-
Interaction between rubber material and mold during
demolding
Von der Fakultät für Maschinenbauder Gottfried Wilhelm Leibniz
Universität Hannover
zur Erlangung des akademischen GradesDoktor-Ingenieur
genehmigte Dissertationvon
Dipl.-Ing. Jan-Hendrik Dobberstein
geboren am 10.06.1983 in Hannover
2014
-
1. Referent: Prof. Dr.-Ing. habil. Dr. h.c. mult. Peter
Wriggers2. Referent: Prof. Dr. -Ing. Matthias Kröger
Tag der Promotion: 01.09.2014
Herausgeber:Prof. Dr.-Ing. habil. Dr. h.c. mult. Peter
Wriggers
Verwaltung:Institut für KontinuumsmechanikGottfried Wilhelm
Leibniz Universität HannoverAppelstraße 1130167 Hannover
Tel: +49 511 762 3220Fax: +49 511 762 5496Web:
www.ikm.uni-hannover.de
© Dipl.-Ing. Jan-Hendrik DobbersteinInstitut für
KontinuumsmechanikGottfried Wilhelm Leibniz Universität
HannoverAppelstraße 1130167 Hannover
Alle Rechte, insbesondere das der Übersetzung in fremde
Sprachen, vorbehalten. Ohne Genehmigung des Autors ist es nicht
gestattet, dieses Heft ganz oder teilweise auf photomechanischem,
elektronischem oder sonstigem Wege zu vervielfältigen.
ISBN 978-3-941302-11-2
-
i
Abstract
This thesis is concerned with the numerical simulation of the
demolding process inthe context of tire production. The demand for
such a model arose from increasingproblems during the manufacturing
process in terms of an undesirable adhesion betweenrubber material
and mold. The simulation aims to increase the understanding of
thedemolding process and furthermore to provide a tool to determine
specific influencingfactors.Since the rubber material is of major
importance for the separation process, first anappropriate material
model is developed. Beside the typical properties of
elastomers,such as the nonlinear material behavior and the
viscoelasticity, also the incompletevulcanization at the time of
the demolding is considered.To describe the interactions between
rubber and mold, an interface model is imple-mented within the
finite element method (FEM). This model includes, alongside withthe
adhesion, also the classical interactions due to contact. The
choice of the modelwas made on the basis of a practically
accessible identification of the parameters. Ini-tially the model
is implemented with the node to segment discretization strategy
usingthe penalty method. In addition, for the first time, an
adhesion model is implementedusing the mortar method, where the
additional constraints, stemming from contact andadhesion, are
treated with the augmented Lagrangian method.All adhesion models,
available in the literature, are based on interface laws, at
whichthe adhesion force between two points decreases with the
distance of these points. Thissoftening behavior can lead to
instabilities at the numerical solution. These instabilitiesare
more likely to occur, the steeper the force decline is, which is
also observed in thesimulations of this work. By means of a
parameter variation it is, however, shown, thatrealistic simulation
results are solely obtained with unstable adhesion curves. Thus
astabilization of the calculations was necessary. For this an
arclength method with anadaptive constraint equation is used.
Alternatively a stabilization is also achieved,when the inertia
effects are considered, and the associated dynamic problem is
solved.Finally some numerical examples are presented. This includes
the inspection of somequalitative effects at the adhesive contact
of elastomers. In addition simulation resultsfor the demolding of a
tread block are shown, where the influence of different factorson
the demolding force is analyzed.
Keywords: Contact Mechanics, Finite Element Method, Adhesion,
Mortar Method,Demolding Process
-
ii
-
iii
Zusammenfassung
Gegenstand dieser Arbeit ist die numerische Simulation des
Formentnahmeprozessesim Rahmen der Reifenherstellung. Der Bedarf
für solch ein Simulationsmodell ist mitzunehmenden Problemen
währen des Produktionsprozesses, in Form eines unerwün-schten
Anhaftens des Gummimaterials an der Vulkanisationsform, entstanden.
Dabeihat die Simulation das Ziel das Verständnis des
Formentnahmeprozesses zu erhöhensowie ein Werkzeug für die
gezielte Bestimmung von Einflussparametern bereitzustel-len.Da dem
Gummimaterial eine entscheidende Bedeutung für den Ablöseprozess
zukommt,wird zunächst ein geeignetes Materialmodell erarbeitet,
welches neben den typischenEigenschaften von Elastomeren wie dem
nichtlinearen Materialverhalten und der Viskoe-lastizität auch die
zum Zeitpunkt der Formentnahme vorliegende, unvollständige
Vulka-nisation berücksichtigt.Um die Wechselwirkungen zwischen der
Form und dem Reifenmaterial zu beschreiben,wird ein
Grenzflächenmodell, welches neben der Adhäsion auch die
klassischen Kontakt-Wechselwirkungen einschließt, im Rahmen der
Finite Elemente Methode (FEM) im-plementiert. Die Auswahl des
Modells wurde auf Basis einer mit vertretbarem experi-mentellen
Aufwand durchführbaren Parameterbestimmung getroffen. Das Modell
wirdzunächst im Rahmen der node to segment Strategie mit der
penalty-Methode imple-mentiert. Weiterhin wird zum ersten mal ein
Adhäsionsmodell auf Basis der MortarMethode entwickelt. Dabei
werden die zusätzlichen Zwangsbedingungen aus Kontaktund Adhäsion
mit dem Augmented Lagrange Verfahren behandelt.Alle in der
Literatur verfügbaren Adhäsionsmodelle basieren auf
Grenzflächengeset-zen, bei denen die Adhäsionskraft wischen zwei
Punkten mit deren Abstand abnimmt.Solch ein Entfestigungseffekt
kann mitunter zu Instabilitäten bei der numerischen Lö-sung
führen. Dies ist umso ausgeprägter, je steiler der Kraftabfall
ist, was auch inden Simulationen zu dieser Arbeit beobachtet werden
konnte. Anhand einer Param-etervariation wird gezeigt, dass
realistische Simulationsergebnisse ausschließlich mitinstabilen
Adhäsionsverläufen erzielt werden, weshalb eine Stabilisierung
der Berech-nungen erforderlich ist. Hierzu wird zunächst ein
Bogenlängenverfahren mit einer adap-tiven Zwangsbedingung
verwendet. Alternativ wird eine Stabilisierung auch durch
dieBerücksichtigung der Trägheitseffekte und die damit verbundene
Lösung des dyna-mischen Problems erreicht.Abschließend werden
einige numerische Ergebnisse vorgestellt. Dies umfasst zunächstdie
Betrachtung einiger qualitativer Effekte beim adhäsiven Kontakt
von Elastomeren.Weiterhin werden Berechnungen des
Formentnahmeprozesses eines Profilklotzes präsen-tiert. Dabei wird
der Einfluss unterschiedlicher Parameter auf die
Entformungskräfteuntersucht.
Schlagworte: Kontaktmechanik, Finite Elemente Methode,
Adhäsion, Mortar Me-thode, Formentnahmeprozesses
-
iv
-
v
Acknowledgements
This thesis is the result of my research work during the years
2009 to 2014 at theInstitute of Continuum Mechanics (IKM) at the
Leibniz Universität Hannover underguidance of Prof. Dr.-Ing.
habil. Dr. h.c. mult. Peter Wriggers. The project was sup-ported by
the German Research Foundation (DFG).
First of all I would like to thank my supervisor Prof. Peter
Wriggers for his constantsupport and his trust. From his guidance I
benefited not only concerning my technicalexpertise but also
personally. He gave me the freedom to follow own ideas and
providedhelpful advice, whenever needed. I am also grateful, that I
had the opportunity toresponsibly work with the project partners
and also that Prof. Wriggers encouragedme to present my work on
international conferences. Both were valuable experiencesto me.
I would also like to thank my second referee Prof. Dr.-Ing.
Matthias Kröger for hisearnest interest in my work, as well as the
fruitful discussions and the good collabora-tion we had within the
joint project. Furthermore I thank Prof. Dr.-Ing. Bernd-ArnoBehrens
for chairing the examination committee.
My sincere thanks also go to my colleagues at the IKM for their
helpfulness and thepleasant working atmosphere. Especially my
office mate Nasim Hajibeik supported andencouraged me in difficult
phases of my work. Special thanks are also due to Dr.-Ing.Christian
Weißenfels for his patient help with contact mechanics, to Dr.-Ing.
StefanLöhnert for his generous help with FEAP and to Dr. Roger A.
Sauer for introducingme to the field of computational mechanics. I
would also like to acknowledge the workof the technical staff and
the office staff.
Last but not least I thank my family for their unconditional
support. My parents havealways believed in me and enabled me to
attend university. Above all I would like tothank my wife Baukje
for her patience and support and all the sacrifices she
made.Without her, this work would not have been possible. I am also
grateful to my childrenWiebke and Gesa, who always showed me, that
there are other important things inlife.
Hannover, September 2014 Jan-Hendrik Dobberstein
-
vi
-
Contents
1 Introduction 11.1 Background and state of the art . . . . . .
. . . . . . . . . . . . . . . . 21.2 Structure of this work . . . .
. . . . . . . . . . . . . . . . . . . . . . . 3
2 Background 52.1 Continuum mechanics . . . . . . . . . . . . .
. . . . . . . . . . . . . . 5
2.1.1 Kinematics . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 52.1.2 Balance laws . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 82.1.3 Constitutive equations . . . . . . . . . .
. . . . . . . . . . . . . 112.1.4 Weak form . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 12
2.2 Contact . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 132.2.1 Kinematics . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 132.2.2 Constraints and constitutive
equations . . . . . . . . . . . . . . 152.2.3 Contact virtual work
and treatment of contact constraints . . . 16
2.3 Finite elements . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 202.3.1 Discretization of space . . . . . . . . .
. . . . . . . . . . . . . . 202.3.2 Discretization of time . . . .
. . . . . . . . . . . . . . . . . . . . 232.3.3 Solution algorithms
. . . . . . . . . . . . . . . . . . . . . . . . . 23
3 Contact finite elements 273.1 Node to segment . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 27
3.1.1 Discretization, projection and contact search . . . . . .
. . . . . 273.1.2 Kinematical quantities and constitutive equations
. . . . . . . . 293.1.3 Contribution to the weak form . . . . . . .
. . . . . . . . . . . . 303.1.4 Linearization . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 313.1.5 Residual vector and
tangent matrix . . . . . . . . . . . . . . . . 323.1.6 Special
cases at the contact search . . . . . . . . . . . . . . . . 34
3.2 Mortar method . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 363.2.1 Introduction . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 363.2.2 Integration domain for
slave-master pairing . . . . . . . . . . . . 383.2.3 Integration
points and Jacobian . . . . . . . . . . . . . . . . . . 413.2.4
Kinematical quantities . . . . . . . . . . . . . . . . . . . . . .
. 423.2.5 Contribution to the weak form . . . . . . . . . . . . . .
. . . . . 423.2.6 Linearization . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 443.2.7 Residual vector and tangent matrix . .
. . . . . . . . . . . . . . 50
vii
-
viii
3.2.8 Treatment of corners and edges . . . . . . . . . . . . . .
. . . . 51
4 Material model 534.1 Characteristic properties of rubber . . .
. . . . . . . . . . . . . . . . . 534.2 Vulcanization process . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 544.3 Linear
viscoelasticity . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 564.4 3D continuous material model . . . . . . . . . . . . . .
. . . . . . . . . 584.5 Parameter identification . . . . . . . . .
. . . . . . . . . . . . . . . . . 59
4.5.1 Static parameters . . . . . . . . . . . . . . . . . . . .
. . . . . . 604.5.2 Viscoelastic parameters . . . . . . . . . . . .
. . . . . . . . . . . 61
4.6 Belt plies . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 64
5 Adhesion 675.1 Background . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 67
5.1.1 Intermolecular forces . . . . . . . . . . . . . . . . . .
. . . . . . 675.1.2 Analytical models and experimental observations
. . . . . . . . 685.1.3 Numerical models . . . . . . . . . . . . .
. . . . . . . . . . . . . 70
5.2 Node to segment . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 735.2.1 Adhesion gap . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 735.2.2 Penalty approach and adhesion
states . . . . . . . . . . . . . . . 755.2.3 Contribution to the
weak form and linearization . . . . . . . . . 765.2.4 Residual
vector and tangent matrix . . . . . . . . . . . . . . . . 785.2.5
Patchtest . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 795.2.6 Modifications . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 81
5.3 Mortar method . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 825.3.1 Normal interaction . . . . . . . . . . . .
. . . . . . . . . . . . . 835.3.2 Tangential interaction . . . . .
. . . . . . . . . . . . . . . . . . 845.3.3 Contribution to the
weak form and linearization . . . . . . . . . 855.3.4 Patchtest . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
6 Solution algorithms 896.1 Modified arclength method . . . . .
. . . . . . . . . . . . . . . . . . . . 896.2 Dynamic calculation .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 92
7 Numerical results 957.1 Qualitative Observations . . . . . . .
. . . . . . . . . . . . . . . . . . . 957.2 Influence of the
adhesion parameters . . . . . . . . . . . . . . . . . . . 977.3
Demolding tests . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 1037.4 Mortar method . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 106
8 Conclusion 111
A Mathematical bases 115A.1 Convective coordinates . . . . . . .
. . . . . . . . . . . . . . . . . . . . 115A.2 Cross product in
matrix form . . . . . . . . . . . . . . . . . . . . . . . 115
-
CONTENTS ix
B NTS contact element 117B.1 Linearization of the kinematical
quantities . . . . . . . . . . . . . . . . 117B.2 Linearization of
the tangential stress . . . . . . . . . . . . . . . . . . . 118B.3
Vectors for the residual and the tangent matrix . . . . . . . . . .
. . . 119
Bibliography 120
Curriculum vitae 130
-
x CONTENTS
-
List of Symbols
Operators and symbols
˙(..) Material time derivativediv Divergence operatorgrad
Gradient operator∆(..) Linearization of a quantityδ(..) Variation
of a quantityΩ (..) Cross product matrix
Continuum mechanics
a AccelerationB0 Reference configuration of a bodyBt Current
configuration of a body∂B Boundary of a body∂Bt Boundary of a body,
current configuration∂tB Boundary with prescribed traction∂uB
Boundary with prescribed displacementb Left Cauchy-Green tensorb̄
Specific body forceC Right Cauchy-Green tensord Symmetric part of
the spatial velocity gradientE Total energy of a systemE1, E2, E3
Base vectors of the reference configuratione1, e2, e3 Base vectors
of the current configurationF Deformation gradientH Displacement
gradienth Entropy fluxI Linear momentumJ Determinant of the
deformation gradientK Kinetic energyL Angular momentuml Spatial
velocity gradientm Massn Surface normal
xi
-
xii CONTENTS
P Mechanical powerQ Thermal powerqi Internal variable
Q̃ Entropy transferqn Heat fluxq Cauchy heat fluxr Heat sourcer̃
Entropy sourcer Lever arm at the balance of angular momentumS
Entropys Specific entropyS Second Piola-Kirchhoff stress tensort
Surface loadU Inner energyu Specific inner energyu Displacementu0
Initial displacementV , v Volume at the reference and the current
configurationv Velocityv0 Initial velocityW Strain energy functionX
Position vector at the reference configurationx Position vector at
the current configurationη Test functionΘ Absolute temperatureρ0, ρ
Density of the reference and the current configurationσ Cauchy
stress tensorϕ Mapping between current and reference configurationΨ
Helmholtz free energy function
Contact mechanics
(..)1 Quantity of the slave surface(..)2 Quantity of the master
surface(..)tr Trial quantity, used within the return mapping
algorithma1, a2 Covariant base vectors∂cBt Contact surfacecN , cT
Penalty parametersCN , CT Nonlinear complementary functionsfs Slip
criterionG Weak form without contact contributionGc Contact
contribution to the weak formGcu Virtual work of the contact
forcesGcl Weak form of the enforcement of the contact
constraints
-
CONTENTS xiii
gN Normal gapgT Tangential sliding distancegeT Elastic part of
the relative tangential movementgsT Slip part of the relative
tangential movement∆gT Tangential displacement incrementtN Normal
contact pressuretT Tangential contact stress vectorγ̇ Slip rateλN
Lagrange multiplier describing the normal contact pressure
λ̂N Augmented Lagrange quantity for the normal contact
pressureλT Vector of Lagrange multipliers for the tangential
contact stress
λ̂T Augmented Lagrange vector for the tangential contact stressµ
Coefficient of frictionξ1, ξ2 Convective coordinatesΠcN , Πc T
Normal and a tangential contact potential
Finite element method
(..)h Discretized quantity(..)k Quantity of the last iteration
step(..)k+1 Quantity of the current iteration step(..)gp Quantity
at a Gauss point(..)n Quantity of the last time step(..)n+1
Quantity of the current time stepJ Mapping between reference and
initial configurationj Mapping between reference and current
configurationKT Tangent matrix of the quasi static problemK∗T
Tangent matrix of the dynamic problemM Mass matrixne Number of
finite elementsngp Number of Gauss pointsNI Shape function of node
IP External load vectorR Residual force vector∆t Time incrementuI
Displacement of node Iwgp Weighting factor at Gauss pointXI
Position vector of node I in reference configurationxI Position
vector of node I in current configurationβ, γ Parameters of the
Newmark methodδIJ Kronecker symbolξ Local coordinates inside the
finite elementξJ Coordinates at the position of node JΩe Domain of
one finite element
-
xiv CONTENTS
Ω� Reference configuration of the finite elementΩ0 Initial
configuration of the finite element
Node to segment contact element
¯(..) Quantity evaluated at the projection point
coordinates(..),α Differentiation with respect to the convective
coordinate ξ
α
nm Number of nodes on a master surface elementas Area
surrounding the slave nodeāαβ Contravariant metric
coefficientsāαβ Covariant metric coefficientsb̄αβ Components of
the curvature tensorDα Vector for the node to segment contact
elementE, Eα Vectors for the node to segment contact elementH̄αβ,
H̄
αβ Auxiliary matrix: co- and contravariant componentsN , Nβ ,
Nαβ Vectors for the node to segment contact element
T β, T αβ , T̂ αβ Vectors for the node to segment contact
elementξ̄α Coordinates of the projection point at the NTS contact
element∆tξαn+1 Increments of the projection point coordinates
Mortar contact element
¯(..) Averaged quantityBj Auxiliary matrix for the linearization
of the Jacobian determinantBl Auxiliary matrix for the
linearizationBn Auxiliary matrix for the linearization of the
normal vectorBt α Auxiliary matrix for the linearization of the
normalized base vectorsBiαg Auxiliary matrix for the linearization
of the integration point coordi-
natesDd Auxiliary matrix for the linearization of the triangle
pointsd1, d2, di Auxiliary vectors for the Cyrus-Beck algorithmEint
Auxiliary matrix for the linearization of intersection pointsEi
Auxiliary matrix for the linearization of the projected nodesEiI
Auxiliary matrix for the linearization of projected slave and
master
nodesEpc Auxiliary matrix for the linearization of the
centroiddetj Jacobian determinant of the triangleMA Shape function
for the Lagrange multiplier at slave node Anpkl Number of points of
the overlapping polygonn1glob Number of slave nodes on the slave
surfacengp Number of Gauss points belonging to a slave noden10
Normal vector at the center of the slave elementnA Normal vector of
the slave surface at slave node AP1 Auxiliary matrix for the
linearization of points on the slave surface
-
CONTENTS xv
P1α Auxiliary matrix for the linearization of the averaged base
vectorsWg Weighting factor at a Gauss pointx10 Position vector of
the center point of the slave elementxig, x
ig,α Integration points and base vectors at these integration
points on the
master and the slave surfacex̄int Position vector of the
intersection pointx̄dJ Position vector of triangle point J
x̄jI Position vector of node I of surface j projected onto the
axillary planex̄pc Position vector of the centroid of the
overlapping polygonx̄pJ Position vector of polygon point Jλ Vector
of Lagrange multipliersξgp Coordinates of the triangle Gauss points
on the auxiliary planeξig Coordinates of the Gauss points on the
slave and the master surface
Material model
be Left Cauchy-Green Tensor of the elastic deformation partCi
Right Cauchy-Green tensor of the inelastic deformation partE∗
Complex modulusE
′
Storage modulusE
′′
Loss modulusE∞, Ej, ηj Parameters of the linear viscoelastic
material modelf90 t90-factorFe Elastic part of the deformation
gradientFi Inelastic part of the deformation gradientI1, I2 First
and second invariant of the right Cauchy-Green tensorJ Determinant
of the deformation gradientqi Generalized parameter to be
determinedS Torque at the rheometer testS ′ Storage momentS ′′ Loss
momentT Temperaturet90 Optimum cure timetref Equivalent curing time
at reference temperatureǫ Strain of the Wiechert modelǫ̂ Amplitude
of the harmonic excitationǫej Elastic strain of Maxwell element
jǫij Inelastic strain of Maxwell element jΛ, µ1, µ2 Parameters of
the Mooney-Rivlin material modelλ Stretchν Poisson ratioσ̂
Amplitude of the stressσEQ Equilibrium stress (finite linear
viscoelastic material)
σjNEQ Stress in Maxwell element j (finite linear viscoelastic
material)
-
xvi CONTENTS
τj Relaxation time of Maxwell element j (τj = ηj/Ej)ψ Phase
differenceω Angular frequency
Adhesion
f̂aA Extended slip criterion including friction and adhesionGa
Adhesion contribution to the weak formgd Decohesion gapga Adhesion
gap vectorr Distance of two particless Tension limitsN Tension
limit in the normal directionsT Tension limit in the tangential
directionta Adhesive stressta Adhesion tension vectorxa Memorized
adhesion pointα Maximum adhesion stressβT Parameter coupling the
tangential with the normal tension limitγ Penalty parameter for the
adhesionδ Rupture gap
λ̂aNA Augmented adhesion stress in the normal direction at slave
node Aξaβ Components of the tangential adhesion gapξp Coordinates
of the remembered adhesion point
-
Chapter 1
Introduction
A key interest of tire manufacturers is to improve the tires
grip properties in order toenhance safety and driving comfort. This
is achieved with a more and more complextread design as well as the
use of compounds with better adhesive properties. Howeverdesired
the advanced grip properties are in later use, they cause major
challenges inproduction.One sub-step at the production process of a
tire is the vulcanization of a green tire underpressure inside a
mold. At the subsequent extraction phase, called demolding,
differentproblems arise. Due to the adhesion on the one hand the
mold can be damaged, or theforce necessary to open the mold can
exceed the capabilities of the machinery, bothcausing production
downtimes and resulting for the former case also in costly
repairs.On the other hand the tire can be damaged, leading to
safety risks, if this remainsundetected.A prevalent method to avoid
these troubles, is, to apply a release agent onto the moldat
regular intervals. This approach, however, causes a pollution of
the environmentand complicates the production process. Another
possibility is a permanent coating ofthe molds. However there is
little research on coatings, which minimize the adhesionbetween
rubber and metal and, at the same time, withstand the high
temperaturesand pressures for a large number of demolding cycles.To
systematically develop solution strategies to the problems, the aim
is, to obtain a ba-sic understanding of the demolding process. This
is pursued by practical experiments aswell as numerical models.
Experiments have the drawback, that they are extensive andtheir
interpretation can be difficult, since they only provide certain,
measurable vari-ables. Numerical simulations allow an inspection of
all calculated quantities, therebyenabling a deeper insight into
the regarded process and thus creating a better under-standing.
This can not only be used to reduce the experimental effort,
leading to anadvantage in time, but also new ideas for products or
the optimization of processesmight be found. However, despite these
advantages, it should be noted, that the sim-ulations can not
entirely replace experiments, since they are based on
simplifications.Instead experiment and simulation complement one
another.In view of this within this work a model to simulate the
demolding of not completelyvulcanized tire tread blocks will be
developed. For this the complex contact with fric-tion and
adhesion, the high temperatures and different states of
vulcanization inside the
1
-
2 CHAPTER 1. INTRODUCTION
material as well as the large deformations during the extraction
of elaborate patternsare of particular challenge.
1.1 Background and state of the art
In the technical literature only a few contributions treating
the demolding of rubbercan be found, and to the authors knowledge
there are no research results published onits simulation. Only for
the molding of rubber some publications exist. In Dupaix andCash
[2009] e.g. the focus is laid on the description of the material,
and the moldingprocess is simulated using a two dimensional contact
model excluding friction andadhesion.A simulation model for the
demolding of tires requires, beside a suitable description ofthe
rubber material, a model for contact with friction and adhesion. In
order, not to berestricted to certain geometries, in this work a
computational model is developed, forwhich, due to the complex
geometry of the tread, a simplification to two dimensions isnot
admissible.For macroscopic mechanical problems usually the Finite
Element Method (FEM) isapplied. An overview on the treatment of
computational contact problems with theFEM is e.g. given in Laursen
[2002] and Wriggers [2006]. For contact problems onthe nano-scale
molecular dynamic simulation methods (MD) are prevalent, see
e.g.Frenkel and Smit [2002] for an introduction. Compared to FEM
models they havethe advantage, that adhesion is automatically
included and chemical reactions at thecontact surface can be
described. However with current computing facilities it is
notpossible to calculate problems on a larger scale. Therefore for
the simulation of thedemolding process the FEM is applied.FEM
models including contact of rubber can e.g. be found in Hofstetter
et al. [2006]and in Wriggers and Reinelt [2009] for the calculation
of friction between rubber andrough, rigid surfaces. In Ziefle and
Nackenhorst [2008] a model to study the behavior ofa rolling tire
is presented and the contribution of Lee et al. [2006] treats the
calculationof the contact of seals.To study the decohesion within a
composite material, i.e. the debonding between fibersand matrix
material, cohesive zone models have been developed. In this context
thework of Xu and Needleman [1994] should be named. Cohesive zone
models are usuallybased on interface laws, describing the tensile
interactions at the interface between twomaterials. Compressive
forces, resulting from the impenetrability between the
contactpartners, are not addressed.In Sauer and Li [2007] an FEM
model considering contact and adhesion is presented.The model is
derived from the interaction between the particles of the
contacting bodies,and is therefore suitable to study adhesion on
the nano- and on the micro-scale. Modelsfor contact and adhesion on
the macro-scale have been developed in Raous et al. [1999]and Talon
and Curnier [2003], both including an irreversible decrease of the
adhesionstrength. In the contribution of Raous et al. [1999] a
possible rate dependency of theadhesive effects is considered,
while in Talon and Curnier [2003] adhesion is treated asa
constraint and decohesion is modeled with a linear constitutive
equation.
-
1.2. STRUCTURE OF THIS WORK 3
Concerning the description of the material, it has to be noted
that rubber is a complexmaterial, which possesses various
characteristic properties, differing from those of otherengineering
materials such as e.g. metals. Depending on, which property is to
be de-scribed, different models have been developed. The nonlinear
elastic response for staticdeformations is described by the models
of Mooney [1940], Rivlin [1948] and Ogden[1982]. In Heinrich and
Kaliske [1997] a model, motivated from the molecular structureis
presented. Inelastic effects are considered e.g. in the models of
Simo [1987] and Reeseand Govindjee [1998a]. The Mullins effect,
which marks a softening of the material af-ter first loading, is
e.g. considered in the models of Ernst and Septanika [1999],
Besdoand Ihlemann [2003] and more recently with a
micro-mechanically motivated approachin De Tommasi et al. [2006]. A
numerical model for the Payne effect, which denotes adecrease in
dynamic stiffness with an increasing strain amplitude, can e.g. be
found inLion and Kardelky [2004]. Models considering the effects of
temperature are e.g. givenin Holzapfel and Simo [1996], Lion [1997]
and Reese and Govindjee [1998b].
At the demolding the separation between tire and mold does not
occur simultaneouslythroughout the interface. Instead a local
detachment is initiated at a small region,which then, comparable to
a crack, propagates across the contact surface. Since thisprocess
occurs within a few seconds, it is important to describe the
viscoelasitcity ofthe rubber correctly. In this context also the
state of curing has to be considered. Asimulation model for the
curing of rubber can e.g. be found in André [2001] and Andréand
Wriggers [2005].
1.2 Structure of this work
Subsequent to this introduction in chapter 2 the fundamental
theory necessary to un-derstand the mathematical description and
the modeling in this work is presented. Thisconsists of a brief
summary of solid continuum mechanics, treating the description
ofthe behavior of bodies under loading, and the theory of contact
mechanics, which marksan extension of the classical continuum
mechanics to contact problems. As a tool toobtain a numerical
solution of the resulting equations at the end of this section
theFEM is introduced.
In chapter 3 the treatment of contact problems with the FEM is
specified. In thiscontext two contact elements, based on different
discretization techniques, are describedin detail. The first is the
well known three dimensional node to segment contactelement for
contact problems with large deformations. The second is the more
recentlydeveloped three dimensional mortar contact element.
Chapter 4 treats the description of the material. Some
characteristic properties ofrubber are briefly described and the
employed material model is specified. Also theidentification of the
material parameters and the homogenization of a belt ply, whichis
used to fix rubber samples at experimental tests, are
addressed.
Adhesion is addressed in chapter 5. After a short summary of the
background in thissection different computational models coupling
contact and adhesion are discussed,and the contact elements of
chapter 3 are extended to also include adhesive interactions.
-
4 CHAPTER 1. INTRODUCTION
All available adhesion models are based on interface laws, at
which the adhesion forcedecreases with an increase of a certain gap
quantity. This softening behavior can leadto instabilities at the
numerical solution, which were also observed at the simulation
ofthe demolding process. Therefore in chapter 6 two methods to
stabilize the calculationsare regarded. These are an arclength-type
solution and a dynamic calculation of themechanical problem.The
numerical results are presented in chapter 7. First two qualitative
simulations,illustrating some characteristic effects at the
adhesive contact of rubber, are presented.Subsequent, using the
stabilization methods of chapter 6, for a simple demolding testthe
influence of the parameters of the adhesion model on the separation
process isregarded. This is followed by simulation results of more
complex demolding tests, forwhich different parameters, such as the
number of sipes, the material and the fixing ofthe rubber sample,
are varied. At the end of this chapter some results for the
mortaradhesion-contact model are presented.Finally in chapter 8 the
main results of this work are summarized and open points
arediscussed. Based on this a perspective on future works is
given.
-
Chapter 2
Background
In this chapter the mathematical bases for the modeling and
simulation of mechanicalproblems are presented. The chapter starts
with a recapitulation of solid continuummechanics in section 2.1,
followed by an extension of the considerations to contactmechanics
in section 2.2. The solution of the resulting equations is obtained
numericallywith the finite element method (FEM), which is described
in section 2.3.
2.1 Continuum mechanics
Solid continuum mechanics is concerned with the behavior of
bodies under mechanical,thermal or other loading. To describe and
predict this behavior, mathematical equa-tions are used, which can
be divided into three different categories. The motion
anddeformation of a body are described by kinematical equations.
The stresses and otherfield variables inside a continuum body are
calculated from the balance laws, whichare fundamental equations
obtained from physical observations and valid for any ma-terial.
The link between both sets of equations is achieved by the
constitutive laws,which provide the relation between deformation
and stress. This section gives onlyan overview on the most
important equations and those necessary to understand
themathematical models in this work. For more information on the
subject of continuummechanics the interested reader is referred to
the literature (Ogden [1984], Mardsenand Hughes [1994], Chadwick
[1999] Holzapfel [2000], Haupt [2002], Truesdell and Noll[2004],
Altenbach [2012]).
2.1.1 Kinematics
A body B is conceived as a continuous set of particles or
material points P ∈ B. Astime t evolves, this body occupies
different regions in Euclidean space E3, referred toas
configurations of B. Since cracks, penetrations and singularities
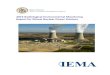
within the body arenot allowed, each configuration can be described
by a bijective mapping X : B → E3,which positions each material
point into E3, see figure 2.1. In order to describe themotion and
deformation of such a body a reference configuration B0 is defined,
whichcan e.g. be the configuration at the initial time t0. The
position vector X of a particle
5
-
6 CHAPTER 2. BACKGROUND
X x
P
B
B0 Bt
X0 Xt
ϕ
E1, e1
E2, e2
E3, e3
Figure 2.1. Motion and deformation of a continuum body.
P in the reference configuration may be given with the mapping
X0 by X = X0 (P ).In the current configuration Bt it reads x = Xt
(P ), which can be expressed in termsof X, since
x = Xt (P ) = Xt(X−10 (X)
)= ϕ (X) . (2.1)
The mapping of position vectors from the current to the
reference configuration can befound by inversion of (2.1) leading
to
X = ϕ−1 (x) . (2.2)
Regarding (2.1) at different points in time, the motion of a
particle is described. Sucha formulation of the field variables
with respect to the reference coordinates X iscalled Lagrangian or
material description, and is mainly used in solid mechanics.
Aformulation with respect to the current coordinates x, as in
(2.2), is called Eulerian orspatial description. In this case the
changes of the field variables at a fixed position inspace are
regarded. This concept is employed in fluid mechanics.Introducing a
Cartesian coordinate system the position vectors of material points
inthe reference- and the current configuration can be written
as
X = XjEj and x = xiei , (2.3)
where Ej and ei are the base vectors of the reference and the
current configuration.With this the displacement field, defined
as
u = x−X (2.4)
can be calculated. As a measure for the deformation, the
deformation gradient
F =∂x
∂X=
∂xi∂Xj
ei ⊗ Ej (2.5)
-
2.1. CONTINUUM MECHANICS 7
is introduced. It is a linear operator, which maps undeformed
line elements dX todeformed ones dx via
dx = FdX . (2.6)
With (2.4) the deformation gradient can also be stated as
F = 1+∂u
∂X= 1+H , (2.7)
with H being the displacement gradient. The mapping of (2.6) is
supposed to beinvertible, what means that the inverse of the
deformation gradient F−1 exists.With the deformation gradient
several strain measures can be defined. Motivated fromthe
calculation (of the square) of the change in length from the
reference to the currentconfiguration, the right Cauchy-Green
tensor C is defined by
C = FT · F , dx · dx = dXC dX . (2.8)
Similarly the left Cauchy-Green tensor b is introduced as
b = F · FT , (2.9)
which appears when (dX)2 is expressed in terms of (dx)2. The
tensors C and b aredefined in reference and current coordinates,
respectively.The conservation laws introduced in the next section
require an integration over thevolume of the body. Therefore the
transformation of an infinitesimal volume elementof the reference
configuration dV , defined by the infinitesimal vectors dX, dY and
dZ,to the current configuration is regarded. It is calculated
by
dv = det[dx dy dz
]= det
[FdX FdY FdZ
]= J dV , (2.10)
where J is the determinant of the deformation gradient, also
known as the Jacobian.As F is invertible and volume elements can
not be negative,
J = detF > 0 (2.11)
has to hold.As in this work rubber materials, which show a rate
dependent mechanical behavior,are investigated and also dynamic
calculations are performed, some time derivativeswill be specified
in the following. The velocity and the acceleration of a particle
in thereference configuration are calculated by
v =∂x
∂t= ẋ = u̇ and a = v̇ = ẍ = ü . (2.12)
Besides, with the material time derivative of the deformation
gradient, given by
Ḟ =∂ẋ
∂X, (2.13)
and the spatial derivative of the velocity
l =∂ẋ
∂x=∂ẋ
∂X
∂X
∂x= ḞF−1 , (2.14)
the material time derivative of the Jacobian follows to
J̇ = J div v . (2.15)
-
8 CHAPTER 2. BACKGROUND
2.1.2 Balance laws
The balance laws represent fundamental equations, which have to
be fulfilled at eachinstant of time. They describe the conservation
of the physical quantities mass, linearmomentum, angular momentum
and energy, as well as the increase of entropy, and areindependent
of the material of the continuum body.
Conservation of mass
In a continuum body the mass m can be either calculated in the
current or in thereference configuration by
m =
∫
Bt
ρ dv =
∫
B0
ρ0 dV , (2.16)
from which with (2.10) the relation between the density of the
reference and the currentconfiguration can be determined to
ρ0 = Jρ . (2.17)
If a closed system is regarded, no change in mass is allowed,
leading to the equation
dm
dt= 0 =
∫
B0
ρ̇0 dV =
∫
B0
(
ρ̇J + ρJ̇)
dV . (2.18)
which can be stated in local or strong form as
ρ̇0 = 0 and ρ̇+ ρ div v = 0 , (2.19)
where the expression inside the second integral has been
simplified using (2.15). Equa-tion (2.19) is called strong form,
since it is fulfilled in every point, whereas (2.18) isonly
satisfied in an averaged sense over the integration domain.
Balance of linear momentum
The linear momentum inside a continuum (or an arbitrary subset
of a continuum) B isgiven by
I =
∫
Bt
ρv dv . (2.20)
Its material time derivative has to be equal to the external
forces acting on B
d
dtI = Fext . (2.21)
These external forces can originate from surface tensions t,
acting on parts of theboundary ∂B of the continuum, and from volume
forces ρb̄, which can e.g. result fromgravity, so that the right
hand side of (2.21) can be specified to
d
dt
∫
Bt
ρv dv =
∫
Bt
ρb̄ dv +
∫
∂Bt
t da . (2.22)
-
2.1. CONTINUUM MECHANICS 9
Using the Cauchy theorem the traction vector t can be written
as
t = σ · n , (2.23)
with n being the surface normal and σ the second order stress
tensor, which uniquelydescribes the state of stress at a material
point. Thus also using the divergence theoremthe surface integral
in (2.22) can be replaced by a volume integral
∫
∂Bt
t da =
∫
∂Bt
σ · n da =
∫
Bt
divσ dv . (2.24)
Inserting (2.24) into (2.22) and arguing that the equation is
satisfied, if the integrandsare zero, the local balance of linear
momentum is obtained to
divσ + ρb̄ = ρv̇ . (2.25)
When solving (2.25) for σ the stress at each point of the
continuum can be calculated.
Balance of angular momentum
The angular momentum in a continuum relative to a reference
point x0 can be stated,with the distance vector r = x− x0, as
L =
∫
Bt
ρ r× v dv . (2.26)
Similar to (2.21) its material time derivative has to balance
the external torque Mext,which can be stated with the volume forces
ρb̄ and the surface tensions t as
d
dtL =
∫
Bt
r× ρb̄ dv +
∫
∂Bt
r× t da . (2.27)
Again applying the Cauchy and the divergence theorem the surface
integral is convertedto a volume integral, leading to
∫
Bt
ρ (ṙ× v + r× v̇) dv =
∫
Bt
(r× ρb̄+ r× divσ + grad r× σ
)dv . (2.28)
With (2.25) and the fact, that ṙ× v = 0 since ṙ = ẋ = v, it
follows that
∫
Bt
grad r× σ dv = 0 , (2.29)
which, written in index notation, reveals the symmetry of the
Cauchy stress tensor
σ = σT . (2.30)
-
10 CHAPTER 2. BACKGROUND
Thermodynamics
In this work rubber has to be modeled, which shows a significant
energy dissipation ata mechanical loading. Therefore, beside the
mechanical balance laws, also continuumthermodynamics will be
viewed.To begin with the energy transfer inside a system is
regarded. The total energy Econsists of the inner energy U and the
kinetic energy K
E = U +K , (2.31)
where U follows with the specific inner energy u to
U =
∫
Bt
ρ u dv (2.32)
and K can be calculated from
K =
∫
Bt
1
2ρv2 dv . (2.33)
The change in energy in the system has to be equal to the sum of
the mechanical andthe thermal power P and Q
d
dtE = P +Q , (2.34)
with P being the mechanical power, which stems from the external
loads
P =
∫
∂Bt
t · v da +
∫
Bt
ρb̄ · v dv . (2.35)
The thermal power Q is calculated with the heat flux qn over the
boundary and theheat source r inside the continuum from
Q =
∫
∂Bt
qn da +
∫
Bt
ρ r dv . (2.36)
Similar to (2.23) the heat flux can be replaced by qn = −q · n,
where q is the Cauchyheat flux and n the surface normal. With
∫
∂Bt
t · v da =
∫
Bt
(divσ · v + σ : gradv) dv (2.37)
and the balance of linear momentum (2.25) the strong form of the
balance of energy(2.34) can be stated as
ρ u̇ = σ : d+ ρ r − div q , (2.38)
which is known as the first law of thermodynamics. In (2.38) d =
1/2(l+ lT
)is the
symmetric part of the spatial velocity gradient l introduced in
(2.14).
-
2.1. CONTINUUM MECHANICS 11
The first law of thermodynamics states, that in a system energy
can not be lost, butis instead converted between different forms of
energy. It provides no information onthe direction of the energy
conversion and when this conversion takes place. To answerthese
questions the entropy
S =
∫
Bt
ρ s dv . (2.39)
is introduced, which can be regarded as a measure of the
disorder inside a system. Overits boundaries and from sources
entropy can be transfered to the system. According tothe second law
of thermodynamics the entropy has to increase, what means that
theentropy transfer
Q̃ = −
∫
∂Bt
h · n da +
∫
Bt
ρ r̃ dv (2.40)
has to be less than the change in entropy, leading to the
inequality relation
d
dtS − Q̃ ≥ 0 . (2.41)
For most processes the entropy flux h and the entropy source r̃
of (2.40) can be relatedto the heat flux q and the heat source r,
respectively by
h =q
Θand r̃ =
r
Θ, (2.42)
with Θ being the absolute temperature. Inserting this into the
second law of thermody-namics (2.41) and eliminating the heat
source r with the first law (2.38), the ClausiusPlanck inequality
is derived, which reads
σ : d− ρ u̇+ ρΘ ṡ ≥ 0 . (2.43)
For an isothermal process (2.43) can with the Helmholtz free
energy function
Ψ = ρ (u−Θs) (2.44)
be written asσ : d− Ψ̇ ≥ 0 , (2.45)
which is known as the internal dissipation inequality.
2.1.3 Constitutive equations
The balance laws are fundamental equations and, just as the
kinematical description,independent of the material of the
continuum. The characteristics of the materials areaccounted for by
the constitutive equations. The aim of the constitutive theory is
tofind a mathematical relation, which describes the response of a
material element to agiven input (Haupt [2002]). Constitutive
equations can e.g. describe the relationshipbetween deformation and
stress, where the deformation or the stress could be the input
-
12 CHAPTER 2. BACKGROUND
and the other quantity arises from this input, or e.g. between
heat and temperature.These relations are necessary to solve the
balance equations. For the deduction ofconsistent constitutive
equations several principles exist, of which in the following
themost important are briefly described.
The principle of determinism demands, that the current state of
stress σ in a materialonly depends on the current deformation and
its history, and not on any future events.
The principle of local action states, that the material response
at a particle P is onlyinfluenced by the infinitesimal neighborhood
of this particle.
The principle of frame indifference requires, that the material
behavior is indepen-dent of the observer and its motion.
There exist also other principles, which are not addressed in
this work. Altogetherthe formulation of consistent constitutive
equations is a complex field, and for a morecomprehensive view on
this topic the reader is refered to e.g. Truesdell and Noll
[2004],Haupt [2002] and Altenbach [2012].The rubber regarded in
this work exhibits inelastic effects. Its stress can be expressedas
a function of the current deformation and a set of internal
variables qk as
σ = f(C, q1, ..., qn) . (2.46)
The current values of the internal variables are determined
implicitly from the defor-mation process and the initial values of
the internal variables qk0. Following Haupt[2002] this is expressed
with the functional f by
qk(t) = ft0≤τ≤t
[C (τ) , q10, ..., qn0] , (2.47)
where the notation ft0≤τ≤t
denotes a dependency on the deformation history between
starting time t0 and current time t.The elastic response of a
rubber material can be modeled using a hyperelastic materiallaw,
which means that the stress can be calculated with a scalar
function W from
S = 2∂W
∂C, (2.48)
where S = J F−1σF−T is the second Piola-Kirchhoff stress tensor.
The actual strainenergy function W and the evolution equations for
the internal variables used in thiswork can be found in chapter
4.
2.1.4 Weak form
Beside the balance of linear momentum the solution of a
mechanical problem has tofulfill some boundary conditions. In this
context the boundary of the continuum bodycan be split into a part
∂uB, where the displacements u are prescribed and the remaining
-
2.2. CONTACT 13
part ∂tB, on which surface tensions t̄ can act. Together with
(2.25) the set of equationsis given by
divσ + ρ(v̇ − b̄
)= 0 in Bt
u = ū on ∂uBt (2.49)
t = σ · n = t̄ on ∂tBt .
If the inertia forces have to be considered for the solution of
a problem, additionallyinitial conditions for the displacement and
its velocity of the form
u (t = 0) = u0 and u̇ (t = 0) = v0 in Bt (2.50)
are required. Altogether equations (2.49) and (2.50) form an
initial boundary valueproblem (IBVP), which in general can not be
solved analytically.A numerical solution can be obtained with the
Finite Element Method (FEM), whichrequires the IBVP to be
formulated in a variational form. To this end the local balanceof
linear momentum is multiplied with a test function η, which
satisfies
η = 0 on ∂uBt . (2.51)
Subsequent integration over the domain Bt yields, after
integration by parts, applicationof the divergence theorem and
consideration of (2.51), the weak form of the IBVP as
−
∫
Bt
σ : gradη dv +
∫
Bt
ρ(v̇− b̄
)· η dv +
∫
∂tBt
t̄ · η da = 0 . (2.52)
The test function η can be regarded as a variation of the
displacement u, which iswhy (2.52) also corresponds to the
principle of virtual work. It includes the boundarycondition for
the surface tensions, which is now fulfilled in a weak sense.
2.2 Contact
The simulation of contact between deformable bodies needs
further considerations.When bodies, of which at least one is
deformable, approach, the area of contact, whichforms between the
bodies, and the forces, acting at this contact surface, are
unknown.Yet (2.52) only captures deformations due to preexisting
loads acting on known sur-faces, and therefore the theory has to be
extended to include also contact.For this purpose, starting with
the works of Wilson and Parsons [1970] and Chan andTuba [1971], the
field of computational contact mechanics has evolved.
Introductionsinto this subject can be found in the books by Kikuchi
and Oden [1988], Laursen [2002]and Wriggers [2006].
2.2.1 Kinematics
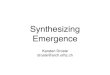
In the following the contact between two deformable bodies, as
sketched in figure 2.2,is regarded. In this context, going back to
Hallquist [1979], one body B2 is denoted as
-
14 CHAPTER 2. BACKGROUND
X̄1
X̄2
B10
B20
B1t
B2tϕ
∂cBt
na
Figure 2.2. Contact of two bodies.
x
ξ1
ξ2n
a1
a2
Figure 2.3. Parametrization of a surface with convective
coordinates.
the master and the other as the slave body B1. In general the
bodies are not allowedto penetrate each other and thus, when they
approach, a contact zone ∂cBt develops,at which interactions
between the bodies take place.To describe these interactions the
surfaces of the master and the slave body areparametrized each by
two convective coordinates ξ1 and ξ2, see figure 2.3. With
thisparametrization coordinate systems fixed at the material points
on each surface are in-troduced. From differential geometry it is
known, that their base vectors are calculatedwith the position
vector x of the regarded particle from
aα =∂x
∂ξα= x,α with α = 1, 2 , (2.53)
see e.g. Klingbeil [1989]. The third base vector is the
normalized surface normal ncalculated by
n =a1 × a2‖a1 × a2‖
. (2.54)
To decide whether contact occurs, two facing surface particles
x̄1 and x̄2 are regarded.The particles are in contact, if the
normal gap function
gN =(x̄2 − x̄1
)· nc (2.55)
equals zero, at which nc denotes the contact normal, which is
specified in Chapter 3.The facing points are determined by
projections from one surface onto the other. Since
-
2.2. CONTACT 15
the projection routine depends on the numerical implementation,
it is not described atthis point but can be found for two different
implementations also in Chapter 3.If friction or adhesion has to be
considered, the two bodies can interact in a directiontangential to
the interface. These interactions are usually modeled by
constituive equa-tions, which need a description of the tangential
movement between both bodies. Therelative tangential velocity can
be defined by
ġT = (1− nc ⊗ nc) ·(v̄2 − v̄1
), (2.56)
from which the total sliding distance between time t0 and t1 can
be computed from
gT =
t1∫
t0
‖ġT‖ dt . (2.57)
2.2.2 Constraints and constitutive equations
With the normal gap gN the different states of contact can be
distinguished. If thebodies are not allowed to penetrate each
other, then gN ≥ 0 has to hold for all particleson the contact
surface ∂cB. This non penetration condition only generates stresses
tNnormal to the contact surfaces. If gN > 0 there is a gap
between both particles andthus, if adhesion is not considered, the
contact pressure tN is equal to zero. On theother hand if the
bodies are in contact, then tN is less than zero. These
circumstancesare combined in the Karush-Kuhn-Tucker conditions
gN ≥ 0 , tN ≤ 0 , gN tN = 0 . (2.58)
In the literature sometimes also the persistency condition is
mentioned (see e.g. Agelet deSaracibar [1997]), which states, that
if the bodies stay in contact, then
ġN = 0 . (2.59)
As mentioned the interaction in tangential direction is
described by a constitutive equa-tion, which is usually based on
measurements. To model friction effects, the classicallaw of
Coulomb is applied in this work.Up to a certain tangential stress
‖tT‖ < µ|tN |, where µ is the models parameter, thebodies stick
to each other, meaning that no relative movement of the two
contactingsurfaces occurs
ġT = 0 . (2.60)
When the limit µ|tN | is reached, a relative tangential movement
of the surfaces calledsliding occurs. In this case the tangential
stress
tT = −µ|tN |ġT
‖ġT‖. (2.61)
acts opposite to the direction of movement. To distinguish
between stick and slip theslip criterion
fs = ‖tT‖ − µ|tN | ≤ 0 (2.62)
-
16 CHAPTER 2. BACKGROUND
is introduced, where slip occurs if fs = 0. In this case the
relative tangential movementof the surfaces is computed from the
evolution equation
ġT = γ̇tT
‖tT‖, (2.63)
in which γ is a plastic parameter and γ̇ ≥ 0 has to hold.
Similar to (2.58) the tangentialcontact constraints can also be
stated as
γ̇ ≥ 0 , fs ≤ 0 , γ̇ fs = 0 . (2.64)
2.2.3 Contact virtual work and treatment of contact
constraints
To model a mechanical system, in which contact occurs, the
governing equation (2.52)has to be extended to also include
interactions due to contact. To begin with theboundary value
problem for two contacting bodies is regarded for the case, that at
thecontact zone no tangential interactions occur. With the unknown
contact surfaces ∂cB
it
on both bodies (i = 1, 2) and the unknown contact stresses
tic = tiNnc , i = 1, 2 (2.65)
it reads
2∑
γ=1
∫
Bγt
σγ : gradηγ dv −
∫
Bγt
ρ(v̇γ − b̄γ
)· ηγ dv −
∫
∂tBγt
t̄γ · ηγ da
−
∫
∂cB1t
t1c · η1c da−
∫
∂cB2t
t2c · η2c da = 0 ,
(2.66)
where ηic are the variations of the displacements of the
particles in contact. The firstthree integral terms arise from the
virtual work of both bodies and are in the followingdenoted by Gγ,
whereas only the remaining terms compose the contribution Gc ofthe
contact constraints to the weak form. Since the contact surfaces on
both bodiesmust be equal and the contact stresses have to be equal
in magnitude and opposite indirection
t1c = −t2c = tc , (2.67)
Gc can be simplified to
Gc =
∫
∂cBt
tc ·(η2c − η
1c
)da . (2.68)
This can, with (2.65) and the variation δgN of the normal gap,
be expressed as
Gc =
∫
∂cBt
tN δgN da , (2.69)
-
2.2. CONTACT 17
since δn · (x̄2 − x̄1) = 0, which will be shown in chapter 3.
Generally the presence ofcontact interactions leads to an extension
of the IBVP by a contact contribution Gc
2∑
γ=1
Gγ +Gc = 0 . (2.70)
Lagrange multiplier method
For the enforcement of the contact constraints, different
methods, which lead to dif-ferent contact contribution Gc exist.
One method is the Lagrange multiplier method,which will be
described only for the adhesion and frictionless case, since it is
not appliedin this work, but is the basis for the augmented
Lagrange multiplier method.Provided that the contact surfaces are
known, the non penetration condition (2.55)leads to additional
equations in the equation system. These equations can be includedby
introducing additional unknowns, the so called Lagrange multipliers
λN . The con-tact contribution for the Lagrange multiplier method
reads
Gc =
∫
∂cBt
(λN δgN + δλN gN) da , (2.71)
where δ(..) denotes the variation of a quantity. Comparing the
first term in (2.71) with(2.69) it can be noticed that the
multiplier λN corresponds to the contact stress tN . Thesecond term
arises from the fact, that the multipliers are independent unknowns
andrepresents a weak formulation of the constraint equation (for
details, see e.g. Wriggers[2006]).
Penalty method
The introduction of additional degrees of freedom (DOF) leads to
an increase in systemsize and thus for later simulations in an
increase in computation time. This can beavoided by a
regularization of the contact constraints with the penalty method.
Sincethis method is used for the simulations in this work, in the
following also tangentialinteractions due to friction are
regarded.Within the penalty method the contact stresses are assumed
to be dependent on thegap, which is sometimes referred to as the
primal variable
tN = cNgN tT =
−cT (gT − gsT ) for stick
−µ |tN |ġT‖ġT‖
for slip ,(2.72)
where cN > 0 and cT > 0 are the so called penalty
parameters and gsT is the slip (or
plastic) part of the relative tangential movement. This
assumption leads to the contactcontribution
Gc =
∫
∂cBt
(tN δgN − tT · δgT ) da . (2.73)
-
18 CHAPTER 2. BACKGROUND
The regularization of the contact constraints leads to a
violation of the non penetrationand the stick condition ((2.55) and
(2.60)). The deviation from the exact solutiondepends on the values
of the penalty parameters. For cN → ∞ and cT → ∞ thesolution
converges to the exact solution of the Lagrange multiplier method.
However,too large penalty parameters lead to an ill-conditioning of
the system of equations, sothat the parameters have to be chosen
with care. Instead of (2.72) also other relationsbetween gap and
stress stemming e.g. from constitutive equations can be used (see
e.g.Zavarise et al. [1992] and Bandeira et al. [2004]).
Augmented Lagrange multiplier method
The augmented Lagrange multiplier method was introduced in the
mathematical liter-ature in the context of optimization with
constraints by Hestenes [1969] and extendedto inequality
constraints by Rockafellar [1976]. An early implementation for
contactproblems can be found in Wriggers et al. [1985]. Since the
augmented method is alsoapplied in this work, it will be described
in detail in this section.Generally two different approaches exist.
In the mixed primal dual formulation theLagrange multipliers, which
appear in the method, are treated as fully independent(denoted as
dual) variables, whereas in the so called Uzawa algorithm they are
handledas known quantities, which are eliminated from the system of
equations and updatedafter each time step. The method can be viewed
as a combination of the penalty and theLagrange multiplier method.
It was found to be more stable than the penalty method(Alart and
Curnier [1991]) and fulfills the non penetration and the stick
conditionexactly.Within the method the augmented stresses
λ̂N = λN + cN gN and λ̂T = λT − cT ∆gT (2.74)
are defined, where cN and cT are regularization parameters, λN
and λT the Lagrangemultipliers in normal and tangential direction
and ∆gT = ġT ∆t is the tangentialdisplacement increment.A mixed
primal dual approach for frictional contact problems was first
formulated byAlart and Curnier [1991] and extended to large
deformations in Pietrzak and Curnier[1999]. There the contact
contribution Gc is calculated from the variation of a normaland a
tangential contact potential, ΠcN and Πc T , respectively, by
Gc =
∫
∂cBt
(
δλN∂Πc N∂λN
+ δgN∂Πc N∂gN
+ δgT∂Πc T∂gT
+ δλT∂Πc T∂λT
)
da . (2.75)
The normal potential ΠcN is determined directly from Rockafellar
[1976] to
ΠcN = −1
2cN|λN |
2 +1
2cN[min (|λN |+ cN gN , 0)]
2 , (2.76)
and the tangential potential reads
Πc T = λT ·∆gT +cT2‖∆gT‖
2 −1
2cT
[
max(
‖λT + cT ∆gT‖ −max(
−µ λ̂N , 0)
, 0)]2
.
(2.77)
-
2.2. CONTACT 19
After evaluation of the min and max functions and subsequent
variation with respectto the variables, the contact contribution Gc
is calculated to
Gc = Gcu +Gcl , (2.78)
where
Gcu =
∫
∂cBt
(
λ̂N δgN + λ̂T · δgT
)
da (2.79)
is independent of the state of contact and can be regarded as
the virtual work of thecontact forces. Gcl represents a weak
formulation of the constraints and reads
Gcl =
∫
∂cBt
(
δλN1
cNλN + δλT ·
1
cTλT
)
da if λ̂N > 0
∫
∂cBt
(δλN gN + δλT ·∆gT ) da if λ̂N ≤ 0 , ‖λ̂T‖ < µ |λ̂N |
∫
∂cBt
(
δλN gN + δλT ·1
cT
[
λT − µ λ̂Nλ̂T
‖λ̂T‖
])
da if λ̂N ≤ 0 , ‖λ̂T‖ ≥ µ |λ̂N | ,
(2.80)where the augmented stresses determine the contact state:
λ̂N > 0 corresponds to aninactive contact, ‖λ̂T‖ < µ |λ̂N |
to stick and ‖λ̂T‖ ≥ µ |λ̂N | accordingly to the case
ofslip.Another approach to deal with the contact constraints, which
arrives at almost thesame equations, is pursued in Hüeber and
Wohlmuth [2005] and Hüeber et al. [2008].Starting from the virtual
work the contact problem for each particle, which can possiblycome
into contact, can be stated as
λNp δgNp + λTp · δgTp = 0
subject to gNp ≥ 0 , λNp ≤ 0 , gNp λNp = 0
and γ̇p ≥ 0 , fsp ≤ 0 , γ̇p fsp = 0 .
(2.81)
The inequalities can be treated with an active set strategy, see
Luenberger [1984],which, however, requires an additional loop in
the iterative solution scheme. In orderto avoid this, two nonlinear
complementary functions (NCF) CN and CT are defined,with which the
inequalities in (2.81) can be replaced by
δλNpCNp = 0
δλTp ·CTp = 0 .(2.82)
The functions CN and CT are given in Hintermüller et al. [2003]
and Hüeber et al. [2008](also see Popp et al. [2009] and Gitterle
et al. [2010]). In accordance with Weißenfels[2013] they are in
this work divided by the respective regularization parameter
andhence read
CN =1
cN
[
λN −min(
0, λ̂N
)]
CT =1
cT
[
max(
µ λ̂N , ‖λT‖)
λT − µ min(
0, λ̂N
)
λ̂T
]
.(2.83)
-
20 CHAPTER 2. BACKGROUND
The formulation of the constraint equations in terms of (2.82)
allows for a solution ofthe contact problem with the semi-smooth
Newton method, where the contact searchand the determination of
stick and slip are treated within the same iterative schemeas the
nonlinearities of the continua. When the min and max functions in
(2.83) areevaluated this approach results in the same equations as
the one based on the potentials,except that (2.79) is changed
to
Gcu =
∫
∂cBt
(λN δgN + λT · δgT ) da . (2.84)
In the following, when the augmented Lagrange multiplier method
is addressed, atreatment of the contact constraints with (2.80) and
(2.84) is meant.Beside the described methods also other approaches
to treat the contact constraints(e.g. Nitsche’s method) exist. For
a more comprehensive overview the reader is referredto e.g.
Wriggers [2006].
2.3 Finite elements
An analytical solution of the IBVP in the form of (2.52), or
(2.70) for contact prob-lems, can only be obtained for special
cases. However, in the mathematical and theengineering literature
several techniques to obtain approximate numerical solutions ofsuch
partial differential equations (PDEs) exist. The most common is the
finite ele-ment method (FEM), which is based on a Rayleigh Ritz
approximation of the soughtquantities and Galerkins method of
weighted residuals. After its first appearance inCourant [1943] it
has been successfully applied and extended to a variety of
differentapplication areas. For a comprehensive overview the reader
is referred to the textbooksof Zienkiewicz et al. [2005],
Zienkiewicz and Taylor [2005] and e.g. Wriggers [2001].
2.3.1 Discretization of space
In the following the solution of the mechanical problem of
(2.52) at one instant in timeis regarded. The discretization of the
contact contributions in (2.70) will be regardedin chapter 3.
Within the FEM the continuous domain B is approximated by a set
ofne non overlapping subdomains Ωe
B ≈ Bh =
ne⋃
e=1
Ωe , (2.85)
(see Wriggers [2001]) which is illustrated in figure 2.4. This
approach also leads toan approximation of the boundaries ∂B of the
domain with the discrete boundaries∂Bh. The subdomains Ωe are
denoted as finite elements. On each element a numberof nodes is
defined, which in figure 2.4 can e.g. be the corners of the
elements. Usuallythe elements are of simple geometry. Triangles and
squares are used to discretize twodimensional domains, whereas in
three dimensional problems mainly tetrahedrons andhexaedrons are
employed.
-
2.3. FINITE ELEMENTS 21
B
Ωe
∂B ∂Bh
Figure 2.4. Discretization of a two dimensional body B.
Following the Rayleigh Ritz approach the solution field u of the
PDE is approximatedby a linear combination of different test
functions. Within the FEM these test functionsare defined only
locally on each element with so called shape functions NI by
u ≈ uh =n∑
I=1
NI (ξ)uI , (2.86)
where uI are the (unknown) displacements at the nodes of the
finite element and ξ arelocal coordinates describing the position
inside the element. In order that the integralsof (2.52) can be
evaluated, the shape functions have to be Cm continuous
functions,when the highest derivative of the variables appearing in
the weak form is of orderm + 1. Furthermore a standard shape
function NI has to be equal to one at node Iand zero at all other
nodes, and the sum of all shape functions has to be always equalto
one
NI (ξJ) = δIJ ,n∑
I=1
NI (ξ) = 1 , (2.87)
where ξJ are the coordinates at the position of node J .
In this work the isoparametric concept is applied, which means
that the geometry isapproximated by the same shape functions as the
displacements
x ≈ xh =
n∑
I=1
NI (ξ)xI . (2.88)
Since the shape functions are defined on a reference element,
this approximation can beinterpreted as a mapping of the element
geometry onto a reference configuration Ω�,see figure 2.5. Ω0
denotes the initial configuration, which can also be mapped on
thisnew reference configuration. With this isoparametric mapping it
is simple to computethe gradients appearing in the weak form. Also
the integration over the domain canbe readily accomplished in the
reference configuration.
-
22 CHAPTER 2. BACKGROUND
ξ
ξ
ξ
ηη
η
F
Ω0
Ωt
Ω�
jJ
Figure 2.5. Isoparametric mapping.
The mappings between the different configurations are calculated
to
j =∂x
∂ξ=
n∑
I=1
xI ⊗∂NI∂ξ
,
J =∂X
∂ξ=
n∑
I=1
XI ⊗∂NI∂ξ
.
(2.89)
With this the gradient of the discretized displacement field,
e.g. , can be calculated to
graduh =∂uh
∂x=
n∑
I=1
uI ⊗∂NI∂x
=
n∑
I=1
uI ⊗ j−T ∂NI
∂ξ. (2.90)
The integrals over the elements and their boundaries are
evaluated numerically usingGaussian quadrature. At this the
integration of a function f is replaced by the sum ofthe values of
the function at different Gauss points gp multiplied with weighting
factorswgp, giving
∫
Ωe
f (ξ) dΩe =
∫
Ω�
f (ξ) det j dΩ� ≈
ngp∑
g=1
f(ξgp)det jgp wgp . (2.91)
Approximating the other field variables η and v̇ with the same
shape functions as thedisplacements, an application of the FEM
approximation to the governing equationsleads to a transformation
of the PDE of (2.52) into a system of nonlinear equations, inwhich
the nodal (displacement) values have to be determined. This can be
written inmatrix form as
ηT [Mv̇ +R(u)−P] = 0 , (2.92)
where u and η are vectors containing the nodal displacements and
their variations, Mis the mass matrix, P a vector containing the
external loads and R is the residual force
-
2.3. FINITE ELEMENTS 23
vector, which results from the internal forces. Since the test
function η is arbitrary,(2.92) is only fulfilled, if the expression
inside the brackets becomes zero.
2.3.2 Discretization of time
If the motion or deformation of a mechanical system is regarded
as it evolves over time,a problem continuous in time results.
Regarding this problem only at discrete pointsin time, it can be
transferred into sequence of a limited number of problems. To
thisend the time is discretized with an adjustable time increment
∆t, which leads to therecursion formula
tn+1 = tn +∆t (2.93)
for the current time tn+1. In (2.92) the accelerations v̇ and
the displacements u are noindependent variables. Thus if inertia
effects have to be considered in the solution of aproblem, a
suitable integration scheme has to be applied, which reflects the
dependencybetween both quantities. To this end the method proposed
by Newmark [1959] isapplied in this work. The current nodal
velocities and displacements, vn+1 and un+1,are calculated with
their values from the last time step, denoted by a subscript
(..)n,and the previous and the current accelerations a = v̇ by
vn+1 = vn +∆t [(1− γ) an + γ an+1] ,
un+1 = un +∆tvn + (∆t)2
[(1
2− β
)
an + β an+1
]
.(2.94)
The parameters β and γ are restricted by
0 ≤ β ≤1
2, 0 ≤ γ ≤ 1 . (2.95)
The Newmark method is called an implicit time integration
scheme, which means thatthe variables to be integrated are
determined not only from kinematical quantities,known from the last
time step, but also from unknown quantities at the new time step.If
the parameters β and γ are chosen to be zero and 0.5, respectively,
the dependency onthe unknown accelerations an+1 drops, which
results in an explicit integration scheme.Inserting relation (2.94)
into (2.92) the system of equations can be solved either for
thedisplacements or the accelerations.
2.3.3 Solution algorithms
Newton-Raphson method
The nonlinear equation system resulting from (2.92) can be
written as
G(u) = Ma(u) +R(u)−P = 0 . (2.96)
Generally its solution is obtained iteratively using the
Newton-Raphson method. Theiterative procedure is derived from a
Taylor expansion of (2.96) to the first order at aknown deformation
state uk, which reads
G(uk+1
)= G
(uk)+∂G(u)
∂u
∣∣∣∣u = uk
·(uk+1 − uk
)= 0 . (2.97)
-
24 CHAPTER 2. BACKGROUND
The new displacement field uk+1 is thus calculated to
uk+1 = uk − (K∗T )−1G
(uk), (2.98)
where
K∗T =∂G(u)
∂u
∣∣∣∣u = uk
(2.99)
denotes the Jacobi or tangent matrix. At each time step the
iteration with (2.98) isrepeated until the solution converges. The
converged solution un from the previoustime step is then chosen as
the initial value u1n+1 at the new time step. Anotherpossibility to
solve (2.96), especially in the case of high nonlinearities, would
be to usearc-length type methods. This approach will be applied and
explained in chapter 6.
Implicit solution
In the case of small accelerations it is sometimes sufficient to
solve the quasi staticproblem, which results when in (2.96) the
term containing the acceleration is neglected.If dynamic effects
have to be considered, the equation system is usually solved for
thenodal displacements. To this end the Newmark equation (2.94)2 is
rewritten as follows
an+1 =1
β (∆t)2(un+1 − un)−
1
β∆tvn −
(1
2β− 1
)
an . (2.100)
Since in (2.96) no velocity dependent terms appear, here only
the accelerations areregarded. Inserting (2.100) into (2.96) the
tangent matrix for the Newton iteration canbe stated as
K∗T =1
β (∆t)2M+KT , (2.101)
where
KT =∂R(u)
∂u
∣∣∣∣u = uk
(2.102)
is the tangent matrix of the quasi static problem.
Explicit solution
As already mentioned an explicit solution scheme results, when
the Newmark parameterβ is chosen to be zero. In this case (2.94)2
reads
un+1 = un +∆tvn + (∆t)2 1
2an , (2.103)
which, inserted into (2.96), leads to the following equation to
determine the currentaccelerations:
an+1 = M−1
[
R
(
un +∆tvn + (∆t)2 1
2an
)
−P
]
. (2.104)
-
2.3. FINITE ELEMENTS 25
With the solution of this equation the unknown displacements
un+1 can in turn becalculated from (2.103). Compared to (2.101) the
explicit solution via (2.104) is verysimple, as the (sometimes very
complex) tangent matrix KT is not required, and onlythe mass matrix
M has to be inverted. However this solution scheme is only
condi-tionally stable and requires a very small time step size ∆t.
An estimation for the timestep size for nonlinear problems can be
found in Belytschko et al. [1976].
Algorithms for contact
In the following the discretization Gc h of the contact
contribution in (2.70) is assumedto be given. Depending on the
applied strategy the contact constraints are imposedon nodes or
elements. To calculate the contact contributions Gc h the contact
surfaces∂cB
h need to be known ((compare e.g. (2.73) and (2.78))), which is
usually not thecase. A simple method to deal with this issue is an
active set strategy, see Luenberger[1984], which will be used in
this work, when the penalty method is applied. Withinthe penalty
method nodes (or elements) are in contact if
gN ≤ 0 . (2.105)
At the beginning of each iterative solution procedure a set of
nodes (or elements),denoted as the active set IA, is assumed to be
in contact. By checking (2.105) for allpossible candidates, nodes
(or elements) can be determined which have to be added toor removed
from IA. Depending on the implementation this update can be
performedin each iteration, or in a outer loop after convergence
with a particular active set hasbeen obtained.Inequality (2.62),
describing the tangential contact conditions, is treated with the
re-turn mapping algorithm, which was first applied to contact
problems in Wriggers [1987].Within the penalty method the relative
tangential movement gT is split into an elasticand an inelastic or
slip part
gT = geT + g
sT , (2.106)
where the elastic part geT stems from the regularization of the
stick condition within thepenalty method. Under the assumption,
that stick occurs, meaning that the currenttangential movement is
elastic, a trial tangential stress
ttrT n+1 = −cT(gT n+1 − g
sT n
)(2.107)
is calculated, which is used to evaluate the slip criterion
(2.62)
f trs n+1 = ‖ttrT n+1‖ − µ |tN | . (2.108)
If f trs n+1 ≤ 0, then the node or element sticks. In this case
the gsT does not change from
the last time step and the actual tangential stress tT n+1 is
equal to ttrT n+1. Otherwise,
if f trs n+1 > 0, sliding occurs, and the tangential stress
has to be projected onto the slipsurface which gives
tT n+1 = µ |tN |ttrT n+1
‖ttrT n+1‖gsT n+1 = g
sT n +
1
cTf trs n+1
ttrT n+1‖ttrT n+1‖
. (2.109)
-
26 CHAPTER 2. BACKGROUND
Within the augmented Lagrangian method active contact nodes (or
elements) and thedifferentiation between sticking and sliding are
determined with the augmented stressesas follows:
active contact if λ̂N ≤ 0 , inactive contact if λ̂N > 0 ,
stick if ‖λ̂T ‖ < µ λ̂N , slip if ‖λ̂T‖ ≥ µ λ̂N .(2.110)
Since the augmentation leads to a regularization of the contact
constraints, the updateof the active set and of the tangential
state can be performed within the same Newton-Raphson loop, the
material and geometrical nonlinearities are treated in.
-
Chapter 3
Contact finite elements
This chapter addresses the discretization of the contact
contributions in the weak form.To enforce the contact constraints
several techniques have been developed in the lit-erature. In the
simplest case, referred to as a node-to-node formulation, they
aredirectly established between the nodes of the contacting
surfaces, see e.g. Francavillaand Zienkiewicz [1975]. Since this
concept needs matching meshes at the interfaces, itis restricted to
small deformations.A more general approach are the node to segment
(NTS) formulations, where the nodesof one of the surfaces are in
contact with the elements of the other. Since this conceptis
employed in this work, its implementation within a three
dimensional finite elementframework and a treatment of the
constraints with the penalty method is described inthe next
section.Recently the mortar method has become very popular. This
method constitutes anenforcement of the contact constraints between
the elements of both contacting sur-faces, and thus represents a
segment-to-segment formulation. It is also applied in thiswork, yet
with an enforcement of the contact constraints using the augmented
Lagrangemultiplier method, and is therefore described in section
3.2.
3.1 Node to segment
Early implementations of 2D NTS strategies can be found in Chan
and Tuba [1971] orHallquist [1979]. Extensions to 3D contact
problems were developed in Parisch [1989]and, for the case of
friction, in Peric and Owen [1992]. A fully consistent
linearizationfor 3D frictional contact problems can be found in
Laursen and Simo [1993]. Theformulation applied in this work is
based on this contribution and can also be found ine.g. Wriggers
[2006] or Weißenfels [2013].
3.1.1 Discretization, projection and contact search
Having assigned one surface as the master and the other as the
slave surface, as intro-duced in section 2.2, the contact
constraints are enforced between the nodes x1 of theslave surface
and the elements of the master surface ∂cB
2. The continua are in this work
27
-
28 CHAPTER 3. CONTACT FINITE ELEMENTS
slave surface
master surface
x1
x2 (ξ1, ξ2)
x21
x22
x23
x24
a22
a21
n2
ξ1
ξ2
Figure 3.1. 3D NTS contact element.
discretized with hexahedrons leading to four sided elements on
the surfaces. Using theisoparametric concept, the geometry and the
displacement field of these elements areinterpolated with the
bi-linear shape functions
NI =1
4
(1 + ξ1I ξ
1) (
1 + ξ2I ξ2), (3.1)
where ξ1 ∈ [−1, 1] and ξ2 ∈ [−1, 1] are the convective
coordinates and the index (..)Idenotes the value at node I. With
this the position of a point on the master surface iscalculated
by
x2 =
nm∑
I=1
NI(ξ1, ξ2
)x2I , (3.2)
where nm denotes the number and x2I the coordinates of the nodes
of the master surface
element, see figure 3.1. Recalling (2.53) the base vectors of
the master surface followfrom
a2α =nm∑
I=1
NI,α(ξ1, ξ2
)x2I , (3.3)
where here and in the following small Greek letters have values
of 1 or 2 and a differ-entiation with respect to ξα is denoted by
(..),α.To determine contact, a function
d = ‖x1 − x2(ξ1, ξ2
)‖ (3.4)
describing the distance between a slave node x1 and a point x2
on a facing masterelement is introduced. The closest point to x1 is
determined by minimizing d withrespect to the convective
coordinates (ξ1, ξ2), which yields
[x1 − x2
(ξ1, ξ2
)]· x2,α
(ξ1, ξ2
)= 0 , (3.5)
-
3.1. NODE TO SEGMENT 29
where x2,α corresponds to the base vector a2α of the master
element. With this in mind
(3.5) denotes a projection of the slave node onto the master
element, along the normalof the master surface at the projection
point. To solve this nonlinear equation for theconvective
coordinates a Newton-Raphson scheme is applied. Neglecting higher
orderterms, the Taylor expansion of (3.5) reads
[x1 − x2 k
]· x2 k,α +
(−a2 kα a
2 kβ +
[x1 − x2 k
]x2 k,α β
) (ξβ k+1 − ξβ k
)= 0 , (3.6)
where the superscript (..)k denotes an evaluation at the
coordinates ξβ k, calculatedin the last iteration. Solving (3.6)
for the new coordinates ξβ k+1, yields the updateformula for the
solution. As initial values for the iteration, ξ1 0 = ξ2 0 = 0 are
chosen,which corresponds to a projection point at the center of the
slave element.Within the NTS strategy for each slave node x1I the
facing master element has to beidentified. To this end the master
node x2J , closest to x
1I , is determined. x
1I is then
projected onto all elements neighboring x2J . The element, which
yields valid values forξ1 and ξ2 is then selected as the facing
element. If more than one projection yieldspoints inside the
corresponding element, a special treatment is necessary, which will
bediscussed in section 3.1.6.
3.1.2 Kinematical quantities and constitutive equations
In the following the coordinate values, which solve (3.5), are
denoted by ξ̄α. Alsoall quantities, which have to be evaluated at
these coordinates, are marked with anoverbar. Having determined the
closest point, the normal gap function is defined withthe normal of
the master surface as
gN = n̄2[x1 − x̄2
]. (3.7)
A multiplication with the normal vector yields the relation
gN n̄2 = x1 − x̄2 , (3.8)
which will be of use in subsequent calculations. The increment
of the relative tangentialmovement between the previous and the
current time step (tn and tn+1, respectively),is calculated from
the change of the convective coordinates of the projection point
via
∆gT n+1 =(ξ̄αn+1 − ξ̄
αn
)ā2α . (3.9)
The contact constraints are treated with the penalty method, so
that the contactstresses are directly related to these kinematical
quantities. The normal contact pres-sure tN is calculated with the
penalty parameter cN from (2.72) to
tN = cN gN . (3.10)
To determine the correct tangential stress, the return mapping
algorithm of section2.3.3 is applied. The covariant components of
the trial tangential stress are computedfrom
ttrTα = −cT
(
∆tξβn+1 + ξe βn
)
āαβ n+1 , (3.11)
-
30 CHAPTER 3. CONTACT FINITE ELEMENTS
where ξeβn are the components of the elastic gap at the previous
time step,
∆tξβn+1 = ξ̄βn+1 − ξ̄
βn (3.12)
are the increments of the projection point coordinates and
āαβ = ā2α · ā
2β (3.13)
is the metric tensor. At the initiation of contact at a node the
elastic gap is zero. Withthe norm of the trail tangential
stress
‖ttrT ‖ =√
ttrTα ttrTβ ā
αβ (3.14)
the trial slip criterionf tr = ‖ttrT ‖ − µ |tN | (3.15)
can be evaluated. Depending on its value, the actual tangential
stress and the compo-nents of the new elastic gap result in
tTα =
ttrTα if ftr < 0
µ |tN |ttrTα‖ttrT ‖
if f tr ≥ 0(3.16)
and
ξe βn+1 =
ξe βn +∆tξβn+1 if f
tr < 0
1
cTtTα ā
αβ if f tr ≥ 0 .(3.17)
3.1.3 Contribution to the weak form
The contribution Gc of the contact constraints to the weak form
is stated, for the case,that the penalty method is applied, in
(2.73). The tangential part can also be writtenin component form
as
tT · δgT = tTαδξ̄α . (3.18)
The integration over the contact surface is carried out on the
slave surface. With thearea as surrounding each slave node, G
c can be approximated by
Gc =
∫
∂cBt
(tN δgN − tT · δgT ) da ≈
n1glob∑
s=1
(tN δgN − tTα · δξ̄
α)as , (3.19)
where the contributions of all n1glob slave nodes are
summarized.To calculate as, the areas of the elements adjacent to
the current slave node have tobe determined. With the same local
node numbering for the slave surface as for themaster surface,
shown in figure 3.1, on each slave element e the edge vectors
de1 = x12 − x
11 , d
e2 = x
14 − x
11 , d
e3 = x
12 − x
13 and d
e4 = x
14 − x
13 (3.20)
-
3.1. NODE TO SEGMENT 31
are defined. With this the area surrounding a slave node is
calculated to
as =1
n1
n1ad∑
e=1
1
2‖de1 × d
e2‖ ‖d
e3 × d
e4‖ , (3.21)
where n1 is the number of nodes on the slave elements and n1ad
the number of adjacentelements.
3.1.4 Linearization
Since the weak form will be solved with a Newton-Raphson scheme
(see section 2.3.3),the contact contribution (3.19) has to be
linearized, giving
∆Gc =
n1glob∑
s=1
(∆tN δgN + tN ∆δgN −∆tTα · δξ̄
α − tTα ·∆δξ̄α)as , (3.22)
where ∆(..) stands for the linearization of a quantity. The
variation δgN of the normalgap is calculated