Embed Size (px)
Citation preview
28. April 2006
U DNIVERSITÄT ORTMUND
1IWL Logistiktag
Intelligente Autonome Systeme– von Science Fiction zur Realität
Dr. Norbert JesseUniversität Dortmund
Fachbereich InformatikeMail: [email protected]
28. April 2006
U DNIVERSITÄT ORTMUND
2IWL Logistiktag
Träume und Visionen
Wo stehen wir heute ?
Die HerausforderungNavigation – Autonomie – Intelligenz
Humanoide Roboter
Roboterfußball als Testfall
Kurzes Resümee
Gliederung
28. April 2006
U DNIVERSITÄT ORTMUND
3IWL Logistiktag
Visionen I
28. April 2006
U DNIVERSITÄT ORTMUND
4IWL Logistiktag
Visionen II: I-Robot
28. April 2006
U DNIVERSITÄT ORTMUND
5IWL Logistiktag
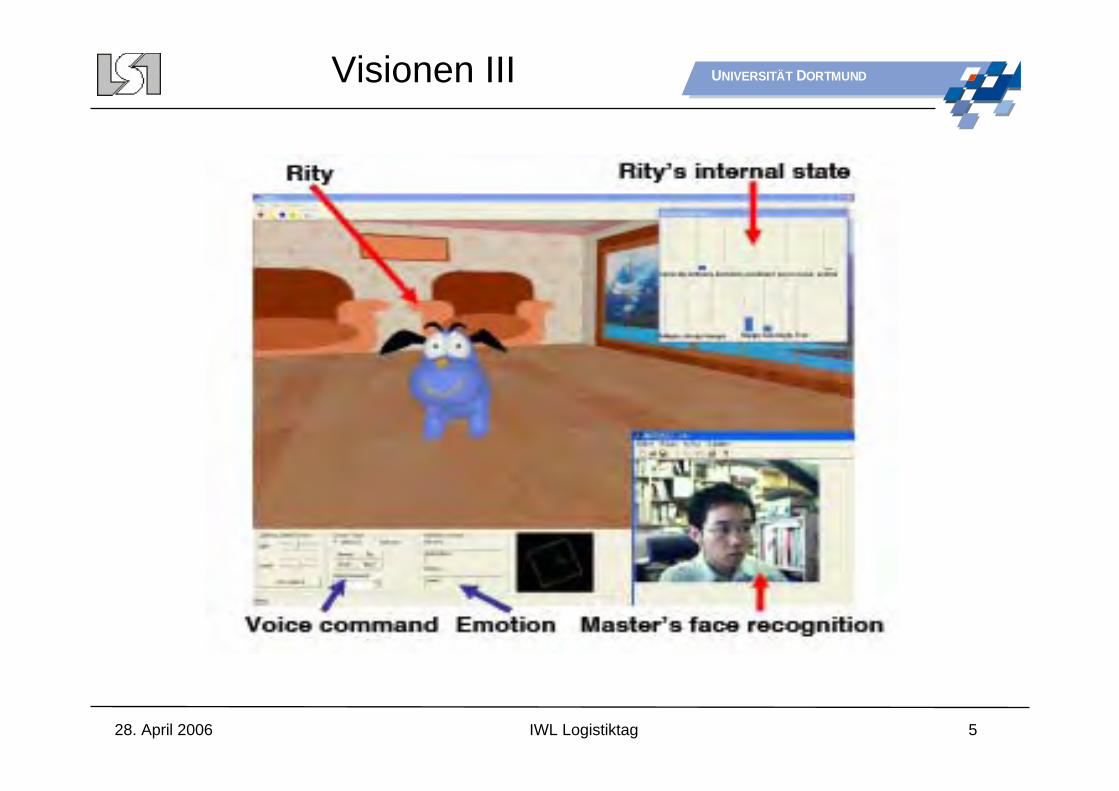
Visionen III
28. April 2006
U DNIVERSITÄT ORTMUND
6IWL Logistiktag
Die Vision IV
„Ich glaube, dass Roboter, deren Intelligenz dermenschlichen ebenbürtig ist, in fünfzig Jahren eine ganz
alltägliche Errungenschaft sein werden.“- Hans Moravec
„And once an intelligent robot exists, it is only a smallstep to a robot species – to an intelligent robot that can
make evolved copies of itself.“- Bill Joy
„Between humans and machines won‘t exist any clear-cut distinctions.“
- Ray Kurzweil
28. April 2006
U DNIVERSITÄT ORTMUND
7IWL Logistiktag
Die Vision V
By mid-21st century, a team of fully
autonomous humanoid robot soccer
players shall win the soccer game,
comply with the official rule of the FIFA,
against the winner of the most recent World Cup.
The RoboCup Federation, 1998
28. April 2006
U DNIVERSITÄT ORTMUND
8IWL Logistiktag
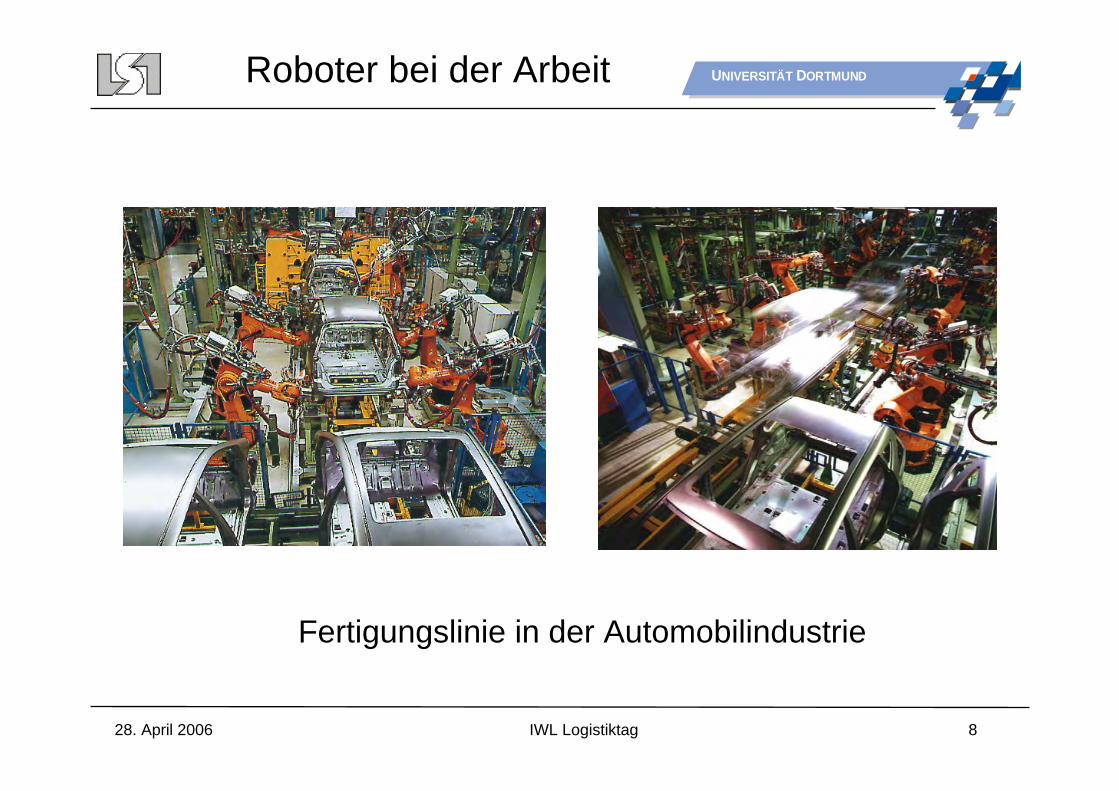
Fertigungslinie in der Automobilindustrie
Roboter bei der Arbeit
28. April 2006
U DNIVERSITÄT ORTMUND
9IWL Logistiktag
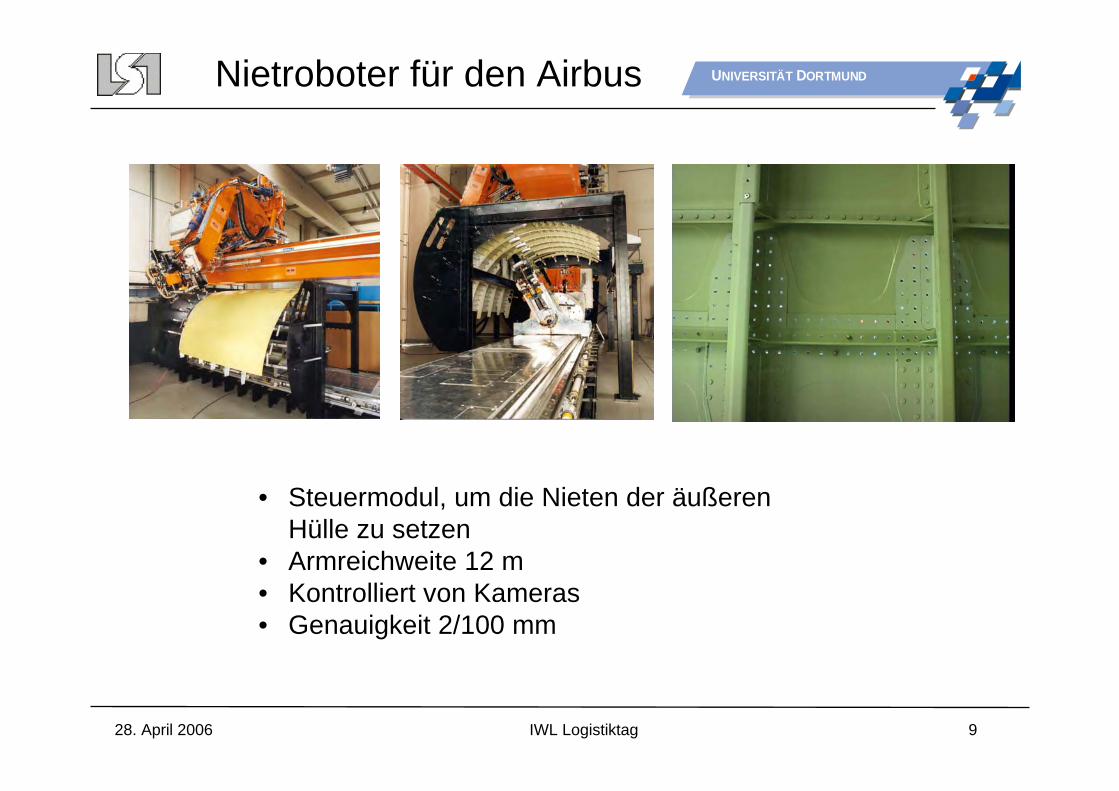
Nietroboter für den Airbus
• Steuermodul, um die Nieten der äußerenHülle zu setzen
• Armreichweite 12 m• Kontrolliert von Kameras• Genauigkeit 2/100 mm
28. April 2006
U DNIVERSITÄT ORTMUND
10IWL Logistiktag
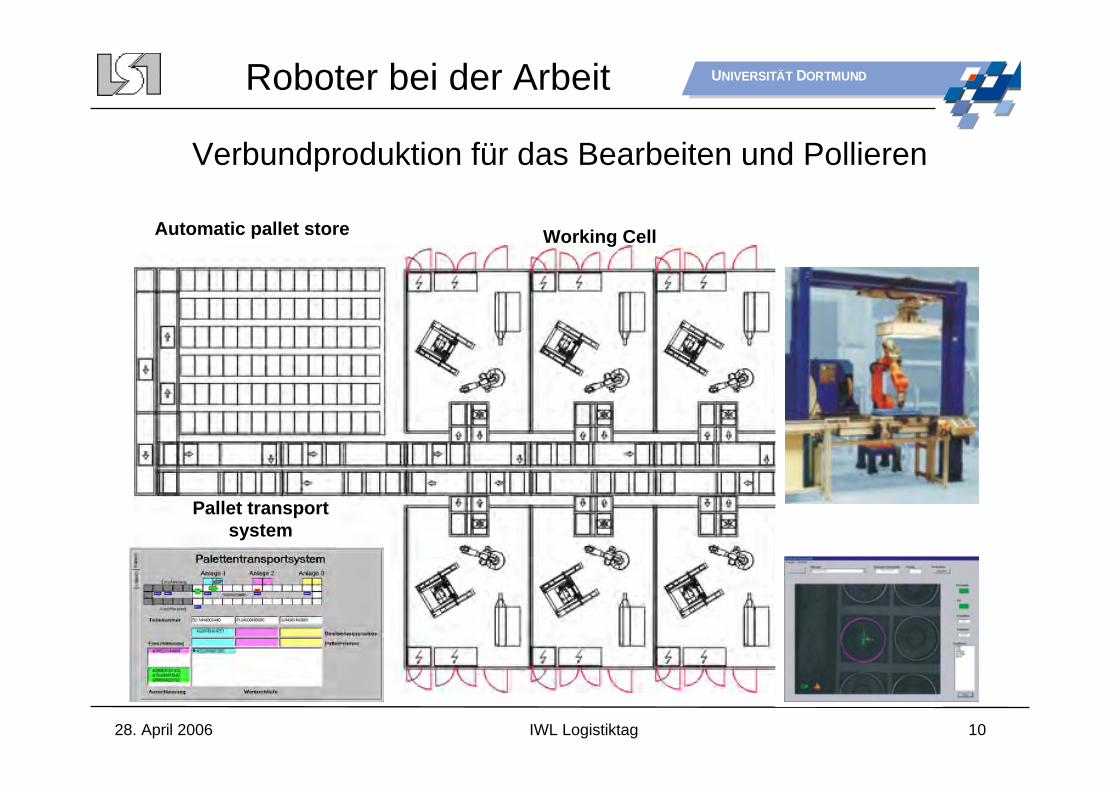
Verbundproduktion für das Bearbeiten und Pollieren
Automatic pallet store Working Cell
Pallet transport system
Roboter bei der Arbeit
28. April 2006
U DNIVERSITÄT ORTMUND
11IWL Logistiktag
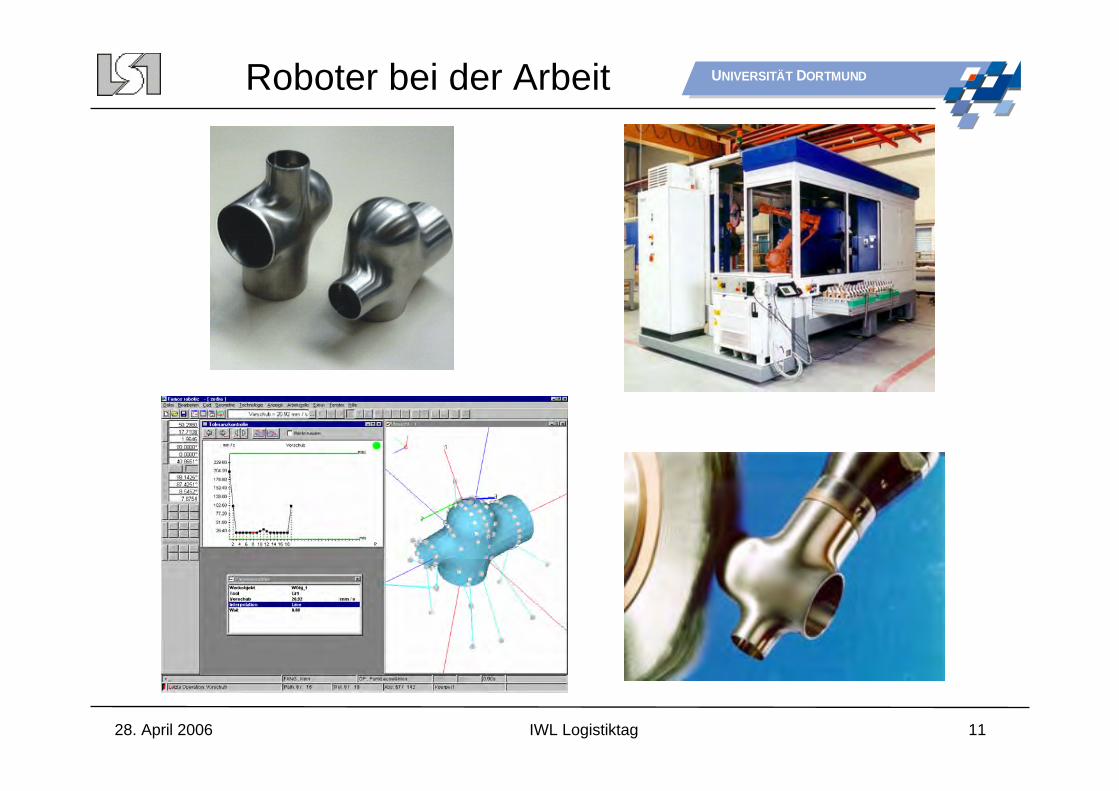
Roboter bei der Arbeit
28. April 2006
U DNIVERSITÄT ORTMUND
12IWL Logistiktag
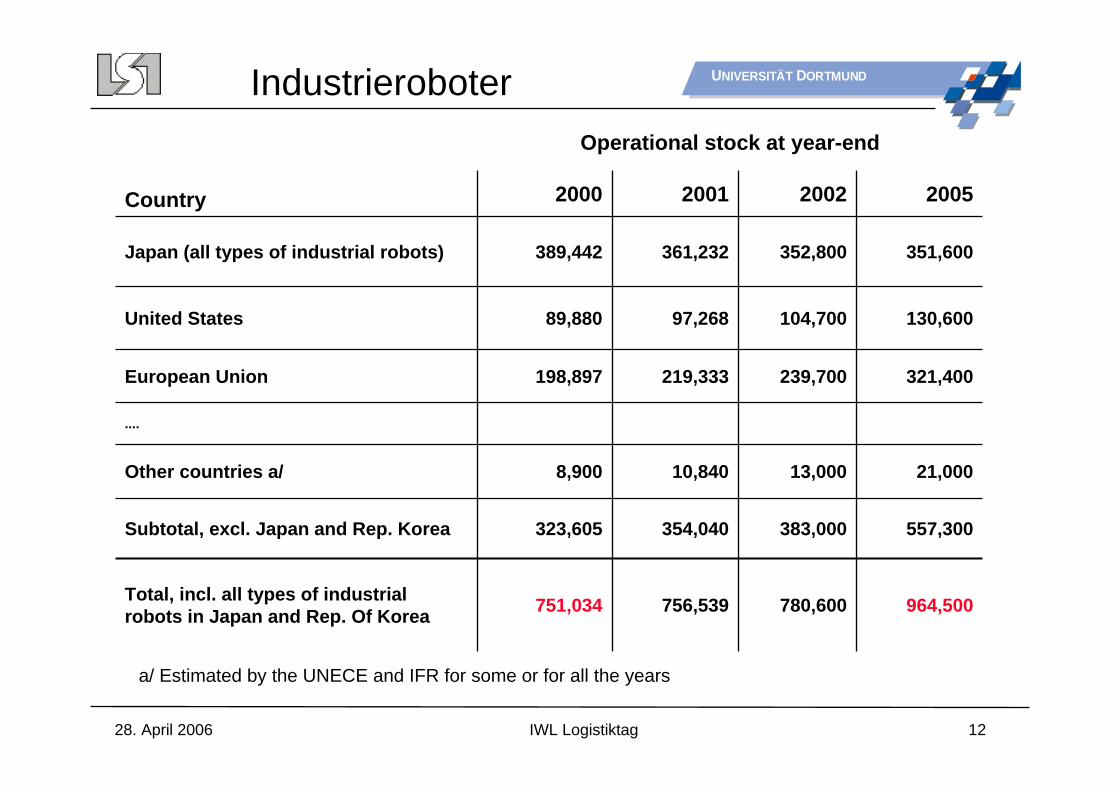
321,400239,700219,333198,897European Union
964,500
557,300
21,000
130,600
351,600
2005
780,600
383,000
13,000
104,700
352,800
2002
756,539
354,040
10,840
97,268
361,232
20012000
751,034Total, incl. all types of industrialrobots in Japan and Rep. Of Korea
323,605Subtotal, excl. Japan and Rep. Korea
8,900Other countries a/
....
89,880United States
389,442Japan (all types of industrial robots)
Operational stock at year-end
Country
Industrieroboter
a/ Estimated by the UNECE and IFR for some or for all the years
28. April 2006
U DNIVERSITÄT ORTMUND
13IWL Logistiktag
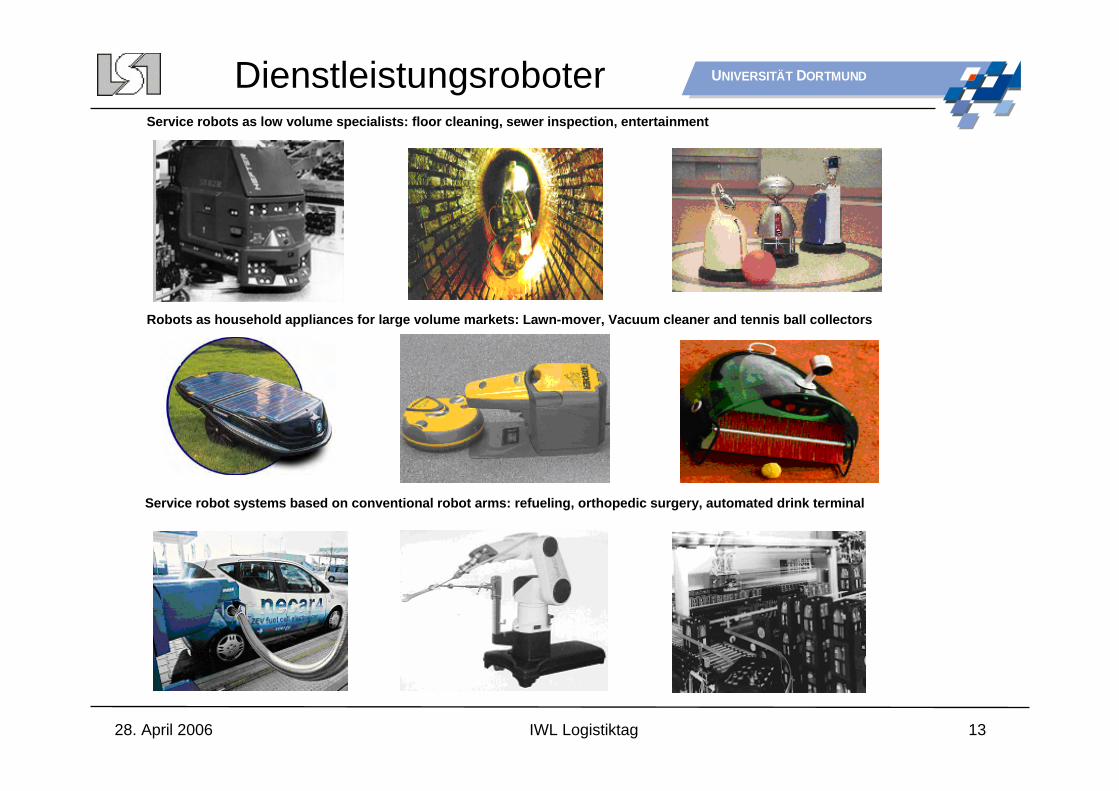
DienstleistungsroboterService robots as low volume specialists: floor cleaning, sewer inspection, entertainment
Robots as household appliances for large volume markets: Lawn-mover, Vacuum cleaner and tennis ball collectors
Service robot systems based on conventional robot arms: refueling, orthopedic surgery, automated drink terminal
28. April 2006
U DNIVERSITÄT ORTMUND
14IWL Logistiktag
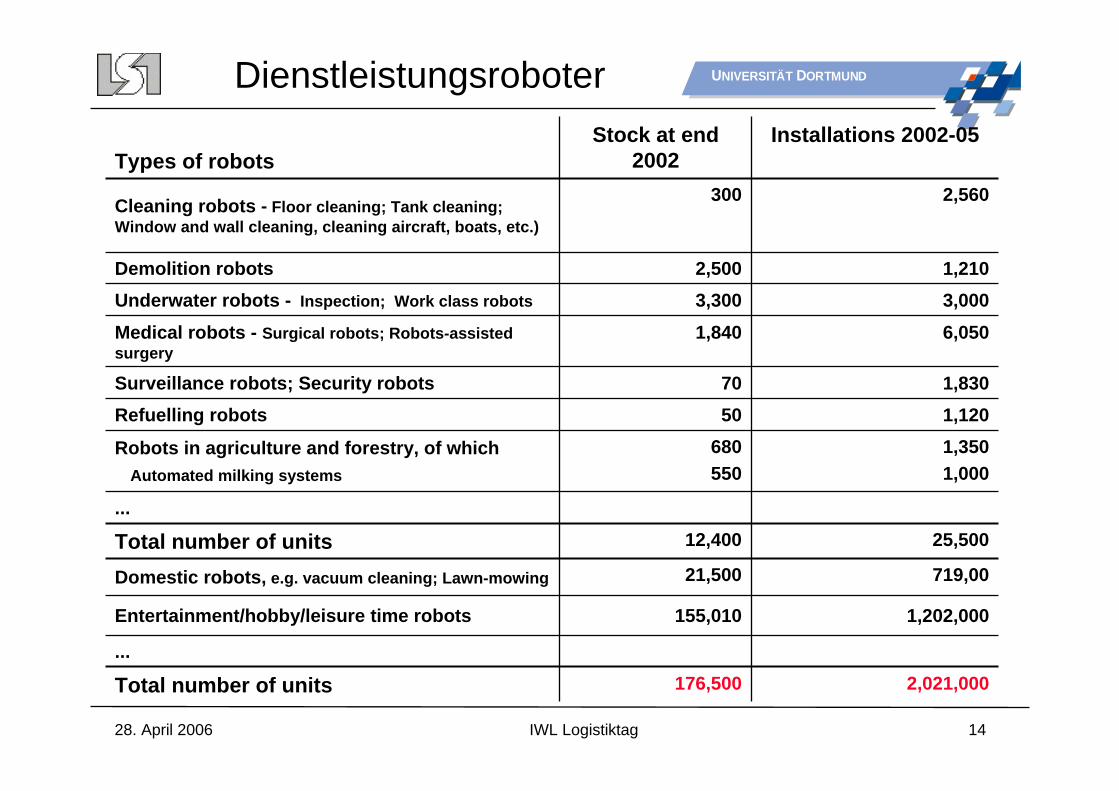
1,3501,000
680550
Robots in agriculture and forestry, of whichAutomated milking systems
...
...
1,12050Refuelling robots1,83070Surveillance robots; Security robots
3,0003,300Underwater robots - Inspection; Work class robots
Installations 2002-05
6,0501,840Medical robots - Surgical robots; Robots-assistedsurgery
2,021,000
1,202,000
719,00
25,500
1,210
2,560
176,500Total number of units
155,010Entertainment/hobby/leisure time robots
21,500Domestic robots, e.g. vacuum cleaning; Lawn-mowing
12,400Total number of units
2,500Demolition robots
300Cleaning robots - Floor cleaning; Tank cleaning; Window and wall cleaning, cleaning aircraft, boats, etc.)
Stock at end 2002Types of robots
Dienstleistungsroboter
28. April 2006
U DNIVERSITÄT ORTMUND
15IWL Logistiktag
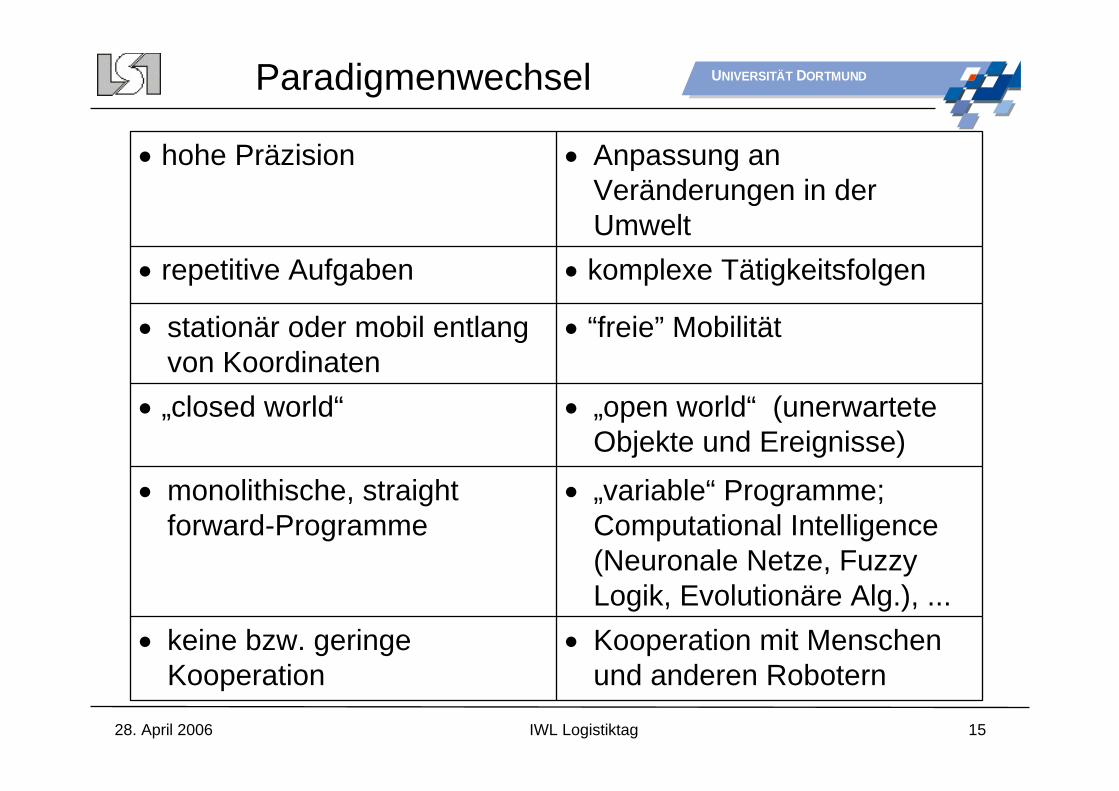
Paradigmenwechsel
• Kooperation mit Menschen und anderen Robotern
• keine bzw. geringe Kooperation
• „variable“ Programme; Computational Intelligence(Neuronale Netze, FuzzyLogik, Evolutionäre Alg.), ...
• monolithische, straight forward-Programme
• „open world“ (unerwartete Objekte und Ereignisse)
• „closed world“
• “freie” Mobilität• stationär oder mobil entlang von Koordinaten
• komplexe Tätigkeitsfolgen• repetitive Aufgaben
• Anpassung an Veränderungen in der Umwelt
• hohe Präzision
28. April 2006
U DNIVERSITÄT ORTMUND
16IWL Logistiktag
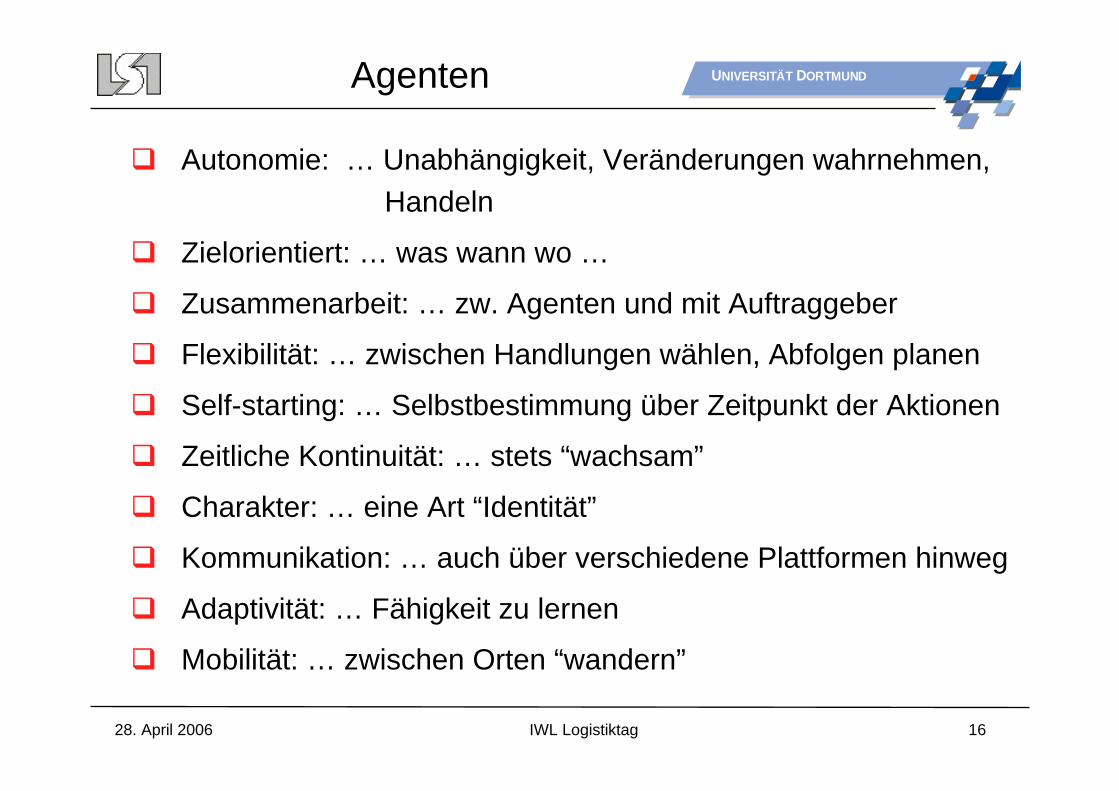
Agenten
Autonomie: … Unabhängigkeit, Veränderungen wahrnehmen, Handeln
Zielorientiert: … was wann wo …
Zusammenarbeit: … zw. Agenten und mit Auftraggeber
Flexibilität: … zwischen Handlungen wählen, Abfolgen planen
Self-starting: … Selbstbestimmung über Zeitpunkt der Aktionen
Zeitliche Kontinuität: … stets “wachsam”
Charakter: … eine Art “Identität”
Kommunikation: … auch über verschiedene Plattformen hinweg
Adaptivität: … Fähigkeit zu lernen
Mobilität: … zwischen Orten “wandern”
28. April 2006
U DNIVERSITÄT ORTMUND
17IWL Logistiktag
NavigationZum “Nest” zurück: Schlussfolgern über räumliche Beziehungen
Drei fundamentale Kompetenzen:
- Selbst-Lokalisation
- Pfadplanung
- Map-Building and –interpretation
Lokalisation: Kompetenz des Agenten, seine eigene Position innerhalb eines Bezugsrahmens zu bestimmen
Pfadplanung: Bestimmung des Weges zwischen der vorhandenen und Zielposition
Map: jede 1:1-Abbildung der realen Welt in eine interne Darstellung
28. April 2006
U DNIVERSITÄT ORTMUND
18IWL Logistiktag
Landmark-basierte Navigation
“Alleinstellungsmerkmale” der Umwelt
Nachbarschaftsbeziehungen zwischen bestimmten
Landmarks
Szenen-Verstehen (Was ist eine “Kirche”?)
Voraussetzung z. B.:- Möglichst weite Sichtbarkeit- Erkennbar unter verschiedenen Lichtbedingungen, Betrachtungswinkeln ….
- entweder stationär oder bekannte Bewegungsbahn
Schlußfolgerung: Multiple Info-quellen => zuverlässigeren und robusteren “Erkenntnissen”
28. April 2006
U DNIVERSITÄT ORTMUND
19IWL Logistiktag
Sensoren
Sensitivität - Verhältnis zw. Output- und Input-Veränderung
Linearität – Maß für Konstanz des I/O-Verhältnisses
Messbereich - Unterschied zw. Min und Max
Antwortzeit – Zeit zw. Umsetzung des Inputs zum sichtbaren Output
Genauigkeit - tatsächliche u. gemessene Werte
Wiederholbarkeit – Unterschiede bei wiederholten Messungen
Auflösung – kleinste beobachtbare Veränderungen
Messen physikalische Eigenschaften der Umwelt: Temperatur, Helligkeit, Widerstand bei Berührung, Gewicht, Größe, Umfang etc.
28. April 2006
U DNIVERSITÄT ORTMUND
20IWL Logistiktag
“If we are able to explain and predict its behavior or if there seems to be little underlying plan, we have little temptation to imagine intelligence.” Alan Turing, 1947
oder
We consider ourselves intelligent, therefore any machine that does what we do has to be considered “intelligent” too.
Intelligenz ist “what humans do, pretty much all the time” –R. Brooks
“The question of intelligence is the last great terrestrial frontier of science.” – Jeff Hawkins
Intelligenz
28. April 2006
U DNIVERSITÄT ORTMUND
21IWL Logistiktag
Intelligenz
Offensichtlich leichte Aufgaben im Zentrum menschlicher Intelligenz
Fokus auf den Prozess von Adaptation und Lernen in der realen Welt – “biologische” Typen von Intelligenz (Bienen, Ameisen, …)
„Embodiment“: Verstehen simpler Bauprinzipien und Materialien: Masse, Steifheit, Elastizität, Viskosität …(dynamic walker, Muskeln)
Intelligenz entsteht durch die Interaktion des Agenten mit der realen Welt
28. April 2006
U DNIVERSITÄT ORTMUND
22IWL Logistiktag
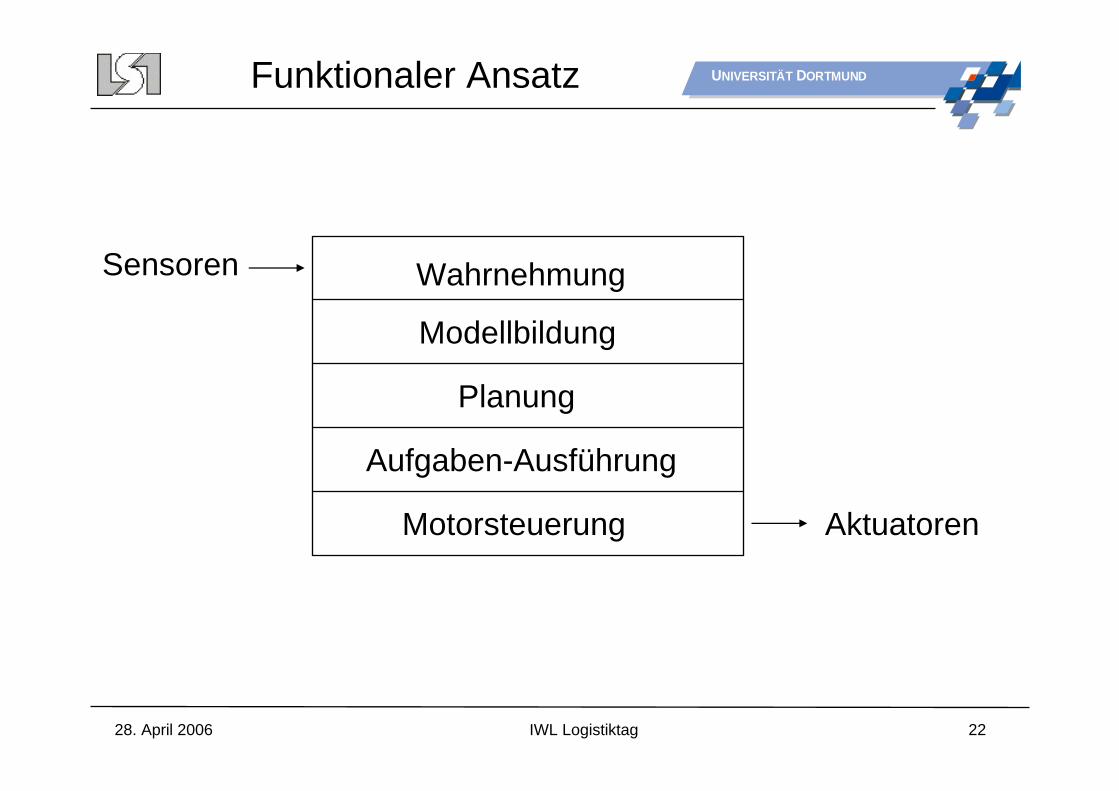
Funktionaler Ansatz
Wahrnehmung
Modellbildung
Aufgaben-Ausführung
Planung
Motorsteuerung
Sensoren
Aktuatoren
28. April 2006
U DNIVERSITÄT ORTMUND
23IWL Logistiktag
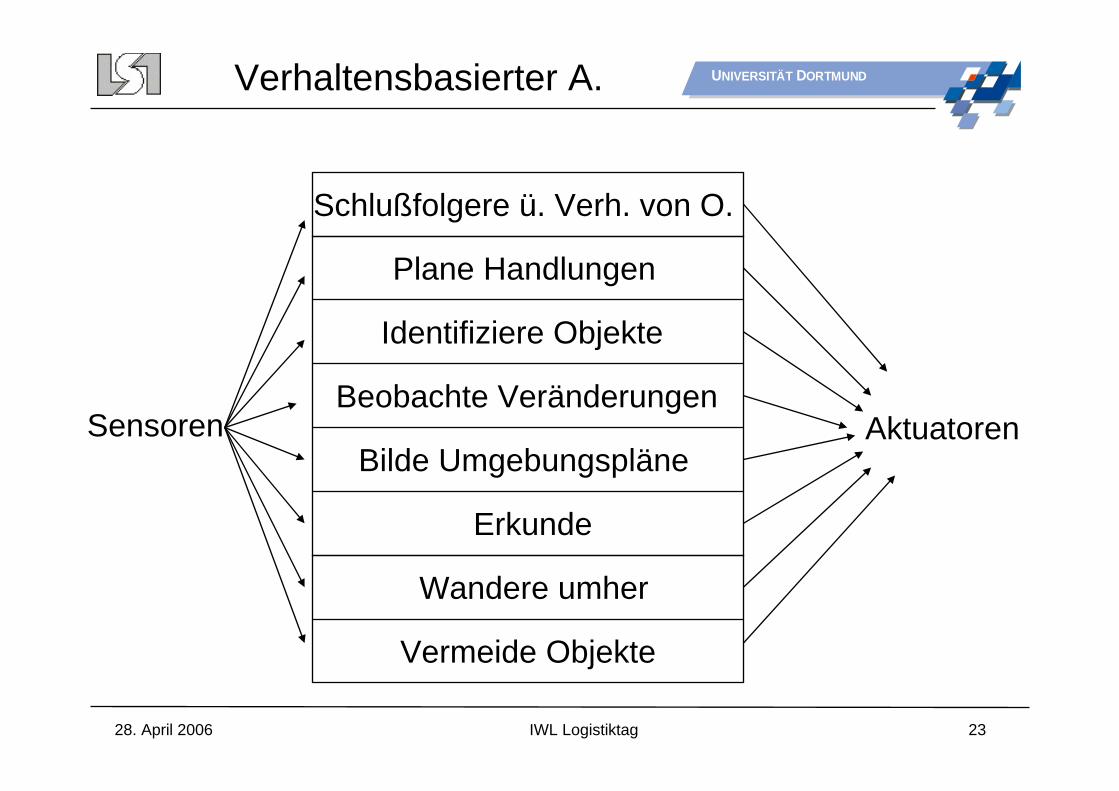
Verhaltensbasierter A.
Plane Handlungen
Identifiziere Objekte
Bilde Umgebungspläne
Beobachte Veränderungen
Erkunde
Sensoren Aktuatoren
Vermeide Objekte
Wandere umher
Schlußfolgere ü. Verh. von O.
28. April 2006
U DNIVERSITÄT ORTMUND
24IWL Logistiktag
Humanoide Roboter
28. April 2006
U DNIVERSITÄT ORTMUND
25IWL Logistiktag
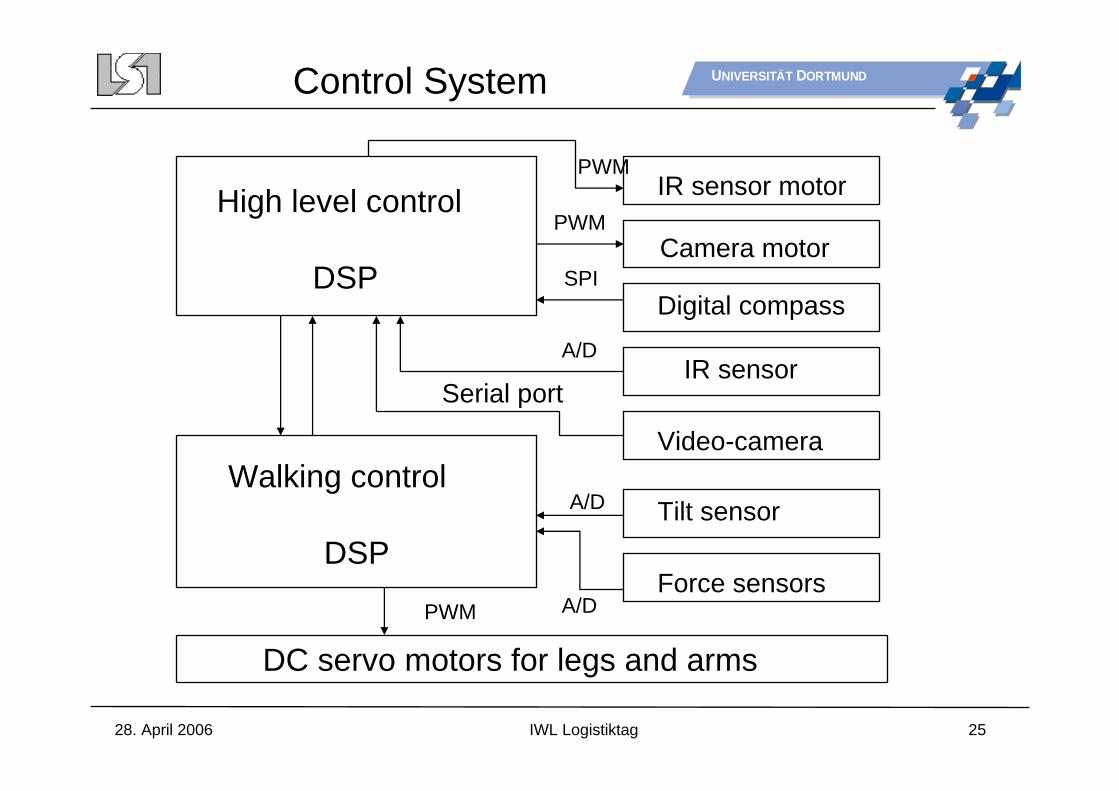
Control System
IR sensor motor
Camera motor
Digital compass
Video-camera
IR sensor
Tilt sensor
Force sensors
High level control
DSP
Walking control
DSP
PWM
Serial port
PWM
PWM
SPI
A/D
A/D
A/D
DC servo motors for legs and arms
28. April 2006
U DNIVERSITÄT ORTMUND
26IWL Logistiktag
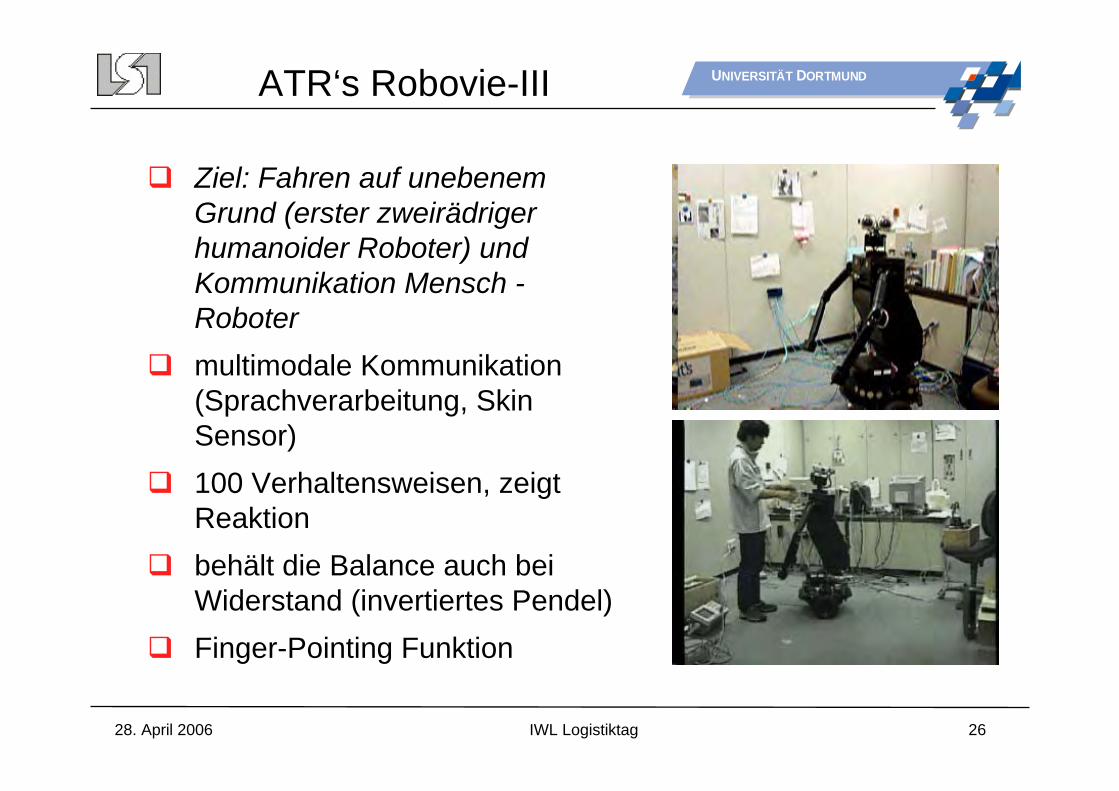
ATR‘s Robovie-III
Ziel: Fahren auf unebenem Grund (erster zweirädriger humanoider Roboter) und Kommunikation Mensch -Robotermultimodale Kommunikation (Sprachverarbeitung, Skin Sensor)100 Verhaltensweisen, zeigt Reaktionbehält die Balance auch bei Widerstand (invertiertes Pendel)Finger-Pointing Funktion
28. April 2006
U DNIVERSITÄT ORTMUND
27IWL Logistiktag
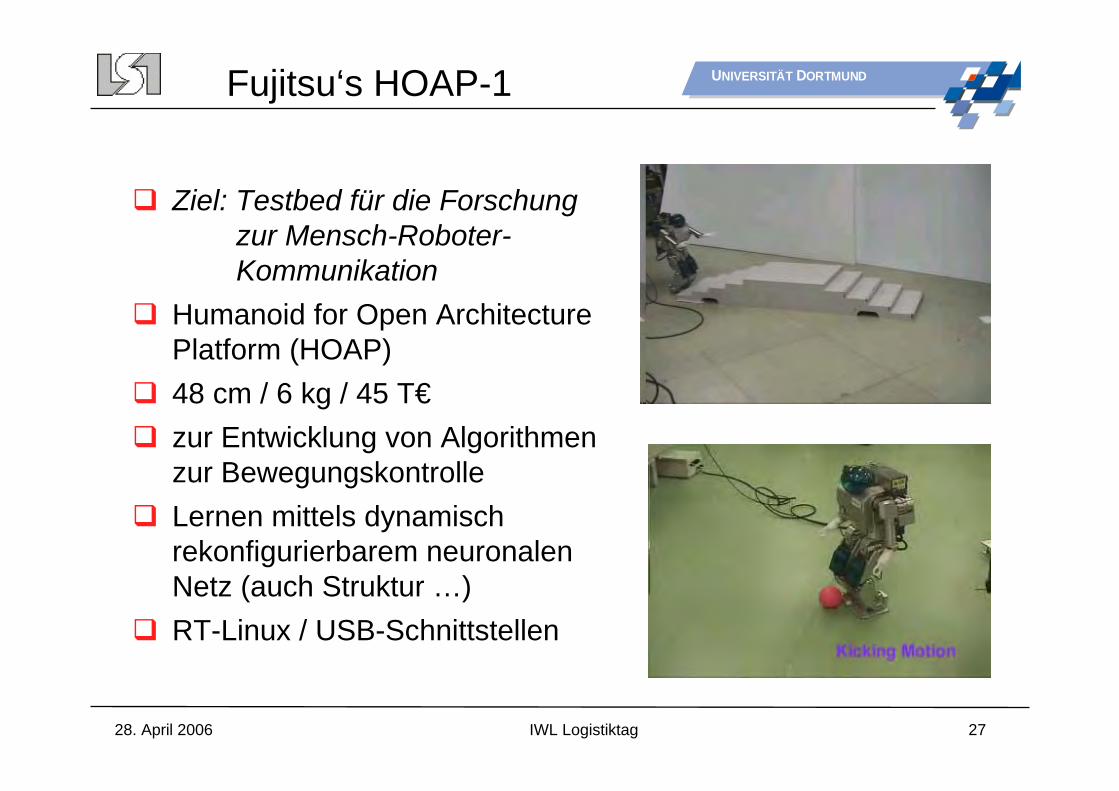
Fujitsu‘s HOAP-1
Ziel: Testbed für die Forschung zur Mensch-Roboter-Kommunikation
Humanoid for Open ArchitecturePlatform (HOAP)48 cm / 6 kg / 45 T€zur Entwicklung von Algorithmen zur BewegungskontrolleLernen mittels dynamisch rekonfigurierbarem neuronalen Netz (auch Struktur …)RT-Linux / USB-Schnittstellen
28. April 2006
U DNIVERSITÄT ORTMUND
28IWL Logistiktag
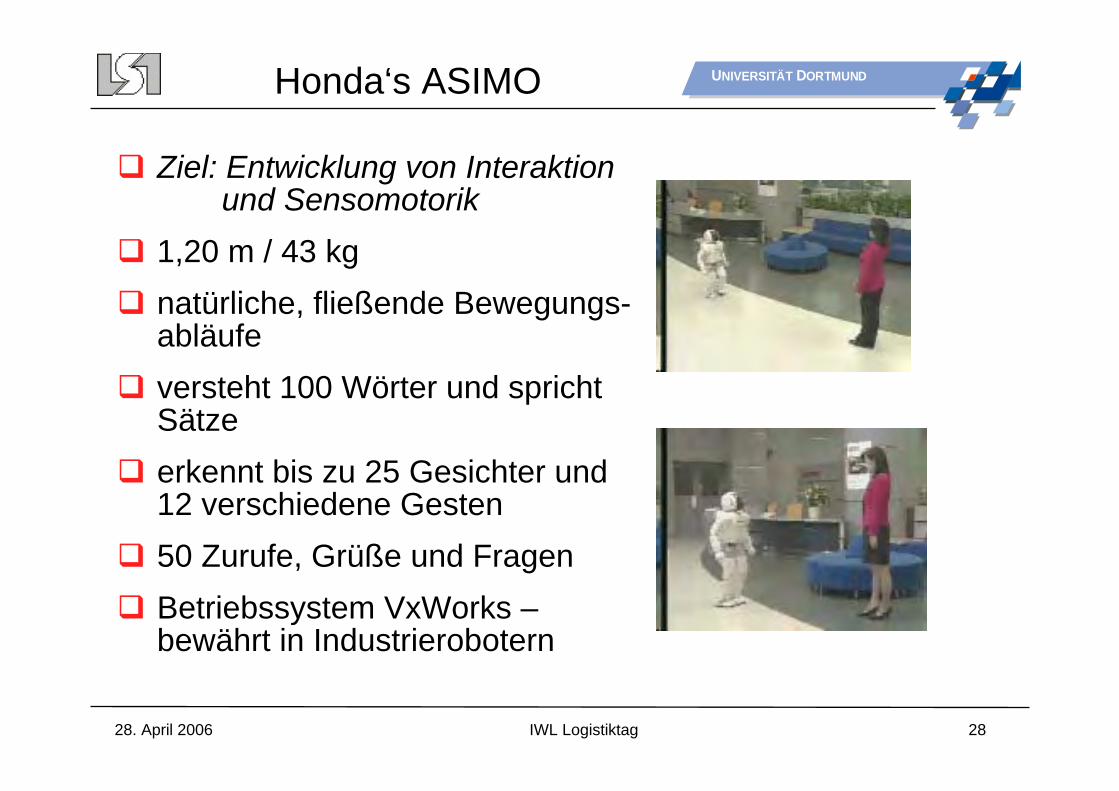
Honda‘s ASIMO
Ziel: Entwicklung von Interaktion und Sensomotorik
1,20 m / 43 kgnatürliche, fließende Bewegungs-abläufeversteht 100 Wörter und spricht Sätzeerkennt bis zu 25 Gesichter und 12 verschiedene Gesten50 Zurufe, Grüße und FragenBetriebssystem VxWorks –bewährt in Industrierobotern
28. April 2006
U DNIVERSITÄT ORTMUND
29IWL Logistiktag
Sony‘s QUIROZiel: Sony’s technologische Führerschaft demonstrieren58 cm high / 7 kg1.000 versch. Bewerbungen, Tanzen, Balance, FußballSprachverarbeitung >20.000 Worte, 200 programmierte PhrasenLangzeit Gedächtnis, nachhaltigere Kommunikation mit Menschen2 CCD Farbkameras für Bildverarbeitung (Gesichtererkennung)Open-R Architectur (AIBO)
28. April 2006
U DNIVERSITÄT ORTMUND
30IWL Logistiktag
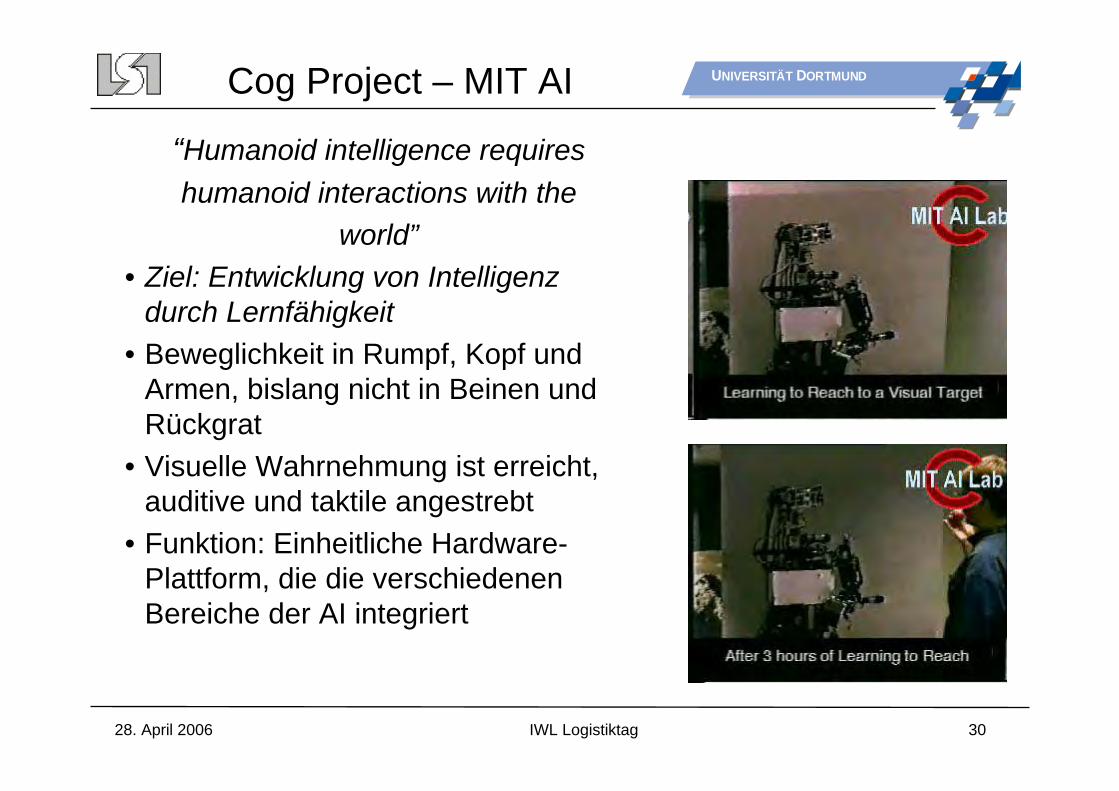
Cog Project – MIT AI
“Humanoid intelligence requireshumanoid interactions with the
world”• Ziel: Entwicklung von Intelligenz
durch Lernfähigkeit• Beweglichkeit in Rumpf, Kopf und
Armen, bislang nicht in Beinen und Rückgrat
• Visuelle Wahrnehmung ist erreicht, auditive und taktile angestrebt
• Funktion: Einheitliche Hardware-Plattform, die die verschiedenen Bereiche der AI integriert
28. April 2006
U DNIVERSITÄT ORTMUND
31IWL Logistiktag
Kismet – MIT AI Lab
“Humanoid intelligence requires humanoid interactions with the world”
• Ziel: Entwicklung von Intelligenz durch Lernfähigkeit
• Beweglichkeit in Rumpf, Kopf und Armen, bislang nicht in Beinen und Rückgrat
• Visuelle Wahrnehmung ist erreicht, auditive und taktile angestrebt
• Funktion: Einheitliche Hardware-Plattform, die die verschiedenen Bereiche der AI integriert
28. April 2006
U DNIVERSITÄT ORTMUND
32IWL Logistiktag
Edutainment Robotics
„We are creating a new industry out of electronic dogs and cats, and toys that can serve both as a technology playground and, potentially, as a platform for consumerelectronics.
Entertainment Robots offer a proving ground whereengineers in software, computers, sensors, communication– all things electrical and mechanical – can test, developand apply their latest technology!“
- Toshi Doi, Vice President Sony Corp.
28. April 2006
U DNIVERSITÄT ORTMUND
33IWL Logistiktag
NEC PaPeRo
Ziel: Entwicklung von Interaktion und Sensomotorik385 mm / 5 kgnatürliche, fließende Bewegungsabläufeversteht 100 Wörter und spricht Sätzeerkennt bis zu 25 Gesichter und 12 verschiedene Gesten50 Zurufe, Grüße und FragenBetriebssystem VxWorks – bewährt in Industrierobotern
28. April 2006
U DNIVERSITÄT ORTMUND
34IWL Logistiktag
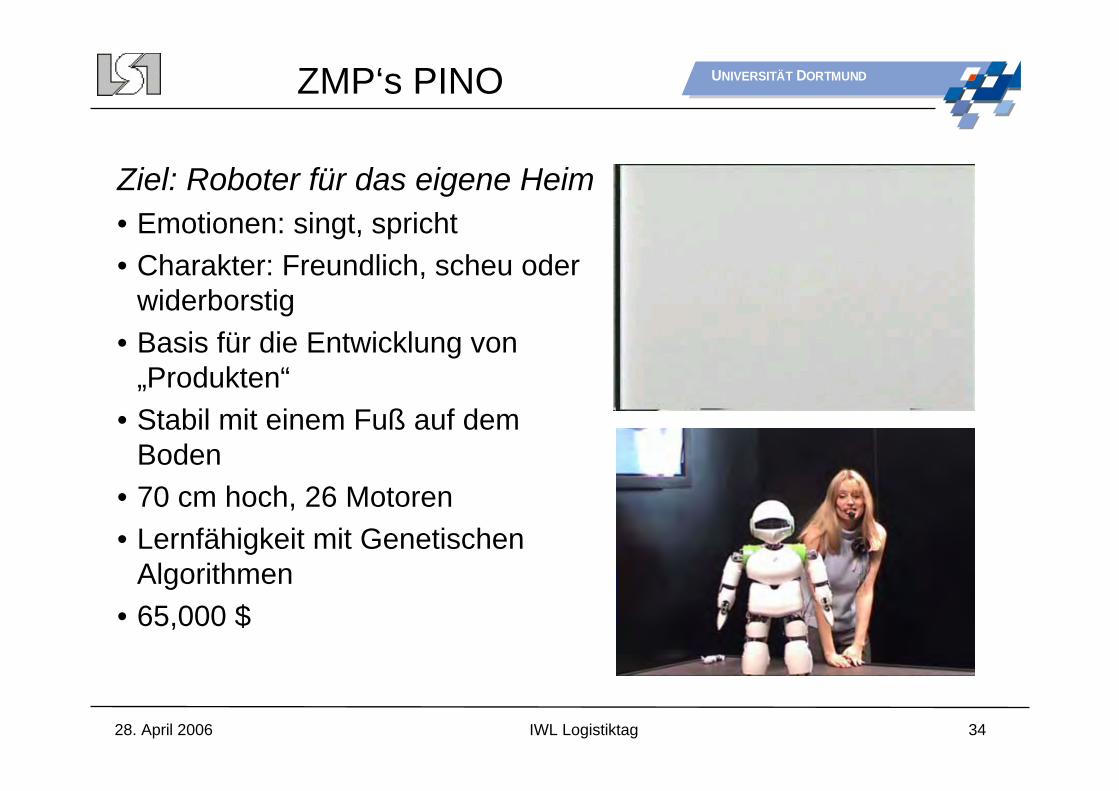
ZMP‘s PINO
Ziel: Roboter für das eigene Heim• Emotionen: singt, spricht• Charakter: Freundlich, scheu oder
widerborstig• Basis für die Entwicklung von
„Produkten“• Stabil mit einem Fuß auf dem
Boden• 70 cm hoch, 26 Motoren• Lernfähigkeit mit Genetischen
Algorithmen• 65,000 $

28. April 2006
U DNIVERSITÄT ORTMUND
35IWL Logistiktag
Fitness
Finesse
Team Geist
Genialer Geistesblitz
Taktische Disziplin
Kreative Flexibilität
Faszination Fußball
www.fira.net - www.robocup.org
28. April 2006
U DNIVERSITÄT ORTMUND
36IWL Logistiktag
selbständige Entscheidungen, auch bei unscharfen oder unvollständigen Infos (Kontrollautonomie)
effiziente Kommunikation (Kommunikationskompetenz)
Teamfähigkeit (Kooperation)
geplantes Verhalten über längere Zeit (Planungskompetenz)
schnelle Reaktion auf unerwartete Veränderungen der Umwelt (Adaptionsfähigkeit)
lernen aus Erfahrungen und Anpassungsfähigkeit (Lern- und Generalisierungsfähigkeit)
Intelligente Software für ...
28. April 2006
U DNIVERSITÄT ORTMUND
37IWL Logistiktag
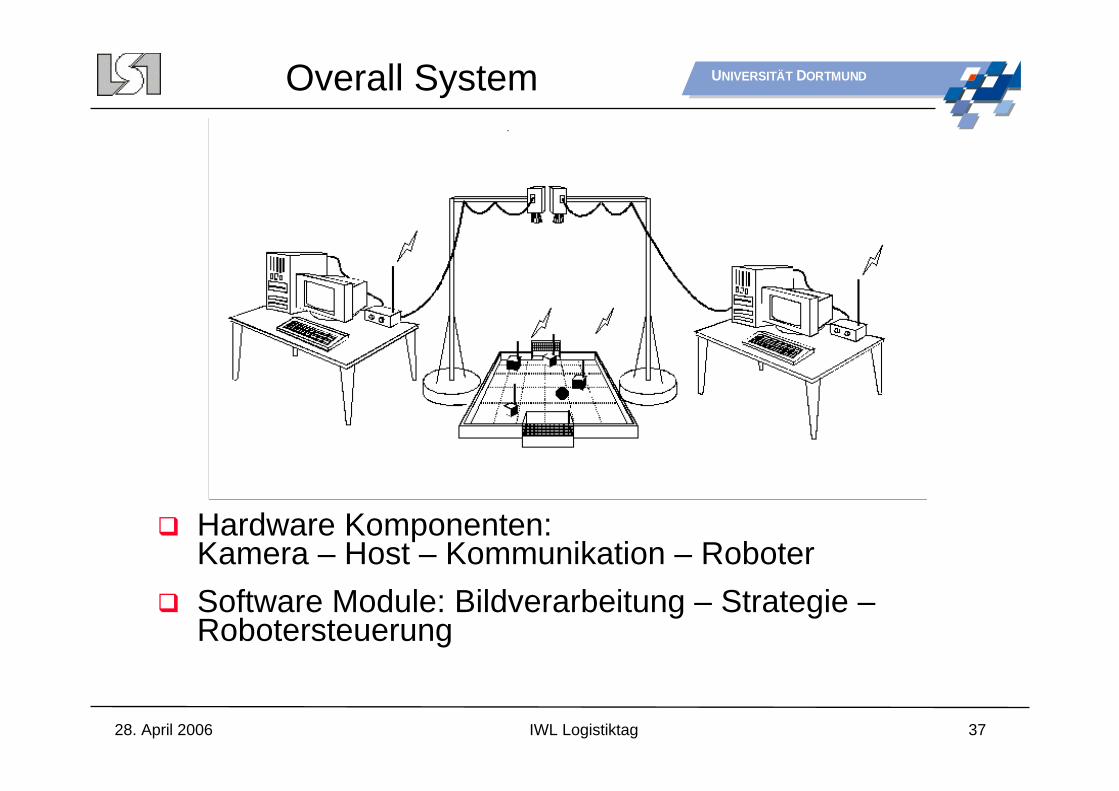
Overall System
Hardware Komponenten: Kamera – Host – Kommunikation – RoboterSoftware Module: Bildverarbeitung – Strategie –Robotersteuerung
28. April 2006
U DNIVERSITÄT ORTMUND
38IWL Logistiktag
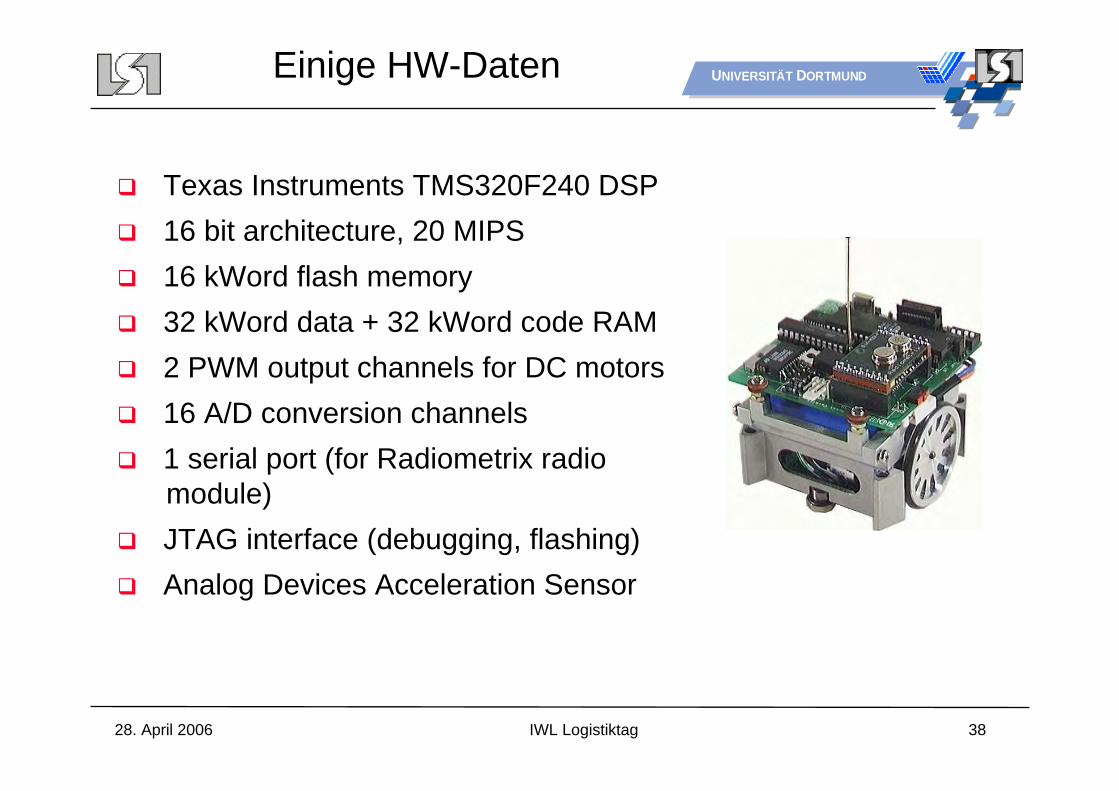
Einige HW-Daten
Texas Instruments TMS320F240 DSP16 bit architecture, 20 MIPS16 kWord flash memory32 kWord data + 32 kWord code RAM2 PWM output channels for DC motors16 A/D conversion channels1 serial port (for Radiometrix radio module)JTAG interface (debugging, flashing)Analog Devices Acceleration Sensor:
ADXL202 (x: 2 g, y: 2 g)
28. April 2006
U DNIVERSITÄT ORTMUND
39IWL Logistiktag
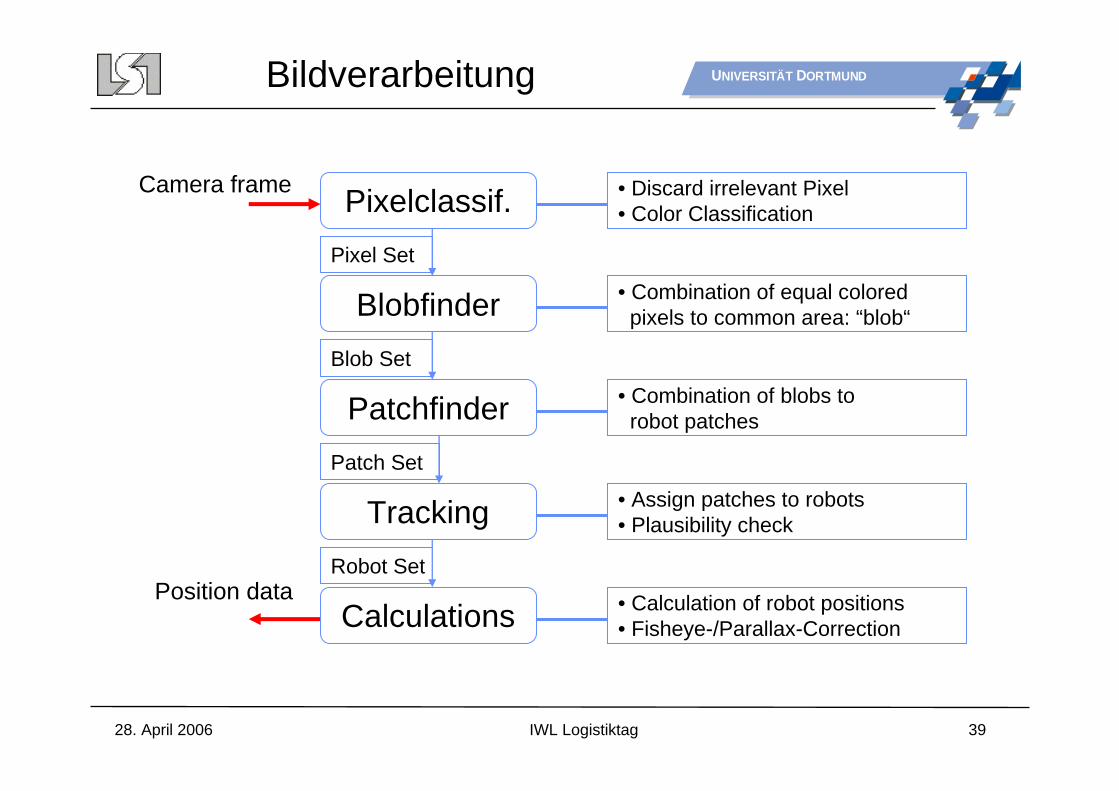
Bildverarbeitung
Blob Set
Patch Set
Camera frame • Discard irrelevant Pixel• Color ClassificationPixelclassif.
Pixel Set
• Combination of equal coloredpixels to common area: “blob“Blobfinder
Position data
• Combination of blobs torobot patchesPatchfinder
• Assign patches to robots• Plausibility checkTracking
• Calculation of robot positions• Fisheye-/Parallax-CorrectionCalculations
Robot Set
28. April 2006
U DNIVERSITÄT ORTMUND
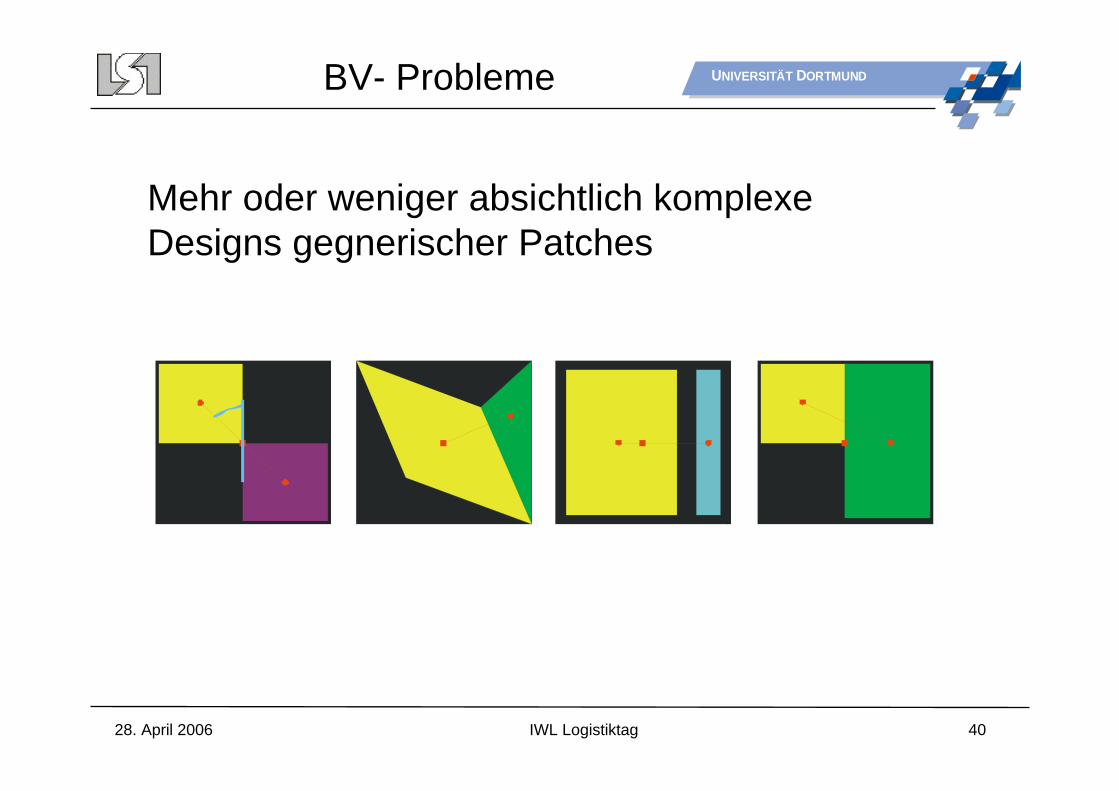
40IWL Logistiktag
Mehr oder weniger absichtlich komplexe Designs gegnerischer Patches
BV- Probleme
28. April 2006
U DNIVERSITÄT ORTMUND
41IWL Logistiktag
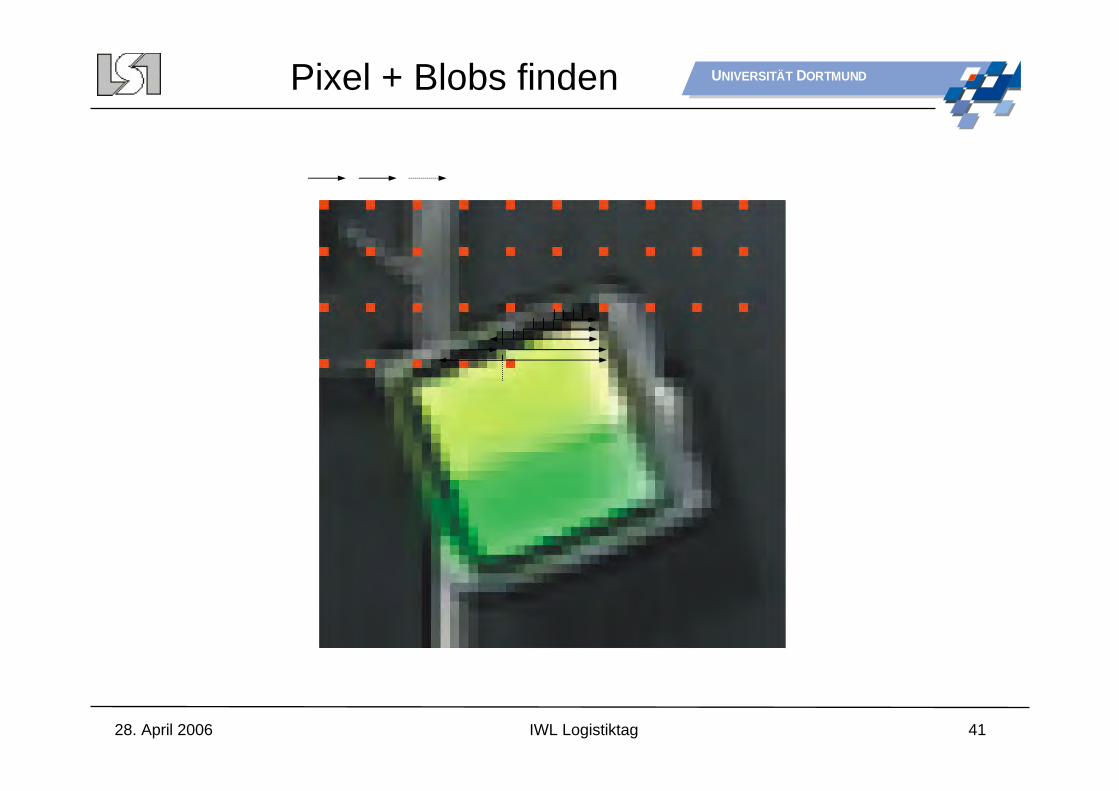
Pixel + Blobs finden
28. April 2006
U DNIVERSITÄT ORTMUND
42IWL Logistiktag
BV-Probleme
Dummy1
28. April 2006
U DNIVERSITÄT ORTMUND
43IWL Logistiktag
BV-Probleme
Dummy1
Dummy2
28. April 2006
U DNIVERSITÄT ORTMUND
44IWL Logistiktag
Problems
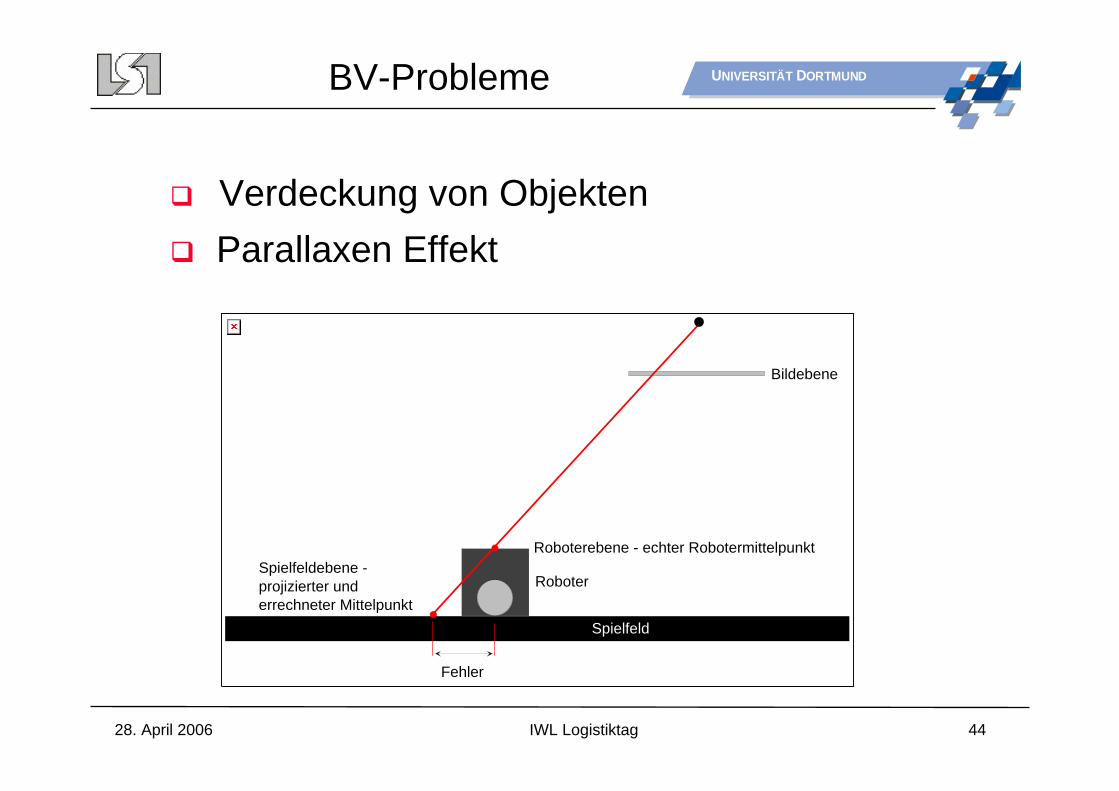
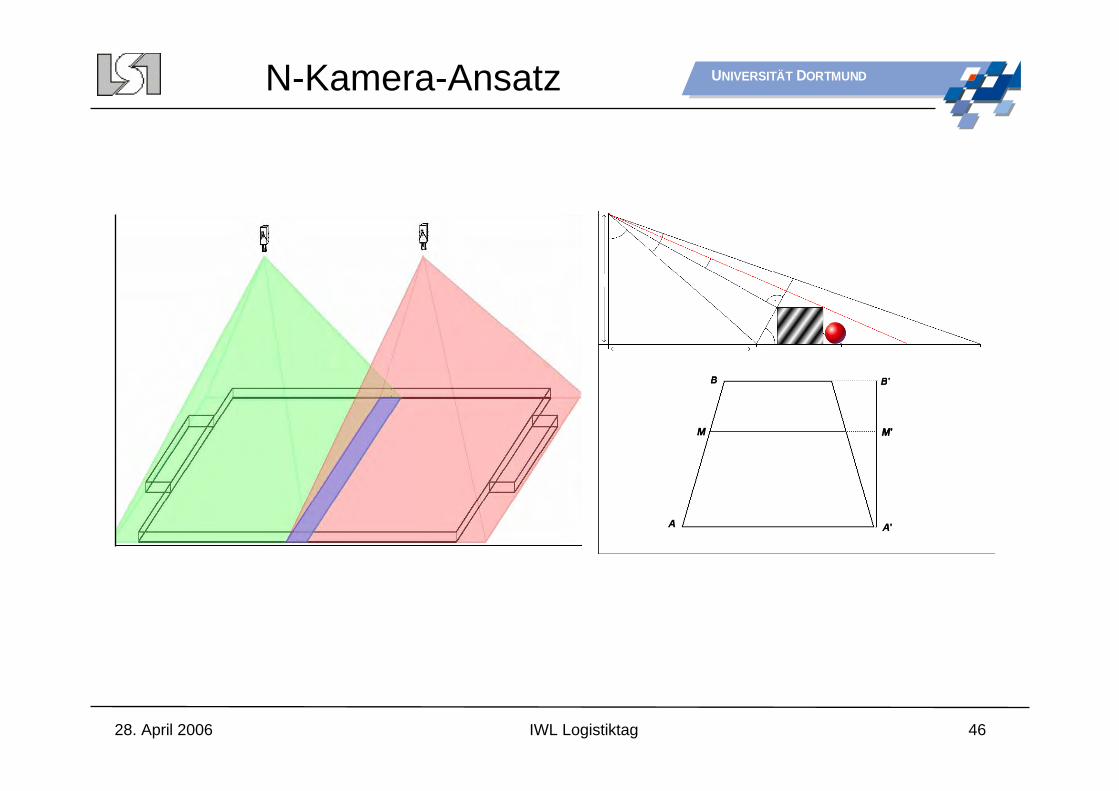
Verdeckung von ObjektenParallaxen Effekt
Bildebene
Roboter
Roboterebene - echter RobotermittelpunktSpielfeldebene -projizierter underrechneter Mittelpunkt
Spielfeld
Fehler
BV-Probleme
28. April 2006
U DNIVERSITÄT ORTMUND
45IWL Logistiktag
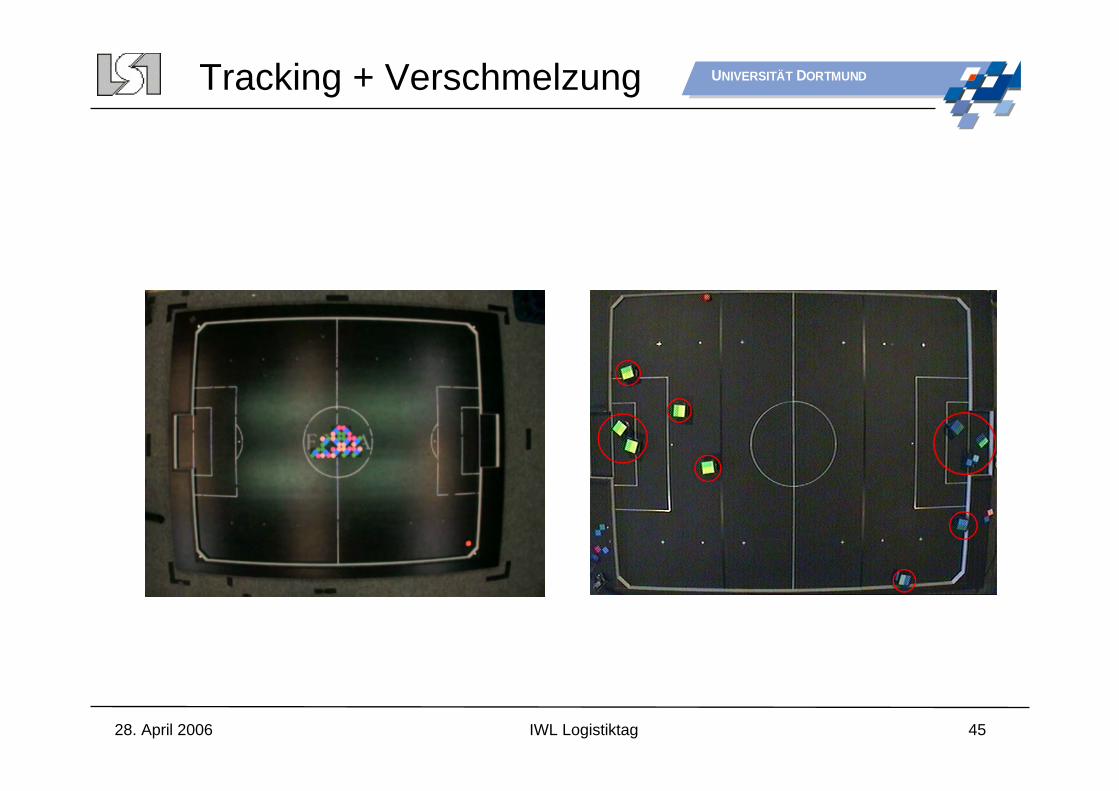
Tracking + Verschmelzung
28. April 2006
U DNIVERSITÄT ORTMUND
46IWL Logistiktag
N-Kamera-Ansatz
28. April 2006
U DNIVERSITÄT ORTMUND
47IWL Logistiktag
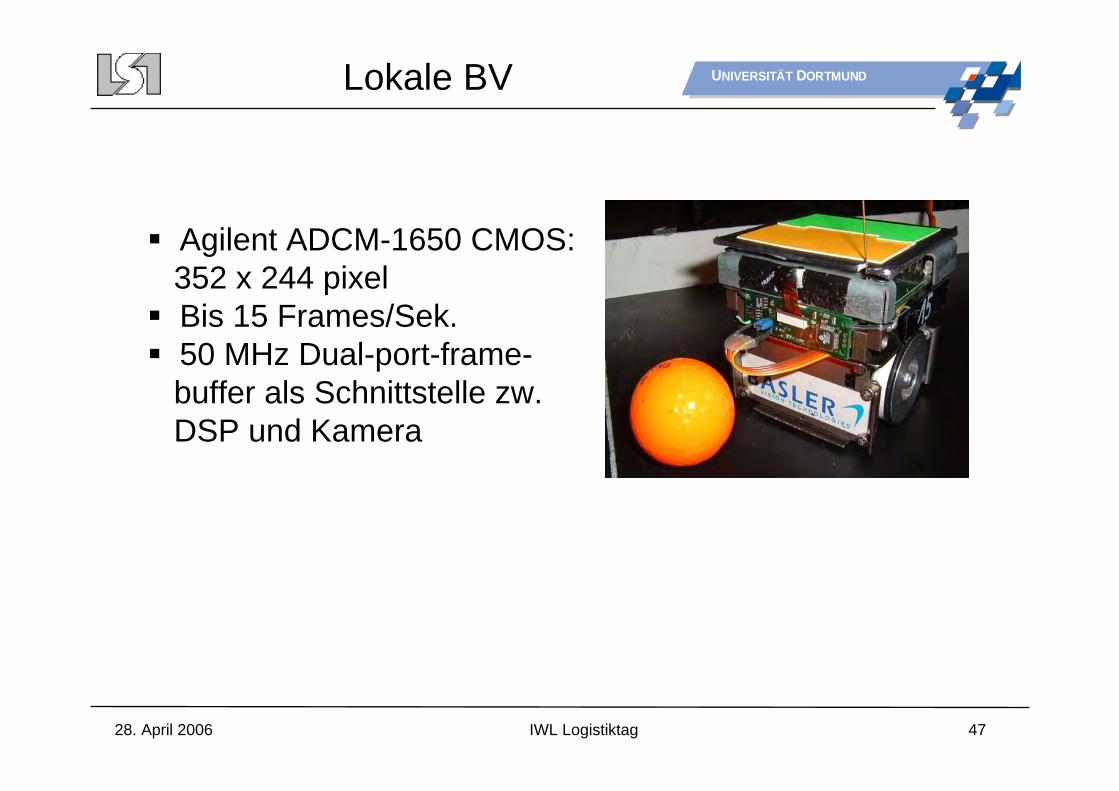
Lokale BV
Agilent ADCM-1650 CMOS:352 x 244 pixelBis 15 Frames/Sek.50 MHz Dual-port-frame-buffer als Schnittstelle zw. DSP und Kamera
28. April 2006
U DNIVERSITÄT ORTMUND
48IWL Logistiktag
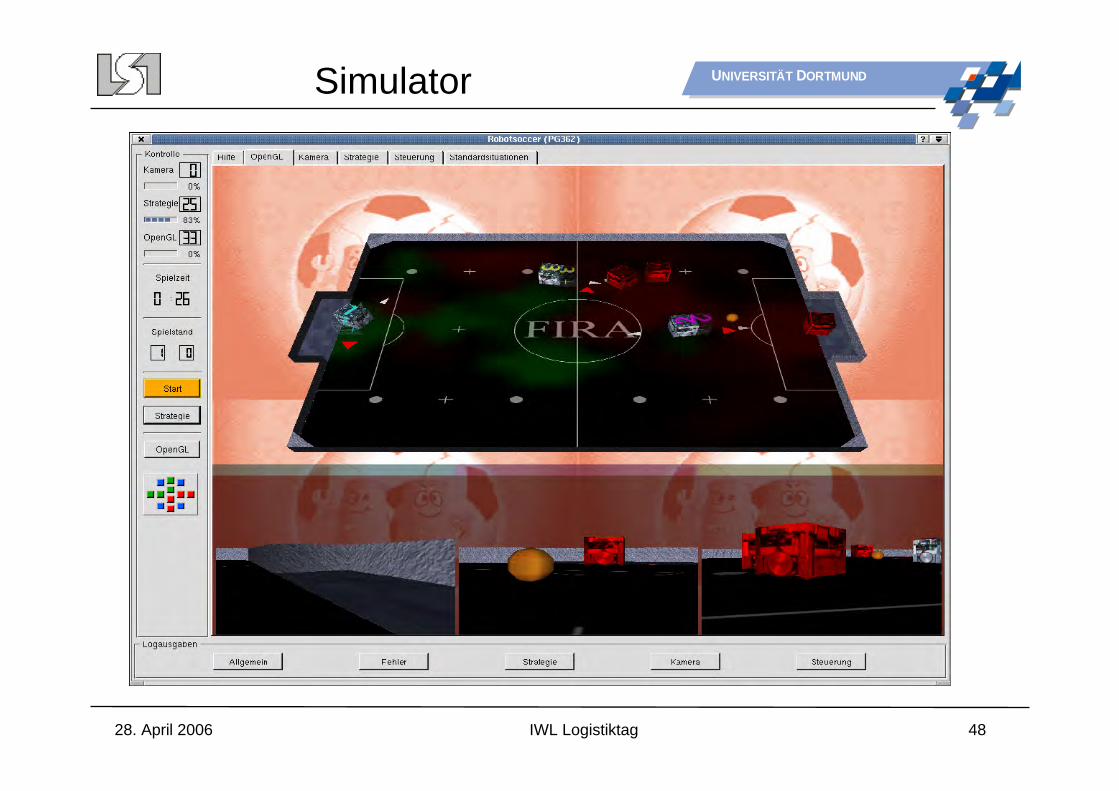
Simulator
28. April 2006
U DNIVERSITÄT ORTMUND
49IWL Logistiktag
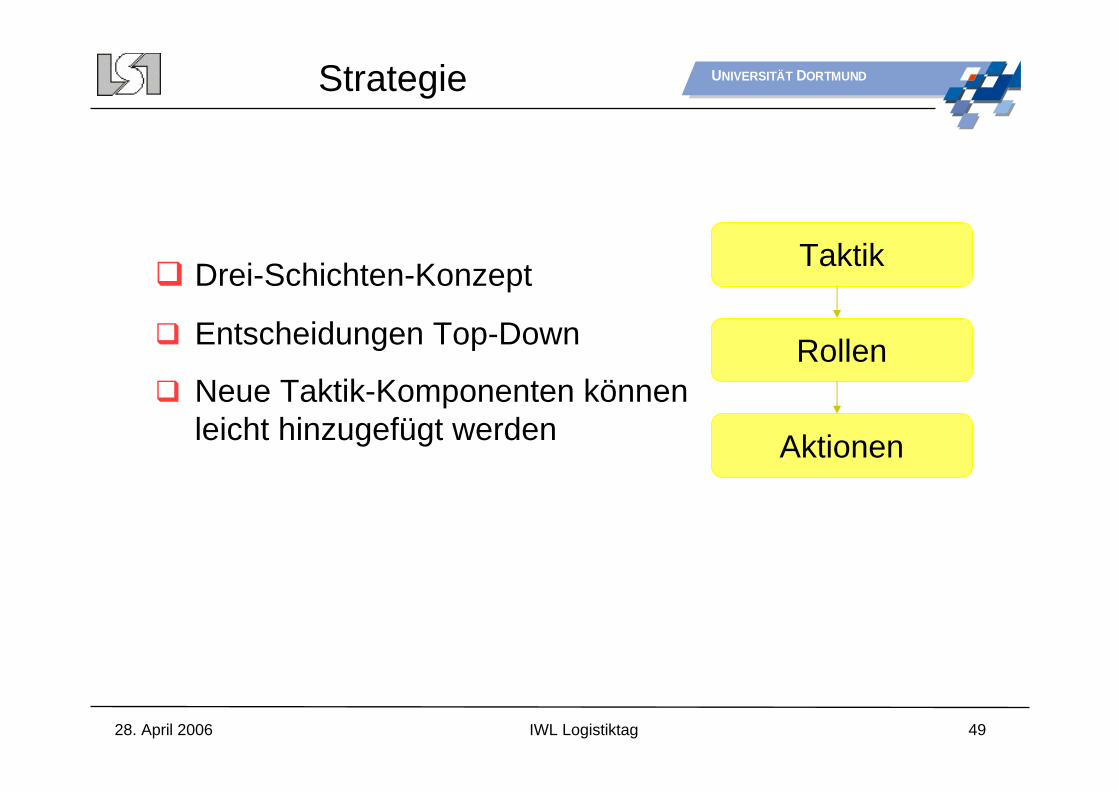
Strategie
Taktik
Rollen
Aktionen
Drei-Schichten-Konzept
Entscheidungen Top-Down
Neue Taktik-Komponenten können leicht hinzugefügt werden
28. April 2006
U DNIVERSITÄT ORTMUND
50IWL Logistiktag
Strategie
actual situation
Tactic1
Tactic2
Tacticn
Maximizer
...
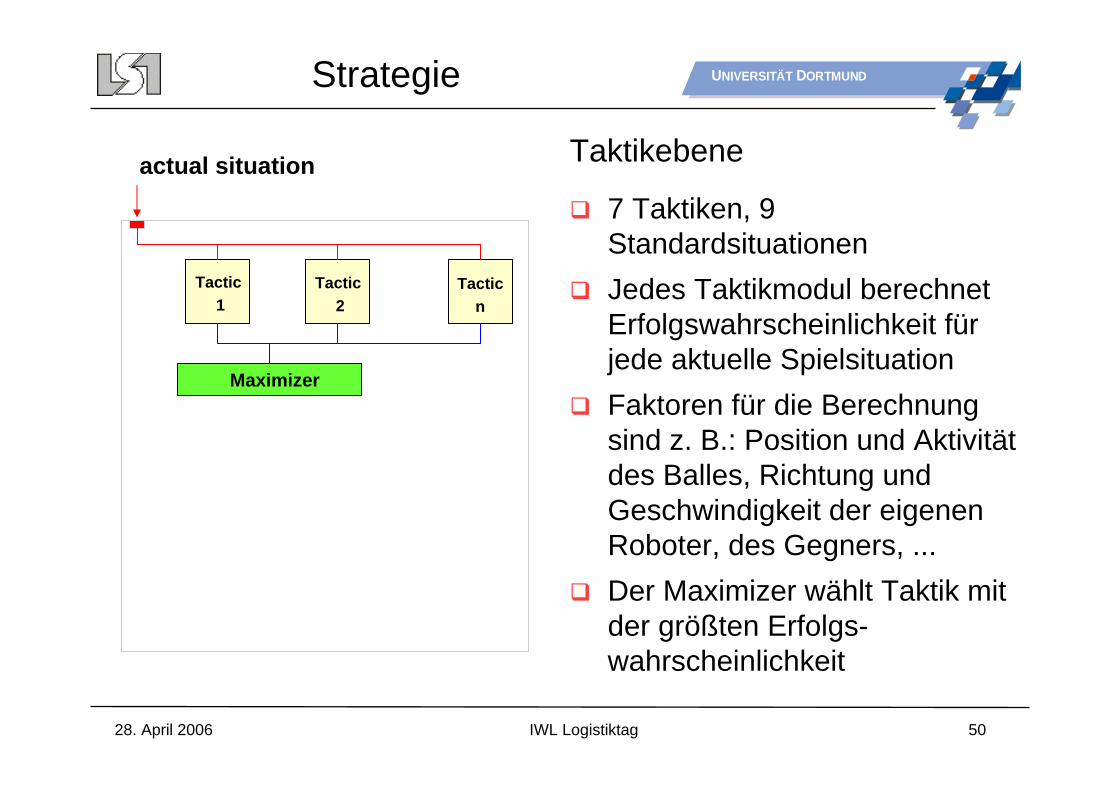
Taktikebene
7 Taktiken, 9 StandardsituationenJedes Taktikmodul berechnet Erfolgswahrscheinlichkeit für jede aktuelle SpielsituationFaktoren für die Berechnung sind z. B.: Position und Aktivität des Balles, Richtung und Geschwindigkeit der eigenen Roboter, des Gegners, ...Der Maximizer wählt Taktik mit der größten Erfolgs-wahrscheinlichkeit
28. April 2006
U DNIVERSITÄT ORTMUND
51IWL Logistiktag
Strategie
actual situation
...(analog)
Robot nRobot 1
...
Action 1 ...Action 2
Role 2Role 1
Tactic1
Tactic2
Maximizer
...Tactic
n
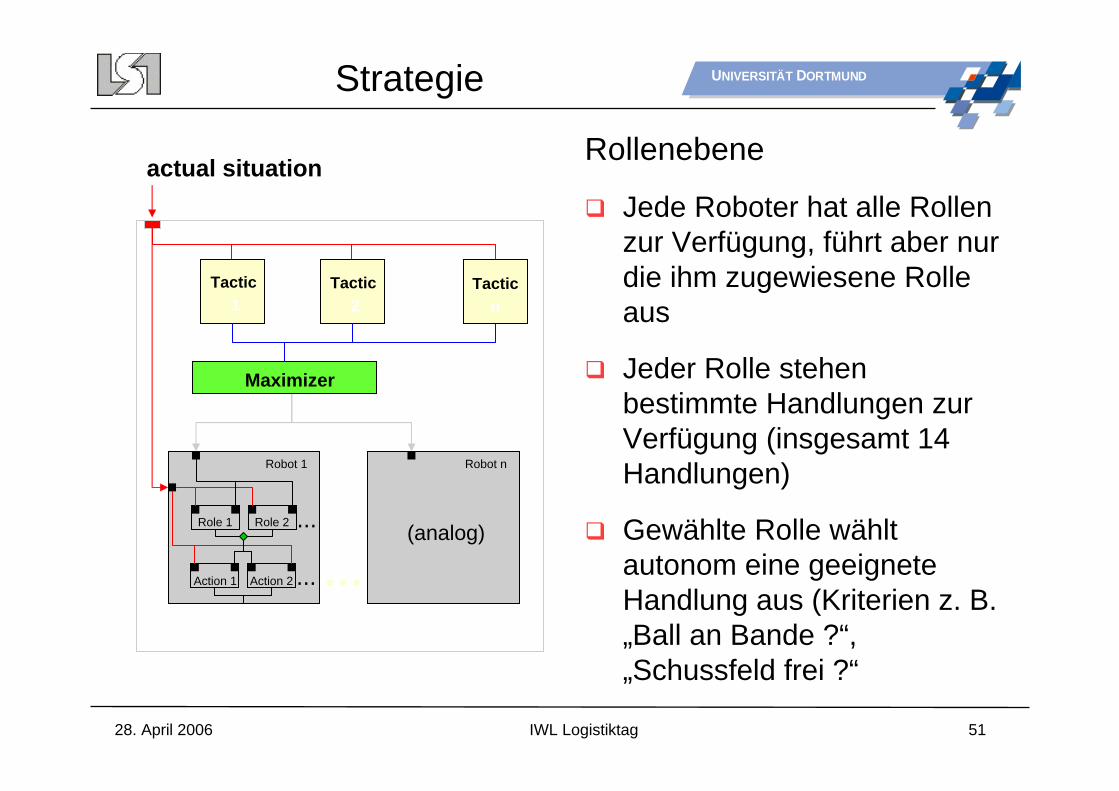
Rollenebene
Jede Roboter hat alle Rollen zur Verfügung, führt aber nur die ihm zugewiesene Rolle aus
Jeder Rolle stehen bestimmte Handlungen zur Verfügung (insgesamt 14 Handlungen)
Gewählte Rolle wählt autonom eine geeignete Handlung aus (Kriterien z. B. „Ball an Bande ?“, „Schussfeld frei ?“
28. April 2006
U DNIVERSITÄT ORTMUND
52IWL Logistiktag
Strategie
desired situation
actual situation
...(analog)
Robot nRobot 1
...
Action 1 ...Action 2
Role 2Role 1
Tactic1
Tactic2
Maximizer
...Tactic
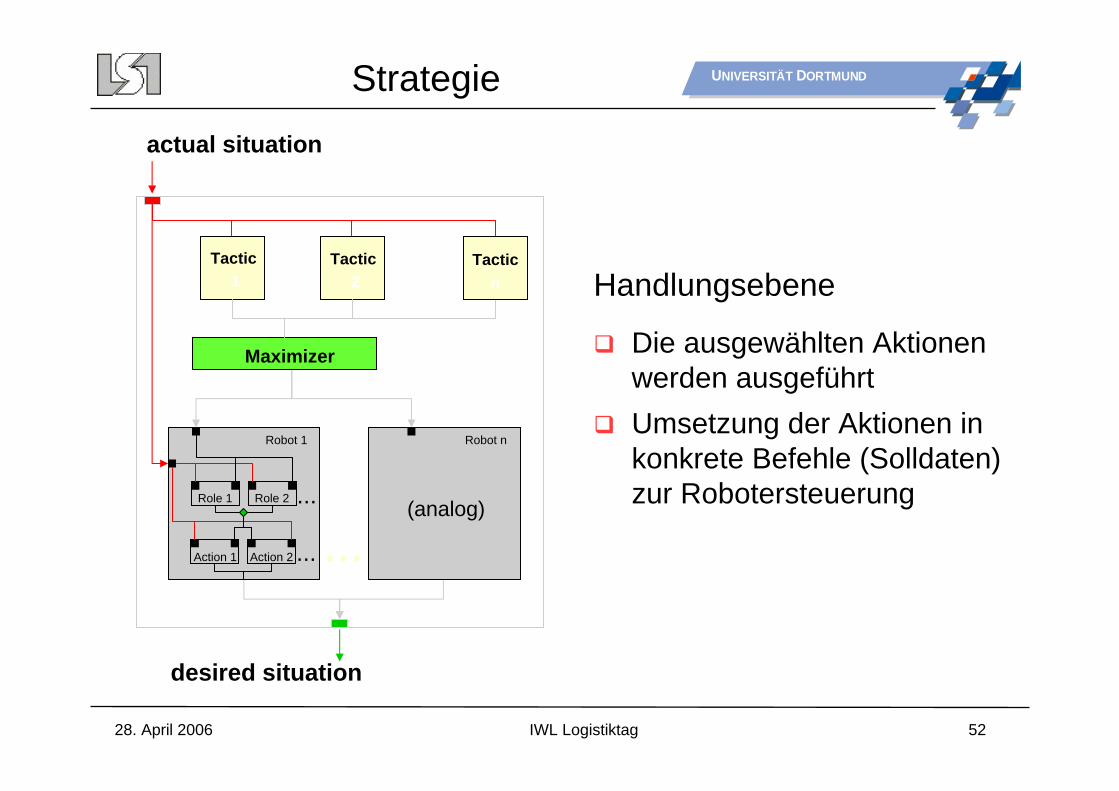
n Handlungsebene
Die ausgewählten Aktionen werden ausgeführt Umsetzung der Aktionen in konkrete Befehle (Solldaten) zur Robotersteuerung
28. April 2006
U DNIVERSITÄT ORTMUND
53IWL Logistiktag
28. April 2006
U DNIVERSITÄT ORTMUND
54IWL Logistiktag
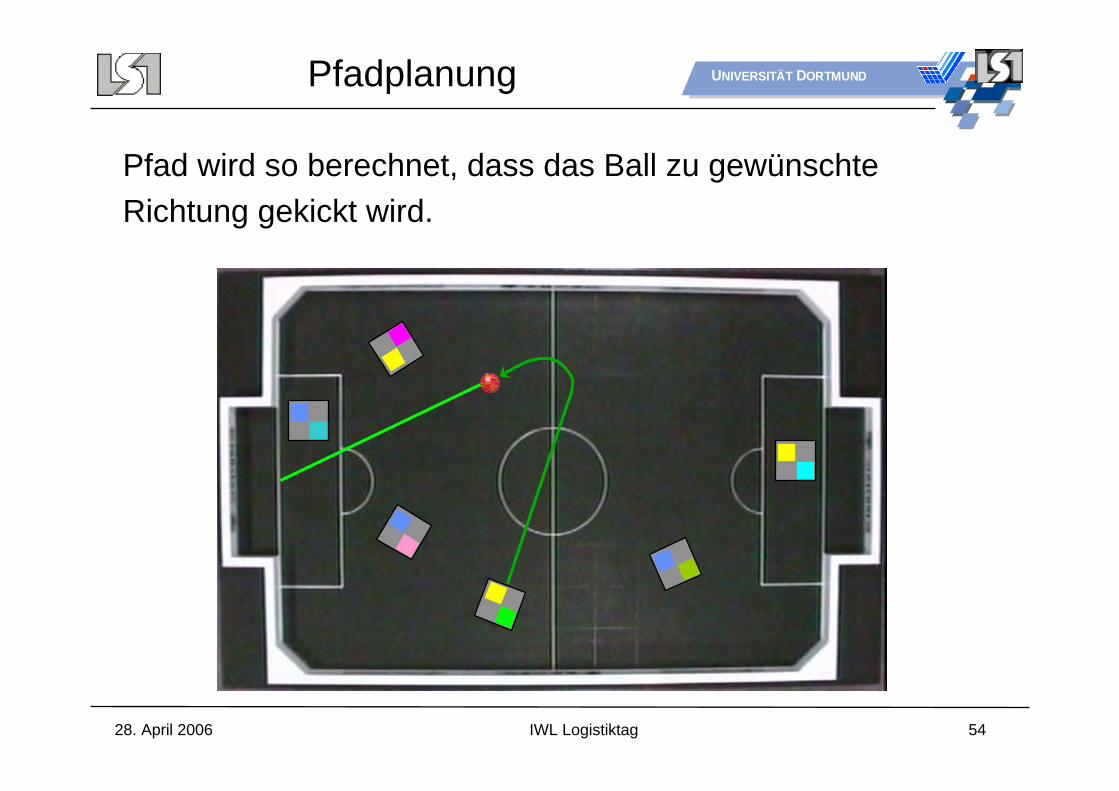
Pfadplanung
Pfad wird so berechnet, dass das Ball zu gewünschte Richtung gekickt wird.

28. April 2006
U DNIVERSITÄT ORTMUND
55IWL Logistiktag
Prinzip:
Pfadplanung
28. April 2006
U DNIVERSITÄT ORTMUND
56IWL Logistiktag
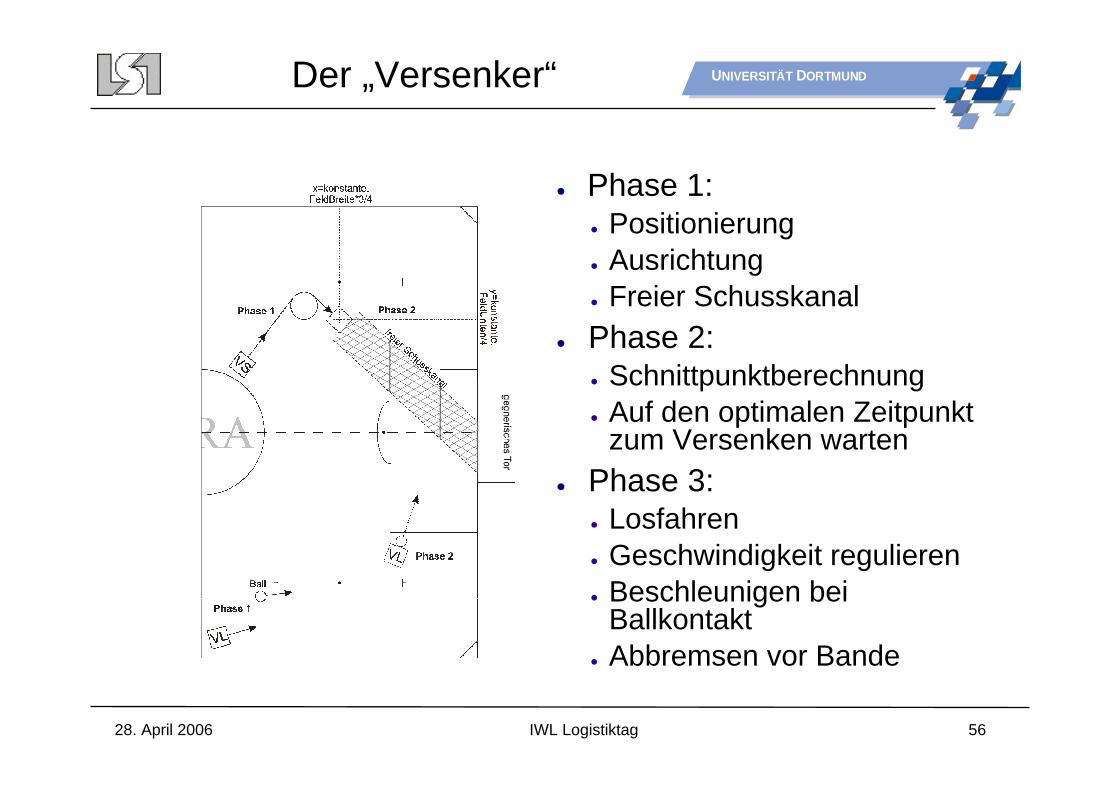
Der „Versenker“
● Phase 1:● Positionierung● Ausrichtung● Freier Schusskanal
● Phase 2:● Schnittpunktberechnung● Auf den optimalen Zeitpunkt
zum Versenken warten● Phase 3:
● Losfahren● Geschwindigkeit regulieren● Beschleunigen bei
Ballkontakt● Abbremsen vor Bande
28. April 2006
U DNIVERSITÄT ORTMUND
57IWL Logistiktag
FIRA WM 2006
28. April 2006
U DNIVERSITÄT ORTMUND
58IWL Logistiktag
Kurzes Resumée
Beträchtliche Fortschritte in der Technologie
Fortschritte in der Entwicklung intelligenter Software
Aber: noch weit von dem entfernt, was für Menschen selbstverständliche Alltagstätigkeiten sind
Nicht robust, nicht sicher im Alltag
Weit von der Komplexität menschlicher Akteure entfernt
Die Zukunft hat begonnen, aber sie kommt mit
behutsamen Schritten !
28. April 2006
U DNIVERSITÄT ORTMUND
59IWL Logistiktag
Danke für Ihre Aufmerksamkeit !





























