Upload
ludwig-limmer
View
33
Download
1
Embed Size (px)
DESCRIPTION
multiharmonic Balance method
Citation preview
Numerische und experimentelle
Untersuchungen zum dynamischen Verhalten
von Strukturen mit Fgestellen
Der Technischen Fakultt der
Universitt Erlangen-Nrnberg
zur Erlangung des Grades
DOKTORINGENIEUR
vorgelegt von
Johannes Geisler
Erlangen 2010
Als Dissertation genehmigt vonder Technischen Fakultt derUniversitt Erlangen-Nrnberg
Tag der Einreichung: 04.12.2009Tag der Promotion: 29.01.2010Dekan: Prof. Dr.-Ing. habil. R. GermanBerichterstatter: Prof. Dr.-Ing. K. Willner
Prof. Dr. rer. nat. N. Hoffmann
Schriftenreihe Technische Mechanik
Band 1 2010
Johannes Geisler
Numerische und experimentelle
Untersuchungen zum dynamischen Verhalten
von Strukturen mit Fgestellen
Herausgeber: Prof. Dr.-Ing. habil. Paul Steinmann
Prof. Dr.-Ing. habil. Kai Willner
Erlangen 2010
Impressum
Prof. Dr.-Ing. habil. Paul SteinmannProf. Dr.-Ing. habil. Kai WillnerLehrstuhl fr Technische MechanikUniversitt Erlangen-NrnbergEgerlandstrae 591058 ErlangenTel: +49 (0)9131 85 28502Fax: +49 (0)9131 85 28503
ISSN 2190-023X
c Johannes Geisler
Alle Rechte, insbesondere dasder bersetzung in fremdeSprachen, vorbehalten. OhneGenehmigung des Autors istes nicht gestattet, dieses Heftganz oder teilweise aufphotomechanischem,elektronischem oder sonstigemWege zu vervielfltigen.
Vorwort
Die vorliegende Arbeit entstand whrend meiner Ttigkeit als wissenschaftlicher As-sistent am Lehrstuhl fr Technische Mechanik der Friedrich-Alexander-UniversittErlangen-Nrnberg.
Mein besonderer Dank gilt meinem Doktorvater, Herrn Professor Kai Willner, der sichstets Zeit fr mich genommen hat. Durch zahlreiche Diskussionen, wertvolle Ratschl-ge und besonders durch die Schaffung eines angenehmen Arbeitsklimas hat er starkzum Gelingen dieser Arbeit beigetragen. Die Freiheiten, die mir in der Auswahl undUmsetzung verschiedener Themen gegeben wurden, wei ich sehr zu schtzen.
Dem Leiter des Lehrstuhls fr Technische Mechanik, Herrn Professor Paul Steinmannmchte ich fr die eingerumten Freirume, sowie insbesondere fr die Finanzierungvon Messgerten danken. Ohne diese Mittel wre die Arbeit in diesem Rahmen nichtmglich gewesen.
Professor Norbert Hoffmann danke ich ganz herzlich fr die bernahme des Zweitgut-achtens sowie das gezeigte Interesse an meiner Arbeit.
Dem ehemaligen Lehrstuhlinhaber, Herrn Professor Gnther Kuhn, mchte ich fr dieFrderung bereits whrend meines Studiums und die Mglichkeit zur Arbeit am Lehr-stuhl danken. An dieser Stelle sei auch Herrn Dr.-Ing Lars Kbler gedankt, der durchsein Gespr fr interessante Themen und durch seine Motivation meinen Werdegangmageblich beeinflusst hat.
Ein besonderer Dank gilt allen Kolleginnen und Kollegen, die durch ihre Hilfsbereit-schaft, fachliche Diskussionen, aber auch verschiedene private Aktivitten zu einerangenehmen Atmosphre, und damit ebenfalls zum Gelingen der Arbeit beigetragenhaben. Hier sei stellvertretend Dipl.-Ing. Markus Kraus erwhnt, der mir stets mit kon-struktiver Kritik sowie fachlichen und privaten Gesprchen zur Seite stand. Weiterhinhaben zahlreiche Studenten im Rahmen von Studien- und Diplomarbeiten immer wie-der neue Anregungen eingebracht und damit einen groen Beitrag zu dieser Arbeitgeleistet. Hier seien besonders Tobias Rasp und Dominik S genannt.
Fr den persnlichen Rckhalt im privaten Umfeld geht ein groer Dank an meineFamilie und Freunde. Insbesondere mchte ich meiner Freundin Andrea danken, diemir mit ihrer Gelassenheit und Zuneigung sowie der Untersttzung meiner beruflichenund privaten Ziele immer beigestanden hat.
Erlangen, im Februar 2010 Johannes Geisler
IInhaltsverzeichnis
Kurzfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1 Einleitung 3
1.1 Problemstellung und Motivation . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Literaturbersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Ziel und Aufbau der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Beschreibung dynamischer Systeme im Zeit- und Frequenzbereich 13
2.1 Systemgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1 Grundlagen der linearen Kontinuumsmechanik . . . . . . . . . . 14
2.1.2 Diskretisierung mit der FEM . . . . . . . . . . . . . . . . . . . 16
2.2 Dmpfungsmechanismen und -modellierung . . . . . . . . . . . . . . . 19
2.2.1 Modellierung der Materialdmpfung . . . . . . . . . . . . . . . . 22
2.2.2 Modellierung der Strukturdmpfung . . . . . . . . . . . . . . . 27
2.3 Systemanregung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4 Behandlung linearer Systeme . . . . . . . . . . . . . . . . . . . . . . . . 34
2.4.1 Harmonische Schwingungen im Frequenzbereich . . . . . . . . . 35
2.4.2 Grundlagen der experimentellen Modalanalyse . . . . . . . . . . 36
2.5 Behandlung nichtlinearer Systeme . . . . . . . . . . . . . . . . . . . . . 38
2.5.1 Eigenschaften nichtlinearer Schwingungssysteme . . . . . . . . . 39
2.5.2 Harmonische-Balance-Methode . . . . . . . . . . . . . . . . . . 42
3 Behandlung des Kontaktproblems 47
3.1 Grundlagen der Kontaktmechanik . . . . . . . . . . . . . . . . . . . . . 47
II Inhaltsverzeichnis
3.2 Diskretisierung der Kontaktbeitrge . . . . . . . . . . . . . . . . . . . . 53
3.2.1 berblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2.2 Formulierung der Zero-Thickness-Elemente . . . . . . . . . . . . 54
3.2.3 Implementierung der konstitutiven Kontaktgesetze . . . . . . . . 58
3.3 Lsung des nichtlinearen Gleichungssystems . . . . . . . . . . . . . . . 65
3.3.1 Grundlagen und berblick . . . . . . . . . . . . . . . . . . . . . 65
3.3.2 Line-Search-Verfahren . . . . . . . . . . . . . . . . . . . . . . . 70
3.3.3 Trust-Region-Verfahren . . . . . . . . . . . . . . . . . . . . . . . 72
3.3.4 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.4 Numerische Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.5 Numerische Zeitschrittintegration . . . . . . . . . . . . . . . . . . . . . 81
3.6 Behandlung des Kontakts mit der HBM . . . . . . . . . . . . . . . . . 83
3.6.1 Einfhrende Betrachtungen . . . . . . . . . . . . . . . . . . . . 84
3.6.2 Bestimmung der quivalenten Parameter . . . . . . . . . . . . . 88
3.6.3 Lsung des Systems im Frequenzbereich . . . . . . . . . . . . . 90
4 Experimentelles Vorgehen 95
4.1 Grundlagen der Schwingungsmesstechnik . . . . . . . . . . . . . . . . . 97
4.1.1 Messaufbau und Sensorik . . . . . . . . . . . . . . . . . . . . . . 97
4.1.2 Signalanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.2 Detektion und Charakterisierung nichtlinearen Systemverhaltens . . . . 103
4.2.1 berblick und Beispiele . . . . . . . . . . . . . . . . . . . . . . 103
4.2.2 bertragungsfrequenzgnge . . . . . . . . . . . . . . . . . . . . 106
4.2.3 Hilbert-Transformation . . . . . . . . . . . . . . . . . . . . . . 108
5 Parameteridentifikation 115
5.1 berblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.2 Grundlagen und gewhltes Vorgehen . . . . . . . . . . . . . . . . . . . 117
6 Anwendungen an einer Beispielstruktur 121
6.1 Lineares Vergleichsmodell - Einzelbalken . . . . . . . . . . . . . . . . . 122
6.2 Grundlegende Untersuchungen am Doppelbalken . . . . . . . . . . . . . 125
Inhaltsverzeichnis III
6.2.1 Normalspannungen in der Fgestelle . . . . . . . . . . . . . . . 125
6.2.2 Parameteridentifikation am Doppelbalken . . . . . . . . . . . . . 127
6.3 Weitere Untersuchungen am Doppelbalken . . . . . . . . . . . . . . . . 132
6.3.1 Analysen im Frequenzbereich . . . . . . . . . . . . . . . . . . . 132
6.3.2 Analyse im Zeitbereich - Stobelastung . . . . . . . . . . . . . . 136
7 Zusammenfassung und Ausblick 139
Literaturverzeichnis 143
Kurzfassung/Abstract 1
Kurzfassung
Die vorliegende Arbeit stellt einen Beitrag zur numerischen und experimentellen Un-tersuchung dynamischer Eigenschaften von Strukturen mit Fgestellen dar. Es erfolgtdabei hauptschlich eine Betrachtung von flchig ausgedehnten Kontaktstellen, dierelativ zur Gesamtstruktur nicht als klein anzusehen sind.
Neben dem Steifigkeits-, ist insbesondere das Dmpfungsverhalten eine wichtige Sys-temeigenschaft, die mglichst realistisch erfasst werden soll. Dafr wird ein ausfhr-licher berblick zu Dmpfungsmechanismen und deren Modellierung gegeben, der diegewhlte Modellbildung motiviert. Die Materialdmpfung der betrachteten Strukturenist als schwach anzusehen und kann daher ber einen einfachen viskosen Dmpfungs-ansatz bercksichtigt werden, fr den realistische Parameter durch eine experimentelleModalanalyse bestimmt werden. Die Strukturdmpfung, die aus trockener Reibung inder Fgestelle resultiert, kann dagegen sehr hoch sein und wird durch eine direkteModellierung des mechanischen Kontakts im Rahmen der Finite-Elemente-Methodeerfasst. Hierfr werden Zero-Thickness-Kontaktelemente eingesetzt, in die beliebigeskonstitutives Kontaktverhalten implementiert werden kann. Die Lsung des entste-henden nichtlinearen Gleichungssystems kann zu Konvergenzschwierigkeiten fhren,weshalb verschiedene Line-Search- und Trust-Region-Algorithmen zum Einsatz kom-men. Mit Hilfe einer zustzlichen Zeitschrittintegration sind Analysen im Zeitbereichfr beliebige Belastungen mglich. Fr die sehr wichtigen harmonischen Anregungenwird die Harmonische-Balance-Methode angewandt, um fr die betrachteten Struktu-ren die stationre Lsung im Frequenzbereich zu berechnen.
Einen tieferen Einblick in das dynamische Verhalten vorliegender Systeme geben De-tektionsmethoden fr Nichtlinearitten, wie z.B. die Betrachtung von bertragungs-frequenzgngen bei unterschiedlichen Anregungsamplituden oder die Anwendung derHilbert-Transformation. Anhand dieser Methoden kann fr vorliegende Problemstel-lungen demonstriert werden, dass die Bercksichtigung der Kontaktnichtlinearittenntig ist, um realistisches Verhalten abzubilden. Im numerischen Modell werden kon-stitutive Kontaktparameter verwendet, die anhand von Messungen identifiziert werdenmssen, um aussagekrftige Resultate zu erhalten. Hierfr wird ein Modellkorrektur-verfahren im Frequenzbereich anhand berechneter und gemessener bertragungsfre-quenzgnge umgesetzt.
Die Funktionsfhigkeit des vorgeschlagenen Vorgehens wird schlielich an einer Bei-spielstruktur unter verschiedenen Belastungen durch Untersuchungen im Zeit- undFrequenzbereich demonstriert.
Schlagwrter: Fgestelle, Dmpfung, Reibung, Zero-Thickness-Element
2 Kurzfassung/Abstract
Abstract
This thesis contributes to the numerical and experimental investigation of dynamicproperties of jointed structures. It is specially focussed on extended joint patches thatcannot be regarded as small in relation to the whole structure.
The main structural dynamic properties are stiffness and damping. In particular, theconsideration of realistic damping behaviour is difficult. For that purpose a detailedsurvey of damping mechanisms and their modelling is presented that also motivatesthe utilized model. Material damping of the regarded structures is weak. Therefore thecommon viscous damping approach is applied, for which realistic parameters are deter-mined by Experimental Modal Analysis. In contrast, structural damping resulting fromdry friction in the joint interface can be very high. This damping mechanism is consi-dered by a direct modelling of the mechanical contact phenomena in the framework ofthe Finite Element Method. Zero-thickness contact elements - in which arbitrary con-stitutive contact behaviour can be implemented - are applied for the discretization ofthe contact interface. Since the solution of the resulting nonlinear system of equationscan lead to difficulties concerning convergence, different line-search and trust-regionalgorithms are applied. By the utilization of an additional time stepping scheme, ana-lyses in the time domain are possible for arbitrary excitations, including transienteffects. For the very important harmonic excitations, the Harmonic Balance Methodis applied in order to compute the steady state solution in the frequency domain.
Methods for the detection of nonlinearities, for example the examination of frequencyresponse functions at different excitation levels or the application of the Hilbert-transform, provide a better understanding of the dynamic behaviour of the regardedsystems. Therewith it is shown that contact nonlinearities have to be considered in themodelling in order to capture realistic behaviour. In the numerical model, constitutivecontact parameters are used, which have to be identified by measurements in order toobtain reliable results. For that purpose, a model update procedure is realized in thefrequency domain by means of the comparison of computed and measured frequencyresponse functions.
Finally, the capability of the proposed approach is demonstrated by investigations intime and frequency domain on a test structure for different types of excitation.
Keywords: joint, damping, friction, zero-thickness-element
Kapitel 1
Einleitung
1.1 Problemstellung und Motivation
In nahezu allen technischen Konstruktionen werden verschiedene Komponenten zu ei-ner Gesamtstruktur zusammengefgt, beispielsweise durch Niet- oder Schraubverbin-dungen. Jegliche Fgestellen haben je nach Art und Weise der Gestaltung in Bezugauf Festigkeit der Verbindung, Materialpaarung, Ausdehnung, Lage im Kraftfluss be-stimmter Belastungen sowie diverser weiterer Faktoren einen hufig nicht zu vernach-lssigenden Einfluss auf das Steifigkeits- und Dmpfungsverhalten der Gesamtstruk-tur. Dies ist v.a. bei dynamischen Untersuchungen relevant, was beispielsweise die Lagevon Resonanzfrequenzen und auftretende Schwingungsamplituden betrifft. Daher sollin dieser Arbeit die numerische und experimentelle Untersuchung von Strukturen mitFgestellen erfolgen. Numerische Simulationen sind wichtig fr grundlegende Analy-sen im frhen Entwicklungsstadium einer Konstruktion, fr Festigkeitsberechnungenoder systematische Strukturoptimierungen. Solchen Untersuchungen liegt ein Modell-bildungsprozess zugrunde, in dem festgelegt wird, welche Struktureigenschaften zubercksichtigen sind und wie diese geeignet in einem numerischen Modell erfasst wer-den. Ein ausgewhltes Berechnungsmodell kann jedoch nur dann verlssliche Resultateliefern, wenn es mitsamt seinen Modellparametern anhand von Messungen an realenStrukturen berprft und angepasst wurde. Somit ist eine kombinierte Herangehens-weise aus Simulation und Experiment unerlsslich.
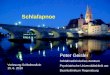
Zur Motivation der Untersuchung dynamischer Eigenschaften von Strukturen mit F-gestellen im Allgemeinen, sowie des dafr eingesetzten Simulationsmodells, werdenzunchst experimentell ermittelte Schwingungsantworten einer gefgten Struktur be-trachtet. Es werden zwei verschraubte Edelstahlbalken herangezogen, die als Gesamt-struktur im Folgenden als Doppelbalken bezeichnet werden, siehe Abbildung 1.1. Diese
4 Kapitel 1. Einleitung
Struktur wird im Laufe der Arbeit als reales Beispielobjekt an verschiedenen Stellenverwendet.
Abbildung 1.1: Einseitig eingespannter Doppelbalken
In Abbildung 1.2 sind gemessene Geschwindigkeitsantworten an der Balkenspitze beiAnregung der einseitig eingespannten Struktur mit einem Impulshammer aufgetragen.Unten ist als Referenz die Schwingungsantwort eines Einzelbalkens abgebildet, deridentische Abmessungen wie der Doppelbalken besitzt. Oben links ist die Antwort desDoppelbalkens bei einem Schraubenanzugsmoment von MA = 2Nm und oben rechtsbei geringerer Schraubenvorspannung (MA < 1Nm) zu sehen. Das Anzugsmomentder Schrauben an der Einspannstelle betrgt hierbei 75Nm, um eine mglichst festeEinspannung zu gewhrleisten.
Es ist ein deutlich unterschiedliches Abklingverhalten der verschiedenen Konfiguratio-nen zu erkennen. Der Einzelbalken weist eine nahezu exponentielle Abklingkurve beigeringer Dmpfung auf. Beim Doppelbalken mit MA = 2Nm ist zunchst eine schnel-le Reduktion der Amplitude bis zu einer gewissen Schwelle zu beobachten, woraufwiederum eine schwach gedmpfte Schwingung folgt. Bei geringerem Anzugsmomentist ein starkes Abklingen der gesamten Schwingung in Form einer mehr oder wenigerlinearen Einhllenden zu sehen, ein Indiz fr Dmpfung durch trockene Reibung. Eshandelt sich aufgrund der Schraubenverbindungen bei diesem Beispiel nicht umMakro-schlupf, also globales Gleiten zwischen den beiden Krper, sondern um Mikroschlupf,
1.1. Problemstellung und Motivation 5
0 0.5 1 1.5 2 2.5 31000
800
600
400
200
0
200
400
600
800
1000
t [s]
v [m
m/s]
0 0.5 1 1.5 2 2.5 31000
800
600
400
200
0
200
400
600
800
1000
t [s]
v [m
m/s]
0 0.5 1 1.5 2 2.5 31000
800
600
400
200
0
200
400
600
800
1000
t [s]
v [m
m/s]
Abbildung 1.2: Schwingungsantworten auf Impulsanregung des Doppelbalkens beiMA = 2NmAnzugsmoment der Schrauben (oben links) und MA < 1Nm (oben rechts);Antwort des Einfachbalkens als Referenz (unten)
d.h. um lokale Gleitbewegungen in bestimmten Bereichen, whrend an anderen Stel-len Haften vorliegt. Sofern keine zustzlichen viskosen Zwischenschichten vorliegen,ist damit trockene Reibung durch Mikroschlupfbewegungen die Ursache fr Fgestel-lendmpfung, die hier als Strukturdmpfung bezeichnet wird. In Abbildung 1.2 ist zusehen, dass diese wesentlich hher als die Materialdmpfung sein kann, die abgesehenvon Einspann- und sonstigen Umgebungseffekten der Haupteinfluss der Dmpfung desEinzelbalkens ist. Zu den genannten Schraubenanzugsmomenten ist anzumerken, dassdiese relativ niedrig sind, wenn eine feste Verbindung zwischen Teilkomponenten erzieltwerden soll. Die demonstrierte Dmpfungserhhung durch Variation der Schrauben-vorspannungen erffnet allerdings die Mglichkeit einer gezielten Beeinflussung derDmpfung durch knstliche, also extra eingebrachte Fgestellen. Da auch solche kon-struktiven Manahmen von Interesse sind, soll in dieser Arbeit keine Einschrnkungauf Fgestellen erfolgen, die nur der Verbindung von Teilstrukturen dienen.
6 Kapitel 1. Einleitung
Um die demonstrierte Dmpfung durch trockene Reibung im Modell zu erfassen, istein linearer Dmpfungsansatz ungeeignet, sodass eine Modellierung des mechanischenKontakts in der Fgestelle ntig ist. Dies stellt ein nichtlineares Problem dar, fr dassich im Zusammenhang mit der Behandlung von Strukturschwingungen die Finite-Elemente-Methode (FEM) eignet und daher hier eingesetzt wird.
In Abbildung 1.3 ist ein weiteres Beispiel einer gefgten Struktur, eine geschraubteFlanschverbindung zweier Wellen, dargestellt. Ebenso wie beim Doppelbalken liegteine ausgedehnte Kontaktstelle vor, d.h. der Kontaktbereich ist relativ zur Strukturnicht als klein anzusehen. Betrachtet man reine Strukturschwingungen und vernach-lssigt groe Rotationen, so erscheint bei Stahlkonstruktionen in einem sinnvollen Be-triebsbereich eine lineare Beschreibung der Teilstrukturen als ausreichend. Die Kopp-lung der gefgten Krper durch den Reibkontakt erfordert aber eine nichtlineare FE-Modellierung fr die Fgestelle und fhrt insgesamt zu nichtlinearem Gesamtverhalten.Das Vorgehen lsst sich natrlich auch auf n Krper verallgemeinern, siehe Abbildung1.3 rechts, sodass komplexe, aus mehreren Krpern zusammengesetzte Strukturen un-tersucht werden knnen.
Kontaktschicht, d = 0
Korper n, lineares FE-Modell
Korper 1 Korper 2
nichtlineares FE-Modellfur Fugestelle
Korper 1, lineares FE-Modell
Abbildung 1.3: Links: zwei Krper mit einer Kontaktstelle, rechts: Verallgemeinerungauf n Krper
In vorliegender Arbeit sollen also Strukturen bestehend aus sich linear verhaltendenKrpern betrachtet werden, die ber flchig ausgedehnte Fgestellen miteinander ver-bunden sind. Im Rahmen der FEM werden dazu Formulierungen im Zeit- und Fre-quenzbereich umgesetzt und ntige Parameter anhand von Messungen identifiziert.Zur Einordnung der Problemstellung in die von diesen Untersuchungen betroffenen
1.2. Literaturbersicht 7
Themengebiete wird im nchsten Abschnitt ein berblick ber bestehende Arbeitengegeben.
1.2 Literaturbersicht
Die numerische und experimentelle Untersuchung von Strukturen mit Fgestellen er-fordert den Einsatz verschiedenster Methoden aus unterschiedlichen Fachgebieten.Hierzu zhlen unter anderem Kontinuums- und Kontaktmechanik und deren nume-rische Umsetzung mitsamt der Lsung nichtlinearer Gleichungssysteme, Verfahren zurParameteridentifikation, sowie Schwingungsmesstechnik und Signalanalyse. Die vorlie-gende Literaturbersicht kann natrlich nicht vollstndig sein, da es zu jedem dieserThemenbereiche eine Vielzahl an Publikationen gibt. Stattdessen soll eine Einordnungder hier betrachteten Themen anhand einiger Werke gegeben werden, die eine weitereVertiefung in die einzelnen Gebiete ermglichen. Fr die Angabe weiterer spezieller Li-teratur wird auf die einzelnen Kapitel verwiesen, weshalb die folgenden Ausfhrungenrelativ knapp gehalten werden.
Einen guten berblick zur Beschreibung mechanischer Strukturen mit Fgestellengibt [Popp, 1994] mit einer Reihe von Literaturhinweisen. Anhand verschiedener An-wendungen wird der Einfluss von Reibkontakten auf das dynamische Verhalten derGesamtstruktur verdeutlicht. Es erfolgt eine Klassifizierung hinsichtlich der Gre desKontaktbereichs relativ zur Struktur, der Funktion des Reibkontakts, und weitererKriterien, z.B. ob Mikro- oder Makroschlupf vorliegt. Es kann also eine Einteilung er-folgen, ob ein Punktkontakt oder ein ausgedehnter, flchenhafter Kontakt modelliertwird, ob die Fgestelle rein zur Kraftbertragung oder gezielt zur Energiedissipationeingesetzt wird und welche Bewegungsmglichkeiten in der Kontaktebene vorliegen.Diese grundlegenden berlegungen sind ntig, um ein geeignetes Modell fr die jewei-lige Problemstellung zu finden. Da in Fgestellen meist Mikroschlupfeffekte relevantsind, muss die gewhlte Modellierung in der Lage sein, diese zu erfasssen. In diesemZusammenhang ist das Hystereseverhalten der realen Struktur und dementsprechendder eingesetzten Modelle wesentlich. Hierzu bieten beispielsweise die Arbeiten [Ottl,1981] und [Gaul und Nitsche, 2001] im allgemeinen Rahmen der Strukturdmp-fung einen berblick. Besonders wenn in einem Punktkontaktmodell das Verhaltender gesamten Fgestelle erfasst werden soll, ist es wesentlich, dass das eingesetzteReibmodell Mikroschlupfverhalten abbilden kann. Dazu gibt es verschiedene Anst-ze wie beispielsweise die Iwan- und Masing-Modelle, siehe [Ottl, 1981] oder dasCattaneo-Mindlin-Modell, vgl. [Popp, 1994]. Es existiert eine Vielzahl weitererBeschreibungsmglichkeiten von Mikroschlupfvorgngen wie das Valanis- oder dasBouc-Wen-Modell, siehe [Gaul und Nitsche, 2001], [Mayer, 2007] oder [Went-
8 Kapitel 1. Einleitung
zel, 2006]. Als weiteres Mikroschlupfmodell wird in [Menq et al., 1986a] das barmodel vorgestellt, das in [Menq et al., 1986b] fr Untersuchungen im Turboma-schinenbau eingesetzt wird. Aus diesem Anwendungsbereich existiert eine Flle anLiteratur zum Thema Reibdmpfung, die hier gezielt zur Erhhung der Dmpfungvon Turbinen- oder Verdichterschaufeln verwendet wird, siehe z.B. [Balmer, 1993],[Sextro, 1997], [Panning, 2005] oder [Sanliturk und Ewins, 1996] auch fr wei-terfhrende Literatur.
In vielen Arbeiten werden Punktkontaktmodelle eingesetzt, da die Abmessungen derReibkontakte klein im Vergleich zur Gesamtstruktur sind. So werden in [Meyer, 2003]neben verschiedenen lokalen Steifigkeits- und Dmpfungsnichtlinearitten, auch kom-binierte Nichtlinearitten wie die genannten Mikroschlupfmodelle an wenigen Stellenin einem komplexen Gesamtsystem eingesetzt. Ausgedehnte Fgestellen werden z.B.in [Mayer, 2007] mit Hilfe der FEM untersucht, und es wird auf die heterogene Nor-maldruckverteilung bei Schraubenverbindungen hingewiesen. So knnen im Bereichder Schrauben lokal hohe Drcke vorliegen, die mit zunehmendem Abstand rasch ab-nehmen. Da Normalspannungen einen hohen Einfluss auch auf das Tangentialverhal-ten haben, ist eine mglichst genaue Erfassung des Kontaktdrucks sehr wichtig. Dieskann bei einer Modellierung als Punktkontakt natrlich nicht abgebildet werden. In[Mayer, 2007] sowie [Mayer und Gaul, 2007] werden zur flchigen Modellierungder Kontaktschicht sogenannte Zero-Thickness-Elemente eingesetzt. Diese Kontakt-elemente haben ihren Ursprung in der Geomechanik, sodass ein Groteil der Literaturzu dieser Thematik eher in diesem Bereich als in der Strukturdynamik zu finden ist,siehe z.B. [Goodman et al., 1968], [Hohberg, 1995] oder [Gens et al., 1995]. ImBereich dynamischer Analysen bei Bercksichtigung von ausgedehnten Fgestellen istaufgrund des hohen rechnerischen Aufwands fr eine detaillierte Auflsung der Kon-taktstelle relativ wenig Literatur zu finden, siehe auch [Wentzel, 2006].
Fr einen allgemeinen Einsatz der FEM in Zusammenhang mit Kontakt sind die Wer-ke [Wriggers, 2002], [Willner, 2003], [Laursen, 2003] und [Eberhard, 2000] zunennen. Durch die Bercksichtigung von Kontakt mit der FEM entsteht schlielichein nichtlineares Gleichungssystem, bei dessen Lsung Konvergenzschwierigkeiten auf-treten knnen. Aus dem Bereich der FE-Literatur beschftigen sich u.a. [Wriggers,2001], [Wriggers, 2002], [Crisfield, 1991] oder [Belytschko et al., 2000] mit derLsung nichtlinearer Gleichungen. Eine weit grere Anzahl hoch entwickelter Algo-rithmen sind allerdings im Bereich der Optimierung zu finden, siehe z.B. [Nocedalund Wright, 2006] fr einen breiten berblick. Insbesondere sind sog. Line-Search-und Trust-Region-Verfahren zu nennen, die im Gegensatz zum klassischen Newton-Raphson-Verfahren bessere globale Konvergenzeigenschaften aufweisen.
Die Kontaktmodellierung im Rahmen der FEM fhrt fr dynamische Untersuchun-
1.2. Literaturbersicht 9
gen auf eine Formulierung im Zeitbereich, womit Systemantworten fr beliebige Be-lastungssituationen berechnet werden knnen. In vielen Anwendungen steht eine Be-rechnung auf harmonische Anregungen im Vordergrund und es interessiert v.a. derstationre Zustand. Fr lineare Systeme ist eine solche Berechnung problemlos di-rekt im Frequenzbereich mglich, siehe [Gasch und Knothe, 1987], wohingegen frnichtlineare Strukturen eine spezielle Behandlung ntig ist. Unter der Annahme, dassbei monofrequenter Anregung der Anteil hherer Harmonischer in der Systemantwortvernachlssigt werden kann, ist mit der Harmonische-Balance-Methode (HBM) auchfr nichtlineare Systeme eine Berechnung der stationren Antwort im Frequenzbe-reich mglich, vgl. hierfr [Worden und Tomlinson, 2001] oder [Balmer, 1993].Wenn hhere Harmonische mit bercksichtigt werden, spricht man von der Hher-Harmonische-Balance-Methode (HHBM). Die HHBM lsst neben Anteilen von hhe-ren Harmonischen in der Schwingungsantwort auf monofrequente Anregungen auchmultifrequente Erregungen der Struktur zu. Anwendungen der HHBM sind z.B. in[Bruns, 2004] und [Poudou, 2007] zu finden. Beim Vorliegen komplexer Bewegungs-muster in Kontaktflchen dreidimensionaler Strukturen wird die Anwendung dieserVerfahren schwieriger und es muss auf eine geeignete Ermittlung der vorliegendennichtlinearen Kontaktkrfte geachtet werden, siehe z.B. [Sanliturk und Ewins, 1996]oder [Poudou, 2007].
Eine wesentliche dynamische Eigenschaft gefgter Strukturen ist ihr Dmpfungsverhal-ten. Die Strukturdmpfung durch trockene Reibung in Fgestellen ist nur eine Ursacheder Dissipation neben der Materialdmpfung oder der Dmpfung durch Bewegungenin viskosen Medien, etc. Um die Gesamtdmpfung einer betrachteten Struktur sinnvollbeschreiben zu knnen, ist eine Auseinandersetzung mit diversen Dmpfungsmechanis-men notwendig. Siehe hierzu beispielsweise [Lazan, 1968], [Argyris und Mlejnek,1988], [Sthler, 1993] oder [Markert und Wlfel, 2006]. Im Zusammenhang derDmpfungsbeschreibung schwach gedmpfter, linearer Strukturen wird klassischerwei-se ein viskoser Dmpfungsansatz gemacht. Hierfr ntige Parameter knnen im Rah-men einer experimentellen Modalanalyse (EMA) bestimmt werden. Die EMA ist eineleistungsstarke, weit entwickelte Methode zur rein experimentellen Untersuchung li-nearer Strukturen, aber auch zur berprfung und Anpassung numerischer Modelle.Standardwerke zur Modalanalyse sind [Ewins, 2000] und [Maia et al., 1998], die auchzu zugehrigen Themengebieten wie der Schwingungsmesstechnik und der Signalana-lyse einen umfangreichen berblick bieten. Aufgrund der grundlegenden Annahmeder Gltigkeit des Superpositionsprinzips kann diese Methode nicht ohne Weiteres frnichtlineare Systeme eingesetzt werden. Um zu berprfen, ob vorhandene Nichtlinea-ritten nur schwach ausgeprgt sind und eventuell vernachlssigt werden knnen, oderob dies nicht zulssig ist, existieren diverse Detektionsmethoden fr Nichtlinearitten.
10 Kapitel 1. Einleitung
Neben den Prinzipien der berlagerung und der Proportionalitt, oder der Anwen-dung von Hilbert-Transformationen auf bertragungsfrequenzgnge, gibt es weitereDetektionsverfahren, die beispielsweise in [Bruns, 2004], [Blohm, 1992], [Wordenund Tomlinson, 2001] oder [Kerschen et al., 2006] beschrieben sind. Wird einenicht zu vernachlssigende Nichtlinearitt erkannt, so muss diese im Modell mit be-rcksichtigt werden. Dies erfordert natrlich wieder eine Bestimmung der eingesetztenParameter in Einklang mit realen Messdaten.
Es existiert eine Reihe verschiedenster Verfahren zur Identifikation nichtlinearer dy-namischer Systeme, siehe z.B. [Kerschen et al., 2006] oder [Worden und Tom-linson, 2001]. Sofern bereits ein Modell der betrachteten Struktur vorliegt, reduziertsich die Systemidentifikation zur Parameteridentifikation. Viele der in der Literaturvorgeschlagenen Methoden sind allerdings nur fr wenige Freiheitsgrade geeignet oderliefern keine physikalischen Parameter. Fr elastische Systeme mit vielen Freiheits-graden kommen daher nur wenige Verfahren in Frage, siehe [Bruns, 2004], der zweiVerfahren detailliert darstellt. Dabei handelt es sich um ein Verfahren, das amplitu-denabhngige modale Parameter verwendet, und um ein Modellkorrekturverfahren,bei dem Abweichungen zwischen berechneten und gemessenen bertragungsfrequenz-gngen minimiert werden. Letztere Herangehensweise wird auch in [Meyer, 2003],sowie in [Bswald und Link, 2004] angewandt. Ein allgemeiner Hintergrund zu Mo-dellkorrekturverfahren ist in [Link, 1999] oder [Natke, 1988] zu finden.
Es gibt damit bereits eine Vielzahl an Arbeiten zum gesamten Themenkomplex vonStrukturen mit Kontaktstellen. Dennoch existiert nach wie vor keine allgemeine Un-tersuchungsmethode, mit der zuverlssige Aussagen fr beliebige gefgte Strukturenhinsichtlich ihres dynamischen Verhaltens mglich sind. Speziell die Behandlung aus-gedehnter Fgestellen ist im Vergleich zu Punktkontaktbeschreibungen im Bereich derStrukturdynamik noch relativ wenig ausgeprgt. Daher ist eine Auseinandersetzungmit der Thematik im Allgemeinen und mit ausgedehnten Fgestellen im Speziellenangebracht, um das allgemeine Verstndnis fr die betrachteten Strukturen zu verbes-sern.
1.3 Ziel und Aufbau der Arbeit
Die vorliegende Arbeit soll einen Beitrag zur numerischen und experimentellen Un-tersuchung von Strukturen mit ausgedehnten, flchigen Fgestellen leisten. Dazu sindverschiedene Teilaspekte zu betrachten, die wie folgt organisiert werden.
In Kapitel 2 werden die ntigen Grundlagen zur Beschreibung linearer und nichtlinea-rer dynamischer Systeme im Zeit- und Frequenzbereich diskutiert. Die Behandlung
1.3. Ziel und Aufbau der Arbeit 11
der Dmpfung ist ein wesentlicher Punkt dieser Arbeit, weshalb ausfhrlich auf ver-schiedene Dmpfungsmechanismen und deren Modellierung eingegangen wird. DieseBetrachtungen dienen neben der Einfhrung diverser Begriffe und der ntigen Grund-lagen einer Konkretisierung des weiteren Vorgehens.
Kapitel 3 behandelt das Kontaktproblem allgemein und im Rahmen der FEM. Die fl-chig ausgedehnten Fgestellen werden mit Hilfe von Zero-Thickness-Elementen model-liert, deren Formulierung mitsamt den darin implementierten konstitutiven Kontaktge-setzen ausfhrlich vorgestellt wird. Da bei der Lsung der entstehenden nichtlinearenGleichungssysteme Konvergenzschwierigkeiten auftreten knnen, werden verschiedeneLsungsstrategien diskutiert. Dabei handelt es sich um Line-Search- und Trust-Region-Verfahren, die auf vorliegende Probleme mit Kontakt angewandt werden. Neben derBehandlung im Zeitbereich fr beliebige Systemanregungen inklusive transienter Ef-fekte, wird eine direkte Berechnung des stationren Zustands im Frequenzbereich frharmonische Erregungen mit Hilfe der Harmonische-Balance-Methode (HBM) fr dasFE-Modell mit der flchigen Fgestelle umgesetzt.
Fr die experimentelle Behandlung von gefgten Strukturen sind in Kapitel 4 zu-nchst einige Grundlagen der Schwingungsmesstechnik ntig. Dies betrifft den Mess-aufbau mitsamt eingesetzter Sensorik sowie die Weiterverarbeitung aufgezeichneterDaten. Durch Messung von Systemanregung und -antwort knnen bertragungsfre-quenzgnge ermittelt und weiter untersucht werden, z.B. auf das Vorhandensein vonNichtlinearitten im betrachteten System. Dafr werden in diesem Kapitel diverse De-tektionsverfahren vorgestellt, die zeigen, dass nichtlineare Kontaktphnomene in derModellierung zu bercksichtigen sind. Weiterhin dienen die Messdaten zur Verifikation,bzw. zum Abgleich des numerischen Modells.
Kapitel 5 beschftigt sich mit der Identifikation von im Simulationsmodell eingesetztenSystemparametern anhand gemessener Daten. Das gewhlte Vorgehen ist eine itera-tive Modellkorrektur unter Verwendung gemessener und berechneter bertragungs-frequenzgnge. Um den Aufwand des Identifikationsverfahrens mglichst niedrig zuhalten, ist eine effiziente Berechnung der Frequenzgnge ntig, wofr die Harmonische-Balance-Methode eingesetzt wird.
In Kapitel 6 wird schlielich das gesamte in dieser Arbeit vorgeschlagene Vorgehen amBeispiel des Doppelbalkens angewendet. Dazu werden die Parameter des Grundmateri-als sowie die Kontaktparameter der Fgestelle identifiziert, und mit dem angepasstenModell weitere Untersuchungen im Zeit- und Frequenzbereich durchgefhrt. Nebenharmonischen Anregungen wird eine Stobelastung herangezogen, um zu zeigen, dassmit dem vorgestellten Ansatz Untersuchungen bei verschiedenen Belastungssituationenmglich sind.
Kapitel 2
Beschreibung dynamischer Systeme
im Zeit- und Frequenzbereich
Der Rahmen dieser Arbeit ist die Untersuchung von Strukturen mit Fgestellen hin-sichtlich ihrer dynamischen Eigenschaften wie dem Steifigkeits- und dem Dmpfungs-verhalten. In diesem Kapitel sollen die hierfr ntigen Grundlagen und wesentlichenBegriffe eingefhrt werden. Dadurch knnen neben der Bereitstellung wichtiger Grund-kenntnisse die speziell fr vorliegende Problemstellung relevanten Themengebiete kon-kretisiert und das weitere Vorgehen motiviert werden.
Zunchst werden in Abschnitt 2.1 die systembeschreibenden Gleichungen berblicks-mig angegeben. Dabei stellt sich sofort die Frage, wie eine sinnvolle Erfassung derDmpfung bewerkstelligt werden kann, weshalb in Abschnitt 2.2 eine bersicht bermgliche Dmpfungsmechanismen und deren Modellierung gegeben wird. Der gesamteModellbildungsprozess fhrt zur Unterscheidung, ob lineares oder nichtlineares Sys-temverhalten betrachtet werden muss. Zieht man zustzlich noch verschiedene Erre-germechanismen heran, Abschnitt 2.3, so ergeben sich weitere Unterschiede hinsicht-lich der Beschreibung im Zeit- oder Frequenzbereich. Dies wird in den Abschnitten2.4 fr lineares und 2.5 fr nichtlineares Verhalten herausgearbeitet, um schlielichdie in vorliegender Arbeit ausgewhlte Strategie zur Behandlung von Strukturen mitFgestellen zu motivieren.
2.1 Systemgleichungen
In Abbildung 1.3 wurde bereits der allgemeine Aufbau der zu untersuchenden Struktu-ren, sowie eine Beispielstruktur dargestellt und dargelegt, dass die Teilsysteme linearesVerhalten aufweisen sollen. In Abbildung 2.1 sind nochmals zwei beliebige, dreidimen-
14 2. Grundlagen
sionale Krper abgebildet, um einige notwendigen Bezeichnungen zu definieren. DieKrper 1 und 2 R3 sollen sich linear-elastisch verhalten und auch keine groenRotationen ausfhren, womit eine lineare Formulierung der kontinuumsmechanischenGren gengt. Die beiden Krper knnen an den Kontaktrndern 1c und
2c , die den
Bereich der Fgestelle darstellen, in Kontakt treten.
1
1u
2
2u
1t
2t
2c
1c
x
y
z
t1
t2
b
u2
u1
b
n2
n1
Abbildung 2.1: Problembeschreibung: Zwei Krper mit Kontaktstelle
Das nichtlineare Verhalten des Gesamtsystems resultiert aus dieser Fgestelle, auf de-ren Modellierung in Kapitel 3 detailliert eingegangen wird. Um eine geeignete Basisfr die Behandlung vorliegender Systeme zu schaffen, werden zunchst die systembe-schreibenden Gleichungen allgemein angegeben, wobei mit den Bewegungsgleichungender linearen Teilsysteme, bzw. eines linear-elastischen Krpers begonnen wird. Diefr vorliegende Arbeit ntigen Grundlagen der linearen Kontinuumsmechanik werdennun vorgestellt, fr ausfhrlichere Abhandlungen siehe z.B. [Altenbach und Alten-bach, 1994] oder [Willner, 2003].
2.1.1 Grundlagen der linearen Kontinuumsmechanik
Da fr die folgenden Darstellungen die Betrachtung eines Krpers gengt, wird zu-nchst auf den Kontaktrand sowie die Indizes der Krpernummerierung verzichtet.Alle Punkte eines Krpers knnen in der Ausgangskonfiguration durch den VektorX beschrieben werden, sodass mit dem Verschiebungsfeld u(X, t) die aktuelle Positionjedes Punktes eindeutig durch
x(X, t) = X + u(X, t) (2.1)
2.1. Systemgleichungen 15
beschrieben werden kann. Die Grundgleichung zur Beschreibung der Dynamik vorlie-gender Krper ist die lokale Formulierung der Impulsbilanz, siehe z.B. [Altenbachund Altenbach, 1994],
div + b = u bzw.ijxj
+ bi = ui , (2.2)
mit dem Cauchyschen Spannungstensor , der Massenkraftdichte b und der zweitenzeitlichen Ableitung des Verschiebungsvektors, dem Beschleunigungsvektor u. Durchdie Drehimpulsbilanz folgt die Symmetrie des Spannungstensors, die spter noch aus-genutzt wird. Es gelten die Verschiebungsrandbedingungen auf dem Dirichlet-Randund die Spannungsrandbedingungen auf dem Neumann-Rand,
u = u auf u und n = t auf t , (2.3)
mit dem nach auen gerichteten und senkrecht auf dem Bauteilrand stehenden Nor-malenvektor n, vgl. Abbildung 2.1. Zusammen mit den Anfangsbedingungen
u(t = 0) = u0 u(t = 0) = v0 (2.4)
ist die starke Form des Anfangsrandwertproblems fr ein linear-elastisches Teilsystemvollstndig beschrieben. Eine analytische Lsung dieses Problems ist fr beliebige drei-dimensionale Krper nicht mglich, v.a. dann nicht, wenn die Nichtlinearitt aufgrunddes Kontakts mit hinzu kommt. Daher geht man auf numerische Nherungslsungenber, wobei im Rahmen dieser Arbeit die Finite-Elemente-Methode (FEM) eingesetztwird. Die FEM basiert auf der schwachen Form, wozu z.B. die starke Form (2.2) mitgeometrisch zulssigen, virtuellen Verschiebungen ui multipliziert und ber den Be-reich integriert wird. Dies fhrt zum Prinzip der virtuellen Arbeit des betrachtetenKrpers
b(ui) =
ui0(ui bi) dV
ijxj
ui dV = 0 . (2.5)
Durch Anwendung der Produktregel der Differentiation und des Gauschen Integral-satzes kann das zweite Integral umgeschrieben werden, womit
b(ui) =
ui0(ui bi) dV
ijuinj dA +
uixj ij
ij dV = 0 (2.6)
mit den virtuellen Verzerrungen ij folgt. Einarbeitung von Spannungs- und Ver-schiebungsrandbedingungen liefert das Prinzip der virtuellen Arbeit in einer geeig-neten Form, da nun der Differentialoperator von den Spannungen auf die virtuellenVerschiebungen bergegangen ist,
b(ui) =
ui(ui bi) dV +
ijij dV
t
uiti dA = 0 . (2.7)
16 2. Grundlagen
Dies fhrt zu geringeren Anforderungen an die spter zu verwendenden FE-Ansatzfunk-tionen. Durch Ausnutzung der Symmetrien von Spannungs- und Verzerrungstensorkann die Voigt-Notation angewendet werden, womit fr linear-elastisches, isotropesMaterialverhalten das Konstitutivgesetz als lineare Matrix-Vektor-Beziehung zwischenSpannungen und Verzerrungen geschrieben werden kann,
= C , (2.8)
mit der Materialmatrix C, dem Spannungsvektor und dem Verzerrungsvektor .Damit erhlt man fr die virtuelle Arbeit in Matrix-Vektor-Notation
b(u) =
uT(u b) dV +
TC dV
t
uT t dA = 0 . (2.9)
In dieser Gleichung sind nun auch die Spannungen als Funktion der Verzerrungenund damit der Verschiebungen formuliert, womit ein Verschiebungsgrenverfahrenvorliegt, d.h. die Verschiebungen sind die verbleibenden Unbekannten. Diese folgenschlielich durch Lsen der Gleichung, die nun im Rahmen der FEM diskretisiert wird.
2.1.2 Diskretisierung mit der FEM
In diesem Abschnitt werden nur die hier bentigten Gren und Konzepte der FEMvorgestellt, fr ausfhrliche Darstellungen siehe z.B. [Knothe und Wessels, 1999],[Bathe, 1995] oder [Wriggers, 2001]. Die Diskretisierung erfolgt nach dem isopara-metrischen Konzept, d.h. sowohl Geometrie- als auch Feldgren werden im Element-gebiet durch die gleichen Anstze approximiert. In dieser Arbeit werden achtknotigeHexaederelemente mit trilinearen Ansatzfunktionen verwendet. Damit ergeben sich dieApproximationen
x = Nxe , und u = Nue , (2.10)
mit den diskreten Knotenkoordinaten xe und -verschiebungen ue eines Elements
xe = [x1 y1 z1 ... x8 y8 z8]T , ue = [ux1 uy1 uz1 ... ux8 uy8 uz8]
T . (2.11)
Andere Feldgren wie Beschleunigungen und virtuelle Verschiebungen werden qui-valent approximiert und angeordnet. Die Matrix
N =
N1 0 0 . . . N8 0 00 N1 0 . . . 0 N8 00 0 N1 . . . 0 0 N8
(2.12)enthlt die trilinearen Ansatzfunktionen
Ni =1
8(1 + i)(1 + i)(1 + i) , i = 1 , ... , 8 , (2.13)
2.1. Systemgleichungen 17
die im lokalen Koordinatensystem des generischen Elements = { } definiert sind.In der eingefhrten Matrix-Vektor-Notation lassen sich die Verzerrungen in Abhngig-keit der Knotenverschiebungen mit dem Operator B darstellen,
= Bue , (2.14)
der die partiellen Ableitungen der Ansatzfunktionen nach den globalen Koordinatenenthlt. Damit ergibt sich eingesetzt in Gleichung (2.9) die diskretisierte Form dervirtuellen Arbeit
b =nee=1
uTe
(e
NT (Nue b) dVe +
e
BTCB dVeue
e
NT t dAe
)= 0 ,
(2.15)mit der Assemblierungsoperation
ber alle Elemente ne. Die numerischen Inte-
grationen werden elementweise im generischen Element ber Gausspunktintegrationausgefhrt. Da diese Gleichung fr beliebige virtuelle Verschiebungen gelten soll, mussder Klammerausdruck verschwinden,
nee=1
(e
NTN dVe M e
ue +
e
BTCB dVe Ke
ue =
e
NTb dVe +
e
NT t dAe f e
)
(2.16)und es folgt nach Durchfhrung der Integrationen auf Elementebene und anschlie-ender Assemblierung das globale, gewhnliche Differentialgleichungssystem (DGL-System) fr das dynamische FE-Problem,
Mu + Ku = f , (2.17)
mit der Massenmatrix M Rnn, der Steifigkeitsmatrix K Rnn, der rechten Sei-te f Rn und der Anzahl der Freiheitsgrade n. Diese Gleichungen enthalten nochkeine Dmpfung, was bereits aufzeigt, dass hierfr gesondert ein Ansatz gemacht wer-den muss. Da das Thema Dmpfung ein wesentlicher Punkt vorliegender Arbeit ist,wird in Abschnitt 2.2 detailliert auf verschiedene Dmpfungsmechanismen und derenModellierung eingegangen. Zunchst sollen aber noch einige allgemeine Anmerkungenzu vorliegender Diskretisierung und deren Lsung, sowie der Darstellung der Lsunggemacht werden.
Bei dem angewendeten isoparametrischen Verschiebungsansatz knnen locking-Proble-me auftreten, d.h. dass beispielsweise bei Biegeproblemen oder bei Verwendung inkom-pressiblen Materialverhaltens eine rein numerisch bedingte, knstliche Versteifung ent-steht. Dies uert sich in geringeren Verschiebungen oder hheren Eigenfrequenzen desbetrachteten Systems und muss vermieden werden. Bei dem in dieser Arbeit hufig
18 2. Grundlagen
herangezogenen Beispiel des Doppelbalkens liegt eine Biegebeanspruchung vor, die einelockingfreie Formulierung unbedingt erforderlich macht, da aufgrund von Einfachheitder Formulierung, Effizienz und Robustheit nicht auf Elemente hherer Ordnung ber-gegangen werden soll. Aus den zahlreich existierenden Formulierungen versteifungsfrei-er Elemente kommt hier eine reduzierte Integration der Steifigkeitsmatrix zum Einsatz.Dies kann zum Hourglassing fhren, weshalb eine Hourglass-Stabilisierung eingesetztwird, siehe [Geisler et al., 2005] fr Details zur Elementformulierung sowie [Ree-se, 2002], [Belytschko et al., 2000] oder [Wriggers, 2001] fr einen berblick zudieser Thematik und fr weiterfhrende Literaturhinweise.
Durch numerische Zeitschrittintegration des Gleichungssystems (2.17) kann die Struk-turantwort in Form von Lage, Geschwindigkeit und Beschleunigung auf eine bestimmteAnregung als Funktion der Zeit berechnet werden. An realen Systemen knnen dieseGren natrlich auch als gemessene Daten vorliegen. Damit kann an dieser Stelle derBegriff des bertragungsfrequenzgangs (FRF, Frequency Response Function) einge-fhrt werden, der im Folgenden hufig bentigt wird,
Hkl(i) =F{uk(t)}F{fl(t)} =
Uk(i)
Fl(i), (2.18)
mit der Anregungsfrequenz und den Fourier-Transformierten der SystemantwortF{uk(t)} = Uk an einer Stelle k und der Systemanregung Fl an einer Stelle l. Es han-delt sich dabei um eine komplexe Gre, die das bertragungsverhalten eines Systemsim Frequenzbereich beschreibt1. So wie Hkl gerade eingefhrt wurde, handelt es sichum eine nichtparametrische Funktion, da sie direkt ber die Fourier-Transformiertenberechneter oder gemessener Gren bestimmt wurde. Ein parametrischer Zusammen-hang, also eine analytische Beschreibung von Hkl in Abhngigkeit gesuchter Systempa-rameter wird in Abschnitt 2.4.2 fr lineare und in 3.6 fr die betrachteten nichtlinearenSysteme hergeleitet. Dies erst macht einen Vergleich zwischen Rechenmodell und Mes-sung und damit eine Parameteridentifikation mglich.
Eine Beschreibung des bertragungsverhaltens im Zeitbereich liefert die sog. Gewichts-funktion, siehe z.B. [Blohm, 1992], oder auch Impulsantwort genannt, [Unbehauen,2002], die aus der inversen Fourier-Transformation des Frequenzgangs bestimmt wer-den kann,
hkl(t) = F1{Hkl(i)} . (2.19)1Hier soll nur kurz der Unterschied zur bertragungsfunktion erwhnt werden, die ber die
Laplace-Transformierten von Systemausgang zu -eingang gebildet wird. Dabei ist die Laplace-Variable s = + i, womit sich fr die bertragungsfunktion eine Flche ber der komplexenZahlenebene ergibt, siehe z.B. [Maia et al., 1998]. Der bertragungsfrequenzgang ist damit letztlichdie bertragungsfunktion auf der imaginren Achse.
2.2. Dmpfungsmechanismen und -modellierung 19
Diese Gre ist hauptschlich von theoretischem Interesse und wird eingefhrt, dader Begriff spter noch bentigt wird, wesentlich wichtiger sind hier jedoch die ber-tragungsfrequenzgnge. Um diese berechnen zu knnen, mssen noch einige Punktezur Modellbildung der betrachteten Systeme geklrt werden, insbesondere hinsichtlichder Dmpfungsbeschreibung. Zur sinnvollen Behandlung einer Systemdmpfung wirdnun ein berblick ber verschiedene physikalische Dmpfungsmechanismen und derenmechanische und mathematische Modellierung gegeben, um das weitere Vorgehen zumotivieren.
2.2 Dmpfungsmechanismen und -modellierung
Die wesentliche Motivation, sich allgemein mit Dmpfung auseinanderzusetzen, liegt inihrem groen Einfluss auf die Systemdynamik, was an vielen Beispielen demonstriertwerden kann. So begrenzt im Falle von Resonanzen alleine die Dmpfung die Schwin-gungsamplituden. Beim Vorliegen von selbsterregten Schwingungen kann nur durchgengende Dmpfung instabiles Verhalten vermieden werden, wohingegen in der Ro-tordynamik eine zu hohe innere2 Dmpfung sogar zu Instabilitten fhren kann, siehe[Gasch et al., 2002].
Um den Begriff der Dmpfung klar einzufhren, wird dieser zunchst in einer berge-ordneten Betrachtung der Schwingungsminderung von der Schwingungsisolation sowieder -tilgung abgegrenzt. Dies erscheint deswegen sinnvoll, da die Begriffe hufig nichtrichtig verwendet werden, oder aber z.B. im englischen Sprachgebrauch die Bezeich-nungen nicht ganz eindeutig sind3.
Das Wirkprinzip der Schwingungsisolation ist das eines mechanischen Tiefpassfilters.Sie dient der schwingungstechnischen Isolation von Gerten gegenber ihrer Umge-bung oder umgekehrt, siehe z.B. [Magnus und Popp, 2005]. Dabei wird eine elasti-sche Lagerung der betrachteten Maschine mglichst niederfrequent abgestimmt, unddie Maschine im berkritischen Bereich dieser Lagerung betrieben. Die mechanischenTiefpassfiltereigenschaften der Lagerung bewirken nun, dass nur Erregerfrequenzen un-terhalb einer Grenzfrequenz weitergeleitet werden, sodass die Systeme oberhalb dieser
2Hinsichtlich der Systemgrenze kann man zwischen innerer und uerer Dmpfung unterscheiden.Speziell in der Rotordynamik entsteht die uere Dmpfung aufgrund der Interaktion der Welle,z.B. eines Elektromotorlufers, mit einem Umgebungsmedium. Die innere Dmpfung entsteht durchDeformationen des Lufers in Form von Materialdmpfung oder Dmpfung in Konstruktionsfugen,bzw. im Blechpaket. Unterhalb einer kritischen Drehzahl wirkt die innere Dmpfung tatschlichdmpfend, wohingegen sie oberhalb dieser Drehzahl Schwingungen der Welle anfacht. Fr weitereDetails siehe [Gasch et al., 2002].
3Z.B. englisch fr Schwingungstilgung: tuned mass damping.
20 2. Grundlagen
Grenze schwingungstechnisch isoliert sind. Eine hohe Dmpfung fhrt hierbei zu ei-ner geringeren Isolationswirkung, da die Teilsysteme dadurch wieder strker gekoppeltwerden. Der letztgenannte Punkt trifft ebenfalls auf die Schwingungstilgung zu, derenWirkung allerdings nicht der eines mechanischen Tiefpassfilters entspricht, sonderneine Kraftkompensation durch gegenphasige Schwingungen darstellt. Somit wird we-der bei der Schwingungsisolation noch bei der Schwingungstilgung Energie dissipiert,abgesehen von zustzlich vorhandener Dmpfung, die aber eher zu einer geringerenIsolations- bzw. Tilgungswirkung fhrt.
Dmpfung dagegen beruht auf Energiedissipation und wird nach [Sthler, 1993]in Umwandlung von Bewegungsenergie in andere, fr das Schwingungssystem nichtmehr relevante Energieformen und Wegfhren von Energie auerhalb der betrachtetenGrenze des Schwingungssystems unterteilt. Letzteres kann auch als Energieabstrahlungbezeichnet werden. Folgende Beispiele der Umwandlung von Bewegungsenergie in eineandere Form der Energie sind mglich:
in Wrme, wobei hier Materialdmpfung, Kontaktflchendmpfung oder Dmp-fung in Mischreibungsschichten zu nennen ist;
in Schall, d.h. die Schwingungsenergie geht in Bewegungsenergie von Gasen ber; in plastische Verformungsenergie von festen Stoffen; in elektrische Energie, z.B. Wirbelstrme, angewandt in Wirbelstrombremsen; in hydraulische Energie bei Flssigkeiten; in Bewegungsenergie angrenzender Systeme, hufig Energieabstrahlung genannt.
Fr ein bestimmtes System muss nun entschieden werden, welche Formen der Umwand-lung von Schwingungsenergie relevant sind, und wie die Modellierung der vorliegendenDmpfungsmechanismen erfolgen soll. Hufig wird nicht die hinter dem jeweiligen Me-chanismus liegende Physik abgebildet, sondern ein mglichst einfaches Dmpfungsmo-dell verwendet, das eine quivalente Energiedissipation aufweist wie die reale Struktur,siehe [Argyris und Mlejnek, 1988]. Damit kann man leicht lsbare Differentialglei-chungen erhalten, allerdings wird eben das reale Verhalten nicht wiedergegeben, wassich z.B. am Abkling- oder am Hystereseverhalten zeigt.
Im Rahmen dieser Arbeit interessieren Strukturen mit Fgestellen, weshalb sich mgli-che auftretende Dmpfungsphnomene weiter auf folgende Mechanismen einschrnkenlassen:
viskose Dmpfung, die bei langsamen Bewegungen in viskosen Medien auftritt -die Dmpfungskrfte sind hier proportional zur Geschwindigkeit;
2.2. Dmpfungsmechanismen und -modellierung 21
Materialdmpfung, bei der die Dmpfungskrfte abhngig von den Verzerrungensind und als innere Reibungskrfte interpretiert werden knnen;
Strukturdmpfung, die aus Reibung an Verbindungsstellen zwischen einzelnenKrpern resultiert - in vorliegender Arbeit erfolgt eine Beschrnkung auf trockeneReibung, es werden also keine viskosen Schmierstoffe oder Zwischenschichtenbetrachtet;
sonstige spezielle Technologien wie adaptive Fgestellendmpfung, Partikeldmp-fung, usw., die eine Kombination verschiedener Mechanismen darstellen knnen.
Fr die untersuchten Strukturen interessieren v.a. die Material- und die Struktur-dmpfung, da keine Bewegung in lbdern o.. betrachtet wird und die Dmpfungdurch die Interaktion der Struktur mit der umgebenden Luft relativ gering ist. ImRahmen von Strukturen mit Fgestellen sind weiterfhrende Technologien, wie z.B.eine adaptive Fgestellendmpfung sehr interessant, sollen hier aber nicht behandeltwerden. Nun stellt sich die Frage, wie die vorliegenden Mechanismen erfasst werden.
In Abbildung 1.2 wurde schon das charakteristische lineare Abklingverhalten am Bei-spiel des Doppelbalkens, also von Strukturen mit trockener Reibung, gezeigt, wohinge-gen nahezu exponentielles Abklingen fr den Einzelbalken vorliegt. Weiterhin wurdeangemerkt, dass die Materialdmpfung relativ schwach ist und die Dmpfung durchReibung je nach Normalpressungen einen hohen Anteil an der Gesamtdmpfung ha-ben kann. Diese Unterschiede, sowie die offensichtlich verschiedenen zugrundeliegendenphysikalischen Mechanismen legen es nahe, diese auch getrennt zu modellieren.
Bevor in den folgenden Abschnitten getrennt auf die Material- und auf die Struktur-dmpfung eingegangen wird, soll neben dem bereits genannten Abklingverhalten dasprinzipielle Aussehen der wichtigsten Hysteresekurven dargestellt werden. In diesemZusammenhang wird grundstzlich zwischen ratenab- und ratenunabhngigen, bzw.geschwindigkeitsab- und geschwindigkeitsunabhngigen Dmpfungskrften unterschie-den. Erstere werden fr langsame Bewegungen sehr klein, womit ein dynamisches Sys-tem mit hinreichend langsamen Bewegungen als konservatives System approximiertwerden kann. Geschwindigkeitsunabhngige Dmpfung tritt bei plastischem Verhal-ten oder Systemen mit Coulombscher Reibung auf, und es ist charakteristisch, dassauch bei unendlich langsam ablaufenden Prozessen dissipative Anteile vorliegen kn-nen. Diese machen sich bei zyklischer Belastung in einer statischen, wegabhngigenHysterese4 bemerkbar, siehe [Mayer, 2007] oder [Haupt, 1991]. Geschwindigkeitsab-hngige Hysteresen werden dagegen auch als dynamische Hysteresen bezeichnet undtreten bei Systemen mit nachlassendem Gedchtnis auf. Das Hauptaugenmerk dieser
4Dieses Verhalten wird auch als solches mit perfektem Gedchtnis bezeichnet.
22 2. Grundlagen
Arbeit sind Mikroschlupfeffekte, die in einer wegabhngigen, statischen Hysterese re-sultieren. In Abbildung 2.2 sind zwei verschiedene Hysteresekurven abgebildet, wobeilinks eine viskose Dmpfung als Beispiel einer geschwindigkeitsabhngigen Dmpfungzugrunde liegt und rechts trockene Reibung den Dmpfungsmechanismus darstellt.Dabei ist links klar die elliptische Form zu sehen, wohingegen rechts scharfe Ecken
Kra
ft
Weg WegK
raft
Abbildung 2.2: Links: Hysterese bei viskoser Dmpfung, rechts: Hysterese bei trockenerReibung
an den Umkehrpunkten vorliegen, wie es fr ratenunabhngiges Verhalten typisch ist,siehe z.B. [Lazan, 1968]. Letzteres Verhalten kann auch im Rahmen der Material-dmpfung eine Rolle spielen, z.B. wenn plastische Verformungen auftreten, in dieserArbeit wird es aber nur in der Fgestelle bercksichtigt. Ziel der folgenden Ausfh-rungen ist die Motivation fr den im Rahmen dieser Arbeit gewhlten Ansatz zurModellierung von Dmpfungsphnomenen im Material und in der Fgestelle.
2.2.1 Modellierung der Materialdmpfung
Prinzipiell ist es natrlich wnschenswert, die Materialdmpfung aus kontinuumsme-chanisch fundierten Materialgesetzen zu bestimmen, was allerdings sehr aufwndigbzw. schwierig ist, siehe [Markert und Wlfel, 2006]. Nach [Sthler, 1993] kannein allgemeines Stoffgesetz zur Modellierung der Werkstoffdmpfung in der Form
... + p2 + p1 + p0 = q0 + q1 + q2 + ... (2.20)
angegeben werden. Dabei stellen und (einachsige) Spannungen bzw. Verzerrungendar. Setzt man z.B. alle Koeffizienten vor den Zeitableitungen zu Null, so folgt das ela-stische Stoffgesetz. Eine Mglichkeit, solche Stoffgesetze zu veranschaulichen, ist dieDarstellung ber rheologische Modelle, die diverse Kombinationen von Federelemen-ten, viskosen Dmpfer- und evtl. zustzlichen Reibelementen in Form von Reihen- und
2.2. Dmpfungsmechanismen und -modellierung 23
Parallelschaltungen darstellen. Schlielich soll noch die Mglichkeit der Formulierungber Gedchtnisfunktionen genannt werden, die als Integration des allgemeinen Stoff-gesetzes verstanden werden knnen, siehe [Sthler, 1993]. Ein solcher Ansatz wirdz.B. in [Ahrens und Ottl, 1991] verwendet, um ein linear-viskoelastisches Materialmit frequenzunabhngiger Dmpfung zu beschreiben. Auf die Frequenzabhngigkeitwird noch eingegangen, zunchst sollte nur vorgestellt werden, dass diese und weiterePhnomene mit den eben genannten Modellierungen durchaus erfasst werden knnen.Es ist aber ein entsprechendes Stoffgesetz aufzustellen und smtliche ntigen Parame-ter sind zu identifizieren. Fr Werkstoffe mit einer hohen inneren Dmpfung erscheintdieser Aufwand durchaus gerechtfertigt, um eine mglichst realistische Modellierungder Dmpfung zu erreichen. In den hier interessierenden Stahlkonstruktionen mit F-gestellen berwiegt dagegen nicht die Material-, sondern die Strukturdmpfung. Dahersoll diese mglichst genau erfasst werden, whrend der Aufwand fr die Materialdmp-fung mglichst gering sein soll. Da es sich um schwache Dmpfung handelt, bietet sichder wohl gelufigste Ansatz, die geschwindigkeitsproportionale Dmpfung an, was inobiger Formulierung einem viskoelastischen Stoffgesetz der Form
p0 = q0 + q1 (2.21)
entspricht. Die Eigenschaften dieser Dmpfungsbeschreibung sowie deren Eignung frvorliegende Problemstellung sollen nun diskutiert werden.
Bei der geschwindigkeitsabhngigen Dmpfung wird zustzlich noch zwischen visko-ser und hysteretischer Dmpfung hinsichtlich der Frequenzabhngigkeit unterschieden.Meist findet hierbei die viskose Dmpfung Anwendung, was an der leichten mathema-tischen Handhabbarkeit dieses linearen, geschwindigkeitsproportionalen Modells liegt.Tatschlich hat die viskose Dmpfung meist wenig mit den vorliegenden Dmpfungs-mechanismen realistischer Systeme zu tun, auer es handelt sich speziell um lgefllteDmpfersysteme, [Maia et al., 1998]. Dass der Ansatz trotzdem eine grundlegendeDaseinsberechtigung hat, liegt eben in der einfachen mathematischen Behandlung,aber auch daran, dass v.a. schwach gedmpfte Systeme doch relativ gut dadurch be-schrieben werden. Daher wird dieser Ansatz nicht nur zur Beschreibung von viskosenDmpfungsmechanismen, sondern auch zur Modellierung der Materialdmpfung undsonstiger Dmpfungseffekte eingesetzt. Im Rahmen einer experimentellen Modalanaly-se (EMA), siehe Abschnitt 2.4.2, knnen Parameter fr diesen Dmpfungstyp bestimmtwerden, was den Ansatz attraktiv macht.
In der Herleitung der linearen Bewegungsgleichungen in Abschnitt 2.1 sind noch kei-ne Dmpfungskrfte enthalten, sodass nun im Falle geschwindigkeitsproportionalerDmpfung noch der Term Du mit der Dmpfungsmatrix D hinzugefgt wird,
Mu(t) + Du(t) + Ku(t) = f(t) . (2.22)
24 2. Grundlagen
Eine Herleitung dieser Matrix quivalent zur Massen- und Steifigkeitsmatrix ist nichtallgemein mglich, weshalb ein Ansatz gemacht werden muss. Der wohl am meistenverwendete Ansatz ist dabei die proportionale Dmpfung, bei der die Dmpfungsma-trix proportional zur Massen- und zur Steifigkeitsmatrix angesetzt wird,
D = dM + dK . (2.23)
Diesem Ansatz liegt die Annahme zugrunde, dass der Mechanismus der Energiedis-sipation in der gleichen Art und Weise ber die Struktur verteilt ist, wie Masse undSteifigkeit, siehe z.B. [Tisseur und Meerbergen, 2001]. Bei Gleichung (2.23) sprichtman auch von der Bequemlichkeitshypothese oder der Rayleigh-Dmpfung. Der mas-senproportionale Anteil entspricht dabei einer ueren Dmpfung (die aus dem dieStruktur umgebenden Medium resultiert), und fhrt auch zu einer Dmpfung vonStarrkrperbewegungen. Der steifigkeitsproportionale Anteil entspricht einer innerenDmpfung (Materialeigenschaft) und spricht nur bei Verzerrungen an, also nicht beiStarrkrperbewegungen. Dies liegt daran, dass zu den Starrkrpermoden Nulleigen-werte der Steifigkeitsmatrix gehren, d.h. bei Wahl von d = 0 werden diese Modennicht gedmpft. Auf diese Formulierung kommt man letzlich auch, wenn (2.21) aufdrei Dimensionen erweitert und konsequent in einer FE-Formulierung eingefhrt wird.Die Dmpfungsparameter knnen bei Kenntnis der ersten beiden Eigenkreisfrequen-zen j und modalen Dmpfungen (Lehrsche Dmpfungsmae) Dj einer betrachtetenStruktur bestimmt werden,
2Dj =dj
+ d j j = 1, 2 . (2.24)
Eigenfrequenzen und modale Dmpfungen erhlt man ber eine EMA, womit einerelativ einfache Mglichkeit zur Bestimmung der Dmpfungsparameter d und d vor-liegt. Die Rayleigh-Dmpfung ist ein Spezialfall der Caughey-Dmpfung, bei derdie Dmpfungsmatrix ber die Caughey-Reihe dargestellt wird, vgl. [Bathe, 1995],wofr allerdings zustzlich die Kenntnis der modalen Parameter hherer Moden ntigist, je nachdem, wie weit die Reihe ausgefhrt wird. Nach [Bathe, 1995] werden diehheren Moden bei Verwendung der Rayleigh-Dmpfung strker gedmpft, als dieje-nigen Moden mit denen die Parameter bestimmt wurden, was auf die bereits genannteFrequenzabhngigkeit hindeutet.
Die groen Vorteile dieser Modellierung liegen im Rahmen dieser Arbeit darin, dasseine schwache Dmpfung erfahrungsgem gut erfasst wird und dass eine Bestimmungder Dmpfungsparameter ber die EMA relativ einfach durchzufhren ist. Wie sp-ter noch gezeigt wird, beruht die EMA auf dem Ansatz einer allgemeinen Dmpfung,also nicht auf dem obigen proportionalen Ansatz. Bei der Durchfhrung der EMA
2.2. Dmpfungsmechanismen und -modellierung 25
mit Hilfe der Modalanalysesoftware MEscope knnen daher nicht direkt die Para-meter d und d bestimmt werden. Stattdessen erhlt man zunchst Eigenfrequenzenund modale Dmpfungen und damit ber die Beziehung (2.24) die gesuchten Para-meter. Damit mssen keine willkrlichen Parameter gewhlt werden und es liegt einBezug zur physikalischen Realitt vor, in dem nun sowohl eine Materialdmpfung alsauch die Interaktion mit dem Umgebungsmedium erfasst wird. Weitere Effekte durchFgestellen, also z.B. auch Einspannungen der untersuchten Struktur, sollten dabeivermieden werden, worauf bei den Messungen zu achten ist. Wird dies gewhrleistet,so kann die eben eingefhrte Dmpfungsmodellierung zur Materialdmpfung einzelnerKomponenten eines Systems eingesetzt werden.
Ein wesentlicher Punkt, der hufig fr die Verwendung der proportionalen Dmpfungspricht, ist die Mglichkeit der modalen Entkopplung der Systemgleichungen mit Hilfeder Eigenvektoren des ungedmpften Systems, die rein reell sind5. Werden hierbei nichtalle Eigenmoden bercksichtigt, so kann eine modale Reduktion durchgefhrt werden,die zu einer geringeren Dimension der Systemgleichungen fhrt. Hierbei muss natrlichvorher eine sorgfltige Wahl der zu bercksichtigenden Moden vorgenommen werden,z.B. durch die Analyse der in der Anregung vorliegenden Frequenzen, vgl. [Bathe,1995] oder [Willner, 2006]. Diese Entkopplung ist nicht mglich, wenn eine allge-meine Dmpfungsmatrix oder Nichtlinearitten vorliegen. Es kann allerdings darbernachgedacht werden, eine modale Reduktion fr lineare Teilsysteme durchzufhren,was durchaus fr sehr groe Systeme interessant sein kann und z.B. in [Panning,2005] angewandt wird. Weitere Ausfhrungen zu dieser Thematik im Hinblick aufSysteme mit Nichtlinearitten sind z.B. in [Meyer, 2003] zu finden, wo auch andereReduktionstechniken als die modale Reduktion dargestellt werden.
Eine allgemeine, also eine nichtproportionale Dmpfung liegt vor, wenn dmpfendeElemente nur lokal an einem Gesamtsystem vorliegen, wenn also starke Variationen inden Energieabsorptionsraten in unterschiedlichen Teilen der Struktur vorliegen, z.B.durch Verwendung unterschiedlicher Materialien in einem Gesamtsystem oder aberdurch Fgestellen. Abgesehen von der Tatsache, dass es sich bei Dmpfung durchtrockene Reibung in Fgestellen nicht um viskose Dmpfung handelt, liegt hier stark
5Bei jeglichem Vorhandensein einer Dmpfung sind die Eigenvektoren schwingungsfhiger Modenkomplex. Im Falle proportionaler Dmpfung knnen auch mit diesen Vektoren die Systemmatrizendiagonalisiert werden. Dabei ist auch eine reelle Darstellung der Eigenvektoren mglich, indem z.B.nur die Realteile ihrer Komponenten verwendet werden. Diese Vektoren entsprechen dann bis auf eineKonstante den Eigenvektoren des ungedmpften Systems. Dass diese reelle Darstellung mglich ist,liegt daran, dass beim proportional gedmpften System die einzelnen Freiheitsgrade entweder genauin Phase oder gegenphasig zueinander schwingen. Dies kann an den Phasendifferenzen der einzel-nen Freiheitsgrade zueinander mit Hilfe der zunchst erhaltenen komplexen Eigenvektoren berprftwerden.
26 2. Grundlagen
lokales Verhalten vor, nmlich nur in der Kontaktschicht. Damit kann der Ansatzder proportionalen Dmpfung fr die Gesamtstruktur nicht richtig sein, allerdingskann durchaus angenommen werden, dass in jeder Teilstruktur fr sich proportionaleDmpfung vorliegt.
Unabhngig von proportionaler oder nichtproportionaler Dmpfung ist die viskoseDmpfung frequenzabhngig. Die pro Schwingungszyklus dissipierte Energie hngtlinear von der Anregungsfrequenz ab, was leicht an einem viskos gedmpften Ein-Freiheitsgrad-(FHG)-Schwinger gezeigt werden kann. Dazu nimmt man eine harmoni-sche Schwingungsantwort auf eine harmonische Erregung der Kreisfrequenz an,
y = Y cos(t) y = Y sin(t) (2.25)
und berechnet die Arbeit, die die Dmpferkraft fd an einer kleinen Verschiebung dyleistet,
fd dy = fddy
dtdt = fd ydt , (2.26)
siehe z.B. [Den Hartog, 1985]. Setzt man den angenommenen Ansatz der geschwin-digkeitsproportionalen Dmpfungskraft fd = dy ein (d: Dmpferkonstante) und inte-griert ber eine Schwingungsperiode,
Ed =
T0
fddy
dtdt =
2pi
0
d y2 dt =
2pi
0
d Y 2 2 sin2(t) dt = dpiY 2 , (2.27)
so erkennt man unmittelbar die lineare Frequenzabhngigkeit. Bei Messungen an rea-len Systemen hat sich hufig gezeigt, dass diese Frequenzabhngigkeit nicht vorliegt,siehe die bereits zitierten Artikel [Haupt, 1991] oder [Ahrens und Ottl, 1991],hauptschlich bzgl. Werkstoffdmpfung. In [Knothe und Wessels, 1999] wird spe-ziell darauf hingewiesen, dass die Werkstoffe Stahl und Beton in einem groen Fre-quenzbereich eine konstante Dmpfungsarbeit Ed aufweisen, wohingegen in [Gaschet al., 2002] eine frequenzunabhngige Dmpfung durch Mikroschlupfeffekte angefhrtwird, die an diversen Stellen in Schrumpfsitzen, im Blechpaket eines Lufers oder inSchraubverbindungen auftreten. Damit handelt es sich wieder um Strukturdmpfung,die in vorliegender Arbeit gesondert behandelt wird, siehe folgenden Abschnitt 2.2.2.Wenn trotzdem allgemeines frequenzunabhngiges Dmpfungsverhalten mit Hilfe ei-nes einfachen geschwindigkeitsproportionalen Modells erfasst werden soll, wird hufigdie hysteretische6 Dmpfung herangezogen, bei der ein Dmpfungsparameter einge-setzt wird, der invers von der Anregungsfrequenz abhngt. In Zusammenhang mit
6In der Literatur wird hysteretische Dmpfung auch hufig Strukturdmpfung genannt. Hier wirdunter ersterer der nun eingefhrte Dmpfungsansatz und unter letzterer der physikalische Dmp-fungsmechanismus in Form von Reibung in Fgestellen verstanden.
2.2. Dmpfungsmechanismen und -modellierung 27
Gleichung (2.27) ergibt sich
d =d
Ed = dpiY 2 . (2.28)
Damit ist die Frequenzabhngigkeit der dissipierten Energie eliminiert, es stellt sichaber die Frage, auf welche Frequenz der Dmpfungsparameter bezogen werden soll.Handelt es sich bei der Betrachtung um die stationre Antwort eines linearen Systemsauf eine harmonische Erregung, so ist es natrlich die Anregungsfrequenz. Sind dage-gen transiente oder nichtlineare Schwingungen von Interesse, so schwingt das Systemin der Regel nicht nur mit einer Frequenz, weshalb sich hier Schwierigkeiten ergeben,siehe z.B. [Maia et al., 1998] oder [Argyris und Mlejnek, 1988]. Ein weiterer Kri-tikpunkt an diesem Modell ist die Tatsache, dass es einen nichtkausalen Anteil bei derRcktransformation aus dem Frequenzbereich in den Zeitbereich liefert, siehe [Wor-den und Tomlinson, 2001]. Dies bedeutet, dass die Impulsantwort (2.19) fr Zeitent < 0 einen Anteil besitzt, d.h. dass eine Antwort bereits ohne Anregung, also eineWirkung ohne Ursache existiert. Neben diesem unphysikalischen Verhalten ergibt sichnoch ein weiteres Problem durch den nichtkausalen Anteil. In Abschnitt 4.2.3 wirdein Verfahren vorgestellt, mit dem man an bertragungsfrequenzgngen mit Hilfe derHilbert-Transformation Nichtlinearitten detektieren kann. Dieses Verfahren nutztgerade das Vorhandensein eines nichtkausalen Anteils aufgrund der Nichtlinearitt undnicht durch eine hysteretische Dmpfung. Verwendet man diese im Berechnungsmodell,so muss man in Zusammenhang mit der Hilbert-Transformation bei der Interpreta-tion der Ergebnisse vorsichtig sein.
Da beliebige, also nicht nur harmonische Anregungen zugelassen werden sollen, undaufgrund der anderen genannten Kritikpunkte erscheint die hysteretische Dmpfungals ungeeignet und es werden die Nachteile der viskosen Dmpfung in Kauf genommen.Da es sich ohnehin um schwache Materialdmpfung handelt, erscheint dieses Vorgehenals vernnftig. Damit steht ein einfaches Modell fr die Werkstoffdmpfung der ein-zelnen Komponenten zur Verfgung, fr das realistische Parameter im Rahmen einerEMA bestimmt werden knnen. Im folgenden Abschnitt wird fr die Erfassung derStrukturdmpfung ein berblick gegeben, um ein geeignetes Modell auszuwhlen.
2.2.2 Modellierung der Strukturdmpfung
Wie bereits angemerkt, soll in dieser Arbeit unter Strukturdmpfung eine Energiedissi-pation durch Reibungsvorgnge in Fgestellen zusammengesetzter Bauteile verstandenwerden. Dabei erfolgt eine Einschrnkung auf trockene Reibung. Im vorigen Abschnittwurde schon auf die Frequenzunabhhngigkeit dieser Art der Dmpfung hingewiesen,
28 2. Grundlagen
weshalb aufgrund der Einfachheit manchmal der Ansatz der geschwindigkeitspropor-tionalen, hysteretischen Dmpfung gemacht wird. Teilweise werden auch quivalenteviskose Dmpfungswerte ermittelt, um eine Gesamtenergiedissipation mglichst leichtbeschreiben zu knnen, siehe z.B. [Virgin, 2000]. Dass dies nicht der zugrundelie-genden Physik entspricht, kann wieder an der pro Schwingungszyklus dissipiertenEnergie eines Ein-FHG-Schwingers unter Einfluss von Coulombscher Reibung ge-zeigt werden. Die dmpfende Kraft ist hier die bewegungsrichtungsabhngige Reib-kraft R = r sgn(y) = Nsgn(y) (: Reibbeiwert, N : Normalkraft) die wiederum andem harmonischen Wegverlauf (2.25) Arbeit leistet. Spaltet man das Integral bereine Schwingungsperiode aufgrund der sgn(y)-Funktion in zwei Bereiche auf, so folgt
Erd =
T0
Rdy
dtdt =
2pi
0
r sgn(y)y dt = pi
0
ry dt +
2pi
pi
ry dt = 4rY = 4NY .
(2.29)Man erkennt hier zwar auch die geforderte Frequenzunabhngigkeit, jedoch ergibt sichein anderer Ausdruck fr die dissipierte Energie als bei der hysteretischen Dmp-fung (2.28), was einen anderen physikalischen Hintergrund aufzeigt. Dieses einfacheReibelement ist zwar auch nur ein Modell, es beschreibt den tatschlichen Mechanis-mus aber besser als die hysteretische Dmpfung. Weiterhin werden hier physikalischsinnvolle, und nicht irgendwelche quivalenten viskosen Parameter eingesetzt. DurchBetrachtung des Abklingverhaltens dieses einfachen Reibschwingers stellt man das be-reits in Abbildung 1.2 demonstrierte lineare Abklingen fest. Dies wird z.B. in [Magnusund Popp, 2005] gezeigt, indem die pro Zyklus abgenommene Amplitude betrachtetwird. Auch in [Worden und Tomlinson, 2001] wird auf die Untersuchung von Ein-hllenden eingegangen, da hiermit relativ schnell aus Ausschwingversuchen auf dasVorliegen bestimmter Dmpfungsmechanismen geschlossen werden kann. Neben denAbkling- interessieren natrlich wieder Hysteresekurven, wobei bereits in Abbildung2.2 die charakteristische Form bei Vorhandensein von geschwindigkeitsunabhngigemVerhalten gezeigt wurde. In Abbildung 2.3 sind weitere Hysteresekurven dargestellt,die durch Auftragung der Tangentialkraft ber der Relativverschiebung zweier in Kon-takt stehender Krper entstehen. Das gerade betrachtete einfache Coulomb-Elementfhrt zu der gestrichelt eingezeichneten rechteckigen Hysterese, d.h. es ist nur Haf-ten oder komplettes Gleiten der Krper, also Makroschlupf mglich. Weiterhin ist dielinke Hlfte einer gemessenen Hysteresekurve eingezeichnet (markiert durch Rauten),wodurch sofort verdeutlicht wird, dass weder das Coulomb-Element, noch die in Ab-schnitt 2.2.1 betrachteten ratenabhngigen Modelle in der Lage sind, dieses Verhaltenzu beschreiben. Es ist ein elastischer Bereich sowie ein bergangs-, der Mikroschlupfbe-reich zu erkennen, bevor Makroschlupf eintritt. Daher sind in Abbildung 2.3 zustzlichdie Hysteresen eines Elasto-Gleit-Elements und eines speziellen Masing-Elements
2.2. Dmpfungsmechanismen und -modellierung 29
Tangentialkraft
Coulomb-Element
Masing-Element
Messung Elasto-Gleit-Element
Relativverschiebung
Abbildung 2.3: Hysteresekurven zur Verdeutlichung des Mikro- und Makroschlupfver-haltens
eingetragen, die das reale Verhalten besser wiedergeben. Wie diese rheologischen Mo-delle aussehen, welche weiteren Anstze es gibt, und welches Modell in dieser Arbeiteingesetzt wird, soll nun diskutiert werden.
Die klassischen Ersatzmodelle, die hufig Verwendung finden, wenn allgemein dasmechanische Verhalten von Werkstoffen und Konstruktionen mit statischer Hystere-se beschrieben werden soll, sind Iwan- und Masing-Elemente, vgl. Abbildung 2.4.Ausfhrliche Abhandlungen hierzu sind z.B. in [Ottl, 1981] oder [Menq et al., 1986a]zu finden. Letztlich beruhen fast alle Modelle auf Reihen- oder Parallelschaltungen vonFedern und Reibelementen, was auch der Modellierung in der Plastizitt entspricht.Ein einzelner Strang des Masing-Elements, bestehend aus einer Reihenschaltung ei-ner Feder ci und eines Reibelements mit der Haftkraft Ri (diese wird hier gleich derGleitkraft angenommen), wird dabei auch Elasto-Gleit-, Jenkin- oder Prandtl-Element genannt, siehe z.B. auch [Mayer, 2007]. Im Bereich der Plastizitt wirdhierbei auch von elastisch-idealplastischem Verhalten gesprochen. Je nachdem, wieviele Teilstrnge bercksichtigt werden, kann mit unterschiedlichen Koeffizienten ciund Ri Mikroschlupfverhalten abgebildet werden, da die Teilstrnge bei jeweils ver-schiedenen Belastungssituationen ihre Haft- und Gleitzustnde wechseln. Man mussnatrlich beachten, dass es sich um eine polygonfrmige Nherung der Hysteresekur-
30 2. Grundlagen
cn
Rn
F
u
R1
c1
c0
R1
R2c2
c1
cnRn
F
c0
u
Abbildung 2.4: Links: Masing-Element, rechts: Iwan-Element
ven handelt, und dass die ntigen Parameter der Teilstrnge experimentell bestimmtwerden mssen. In [Wentzel, 2006] wird auf die Mglichkeit von Verteilungsfunk-tionen fr die Haft-Gleitgrenzen eingegangen und weitere Literaturhinweise zu dieserThematik gegeben.
Die Behandlung der bei diesen Modellen entstehenden Evolutionsgleichungen erfordertdie Auswertung der Signumfunktion, was bei numerischen Lsungen zu Schwierigkei-ten fhren kann, [Ottl, 1981]. Um diese Probleme in den Griff zu bekommen, und umkontinuierliche, im Gegensatz zu den polygonartigen Hysteresen zu erhalten, werdenteilweise Regularisierungen verwendet, siehe z.B. [Mayer, 2007] und die dort angege-bene Literatur. In der Diplomarbeit [Rasp, 2008] wird ebenfalls eine Glttung solcherGesetze vorgeschlagen, allerdings zeigt sich, wie auch in [Chiang, 1992] zu lesen ist,dass solche Regularisierungen zu einem Wandern der Hysteresen fhren knnen undsomit unphysikalisches Verhalten darstellen. Als weitere Mikroschlupfmodelle werdenbeispielhaft das Bouc-Wen-, das Valanis-Modell, [Mayer, 2007], [Gaul und Nit-sche, 2001], sowie das bar model von [Menq et al., 1986a] genannt. Fr Details undweiterfhrende Literatur siehe die eben genannten Literaturstellen, hier wird nichtweiter auf diese Mikroschlupfmodelle eingegangen, da sie in dieser Arbeit nicht zumEinsatz kommen. Um dies zu begrnden, werden nun verschiedene Modellierungsstra-tegien diskutiert.
Die gewhlte Modellierung muss in der Lage sein, Mikroschlupfeffekte in der Fgestelleabbilden zu knnen. Dabei ist zunchst zu entscheiden, ob die Fgestelle als punktuel-ler oder ausgedehnter, flchiger Kontakt modelliert werden soll. Da die hier betrachte-
2.2. Dmpfungsmechanismen und -modellierung 31
ten Konstruktionsfugen nicht als klein relativ zur Gesamtstruktur anzusehen sind, wirdeine flchige Modellierung gewhlt. Handelt es sich dagegen um kleine Fgestellen imVergleich zur Gesamtstruktur, oder soll die Verbindung in einem FE-Modell sehr grobdiskretisiert werden, so wird das Kontaktverhalten nur an wenigen Punkten betrachtet.Dann ist es zur Erfassung von Mikroschlupfeffekten ntig, ein entsprechendes Modelleinzusetzen. Wird die Kontaktflche rumlich aufgelst und fein genug diskretisiert,so gengt lokal (an den Integrationspunkten) ein Makroschlupfverhalten, global kannaber durchaus Mikroschlupf abgebildet werden, indem einige Punkte gleiten und an-dere eben haften. Ein solches detailliertes FE-Modell wird auch in [Wentzel, 2006]von den eben genannten Mikroschlupfmodellen abgegrenzt, die als einzelnes Modelldie gesamte Fgestelle darstellen sollen. [Panning, 2005] wendet so gesehen eine Zwi-schenform an, bei der die dort betrachtete Kontaktstelle zwischen Turbinenschaufelund einem Koppelelement diskretisiert wird und dann einzelne Punktkontaktmodel-le zum Einsatz kommen. [Meyer, 2003] dagegen betrachtet einzelne Punktkontaktein ansonsten linearen Gesamtsystemen. Fr industrielle Anwendungen ist sicher eineLsung mit mglichst einfachen Punktkontaktmodellen erstrebenswert, die eventuellauch aus komplexen FE-Modellen in Zusammenhang mit Experimenten identifiziertwerden knnen, [Wentzel, 2006]. In vorliegender Arbeit wird eine detaillierte, flchigeModellierung verwendet, d.h. die Fgestelle wird mglichst realittsnah diskretisiert.Lokal kommt das einfache Elasto-Gleit-Modell zum Einsatz, siehe Kapitel 3 fr Detailszur Formulierung im Rahmen der FEM. Die globale Erfassung von Mikroschlupf wirdanhand numerischer Beispiele in Abschnitt 3.4 demonstriert.
Durch die Bercksichtigung des Kontakts entstehen letztlich die nichtlinearen Bewe-gungsgleichungen
Mu(t) + Du(t) + k(u,u, t) = f(t) . (2.30)
Der Vektor k kann dabei nichtlinear von den Verschiebungen und den Geschwindigkei-ten abhngen und enthlt alle inneren Krfte des Systems inklusive der Dmpfungs-anteile aufgrund von Reibung in der Fgestelle. Auerdem sind darin noch die Anteileder elastischen Krfte der linearen Teilsysteme enthalten, wohingegen andere, nichtreibungsinduzierte Dmpfungsanteile im Term Du bercksichtigt werden.
Damit steht nun ein Rahmen zur Erfassung von Mikroschlupf und damit zur realisti-schen Beschreibung der Dmpfung von gefgten Strukturen bereit, sodass in Kapitel 3die Umsetzung mit Hilfe der FEM vorgestellt werden kann. Zunchst soll aber noch einberblick ber unterschiedliche Anregungsarten gegeben werden, um abhngig davonauf verschiedene Behandlungsmglichkeiten der Systemgleichungen eingehen zu kn-nen. Weiterhin ist die Diskussion der Anregung auch im Hinblick auf experimentelleUntersuchungen, sowie auf das Verhalten nichtlinearer Systeme wichtig.
32 2. Grundlagen
2.3 Systemanregung
Die Erregung eines vorliegenden Systems wird einerseits unter dem Gesichtspunktder im realen Betrieb auftretenden Anregungskrfte, andererseits bzgl. der in expe-rimentellen Untersuchungen eingesetzten Erregersignale betrachtet. Es erscheint zwarsinnvoll, auch im Laborexperiment die jeweiligen realen Situationen nachzubilden, al-lerdings sind zur gezielten Analyse v.a. nichtlinearer Effekte, auch im Hinblick auf eineParameteridentifikation, nur spezielle Erregungen geeignet. Zur Darstellung diverserEigenschaften unterschiedlicher Anregungsfunktionen werden die bereits eingefhrtenbertragungsfrequenzgnge (2.18) herangezogen, die aus den Systemantworten (Lage,Geschwindigkeit oder Beschleunigung) bezogen auf eine Anregung gebildet werden. Beilinearen Systemen sind die bertragungsfrequenzgnge unabhngig von der Anregung,was bei nichtlinearen Strukturen nicht zutrifft. Weiterhin hngt die Lsungsmglich-keit der Systemgleichungen von der Anregungsart ab, so bietet sich z.B. bei harmoni-scher Erregung eine direkte Lsung der stationren Antwort im Frequenzbereich an,wohingegen bei allgemeinen transienten Anregungen eine Integration im Zeitbereicherforderlich ist. Auf diese Aspekte wird nun fr die wichtigsten Erregersignale einge-gangen.
Harmonische Signale: Anregungen dieser Art entstehen z.B. durch Unwuchtenund sind als monofrequente Signale die Einzelkomponenten einer allgemein periodi-schen Funktion, die mit Hilfe einer Fourier-Reihe in diese Einzelanteile zerlegt wer-den kann. Eine monofrequente Anregung bietet aus berechnungstechnischer Sicht dengroen Vorteil, dass fr lineare Systeme ohne Weiteres eine direkte Berechnung der Sys-temantwort im stationren Zustand im Frequenzbereich mglich ist, siehe Abschnitt2.4.1. Fr periodische Funktionen ist dies ebenfalls durch Superposition der einzel-nen Frequenzanteile mglich, siehe z.B. [Gasch und Knothe, 1987]. Fr nichtlineareSysteme gilt die Superposition nicht mehr, fr monofrequente Signale ist aber durch ge-wisse Annahmen sowie eine geeignete Linearisierung eine direkte Antwortberechnungdes stationren Zustands im Frequenzbereich erreichbar. Eine Mglichkeit bietet hierdie Harmonische-Balance-Methode (HBM), auf die in Abschnitt 2.5.2 berblicksmigeingegangen wird. Im Rahmen der Hher-Harmonische-Balance-Methode (HHBM) istauch die Bercksichtigung hherer Harmonischer mglich. Letztlich erhlt man direktdie bertragungsfrequenzgnge ohne Umweg ber den Zeitbereich, und kann diesez.B. mit Messergebnissen abgleichen, um gesuchte Systemparameter zu erhalten bzw.anzupassen. Speziell bei nichtlinearen Systemen bietet sich eine harmonische Anre-gung mit Hilfe eines elektrodynamischen Schwingerregers (Shaker) an, da hiermit diegesamte Schwingungsenergie mit geregelter Amplitude bei jeweils einer Frequenz indie Struktur eingebracht werden kann. Dadurch treten Nichtlinearitten in den gemes-
2.3. Systemanregung 33
senen Frequenzgngen deutlich zum Vorschein, d.h. die Information des nichtlinearenSystemverhaltens ist darin enthalten. Durch eine Amplitudenregelung kann kontrol-liert die Amplitudenabhngigkeit nichtlinearer Strukturen untersucht werden. Zur Er-fassung eines bestimmten Frequenzbereichs muss dieser entweder mit einem gestuftenSinus (stepped sine) oder mit einem Gleitsinus (sine sweep) durchfahren werden, wo-bei darauf zu achten ist, dass nur die stationre Antwort in die Messung mit eingeht.Dies bedeutet, dass eine Gleitsinusmessung mit sehr langsamer Sweep-Geschwindigkeitdurchzufhren ist, um die Anteile des Einschwingvorgangs mglichst gering zu halten.Bei einer stepped sine-Messung wird der Einschwingvorgang abgeschnitten und nurder stationre Zustand zur Weiterverarbeitung betrachtet. Fr weitere Betrachtungenzu diesem Thema siehe Abschnitt 4.1, sowie [Ewins, 2000] oder [Maia et al., 1998].
Rauschen, stochastische Signale: Solche Signale knnen z.B. Windanregungenoder auch Fahrbahnprofile beschreiben und besitzen daher eine groe Relevanz frden praktischen Einsatz. Die Beschreibung der durch solche Anregungen entstehendenSchwingungen geschieht meist durch statistische Kenngren wie Mittelwerte, Stan-dardabweichungen oder Wahrscheinlichkeitsverteilungen, da meist nicht interessiert,wie sich ein Schwingungssystem zu einem bestimmten Zeitpunkt verhlt. Vielmehrmchte man z.B. wissen, wie es sich ber einen lngeren Zeitraum im statistischenMittel bewegt, [Mitschke, 1995]. Es ist natrlich immer mglich, die Systemantwortdurch direkte Simulation zu erhalten und dann die statistischen Kennzahlen auszu-werten. Diese Kennwerte knnen aber mit geringerem Aufwand durch Berechnungs-verfahren wie die Spektral- und die Kovarianzanalyse direkt bestimmt werden, siehe[Mller und Schiehlen, 1976] fr die Behandlung linearer Systeme. Im Falle vonnichtlinearen Systemen geht solchen Methoden eine statistische, bzw. quivalente Li-nearisierung voraus, und man erhlt die Kenndaten nur noch nherungsweise, siehe[Mller et al., 1980]. Dieses Vorgehen ist z.B. beim Vorhandensein starker Nichtli-nearitten nur eingeschrnkt anwendbar, weshalb hufig auf die Monte-Carlo-Methodebergegangen wird, [Miao, 1982]. Dabei wird der stochastische Erregerprozess nume-risch simuliert und die Systemgleichungen direkt numerisch integriert. Anschlieendwerden die statistischen Eigenschaften des Antwortprozesses ausgewertet.
Bei einer experimentellen Untersuchung kann wieder ein Shaker herangezogen werden,um die Struktur mit zufallsbedingten Lastniveaus und Phasenbeziehungen anzuregen.Die resultierende Schwingungsantwort an einem Frequenzpunkt stellt dann einen Mit-telwert vieler Antworten unter unterschiedlichen Lastniveaus dar. Fr lineare Systemeerhlt man wieder den gleichen Frequenzgang7, wohingegen bei nichtlinearen Syste-
7Hierbei ist auf leakage-Probleme sowie deren mgliche Vermeidung durch geeignete Fensterfunk-tionen in Abhngigkeit des Anregungssignals hinzuweisen, vgl. [Ewins, 2000] fr eine ausfhrlicheBeschreibung der Signalanalyse, und Abschnitt 4.1.2 fr einen kurzen berblick.
34 2. Grundlagen
men aufgrund des Mittelungsprozesses letztendlich ein linearisierter bertragungsfre-quenzgang herauskommt. Dies kann erwnscht sein, wenn schwache Nichtlinearittenvernachlssigt werden sollen, fhrt aber offensichtlich zu Problemen, wenn gerade die-se nichtlinearen Phnomene detektiert und identifiziert werden sollen, siehe z.B. auch[Blohm, 1992].
Transiente Signale: Dazu zhlen z.B. Impulserregungen wie das Durchfahren einesSchlaglochs oder Sprungerregungen wie das berfahren eines Randsteins. Prinzipiellist hier bei linearen Systemen eine Berechnung der Systemantwort im Frequenzbe-reich mglich, wobei dann eine Fourier-Transformation der Anregungsfunktion unddie Kenntnis des bertragungsfrequenzgangs ntig sind. Es ist aber eine Analyse imZeitbereich vorzuziehen, [Gasch und Knothe, 1987]. Bei nichtlinearen Systemen isteine direkte Berechnung im Frequenzbereich nicht mehr mglich, womit eine Zeitbe-reichsanalyse fr transiente Anregungen notwendig ist. Zur experimentellen Struktur-untersuchung sind Impulsanregungen oder auch Ausschwingversuche z.B. zur Analysevon Einhllenden der Abklingkurven interessant. Im Rahmen der EMA ist die Im-pulshammeranregung eine klassische und relativ einfache Methode, um schnell diemodalen Parameter Eigenfrequenz und Dmpfung, sowie die Eigenformen einer linea-ren Struktur zu erhalten. Aufgrund der breitbandigen Anregung und der schlechtenSteuerbarkeit der Anregungsamplitude ist eine saubere Untersuchung bzgl. Nichtlinea-ritten schwierig.
In Abhngigkeit des Anregungssignals und des Vorliegens von Nichtlinearitten kannnun auf mgliche Lsungsmethoden eingegangen werden. Begonnen wird dabei mitlinearen Systemen, da hieran bereits einige wesentliche Aspekte und wichtige Grund-lagen vorgestellt werden knnen.
2.4 Behandlung linearer Systeme
Das Bewegungs-DGL-System linearer Systeme (2.22) sei hier nochmals angegeben,
Mu(t) + Du(t) + Ku(t) = f(t) .
Dieses System kann fr beliebige rechte Seiten f numerisch in der Zeit integriertwerden, woraus die vollstndige Antwort im Zeitbereich inklusive Einschwingvorgn-gen folgt. Die Methoden der Zeitschrittintegration werden in explizite und impliziteVerfahren unterteilt, mit der Zentrale-Differenzen-Methode als klassischen Vertreterfr explizite und der Newmark-Metho