Embed Size (px)
Citation preview
Optimierung der Indoor-Ortung mittels
Fingerprintverfahren basierend auf WLAN
Masterarbeit
Hochschule für Technik und Wirtschaft Berlin
Angewandte Informatik
Verfasser: Carola Walter
Matrikelnummer: s0547174
Anschrift: Aristotelessteig 2, 10318 Berlin
E-Mail-Adresse: [email protected]
Studiengang: Angewandte Informatik
1. Gutachter: Prof. Dr.-Ing. Thomas Schwotzer
2. Gutachter: Dr. Alexander Huhn
Berlin, 05.07.17
Eidesstattliche Erklärung
Ich erkläre hiermit an Eides statt, dass
• ich die vorliegende wissenschaftliche Arbeit selbständig und ohne unerlaubte Hilfe
angefertigt habe, • ich andere als die angegebenen Quellen und Hilfsmittel nicht benutzt habe, • ich die den benutzten Quellen wörtlich oder inhaltlich entnommenen Stellen als
solche kenntlich gemacht habe, • die Arbeit in gleicher oder ähnlicher Form noch keiner anderen Prüfbehörde
vorgelegen hat.
Berlin, 05.05.2017 _________________________________
AbstractThe aim of this thesis is to develop a WLAN detection. The detection should take place at
a subway station in Berlin. At the subway stations in Berlin WLAN was extended.
Therefore, the WLAN network is to be used in this work. In this work, a WLAN
Fingerprinting Indoor Positioning Method is used. The method consists of an offline and
an online phase. In the offline phase, the signal strengths of visible access points are
measured at specific reference points and stored as a dataset. The online phase is used
for the real positioning. At an unknown place a measurement is carried out. The current
values are compared with the values from the reference points. The best match is
assumed as the location. For an examination of the method on Android prototype is
developed.
A problem with the detection are the fluctuating WLAN signal strengths. Therefore, it is
necessary to carry out several measurements at one specific reference point. Now, the
measurement results can be processed. For this propose a moving average or a Kalman
filter can be selected. In the offline phase, it must be determined which reference point
has the best match with the current values. For this purpose, the Euclidean distance is
calculated for each measured value in the reference dataset. The best match is
determined by a k nearest neighbor classification. The k value can be chosen.
The Android application is tested with two devices. The moving average achieve better
results than the Kalman filter. A k value between five and seven should be selected.
Measurement over several floors is possible. The accuracy is between 5-15 meters.
Die vorliegende Arbeit beschäftigt sich mit der Standortbestimmung einer Person an
einem U-Bahnhof in Berlin. An den U-Bahnhöfen wurde WLAN ausgebaut und so soll das
ausgebaute WLAN Netz für die Standortbestimmung genutzt werden. Als Verfahren wird
das Fingerprintverfahren genutzt. Dieses besteht aus einer Offline Phase und einer Online
Phase. In der Offlinephase werden an bestimmten Referenzpunkten die Signalstärken
sichtbarer Access Points gemessen und diese als Datensatz gespeichert. Die Online Phase
dient der eigentlichen Positionierung. An einem dem System unbekannten Standort wird
eine Messung durchgeführt. Die aktuellen Werte werden mit den Werten aus den
Referenzpunkten verglichen. Die beste Übereinstimmung wird als Standort angenommen.
Für die Umsetzung wird ein Android Prototyp entwickelt.
Ein Problem bei der Ortung sind die schwankenden WLAN Signalstärken. Daher werden
an den Referenzpunkt nicht nur ein Datensatz aufgenommen, sondern mehrere. Der
Datensatz wird anschließend bearbeitet. Dabei kann zwischen dem gleitenden Mittelwert
oder dem Kalmanfilter ausgewählt werden. Bei der Offlinephase muss ermittelt werden,
welcher Referenzpunkt die größte Übereinstimmung mit den aktuellen Werten hat. Dafür
wird für jeden Messwert in dem Referenzdatensatz die Euklidische Distanz berechnet. Das
beste Ergebnis wird durch eine k Nächste-Nachbar-Klassifikation ermittelt, wobei der k
Wert einstellbar ist.
Bei einem Test mit der Android Anwendung und zwei Geräten erzielte der gleitende
Mittelwertfilter insgesamt bessere Ergebnisse als der Kalman Filter. Ein k Wert zwischen
fünf und sieben sollte ausgewählt werden. Eine Messung über mehrere Etagen ist
möglich. Die Genauigkeit liegt zwischen 5-15 Meter.

Inhaltsverzeichnis
Eidesstattliche Erklärung........................................................................2
1 Einleitung.........................................................................................1
1.1 Motivation....................................................................................1
1.2 Aufgabe/Fragestellung....................................................................2
1.3 Vorgehensweise/Aufbau der Arbeit...................................................2
2 Grundlagen.......................................................................................3
2.1 Vorhandene Ortungssyteme............................................................3
2.1.1 Microsoft RADAR......................................................................3
2.1.2 Awiloc....................................................................................4
2.1.3 Google Indoor.........................................................................5
2.2 Signalausbreitung..........................................................................5
2.3 WLAN-Ortung und seine Probleme...................................................6
2.4 Fingerprintverfahren......................................................................8
2.5 Aktives und passives Scannen.........................................................9
2.6 Data Mining................................................................................10
2.7 Klassifizierung.............................................................................11
2.8 Methoden zu der Offline Phase.......................................................12
2.8.1 Gleitender Mittelwertfilter........................................................12
2.8.2 Varianz und Standardabweichung und Variationskoeffizient..........13
2.8.3 Kalman Filter.........................................................................14
2.9 Methoden zu der Online Phase.......................................................16
2.9.1 Euklidische Distanz.................................................................16
2.9.2 Nächster-Nachbar-Klassifikation...............................................19
3 Umsetzung.....................................................................................20
3.1 Anwendung.................................................................................20
3.2 Implementierung.........................................................................23
3.2.1 Messungen............................................................................23
3.2.2 Gleitender Mittelwertfilter........................................................24
3.2.3 Kalmanfilter...........................................................................25
3.2.4 Euklidische Distanz und k Nächster-Nachbar-Klassifikation...........26
3.3 Ergebnisse der Messungen............................................................27
3.3.1 Zwei Smartphones.................................................................28
3.3.2 Messdauer............................................................................30
3.3.3 Mehrere Tage.........................................................................31
3.3.4 U-Bahnhof Tierpark................................................................33
3.3.5 U- Bahnhof Möckernbrücke......................................................35
3.4 Ortung.......................................................................................37
3.4.1 U-Bahnhof Tierpark................................................................37
3.4.2 U-Bahnhof Möckernbrücke.......................................................39
4 Zusammenfassung und Ausblick.....................................................40
I. Abbildungsverzeichnis....................................................................42
II. Tabellenverzeichnis.....................................................................43
III. Abkürzungsverzeichnis................................................................43
IV. Literaturverzeichnis.....................................................................44
V. Anhang........................................................................................47
1 Einleitung
1.1 Motivation
Smartphones sind mittlerweile zu einem festen Bestandteil des Alltags geworden. Ein
beliebtes Anwendungsgebiet von Smartphones sind Navigationsanwendungen. Damit eine
Navigation stattfinden kann muss das Gerät geortet werden. Außerhalb von Gebäuden
geschieht dies in der Regel mit Global Positioning System (GPS) Signalen. Innerhalb von
Gebäuden sind die GPS Signale jedoch sehr schwach, daher müssen andere Signale
verwendet werden, wie beispielsweise Bluetooth oder Wireless Local Area Network
(WLAN). In den meisten größeren Gebäuden ist WLAN bereits vorhanden und bietet sich
dadurch gut für eine Raumortung ohne großen Installationsaufwand und damit ohne
große Mehrkosten an.
Die Berliner Verkehrsbetriebe (BVG) stellt mittlerweile an den U-Bahnhöfen kostenlos
WLAN zur Verfügung. Es besteht die Idee das ausgebaute WLAN-Netz vielseitig zu
nutzen, sodass das es auch für eine Ortung dienen soll. Ziel ist es eine Person auf einem
U-Bahnhof grob zu orten. Beispielsweise gilt es festzustellen auf welchen Bahngleis eine
Person steht, und ob sich diese rechts, mittig oder links befindet. Durch eine grobe
Ortung wäre es beispielsweise möglich dem Fahrgast eine Richtung für sein nächstes Ziel
anzuzeigen.
Der Vorteil einer WLAN basierenden Ortung ist, dass die Ortung sowohl in Außen-, als
auch Innenbereichen geschehen kann. Für eine Ortung mit WLAN werden meist die
Signalstärken genutzt. Hierfür gibt es zum einen distanzbasierende Verfahren, wie
beispielsweise der Trilateration mit Referenzpunkten und distanzunabhängige Verfahren,
wie beispielsweiße dem Fingerprintverfahren. Leider schwanken WLAN Signalstärken,
sodass es nur schwer möglich ist eine genaue Ortung durchzuführen. Besonders bei
distanzbasierten Verfahren ist das sehr relevant. Deshalb ist das Fingerprintverfahren
eine gute Alternative bei einer Indoor-Ortung und soll in dieser Arbeit genutzt werden.
Das Verfahren nutzt dabei die Verteilung der Feldstärken und keine genauen Distanzen.
Das Fingerprintverfahren besteht aus zwei Phasen, einer Offline und einer Online Phase.
In der Offlinephase werden Signalstärken an bekannten Referenzpunkten aufgenommen
und in einer Datenbank gespeichert. In der Onlinephase werden aktuelle Signalstärken
mit den Daten aus der Datenbank verglichen, wodurch eine Zuordnung erfolgen kann.
In den Forschungsarbeiten A und B (Walter, 2016) wurde bereits eine Ortung mittels
WLAN realisiert. Diese verwendet ebenfalls das Fingerprintverfahrens. Leider ist die
Ortung sehr ungenau und nicht zufriedenstellend. Eine einmalige Aufnahme der Signale
ist nicht ausreichend.
Für die Umsetzung des Fingerprintverfahrens gibt es keine eindeutige Regel. Deshalb
sollen in dieser Arbeit verschiedene Methoden getestet und evaluiert werden, damit eine
möglichst genaue Raumortung an einem U-Bahnhof erzielt werden kann.
1.2 Aufgabe/Fragestellung
Ziel dieser Arbeit ist es eine Ortung zu gewährleisten, nicht aber ein Navigatonssystem zu
erstellen. Die Ortung wird beispielhaft an den U-Bahnhöfen Tierpark und Möckernbrücke
in Berlin erfolgen. Als Ortungsverfahren soll das Fingerprintverfahren genutzt werden.
Hierfür werden einige Algorithmen und Methoden getestet, welche für das Verfahren
genutzt werden können. Es soll dabei herausgestellt werden, welche Methoden für einen
U-Bahnhof am geeignetsten sind.
1.3 Vorgehensweise/Aufbau der Arbeit
Damit die Arbeit Erfolg haben kann müssen Verfahren erarbeitet werden, mit deren Hilfe
eine Fehlerkorrektur möglich ist. Eine Fehlerkorrektur soll sowohl in der Online als auch
Offline Phase des Fingerprints geschehen.
Damit eine Fehlerkorrektur in der Online Phase möglich ist sind mehrere Messdaten
nötig. Messdaten müssen daher gesammelt und ausgewertet werden. Für das Aufnehmen
der Messdaten wird eine Android Anwendung geschrieben. Mit einem Smartphone werden
die benötigten Daten über die Anwendung aufgenommen und gespeichert. Die Daten
können analysiert und bearbeitet werden. Mögliche Verfahren für die Online Phase
werden in Kapitel 2.8 beschrieben. Nach einer genauen Analyse der Messwerte, welche in
Kapitel 3.3 erfolgt, können einzelne Verfahren implementiert und getestet werden.
Auch für die Offline Phase wird die Android Anwendung erweitert. Mehrere Verfahren
werden implementiert und können so getestet werden. Diese Verfahren werden in Kapitel
2.9 erläutert. Zum Testen soll ein Android Prototyp dienen. Die genutzten Geräte sind
hierbei das Samsung Galaxy S6 und das Google Nexus 5X. Die Testergebnisse werden
am Ende ausgewertet. Die Auswertung der Ergebnisse erfolgt in Kapitel 3.4.
2 Grundlagen
2.1 Vorhandene Ortungssyteme
2.1.1 Microsoft RADAR
Microsoft RADAR wurde 1999 von der Microsoft Research Gruppe entwickelt und ist das
erste WLAN basierende Ortungssystem. Das System nutzt dabei bestehende WLAN
Infrastrukturen. (Jacob, n.d.) Die unterschiedlichen Signalstärken sollen ausgenutzt
werden. Deshalb wird eine Karte mit mehreren Referenzpunkten erstellt. An den
Referenzpunkten werden Messungen durchgeführt und diese gespeichert. Neben den
Signalstärken werden zusätzlich x,y Werte, die aktuelle Zeit und die Orientierung der
Person gespeichert. (Bahl & Padmanabhan, 2000) Für eine Ortung misst ein mobiles
Gerät die Signalstärken der Access Points (APs) in seinen Bereich. Das Ergebnis wird mit
der Karte abgeglichen. Microsoft RADAR arbeitet daher mit einem Fingerprintverfahren.
(“RADAR,” 2001) Für eine genauere Ortung benutzt das System zusätzliche
Informationen wie die Anzahl vorhandener Personen, der Temperatur und dem
Bewegungsmuster. (“RADAR,” 2001)
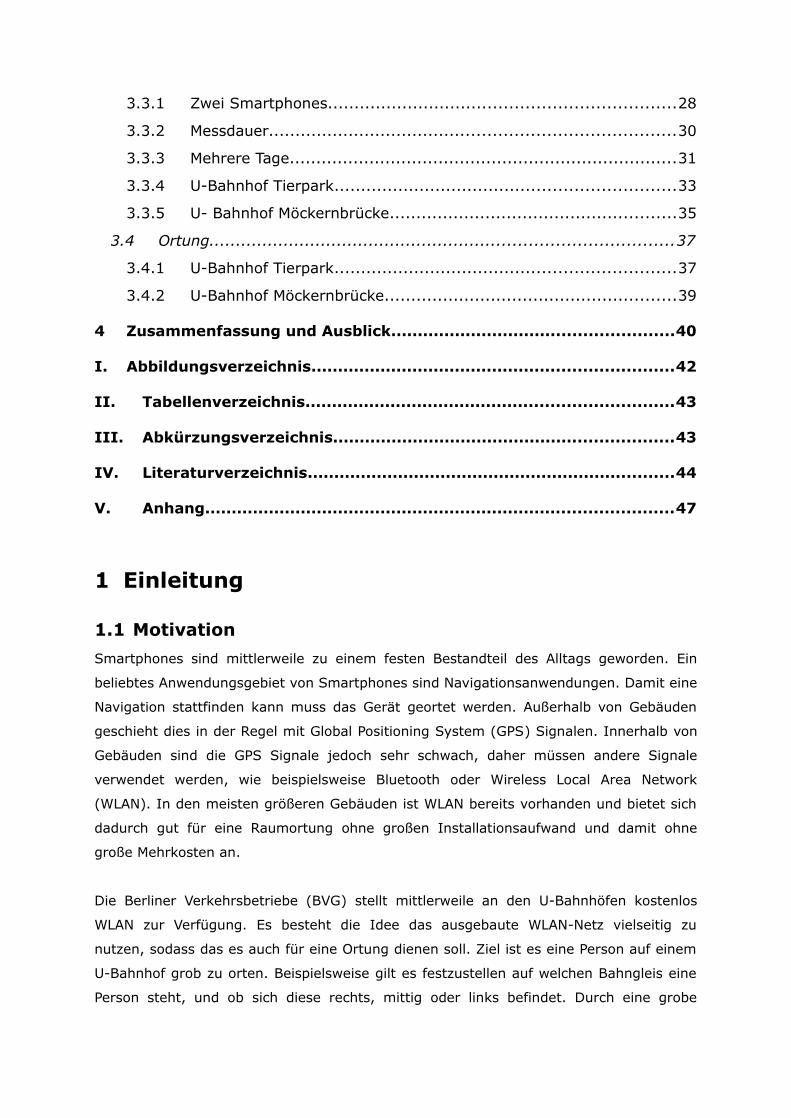
Getestet wurde das System im obersten Stock eines dreistöckigen Gebäudes. Das
Stockwerk hat eine Breite von 22,5 Meter und eine Länge von 43,5 Meter und besitzt
über 50 Räume. Insgesamt wurden drei Basisstationen aufgebaut (s. Abbildung 1 Sterne)
und einige Referenzpunkte (s. Abbildung 1 schwarze Punkte) gemessen. Die Genauigkeit
liegt durchschnittlich bei zwei bis drei Metern.
Abbildung 1: RADAR Karte mit Basisstationen und Referenzpunkten
2.1.2 Awiloc
Das „Frauenhofer-Institut für Integrierte Schaltung IIS“ hat das Ortungssystem
„awiloc®“ entwickelt. Das System ist eine reine Softwarelösung, die für eine 3D-
Lokalisierung leicht in die Anwendung integriert werden kann und speziell für den Indoor-
Bereich entwickelt wurde“. (Dr. Berthold Schmitt, 2015) Die einfache Integration kann
aufgrund der Nutzung bereits vorhandener Infrastruktur gewährleistet werden. Es wird
kein zusätzliches Netz benötigt. Neben WLAN kann auch GPS, Universal Mobile
Telecommunications System (UMTS) oder Bluetooth genutzt werden. Das System basiert
auf dem Fingerprintverfahren und nutzt die vorhandene Feldstärkenverteilung. Für die
Positionierung misst ein mobiles Endgerät die Signalstärken. Die Genauigkeit in
Innenräumen beträgt ein bis fünf Meter und in Außenbereichen zehn Meter, wobei die
Genauigkeit von dem Umfeld abhängig ist. (Dr. Berthold Schmitt, 2015)
Eingesetzt werden kann das System vielseitig, beispielsweiße bei Messen, für den
öffentlichen Nahverkehr oder für Museen. (Fraunhofer-Institut für Integrierte Schaltungen
IIS, 2017) Awiloc® wird beispielsweiße im Nürnberger Museum für Industriekultur, im
National Maritime Museum in London, im Perot Museum of Nature and Science in Dallas
und im Staatliche Museum Ägyptischer Kunst in München verwendet. (Dr. Berthold
Schmitt, 2015)
Besonderes Merkmal ist der Datenschutz von awiloc®. „Das Bayerische Landesamt für
Datenschutzaufsicht hat das Ortungssystem awiloc®, dass das Erlanger Fraunhofer
Institut für Integrierte Schaltungen IIS entwickelt, geprüft und aus Sicht des
Datenschutzes für unbedenklich erklärt“. (Werner, 2011) Es werden keine
personenbezogenen Daten gespeichert.
2.1.3 Google Indoor
Google Maps bietet seit einiger Zeit auch eine Indoor Navigation in einigen Gebäuden an.
Ein genaues Verfahren konnte nicht recherchiert werden. Der Aufwand für die
Verwendung für Google Maps ist sehr gering. Mit Google ist es möglich einen nahtlosen
Übergang zwischen Outdoor und Indoor Ortung zu ermöglichen.
Durch heranzoomen in Google Maps wird ein Gebäudeplan angezeigt. Unten rechts auf
dem Bildschirm kann das Stockwerk ausgewählt werden. (“Indoor-Karten für
Innenräume,” n.d.) Über die Google API können diese Informationen in der eigenen
Anwendung genutzt werden. (“Google Maps APIs,” n.d.) Derzeit sind noch nicht viele
Gebäude ausgemessen. In Berlin sind das der Flughafen Berlin Schönefeld, der Flughafen
Berlin Tegel, O2 World Berlin, das Designer-Outlet Berlin, Mall of Berlin und das KaDeWe.
(Google, 2017b) Es ist jedoch auch möglich eigene Raumpläne von Gebäuden
hinzuzufügen, um dadurch eine Navigation zu ermöglichen. Jedoch ist es dafür
notwendig, dass alle Berechtigungen für das Hochladen vorhanden sind. (Google, 2017a)
2.2 Signalausbreitung
Funksignale werden über eine Strecke hinweg gedämpft. Im Freiraum ist die allgemeine
Dämpfung bekannt. In einem Raum kann es allerdings zu Störungen durch Wände, Türen
oder Einrichtung kommen. Sich bewegende Personen verändern die Umgebung
permanent und sind damit ein Problem. Die Wellen können bei Hindernissen reflektiert,
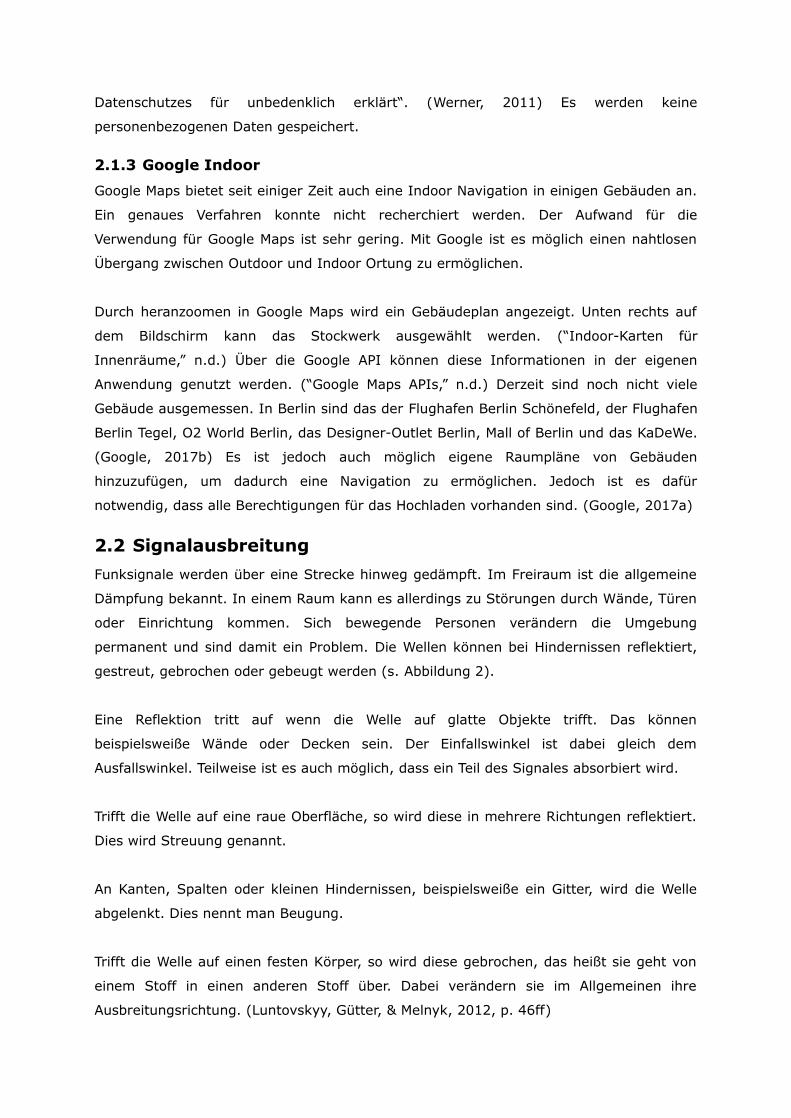
gestreut, gebrochen oder gebeugt werden (s. Abbildung 2).
Eine Reflektion tritt auf wenn die Welle auf glatte Objekte trifft. Das können
beispielsweiße Wände oder Decken sein. Der Einfallswinkel ist dabei gleich dem
Ausfallswinkel. Teilweise ist es auch möglich, dass ein Teil des Signales absorbiert wird.
Trifft die Welle auf eine raue Oberfläche, so wird diese in mehrere Richtungen reflektiert.
Dies wird Streuung genannt.
An Kanten, Spalten oder kleinen Hindernissen, beispielsweiße ein Gitter, wird die Welle
abgelenkt. Dies nennt man Beugung.
Trifft die Welle auf einen festen Körper, so wird diese gebrochen, das heißt sie geht von
einem Stoff in einen anderen Stoff über. Dabei verändern sie im Allgemeinen ihre
Ausbreitungsrichtung. (Luntovskyy, Gütter, & Melnyk, 2012, p. 46ff)
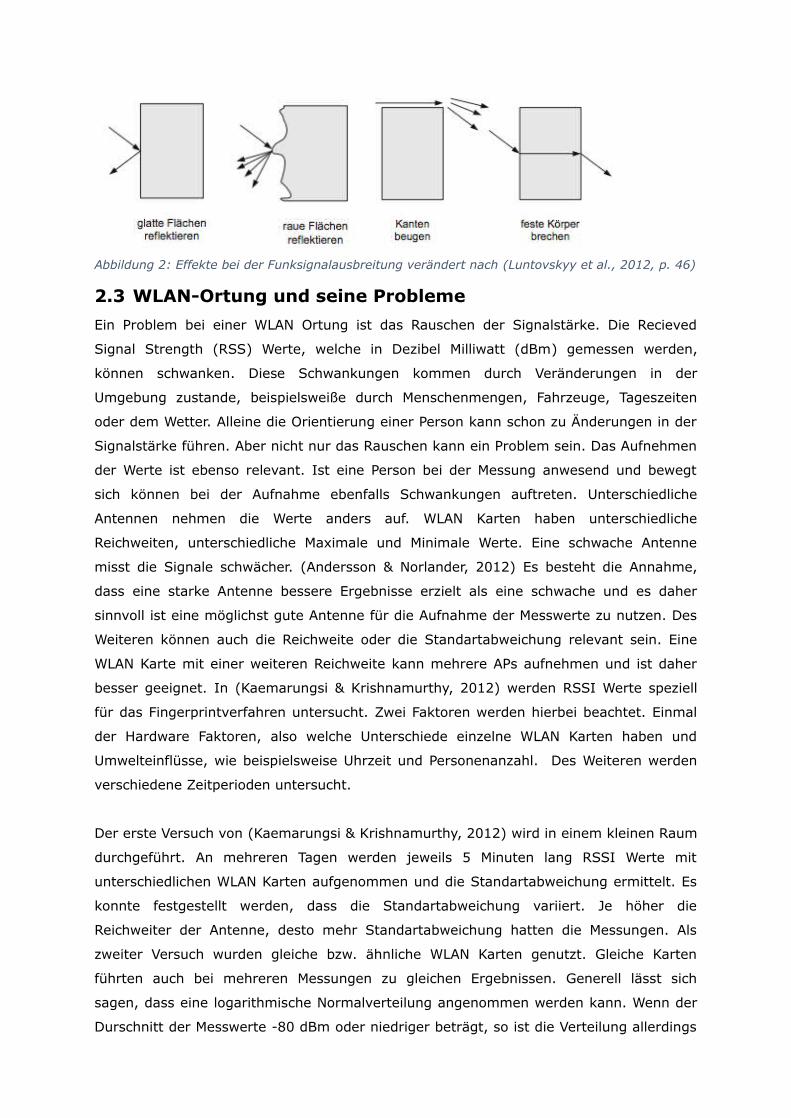
Abbildung 2: Effekte bei der Funksignalausbreitung verändert nach (Luntovskyy et al., 2012, p. 46)
2.3 WLAN-Ortung und seine Probleme
Ein Problem bei einer WLAN Ortung ist das Rauschen der Signalstärke. Die Recieved
Signal Strength (RSS) Werte, welche in Dezibel Milliwatt (dBm) gemessen werden,
können schwanken. Diese Schwankungen kommen durch Veränderungen in der
Umgebung zustande, beispielsweiße durch Menschenmengen, Fahrzeuge, Tageszeiten
oder dem Wetter. Alleine die Orientierung einer Person kann schon zu Änderungen in der
Signalstärke führen. Aber nicht nur das Rauschen kann ein Problem sein. Das Aufnehmen
der Werte ist ebenso relevant. Ist eine Person bei der Messung anwesend und bewegt
sich können bei der Aufnahme ebenfalls Schwankungen auftreten. Unterschiedliche
Antennen nehmen die Werte anders auf. WLAN Karten haben unterschiedliche
Reichweiten, unterschiedliche Maximale und Minimale Werte. Eine schwache Antenne
misst die Signale schwächer. (Andersson & Norlander, 2012) Es besteht die Annahme,
dass eine starke Antenne bessere Ergebnisse erzielt als eine schwache und es daher
sinnvoll ist eine möglichst gute Antenne für die Aufnahme der Messwerte zu nutzen. Des
Weiteren können auch die Reichweite oder die Standartabweichung relevant sein. Eine
WLAN Karte mit einer weiteren Reichweite kann mehrere APs aufnehmen und ist daher
besser geeignet. In (Kaemarungsi & Krishnamurthy, 2012) werden RSSI Werte speziell
für das Fingerprintverfahren untersucht. Zwei Faktoren werden hierbei beachtet. Einmal
der Hardware Faktoren, also welche Unterschiede einzelne WLAN Karten haben und
Umwelteinflüsse, wie beispielsweise Uhrzeit und Personenanzahl. Des Weiteren werden
verschiedene Zeitperioden untersucht.
Der erste Versuch von (Kaemarungsi & Krishnamurthy, 2012) wird in einem kleinen Raum
durchgeführt. An mehreren Tagen werden jeweils 5 Minuten lang RSSI Werte mit
unterschiedlichen WLAN Karten aufgenommen und die Standartabweichung ermittelt. Es
konnte festgestellt werden, dass die Standartabweichung variiert. Je höher die
Reichweiter der Antenne, desto mehr Standartabweichung hatten die Messungen. Als
zweiter Versuch wurden gleiche bzw. ähnliche WLAN Karten genutzt. Gleiche Karten
führten auch bei mehreren Messungen zu gleichen Ergebnissen. Generell lässt sich
sagen, dass eine logarithmische Normalverteilung angenommen werden kann. Wenn der
Durschnitt der Messwerte -80 dBm oder niedriger beträgt, so ist die Verteilung allerdings
leicht linksschief. Dies ist zu 70 % der Fall. Das kann daran liegen, dass teilweise die AP
nicht gemessen werden. Die Standardabweichung ist je nach gemessenen Ort
unterschiedlich. Die Abweichung zu einem Access Point (AP) ist kleiner je weiter weg die
APs sind und desto niedriger die Signalstärke ist. Daher kann sich das Problem ergeben,
dass es zu Schwierigkeiten bei der Identifizierung des Ortes aufgrund der nahen
Abstände der einzelnen APs kommen kann. Als letzter Versuch wurde getestet, in wie
weit Uhrzeiten eine Rolle spielen. Je nachdem wie viele Leute sich in dem Büro aufhielten
änderten sich die Werte. Es gibt also eine starke Abhängigkeit von Personen und Stärke.
Es ist daher sinnvoll Messwerte zu unterschiedlichen Zeiten aufzunehmen. Die letzte
Untersuchung des Papers war es die Einflüsse der einzelnen APs zu untersuchen. Die
Interferenzen waren dabei minimal und sind daher zu vernachlässigen.
Obwohl es eventuell Sinn macht eine Antenne mit möglichst minimaler
Standardabweichung und starker Reichweite zu nutzen, soll in dieser Arbeit eine normale
Smartphone Antenne zur Aufnahme der Messwerte genutzt werden. Die spätere
Anwendung soll ebenfalls auf einem Smartphone geschehen. Bei der Aufnahme ist eine
aufnehmende Person anwesend, so wie später auch die zu ortende Person.
2.4 Fingerprintverfahren
Bei dem Fingerprintverfahren wird versucht durch das Wiedererkennen von
Signalmustern den Ort zu lokalisieren. Das Fingerprintverfahren besteht aus zwei Phasen,
einer Offline und einer Online Phase. In der Onlinephase werden Werte aufgenommen
und gespeichert. Es wird sozusagen ein Fingerabdruck für einen Ort erstellt. Dies muss
an mehreren Stellen im Gebäude geschehen. In der Offlinephase werden ebenfalls die
Signalstärken aufgenommen. Für das Finden einer Übereinstimmung werden dann diese
Signale mit den gespeicherten Fingerabdrücken verglichen. Die entsprechenden
Positionskoordinaten können dann angezeigt werden. (Fet, Handte, & Marrón, 2016)
Für das Fingerprintverfahren ist ein Satz fester Knoten, den sogenannten Basisstationen,
erforderlich. Die Basisstationen befinden sich an einem festen Ort und werden nicht
verändert. Der Ort muss allerdings nicht unbedingt bekannt sein. Im Falle einer WLAN
Ortung sind das die APs in dem genutzten WLAN-Netz (s. Abbildung 3 rote Punkte). Des
Weiteren wird eine mobile Station benötigt. Dies kann ein Laptop oder ein Smartphone
sein. Für eine Ortung sind Punkte auf einer Karte mit bekannten Koordinaten notwendig.
Diese Punkte nennt man Referenzpunkte. Referenzpunkte können entweder einen
bestimmten Abstand voneinander haben oder prägnante und wichtige Punkte auf der
Karte sein (s. Abbildung 3 schwarze Punkte). (Gómez, Medina, Martín, Dorronzoro, &
Rivera, 2016)
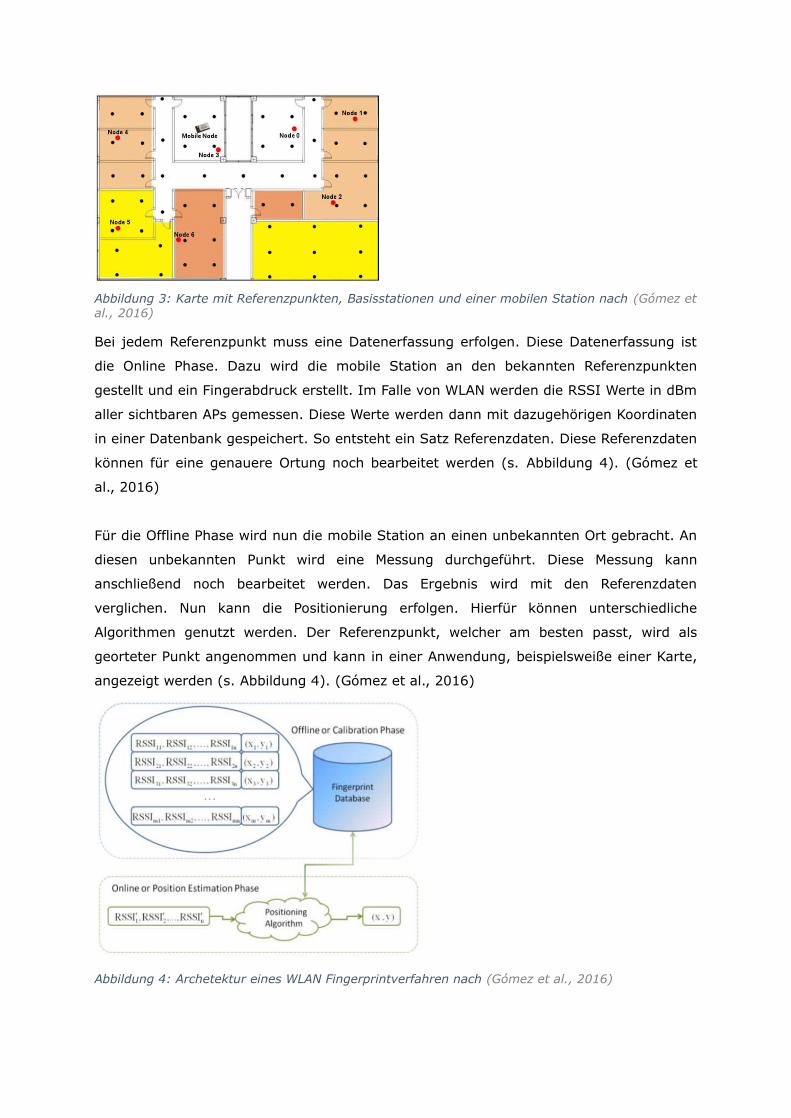
Abbildung 3: Karte mit Referenzpunkten, Basisstationen und einer mobilen Station nach (Gómez etal., 2016)
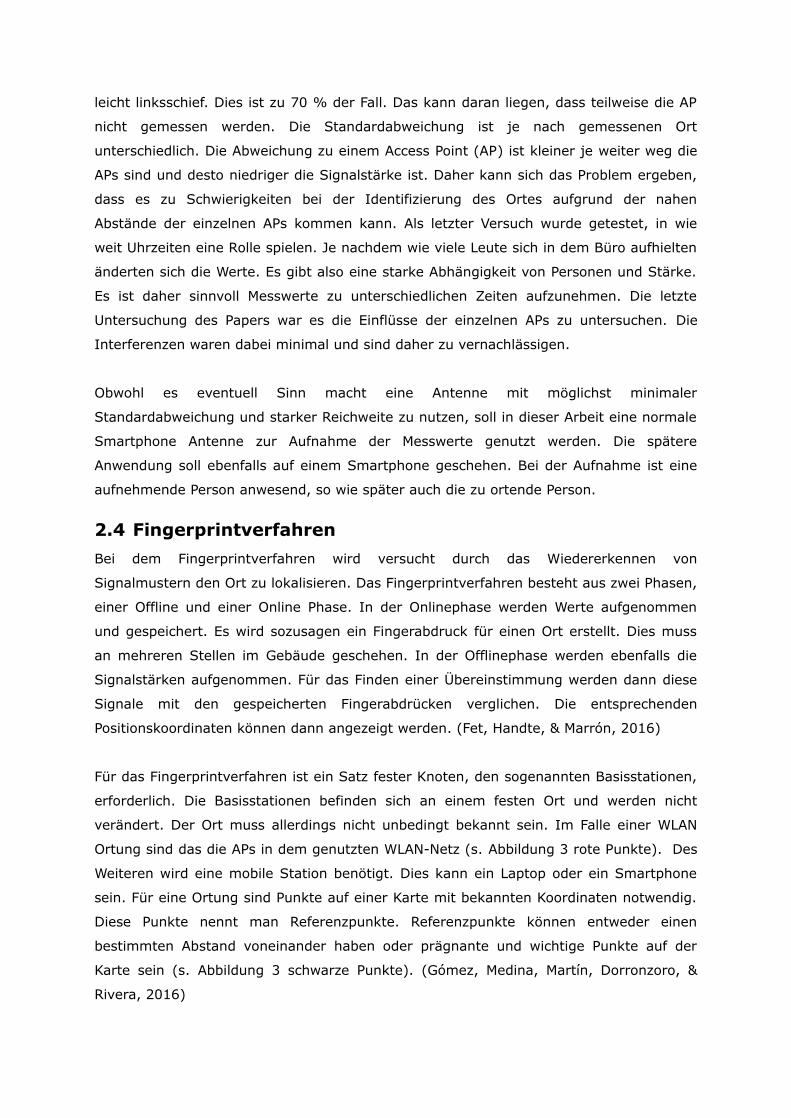
Bei jedem Referenzpunkt muss eine Datenerfassung erfolgen. Diese Datenerfassung ist
die Online Phase. Dazu wird die mobile Station an den bekannten Referenzpunkten
gestellt und ein Fingerabdruck erstellt. Im Falle von WLAN werden die RSSI Werte in dBm
aller sichtbaren APs gemessen. Diese Werte werden dann mit dazugehörigen Koordinaten
in einer Datenbank gespeichert. So entsteht ein Satz Referenzdaten. Diese Referenzdaten
können für eine genauere Ortung noch bearbeitet werden (s. Abbildung 4). (Gómez et
al., 2016)
Für die Offline Phase wird nun die mobile Station an einen unbekannten Ort gebracht. An
diesen unbekannten Punkt wird eine Messung durchgeführt. Diese Messung kann
anschließend noch bearbeitet werden. Das Ergebnis wird mit den Referenzdaten
verglichen. Nun kann die Positionierung erfolgen. Hierfür können unterschiedliche
Algorithmen genutzt werden. Der Referenzpunkt, welcher am besten passt, wird als
georteter Punkt angenommen und kann in einer Anwendung, beispielsweiße einer Karte,
angezeigt werden (s. Abbildung 4). (Gómez et al., 2016)
Abbildung 4: Archetektur eines WLAN Fingerprintverfahren nach (Gómez et al., 2016)
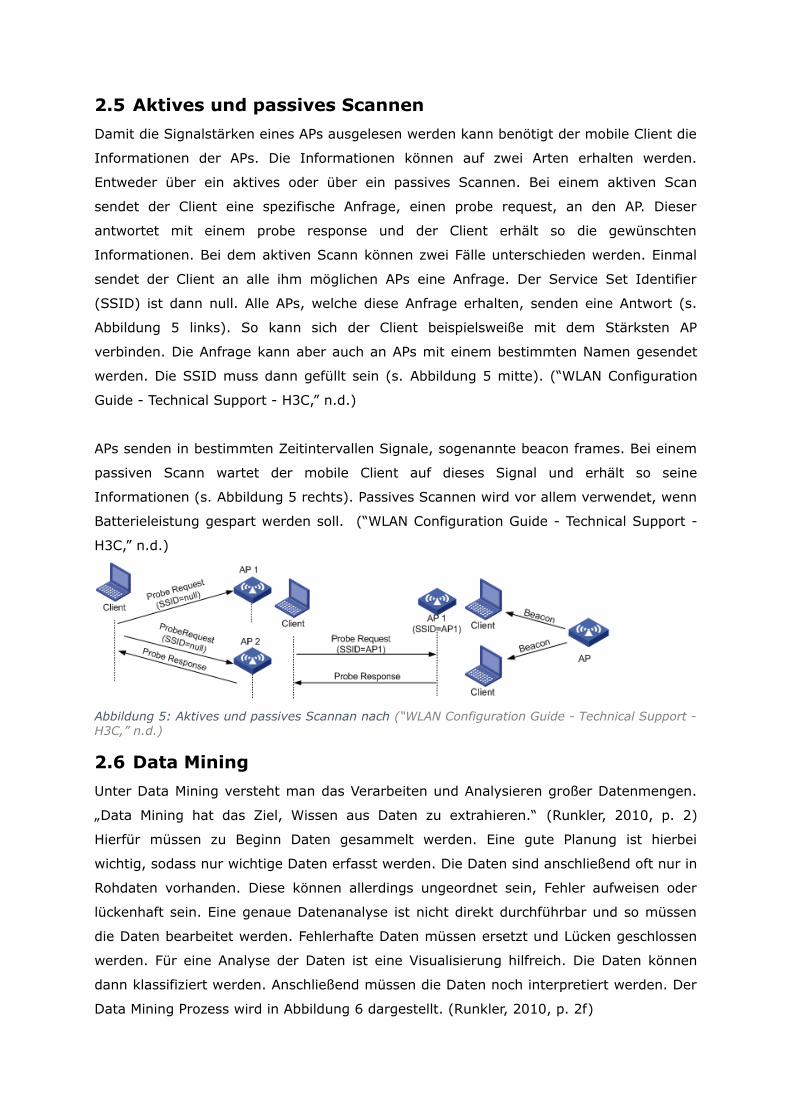
2.5 Aktives und passives Scannen
Damit die Signalstärken eines APs ausgelesen werden kann benötigt der mobile Client die
Informationen der APs. Die Informationen können auf zwei Arten erhalten werden.
Entweder über ein aktives oder über ein passives Scannen. Bei einem aktiven Scan
sendet der Client eine spezifische Anfrage, einen probe request, an den AP. Dieser
antwortet mit einem probe response und der Client erhält so die gewünschten
Informationen. Bei dem aktiven Scann können zwei Fälle unterschieden werden. Einmal
sendet der Client an alle ihm möglichen APs eine Anfrage. Der Service Set Identifier
(SSID) ist dann null. Alle APs, welche diese Anfrage erhalten, senden eine Antwort (s.
Abbildung 5 links). So kann sich der Client beispielsweiße mit dem Stärksten AP
verbinden. Die Anfrage kann aber auch an APs mit einem bestimmten Namen gesendet
werden. Die SSID muss dann gefüllt sein (s. Abbildung 5 mitte). (“WLAN Configuration
Guide - Technical Support - H3C,” n.d.)
APs senden in bestimmten Zeitintervallen Signale, sogenannte beacon frames. Bei einem
passiven Scann wartet der mobile Client auf dieses Signal und erhält so seine
Informationen (s. Abbildung 5 rechts). Passives Scannen wird vor allem verwendet, wenn
Batterieleistung gespart werden soll. (“WLAN Configuration Guide - Technical Support -
H3C,” n.d.)
Abbildung 5: Aktives und passives Scannan nach (“WLAN Configuration Guide - Technical Support -H3C,” n.d.)
2.6 Data Mining
Unter Data Mining versteht man das Verarbeiten und Analysieren großer Datenmengen.
„Data Mining hat das Ziel, Wissen aus Daten zu extrahieren.“ (Runkler, 2010, p. 2)
Hierfür müssen zu Beginn Daten gesammelt werden. Eine gute Planung ist hierbei
wichtig, sodass nur wichtige Daten erfasst werden. Die Daten sind anschließend oft nur in
Rohdaten vorhanden. Diese können allerdings ungeordnet sein, Fehler aufweisen oder
lückenhaft sein. Eine genaue Datenanalyse ist nicht direkt durchführbar und so müssen
die Daten bearbeitet werden. Fehlerhafte Daten müssen ersetzt und Lücken geschlossen
werden. Für eine Analyse der Daten ist eine Visualisierung hilfreich. Die Daten können
dann klassifiziert werden. Anschließend müssen die Daten noch interpretiert werden. Der
Data Mining Prozess wird in Abbildung 6 dargestellt. (Runkler, 2010, p. 2f)

Abbildung 6: Data Mining Prozess nach (Runkler, 2010, p. 2)
Daten können in unterschiedlicher Form vorliegen. Sie können numerisch oder
nichtnumerisch sein. Numerische Messdaten können auf verschiedene Weisen verglichen
werden. Sie können mit Ähnlichkeitsmaßen wie größer oder kleiner beschrieben werden,
oder aber mit statistischen Merkmalen wie dem arithmetischen Mittel oder den Median.
Datensätze werden häufig dadurch erzeugt, dass in festen zeitlichen Abständen etwas
abgetastet wird. Beispielsweiße können Signale in bestimmten Zeitintervallen
aufgenommen werden. Hierbei ist zu beachten, dass nur einzelne Signalwerte zu einem
diskreten Zeitpunkt gemessen werden. Die Zeitreihe ist also nicht vollständig und kann
fehlerbehaftet sein. (Runkler, 2010, p. 17ff) Sie kann zum einen Rauschen, aber auch
Fehler durch falsches kalibrieren oder durch Dritteffekte aufweisen. Ausreiser können
stark von den restlichen Daten abweichen. Das Rauschen kann durch Filter beispielsweiße
dem gleitenden Mittelwert abgeschwächt werden. Des Weiteren kann der Datensatz
Lücken aufweisen. Diese sollte ersetzt werden. Beispielsweiße kann der Wert durch den
globalen Mittelwert oder den nächsten Nachbar ersetzt werden. (Runkler, 2010, p. 22ff)
2.7 Klassifizierung
Ein neues Objekt soll zu einem vorhandenen Datensatz richtig zugeordnet werden.
Damit ein Objekt oder ein Punkt richtig zugeordnet werden kann, muss dieser einer
Klasse zugordnet werden. Es wird dabei angenommen, dass das Objekt zu einer von
diversen c Klassen gehört, c ∈ {2, 3,...}. (Runkler, 2010, p. 85ff) Ein Apfel soll
beispielsweiße der Handelsklasse A oder B zugordnet werden. Dafür ist der Durchmesser
in Zentimeter und die Farbe rot oder grün relevant. Mit diesen Merkmalen lässt sich ein
Merkmalsvektor aufstellen und der neue Apfel kann zugordnen werden. Für eine
Zuordnung muss der vorliegende Datensatz bereits klassifiziert sein, d.h. die Merkmale
müssen bereits in Klassen zugordnet sein. In dem Beispiel mit dem Apfel kann ein
Fachmann eine gewisse Anzahl Äpfel sortieren und die Merkmale in eine Tabelle eintragen
(s. Tabelle 1). Der Durchmesser wird in Zentimeter angegeben und die Farbe mit einem
Zahlenwert zwischen null für grün und eins für rot angegeben. (Ertel, 2016, p. 193)

Tabelle 1: Kalibrierte Daten für die Apfelsortierung nach (Ertel, 2016, p. 193)
Damit ist der Datensatz klassifiziert. Ein typisches Merkmal für eine Apfel der
Handelsklasse A in dem bereits klassifizierten Datensatz ist beispielsweise eine große
Größe und die Farbe Rot. Weißt der noch nicht identifizierte Apfel dieses Merkmal auf, so
wird er als Teil der Handelsklasse A klassifiziert. Für eine weitere Darstellung kann ein
Streudiagramm erstellt werden (s. Abbildung 7 links). Es wird also eine Funktion gesucht,
welche mit dem gegebenen Merkmalsvektor und Basis der kalibrierten Daten die
gesuchte Klasse liefern soll. Eine solche Funktion kann durch eine Trennlinie dargestellt
werden (s. Abbildung 7 rechts). Bei mehreren Merkmalen kann es schwer werden eine
solche Trennlinie zu bilden. (Ertel, 2016, p. 193 ff)
Abbildung 7: Streudiagramm der klassifizierten Äpfel ohne und mit Trennlinie
2.8 Methoden zu der Offline Phase
2.8.1 Gleitender Mittelwertfilter
Der gleitende Mittelwertfilter kann zur Glättung von Datenreihen genutzt werden. Die
einfachste Form ist der einfache gleitende Mittelwert. Dabei werden n Werte mit
einbezogen. Je größer n gewählt wird, desto stärker wird geglättet. Der gleitende
Mittelwert hat eine Verzögerung und wird daher zentriert. Bei größer gewählten n werden
mehr Werte abgeschnitten (s. Abbildung 8). (Kohn & Öztürk, 2017, p. 39f)

Object 3
Abbildung 8: Mittelwert dritter und fünfter Ordnung
Der gleitende Mittelwert lässt sich mit
mn (t )=1n∑i=0
n−1
x (t−1)
darstellen. Für die dritte Ordnung ergibt sich also
m3 (t+1)=13∙(x ( t )+x (t+1)+x (t+2))
Neben den einfachen gleitenden Mittelwert ist es nun auch möglich einzelne Werte zu
gewichten. Beispielsweiße können so ersetzte Werte weniger gewichtet werden wie
gemessene Werte (Lohninger, 2012). Das arithmetische Mittel ist generell bei
Extremwerten sehr anfällig. Daher kann es sinnvoll sein diese Extremwerte vor der
Berechnung des gleitenden Mittelwertes zu entfernen. (Kohn & Öztürk, 2017, p.37)
2.8.2 Varianz und Standardabweichung und Variationskoeffizient
Bei der Messung der WLAN Daten wird jede Sekunde eine Messung vorgenommen. Damit
sind jedoch nicht alle möglichen Werte gemessen. Es handelt sich daher um eine
Stichprobe. Die Varianz ist ein häufig verwendeter Wert für das Streuungsmaß bei einer
Normalverteilung. (Kohn & Öztürk, 2017, p. 65) Da es sich bei WLAN Daten um eine
Stichprobe handelt, muss die Stichprobenvarianz verwendet werden. „Die
Stichprobenvarianz ist als mittlerer quadratischer Abstand zum Mittelwert definiert. Das
Quadrat wird verwendet, damit sich positive und negative Abweichungen vom Mittelwert
nicht aufheben.“ (Kohn & Öztürk, 2017, p. 65). Die Varianz kann als Ergebnis Werte von
null bis unendlichen haben, wobei bei einem Wert von null keine Streuung vorliegt. Die
Stichprobenvarianz kann mit
s2=
1n−1
∑i=1
n
(x i−x)2 0≤ s2≤∞
beschrieben werden.
Die Standartabweichung s ist die Wurzel aus der Varianz. Sie ist die Streuung der
Normalverteilung und sagt, wie weit die durchschnittliche Entfernung von Messwerten
zum Mittelwert liegt (Kohn & Öztürk, 2017, p. 65f).
Der Variationskoeffizient ist ein relatives Streuungsmaß und hängt damit nicht von der
Maßeinheit ab. Die Berechnung des Variationskoeffizienten ist nur für positive Werte oder
nur für negative Werte sinnvoll ist. Anderenfalls könnte es ein Wert von null geben. „Der
Variationskoeffizient kann als Streuung in Prozent vom Mittelwert interpretiert werden.“
(Kohn & Öztürk, 2017, p. 68f). Der Variationskoeffizient wird ausgerechnet, indem man
die Standartabweichung durch den Erwartungswert teilt. Als Erwartungswert bei einer
Stichprobe kann das arithmetische Mitteln genutzt werden. (Kohn & Öztürk, 2017, p. 68f)
2.8.3 Kalman-Filter
Der Kalman-Filter ist ein häufig verwendetes Verfahren womit es trotz verrauschter
Messdaten möglich ist, einen optimalen Schätzwert für den Systemzustand zu finden. In
modernen Navigationssystemen wird er häufig für die Positionsschätzung eingesetzt.
(Nischwitz, Fischer, Haberäcker, & Socher, 2011, p.545)
Die Schätzung des echten Wertes basiert auf der aktuellen Messung und den
Vorangegangenen. Die Schätzung lässt sich mit
X̂ k= X̂ k−1+K k ∙( zk−X̂ k−1)
darstellen. Dabei ist X k die aktuelle Schätzung, X k−1 die vorherige Schätzung,
zk der aktuelle Messwert und K k der Kalman Gain. Der Kalman Gain legt fest, wie
stark die Messung zu den vorherigen gewichtet wird. Ein hohes „K“ steht für eine sichere
Messung des aktuellen Zustands. (Winkler, 2004) Er ist die einzige unbekannte
Komponente in dieser Gleichung und muss berechnet werden. Hierfür müssen mehrere
Schritte durchgeführt werden.
Der Filter besteht aus zwei Teilen, dem Prädiktionsschritt und dem Korrekturschritt. Bei
dem Prädiktionsschritt wird eine Vorhersage für das Verhalten des Systems zum nächsten
Zeitpunkt getroffen (a-priori). Im Korrekturschritt wird die Schätzung dann korrigiert (a-
posteriori). Die a-posteriori Schätzung wird im nächsten Zeitschritt die neue a-priori
Schätzung. In dem Prädikationsschritt wird der Zustand des Systems vorhergesagt bzw.
geschätzt. Des Weiteren wird ein vermuteter Schätzfehler berechnet. Im Korrekturschritt
wird der Kalman Gain berechnet, die Schätzung aktualisiert und die Fehlerkovarianz
aktualisiert (s. Abbildung 9). (Winkler, 2004)
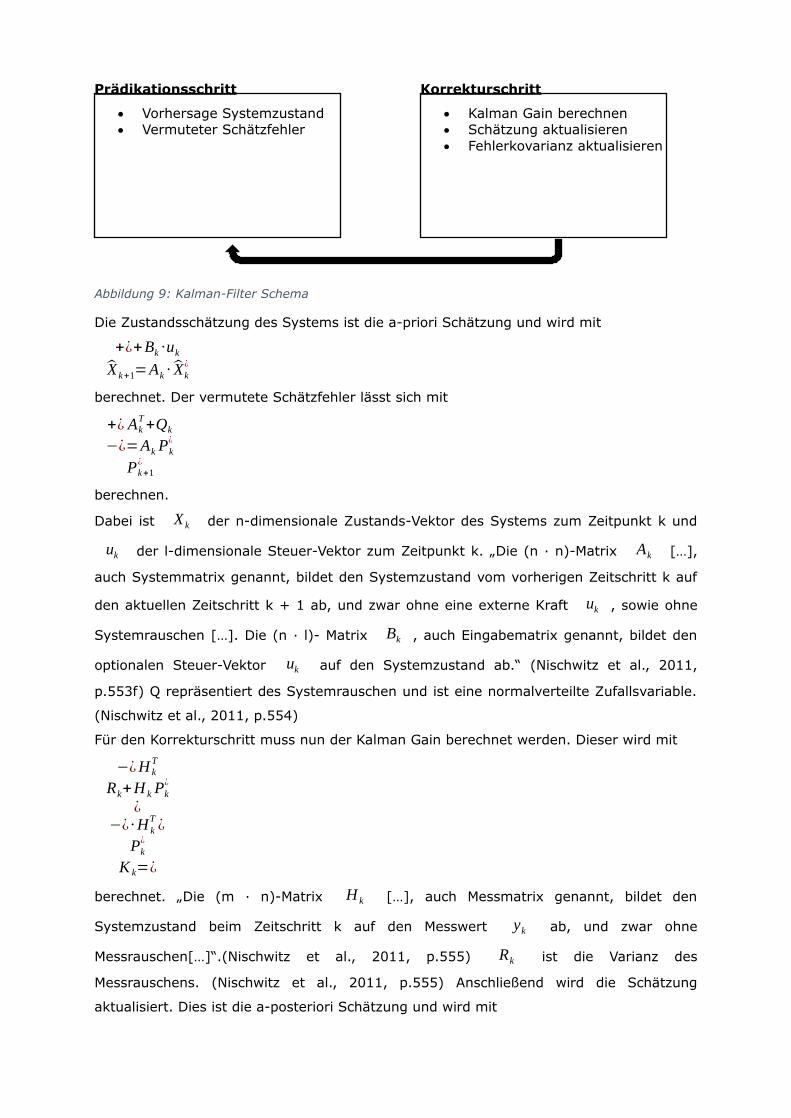
Abbildung 9: Kalman-Filter Schema
Die Zustandsschätzung des Systems ist die a-priori Schätzung und wird mit
+¿+Bk ∙uk
X̂ k+1=Ak ∙ X̂k¿
berechnet. Der vermutete Schätzfehler lässt sich mit
+¿ AkT+Qk
−¿=Ak Pk¿
Pk+1¿
berechnen.
Dabei ist X k der n-dimensionale Zustands-Vektor des Systems zum Zeitpunkt k und
uk der l-dimensionale Steuer-Vektor zum Zeitpunkt k. „Die (n · n)-Matrix Ak […],
auch Systemmatrix genannt, bildet den Systemzustand vom vorherigen Zeitschritt k auf
den aktuellen Zeitschritt k + 1 ab, und zwar ohne eine externe Kraft uk , sowie ohne
Systemrauschen […]. Die (n · l)- Matrix Bk , auch Eingabematrix genannt, bildet den
optionalen Steuer-Vektor uk auf den Systemzustand ab.“ (Nischwitz et al., 2011,
p.553f) Q repräsentiert des Systemrauschen und ist eine normalverteilte Zufallsvariable.
(Nischwitz et al., 2011, p.554)
Für den Korrekturschritt muss nun der Kalman Gain berechnet werden. Dieser wird mit
−¿H kT
Rk+H k Pk¿
¿−¿ ∙ H k
T¿
Pk¿
K k=¿
berechnet. „Die (m · n)-Matrix H k […], auch Messmatrix genannt, bildet den
Systemzustand beim Zeitschritt k auf den Messwert yk ab, und zwar ohne
Messrauschen[…]“.(Nischwitz et al., 2011, p.555) Rk ist die Varianz des
Messrauschens. (Nischwitz et al., 2011, p.555) Anschließend wird die Schätzung
aktualisiert. Dies ist die a-posteriori Schätzung und wird mit
Prädikationsschritt
Vorhersage Systemzustand Vermuteter Schätzfehler
Korrekturschritt
Kalman Gain berechnen Schätzung aktualisieren Fehlerkovarianz aktualisieren
−¿y k−H k X̂ k
¿
+¿= X̂ k+K k ¿
X̂ k¿
berechnet. Zu guter Letzt muss noch die Fehlerkovarianz mit
−¿+¿=(I−K kH k)Pk
¿
Pk¿
aktualisiert werden. I ist die Einheitsmatrix entsprechender Dimension. (Winkler, 2004).
Es kann angenommen werde, dass Ak , Bk und H k Konstante sind. In der Praxis
stimmt dies allerdings nicht immer und die Werte können sich unter Umständen in jedem
Zeitschritt ändern. (Nischwitz et al., 2011, p.555) Eine Zusammenfassung des Kalman-
Filters wird in Abbildung 10 gezeigt.
Abbildung 10: Kalman-Filter Schema mit Formeln nach (Nischwitz et al., 2011, p.557)
2.9 Methoden zu der Online Phase
2.9.1 Euklidische Distanz
Mithilfe der Euklidischen Distanz können Abstände bzw. Ähnlichkeitsmaße gemessen
werden. Die Euklidische Distanz kann genutzt werden, damit der nächstgelegene Knoten
gefunden werden kann. Hierfür werden die Receive Signal Strength Indicator (RSSI)
Werte in dBm des aktuellen Knoten und der gespeicherten Knoten benötigt. Für jeden
gespeicherten Knoten wird die Distanz zu den aktuellen Werten ausgerechnet. Je kleiner
die Distanz d ausfällt, desto näher ist der aktuelle Knoten an dem gemessenen knoten.
Der Knoten mit kleinsten
d=√∑i=i
n
(RSSI ci−RSSI pi)2
ist also der am nächst gelegensten Punkt. Dabei sind RSSI ci die RSSI Werte der
Basisstation i der Offline Phase, RSSI pi die Messwerte der Onlinephase und n die
Anzahl der Basisstationen. (Gansemer, Großmann, & Hakobyan, 2010)
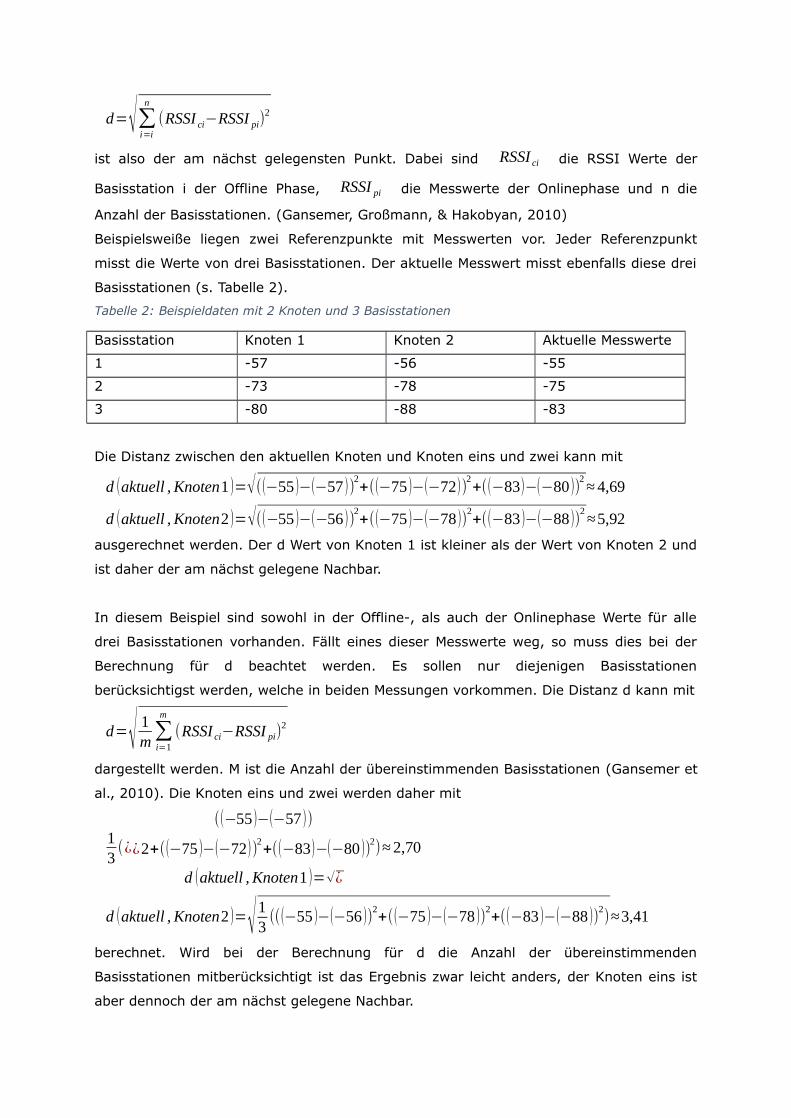
Beispielsweiße liegen zwei Referenzpunkte mit Messwerten vor. Jeder Referenzpunkt
misst die Werte von drei Basisstationen. Der aktuelle Messwert misst ebenfalls diese drei
Basisstationen (s. Tabelle 2).
Tabelle 2: Beispieldaten mit 2 Knoten und 3 Basisstationen
Basisstation Knoten 1 Knoten 2 Aktuelle Messwerte
1 -57 -56 -55
2 -73 -78 -75
3 -80 -88 -83
Die Distanz zwischen den aktuellen Knoten und Knoten eins und zwei kann mit
d (aktuell , Knoten1 )=√((−55 )−(−57 ))2+((−75 )−(−72))
2+((−83)−(−80 ))
2≈ 4,69
d (aktuell , Knoten2 )=√((−55 )−(−56 ))2+((−75 )−(−78 ))
2+((−83 )−(−88 ))
2≈5,92
ausgerechnet werden. Der d Wert von Knoten 1 ist kleiner als der Wert von Knoten 2 und
ist daher der am nächst gelegene Nachbar.
In diesem Beispiel sind sowohl in der Offline-, als auch der Onlinephase Werte für alle
drei Basisstationen vorhanden. Fällt eines dieser Messwerte weg, so muss dies bei der
Berechnung für d beachtet werden. Es sollen nur diejenigen Basisstationen
berücksichtigst werden, welche in beiden Messungen vorkommen. Die Distanz d kann mit
d=√ 1m∑
i=1
m
(RSSI ci−RSSI pi)2
dargestellt werden. M ist die Anzahl der übereinstimmenden Basisstationen (Gansemer et
al., 2010). Die Knoten eins und zwei werden daher mit
((−55 )−(−57 ))13(¿¿2+((−75 )−(−72))
2+((−83)−(−80 ))
2)≈ 2,70
d (aktuell , Knoten1 )=√¿
d (aktuell , Knoten2 )=√13(((−55 )−(−56 ))
2+((−75 )−(−78 ))
2+((−83 )−(−88 ))
2)≈3,41
berechnet. Wird bei der Berechnung für d die Anzahl der übereinstimmenden
Basisstationen mitberücksichtigt ist das Ergebnis zwar leicht anders, der Knoten eins ist
aber dennoch der am nächst gelegene Nachbar.

Kann beispielsweiße bei der aktuellen Messung die Basisstation drei nicht gemessen
werden, so gibt es nur noch zwei übereinstimmende Basisstationen (s. Tabelle 3).
Tabelle 3: Beispieldaten mit fehlender Basisstation drei des aktuellen Messwertes
Basisstation Knoten 1 Knoten 2 Aktuelle Messwerte
1 -57 -56 -55
2 -73 -78 -75
3 -80 -88
Die Distanz d wird mit
((−55 )−(−57 ))12(¿¿2+((−75)−(−72))
2)≈2,55
d (aktuell ,Knoten1 )=√¿
d (aktuell , Knoten2 )=√12(((−55 )−(−56 ))
2+((−75)−(−78))
2)≈ 2,23
ausgerechnet. Knoten zwei ist der am nächst gelegene Nachbar. Fehlende Messwerte
können zu anderen Ergebnissen führen und bergen damit gegebenenfalls eine gewisse
Fehlerrate.
Neben dem fehlenden Messwert der aktuellen Messung ist es auch möglich, dass bereits
bei der Offlinephase ein Knoten eine Lücke aufweist. So kann beispielsweiße Knoten zwei
nur die Messwerte von Basisstation eins und zwei haben. (s. Tabelle 4).
Tabelle 4: Beispieldaten mit fehlender Basisstation drei bei Knoten zwei
Basisstation Knoten 1 Knoten 2 Aktuelle Messwerte
1 -57 -56 -55
2 -73 -78 -75
3 -80 -83
Knoten eins stimmt mit allen drei Basisstationen überein, wohingegen Knoten zwei nur
mit zwei übereinstimmt. Die Distanz d wird mit
((−55 )−(−57 ))13(¿¿2+((−75 )−(−72))
2+((−83)−(−80 ))
2)≈ 2,70
d (aktue l l , Knoten1)=√¿
d (aktuell , Knoten2 )=√12(((−55 )−(−56 ))
2+((−75)−(−78))
2)≈ 2,23
berechnet. Der Wert des zweiten Knotens ist kleiner und damit der nächst gelegene
Nachbar.
2.9.2 Nächster-Nachbar-Klassifikation
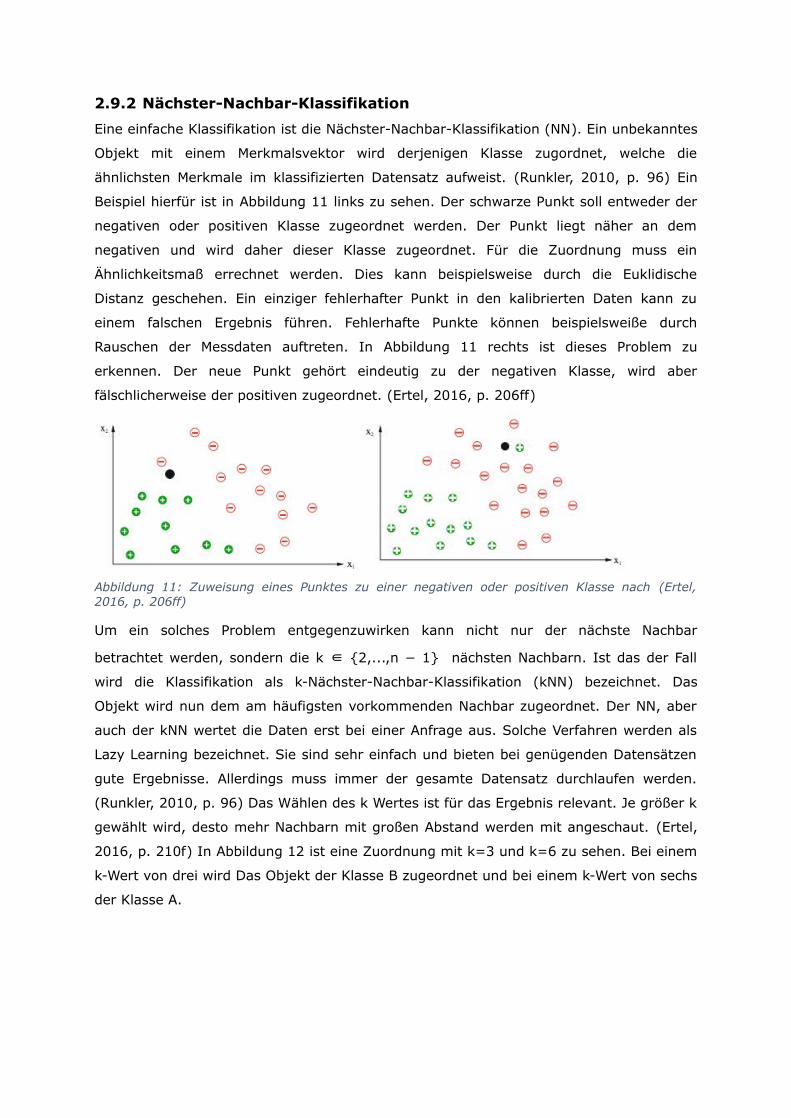
Eine einfache Klassifikation ist die Nächster-Nachbar-Klassifikation (NN). Ein unbekanntes
Objekt mit einem Merkmalsvektor wird derjenigen Klasse zugordnet, welche die
ähnlichsten Merkmale im klassifizierten Datensatz aufweist. (Runkler, 2010, p. 96) Ein
Beispiel hierfür ist in Abbildung 11 links zu sehen. Der schwarze Punkt soll entweder der
negativen oder positiven Klasse zugeordnet werden. Der Punkt liegt näher an dem
negativen und wird daher dieser Klasse zugeordnet. Für die Zuordnung muss ein
Ähnlichkeitsmaß errechnet werden. Dies kann beispielsweise durch die Euklidische
Distanz geschehen. Ein einziger fehlerhafter Punkt in den kalibrierten Daten kann zu
einem falschen Ergebnis führen. Fehlerhafte Punkte können beispielsweiße durch
Rauschen der Messdaten auftreten. In Abbildung 11 rechts ist dieses Problem zu
erkennen. Der neue Punkt gehört eindeutig zu der negativen Klasse, wird aber
fälschlicherweise der positiven zugeordnet. (Ertel, 2016, p. 206ff)
Abbildung 11: Zuweisung eines Punktes zu einer negativen oder positiven Klasse nach (Ertel,2016, p. 206ff)
Um ein solches Problem entgegenzuwirken kann nicht nur der nächste Nachbar
betrachtet werden, sondern die k ∈ {2,...,n − 1} nächsten Nachbarn. Ist das der Fall
wird die Klassifikation als k-Nächster-Nachbar-Klassifikation (kNN) bezeichnet. Das
Objekt wird nun dem am häufigsten vorkommenden Nachbar zugeordnet. Der NN, aber
auch der kNN wertet die Daten erst bei einer Anfrage aus. Solche Verfahren werden als
Lazy Learning bezeichnet. Sie sind sehr einfach und bieten bei genügenden Datensätzen
gute Ergebnisse. Allerdings muss immer der gesamte Datensatz durchlaufen werden.
(Runkler, 2010, p. 96) Das Wählen des k Wertes ist für das Ergebnis relevant. Je größer k
gewählt wird, desto mehr Nachbarn mit großen Abstand werden mit angeschaut. (Ertel,
2016, p. 210f) In Abbildung 12 ist eine Zuordnung mit k=3 und k=6 zu sehen. Bei einem
k-Wert von drei wird Das Objekt der Klasse B zugeordnet und bei einem k-Wert von sechs
der Klasse A.
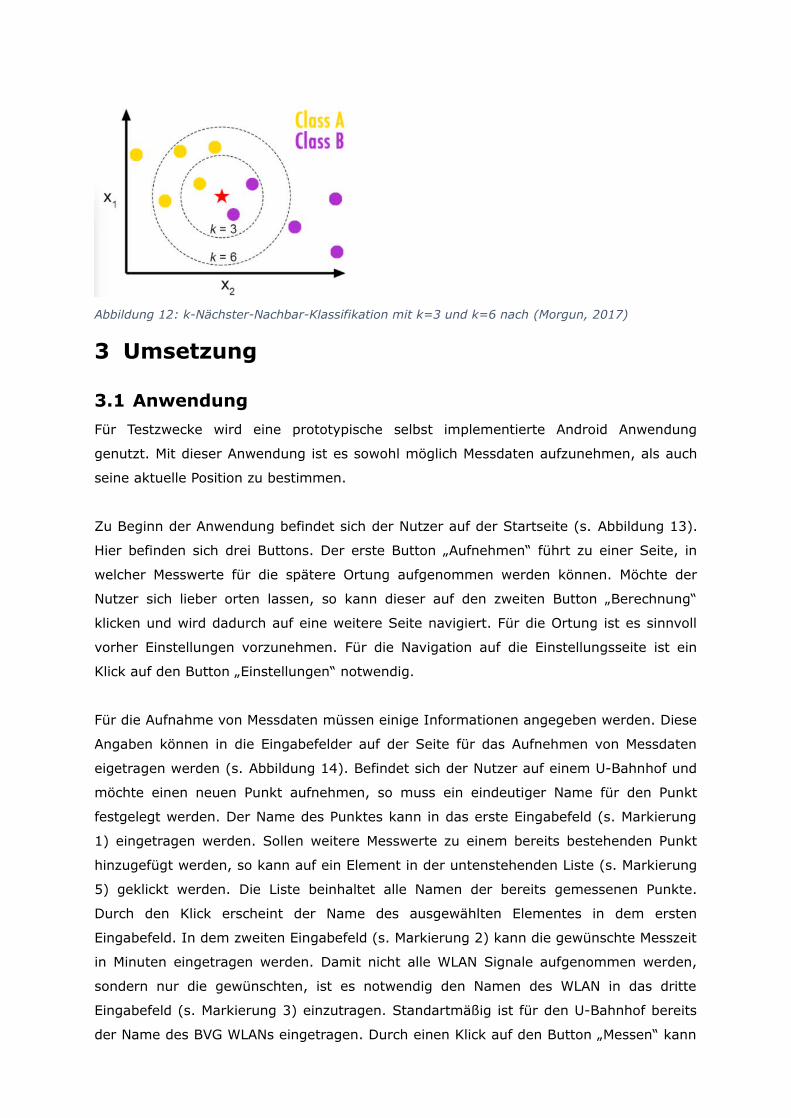
Abbildung 12: k-Nächster-Nachbar-Klassifikation mit k=3 und k=6 nach (Morgun, 2017)
3 Umsetzung
3.1 Anwendung
Für Testzwecke wird eine prototypische selbst implementierte Android Anwendung
genutzt. Mit dieser Anwendung ist es sowohl möglich Messdaten aufzunehmen, als auch
seine aktuelle Position zu bestimmen.
Zu Beginn der Anwendung befindet sich der Nutzer auf der Startseite (s. Abbildung 13).
Hier befinden sich drei Buttons. Der erste Button „Aufnehmen“ führt zu einer Seite, in
welcher Messwerte für die spätere Ortung aufgenommen werden können. Möchte der
Nutzer sich lieber orten lassen, so kann dieser auf den zweiten Button „Berechnung“
klicken und wird dadurch auf eine weitere Seite navigiert. Für die Ortung ist es sinnvoll
vorher Einstellungen vorzunehmen. Für die Navigation auf die Einstellungsseite ist ein
Klick auf den Button „Einstellungen“ notwendig.
Für die Aufnahme von Messdaten müssen einige Informationen angegeben werden. Diese
Angaben können in die Eingabefelder auf der Seite für das Aufnehmen von Messdaten
eigetragen werden (s. Abbildung 14). Befindet sich der Nutzer auf einem U-Bahnhof und
möchte einen neuen Punkt aufnehmen, so muss ein eindeutiger Name für den Punkt
festgelegt werden. Der Name des Punktes kann in das erste Eingabefeld (s. Markierung
1) eingetragen werden. Sollen weitere Messwerte zu einem bereits bestehenden Punkt
hinzugefügt werden, so kann auf ein Element in der untenstehenden Liste (s. Markierung
5) geklickt werden. Die Liste beinhaltet alle Namen der bereits gemessenen Punkte.
Durch den Klick erscheint der Name des ausgewählten Elementes in dem ersten
Eingabefeld. In dem zweiten Eingabefeld (s. Markierung 2) kann die gewünschte Messzeit
in Minuten eingetragen werden. Damit nicht alle WLAN Signale aufgenommen werden,
sondern nur die gewünschten, ist es notwendig den Namen des WLAN in das dritte
Eingabefeld (s. Markierung 3) einzutragen. Standartmäßig ist für den U-Bahnhof bereits
der Name des BVG WLANs eingetragen. Durch einen Klick auf den Button „Messen“ kann
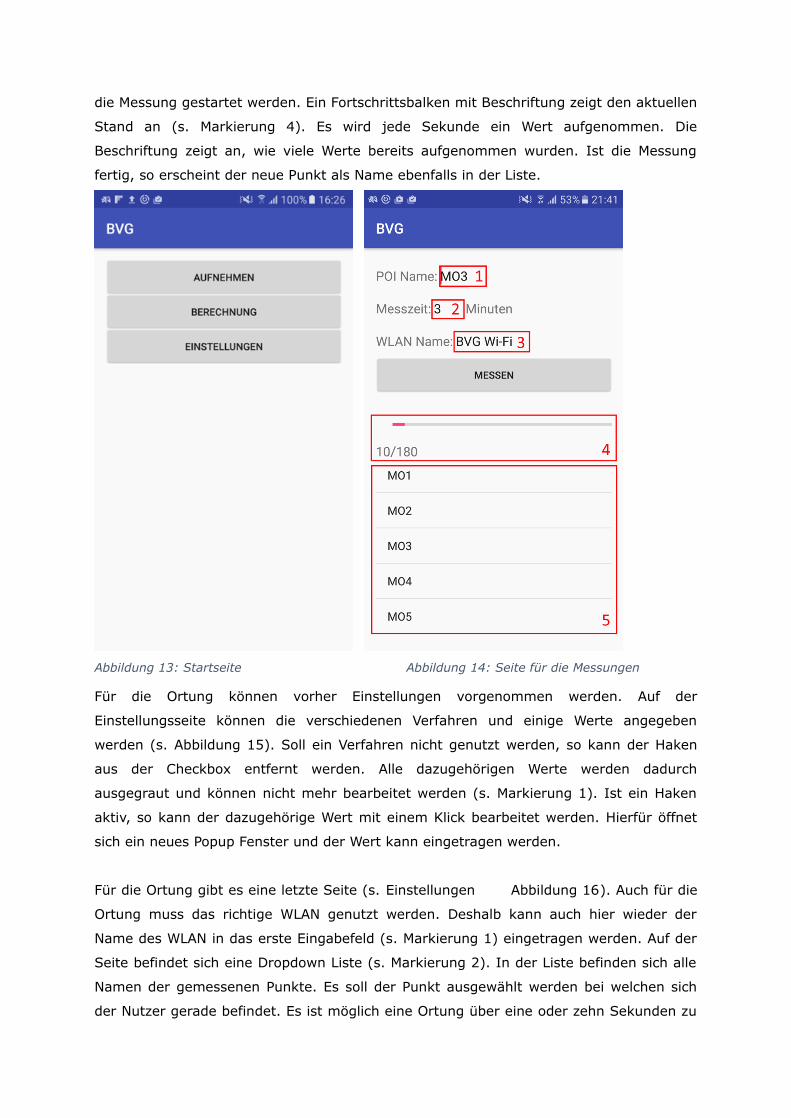
die Messung gestartet werden. Ein Fortschrittsbalken mit Beschriftung zeigt den aktuellen
Stand an (s. Markierung 4). Es wird jede Sekunde ein Wert aufgenommen. Die
Beschriftung zeigt an, wie viele Werte bereits aufgenommen wurden. Ist die Messung
fertig, so erscheint der neue Punkt als Name ebenfalls in der Liste.
Abbildung 13: Startseite Abbildung 14: Seite für die Messungen
Für die Ortung können vorher Einstellungen vorgenommen werden. Auf der
Einstellungsseite können die verschiedenen Verfahren und einige Werte angegeben
werden (s. Abbildung 15). Soll ein Verfahren nicht genutzt werden, so kann der Haken
aus der Checkbox entfernt werden. Alle dazugehörigen Werte werden dadurch
ausgegraut und können nicht mehr bearbeitet werden (s. Markierung 1). Ist ein Haken
aktiv, so kann der dazugehörige Wert mit einem Klick bearbeitet werden. Hierfür öffnet
sich ein neues Popup Fenster und der Wert kann eingetragen werden.
Für die Ortung gibt es eine letzte Seite (s. Einstellungen Abbildung 16). Auch für die
Ortung muss das richtige WLAN genutzt werden. Deshalb kann auch hier wieder der
Name des WLAN in das erste Eingabefeld (s. Markierung 1) eingetragen werden. Auf der
Seite befindet sich eine Dropdown Liste (s. Markierung 2). In der Liste befinden sich alle
Namen der gemessenen Punkte. Es soll der Punkt ausgewählt werden bei welchen sich
der Nutzer gerade befindet. Es ist möglich eine Ortung über eine oder zehn Sekunden zu
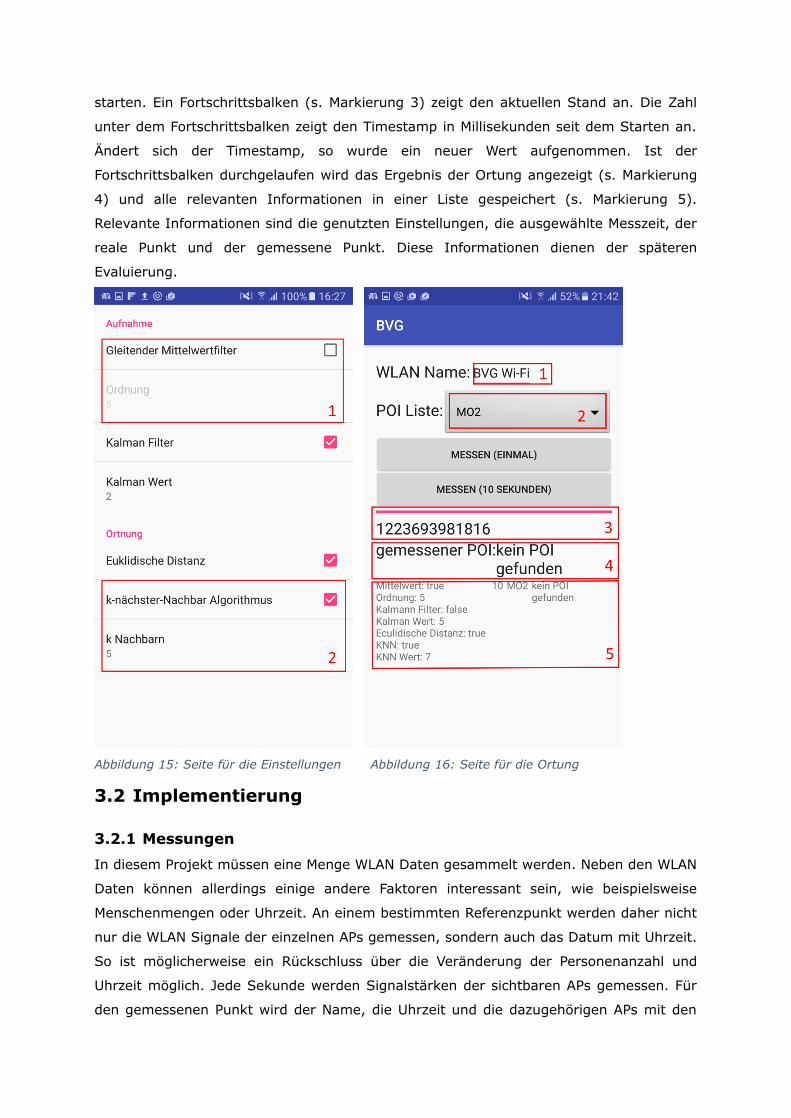
starten. Ein Fortschrittsbalken (s. Markierung 3) zeigt den aktuellen Stand an. Die Zahl
unter dem Fortschrittsbalken zeigt den Timestamp in Millisekunden seit dem Starten an.
Ändert sich der Timestamp, so wurde ein neuer Wert aufgenommen. Ist der
Fortschrittsbalken durchgelaufen wird das Ergebnis der Ortung angezeigt (s. Markierung
4) und alle relevanten Informationen in einer Liste gespeichert (s. Markierung 5).
Relevante Informationen sind die genutzten Einstellungen, die ausgewählte Messzeit, der
reale Punkt und der gemessene Punkt. Diese Informationen dienen der späteren
Evaluierung.
Abbildung 15: Seite für die Einstellungen Abbildung 16: Seite für die Ortung
3.2 Implementierung
3.2.1 Messungen
In diesem Projekt müssen eine Menge WLAN Daten gesammelt werden. Neben den WLAN
Daten können allerdings einige andere Faktoren interessant sein, wie beispielsweise
Menschenmengen oder Uhrzeit. An einem bestimmten Referenzpunkt werden daher nicht
nur die WLAN Signale der einzelnen APs gemessen, sondern auch das Datum mit Uhrzeit.
So ist möglicherweise ein Rückschluss über die Veränderung der Personenanzahl und
Uhrzeit möglich. Jede Sekunde werden Signalstärken der sichtbaren APs gemessen. Für
den gemessenen Punkt wird der Name, die Uhrzeit und die dazugehörigen APs mit den
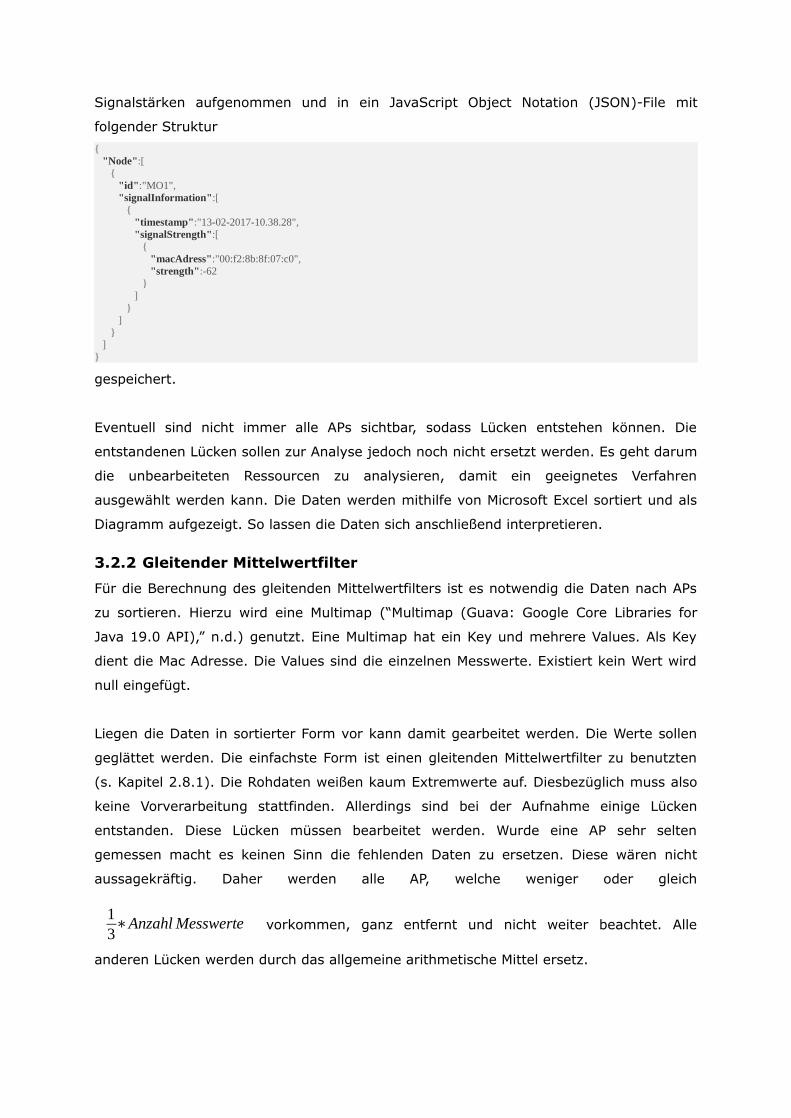
Signalstärken aufgenommen und in ein JavaScript Object Notation (JSON)-File mit
folgender Struktur
{ "Node":[ { "id":"MO1", "signalInformation":[ { "timestamp":"13-02-2017-10.38.28", "signalStrength":[ { "macAdress":"00:f2:8b:8f:07:c0", "strength":-62 } ] } ] } ]}
gespeichert.
Eventuell sind nicht immer alle APs sichtbar, sodass Lücken entstehen können. Die
entstandenen Lücken sollen zur Analyse jedoch noch nicht ersetzt werden. Es geht darum
die unbearbeiteten Ressourcen zu analysieren, damit ein geeignetes Verfahren
ausgewählt werden kann. Die Daten werden mithilfe von Microsoft Excel sortiert und als
Diagramm aufgezeigt. So lassen die Daten sich anschließend interpretieren.
3.2.2 Gleitender Mittelwertfilter
Für die Berechnung des gleitenden Mittelwertfilters ist es notwendig die Daten nach APs
zu sortieren. Hierzu wird eine Multimap (“Multimap (Guava: Google Core Libraries for
Java 19.0 API),” n.d.) genutzt. Eine Multimap hat ein Key und mehrere Values. Als Key
dient die Mac Adresse. Die Values sind die einzelnen Messwerte. Existiert kein Wert wird
null eingefügt.
Liegen die Daten in sortierter Form vor kann damit gearbeitet werden. Die Werte sollen
geglättet werden. Die einfachste Form ist einen gleitenden Mittelwertfilter zu benutzten
(s. Kapitel 2.8.1). Die Rohdaten weißen kaum Extremwerte auf. Diesbezüglich muss also
keine Vorverarbeitung stattfinden. Allerdings sind bei der Aufnahme einige Lücken
entstanden. Diese Lücken müssen bearbeitet werden. Wurde eine AP sehr selten
gemessen macht es keinen Sinn die fehlenden Daten zu ersetzen. Diese wären nicht
aussagekräftig. Daher werden alle AP, welche weniger oder gleich
13∗Anzahl Messwerte vorkommen, ganz entfernt und nicht weiter beachtet. Alle
anderen Lücken werden durch das allgemeine arithmetische Mittel ersetz.
In der Android Anwendung ist es möglich einen Mittelwertfilter der dritten oder fünften
Ordnung auszuwählen. Ein neuer Datensatz wird nun errechnet und in einer neuen
Multimap für die weitere Verwendung gespeichert.
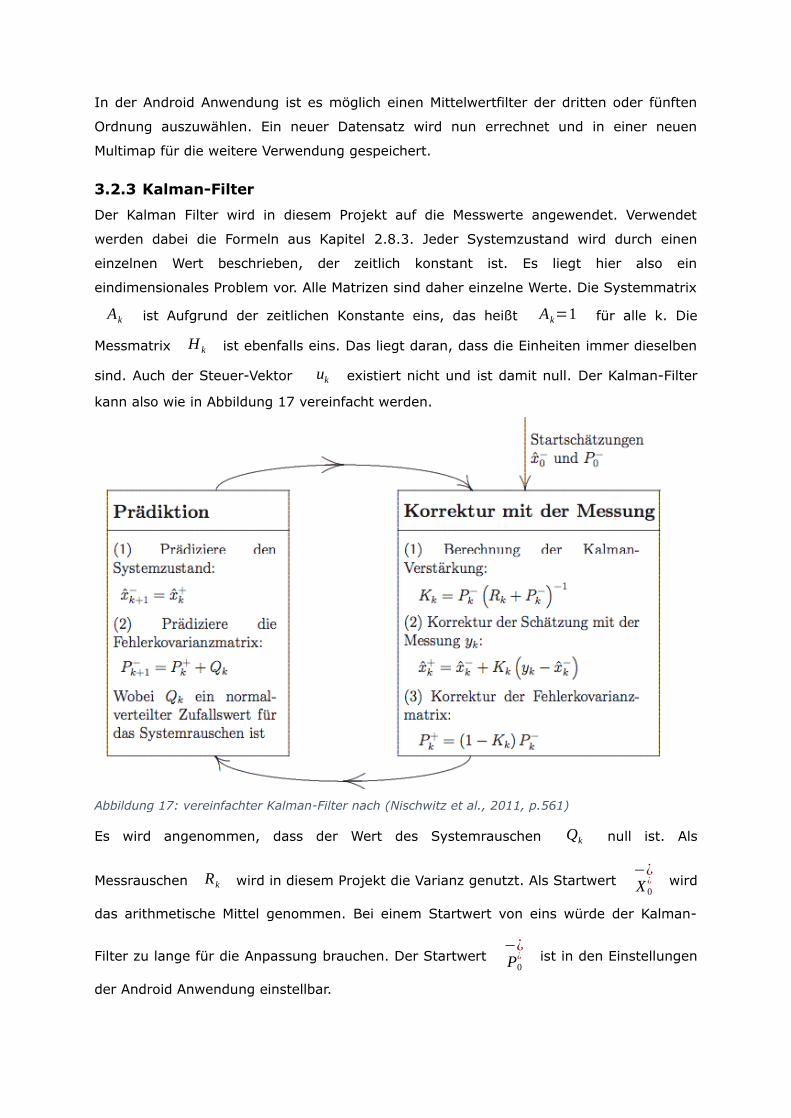
3.2.3 Kalman-Filter
Der Kalman Filter wird in diesem Projekt auf die Messwerte angewendet. Verwendet
werden dabei die Formeln aus Kapitel 2.8.3. Jeder Systemzustand wird durch einen
einzelnen Wert beschrieben, der zeitlich konstant ist. Es liegt hier also ein
eindimensionales Problem vor. Alle Matrizen sind daher einzelne Werte. Die Systemmatrix
Ak ist Aufgrund der zeitlichen Konstante eins, das heißt Ak=1 für alle k. Die
Messmatrix H k ist ebenfalls eins. Das liegt daran, dass die Einheiten immer dieselben
sind. Auch der Steuer-Vektor uk existiert nicht und ist damit null. Der Kalman-Filter
kann also wie in Abbildung 17 vereinfacht werden.
Abbildung 17: vereinfachter Kalman-Filter nach (Nischwitz et al., 2011, p.561)
Es wird angenommen, dass der Wert des Systemrauschen Qk null ist. Als
Messrauschen Rk wird in diesem Projekt die Varianz genutzt. Als Startwert −¿X 0
¿ wird
das arithmetische Mittel genommen. Bei einem Startwert von eins würde der Kalman-
Filter zu lange für die Anpassung brauchen. Der Startwert −¿P0
¿ ist in den Einstellungen
der Android Anwendung einstellbar.
3.2.4 Euklidische Distanz und k Nächster-Nachbar-Klassifikation
Durch die Ersetzung der Lücken bei dem gleitenden Mittelwert oder dem Kalmanfilter ist
eine Berechnung der Euklidischen Distanz, wie in Kapitel 2.9.1 beschrieben wird, möglich.
Dabei wird zu jedem Punkt für jede gemessene Sekunde eine Distanz errechnet und der
Wert mit dem Name des Punktes in einer Liste gespeicherte. Mit einem Selectionsort wird
diese Liste der Größe nach sortiert.
Der k Wert ist in der Anwendung einstellbar. Android kann nur passiv scannen. Bei den U-
Bahnhöfen sind die Messwerte daher für jeweils vier Sekunden gleich. Damit sind auch
jeweils die vier ausgerechneten Euklidischen Distanzen gleich. Für die K-Nächsten-
Nachbar-Klassifikation wird der eingestellte k Wert daher mal vier genommen. Ist der k
Wert beispielsweise vier, so werden sich die ersten 16 Werte der sortierten Liste
angeschaut. Der Name des Punktes, welcher bei diesen zwölf Werten am häufigsten
vorkommt, wird als aktueller Standort angenommen. Als einfaches Beispiel werden die
Punkte MO1, MO2 und MO3 mit der Basic Service Set Identification (BSSID) eins und
zwei angeschaut. Diese werden in ein Streudiagramm dargestellt (s. Abbildung 18). Der
aktuelle Messpunkt wird mit einem schwarzen Punkt dargestellt. Die k Wert ist in diesem
Beispiel vier. Der Punkt MO2 kommt dabei dreimal vor und der Punkt MO1 nur einmal.
Der Punkt MO2 wird als aktueller Standort angenommen.
Object 96
Abbildung 18: Streudiagramm mit 3 Punkten und aktuellen Wert
Für eine spätere Validierung werden alle Einstellungen zur Zeit der Messung, die
Messdauer, der echte Standort und der gemessene Standort in ein JSON-File mit
folgender Struktur
{ "Results":[ [
{ "Setting":"Mittelwert: true\r\nOrdnung: 3\r\nKalmann FIlter: false\r\nEculidisc he Distanz: true\r\nKNN: true\r\nKNN Wert5" }, { "Time":"1" }, { "Poi":"MO2" }, { "MeasuredPoi":"MO2" } ] ]}
gespeichert.
3.3 Ergebnisse der Messungen
Im Kapitel 2.3 wurde aufgezeigt welche Probleme das Messen der Signalstärken für ein
Fingerprintverfahren aufweisen kann. Die beiden großen Probleme sind die
unterschiedlich eingebauten WLAN Antennen und die Schwankungen der Signale. Die
Untersuchung von (Kaemarungsi & Krishnamurthy, 2012) wurden in einem Bürogebäude
durchgeführt. In dieser Arbeit soll die Ortung jedoch an einem U-Bahnhof stattfinden.
Sowohl zur Aufnahme, als auch zur Ortung sollen Android Smartphones genutzt werden.
Damit besteht ein leicht anderes Szenario und so soll eine kurze Untersuchung bezüglich
der Signalstärken gemacht werden. Hierfür werden mehrere Messungen durchgeführt. Zu
guter Letzt wird eine endgültige Messung sowohl für den U-Bahnhof Tierpark, als auch für
den U-Bahnhof Möckernbrücke durchgeführt, damit dort eine Ortung stattfinden kann.
3.3.1 Zwei Smartphones
Der erste Versuch untersucht unterschiedliche WLAN Antennen. Genutzt werden hierfür
die Geräte Samsung Galaxy S6 und das Google Nexus 5X. Leider konnten keine
genaueren Angaben über die verbauten WLAN Antennen gefunden werden.
Für diese Untersuchung wird an einem Punkt am Tierpark mit beiden Geräten zur
gleichen Zeit Messungen durchgeführt. Für drei Minuten wird jede Sekunde eine Messung
gemacht und die Signalstärke von jeder sichtbaren BSSID in dBm gespeichert. Gemessen
werden die Werte mit der selbst implementierten Android Anwendung (s. Kapitel 3.1),
welche den WiFi-Manager nutzt. Bei der Untersuchung der Messwerte ist auffällig, dass
sich die Werte über ein paar Sekunden lang nicht ändern. Das liegt daran, dass der
implementierte WiFi-Manager nur passiv scannen kann (s. Kapitel 2.5). Es wird auf ein
„frame Beacon“ des APs gewartet. Das dauert bei dem BVG-WiFi ca. vier Sekunden. Für
die Analyse der Ergebnisse werden daher alle doppelt gemessenen Werte entfernt.
Für jede gemessene BSSID werden sowohl Minimale und Maximale Werte
herausgeschrieben, als auch das arithmetische Mittel (Mittelwert), der Median und die
Standartabweichung für eine Stichprobe (auf zwei Dezimalstellen gerundet) berechnet (s.
Tabelle 5 und Tabelle 6).
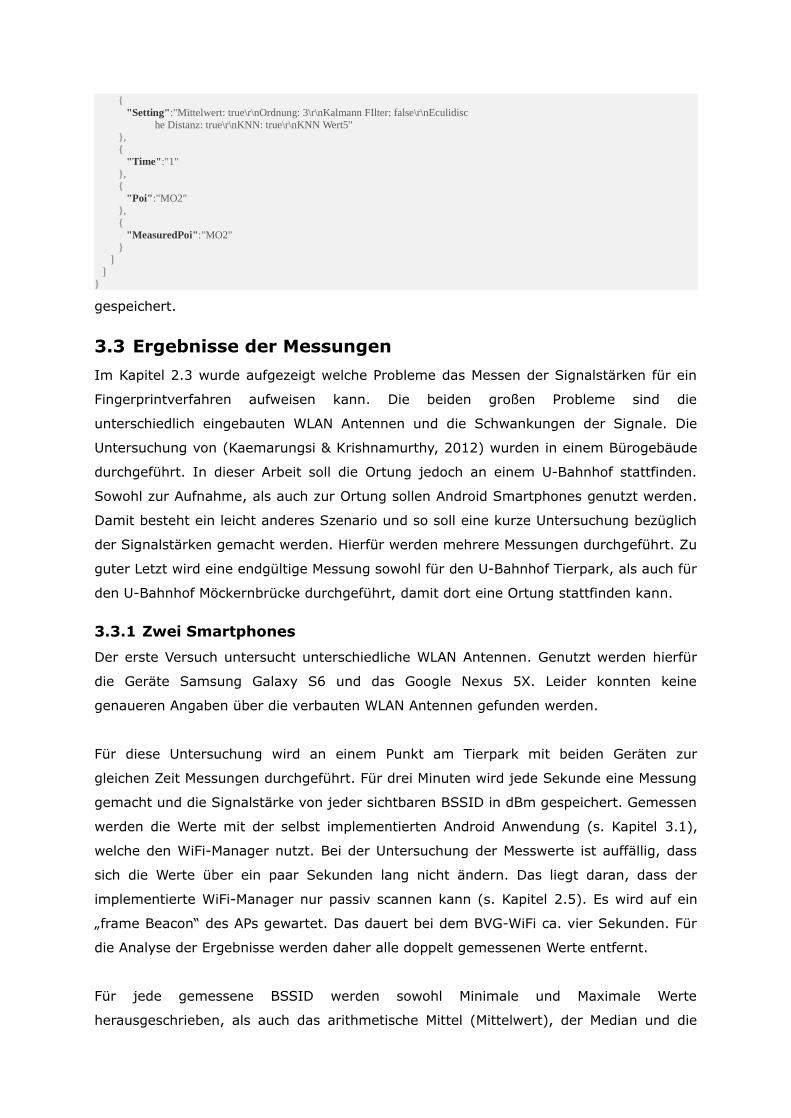
Auf den ersten Eindruck sehen beide Ergebnisse recht ähnlich aus (vgl. Abbildung 19 und
Abbildung 20). Es lassen sich jedoch einige Unterschiede erkennen. Die BSSIDs werden
von den beiden Geräten unterschiedlich erkannt. Bei dem Nexus wird beispielsweise die
BSSID3 nur sehr selten erkannt und gemessen, wohingegen das Gerät von Samsung
diesen AP fast immer misst. Grundsätzlich sind die Werte des Samsung Gerätes niedriger
als die gemessenen Werte des Nexus Gerätes. Das Nexus Gerät hat vermutlich eine
stärkere Antenne. Die Standartabweichung variiert ebenfalls, wobei keine Differenz
größer als eins ist. Die Minimale Differenz liegt bei 0,17 und die größte bei 0,96. Eine
Ortung sollte daher trotz unterschiedlicher Geräte noch möglich sein, wobei es besser ist
mit der besseren WLAN Antenne aufzunehmen. Der Mittelwert und der Median sind so
gut wie identisch. Mit dem Mittelwert kann daher gearbeitet und gerechnet werden.
Object 99
Abbildung 19: Messwerte über drei Minuten mit dem Google Nexus 5X, wobei doppelte Messwerteentfernt wurden
Tabelle 5: Ergebnisse mit dem Google Nexus 5X
BSSID
1
BSSID
2
BSSID
3
BSSID
4
BSSID
5
BSSID
6
BSSID
7
BSSID
8Max. -71 -76 -43 -44 -59 -65 -69 -69Min. -80 -84 -47 -51 -69 -75 -79 -74Mittelwert -74,66 -79,5 -45,29 -46,02 -66,68 -70,11 -73,43 -70,98Median -75 -79,5 -45 -46 -67 -70 -74 -71Stan-
dartab-
weichung
2,03 1,93 1,19 1,61 2,36 2,12 2,25 1,33
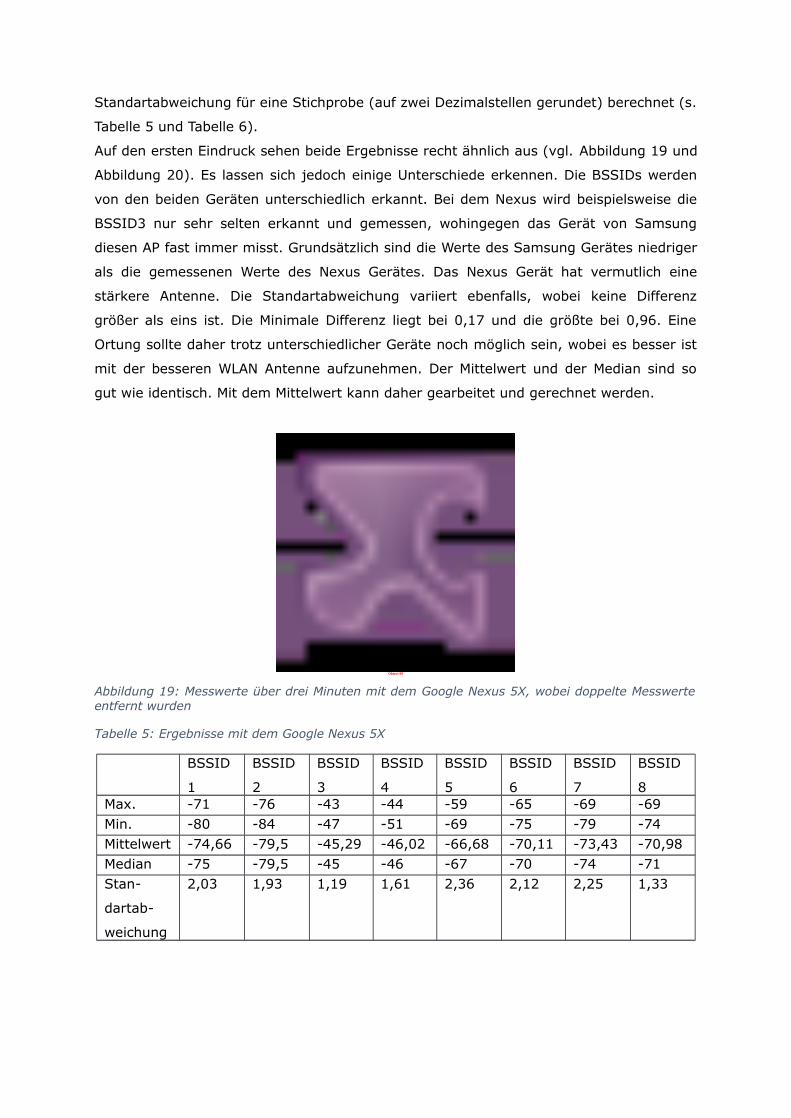
Object 102
Abbildung 20: Messwerte über drei Minuten mit dem Samsung Galaxy S6, wobei doppelteMesswerte entfernt wurden
Tabelle 6: Ergebnisse mit dem Samsung Galaxy S6
BSSID
1
BSSID
2
BSSID
3
BSSID
4
BSSID
5
BSSID
6
BSSID
7
BSSID
8Max. -82 -89 -48 -51 -73 -78 -82 -75Min. -93 -92 -55 -62 -83 -92 -89 -86Mittelwert -86,33 -90,4 -50,9 -57,31 -78,24 -83,89 -85,71 -81,21Median -86 -91 -51 -57 -78,5 -84 -86 -82Stan-
dartab-
weichung
2,47 1,34 1,96 2,32 2,19 2,92 1,73 2,29
3.3.2 Messdauer
Der zweite Versuch soll mögliche Unterschiede bei verschiedenen Messzeiten feststellen.
Deshalb wird an dem U-Bahnhof Möckernbrücke einmal für drei und einmal für zehn
Minuten jede Sekunde ein Messwert mit dem Samsung Galaxy S6 aufgenommen (s.
Tabelle 7 und Tabelle 8). Besonders interessant ist hierbei der Mittelwert. Ist dieser
ähnlich oder gleich, so reichen auch wenige Messdaten aus.
Der Maximale und Minimale Wert unterscheiden sich gar nicht oder nur gering. Die
Abweichungen des Mittelwertes sind meisten recht gering. Sie liegen zwischen 0,16 und
0,9. Nur zwei Werte sind größer. Die Abweichung von dem BSSID8 beträgt 1,16 und die
von dem AP6 2,69. Auch der Median ist relativ konstant. Nur die Differenz von 2 bei dem
BSSID6 fällt etwas heraus. Der Unterschied der Standardabweichung ist ebenfalls sehr
gering. Die Größte Differenz beträgt 0,96. Im Allgemeinen lässt sich also sagen, dass
eine Messzeit von 3 Minuten ausreichend ist und eine längere Messung daher unnötig ist.
Tabelle 7: Messergebnisse für zehn Minuten
BSSID BSSID BSSID BSSID BSSID BSSID BSSID BSSID8
1 2 3 4 5 6 7Max. -70 -63 -48 -49 -80 -82 -63 -65Min. -83 -84 -60 -61 -93 -94 -72 -76Mittelwert -76,26 -77,35 -50,69 -54,1 -87,73 -88,35 -67,43 -70,22Median -76 -78 -50 -54 -88 -88 -67 -70Stan-
dartab-
weichung.
3,05 2,72 2 2,04 2,42 2,75 1,83 2,21
Tabelle 8: Messergebnisse für drei Minuten
BSSID
1
BSSID
2
BSSID
3
BSSID
4
BSSID
5
BSSID
6
BSSID
7
BSSID8
Max. -70 -63 -48 -49 -81 -82 -63 -65
Min. -83 -84 -60 -61 -92 -90 -70 -75Mittelwert -76,86 -76,92 -50,47 -53,94 -86,83 -85,66 -66,73 -69,06Median -76,5 -78 -49 -54 -87 -86 -66 -69Stan-
dartab-
wei-
chung.
3,64 3,68 2,76 2,68 2,06 1,95 1,82 2,13
3.3.3 Mehrere Tage
Für den dritten Versuch dient der Untersuchung von Tageszeiten. An drei verschiedenen
Tagen mit drei verschiedenen Uhrzeiten wird mit dem Samsung Galaxy S6 jede Sekunde
jeweils für drei Minuten gemessen. Als erstes wird an einem Dienstag zwischen 15:23-
15.26 Uhr gemessen. Anschließend an einem Montag zwischen 10:38-10:41 Uhr und als
letztes an einem Mittwoch zwischen 17:36-17:39 Uhr. Für alle Tage werden Maximal und
Minimalwert herausgeschrieben, sowie das arithmetische Mittel, der Median und die
Standartabweichung berechnet (s. Tabelle 9). Auffällig ist hierbei, dass alle Werte
variieren. Bei den Minimalen hat die größte Differenz bei dem BSSID2 zwischen Tag eins
und zwei sogar einen Betrag von 14 und bei den Maximalen Werten bei dem BSSID3
zwischen Tag zwei und drei von zwölf. Der Mittelwert ist ebenfalls nicht mehr so
eindeutig. Bei BSSID3 beträgt die Differenz zwischen Tag drei und eins sogar 7,76. Es ist
dadurch nicht mehr möglich den Mittelwert als genaues Indiz zu nutzen. Die größte
Standartabweichung hat der Mittwoch mit der spätesten Uhrzeit. Die Streuung ist hier
leicht größer. Eventuell waren hier mehr Personen auf dem U-Bahnhof. Durch die großen
Unterschiede bei den Messungen ist es grundsätzlich besser mehrere Messungen an
verschieden Tagen durchzuführen, so dass mehr Anhaltspunkte verfügbar sind.
Tabelle 9: Messergebnisse an drei unterschiedlichen Tagen
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5 BSSID6 BSSID7 BSSID8Dienstag
15:23-15:26Max. -70 -63 -48 -49 -81 -82 -63 -65Min. -83 -84 -60 -61 -92 -90 -70 -75Mittelwert -76,86 -76,92 -50,47 -53,94 -86,83 -85,66 -66,73 -69,06Median -76,5 -78 -49 -54 -87 -86 -66 -69Stan-
dartab-
wei-
chung.
3,64 3,68 2,76 2,68 2,06 1,95 1,82 2,13
Montag
10:38-10:41Max. -77 -77 -50 -46 -81 -79 -62 -65Min. -84 -90 -59 -59 -90 -88 -70 -75Mittelwert -81,04 -81,45 -53,2 -55,22 -85,95 -84,57 -65,11 -70,98Median -81 -81 -54 -56 -86 -85 -65 -71Stan-
dartab-
weichung
1,51 2,37 1,92 2,69 1,93 1,79 2,05 2,22
Mittwoch
17:36-17:39Max. -76 -72 -52 -54 -78 -84 -59 -63Min. -85 -83 -71 -70 -91 -92 -68 -74Mittelwert -79,8 -78,11 -58,23 -58,44 -86 -88,62 -64,13 -69,17Median -79 -78 -58 -58 -86,5 -89 -64 -69Stan-
dartab-
weichung
2,47 2,68 3,62 2,69 2,52 1,85 2,34 2,66
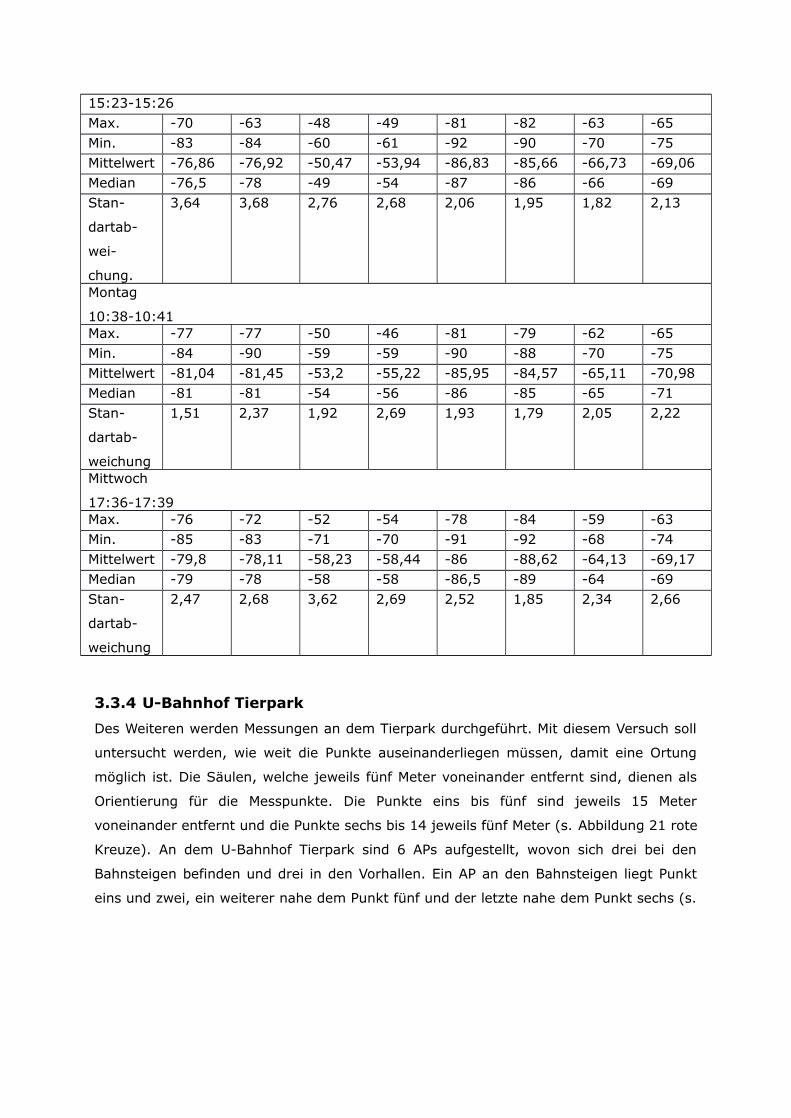
3.3.4 U-Bahnhof Tierpark
Des Weiteren werden Messungen an dem Tierpark durchgeführt. Mit diesem Versuch soll
untersucht werden, wie weit die Punkte auseinanderliegen müssen, damit eine Ortung
möglich ist. Die Säulen, welche jeweils fünf Meter voneinander entfernt sind, dienen als
Orientierung für die Messpunkte. Die Punkte eins bis fünf sind jeweils 15 Meter
voneinander entfernt und die Punkte sechs bis 14 jeweils fünf Meter (s. Abbildung 21 rote
Kreuze). An dem U-Bahnhof Tierpark sind 6 APs aufgestellt, wovon sich drei bei den
Bahnsteigen befinden und drei in den Vorhallen. Ein AP an den Bahnsteigen liegt Punkt
eins und zwei, ein weiterer nahe dem Punkt fünf und der letzte nahe dem Punkt sechs (s.
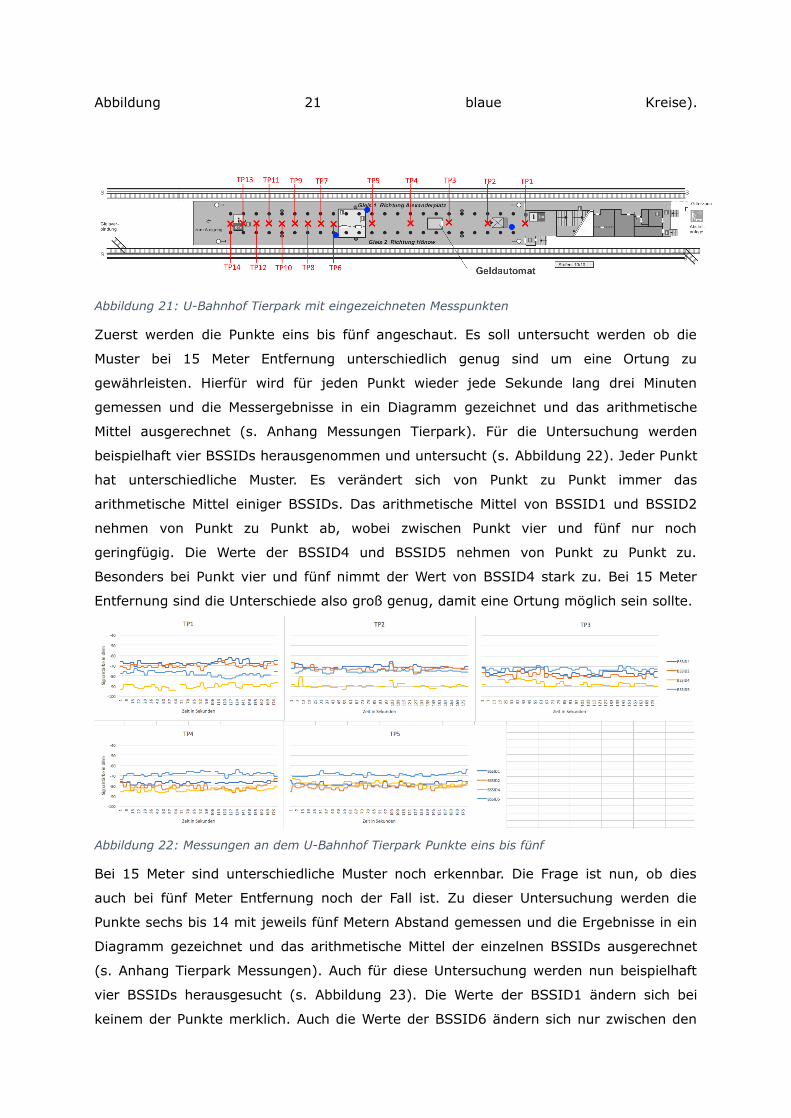
Abbildung 21 blaue Kreise).
Abbildung 21: U-Bahnhof Tierpark mit eingezeichneten Messpunkten
Zuerst werden die Punkte eins bis fünf angeschaut. Es soll untersucht werden ob die
Muster bei 15 Meter Entfernung unterschiedlich genug sind um eine Ortung zu
gewährleisten. Hierfür wird für jeden Punkt wieder jede Sekunde lang drei Minuten
gemessen und die Messergebnisse in ein Diagramm gezeichnet und das arithmetische
Mittel ausgerechnet (s. Anhang Messungen Tierpark). Für die Untersuchung werden
beispielhaft vier BSSIDs herausgenommen und untersucht (s. Abbildung 22). Jeder Punkt
hat unterschiedliche Muster. Es verändert sich von Punkt zu Punkt immer das
arithmetische Mittel einiger BSSIDs. Das arithmetische Mittel von BSSID1 und BSSID2
nehmen von Punkt zu Punkt ab, wobei zwischen Punkt vier und fünf nur noch
geringfügig. Die Werte der BSSID4 und BSSID5 nehmen von Punkt zu Punkt zu.
Besonders bei Punkt vier und fünf nimmt der Wert von BSSID4 stark zu. Bei 15 Meter
Entfernung sind die Unterschiede also groß genug, damit eine Ortung möglich sein sollte.
Abbildung 22: Messungen an dem U-Bahnhof Tierpark Punkte eins bis fünf
Bei 15 Meter sind unterschiedliche Muster noch erkennbar. Die Frage ist nun, ob dies
auch bei fünf Meter Entfernung noch der Fall ist. Zu dieser Untersuchung werden die
Punkte sechs bis 14 mit jeweils fünf Metern Abstand gemessen und die Ergebnisse in ein
Diagramm gezeichnet und das arithmetische Mittel der einzelnen BSSIDs ausgerechnet
(s. Anhang Tierpark Messungen). Auch für diese Untersuchung werden nun beispielhaft
vier BSSIDs herausgesucht (s. Abbildung 23). Die Werte der BSSID1 ändern sich bei
keinem der Punkte merklich. Auch die Werte der BSSID6 ändern sich nur zwischen den
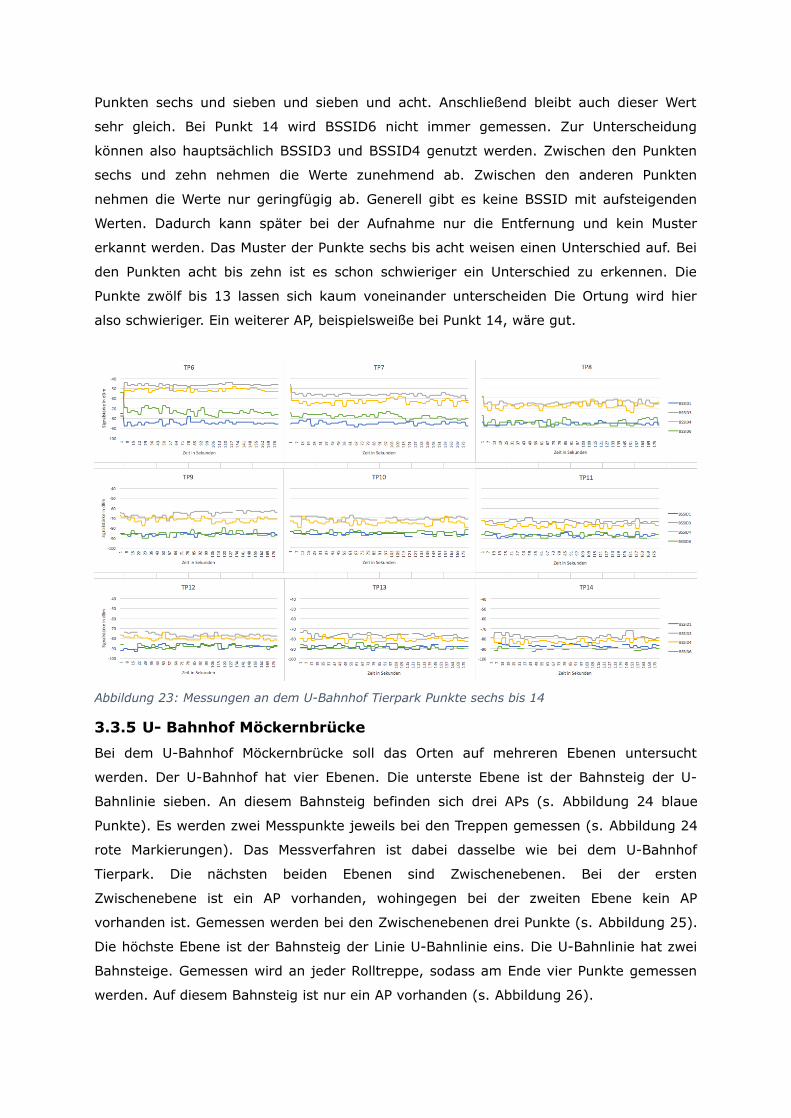
Punkten sechs und sieben und sieben und acht. Anschließend bleibt auch dieser Wert
sehr gleich. Bei Punkt 14 wird BSSID6 nicht immer gemessen. Zur Unterscheidung
können also hauptsächlich BSSID3 und BSSID4 genutzt werden. Zwischen den Punkten
sechs und zehn nehmen die Werte zunehmend ab. Zwischen den anderen Punkten
nehmen die Werte nur geringfügig ab. Generell gibt es keine BSSID mit aufsteigenden
Werten. Dadurch kann später bei der Aufnahme nur die Entfernung und kein Muster
erkannt werden. Das Muster der Punkte sechs bis acht weisen einen Unterschied auf. Bei
den Punkten acht bis zehn ist es schon schwieriger ein Unterschied zu erkennen. Die
Punkte zwölf bis 13 lassen sich kaum voneinander unterscheiden Die Ortung wird hier
also schwieriger. Ein weiterer AP, beispielsweiße bei Punkt 14, wäre gut.
Abbildung 23: Messungen an dem U-Bahnhof Tierpark Punkte sechs bis 14
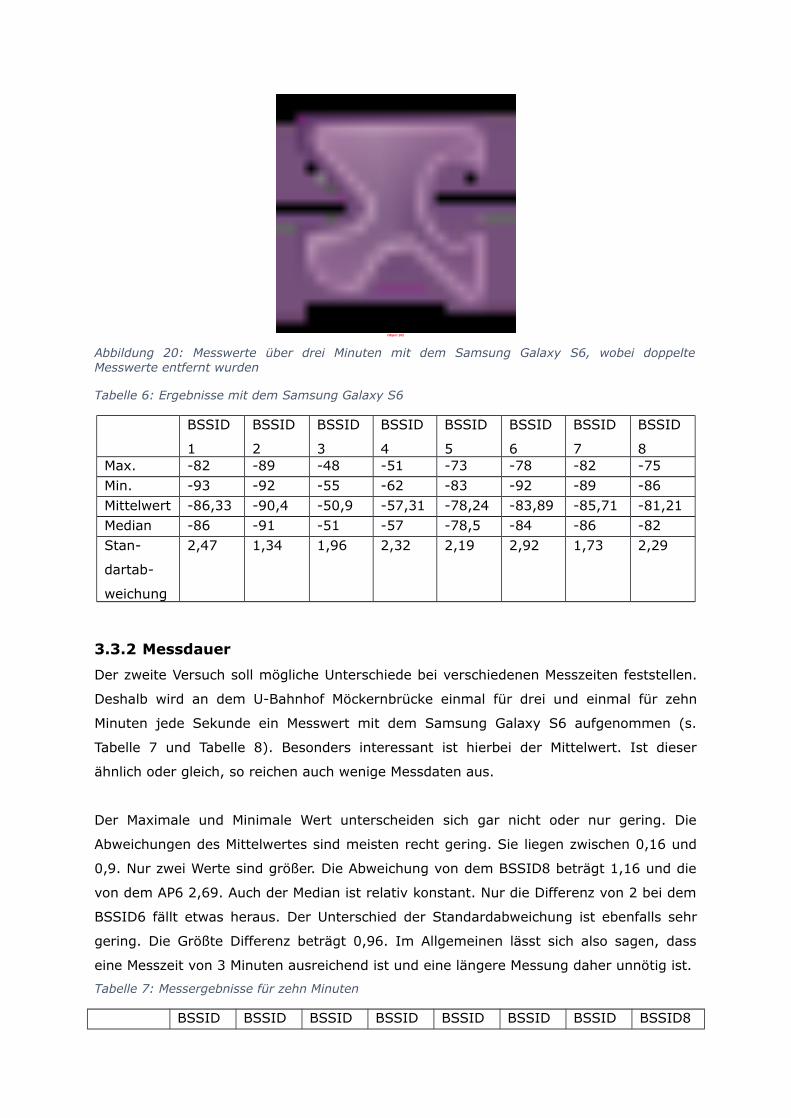
3.3.5 U- Bahnhof Möckernbrücke
Bei dem U-Bahnhof Möckernbrücke soll das Orten auf mehreren Ebenen untersucht
werden. Der U-Bahnhof hat vier Ebenen. Die unterste Ebene ist der Bahnsteig der U-
Bahnlinie sieben. An diesem Bahnsteig befinden sich drei APs (s. Abbildung 24 blaue
Punkte). Es werden zwei Messpunkte jeweils bei den Treppen gemessen (s. Abbildung 24
rote Markierungen). Das Messverfahren ist dabei dasselbe wie bei dem U-Bahnhof
Tierpark. Die nächsten beiden Ebenen sind Zwischenebenen. Bei der ersten
Zwischenebene ist ein AP vorhanden, wohingegen bei der zweiten Ebene kein AP
vorhanden ist. Gemessen werden bei den Zwischenebenen drei Punkte (s. Abbildung 25).
Die höchste Ebene ist der Bahnsteig der Linie U-Bahnlinie eins. Die U-Bahnlinie hat zwei
Bahnsteige. Gemessen wird an jeder Rolltreppe, sodass am Ende vier Punkte gemessen
werden. Auf diesem Bahnsteig ist nur ein AP vorhanden (s. Abbildung 26).
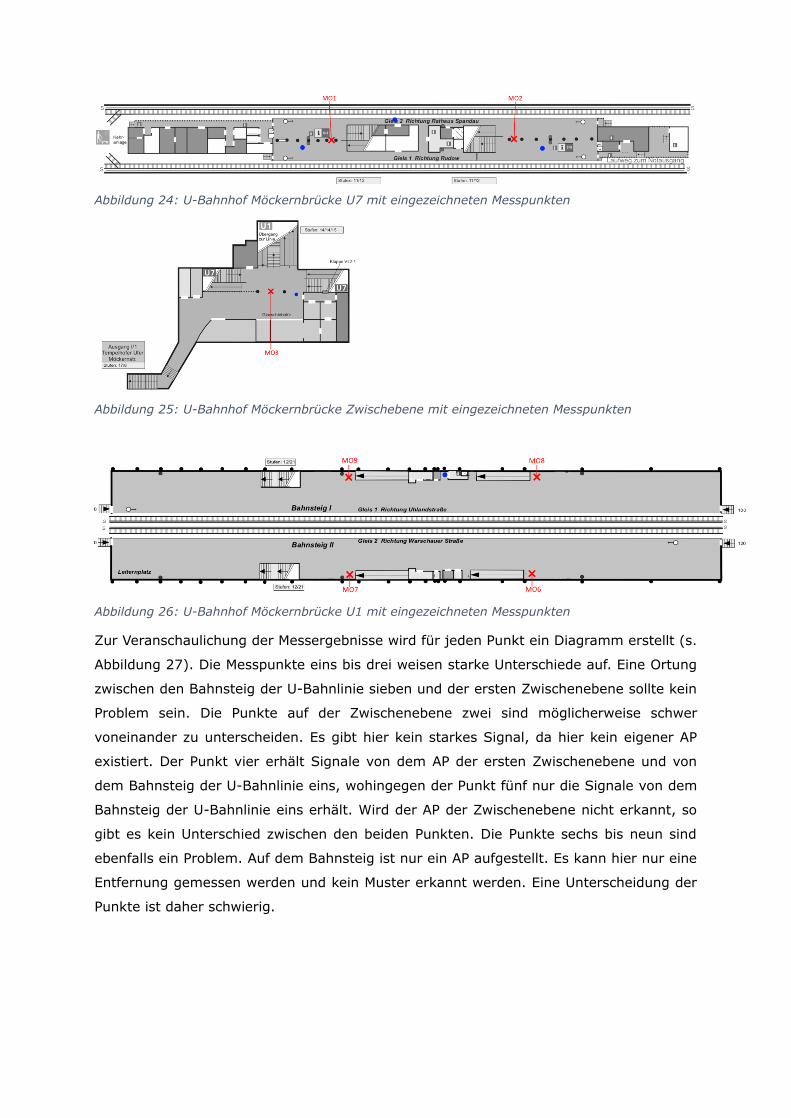
Abbildung 24: U-Bahnhof Möckernbrücke U7 mit eingezeichneten Messpunkten
Abbildung 25: U-Bahnhof Möckernbrücke Zwischebene mit eingezeichneten Messpunkten
Abbildung 26: U-Bahnhof Möckernbrücke U1 mit eingezeichneten Messpunkten
Zur Veranschaulichung der Messergebnisse wird für jeden Punkt ein Diagramm erstellt (s.
Abbildung 27). Die Messpunkte eins bis drei weisen starke Unterschiede auf. Eine Ortung
zwischen den Bahnsteig der U-Bahnlinie sieben und der ersten Zwischenebene sollte kein
Problem sein. Die Punkte auf der Zwischenebene zwei sind möglicherweise schwer
voneinander zu unterscheiden. Es gibt hier kein starkes Signal, da hier kein eigener AP
existiert. Der Punkt vier erhält Signale von dem AP der ersten Zwischenebene und von
dem Bahnsteig der U-Bahnlinie eins, wohingegen der Punkt fünf nur die Signale von dem
Bahnsteig der U-Bahnlinie eins erhält. Wird der AP der Zwischenebene nicht erkannt, so
gibt es kein Unterschied zwischen den beiden Punkten. Die Punkte sechs bis neun sind
ebenfalls ein Problem. Auf dem Bahnsteig ist nur ein AP aufgestellt. Es kann hier nur eine
Entfernung gemessen werden und kein Muster erkannt werden. Eine Unterscheidung der
Punkte ist daher schwierig.
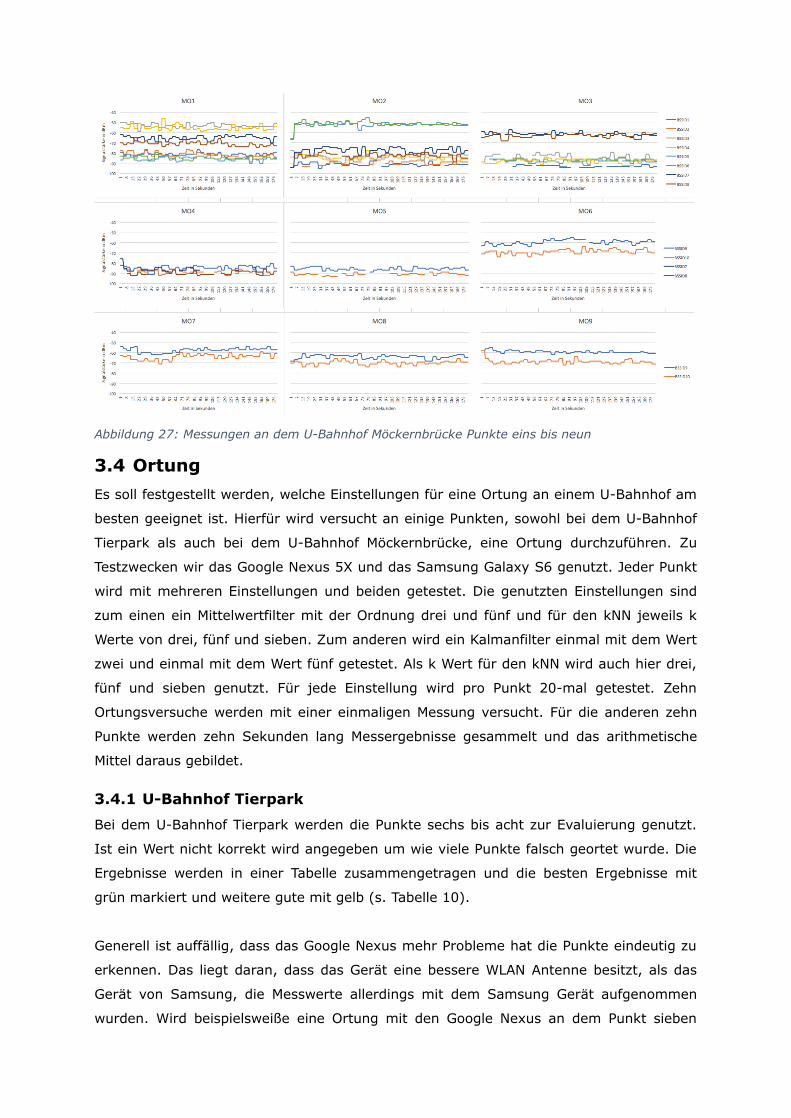
Abbildung 27: Messungen an dem U-Bahnhof Möckernbrücke Punkte eins bis neun
3.4 Ortung
Es soll festgestellt werden, welche Einstellungen für eine Ortung an einem U-Bahnhof am
besten geeignet ist. Hierfür wird versucht an einige Punkten, sowohl bei dem U-Bahnhof
Tierpark als auch bei dem U-Bahnhof Möckernbrücke, eine Ortung durchzuführen. Zu
Testzwecken wir das Google Nexus 5X und das Samsung Galaxy S6 genutzt. Jeder Punkt
wird mit mehreren Einstellungen und beiden getestet. Die genutzten Einstellungen sind
zum einen ein Mittelwertfilter mit der Ordnung drei und fünf und für den kNN jeweils k
Werte von drei, fünf und sieben. Zum anderen wird ein Kalmanfilter einmal mit dem Wert
zwei und einmal mit dem Wert fünf getestet. Als k Wert für den kNN wird auch hier drei,
fünf und sieben genutzt. Für jede Einstellung wird pro Punkt 20-mal getestet. Zehn
Ortungsversuche werden mit einer einmaligen Messung versucht. Für die anderen zehn
Punkte werden zehn Sekunden lang Messergebnisse gesammelt und das arithmetische
Mittel daraus gebildet.
3.4.1 U-Bahnhof Tierpark
Bei dem U-Bahnhof Tierpark werden die Punkte sechs bis acht zur Evaluierung genutzt.
Ist ein Wert nicht korrekt wird angegeben um wie viele Punkte falsch geortet wurde. Die
Ergebnisse werden in einer Tabelle zusammengetragen und die besten Ergebnisse mit
grün markiert und weitere gute mit gelb (s. Tabelle 10).
Generell ist auffällig, dass das Google Nexus mehr Probleme hat die Punkte eindeutig zu
erkennen. Das liegt daran, dass das Gerät eine bessere WLAN Antenne besitzt, als das
Gerät von Samsung, die Messwerte allerdings mit dem Samsung Gerät aufgenommen
wurden. Wird beispielsweiße eine Ortung mit den Google Nexus an dem Punkt sieben
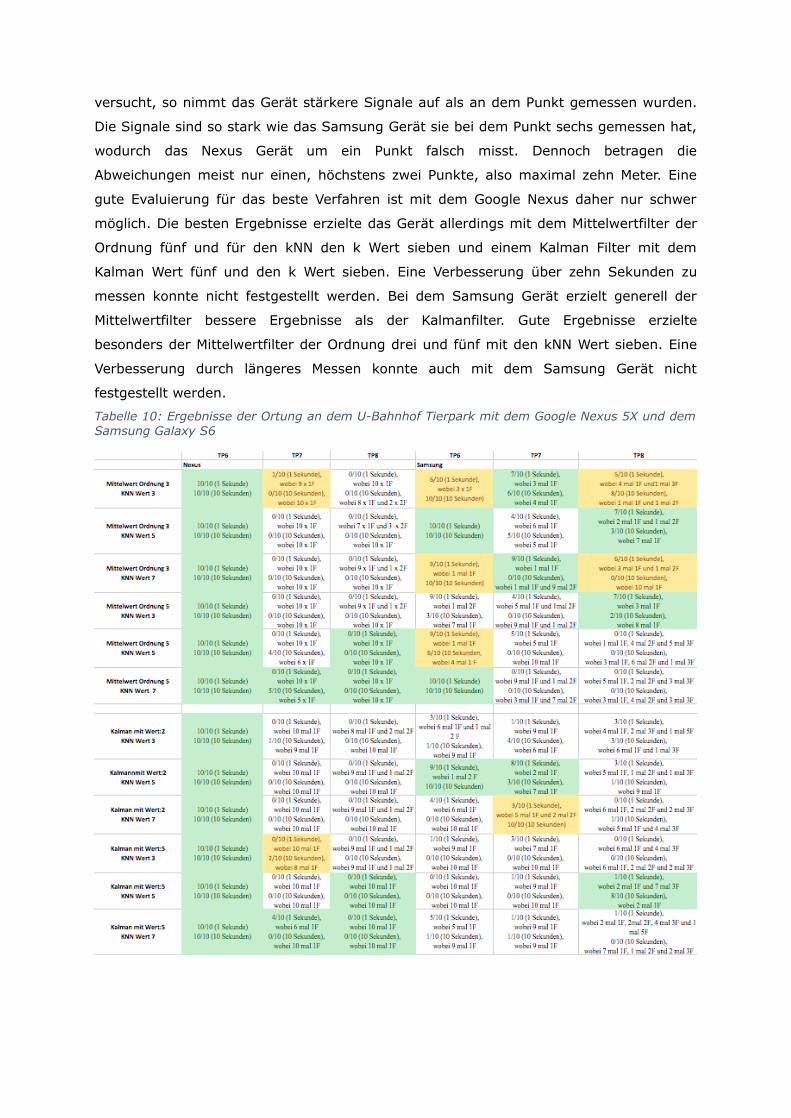
versucht, so nimmt das Gerät stärkere Signale auf als an dem Punkt gemessen wurden.
Die Signale sind so stark wie das Samsung Gerät sie bei dem Punkt sechs gemessen hat,
wodurch das Nexus Gerät um ein Punkt falsch misst. Dennoch betragen die
Abweichungen meist nur einen, höchstens zwei Punkte, also maximal zehn Meter. Eine
gute Evaluierung für das beste Verfahren ist mit dem Google Nexus daher nur schwer
möglich. Die besten Ergebnisse erzielte das Gerät allerdings mit dem Mittelwertfilter der
Ordnung fünf und für den kNN den k Wert sieben und einem Kalman Filter mit dem
Kalman Wert fünf und den k Wert sieben. Eine Verbesserung über zehn Sekunden zu
messen konnte nicht festgestellt werden. Bei dem Samsung Gerät erzielt generell der
Mittelwertfilter bessere Ergebnisse als der Kalmanfilter. Gute Ergebnisse erzielte
besonders der Mittelwertfilter der Ordnung drei und fünf mit den kNN Wert sieben. Eine
Verbesserung durch längeres Messen konnte auch mit dem Samsung Gerät nicht
festgestellt werden.
Tabelle 10: Ergebnisse der Ortung an dem U-Bahnhof Tierpark mit dem Google Nexus 5X und demSamsung Galaxy S6
3.4.2 U-Bahnhof Möckernbrücke
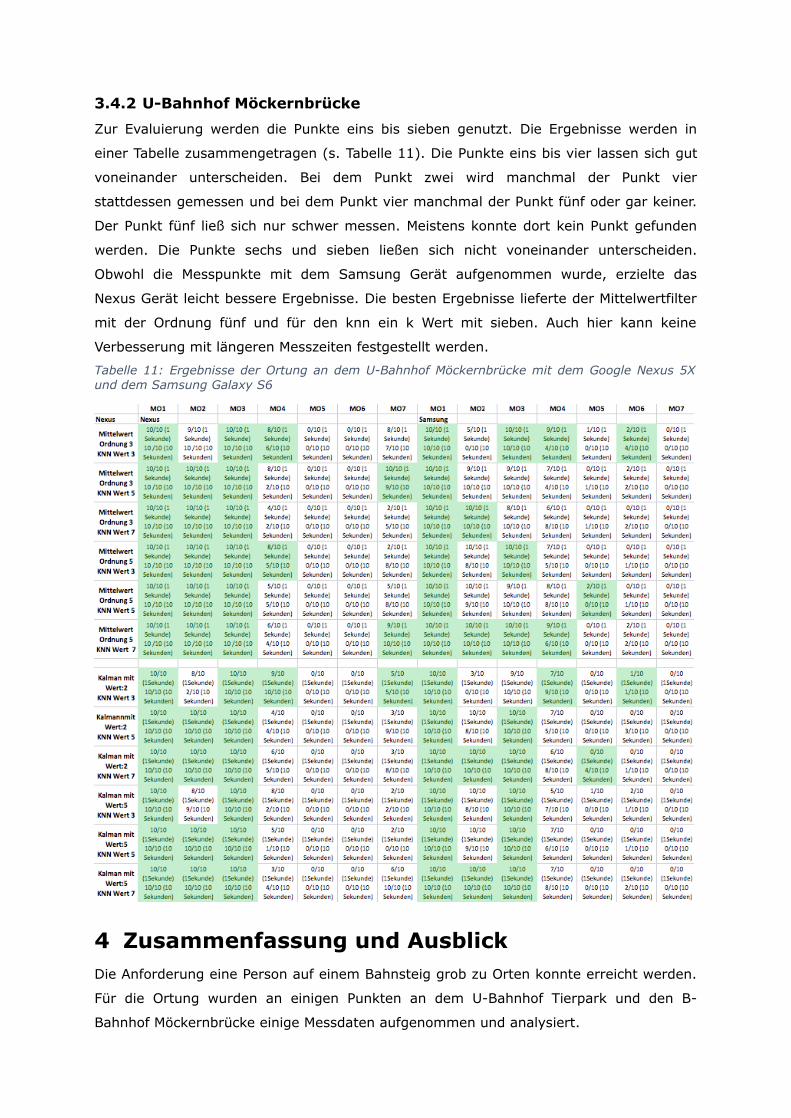
Zur Evaluierung werden die Punkte eins bis sieben genutzt. Die Ergebnisse werden in
einer Tabelle zusammengetragen (s. Tabelle 11). Die Punkte eins bis vier lassen sich gut
voneinander unterscheiden. Bei dem Punkt zwei wird manchmal der Punkt vier
stattdessen gemessen und bei dem Punkt vier manchmal der Punkt fünf oder gar keiner.
Der Punkt fünf ließ sich nur schwer messen. Meistens konnte dort kein Punkt gefunden
werden. Die Punkte sechs und sieben ließen sich nicht voneinander unterscheiden.
Obwohl die Messpunkte mit dem Samsung Gerät aufgenommen wurde, erzielte das
Nexus Gerät leicht bessere Ergebnisse. Die besten Ergebnisse lieferte der Mittelwertfilter
mit der Ordnung fünf und für den knn ein k Wert mit sieben. Auch hier kann keine
Verbesserung mit längeren Messzeiten festgestellt werden.
Tabelle 11: Ergebnisse der Ortung an dem U-Bahnhof Möckernbrücke mit dem Google Nexus 5Xund dem Samsung Galaxy S6
4 Zusammenfassung und Ausblick Die Anforderung eine Person auf einem Bahnsteig grob zu Orten konnte erreicht werden.
Für die Ortung wurden an einigen Punkten an dem U-Bahnhof Tierpark und den B-
Bahnhof Möckernbrücke einige Messdaten aufgenommen und analysiert.
Aufgrund eines passiven Scannvorganges misst Android nur alle vier Sekunden einen
neuen Wert. Für eine Datenanalyse wurden mehrere Versuche durchgeführt. Der erste
Versuch untersucht unterschiedliche WLAN-Antennen mit dem Samsung Galaxy S6 und
dem Google Nexus 5X. Die beiden Geräte nehmen die Messwerte unterschiedlich auf,
dabei nimmt das Samsung Gerät die Werte schwächer auf. Der zweite Versuch untersucht
verschiedene Messzeiten. Es wurden einmal zehn und einmal drei Minuten gemessen. Die
Werte waren relativ ähnlich, sodass angenommen werden kann, dass drei Minuten
Messzeit ausreichend sind. Der letzte Versuch untersucht unterschiedliche Zeitpunkte der
Aufnahmen, wobei die Messergebnisse an unterschiedlichen Zeitpunkten variieren. Es ist
daher sinnvoll an unterschiedlichen Zeitpunkten Messungen durchzuführen. Dies wurde in
dieser Arbeit allerdings nicht weiter untersucht.
Für die Ortung an dem U-Bahnhof Tierpark wurden insgesamt 14 Punkte gemessen. In
diesem Versuch geht es darum, wie groß der Abstand zwischen den einzelnen Punkten
sein muss, damit eine Ortung noch gewährleistet werden kann. Die Punkte eins bis fünf
sind jeweils 15 Meter voneinander entfernt. Die anderen Punkte jeweils fünf Meter. Bei
der Untersuchung der Messergebnisse ist erkennbar, dass sich die Muster bei den
Punkten eins bis fünf gut voneinander unterschieden lassen. Bei den anderen Punkten
wird eine Unterscheidung schwieriger. Das liegt allerdings auch daran, dass sich die
Punkte von allen vorhanden APs entfernen. Ein weiterer AP wäre für eine bessere Ortung
anzubringen. An den U-Bahnhof Tierpark werden für die Evaluierung die Punkte sechs,
sieben und acht genutzt. Jeder Punkt wird mit jeder möglichen Einstellung 20-mal
getestet, wobei die letzten zehn Messungen eine Messzeit von zehn Sekunden haben.
Eine Verbesserung mit längerer Messzeit konnte allerdings nicht festgestellt werden. Das
beste Ergebnis lieferte der Mittelwertfilter der Ordnung drei und fünf mit den k Wert
sieben. Teilweise gab es bei der Ortung eine Abweichung von fünf bis 15 Metern.
Bei dem U-Bahnhof Möckernbrücke wurden insgesamt 9 Punkte gemessen. Die Punkte
befinden sich auf unterschiedlichen Ebenen. Es soll überprüft werden ob die Ortung bei
unterschiedlichen Ebenen problematisch ist. Die Punkte MO1 und MO2 befinden sich auf
der untersten Ebene. Der Punkt MO3 auf einer ersten Zwischenebene und die Punkte
MO4 und MO5 auf einer zweiter Zwischenebene. Die restlichen Punkte befinden sich auf
der obersten Ebene. Diese ist oberirdisch. Nur auf der untersten Ebene sind drei APs. Alle
anderen Ebenen haben nur einen oder gar kein AP. Eine Ortung ist daher schwierig. Die
Muster der Punkte eins bis drei lassen sich allerdings gut voneinander unterschieden. Für
die Überprüfung werden die Punkte eins bis sieben untersucht. Das Verfahren gleicht
dabei dem des Tierparks. Wie zu erwarten lassen sich die Punkte eins bis drei sehr gut
voneinander unterschieden. Auch der Punkt vier wird sehr häufig richtig erkannt. Alle
anderen Punkte lassen sich schwer bis gar nicht erkennen. Das beste Ergebnis liefert der
Mittelwertfilter der Ordnung fünf mit einem k Wert von sieben. Eine Verbesserung mit
erhöhter Messzeit konnte auch hier nicht festgestellt werden.
Generell lässt sich sagen, dass der Mittelwertfilter bessere Ergebnisse erzielt als der
Kalman-Filter. Es ist hierbei allerdings zu erwähnen, dass der Kalman Filter nur auf die
Messdaten angewendet wird. Es wird der optimale Wert gesucht. Bei einer späteren
Navigation kann der Kalman-Filter weiter ausgebaut werden und dann für die Schätzung
der Position genutzt werden. Ein k Wert für die k-Nächste-Nachbar-Klassifikation
zwischen fünf und sieben sollte ausgewählt werden. Es wäre möglicherweise besser eine
stärkere Antenne für die Messung zu nutzen. Dies wurde in dieser Arbeit nicht untersucht
und muss evaluiert werden. Des Weiteren sollte für die Messung ein Gerät genutzt
werden welches aktiv scannen kann. In dieser Arbeit wurde jeder Punkt nur drei Minuten
zu einer Uhrzeit gemessen. Messergebnisse sind allerdings je nach Uhrzeit
unterschiedlich. Deshalb sollten zu verschiedenen Uhrzeiten Messungen durchgeführt
werden. Eine weitere Idee ist es die Algorithmen weiter zu verfeinern. Beispielsweiße
könnte bei der Euklidischen Distanz schwache Messwerte weniger gewichtet werden, als
starke.
I. AbbildungsverzeichnisAbbildung 1: RADAR Karte mit Basisstationen und Referenzpunkten.........................4
Abbildung 2: Effekte bei der Funksignalausbreitung verändert nach (Luntovskyy et al.,
2012, p. 46)................................................................................................6
Abbildung 3: Karte mit Referenzpunkten, Basisstationen und einer mobilen Station nach
(Gómez et al., 2016).....................................................................................8
Abbildung 4: Archetektur eines WLAN Fingerprintverfahren nach (Gómez et al., 2016)9
Abbildung 5: Aktives und passives Scannan nach (“WLAN Configuration Guide - Technical
Support - H3C,” n.d.)..................................................................................10
Abbildung 6: Data Mining Prozess nach (Runkler, 2010, p. 2).................................11
Abbildung 7: Streudiagramm der klassifizierten Äpfel ohne und mit Trennlinie..........12
Abbildung 8: Mittelwert dritter und fünfter Ordnung..............................................13
Abbildung 9: Kalman-Filter Schema....................................................................15
Abbildung 10: Kalman-Filter Schema mit Formeln nach (Nischwitz et al., 2011, p.557)16
Abbildung 11: Zuweisung eines Punktes zu einer negativen oder positiven Klasse nach
(Ertel, 2016, p. 206ff).................................................................................19
Abbildung 12: k-Nächster-Nachbar-Klassifikation mit k=3 und k=6 nach (Morgun, 2017)
................................................................................................................20
Abbildung 13: Startseite Abbildung 14: Seite für die Messungen.................22
Abbildung 15: Seite für die Einstellungen Abbildung 16: Seite für die Ortung.....23
Abbildung 17: vereinfachter Kalman-Filter nach (Nischwitz et al., 2011, p.561)........25
Abbildung 18: Streudiagramm mit 3 Punkten und aktuellen Wert...........................27
Abbildung 19: Messwerte über drei Minuten mit dem Google Nexus 5X, wobei doppelte
Messwerte entfernt wurden..........................................................................29
Abbildung 20: Messwerte über drei Minuten mit dem Samsung Galaxy S6, wobei doppelte
Messwerte entfernt wurden..........................................................................30
Abbildung 21: U-Bahnhof Tierpark mit eingezeichneten Messpunkten......................33
Abbildung 22: Messungen an dem U-Bahnhof Tierpark Punkte eins bis fünf.............34
Abbildung 23: Messungen an dem U-Bahnhof Tierpark Punkte sechs bis 14.............35
Abbildung 24: U-Bahnhof Möckernbrücke U7 mit eingezeichneten Messpunkten.......35
Abbildung 25: U-Bahnhof Möckernbrücke Zwischebene mit eingezeichneten Messpunkten
................................................................................................................36
Abbildung 26: U-Bahnhof Möckernbrücke U1 mit eingezeichneten Messpunkten.......36
Abbildung 27: Messungen an dem U-Bahnhof Möckernbrücke Punkte eins bis neun. .37
II. TabellenverzeichnisTabelle 1: Kalibrierte Daten für die Apfelsortierung nach (Ertel, 2016, p. 193)..........12
Tabelle 2: Beispieldaten mit 2 Knoten und 3 Basisstationen...................................17
Tabelle 3: Beispieldaten mit fehlender Basisstation drei des aktuellen Messwertes....18
Tabelle 4: Beispieldaten mit fehlender Basisstation drei bei Knoten zwei..................18
Tabelle 5: Ergebnisse mit dem Google Nexus 5X...................................................29
Tabelle 6: Ergebnisse mit dem Samsung Galaxy S6..............................................30
Tabelle 7: Messergebnisse für zehn Minuten.........................................................31
Tabelle 8: Messergebnisse für drei Minuten..........................................................31
Tabelle 9: Messergebnisse an drei unterschiedlichen Tagen....................................32
Tabelle 10: Ergebnisse der Ortung an dem U-Bahnhof Tierpark mit dem Google Nexus 5X
und dem Samsung Galaxy S6.......................................................................38
Tabelle 11: Ergebnisse der Ortung an dem U-Bahnhof Möckernbrücke mit dem Google
Nexus 5X und dem Samsung Galaxy S6.........................................................39
III. AbkürzungsverzeichnisAP. Access Point
APs. Access Points
BSSID. Basic Service Set Identification
BVG. Berliner Verkehrsbetriebe
dBm. Dezibel Milliwatt
GPS. Global Positioning System
JSON. JavaScript Object Notation
kNN. k-Nächster-Nachbar-Klassifikation
NN. Nächster-Nachbar-Klassifikation
RSS. Recieved Signal Strength
RSSI. Receive Signal Strength Indicator
SSID. Service Set Identifier
UMTS. Universal Mobile Telecommunications System
WLAN. Wireless Local Area Network
IV. LiteraturverzeichnisAndersson, P., & Norlander, A. (2012). Indoor Positioning Using WLAN. Retrieved from
http://www.diva-portal.org/smash/record.jsf?pid=diva2:533773
Bahl, P., & Padmanabhan, V. N. (2000). RADAR: An in-building RF-based user location
and tracking system. In ResearchGate. Microsoft Research. Retrieved from
https://www.researchgate.net/publication/247326334_RADAR_An_in-building_RF-
based_user_location_and_tracking_system
Dr. Berthold Schmitt. (2015). KulturBetrieb, Magazin für innovatibe und wirtschafliche
Lösung in Museen, Bibilotheken und Archiven, (1), 16.
Ertel, W. (2016). Maschinelles Lernen und Data Mining. In Grundkurs Künstliche
Intelligenz (pp. 191–264). Springer Fachmedien Wiesbaden.
https://doi.org/10.1007/978-3-658-13549-2_8
Fet, N., Handte, M., & Marrón, P. J. (2016). An Approach for Autonomous Recalibration of
Fingerprinting-Based Indoor Localization Systems. In 2016 12th International Conference
on Intelligent Environments (IE) (pp. 24–31). https://doi.org/10.1109/IE.2016.13
Fraunhofer-Institut für Integrierte Schaltungen IIS. (2017, October 1). Lokalisierung -
RSSI - Received Signal Strength Indication. Retrieved April 7, 2017, from
http://www.iis.fraunhofer.de/de/ff/lok/tech/feldstaerke/rssi.html
Gansemer, S., Großmann, U., & Hakobyan, S. (2010). RSSI-based Euclidean Distance
algorithm for indoor positioning adapted for the use in dynamically changing WLAN
environments and multi-level buildings. In 2010 International Conference on Indoor
Positioning and Indoor Navigation (pp. 1–6). https://doi.org/10.1109/IPIN.2010.5648247
Gómez, J. A., Medina, A. V., Martín, S., Dorronzoro, E., & Rivera, O. (2016). Fingerprint
indoor location simulator for AAL. Journal of Ambient Intelligence and Smart
Environments, 8(2), 109–124. https://doi.org/10.3233/AIS-160371
Google. (2017a). Gebäudepläne mit Indoor-Karten ansehen - Computer - Google Maps-
Hilfe. Retrieved April 20, 2017, from https://support.google.com/maps/answer/2803784?
hl=de&ref_topic=3280760
Google. (2017b). Verfügbarkeit von Indoor-Karten - Google Maps-Hilfe. Retrieved April
20, 2017, from https://support.google.com/maps/answer/1685827?
hl=de&ref_topic=3280760
Google Maps APIs. (n.d.). Retrieved April 20, 2017, from
https://developers.google.com/maps/?hl=de
Indoor-Karten für Innenräume. (n.d.). Retrieved April 20, 2017, from
https://www.google.com/intl/de/maps/about/partners/indoormaps/
Jacob, T. (n.d.). Microsoft-Radar : Indoor-Ortung.de. Retrieved April 8, 2017, from
http://indoor-ortung.de/systeme/microsoft-radar/
Kaemarungsi, K., & Krishnamurthy, P. (2012). Analysis of WLAN’s received signal strength
indication for indoor location fingerprinting. Pervasive and Mobile Computing, 8(2), 292–
316. https://doi.org/10.1016/j.pmcj.2011.09.003
Kohn, W., & Öztürk, R. (2017). Grundlagen. In Statistik für Ökonomen (pp. 13–20).
Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-662-50442-0_3
Lohninger, H. (2012, October 8). Gleitender Mittelwert. Retrieved April 10, 2017, from
http://www.statistics4u.com/fundstat_germ/cc_moving_average.html
Luntovskyy, A., Gütter, D., & Melnyk, I. (2012). Grundlagen. In Planung und Optimierung
von Rechnernetzen (pp. 23–73). Vieweg+Teubner Verlag. https://doi.org/10.1007/978-
3-8348-8242-4_2
Morgun, I. (2017, January 22). Classification using k-Nearest Neighbors in R |
en.proft.me. Retrieved April 10, 2017, from
http://en.proft.me/2017/01/22/classification-using-k-nearest-neighbors-r/
Multimap (Guava: Google Core Libraries for Java 19.0 API). (n.d.). Retrieved April 20,
2017, from
https://google.github.io/guava/releases/19.0/api/docs/com/google/common/collect/Multi
map.html
Nischwitz, A., Fischer, M., Haberäcker, P., & Socher, G. (2011). Kalman-Filter. In
Computergrafik und Bildverarbeitung (pp. 545–574). Vieweg+Teubner Verlag.
https://doi.org/10.1007/978-3-8348-8300-1_27
RADAR. (2001, November 5). Retrieved April 8, 2017, from
https://www.microsoft.com/en-us/research/project/radar/
Runkler, T. A. (2010). Data-Mining-Prozess. In Data Mining (pp. 1–3). Vieweg+Teubner.
https://doi.org/10.1007/978-3-8348-9353-6_1
Walter, C. (2016, May 10). Smartwatch als Navigationshilfe- Gebäude-Navigation an der
HTW.
Werner, P. (2011, July 3). Awiloc: Datenschützer loben WLAN-Ortungssystem - Golem.de.
Retrieved April 8, 2017, from https://www.golem.de/1103/81948.html
Winkler, P. (2004, December). Der diskrete Kalman Filter. Technische Universität
Darmstadt. Retrieved from http://www.sim.informatik.tu-
darmstadt.de/edu/hseminar/ws0405/intern/material/folien103.pdf
WLAN Configuration Guide - Technical Support - H3C. (n.d.). Retrieved April 8, 2017,
from
http://www.h3c.com.hk/technical_support___documents/technical_documents/wlan/acce
ss_point/h3c_wa2200_series_wlan_access_points/configuration/operation_manual/h3c_
wa_series_wlan_access_cg-6w100/02/201009/691527_1285_0.htm
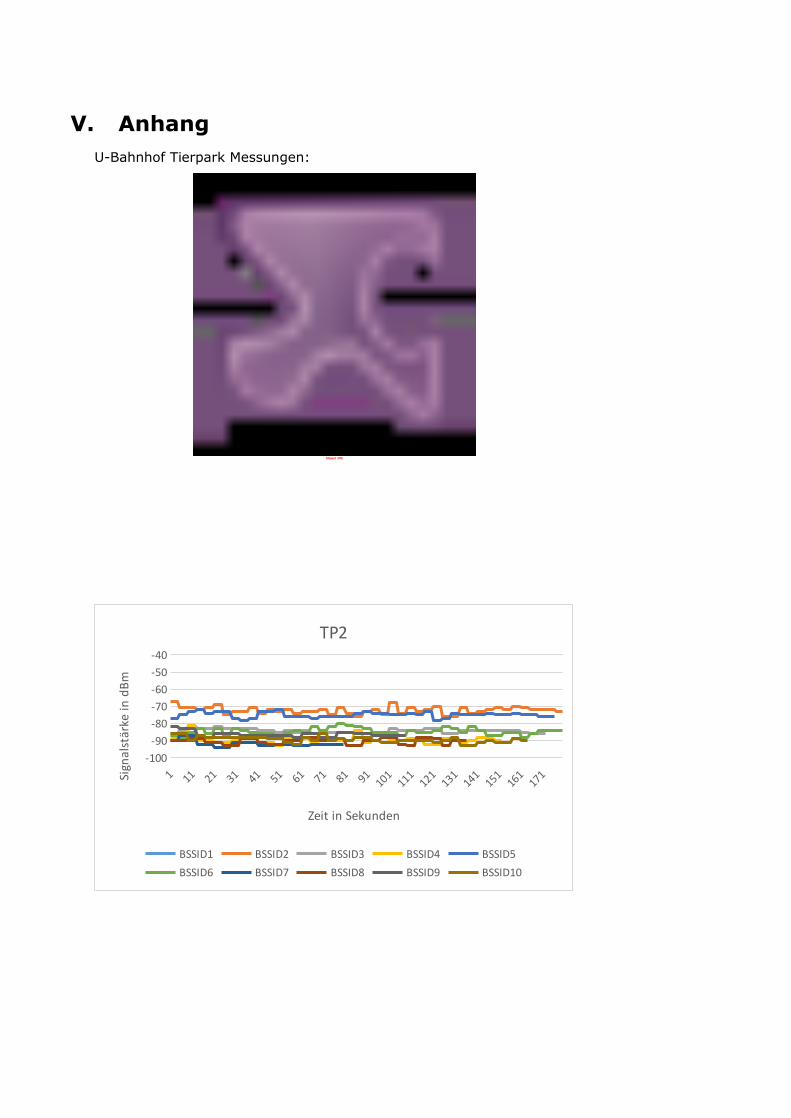
V. AnhangU-Bahnhof Tierpark Messungen:
Object 105
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP2
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID9 BSSID10
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
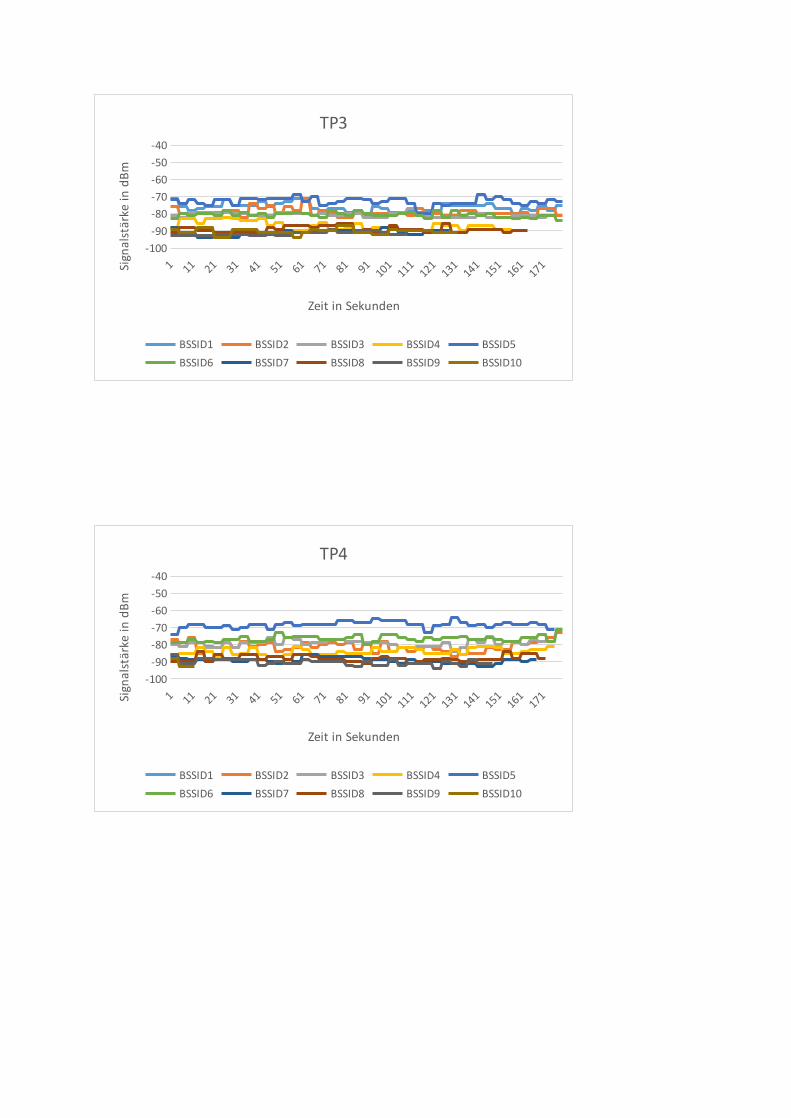
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP3
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID9 BSSID10
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP4
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID9 BSSID10
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
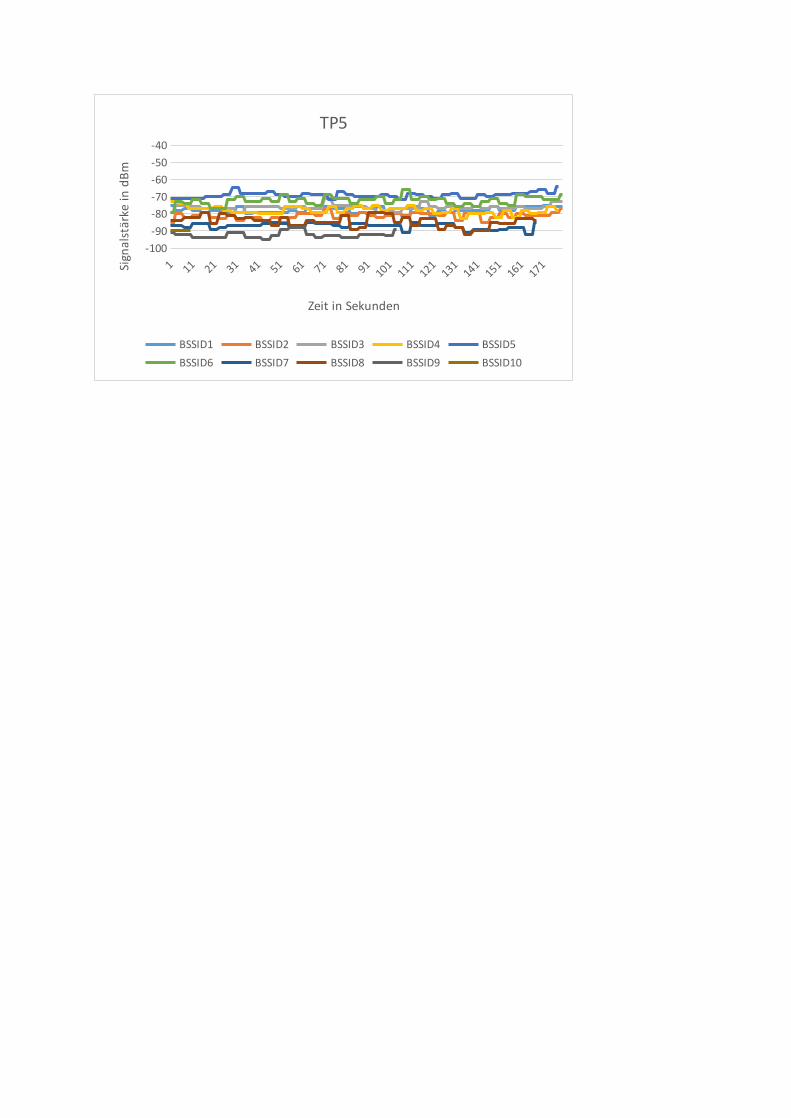
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP5
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID9 BSSID10
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
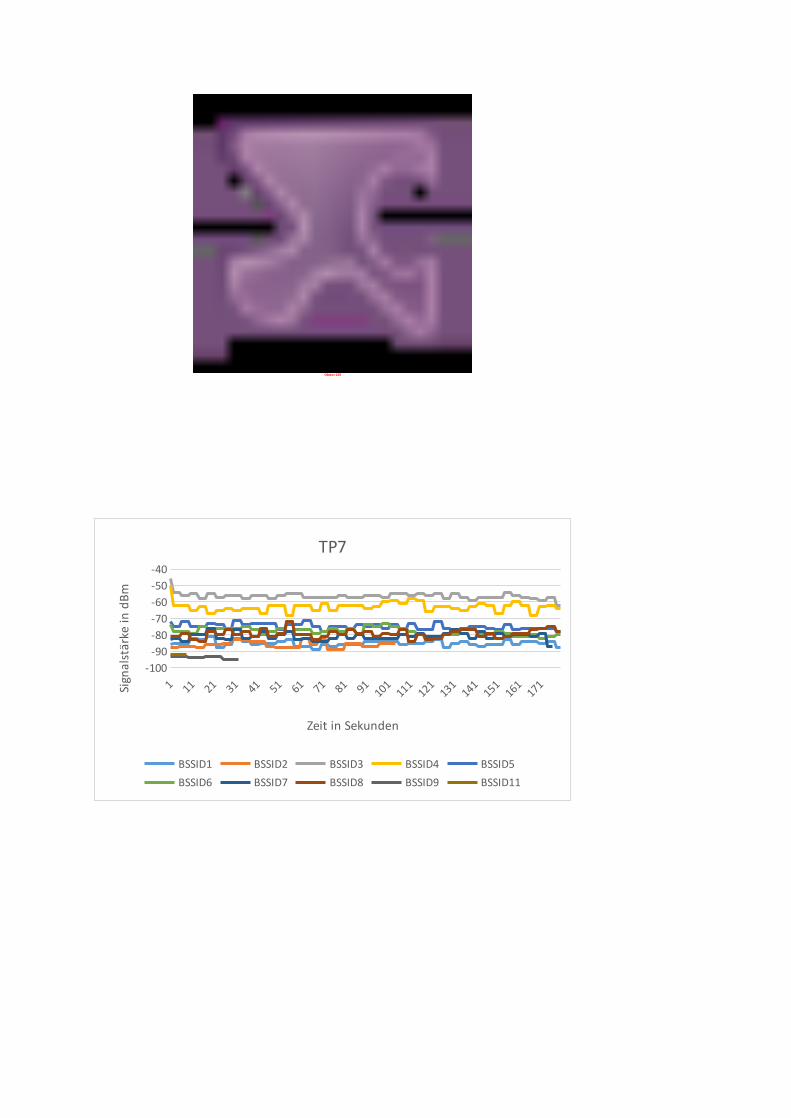
Object 120
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP7
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID9 BSSID11
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
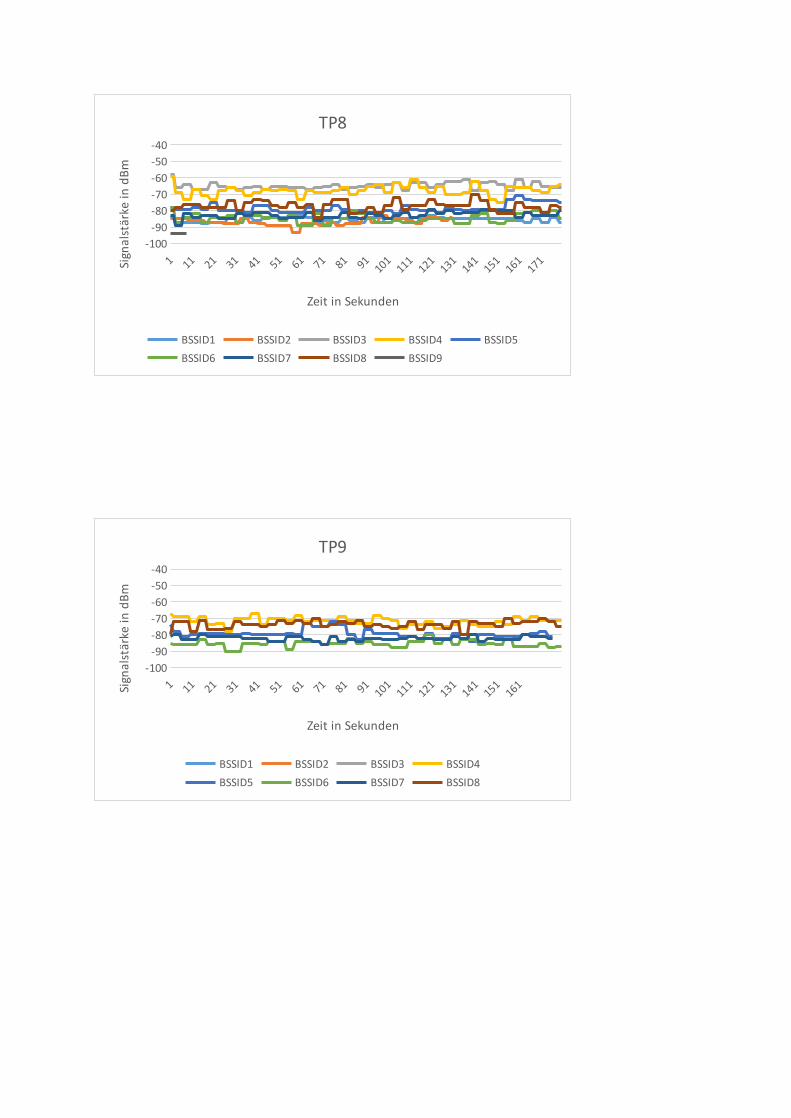
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP8
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID9
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
-100-90-80-70-60-50-40
TP9
BSSID1 BSSID2 BSSID3 BSSID4
BSSID5 BSSID6 BSSID7 BSSID8
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
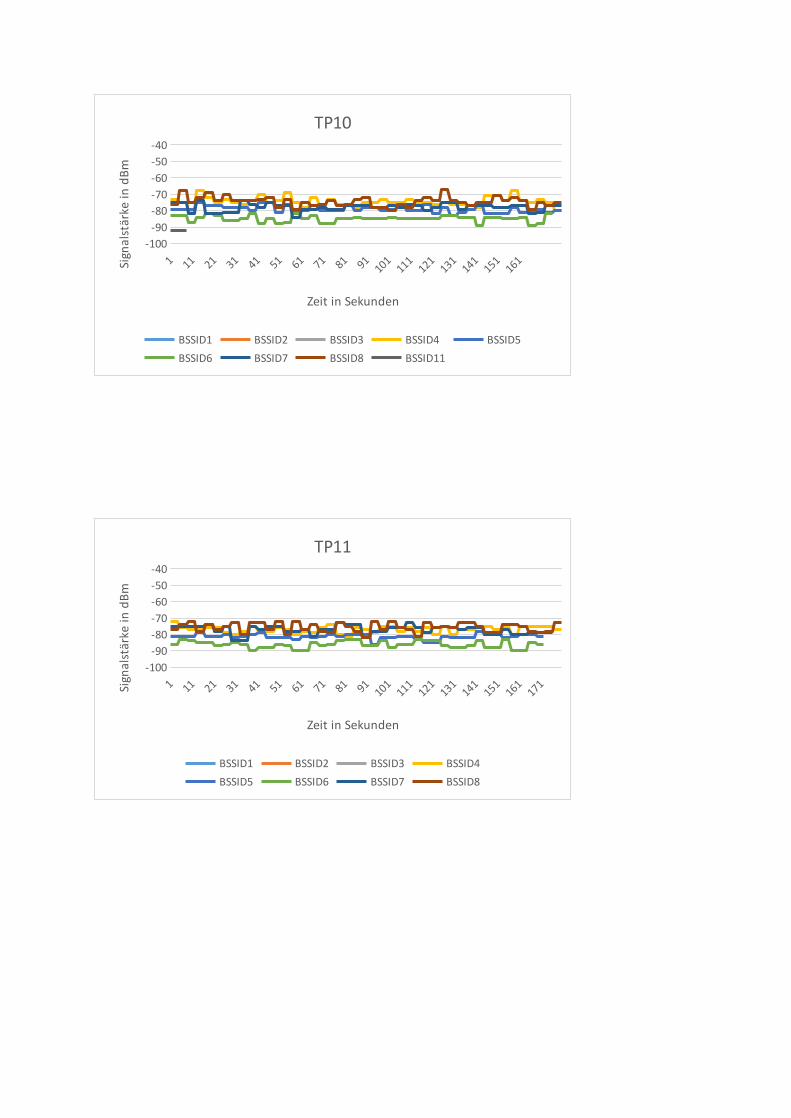
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
-100-90-80-70-60-50-40
TP10
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID11
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP11
BSSID1 BSSID2 BSSID3 BSSID4
BSSID5 BSSID6 BSSID7 BSSID8
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
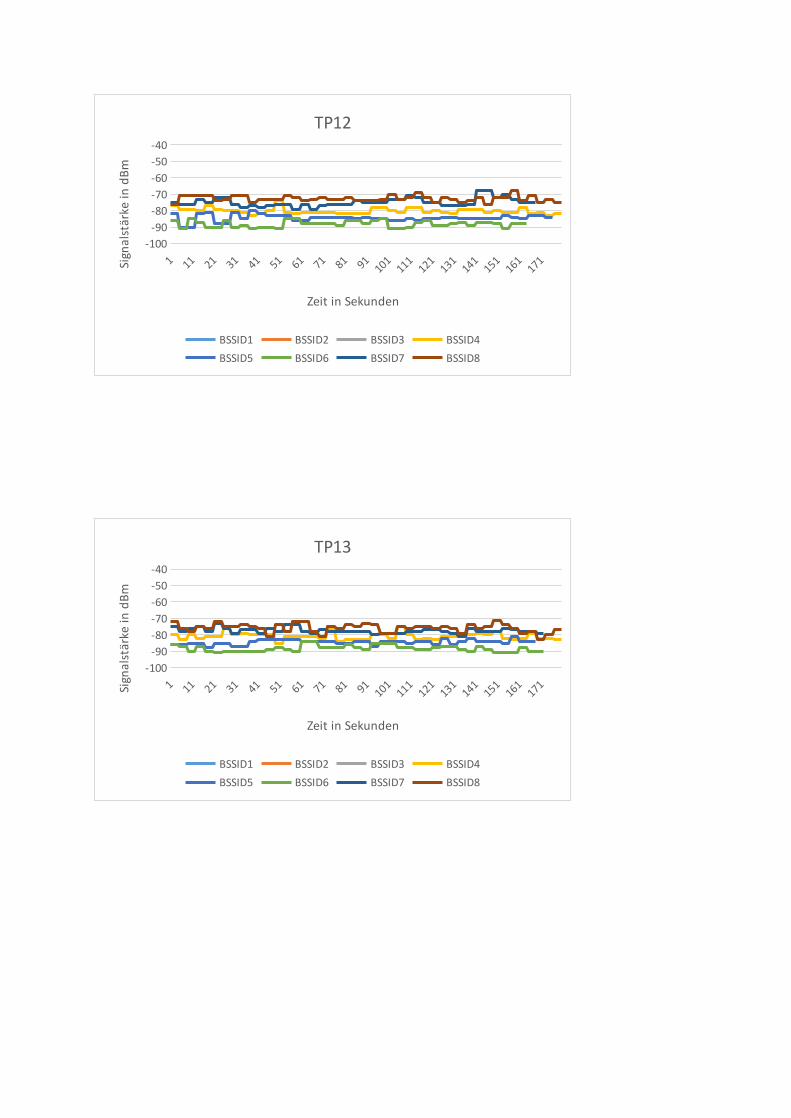
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP12
BSSID1 BSSID2 BSSID3 BSSID4
BSSID5 BSSID6 BSSID7 BSSID8
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
1 9111 21 31 41 51 61 71 81101
111121
131141
151161
171-100
-90-80-70-60-50-40
TP13
BSSID1 BSSID2 BSSID3 BSSID4
BSSID5 BSSID6 BSSID7 BSSID8
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
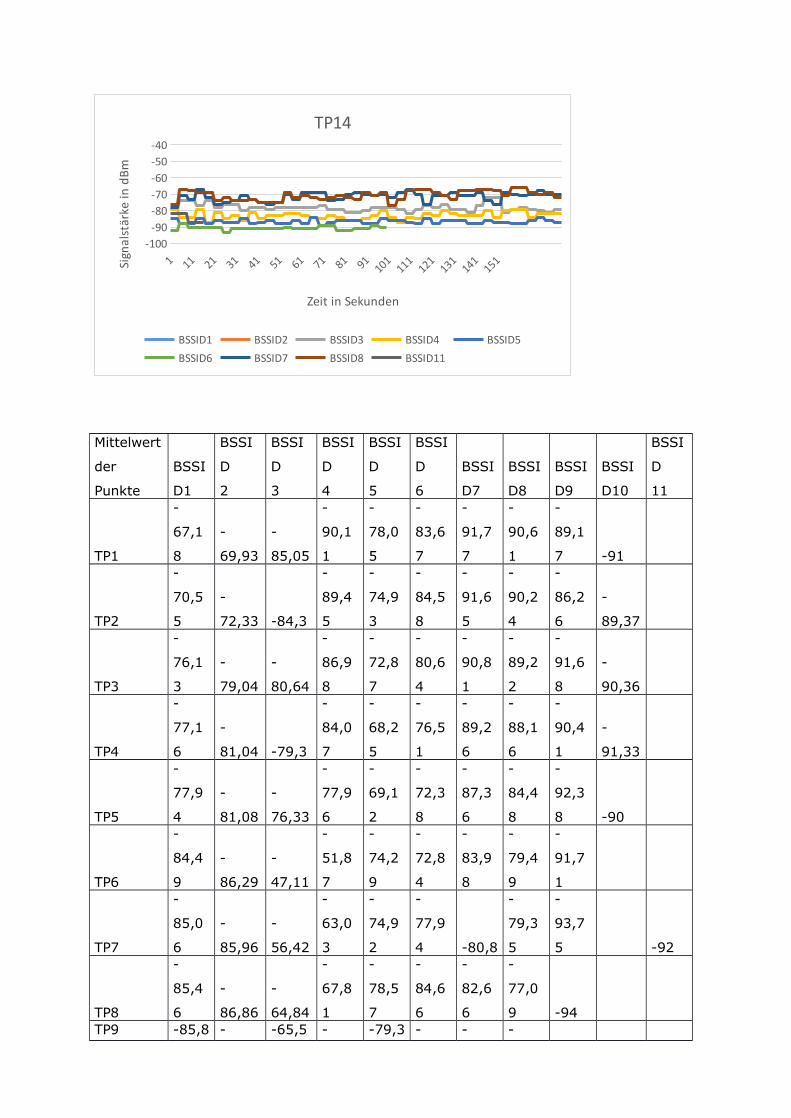
1 9111 21 31 41 51 61 71 81101
111121
131141
151-100
-90-80-70-60-50-40
TP14
BSSID1 BSSID2 BSSID3 BSSID4 BSSID5
BSSID6 BSSID7 BSSID8 BSSID11
Zeit in Sekunden
Sign
alst
ärke
in d
Bm
Mittelwert
der
Punkte
BSSI
D1
BSSI
D
2
BSSI
D
3
BSSI
D
4
BSSI
D
5
BSSI
D
6
BSSI
D7
BSSI
D8
BSSI
D9
BSSI
D10
BSSI
D
11
TP1
-
67,1
8
-
69,93
-
85,05
-
90,1
1
-
78,0
5
-
83,6
7
-
91,7
7
-
90,6
1
-
89,1
7 -91
TP2
-
70,5
5
-
72,33 -84,3
-
89,4
5
-
74,9
3
-
84,5
8
-
91,6
5
-
90,2
4
-
86,2
6
-
89,37
TP3
-
76,1
3
-
79,04
-
80,64
-
86,9
8
-
72,8
7
-
80,6
4
-
90,8
1
-
89,2
2
-
91,6
8
-
90,36
TP4
-
77,1
6
-
81,04 -79,3
-
84,0
7
-
68,2
5
-
76,5
1
-
89,2
6
-
88,1
6
-
90,4
1
-
91,33
TP5
-
77,9
4
-
81,08
-
76,33
-
77,9
6
-
69,1
2
-
72,3
8
-
87,3
6
-
84,4
8
-
92,3
8 -90
TP6
-
84,4
9
-
86,29
-
47,11
-
51,8
7
-
74,2
9
-
72,8
4
-
83,9
8
-
79,4
9
-
91,7
1
TP7
-
85,0
6
-
85,96
-
56,42
-
63,0
3
-
74,9
2
-
77,9
4 -80,8
-
79,3
5
-
93,7
5 -92
TP8
-
85,4
6
-
86,86
-
64,84
-
67,8
1
-
78,5
7
-
84,6
6
-
82,6
6
-
77,0
9 -94TP9 -85,8 - -65,5 - -79,3 - - -

89,23
71,7
1
85,3
2
82,1
8
73,6
3
TP10
-
86,2
9
-
89,45 -70,3
-
74,4
9 -79
-
84,9
3
-
77,9
3
-
74,4
7 -92
TP11
-
87,1
1 -88,5
-
73,07 -77
-
81,2
6
-
86,2
1
-
77,1
4
-
75,7
3
TP12
-
87,7
7
-
90,68
-
76,55 -80,2
-
84,4
8
-
88,1
5
-
74,8
1
-
72,6
9
TP13
-
88,8
1
-
89,24
-
76,59
-
80,9
1 -84,4
-
88,3
5
-
77,4
9
-
75,8
9
TP14
-
87,3
1
-
91,07
-
78,04
-
82,9
1
-
86,7
1 -90,6
-
71,4
9
-
70,6
9 -84,5
U-Bahnhof Möckernbrücke Messungen

Object 147
Object 150

Object 153

Object 156
Object 159

Object 162
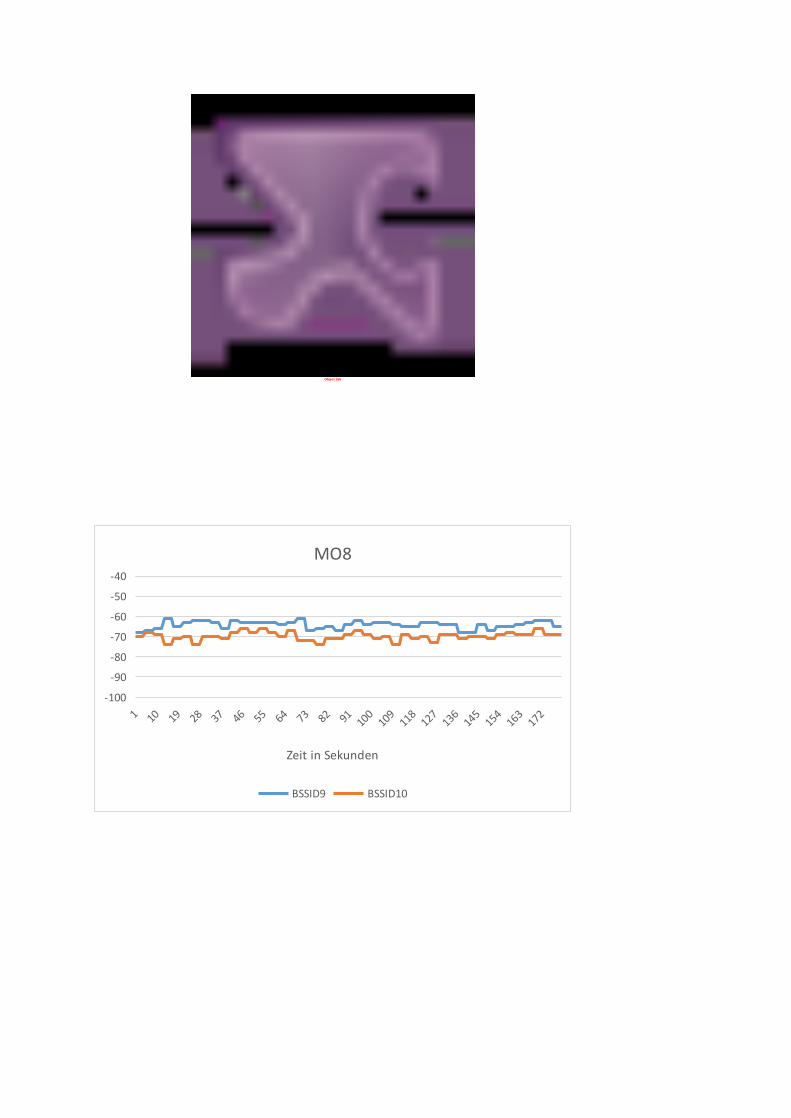
Object 165
1 7310 19 28 37 46 55 64 82 91100
109118
127136
145154
163172
-100
-90
-80
-70
-60
-50
-40
MO8
BSSID9 BSSID10
Zeit in Sekunden
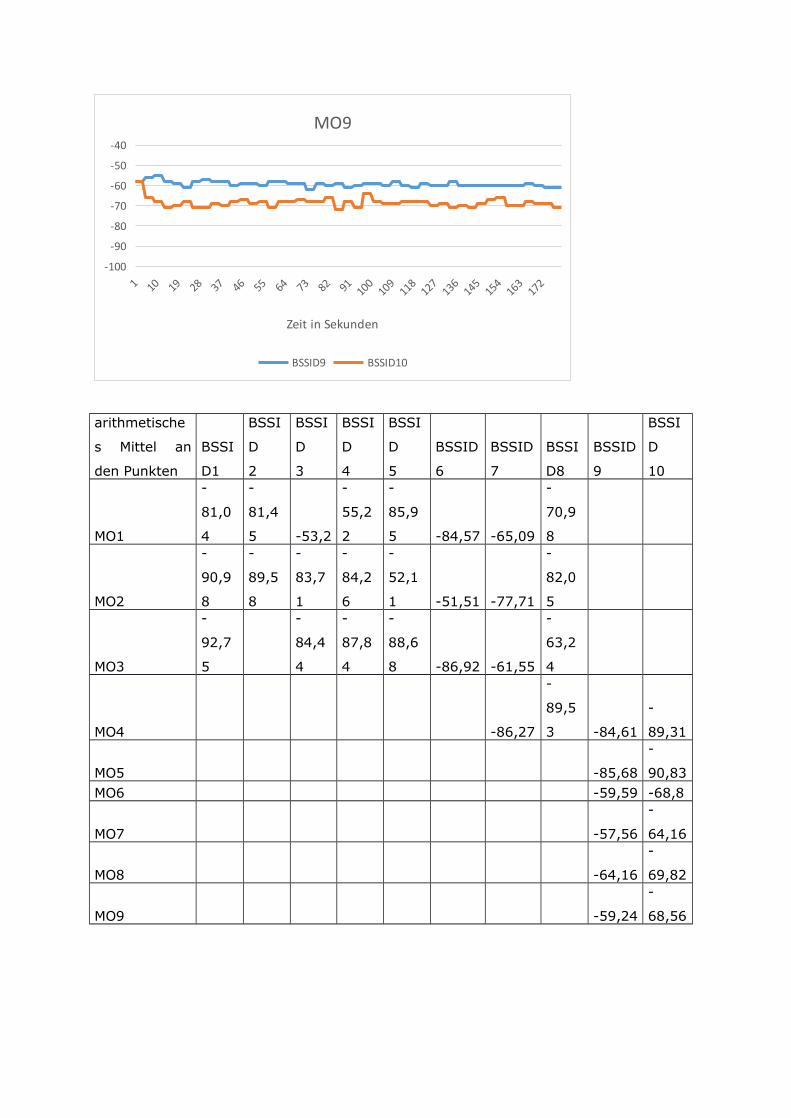
1 7310 19 28 37 46 55 64 82 91100
109118
127136
145154
163172
-100
-90
-80
-70
-60
-50
-40
MO9
BSSID9 BSSID10
Zeit in Sekunden
arithmetische
s Mittel an
den Punkten
BSSI
D1
BSSI
D
2
BSSI
D
3
BSSI
D
4
BSSI
D
5
BSSID
6
BSSID
7
BSSI
D8
BSSID
9
BSSI
D
10
MO1
-
81,0
4
-
81,4
5 -53,2
-
55,2
2
-
85,9
5 -84,57 -65,09
-
70,9
8
MO2
-
90,9
8
-
89,5
8
-
83,7
1
-
84,2
6
-
52,1
1 -51,51 -77,71
-
82,0
5
MO3
-
92,7
5
-
84,4
4
-
87,8
4
-
88,6
8 -86,92 -61,55
-
63,2
4
MO4 -86,27
-
89,5
3 -84,61
-
89,31
MO5 -85,68
-
90,83MO6 -59,59 -68,8
MO7 -57,56
-
64,16
MO8 -64,16
-
69,82
MO9 -59,24
-
68,56





























