Embed Size (px)
Citation preview
- Kinematik -
Prof. Dr. Ulrich Hahn
WS 2015/2016
Physik I im Studiengang Elektrotechnik
Kinematik 2
Bewegung
Ein Körper/Objekt ändert seine Position (Ort)
Dafür wird Zeit benötigt
Kinematik 3
Bewegung
Kinematik 4
Rotation Unterschiedliche Punkte des Objektes bewegen
sich auf konzentrischen Kreisen
Kinematik 5
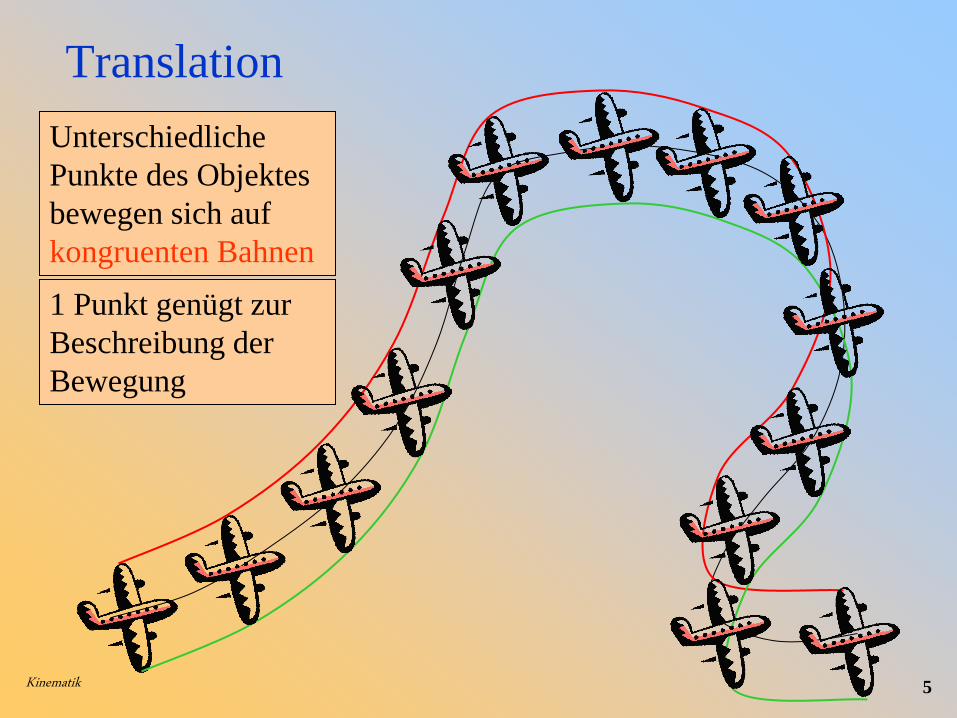
Translation
Unterschiedliche
Punkte des Objektes
bewegen sich auf
kongruenten Bahnen
1 Punkt genügt zur
Beschreibung der
Bewegung
Kinematik 6
Festlegen der Position
bezüglich eines ruhenden Referenzpunktes
auf der Erde
im Labor
auf dem Tisch
„Ruhe“ ist willkürlich! Transformation von
Bezugssystemen
Bezugssystem festlegen
Kinematik 7
Positionsänderung
Entfernung: neue Position – alte Position
Richtung der Bewegung
einfach: eindimensionale Bewegung
Bewegung mit 1 Freiheitsgrad
Richtung Vorzeichen der Position
(Weg, Strecke)
Konvention:
+ : nach rechts/nach oben vom Bezugspunkt
– : nach links/nach unten vom Bezugspunkt
Zeitpunkte, zu denen das Objekt die Positionen einnimmt
Kinematik 8
Basisgröße Länge
Einheit: 1m
Messvorschriften für die Basiseinheit:
1/40 000 000 des Äquatorumfanges der Erde
Urmeter aus Pt/Ir in Paris
Strecke, die Licht in einer bestimmten Zeit durchquert
Wellenlänge von Licht eines atomaren Übergangs
Genauigkeit steigt
Kinematik 9
Basisgröße Zeit
Einheit: 1s
Messvorschriften für die Basiseinheit:
astronomisch: Tag/Nacht, Jahreszeiten...
mechanisch: Pendelschwingung...
elektrisch: Schwingungen (Umladungsprozesse)
atomar: Schwingungsdauer des Lichtes eines
atomaren Übergangs
Genauigkeit steigt
Kinematik 10
Geschwindigkeit
AE
AE
tt
ssv
Eigenschaften von Bewegungen schnell
langsam
quantifizieren durch:
Geschwindigkeit := zurückgelegter Weg
dafür benötigte Zeit
Formelkonvention:
Verfeinerte Betrachtung: v = Ds/Dt: Durchschnittsgeschwindigkeit
t
s
D
D:
s
mv
Kinematik 11
Momentangeschwindigkeit
Bewegungen können längs des Weges schneller/langsamer werden.
Weg in kleine Abschnitte aufteilen
Durchschnittsgeschwindigkeit für kleineres Dt
Geschwindigkeit an einer Position zu einem Zeitpunkt?
Grenzfall: Dt 0 )()(:d
)(d:lim 11
011
tvtst
ts
t
s
ttt
D
D
D
v(t1): Momentangeschwindigkeit
Kinematik 12
Beschleunigung
Änderung der Momentangeschwindigkeit:
VW-Polo: 0 auf 100 km/h in 15s
Porsche: 0 auf 100 km/h in 5 s
quantifizieren durch:
Beschleunigung := Geschwindigkeitsänderung
dafür benötigte Zeit
Durchschnittsbeschleunigung
)()(:d
)(d:lim 11
011
tatvt
tv
t
v
ttt
D
D
D
Momentanbeschleunigung:
AE
AE
tt
vva
t
v
D
D:
s²
ma
Kinematik 13
-300
-200
-100
0
100
200
300
0 5 10 15 20 25
t
s
m
s
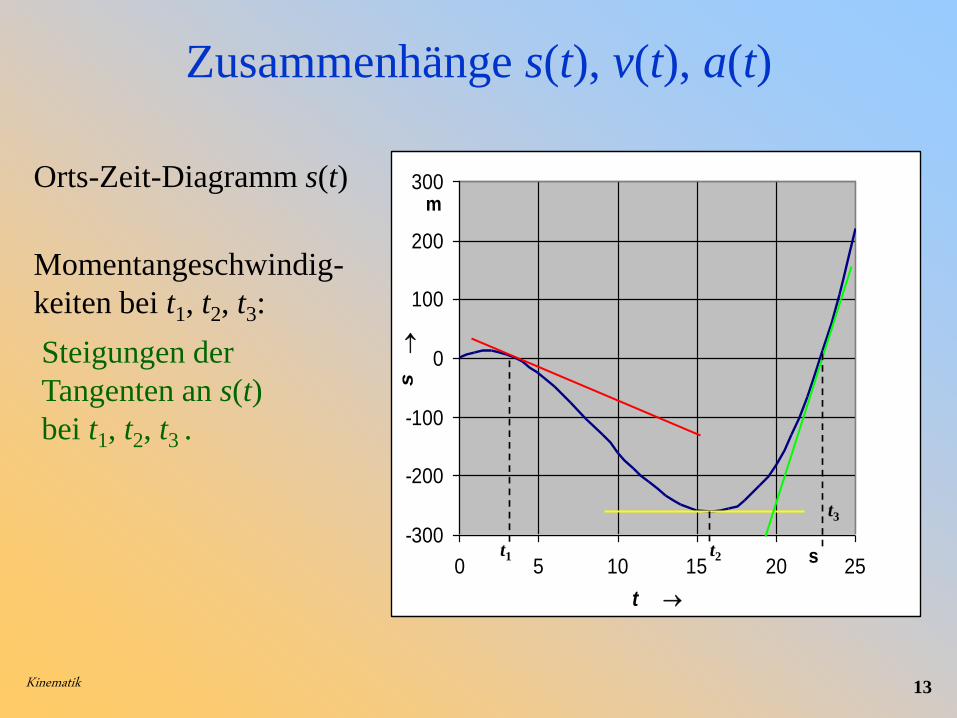
Zusammenhänge s(t), v(t), a(t)
Orts-Zeit-Diagramm s(t)
Momentangeschwindig-
keiten bei t1, t2, t3:
Steigungen der
Tangenten an s(t)
bei t1, t2, t3 .
t1 t2
t3
Kinematik 14
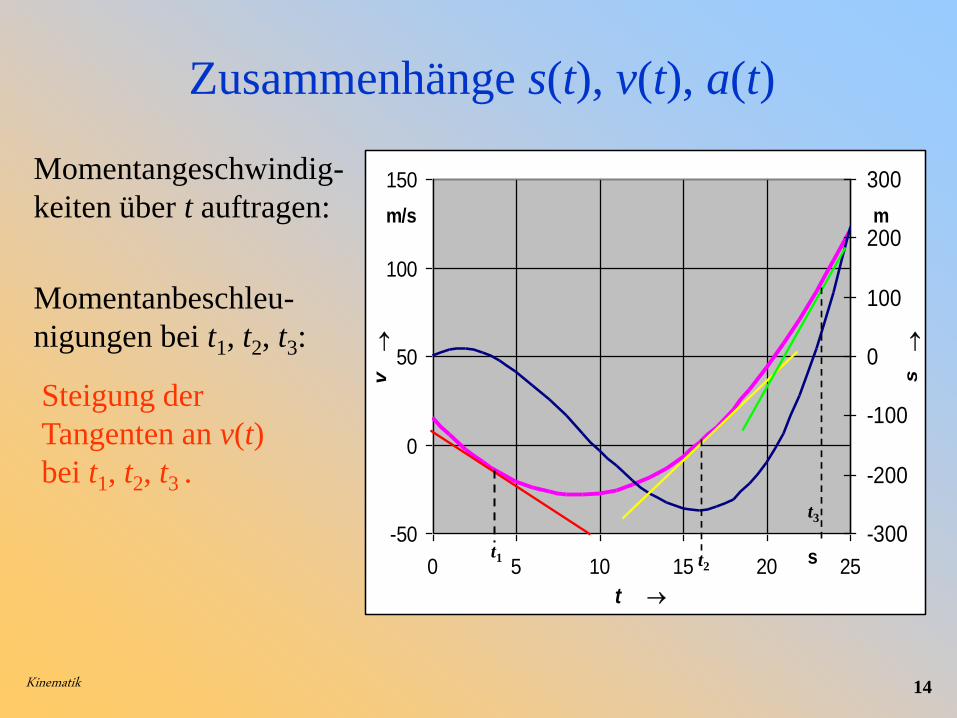
Zusammenhänge s(t), v(t), a(t)
Momentangeschwindig-
keiten über t auftragen:
Momentanbeschleu-
nigungen bei t1, t2, t3:
Steigung der
Tangenten an v(t)
bei t1, t2, t3 .
-50
0
50
100
150
0 5 10 15 20 25
t
v
-300
-200
-100
0
100
200
300
s
m
s
m/s
t1 t2
t3
Kinematik 15
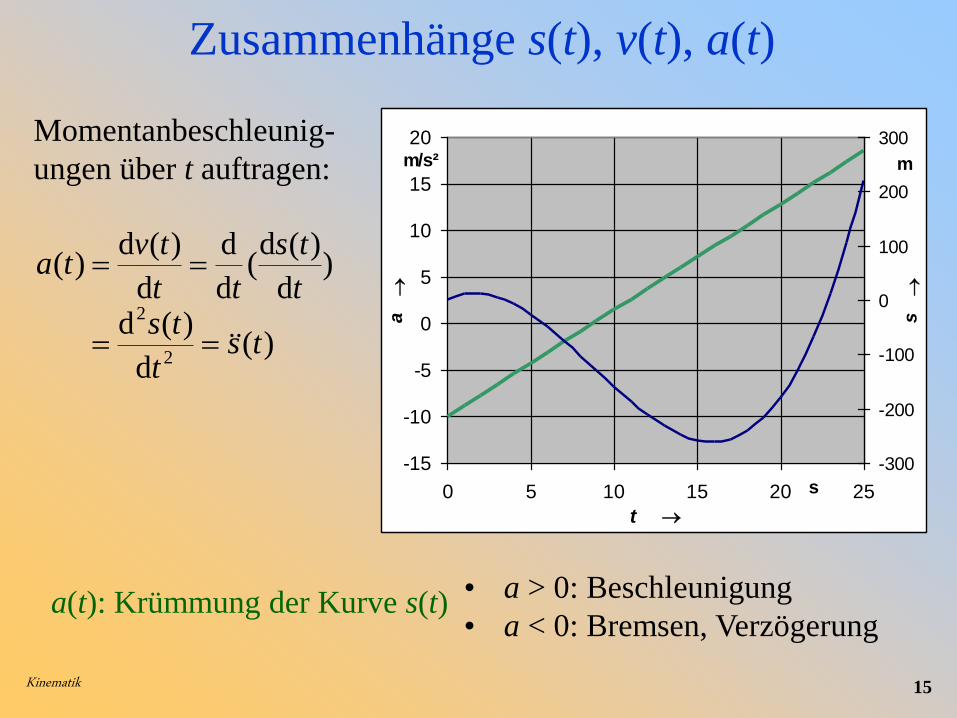
Zusammenhänge s(t), v(t), a(t)
Momentanbeschleunig-
ungen über t auftragen:
-15
-10
-5
0
5
10
15
20
0 5 10 15 20 25
t
a
-300
-200
-100
0
100
200
300
s
m
s
m/s²
)(d
)(d
)d
)(d(
d
d
d
)(d)(
2
2
tst
tst
ts
tt
tvta
a(t): Krümmung der Kurve s(t) • a > 0: Beschleunigung
• a < 0: Bremsen, Verzögerung
Kinematik 16
Gleichförmige Bewegung
Momentangeschwindigkeit = Durchschnittsgeschwindigkeit
AE
AE
tt
tsts
t
sconstv
)()(
Δ
Δ
0)()(
D
D
AE
AE
tt
tvtv
t
vav(tE) = v(tA)
linearer Zusammenhang s(t) Gerade im s (t )-Diagramm
v(t)-Diagramm: Horizontale Linie
In Dt zurückgelegter Weg: (Rechteck)Flächen im v(t)-Diagramm
v = const
Kinematik 17
gleichmäßig beschleunigte Bewegung
AE
AE
tt
tvtv
t
vconsta
D
D
)()(
Momentanbeschleunigung = Durchschnittsbeschleunigung
linearer Zusammenhang v(t) Gerade im v(t)-Diagramm
a(t)-Diagramm: horizontale Linie
Geschwindigkeitszuwachs in Dt: (Rechteck)Flächen im a(t)-Diagramm
Zurückgelegter
Weg? v
tt
tsts
t
s
AE
AE
D
D )()(
2
)()( AE tvtvv
a = const
Kinematik 18
gleichmäßig beschleunigte Bewegung
tA = 0, v(tA) = 0, s(tA) = 0 2
2
1)( EE tats
sonst:
Zusammenhang s(t) Parabel im s (t )-Diagramm
s(tE) = 1/2 a . (tE – tA)² + v(tA) . (tE – tA) + s(tA)
quadratisch linear konstant
Kinematik 19
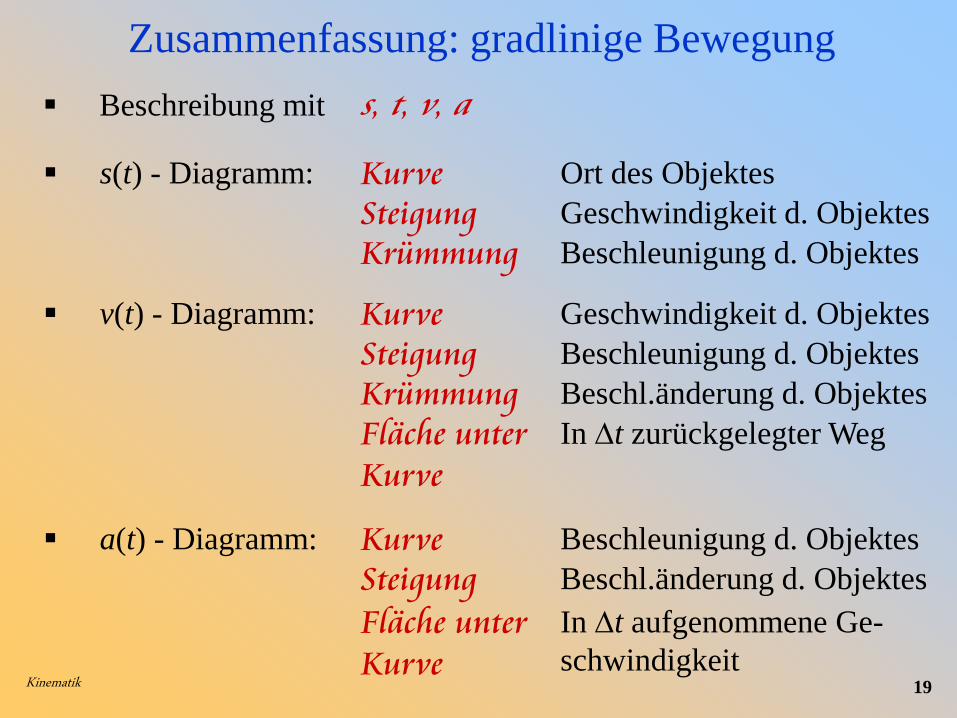
Zusammenfassung: gradlinige Bewegung
Beschreibung mit s, t, v, a
s(t) - Diagramm: Kurve Ort des Objektes
Steigung Geschwindigkeit d. Objektes
Krümmung Beschleunigung d. Objektes
v(t) - Diagramm: Kurve
Steigung
Krümmung
Beschleunigung d. Objektes
Geschwindigkeit d. Objektes
Beschl.änderung d. Objektes
Fläche unter
Kurve
In Dt zurückgelegter Weg
a(t) - Diagramm: Kurve
Steigung
Beschleunigung d. Objektes
Beschl.änderung d. Objektes
Fläche unter
Kurve
In Dt aufgenommene Ge-
schwindigkeit





























