Embed Size (px)
Citation preview
Optische lineare Wegmessung zur Modellierung und Regelung von
Lautsprechern
Technische Fakultät der Friedrich-Alexander-Universität Erlangen-Nürnberg
zur Erlangung des Grades Doktor-Ingenieur
vorgelegt von:
Dipl.-Phys. Wolfgang Geiger Erlangen - 2004
Als Dissertation genehmigt von der Technischen Fakultät der Universität Erlangen-Nürnberg Tag der Einreichung: 20.09.2004 Tag der Promotion: 17.12.2004 Dekan: Prof. Dr.-Ing. A. Winnacker Berichterstatter: PD Dr.-Ing. U. Tietze Prof. Dr.-Ing. R. Hagelauer
Abstrakt:
Elektrodynamische Lautsprecher zeigen die größten nichtlinearen Verzerrungen in einem Audio-System. Bei großen Signalen entstehen durch das inhomogene Magnetfeld der Antriebsspule und dem Hystereseeffekt der mechanischen Ele-mente große Verzerrungen. Eine Regelung der Membranbewegung des Lautspre-chers mit Hilfe einer linearen optischen Messwerterfassung zeigt eine Reduzie-rung der nichtlinearen Verzerrungen von bis zu 20 dB. Der Weg der Lautspre-chermembran ist somit bestimmt von der Regelung und nicht mehr von den Ei-genschaften des Lautsprechers. Die Charakterisierung des Systems findet an Hand von konzentrierten Elementen statt. Aus einer neuen Auswertungsmethode resul-tieren die Thiele-Small-Parameter. Der Lautsprecher wird mit konzentrierten Elementen modelliert und mit einem Schaltungssimulator untersucht. Durch Auswertung der Übertragungsfunktionen des Lautsprechers lassen sich seine Parameter besser und genauer bestimmen als es bisher nach Thiele-Small möglich war. Die Systemparameter des Lautsprechers werden durch Einzelmessungen nach ihrem physikalischen Ursprung bestimmt und ein Regler entwickelt.

Inhaltsangabe
1 Einleitung 7
1.1 Stand der Technik 7
1.2 Messwandler 2
1.3 Steuern und Regeln 4
1.4 Fortschritt durch Regelung mit optischer linearer Wegmessung 4
2 Bestimmung der Lautsprecherparameter 6
3 Modellierung des Schallfelds 9
4 Beschreibung der Hardware-Komponenten 13
4.1 Elektrodynamischer Lautsprecher 13
4.2 Messwerterfassung mittels eines Ortssensors 32
4.3 Stellglied 37
4.4 Bestimmung des Reglers 50
5 Beschreibung der Systemkomponenten 53
5.1 Modellierung der Strecke 53
5.2 Messsystem 54
5.3 Struktur des Reglers 55
5.4 Geschlossenes System 57
6 Messungen und Ergebnisse 58
6.1 Bestimmung der Lautsprechereigenschaften 58
6.2 Erfassung des Systems zur Regelung der Wegauslenkung 74
7 Zusammenfassung 95
8 Ausblick 96
9 Summary 97
10 Anhang 98
11 Referenz 99
Danksagung 105
Lebenslauf 107

1 Einleitung Durch immer leistungsfähigere Computer und Mikrokontroller entstanden in den letzten Jahren viele Möglichkeiten und Methoden Lautsprecher und ihre nichtli-nearen Effekte in der Schallabstrahlung zu simulieren sowie ihre Parameter zu erfassen. Die gängigste und am häufigsten von den Herstellern benutzte Methode ist die auf konzentrierten Elementen basierende Thiele-Small-Darstellung. Aus den konzentrierten Elementen entwickeln sich die neuen Zustandsmodelle des Lautsprechers, die durch nichtlineare Effekte erweitert werden. Für die Entzerrung und Reduzierung dieser Nichtlinearitäten kommen Signalprozessoren zum Ein-satz, die dem Lautsprecher durch Steuern mit nichtlinearen Filtern nach der Mir-ror-Methode oder Volterra-Filter eine neue Charakteristik geben. Durch den verstärkten Computereinsatz verlagert sich die Entwicklung immer mehr auf die Softwarelinie. Die Konstruktion ganzer Chassis findet am Computer statt. Durch die Finite-Elemente-Methode (FEM) und der Boundary-Elemente-Methode (BEM) werden die mechanischen und elektrischen Komponenten bei der Ent-wicklung simuliert. Die Anzahl der notwendigen Knoten und Elemente ist durch die Rechenzeit limitiert. Bei regelungstechnischen Echtzeitsystemen finden diese aufwendigen Simulationsmodelle nur selten Verwendung. Durch Abbilden von komplexen ausgedehnten Systemen, wie einer Lautsprechermembran oder einem räumlich verteilten Schallwellenfeld, auf einfache konzentrierte mechanische oder in elektrische Elemente lässt sich ein einfacheres Modell erstellen. Die daraus zu entwickelnden Systemübertragungsfunktionen sind leichter handhabbar. Ein Reglerentwurf ist schnell möglich. Die aus den konzentrierten Elementen hervor-gehenden Laplace-Gleichungen können leicht in einen Schaltungssimulator wie PSpice integriert und mit elektrischen Verstärkern und Kontrollern getestet und optimiert werden.
1.1 Stand der Technik
Zum Vermessen der Lautsprecherparameter setzte sich die Thiele-Small-Methode durch. Aus der Impedanz des Lautsprechers werden alle mechanischen Parameter bestimmt. Unter Vernachlässigung der Schallparameter und die Nichtberücksich-tigung des einsetzenden Wirbelstroms werden die Thiele-Small-Parameter aus der elektrischen Impedanz bestimmt. Durch Parallelschalten eines ohmschen Wider-stands [Klippel, Seidel, 2001] zur Spuleninduktivität kommt es zu einer Näherung der Auswirkungen der Wirbelstromeffekte in der elektrischen Impedanz. Eine Verbesserung der Messgenauigkeit [Kreutz, Panzer, 1991] ergab das Einführen von statistischen Methoden bei der Bestimmung der Thiele-Small-Parameter. Die Vermessung der elektrischen Impedanz ist eine indirekte Methode für die Erfas-sung der Membranauslenkung. Sie erfasst die Bewegung durch die Rückwirkung der elektromotorischen induzierten Spannung in den elektrischen Kreis. Bei hohen Frequenzen überdeckt die Impedanz der Schwingspule die induzierte EMK-Spannung. Eine direkte Messung der Membranauslenkung erfolgt durch einen eigenen Messwandler [Birt, 1990] [Knudsen, Rubak, 1987] [Freschi, at al., 2003].
2 1.2 Messwandler
Simulationen am Rechner finden heute mit Hilfe der Finiten-Elemente-Methode oder der Boundary-Elemente-Methode (BEM) statt. Die mechanischen und elekt-rischen Nichtlinearitäten und Sättigungseffekte werden simuliert [Rausch, at al., 2000] [Järvinen, 1998] und der Lautsprecher während der Entwicklung optimiert.
1.2 Messwandler
Es existieren heute für alle physikalischen Zustandsgrößen einer Lautsprecher-membran (v Geschwindigkeit,
x Wegauslenkung, a Beschleunigung) entspre-
chende Sensoren. Das physikalische Messprinzip gibt die Funktionsweise des Sensors vor. Geschwindigkeits- und Beschleunigungssensoren arbeiten nach einem dynamischen Prinzip. Nur mit Hilfe von Wegsensoren ist auch eine stati-sche Messwerterfassung möglich.
1.2.1 Dynamische Messwandler
Geschwindigkeitssensor: Eine zweite Induktionsspule erfasst die Geschwindigkeit v der Lautsprecher-membranbewegung [Radcliffe, Gogate, 1996]. Die gemessenen Spannungen sind direkt proportional zur aufgenommenen Geschwindigkeit. Dem geringen Preis und die einfache Verwirklichung durch Aufbringen der Messspule auf die Schwingspule steht vor allem der Nachteil der direkten Signaleinkopplung der Stellgröße des Lautsprechers gegenüber. Beschleunigungssensor: Beschleunigungsaufnehmer besitzen eine Probemasse, die durch die Gesamtbe-schleunigung des Wandlers mitbeschleunigt wird [Hall, Alto, 1986]. Die dort entstehende Kraft wird durch den Piezoeffekt in eine Spannung umgewandelt. Ein solcher Sensor wird auf die Lautsprechermembran aufgebracht und die Membran-beschleunigung gemessen [Frankort, 1997]. Beschleunigungssensoren sind jedoch nur näherungsweise über den gesamten Übertragungsbereich linear [Tränkler, S. 453, 1998]. Um mit einem dynamischen Messprinzip die Lage der Membran vermessen zu können, ist eine einfache (v Geschwindigkeitsmessung) bzw. doppelte Integration (a Beschleunigungsmessung) notwendig. Die geringsten nichtlinearen Verzerrungen besitzt der Lautsprecher, wenn er um die Ruhelage schwingt. Die Membran wandert aber auf Grund von nichtlinearen Effekten [Klippel, 1991] der mechanischen und elektrischen Elemente bei hohen Frequenzen aus dem Luftspalt, in dem die Schwingspule angebracht ist. Die nicht-linearen Effekte des statischen Magnetfelds steigen mit wachsenden inhomogenen magnetischen Feldflusslinien [Rausch, 2001, S. 77] stark an. Kann der Lautspre-
1. Kapitel Einleitung 3
cher in der Ruhelage gehalten werden, sind die nichtlinearen Verzerrungen redu-ziert. Um aus der Beschleunigung der Membranbewegung auf die Wegauslenkung schließen zu können, ist eine doppelte Integration notwendig. Der Arbeitspunkt lässt sich ohne kontinuierliches Nacheichen nur schwer stabil halten. Mikrophon: Ein Mikrophon besitzt im Nutzbereich eine komplizierte Übertragungsfunktion [Leichsenring, 1996]. In der Gesamtstrecke addieren sich die einzelnen Zeiten des Stellglieds, des Lautsprechers und der Schallausbreitungszeit zwischen Membran und Mirkophon zu einer großen Totzeit. Die Störungen durch Fremdeinflüsse sind sehr groß und die Regelschleife ist nur schwer zu dimensionieren.
1.2.2 Statische und dynamische Messwandler
Eine statische sowie eine dynamische Messung des Membranzustands ist nur durch eine Ortsbestimmung möglich. In den letzten Jahren wurden für die Weg-messung folgende Sensoren entwickelt: CCD-Element: Mit einem CCD-Element kann die Membranbewegung
x verfolgt und somit die
statische Auslenkung ermittelt werden. Die Genauigkeit ist durch das Arbeitsprin-zip, nämlich das Aufsammeln von einzelnen Photonen in einer Potentialmulde des CMOS Sensors, auf dessen geometrische Dimensionen beschränkt ( m-Bereich). Die notwendige Ortsauflösungsgenauigkeit von bis zu 96 dB bei einer Maximal-auslenkung von 12 mm lässt sich nicht erreichen. Laser-Vibrometer: Das Laser-Vibrometer ist zwar ein sehr teueres Verfahren [Med, 2001] um die Ortsauflösung zu gewinnen, erreicht aber die geforderten Ortsauflösungen von ca. 200 nm. Photodiode: Distanzmessung durch Intensitätsänderung der Beleuchtungsstärke auf eine Pho-todiode, hervorgerufen durch eine Abstandsveränderung zur Lichtquelle, ist nur für kleine Amplituden linear [Gies, 1978]. Das Verwenden einer Blende [Lu-kavsky, 1977] [Rau, 1986], die den Lichtweg von einer Lichtquelle zum Photo-sensor in Abhängigkeit von der Position der Membran abdeckt, ergibt wegen der inhomogenen großen Beleuchtungsfläche nur bei kleinen Amplituden einen linea-ren Verlauf. Durch Eigenresonanzen des mechanischen Aufbaus ist es schwer eine Regelung zu erstellen. Ein Abgleichen der Membranstellung auf die Ruhelage des ungeregelten Systems ist nur durch eine Eichung der Apparatur möglich.
4 1.3 Steuern und Regeln
1.3 Steuern und Regeln
Durch Steuern mit der inversen Funktion der nichtlinearen Verzerrungen GK-1(x)
ist eine Beseitigung der Nichtlinearitäten möglich. Das Stabilitätskriterium redu-ziert sich auf die Filterfunktion GK
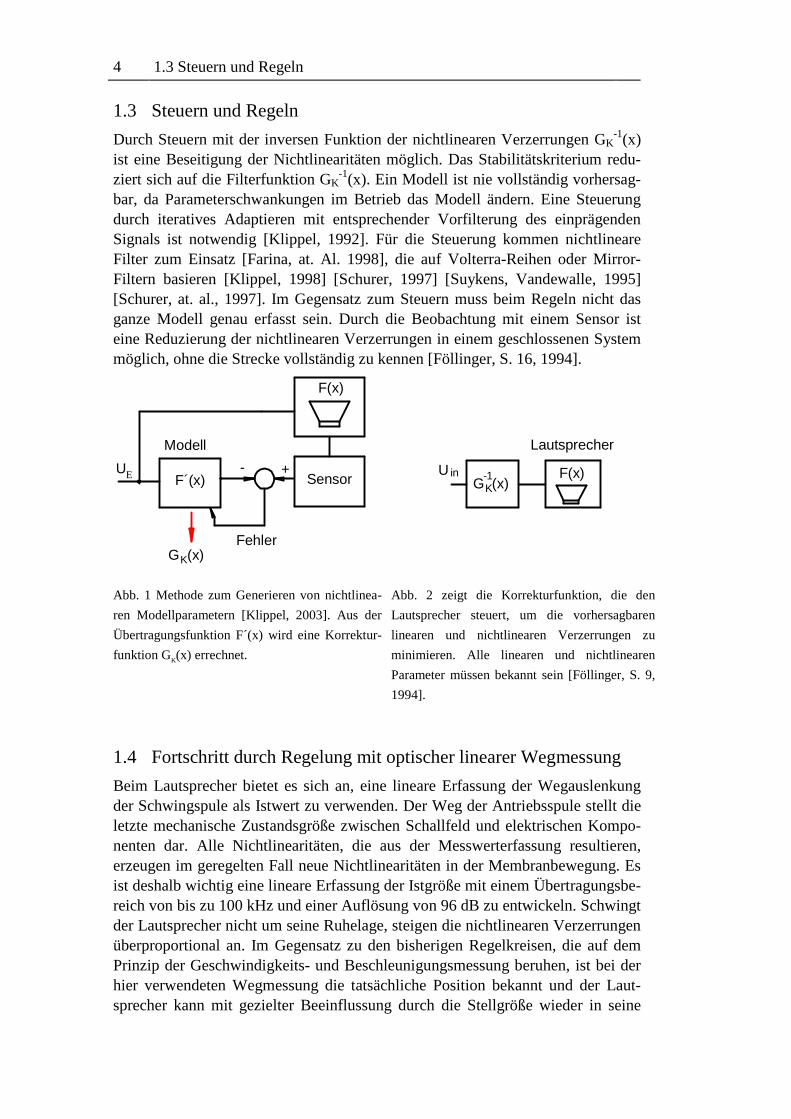
-1(x). Ein Modell ist nie vollständig vorhersag-bar, da Parameterschwankungen im Betrieb das Modell ändern. Eine Steuerung durch iteratives Adaptieren mit entsprechender Vorfilterung des einprägenden Signals ist notwendig [Klippel, 1992]. Für die Steuerung kommen nichtlineare Filter zum Einsatz [Farina, at. Al. 1998], die auf Volterra-Reihen oder Mirror- Filtern basieren [Klippel, 1998] [Schurer, 1997] [Suykens, Vandewalle, 1995] [Schurer, at. al., 1997]. Im Gegensatz zum Steuern muss beim Regeln nicht das ganze Modell genau erfasst sein. Durch die Beobachtung mit einem Sensor ist eine Reduzierung der nichtlinearen Verzerrungen in einem geschlossenen System möglich, ohne die Strecke vollständig zu kennen [Föllinger, S. 16, 1994].
Abb. 1 Methode zum Generieren von nichtlinea-
ren Modellparametern [Klippel, 2003]. Aus der
Übertragungsfunktion F´(x) wird eine Korrektur-
funktion GK(x) errechnet.
Abb. 2 zeigt die Korrekturfunktion, die den
Lautsprecher steuert, um die vorhersagbaren
linearen und nichtlinearen Verzerrungen zu
minimieren. Alle linearen und nichtlinearen
Parameter müssen bekannt sein [Föllinger, S. 9,
1994].
1.4 Fortschritt durch Regelung mit optischer linearer Wegmessung
Beim Lautsprecher bietet es sich an, eine lineare Erfassung der Wegauslenkung der Schwingspule als Istwert zu verwenden. Der Weg der Antriebsspule stellt die letzte mechanische Zustandsgröße zwischen Schallfeld und elektrischen Kompo-nenten dar. Alle Nichtlinearitäten, die aus der Messwerterfassung resultieren, erzeugen im geregelten Fall neue Nichtlinearitäten in der Membranbewegung. Es ist deshalb wichtig eine lineare Erfassung der Istgröße mit einem Übertragungsbe-reich von bis zu 100 kHz und einer Auflösung von 96 dB zu entwickeln. Schwingt der Lautsprecher nicht um seine Ruhelage, steigen die nichtlinearen Verzerrungen überproportional an. Im Gegensatz zu den bisherigen Regelkreisen, die auf dem Prinzip der Geschwindigkeits- und Beschleunigungsmessung beruhen, ist bei der hier verwendeten Wegmessung die tatsächliche Position bekannt und der Laut-sprecher kann mit gezielter Beeinflussung durch die Stellgröße wieder in seine
E
USensor
FehlerK
Modell
+-
G (x)
F(x)
F´(x)U in
K
Lautsprecher
G (x)F(x)-1
1. Kapitel Einleitung 5
Ruhelage gebracht werden. In der Patentanmeldung DE 102 56 033.1 [Geiger, 2002] wurde gezeigt, dass solch ein System unter Zuhilfenahme eines Position-Sensitive-Detektors (PSD) [Sitek, 2002] und eines realen PID-Reglers zu verwirk-lichen ist. Die Ordnung des Systems ist so gering wie möglich zu halten um die Regelung des Lautsprechers zu ermöglichen. Durch folgende Maßnahmen lässt sich die Ordnung des Systems reduzieren: Ein Stromverstärker wird zum Stellen der Membranauslenkung eingesetzt. wo-durch die elektrischen Komponenten aus der Übertragungsfunktion des Weges eliminiert werden. Die Membranauslenkung ∆x des elektrodynamischen Laut-sprechers ist direkt proportional zum Strom. Die Beobachtung der Membranaus-lenkung geschieht durch eine optische lineare Positionserkennung in Echtzeit. Zusätzlich zur mechanischen Resonanz besitzt der Lautsprecher auf der Mem-branoberfläche mechanische Eigenschwingungen, die für eine stabile Regelung kompensiert werden müssen. Die Wegmessung muss in Echtzeit mit geringer Phasenverschiebung erfolgen. Eine hohe Wegauflösung über mehrere Dekaden mit geringem Rauschen ist er-forderlich. Für die Sensorik ist ein Position-Sensitive-Detector (PSD) in Kombi-nation mit einem Beleuchtungselement ideal. Es wurde eine Anordnung auf Re-flexionsbasis für die Voruntersuchungen (Kap. 4.2.3.1) verwendet. Der größte Vorteil liegt im einfachen, kostengünstigen und schnellen Aufbau. Durch die langen Lichtwege zwischen Sensor, Laser und zu detektierender Membran sind 96 dB Störmessabstand wegen den dort entstehenden Eigenschwingungen des Mess-aufbaus nur schwer zu erreichen. Ein verkleinerter mechanischer Aufbau (Kap. 4.2.3.2) mit kurzem Strahlengang, im Antrieb eingebettet, beseitigt diesen Nach-teil.
6 2 Bestimmung der Lautsprecherparameter
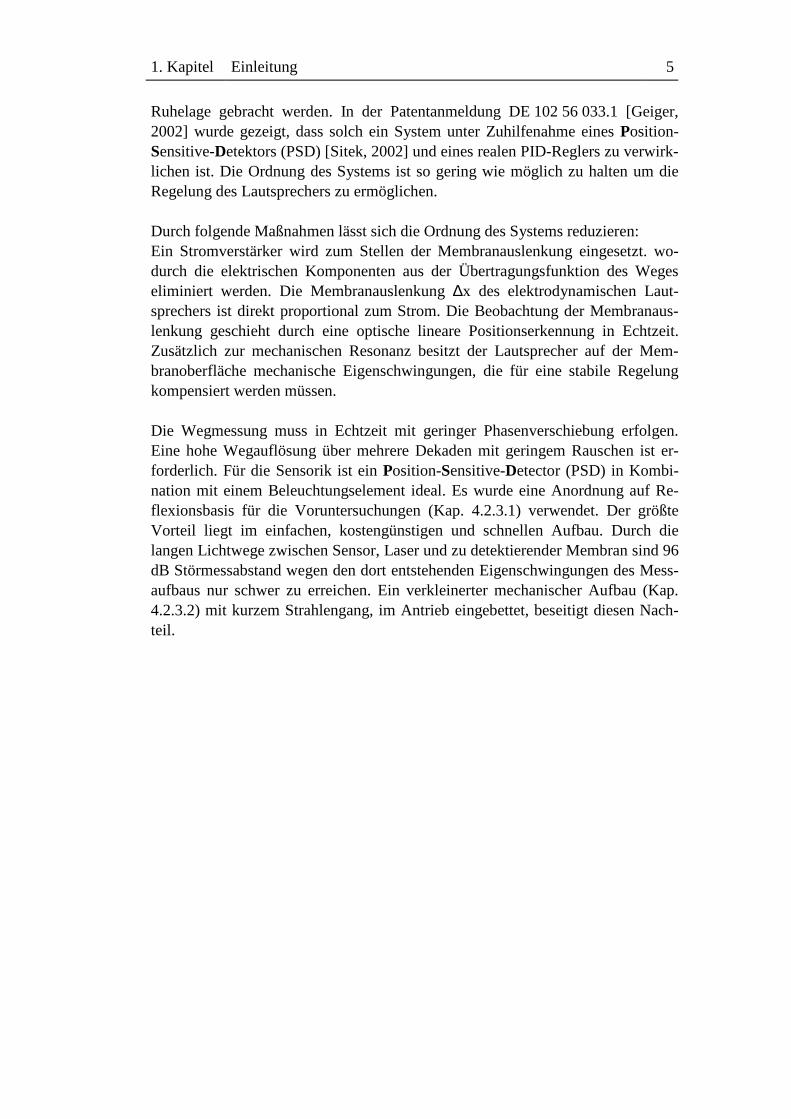
2 Bestimmung der Lautsprecherparameter In der heutigen Audiotechnik werden die Thiele-Small-Parameter [Thiele, 1976] [Small, 1971] zur Charakterisierung von Lautsprecherchassis verwendet. Diese Methode wurde entwickelt zur Optimierung der Systemantwort oder zur Filterop-timierung um die Lautsprecherimpedanz an den Leistungsverstärker anzupassen. Die elektrische Impedanz (Abb. 11) des elektrodynamischen Lautsprechers wird in der Nähe der mechanischen Resonanz durch Vernachlässigen der Induktivität Lel, der Schwingspule und der Schallkomponenten (Cs, Rs) wegen deren geringen Einflusses vereinfacht. Das vereinfachte transformierte Lautsprechermodell be-steht nur noch aus den transformierten mechanischen Elementen (Cm, Lm, Rm) und dem elektrischen ohmschen Widerstand Rel (Abb. 3).
Abb. 3 zeigt die Vereinfachung der
elektrischen Impedanz zum
Bestimmen der Thiele-Small-
Parameter. Es wird zwischen drei
Schwingkreisen unterschieden. Der
rein mechanische Schwingkreis mit
der Güte QMS, der elektrische
Schwingkreis mit der Güte QES und
die Güte QTS des gesamten
Schwingkreises.
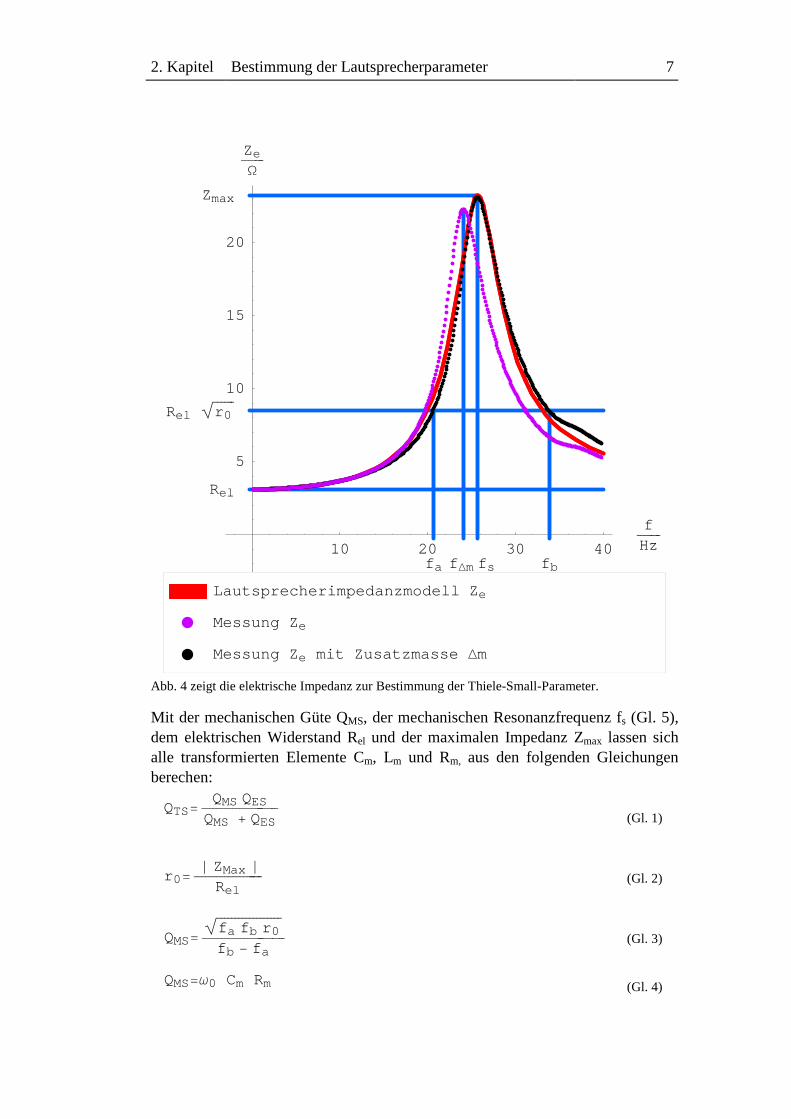
Bei der vereinfachten Impedanz wird unterschieden zwischen einer elektrischen Güte QES mit den Elementen Cm, Lm und Rel, einer mechanischen Güte QMS mit Cm, Lm und Rm und einer Gesamtgüte QTS bestehend aus allen beteiligten Ele-menten mit Cm, Lm, Rm und Rel. Mit dem 3 dB-Punkt in der elektrischen Impedanz lässt sich die Gesamtgüte QTS bestimmen. Für die mechanische Güte gibt es keinen 3 dB-Punkt in der elektri-schen Impedanz. Er kann jedoch aus der Gesamtgüte (Gl. 1) errechnet werden. Für die Bestimmung der mechanischen Güte ist eine Wichtung notwendig. Durch Ablesen aus Abb. 4 wird die maximale Impedanz ZMax=Rel + Rm und der ohm-sche Widerstand Rel bestimmt und der Faktor r0 berechnet. An der Stelle Rel
!!!!!!r 0 werden die Grenzfrequenzen fa und fb bestimmt und die mechanische Güte (Gl. 3) ermittelt.
Rm Cm L m
Ie
U in
R el
Mechanische Güte QMSElektrische Güte Q ESGesamt Güte Q TS
2. Kapitel Bestimmung der Lautsprecherparameter 7
10 20 30 40
fHz
5
10
15
20
ZeW
Zmax
Rel
Rel!!!!!!r 0
f a f bf Dmf s
Messung Z e mit Zusatzmasse Dm
Messung Z e
Lautsprecherimpedanzmodell Z e
Abb. 4 zeigt die elektrische Impedanz zur Bestimmung der Thiele-Small-Parameter.
Mit der mechanischen Güte QMS, der mechanischen Resonanzfrequenz fs (Gl. 5), dem elektrischen Widerstand Rel und der maximalen Impedanz Zmax lassen sich alle transformierten Elemente Cm, Lm und Rm, aus den folgenden Gleichungen berechen:
(Gl. 1)
(Gl. 2)
(Gl. 3)
(Gl. 4)
QTS=QMSQES
QMS + QES
QMS=
!!!!!!!!!!!!!!!!!!f a f b r 0
f b - f a
QMS=Ω0 Cm Rm
r 0=È ZMax È
Rel
8 2 Bestimmung der Lautsprecherparameter
(Gl. 5)
(Gl. 6)
(Gl. 7) (Gl. 8)
Die mechanischen äquivalenten Elemente errechnen sich aus den transformierten elektrischen Komponenten wie folgt:
(Gl. 9)
(Gl. 10)
(Gl. 11)
[Small, 1971] [Small, 1976] Durch Auflegen einer bekannten Zusatzmasse m [Stark, 1999] verschiebt sich die mechanisch verursachte Resonanzstelle der elektrischen Impedanz. Aus der frequenzverschobenen und nicht verschobenen mechanischen Resonanzfrequenz (fs, fz) in der elektrischen Impedanz folgt die mechanische Membranmasse mm aus:
(Gl. 12)
Sie ist notwendig um den fehlenden Kraftfaktor M (Gl. 10) zu berechnen. Ohne diese Messung kann der Kraftfaktor [Rausch, 2001, S. 54] auch durch eine Feder-prüfmaschine [Wolpert-Werke, 1994] bestimmt werden. Beide Messungen sind ohne Beeinflussung des Systems nicht möglich.
km=M2Rm
M2=mmCm
Dm=M2Lm
Lm=Rm
Ω0 QMS
Cm =QMS
Ω0 Rm
Rm=AbsHZMaxL-Rel
2Π f s = Ω0 =1
!!!!!!!!!!!!Cm Lm
mm=Dm
H f sfzL2
- 1

3. Kapitel Modellierung des Schallfelds 9
3 Modellierung des Schallfelds Schallwellen propagieren in isotropen Medien als kugelsymmetrische Wellenzüge [Leichsenring, 1996, S. 32] mit der Ausbreitungsgeschwindigkeit in Luft c = 340m/s. Die homogene partielle Differentialgleichung (Gl. 13) mit dem Schallschnellepotential Φ ermöglicht eine einfache Beschreibung des Schall-drucks in späherischen Koordinaten.
(Gl. 13)
Das Ansetzen des Schnellepotentials Φ multipliziert mit der Ausbreitungsvariab-len r, reduziert das Lösen der Differentialgleichung durch die radiale Symmetrie auf das eindimensional ebene Wellenproblem (Gl. 14) mit der Wellenzahl k und die durch Randbedingungen festzulegenden Konstante A. Es folgt:
(Gl. 14)
Die partielle Ableitung des Schnellepotentials Φ nach der Zeit beschreibt den Druckverlauf p (Gl. 15) in Richtung des radialen Einheitsvektors er. Die Schnelle des Schallfeldes v (Gl. 16) errechnet sich durch die partielle Ablei-tung nach dem Ort. Der Druck p und die Schnelle v sind Lösungen des unge-dämpften homogenen Systems.
(Gl. 15)
(Gl. 16)
0: Dichte der Luft
k: Kreiswellenzahl
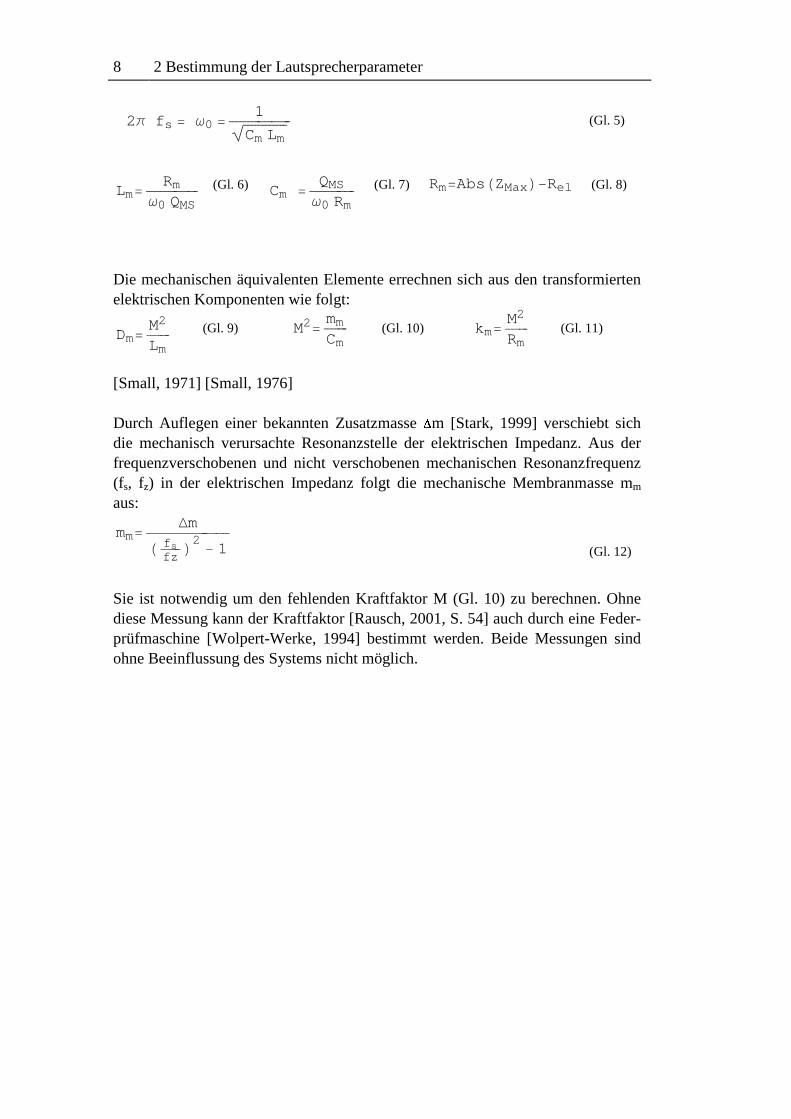
Die Kraft Fsch (Abb. 5), entsehend durch eine oszillierende virtuelle Luftkugel, die aus der Ruhelage (Abstand R) um ∆r ausgelenkt wird, ergibt die Belastung der Kugel auf das antreibende Element (Membranoberfläche). Diese Kraft (Gl. 17) errechnet sich durch Integrieren des auf der Oberfläche senkrecht stehenden Drucks p (Gl. 15) über die gesamte Kugelfläche FA der sich bewegenden Luftmas-sen. Sie bestimmt die Rückwirkung des abgestrahlten Schallfeldes auf den An-trieb.
(Gl. 17)
Die mechanische Impedanz ist definiert als Kraft pro Geschwindigkeit v eines Elements und ergibt für die mechanische Schallimpedanz:
2 r
r 2
1
c 22r
t 2
r A j k c t r
A
r
j k c t r
v=er® ¶F
¶ r
=-jk A
rã j k Hc t -r L- A
r 2
ã j k Hc t -r Lp=-Ρ0
¶F¶ t
=-j Ρ0 k cAr
ã j k Hc t -r L
Fsch =à0
Rpâr =p×FA
10 3 Modellierung des Schallfelds
(Gl. 18)
Durch Einsetzen der Kraft Fsch (Gl. 17), des Drucks p (Gl. 15) und der Geschwin-digkeit v (Gl. 16) ergibt sich:
(Gl. 19)
s: komplexe Kreisfrequenz j·ω
FA: Oberfläche der oszillierenden Luftkugel in Ruhelage
R: Radius der ruhenden Kugel
Abb. 5 zeigt die oszillierende virtuelle Luftkugel mit der
Kugeloberfläche FA. Die Oberfläche oszilliert im Abstand
R um die Auslenkung ∆r in sphärischen Koordinaten. Es
entsteht durch die atmende Kugeloberfläche eine Kraft Fsch,
die auf das antreibende Element, die Membranoberfläche,
zurückwirkt.
Abb. 6 zeigt die Modellierung des
komplexen räumlich ausgedehn-
ten sphärischen Schallfelds mit
vereinfachten mechanischen kon-
zentrierten Elementen.
Die Übertragungsfunktion der Schallimpedanz Zsch eines Kugelstrahlers (Gl. 19) ist identisch mit der mechanischen Impedanz (Gl. 23) eines seriellen mechani-schen Masse-Dämpfungsglieds (msch-ksch). Durch die Serienschaltung wirkt die einprägende Kraft Fsch gleichermaßen auf den idealen masselosen mechanischen Dämpfer (Gl. 21) und auf die ideale konzen-trierte mechanische Masse (Gl. 20). Die Geschwindigkeiten der konzentrierten Elemente addieren sich zu einer Gesamtgeschwindigkeit vsch.
(Gl. 20)
(Gl. 21)
(Gl. 22)
Zsch =Fsch
v
∆R+ r
r
R
Lautsprecherchassis
m
k
v 2
1v
v
F
mechanischesSchallfeldmodell
sch
sch
sch
sch
Zsch=Fsch
v=FA R Ρ0
s1 + R
c s
vsch =v1+v2
Fsch =ksch v2
Fsch =msch v 1=msch s v 1
3. Kapitel Modellierung des Schallfelds 11
Durch ins Verhältnis setzen der einprägenden Kraft Fsch zur resultierenden Ge-schwindigkeit vsch ergibt sich mit den Gleichungen (Gl. 20), (Gl. 21) und (Gl. 22) die mechanische Impedanz Zsch (Gl. 23).
(Gl. 23)
Der Koeffizientenvergleich zwischen der mechanischen Impedanz, errechnet aus dem Schallfeld (Gl. 19), und der Impedanz, errechnet aus konzentrierten mechani-schen Elementen (Gl. 23), ergibt die äquivalente Masse- und Dämpfungskonstante (msch, ksch) des äquivalenten mechanischen Masse-Dämpfungsschwingers.
(Gl. 24)
(Gl. 25)
msch: äquivalente Masse
ksch: äquivalente Dämpfungskonstante
Eine Serienschaltung aus zwei konzentrierten mechanischen Elementen modelliert die Rückwirkung des komplexen räumlich ausgedehnten Schallfeldes auf eine kugelförmige Lautsprechermembranfläche. Eine weitere einfache und geschlossene Lösung für die Belastung des Lautspre-chers ist nur für den Kreiskolben möglich (Abb. 7):
(Gl. 26)
(Gl. 27)
J1(2 z) : Besselfunktion erster Ordnung K1(2 z) : Struvefunktion erster Ordnung [Leichsenring, 1996, S. 39] Für große Wellenlängen gegenüber dem Radius R der Lautsprechermembran [Kollmeier, 2004] (Gl. 28) verhält sich die Schallquelle wie ein idealer Punkt-strahler, der in eine unendlich große Wand eingebaut ist.
(Gl. 28)
Im Fernfeld ist nicht zu erkennen, ob das erzeugende Element punkt-, kugel-, kreiskolben- oder trichterförmig ist. Die Trichterform der Lautsprechermembran wirkt sich nicht aus. Der Trichter kann für große Wellenlängen durch einen Kol-benstrahler ersetzt werden. Die Oberfläche des Kugelstrahlers ist somit mit der Fläche des Kolbenstrahlers gleichzusetzen, was zu einer Normierung des Radius Räq des Kugelstrahlers auf den Radius des Kolbenstrahlers Rko führt.
(Gl. 29)
z
cR
Räq=Rko!!!!2
ÈkÈ R =2 Π
ΛR =
Ωc
R << 1
msch =FA R Ρ0
ksch =FA c Ρ0
Zsch =Fsch
v= msch
s1 +
mschksch
s
Zko =c×Ρ0×FAHH1-J1 H2 zL
zL+j
K1 H2 zL
2 z 2L
12 3 Modellierung des Schallfelds
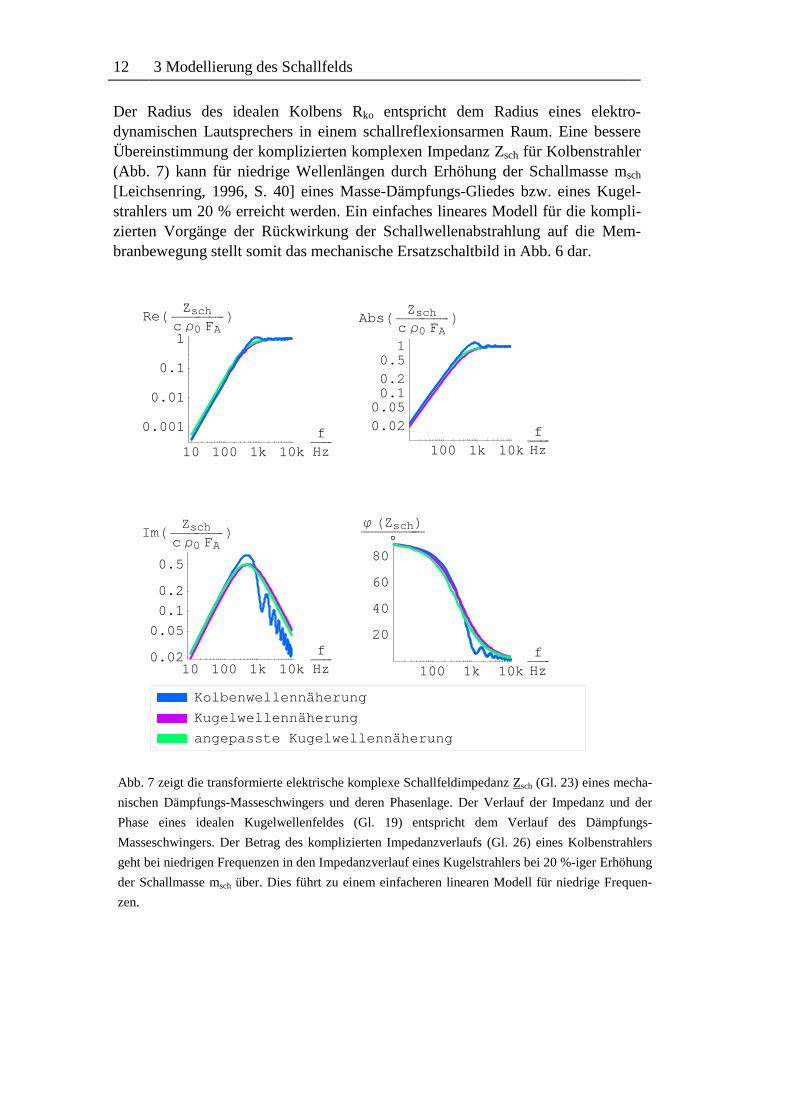
Der Radius des idealen Kolbens Rko entspricht dem Radius eines elektro-dynamischen Lautsprechers in einem schallreflexionsarmen Raum. Eine bessere Übereinstimmung der komplizierten komplexen Impedanz Zsch für Kolbenstrahler (Abb. 7) kann für niedrige Wellenlängen durch Erhöhung der Schallmasse msch [Leichsenring, 1996, S. 40] eines Masse-Dämpfungs-Gliedes bzw. eines Kugel-strahlers um 20 % erreicht werden. Ein einfaches lineares Modell für die kompli-zierten Vorgänge der Rückwirkung der Schallwellenabstrahlung auf die Mem-branbewegung stellt somit das mechanische Ersatzschaltbild in Abb. 6 dar.
Abb. 7 zeigt die transformierte elektrische komplexe Schallfeldimpedanz Zsch (Gl. 23) eines mecha-
nischen Dämpfungs-Masseschwingers und deren Phasenlage. Der Verlauf der Impedanz und der
Phase eines idealen Kugelwellenfeldes (Gl. 19) entspricht dem Verlauf des Dämpfungs-
Masseschwingers. Der Betrag des komplizierten Impedanzverlaufs (Gl. 26) eines Kolbenstrahlers
geht bei niedrigen Frequenzen in den Impedanzverlauf eines Kugelstrahlers bei 20 %-iger Erhöhung
der Schallmasse msch über. Dies führt zu einem einfacheren linearen Modell für niedrige Frequen-
zen.
10 100 1k 10kf
Hz
0.02
0.05
0.1
0.2
0.5
ImH Zschc Ρ0 FA
L
100 1k 10kf
Hz
20
40
60
80
j HZsch L
°
10 100 1k 10kf
Hz
0.001
0.01
0.1
1
ReH Zschc Ρ0 FA
L
100 1k 10kf
Hz
0.020.05
0.10.20.5
1
AbsH Zschc Ρ0 FA
L
angepasste Kugelwellennäherung
Kugelwellennäherung
Kolbenwellennäherung
4. Kapitel Beschreibung der Hardware-Komponenten 13
4 Beschreibung der Hardware-Komponenten Um ein System gut regeln zu können, ist es wichtig die Strecke, das Stellglied und den Istgrößensensor durch ein gutes Modell zu charakterisieren und durch eine Systemfunktion zu beschreiben. Ein solches Modell entsteht durch Umwandeln der Hardwarekomponenten unter Beachtung der physikalischen Besonderheiten in idealisierte Komponenten. Mechanische reale Komponenten werden durch punkt-förmige Masseelemente, Dämpfer ohne Masse oder dämpfungsfreie, masselose Federn ersetzt. Für reale elektrische Komponenten werden ideale Strom- und Spannungsquellen, Kondensatoren, Induktivitäten, Widerstände und Laplace-Funktionen eingesetzt.
4.1 Elektrodynamischer Lautsprecher
Ein gewöhnlicher Lautsprecher besitzt eine komplexe Struktur. Er besteht aus elektrischen und mechanischen Komponenten. Das Schallfeld, erzeugt durch die mechanischen Bauteile, wirkt sowohl auf diese, als auch auf die elektrischen Komponenten zurück. Die mechanischen Elemente des Lautsprechers und das räumlich verteilte Schallfeld sind ausgedehnte Objekte. Sie sind nur durch partiel-le Differentialgleichungen zu beschreiben. Auch die elektromagnetischen Effekte haben räumlich ausgedehnte Dimensionen. Wirbelströme verteilen sich über den ganzen Weicheisenkern (Abb. 8) des Lautsprechers und ergeben mathematisch nichtlineare partielle Differentialgleichungen. Die Entwicklung eines Reglers für einen elektrodynamischen Lautsprecher lässt sich wesentlich vereinfachen, wenn sich Lösungen der partiellen Differentialgleichung durch lineare Lösungen annä-hern lassen. Für den elektrodynamischen Lautsprecher wird eine solche Modell-bildung beschrieben.
4.1.1 Mechanisches Modell
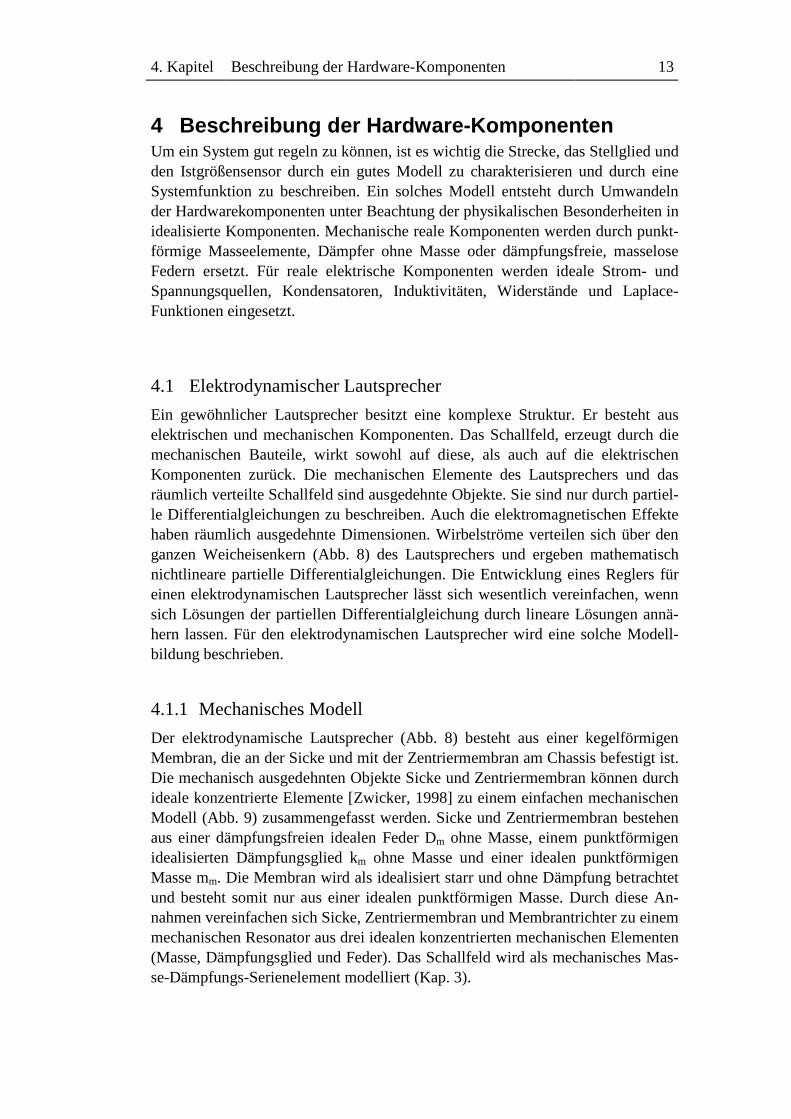
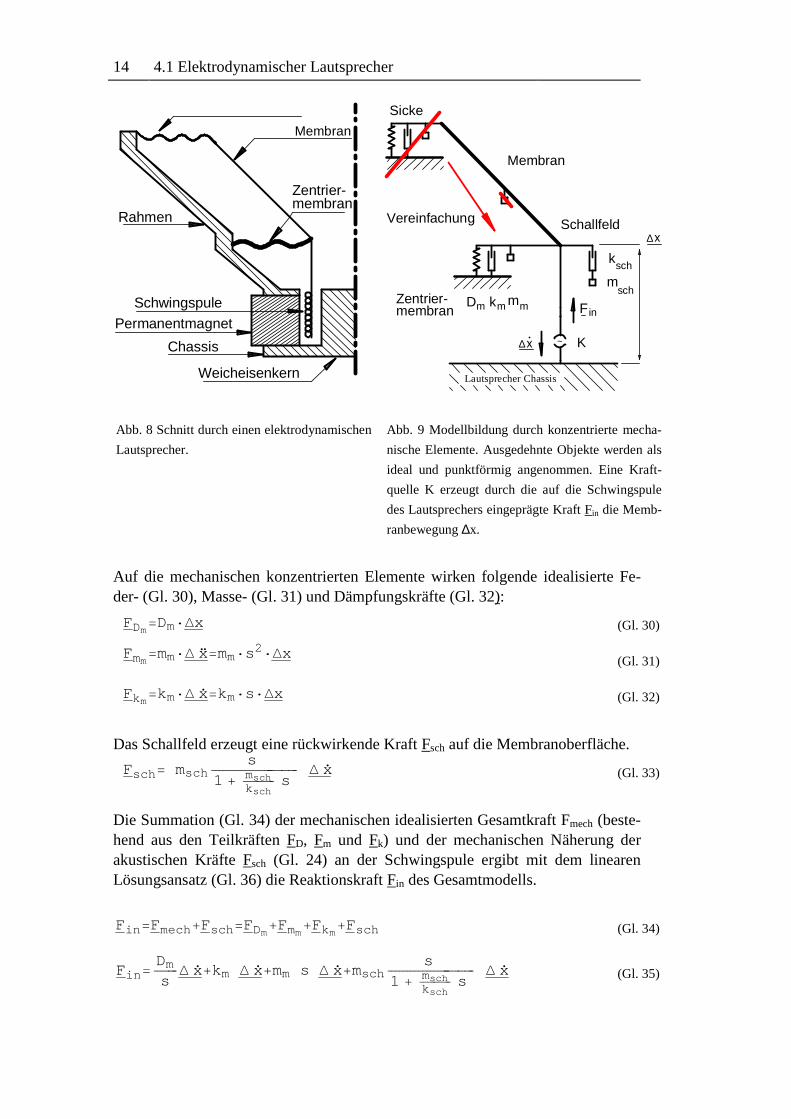
Der elektrodynamische Lautsprecher (Abb. 8) besteht aus einer kegelförmigen Membran, die an der Sicke und mit der Zentriermembran am Chassis befestigt ist. Die mechanisch ausgedehnten Objekte Sicke und Zentriermembran können durch ideale konzentrierte Elemente [Zwicker, 1998] zu einem einfachen mechanischen Modell (Abb. 9) zusammengefasst werden. Sicke und Zentriermembran bestehen aus einer dämpfungsfreien idealen Feder Dm ohne Masse, einem punktförmigen idealisierten Dämpfungsglied km ohne Masse und einer idealen punktförmigen Masse mm. Die Membran wird als idealisiert starr und ohne Dämpfung betrachtet und besteht somit nur aus einer idealen punktförmigen Masse. Durch diese An-nahmen vereinfachen sich Sicke, Zentriermembran und Membrantrichter zu einem mechanischen Resonator aus drei idealen konzentrierten mechanischen Elementen (Masse, Dämpfungsglied und Feder). Das Schallfeld wird als mechanisches Mas-se-Dämpfungs-Serienelement modelliert (Kap. 3).
14 4.1 Elektrodynamischer Lautsprecher
Abb. 8 Schnitt durch einen elektrodynamischen
Lautsprecher.
Abb. 9 Modellbildung durch konzentrierte mecha-
nische Elemente. Ausgedehnte Objekte werden als
ideal und punktförmig angenommen. Eine Kraft-
quelle K erzeugt durch die auf die Schwingspule
des Lautsprechers eingeprägte Kraft Fin die Memb-
ranbewegung ∆x.
Auf die mechanischen konzentrierten Elemente wirken folgende idealisierte Fe-der- (Gl. 30), Masse- (Gl. 31) und Dämpfungskräfte (Gl. 32):
(Gl. 30)
(Gl. 31)
(Gl. 32)
Das Schallfeld erzeugt eine rückwirkende Kraft Fsch auf die Membranoberfläche.
(Gl. 33)
Die Summation (Gl. 34) der mechanischen idealisierten Gesamtkraft Fmech (beste-hend aus den Teilkräften FD, Fm und Fk) und der mechanischen Näherung der akustischen Kräfte Fsch (Gl. 24) an der Schwingspule ergibt mit dem linearen Lösungsansatz (Gl. 36) die Reaktionskraft Fin des Gesamtmodells.
(Gl. 34)
(Gl. 35)
~
k
m
k
D
Lautsprecher Chassis
Zentrier-membran
Schallfeld
Membran
Vereinfachung
Sicke
m m mm
in
∆ K
sch
sch
F
∆
Fsch = mschs
1 +
mschksch
sD x
FDm=Dm×Dx
Fmm=mm×D xÐ=mm×s2×Dx
Fkm=km×D x =km×s×Dx
Fin =Fmech+Fsch =FDm+Fmm
+Fkm+Fsch
Fin =Dms
D x +km D x +mm s D x +mschs
1 +
mschksch
sD x
Rahmen
Membran
Schwingspule
Chassis
Zentrier-membran
Weicheisenkern
Permanentmagnet
4.1 Elektrodynamischer Lautsprecher 15
Linearer Lösungsansatz zum Lösen der Kräftegleichungen:
(Gl. 36)
Das Verhältnis der mechanischen idealisierten Kraft Fin zu der resultierenden mechanischen Geschwindigkeit v ergibt die mechanische Ersatzadmittanz Ymech.
(Gl. 37)
(Gl. 38)
mm: ideale mechanische Massekonstante der Lautsprechermembran
km: ideale Dämpfungskonstante der Lautsprechermembran
Dm: ideale Federkonstante der Lautsprechermembran
4.1.2 Anbindung der mechanischen an die elektrischen Komponenten
Bei elektromechanischen Lautsprechern ist die Anbindung zwischen elektrischem Antriebskreis und mechanischen Komponenten über die Lorentzkraft FL (Gl. 39) gegeben. Diese wird über eine (Kap. 4.1.2) oder zwei (Kap. 4.1.6) Schwingspulen auf die mechanischen Komponenten übertragen.
(Gl. 39)
Die aus den elektrischen Elementen senkrecht zur Spulenfläche A resultierende mechanische Kraft FIn auf die Schwingspule, hängt quadratisch vom magneti-schen Gesamtfluss (Gl. 40) [Küpfmüller, S.249, 1936] durch die Spule ab.
(Gl. 40)
Dem magnetischen Wechselfluss des Antriebs Le·Ie ist ein konstantes Magnetfeld mit dem Fluss 0 überlagert. Mit der Randbedingung, dass der Wechselfluss Le·Ie viel kleiner als der konstante Fluss 0~B0 ist, ergibt sich der lineare Zusammen-hang (Gl. 41) zwischen der Kraft FIn und dem Strom Ie.
(Gl. 41)
Die Näherung entspricht der Lorentzkraft. Durch diese Kraft Fin (Gl. 42) findet die Anbindung des elektrischen Kreises an den mechanischen Ersatzkreis (Abb. 10) statt.
(Gl. 42)
Die aus der Schwingspulenbewegung x∆ resultierte Geschwindigkeit v führt zu einer elektromotorischen rückwirkenden Induktionsspannung Uemk im elektri-
x es t
Fin ~Y2
Fin ~2×Y0×Le×I e~B0×Le×I e~B0×I e
Ymech=1
Dms
+ km+ s mm+s k sch mschksch +s msch
Ymech=v
Fin
FL = B0 l I e
Fin = M Ie
16 4.1 Elektrodynamischer Lautsprecher
schen Kreis. Ursache für diese Rückwirkung ist die übernommene infinitesimale mechanische geleistete Arbeit dA (Gl. 43) [Küpfmüller, S. 251, 1941] bei erfor-derlicher infinitesimaler elektrisch verrichteter Arbeit dW (Gl. 44).
(Gl. 43)
(Gl. 44)
Der Koeffizientenvergleich zwischen der mechanischen Arbeit (Gl. 43) und der elektrischen verrichteten Arbeit (Gl. 44) ergibt die elektromotorische Spannungs-rückwirkung in den elektrischen Kreis, verursacht durch die Geschwindigkeit v der mechanischen Bewegung
x der Schwingspule.
(Gl. 45)
Die Maschenregel, angewandt auf den elektrischen Kreis (Abb. 10), verknüpft die mechanische Bewegung
x mit den elektrischen Elementen.
(Gl. 46)
Das Verhältnis aus Spannung Uemk (Gl. 45) zum elektrischen Strom Ie (Gl. 42) ergibt mit der Definition des mechanischen Widerstands (Gl. 37) Ze,m.
(Gl. 47)
Die Auswirkungen im elektrischen Kreis lassen sich als elektrischer Widerstand interpretieren, dessen Ursprung in der mechanischen Bewegung des Lautsprechers liegt. Die komplexe Impedanz Ze des Lautsprechers mit mechanischer Rückwirkung und elektrischen Komponenten errechnet sich zu:
(Gl. 48)
(Gl. 49)
4.1.3 Einfaches Schwingspulensystem
Die elektromotorische Kraft Fin resultiert aus der Überlagerung des magnetischen Wechselfelds B~ der Schwingspule und des statischen Magnetfelds B0 des Perma-nentmagnets. Die mechanische Kraftquelle K prägt die Kraft Fin (Gl. 42) auf die Schwingspule des Lautsprechers ein und beschleunigt sie auf die Geschwindig-keitD x
•= v .
dA = Find Dx
dtdt = M Ie v dt
dW = Uemk I e dt
Uemk = M v
Uin =URel+ULel
+M v
Ze,m =UemkI e
=Ymech×M2
Ze=Zel +M2 Ymech
Ze=HRel +s×Lel L+M2
Dms
+ km+ s mm+s k sch mschksch +s msch
4.1 Elektrodynamischer Lautsprecher 17
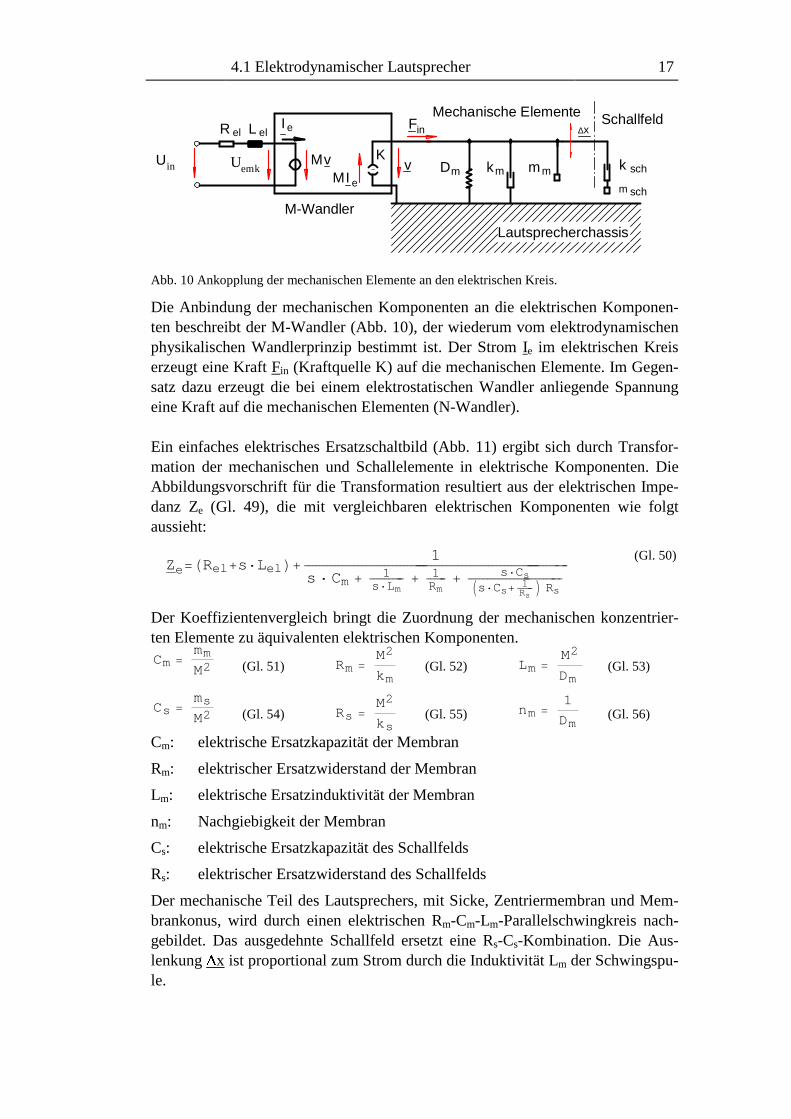
Abb. 10 Ankopplung der mechanischen Elemente an den elektrischen Kreis.
Die Anbindung der mechanischen Komponenten an die elektrischen Komponen-ten beschreibt der M-Wandler (Abb. 10), der wiederum vom elektrodynamischen physikalischen Wandlerprinzip bestimmt ist. Der Strom Ie im elektrischen Kreis erzeugt eine Kraft Fin (Kraftquelle K) auf die mechanischen Elemente. Im Gegen-satz dazu erzeugt die bei einem elektrostatischen Wandler anliegende Spannung eine Kraft auf die mechanischen Elementen (N-Wandler). Ein einfaches elektrisches Ersatzschaltbild (Abb. 11) ergibt sich durch Transfor-mation der mechanischen und Schallelemente in elektrische Komponenten. Die Abbildungsvorschrift für die Transformation resultiert aus der elektrischen Impe-danz Ze (Gl. 49), die mit vergleichbaren elektrischen Komponenten wie folgt aussieht:
(Gl. 50)
Der Koeffizientenvergleich bringt die Zuordnung der mechanischen konzentrier-ten Elemente zu äquivalenten elektrischen Komponenten.
(Gl. 51) (Gl. 52) (Gl. 53)
(Gl. 54) (Gl. 55) (Gl. 56)
Cm: elektrische Ersatzkapazität der Membran
Rm: elektrischer Ersatzwiderstand der Membran
Lm: elektrische Ersatzinduktivität der Membran
nm: Nachgiebigkeit der Membran
Cs: elektrische Ersatzkapazität des Schallfelds
Rs: elektrischer Ersatzwiderstand des Schallfelds
Der mechanische Teil des Lautsprechers, mit Sicke, Zentriermembran und Mem-brankonus, wird durch einen elektrischen Rm-Cm-Lm-Parallelschwingkreis nach-gebildet. Das ausgedehnte Schallfeld ersetzt eine Rs-Cs-Kombination. Die Aus-lenkung
x ist proportional zum Strom durch die Induktivität Lm der Schwingspu-
le.
Cmmm
M2 RmM2
k mLm
M2
Dm
Cs ms
M2 Rs M2
k snm
1
Dm
U
Lautsprecherchassis
R
SchallfeldI
M-Wandler
L
Dm km m k
m
mvMv
e ∆x
emk
el el
sch
schin ~
IM e
K
Mechanische Elemente
U
Fin
Ze=HRel +s×Lel L+1
s × Cm+ 1
s×Lm+ 1
Rm+
s×CsIs×Cs + 1RsM Rs
18 4.1 Beschreibung der Hardware-Komponenten 4. Kapitel
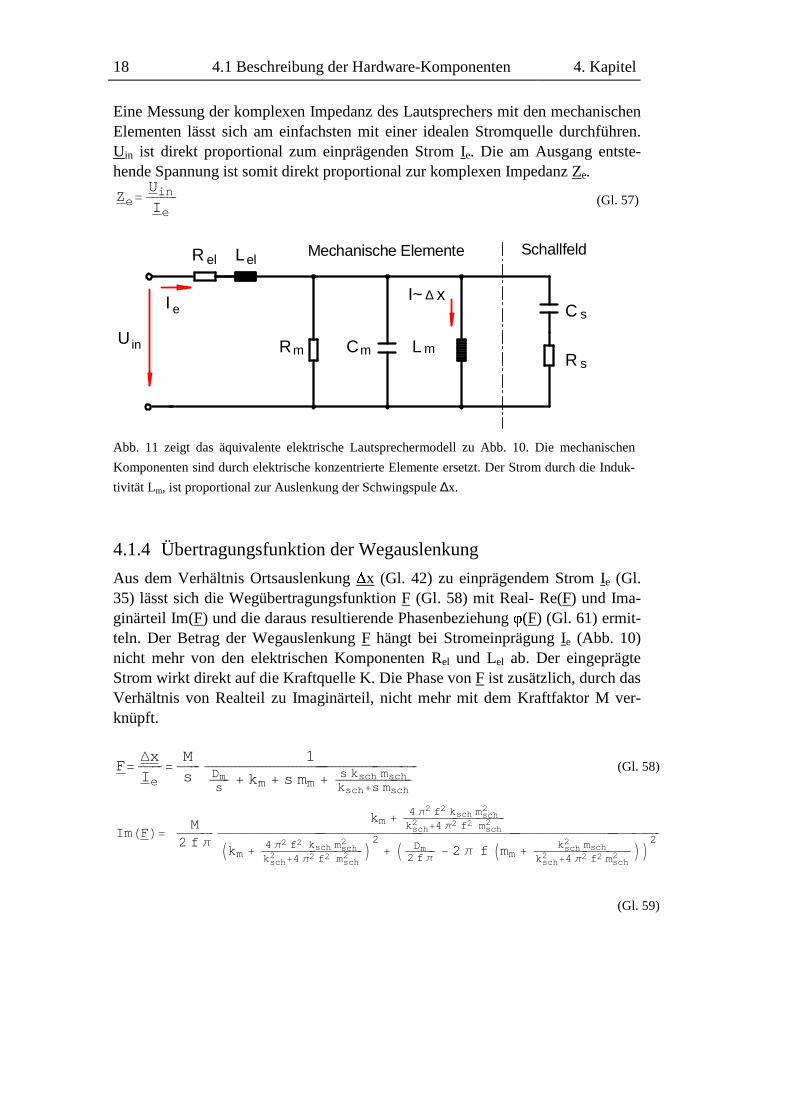
Eine Messung der komplexen Impedanz des Lautsprechers mit den mechanischen Elementen lässt sich am einfachsten mit einer idealen Stromquelle durchführen. Uin ist direkt proportional zum einprägenden Strom Ie. Die am Ausgang entste-hende Spannung ist somit direkt proportional zur komplexen Impedanz Ze.
(Gl. 57)
Abb. 11 zeigt das äquivalente elektrische Lautsprechermodell zu Abb. 10. Die mechanischen
Komponenten sind durch elektrische konzentrierte Elemente ersetzt. Der Strom durch die Induk-
tivität Lm, ist proportional zur Auslenkung der Schwingspule ∆x.
4.1.4 Übertragungsfunktion der Wegauslenkung
Aus dem Verhältnis Ortsauslenkung
x (Gl. 42) zu einprägendem Strom Ie (Gl. 35) lässt sich die Wegübertragungsfunktion F (Gl. 58) mit Real- Re(F) und Ima-ginärteil Im(F) und die daraus resultierende Phasenbeziehung (F) (Gl. 61) ermit-teln. Der Betrag der Wegauslenkung F hängt bei Stromeinprägung Ie (Abb. 10) nicht mehr von den elektrischen Komponenten Rel und Lel ab. Der eingeprägte Strom wirkt direkt auf die Kraftquelle K. Die Phase von F ist zusätzlich, durch das Verhältnis von Realteil zu Imaginärteil, nicht mehr mit dem Kraftfaktor M ver-knüpft.
(Gl. 58)
(Gl. 59)
Ze=UinI e
F=DxI e
=M
s
1Dm
s+ km+ s mm+
s k sch mschksch +s msch
ImHFL=M
2 f Π
km+4 Π2 f 2 ksch msch
2ksch
2 +4 Π2 f 2 msch2
Ikm+4 Π2 f 2 ksch msch
2ksch
2 +4 Π2 f 2 msch2 M2
+ I Dm2 f Π
- 2 Π f Imm+ksch
2 mschksch
2 +4 Π2 f 2 msch2 MM2
R
C
Rm Cm L m
I~ x∆s
s
Mechanische Elemente Schallfeld
R el Lel
U in
I e

4.1 Elektrodynamischer Lautsprecher 19
-Π ReHFL0
-Π2
ReHFL=0
0 ReHFL0
(Gl. 60)
(Gl. 61)
n =
Sowohl die Wegauslenkungsübertragungsfunktion F als auch deren Phasenbezieh-ung sind nur noch von den Verhältnissen av, bv, cv, dv und ev abhängig.
(Gl. 62) (Gl. 63) (Gl. 64)
(Gl. 65) (Gl. 66)
Dies führt zu den folgenden vereinfachten Beziehungen für die Übertragungsfunk-tion F (Gl. 67) und deren Phasenlage (F) (Gl. 68). Die Vereinfachung setzt sich mit jeder aus F errechneten Größe fort.
(Gl. 67)
(Gl. 68)
Die Unstetigkeitsstelle der Phasendefinition bei Re(F) = 0 befindet sich bei der Frequenz f90°,luf und der Phasenlage 90°.
(Gl. 69)
Der Informationsgehalt aus dem Phasenverlauf entspricht den vier Parametern bv, cv, dv und ev. In diesen, ins Verhältnis gesetzten Größen sind die mechani-schen Lautsprecherparameter und die Schallfeldparameter enthalten. Die Form
=1
!!!!2 Π !!!!!!!cV
*(+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ikjjjjjjjjj1 +
dVcV
-eV
2cV
+&'''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''ikjjjj1 +2 HdV + eV
2L
cV+HdV - eV
2L2
cV
2
yzzzzyzzzzzzzzz
f 90 °,luf =1
2 !!!!2 Π
$%%%%%%%%%Dmmm
&'''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''1 - J kschmsch
N2 J mmDm
+mschDmN +$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%1 + 2 J ksch
msch
N2 J mmDm
-mschDmN + J ksch
msch
N4 J mmDm
+mschDmN2
aV=M
Dm
bV=kmDm
cV=mm
Dm
dV=msch
Dm
eV=msch
ksch
ReHFL=M
2 Π f
Dm2 Π f
- 2 f Π mm-2 Π f k sch
2 mschksch
2 +4 Π2 f 2 msch2
Ikm+4 Π2 f 2 ksch msch
2ksch
2 +4 Π2 f 2 msch2 M2
+ I Dm2 f Π
- 2 Π f Imm+ksch
2 mschksch
2 +4 Π2 f 2 msch2 MM2
jHFL=ArctTan -
km+4 Π2 f 2 ksch msch
2ksch
2 +4 Π2 f 2 msch2
Dm
2 f Π- 2 f Π mm-
2 Π f k sch2 msch
ksch2 +4 Π2 f 2 msch
2
+n
F=aV1 + s e V
1 + s b V + s2 cV + s2 dV + s e V + s2 bV eV + s3 cV eV
jHFL=ArctTan -
bV +4 Π2 f 2 dV eV1+4 Π2 f 2 eV
2
12 Π f
- 2 Π f c V -2 Π f d V
1+4 Π2 f 2 eV2
+n
20 4.1 Beschreibung der Hardware-Komponenten 4. Kapitel
des Verlaufs der Übertragungsfunktion des Weges F ist mit der Bestimmung der Phasenparameter bv, cv, dv und ev vollständig beschrieben. Die Bestimmung des Faktors av (Gl. 62) legt den Ursprung von F bei 0 Hz fest. Er ist bestimmt durch das Verhältnis des Kraftfaktors M zur Federkonstante Dm der Membran und nur im Betrag der Übertragungsfunktion des Wegs enthalten. Der Grenzübergang zu sehr niedrigen Frequenzen (Gl. 70) ergibt die Anbin-dungskonstante av aus der Wegübertragungsfunktion in Vakuum (Gl. 71) oder Luft (Gl. 58).
(Gl. 70)
Eine Reduktion der mechanischen Parameter in der Übertragungsfunktion des Wegs (Gl. 67) ist durch gezielte Manipulation am Lautsprechersystem möglich. Das Versetzen des Lautsprechers in eine Vakuumumgebung eliminiert die Schall-parameter dv, ev.
4.1.4.1 Reduktion der Auslenkungsübertragungsfunktion auf mecha-nische Komponenten
Der Betrag und die Phase der Übertragungsfunktion des Weges F vereinfachen sich ohne Schallfeldabstrahlung im Vakuum zu:
(Gl. 71)
(Gl. 72)
n =
Mathematisch gelingt der Übergang von der Übertragungsfunktion der Wegaus-lenkung in Luft F zur Vakuummessung Fvak durch den Grenzübergang ksch 0 bei endlicher Schallmasse msch. Die Phase von Fvak hängt wie die Phase der Weg-auslenkungsfunktion in Luft F nicht mehr vom Kraftfaktor M ab. Zusätzlich verschwinden in Betrag und Phase die Schallkomponenten msch und ksch. Die Schallmasse msch und das Dämpfungsglied ksch sind somit nicht mehr im Laut-sprechermodell (Abb. 12) vorhanden.
lim Èf ®0 Hz
FHsLÈ=aV
Fvak = limksch ®0
F=Ms
1Dm
s+ km+ s mm
= aV1
H1 + bV s + cV s2L
0 ReHFvak L0
-Π2
ReHFvak L=0
-Π ReHFvak L0
jHFvak L= limksch ®0
jHFL=ArcTan2 Π f k m
-Dm+ 4 f 2 Π2 mm
+n
=ArcTan2 Π f b V
-1 + 4 f 2 Π2 cV
+n

4.1 Elektrodynamischer Lautsprecher 21
Abb. 12 zeigt das Lautspre-
chermodell. Durch Messen
der Übertragungsfunktion
des Wegs Fvak im Vakuum
verschwinden die Schall-
elemente msch und ksch (siehe
auch Abb. 10).
Die Unstetigkeitsstelle der Vakuumphasenrelation liegt bei 90° und ist nur noch abhängig vom Verhältnis (Gl. 73) der mechanischen Parameter Dm zu mm und nicht mehr von der Dämpfung der Membran.
(Gl. 73)
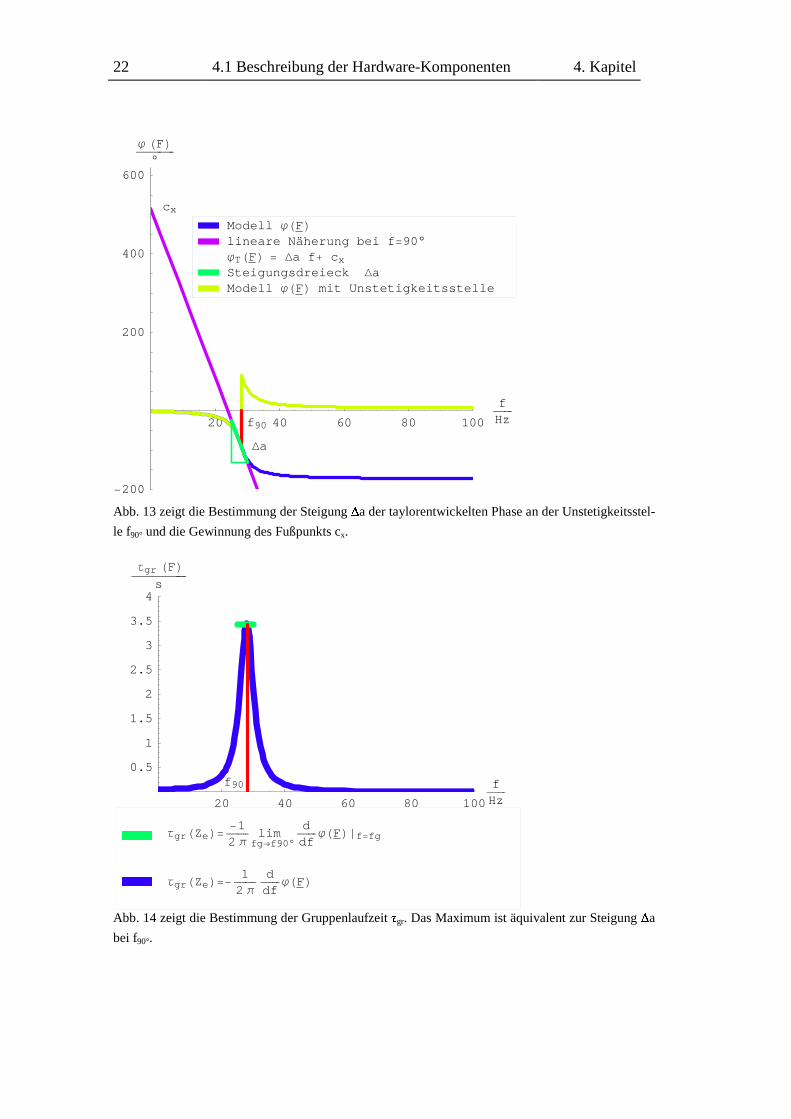
Eine Taylorreihenentwicklung erster Ordnung um die Unstetigkeitsstelle ergibt:
(Gl. 74)
Ein Ermitteln der Verhältnisse cv und bv ist durch Anlegen einer Geraden (Abb. 13) an der Unstetigkeitsstelle leicht möglich. Aus dem Fußpunkt cx der Geraden und der Steigung
a folgen die Konstante cv und bv.
Durch Ermittlung des Maximums (Gl. 65) der Gruppenlaufzeit gr (Abb. 14) bei der Frequenz f90°,vak (Gl. 73) kann das Verhältnis cv zu bv direkt bestimmt werden. cv folgt direkt aus dem Ort des Maximus.
(Gl. 75)
Die Bestimmung der mechanischen Parameter der Massekonstante mm (Gl. 77) und der Dämpfungskonstante km (Gl. 76) der Membran ist aus der Phase der Wegauslenkung Fvak im Vakuum bei bekannter Federkonstante Dm (Gl. 97) voll-ständig und geschlossen möglich.
(Gl. 76)
(Gl. 77)
Dm km mm
Lautsprecherchassis
R Lel el
KinU~
∆xM-Wandler Mechanische Elemente
f 90 °,vak =1
2 Π
$%%%%%%%%%Dmmm
=1
2 Π
1!!!!!!cV
mm=bvDm=Dax,vac
24 Hcx,vac + 90L2 Π2
Dm
jHFvak LT=3602 ΠH-
Π2
-4ΠmmkmHf -
12 Π$%%%%%%%%%Dm
mmLL
=H-90-720cVbVHf -
12 Π
1!!!!!!cV
LL=Dax,vac f +cx,vac
Τgr =-d
dΩ
jHFvak LÈf 90 °,vak=
3602 ΠH4Π
cVbVL=720
cVbV
=Dax,vac
2 Π
km=cvDm=180 Dax,vac
Hcx,vac + 90L2 Π2Dm
22 4.1 Beschreibung der Hardware-Komponenten 4. Kapitel
20 40 60 80 100
fHz
0.5
1
1.5
2
2.5
3
3.5
4
Τgr HFL
s
f 90
Τgr HZeL=-1
2 Π
ddf
jHFLΤgr HZeL=
-12 Π
limfg ®f90°
ddf
jHFLÈf =fg
20 40 60 80 100
fHz
-200
200
400
600
j HFL
°
cx
Da
f 90
Modell jHFL mit UnstetigkeitsstelleSteigungsdreieck DajTHFL = Da f + cx
lineare Näherung bei f =90°Modell jHFL
Abb. 13 zeigt die Bestimmung der Steigung a der taylorentwickelten Phase an der Unstetigkeitsstel-
le f90° und die Gewinnung des Fußpunkts cx.
Abb. 14 zeigt die Bestimmung der Gruppenlaufzeit gr. Das Maximum ist äquivalent zur Steigung a
bei f90°.
4.1 Elektrodynamischer Lautsprecher 23
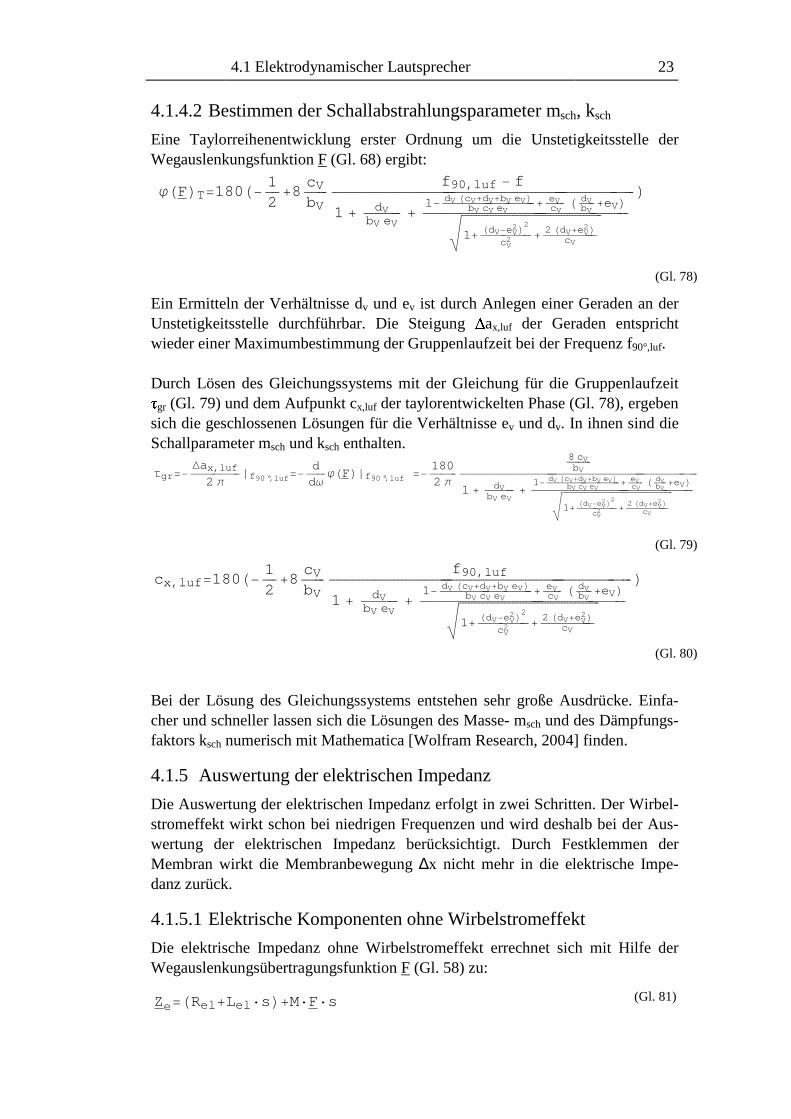
4.1.4.2 Bestimmen der Schallabstrahlungsparameter msch, ksch
Eine Taylorreihenentwicklung erster Ordnung um die Unstetigkeitsstelle der Wegauslenkungsfunktion F (Gl. 68) ergibt:
(Gl. 78)
Ein Ermitteln der Verhältnisse dv und ev ist durch Anlegen einer Geraden an der Unstetigkeitsstelle durchführbar. Die Steigung
ax,luf der Geraden entspricht
wieder einer Maximumbestimmung der Gruppenlaufzeit bei der Frequenz f90°,luf. Durch Lösen des Gleichungssystems mit der Gleichung für die Gruppenlaufzeit gr (Gl. 79) und dem Aufpunkt cx,luf der taylorentwickelten Phase (Gl. 78), ergeben sich die geschlossenen Lösungen für die Verhältnisse ev und dv. In ihnen sind die Schallparameter msch und ksch enthalten.
(Gl. 79)
(Gl. 80)
Bei der Lösung des Gleichungssystems entstehen sehr große Ausdrücke. Einfa-cher und schneller lassen sich die Lösungen des Masse- msch und des Dämpfungs-faktors ksch numerisch mit Mathematica [Wolfram Research, 2004] finden.
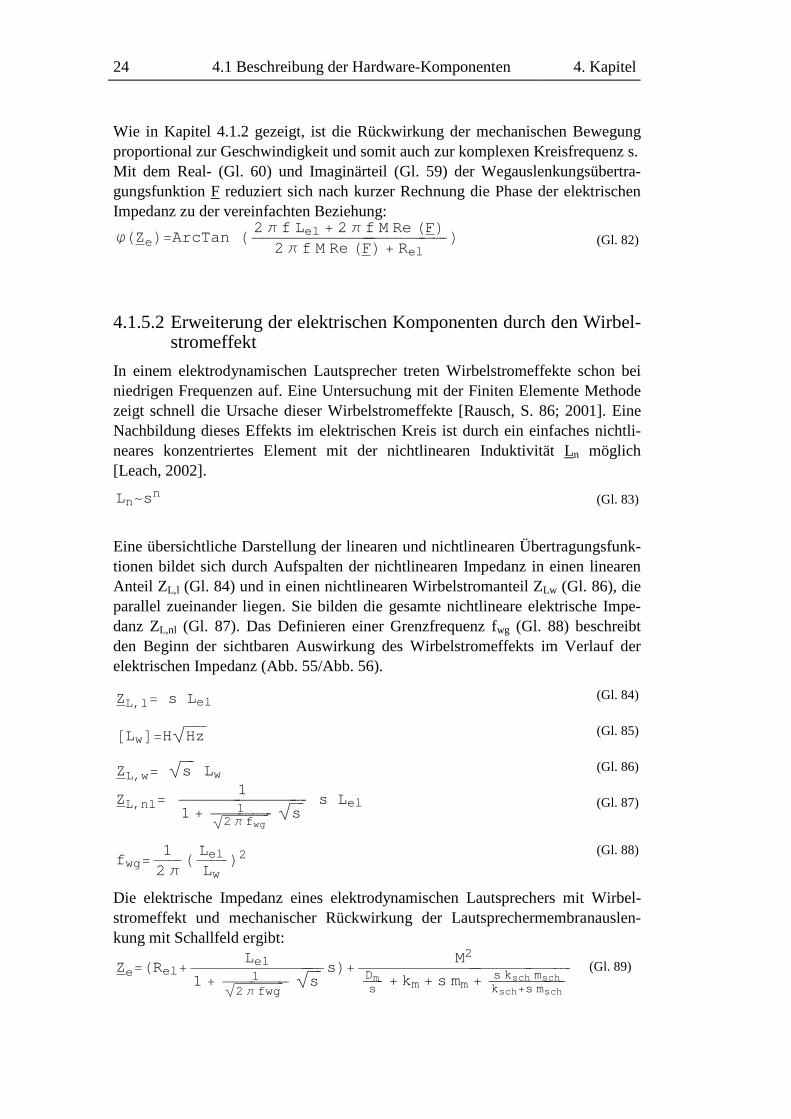
4.1.5 Auswertung der elektrischen Impedanz
Die Auswertung der elektrischen Impedanz erfolgt in zwei Schritten. Der Wirbel-stromeffekt wirkt schon bei niedrigen Frequenzen und wird deshalb bei der Aus-wertung der elektrischen Impedanz berücksichtigt. Durch Festklemmen der Membran wirkt die Membranbewegung ∆x nicht mehr in die elektrische Impe-danz zurück.
4.1.5.1 Elektrische Komponenten ohne Wirbelstromeffekt
Die elektrische Impedanz ohne Wirbelstromeffekt errechnet sich mit Hilfe der Wegauslenkungsübertragungsfunktion F (Gl. 58) zu:
(Gl. 81) Ze=HRel +Lel ×sL+M×F×s
jHFLT=180H-12
+8cVbV
f 90,luf - f
1 +dV
bV eV+
1-dV HcV+dV+bV eVLbV cV eV
+eVcV
H dVbV+eVL
$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%1+HdV-eV
2L2
cV
2 +2 HdV+eV
2LcV
L
cx,luf =180H-12
+8cVbV
f 90,luf
1 +dV
bV eV+
1-dV HcV+dV+bV eVLbV cV eV
+eVcV
H dVbV+eVL
$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%1+HdV-eV
2L2
cV
2 +2 HdV+eV
2LcV
L
Τgr =-Dax,luf
2 ΠÈf 90 °,luf =-
ddΩ
jHFLÈf 90 °,luf =-1802 Π
8 c VbV
1 +dV
bV eV+
1-dV HcV+dV+bV eVLbV cV eV
+eVcV
H dVbV+eVL
$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%1+HdV-eV
2L2
cV
2 +2 HdV+eV
2LcV
24 4.1 Beschreibung der Hardware-Komponenten 4. Kapitel
Wie in Kapitel 4.1.2 gezeigt, ist die Rückwirkung der mechanischen Bewegung proportional zur Geschwindigkeit und somit auch zur komplexen Kreisfrequenz s. Mit dem Real- (Gl. 60) und Imaginärteil (Gl. 59) der Wegauslenkungsübertra-gungsfunktion F reduziert sich nach kurzer Rechnung die Phase der elektrischen Impedanz zu der vereinfachten Beziehung:
(Gl. 82)
4.1.5.2 Erweiterung der elektrischen Komponenten durch den Wirbel-stromeffekt
In einem elektrodynamischen Lautsprecher treten Wirbelstromeffekte schon bei niedrigen Frequenzen auf. Eine Untersuchung mit der Finiten Elemente Methode zeigt schnell die Ursache dieser Wirbelstromeffekte [Rausch, S. 86; 2001]. Eine Nachbildung dieses Effekts im elektrischen Kreis ist durch ein einfaches nichtli-neares konzentriertes Element mit der nichtlinearen Induktivität Ln möglich [Leach, 2002].
(Gl. 83)
Eine übersichtliche Darstellung der linearen und nichtlinearen Übertragungsfunk-tionen bildet sich durch Aufspalten der nichtlinearen Impedanz in einen linearen Anteil ZL,l (Gl. 84) und in einen nichtlinearen Wirbelstromanteil ZLw (Gl. 86), die parallel zueinander liegen. Sie bilden die gesamte nichtlineare elektrische Impe-danz ZL,nl (Gl. 87). Das Definieren einer Grenzfrequenz fwg (Gl. 88) beschreibt den Beginn der sichtbaren Auswirkung des Wirbelstromeffekts im Verlauf der elektrischen Impedanz (Abb. 55/Abb. 56).
(Gl. 84)
(Gl. 85)
(Gl. 86)
(Gl. 87)
(Gl. 88)
Die elektrische Impedanz eines elektrodynamischen Lautsprechers mit Wirbel-stromeffekt und mechanischer Rückwirkung der Lautsprechermembranauslen-kung mit Schallfeld ergibt:
(Gl. 89)
jHZeL=ArcTan H 2 Π f L el + 2 Π f M Re HFL
2 Π f M Re HFL + RelL
Ln~sn
ZL,l = s L el
ZL,w =!!!!s L w
ZL,nl =1
1 + 1!!!!!!!!!!!!!!!!!2 Π f wg
!!!!s s L el
f wg=1
2 ΠH Lel
LwL2
Ze=HRel +Lel
1 + 1!!!!!!!!!!!!!!!!!!2 Π fwg
!!!!s sL+
M2Dm
s+ km+ s mm+
s k sch mschksch +s msch
@LwD=H!!!!!!Hz

4.1 Elektrodynamischer Lautsprecher 25
Mit dem Real- (Gl. 60) und Imaginärteil (Gl. 59) der Wegauslenkungsübertra-gungsfunktion F reduziert sich nach kurzer Rechnung die Phase der elektrischen Impedanz zu der vereinfachten Beziehung:
Die mechanischen Parameter in der Phase der elektrischen Impedanz hängen, gewichtet mit der Kreisfrequenz 2 f und dem Kraftfaktor M, direkt von den Real- und Imaginärteilen der Wegauslenkungsfunktion F ab. Für Frequenzen, die sehr viel kleiner als die mechanische Eigenresonanz f << fres,mech des elektrodynamischen Lautsprechers sind, ergibt die Taylorentwick-lung erster Ordnung für die Phase der elektrischen Impedanz:
Die Steigung der Geraden
ael,g enthält den reinen elektrischen Anteil
ael und
einen gemischten Anteil
ael aus mechanischen und elektrischen Parametern (M, Dm, Rel). Die Gerade beginnt bei linearer Auftragung im Ursprung des Koordina-tensystems. Die Gruppenlaufzeit entspricht der Gesamtsteigung
ael,g der nach Taylor entwi-
ckelten Phase (F):
Der Parameter gv (Gl. 93) bestimmt die Stärke der Rückwirkung der mechani-schen Elemente auf den elektrischen Kreis und hängt vom Verhältnis des qua-drierten Kraftfaktors M und der Membranfederkonstante Dm ab.
Die Induktivität errechnet sich aus dem reinen elektrischen Steigungsanteil
ael
und dem Parameter gv aus dem gemischten Anteil
ael,mech. Das Auftrennen der mechanischen und elektrischen Komponenten in der Steigung
ael,g (Gl. 92) im
elektrischen Kreis ist durch Festklemmen der Membran möglich (Kap. 4.1.5.3).
(Gl. 90)
(Gl. 91)
(Gl. 92)
(Gl. 93)
(Gl. 94)
(Gl. 95)
gV=M2
Dm
Lel =DaelRel360
gV=Dael,mechRel360
jHZeL=ArcTan
11+ ff wg
+!!!!2
!!!!f!!!!!!!!!f wg
J2 Π f L el +!!!!2 Π!!!!!!!!!f wg
Lel f 32N + 2 Π f M Re HFL
1J1+ ff wg+!!!!2 !!!!f!!!!!!!!!f wg
N !!!!2 Π!!!!!!!!!f wg
Lel f 32 + 2 Π f M Re HFL + Rel
jHFLT=360Rel
HLel +M2
DmL f =
360Rel
HLel +gVL f =HDael +Dael,mech L f =Dael,g f
Τgr = limfg ®0
-d
dΩ
jHZeLÈΩ=2 Π fg =-1
2 Π
360Rel
HLel +M2
DmL=-
12 ΠHDael +Dael,mech L=Dael,g
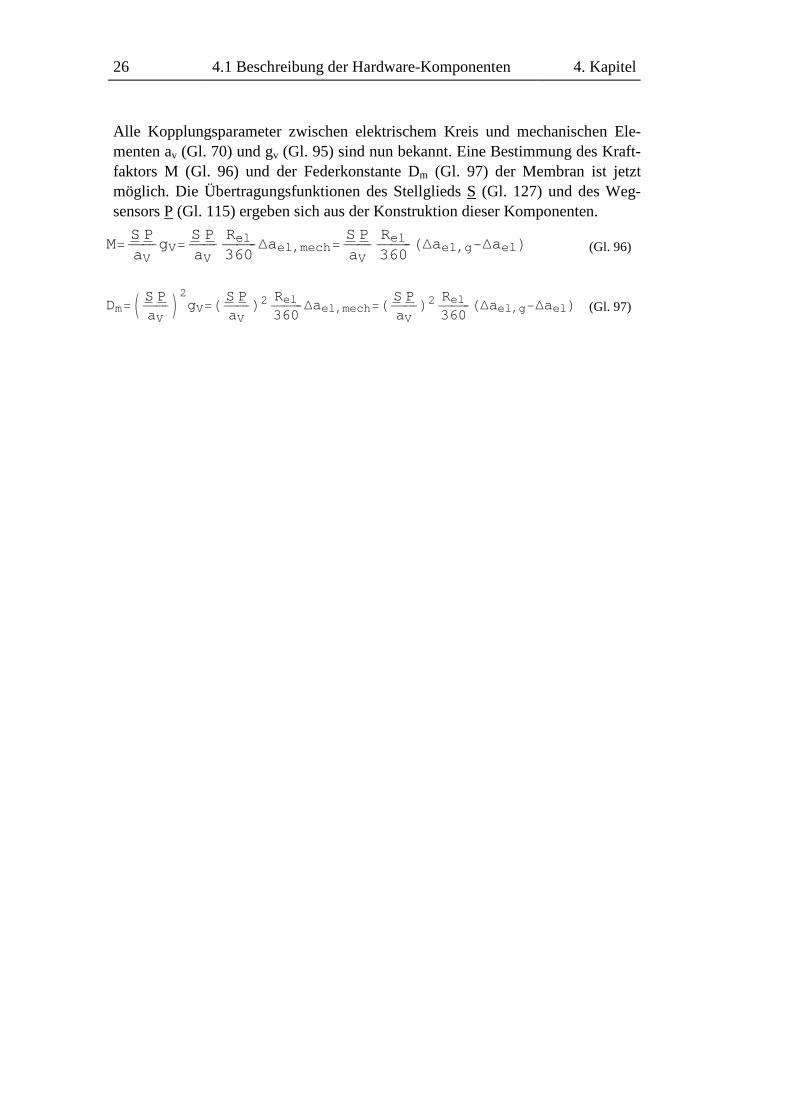
26 4.1 Beschreibung der Hardware-Komponenten 4. Kapitel
Alle Kopplungsparameter zwischen elektrischem Kreis und mechanischen Ele-menten av (Gl. 70) und gv (Gl. 95) sind nun bekannt. Eine Bestimmung des Kraft-faktors M (Gl. 96) und der Federkonstante Dm (Gl. 97) der Membran ist jetzt möglich. Die Übertragungsfunktionen des Stellglieds S (Gl. 127) und des Weg-sensors P (Gl. 115) ergeben sich aus der Konstruktion dieser Komponenten.
(Gl. 96)
(Gl. 97)
M=S PaV
gV=S PaV
Rel360
Dael,mech =S PaV
Rel360
HDael,g -Dael LDm=J S P
aVN2
gV=H S PaVL2 Rel
360
Dael,mech =H S PaVL2 Rel
360
HDael,g -Dael L

4.1 Elektrodynamischer Lautsprecher 27
4.1.5.3 Reduktion von Ze auf reine lineare elektrische Komponenten
Bei großer Membranmasse verschwindet die Rückwirkung der mechanischen und Schallelemente auf die elektrische Impedanz. Ein Erreichen des Grenzübergangs zu mm ist durch Festklemmen der Membran leicht möglich. Der Term der mechanischen Rückwirkung in Ze (Gl. 89) geht für große Membranmasse gegen Null. Die komplexe elektrische Impedanz eines festgeklemmten Lautsprechers vereinfacht sich zu:
Aus der Grenzbetrachtung der elektrischen Impedanz Ze (Gl. 89) des Lautspre-chers bei niedrigen Frequenzen folgt der Gleichstromwiderstand Rel.
Die Phasenrelation ϕ(Ze) (Gl. 100) ergibt:
(Gl. 100)
Für Frequenzen sehr viel kleiner als die mechanische Eigenresonanz des elektro-dynamischen Lautsprechers f << fres,mech ergibt die Taylorentwicklung erster Ord-nung für die Phase der elektrischen Impedanz:
Die Steigung der Geraden
ael enthält nur noch die lineare Induktivität und den
ohmschen Gleichstromwiderstand Rel. Der mechanische Parameter gv (Gl. 91) verschwindet und das Verhältnis von linearer Induktivität Lel zu ohmschem Gleichstromwiderstand Rel ist aus der Steigung der Geraden
ael (Gl. 101) ermit-
telbar. Sie entspricht der invertierten Gruppenlaufzeit bei niedrigen Frequenzen.
(Gl. 98)
(Gl. 99)
(Gl. 101)
(Gl. 102)
limfg ®0
ZeÈΩ=2 Π fg =Rel
jHZeL=limmm®¥
jHZeL=ArcTan
11+ ff wg
+!!!!2
!!!!f!!!!!!!!!f wg
J2 Π f L el +!!!!2 Π!!!!!!!!!f wg
Lel f 32N
11+ ff wg
+!!!!2 !!!!f!!!!!!!!!f wg
!!!!2 Π!!!!!!!!!f wg
Lel f 32 + Rel
Τgr = limfg ®0
-d
dΩ
jHZeLÈΩ=2 Π fg =-3602 Π
LelRel
=-1
2 Π
Dael
jHZeLT=360Rel
Lel f =360Rel
Lel f =Dael f
limmm®¥
Ze=Rel +Lel
1 + 1!!!!!!!!!!!!!!!!!!2 Π fwg
!!!!s s
28 4.1 Beschreibung der Hardware-Komponenten 4. Kapitel
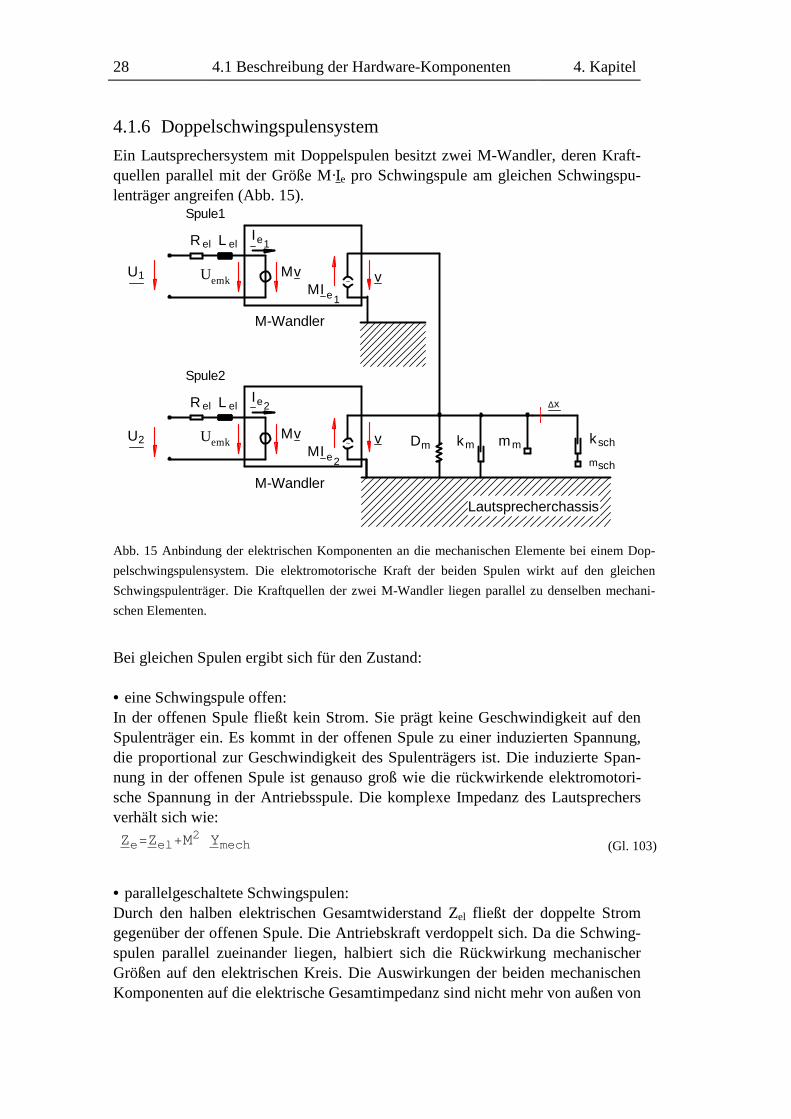
4.1.6 Doppelschwingspulensystem
Ein Lautsprechersystem mit Doppelspulen besitzt zwei M-Wandler, deren Kraft-quellen parallel mit der Größe M·Ie pro Schwingspule am gleichen Schwingspu-lenträger angreifen (Abb. 15).
Abb. 15 Anbindung der elektrischen Komponenten an die mechanischen Elemente bei einem Dop-
pelschwingspulensystem. Die elektromotorische Kraft der beiden Spulen wirkt auf den gleichen
Schwingspulenträger. Die Kraftquellen der zwei M-Wandler liegen parallel zu denselben mechani-
schen Elementen.
Bei gleichen Spulen ergibt sich für den Zustand: • eine Schwingspule offen: In der offenen Spule fließt kein Strom. Sie prägt keine Geschwindigkeit auf den Spulenträger ein. Es kommt in der offenen Spule zu einer induzierten Spannung, die proportional zur Geschwindigkeit des Spulenträgers ist. Die induzierte Span-nung in der offenen Spule ist genauso groß wie die rückwirkende elektromotori-sche Spannung in der Antriebsspule. Die komplexe Impedanz des Lautsprechers verhält sich wie: Ze=Zel +M2 Ymech (Gl. 103)
• parallelgeschaltete Schwingspulen: Durch den halben elektrischen Gesamtwiderstand Zel fließt der doppelte Strom gegenüber der offenen Spule. Die Antriebskraft verdoppelt sich. Da die Schwing-spulen parallel zueinander liegen, halbiert sich die Rückwirkung mechanischer Größen auf den elektrischen Kreis. Die Auswirkungen der beiden mechanischen Komponenten auf die elektrische Gesamtimpedanz sind nicht mehr von außen von
U
R
I
M-Wandler
L
v~
IMMv
e
e
UU
R
I
M-Wandler
L
v~IM
Mv
e
e
Lautsprecherchassis
Dm km m k
m
m
∆x
U
1
2
emk
emk
Spule1
Spule2
2
1
1
2
el el
el el
sch
sch
4.1 Elektrodynamischer Lautsprecher 29
der Wirkung eines einfachen Schwingspulensystems unterscheidbar. Die elektri-sche Impedanz Zel halbiert sich gegenüber einem einfachen System. Die elektrische komplexe Lautsprecherimpedanz mit Membranrückwirkung ver-hält sich wie folgt:
(Gl. 104)
• Reihenschaltung der Schwingspulen: Durch die Reihenschaltung fließt durch jede Schwingspule der Strom Ie bei Stromeinprägung. Die Angriffskraft verdoppelt sich. Die Spannungsquellen der rückwirkenden mechanischen Komponenten liegen in Reihe. Bei Gewichtung des M-Faktor mit M´ = 2·M (Gl. 106) verhalten sich die mechanischen Komponenten bei Reihenschaltung in der elektrischen Gesamtimpedanz (Gl. 105) wie bei einem einfachen Spulensystem. Ze=2 Zel +4 M2 Ymech (Gl. 105)
(Gl. 106)
4.1.7 Membran-Eigenschwingungen
Bei modernen Lautsprechern besteht die Lautsprechermembran aus einem Trich-ter mit einer dünnen Papier-, Teflon- oder Kevelar-Schicht. Der ausgedehnte Trichter bildet durch die mechanische anregende Kraft Eigenresonanzen und Eigenmoden aus [Jecklin, 2003], die von der Form und Material der Membran abhängt.
4.1.7.1 Eigenmoden der Membran
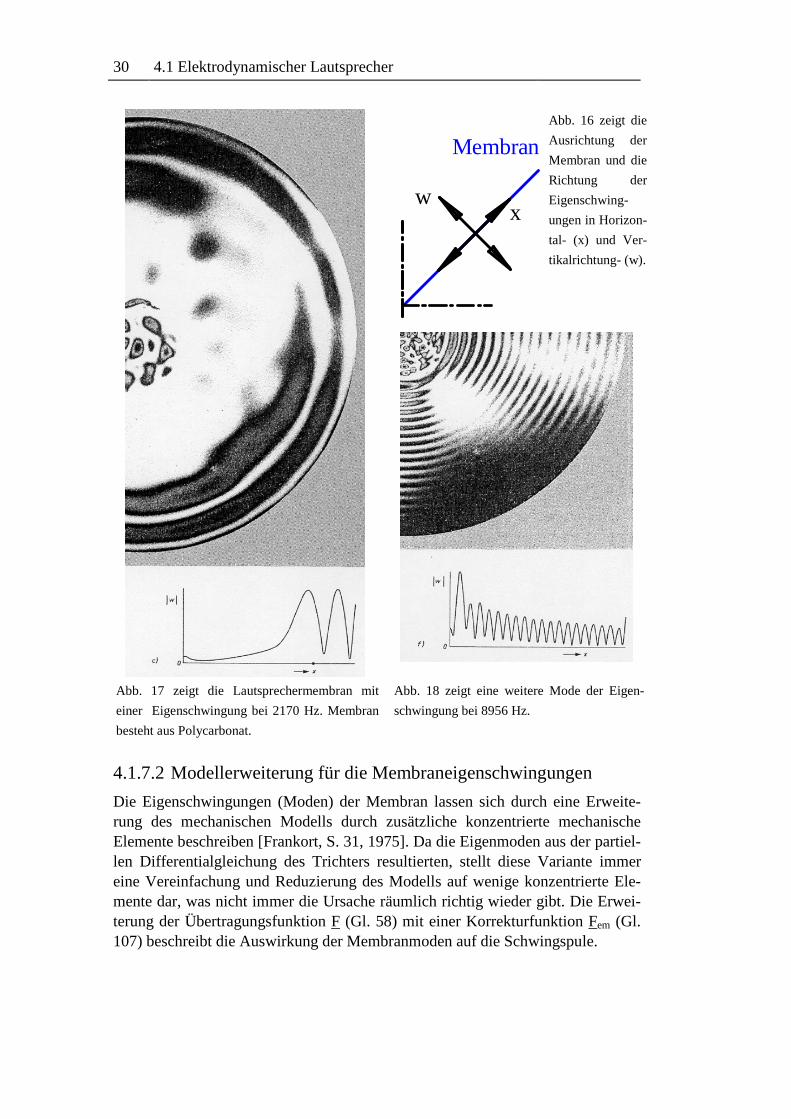
Durch Holographie (Abb. 17/Abb. 18) [Frankort, S. 105, 106, 1975] lassen sich die Maxima und Minima der Membranschwingungen auf der Oberfläche sichtbar machen. Diese Eigenschwingungen auf der Membranoberfläche finden vertikal und horizontal zur Lautsprechermembran statt (Abb. 16) und lassen sich durch das Superpositionsprinzip in vertikale und horizontale Schwingungen separieren. In Abb. 17 und Abb. 18 ist die Vertikalauslenkung der Membran |w| über der Memb-ranlänge x aufgetragen. Eine Messung der Membraneigenschwingung kann indi-rekt durch eine Differenzmessung des Impedanzverlaufs eines festgeklemmten und eines freischwingenden Lautsprechers erfolgen.
M´2 = 4 M2
Ze=12
Zel +M2 Ymech
30 4.1 Elektrodynamischer Lautsprecher
Abb. 16 zeigt die
Ausrichtung der
Membran und die
Richtung der
Eigenschwing-
ungen in Horizon-
tal- (x) und Ver-
tikalrichtung- (w).
Abb. 17 zeigt die Lautsprechermembran mit
einer Eigenschwingung bei 2170 Hz. Membran
besteht aus Polycarbonat.
Abb. 18 zeigt eine weitere Mode der Eigen-
schwingung bei 8956 Hz.
4.1.7.2 Modellerweiterung für die Membraneigenschwingungen
Die Eigenschwingungen (Moden) der Membran lassen sich durch eine Erweite-rung des mechanischen Modells durch zusätzliche konzentrierte mechanische Elemente beschreiben [Frankort, S. 31, 1975]. Da die Eigenmoden aus der partiel-len Differentialgleichung des Trichters resultierten, stellt diese Variante immer eine Vereinfachung und Reduzierung des Modells auf wenige konzentrierte Ele-mente dar, was nicht immer die Ursache räumlich richtig wieder gibt. Die Erwei-terung der Übertragungsfunktion F (Gl. 58) mit einer Korrekturfunktion Fem (Gl. 107) beschreibt die Auswirkung der Membranmoden auf die Schwingspule.
x
Membran
w
4. Kapitel Beschreibung der Hardware-Komponenten 31
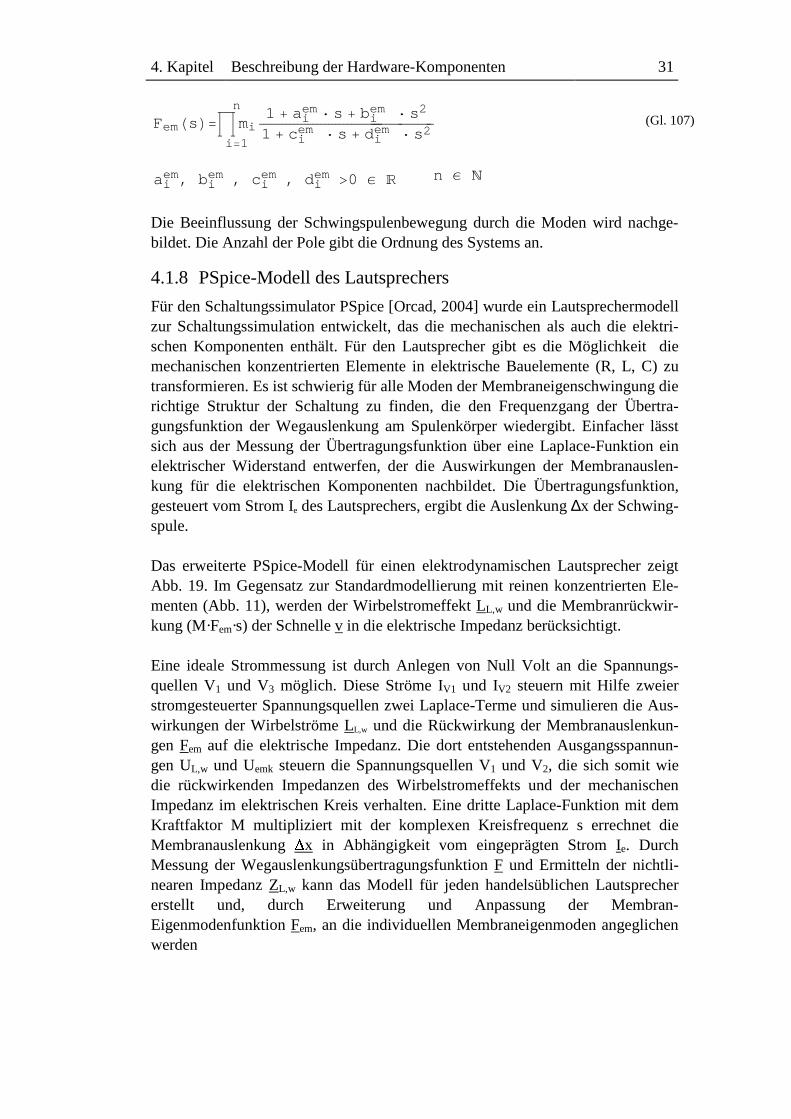
(Gl. 107)
Die Beeinflussung der Schwingspulenbewegung durch die Moden wird nachge-bildet. Die Anzahl der Pole gibt die Ordnung des Systems an.
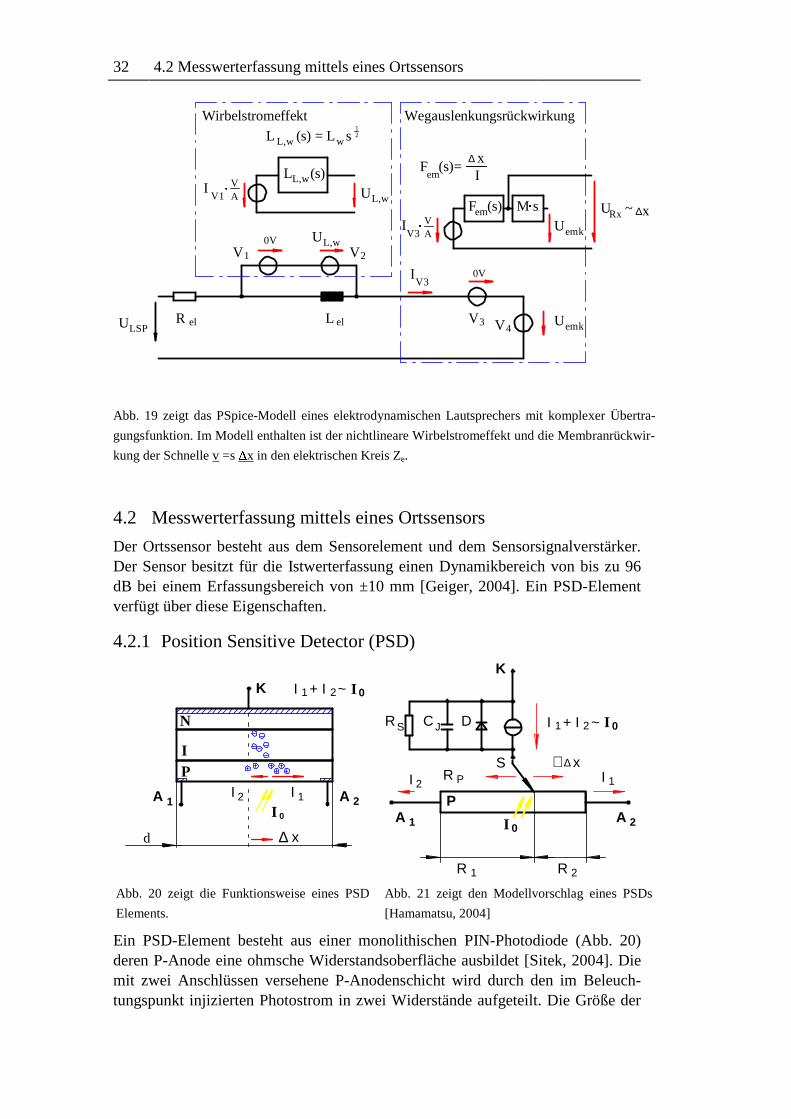
4.1.8 PSpice-Modell des Lautsprechers
Für den Schaltungssimulator PSpice [Orcad, 2004] wurde ein Lautsprechermodell zur Schaltungssimulation entwickelt, das die mechanischen als auch die elektri-schen Komponenten enthält. Für den Lautsprecher gibt es die Möglichkeit die mechanischen konzentrierten Elemente in elektrische Bauelemente (R, L, C) zu transformieren. Es ist schwierig für alle Moden der Membraneigenschwingung die richtige Struktur der Schaltung zu finden, die den Frequenzgang der Übertra-gungsfunktion der Wegauslenkung am Spulenkörper wiedergibt. Einfacher lässt sich aus der Messung der Übertragungsfunktion über eine Laplace-Funktion ein elektrischer Widerstand entwerfen, der die Auswirkungen der Membranauslen-kung für die elektrischen Komponenten nachbildet. Die Übertragungsfunktion, gesteuert vom Strom Ie des Lautsprechers, ergibt die Auslenkung ∆x der Schwing-spule. Das erweiterte PSpice-Modell für einen elektrodynamischen Lautsprecher zeigt Abb. 19. Im Gegensatz zur Standardmodellierung mit reinen konzentrierten Ele-menten (Abb. 11), werden der Wirbelstromeffekt LL,w und die Membranrückwir-kung (M·Fem·s) der Schnelle v in die elektrische Impedanz berücksichtigt. Eine ideale Strommessung ist durch Anlegen von Null Volt an die Spannungs-quellen V1 und V3 möglich. Diese Ströme IV1 und IV2 steuern mit Hilfe zweier stromgesteuerter Spannungsquellen zwei Laplace-Terme und simulieren die Aus-wirkungen der Wirbelströme LL,w und die Rückwirkung der Membranauslenkun-gen Fem auf die elektrische Impedanz. Die dort entstehenden Ausgangsspannun-gen UL,w und Uemk steuern die Spannungsquellen V1 und V2, die sich somit wie die rückwirkenden Impedanzen des Wirbelstromeffekts und der mechanischen Impedanz im elektrischen Kreis verhalten. Eine dritte Laplace-Funktion mit dem Kraftfaktor M multipliziert mit der komplexen Kreisfrequenz s errechnet die Membranauslenkung
x in Abhängigkeit vom eingeprägten Strom Ie. Durch
Messung der Wegauslenkungsübertragungsfunktion F und Ermitteln der nichtli-nearen Impedanz ZL,w kann das Modell für jeden handelsüblichen Lautsprecher erstellt und, durch Erweiterung und Anpassung der Membran-Eigenmodenfunktion Fem, an die individuellen Membraneigenmoden angeglichen werden
n Ε N
FemHsL=ämii =1
n1 + ai
em× s + biem × s2
1 + c i
em × s + diem × s2
aiem, b i
em , c iem , d i
em >0 Ε R
32 4.2 Messwerterfassung mittels eines Ortssensors
Abb. 19 zeigt das PSpice-Modell eines elektrodynamischen Lautsprechers mit komplexer Übertra-
gungsfunktion. Im Modell enthalten ist der nichtlineare Wirbelstromeffekt und die Membranrückwir-
kung der Schnelle v =s x in den elektrischen Kreis Ze.
4.2 Messwerterfassung mittels eines Ortssensors
Der Ortssensor besteht aus dem Sensorelement und dem Sensorsignalverstärker. Der Sensor besitzt für die Istwerterfassung einen Dynamikbereich von bis zu 96 dB bei einem Erfassungsbereich von ±10 mm [Geiger, 2004]. Ein PSD-Element verfügt über diese Eigenschaften.
4.2.1 Position Sensitive Detector (PSD)
Abb. 20 zeigt die Funktionsweise eines PSD
Elements.
Abb. 21 zeigt den Modellvorschlag eines PSDs
[Hamamatsu, 2004]
Ein PSD-Element besteht aus einer monolithischen PIN-Photodiode (Abb. 20) deren P-Anode eine ohmsche Widerstandsoberfläche ausbildet [Sitek, 2004]. Die mit zwei Anschlüssen versehene P-Anodenschicht wird durch den im Beleuch-tungspunkt injizierten Photostrom in zwei Widerstände aufgeteilt. Die Größe der
I
I 2 I 1
N
d
∆ x
0
A 2A 1
K 01 2I + I ~ I
I
P
0
K
RS CJ D I + I ~1 2 0
x∼ ∆
I 2R P
P
I 1
A 2A 1
R 1 R 2
I
I
S
L el
V1
UemkV VULSP
I
L,w
L (s)UL,w
R el
UL,w0V
0V
L,w
Wirbelstromeffekt Wegauslenkungsrückwirkung
V2
34
wL (s) = L s12
V1VA
VA
IF (s)em
F (s)=em I
∆ x
M sUemk
I
V3
V3
x∆U ~Rx
4. Kapitel Beschreibung der Hardware-Komponenten 33
entstandenen Teilwiderstände ist direkt proportional zum Abstand der jeweiligen Photoanode. Die Beleuchtungsstärke I0 ist proportional zu der Summe der Teil-ströme. Die Normierung der Differenz der Teilströme I1 und I2 ergibt das Verhält-nis von Abstand ∆x zu Länge d der P-Photoschicht des PSD (Gl. 108).
(Gl. 108)
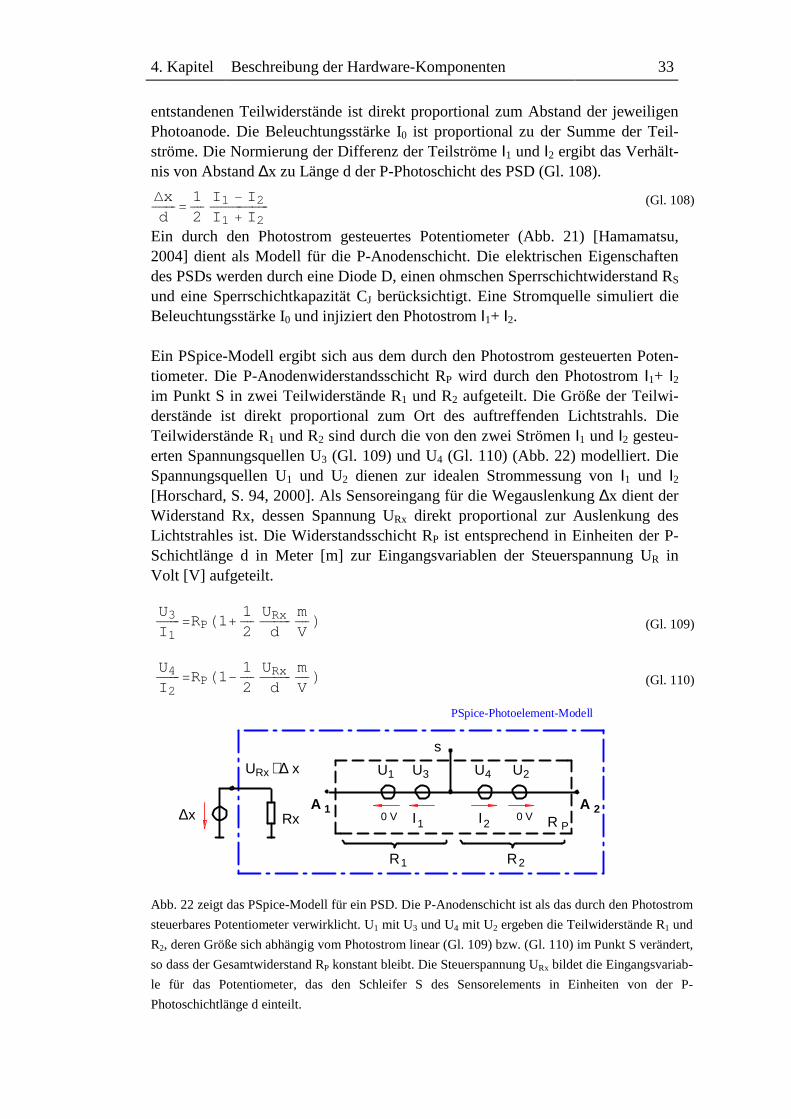
Ein durch den Photostrom gesteuertes Potentiometer (Abb. 21) [Hamamatsu, 2004] dient als Modell für die P-Anodenschicht. Die elektrischen Eigenschaften des PSDs werden durch eine Diode D, einen ohmschen Sperrschichtwiderstand RS und eine Sperrschichtkapazität CJ berücksichtigt. Eine Stromquelle simuliert die Beleuchtungsstärke I0 und injiziert den Photostrom I1+ I2. Ein PSpice-Modell ergibt sich aus dem durch den Photostrom gesteuerten Poten-tiometer. Die P-Anodenwiderstandsschicht RP wird durch den Photostrom I1+ I2 im Punkt S in zwei Teilwiderstände R1 und R2 aufgeteilt. Die Größe der Teilwi-derstände ist direkt proportional zum Ort des auftreffenden Lichtstrahls. Die Teilwiderstände R1 und R2 sind durch die von den zwei Strömen I1 und I2 gesteu-erten Spannungsquellen U3 (Gl. 109) und U4 (Gl. 110) (Abb. 22) modelliert. Die Spannungsquellen U1 und U2 dienen zur idealen Strommessung von I1 und I2 [Horschard, S. 94, 2000]. Als Sensoreingang für die Wegauslenkung ∆x dient der Widerstand Rx, dessen Spannung URx direkt proportional zur Auslenkung des Lichtstrahles ist. Die Widerstandsschicht RP ist entsprechend in Einheiten der P-Schichtlänge d in Meter [m] zur Eingangsvariablen der Steuerspannung UR in Volt [V] aufgeteilt.
(Gl. 109)
(Gl. 110)
Abb. 22 zeigt das PSpice-Modell für ein PSD. Die P-Anodenschicht ist als das durch den Photostrom
steuerbares Potentiometer verwirklicht. U1 mit U3 und U4 mit U2 ergeben die Teilwiderstände R1 und
R2, deren Größe sich abhängig vom Photostrom linear (Gl. 109) bzw. (Gl. 110) im Punkt S verändert,
so dass der Gesamtwiderstand RP konstant bleibt. Die Steuerspannung URx bildet die Eingangsvariab-
le für das Potentiometer, das den Schleifer S des Sensorelements in Einheiten von der P-
Photoschichtlänge d einteilt.
Dxd
=12
I 1 - I 2I 1 + I 2
U3I 1
=RPH1+12
URx
dmVL
U4I 2
=RPH1-12
URx
dmVL
A 2A 10 V I I 0 V R P
R R21
U U U U2
2
1
1
3 4
x∆
U
s
Rx ∼∆ x
Rx
PSpice-Photoelement-Modell
34 4.2 Messwerterfassung mittels eines Ortssensors
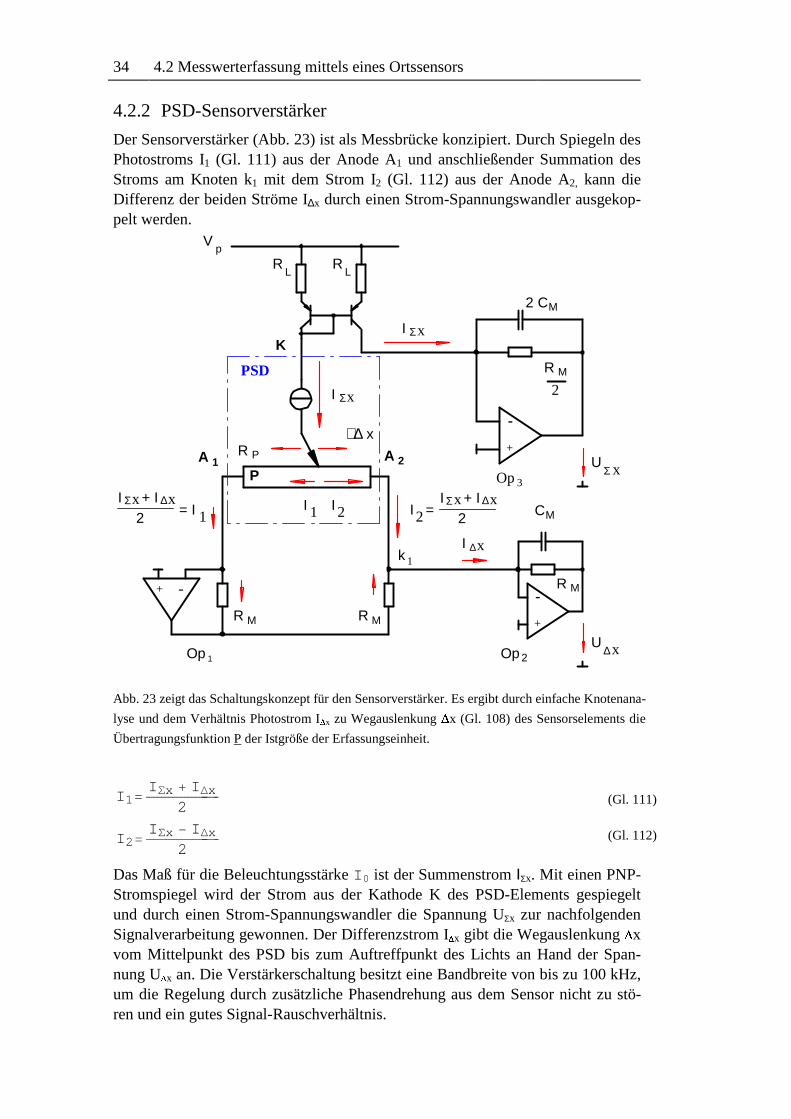
4.2.2 PSD-Sensorverstärker
Der Sensorverstärker (Abb. 23) ist als Messbrücke konzipiert. Durch Spiegeln des Photostroms I1 (Gl. 111) aus der Anode A1 und anschließender Summation des Stroms am Knoten k1 mit dem Strom I2 (Gl. 112) aus der Anode A2, kann die Differenz der beiden Ströme I∆x durch einen Strom-Spannungswandler ausgekop-pelt werden.
Abb. 23 zeigt das Schaltungskonzept für den Sensorverstärker. Es ergibt durch einfache Knotenana-
lyse und dem Verhältnis Photostrom I x zu Wegauslenkung x (Gl. 108) des Sensorselements die
Übertragungsfunktion P der Istgröße der Erfassungseinheit.
Das Maß für die Beleuchtungsstärke I 0 ist der Summenstrom IΣx. Mit einen PNP-Stromspiegel wird der Strom aus der Kathode K des PSD-Elements gespiegelt und durch einen Strom-Spannungswandler die Spannung UΣx zur nachfolgenden Signalverarbeitung gewonnen. Der Differenzstrom I x gibt die Wegauslenkung x vom Mittelpunkt des PSD bis zum Auftreffpunkt des Lichts an Hand der Span-nung U x an. Die Verstärkerschaltung besitzt eine Bandbreite von bis zu 100 kHz, um die Regelung durch zusätzliche Phasendrehung aus dem Sensor nicht zu stö-ren und ein gutes Signal-Rauschverhältnis.
(Gl. 111)
(Gl. 112) I 2=I Sx - I Dx
2
I 1=I Sx + I Dx
2
Σ
∼∆
1
Op 1
R M R M
P
x
Vp
RL
RL
I
k
A 2A 1
+ -
x
R P
II 21
+
Op 2
-R M
∆U x
+
-
Op3
2
R M
UΣ x
2 CM
CM
K
PSD
I ∆x
2I = 2xI + I ∆Σ x
1= I2xI + IΣ x∆
ΣI x
4. Kapitel Beschreibung der Hardware-Komponenten 35
Mit der Gleichung für die Erfassung der Wegauslenkung (Gl. 108) und der Über-tragungsfunktion der beschalteten Operationsverstärker Op1 (Gl. 114) und Op2 (Gl. 113) ergibt sich die Übertragungsfunktion der Sensoreinheit P (Gl. 115).
(Gl. 113)
(Gl. 114)
(Gl. 115)
4.2.3 Geometrische Anordnung der Istwerterfassung
Die mechanische Anordnung des Sensors ist entscheidend für die Genauigkeit der Messung. Ein externer Messaufbau mit Sensor im Messverstärker ergibt eine einfache und schnelle Handhabung mit leichter Justierung. Durch geschickte Wahl einer Reflexionswinkelanordnung (Kap. 4.2.3.1) zwischen Sensor und Lichtquelle über einen Spiegel, fokussiert der Laser stets auf das Photoelement. Durch die Montage auf einem Stativ und die hierdurch entstehenden langen Lichtwege sind Vibrationen möglich. Eine Fixierung im Lautsprecherchassis (Kap. 4.2.3.2) mit direkter Beleuchtung des Sensors reduziert den Vibrationen.
4.2.3.1 Externer Messaufbau
Eine senkrechte Anordnung des PSD-Elements (Abb. 25) im Abstand w zum bewegenden Spiegel bewirkt eine Fokussierung des Lichtstrahls unabhängig von ∆x der Wegauslenkung. Die Länge des Lichtwegs ist konstant. Der Winkel α des einfallenden Lichts findet sich im Versetzungsdreieck zur Lichtverschiebung ∆y wieder. Die Fokussierung des Laserstrahls bestimmt den Abstand zwischen Spie-gel und PSD Element. Ein Aluminiumring, befestig durch Cyan-Acrylat-Kleber, trägt einen mit Aluminium-Ionen bedampften Silizium Wafer (Länge zu Breite 20mm x 5mm). Die Siliziumscheibe bildet einen leichten und hochreflektierenden Spiegel. Fehler in der Beleuchtungsintensität reduzieren sich durch den fokussier-ten Strahl, ca. 200 µm ∅ im Auftreffpunkt [Laser Components, 2004], auf die Größe des Beleuchtungspunktes. Mit Abb. 24 lässen sich auf einfache geometrische Weise die folgenden Bezie-hungen aufstellen:
(Gl. 116)
UDx=1
1 + RM CM× s
RM×I Dx
USx=RM2
×I Sx
UDxDx
=41
1 + RM CM× s
×USx
d=PHsL
DxDy
=tan Α
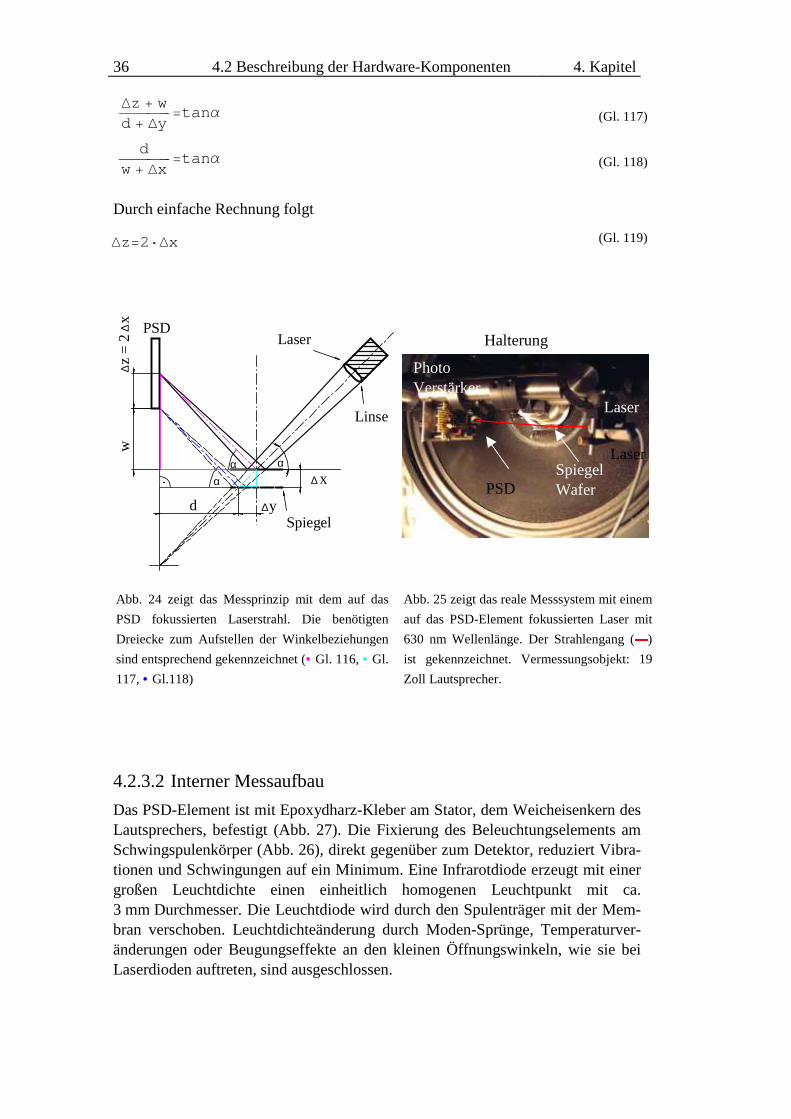
36 4.2 Beschreibung der Hardware-Komponenten 4. Kapitel
(Gl. 117)
(Gl. 118)
Durch einfache Rechnung folgt
(Gl. 119)
Abb. 24 zeigt das Messprinzip mit dem auf das
PSD fokussierten Laserstrahl. Die benötigten
Dreiecke zum Aufstellen der Winkelbeziehungen
sind entsprechend gekennzeichnet (• Gl. 116, • Gl.
117, • Gl.118)
Abb. 25 zeigt das reale Messsystem mit einem
auf das PSD-Element fokussierten Laser mit
630 nm Wellenlänge. Der Strahlengang ( )
ist gekennzeichnet. Vermessungsobjekt: 19
Zoll Lautsprecher.
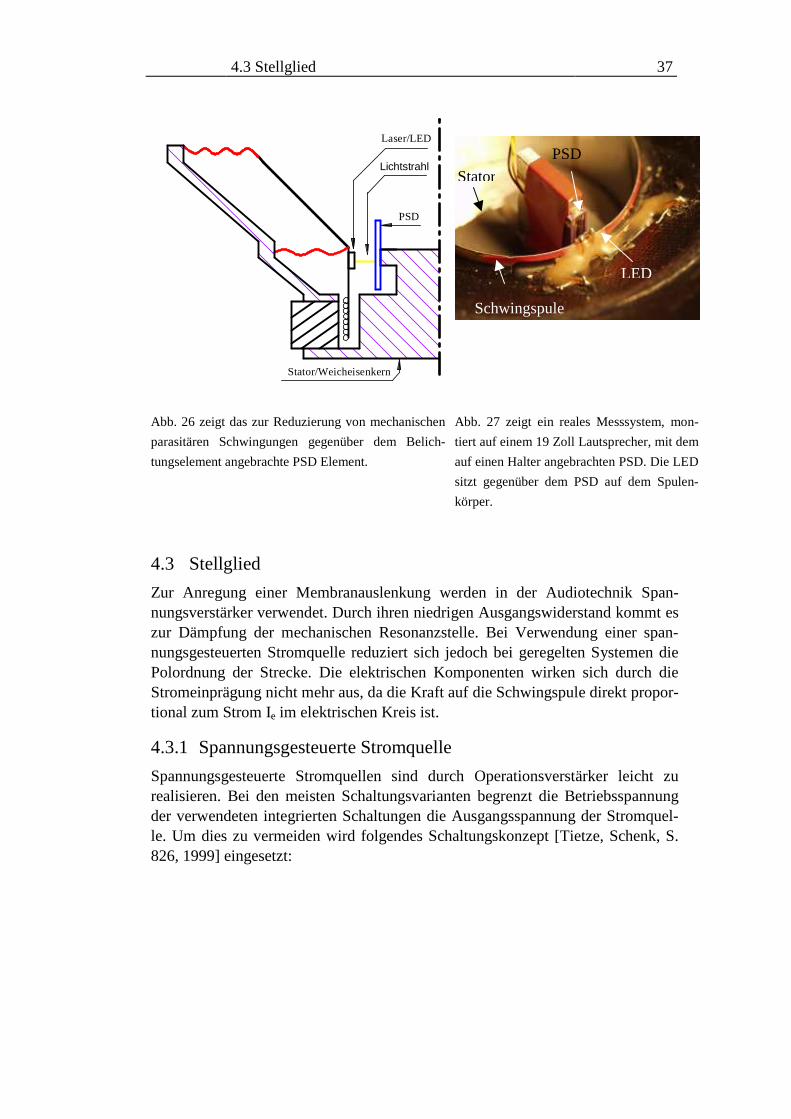
4.2.3.2 Interner Messaufbau
Das PSD-Element ist mit Epoxydharz-Kleber am Stator, dem Weicheisenkern des Lautsprechers, befestigt (Abb. 27). Die Fixierung des Beleuchtungselements am Schwingspulenkörper (Abb. 26), direkt gegenüber zum Detektor, reduziert Vibra-tionen und Schwingungen auf ein Minimum. Eine Infrarotdiode erzeugt mit einer großen Leuchtdichte einen einheitlich homogenen Leuchtpunkt mit ca. 3 mm Durchmesser. Die Leuchtdiode wird durch den Spulenträger mit der Mem-bran verschoben. Leuchtdichteänderung durch Moden-Sprünge, Temperaturver-änderungen oder Beugungseffekte an den kleinen Öffnungswinkeln, wie sie bei Laserdioden auftreten, sind ausgeschlossen.
Laser
Photo Verstärker
Spiegel -Wafer
Halterung
PSD
Laser
Dz=2×Dx
dw+ Dx
=tan Α
Dz + wd + Dy
=tan Α
Laser
Linse
PSD
z =
2 x
d y
Spiegel
αα α
∆∆
x∆
∆
w
4.3 Stellglied 37
Abb. 26 zeigt das zur Reduzierung von mechanischen
parasitären Schwingungen gegenüber dem Belich-
tungselement angebrachte PSD Element.
Abb. 27 zeigt ein reales Messsystem, mon-
tiert auf einem 19 Zoll Lautsprecher, mit dem
auf einen Halter angebrachten PSD. Die LED
sitzt gegenüber dem PSD auf dem Spulen-
körper.
4.3 Stellglied
Zur Anregung einer Membranauslenkung werden in der Audiotechnik Span-nungsverstärker verwendet. Durch ihren niedrigen Ausgangswiderstand kommt es zur Dämpfung der mechanischen Resonanzstelle. Bei Verwendung einer span-nungsgesteuerten Stromquelle reduziert sich jedoch bei geregelten Systemen die Polordnung der Strecke. Die elektrischen Komponenten wirken sich durch die Stromeinprägung nicht mehr aus, da die Kraft auf die Schwingspule direkt propor-tional zum Strom Ie im elektrischen Kreis ist.
4.3.1 Spannungsgesteuerte Stromquelle
Spannungsgesteuerte Stromquellen sind durch Operationsverstärker leicht zu realisieren. Bei den meisten Schaltungsvarianten begrenzt die Betriebsspannung der verwendeten integrierten Schaltungen die Ausgangsspannung der Stromquel-le. Um dies zu vermeiden wird folgendes Schaltungskonzept [Tietze, Schenk, S. 826, 1999] eingesetzt:
PSD
LED
Schwingspule
Stator
Schwingspule
Lichtstrahl
Laser/LED
PSD
Stator/Weicheisenkern
38 4.3 Stellglied
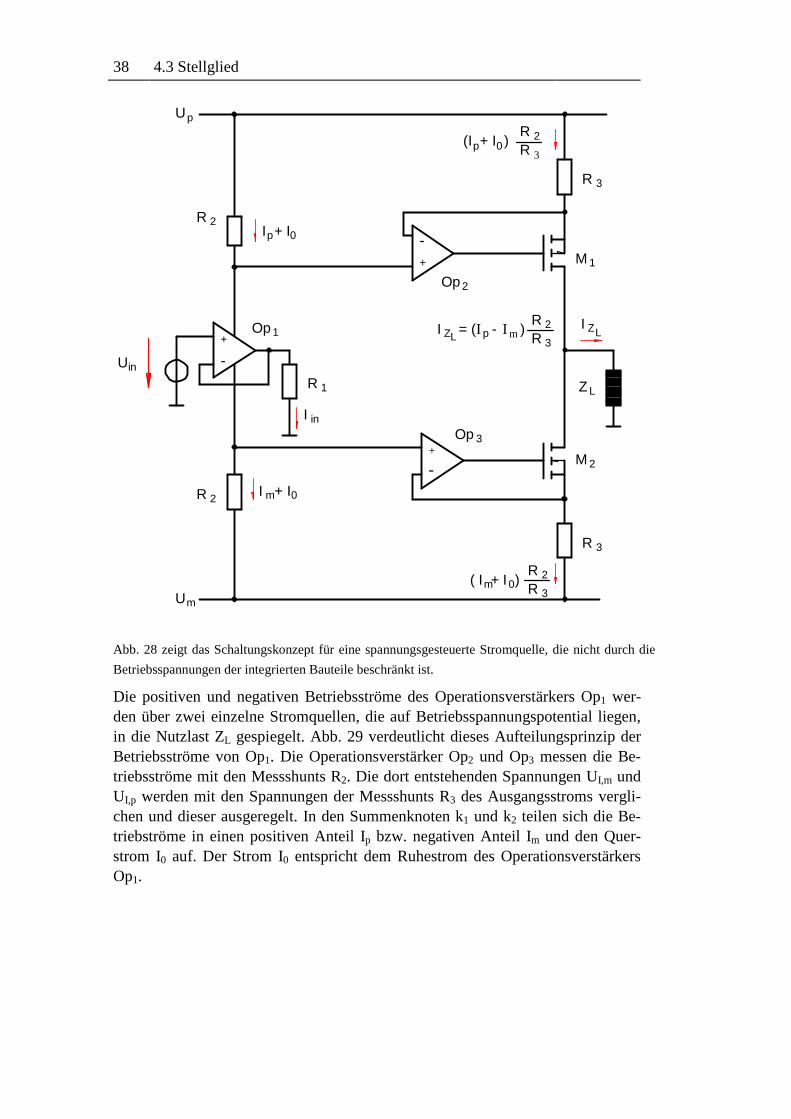
Abb. 28 zeigt das Schaltungskonzept für eine spannungsgesteuerte Stromquelle, die nicht durch die
Betriebsspannungen der integrierten Bauteile beschränkt ist.
Die positiven und negativen Betriebsströme des Operationsverstärkers Op1 wer-den über zwei einzelne Stromquellen, die auf Betriebsspannungspotential liegen, in die Nutzlast ZL gespiegelt. Abb. 29 verdeutlicht dieses Aufteilungsprinzip der Betriebsströme von Op1. Die Operationsverstärker Op2 und Op3 messen die Be-triebsströme mit den Messshunts R2. Die dort entstehenden Spannungen UI,m und UI,p werden mit den Spannungen der Messshunts R3 des Ausgangsstroms vergli-chen und dieser ausgeregelt. In den Summenknoten k1 und k2 teilen sich die Be-triebströme in einen positiven Anteil Ip bzw. negativen Anteil Im und den Quer-strom I0 auf. Der Strom I0 entspricht dem Ruhestrom des Operationsverstärkers Op1.
-+
R 2
Op
Uin
R
I
1+
-
R 2
1
in
M
M 2
Z L
1
3R
pU
3R
Um
mI + I0
I + I0p
Op 2
2RR 3
II ZL m
+
-
Op 3
= ( - )I p
3
R 2R0p(I + I )
R 3
R 2m( I + I )0
I ZL
4. Kapitel Beschreibung der Hardware-Komponenten 39
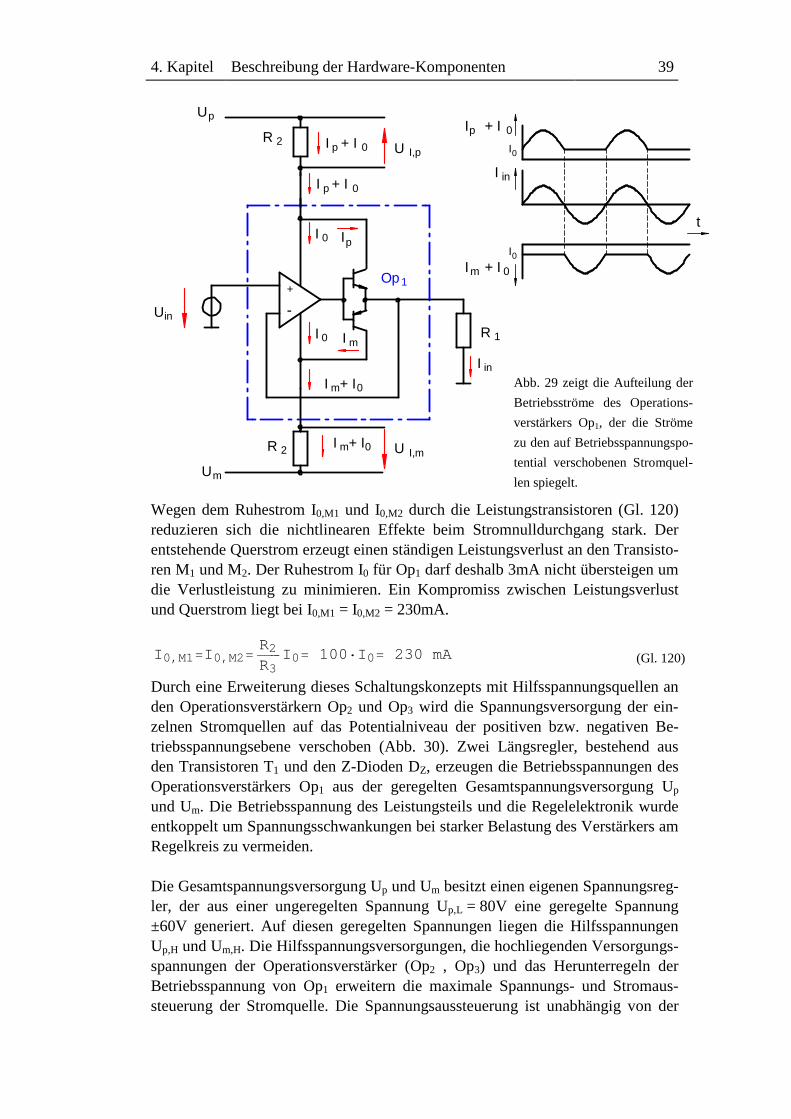
Abb. 29 zeigt die Aufteilung der
Betriebsströme des Operations-
verstärkers Op1, der die Ströme
zu den auf Betriebsspannungspo-
tential verschobenen Stromquel-
len spiegelt.
Wegen dem Ruhestrom I0,M1 und I0,M2 durch die Leistungstransistoren (Gl. 120) reduzieren sich die nichtlinearen Effekte beim Stromnulldurchgang stark. Der entstehende Querstrom erzeugt einen ständigen Leistungsverlust an den Transisto-ren M1 und M2. Der Ruhestrom I0 für Op1 darf deshalb 3mA nicht übersteigen um die Verlustleistung zu minimieren. Ein Kompromiss zwischen Leistungsverlust und Querstrom liegt bei I0,M1 = I0,M2 = 230mA.
(Gl. 120)
Durch eine Erweiterung dieses Schaltungskonzepts mit Hilfsspannungsquellen an den Operationsverstärkern Op2 und Op3 wird die Spannungsversorgung der ein-zelnen Stromquellen auf das Potentialniveau der positiven bzw. negativen Be-triebsspannungsebene verschoben (Abb. 30). Zwei Längsregler, bestehend aus den Transistoren T1 und den Z-Dioden DZ, erzeugen die Betriebsspannungen des Operationsverstärkers Op1 aus der geregelten Gesamtspannungsversorgung Up und Um. Die Betriebsspannung des Leistungsteils und die Regelelektronik wurde entkoppelt um Spannungsschwankungen bei starker Belastung des Verstärkers am Regelkreis zu vermeiden. Die Gesamtspannungsversorgung Up und Um besitzt einen eigenen Spannungsreg-ler, der aus einer ungeregelten Spannung Up,L = 80V eine geregelte Spannung ±60V generiert. Auf diesen geregelten Spannungen liegen die Hilfsspannungen Up,H und Um,H. Die Hilfsspannungsversorgungen, die hochliegenden Versorgungs-spannungen der Operationsverstärker (Op2 , Op3) und das Herunterregeln der Betriebsspannung von Op1 erweitern die maximale Spannungs- und Stromaus-steuerung der Stromquelle. Die Spannungsaussteuerung ist unabhängig von der
I in
t
0I
I0
0
m 0I + I
I + Ip
I 0,M1 =I 0,M2 =R2R3
I 0= 100×I 0= 230 mA
+
-Uin
R
I
1
in
Op 1
Um
mR 2
I + I0
U
R 2
pI + I 0 U
pU
I,p
I,m
pI + I 0
I 0
Ip
0I
mI
mI + I0
40 4.3 Stellglied
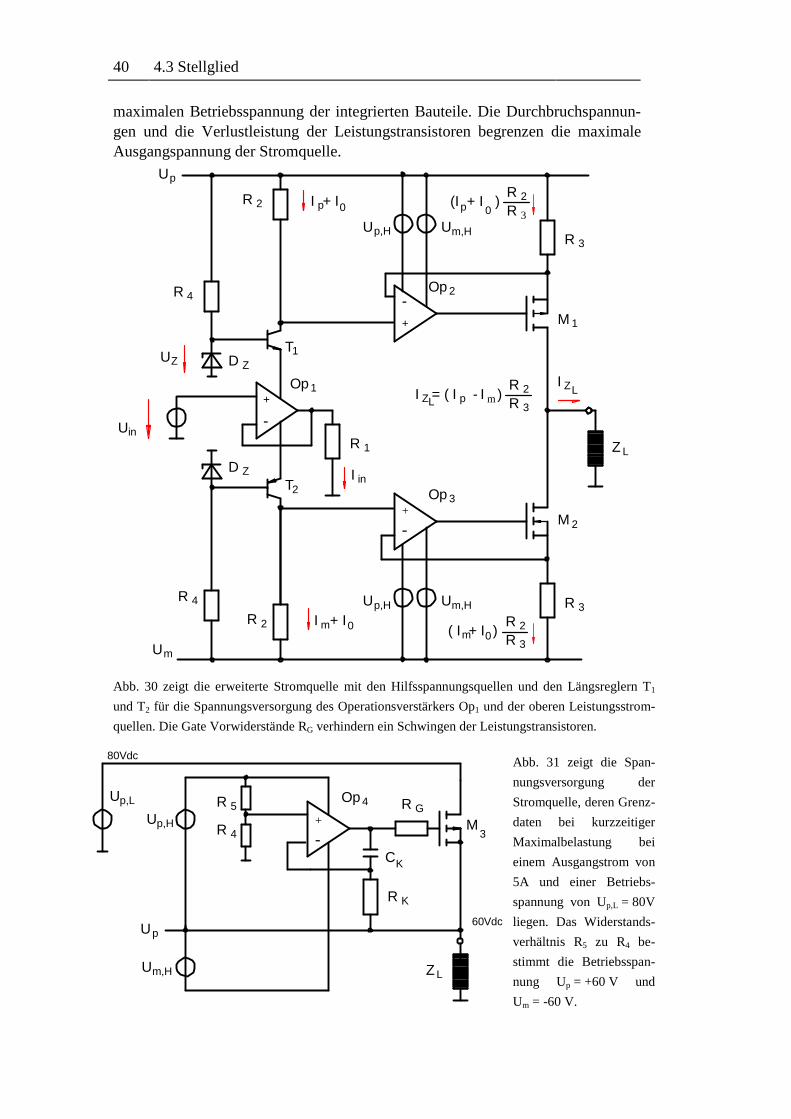
maximalen Betriebsspannung der integrierten Bauteile. Die Durchbruchspannun-gen und die Verlustleistung der Leistungstransistoren begrenzen die maximale Ausgangspannung der Stromquelle.
Abb. 30 zeigt die erweiterte Stromquelle mit den Hilfsspannungsquellen und den Längsreglern T1
und T2 für die Spannungsversorgung des Operationsverstärkers Op1 und der oberen Leistungsstrom-
quellen. Die Gate Vorwiderstände RG verhindern ein Schwingen der Leistungstransistoren.
Abb. 31 zeigt die Span-
nungsversorgung der
Stromquelle, deren Grenz-
daten bei kurzzeitiger
Maximalbelastung bei
einem Ausgangstrom von
5A und einer Betriebs-
spannung von Up,L = 80V
liegen. Das Widerstands-
verhältnis R5 zu R4 be-
stimmt die Betriebsspan-
nung Up = +60 V und
Um = -60 V.
Up
+
-M
3R 4
R 5
Z L
Op 4
Up,H
Um,H
80Vdc
60Vdc
R K
R GUp,L
CK
R 2 p
R 4
m
+
-
-+
Op 2
3Op
M
M 2
1
3R
pU
3R
R
+
-
1
Op 1
I in
R 4
R 2
Um
UZ
R 2R 3
RR 2
3
Z L
2RR 3
D Z
Uin
D Z
I ZL p m
p(I + I )
m( I + I )I + I
I + I0 0
00
Up,H Um,H
Up,H Um,H
I ZL
T1
T2
I I= ( - )
4. Kapitel Beschreibung der Hardware-Komponenten 41
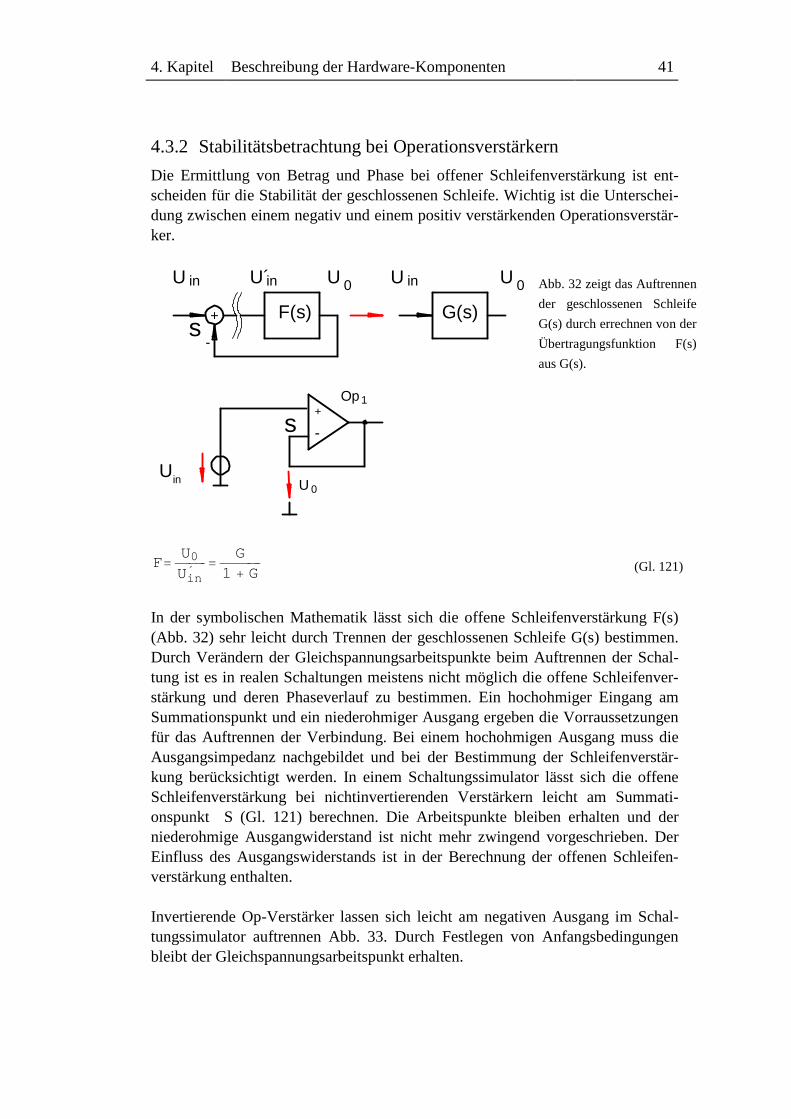
4.3.2 Stabilitätsbetrachtung bei Operationsverstärkern
Die Ermittlung von Betrag und Phase bei offener Schleifenverstärkung ist ent-scheiden für die Stabilität der geschlossenen Schleife. Wichtig ist die Unterschei-dung zwischen einem negativ und einem positiv verstärkenden Operationsverstär-ker.
Abb. 32 zeigt das Auftrennen
der geschlossenen Schleife
G(s) durch errechnen von der
Übertragungsfunktion F(s)
aus G(s).
(Gl. 121)
In der symbolischen Mathematik lässt sich die offene Schleifenverstärkung F(s) (Abb. 32) sehr leicht durch Trennen der geschlossenen Schleife G(s) bestimmen. Durch Verändern der Gleichspannungsarbeitspunkte beim Auftrennen der Schal-tung ist es in realen Schaltungen meistens nicht möglich die offene Schleifenver-stärkung und deren Phaseverlauf zu bestimmen. Ein hochohmiger Eingang am Summationspunkt und ein niederohmiger Ausgang ergeben die Vorraussetzungen für das Auftrennen der Verbindung. Bei einem hochohmigen Ausgang muss die Ausgangsimpedanz nachgebildet und bei der Bestimmung der Schleifenverstär-kung berücksichtigt werden. In einem Schaltungssimulator lässt sich die offene Schleifenverstärkung bei nichtinvertierenden Verstärkern leicht am Summati-onspunkt S (Gl. 121) berechnen. Die Arbeitspunkte bleiben erhalten und der niederohmige Ausgangwiderstand ist nicht mehr zwingend vorgeschrieben. Der Einfluss des Ausgangswiderstands ist in der Berechnung der offenen Schleifen-verstärkung enthalten. Invertierende Op-Verstärker lassen sich leicht am negativen Ausgang im Schal-tungssimulator auftrennen Abb. 33. Durch Festlegen von Anfangsbedingungen bleibt der Gleichspannungsarbeitspunkt erhalten.
F=U0
Uin
´=
G1 + G
+
-
U in U in
F(s)
U
G(s)
U in
s
+
-
Op1
in
U
0
s
U
00 U
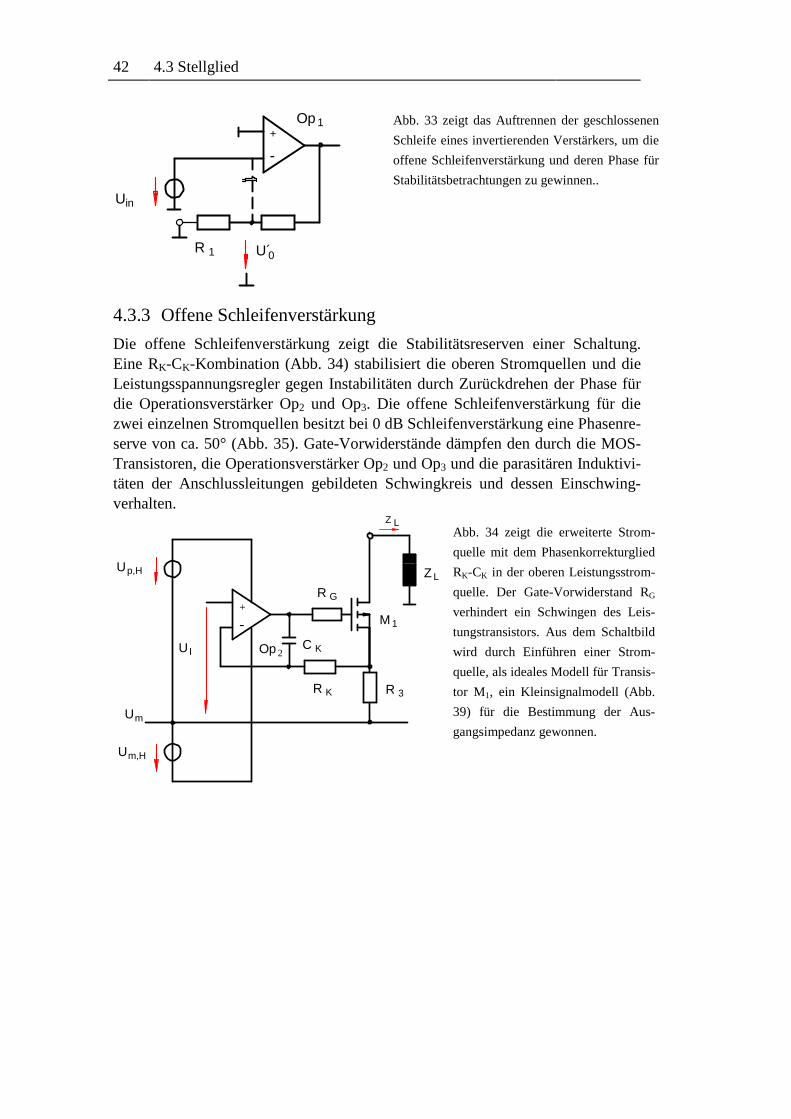
42 4.3 Stellglied
Abb. 33 zeigt das Auftrennen der geschlossenen
Schleife eines invertierenden Verstärkers, um die
offene Schleifenverstärkung und deren Phase für
Stabilitätsbetrachtungen zu gewinnen..
4.3.3 Offene Schleifenverstärkung
Die offene Schleifenverstärkung zeigt die Stabilitätsreserven einer Schaltung. Eine RK-CK-Kombination (Abb. 34) stabilisiert die oberen Stromquellen und die Leistungsspannungsregler gegen Instabilitäten durch Zurückdrehen der Phase für die Operationsverstärker Op2 und Op3. Die offene Schleifenverstärkung für die zwei einzelnen Stromquellen besitzt bei 0 dB Schleifenverstärkung eine Phasenre-serve von ca. 50° (Abb. 35). Gate-Vorwiderstände dämpfen den durch die MOS-Transistoren, die Operationsverstärker Op2 und Op3 und die parasitären Induktivi-täten der Anschlussleitungen gebildeten Schwingkreis und dessen Einschwing-verhalten.
Abb. 34 zeigt die erweiterte Strom-
quelle mit dem Phasenkorrekturglied
RK-CK in der oberen Leistungsstrom-
quelle. Der Gate-Vorwiderstand RG
verhindert ein Schwingen des Leis-
tungstransistors. Aus dem Schaltbild
wird durch Einführen einer Strom-
quelle, als ideales Modell für Transis-
tor M1, ein Kleinsignalmodell (Abb.
39) für die Bestimmung der Aus-
gangsimpedanz gewonnen.
M 1
3R
-+
2Op
Z L
Z L
R K
C K
R G
Um
U I
Um,H
Up,H
+
-
Op 1
R 1
Uin
U 0
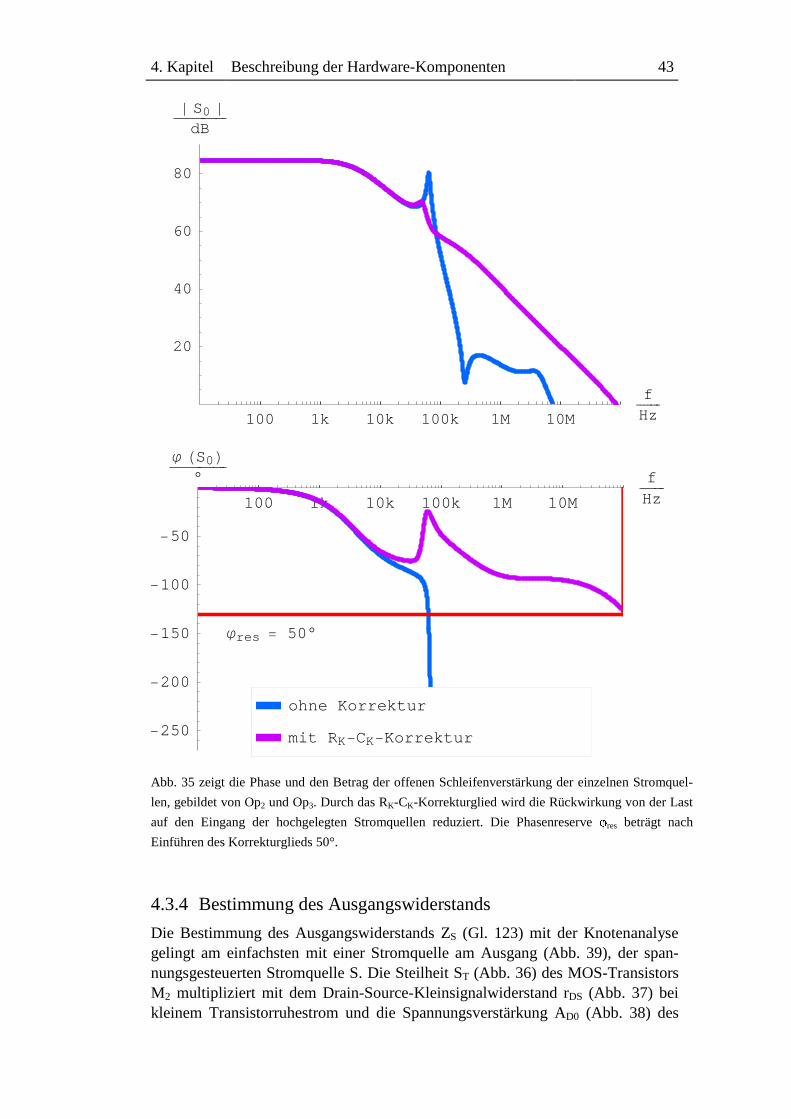
4. Kapitel Beschreibung der Hardware-Komponenten 43
100 1k 10k 100k 1M 10M
fHz
-250
-200
-150
-100
-50
j HS0L
°
jres = 50°
mit R K-CK-Korrektur
ohne Korrektur
Abb. 35 zeigt die Phase und den Betrag der offenen Schleifenverstärkung der einzelnen Stromquel-
len, gebildet von Op2 und Op3. Durch das RK-CK-Korrekturglied wird die Rückwirkung von der Last
auf den Eingang der hochgelegten Stromquellen reduziert. Die Phasenreserve res beträgt nach
Einführen des Korrekturglieds 50°.
4.3.4 Bestimmung des Ausgangswiderstands
Die Bestimmung des Ausgangswiderstands ZS (Gl. 123) mit der Knotenanalyse gelingt am einfachsten mit einer Stromquelle am Ausgang (Abb. 39), der span-nungsgesteuerten Stromquelle S. Die Steilheit ST (Abb. 36) des MOS-Transistors M2 multipliziert mit dem Drain-Source-Kleinsignalwiderstand rDS (Abb. 37) bei kleinem Transistorruhestrom und die Spannungsverstärkung AD0 (Abb. 38) des
100 1k 10k 100k 1M 10M
fHz
20
40
60
80
È S0 È
dB
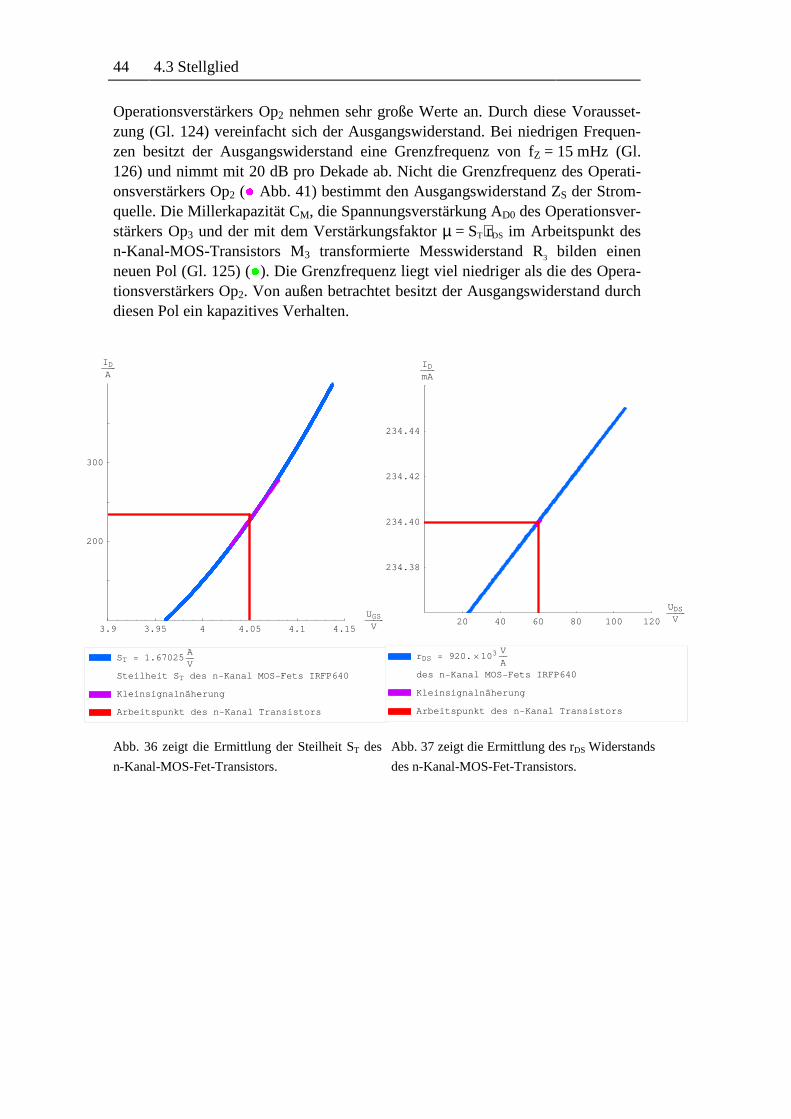
44 4.3 Stellglied
20 40 60 80 100 120
UDS
V
234.38
234.40
234.42
234.44
I DmA
Arbeitspunkt des n -Kanal Transistors
Kleinsignalnäherung
des n -Kanal MOS-Fets IRFP640
r DS = 920. ´ 103 VA
Operationsverstärkers Op2 nehmen sehr große Werte an. Durch diese Vorausset-zung (Gl. 124) vereinfacht sich der Ausgangswiderstand. Bei niedrigen Frequen-zen besitzt der Ausgangswiderstand eine Grenzfrequenz von fZ = 15 mHz (Gl. 126) und nimmt mit 20 dB pro Dekade ab. Nicht die Grenzfrequenz des Operati-onsverstärkers Op2 ( Abb. 41) bestimmt den Ausgangswiderstand ZS der Strom-quelle. Die Millerkapazität CM, die Spannungsverstärkung AD0 des Operationsver-stärkers Op3 und der mit dem Verstärkungsfaktor µ = ST⋅rDS im Arbeitspunkt des n-Kanal-MOS-Transistors M3 transformierte Messwiderstand R3 bilden einen neuen Pol (Gl. 125) ( ). Die Grenzfrequenz liegt viel niedriger als die des Opera-tionsverstärkers Op2. Von außen betrachtet besitzt der Ausgangswiderstand durch diesen Pol ein kapazitives Verhalten.
Abb. 36 zeigt die Ermittlung der Steilheit ST des
n-Kanal-MOS-Fet-Transistors.
Abb. 37 zeigt die Ermittlung des rDS Widerstands
des n-Kanal-MOS-Fet-Transistors.
3.9 3.95 4 4.05 4.1 4.15
UGS
V
200
300
I DA
Arbeitspunkt des n -Kanal Transistors
Kleinsignalnäherung
Steilheit S T des n -Kanal MOS-Fets IRFP640
ST = 1.67025AV
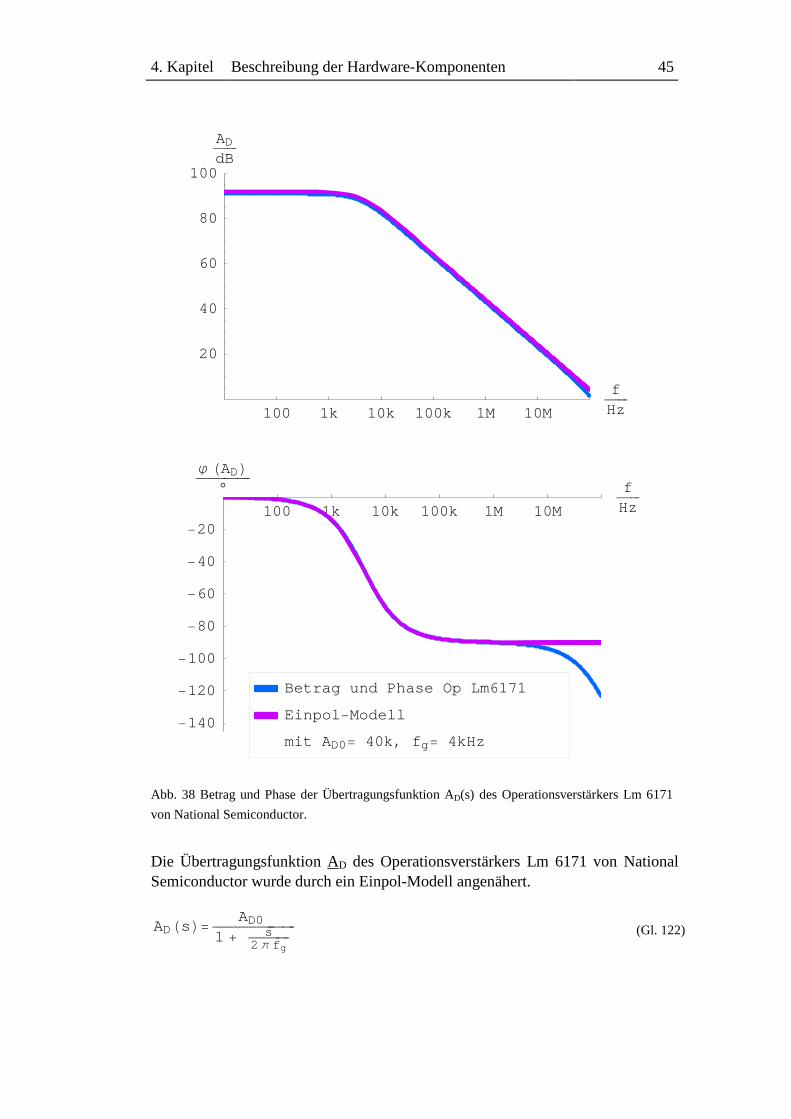
4. Kapitel Beschreibung der Hardware-Komponenten 45
Abb. 38 Betrag und Phase der Übertragungsfunktion AD(s) des Operationsverstärkers Lm 6171
von National Semiconductor.
Die Übertragungsfunktion AD des Operationsverstärkers Lm 6171 von National Semiconductor wurde durch ein Einpol-Modell angenähert.
(Gl. 122)
ADHsL=AD0
1 + s
2 Π f g
100 1k 10k 100k 1M 10M
fHz
-140
-120
-100
-80
-60
-40
-20
j HADL
°
100 1k 10k 100k 1M 10M
fHz
20
40
60
80
100
ADdB
mit A D0= 40k, f g= 4kHz
Einpol -Modell
Betrag und Phase Op Lm6171
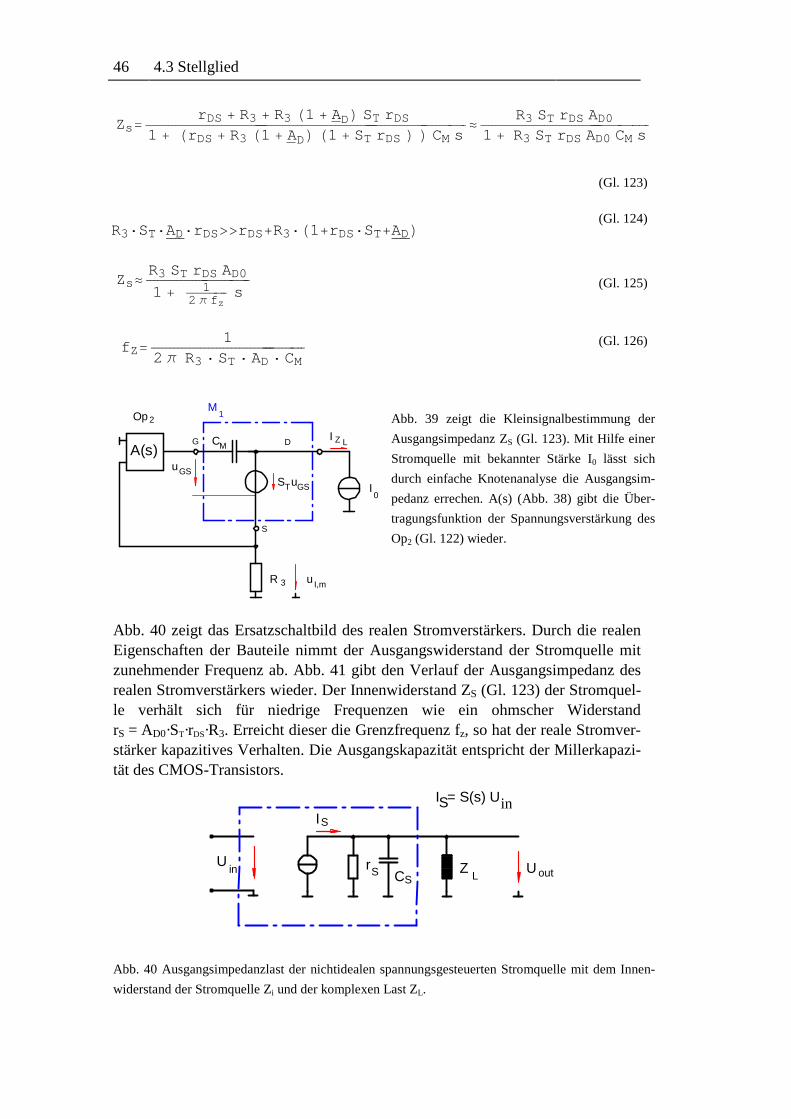
46 4.3 Stellglied
(Gl. 123)
(Gl. 124)
(Gl. 125)
(Gl. 126)
Abb. 39 zeigt die Kleinsignalbestimmung der
Ausgangsimpedanz ZS (Gl. 123). Mit Hilfe einer
Stromquelle mit bekannter Stärke I0 lässt sich
durch einfache Knotenanalyse die Ausgangsim-
pedanz errechen. A(s) (Abb. 38) gibt die Über-
tragungsfunktion der Spannungsverstärkung des
Op2 (Gl. 122) wieder.
Abb. 40 zeigt das Ersatzschaltbild des realen Stromverstärkers. Durch die realen Eigenschaften der Bauteile nimmt der Ausgangswiderstand der Stromquelle mit zunehmender Frequenz ab. Abb. 41 gibt den Verlauf der Ausgangsimpedanz des realen Stromverstärkers wieder. Der Innenwiderstand ZS (Gl. 123) der Stromquel-le verhält sich für niedrige Frequenzen wie ein ohmscher Widerstand rS = AD0·ST·rDS·R3. Erreicht dieser die Grenzfrequenz fz, so hat der reale Stromver-stärker kapazitives Verhalten. Die Ausgangskapazität entspricht der Millerkapazi-tät des CMOS-Transistors.
Abb. 40 Ausgangsimpedanzlast der nichtidealen spannungsgesteuerten Stromquelle mit dem Innen-
widerstand der Stromquelle Zi und der komplexen Last ZL.
R3×ST×AD×r DS>>r DS+R3×H1+r DS×ST+ADL
f Z=1
2 Π R3 × ST × AD × CM
Zs=r DS + R3 + R3 H1 + ADL ST r DS
1 + Hr DS + R3 H1 + ADL H1 + ST r DSL L CMs
»R3 ST r DS AD0
1 + R3 ST r DS AD0 CMs
Zs»R3 ST r DS AD01 + 1
2 Π f zs
3R
CM
S uT GS
M1
I0
S
G D
Op 2
A(s)uGS
u I,m
I Z L
ZL
U out
SI = S(s) Uin
Uin
CSrS
IS
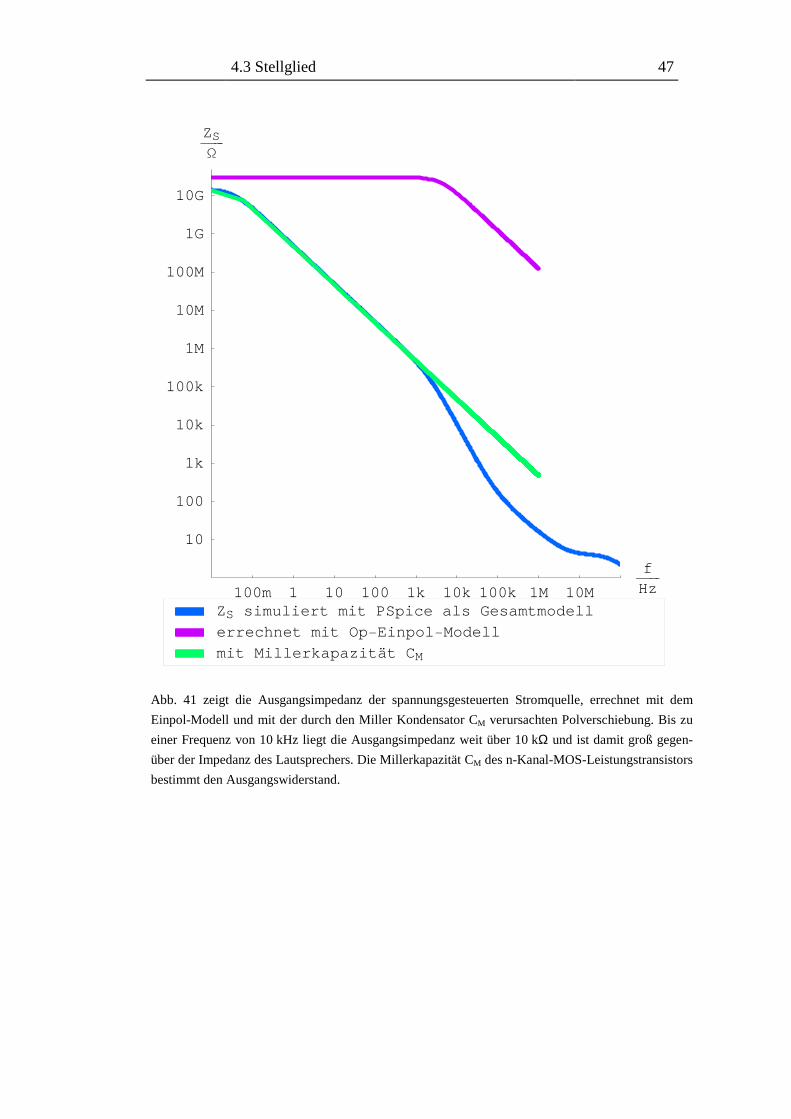
4.3 Stellglied 47
Abb. 41 zeigt die Ausgangsimpedanz der spannungsgesteuerten Stromquelle, errechnet mit dem
Einpol-Modell und mit der durch den Miller Kondensator CM verursachten Polverschiebung. Bis zu
einer Frequenz von 10 kHz liegt die Ausgangsimpedanz weit über 10 kΩ und ist damit groß gegen-
über der Impedanz des Lautsprechers. Die Millerkapazität CM des n-Kanal-MOS-Leistungstransistors
bestimmt den Ausgangswiderstand.
100m 1 10 100 1k 10k 100k 1M 10M
fHz
10
100
1k
10k
100k
1M
10M
100M
1G
10G
ZSW
mit Millerkapazität C M
errechnet mit Op -Einpol -Modell
ZS simuliert mit PSpice als Gesamtmodell
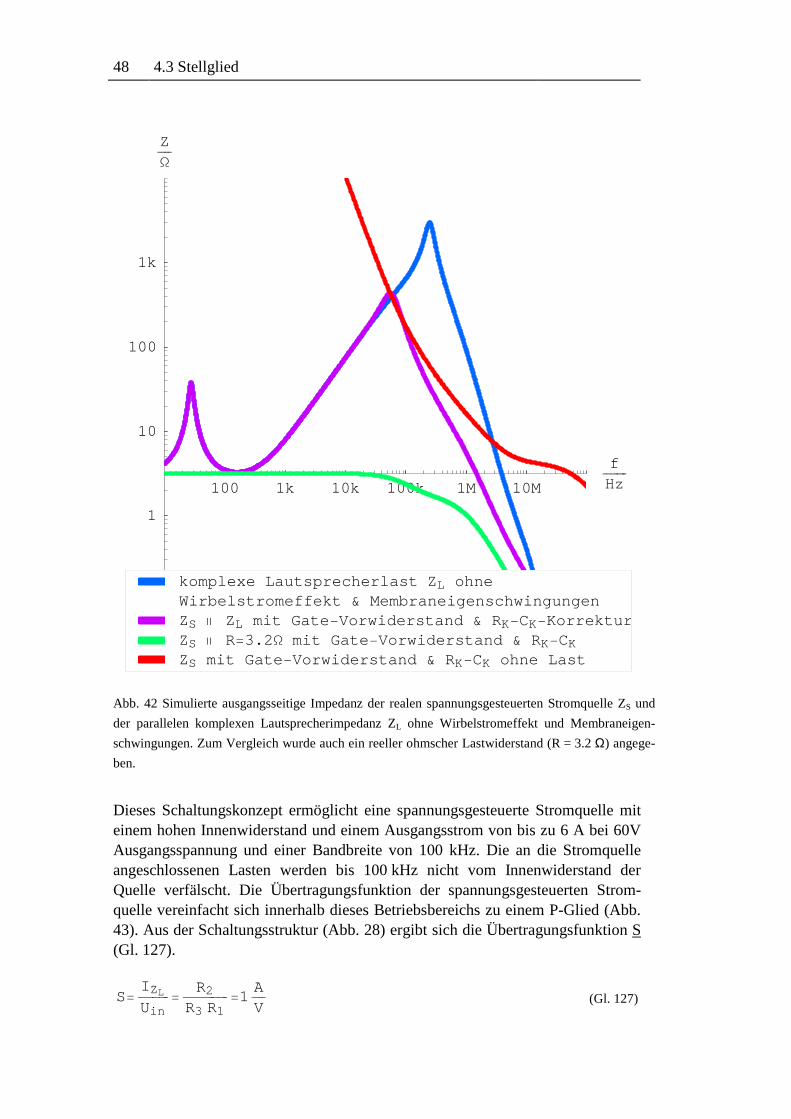
48 4.3 Stellglied
Abb. 42 Simulierte ausgangsseitige Impedanz der realen spannungsgesteuerten Stromquelle ZS und
der parallelen komplexen Lautsprecherimpedanz ZL ohne Wirbelstromeffekt und Membraneigen-
schwingungen. Zum Vergleich wurde auch ein reeller ohmscher Lastwiderstand (R = 3.2 Ω) angege-
ben.
Dieses Schaltungskonzept ermöglicht eine spannungsgesteuerte Stromquelle mit einem hohen Innenwiderstand und einem Ausgangsstrom von bis zu 6 A bei 60V Ausgangsspannung und einer Bandbreite von 100 kHz. Die an die Stromquelle angeschlossenen Lasten werden bis 100 kHz nicht vom Innenwiderstand der Quelle verfälscht. Die Übertragungsfunktion der spannungsgesteuerten Strom-quelle vereinfacht sich innerhalb dieses Betriebsbereichs zu einem P-Glied (Abb. 43). Aus der Schaltungsstruktur (Abb. 28) ergibt sich die Übertragungsfunktion S (Gl. 127).
(Gl. 127) S=I ZLUin
=R2
R3 R1
=1AV
100 1k 10k 100k 1M 10M
fHz
1
10
100
1k
ZW
ZS mit Gate -Vorwiderstand & R K-CK ohne LastZS þ R=3.2 W mit Gate -Vorwiderstand & R K-CK
ZS þ ZL mit Gate -Vorwiderstand & R K-CK-KorrekturWirbelstromeffekt & Membraneigenschwingungenkomplexe Lautsprecherlast Z L ohne
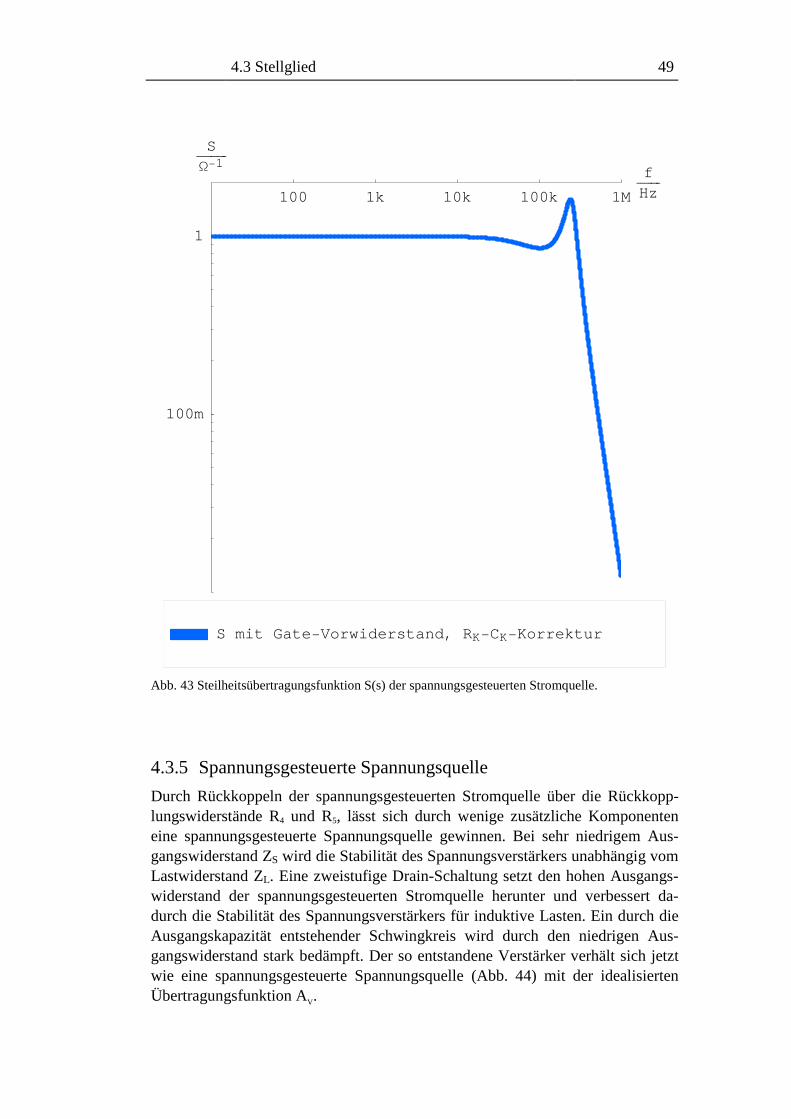
4.3 Stellglied 49
100 1k 10k 100k 1M
fHz
100m
1
SW-1
S mit Gate -Vorwiderstand, R K-CK-Korrektur
Abb. 43 Steilheitsübertragungsfunktion S(s) der spannungsgesteuerten Stromquelle.
4.3.5 Spannungsgesteuerte Spannungsquelle
Durch Rückkoppeln der spannungsgesteuerten Stromquelle über die Rückkopp-lungswiderstände R4 und R5, lässt sich durch wenige zusätzliche Komponenten eine spannungsgesteuerte Spannungsquelle gewinnen. Bei sehr niedrigem Aus-gangswiderstand ZS wird die Stabilität des Spannungsverstärkers unabhängig vom Lastwiderstand ZL. Eine zweistufige Drain-Schaltung setzt den hohen Ausgangs-widerstand der spannungsgesteuerten Stromquelle herunter und verbessert da-durch die Stabilität des Spannungsverstärkers für induktive Lasten. Ein durch die Ausgangskapazität entstehender Schwingkreis wird durch den niedrigen Aus-gangswiderstand stark bedämpft. Der so entstandene Verstärker verhält sich jetzt wie eine spannungsgesteuerte Spannungsquelle (Abb. 44) mit der idealisierten Übertragungsfunktion AV.
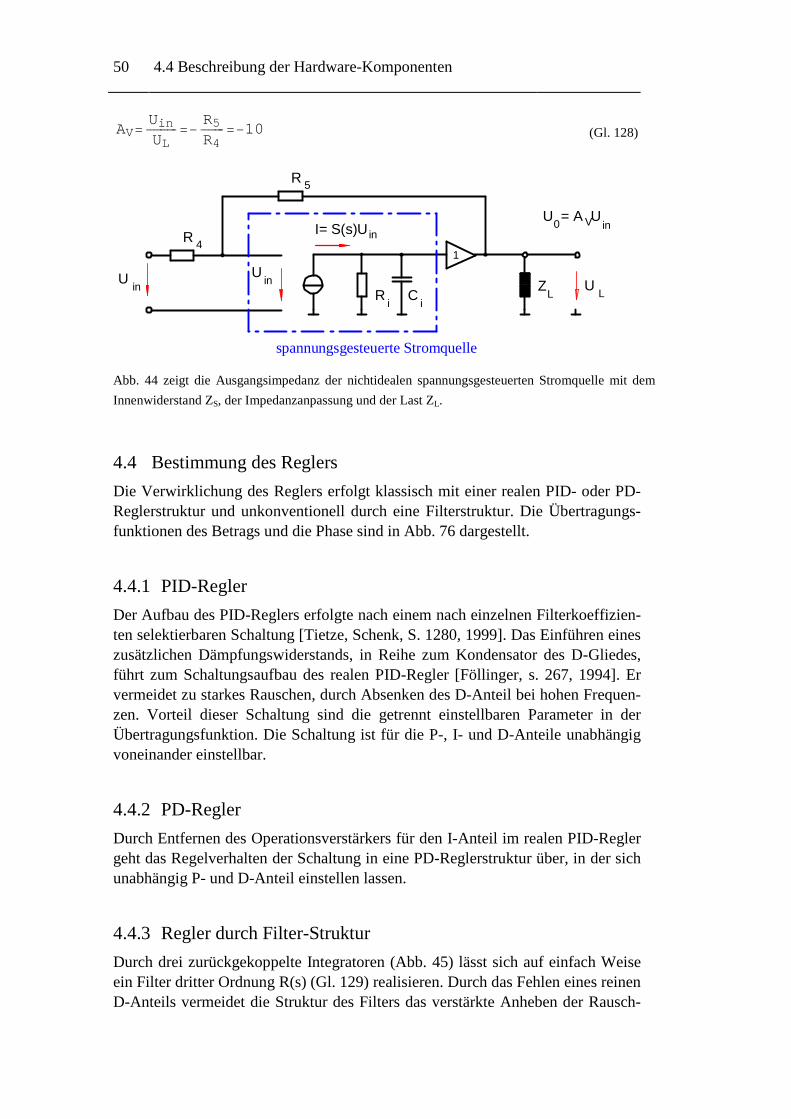
50 4.4 Beschreibung der Hardware-Komponenten
(Gl. 128)
Abb. 44 zeigt die Ausgangsimpedanz der nichtidealen spannungsgesteuerten Stromquelle mit dem
Innenwiderstand ZS, der Impedanzanpassung und der Last ZL.
4.4 Bestimmung des Reglers
Die Verwirklichung des Reglers erfolgt klassisch mit einer realen PID- oder PD-Reglerstruktur und unkonventionell durch eine Filterstruktur. Die Übertragungs-funktionen des Betrags und die Phase sind in Abb. 76 dargestellt.
4.4.1 PID-Regler
Der Aufbau des PID-Reglers erfolgte nach einem nach einzelnen Filterkoeffizien-ten selektierbaren Schaltung [Tietze, Schenk, S. 1280, 1999]. Das Einführen eines zusätzlichen Dämpfungswiderstands, in Reihe zum Kondensator des D-Gliedes, führt zum Schaltungsaufbau des realen PID-Regler [Föllinger, s. 267, 1994]. Er vermeidet zu starkes Rauschen, durch Absenken des D-Anteil bei hohen Frequen-zen. Vorteil dieser Schaltung sind die getrennt einstellbaren Parameter in der Übertragungsfunktion. Die Schaltung ist für die P-, I- und D-Anteile unabhängig voneinander einstellbar.
4.4.2 PD-Regler
Durch Entfernen des Operationsverstärkers für den I-Anteil im realen PID-Regler geht das Regelverhalten der Schaltung in eine PD-Reglerstruktur über, in der sich unabhängig P- und D-Anteil einstellen lassen.
4.4.3 Regler durch Filter-Struktur
Durch drei zurückgekoppelte Integratoren (Abb. 45) lässt sich auf einfach Weise ein Filter dritter Ordnung R(s) (Gl. 129) realisieren. Durch das Fehlen eines reinen D-Anteils vermeidet die Struktur des Filters das verstärkte Anheben der Rausch-
AV=UinUL
=-R5R4
=-10
inU
R 4
Ci
Ri
1
Z
ULL
Uin
U = A UV0 in
spannungsgesteuerte Stromquelle
R 5
I= S(s)U in
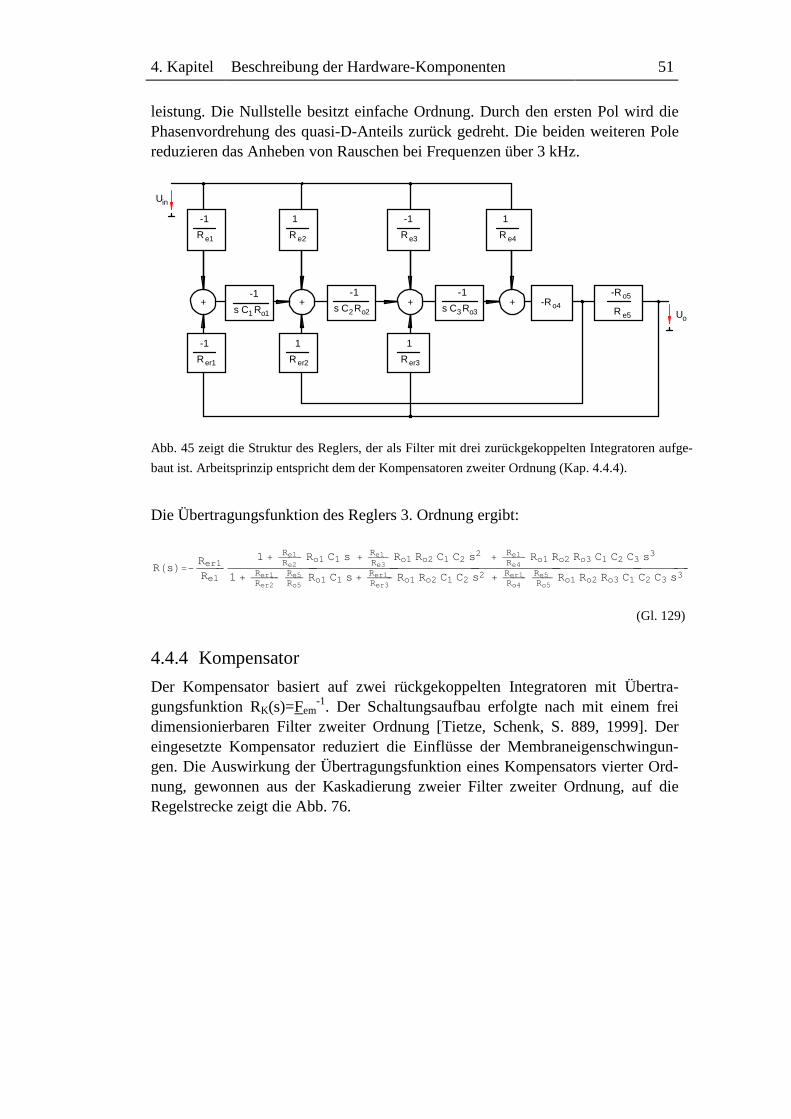
4. Kapitel Beschreibung der Hardware-Komponenten 51
leistung. Die Nullstelle besitzt einfache Ordnung. Durch den ersten Pol wird die Phasenvordrehung des quasi-D-Anteils zurück gedreht. Die beiden weiteren Pole reduzieren das Anheben von Rauschen bei Frequenzen über 3 kHz.
Abb. 45 zeigt die Struktur des Reglers, der als Filter mit drei zurückgekoppelten Integratoren aufge-
baut ist. Arbeitsprinzip entspricht dem der Kompensatoren zweiter Ordnung (Kap. 4.4.4).
Die Übertragungsfunktion des Reglers 3. Ordnung ergibt:
(Gl. 129)
4.4.4 Kompensator
Der Kompensator basiert auf zwei rückgekoppelten Integratoren mit Übertra-gungsfunktion RK(s)=Fem
-1. Der Schaltungsaufbau erfolgte nach mit einem frei dimensionierbaren Filter zweiter Ordnung [Tietze, Schenk, S. 889, 1999]. Der eingesetzte Kompensator reduziert die Einflüsse der Membraneigenschwingun-gen. Die Auswirkung der Übertragungsfunktion eines Kompensators vierter Ord-nung, gewonnen aus der Kaskadierung zweier Filter zweiter Ordnung, auf die Regelstrecke zeigt die Abb. 76.
RHsL=-Rer1Re1
1 +Re1Re2
Ro1 C1 s +Re1Re3
Ro1 Ro2 C1 C2 s2 +Re1Re4
Ro1 Ro2 Ro3 C1 C2 C3 s3
1 +
Rer1Rer2
Re5Ro5
Ro1 C1 s +Rer1Rer3
Ro1 Ro2 C1 C2 s2 +Rer1Ro4
Re5Ro5
Ro1 Ro2 Ro3 C1 C2 C3 s3
R
1
er2
+
R e2
1
-1
R er1
-1
s C R+
1 o1
-1
e1R
-1
s C R2 o2
R
1
er3
+
-1
R e3
-1
s C R3 o3
o4-R+
R e4
1
-R
R Uo
Uin
o5
e5
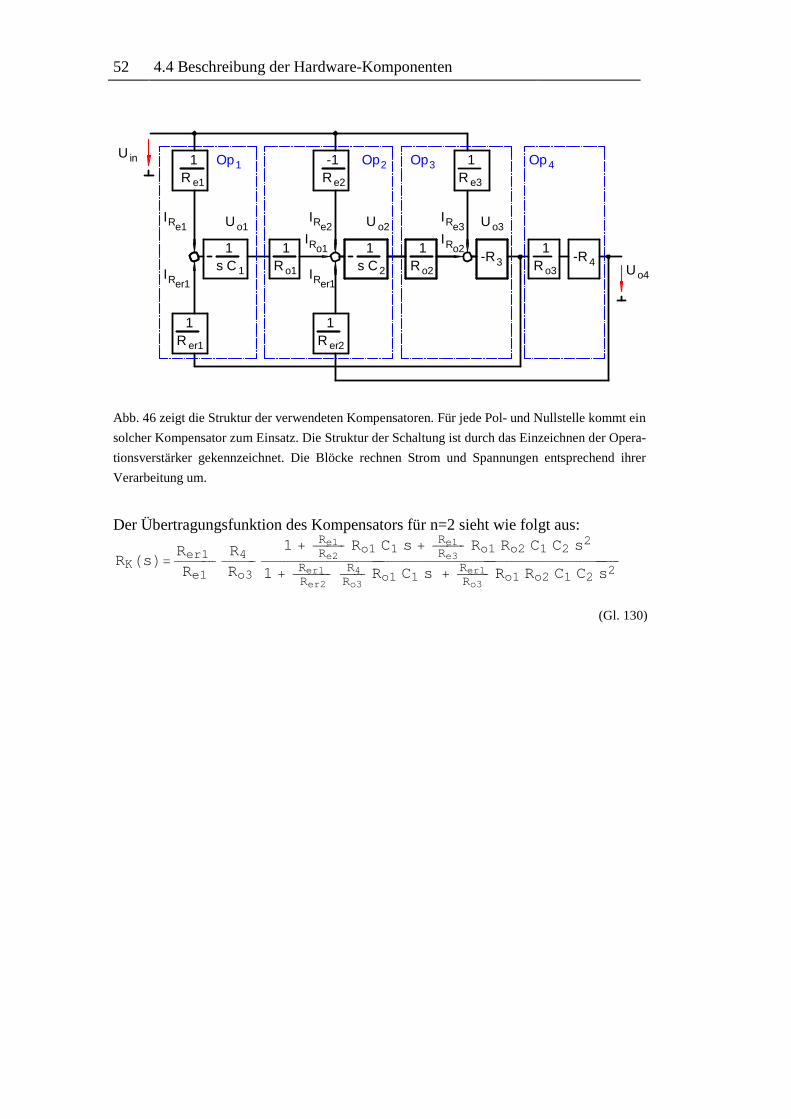
52 4.4 Beschreibung der Hardware-Komponenten
Abb. 46 zeigt die Struktur der verwendeten Kompensatoren. Für jede Pol- und Nullstelle kommt ein
solcher Kompensator zum Einsatz. Die Struktur der Schaltung ist durch das Einzeichnen der Opera-
tionsverstärker gekennzeichnet. Die Blöcke rechnen Strom und Spannungen entsprechend ihrer
Verarbeitung um.
Der Übertragungsfunktion des Kompensators für n=2 sieht wie folgt aus:
(Gl. 130)
1R er2
R-1
e2
1R o1
IR o1
1R er1
1R e1
IRI e1R
IR er1IR er1
1
e3R
IR1R o2
IR
o2
e3 e2
-R 31
s C2
1s C 1
U o2
o1U
Op1 Op Op2 3U Op4
1R o3
-R 4U o4
U o3
in
RKHsL=Rer1Re1
R4Ro3
1 +Re1Re2
Ro1 C1 s +Re1Re3
Ro1 Ro2 C1 C2 s2
1 +
Rer1Rer2
R4
Ro3 Ro1 C1 s +
Rer1Ro3
Ro1 Ro2 C1 C2 s2
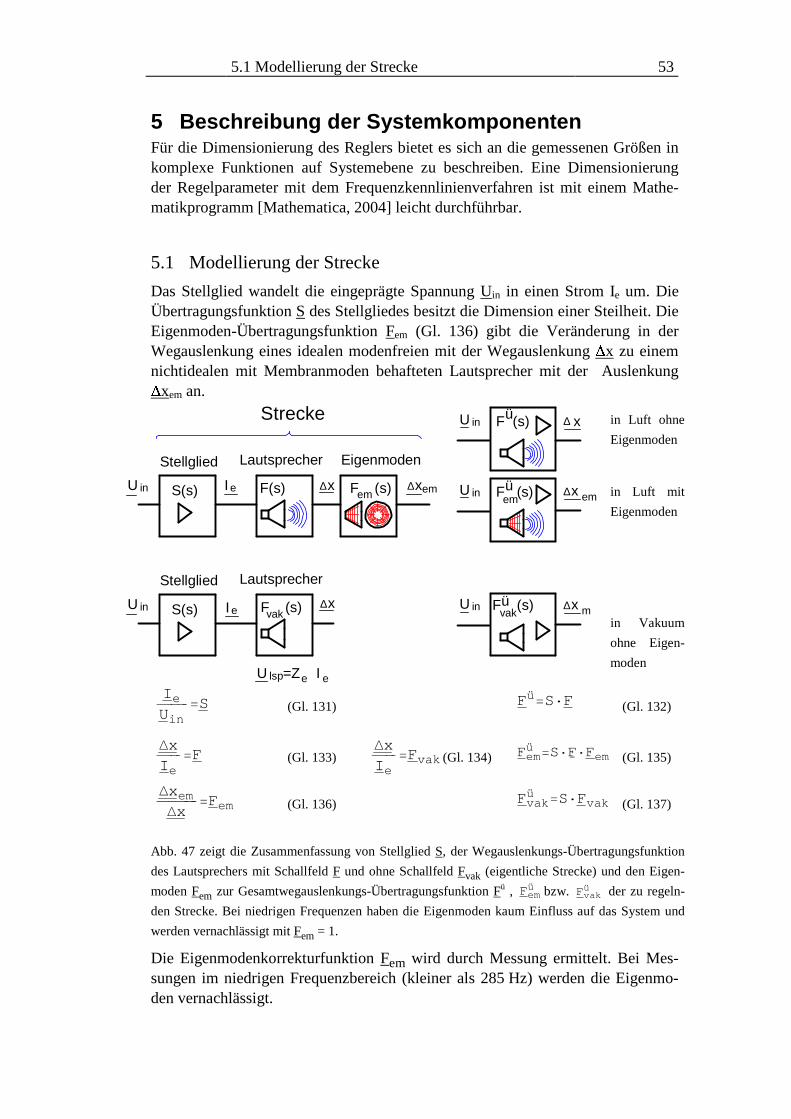
5.1 Modellierung der Strecke 53
5 Beschreibung der Systemkomponenten Für die Dimensionierung des Reglers bietet es sich an die gemessenen Größen in komplexe Funktionen auf Systemebene zu beschreiben. Eine Dimensionierung der Regelparameter mit dem Frequenzkennlinienverfahren ist mit einem Mathe-matikprogramm [Mathematica, 2004] leicht durchführbar.
5.1 Modellierung der Strecke
Das Stellglied wandelt die eingeprägte Spannung Uin in einen Strom Ie um. Die Übertragungsfunktion S des Stellgliedes besitzt die Dimension einer Steilheit. Die Eigenmoden-Übertragungsfunktion Fem (Gl. 136) gibt die Veränderung in der Wegauslenkung eines idealen modenfreien mit der Wegauslenkung
x zu einem
nichtidealen mit Membranmoden behafteten Lautsprecher mit der Auslenkung
xem an.
in Luft ohne
Eigenmoden
in Luft mit
Eigenmoden
in Vakuum
ohne Eigen-
moden
(Gl. 131) Fü=S×F (Gl. 132)
(Gl. 133) (Gl. 134) Femü =S×F×Fem (Gl. 135)
(Gl. 136) Fvakü =S×Fvak (Gl. 137)
Abb. 47 zeigt die Zusammenfassung von Stellglied S, der Wegauslenkungs-Übertragungsfunktion
des Lautsprechers mit Schallfeld F und ohne Schallfeld Fvak (eigentliche Strecke) und den Eigen-
moden Fem zur Gesamtwegauslenkungs-Übertragungsfunktion Fü , Femü bzw. Fvak
ü der zu regeln-
den Strecke. Bei niedrigen Frequenzen haben die Eigenmoden kaum Einfluss auf das System und
werden vernachlässigt mit Fem = 1.
Die Eigenmodenkorrekturfunktion Fem wird durch Messung ermittelt. Bei Mes-sungen im niedrigen Frequenzbereich (kleiner als 285 Hz) werden die Eigenmo-den vernachlässigt.
Stellglied Lautsprecher
S(s)
Strecke
Stellglied Lautsprecher
S(s) vakF (s)
F(s)
I e
lspU =Z Ie e
∆xI e ∆xemF (s) em
Eigenmoden
U in
U in ∆x U in ∆xF (s)vak
U in ∆x
U in ∆ xF (s)
ü
ü
ü
F (s)em
m
em
I eUin
=S
DxI e
=F
DxemDx
=Fem
DxI e
=Fvak
54 5.2 Beschreibung der Systemkomponenten 5. Kapitel Die Übertragungsfunktion der Strecke vereinfacht sich durch Zusammenfassen der Funktionen des Stellglieds S (Gl. 131), der idealen Wegauslenkungsübertra-gungsfunktion F (Gl. 133) des elektrodynamischen Lautsprechers und der Eigen-modenfunktion Fem zu einer Gesamtstrecke Fü (Gl. 132) bzw. Fem
ü (Gl. 135). Messungen im Vakuum führen zur Wegauslenkungs-Übertragungsfunktion Fvak
ü (Gl. 134), bei der das Schallfeld keine Rückwirkung auf die Membranauslenkung hat und die Auswirkungen der Membran-Eigenmoden vernachlässigt werden. Das Stellglied zeigt reines P-Glied-Verhalten bis zu einem Frequenzbereich von 100 kHz. Seine Übertragungsfunktion S bestimmt sich direkt aus der Schaltung der spannungsgesteuerten Stromquelle (Abb. 23). Das Übertragungsverhalten des Lautsprechers ergibt sich direkt aus dem konzentrierten-Elemente-Modell (Gl. 58).
5.2 Messsystem
Die Istgrößenerfassung bildet mit der Übertragungsfunktion der Strecke F bzw. Fvak und dem Ortssensor P (Gl. 138) eine Messeinheit. Es ist nur schwer möglich zwischen der wahren Strecke F und der Übertragungsfunktion P des Wegsensors zu unterscheiden. Die Multiplikation der beiden Funktionen ergibt die Gesamt-übertragungsfunktion des Messsystems. Der Wegsensor muss deshalb so entwi-ckelt werden, dass die Übertragungsfunktion P bekannt ist. Die Messverstärker-schaltung mit der Ausgangsspannung U x und dem Photoelement (PSD) bilden den Wegsensor (Kapt. 4.2), der die Übertragungsfunktion P der Ortsauslenkung bestimmt. Die Schaltungsdimensionierung des Photoverstärkers und der Sensor-typ wurden so gewählt, dass eine lineare Wegsensoreinheit entsteht. Die Wegaus-lenkung
x ist linear direkt proportional zur Ausgangsspannung U x. Die am
Mikrophonverstärker entstehende Ausgangsspannung U p, ergibt im Verhältnis zur Wegauslenkung
xem die Mikrophon-Übertragungsfunktion M. In ihr sind alle
Effekte von der Membranauslenkung mit den Eigenmoden über die akustischen Effekte des Raums bis zur Ausgangsspannung des Mikrophonverstärkers enthal-ten. Die Mikrophonübertragungsfunktion wurde vom Hersteller spezifiziert. Es wurde sichergestellt, dass keine Eigenresonanzen im verwendeten Messbereich von 10 bis 10 kHz (Kap. 10) vorhanden sind [Beyerdynamic, 2004].
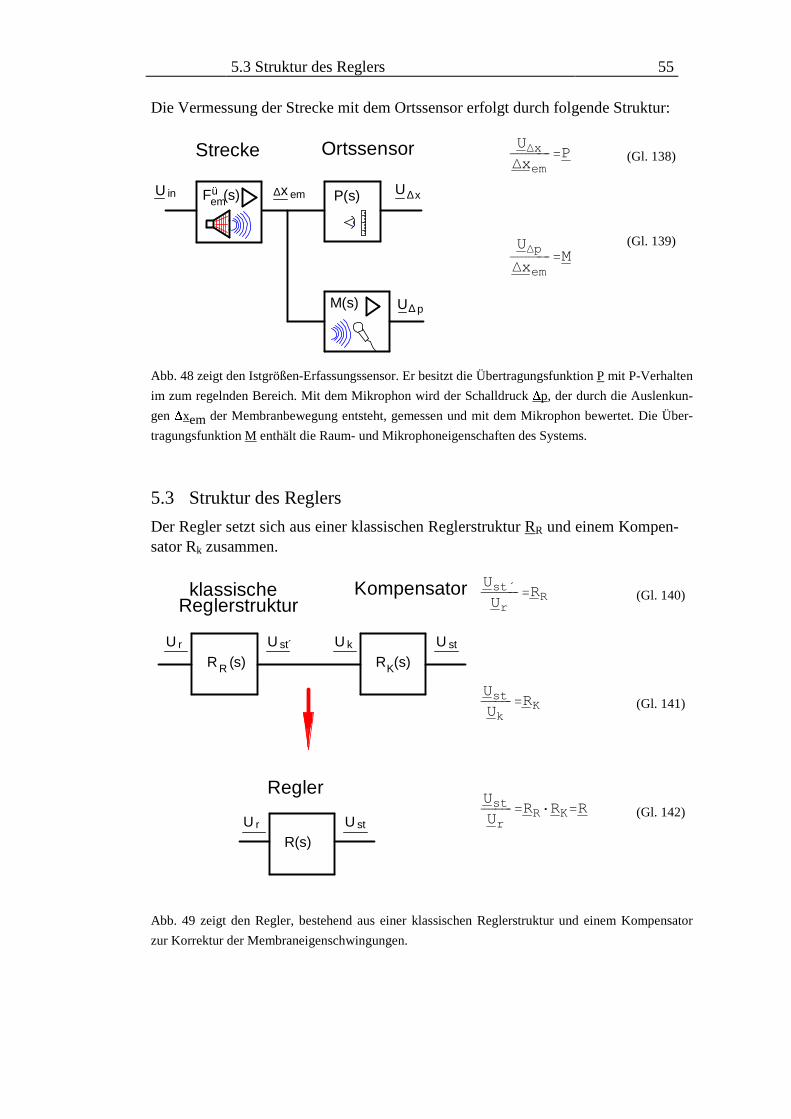
5.3 Struktur des Reglers 55 Die Vermessung der Strecke mit dem Ortssensor erfolgt durch folgende Struktur:
(Gl. 138)
(Gl. 139)
Abb. 48 zeigt den Istgrößen-Erfassungssensor. Er besitzt die Übertragungsfunktion P mit P-Verhalten
im zum regelnden Bereich. Mit dem Mikrophon wird der Schalldruck p, der durch die Auslenkun-
gen xem der Membranbewegung entsteht, gemessen und mit dem Mikrophon bewertet. Die Über-
tragungsfunktion M enthält die Raum- und Mikrophoneigenschaften des Systems.
5.3 Struktur des Reglers
Der Regler setzt sich aus einer klassischen Reglerstruktur RR und einem Kompen-sator Rk zusammen.
(Gl. 140)
(Gl. 141)
(Gl. 142)
Abb. 49 zeigt den Regler, bestehend aus einer klassischen Reglerstruktur und einem Kompensator
zur Korrektur der Membraneigenschwingungen.
U r U
R
st´
R (s)U U stk
R (s)K
klassischeReglerstruktur
Kompensator
R(s)
Regler
U r U st
UDpDxem
=M
UDxDxem
=P
∆x
Ortssensor
U in
Strecke
M(s)
P(s)em ∆
∆
U
U
x
p
F (s)emü
Ust´Ur
=RR
UstUk
=RK
UstUr
=RR×RK=R

56 5.3 Beschreibung der Systemkomponenten 5. Kapitel Dem Regler liegen die folgenden Übertragungsfunktionen zugrunde:
Eine Stabilitätskorrektur ist notwendig. Die mechanische Eigenresonanz der Membranauslenkung des Masse-Dämpfer-Feder-Systems verursacht eine Phasen-drehung von 180°. Ein Rückdrehen der Phase beim 0 dB-Betragsdurchgang der offenen Schleifenverstärkung der Strecke mit Regler ist notwendig. Dies erledigt die Reglerstruktur RR. Um Anhebungen von Störungen im hohen Frequenzbereich zu vermeiden muss die Phasenvoreilung für hohe Frequenzen wieder zurück gedreht und somit der Frequenzgang abgesenkt werden. Bei der Wahl des Reglerparameters c0 = 0 in der Reglerübertragungsfunktion RR (Gl. 143) entsteht der klassische PID-Regler (Gl. 145). Durch zusätzliches Setzen von b0 = 0 reduziert sich der PID-Regler zu einem realen D-Regler (Gl. 146).
Für ein verstärktes Absenken des Frequenzgangs zur Rauschunterdrückung bei hohen Frequenzen wurde folgende Struktur getestet:
Die Kompensatorstruktur eliminiert die Auswirkungen von parasitären Schwing-ungen des Lautsprecherchassis und der Membran. Das Einführen einer inversen Übertragungsfunktion RK (Gl. 144) führt zu Dämpfung der Resonanzstellen der parasitären Effekte, durch Kompensation am Ort der Schwingspule des Lautspre-chers.
(Gl. 143)
(Gl. 144)
n =
(Gl. 145)
(Gl. 146)
(Gl. 147)
RRHsL=h01 + a0 s + b0 s2
c0 + d0 s + e0 s2
RRHsL=h01 + a0 s + b0 s2
s Hd0 + e0 sLRR
2HsL=h01 + a0 s
s Hh0 + e0 sL
RKHsL=ämik
i =1
n1 + c i
k × s + dik × s2
1 + ai
k × s + bik × s2
a0 , b 0, c 0, d 0, e 0, h 0> 0 Ε R
aik , b i
k , c ik , d i
k , m ik > 0 Ε R
RR3HsL=h0
1 + a0 sH1 + c0 sL H1 + d0 sL H1 + e0 sL
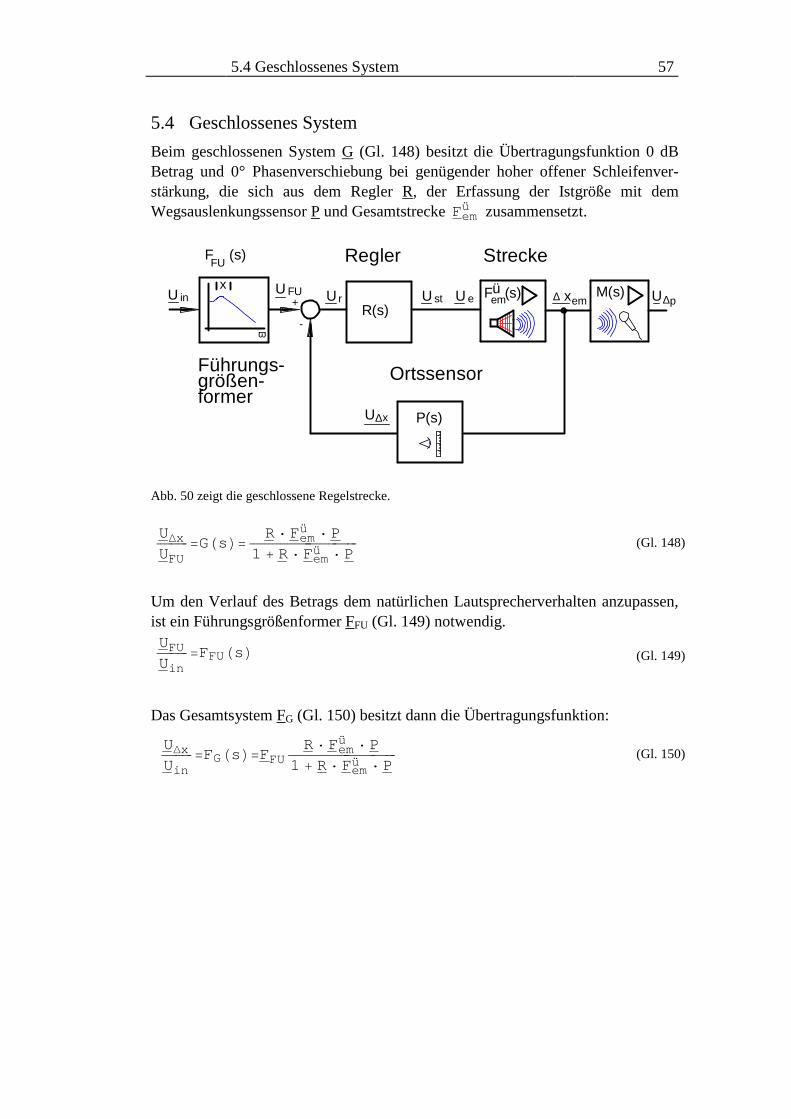
5.4 Geschlossenes System 57
5.4 Geschlossenes System
Beim geschlossenen System G (Gl. 148) besitzt die Übertragungsfunktion 0 dB Betrag und 0° Phasenverschiebung bei genügender hoher offener Schleifenver-stärkung, die sich aus dem Regler R, der Erfassung der Istgröße mit dem Wegsauslenkungssensor P und Gesamtstrecke Fem
ü zusammensetzt.
Abb. 50 zeigt die geschlossene Regelstrecke.
Um den Verlauf des Betrags dem natürlichen Lautsprecherverhalten anzupassen, ist ein Führungsgrößenformer FFU (Gl. 149) notwendig.
Das Gesamtsystem FG (Gl. 150) besitzt dann die Übertragungsfunktion:
(Gl. 148)
(Gl. 149)
(Gl. 150)
R(s)
Regler
Ortssensor
P(s)∆U x
ω
x
FU
Führungs-größen-former
F (s)
+
-
U inU FU U stU r
Strecke
M(s) U∆p∆ xemU e emF (s)ü
UDxUFU
=GHsL=R× Fem
ü × P1 + R× Fem
ü × P
UFUUin
=FFUHsL
UDxUin
=FGHsL=FFUR× Fem
ü × P1 + R× Fem
ü × P
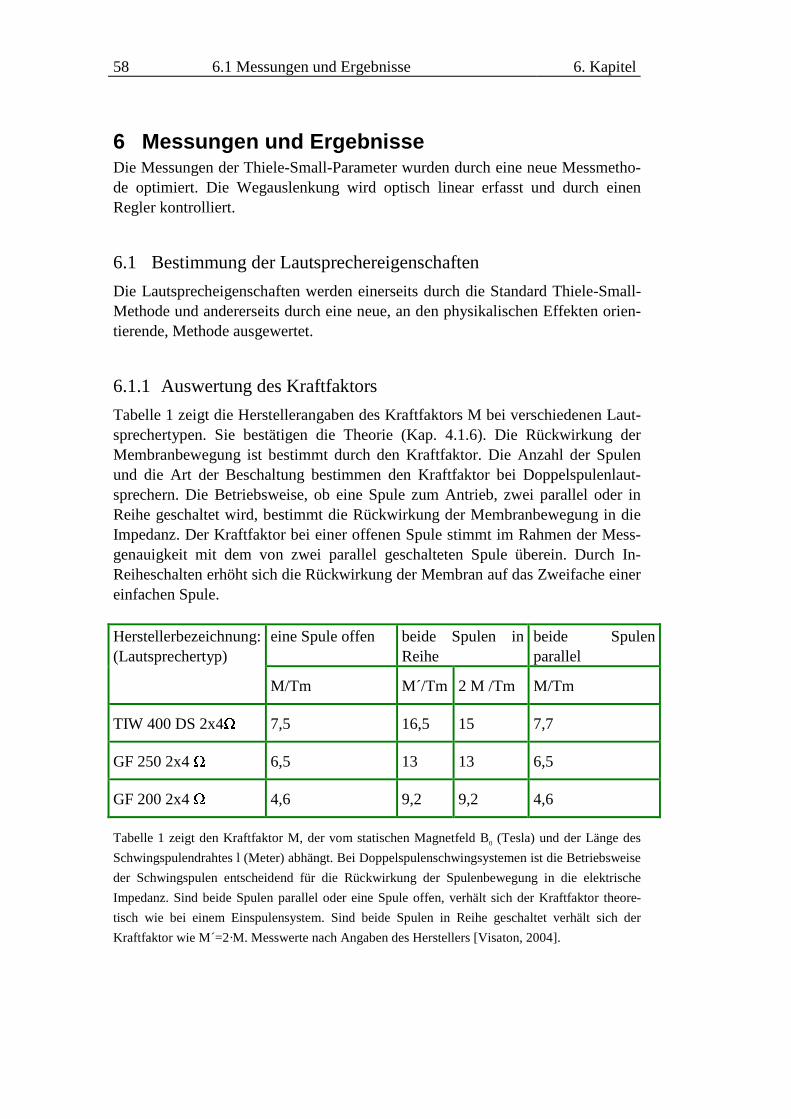
58 6.1 Messungen und Ergebnisse 6. Kapitel
6 Messungen und Ergebnisse Die Messungen der Thiele-Small-Parameter wurden durch eine neue Messmetho-de optimiert. Die Wegauslenkung wird optisch linear erfasst und durch einen Regler kontrolliert.
6.1 Bestimmung der Lautsprechereigenschaften
Die Lautsprecheigenschaften werden einerseits durch die Standard Thiele-Small-Methode und andererseits durch eine neue, an den physikalischen Effekten orien-tierende, Methode ausgewertet.
6.1.1 Auswertung des Kraftfaktors
Tabelle 1 zeigt die Herstellerangaben des Kraftfaktors M bei verschiedenen Laut-sprechertypen. Sie bestätigen die Theorie (Kap. 4.1.6). Die Rückwirkung der Membranbewegung ist bestimmt durch den Kraftfaktor. Die Anzahl der Spulen und die Art der Beschaltung bestimmen den Kraftfaktor bei Doppelspulenlaut-sprechern. Die Betriebsweise, ob eine Spule zum Antrieb, zwei parallel oder in Reihe geschaltet wird, bestimmt die Rückwirkung der Membranbewegung in die Impedanz. Der Kraftfaktor bei einer offenen Spule stimmt im Rahmen der Mess-genauigkeit mit dem von zwei parallel geschalteten Spule überein. Durch In-Reiheschalten erhöht sich die Rückwirkung der Membran auf das Zweifache einer einfachen Spule. Herstellerbezeichnung: (Lautsprechertyp)
eine Spule offen beide Spulen in Reihe
beide Spulen parallel
M/Tm M´/Tm 2 M /Tm M/Tm
TIW 400 DS 2x4
7,5 16,5 15 7,7
GF 250 2x4
6,5 13 13 6,5
GF 200 2x4
4,6 9,2 9,2 4,6
Tabelle 1 zeigt den Kraftfaktor M, der vom statischen Magnetfeld B0 (Tesla) und der Länge des
Schwingspulendrahtes l (Meter) abhängt. Bei Doppelspulenschwingsystemen ist die Betriebsweise
der Schwingspulen entscheidend für die Rückwirkung der Spulenbewegung in die elektrische
Impedanz. Sind beide Spulen parallel oder eine Spule offen, verhält sich der Kraftfaktor theore-
tisch wie bei einem Einspulensystem. Sind beide Spulen in Reihe geschaltet verhält sich der
Kraftfaktor wie M´=2·M. Messwerte nach Angaben des Herstellers [Visaton, 2004].
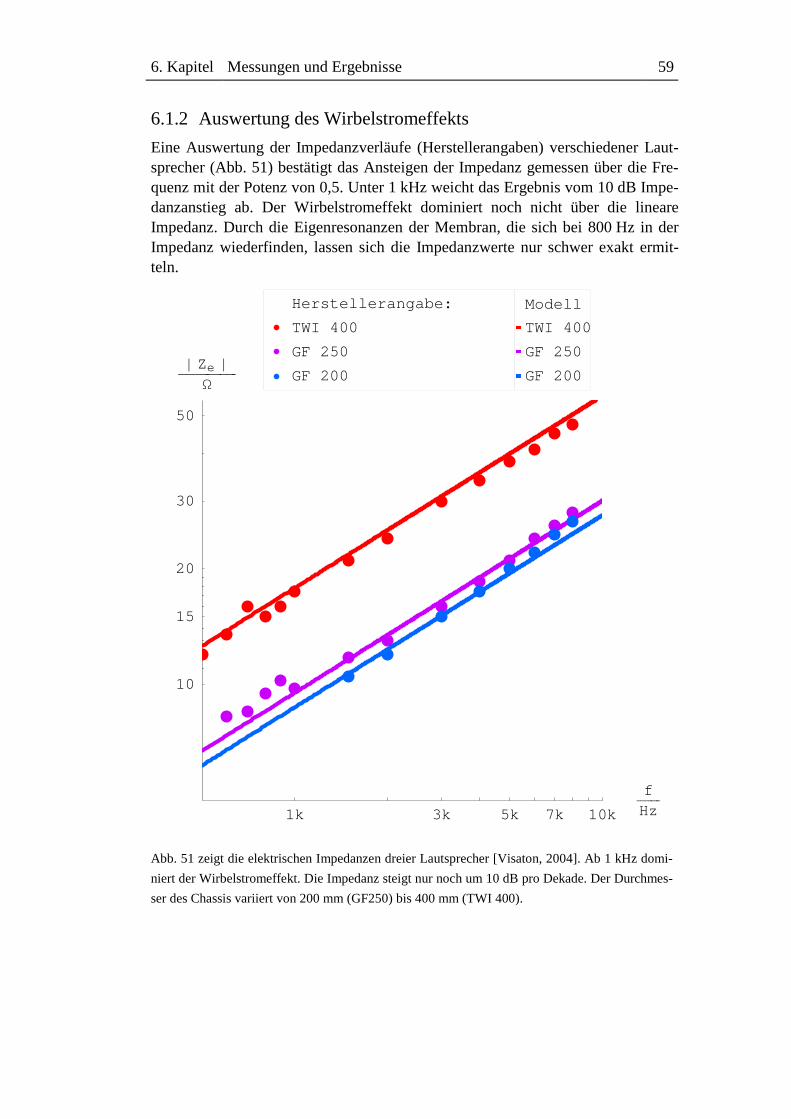
6. Kapitel Messungen und Ergebnisse 59
1k 3k 5k 7k 10k
fHz
10
15
20
30
50
È Ze È
WGF 200
GF 250
TWI 400
Herstellerangabe:
GF 200
GF 250
TWI 400
Modell
6.1.2 Auswertung des Wirbelstromeffekts
Eine Auswertung der Impedanzverläufe (Herstellerangaben) verschiedener Laut-sprecher (Abb. 51) bestätigt das Ansteigen der Impedanz gemessen über die Fre-quenz mit der Potenz von 0,5. Unter 1 kHz weicht das Ergebnis vom 10 dB Impe-danzanstieg ab. Der Wirbelstromeffekt dominiert noch nicht über die lineare Impedanz. Durch die Eigenresonanzen der Membran, die sich bei 800 Hz in der Impedanz wiederfinden, lassen sich die Impedanzwerte nur schwer exakt ermit-teln.
Abb. 51 zeigt die elektrischen Impedanzen dreier Lautsprecher [Visaton, 2004]. Ab 1 kHz domi-
niert der Wirbelstromeffekt. Die Impedanz steigt nur noch um 10 dB pro Dekade. Der Durchmes-
ser des Chassis variiert von 200 mm (GF250) bis 400 mm (TWI 400).
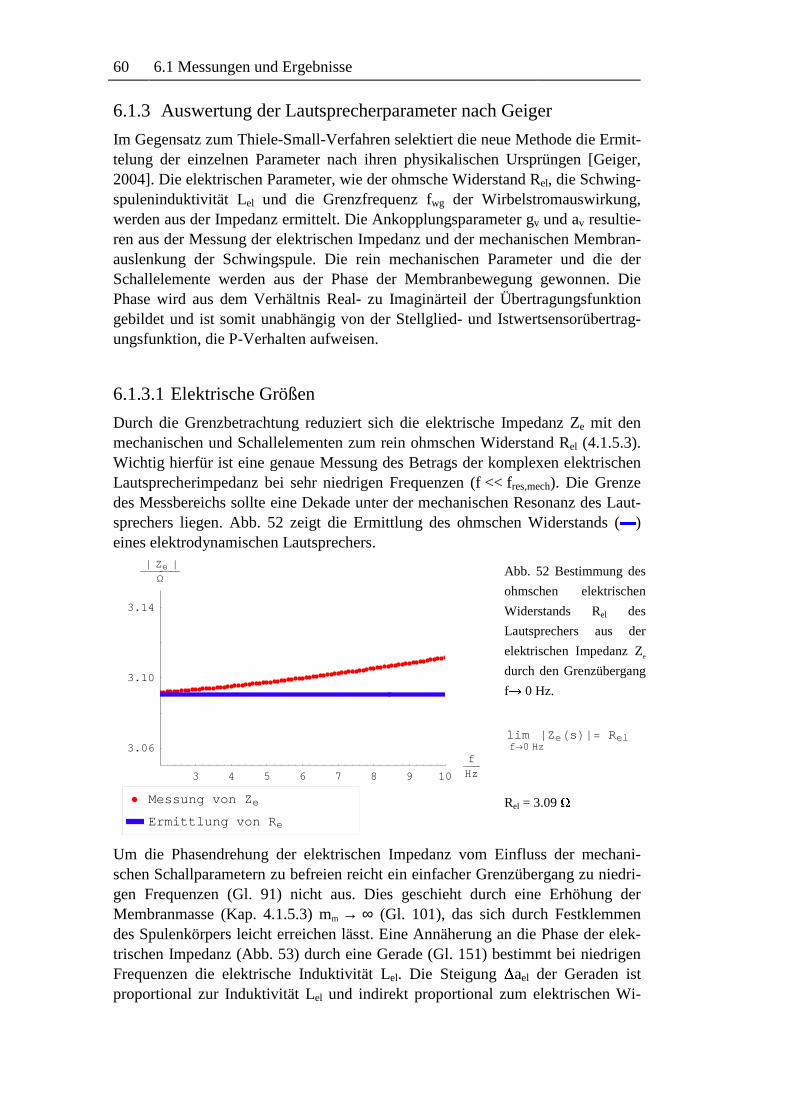
60 6.1 Messungen und Ergebnisse
6.1.3 Auswertung der Lautsprecherparameter nach Geiger
Im Gegensatz zum Thiele-Small-Verfahren selektiert die neue Methode die Ermit-telung der einzelnen Parameter nach ihren physikalischen Ursprüngen [Geiger, 2004]. Die elektrischen Parameter, wie der ohmsche Widerstand Rel, die Schwing-spuleninduktivität Lel und die Grenzfrequenz fwg der Wirbelstromauswirkung, werden aus der Impedanz ermittelt. Die Ankopplungsparameter gv und av resultie-ren aus der Messung der elektrischen Impedanz und der mechanischen Membran-auslenkung der Schwingspule. Die rein mechanischen Parameter und die der Schallelemente werden aus der Phase der Membranbewegung gewonnen. Die Phase wird aus dem Verhältnis Real- zu Imaginärteil der Übertragungsfunktion gebildet und ist somit unabhängig von der Stellglied- und Istwertsensorübertrag-ungsfunktion, die P-Verhalten aufweisen.
6.1.3.1 Elektrische Größen
Durch die Grenzbetrachtung reduziert sich die elektrische Impedanz Ze mit den mechanischen und Schallelementen zum rein ohmschen Widerstand Rel (4.1.5.3). Wichtig hierfür ist eine genaue Messung des Betrags der komplexen elektrischen Lautsprecherimpedanz bei sehr niedrigen Frequenzen (f << fres,mech). Die Grenze des Messbereichs sollte eine Dekade unter der mechanischen Resonanz des Laut-sprechers liegen. Abb. 52 zeigt die Ermittlung des ohmschen Widerstands ( ) eines elektrodynamischen Lautsprechers.
Abb. 52 Bestimmung des
ohmschen elektrischen
Widerstands Rel des
Lautsprechers aus der
elektrischen Impedanz Ze
durch den Grenzübergang
f 0 Hz.
Rel = 3.09
Um die Phasendrehung der elektrischen Impedanz vom Einfluss der mechani-schen Schallparametern zu befreien reicht ein einfacher Grenzübergang zu niedri-gen Frequenzen (Gl. 91) nicht aus. Dies geschieht durch eine Erhöhung der Membranmasse (Kap. 4.1.5.3) mm → ∞ (Gl. 101), das sich durch Festklemmen des Spulenkörpers leicht erreichen lässt. Eine Annäherung an die Phase der elek-trischen Impedanz (Abb. 53) durch eine Gerade (Gl. 151) bestimmt bei niedrigen Frequenzen die elektrische Induktivität Lel. Die Steigung
ael der Geraden ist
proportional zur Induktivität Lel und indirekt proportional zum elektrischen Wi-
lim Èf ®0 Hz
ZeHsLÈ= Rel
3 4 5 6 7 8 9 10
fHz
3.06
3.10
3.14
È Ze È
W
Ermittlung von R e
Messung von Z e
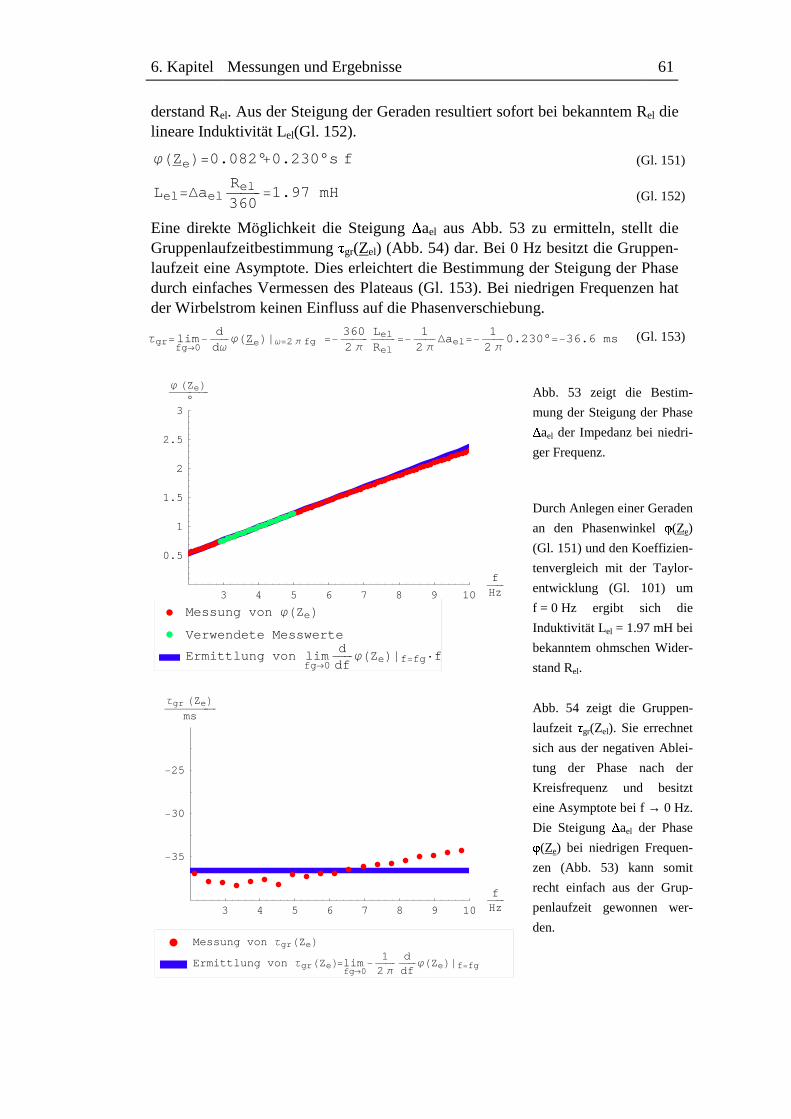
6. Kapitel Messungen und Ergebnisse 61
derstand Rel. Aus der Steigung der Geraden resultiert sofort bei bekanntem Rel die lineare Induktivität Lel(Gl. 152).
(Gl. 151)
(Gl. 152)
Eine direkte Möglichkeit die Steigung
ael aus Abb. 53 zu ermitteln, stellt die Gruppenlaufzeitbestimmung gr(Zel) (Abb. 54) dar. Bei 0 Hz besitzt die Gruppen-laufzeit eine Asymptote. Dies erleichtert die Bestimmung der Steigung der Phase durch einfaches Vermessen des Plateaus (Gl. 153). Bei niedrigen Frequenzen hat der Wirbelstrom keinen Einfluss auf die Phasenverschiebung.
(Gl. 153)
Abb. 53 zeigt die Bestim-
mung der Steigung der Phase
ael der Impedanz bei niedri-
ger Frequenz.
Durch Anlegen einer Geraden
an den Phasenwinkel (Ze)
(Gl. 151) und den Koeffizien-
tenvergleich mit der Taylor-
entwicklung (Gl. 101) um
f = 0 Hz ergibt sich die
Induktivität Lel = 1.97 mH bei
bekanntem ohmschen Wider-
stand Rel.
Abb. 54 zeigt die Gruppen-
laufzeit gr(Zel). Sie errechnet
sich aus der negativen Ablei-
tung der Phase nach der
Kreisfrequenz und besitzt
eine Asymptote bei f → 0 Hz.
Die Steigung ael der Phase (Ze) bei niedrigen Frequen-
zen (Abb. 53) kann somit
recht einfach aus der Grup-
penlaufzeit gewonnen wer-
den.
3 4 5 6 7 8 9 10
fHz
0.5
1
1.5
2
2.5
3
j HZeL
°
Ermittlung von limfg ®0
ddf
jHZeLÈf =fg ×f
Verwendete Messwerte
Messung von jHZeL
jHZeL=0.082° +0.230°s f
Lel =DaelRel360
=1.97 mH
Τgr = limfg ®0
-d
dΩ
jHZeLÈΩ=2 Π fg =-3602 Π
LelRel
=-1
2 Π
Dael =-1
2 Π
0.230° =-36.6 ms
3 4 5 6 7 8 9 10
fHz
-35
-30
-25
Τgr HZeL
ms
Ermittlung von Τgr HZeL=limfg ®0
-1
2 Π
ddf
jHZeLÈf =fg
Messung von Τgr HZeL
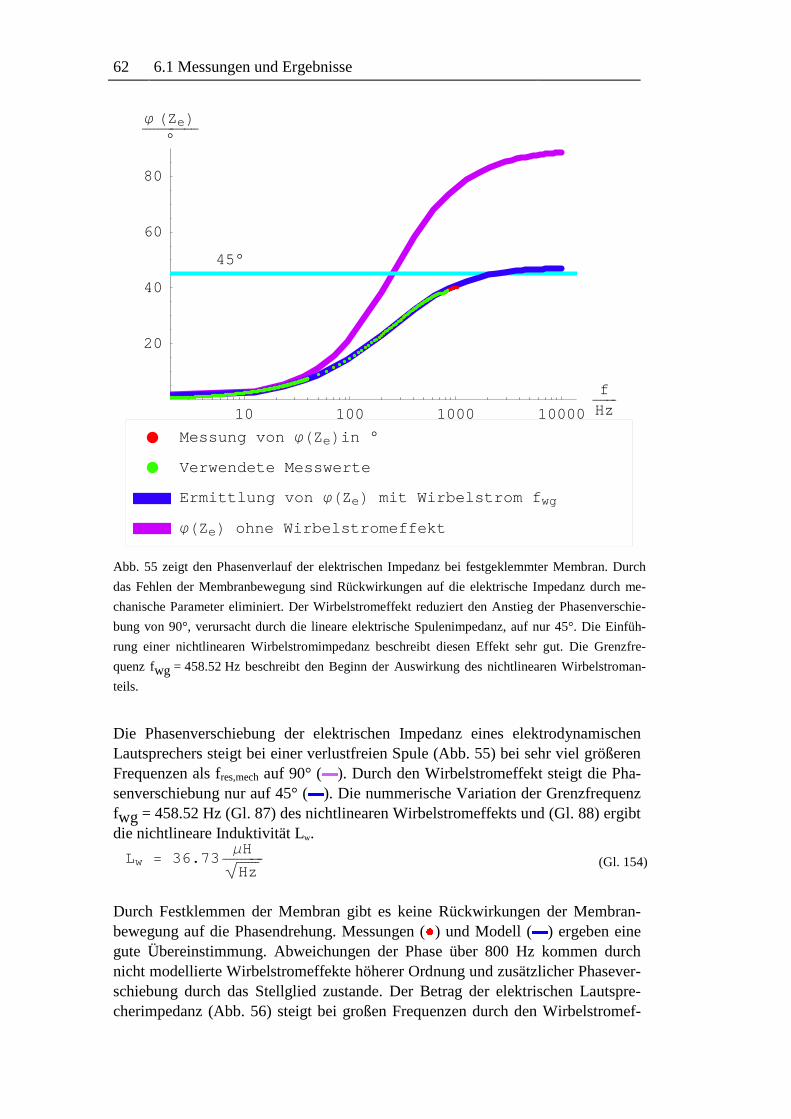
62 6.1 Messungen und Ergebnisse
10 100 1000 10000
fHz
20
40
60
80
j HZeL
°
45°
jHZeL ohne Wirbelstromeffekt
Ermittlung von jHZeL mit Wirbelstrom f wg
Verwendete Messwerte
Messung von jHZeLin °
Abb. 55 zeigt den Phasenverlauf der elektrischen Impedanz bei festgeklemmter Membran. Durch
das Fehlen der Membranbewegung sind Rückwirkungen auf die elektrische Impedanz durch me-
chanische Parameter eliminiert. Der Wirbelstromeffekt reduziert den Anstieg der Phasenverschie-
bung von 90°, verursacht durch die lineare elektrische Spulenimpedanz, auf nur 45°. Die Einfüh-
rung einer nichtlinearen Wirbelstromimpedanz beschreibt diesen Effekt sehr gut. Die Grenzfre-
quenz fwg = 458.52 Hz beschreibt den Beginn der Auswirkung des nichtlinearen Wirbelstroman-
teils.
Die Phasenverschiebung der elektrischen Impedanz eines elektrodynamischen Lautsprechers steigt bei einer verlustfreien Spule (Abb. 55) bei sehr viel größeren Frequenzen als fres,mech auf 90° ( ). Durch den Wirbelstromeffekt steigt die Pha-senverschiebung nur auf 45° ( ). Die nummerische Variation der Grenzfrequenz fwg = 458.52 Hz (Gl. 87) des nichtlinearen Wirbelstromeffekts und (Gl. 88) ergibt die nichtlineare Induktivität Lw.
(Gl. 154)
Durch Festklemmen der Membran gibt es keine Rückwirkungen der Membran-bewegung auf die Phasendrehung. Messungen ( ) und Modell ( ) ergeben eine gute Übereinstimmung. Abweichungen der Phase über 800 Hz kommen durch nicht modellierte Wirbelstromeffekte höherer Ordnung und zusätzlicher Phasever-schiebung durch das Stellglied zustande. Der Betrag der elektrischen Lautspre-cherimpedanz (Abb. 56) steigt bei großen Frequenzen durch den Wirbelstromef-
Lw = 36.73ΜH
!!!!!!Hz
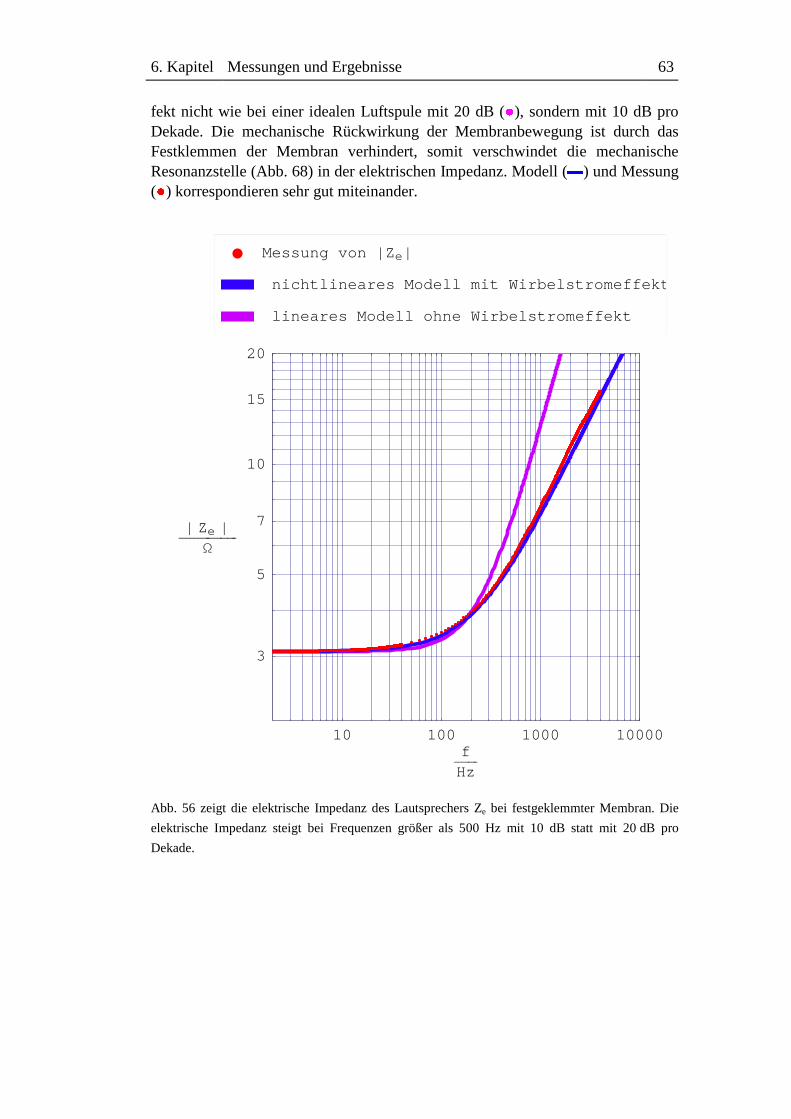
6. Kapitel Messungen und Ergebnisse 63
10 100 1000 10000f
Hz
3
5
7
10
15
20
È Ze È
W
lineares Modell ohne Wirbelstromeffekt
nichtlineares Modell mit Wirbelstromeffekt
Messung von ÈZeÈ
fekt nicht wie bei einer idealen Luftspule mit 20 dB ( ), sondern mit 10 dB pro Dekade. Die mechanische Rückwirkung der Membranbewegung ist durch das Festklemmen der Membran verhindert, somit verschwindet die mechanische Resonanzstelle (Abb. 68) in der elektrischen Impedanz. Modell ( ) und Messung ( ) korrespondieren sehr gut miteinander.
Abb. 56 zeigt die elektrische Impedanz des Lautsprechers Ze bei festgeklemmter Membran. Die
elektrische Impedanz steigt bei Frequenzen größer als 500 Hz mit 10 dB statt mit 20 dB pro
Dekade.
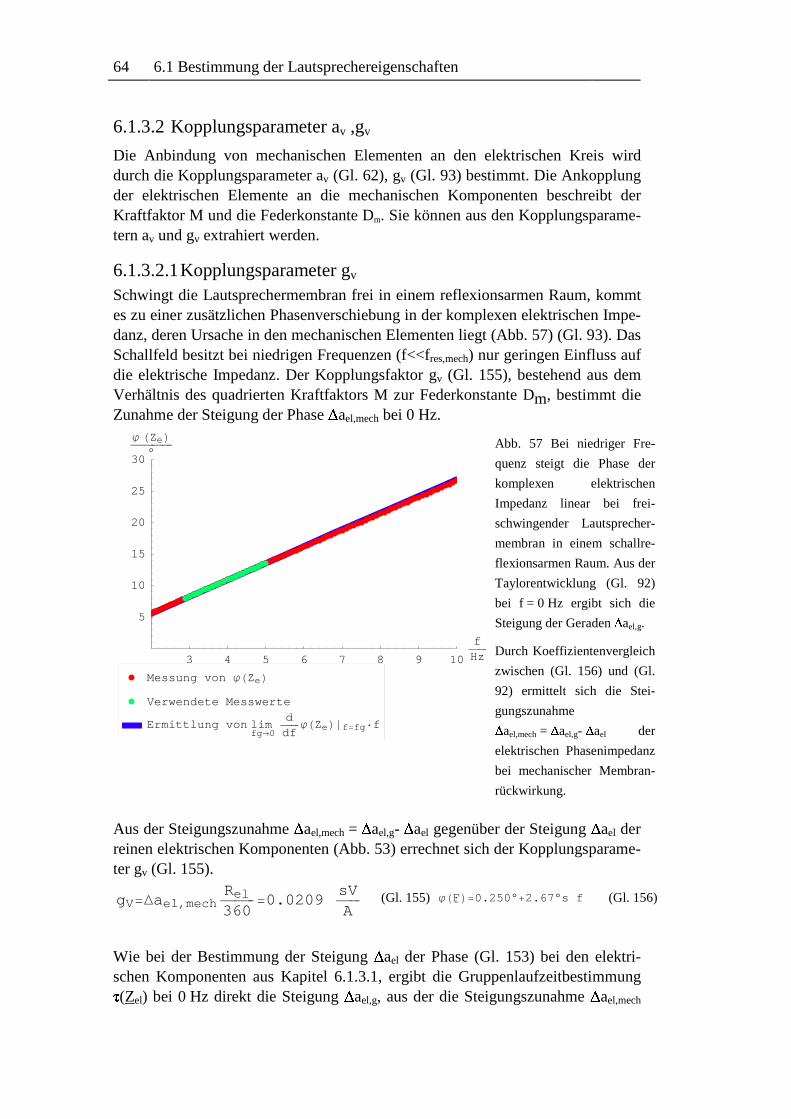
64 6.1 Bestimmung der Lautsprechereigenschaften
6.1.3.2 Kopplungsparameter av ,gv
Die Anbindung von mechanischen Elementen an den elektrischen Kreis wird durch die Kopplungsparameter av (Gl. 62), gv (Gl. 93) bestimmt. Die Ankopplung der elektrischen Elemente an die mechanischen Komponenten beschreibt der Kraftfaktor M und die Federkonstante Dm. Sie können aus den Kopplungsparame-tern av und gv extrahiert werden.
6.1.3.2.1 Kopplungsparameter gv Schwingt die Lautsprechermembran frei in einem reflexionsarmen Raum, kommt es zu einer zusätzlichen Phasenverschiebung in der komplexen elektrischen Impe-danz, deren Ursache in den mechanischen Elementen liegt (Abb. 57) (Gl. 93). Das Schallfeld besitzt bei niedrigen Frequenzen (f<<fres,mech) nur geringen Einfluss auf die elektrische Impedanz. Der Kopplungsfaktor gv (Gl. 155), bestehend aus dem Verhältnis des quadrierten Kraftfaktors M zur Federkonstante Dm, bestimmt die Zunahme der Steigung der Phase
ael,mech bei 0 Hz.
Abb. 57 Bei niedriger Fre-
quenz steigt die Phase der
komplexen elektrischen
Impedanz linear bei frei-
schwingender Lautsprecher-
membran in einem schallre-
flexionsarmen Raum. Aus der
Taylorentwicklung (Gl. 92)
bei f = 0 Hz ergibt sich die
Steigung der Geraden ael,g.
Durch Koeffizientenvergleich
zwischen (Gl. 156) und (Gl.
92) ermittelt sich die Stei-
gungszunahme
ael,mech = ael,g- ael der
elektrischen Phasenimpedanz
bei mechanischer Membran-
rückwirkung.
Aus der Steigungszunahme
ael,mech =
ael,g-
ael gegenüber der Steigung
ael der
reinen elektrischen Komponenten (Abb. 53) errechnet sich der Kopplungsparame-ter gv (Gl. 155).
(Gl. 155)
(Gl. 156)
Wie bei der Bestimmung der Steigung
ael der Phase (Gl. 153) bei den elektri-
schen Komponenten aus Kapitel 6.1.3.1, ergibt die Gruppenlaufzeitbestimmung (Zel) bei 0 Hz direkt die Steigung
ael,g, aus der die Steigungszunahme
ael,mech
3 4 5 6 7 8 9 10
fHz
5
10
15
20
25
30
j HZeL
°
Ermittlung von limfg ®0
ddf
jHZeLÈf =fg ×f
Verwendete Messwerte
Messung von jHZeL
jHFL=0.250° +2.67°s fgV=Dael,mechRel360
=0.0209sVA
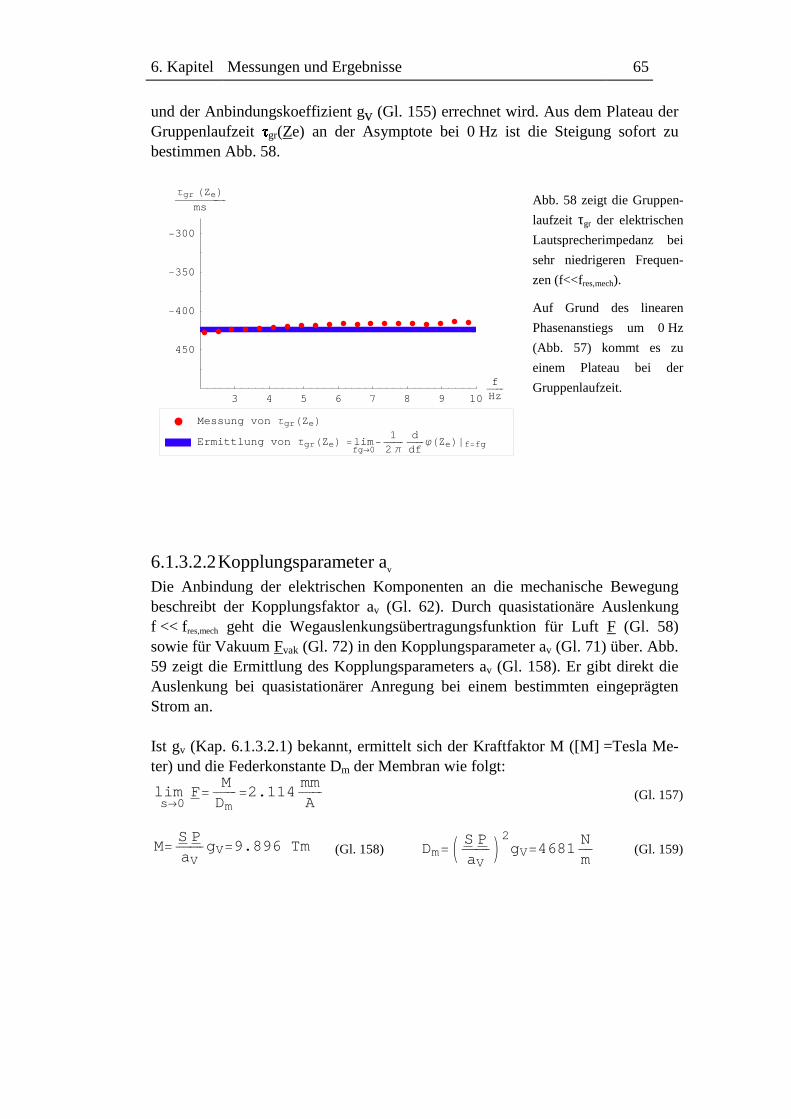
6. Kapitel Messungen und Ergebnisse 65
und der Anbindungskoeffizient gv (Gl. 155) errechnet wird. Aus dem Plateau der Gruppenlaufzeit gr(Ze) an der Asymptote bei 0 Hz ist die Steigung sofort zu bestimmen Abb. 58.
Abb. 58 zeigt die Gruppen-
laufzeit τgr der elektrischen
Lautsprecherimpedanz bei
sehr niedrigeren Frequen-
zen (f<<fres,mech).
Auf Grund des linearen
Phasenanstiegs um 0 Hz
(Abb. 57) kommt es zu
einem Plateau bei der
Gruppenlaufzeit.
6.1.3.2.2 Kopplungsparameter av Die Anbindung der elektrischen Komponenten an die mechanische Bewegung beschreibt der Kopplungsfaktor av (Gl. 62). Durch quasistationäre Auslenkung f << fres,mech geht die Wegauslenkungsübertragungsfunktion für Luft F (Gl. 58) sowie für Vakuum Fvak (Gl. 72) in den Kopplungsparameter av (Gl. 71) über. Abb. 59 zeigt die Ermittlung des Kopplungsparameters av (Gl. 158). Er gibt direkt die Auslenkung bei quasistationärer Anregung bei einem bestimmten eingeprägten Strom an. Ist gv (Kap. 6.1.3.2.1) bekannt, ermittelt sich der Kraftfaktor M ([M] =Tesla Me-ter) und die Federkonstante Dm der Membran wie folgt:
(Gl. 157)
(Gl. 158) (Gl. 159)
3 4 5 6 7 8 9 10
fHz
-300
-350
-400
450
Τgr HZeL
ms
Ermittlung von Τgr HZeL = limfg ®0
-1
2 Π
ddf
jHZeLÈf =fg
Messung von Τgr HZeL
M=S PaV
gV=9.896 Tm Dm=J S PaVN2
gV=4681Nm
lims®0
F=M
Dm
=2.114mmA
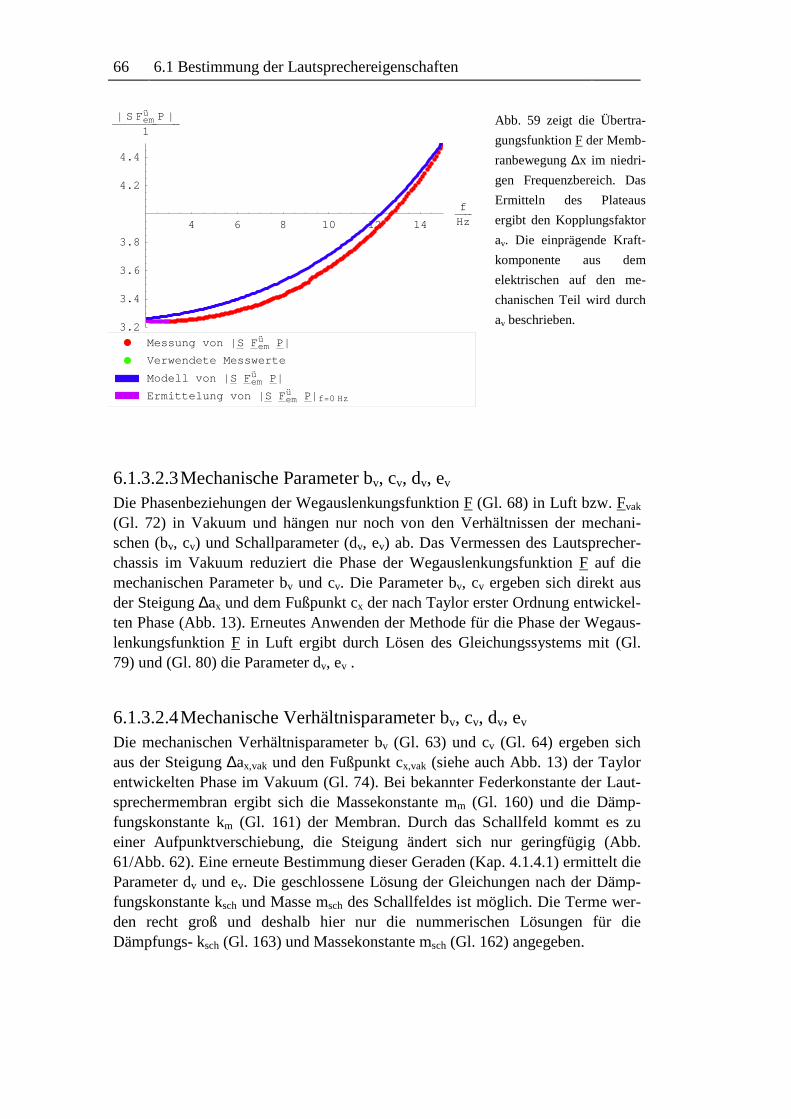
66 6.1 Bestimmung der Lautsprechereigenschaften
Abb. 59 zeigt die Übertra-
gungsfunktion F der Memb-
ranbewegung ∆x im niedri-
gen Frequenzbereich. Das
Ermitteln des Plateaus
ergibt den Kopplungsfaktor
av. Die einprägende Kraft-
komponente aus dem
elektrischen auf den me-
chanischen Teil wird durch
av beschrieben.
6.1.3.2.3 Mechanische Parameter bv, cv, dv, ev Die Phasenbeziehungen der Wegauslenkungsfunktion F (Gl. 68) in Luft bzw. Fvak (Gl. 72) in Vakuum und hängen nur noch von den Verhältnissen der mechani-schen (bv, cv) und Schallparameter (dv, ev) ab. Das Vermessen des Lautsprecher-chassis im Vakuum reduziert die Phase der Wegauslenkungsfunktion F auf die mechanischen Parameter bv und cv. Die Parameter bv, cv ergeben sich direkt aus der Steigung ∆ax und dem Fußpunkt cx der nach Taylor erster Ordnung entwickel-ten Phase (Abb. 13). Erneutes Anwenden der Methode für die Phase der Wegaus-lenkungsfunktion F in Luft ergibt durch Lösen des Gleichungssystems mit (Gl. 79) und (Gl. 80) die Parameter dv, ev .
6.1.3.2.4 Mechanische Verhältnisparameter bv, cv, dv, ev Die mechanischen Verhältnisparameter bv (Gl. 63) und cv (Gl. 64) ergeben sich aus der Steigung ∆ax,vak und den Fußpunkt cx,vak (siehe auch Abb. 13) der Taylor entwickelten Phase im Vakuum (Gl. 74). Bei bekannter Federkonstante der Laut-sprechermembran ergibt sich die Massekonstante mm (Gl. 160) und die Dämp-fungskonstante km (Gl. 161) der Membran. Durch das Schallfeld kommt es zu einer Aufpunktverschiebung, die Steigung ändert sich nur geringfügig (Abb. 61/Abb. 62). Eine erneute Bestimmung dieser Geraden (Kap. 4.1.4.1) ermittelt die Parameter dv und ev. Die geschlossene Lösung der Gleichungen nach der Dämp-fungskonstante ksch und Masse msch des Schallfeldes ist möglich. Die Terme wer-den recht groß und deshalb hier nur die nummerischen Lösungen für die Dämpfungs- ksch (Gl. 163) und Massekonstante msch (Gl. 162) angegeben.
4 6 8 10 12 14
fHz
3.2
3.4
3.6
3.8
4.2
4.4
È S Femü PÈ
1
Ermittelung von ÈS Femü PÈf =0 Hz
Modell von ÈS Femü PÈVerwendete Messwerte
Messung von ÈS Femü PÈ
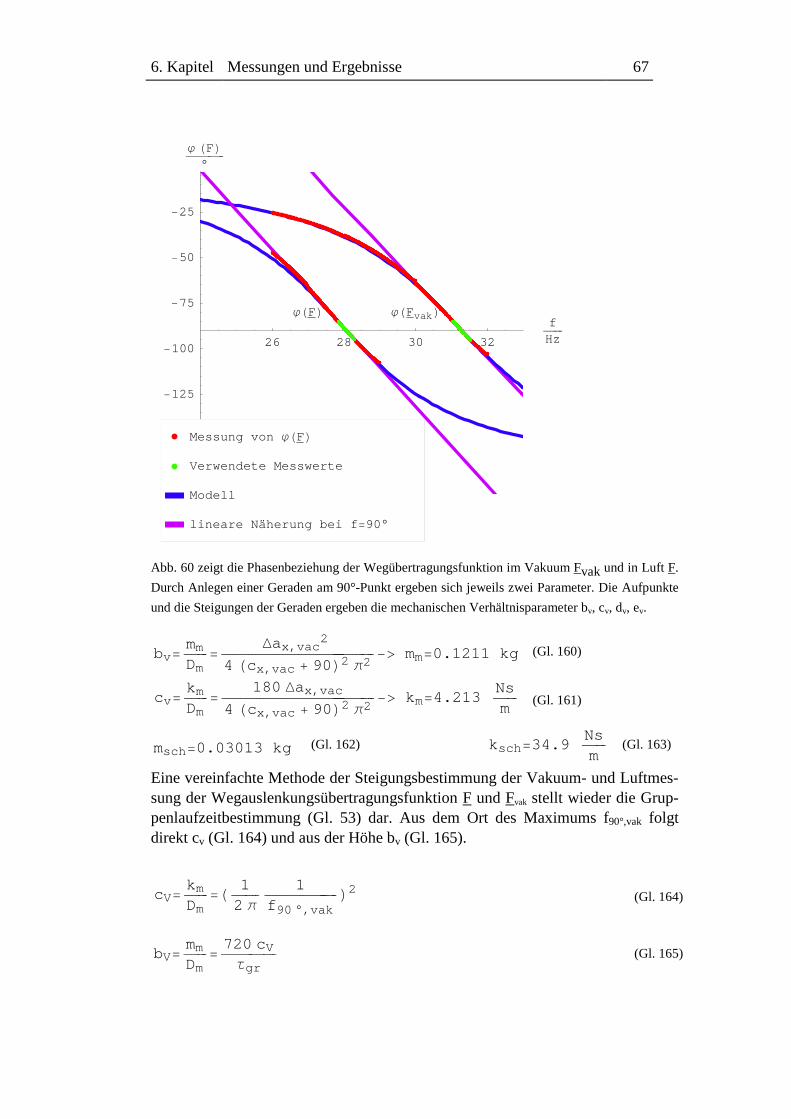
6. Kapitel Messungen und Ergebnisse 67
26 28 30 32
fHz
-175
-150
-125
-100
-75
-50
-25
j HFL
°
jHFvak LjHFL
lineare Näherung bei f =90°
Modell
Verwendete Messwerte
Messung von jHFL
Abb. 60 zeigt die Phasenbeziehung der Wegübertragungsfunktion im Vakuum Fvak und in Luft F.
Durch Anlegen einer Geraden am 90°-Punkt ergeben sich jeweils zwei Parameter. Die Aufpunkte
und die Steigungen der Geraden ergeben die mechanischen Verhältnisparameter bv, cv, dv, ev.
(Gl. 160)
(Gl. 161)
(Gl. 162) (Gl. 163)
Eine vereinfachte Methode der Steigungsbestimmung der Vakuum- und Luftmes-sung der Wegauslenkungsübertragungsfunktion F und Fvak stellt wieder die Grup-penlaufzeitbestimmung (Gl. 53) dar. Aus dem Ort des Maximums f90°,vak folgt direkt cv (Gl. 164) und aus der Höhe bv (Gl. 165).
(Gl. 164)
(Gl. 165)
cv=kmDm
=180 Dax,vac
4 Hcx,vac + 90L2 Π2
-> km=4.213Nsm
msch =0.03013 kg ksch =34.9Nsm
bv=mmDm
=Dax,vac
24 Hcx,vac + 90L2 Π2
-> mm=0.1211 kg
cV=kmDm
=H 12 Π
1f 90 °,vak
L2
bV=mmDm
=720 c V
Τgr
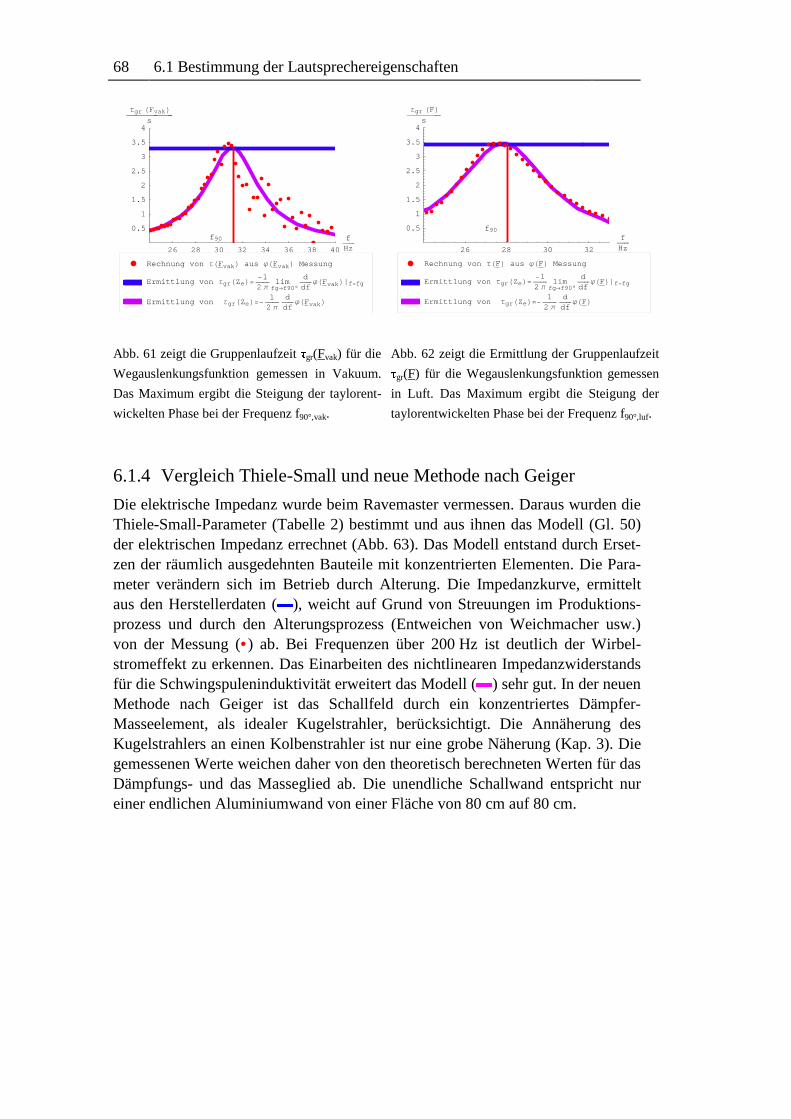
68 6.1 Bestimmung der Lautsprechereigenschaften
Abb. 61 zeigt die Gruppenlaufzeit gr(Fvak) für die
Wegauslenkungsfunktion gemessen in Vakuum.
Das Maximum ergibt die Steigung der taylorent-
wickelten Phase bei der Frequenz f90°,vak.
Abb. 62 zeigt die Ermittlung der Gruppenlaufzeit
gr(F) für die Wegauslenkungsfunktion gemessen
in Luft. Das Maximum ergibt die Steigung der
taylorentwickelten Phase bei der Frequenz f90°,luf.
6.1.4 Vergleich Thiele-Small und neue Methode nach Geiger
Die elektrische Impedanz wurde beim Ravemaster vermessen. Daraus wurden die Thiele-Small-Parameter (Tabelle 2) bestimmt und aus ihnen das Modell (Gl. 50) der elektrischen Impedanz errechnet (Abb. 63). Das Modell entstand durch Erset-zen der räumlich ausgedehnten Bauteile mit konzentrierten Elementen. Die Para-meter verändern sich im Betrieb durch Alterung. Die Impedanzkurve, ermittelt aus den Herstellerdaten ( ), weicht auf Grund von Streuungen im Produktions-prozess und durch den Alterungsprozess (Entweichen von Weichmacher usw.) von der Messung (•) ab. Bei Frequenzen über 200 Hz ist deutlich der Wirbel-stromeffekt zu erkennen. Das Einarbeiten des nichtlinearen Impedanzwiderstands für die Schwingspuleninduktivität erweitert das Modell ( ) sehr gut. In der neuen Methode nach Geiger ist das Schallfeld durch ein konzentriertes Dämpfer-Masseelement, als idealer Kugelstrahler, berücksichtigt. Die Annäherung des Kugelstrahlers an einen Kolbenstrahler ist nur eine grobe Näherung (Kap. 3). Die gemessenen Werte weichen daher von den theoretisch berechneten Werten für das Dämpfungs- und das Masseglied ab. Die unendliche Schallwand entspricht nur einer endlichen Aluminiumwand von einer Fläche von 80 cm auf 80 cm.
26 28 30 32 34 36 38 40
fHz
0.5
1
1.5
2
2.5
3
3.5
4
Τgr HFvak L
s
f 90
Ermittlung von Τgr HZeL=-1
2 Π
ddf
jHFvak LErmittlung von Τgr HZeL=
-12 Π
limfg ®f90°
ddf
jHFvak LÈf =fg
Rechnung von ΤHFvak L aus jHFvak L Messung
26 28 30 32
fHz
0.5
1
1.5
2
2.5
3
3.5
4
Τgr HFL
s
f 90
Ermittlung von Τgr HZeL=-1
2 Π
ddf
jHFLErmittlung von Τgr HZeL=
-12 Π
limfg ®f90°
ddf
jHFLÈf =fg
Rechnung von ΤHFL aus jHFL Messung
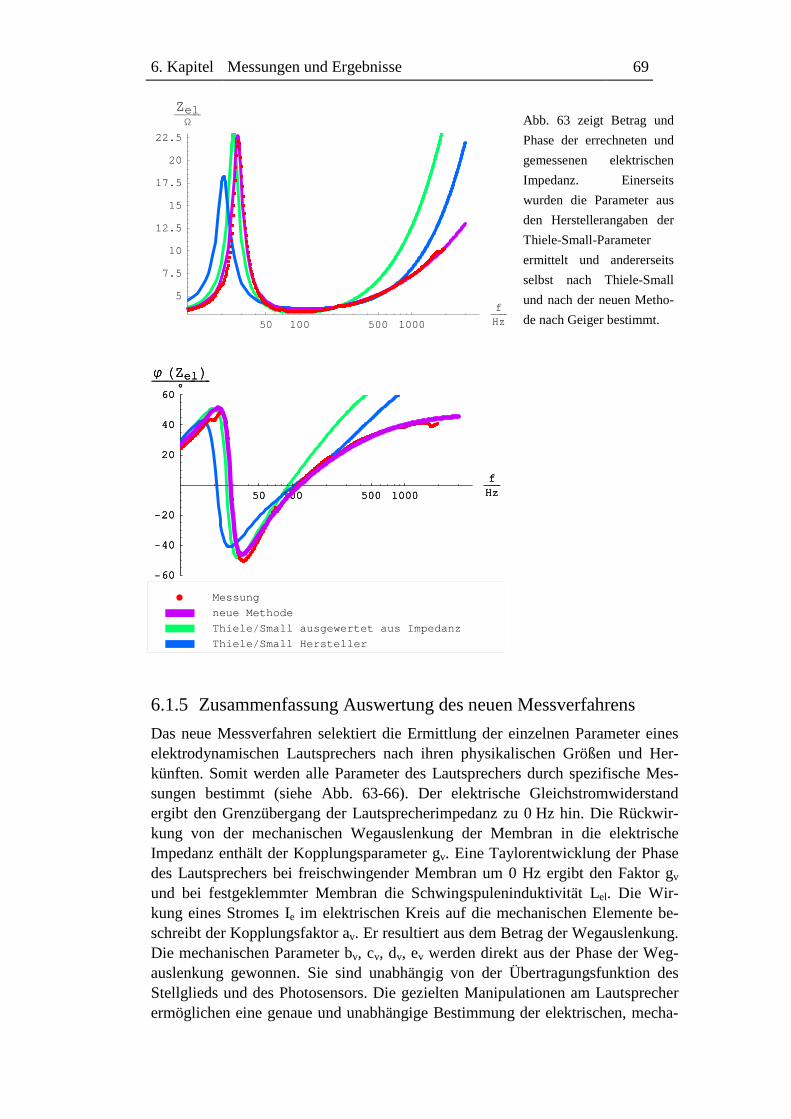
6. Kapitel Messungen und Ergebnisse 69
Abb. 63 zeigt Betrag und
Phase der errechneten und
gemessenen elektrischen
Impedanz. Einerseits
wurden die Parameter aus
den Herstellerangaben der
Thiele-Small-Parameter
ermittelt und andererseits
selbst nach Thiele-Small
und nach der neuen Metho-
de nach Geiger bestimmt.
6.1.5 Zusammenfassung Auswertung des neuen Messverfahrens
Das neue Messverfahren selektiert die Ermittlung der einzelnen Parameter eines elektrodynamischen Lautsprechers nach ihren physikalischen Größen und Her-künften. Somit werden alle Parameter des Lautsprechers durch spezifische Mes-sungen bestimmt (siehe Abb. 63-66). Der elektrische Gleichstromwiderstand ergibt den Grenzübergang der Lautsprecherimpedanz zu 0 Hz hin. Die Rückwir-kung von der mechanischen Wegauslenkung der Membran in die elektrische Impedanz enthält der Kopplungsparameter gv. Eine Taylorentwicklung der Phase des Lautsprechers bei freischwingender Membran um 0 Hz ergibt den Faktor gv und bei festgeklemmter Membran die Schwingspuleninduktivität Lel. Die Wir-kung eines Stromes Ie im elektrischen Kreis auf die mechanischen Elemente be-schreibt der Kopplungsfaktor av. Er resultiert aus dem Betrag der Wegauslenkung. Die mechanischen Parameter bv, cv, dv, ev werden direkt aus der Phase der Weg-auslenkung gewonnen. Sie sind unabhängig von der Übertragungsfunktion des Stellglieds und des Photosensors. Die gezielten Manipulationen am Lautsprecher ermöglichen eine genaue und unabhängige Bestimmung der elektrischen, mecha-
50 100 500 1000
fHz
5
7.5
10
12.5
15
17.5
20
22.5
ZelW
50 100 500 1000
fHz
-60
-40
-20
20
40
60
j HZel L°
Thiele Small Hersteller
Thiele Small ermittel
neue Methode
Daten
50 100 500 1000
fHz
-60
-40
-20
20
40
60
j HZel L°
Thiele Small Hersteller
Thiele Small ermittel
neue Methode
Daten
50 100 500 1000
fHz
-60
-40
-20
20
40
60
j HZel L°
Thiele Small Hersteller
Thiele Small ausgewertet aus Impedanz
neue Methode
Messung
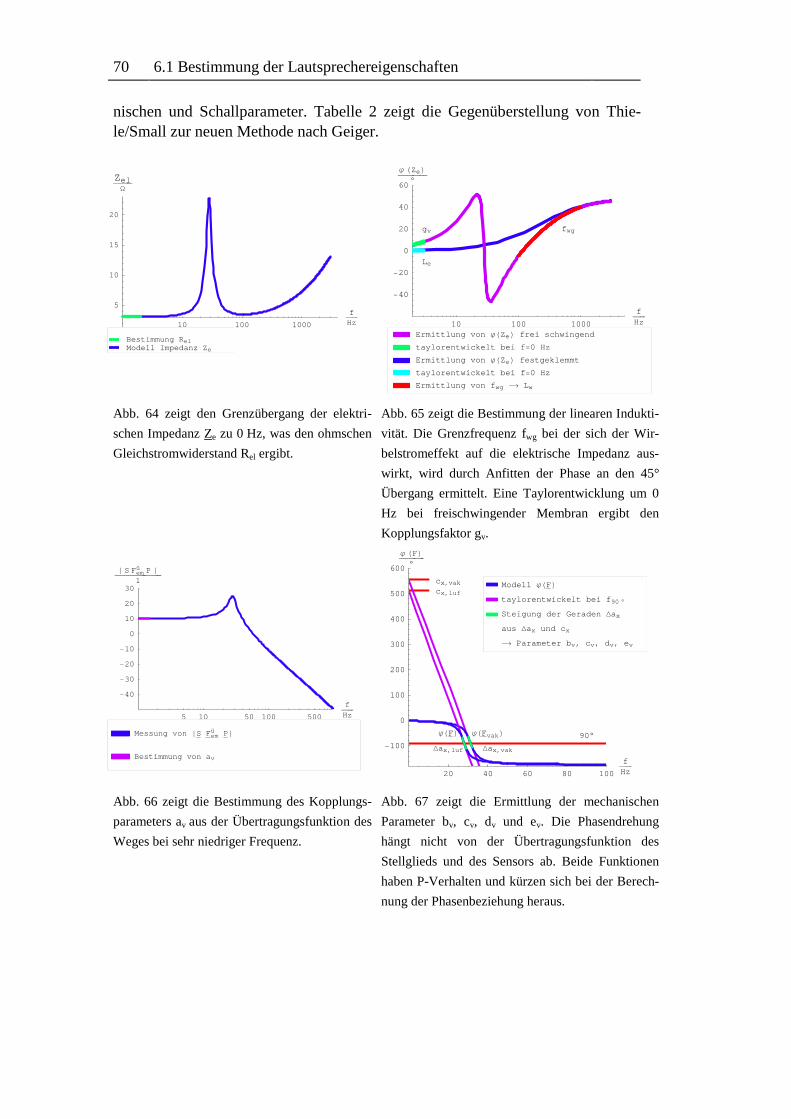
70 6.1 Bestimmung der Lautsprechereigenschaften
10 100 1000
fHz
-40
-20
0
20
40
60
j HZeL
°
f wggv
Le
Ermittlung von f wg Lw
taylorentwickelt bei f =0 Hz
Ermittlung von jHZeL festgeklemmt
taylorentwickelt bei f =0 Hz
Ermittlung von jHZeL frei schwingend
20 40 60 80 100
fHz
-100
0
100
200
300
400
500
600
j HFL
°
jHFvak LjHFL
cx,luf
cx,vak
Dax,luf Dax,vak
90°
Parameter b v , c v , d v , e v
aus Dax und c x
Steigung der Geraden Dax
taylorentwickelt bei f 90 °
Modell jHFL
nischen und Schallparameter. Tabelle 2 zeigt die Gegenüberstellung von Thie-le/Small zur neuen Methode nach Geiger.
Abb. 64 zeigt den Grenzübergang der elektri-
schen Impedanz Ze zu 0 Hz, was den ohmschen
Gleichstromwiderstand Rel ergibt.
Abb. 65 zeigt die Bestimmung der linearen Indukti-
vität. Die Grenzfrequenz fwg bei der sich der Wir-
belstromeffekt auf die elektrische Impedanz aus-
wirkt, wird durch Anfitten der Phase an den 45°
Übergang ermittelt. Eine Taylorentwicklung um 0
Hz bei freischwingender Membran ergibt den
Kopplungsfaktor gv.
Abb. 66 zeigt die Bestimmung des Kopplungs-
parameters av aus der Übertragungsfunktion des
Weges bei sehr niedriger Frequenz.
Abb. 67 zeigt die Ermittlung der mechanischen
Parameter bv, cv, dv und ev. Die Phasendrehung
hängt nicht von der Übertragungsfunktion des
Stellglieds und des Sensors ab. Beide Funktionen
haben P-Verhalten und kürzen sich bei der Berech-
nung der Phasenbeziehung heraus.
10 100 1000
fHz
5
10
15
20
ZelW
Modell Impedanz Z e
Bestimmung R el
5 10 50 100 500
fHz
-40
-30
-20
-10
0
10
20
30
È S Femü PÈ
1
Bestimmung von a v
Messung von ÈS Femü PÈ
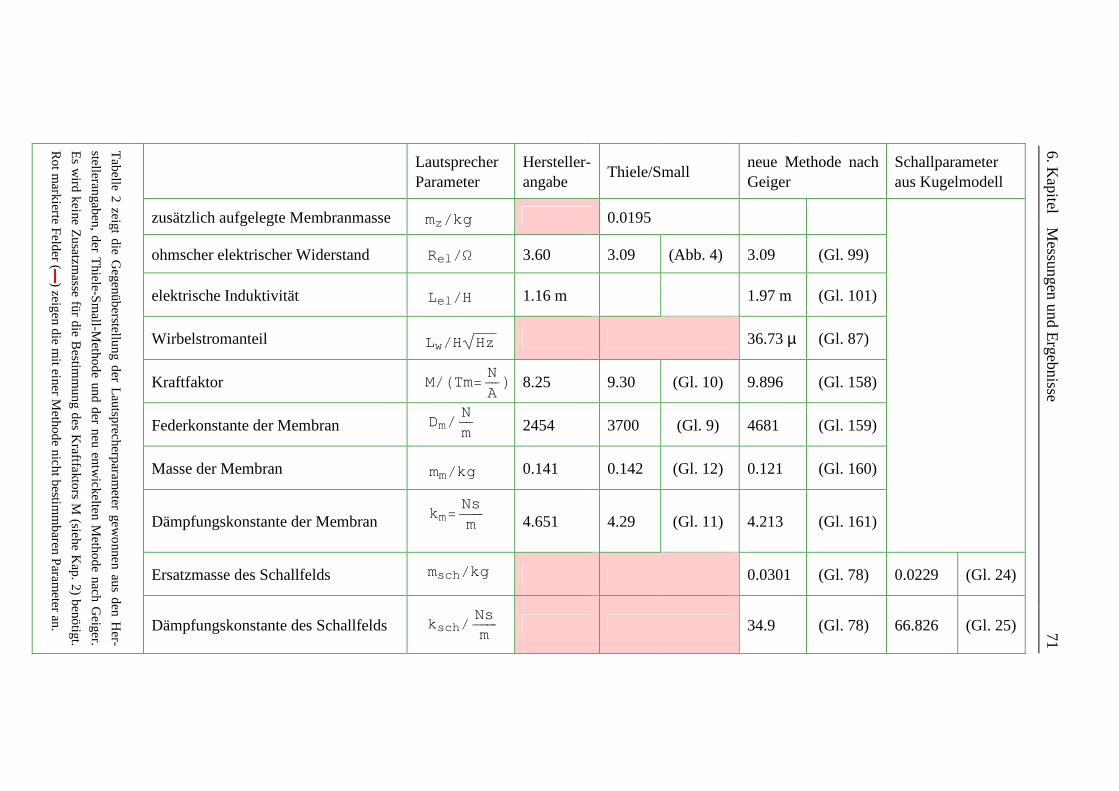
6. Kapitel
Messungen und E
rgebnisse 71
km=Nsm
MHTm=NAL
(Gl. 24)
(Gl. 25)
Schallparameter aus Kugelmodell
0.0229
66.826
(Gl. 99)
(Gl. 101)
(Gl. 87)
(Gl. 158)
(Gl. 159)
(Gl. 160)
(Gl. 161)
(Gl. 78)
(Gl. 78)
neue Methode nach Geiger
3.09
1.97 m
36.73 µ
9.896
4681
0.121
4.213
0.0301
34.9
(Abb. 4)
(Gl. 10)
(Gl. 9)
(Gl. 12)
(Gl. 11)
Thiele/Small
0.0195
3.09
9.30
3700
0.142
4.29
Hersteller-angabe
3.60
1.16 m
8.25
2454
0.141
4.651
Lautsprecher Parameter
zusätzlich aufgelegte Membranmasse
ohmscher elektrischer Widerstand
elektrische Induktivität
Wirbelstromanteil
Kraftfaktor
Federkonstante der Membran
Masse der Membran
Dämpfungskonstante der Membran
Ersatzmasse des Schallfelds
Dämpfungskonstante des Schallfelds
Tab
elle 2 zeigt d
ie Gegenüb
erstellu
ng d
er Lautsprec
herpara
meter ge
wo
nnen au
s den H
er-
stellerangab
en, der T
hiele-Sm
all-Metho
de und
der neu entw
ickelten M
ethod
e nach Geiger.
Es w
ird keine Z
usatzm
asse für d
ie Bestim
mu
ng d
es Kr
aftfakto
rs M (siehe K
ap. 2
) benö
tigt.
Ro
t markierte F
elder ( ) zeig
en die m
it einer Metho
de nich
t bestim
mb
aren Para
meter an.
ksch Nsm
msch kg
mmkg
Dm Nm
Lel H
Rel W
mzkg
LwH!!!!!!Hz
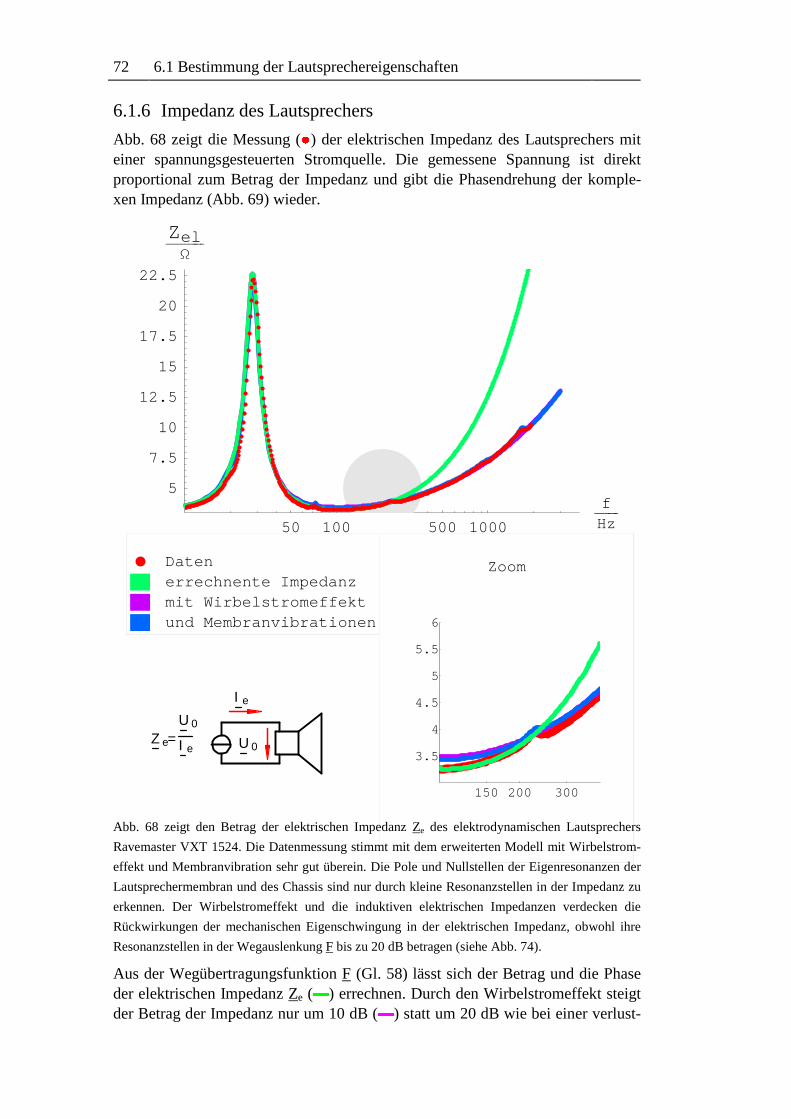
72 6.1 Bestimmung der Lautsprechereigenschaften
50 100 500 1000
fHz
5
7.5
10
12.5
15
17.5
20
22.5
ZelW
und Membranvibrationenmit Wirbelstromeffekterrechnente ImpedanzDaten
150 200 300
3.5
4
4.5
5
5.5
6
Zoom
6.1.6 Impedanz des Lautsprechers
Abb. 68 zeigt die Messung ( ) der elektrischen Impedanz des Lautsprechers mit einer spannungsgesteuerten Stromquelle. Die gemessene Spannung ist direkt proportional zum Betrag der Impedanz und gibt die Phasendrehung der komple-xen Impedanz (Abb. 69) wieder.
Abb. 68 zeigt den Betrag der elektrischen Impedanz Ze des elektrodynamischen Lautsprechers
Ravemaster VXT 1524. Die Datenmessung stimmt mit dem erweiterten Modell mit Wirbelstrom-
effekt und Membranvibration sehr gut überein. Die Pole und Nullstellen der Eigenresonanzen der
Lautsprechermembran und des Chassis sind nur durch kleine Resonanzstellen in der Impedanz zu
erkennen. Der Wirbelstromeffekt und die induktiven elektrischen Impedanzen verdecken die
Rückwirkungen der mechanischen Eigenschwingung in der elektrischen Impedanz, obwohl ihre
Resonanzstellen in der Wegauslenkung F bis zu 20 dB betragen (siehe Abb. 74).
Aus der Wegübertragungsfunktion F (Gl. 58) lässt sich der Betrag und die Phase der elektrischen Impedanz Ze ( ) errechnen. Durch den Wirbelstromeffekt steigt der Betrag der Impedanz nur um 10 dB ( ) statt um 20 dB wie bei einer verlust-
U 0
I
U 0
IZ =e
e
e
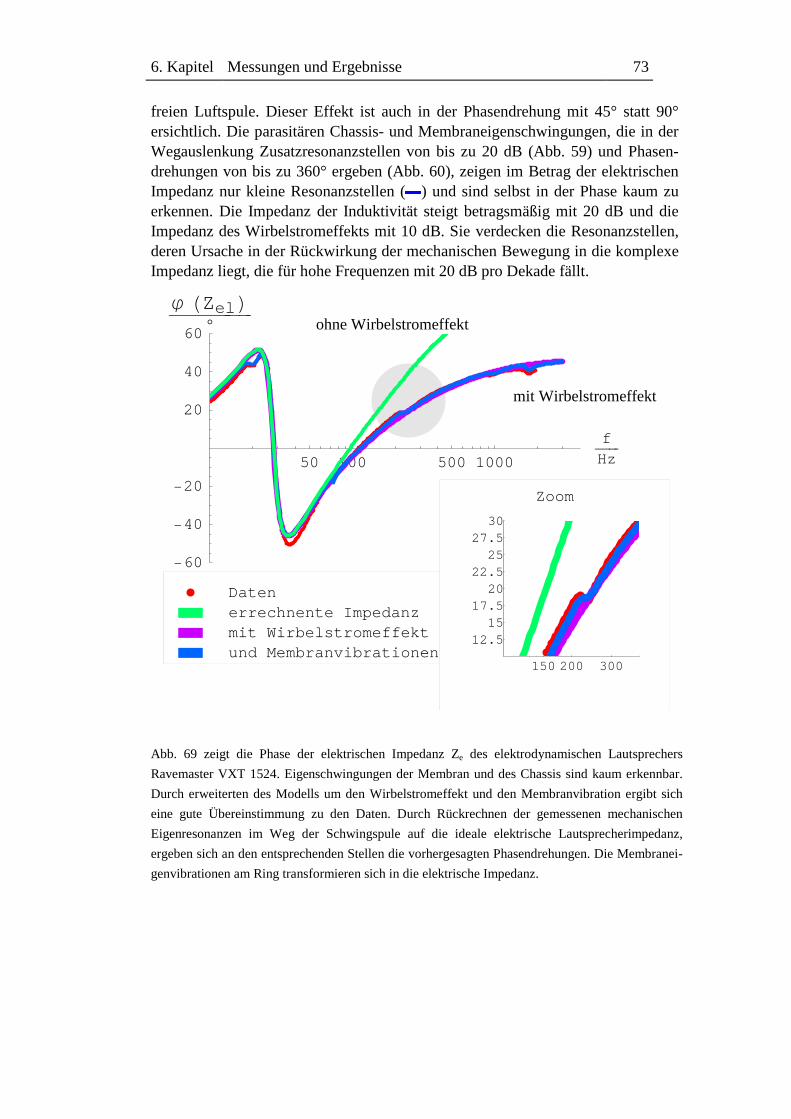
6. Kapitel Messungen und Ergebnisse 73
freien Luftspule. Dieser Effekt ist auch in der Phasendrehung mit 45° statt 90° ersichtlich. Die parasitären Chassis- und Membraneigenschwingungen, die in der Wegauslenkung Zusatzresonanzstellen von bis zu 20 dB (Abb. 59) und Phasen-drehungen von bis zu 360° ergeben (Abb. 60), zeigen im Betrag der elektrischen Impedanz nur kleine Resonanzstellen ( ) und sind selbst in der Phase kaum zu erkennen. Die Impedanz der Induktivität steigt betragsmäßig mit 20 dB und die Impedanz des Wirbelstromeffekts mit 10 dB. Sie verdecken die Resonanzstellen, deren Ursache in der Rückwirkung der mechanischen Bewegung in die komplexe Impedanz liegt, die für hohe Frequenzen mit 20 dB pro Dekade fällt.
Abb. 69 zeigt die Phase der elektrischen Impedanz Ze des elektrodynamischen Lautsprechers
Ravemaster VXT 1524. Eigenschwingungen der Membran und des Chassis sind kaum erkennbar.
Durch erweiterten des Modells um den Wirbelstromeffekt und den Membranvibration ergibt sich
eine gute Übereinstimmung zu den Daten. Durch Rückrechnen der gemessenen mechanischen
Eigenresonanzen im Weg der Schwingspule auf die ideale elektrische Lautsprecherimpedanz,
ergeben sich an den entsprechenden Stellen die vorhergesagten Phasendrehungen. Die Membranei-
genvibrationen am Ring transformieren sich in die elektrische Impedanz.
50 100 500 1000
fHz
-60
-40
-20
20
40
60
j HZel L°
und Membranvibrationenmit Wirbelstromeffekterrechnente ImpedanzDaten
150 200 300
12.515
17.520
22.525
27.530
Zoom
ohne Wirbelstromeffekt
mit Wirbelstromeffekt
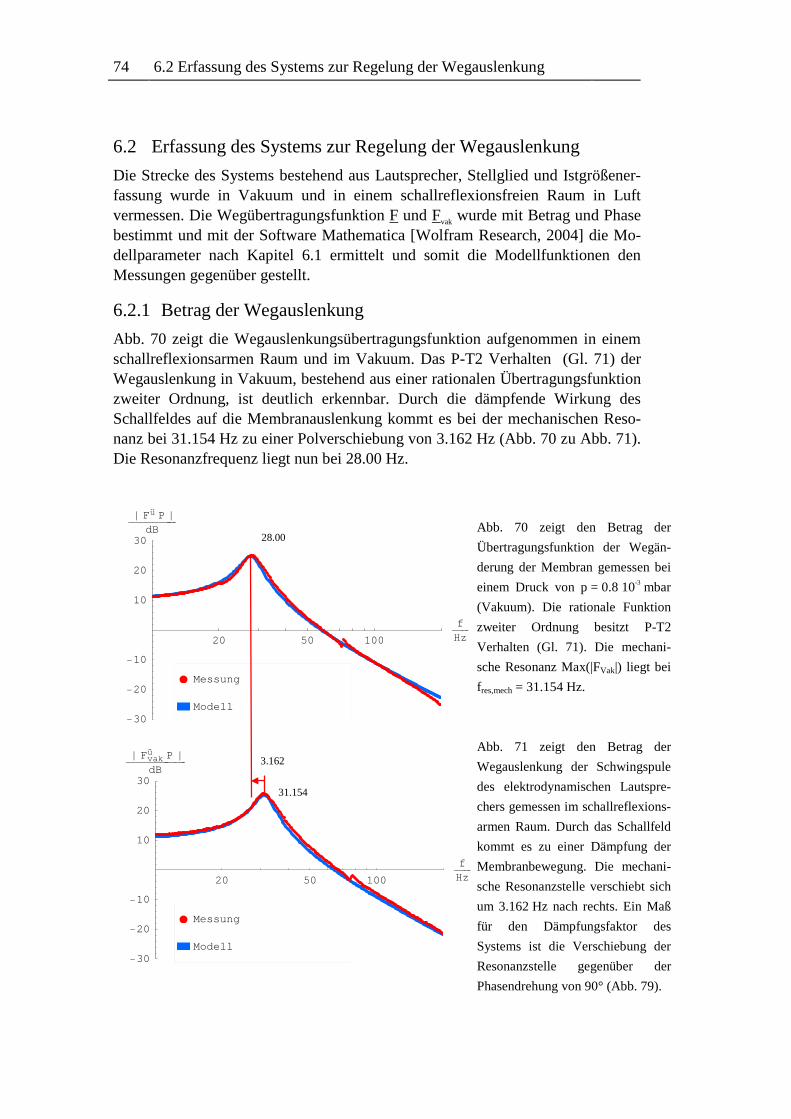
74 6.2 Erfassung des Systems zur Regelung der Wegauslenkung
20 50 100
fHz
-30
-20
-10
10
20
30
È Fü PÈ
dB
Modell
Messung
20 50 100
fHz
-30
-20
-10
10
20
30
È Fvakü P È
dB
Modell
Messung
6.2 Erfassung des Systems zur Regelung der Wegauslenkung
Die Strecke des Systems bestehend aus Lautsprecher, Stellglied und Istgrößener-fassung wurde in Vakuum und in einem schallreflexionsfreien Raum in Luft vermessen. Die Wegübertragungsfunktion F und Fvak wurde mit Betrag und Phase bestimmt und mit der Software Mathematica [Wolfram Research, 2004] die Mo-dellparameter nach Kapitel 6.1 ermittelt und somit die Modellfunktionen den Messungen gegenüber gestellt.
6.2.1 Betrag der Wegauslenkung
Abb. 70 zeigt die Wegauslenkungsübertragungsfunktion aufgenommen in einem schallreflexionsarmen Raum und im Vakuum. Das P-T2 Verhalten (Gl. 71) der Wegauslenkung in Vakuum, bestehend aus einer rationalen Übertragungsfunktion zweiter Ordnung, ist deutlich erkennbar. Durch die dämpfende Wirkung des Schallfeldes auf die Membranauslenkung kommt es bei der mechanischen Reso-nanz bei 31.154 Hz zu einer Polverschiebung von 3.162 Hz (Abb. 70 zu Abb. 71). Die Resonanzfrequenz liegt nun bei 28.00 Hz.
Abb. 70 zeigt den Betrag der
Übertragungsfunktion der Wegän-
derung der Membran gemessen bei
einem Druck von p = 0.8 10-3 mbar
(Vakuum). Die rationale Funktion
zweiter Ordnung besitzt P-T2
Verhalten (Gl. 71). Die mechani-
sche Resonanz Max(|FVak|) liegt bei
fres,mech = 31.154 Hz.
Abb. 71 zeigt den Betrag der
Wegauslenkung der Schwingspule
des elektrodynamischen Lautspre-
chers gemessen im schallreflexions-
armen Raum. Durch das Schallfeld
kommt es zu einer Dämpfung der
Membranbewegung. Die mechani-
sche Resonanzstelle verschiebt sich
um 3.162 Hz nach rechts. Ein Maß
für den Dämpfungsfaktor des
Systems ist die Verschiebung der
Resonanzstelle gegenüber der
Phasendrehung von 90° (Abb. 79).
3.162
31.154
28.00
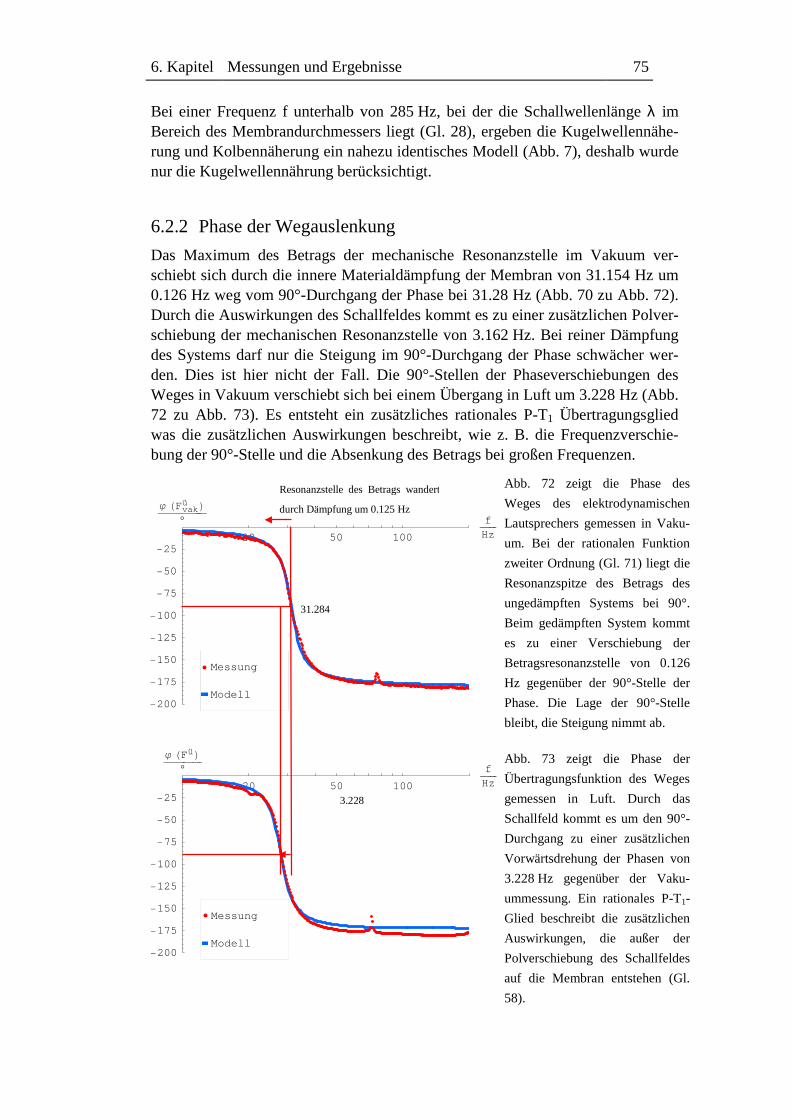
6. Kapitel Messungen und Ergebnisse 75
20 50 100
fHz
-200
-175
-150
-125
-100
-75
-50
-25
j HFvakü L
°
Modell
Messung
20 50 100
fHz
-200
-175
-150
-125
-100
-75
-50
-25
j HFüL
°
Modell
Messung
Bei einer Frequenz f unterhalb von 285 Hz, bei der die Schallwellenlänge λ im Bereich des Membrandurchmessers liegt (Gl. 28), ergeben die Kugelwellennähe-rung und Kolbennäherung ein nahezu identisches Modell (Abb. 7), deshalb wurde nur die Kugelwellennährung berücksichtigt.
6.2.2 Phase der Wegauslenkung
Das Maximum des Betrags der mechanische Resonanzstelle im Vakuum ver-schiebt sich durch die innere Materialdämpfung der Membran von 31.154 Hz um 0.126 Hz weg vom 90°-Durchgang der Phase bei 31.28 Hz (Abb. 70 zu Abb. 72). Durch die Auswirkungen des Schallfeldes kommt es zu einer zusätzlichen Polver-schiebung der mechanischen Resonanzstelle von 3.162 Hz. Bei reiner Dämpfung des Systems darf nur die Steigung im 90°-Durchgang der Phase schwächer wer-den. Dies ist hier nicht der Fall. Die 90°-Stellen der Phaseverschiebungen des Weges in Vakuum verschiebt sich bei einem Übergang in Luft um 3.228 Hz (Abb. 72 zu Abb. 73). Es entsteht ein zusätzliches rationales P-T1 Übertragungsglied was die zusätzlichen Auswirkungen beschreibt, wie z. B. die Frequenzverschie-bung der 90°-Stelle und die Absenkung des Betrags bei großen Frequenzen.
Abb. 72 zeigt die Phase des
Weges des elektrodynamischen
Lautsprechers gemessen in Vaku-
um. Bei der rationalen Funktion
zweiter Ordnung (Gl. 71) liegt die
Resonanzspitze des Betrags des
ungedämpften Systems bei 90°.
Beim gedämpften System kommt
es zu einer Verschiebung der
Betragsresonanzstelle von 0.126
Hz gegenüber der 90°-Stelle der
Phase. Die Lage der 90°-Stelle
bleibt, die Steigung nimmt ab.
Abb. 73 zeigt die Phase der
Übertragungsfunktion des Weges
gemessen in Luft. Durch das
Schallfeld kommt es um den 90°-
Durchgang zu einer zusätzlichen
Vorwärtsdrehung der Phasen von
3.228 Hz gegenüber der Vaku-
ummessung. Ein rationales P-T1-
Glied beschreibt die zusätzlichen
Auswirkungen, die außer der
Polverschiebung des Schallfeldes
auf die Membran entstehen (Gl.
58).
3.228
31.284
Resonanzstelle des Betrags wandert
durch Dämpfung um 0.125 Hz
76 6.2 Erfassung des Systems zur Regelung der Wegauslenkung
6.2.3 Membranauslenkung mit Eigenschwingungen der Membran
Abb. 74 zeigt den Betrag der Übertragungsfunktion des Weges eines Doppel-schwingspulensystems (Ravemaster VXT 1524) von 10 Hz bis 2.5 kHz. Bei höhe-ren Frequenzen weicht das vereinfachte Lautsprechermodell Fü ( ) von den Messwerten ( ) ab. Ursachen hierfür sind Membraneigenschwingungen (Kap. 4.1.7) und parasitäre Schwingungen des Lautsprecherchassis. Eine Beschreibung dieser Pole und Nullstellen ist durch Einführen einer Korrekturfunktion Fem
ü (Gl. 107 in Kap. 4.1.7.2, siehe auch Abb. 74 ) möglich. Die parasitären Eigenschwingungen resultieren zum Großteil aus den Eigenreso-nanzen des Membrantrichters des Lautsprechers. Durch Messen der eindimensio-nalen Verschiebung der Spulenauslenkung kommt es zu Vereinfachung der kom-plexen partiellen Differentialgleichungslösung zu einer eindimensionalen Lösung F (Gl. 58). Problematisch für einen Regelkreis sind Phasendrehungen über 180°. Durch Implementieren einer Korrekturfunktionen RK(s) (Gl. 166) im Regler als inverse Funktion kann solch einem Streckenverhalten entgegen gewirkt werden.
(Gl. 166)
Durch Vergleich von Kompensatorstruktur RK (Gl. 144) und ermittelten Korrek-turfunktion Fem (Gl. 107) für die parasitären Schwingungen ergeben sich die notwendigen Koeffizienten. Besteht die Phasennacheilung in Verbindung eines Pol- links und einer Nullstelle rechts der komplexen Polhalbebene, limitiert dies die maximal höchste zu regelnde Frequenz (Gl. 166). Die Phase dreht sich um zusätzliche 360° bei insgesamt steigendem Betragverlauf (siehe Phase Abb. 74 beim Ravemaster VXT 1524 ab 1k Hz). Durch gemeinsame Betrachtung von Phase und Betrag lässt sich erkennen, ob eine Phasennacheilung durch einen Pol links oder durch eine Nullstelle rechts von der komplexen s-Ebene verursacht wird. Es lassen sich aus Stabilitätsgründen keine Pole rechts der komplexen Ebene einfügen. Dies limitiert die Kompensati-onsmöglichkeit auf rein positive Pole und Nullstellen. FemHsL×RKHsL=... HFem,i -1HsL×RK,i -1HsLL×HFem,i HsL×RK,i HsLL...
( aus Stabilitätsgründen verboten) (Gl. 167)
=.. H 1 + ai -1em × s + bi -1
em × s21 + c i -1
em × s + di -1em × s2
×1 + c i -1
k × s + di -1k × s2
1 + ai -1
k × s + bi -1k × s2
L×H 1 - aiem× s + bi
em × s21 + c i
em × s + diem × s2
×1 + c i
k × s + dik × s2
1 - ai
k × s + bik × s2
L..
RKHsL=Fem-1
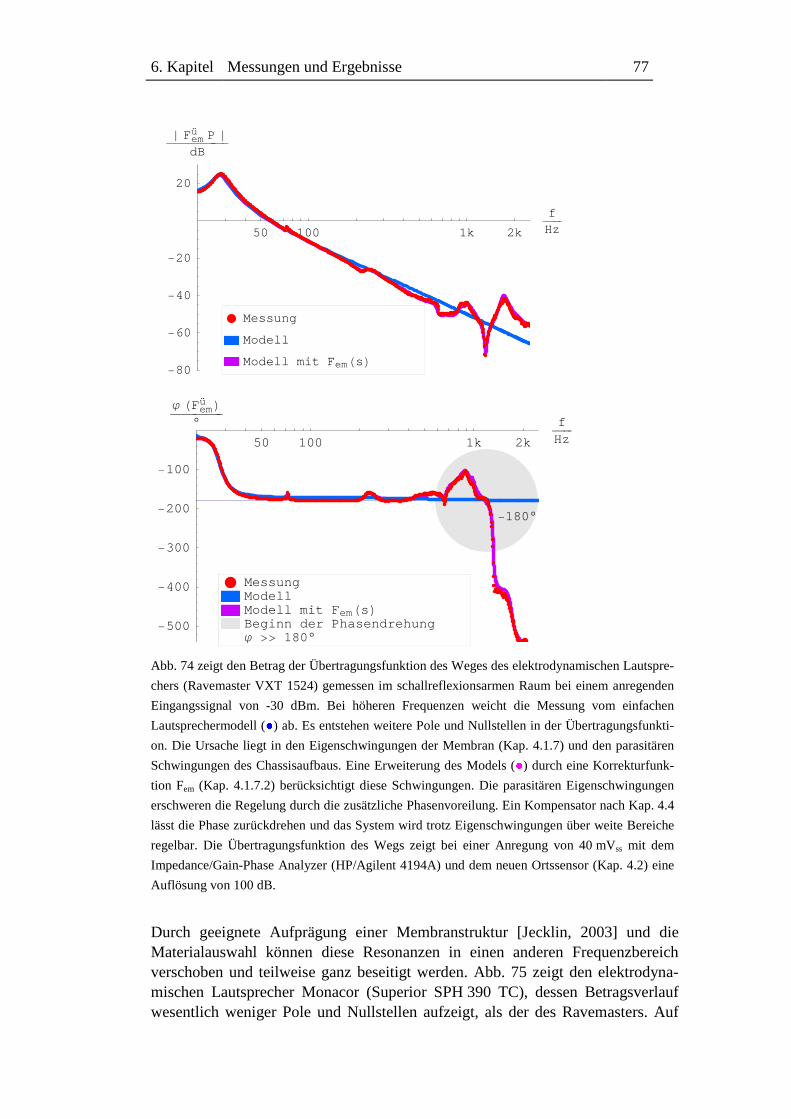
6. Kapitel Messungen und Ergebnisse 77
50 100 1k 2k
fHz
-500
-400
-300
-200
-100
j HFemü L
°
-180°
j >> 180°Beginn der PhasendrehungModell mit F emHsLModellMessung
Abb. 74 zeigt den Betrag der Übertragungsfunktion des Weges des elektrodynamischen Lautspre-
chers (Ravemaster VXT 1524) gemessen im schallreflexionsarmen Raum bei einem anregenden
Eingangssignal von -30 dBm. Bei höheren Frequenzen weicht die Messung vom einfachen
Lautsprechermodell ( ) ab. Es entstehen weitere Pole und Nullstellen in der Übertragungsfunkti-
on. Die Ursache liegt in den Eigenschwingungen der Membran (Kap. 4.1.7) und den parasitären
Schwingungen des Chassisaufbaus. Eine Erweiterung des Models ( ) durch eine Korrekturfunk-
tion Fem (Kap. 4.1.7.2) berücksichtigt diese Schwingungen. Die parasitären Eigenschwingungen
erschweren die Regelung durch die zusätzliche Phasenvoreilung. Ein Kompensator nach Kap. 4.4
lässt die Phase zurückdrehen und das System wird trotz Eigenschwingungen über weite Bereiche
regelbar. Die Übertragungsfunktion des Wegs zeigt bei einer Anregung von 40 mVss mit dem
Impedance/Gain-Phase Analyzer (HP/Agilent 4194A) und dem neuen Ortssensor (Kap. 4.2) eine
Auflösung von 100 dB.
Durch geeignete Aufprägung einer Membranstruktur [Jecklin, 2003] und die Materialauswahl können diese Resonanzen in einen anderen Frequenzbereich verschoben und teilweise ganz beseitigt werden. Abb. 75 zeigt den elektrodyna-mischen Lautsprecher Monacor (Superior SPH 390 TC), dessen Betragsverlauf wesentlich weniger Pole und Nullstellen aufzeigt, als der des Ravemasters. Auf
50 100 1k 2k
fHz
-80
-60
-40
-20
20
È Femü P È
dB
Modell mit F emHsLModell
Messung
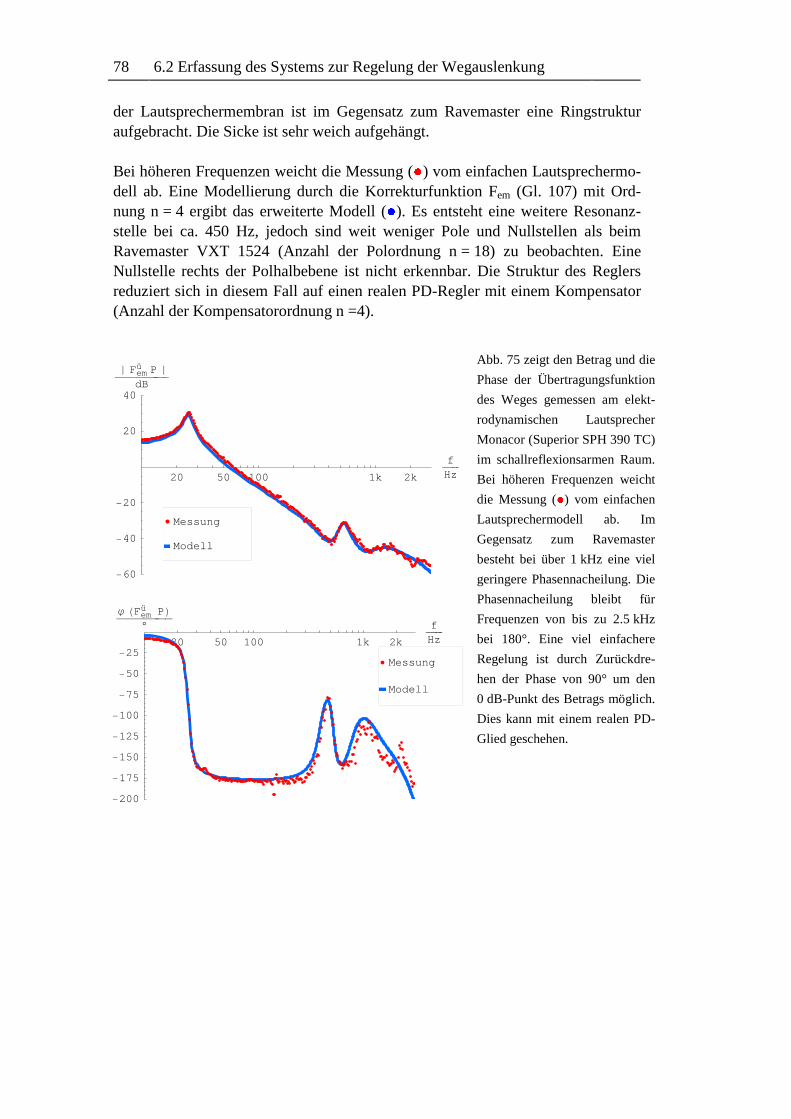
78 6.2 Erfassung des Systems zur Regelung der Wegauslenkung
20 50 100 1k 2k
fHz
-200
-175
-150
-125
-100
-75
-50
-25
j HFemü PL
°
Modell
Messung
20 50 100 1k 2k
fHz
-60
-40
-20
20
40
È Femü P È
dB
Modell
Messung
der Lautsprechermembran ist im Gegensatz zum Ravemaster eine Ringstruktur aufgebracht. Die Sicke ist sehr weich aufgehängt. Bei höheren Frequenzen weicht die Messung ( ) vom einfachen Lautsprechermo-dell ab. Eine Modellierung durch die Korrekturfunktion Fem (Gl. 107) mit Ord-nung n = 4 ergibt das erweiterte Modell ( ). Es entsteht eine weitere Resonanz-stelle bei ca. 450 Hz, jedoch sind weit weniger Pole und Nullstellen als beim Ravemaster VXT 1524 (Anzahl der Polordnung n = 18) zu beobachten. Eine Nullstelle rechts der Polhalbebene ist nicht erkennbar. Die Struktur des Reglers reduziert sich in diesem Fall auf einen realen PD-Regler mit einem Kompensator (Anzahl der Kompensatorordnung n =4).
Abb. 75 zeigt den Betrag und die
Phase der Übertragungsfunktion
des Weges gemessen am elekt-
rodynamischen Lautsprecher
Monacor (Superior SPH 390 TC)
im schallreflexionsarmen Raum.
Bei höheren Frequenzen weicht
die Messung ( ) vom einfachen
Lautsprechermodell ab. Im
Gegensatz zum Ravemaster
besteht bei über 1 kHz eine viel
geringere Phasennacheilung. Die
Phasennacheilung bleibt für
Frequenzen von bis zu 2.5 kHz
bei 180°. Eine viel einfachere
Regelung ist durch Zurückdre-
hen der Phase von 90° um den
0 dB-Punkt des Betrags möglich.
Dies kann mit einem realen PD-
Glied geschehen.
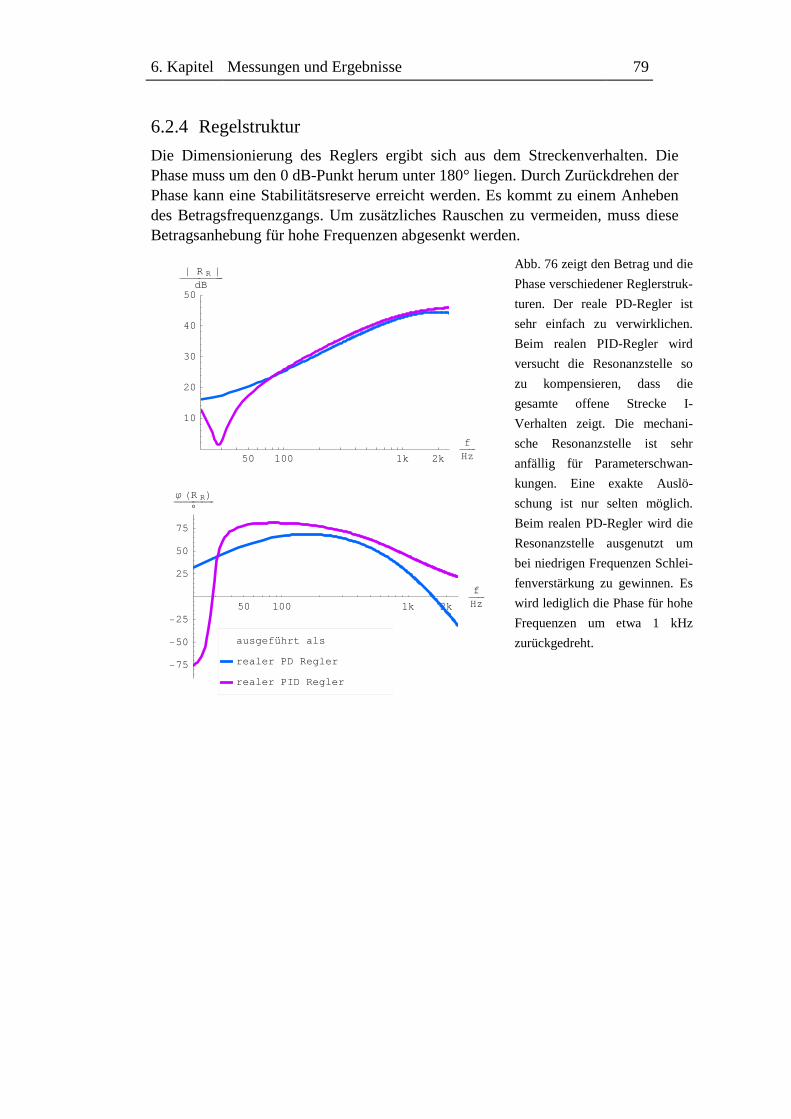
6. Kapitel Messungen und Ergebnisse 79
6.2.4 Regelstruktur
Die Dimensionierung des Reglers ergibt sich aus dem Streckenverhalten. Die Phase muss um den 0 dB-Punkt herum unter 180° liegen. Durch Zurückdrehen der Phase kann eine Stabilitätsreserve erreicht werden. Es kommt zu einem Anheben des Betragsfrequenzgangs. Um zusätzliches Rauschen zu vermeiden, muss diese Betragsanhebung für hohe Frequenzen abgesenkt werden.
Abb. 76 zeigt den Betrag und die
Phase verschiedener Reglerstruk-
turen. Der reale PD-Regler ist
sehr einfach zu verwirklichen.
Beim realen PID-Regler wird
versucht die Resonanzstelle so
zu kompensieren, dass die
gesamte offene Strecke I-
Verhalten zeigt. Die mechani-
sche Resonanzstelle ist sehr
anfällig für Parameterschwan-
kungen. Eine exakte Auslö-
schung ist nur selten möglich.
Beim realen PD-Regler wird die
Resonanzstelle ausgenutzt um
bei niedrigen Frequenzen Schlei-
fenverstärkung zu gewinnen. Es
wird lediglich die Phase für hohe
Frequenzen um etwa 1 kHz
zurückgedreht.
50 100 1k 2k
fHz
-75
-50
-25
25
50
75
j HR RL
°
50 100 1k 2k
fHz
10
20
30
40
50
È R R È
dB
realer PID Regler
realer PD Regler
ausgeführt als
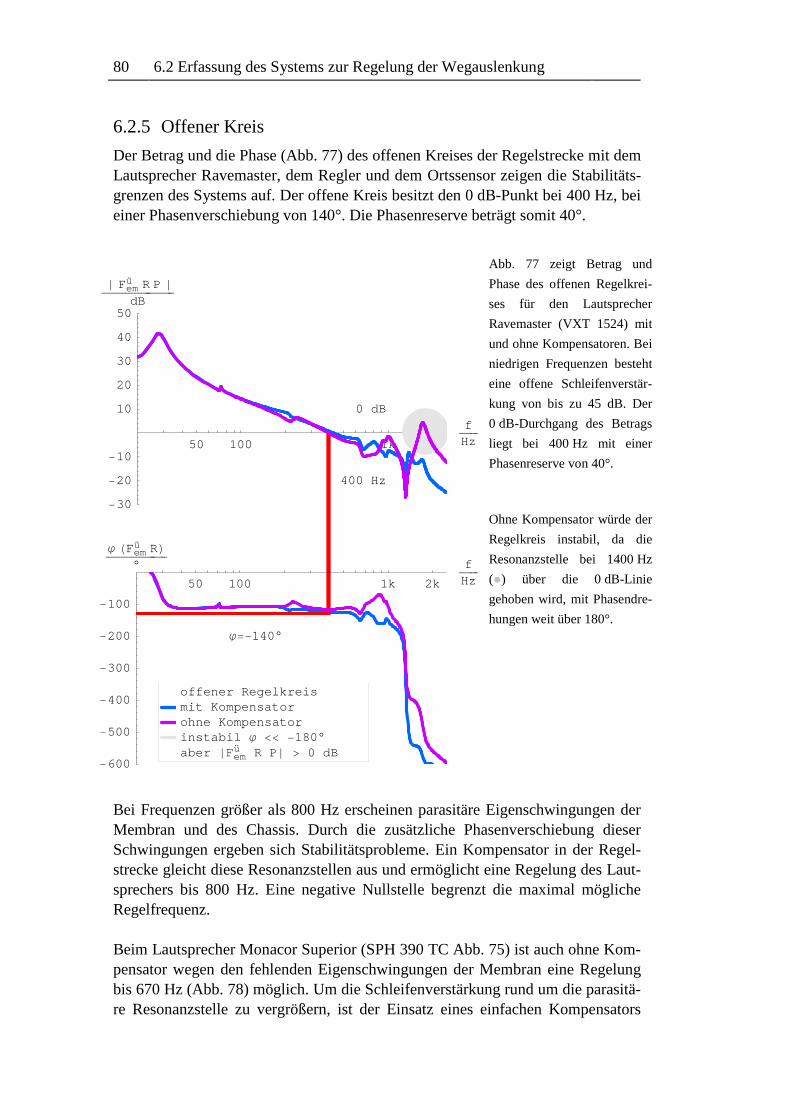
80 6.2 Erfassung des Systems zur Regelung der Wegauslenkung
50 100 1k 2k
fHz
-600
-500
-400
-300
-200
-100
j HFemü RL
°
j=-140°
50 100 1k 2k
fHz
-30
-20
-10
10
20
30
40
50
È Femü R PÈ
dB
400 Hz
0 dB
aber ÈFemü R PÈ > 0 dB
instabil j << -180°ohne Kompensatormit Kompensatoroffener Regelkreis
6.2.5 Offener Kreis
Der Betrag und die Phase (Abb. 77) des offenen Kreises der Regelstrecke mit dem Lautsprecher Ravemaster, dem Regler und dem Ortssensor zeigen die Stabilitäts-grenzen des Systems auf. Der offene Kreis besitzt den 0 dB-Punkt bei 400 Hz, bei einer Phasenverschiebung von 140°. Die Phasenreserve beträgt somit 40°.
Abb. 77 zeigt Betrag und
Phase des offenen Regelkrei-
ses für den Lautsprecher
Ravemaster (VXT 1524) mit
und ohne Kompensatoren. Bei
niedrigen Frequenzen besteht
eine offene Schleifenverstär-
kung von bis zu 45 dB. Der
0 dB-Durchgang des Betrags
liegt bei 400 Hz mit einer
Phasenreserve von 40°.
Ohne Kompensator würde der
Regelkreis instabil, da die
Resonanzstelle bei 1400 Hz
( ) über die 0 dB-Linie
gehoben wird, mit Phasendre-
hungen weit über 180°.
Bei Frequenzen größer als 800 Hz erscheinen parasitäre Eigenschwingungen der Membran und des Chassis. Durch die zusätzliche Phasenverschiebung dieser Schwingungen ergeben sich Stabilitätsprobleme. Ein Kompensator in der Regel-strecke gleicht diese Resonanzstellen aus und ermöglicht eine Regelung des Laut-sprechers bis 800 Hz. Eine negative Nullstelle begrenzt die maximal mögliche Regelfrequenz. Beim Lautsprecher Monacor Superior (SPH 390 TC Abb. 75) ist auch ohne Kom-pensator wegen den fehlenden Eigenschwingungen der Membran eine Regelung bis 670 Hz (Abb. 78) möglich. Um die Schleifenverstärkung rund um die parasitä-re Resonanzstelle zu vergrößern, ist der Einsatz eines einfachen Kompensators
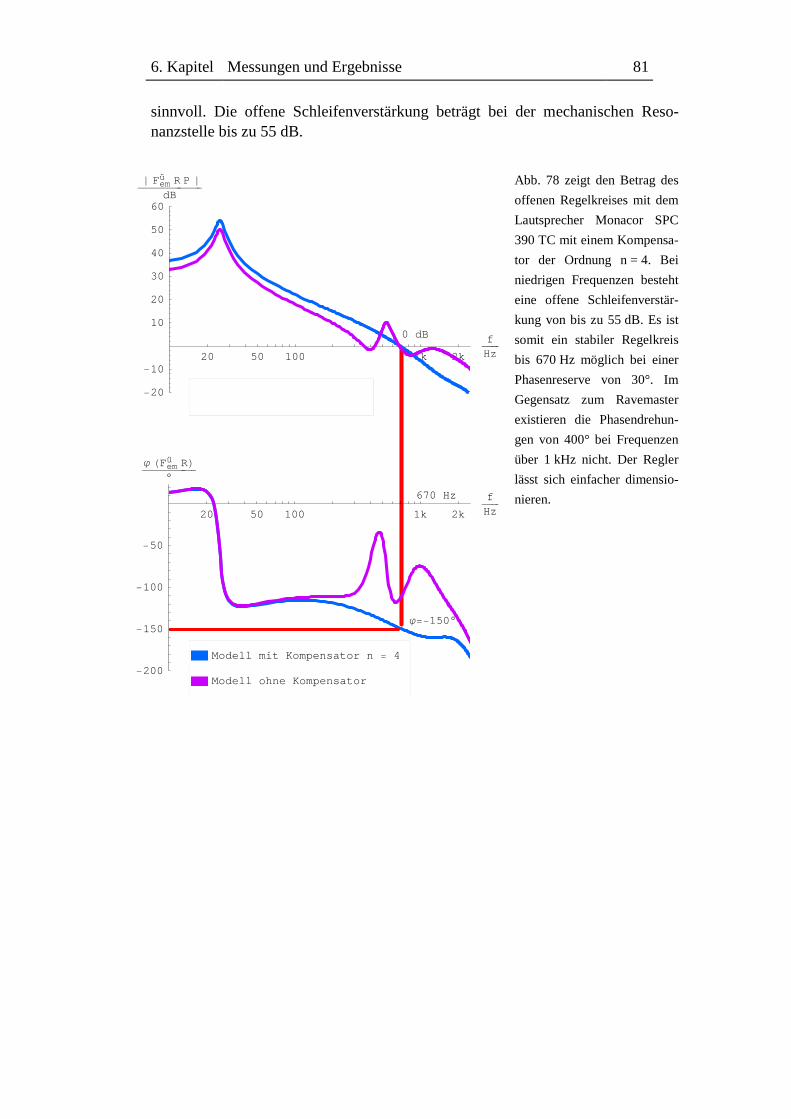
6. Kapitel Messungen und Ergebnisse 81
20 50 100 1k 2k
fHz
-200
-150
-100
-50
j HFemü RL
°
670 Hz
j=-150°
Modell ohne Kompensator
Modell mit Kompensator n = 4
20 50 100 1k 2k
fHz
-20
-10
10
20
30
40
50
60
È Femü R PÈ
dB
0 dB
sinnvoll. Die offene Schleifenverstärkung beträgt bei der mechanischen Reso-nanzstelle bis zu 55 dB.
Abb. 78 zeigt den Betrag des
offenen Regelkreises mit dem
Lautsprecher Monacor SPC
390 TC mit einem Kompensa-
tor der Ordnung n = 4. Bei
niedrigen Frequenzen besteht
eine offene Schleifenverstär-
kung von bis zu 55 dB. Es ist
somit ein stabiler Regelkreis
bis 670 Hz möglich bei einer
Phasenreserve von 30°. Im
Gegensatz zum Ravemaster
existieren die Phasendrehun-
gen von 400° bei Frequenzen
über 1 kHz nicht. Der Regler
lässt sich einfacher dimensio-
nieren.
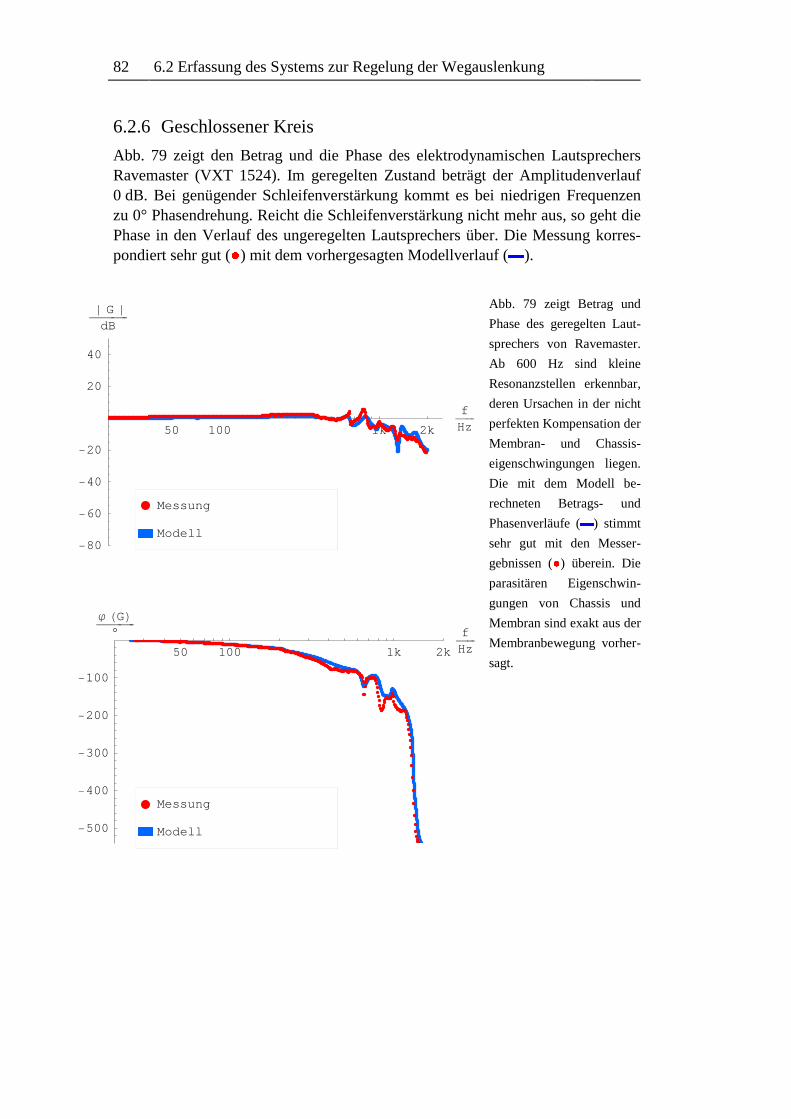
82 6.2 Erfassung des Systems zur Regelung der Wegauslenkung
50 100 1k 2k
fHz
-80
-60
-40
-20
20
40
È GÈ
dB
Modell
Messung
50 100 1k 2k
fHz
-500
-400
-300
-200
-100
j HGL
°
Modell
Messung
6.2.6 Geschlossener Kreis
Abb. 79 zeigt den Betrag und die Phase des elektrodynamischen Lautsprechers Ravemaster (VXT 1524). Im geregelten Zustand beträgt der Amplitudenverlauf 0 dB. Bei genügender Schleifenverstärkung kommt es bei niedrigen Frequenzen zu 0° Phasendrehung. Reicht die Schleifenverstärkung nicht mehr aus, so geht die Phase in den Verlauf des ungeregelten Lautsprechers über. Die Messung korres-pondiert sehr gut ( ) mit dem vorhergesagten Modellverlauf ( ).
Abb. 79 zeigt Betrag und
Phase des geregelten Laut-
sprechers von Ravemaster.
Ab 600 Hz sind kleine
Resonanzstellen erkennbar,
deren Ursachen in der nicht
perfekten Kompensation der
Membran- und Chassis-
eigenschwingungen liegen.
Die mit dem Modell be-
rechneten Betrags- und
Phasenverläufe ( ) stimmt
sehr gut mit den Messer-
gebnissen ( ) überein. Die
parasitären Eigenschwin-
gungen von Chassis und
Membran sind exakt aus der
Membranbewegung vorher-
sagt.
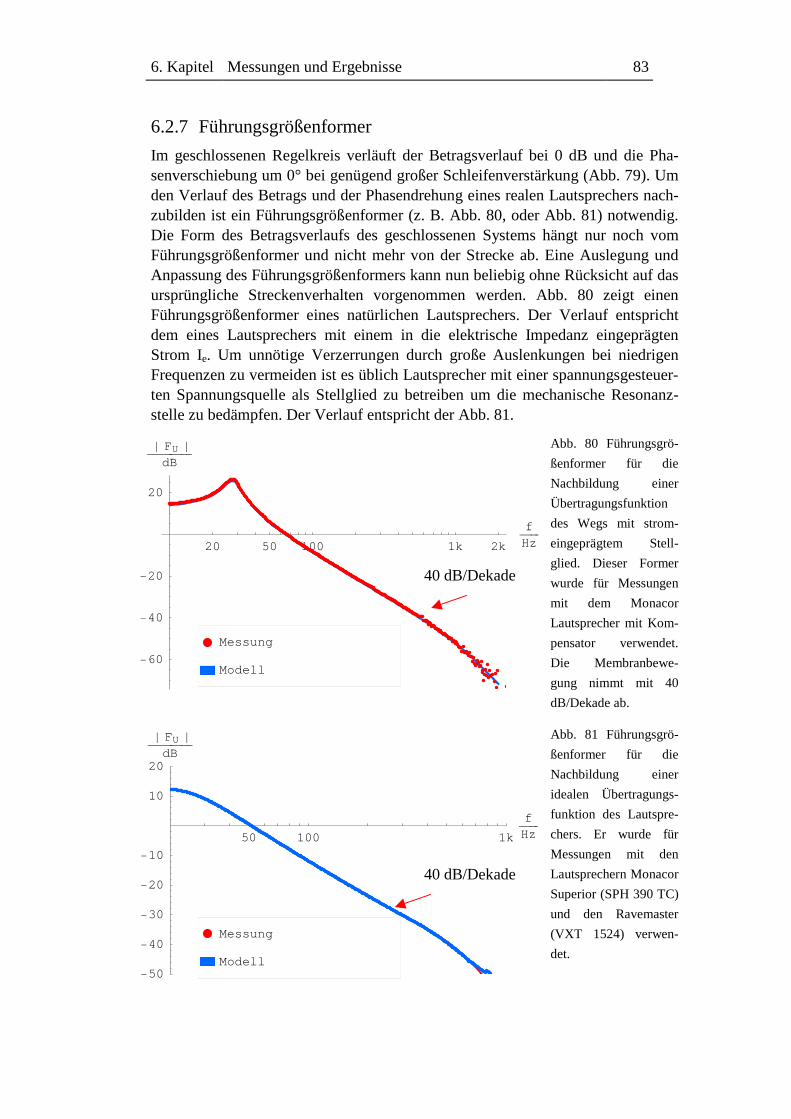
6. Kapitel Messungen und Ergebnisse 83
20 50 100 1k 2k
fHz
-60
-40
-20
20
È FU È
dB
Modell
Messung
50 100 1k
fHz
-50
-40
-30
-20
-10
10
20
È FU È
dB
Modell
Messung
6.2.7 Führungsgrößenformer
Im geschlossenen Regelkreis verläuft der Betragsverlauf bei 0 dB und die Pha-senverschiebung um 0° bei genügend großer Schleifenverstärkung (Abb. 79). Um den Verlauf des Betrags und der Phasendrehung eines realen Lautsprechers nach-zubilden ist ein Führungsgrößenformer (z. B. Abb. 80, oder Abb. 81) notwendig. Die Form des Betragsverlaufs des geschlossenen Systems hängt nur noch vom Führungsgrößenformer und nicht mehr von der Strecke ab. Eine Auslegung und Anpassung des Führungsgrößenformers kann nun beliebig ohne Rücksicht auf das ursprüngliche Streckenverhalten vorgenommen werden. Abb. 80 zeigt einen Führungsgrößenformer eines natürlichen Lautsprechers. Der Verlauf entspricht dem eines Lautsprechers mit einem in die elektrische Impedanz eingeprägten Strom Ie. Um unnötige Verzerrungen durch große Auslenkungen bei niedrigen Frequenzen zu vermeiden ist es üblich Lautsprecher mit einer spannungsgesteuer-ten Spannungsquelle als Stellglied zu betreiben um die mechanische Resonanz-stelle zu bedämpfen. Der Verlauf entspricht der Abb. 81.
Abb. 80 Führungsgrö-
ßenformer für die
Nachbildung einer
Übertragungsfunktion
des Wegs mit strom-
eingeprägtem Stell-
glied. Dieser Former
wurde für Messungen
mit dem Monacor
Lautsprecher mit Kom-
pensator verwendet.
Die Membranbewe-
gung nimmt mit 40
dB/Dekade ab.
Abb. 81 Führungsgrö-
ßenformer für die
Nachbildung einer
idealen Übertragungs-
funktion des Lautspre-
chers. Er wurde für
Messungen mit den
Lautsprechern Monacor
Superior (SPH 390 TC)
und den Ravemaster
(VXT 1524) verwen-
det.
40 dB/Dekade
40 dB/Dekade
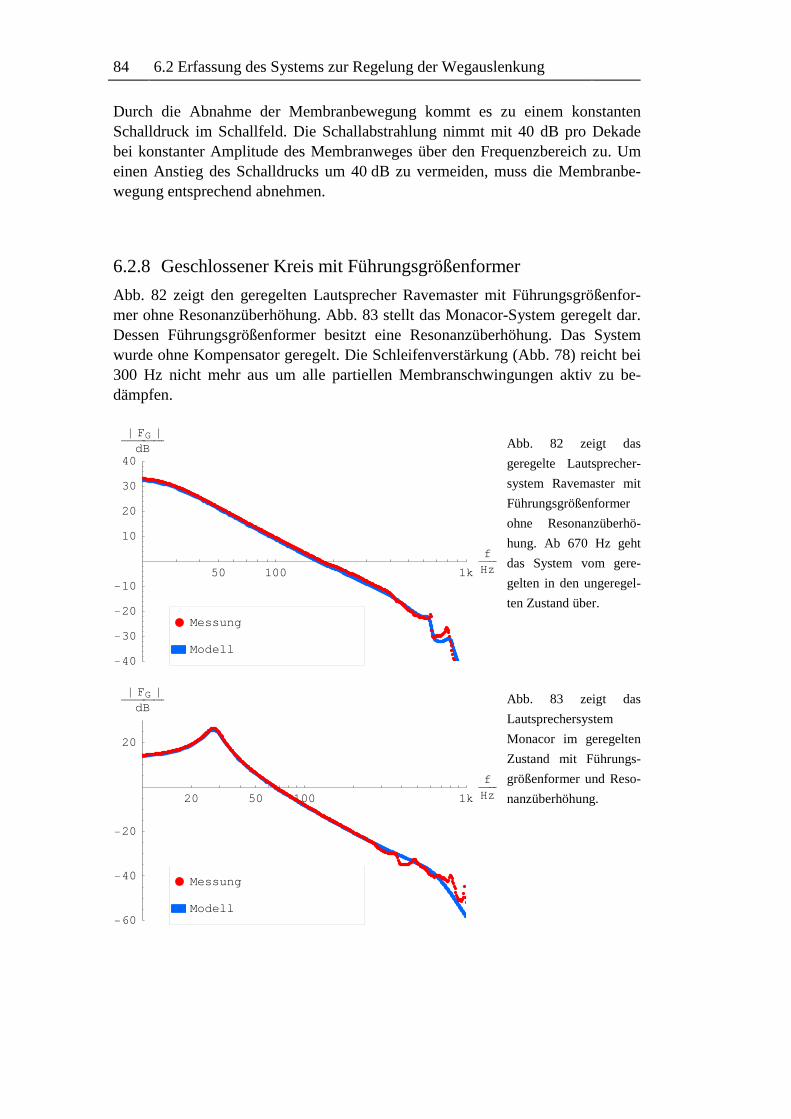
84 6.2 Erfassung des Systems zur Regelung der Wegauslenkung
20 50 100 1k
fHz
-60
-40
-20
20
È FG È
dB
Modell
Messung
50 100 1k
fHz
-40
-30
-20
-10
10
20
30
40
È FG È
dB
Modell
Messung
Durch die Abnahme der Membranbewegung kommt es zu einem konstanten Schalldruck im Schallfeld. Die Schallabstrahlung nimmt mit 40 dB pro Dekade bei konstanter Amplitude des Membranweges über den Frequenzbereich zu. Um einen Anstieg des Schalldrucks um 40 dB zu vermeiden, muss die Membranbe-wegung entsprechend abnehmen.
6.2.8 Geschlossener Kreis mit Führungsgrößenformer
Abb. 82 zeigt den geregelten Lautsprecher Ravemaster mit Führungsgrößenfor-mer ohne Resonanzüberhöhung. Abb. 83 stellt das Monacor-System geregelt dar. Dessen Führungsgrößenformer besitzt eine Resonanzüberhöhung. Das System wurde ohne Kompensator geregelt. Die Schleifenverstärkung (Abb. 78) reicht bei 300 Hz nicht mehr aus um alle partiellen Membranschwingungen aktiv zu be-dämpfen.
Abb. 82 zeigt das
geregelte Lautsprecher-
system Ravemaster mit
Führungsgrößenformer
ohne Resonanzüberhö-
hung. Ab 670 Hz geht
das System vom gere-
gelten in den ungeregel-
ten Zustand über.
Abb. 83 zeigt das
Lautsprechersystem
Monacor im geregelten
Zustand mit Führungs-
größenformer und Reso-
nanzüberhöhung.
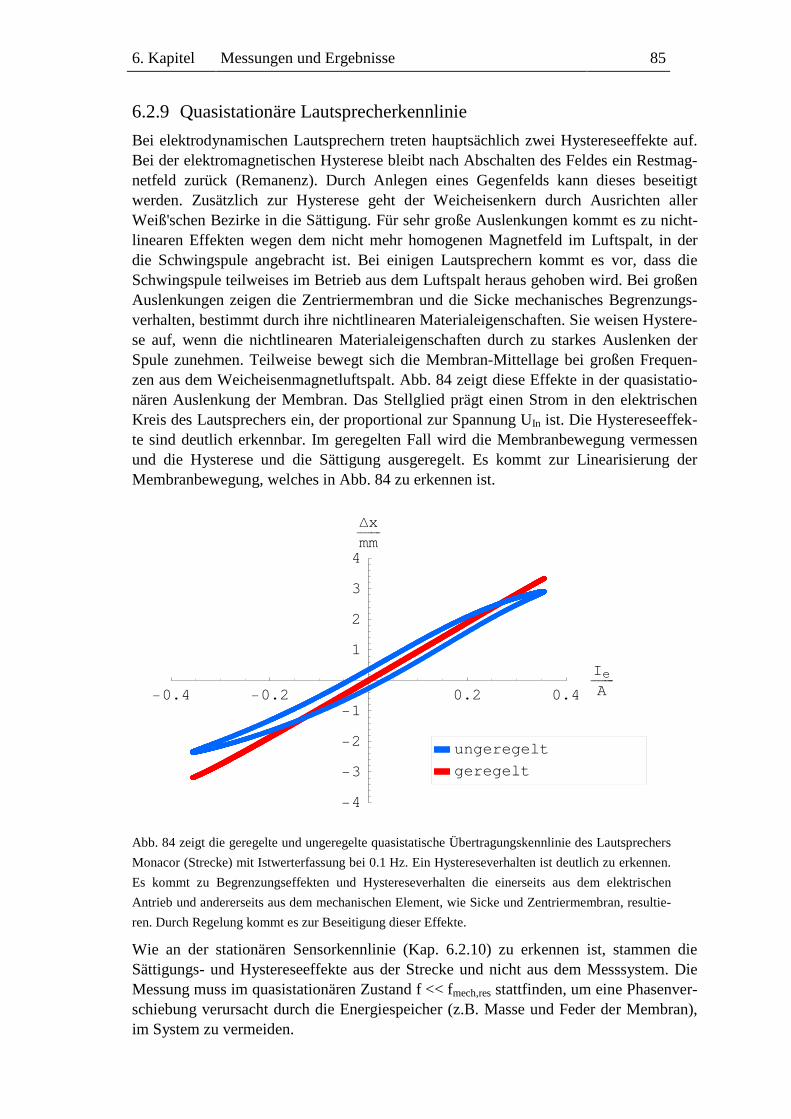
6. Kapitel Messungen und Ergebnisse 85
6.2.9 Quasistationäre Lautsprecherkennlinie
Bei elektrodynamischen Lautsprechern treten hauptsächlich zwei Hystereseeffekte auf. Bei der elektromagnetischen Hysterese bleibt nach Abschalten des Feldes ein Restmag-netfeld zurück (Remanenz). Durch Anlegen eines Gegenfelds kann dieses beseitigt werden. Zusätzlich zur Hysterese geht der Weicheisenkern durch Ausrichten aller Weiß'schen Bezirke in die Sättigung. Für sehr große Auslenkungen kommt es zu nicht-linearen Effekten wegen dem nicht mehr homogenen Magnetfeld im Luftspalt, in der die Schwingspule angebracht ist. Bei einigen Lautsprechern kommt es vor, dass die Schwingspule teilweises im Betrieb aus dem Luftspalt heraus gehoben wird. Bei großen Auslenkungen zeigen die Zentriermembran und die Sicke mechanisches Begrenzungs-verhalten, bestimmt durch ihre nichtlinearen Materialeigenschaften. Sie weisen Hystere-se auf, wenn die nichtlinearen Materialeigenschaften durch zu starkes Auslenken der Spule zunehmen. Teilweise bewegt sich die Membran-Mittellage bei großen Frequen-zen aus dem Weicheisenmagnetluftspalt. Abb. 84 zeigt diese Effekte in der quasistatio-nären Auslenkung der Membran. Das Stellglied prägt einen Strom in den elektrischen Kreis des Lautsprechers ein, der proportional zur Spannung UIn ist. Die Hystereseeffek-te sind deutlich erkennbar. Im geregelten Fall wird die Membranbewegung vermessen und die Hysterese und die Sättigung ausgeregelt. Es kommt zur Linearisierung der Membranbewegung, welches in Abb. 84 zu erkennen ist.
Abb. 84 zeigt die geregelte und ungeregelte quasistatische Übertragungskennlinie des Lautsprechers
Monacor (Strecke) mit Istwerterfassung bei 0.1 Hz. Ein Hystereseverhalten ist deutlich zu erkennen.
Es kommt zu Begrenzungseffekten und Hystereseverhalten die einerseits aus dem elektrischen
Antrieb und andererseits aus dem mechanischen Element, wie Sicke und Zentriermembran, resultie-
ren. Durch Regelung kommt es zur Beseitigung dieser Effekte.
Wie an der stationären Sensorkennlinie (Kap. 6.2.10) zu erkennen ist, stammen die Sättigungs- und Hystereseeffekte aus der Strecke und nicht aus dem Messsystem. Die Messung muss im quasistationären Zustand f << fmech,res stattfinden, um eine Phasenver-schiebung verursacht durch die Energiespeicher (z.B. Masse und Feder der Membran), im System zu vermeiden.
-0.4 -0.2 0.2 0.4
I eA
-4
-3
-2
-1
1
2
3
4
Dxmm
geregelt
ungeregelt
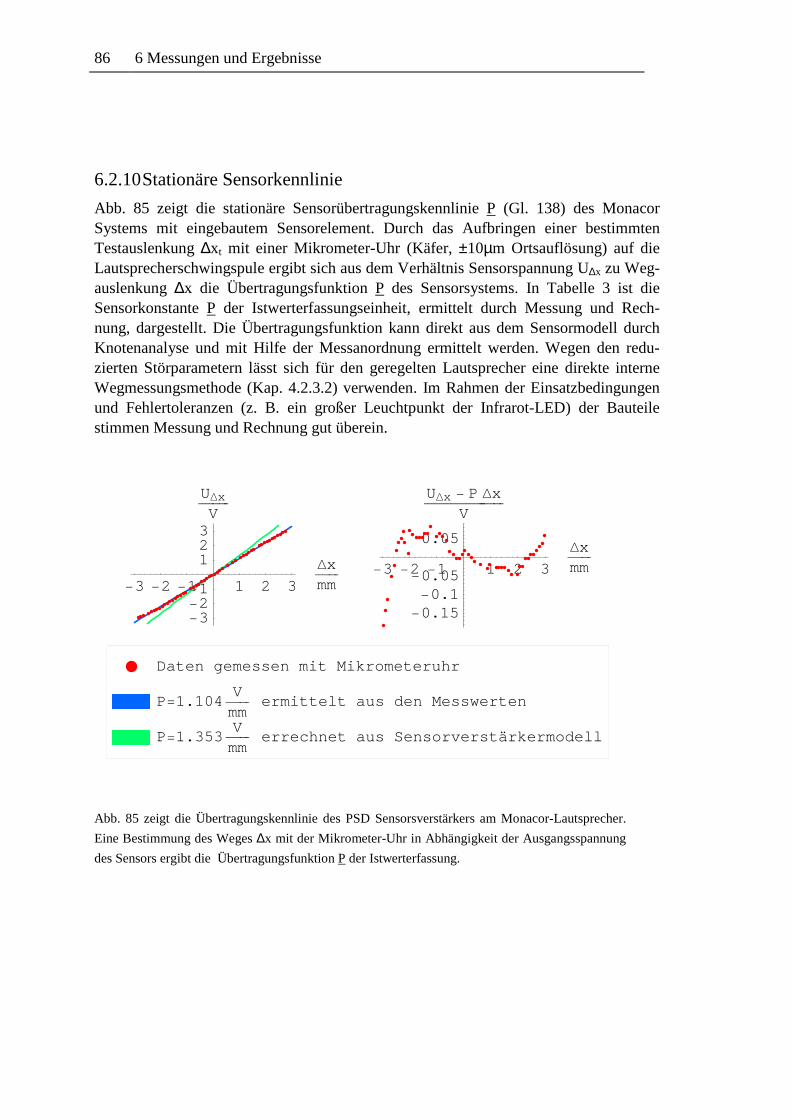
86 6 Messungen und Ergebnisse
6.2.10 Stationäre Sensorkennlinie
Abb. 85 zeigt die stationäre Sensorübertragungskennlinie P (Gl. 138) des Monacor Systems mit eingebautem Sensorelement. Durch das Aufbringen einer bestimmten Testauslenkung ∆xt mit einer Mikrometer-Uhr (Käfer, ±10µm Ortsauflösung) auf die Lautsprecherschwingspule ergibt sich aus dem Verhältnis Sensorspannung U∆x zu Weg-auslenkung ∆x die Übertragungsfunktion P des Sensorsystems. In Tabelle 3 ist die Sensorkonstante P der Istwerterfassungseinheit, ermittelt durch Messung und Rech-nung, dargestellt. Die Übertragungsfunktion kann direkt aus dem Sensormodell durch Knotenanalyse und mit Hilfe der Messanordnung ermittelt werden. Wegen den redu-zierten Störparametern lässt sich für den geregelten Lautsprecher eine direkte interne Wegmessungsmethode (Kap. 4.2.3.2) verwenden. Im Rahmen der Einsatzbedingungen und Fehlertoleranzen (z. B. ein großer Leuchtpunkt der Infrarot-LED) der Bauteile stimmen Messung und Rechnung gut überein.
Abb. 85 zeigt die Übertragungskennlinie des PSD Sensorsverstärkers am Monacor-Lautsprecher.
Eine Bestimmung des Weges ∆x mit der Mikrometer-Uhr in Abhängigkeit der Ausgangsspannung
des Sensors ergibt die Übertragungsfunktion P der Istwerterfassung.
-3 -2 -1 1 2 3
Dxmm
-3-2-1
123
UDx
V
-3 -2 -1 1 2 3
Dxmm
-0.15-0.1
-0.05
0.05
UDx - P Dx
V
P=1.353V
mm
errechnet aus Sensorverstärkermodell
P=1.104V
mm
ermittelt aus den Messwerten
Daten gemessen mit Mikrometeruhr
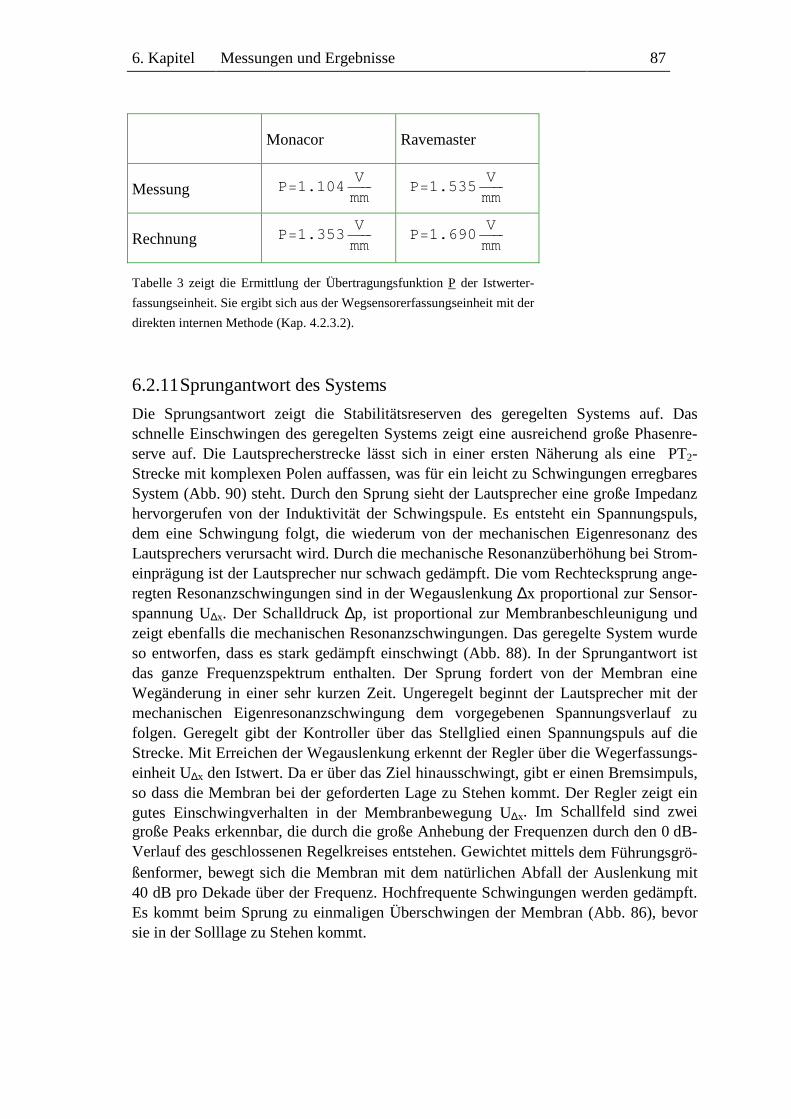
6. Kapitel Messungen und Ergebnisse 87
P=1.104V
mm
P=1.535V
mm
P=1.353V
mm
P=1.690V
mm
Monacor Ravemaster
Messung
Rechnung
Tabelle 3 zeigt die Ermittlung der Übertragungsfunktion P der Istwerter-
fassungseinheit. Sie ergibt sich aus der Wegsensorerfassungseinheit mit der
direkten internen Methode (Kap. 4.2.3.2).
6.2.11 Sprungantwort des Systems
Die Sprungsantwort zeigt die Stabilitätsreserven des geregelten Systems auf. Das schnelle Einschwingen des geregelten Systems zeigt eine ausreichend große Phasenre-serve auf. Die Lautsprecherstrecke lässt sich in einer ersten Näherung als eine PT2-Strecke mit komplexen Polen auffassen, was für ein leicht zu Schwingungen erregbares System (Abb. 90) steht. Durch den Sprung sieht der Lautsprecher eine große Impedanz hervorgerufen von der Induktivität der Schwingspule. Es entsteht ein Spannungspuls, dem eine Schwingung folgt, die wiederum von der mechanischen Eigenresonanz des Lautsprechers verursacht wird. Durch die mechanische Resonanzüberhöhung bei Strom-einprägung ist der Lautsprecher nur schwach gedämpft. Die vom Rechtecksprung ange-regten Resonanzschwingungen sind in der Wegauslenkung ∆x proportional zur Sensor-spannung U∆x. Der Schalldruck ∆p, ist proportional zur Membranbeschleunigung und zeigt ebenfalls die mechanischen Resonanzschwingungen. Das geregelte System wurde so entworfen, dass es stark gedämpft einschwingt (Abb. 88). In der Sprungantwort ist das ganze Frequenzspektrum enthalten. Der Sprung fordert von der Membran eine Wegänderung in einer sehr kurzen Zeit. Ungeregelt beginnt der Lautsprecher mit der mechanischen Eigenresonanzschwingung dem vorgegebenen Spannungsverlauf zu folgen. Geregelt gibt der Kontroller über das Stellglied einen Spannungspuls auf die Strecke. Mit Erreichen der Wegauslenkung erkennt der Regler über die Wegerfassungs-einheit U∆x den Istwert. Da er über das Ziel hinausschwingt, gibt er einen Bremsimpuls, so dass die Membran bei der geforderten Lage zu Stehen kommt. Der Regler zeigt ein gutes Einschwingverhalten in der Membranbewegung U∆x. Im Schallfeld sind zwei große Peaks erkennbar, die durch die große Anhebung der Frequenzen durch den 0 dB-Verlauf des geschlossenen Regelkreises entstehen. Gewichtet mittels dem Führungsgrö-ßenformer, bewegt sich die Membran mit dem natürlichen Abfall der Auslenkung mit 40 dB pro Dekade über der Frequenz. Hochfrequente Schwingungen werden gedämpft. Es kommt beim Sprung zu einmaligen Überschwingen der Membran (Abb. 86), bevor sie in der Solllage zu Stehen kommt.
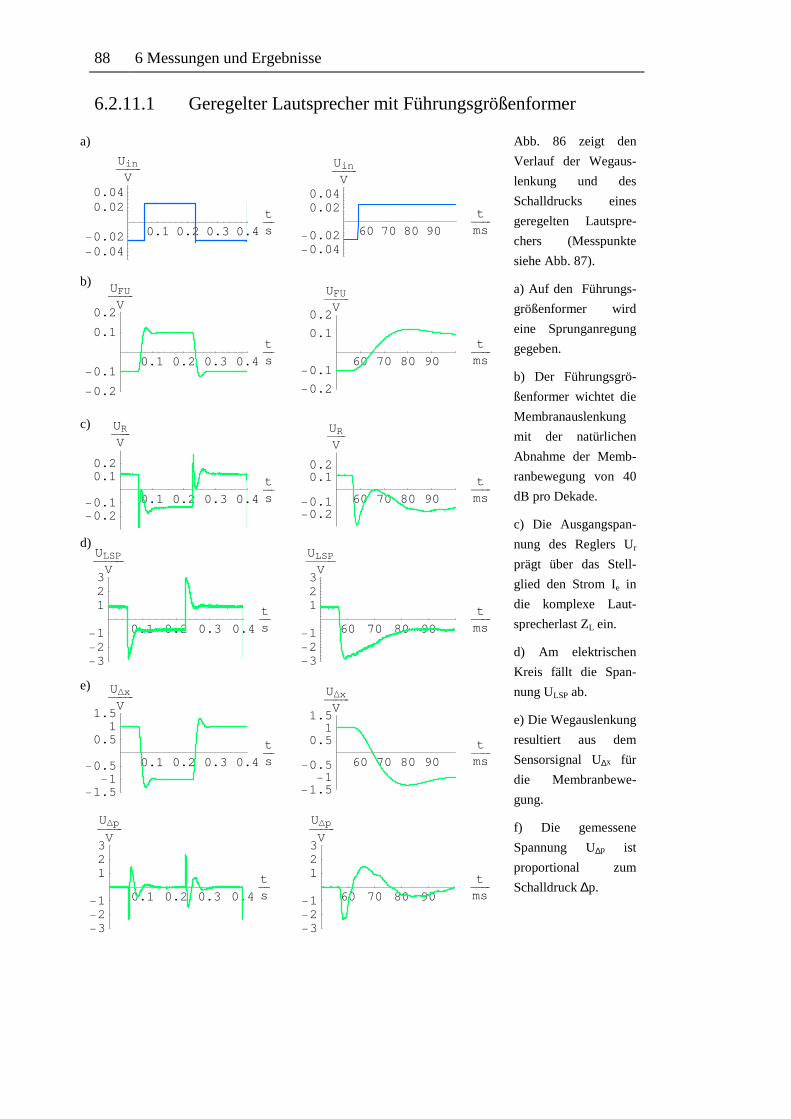
88 6 Messungen und Ergebnisse
0.1 0.2 0.3 0.4
ts
-3-2-1
123
UDp
V
60 70 80 90
tms
-3-2-1
123
UDp
V
0.1 0.2 0.3 0.4
ts
-1.5-1
-0.5
0.51
1.5
UDx
V
60 70 80 90
tms
-1.5-1
-0.5
0.51
1.5
UDx
V
0.1 0.2 0.3 0.4
ts
-3-2-1
123
ULSP
V
60 70 80 90
tms
-3-2-1
123
ULSP
V
0.1 0.2 0.3 0.4
ts
-0.2-0.1
0.10.2
URV
60 70 80 90
tms
-0.2-0.1
0.10.2
URV
0.1 0.2 0.3 0.4
ts
-0.2
-0.1
0.1
0.2
UFU
V
60 70 80 90
tms
-0.2
-0.1
0.1
0.2
UFU
V
0.1 0.2 0.3 0.4
ts
-0.04-0.02
0.020.04
Uin
V
60 70 80 90
tms
-0.04-0.02
0.020.04
Uin
V
6.2.11.1 Geregelter Lautsprecher mit Führungsgrößenformer
a)
b)
c)
d)
e)
Abb. 86 zeigt den
Verlauf der Wegaus-
lenkung und des
Schalldrucks eines
geregelten Lautspre-
chers (Messpunkte
siehe Abb. 87).
a) Auf den Führungs-
größenformer wird
eine Sprunganregung
gegeben.
b) Der Führungsgrö-
ßenformer wichtet die
Membranauslenkung
mit der natürlichen
Abnahme der Memb-
ranbewegung von 40
dB pro Dekade.
c) Die Ausgangspan-
nung des Reglers Ur
prägt über das Stell-
glied den Strom Ie in
die komplexe Laut-
sprecherlast ZL ein.
d) Am elektrischen
Kreis fällt die Span-
nung ULSP ab.
e) Die Wegauslenkung
resultiert aus dem
Sensorsignal U∆x für
die Membranbewe-
gung.
f) Die gemessene
Spannung U∆p ist
proportional zum
Schalldruck ∆p.
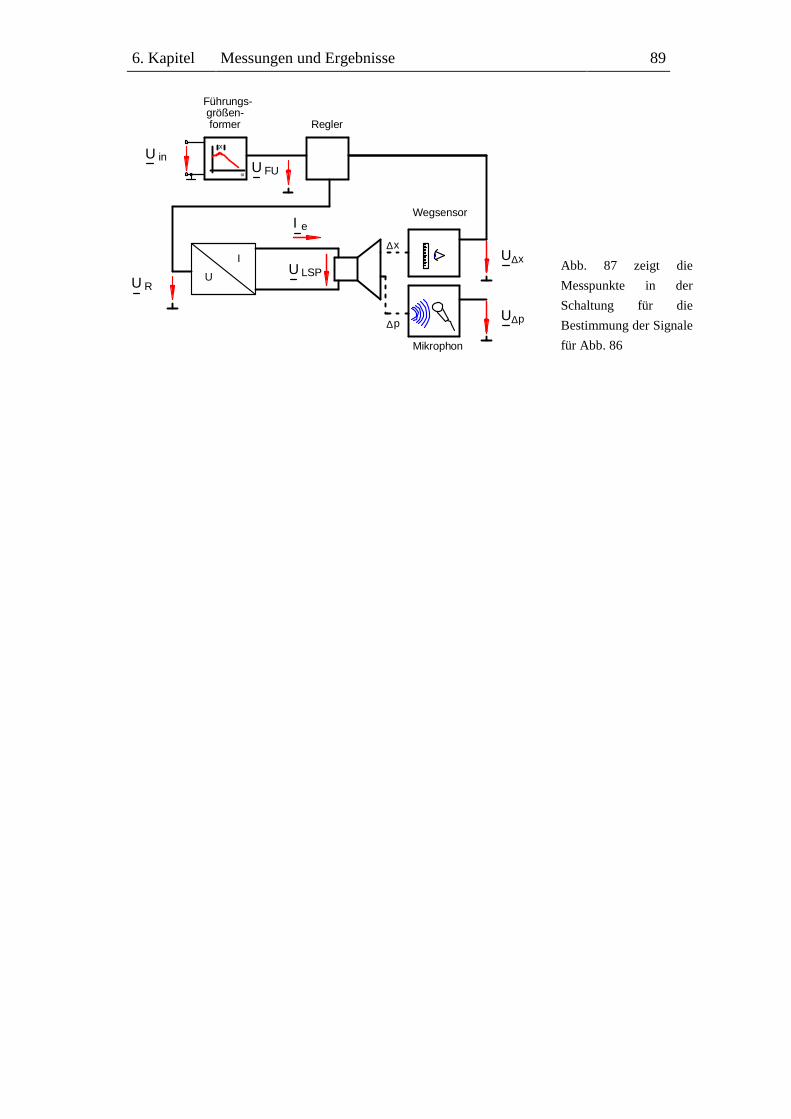
6. Kapitel Messungen und Ergebnisse 89
Abb. 87 zeigt die
Messpunkte in der
Schaltung für die
Bestimmung der Signale
für Abb. 86
I e
U LSPI
U
Wegsensor
Mikrophon
U
U
x
p
∆
∆
x∆
p∆
U R
U in
Führungs- größen- former
ω
x
U FU
Regler
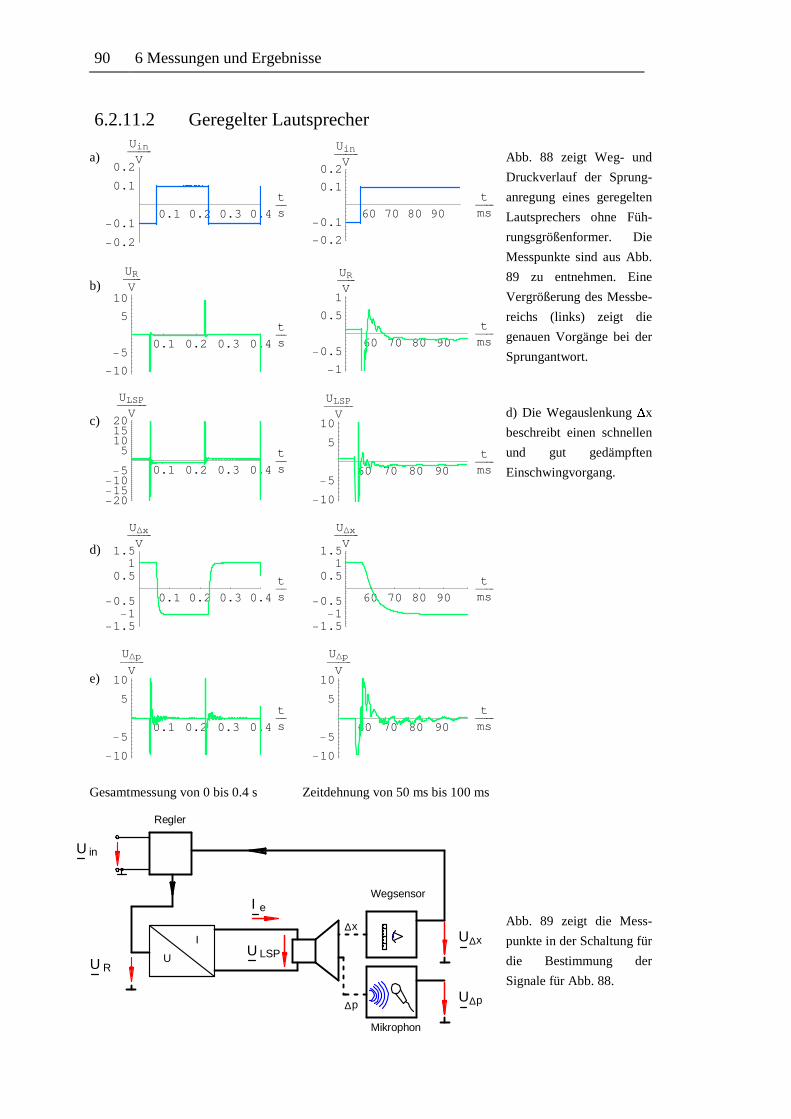
90 6 Messungen und Ergebnisse
0.1 0.2 0.3 0.4
ts
-10
-5
5
10
UDp
V
60 70 80 90
tms
-10
-5
5
10
UDp
V
0.1 0.2 0.3 0.4
ts
-1.5-1
-0.5
0.51
1.5
UDx
V
60 70 80 90
tms
-1.5-1
-0.5
0.51
1.5
UDx
V
0.1 0.2 0.3 0.4
ts
-20-15-10
-5
5101520
ULSP
V
60 70 80 90
tms
-10
-5
5
10
ULSP
V
0.1 0.2 0.3 0.4
ts
-10
-5
5
10
URV
60 70 80 90
tms
-1
-0.5
0.5
1
URV
0.1 0.2 0.3 0.4
ts
-0.2
-0.1
0.1
0.2
Uin
V
60 70 80 90
tms
-0.2
-0.1
0.1
0.2
Uin
V
6.2.11.2 Geregelter Lautsprecher
a)
b)
c)
d)
e)
Abb. 88 zeigt Weg- und
Druckverlauf der Sprung-
anregung eines geregelten
Lautsprechers ohne Füh-
rungsgrößenformer. Die
Messpunkte sind aus Abb.
89 zu entnehmen. Eine
Vergrößerung des Messbe-
reichs (links) zeigt die
genauen Vorgänge bei der
Sprungantwort.
d) Die Wegauslenkung x
beschreibt einen schnellen
und gut gedämpften
Einschwingvorgang.
Gesamtmessung von 0 bis 0.4 s Zeitdehnung von 50 ms bis 100 ms
Abb. 89 zeigt die Mess-
punkte in der Schaltung für
die Bestimmung der
Signale für Abb. 88.
I e
U LSPI
U
Wegsensor
Mikrophon
U
U
x
p
∆
∆
x∆
p∆
U in
U R
Regler
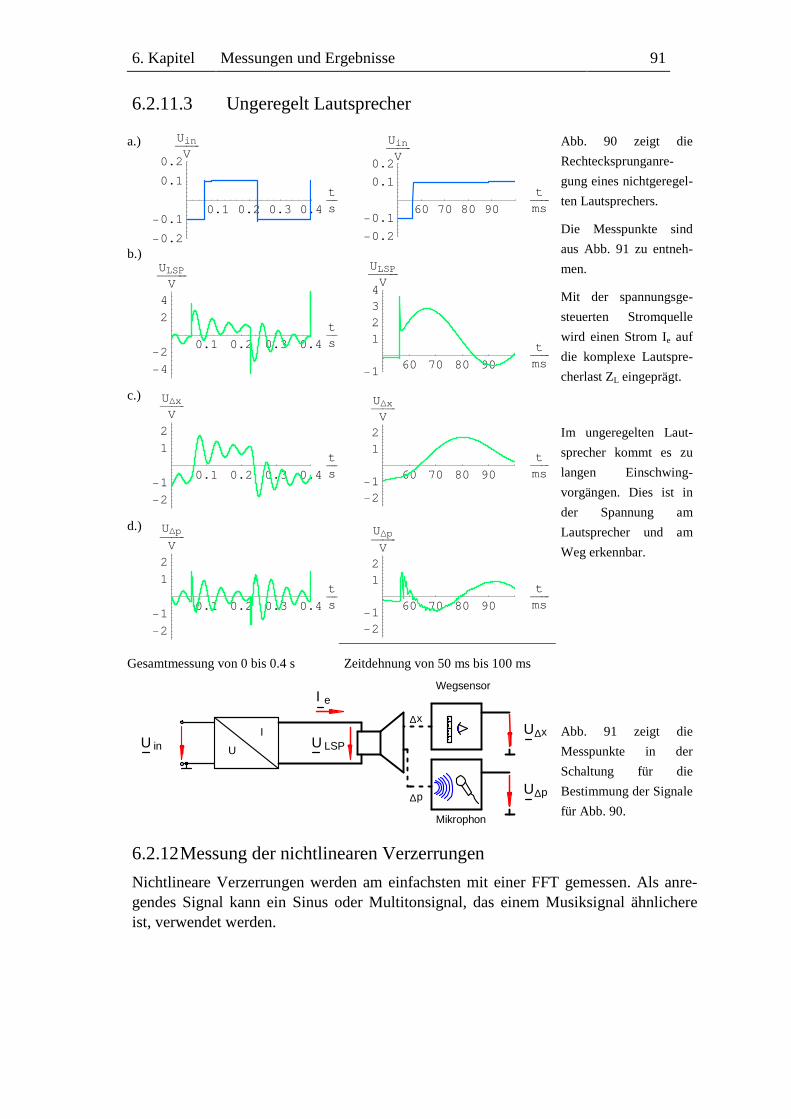
6. Kapitel Messungen und Ergebnisse 91
0.1 0.2 0.3 0.4
ts
-2
-1
1
2
UDp
V
60 70 80 90
tms
-2-1
12
UDp
V
0.1 0.2 0.3 0.4
ts
-2
-1
1
2
UDx
V
60 70 80 90
tms
-2-1
12
UDx
V
0.1 0.2 0.3 0.4
ts
-4
-2
2
4
ULSP
V
60 70 80 90
tms
-1
1234
ULSP
V
0.1 0.2 0.3 0.4
ts
-0.2
-0.1
0.1
0.2
Uin
V
60 70 80 90
tms
-0.2
-0.1
0.1
0.2
Uin
V
6.2.11.3 Ungeregelt Lautsprecher
a.)
b.)
c.)
d.)
Gesamtmessung von 0 bis 0.4 s Zeitdehnung von 50 ms bis 100 ms
Abb. 90 zeigt die
Rechtecksprunganre-
gung eines nichtgeregel-
ten Lautsprechers.
Die Messpunkte sind
aus Abb. 91 zu entneh-
men.
Mit der spannungsge-
steuerten Stromquelle
wird einen Strom Ie auf
die komplexe Lautspre-
cherlast ZL eingeprägt.
Im ungeregelten Laut-
sprecher kommt es zu
langen Einschwing-
vorgängen. Dies ist in
der Spannung am
Lautsprecher und am
Weg erkennbar.
Abb. 91 zeigt die
Messpunkte in der
Schaltung für die
Bestimmung der Signale
für Abb. 90.
6.2.12 Messung der nichtlinearen Verzerrungen
Nichtlineare Verzerrungen werden am einfachsten mit einer FFT gemessen. Als anre-gendes Signal kann ein Sinus oder Multitonsignal, das einem Musiksignal ähnlichere ist, verwendet werden.
I e
U LSPI
UU in
Wegsensor
Mikrophon
U
U
x
p
∆
∆
x∆
p∆
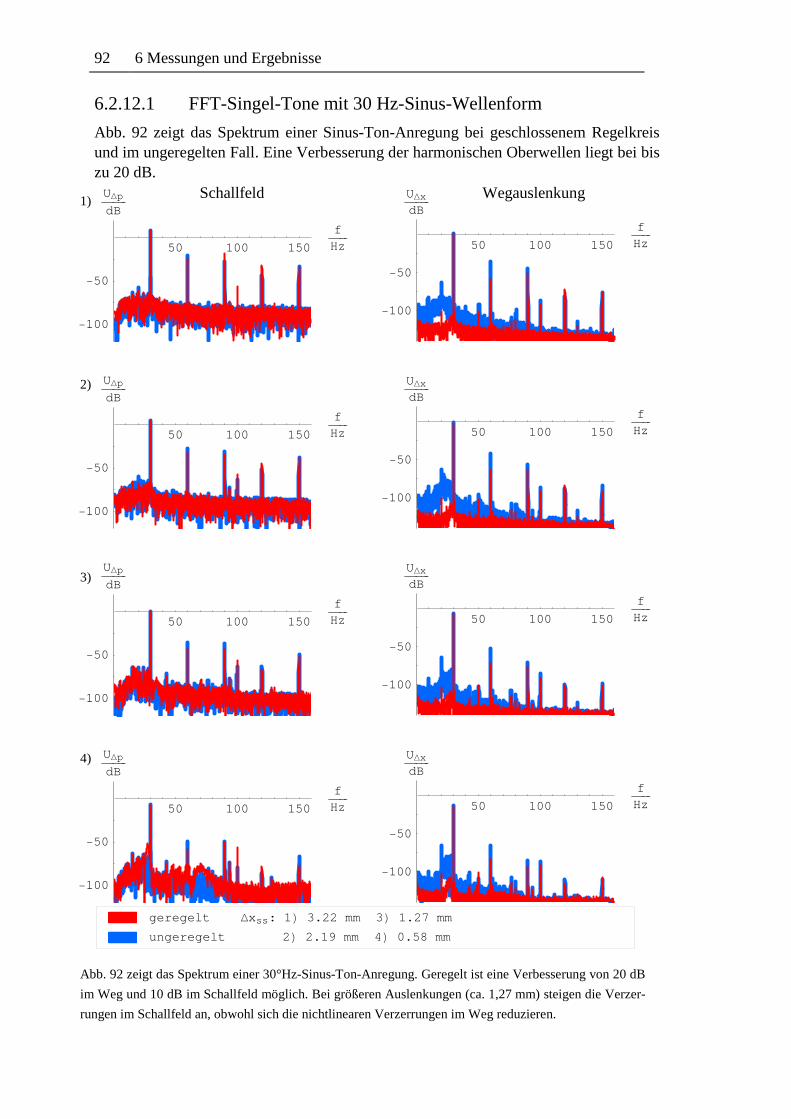
92 6 Messungen und Ergebnisse
50 100 150
fHz
-50
-100
UDpdB
50 100 150
fHz
-50
-100
UDxdB
50 100 150
fHz
-50
-100
UDpdB
50 100 150
fHz
-50
-100
UDxdB
50 100 150
fHz
-50
-100
UDpdB
50 100 150
fHz
-50
-100
UDxdB
50 100 150
fHz
-50
-100
UDpdB
50 100 150
fHz
-50
-100
UDxdB
ungeregelt 2 L 2.19 mm 4L 0.58 mm
geregelt Dxss : 1 L 3.22 mm 3L 1.27 mm
6.2.12.1 FFT-Singel-Tone mit 30 Hz-Sinus-Wellenform
Abb. 92 zeigt das Spektrum einer Sinus-Ton-Anregung bei geschlossenem Regelkreis und im ungeregelten Fall. Eine Verbesserung der harmonischen Oberwellen liegt bei bis zu 20 dB.
1)
2)
3)
4)
Abb. 92 zeigt das Spektrum einer 30°Hz-Sinus-Ton-Anregung. Geregelt ist eine Verbesserung von 20 dB
im Weg und 10 dB im Schallfeld möglich. Bei größeren Auslenkungen (ca. 1,27 mm) steigen die Verzer-
rungen im Schallfeld an, obwohl sich die nichtlinearen Verzerrungen im Weg reduzieren.
Schallfeld Wegauslenkung

6. Kapitel Messungen und Ergebnisse 93
6.2.12.2 FFT-Multi-Ton-Messung
Die nichtlinearen Verzerrungen eines Multitonsignals zeigen die Problematik der Ver-zerrungen eines Musiksignals deutlicher als ein einzelner Sinus-Ton. Durch eine Fre-quenz im Bereich der mechanischen Eigenresonanz wird der Lautsprecher zu Eigen-schwingungen angeregt, die nur sehr langsam abklingen (Abb. 90). Es entstehen durch das PT2-Verhalten sehr große Amplituden. Bei einem Multitonsignal mit f1 = 31.91 Hz und f2 = 35.648 Hz treten wegen der nichtlinearen Kennlinie vom Grad N des Lautspre-chers nicht nur harmonische Oberwellen n·f1 , n·f2 mit n=1,..,N, sondern auch die Mischprodukte der Intermodulation auf (Tabelle 4). n = 2 2 f1, 2 f2, f2- f1
n = 3 3 f1, 3 f2, 2 f1+ f2, 2 f1 – f2, 2 f2 + f1, 2 f2- f1
n = 5 .....
Tabelle 4 zeigt die Mischprodukte bei Intermodulationsverzerrung [Tietze, Schenk, S. 471, 1999].
Abb. 93 zeigt die Messung der Intermodulationsverzerrungen in der Schwingspulen-wegauslenkung ∆x und im Schallfeld ∆p bei Maximalamplituden von ∆xss = 1,52 mm und 0,84 mm (Spitze-Spitze) mit ( ) und ohne ( ) Regelung. Eine Verbesserung der nichtlinearen Verzerrungen in den Seitenbändern der harmonischen Schwingungen der Wegauslenkung ∆x liegt bei bis zu 50 dB. Bei den harmonischen Oberschwingungen ergibt sich eine Reduzierung von bis zu 20 dB. Eine Verbesserung ist auch im Schall-feld beobachtbar.
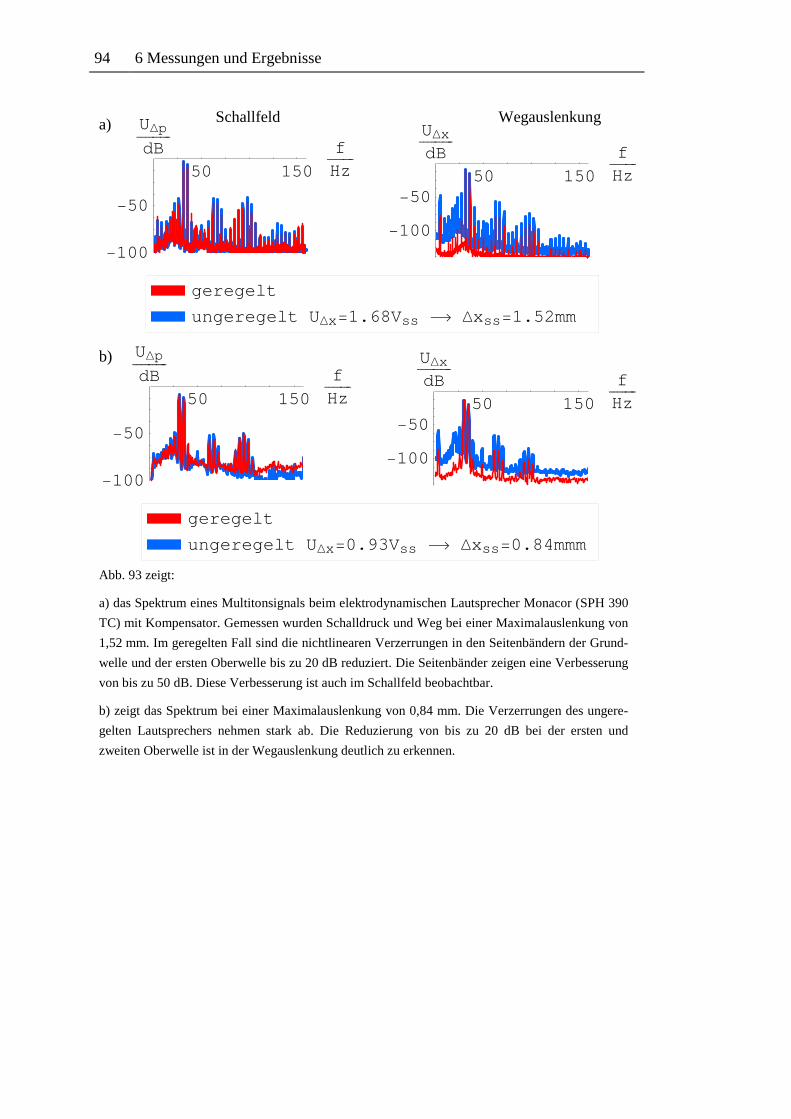
94 6 Messungen und Ergebnisse
50 150
fHz
-50
-100
UDpdB
50 150
fHz
-50
-100
UDxdB
ungeregelt U Dx=1.68V ss Dxss =1.52mm
geregelt
50 150
fHz
-50
-100
UDpdB
50 150
fHz
-50
-100
UDxdB
ungeregelt U Dx=0.93V ss Dxss =0.84mmm
geregelt
a)
b)
Abb. 93 zeigt:
a) das Spektrum eines Multitonsignals beim elektrodynamischen Lautsprecher Monacor (SPH 390
TC) mit Kompensator. Gemessen wurden Schalldruck und Weg bei einer Maximalauslenkung von
1,52 mm. Im geregelten Fall sind die nichtlinearen Verzerrungen in den Seitenbändern der Grund-
welle und der ersten Oberwelle bis zu 20 dB reduziert. Die Seitenbänder zeigen eine Verbesserung
von bis zu 50 dB. Diese Verbesserung ist auch im Schallfeld beobachtbar.
b) zeigt das Spektrum bei einer Maximalauslenkung von 0,84 mm. Die Verzerrungen des ungere-
gelten Lautsprechers nehmen stark ab. Die Reduzierung von bis zu 20 dB bei der ersten und
zweiten Oberwelle ist in der Wegauslenkung deutlich zu erkennen.
Schallfeld Wegauslenkung
7. Kapitel Zusammenfassung 95
7 Zusammenfassung Mit Hilfe der konzentrierten Elemente wurde ein Modell eines Lautsprechers erstellt, welches die Übertragungsfunktion des Weges sehr gut wieder gibt. Die Rückwirkung der Membranbewegung auf die elektrische Impedanz zeigt bei Hinzunahme des Wirbel-stromeffekts ebenfalls eine gute Übereinstimmung zwischen Modell und Messung. Die Partialeigenschwingungen der Membran wirken auf den Schwingspulenköper zurück. Der Wirbelstromeffekt und die lineare Impedanz der Schwingspule verdecken die Rückwirkung der Partialschwingungen auf die elektrische Impedanz. Eine Messung der Membranbewegung durch Aufnehmen der Änderung der elektrischen Impedanz ist nur durch eine Differenzmessung zwischen einem festgeklemmten und einem freischwin-genden Lautsprecher möglich. In der Übertragungsfunktion des Weges sind an der Schwingspule Resonanzstellen von bis zu 20 dB zu erkennen. Es ist keine Differenz-messung nötig. Die Modellierung der Partialschwingung der Lautsprechermembran am Ort der Schwingspule wird durch eine Laplace-Funktion zum Modell der elektrischen Impedanz und der Membranbewegung hinzugefügt. Die Bestimmung der Thiele-Small-Parameter wurde nach einer neuen Methode durchgeführt, die die Parameter ihren physikalischen Effekten zuordnet. Der elektrische Widerstand ergibt sich aus einer Betragsmessung bei sehr niedrigen Frequenzen. Die Induktivität, der Wirbelstromeffekt sowie die mechanischen und Schallelemente haben dort keine Auswirkungen, da sie dynamische Größen sind. Aus der Gruppenlaufzeit der Phase der elektrischen Impedanz bei festgeklemmter Membran und bei niedriger Frequenz lässt sich die Induktivität bestimmen. Bei Frequenzen über der mechanischen Resonanzfrequenz setzt der Wirbel-stromeffekt ein. Die Phase dreht sich nicht über 45°. Eine Phasendrehung von 90°, wie bei einer idealen Induktivität, kommt nicht zustande. Für diesen Effekt kann eine Grenz-frequenz für eine nichtlineare Impedanz ermittelt werden, die den Wirbelstromeffekt sehr gut beschreibt. Die Gruppenlaufzeit nimmt bei niedrigen Frequenzen zu, wenn der Lautsprecher frei schwingt. In Verbindung mit einer Betragsmessung der Übertragungs-funktion der Membranbewegung des Lautsprechers bei niedrigen Frequenzen, lassen sich daraus der Kraftfaktor M und die Federkonstante Dm der Membran errechnen. Beide beschreiben Größen für die Kopplungen zwischen den elektrischen und mechani-schen Elementen. Das Bestimmen der Gruppenlaufzeit der Wegauslenkung der Schwingspule in einer Vakuumumgebung ergibt die Dämpfungs- (km) und die Masse-konstante (mm) der Membran. Durch erneutes Ermitteln der Gruppenlaufzeit der Über-tragungsfunktion des Weges in einem schalltoten Raum, ergeben sich die Auswirkun-gen des Schallfeldes auf die Membranbewegung, die in der Schallmassenkonstante msch und dem Schalldämpfungsglied ksch modelliert sind. Mit diesen Parametern wird das Streckenmodell erstellt und in einem PSpice-Simulator mit dem Regler, dem Sensor und dem Stellglied zu einem geschlossenen Regelkreis ergänzt. Die Dimensionierung des Regelkreises in der Systemebene erfolgte symbolisch mit dem Softwarepaket Mathematica. Aus den Systemgleichungen wurden elektrische PSpice-Modelle erstellt und die gesamte Schaltung auf die Stabilität bei Parameter-schwankungen verschiedener Reglerstrukturen und Schaltungsvarianten getestet. Die partiellen Eigenschwingungen der Membranoberfläche beinträchtigen die Stabilität der Regelung. Durch Einsatz eines Kompensators lässt sich dieses Problem reduzieren. Der elektrodynamische Lautsprecher Ravemaster VXT 1524 zeigte besonders viele Eigen-
96 8 Ausblick
schwingungen. Eine veränderte Membranstruktur eines anderen Lautsprechers besitzt geringere Eigenschwingungen im zu regelnden Bereich. Beim Lautsprecher Monacor traten weniger Partialmoden auf. Eine Regelung war selbst ohne Kompensator möglich. Durch die Lageregelung ist gewährleistet, dass der Lautsprecher stets um die Ruhelage schwingt. Ein Austreten der Membran aus der Ruhelage im Luftspalt der Schwingspule bei höheren Frequenzen wird verhindert. Die nichtlinearen Effekte des Antriebs, erzeugt durch inhomogene Magnetfelder außerhalb des Luftspaltes, werden reduziert, ebenso Nichtlinearitäten der Rückstellkraft von der Führungsmembran und der Sicke. Ein Referenzsystem wurde aufgebaut und vermessen. Die Messergebnisse von Simula-tion und Experiment stimmten gut überein. Die nichtlinearen Verzerrungen eines Multi-tonsignals bei niedrigen Frequenzen reduzierten sich um bis zu 50 dB in den Seitenbän-dern und bis zu 20 dB bei den Harmonischen. Dieser Trend war auch im Schallfeld zu erkennen.Das Auftrennen in Einzelmessungen für die Bestimmung der Lautsprecherpa-rameter, selektiert nach ihren physikalischen Ursprüngen, erleichtert die Gewinnung der Thiele-Small-Parameter. Darüber hinaus lassen sich aus der Messung der Membranaus-lenkung in Luft die Dämpfungskostante des Schallfelds ksch und die Schallkonstante msch bestimmen. In der elektrischen Impedanz wird durch Festlegen einer neuen Grenz-frequenz fwg der Wirbelstromeffekt gut beschrieben. Die Kopplungsparameter Kraftfak-tor M und Federkonstante der Membran Dm können bei freischwingender Membran im Vakuum direkt bestimmt werden. Für den Kraftfaktor ist keine Federwaage mehr not-wendig. Die Schallparameter mit der Masse- (msch) und Dämpfungskonstante (ksch) für das Kugelwellenmodell resultieren aus einer Verschiebung der mechanischen Gruppen-laufzeit. Die elektrische Induktivität der Schwingspule wird durch die Gruppenlaufzeit bei niedrigen Frequenzen und festgeklemmter Membran gewonnen.
8 Ausblick Die Partialschwingungen an der Oberfläche der Lautsprechermembran erschweren die Regelung der Membranauslenkung. Eine Veränderung der Struktur der Membran und Verwendung ausgewählter Materialien reduzieren diese Schwingungsmoden oder ver-schieben sie in andere Frequenzbereiche. Durch Simulation des Chassis mit Hilfe der Finiten-Elemente können Strukturveränderungen und ihre Auswirkungen getestet und für den membrangeregelten Lautsprecher optimieren werden. Bei geregelten Lautspre-chern sind weiche Aufhängungen und geringe partielle Membraneigenschwingungen nötig. Durch die Membranregelung ist jedoch gewährleistet, dass sich nichtlineare Verzerrungen des Antriebs durch inhomogene Magnetfelder auf Grund von großen Auslenkungen nicht in der Membranbewegung und somit auch nicht im Schallfeld bemerkbar machen. Nichtlinearitäten der Membranauslenkung werden ausgeregelt. Der letzte Schritt zum volldigitalen Lautsprechsystem von der CD bis zur Membranauslen-kung ist möglich. Die Erfassung des Weges mit einem linearen Sensor wird direkt in einen digitalen Wert umgesetzt. Die Regelung findet in einem Signalprozessor statt. Ein Anpassen der Regelung an den Lautsprecher ist bei jeder Inbetriebnahme durch das Ausmessen der Strecke möglich. Damit können auch die Parameter der Kompensatoren für jeden Lautsprecher individuell bestimmt werden. Das analoge Stellglied, ersetzt durch einen Klasse-D-Verstärker, lässt ein volldigitales System von der Aufnahmequel-le bis zur Membranauslenkung entstehen.

9. Kapitel Summary 97
9 Summary Manufacturers of speakers characterize the properties of chassis with the Thiele-Small parameters, which are calculated from the electrical impedance. The largest influence of the mechanical parameters is at the mechanical fundamental resonance of the membrane displacement. Additionaly there are natural resonances of the membrane that influence the quality of the speaker at higher frequencies. All mechanical resonances of the speaker membrane oscillations are detected as electrical impedance peaks, but at higher frequencies the mechanical natural vibrations of the speaker membrane are concealed by eddy current effects and the speaker voice coil impedance. Therefore, it is difficult to calculate the mechanical displacement from the electrical impedance at higher frequen-cies, which is fundamental for the sound pressure propagations. Until today most devel-opers measure only the mechanical resonance of the speaker to characterize all speaker properties. When a Position Sensitive Detector is used, it is possible to measure the real displacement with high linearity, a large dynamic range and a signal to noise ratio up to 90 dB even if high frequencies are obtained. The electrical impedance can be calculated from the voice coil displacement transfer function with the lumped element model. The comparison of the calculated data with the measured electrical impedance shows an excellent correspondence. The sound pressure can be predicted from the mechanical displacement of the speaker membrane with a simplified lumped rigid piston model. Large signals cause non-linear effects in the speaker actuators, which induce the most harmonic distortions. Speakers show displacement errors, which are caused by the non-linear force factor and the stiffness. Both effects can be reduced by an optical linear displacement measurement and a closed loop control of the speaker membrane. The absolute value and phase of the membrane displacement is defined by the controller and not by the speaker. This is important for speaker arrays. The linearity of the measure-ment system makes it possible to control the speaker membrane displacement in a real time closed loop system.
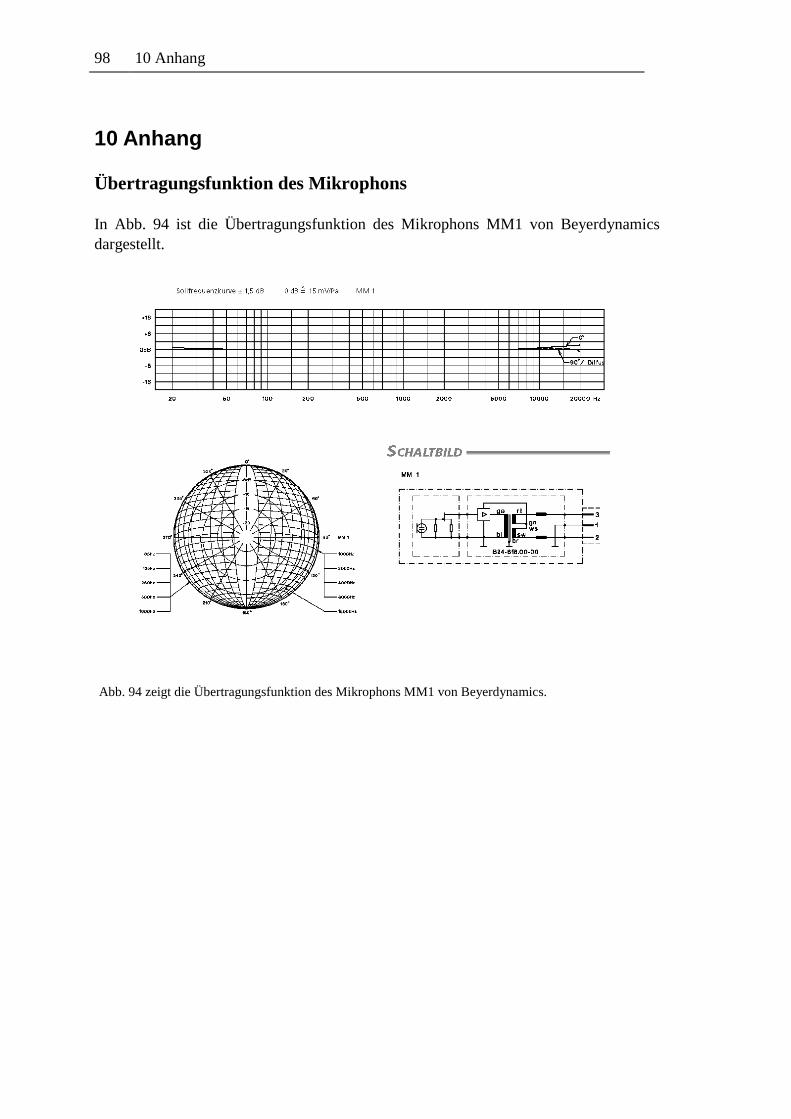
98 10 Anhang
10 Anhang Übertragungsfunktion des Mikrophons In Abb. 94 ist die Übertragungsfunktion des Mikrophons MM1 von Beyerdynamics dargestellt.
Abb. 94 zeigt die Übertragungsfunktion des Mikrophons MM1 von Beyerdynamics.
11. Kapitel Referenz 99
11 Referenz
[Beyerdynamic, 2004] http:www.beyerdynamic.de, 2004
[Birt, 1990] Birt, D.: Nonlinearities in Moving Coil Loudspeakers with Overhung Voice Coils; AES Pre. #2904, Conv.: 88 Mont-reux , Schweiz, 1990
[Farina, at. Al., 1998] Farina A.,Ugolotti E., Bellini A., Cibelli G., Morandi C.: Inverse numerical filters for linearisation of loudspeaker's response; DAFX-98 Conf. Nov. 19-21, Barcelona, Spain, 1998
[Föllinger, 1994] Föllinger O., Dörrscheidt F., Klittich M.: Regelungstech-nik: Einführung in die Methoden und ihre Anwendung; 8 Aufl., Heidelberg: Hüthig, 1994, ISBN 3-7785-2336-8
[Frankort, 1975] Frankort F.J.M.: Vibration and sound radiation of Loud-speakers cones; Thesis, Philips Res. Repts. Suppl., No.2, 1975
[Freschi, at al., 2003] Freschi A. A., Caetano N. R., Sanarine G. A., Hessel R.; Laser interferometric characterization of a vibrating speaker system; Am. J. Phys. 71; Nov. 2003
[Geiger, 2002] Geiger W.: Vorrichtung für Lautsprecherpositionsrege-lung, English translation: Device for the control of the speaker membrane displacement; Patent DE 102 56 033.1, 2002
[Geiger, 2004] Geiger W.: A new way to linearise speaker actuators is to control the membrane using optical linear displacement sensors, AES Journ., eingereicht Jan 2004
[Geiger, 2004] Geiger W.: Optical Linear Position Measurements of the Speaker Membrane Displacement-A New, Cheap and Easy Way to Characterise the Speaker Behaviour with High Accuracy, DAGA 2004, Transparencies, Strass-bourg, Frankreich, 2004
[Gies, 1978] Gies J.: Schallwandler mit einer Einrichtung zur Er-zeugung einer Messspannung, Patent DE 27 43 881, 1978
100 11 Referenz
[Hall, Alto, 1986] Hall D. S., Alto P.: Loudspeaker with high frequency motional feedback; Velodyne Acoustics, Inc., Santa Clara, Calif. Patent 4 573 189, 1986
[Hamamatsu, 2004] http://www.Hamamatsu.com, 2004
[Horschard, 2000] Krämer F.: Das große PSpice V9 Arbeitsbuch; 1. Auf., Fächer Verlag & Didaktik, Karlsruhe, Germany, 2000
[Järvinen, 1998] Järvinen A.: Vibro-acoustic modeling of a loudspeaker; NAM 98 Stockholm 7 - 9 Sept., University of Technol-ogy, Laboratory of Acoustics and Audio Signal Process-ing, Helsinki, Finland, 1998
[Klippel, 1991] Klippel W.: The non-linear large-signal transfer charac-teristics of electrodynamical loudspeakers at low frequen-cies; AES Journal Vol.: Issue: 40:6, Page: 483, 1992
[Jecklin, 2003] http://www.mdw.ac.at/I101/iea/tm/scripten, 2004
[Klippel, 1998] Klippel W.: Direct Feedback Linearization of Nonlinear Loudspeaker Systems; AES Journ. 46, pp. 499-507, 1998.
[Klippel, 1992] Klippel W.: The Mirror Filter - A New Basis for Linear Equalization and Nonlinear Distortion Reduction of Woofer Systems; AES Journ. Vol.: Iss.: 40:9, pp. 675, 1992
[Klippel, 2003] Klippel W.: Verzerrungsmessung mit Systemidentifika-tion; DAGA 2003, Transparencies, Aachen, Germany, 2003
[Klippel, Seidel, 2001] Klippel W., Seidel U.: Fast and Accurate Measurement of Linear Transducer Parameters; AES Pre. #5308, Conv. 110, Transparencies, Amsterdam, Netherlands, 2001,
[Knudsen, Rubak, 1987] Knudsen M. H., Rubak P.: Determination of Loudspeaker Parameters Using a System Identification; AES Pre. #2445, Conv.: 82, 1987
[Kollmeier, 2004] Kollmeier B. : http://medi.uni-oldenburg.de/html/teaching_download.html, 2004
11. Kapitel Referenz 101
[Kreutz, Panzer, 1991] Kreutz J. J. M., Panzer J.: Determination of the Quality Factors of Loudspeakers by a Statistical Method; AES Pre. #3039, Conv. 90, Paris, Frankreich, 1991
[Küpfmüller, 1941] Küpfmüller, K: Einführung in die theoretische Elektrote-chik, 3. Auflage, SpringerVerlag, Berlin, Germany, 1941
[Laser Components, 2004]
http://www.lasercomponents.de, 2004 (Datenblattanfrage)
[Leach, 2002] Leach W. M.; Loudspeaker Voice-Coil Inductance Losses: Circuit Models, Parameter Estimation, and Effect on Frequency Response; AES Journal Vol. 50, No. 6, 2002
[Leichsenring, 1996] Leichsenring J.: Technische Akustik; M Verlag Mainz, Aachen, ISBN 3-89653-065-8, 1996
[Lukavsky, 1977] Lukavsky Z.: Prinzip zum Erreichen der absoluten Re-produktion von elektroakustischen Wandlern; Patent 25 44 151, 1977
[Radcliffe, Gogate, 1996]
Radcliffe C. J., Gogate S. D.M: Velocity Feedback Com-pensation of Electromechanical Speakers for Acoustic Applications; Paper 3a-07-1; Intern. Federation of Auto-matic Control Triennial World Congress, Jun./Jul. 30-05, San Francisco, Calif., USA, 1996
[Rau, 86] Rau G.: Vorrichtung zur Gegenkopplung eines Laut-sprechers; Patent DE 3426231 C2, 1986
[Rausch, 2001] Rausch M.: Numerische Analyse und Computeroptimie-rung von elektrodynamischen Aktoren am Beispiel eines elektrodynamischen Lautsprechers; Dissertation, Erlan-gen, Germany, 2001
[Rausch, at al., 2000] Rausch M.: Kaltenbacher M., Kreitmeier L., Krump G., Landes H., Lerch R., Simkovics R.; Einsatz numerischer Verfahren bei der Berechnung der nichtlinearen Eigen-schaften von elektrodynamischen Lautsprechern; DAGA 2000, Oldenbourg, pp. 710-711, Germany, 2000
102 11 Referenz
[Schurer, 1997] Schurer, H.: Linearization of electroacoustic Transducer; Ipskamp, Enschede, Netherlands, ISBN 90-365-1032-5, 1997
[Schurer, at Al., 97] Schurer H., Slump C., Herrmann O., Nijmeijer A., Boer M.: Identification and Compensation of the Electrody-namic Transducer Nonlinearities; Proc. ICASSP-97; Munich, Germany, 1997
[Sitek, 2004] http://www.sitek.se; 2004
[Small, 1976] Small, R.: Synthesis of loudspeaker driver parameters; Proc. ICASSP ’76, Vol.: 1, pp. 406- 408, 1976
[Small, 1971] Small R.: Direct-Radiator Loud-speaker System Analysis; IEEE Transactions on audio and electroacoustics, Vol. AU-19, No. 4, 1971
[Suykens, Vandewalle, 1995]
Suykens J., Vandewalle J.: Feedback Linearization of nonlinear distortion in Electrodynamic Loudspeakers; J. Audio Eng. Soc. Vol. 43, No. 9 pp. 690-694, 1995
[Thiele, 1976] Thiele, A.: Applications of network synthesis to loud-speaker system theory; ICASSP ’76, Vol.: 1, pp. 402 – 405, 1976
[Tietze, Schenk, 1999] Tietze U., Schenk C., Gamm E.: Halbleiter-Schaltungstechnik; 11. Aufl. ,Springer Verlag, Berlin Heidelberg New York, ISBN 3-540-64192-0, 1999
[Stark, 1999] Stark, B.: Lautsprecher-Handbuch; 7. Auflage, Pflaum, München, 1999
[Tränkler, 1998] Tränkler H.-R., Obermeier E.: Sensortechnik: Handbuch für die Praxis und Wissenschaft; Springer Verlag, Berlin Heidelberg, 1998
[Mathematica, 2004] http://www.wolframresearch.com
[Visaton, 2004] http://www.visaton.de, 2004
[Wiemann, 1987] Wiemann L.: Regelungssysteme: Dem Ideal näherge-kommen. Infrarotlicht in der Hifi-Box; Funkschau, pp 45-48, 1987

11. Kapitel Referenz 103
[Wolpert-Werke, 1994] Wolpert-Werke GmbH: Handbuch Federprüfmaschine Type SF 101; Ludwigshafen; Eigenverlag, 1994
[Zwicker, 1998] Zollner, M., Zwicker, E.: Elektroakustik; Springer-Verlag Berlin; ISBN 3-540-64665-5, 1998
Danksagung Die vorliegende Arbeit entstand im Rahmen meiner Tätigkeit als wissenschaftlicher Mitarbeiter am Lehrstuhl für Technische Elektronik der Friedrich-Alexander-Universität Erlangen-Nürnberg. Einen besonderen Dank möchte ich an Herrn PD Dr. U. Tietze, der mich während mei-ner Arbeit betreut hat und mich für das Fachgebiet der Schaltungstechnik begeistern konnte. Er hatte während meiner Arbeit stets ein offenes Ohr für Fachgespräche und Fachdiskussionen über das Gebiet der Schaltungstechnik. Ebenso gilt mein besonderer Dank Prof. Dr.-Ing. R. Hagelauer von der Johannes Kepler Universität Linz, der sich bereit erklärt hat als Berichterstatter an meiner Arbeit mitzu-wirken. Weiterer Dank geht an Prof. Dr.-Ing. R. Weigel, der nach der Neubesetzung des Lehr-stuhls für Technische Elektronik, mir die Gelegenheit gab, nach seinem Amtsantritt, meine Arbeit fortzusetzen und die Einrichtungen des Lehrstuhls weiterhin zu nutzen. Ebenso geht mein Dank an Prof. Dr. Oehme der mir die Möglichkeit gab, am Lehrstuhl die Arbeit meiner Promotion festzulegen und zu beginnen. Ein besonderer Dank geht an den ehemaligen Vorstand des Lehrstuhls Prof. Dr.-Ing. D. Seitzer, der stets für ein Fachgespräch bereit war und sich um die Vermittelung eines fachfremden Prüfers bemühte. Allen weiteren Kollegen und Mitarbeiter/-in des Lehrstuhls für Technische Elektronik, die mich während meiner Arbeit unterstützten und in vielfältiger Art und Weise zum Erfolg meiner Arbeit beitrugen, möchte ich recht herzlich danken. Für Diskussionsbei-trägen auf wissenschaftlicher Ebene, so wie für die Arbeiten der Techniker, die es er-möglichten meine Promotion abzuschließen.

Lebenslauf 09/84-07/88
Schulbildung: Besuch der staatlichen Realschule Höchberg, technischer Zweig
09/88-02/92
Berufsausbildung und Berufspraxis: Ausbildung zum Kommunikationselektroniker in der Fachrichtung Kommunikationstechnik bei der Deutschen Bundespost Telekom im Fernmeldeamt Würzburg
03/92-08/92 Tätigkeit als Fernmeldemonteur bei der Telefon-/Kommunikations-/Sicherheitsanlagen GmbH, Würzburg
09/92-07/94
Berufsoberschule: Erwerb der fachgebundenen Hochschulreife an der Berufsoberschule Würzburg, Ausbildungsrichtung Technik
10/94-12/99
Studium: Studium der Physik an der Universität Würzburg Abschluss mit dem Diplom
02/00-03/00
Wissenschaftliche Tätigkeit Anstellung als wissenschaftlicher Hilfsassistent am Lehrstuhl für Bio-technologie der Bayerische Julius-Maximilians-Universität Würzburg
05/00 Wissenschaftlicher Angestellter am Lehrstuhl für Technische Elektro-nik der Friedrich-Alexander-Universität Erlangen-Nürnberg