Embed Size (px)
Citation preview

Technische Universitat WienFakultat fur Physik
Institut fur Angewandte Physik
Unterlagen zur Vorlesung / VU
Modellbildung in der Physik VUWS 2012/13
Prof. Wolfgang Husinsky

Inhaltsverzeichnis
I Einleitung 9
II Die Bewegungsgleichung 9
1 Physikalische Grundgesetze 91.1 Die Newton´schen Axiome . . . . . . . . . . . . . . . . . . . . . . 91.2 Tragheitsgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3 Kraft, Masse und das zweite Newton’sche Axiom . . . . . . . . . 10
1.3.1 Gewichtskraft . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Die Naturkrafte 13
2.1 Fernwirkung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Reibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.3 Kontaktkrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4 Losen der Bewegungsgleichung . . . . . . . . . . . . . . . . . . . 17
2.4.1 Losung durch Integration . . . . . . . . . . . . . . . . . . 172.4.2 Numerisches Losen . . . . . . . . . . . . . . . . . . . . . . 19
3 Die Gravitationskraft 20
3.1 Kepler´sche Gesetze . . . . . . . . . . . . . . . . . . . . . . . . . 22
4 Drehbewegung: Winkelgeschwindigkeit und Winkelbeschleuni-gung 23
5 Zentripetal und Zentrifugalbeschleunigung 25
5.0.1 Scheinkrafte . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6 Arbeit und kinetische Energie 266.1 Allgemeine Bemerkungen zum Begriff Energie
266.1.1 Energieerhaltung . . . . . . . . . . . . . . . . . . . . . . . 26
6.2 Eindimensionale Bewegung mit konstanten Kraften . . . . . . . . 276.2.1 Der Zusammenhang zwischen Gesamtarbeit und kineti-
scher Energie . . . . . . . . . . . . . . . . . . . . . . . . . 276.2.2 Die von einer ortsabghangigen Kraft verrichtetet Arbeit . 286.2.3 Arbeit und Energie in drei Dimensionen . . . . . . . . . . 28
7 Arbeit und potentielle Energie 287.0.4 Konservative Krafte . . . . . . . . . . . . . . . . . . . . . 297.0.5 Arbeit und Potential in 1/r2−Feldern . . . . . . . . . . . 30
7.0.6 Erdbeschleunigung . . . . . . . . . . . . . . . . . . . . . . 31
1
8 Energie und Impulserhaltung 318.1 Impulserhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
9 Teilchensysteme 349.1 Schwerpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349.2 Bewegung des Massenmittelpunktes . . . . . . . . . . . . . . . . 359.3 Kinetische Energie der Drehbewegung . . . . . . . . . . . . . . . 36
9.3.1 Der Steiner’sche Satz . . . . . . . . . . . . . . . . . . . . . 38
9.4 Das zweite Newton’sche Axiom fur Drehbewegungen: Der Dre-himpuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
III Ladung-Elektrisches Feld und Strom 42
10 Die Coulomb (elektrische-) Kraft 4210.1 Ladungsquantisierung . . . . . . . . . . . . . . . . . . . . . . . . 4210.2 Ladungserhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . 4310.3 Das Coulomb’sche Gesetz . . . . . . . . . . . . . . . . . . . . . . 4410.4 Der Feldbegriff: das elektrische- bzw. das Gravitationsfeld . . . . 45
10.4.1 Elektrische Feldlinien . . . . . . . . . . . . . . . . . . . . 46
10.4.2 Elektrische Dipole in elektrischen Feldern . . . . . . . . . 4810.5 Berechnung von Potentialen und Kraftfeldern . . . . . . . . . . . 51
10.5.1 Der Gauß´sche Satz . . . . . . . . . . . . . . . . . . . . . 5110.5.2 Quantitative Darstellung des Gauß‘schen Gesetzes . . . . 55
10.5.3 Berechnung von Feldern mit dem Gauß´schen Satz . . . . 5710.5.4 Potential und ~E − Feld mittels Relaxationsmethode . . . 58
11 Elektrischer Strom 6011.1 Vorbemerkung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6011.2 Ladung-Strom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6111.3 Widerstand und Ohm’sches Gesetz . . . . . . . . . . . . . . . . . 6311.4 Elektrische Leistung . . . . . . . . . . . . . . . . . . . . . . . . . 64
IV Schwingungen und Wellen 66
12 Harmonische Bewegungen 66
13 Energie des harmonischen Oszillators 68
14 Gedampfte Schwingung 70
14.1 Schwach gedampfter Oszillator (unterdampfte Bewegung) . . . . 70
2

15 Erzwungene Schwingungen 71
15.1 Resonanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
16 Schwingende Systeme mit mehreren Freiheitsgraden 7516.1 Betrachtungsweisen: Mehrdimensionales System-Welle . . . . . . 78
17 Wellen 7917.1 Einige Begriffe . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
17.1.1 Ausbreitungsgeschwindigkeit der Wellen . . . . . . . . . . 8017.2 Wellengleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8117.3 Periodische Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . 84
17.3.1 Harmonische Wellen . . . . . . . . . . . . . . . . . . . . . 84
3

Tabellenverzeichnis
4

Abbildungsverzeichnis
1 Ein Korper bewegt sich auf einem Tisch oder auf dem Bodennach rechts. Die bei den Beruhrungsflachen sind rau, zumindestaus mikroskopischer Sicht. . . . . . . . . . . . . . . . . . . . . . 14
2 Wenn ein Korper durch eine ausgeubte Kraft (FAl uber eineFlache gezogen wird, wirkt die Reibungskraft FR der Bewegungentgegen. Der Betrag von FR ist proportional zum Betrag derNormalkraft FN . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Bestimmung der Gravitationskonstante nach Cavendish . . . . . 214 Zu den Kepler´schen Gesetzen . . . . . . . . . . . . . . . . . . . 235 Großen bei der Drehbewegung . . . . . . . . . . . . . . . . . . . . 236 Radiusanderung bei Drehbewegung . . . . . . . . . . . . . . . . . 267 Zwei Wege im Raum verbinden die Punkte 1 und 2. Die Arbeit
einer konservativen Kraft zwischen Punkt 1 und 2 auf dem WegA sei W Da die Arbeit bei einem vollen Umlauf null ist, mussdie Arbeit fur den Ruckweg entlang des Wegs B gleich - W sein.Wird der Weg B in entgegengesetzter Richtung, also von Punkt1 zu Punkt 2, ist die Kraft an jedem Punkt genauso groß wie beider Bewegung von 2 nach 1, wahrend die Verschiebung entgegen-gesetzt ist. Damit ist die Arbeit von Punkt 1 zu Punkt 2 entlangdes Wegs Bebenfalls W Allgemein gilt also, dass die Arbeit aufjedem Weg, der die beiden Punkte 1 und 2 verbindet, gleich ist. 30
8 Impulserhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . 329 Zur Impulserhaltung . . . . . . . . . . . . . . . . . . . . . . . . . 3210 Komplexe bewegung eines Korpers und einfache Bewegung des
Massenmittelpunktes . . . . . . . . . . . . . . . . . . . . . . . . . 3511 Tragheitsmomente einiger Korper . . . . . . . . . . . . . . . . . . 3712 Ein Teilchen mit der Masse m ist durch einen masselosen Stab
in seiner Bewegung auf eine Kreisbahn mit dem Radius ~r,. be-schrankt. Wirkt eine Kraft ~F auf das Teilchen, so kann man furdie Tangentialkomponente der Kraft das zweite Newton’sche Axi-om anwenden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
13 Ein Teilchen mit dem Impuls ~p am Ort ~r hat relativ zum Ur-sprung 0 einen Drehimpuls L = ~r × ~p. Liegen wie hier gezeigt ~rund ~p in der x-y-Ebene, dann verlauft ~L in der z-Achse. . . . . . 40
14 Ein Teilchen, das sich auf einer Kreisbahn bewegt, hat bezuglichdes Kreismittelpunkts einen Drehimpuls L = Iω parallel zurWinkelgeschwindigkeit ω. . . . . . . . . . . . . . . . . . . . . . . 41
15 Beispiel: Wieviel elektronenladung in Kupferring . . . . . . . . . 4416 Faser, wodurch sie sich parallel zum Feld ausrichten. . . . . . . . 4717 a) Elektrische Feldlinien von zwei positiven Punktladungen. Die
Pfeile wurden in die umgekehrte Richtung zeigen, wenn die La-dungen negativ waren. b) Die gleichen elektrischen Feldlinien,veranschaulicht durch Fasern in Ol. . . . . . . . . . . . . . . . . . 47
18 Ein Wasser-Molekul hat ein permanentes elektrisches Dipolmoment, 4819 Ein Dipol in einem homogenen elektrischen Feld erfahrt entge-
gengesetzt gleiche Krafte, die ihn drehen, bis sein Dipolmomentdie Richtung des Felds hat. . . . . . . . . . . . . . . . . . . . . . 49
5
20 Ein nichtpolares Molekul in dem inhomogenen Feld einer positi-ven Punktladung. Das induzierte elektrische Dipolmoment t-J istparallel zu dem Feld der Punktladung. Da sich die Punktladungnaher am Zentrum der negativen Ladung als am Zentrum derpositiven Ladung des Molekuls befindet, gibt es eine resultieren-de Anziehungskraft zwischen dem Dipol und der Punktladung.Wenn die Punktladung negativ ware, wurde das induzierte Di-polmoment umgekehrt sein und das Molekul wurde wieder vonder Punktladung angezogen werden. . . . . . . . . . . . . . . . . 50
21 Beispiel: Berechnung des elektrischen feldes einer Linienladung . 5222 Eine Oberflache von beliebiger Gestalt, die einen elektrischen Di-
pol einschließt. Wenn die Oberfl ache beide Ladungen einschließt,ist die Zahl der Linien, die die Oberflache von innen her durch-stoßen, gleich der Zahl der Linien, die die Oberflache von außendurchdringen, unabhangig davon, wie die Oberflache gestaltet ist. 53
23 Eine Oberflache von beliebiger Gestalt, die die Ladungen +2qund −q einschließt. Jede Feldlinie, die an −q endet, verlauft ent-weder nur im Innengebiet oder verlasst die Oberflache und trittwieder ein. Die Gesamtzahl der durch die Oberflache austreten-den Linien bei der Ladungen ist die gleiche wie fur eine ei nzelneeingeschlossene Ladung +q. . . . . . . . . . . . . . . . . . . . . . 53
24 Elektrische Feldlinien eines homogenen Felds, die eine Flache Asen krecht durchdringen. Das Produkt ~E ~A ist der elektrischeFluss durch die Flache. . . . . . . . . . . . . . . . . . . . . . . . 54
25 Eine Kugeloberflache mit einer eingeschlossenen Punktladung q.a) Die Gesamtzahl der elektrischen Feldlinien, die aus dieser Ober-flache heraustreten, ist gleich der Gesamtzahl der austretendenLinien durch eine beliebige geschlossene Oberflache, die ebenfalls die Ladung q ein schließt. b) Der Gesamtfluss durch eine Ku-geloberflache ist leicht zu berechnen. Er ist gleich dem Produktaus En und der Oberflache 4πr2, also En4πr2. . . . . . . . . . . 55
26 Beispiel zur Berechnung des E-Feldes mittels Gauß´schem Satz. . 5727 Gauß’sche Oberflache fur die Berechnung von ~E, das von einer
unendlichen Ladungsebene erzeugt wird. (Nur der Teil der Ebe-ne ist gezeigt, die innerhalb der Gauß’schen Oberflache liegt. )
Auf den ebenen Flachen dieses Zylinders liegt ~E parallel zu derOberflachennormalen, und der Betrag ist konstant. Auf der ge-krummten Oberflache (Mantelflache) steht ~E senkrecht zur Ober-flachennormalen . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
28 Potentialgitter fur Relaxationsmethode, . . . . . . . . . . . . . . 6029 Ein Abschnitt eines stromdurchflossenen Drahts. Fließt wahrend
der Zeit ∆t die Ladungsmenge ∆q durch die QuerschnittsflacheA, so ist der Strom durch A definiert gemaß / = ∆q/ßt. . . . . . 61
30 Zwei lange gerade Leiter, die von parallelen Stromen durchflossenwerden. Das vom Strom I, erzeugte Magnetfeld B2 steht senk-recht auf I2, Die Kraft, die ~B1 auf I2 ausubt, zeigt in Richtungdes ersten Leiters. Das Magnetfeld des Stroms I2 ubt auf I1, einegleich große, aber entgegengesetzt gerichtete Kraft aus. Deshalbziehen die Leiter einander an. . . . . . . . . . . . . . . . . . . . . 62
6
31 Durch den Leiterabschnitt mit der Lange ∆` fließt ein Strom I.Die Beziehung zwischen Spannung und elektrischem Feld lautet
Φa − Φb =∣∣∣ ~E∣∣∣∆`. . . . . . . . . . . . . . . . . . . . . . . . . . . 64
32 Schwingende, ungedampfte Feder . . . . . . . . . . . . . . . . . . 6633 Schwingender Stab (physikalisches Pendel) . . . . . . . . . . . . . 6934 Beispiele fur eine stark gedampfte Bewegung (uberdampft) und
den aperiodischen Grenzfall (kritische Dampfung). . . . . . . . . 7135 (a) Resonanzkurve der erzwungenen Schwingung fur verschiede-
ne Dampfungen. Man beachte die Verschiebung des Maximumsmit zunehmender Dampfung. (b) Quantitativer Verlauf der Pha-senverschiebung . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
36 Elastische und Inelastische Amplitude. . . . . . . . . . . . . . . . 7437 Leistungsaufnahme bei erzwungener Schwingung (Lorentzkurve). 7638 Einfaches zweidimensionales schwingendes System . . . . . . . . 7639 Einige harmonische Eigenschwingungen der eingespannten Saite . 7840 Ausbreitung eines Wellenbergs langs eines Seils. . . . . . . . . . . 8041 Ein Segment einer gespannten Saite, das zur Herleitung der Wel-
lengleichung benutzt wird. Die Vertikalkomponente der resultie-
renden Kraft auf das Segment ist∣∣∣~FS.2∣∣∣ sinϑ2 −
∣∣∣~FS.1∣∣∣ sinϑ1 wo
|Fs| der Betrag der Spannkraft in der Saite ist. Die Wellenglei-chung wird mit dem zweiten Newton’schen Gesetz hergeleitet,das auf das Saitensegment angewandt wird. . . . . . . . . . . . . 81
42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8343 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8544 Harmonische Welle, betrachtet zu einem festen Zeitpunkt. A ist
die Amplitude und λ die Wellenlange. Eine solche Figur erhaltman durch eine Momentaufnahme einer schwingenden Saite. . . 86
7

VorwortDiese Vorlesungsunterlagen sind nur als Hilfe zur Vorlesung gedacht und
konnen und sollen nur im engen Zusammenhang mit der Vorlesung ihren Sinnerfullen. Die Texte sind zum Studium vor bzw. nach der Vorlesung gedacht, umin der Vorlesung die Probleme im Detail zu besprechen bzw. um dann zusammenmit den Folien und erganzender Literatur den besprochenen Stoff zu verarbeitenund zu lernen.
8
Teil I
EinleitungPhysik ist die grundlegendste aller Wissenschaften. Sie handelt von dem Ver-halten und der Struktur der Materie und Strahlung. Gewohnlich unterteilt mandie Physik in die Gebiete klassische Mechanik, Stromungslehre, Thermodyna-mik, Akustik, Optik, Elektrizitat und Magnetismus - die klassische Physik.Hinzu kommt die moderne Physik mit den Bereichen Quantenmechanik, Re-lativitatstheorie, Atom-, Festkorper-, Kern-, Teilchen- und Astrophysik.
Die Grundlagen der Physik mussen von allen verstanden werden, die einenwissenschaftlichen oder technischen Beruf ergreifen wollen: Physiker, Ingenieu-re, Chemiker, Astronomen, Mathematiker. Geologen und Biologen. Alle Wis-senschaften nutzen die Physik als fundamentale Basis, auch die Ingenieurwis-senschaften. Beispielsweise mussen Ingenieure wissen. wie man sich die Gesetzeder Thermodynamik zunutze macht, um eine Heizung zu entwerfen; sie mussenetwas von Optik und Elektromagnetismus verstehen, um medizinische Abbil-dungssysteme zu konstruieren. Und sie mussen die in einem Bauwerk wirksamenKrafte berechnen konnen, damit es nicht einsturzt.
Teil II
Die Bewegungsgleichung
1 Physikalische Grundgesetze
Wir wollen unser Studium der physikalischen Erscheinungen mit der Unter-suchung bewegter Korper beginnen. Die Untersuchung von Bewegungen wirdKinematik genannt. Die Messung solcher Bewegungen begrundete in gewisserWeise vor mehr als 400 Jahren die Physik, wie wir sie heute als Wissenschaftkennen. Es wird jedoch unser Ziel sein, an Hand dieses extrem wichtigen Bei-spiels, allgemeine Vorgangsweisen fur die Losung von Problemen zu erarbeiten.
1.1 Die Newton´schen Axiome
Eine der fundamentalen Gesetze der Physik sind die sogenannten Newton´schenAxiome. Auf ihnen beruht praktisch die gesamte Mechanik.
Die klassische Mechanik untersucht die Krafte, die Korper aufeinander ausuben,und erklart auch Bewegungsanderungen uber die Krafte, die auf einen Korperwirken. Sie beschreibt die Erscheinungen mit den drei Newton’schen Axiomender Bewegung.
Naturlich hat jeder eine intuitive Vorstellung von einer Kraft als Ziehen oderDrucken, etwa bei Muskeln, Gummibandern oder Federn. Erst die Newton’schenAxiome erlauben aber unsere Vorstellung uber Krafte zu prazisieren.
Eigentlich konnten wir die meisten mechanischen Probleme ausgehend vomersten Newton´schen Axiom bzw. seiner Formulierungs als Differentialgleichung
9

losen. In der Praxis wird es jedoch sinnvoll sein, weitere daraus folgende Ge-setzmaßigkeiten zu verwenden, um ein spezielles Problem elegant zu losen (z.B.Energieerhaltung, Impulserhaltung, lineare und Kreisbewegungen etc.)
Axiom 1 (Erstes Newton´sches Axiom) Ein Korper bleibt in Ruhe oderbewegt sich mit konstanter Geschwindigkeit weiter, wenn keine resultierendeaußere Kraft auf ihn einwirkt.
Axiom 2 (Zweites Newton´sches Axiom) Ein Korper wird in Richtung derresultierenden außeren Kraft beschleunigt, die auf ihn wirkt. Die Beschleunigung
ist gemaß−→F ges = m−→a proportional zur resultierenden außeren Kraft
−→F ges>
wobei m die Masse des Korpers ist. Die resultierende außere Kraft auf einen
Korper ist die Vektorsumme aller Krafte, die auf ihn wirken,−→F ges =
∑−→F .
Somit gilt ∑~F = m~a (1)
.
Axiom 3 (Drittes Newton´sches Axiom) Krafte treten immer paarweise
auf. Wenn der Korper A eine Kraft F(A)B auf den Korper B ausubt, wirkt eine
gleich große, aber entgegengesetzt gerichtete Kraft F(B)A vom Korper B auf den
Korper A. Somit gilt F(B)A = −F (A)
B
1.2 Tragheitsgesetz
Stoßen Sie einen Eiswurfel auf der Theke an. Er wird zunachst ein Stuck gleitenund bleibt schließlich liegen. Wenn die Theke nass ist, wird er weiter gleiten,bevor er liegen bleibt. Ein Stuckchen Trockeneis (gefrorenes Kohlendioxid) ,das quasi auf einem Kissen aus Kohlendioxiddampf schwebt, gleitet viel weiter,ohne dass sich seine Geschwindigkeit wesentlich andert. Vor Galilei glaubte man,dass standig eine Kraft, ein Zug oder Druck, vorhanden sein muss, damit sich einKorper mit konstanter Geschwindigkeit weiterbewegen kann. Galilei und spaterNewton erkannten dagegen, dass das aus dem Alltag bekannte Abbremsen vonKorpern auf die Reibungskraft zuruckzufuhren ist. Wird die Reibung verringert,nimmt gleichzeitig die Bremswirkung ab. Ein Wasserfilm oder ein Kissen aus Gasverringert die Reibung besonders wirksam und ermoglicht, dass Korper ohnegroße Geschwindigkeitsanderung uber große Strecken gleiten konnen. Galileifolgerte daraus, dass sich die Geschwindigkeit eines Korpers nie andern wurde,wenn man ihn von allen außeren Kraften einschließlich der Reibung befreienwurde. Diese Eigenschaft der Materie beschrieb er als Tragheit. Deshalb wirddiese Aussage, die Newton spater als erstes Newton’sches Axiom umformulierte,auch das Tragheitsgesetz genannt..
1.3 Kraft, Masse und das zweite Newton’sche Axiom
Das erste und das zweite Newton’sche Axiom konnen als Definition der Kraftbetrachtet werden. Eine Kraft ist ein außerer Einfluss auf einen Korper, derveranlasst, dass der Korper relativ zu einem Inertialsystem beschleunigt wird.(Dabei haben wir angenommen, dass keine weiteren Krafte wirken.) Die Kraft
10

und die durch sie hervorgerufene Beschleunigung haben dieselbe Richtung. DerBetrag der Kraft ist das Produkt aus der Masse des beschleunigten Korpers unddem Betrag der Beschleunigung. Diese Definition beruht auf Gleichung 1.
Definition 4 (Inertialsystem) Ein Bezugssystem, das mit dem gleichformigbewegten Flugzeug verbunden ist, nennt man ein Inertialsystem. Ein Bezugssy-stem, das relativ zu einem solchen Inertialsystem beschleunigt wird, ist selbstkein Inertialsystem. Das erste Newton’sche Axiom gibt uns also ein Kriteriumin die Hand, mit dem wir bestimmen konnen, ob ein Bezugssystem ein Iner-tialsystem ist. Ja, es ist durchaus sinnvoll, das erste Newton’sche Axiom alsDefinition von Inertialsystemen zu betrachten. Jedes Bezugssystem, in dem sichein kraftefreier Korper geradlinig gleichformig bewegt, ist ein Inertialsystem.
Krafte konnen uber die Dehnung gleicher Gummibander verglichen werden.Werden etwa zwei gleiche Gummibander um die gleiche Lange gedehnt, habendie auf sie wirkenden Krafte den gleichen Betrag. Korper besitzen einen in-neren Widerstand gegen jegliche Art von Beschleunigung. Vergleichen Sie denWiderstand, wenn Sie mit dem Fuß einen Fußball oder eine Kegelkugel zu be-schleunigen versuchen. Ihre blauen Fußspitzen werden Sie schnell lehren, dassdie Kegelkugel wesentlich schwerer als der Fußball zu beschleunigen ist. Dieseinnere Eigenschaft des Korpers wird die Masse genannt. Sie ist ein Maß furdie Tragheit des Korpers. Das Verhaltnis zweier Massen lasst sich quantita-tiv dadurch definieren, dass man auf beide Korper die gleiche Kraft anwendetund ihre Beschleunigungen vergleicht. Erzeugt eine Kraft ~F bei Anwendung aufeinen Korper der Masse m1 eine Beschleunigung ~a1 wahrend die gleiche Kraftbei Anwendung auf einen Korper der Masse m2 die Beschleunigung a2 liefert,ist das Verhaltnis ihrer Massen durch
m1
m2=a2
a1(2)
definiert. Diese Definition stimmt mit unserer intuitiven Vorstellung von derMasse uberein. Wenn auf zwei verschiedene Korper eine Kraft angewendet wird,wird der Korper mit der großeren Masse weniger beschleunigt. Das Experimentzeigt: Das Verhaltnis der Beschleunigungen a1/a2 , das die beiden gleich großenKrafte hervorrufen, die auf die zwei Korper wirken, ist unabhangig von Betrag,Richtung und Art der Kraft. Die Masse ist eine innere Eigenschaft eines Korpers,die unabhangig von seinem Ort ist - sie ist immer gleich, unabhangig davon ob,sich der Korper auf der Erde oder auf dem Mond befindet oder gar frei imWeltraum schwebt.
1.3.1 Gewichtskraft
Lasst man einen Korper in der Nahe der Erdoberflache fallen, wird er durch dieGravitationsbeschleunigung nach unten, zum Erdmittelpunkt hin beschleunigt.Vernachlassigt man dabei den Luftwiderstand, ist diese Beschleunigung ~g furalle Korper und an jedem Ort gleich. Ihr Betrag hat den durch die Erdbeschleu-nigungskonstante g gegebenen Wert. Die Kraft, die diese Gravitationsbeschleu-nigung erzeugt, ist die Gewichtskraft, umgangssprachlich auch Gewicht genannt.Allerdings ist die letztere Bezeichnung fur die Gewichtskraft etwas unglucklich,
11
verleitet sie doch zu der Annahme, dass das Gewicht wie die Masse eine Eigen-schaft des Korpers sei und nicht eine Kraft, die auf ihn wirkt. Wenn der Begriff”Gewicht eines Korpersauftaucht, sollte man ihn also immer in Gedanken in aufden Korper wirkende Gewichtskraft”ubersetzen.
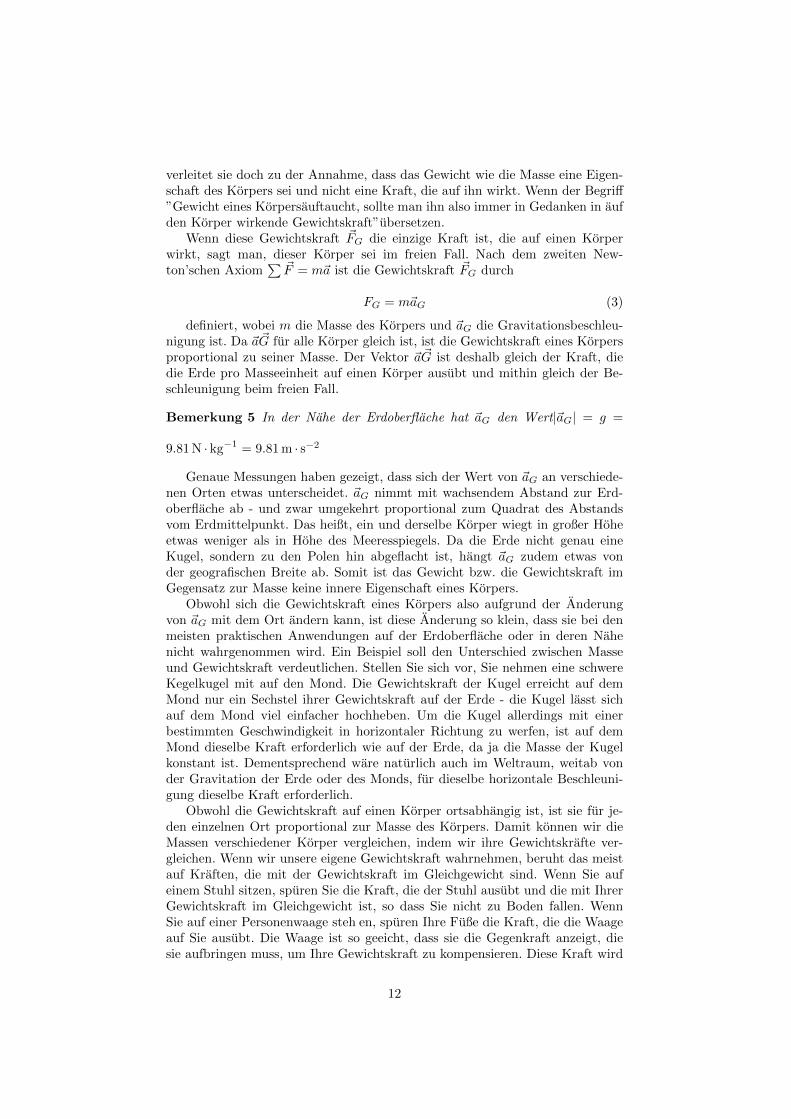
Wenn diese Gewichtskraft ~FG die einzige Kraft ist, die auf einen Korperwirkt, sagt man, dieser Korper sei im freien Fall. Nach dem zweiten New-ton’schen Axiom
∑ ~F = m~a ist die Gewichtskraft ~FG durch
FG = m~aG (3)
definiert, wobei m die Masse des Korpers und ~aG die Gravitationsbeschleu-nigung ist. Da ~a~G fur alle Korper gleich ist, ist die Gewichtskraft eines Korpersproportional zu seiner Masse. Der Vektor ~a~G ist deshalb gleich der Kraft, diedie Erde pro Masseeinheit auf einen Korper ausubt und mithin gleich der Be-schleunigung beim freien Fall.
Bemerkung 5 In der Nahe der Erdoberflache hat ~aG den Wert|~aG| = g =
9.81 N · kg−1 = 9.81 m · s−2
Genaue Messungen haben gezeigt, dass sich der Wert von ~aG an verschiede-nen Orten etwas unterscheidet. ~aG nimmt mit wachsendem Abstand zur Erd-oberflache ab - und zwar umgekehrt proportional zum Quadrat des Abstandsvom Erdmittelpunkt. Das heißt, ein und derselbe Korper wiegt in großer Hoheetwas weniger als in Hohe des Meeresspiegels. Da die Erde nicht genau eineKugel, sondern zu den Polen hin abgeflacht ist, hangt ~aG zudem etwas vonder geografischen Breite ab. Somit ist das Gewicht bzw. die Gewichtskraft imGegensatz zur Masse keine innere Eigenschaft eines Korpers.
Obwohl sich die Gewichtskraft eines Korpers also aufgrund der Anderungvon ~aG mit dem Ort andern kann, ist diese Anderung so klein, dass sie bei denmeisten praktischen Anwendungen auf der Erdoberflache oder in deren Nahenicht wahrgenommen wird. Ein Beispiel soll den Unterschied zwischen Masseund Gewichtskraft verdeutlichen. Stellen Sie sich vor, Sie nehmen eine schwereKegelkugel mit auf den Mond. Die Gewichtskraft der Kugel erreicht auf demMond nur ein Sechstel ihrer Gewichtskraft auf der Erde - die Kugel lasst sichauf dem Mond viel einfacher hochheben. Um die Kugel allerdings mit einerbestimmten Geschwindigkeit in horizontaler Richtung zu werfen, ist auf demMond dieselbe Kraft erforderlich wie auf der Erde, da ja die Masse der Kugelkonstant ist. Dementsprechend ware naturlich auch im Weltraum, weitab vonder Gravitation der Erde oder des Monds, fur dieselbe horizontale Beschleuni-gung dieselbe Kraft erforderlich.
Obwohl die Gewichtskraft auf einen Korper ortsabhangig ist, ist sie fur je-den einzelnen Ort proportional zur Masse des Korpers. Damit konnen wir dieMassen verschiedener Korper vergleichen, indem wir ihre Gewichtskrafte ver-gleichen. Wenn wir unsere eigene Gewichtskraft wahrnehmen, beruht das meistauf Kraften, die mit der Gewichtskraft im Gleichgewicht sind. Wenn Sie aufeinem Stuhl sitzen, spuren Sie die Kraft, die der Stuhl ausubt und die mit IhrerGewichtskraft im Gleichgewicht ist, so dass Sie nicht zu Boden fallen. WennSie auf einer Personenwaage steh en, spuren Ihre Fuße die Kraft, die die Waageauf Sie ausubt. Die Waage ist so geeicht, dass sie die Gegenkraft anzeigt, diesie aufbringen muss, um Ihre Gewichtskraft zu kompensieren. Diese Kraft wird
12
auch scheinbare Gewichtskraft genannt. Wenn wie etwa beim freien Fall kei-ne Kraft vorhanden ist, die der Gewichtskraft entgegenwirkt, ist die scheinbareGewichtskraft null. Diesen Zustand, die so genannte Schwerelosigkeit, erfahrenAstronauten in ihren Raumschiffen. Stellen Sie sich ein Raumschiff vor, dassich auf einer kreisformigen Erdumlaufbahn bewegt und somit standig zur Er-de beschleunigt wird. Die einzige Kraft, die auf das Raumschiff wirkt, ist dieErdanziehung (sein Gewicht), so dass es frei fallt. Auch die Astronauten in demRaumschiff sind im freien Fall. Die einzige Kraft, die auf sie wirkt, ist ihre Ge-wichtskraft, die fur die Beschleunigung ~aG verantwortlich ist. Da es unter diesenBedingungen keine Kraft gibt, die den freien Fall in der Umlaufbahn aufhalt,ist die scheinbare Gewichtskraft der Astronauten null.
2 Die Naturkrafte
Die volle Reichweite des zweiten Newton’schen Axioms zeigt sich erst, wennes zusammen mit den Gesetzen fur die Krafte betrachtet wird, die die Wech-selwirkungen von Korpern beschreiben. Dazu gehort beispielsweise das in zubesprechende Newton’sche Gravitationsgesetz, das die Gravitationskraft, dieein Korper auf einen anderen ausubt, durch den Abstand beider Korper unddurch ihre Massen ausdruckt. Zusammen mit dem zweiten Newton’schen Axi-om gestattet dieses Gesetz, die Umlaufbahnen der Planeten um die Sonne, dieBewegung des Monds wie auch die Hohenabhangigkeit von ~aG , der Gravitati-onsbeschleunigung, zu berechnen.
Alle Krafte, denen wir in der Natur begegnen, lassen sich auf vier funda-mentale Wechselwirkungen zwischen Elementarteilchen zuruckfuhren .
1. Die Gravitationskraft ist die Kraft der gegenseitigen Anziehung zwischenallen Korpern mit Masse.
2. Die elektromagnetische Kraft ist die Kraft zwischen allen Korpern mitelektrischer Ladung
3. Die starke Kernkraft ist die Kraft zwischen bestimmten subatomaren Teil-chen, den Hadronen.
4. Die schwache Kraft ist die Kraft zwischen subatomaren Teilchen wahrendspezieller radioaktiver Zerfallsprozesse.
Die Krafte, die wir im Alltag bei makroskopischen Korpern beobachtenkonnen, werden entweder durch die Gravitationskraft oder durch die elektro-magnetische Kraft hervorgerufen.
2.1 Fernwirkung
Die ersten beiden Grundkrafte, die Schwerkraft und die elektromagnetischeKraft, wirken zwischen Teilchen, die raumlich voneinander getrennt sind. Diesfuhrt zu einem philosophischen Problem, namlich dem der Fernwirkung oder
13
Wirkung uber eine Entfernung hinweg. Newton sah diese Fernwirkung als einenMangel seiner Gravitationstheorie an, war aber außerstande, eine andere Hypo-these uber das Wesen der Krafte zu formulieren.
Heute wird das Problem der Fernwirkung vermieden, indem das Konzeptdes Felds eingefuhrt wird, das als Ubertrager wirkt. Dabei wird beispielsweisedie Anziehung der Erde durch die Sonne in zwei Schritten betrachtet. Zunachsterzeugt die Sonne im Raum ein Gravitationsfeld, in dem die Gravitationsbe-schleunigung ~aG durch die Sonnenanziehung mit wachsendem Abstand zur Son-ne abnimmt Dieses Feld ubt dann eine Kraft auf die Erde aus. Das Feld spieltalso die Rolle des Vermittlers. Auf ahnliche Weise erzeugt die Erde ein Gravi-tationsfeld, das eine Kraft auf die Sonne ausubt. Auch unser Eigengewicht isteine Kraft, die das Gravitationsfeld auf uns ausubt. Ganz analog ergeben sich(in der Elektrizitat und Magnetismus) sowohl elektrische Felder, die durch alleelektrischen Ladungen entstehen, als auch magnetische Felder, die nur durch be-wegte elektrische Ladungen hervorgerufen werden. Im Prinzip sind sie also auchKrafte, und haben daher entsprechend analoge Konsequenzen fur die Bewegung(Mechanik) geladener Teilchen.
2.2 Reibung
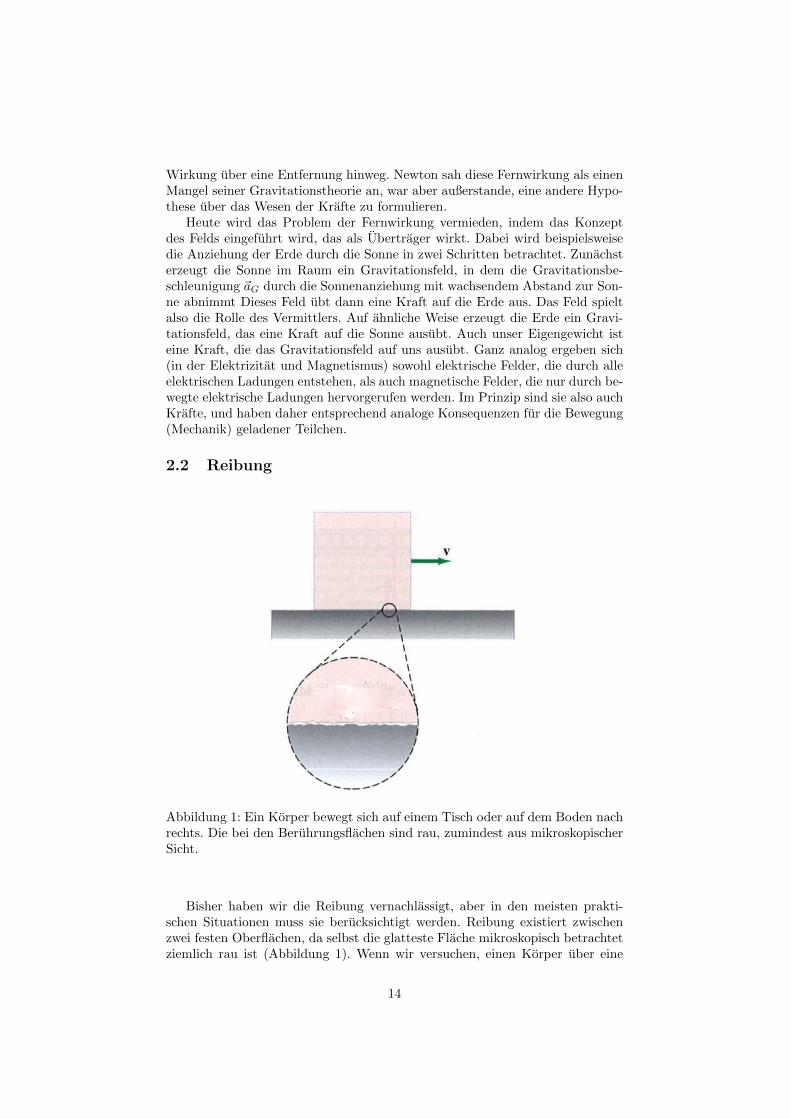
Abbildung 1: Ein Korper bewegt sich auf einem Tisch oder auf dem Boden nachrechts. Die bei den Beruhrungsflachen sind rau, zumindest aus mikroskopischerSicht.
Bisher haben wir die Reibung vernachlassigt, aber in den meisten prakti-schen Situationen muss sie berucksichtigt werden. Reibung existiert zwischenzwei festen Oberflachen, da selbst die glatteste Flache mikroskopisch betrachtetziemlich rau ist (Abbildung 1). Wenn wir versuchen, einen Korper uber eine
14
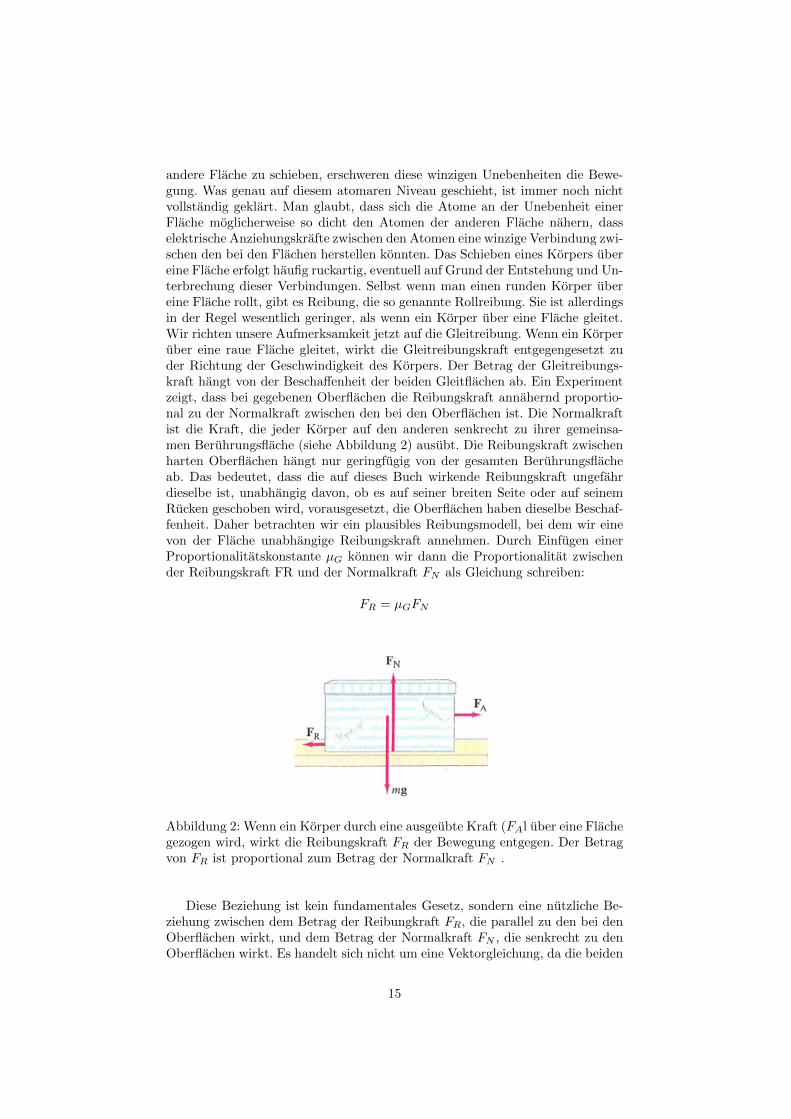
andere Flache zu schieben, erschweren diese winzigen Unebenheiten die Bewe-gung. Was genau auf diesem atomaren Niveau geschieht, ist immer noch nichtvollstandig geklart. Man glaubt, dass sich die Atome an der Unebenheit einerFlache moglicherweise so dicht den Atomen der anderen Flache nahern, dasselektrische Anziehungskrafte zwischen den Atomen eine winzige Verbindung zwi-schen den bei den Flachen herstellen konnten. Das Schieben eines Korpers ubereine Flache erfolgt haufig ruckartig, eventuell auf Grund der Entstehung und Un-terbrechung dieser Verbindungen. Selbst wenn man einen runden Korper ubereine Flache rollt, gibt es Reibung, die so genannte Rollreibung. Sie ist allerdingsin der Regel wesentlich geringer, als wenn ein Korper uber eine Flache gleitet.Wir richten unsere Aufmerksamkeit jetzt auf die Gleitreibung. Wenn ein Korperuber eine raue Flache gleitet, wirkt die Gleitreibungskraft entgegengesetzt zuder Richtung der Geschwindigkeit des Korpers. Der Betrag der Gleitreibungs-kraft hangt von der Beschaffenheit der beiden Gleitflachen ab. Ein Experimentzeigt, dass bei gegebenen Oberflachen die Reibungskraft annahernd proportio-nal zu der Normalkraft zwischen den bei den Oberflachen ist. Die Normalkraftist die Kraft, die jeder Korper auf den anderen senkrecht zu ihrer gemeinsa-men Beruhrungsflache (siehe Abbildung 2) ausubt. Die Reibungskraft zwischenharten Oberflachen hangt nur geringfugig von der gesamten Beruhrungsflacheab. Das bedeutet, dass die auf dieses Buch wirkende Reibungskraft ungefahrdieselbe ist, unabhangig davon, ob es auf seiner breiten Seite oder auf seinemRucken geschoben wird, vorausgesetzt, die Oberflachen haben dieselbe Beschaf-fenheit. Daher betrachten wir ein plausibles Reibungsmodell, bei dem wir einevon der Flache unabhangige Reibungskraft annehmen. Durch Einfugen einerProportionalitatskonstante µG konnen wir dann die Proportionalitat zwischender Reibungskraft FR und der Normalkraft FN als Gleichung schreiben:
FR = µGFN
Abbildung 2: Wenn ein Korper durch eine ausgeubte Kraft (FAl uber eine Flachegezogen wird, wirkt die Reibungskraft FR der Bewegung entgegen. Der Betragvon FR ist proportional zum Betrag der Normalkraft FN .
Diese Beziehung ist kein fundamentales Gesetz, sondern eine nutzliche Be-ziehung zwischen dem Betrag der Reibungkraft FR, die parallel zu den bei denOberflachen wirkt, und dem Betrag der Normalkraft FN , die senkrecht zu denOberflachen wirkt. Es handelt sich nicht um eine Vektorgleichung, da die beiden
15
Krafte senkrecht zueinander wirken. Der Term µG ist die Gleitreibungszahl undihr Wert hangt von der Beschaffenheit der beiden Oberflachen ab.
µG hangt davon ab, ob die Oberflachen nass oder trocken sind, in welchemMaße sie abgeschmirgelt oder abgeschliffen wurden, ob noch Grate vorhandensind etc. Ganz allgemein gesagt ist µG aber unabhangig von der Gleitgeschwin-digkeit und der Beruhrungsflache.
Bisher haben wir die Gleitreibung erortert, wenn ein Korper uber einenanderen Haftreibung gleitet. Es gibt auch eine Haftreibung, die sich auf eineKraft parallel zu den bei den Oberflachen bezieht, die auch auftreten kann,wenn die Oberflachen nicht gleiten. Nehmen wir an, ein Korper, z. B. ein Tisch,steht auf einem waagerechten Boden. Wenn keine horizontale Kraft auf denTisch ausgeubt wird, gibt es auch keine Reibungskraft. Nehmen wir jetzt aberan, Sie versuchen, den Tisch zu schieben und er bewegt sich nicht. Sie ubeneine horizontale Kraft aus, aber der Tisch bewegt sich nicht. Es muss also eineandere Kraft auf den Tisch wirken, die ihn daran hindert, sich zu bewegen (beieinem Korper, der sich nicht bewegt, ist die Nettokraft null). Hierbei handeltes sich um die Haftreibungskraft, die der Boden auf den Tisch ausubt. WennSie mit mehr Kraft schieben, der Tisch sich aber weiterhin nicht bewegt, hatdie Haftreibungskraft auch zugenommen. Wenn Sie kraftig genug schieben, wirdder Tisch sich schließlich bewegen, und die Gleitreibung gewinnt die Oberhand.An diesem Punkt haben sie die maximale Haftreibungskrafft ubertroffen, diegegeben ist durch FR(max) = µHFN . Dabei ist µH die Haftreibungszahl. Dadie Haftreibungskraft zwischen null und diesem maximalen Wert liegen kann,schreiben wir
FR ≤ µHFN
2.3 Kontaktkrafte
Viele uns bekannte Krafte werden von Objekten aufeinander ausgeubt, die indirektem Kontakt miteinander sind - sich also beruhren. Sie sind eine Folge vonKraften zwischen den Oberflachenmolekulen der Korper, die im Kontakt sind.
Festkorper Druckt man gegen eine Oberflache, so druckt diese zuruck. Be-trachten Sie z.B. eine angelehnte Leiter. An der KontaktsteIle druckt die Leitermit einer horizontalen Kraft auf die Wand, wobei sich die Molekule in der Ober-flache der Wand verschieben. Wie die Federn einer Matratze drucken dadurchdie verschobenen Molekule der Wand horizontal zuruck auf die Leiter. Krafte,die wie diese senkrecht zur Kontaktflache wirken, werden als Normalkrafte be-zeichnet (wobei Normal-ın diesem Fall ßenkrecht dazu”bedeutet). Dass sich dieWand in Folge der Belastung etwas biegt, ist mit bloßem Auge kaum wahrnehm-bar.
Normalkrafte treten in den verschiedensten Großenordnungen auf. So ubtein Tisch auf jeden darauf liegenden Gegenstand eine Normalkraft aus. Solangeder Tisch dabei nicht zerbricht, ist diese Kraft mit der Gewichtskraft des dar-auf liegenden Korpers im Gleichgewicht. Drucken Sie zusatzlich noch auf denKorper, erhoht sich im Gegenzug die nach oben gerichtete Kraft und verhindertdamit, dass der Korper nach unten beschleunigt wird.
Kontaktflachen konnen auch Krafte aufeinander ausuben, die parallel zu denKontaktflachen sind. z.B. ein großer Quader auf dem Boden. Wenn man ver-sucht, ihn mit einer kleinen horizontalen Kraft zur Seite zu bewegen, gleitet er
16
uberhaupt nicht. Die Bodenoberflache ubt eine Kraft auf den Quader auf, diesich dessen Bestreben, in Druckrichtung zu gleiten, vollstandig entgegenstellt.Dagegen wird der Quader zu gleiten beginnen, wenn er mit einer hinreichendstarken Kraft zur Seite gedruckt wird. Damit er weitergleitet, muss weiter Druckauf ihn ausgeubt werden. Ist das nicht der Fall, bremst die Reibungskraft dieBewegung des Quaders ab, so dass er schließlich ganz zur Ruhe kommt. EineKomponente einer Kontaktkraft, die dem Gleiten oder der Tendenz zu gleitenentgegenwirkt, wird Reibungskraft genannt. Eine Reibungskraft wirkt stets par-allel zur Kontaktflache. Auch wenn es in den Abbildungen scheinen konnte, alswurden Normalkrafte und Reibungskrafte nur an einem Punkt angreifen, sindsie in der Realitat uber die ganze Kontaktflache verteilt.
Federn Die Kraft, die eine um eine kleine Lange ∆x zusammengedruckteoder gedehnte Feder ausubt, ergibt sich experimentell zu
Fx = −kF ·∆x (4)
(Hook´sches gesetz) Dabei ist kF die so genannte Federkonstante, ein Maß furdie Steifheit einer Feder. Das negative Vorzeichen in der Gleichung zeigt, dassdiese Kraft in entgegengesetzter Richtung zu der wirkt, in der die Feder gedehntbzw. zusammengedruckt wird. Diese Beziehung, die als das Hooke’sche Gesetzbekannt ist, ist recht bedeutsam: Von einem Korper, der unter dem Einflussvon Kraften, die sich ausgleichen, im Ruhezustand ist, sagt man, er sei in einemstatischen Gleichgewicht. Wenn eine kleine Verschiebung dieses Korpers eineGesamtkraft zur Folge hat, die wieder in Richtung des Gleichgewichtspunktsweist (eine so genannte Ruckstellkraft) , spricht man von einem stabilen Gleich-gewicht.
2.4 Losen der Bewegungsgleichung
Die Bewegungsgleichung ist eine Differentialgleichung
~F = m · d2~r
dt2(5)
Ihre Losung ergibt den Ort zu einem gewissen Zeitpunkt. Die Geschwin-digkeit ergibt sich direkt aus der zeitlichen Ableitung des Ortes. Die zweiteAbleitung ist dann identisch mit der Beschleunigung und multipliziert mit derMasse die Kraft, die zur Zeit t am Ort ~r = (x, y, z) herrscht.
Die Losung der Differentialgleichung kann trivial, einfach, kompliziert odersogar analytisch unlosbar sein. Praktisch immer ist aber eine numerische Losungmoglich.
2.4.1 Losung durch Integration
Wir wissen, wie man die Geschwindigkeitsfunktion υ(t) und die Beschleuni-gungsfunktion a(t) durch Ableiten der Ortsfunktion x(t) nach der Zeit gewinnenkann. Das umgekehrte Problem besteht darin, die Funktion x(t) zu ermitteln,wenn die Geschwindigkeit υ(t) oder die Beschleunigung a(t) gegeben ist. Da-zu muss man das Verfahren der Integration anwenden, das wir an dieser Stelle
17
deshalb kurz erlautern wollen. Wenn wir die Beschleunigung a(t) als Funkti-on der Zeit kennen, gilt es, eine Funktion υ(t)zu finden, deren Ableitung dieBeschleunigung ist. Die Funktion υ(t) wird dann eine Stammfunktion von a(t)genannt.
Wenn beispielsweise die Beschleunigung konstant ist, also dυ(t) = a, a =konstant gilt, ist die Geschwindigkeit eine Funktion der Zeit, deren Ableitunggerade diese Konstante ist. Eine solche Funktion lautet υ(t) = at. Allerdingskann zu der Funktion υ(t) = at noch eine beliebige Konstante - nennen wir sieVo - addiert werden, ohne das Ergebnis
der Differenziation zu andern. Also gilt folgende allgemeinere Form als dieLosung:
υ(t) = at+ Vo (6)
Furt = 0gilt υ = Va. Somit ist Vo die Anfangsgeschwindigkeit. Mit der glei-chen Begrundung ist auch die Ortsfunktion x(t) jene Funktion, deren Ableitungdie Geschwindigkeit ist:
dx
dt= υ(t) = at+ Vo
→x(t) =
a
2t2 + Vot+ x0
Wir haben hier ein wichtiges Merkmal der Vorgehensweise bei der Integrationkennen gelernt: Um die allgemeine Losung anzugeben, muss zu der Stammfunk-tion eine beliebige Konstante, die Integrationskonstante, hinzugefugt werden.Da wir zweimal integrieren mussten, um aus der Funktiona(t) die Funktion x(t)zu erhalten, treten nun zwei Konstanten, X0 und V0, auf. Diese Konstanten sinddurch die Geschwindigkeit und den Ort des Teilchens zu einem bestimmten An-fangszeitpunkt gegeben, der gewohnlich als t = 0 gewahlt wird. Sie werden des-halb die Anfangsbedingungen genannt. Das Problem ermitteln Sie bei gegebenerFunktion a(t) und den Anfangswerten X0 und V0 die Funktion x(t) heißt dasAnfangswertproblem. Da die Beschleunigung eines Teilchens durch die Kraftebestimmt ist, die auf das Teilchen einwirken, ist dieses Problem in der Physikvon fundamentaler Bedeutung. Somit konnen wir den Ort eines Teilchens imPrinzip fur alle Zeiten berechnen, wenn wir die auf das Teilchen einwirkendenKrafte sowie seinen Ort und seine Geschwindigkeit zu einem bestimmten Zeit-punkt kennen (man spricht dann auch von der Losung der Bewegungsgleichung).
Das Bestimmen der Stammfunktion einer Funktion ist eng mit der Aufgabeverbunden, die Flache unter einer Kurve zu berechnen. Wir betrachten dazuden Fall der Bewegung mit konstanter Geschwindigkeit V0. Die Ortsanderungoder Verschiebung ∆x im Zeitraum ∆t ist dann ∆x = V0∆t
Dies die Flache unter der Geschwindigkeits-Zeit-Kurve. Wenn V0 negativist, sind auch die Verschiebung und die Flache unter der Kurve negativ. ImUnterschied zu unserer herkommlichen Vorstellung, eine Flache sei immer posi-tiv, erhalt die Flache unter der Kurve”(die Flache zwischen der Kurve und derZeitachse) in diesem Fall also einen negativen Wert.
Diese graphische Interpretation der Verschiebung als Flache unter der v −t−Kurve ist auch dann gultig, wenn die Geschwindigkeit nicht konstant ist. Umdies zu zeigen,
18

teilen wir die Flache unter der Kurve zunachst in viele kleinere Intervalle ∆t1,∆t2 ... usw. auf, denen jeweils ein Rechteck zugeordnet ist. Der Flacheninhaltdieser diskreten Rechteck ist Vi∆.ti, was naherungsweise gleich der Verschie-bung ∆xi des Teilchens im Zeitintervall ∆ti ist. Somit ist die Summe derFlacheninhalte der Rechtecke naherungsweise gleich der Summe der Verschie-bungen in den einzelnen Zeitintervallen und damit gleich der Gesamtverschie-bung vom Zeitpunkt t1 bis zum Zeitpunkt t2•
Mathematisch schreibt man dafur∆x ∼∑i
Vi∆ti.
Die Naherung kann beliebig gut gemacht werden, wenn nur eine ausreichendeAnzahl von Rechtecken unter die Kurve gelegt wird, von denen jedes Rechteckeinen ausreichend kleinen Wert von ∆t besitzt. Im Grenzwert immer kleinererZeitintervalle (in dem die Anzahl der Rechtecke immer großer wird) geht dieSumme gegen den Flacheninhalt unter der Kurve, der seinerseits gleich der Ver-schiebung ist. Der Grenzwert fur immer kleiner werdende Zeitintervalle ∆t istgleich der Flache unter der Kurve v(t); er heißt Integral der Funktion υ(t) undwird geschrieben als
∆x = x(t2)− x(t1) = lim∆t→0
(∑i
Vi∆ti
)=
∫ t2
t1
υ · dt (7)
2.4.2 Numerisches Losen
Das Euler-Verfahren Wenn sich ein Teilchen unter dem Einfluss einer kon-stanten Kraft bewegt, ist seine Beschleunigung konstant. Damit kann man dieBewegungsgleichung, wie oben gezeigt, analytisch losen (aufintegrieren). Dochwas ist, wenn sich das Teilchendurch den Raum bewegt, wahrend die auf dasTeilchen wirkenden Krafte z.B. von dessen Ort und Geschwindigkeit abhangen?In diesem Fall bestimmen der Ort, die Geschwindigkeit und die Beschleunigungdes Teilchens zu einem Zeitpunkt den Ort und die Geschwindigkeit des Teilchensim nachsten Augenblick, woraus sich wiederum die Beschleunigung zu diesemZeitpunkt ergibt. Sowohl der Ort und die Geschwindigkeit als auch die Beschleu-nigung des Teilchens andern sich standig mit der Zeit. Ein Naherungsverfahrenfur diese Aufgabenstellung besteht darin, die sich kontinuierlich andernde Zeitin viele kleine Zeitintervalle ∆t zu zerlegen. Bei der einfachsten Naherung wirddann einfach angenommen, dass die Beschleunigung wahrend jedes Zeitschrittskonstant ist. Diese Naherung wird das Euler-Verfahren oder Polygonzugver-fahren genannt. Tatsachlich ist die Anderung der Beschleunigung wahrend desIntervalls vernachlassigbar gering, wenn das Zeitintervall nur hinreichend kleinist.
Es seien xo, V0 und a0 die bekannten Variablen Ort, Geschwindigkeit und Be-schleunigung eines Teilchens zu einem Anfangszeitpunkt to. Wenn man wahrend∆t eine konstante Beschleunigung annimmt, betragt die Geschwindigkeit zumZeitpunkt t1 = to + ∆t
υ1 = υo + a0∆t (8)
19