Embed Size (px)
Citation preview
Phasenporträts linearer Systeme
Franziska Stocker
Ausarbeitung zum Vortrag im Seminar Mathematische Modellierung(Wintersemester 2008/09, Leitung PD Dr. Gudrun Thäter)
Zusammenfassung: Um eine reales Problem mathematisch betrachten und lösen zu kön-nen, benötigt man ein geeignetes Modell, welches nur die wichtigen Faktoren berücksichtigtund alles Unnötige auÿer Acht lässt. Ein solches Modell kann zur Vorhersage und Kontrolledienen und wird mit Hilfe von Beobachtungen und Erfahrungen immer weiter idealisiert, bisdas Problem genau genug formuliert und gelöst werden kann.
Diese Art der Mathematisierung von Problemen spielt eine groÿe Rolle in allen Naturwissen-schaften, aber auch in Technik, Medizin, sowie in Wirtschafts- und Sozialwissenschaften. Dadie Änderung einer Gröÿe mathematisch durch ihre Ableitung darstellbar ist, bestehen vieledieser Modelle aus Di�erentialgleichungen.Nicht zu allen Di�erentialgleichungen kann eine Lösung analytisch gefunden werden. Umtrotzdem zu brauchbaren Daten zu gelangen, besteht die Möglichkeit sich intensiver mit denqualitativen Eigenschaften der Lösungen zu beschäftigen.Dies ist Inhalt dieser Ausarbeitung. Gleichzeitig wollen wir die Dynamik dieser Systeme, diesich in Form der Phasenporträts darstellen lässt, charakterisieren.

Inhaltsverzeichnis
1 Einleitung 4
2 Vorbereitung 52.1 Begri�serläuterungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Berechnung der Lösungen . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.1 1. Fall: A ist diagonalisierbar . . . . . . . . . . . . . . . . . . . 72.2.2 2. Fall: A ist nicht diagonalisierbar . . . . . . . . . . . . . . . . 7
2.3 Fallunterscheidung durch die Eigenwerte . . . . . . . . . . . . . . . . . 8
3 Einordnung der Phasenporträts 103.1 A hat zwei reelle Eigenwerte . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1.1 det(A) > 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.1.2 det(A) < 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2 A hat einen (doppelten) reellen Eigenwert . . . . . . . . . . . . . . . . 113.2.1 A ist diagonalisierbar . . . . . . . . . . . . . . . . . . . . . . . . 113.2.2 A ist nicht diagonalisierbar . . . . . . . . . . . . . . . . . . . . . 12
3.3 A hat zwei komplexe Eigenwerte . . . . . . . . . . . . . . . . . . . . . . 133.3.1 α = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.3.2 α 6= 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4 Zusammenfassung 16
5 Resümee 16
6 Quellenverzeichnis der Abbildungen 17
7 Anhang 187.1 Anhang 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187.2 Anhang 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187.3 Anhang 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2

Abbildungsverzeichnis
2.1 Beispiel zur Ermittlung von Bahnkurven . . . . . . . . . . . . . . . . . 52.2 Stabilität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3 asymptotische Stabilität . . . . . . . . . . . . . . . . . . . . . . . . . . 63.1 stabiler Knotenpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2 instabiler Sattelpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.3 stabiler Stern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.4 stabiler eintangentialer Knoten . . . . . . . . . . . . . . . . . . . . . . 123.5 Veranschaulichung zum Wirbelpunkt . . . . . . . . . . . . . . . . . . . 133.6 Wirbelpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.7 stabiler Strudelpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Tabellenverzeichnis
1 Einordnung von Phasenporträts . . . . . . . . . . . . . . . . . . . . . . 16
3

1 Einleitung
Zunächst ist zu klären, was wir unter einer Di�erentialgleichung und unter einer Lö-sung einer Di�erentialgleichung verstehen. Wir beginnen mit einer sehr allgemeinenDe�nition:
De�nition 1.1 Es seien n ∈ N, D ⊂ R× Cn+1 und f : D → C. Dann heiÿt
f(t, x(t), x′(t), ..., x(n)(t)) = 0 (1.1)
gewöhnliche Di�erentialgleichung n-ter Ordnung.
Gegeben ist hierbei eine Funktion f . Gesucht ist eine Funktion x(t) einer Veränderlichent, de�niert auf einem Intervall, so dass die Gleichung (1.1) erfüllt ist1.
In vielen Fällen wird es möglich sein, diese Gleichung nach der höchsten auftretendenAbleitung x(n)(t) aufzulösen. Sie hat dann die Form
x(n)(t) = f(t, x′(t), ..., x(n−1)(t)),
wobei die Funktion f nun auf dem Rn (oder auf einer Teilmenge) de�niert ist.
Im weiteren setzen wir voraus, dass unsere Di�erentialgleichungen zweiter Ordnungsind, bzw. in ein System zweier Di�erentialgleichungen erster Ordnung um-geformt werden können. Dass man dies als äquivalent ansehen kann, sieht man z.B.folgendermaÿen:
Man betrachte die Di�erentialgleichung zweiter Ordnung:
x(t) = f(t, x(t), x(t))
Man de�niere sich eine Funktion y(t) mit x(t) := y(t) ⇒ y(t) = f(t, x(t), y(t)),d.h. es gilt:
x(t) = y(t)y(t) = f(t, x(t), y(t))
Wir betrachten im weiteren nur noch lineare Di�erentialgleichungssysteme mit zweiUnbekannten, also Di�erentialgleichungen erster Ordnung in der Form:
x1(t) = ax1(t) + bx2(t)
x2(t) = cx1(t) + dx2(t)(1.2)
mit a, b, c, d ∈ R.Dies lässt sich als x(t) = Ax(t) schreiben mit der gegebenen konstanten (2, 2)-Matrix
A =
(a bc d
)und dem Vektor x(t) =
(x1(t)x2(t)
).
1Wie man sieht liegt die Besonderheit von Di�erentialgleichung vor allem im Lösungsraum, der
hier von Funktionen und nicht wie �gewohnt� von Zahlen aufgespannt wird.
4
2 Vorbereitung
2.1 Begri�serläuterungen
Wir betrachten die Di�erentialgleichungen erster Ordnung:
x(t) = f(t, x(t)) , M ⊂ R× R4, f : M → R2. (2.1)
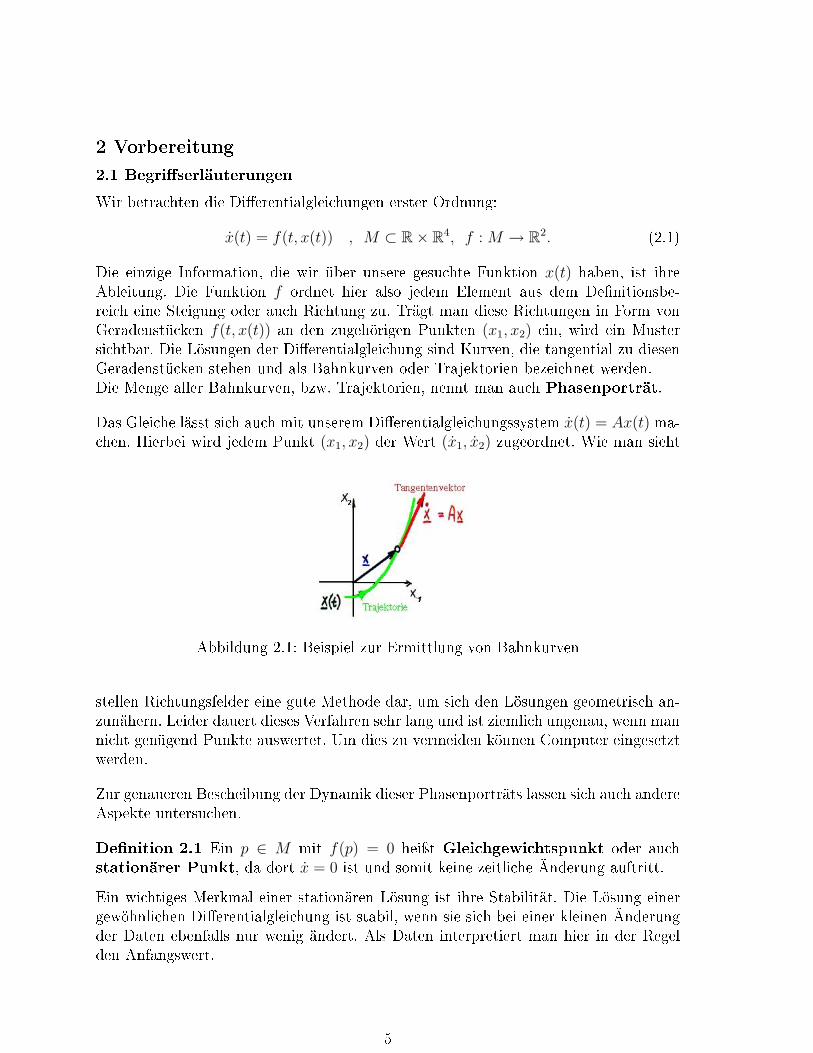
Die einzige Information, die wir über unsere gesuchte Funktion x(t) haben, ist ihreAbleitung. Die Funktion f ordnet hier also jedem Element aus dem De�nitionsbe-reich eine Steigung oder auch Richtung zu. Trägt man diese Richtungen in Form vonGeradenstücken f(t, x(t)) an den zugehörigen Punkten (x1, x2) ein, wird ein Mustersichtbar. Die Lösungen der Di�erentialgleichung sind Kurven, die tangential zu diesenGeradenstücken stehen und als Bahnkurven oder Trajektorien bezeichnet werden.Die Menge aller Bahnkurven, bzw. Trajektorien, nennt man auch Phasenporträt.
Das Gleiche lässt sich auch mit unserem Di�erentialgleichungssystem x(t) = Ax(t) ma-chen. Hierbei wird jedem Punkt (x1, x2) der Wert (x1, x2) zugeordnet. Wie man sieht
Abbildung 2.1: Beispiel zur Ermittlung von Bahnkurven
stellen Richtungsfelder eine gute Methode dar, um sich den Lösungen geometrisch an-zunähern. Leider dauert dieses Verfahren sehr lang und ist ziemlich ungenau, wenn mannicht genügend Punkte auswertet. Um dies zu vermeiden können Computer eingesetztwerden.
Zur genaueren Bescheibung der Dynamik dieser Phasenporträts lassen sich auch andereAspekte untersuchen.
De�nition 2.1 Ein p ∈ M mit f(p) = 0 heiÿt Gleichgewichtspunkt oder auchstationärer Punkt, da dort x = 0 ist und somit keine zeitliche Änderung auftritt.
Ein wichtiges Merkmal einer stationären Lösung ist ihre Stabilität. Die Lösung einergewöhnlichen Di�erentialgleichung ist stabil, wenn sie sich bei einer kleinen Änderungder Daten ebenfalls nur wenig ändert. Als Daten interpretiert man hier in der Regelden Anfangswert.
5

De�nition 2.2 Ein Gleichgewichtspunkt x∗ heiÿt stabil, wenn zu jeder Umgebung Uvon x∗ eine Umgebung V von x∗ existiert, so dass für jede Lösung der Anfangswert-probleme x(t) = Ax(t), x(0) = x0 ∈ V gilt: x(t) ∈ U für alle t > 0.Der Gleichgewichtspunkt heiÿt asymptotisch stabil, wenn er stabil ist und wennzusätzlich eine Umgebung W von x∗ existiert, so dass für jede Lösung der Anfangs-wertprobleme x(t) = Ax(t), x(0) = x0 ∈ W gilt: lim
t→∞x(t) = x∗.
Der Gleichgewichtspunkt heiÿt instabil, wenn er nicht stabil ist.
Abbildung 2.2: Stabilität Abbildung 2.3: asymptotische Stabilität
Zur Veranschaulichung: Zunächst betrachten wir die Abbildung 2.2: Die Kurvenverlaufen für wachsende t periodisch immer wieder auf Ellipsenbahnen. Nun lässt sichzu jedem ε ein δ �nden, sodass zu einem Zeitpunkt t1 (roter Punkt), die Bahnkurveinnerhalb des gestrichelten Kreises mit dem Radius δ liegt. Nun kann die Bahnkurvedurchaus noch mehrfach die δ-Umgebung verlassen, wird aber die ε-Umgebung (durch-gezogener, dicker Kreis) des Gleichgewichtspunktes (0,0) nie erreichen. Dieses Verhaltenwird als �stabil� bezeichnet.Nun betrachten wir die Abbildung 2.3: Gegeben sei ein Kreis um den Ursprung mitRadius R. Angenommen, für wachsendes t verlaufe die Kurve in Richtung Ursprung.Dann lässt sich ein Zeitpunkt t1 �nden (roter Punkt), an dem die Spirale in den Kreiseindringt. Für t > t1 gilt nun, dass für t → ∞ die Lösung (x1(t), x2(t)) nach (0, 0)strebt (�die Bahnkurve konvergiert gegen den Gleichgewichtspunkt�). Wenn eine Lö-sung stabil ist und darüber hinaus noch diese gerade eben beschriebene Eigenschaftbesitzt, bezeichnet man den zugehörigen Gleichgewichtspunkt als �asymptotisch stabil�.
2.2 Berechnung der Lösungen
Wir betrachten also lineare Di�erentialgleichungen der Form
x(t) = Ax(t) (2.2)
mit der konstanten (2, 2)-Matrix A =
(a bc d
)und dem Vektor x(t) =
(x1(t)x2(t)
). Wir
wissen, dass die Funktion x(t) = eAt · C mit der Konstanten C =
(c1c2
)die Gleichung
löst. Die Matrixexponentialfunktion eAt ist hierbei über eine unendliche Reihe de�niert(siehe (2.4)). Zur Vereinfachung der Rechnung muss A auf Diagonal- bzw. Jordannor-malform gebracht werden.
6

Betrachten wir deshalb die Aussage über die Diagonalisierbarkeit nun etwas genauer:
2.2.1 1. Fall: A ist diagonalisierbar
Angenommen A ist diagonalisierbar mit den Eigenwerten λ1,2 und den zugehörigen
Eigenvektoren v1,2. Sei ferner S = (v1, v2) =
(s1 s2
s3 s4
)mit s1,...,4 ∈ R, so gilt
D := S−1AS =
(λ1 00 λ2
), mit geeignetem S ∈ GL(2,R), λ1,2 ∈ R (2.3)
Es gilt2:
eAt =∞∑j=0
1
j!(SDS−1)j · tj = SeDtS−1 (2.4)
Daraus folgt3:
x(t) = eAt · C = S · eDt · S−1 · C = S ·(eλ1t 00 eλ2t
)· C
= (v1eλ1t, v2e
λ2t) · C = c1v1eλ1t + c2v2e
λ2t
(2.5)
Satz 2.3 Die allgemeinen Lösungen für eine lineare Di�erentialgleichungx(t) = Ax(t), bei der A diagonalisierbar ist, lauten:
x(t) = c1v1eλ1t + c2v2e
λ2t mit c1,2 ∈ R
Eine alternative Rechnung lässt sich im Anhang 1 nachlesen.
2.2.2 2. Fall: A ist nicht diagonalisierbar
Ist A nicht diagonalisierbar, dann existiert nach dem Satz über die Jordan-Normalformeine invertierbare (2, 2)-Matrix S, so dass gilt:
J := S−1AS =
(λ1 10 λ1
), λ1 ∈ C (2.6)
Da J sich in eine Diagonalmatrix und eine nilpotente Matrix (hier
(0 10 0
)) zerlegen
lässt, folgt:
eJt = eDt+Nt = eDt · eNt
2da (SDS−1)m = SDS−1 · SDS−1 · ... · SDS−1 = SDmS−1
3S−1 · C ist eine Konstante und wir ersetzten deshalb S−1 · C durch C
7

Hiermit lässt sich eAt nun berechnen:
eAt = SeJtS−1 = S · eDt+Nt · S−1 = S · eDt · eNt · S−1
= S · e
λ1t 00 λ1t
· (E2 +N + 1
2(tN)2 + ...) · S−1
= S ·(eλ1t 00 eλ1t
)(1 t0 1
)· S−1 = S ·
(eλ1t teλ1t
0 eλ1t
)· S−1 mit E2 =
(1 00 1
)Gleichzeitig können wir auch annehmen, dass wieder (nach der De�nition der Jordan-normalform) die erste Spalte von S ein Eigenvektor zum Eigenwert λ1 von A ist. Diezweite Spalte ist ein zugehöriger Hauptvektor der Stufe 2, welcher in Folge mit u ∈ R2
bezeichnet wird.4
Damit gilt:
eAt = S ·(eλ1t teλ1t
0 eλ1t
)· S−1 =
(s1 ts1 + s2
s3 ts3 + s4
)· eλ1t · S−1 (2.7)
und somit folgt (entsprechend (2.5)) für die allgemeine Lösung:
x(t) = eAt · C =
(s1 ts1 + s2
s3 ts3 + s4
)· eλ1t · C =
(s1c1 + (ts1 + s2)c2s3c1 + (ts3 + s4)c2
)· eλ1t
Satz 2.4 Die allgemeinen Lösungen für eine lineare Di�erentialgleichungx(t) = Ax(t), bei der A nicht diagonalisierbar ist, lauten:
x(t) = [c1v1 + c2(tv1 + u)]eλ1t
Eine alternative Rechnung lässt sich in Anhang 2 nachlesen.
2.3 Fallunterscheidung durch die Eigenwerte
Zur Erinnerung ist zu sagen, dass Eigenvektoren die Vektoren sind, deren Richtungdurch die Abbildung nicht verändert werden. Sie werden nur um den Wert des zuge-hörigen Eigenwertes gestreckt.Damit lässt sich bereits eine Aussage über die geometrischen Eigenschaften des Di�e-rentialgleichungssystems machen. Hierzu ist eine Fallunterscheidung nützlich. Vorerstsetzten wir voraus, dass det(A) 6= 0, wodurch 0 als Eigenwert ausfällt. Gleichzeitig istder Punkt (0, 0) der einzige Gleichgewichtspunkt.
4Hauptvektoren der Stufe n sind die Vektoren u, die die Gleichung (A− λE2)nu = 0 lösen
8
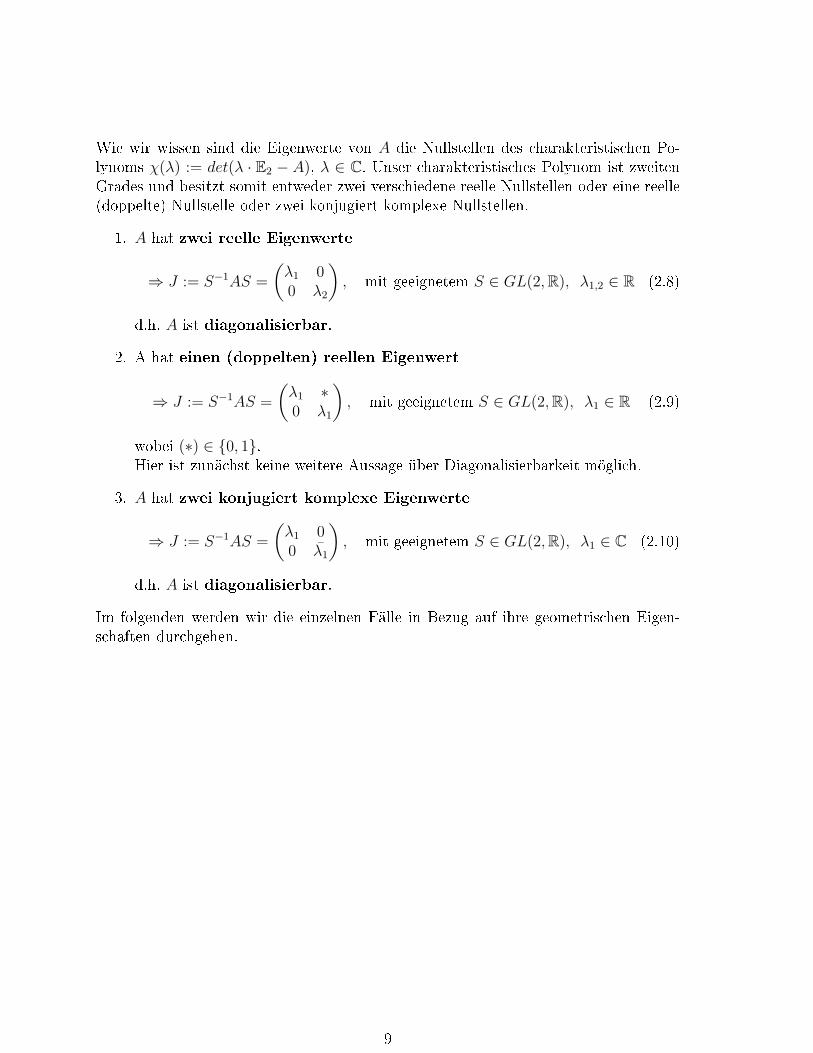
Wie wir wissen sind die Eigenwerte von A die Nullstellen des charakteristischen Po-lynoms χ(λ) := det(λ · E2 − A), λ ∈ C. Unser charakteristisches Polynom ist zweitenGrades und besitzt somit entweder zwei verschiedene reelle Nullstellen oder eine reelle(doppelte) Nullstelle oder zwei konjugiert komplexe Nullstellen.
1. A hat zwei reelle Eigenwerte
⇒ J := S−1AS =
(λ1 00 λ2
), mit geeignetem S ∈ GL(2,R), λ1,2 ∈ R (2.8)
d.h. A ist diagonalisierbar.
2. A hat einen (doppelten) reellen Eigenwert
⇒ J := S−1AS =
(λ1 ∗0 λ1
), mit geeignetem S ∈ GL(2,R), λ1 ∈ R (2.9)
wobei (∗) ∈ {0, 1}.Hier ist zunächst keine weitere Aussage über Diagonalisierbarkeit möglich.
3. A hat zwei konjugiert komplexe Eigenwerte
⇒ J := S−1AS =
(λ1 00 λ1
), mit geeignetem S ∈ GL(2,R), λ1 ∈ C (2.10)
d.h. A ist diagonalisierbar.
Im folgenden werden wir die einzelnen Fälle in Bezug auf ihre geometrischen Eigen-schaften durchgehen.
9

3 Einordnung der Phasenporträts
Mit Hilfe der vorangegangenen Überlegungen können wir die Phasenporträts linearerSysteme genauer betrachten. Wir betrachten nun die verschiedenen Fälle, wobei dieFälle mit det(A) = 0 nicht weiter behandelt werden.
3.1 A hat zwei reelle Eigenwerte
Die Matrix A hat zwei verschiedene reelle Eigenwerte λ1 und λ2.In diesem Fall ist A diagonalisierbar, kann also wie in Kapitel 2.2.1 auf die Normalform(2.3) transformiert werden. Die allgemeinen Lösungen sind demnach wie in Satz 2.3:
x(t) = c1v1eλ1t + c2v2e
λ2t
Hier müssen Fallunterscheidungen vorgenommen werden:
3.1.1 det(A) > 0
Im Falle det(A) > 0 folgt, dass beide Eigenwerte von A das gleiche Vorzeichen ha-ben.Wir nehmen O.B.d.A. an, dass | λ1 |<| λ2 |.
1. Fall: λ2 < λ1 < 0c1v1e
λ1t und c2v2eλ2t stellen Bahnkurven dar. Da für groÿe t alle Bahnkurven gegen
c1v1eλ1t streben, stellt sich das Phasenporträt aus Abbildung 3.1 ein. S1 und S2 ent-
sprechen c1v1eλ1t und c2v2e
λ2t. Man spricht hier von einem Knoten, da die Bahnkurvenim Ursprung münden, dieser muss jedoch nicht zwingend selbst auf der Bahn liegen.Es gilt x(t) → 0, für t → ∞. Man hat also asymptotische Stabilität. Bei diesem Pha-senporträt spricht man von einem stabilen Knoten(punkt).
–6
–4
–2
0
2
4
6
–6 –4 –2 0 2 4 6
s2
s1
Abbildung 3.1: stabiler Knotenpunkt
2. Fall: λ2 > λ1 > 0Für λ1,2 > 0 ist der Punkt (0, 0) instabil, da für t → ∞ gilt, dass | x(t) |→ ∞. DasPhasenporträt entspricht dem vorangegangenen, wobei die Pfeilrichtungen umgekehrtwerden müssen. Es handelt sich also um einen instabilen Knoten.
10
3.1.2 det(A) < 0
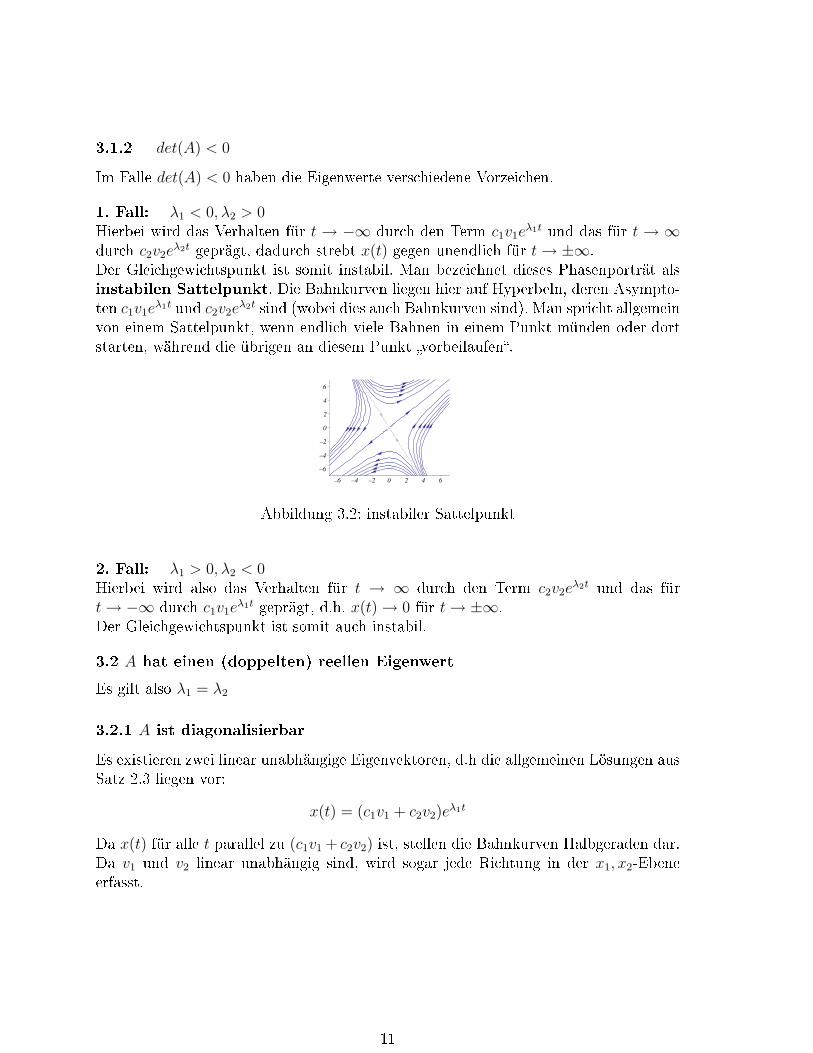
Im Falle det(A) < 0 haben die Eigenwerte verschiedene Vorzeichen.
1. Fall: λ1 < 0, λ2 > 0Hierbei wird das Verhalten für t → −∞ durch den Term c1v1e
λ1t und das für t → ∞durch c2v2e
λ2t geprägt, dadurch strebt x(t) gegen unendlich für t→ ±∞.Der Gleichgewichtspunkt ist somit instabil. Man bezeichnet dieses Phasenporträt alsinstabilen Sattelpunkt. Die Bahnkurven liegen hier auf Hyperbeln, deren Asympto-ten c1v1e
λ1t und c2v2eλ2t sind (wobei dies auch Bahnkurven sind). Man spricht allgemein
von einem Sattelpunkt, wenn endlich viele Bahnen in einem Punkt münden oder dortstarten, während die übrigen an diesem Punkt �vorbeilaufen�.
–6
–4
–2
0
2
4
6
–6 –4 –2 0 2 4 6
!
!
Abbildung 3.2: instabiler Sattelpunkt
2. Fall: λ1 > 0, λ2 < 0Hierbei wird also das Verhalten für t → ∞ durch den Term c2v2e
λ2t und das fürt→ −∞ durch c1v1e
λ1t geprägt, d.h. x(t)→ 0 für t→ ±∞.Der Gleichgewichtspunkt ist somit auch instabil.
3.2 A hat einen (doppelten) reellen Eigenwert
Es gilt also λ1 = λ2
3.2.1 A ist diagonalisierbar
Es existieren zwei linear unabhängige Eigenvektoren, d.h die allgemeinen Lösungen ausSatz 2.3 liegen vor:
x(t) = (c1v1 + c2v2)eλ1t
Da x(t) für alle t parallel zu (c1v1 + c2v2) ist, stellen die Bahnkurven Halbgeraden dar.Da v1 und v2 linear unabhängig sind, wird sogar jede Richtung in der x1, x2-Ebeneerfasst.
11
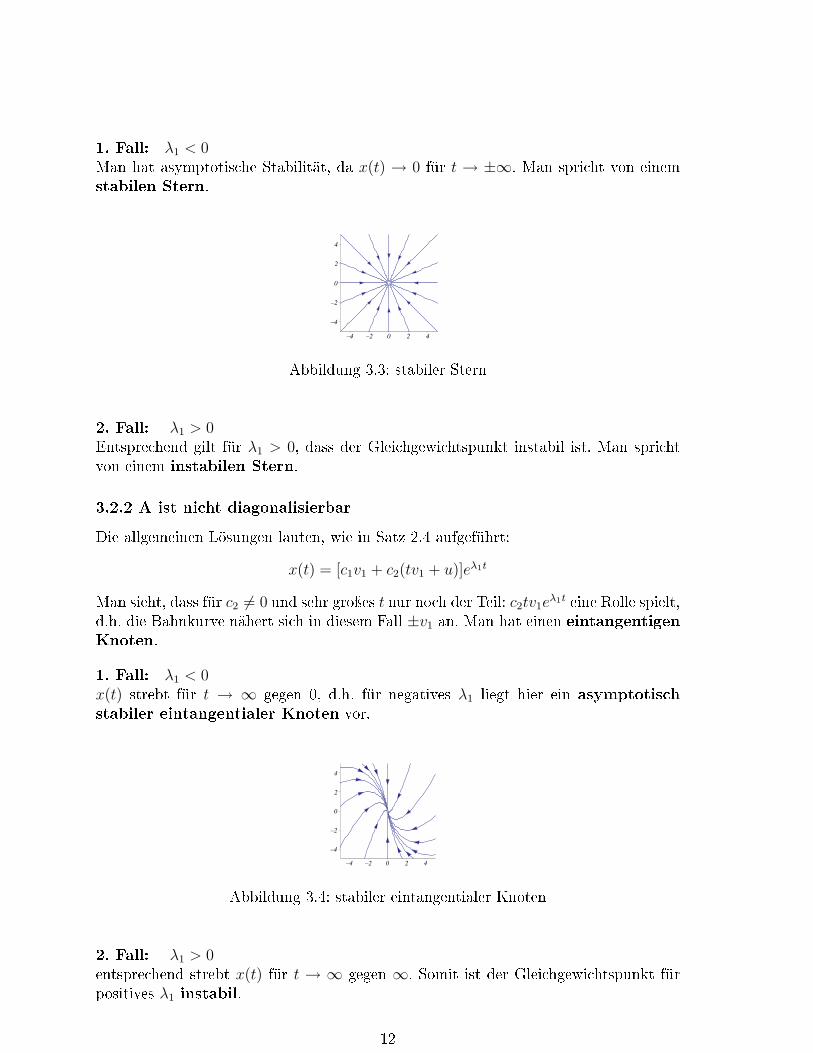
1. Fall: λ1 < 0Man hat asymptotische Stabilität, da x(t) → 0 für t → ±∞. Man spricht von einemstabilen Stern.
–4
–2
0
2
4
–4 –2 0 2 4
Abbildung 3.3: stabiler Stern
2. Fall: λ1 > 0Entsprechend gilt für λ1 > 0, dass der Gleichgewichtspunkt instabil ist. Man sprichtvon einem instabilen Stern.
3.2.2 A ist nicht diagonalisierbar
Die allgemeinen Lösungen lauten, wie in Satz 2.4 aufgeführt:
x(t) = [c1v1 + c2(tv1 + u)]eλ1t
Man sieht, dass für c2 6= 0 und sehr groÿes t nur noch der Teil: c2tv1eλ1t eine Rolle spielt,
d.h. die Bahnkurve nähert sich in diesem Fall ±v1 an. Man hat einen eintangentigenKnoten.
1. Fall: λ1 < 0x(t) strebt für t → ∞ gegen 0, d.h. für negatives λ1 liegt hier ein asymptotischstabiler eintangentialer Knoten vor.
z-Ebene
–4
–2
0
2
4
–4 –2 0 2 4
!Abbildung 3.4: stabiler eintangentialer Knoten
2. Fall: λ1 > 0entsprechend strebt x(t) für t → ∞ gegen ∞. Somit ist der Gleichgewichtspunkt fürpositives λ1 instabil.
12

3.3 A hat zwei komplexe Eigenwerte
Hier liegen wieder die allgemeinen Lösungen aus Satz 2.3 vor. Diese können im Falleder komplexen Eigenwerte λ1 = α+iβ = λ2 (mit α, β ∈ R und o.B.d.A. β > 0) und denzugehörigen Eigenvektoren: v1 = u + iw = v2(mit u,w ∈ R2) noch exakter angegebenwerden.Jede reellwertige Lösung des Di�erentialgleichungssystem lässt sich in der Form:
x(t) = C1 · eαt[ucos(βt)− wsin(βt)] + C2 · eαt[wcos(βt) + usin(βt)]
mit den Konstanten C1,2 ∈ R schreiben.7
Dieser Ausdruck lässt sich noch weiter vereinfachen.Da der Sinus ein phasenverschobener Kosinus ist, folgt:
x(t) = C1eαt[ucos(βt)− wcos(βt− π
2)] + C2e
αt[wcos(βt) + ucos(βt− π2)]
= eαtRcos(βt− δ)
mit R =
(R1
R2
), δ =
(δ1δ2
)3.3.1 α = 0
In diesem Fall sind die Lösung durch die Gleichung:(x1(t)x2(t)
)=
(R1cos(βt− δ1)R2cos(βt− δ2)
)gegeben.
x(t) = Rcos(βt− δ) ist eine periodische Funktion mit der Periode 2πβ.
x1(t) = R1cos(βt−δ1) verläuft dabei zwischen ±R1 und x2(t) = R2cos(βt−δ2) variiertzwischen ±R2.
Abbildung 3.5: Veranschaulichung zum Wirbelpunkt
7genauere Berechnungen sind im Anhang 3 aufgeführt.
13

Wie man auf dem Bild gut sehen kann, ist die Bahnkurve einer beliebigen Lösung eineden Ursprung umlaufende geschlossene Kurve. In diesem Fall spricht man von einemWirbelpunkt oder Zentrum.Die Bahnkurve einer Lösung stellt also einen �verzerrten� Einheitskreis dar, wobei dieserin x1-Richtung um höchstens R1 und in x2-Richtung höchstens um R2 ausgedehntwurde.In welcher Richtung diese Kreise durchlaufen werden, lässt sich im Falle von x2(t) = 0durch das Vorzeichen von x2(t) bestimmen.Ist x2(t) > 0 für x2(t) = 0 und x1(t) > 0 dann werden die Kreise im Gegenuhrzeigersinndurchlaufen. Gilt jedoch, dass x2(t) < 0 für x2(t) = 0 und x1(t) > 0 dann bewegen sichdie Lösungen im Uhrzeigersinn.
–4
–2
0
2
4
–4 –2 0 2 4
Abbildung 3.6: Wirbelpunkt
3.3.2 α 6= 0
Es gilt:
x1(2πβ
) = e2πα
β R1cos(2π − δ1) = e2πα
β R1cos(δ1) = e2πα
β x1(0)
x2(2πβ
) = e2πα
β R2cos(2π − δ2) = e2πα
β R2cos(δ2) = e2πα
β x2(0)
Da x(t) eine periodische Funktion mit der Periode 2πβist, müssten im Falle von geschlos-
senen Kurven x(2πβ
) = x(0) gelten. Da in diesem Fall gilt, dass x(2πβ
) 6= x(0), liegendie Kurven �spiralig� um den Ursprung. Dies lässt sich auch dadurch veranschaulichen,dass im Gegensatz zu 3.3.1 x(t) noch um den Faktor eαt gestreckt wird. Somit wird fürt→∞ der Streckungsfaktor immer gröÿer/kleiner.
Im verbleibenden Fall erhält man also einen sogenanntenStrudelpunkt oder auchBrennpunkt, d. h. die Trajektorien lassen sich so zu Kurven zusammensetzen, welcheeinen Punkt beliebig oft umlaufen und dem Punkt dabei beliebig nahekommen, ohnemit einer bestimmten Tangentenrichtung in ihn einzumünden.
14
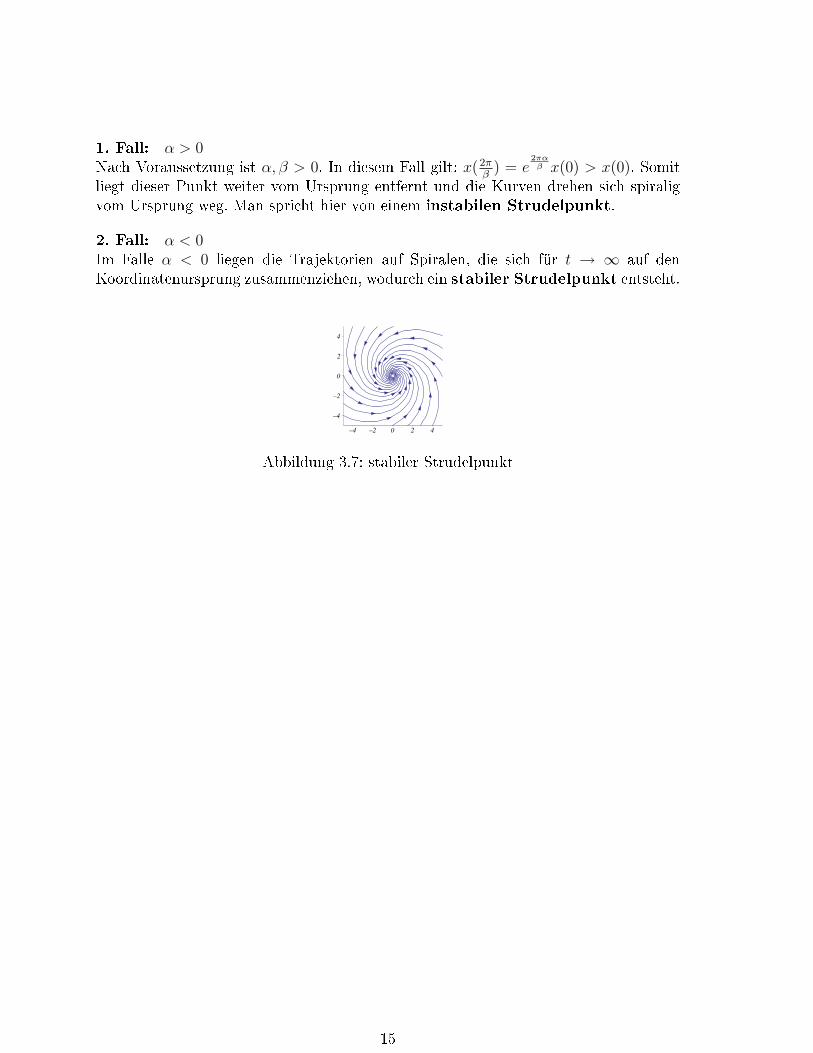
1. Fall: α > 0Nach Voraussetzung ist α, β > 0. In diesem Fall gilt: x(2π
β) = e
2παβ x(0) > x(0). Somit
liegt dieser Punkt weiter vom Ursprung entfernt und die Kurven drehen sich spiraligvom Ursprung weg. Man spricht hier von einem instabilen Strudelpunkt.
2. Fall: α < 0Im Falle α < 0 liegen die Trajektorien auf Spiralen, die sich für t → ∞ auf denKoordinatenursprung zusammenziehen, wodurch ein stabiler Strudelpunkt entsteht.
–4
–2
0
2
4
–4 –2 0 2 4
Abbildung 3.7: stabiler Strudelpunkt
15
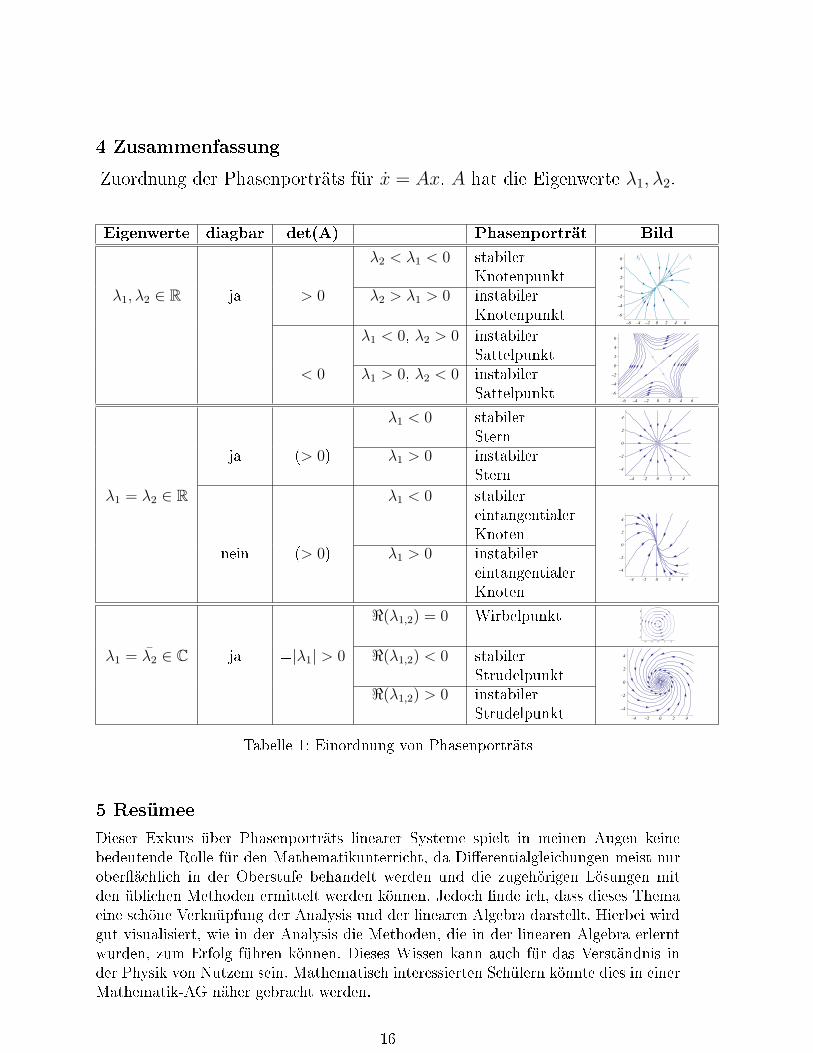
4 Zusammenfassung
Zuordnung der Phasenporträts für x = Ax. A hat die Eigenwerte λ1, λ2.
Eigenwerte diagbar det(A) Phasenporträt Bild
λ2 < λ1 < 0 stabilerKnotenpunkt
–6
–4
–2
0
2
4
6
–6 –4 –2 0 2 4 6
s2
s1
λ1, λ2 ∈ R ja > 0 λ2 > λ1 > 0 instabilerKnotenpunkt
λ1 < 0, λ2 > 0 instabilerSattelpunkt
–6
–4
–2
0
2
4
6
–6 –4 –2 0 2 4 6
!
!
< 0 λ1 > 0, λ2 < 0 instabilerSattelpunkt
λ1 < 0 stabilerStern
–4
–2
0
2
4
–4 –2 0 2 4
ja (> 0) λ1 > 0 instabilerStern
λ1 = λ2 ∈ R λ1 < 0 stabilereintangentialerKnoten
z-Ebene
–4
–2
0
2
4
–4 –2 0 2 4
!
nein (> 0) λ1 > 0 instabilereintangentialerKnoten
<(λ1,2) = 0 Wirbelpunkt
–4
–2
0
2
4
–4 –2 0 2 4
λ1 = λ2 ∈ C ja =|λ1| > 0 <(λ1,2) < 0 stabilerStrudelpunkt
–4
–2
0
2
4
–4 –2 0 2 4
<(λ1,2) > 0 instabilerStrudelpunkt
Tabelle 1: Einordnung von Phasenporträts
5 Resümee
Dieser Exkurs über Phasenporträts linearer Systeme spielt in meinen Augen keinebedeutende Rolle für den Mathematikunterricht, da Di�erentialgleichungen meist nurober�ächlich in der Oberstufe behandelt werden und die zugehörigen Lösungen mitden üblichen Methoden ermittelt werden können. Jedoch �nde ich, dass dieses Themaeine schöne Verknüpfung der Analysis und der linearen Algebra darstellt. Hierbei wirdgut visualisiert, wie in der Analysis die Methoden, die in der linearen Algebra erlerntwurden, zum Erfolg führen können. Dieses Wissen kann auch für das Verständnis inder Physik von Nutzem sein. Mathematisch interessierten Schülern könnte dies in einerMathematik-AG näher gebracht werden.
16
Literatur
[1] HEUSER, Harro: Gewöhnliche Di�erentialgleichungen: Einführung in Lehre und
Gebrauch. 5. Au�. Wiesbaden: B.G. Teubner Verlag, 2006
[2] BRAUN, Martin: Di�erentialgleichungen und ihre Anwendungen. Berlin: SpringerVerlag
[3] FORST, Wilhelm; HOFFMANN, Dieter: Gewöhnliche Di�erentialglei-
chungen: Theorie und Praxis. Berlin: Springer Verlag, 2005. URL:http://www.springerlink.com.ubproxy.ub.uni-heidelberg.de/content/k23487
[4] WIRSCHING, Günther J.: Gewöhnliche Di�erentialgleichungen: Eine Ein-
führung mit Beispielen, Aufgaben und Musterlösungen. Wiesbaden: B.G.Teubner Verlag, 2006. URL: http://www.springerlink.com.ubproxy.ub.uni-heidelberg.de/content/p45556
[5] FREITAG, Eberhard: Skript Analysis 2 : Kapitel V. Funktionen auf metrischenRäumen: 8. Di�erentialgleichungen
[6] BÖGE, Sigrid: Skript lineare Algebra 1 : Abschnitt 15 Jordansche Normalform
[7] WELZER, René: Stabilitätstheorie und Anwendungen von ebenen autono-
men Di�erentialgleichungssystemen: Zusammenfassung der Diplomarbeit. URL:http://www1.tfh-berlin.de/ schwenk/Lehrgebiete/welzer/Welcome.html
6 Quellenverzeichnis der Abbildungen
Abbildung 2.1 Material der TU München:http://www-hm.ma.tum.de/archiv/ei2/ss98/ei2/folien/folie16.gif
Abbildung 2.2 Forst,Ho�mann. Gewöhnliche Di�erentialgleichungen, S.7
Abbildung 2.3 Ebd., S.7
Abbildung 2.4 Welzer, René. Stabilitätstheorie und Anwendungen von ebenenautonomen Di�erentialgleichungssystemen:http://www1.tfh-berlin.de/ schwenk/Lehrgebiete/welzer/Welcome.html
Abbildung 2.5 Ebd.
Abbildung 3.1 Forst,Ho�mann. Gewöhnliche Di�erentialgleichungen, S.162
Abbildung 3.2 Ebd., S.163
Abbildung 3.3 Ebd., S.164
Abbildung 3.4 Ebd., S.165
Abbildung 3.5 Ebd., S.166
Abbildung 3.6 Ebd., S.167
17

7 Anhang
Anhang 1 und 2 entnommen: Forst, Ho�mann: Gewöhnliche Di�erentialgleichungen.
7.1 Anhang 1
Mittels der Transformationz := S−1x (7.1)
mit der in (2.3) auf Seite 7 gewählten Matrix S und dem Vektor z =
(z1
z2
)lässt sich
die Di�erentialgleichung auf ein von x abgekoppeltes System z = Dz umformen9.
Da D =
(λ1 00 λ2
)gilt, folgt:
(z1
z2
)=
(λ1 00 λ2
)(z1
z2
)=
(λ1z1
λ2z2
)Über diese neue Darstellung sind von den skalaren Di�erentialgleichungen z1 = λ1z1
und z2 = λ2z2 sofort die Lösungen z1(t) = eλ1t und z2(t) = eλ2t zu erkennen.Durch Rücktransformation x = Sz wird ersichtlich, dass x als Linearkombination vonz darstellbar ist. Es gilt:(
xy
)=
(s1 s2
s3 s4
)(z1
z2
)=
(s1z1 + s2z2
s3z1 + s4z2
)Wir wissen aus der Vorlesung lineare Algebra 1, dass die Spalten von S Eigenvektorenzu den Eigenwerten λ1,2 von A sind. Dies hat zur Folge, dass sich für die Lösungen dieGleichung:(
x(t)y(t)
)=
(s1z1(t) + s2z2(t)s3z1(t) + s4z2(t)
)=
(s1
s3
)· z1(t) +
(s2
s4
)· z2(t)= v1 · eλ1t + v2 · eλ2t
ergibt, wobei v1,2 die zugehörigen Eigenvektoren sind.
7.2 Anhang 2
Die Transformation z := S−1x führt hier, bei entsprechenden Umformungen wie inAnhang 1, auf das Di�erentialgleichungssystem z = Jz und somit zu den Di�erential-gleichungen: z1 = λ1z1 + z2 und z2 = λ1z2. Hierbei ergeben sich die nicht-trivialenLösungen z2(t) = eλ1t und z1(t) = (1 + t)eλ1t, was sich leicht nachrechnen lässt.Damit führt:(
x(t)y(t)
)= S
(z1(t)z2(t)
)=
(s1(1 + t)eλ1t s2e
λ1t
s3(1 + t)eλ1t s4eλ1t
)= v1(1 + t)eλ1t + ueλ1t
zur Lösung von (2.2) auf Seite 6.
9D := S−1AS ⇔ Dz = S−1ASz = S−1Ax = S−1x = z
18

7.3 Anhang 3
Hier liegen wieder die allgemeinen Lösungen aus Satz 2.3 vor. Diese können im Falleder komplexen Eigenwerte λ1 = α+iβ = λ2 (mit α, β ∈ R und o.B.d.A. β > 0) und denzugehörigen Eigenvektoren: v1 = u + iw = v2(mit u,w ∈ R2) noch exakter angegebenwerden.Es folgt:
x(t) = c1(u+ iw)e(α+iβ)t + c2(u− iw)e(α−iβ)t
= c1(u+ iw)eαt(cos(βt) + isin(βt)) + c2(u− iw)eαt(cos(βt)− isin(βt))
= eαt[u(c1 + c2)cos(βt) − w(c1 + c2)sin(βt)]+ieαt[w(c1 − c2)cos(βt) + u(c1 − c2)sin(βt)]
Für eine reelle Matrix A sind die Gleichungen:
<(x(t)) = eαt[u(c1 + c2)cos(βt)− w(c1 + c2)sin(βt)]
=(x(t)) = eαt[w(c1 − c2)cos(βt) + u(c1 − c2)sin(βt)](7.2)
Lösungen des gesuchten Di�erentialgleichungssystems.
Somit sind die allgemeinen Lösungen Linearkombinationen von <(x(t)) und =(x(t)):
x∗(t) = <(x(t)) + =(x(t))= eαt[u(c1 + c2)cos(βt)− w(c1 + c2)sin(βt)]
+eαt[w(c1 − c2)cos(βt) + u(c1 − c2)sin(βt)]= eαt[(c1 + c2)[ucos(βt)− wsin(βt)] + (c1 − c2)[wcos(βt) + usin(βt)]]
Zur Vereinfachung: Jede reellwertige Lösung des Di�erentialgleichungssystem lässtsich in der Form:
x(t) = eαt[C1[ucos(βt)− wsin(βt)] + C2[wcos(βt) + usin(βt)]]
schreiben mit: C1 = c1 + c2 ; C2 = c1 − c2
Dieser Ausdruck lässt sich noch weiter vereinfachen.Da der Sinus ein phasenverschobener Kosinus ist, folgt:
x(t) = eαt[C1[ucos(βt)− wcos(βt− π2)] + C2[wcos(βt) + ucos(βt− π
2)]]
= eαtRcos(βt− δ)
mit R, δ ∈ R2
19