dies leicht vereinfacht werden:
−a+ b ≥ 0 (3.71)∫ ϕb
ϕa
(h− lw2) dϕ+
∫ ϕ2
ϕb
(h− lw2) dϕ ≥ 0 (3.72)∫ ϕ2
ϕa
(h− lw2) dϕ =
∫ ϕ2
ϕa
hdϕ−∫ ϕ2
ϕa
lw2 dϕ ≥ 0 (3.73)∫ ϕ2
ϕa
hdϕ ≥∫ ϕ2
ϕa
lw2 dϕ = lw2 · (ϕ2 − ϕa) (3.74)
Somit bleibt nur die Hebelarmkurve h numerisch zu integrieren. Meist wird allerdingsexplizit gefordert sein, die beiden Flachen a und b zu ermitteln.
lw2
lw1
ϕcϕ2ϕb
ϕ0ϕa ϕ1
b
a
Krangungswinkel
Heb
elar
m
Abbildung 4: Hebelarmkurve des Wetterkriteriums
3.4.5 Einschrankungen
Es sei darauf hingewiesen, dass das Wetterkriterium auf bestimmte Schiffstypen nichtanzuwenden ist. Diese Einschrankungen sind in Teil A, Abschnitt 2.3.5 zu finden. Danachgilt das Wetterkriterium nur fur Schiffe mit den folgenden Parametern:
1. B/d kleiner als 3.5
2. KG/d− 1 zwischen -0.3 und 0.5
3. T kleiner 20 s
Des Weiteren schließt Teil B fur bestimmte Schiffstypen (z.B. Offshore Supply Vessels,Special Purpose ships) die Anwendung des Wetterkriteriums aus. Genau diese Typen fal-len meist nicht in die oben genannten Kriterien. Stattdessen wird die Einhaltung einesalternativen Stabilitatskriteriums gefordert, welches in Teil B, Abschnitt 2.4.5 beschrie-ben ist.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 24/44

3.4 Das Wetterkriterium
3.4.6 Kritik
Das Wetterkriterium reprasentiert den Versuch, ein dynamisches Intakstabilitatskrite-rium zu etablieren, welches uber die rein praskriptive Vorgabe bestimmter, nicht mitder Schiffsgroße skalierter Mindestwerte hinausgeht. Insofern ist das Wetterkriterium einFortschritt gegenuber den restlichen allgemeinen Stabilitatskriterien in der IMO A.749.Folgende Kritikpunkte bzw. Defizite bleiben aber:
- Der konstant angenommene Hebel fur Wind, unabhangig vom Krangungswinkel, istunrealistisch.
- Ein Driften des Schiffes wird nicht berucksichtigt.
- Es wird nur der Rollwinkel als Kriterium herangezogen, andere maßgebliche Großen,wie beispielsweise die Rollbeschleunigung werden nicht bewertet.
- Es wird lediglich das Kentern aufgrund externer Momente als Versagenskriterium be-rucksichtigt. Andere Szenarien, z.B. zusatzliche Ladungsverschiebung, Wasser an Deck,werden vernachlassigt.
- Es wird lediglich die Glattwasserhebelarmkurve berucksichtigt. Anderungen des Auf-richthebels durch die Veranderung der Wasserlinie im Seegang werden vernachlassigt.
- Große Schiffe sind selten im quereinkommenden Seegang gefahrdet. Viel kritischersind Stabilitatsverlust bzw. resonante Rollerregung in langslaufenden Wellen. DiesePhanomene werden vom Wetterkriterium nicht abgedeckt.
- Das Verfahren ist nach wie vor praskriptiv und fuhrt nicht zu einem quantifizierbaren,einheitlichen Sicherheitsniveau fur alle Schiffe, insbesondere auch durch die (zu) starkeVereinfachung des physikalischen Modells.
Es sei darauf verwiesen, dass es Richtlinien von der IMO in der MSC.1/Circ.1200 gibt,in denen beschrieben ist, wie man eine Uberprufung des Wetterkriteriums mit Hilfevon Modellversuchen aufwerten kann. Dort werden Alternativen aufgezeigt wie manzum Beispiel die winkelabhangigen krangenden Momente durch Wind aber auch dieBestimmung des Ruckrollwinkels mit Hilfe von Modellversuchen ermitteln kann. DieseVersuche sind aber naturlich entsprechend aufwendig und lohnen meist nicht fur jedesProjekt. Die Erlauterungen zu diesen Richtlinien sind in der MSC.1/Circ.1227 zu finden.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 25/44

4 Transport von Schuttgut
4.1 Allgemeines
Schuttgut verhalt sich an Bord von Schiffen ahnlich wie eine sehr zahe Flussigkeit. Diesbedeutet, dass es ab einem bestimmten Krangungswinkel und/oder entsprechend großenBeschleunigungen zu Ladungsverschiebungen kommt, die das Schiff unter Umstanden er-heblich gefahrden konnen (z.B. PAMIR, PASSAT). Anders als beispielsweise bei Wasser(freie Oberflachen) verandert die Schuttgutladung bei Auftreten eines Krangungswinkelsnicht sofort ihre Lage, sondern das Schuttgut rutscht erst bei Erreichen eines bestimm-ten
”Boschungswinkels“ nach. Dafur bleibt beim Wiederaufrichten des Schiffes aber auch
ein krangendes Moment ubrig, da das Schuttgut seine ursprungliche Form nicht wie-der vollstandig erreicht. Dies kann in schwerem Wetter dazu fuhren, dass das Schuttgutschrittweise immer weiter
”ubergeht“, bis schließlich eine, fur das Schiff bedrohliche Si-
tuation entsteht. Aus diesem Grund sind besondere Stabilitatsforderungen fur Schiffenotwendig, die Schuttgut als Massengutladung fahren.
4.2 Ubergehen der Ladung
(a) Boschungswinkel
α7
(b) Ubergehen von Schuttgut
Abbildung 5: Schuttkegel
Lasst man Schuttgut durch einen Trichter auf eine Oberflache rieseln, so entsteht einKegel mit einem bestimmten, materialabhangigen2 Boschungswinkel α. Dies ist also derWinkel, bei dem das Material seine Lage gerade noch nicht andert. Aus Versuchen weißman, dass Schuttgut, statisch betrachtet, bei einer Uberschreitung des Schuttwinkelsα um 7 zu rutschen beginnt (siehe Abbildung 5). Treten dynamische Effekte auf wiez.B. großere Beschleunigungen, kann ein Verrutschen naturlich auch wesentlich fruherauftreten.
Uberschreitet das Schiff also einen Krangungswinkel von ϕ ≥ 7 (Ladung nicht ein-geebnet) bzw. von ϕ = α + 7 (Ladung eingeebnet), so besteht die Gefahr, dass die
2Der Schuttwinkel ist hauptsachlich abhangig von der Kornung des Materials
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 26/44

4.2 Ubergehen der Ladung
Boschungswinkel in Grad
Erze und Kohle 30 . . . 50Zement und Salz 40Koks 45Kies (trocken) 35Kies (nass) 25Sand (trocken) 30 . . . 35Gerste, Hafer 45 . . . 50Roggen 32 . . . 37Weizen 23 . . . 35Reis 20Flussigkeiten 0
Tabelle 4: Boschungswinkel fur ausgewahlte Materialien
Ladung zu rutschen beginnt. Bei eingeebneter Ladung stellt sich ein Oberflachenwinkel(auch
”Ladungsspiegelwinkel“ genannt) von β ≥ ϕ − (α + 7) ein (siehe Abbildung 6).
Das krangende Moment MG der Ladung ergibt sich dann zu:
MG = mG · g · hG (4.1)
Wie groß die Menge der Ladung ist, die ubergeht, und wie weit die Ladung ubergeht,hangt stark davon ab, wieviel Platz hierfur bis zum Deck bzw. bis zum Lukendeckel vor-handen ist (siehe Abbildung 6). Hierbei ist zu beachten, dass die Ladung wahrend derReise durch dynamische Effekte wie Schiffsvibrationen, Tauchschwingungen und Stoße(Slamming) verdichtet wird. Dadurch wandert einerseits der Gewichtsschwerpunkt, an-dererseits entstehen Hohlraume unter den Decks und Luken. Dies ist bei der Berechnungder Ladungsverschiebung zu beachten.
Ladungsspiegel nach dem Sacken Ladungsspiegel vor dem Sacken
β
G1G2
G3
hk
ϕ
Abbildung 6: Verschiebung des Ladungsschwerpunktes
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 27/44

4.3 Der”Grain Code“ der IMO
Je nach Ladungsart ergeben sich etwa folgende Werte fur die VolumenverminderungdV der Ladung:
dV Ladungsart
1,5 . . . 3,0 % Erzkonzentrat, Staub- und Schlammkohle, Leinsaat, Hirse,Braumalz, Baumwollsamen, etc.
2,0 . . . 5,0 % leichte Erzsorten, Braunkohle, Kies, Sand, Zement, Gips,Kalk, Kunstdunger, Getreide, Bohnen, Erbsen, Zucker, etc.
Tabelle 5: Volumenverminderung ausgewahlter Materialien
4.3 Der”Grain Code“ der IMO
Aufgrund der bereits skizzierten Gefahren und aufgrund von schweren Unfallen in derVergangenheit gelten fur Schiffe, die Getreide als Massengutladung transportieren, zu-satzlich zu den normalen Intaktstabilitatsvorschriften nach IMO A.749 weitere Intakt-stabilitatsforderungen. Diese sind im
”International Code for the Safe Carriage of Grain
in Bulk“3 enthalten.
4.3.1 Forderungen
Man nimmt an, dass die Ladung nach dem Ubergehen einen Oberflachenwinkel einnimmtvon
- 15, wenn die Ladung eingeebnet war,
- 25, wenn die Ladung nicht eingeebnet war.
Ist der Laderaum nur teilgefullt, so muss man die Neigung der vorher eingeebneten Ge-treideoberflache mit 25 annehmen und zusatzlich das Gesamtkrangungsmoment mitdem Faktor 1,12 multiplizieren (als Kompensation fur die Verlagerung des Gewichts-schwerpunkts in vertikaler Richtung).
Aus der Verlagerung des Getreides resultiert ein krangendes Moment. Unter Beruck-sichtigung dieses krangenden Momentes muss folgendes gewahrleistet werden:
1. Der Krangungswinkel ϕ0, der sich nach Ubergehen der Ladung einstellt, darf einenWert von 12 und den Uberflutungswinkel ϕu nicht uberschreiten.
2. Die Restflache A12 zwischen dem aufrichtenden und dem krangenden Hebel darfeinen Wert von A12 ≥ 0,075 m Rad nicht unterschreiten. Dabei wird von der erstenGleichgewichtslage ϕ0 jeweils bis zum kleinsten der folgenden Winkel ϕ1 integriert:
- Winkel an der Stelle des maximalen Resthebels
- 40 Grad
3IMO MSC.23(59)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 28/44

4.3 Der”Grain Code“ der IMO
- Uberflutungswinkel ϕu, nicht wetterdicht verschließbare Offnungen kommen zuWasser
Zur Veranschaulichung siehe auch Abbildung 7.
3. Das Mindest-GM darf einen Betrag von 30 cm nicht unterschreiten (inkl. Korrekturfur freie Oberflachen).
hk
ϕ1ϕ0
A12
Abbildung 7: Flachenkriterium Getreide Code
4.3.2 Annahmen fur den krangenden Hebel
Die Getreideoberflache liegt (bei als”voll gefullt“ angenommenem Laderaum) um einen
Abstand Vd unter Unterkante Deck (angenommenes”Sacken“) bzw. 150 mm unterhalb
des Lukendeckels. Eventuelle Leeraume innerhalb des Lukendeckels sind zu addieren.Fur Vd ist der großere der folgenden Werte anzusetzen:
Vd = max(100, Vd1 + 0,75 (d− 600)) (mm) (4.2)
Der Wert Vd1 ist Tabelle ?? zu entnehmen. Dabei ist jeweils der Abstand b bis zumnachsten, begrenzenden Sull, Unterzug, oder Ahnlichem anzunehmen.
b (m) Vd1 (mm) b (m) Vd1 (mm)
0.5 570 4.5 4301.0 530 5.0 4301.5 500 5.5 4502.0 480 6.0 4702.5 450 6.5 4903.0 440 7.0 5203.5 430 7.5 5504.0 430 8.0 590
Ist die Unterzughohe d nach der Neigungsannahme nicht groß genug, kommt es zueiner Umlagerung des Getreides. Dabei verlagert sich das freie Volumen durch Nach-rutschen in den hoheren Abschnitt. Die in Abbildung 9 vorgeschlagenen Werte sind
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 29/44

4.3 Der”Grain Code“ der IMO
A B
C D
E F
1515
15
d Vd
a
eingetauchte Seite
ausgetauchte Seite
Vd1 hangt von diesem Abstand ab
Abbildung 8: Zur Bestimmung der Leerraumhohe
Auffüllen
Ladung „rutscht nach“
höhergelegene Seite
50%25%
25%
Abbildung 9: Umlagerung bei unzureichender Begrenzung
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 30/44

4.3 Der”Grain Code“ der IMO
Empfehlungen des Germanischen Lloyd. Der krangende Hebel hk braucht nur fur dieaufrechte Schwimmlage (ϕ = 0) bestimmt zu werden. Die Vorschrift berucksichtigt da-mit nur die seitliche Verschiebung des Gewichtsschwerpunkts der Ladung, nicht jedochdie vertikale Verschiebung des Gewichtsschwerpunkts und die damit verbundenen Ver-anderung des KG. Nach Vorschrift wird ein linearer Verlauf des krangenden Hebels uberden Krangungswinkel angenommen. Es gilt:
hk(40) = 0,8hk(0) = 0,8h0 (4.3)
ϕ
h
hk
40
h40
h0
Abbildung 10: Krangender Hebel nach Grain Code
Der Verlauf des krangenden Hebels leitet sich damit wie folgt her:
hk(ϕ) = h0 +m · ϕ (4.4)
hk(40) = 0,8h0 = h0 +m · 40 (4.5)
m = − 0,2
40h0 (4.6)
hk(ϕ) = h0
(1− 0,2
40· ϕ)
(4.7)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 31/44

5 Dynamische Stabilitat
5.1 Allgemeines
Grundsatzlich kann das dynamische Verhalten eines Schiffes im Seegang nur sehr rudi-mentar mit einfachen Mitteln abgeschatzt werden. In der Regel fuhrt kein Weg vorbeian einer nicht-linearen, numerischen Simulation, wenn man sinnvolle Aussagen erhaltenmochte uber z. B. das Rollverhalten eines Schiffes. Und auch dann kann man nur Aus-sagen statistischen Charakters treffen, da der naturliche Seegang ein zufalliger Prozessist und die Physik hochgradig nicht-linear ist. Trotzdem sollen im Folgenden einfacheGleichungen formuliert werden, mit denen eine erste Aussage getroffen werden kann, obes zu Problemen beim Seeverhalten kommen kann.
5.2 Freie Rollschwingung im glatten Wasser
Fur den Glattwasser-Fall ohne Seegang wird im Folgenden eine Abschatzung fur dieRolleigenfrequenz hergeleitet. Nach Newton gilt translatorisch und rotatorisch:
F = m · a (5.1)
M = J · ϕ (5.2)
mit J als Massentragheitsmoment:
J =
∫Vr2ρ(r) dV (5.3)
J =∑i
r2imi (5.4)
Uber eine Momentenbilanz mit den bekannten Momenten im glatten Wasser (siehe Ab-bildung 11) ergibt sich folgende Beziehung:
Ma +Mk = 0 (5.5)
Ma = ∆ · g · h(ϕ) (5.6)
Mk = J · ϕ (5.7)
J = ∆ · k2 (5.8)
Der Tragheitsradius k ist das Tragheitsmoment J bezogen auf das Deplacment ∆ unterBerucksichtigung hydrodynamischer Massen. Damit ergibt sich durch Umformen folgen-de Differentialgleichung:
Ma +Mk = 0 (5.9)
∆ · g · h(ϕ) + ∆ · k2 · ϕ = 0 (5.10)
ϕ+g
k2· h(ϕ) = 0 (5.11)
Das Problem bei der Losung ist, dass der Hebelarm h(ϕ) nicht analytisch gegeben ist.Nur mit verschiedenen Vereinfachungen fur den Hebel kann diese direkt gelost werden.Die schrittweise Vereinfachung soll im Folgenden durchgefuhrt werden.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 32/44

5.2 Freie Rollschwingung im glatten Wasser
M
G
BϕB0
K
L
W = ∆ · g
ϕ
hϕ
Ruckstellmoment
Abbildung 11: Momente im glatten Wasser
1. Senkrechte Wande: Bei senkrechten Wanden kann die Beziehung fur den Hebeleines Pontons verwendet werden.
h(ϕ) =
(GM +
BM
2tan2 ϕ
)sinϕ (5.12)
2. Lineariserung der trigonometrischen Terme: Mit Hilfe der Reihenentwicklung kon-nen diese vereinfacht werden, Terme hoherer Ordnung werden vernachlassigt.
cos(ϕ) = 1− 1
2ϕ2 +
1
24ϕ4 − . . . (5.13)
sin(ϕ) = ϕ− 1
6ϕ3 + . . . (5.14)
tan(ϕ) = ϕ+
1
3ϕ3 + . . . (5.15)
h(ϕ) = GM · ϕ+
(BM
2− GM
6
)ϕ3 (5.16)
h(ϕ) = GM ·(ϕ+ c · ϕ3
)(5.17)
c =1
6·(
3BM
GM− 1
)(5.18)
In Abhangigkeit von c kann jetzt eine analytische Losung gefunden werden. ImFolgenden soll nur der einfache Spezialfall gezeigt werden, wenn c = 0 ist.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 33/44

5.3 Rollen in regelmaßiger Quersee
3. Lineariserung der Hebelarmkurve: Fur c = 0 gilt die linearisierte Hebelarmkurve.
c = 0 (5.19)
h(ϕ) = GM · ϕ (5.20)
Damit ergibt sich folgende Differentialgleichung:
ϕ+g
k2·GM · ϕ = 0 (5.21)
Mit dem entsprechenden Ansatz fur ϕ(t) kann die obige Gleichung gelost werden:
ϕ(t) = ϕ0 · sin(ω t− α) (5.22)
ϕ = ω · ϕ0 · cos(ω t− α) (5.23)
ϕ = −ω2 · ϕ0 · sin(ω t− α) (5.24)
Durch Einsetzen in Gleichung 5.11 ergibt sich folgende Beziehung fur die Rolleigenfre-quenz ω:
−ω2 · ϕ0 · sin(ω t− α) = − g
k2·GM · ϕ0 · sin(ω t− α) (5.25)
ω2 =g ·GM
k2(5.26)
Im Allgemeinen gilt fur die Periode:
T =2π
ω(5.27)
Damit ergibt sich folgende Abschatzung fur die Rollperiode:
T =2π k√g ·GM
(5.28)
Diese kann verwendet werden, um mit Hilfe eines Rollzeitversuchs im Bordbetrieb na-herungsweise die Anfangsstabilitat GM zu bestimmen, wenn der Rolltragheitsradius be-kannt ist oder ebenfalls abgeschatzt werden kann.
5.3 Rollen in regelmaßiger Quersee
Wird ein sehr vereinfachtes Modell fur quereinkommende Wellen angenommen, kann einkritisches Frequenzverhaltnis zwischen Wellen- und Rolleigenfrequenz bestimmt werden.Die Wellen werden vereinfacht als harmonische Sinuswellen angenommen. Die entsprichtnaturlich nie der Realitat. Fur Schwerewellen im tiefen Wasser gilt folgendes fur diePeriode und Frequenz:
Tw =
√2π · λg
(5.29)
Ω =2π
Tw=
√2π · gλ
(5.30)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 34/44

5.3 Rollen in regelmaßiger Quersee
mit λ als Wellenlange. Fur die Wellengeschwindigkeit gilt allgemein und im Besonderen:
c =λ
T=
√λ · g2π
(5.31)
Damit ergibt sich mit den Wellen als erregendes Moment eine erzwungene Schwingung.
M
G
Bϑ
L
ϑ
hkr
WL
Wellenkontur λ >> B
Abbildung 12: Moment in Quersee
Das Moment der Wellen ergibt sich durch den variierenden, krangende Hebelarm hk(siehe Abbildung 12):
Mk(ϕ) = ∆ · g · hk(ϕ) (5.32)
hk(ϕ) = GM · sin(ϑ) (5.33)
mit der zeitlich veranderlichen Wellenschrage ϑ(t):
ϑ(t) = ϑ0 · cos(Ω t) (5.34)
ϑ0 ≈ π ·H
λ(5.35)
Die Amplitude ϑ0 ist die maximale Wellenschrage. Somit ergibt sich folgendes krangendesMoment, wobei dieses wiederum linearisiert wird:
Mk = ∆ · g ·GM · sin(ϑ0 · cos(Ω t)) (5.36)
Mk ≈ ∆ · g ·GM · ϑ0 · cos(Ω t) (5.37)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 35/44

5.4 Parametrisches Rollen in Langssee
Die Momentenbilanz unter Berucksichtigung eines Dampfungsanteils Wϕ liefert folgendeDifferentialgleichung bei Verwendung von Gleichung 5.26 und Gleichung 5.21:
∆ · (k2 · ϕ+ g ·GM · ϕ) = ∆ · g ·GM · ϑ0 · cos(Ω t) (5.38)
k2 · ω2 = g ·GM (5.39)
ϕ+Wϕ
∆ · k2· ϕ+ ω2 · ϕ = ω2 · ϑ0 · cos(Ω t) (5.40)
Uber einen hier jetzt nicht weiter ausgefuhrten Ansatz kann auch diese Gleichung einererzwungenen Schwingung gelost werden fur die Rollamplitude ϕ:
ϕ =ω2 · ϑ0√
(ω2 − Ω2)2 +(
Wϕ
∆·k2 · Ω)2
(5.41)
Typischerweise werden noch ein dimensionsloses Dampfungsmaß D und das Frequenz-verhaltnis η als Abkurzungen verwendet:
D =Wϕ · ω∆ · k2
(5.42)
η =Ω
ω(5.43)
Damit schreibt sich die obige Gleichung etwas ubersichtlicher:
ϕ =ϑ0√
(1− η2)2 + (D · η)2(5.44)
Liegt also das Frequenzverhaltnis in der Nahe von η = 1 bei nicht vorhandener Damp-fung, kommt es zur Resonanz und die Amplitude wird ϕ =∞.
Hier soll nochmals betont sein, dass dies ein sehr vereinfachtes Modell ist. In der Regelkommt es in Quersee zwar zu großen Rollwinkeln, Kenterunfallen sind allerdings sehrselten.
5.4 Parametrisches Rollen in Langssee
Die haufigsten Kenterunfalle passieren meist in der sehr viel schwieriger zu erfassendenLangssee. Die Differentialgleichung ist jetzt nicht mehr eine erzwungene sondern eineparamtererregte Schwingung mit der Zeit als Parameter:
J · ϕ+Wϕ · ϕ+ ∆ · g · h(ϕ, t) = 0 (5.45)
Fur die Hebelarmschwankungen (siehe Abbildung 13) soll vereinfacht folgendes Modellverwendet werden mit Te als Begegnungsperiode der Wellen:
h(ϕ, t) = h(ϕ, t+ Te) (5.46)
h(ϕ, t) = GM0 + dGM · sin(Ωe t) (5.47)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 36/44

5.4 Parametrisches Rollen in Langssee
WT
WB
WL-Flachen
h
ϕ
Schwankungsbereich
WT (Wellental)
WB (Wellenberg)
Abbildung 13: Schwankungen der Hebelarmkurve (nach Walter Abicht (1970))
Der Hebelarm schwankt mit einer harmonischen Schwingung um den Mittelwert GM0.Fur die nachlaufende oder entgegenkommende See gilt folgendes:
Ωe =2π
Te(5.48)
Te =λ
c− VS(5.49)
Die Begegnungsperiode und Frequenz ist damit abhangig von der Wellen- und Schiffs-geschwindigkeit VS . Die resultierende Differentialgleichung (hier ohne Dampfungsglied)wird auch Mathieusche Differentialgleichung genannt:
ϕ+
(1 +
dGM
GM0
· sin(Ωe t)
)ω2 · ϕ = 0 (5.50)
Die Losung dieser Gleichung hat instabile Bereiche, in denen die Rollamplitude wiedersehr groß wird. Diese Bereiche sind abhangig vom Frequenzverhaltnis η:
ω
Ωe=
1
2· i i = 1,2, . . . (5.51)
Liegt also das Frequenzverhaltnis von Rolleigenfrequenz zur Begegnungsfrequenz derWellen bei einem vielfachen von 0,5, kann es zu großen Rollamplituden kommen. Somitsollten bestimmte GM-Werte bei gegebenen Seegang vermieden werden.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 37/44

6 Deterministische Leckrechnung
6.1 Allgemeines
Fur Fahrgastschiffe war bislang eine deterministische Leckrechnung nach SOLAS KapitelII-1, Teil B erforderlich. Dabei ist grundsatzlich nach folgendem Schema vorzugehen:
1. Erstellung einer Schottenkurve
2. Generierung der zu untersuchenden Leckfalle
a) Maximal zulassige Abteilungslange und Abteilungsstatus ermitteln
b) Mindestabstand der Schotten uber die anzunehmende Leckausdehnung be-stimmen, Erweiterung der Leckfalle
3. Uberprufung der Stabilitatsforderungen fur die Leckfalle
6.2 Flutbare Langen
Die flutbare Lange ist die zulassige Lange a einer Flutung bei einer Beschadigung desSchiffsrumpfes an einer Stelle x entlang des Rumpfes zur Bestimmung der Schottenstel-lung im Entwurfsstadium. Bedingung ist dabei, dass die sogenannte
”Margin Line“ nicht
getaucht wird. Die Margin Line (Tauchgrenze) liegt 76 Millimeter (oder 3 Zoll) unter-halb des Freiborddecks, eine Langsunterteilung wie B/5 Schotte bleiben unberucksichtigt.Wird diese Lange uber die Schiffslange aufgetragen, so erhalt man die Schottenkurve,welche exemplarisch in Abbildung 14 dargestellt ist.
Leck
lange
X
76 mm
Xa a
Abbildung 14: Schottenkurve
6.2.1 Flutbarkeiten fur die Schottenkurve
Fur die Ermittlung der flutbaren Langen sind bestimmte Flutbarkeiten fur die verschie-denen Bereiche im Schiff anzunehmen. Insbesondere ist die Flutbarkeit des Maschinen-
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 38/44

6.3 Zulassige Abteilungslange und Abteilungsstatus
raumes definiert. Die genauen Bestimmungen sind Regel 5 zu entnehmen.
6.3 Zulassige Abteilungslange und Abteilungsstatus
Die maximal zulassige Abteilungslange la errechnet sich aus der flutbaren Lange a mul-tipliziert mit dem sogenannten Unterteilungsfaktor:
la = a fa (6.1)
Die Berechnung des Unterteilungsfaktors fa erfolgt nach Regel 6 und ist abhangig vonfolgenden Punkten:
• Schiffslange
• Verwendungszweck des Schiffes
– Volumen des Maschinenraums
– Volumen der Fahrgastraume
– Verdrangung
Dieser Faktor definiert auch den erforderlichen Abteilungsstatus, dieser ist einfach gesagtder ganzzahlige Kehrwert des Unterteilungsfaktors. Es kann fur ein Schiff ein 1-, 2-oder 3-Abteilungsstatus gefordert werden. Die Uberflutung der entsprechende Anzahl annebeneinander liegenden Abteilungen muss uberlebt werden, wobei dieses
”Uberleben“
definiert wird durch die in Unterabschnitt 6.5 beschriebenen Stabilitatsforderungen.
6.4 Leckausdehnung
Die vorgegebene Leckgroße definiert einen Mindestabstand der Schotten. Dabei soll fol-gende Ausdehnung angenommen werden:
l = min(3 + 0,03 · L,11) m (6.2)
b = B/5 (6.3)
h =∞ (6.4)
Der Beginn der Beschadigung ist dabei in vertikaler Richtung die Basis, in Querrichtungdie Breite der Wasserlinie auf dem gewahlten Tiefgang. Dies soll einen Mindestabstandder Schotten sicherstellen. Uber die Leckausdehnung kann also der erforderliche Abtei-lungsstatus erhoht werden.
6.5 Stabilitatsforderungen
Uber den maximal zulassigen Abstand der Schotten (Abteilungslange la) und den Abtei-lungsstatus ergeben sich die mindestens zu untersuchenden Leckfalle. Die Schadensan-nahme generiert eventuell zusatzliche Falle, die ebenfalls uberlebt werden mussen. Furden Endzustand der Flutung gelten folgende Kriterien:
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 39/44

6.5 Stabilitatsforderungen
1. Die Margin Line darf in keinem Fall getaucht werden.
2. Die Gleichgewichtsschwimmlage ϕ0 muss vor folgenden Winkeln erreicht werden:
a) ϕ0 ≤ 7 fur die 1-Abteilungsfalle
b) ϕ0 ≤ 12 fur Mehrabteilungsfalle
3. Die verbleibende metazentrische Hohe muss mindestens GM ≥ 0,05 m betragen.
4. Der Umfang der Hebelarmkurve muss mindestens ϕu ≥ 15 betragen.
5. Die Flache unter der Hebelarmkurve muss großer A ≥ 0,015 m rad sein, wobei vonder Gleichgewichtsschwimmlage bis zum kleinsten der folgenden Winkel integriertwird:
a) Uberflutungswinkel: Winkel bei dem nicht wetterdichte Offnungen zu Wasserkommen
b) 22 bei 1-Abteilungsstatus
c) 27 bei 2-Abteilungsstatus
6. Im positiven Bereich der Hebelarmkurve (Umfang) darf der resultierende Hebel-arm, der sich aus den folgenden zusatzlichen krangenden Momenten Mk ergibt,nicht kleiner als 0,10 m werden.
a) Passagiermoment
b) Moment durch Rettungsboote
c) Winddruckmoment
Der krangende Hebel berechnet sich wie folgt:
hk =Mk
∆+ 0,04 (6.5)
Des weiteren gibt es Forderungen fur die Zwischenzustande (intermediate stages) derFlutung:
1. Maximaler Hebel: hmax ≥ 0,05 m
2. Hebelarmumfang: ϕu ≥ 7
Unsymmetrische Flutung soll vermieden werden und durch Querflutanlage ausgeglichenwerden. Fur diesen Ausgleich gelten folgende Anforderungen:
1. Dauer des Ausgleichs nicht langer als t ≤ 15 min.
2. Großter Krangungswinkel vor dem Ausgleich ϕ0 ≤ 15
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 40/44

7 Probabilistische Leckrechnung
7.1 Einfuhrung
Hier soll eine kurze Einfuhrung in die Grundprinzipien erfolgen, die hinter der sog. pro-babilistischen Leckrechnung stehen. Bei der deterministischen Leckrechnung werden be-stimmte Raumkombinationen festgelegt, deren Flutung das Schiff im Sinne der Vorschrift
”uberleben“ muss. Bei der probabilistischen Leckrechnung hingegen wird das Erreichen
eines bestimmten Uberlebensindexes gefordert. Dabei liefert jede im Sinne der Vorschriftuberlebte Raumkombination einen Beitrag zum Uberlebensindex. Die Hohe des Beitragesentspricht der Trefferwahrscheinlichkeit, welche ihrerseits uber Dichtefunktionen ermit-telt wird.
Diese Dichtefunktionen werden aus Unfallstatisiken gewonnen. Im Folgenden sollendie Grundprinzipien dargestellt werden, wie man die Uberlebenswahrscheinlichkeiten furbeschadigte Schiffe bestimmt. Eine detaillierte Darstellung der probabilistischen Leck-rechnungsvorschrift fur Frachtschiffe findet sich in der aktuellen SOLAS (IMO, 2009b)und in den sogenannten
”Explanatory Notes“ zur probabilistischen Leckrechnung.
7.2 Vorschriften
Eine Ubersicht uber die Entwicklung der Leckrechnungsvorschriften ist in Abbildung 15dargestellt.
Abbildung 15: Vorschriftensituation nach Einfuhrung der neuen (=Harmonized) Regelnfur RoRo- Passagierschiffe. Quelle: C. Ortloff, FSG, in: Designs 06, Ship-Pax Information, Goteborg
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 41/44

7.3 Konzept
7.3 Konzept
- det. Leckrechnung: bestimmte, festgelegte Raumkombinationen (Leckfalle) mussen”ue-
berlebt“ werden, also bestimmte Kriterien erfullen
- pro. Leckrechnung: ein bestimmtes Sicherheitsniveau muss erreicht werden, es ist frei-gestellt, wie
Das erreichte Sicherheitsniveau (Index) ist definiert durch die Summe der Auftretens-wahrscheinlichkeiten pi der betrachteten Leckfalle gewichtet mit der sogenannten Uber-lebenswahrscheinlichkeit si des jeweiligen Falles. Diese Summe liefert den sogenannten
”attained Index“ A, welcher großer sein muss als ein
”required index“ R.
A =∑
ai =∑
pi · si ≥ R (7.1)
Die Uberlebenswahrscheinlichkeit si wird ermittelt uber bestimmte Stabilitatskriterien,die fur jeden Leckfall auszuwerten sind und liegt zwischen 0 und 1.
7.3.1 Auftretenswahrscheinlichkeiten
Die Wahrscheinlichkeit des Treffens einer bestimmten Raumkombination wird ermitteltuber Dichtefunktionen basierend auf Unfallstatisiken. Diese Dichtefunktionen model-lieren einen statistischen Leckquader. Dieser Leckquader hat die folgenden normiertenFreiheitsgrade:
• x Lage
• l Lange
• t Eindringtiefe
• z Hohe
Normiert werden diese Großen auf den Bereich 0 bis 1 wie folgt, wobei die schiffsfestenGroßen in Metern mit einem Querstrich gekennzeichnet sind:
x =x
Ls(7.2)
l =l
Ls(7.3)
t =t
B(7.4)
z =z
H(7.5)
Diese Bezeichnungen konnen naturlich variieren, ublich fur die Lecklange ist auch J odergriechische Buchstaben fur die dimensionslosen Großen.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 42/44

7.3 Konzept
7.3.2 Seitenbeschadigung
Wie groß die Wahrscheinlichkeit ist, dass an einer bestimmten Position x eine Raum einerLange l getroffen wird, soll anhand eines Beispiels erlautert werden. Die Dichtefunktionenseien gleichverteilt fur die Lage und linear fur die Lange.
p(x) = p0 (7.6)
p(l) = 1− l
lmax(7.7)
p(x,l) = p(x) · p(l) = p0
(1− l
lmax
)(7.8)
Die Lange wird als stochastisch unabhangig von der Lage angenommen. Allerdings sinddiese aufgrund der Normierung geometrisch abhangig, was bei der Integration zu be-rucksichtigen ist, da die Lange und Lage definiert sind uber die Vor- und Hinterkanteder Beschadigung:
l = x2 − x1 (7.9)
x =x2 + x1
2(7.10)
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 43/44

Literatur
Literatur
IMO (2009a). International Code on Intact Stability, 2008. International MaritimeOrganization.
IMO (2009b). SOLAS 2009. International Maritime Organization, consolidated edition.Consolidate text of the International Convention for Safety of Life at Sea, 1974, andits Protocol of 1988: articles, annexes and certificates.
Walter Abicht (1970). Stabilitat und Lecksicherheit I & II. Technical report, Institutfur Schiffbau, Hamburg.
Prof. Dr.-Ing. Stefan Kruger www.ssi.tu-harburg.de Seite: 44/44