Embed Size (px)
Citation preview

Lineare Algebra II
Sommersemester 2017Universitat Regensburg
Clara Loh

Version vom 27. Juli [email protected] fur Mathematik, Universitat Regensburg, 93040 Regensburg©Clara Loh, 2017

Inhaltsverzeichnis
Literaturhinweise vii
0 Einfuhrung 1
1 Euklidische/Unitare Vektorraume 31.1 Euklidische und unitare Vektorraume 4
1.1.1 Bilinearformen und Skalarprodukte 5
1.1.2 Langen und Winkel 8
1.1.3 Lineare Isometrien 14
1.1.4 Matrizenkalkul fur Bilinearformen 17
1.1.5 Matrizenkalkul fur Sesquilinearformen 21
1.2 Orthogonalitat 221.2.1 Orthogonale Vektoren 22
1.2.2 Orthonormalbasen 23
1.2.3 Die orthogonale Gruppe 29
1.3 Spektralsatze 351.3.1 Selbstadjungierte Endomorphismen 35
1.3.2 Der Spektralsatz 37
1.3.3 Hauptachsentransformation 43
1.3.4 Der Tragheitssatz und die Signatur 45
2 Normalformen II: Moduln uber Hauptidealringen 492.1 Zerlegung von Endomorphismen und Moduln 502.2 Ringe 52
2.2.1 Ringe 52
2.2.2 Ringhomomorphismen 54

iv Inhaltsverzeichnis
2.3 Moduln 572.3.1 Moduln 572.3.2 Modulhomomorphismen 612.3.3 Ideale 632.3.4 Quotientenmoduln 642.3.5 Direkte Summen 68
2.4 Hauptidealringe 732.4.1 Hauptidealringe 732.4.2 Euklidische Ringe 742.4.3 Teilbarkeit und Primfaktoren 772.4.4 Der großte gemeinsame Teiler 83
2.5 Moduln uber Hauptidealringen 872.5.1 Prasentationen von Moduln 882.5.2 Der Elementarteilersatz 902.5.3 Die Klassifikation endlich erzeugter Moduln 98
3 Normalformen III: Die Jordansche Normalform 1073.1 Moduln zu Endomorphismen 108
3.1.1 Zerlegung von Endomorphismen: Modulversion 1083.1.2 Zerlegung von Endomorphismen: Matrizenversion 110
3.2 Das Minimalpolynom 1123.3 Die Jordansche Normalform 118
3.3.1 Vorbereitung: Algebraisch abgeschlossene Korper 1203.3.2 Existenz und Eindeutigkeit der Jordanschen Normalform 1213.3.3 Berechnung der Jordanschen Normalform 1233.3.4 Anwendungen der Jordanschen Normalform 134
4 Multilineare Algebra 1374.1 Das Tensorprodukt 138
4.1.1 Wozu das Tensorprodukt? 1384.1.2 Rechnen mit Tensorprodukten 1414.1.3 Anwendungen des Tensorprodukts 1454.1.4 Konstruktion des Tensorprodukts 151
4.2 Das außere Produkt 1534.2.1 Wozu das außere Produkt? 1534.2.2 Rechnen mit außeren Produkten 1554.2.3 Anwendungen des außeren Produkts 1604.2.4 Konstruktion des außeren Produkts 165
A Anhang A 1A.1 Elementare Analysis von Sinus und Kosinus A 3A.2 Kategorien A 5A.3 (Ko)Produkte A 9A.4 Funktoren A 11A.5 Differentialformen A 15A.6 Die LA-Matrix A 19

Inhaltsverzeichnis v
B Ubungsblatter B 1
C Fingerubungen C 1
D Allgemeine Hinweise D 1
Literaturverzeichnis C 1

vi Inhaltsverzeichnis

Literaturhinweise
Die Vorlesung wird sich nicht an einer einzelnen Quelle orientieren – Siesollten also individuell je nach Thema und eigenen Vorlieben die Literaturauswahlen, die am besten zu Ihnen passt.
Lineare Algebra
• S. Bosch. Lineare Algebra, funfte Auflage, Springer Spektrum, 2014.• G. Fischer. Lineare Algebra, Eine Einfuhrung fur Studienanfanger,
18. Auflage, Springer Spektrum, 2013.• K. Janich. Lineare Algebra, 11. Auflage, Springer, 2013.• W. Klingenberg. Lineare Algebra und Geometrie, Hochschultext, Sprin-
ger, 1984.• S. Lang. Linear Algebra, Undergraduate Texts in Mathematics, 3. Auf-
lage, Springer, 1987.
Sonstige Grundlagen
• A. Beutelspacher. Das ist o.B.d.A. trivial!, neunte Auflage, Vieweg+-Teubner, 2009.http://link.springer.com/book/10.1007%2F978-3-8348-9599-8
• A.G. Konforowitsch. Logischen Katastrophen auf der Spur, zweite Auf-lage, Fachbuchverlag Leipzig, 1994.
• C. Loh, S. Krauss, N. Kilbertus. Quod erat knobelandum, Springer Spek-trum, 2016.

viii Literaturhinweise
• G. Polya, J.H. Conway (Hrsg.). How to Solve it: A New Aspect of Ma-thematical Method, Princeton Science Library, 2014.
• T. Tao. Solving mathematical problems. A personal perspective, OxfordUniversity Press, 2006.
Weiterfuhrende Literatur
• K. Janich. Vektoranalysis, funfte Auflage, Springer, 2005.• S. Lang. Algebra, Graduate Texts in Mathematics, 211, dritte uberar-
beitete Auflage, Springer, 2002.• S. Lang. Real and Functional Analysis, Graduate Texts in Mathematics,
142, dritte Auflage, Springer, 1993.• W. Rudin. Functional Analysis, zweite Auflage, International Series in
Pure and Applied Mathematics, McGraw-Hill, 1991.

0
Einfuhrung
Die Algebra befasst sich mit der abstrakten Struktur allgemeiner”Zahlenbe-
reiche“. Eine besonders einfache und zugangliche Art solcher Strukturen sindlineare Strukturen, d.h. Vektorraume und lineare Abbildungen zwischen Vek-torraumen. Wie wir bereits in der Linearen Algebra I gesehen haben, tretenlineare Strukturen an vielen verschiedenen Stellen auf:
• Losung linearer Gleichungssysteme,
• elementare ebene und raumliche Geometrie,
• Computergeometrie und dreidimensionale Modellierung,
• geschlossene Darstellung kombinatorischer Phanomene,
• als zentraler Approximationsbaustein in der Analysis,
• als erste Abstraktionsstufe in der Algebra,
• . . .
Warum noch mehr Lineare Algebra?
Wir werden in der Vorlesung Lineare Algebra II die folgenden Themen be-handeln und an passender Stelle auch Ausblicke auf Anwendungen geben:
• Euklidische und unitare Vektorraume. Mithilfe der Methoden der Li-nearen Algebra lassen sich viele Aspekte der zwei- bzw. dreidimensio-nalen Geometrie gut beschreiben und berechnen. Zum Beispiel erhaltman so einen rechnerischen Zugang zur Elementargeometrie.

2 0. Einfuhrung
• Normalformen von Endomorphismen. Wir werden die Existenz derJordanschen Normalform beweisen und untersuchen, wie man diesevernunftig berechnen kann. Zum Beispiel ist dies bei der Losung li-nearer Differentialgleichungssysteme ein wichtiges Hilfsmittel.
• Multilineare Algebra. Wir werden die Grundlagen der multilinearenAlgebra kennenlernen, wie zum Beispiel Tensorprodukte und außereProdukte. Konstruktionen dieser Art treten zum Beispiel bei der Be-trachtung der Geometrie gekrummter Raume, sogenannter Mannigfal-tigkeiten, auf.
Anmerkung fur Lehramtsstudenten. Auf ganz naturliche Weise werden wirdabei Begriffen und Themen aus der Schulmathematik begegnen und diesevertiefen sowie auch Aspekten der Mathematik, die in Zukunft Bestandteilder Schulmathematik werden konnten. Wichtiger als die Beherrschung desaktuellen Lehrplans ist es, ein solides Fundament zu erlernen, das es erlaubt,Mathematik inhaltlich korrekt, nachvollziehbar und souveran zu lehren undauf das der Unterricht im Rahmen des aktuellen und der zukunftigen Lehr-plane aufbauen kann.
Anmerkung zum Lernen. Dieses Skript dokumentiert die in der Vorlesungbehandelten Inhalte. Es dient keineswegs dazu, den Besuch der Vorlesungoder gar der Ubungen zu ersetzen. Außerdem spiegelt sich in diesem Skriptnaturlich nur ein kleiner Ausschnitt der Linearen Algebra wider. Sie solltensich unbedingt auch mithilfe anderer Quellen (Bucher!) selbst ein Bild desgesamten Gebietes machen! Referenzen der Form
”Satz I.6.4.11“ verweisen
auf die entsprechende Stelle im Skript zur Linearen Algebra I:
http://www.mathematik.uni-r.de/loeh/teaching/linalg1 ws1617/lecture notes.pdf
Wie der Name der Vorlesung bereits andeutet, ist es unabdingbar, dieInhalte der Linearen Algebra I zu beherrschen, um die Lineare Algebra IIverstehen zu konnen. Lucken in der Linearen Algebra I sollten Sie also zugigfullen.

1
Euklidische/Unitare Vektorraume
Wir haben bereits gesehen, dass die reellen Vektorraume R2 bzw. R3 geeig-net sind, um Situationen der ebenen bzw. raumlichen Geometrie zu model-lieren. Wir werden dies im folgenden vertiefen und erklaren, wie man mithil-fe von sogenannten Skalarprodukten grundlegende geometrische Großen wieLangen und Winkel beschreiben kann. Insbesondere werden wir den Ortho-gonalitatsbegriff und Isometrien von Rn eingehend untersuchen sowie Spek-tralsatze herleiten, die in vielen Anwendungen eine wichtige Rolle spielen.
Uberblick uber dieses Kapitel.
1.1 Euklidische und unitare Vektorraume 41.2 Orthogonalitat 221.3 Spektralsatze 35
Schlusselbeispiel. euklidische Metrik auf Rn via Standardskalarprodukt; Spie-gelungen bzw. Drehungen in Rn; Kegelschnitte

4 1. Euklidische/Unitare Vektorraume
1.1 Euklidische und unitare Vektorraume
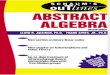
Wir werden uns im folgenden mit der Geometrie reeller bzw. komplexer Vek-torraume befassen; daher werden wir uns meistens auf die Grundkorper Rbzw. C einschranken. Die fundamentale geometrische Große in Rn ist der eu-klidische Abstand eines Punktes vom Ursprung; dieser ist in Anlehnung anden Satz von Pythagoras durch folgende Abbildung (die euklidische Norm)definiert:
‖ · ‖2 : Rn −→ R≥0
x 7−→
√√√√n∑
j=1
x2j
À
Á
(x1
x2
)x2
x1
Abbildung 1.1.: Der Abstand vom Ursprung und der Satz von Pythagoras
Selbst wenn man die Wurzel ignoriert, ist diese Abbildung weit davonentfernt, linear zu sein. Mit einem kleinen Trick wird diese Abbildung je-doch zuganglich fur die Methoden aus der linearen Algebra: Statt der Abbil-dung ‖ · ‖2 betrachten wir allgemeiner die, zunachst komplizierter wirkende,Abbildung (das Standardskalarprodukt)
〈·, ·〉2 : Rn × Rn −→ R
(x, y) 7−→n∑
j=1
xj · yj .
Auch diese Abbildung ist nicht linear im eigentlichen Sinne, aber immerhinbilinear (d.h. linear in jedem Argument). Und wegen
∀x∈Rn ‖x‖2 =√〈x, x〉2

1.1. Euklidische und unitare Vektorraume 5
ist es plausibel, dass 〈·, ·〉2 geeignet ist, um euklidische Abstande zu untersu-chen. Auch wenn unser Hauptinteresse dieser konkreten Abbildung gilt, ist essinnvoll, die Theorie allgemeiner fur sogenannte Skalarprodukte aufzuziehen.
1.1.1 Bilinearformen und Skalarprodukte
Wir fuhren zunachst die grundlegenden Begriffe fur Skalarprodukte ein.
Definition 1.1.1 (Bilinearform, Symmetrie). Sei K ein Korper und sei V einK-Vektorraum.
• Eine Bilinearform auf V ist eine bilineare Abbildung V ×V −→ K. EineAbbildung b : V × V −→ K heißt dabei bilinear, wenn fur jedes x ∈ Vdie Abbildungen
b( · , x) : V −→ K
b(x, · ) : V −→ K
(uber K) linear sind.
• Eine Bilinearform b : V × V −→ K heißt symmetrisch, wenn
b(x, y) = b(y, x)
fur alle x, y ∈ V gilt.
Anmerkung zum Lernen. In der Linearen Algebra bezeichnen . . . formen imNormalfall Abbildungen, deren Wertebereich im Grundkorper liegt.
Erinnern Sie sich noch an die Eigenschaften von Determinanten? Verglei-chen Sie diese mit der obigen Definition!
Definition 1.1.2 (Definitheit). Sei V ein R-Vektorraum und sei b : V ×V −→ Reine Bilinearform. Die Bilinearform b heißt
positiv definit, wenn: ∀x∈V \{0} b(x, x) > 0.negativ definit, wenn: ∀x∈V \{0} b(x, x) < 0.positiv semidefinit, wenn: ∀x∈V b(x, x) ≥ 0.negativ semidefinit, wenn: ∀x∈V b(x, x) ≤ 0.indefinit, wenn es x, y ∈ V mit b(x, x) > 0 und b(y, y) < 0 gibt.
Definition 1.1.3 (Skalarprodukt). Sei V ein R-Vektorraum. Ein Skalarproduktauf V ist eine symmetrische, positiv definite Bilinearform auf V .
Der Name”Skalarprodukt“ erinnert daran, dass die Werte Skalare (d.h.
Elemente aus dem Grundkorper) sind. Dies darf naturlich nicht mit der Sk-alarmultiplikation (aus der Vektorraumstruktur) verwechselt werden!

6 1. Euklidische/Unitare Vektorraume
Caveat 1.1.4. Skalarprodukte werden oft durch spitze Klammern 〈·, ·〉 no-tiert. In LATEX sollte das auf keinen Fall durch die binaren Operatoren
”<“
bzw.”>“ dargestellt werden, sondern immer durch vernunftige Klammern,
wie zum Beispiel \langle und \rangle (aus dem Paket amsmath).
Beispiel 1.1.5.
• Sei n ∈ N. Dann ist
〈·, ·〉2 : Rn × Rn −→ R
(x, y) 7−→n∑
j=1
xj · yj = xT · y
ein Skalarprodukt auf Rn, das Standardskalarprodukt auf Rn.
Dass es sich dabei tatsachlich um ein Skalarprodukt handelt, ist schnellnachgerechnet: Die Bilinearitat folgt aus den Eigenschaften der Ma-trixmultiplikation (Proposition I.4.2.11). Die Symmetrie folgt aus derKommutativitat der Multiplikation auf R und die positive Definitheitaus der Tatsache, dass Quadrate von reellen Zahlen ungleich Null stetspositiv sind.
• Analog erhalt man, indem man Summieren durch allgemeine Integrati-on ersetzt, das L2-Skalarprodukt auf gewissen Funktionenraumen. ZumBeispiel ist
C([0, 1],R
)× C
([0, 1],R
)−→ R
(f, g) 7−→∫ 1
0
f(x) · g(x) dx
ein Skalarprodukt auf dem R-Vektorraum C([0, 1],R) der stetigen re-ellwertigen Funktionen auf R (nachrechnen).
Auf ahnliche Weise erhalt man auch ein Skalarprodukt auf dem Vek-torraum `2(R) der quadratsummierbaren Folgen (s. Analysis II).
Wurde man auf Cn analog zum Standardskalarprodukt auf Rn eine bilinea-re Abbildung definieren, so erhielte man naturlich keine positive Definitheit(da Quadrate komplexer Zahlen im allgemeinen keine positiven reellen Zah-len sind). Daher bringt man die komplexe Konjugation ins Spiel. Dies fuhrtzu den folgenden Definitionen:
Definition 1.1.6 (hermitesches Skalarprodukt). Sei V ein C-Vektorraum. Einhermitesches Skalarprodukt auf V ist eine hermitesche,1 positiv definiteSesquilinearform auf V . Die Begriffe haben dabei die folgende Bedeutung:
1benannt nach Charles Hermite (1822–1901), einem franzosischen Mathematiker

1.1. Euklidische und unitare Vektorraume 7
• Eine Abbildung b : V × V −→ C ist eine Sesquilinearform, wenn furjedes x ∈ V die Abbildung
b(x, · ) : V −→ C
C-linear ist und die Abbildung
b( · , x) : V −→ C
R-linear ist und
∀y∈V ∀λ∈C b(λ · y, x) = λ · b(y, x)
erfullt.
• Eine Sesquilinearform b : V × V −→ C ist hermitesch, wenn
∀x,y∈V b(x, y) = b(y, x)
gilt; dabei ist · die komplexe Konjugation. Insbesondere gilt in diesemFall fur alle x ∈ V , dass b(x, x) = b(x, x) ist, d.h., dass b(x, x) reell ist.
• Eine hermitesche Sesquilinearform b : V ×V −→ C heißt positiv definit,wenn
∀x∈V \{0} b(x, x) > 0.
Caveat 1.1.7. In manchen Quellen wird komplexe Linearitat im ersten Argu-ment und konjugierte Linearitat im zweiten Argument gefordert. Dies fuhrtnaturlich letztendlich zur selben Theorie. Wir haben uns fur die obige Va-riante entschieden, da diese gut mit dem Operator · H (s.u.) kompatibelist.
Beispiel 1.1.8.
• Sei n ∈ N. Dann ist
〈·, ·〉2 : Cn × Cn −→ C
(x, y) 7−→n∑
j=1
xj · yj = (x)T · y = xH · y
ein hermitesches Skalarprodukt auf Cn, namlich das Standardskalarpro-dukt auf Cn. Dabei bezeichnet AH fur komplexe Matrizen A die Matrix,die man erhalt, indem man A transponiert und alle Koeffizienten kom-plex konjugiert.
Dass es sich dabei tatsachlich um ein hermitisches Skalarprodukt han-delt, ist schnell nachgerechnet: Die Sesquilinearitat folgt aus den Eigen-schaften der Matrixmultiplikation (Proposition I.4.2.11) und der kom-plexen Konjugation. Dass die Abbildung hermitesch ist, folgt aus der

8 1. Euklidische/Unitare Vektorraume
Kommutativitat der Multiplikation auf C und der Multiplikativitat derkomplexen Konjugation. Die positive Definitheit erhalten wir aus derTatsache, dass x · x = (Rex)2 + (Imx)2 fur jede komplexe Zahl x ∈ Ceine Summe reeller Quadrate ist und Quadrate von reellen Zahlen un-gleich Null stets positiv sind.
• Analog erhalt man, indem man Summieren durch allgemeine Integrati-on ersetzt, das L2-Skalarprodukt auf gewissen Funktionenraumen. ZumBeispiel ist
C([0, 1],C
)× C
([0, 1],C
)−→ C
(f, g) 7−→∫ 1
0
f(x) · g(x) dx
ein hermitesches Skalarprodukt auf dem C-Vektorraum C([0, 1],C) derstetigen komplexwertigen Funktionen auf C (nachrechnen).
Auf ahnliche Weise erhalt man auch ein Skalarprodukt auf dem Vektor-raum `2(C) der quadratsummierbaren komplexwertigen Folgen (s. Ana-lysis II).
Definition 1.1.9 (euklidischer/unitarer Vektorraum).
• Ein euklidischer Vektorraum ist ein Paar (V, 〈·, ·〉), bestehend aus einemR-Vektorraum V und einem Skalarprodukt 〈·, ·〉 auf V .
• Ein unitarer Vektorraum ist ein Paar (V, 〈·, ·〉), bestehend aus einemC-Vektorraum V und einem hermiteschen Skalarprodukt 〈·, ·〉.
1.1.2 Langen und Winkel
Wir kehren nun zu unserem eigentlichen Ziel zuruck, namlich zur Beschrei-bung geometrischer Großen wie Langen und Winkel. Wir beginnen mitLangen bzw. Abstanden; diese Begriffe passen in den Kontext normierterVektorraume, wobei Normen gerade die
”Lange“ von Vektoren (d.h. den Ab-
stand zum Nullpunkt) messen.
Definition 1.1.10 (Norm, normierter Vektorraum). Sei K ∈ {R,C}.
• Sei V ein K-Vektorraum. Eine Norm auf V ist eine Abbildung
‖ · ‖ : V −→ R≥0
mit den folgenden Eigenschaften:
– Homogenitat. Fur alle λ ∈ K und alle x ∈ V ist
‖λ · x‖ = |λ| · ‖x‖.

1.1. Euklidische und unitare Vektorraume 9
– Definitheit. Fur alle x ∈ V ist ‖x‖ ≥ 0 und Gleichheit tritt nurfur x = 0 ein.
– Dreiecksungleichung. Fur alle x, y ∈ V ist
‖x+ y‖ ≤ ‖x‖+ ‖y‖.
• Ein normierter K-Vektorraum ist ein Paar (V, ‖·‖), bestehend aus einemK-Vektorraum V und einer Norm ‖ · ‖ auf V .
Bemerkung 1.1.11 (Metriken aus Normen). Ist (V, ‖ · ‖) ein normierter Vek-torraum, so ist
V × V −→ R≥0
(x, y) 7−→ ‖x− y‖
eine Metrik auf V (nachrechnen). Insbesondere erhalten wir so auf normiertenVektorraumen auch eine Topologie (d.h. offene bzw. abgeschlossene Mengen)und einen Begriff von Kompaktheit bzw. Stetigkeit (s. Analysis I/II).
Definition 1.1.12 (induzierte Norm). Sei (V, 〈·, ·〉) ein euklidischer/unitarerVektorraum. Dann definieren wir durch
‖ · ‖ : V −→ R
x 7−→√〈x, x〉
die von 〈·, ·〉 induzierte Norm auf V .
Um nachzuweisen, dass diese Konstruktion tatsachlich die Dreiecksunglei-chung erfullt, verwenden wir das folgende Hilfsmittel:
Satz 1.1.13 (Ungleichung von Cauchy-Schwarz). Sei (V, 〈·, ·〉) ein euklidischerbzw. unitarer Vektorraum mit induzierter
”Norm“ ‖ · ‖ und seien x, y ∈ V .
Dann gilt ∣∣〈x, y〉∣∣ ≤ ‖x‖ · ‖y‖.
Gleichheit tritt genau dann ein, wenn x und y linear abhangig sind.
Beweis. Ist y = 0, so sieht man leicht, dass die Behauptung gilt. Im folgendennehmen wir daher y 6= 0 an. Die Idee ist, den Term 〈x− λ · y, x− λ · y〉 (derja nicht-negativ ist!) fur ein geeignetes λ besser zu verstehen. Wir betrachtendazu
λ :=〈x, y〉‖y‖2 ∈ C;
im euklidischen Fall ist dabei λ ∈ R. Dann gilt (sowohl im euklidischen alsauch im unitaren Fall!)

10 1. Euklidische/Unitare Vektorraume
0 ≤ 〈x− λ · y, x− λ · y〉= 〈x, x〉 − 〈x, λ · y〉 − 〈λ · y, x〉+ 〈λ · y, λ · y〉= 〈x, x〉+ λ · λ · 〈y, y〉 − λ · 〈x, y〉 − λ · 〈x, y〉
= ‖x‖2 +1
‖y‖2 ·∣∣〈x, y〉
∣∣2 − 2 · 1
‖y‖2 ·∣∣〈x, y〉
∣∣2
= ‖x‖2 − 1
‖y‖2 ·∣∣〈x, y〉
∣∣2.
Also ist ∣∣〈x, y〉∣∣2 ≤ ‖x‖2 · ‖y‖2,
wobei Gleichheit genau dann auftritt, wenn x − λ · y = 0 ist. Man rechnetleicht nach, dass letztere Bedingung dazu aquivalent ist, dass x und y linearabhangig sind (Ubungsaufgabe; diese Rechnung erklart insbesondere auch,wie man auf die Definition von λ kommt . . . ). Aus dieser Ungleichung folgtmit der Monotonie der Wurzel und der Positivitat von ‖ · ‖ die gewunschteUngleichung.
Korollar 1.1.14 (Normen aus Skalarprodukten). Sei (V, 〈·, ·〉) ein euklidischer[oder unitarer] Vektorraum mit induzierter
”Norm“ ‖ · ‖. Dann ist ‖ · ‖ eine
Norm auf V .
Beweis. Homogenitat und Definitheit folgen direkt aus den entsprechendenEigenschaften des (hermiteschen) Skalarproduktes 〈·, ·〉. Es bleibt also dieDreiecksungleichung zu zeigen: Seien x, y ∈ V . Dann ist (sozusagen die bino-mische Formel fur Skalarprodukte)
‖x+ y‖2 = 〈x+ y, x+ y〉= 〈x, x〉+ 〈x, y〉+ 〈y, x〉+ 〈y, y〉= ‖x‖2 + 〈x, y〉+ 〈x, y〉+ ‖y‖2.
Da 〈x, y〉 + 〈x, y〉 = 2 · Re〈x, y〉 reell ist und nach oben durch 2 · |〈x, y〉|beschrankt ist, folgt daraus
‖x+ y‖2 ≤ ‖x‖2 + 2 ·∣∣〈x, y〉
∣∣+ ‖y‖2.
Mit der Cauchy-Schwarzschen Ungleichung (Satz 1.1.13) erhalten wir somit
‖x+ y‖2 ≤ ‖x‖2 + 2 · ‖x‖ · ‖y‖+ ‖y‖2 =(‖x‖+ ‖y‖
)2.
Mit der Monotonie der Wurzel und Positivitat der Abbildung ‖ · ‖ folgt dar-aus ‖x+ y‖ ≤ ‖x‖+ ‖y‖, wie gewunscht.
Beispiel 1.1.15 (euklidische Norm). Sei n ∈ N. Dann schreiben wir ‖ · ‖2 furdie von 〈·, ·〉2 auf Rn induzierte Norm und bezeichnen diese als euklidischeNorm auf R2.

1.1. Euklidische und unitare Vektorraume 11
Falls eine Norm von einem Skalarprodukt induziert wird, so kann man dasSkalarprodukt aus der Norm zuruckgewinnen:
Proposition 1.1.16 (Polarisierung). Sei (V, 〈·, ·〉) ein euklidischer oder unitarerVektorraum und sei ‖ · ‖ die von 〈·, ·〉 induzierte Norm auf V .
1. Im euklidischen/reellen Fall gilt fur alle x, y ∈ V :
〈x, y〉 =1
2·(‖x+ y‖2 − ‖x‖2 − ‖y‖2
)
2. Im unitaren/komplexen Fall gilt fur alle x, y ∈ V :
〈x, y〉 =1
4·(‖x+ y‖2 − ‖x− y‖2
)− i
4·(‖x+ i · y‖2 − ‖x− i · y‖2
)
Beweis. Dies folgt durch direktes Nachrechnen, indem man die Terme auf derrechten Seite durch das Skalarprodukt ausdruckt und aus
”multipliziert“.
Caveat 1.1.17 (Norm ohne Skalarprodukt). Es gibt jedoch auch Normen, dienicht von Skalarprodukten induziert werden: Die Norm (nachrechnen!)
‖ · ‖1 : R2 −→ R≥0
x 7−→ |x1|+ |x2|
auf R2 wird nicht von einem Skalarprodukt induziert: Angenommen, ‖ · ‖1ware von einem Skalarprodukt 〈·, ·〉1 induziert. Mit der Polarisierungsformel(Proposition 1.1.16) folgt dann fur
x :=
(11
)und y :=
(−1
1
),
dass
〈x, y〉1 =1
2· (22 − 22 − 22) = −2
〈x,−y〉1 =1
2· (22 − 22 − 22) = −2 6= −(−2),
im Widerspruch zur Bilinearitat von 〈·, ·〉1. Also kann es ein solches Skalar-produkt 〈·, ·〉1 nicht geben.
Aus der Analysis ist bekannt, dass alle Normen auf endlich-dimensionalenVektorraumen im folgenden Sinne aquivalent sind (im unendlich-dimensionalenFall stimmt das im allgemeinen nicht !):
Satz 1.1.18 (Aquivalenz von Normen im endlich-dimensionalen Fall). Sei Vein endlich-dimensionaler reeller oder komplexer Vektorraum und seien ‖ · ‖bzw. ‖ · ‖′ Normen auf V . Dann gibt es eine Konstante C ∈ R≥1 mit

12 1. Euklidische/Unitare Vektorraume
∀x∈V1
C· ‖x‖ ≤ ‖x‖′ ≤ C · ‖x‖.
Insbesondere induzieren ‖·‖ und ‖·‖′ dieselbe Topologie auf V (d.h. dieselbenoffenen/abgeschlossenen Mengen, dieselben stetigen Abbildungen, . . . ).
Beweis. Diese Aussage kann man durch den Vergleich mit der 1-Norm undein Kompaktheitsargument beweisen (s. Analysis II).
Ausblick 1.1.19 (Banachraume, Hilbertraume, Funktionalanalysis). Die Funk-tionalanalysis beschaftigt sich systematisch mit der Theorie der stetigen linea-ren Abbildungen auf (unendlich-dimensionalen) normierten Vektorraumen.Vollstandige normierte Vektorraume bezeichnet man als Banachraume; voll-standige euklidische/unitare Vektorraume bezeichnet man als Hilbertraume.
Zusatzlich zu Abstanden/Langen liefern Skalarprodukte auch einen Win-kelbegriff auf euklidischen Vektorraumen:
Definition 1.1.20 (Winkel). Sei (V, 〈·, ·〉) ein euklidischer Vektorraum mit in-duzierter Norm ‖ · ‖ und seien x, y ∈ V mit x 6= 0 und y 6= 0. Dann ist derWinkel zwischen x und y definiert als
^(x, y) := arccos〈x, y〉‖x‖ · ‖y‖ ∈ [0, π].
Dabei bezeichnet arccos : [−1, 1] −→ [0, π] die Umkehrfunktion von cos |[0,π]
(Analysis I, Anhang A.1). Man beachte, dass das Argument von arccos in derobigen Definition nach der Cauchy-Schwarzschen Ungleichung (Satz 1.1.13)tatsachlich im Intervall [−1, 1] liegt.
Wie kommt man auf diese Definition von Winkeln bzw., warum liefertdiese Definition einen sinnvollen Winkelbegriff? In der euklidischen Ebeneentspricht die obige Definition der Beschreibung des Winkels mithilfe desKosinussatzes. Außerdem stimmt die obige Definition mit der klassischenAnschauung von Winkeln uber Bogenlangen uberein (Abbildung 1.2):
Bemerkung 1.1.21 (klassische Anschauung). Dazu betrachten wir in der eu-klidischen Ebene (R2, 〈·, ·〉2) die Kurve
γ : [0, π] −→ R2
t 7−→(
cos tsin t
).
Mithilfe geeigneter Integrale kann man die Lange von (glatten) Kurven be-stimmen (Analysis II). In diesem Fall erhalt man fur alle α ∈ [0, π]
L(γ|[0,α]) =
∫ α
0
∥∥γ(t)∥∥
2dt = α = arccos
(cosα+ 0
1 · 1)
= ^(e1, γ(α)
).

1.1. Euklidische und unitare Vektorraume 13
e1cosα
γ
γ(α)
α
Abbildung 1.2.: Winkel, Bogenlange und Ankathete
Anmerkung fur Lehramtsstudenten (Winkel in der Schule). Versuchen Siezu verstehen, wie diese Begrifflichkeiten mit dem in der Schule unterrichtetenWinkelbegriff zusammenhangen. Achten Sie dabei insbesondere darauf, wel-che mathematischen Konzepte dabei durch anschauliche Gegenstucke ersetztwerden!
Beispiel 1.1.22. In (R2, 〈·, ·〉2) gilt (so wie wir es auch aus der Anschauungerwarten wurden)
^(e1, e2) = arccos〈e1, e2〉2‖e1‖2 · ‖e2‖2
= arccos 0 = π/2
und
^((
cosϕsinϕ
), e1
)= arccos cosϕ = ϕ
fur alle ϕ ∈ [0, π].
Beispiel 1.1.23 (senkrechte Vektoren). Sei (V, 〈·, ·〉) ein euklidischer Vektor-raum und seien x, y ∈ V \ {0}. Nach Definition des Winkels gilt genau dann^(x, y) = π/2, wenn 〈x, y〉 = 0 ist. In diesem Fall nennt man die Vekto-ren x und y orthogonal. Dieses Konzept ist außerordentlich wichtig und wirdausfuhrlich in Kapitel 1.2 behandelt.
Ausblick 1.1.24 (elementare ebene und raumliche Geometrie). Wir habennun im Prinzip alle Hilfsmittel beisammen, um die (elementare) ebeneund raumliche Geometrie mithilfe der euklidischen Vektorraume (R2, 〈·, ·〉2)bzw. (R3, 〈·, ·〉2) zu modellieren und zu entwickeln. Zum Beispiel konnte mannun die Begriffe
”Dreieck“ und
”Kreis“ definieren und die Standardsatze
daruber beweisen (z.B. die Invarianz der Winkelsumme in euklidischen Drei-ecken etc.) [8]. Wir werden uns im folgenden jedoch auf andere Aspekte kon-zentrieren.

14 1. Euklidische/Unitare Vektorraume
1.1.3 Lineare Isometrien
Wir erinnern uns daran, dass zu einer mathematischen Theorie nicht nur Ob-jekte, sondern immer auch strukturerhaltende Morphismen gehoren. Im Fallder euklidischen/unitaren Vektorraume sind dies die (linearen) Isometrien.
Definition 1.1.25 (lineare isometrische Einbettung, lineare Isometrie). Seien(V, ‖ · ‖) und (V ′, ‖ · ‖′) normierte Vektorraume uber K ∈ {R,C}.
• Eine lineare isometrische Einbettung (V, ‖ · ‖) −→ (V ′, ‖ · ‖′) ist eineK-lineare Abbildung f : V −→ V ′, die
∀x∈V∥∥f(x)
∥∥′ = ‖x‖
erfullt.
• Eine lineare Isometrie (V, ‖ · ‖) −→ (V ′, ‖ · ‖′) ist eine lineare isome-trische Einbettung f : V −→ V ′, fur die es eine lineare isometrischeEinbettung g : V ′ −→ V mit
f ◦ g = idV ′ und g ◦ f = idV
gibt.
Bemerkung 1.1.26 (alternative Charakterisierung linearer Isometrien). Jede li-neare isometrische Einbettung ist injektiv (nachrechnen). Lineare isometri-sche Einbettungen zwischen endlich-dimensionalen normierten Vektorraumensind also genau dann Isomorphismen, wenn die beiden Vektorraume dieselbeDimension haben (Korollar I.4.4.15). Da in diesem Fall die inverse Abbildungauch automatisch eine isometrische Einbettung ist (nachrechnen), folgt: Li-neare isometrische Einbettungen zwischen endlich-dimensionalen normiertenVektorraumen sind genau dann (lineare) Isometrien, wenn die beiden Vek-torraume dieselbe Dimension haben.
Beispiel 1.1.27 (Isometrien in der euklidischen Ebene).
• Drehungen. Wir erinnern kurz an die Rotationsmatrizen: Sei ϕ ∈ R undsei
R(ϕ) :=
(cosϕ − sinϕsinϕ cosϕ
)∈M2×2(R).
Dann ist L(R(ϕ)) : R2 −→ R2 Rotation um ϕ um den Nullpunkt (Ab-bildung 1.3).
Die Abbildung L(R(ϕ)) : R2 −→ R2 ist isometrisch bezuglich ‖ · ‖2,denn fur alle x ∈ R2 ist

1.1. Euklidische und unitare Vektorraume 15
∥∥R(ϕ) · x∥∥2
2=
∥∥∥∥(
cosϕ · x1 − sinϕ · x2
sinϕ · x1 + cosϕ · x2
)∥∥∥∥2
2
= cos2 ϕ · x21 − 2 · cosϕ · sinϕ · x1 · x2 + sin2 ϕ · x2
2
+ sin2 ϕ · x21 + 2 · cosϕ · sinϕ · x1 · x2 + cos2 ϕ · x2
2
= (cos2 ϕ+ sin2 ϕ) · (x21 + x2
2)
= x21 + x2
2 = ‖x‖22.
• Spiegelungen. Die Spiegelung an der Geraden R · e2 wird durch dieMatrix
S :=
(−1 00 1
)
beschrieben. Die Abbildung L(S) : R2 −→ R2 ist isometrisch bezuglichder euklidischen Norm ‖ · ‖2, denn fur alle x ∈ R2 ist
‖S · x‖22 =
∥∥∥∥(−x1
x2
)∥∥∥∥2
2
= x21 + x2
2 = ‖x‖22.
• Translationen. Sei a ∈ R2 und sei
f : R2 −→ R2
x 7−→ x+ a
die zugehorige Translationsabbildung. Dann ist f nicht linear, aber imfolgenden Sinne abstandserhaltend bezuglich der von ‖ · ‖2 induziertenMetrik: Fur alle x, y ∈ R2 gilt
∥∥f(x)− f(y)∥∥
2= ‖x− y‖2.
• Streckungen. Streckungs-/Skalierungsabbildungen sind im allgemeinekeine linearen Isometrien: Sei λ ∈ R \ {0}. Dann ist die Streckungs-abbildung
R2 −→ R2
x 7−→ λ · x
ein Isomorphismus und genau dann isometrisch bezuglich der euklidi-schen Norm ‖ · ‖2, wenn |λ| = 1 ist.
Bemerkung 1.1.28 (allgemeine euklidische Isometrien). Sei n ∈ N und seif : Rn −→ Rn eine Abbildung, die isometrisch bezuglich des euklidischenAbstands ist, die also
∀x,y∈Rn∥∥f(x)− f(y)
∥∥2
= ‖x− y‖2

16 1. Euklidische/Unitare Vektorraume
À
Á
cosϕ
sinϕ
e1
ϕ
Bild von e1
À
Á
− sinϕ
cosϕ
e2
ϕ
Bild von e2
Abbildung 1.3.: Zusammenhang zwischen Rotation und Rotationsmatrix
erfullt. Dann ist f bereits affin linear, d.h. die”verschobene“ Abbildung
Rn −→ Rn
x 7−→ f(x)− f(0)
ist R-linear (und eine lineare Isometrie in unserem Sinne). Der Beweis dieserTatsache ist elementar [8, Satz 2.5.1], wurde uns aber von unseren eigentli-chen Zielen zu weit entfernen. Es ist daher auch geometrisch (nicht nur ausdem Blickwinkel der Linearen Algebra) sinnvoll, sich auf lineare Isometrieneinzuschranken.
Wir haben bisher nur Strukturerhaltung bezuglich der Norm gefordert.Im euklidischen und unitaren Fall konnte man auch noch verlangen, dass dasSkalarprodukt erhalten bleibt. Tatsachlich muss man dies nicht zusatzlichverlangen, da dank Polarisierung der folgende Starrheitssatz gilt:
Proposition 1.1.29 (Isometrien sind winkeltreu). Seien (V, 〈·, ·〉) und (V ′, 〈·, ·〉′)euklidische Vektorraume und sei f : V −→ V ′ eine lineare Isometrie bezuglichden induzierten Normen. Dann gilt
∀x,y∈V \{0} ^(f(x), f(y)
)= ^(x, y).
Beweis. Seien x, y ∈ V \ {0}. Da f ein Isomorphismus ist, ist dann auchf(x) 6= 0 und f(y) 6= 0; insbesondere ist der Winkel ^(f(x), f(y)) definiert.Mithilfe von Polarisierung (Proposition 1.1.16) und der Isometrieeigenschaftfolgt ⟨
f(x), f(y)⟩′
= 〈x, y〉.Die Definition des Winkels durch das Skalarprodukt bzw. die Norm liefertdann, dass ^
(f(x), f(y)
)= ^(x, y).
Ein Spezialfall der Isomorphismen sind Automorphismen. Im Fall der li-nearen Isometrien erhalt man so die Symmetriegruppe:

1.1. Euklidische und unitare Vektorraume 17
Definition 1.1.30 (Isometriegruppe). Sei (V, ‖ · |) ein normierter Vektorraum.Dann ist
Isom(V, ‖ · ‖
):={f∣∣ f : (V, ‖ · ‖) −→ (V, ‖ · ‖) ist eine lineare Isometrie
}
eine Gruppe bezuglich Abbildungskomposition (nachrechnen), die Isometrie-gruppe von (V, ‖ · ‖).
Wir werden in Kapitel 1.2.3 die Isometriegruppen der Anschauungsrau-me (R2, ‖ · ‖2) bzw. (R3, ‖ · ‖2) mithilfe des Orthogonalitatsbegriffs systema-tisch untersuchen und explizit beschreiben. Aufbauend darauf konnte manzum Beispiel die Symmetriegruppen der platonischen Korper explizit berech-nen.
1.1.4 Matrizenkalkul fur Bilinearformen
Es stellt sich nun die naturliche Frage, wie man die Menge aller Skalarpro-dukte auf Rn bzw. Cn oder allgemeiner der Bilinearformen (mit gewissenEigenschaften) gut beschreiben und klassifizieren kann. Als ersten Schrittin diese Richtung uberlegen wir uns, wie man diese Fragestellungen in derSprache von Matrizen ausdrucken kann.
Da es etwas unubersichtlich ist, den reellen und den komplexen Fall gleich-zeitig zu behandeln, konzentrieren wir uns zuerst auf den reellen Fall undgeben im Anschluss die entsprechenden Resultate im komplexen Fall an (Ka-pitel 1.1.5).
Bemerkung 1.1.31 (der Raum der Bilinearformen). Ist V ein Vektorraum ubereinem Korper K, so schreiben wir BilK(V ) fur die Menge aller Bilinearfor-men auf V . Bezuglich punktweiser Addition und Skalarmultiplikation bil-det BilK(V ) einen K-Vektorraum (nachrechnen).
Bilinearformen lassen sich wie folgt durch Matrizen darstellen, unter Ver-wendung der Notation aus (Korollar I.4.3.3 und Kapitel I.5).
Proposition 1.1.32 (Bilinearformen aus Matrizen). Sei K ein Korper, sei Vein endlich-dimensionaler K-Vektorraum der Dimension n ∈ N und sei C =(c1, . . . , cn) eine Basis von V . Dann sind
ϕ : BilK(V ) −→Mn×n(K)
b 7−→MC(b) :=(b(cj , ck)
)j,k∈{1,...,n},
ψ : Mn×n(K) −→ BilK(V )
A 7−→ BC(A)
zueinander inverse Isomorphismen von K-Vektorraumen. Dabei verwendenwir die folgende Notation: Fur A ∈Mn×n(K) sei

18 1. Euklidische/Unitare Vektorraume
BC(A) : V × V −→ K
(x, y) 7−→ TC,En(x)T ·A · TC,En(y).
Beweis. Zu ϕ: Eine einfache Rechnung zeigt, dass ϕ linear ist.Zu ψ: Ist A ∈ Mn×n(K), so zeigen dieselben Uberlegungen wie bei der
Definition des euklidischen Skalarproduktes, dass BC(A) eine Bilinearformauf V ist. Außerdem ist ψ linear (nachrechnen).
Zu ϕ ◦ψ: Sei A ∈Mn×n(K). Dann ist ϕ ◦ψ(A) = A, denn: Fur alle j, k ∈{1, . . . , n} ist nach Konstruktion
(ϕ ◦ ψ(A)
)j,k
=(TC,En(cj)
)T ·A · TC,En(ck)
= eTj ·A · ek = Aj,k
Hierbei haben wir verwendet, dass Matrixmultiplikation mit den Standard-einheitsvektoren Zeilen bzw. Spalten extrahiert (Beispiel I.4.2.9).
Zu ψ ◦ ϕ: Sei b ∈ BilK(V ). Dann ist ψ ◦ ϕ(b) = b, denn: Aufgrundder Bilinearitat von ψ ◦ ϕ(b) und b genugt es zu zeigen, dass diese beidenAbbildungen auf Paaren von Basisvektoren aus C ubereinstimmen. Fur al-le j, k ∈ {1, . . . , n} gilt nach Konstruktion
(ψ ◦ ϕ(b)
)(cj , ck) = eT
j ·MC(b) · ek =(MC(b)
)j,k
= b(cj , ck).
Auch dabei haben wir wieder verwendet, dass Matrixmultiplikation mit denStandardeinheitsvektoren Zeilen bzw. Spalten extrahiert.
Beispiel 1.1.33 (Standardskalarprodukt). Sei K ein Korper. Ist V = Kn undC = En die Standardbasis, so schreiben wir kurz M(b) := MEn(b) undB(A) := BEn(A). Die Definition von B(A) vereinfacht sich dann zu
B(A) : Kn ×Kn −→ K
(x, y) 7−→ xT ·A · y.
Ist K = R, so ist B(In) nichts anderes als das Standardskalarprodukt auf Rn.
In Analogie zu Proposition I.5.1.20 und Korollar I.5.1.21 erhalten wir:
Proposition 1.1.34 (Basiswechsel und Matrizen von Bilinearformen). Sei K einKorper, sei V ein endlich-dimensionaler K-Vektorraum der Dimension n ∈N, sei b ∈ BilK(V ), sei C eine Basis von V und sei A ∈ Mn×n(K). Dannsind aquivalent:
1. Es gibt eine Matrix S ∈ GLn(K) mit
A = ST ·MC(b) · S.
2. Es gibt eine Basis D von V mit A = MD(b).

1.1. Euklidische und unitare Vektorraume 19
Beweis. Wir machen zunachst eine Voruberlegung zum Basiswechsel: Ist Deine Basis von V und ist S := MD,C ∈ GLn(K) die zugehorige Basiswechsel-matrix, so erhalten wir
b(x, y) = TC,En(x)T ·MC(b) · TC,En(y)
= (S · TD,En(x))T ·MC(b) · S · TD,En(y)
= TD,En(x)T ·(ST ·MC(b) · S
)· TD,En(y)
fur alle x, y ∈ V . Mit Proposition 1.1.32 (angewendet auf die Basis D) folgtaus dieser Gleichung die Basiswechselformel
MD(b) = ST ·MC(b) · S.
Zu 2. =⇒ 1.: Es gebe eine Basis D von V mit A = MD(b). DieVoruberlegung liefert A = MD(b) = ST ·MC(b) ·S fur S := MD,C ∈ GLn(K).
Zu 1. =⇒ 2.: Es gebe eine Matrix S ∈ GLn(K) mit A = ST ·MC(b) ·S. DaS invertierbar ist, bilden die Spalten (s1, . . . , sn) von S eine Basis von Kn.Also ist
D :=(TEn,C(s1), . . . , TEn,C(sn)
)
eine Basis von V und es gilt nach Konstruktion MD,C = S (nachrechnen!).Nach der Voruberlegung ist somit A = ST ·MC(b) · S = MD(b).
Caveat 1.1.35. Man beachte, dass sich die Basiswechselformel fur Matrizenzu Bilinearformen von der Basiswechselformel fur Matrizen zu linearen Ab-bildungen signifikant unterscheidet! Im bilinearen Fall involviert die Trans-formation das Transponierte der Basiswechselmatrix, im linearen Fall dasInverse.
Beispiel 1.1.36 (Basiswechselwunder fur Bilinearformen). Wir betrachten dieBilinearform
b : R2 × R2 −→ R(x, y) 7−→ 5 · x1 · y1 + 3 · x1 · y2 + 3 · x2 · y1 + 2 · x2 · y2
auf R2. Dann ist
ME2(b) =
(5 33 2
).
Fur die Basis (nachrechnen!)
C :=
((1−1
),
(1−2
))
von R2 erhalten wir
MC(b) = MTC ·ME2
(b) ·MC =
(1 −11 −2
)·(
5 33 2
)·(
1 1−1 −2
)=
(1 00 1
).

20 1. Euklidische/Unitare Vektorraume
Wie im Fall linearer Abbildungen kann also auch bei der Betrachtung von Bi-linearformen der Ubergang zu einer anderen Basis die Untersuchung erheblichvereinfachen.
Mithilfe von Proposition 1.1.32 und Proposition 1.1.34 konnen wir stattmit Bilinearformen auch einfach mit Matrizen arbeiten. Es stellt sich da-her die Frage, wie sich Eigenschaften von Bilinearformen in entsprechendeEigenschaften von Matrizen ubersetzen.
Proposition 1.1.37 (Symmetriekriterium). Sei K ein Korper, sei V ein endlich-dimensionaler K-Vektorraum, sei C eine Basis und sei b : V ×V −→ K eineBilinearform auf K. Dann ist b genau dann symmetrisch, wenn die Ma-trix MC(b) symmetrisch ist.
Beweis. Ist b symmetrisch, so folgt aus der Definition von MC(b), dass dieMatrix MC(b) symmetrisch ist.
Sei umgekehrt A := MC(b) symmetrisch. Da 1× 1-Matrizen symmetrischsind, gilt b(x, y) = b(x, y)T fur alle x, y ∈ V . Mit Proposition 1.1.32 undder Kompatibilitat von Transponieren und Matrixmultiplikation (diese folgtdurch direktes Nachrechnen oder mithilfe von Proposition I.5.1.16) erhaltenwir somit
b(x, y) = b(x, y)T
=(BC(A)(x, y)
)T
=(TC,En(x)T ·A · TC,En(y)
)T
= TC,En(y)T ·AT · (TC,En(x)T)T.
Da A nach Voraussetzung symmetrisch ist, folgt
b(x, y) = TC,En(y)T ·A · TC,En(x)
= BC(A)(y, x)
= b(y, x).
Also ist b symmetrisch.
Etwas komplizierter ist die Lage bei der Untersuchung von Definitheit.
Definition 1.1.38 (Definitheit von Matrizen). Sei n ∈ N. Ein Matrix A ∈Mn×n(R) heißt positiv definit wenn die Bilinearform B(A) auf Rn positivdefinit ist. Analog definert man negative Definitheit, . . . fur Matrizen.
Wir werden in Korollar 1.3.14 Kriterien kennenlernen, mit denen manuberprufen kann, ob eine gegebene symmetrische Matrix positiv definit ist.
Insbesondere folgern wir aus den obigen Betrachtungen: Um symmetrischeBilinearformen auf Rn zu klassifizieren genugt es, symmetrische Matrizenin Mn×n(R) zu klassifizieren. Dies werden wir in Kapitel 1.3 genauer unter-suchen. Die Klassifikation der Skalarprodukte auf Rn erfolgt in Kapitel 1.2.2.

1.1. Euklidische und unitare Vektorraume 21
1.1.5 Matrizenkalkul fur Sesquilinearformen
Analog konnen wir im komplexen Fall verfahren:
Bemerkung 1.1.39 (der Raum der Sesquilinearformen). Ist V ein C-Vektor-raum, so schreiben wir SilC(V ) fur die Menge aller Sesquilinearformen auf V .Bezuglich punktweiser Addition und Skalarmultiplikation bildet SilC(V ) einenC-Vektorraum (nachrechnen).
Proposition 1.1.40 (Sesquilinearformen aus Matrizen). Sei V ein endlich-dimensionaler C-Vektorraum der Dimension n ∈ N und sei C = (c1, . . . , cn)eine Basis von V . Dann sind
ϕ : SilC(V ) −→Mn×n(C)
b 7−→MC(b) =(b(cj , ck)
)j,k∈{1,...,n},
ψ : Mn×n(C) −→ SilC(V )
A 7−→ BCC(A)
zueinander inverse Isomorphismen von C-Vektorraumen. Dabei verwendenwir die folgende Notation: Fur A ∈Mn×n(C) sei
BCC(A) : V × V −→ K
(x, y) 7−→ TC,En(x)H ·A · TC,En(y).
Beweis. Dies zeigt man analog zu Proposition 1.1.32.
Das Standardskalarprodukt auf Cn erhalt man in der obigen Notationals BC
En(In).
Proposition 1.1.41 (Basiswechsel und Matrizen von Bilinearformen). Sei V einendlich-dimensionaler C-Vektorraum der Dimension n ∈ N, sei b ∈ SilC(V ),sei C eine Basis von V und sei A ∈Mn×n(C). Dann sind aquivalent:
1. Es gibt eine Matrix S ∈ GLn(C) mit
A = SH ·MC(b) · S.
2. Es gibt eine Basis D von V mit A = MD(b).
Beweis. Der Beweis ist analog zum reellen Fall (Proposition 1.1.34).
Das komplexe Analogon zu symmetrischen Matrizen sind die selbstadjun-gierten Matrizen.

22 1. Euklidische/Unitare Vektorraume
Definition 1.1.42 (selbstadjungierte Matrix). Sei n ∈ N. Eine Matrix A ∈Mn×n(C) ist selbstadjungiert, wenn AH = A ist, d.h., wenn
∀j,k∈{1,...,k} Ak,j = Aj,k.
Proposition 1.1.43 (hermitesche Sesquilinearformen aus selbstadjungierten Ma-trizen). Sei V ein endlich-dimensionaler C-Vektorraum, sei C eine Basisvon V und sei b : V × V −→ C eine Sesquilinearform. Dann ist b genaudann hermitesch, wenn die Matrix MC(b) selbstadjungiert ist.
Beweis. Der Beweis ist analog zum reellen Fall (Proposition 1.1.37), wobeiwir statt Transponieren den Operator ·H verwenden.
1.2 Orthogonalitat
Der Winkelbegriff (zu einem gegebenen Skalarprodukt) liefert insbesondereauch eine Definition von Orthogonalitat. Wir werden im folgenden ortho-gonale Vektoren betrachten und zeigen, dass jeder euklidische Vektorraumeine sogenannte Orthonormalbasis besitzt. Solche Orthonormalbasen liefernin vielen Anwendungen bequeme Koordinaten.
1.2.1 Orthogonale Vektoren
In Beispiel 1.1.23 haben wir bereits gesehen, wie man den Winkel π/2 (deranschaulich zur Orthogonalitat korrespondiert) mithilfe des Skalarproduktscharakterisieren kann. Es ist außerdem nutzlich, diesen Begriff auch auf denNullvektor zu verallgemeinern:
Definition 1.2.1 (orthogonal). Sei (V, 〈·, ·〉) ein euklidischer/unitarer Vektor-raum.
• Zwei Vektoren x, y ∈ V heißen orthogonal, falls 〈x, y〉 = 0 gilt. In diesemFall schreiben wir auch
x ⊥ y.
• Allgemeiner nennen wir Teilmengen A,B ⊂ V orthogonal (und schrei-ben dann A ⊥ B), wenn
∀x∈A ∀y∈B x ⊥ y.
• Ist A ⊂ V , so nennen wir
A⊥ := {y ∈ V | ∀x∈A x ⊥ y}
das orthogonale Komplement von A.

1.2. Orthogonalitat 23
Bemerkung 1.2.2 (Nullvektor). Aufgrund der positiven Definitheit von Ska-larprodukten ist der Nullvektor (in einem euklidischen/unitaren Vektorraum)der einzige Vektor, der zu allen anderen Vektoren orthogonal ist.
Dies hat die folgende Konsequenz: Sei (V, 〈 · , · 〉) ein euklidischer/unitarerVektorraum und sei A ⊂ V . Dann ist
A ∩A⊥ ⊂ {0},
denn: Sei x ∈ A∩A⊥. Insbesondere ist x ⊥ x, und damit x = 0. Wir werdendiese Aussage in Korollar 1.2.13 verfeinern.
Beispiel 1.2.3. Sei n ∈ N. Dann gilt in (Rn, 〈 · , · 〉2) fur alle j, k ∈ {1, . . . , n}:
ej ⊥ ek ⇐⇒ j 6= k
Außerdem gilt zum Beispiel, dass e1 nicht zu e1 + e2 orthogonal, aber esist (e1 + e2) ⊥ (e1 − e2). Außerdem ist
{e1}⊥ = (R · e1)⊥ = SpanR{e2, . . . , en}.
Bemerkung 1.2.4 (Orthogonalitat und Abstande). Sei (V, 〈·, ·〉) ein euklidi-scher/unitarer Vektorraum mit induzierter Norm ‖ · ‖ und seien x, y ∈ Vmit x ⊥ y. Dann gilt
‖x+ y‖2 = ‖x‖2 + ‖y‖2
(nachrechnen!). Der Satz des Pythagoras ist also in die Definition des Ska-larprodukts bzw. der induzierten Norm eingebaut.
1.2.2 Orthonormalbasen
In euklidischen bzw. unitaren Vektorraumen ist es oft nutzlich, statt allge-meiner Basen sogenannte Orthonormalbasen zu betrachten.
Definition 1.2.5 (Orthonormalbasis). Sei (V, 〈 · , · 〉) ein euklidischer/unitarerVektorraum.
1. Eine Familie (vi)i∈I in V ist ein Orthonormalsystem, wenn
∀i,j∈I 〈vi, vj〉 = δi,j
(d.h. alle Vektoren der Familie haben Lange 1 und die Vektoren stehenalle orthogonal aufeinander).
2. Eine Orthonormalbasis von (V, 〈 · , · 〉) ist eine Basis von V , die ein Or-thonormalsystem ist.
Beispiel 1.2.6. Sei n ∈ N. Dann ist die Standardbasis (e1, . . . , en) eine Or-thonormalbasis von (Rn, 〈 · , · 〉2).

24 1. Euklidische/Unitare Vektorraume
Lemma 1.2.7 (Orthogonalitat und lineare Unabhangigkeit). Sei (V, 〈 · , · 〉) eineuklidischer/unitarer Vektorraum. Jedes Orthonormalsystem in V ist linearunabhangig (im euklidischen Fall uber R, im unitaren Fall uber C).
Beweis. Sei (vi)i∈I ein Orthonormalsystem in V . Ist J ⊂ I endlich und ist(λj)j∈J eine Familie in R (bzw. im unitaren Fall in C), mit
∑j∈J λj · vj = 0,
so folgt mit den Eigenschaften des Skalarprodukts
0 = 〈vk, 0〉 =⟨vk,∑
j∈Jλj · vj
⟩=∑
j∈Jλj · 〈vk, vj〉 =
∑
j∈Jλj · δk,j = λk
fur alle k ∈ J . Also ist (vi)i∈I linear unabhangig.Mit demselben Argument erhalt man auch die folgende Verallgemeinerung
von Bemerkung 1.2.4: Ist (λj)j∈J eine Familie in R (bzw. C), so gilt
∥∥∥∥∑
j∈Jλj · vj
∥∥∥∥ =
√∑
j∈J|λj |2
fur die von 〈 · , · 〉 induzierte Norm ‖ · ‖ auf V .
Jeder endlich-dimensionale euklidische bzw. unitare Vektorraum besitzteine Orthonormalbasis und eine solche kann mit dem folgenden Verfahrenaus einer gewohnlichen Basis konstruiert werden:
Satz 1.2.8 (Orthonormalisierungsverfahren von Gram-Schmidt). Sei (V, 〈 · , · 〉)ein euklidischer/unitarer Vektorraum, sei K der Grundkorper (also R imeuklidischen Fall bzw. C im unitaren Fall), sei n ∈ N und sei (v1, . . . , vn)eine linear unabhangige Familie in V . Dann gibt es ein Orthonormalsy-stem (w1, . . . , wn) in V mit
∀k∈{1,...,n} SpanK({w1, . . . , wk}
)= SpanK
({v1, . . . , vk}
).
Genauer gilt: Die Familie (w1, . . . , wn), die rekursiv durch
w1 :=1
‖w1‖· w1 und w1 := v1
und
wk+1 :=1
‖wk+1‖· wk+1 und wk+1 := vk+1 −
k∑
j=1
〈wj , vk+1〉 · wj
fur alle k ∈ {1, . . . , n− 1} definiert ist, hat diese Eigenschaft. Dabei bezeich-net ‖ · ‖ die von 〈 · , · 〉 induzierte Norm auf V .
Bevor wir mit dem eigentlichen Beweis beginnen, machen wir die Kon-struktion anschaulich plausibel: Nach Konstruktion entsteht wk jeweils aus wkdurch Normierung auf die Lange 1.

1.2. Orthogonalitat 25
À
Á
w
x
〈w, x〉 · w
Abbildung 1.4.: Extraktion des w-Anteils
Ist x ∈ V und w ∈ V mit ‖w‖ = 1, so gibt 〈w, x〉·w den w-Anteil von x (imSinne einer orthogonalen Zerlegung) an (Abbildung 1.4). In der rekursivenDefinition
wk+1 := vk+1 −k∑
j=1
〈wj , vk+1〉 · wj
wird also der Anteil von vk+1 extrahiert, der nicht in Richtung der w1, . . . , wkliegt.
Beweis. Wir beweisen die Behauptung folgendermaßen per Induktion:
Induktionsanfang. Da (v1, . . . , vn) linear unabhangig ist, ist v1 6= 0. Ins-besondere ist w1 wohldefiniert und ‖w1‖ = 1. Nach Konstruktion ist dabeiSpanK{w1} = SpanK{v1}.
Induktionsvoraussetzung. Sei k ∈ {1, . . . , n − 1} und es sei bereits ge-zeigt, dass (w1, . . . , wk) ein Orthonormalsystem mit SpanK{w1, . . . , wk} =SpanK{v1, . . . , vk} ist.
Induktionsschritt. Wir zeigen nun, dass dann auch (w1, . . . , wk+1) ein Or-thonormalsystem mit SpanK{w1, . . . , wk+1} = SpanK{v1, . . . , vk+1} ist.
• Es ist wk+1 6= 0, denn: Nach Induktionsvoraussetzung ist die Linear-
kombination∑kj=1〈wj , vk+1〉 · wj ∈ SpanK{v1, . . . , vk}. Da (v1, . . . , vn)
eine linear unabhangige Familie ist, folgt aus der Konstruktion von wk+1,dass wk+1 6= 0.
Also ist wk+1 wohldefiniert und ‖wk+1‖ = 1.
• Sei ` ∈ {1, . . . , k}. Dann ist 〈w`, wk+1〉 = 0, denn: Es genugt dafur,〈w`, wk+1〉 = 0 zu zeigen. Nach Konstruktion und Induktionsvorausset-zung ist

26 1. Euklidische/Unitare Vektorraume
〈w`, wk+1〉 =
⟨w`, vk+1 −
k∑
j=1
〈wj , vk+1〉 · wj⟩
= 〈w`, vk+1〉 −k∑
j=1
〈wj , vk+1〉 · 〈w`, wj〉
= 〈w`, vk+1〉 − 〈w`, vk+1〉= 0.
• Nach Konstruktion von wk+1 und nach Induktionsvoraussetzung istwk+1 ∈ SpanK{v1, . . . , vk+1} und vk+1 ∈ SpanK{w1, . . . , wk+1}. Zusam-men mit der Induktionsvoraussetzung ergibt sich daraus die GleichheitSpanK{w1, . . . , wk+1} = SpanK{v1, . . . , vk+1}.
Beispiel 1.2.9. Wir betrachten die linear unabhangige Familie
(v1 :=
(11
), v2 :=
(20
))
in (R2, 〈 · , · 〉2). Wenden wir das Orthonormalisierungsverfahren von Gram-Schmidt an, so erhalten wir
w1 = v1 =
(11
)und w1 =
1√2· v1 =
1√2·(
11
)
sowie
w2 = v2 − 〈w1, v2〉2 · w1 =
(20
)− 2√
2· 1√
2
(11
)=
(1−1
)
bzw.
w2 =1√2·(
1−1
).
Dann ist (w1, w2) eine Orthonormalbasis von (R2, 〈 · , · 〉2).
Korollar 1.2.10. Jeder endlich-dimensionale euklidische/unitare Vektorraumbesitzt eine Orthonormalbasis.
Beweis. Jeder (endlich-dimensionale) Vektorraum besitzt eine (endliche) Ba-sis. Auf eine solche Basis konnen wir das Orthonormalisierungsverfahren vonGram-Schmidt anwenden (Satz 1.2.8) und erhalten so eine Orthonormalba-sis.
Als erste Anwendung des Orthonormalisierungsverfahrens erhalten wir,dass im endlich-dimensionalen Fall das Standardskalarprodukt (bis auf Iso-metrie) das einzige Skalarprodukt ist:

1.2. Orthogonalitat 27
Korollar 1.2.11 (Klassifikation der endlich-dimensionalen euklidischen/unitarenVektorraume). Sei (V, 〈 · , · 〉) ein euklidischer/unitaren Vektorraum der end-lichen Dimension n ∈ N und sei K der Grundkorper (also R im euklidischenFall, C im komplexen Fall). Dann gibt es einen Isomorphismus f : V −→ Knmit
∀x,y∈V⟨f(x), f(y)
⟩2
= 〈x, y〉.(Dies ist gleichbedeutend damit, dass f eine lineare Isometrie bezuglich derinduzierten Normen ist.)
Beweis. Aufgrund von Satz 1.2.8 besitzt V eine Orthonormalbasis B. MitBemerkung 1.2.4 folgt dann, dass der Isomorphismus TB,En : V −→ Kn einelineare Isometrie ist. Da lineare Isometrien mit dem Skalarprodukt vertraglichsind (Proposition 1.1.16 bzw. Proposition 1.1.29), folgt die Behauptung.
Aus der Existenz von Orthonormalbasen erhalt man außerdem auch daswichtige Werkzeug der orthogonalen Projektionen.
Korollar 1.2.12 (orthogonale Projektion). Sei (V, 〈 · , · 〉) ein euklidischer/uni-tarer Vektorraum und sei U ⊂ V ein endlich-dimensionaler Untervektor-raum. Dann gibt es genau eine lineare Abbildung pU : V −→ V mit folgendenEigenschaften:
1. Es gilt im pU ⊂ U
2. und es gilt im(pU − idV ) ⊂ U⊥.
Man bezeichnet pU als orthogonale Projektion von V auf U .
Beweis. Existenz. Nach Orthonormalisierungssatz (Satz 1.2.8) besitzt U eineOrthonormalbasis B = (v1, . . . , vn) (bezuglich dem von V eingeschranktenSkalarprodukt). Dann definieren wir
pU : V −→ V
x 7−→n∑
j=1
〈vj , x〉 · vj .
Nach Konstruktion ist pU linear und im pU ⊂ U . (Wegen vj = pU (vj) furalle j ∈ {1, . . . , n} gilt sogar pU (x) = x fur alle x ∈ U .)
Außerdem gilt im(pU − idV ) ⊂ U⊥, denn: Sei x ∈ V und j ∈ {1, . . . , n}.Nach Konstruktion von pU gilt
〈vj , pU (x)− x〉 =
n∑
k=1
(⟨vj , 〈vk, x〉 · vk
⟩− 〈vj , x〉
)
= 〈vj , x〉 · 〈vj , vj〉 − 〈vj , x〉= 0.

28 1. Euklidische/Unitare Vektorraume
Daher ist (pU − idV )(x) ∈ {v1, . . . , vn}⊥ = U⊥.Eindeutigkeit. (Ubungsaufgabe).
Orthogonale Komplemente liefern eine Moglichkeit, kanonische komple-mentare Untervektorraume zu konstruieren:
Korollar 1.2.13 (Komplemente). Sei (V, 〈·, ·〉) ein euklidischer/unitarer Vek-torraum und sei U ⊂ V ein endlich-dimensionaler Untervektorraum.
1. Dann ist U⊥ ein zu U komplementarer Untervektorraum.
2. Insbesondere ist die Abbildung
U⊥ −→ V/U
x 7−→ x+ U
ein Isomorphismus von reellen/komplexen Vektorraumen.
Beweis. Zu 1. Es ist U⊥ ein Untervektorraum, denn: Man kann dies direktnachrechnen. Mit der bereits gelernten Theorie konnen wir aber auch bequemwie folgt argumentieren. Nach Definition ist
U⊥ = {y ∈ V | ∀x∈U x ⊥ y}= {y ∈ V | ∀x∈U 〈x, y〉 = 0}=⋂
x∈Uker〈x, ·〉.
Da Kerne von linearen Abbildungen Untervektorraume sind und Durchschnit-te von Untervektorraumen Untervektorraume sind, folgt, dass U⊥ ein Unter-vektorraum ist.
Außerdem sind U und U⊥ komplementar, denn:
• Es ist U ∩ U⊥ = {0} (Bemerkung 1.2.2).
• Es ist U + U⊥ = V , denn: Sei x ∈ V . Ist pU : V −→ V die orthogonaleProjektion auf U , so folgt
x = −(pU (x)− x) + pU (x);
der erste Term liegt in U⊥, der zweite in U . Also ist x ∈ U + U⊥.
Zu 2. Dies folgt aus dem ersten Teil und Bemerkung I.4.4.12.
Die obigen Aussagen uber die Existenz von Orthonormalbasen, orthogona-le Projektionen, komplementare Untervektorraume, . . . gelten im allgemei-nen nicht, wenn der betrachtete Untervektorraum unendlich-dimensional ist.Im unendlich-dimensionalen Fall werden zusatzlich noch Abgeschlossenheits-eigenschaften bezuglich der induzierten Norm benotigt. Die Untersuchungsolcher Fragen ist Gegenstand der Funktionalanalysis (Ausblick 1.1.19).

1.2. Orthogonalitat 29
Ausblick 1.2.14 (Fouriertransformation). Die zusammengesetzte Familie
(x 7→
√2 · sin(2 · π · n · x)
)n∈N>0
∪(x 7→
√2 · cos(2 · π · n · x)
)n∈N
ist ein Orthonormalsystem in C([0, 1],R) (bezuglich dem L2-Skalarproduktaus Beispiel 1.1.5); dies folgt aus einer langlichen (aber elementaren) Berech-nung der entsprechenden Integrale.
Es gilt sogar noch mehr: bezuglich der durch das L2-Skalarprodukt indu-zierten Norm ist der von dieser Familie erzeugte Untervektorraum dicht imUntervektorraum der stetigen Funktionen f : [0, 1] −→ R mit f(0) = f(1).Dies ist die Grundlage der sogenannten Fouriertransformation, bei der manperiodische Funktionen als Reihe der obigen Sinus- und Kosinusfunktionendarstellt.
1.2.3 Die orthogonale Gruppe
Wir untersuchen im folgenden die Symmetriegruppe der euklidischen Ebenebzw. des dreidimensionalen euklidischen Raums genauer. Dazu betrachtenwir die folgenden Matrixgruppen:
Definition 1.2.15 (orthogonale Gruppe, unitare Gruppe). Sei n ∈ N. Danndefiniert man die folgenden Gruppen:
O(n) := {A ∈ GLn(R) | L(A) ∈ Isom(Rn, ‖ · ‖2)} orthogonale Gruppe von Rn
SO(n) := {A ∈ O(n) | detA = 1} spezielle orthogonale Gruppe von Rn
U(n) := {A ∈ GLn(C) | L(A) ∈ Isom(Cn, ‖ · ‖2)} unitare Gruppe von Cn
SU(n) := {A ∈ U(n) | detA = 1} spezielle unitare Gruppe von Cn
Die Vertraglichkeit von Abbildungskomposition mit Matrixmultiplikati-on und die Multplikativitat der Determinante zeigen, dass es sich dabeitatsachlich um Gruppen handelt (nachrechnen).
An dieser Stelle sollte man sich daran erinnern, dass Automorphismenvon Rn mit positiver Determinante orientierungserhaltend sind und solchemit negativer Determinante orientierungsumkehrend sind. Erstere konnen wirim dreidimensionalen euklidischen Raum praktisch realisieren, letztere imNormalfall nicht: Es ist einfach, sich in eine gewisse Richtung zu drehen;es ist (zum Gluck!) nicht ohne weiteres moglich, sich als Ganzes an einerEbene zu spiegeln (viele molekulare Strukturen haben nur in einer der beidenmoglichen Orientierungen den gewunschten Effekt).
Zum Beispiel enthalt O(2) die Rotationen um den Ursprung und die Spie-gelungen an den Geraden in R2 (Beispiel 1.1.27 bzw. Ubungsaufgabe). InSatz 1.2.18 werden wir sehen, dass O(2) (wie wir auch aus der Anschauungerwarten wurden!) keine weiteren Elemente enthalt.

30 1. Euklidische/Unitare Vektorraume
In der Praxis ist es bequem, die folgenden alternativen Beschreibungendieser Gruppen zu verwenden. Die erste Eigenschaft erklart auch die Be-zeichnung als
”orthogonale“ Gruppe.
Proposition 1.2.16. Sei (V, 〈 · , · 〉) ein euklidischer/unitarer Vektorraum derDimension n ∈ N, sei B = (v1, . . . , vn) eine Orthonormalbasis von V und seif : V −→ V ein Endomorphismus.
1. Es ist f genau dann eine lineare Isometrie (bezuglich der von 〈 · , · 〉 in-duzierten Norm auf V ), wenn (f(v1), . . . , f(vn)) eine Orthonormalbasisvon V ist.
2. Ist f eine lineare Isometrie, so gilt im euklidischen Fall MB,B(f) ∈O(n) und im unitaren Fall MB,B(f) ∈ U(n).
Beweis. Zu 1. Ist f eine lineare Isometrie, so ist f wegen Polarisierung mitdem Skalarprodukt vertraglich (Proposition 1.1.16 und Proposition 1.1.29).Insbesondere bildet f also Orthonormalbasen auf Orthonormalbasen ab.
Ist umgekehrt (f(v1), . . . , f(vn)) eine Orthonormalbasis von V , so ist feine Isometrie (Bemerkung 1.2.4 und Beweis von Lemma 1.2.7).
Zu 2. Da B eine Orthonormalbasis ist, ist TB,En : V −→ Kn eine lineareIsometrie bezuglich dem euklidischen Abstand ‖ · ‖2 auf Kn (Beweis vonKorollar 1.2.11); dabei bezeichnet K den Grundkorper. Also ist auch dieKomposition
L(MB,B(f)
)= fB,B = TB,En ◦ f ◦ T−1
B,En: Kn −→ Kn
eine lineare Isometrie bezuglich ‖ · ‖2. Nach Definition ist somit MB,B(f) inder orthogonalen bzw. unitaren Gruppe.
Korollar 1.2.17 (alternative Beschreibung der orthogonalen/unitaren Gruppe).Sei n ∈ N. Dann ist
O(n) ={A ∈Mn×n(R)
∣∣ AT ·A = In}
undU(n) =
{A ∈Mn×n(C)
∣∣ AH ·A = In}.
Beweis. Wir fuhren den Beweis nur im euklidischen Fall (der unitare Fallgeht analog): Ist A ∈ Mn×n(R), so gilt nach Definition des Standardska-larprodukts genau dann AT · A = In, wenn die Spalten von A eine Ortho-normalbasis von (Rn, 〈 · , · 〉2) bilden. Mit Proposition 1.2.16 folgt somit dieBehauptung.
Satz 1.2.18 (niedrigdimensionale orthogonale Gruppen).
1. Fur alle n ∈ N>0 gilt
O(n) = SO(n)∪{S ·A
∣∣ A ∈ SO(n)},

1.2. Orthogonalitat 31
wobei S die Spiegelungsmatrix
S :=
−1 0 . . . 00 1 . . . 0...
. . .. . . 0
0 . . . 0 1
∈ O(n)
bezeichnet.
2. Es gilt SO(2) ={R(ϕ)
∣∣ ϕ ∈ [0, 2 · π)}
. D.h. SO(2) ist die Gruppe derRotationen in R2 um den Ursprung.
3. Das Komplement O(2)\SO(2) besteht genau aus der Menge aller Spie-gelungen in R2 an Geraden. Genauer: Sei A ∈ M2×2(R). Dann giltgenau dann A ∈ O(2) \ SO(2), wenn es B ∈ O(2) gibt mit
B−1 ·A ·B =
(−1 00 1
).
4. Die Gruppe SO(3) besteht genau aus den Drehungen in R3 um Geraden.Genauer: Sei A ∈ M3×3(R). Dann gilt genau dann A ∈ SO(3), wennes B ∈ O(3) und ϕ ∈ [0, 2 · π) gibt mit
B−1 ·A ·B =
(1 00 R(ϕ)
)=
1 0 00 cosϕ − sinϕ0 sinϕ cosϕ
.
Bemerkung 1.2.19 (uber die Konjugation mit orthogonalen Matrizen). Es sein ∈ N und sei A ∈ Mn×n(R). Ist B ∈ O(n), so ist B−1 · A · B, die Matrixfur die lineare Abbildung L(A) : Rn −→ Rn bezuglich der Orthonormalba-sis von Rn, die durch die Spalten von B gegeben ist. Der obige Satz besagtalso, dass Isometrien der euklidischen Ebene bzw. des euklidischen Raumsbezuglich geeigneter orthonormaler(!) Koordinatensysteme ein besonders ein-fache Gestalt haben.
Beweis. Zu 1. Offenbar ist die rechte Seite in der linken Seite enthalten.
Sei umgekehrt A ∈ O(n). Mit der Multiplikativitat der Determinante undKorollar I.5.3.22 erhalten wir
1 = det In = det(AT ·A) = detAT · detA = detA · detA,
und damit detA ∈ {−1, 1}.
• Ist detA = 1, so gilt nach Definition A ∈ SO(n).
• Ist detA = −1, so ist

32 1. Euklidische/Unitare Vektorraume
det(S−1 ·A) =1
detS· detA = (−1) · (−1) = 1,
und damit S−1 ·A ∈ SO(n). Daher hat A = S · (S−1 ·A) die gewunschteGestalt.
Zu 2. Ist ϕ ∈ [0, 2 ·π), so ist R(ϕ) ∈ SO(2) (Beispiel 1.1.27). Sei umgekehrt
A =
(a bc d
)∈ SO(2).
Die Bedingung A ∈ SO(2) liefert (mithilfe von Korollar 1.2.17) die folgendenGleichungen:
a2 + c2 = (a, c) ·(ac
)= 1 (1.1)
b2 + d2 = (b, d) ·(bd
)= 1 (1.2)
a · b+ c · d = (b, d) ·(ac
)= 0 (1.3)
a · b+ c · d = (a, c) ·(bd
)= 0 (1.4)
a · d− b · c = detA = 1 (1.5)
Wir multiplizieren Gleichung (1.4) mit b, Gleichung (1.5) mit d und addierendie entstehenden Gleichungen; dies liefert
d = a · (b2 + d2) + b · c · d− b · c · d = a · (b2 + d2).
Mit Gleichung (1.2) erhalten wir somit a = d. Analog zeigt man b = −c.Aus der Analysis wissen wir außerdem wegen Gleichung (1.1), dass es
ein ϕ ∈ [0, 2 · π) mita = cosϕ und c = sinϕ
gibt. Insgesamt folgt daher A = R(ϕ).Zu 3. Dies kann man durch eine geeignete Kombination der ersten beiden
Teile sehen oder indem man den Beweis des zweiten Teils auf den Fall vonDeterminante −1 anpasst (Ubungsaufgabe).
Zu 4. Eine Rechnung zeigt: Fur alle B ∈ O(3) und alle ϕ ∈ [0, 2 · π) ist
B ·(
1 00 R(ϕ)
)·B−1
ein Element von SO(3).Um zu verstehen, warum alle Elemente von SO(3) von dieser Form sind,
bietet es sich an, zunachst etwas Spektraltheorie fur Isometrien zu entwickeln(Lemma 1.2.20). Sei nun A ∈ SO(3) und f := L(A) : R3 −→ R3. Die Idee ist,

1.2. Orthogonalitat 33
zunachst einen Kandidaten fur die Rotationsachse zu finden und sich danndes zweiten bzw. dritten Teils zu bedienen.
• Eine spezielle Gerade. Der Endomorphismus f besitzt einen Eigenvek-tor v ∈ R3 zum Eigenwert 1 oder −1, denn: Das charakteristische Po-lynom χf ∈ R[T ] von f ist ein Polynom dritten Grades mit Leitkoeffi-zient 1. Also gilt
limx→−∞
χf (x) = −∞ und limx→∞
χf (x) =∞;
mit dem Zwischenwertsatz folgt daraus, dass χf mindestens eine reelleNullstelle besitzt. Somit besitzt f mindestens einen Eigenwert λ ∈ Rund insbesondere einen Eigenvektor v zum Eigenwert λ. Nach Lem-ma 1.2.20 ist dabei λ ∈ {1,−1}. Indem wir statt v den normiertenVektor 1/‖v‖ · v betrachten, konnen wir ohne Einschrankung anneh-men, dass ‖v‖ = 1 ist.
• Reduktion auf den zweidimensionalen Fall. Sei U := (R · v)⊥ ⊂ R3.Dann ist dimR U = 2 (Korollar 1.2.13). Sei (w1, w2) eine Orthonor-malbasis von U . Dann ist (v, w1, w2) eine Orthonormalbasis von R3.Da f als Isometrie Orthonormalbasen auf Orthonormalbasen abbildet,folgt f(w1), f(w2) ∈ {f(v)}⊥ = (R · v)⊥ = U bzw. f(U) ⊂ U . Also istf |U ∈ Isom(U, ‖ · ‖2). Daher ist (Proposition 1.2.16)
AU := M(w1,w2),(w1,w2)(f |U ) ∈ O(2)
und (wie man an M(v,w1,w2),(v,w1,w)(f) ablesen kann)
detAU =detA
λ=
1
λ.
Wir unterscheiden nun zwei Falle:
• Ist λ = 1, so ist AU ∈ SO(2) und es gibt nach dem zweiten Teilein ϕ ∈ [0, 2 · π) mit AU = R(ϕ); in anderen Worten: auf U wirkt fdurch Rotation um ϕ. Wir betrachten dann die Matrix B, deren Spal-ten die Orthonormalbasis (v, w1, w2) bilden. Somit ist B ∈ O(3) undnach Konstruktion gilt
B−1 ·A ·B =
(1 00 AU
)=
(1 00 R(ϕ)
).
• Ist λ = −1, so ist AU ∈ O(2) \SO(2) und es gibt nach dem dritten Teileine Matrix BU ∈ O(2) mit
B−1U ·AU ·BU =
(−1 00 1
);

34 1. Euklidische/Unitare Vektorraume
in anderen Worten: auf U wirkt f als Spiegelung an einer Geraden. Mitder Matrix
B :=
(1 00 BU
)· (v |w1 |w2) ∈ O(3)
erhalten wir somit
B−1 ·A ·B =
−1 0 00 −1 00 0 1
.
Indem wir die erste und dritte Spalte von B tauschen, erhalten wir eineMatrix C ∈ O(3) mit
C−1 ·A · C =
1 0 00 −1 00 0 −1
=
(1 00 R(π)
).
Damit ist der Satz gezeigt.
Lemma 1.2.20 (grundlegende spektrale Eigenschaften von Isometrien). Sei(V, 〈 · , · 〉) ein euklidischer/unitarer Vektorraum und sei f ∈ Isom(V, ‖ · ‖),wobei ‖ · ‖ die von 〈 · , · 〉 induzierte Norm auf V bezeichnet. Im euklidischenFall sei K = R, im unitaren Fall sei K = C.
1. Dann ist σK(f) ⊂{λ ∈ K
∣∣ |λ| = 1}
.
2. Sind λ, µ ∈ σK(f) mit λ 6= µ, so gilt
Eigλ(f) ⊥ Eigµ(f).
Insbesondere treffen diese Eigenschaften also auf Matrizen aus O(n) zu.
Beweis. Zu 1. Sei λ ∈ K ein Eigenwert von f und sei x ∈ V ein Eigenvektorzum Eigenwert λ. Da f eine Isometrie ist, folgt
‖x‖ =∥∥f(x)
∥∥ = |λ| · ‖x‖.
Wegen x 6= 0 ist somit |λ| = 1.Zu 2. Seien λ 6= µ Eigenwerte von f und seien x, y ∈ V Eigenvektoren
zum Eigenwert λ bzw. µ. Da f auch mit dem Skalarprodukt vertraglich ist(wegen Polarisierung; Proposition 1.1.16), folgt dann
〈x, y〉 =⟨f(x), f(y)
⟩= 〈λ · x, µ · y〉 = λ · µ · 〈x, y〉.
Wegen λ 6= µ und |λ| = 1 = |µ| erhalten wir λ · µ 6= 1, und damit 〈x, y〉 = 0.Also ist x ⊥ y.

1.3. Spektralsatze 35
Korollar 1.2.21. Jede lineare Isometrie von (R2, ‖ · ‖2) lasst sich als Kompo-sition von einer oder zwei Spiegelungen schreiben.
Beweis. Dies folgt aus Satz 1.2.18 und einem kleinen geometrischen Argu-ment (Ubungsaufgabe).
Beispiel 1.2.22 (kleine unitare Gruppe). Nach Definition der unitaren Grup-pen ist U(1) = {x ∈ C | |x| = 1}. Man beachte dabei, dass {x ∈ C | |x| = 1}nichts anderes als der Einheitskreis in C ist.
1.3 Spektralsatze
Die Untersuchung von Endomorphismen auf Diagonalisierbarkeit ist sowohlin den Anwendungen der linearen Algebra als auch fur die abstrakte Klassi-fikation von Endomorphismen von Bedeutung. Im euklidischen/unitaren Fallstellt sich heraus, dass es eine große Klasse von Endomorphismen gibt, diesich besonders schon diagonalisieren lassen: Dies sind die sogenannten selbst-adjungierten Endomorphismen.
Wir fuhren zunachst selbstadjungierte Endomorphismen ein und beweisendann den sogenannten Spektralsatz (also, dass solche Endomorphismen aufeine besonders schone Weise diagonalisierbar sind). Als Anwendung erhaltman zum Beispiel die Hauptachsentransformation. Zum Abschluss betrach-ten wir noch den Sylvesterschen Tragheitssatz und Definitheitskriterien fursymmetrische Matrizen.
1.3.1 Selbstadjungierte Endomorphismen
Ein Endomorphismus eines euklidischen/unitaren Vektorraums ist selbstad-jungiert, wenn er sich
”durch das Skalarprodukt durchziehen“ lasst.
Definition 1.3.1 (selbstadjungiert). Sei (V, 〈 · , · 〉) ein euklidischer/unitarerVektorraum. Ein Endomorphimus f : V −→ V ist selbstadjungiert, wenn
∀x,y∈V⟨x, f(y)
⟩=⟨f(x), y
⟩.
Wir erinnern daran, dass eine komplexe Matrix A selbstadjungiert heißt,wenn AH = A ist. Sind alle Koeffizienten von A reell, so ist dies aquivalentdazu, dass A symmetrisch ist (also AT = A gilt).
Proposition 1.3.2 (Selbstadjungiertheit via Matrizen). Sei (V, 〈 · , · 〉) ein eu-klidischer/unitarer Vektorraum der Dimension n ∈ N, sei B eine Orthonor-malbasis von V und sei f : V −→ V ein Endomorphismus. Dann ist f genaudann selbstadjungiert, wenn die Matrix MB,B(f) selbstadjungiert ist.

36 1. Euklidische/Unitare Vektorraume
Beweis. Wir schreiben B = (v1, . . . , vn). Da B eine Orthonormalbasis ist,gilt fur alle j, k ∈ {1, . . . , n}, dass
⟨vj , f(vk)
⟩=
⟨vj ,
n∑
`=1
A`,kv`
⟩= Aj,k
und analog ⟨f(vj), vk
⟩= Ak,j .
Mit der Bi- bzw. Sesquilinearitat des Skalarprodukts folgt daraus die Be-hauptung.
Der obige Beweis erinnert an die Betrachtungen in Kapitel 1.1.4 und 1.1.5.Tatsachlich gibt es auch die Moglichkeit, beide Aspekte in einem gemeinsa-men Formalismus zu fassen.
Die Charakterisierung aus Proposition 1.3.2 erlaubt es uns, auf einfacheWeise Beispiele fur Selbstadjungiertheit anzugeben:
Beispiel 1.3.3. Der Endomorphismus
C2 −→ C
x 7−→(
1 i−i 2017
)· x
ist selbstadjungiert, aber der Endomorphismus
C2 −→ C
x 7−→(i i−i 2017
)· x
ist nicht selbstadjungiert.
Die folgende Beobachtung erklart den Begriff der Selbstadjungiertheit:
Proposition 1.3.4 (adjungierte Homomorphismen). Sei (V, 〈 · , · 〉) ein euklidi-scher/unitarer Vektorraum der Dimension n ∈ N und sei f : V −→ V einEndomorphismus. Dann gibt es genau einen Endomorphismus fH : V −→ Vmit
∀x,y∈V⟨x, f(y)
⟩=⟨fH(x), y
⟩.
Man bezeichnet fH dann auch als adjungierte Abbildung von f .
Beweis. Existenz. Sei B = (v1, . . . , vn) eine Orthonormalbasis von V und seiA := MB,B(f). Wir definieren den Endomorphismus
fH := T−1B,En
◦ L(AH)◦ TB,En : V −→ V.
Fur alle j, k ∈ {1, . . . , n} gilt dann nach Konstruktion

1.3. Spektralsatze 37
⟨vj , f(vk)
⟩= Aj,k = AH
k,j =⟨fH(vj), vk
⟩.
Mit der Bi- bzw. Sesquilinearitat des Skalarprodukts folgt daraus 〈x, f(y)〉 =〈fH(x), y〉 fur alle x, y ∈ V .
Eindeutigkeit. Seien F,G : V −→ V Endomorphismen mit
∀x,y∈V⟨F (x), y
⟩=⟨x, f(y)
⟩=⟨G(x), y
⟩.
Sei x ∈ V . Dann gilt fur alle y ∈ V (insbesondere fur y = F (x)−G(x)), dass
⟨F (x)−G(x), y
⟩=⟨F (x), y
⟩−⟨G(x), y
⟩=⟨x, f(y)
⟩−⟨x, f(y)
⟩= 0.
Mit der positiven Definitheit erhalten wir daraus F (x)−G(x) = 0 bzw. F (x) =G(x). Dies beweist die Eindeutigkeit.
Korollar 1.3.5 (Selbst-Adjungiertheit). Sei (V, 〈 · , · 〉) ein endlich-dimensiona-ler euklidischer/unitarer Vektorraum und sei f : V −→ V ein Endomorphis-mus. Dann ist f genau dann selbstadjungiert, wenn f = fH gilt.
Beweis. Dies folgt direkt aus der vorigen Proposition 1.3.4.
Caveat 1.3.6. Oft wird die adjungierte Abbildung von f in der Literaturauch mit f∗ bezeichnet. Dies kann jedoch zu Verwechslungen mit der dualenAbbildung fuhren. Da die duale Abbildung bezuglich (dualer Basen) durchdie transponierte Matrix dargestellt wird (Proposition I.5.1.16) und da manmithilfe von Skalarprodukten auch Dualisieren kann (Ubungsaufgabe), stim-men diese beiden Konstruktionen (im reellen Fall) sogar in einem gewissenSinne uberein. Wir werden davon im folgenden aber keinen Gebrauch machenund daher die adjungierte Abbildung mit fH bezeichnen.
1.3.2 Der Spektralsatz
Satz 1.3.7 (Spektralsatz fur selbstadjungierte Endomorphismen). Sei (V, 〈 · , · 〉)ein endlich-dimensionaler euklidischer/unitarer Vektorraum und sei f : V −→V ein selbstadjungierter Endomorphismus. Es bezeichne K den Grundkorpervon V (also R im euklidischen Fall bzw. C im unitaren Fall). Dann gilt:
1. Alle Eigenwerte von f uber K sind bereits reell, d.h. σK(f) ⊂ R.
2. Es gibt eine Orthonormalbasis von V aus Eigenvektoren von f .
3. Insbesondere ist f uber K diagonalisierbar.
Wir werden den zweiten Teil dieses Satzes per Induktion uber die Dimen-sion des Vektorraums fuhren. Dazu benotigen wir zwei wesentliche Bausteine:
• Jeder selbstadjungierte Endomorphismus eines endlich-dimensionaleneuklidischen/unitaren Vektorraums besitzt mindestens einen Eigenwert/-vektor.

38 1. Euklidische/Unitare Vektorraume
• Ist W ⊂ V ein Untervektorraum von V mit f(W ) ⊂ W , so giltauch f(W⊥) ⊂W⊥.
Kombinieren wir diese beiden Eigenschaften, so sehen wir, dass wir uns Di-mension fur Dimension nach unten (bis zur Dimension 0) hangeln konnen.
Anmerkung zum Lernen. Woher kennen Sie diese Beweisstrategie?
Beweis. Zu 1. Sei λ ∈ σK(f) und sei v ∈ V ein Eigenvektor zum Eigenwert λ.Da f selbstadjungiert ist, folgt
λ · 〈v, v〉 =⟨v, f(v)
⟩=⟨f(v), v
⟩= λ · 〈v, v〉.
Wegen v 6= 0 erhalten wir daraus λ = λ, d.h. λ ist reell.Zu 3. Der dritte Teil ist eine direkte Folgerung aus dem zweiten Teil.Zu 2. Wir beweisen die zweite Behauptung durch Induktion uber dimK V :Induktionsanfang. Im Fall dimK V = 0 ist nichts zu zeigen.Induktionsvoraussetzung. Sei n ∈ N>0 und es sei bereits gezeigt, dass es zu
jedem selbstadjungierten Endomorphismus eines euklidischen/unitaren Vek-torraums der Dimension n−1 eine Orthonormalbasis aus Eigenvektoren gibt.
Induktionsschritt. Sei dimK V = n und sei f : V −→ V selbstadjungiert.
• Dann besitzt f mindestens einen Eigenvektor v ∈ V , denn: Wegen n > 0besitzt das charakteristische Polynom χf ∈ K[T ] ⊂ C[T ] (das Grad nhat) nach dem Fundamentalsatz der Algebra (Satz I.6.3.8) mindestenseine Nullstelle λ ∈ C. Ist K = C, so ist λ ein Eigenwert von f und nachdem ersten Teil λ ∈ R.
Ist K = R, so argumentieren wir wie folgt: Sei B eine Orthonormalbasisvon V und sei A := MB,B(f) ∈Mn×n(R). Da f selbstadjungiert ist, istA symmetrisch bzw. selbstadjungiert (Proposition 1.3.2). Fassen wir Aals Matrix in Mn×n(C) auf, so zeigt das obige Argument im komplexenFall fur L(A) : Cn −→ Cn, dass λ eine reelle(!) Nullstelle von χA = χfist (es macht keinen Unterschied, ob wir das charakteristische Polynomvon A uber C oder uber R berechnen). Somit ist λ auch ein Eigewertder reellen Matrix A bzw. von f .
Insbesondere besitzt f mindestens einen Eigenvektor v ∈ V .
• Sei U := (K · v)⊥ ⊂ V . Dann gilt f(U) ⊂ U , denn: Sei x ∈ U . Danngilt (da f selbstadjungiert und v ein Eigenvektor zum Eigenwert λ ist)
⟨f(x), v
⟩=⟨x, f(v)
⟩= λ ·
⟨x, v⟩
= 0,
und damit f(x) ⊥ v. Also ist auch f(x) ∈ {v}⊥ = (K · v)⊥ = U .
• Anwendung der Induktionsvoraussetzung: Da U komplementar zu K ·vist (Korollar 1.2.13), ist
dimC U = dimC V − 1 = n− 1.

1.3. Spektralsatze 39
Die Einschrankung f |U : U −→ U ist nach dem vorigen Schritt tatsach-lich ein Endomorphismus von U und nach Konstruktion selbstadjun-giert (bezuglich dem von V auf U eingeschrankten Skalarprodukt).
Nach Induktionsvoraussetzung besitzt somit U eine Orthonormalba-sis (u1, . . . , un−1) aus Eigenvektoren von f |U .
Dann ist (1/‖v‖ · v, u1, . . . , un) eine Orthonormalbasis von V , die aus Eigen-vektoren von f besteht.
Bemerkung 1.3.8 (Spektralsatz fur normale Operatoren). Allgemeiner giltauch ein leicht modifizerter Spektralsatz fur sogenannte normale Operatoren,d.h. fur Endomorphismen f mit fH◦f = f ◦fH (mit einem ahnlichen Beweis).Neben den selbstadjungierten Endomorphismen sind auch Endomorphismen,die lineare Isometrien sind, normal. Das Konzept der normalen Operatorenerlaubt es also, die spektralen Eigenschaften von selbstadjungierten und iso-metrischen Endomorphismen gleichzeitig zu behandeln.
Korollar 1.3.9 (Spektralsatz fur symmetrische Matrizen). Sei n ∈ N und seiA ∈Mn×n(R) eine symmetrische Matrix, d.h. A = AT. Dann ist A (uber R)diagonalisierbar. Genauer gilt sogar: Es gibt eine Matrix S ∈ O(n) mit derEigenschaft, dass S−1 ·A · S in Diagonalgestalt ist.
Beweis. Da A symmetrisch ist, ist f := L(A) : Rn −→ Rn bezuglich 〈 · , · 〉2selbstadjungiert. Also konnen wir den Spektralsatz (Satz 1.3.7) auf f anwen-den und erhalten so eine Orthonormalbasis B von Rn, die aus Eigenvekto-ren von f besteht. Dann hat die Matrix S := MB (d.h. die Matrix, derenSpalten aus den Vektoren aus B besteht) die Eigenschaft, dass S−1 · A · Sin Diagonalgestalt ist. Da B eine Orthonormalbasis ist, gilt dabei außer-dem S ∈ O(n).
Bemerkung 1.3.10. Mit den bereits entwickelten Techniken konnen wir furreelle symmetrische Matrizen A solche Transformationsmatrizen S wie inKorollar 1.3.9 rechnerisch bestimmen:
• Wir bestimmen die Eigenwerte von A uber das charakteristische Poly-nom χA.
• Wir bestimmen mit dem Gaußschen Eliminationsverfahren Basen furdie Eigenraume von A.
• Wir werden das Orthonormalisierungsverfahren auf jede dieser Basenan.
• Wir setzen diese Basen zu einer Basis des Gesamtraums zusammen undverwenden diese Basisvektoren als Spalten von S.

40 1. Euklidische/Unitare Vektorraume
Man beachte, dass die Spalten von S tatsachlich eine Orthonormalbasis bil-den: Nach dem Spektralsatz (alternativ: uber eine einfache Rechnung) sinddie Eigenraume orthogonal zueinander. Somit lassen sich Orthonormalbasender Eigenraume zu einer Orthonormalbasis des gesamten Raums zusammen-setzen.
Bemerkung 1.3.11 (Verzicht auf den Fundementalsatz der Algebra). Im reellenFall kann man auch ohne den Fundamentalsatz der Algebra auskommen. Mankann namlich mit dem folgenden analytischen Trick auf die Existenz einesreellen Eigenwertes schließen:
Sei n ∈ N und sei A ∈Mn×n(R) eine symmetrische Matrix. Dazu betrach-ten wir die Abbildung
R : Sn−1 −→ Rx 7−→ 〈x,A · x〉2
wobei Sn−1 := {x ∈ Rn | ‖x‖2 = 1} die Einheitssphare in Rn ist. Wir zeigennun, dass diese Abbildung ein Minimum λ besitzt und dass MinimalstellenEigenvektoren zum Eigenwert λ sind:
• Existenz eines Minimums: Die Abbildung R ist stetig (sogar glatt) undSn−1 ist kompakt. Also besitzt R ein Minimum λ ∈ R.
• Das Minimum ist ein Eigenwert von A: Sei v ∈ Sn−1 eine Minimal-stelle von R. Mithilfe der Methode der Lagrangemultiplikatoren fur dieBestimmung von Extrema der glatten Funktion R (die sich auch glattauf eine Umgebung von Sn−1 fortsetzen lasst) unter Nebenbedingungen(Analysis II) sieht man dann, dass A · v = λ · v ist.
Korollar 1.3.12 (Wurzeln aus”nicht-negativen“ symmetrischen Matrizen). Sei
n ∈ N und sei A ∈ Mn×n(R) eine symmetrische Matrix mit σR(A) ⊂ R≥0.Dann gibt es eine Matrix B ∈Mn×n(R) mit
B2 = A.
Beweis. Wir wenden den Konjugationstrick an: Nach dem Spektralsatz fursymmetrische Matrizen (Korollar 1.3.9) ist A diagonalisierbar. Da σR(A) ⊂R≥0 ist, existieren somit λ1, . . . , λn ∈ R≥0 und eine Matrix S ∈ O(n) mit
A = S ·D · S−1,
wobei
D :=
λ1 . . . 0...
. . ....
0 . . . λn
.

1.3. Spektralsatze 41
Wir betrachten dann die Matrix B := S−1 ·√D · S ∈ Mn×n(R), wobei wir
die suggestive Notation
√D :=
√λ1 . . . 0...
. . ....
0 . . .√λn
vewenden. Nach Konstruktion gilt
B2 = S−1 ·√D · S · S−1 ·
√D · S = S−1 ·
√D ·√D · S = S−1 ·D · S = A,
wie gewunscht.
Ausblick 1.3.13 (Spektralkalkul). Allgemeiner kann man auf diagonalisierbare(insbesondere auf symmetrische) Matrizen mit demselben Trick auch andereFunktionen sinnvoll anwenden. Die systematische Betrachtung solcher Kon-struktion fuhrt zum sogenannten Spektralkalkul in der Funktionalanalysis.
Aus dem Spektralsatz erhalten wir zudem auch das folgende Kriterium furpositive Definitheit symmetrischer Matrizen:
Korollar 1.3.14 (Definitheitskriterium fur symmetrische Matrizen). Sei n ∈ Nund sei A ∈Mn×n(R) eine symmetrische Matrix. Dann ist die Matrix A
genau dann positiv definit, wenn σR(A) ⊂ R>0
genau dann positiv semi-definit, wenn σR(A) ⊂ R≥0
genau dann negativ definit, wenn σR(A) ⊂ R<0
genau dann negativ semi-definit,wenn σR(A) ⊂ R≤0
genau dann indefinit, wenn σR(A) ∩ R>0 6= ∅ 6= σR(A) ∩ R<0.
Beweis. Nach dem Spektralsatz fur symmetrische Matrizen (Korollar 1.3.9gibt es S ∈ O(n) und λ1, . . . , λn ∈ R mit
S ·A · S−1 =
λ1 . . . 0...
. . ....
0 . . . λn
=: D;
insbesondere ist σR(A) = {λ1, . . . , λn}. Da die Matrix S orthogonal ist,folgt A = ST ·D · S.
Wir zeigen nur das Kriterium fur positive Definitheit (die anderen Fallegehen analog):
Sei A positiv definit und j ∈ {1, . . . , n}. Mit vj := S−1 · ej erhalten wirdann
0 < vTj ·A · vj
= vTj · ST ·D · S · vj = (S · vj)T ·D · (S · vj) = eT
j ·D · ej= λj .

42 1. Euklidische/Unitare Vektorraume
Es gelte umgekehrt λj > 0 fur alle j ∈ {1, . . . , n}. Sei x ∈ Rn und y := S ·x.Dann folgt
xT ·A · x = (S · x)T ·D · (S · x) = yT ·D · y =
n∑
j=1
λj · y2j .
Ist x 6= 0, so ist y 6= 0 und es gibt ein j ∈ {1, . . . , n} mit yj 6= 0. Wegenλ1, . . . , λn ∈ R>0 erhalten wir somit
xT ·A · x ≥ λj · y2j > 0.
Also ist A positiv definit.
Bemerkung 1.3.15 (das Hauptminorenkriterium). In der Praxis kann auch dasfolgende Kriterium fur positive Definitheit nutzlich sein: Sei n ∈ N und seiA ∈ Mn×n(R) eine symmetrische Matrix. Dann ist A genau dann positivdefinit, wenn
∀j∈{1,...,n} detA(j) > 0
ist. Dabei bezeichnet A(j) die Matrix, die man aus A erhalt, indem mandie (j + 1)-te, . . . , n-te Zeile und Spalte von A streicht. Die DeterminantendetA(j) bezeichnet man auch als Hauptminoren von A. Dies kann man zumBeispiel durch Induktion uber n beweisen (Ubungsaufgabe).
Symmetrische Matrizen treten zum Beispiel auf naturliche Weise in dermehrdimensionalen Analysis auf (als Hesse-Matrizen gutartiger Funktionen)oder in der algebraischen Topologie (im Kontext von Schnittformen).
Ausblick 1.3.16 (Hesse-Matrix). Definitheitskriterien sind (analog zum ein-dimensionalen Fall) in der mehrdimensionalen Analysis bei der Suche nachlokalen Extrema nutzlich:
Sei n ∈ N und sei f ∈ C2(Rn,R). Ist x ∈ Rn eine lokale Extremalstellevon f , so gilt f ′(x) = 0. Dies ist also eine notwendige Bedingung fur lokaleExtremalstellen.
Ist x ∈ Rn mit f ′(x) = 0, so gibt es das folgende hinreichende Kriterium:Die zweite Ableitung f ′′(x) ist eine symmetrische Bilinearform auf Rn. Istdiese positiv definit, so ist x eine isolierte lokale Minimalstelle. Ist f ′′(x)negativ definit, so ist x eine isolierte lokale Maximalstelle. Ist f ′′(x) indefinit,so ist x keine lokale Extremalstelle.
Indem man eine Matrix zu f ′′(x) mithilfe der partiellen Ableitungen be-rechnet (sogenannte Hesse-Matrix ), kann man nun Definitheitskriterien fursymmetrische Matrizen anwenden.

1.3. Spektralsatze 43
À
Á
{x ∈ R2 | x21 + x2
2 = 1}
À
Á
{x ∈ R2 | 2 · x21 + x2
2 = 1}
À
Á
{x ∈ R2 | x21 − x2
2 = 1}
Abbildung 1.5.: Beispiele fur ebene Quadriken
1.3.3 Hauptachsentransformation
Eine schone geometrische Anwendung des Spektralsatzes fur symmetrischeMatrizen ist die sogenannte Hauptachsentransformation. Wir beschrankenuns der Einfachheit halber auf
”zentrierte“ Quadriken (der allgemeine Fall
kann daraus aber durch quadratischer Erganzung erhalten werden und brauchtkeine weiteren theoretischen Hilfsmittel). Quadriken sind Losungsmengen von(homogenen) quadratischen Gleichungen:
Definition 1.3.17 (Quadrik). Sei n ∈ N, sei A ∈ Mn×n(R) symmetrisch undsei c ∈ R. Dann ist die zugehorige Quadrik definiert als
Q(A, c) := {x ∈ Rn | xT ·A · x = c} ⊂ Rn.
Beispiel 1.3.18. Einfache Beispiele fur ebene Quadriken sind (Abbildung 1.5):
Q
((1 00 1
), 1
)= {x ∈ R2 | x2
1 + x22 = 1} (Einheitskreis)
Q
((2 00 1
), 1
)= {x ∈ R2 | 2 · x2
1 + x22 = 1} (Ellipse)
Q
((1 00 −1
), 1
)= {x ∈ R2 | x2
1 − x22 = 1} (Hyperbel)
Mithilfe des Spektralsatzes fur symmetrische Matrizen lassen sich Quadri-ken vollstandig klassifizieren. Insbesondere liefert dies auch eine Klassifikationder sogenannten Kegelschnitte.
Korollar 1.3.19 (Hauptachsentransformation). Sei n ∈ N, sei A ∈ Mn×n(R)symmetrisch und sei c ∈ R. Dann gibt es λ1, . . . , λn ∈ R und eine Isome-trie f ∈ Isom(Rn, ‖ · ‖2) mit

44 1. Euklidische/Unitare Vektorraume
Q(A, c) = f
({x ∈ Rn
∣∣∣∣n∑
j=1
λj · x2j = c
}).
Man bezeichnet in dieser Situation die Geraden f(R · e1), . . . , f(R · en) (diepaarweise orthogonal zueinander stehen) auch als Hauptachsen von Q(A, c).
Beweis. Nach dem Spektralsatz fur symmetrische Matrizen (Korollar 1.3.9)gibt es eine Matrix S ∈ O(n) und λ1, . . . , λn ∈ R mit
ST ·A · S = S−1 ·A · S =
λ1 . . . 0...
. . ....
0 . . . λn
=: D.
Sei f := L(S) = L((ST)−1) : Rn −→ Rn. Dann ist f eine lineare Isometriebezuglich der euklidischen Norm und
Q(A, c) = {x ∈ Rn | xT ·A · x = c}={x ∈ Rn
∣∣ xT · (S ·D · ST) · x = c}
={x ∈ Rn
∣∣ (ST · x)T ·D · (ST · x) = c}
= f({x ∈ Rn
∣∣ xT ·D · x = c}).
Beispiel 1.3.20. Sei
Q :={x ∈ R2
∣∣∣ 5
4· x2
1 −3
2·√
3 · x1 · x2 −1
4· x2
2 = 1}⊂ R2.
Um zu verstehen, was dies fur ein geometrisches Gebilde ist, fuhren wir dieHauptachsentransformation durch: Als ersten Schritt schreiben wir Q alsQuadrik einer geeigneten symmetrischen Matrix: Sei
A :=
(5/4 −3/4 ·
√3
−3/4 ·√
3 −1/4
)∈M2×2(R).
Dann ist A symmetrisch und
Q = Q(A, 1).
Als nachsten Schritt bestimmen wir Hauptachsen fur Q. Dazu bestimmen wireine Eigenbasis von A. Mithilfe des charakteristischen Polynoms etc. findetman heraus, dass
(v1 :=
(−√
3/21/2
), v2 :=
(1/2√3/2
))
eine Orthonormalbasis aus Eigenvektoren von A ist. Die Eigenwerte sinddabei 2 bzw. −1. Also sind R · v1 und R · v2 Hauptachsen von Q und wir

1.3. Spektralsatze 45
À
Á
Q
Hauptachsen
Abbildung 1.6.: Eine Hyperbel und ihre Hauptachsen
erhaltenQ = f
({x ∈ R2 | 2 · x2
1 − x22 = 1}
)
mit f := L((v1 | v2)). Es handelt sich daher um eine Hyperbel (Abbil-dung 1.6).
Ausblick 1.3.21 (Tragheitsmomente/Deviationsmomente). In der Physik wer-den Tragheitsmomente durch Tensoren beschrieben. Diese Tensoren kannman durch reelle Matrizen darstellen, die in dieser Situation symmetrischsind. Mithilfe der Hauptachsentransformation lassen sich (orthogonale) Ko-ordinaten finden, fur die die zugehorige Tragheitsmomentenmatrix eine Dia-gonalmatrix ist (d.h. in diesen Koordinaten verschwinden die sogenanntenDeviationsmomente). Solche Koordinaten sind z.B. bei der analytischen Un-tersuchung von Kreiseln hilfreich.
1.3.4 Der Tragheitssatz und die Signatur
Nach dem Spektralsatz sind reelle symmetrische Matrizen diagonalisierbarund man kann solche Diagonalisierungen immer durch orthogonale Matri-zen realisieren. Insbesondere ist dies also beim Basiswechsel fur Matrizenvon symmetrischen Bilinearformen hilfreich. Allgemeiner gilt fur solche Ba-siswechsel sogar:
Satz 1.3.22 (Tragheitssatz von Sylvester). Sei n ∈ N und sei A ∈ Mn×n(R)symmetrisch.
1. Dann gibt es eine Matrix S ∈ GLn(R) und r, k ∈ N mit

46 1. Euklidische/Unitare Vektorraume
ST ·A · S =
Ir 0 00 −Ik 00 0 0
.
2. Ist S ∈ GLn(R) wie im ersten Teil, so gilt r = n+ und k = n−, wobei
n+ := max{
dimR U∣∣ U ⊂ Rn ist ein Untervektorraum
und fur alle x ∈ U \ {0} ist xT ·A · x > 0},
n− := max{
dimR U∣∣ U ⊂ Rn ist ein Untervektorraum
und fur alle x ∈ U \ {0} ist xT ·A · x < 0}
Insbesondere sind die Zahlen r und k im ersten Teil unabhangig von S.
Man bezeichnet die Differenz n+ − n− auch als Signatur von A.
Beweis. Zu 1. Nach dem Spektralsatz fur symmetrische Matrizen (Korol-lar 1.3.9) gibt es S ∈ O(n) und λ1, . . . , λn mit
ST ·A · S = S−1 ·A · S =
λ1 . . . 0...
. . ....
0 . . . λn
=: D.
Ohne Einschrankung konnen wir dabei annehmen, dass die Eigenwerte wiefolgt sortiert sind (ansonsten tauschen wir die Spalten von S entsprechend):
λ1, . . . , λr > 0,
λr+1, . . . , λr+k < 0,
λr+k+1, . . . , λn = 0.
Dann hat die Matrix
( 1√λ1
·s1
∣∣∣ · · ·∣∣∣ 1√
λr·sr∣∣∣ −1√|λr+1|
·sr+1
∣∣∣ · · ·∣∣∣ −1√|λr+k|
·sr+k∣∣∣ sr+k+1
∣∣∣ · · ·∣∣∣ sn
),
die man durch Reskalieren der Spalten s1, . . . , sn von S erhalt, die gewunschteEigenschaft (nachrechnen).
Zu 2. Sei
b := B(A) : Rn × Rn −→ R(x, y) 7−→ xT ·A · y
die von A induzierte symmetrische Bilinearform und sei S ∈ GLn(R) wie imersten Teil des Satzes.
Wir zeigen, dass r = n+ ist (der Beweis von k = n− geht analog): NachWahl von S ist b auf dem Untervektorraum

1.3. Spektralsatze 47
S−1(SpanR({e1, . . . , er})
)⊂ Rn.
positiv definit (nachrechnen). Insbesondere ist daher r ≤ n+.Angenommen, es gilt r < n+, d.h. es gibt einen Untervektorraum W ⊂ Rn
mit dimRW > r, auf dem b positiv definit ist. Aus der Dimensionsformel furkomplementare Untervektorraume erhalten wir dann, dass
W ∩ S−1(SpanR({er+1, . . . , en})
)
nicht Dimension 0 hat. Insbesondere gibt es in diesem Durchschnitt einenVektor x 6= 0. Wegen x ∈W gilt einerseits b(x, x) > 0. Nach Wahl von S ist bauf dem rechten Untervektorraum negativ semi-definit; daher gilt b(x, x) ≤ 0.Dies ist ein Widerspruch.
Also ist r = n+, wie behauptet.
Die Bezeichnung des Satzes als Tragheitssatz geht auf die Originalarbeitvon Sylvester zuruck (da die Zahlen n+ und n− zu trage sind, sich unterBasiswechsel fur Bilinearformen zu andern).
Ausblick 1.3.23 (die Signatur in der Topologie). Der Sylvestersche Tragheits-satz zeigt, dass auch die Signatur von symmetrischen Bilinearformen aufendlich-dimensionalen reellen Vektorraume wohldefiniert ist (da sie unter Ba-siswechsel invariant ist).
Diese Invariante wird zum Beispiel in der algebraischen Topologie verwen-det: Dort treten auf naturliche Weise bei Mannigfaltigkeiten symmetrischeBilinearformen (die sogenannte Schnittform) auf. Da es auf dem entsprechen-den endlich-dimensionalen reellen Vektorraum jedoch keine ausgezeichneteBasis ist, benotigt man eine Invariante von symmetrischen Bilinearformen,die nicht auf die Wahl einer Basis angewiesen ist. Die Signatur ist eine solcheInvariante und fuhrt dann zur Signatur von Mannigfaltigkeiten.

48 1. Euklidische/Unitare Vektorraume

2
Normalformen II: Modulnuber Hauptidealringen
Wir kommen nun zum Klassifikationsproblem fur Endomorphismen bzw.von Matrizen bis auf Ahnlichkeit zuruck. Das Hauptziel ist dabei, die Exi-stenz der Jordanschen Normalform zu beweisen. Wir werden dieses Pro-blem durch einen algebraischen Trick auf ein anderes Klassifikationsproblemzuruckfuhren, das eine schone und auch auf andere Probleme anwendbareLosung besitzt: die Klassifikation von endlich erzeugten Moduln uber Haupt-idealringen.
In diesem Kapitel werden wir die Grundlagen uber Ringe (eine Ab-schwachung von Korpern) und Moduln (das Analogon von Vektorraumenaber fur Ringe) erklaren und die Klassifikation von endlich erzeugten Mo-duln uber Hauptidealringen durchfuhren.
Uberblick uber dieses Kapitel.
2.1 Zerlegung von Endomorphismen und Moduln 502.2 Ringe 522.3 Moduln 572.4 Hauptidealringe 732.5 Moduln uber Hauptidealringen 87
Schlusselbeispiel. Polynomringmoduln, die von Endomorphismen auf Vek-torraumen induziert werden.

50 2. Normalformen II: Moduln uber Hauptidealringen
2.1 Zerlegung von Endomorphismen und Moduln
Um die Strategie fur die Klassifikation von Endomorphismen geeignet for-mulieren zu konnen, fuhren wir etwas Terminologie fur Endomorphismen einbzw. Zerlegungen von Vektorraumen mit Endomorphismen in kleinere Bau-steine.
Definition 2.1.1 (invariant, zyklisch, irreduzibel). Sei K ein Korper, sei V einK-Vektorraum und sei f : V −→ V ein Endomorphismus.
• Ein Untervektorraum U ⊂ V ist f -invariant, wenn f(U) ⊂ U gilt.
• Der Vektorraum U ist f -zyklisch, wenn es einen Vektor v ∈ V gibt, furden {fn(v) | n ∈ N} ein Erzeugendensystem von V ist.
• Der Vektorraum V ist f -reduzibel, wenn es nicht-triviale komplementaref -invariante Untervektorraume U,W ⊂ V gibt (d.h. es gilt f(U) ⊂ U ,f(W ) ⊂ W sowie U ∩W = {0} und U + W = V , aber U 6= {0} undW 6= {0}).
• Der Vektorraum V ist f -irreduzibel, wenn er nicht f -reduzibel ist.
Beispiel 2.1.2 (diagonalisierbarer Endomorphismus). Sei K ein Korper, seienλ1, λ2 ∈ K und sei
f : K2 −→ K2
x 7−→(λ1 00 λ2
)· x.
Die Untervektorraume K · e1 und K · e2 sind f -invariant und komplementar.Also ist K2 ein f -reduzibler Vektorraum.
Ist λ1 = λ2, so ist K2 nicht f -zyklisch (denn fur alle v ∈ K2 und n ∈ Ngilt dann fn(v) ∈ K · v). Ist λ1 6= λ2, so ist K2 ein f -zyklischer Vektorraum,denn (e1 + e2, f(e1 + e2) = λ1 · e1 + λ2 · e2) ist eine Basis von K2.
Beispiel 2.1.3 (Jordanblock). Sei K ein Korper, sei λ ∈ K und sei
f : K2 −→ K2
x 7−→(λ 10 λ
)· x.
Der Untervektorraum K ·e1 ⊂ K2 ist f -invariant (da e1 ein Eigenvektor von fist), aber der Vektorraum K2 ist f -irreduzibel (eindimensionale f -invarianteUntervektorraume sind Eigenraume und die Summe der geometrischen Viel-fachheiten aller Eigenwerte von f ist nur 1). Außerdem ist K2 ein f -zyklischerVektorraum, denn (e2, f(e2)) ist eine Basis von K2.

2.1. Zerlegung von Endomorphismen und Moduln 51
Bei der Untersuchung orthogonaler bzw. selbstadjungierter Matrizen hatuns das Standardskalarprodukt via Orthogonalitat fur jeden invarianten Un-terraum einen invarianten komplementaren Unterraum geliefert. Im allgemei-nen Fall besitzt jedoch nicht jeder invariante Unterraum einen invariantenkomplementaren Unterraum, wie dieses Jordanblock-Beispiel zeigt.
Beispiel 2.1.4 (Endomorphismus ohne Eigenwerte). Sei ϕ ∈ (0, 2 ·π) \ {π} undsei
f : R2 −→ R2
x 7−→ R(ϕ) · x.
Dann besitzt R2 keine eindimensionalen f -invarianten Untervektorraume (daf keine reellen Eigenwerte besitzt). Also ist R2 ein f -irreduzibler Vektorraum.Außerdem ist (e1, f(e1)) eine Basis von R2, d.h. der Vektorraum R2 ist f -zyklisch. Aber f kann nicht durch eine Jordanblock dargestellt werden (da fja keine Eigenwerte besitzt).
Um die Existenz der Jordanschen Normalform (Satz I.6.4.11) fur kom-plexe Matrizen zu beweisen, genugt es also (in Kombination mit einer In-duktion uber die Dimension des unterliegenden Vektorraums) die folgendenAussagen fur Endomorphismen f : V −→ V eines endlich-dimensionalen C-Vektorraums V zu zeigen:
• Ist V ein f -irreduzibler Vektorraum, so ist V bereits f -zyklisch.
• Ist V ein f -irreduzibler (und damit f -zyklischer) Vektorraum, so kannf bezuglich einer geeigneten Basis durch einen Jordanblock dargestelltwerden.
Fur die Eindeutigkeit mussen wir zusatzlich nachweisen, dass diese Zerlegun-gen im wesentlichen eindeutig sind.
Die Schlusselidee ist, Endomorphismen f : V −→ V eines K-Vektor-raums V mit dem folgenden Trick in eine andere algebraische Struktur zuubersetzen: Dazu betrachten wir die
”Skalarmultiplikation“
K[T ]× V −→ V( m∑
j=1
aj · T j , x)7−→
m∑
j=1
aj · f j(x)
von K[T ] auf V (dabei bezeichnet f j die j-fache Komposition von f mit sichselbst). Nun ist K[T ] zwar kein Korper, aber immer noch gut genug fur dasKlassifikationsziel. Durch diese Konstruktion wird V zu einem sogenanntenModul uber dem Ring K[T ]. Die wesentliche Beobachtung ist dabei, dass sichdie grundlegenden Eigenschaften von f : V −→ V wie Irreduzibilitat etc. anEigenschaften des K[T ]-Moduls V ablesen lassen, die sich wiederum durchBerechnungen mit Polynomen bestimmen lassen. Diese Theorie werden wirin den folgenden Abschnitten entwickeln.

52 2. Normalformen II: Moduln uber Hauptidealringen
2.2 Ringe
Ringe sind grob gesagt Korper, in denen man auf die Existenz von multipli-kativen Inversen (und manchmal auch auf die Kommutativitat der Multipli-kation oder gar auf die Existenz eines neutralen Elements bezuglich Multi-plikation) verzichtet.
2.2.1 Ringe
Wir fuhren die grundsatzlichen Begriffe uber Ringe ein; wir schranken unsdabei der Einfachheit halber auf Ringe mit Eins ein.
Definition 2.2.1 (Ring). Ein Ring ist ein Tripel (R,+, · ) bestehend aus einerMenge R und Abbildungen +, · : R×R −→ R (Addition bzw. Multiplikation)mit folgenden Eigenschaften:
• Das Paar (R,+) bildet eine abelsche Gruppe. Wir schreiben 0 fur dasneutrale Element dieser Gruppe.
• Die Multiplikation ist assoziativ und es gibt ein neutrales Elementbezuglich Multiplikation; dieses ist dann eindeutig bestimmt (nachrech-nen) und wird mit 1 bezeichnet.
• Es gilt das Distributivgesetz, d.h. fur alle x, y, z ∈ R gilt
x · (y + z) = x · y + x · z und (y + z) · x = y · x+ z · x.
Ein Ring (R,+, · ) ist kommutativ, wenn
∀x,y∈R x · y = y · x.
Beispiel 2.2.2 (Ringe).
• Alle Korper sind kommutative Ringe.
• Der Nullring besteht aus der Menge {0} mit der einzig moglichen Ad-dition bzw. Multiplikation; in diesem Fall ist 1 = 0.
• Die ganzen Zahlen Z bilden bezuglich der gewohnlichen Addition undMultiplikation einen kommutativen Ring.
• Ist K ein Korper, so ist K[T ] bezuglich der Polynomaddition bzw. Po-lynommultiplikation ein kommutativer Ring (Kapitel I.6.3.1).

2.2. Ringe 53
• Ist K ein Korper und V ein K-Vektorraum, so ist HomK(V, V ) einRing (bezuglich punktweiser Addition bzw. Abbildungskomposition alsMultiplikation); das neutrale Element der Multiplikation ist dabei idV .Ist dimK V ≥ 2, so ist dieser Ring nicht kommutativ.
Insbesondere ist auch fur n ∈ N die Menge Mn×n(K) bezuglich Matrix-addition/-multiplikation ein Ring.
Allgemeine Ringe sind viel zu wild, um vernunftig damit arbeiten zukonnen. Wir werden uns daher im folgenden zumeist auf algebraisch gut-artige Ringe einschranken.
Definition 2.2.3 (Integritatsring). Sei R ein kommutativer Ring mit 1 6= 0.Man bezeichnet den Ring R als Integritatsring, wenn er nullteilerfrei ist, d.h.,wenn
∀x,y∈R x · y = 0 =⇒ (x = 0 ∨ y = 0).
Beispiel 2.2.4. Korper sind Integritatsringe und Z ist ein Integritatsring. DieMenge R2 bildet mit komponentenweiser Addition bzw. Multiplikation einenkommutativen Ring. Dieser ist jedoch kein Integritatsring, da bzgl. dieserMultiplikation e1 · e2 = 0 gilt.
Proposition 2.2.5 (Nullteilerfreiheit von Polynomringen). Sei K ein Korper.
1. Fur alle f, g ∈ K[T ] gilt deg(f · g) = deg f + deg g.
2. Insbesondere ist K[T ] ein Integritatsring.
Beweis. Zu 1. Es genugt, die Behauptung fur f 6= 0 und g 6= 0 zu beweisen(wegen deg 0 = −∞ und den normalen Rechenregeln fur −∞).
Sei n := deg f und m := deg g. Also konnen wir f und g in der Formf =
∑nj=0 aj · T j bzw. g =
∑mj=0 bj · T j mit an 6= 0 und bm 6= 0 schreiben.
Nach Definition der Multiplikation von Polynomen ist
f · g =
( n∑
j=0
aj · T j)·( m∑
j=0
bj · T j)
=
m+n∑
j=0
( min(n,j)∑
k=max(0,j−m)
ak · bj−k)· T j
= (an · bm) · Tn+m +
m+n−1∑
j=0
( min(n,j)∑
k=max(0,j−m)
ak · bj−k)· T j .
Da K als Korper nullteilerfrei ist, ist an ·bm 6= 0. Also ist deg(f ·g) = n+m =deg f + deg g.
Zu 2. Wir wissen bereits, dass K[T ] ein kommutativer Ring ist. Es bleibtalso nur die Nullteilerfreiheit zu zeigen: Seien f, g ∈ K[T ] \ {0}. Dann istdeg f ≥ 0 und deg g ≥ 0. Mit dem ersten Teil folgt somit

54 2. Normalformen II: Moduln uber Hauptidealringen
deg(f · g) = deg f + deg g ≥ 0,
und daher insbesondere f · g 6= 0.
Bemerkung 2.2.6. Allgemeiner kann man nicht nur Polynomringe mit Kor-perkoeffizienten, sondern mit Ringkoeffizienten betrachten. Die obige Propo-sition verallgemeinert sich dann entsprechend: Ist R ein Integritatsring, so istauch der Polynomring R[T ] uber R ein Integritatsring.
2.2.2 Ringhomomorphismen
Wo Objekte (in diesem Fall Ringe) sind, sind auch die Morphismen (in diesemFall Ringhomomorphismen) nicht weit:
Definition 2.2.7 (Ringhomomorphismus). Seien R, S Ringe. Ein Ringhomo-morphismus R −→ S ist eine Abbildung f : R −→ S mit folgenden Eigen-schaften:
• Die Abbildung f ist ein Gruppenhomomorphismus der unterliegendenadditiven abelschen Gruppen, d.h. es gilt
∀x,y∈R f(x+ y) = f(x) + f(y).
• Es gilt f(1) = 1 und
∀x,y∈R f(x · y) = f(x) · f(y).
(Die Multiplikation links ist dabei die Multiplikation in R, die rechtsist die Multiplikation in S).
Analog zum Fall von Vektorraumen fuhrt man auch den Begriff der Ring-isomorphismen als Ringhomomorphismen ein, die einen inversen Ringhomo-morphismus besitzen. Die Klasse der Ringe bildet zusammen mit den Ring-homomorphismen eine Kategorie (Anhang A.2).
Beispiel 2.2.8.
• Ist R ein Ring, so existiert genau ein Ringhomomorphismus Z −→ R.
• Sei K ein Korper und sei x ∈ K. Dann ist der Einsetzungshomomor-phismus
K[T ] −→ K
p 7−→ p(x)
ein Ringhomomorphismus.
Ist p ∈ K[T ], so ist die Abbildung

2.2. Ringe 55
K −→ K
y 7−→ p(y)
im allgemeinen kein Ringhomomorphismus!
• Es gibt keinen Ringhomomorphismus Q −→ Z (wohin soll 1/2 ?) undkeinen Ringhomomorphismus F2 −→ Z oder F2 −→ Q (in F2 gilt 1+1 =0, nicht aber in Z oder Q).
Im folgenden werden wir erklaren, wie man Polynomringe mithilfe vonHomomorphismen durch eine universelle Eigenschaft charakterisieren kann.Um diese universelle Eigenschaft formulieren zu konnen, benotigen wir denBegriff der Algebren bzw. Algebrahomomorphismen:
Bemerkung 2.2.9 (Algebren, Algebrenhomomorphismus). Sei K ein Korper.Eine K-Algebra ist ein Paar (A, ∗ ), bestehend aus einem Ring A und einerAbbildung ∗ : K ×A −→ A mit folgenden Eigenschaften:
1. Die unterliegende additive Gruppe von A bildet zusammen mit ∗ einenK-Vektorraum.
2. Die Skalarmultiplikation ∗ ist mit der Ringmultiplikation vertraglich,d.h. es gilt
∀λ∈K ∀x,y∈A λ ∗ (x · y) = (λ ∗ x) · y = x · (λ ∗ y).
Im folgenden werden wir im Normalfall in Algebren sowohl die Skalar- alsauch die Ringmultiplikation mit
”·“ bezeichnen. Eine Abbildung zwischen
K-Algebren ist ein K-Algebrenhomomorphismus, wenn sie gleichzeitig einRing- und ein K-Vektorraumhomomorphismus ist.
Wichtige Beispiele fur K-Algebren sind K selbst (in diesem Fall stim-men die Ring- und die Skalarmultiplikation uberein), der Polynomring K[T ]und die Endomorphismenringe HomK(V, V ) bzw. Mn×n(K), wobei V ein K-Vektorraum und n ∈ N ist, jeweils bezuglich der bereits bekannten Ring- undK-Vektorraumstruktur.
Satz 2.2.10 (universelle Eigenschaft des Polynomrings). Sei K ein Korper.
1. Ist A eine K-Algebra und x ∈ A, so gibt es genau einen K-Algebren-homomorphismus ϕ : K[T ] −→ A mit
ϕ(T ) = x.
Ist p ∈ K[T ], so schreibt man auch kurz p(x) := ϕ(p).
2. Sei P eine K-Algebra und t ∈ P mit folgender Eigenschaft: Ist A eineK-Algebra und x ∈ A, so gibt es genau einen K-Algebrenhomomorphis-mus ϕ : P −→ A mit ϕ(t) = x. Dann gibt es genau einen K-Algebren-isomorphismus ϕ : K[T ] −→ P mit ϕ(T ) = t.

56 2. Normalformen II: Moduln uber Hauptidealringen
Beweis. Zu 1. Sei A eine K-Algebra und sei x ∈ A.Existenz. Wir definieren
ϕ : K[T ] −→ Am∑
j=0
aj · T j 7−→m∑
j=0
aj · xj .
Aus der Definition der Multiplikation auf K[T ] und den Vertraglichkeitseigen-schaften von Skalar- und Ringmultiplikation in A folgt, dass ϕ tatsachlich einK-Algebrenhomomorphismus ist. Nach Konstruktion gilt dabei ϕ(T ) = x.
Eindeutigkeit. Seien ϕ,ψ : K[T ] −→ A Algebrenhomomorphismen mit derEigenschaft ϕ(T ) = x = ψ(T ). Dann gilt fur alle f =
∑mj=0 aj ·T j (mit m ∈ N
und a0, . . . , am ∈ K), dass
ϕ(f) = ϕ
( m∑
j=0
aj · T j)
=
m∑
j=0
aj · ϕ(T j) (K-Linearitat von ϕ)
=
m∑
j=0
aj ·(ϕ(T )
)j(Multiplikativitat von ϕ)
=
m∑
j=0
aj · xj
und ebenso auch ψ(f) =∑mj=0 aj · xj . Insbesondere ist ϕ(f) = ψ(f).
Zu 2. Dies folgt mit dem ublichen Trick fur universelle Eigenschaften(Abbildung I.4.6). Wir werden diesen spater in einem anderen Kontextausfuhrlich diskutieren.
Ausblick 2.2.11 (universelle Eigenschaften). Die meisten universellen Eigen-schaften (z.B. auch die universelle Eigenschaft von Quotienten, direkten Sum-men, Produkten, . . . ) sind von der obigen Form:
• Einerseits geben sie einem eine einfache Methode, um Morphismen zukonstruieren. Dabei lassen sich im Normalfall nur entweder Morphismenaus dem Objekt oder Morphismen in das Objekt einfach charakterisie-ren. Im Fall des Polynomrings ist es nach der universellen Eigenschaftleicht, Morphismen aus dem Polynomring heraus zu konstruieren.
• Andererseits geben die universellen Eigenschaften eine Methode, umdas gegebene Objekt (bis kanonische Isomorphie) eindeutig zu charak-terisieren und damit unter anderen Objekten wiederzuerkennen.
Diese Aspekte lassen sich im Rahmen der Kategorientheorie allgemeiner for-malisieren.

2.3. Moduln 57
Beispiel 2.2.12 (Endomorphismenpolynome). Sei K ein Korper, sei V ein K-Vektorraum und sei f : V −→ V ein Endomorphismus. Dann gibt es genaueinen K-Algebrenhomomorphismus
ϕ : K[T ] −→ HomK(V, V )
mit ϕ(T ) = f . Ist p ∈ K[T ], so schreiben wir kurz p(f) := ϕ(p). Explizitergilt (nach dem obigen Beweis): Ist p =
∑mj=0 aj · T j ∈ K[T ] mit m ∈ N und
a0, . . . , am ∈ K, so ist
p(f) = ϕ(p) =
m∑
j=0
aj · f j ,
wobei f j die j-fache Komposition von f bezeichnet.
2.3 Moduln
Grob gesagt sind Moduln Vektorraume mit einer Skalarmultiplikation durchRingelemente statt Korperelemente. Viele grundlegende Eigenschaften vonVektorraumen ubertragen sich auf Moduln (alles, wofur man keine multipli-kativen Inversen von Skalaren oder die Kommutativitat der Multiplikationbenotigt). Im allgemeinen ist die Modultheorie jedoch viel verworrener alsdie Vektorraumtheorie, da Ringe viel wilder sein konnen als Korper.
2.3.1 Moduln
Wir orientieren uns bei der Definition von Moduln an der Definition vonVektorraumen:
Definition 2.3.1 (Modul, Untermodul). Sei R ein Ring. Ein R-Modul ist einTripel (V,+, · ), bestehend aus einer Menge V und Abbildungen +: V ×V −→ V bzw. · : R× V −→ V , mit folgenden Eigenschaften:
• Es ist (V,+) eine abelsche Gruppe.
• Assoziativitat. Fur alle a, b ∈ R und alle v ∈ V gilt
(a · b) · v = a · (b · v).
• Neutrale Skalarmultiplikation. Fur alle v ∈ V gilt
1 · v = v.

58 2. Normalformen II: Moduln uber Hauptidealringen
• Distributivitat. Fur alle a, b ∈ R und alle v, w ∈ V gilt
(a+ b) · v = a · v + b · v und a · (v + w) = a · v + b · w.
Ein R-Untermodul von V ist eine Teilmenge U ⊂ V mit folgenden Eigen-schaften:
• Die Abbildungen +: V ×V −→ V und · : R×V −→ V schranken sichzu Abbildungen +: U × U −→ U und · : R× U −→ U ein.
• Die Menge U bildet bezuglich dieser eingeschrankten Addition bzw.Skalarmultiplikation einen R-Modul.
Caveat 2.3.2. In diesem Zusammenhang heißt es im Singular”der Modul“
bzw. im Plural”die Moduln“ (jeweils mit Betonung auf der ersten Silbe).
Beispiel 2.3.3.
• Ist K ein Korper und V ein K-Vektorraum, so ist V ein K-Modul.Man spricht in diesem Fall aber eigentlich immer von Vektorraumenund nicht von Moduln.
• Ist R ein Ring und n ∈ N, so bildet die Menge Rn der n-Tupel mitKoeffizienten aus R (geschrieben als Spaltenvektoren) einen R-Modulbezuglich komponentenweiser Addition und Skalarmultiplikation (imFalle von Korpern: Proposition I.3.1.6).
• Ist R ein Ring und X eine Menge, so bildet die Menge Abb(X,R) allerAbbildungen X −→ R einen R-Modul bezuglich punktweiser Additionund Skalarmultiplikation (im Falle von Korpern: Beispiel I.3.1.9).
• Ist (A,+) eine abelsche Gruppe, so bildet A mit dieser Addition undder Skalarmultiplikation
Z×A −→ A
(n, v) 7−→
n mal︷ ︸︸ ︷v + · · ·+ v falls n > 0
0 falls n = 0
−(v + · · ·+ v︸ ︷︷ ︸−n mal
) falls n < 0
einen Z-Modul. Umgekehrt liefert jeder Z-Modul durch Vergessen derSkalarmultiplikation eine abelsche Gruppe (bezuglich der Addition desModuls).
Insbesondere wird auf diese Weise zum Beispiel die additive Gruppedes Korpers F2 zu einem zwei-elementigen(!) Z-Modul.

2.3. Moduln 59
Bemerkung 2.3.4 (Rechnen in Moduln). Die folgenden grundlegenden Eigen-schaften ubertragen sich wortwortlich von Vektorraumen auf Moduln (indemman die Beweise direkt in die Sprache der Moduln ubersetzt): Sei R ein Ringund sei V ein R-Modul.
• Grundlegende Rechnungen in Moduln. Die Modulversion von Proposi-tion I.3.1.10 lautet (siehe auch Caveat 2.3.5):
1. Fur alle a ∈ R gilt a · 0 = 0. Dabei bezeichnet 0 auf beiden Seitendas neutrale Element der Gruppe (V,+).
2. Fur alle v ∈ V gilt 0 · v = 0. Dabei bezeichnet 0 auf der linkenSeite das neutrale Element von (R,+) und auf der rechten Seitedas neutrale Element von (V,+).
3. Fur alle a ∈ R, v ∈ V gilt
(−λ) · v = −(λ · v) = λ · (−v).
• Charakterisierung von Untermoduln. Die Modulversion von Propositi-on I.3.1.13 lautet: Sei U ⊂ V eine nicht-leere Teilmenge. Dann ist Ugenau dann ein R-Untermodul von V , wenn folgende Bedingungen bei-de erfullt sind:
À Fur alle u, v ∈ U gilt u+ v ∈ U .
Á Fur alle a ∈ R und alle u ∈ U gilt a · u ∈ U .
• Durchschnitte. Die Modulversion von Proposition I.3.1.16 lautet: SindU,W ⊂ V Untermoduln von V , so ist auch U ∩W ein R-Untermodulvon V .
Allgemeiner gilt: Ist Z ⊂ P (V ) eine nicht-leere Menge von R-Untermo-duln von V , so ist auch der Durchschnitt
⋂Z = {v | ∀U∈Z v ∈ U} ein
R-Untermodul von V .
• Erzeugte Untermoduln. Sei E ⊂ V . Dann heißt der R-Untermodul
SpanR(E) :=⋂
U∈UE(V )
U
von E erzeugter R-Untermodul von V . Dabei bezeichnet UE(V ) ⊂P (V ) die Menge aller R-Untermoduln U von V mit E ⊂ U (insbe-sondere ist V ∈ UE(V ).
Ist SpanR(E) = V , so ist E ein Erzeugendensystem von V . Falls Vein endliches Erzeugendensystem besitzt, ist V ein endlich erzeugterR-Modul.
Analog zu Proposition I.3.1.21 erhalten wir die folgende explizite Be-schreibung erzeugter Untermoduln: Ist E ⊂ V , so gilt

60 2. Normalformen II: Moduln uber Hauptidealringen
SpanR(E) =
{ n∑
j=1
aj · vj∣∣∣∣ n ∈ N, v1, . . . , vn ∈ E, a1, . . . , an ∈ R
}.
Caveat 2.3.5 (Torsion in Moduln). Sei R ein Ring und sei V ein R-Modul. Ista ∈ R und v ∈ V mit a · v = 0, so folgt im allgemeinen nicht, dass a = 0 oderv = 0 ist! Dies ist eine der wesentlichen Komplikationen der Modultheorie.
Zum Beispiel gilt in dem Z-Modul, den wir aus der additiven Gruppevon F2 erhalten, dass 2 · 1 = 0 ist, aber 2 6= 0 (in Z) und 1 6= 0 (in F2).
Unsere ursprungliche Motivation Moduln zu untersuchen basiert auf demfolgenden zentralen Beispiel, das wir bereits in Kapitel 2.1 angedeutet haben;in Kapitel 3 werden wir die Modultheorie der folgenden Abschnitte auf solcheModuln zu Vektorraumendomorphismen anwenden.
Proposition 2.3.6 (Modul zu einem Endomorphismus). Sei K ein Korper, seiV ein K-Vektorraum und sei f : V −→ V ein Endomorphismus. Dann bildetV bezuglich der Vektorraumaddition und der Abbildung
K[T ]× V −→ V
(p, x) 7−→(p(f)
)(x)
einen K[T ]-Modul, den zu f assoziierten K[T ]-Modul V [f ].
Beweis. Da V ein K-Vektorraum ist, bildet V bezuglich Addition eine abel-sche Gruppe. Es bleiben daher nur die Aussagen uber die K[T ]-Skalarmulti-plikation zu zeigen. Diese zeigt man, indem man die beteiligten DefinitionenSchritt fur Schritt expandiert:
• Assoziativitat: Seien p, q ∈ K[T ] und v ∈ V . Da der Einsetzungshomo-morphismus K[T ] −→ HomK(V, V ) ein K-Algebrenhomomorphismusist, erhalten wir
(p · q) · v =((p · q)(f)
)(v)
=(p(f) ◦ q(f)
)(v)
=(p(f)
)((q(f)
)(v))
=(p(f)
)(q · v)
= p · (q · v).
• Neutrale Skalarmultiplikation: Sei v ∈ V . Dann gilt fur das Einspoly-nom E := 1 = T 0 ∈ K[T ] wegen f0 = idV , dass
E · v =(E(f)
)(v) = idV (v) = v.
• Distributivitat: Seien p, q ∈ K[T ] und v, w ∈ V . Analog zur Assoziati-vitat erhalten wir (da die Addition in HomK(V, V ) punktweise definiertist)

2.3. Moduln 61
(p+ q) · v =((p+ q)(f)
)(v)
=(p(f) + q(f)
)(v)
=(p(f)
)(v) +
(q(f)
)(v)
= p · v + q · v.
Da p(f) eine lineare Abbildung ist, gilt außerdem auch
p · (v + w) =(p(f)
)(v + w)
=(p(f)
)(v) +
(p(f)
)(w)
= p · v + p · w.
2.3.2 Modulhomomorphismen
Modulhomomorphismen sind strukturerhaltende Abbildungen zwischen Mo-duln:
Definition 2.3.7 (Modulhomomorphismus). Sei R ein Korper und seien V undW Moduln uber R. Eine R-lineare Abbildung von V nach W (oder ein R-Modulhomomorphismus von V nach W ) ist eine Abbildung f : V −→W mitfolgenden Eigenschaften:
• Fur alle v, v′ ∈ V gilt
f(v + v′) = f(v) + f(v′)
• und fur alle v ∈ V und alle a ∈ R gilt
f(a · v) = a · f(v).
Ein R-Modulisomorphismus ist ein Modulhomomorphismus, der einen bezug-lich Komposition inversen Modulhomomorphismus besitzt. Wenn es einenR-Modulisomorphismus V −→ W gibt, so nennen wir V und W isomorphund schreiben dafur V ∼=R W .
Die Klasse der Moduln uber einem gegebenen Ring bildet zusammen mitden Modulhomomorphismen eine Kategorie (Anhang A.2).
Beispiel 2.3.8.
• Lineare Abbildungen zwischen Vektorraumen sind selbstverstandlichauch Modulhomomorphismen.
• Gruppenhomomorphismen abelscher Gruppen (d.h. Abbildungen zwi-schen abelschen Gruppen, die mit der Addition vertraglich sind), sindZ-Modulhomomorphismen bezuglich der zugehorigen Z-Modulstrukturaus Beispiel 2.3.3.

62 2. Normalformen II: Moduln uber Hauptidealringen
• Ist R ein Ring und m,n ∈ N, so schreiben wir Mm×n(R) fur die Mengealler {1, . . . ,m}×{1, . . . , n}-indizierten Familien in R. Analog zum Fallvon Matrizen uber Korpern definieren wir die Matrixmultiplikation furMatrizen uber Ringen.
Ist R ein kommutativer Ring und ist A ∈Mm×n(R), so ist
L(A) : Rn −→ Rm
x 7−→ A · x
ein R-Modulhomomorphismus (fur die Vertraglichkeit mit der Skalar-multiplikation benotigt man die Kommutativitat von R; alternativ kannman auch durch x 7−→ (xT · AT)T fur allgemeine Ringe Modulhomo-morphismen definieren).
Proposition 2.3.9 (Modulhomomorphismen zwischen Endomorphismenmoduln).Sei K ein Korper, seien V und W Vektorraume uber K und seien f : V −→ Vund g : W −→ W Endomorphismen. Sei F : V −→ W eine K-lineare Abbil-dung. Dann sind die folgenden Aussagen aquivalent:
1. Die Abbildung F ist ein K[T ]-Modulhomomorphismus V [f ] −→W [g].
2. Es gilt F ◦ f = g ◦ F . In anderen Worten: Das Diagramm
VF //
f
��
W
g
��
VF// W
ist kommutativ.
Beweis. Es sei F ein K[T ]-Modulhomomorphismus V [f ] −→W [g]. Dann istF ◦ f = g ◦ F , denn: Sei v ∈ V . Da F mit der K[T ]-Skalarmultiplikationvertraglich ist, folgt
g(F (v)
)=(T (g)
)(F (v)
)
= T · F (v)
= F (T · v)
= F((T (f))(v)
)
= F(f(v)
).
Es gelte umgekehrt F ◦ f = g ◦ F . Dann ist F ein K[T ]-Modulhomomor-phismus, denn: Induktiv folgt aus der Voraussetzung, dass F ◦f j = gj ◦F furalle j ∈ N gilt. Ist p =
∑mj=0 aj · T j ∈ K[T ] mit aj , . . . , am ∈ R, so erhalten
wir

2.3. Moduln 63
F (p · v) = F((p(f))(v)
)= F
( m∑
j=0
aj · f j(v)
)=
m∑
j=0
aj · F(f j(v)
)
=
m∑
j=0
aj · gj(F (v)
)
= p ·(F (v)
).
Da F als K-lineare Abbildung auch mit Addition vertraglich ist, folgt dieBehauptung.
Insbesondere werden also zwei Endomorphismen von Vektorraumen genaudann durch einen Vektorraumisomorphismus ineinander ubersetzt, wenn diezugehorigen Moduln uber dem Polynomring isomorph sind.
Bemerkung 2.3.10 (Kerne von Modulhomomorphismen). Sei R ein Ring undsei f : V −→W ein R-Modulhomomorphismus. Dann bezeichnet man
ker f :={x ∈ V
∣∣ f(x) = 0}⊂ V
als Kern von f . Es gilt (nachrechnen):
1. Der Kern von f ist ein R-Untermodul von V .
2. Die Abbildung f ist genau dann injektiv, wenn ker f = {0} ist.
Beispiel 2.3.11 (die geraden Zahlen). Die Abbildung
f : Z −→ F2
n 7−→{
0 falls n gerade ist
1 falls n ungerade ist
ist ein Z-Modulhomomorphismus (wobei Z und F2 als abelsche Gruppenbezuglich Addition bzw. als Z-Moduln auffassen). Also ist ker f ein Z-Un-termodul von Z. Nach Definition gilt dabei
ker f = {n ∈ Z | n ist gerade} = {2 · k | k ∈ Z}.
2.3.3 Ideale
Ein wesentlicher Unterschied zwischen der Modul- und der Vektorraumtheo-rie ist die Tatsache, dass der R-Modul R im allgemeinen nicht-triviale Unter-moduln besitzen kann. Es ist plausibel, dass solche Untermoduln eine wichtigeRolle bei der Klassifikation der R-Moduln spielen werden. Daher bekommensie einen eigenen Namen:

64 2. Normalformen II: Moduln uber Hauptidealringen
Definition 2.3.12 (Ideal). Sei R ein Ring. Ein (linksseitiges) Ideal in R istein R-Untermodul des R-Moduls R.
Beispiel 2.3.13.
• Ist K ein Korper, so sind {0} und K die einzigen Ideale in K (nach-rechnen).
• Ist n ∈ Z, so ist die Teilmenge n · Z = {a · n | a ∈ Z} von Z einIdeal im Ring Z der ganzen Zahlen (nachrechnen). Die Mengen N und{0} ∪ {2 · k + 1 | k ∈ Z} sind keine Ideale in Z.
• Ist K ein Korper, ist V ein K-Vektorraum und ist U ⊂ V , so istdie Menge {f ∈ HomK(V, V ) | f |U = 0} ein (linksseitiges) Idealin HomK(V, V ).
Bemerkung 2.3.14 (Kerne als Ideale). Seien R, S Ringe und sei ϕ : R −→ Sein Ringhomomorphismus. Dann bezeichnet man
kerϕ :={x ∈ R
∣∣ ϕ(x) = 0}⊂ R
als Kern von ϕ. Es gilt (nachrechnen!):
1. Der Kern von ϕ ist ein Ideal in R.
2. Der Ringhomomorphismus ϕ ist genau dann injektiv, wenn kerϕ = {0}ist.
Ausblick 2.3.15. Ideale sind auch noch aus einem weiteren Grund in derRingtheorie von Bedeutung: Ideale sind namlich genau die Teilmengen vonRingen, die als Kerne von Ringhomomorphismen auftreten konnen, undkonnen verwendet werden, um sogenannte Quotientenringe und Quotien-tenkorper zu konstruieren. Dies werden wir im Rahmen der Korpertheoriein der Algebra systematisch untersuchen.
2.3.4 Quotientenmoduln
Um Moduln insgesamt besser verstehen zu konnen, benotigen wir außer Un-termoduln auch die bereits fur Vektorraume bekannten Konstruktionstech-niken der Quotientenmoduln und der direkten Summen.
Wir beginnen mit der Definition der Quotientenmoduln; dabei verwendenwir wie im Fall von Vektorraumen eine geeignete Aquivalenzrelation (die allesvergisst, was in dem gegebenen Untermodul passiert, Proposition I.3.4.13und I.3.4.14):
Proposition 2.3.16 (Quotienten nach Untermoduln). Sei R ein Ring, sei Vein R-Modul, sei U ⊂ V ein Untermodul und sei ∼U die Relation auf V , diedurch

2.3. Moduln 65
{(v, w) ∈ V × V
∣∣ v − w ∈ U}⊂ V × V
definiert ist. Wir schreiben dann V/U := V/ ∼U .
1. Fur alle v, w ∈ V gilt
v ∼U w ⇐⇒ v + U = w + U
2. Die Relation ∼U ist eine Aquivalenzrelation auf V .
3. Ist v ∈ V , so ist die von v reprasentierte Aquivalenzklasse bezuglich ∼Uder affine Untermodul v + U = {v + u | u ∈ U}.
Beweis. Der Beweis im Fall von Vektorraumen hat an keiner Stelle verwendet,dass die Skalare aus einem Korper stammen. Daher konnen wir den Beweiswortlich ubernehmen:
Zu 1. Seien v, w ∈ V . Gilt v ∼U w, so ist u := v − w ∈ U , und damit
v + U = (w + u) + U = w + (u+ U) = w + U.
Gilt umgekehrt v + U = w + U , so folgt insbesondere, dass es ein u ∈ Umit v + 0 = w + u gibt. Dann ist aber
v − w = u ∈ U.
Zu 2. Reflexivitat von ∼U ist klar. Symmetrie von ∼U folgt, da U alsUntermodul unter additiven Inversen abgeschlossen ist. Transitivitat ergibtsich, da U als Untermodul unter Addition abgeschlossen ist.
Zu 3. Dies ist eine einfach Rechnung (ahnlich zum ersten Teil).
Proposition 2.3.17 (Quotientenmodul). Sei R ein Ring, sei V ein R-Modul,sei U ⊂ V ein Untermodul.
1. Die Abbildungen
· : R× V/U −→ V/U
(a, v + U) 7−→ (a · v) + U,
+: V/U × V/U −→ V/U
(v + U,w + U) 7−→ (v + w) + U
sind wohldefiniert.
2. Die Menge V/U bildet bezuglich der obigen Skalarmultiplikation undAddition einen R-Modul.
Man bezeichnet dann V/U mit dieser Struktur als Quotientenmodul von Vnach U oder auch als V modulo U .
Beweis. Auch in diesem Fall lasst sich der Beweis von Vektorraumen (Pro-position I.3.4.14) ohne Schwierigkeiten auf Moduln ubertragen.

66 2. Normalformen II: Moduln uber Hauptidealringen
Mon
tag
Sonnt
ag
Samstag
Freitag
Don
nerstag
Mittwoch
Diensta
g
[0][1]
[2]
[3][4]
[5]
[6]
1
2
3
4
567
8
9
10
11 12
[0] [1][2][3][4]
[5][6][7][8][9][10][11]
C
Cis
/Des
D
Dis/Es
E
FFis/G
es
G
Gis/As
A
Ais/B H
[0] [1][2][3][4]
[5][6][7][8][9][10][11]
Abbildung 2.1.: Moduln im Alltag
Beispiel 2.3.18. Sei n ∈ Z>0. Dann ist n ·Z ein Untermodul des Z-Moduls Z.Der Quotientenmodul Z/nZ := Z/(n · Z) besteht dann aus genau n Elemen-ten und die Addition bzw. Skalarmultiplikation erfolgt
”modulo n“, d.h. es
werden nur die Reste bezuglich Division durch n betrachtet.Genauer: Sei n ∈ N>0. Dann ist
Z/nZ = {0 + n · Z, 1 + n · Z, . . . , (n− 1) + n · Z} = {[0], . . . , [n− 1]}.
Sind k,m ∈ {0, . . . , n− 1} und a ∈ Z, so gilt (im Z-Modul Z/nZ)
[k] + [m] = [r] und a · [k] = [s],
wobei r und s die Reste von k +m bzw. a · k bei Division durch n sind.Der Modul Z/7Z kann verwendet werden, um die Arithmetik von Wo-
chentagen zu simulieren, der Modul Z/12Z kann verwendet werden, um dieArithmetik von Stunden oder Halbtonen (in der gleichstufigen Stimmung) zumodellieren (Abbildung 2.1).
Das Objekt Z/nZ tritt an verschiedenen Stellen in der Algebra mit leichtunterschiedlichem Fokus auf: so wie hier als Z-Modul oder als Baustein derGruppentheorie (als abelsche Gruppe) oder als Ring (als Quotientenring desIdeals n · Z in Z).
Caveat 2.3.19. Sei R ein Ring, sei V ein R-Modul und seien U,W ⊂ VUntermoduln mit U ∼=R W . Dann folgt im allgemeinen nicht, dass die Quo-tientenmoduln V/U und V/W isomorph sind!
Zum Beispiel sind die Untermoduln Z und 2 · Z von Z als Z-Moduln iso-morph, aber Z/Z hat nur ein Element, wohingegen Z/2Z aus genau zweiElementen besteht.

2.3. Moduln 67
Statt mit der Konstruktion von Quotientenmoduln bietet es sich oft an,mit der universellen Eigenschaft bzw. mit dem Homomorphiesatz zu arbeiten:
Satz 2.3.20 (universelle Eigenschaft von Quotienten). Sei R ein Ring, sei Vein R-Modul und sei U ⊂ V ein Untervektorraum. Dann besitzt der Quoti-entenmodul V/U zusammen mit der kanonischen Projektion
πU : V −→ V/U
v 7−→ v + U
die folgende universelle Eigenschaft: Fur jeden R-Modul W und jeden Mo-dulhomomorphismus f : V −→ W mit U ⊂ ker f gibt es genau einen Modul-homomorphismus f : V/U −→W mit
f ◦ πU = f.
Vf//
πU
��
W
V/U
∃! f
==
In anderen Worten: Fur jeden R-Modul W ist die R-lineare Abbildung
HomR(πU ,W ) : HomR(V/U,W ) −→{f ∈ HomR(V,W )
∣∣ f |U = 0}
g 7−→ g ◦ πU
zwischen den entsprechenden Homomorphismenraumen bijektiv (und somitein Isomorphismus von R-Moduln).
Beweis. Der Beweis fur den Vektorraumfall funktioniert auch fur Moduln:Sei f : V −→W ein R-Modulhomomorphismus mit U ⊂ ker f .
• Existenz von f : Die Abbildung
f : V/U −→W
v + U 7−→ f(v)
ist wegen U ⊂ ker f wohldefiniert und außerdem R-linear (nachrech-nen). Nach Konstruktion ist f ◦ πU = f .
• Eindeutigkeit von f : Die Eindeutigkeit folgt, da πU surjektiv ist.
Satz 2.3.21 (Homomorphiesatz fur Moduln). Sei R ein Modul und sei f : V −→W ein R-Modulhomomorphismus. Dann ist
f : V/ ker f −→ im f :={f(v)
∣∣ v ∈ V}
v + ker f 7−→ f(v)
ein (wohldefinierter!) Isomorphismus von R-Moduln.

68 2. Normalformen II: Moduln uber Hauptidealringen
Beweis. Dies konnen wir wie im Vektorraumfall beweisen: Nach Definitionvon ker f ist f wohldefiniert. Da R-lineare Abbildungen genau dann Modul-isomorphismen sind, wenn sie bijektiv sind (das ist die Modulversion vonProposition I.4.4.8), genugt es zu zeigen, dass im f = im f und ker f = {0 +ker f} gilt:
• Bild von f : Nach Konstruktion ist im f = im f .
• Kern von f : Es gilt
ker f = {v + ker f | f(v) = 0}= {v + ker f | v ∈ ker f}= {0 + ker f}.
Korollar 2.3.22 (zyklische Moduln). Sei R ein Ring und sei V ein R-Modul.Dann sind die folgenden Aussagen aquivalent:
1. Der R-Modul V ist zyklisch, d.h. von einem Element erzeugt.
2. Es gibt ein Ideal A ⊂ R mit V ∼=R R/A.
Beweis. Sei V zyklisch, d.h. es gibt ein v ∈ V mit V = SpanR{v} = R · v.Also ist
f : R −→ V
a 7−→ a · v
ein surjektiver R-Modulhomomorphismus und mit dem Homomorphiesatz(Satz 2.3.21) folgt, dass das Ideal A := ker f ⊂ R die Eigenschaft
R/A = R/ ker f ∼=R im f = V
besitzt.Es gebe umgekehrt ein Ideal A ⊂ R mit V ∼=R R/A; sei f : R/A −→
V ein R-Modulisomorphismus. Wegen R/A = SpanR{1 + A} ist R/A voneinem Element erzeugt. Da f surjektiv und R-linear ist, ist dann auch dasBild V = im f = SpanR{f(1 + A)} von einem Element erzeugt (und damitzyklisch).
Der Begriff des zyklischen Moduls ist dabei naturlich an das Beispiel Z/nZmit n ∈ N>0 (Beispiel 2.3.18, Abbildung 2.1) angelehnt.
2.3.5 Direkte Summen
Wie Vektorraume lassen sich auch Moduln durch direkte Summen kombinie-ren. Statt nur die direkte Summe von zwei Moduln einzufuhren, werden wiruns gleich mit allgemeinen direkten Summen befassen:

2.3. Moduln 69
Definition 2.3.23 (direktes Produkt/direkte Summe). Sei R ein Ring, sei Ieine Menge und sei (Vi)i∈I eine Familie von R-Moduln.
• Die Menge
∏
i∈IVi :=
{f ∈ Abb
(I,⋃
i∈IVi
) ∣∣∣ ∀i∈I f(i) ∈ Vi}
ist bezuglich komponentenweiser Addition bzw. Skalarmultiplikationein R-Modul, das Produkt der (Vi)i∈I . Die Elemente von
∏i∈I Vi no-
tieren wir oft statt als Abbildungen auch als Familien (xi)i∈I (wobeidann xi ∈ Vi fur jedes i ∈ I gilt).
Ist j ∈ I, so schreiben wir
πj :∏
i∈IVi −→ Vj
(xi)i∈I 7−→ xj
fur die Projektion auf den j-ten Faktor und
ij : Vj 7−→∏
i∈IVi
x 7−→(i 7→
{x falls i = j
0 falls i 6= j
)
fur die Inklusion des j-ten Faktors.
• Die Menge
⊕
i∈IVi :=
{f ∈
∏
i∈IVi
∣∣∣ es gibt eine endliche Menge J ⊂ I mit f |I\J = 0}
ist ein Untermodul von∏i∈I Vi, die direkte Summe der (Vi)i∈I .
Ist j ∈ I, so schreiben wir auch ij : Vj −→⊕
i∈I Vi fur die Inklusiondes j-ten Summanden.
Ist die Indexmenge I eine zweielementige Menge, so erhalt man im Vektor-raumfall genau die Definition der direkten Summe zweier Vektorraume undwir werden auch im Modulfall V ⊕W fur die direkte Summe zweier Moduln Uund W (uber demselben Grundring) schreiben.
Direkte Summen werden durch die folgende universelle Eigenschaft charak-terisiert, die es ermoglicht, Homomorphismen aus direkten Summen herauszu konstruieren, indem man den Homomorphismus auf jedem Summandenvorgibt:

70 2. Normalformen II: Moduln uber Hauptidealringen
Satz 2.3.24 (universelle Eigenschaft der direkten Summe). Sei R ein Ring undsei (Vi)i∈I eine Familie von R-Moduln. Wir sagen, dass ein Modul V zu-sammen mit Modulhomomorphismen (gi : Vi → V )i∈I die universelle Eigen-schaft der direkten Summe
⊕i∈I Vi besitzt, wenn folgendes gilt: Fur jeden
R-Modul W und jede Familie (fi : Vi → W )i∈I von Modulhomomorphismengibt es genau einen Modulhomomorphismus f : V −→W mit
∀i∈I f ◦ gi = fi.
V∃!f// W
Vj
gj
OO
fj
>>
Dann gilt:
1. Die direkte Summe⊕
i∈I Vi erfullt zusammen mit den kanonischen In-klusionen (ij)j∈I der Summanden die universelle Eigenschaft der di-rekten Summe
⊕i∈I Vi.
2. Erfullt ein R-Modul V zusammen mit Modulhomomorphismen (gi)i∈Idie universelle Eigenschaft der direkten Summe
⊕i∈I Vi, so gibt es ge-
nau einen Modulisomorphismus f :⊕
i∈I Vi −→ V mit
∀j∈I f ◦ ij = gj .
Beweis. Zu 1. Sei (fi : Vi −→ W )i∈V eine Familie von Modulhomomorphis-men.
• Existenz von f : Es ist
f :⊕
i∈IVi 7−→W
(xi)i∈I 7−→∑
i∈Ifi(xi)
ein wohldefinierter (man beachte, dass jede der Summen auf der rech-ten Seite nur endlich viele Summanden ungleich Null besitzt) R-Modulhomomorphismus. Nach Konstruktion gilt dabei fur alle j ∈ Iund alle x ∈ Vj , dass
f ◦ ij(x) = fj(xi);
also ist f ◦ ij = fj .
• Eindeutigkeit von f : Da⊕
i∈I Vi nach Konstruktion von⋃j∈I im ij er-
zeugt wird, folgt die Eindeutigkeit.

2.3. Moduln 71
Zu 2. Wir folgen dem Kinderlied Bruderchen, komm tanz mit mir : (”. . . ein-
mal hin, einmal her, rundherum das ist nicht schwer . . .“):
•”
einmal hin“: Da⊕
i∈I Vi (mit (ij)j∈I) die universelle Eigenschaft derdirekten Summe erfullt, gibt es einen eindeutig bestimmten Modulho-momorphismus f :
⊕i∈I Vi −→W mit
∀j∈I f ◦ ij = gj .
•”
einmal her“: Da V (mit (gi)i∈I) die universellen Eigenschaft der di-rekten Summe erfullt, gibt es einen Modulhomomorphismus g : V −→⊕
i∈I Vi mit∀j∈I g ◦ gj = ij .
•”
rundherum, das ist nicht schwer“: Nach Konstruktion gilt fur alle j ∈I, dass
(f ◦ g) ◦ gj = gj = idV ◦gj und (g ◦ f) ◦ ij = ij = id⊕i∈I Vi
◦ij .
Wenden wir die Eindeutigkeitsaussage aus der universellen Eigenschaftauf f ◦ g bzw. g ◦ f an, so erhalten wir daraus
f ◦ g = idV und g ◦ f = id⊕i∈I Vi
.
Damit ist die Behauptung gezeigt.
Ausblick 2.3.25 (Koprodukt). Die universelle Eigenschaft der direkten Sum-me lasst sich nicht nur fur Moduln, sondern auch in anderen Kategorienformulieren. Dies fuhrt zum Begriff des Koprodukts (Anhang A.3).
Caveat 2.3.26 (Produkte vs. Summen). Sei R ein Ring und sei (Vi)i∈I ei-ne Familie von R-Moduln. Ist die Menge I unendlich, so unterscheidet sichdie direkte Summe
⊕i∈I Vi vom direkten Produkt
∏i∈I Vi im allgemeinen
bereits in der Machtigkeit, aber auch in der universellen Eigenschaft: Dieuniverselle Eigenschaft des direkten Produktes beschreibt Homomorphismenin das Produkt hinein. Homomorphismen aus Produkten heraus konnen nurin speziellen Situationen konstruiert werden.
Mithilfe der direkten Summen konnen wir auch einen Unzerlegbarkeitsbe-griff fur Moduln einfuhren:
Definition 2.3.27 (zerlegbarer/unzerlegbarer Modul). Sei R ein Ring und Vein R-Modul.
• Der R-Modul V ist zerlegbar, wenn es R-Moduln U,W mit U 6∼=R {0},W 6∼=R {0} und
V ∼=R U ⊕Wgibt.

72 2. Normalformen II: Moduln uber Hauptidealringen
• Der R-Modul V ist unzerlegbar, wenn er nicht zerlegbar ist.
Vektorraume sind also genau dann unzerlegbar, wenn ihre Dimensionhochstens 1 ist. Der Modulfall ist unubersichtlicher:
Caveat 2.3.28 (komplementare Untermoduln). Untermoduln besitzen im all-gemeinen keine Komplemente: Ist R ein Ring, V ein R-Modul und U ⊂ Vein Untermodul, so gibt es im allgemeinen keinen Untermodul W ⊂ Vmit V ∼=R U ⊕W (wobei der Isomorphismus von den Inklusionen induziertwird).
Zum Beispiel besitzt der Untermodul 2 · Z ⊂ Z kein Komplement im Z-Modul Z.
Die universelle Eigenschaft der direkten Summe erinnert an die universelleEigenschaft von Basen in Vektorraumen (Satz I.4.3.1).
Definition 2.3.29 (Basis eines Moduls, freier Modul). Sei R ein Ring und Vein R-Modul.
• Eine Familie (vi)i∈I in V ist linear unabhangig (uber R), wenn folgendesgilt: fur jede endliche Teilmenge J ⊂ I und alle Familien (aj)j∈J in Rmit
∑j∈J aj · vj = 0 folgt bereits
∀j∈J aj = 0.
• Eine Familie (vi)i∈I in V ist eine R-Basis von V , wenn sie uber R linearunabhangig ist und V als R-Modul erzeugt.
• Der R-Modul V ist frei, wenn er eine Basis besitzt.
Beispiel 2.3.30.
• Jeder Vektorraum ist ein freier Modul uber seinem Grundkorper, dajeder Vektorraum eine Basis besitzt (Satz I.3.3.21).
• Ist R ein Ring und n ∈ N, so ist der R-Modul Rn frei (die Ringversionder Standardbasis ist eine R-Basis von Rn).
• Der Z-Modul Z/2Z ist nicht frei: Jeder nicht-triviale freie Z-Modulmuss naturlich mindestens |Z| Elemente enthalten. Aber Z/2Z bestehtnur aus genau zwei Elementen.
Proposition 2.3.31 (freie Moduln als direkte Summen). Sei R ein Ring undsei V ein R-Modul. Dann sind aquivalent:
1. Der R-Modul V ist frei.
2. Es gibt eine Menge I mit V ∼=R
⊕I R.
Beweis. Jede Basis von V kann fur eine direkte Summenzerlegung verwen-det werden; umgekehrt liefern die
”Standardeinheitsvektoren“ in Moduln der
Form⊕
I R eine Basis (Ubungsaufgabe).

2.4. Hauptidealringe 73
Die Klassifikation der Vektorraume beruht auf dem Dimensionsbegriff. FurModuln ist die Lage im allgemeinen deutlich komplizierter:
Caveat 2.3.32 (Dimension von Moduln). Im allgemeinen gibt es keine vernunf-tige Dimensionstheorie fur Moduln:
• Nicht jeder Modul ist frei! Zum Beispiel ist der Z-Modul Z/2Z keinfreier Z-Modul.
• Es gibt Moduln uber bestimmten Ringen, die Basen verschiedenerLange besitzen.
Wir haben nun die fur uns wichtigen Bausteine fur Moduln eingefuhrt(Quotientenmoduln, freie Moduln, direkte Summen). Als nachsten Schrittbenotigen wir zunachst etwas Ringtheorie.
Anmerkung zum Lernen. Vergleichen Sie das, was Sie uber Vektorraume wis-sen, mit der bereits entwickelten Modultheorie. Fallt es Ihnen jetzt leichter,die Konzepte, Konstruktionen und Beispiele aus der Linearen Algebra I zuverstehen?
2.4 Hauptidealringe
Allgemeine Ringe sind zu wild um eine sinnvolle vollstandige Klassifikationihrer Moduln zu ermoglichen. Da eine Klassifikation der Moduln auch eingewisses Verstandnis der Ideale des Grundrings mit einschließt, ist es nahe-liegend, sich auf Ringe zu beschranken, deren Ideale nicht zu kompliziert sind.Nach den Korpern die einfachste solche Klasse ist die Klasse der sogenanntenHauptidealringe.
2.4.1 Hauptidealringe
Definition 2.4.1 (erzeugtes Ideal, Hauptideal, Hauptidealring). Sei R ein Ring.
• Ist S ⊂ R eine Teilmenge, so schreibt man auch kurz (S) := SpanR Sfur das von S erzeugte Ideal in R.
• Die Ideale in R, die von einem einzelnen Element erzeugt werden, be-zeichnet man als Hauptideale.
• Ein Hauptidealring ist ein Integritatsring, in dem alle Ideale Hauptidea-le sind.
Bemerkung 2.4.2 (einfache Beschreibung von Hauptidealen). Sei R ein Ringund a ∈ R. Dann ist das von a erzeugte Hauptideal in R nichts anderes als

74 2. Normalformen II: Moduln uber Hauptidealringen
(a) = SpanR{a} = R · a = {s · a | s ∈ R},
d.h. die Menge aller (Links-)Vielfachen von a.
Beispiel 2.4.3.
• Korper sind Hauptidealringe, denn: Ist K ein Korper, so sind {0} = (0)und K = (1) die einzigen Ideale in K.
• Der Polynomring Z[T ] der Polynome mit ganzzahligen Koeffizienten istkein Hauptidealring; zum Beispiel ist das Ideal (2, T ), das von 2 und Terzeugt wird, kein Hauptideal (nachrechnen).
• Wir werden sehen, dass Z und Polynomringe uber Korpern Hauptideal-ringe sind (Kapitel 2.4.2).
2.4.2 Euklidische Ringe
Wie konnen wir beweisen, dass Z und Polynomringe uber Korpern Haupt-idealringe sind? Die grundlegende Idee dazu ist, Division mit Rest zu nutzen.Wir werden dies nun formalisieren:
Definition 2.4.4 (euklidischer Ring). Sei R ein kommutativer, nullteilerfreierRing.
• Eine euklidische Gradfunktion auf R ist eine Abbildung δ : R −→ Nmit: Fur alle a ∈ R und alle b ∈ R \ {0} gibt es r, s ∈ R mit
a = s · b+ r und[δ(r) < δ(b) oder r = 0
].
• Der Ring R ist ein euklidischer Ring, wenn er eine euklidische Grad-funktion besitzt.
Da euklidische Ringe eine Verallgemeinerung großer Teile der elementarenZahlentheorie (in Z) erlauben, die auch von Euklid untersucht wurde, tragenauch diese Strukturen den Namen Euklids.
Beispiel 2.4.5 (die ganzen Zahlen als euklidischer Ring). Die Abbildung (wo-bei | · | den gewohnlichen Absolutbetrag auf R bezeichnet)
δ : Z −→ Nx 7−→ |x|
ist eine euklidische Gradfunktion auf Z, denn: Seien a, b ∈ Z mit b 6= 0. Wirbetrachten nur den Fall a, b > 0 (die anderen Falle gehen analog). Sei
s := max{n ∈ N | n · b ≤ a}.

2.4. Hauptidealringe 75
Wegen b 6= 0 ist die Menge {n ∈ N | n · b < a} endlich; außerdem enthaltdiese Menge 0 und ist somit nicht-leer. Das Maximum existiert somit. NachKonstruktion hat dabei
r := a− s · bdie Eigenschaft r ∈ {0, . . . , b− 1} und daher ist die Darstellung a = s · b+ rvon der gewunschten Form.
Insbesondere zeigt dies auch rigoros, dass Z/nZ = {[0], . . . , [n − 1]} furalle n ∈ N>0 gilt (Bespiel 2.3.18).
Proposition 2.4.6 (Polynomringe als euklidische Ringe). Sei K ein Korper.Dann ist der Polynomring K[T ] ein euklidischer Ring bezuglich der modifi-zierten Gradabbildung max(deg, 0) : K[T ] −→ N.
Beweis. Wir schreiben δ := max(deg, 0) : K[T ] −→ N. Der Beweis, dass δeine euklidische Gradfunktion ist, verwendet die sogenannte Polynomdivision,die wie folgt algorithmisch durchgefuhrt werden kann:
Seien a, b ∈ K[T ] mit b 6= 0. Wir zeigen per Induktion uber δ(a) ∈ N, dasses r, s ∈ K[T ] mit a = s · b+ r und δ(r) < δ(b) (oder sogar r = 0) gibt.
• Induktionsanfang. Ist a = 0, so ist a = 0 · b + 0 eine Darstellung dergewunschten Form.
Ist δ(a) < δ(b), so ist a = 0 · b + a eine Darstellung der gewunschtenForm.
• Induktionsvoraussetzung. Sei δ(a) > 0 und fur alle a′ ∈ K[T ] mit δ(a′) <δ(a) gebe es r′, s′ ∈ K[T ] mit a′ = s′ · b + r′ und δ(r′) < δ(b) (odersogar r′ = 0).
• Induktionsschritt. Wir schreiben
b =
n∑
j=0
bj · T j und a =
m∑
j=0
aj · T j
mit a0, . . . , am, b0, . . . , bn ∈ K und am 6= 0 6= bn. Wegen bn 6= 0 konnenwir das Polynom (Elimination der hochsten T -Potenz aus a)
a′ := a− ambn· Tm−n · b ∈ K[T ]
definieren; nach Konstruktion ist δ(a′) < m = δ(a) und
a = a′ +ambn· Tm−n · b.
Nach Induktionsvoraussetzung gibt es r′, s′ ∈ K[T ] mit a′ = s′ · b + r′
und δ(r′) < δ(b) (oder sogar r′ = 0). Damit ist
a =(s′ +
ambn· Tm−n
)· b+ r′

76 2. Normalformen II: Moduln uber Hauptidealringen
eine Darstellung der gewunschten Form.
Beispiel 2.4.7 (Polynomdivision). Dividieren wir T 3 − 1 in Q[T ] mit Restdurch T + 2, so erhalten wir T 2 − 2 · T + 4 mit Rest −9, denn
T 3 − 1 = (T + 2) · (T 2 − 2 · T + 4)− 9.
Von Hand kann man dies wie folgt bestimmen:
T 3 + 0 · T 2 + 0 · T − 1 = (T + 2) · (1 · T 2−2 · T + 4) − 9
T 3 + 2 · T 2− ( )
− 2 · T 2 + 0 · T − 1
− ( )− 2 · T 2 − 4 · T+ 4 · T − 1
− ( )+ 4 · T + 8
− 9
Proposition 2.4.8 (euklidische Ringe sind Hauptidealringe). Jeder euklidischeRing ist ein Hauptidealring.
Beweis. Sei R ein euklidischer Ring mit eukildischer Gradfunktion δ : R −→N und sei A ⊂ R ein Ideal. Ohne Einschrankung sei A 6= {0}. Wir betrachtenein Element b ∈ A mit
δ(b) = min{δ(a)
∣∣ a ∈ A \ {0}}∈ N;
ein solches Element existiert, da A \ {0} nicht-leer ist und N wohlgeordnetist. Dann gilt
A = SpanR{b},denn: Wegen b ∈ A ist SpanR{b} ⊂ A. Sei umgekehrt a ∈ A. Da δ eineeuklidische Gradfunktion ist, gibt es r, s ∈ R mit
a = s · b+ r und[δ(r) < δ(b) oder r = 0
].
Wegen r = a− s · b und a, b ∈ A folgt auch r ∈ A. Aufgrund der Minimalitatvon b bezuglich δ erhalten wir daraus r = 0. Also ist a = s·b ∈ SpanR{b}.Korollar 2.4.9.
1. Der Ring Z der ganzen Zahlen ist ein Hauptidealring.
2. Ist K ein Korper, so ist K[T ] ein Hauptidealring.
Beweis. Sowohl Z als auchK[T ] sind euklidische Ringe (Beispiel 2.4.5, Propo-sition 2.4.6). Also sind diese Ringe insbesondere auch Hauptidealringe (Pro-position 2.4.8).
Caveat 2.4.10. Nicht jeder Hauptidealring ist ein euklidischer Ring!

2.4. Hauptidealringe 77
2.4.3 Teilbarkeit und Primfaktoren
Um Ideale und Zusammenhange zwischen verschiedenen Idealen in Haupt-idealringen bzw. deren Quotientenmoduln besser zu verstehen, ist es hilfreich,sich mit der Teilbarkeit von Elementen auseinanderzusetzen.
Definition 2.4.11 (Einheit, assoziiert, teilt, irreduzibel, prim). Sei R ein Inte-gritatsring.
• Ein Element a ∈ R ist eine Einheit, wenn es b ∈ R mit a·b = 1 und b·a =1 gibt. Wir schreiben R× fur die Gruppe (bezuglich Multiplikation!) derEinheiten von R.
• Elemente a, b ∈ R heißen assoziiert, wenn es eine Einheit s ∈ R×
mit a = s · b gibt.
• Ein Element b ∈ R teilt ein Element a, wenn es ein s ∈ R mit a = s · bgibt. In diesem Fall schreibt man auch kurz b | a (
”b teilt a“).
• Ein Element a ∈ R \ {0} ist irreduzibel, wenn a keine Einheit ist undfolgendes gilt: Fur alle x, y ∈ R mit a = x · y ist x ∈ R× oder y ∈ R×.
• Ein Element p ∈ R\{0} ist prim, wenn p keine Einheit ist und folgendesgilt:
∀x,y∈R p | x · y =⇒ (p | x ∨ p | y).
Caveat 2.4.12 (Primzahlen aus der Schule). Die Definition von Primzahlenaus der Schule entspricht der obigen Definition von irreduziblen Elementen;wir werden sehen, dass dies im Fall der ganzen Zahlen zur obigen Defini-tion von Primelementen aquivalent ist (Proposition 2.4.17). In allgemeinenRingen ist dies jedoch nicht zutreffend. Der Grund fur die obige Definitionvon Primelementen ist, dass sie die Eindeutigkeit von Primfaktorzerlegungenliefert (Bemerkung 2.4.20).
Beispiel 2.4.13.
• Ist K ein Korper, so gilt K = {0} ∪K×. Also enthalten Korper keinePrimelemente.
• Die Zahl 2017 ∈ Z ist irreduzibel (nachrechnen).
• Die Zahl 10 ∈ Z ist nicht prim, denn 10 | 2 · 5, aber 10 teilt weder 2noch 5.
• Das Polynom T 2 + 1 ∈ R[T ] ist irreduzibel (jeder Teiler musste linearsein, was aber zu reellen Nullstellen fuhren wurde). In C[T ] gilt
T 2 + 1 = (T + i) · (T − i)

78 2. Normalformen II: Moduln uber Hauptidealringen
und T + i, T − i 6∈ C[T ]×; das Polynom T 2 + 1 ist also in C[T ] nichtirreduzibel.
• Ist K ein Korper und λ ∈ K, so ist T − λ in K[T ] irreduzibel (ausGradgrunden).
Proposition 2.4.14 (Nullstellen vs. Linearfaktoren). Sei K ein Korper, sei f ∈K[T ] und sei λ ∈ K. Dann sind folgende Aussagen aquivalent:
1. Es ist λ eine Nullstelle von f , d.h. f(λ) = 0.
2. Es gilt (T − λ) | f in K[T ].
Beweis. Sei λ eine Nullstelle von f . Dann ist T − λ ein Teiler von f , denn:Mithilfe von Polynomdivision erhalten wir r, s ∈ K[T ] mit
f = s · (T − λ) + r und deg r < 1.
Also ist r ein konstantes Polynom. Wegen
0 = f(λ) = s(λ) · (λ− λ) + r(λ) = r(λ)
ist somit r = 0. Also ist T − λ ein Teiler von f .Ist umgekehrt T − λ ein Teiler von f , so gibt es ein s ∈ K[T ] mit f =
s · (T − λ). Insbesondere ist dann
f(λ) = s(λ) · (λ− λ) = s(λ) · 0 = 0.
Bemerkung 2.4.15 (Teilbarkeit und Ideale). Sei R ein Integritatsring und sei-en a, b ∈ R. Teilbarkeit und Assoziiertheit lassen sich dann wie folgt durchdie zugehorigen Hauptideale (a) und (b) ausdrucken (nachrechnen):
1. Es gilt genau dann b | a, wenn (a) ⊂ (b) ist.
2. Es gilt genau dann (a) = (b), wenn a und b assoziiert sind.
Beispiel 2.4.16. Wir betrachten die Elemente 1, 2, 3, 6 in Z. Dann gilt
1 | 2, 1 | 3, 1 | 6, 2 | 6, 3 | 6
und es bestehen keine weiteren Teilbarkeiten. Dies liefert entsprechende In-klusionsbeziehungen zwischen den zugehorigen Hauptidealen und kanoni-schen Projektionen zwischen den zugehorigen zyklischen Moduln (Abbil-dung 2.2) .
Die Definition von Primelementen ist in der Praxis nicht leicht nachzu-prufen. In Hauptidealringen ist aber prim zu sein aquivalent dazu irreduzibelzu sein. In vielen Fallen kann man so zeigen, dass gegebene Elemente primsind.
Proposition 2.4.17 (irreduzibel vs. prim). Sei R ein Integritatsring und seia ∈ R \ {0} keine Einheit.

2.4. Hauptidealringe 79
6
2
@@
3
^^
1
@@^^
OO(6)
⊂⊂
⊂
(2)
⊂
(3)
⊂
(1) = Z
Z/6Z
~~~~
����
Z/2Z
Z/3Z
~~~~
{0}
Abbildung 2.2.: Teilbarkeit, Idealinklusionen, kanonische Projektionen zwi-schen den zugehorigen zyklischen Moduln; links bedeutendabei die Pfeile
”ist ein Teiler von“.
1. Ist a prim, so ist a auch irreduzibel.
2. Ist R ein Hauptidealring und ist a irreduzibel, so ist a bereits prim.
Beispiel 2.4.18.
• Die Zahl 2017 ∈ Z ist irreduzibel, und somit prim (da Z ein Haupt-idealring ist).
• Das Polynom T 2 + 1 ∈ R[T ] ist irreduzibel, und somit prim (da R[T ]ein Hauptidealring ist).
Da das Polynom T 2 +1 ∈ C[T ] nicht irreduzibel ist, ist es insbesondereauch nicht prim.
• Ist K ein Korper und λ ∈ K, so ist das Polynom T − λ ∈ K[T ] irredu-zibel, und somit prim (da K[T ] ein Hauptidealring ist).
Literaturaufgabe (Primzahlen). Die ersten (positiven) Primzahlen in Z lau-ten:
2, 3, 5, 7, 11, 13, 17, 23, 29, 31, 37, . . .
Bereits Euklid konnte rigoros nachweisen, dass es unendlich viele Primzahlenin Z gibt. Lesen Sie im Buch Proofs from The Book [1, Chapter 1] das Kapiteluber die Existenz unendlich vieler Primzahlen in Z. Welcher Beweis gefalltIhnen am besten?
Beweis (von Proposition 2.4.17). Zu 1. Sei a prim und seien x, y ∈ R mit a =x · y. Da a prim ist, folgt a | x oder a | y. Ohne Einschrankung gelte a | y,d.h. es gibt ein s ∈ R mit y = s · a. Damit erhalten wir
a = x · y = x · s · a.
Da R nullteilerfrei und a 6= 0 ist, folgt x ·s = 1. Also ist x eine Einheit. Somitist a irreduzibel.

80 2. Normalformen II: Moduln uber Hauptidealringen
Zu 2. Sei R ein Hauptidealring und sei a irreduzibel. Dann ist a bereitsprim, denn: Seien x, y ∈ R mit a | x · y. Um die Voraussetzung, dass R einHauptidealring ist, nutzen zu konnen, liegt es nahe, ein geeignetes Ideal zuuntersuchen. Wir betrachten das Ideal
A := (a, x) = SpanR{a, x} ⊂ R.
Da R ein Hauptidealring ist, ist A ein Hauptideal; also gibt es ein z ∈ Rmit A = (z) = R · z. Wegen a ∈ A und x ∈ A folgt somit
z | a und z | x.
Insbesondere gibt es ein s ∈ R mit a = s · z. Da a irreduzibel ist, ist s oderz eine Einheit. Wir betrachten nun diese beiden Falle:
À Es sei s eine Einheit. Dann ist z = s−1 · a. Wegen z | x erhalten wirsomit auch a | x.
Á Es sei z eine Einheit. Dann ist
R = R · z = (z) = A = SpanR{a, x}.
Insbesondere gibt es also r, t ∈ R mit
1 = r · a+ t · x.
Multiplikation mit y liefert
y = r · a · y + t · x · y.
Da a beide Summanden auf der rechten Seite teilt, ist somit a ein Teilervon y.
Insgesamt erhalten wir a | x oder a | y. Es handelt sich bei a also um einPrimelement.
In der elementaren Zahlentheorie (d.h. der Theorie der Arithmetik von Z)sind die Primelemente die grundlegenden Bausteine: jede ganze Zahl außer 0,1, −1 lasst sich (eindeutig) als Produkt von Primzahlen schreiben. Wir wer-den dies im folgenden ganz allgemein fur jeden Hauptidealring beweisen.
Definition 2.4.19 (faktoriell). Ein faktorieller Ring ist ein Integritatsring R,in dem sich jedes Element aus R \ ({0} ∪ R×) als endliches Produkt vonPrimelementen schreiben lasst.
Bemerkung 2.4.20 (Eindeutigkeit von Primfaktorzerlegungen). Primfaktorzer-legungen sind (wenn sie existieren) im wesentlichen eindeutig: Sei R ein In-tegritatsring und seien p1, . . . , pn, q1, . . . , qm ∈ R Primelemente mit

2.4. Hauptidealringe 81
n∏
j=1
pj =
m∏
j=1
qj .
Dann folgt n = m und es gibt eine Permutation σ ∈ Sn und Einhei-ten ε1, . . . , εn ∈ R× mit
∀j∈{1,...,n} pj = εj · qσ(j).
Man kann diese Aussage per Induktion uber n aus der definierenden Eigen-schaft von Primelementen ableiten (Ubungsaufgabe).
Satz 2.4.21 (Hauptidealringe sind faktoriell). Jeder Hauptidealring ist faktori-ell. Jede nicht-triviale Nicht-Einheit in einem Hauptidealring besitzt also eineim wesentlichen eindeutige Primfaktorzerlegung.
Die naheliegende Idee des Beweises ist, Elemente schrittweise in Primfak-toren zu zerlegen: Ist das betrachtete Element irreduzibel, so ist es (da wiruns in einem Hauptidealring befinden) bereits prim. Ist es nicht irreduzi-bel, so kann es als Produkt zweier Nicht-Einheiten geschrieben werden, dieman nach demselben Verfahren weiter zerlegen kann. Es bleibt jedoch nochnachzuweisen, dass dieses Verfahren tatsachlich nach endlich vielen Schrittenterminiert. Wir werden den Beweis etwas abstrakter wie folgt formulieren:
Beweis. Sei R ein Hauptidealring. Sei Q ⊂ R die Menge aller Elemente a ∈R\({0}∪R×), die nicht als endliches Produkt von Primelementen geschriebenwerden konnen. Wir betrachten dann die Menge S := {(a) | a ∈ Q} derzugehorigen Hauptideale und zeigen, dass S = ∅ ist:
Angenommen, S ware nicht-leer. Aus Lemma 2.4.22 folgt dann, dass SElemente enthalt, die bezuglich Inklusion maximal sind, d.h. es gibt ein A ∈ Smit:
∀B∈S A ⊂ B =⇒ A = B.
Etwas genauer: Angenommen, es gabe kein maximales Element in S 6= ∅.Sei A0 ∈ S. Da A0 nicht maximal ist, existiert ein A1 ∈ S mit A0 ⊂ A1
und A1 6= A0. Da auch A1 nicht maximal ist, gibt es dann ein A2 ∈ S mit . . . .Dies liefert eine echt aufsteigende Kette (An)n∈N von Idealen in R, im Wider-spruch zu Lemma 2.4.22. Strenggenommen haben wir bei der Konstruktionder Folge (An)n∈N eine etwas schwachere Variante des Auswahlaxioms, Axiomof Dependent Choice, verwendet. Also enthalt S ein maximales Element A.
Sei nun a ∈ Q mit A = (a). Wegen a ∈ Q ist a insbesondere kein Prim-element und daher (da R ein Hauptidealring ist) auch nicht irreduzibel. Esgibt also x, y ∈ R \R× mit
a = x · y.Wegen a ∈ Q ist auch x ∈ Q oder y ∈ Q. Ohne Einschrankung sei x ∈ Q. Ausx | a erhalten wir aber A = (a) ⊂ (x). Da A in S maximal ist, folgt (a) = (x),und damit, dass a und x assoziiert sind. Dies steht jedoch im Widerspruchdazu, dass y keine Einheit ist. Also ist S = ∅, und damit auch Q = ∅.

82 2. Normalformen II: Moduln uber Hauptidealringen
Lemma 2.4.22 (Hauptidealringe sind noethersch). Sei R ein Hauptidealringund sei (An)n∈N eine aufsteigende Folge von Idealen in R, d.h. fur alle n ∈ Ngilt
An ⊂ An+1.
Dann wird diese Kette stationar, d.h. es gibt ein N ∈ N mit
∀n∈N≥N An = AN .
Beweis. Wir betrachten die Vereinigung
A :=⋃
n∈NAn ⊂ R.
Da es sich dabei um eine aufsteigende Vereinigung handelt, ist A ein Idealin R (nachrechnen). Nach Voraussetzung ist R ein Hauptidealring; es gibtdaher ein a ∈ R mit A = (a).
Nach Definition von A gibt es dann aber bereits ein N ∈ N mit a ∈ AN .Also erhalten wir das Inklusionssandwich
A = (a) = R · a ⊂ AN ⊂ AN+1 ⊂ · · · ⊂⋃
n∈NAn = A,
und damit An = AN fur alle n ∈ N≥N .
Korollar 2.4.23 (der Hauptsatz der elementaren Zahlentheorie).
1. Der Ring Z der ganzen Zahlen ist faktoriell.
2. Ist K ein Korper, so ist K[T ] faktoriell.
Beweis. Nach Korollar 2.4.9 handelt es sich in beiden Fallen um Hauptideal-ringe; diese sind nach Satz 2.4.21 faktoriell.
Beispiel 2.4.24.
• Eine/Die Primfaktorzerlegung von 12 ∈ Z lautet
12 = 2 · 2 · 3.
Viele der klassischen Mengenangaben (Dutzend, Anzahl der Minutenpro Stunde, . . . ) beruhen auf Zahlen (12, 60, . . . ), die
”viele“ Teiler
besitzen, um viel Flexibilitat bei der Aufteilung zu liefern.
• Eine/Die Primfaktorzerlegung von T 3 − T 2 + T − 1 ∈ R[T ] lautet
T 3 − T 2 + T − 1 = (T − 1) · (T 2 + 1).
Eine/Die Primfaktorzerlegung von T 3 − T 2 + T − 1 ∈ C[T ] lautet
T 3 − T 2 + T − 1 = (T − 1) · (T + i) · (T − i).

2.4. Hauptidealringe 83
Ausblick 2.4.25 (Primzahlen in der Praxis). Primzahlen sind nicht nur in derMathematik ein faszinierender Untersuchungsgegenstand, sondern sind auchaus unserem Alltag nicht mehr wegzudenken – ein Großteil der elektroni-schen Verschlusselungs- und Authentifizierungstechnologie beruht auf zah-lentheoretischen Eigenschaften von Primzahlen! Wir werden im Rahmen derAlgebra-Vorlesung genauer auf solche Anwendungen eingehen.
2.4.4 Der großte gemeinsame Teiler
Will man mehrere Hauptideale zu neuen Idealen kombinieren, so kommt dergroßte gemeinsame Teiler ins Spiel:
Definition 2.4.26 (großter gemeinsamer Teiler, kleinstes gemeinsames Vielfa-ches). Sei R ein Integritatsring und sei S ⊂ R.
• Ein großter gemeinsamer Teiler von S ist ein Element d ∈ R mit fol-gender Eigenschaft: Es gilt d | s fur alle s ∈ S und fur alle a ∈ Rgilt (
∀s∈S a | s)
=⇒ a | d.
• Ein kleinstes gemeinsames Vielfaches von S ist ein Element m ∈ R mitfolgender Eigenschaft: Es gilt s | m fur alle s ∈ S und fur alle a ∈ Rgilt (
∀s∈S s | a)
=⇒ m | a.
Proposition 2.4.27 (Darstellungen des ggT). Sei R ein Integritatsring undseien a, b ∈ R.
1. Falls es in R einen großten gemeinsamen Teiler von a und b gibt,so ist dieser bis auf Assoziiertheit eindeutig bestimmt; wir schreibendann ggT(a, b) fur einen/den großten gemeinsamen Teiler von a und b.
2. Gibt es ein d ∈ R mit (d) = (a, b), so ist d ein großter gemeinsamerTeiler von a und b.
3. Ist R ein Hauptidealring, so gibt es einen großten gemeinsamen Teilervon a und b und fur jeden großten gemeinsamen Teiler d von a und bgilt (d) = (a, b). Insbesondere gibt es r, s ∈ R mit
d = r · a+ s · b.
4. Ist R faktoriell, ist P ⊂ R ein Reprasentantensystem aller Primele-mente modulo Assoziiertheit, sind a, b 6∈ {0} ∪R× und sind
a =∏
p∈Ppνp(a) und b =
∏
p∈Ppνp(b)

84 2. Normalformen II: Moduln uber Hauptidealringen
die zugehorigen Primfaktorzerlegungen von a bzw. b, so ist
∏
p∈Ppmin(νp(a),νp(b))
der großte gemeinsame Teiler von a und b.
Beweis. Zu 1. Dies folgt aus der Definition großter gemeinsamer Teiler, dasich je zwei goßte gemeinsame Teiler c, d von a und b gegenseitig teilen.
Zu 2. Sei d ∈ R mit (d) = (a, b). Dann ist insbesondere (a) ⊂ (d) und(b) ⊂ (d) bzw. d | a und d | b (Bemerkung 2.4.15). Wegen d ∈ (a, b) gibtes r, s ∈ R mit d = r · a+ s · b; daraus folgt, dass jedes Element, das a und bteilt, auch ein Teiler von d ist. Also ist d ein großter gemeinsamer Teiler von aund b.
Zu 3. Da R ein Hauptidealring ist, gibt es ein c ∈ R mit (c) = (a, b). Nachdem zweiten Teil handelt es sich dabei um einen/den großten gemeinsamenTeiler von a und b.
Ist d ∈ R ein großter gemeinsamer Teiler, so ist d nach dem ersten Teilzu c assoziiert. Somit folgt (d) = (c) = (a, b) = SpanR{a, b}. Insbesonderegibt es r, s ∈ R mit d = r · a+ s · b.
Zu 4. Offenbar ist das angegebene Element ein Teiler von a und b. Be-trachtet man die Primfaktorzerlegungen von Teilern von a und b, so siehtman, dass jeder dieser Teiler auch das angegebene Element teilt.
In euklidischen Ringen konnen wir großte gemeinsame Teiler auf einfacheWeise algorithmisch bestimmen. Dieses Verfahren geht auf Euklid zuruck.
Algorithmus 2.4.28 (der euklidische Algorithmus). Sei R ein euklidischer Ringmit der euklidischen Gradfunktion δ : R −→ N. Außerdem sei ein Algorithmusfur die Division mit Rest bezuglich δ gegeben. Seien a, b ∈ R. Wir berechnennun daraus wie folgt ein Element von R:
• Ist b = 0, so beenden wir den Algorithmus und verwenden a als Ergeb-nis.
• Ist b 6= 0, so bestimmen wir durch Division mit Rest r, s ∈ R mit
a = s · b+ r und[δ(r) < δ(b) oder r = 0
]
und wenden den Algorithmus rekursiv auf b und r an.
Proposition 2.4.29 (Analyse des euklidischen Algorithmus). Sei R ein euklidi-scher Ring und seien a, b ∈ R. Dann gilt: Wendet man den euklidischen Algo-rithmus auf a und b bzgl. einer euklidischen Gradfunktion δ : R −→ N auf Ran, so terminiert der Algorithmus und fur das resultierende Element c ∈ Rgilt
(a, b) = (c)
bzw. c = ggT(a, b).

2.4. Hauptidealringe 85
Beweis. Der Algorithmus terminiert, da in jedem Rekursionsschritt der δ-Wert des zweiten Elements sinkt (oder der Algorithmus im darauffolgendenSchritt terminiert).
Außerdem hat das berechnete Element die gewunschte Eigenschaft, denn:
• Ist b = 0, so ist (a, b) = (a, 0) = (a).
• Ist b 6= 0 und sind r, s ∈ R mit
a = s · b+ r,
so gilt (a, b) = (b, r) (nachrechnen).
Induktiv folgt somit die Behauptung.
Bemerkung 2.4.30 (der euklidische Algorithmus in Haskell). In der funktiona-len Programmiersprache Haskell (https://www.haskell.org) lasst sich der eu-klidische Algorithmus zum Beispiel wie folgt definieren:
gcd :: (Integral a) => a -> a -> a
gcd x y = gcd’ (abs x) (abs y)
where gcd’ a 0 = a
gcd’ a b = gcd’ b (a ‘rem‘ b)
Beispiel 2.4.31. Wir bestimmen den großten gemeinsamen Teiler von 14und 34 in Z mit dem euklidischen Algorithmus:
• Anwendung auf (14, 34): Division mit Rest liefert 14 = 0 · 34 + 14.
• Anwendung auf (34, 14): Division mit Rest liefert 34 = 2 · 14 + 6.
• Anwendung auf (14, 6): Division mit Rest liefert 14 = 2 · 6 + 2.
• Anwendung auf (6, 2): Division mit Rest liefert 6 = 3 · 2 + 0.
• Anwendung auf (2, 0): Das Ergebnis ist 2.
Also ist 2 der großte gemeinsame Teiler von 14 und 34.Indem wir ruckwarts durch die Berechnungen durchgehen und jeweils ge-
eignet auflosen, erhalten wir die folgende Darstellung des großten gemeinsa-men Teilers durch die Ausgangszahlen:
2 = 14− 2 · 6= 14− 2 · (34− 2 · 14)
= 5 · 14− 2 · 34.

86 2. Normalformen II: Moduln uber Hauptidealringen
Ausblick 2.4.32 (Common Factor Attacks). Die Tatsache, dass großte ge-meinsame Teiler algorithmisch effizient berechnet werden konnen, hat prak-tische Konsequenzen. Zum Beispiel wurde dies genutzt, um erfolgreich priva-te RSA-Schlussel aus offentlichen Schlusseln zu berechnen (!), wenn bei derSchlusselerzeugung
”schlechte“ Zufallszahlen verwendet wurden [11].
Satz 2.4.33 (chinesischer Restsatz fur Moduln). Sei R ein Integritatsring undseien a, b ∈ R mit (a, b) = (1) (dies ist zum Beispiel erfullt, wenn R einHauptidealring ist und ggT(a, b) = 1 gilt). Seien r, s ∈ R mit r · a+ s · b = 1(Proposition 2.4.27). Dann sind
f : R/(a · b) −→ R/(a)⊕R/(b)[x] 7−→
([x], [x]
)
g : R/(a)⊕R/(b) −→ R/(a · b)([x], [y]
)7−→ [s · b · x+ r · a · y]
wohldefinierte zueinander inverse R-Modulisomorphismen.
Beweis. Wohldefiniertheit von f : Die Wohldefiniertheit von f folgt aus derTatsache, dass (a · b) = (b · a) ⊂ (a) und (a · b) ⊂ (b).
Wohldefiniertheit von g: Dies ist eine einfache Rechnung (man beachtedabei auch, dass R kommutativ ist).
Die R-Linearitat von f bzw. g kann man leicht nachrechnen.Die Kompositionen f ◦ g und g ◦ f :
• Sei [x] ∈ R/(a · b). Dann ist (nach Definition von f , g, r, s)
g ◦ f([x])
= g([x], [x]
)
= [s · b · x+ r · a · x]
=[(r · a+ s · b) · x]
= [1 · x] = [x].
• Sei umgekehrt ([x], [y]) ∈ R/(a)⊕R/(b). Dann ist
f ◦ g([x], [y]
)= f
([s · b · x+ r · a · y]
)
=([s · b · x], [r · a · y]
).
Wegen r · a+ s · b = 1 erhalten wir in R/(a), dass
[s · b · x] =[(1− r · a) · x
]= [1 · x]− [r · a · x] = [x]− [0] = [x]
und analog [r · a · y] = [y] in R/(b). Also ist
f ◦ g([x], [y]
)=([x], [y]
).

2.5. Moduln uber Hauptidealringen 87
Beispiel 2.4.34 (Flaschen). Fur welche Anzahlen von Flaschen bleiben
• beim Verpacken in Sechserkasten genau zwei Flaschen ubrig und
• beim Verpacken in Elferkasten genau funf Flaschen ubrig?
Fragen dieser Art konnen mit dem chinesischen Restsatz beantwortet werden:Gesucht ist die Teilmenge {n | [n] = [2] ∈ Z/6Z und [n] = [5] ∈ Z/11Z}von Z bzw. N. Wegen ggT(6, 11) = 1 und 2 · 6− 11 = 1 ist
g : Z/6Z⊕ Z/11Z −→ Z/66Z([x], [y]
)7−→ [−11 · x+ 12 · y]
nach dem chinesischen Restsatz ein zu
Z/66Z −→ Z/6Z⊕ Z/11Z[x] 7−→
([x], [x]
)
inverser Isomorphismus von Z-Moduln. Wegen
g([2], [5]
)= [−11 · 2 + 12 · 5] = [38]
(in Z/66Z) ist 38 + 66Z (bzw. 38 + 66 ·N) die gesuchte Menge von Anzahlen.
2.5 Moduln uber Hauptidealringen
Vektorraume uber einem gegebenen Grundkorper werden durch die Dimen-sion bis auf Isomorphie klassifiziert. In der Modultheorie ist diese Klassi-fikation komplizierter – wie wir bereits anhand der behandelten Beispieleerahnen konnen. Fur gewisse Klassen von Ringen ist eine Klassifikation nochmoglich, z.B. fur Hauptidealringe. Wir werden nun endlich erzeugte Modulnuber Hauptidealringen klassifizieren.
Unsere Strategie ist dabei wie folgt:
• Wir beschreiben endlich erzeugte Moduln durch Matrizen mit Koeffizi-enten im Grundring (Kapitel 2.5.1).
• Wir beweisen dann ein Klassifikationsresultat fur Matrizen, den Ele-mentarteilersatz fur Matrizen (Kapitel 2.5.2).
• Wir ubersetzen diese Klassifikation in entsprechende Resultate fur Mo-duln, den Elementarteilersatz fur Moduln und den Hauptsatz uber end-lich erzeugte Moduln uber Hauptidealringen (Kapitel 2.5.3).

88 2. Normalformen II: Moduln uber Hauptidealringen
2.5.1 Prasentationen von Moduln
Als ersten Schritt beschreiben wir endlich erzeugte Moduln durch Matrizen:
Satz 2.5.1. Sei R ein Hauptidealring, sei V ein endlich erzeugter R-Modulund sei U ⊂ V ein Untermodul. Dann ist auch U endlich erzeugt.
Beweis. Wir schreiben
d(V ) := min{n ∈ N | es gibt ein n-elementiges Erzeugendensystem von V };
da V nach Voraussetzung endlich erzeugt ist, handelt es sich bei d(V ) umeine wohldefinierte naturliche Zahl. Wir zeigen die Behauptung nun durchInduktion uber d(V ); genauer zeigen wir: Ist U ⊂ V ein Untermodul, sogilt d(U) ≤ d(V ).
• Induktionsanfang. Ist d(V ) = 0, so ist V ∼=R {0}. Der einzige Untermo-dul von V ist also V selbst (und damit insbesondere endlich erzeugt).
• Induktionsvoraussetzung. Sei nun m := d(V ) > 0 und es sei fur alleendlich erzeugten R-Moduln V ′ mit d(V ′) < m bereits gezeigt, dassjeder Untermodul U ′ von V ′ endlich erzeugt ist und d(U ′) ≤ d(V ′)erfullt.
• Induktionsschritt. Sei S ein Erzeugendensystem von V mit |S| = mund sei U ⊂ V ein Untermodul. Als ersten Schritt zeigen wir, dass esgenugt, den Fall zu betrachten, dass V ein freier Modul ist:
Mit der universellen Eigenschaft des freien Moduls Rm ∼=R
⊕{1,...,m}R
(bzw. der universellen Eigenschaft der Standardbasis von Rm) erhaltenwir einen R-Modulhomomorphismus
f : Rm −→ V
mit f({e1, . . . , em}) = S. Da S ein Erzeugendensystem von V ist, ist f
surjektiv. Sei U := f−1(U) ⊂ Rm. Dann ist U ein Untermodul von Rm
und nach Konstruktion ist f(U) = U . Es genugt also zu zeigen, dass U
endlich erzeugt ist mit d(U) ≤ m = d(V ).
Wir zerlegen das Problem nun: Dazu betrachten wir die Projektion
π : Rm −→ R
x 7−→ xm
auf die letzte Komponente (dies ist ein R-Modulhomomorphismus) und
K := kerπ = Rm−1×{0} ⊂ Rm. Mithilfe von π konnen wir U zerlegen:

2.5. Moduln uber Hauptidealringen 89
– Der Untermodul K := K ∩ U ⊂ K ist wegen d(K) ≤ m− 1 nachInduktionsvoraussetzung endlich erzeugt und erfullt
d(K) ≤ m− 1.
– Nach dem Homomorphiesatz fur Moduln (Satz 2.3.21) ist
U/K = U/ ker(π|U ) ∼=R π(U) ⊂ R.
Da π(U) ein Untermodul von R (d.h. ein Ideal) ist und R einHauptidealring ist, folgt
d(U/K) = d(π(U)
)≤ 1.
Aus endlichen Erzeugendensystemen von U/K und K konnen wir ein
endliches Erzeugendensystem von U zusammensetzen (Ubungsaufgabe)und wir erhalten
d(U) ≤ d(K) + d(U/K) ≤ m− 1 + 1 = m,
wie gewunscht.
Anmerkung zum Lernen. Bei der Reduktion auf Untermoduln von freienModuln haben wir eine Konstruktion verwendet, die an vielen Stellen inder (homologischen) Algebra auftritt: Man beschreibt Moduln als Bild vonHomomorphismen von freien Moduln. Analog ist es in der Gruppentheorie oftgunstig, Gruppen als Bild von Gruppenhomomorphismen von sogenanntenfreien Gruppen anzusehen. An dieser Stelle zahlt sich also ein gutes Verhaltniszu universellen Eigenschaften aus, da diese – wie der Name schon sagt –universell einsetzbar sind.
Korollar 2.5.2 (endliche Prasentiertheit). Sei R ein Hauptidealring.
1. Ist m ∈ N und ist U ⊂ Rm ein Untermodul, so gibt es ein n ∈ N undeine Matrix A ∈Mm×n(R) mit U = imL(A).
2. Ist V ein endlich erzeugter R-Modul, so ist V endlich prasentiert, d.h.es gibt m,n ∈ N und eine Matrix A ∈Mm×n(R) mit
V ∼=R Rm/ imL(A).
Beweis. Zu 1. Nach Satz 2.5.1 ist der Untermodul U ⊂ Rm endlich erzeugt,da Rm ein endlich erzeugter R-Modul ist. Sei T ⊂ U ein endliches Erzeugen-densystem und n := |T |. Dann liefert die universelle Eigenschaft der direktenSumme Rn ∼=R ⊕{1,...,n}R einen R-Modulhomomorphismus f : Rn −→ Rm
mit U = im f . Die Matrix A := (f(e1), . . . , f(en)) ∈ Mm×n(R) erfulltf = L(A) und somit

90 2. Normalformen II: Moduln uber Hauptidealringen
1
2
...
r
...
m
1 2 . . . r . . . n
0 0
0
0
α1
α2
. . .
αr
Abbildung 2.3.: Smith-Normalform; im grauen Bereich stehen nur Nullen.
U = im f = imL(A).
Zu 2. Sei S ⊂ V ein endliches Erzeugendensystem von V und sei m := |S|.Dann liefert die universelle Eigenschaft der direkten Summe einen surjekti-ven R-Modulhomomorphismus f : Rm −→ V . Nach dem Homomorphiesatzinduziert f einen R-Modulisomorphismus Rm/ ker f ∼=R V .
Da ker f ⊂ Rm ein Untermodul ist, erhalten wir aus dem ersten Teilein n ∈ N und eine Matrix A ∈Mm×n(R) mit ker f = imL(A). Also ist
V ∼=R Rm/ ker f = Rm/ imL(A).
Beispiel 2.5.3 (zyklische Moduln via Matrizen). Sei R ein kommutativer Ringund sei a ∈ R. Dann ist R/(a) ∼=R R/ imL(A), wobei A ∈ M1×1(R) die1× 1-Matrix ist, deren einziger Koeffizient das gegebene Element a ist.
Wir konnen im folgenden also endlich erzeugte Moduln uber Hauptideal-ringen mithilfe von Matrizen beschreiben. Wir werden daher zunachst Ma-trizen uber Hauptidealringen genauer betrachten.
2.5.2 Der Elementarteilersatz
Der Gauß-Algorithmus erlaubt es, Matrizen uber Korper in Zeilenstufenformzu transformieren (Satz I.5.2.8). Da in allgemeineren Ringen nicht jedes Ele-ment ungleich 0 eine Einheit ist, konnen wir dieses Verfahren nicht ohne wei-teres auf allgemeine Ringe ubertragen bzw. mussen damit rechnen, dass dieerreichbaren Zeilenstufenformen kompliziertere Pivotelemente enthalt. Diesfuhrt zur sogenannten Smith-Normalform und dem Elementarteilersatz furMatrizen:

2.5. Moduln uber Hauptidealringen 91
Definition 2.5.4 (Smith-Normalform). Sei R ein Integritatsring, seien m,n ∈N und sei A ∈Mm×n(R). Dann ist A in Smith-Normalform, wenn A von derGestalt in Abbildung 2.3 ist, mit r ∈ {0, . . . ,min(m,n)} und α1, . . . , αr ∈R \ {0}, wobei
αj | αj+1
fur alle j ∈ {1, . . . , r−1} gilt. Die Elemente α1, . . . , αr heißen Elementarteilervon A.
Beispiel 2.5.5. Die Matrizen
(2 00 4
),
(1 00 4
),
(2 00 0
)
in M2×2(Z) sind in Smith-Normalform. Die Matrizen
(2 00 3
),
(4 00 2
),
(0 00 1
)
in M2×2(Z) sind nicht in Smith-Normalform.
Satz 2.5.6 (Elementarteilersatz fur Matrizen). Sei R ein Hauptidealring, seienm,n ∈ N und sei A ∈Mm×n(R).
1. Dann gibt es Matrizen S ∈ GLm(R), T ∈ GLn(R), so dass
B := S ·A · T
in Smith-Normalform ist.
2. Fur die Elementarteiler α1, . . . , αr von B gilt:
∀k∈{1,...,min(m,n)} Dk(A) =
{(α1 · · · · · αk) falls k ≤ r{0} falls k > r.
Insbesondere sind r und die Elementarteiler von B (bis auf Assoziiert-heit) eindeutig durch A bestimmt; man bezeichnet sie daher auch alsElementarteiler von A.
Wir erklaren nun die noch nicht definierten Begriffe GLm(R) und Dk(A),die in der obigen Formulierung des Elementarteilersatzes verwendet wurden:
Bemerkung 2.5.7 (Determinanten uber Ringen). Sei R ein kommutativer Ringund n ∈ N>0. Dann definieren wir (in Anlehnung an die Leibnizformel dieDeterminante
det : Mn×n(R) −→ R
A 7−→∑
σ∈Snsgn(σ) ·
n∏
j=1
Aj,σ(j).

92 2. Normalformen II: Moduln uber Hauptidealringen
Man kann nun analog zum Fall von Matrizen uber Korpern nachrechnen,dass diese Determinantenfunktion n-linear und alternierend in den Zeilenund Spalten ist, die Normierung det In = 1 erfullt und durch Entwicklungnach einer Zeile bzw. Spalte rekursiv berechnet werden kann; außerdem giltfur alle A,B ∈Mn×n(R)
det(A ·B) = detA · detB.
Wir schreiben
GLn(R) :={A ∈Mn×n(R)
∣∣ ∃B∈Mn×n(R) A ·B = In = B ·A}
fur die Menge der (uber R) invertierbaren n × n-Matrizen uber R. Mithilfeder Ring-Version der Cramerschen Regel (Satz I.5.3.6) erhalten wir dann
GLn(R) ={A ∈Mn×n(R)
∣∣ detA ∈ R×}
;
man beachte dabei, dass im allgemeinen R× 6= R \ {0} gilt.
Definition 2.5.8 (Determinantenideale). Sei R ein kommutativer Ring, seienm,n ∈ N>0 und sei A ∈Mm×n(R). Sei r ∈ {1, . . . ,min(m,n)}.
• Eine r × r-Untermatrix von A ist eine Matrix der Form (Aj,k)j∈J,k∈K ,wobei J ⊂ {1, . . . ,m}, K ⊂ {1, . . . , n} mit |J | = r = |K| sind.
Strenggenommen sollten wir eigentlich die ordnungserhaltenden Bijek-tionen fJ : {1, . . . , r} −→ J bzw. fK : {1, . . . , r} −→ K und die zu-gehorigen Matrizen (AfJ (j),fK(k))j,k∈{1,...,r} betrachten. Um die Nota-tion etwas ubersichtlicher zu halten, haben wir die obige Darstellungverwendet.
• Sei
Dr(A) := SpanR{
detB∣∣ B ist eine r × r-Untermatrix von A
}⊂ R
das von der r-Minoren von A erzeugte Ideal in R.
Beweis (von Satz 2.5.6). Zu 1. Der Ubersichtlichkeit halber beweisen wir dieExistenz der Smith-Normalform nur in dem Fall, dass der Ring R euklidischist; der allgemeine Fall ist etwas aufwendiger (Bemerkung 2.5.10) und der eu-klidische Fall zeigt wie wir die fur uns relevanten Falle bequem algorithmischbehandeln konnen.
Analog zum Gaußschen Eliminationsverfahren verwenden wir Zeilen- undSpaltenoperationen der folgenden Form:
• Vertauschen zweier Zeilen [bzw. zweier Spalten].
• Multiplikation einer Zeile [bzw. einer Spalte] mit einer Einheit aus R.
• Addition eines skalaren Vielfachen einer Zeile [bzw. Spalte] zu eineranderen Zeile [bzw. Spalte].

2.5. Moduln uber Hauptidealringen 93
Wie im Fall von Zeilenoperationen auf Matrizen uber Korpern konnen wirdie obigen Zeilenoperationen als Multiplikation der gegebenen Matrix vonlinks mit uber R invertierbaren Matrizen auffassen; analog erhalten wir dieobigen Spaltenoperationen durch Multiplikation der gegebenen Matrix vonrechts mit uber R invertierbaren Matrizen.
Es genugt daher zu zeigen, dass wir die gegebene Matrix A durch dieobigen Zeilen-/Spaltenoperationen in Smith-Normalform uberfuhren konnen.Sei δ : R −→ N eine euklidische Gradfunktion fur R. Die essentielle Große,die das Verfahren steuert, ist
∆(A) := min{δ(Aj,k)
∣∣ j ∈ {1, . . . ,m}, k ∈ {1, . . . , n}, Aj,k 6= 0}∈ N
(sofern A 6= 0 ist). Wir gehen dann wie folgt vor:
• Minimierung des ersten Eintrags einer Matrix A.
– Ist A = 0 ∈ Mm×n(R) (oder m = 0 oder n = 0), so beenden wirden Algorithmus und verwenden A als Ergebnis.
– Ist A 6= 0, so wenden wir Zeilen- und Spaltenvertauschungen an,um δ(A1,1) = ∆(A) zu erreichen. Falls es mehrere Matrixeintragegibt, die ∆(A) liefern, kann man das Verfahren dadurch determi-nistisch gestalten, dass man den Eintrag mit dem kleinsten Spal-tenindex und dann in dieser Spalte mit dem kleinsten Zeilenindexwahlt und die zugehorigen Zeilen/Spalten entsprechend tauscht.Analog kann man auch alle anderen Schritte dieses Algorithmusdeterministisch beschreiben.
Wir wenden dann auf diese neue Matrix Reduktion der ersten Zei-le/Spalte an.
• Reduktion der ersten Zeile/Spalte einer Matrix A.
– Falls
∀k∈{2,...,n} A1,1 | A1,k und ∀j∈{2,...,m} A1,1 | Aj,1
gilt, wenden wir Ausraumen der ersten Zeile/Spalte auf unsereMatrix an.
– Falls es ein j ∈ {2, . . . ,m}mitA1,1 6 | Aj,1 gibt, wenden wir Divisionmit Rest an und erhalten so r, s ∈ R mit
Aj,1 = s ·A1,1 + r und δ(r) < δ(A1,1).
Wir addieren nun das −s-fache der ersten Zeile von A zur j-tenZeile von A. Der (j, 1)-Eintrag der neuen Matrix ist also r. Dannwenden wir Minimierung des ersten Eintrags auf die entstandeneMatrix an.

94 2. Normalformen II: Moduln uber Hauptidealringen
[Man beachte, dass sich durch diesen Schritt der ∆-Wert der Ma-trix verringert; dieser Schritt kann also nur endlich oft auftreten.]
– Falls es ein k ∈ {2, . . . , n} mit A1,1 6 | A1,k gibt (aber A1,1 alleEintrage der ersten Spalte teilt), wenden wir Division mit Rest anun erhalten so r, s ∈ R mit
A1,k = s ·A1,1 + r und δ(r) < δ(A1,1).
Wir addieren nun das −s-fache der ersten Spalte von A zur k-tenSpalte von A. Der (1, k)-Eintrag der neuen Matrix ist also r. Dannwenden wir Minimierung des ersten Eintrags auf die entstandeneMatrix an.
[Man beachte, dass sich durch diesen Schritt der ∆-Wert der Ma-trix verringert; dieser Schritt kann also nur endlich oft auftreten.]
• Ausraumen der ersten Zeile/Spalte einer Matrix A.
[Wir sind nun in der Situation, dass A1,1 ein Teiler aller Elemente derersten Zeile und der ersten Spalte von A ist.]
1. Fur jedes j ∈ {2, . . . ,m} addieren wir das −qj,1-fache der erstenZeile zur j-ten Zeile; dabei ist qj,1 ∈ R das Element mit Aj,1 =qj,1 ·A1,1.
2. Fur jedes k ∈ {2, . . . , n} addieren wir das −q1,k-fache der erstenSpalte zur k-ten Spalte; dabei ist q1,k ∈ R mit A1,k = q1,k ·A1,1.
Sei A′ die resultierende Matrix.
[Wir sind nun in der Situation, dass in der ersten Zeile und der erstenSpalte außer an der Position (1, 1) nur Nullen stehen.]
– Falls A1,1 alle Matrixeintrage von A′ teilt, so wenden wir Minimie-rung des ersten Eintrags (und alle damit verbundenen rekursivenOperationen) auf die verkleinerte Matrix
B := (Aj−1,k−1)(j,k)∈{1,...,m}×{1,...,n} ∈M(m−1)×(n−1)(R)
an und erhalten so eine Matrix B′. Dann verwenden wir(A1,1 0
0 B′
)
als Ergebnis.
– Falls es j ∈ {2, . . . ,m} und k ∈ {2, . . . , n} mit A1,1 6 | A′j,k gibt, soaddieren wir die j-te Zeile von A′ zur ersten Zeile von A′ (dabeibleibt der Eintrag an Position (1, 1) und der ∆-Wert der gesamten

2.5. Moduln uber Hauptidealringen 95
Matrix unverandert!) und wenden Minimierung des ersten Ein-trags auf die entstandene Matrix an.
Dieser Algorithmus terminiert, da ein erneuter Durchlauf von Minimie-rung des ersten Eintrags nur nach/bei Verringerung des ∆-Werts oder einerVerkleinerung der Matrix auftritt.
Induktiv folgt, dass die erhaltene Matrix außerhalb der”Diagonalen“ nur
Nullen enthalt und sich die Diagonaleintrage in der richtigen Reihenfolgeteilen. Das Ergebnis ist also in Smith-Normalform.
Zu 2. Nach Lemma 2.5.9 gilt
Dk(A) = Dk(S ·A · T ) = Dk(B)
fur alle k ∈ {1, . . . ,min(m,n)}. Da die α1, . . . , αr aufsteigend nach Teilbarkeitsortiert sind, folgt daher
Dk(A) = Dk(B) =
{(α1 · · · · · αk) falls k ≤ r{0} falls k > r
fur alle k ∈ {1, . . . ,min(m,n)}. Insbesondere konnen wir auf diese Weiserekursiv α1, . . . , αr (bis auf Assoziiertheit) und r aus D1(A), . . . , Dr(A) von Abestimmen.
Alternativ kann man die Eindeutigkeit der Elementarteiler auch mithilfeder Verwendung geeigneter Quotienten-/Restklassenkorper und der Langevon Moduln oder Tensorprodukten beweisen [3, Kapitel 6.3].
Lemma 2.5.9 (Determinantenideale). Sei R ein kommutativer Ring, seienm,n ∈ N>0, sei A ∈Mm×n(R) und sei k ∈ {1, . . . ,min(m,n)}.
1. Sind S ∈Mm×m(R) und T ∈Mn×n(R), so gilt
Dk(S ·A) ⊂ Dk(A) und Dk(A · T ) ⊂ Dk(A).
2. Sind S ∈ GLm×m(R) und T ∈ GLn×n(R), so gilt
Dk(S ·A · T ) = Dk(A).
Beweis. Der erste Teil folgt aus einer geschickten Berechnung/Darstellungder Determinanten von Untermatrizen unter Transformationen (Ubungsauf-gabe). Der zweite Teil ist eine direkte Konsequenz, indem man den erstenTeil auch auf die inversen Matrizen anwendet (Ubungsaufgabe).
Bemerkung 2.5.10 (der Fall allgemeiner Hauptidealringe). Der Beweis der Exi-stenz der Smith-Normalform uber allgemeinen Hauptidealringen ist ahnlichzum euklidischen Fall, jedoch im Detail etwas aufwendiger [3, S. 210ff]:
• Als Großenmaß der Matrixkoeffizienten verwendet man die Lange derPrimfaktorzerlegung.

96 2. Normalformen II: Moduln uber Hauptidealringen
• Statt Division mit Rest in Reduktion der ersten Zeile/Spalte verwendetman eine Darstellung des großten gemeinsamen Teilers der beiden be-trachteten Matrixkoeffizienten; an dieser Stelle werden dann auch etwaskompliziertere Zeilen-/Spaltenoperationen notig, um den gewunschtenEliminationseffekt zu erzielen.
Anmerkung zum Lernen (Vergleich des Elementarteilersatzes mit anderen Re-sultaten). Was besagt der Elementarteilersatz fur Matrizen in dem Fall, dassder Grundring ein Korper ist? Welchen Algorithmus erhalt man, wenn manden Algorithmus im Beweis des Elementarteilersatzes auf eine 1 × 2-Matrixmit Koeffizienten in einem euklidischen Ring anwendet? (Hinweis: es ist einalter Bekannter!)
Beispiel 2.5.11 (Berechnung der Elementarteiler). Wir betrachten
A :=
(4 6−8 12
)∈M2×2(Z).
Was sind die Elementarteiler von A ? Da A eine”kleine“ Matrix ist, konnen
wir dies mit dem zweiten Teil von Satz 2.5.6 bequem beantworten:
• Bestimmung von D1(A): Der großte gemeinsame Teiler aller Matrixein-trage ist 2; also ist D1(A) = (4, 6,−8, 12) = (2).
• Bestimmung von D2(A): Die einzige 2 × 2-Untermatrix von A ist Aselbst und
detA = 4 · 12 + 8 · 6 = 96.
Also ist D2(A) = (96).
Somit sind 2 und 96/2 = 48 die Elementarteiler von A.Mochte man auch noch invertierbare Matrizen finden, die A in Smith-
Normalform transformieren, so bietet es sich an, den im Beweis von Satz 2.5.6beschriebenen Algorithmus anzuwenden:
• Minimierung des ersten Eintrags von A: Es ist A 6= 0 und ∆(A) = 4(bezuglich δ = | · | : Z −→ N). Der erste Eintrag ist bereits ∆-minimal.
• Reduktion der ersten Zeile/Spalte von A: Alle Eintrage der ersten Spal-te sind durch 4 teilbar. Es gibt einen Eintrag (6 = 1 ·4+2) in der erstenZeile, der nicht durch 4 teilbar ist. Addition des −1-fachen der erstenSpalte zur zweiten Spalte liefert
A′ :=
(4 2−8 20
).
• Minimierung des ersten Eintrags von A′: Wir tauschen dazu die ersteund zweite Spalte. Dies liefert

2.5. Moduln uber Hauptidealringen 97
A′′ :=
(2 420 −8
).
• Reduktion der ersten Zeile/Spalte vonA′′: Der erste Eintrag (namlich 2)teilt alle anderen Matrixeintrage in der ersten Zeile/Spalte.
• Ausraumen der ersten Zeile/Spalte von A′′: Addition des −10-fachender ersten Zeile zur zweiten Zeile liefert
(2 40 −48
)
Addition des −2-fachen der ersten Spalte dieser Matrix zur zweitenSpalte dieser Matrix liefert
(2 00 −48
).
Der erste Matrixeintrag teilt alle anderen Eintrage. Wir wenden daherden Algorithmus auf die 1×1-Matrix −48 an. Dies liefert insgesamt alsErgebnis
B :=
(2 00 −48
).
Indem wir die Zeilen- und Spaltenoperationen in der richtigen Reihenfolgesammeln und in Matrizen umschreiben, erhalten wir fur (Zeilenoperationen:zweite Zeile minus 10-mal die erste Zeile)
S :=
(1 0−10 1
)
und (Spaltenoperationen: erstens: zweite Spalte minus die erste Spalte; zwei-tens: Vertauschung der ersten und zweiten Spalte; drittens: zweite Spalteminus 2-mal die erste Spalte; Spaltenoperationen werden von rechts multi-pliziert!)
T :=
(1 −10 1
)·(
0 11 0
)·(
1 −20 1
)=
(−1 31 −2
),
dass
B := S ·A · T =
(2 00 −48
);
man beachte dabei, dass 48 und −48 in Z assoziiert sind!
Alternativ kann man die Berechnung von S und T auch mithilfe einesdreigeteilten Schemas (analog zum zweigeteilten Schema zur Berechnung voninversen Matrizen uber Korpern) in den obigen Algorithmus integrieren.

98 2. Normalformen II: Moduln uber Hauptidealringen
Der Elementarteilersatz liefert außerdem analog zum Gaußschen Elimina-tionsverfahren insbesondere ein Losungsverfahren zur Losung linearer Glei-chungssysteme uber Hauptidealringen. Zum Beispiel kann man auf diese Wei-se lineare Gleichungssysteme (sogenannte lineare diophantische Gleichungen)uber den ganzen Zahlen losen.
Beispiel 2.5.12 (Losung linearer Gleichungssysteme uber Ringen). Die Bestim-mung der Transformationsmatrizen ist zum Beispiel dann relevant, wenn manlineare Gleichungssysteme losen mochte: In Beispiel 2.5.11 konnen wir so dieMenge
V :={x ∈ Z2
∣∣ 4 · x1 + 6 · x2 = 42 und − 8 · x1 + 12 · x2 = 0}
bestimmen: Es gilt (mit der Notation aus Beispiel 2.5.11)
V =
{x ∈ Z2
∣∣∣∣ A · x =
(420
)}
=
{x ∈ Z2
∣∣∣∣ B · T−1 · x = S ·(
420
)}
=
{T · y ∈ Z2
∣∣∣∣ B · y = S ·(
420
)}
=
{T · y ∈ Z2
∣∣∣∣(
2 00 −48
)· y =
(42
−420
)}
={T · y ∈ Z2
∣∣ 2 · y1 = 42 und − 48 · y2 = −420}
= ∅.
Im letzten Schritt haben wir verwendet, dass −420 nicht durch −48 teilbarist.
Analog zu den Gauß-Rezepten uber Korpern konnen wir mithilfe des Ele-mentarteilersatzes viele lineare Probleme in (freien) Moduln uber Hauptideal-ringen losen. Dies spielt zum Beispiel bei der algorithmischen Berechnung vonHomologiegruppen in der Algebraischen Topologie eine Rolle [7].
2.5.3 Die Klassifikation endlich erzeugter Moduln
Indem wir endlich erzeugte Moduln durch Matrizen beschreiben und auf die-se Matrizen den Elementarteilersatz fur Matrizen anwenden, erhalten wir diegewunschte Klassifikation von endlich erzeugten Moduln uber Hauptidealrin-gen. Insbesondere zeigen wir die Wohldefiniertheit des Rangs freier Moduln(Proposition 2.5.13), den Elementarteilersatz fur Moduln (Satz 2.5.14) undden Klassifikationssatz fur endlich erzeute Moduln (Satz 2.5.15).
Proposition 2.5.13 (Rang freier Moduln uber Hauptidealringen). Sei R einHauptidealring und seien m,n ∈ N.

2.5. Moduln uber Hauptidealringen 99
1. Gilt n > m und ist A ∈ Mm×n(R), so ist L(A) : Rn −→ Rm nichtinjektiv.
2. Insbesondere folgtRm ∼=R R
n ⇐⇒ m = n.
Beweis. Der erste Teil ist eine Folgerung aus dem Elementarteilersatz furMatrizen (Satz 2.5.6) (Ubungsaufgabe); der zweite Teil ist eine direkte Kon-sequenz des ersten Teils.
Satz 2.5.14 (Elementarteilersatz fur Moduln). Sei R ein Hauptidealring, seim ∈ N und sei U ⊂ Rm ein Untermodul.
1. Dann gibt es eine R-Basis (v1, . . . , vm) von Rm sowie r ∈ {0, . . . ,m}und α1, . . . , αr ∈ R \ {0} mit
U = SpanR{α1 · v1, . . . , αr · vr}
und αj | αj+1 fur alle j ∈ {1, . . . , r − 1}.
2. Insbesondere ist U ein freier R-Modul.
3. Dabei sind r und α1, . . . , αr (bis auf Assoziiertheit) im folgenden Sinneeindeutig durch U bestimmt: Ist (v′1, . . . , v
′m) eine R-Basis von Rm und
gibt es r′ ∈ {0, . . . ,m} sowie α′1, . . . , α′r ∈ R \ {0} mit U = SpanR{α′1 ·
v′1, . . . , α′r · v′r′}, so gilt bereits r = r′ und fur jedes j ∈ {1, . . . , r = r′}
ist αj zu α′j assoziiert.
Man bezeichnet dann α1, . . . , αr als Elementarteiler von U .
Beweis. Zu 1. Wir beschreiben U zunachst durch eine Matrix: Nach Korol-lar 2.5.2 gibt es n ∈ N und A ∈Mm×n(R) mit U = imL(A).
Aus dem Elementarteilersatz fur Matrizen (Satz 2.5.6) erhalten wir dannMatrizen S ∈ GLm(R) und T ∈ GLn(R), so dass
B := S ·A · T
in Smith-Normalform ist; sei α1, . . . , αr die Folge der Elementarteiler von B(bzw. A). Dann ist
A = S−1 ·B · T−1
und die Spalten v1, . . . , vm von S−1 bilden eine R-Basis von Rm. Nach Kon-struktion gilt dabei
U = imL(A) (Konstruktion von A)
= im(L(S−1 ·B) ◦ L(T−1)
)(wegen A = S−1 ·B · T−1)
= imL(S−1 ·B) (da L(T−1) surjektiv ist)
= SpanR{α1 · v1, . . . , αr · vr} (Gestalt von B).

100 2. Normalformen II: Moduln uber Hauptidealringen
Zu 2. Die Familie (α1 · v1, . . . , αr · vr) aus dem ersten Teil ist linear un-abhangig uber R (da α1, . . . , αr ∈ R \ {0}, die Familie (v1, . . . , vm) linearunabhangig ist und R nullteilerfrei ist). Außerdem ist {α1 · v1, . . . , αr · vr}nach Konstruktion ein Erzeugendensystem von U . Also ist (α1 ·v1, . . . , αr ·vr)eine R-Basis von U ; insbesondere ist U ein freier R-Modul.
Zu 3. Die Eindeutigkeitsaussage kann man wie folgt mithilfe der Ele-mentarteiler bzw. Determinantenideale von Matrizen ableiten: Wir betrach-ten dazu die Matrizen
A := (α1 · v1 | · · · | αr · vr | 0 | · · · | 0) ∈Mm×m(R),
A′ := (α′1 · v′1 | · · · | α′r′ · v′r′ | 0 | · · · | 0) ∈Mm×m(R).
Dann ist imL(A) = U = imL(A′). Zu j ∈ {1, . . . , r} gibt es also wj ∈ Rmmit A′ · wj = αj · vj . Fur j ∈ {r + 1, . . . ,m} setzen wir wj := 0. Zusammen-gesetzt ergibt dies eine Matrix
T := (w1 | · · · | wm) ∈Mm×m(R)
mit∀j∈{1,...,m} A′ · T = A
(die Spalten . . . !). Also gilt (Lemma 2.5.9)
∀j∈{1,...,m} Dj(A) = Dj(A′ · T ) ⊂ Dj(A
′).
Indem wir die Rollen von A und A′ vertauschen, erhalten wir auch die In-klusionen Dj(A
′) ⊂ Dj(A) fur alle j ∈ {1, . . . ,m}. Wir ubersetzen nun dieDeterminantenideale wieder zuruck in Elementarteiler und erhalten so, dassr = r′ ist und dass αj fur jedes j ∈ {1, . . . , r} zu α′j assoziiert ist.
Anmerkung zum Lernen. Was besagt der Elementarteilersatz fur Modulnim Fall von Vektorraumen? Wie haben wir dies in der Linearen Algebra Ibewiesen?
Mit dem Chinesischen Restsatz konnen wir den Elementarteilersatz furModuln wie folgt umformulieren:
Satz 2.5.15 (Hauptsatz uber endlich erzeugte Moduln uber Hauptidealringen).Sei R ein Hauptidealring und sei V ein endlich erzeugter R-Modul. Danngibt es d, k ∈ N, Primelemente p1, . . . , pk ∈ R und Zahlen n1, . . . , nk ∈ N>0
mitV ∼=R R
d ⊕⊕
j∈{1,...,k}R/(p
njj ).
Dabei sind d, k, die Primelemente p1, . . . , pk (bis auf Assoziiertheit) und diezugehorigen Exponenten n1, . . . , nk eindeutig durch V bestimmt.
Beweis. Existenz der Zerlegung. Wir gehen wie im Beweis des Elementar-teilersatzes fur Untermoduln vor (alternativ konnte man ihn auch geschickt

2.5. Moduln uber Hauptidealringen 101
auf diese Situation anwenden): Da V endlich erzeugt ist, gibt es nach Korol-lar 2.5.2 Zahlen m,n ∈ N und eine Matrix A ∈Mm×n(R) mit
V ∼=R Rm/ imL(A).
Nach dem Elementarteilersatz fur Matrizen (Satz 2.5.6) gibt es invertierbareMatrizen S ∈ GLm(R) und T ∈ GLn(R), so dass
B := S ·A · T
in Smith-Normalform ist; seien α1, . . . , αr ∈ R die Elementarteiler von A(bzw. B). Eine einfache Rechnung zeigt somit
V = Rm/ imL(A) ∼=R Rm/ imL(B) ∼=R R
m−r ⊕⊕
j∈{1,...,r}R/(αj).
Wir verwenden nun den Chinesischen Restsatz (Satz 2.4.33), um dies zurgewunschten Primpotenzform zu reorganisieren: Dazu zerlegen wir die Ele-mentarteiler α1, . . . , αr in ihre Primfaktoren: Seien p1, . . . , pk die in α1, . . . , αrauftretenden Primelemente; ohne Einschrankung konnen wir dabei anneh-men, dass p1, . . . , pk paarweise nicht assoziiert sind bzw. dass ggT(ps, pt) = 1fur alle s, t ∈ {1, . . . , k} mit s 6= k gilt. Ist j ∈ {1, . . . , r}, so schreiben wir
αj = pnj,11 · · · · · pnj,kk
mit nj,1, . . . , nj,k ∈ N. Induktiv erhalten wir mit dem Chinesischen Restsatz:
R/(αj) ∼=R
k⊕
s=1
R/(pnj,sj ) ∼=R
⊕
s∈{1,...,k} mit nj,s 6=0
R/(pnj,sj ).
Dies liefert insgesamt die gewunschte Beschreibung von V .
Eindeutigkeit der Terme in einer solchen Zerlegung. Wir skizzieren einenBeweis, der nur auf der bisher entwickelten Matrizen- und Modultheorie be-ruht. Mithilfe von geeigneten Quotientenkorpern und Tensorprodukten kannman auch einen Beweis fuhren, der das Problem in ein Dimensionsproblemvon Vektorraumen ubersetzt [3, Kapitel 6.3].
Sei etwa V ∼=R Rd′ ⊕⊕j∈{1,...,k′}R/(p
′jn′k) eine weitere solche Zerlegung.
Insbesondere erhalten wir einen R-Modulisomorphismus
f : Rd ⊕⊕
j∈{1,...,k}R/(p
njj ) −→ Rd
′ ⊕⊕
j∈{1,...,k′}R/(p′j
n′j )
• Dann gilt d = d′, denn: Die Komposition Rd −→ Rd′, die man aus f und
der kanonischen Inklusion/Projektion erhalt, ist injektiv (nachrechnen).Also ist d′ ≤ d (Proposition 2.5.13). Mit dem Inversen von f erhaltman d ≤ d′. Also ist d = d′.

102 2. Normalformen II: Moduln uber Hauptidealringen
• Es gibt s1, . . . , sk ∈ R× mit {s1 · p1, . . . , sk · pk} = {p′1, . . . , p′k′}, denn:Ist p ∈ R prim, so schreiben wir
TorR1(V,R/(p)
):= {x ∈ V | p · x = 0} ⊂ V
fur den p-Torsionsanteil von V ; dies ist ein Untermodul von V . Dannliefert f einen Isomorphismus (nachrechnen)
⊕
j∈NpR/(p
njj ) ∼=R TorR1
(V,R/(p)
) ∼=R
⊕
j∈N ′p
R/(p′jn′j ),
wobei
Np :={j ∈ {1, . . . , k}
∣∣ pj und p sind assoziiert}
N ′p :={j ∈ {1, . . . , k′}
∣∣ p′j und p sind assoziiert}.
Damit folgt, dass Np genau dann leer ist, wenn N ′p leer ist. Also stim-men {p1, . . . , pk} und {p′1, . . . , p′k′} bis auf elementweise Assoziiertheituberein und wir konnen die p-Torsionsanteile einzeln untersuchen.
• Es gilt k = k′ und die Familien ((pj , nj))j∈{1,...,k}, ((p′j , n′j))j∈{1,...,k′}
von Paaren stimmen bis auf die Reihenfolge und Assoziiertheit derPrimelemente uberein, denn: Nach dem letzten Schritt konnen wir ohneEinschrankung annehmen, dass nur ein einziger Primfaktor p auftritt.Wir betrachten also den Fall, dass ein R-Modulisomorphismus
f :⊕
j∈{1,...,k}R/(pnj ) −→
⊕
j∈{1,...,k′}R/(pn
′j )
vorliegt; dabei seien die Potenzen so sortiert, dass n1 ≤ · · · ≤ nk undn′1 ≤ · · · ≤ n′k′ gilt.
Wir betrachten nun die Diagonalmatrizen
A :=
pn1 . . . 0
.... . .
...0 . . . pnk
∈Mk×k(R) und A′ :=
pn′1 . . . 0
.... . .
...
0 . . . pn′k′
∈Mk′×k′(R).
Da diese Matrizen in Smith-Normalform sind und p prim ist, genugtes also zu zeigen, dass diese beiden Matrizen dieselben Elementarteilerbesitzen. Wir nutzen nun den Isomorphismus f , um diese Matrizen zuvergleichen:
Die kanonische Projektion Rk −→ Rk/ imL(A) liefert einen surjektiven
R-Modulhomomorphismus π : Rk −→ ⊕kj=1R/(p
nj ). Analog erhalten
wir einen Epimorphismus π′ : Rk −→⊕k′
j=1R/(pn′j ). Da f ein Isomor-
phismus ist, erhalten wir mit der universellen Eigenschaft des freien

2.5. Moduln uber Hauptidealringen 103
RkL(A)
//
h
��
Rkπ //
g
��
⊕kj=1R/(p
nj )
f∼=��
Rk′
L(A′)// Rk
′
π′//⊕k′
j=1R/(pn′j )
Abbildung 2.4.: Zerlegungen des p-Torsionsanteils eines Moduls
Moduls Rk Homomorphismen g : Rk −→ Rk′
und h : Rk −→ Rk′
mit
f ◦ π = π′ ◦ g und g ◦ L(A) = L(A′) ◦ h.
Betrachten wir den inversen Homomorphismus f ′ von f , so finden wiranalog Homomorphismen g′, h′ : Rk
′ −→ Rk mit
f ′ ◦ π′ = π ◦ g′ und g′ ◦ L(A′) = L(A) ◦ h′
(Abbildung 2.4).
Die Tatsache, dass f und f ′ invers zueinander sind, liefert zwar im allge-meinen nicht, dass g und g′ invers zueinander sind, aber immerhin, dasssich die Kompositionen g′ ◦g und g ◦g′ nur um einen Homomorphismusmit Bild in imL(A) bzw. imL(A′) von idRk bzw. idRk′ unterscheiden.In anderen Worten: Schreiben wir
S :=(g(e1) | · · · | g(ek)
)∈Mk×k′(R)
S′ :=(g′(e1) | · · · | g′(ek′)
)∈Mk′×k(R)
T :=(h(e1) | · · · | h(ek)
)∈Mk×k′(R)
T ′ :=(h′(e1) | · · · | h′(ek′)
)∈Mk′×k(R),
so gibt es Matrizen U ∈Mk×k(R) und U ′ ∈Mk′×k′(R) mit
S′ · S = In + U und S · S′ = In + U ′
und imL(U) ⊂ imL(A), imL(U ′) ⊂ imL(A′). Nach Definition von Abzw. A′ bedeutet dies insbesondere, dass alle Matrixeintrage von Ubzw. U ′ durch p teilbar sind. Mit der Leibnizformel erhalten wir daher
det(S′ · S) ∈ 1 + (p) und det(S · S′) ∈ 1 + (p).
Dies hat zwei wichtige Konsequenzen: Erstens hat die Smith-Normal-form von S bzw. S′ keine Nullspalten; somit ist k = k′ und
detS′ · detS = det(S′ · S) ∈ 1 + (p).

104 2. Normalformen II: Moduln uber Hauptidealringen
Zweitens ist daher also keiner der Elementarteiler von S bzw. S′ durch pteilbar.
Mit Lemma 2.5.9 und der Konstruktion von S und T erhalten wir
∀j∈{1,...,k=k′} Dj(A′) ⊃ Dj(A
′ · T ) = Dj(S ·A).
Alle Elementarteiler von A′ sind also Teiler der entsprechenden Ele-mentarteiler von S ·A. Nach Konstruktion von A′ sind die Elementar-teiler von A′ genau die p-Potenzen pn
′1 , . . . , pn
′k . Andererseits kann man
mithilfe von Lemma 2.5.9 und der Smith-Normalform von S nachrech-nen, dass eine p-Potenz pm mit m ∈ N>0 nur dann ein Teiler einesElementarteilers von S ·A sein kann, wenn pm den entsprechenden Ele-mentarteiler von A teilt (da ja keiner der Elementarteiler von S durch pteilbar ist). Insgesamt folgt daher
∀j∈{1,...,k} n′j ≤ nj .
Analog erhalten wir auch die umgekehrte Ungleichung; also gilt n′j = njfur alle j ∈ {1, . . . , k}, wie gewunscht.
Insbesondere erhalten wir aus Satz 2.5.15 auch die Klassifikation der end-lich erzeugten Z-Moduln (bzw. endlich erzeugten abelschen Gruppen):
Korollar 2.5.16 (Klassifikation der endlich erzeugten abelschen Gruppen). SeiA eine endlich erzeugte abelsche Gruppe. Dann gibt es d, k ∈ N, Primzah-len p1, . . . , pk ∈ N und Zahlen n1, . . . , nk ∈ N>0 mit
A ∼=Z Zd ⊕⊕
j∈{1,...,k}Z/pnjj Z.
Dabei sind d, k, p1, . . . , pk und n1, . . . , nk eindeutig durch A bestimmt.
Beweis. Da Z ein Hauptidealring ist, konnen wir den Hauptsatz uber endlicherzeugte Moduln uber Hauptidealringen (Satz 2.5.15) anwenden; man beachtedabei, dass jede Primzahl in Z zu genau einer Primzahl in N assoziert ist.
Dieser Klassifikationssatz kann unter anderem dafur genutzt werden, end-liche abelsche Gruppen zu klassifizieren. Dazu muss man nach Korollar 2.5.16nur die Anzahl der Elemente der Gruppe in Primfaktoren zerlegen unduberlegen, welche Kombinationsmoglichkeiten von Primpotenzen es gibt, umdasselbe Produkt zu erhalten.
Beispiel 2.5.17.
• Ist p prim, so gibt es bis auf Isomorphie genau eine abelsche Gruppemit genau p Elementen, namlich Z/pZ.

2.5. Moduln uber Hauptidealringen 105
Genauer argumentiert man wie folgt: Es ist Z/pZ eine abelsche Grup-pe mit genau p Elementen. Warum ist das bis auf Isomorphie die ein-zige Moglichkeit? Sei A eine abelsche Gruppe mit genau p Elemen-ten; insbesondere ist A endlich erzeugt. Nach der Klassifikation derendlich erzeugten abelschen Gruppen gibt es dann d, k ∈ N, Primzah-len p1, . . . , pk ∈ N und Zahlen n1, . . . , nk ∈ N>0 mit
A ∼=Z Zd ⊕⊕
j∈{1,...,k}Z/pnjj Z.
Da A endlich ist, ist d = 0 und
p = |A| =k∏
j=1
∣∣Z/pnjj Z∣∣ =
k∏
j=1
pnjj .
Da p prim ist, erhalten wir somit k = 1 und p1 = p, n1 = 1. Also bleibtin der direkten Summenzerlegung nur der Summand Z/pZ ubrig, d.h.es ist A ∼=Z Z/pZ.
• Es gibt bis auf Isomorphie genau eine abelsche Gruppe mit genau 10 =2 · 5 Elementen, namlich
Z/10Z ∼=Z Z/2Z⊕ Z/10Z.
• Es gibt bis auf Isomorphie genau zwei abelsche Gruppen mit genau vierElementen, namlich (da 4 = 2 · 2 = 22)
Z/4Z und Z/2Z⊕ Z/2Z.
Anmerkung zum Lernen. Der Elementarteilersatz und der Klassifikations-satz der endlich erzeugten abelschen Gruppen treten regelmaßig im schrift-lichen Staatsexamen auf. Es ist also sicher nicht verkehrt, diese Satze (undihre Anwendungen) gut zu beherrschen.
Unsere Hauptanwendung des Klassifikationssatzes (Satz 2.5.15) ist jedochder Beweis der Existenz bzw. Eindeutigkeit der Jordanschen Normalform furquadratische Matrizen uber dem Korper C (Kapitel 3).

106 2. Normalformen II: Moduln uber Hauptidealringen

3
Normalformen III: Die JordanscheNormalform
Wir werden nun mithilfe der Modultheorie aus Kapitel 2, genauer mitder Klassifikation von endlich erzeugten Moduln uber Polynomringen, denSatz uber die Jordansche Normalform fur Endomorphismen von endlich-dimensionalen C-Vektorraumen beweisen.
Dazu ubersetzen wir die Begriffe uber das Zerlegen von Endomorphismenzunachst in die Sprache der Moduln und erklaren die Rolle des sogenanntenMinimalpolynoms bzw. des charakteristischen Polynoms in diesem Kontext.
Im Anschluss geben wir einen kleinen Ausblick auf typische Anwendungender Jordanschen Normalform.
Uberblick uber dieses Kapitel.
3.1 Moduln zu Endomorphismen 1083.2 Das Minimalpolynom 1123.3 Die Jordansche Normalform 118
Schlusselbeispiel. Jordanblocke, Begleitmatrizen

108 3. Normalformen III: Die Jordansche Normalform
3.1 Moduln zu Endomorphismen
Wir wissen bereits, dass die Klassifikation von Endomorphismen von endlich-dimensionalen Vektorraumen zur Klassifikation von quadratischen Matrizenbis auf Ahnlichkeit aquivalent ist (Kapitel I.6.4.1). Wir werden daher imfolgenden quadratische Matrizen bis auf Ahnlichkeit klassifizieren. Genau-er gesagt werden wir die Klassifikationsresultate fur Matrizen formulieren,aber bei der Herleitung oft die Sprache der Endomorphismen verwenden – jenachdem, was in der gegebenen Situation bequemer ist.
Dazu werden wir zu einem Endomorphismus f : V −→ V von K-Vektor-raumen den zugehorigen K[T ]-Modul V [f ] (Proposition 2.3.6) mithilfe derModultheorie uber dem Hauptidealring K[T ] analysieren.
3.1.1 Zerlegung von Endomorphismen: Modulversion
Als ersten Schritt uberlegen wir uns, dass diese Modultheorie tatsachlich dazugeeignet ist, das vorliegende Klassifikationsproblem zu losen.
Proposition 3.1.1 (Matrizenkalkul und Moduln). Sei K ein Korper, seienm,n ∈ N und seien A ∈ Mm×m(K), B ∈ Mn×n(K). Dann sind die fol-genden Aussagen aquivalent:
1. Es gilt m = n und die Matrizen A und B sind ahnlich, d.h. es gibt eineMatrix S ∈ GLn(K) mit B = S−1 ·A · S.
2. Die K[T ]-Moduln Km[L(A)] und Kn[L(B)] sind isomorph.
Beweis. Wir schreiben f := L(A) und g := L(B).Sei m = n und die Matrizen seien A und B ahnlich; sei etwa S ∈ GLn(K)
mit B = S−1 ·A · S. Mit F := L(S−1) : Kn −→ Kn erhalten wir dann
F ◦ f = L(S−1) ◦ L(A) = L(S−1 ·A) = L(B · S−1) = L(B) ◦ L(S−1)
= g ◦ F.
Nach Proposition 2.3.9 sind dann die K[T ]-Moduln Kn[f ] und Kn[g] iso-morph.
Seien umgekehrt Km[L(A)] und Kn[L(B)] isomorphe K[T ]-Moduln, etwadurch einen K[T ]-Isomorphismus F : Km[L(A)] −→ Kn[L(g)]. Dann sindinsbesondere die unterliegendenK-Vektorraume isomorph, und damitm = n.Die Matrix S := M(F )−1 ∈ GLn(K) hat die Eigenschaft B = S−1 · A · S(nach Proposition 2.3.9). Also sind A und B ahnlich.
Mit dem folgenden Worterbuch konnen wir außerdem die Zerlegung vonEndomorphismen in die Zerlegung von Moduln ubersetzen und umgekehrt:

3.1. Moduln zu Endomorphismen 109
Proposition 3.1.2 (Endomorphismenmodulnworterbuch). Sei K ein Korper,sei V ein K-Vektorraum und sei f : V −→ V ein Endomorphismus.
1. Ein Untervektorraum U ⊂ V ist genau dann f -invariant, wenn U einK[T ]-Untermodul des K[T ]-Moduls V [f ] ist.
2. Der K-Vektorraum V ist genau dann f -reduzibel, wenn der K[T ]-Mo-dul V [f ] zerlegbar ist.
3. Der K-Vektorraum V ist genau dann f -zyklisch, wenn der K[T ]-Mo-dul V [f ] zyklisch ist (d.h. als K[T ]-Modul von einem Element erzeugtist).
Beweis. All diese Zusammenhange kann man in wenigen Schritten aus denentsprechenden Definitionen ableiten (Ubungsaufgabe).
Aus dem Hauptsatz uber endlich erzeugten Moduln uber Hauptidealringen(in diesem Fall der Polynomring uber dem Grundkorper) erhalten wir:
Proposition 3.1.3 (Primzerlegung von Endomorphismenmoduln). Sei K einKorper, sei V ein endlich-dimensionaler K-Vektorraum und sei f : V −→ Vein Endomorphismus.
1. Der Einsetzungshomomorphismus
K[T ] −→ HomK(V, V )
p 7−→ p(f)
ist nicht injektiv.
Mit anderen Worten: Es gibt ein Polynom p ∈ K[T ]\{0} mit p(f) = 0.
2. Es gibt also k ∈ N, Primpolynome p1, . . . , pk ∈ K[T ] und n1, . . . , nk ∈N>0 mit
V [f ] ∼=K[T ]
⊕
j∈{1,...,k}K[T ]/(p
njj )
(und diese Daten sind bis auf Assoziiertheit der Primpolynome eindeu-tig).
3. Insbesondere gilt: Ist V ein f -irreduzibler Vektorraum, so ist V bereitsf -zyklisch (und im Fall V 6∼= {0} gilt V [f ] ∼=K[T ] K[T ]/(pn) fur eingeeignetes Primpolynom p und ein geeignetes n ∈ N>0).
Beweis. Zu 1. Der K-Vektorraum K[T ] ist unendlich-dimensional, der Ein-setzungshomomorphismus ϕ ist K-linear und der EndomorphismenraumHomK(V, V ) ist endlich-dimensional (da V endlich-dimensional ist). Somitist ϕ nicht injektiv. (Ubungsaufgabe).
Zu 2. Wir wenden den Hauptsatz uber endlich erzeugte Moduln uberHauptidealringen auf den K[T ]-Modul V [f ] an (wegen dimK V < ∞ sieht

110 3. Normalformen III: Die Jordansche Normalform
man leicht, dass V [f ] als K[T ]-Modul endlich erzeugt ist). Also gibt es d, k ∈N, Primpolynome p1, . . . , pk ∈ K[T ] und n1, . . . , nk ∈ N>0 mit
V [f ] ∼=K[T ] K[T ]d ⊕⊕
j∈{1,...,k}K[T ]/(p
njj )
(und diese Daten sind bis auf Assoziiertheit der Primpolynome eindeutig).Aus dem ersten Teil und der Konstruktion der K[T ]-Modulstruktur auf V [f ]folgt, dass d = 0 ist. Somit erhalten wir die behauptete Beschreibungvon V [f ].
Zu 3. Dies folgt aus der Beschreibung von V [f ] im zweiten Teil und demWorterbuch aus Proposition 3.1.2.
3.1.2 Zerlegung von Endomorphismen: Matrizenversion
Bemerkung 3.1.4 (der allgemeine Klassifikationssatz fur Matrizen). Im Zusam-menspiel von Proposition 3.1.3 mit Proposition 3.1.1 ergibt sich somit: Ist Kein Korper,
• ist P ⊂ K[T ] ein Reprasentantensystem der Primelemente in K[T ]modulo Assoziiertheit (ein solches existiert nach dem Auswahlaxiom)und
• ist (A(p, n))p∈P,n∈N>0eine Familie von Matrizen mit der Eigenschaft,
dass der K[T ]-Modul des Endomorphismus L(A(p, n)) zu K[T ]/(pn)isomorph ist,
so ist jede quadratische Matrix uber K zu einer Blockmatrix der Form
A(p1, n1) . . . 0
.... . .
...0 . . . A(pk, nk)
ahnlich, wobei k ∈ N, p1, . . . , pk ∈ P und n1, . . . , nk ∈ N>0; diese Daten sindbis auf die Reihenfolge eindeutig.
Eine Moglichkeit, Matrizen zu vorgegebenen zyklischen Moduln zu kon-struieren, ist via der sogenannten Begleitmatrizen; zusammen mit Bemer-kung 3.1.4 erhalten wir so eine Klassifikation von quadratischen Matrizenbis auf Ahnlichkeit uber jedem gegebenen Grundkorper. Man beachte dabeijedoch, dass wir im Fall der komplexen Zahlen fur Primpotenzen nicht diegewunschten Jordanblocke als Matrizen erhalten, sondern andere Matrizen.
Proposition 3.1.5 (Begleitmatrizen). Sei K ein Korper und sei p = Tm +∑m−1j=0 aj ·T j ∈ K[T ] (mit m ∈ N, a0, . . . , am ∈ K) ein normiertes Polynom.
Dann hat die Matrix

3.1. Moduln zu Endomorphismen 111
A :=
0 0 . . . 0 −a0
1 0 . . . 0 −a1
0 1 . . . 0 −a2
.... . .
. . ....
...0 0 . . . 1 −am−1
∈Mm×m(K)
(die sogenannte Begleitmatrix zu p) die Eigenschaft, dass
Km[L(A)
] ∼=K[T ] K[T ]/(p).
Beweis. Man konnte den Beweis so fuhren, dass man zu A einfach den Mo-dul Km[L(A)] bestimmt. Wir gehen jedoch umgekehrt vor, da dies auch er-klart, wie man uberhaupt auf die Idee kommt, die obige Matrix A zu be-trachten.
Allgemein gilt: Sei W ein K[T ]-Modul und sei V der Vektorraum, den manaus W erhalt, indem man nur Skalare aus K statt aus K[T ] operieren lasst.Dann ist
f : V −→ V
x 7−→ T · x
eine K-lineare Abbildung und V [f ] = W (nach Definition von V [f ]).Es genugt daher in unserem Fall von W = K[T ]/(p) zu zeigen, dass es
eine K-Basis B des unterliegenden K-Vektorraums V mit MB,B(f) = A gibt(unter Verwendung von Proposition 2.3.9 bzw. 3.1.1). Dazu betrachten wirdie Familie
B :=([T 0], [T 1], . . . , [Tm−1]
)
in V . Diese Familie ist eine K-Basis von V , denn:
• Es ist SpanK B = V , denn: Sei q ∈ K[T ]. Durch Division mit Restdurch p erhalten wir r, s ∈ K[T ] mit q = s ·p+r und deg r < deg p = m.Also erhalten wir in K[T ]/(p), dass
[q] = [s · p+ r] = [r].
Wegen deg r ≤ m− 1 ist dabei [r] ∈ SpanK B.
• Die Familie B ist uber K linear unabhangig, denn: Seien b0, . . . , bm−1 ∈K mit (in K[T ]/(p))
0 =
m−1∑
j=0
bj · [T j ] =
[m−1∑
j=0
bj · T j].
Also ist∑m−1j=0 bj · T j ∈ (p) = K[T ] · p. Wegen deg p = m ist da-
her∑m−1j=0 bj · T j = 0, und damit b0 = b1 = · · · = bm−1 = 0.

112 3. Normalformen III: Die Jordansche Normalform
Also ist B eine K-Basis von V .An der Matrix A liest man leicht ab (die Spalten . . . !), dass
MB,B(f) = A
gilt; fur die letzte Spalte verwendet man dabei, dass im Quotientenmo-dul K[T ]/(p) die Gleichung
[f(Tm−1)
]= [T · Tm−1] = [Tm] = [Tm − p] =
[−m−1∑
j=1
aj · T j]
gilt.
Im Falle des Grundkorpers C mussen wir also
• alle Primpolynome in C[T ] beschreiben und
• den Zusammenhang von Primpotenzen und Jordanblocken verstehen.
Außerdem wollen wir untersuchen, wie man fur eine gegebene Matrix dieseZerlegung in Blocke berechnen kann.
3.2 Das Minimalpolynom
Um zu verstehen, welche Polynome bei den zyklischen Anteilen eines gege-benen Endomorphismus auftreten und wie man diese berechnen kann, bietetes sich an, das Minimalpolynom von Endomorphismen/Matrizen genauer zubetrachten:
Proposition 3.2.1 (das Minimalpolynom eines Endomorphismus). Sei K einKorper, sei V ein endlich-dimensionaler K-Vektorraum und sei f : V −→ Vein Endomorphismus. Dann gibt es genau ein normiertes Polynom p ∈K[T ] \ {0} minimalen Grades mit p(f) = 0. Das Polynom p wird als Mi-nimalpolynom µf von f bezeichnet.
Beweis. Der Einsetzungshomomorphismus ϕ : K[T ] −→ HomK(V, V ) zu fist nicht injektiv (Proposition 3.1.3). Also ist das Ideal kerϕ ⊂ K[T ] nichtdas Nullideal. Da K[T ] ein Hauptidealring ist, gibt es somit ein Polynom p ∈K[T ] \ {0} mit (p) = kerϕ; indem wir durch den hochsten Koeffizientendividieren, konnen wir annehmen, dass p normiert ist. Wegen (p) = kerϕ istinsbesondere p(f) = 0.
Ist q ∈ K[T ] \ {0} ein normiertes Polynom mit q(f) = 0, so ist q ∈ kerϕ.Also gibt es ein s ∈ K[T ] mit
q = s · p.

3.2. Das Minimalpolynom 113
Wegen q 6= 0 ist s 6= 0. Mit der Additivitat des Grades folgt also
deg q = deg(s · p) = deg s+ deg p ≥ deg p;
Gleichheit liegt dabei genau dann vor, wenn s = 1 ist (Normiertheit von pund q). Dies zeigt die Minimalitat des Grades von p und die Eindeutigkeit.
Beispiel 3.2.2. Sei K ein Korper, sei V ein endlich-dimensionaler K-Vektor-raum, sei λ ∈ K und sei f := λ · idV : V −→ V . Dann ist
µf = T − λ,
denn: Es gilt (T − λ)(f) = f − λ · idV = 0, das Polynom T − λ ist normiertund es gibt (wegen deg(T − λ) = 1) kein normiertes Polynom p kleinerenGrades mit p(f) = 0.
Bemerkung 3.2.3 (Minimalpolynom einer Matrix). Sei K ein Korper, sei m ∈N und sei A ∈Mm×m(K). Dann nennt man
µA := µL(A) ∈ K[T ]
das Minimalpolynom von A. Nach Konstruktion ist dabei klar, dass ahnlicheMatrizen dasselbe Minimalpolynom besitzen (Konjugationstrick).
Bemerkung 3.2.4 (Bestimmung des Minimalpolynoms durch lineare Gleichungs-systeme). Sei K ein Korper, sei n ∈ N und sei A ∈ Mn×n(K). Dann liefertder Beweis von Proposition 3.2.1 das folgende Verfahren, um das Minimal-polynom µA ∈ K[T ] zu bestimmen:
• Man berechnet induktiv die Potenzen A0, A1, A2, . . . (so weit wienotig).
• Man bestimmt die kleinste Zahlm ∈ N, fur die Familie (A0, A1, . . . , Am)in Mn×n(K) uber K linear abhangig ist (dies kann durch Losen linearerGleichungssysteme uberpruft werden).
• Man bestimmt Koeffizienten a0, . . . , am ∈ K (die nicht alle 0 sind) mit
m∑
j=0
aj ·Aj = 0.
Aufgrund der Minimalitat von m ist am 6= 0; dann ist
µf = Tm +
m−1∑
j=0
ajam· T j ∈ K[T ].
In der Praxis verwendet man haufig auch die folgende Beschreibung desMinimalpolynoms (vor allem im Zusammenspiel mit dem Satz von Cayley-Hamilton (Satz 3.2.12)):

114 3. Normalformen III: Die Jordansche Normalform
Proposition 3.2.5 (alternative Beschreibung des Minimalpolynoms). Sei K einKorper, sei V ein endlich-dimensionaler K-Vektorraum und sei f : V −→ Vein Endomorphismus. Ist p ∈ K[T ] ein normiertes Polynom mit p(f) = 0und gilt fur alle Teiler q ∈ K[T ] von p mit deg q ∈ {0, . . . ,deg p − 1}, dassq(f) 6= 0 ist, so ist p das Minimalpolynom von f .
Beweis. Wegen p(f) = 0 ist (Division mit Rest oder Idealargument) µf einTeiler von p. Nach Voraussetzung ist somit deg µf ≥ deg p. Da p normiert ist,folgt aus den definierenden Eigenschaften des Minimalpolynoms p = µf .
Beispiel 3.2.6 (Jordanblocke). Sei K ein Korper, sei n ∈ N und sei λ ∈ K.Der Jordanblock
Jn(λ) =
λ 1 0 . . . 00 λ 1 . . . 0
0 0. . .
. . ....
0 0 . . . λ 10 0 . . . 0 λ
∈Mn×n(K)
hat das Minimalpolynom (T −λ)n, denn: Eine einfache Rechnung zeigt, dass
∀k∈N((T − λ)n
)(Jn(λ)
)=(Jn(λ)− λ · In
)k= 0⇐⇒ k ≥ n
gilt (die Matrix Jn(λ) − λ · In tragt auf der Nebendiagonalen Einsen undsonst nur Nullen; wachst der Exponent um 1, so wandert diese Einserreiheeine Stufe weiter nach oben). Mit Proposition 3.2.5 folgt daher
µJn(λ) = (T − λ)n.
Beispiel 3.2.7 (Kombination zweier Blocke). Sei K ein Korper, seien k,m ∈ N,seien B ∈Mk×k(K), C ∈Mm×m(K). Dann betrachten wir die Blockmatrix
A :=
(B 00 C
)∈Mn×n(K)
mit n := k + m. Mit Proposition 3.2.5 folgt, dass das Minimalpolynom µAdas (normierte) kleinste gemeinsame Vielfache von µB und µC ist (Ubungs-aufgabe).
Beispiel 3.2.8 (Rotationsmatrix). Sei
R :=
(0 −11 0
)∈M2×2(R)
die Rotationsmatrix zur Rotation um π/2. Dann ist
(T 2 + 1)(R) = R2 + I2 = −I2 + I2 = 0.

3.2. Das Minimalpolynom 115
Da das Polynom T 2 +1 normiert und in R[T ] irreduzibel ist, gilt µR = T 2 +1(Proposition 3.2.5; alternativ kann man auch uber die Minimalitat des Gradesargumentieren).
Im zyklischen Fall weiß das Minimalpolynom alles uber den zu einem En-domorphismus gehorenden Modul uber dem Polynomring:
Proposition 3.2.9 (Minimalpolynome zyklischer Endomorphismen). Sei K einKorper, sei V ein endlich-dimensionaler K-Vektorraum und sei f : V −→ Vein Endomorphismus. Ist V ein f -zyklischer K-Vektorraum, so gilt
V [f ] ∼=K[T ] K[T ]/(µf ).
Beweis. Da V als f -zyklisch vorausgesetzt ist, gibt es ein v ∈ V , fur das derK[T ]-Modulhomomorphismus
ϕ : K[T ] −→ V [f ]
p 7−→ p · v =(p(f)
)(v)
surjektiv ist. Wegen µf (f) = 0 induziert dieser nach dem Homomorphiesatzeinen wohldefinierten, surjektiven K[T ]-Modulhomomorphismus
ϕ : K[T ]/(µf ) −→ V [f ]
[p] 7−→ p · v.
Es genugt daher zu zeigen, dass ϕ auch injektiv bzw., dass kerϕ ⊂ (µf ), ist.
Sei p ∈ kerϕ. Also ist p · v = 0. Daher gilt auch
∀q∈K[T ] 0 = q · p · v = p · q · v = p · ϕ(q).
Da ϕ surjektiv ist, liefert dies
∀x∈V 0 = p · x =(p(f)
)(x),
und damit p(f) = 0. Daher ist µf ein Teiler von p (Division mit Rest;s. Beweis von Proposition 3.2.5) bzw. p ∈ (µf ). Somit ist kerϕ ⊂ (µf ),wie gewunscht.
Beispiel 3.2.10 (Moduln zu Jordanblocken). Sei K ein Korper, sei n ∈ N undsei λ ∈ K. Dann ist
Kn[Jn(λ)
] ∼=K[T ] K[T ]/((T − λ)n
),
denn: Sei f := L(Jn(λ)) : Kn −→ Kn. Der K-Vektorraum Kn ist f -zyklisch,denn
Kn = SpanK{e1, . . . , en} = SpanK{en, f(en), . . . , fn−1(en)
}.

116 3. Normalformen III: Die Jordansche Normalform
Wegen µf = (T −λ)n (Beispiel 3.2.6) folgt dann die Behauptung mithilfe vonProposition 3.2.9.
Beispiel 3.2.11 (Minmalpolynom der Begleitmatrix). Sei K ein Korper, seip ∈ K[T ] \K ein normiertes Polynom vom Grad m und sei A ∈ Mm×m(K)die Begleitmatrix zu p. Dann ist µA = p, denn: Sei f := L(A) : Km −→ Km.Nach Proposition 3.1.5 ist Km[f ] ∼=K[T ] K[T ]/(p); somit ist Km insbesonderef -zyklisch (Proposition 3.1.2) und mit Proposition 3.2.9 erhalten wir
K[T ]/(p) ∼=K[T ] Km[f ] ∼=K[T ] K[T ]/(µA).
Wir faktorisieren nun p bzw. µA in Primpotenzen und wenden den chine-sischen Restsatz sowie den Klassifikationssatz fur endlich erzeugte Modulnuber dem Hauptidealring K[T ] an. Dann liefert die Eindeutigkeitssausage,dass p und µA assoziiert sind; da beide Polynome normiert sind, folgt be-reits p = µA.
Alternativ kann man auch einfach nachrechnen, dass p(A) = 0 ist und eskein Polynom q ∈ K[T ] \K mit deg q < m und q(A) = 0 gibt.
Mithilfe der Begleitmatrizen und dem allgemeinen Klassifikationssatz furMatrizen (Bemerkung 3.1.4) erhalt man den folgenden Zusammenhang zwi-schen dem Minimalpolynom und dem charakteristischen Polynom; wir for-mulieren den Satz nur fur Matrizen; er gilt aber auch fur Endomorphismenvon endlich-dimensionalen Vektorraumen.
Satz 3.2.12 (der Satz von Cayley-Hamilton). Sei K ein Korper, sei n ∈ N undA ∈Mn×n(K). Dann gilt:
1. Das Minimalpolynom µA ist ein Teiler (in K[T ]) des charakteristischenPolynoms χA.
2. Jeder Primfaktor von χA tritt auch in µA auf.
3. Insbesondere haben χA und µA dieselben Nullstellen.
Beweis. Nach dem allgemeinen Klassifikationssatz (Bemerkung 3.1.4) undProposition 3.1.5 gibt es k ∈ N>0 und Primpotenzen p1, . . . , pk ∈ K[T ], sodass A zu der Blockmatrix
B :=
A1 0 . . . 00 A2 . . . 0...
. . .. . .
...0 . . . 0 Ak
ahnlich ist, wobei A1, . . . , Ak die Begleitmatrizen zu p1, . . . , pk sind. Mitder Konjugationsinvarianz des Minimalpolynoms und des charakteristischenPolynoms folgt somit: Es gilt

3.2. Das Minimalpolynom 117
χA = χB =
k∏
j=1
χAj =
k∏
j=1
pj
(fur den letzten Schritt haben wir eine Ubungsaufgabe aus der Linearen Al-gebra I verwendet). Andererseits ist
µA = µB = kgV(µA1 , . . . , µAk) = kgV(p1, . . . , pk)
(dabei bezeichnet kgV hier das normierte kleinste Vielfache der angegebenenPolynome; im letzten Schritt haben wir Beispiel 3.2.11 verwendet).
Insbesondere ist µA ein Teiler von χA und alle Primfaktoren von χA tre-ten auch in µA auf. Die Aussage uber die Nullstellen folgt daraus mit Pro-position 2.4.14 und der Tatsache, dass Polynome vom Grad 1 in K[T ] primsind.
Bemerkung 3.2.13 (Bestimmung des Minimalpolynoms uber das charakteristi-sche Polynom). Sei K ein Korper, sei n ∈ N und sei A ∈ Mn×n(K). Dannliefert der Satz von Cayley-Hamilton zusammen mit Proposition 3.2.5 dasfolgende Verfahren, um das Minimalpolynom µA ∈ K[T ] zu bestimmen (dasvor allem fur
”kleine“ Matrizen von Hand oft gut angewendet werden kann):
• Man berechnet χA = det(T · In −A) ∈ K[T ].
• Man bestimmt die (normierte) Primfaktorzerlegung von χA in K[T ](das ist im allgemeinen ein algorithmisch schwieriger Schritt!).
• Man sucht den (normierten) Teiler p kleinsten Grades von χA, derp(A) = 0 erfullt, indem man entsprechende Potenzen der Primfaktorenvon χA multipliziert. Nach Satz 3.2.12 gibt es einen solchen Teiler undnach Proposition 3.2.5 gilt p = µA. Man beachte dabei, dass jederPrimfaktor von χA auch mindestens einmal in µA auftreten muss!
Proposition 3.2.14 (Minimalpolynom und Diagonalisierbarkeit). Sei K einKorper, sei n ∈ N und sei A ∈ Mn×n(K). Dann sind die folgenden Aus-sagen aquivalent:
1. Die Matrix A ist diagonalisierbar.
2. Es gibt k ∈ N und (paarweise) verschiedene λ1, . . . , λk ∈ K mit
µA =
k∏
j=1
(T − λj).
Beweis. Ist A diagonalisierbar, so kann man µA mithilfe der Konjugations-invarianz berechnen.
Hat umgekehrt µA die angegebene Gestalt, so kann man wie beim Beweisdes Satzes von Cayley-Hamilton vorgehen, um auf Diagonalisierbarkeit zuschließen (Ubungsaufgabe).

118 3. Normalformen III: Die Jordansche Normalform
3.3 Die Jordansche Normalform
Als Spezialfall der allgemeinen Klassifikationstheorie, die wir bereits ent-wickelt haben, erhalten wir die Jordansche Normalform. Dabei werden wirdie Jordansche Normalform in der folgenden Formulierung behandeln; denBegriff des algebraisch abgeschlossenen Korpers fuhren wir in Kapitel 3.3.1genauer ein.
Satz 3.3.1 (Jordansche Normalform). Sei K ein algebraisch abgeschlossenerKorper (z.B. C). Sei n ∈ N und sei A ∈Mn×n(K). Seien λ1, . . . , λr ∈ K dieEigenwerte von A und seien
∀j∈{1,...,r} nj := dimC Eigλj (A)
die geometrischen Vielfachheiten der Eigenwerte von A. Dann gibt es zu je-dem j ∈ {1, . . . , r} eindeutig bestimmte positive naturliche Zahlen
mj,1 ≤ · · · ≤ mj,nj
mit der Eigenschaft, dass A zu der Blockmatrix in Abbildung 3.1, bestehendaus den Jordanblocken
Jm1,1(λ1), . . . , Jm1,n1
(λ1), Jm2,1(λ2), . . . , Jmr,nr (λr),
ahnlich ist (in Mn×n(K)). Diese Jordan-Normalform von A ist bis auf dieReihenfolge der Blocke eindeutig durch A bestimmt. Dabei gilt
χA =
r∏
j=1
(T − λj)∑njk=1mj,k ,
µA =
r∏
j=1
(T − λj)max{mj,k|k∈{1,...,nj}},
Kn[L(A)] ∼=K[T ]
⊕
j∈{1,...,r}
⊕
k∈{1,...,nj}K[T ]/
((T − λj)mj,k
).
Insbesondere ist das Minimalpolynom µf ein Teiler des charakteristischen Po-lynoms χf und die Polynome µf und χf haben dieselben Nullstellen (in K).
Bevor wir den Beweis von Satz 3.3.1 in Kapitel 3.3.2 geben, betrachtenwir zunachst die Aussage des Satzes etwas genauer:
Nach Satz 3.3.1 bilden die Eigenwerte, geometrischen Vielfachheiten unddie Großen der Jordanblocke zu den entsprechenden Eigenwerten zusammeneine vollstandige Invariante fur Mn×n(C)/Ahnlichkeit.

3.3. Die Jordansche Normalform 119
Jm1,1(λ1)
Jm1,2(λ1)
. . .
Jm1,n1(λ1)
Jm2,1(λ2)
. . .
Jmr,nr (λr)
sonst nur Nullen
sonst nur Nullen
Abbildung 3.1.: Jordansche Normalform
Bei einer diagonalisierbaren Matrix haben alle Jordanblocke das For-mat 1 × 1. Umgekehrt zeigt der obige Satz, in welchem Sinne jede Matrixin Mn×n(C)
”fast“ diagonalisierbar ist.
Der letzte Absatz des Satzes 3.3.1 ist ein Spezialfall des Satzes von Cayley-Hamilton.
Bemerkung 3.3.2 (Was wissen charakteristisches Polynom und Minimalpolynomuber die Jordansche Normalform?). Was kann man aus dem charakteristischenPolynom bzw. Minimalpolynom uber die Jordansche Normalform ablesen?Nach Satz 3.3.1 gilt folgendes:
• Die Nullstellen des charakteristischen Polynoms (und damit auch desMinimalpolynoms) sind die Eigenwerte der Matrix.

120 3. Normalformen III: Die Jordansche Normalform
• Die geometrische Vielfachheit eines Eigenwerts gibt die Anzahl der Jor-danblocke zu diesem Eigenwert an.
• Die algebraische Vielfachheit eines Eigenwerts (also die Vielfachheitdieser Nullstelle im charakteristischen Polynom) gibt die Summe derGroßen der Jordanblocke zu diesem Eigenwert an.
• Die Vielfachheit einer Nullstelle im Minimalpolynom gibt an, wie großder großte Jordanblock zu diesem Eigenwert ist.
Caveat 3.3.3. Die Jordansche Normalform lasst sich im allgemeinen nicht al-lein aus dem Minimalpolynom und dem charakteristischen Polynom ablesen!Zum Beispiel haben die Matrizen
2 0 0 00 2 0 00 0 2 10 0 0 2
und
2 1 0 00 2 0 00 0 2 10 0 0 2
in M4×4(C) dasselbe charakteristische Polynom (namlich (T − 2)4) und das-selbe Minimalpolynom (namlich (T−2)2), aber verschiedene Jordansche Nor-malformen.
3.3.1 Vorbereitung: Algebraisch abgeschlossene Korper
Wir erklaren nun zunachst den Begriff des algebraisch abgeschlossenen Korpersetwas genauer und bestimmen insbesondere alle Primpolynome uber algebra-isch abgeschlossenen Korpern. Grob gesagt sind algebraisch abgeschlosseneKorper der geeignete Rahmen um uber Losungen polynomialer Gleichungenzu sprechen:
Definition 3.3.4 (algebraisch abgeschlossen). Ein Korper K ist algebraisch ab-geschlossen, wenn jedes Polynom in K[T ] vom Grad mindestens 1 mindestenseine Nullstelle in K besitzt.
Beispiel 3.3.5.
1. Der Korper C ist algebraisch abgeschlossen (nach dem Fundamentalsatzder Algebra, Satz I.6.3.8).
2. Die Korper R und Q sind nicht algebraisch abgeschlossen, denn dasPolynom T 2+1 in R[T ] (bzw. Q[T ]) hat keine Nullstellen in R (bzw. Q).
3. Der Korper F2 ist nicht algebraisch abgeschlossen, denn das Poly-nom T 2 + T + 1 ∈ F2[T ] hat keine Nullstelle in F2.
Allgemeiner gilt: Ist K ein endlicher Korper, so ist K nicht algebraischeabgeschlossen, denn: Das Polynom

3.3. Die Jordansche Normalform 121
p :=∏
λ∈K(T − λ) + 1 ∈ K[T ]
hat Grad mindestens 1 und wegen
∀x∈K p(x) =∏
λ∈K(x− λ) + 1 = (x− x) ·
∏
λ∈K\{x}(x− λ) + 1 = 0 + 1
keine Nullstelle in K.
Ausblick 3.3.6 (algebraischer Abschluss). Sei K ein Korper. Im Rahmen derAlgebra-Vorlesung werden wir sehen, dass es dann einen
”kleinsten“ algebra-
isch abgeschlossenen Korper L gibt, der K enthalt; dies ist der sogenanntealgebraische Abschluss von K. Zum Beispiel ist C ein algebraischer Abschlussvon R.
Proposition 3.3.7 (Primpolynome in algebraisch abgeschlossenen Korpern). SeiK ein algebraisch abgeschlossener Korper. Ist p ∈ K[T ] prim und normiert,so gibt es ein λ ∈ K mit p = T − λ.
Beweis. Sei p ∈ K[T ] prim und normiert; insbesondere ist deg p ≥ 1. DaK algebraisch abgeschlossen ist, gibt es ein λ ∈ K mit p(λ) = 0. Daher istT − λ ein Teiler von p in K[T ] (Proposition 2.4.14). Da p als Primelementirreduzibel ist und T − λ (aus Gradgrunden) keine Einheit ist, gibt es eineEinheit s ∈ K[T ] mit p = s ·(T −λ). Wegen K[T ]× = K× (aus Gradgrunden)und der Normiertheit von p folgt s = 1 bzw. p = T − λ.
3.3.2 Existenz und Eindeutigkeit der Jordanschen Nor-malform
Mit den bereits geleisteten Vorarbeiten ist es nun nicht schwer, den Satz uberdie Jordansche Normalform zu beweisen. Wir verwenden dazu die folgendeStrategie (die wir auch bereits in Bemerkung 3.1.4 und Satz 3.2.12 erfolgreicheingesetzt haben):
• Wir zerlegen den K[T ]-Modul Kn[L(A)] in zyklische Summanden zuPrimpotenzen und sortieren diese Zerlegung geeignet.
• Wir zeigen, dass eine entsprechende Matrix J in Jordan-Normalformeinen dazu isomorphen K[T ]-Modul liefert und wenden dann Proposi-tion 2.3.9 an, um zu schließen, dass A und J ahnlich sind.
• An J kann man ohne Schwierigkeiten das charakteristische und dasMinimalpolynom ablesen.
Beweis von Satz 3.3.1. Existenz der Jordanschen Normalform: Nach der Prim-zerlegung von Endomorphismenmoduln (Proposition 3.1.3) gibt es (im we-sentlichen eindeutige) k ∈ N, Primpolynome p1, . . . , pk ∈ K[T ] und Zah-len m1, . . . ,mk ∈ N>0 mit

122 3. Normalformen III: Die Jordansche Normalform
Kn[L(A)] ∼=K[T ]
⊕
j∈{1,...,k}K[T ]/(p
mjj ).
Ohne Einschrankung konnen wir dabei annehmen, dass p1, . . . , pk normiertsind. Da der Korper K als algebraisch abgeschlossen vorausgesetzt ist, gibtes zu jedem j ∈ {1, . . . , k} ein νj ∈ K mit pj = T − νj (Proposition 3.3.7).
Indem wir die obige direkte Summe nach gleichen Primfaktoren umsortie-ren, erhalten wir also: Es gibt (eindeutige) r ∈ N, verschiedene λ1, . . . , λr ∈K, Zahlen n1, . . . , nr ∈ N>0 und zu jedem j ∈ {1, . . . , r} eindeutig bestimmtepositive naturliche Zahlen
mj,1 ≤ · · · ≤ mj,nj
mitKn[L(A)
] ∼=K[T ]
⊕
j∈{1,...,r}
⊕
k∈{1,...,nj}K[T ]/
((T − λj)mj,k
).
Sei J die Jordanblock-Matrix aus Abbildung 3.1. Mit dem Worterbuch undden Moduln zu Jordanblocken (Beispiel 3.2.10) folgt, dass auch
Kn[L(J)
] ∼=K[T ]
⊕
j∈{1,...,r}
⊕
k∈{1,...,nj}K[T ]/
((T − λj)mj,k
)
gilt; insbesondere ist
Kn[L(A)
] ∼=K[T ] Kn[L(J)
].
Also ist die Matrix A zu J ahnlich in Mn×n(K) (Proposition 2.3.9).Wir lesen nun die Kenndaten von J ab:
• Die Matrix J hat genau die Eigenwerte λ1, . . . , λr und die geometrischeVielfachheit von λj ist nj .
• Es gilt (nachrechnen)
χJ =
r∏
j=1
(T − λj)∑njk=1mj,k
• Mit Beispiel 3.2.7 und Beispiel 3.2.6 erhalten wir außerdem
µJ =
r∏
j=1
(T − λj)max{mj,k|k∈{1,...,nj}}.
Da A und J ahnlich sind, hat A dieselben Eigenwerte und geometrischenVielfachheiten wie J und es gilt χA = χJ bzw. µA = µJ .
Eindeutigkeit der Jordanschen Normalform: Ist J ′ ∈Mn×n(K) in Jordan-Normalform und ahnlich zu A, so folgt

3.3. Die Jordansche Normalform 123
Kn[L(J ′)] ∼=K[T ] Kn[L(A)] ∼=K[T ] K
n[L(J ′)].
Dabei korrespondieren die Jordanblocke von J ′ zur Primzerlegung des K[T ]-Moduls Kn[L(J ′)] (und damit zu der von Kn[L(J)]). Mit der Eindeutigkeits-aussage aus dem Hauptsatz uber endlich erzeugte K[T ]-Moduln (Satz 2.5.15)folgt daher, dass J ′ und J genau aus denselben Jordanblocken (bis auf dieReihenfolge) bestehen. Damit ist Satz 3.3.1 vollstandig bewiesen.
Bemerkung 3.3.8 (allgemeinere Grundkorper). Die Voraussetzung, dass derGrundkorper algebraisch abgeschlossen ist, ging nur bei der Beschreibungder Primpolynome ein. Mit ahnlichen Methoden kann man die folgende Ver-allgemeinerung zeigen: Ist K ein Korper, n ∈ N und ist A ∈ Mn×n(K) mitder Eigenschaft, dass alle Primfaktoren von χA in K[T ] vom Grad 1 sind, soist A in Mn×n(K) zu einer Matrix in Jordan-Normalform ahnlich.
Die Eindeutigkeit der Jordanschen Normalform beruht im obigen Satz aufder Eindeutigkeit im Hauptsatz uber endlich erzeugte Moduln uber Haupt-idealringen. Bei der Beschreibung der Berechnung der Jordanschen Normal-form werden wir noch einen alternativen Beweis fur die Eindeutigkeit ken-nenlernen (Bemerkung 3.3.12).
3.3.3 Berechnung der Jordanschen Normalform
Wir erklaren nun, wie man die Jordansche Normalform einer gegebenen Ma-trix bestimmen kann. Dabei geht wesentlich die folgende Beobachtung uberverallgemeinerte geometrische Vielfachheiten ein:
Definition 3.3.9 (verallgemeinerte geometrische Vielfachheiten). Sei K einKorper, sei n ∈ N>0, sei A ∈Mn×n(K) und sei λ ∈ K ein Eigenwert von A.Fur s ∈ N definieren wir dann
aλ,s(A) := dimK V((A− λ · In)s, 0
)∈ N.
Die gewohnliche geometrische Vielfachheit eines Eigenwerts λ einer Ma-trix A ist in dieser Notation also aλ,1(A).
Proposition 3.3.10 (verallgemeinerte geometrische Vielfachheiten und Jordan-sche Normalform). Sei K ein Korper, sei n ∈ N>0.
1. Sind A,B ∈ Mn×n(K) ahnlich, so gilt fur alle λ ∈ σK(A) = σK(B)und alle s ∈ N, dass
aλ,s(A) = aλ,s(B).
2. Ist J ∈Mn×n(K) in Jordan-Normalform, ist λ ∈ σK(J) und s ∈ N>0,so ist
2 · aλ,s(J)− aλ,s−1(J)− aλ,s+1(J).
die Anzahl der Jordanblocke von J der Große s zum Eigenwert λ.

124 3. Normalformen III: Die Jordansche Normalform
3. Ist K algebraisch abgeschlossen und A ∈Mn×n(K), so gilt fur alle λ ∈σK(A) und alle s ∈ N>0, dass
2 · aλ,s(A)− aλ,s−1(A)− aλ,s+1(A).
die Anzahl der Jordanblocke von A der Große s zum Eigenwert λ ist.
Beweis. Zu 1. Sei S ∈ GLn(K) mit B = S−1 ·A ·S. Dann ist (Konjugations-trick)
aλ,s(B) = dimK V((B − λ · In)s, 0
)
= dimK V((S−1 ·A · S − λ · In)s, 0
)
= dimK V((S−1 · (A− λ · In) · S)s, 0
)
= dimK V((S−1 · (A− λ · In)s · S, 0
)
= dimK S−1 · V
((A− λ · In)s, 0
)
= dimK V((A− λ · In)s, 0
)
= aλ,s(A).
Zu 2. Die Familie aller Spalten von J , die jeweils zu den ersten s Spaltender λ-Jordanblocke von J gehoren, bildet eine Basis von V ((J − λ · In)s, 0).(Dies kann man direkt nachrechnen und ist ahnlich zu Beispiel 3.2.6).
Die Anzahl der Jordanblocke von J der Große mindestens s ist da-her aλ,s(J) − aλ,s−1(J). Somit ergibt sich fur die Anzahl der Jordanblockevon J der Große genau s (Abbildung 3.2):
(aλ,s(J)− aλ,s−1(J)
)−(aλ,s+1(J)− aλ,s(J)
)
= 2 · aλ,s(J)− aλ,s−1(J)− aλ,s+1(J).
Zu 3. Nach Satz 3.3.1 wissen wir, dass es eine Matrix S ∈ GLn(K) undeine Matrix J ∈Mn×n(K) in Jordan-Normalform mit
J = S−1 ·A · S
gibt. Da das charakteristische Polynom und die verallgemeinerten geometri-schen Vielfachheiten von A und der dazu ahnlichen Matrix J ubereinstimmennach dem ersten Teil ubereinstimmen, genugt es sich zu uberlegen, dass dasobige Verfahren, angewendet auf J , das richtige Ergebnis liefert. Dies liefertder zweite Teil.
Rezept 3.3.11 (Berechnung der Jordanschen Normalform).
• Gegeben sei ein algebraisch abgeschlossener Korper K, ein n ∈ N>0 undA ∈Mn×n(K).
• Gesucht sei die Jordansche Normalform von A (d.h. eine Matrix inJordanscher Normalform, die ahnlich zu A ist).

3.3. Die Jordansche Normalform 125
λ
λ
λ
1
1
λ
λ
λ
1
1
λ
λ
λ
1
1
λ
1
Abbildung 3.2.: Verallgemeinerte geometrische Vielfachheiten und Große vonJordanblocken von Matrizen in Jordan-Normalform: Sei s =3. Der blaue Bereich tragt zu aλ,s−1(J) bei, der violette Be-reich tragt zu aλ,s(J) aber nicht zu aλ,s−1(J) bei, der roteBereich tragt zu aλ,s+1(J) aber nicht zu aλ,s(J) bei.
• Rezept: Man bestimmt zunachst das charakteristische Polynom χA ∈K[T ] von A. Als nachstes bestimmt man die Nullstellen des cha-rakteristischen Polynoms (dies ist im allgemeinen algorithmisch nurnaherungsweise moglich!); diese Menge stimmt mit der Menge σK(A)der Eigenwerte von A uberein. Außerdem ist es hilfreich, an dieser Stelleauch die algebraischen Vielfachheiten der Eigenwerte von A zu bestim-men; dies liefert eine Faktorisierung
χA =∏
λ∈σK(A)
(T − λ)mλ ,
was bereits eine erste Orientierung uber das Aussehen der JordanschenNormalform von A liefert (Bemerkung 3.3.2).
Man betrachtet im folgenden die Eigenwerte einzeln und fuhrt jeweilsdas folgende Verfahren durch: Sei λ ∈ σK(A). Fur alle s ∈ {1, . . . ,mλ}bestimmt man
aλ,s(A) = dimK V((A− λ · In)s, 0
)

126 3. Normalformen III: Die Jordansche Normalform
mit dem Gaußschen Eliminationsverfahren; nach Definition ist da-bei aλ,0(A) = 0. Dann ist
2 · aλ,s(A)− aλ,s−1(A)− aλ,s+1(A)
die Anzahl der Jordanblocke der Große s zum Eigenwert λ in derJordanschen Normalform fur A.
• Begrundung: Dass dieses Verfahren funktioniert, ist Inhalt von Propo-sition 3.3.10.
Bemerkung 3.3.12 (Eindeutigkeit der Jordanschen Normalform). Die Beschrei-bung der Anzahl der Jordanblocke aus Proposition 3.3.10 liefert außerdemeinen alternativen Beweis der Eindeutigkeit der Jordanschen Normalform ei-ner Matrix: die Anzahlen/Großen der Jordanblocke konnen namlich direktaus dem verallgemeinerten geometrischen Vielfachheiten bestimmt werden.
Beispiel 3.3.13 (Berechnung der Jordanschen Normalform einer Matrix). Wirbestimmen im folgenden die Jordansche Normalform der Matrix
A :=
2 0 0−1 0 2−1 −2 4
∈M3×3(C)
mit dem Verfahren aus Rezept 3.3.11:
• Besimmung des charakteristischen Polynoms: Das charakteristische Po-lynom von A ist
χA = det(T · I3 −A) = (T − 2)3.
Also ist 2 der einzige Eigenwert von A.
• Bestimmung der verallgemeinerten geometrischen Vielfachheiten: We-gen
A− 2 · I3 =
0 0 0−1 −2 2−1 −2 2
und(A− 2 · I3)2 = 0
erhalten wir (mit dem Gaußschen Eliminationsverfahren oder aus demRang von A− 2 · I3)
a2,1(A) = dimC V (A− 2 · I3, 0) = 2
a2,2(A) = dimC V((A− 2 · I3)2, 0
)= dimC V (0, 0) = 3
a2,3(A) = dimC V((A− 2 · I3)2, 0
)= dimC V (0, 0) = 3.

3.3. Die Jordansche Normalform 127
• Bestimmung der Große der Jordan-Blocke: Es gibt also
– wegen 2 · 2− 3− 0 = 1 genau einen Jordanblock der Große 1 zumEigenwert 2,
– wegen 2 · 3− 2− 3 = 1 genau einen Jordanblock der Große 2 zumEigenwert 2,
– wegen 2 · 3 − 3 − 3 = 1 keinen Jordanblock der Große 3 zumEigenwert 2 (das ist auch schon aus den vorherigen Großen klar,da gar kein Platz mehr fur einen weiteren Block ist).
Also ist
2 0 00 2 10 0 2
die Jordansche Normalform von A.
In diesem, kleinen, Beispiel hatte es auch genugt, nur das charakteristischePolynom, die Eigenwerte und ihre geometrischen Vielfachheiten zu bestim-men, um auf die gesamte Jordansche Normalform zu schließen. Das obigeVerfahren funktioniert jedoch ganz allgemein und wir haben nur deshalb einkleines Beispiel gewahlt, um die Berechnungen nicht unnotig ausufern zulassen.
Alternativ kann man auch den Elementarteilersatz fur Matrizen verwen-den, um die Jordansche Normalform zu bestimmen; aber auch bei diesemVerfahren muss der schwierige Schritt der Faktorisierung des charakteristi-schen Polynoms (getarnt als Primfaktorzerlegungen gewisser Elementarteiler)durchgefuhrt werden.
Rezept 3.3.14 (Berechnung der Jordanschen Normalform uber den Elementar-teilersatz).
• Gegeben sei ein algebraisch abgeschlossener Korper K, ein n ∈ N>0 undA ∈Mn×n(K).
• Gesucht sei die Jordansche Normalform von A (d.h. die Matrix inJordanscher Normalform, die ahnlich zu A ist).
• Rezept: Man betrachtet die Matrix
B := T · In −A ∈Mn×n(K[T ]
)
und bringt diese auf Smith-Normalform C (mit dem Algorithmus ausdem Beweis von Satz 2.5.6). Seien α1, . . . , αr ∈ K[T ] diejenigen Ele-mentarteiler von C, die keine Einheiten sind.
Man zerlegt nun jeden der Elementarteiler α1, . . . , αr in Primfaktoren.Da K algebraisch abgeschlossen ist, gibt es zu jedem j ∈ {1, . . . , r} eineFaktorisierung der Form

128 3. Normalformen III: Die Jordansche Normalform
αj = sj ·nj∏
k=1
(T − λj,k)mj,k
mit sj ∈ K×, nj ∈ N>0, mj,1, . . . ,mj,nj ∈ N>0 und verschiede-nen λj,1, . . . , λj,nj ∈ K. Dann besteht die Jordansche Normalformvon A genau aus der Familie
(Jmj,k(λj,k)
)j∈{1,...,r},k∈{1,...,nj}
von Jordanblocken (diese sind nun aber anders sortiert als in Abbil-dung 3.1!).
• Begrundung: Wir betrachten die K[T ]-Modulhomomorphismen
π : K[T ]n −→ Kn[L(A)
]
p 7−→n∑
j=1
pj · ej
ϕ := L(T · In −A) : K[T ]n −→ K[T ]n.
Dann ist π offenbar surjektiv und es gilt außerdem imϕ = kerπ [3,Lemma 6.3/17]. Mit dem Homomorphiesatz erhalten wir daher
Kn[L(A)
] ∼=K[T ] K[T ]n/ imL(T · In −A) ∼= K[T ]n/ imL(B).
Da B in Smith-Normalform ist, ist K[T ]n/ imL(B) in kanonischer Wei-se eine direkte Summe von zyklischen K[T ]-Moduln. Wie im Beweis vonSatz 2.5.15 liefern die Primfaktorzerlegungen der Elementarteiler undder chinesische Restsatz dann eine direkte Summenzerlegung in zykli-sche K[T ]-Moduln zu Primpotenzen. Wie wir im Beweis von Satz 3.3.1gesehen haben, entsprechen diese direkten Summanden genau den Jor-danblocken der Jordanschen Normalform von A.
Rezept 3.3.15 (Berechnung einer Jordan-Basis).
• Gegeben sei ein algebraisch abgeschlossener Korper K, ein n ∈ N>0 undA ∈Mn×n(K).
• Gesucht sei die Jordansche Normalform von A und eine invertierbareMatrix S ∈ GLn(K), fur die S−1 ·A ·S in Jordanscher Normalform ist.
• Rezept: Man beginnt wie bei der Berechnung der Jordanschen Normal-form von A (Rezept 3.3.11): Man bestimmt zunachst das charakteri-stische Polynom χA ∈ K[T ] von A. Als nachstes bestimmt man dieNullstellen des charakteristischen Polynoms (dies ist im allgemeinen al-gorithmisch nur naherungsweise moglich!); diese Menge stimmt mit derMenge σK(A) der Eigenwerte von A uberein. Außerdem ist es hilfreich,

3.3. Die Jordansche Normalform 129
an dieser Stelle auch die algebraischen Vielfachheiten der Eigenwertevon A zu bestimmen; dies liefert eine Faktorisierung
χA =∏
λ∈σK(A)
(T − λ)mλ ,
was bereits eine erste Orientierung uber das Aussehen der JordanschenNormalform von A liefert (Bemerkung 3.3.2).
Man betrachtet im folgenden die Eigenwerte einzeln und fuhrt jeweilsdas folgende Verfahren durch: Sei λ ∈ σK(A). Fur alle s ∈ {1, . . . ,mλ}bestimmt man
aλ,s(A) = V((A− λ · In)s, 0
)
mit dem Gaußschen Eliminationsverfahren. Sei dλ ∈ {1, . . . ,mλ} dasminimale s ∈ N mit aλ,s(A) = aλ,s+1(A) (dann ist dλ nichts anderesals die Vielfachheit der Nullstelle λ des Minimalpolynoms µA).
Man geht nun induktiv uber s ∈ {1, . . . , dλ} vor, wobei man bei dλ be-ginnt und dann absteigend fortfahrt: Sei Mλ,s die Menge aller bereitserzeugten Basisvektoren der Stufe s (d.h. bereits bestimmte Basisvekto-ren, die in V ((A−λ ·In)s, 0) liegen); wir beginnen dabei mit Mλ,dλ = ∅.Zur Blockgroße s bestimmt man folgendermaßen Basisvektoren:
– Man bestimmt eine Basis Bλ,s eines komplementaren Untervektor-raums von V ((A−λ ·In)s−1, 0)∪SpanKMλ,s in V ((A−λ ·In)s, 0).Dafur bestimmt man zunachst eine Basis von V ((A − λ · In)s, 0)bzw. V ((A−λ ·In)s−1, 0) mit dem Gaußschen Eliminationsverfah-ren und wendet dann Rezept I.5.2.19 an.
– Fur jeden Vektor v in Bλ,s bildet man dann (von rechts beginnend)die Kette
Bλ,s,v :=(
(A− λ · In)s−1 · v︸ ︷︷ ︸Eigenvektor zum Eigenwert λ
, . . . , (A− λ · In) · v, v).
– Man setzt dann Mλ,s−1 := {(A−λ · In) ·v | v ∈Mλ,s∪Bλ,s} (fallss > 1 ist).
Dann bilden die Familien
(Bλ,s,v
)λ∈σK(A),s∈{1,...,dλ},v∈Bλ,s
zusammen eine Basis B von Kn. Sei S ∈ GLn(K) die Matrix, derenSpalten die Elemente von B (in der richtigen Reihenfolge) sind. Dannist S−1 ·A · S in Jordan-Normalform.
• Begrundung: Es ist zu zeigen,
1. dass B eine Basis von Kn ist und

130 3. Normalformen III: Die Jordansche Normalform
2. dass MB,B(L(A)) = S−1 ·A · S in Jordan-Normalform ist.
Zu 2. Nach dem ersten Teil ist B eine Basis von Kn. Wir betrachten da-zu jeden Eigenwert einzeln. Dass dann jede Teilfamilie der Form Bλ,s,veinen Jordanblock (der Große s) liefert, folgt aus der folgenden Berech-nung: Fur alle v ∈ V ((A− λ · In)s, 0) und alle k ∈ N gilt
A ·((A− λ · In)k · v
)= λ ·
((A− λ · In)k · v
)
+ 1 ·((A− λ · In)k+1 · v
);
insbesondere ist
A ·((A− λ · In)s−1 · v
)= λ ·
((A− λ · In)s−1 · v
).
Zu 1. Da die Matrix A zu einer Matrix in Jordan-Normalform ahnlichist (Satz 3.3.1), folgt (Konjugationstrick und eine kleine Rechnung furMatrizen in Jordan-Normalform)
SpanK⋃
λ∈σK(A)
V((A− λ · In)dλ , 0
)= Kn.
Nach Konstruktion von B ist B ein Erzeugendensystem der linken Seite,also auch von Kn.
Warum ist die Familie B linear unabhangig? Auch hier kann man auf-grund der Ahnlichkeit von A zu einer Matrix in Jordan-Normalformjeden Eigenwert einzeln behandeln. Man zeigt dann induktiv uber dieStufen, dass die entsprechende Teilfamilie von B linear unabhangigist (wobei man bei der hochsten Stufe beginnt und dann absteigt).Der wesentliche Schritt ist dann, dass fur jedes λ ∈ σK(A) und je-des s ∈ {2, . . . , dλ} die von A− λ · In induzierte lineare Abbildung
V((A− λ · In)s, 0
)
V((A− λ · In)s−1, 0
) −→ V((A− λ · In)s−1, 0
)
V((A− λ · In)s−2, 0
)
wohldefiniert und injektiv ist (und daher insbesondere linear unabhangigeFamilien auf linear unabhangige Familien abbildet) (nachrechnen).
Beispiel 3.3.16 (Berechnung einer Jordan-Basis einer Matrix). Wir betrachtenwieder die Matrix
A :=
2 0 0−1 0 2−1 −2 4
∈M3×3(C)
aus Beispiel 3.3.13 und bestimmen mit dem Verfahren aus Rezept 3.3.15 eineMatrix S ∈ GL3(C), fur die S−1 ·A · S in Jordan-Normalform ist:

3.3. Die Jordansche Normalform 131
• Bestimmung des charakteristischen Polynoms: Es ist (Beispiel 3.3.13)χA = (T − 2)3 und somit σC(A) = {2}.
• Bestimmung der verallgemeinerten geometrischen Vielfachheiten: Esgilt (Beispiel 3.3.13)
a2,1(A) = 2
a2,2(A) = 3
a2,3(A) = 3.
Insbesondere ist d2 = 2.
• Bestimmung der Basisblocke: Mit dem Gaußschen Eliminationsverfah-ren (oder in diesem Fall durch scharfes Hinsehen) erhalten wir
V((A− 2 · I3)0, 0
)= V (I3, 0) = {0}
V((A− 2 · I3)1, 0
)= SpanC
2−1
0
,
011
V((A− 2 · I3)2, 0
)= V
(0 ∈M3×3(C), 0
)= SpanC{e1, e2, e3}
Wir beginnen nun die rekursive Wahl der Basisvektoren bei der Stu-fe
”s = d2 = 2“: Es ist M2,2 = ∅.– Eine Basis eines zu
V((A− 2 · I3)1, 0
)∪ SpanCM2,2 = V
((A− 2 · I3)1, 0
)
komplementaren Untervektorraums in V ((A − 2 · I3)2, 0) ist zumBeispiel
B2,2 = (e3).
– Der Vektor e3 liefert dann die Familie
B2,2,e3 =((A− 2 · I3) · e3, e3
)=
022
,
001
.
– Dies liefert
M2,1 =
022
.
Wir kommen nun zur Stufe”s = 1“:
– Eine Basis eines zu

132 3. Normalformen III: Die Jordansche Normalform
V((A− 2 · I3)0, 0
)∪ SpanCM2,1 = C ·
022
komplementaren Untervektorraums in V ((A − 2 · I3)1, 0) ist zumBeispiel
B2,1 =
2−1
0
.
– Der Vektor v := (2,−1, 0)T liefert dann die Familie
B2,2,v =
2−1
0
.
• Bestimmung einer Jordan-Basis bzw. der zugehorigen Transformation:Insgesamt erhalten wir so die kombinierte Basis
2−1
0
,
022
,
001
.
Diese Basis liefert die invertierbare Matrix
S :=
2 0 0−1 2 00 2 1
∈ GL3(C).
Nach Konstruktion ist dabei
S−1 ·A = S =
2 0 00 2 10 0 2
.
Caveat 3.3.17. Ein beliebter Fehler ist, bei der Bestimmung einer Jordan-Basis in der falschen Reihenfolge vorzugehen, indem zuerst zu jedem Eigen-wert eine Basis des zugehorigen Eigenraums bestimmt wird und dann zusolchen Basisvektoren v zum Eigenwert λ versucht wird, rekursiv v1, . . . mit
(A− λ · In) · v1 = v
(A− λ · In) · v2 = v1
...
zu bestimmen. Dieses Verfahren funktioniert im allgemeinen nicht, denn nichtjede Basis des Eigenraums lasst sich zu einer Jordanbasis fur die Jordanblocke

3.3. Die Jordansche Normalform 133
zu diesem Eigenwert fortsetzen! Wir verdeutlichen dies an einem konkretenBeispiel: Sei
A :=
2 0 00 2 10 0 2
∈M3×3(C).
Dann ist 2 ein Eigenwert von A und (e1, e1+e2) ist eine Basis des Eigenraumszum Eigenwert 2 von A. Aber es gibt keinen Vektor v ∈ C3 mit
(A− 2 · I3) · v = e1 oder (A− 3 · I3) · v = e1 + e2.
Die Basis (e1, e1 + e2) des Eigenraums lasst sich somit nicht zu einer Jordan-Basis von A fortsetzen.
Es ist also essentiell, bei den Basisvektorketten auf der hochstmoglichenStufe zu beginnen und sich dann Schritt fur Schritt in Richtung Eigenvektorenvorzuhangeln.
Rezept 3.3.18 (Jordansche Normalform von Endomorphismen).
• Gegeben sei ein algebraisch abgeschlossener Korper K, ein endlich-dimensionaler K-Vektorraum V und ein Endomorphismus f : V −→ V .
• Gesucht sei eine Basis B von V mit der Eigenschaft, dass die darstel-lende Matrix MB,B(f) von f in Jordan-Normalform ist.
• Rezept: Sei n := dimK V . Man wahle eine Basis C von V und bestimmedie darstellende Matrix
A := MB,B(f) ∈Mn×n(K).
Dann bestimme man mithilfe von Rezept 3.3.15 eine Matrix S ∈GLn(K) mit der Eigenschaft, dass J := S−1·A·S in Jordan-Normalformist.
SeiB :=
(TEn,C ◦ L(S−1)(e1), . . . , TEn,C ◦ L(S−1)(en)
).
Dann ist B eine Basis von V und MB,B(f) ist in Jordan-Normalform.
• Begrundung: Nach Konstruktion ist J in Jordan-Normalform und
MB,B(f) = S−1 ·MB,B(f) · S = S−1 ·A · S = J.
Man beachte dabei, dass B eine Basis von V ist, da (e1, . . . , en) eine Ba-sis von Kn ist und die Abbildungen L(S−1) und TEn,C Isomorphismenvon K-Vektorraumen sind.
Anmerkung zum Lernen. Falls Ihnen entfallen sein sollte, wie man Matrizenzu linearen Abbildungen erstellen kann und wie die Basiswechselberechnun-gen funktionieren, sollten Sie diese Techniken dringend wiederholen!

134 3. Normalformen III: Die Jordansche Normalform
3.3.4 Anwendungen der Jordanschen Normalform
Zum Abschluss gehen wir noch auf ausgewahlte Anwendungen der Jordan-schen Normalform ein:
Wir beginnen mit einer Variante des Konjugationstricks zur Berechnungvon Potenzen von Matrizen:
Beispiel 3.3.19 (Konjugationstrick fur Potenzen). Sei A ∈Mn×n(C). Wie kannman die Potenzen Ak fur k ∈ N geschickt (moglichst in geschlossener Form)berechnen? Nach dem Satz uber die Jordansche Normalform (Satz 3.3.1) gibtes S ∈ GLn(C) mit der Eigenschaft, dass
J := S−1 ·A · S
in Jordan-Normalform ist. Sei D ∈ Mn×n(C) die Matrix, die nur die Dia-gonaleintrage von J (und sonst Nullen) enthalt und sei N ∈ Mn×n(C) dieMatrix, die nur die ersten Nebendiagonaleintrage von J (und sonst Nullen)enthalt. Dann gilt (nachrechnen)
D ·N = N ·D und Nn = 0.
Also erhalten wir fur alle k ∈ N, dass
Ak = (S · J · S−1)k
= S · Jk · S−1
= S · (D +N)k · S−1
= S ·( k∑
j=0
(k
j
)·Dk−j ·N j
)· S−1
= S ·(min(n−1,k)∑
j=0
Dk−j ·N j
)· S−1
Die binomische Formel zur Berechnung von (D+N)k ist dabei anwendbar, daD ·N = N ·D gilt. Man beachte außerdem, dass die Potenzen Dk−j und N j
einfach zu berechnen sind (da es sich jeweils um (Neben)-Diagonalmatrizenhandelt).
Beispiel 3.3.20 (Kombinatorik). Analog zur Herleitung der expliziten Formelfur Fibonacci-Zahlen uber den Konjugationstrick (Beispiel I.6.2.12) kann manauch viele andere Zahlprobleme in der Kombinatorik, die auf (wechselseiti-gen) linearen Rekursionen beruhen, uber den allgemeineren Konjugations-trick aus Beispiel 3.3.19 mit der Jordanschen Normalform behandeln.

3.3. Die Jordansche Normalform 135
Beispiel 3.3.21 (die Exponentialfunktion fur Matrizen). In Analogie zur gewohn-lichen Exponentialfunktion definiert man
exp: Mn×n(C) −→Mn×n(C)
A 7−→∞∑
k=0
1
k!·Ak;
die Exponentialreihe fur komplexe Matrizen konvergiert dabei fur jede Matrix(bezuglich der Maximumsnorm der Koeffizienten) – dies lasst sich analog zurKonvergenz der gewohnlichen Exponentialreihen beweisen (Analysis II).
Sei A ∈ Mn×n(C). Wie in Beispiel 3.3.19 konnen wir dann S−1 · A · S =D + N schreiben, wobei S ∈ GLn(C) ist, D eine Diagonalmatrix ist und Nnilpotent ist mit D ·N = N ·D. Dann folgt
exp(A) = exp(S · (D +N) · S−1
)= S · exp(D +N) · S−1
= S · expD · expN · S−1.
Im letzten Schritt ist es essentiell, dass D ·N = N ·D ist! Die Matrizen expDund expN lassen sich ohne Schwierigkeiten direkt berechnen.
Beispiel 3.3.22 (lineare Differentialgleichungssysteme). Die Exponentialfunk-tion fur Matrizen (Beispiel 3.3.21) liefert eine Moglichkeit, lineare Differen-tialgleichungssysteme mit konstanten Koeffizienten explizit zu losen (Analy-sis II).
Beispiel 3.3.23 (gruppentheoretische Eigenschaften von GLn(C)). Sei n ∈ N.Dann gibt es nur endlich viele Konjugationsklassen von Elementen A ∈GLn(C) mit
A2017 = In,
denn: Konjugiertheit in GLn(C) ist dasselbe wie Ahnlichkeit von Matrizenin GLn(C). Es genugt daher, die analoge Aussage fur Ahnlichkeit zu beweisen.Nach dem Satz uber die Jordansche Normalform (Satz 3.3.1) genugt es dafurzu zeigen, dass nur endlich viele Jordan-Normalformen fur solche Matrizenauftreten konnen.
Sei nun A ∈ GLn(C) mit A2017 = In. Insbesondere ist das Minimalpoly-nom daher ein Teiler von p := T 2017 − 1 ∈ C[T ]. Da
∀j∈{0,...,2016} p(e
2·π·j2017
)= 1− 1 = 0
ist, ist2016∏
j=0
(T − e 2·π·j
2017
)
ein normiertes Polynom vom Grad 2017, was das normierte Polynom p vomGrad 2017 teilt. Also ist

136 3. Normalformen III: Die Jordansche Normalform
p =
2016∏
j=0
(T − e 2·π·j
2017
).
Da µA ein Teiler von p ist, zerfallt somit auch µA in verschiedene Linearfakto-ren. Daher ist A diagonalisierbar (Proposition 3.2.14 oder Satz 3.3.1) und die
Eigenwerte von A liegen in der endlichen Menge {e 2·π·j2017 | j ∈ {0, . . . , 2016}}.
Aus diesen Eigenwerten lassen sich aber nur endlich viele verschiedeneJordan-Normalformen der Große n× n zusammensetzen.
Beispiel 3.3.24 (Lie-Gruppen und Lie-Algebren). Lie-Gruppen sind Gruppen,die eine glatte Struktur besitzen (d.h. die unterliegende Menge ist eine glat-te Mannigfaltigkeit), und deren Gruppenverknupfung und Gruppeninversionglatte Abbildungen sind. Ein wichtiges Beispiel ist die Gruppe GLn(C) derinvertierbaren n×n-Matrizen uber C. Die Jordansche Normalform erlaubt es,Gruppenelemente in GLn(C) in einfachere Gruppenelemente zu zerlegen (ge-nauer gesagt verwendet man dafur eine multiplikative Variante der Jordan-schen Normalform). Diese Zerlegung ist die Grundlage fur ahnliche Zerle-gungen in komplizierteren Lie-Gruppen. Die Linearisierung von Lie-Gruppenfuhrt zu sogenannten Lie-Algebren. Die Jordansche Normalform ist dann ei-ner der Grundsteine fur Zerlegungen von Lie-Algebren in einfachere Baustei-ne.

4
Multilineare Algebra
Die multilineare Algebra befasst sich systematisch mit multilinearen Abbil-dungen, also insbesondere mit Bilinearformen und Determinanten.
Die grundlegende Idee ist dabei, durch einen Trick diese multilinearenAbbildungen wieder in lineare Abbildungen zu ubersetzen; der Preis dieserUbersetzung ist, dass die Startraume, auf denen diese linearen Abbildungendefiniert sind, etwas komplizierter sind. So lassen sich zum Beispiel bilinea-re Abbildungen als lineare Abbildungen auf geeigneten Tensorprodukten be-schreiben und Determinanten als lineare Abbildungen auf geeigneten außerenProdukten.
Diese Vektorraume bilden außerdem wichtige Bausteine in der Differential-geometrie, namlich zum Beispiel bei der Definition so grundlegender Begriffewie riemannscher Metriken auf glatten Mannigfaltigkeiten.
Die multilineare Algebra kann auch in der großeren Allgemeinheit derModul- statt der Vektorraumtheorie formuliert werden. Der Einfachheit hal-ber beschranken wir uns aber auf den Vektorraumfall.
Uberblick uber dieses Kapitel.
4.1 Das Tensorprodukt 1384.2 Das außere Produkt 153
Schlusselbeispiel. Tensorprodukte fur bilineare Abbildungen, außere Pro-dukte fur Determinanten

138 4. Multilineare Algebra
4.1 Das Tensorprodukt
Das Tensorprodukt ist eine Maschine, die multilineare Abbildungen in li-neare Abbildungen verwandelt (Abbildung 4.1). Wie bei vielen Maschinenist es in den meisten Situationen nur wichtig zu wissen welche Funktiona-litat diese Maschine bereitstellt und nicht wie sie von innen aussieht. DieseFunktionalitat lasst sich kurz und knapp durch eine universelle Eigenschaftbeschreiben.
4.1.1 Wozu das Tensorprodukt?
Bevor wir erklaren, in welchem Sinne das Tensorprodukt multilineare Abbil-dungen in lineare Abbildungen verwandelt, fuhren wir den Begriff der multi-linearen Abbildung allgemein ein.
Definition 4.1.1 (bilineare Abbildung, multilineare Abbildung). SeiK ein Korper.
• Seien U , V , W Vektorraume uber K. Eine Abbildung f : V ×W −→ Uist bilinear, wenn folgendes gilt: Fur alle v ∈ V und alle w ∈ W sinddie Abbildungen
f(v, · ) : W −→ U
x 7−→ f(v, x)
f( · , w) : V −→ U
x 7−→ f(x,w)
K-linear.
• Sei n ∈ N>0, seien V1, . . . , Vn und U Vektorraume uber K. Eine Ab-bildung f :
∏nj=1 Vj −→ U ist n-linear, wenn sie folgende Eigenschaft
besitzt: Fur alle j ∈ {1, . . . , n} und alle v1 ∈ V1, . . . , vj−1 ∈ Vj−1, vj+1 ∈vj+1, . . . , vn ∈ Vn ist
∏
k∈{1,...,n}\{j}Vk −→ U
x 7−→ f(v1, . . . , vj−1, x, vj+1, . . . , vn)
eine K-lineare Abbildung.
Bilineare Abbildungen sind in dieser Terminologie dasselbe wie 2-lineareAbbildungen (was ja sprachlich auch Sinn ergibt!).

4.1. Das Tensorprodukt 139
Abbildung 4.1.: Das Tensorprodukt als Maschine
Beispiel 4.1.2. Wir kennen bereits wichtige Beispiele fur multilineare Abbil-dungen: Sei K ein Korper.
• Ist V ein K-Vektorraum, so sind Bilinearformen V × V −→ K nichtsanderes als bilineare Abbildungen V × V −→ K. Insbesondere passenSkalarprodukte bzw. hermitesche Skalarprodukte in diesen Kontext.
• Ist n ∈ N>0, so kann man die Determinante det : Mn×n(K) −→ Kals n-lineare Abbildung Kn × · · · × Kn −→ K auffassen (wobei dieArgumente jeweils den Zeilen der Matrizen entsprechen).
• Ist V ein K-Vektorraum, so ist die Skalarmultiplikation
· : K × V −→ V
bilinear; aber die Abbildung +: V × V −→ V ist im allgemeinen nichtbilinear.
• Ist A eine kommutative K-Algebra, so ist die Multiplikationsabbildung
· : A×A −→ A
bilinear.
• Ist V ein K-Vektorraum, so ist die Auswertungsabbildung
V ∗ × V −→ K
(f, v) 7−→ f(v)
bilinear.

140 4. Multilineare Algebra
• Ist n ∈ N, so ist die Abbildung
C× Rn −→ Cn
(λ, v) 7−→ λ · v
bilinear (uber R).
Bemerkung 4.1.3. Sei K ein Korper und seien V , W , X, Y Vektorraumeuber K. Ist f : V ×W −→ X bilinear und ist g : X −→ Y linear, so ist dieKomposition g ◦ f : V ×W −→ Y bilinear.
Caveat 4.1.4. Multilineare Abbildungen sind im allgemeinen nicht linear undlineare Abbildungen von Produkten sind im allgemeinen nicht multilinear!
Da wir bereits eine ausgefeilte Theorie fur lineare Abbildungen entwickelthaben, ist es wunschenswert diese Theorie auch fur multilineare Abbildungenzu nutzen. Das Tensorprodukt ermoglicht genau das:
Satz 4.1.5 (Tensorprodukt). Sei K ein Korper und seien V , W Vektorraumeuber K. Dann gibt es einen K-Vektorraum V ⊗K W und eine bilineare Ab-bildung ⊗ : V ×W −→ V ⊗K W mit folgender universellen Eigenschaft:
Fur jeden K-Vektorraum Z und jede bilineare Abbildung f : V ×W −→ Zgibt es genau eine lineare Abbildung f⊗ : V ⊗K W −→ Z mit
f⊗ ◦ ⊗ = f.
V ×Wf (bilinear)//
⊗��
Z
V ⊗K W
∃! f⊗ (linear)
::
Der K-Vektorraum V ⊗KW und die Abbildung ⊗ : V ×W −→ V ⊗KW sinddurch diese universelle Eigenschaft bis auf kanonische Isomorphie eindeutigbestimmt. Man bezeichnet V ⊗KW als Tensorprodukt von V und W uber K.
Beweis. Die Eindeutigkeit folgt mit dem Standardargument fur universelleEigenschaften (Beweis von Satz 2.3.24).
Die Existenz reichen wir in Kapitel 4.1.4 durch eine konkrete (aber rechtunformige) Konstruktion nach.
Caveat 4.1.6 (Elementartensoren). Sei K ein Korper, seien V , W Vektorrau-me uber K. Elemente der Form
v ⊗ w := ⊗(v, w) ∈ V ⊗K W
mit v ∈ V und w ∈W bezeichnet man als Elementartensoren.Da die Abbildung ⊗ : V ×W −→ V ⊗K W im allgemeinen nicht surjek-
tiv ist, sind nicht alle Elemente von V ⊗K W Elementartensoren, sondernLinearkombinationen von Lineartensoren.

4.1. Das Tensorprodukt 141
Ist f : V ×W −→ Z eine bilineare Abbildung von K-Vektorraumen, soschreibt man normalerweise
V ⊗K W −→ Z
v ⊗ w 7−→ f(v, w)
fur die induzierte lineare Abbildung f⊗ (obwohl ja nicht alle Elemente auf derlinken Seite Elementartensoren sind . . . aber wegen der Eindeutigkeit von f⊗ist f⊗ durch diese Beschreibung bereits eindeutig bestimmt).
Beispiel 4.1.7 (Rechnen mit Tensoren). Die SkalarmultiplikationsabbildungR×R2 −→ R2 induziert also eine R-lineare Abbildung R⊗RR2 −→ R2. ZumBeispiel gilt in R2 ⊗R R2, dass
(10
)⊗(
22
)+
(−2
0
)⊗(
11
)=
(10
)⊗(
22
)− 2 ·
(10
)⊗(
11
)
=
(10
)⊗(
22
)−(
10
)⊗ 2 ·
(11
)
=
(10
)⊗(
22
)−(
10
)⊗(
22
)
= 0.
(da die Abbildung ⊗ : R2 × R2 −→ R2 ⊗R R2 bilinear ist).
4.1.2 Rechnen mit Tensorprodukten
Es empfiehlt sich im Normalfall, mit dem Tensorprodukt nur mithilfe deruniversellen Eigenschaft zu arbeiten. Daraus leiten sich zum Beispiel die fol-genden Eigenschaften und Konstruktionsprinzipien ab, die fur die meistenAnwendungen vollig ausreichen.
Satz 4.1.8 (der Tensorproduktbaukasten). Sei K ein Korper und seien U , V ,W Vektorraume uber K. Dann gilt:
1. Neutralitat des Grundkorpers. Die folgenden Abbildungen sind wohlde-finierte zueinander inverse Isomorphismen von K-Vektorraumen:
K ⊗K V −→ V
λ⊗ v 7−→ λ · vV −→ K ⊗K V
v 7−→ 1⊗ v
2. Kommutativitat. Die folgenden Abbildungen sind wohldefinierte zuein-ander inverse Isomorphismen von K-Vektorraumen:

142 4. Multilineare Algebra
V ⊗K W −→W ⊗K V
v ⊗ w 7−→ w ⊗ vW ⊗K V −→ V ⊗K W
v ⊗ w 7−→ w ⊗ v
3. Assoziativitat. Die folgenden Abbildungen sind wohldefinierte zueinan-der inverse Isomorphismen von K-Vektorraumen:
U ⊗K (V ⊗K W ) −→ (U ⊗K V )⊗K W
u⊗ (v ⊗ w) 7−→ u⊗ (v ⊗ w)
(U ⊗K V )⊗K W −→ U ⊗K (V ⊗K W )
(u⊗ v)⊗ w 7−→ u⊗ (v ⊗ w)
4. Vertraglichkeit mit direkten Summen. Sei (Wi)i∈I eine Familie von K-Vektorraumen. Die folgenden Abbildungen sind wohldefinierte zueinan-der inverse Isomorphismen von K-Vektorraumen:
V ⊗K⊕
i∈IWi −→
⊕
i∈I(V ⊗K Wi)
v ⊗ (wi)i∈I 7−→ (v ⊗ wi)i∈I⊕
i∈I(V ⊗K Wi) −→ V ⊗K
⊕
i∈IWi
(v ⊗ wi)i∈I 7−→ v ⊗ (wi)i∈I
5. Exponentialgesetz. Die folgenden Abbildungen sind wohldefinierte zu-einander inverse Isomorphismen von K-Vektorraumen:
HomK(V ⊗K W,U) −→ HomK
(W,HomK(V,U)
)
f 7−→(w 7→ (v 7→ f(v ⊗ w))
)
HomK
(W,HomK(V,U)
)−→ HomK(V ⊗K W,U)
f 7−→(v ⊗ w 7→ (f(w))(v)
)
6. Funktorialitat. Sind f : V −→ V ′ und g : W −→ W ′ lineare Abbildun-gen, so liefert
f ⊗K g : V ⊗K W −→ V ′ ⊗K W ′
v ⊗ w 7−→ f(v)⊗ g(w)
eine wohldefinierte lineare Abbildung. Dabei gilt idV ⊗K idW = idV⊗KWund diese Konstruktion ist mit der Komposition von Abbildungen kom-patibel.

4.1. Das Tensorprodukt 143
Beweis. Wir zeigen nur die erste Aussage, mithilfe der universellen Eigen-schaft des Tensorprodukts (die anderen Teile lassen sich analog behandeln):Die Abbildung
K × V −→ V
(λ, v) 7−→ λ · v
ist bilinear und induziert somit eine wohldefinierte lineare Abbildung
ϕ : K ⊗K V −→ V
λ⊗ v 7−→ λ · v.
Außerdem ist
ψ : V −→ K ⊗K V
v 7−→ 1⊗ v = ⊗(1, v)
eine lineare Abbildung (da ⊗ : K × V −→ K ⊗K V bilinear ist).
Es gilt ϕ ◦ ψ = idV , denn: Fur alle v ∈ V ist
ϕ ◦ ψ(v) = ϕ(1⊗ v) = 1 · v = v.
Umgekehrt gilt auch ψ◦ϕ = idK⊗KV , denn: Die Abbildung ψ◦ϕ : K⊗KV −→K ⊗K V ist linear und erfullt wegen
∀(λ,v)∈K×V ψ ◦ ϕ(λ⊗ v) = ψ(λ · v) = 1⊗ (λ · v) = λ⊗ v
die Gleichung(ψ ◦ ϕ) ◦ ⊗ = ⊗ = idK⊗KV ◦ ⊗ .
Mit der universellen Eigenschaft des Tensorprodukts K⊗K V folgt daher diebehauptete Gleichheit ψ ◦ ϕ = idK⊗KV .
Insbesondere erhalten wir daraus eine Berechnung der Dimension von Ten-sorprodukten bzw. genauer eine gute Moglichkeit, um Elemente von Tensor-produkten auf Trivialitat zu testen:
Korollar 4.1.9 (Dimension von Tensorprodukten). Sei K ein Korper und seienV , W Vektorraume uber K. Ist (vi)i∈I eine Basis von V und ist (wj)j∈J eineBasis von W , so ist (vi⊗wj)(i,j)∈I×J eine Basis von V ⊗KW . Insbesonderegilt:
dimK V ⊗K W = |I × J | = |I| · |J | = dimK V · dimKW.
Beweis. Die Basen (vi)i∈I von V bzw. (wj)j∈J von W liefern kanonischeIsomorphismen
V ∼=K
⊕
i∈IK und W ∼=K
⊕
j∈JK.

144 4. Multilineare Algebra
Mit Satz 4.1.8 erhalten wir daher einen Isomorphismus
V ⊗K W ∼=K
(⊕
I
K
)⊗K
(⊕
J
K
)
∼=K
⊕
I
⊕
J
(K ⊗K K)
∼=K
⊕
I×JK
von K-Vektorraumen, der die Familie (vi⊗vj)(i,j)∈I×J auf die Standardbasisvon
⊕I×J K abbildet. Also ist (vi ⊗ vj)(i,j)∈I×J eine Basis von V ⊗K W .
Die Dimensionsberechnung ist eine direkte Konsequenz daraus. Man be-achte dabei, dass in dem Fall, dass |I| oder |J | unendlich ist, die Gleich-heit |I × J | = |I| · |J | nach Definition der Multiplikation von Kardinalzahlengilt.
Beispiel 4.1.10. Zum Beispiel gilt in R2 ⊗R R2, dass
(10
)⊗(
22
)+
(−2
0
)⊗(
01
)6= 0,
denn (e1 ⊗ e1, e1 ⊗ e2, e2 ⊗ e1, e2 ⊗ e2) bildet eine Basis von R2 ⊗R R2 (Ko-rollar 4.1.9) und
(10
)⊗(
22
)+
(−2
0
)⊗(
01
)= 2 · e1 ⊗ e1 + 2 · e1 ⊗ e2 − 2 · e1 ⊗ e2
= 2 · e1 ⊗ e1.
Bemerkung 4.1.11 (Darstellung von Tensoren durch Matrizen). Sei K einKorper und seien m,n ∈ N. Dann ist (ej ⊗ ek)j∈{1,...,m},k∈{1,...,n} eine Basisvon Km⊗KKn. Daher kann man Elemente von Km⊗KKn auch bequem alsMatrizen in Mm×n(K) darstellen. Darstellungen dieser Art sind vor allem inder Physik popular (z.B. Tragheitstensoren).
Sei nun m = n. Unter dem zur Basis (ej ⊗ ek)j,k∈{1,...,n} assoziiertenIsomorphismus sowie dem von der Abbildung ⊗ : Kn ×Kn −→ Kn ⊗K Kn
induzierten Isomorphismus
Kn ⊗K Kn ∼=K (Kn ⊗K Kn)∗ = HomK(Kn ⊗K Kn,K) ∼=K BilK(Kn)
entspricht diese Darstellung von Tensoren in Kn⊗K Kn der Darstellung vonBilinearformen auf Kn durch quadratische Matrizen (Kapitel 1.1.4).
Anmerkung zum Lernen (der Schrecken des Tensorprodukts). Warum wirddas Tensorprodukt oft als so schwierig und unzuganglich empfunden? DerHauptgrund liegt vermutlich darin, dass wir mit den meisten bisher behan-delten Vektorraumen eine konkrete geometrische Anschauung (zum Beispiel

4.1. Das Tensorprodukt 145
angelehnt an die euklidische Geometrie) verbinden. Das Tensorprodukt hin-gegen stammt nicht aus der Quelle der Anschauung, sondern aus abstraktenstrukturellen Uberlegungen, und besitzt keine wirklich gute anschauliche In-terpretation. Positiver formuliert: Man muss sich gar nichts dafur vorstellenkonnen und es ist vollig ausreichend, die universelle Eigenschaft, den Tensor-produktbaukasten und die Konstruktion expliziter Basen aus Korollar 4.1.9zu beherrschen.
4.1.3 Anwendungen des Tensorprodukts
Nach Definition verwandelt das Tensorprodukt bilineare Abbildungen in li-neare Abbildungen, was in vielen Situationen nutzlich ist. Daruberhinaus gibtes noch viele spezifischere Anwendungen des Tensorprodukts in der Mathe-matik:
Beispiel 4.1.12 (Anderung der Skalare). Sei K ein Korper, sei V ein K-Vektorraum und sei A eine kommutative K-Algebra (zum Beispiel die Poly-nomalgebra K[T ] oder ein Korper, der K als Teilkorper enthalt). Dann bildetA⊗K V bezuglich der durch
A× (A⊗K V ) −→ A⊗K V(a, (b⊗ v)
)7−→ (a · b)⊗ v
gegebenen Skalarmultiplikation einen A-Modul (nachrechnen).Ist f : V −→ W eine K-lineare Abbildung von K-Vektorraumen, so ist
idA⊗Kf : A⊗K V −→ A⊗K W eine A-lineare Abbildung (nachrechnen).Man kann auf diese Weise das Tensorprodukt A⊗K · als Funktor von der
Kategorie der K-Vektorraume in die Kategorie der A-Moduln auffassen.Zum Beispiel erhalt man so aus jedem R-Vektorraum V den induzierten
C-Vektorraum C⊗R V und es gilt
dimC(C⊗R V ) = dimR V.
Jeder R-lineare Endomorphismus f von V induziert einen C-linearen Endo-morphismus idC⊗Rf von C ⊗R V . Dies kann manchmal nutzlich sein, wennman die Normalformentheorie uber C auf Endomorphismen von R-Vektor-raumen anwenden mochte.
Ausblick 4.1.13 (Dimensionen statt Range). Betrachtet man allgemeiner dasTensorprodukt uber Ringen, so kann man sich in vielen Situationen vonRangen von Moduln auf Dimensionen von Vektorraumen zuruckziehen. Istzum Beispiel V ein endlich erzeugter Z-Modul, so ist der durch Anderungder Skalare gebildete Q-Vektorraum Q ⊗Z V endlich-dimensional und dabeistimmt dimQ(Q⊗Z V ) mit dem Rang (des freien Anteils) von V uberein.

146 4. Multilineare Algebra
Argumente dieser Art konnen verwendet werden, um die Eindeutigkeits-aussage im Hauptsatz uber endlich erzeugte Moduln uber Hauptidealringen(Satz 2.5.15) auf Dimensionsgleichheiten von Vektorraumen zu reduzieren.
Beispiel 4.1.14 (koordinatenfreie Beschreibung der Spur). Sei K ein Korper,sei V ein endlich-dimensionaler K-Vektorraum und sei f : V −→ V ein En-domorphismus von f . Dann ist
tr f = E ◦ ψ(f),
wobei ψ : HomK(V, V ) −→ V ∗ ⊗K V das Inverse des Isomorphismus (sieheunten)
ϕ : V ∗ ⊗K V −→ HomK(V, V )
g ⊗ v 7−→(x 7→ g(x) · v
)
ist und
E : V ∗ ⊗K V −→ K
g ⊗ v 7−→ g(v)
die Auswertungsabbildung ist.
Warum ist ϕ ein Isomorphismus von K-Vektorraumen? Da V endlich-dimensional ist, ist dimK V
∗ = dimK V , und damit
dimK(V ∗ ⊗K V ) = dimK V∗ · dimK V = dimK V · dimK V
= dimK HomK(V, V ).
Es genugt daher zu zeigen, dass ϕ injektiv ist. Sei (v1, . . . , vn) eine Basisvon V und sei (v∗1 , . . . , v
∗n) die zugehorige duale Basis von V ∗ (Beweis von
Satz I.4.5.4). Dann ist (v∗j ⊗ vk)(j,k)∈{1,...,n}2 eine Basis von V ∗ ⊗K V (Ko-rollar 4.1.9). Sei außerdem A ∈Mn×n(K) mit
0 = ϕ
( n∑
j=1
n∑
k=1
Aj,k · v∗j ⊗ vk)
=
(x 7→
n∑
j=1
n∑
k=1
Aj,k · v∗j (x) · vk).
Insbesondere erhalten wir fur alle j ∈ {1, . . . , n} (durch Einsetzen von vj),dass
0 =
n∑
k=1
Aj,k · 1 · vk.
Da die Familie (v1, . . . , vn) linear unabhangig ist, folgt daraus Aj,1 = · · · =Aj,k = 0. Insgesamt liefert dies A = 0, was die Injektivitat von ϕ beweist.
Wir erklaren nun, warum tatsachlich die behauptete Gleichheit tr f =E ◦ψ(f) gilt: Sei B := (v1, . . . , vn) und A := MB,B(f) ∈Mn×n(K). Dann ist

4.1. Das Tensorprodukt 147
f = ϕ
( n∑
j=1
n∑
k=1
Ak,j · v∗j ⊗ vk)
(nachrechnen, dass beide Seiten auf der Basis B ubereinstimmen). Also er-halten wir
E ◦ ψ(f) = E ◦ ψ ◦ ϕ( n∑
j=1
n∑
k=1
Ak,j · v∗j ⊗ vk)
= E
( n∑
j=1
n∑
k=1
Ak,j · v∗j ⊗ vk)
=
n∑
j=1
n∑
k=1
Ak,j · v∗j (vk) =
n∑
j=1
n∑
k=1
Ak,j · δj,k =
n∑
j=1
Aj,j
= trMB,B(f)
= tr f,
wie gewunscht.Damit erhalt man also eine Beschreibung von tr f , die keine Wahl von
Basen mehr enthalt; da die Wahl einer Basis der Wahl eines Koordinaten-systems entspricht, bezeichnet man dies als koordinatenfreie Beschreibungvon tr f . Fur konkrete Berechnungen ist diese Beschreibung im Normalfallnicht nutzlich. Mochte man aber die Spur auf allgemeinere Situationen ver-allgemeinern, so ist diese Beschreibung hilfreich.
Beispiel 4.1.15 (die Tensoralgebra). SeiK ein Korper, sei V einK-Vektorraum.Wir schreiben V ⊗0 := K, V ⊗1 := V und definieren induktiv fur alle n ∈ N>0
V ⊗(n+1) := V ⊗K V ⊗n.
Dann bildet der K-Vektorraum
T (V ) :=⊕
n∈NV ⊕n
zusammen mit der folgenden Multiplikation m : T (V )× T (V ) −→ T (V ) eineK-Algebra (nachrechnen). Die Abbildung m ist dabei die bilineare Fortset-zung der Bausteine
V ⊗0 × V ⊗n −→ V ⊗n
(λ, v) 7−→ λ · vV ⊗n × V ⊗0 −→ V ⊗n
(v, λ) 7−→ λ · v
fur alle n ∈ N>0 bzw.

148 4. Multilineare Algebra
V ⊗n × V ⊗m −→ V ⊗(n+m)
(v1 ⊗ · · · ⊗ vn, w1 ⊗ · · · ⊗ wm) 7−→ v1 ⊗ · · · ⊗ vn ⊗ w1 ⊗ · · · ⊗ wm
fur alle n,m ∈ N>0.
Ist V = K, so ist T (V ) = T (K) isomorph zur K-Algebra K[T ] (wobei1 ∈ V ⊗1 = K ⊂ T (K) dem Element T ∈ K[T ] entspricht).
Man beachte jedoch, dass die K-Algebra T (V ) im Falle dimK V > 1 nichtkommutativ ist!
Beispiel 4.1.16 (kategorielle Definition von Algebren). Sei K ein Korper, sei Aein K-Vektorraum und seien
ε : K −→ A
µ : A⊗K A −→ A
K-lineare Abbildungen. Dann bildet A genau dann eine (kommutative) K-Algebra bezuglich der Multiplikation
A×A −→ A
(x, y) 7−→ µ(x⊗ y)
und der Skalarmultiplikation
K ×A −→ A
(λ, x) 7−→ µ(ε(λ), x
)
wenn die Diagramme in Abbildung 4.2 alle kommutativ sind (nachrechnen).Dabei bezeichnet
flip: A⊗K A −→ A⊗K A
x⊗ y 7−→ y ⊗ x
die Vertauschungsabbildung.
Das Tensorprodukt erlaubt es also, den Algebrenbegriff nur mithilfe vonlinearen Abbildungen und der Gleichheit der Komposition von gewissen li-nearen Abbildugnen zu definieren. Dies kann genutzt werden, um Algebren inallgemeineren Kategorien einzufuhren und um den Begriff der Algebra (durchUmdrehen der
”Pfeile“) zum Begriff der Koalgebra zu dualisieren.
Beispiel 4.1.17 (Dualitat zwischen Tensorprodukten und Hom-Funktoren). SeiK ein Korper. Der Tensorproduktbaukasten (Satz 4.1.8) beinhaltet insbeson-dere den kanonischen Isomorphismus
HomK(V ⊗K W,U) ∼=K HomK
(W,HomK(V,U)
)

4.1. Das Tensorprodukt 149
Neutralitat von 1 ∈ K bezuglich Multiplikation (von links):
AidA //
a7→1⊗a��
A
K ⊗K Aε⊗K idA
// A⊗K A
µ
OO
Kommutativitat der Multiplikation:
A⊗K Aflip//
µ
��
A⊗K A
µ
��
AidA
// A
Assoziativitat der Multiplikation:
A⊗K (A⊗K A)
idA⊗Kµ��
a⊗(b⊗c)7→(a⊗b)⊗c// (A⊗K A)⊗K A
µ⊗K idA
��
A⊗K A
µ
&&
A⊗K A
µ
xxA
Abbildung 4.2.: Algebrenaxiome durch Tensorprodukte
fur alle K-Vektorraume U , V , W . Diese”Dualitat“ zwischen den Funkto-
ren V ⊗K · und HomK(V, · ) ist ein Beispiel fur eine sogenannte Adjunktionvon Funktoren und spielt in der homologischen Algebra eine wichtige Rolle.
Beispiel 4.1.18 (stetige Funktionen auf Produkten). Seien X und Y endlicheMengen. Dann zeigt der Tensorproduktbaukasten (Satz 4.1.8), dass die Ab-bildung
Abb(X,R)⊗R Abb(Y,R) −→ Abb(X × Y,R)
f ⊗ g 7−→((x, y) 7→ f(x) · g(y)
)
ein Isomorphismus von R-Vektorraumen ist.Allgemeiner: Ist X ein topologischer Raum, so bildet die Menge C(X,R)
der stetigen reellwertigen Funktionen auf X eine R-Algebra (bezuglich derpunktweisen Verknupfungen). Ist Y ein weiterer topologischer Raum, so kannman sich fragen, wie man die R-Algebra C(X×Y,R) aus C(X,R) und C(Y,R)

150 4. Multilineare Algebra
Qj aj
aj
Abbildung 4.3.: Pflasterung eines Rechtecks durch Quadrate
berechnen kann. Es stellt sich heraus, dass (fur gutartige topologische Raume)die R-Algebra C(X × Y,R) eine geeignete Vervollstandigung des Tensorpro-dukts C(X,R)⊗R C(Y,R) ist.
Beispiel 4.1.19 (Rechtecke [10, Miniature 12]). Sei α ∈ R>0 eine irrationaleZahl und sei
R := [0, 1]× [0, α] ⊂ R2.
Dann kann R nicht durch endlich viele Quadrate gepflastert werden, denn:Angenommen, es gabe eine Pflasterung von R durch endlich viele Quadra-
te Q1, . . . , QN der Seitenlange a1, . . . , aN ∈ R>0 (Abbildung 4.3). Genauer:Fur jedes j ∈ {1, . . . , N} gibt es einen Punkt xj ∈ R2 mit
Qj = xj + [0, aj ]× [0, aj ] ⊂ R
und es gilt
N⋃
j=1
Qj = R und ∀j,k∈{1,...,N} j 6= k =⇒ Q◦j ∩Q◦k = ∅.
Wir betrachten R als Q-Vektorraum(!) und darin den Q-Untervektorraum
V := SpanQ{a1, . . . , aN} ⊂ R.
Da die Zahl α irrational ist, ist die Familie (1, α) im Q-Vektorraum Rlinear unabhangig (Ubungsaufgabe). Daher gibt es eine Q-lineare Abbil-dung f : R −→ Q mit
f(1) = 1 und f(α) = −1
(man erganzt (1, α) zu einer Basis von R und gibt dann f auf den Basisvek-toren geeignet vor).
Andererseits folgt aus der Tatsache, dass die Quadrate Q1, . . . , QN dasRechteck R pflastern, die Gleichung

4.1. Das Tensorprodukt 151
1⊗ α =
N∑
j=1
aj ⊗ aj
in V ⊗Q V (nachrechnen; man kann dies zum Beispiel induktiv fur Pflaste-rungen von Rechtecken durch Rechtecke durch geeignete weitere Zerlegungenzeigen; geometrisch ist dies eine Verfeinerung der Flacheninhaltsgleichung, dieman aus der Pflasterung erhalt). Durch Anwendung der (wohldefinierten!) Q-linearen Abbildung
F : V ⊗Q V −→ Qv ⊗ w 7−→ f(v) · f(w)
erhalten wir daher
−1 = 1 · (−1) = f(1) · f(α) = F (1⊗ α)
= F
( N∑
j=1
aj ⊗ aj)
=N∑
j=1
F (aj ⊗ aj)
=
N∑
j=1
f(aj) · f(aj)
≥ 0,
was nicht sein kann.
4.1.4 Konstruktion des Tensorprodukts
Man beachte, dass wir fur alle bisherigen Anwendungen des Tensorproduktsnur die universelle Eigenschaft des Tensorprodukts verwendet haben, nichtaber wie man das Tensorprodukt konstruieren kann. Um aber uberhauptuber das Tensorprodukt sprechen zu konnen, mussen wir naturlich wissen,dass es existiert. Dies zeigen wir nun: Die Idee ist es, zunachst den im allge-meinen irrsinnig großen Vektorraum
⊕V×W K zu betrachten (in dem sehr
viel Platz fur V und W ist) und dann durch Ausdividieren eines geeignetenUntervektorraums die gewunschte bilineare Interaktion von Elementen aus Vbzw. W zu erzwingen.
Beweis der Existenzaussage von Satz 4.1.5. Wir betrachten den Vektorraum
V ⊗K W :=
(⊕
V×WK
) /N,

152 4. Multilineare Algebra
wobei (zur Erzwingung der bilinearen Interaktion!)
N := SpanK
( {e(v+v′,w) − ev,w − ev′,w
∣∣ v, v′ ∈ V, w ∈W}
{e(λ·v,w) − λ · e(v,w)
∣∣ v ∈ V, w ∈W,λ ∈ K}
{e(v,w+w′) − e(v,w) − e(v,w′)
∣∣ v ∈ V, w,w′ ∈W}
{e(v,λ·w) − λ · e(v,w)
∣∣ v ∈ V, w ∈W,λ ∈ K}).
Zusatzlich definieren wir die Abbildung
⊗ : V ×W −→ V ⊗K W
(v, w) 7−→ [e(v,w)].
Wir mussen nun zeigen, dass diese Abbildung ⊗ bilinear ist und dass V ⊗KWzusammen mit ⊗ die universelle Eigenschaft des Tensorprodukts erfullt:
• Die Abbildung ⊗ : V ×W −→ V ⊗KW ist bilinear, denn: Seien v ∈ V ,w ∈W und λ ∈ K. Dann gilt (nach Konstruktion von N)
⊗(λ · v, w) = [e(λ·v,w)] (Definition von ⊗)
=[e(λ·v,w) − (e(λ·v,w) − λ · e(v,w))
](Definition von N)
= [λ · e(v,w)]
= λ · [e(v,w)]
= λ · ⊗(v, w) (Definition von ⊗).
Analog zeigt man, dass ⊗ im ersten Argument additiv und auch imzweiten Argument linear ist. Also ist ⊗ bilinear.
• Sei f : V ×W −→ Z eine lineare Abbildung in einen K-Vektorraum Z.
Existenz von f⊗. Die durch
F :⊕
V×WK −→ U
e(v,w) 7−→ f(v, w)
definierte lineare Abbildung erfullt N ⊂ kerF , da f bilinear ist (nach-rechnen). Daher induziert F eine wohldefinerte lineare(!) Abbildung
f⊗ : V ⊗K W =⊕
V×WK/N −→ Z.
Nach Konstruktion gilt dabei fur alle (v, w) ∈ V ×W , dass
f⊗ ◦ ⊗(v, w) = F (e(v,w)) = f(v, w).

4.2. Das außere Produkt 153
• Eindeutigkeit von f⊗. Sei g : V ⊗K W −→ Z eine lineare Abbildungmit g ◦ ⊗ = f . Dann gilt g = f⊗, denn: Wegen g ◦ ⊗ = f = f⊗ ◦ ⊗stimmen g und f⊗ auf der Bildmenge von ⊗ : V × W −→ V ⊗K Wuberein. Diese Bildmenge ist nach Konstruktion ein Erzeugendensystemdes K-Vektorraums V ⊗K W . Da g und f⊗ linear sind, folgt g = f⊗.
Damit ist die Existenz des Tensorprodukts gezeigt.
4.2 Das außere Produkt
Analog zum Tensorprodukt ist das außere Produkt eine Maschine, die multi-lineare alternierende Abbildungen in lineare Abbildungen verwandelt. Auchin diesem Fall ist es wichtiger zu wissen, welche Funktionalitat diese Maschi-ne bereitstellt als zu wissen wie sie von innen aussieht. Diese Funktionalitatwerden wir durch eine universelle Eigenschaft beschreiben.
4.2.1 Wozu das außere Produkt?
Als erstes fuhren wir den Begriff der alternierenden Abbildung allgemein ein.
Definition 4.2.1 (alternierende Abbildung). Sei K ein Korper, sei n ∈ N>0
und seien V und W Vektorraume uber K.
• Eine Abbildung f : V n −→W ist alternierend, wenn folgendes gilt: Furalle v1, . . . , vn ∈ V mit |{v1, . . . , vn}| < n gilt
f(v1, . . . , vn) = 0.
In anderen Worten: Stimmen mindestens zwei der Argumente uberein,so ist das Ergebnis 0.
• Eine Abbildung f : V n −→W ist antisymmetrisch, wenn folgendes gilt:Fur alle v1, . . . , vn ∈ V und alle j, k ∈ {1, . . . , n} mit j < k ist
f(v1, . . . , vn) = −f(v1, . . . , vj−1, vk, vj+1, . . . , vk−1, vj , vk+1, . . . , vn).
In anderen Worten: Vertauscht man zwei Argumente, so andert sichdas Vorzeichen.
Beispiel 4.2.2. Wir kennen bereits wichtige Beispiele fur multilineare Abbil-dungen: Sei K ein Korper.
• Ist n ∈ N>0, so ist die Determinante det : Mn×n(K) −→ K eine n-lineare alternierende Abbildugn Kn×· · ·×Kn −→ K (eine sogenanntealternierende n-Form auf Kn), wobei die Argumente jeweils den Zeilender Matrizen entsprechen.

154 4. Multilineare Algebra
• Das Kreuzprodukt
× : K3 ×K3 −→ K3
(x, y) 7−→
x2 · y3 − x3 · y2
x3 · y1 − x1 · y3
x1 · y2 − x2 · y1
ist bilinear und alternierend. Auf die geometrische Bedeutung desKreuzprodukts werden wir in Beispiel 4.2.12 genauer eingehen.
• Die Abbildung +: K ×K −→ K ist im allgemeinen nicht alternierend.Aber zum Beispiel ist +: F2 × F2 −→ F2 alternierend.
• Das Standardskalarprodukt 〈 · , · 〉2 : R2 × R2 −→ R ist bilinear, abernicht alternierend.
Bemerkung 4.2.3 (alternierend vs. antisymmetrisch). Wie in Bemerkung I.5.3.2gilt allgemein: Sei K ein Korper, sei n ∈ N>0, seien V und W Vektorraumeuber K und sei f : V n −→W eine n-lineare Abbildung. Ist f alternierend, soist f auch antisymmetrisch. Die Umkehrung gilt im allgemeinen nur, wenndie Charakteristik von K nicht 2 ist.
Satz 4.2.4 (außeres Produkt). Sei K ein Korper, sei V ein K-Vektorraumund sei n ∈ N>0. Dann gibt es einen K-Vektorraum Λn V und eine n-lineareund alternierende Abbildung ∧ : V n −→ Λn V mit folgender universellen Ei-genschaft:
Fur jeden K-Vektorraum Z und jede n-lineare und alternierende Abbil-dung f : V n −→ Z gibt es genau eine lineare Abbildung f∧ : Λn V −→ Zmit
f∧ ◦ ∧ = f.
V × · · · × Vf(n-lin./alt.)//
∧��
Z
Λn V
∃!f(linear)
99
Der K-Vektorraum Λn V und die Abbildung ∧ : V n −→ Λn V sind durch dieseuniverselle Eigenschaft bis auf kanonische Isomorphie eindeutig bestimmt.Man bezeichnet Λn V als n-faches außeres Produkt von V uber K. Außerdemverwendet man die Konvention Λ0 V := K.
Beweis. Die Eindeutigkeit folgt mit dem Standardargument fur universelleEigenschaften (Beweis von Satz 2.3.24).
Die Existenz reichen wir in Kapitel 4.2.4 durch eine konkrete (aber rechtunformige, analog zum Tensorprodukt) Konstruktion nach.
In der Notation des außeren Produkt verzichtet man auf die Angabe desGrundkorpers, da bei der Verwendung des außeren Produkts (im Gegensatz

4.2. Das außere Produkt 155
zum Tensorprodukt) im Normalfall keine Anderung der Skalare vorgenommenwird.
Caveat 4.2.5. Sei K ein Korper, sei n ∈ N≥2 und sei V ein K-Vektorraum.Ist ∧ : V n −→ Λn V die Strukturabbildung in das n-fache außere Produktvon V und sind v1, . . . , vn ∈ V , so schreiben wir
v1 ∧ · · · ∧ vn := ∧(v1, . . . , vn) ∈ Λn V.
Im allgemeinen ist nicht jedes Element von Λn V von dieser Form (im all-gemeinen benotigt man Linearkombinationen solcher elementaren Produk-te). Ist f : V n −→ Z eine n-lineare und alternierende Abbildung von K-Vektorraumen, so schreibt man normalerweise
Λn V −→ Z
v1 ∧ · · · ∧ vn 7−→ f(v1, . . . , vn)
fur die induzierte lineare Abbildung f∧ (obwohl ja nicht alle Elemente aufder linken Seite elementare Produkte sind . . . aber wegen der Eindeutigkeitvon f∧ ist f∧ durch diese Beschreibung bereits eindeutig bestimmt).
Beispiel 4.2.6 (Rechnen mit außeren Produkten).
• Sei K ein Korper und n ∈ N>0. Die Determinante det : Mn×n(K) −→K induziert eine K-lineare Abbildung Λn(Kn) −→ K.
• Das Kreuzprodukt × : R3 × R3 −→ R3 induziert eine R-lineare Abbil-dung Λ2(R3) −→ R3.
• Zum Beispiel gilt in Λ2(R2), dass
(10
)∧(
22
)+
(02
)∧(
11
)= 2 ·
(10
)∧(
11
)+ 2 ·
(01
)∧(
11
)
= 2 ·((
10
)+
(01
))∧(
11
)
= 2 ·(
11
)∧(
11
)
= 0
(da die Abbildung ∧ : R2×R2 −→ Λ2 R2 bilinear und alternierend ist).
4.2.2 Rechnen mit außeren Produkten
Aus der universellen Eigenschaft des außeren Produkts lassen sich die folgen-den Eigenschaften und Konstruktionsprinzipien ableiten. Diese sind fur diemeisten Anwendungen vollig ausreichend.

156 4. Multilineare Algebra
Satz 4.2.7 (der Außere-Produkt-Baukasten). Sei K ein Korper und seien Vund W Vektorraume uber K.
1. Funktorialitat. Ist f : V −→W linear und n ∈ N>0, so ist
Λn f : Λn V −→ ΛnW
v1 ∧ · · · ∧ vn 7−→ f(v1) ∧ · · · ∧ f(vn)
eine wohldefinierte K-lineare Abbildung. Dabei gilt Λn idV = idΛn V unddiese Konstruktion ist mit Abbildungskomposition vertraglich.
2. Niedrige außere Produkte. Der K-Vektorraum V erfullt zusammenmit idV : V −→ V die universelle Eigenschaft des einfachen außerenProdukts Λ1 V . Insbesondere ist Λ1 V ∼=K V .
3. Determinante und außere Produkte. Ist n ∈ N>0, so erfullt K zusam-men mit der Abbildung det : (Kn)n −→ K die universelle Eigenschaftdes n-fachen außeren Produkts von Kn uber K. Insbesondere ist
ΛnKn −→ K
v1 ∧ · · · ∧ vn 7−→ det
vT
1...vTd
= det(v1 | · · · | vn)
ein wohldefinierter Isomorphismus von K-Vektorraumen.
4. Das außere Produkt zur Dimension. Ist n := dimK V ∈ N>0, so istΛn V ∼=K K.
5. Hohe außere Produkte. Ist dimK V < ∞ und n ∈ N mit n > dimK V ,so folgt
Λn V ∼=K {0}.
6. Außere Produkte des Grundkorpers. Fur alle n ∈ N ist
ΛnK ∼=K
{K falls n ∈ {0, 1}{0} falls n > 1.
7. Vertraglichkeit mit direkten Summen. Fur alle n ∈ N ist
Λn V ⊕n−1⊕
k=1
(Λk V ⊗K Λn−kW
)⊕ ΛnW −→ Λn(V ⊕W )
(v1 ∧ · · · ∧ vk)⊗ (wk+1 ∧ · · · ∧ wn) 7−→ (v1, 0) ∧ · · · ∧ (vk, 0)
∧ (0, wk+1) ∧ · · · ∧ (0, wn)
ein wohldefinierter Isomorphismus von K-Vektorraumen.

4.2. Das außere Produkt 157
Beweis. Zu 1. Diese Aussagen erhalt man durch direktes Nachrechnen.
Zu 2. Da 1-lineare Abbildungen dasselbe sind wie lineare Abbildungen,lasst sich leicht uberprufen, dass V zusammen mit idV die universelle Eigen-schaft von Λ1 V besitzt.
Zu 3. Wir betrachten zunachst den Spezialfall, dass der Zielraum derGrundkorper K ist: Sei f : (Kn)n −→ K eine n-lineare und alternierendeAbbildung. Dann ist (Satz I.5.3.3)
f = f(e1, . . . , en) · det : (Kn)n −→ K.
Also gibt es genau eine lineare Abbildung f : K −→ K mit f ◦ det = f ,namlich f = f(e1, . . . , en) · idK .
Fur allgemeine Zielraume kann man entweder den Beweis von Satz I.5.3.3entsprechend anpassen oder wie folgt vorgehen: Sei Z ein K-Vektorraumund sei f : (Kn)n −→ Z eine n-lineare und alternierende Abbildung. DurchWahl einer Basis von Z erhalten wir einen Isomorphismus Z ∼=K
⊕I K.
Fur jedes i ∈ I wenden wir den Spezialfall, dass der Zielraum K ist, aufdie Komposition πi ◦ f an, wobei πi : Z −→ K die Projektion auf den i-tenSummanden bezeichnet. Also ist
πi ◦ f =(πi ◦ f(e1, . . . , en)
)· det .
Setzen wir dies nun zusammen, so erhalten wir fur alle (v1, . . . , vn) ∈ (Kn)n,dass
f(v1, . . . , vn) = f(e1, . . . , en) · det(v1 | · · · | vn)
=(λ 7→ λ · f(e1, . . . , en)
)◦ det(v1 | · · · | vn)
(und offenbar gibt es keine weitere lineare Abbildung K −→ Z mit dieserEigenschaft).
Daher erfullt K zusammen mit der n-linearen und alternierenden Abbil-dung det : (Kn)n −→ K die universelle Eigenschaft von Λn(Kn).
Zu 4. Wegen V ∼=K Kn folgt dies aus dem ersten und dem dritten Teil.
Zu 5. Es genugt zu zeigen, dass {0} (zusammen mit der Nullabbil-dung V n −→ {0}) die universelle Eigenschaft von Λn V erfullt. Dafur brau-chen wir nur nachzuweisen, dass es aus V n als einzige n-lineare und alternie-rende Abbildung nur die Nullabbildung gibt.
Sei also Z ein K-Vektorraum und sei f : V n −→ Z eine n-lineare undalternierende Abbildung. Seien nun v1, . . . , vn ∈ V . Wegen n > dimK V ist dieFamilie (v1, . . . , vn) in V linear abhangig. Daher kann einer dieser Vektorenals Linearkombination der anderen dargestellt werden; ohne Einschrankungsei dies v1. Es gibt somit λ2, . . . , λn ∈ K mit
v1 =
n∑
j=2
λj · vj .

158 4. Multilineare Algebra
Daher erhalten wir
f(v1, . . . , vn) = f
( n∑
j=2
λj · vj , v2, . . . , vn
)
=
n∑
j=2
λj · f(vj , v2, . . . , vn) (f ist n-linear)
=
n∑
j=2
λj · 0 (f ist alternierend)
= 0.
Insgesamt folgt f = 0, wie behauptet.
Zu 6. Dies ist eine Zusammenfassung der vorigen Teile im Spezialfall, dassder betrachtete Vektorraum der Grundkorper K ist.
Zu 7. Dass die angegebene Abbildung wohldefiniert und linear ist, kannman leicht ablesen (nachrechnen). Um zu zeigen, dass es sich dabei um einenIsomorphismus handelt, geben wir das Inverse explizit an:
Λn(V ⊕W ) −→ Λn V ⊕n−1⊕
k=1
(Λk V ⊗K Λn−k V )⊕ ΛnW
(v1, w1) ∧ · · · ∧ (vn, wn) 7−→∑
S∈P ({1,...,n})sgn(πS) · (vjS,1 ∧ · · · ∧ vjS,|S|)
⊗ (wjS,|S|+1∧ · · · ∧ wjS,n);
dabei haben wir die folgende Notation verwendet: Ist S ∈ P ({1, . . . , n}), soschreiben wir
S = {jS,1, . . . , jS,|S|} und {1, . . . , n} \ S = {jS,|S|+1, . . . , jS,n}
mit jS,1 < · · · < jS,|S| und jS,|S|+1 < · · · < jS,n. Außerdem sei πS diedurch k 7→ jS,k gegebene Permutation von {1, . . . , n}. Der obige Kandidat furdas Inverse liefert dann eine wohldefinierte lineare Abbildung (nachrechnen).
Nach Konstruktion ist diese Abbildung offensichtlich ein einseitiges Inver-ses der in der Behauptung des siebten Teils angegebenen Abbildung. Fur dieumgekehrte Komposition ist eine muhsame Induktion notwendig (dies wollenwir hier aber nicht im Detail ausfuhren).
Korollar 4.2.8 (Dimension außerer Produkte). Sei K ein Korper, sei V einendlich-dimensionaler K-Vektorraum mit d := dimK V > 0 und sei n ∈{1, . . . , d}. Dann gilt: Ist (v1, . . . , vd) eine Basis von V , so ist die Familie
(vj1 ∧ · · · ∧ vjn)j1<···<jn∈{1,...,d}

4.2. Das außere Produkt 159
eine Basis von Λn V . Insbesondere folgt
dimK Λn V =
(d
n
).
Beweis. Wegen der Funktorialitat der außeren Produkte genugt es, diese Aus-sage fur den K-Vektorraum Kd zu beweisen. In diesem Fall kann man zumBeispiel induktiv (uber d) mithilfe der Vertraglichkeit mit direkten Summen(Satz 4.2.7, angewendet auf Λn(Kd−1 ⊕K)) argumentieren. Alternativ kannman auch von Hand uber die universelle Eigenschaft nachrechnen, dass diegegebene Familie eine Basis von Λn V ist.
Die Behauptung uber die Dimension folgt aus der Behauptung uber dieBasen, da es genau
(dn
)verschiedene streng monoton wachsende Folgen der
Lange n in {1, . . . , d} gibt.
In der Differentialgeometrie (Beispiel 4.2.14) treten Dualraume (Λn V )∗
von außeren Produkten in naturlicher Weise auf. In diesem Kontext ist esnutzlich zu wissen, dass man solche Dualraume alternativ auch als außeresProdukt der Dualraume auffassen kann:
Korollar 4.2.9 (außere Produkte und Dualraume). Sei K ein Korper, sei V einendlich-dimensionaler K-Vektorraum und sei n ∈ {0, . . . ,dimK V }. Dann ist
Λn(V ∗) −→(Λn V
)∗
f1 ∧ · · · ∧ fn 7−→(v1 ∧ · · · ∧ vn 7→
∑
σ∈Snsgn(σ) ·
n∏
j=1
fj(vσ(j))
︸ ︷︷ ︸=det
(fj(vk)
)j,k∈{1,...,n}
)
ein wohldefinierter Isomorphismus von K-Vektorraumen.
Beweis. Dass die angegebene Abbildung wohldefiniert und linear ist, kannman wieder leicht ablesen (nachrechnen).
Warum handelt es sich dabei um einen Isomorphismus? Wir bezeichnendie angegebene Abbildung mit ϕ. Sei d := dimK V , sei (v1, . . . , vd) eine Basisvon V und sei (v∗1 , . . . , v
∗d) die zugehorige duale Basis von V . Aus dem vorigen
Korollar 4.2.8 erhalten wir daraus durch geeignete außere Produkte bzw.Dualisieren Basen von Λn(V ∗) bzw. (Λn V )∗. Fur alle j1, . . . , jn ∈ {1, . . . , d}und alle k1, . . . , kn ∈ {1, . . . , d} mit j1 < · · · < jn und k1 < · · · < kn gilt
(ϕ(v∗j1 ∧ · · · ∧ v∗jn)
)(vk1 ∧ · · · ∧ vkn) =
∑
σ∈Snsgn(σ) ·
n∏
r=1
v∗jr (vkσ(r))
=
{0 falls (j1, . . . , jn) 6= (k1, . . . , kn)
1 falls (j1, . . . , jn) = (k1, . . . , kn).

160 4. Multilineare Algebra
Damit folgt, dass ϕ(v∗j1 ∧ · · · ∧ v∗jn) das duale Basiselement zu vj1 ∧ · · · ∧ vjnist. Also bildet ϕ eine Basis von Λn(V ∗) auf eine Basis von (Λn V )∗ ab undist somit insbesondere ein Isomorphismus von K-Vektorraumen.
4.2.3 Anwendungen des außeren Produkts
Nach Definition verwandeln außere Produkte multilineare alternierende Ab-bildungen in lineare Abbildungen, was in vielen Situationen nutzlich ist.Daruberhinaus gibt es noch viele spezifischere Anwendungen der außerenProdukte in der Mathematik:
Beispiel 4.2.10 (koordinatenfreie Beschreibung der Determinante). Sei K einKorper, sei V ein endlich-dimensionaler K-Vektorraum der Dimension n ∈N>0 und sei f : V −→ V ein Endomorphismus. Dann ist Λn V ∼=K K unddaher gibt es genau ein ∆(f) ∈ K mit
Λn f = ∆(f) · idΛn V : Λn V −→ Λn V.
Dabei ist ∆(f) = det f , denn: Sei B eine Basis von V und sei A := MB,B(f) ∈Mn×n(K) die zugehorige darstellende Matrix von f bezuglich der Basis B.Aufgrund der Funktorialitat von Λn gilt
Λn(TB,En) ◦ Λn f = Λn(L(A)) ◦ Λn(TB,En),
und damit (nachrechnen; die Abbildung TB,En ist ein Isomorphismus!)
∆(f) = ∆(L(A)
).
Nach Definition der Determinante von Endomorphismen gilt det f = detA;es genugt daher ∆(L(A)) = detA zu zeigen: Da die Abbildung
∆′ : (Kn)n −→ K
(v1, . . . , vn) 7−→ ∆(L(v1 | · · · | vn)
)
n-linear und alterierend ist und ∆′(e1, . . . , en) = 1 erfullt (nachrechnen), folgtaus der Eindeutigkeit der Determinantenfunktion, dass
∀v1,...,vn∈Kn ∆′(v1, . . . , vn) = det(v1 | · · · | vn)T = det(v1 | · · · | vn)
gilt. Insbesondere ist ∆(L(A)
)= ∆′(A∗,1, . . . , A∗,n) = detA, wie gewunscht.
Beispiel 4.2.11 (Orientierungen). Sei V ein endlich-dimensionaler R-Vektor-raum mit n := dimR V ∈ N>0. Wir definieren wie folgt eine Relation
”∼“
auf der Menge der Basen von V : Sind B und C Basen von V , so gelte genaudann B ∼ C, wenn detTB,C > 0 ist.

4.2. Das außere Produkt 161
ÀÁ
Â
ÀÁ
Â
Abbildung 4.4.: Orientierungen und Hande
Dann ist”∼“ eine Aquivalenzrelation auf der Menge der Basen von V
(Ubungsaufgabe). Die Aquivalenzklassen von Basen von V bezuglich”∼“
bezeichnet man als Orientierungen von V . Man kann zeigen, dass V genauzwei Orientierungen besitzt (Ubungsaufgabe).
Zum Beispiel liefern die Basen (e1, e2, e3) und (e2, e1, e3) verschiedene Ori-entierungen von R3; identifiziert man den Daumen mit e1, den Zeigefingermit e2 und den Mittelfinger mit e3, so entspricht der Orientierungsunterschiedzwischen den zugehorigen Orientierungen dieser Basen dem Orientierungsun-terschied zwischen der linken und der rechten Hand (Abbildung 4.4).
Wir gehen nun auf den Zusammenhang zu außeren Produkten ein: Da Rzusammen mit det : V n −→ R die universelle Eigenschaft von Λn V erfullt(Satz 4.2.7; alternativ kann man auch die koordinatenfreie Beschreibung derDeterminanten aus Beispiel 4.2.10 nutzen), kann man dies auch wie folgtumformulieren: Sind B = (v1, . . . , vn) und C = (w1, . . . , wn) Basen von V , soliefern B und C genau dann dieselbe Orientierung von V , wenn es ein λ ∈ R>0
mitv1 ∧ · · · ∧ vn = λ · w1 ∧ · · · ∧ wn
(in Λn V ∼=R R) gibt. Die Wahl einer Orientierung von V entspricht alsogerade der Wahl eines Isomorphismus Λn V −→ R bzw. eines nicht-trivialenElements von (Λn V )∗.

162 4. Multilineare Algebra
Beispiel 4.2.12 (Kreuzprodukt). Das Kreuzprodukt
× : R3 × R3 −→ R3
(x, y) 7−→
x2 · y3 − x3 · y2
x3 · y1 − x1 · y3
x1 · y2 − x2 · y1
ist bilinear und alternierend und induziert somit die R-lineare Abbildung
×∧ : Λ2(R3) −→ R3
x ∧ y 7−→
x2 · y3 − x3 · y2
x3 · y1 − x1 · y3
x1 · y2 − x2 · y1
.
Wegen dimR Λ2(R3) =(
32
)= 3 und
e1 ×∧ e2 = e3, e1 ×∧ e3 = −e2, e2 ×∧ e3 = e1
ist ×∧ : Λ2(R3) −→ R3 sogar ein Isomorphismus von R-Vektorraumen.Wir gehen nun kurz auf geometrische Aspekte des Kreuzprodukts ein:
Seien x, y ∈ R3. Dann zeigt eine Rechnung, dass der Vektor x × y ∈ R3
bezuglich 〈 · , · 〉2 orthogonal zu x und y ist. Ist (x, y) eine linear unabhangigeFamilie in R3, so ist (x, y, x × y) eine Basis von R3 und diese Basis liefertdieselbe Orientierung wie (e1, e2, e3). Die euklidische Lange des Vektors x×yentspricht dabei dem Flacheninhalt des von x und y aufgespannten Paralle-logramms (Ubungsaufgabe).
Beispiel 4.2.13 (die Volumenform). Sei (V, 〈 · , · 〉) ein endlich-dimensionalereuklidischer Vektorraum der Dimension n ∈ N>0 und es sei eine Orientierungauf V gegeben. Dann gibt es genau ein ω ∈ (Λn V )∗ mit folgender Eigenschaft:Fur jede positiv orientierte Basis (v1, . . . , vn) von V gilt
ω(v1 ∧ · · · ∧ vn) =√
det((〈vj , vk〉)j,k∈{1,...,n}
).
Dabei bedeutet”postiv orientiert“, dass die von der entsprechenden Basis in-
duzierte Orientierung mit der gegebenen Orientierung von V ubereinstimmt.Diese Form ω bezeichnet man als Volumenform von (V, 〈 · , · 〉). Der Namekommt daher, dass der Wurzelausdruck auf der rechten Seite das euklidischeVolumen des von v1, . . . , vn aufgespannten Parallelogramms/-epipeds/-otopsist.
Eindeutigkeit von ω. Der euklidische Vektorraum V besitzt eine Ortho-normalbasis (Korollar 1.2.10). Durch Vorzeichenanderung oder Anderungder Reihenfolge der Basisvektoren erhalt man so auch eine positiv orien-tierte Orthonormalbasis (v1, . . . , vn) von V . Dann ist die einelementige Fa-milie v1∧· · ·∧vn eine Basis von Λn V (Korollar 4.2.8). Also kann es hochstenseine solche Form ω geben.

4.2. Das außere Produkt 163
M
TpM
p
Abbildung 4.5.: Tangentialraume, schematisch
Existenz von ω. Sei wieder B := (v1, . . . , vn) eine positiv orientierte Or-thonormalbasis von V . Wir definieren dann ω : Λn V −→ R als die eindeutigbestimmte lineare Abbildung mit
ω(v1 ∧ · · · ∧ vn) := 1.
Ist C := (w1, . . . , wn) eine positiv orientierte Basis von V , so gilt wegen derkoordinatenfreien Beschreibung der Determinante, dass
ω(w1 ∧ · · · ∧ wn) = ω ◦ Λn(TB,C)(v1 ∧ · · · ∧ vn)
= det(TB,C) · ω(v1 ∧ · · · ∧ vn)
= detTB,C .
Indem man zunachst den Spezialfall (Rn, 〈 · , · 〉2) betrachtet (und sich dannmit Korollar 1.2.11 wieder in den allgemeinen Fall begibt), sieht man, dass
detT 2B,C = det
((〈vj , vk〉)j,k∈{1,...,n}
)
gilt (Ubungsaufgabe). Dies zeigt die Existenz von ω.
Beispiel 4.2.14 (Differentialformen). In der Differentialgeometrie untersuchtman die geometrischen und analytischen Eigenschaften
”gekrummter Raume“,
sogenannter (glatter) Mannigfaltigkeiten. Grob gesagt ist eine glatte n-dimen-sionale Mannigfaltigkeit ein gutartiger topologischer Raum, der lokal (glatt)wie Rn aussieht.
Den Grundgedanken der linearen Approximation kann man auch auf dieseSituation erweitern: Zu jedem Punkt p in einer solchen Mannigfaltigkeit Mgibt es eine
”beste lineare Approximation“ an die Mannigfaltigkeit M , den
Tangentialraum TpM (Abbildung 4.5). Dabei handelt es sich um einen R-Vektorraum mit dimR TpM = n. Die Familie (TpM)p∈M der Tangentialraumekann wieder zu einem mathematischen Objekt zusammengefasst werden, zumsogenannten Tangentialbundel TM von M .

164 4. Multilineare Algebra
Um zum Beispiel das Volumen von Mannigfaltigkeiten zu definieren/be-rechnen oder Flusse etc. auf Mannigfaltigkeiten zu beschreiben, ist es notig,die reelle Analysis von Funktionen R −→ R auf Funktionen auf Mannigfal-tigkeiten zu ubertragen.
Dabei stellt es sich heraus, dass außere Produkte von Tangentialraumen(genauer gesagt die Vektorraumbundel (Λk TM)∗ uber M und ihre Schnitte)genau das richtige Orientierungs- und Transformationsverhalten liefern, dasman von der entsprechenden Differentiations- und Integrationstheorie geo-metrisch erwarten wurde. Dies fuhrt zu den sogenannten Differentialformenauf Mannigfaltigkeiten (Anhang A.5).
Literaturaufgabe (Vorbereitung auf die Analysis auf Mannigfaltigkeiten). Uber-fliegen Sie die linear-algebraischen Abschnitte des Buchs Vektoranalysis vonK. Janich [6].
Anmerkung fur Lehramtsstudenten. Die Berechnung von Oberflachen, Vo-lumina etc. und das Untersuchen von Krummungseigenschaften (warum gibtes keine
”vernunftigen“ ebenen Landkarten?!) gehoren zu den klassischen
Fragestellungen der Geometrie und sind somit ein Teil der mathematischenAllgemeinbildung. Auch wenn nicht zu erwarten ist, dass der Lehrplan anGymnasien plotzlich die Behandlung von Differentialformen vorsehen wird,ist es doch ausgesprochen nutzlich zu wissen, wie man geometrische Kenn-daten von komplizierteren geometrischen Objekten prazise definieren undausrechnen kann.
Beispiel 4.2.15 (die außere Algebra). Sei K ein Korper und sei V ein K-Vektorraum. Dann bildet der K-Vektorraum
Λ V :=⊕
n∈NΛn V
zusammen mit der (bilinearen) Fortsetzung des kovarianten Dachprodukts(das auch mit dem Symbol ∧ bezeichnet wird . . . )
Λ0 V × Λn V −→ Λn V
(λ, v) 7−→ λ · v,Λn V × Λ0 V −→ Λn V
(v, λ) 7−→ λ · v,Λn V × Λm V −→ Λn+m V
(v1 ∧ · · · ∧ vn, w1 ∧ · · · ∧ wm) 7−→ v1 ∧ · · · ∧ vn ∧ w1 ∧ · · · ∧ wm
eine K-Algebra. Man beachte jedoch, dass die K-Algebra ΛV im allgemeinennicht kommutativ ist. Sie ist jedoch im folgenden Sinne graduiert kommuta-tiv: Fur alle n,m ∈ N und alle v ∈ Λn V , w ∈ Λm V gilt
v ∧ w = (−1)n·m · v ∧ w.

4.2. Das außere Produkt 165
Zum Beispiel ist fur V = K die außere Algebra Λ V = ΛK isomorphzu K[T ]/(T 2) (mit reprasentantenweiser Multiplikation).
4.2.4 Konstruktion des außeren Produkts
Zum Abschluss mussen wir noch nachweisen, dass die außeren Produktetatsachlich existieren. Wir gehen dabei wie bei der Konstruktion des Ten-sorprodukts vor: Wir konstruieren einen viel zu großen Vektorraum und er-zwingen dann durch eine geeignete Quotientenbildung die gewunschten Mul-tilinearitats- und Alternierungseigenschaften.
Beweis der Existenzaussage aus Satz 4.2.4. Wir betrachten den Vektorraum
Λn V :=
(⊕
V n
K
) /N,
wobei (zur Erzwingung der n-linearen und alternierenden Interaktion)
N := SpanK
( {e(v1,...,vj+v′j ,...,vn) − e(v1,...,vj ,...,vn) − e(v1,...,v′j ,...,vn)∣∣ j ∈ {1, . . . , n}, v1, . . . , vn ∈ V, v′j ∈ V
}
∪{e(v1,...,λ·vj ,...,vn) − λ · e(v1,...,vn)∣∣ j ∈ {1, . . . , n}, v1, . . . , vn ∈ V, λ ∈ K
}
∪{e(v1,...,vn)
∣∣ v1, . . . , vn ∈ V, |{v1, . . . , vn}| < n}).
Zusatzlich definieren wir die Abbildung
∧ : V n −→ Λn V
(v1, . . . , vn) 7−→ [e(v1,...,vn)].
Wie im Fall der Konstruktion des Tensorprodukts rechnet man nun nach,dass Λn V zusammen mit dieser Abbildung ∧ die universelle Eigenschaft desn-fachen außeren Produkts von V erfullt. Damit ist die Existenz des n-fachenaußeren Produkts gezeigt.
Hat man die Theorie der Algebren in einem großeren Umfang zur Verfugungals wir sie bisher entwickelt haben, so kann man die außere Algebra auch kurzund bundig als Quotientenalgebra der Tensoralgebra konstruieren und darausdann die einzelnen außeren Produkte extrahieren.

166 4. Multilineare Algebra

A
Anhang
Uberblick uber dieses Kapitel.
A.1 Elementare Analysis von Sinus und Kosinus A 3A.2 Kategorien A 5A.3 (Ko)Produkte A 9A.4 Funktoren A 11A.5 Differentialformen A 15A.6 Die LA-Matrix A 19

A 2 A. Anhang

A.1. Elementare Analysis von Sinus und Kosinus A 3
A.1 Elementare Analysis von Sinus und Kosinus
Im folgenden ist der analytische Zugang zu Sinus, Kosinus und π kurz zu-sammengefasst. Der Zusammenhang mit der Anschauung zu Winkeln amKreisbogen ergibt sich daraus erst durch Berechnung der Lange geeigneterKreisbogen (s. Analysis I/II).
Definition A.1.1 (Sinus, Kosinus). Die Funktionen Sinus und Kosinus sinddurch die folgenden (uberall absolut konvergenten!) Potenzreihen gegeben:
cos : R −→ R
x 7−→∞∑
n=0
(−1)n
(2n)!· x2n
sin : R −→ R
x 7−→∞∑
n=0
(−1)n
(2n+ 1)!· x2n+1.
Graphische Darstellung. Auswertung der obigen Ausdrucke an vielen Punk-ten ergibt die graphische Darstellung von cos bzw. sin in Abbildung A.1.
1
1sin
cos
Abbildung A.1.: Graphische Darstellung von cos und sin
Symmetrie. Nach Definition gilt fur alle x ∈ R, dass
cos(−x) = cos(x) und sin(−x) = − sin(x).
Differenzierbarkeit/Ableitungen. Aus allgemeinen Eigenschaften von Po-tenzreihen erhalten wir: Die Funktionen cos und sin sind glatt und fur dieAbleitungen gilt (gliedweises Differenzieren!)
cos′ = − sin und sin′ = cos .

A 4 A. Anhang
Quadratsumme. Es giltcos2 + sin2 = 1,
denn (cos2 + sin2)′ = 0 und cos2(0) + sin2(0) = 1.
Die Zahl π und ihre Halfte. Eine sorgfaltige Abschatzung von Hand derPotenzreihe zeigt, dass sin(x) > 0 fur alle x ∈ (0, 2] gilt; also ist cos we-gen cos′ = − sin auf [0, 2] streng monoton fallend. Außerdem zeigt eineAbschatzung von Hand, dass cos(2) < 0 ist. Also hat cos in [0, 2] genaueine Nullstelle x0. Wir definieren
π := 2 · x0.
Nach Definition ist cos(π/2) = 0. Aus der Quadratsumme und der Positivitatvon sin auf [0, 2] folgt sin(π/2) = 1.
Additionstheoreme. Mithilfe des Cauchyprodukts von Potenzreihen kannman nachrechnen, dass
cos(x+ y) = cosx · cos y − sinx · sin y,sin(x+ y) = sinx · cos y + cosx · sin y
fur alle x, y ∈ R gilt. Insbesondere erhalt man daraus aus den bereits bekann-ten Werten, dass
cos(π) = −1, sin(π) = 0, cos(2 · π) = 1, sin(2 · π) = 0.
Periodizitat. Aus den Additionstheoremen und den bereits berechneten spe-ziellen Werten ergibt sich
cos(x+ 2 · π) = cos(x)
sin(x+ 2 · π) = sin(x)
cos(x− π
2
)= sin(x)
fur alle x ∈ R.
Invertierbarkeit. Aus den bereits gezeigten Positivitats- und Symmetrieei-genschaften sowie den bereits berechneten Werten folgt, dass
cos : [0, π] −→ [−1, 1]
sin : [−π/2, π/2] −→ [−1, 1]
Homoomorphismen sind; die inversen Funktionen bezeichnet man mit arccosbzw. arcsin.

A.2. Kategorien A 5
A.2 Kategorien
Mathematische Theorien bestehen aus Objekten (z.B. Gruppen, reelle Vek-torraume, topologische Raume, messbare Raume, . . . ) und strukturerhalten-den Abbildungen (z.B. Gruppenhomomorphismen, R-lineare Abbildungen,stetige Abbildungen, messbare Abbildungen, . . . ) dazwischen. Dies abstra-hiert man zum Begriff der Kategorie [9, 4]:
Definition A.2.1 (Kategorie). Eine Kategorie C besteht aus den folgendenKomponenten:
• Eine Klasse Ob(C); die Elemente von Ob(C) heißen Objekte von C.
• Zu je zwei Objekten X,Y ∈ Ob(C) einer Menge MorC(X,Y ); die Ele-mente von MorC(X,Y ) heißen Morphismen von X nach Y in C. (Dabeiwird implizit angenommen, dass die Morphismenmengen zwischen ver-schiedenen Objektpaaren disjunkt sind.)
• Zu je drei Objekten X,Y, Z ∈ Ob(C) einer Verknupfung
◦ : MorC(Y,Z)×MorC(X,Y ) −→ MorC(X,Z)
(g, f) 7−→ g ◦ f
von Morphismen.
Dabei mussen folgende Bedingungen erfullt sein:
• Fur jedes Objekt X in C gibt es einen Morphismus idX ∈ MorC(X,X)mit folgender Eigenschaft: Fur alle Y ∈ Ob(C) und alle Morphis-men f ∈ MorC(X,Y ) bzw. g ∈ MorC(Y,X) gilt
f ◦ idX = f und idX ◦g = g.
(Dadurch ist idX eindeutig bestimmt und heißt Identitatsmorphismusvon X in C.)
• Die Verknupfung von Morphismen ist assoziativ: Fur alle Objekte W ,X, Y , Z in C und alle Morphismen f ∈ MorC(W,X), g ∈ MorC(X,Y )und h ∈ MorC(Y,Z) gilt
h ◦ (g ◦ f) = (h ◦ g) ◦ f.
Caveat A.2.2. Das Konzept der Morphismen und Verknupfungen ist nachdem Beispiel der Abbildungen zwischen Mengen und der gewohnlichen Ab-bildungskomposition modelliert. Im allgemeinen muss es sich bei Morphismen

A 6 A. Anhang
aber nicht um Abbildungen zwischen Mengen und bei der Verknupfung nichtum Abbildungskomposition handeln!
Beispiel A.2.3 (leere Kategorie). Die leere Kategorie ist die (eindeutig be-stimmte) Kategorie, deren Objektklasse die leere Menge ist.
Beispiel A.2.4 (Gruppen als Kategorien). Sei G eine Gruppe. Dann erhaltenwir wie folgt eine Kategorie CG:
• Objekte: Die Kategorie CG besitze genau ein Objekt, etwa 0.
• Morphismen: Es sei MorC(0, 0) := G.
• Verknupfungen: Die Verknupfung sei wie folgt gegeben:
MorC(0, 0)×MorC(0, 0) −→ MorC(0, 0)
(g, h) 7−→ g · h.
Beispiel A.2.5 (Mengenlehre). Die Kategorie Set der Mengen besteht aus:
• Objekte: Es sei Ob(Set) die Klasse(!) aller Mengen.
• Morphismen: Sind X und Y Mengen, so sei MorSet(X,Y ) die Mengealler mengentheoretischen Abbildungen X −→ Y .
• Verknupfungen: Sind X,Y und Z Mengen, so sei die VerknupfungMorSet(Y,Z) ×MorSet(X,Y ) −→ MorSet(X,Z) die gewohnliche Abbil-dungskomposition.
Es ist klar, dass die Verknupfung assoziativ ist. Ist X eine Menge, so ist diegewohnliche Identitatsabbildung
X −→ X
x 7−→ x
der Identitatsmorphismus idX von X in Set.
Beispiel A.2.6 (lineare Algebra). Sei K ein Korper. Die Kategorie VectK derK-Vektorraume besteht aus:
• Objekte: Es sei Ob(VectK) die Klasse aller K-Vektorraume.
• Morphismen: Sind V und W Vektorraume uber K, so sei MorK(V,W )die Menge aller K-linearen Abbildungen V −→W .
• Verknupfungen: Die Verknupfung sei durch die gewohnliche Abbil-dungskomposition gegeben.
Analog erhalt man auch die Kategorie Group der Gruppen, die Kategorie Abder abelschen Gruppen, . . .

A.2. Kategorien A 7
Beispiel A.2.7 (Ringtheorie). Die Kategorie Ring der Ringe besteht aus:
• Objekte: Es sei Ob(Ring) die Klasse aller Ringe.
• Morphismen: Sind R und S Ringe, so sei MorRing(R,S) die Menge allerRinghomomorphismen R −→ S.
• Verknupfungen: Die Verknupfung sei durch die gewohnliche Abbil-dungskomposition gegeben.
Beispiel A.2.8 (Algebren). Sei K ein Korper. Die Kategorie AlgK der K-Algebren besteht aus:
• Objekte: Es sei Ob(AlgK) die Klasse aller K-Algebren.
• Morphismen: Sind A und B Algebren uber K, so sei MorAlgK (A,B) dieMenge aller K-Algebrenhomomorphismen A −→ B.
• Verknupfungen: Die Verknupfung sei durch die gewohnliche Abbil-dungskomposition gegeben.
Beispiel A.2.9 (Modultheorie). Sei R ein Ring. Die Kategorie ModR der(Links-)R-Moduln besteht aus:
• Objekte: Es sei Ob(ModR) die Klasse aller R-Moduln.
• Morphismen: Sind V und W Moduln uber R, so sei MorModR(V,W ) dieMenge aller R-Modulhomomorphismen V −→W .
• Verknupfungen: Die Verknupfung sei durch die gewohnliche Abbil-dungskomposition gegeben.
Beispiel A.2.10 (Topologie). Die Kategorie Top der topologischen Raume be-steht aus:
• Objekte: Es sei Ob(Top) die Klasse aller topologischen Raume.
• Morphismen: Sind X und Y topologische Raume, so sei
map(X,Y ) := MorTop(X,Y )
die Menge aller stetigen Abbildungen X −→ Y .
• Verknupfungen: Die Verknupfung sei durch die gewohnliche Abbil-dungskomposition gegeben.
Alle Begriffe, die sich durch Objekte und (Komposition von) Morphismenausdrucken lassen, lassen sich zu entsprechenden Begriffen in allgemeinenKategorien verallgemeinern. Ein erstes Beispiel ist der Isomorphiebegriff:

A 8 A. Anhang
Definition A.2.11 (Isomorphismus). Sei C eine Kategorie. Objekte X,Y ∈Ob(C) sind isomorph in C, wenn es Morphismen f ∈ MorC(X,Y ) und g ∈MorC(Y,X) mit
g ◦ f = idX und f ◦ g = idY
gibt. In diesem Fall sind f und g Isomorphismen in C und wir schreibenX ∼=C Y (oder wenn die Kategorie aus dem Kontext klar ist: X ∼= Y ).
Beispiel A.2.12 (Isomorphismenbegriffe).
• Objekte in Set sind genau dann isomorph, wenn sie gleichmachtig sind.
• Sei K ein Korper und sei R ein Ring. Objekte in Group, Ab, VectK , Ring,AlgK , ModR, . . . sind genau dann im obigen Sinne isomorph, wenn sieim gewohnlichen algebraischen Sinne isomorph sind.
• Objekte in Top sind genau dann isomorph, wenn sie homoomorph sind.
Definition A.2.13 (Automorphismengruppe). Sei C eine Kategorie und seiX ∈ Ob(C). Dann bildet die Menge Aut(X) aller Isomorphismen X −→ Xin C bezuglich der Komposition von Morphismen in C eine Gruppe, die Au-tomorphismengruppe von X in C.

A.3. (Ko)Produkte A 9
A.3 (Ko)Produkte
Die Formulierung der universellen Eigenschaft der direkten Summe von Mo-duln beruht nur auf Homomorphismen und deren Verknupfung. Diese uni-verselle Eigenschaft kann also in jeder Kategorie formuliert werden:
Definition A.3.1 (Koprodukt). Sei C eine Kategorie und sei (Vi)i∈I eine Fa-milie von Objekten in C. Wir sagen, dass ein Objekt V in C zusammen mitMorphismen (gi ∈ MorC(Vi, V ))i∈I die universelle Eigenschaft des Kopro-dukts
∐i∈I Vi besitzt, wenn folgendens gilt: Fur jedes Objekt W in C und
jede Familie (fi ∈ MorC(Vi,W ))i∈I von Morphismen in C gibt es genau einenMorphismus f ∈ MorC(V,W ) mit
∀i∈I f ◦ gi = fi.
V∃!f// W
Vi
gi
OO
fi
>>
Proposition A.3.2 (Eindeutigkeit von Koprodukten). Sei C eine Kategorieund sei (Vi)i∈I eine Familie von Objekten in C. Erfullen V mit (gi ∈MorC(Vi, V ))i∈I und V ′ mit (g′i ∈ MorC(Vi, V
′))i∈I die universelle Eigen-schaft des Koprodukts
∐i∈I Vi, so gibt es genau einen Isomorphismus f ∈
MorC(V, V ′) in C mit∀i∈I f ◦ gi = g′i.
Beweis. Einmal hin, einmal her, rundherum das ist nicht schwer . . .
Beispiel A.3.3.
• Sei R ein Ring. Das Koprodukt in der Kategorie ModR der R-Modulnist die direkte Summe von R-Moduln (zusammen mit den Inklusionender Summanden).
• Das Koprodukt in der Kategorie Set der Mengen ist durch die disjunkteVereinigung von Mengen (zusammen mit den zugehorigen Inklusionen)gegeben.
• Das Koprodukt in der Kategorie Top der topologischen Raume ist durchdie disjunkte Vereigung der unterliegenden Raume mit einer geeignetenTopologie (zusammen mit den zugehorigen Inklusionen) gegeben.

A 10 A. Anhang
• Das Koprodukt in der Kategorie Group der Gruppen ist das sogenann-te freie Produkt (zusammen mit den zugehorigen Inklusionshomomor-phismen). Dieses stimmt fur nicht-abelsche Gruppen nicht mit der Kon-struktion
”fast uberall triviale Familien im kartesischen Produkt“ uber-
ein. Zum Beispiel ist das freie Produkt zweier endlicher Gruppen imallgemeinen nicht endlich.
Caveat A.3.4 (Existenz von Koprodukten). Nicht in jeder Kategorie existie-ren alle Koprodukte! Zum Beispiel existieren in der Kategorie der endlichenMengen (und gewohnlichen Abbildungen) nur die Koprodukte uber endlicheFamilien, nicht aber die Koprodukte uber unendliche Familien (nicht-leerer)Mengen.
Analog kann man auch die universelle Eigenschaft des Produkts in allge-meinen Kategorien formulieren und die entsprechende Eindeutigkeitsaussageformulieren.
Anmerkung zum Lernen. Wichtig ist nur, sich zu merken, dass
• Koprodukte durch Morphismen heraus,
• Produkte durch Morphismen hinein
charakterisiert werden. Alles andere ergibt sich dann (fast) von selbst.Auf ahnliche Weise kann man auch allgemeinere Kolimiten und Limiten
einfuhren, wobei
• Kolimiten durch Morphismen heraus,
• Limiten durch Morphismen hinein
charakterisiert werden.

A.4. Funktoren A 11
A.4 Funktoren
Die Ubersetzung zwischen mathematischen Theorien (d.h. zwischen Katego-rien) erfolgt durch sogenannte Funktoren. Grob gesagt handelt es sich dabeium
”strukturerhaltende Abbildungen zwischen Kategorien“.
Definition A.4.1 (Funktor). Seien C und D Kategorien. Ein (kovarianter)Funktor F : C −→ D besteht aus folgenden Komponenten:
• Einer Abbildung F : Ob(C) −→ Ob(D).
• Zu je zwei Objekten X,Y ∈ Ob(C) einer Abbildung
F : MorC(X,Y ) −→ MorC(F (X), F (Y )
).
Dabei mussen folgende Bedingungen erfullt sein:
• Fur alle X ∈ Ob(C) ist F (idX) = idF (X).
• Fur alle X,Y, Z ∈ Ob(C) und alle f ∈ MorC(X,Y ), g ∈ MorC(Y,Z)gilt
F (g ◦ f) = F (g) ◦ F (f).
Beispiel A.4.2 (Identitatsfunktor). Sei C eine Kategorie. Dann ist der Iden-titatsfunktor IdC : C −→ C wie folgt definiert:
• Auf Objekten betrachten wir die Abbildung
Ob(C) −→ Ob(C)
X 7−→ X.
• Auf Morphismen: Fur alle X,Y ∈ Ob(C) betrachten wir
MorC(X,Y ) −→ MorC(X,Y )
f 7−→ f.
Beispiel A.4.3 (Vergissfunktor). Der Vergissfunktor VectR −→ Set ist wie folgtdefiniert:
• Auf Objekten betrachten wir die Abbildung Ob(VectR) −→ Ob(Set),die einem R-Vektorraum die unterliegende Menge zuordnet.
• Auf Morphismen: Fur alle R-Vektorraume X,Y betrachten wir
MorVectR(X,Y ) = HomR(X,Y ) −→ MorSet(X,Y )
f 7−→ f.

A 12 A. Anhang
Analog erhalt man Vergissfunktoren Top −→ Set, VectR −→ Ab, . . .
Beispiel A.4.4 (basierte Vektorraume). Man kann die Mengenlehre uber denfolgenden Funktor F : Set −→ VectR in die lineare Algebra ubersetzen:
• Auf Objekten definieren wir
F : Ob(Set) −→ Ob(VectR)
X 7−→⊕
X
R.
(Dabei ist⊕
X R eine Verallgemeinerung der direkten Summe zweierVektorraume (s. Lineare Algebra II). Wir betrachten eine Menge X inkanonischer Weise als Teilmenge, bzw. sogar Basis, von
⊕X R.)
• Auf Morphismen definieren wir F wie folgt: Sind X,Y Mengen und istf : X −→ Y eine Abbildung, so definieren wir F (f) :
⊕X R −→⊕
Y Rals die eindeutig bestimmte R-lineare Abbildung, die f von der Basis Xauf ganz
⊕X R fortsetzt.
Dies liefert tatsachlich einen Funktor. Dabei gilt fur alle Mengen X und alleR-Vektorraume V , dass
MorVectR
(F (X), V
)−→ MorSet(X,V )
f −→ f |X
eine Bijektion ist (universelle Eigenschaft von Basen).
Beispiel A.4.5 (Tensorprodukte). SeiK ein Korper und sei V einK-Vektorraum.Dann ist V ⊗K · : VectK −→ VectK ein Funktor (Satz 4.1.8):
• Auf Objekten:
Ob(VectK) −→ Ob(VectK)
W 7−→ V ⊗K W.
• Auf Morphismen: Fur alle R-Vektorraume V,W betrachten wir
HomK(W,W ′) −→ HomK(V ⊗K W,V ⊗K W ′)
f 7−→ idV ⊗Kf.
Beispiel A.4.6 (Tensorprodukte und Basiswechsel). Sei K ein Korper und seiA eine kommutative K-Algebra. Dann ist A ⊗K · : VectK −→ ModA einFunktor (Beispiel 4.1.12).
Beispiel A.4.7 (außere Produkte). Sei K ein Korper und sei n ∈ N>0. Dann istdas n-fache außere Produkt Λn : VectK −→ VectK ein Funktor (Satz 4.2.7):

A.4. Funktoren A 13
• Auf Objekten:
Ob(VectK) −→ Ob(VectK)
V 7−→ Λn V.
• Auf Morphismen: Fur alle R-Vektorraume V,W betrachten wir
HomK(V,W ) −→ HomK(Λn V,ΛnW )
f 7−→ Λn f.
In vielen Situationen benotigt man Funktoren, die”die Richtung der Pfeile
umdrehen“, also sogenannte kontravariante Funktoren:
Definition A.4.8 (kontravarianter Funktor). Seien C und D Kategorien. Einkontravarianter Funktor F : C −→ D besteht aus folgenden Komponenten:
• Einer Abbildung F : Ob(C) −→ Ob(D).
• Zu je zwei Objekten X,Y ∈ Ob(C) einer Abbildung
F : MorC(X,Y ) −→ MorC(F (Y ), F (X)
).
Dabei mussen folgende Bedingungen erfullt sein:
• Fur alle X ∈ Ob(C) ist F (idX) = idF (X).
• Fur alle X,Y, Z ∈ Ob(C) und alle f ∈ MorC(X,Y ), g ∈ MorC(Y,Z)gilt
F (g ◦ f) = F (f) ◦ F (g).
Beispiel A.4.9 (Dualraum). Man kann die Konstruktion des Dualraums alskontravarianten Funktor · ∗ : VectR −→ VectR auffassen:
• Auf Objekten verwenden wir
Ob(VectR) −→ Ob(VectR)
X 7−→ X∗ = HomR(X,R).
• Auf Morphismen: Fur alle R-Vektorraume X,Y betrachten wir
MorVectR(X,Y ) = HomR(X,Y ) −→ HomR(Y ∗, X∗)
f 7−→ f∗.
Allgemeiner liefern Objekte in Kategorien Funktoren, die beschreiben wiedie entsprechende Kategorie aus dem Blickwinkel dieses Objekts aussieht:

A 14 A. Anhang
Beispiel A.4.10 (darstellbare Funktoren). Sei C eine Kategorie und X ∈Ob(C). Dann erhalten wir einen kontravarianten Funktor
MorC( · , X) : C −→ Set,
den von X dargestellten kontravarianten Funktor. Dieser Funktor ist wie folgtdefiniert:
• Auf Objekten: Sei
MorC( · , X) : Ob(C) −→ Ob(Set)
Y 7−→ MorC(Y,X).
• Auf Morphismen: Sind Y, Z ∈ Ob(C), so definieren wir
MorC( · , X) : MorC(Y, Z) −→ MorSet
(MorC(Z,X),MorC(Y,X)
)
f 7−→ (g 7→ g ◦ f).
Analog erhalt man einen kovarianten Funktor MorC(X, · ) : C −→ Set.
Eine wesentliche Eigenschaft von (kovarianten wie kontravarianten) Funk-toren ist, dass sie – da sie mit Verknupfungen und Identitatsmorphismenvertraglich sind – Isomorphie erhalten und somit ein geeignetes Konzept furInvarianten liefern:
Proposition A.4.11 (Funktoren erhalten Isomorphie). Seien C, D Kategorien,sei F : C −→ D ein Funktor und seien X,Y ∈ Ob(C).
1. Ist f ∈ MorC(X,Y ) ein Isomorphismus in C, so ist der ubersetzteMorphismus F (f) ∈ MorD(F (X), F (Y )) ein Isomorphismus in D.
2. Insbesondere: Ist X ∼=C Y , so folgt F (X) ∼=D F (Y ). Bzw.: Ist F (X) 6∼=D
F (Y ), so ist X 6∼=C Y .
Beweis. Der erste Teil folgt direkt aus den definierenden Eigenschaften vonFunktoren. Der zweite Teil ist eine unmittelbare Folgerung aus dem erstenTeil.
Geeignete Funktoren konnen also helfen zu zeigen, dass gewisse Objektenicht isomorph sind.
Caveat A.4.12. Die Umkehrung gilt im allgemeinen nicht ! D.h. Objekte,die unter einem Funktor auf isomorphe Objekte abgebildet werden, sind imallgemeinen nicht isomorph.

A.5. Differentialformen A 15
A.5 Differentialformen
In der Differentialgeometrie untersucht man die geometrischen und analyti-schen Eigenschaften
”gekrummter Raume“, sogenannter (glatter) Mannigfal-
tigkeiten. Die Differential- und Integralrechnung auf glatten Mannigfaltigkei-ten lasst sich gut mithilfe von Differentialformen formalisieren. Wir skizzierennun, was es mit dieser Mischung von Analysis und Linearer Algebra auf sichhat (im Detail wird dies in der Analysis auf Mannigfaltigkeiten bzw. bis zueinem gewissen Grad auch in der Geometrie fur Lehramtskandidaten (Gym-nasium) durchgefuhrt).
Zum Einstieg erinnern wir kurz an ein paar Grundlagen der mehrdimen-sionale Analysis:
Bemerkung A.5.1 (Erinnerung an die mehrdimensionale Analysis). Sei n ∈ N.Ist f : Rn −→ R eine glatte Abbildung, so ist fur jedes p ∈ Rn die Ab-leitung f ′(p) an der Stelle p eine lineare Abbildung Rn −→ R (also einElement in (Λ1(Rn))∗). Die zweite Ableitung f ′′(p) ist eine bi lineare Ab-bildung Rn × Rn −→ R. Ableiten erhoht also in naturlicher Weise die Mul-tilinearitat. Durch Berucksichtigung der Reihenfolge der Koordinaten undEinfuhrung passender Vorzeichen erhalt man daraus alternierende Abbildun-gen.
Außerdem wissen wir, dass in der Transformationsformel fur Integrale vonFunktionen in mehreren Variablen die Determinante (ein Objekt aus dermultilinearen Algebra!) als Korrekturfaktor auftritt.
Es ist daher naheliegend, Funktionen mit Werten in (Dualraumen von)außeren Produkten zu betrachten.
Sei M eine glatte Mannigfaltigkeit der Dimension n und sei TM das zu-gehorige Tangentialbundel uber M (Beispiel 4.2.14). Ist k ∈ N, so kann mandaraus das Bundel (Λk TM)∗ der k-linearen alternierenden Formen auf denTangentialraumen konstruieren.
Funktionen als Differentialformen. Ist f : M −→ R eine glatte Abbildung,so konnen wir wegen Λ0 TpM = R diese Abbildung auch als eine Abbildung
M −→ (Λ0 TM)∗
mit f(p) ∈ (Λ0 TpM)∗ fur alle p ∈ M auffassen. Dies mag zunachst unnotigkompliziert erscheinen, gibt aber den Hinweis auf die richtige hoherdimen-sionale Verallgemeinerung und ist somit der Ausgangspunkt fur die moderneBeschreibung der Differential- und Integralrechnung auf Mannigfaltigkeiten.
Differentialformen. Eine Differentialform vom Grad k ist eine glatte Abbil-dung f : M −→ (Λk TM)∗ mit

A 16 A. Anhang
∀p∈M f(p) ∈ (Λk TpM)∗.
Eine Differentialform ordnet also auf glatte Weise jedem Punkt von M einemultilineare alternierende Form auf dem zugehorigen Tangentialraum zu.
Lokale Koordinaten. Lokale Koordinaten auf M liefern (durch Differen-tiation und Korollar 4.2.8) explizite lokale Basen von Λk(TM∗). Mithilfevon Korollar 4.2.9 erhalt man daraus explizite lokale Basen von (Λk TM)∗.Dies ermoglicht es, bei Bedarf, in sogenannten lokalen Koordinaten zu rech-nen. Der Vorzug des Differentialformenkalkuls ist aber eigentlich, dass er esermoglicht, uber Differentiation und Integration auf Mannigfaltigkeiten zusprechen, ohne Koordinaten wahlen zu mussen und somit die damit verbun-dene Indexschlacht zu umschiffen.
Cartan-Ableitung von Differentialformen. Ist f : M −→ R eine glatte Ab-bildung, so erhalt man durch Differentiation eine Abbildung
df : M −→ (TM)∗ ∼= (Λ1 TM)∗
mit df(p) ∈ (TpM)∗ fur alle p ∈ M (also eine Differentialform vom Grad 1).Allgemeiner liefert die sogenannte Cartan-Ableitung fur jede Differentialformauf M vom Grad k eine Differentialform auf M vom Grad k + 1.
Dachprodukt von Differentialformen. Seien k,m ∈ N. Dann ist das Dach-produkt von Multilinearformen definiert durch
(Λk TpM)∗ ⊗R (Λm TpM)∗ −→ (Λk+m TpM)∗
α⊗ β 7−→(v1 ∧ · · · ∧ vk+m 7→
∑
σ∈Sk,msgn(σ) · α(vσ(1) ∧ · · · ∧ vσ(k))
· β(vσ(k+1) ∧ · · · ∧ vσ(k+m))
),
wobei Sk,m ⊂ Sk+m die Menge aller Permutationen von {1, . . . , k +m} mit
σ(1) < · · · < σ(k) und σ(k + 1) < · · · < σ(k +m)
ist. Woher kommt diese Abbildung? Nach Korollar 4.2.9 wissen wir, dassder Dualraum (Λk TpM)∗ kanonisch isomorph zu Λk(TpM
∗) ist (und analogfur m). Ubersetzt man mit diesem Isomorphismus die außere Produktabbil-dung
Λk(TpM∗)⊗K Λm(TpM
∗) −→ Λk+m(TpM∗)
(v1 ∧ · · · ∧ vk)⊗ (vk+1 ∧ · · · ∧ vk+m) 7−→ v1 ∧ · · · ∧ vk+m,
so erhalt man die obige Formel. Diese Konstruktion fuhrt zum Dachpro-dukt von Differentialformen. Die Cartan-Ableitung erfullt eine
”Produktre-
gel“ bezuglich diesem Dachprodukt.

A.5. Differentialformen A 17
Integration von Differentialformen. Der Zusammenhang zwischen Determi-nanten und (Λn TM)∗ (wie in der koordinatenfreien Beschreibung der Deter-minante in Beispiel 4.2.10) zeigt in Kombination mit der Transformationsfor-mel fur Integration (in der Determinanten auch eine wichtige Rolle spielen!),dass Differentialformen vom Grad n auf n-dimensionalen (kompakten) Man-nigfaltigkeiten sinnvoll integriert werden konnen.
Orientierbarkeit von Mannigfaltigkeiten. Eine Mannigfaltigkeit M heißt ori-entierbar, wenn es eine glatte Funktion ωM : M −→ (Λn TM)∗ mit ωM (p) ∈(Λn TpM)∗ \ {0} gibt (also eine nirgends-verschwindende Differentialformvom Grad n). Anschaulich bedeutet dies, dass es moglich ist, zu jedemPunkt p ∈ M so eine Orientierung auf TpM zu wahlen (im Sinne von Bei-spiel 4.2.11), dass all diese Wahlen kompatibel sind.
Riemannsche Metriken auf Manngifaltigkeiten und das Volumen. Eine rie-mannsche Metrik auf M ist eine glatte Wahl von Skalarprodukten auf denTangentialraumen auf M (dies kann auch durch geeignete Abbildungen indas Bundel (TM ⊗R TM)∗ beschrieben werden). Ist eine riemannsche Metrikauf M gegeben und ist M orientierbar, so kann man wie in Beispiel 4.2.13eine Volumenform auf M als Differentialform auf M vom Grad n definieren.Nach Definition ist das Volumen von M dann nichts anderes als das Integraluber diese Volumenform. Riemannschen Metriken erlauben es außerdem aufMannigfaltigkeiten Abstande und Winkel zu messen.
Hodge-∗-Operator und Dualitat. Sei k ∈ {1, . . . , n}. Aus Korollar 4.2.8 er-halten wir fur alle p ∈M , dass
dimR(Λk TpM)∗ =
(n
k
)=
(n
n− k
)= dimR(Λn−k TpM)∗,
und damit (Λk TpM)∗ ∼=R (Λn−k TpM)∗. Ist eine riemannsche Metrik auf Mgegeben, so kann man die dadurch gegebenen lokalen Skalarprodukte nutzen,um einen naturlichen expliziten Isomorphismus
∗ : (Λk TpM)∗ −→ (Λn−k TpM)∗
(und entsprechend fur Differentialformen) zu konstruieren, den sogenanntenHodge-∗-Operator. Geometrisch fuhrt diese Abbildung letztendlich zur Poin-care-Dualitat der De-Rham-Kohomologie [6].
Funktorialitat. All diese Konstruktionen sind im folgenden Sinne funktoriell:Sind M und N glatte Mannigfaltigkeiten und ist f : M −→ N eine glatteAbbildung, so liefert die induzierte Abbildung Tf : TM −→ TN zwischenden Tangentialbundeln auch Abbildungen
(Λk f)∗ : (Λk TN)∗ −→ (Λk TM)∗

A 18 A. Anhang
auf den entsprechenden Bundeln der multilinearen Formen. Dies fuhrt zumPullback von Differentialformen. Differentialformen erfullen also (im Gegen-satz zu Vektorfeldern) eine sehr allgemeine Form der Funktorialitat.
Aufbauend auf dieser Theorie lassen sich dann auch zum Beispiel Krum-mungsphanomene etc. auf Mannigfaltigkeiten untersuchen. Dies ist Gegen-stand der Differentialgeometrie.
Grundlegende Beispiele fur Mannigfaltigkeiten, auf die diese Theorie an-wendbar ist, sind Spharen, Tori und die hyperbolischen Raume. Die Theorieist aber machtig genug, um noch viele weitere gekrummten Raume zu be-schreiben und verstehen.

A.6. Die LA-Matrix A 19
A.6 Die LA-Matrix
In den Vorlesungen Lineare Algebra I/II haben wir uns mit diversen Aspektenlinearer Strukturen und ihrer Anwendungen beschaftigt. Im wesentlichen lasstsich das Material mithilfe der untenstehenden LA-Matrix organisieren. Es isteine gute Ubung, diese Matrix selbstandig auszufullen (bis auf die wenigenEintrage, die offensichtlich keinen Sinn ergeben). Matrixeintrage, die Ihnenim Moment noch Kummer bereiten, sollten Sie bei der Prufungsvorbereitungnaturlich besonders berucksichtigen.
grundlegende Definitionen?
grundlegende Beispiele?
wichtige Satze?
wichtige Beweistechniken?
wichtige Zusammenhange?
wichtige Anwendungen?
universelle Eigenschaften?
Matrizenkalkul dafur?
Algorithmen/Rezepte?
Standardaufgaben dazu?
weitere Aufgaben dazu?
Log
iku
nd
Men
genle
hre
Zah
len
,Z
ahle
n,
Kor
per
Vek
torr
aum
e
Lin
eare
Ab
bil
du
nge
n
Mat
rize
nka
lku
l
Eig
enw
erte
/Dia
gon
ali
sier
bar
kei
t
Eu
kli
dis
che/
Un
itare
Vek
torr
au
me
Mod
uln
ub
erH
aup
tid
ealr
ingen
Jor
dan
sch
eN
orm
alf
orm
Mu
ltil
inea
reA
lgeb
ra

A 20 A. Anhang

B
Ubungsblatter

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 0 vom 24. April 2017
Aufgabe 1 (Bilinearformen?). Wir betrachten die Abbildungen
R2 × R2 −→ Rb1 : (x, y) 7−→ x1 · y1 + x1 · y2b1 : (x, y) 7−→ x1 · x1 + x1 · y2
Welche der folgenden Aussagen sind wahr? Begrunden Sie Ihre Antwort (durcheinen Beweis oder ein geeignetes Gegenbeispiel)!
1. Die Abbildung b1 ist eine Bilinearform (uber R).
2. Die Abbildung b2 ist eine Bilinearform (uber R).
Aufgabe 2 (ein Skalarprodukt auf R2). Sei
b : R2 × R2 −→ R(x, y) 7−→ 2 · x1 · y1 − x1 · y2 − x2 · y1 + x2 · y2.
Zeigen Sie, dass b ein Skalarprodukt definiert.
Aufgabe 3 (ein Skalarprodukt fur Matrizen). Sei n ∈ N und sei
b : Mn×n(R)×Mn×n(R) −→ R(A,B) 7−→ tr(AT ·B).
Zeigen Sie, dass b ein Skalarprodukt auf Mn×n(R) definiert.
Aufgabe 4 (Dreieck). Sei
∆ :=
{t0 ·(
01
)+ t1 ·
(−√
3/2−1/2
)+ t2 ·
(√3/2−1/2
) ∣∣∣∣ t0, t1, t2 ∈ [0, 1], t0 + t1 + t2 = 1
}⊂ R2.
1. Wie heißt der griechische Buchstabe auf der linken Seite? Beherrschen Siedas große und kleine griechische Alphabet?
2. Skizzieren Sie die Menge ∆ ⊂ R2.
3. Geben Sie sechs verschiedene Matrizen A ∈ GL(2,R) mit A ·∆ = ∆ an.Welche geometrischen Namen haben die zugehorigen Abbildungen?
4. Machen Sie anschaulich plausibel, warum es keine weiteren solchen Ma-trizen geben kann.
Bonusaufgabe (Winkelsumme). Formalisieren Sie mithilfe von Begriffen aus derLinearen Algebra, was ein Dreieck in R2 ist und was die Innenwinkel einessolches Dreiecks sind. Formulieren Sie dann den Satz uber die Invarianz derWinkelsumme und beweisen Sie diesen.
a
bc
α
β γ
keine Abgabe; diese Aufgaben werden in den Ubungenin der zweiten Vorlesungswoche besprochen

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 1 vom 27. April 2017
Aufgabe 1 (Bilinearformen). Wir betrachten die Bilinearform
b : R2 × R2 −→ R(x, y) 7−→ x1 · y1 + 2 · x1 · y2 + 2 · x2 · y1 + x2 · y2.
Welche der folgenden Aussagen sind wahr? Begrunden Sie Ihre Antwort (durcheinen Beweis oder ein geeignetes Gegenbeispiel)!
1. Die Bilinearform b ist symmetrisch.
2. Die Bilinearform b ist positiv definit.
Aufgabe 2 (lineare Abhangigkeit und Skalarprodukte). Sei (V, 〈 · , · 〉) ein euklidi-scher oder unitarer Vektorraum, sei ‖ · ‖ die induzierte
”Norm“ auf V und seien
x, y ∈ V mit y 6= 0. Sei
λ :=〈x, y〉‖y‖2 .
Zeigen Sie: Die Familie (x, y) ist genau dann linear abhangig, wenn x−λ · y = 0ist.
Aufgabe 3 (Parallelogrammgleichung). Sei (V, 〈 · , · 〉) ein euklidischer Vektor-raum und sei ‖ · ‖ die von 〈 · , · 〉 auf V induzierte Norm.
1. Zeigen Sie die Parallelogrammgleichung : Fur alle x, y ∈ V gilt
‖x+ y‖2 + ‖x− y‖2 = 2 ·(‖x‖2 + ‖y‖2
).
2. Warum heißt diese Gleichung Parallelogrammgleichung? Illustrieren Siedie Situation durch eine geeignete Skizze.
Aufgabe 4 (Dualisieren uber Skalarprodukte). Sei (V, 〈 · , · 〉) ein euklidischer Vek-torraum. Dann betrachten wir die Abbildung
ϕ : V −→ V ∗
x 7−→ 〈x, · 〉von V in den Dualraum V ∗ = HomR(V,R).
1. Zeigen Sie, dass ϕ injektiv ist.
2. Folgern Sie: Ist dimR V <∞, so ist ϕ ein Isomorphismus.
Bonusaufgabe ( Parallelogrammgleichung ). Sei (V, ‖·‖) ein normierter R-Vektor-raum, in dem die Parallelogrammgleichung erfullt ist, d.h. es gilt
∀x,y∈V ‖x+ y‖2 + ‖x− y‖2 = 2 ·(‖x‖2 + ‖y‖2
).
Zeigen Sie, dass ‖ · ‖ dann von einem Skalarprodukt induziert ist.Hinweis. Die rationalen Zahlen liegen dicht in R !
Abgabe bis zum 4. Mai 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 2 vom 4. Mai 2017
Aufgabe 1 (Eigenwerte von Bilinearformen). Sei n ∈ N und sei b : Rn×Rn −→ Reine symmetrische Bilinearform. Welche der folgenden Aussagen sind in dieserSituation immer wahr? Begrunden Sie Ihre Antwort (durch einen Beweis oderein geeignetes Gegenbeispiel)!
1. Ist B eine Basis von Rn, so ist σR(MB(b)
)= σR
(MEn(b)
).
2. Es gilt σR(MEn(b)
)⊂ R≥0.
Aufgabe 2 (Wieviele (symmetrische) Bilinearformen gibt es?). Sei K ein Korperund sei V ein endlich-dimensionaler K-Vektorraum.
1. Bestimmen Sie dimK BilK(V ).
2. Bestimmen Sie die Dimension des K-Vektorraums aller symmetrischenBilinearformen auf V .
Aufgabe 3 (Spieglein, Spieglein, . . . ). Sei (V, 〈 · , · 〉) ein euklidischer Vektorraumund zu v ∈ V \ {0} sei
Sv : V −→ V
x 7−→ x− 2 · 〈v, x〉‖v‖2 · v.
Man bezeichnet Sv als Spiegelung an der zu v orthogonalen Hyperebene.
1. Berechnen Sie Sv(x) in den Fallen x ∈ R·v bzw. x ⊥ v. Warum rechtfertigtdies die Bezeichnung von Sv als Spiegelung?
2. Zeigen Sie, dass Sv eine Isometrie bezuglich der induzierten Norm ist.
3. Zeigen Sie: Ist dimR V ∈ N>0, so ist detSv = −1.4. Skizzieren Sie Sv in den Fallen v = e2 bzw. v = e1+ e2 in (R2, 〈 · , · 〉2). Ist
die Komposition Se1 ◦ Se1+e2 auch eine Spiegelung?
Aufgabe 4 (Isometriegruppe eines Quadrats). Sei Q := [−1, 1]× [−1, 1] ⊂ R2 undsei G :=
{f ∈ Isom(R2, ‖ · ‖2)
∣∣ f(Q) = Q}. Dann ist G eine Gruppe.
1. Zeigen Sie, dass G genau acht Elemente enthalt.
Hinweis. Was passiert mit den Ecken des Quadrats? Warum?
2. Ist die Gruppe G abelsch? Begrunden Sie Ihre Antwort!
Bonusaufgabe (Wurfel). Vervollstandigen Sie im OpenSCAD-Programm auf derRuckseite cube_isometries derart, dass ein Wurfel erzeugt wird.
Abgabe bis zum 11. Mai 2017, 10:00 Uhr, in die Briefkasten

// Cube
//
//--------------------------------------------------------
// global settings
// global resolution settings
$fs = 0.1; // facet resolution
$fa = 2; // angle resolution
$fn = 100; // circle resolution
// helper geometry
debug = true;
// thickness of faces
t = 1;
// edge length of the cube
el = 20;
//--------------------------------------------------------
// main:
cube(el);
//--------------------------------------------------------
// cube with edge length c (centred at the origin)
module cube(c) {
union() {
// we reconstruct the cube by applying enough symmetries to the base face
cube_isometries() cube_baseface(c);
}
}
// base face of the cube (edge length c)
module cube_baseface(c) {
translate (-c/2*[0,0,1]) // moving the block to the correct position
linear_extrude(t) // 2D-square -> 3D-block of thickness t
square(size = c, center = true); // 2D-square
}
// two generating symmetries of the cube
module c_r1() {
rotate(a=90,v=[1,0,0]) children();
}
module c_r2() {
rotate(a=90,v=[0,1,0]) children();
}
// enough symmetries of the cube
module cube_isometries() {
union() {
children();
c_r1() children();
// ?!
// the isometries for the remaining faces are missing ...
// note that isometries can also be composed,
// using syntax of the form "f() g() children();" etc
// ?!
}
}

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 3 vom 11. Mai 2017
Aufgabe 1 (orthogonale Komplemente von orthogonalen Komplementen . . . ). Sei(V, 〈 · , · 〉) ein euklidischer Vektorraum und sei A ⊂ V . Welche der folgendenAussagen sind in dieser Situation immer wahr? Begrunden Sie Ihre Antwort(durch einen Beweis oder ein geeignetes Gegenbeispiel)!
1. Es gilt (A⊥)⊥ = A.
2. Es gilt((A⊥)⊥
)⊥= A⊥.
Aufgabe 2 (Orthonormalisierung). Sei
A :=
2 1 1 00 1 −1 −21 0 1 17 5 2 −3
∈M4×4(R).
1. Bestimmen Sie mit dem Gaußschen Eliminationsverfahren eine Basis desUntervektorraums V (A, 0) = {x ∈ R4 | A · x = 0}.
2. Wenden Sie nun das Orthonormalisierungsverfahren von Gram-Schmidtauf diese Basis an, um eine Orthonormalbasis von V (A, 0) (bezuglich demeuklidischen Skalarprodukt) zu erhalten.
Aufgabe 3 (Eindeutigkeit orthogonaler Projektionen). Sei (V, 〈 · , · 〉) ein euklidi-scher/unitarer Vektorraum und sei U ⊂ V ein Untervektorraum. Zeigen Sie: Esgibt hochstens eine lineare Abbildung p : V −→ V mit
im p ⊂ U und im(p− idV ) ⊂ U⊥.Aufgabe 4 (Spiegelei).
1. Zeigen Sie: Ist A ∈ O(2) \ SO(2), so ist L(A) eine Spiegelung (im Sinnevon Aufgabe 3 auf Blatt 2).
2. Folgern Sie: Jede lineare Isometrie der euklidischen Ebene (R2, ‖ · ‖2) isteine Spiegelung oder kann als Komposition von zwei Spiegelungen ge-schrieben werden.
Bonusaufgabe (Legometrie). Beim Bauen nach einer Lego-Anleitung finden Siestatt des eigentlich gesuchten Teils nur das (an einer Ebene) gespiegelte Teil.Erfreut stellen Sie fest, dass sich dieses durch eine ebene Rotation in das gesuchteTeil uberfuhren lasst. Was konnen Sie daraus uber Ihr Teil schließen?
gesucht gefunden . . . rotiert
Abgabe bis zum 18. Mai 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 4 vom 18. Mai 2017
Aufgabe 1 (adjungierte Homomorphismen). Sei (V, 〈 · , · 〉) ein endlich-dimensio-naler unitarer Vektorraum und sei f : V −→ V ein Endomorphismus. Welcheder folgenden Aussagen sind in dieser Situation immer wahr? Begrunden SieIhre Antwort (durch einen Beweis oder ein geeignetes Gegenbeispiel)!
1. Es gilt (fH)H = f .
2. Es gilt (f ◦ f)H = fH ◦ fH.
Aufgabe 2 (Hauptachsentransformation). Zu c ∈ R sei
Qc := {x ∈ R2 | 3/2 · x21 − x1 · x2 + 3/2 · x22 = c} ⊂ R2.
1. Bestimmen Sie fur jedes c ∈ R Hauptachsen fur die Quadrik Qc undbestimmen Sie die Menge {c ∈ R | Qc 6= ∅}.
2. Skizzieren Sie die Quadrik Q2. Ist Q2 beschrankt (bezuglich ‖ · ‖2)?
Aufgabe 3 (Spektraldarstellung). Sei (V, 〈 · , · 〉) ein endlich-dimensionaler eukli-discher/unitarer Vektorraum und sei f : V −→ V ein selbstadjungierter Endo-morphismus. Sei K der Grundkorper (also R im euklidischen Fall bzw. C imkomplexen Fall). Zu λ ∈ σK(f) sei pλ : V −→ V die orthogonale Projektionauf Eigλ(f). Zeigen Sie, dass dann die folgende Spektraldarstellung gilt:
f =∑
λ∈σK(f)
λ · pλ
Aufgabe 4 (Polarzerlegung). Sei n ∈ N und sei A ∈ GLn×n(R).
1. Zeigen Sie, dass A eine Polarzerlegung besitzt, d.h., es existiert eine or-thogonale Matrix U ∈ O(n) und eine symmetrische positiv definite Ma-trix P ∈Mn×n(R) mit
A = U · P.2. Zeigen Sie außerdem, dass diese Matrizen U und P eindeutig durch A
bestimmt sind.
Hinweis. Ziehen Sie die Wurzel aus AT ·A . . .
Bonusaufgabe (Hauptminorenkriterium). Beweisen Sie das Hauptminorenkrite-rium fur positive Definitheit: Sei n ∈ N und sei A ∈Mn×n(R) eine symmetrischeMatrix. Zeigen Sie: Dann ist A genau dann positiv definit, wenn
∀j∈{1,...,n} detA(j) > 0
ist. Dabei bezeichnet A(j) die Matrix, die man aus A erhalt, indem man die(j + 1)-te, . . . , n-te Zeile und Spalte von A streicht.Hinweis. Die Basiswechselformel fur Matrizen von Bilinearformen ist sichernutzlich. Man kann die schwierige Richtung per Induktion uber die Dimensionbeweisen. Im Induktionsschritt kann man analog zum Orthonormalisierungsver-fahren von Gram-Schmidt oder mit dem Sylvesterschen Tragheitssatz argumen-tieren.
Abgabe bis Mittwoch, 24. Mai 2017, 16:00, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 5 vom 25. Mai 2017
Aufgabe 1 (Quadrieren). Zu einem Korper K sei
ϕK : K[T ] −→ K[T ]
f 7−→ f · f.Welche der folgenden Aussagen sind wahr? Begrunden Sie Ihre Antwort (durcheinen Beweis oder ein geeignetes Gegenbeispiel)!
1. Die Abbildung ϕQ ist ein Ringhomomorphismus.
2. Die Abbildung ϕF2ist ein Ringhomomorphismus.
Aufgabe 2 (Zerlegung von Endomorphismen). Sei λ ∈ C, sei
A :=
λ 1 00 λ 10 0 λ
∈M3×3(C)
und f := L(A) : C3 −→ C3.
1. Zeigen Sie, dass C3 ein f -zyklischer Vektorraum ist.
2. Zeigen Sie, dass C3 ein f -irreduzibler Vektorraum ist.
Aufgabe 3 (Endomorphismenpolynome). Sei K ein Korper, sei V ein endlich-dimensionaler K-Vektorraum und sei f : V −→ V ein Endomorphismus. ZeigenSie, dass es dann ein Polynom p ∈ K[T ] \ {0} mit p(f) = 0 gibt.Hinweis. Ist p =
∑mj=0 aj · T j , so ist p(f) =
∑mj=0 aj · f j . Im Notfall:
WelcheDimensionhatHomK(V,V)(Matrizenkalkul!)?KanndieFamilie(fj)j∈Ndannuberhauptlinearun-
abhangigsein?Wasbedeutetes,dassdieFamilie(fj)j∈Nlinearabhangigist?
Aufgabe 4 (Uhrzeitring). Wir betrachten die Aquivalenzrelation
:={
(x, y) ∈ Z× Z∣∣ ∃k∈Z x− y = 12 · k
}⊂ Z× Z
auf Z und den Quotienten U := Z/ .
1. Zeigen Sie, dass die Abbildungen
+ : U × U −→ U([x], [y]
)7−→ [x+ y]
· : U × U −→ U([x], [y]
)7−→ [x · y]
wohldefiniert sind.
2. Zeigen Sie, dass U mit diesen Verknupfungen ein kommutativer Ring ist.
3. Was hat U mit Uhrzeiten zu tun?
4. Ist U ein Integritatsring? Begrunden Sie Ihre Antwort!
Bonusaufgabe (Gruppenringe). Sei G eine Gruppe. Finden Sie mithilfe geeigne-ter Literatur heraus, wie der Gruppenring CG definiert ist und was die Kaplan-sky-Vermutung besagt. Zeigen Sie: Gibt es ein Element g ∈ G\{e}mit g2017 = e,so ist der Ring CG nicht nullteilerfrei.
Abgabe bis zum 1. Juni 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 6 vom 1. Juni 2017
Aufgabe 1 (Modulhomomorphismen). Sei R ein Ring, seien V , W Moduln uber Rund sei f : V −→W ein R-Modulhomomorphismus. Welche der folgenden Aus-sagen sind in dieser Situation immer wahr? Begrunden Sie Ihre Antwort (durcheinen Beweis oder ein geeignetes Gegenbeispiel)!
1. Es gilt f(0) = 0.
2. Ist a ∈ R \ {0} und v ∈ V mit f(a · v) = 0, so folgt f(v) = 0.
Aufgabe 2 (minimale Erzeugendensysteme). Im Z-Modul Z2 betrachten wir
E :=
{(2017
0
),
(11
),
(02
)}⊂ Z2.
1. Zeigen Sie, dass SpanZE = Z2 gilt.
2. Zeigen Sie: Ist F ⊂ E mit F 6= E, so ist SpanZ F 6= Z2.
Aufgabe 3 (invariante Unterraume). Sei K ein Korper, V ein K-Vektorraum undf : V −→ V ein Endomorphismus. Außerdem sei U ⊂ V einK-Untervektorraum.Zeigen Sie, dass dann die folgenden Aussagen aquivalent sind:
1. Der Unterraum U ist f -invariant, d.h. es gilt f(U) ⊂ U .
2. Die Teilmenge U ⊂ V ist ein K[T ]-Untermodul von V [f ].
Aufgabe 4 (Vererbung von endlicher Erzeugtheit). Sei R ein Ring, sei V ein R-Mo-dul und sei U ⊂ V ein Untermodul. Zeigen Sie: Sind U und V/U endlich erzeugteR-Moduln, so ist auch der R-Modul V endlich erzeugt.
Hinweis.WiekannmanausdemBeweisderDimensionsformelfurQuotientenvek-torraumeeinenBeweisdieserAussageuberModulnextrahieren?Basensolltendabeinaturlichnichtauftreten,sondernnurErzeugendensysteme.
Bonusaufgabe (Zauberei!). Professor Pirkheimer fuhrt seinen Kollegen in derModulkatalogslekturegesellschaft zusammen mit seinem Assistenten folgendenKartentrick vor: Pirkheimer bittet einen der Zuschauer, ein Kartendeck mit52 Karten (jeweils 2, 3, . . . , 10, B, D, K, A in den Farben Karo, Herz, Pik, Kreuz)zu mischen. Ein weiterer Zuschauer zieht aus diesem Deck funf Karten undgibt sie dem Assistenten (naturlich so, dass Pirkheimer die Karten nicht sehenkann; der Assistent darf sie aber ansehen). Der Assistent gibt dann nacheinandervier Karten offen an Pirkheimer und behalt die funfte Karte verdeckt bei sich.Professor Pirkheimer nennt daraufhin korrekt die verdeckte funfte Karte.
♦ ♥ ♠ ♣ ?
Wie funktioniert dieser Trick? Wie kann man den Trick so arrangieren, dasser einfach durchzufuhren ist?Hinweis. Es geht alles mit rechten Dingen zu – insbesondere kommt es nichtdarauf an, ob die Karten quer, hochkant, mit wackelnden Ohren, etc. uberreichtwerden. Zum Einstieg kann es hilfreich sein, sich zunachst eine Variante zuuberlegen, bei der Pirkheimer nur die Farbe der funften Karte korrekt nennt.Der Z-Modul Z/13Z und die symmetrische Gruppe S3 durfen gerne mitspielen!
Abgabe bis zum 8. Juni 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 7 vom 8. Juni 2017
Aufgabe 1 (Quotienten und direkte Summen). Welche der folgenden Aussagensind wahr? Begrunden Sie Ihre Antwort!
1. Es gilt Z/4Z ∼=Z Z/2Z⊕ Z/2Z.
2. Es gilt Z/6Z ∼=Z Z/2Z⊕ Z/3Z.
Aufgabe 2 (Irreduzibilitat). Sei K ein Korper, V ein K-Vektorraum und es seif : V −→ V ein Endomorphismus. Zeigen Sie, dass dann die folgenden Aussagenaquivalent sind:
1. Der Vektorraum V ist f -reduzibel.
2. Der K[T ]-Modul V [f ] ist zerlegbar.
Aufgabe 3 (freie Moduln). Sei R ein Ring und sei V ein R-Modul. Zeigen Sie,dass die folgenden Aussagen aquivalent sind:
1. Der R-Modul V ist frei.
2. Es gibt eine Menge I mit V ∼=R
⊕I R.
Aufgabe 4 (Determinantenideale). Sei R ein kommutativer Ring, seien m,n ∈N>0 und sei A ∈ Mm×n(R). Mithilfe der Leibniz-Formel erhalt man eine De-finition der Determinante von quadratischen Matrizen mit Koeffizienten in R.Sei r ∈ {1, . . . ,min(m,n)}. Ein r × r-Untermatrix von A ist eine Matrix derForm (Aj,k)j∈J,k∈K ∈Mr×r(R), wobei J ⊂ {1, . . . .m},K ⊂ {1, . . . , n}mit |J | =r = |K|. Sei
Dr(A) := SpanR
{detB
∣∣ B ist eine r × r-Untermatrix von A}⊂ R
das von den r-Minoren von A erzeugte Ideal in R.
1. Bestimmen Sie fur die Matrix
A :=
(2 0 03 0 6
)∈M2×3(Z)
die Ideale D1(A) und D2(A).
2. Zeigen Sie: Sind S ∈Mm×m(R) und T ∈Mn×n(R), so gilt
Dr(S ·A) ⊂ Dr(A) und Dr(A · T ) ⊂ Dr(A)
fur alle r ∈ {1, . . . ,min(m,n)}.
3. Folgern Sie: Sind S ∈Mm×m(R) und T ∈Mn×n(R) invertierbar (d.h. die-se Matrizen besitzen multiplikative Inverse in Mm×m(R) bzw. Mn×n(R)),so gilt Dr(S ·A · T ) = Dr(A) fur alle r ∈ {1, . . . ,min(m,n)}.
Bitte wenden

Bonusaufgabe (Verschworung!). Funfundzwanzig Modulbeauftragte planen ei-ne Revolution und kommen daher zu konspirativen Sitzungen zusammen. DerSitzungsmarathon besteht aus sechs Terminen, zu denen sich die funfundzwan-zig Teilnehmer auf funf Raume verteilen. Um die Konspirativitat zu bewahren,besteht jede dieser Sitzungsgruppen aus genau funf Teilnehmern. Andererseitssoll jeder Teilnehmer mindestens einmal mit jedem anderen Teilnehmer in einerdieser Funfergruppen konspiriert haben. Zeigen Sie, dass es moglich ist, einenSitzungsplan zu erstellen, der diese Bedingungen erfullt.Hinweis. Betrachten Sie den Z-Modul Z/5Z ⊕ Z/5Z. Wieviele Untermodulnmit genau funf Elementen besitzt dieser? Wie kann man die Elemente der zu-gehorigen Quotientenmoduln interpretieren?
Abgabe bis Mittwoch, 14. Juni 2017, 16:00, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 8 vom 15. Juni 2017
Aufgabe 1 (Ideale/Teilbarkeit). Sei R ein Ring und seien a, b ∈ R. Welche derfolgenden Aussagen sind in dieser Situation immer wahr? Begrunden Sie IhreAntwort (durch einen Beweis oder ein geeignetes Gegenbeispiel)!
1. Es gilt (a+ b) = (a) + (b).
Hinweis. Dabei ist (a) + (b) = {x+ y | x ∈ (a), y ∈ (b)}.2. Es gilt (a · b) = (a) ∩ (b).
Aufgabe 2 (Primfaktorzerlegungen uber verschiedenen Korpern). Bestimmen SiePrimfaktorzerlegungen des Polynoms
T 4 − 4
in Q[T ] bzw. R[T ] bzw. C[T ] (und begrunden Sie jeweils, warum es sich dabeium Primfaktorzerlegungen handelt).
Aufgabe 3 (Eindeutigkeit der Primfaktorzerlegung). Sei R ein Integritatsring undseien p1, . . . , pn, q1, . . . , qm ∈ R Primelemente mit
n∏
j=1
pj =m∏
j=1
qj .
Zeigen Sie: Dann ist n = m und es gibt eine Permutation σ ∈ Sn und Einhei-ten ε1, . . . , εn ∈ R× mit
∀j∈{1,...,n} pj = εj · qσ(j).Hinweis. Zeigen Sie zunachst, dass p1 zu einem der Elemente q1, . . . , qm assozi-iert ist und hangeln Sie sich dann Primfaktor fur Primfaktor durch das Produkt.
Aufgabe 4 (zyklische Moduln). Sei K ein Korper, V ein K-Vektorraum undes sei f : V −→ V ein Endomorphismus. Zeigen Sie, dass dann die folgendenAussagen aquivalent sind:
1. Der Vektorraum V ist f -zyklisch.
2. Der K[T ]-Modul V [f ] ist zyklisch.
Bonusaufgabe (prima Primzahl?!). Ist 42345 + 23454 eine Primzahl? BegrundenSie Ihre Antwort!Hinweis.
Abgabe bis zum 22. Juni 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 9 vom 22. Juni 2017
Aufgabe 1 (Idealgleichheiten). Welche der folgenden Aussagen sind wahr? Be-grunden Sie Ihre Antwort!
1. Es gilt (T 4 + T 2 + 2 · T, T 3 + 2017 · T ) = (T ) in Q[T ].
2. Es gilt (T 2 + T, T + 1) = (T 2 + T, T 5 + 1) in F2[T ].
Aufgabe 2 (Schwanensee). Professor Pirkheimer bewundert das Schwanensee-Ballett und wusste zu gerne, wie viele Tanzerinnen involviert sind. Aufgrunddes permanenten Rumgehopses sind sie jedoch nur schwer zu zahlen. Er stelltjedoch fest, dass es je einen Tanz gibt, bei dem sich
• alle bis auf drei Tanzerinnen in Funfergruppchen aufteilen, bzw.
• alle bis auf funf Tanzerinnen in Zwolfergruppchen aufteilen, bzw.
• alle bis auf sechs Tanzerinnen in Siebenergruppchen aufteilen.
Außerdem ist sich Pirkheimer sicher, dass es sich insgesamt um weniger als1000 Tanzbeine bzw. 500 Tanzerinnen handelt.
Wieviele Tanzerinnen schwirren herum? Begrunden Sie Ihre Antwort! Wiehaben Sie diese Losung gefunden?
Aufgabe 3 (Wahrungsreform). Im Rahmen einer Wahrungsreform werden neueMunzen mit dem Wert von 30 Blorx, 42 Blorx bzw. 105 Blorx eingefuhrt.
B30
B42
B105
1. Ist es moglich, 44 Blorx exakt zu bezahlen (wenn auch Ruckgeld gegebenwerden darf)? Begrunden Sie Ihre Antwort!
2. Wie kann man den Betrag von 9 Blorx exakt bezahlen (wenn auch Ruck-geld gegeben werden darf)?
Hinweis. Sie durfen in beiden Fallen annehmen, dass Kaufer und Verkaufergenug Exemplare der verschiedenen Munztypen besitzen.
Aufgabe 4 (Prasentationen von Moduln). Bestimmen Sie fur die folgenden Z-Moduln V jeweils zwei verschiedene Wahlen von m,n ∈ N und A ∈ Mm×n(Z)mit V ∼=Z Zm/ imL(A).
1. Fur den Z-Modul Z/5Z⊕ Z/42Z⊕ Z2017.
2. Fur den Z-Modul Z/2Z⊕ Z/2Z⊕ Z/4Z.
Bonusaufgabe (große kleine Moduln). Geben Sie einen Integritatsring R an, furden nicht jeder Untermodul von R2017 endlich erzeugt ist.Hinweis. Man konnte zum Beispiel Polynome mit viiiiiiielen Variablen betrach-ten . . .
Abgabe bis zum 29. Juni 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 10 vom 29. Juni 2017
Aufgabe 1 (Elementarteiler von Moduln). Sei R ein Hauptidealring und sei U einUntermodul von R3. Welche der folgenden Aussagen sind in dieser Situation im-mer wahr? Begrunden Sie Ihre Antwort (durch einen Beweis oder ein geeignetesGegenbeispiel)!
1. Ist (v1, v2, v3) eine R-Basis von R3, so gibt es Skalare α1, α2, α3 ∈ Rmit U = SpanR{α1 · v1, α2 · v2, α3 · v3}.
2. Es gibt eine Basis (v1, v2, v3) von R3 und Primelemente p1, p2, p3 ∈ Rmit U = SpanR{p1 · v1, p2 · v2, p3 · v3}.
Aufgabe 2 (mehr Elementarteiler). Seien
v1 :=
(4−2
), v2 :=
(24
), v3 :=
(3010
)
Bestimmen Sie alle Punkte x ∈ SpanZ{v1, v2, v3} ⊂ R2 mit ‖x‖2 ≤ 9, indem Siezunachst geeignete Elementarteiler und zugehorige Transformationen bestim-men.
Aufgabe 3 (schon wieder Elementarteiler). Sei
A :=
T 3 (T + 1) −1T T TT 2 (T + 1) 1
∈M3×3
(Q[T ]
)
und U := imL(A) ⊂ Q[T ]3. Bearbeiten Sie zwei der folgenden vier Aufgaben:
1. Bestimmen Sie die Elementarteiler von A.
2. Bestimmen Sie eine Q[T ]-Basis von U .
3. Geben Sie eine Darstellung von Q[T ]3/U als direkte Summe zyklischerQ[T ]-Moduln an.
4. Ist Q[T ]3/U ∼=Z Q[T ]/(T 3 + T 2) ? Begrunden Sie Ihre Antwort!
Aufgabe 4 (Rang freier Moduln uber Hauptidealringen). Sei R ein Hauptidealringund seien m,n ∈ N.
1. Zeigen Sie: Gilt n > m und ist A ∈ Mm×n(R), so ist L(A) : Rn −→ Rm
nicht injektiv.
2. Folgern Sie: Es gilt genau dann Rn ∼=R Rm, wenn n = m ist.
Bitte wenden

Bonusaufgabe (Staatsexamensaufgaben zu abelschen Gruppen). Die folgendenAufgaben sind ehemalige (teilweise leicht umformulierte) Staatsexamensaufga-ben:
1. Bestimmen Sie die Anzahl der Isomorphietypen von abelschen Gruppen,die genau 1980 Elemente enthalten, und geben Sie fur jeden Isomorphietypein Beispiel.
2. Bestimmen Sie die kleinste naturliche Zahl n, so dass es genau sechs Iso-morphietypen von abelschen Gruppen mit genau n Elementen gibt.
3. Sei n ∈ N>0 und sei A ∈Mn×n(Z) mit detA 6= 0. Zeigen Sie, dass
|detA| = |Zn/ imL(A)|.
4. Zeigen Sie, dass die abelsche Gruppe der positiven reellen Zahlen (bezug-lich Multiplikation) zur abelschen Gruppe aller reellen Zahlen (bezuglichAddition) isomorph ist.
Hinweis. Analysis!
Hinweis. Herzlichen Gluckwunsch! Bereits mit dem jetzigen Wissen aus derLinearen Algebra und der Analysis sind Sie in der Lage einen signifikantenAnteil an Staatsexamensaufgaben (aber naturlich bei weitem nicht alle . . . ) zulosen.
Abgabe bis zum 6. Juli 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 11 vom 6. Juli 2017
Aufgabe 1 (Minimalpolynome). SeiK ein Korper, sei n ∈ N>0, seiA ∈Mn×n(K).Welche der folgenden Aussagen sind in dieser Situation immer wahr? BegrundenSie Ihre Antwort (durch einen Beweis oder ein geeignetes Gegenbeispiel)!
1. Ist λ ∈ K \ {0}, so ist µλ·A = λdeg µA · µA(1λ · T
).
2. Es gilt µA·A = µA · µA.
Aufgabe 2 (Kombination zweier Blocke). Sei K ein Korper, seien k,m ∈ N, seienB ∈Mk×k(K), C ∈Mm×m(K). Dann betrachten wir die Blockmatrix
A :=
(B 00 C
)∈Mn×n(K)
mit n := k + m. Zeigen Sie, dass das Minimalpolynom µA das (normierte)kleinste gemeinsame Vielfache von µB und µC in K[T ] ist.
Aufgabe 3 (Minimalpolynome und Normalformen). Sei
A :=
1 1 0 0−1 −1 0 00 0 1 10 0 1 −1
∈M4×4(Q).
1. Bestimmen Sie das Minimalpolynom µA ∈ Q[T ].
2. Ist A uber Q zu einer Matrix in M4×4(Q) in Jordanscher Normalformahnlich? Begrunden Sie Ihre Antwort!
3. Ist die Matrix A (aufgefasst als Matrix in M4×4(R)) uber R diagonalisier-bar? Begrunden Sie Ihre Antwort!
4. Bestimmen Sie das Minimalpolynom von A in F2[T ], wenn wir A als Ma-trix in M4×4(F2) auffassen.
Aufgabe 4 (Minimalpolynom und Diagonalisierbarkeit). Sei K ein Korper, sein ∈ N und sei A ∈ Mn×n(K). Zeigen Sie, dass dann die folgenden Aussagenaquivalent sind:
1. Die Matrix A ist diagonalisierbar.
2. Es gibt k ∈ N und (paarweise) verschiedene λ1, . . . , λk ∈ K mit
µA =k∏
j=1
(T − λj).
Hinweis. Falls A diagonalisierbar ist, so bietet es sich an, das Minimalpolynommithilfe der Konjugationsinvarianz zu berechnen. Fur die umgekehrte Impli-kation kann man wie beim Beweis des Satzes von Cayley-Hamilton vorgehen.
Bitte wenden

Bonusaufgabe (Cayley-Hamilton, ganz einfach?!). Was ist falsch am nachfolgen-den
”Beweis“? Geben Sie genau an, an welcher Stelle etwas schiefgeht und er-
klaren Sie den Fehler!
Behauptung. Sei K ein Korper, sei n ∈ N>0 und sei A ∈ Mn×n(K). Dann istµA in K[T ] ein Teiler von χA.
Beweis. Da das Minimalpolynom den Kern der Auswertung bei A als Idealin K[T ] erzeugt, genugt es zu zeigen, dass χA(A) = 0 ∈Mn×n(K) gilt.
Nach Definition des charakteristischen Polynoms ist χA = det(T · In−A).Also erhalten wir
χA(A) = det(A · In −A) = det 0 = 0,
wie gewunscht.
Hinweis. Es ist hilfreich, dies an einem konkreten Beispiel, Schritt fur Schrittdurchzugehen und jeweils pedantischst darauf zu achten, dass man nicht schlam-pert . . .
Abgabe bis zum 13. Juli 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 12 vom 13. Juli 2017
Aufgabe 1 (Jordansche Normalformen?). Welche der folgenden Aussagen sindwahr? Begrunden Sie Ihre Antwort (durch einen Beweis oder ein geeignetesGegenbeispiel)!
1. Es gibt eine Matrix A ∈M5×5(C) mit
detA = 8 und µA = (T − 2)2 · (T − 1).
2. Es gibt eine Matrix A ∈M5×5(C) mit
detA = 54 und µA = (T − 3)2 · (T − 2).
Aufgabe 2 (Jordansche Normalform und Ahnlichkeit).
1. Bestimmen Sie jeweils die Jordansche Normalform der folgenden Matrizenin M3×3(C):
5 −1 −11 3 −11 0 2
,
3 1 00 4 00 0 4
,
−10 10 −9−14 14 −9
3 −2 6
2. Welche dieser Matrizen sind ahnlich zueinander? Welche nicht? BegrundenSie Ihre Antwort!
Aufgabe 3 (iiiii!). Bestimmen Sie die Jordansche Normalform der Matrix
A :=
i −i i ii 0 0 ii 0 0 ii i −i i
∈M4×4(C).
Bestimmen Sie außerdem (mit dem Verfahren aus der Vorlesung) eine Ma-trix S ∈ GL4(C), fur die S−1 ·A · S in Jordan-Normalform ist.
Aufgabe 4 (Blorxisch). Die Sprache BLORX beruht auf dem Alphabet mit denBuchstaben B, L, O, R, X. Blorxische Worter werden dabei nach den folgendenRegeln gebildet:
• Worter durfen mit jedem der Buchstaben B, L, O, R, X beginnen.
• Auf B kann nur B oder L folgen (oder das Wortende).
• Auf L oder O kann nur L, O, R oder X folgen (oder das Wortende).
• Auf R kann nur O oder X folgen (oder das Wortende).
• Auf X kann nur L oder X folgen (oder das Wortende).
Zum Beispiel sind BLORX und RORO korrekte blorxische Worter, nicht aberROXOR. Bestimmen Sie eine geschlossene Formel fur die Anzahl der blorxischenWorter gegebener Lange, die mit X beginnen und mit X enden!Hinweis. Betrachten Sie eine geeignete Matrix in M5×5(C), deren Eintrage nurNullen und Einsen sind. Was haben Potenzen dieser Matrix mit den gesuchtenAnzahlen zu tun? Wie kann man Potenzen von Matrizen mithilfe der Jordan-schen Normalform bestimmen?
Bitte wenden

Bonusaufgabe (Berechnung der Jordanschen Normalform uber den Elementartei-lersatz fur Matrizen). Sei K ein algebraisch abgeschlossener Korper, sei n ∈ Nund sei A ∈Mn×n(K).
1. Lesen Sie im Skript nach, wie man die Jordansche Normalform von Aberechnen kann, indem man den Elementarteilersatz fur Matrizen auf dieMatrix T · In −A ∈Mn×n(K[T ]) anwendet.
2. Zeigen Sie die dabei verwendete Tatsache, dass imL(T · In − A) = kerπgilt, wobei
π : K[T ]n −→ Kn[L(A)]
p 7−→n∑
j=1
pj · ej .
Bonusaufgabe (runde Matrizen; fur Lehramtler (als optionale Alternative zur obi-gen Bonusaufgabe)). Ein wesentlicher Bestandteil des Unterrichts ist ein Fundusan interessanten Aufgaben. Die Schuler freuen sich dabei naturlich, wenn der ei-gentliche Inhalt der Aufgaben nicht durch
”krumme“ Zahlen in den Rechnungen
in den Hintergrund ruckt. In diesem Sinne:
1. Sei n ∈ N. Wie kann man viele Beispiele von Matrizen in Mn×n(C) finden,deren Jordan-Normalform nur ganzzahlige Eintrage besitzt, und fur die esauch Ahnlichkeitstransformationen mit ganzzahligen Eintragen gibt?
2. In welchen Fallen kann man es sogar einrichten, dass alle zugehorigen Ahn-lichkeitstransformationen (bis auf ein skalares Vielfaches) ganzzahlig sind?(Das gibt einem die Garantie, dass ziemlich unabhangig vom Losungswegkeine zu komplizierten Matrizen auftreten.)
Bonusaufgabe (Hamilton; fur Physiker (als optionale Alternative zur obigen Bonus-aufgabe)).
”Welcher“ Hamilton hat am Satz von Cayley-Hamilton mitgewirkt?
Welche weiteren Konzepte der Physik/Mathematik gehen auf ihn zurck?
Abgabe bis zum 20. Juli 2017, 10:00 Uhr, in die Briefkasten

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 13 vom 20. Juli 2017
Aufgabe 1 (Tensoren). Sei K ein Korper und seien V und W Vektorraumeuber K und seien v, v′ ∈ V und w,w′ ∈ W . Welche der folgenden Aussagensind in dieser Situation immer wahr? Begrunden Sie Ihre Antwort (durch einenBeweis oder ein geeignetes Gegenbeispiel)!
1. Ist v ⊗ w = v′ ⊗ w′, so folgt v = v′ und w = w′.
2. Es gilt v ⊗ w + v′ ⊗ w′ = (v + v′)⊗ (w + w′).
Aufgabe 2 (Skalarprodukte und Tensorprodukte). Sei V ein R-Vektorraum. Re-formulieren Sie die Definition von Skalarprodukten auf V so, dass Sie nur dasTensorprodukt und Eigenschaften von linearen Abbildungen verwenden. ZeigenSie, dass Ihre Reformulierung zur gewohnlichen Definition aquivalent ist!
Aufgabe 3 (Assoziativitat des Tensorprodukts). Sei K ein Korper und seien U ,V , W Vektorraume uber K. Zeigen Sie, dass
U ⊗K (V ⊗K W ) −→ (U ⊗K V )⊗K W
u⊗ (v ⊗ w) 7−→ (u⊗ v)⊗ wein wohldefinierter Isomorphismus von K-Vektorraumen ist, indem Sie das fol-gende Diagramm geeignet dekorieren:
U × (V ×W ) oo //
��
(U × V )×W
��
U × (V ⊗K W )
�� ))
(U ⊗K V )×W
��uu
U ⊗K (V ⊗K W ) oo // (U ⊗K V )⊗K W
Aufgabe 4 (mehr zur koordinatenfreien Spur). Sei K ein Korper und sei V einendlich-dimensionaler K-Vektorraum.
1. Wie sieht die Komposition von Endomorphismen von V unter dem kano-nischen Isomorphismus V ∗ ⊗K V ∼=K HomK(V, V ) in V ∗ ⊗K V aus?
2. Wie kann man mit dem ersten Teil und der koordinatenfreien Beschrei-bung der Spur beweisen, dass fur alle Endomorphismen f, g : V −→ V dieSpurgleichung
tr f ◦ g = tr g ◦ fgilt?
Bonusaufgabe (Tensorprodukt uber Z). Schlagen Sie in der Literatur nach, wiedas Tensorprodukt ⊗Z von Z-Moduln definiert ist. Wie kann man den Z-Modul
Z/2017Z⊗Z Z/2016Z
einfacher beschreiben?
Bonusaufgabe (mathematische Allgemeinbildung). Wer war Maryam Mirzakha-ni? Warum wird diese Aufgabe gerade jetzt gestellt?
Freiwillige Abgabe (bis zum 27. Juli 2017, 10:00, in die Briefkasten)

Ubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 14 vom 27. Juli 2017
Aufgabe 1 (außere Produkte). Sei K ein Korper, sei V ein K-Vektorraum undseien v, v′ ∈ V . Welche der folgenden Aussagen sind in dieser Situation immerwahr? Begrunden Sie Ihre Antwort (durch einen Beweis oder ein geeignetesGegenbeispiel)!
1. Ist v ∧ v′ = v′ ∧ v in Λ2 V , so folgt v = v′.
2. Es gilt v ∧ v′ + v′ ∧ v = (v + v′) ∧ (v′ + v) in Λ2 V .
Aufgabe 2 (algebraische Eigenschaften des Kreuzprodukts).
1. Ist das Kreuzprodukt × : R3 × R3 −→ R3 kommutativ? Assoziativ? Gibtes ein neutrales Element fur das Kreuzprodukt?
2. Gibt es zu allen x, y ∈ R3 \ {0} ein z ∈ R3 mit x× z = y ?
Aufgabe 3 (geometrische Eigenschaften des Kreuzprodukts). Seien x, y ∈ R3.
1. Zeigen Sie, dass x× y zu x und y orthogonal ist (bezuglich 〈 · , · 〉2).2. Zeigen Sie: Ist die Familie (x, y) linear unabhangig, so ist (x, y, x× y) eine
Basis von R3, deren Orientierung mit der Orientierung der Standardba-sis (e1, e2, e3) ubereinstimmt.
3. Zeigen Sie, dass ‖x× y‖2 der (euklidische) Flacheninhalt des von x und yin R3 aufgespannten Parallelogramms ist.
Hinweis. Winkel?!
Aufgabe 4 (Konstruktion der Volumenform). Sei (V, 〈 · , · 〉) ein endlich-dimensio-naler euklidischer Vektorraum der Dimension n > 0 und sei eine Orientierungvon V gewahlt. Zeigen Sie, dass es dann ein Element ω ∈ (Λn V )∗ mit folgenderEigenschaft gibt: Fur jede positiv orientierte Basis (v1, . . . , vn) von V gilt
ω(v1 ∧ · · · ∧ vn) =√
det((〈vj , vk〉)j,k∈{1,...,n}
).
Gehen Sie dabei wie folgt vor:
1. Konstruieren Sie ω, indem Sie der Anleitung im Skript folgen und dieDetails ausfuhren.
2. Welche geometrische Bedeutung hat die Volumenform im Fall des eukli-dischen Vektorraums (R2, 〈 · , · 〉2) ? Warum?
Bonusaufgabe (Skript). Finden Sie moglichst viele Fehler im Skript!
keine Abgabe

B 22 B. Ubungsblatter

C
Fingerubungen

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 1 vom 24. April 2017
Aufgabe 1 (Skalarprodukte). Wir betrachten
x :=
10−1
, y :=
111
, z :=
−2−1
0
∈ R3
Zeichnen Sie diese Vektoren in ein geeignetes Koordinatensystem und berechnenSie die folgenden Skalarprodukte:
〈x, x〉2, 〈y, y〉2, 〈z, z〉2, 〈x, y〉2, 〈x, z〉2, 〈y, z〉2
Aufgabe 2 (Formchen). Sei
b : R3 × R3 −→ R(x, y) 7−→ 20 · x1 · y1 + 17 · x2 · y3
gegeben.
1. Ist b bilinear (uber R)?
2. Ist b symmetrisch?
3. Ist b positiv definit?
Aufgabe 3 (quadratische Formen). Zu ε ∈ R sei
bε : R2 × R2 −→ R(x, y) 7−→ x1 · y1 + ε · x2 · y2
und
qε : R2 −→ Rx 7−→ bε(x, x).
1. Fur welche ε ∈ R ist bε positiv definit bzw. positiv semi-definit bzw.negativ definit bzw. negativ semi-definit bzw. indefinit?
2. Skizzieren Sie die Menge {x ∈ R2 | q1(x) = 1}. Wie heißt das entstehendeGebilde?
3. Skizzieren Sie die Menge {x ∈ R2 | q−1(x) = 1}. Wie heißt das entstehendeGebilde (jedenfalls, wenn man es geeignet dreht)?
Aufgabe 4 (Lucken). Welche Begriffe/Satze aus der Linearen Algebra I habenSie vergessen? Welche Beweise/Rechentechniken aus der Linearen Algebra I fin-den Sie dubios? Fullen Sie diese Lucken!
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 2 vom 2. Mai 2017
Aufgabe 1 (Langen). Bestimmen Sie fur alle Vektoren
v ∈{(
10
),
(11
),
(1−1
),
(1/21/2
)}⊂ R2
jeweils ‖v‖2 und ‖v‖1.
Aufgabe 2 (Winkel). Bestimmen Sie (bezuglich des Standardskalarproduktesauf R2) die Winkel
^((
10
),
(11
)), ^
((10
),
(−1−1
)), ^
((10
),
(22
)), ^
((11
),
(10
)).
Aufgabe 3 (Isometrien). Wir betrachten die Endomorphismen
f : R2 −→ R2
x 7−→(−x2x1
),
g : R2 −→ R2
x 7−→ 1√2·(x1 − x2x1 + x2
)
von R2.
0. Skizzieren Sie f und g.
1. Ist f eine lineare Isometrie (R2, ‖ · ‖2) −→ (R2, ‖ · ‖2) ?
2. Ist f eine lineare Isometrie (R2, ‖ · ‖1) −→ (R2, ‖ · ‖1) ?
3. Ist g eine lineare Isometrie (R2, ‖ · ‖2) −→ (R2, ‖ · ‖2) ?
4. Ist g eine lineare Isometrie (R2, ‖ · ‖1) −→ (R2, ‖ · ‖1) ?
Aufgabe 4 (nachrechnen). Ist es Ihnen gelungen, alles nachzurechnen, was inder Vorlesung als nachrechenbar deklariert wurde? Falls nicht, sollten Sie in denUbungen oder in der Zentralubung Fragen dazu stellen!
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 3 vom 8. Mai 2017
Aufgabe 1 (Orthogonalitat). Wir betrachten die Abbildung
〈 · , · 〉 : R2 × R2 −→ R(x, y) 7−→ 2 · x1 · y1 + x1 · y2 + x2 · y1 + x2 · y2.
1. Zeigen Sie, dass 〈 · , · 〉 ein Skalarprodukt auf R2 ist.
2. Gilt bezuglich diesem Skalarprodukt, dass e1 ⊥ e2 ?
3. Finden Sie ein x ∈ R2 \ {0} mit e1 ⊥ x.
Aufgabe 2 (orthogonale Komplemente). Bestimmen Sie die folgenden orthogo-nalen Komplemente in (R3, 〈 · , · 〉2):
130
⊥
,
R ·
130
⊥
,
−2−60
⊥
,
131
⊥
.
Aufgabe 3 (Orthonormalisierung). Wenden Sie das Orthonoramlisierungsverfah-ren von Gram-Schmidt auf die Familie
101
,
001
,
333
in (R3, 〈 · , · 〉2) an. Erhalten Sie dasselbe Ergebnis, wenn Sie dieses Verfahrenauf
001
,
333
,
101
anwenden?
Aufgabe 4 (nachrechnen). Ist es Ihnen gelungen, alles nachzurechnen, was inder Vorlesung als nachrechenbar deklariert wurde? Falls nicht, sollten Sie in denUbungen oder in der Zentralubung Fragen dazu stellen!
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 4 vom 15. Mai 2017
Aufgabe 1 (Diagonalisierbarkeit). Welche der folgenden Matrizen sind uber Cdiagonalisierbar? (
2 01 7
),
(2 ii 7
),
(2 i−i 7
)
Aufgabe 2 (adjungierte Abbildung). Zu a ∈ R betrachten wir
fa : R3 −→ R3
x 7−→
x1 + a · x2a2 · x1 + x3x2 + a · x3
.
1. Bestimmen Sie fur jedes a ∈ R die adjungierte Abbildung zu fa.
2. Fur welche a ∈ R ist fa selbstadjungiert?
Aufgabe 3 (Orthonormalbasen aus Eigenvektoren).
1. Bestimmen Sie eine Orthonormalbasis von R4, die aus Eigenvektoren derMatrix
2 0 0 00 0 0 00 0 1 50 0 5 7
∈M4×4(R)
besteht.
2. Finden Sie ein symmetrische Matrix in M3×3(R) mit Eigenwerten 1, 2, 3,fur die die Vektoren
001
,
110
,
2−20
Eigenvektoren sind.
Aufgabe 4 (CAS). Uberprufen Sie Ihre Rechnungen mit einem Computeralge-brasystem!
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 5 vom 22. Mai 2017
Aufgabe 1 (Endomorphismenpolynome). Sei λ ∈ C und f := L(A) : C3 −→ C3,wobei
A :=
λ 1 00 λ 10 0 λ
∈M3×3(C).
Bestimmen Sie fur jedes der folgenden Polynome p ∈ C[T ] den Endomorphis-mus p(f), den man erhalt, indem man f in p einsetzt:
T − λ, (T − λ)2, (T − λ)3
Aufgabe 2 (Ringrechnungen). Sei R ein Ring. Zeigen Sie:
1. Fur alle x ∈ R ist 0 · x = 0.
2. Fur alle x ∈ R ist −x = (−1) · x.
Aufgabe 3 (Ringe). Zeigen Sie, dass die folgenden Ringe paarweise nicht iso-morph sind:
Z, Q, Q[T ], F2[T ].
Aufgabe 4 (Wiederholung). Schreiben Sie eine kurze Zusammenfassung des Ka-pitels uber euklidische und unitare Vektorraume. Was sind die wichtigsten Be-griffe, Beispiele, Satze, Techniken?
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 6 vom 29. Mai 2017
Aufgabe 1 (universelle Eigenschaft des Polynomrings). Uberprufen Sie jeweils, obes einen Q-Algebrenhomomorphismus f : Q[T ] −→ Q[T ] mit den angegebenenEigenschaften gibt!
1. Es gilt f(T ) = −T und f(T 2) = T 2.
2. Es gilt f(T ) = T und f(T 2) = −T 2.
3. Es gilt f(T ) = 2017 · T 3.
4. Es gilt f(T 3) = T .
Aufgabe 2 (Untermoduln). Wir betrachten den Z-Modul Z. Welche der folgen-den Teilmengen von Z sind Untermoduln von Z ?
1. {n2 | n ∈ Z}
2. {2017 · n | n ∈ Z}
3. {2017 · n+ 5 ·m | n,m ∈ Z}
4. {n ∈ Z | ∃p∈Q[T ] p(n) = 0}
Aufgabe 3 (Modul zu einem Endomorphismus). Sei
A :=
(1 20 1
)∈M2×2(R)
und f := L(A) : R2 −→ R2. Berechnen Sie im Modul R2[f ] die folgenden Terme:
1. 1 ·(01
)
2. T 2 ·(11
)
3. (T − 1) ·(21
)
4. (T − 1)2 ·(21
)
Aufgabe 4 (Wozu?). Warum befassen wir uns im Augenblick mit Modultheorie?Warum ist dafur auch Ringtheorie notig?
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 7 vom 5. Juni 2017
Aufgabe 1 (Arithmetik mit Rest). Fuhren Sie die folgenden Rechnungen in denangegebenen Quotientenmoduln des Z-Moduls Z aus:
[8] + [15] in Z/12Z−3 · [6] in Z/4Z3 · [−2] in Z/6Z
−48 · [42] in Z/2017Z
Aufgabe 2 (Quotientenmoduln im Alltag). Welche Quotientenmoduln von Z bie-ten sich zur Modellierung von Rechnungen im Rahmen der folgenden Sachver-halte an?
1. Monate im Jahr
2. Mondphasen
3. Haltestellen der Yamanote Line in Tokyo
4. Paternosteraufzuge
Aufgabe 3 (mehr Quotientenmoduln). Bestimmen Sie jeweils fur die folgendenMatrizen A ∈ M2×2(Z), wieviele Elemente der Quotientenmodul Z2/ imL(A)des Z-Moduls Z2 enthalt:
(1 00 1
),
(1 00 0
),
(1 00 2017
),
(2 11 1
)
Aufgabe 4 (Wozu?). Warum befassen wir uns im Moment mit der Konstruktionvon Moduln?
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 8 vom 12. Juni 2017
Aufgabe 1 (Division mit Rest). Wir betrachten auf Z den Absolutbetrag alseuklidische Gradfunktion und auf Polynomringen uber Korpern die modifizierteGradfunktion.
1. Berechnen Sie in Z die Division von 2017 mit Rest durch 126.
2. Berechnen Sie in Z die Division von 4242 mit Rest durch −17
3. Berechnen Sie in Q[T ] die Division von T 4 − 2 · T 3 + T + 7 mit Restdurch T 2 + 2 · T − 6.
4. Berechnen Sie in F2[T ] die Division von T 3+T 2+1 mit Rest durch T 2+T .
Aufgabe 2 (Primfaktorzerlegung). Bestimmen Sie Primfaktorzerlegungen der Po-lynome
T 2 − 3 und T 2 + 3
in Q[T ] bzw. R[T ] bzw. C[T ].
Aufgabe 3 (Idealinklusionen). Bestimmen Sie jeweils fur die nachfolgenden Idea-le, welche Ideale in welchen anderen Idealen enthalten sind. Was bedeutet dasfur die zugehorigen zyklischen Quotientenmoduln?
1. (3), (6), (4), (12) in Z
2. (3), (T ), (T 2), (T + 1) in Q[T ]
3. (T + 1), (T 2 + 1), (T ), (T 2 + T ) in F2[T ]
4. (T, T + 1), (T ), (T 2), (T 3) in C[T ]
Aufgabe 4 (CAS). Finden Sie heraus, wie man mit einem Computeralgebrasys-tem Polynomdivision durchfuhren kann.
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 9 vom 19. Juni 2017
Aufgabe 1 (großter gemeinsamer Teiler).
1. Bestimmen Sie den großten gemeinsamen Teiler von 2015 und 25 in Z.
2. Bestimmen Sie den großten gemeinsamen Teiler von 2017 und 5 in Z.
3. Bestimmen Sie den großten gemeinsamen Teiler von T 2+T und T 3 in F2[T ].
4. Bestimmen Sie den großten gemeinsamen Teiler von T 5 ·(T+1)7 ·(T+2)11
und T 3 · (T + 1)13 · (T + 2)8 · (T + 3)2 in R[T ].
Aufgabe 2 (Gleichungen in Ringen).
1. Finden Sie ganze Zahlen x, y ∈ Z mit 2017 · x+ 42 · y = −8.
2. Gibt es ganze Zahlen x, y ∈ Z mit 44 · x+ 42 · y = 2017 ?
3. Finden Sie Polynome p, q ∈ Q[T ] mit p · (T 2 + 2) + q · (T − 1) = T 3.
4. Gibt es Polynome p, q ∈ F2[T ] mit p · (T 2 + 1) + q · (T + 1) = T 2 ?
Aufgabe 3 (Idealinklusionen). Bestimmen Sie jeweils fur die nachfolgenden Idea-le, welche Ideale in welchen anderen Idealen enthalten sind.
1. (5), (100, 80) in Z
2. (10), (8, 12), (8, 14), (20) in Z
3. (T, T + 1), (T 2 + 2017) in Q[T ]
4. (T 2 + T, T ), (T 2), (T 2 + 2 · T + 1) in C[T ]
Aufgabe 4 (Ringeigenschaften). Sammeln Sie alle Ringeigenschaften, die wir bis-her behandelt haben, und fassen Sie die bereits bewiesenen Implikationen/Zu-sammenhange zwischen diesen Eigenschaften in einem moglichst ubersichtlichenDiagramm zusammen.
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 10 vom 26. Juni 2017
Aufgabe 1 (Prasentationen von Moduln).
1. Gehen Sie den Beweis von Satz 2.5.1 Schritt fur Schritt im Falle des Un-termoduls
{x ∈ Z2 | 2 · x1 + x2 = 0} ⊕{[2 · x]
∣∣ x ∈ Z}⊂ Z2 ⊕ Z/8Z
durch.
2. Gehen Sie den Beweis von Korollar 2.5.2 Schritt fur Schritt im Falle desZ-Moduls Z2017 ⊕ Z/2017Z durch.
Aufgabe 2 (Elementarteiler). Bestimmen Sie die Elementarteiler der folgendenMatrizen:
(5 250 −10
)∈M2×2(Z)
−4 −3 18 8 03 5 2
∈M3×3(Z)
(10 · T 5 · T 2 + 5 · T−15 · T 2 5 · T 3
)∈M2×2
(Q[T ]
)
(T T + 1T 2 1
)∈M2×2
(F2[T ]
)
Aufgabe 3 (lineare Gleichungssysteme uber Z).
1. Bestimmen Sie alle x ∈ Z3 mit
−x1 + 2017 · x3 = 0 und 2 · x1 + 4 · x2 − 8 · x3 = 42.
2. Bestimmen Sie alle x ∈ Z3 mit
x1 + x2 − 2 · x3 = 5 und 2 · x1 − 4 · x2 + x3 = 2.
Aufgabe 4 (Wiederholung). Fassen Sie alles zusammen, was Sie bereits uberModuln zu Endomorphismen von endlich-dimensionalen Vektorraumen wissen.
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 11 vom 3. Juli 2017
Aufgabe 1 (Minimalpolynome). Bestimmen Sie jeweils das Minimalpolynom derfolgenden Matrizen in M2×2(C):
(2 10 2
),
(2 01 2
),
(2 02 2
),
(0 22 0
)
Geben Sie auch jeweils eine Zerlegung des zugehorigen C[T ]-Moduls in zyklischeModuln zu Primpolynompotenzen an.
Aufgabe 2 (mehr Minimalpolynome). Bestimmen Sie jeweils das Minimalpoly-nom der folgenden Matrizen in M2×2(C):
(2 22 2
),
(0 00 0
),
(1 11 1
),
(7 77 7
)
Gibt es einen Zusammenhang zwischen manchen dieser Polynome? FormulierenSie eine Vermutung!
Aufgabe 3 (noch mehr Minimalpolynome). Bestimmen Sie jeweils das Minimal-polynom und das charakteristische Polynom der folgenden Matrizen inM5×5(C):
2 0 0 0 00 2 1 0 00 0 2 0 00 0 0 3 00 0 0 0 3
,
2 1 0 0 00 2 0 0 00 0 2 1 00 0 0 2 00 0 0 0 3
Fallt Ihnen ein Zusammenhang zwischen dem Minimalpolynom und dem cha-rakteristischen Polynom auf? Formulieren Sie eine Vermutung!
Aufgabe 4 (Wiederholung). Schreiben Sie eine kurze Zusammenfassung uber dasKapitel uber Moduln uber Hauptidealringen. Was sind die wichtigsten Begriffe,Beispiele, Satze, Techniken?
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 12 vom 10. Juli 2017
Aufgabe 1 (Jordansche Normalform: 2×2). Bestimmen Sie jeweils die JordanscheNormalform der folgenden Matrizen
(2 22 2
),
(1 11 1
),
(2 01 2
),
(2 02 2
),
(0 22 0
)
in M2×2(C).
Aufgabe 2 (Jordansche Normalform: 3×3). Bestimmen Sie jeweils die JordanscheNormalform der folgenden Matrizen
0 2 12 0 20 0 3
,
1 1 11 1 11 1 1
in M3×3(C).
1. Verwenden Sie dazu zunachst stur das Verfahren aus der Vorlesung.
2. In einem zweiten Durchlauf sollten Sie versuchen, moglichst viele Abkur-zungen zu finden und die Jordansche Normalform mit minimalem Rechen-aufwand bestimmen!
Aufgabe 3 (Jordansche Normalformen?). Entscheiden Sie jeweils, ob es Matri-zen A ∈M3×3(C) mit den folgenden Eigenschaften gibt oder nicht:
1. Es gilt trA = 0 und (T − 2) · (T + 4) ist ein Teiler von µA.
2. Es gilt trA = 0 und (T − 2) · (T − 2) · (T + 4) ist ein Teiler von µA.
3. Es gilt trA = 0 und (T − 2) · (T + 2) · (T + 4) ist ein Teiler von µA.
4. Es gilt detA = i und T ist ein Teiler von µA.
Aufgabe 4 (Wiederholung). Wiederholen Sie die Themen Eigenwerte, Eigenrau-me, Diagonalisierbarkeit, darstellende Matrizen aus der Linearen Algebra I undschreiben Sie eine kurze Zusammenfassung dazu.
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 13 vom 17. Juli 2017
Aufgabe 1 (Tensoren). Welche der folgenden Gleichheiten gelten in R2 ⊗R R2 ?
1.
(11
)⊗(
23
)=
(22
)⊗(
11
)+
(11
)⊗(
01
)
2. 2016 · e1 ⊗ e2 + e1 ⊗ e1 = e1 ⊗ (e1 + 2017 · e2)
3.
(−1
1
)⊗(
1−1
)−(
11
)⊗(
11
)= 0
4. e1 ⊗ e2 = e2 ⊗ e1Aufgabe 2 (Abbildungen auf Tensorprodukten). Sei K ein Korper. Welche derfolgenden Abbildungen K3 ⊗K K3 −→ K sind wohldefiniert?
1. v ⊗ w 7−→ 0
2. v ⊗ w 7−→ v + w
3. v ⊗ w 7−→ v
4. v ⊗ w 7−→ v1 · w3 − v2 · w1
Aufgabe 3 (Tensorproduktbaukasten). Sei K ein Korper und sei V ein endlich-dimensionaler K-Vektorraum. Welche der folgenden Vektorraume sind in dieserSituation immer isomorph zueinander? Welche im allgemeinen nicht?
V ∗ ⊗K V, K ⊗K (V ⊗K K), HomK(K,V ⊗K V ), (V ⊗K V )⊕ (K ⊗K K)
Aufgabe 4 (Wiederholung). Schreiben Sie eine kurze Zusammenfassung uber dasKapitel uber die Jordansche Normalform. Was sind die wichtigsten Begriffe,Beispiele, Satze, Techniken?
keine Abgabe!

Fingerubungen zur Linearen Algebra II
Prof. Dr. C. Loh/D. Fauser/J. Witzig Blatt 14 vom 24. Juli 2017
Aufgabe 1 (außere Produkte). Welche der folgenden Gleichheiten gelten im auße-ren Produkt Λ2(R2) ?
1.
(11
)∧(
23
)=
(22
)∧(
11
)+
(11
)∧(
01
)
2. 2016 · e1 ∧ e2 + e1 ∧ e1 = e1 ∧ (e1 + 2017 · e2)
3.
(−1
1
)∧(
1−1
)−(
10
)∧(
10
)= 0
4. e1 ∧ e2 = e2 ∧ e1Aufgabe 2 (Abbildungen auf außeren Produkten). Sei K ein Korper. Welche derfolgenden Abbildungen Λ2(K3) −→ K sind wohldefiniert?
1. v ∧ w 7−→ v + w
2. v ∧ w 7−→ v
3. v ∧ w 7−→ v1 · w3 − v2 · w1
4. v ∧ w 7−→ v1 · w2 − v2 · w1
Aufgabe 3 (Außerer-Produkt-Baukasten). SeiK ein Korper und sei V ein endlich-dimensionaler K-Vektorraum. Welche der folgenden Vektorraume sind in dieserSituation immer isomorph zueinander? Welche im allgemeinen nicht?
Λ2(V ∗), V ⊗K V, HomK(K,Λ2 V ), (Λ3 V )∗,1/2·dimK V ·(dimK V−1)⊕
j=1
K
Aufgabe 4 (Wiederholung). Schreiben Sie eine kurze Zusammenfassung uber dasKapitel uber multilineare Algebra. Was sind die wichtigsten Begriffe, Beispiele,Satze, Techniken?
keine Abgabe!

C 16 C. Fingerubungen

D
Allgemeine Hinweise

Lineare Algebra II im SS 2017Organisatorisches
Prof. Dr. C. Loh/D. Fauser/J. Witzig April 2017
Homepage. Alle aktuellen Informationen zur Vorlesung, zu den Ubungen, zuSprechstunden, Literaturangaben, sowie die Ubungsblatter finden Sieauf der Homepage zur Vorlesung bzw. in GRIPS:
http://www.mathematik.uni-regensburg.de/loeh/teaching/linalg2 ss17
https://elearning.uni-regensburg.de
Vorlesung. Die Vorlesung findet jeweils montags (10:15–12:00; H 32) und don-nerstags (10:15–12:00; H 32) statt.
Es wird ein (Kurz)Skript zur Vorlesung geben, das eine Ubersichtuber die wichtigsten Themen der Vorlesung enthalt. Dieses Skript wirdjeweils auf den obigen Homepages aktualisiert. Beachten Sie bitte, dassdieses Kurzskript keineswegs geeignet ist, den Besuch der Vorlesungoder der Ubungen zu ersetzen!
Ubungen. Die neuen Ubungsaufgaben werden wochentlich donnerstags spate-stens um 10:00 Uhr auf den obigen Homepages online gestellt und sindbis zum Donnerstag eine Woche spater um 10:00 Uhr in die entspre-chenden Briefkasten in der Mathematik abzugeben.
Auf jedem Ubungsblatt gibt es vier regulare Aufgaben (je 4 Punkte)und herausforderndere Bonusaufgaben (je 4 Bonuspunkte).
Sie durfen (und sollen) die Aufgaben in kleinen Gruppen bearbeiten;aber die Losungen mussen individuell ausformuliert und aufgeschriebenwerden (andernfalls werden die Punkte aberkannt). Sie durfen (mussenaber nicht!) Losungen zu zweit abgeben; in diesem Fall mussen selbst-verstandlich jeweils beide Autoren in der Lage sein, alle der Zweier-gruppe abgegebenen Losungen an der Tafel zu prasentieren (andernfallswerden die Punkte aberkannt).
Die Ubungen beginnen in der zweiten Vorlesungswoche; in diesenersten Ubungen wird das Einfuhrungsblatt, Blatt 0, besprochen.
Zentralubung. Zusatzlich zur Vorlesung und den Ubungen bietet die Zentral-ubung die Gelegenheit, Fragen zu stellen und den Stoff der Vorlesung zuwiederholen und zu vertiefen. Die Zentralubung findet jeweils montags(14:15–16:00; H 32) statt und wird von Daniel Fauser und JohannesWitzig geleitet; die Zentralubung beginnt in der ersten Vorlesungswo-che.
Außerdem werden wir auf der Homepage Fingerubungen anbieten,mit denen grundlegende Begriffe, Handgriffe und Rechentechniken ein-geubt werden konnen. Diese Aufgaben werden nicht abgegeben bzw.korrigiert.
1

Einteilung in die Ubungsgruppen. Die Einteilung in die Ubungsgruppen er-folgt uber GRIPS:
https://elearning.uni-regensburg.de
Sie konnen sich bis Mittwoch, den 26. April 2017, um 10:00 Uhrfur die Ubungen anmelden; Sie konnen dort Ihre Praferenzen fur dieUbungstermine auswahlen und wir werden versuchen, diese Wunschezu erfullen. Bitte beachten Sie jedoch, dass es sein kann, dass wir nichtalle Wunsche erfullen konnen.
Falls Sie noch keine Kennung des Rechenzentrums haben, wendenSie sich bitte an Daniel Fauser oder Johannes Witzig.
Die endgultige Einteilung der Ubungsgruppen wird spatestens amFreitag, den 28. April 2017, in GRIPS bekanntgegeben. Ein Wechsel involle Ubungsgruppen ist dann nur durch Tausch mit einem Tauschpart-ner moglich.
Bei Fragen zur Einteilung der Ubungsgruppen und zum Ubungsbe-trieb wenden Sie sich bitte an Daniel Fauser ([email protected]) oderJohannes Witzig ([email protected]).
Leistungsnachweise. Diese Vorlesung kann wie in den einzelnen Modulkatalo-gen spezifiziert in die Studiengange eingebracht werden.
• Studienleistung : Regelmaßige und aktive Teilnahme an den Ubun-gen, mindestens 50% der (in den regularen Aufgaben) moglichenPunkte, mindestens einmal zufriedenstellend vorrechnen.
• Prufungsleistung (fur den Leistungsnachweis zur Linearen Alge-bra II): Zweistundige Klausur (s.u.). Die Modulnote ergibt sichwie im jeweiligen Modulkatalog angegeben.
Im Bachelorstudiengang Mathematik ist fur das Modul BGLA zusatz-lich noch eine (mundliche) Modulabschlussprufung uber die Inhalte derVorlesungen Lineare Algebra I und II abzulegen. Details zu diesen Prufun-gen werden am Ende der Linearen Algebra II bekanntgegeben.
Klausur. Die Klausur findet am Dienstag, den 1. August 2017, von 9:00 bis11:00 Uhr, statt. Die Wiederholungsklausur ist voraussichtlich am Endeder Semesterferien; der genaue Termin wird so bald wie moglich be-kanntgegeben.
Sie mussen sich in FlexNow fur die Studienleistung und die Prufungs-leistung anmelden. Bitte informieren Sie sich fruhzeitig. Wir werdenrechtzeitig Eintrage in FlexNow vorbereiten. Berucksichtigen Sie bit-te auch (implizite) Fristen der entsprechenden Prufungsordnungen biswann (Wiederholungs-)Prufungen abgelegt werden mussen.
Wichtige Informationen im Krankheitsfall finden Sie unter:
http://www.uni-regensburg.de/mathematik/fakultaet/studium/studierende-und-studienanfaenger/index.html
2

Hinweise fur Wiederholer. Studenten, die bereits in einem vorangegangenenSemester die Klausurzulassung erhalten haben, aber im entsprechendenSemester die Klausur nicht bestanden haben oder nicht an der Klausurteilgenommen haben, konnen mit dieser Zulassung auch an den obengenannten Klausurterminen teilnehmen. Informieren Sie sich rechtzei-tig uber den Stoffumfang dieser Vorlesung (z.B. uber das Kurzskript).Außerdem kann es je nach Kenntnisstand sinnvoll sein, nochmal an denUbungen oder der Vorlesung teilzunehmen.
Fur den Drittversuch besteht alternativ zur Klausur auch wahlweisedie Moglichkeit, die Prufung als mundliche Prufung abzulegen.
Falls Sie an den Ubungen teilnehmen mochten, ohne dass Ihre Losun-gen korrigiert werden sollen, schreiben Sie bitte eine email an DanielFauser oder Johannes Witzig mit Ihren Wunschterminen (damit dieUbungsgruppen einigermaßen gleichmaßig besucht sind).
Ansprechpartner.
• Bei Fragen zur Organisation des Ubungsbetriebs wenden Sie sichbitte an Daniel Fauser oder Johannes Witzig (Buro M 205):
[email protected]@ur.de
• Bei Fragen zu den Ubungsaufgaben wenden Sie sich bitte an IhrenUbungsleiter oder an Daniel Fauser oder Johannes Witzig.
• Bei mathematischen Fragen zur Vorlesung wenden Sie sich bittean Ihren Ubungsleiter, an Daniel Fauser, Johannes Witzig oder anClara Loh.
• Bei Fragen zur Planung Ihres Studiums bzw. zur Prufungsordnungwenden Sie sich bitte an die zustandige Studienberatung oder daszustandige Prufungsamt:
http://www.uni-regensburg.de/mathematik/fakultaet/studium/ansprechpersonen/index.html
Bei vielen Fragen kann Ihnen auch die Fachschaft weiterhelfen:
http://www-cgi.uni-regensburg.de/Studentisches/FS MathePhysik/cmsms/
3

Lineare Algebra II im SS 2017Hinweise zur Prufungsvorbereitung
Prof. Dr. C. Loh/D. Fauser/J. Witzig April 2017
Ziel der Prufungsvorbereitung. Hauptziel der Prufungsvorbereitung ist die sou-verane Beherrschung des behandelten Fachgebiets. Die Prufung sichertab, dass dies tatsachlich der Fall ist, ist aber nicht das eigentliche in-haltliche Ziel der Vorlesung.
Beherrscht werden sollten also:
• aktive Kenntnis der Fachbegriffe und Formalisierungsmethoden
• Verstandnis der Ideen, die zu diesen Fachbegriffen und Formalisie-rungen fuhren
• wichtige Probleme und Fragestellungen, die das Gebiet maßgeblichbeeinflusst haben bzw. die durch das Gebiet gelost werden konnen
• wichtige Resultate und Zusammenhange innerhalb des Gebiets
• wichtige Beweis- und Losungsstrategien
• reprasentative Beispiele
• Anwendungen des Gebiets und Interaktion mit anderen Gebieten
• Fahigkeit, auf all diesen Kenntnissen weiter aufzubauen.
Erreichen dieses Ziels. Wahrend der Vorlesungszeit:
• aktive Auseinandersetzung mit den Ubungsaufgaben
• Erlernen des Fachwissens (Definitionen, Satze), notfalls mit Kar-teikarten
• weiteres aktives Uben mit zusatzlichen Aufgaben und Vertiefungder Kenntnisse durch Selbststudium (Bibliothek!)
• Bei Fragen: Betreuungsangebote nutzen!
Kurz vor der Prufung:
• Kann ich mein Wissen prazise und verstandlich prasentieren? (Daskann man einfach an anderen Kommilitonen ausprobieren . . . )
• Was konnten typische Prufungsfragen sein? Was sind gute Losun-gen zu diesen Fragen?
• Wie belastbar sind meine Fahigkeiten? Was muss ich noch verbes-sern?
Bewertungskriterien. In der Prufung werden folgende Fahigkeiten abgepruft:
• Fachwissen (Definitionen, Satze, Beweise, Beispiele, Anschauung,Zusammenhange, Anwendungen, . . . )
• prazises und korrektes, logisch schlussiges, Formulieren und Argu-mentieren
• Losen von Standardproblemen
• Kreativitat bei der Losung von Problemen
Viel Erfolg bei der Prufung!

Lineare Algebra II im SS 2017Hinweise zu den Ubungsaufgaben
Prof. Dr. C. Loh/D. Fauser/J. Witzig April 2017
Ziel der Ubungsaufgaben. Ziel der Ubungsaufgaben ist, sich aktiv mit den be-handelten Definitionen, Satzen, Beispielen und Beweistechniken ausein-anderzusetzen und zu lernen, damit umzugehen.
Wie bearbeitet man eine Ubungsaufgabe?
• Beginnen Sie mit der Bearbeitung an dem Tag, an dem das Ubungs-blatt erscheint – manche Dinge brauchen einfach ein paar TageZeit.
• Lesen Sie sich alle Aufgaben grundlich durch. Kennen Sie alle auf-tretenden Begriffe? Verstehen Sie, was in den Aufgaben verlangtwird?
• Was sind die Voraussetzungen? Was ist zu zeigen? Wie konntendiese Dinge zusammenhangen? Gibt es Satze aus der Vorlesung,die auf diese Situation passen?
• Welche Losungsstrategien bzw. Beweisstrategien passen auf dieAufgabe? Kann man einfach direkt mit den Definitionen arbeitenund so zum Ziel gelangen?
• Ist die Aufgabe plausibel? Versuchen Sie die behaupteten Aussa-gen, an einfachen Beispielen nachzuvollziehen!
• Falls Sie die Aufgabe unplausibel finden, konnen Sie versuchen, siezu widerlegen und untersuchen, woran dieses Vorhaben scheitert.
• Kann man die Situation durch eine geeignete Skizze graphisch dar-stellen?
• Versuchen Sie, das Problem in kleinere Teilprobleme aufzuteilen.Konnen Sie diese Teilprobleme losen?
• Verwenden Sie viel Schmierpapier und geben Sie sich genug Zeit, ander Aufgabe herumzuexperimentieren! Selbst wenn Sie die Aufgabenicht vollstandig losen, werden Sie auf diese Weise viel lernen, daSie sich aktiv mit den Begriffen und Satzen auseinandersetzen.
• Wenn Sie nicht weiterwissen, diskutieren Sie die Aufgabe mit Kom-militonen. Lassen Sie sich aber auf keinen Fall dazu verleiten, ein-fach Losungen irgendwo abzuschreiben. Mathematik kann man nurlernen, wenn man aktiv damit arbeitet und seine Gedanken selbstformuliert!
Wie schreibt man eine Losung auf?
• Gliedern Sie Ihre Losung sauber in Voraussetzung, Behauptungund Beweis.
• Teilen Sie Ihre Beweise in sinnvolle Zwischenschritte auf.

• Achten Sie darauf, dass Sie verstandlich formulieren und dass dieArgumente logisch aufeinander aufbauen.
• Ist Ihre Argumentationskette wirklich luckenlos? Seien Sie miss-trauisch gegenuber Ihrer eigenen Losung und versuchen Sie, allepotentiellen Schwachpunkte ausfindig zu machen!
• Wenn Sie einzelne Beweisschritte nicht vollstandig durchfuhrenkonnen, konnen Sie in Ihrer Losung darauf hinweisen – die restlicheLosung kann trotzdem Punkte erhalten!
• Achten Sie darauf, dass Sie alle Bezeichner einfuhren und dass Siemathematische Symbole und Fachbegriffe korrekt verwenden.
• Versuchen Sie, sich so prazise wie moglich auszudrucken!
• Versuchen Sie, indirekte Argumente so weit wie moglich zu vermei-den.
• Uberprufen Sie am Ende, ob Sie wirklich das bewiesen haben, wasSie ursprunglich behauptet haben.
• Oft ist es auch hilfreich zu uberprufen, ob/wie alle in der Aufgabegegebenen Voraussetzungen verwendet wurden.
• Wurden Sie Ihre Losung verstehen, wenn Sie sie zum ersten Mallesen wurden?
• Alles, was Sie abgeben, mussen Sie eigenstandig formuliert undauch verstanden haben.
• Geben Sie Literaturangaben an, wenn Sie zusatzliche Quellen ver-wendet haben.
Bewertungskriterien. Bei der Bewertung der abgegebenen Losungen wird auffolgendes geachtet:
• Wurde die gestellte Aufgabe vollstandig gelost?
• Wurden Voraussetzung, Behauptung, Beweis deutlich voneinandergetrennt?
• Stimmen die Voraussetzungen? Sind sie sauber formuliert?
• Stimmen die Behauptungen/Zwischenbehauptungen? Sind sie sau-ber formuliert?
• Ist die Argumentationskette der Beweisschritte vollstandig?
• Sind die Beweisschritte prazise formuliert und verstandlich?
• Sind alle Bezeichner eingefuhrt?
• Werden mathematische Symbole und Fachbegriffe korrekt einge-setzt?
• Ist an jeder Stelle des Beweises klar, was passiert?
• Werden die neu erlernten Begriffe und Techniken passend einge-setzt?
Viel Erfolg und viel Spass bei den Ubungen!

D 8 D. Allgemeine Hinweise

Literaturverzeichnis
Bitte beachten Sie, dass das Literaturverzeichnis im Laufe der Vor-lesung wachsen wird und sich daher auch die Nummern der Quellenandern werden!
[1] M. Aigner, G.M. Ziegler, Proofs from The Book, dritte Auflage, Sprin-ger, 2004. Zitiert auf Seite: 79
[2] A. Beutelspacher. Das ist o.B.d.A. trivial!, neunte Auflage, Vieweg+-Teubner, 2009.http://link.springer.com/book/10.1007%2F978-3-8348-9599-8 Zitiertauf Seite:
[3] S. Bosch. Lineare Algebra, funfte Auflage, Springer Spektrum, 2014.Zitiert auf Seite: 95, 101, 128
[4] M. Brandenburg. Einfhrung in die Kategorientheorie: Mit ausfhrlichenErklrungen und zahlreichen Beispielen, Springer-Spektrum, 2015. Zi-tiert auf Seite: A 5
[5] K. Janich. Lineare Algebra, 11. Auflage, Springer, 2013. Zitiert aufSeite:
[6] K. Janich. Vektoranalysis, funfte Auflage, Springer, 2005. Zitiert aufSeite: 164, A 17
[7] T. Kaczynski, K. Mischaikow, M. Mrozek. Computational Homology,Applied Mathematical Sciences, Band 157, Springer, 2004. Zitiert aufSeite: 98

C 2 Literaturverzeichnis
[8] C. Loh. Geometrie, Vorlesungsskript (SS 2016), Universitat Regens-burg, 2016.http://www.mathematik.uni-r.de/loeh/teaching/geometrie ss16/lecture notes.pdfZitiert auf Seite: 13, 16
[9] S. MacLane. Categories for the Working Mathematician, zweite Auf-lage, Springer, 1998. Zitiert auf Seite: A 5
[10] J. Matousek. Thirty-three Miniatures. Mathematical and AlgorithmicApplications of Linear Algebra. AMS Student Mathematical Library,Band 53, AMS, 2010. Zitiert auf Seite: 150
[11] S.D. Schoen. Understanding Common Factor Attacks: An RSA-Cracking Puzzle http://www.loyalty.org/∼schoen/rsa/ Zitiert auf Sei-te: 86













![Lineare Algebra I Bernd Ammann, WS 2007/08 · ... Lineare Algebra und Analytische Geometrie [8] Falko Lorenz, Lineare Algebra I und II [9] Serge Lang, Linear Algebra, Second Edition,](https://img.pdfslide.org/doc/110x75/5c66806a09d3f252168c7903/lineare-algebra-i-bernd-ammann-ws-200708-lineare-algebra-und-analytische.jpg)