Embed Size (px)
Citation preview

Lotka-Volterra
Till Rehmert
Hemmat Djamali 10.06.2015
Inhalt
• Motivation
• Räuber-Beute-System / Lotka-Volterra
• Eingriffe von außen
• Logistisches Wachstum
• Jacobi-Matrix
• Drei Spezies
• Infektion/Epidemie
• Wirtschaftsmodell
Motivation
Wie kam Lotka und Volterra auf die Idee?
Motivation
Wie kam Lotka und Volterra auf die Idee?
→ Kurz vor dem Ende des ersten Weltkrieg:
Anteil der Jagdfische im Gegensatz zu den
Beutefischen zu hoch.
Danach stabilisierte sich das wieder.
Motivation
Wie kam Lotka und Volterra auf die Idee?
→ Kurz vor dem Ende des ersten Weltkrieg:
Anteil der Jagdfische im Gegensatz zu den
Beutefischen zu hoch.
Danach stabilisierte sich das wieder.
Lotka und Volterra kamen getrennt auf die selbe
Gleichung
Problemstellung
Problemstellung
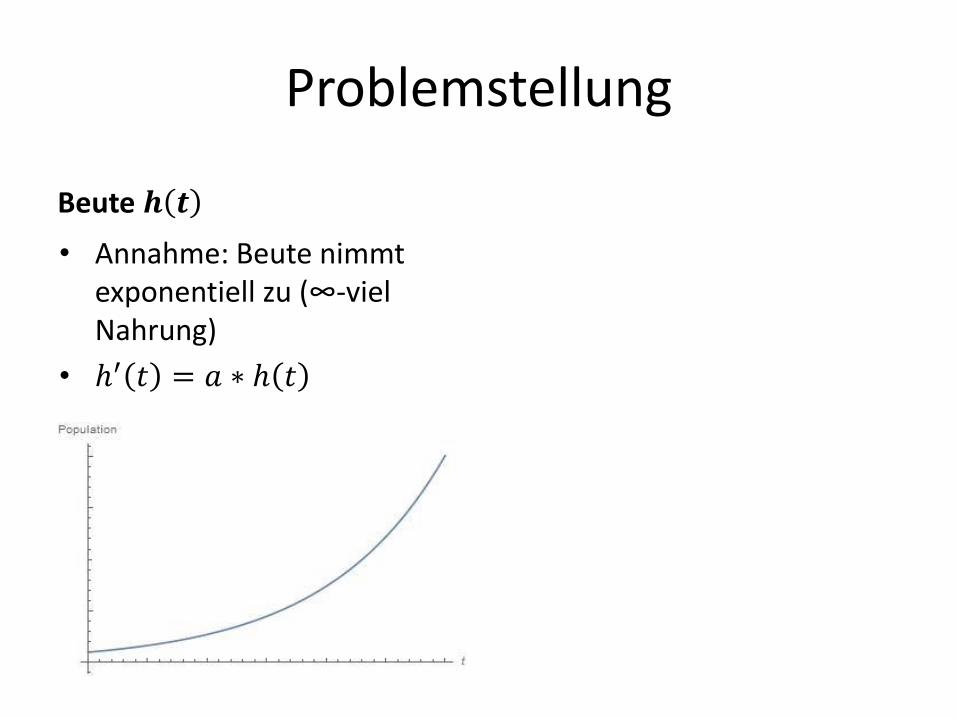
Beute 𝒉 𝒕
• Annahme: Beute nimmt exponentiell zu (∞-viel Nahrung)
• ℎ′ 𝑡 = 𝑎 ∗ ℎ 𝑡
Problemstellung
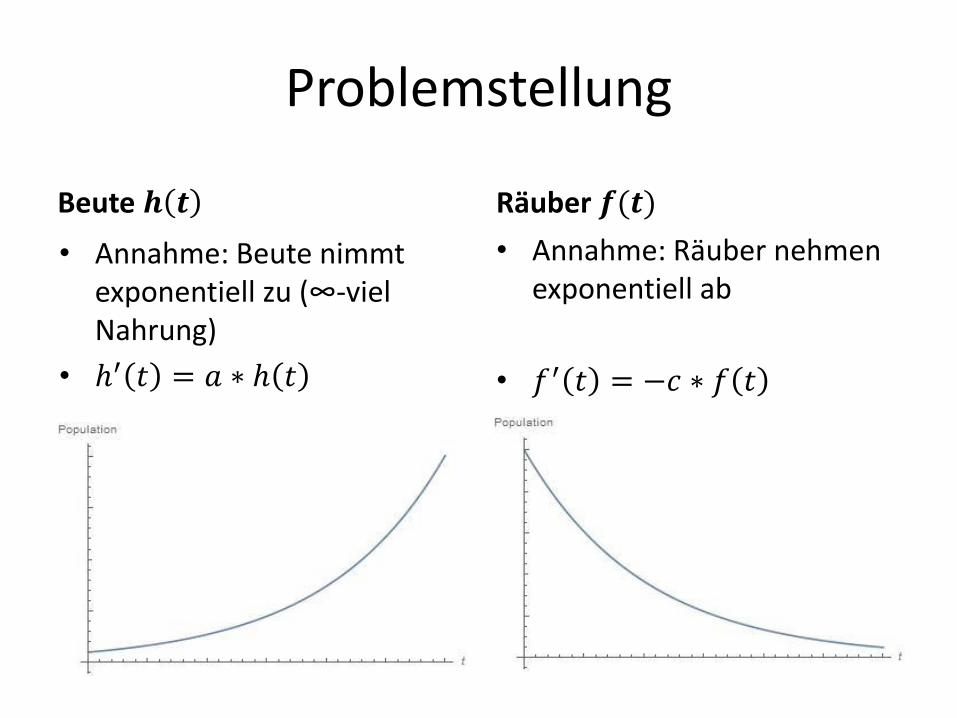
Beute 𝒉 𝒕
• Annahme: Beute nimmt exponentiell zu (∞-viel Nahrung)
• ℎ′ 𝑡 = 𝑎 ∗ ℎ 𝑡
Räuber 𝒇(𝒕)
• Annahme: Räuber nehmen exponentiell ab
• 𝑓′ 𝑡 = −𝑐 ∗ 𝑓 𝑡
Problemstellung
ℎ′ 𝑡 = 𝑎 ∗ ℎ 𝑡
𝑓′ 𝑡 = −𝑐 ∗ 𝑓 𝑡
𝑎 ≔ 𝑉𝑒𝑟𝑚𝑒ℎ𝑟𝑢𝑛𝑔𝑠𝑟𝑎𝑡𝑒
𝑐 ≔ 𝑍𝑢𝑛𝑎ℎ𝑚𝑒𝑓𝑎𝑘𝑡𝑜𝑟 𝑑𝑒𝑟 𝑅ä𝑢𝑏𝑒𝑟 𝑏𝑒𝑖 𝐵𝑒𝑔𝑒𝑔𝑛𝑢𝑛𝑔
Problemstellung
ℎ′ 𝑡 = 𝑎 ∗ ℎ 𝑡
𝑓′ 𝑡 = −𝑐 ∗ 𝑓 𝑡
𝑎 ≔ 𝑉𝑒𝑟𝑚𝑒ℎ𝑟𝑢𝑛𝑔𝑠𝑟𝑎𝑡𝑒
𝑐 ≔ 𝑆𝑡𝑒𝑟𝑏𝑒𝑟𝑎𝑡𝑒
Zahl der möglichen Begegnungen: 𝑓 𝑡 ∗ ℎ(𝑡)

Problemstellung
ℎ′ 𝑡 = 𝑎 ∗ ℎ 𝑡 −𝑏 ∗ 𝑓 𝑡 ℎ 𝑡
𝑓′ 𝑡 = −𝑐 ∗ 𝑓 𝑡 +𝑑 ∗ 𝑓 𝑡 ℎ 𝑡
𝑎 ≔ 𝑉𝑒𝑟𝑚𝑒ℎ𝑟𝑢𝑛𝑔𝑠𝑟𝑎𝑡𝑒
𝑏 ≔ 𝑆𝑡𝑒𝑟𝑏𝑒𝑟𝑎𝑡𝑒 𝑑𝑒𝑟 𝐵𝑒𝑢𝑡𝑒 𝑏𝑒𝑖 𝐵𝑒𝑔𝑒𝑔𝑛𝑢𝑛𝑔
𝑐 ≔ 𝑆𝑡𝑒𝑟𝑏𝑒𝑟𝑎𝑡𝑒
𝑑 ≔ 𝑍𝑢𝑛𝑎ℎ𝑚𝑒𝑓𝑎𝑘𝑡𝑜𝑟 𝑑𝑒𝑟 𝑅ä𝑢𝑏𝑒𝑟 𝑏𝑒𝑖 𝐵𝑒𝑔𝑒𝑔𝑛𝑢𝑛𝑔
Zahl der möglichen Begegnungen: 𝑓 𝑡 ∗ ℎ(𝑡)
Lotka-Volterra Gleichungen
• Wähle Anfangspopulation:
(ℎ 0 = ℎ0, 𝑓 0 = 𝑓0)
ℎ0 = 0 oder 𝑓0 = 0
Spezielle Lösung
Lotka-Volterra Gleichungen
• Wähle Anfangspopulation:
(ℎ 0 = ℎ0, 𝑓 0 = 𝑓0)
ℎ0 = 0 oder 𝑓0 = 0
Spezielle Lösungen:
ℎ0𝑒𝑎𝑡 , 0 , 0, 𝑓0𝑒
−𝑐𝑡 , 0,0 ,𝑐
𝑑,𝑎
𝑏
(ℎ𝑔, 𝑓𝑔) =𝑐
𝑑,𝑎
𝑏 kritischer Punkt
Spezielle Lösung
Lotka-Volterra Gleichungen
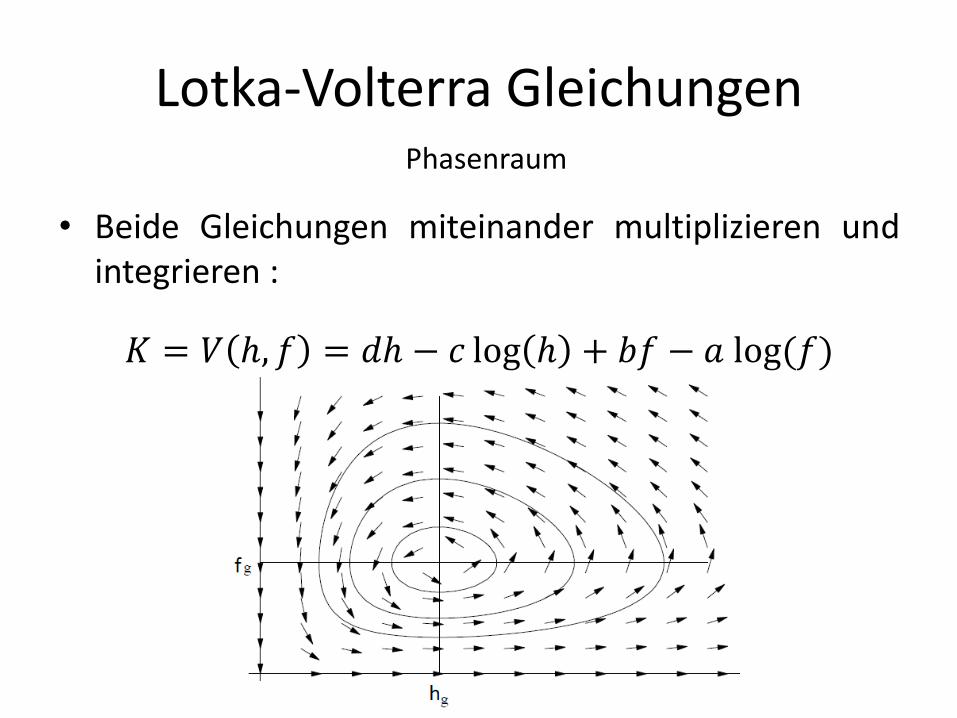
• Beide Gleichungen miteinander multiplizieren und integrieren :
𝐾 = 𝑉 ℎ, 𝑓 = 𝑑ℎ − 𝑐 log ℎ + 𝑏𝑓 − 𝑎 log (𝑓)
Phasenraum
Lotka-Volterra Gleichungen
• Beide Gleichungen miteinander multiplizieren und integrieren :
𝐾 = 𝑉 ℎ, 𝑓 = 𝑑ℎ − 𝑐 log ℎ + 𝑏𝑓 − 𝑎 log (𝑓)
Phasenraum
Eingriffe von außen
ℎ′ 𝑡 = 𝑎 ℎ 𝑡 − 𝑏 𝑓 𝑡 ℎ 𝑡
𝑓′ 𝑡 = −𝑐 𝑓 𝑡 + 𝑑 𝑓 𝑡 ℎ 𝑡
𝑎 ≔ 𝑉𝑒𝑟𝑚𝑒ℎ𝑟𝑢𝑛𝑔𝑠𝑟𝑎𝑡𝑒
𝑏 ≔ 𝑆𝑡𝑒𝑟𝑏𝑒𝑟𝑎𝑡𝑒 𝑑𝑒𝑟 𝐵𝑒𝑢𝑡𝑒 𝑏𝑒𝑖 𝐵𝑒𝑔𝑒𝑔𝑛𝑢𝑛𝑔
𝑐 ≔ 𝑆𝑡𝑒𝑟𝑏𝑒𝑟𝑎𝑡𝑒
𝑑 ≔ 𝑍𝑢𝑛𝑎ℎ𝑚𝑒𝑓𝑎𝑘𝑡𝑜𝑟 𝑑𝑒𝑟 𝑅ä𝑢𝑏𝑒𝑟 𝑏𝑒𝑖 𝐵𝑒𝑔𝑒𝑔𝑛𝑢𝑛𝑔
Differentialgleichung
Eingriffe von außen
ℎ′ 𝑡 = 𝑎 ℎ 𝑡 − 𝑏 𝑓 𝑡 ℎ 𝑡 − ∆𝑎 ℎ(𝑡)
𝑓′ 𝑡 = −𝑐 𝑓 𝑡 + 𝑑 𝑓 𝑡 ℎ 𝑡 − ∆𝑐 𝑓(𝑡)
𝑎 ≔ 𝑉𝑒𝑟𝑚𝑒ℎ𝑟𝑢𝑛𝑔𝑠𝑟𝑎𝑡𝑒
𝑏 ≔ 𝑆𝑡𝑒𝑟𝑏𝑒𝑟𝑎𝑡𝑒 𝑑𝑒𝑟 𝐵𝑒𝑢𝑡𝑒 𝑏𝑒𝑖 𝐵𝑒𝑔𝑒𝑔𝑛𝑢𝑛𝑔
𝑐 ≔ 𝑆𝑡𝑒𝑟𝑏𝑒𝑟𝑎𝑡𝑒
𝑑 ≔ 𝑍𝑢𝑛𝑎ℎ𝑚𝑒𝑓𝑎𝑘𝑡𝑜𝑟 𝑑𝑒𝑟 𝑅ä𝑢𝑏𝑒𝑟 𝑏𝑒𝑖 𝐵𝑒𝑔𝑒𝑔𝑛𝑢𝑛𝑔
∆𝑎 ≔ 𝐸𝑖𝑛𝑔𝑟𝑖𝑓𝑓𝑒 𝑝𝑟𝑜 𝑍𝑒𝑖𝑡𝑒𝑖𝑛ℎ𝑒𝑖𝑡
∆𝑐 ≔ 𝐸𝑖𝑛𝑔𝑟𝑖𝑓𝑓𝑒 𝑝𝑟𝑜 𝑍𝑒𝑖𝑡𝑒𝑖𝑛ℎ𝑒𝑖𝑡
Voraussetzung: ∆𝑎< 𝑎 und ∆𝑐< 𝑐
Differentialgleichung
Eingriffe von außen
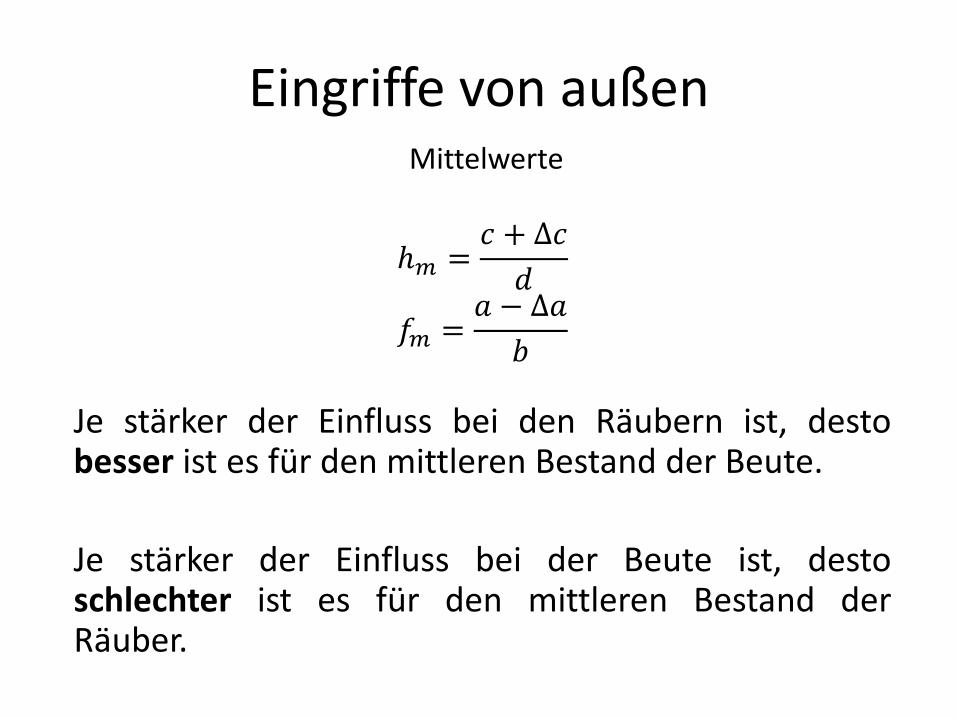
ℎ𝑚 =𝑐 + ∆𝑐
𝑑
𝑓𝑚 =𝑎 − ∆𝑎
𝑏
Mittelwerte
Eingriffe von außen
ℎ𝑚 =𝑐 + ∆𝑐
𝑑
𝑓𝑚 =𝑎 − ∆𝑎
𝑏
Je stärker der Einfluss bei den Räubern ist, desto besser ist es für den mittleren Bestand der Beute.
Je stärker der Einfluss bei der Beute ist, desto schlechter ist es für den mittleren Bestand der Räuber.
Mittelwerte
Beschränktes Wachstum der Beute
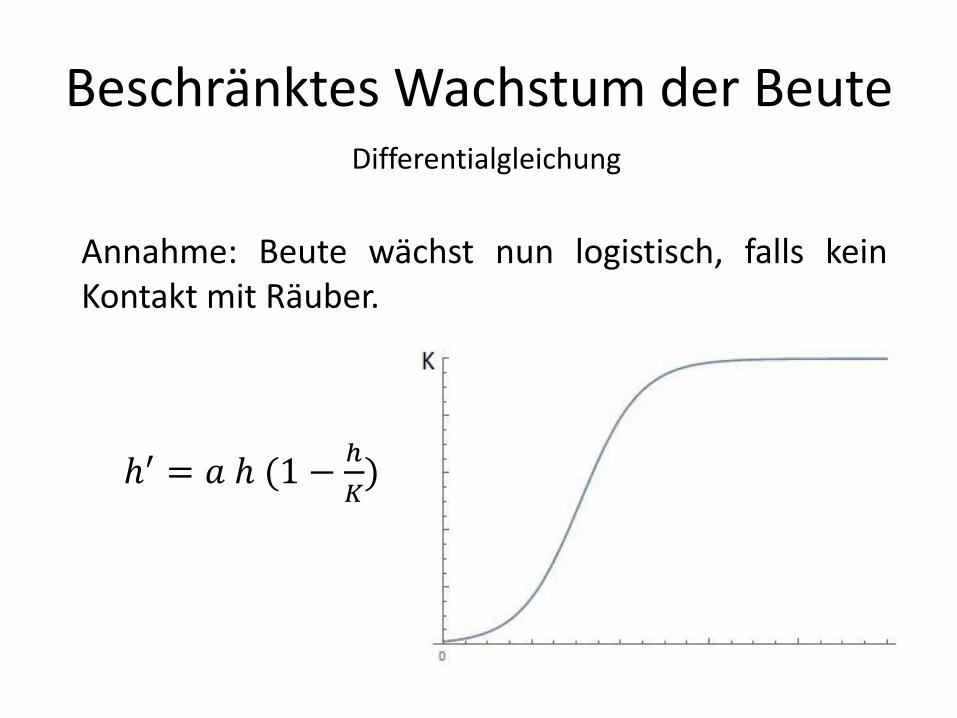
Annahme: Beute wächst nun logistisch, falls kein Kontakt mit Räuber.
ℎ′ = 𝑎 ℎ (1 −ℎ
𝐾)
Differentialgleichung
Beschränktes Wachstum der Beute
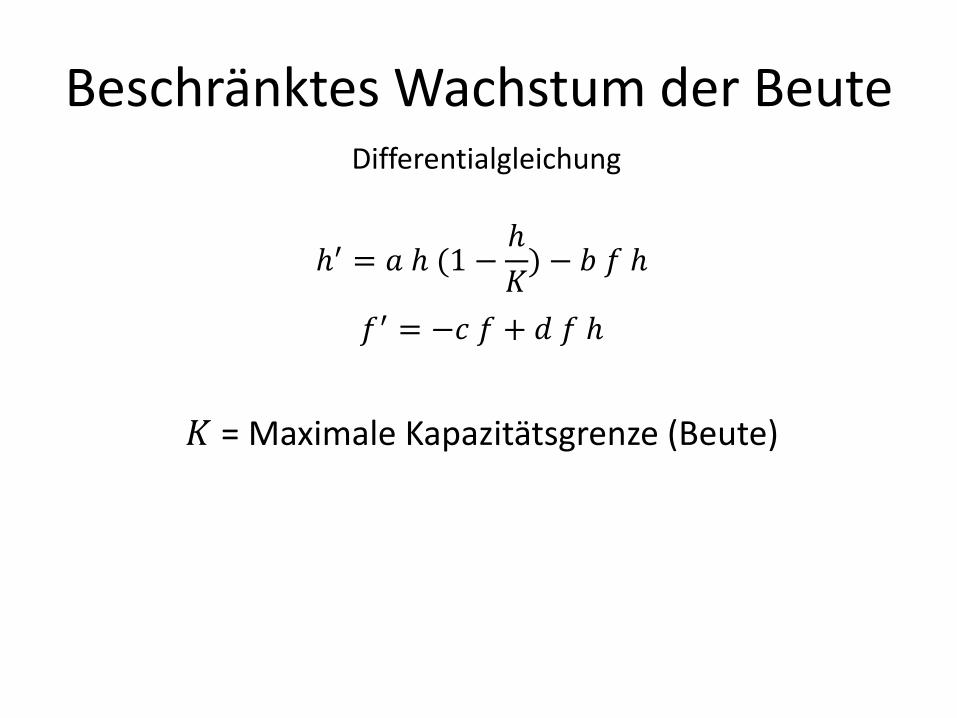
ℎ′ = 𝑎 ℎ (1 −ℎ
𝐾) − 𝑏 𝑓 ℎ
𝑓′ = −𝑐 𝑓 + 𝑑 𝑓 ℎ
𝐾 = Maximale Kapazitätsgrenze (Beute)
Differentialgleichung
Beschränktes Wachstum der Beute
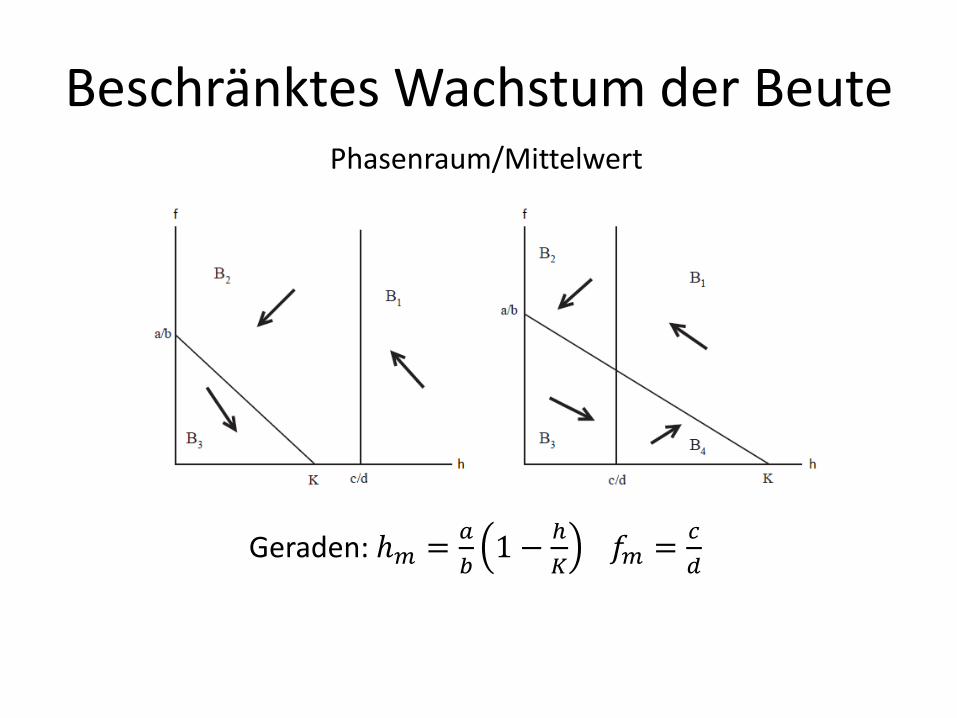
Geraden: ℎ𝑚 =𝑎
𝑏1 −
ℎ
𝐾 𝑓𝑚 =
𝑐
𝑑
Phasenraum/Mittelwert
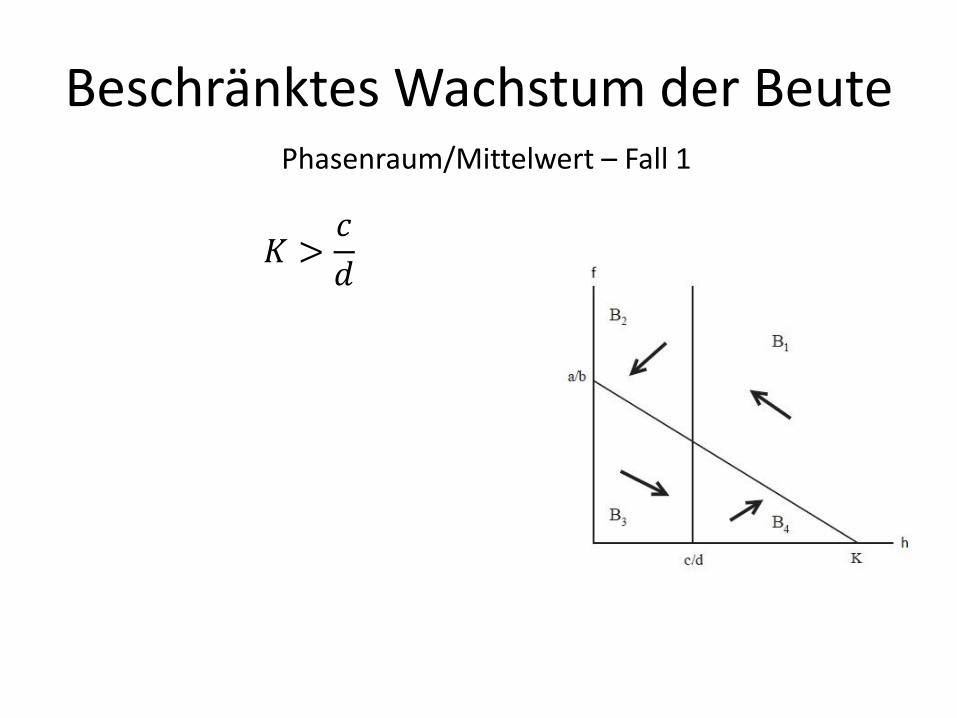
Beschränktes Wachstum der Beute
𝐾 >𝑐
𝑑
Phasenraum/Mittelwert – Fall 1
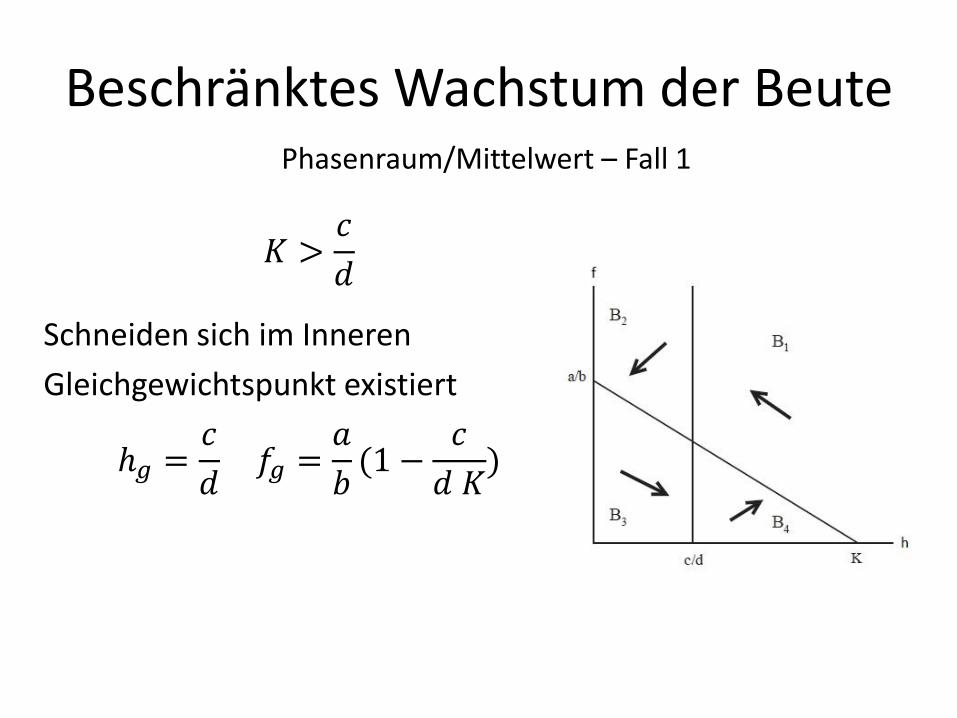
Beschränktes Wachstum der Beute
𝐾 >𝑐
𝑑
Schneiden sich im Inneren
Gleichgewichtspunkt existiert
ℎ𝑔 =𝑐
𝑑 𝑓𝑔 =
𝑎
𝑏(1 −
𝑐
𝑑 𝐾)
Phasenraum/Mittelwert – Fall 1
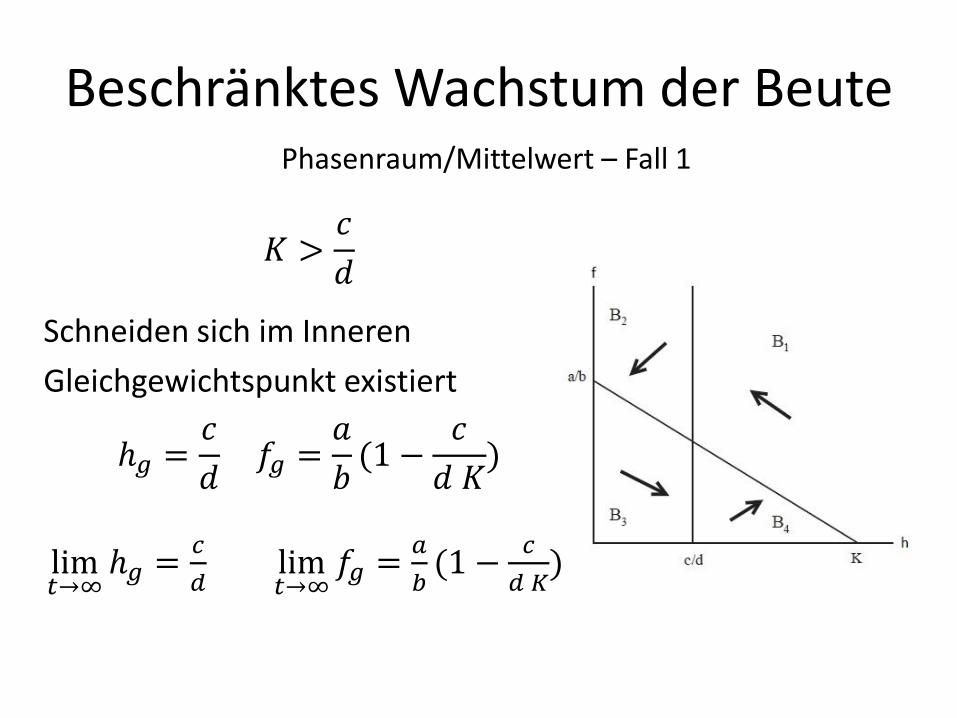
Beschränktes Wachstum der Beute
𝐾 >𝑐
𝑑
Schneiden sich im Inneren
Gleichgewichtspunkt existiert
ℎ𝑔 =𝑐
𝑑 𝑓𝑔 =
𝑎
𝑏(1 −
𝑐
𝑑 𝐾)
lim𝑡→∞
ℎ𝑔 =𝑐
𝑑 lim
𝑡→∞𝑓𝑔 =
𝑎
𝑏(1 −
𝑐
𝑑 𝐾)
Phasenraum/Mittelwert – Fall 1
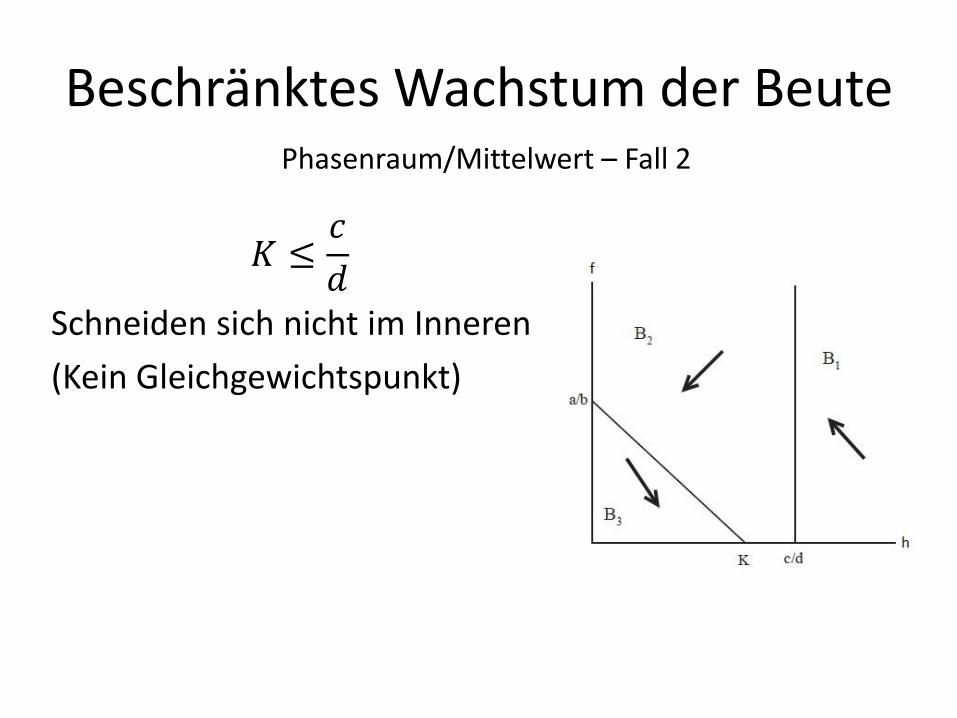
Beschränktes Wachstum der Beute
𝐾 ≤𝑐
𝑑
Schneiden sich nicht im Inneren
(Kein Gleichgewichtspunkt)
Phasenraum/Mittelwert – Fall 2
Beschränktes Wachstum der Beute
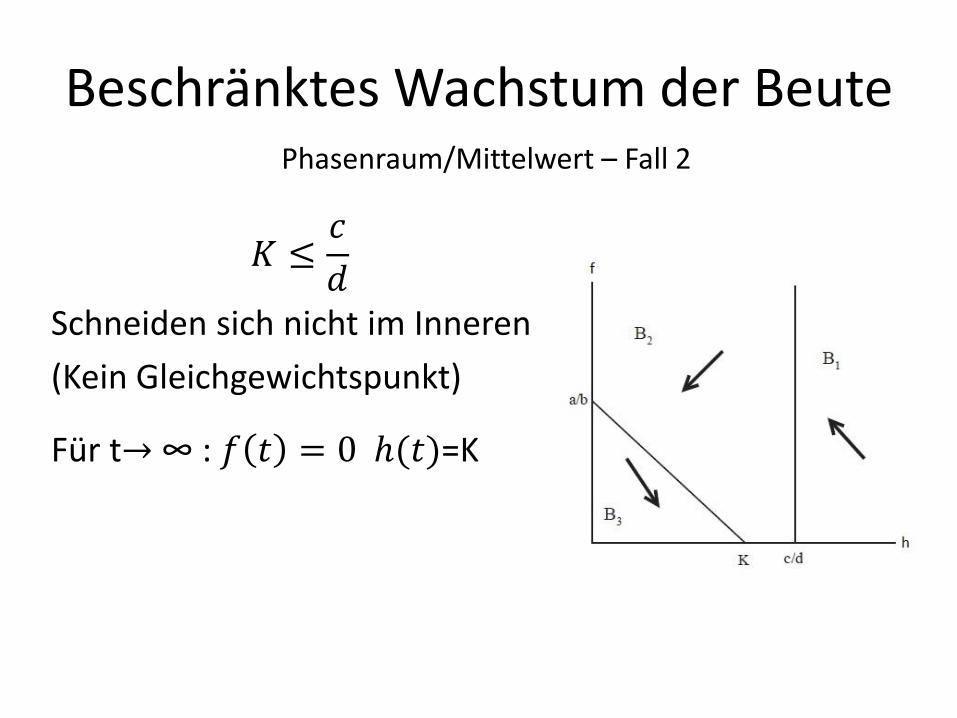
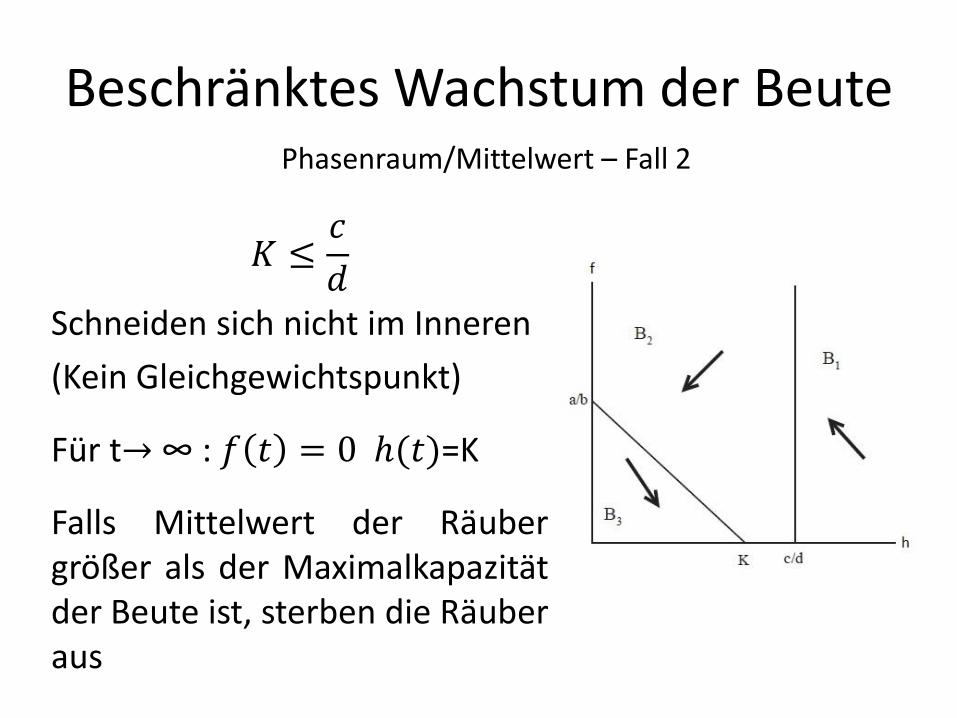
𝐾 ≤𝑐
𝑑
Schneiden sich nicht im Inneren
(Kein Gleichgewichtspunkt)
Für t→ ∞ : 𝑓 𝑡 = 0 ℎ(𝑡)=K
Phasenraum/Mittelwert – Fall 2
Beschränktes Wachstum der Beute
𝐾 ≤𝑐
𝑑
Schneiden sich nicht im Inneren
(Kein Gleichgewichtspunkt)
Für t→ ∞ : 𝑓 𝑡 = 0 ℎ(𝑡)=K
Falls Mittelwert der Räuber größer als der Maximalkapazität der Beute ist, sterben die Räuber aus
Phasenraum/Mittelwert – Fall 2
Jacobi-Matrix
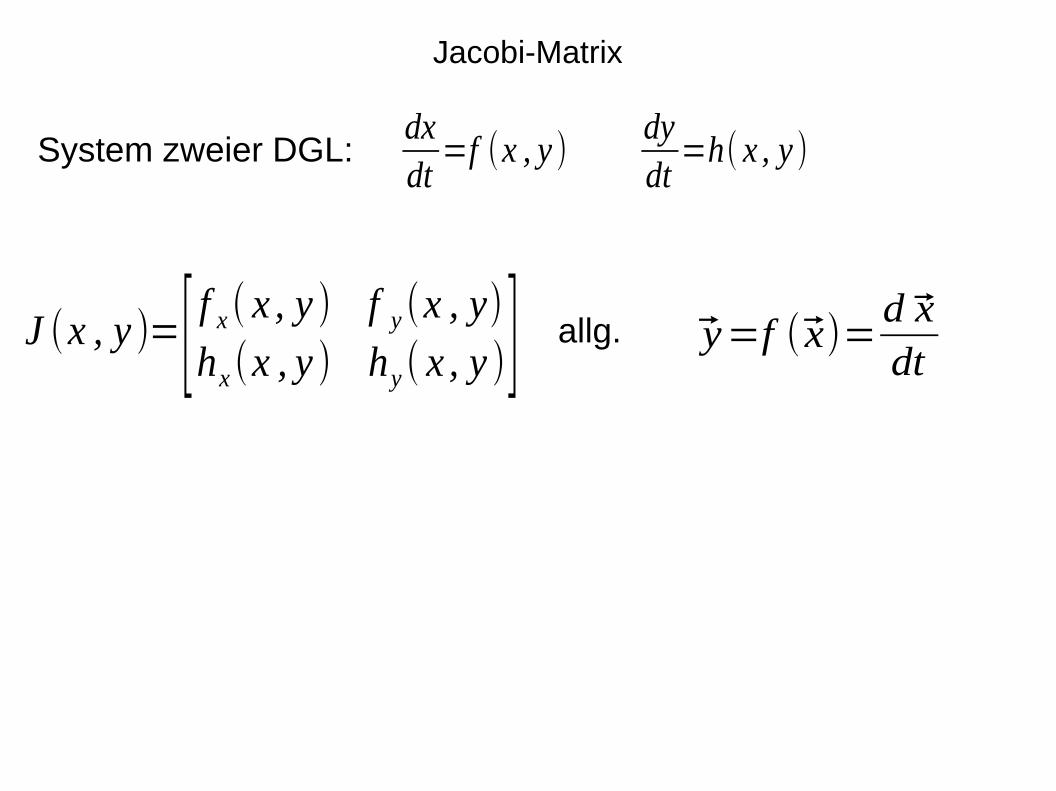
System zweier DGL:dydt
=h( x , y )dxdt
=f (x , y )
J (x , y )=[ f x ( x , y ) f y (x , y)hx (x , y ) hy ( x , y )] allg. y=f ( x)=
d xdt
Jacobi-Matrix
System zweier DGL:dydt
=h( x , y )dxdt
=f (x , y )
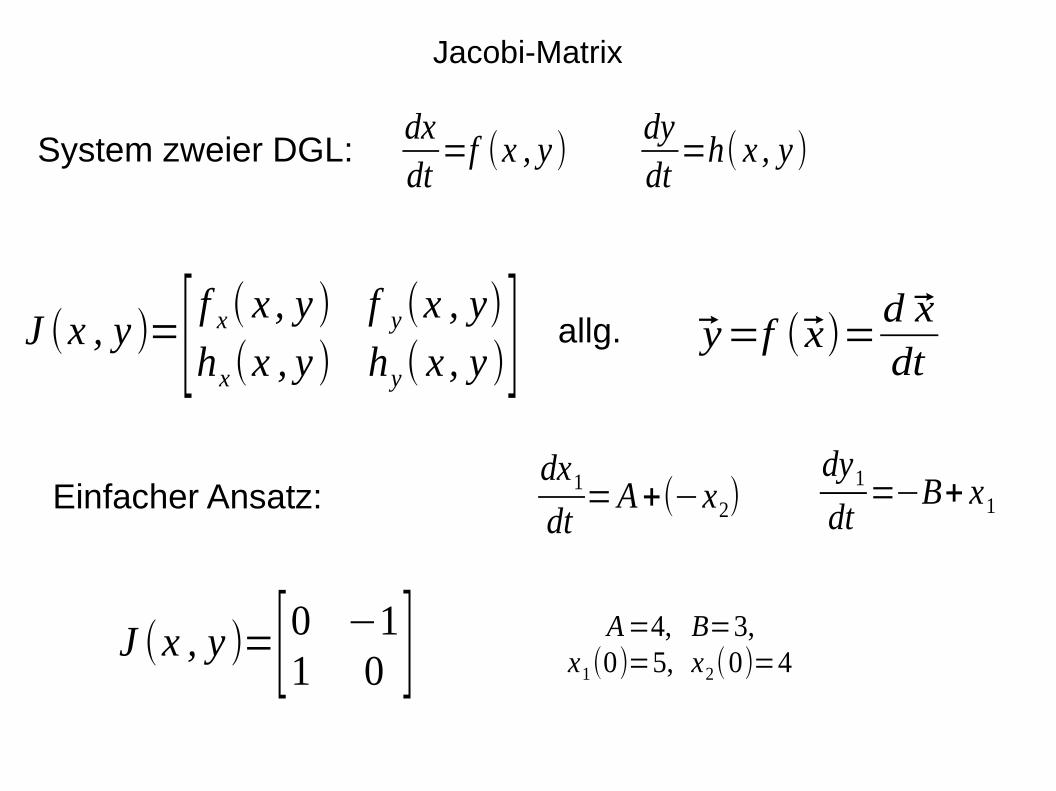
J (x , y )=[ f x ( x , y ) f y (x , y)hx (x , y ) hy ( x , y )] allg.
dx1
dt=A+(−x2)
dy1
dt=−B+ x1
y=f ( x)=d xdt
Einfacher Ansatz:
J (x , y )=[0 −11 0 ] A=4, B=3,
x1(0)=5, x2(0)=4
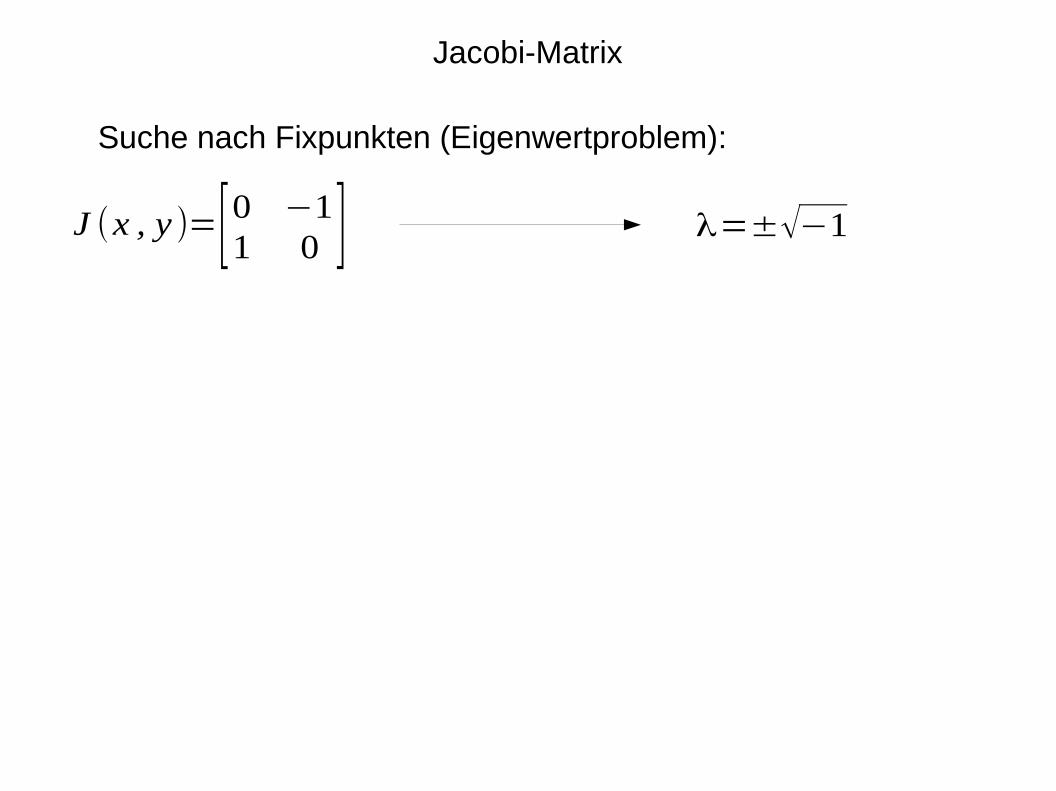
Suche nach Fixpunkten (Eigenwertproblem):
Jacobi-Matrix
J (x , y )=[0 −11 0 ] λ=±√−1
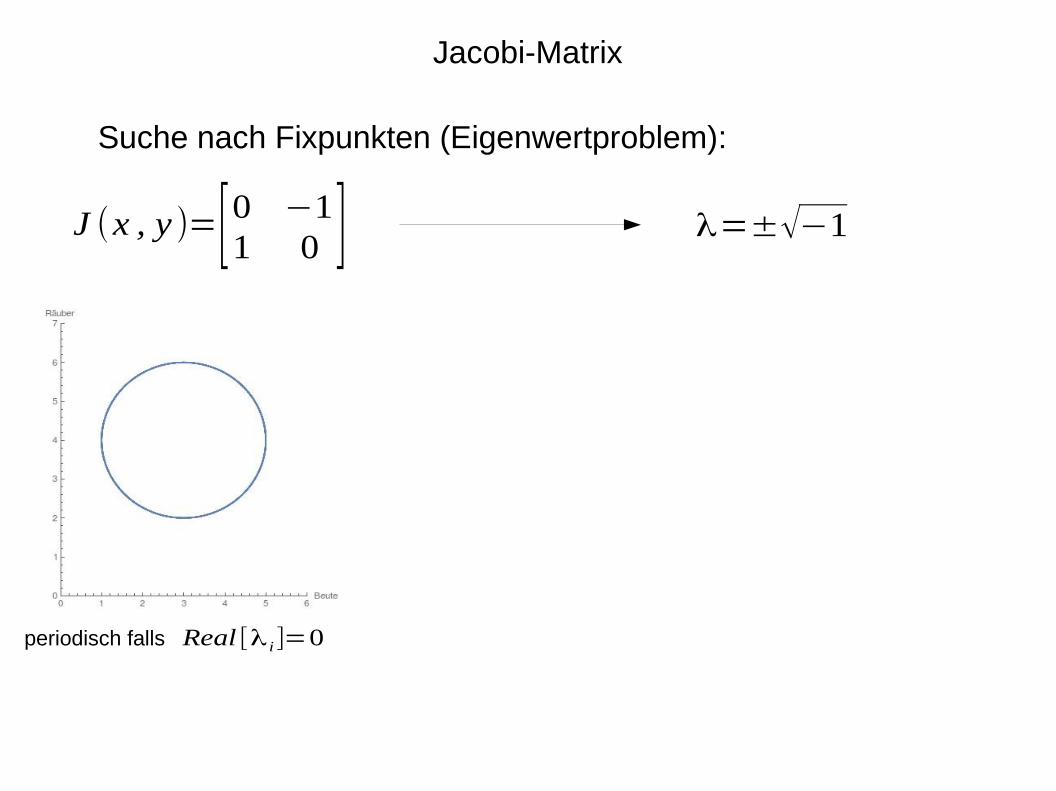
Suche nach Fixpunkten (Eigenwertproblem):
Jacobi-Matrix
J (x , y )=[0 −11 0 ] λ=±√−1
periodisch falls Real [λ i]=0
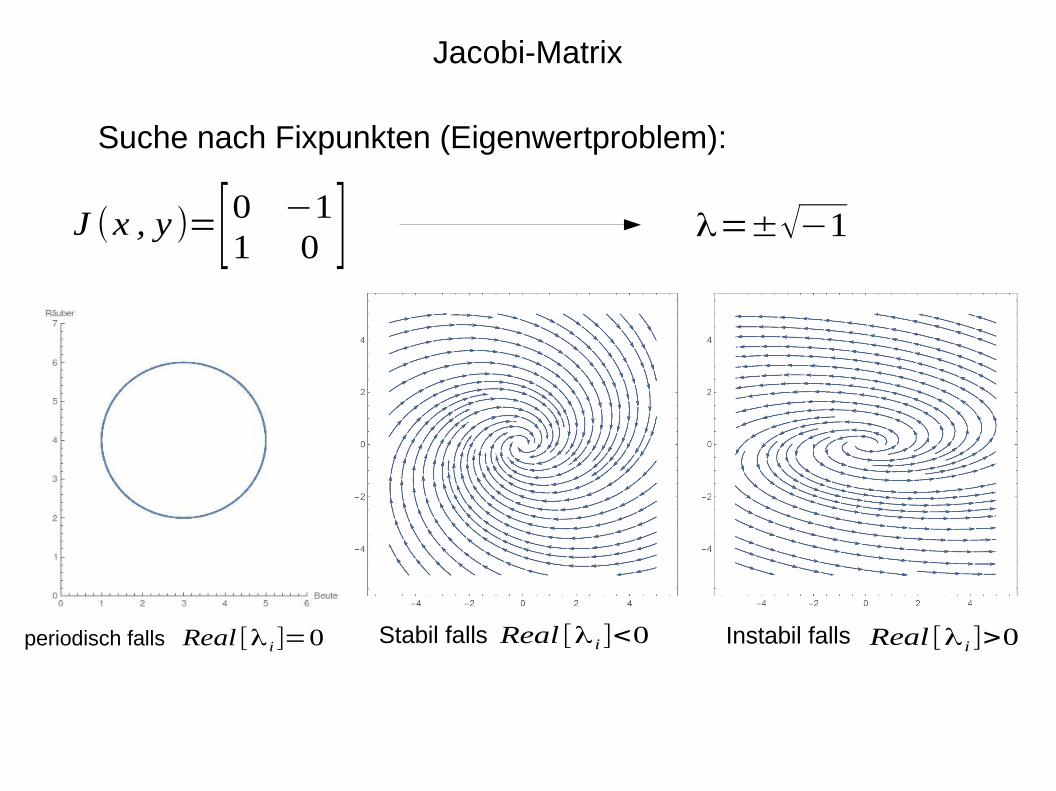
Suche nach Fixpunkten (Eigenwertproblem):
Jacobi-Matrix
J (x , y )=[0 −11 0 ] λ=±√−1
Stabil falls Instabil falls Real [λ i ]<0 Real [λ i ]>0periodisch falls Real [λ i]=0
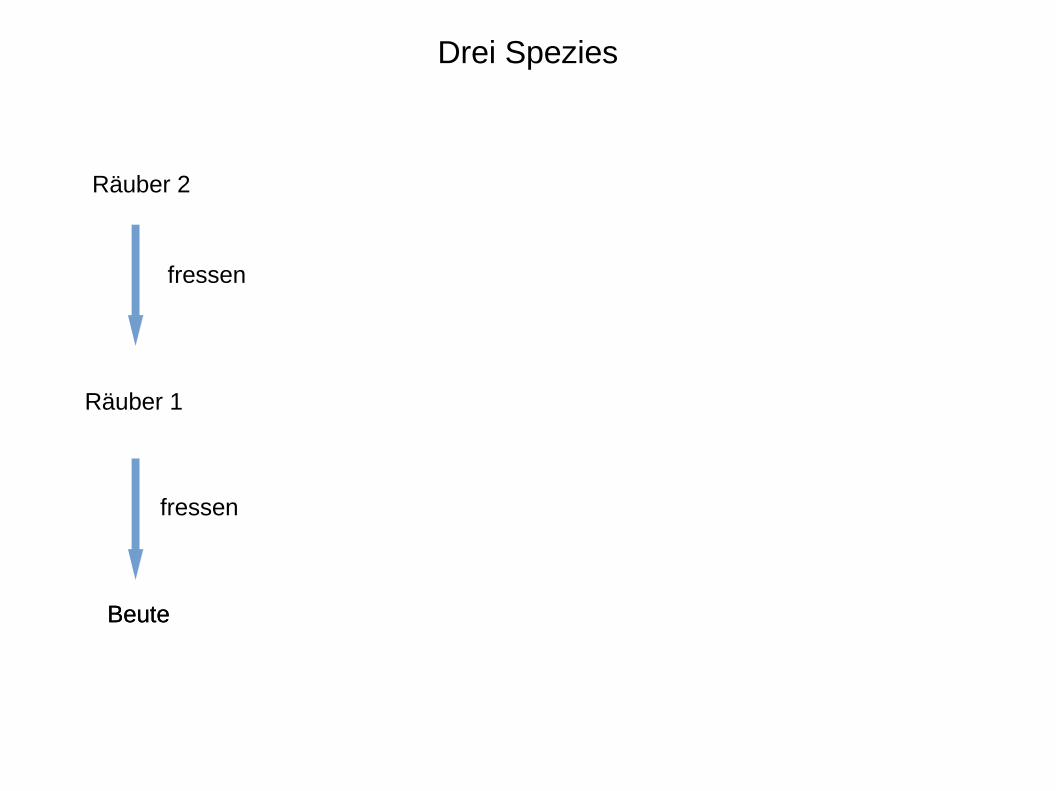
Drei Spezies
Beute
Räuber 2
Beute
Räuber 1
fressen
fressen
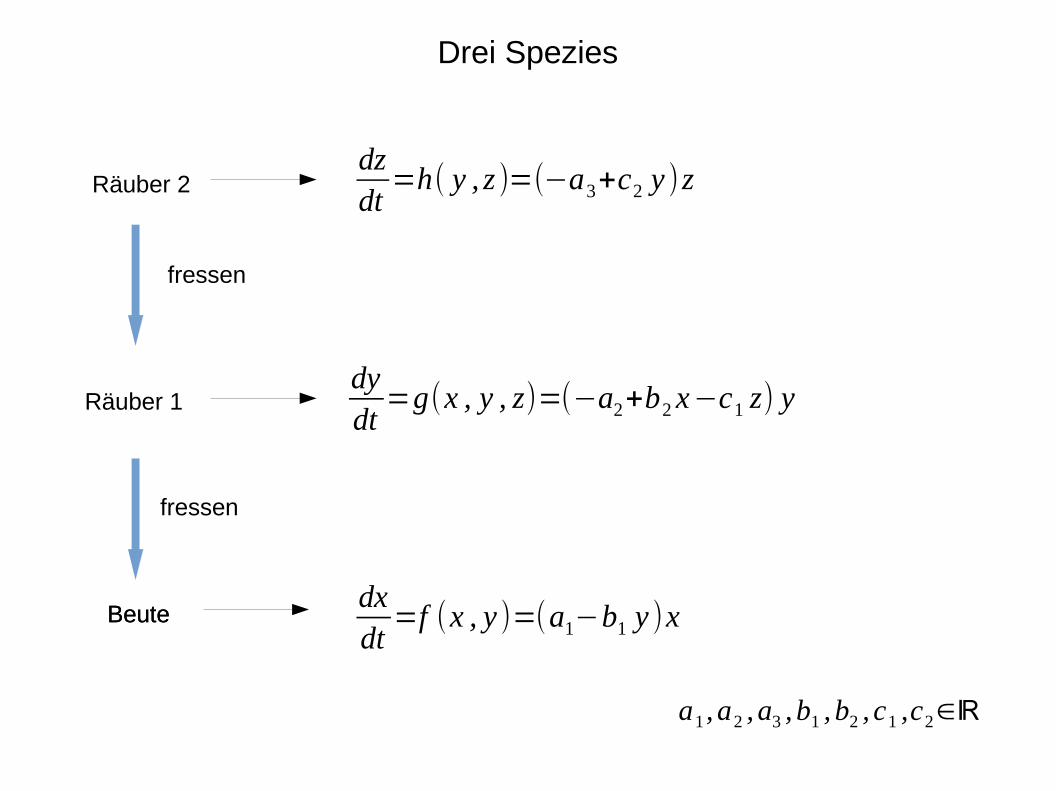
Drei Spezies
Beute
Räuber 2
Beute
Räuber 1
fressen
fressen
dxdt
=f (x , y )=(a1−b1 y )x
dydt
=g(x , y , z)=(−a2+b2 x−c1 z) y
dzdt
=h( y , z )=(−a3+c2 y )z
a1 , a2 , a3 , b1 , b2 , c1 ,c2∈ℝ
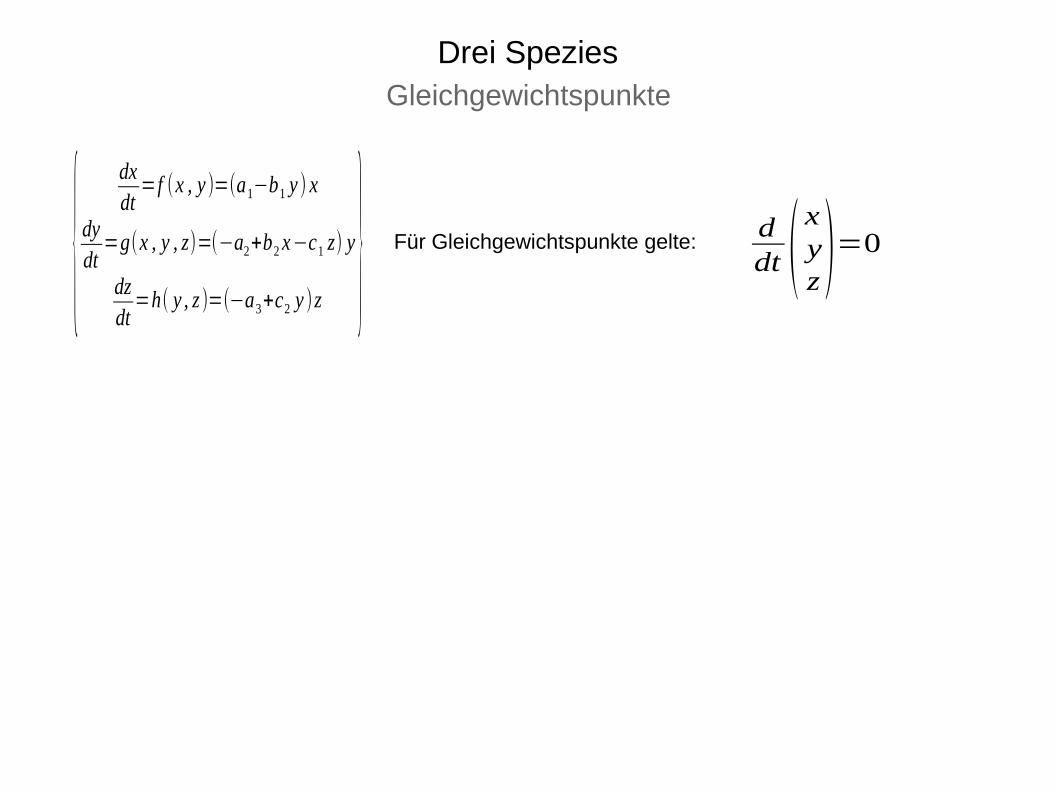
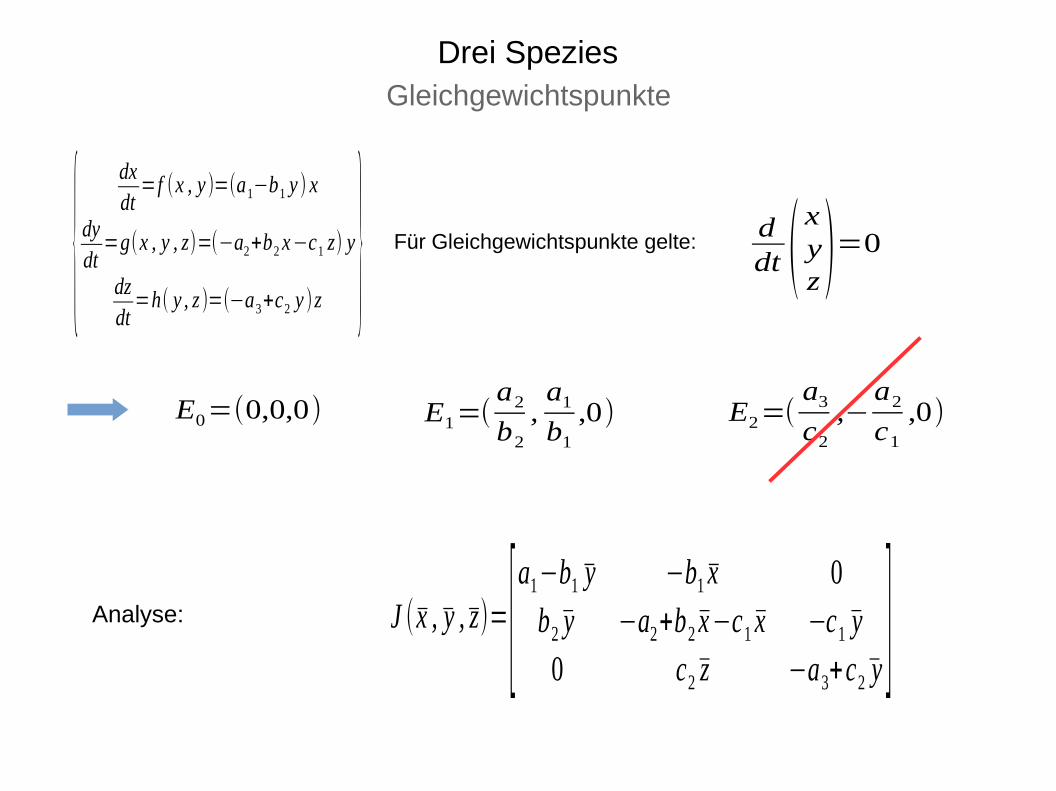
Drei SpeziesGleichgewichtspunkte
{dxdt
= f (x , y )=(a1−b1 y ) x
dydt
=g(x , y , z)=(−a2+b2 x−c1 z) y
dzdt
=h( y , z )=(−a3+c2 y )z } ddt (
xyz )=0Für Gleichgewichtspunkte gelte:
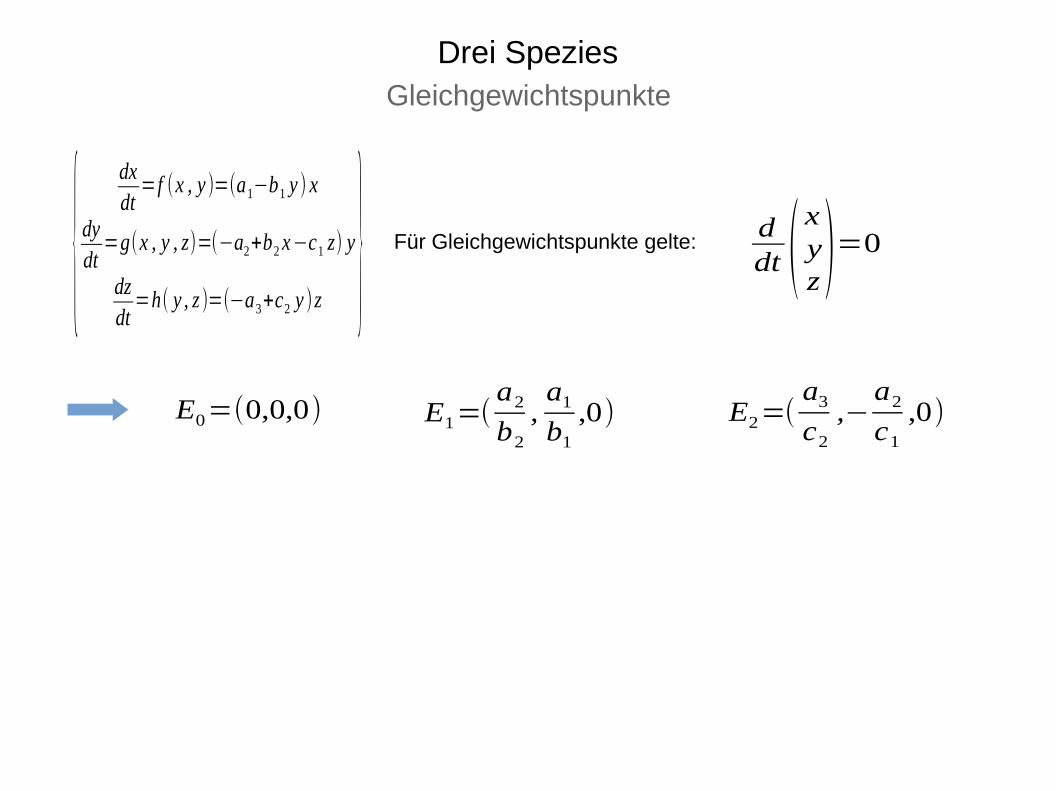
Drei Spezies
{dxdt
= f (x , y )=(a1−b1 y ) x
dydt
=g(x , y , z)=(−a2+b2 x−c1 z) y
dzdt
=h( y , z )=(−a3+c2 y )z } ddt (
xyz )=0Für Gleichgewichtspunkte gelte:
E0=(0,0,0) E1=(a2
b2
,a1
b1
,0) E2=(a3
c2
,−a2
c1
,0)
Gleichgewichtspunkte
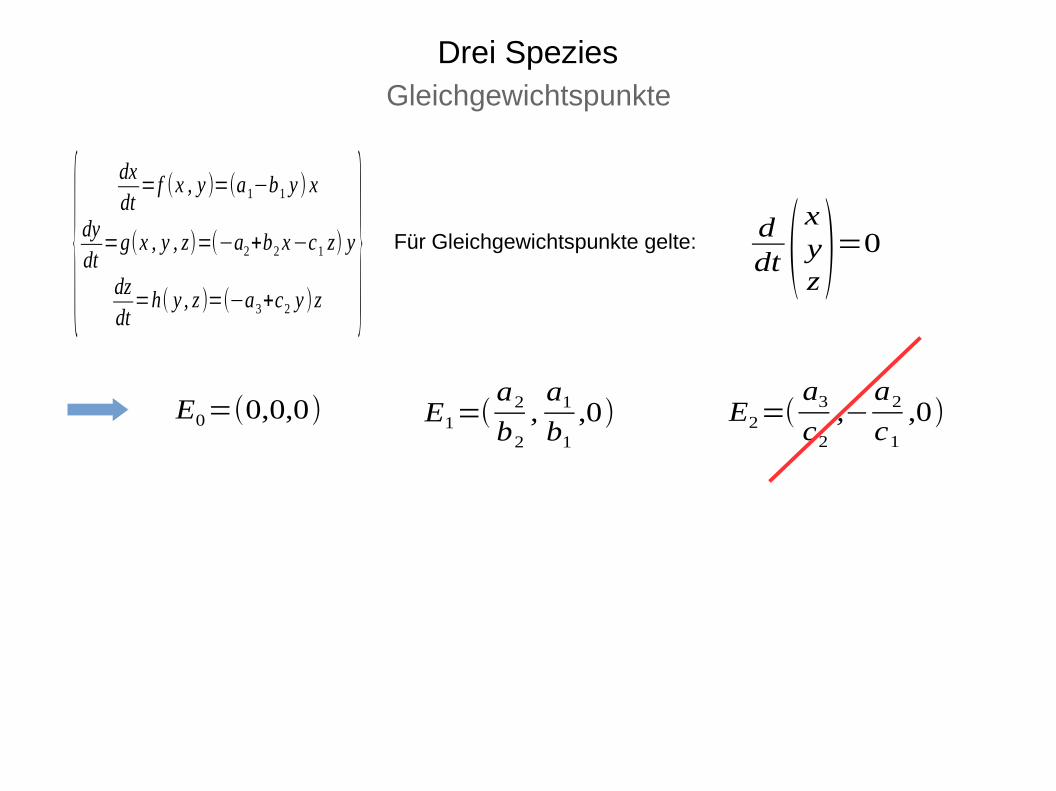
Drei Spezies
{dxdt
= f (x , y )=(a1−b1 y ) x
dydt
=g(x , y , z)=(−a2+b2 x−c1 z) y
dzdt
=h( y , z )=(−a3+c2 y )z } ddt (
xyz )=0Für Gleichgewichtspunkte gelte:
E0=(0,0,0) E1=(a2
b2
,a1
b1
,0) E2=(a3
c2
,−a2
c1
,0)
Gleichgewichtspunkte
Drei Spezies
{dxdt
= f (x , y )=(a1−b1 y ) x
dydt
=g(x , y , z)=(−a2+b2 x−c1 z) y
dzdt
=h( y , z )=(−a3+c2 y )z } ddt (
xyz )=0Für Gleichgewichtspunkte gelte:
E0=(0,0,0) E1=(a2
b2
,a1
b1
,0) E2=(a3
c2
,−a2
c1
,0)
J ( x , y , z)=[a1−b1 y −b1 x 0
b2 y −a2+b2 x−c1 x −c1 y0 c2 z −a3+c2 y ]Analyse:
Gleichgewichtspunkte
Drei Spezies
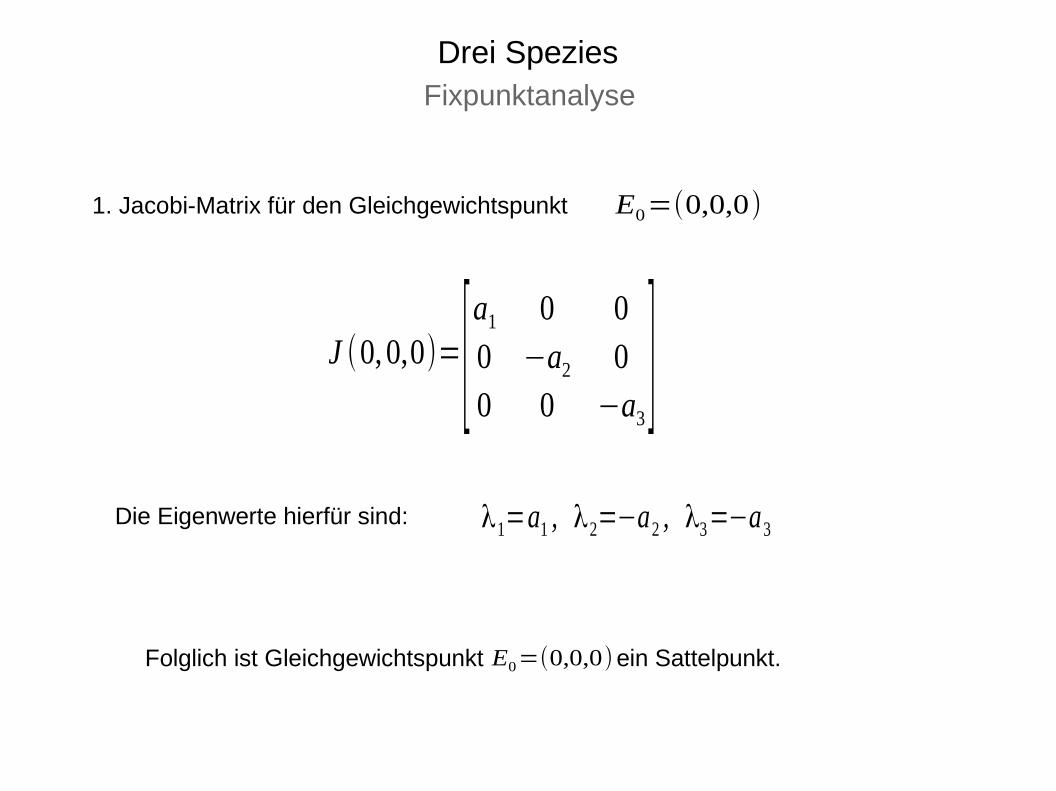
1. Jacobi-Matrix für den Gleichgewichtspunkt E0=(0,0,0)
J (0, 0,0)=[a1 0 00 −a2 00 0 −a3
]Die Eigenwerte hierfür sind: λ1=a1 , λ2=−a2 , λ3=−a3
Folglich ist Gleichgewichtspunkt ein Sattelpunkt.E0=(0,0,0)
Fixpunktanalyse
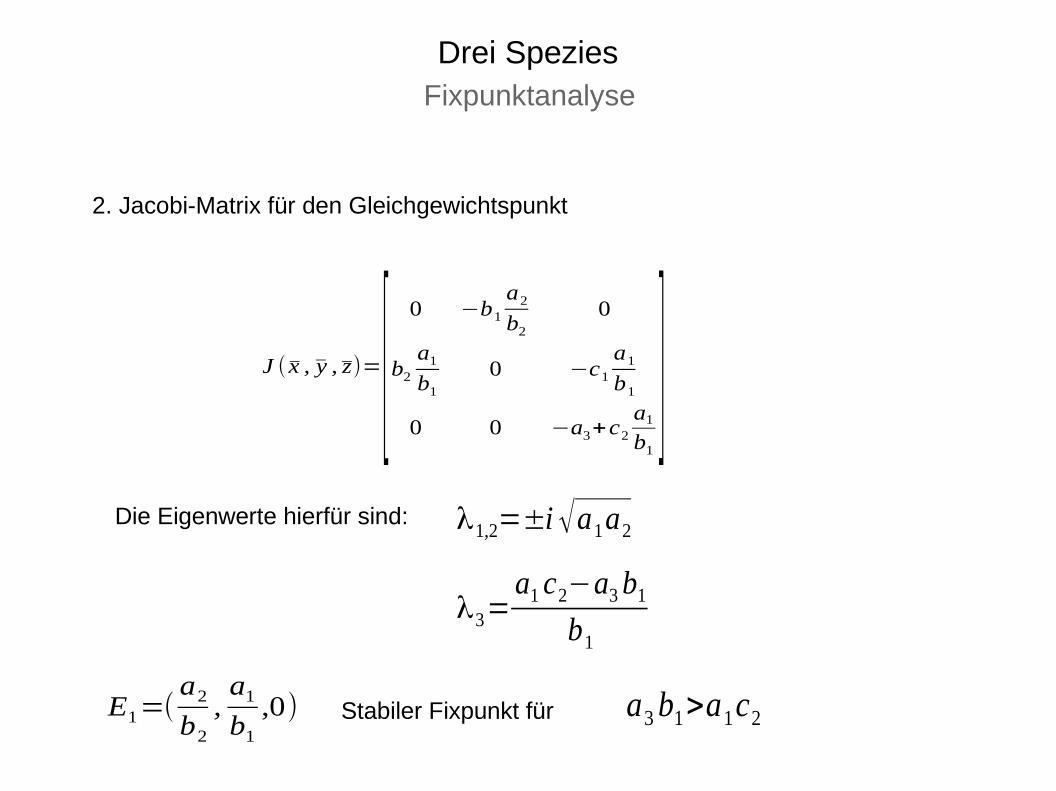
2. Jacobi-Matrix für den Gleichgewichtspunkt
E1=(a2
b2
,a1
b1
,0)
Drei Spezies
J ( x , y , z)=[0 −b1
a2
b2
0
b2
a1
b1
0 −c1
a1
b1
0 0 −a3+c2
a1
b1
]Die Eigenwerte hierfür sind: λ1,2=±i √a1a2
λ3=a1 c2−a3 b1
b1
Stabiler Fixpunkt für a3 b1>a1c2
Fixpunktanalyse
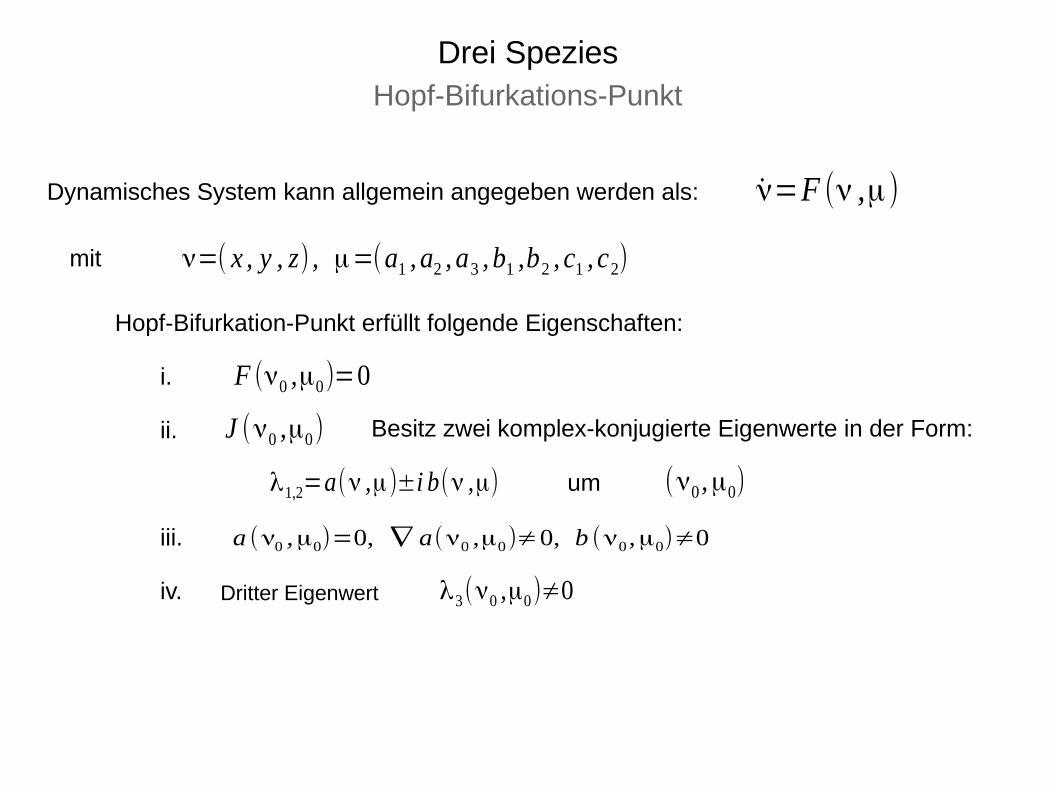
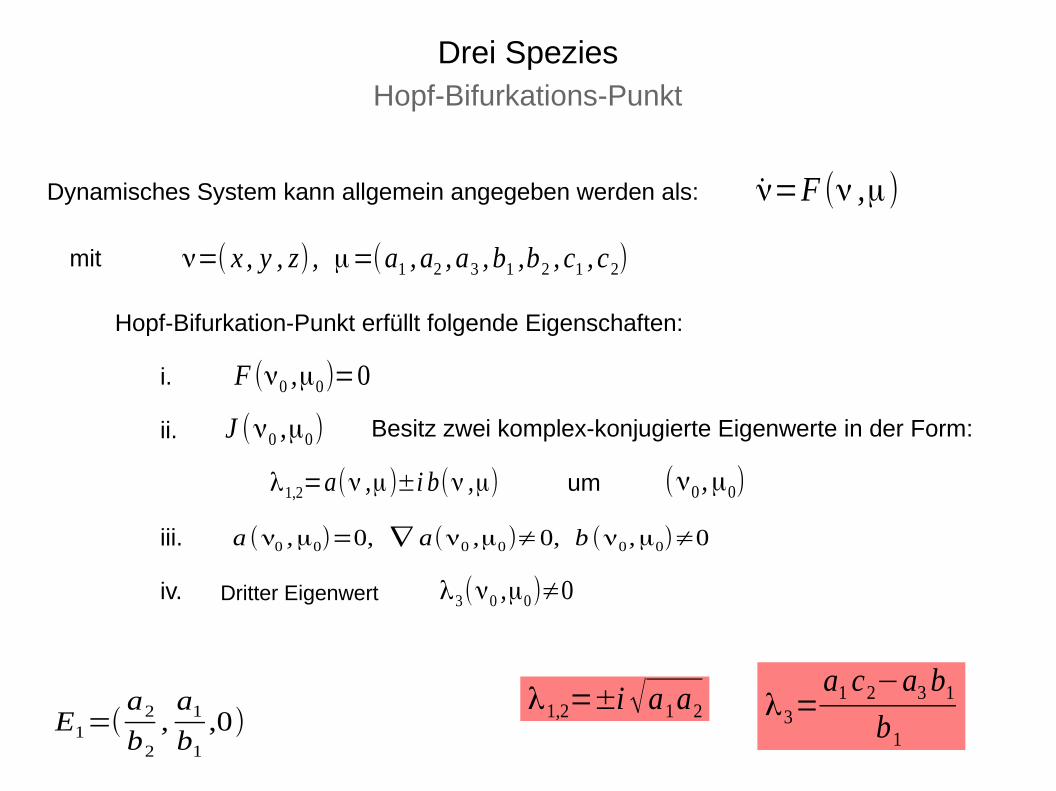
Drei SpeziesHopf-Bifurkations-Punkt
Dynamisches System kann allgemein angegeben werden als: ν=F (ν ,μ)
mit ν=( x , y , z) , μ=(a1 , a2 , a3 , b1 ,b2 , c1 , c2)
Hopf-Bifurkation-Punkt erfüllt folgende Eigenschaften:
i.
ii.
iii.
iv.
F (ν0 ,μ0)=0
J (ν0 ,μ0) Besitz zwei komplex-konjugierte Eigenwerte in der Form:
λ1,2=a(ν ,μ)±i b(ν ,μ) um
a (ν0 ,μ0)=0, ∇ a(ν0 ,μ0)≠0, b (ν0 ,μ0)≠0
Dritter Eigenwert λ3(ν0 ,μ0)≠0
Drei Spezies
Dynamisches System kann allgemein angegeben werden als: ν=F (ν ,μ)
mit ν=( x , y , z) , μ=(a1 , a2 , a3 , b1 ,b2 , c1 , c2)
Hopf-Bifurkation-Punkt erfüllt folgende Eigenschaften:
i.
ii.
iii.
iv.
F (ν0 ,μ0)=0
J (ν0 ,μ0) Besitz zwei komplex-konjugierte Eigenwerte in der Form:
λ1,2=a(ν ,μ)±i b(ν ,μ) um
a (ν0 ,μ0)=0, ∇ a(ν0 ,μ0)≠0, b (ν0 ,μ0)≠0
Dritter Eigenwert λ3(ν0 ,μ0)≠0
λ1,2=±i √a1a2 λ3=a1 c2−a3 b1
b1E1=(
a2
b2
,a1
b1
,0)
Hopf-Bifurkations-Punkt
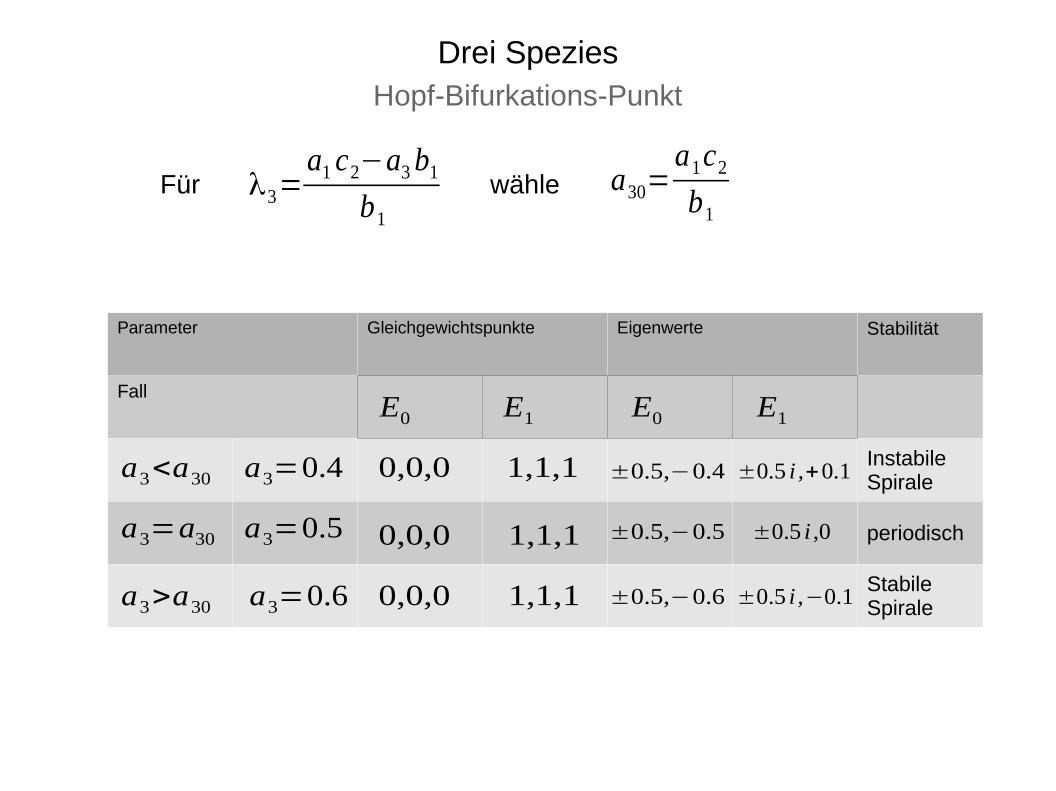
Drei Spezies
Für wähle λ3=a1 c2−a3 b1
b1
a30=a1c2
b1
Parameter Gleichgewichtspunkte Eigenwerte Stabilität
Fall
Instabile Spirale
periodisch
Stabile Spirale
a3<a30
a3=a30
a3>a30
E0 E1 E0 E1
a3=0.4
a3=0.5
a3=0.6
0,0,0
0,0,0
0,0,0
1,1,1
1,1,1
1,1,1
±0.5,−0.4
±0.5,−0.5
±0.5,−0.6
±0.5 i ,+0.1
±0.5 i ,0
±0.5 i ,−0.1
Hopf-Bifurkations-Punkt
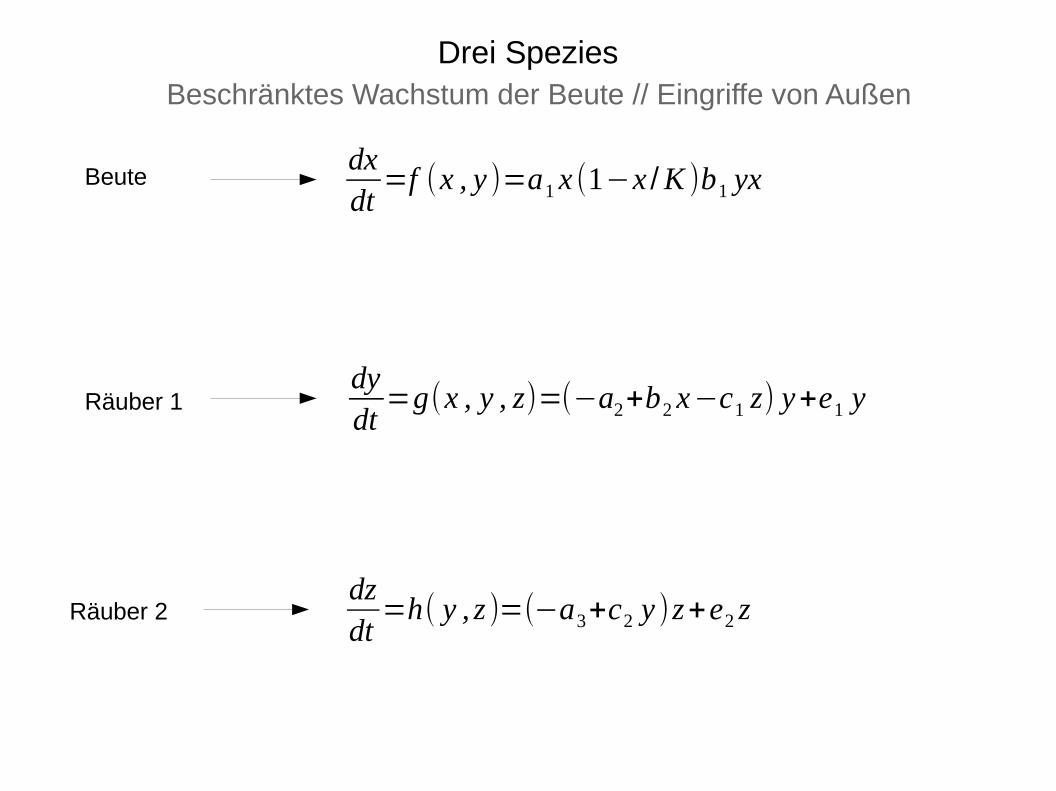
Drei SpeziesBeschränktes Wachstum der Beute // Eingriffe von Außen
Räuber 2
Beute
Räuber 1
dxdt
=f (x , y )=a1 x (1−x /K )b1 yx
dydt
=g(x , y , z)=(−a2+b2 x−c1 z) y+e1 y
dzdt
=h( y , z )=(−a3+c2 y )z+e2 z
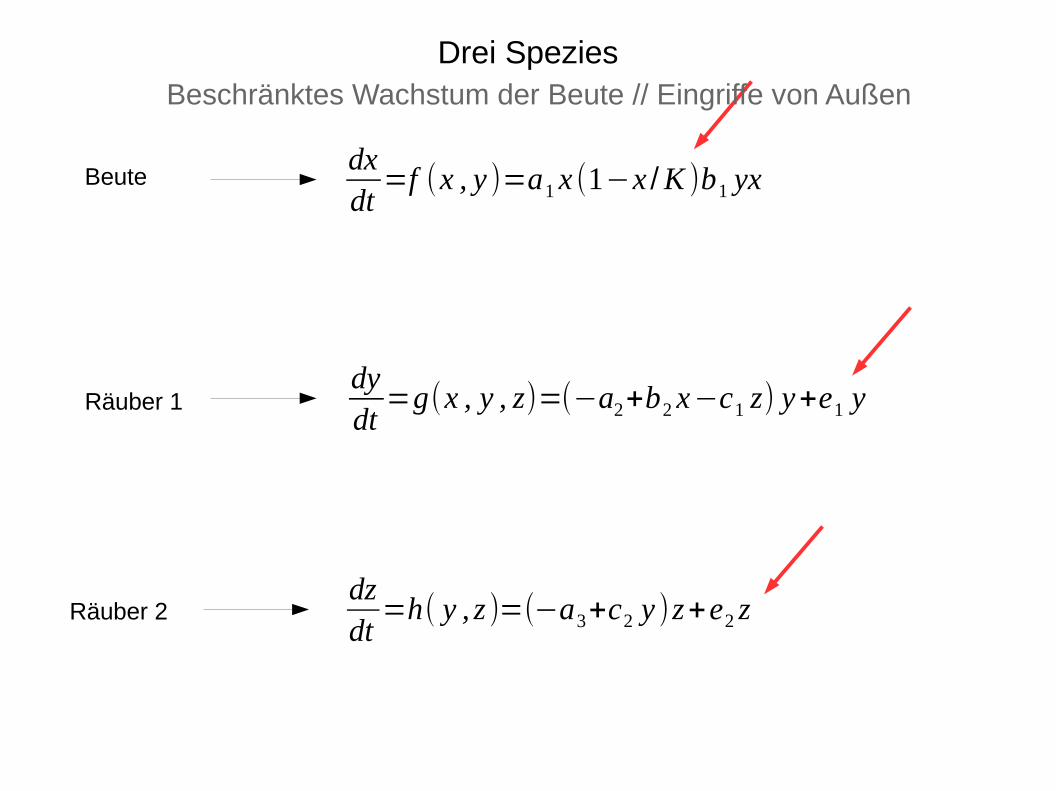
Drei Spezies
Räuber 2
Beute
Räuber 1
dxdt
=f (x , y )=a1 x (1−x /K )b1 yx
dydt
=g(x , y , z)=(−a2+b2 x−c1 z) y+e1 y
dzdt
=h( y , z )=(−a3+c2 y )z+e2 z
Beschränktes Wachstum der Beute // Eingriffe von Außen
Infektion/Epidemie
Wie entwickelt sich Infektion?
Wann wird dies zur Epidemie?
Motivation
Infektion/Epidemie
ℎ = −𝑎 ℎ 𝑓 𝑓 = 𝑎 ℎ 𝑓 − 𝑐 𝑓
𝑔 = 𝑐 𝑓
ℎ = gesunde Menschen
𝑓 = kranke Menschen
𝑔 = Menschen die immun, tot oder isoliert sind (nicht
mehr angesteckt werden können)
Differentialgleichung
Infektion/Epidemie
ℎ + 𝑓 + 𝑔 = 0
ℎ + 𝑓 + 𝑔 = 𝑁 = 𝐺𝑒𝑠𝑎𝑚𝑡𝑏𝑒𝑣ö𝑙𝑘𝑒𝑟𝑢𝑛𝑔
Eigenschaften
Infektion/Epidemie
ℎ + 𝑓 + 𝑔 = 0
ℎ + 𝑓 + 𝑔 = 𝑁 = 𝐺𝑒𝑠𝑎𝑚𝑡𝑏𝑒𝑣ö𝑙𝑘𝑒𝑟𝑢𝑛𝑔
AB: ℎ 0 > 0, ℎ 0 < 0, 𝑓 0 > 0, 𝑔 0 = 0
Eigenschaften
Infektion/Epidemie
Wann haben wir nun eine Epidemie und wann nicht? Was für Anfangswerte brauchen wir?
ℎ 0 <𝑐
𝑎
ℎ 0 >𝑐
𝑎
Epidemie
Infektion/Epidemie
1. ℎ 0 <𝑐
𝑎 , ℎ ≤ 0 somit ℎ < ℎ(0)
𝑓 = 𝑎 ℎ − 𝑐 𝑓 ≤ 0 für alle 𝑡 ≥ 0
Infektion stirbt aus
Optimal wenn 𝑐 (Ansteckungsrate) klein und 𝑎 (Todesrate) klein ist.
Epidemie - Fallunterscheidung
Infektion/Epidemie
1. ℎ 0 <𝑐
𝑎 , ℎ ≤ 0 somit ℎ < ℎ(0)
𝑓 = 𝑎 ℎ − 𝑐 𝑓 ≤ 0 für alle 𝑡 ≥ 0
Epidemie - Fallunterscheidung
Infektion/Epidemie
2. ℎ 0 >𝑐
𝑎 : 𝑓 = 𝑎 ℎ − 𝑐 𝑓 > 0 für bestimmtes 𝑡
Epidemie - Fallunterscheidung
Infektion/Epidemie
2. ℎ 0 >𝑐
𝑎 : 𝑓 = 𝑎 ℎ − 𝑐 𝑓 > 0 für bestimmtes 𝑡
Maximum bei
𝑓𝑚𝑎𝑥 = 𝑔 −𝑐
𝑎+ log (
𝑐
𝑎 ℎ(0))
Epidemie - Fallunterscheidung
Infektion/Epidemie
2. ℎ 0 >𝑐
𝑎 : 𝑓 = 𝑎 ℎ − 𝑐 𝑓 > 0 für bestimmtes 𝑡
Maximum bei
𝑓𝑚𝑎𝑥 = 𝑔 −𝑐
𝑎+ log (
𝑐
𝑎 ℎ(0))
𝑓 ∞ = 0 (heißt aber nicht, alle wurden infiziert)
denn mit Gl 1 und 3 folgt ℎ > 0
𝑓𝑡𝑜𝑡𝑎𝑙 = 𝑓 0 + ℎ 0 − ℎ(∞)
Epidemie - Fallunterscheidung
Infektion/Epidemie
Je tödlicher das Virus, desto unwahrscheinlicher einer Epidemie
Problem bei Infektion ist die Ansteckungsgefahr
Zusammenfassung
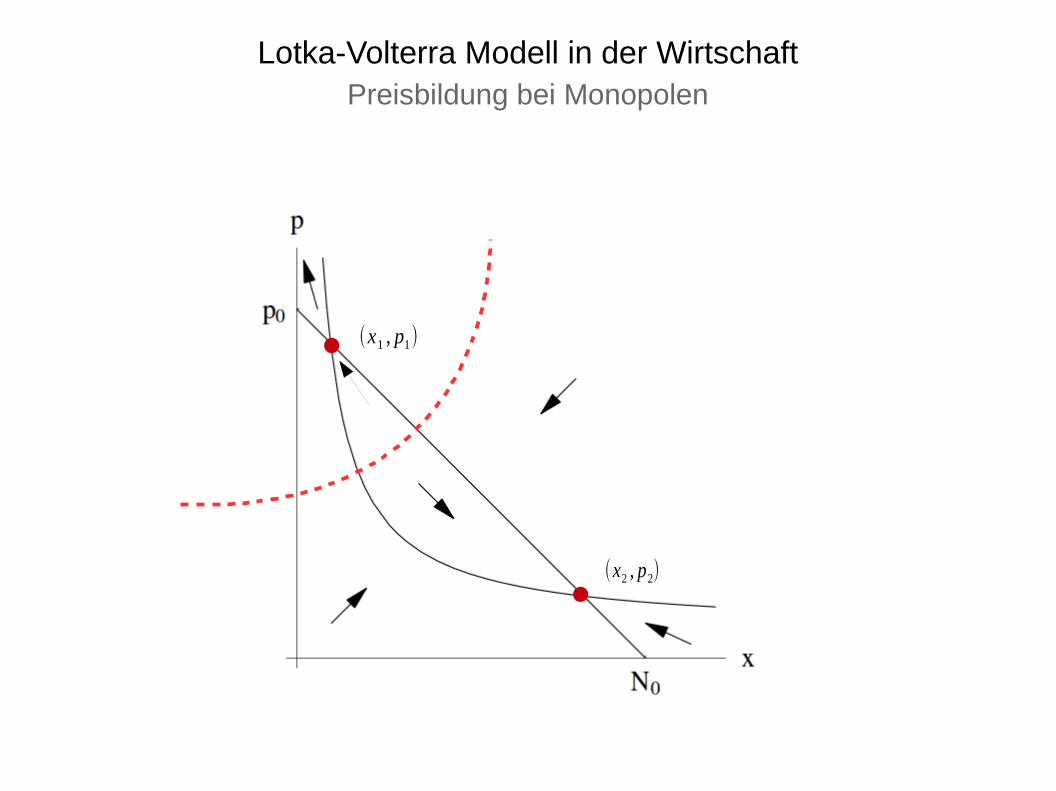
Lotka-Volterra Modell in der WirtschaftPreisbildung bei Monopolen
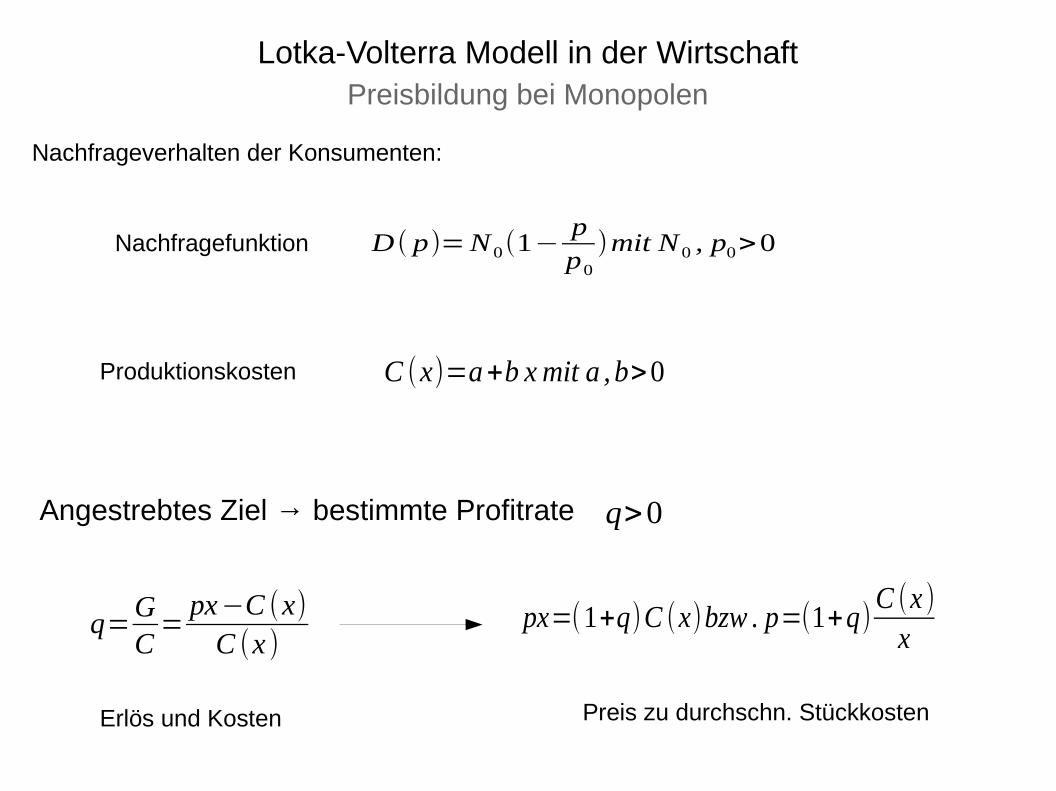
Nachfrageverhalten der Konsumenten:
D( p)=N0(1−pp0
)mit N0 , p0>0Nachfragefunktion
Produktionskosten C (x)=a+b x mit a ,b>0
Lotka-Volterra Modell in der WirtschaftPreisbildung bei Monopolen
Nachfrageverhalten der Konsumenten:
D( p)=N0(1−pp0
)mit N0 , p0>0Nachfragefunktion
Produktionskosten C (x)=a+b x mit a ,b>0
Angestrebtes Ziel → bestimmte Profitrate q>0
q=GC
=px−C (x)
C (x )px=(1+q)C (x)bzw . p=(1+q)
C (x )
x
Erlös und Kosten Preis zu durchschn. Stückkosten
Lotka-Volterra Modell in der WirtschaftPreisbildung bei Monopolen
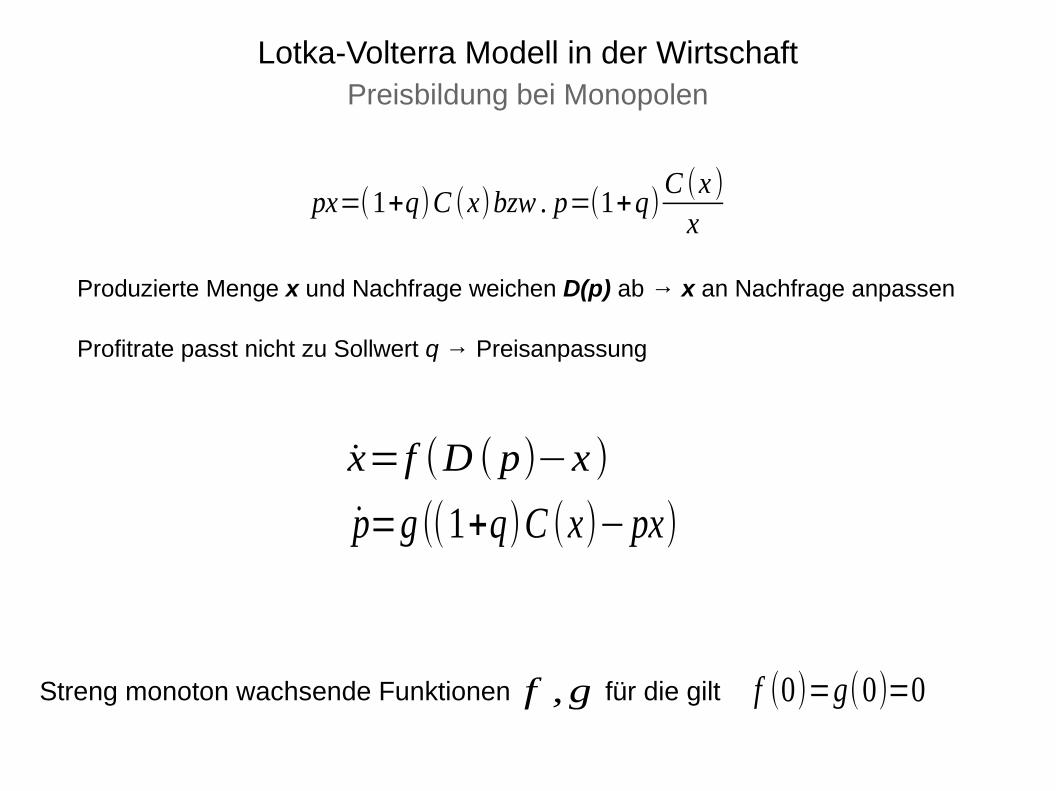
Produzierte Menge x und Nachfrage weichen D(p) ab → x an Nachfrage anpassen
px=(1+q)C (x)bzw . p=(1+q)C (x )
x
Profitrate passt nicht zu Sollwert q → Preisanpassung
Lotka-Volterra Modell in der WirtschaftPreisbildung bei Monopolen
Produzierte Menge x und Nachfrage weichen D(p) ab → x an Nachfrage anpassen
px=(1+q)C (x)bzw . p=(1+q)C (x )
x
Profitrate passt nicht zu Sollwert q → Preisanpassung
x=f (D ( p)−x )
p=g ((1+q)C (x)−px)
Streng monoton wachsende Funktionen für die giltf , g f (0)=g(0)=0
Lotka-Volterra Modell in der WirtschaftPreisbildung bei Monopolen
(x1 , p1)
(x2 , p2)
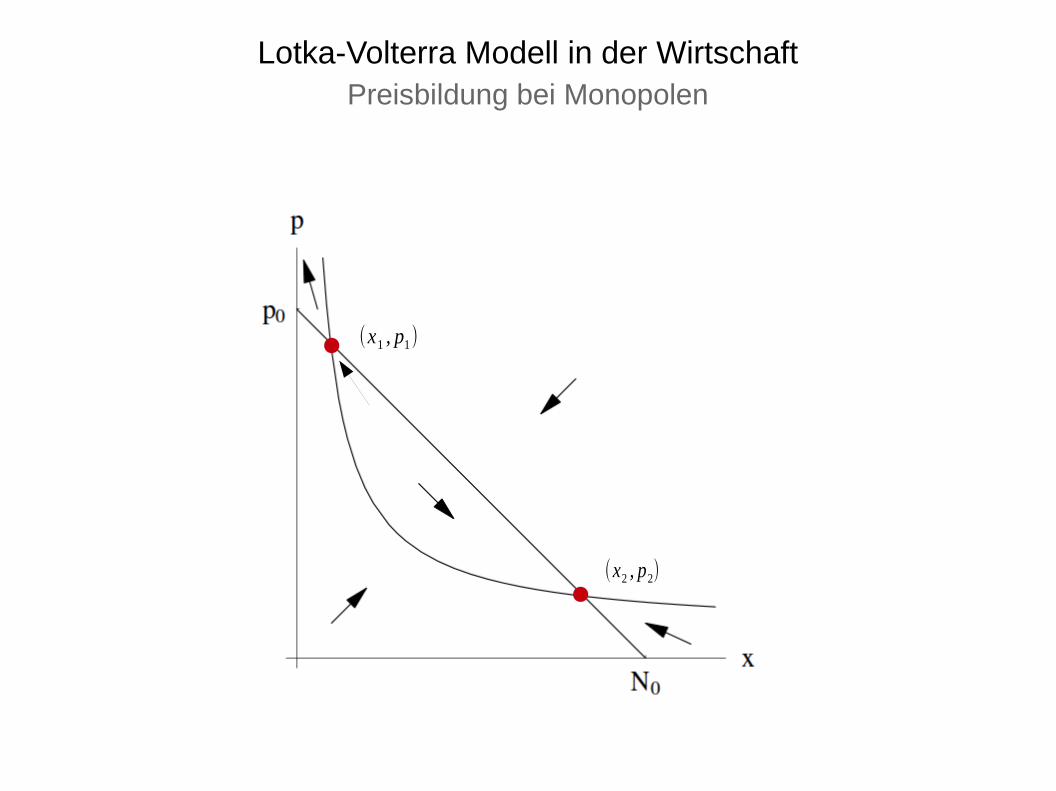
Lotka-Volterra Modell in der WirtschaftPreisbildung bei Monopolen
(x1 , p1)
(x2 , p2)
Danke
● Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering, Steven Strogatz
● Predator-Prey Modeling with the Lotka-Volterra Equations, David Hyde
● Numerical Simulation for the non-linear Lotka-Volterra System; Lohan, Ignat, 2006
● Numerical Simulation Dynamical Model of Three-Spezies Food Chain with Lotka-Volterra Linear Funktional Response, M. Mamat et al., 2011
● Dynamische Modelle in den Lebens- und Gesellschaftswissenschaften, Claus Peter Ortlieb, 2009/10
Quellen



![Beispiel: A[300] h A[300]unikorn/lehre/gdra/ss15... · 2015. 6. 12. · Zusammenfassung der behandelten Instruktionen Grundlagen der Rechnerarchitektur ‐Assembler 31 Instruktion](https://img.pdfslide.org/doc/110x75/60dc2309f95aa917695e8c07/beispiel-a300-h-a300-unikornlehregdrass15-2015-6-12-zusammenfassung.jpg)

























