Embed Size (px)
Citation preview

Multimodal routing and energy schedulingfor optimized charging of electric vehiclesA. Schuster OVE, S. Bessler OVE, J. Grønbæk
In this work we describe the brokerage function between electric vehicle users searching for a charging spot and the charging stationsproviding the charging service. We propose a routing service for locating and reserving charging spots. Furthermore, we extend thesearch for charging stations to the case where the trip from the charging station to destination is made using public transportation.Further contributions address the load balancing functionality at the charging station and at the low voltage grid level. In order to
realize the latter, we argue for the introduction of a bidirectional interface between the charging station and the DSO, and show howavailable power for charging stations can be dynamically calculated. Finally, we analyze in detail different charge control concepts forgrid component protection.
Keywords: battery electric vehicle; BEV; navigation; city traffic; public transport; control system; infrastructure; smart grid; solar energy;load and power management
Multimodales Routing und Energieflusssteuerung f€ur optimierte Ladevorg€ange bei Elektrofahrzeugen.
Diese Arbeit besch€aftigt sich mit der Verkn€upfung zwischen den suchenden Elektroautobenutzern und den Ladestationen. Ziel ist es,
mittels Verkehrslenkungsdiensten die optimale Ladestation zu finden und im Vorhinein zu reservieren. Weiters wird in dieser Arbeit die
Kombination mit dem €offentlichen Verkehr in Form mehrerer Szenarien detailliert analysiert.
Neben allen wichtigen Informationen f€ur den Benutzer soll ebenfalls die zur Verf€ugung stehende Leistung an der Ladestation geliefert
werden. Die Methodik der Berechnung dieser freien Kapazit€aten im Niederspannungsnetz wird ebenfalls erl€autert. Abschließend
werden Ladesteuerungskonzepte, welche die Netzkomponenten sch€utzen sollen, eingef€uhrt und auf deren Funktion gepr€uft.
Schlusselworter: Batterie-Elektrofahrzeug; Navigation; Stadtverkehr; Offentlicher Verkehr; Steuersystem; Ladeinfrastruktur;
Smart Grids; Solarenergie; Last- und Leistungs-Management
Received January 13, 2012, accepted March 21, 2012� Springer-Verlag 2012
1. Introduction
The problem of electric vehicle (EV) charging has to be analyzed in
both spatial (geographic) and temporal dimensions. The geographi-
cal aspect is related to the mobility model: a solution approach is to
search for available power in charging stations near the user�s activityplaces, or to search for less congested charging stations. We show
that the latter problem which is relevant in urban regions can be
solved by suggesting multimodal routes (drive, walk, use public
transportation).
The temporal aspects arise when the distribution network opera-
tor together with the charging station owner (a new actor in
e-mobility) are trying to flatten the load peak and delay in this way
investments in grid enhancement. The solutions investigated in this
work are: controlled charging (that is an optimized scheduling of EV-
charging tasks using time windows), the LV grid level computation of
the available power at each charging station and charge control
concepts to protect grid components.
The work is being performed within the Austrian project KOFLA
(KOFLA Project website), in the new mobility program “ways2go”
and the results are currently tested in a lab environment.
2. System architecture
In this section we discuss the system architecture of public charging
stations (see Fig. 1). Although public charging seems not to be the
highest priority for advancing the e-mobility in Europe, it poses major
challenges both for the user logistics and for the energy network
provider. Thus, a public charging station (comprising a number of
charging points) has to advertise its position and availability status to
the driving users, and it has to cope with highly stochastic charging
demand. Both requirements can be fulfilled using ICT networking:
the first can be realized with a routing and brokerage service, the
second – by demand side management and load coordination with
other consumers of the same low voltage grid.
In Fig. 1 the charging station communicates with a routing service
and with a grid calculation function to be discussed in the following
sections.
2.1 Decentralized architecture
The liberalization of the energy market in Europe allows of course to
buy EV charging energy from the home utility, independently of the
grid and the charging station provider (energy roaming). The ex-
pected advantage for the user is the existence of one single bill, and
for the home energy provider – to maintain the loyalty of the
customer. This business model has, however, several drawbacks:
a) Energy charging is only a part of the service offered by a service
provider (Rautiainen et al., 2011), who is also the charging station
owner. A variety of services will emerge, such as: multimodal
mobility (combined use of public transportation and EV), parking
Schuster, Andreas, Dipl.-Ing., Technische Universit€at Wien, Institut f€ur
Energiesysteme und Elektrische Antriebe, Gußhausstraße 25/370-1, 1040 Wien,
Osterreich; Bessler, Sandford, Dipl.-Ing. Dr. techn., Grønbæk, Jesper, Dr. M.
Sc.E.E., FTW The Telecommunications Research Center Vienna, Donau-City-Straße 1,
1220 Wien, Osterreich (E-mail: [email protected])
Mai 2012 | 129. Jahrgang © Springer-Verlag heft 3.2012 141
Elektrotechnik & Informationstechnik (2012) 129/3: 141–149. DOI 10.1007/s00502-012-0093-1 ORIGINALARBEITEN

services (because parking space in the cities probably accounts for
the main share in the charging bill), loyalty programs combining
shopping with park & charge and many more. With such models,
the advantage of the single home energy bill and the required
“energy roaming” idea disappears.
b) The business model of independent charging station owners
fosters the competition such that, charging at the next street
corner may be less expensive than charging energy from the
“home” energy provider.
Many e-mobility projects have opted for a system that centrally
controls each EV charging operation and its associated transaction.
The implication is that the power meter at a charging point belongs
to the grid operator and is controlled by a central server that
" capitalizes all energy accounting and payment processes" centralizes communication with the user/vehicle" prevents the emerging of open, interworking and independent
charging stations
In contrast, we advocate a decentralized architecture (see Fig. 1)
that provides control, payment and resource management functions
at the charging station level. Thus, the charging station controller is
finally responsible for the admission of a reservation request.
Through sending regular availability updates, every charging sta-
tion contributes to the brokerage of demand and supply, performed
by a wide area routing service.
3. Routing service
The “driver anxiety” is only one cause for the routing support
needed by drivers during the trip. Mobility studies in Lower Austria
and Vorarlberg, Austria (Herry, Tomschy, 2009a, 2009b) showed
that the charging place will be determined by the user activity at
the trip destination. Therefore, the routing service searches for a
charging spot situated in the vicinity of the destination. As charging
durations are still in the range of hours, not only the mere existence
of charging points are required, but also their availability, with the
possibility to reserve in advance.
The functionality of the proposed routing service enables the user
" to query anytime the availability and the characteristics (see be-
low) of the public charging stations in the vicinity of the
destination,
" to initiate a booking (reservation) at a selected public charging
station," in case no available charging spots are found, to get notified
when a charging point becomes available," to search around the current location in emergency case (traffic
jam, unexpected energy consumption because of heating, cool-
ing, etc.).
The routing service is regularly updated by the charging sta-
tions with the forecast of available power and parking lots. In
order to better match a user request with a set of available
charging stations, the charging request message contains a num-
ber of user preferences such as loyalty programs supported, user
perceived importance of price, green energy, comfort and urgen-
cy (see Table 1).
Upon receiving a query, the routing service responds with a
ranked list of charging stations. This allows the user to select one
of them with a single click. The reservation commits the charging
station for the charging period, and tolerates deviations from the
stated arrival time of the user. Whereas a query uses the approxi-
mated station availability stored in the routing server, a reservation
causes the resource commitment at the selected charging station
controller.
Fig. 1. Public charging system components
Table 1. Main parameters used in the simulation of routingschemes
Parameter Value
TimestampDestination CoordinatesExpected arrival timeExpected departure timeExpected state of charge (SoC)Allow multimodality Yes/noCharging rates supported Slow/normal/quickPrice importance High/lowWaiting importance High/lowWalking distance importance High/lowRenewable energy importance High/lowPayment means Card name, null
142 heft 3.2012 © Springer-Verlag e&i elektrotechnik und informationstechnik
ORIGINALARBEITEN A. Schuster et al. Multimodal routing and energy scheduling

4. Multimodal routing
Multimodal routes include several means of transportation. In this
section we focus on multimodality encompassing EV-mobility, walk-
ing and public transport solely. The considered use case scenario
extends the use case of Sect. 3 by enabling the EV-user to use
charging stations in vicinity of public transport stops that can provide
transport to the final destination. Following this scenario, a heuristic
has been specified to identify relevant charging stations. The heuris-
tic is based on the presumptions that: 1) An EV-user can accept to
walk maximally Twalk seconds between two points on a route, 2) The
user can accept to spend maximally Tpt seconds in public transport
transit, 3) The desired EV driving range is limited to EVrange e.g. to
satisfy low battery EV range constraints.
A realization of this heuristic consists of the following main steps:
Offline initialization: All charging stations within Twalk seconds of a
public transport stop are identified.
Online processing (at request):
A. Identify the closest public transport stop Pds (destination stop)
within Tpt walking distance. If none are found, return an empty
set.
B. Identify public transport stops Picss, i¼ 0...N (charging station
stop). N corresponds to the amount of stops that can be reached
within Tpt seconds from Pds (assuming symmetric of public trans-
port routes). The travel time to each station can be calculated
from a shortest-path-tree (Dijkstra, 1959). Based on Picss, look-up
all charging stations CSjall, j¼0...M within walking distance
C. Of the charging stations CSjall filter out irrelevant charging
stations based on desired EV range. In this case charging sta-
tions are considered in a radius defined by the distance from the
EV to the destination stop þ2000 meter to avoid excessively
long routes.
D. For each remaining charging station calculate two routes: 1)
driving from the current location of the EV to the charging station
and 2) public transport from the charging station to the
destination.
E. The routes calculated for each charging station in D. are returned
to the EV-user for a final selection.
4.1 Evaluation scenario
The proposed multimodal routing scheme has been evaluated to
clarify the potential gains and costs. We primarily focus on scenari-
os where public transport is widely available and expected to
provide support for EV-mobility in park-and-ride like scenarios.
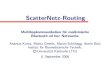
An evaluation scenario has been built around the city of Vienna
(16 km by 16 km region, see Fig. 2) considering the subway system
(90 stations) which supports 64% of all public transport (Wiener
Linien, 2010).
In this scenario, independent start and destination locations are
generated to form a trip simulating mobility needs. The start
locations are randomly generated (uniformly) all over the region.
Destination locations are randomly chosen from points-of-interest
(from data.wien.gv.at containing restaurants, sport centers, etc.)
to ensure commonly relevant destinations. Charging station loca-
tions are derived from 568 publicly available parking locations
defined in OpenStreetMaps (CloudMade extract of Wien, 2011).
Introducing the probability pCS that a parking location offers a
charging station, it is possible to study the impact of future charg-
ing stations penetration levels.
The multimodal routing scheme has been implemented for eva-
luation using existing open source tools for shortest time public
transport and road network routing. These operate with geographi-
cal data and context information (speed limits, road type) available
from OpenStreetMap.org (CloudMade extract of Wien, 2011). Public
transport schedule information for 2011 has been provided by
“Wiener Linien”.
4.2 Evaluation approach
In the evaluation, three schemes are compared: reference: driving
directly to destination without charging/parking, destination vicinity
charging: driving to charging station reachable within Twalk seconds
from destination, andmultimodalwhich is destination vicinity charg-
ing with the multimodality enabled. A simulation is run over a large
number of independent trips (start-destination sets) evaluating for
each scheme the total travel time and the amount of charging
stations identified. The parameters used for the study are listed in
Table 2. Generated trips with a distance larger than 350m from a
map way node have been discarded to avoid evaluating remote
locations (e.g. as in a forest).
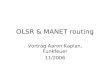
The results in Fig. 3 depict the search results for increasing charg-
ing station penetration levels. Sub-figure a) the probability to find at
least one charging station for a trip. In the lowest penetration case
the chance of finding a charging station driving to the vicinity of the
destination is lower than 10%. In this setting the multimodal scheme
shows a significant improvement to around 40%. For increasing
penetration the differences are reduced but still with multimodality
offering a clear advantage.
Identifying several charging station options to choose from is
necessary to address issues of charging station occupation, grid load,
etc. To address this aspect sub-figure b) depicts the cases where at
least 3 charging stations can be reached. In this case the multimodal
scheme is superior again, as the access to public transportation
provides access to a large set of charging stations. The advantage
is clearly that access to the public transport network provides access
Fig. 2. Vienna map including public parking areas (with/withoutcharging) and an example of a direct and multimodal route via acharging station
Table 2. Main parameters used in the simulation
Parameter Value
Trips evaluated 484Walking speed 5 km/hTrip start time 09:00:00 (weekday)Tpt 900 sTwalk 300 s
Mai 2012 | 129. Jahrgang © Springer-Verlag heft 3.2012 143
ORIGINALARBEITENA. Schuster et al. Multimodal routing and energy scheduling

to a large set of charging stations. In fact, 30% of trips for the 100%
penetration level offer access to more than 20 charging stations.
The multimodal scheme, however, comes at a cost of increased
travel times. Sub-figure c) depicts average total travel times of the
destination vicinity charging scheme compared to the trips made
using public transport. The latter is depicted for both the single
fastest multimodal trip as well as for cases where the 3 fastest
multimodal trips are considered. The dash-dotted line shows the
average reference driving time directly to the destination. In the
10% penetration case it is observed that an average trip time
increase of around 450 seconds must be expected when public
transportation is used, compared to vicinity charging. At 100%
e-mobility penetration this time penalty decreases to around 330
seconds. It can, however, also be observed that the average travel
time for the three best route alternatives is only slightly higher than
for the best route.
The results show a clear advantage of the multimodal scheme
provided that EV-users can accept the increased delays. In future
work we will study improved heuristics for charging station location
selection in conjunction to public transport in order to mitigate the
increased delay cost.
5. Energy scheduling
5.1 Charging schedules
The stochastic demand at public charging stations creates an inevi-
table imbalance between the planned load and the actual one. Since
battery storage is a controllable load (with availability time con-
straints), the approach followed in KOFLA is to keep the total load
below the calculated maximum available power. This is done by the
charging station controller (see Fig. 1). Key for solving the scheduling
problem is the knowledge of the available power, i.e. the maximum
power that could be used for the charging in every time slot. Note
that, the available power is time varying, and different from the
today�s contracted and guaranteed maximum power load levels. The
available power calculation is discussed in the following section.
The machine scheduling problem described in detail in (Bessler,
Grønbæk, 2012) aims at shifting the actual charging intervals of all
the plugged-in EVs such that the total consumption does not exceed
the available power at any moment. The solution is relevant not only
for public charging stations but also for private or corporate EV
parking lot.
5.2 Power flow calculation methods
In this section we propose to calculate the available power for all
charging stations situated in a low voltage grid, using power grid
flow calculation. The available power is the maximum power in
kilowatt of a charging station without any grid component overloads
and without any node under voltage.
A condition for the flow calculation is the availability of power
values of all demands (households, enterprises) and decentralized
sources (PV, small wind turbines). In case metering infrastructure is
not available, typical day load profiles can be used. In order to
simplify and speed up the calculation methods, a DC load flow
analysis method including electric current iteration is adopted under
following assumptions:
" Demand and power factor of all consumers and sources in the low
voltage grid are well-known." All loads are symmetric and therefore the positive-sequence poly-
phase system can be used in the calculation." Only radial systems without intermeshing are supported.
The proposed Easy Grid Analysis Method (EGAM) has five steps
with one decision, see Fig. 4. Step 1 initializes components and node
voltage values as well as load profiles of consumers to the correct
node. Step 2 and 3 are the DC load flow calculation with electric
current iteration. The results are stable, if these computations run in
two iterations. An additional calculation changes the values maxi-
mally 0.0004%. Step 4 reduces the absolute failure of EGAM with
correction values and Step 5 calculates grid losses of the total LV
grid.
The accuracy of the calculated values is compared with the results
of an extended Newton Raphson calculation in NEPLAN (a popular
software tool from BCP BusarelloþCottþ Partner AG, Zurich,
Switzerland). For evaluation, we used a LV grid in the city of Bregenz
Fig. 3. Charging station availability and trip time increases fordifferent levels of charging station penetration on public parkingplaces
Fig. 4. Flow chart of the Easy Grid Analysis Method (EGAM)
144 heft 3.2012 © Springer-Verlag e&i elektrotechnik und informationstechnik
ORIGINALARBEITEN A. Schuster et al. Multimodal routing and energy scheduling

(Austria). All information of the grid components are given by the
VKW-Netz AG. The largest node voltage errors of EGAM are be-
tween –0.22% and 0.14% of the nominal voltage (Schuster,
Litzlbauer, 2011). The EGAM must be fast, because of repeated
usage. One load flow calculation inclusive grid loss computation
takes 0.6ms.
5.3 Results of the LV grid calculation
The results obtained from the computation are the available charg-
ing power and the estimated grid losses in the LV grid. If the grid
supplies more than one charging station, the available power values
are interdependent. This leads to our desired result, namely, the
charging stations have to coordinate their decisions via the LV grid
computed feasible region. For more information see (Bessler et al.
2011).
6. Charge control concepts
If the actual EV demand and household loads are higher than the
planned scheduled load, and overload the grid, charge control
strategies are required to protect the grid components. In the fol-
lowing section those control concepts will be discussed in detail.
6.1 Classification of charge control concepts
Generally, a multitude of classifications are used in the context of
charge control. We use a classification, as seen in Fig. 5, with
following categories:
" Uncontrolled charging: In this case the charging process starts
immediately after plug-in and ends with a fully charged battery or
a consumer plug-out." Load oriented controlled charging: To control charging processes
the start time or charging power are changed in such a way as to
level the consumer load profile." Supply oriented controlled charging: In this case the charging
process is triggered by the renewable energy supply level (e.g. PV)." Grid oriented controlled charging: The charging load in this strat-
egy is such that the voltage and current limits are not exceeded
anywhere in the grid.
Each category requires a different communication infrastructure
between utility, charging spot and electric vehicle. In the following
sections the charge control concepts and effects on the grid are
shown on the basis of a real LV grid of Bregenz. The load flows of the
LV grid are calculated with the tool NEPLAN, which is controlled by a
MATLAB routine. This routine calculates the load profiles of the
BEVs, households and enterprises as well as influences the charging
possibility according to the charge control concepts. The household
load profiles are taken from the project ADRES (Institut f€ur Energie-
systeme und Elektrische Antriebe) and the vehicle mobility patterns
are taken from (Herry, Tomschy, 2009a).
6.2 Results of charge control concepts
To demonstrate the impact of charge controls on grid quality and
losses, we use the LV grid in Fig. 6. Following assumptions are made:
" Examination year of this analysis is 2030." Current consumer (household and industry) load profiles are
increased with a rate of 2% per year." A 9 kilowatt peak photovoltaic facility is additionally installed on
each house roof." Electric vehicle penetration of 80% for private households with a
charging power of 10.5 kilowatt is assumed. Additionally 40
battery electric vehicles can charge at working and public places." The load oriented charging mode is enabled from 10 pm until 6
am and the supply (PV) oriented one – from 8 am until 6 pm. Only
in this time periods charging is possible.
Fig. 5. Classification of charge controls (Leitinger, 2011)
Fig. 6. Simulated LV grid with PV (Lanner, 2012)
Mai 2012 | 129. Jahrgang © Springer-Verlag heft 3.2012 145
ORIGINALARBEITENA. Schuster et al. Multimodal routing and energy scheduling

" Grid oriented charging control pulses the charging possibility of all
plugged-in electric vehicles on/off in the overloaded grid section.
For detail information see (Lanner, 2012).
6.2.1 At home
For home charging spots supply oriented charging control is not
feasible, because the majority of the vehicles are not at home
between 8 am and 6 pm and therefore the supplied energy by PV
cannot be used.
To compare uncontrolled with controlled charging (load oriented)
the power profile of load “L-138” (see Fig. 6) on one working day is
exemplary shown in Fig. 7. With load oriented charging the
peak value is reduced and all electric vehicles are fully charged at
about 3 am.
In case of uncontrolled charging a high demand of power is
needed about 6 pm. Therefore the load of the power supply line
“L92” is nearly 60% (see Fig. 8). With load oriented charging control
the maximum load due to household and industry demand of 30%
does not increase by charging electric vehicles. However, a second
load peak at about 11 pm appears.
6.2.2 At work
In contrast to home charging stations, load oriented charging control
is not feasible at work (charging time period doesn�t fit with working
hours). But in case of an own photovoltaic facility supply oriented
charging can be very useful.
Such control can reduce power peaks e.g. of the load “L-156” at
nearly 50%. In this case all electric vehicles are fully recharged before
driving away.
Figure 9 shows the load profile of the power line “L120”, which
supplies load “L-156”. The high peak load about 65% is reduced by
supply oriented charging. However, the peak load of the supply line
at working places increases by adding charging loads.
6.2.3 Grid oriented charging control
This strategy (described in Sect. 6) avoids overloads or voltage
deviations at any charging spot in the grid section (at home, work
and public places). As shown in Fig. 9 power line “L120” has a peak
load over 60% if charging is uncontrolled. To reduce this overload,
the charging start time of the electric vehicles at load “L-156” are
controlled.
Fig. 7. Load profile (working day) of load �L-138� with households, industries and electric vehicles (uncontrolled and load oriented)
Fig. 8. Load profile (working day) of supply line �L92� with electric vehicles (uncontrolled and load oriented)
146 heft 3.2012 © Springer-Verlag e&i elektrotechnik und informationstechnik
ORIGINALARBEITEN A. Schuster et al. Multimodal routing and energy scheduling

Fig. 9. Load profile (working day) of supply line �L120� with electric vehicles (uncontrolled and supply oriented)
Fig. 10. Load profile (working day) of load �L-156� with households, industries and electric vehicles (uncontrolled and grid oriented)
Fig. 11. Load profile (working day) of supply line �L120� with electric vehicles (uncontrolled and grid oriented)
Mai 2012 | 129. Jahrgang © Springer-Verlag heft 3.2012 147
ORIGINALARBEITENA. Schuster et al. Multimodal routing and energy scheduling

In Fig. 10 the effect of grid oriented charging is shown in detail.
The charging period is extended, because the electric vehicles are
switched on and off periodically.
Grid oriented charging control reduces the peak load of power
line “L120” (see Fig. 11) and all battery electric vehicles are fully
recharged.
6.3 Comparison of charge control concepts
For comparison of charge concepts two grid parameters are impor-
tant: supply line loads and grid losses. Every high applied load causes
thermal stress and reduces durability of electric lines and transfor-
mers. Therefore, charge control concepts should minimize supply
line loads.
In case of a strict load or supply oriented charging, a few of
electric vehicles cannot fully charge their batteries. Therefore, the
supply line loads are lower with these assumptions (see Fig. 12).
Hence, the combination of load (at home) and supply (at work)
oriented charging has the lowest load range for electric lines. Every
charging control concept reduces the maximal line load in compar-
ison with the uncontrolled case and thus preserves grid
components.
Aside load and supply oriented charging, which have the above
mentioned restrictions, the combination has the lowest grid losses
(see Fig. 13). However, the grid oriented charging also reduces
losses. For more information see (Lanner, 2012).
7. Conclusion
In this work we presented a number of ways to help EV users in
finding public charging spots and to optimize the EV created load in
the grid. Based on user mobility needs that have been extrapolated
to e-mobility, we have sketched the design of a routing and reser-
vation service. We have shown that, by including public transporta-
tion alternatives from the charging point to the destination, the
availability of charging spots drastically increases, particularly at low
charging station densities.
Furthermore, we have proposed a distributed architecture that
allows to perform energy balancing at three levels: at the charging
station using charge control concepts, at the LV grid using grid flow
calculation and at the routing area using the brokerage function.
Acknowledgements
This work has been performed within the Austrian project KOFLA
(Kooperative Fahrerunterst€utzung f€ur Lademanagement von elek-
trischen Fahrzeugen) which is funded by the programme "ways2go"
and by the Austrian Federal Ministry for Transport, Innovation and
Technology.
References
Bessler, S. et al. (2011): Supporting E-mobility users and utilities towards an optimized
charging service, EEVC, Brussels, Belgium, October 26-28.
Bessler, S., Grønbæk, J. (2012): Routing EV users towards an optimal charging plan,
Proceedings EVS�26, 6–9 May, Los Angeles, USA.
CloudMade extract of Wien, Austria from OpenStreetMap.org. Downloaded August
2011.
Dijkstra, E. W. (1959): A note on two problems in connexion with graphs. Numerische
Mathematik 1: 269271.
Herry, M., Tomschy, R. (2009a): Travel behavior survey in Lower Austria 2008, Final
Report, Vienna.
Herry, M., Tomschy, R. (2009b): Travel behavior survey in Vorarlberg 2008, Final Report,
Vienna.
Institut f€ur Energiesysteme und Elektrische Antriebe, TU Wien: EZ-IF: Konzeptentwicklung
f€ur ADRES – Autonome Dezentrale Regenerative Energie Systeme, FFG-Projekt
815674. (http://www.ea.tuwien.ac.at/projekte/adres_concept/, Last visited April
2012)
KOFLA Project website, online: http://www.ftw.at/research-innovation/projects/kofla/,
Last visited April 2012.
Lanner, M. (2012): Auswirkungen von Ladesteuerungen elektrischer Fahrzeuge in einem
konkreten Verteilnetz, Diplomarbeit.
Leitinger, C. (2011): Netzintegration von solarer elektrischer Mobilit€at – Auswirkungen
auf das elektrische Energiesystem, Dissertation, September 21.
Rautiainen, A., Evens, C., Repo, S., Jarventausta, P. (2011): Requirements for an Interface
Between a Plug-in Vehicle and an Energy System, IEEE PES PowerTech, Trondheim.
Schuster, A., Litzlbauer, M. (2011): Easy grid analysis method for a central observing and
controlling system in the low voltage grid for E-Mobility and renewable integration,
3rd European Conference SmartGrids and E-Mobility, Munich, October 17-18.
Wiener Linien (2010): Ein Blick auf die Leistung – Jahresbericht 2010.
Fig. 12. Load range of all involved power supply lines with uncon-trolled and controlled charging in comparison
Fig. 13. Total grid losses with uncontrolled and controlled chargingin comparison
148 heft 3.2012 © Springer-Verlag e&i elektrotechnik und informationstechnik
ORIGINALARBEITEN A. Schuster et al. Multimodal routing and energy scheduling

Authors
Andreas Schuster
studied electrical engineering (concentra-
tion of energy engineering) at Vienna Uni-
versity of Technology. Schuster finished his
degree with the diploma thesis “Battery
and hydrogen storage in electrical vehicles”
in the year 2008. Since February 2009 he
has been working as a project assistant at
the Institute of Energy Systems and Electri-
cal Drives in the working area electric mo-
bility and energy storage.
Sandford Bessler
has a M.Sc. in Electrical Engineering (1983)
and a Ph.D. in Operations Research (1988),
both from Vienna University of Technology.
From 1980 till 2001 he held different R&D
positions at Kapsch AG in the development
of packet networks, later Internet. Since
2001 Dr. Bessler has been working as a key
researcher at The Telecommunications Re-
search Center Vienna (FTW) and as a lec-
turer at the Vienna University of Technology. His main research
interests are resource optimization problems in the e-mobility, and
service concepts in intelligent transportation and energy distribution
networks.
Jesper Grønbæk
has an M.Sc.E.E. (2007) from Aalborg Uni-
versity (AAU). In 2010 he finished his Ph.D.
from AAU under the topic of dependable
service provisioning in future ubiquitous
networks. Since 2010 Dr. Grønbæk has
worked as a senior researcher at The Tele-
communications Research Center Vienna
(FTW). His main research interests are intel-
ligent energy networks, e-mobility and
wireless network fault management.
Mai 2012 | 129. Jahrgang © Springer-Verlag heft 3.2012 149
ORIGINALARBEITENA. Schuster et al. Multimodal routing and energy scheduling