Embed Size (px)
Citation preview
Pr�azise Positionierung in regionalenGPS�Referenzstationsnetzen
von der Fakult�at Forst�� Geo� und Hydrowissenschaften
der Technischen Universit�at Dresden
zur Erlangung der Lehrbef�ahigung
im Fachgebiet Geod�asie
genehmigte Habilitationsschrift
von
Dr��Ing� Lambert Wanninger
Ver�o�entlicht bei der Deutschen Geod�atischen Kommission in der Reihe C� Heft Nr� ���� M�unchen �����

Gutachter der schriftlichen Habilitationsleistung�Prof� Dr�Ing� W� Augath� DresdenProf� Dr�Ing� A� Kleusberg� StuttgartProf� Dr�Ing� G� Seeber� Hannover
Tag der Einreichung� �� ��� ��Tag der m�undlichen Habilitationsleistungen� ��� ��� �

Zusammenfassung
Permanent arbeitende GPSReferenzstationen erzeugen Korrekturdaten f�ur die cmgenaue relative Positionierung und scha�en gleichzeitig die Verbindung zum gew�unschten geod�atischen Bezugssystem�F�ur eine ��achendeckende und wirtschaftliche Versorgung mit Korrekturdaten ist es notwendig� dieAnzahl der Referenzstationen gering zu halten� ohne aber gleichzeitig Genauigkeitsverluste hinnehmenzu m�ussen� Dies gelingt nur �uber eine pr�azise Modellierung der entfernungs und richtungsabh�angigenFehlerein��usse�
Voraussetzung f�ur eine solche Modellierung auf derGrundlage von Phasendaten ist die Festsetzungder Mehrdeutigkeiten im Netz der Referenzstationen� Wie theoretisch und praktisch gezeigt� gelingtdann die mmgenaue Modellierung der entfernungsund richtungsabh�angigen Fehler mit Hilfe eineszweidimensionalen linearen Interpolationsalgorithmus� wenn die Entfernungen zwischen den Referenzstationen unter ��� km liegen�
Beim Auftreten von regionalen St�orungen in derIonosph�are oder Troposph�are mu aber mit gr�o erenRestfehlern gerechnet werden� Um h�ochsten Genauigkeitsanspr�uchen zu gen�ugen� sind daher f�ur Mit
teleuropa Stationsabst�ande von maximal �� km zuempfehlen�
In der praktischen Verwirklichung dieses Ansatzeswerden die realen Referenzstationsdaten zu Beobachtungskorrekturen einer Basisstation und Korrekturmodellen der entfernungs und richtungsabh�angigenFehler vorverarbeitet� In einem zweiten Schritt werden dann virtuelle Beobachtungen f�ur eine vorgegebene Stationsposition berechnet� die dann f�ur die relative Positionierung eines Neupunktes genutzt werden� Die basislinienweise Neupunktbestimmung kanndabei problemlos mit vorhandener Software durchgef�uhrt werden�
Umfangreiche Testmessungen und auswertungen ergaben� da in einem mitteleurop�aischen Referenzstationsnetz mit einem Punktabstand von �� km eine Genauigkeit der Lagekoordinaten von � cm �einfache Standardabweichung� auf f�ur GPS gut geeigneten Me punkten innerhalb von wenigen Minuten��achendeckend erreicht werden k�onnen� Da die entfernungsabh�angigen Fehlerein��usse fast vollst�andigkorrigiert werden� ist die notwendige Me dauer aufeinem Neupunkt fast ausschlie lich von seiner GPSEignung abh�angig�
Abstract
Permanent GPS reference stations produce observation corrections to be used for cmaccurate relativepositioning and they establish the connection to ageodetic reference frame� In order to supply observation corrections for larger areas at minimumcosts�the number of reference stations should be as small aspossible� but large enough to guarantee cmaccuracy�The solution lies in the precise modelling of the distance and direction dependent errors�
Error modelling based on GPS phase data requires�xing of the carrier phase ambiguities in the network of reference stations� It could be shown� boththeoretically and with real observation data� that atwodimensional linear interpolation algorithmyieldsmmaccurate corrections if the reference station distances do not exceed ��� km�
However� if regional scale disturbances exist in theionosphere or in the troposphere� larger errors can beencountered� For the application in Central Europe�
it is therefore recommended to limit the referencestation distances to some �� km�
The realization of this positioning concept is performed in two steps� In the �rst one� the observationsof the reference stations are preprocessed and separated into observation correction of one base stationand correction models for the distance and directiondependent errors� In the second step� virtual observations of a reference station at a selected positionare calculated� They can then be used for the positioning of a rover receiver in baseline mode usingexisting software�
The processing of various test data sets showed thatin Central Europe and with reference station distances of some �� km� � cm accurate horizontal coordinates could be obtained within a few minutes� Sincethe distance and direction dependent errors can almost completely be corrected� the necessary observation time at a rover site is mainly a function of therover receiver�s data quality�


�
Inhaltsverzeichnis
� Einleitung �
� Pr�azise Positionierung mit GPS ��
��� Beobachtungsgleichungen und Artender Positionierung � � � � � � � � � � � � � � � � � � � � ��
��� Linearkombinationen der Phasenmessungen � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
��� Mehrdeutigkeitssuchverfahren � � � � � � � � ��
� Fehlerquellen und Fehlerverminderungbei der relativen Positionierung ��
��� Orbitfehler � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
��� Ionosph�arische Refraktion � � � � � � � � � � � � �
��� Troposph�arische Refraktion � � � � � � � � � � ��
��� Mehrwegeausbreitung � � � � � � � � � � � � � � � � ��
��� Antennenphasenzentren � � � � � � � � � � � � � � ��
� Fehlermodellierung in regionalenReferenzstationsnetzen ��
��� Fehlerbestimmung im Referenzstationsnetz � � � � � � � � � � � � � � � � � � � � � � � � � � ��
����� Mehrdeutigkeitsfestsetzung � � � � � � � ��
����� Beobachtungsresiduen � � � � � � � � � � � � ��
��� Linearit�at der entfernungs und richtungsabh�angigen Fehler � � � � � � � � � � � � � � �
����� Orbitfehler � � � � � � � � � � � � � � � � � � � � � � � �
����� Ionosph�arische Refraktion � � � � � � � � ��
����� Troposph�arische Refraktion � � � � � � ��
��� Fl�achenhafte Modellierung der entfernungs und richtungsabh�angigen Fehlerein��usse � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
��� Stationsabh�angige Fehlerein��usse � � � � � ��
����� Mehrwegeausbreitung � � � � � � � � � � � � ��
����� Antennenphasenzentren � � � � � � � � � � ��
� Virtuelle Referenzstationen �
��� Das Konzept � � � � � � � � � � � � � � � � � � � � � � � � � ��
��� Berechnung virtueller Beobachtungen � ��
��� Realisierungsarten � � � � � � � � � � � � � � � � � � � � ��
����� Zentrale oder dezentraleBerechnung � � � � � � � � � � � � � � � � � � � � � � ��
����� Verwendung von Beobachtungenoder Beobachtungskorrekturen � � � ��
� Anwendungen und Ergebnisse ��
��� Anwendungen in einer ReferenzstationsNetzschleife � � � � � � � � � � � � � � � � � � ��
����� Korrekturmodelle � � � � � � � � � � � � � � � � ��
����� Verringerung der Fehlerein��usse � � ��
����� Positionierungsergebnisse � � � � � � � � ��
��� Untersuchungen extremer Fehlerein��usse � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
����� Korrekturmodelle � � � � � � � � � � � � � � � � ��
����� Positionierungsergebnisse � � � � � � � � ��
��� Anwendungen in einer gro r�aumigen ReferenzstationsNetzschleife � � ��
� Zusammenfassung und Ausblick ��
Literatur ��
A Di�erenzen der Satellitenelevationen aufgrund des Stationsabstandes � � � � � � � � � � � � � � ��
B Di�erenzen der Satellitenelevationen aufgrund des H�ohenunterschieds zwischenzwei Stationen � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
�mit �� Abbildungen und Tabellen�


�
� Einleitung
Eine der Hauptaufgaben der Geod�asie ist die Bereitstellung von Bezugssystemen und geod�atischen Netzen als Realisierung dieser Systeme� Einzelvermessungen schlie en sich dabei an Punkte der h�ochsten Verdichtungsstufe dieser Netze an� Durch die Einf�uhrungder Positionierung mit Hilfe von Signalen des GlobalPositioning Systems �GPS� wurden und werden nichtnur die Me verfahren einem grunds�atzlichen Wandelunterzogen� sondern es wurde auch der bisherige Aufbau der Grundlagennetze in Frage gestellt �Van���ceku�a� ������ da Sichtverbindungen zwischen Me punkten nicht mehr notwendig sind und auch �uber vieleKilometer Entfernung h�ochste Genauigkeiten erzieltwerden k�onnen�
Noch in der Testphase des GPS wurde deutlich� da mit geeigneten Empf�angern und Auswertealgorithmen Genauigkeiten der relativen Positionierung inder Gr�o enordnung von � ppm� also � cm auf �� kmPunktentfernung� erzielbar sind �Beispiele in Wells������ W�ahrend solche Ergebnisse urspr�unglich nurnach l�angerer Me dauer �eine Stunde und mehr� undbei Auswertungen im PostProcessing m�oglich waren� wurden im Laufe der ersten H�alfte der �er Jahre L�osungsalgorithmen entwickelt� die mit sehr kurzen Beobachtungsperioden �minimal eine oder wenigeEpochen� auskommen und bei Vorhandensein einergeeigneten Kommunikationsverbindung auch in Echtzeit einsetzbar sind �z�B� Han und Rizos ���b�� Andererseits wurde es m�oglich� �uber im Prinzip beliebiggro e Entfernungen cmGenauigkeit zu erzielen� wennnur die Beobachtungszeit auf viele Stunden bis Tageausgedehnt wird �z�B� Gendt u�a� ������
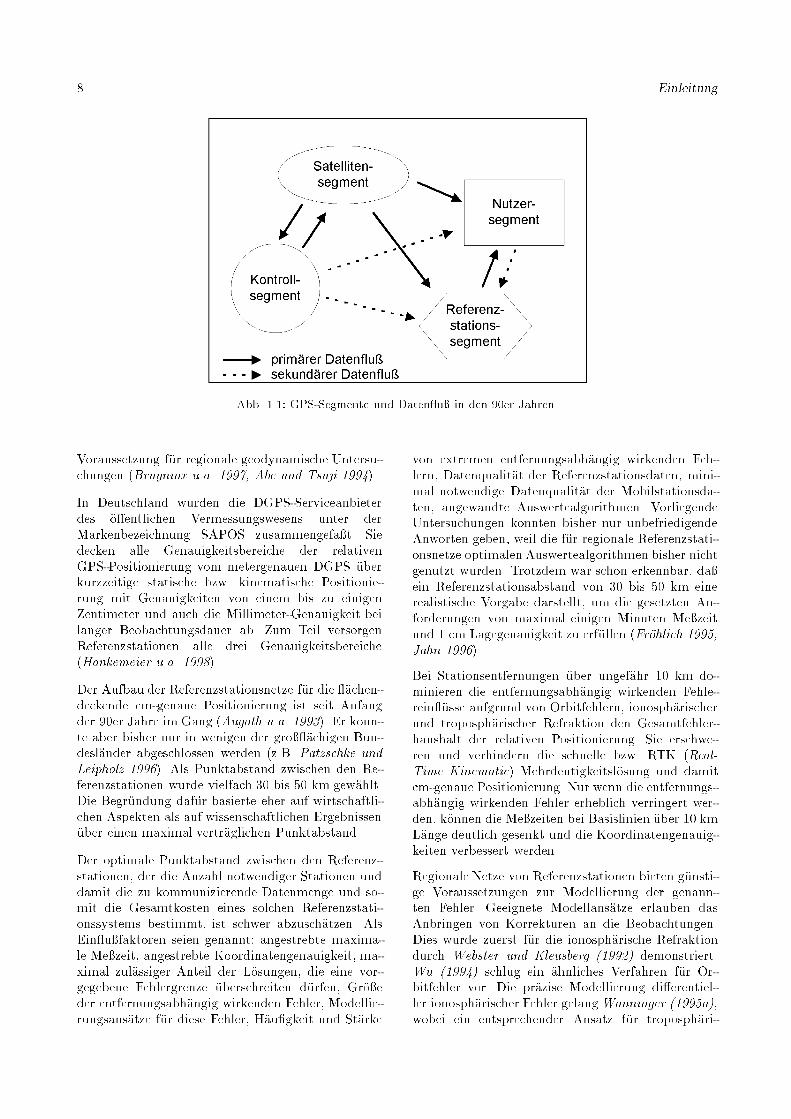
Urspr�unglich mu te ein Nutzer der relativen Positionierung �uber mindestens zwei Empf�anger verf�ugenund diese simultan einsetzen� Inzwischen gibt esaber immer mehr Serviceanbieter� die Referenzstationen betreiben� Sie bilden ein eigenst�andiges Segment bei der Positionierung mit GPS �Abb� �����Aufgabe dieses Referenzstationssegments ist es� aufder Grundlage von GPSMessungen auf Punkten bekannter Position Beobachtungskorrekturen bzw� Korrekturmodelle zu erzeugen� die Nutzern in Echtzeit �mit wenigen Sekunden Verz�ogerung oder auchz�T� pr�adiziert� oder mit zeitlicher Verz�ogerung zurVerf�ugung gestellt werden� Im Gegensatz zu derf�ur den Nutzer kostenlosen Zurverf�ugungstellung derGPSSatellitensignale arbeiten die meisten Anbieterim Referenzstationssegment kommerziell und verlangen dementsprechend die Bezahlung ihres Service�
Als die k�unstliche Genauigkeitseinschr�ankung durchSelective Availability �SA� Anfang der �er Jahre ein
gef�uhrt wurde� waren im Navigationsbereich bei Genauigkeitsanforderungen von einem bis einigen Metern viele Nutzer gezwungen� auf relative Positionierung �DGPS� umzusteigen� Es entstanden zum Teilkommerzielle und zum Teil amtliche Services� die dieReferenzstationsinformationen meistens in der Formvon Beobachtungskorrekturen anbieten� Um den Anforderungen der Navigationsnutzer gerecht zu werden� ist eine gro e zeitliche und r�aumliche Verf�ugbarkeit sowie eine hohe Zuverl�assigkeit der Korrekturen notwendig� Daf�ur braucht man nicht nur einegr�o ere Anzahl von Referenzstationen� sondern vielfach werden deren Beobachtungen auch gemeinsamvorausgewertet �vernetzt�� um die Zuverl�assigkeitsund Genauigkeitsanforderungen erf�ullen zu k�onnen�So werden bei vielen Wide Area DGPS �WADGPS�Algorithmen aus den GPSReferenzbeobachtungenund z�T� unter Hinzunahme weiterer Daten �z�B� meteorologischer Parameter� die entfernungsabh�angigwirkenden Fehlerein��usse �der Orbits� der ionosph�arischen und troposph�arischen Refraktion� bestimmt�Durch diese Vorgehensweise ist es m�oglich� einenDGPSService f�ur ein gr�o eres Gebiet mit wenigenEmpf�angern zu betreiben �Mueller ������
Es liegen dabei zus�atzlich zu den Beobachtungskorrekturen� die im wesentlichen Satellitenuhrenfehlerber�ucksichtigen� weitere fehlerspezi�sche Korrekturmodelle vor� die in Abh�angigkeit von der N�aherungsposition des Nutzers auf Zuschl�age zu den Beobachtungskorrekturen umgerechnet werden �Kee ������Es kann auch die Technik der virtuellen Referenzstationen angewandt werden� bei der f�ur eine gew�ahltePosition optimale Beobachtungskorrekturen erzeugtwerden� die dann f�ur ein begrenztes Gebiet G�ultigkeit haben �Weber und Tiwari ������
Im Vermessungswesen mit seinen Genauigkeitsanforderungen im Submeter �uber Zentimeter bisMillimeterBereich haben sich in den letzten Jahren auch etliche Formen von Referenzstationsnetzenentwickelt� Das globale Netz des International GPSService �IGS� tr�agt zur Realisierung eines globalenBezugssystems bei und liefert daf�ur pr�azise Stationskoordinaten und Satellitenorbits� Gleichzeitig unduntrennbar damit verbunden werden geodynamischeParameter bestimmt� Weiterhin werden gro r�aumigeFehlermodelle f�ur troposph�arische und ionosph�arischeRefraktion entwickelt �IGS ����� IGSMe daten undIGSProdukte werden kostenlos zur Verf�ugung gestellt� Netze von GPSReferenzstationen auf kontinentaler oder nationaler Ebene werden zur Verdichtung des globalen IGSNetzes genutzt und bilden die
� Einleitung
����������� �
Abb� ���� GPS�Segmente und Daten�u� in den ��er Jahren�
Voraussetzung f�ur regionale geodynamische Untersuchungen �Bruyninx u�a� ��� Abe und Tsuji ������
In Deutschland wurden die DGPSServiceanbieterdes �o�entlichen Vermessungswesens unter derMarkenbezeichnung SAPOS zusammengefa t� Siedecken alle Genauigkeitsbereiche der relativenGPSPositionierung vom metergenauen DGPS �uberkurzzeitige statische bzw� kinematische Positionierung mit Genauigkeiten von einem bis zu einigenZentimeter und auch die MillimeterGenauigkeit beilanger Beobachtungsdauer ab� Zum Teil versorgenReferenzstationen alle drei Genauigkeitsbereiche�Hankemeier u�a� ������
Der Aufbau der Referenzstationsnetze f�ur die ��achendeckende cmgenaue Positionierung ist seit Anfangder �er Jahre im Gang �Augath u�a� ������ Er konnte aber bisher nur in wenigen der gro ��achigen Bundesl�ander abgeschlossen werden �z�B� Patzschke undLeipholz ������ Als Punktabstand zwischen den Referenzstationen wurde vielfach �� bis �� km gew�ahlt�Die Begr�undung daf�ur basierte eher auf wirtschaftlichen Aspekten als auf wissenschaftlichen Ergebnissen�uber einen maximal vertr�aglichen Punktabstand�
Der optimale Punktabstand zwischen den Referenzstationen� der die Anzahl notwendiger Stationen unddamit die zu kommunizierende Datenmenge und somit die Gesamtkosten eines solchen Referenzstationssystems bestimmt� ist schwer abzusch�atzen� AlsEin�u faktoren seien genannt� angestrebte maximale Me zeit� angestrebte Koordinatengenauigkeit� maximal zul�assiger Anteil der L�osungen� die eine vorgegebene Fehlergrenze �uberschreiten d�urfen� Gr�o eder entfernungsabh�angig wirkenden Fehler� Modellierungsans�atze f�ur diese Fehler� H�au�gkeit und St�arke
von extremen entfernungsabh�angig wirkenden Fehlern� Datenqualit�at der Referenzstationsdaten� minimal notwendige Datenqualit�at der Mobilstationsdaten� angewandte Auswertealgorithmen� VorliegendeUntersuchungen konnten bisher nur unbefriedigendeAnworten geben� weil die f�ur regionale Referenzstationsnetze optimalen Auswertealgorithmen bisher nichtgenutzt wurden� Trotzdem war schon erkennbar� da ein Referenzstationsabstand von �� bis �� km einerealistische Vorgabe darstellt� um die gesetzten Anforderungen von maximal einigen Minuten Me zeitund � cm Lagegenauigkeit zu erf�ullen �Fr�ohlich ���� Jahn ������
Bei Stationsentfernungen �uber ungef�ahr �� km dominieren die entfernungsabh�angig wirkenden Fehlerein��usse aufgrund von Orbitfehlern� ionosph�arischerund troposph�arischer Refraktion den Gesamtfehlerhaushalt der relativen Positionierung� Sie erschweren und verhindern die schnelle bzw� RTK �RealTime Kinematic� Mehrdeutigkeitsl�osung und damitcmgenaue Positionierung� Nur wenn die entfernungsabh�angig wirkenden Fehler erheblich verringert werden� k�onnen die Me zeiten bei Basislinien �uber �� kmL�ange deutlich gesenkt und die Koordinatengenauigkeiten verbessert werden�
Regionale Netze von Referenzstationen bieten g�unstige Voraussetzungen zur Modellierung der genannten Fehler� Geeignete Modellans�atze erlauben dasAnbringen von Korrekturen an die Beobachtungen�Dies wurde zuerst f�ur die ionosph�arische Refraktiondurch Webster und Kleusberg ������ demonstriert�Wu ������ schlug ein �ahnliches Verfahren f�ur Orbitfehler vor� Die pr�azise Modellierung di�erentieller ionosph�arischer Fehler gelangWanninger �����a��wobei ein entsprechender Ansatz f�ur troposph�ari

Einleitung
sche und Orbitfehler aufgrund der geringen Qualit�at der Referenzstationsbeobachtungen fehlschlug�W�ubbena u�a� �����b� zeigten� da bei Verwendungeines geometrischen Modells zur Erfassung von Orbitfehlern bei der Neupunktbestimmung die Mehrdeutigkeitsl�osung beschleunigt und die Koordinatenfehler verringert werden k�onnen� Die gemeinsame Anwendung von ionosph�arischem und geometrischemModell in regionalen Netzen demonstriertenWanninger ������ und auch Han und Rizos ������ ����a��
Auch stationsabh�angige Fehlerein��usse� die insbesondere durch Mehrwegeausbreitung verursacht werden� lassen sich in Referenzstationsnetzen verringern�Raquet ������ zeigte dies f�ur Codemessungen undschlug ein entsprechendes Verfahren auch f�ur Phasenmessungen vor� Eine Verringerung sowohl der entfernungsabh�angig wirkenden wie auch stationsbedingtenBeobachtungsfehler gelingt durch den Ansatz der virtuellen Referenzstationen�Wanninger ����a b� zeigtdie M�oglichkeiten und Grenzen des Einsatzes virtueller Stationen in regionalen Referenzstationsnetzenauf�
Die vorliegende Arbeit befa t sich ausschlie lich mitcmgenauer Positionierung in regionalen Referenzstationsnetzen �Punktabstand bis ��� km�� die mitm�oglichst kurzer Me dauer erzielt werden soll� DerSchwerpunkt liegt auf den die relative Positionierungbeein�ussenden Fehlern und ihrer Behandlung in Referenzstationsnetzen� W�ahrend es keine Zweifel geben
kann� da das ultimative Ziel der Positionierungdarin liegt� die gew�unschte Genauigkeit in Echtzeit zu erzielen� ist die im Rahmen dieser Arbeitdurchgef�uhrte Realisierung ausschlie lich f�ur PostProcessingAnwendungen geeignet� EchtzeitAspektewurden trotzdem �uberall dort behandelt� wo Unterschiede zu den PostProcessingAns�atzen existieren� Kommunikationstechnische Fragestellungen� diebei der praktischen EchtzeitRealisierung der pr�azisen Positionierung in regionalen Netzen eine gro eRolle spielen� wurden aber von der Betrachtung ausgeschlossen�
Im Kapitel � werden die notwendigen Grundlagen zurpr�azisen relativen GPSPositionierung bereitgestellt�Das Kapitel � gibt einen �Uberblick �uber die auf dierelative Positionierung entfernungsabh�angig wirkenden Fehlerquellen �Orbitfehler� ionosph�arische undtroposph�arische Refraktion� und die stationsabh�angigen Fehlerquellen �Mehrwegeausbreitung und Antennenphasenzentren� sowie die Techniken zur Fehlerverminderung� Es folgen in Kapitel � die Bestimmung der relativen Beobachtungsfehler in Referenzstationsnetzen sowie ihre ��achenhafte Modellierung�Aufbauend auf diesen Korrekturmodellen werden Beobachtungen virtueller Referenzstationen erzeugt� deren Konzept und Realisierung in Kapitel � beschrieben werden� In einem umfangreichen Kapitel werden danach praktische Anwendungen und Ergebnisseaus regionalen Referenzstationsnetzen dargestellt unddiskutiert �Kapitel ���

��
� Pr�azise Positionierung mit GPS
Das NAVSTAR Global Positioning System �GPS� istein satellitengest�utztes Radionavigationssystem� welches durch die USA betrieben wird und seit ��vollst�andig ausgebaut ist� Jeder der nominal �� Satelliten sendet zwei Tr�agerwellen L� und L� mit den Frequenzen f� ��������MHz und f� ��������MHz aus�denen Navigationssignale �Codes� und Navigationsnachricht aufmoduliert sind� Das L�Signal enth�altsowohl den mit einer Taktrate von ����� Mbps genaueren P bzw� YCode wie auch den mit einer Taktrate von ����� Mbps weniger genauen C�ACode�Das L�Signal enth�alt ausschlie lich den P bzw� YCode� Aus Messungen an f�unf Monitorstationen aufder Erde werden die Satellitenbahnen und das Satellitenuhrverhalten bestimmt und pr�adiziert� Dem Nutzer werden die Ergebnisse in der Navigationsnachricht mitgeteilt� Da es sich bei GPS um ein EinwegEntfernungsme verfahren handelt� ist die Anzahl derNutzer unbegrenzt �USCG ������
Der Me vorgang beinhaltet die Erzeugung einer identischen Codesequenz im Empf�anger� die soweit verschoben wird� bis maximale Korrelation mit demempfangenen Signal erreicht ist �CodeKorrelation��Bei maximaler Korrelation entspricht der Verschiebungsbetrag der Laufzeit des Signals� Nach Beseitigung der Signalmodulation erfolgt die Tr�agerphasenmessung in Di�erenz zu einem intern erzeugten Tr�agersignal mit der Nominalfrequenz f� bzw�f� �Tr�agermischphase�� F�ur beide Signale eines jeden Satelliten gibt es somit zwei unabh�angige Beobachtungsgr�o en� die eindeutige und mit deutlichst�arkerem Me rauschen behaftete Codebeobachtungund andererseits die mehrdeutige und genauer bestimmbare Phasenbeobachtung� Diese Laufzeitmessungen werden insbesondere durch den Synchronisationsfehler der Empf�angeruhr in bezug auf die GPSSystemzeit verf�alscht� so da man f�ur sie den Begri�Pseudostreckenmessung verwendet�
Um die erreichbaren Genauigkeiten f�ur zivile und unberechtigte Nutzer gering zu halten� wurden zwei Verfahren der k�unstlichen Systemverschlechterung eingef�uhrt� Das erste Verfahren� die sogenannte Selective Availability �SA�� besteht aus einer kontrolliertenBeein�ussung der Satellitenuhr� welche direkt und inidentischer Weise auf alle Beobachtungsgr�o en wirkt�Die ebenfalls angek�undigte kontrollierte Verschlechterung der in den Navigationsnachrichten gesendetenBahnparameter scheint nicht angewendet zu werden�ImNormalfall soll unter SA der horizontale Punktfehler zu �� der Zeit ��� m nicht �ubersteigen �USCG������ SatellitenuhrenSA kann durch di�erentiellesGPS �DGPS� praktisch vollst�andig beseitigt werden�
Um auch bei EchtzeitAnwendungen die hochfrequenten SAAnteile zu erfassen� ist die h�au�ge �Sekundenabstand� Aufdatierung der Pseudostreckenkorrekturen und die Verwendung von Pseudogeschwindigkeitskorrekturen notwendig�
Die zweite Methode� Nutzern den Zugang zu h�ochstenGenauigkeiten zu verweigern� besteht in der Umwandlung des bekannten PCodes in den
�unbekann
ten� YCode �AntiSpoo�ng �AS��� In der praktischen Anwendung bedeutet dies� da auf L� nurnoch der ungenauere C�ACode zur Verf�ugung stehtund auf L� keine CodeKorrelationsMessungen mehrdurchf�uhrbar sind� Die Empf�angerhersteller reagierten auf AS mit neuen Verfahren� mit denen auchohne CodeKenntnis L�Beobachtungsgr�o en erzeugtwerden k�onnen� z�B� die Bestimmung des Gruppenlaufzeitunterschieds und der L�L�Phasendi�erenzdurch Kreuzkorrelation der Codes auf beiden Frequenzen oder Me verfahren� die die unverschl�usselten PCodeAnteile des YCodes nutzen �Breueru�a� ������ Die erhaltenen Beobachtungen weisenaber im Vergleich zum CodeKorrelationsVerfahrendurchweg ein h�oheres Me rauschen auf�
��� Beobachtungsgleichungen
und Arten der Positionie�
rung
Die Beobachtungsgleichungen f�ur Code und Phasenmessungen sollen hier in der f�ur das Verst�andnisdieser Arbeit notwendigen Ausf�uhrlichkeit behandeltwerden� Eine noch detailliertere Aufstellung von Beobachtungsgleichungen �ndet sich in Teunissen undKleusberg �������
Ein geod�atischer GPSEmpf�anger a liefert in jeder Me epoche Codemessungen Ci
a�f und Phasen
messungen �ia�f jedes sichtbaren Satelliten i aufeiner �Einfrequenz� oder beiden Frequenzen f�ZweifrequenzEmpf�anger��
Cia�f � Ri
a � c� � ��ta � ha�f�C � �ti � hif�C �
�Iia�f � T ia � Oi
a �M ia�f�C �Ai
a�f�C
��ia�f�C �����
�ia�f � Ria � c� � ��ta � ha�f�� � �ti � hif���
�Iia�f � T ia � Oi
a �M ia�f�� �Ai
a�f��
��f �Nia�f � �ia�f�� �����

Pr�azise Positionierung mit GPS ��
mit
Ria � j �Xi � �Xaj� �����
Dabei zeigen die Indizes C �Code� bzw� � �Phase�Abh�angigkeiten von der Art der Beobachtungsgr�o ean und es bedeuten
Cia � Codemessung �m���ia � Phasenmessung �m��Ria � Entfernung Satellit i � Empf�anger
a �m� gem�a Gl� ������c� � Vakuumlichtgeschwindigkeit �m�s���ta � Empf�angeruhrfehler �s��ha � instrumentelle Signalverz�ogerungen
im Empf�anger �s���ti � Satellitenuhrfehler �s��hi � instrumentelle Signalverz�ogerungen
im Satelliten �s��Iia � Laufzeitfehler aufgrund iono
sph�arischer Refraktion �m��T ia � Laufzeitfehler aufgrund tropo
sph�arischer Refraktion �m��Oia � Orbitfehler �m��
M ia � Mehrwegeausbreitungsfehler �m��
Aia � Exzentrizit�at des Antennenphasen
zentrums �m���ia � zuf�allige Me fehler �m��� � Wellenl�ange �m��N ia � nichtganzzahlige Phasenmehr
deutigkeit ����Xa� �Xi � Vektoren globaler kartesischer
Koordinaten X�Y� Z �m��
Die geometrische Entfernung Ria gibt die Entfer
nung zwischen der Position des Satelliten i zum Signalaussendezeitpunkt und der Position des GPSEmpf�angers a zum Signalempfangszeitpunkt an� Dadie verwendeten Satellitenorbits� die der Berechnung
des Satellitenpositionsvektors �Xi dienen� nicht fehlerfrei sind� werden Orbitfehler Oi
a ber�ucksichtigt�Uhrfehler �ta und instrumentelle Verz�ogerungen imEmpf�anger ha�f k�onnen bei der Positionsberechnungnicht einwandfrei voneinander getrennt werden undwerden gemeinsam als
�Uhr�fehler bestimmt� Die
weiteren prim�aren Unbekannten sind die Empf�angerkoordinaten �Xa�
Die Auswirkungen der ionosph�arischen Refraktionerster Ordnung sind f�ur Code und Phase gleicherTr�agerfrequenz vom Betrag her gleich gro � aberunterscheiden sich in ihren Vorzeichen �Gruppensignalverz�ogerung� Phasenbeschleunigung�� Die Phasenmehrdeutigkeit N i
a hat in dieser undi�erenziertenForm nicht die Eigenschaft der Ganzzahligkeit� dadavon ausgegangen werden mu � da sowohl das Satellitensignal zum Signalaussendezeitpunkt und auchdas empf�angerintern erzeugte Tr�agersignal zum Empfangszeitpunkt keine Phasennullage aufweisen�
F�ur Relativmessungen werden die Di�erenzen zwischen simultanen Beobachtungen zweier Empf�angera und b und jeweils einem Satelliten i gebildet � Operator�� Der maximale zeitliche Abstand der Beobachtungen zweier GPSEmpf�anger betr�agt heute knapp �uber � ms� da die Me zeitpunkte mitmaximal �� ms Abweichung auf die volle GPSSekunde synchronisiert sind und zus�atzlich unterschiedliche Signallaufzeiten auftreten� Diese Beobachtungen k�onnen als ausreichend simultan betrachtet werden� Bei der Bildung einfacher Di�erenzen zwischen Empf�angern fallen Satellitenuhrfehler und instrumentelle Signalverz�ogerungen heraus�Refraktions und Orbitfehlerein��usse werden verringert�
Ciab�f � Ci
b �Cia
� Riab � c� � � �tab � hab�f�C�
� Iiab�f � Tiab � O
iab � M
iab�f�C
� Aia�f�C �Ki
ab � �iab�f��C �����
�iab�f � �ib ��ia
� Riab � c� � � �tab � hab�f���
� Iiab�f � Tiab � O
iab � M
iab�f��
� Aiab�f�� � �f � N
iab�f
�Kiab � �iab�f��� �����
mit
Riab � Ri
b �Ria
� j �Xi � �Xbj � j �Xi � �Xaj
� j �Xi � �Xa � �Xabj � j �Xi � �Xaj �����
wobei
Kiab � Auswirkungen der Einf�uhrung von
fehlerbehafteten Absolutkoordinatenf�ur die Station a �m��
�Xab � Basislinienvektor zwischen denbeiden Empf�angern �m��
Als prim�are Unbekannte werden der Basislinienvektor �Xab und die Summe aus der Di�erenz derEmpf�angeruhrfehler und der Di�erenz der instrumentellen Verz�ogerungen bestimmt� Die absolute Lagerung der Basislinie� die z�B� durch den Positionsvektor �Xa des Punktes a gegeben sein kann� wird nichtfehlerfrei sein und bedingt den neu hinzugenommenen Fehlerterm Ki
ab� Die einfache Di�erenz der Phasenmehrdeutigkeiten N besitzt weiterhin nicht dieEigenschaft der Ganzzahligkeit� da davon ausgegangen werden mu � da die Di�erenz der empf�angerintern erzeugten Tr�agersignale keinen Phasennullageaufweist�
�� Pr�azise Positionierung mit GPS
����������� ������
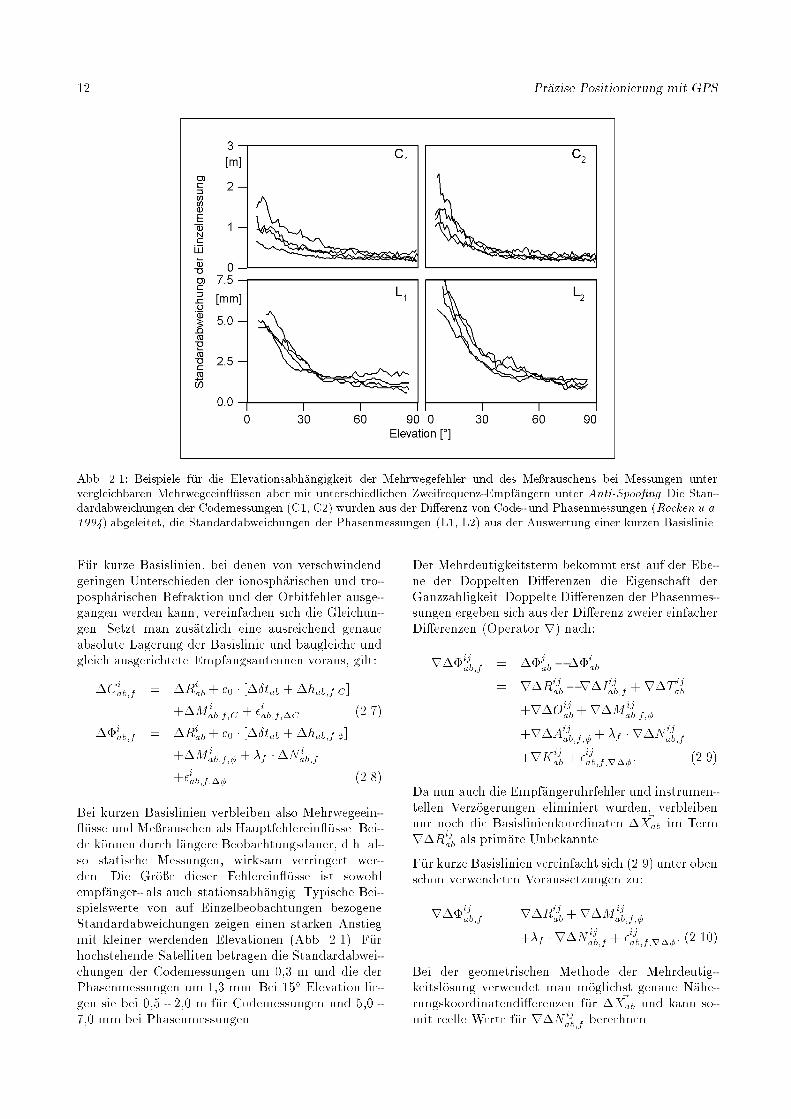
Abb� ���� Beispiele fur die Elevationsabhangigkeit der Mehrwegefehler und des Me�rauschens bei Messungen untervergleichbaren Mehrwegeein�ussen aber mit unterschiedlichen Zweifrequenz�Empfangern unter Anti�Spoo�ng� Die Stan�dardabweichungen der Codemessungen C�� C�� wurden aus der Di erenz von Code� und Phasenmessungen Rocken u�a������ abgeleitet� die Standardabweichungen der Phasenmessungen L�� L�� aus der Auswertung einer kurzen Basislinie�
F�ur kurze Basislinien� bei denen von verschwindendgeringen Unterschieden der ionosph�arischen und troposph�arischen Refraktion und der Orbitfehler ausgegangen werden kann� vereinfachen sich die Gleichungen� Setzt man zus�atzlich eine ausreichend genaueabsolute Lagerung der Basislinie und baugleiche undgleich ausgerichtete Empfangsantennen voraus� gilt�
Ciab�f � Ri
ab � c� � � �tab � hab�f�C�
� M iab�f�C � �iab�f��C �����
�iab�f � Riab � c� � � �tab � hab�f���
� M iab�f�� � �f � N
iab�f
��iab�f��� �����
Bei kurzen Basislinien verbleiben also Mehrwegeein��usse und Me rauschen als Hauptfehlerein��usse� Beide k�onnen durch l�angere Beobachtungsdauer� d�h� also statische Messungen� wirksam verringert werden� Die Gr�o e dieser Fehlerein��usse ist sowohlempf�anger als auch stationsabh�angig� Typische Beispielswerte von auf Einzelbeobachtungen bezogeneStandardabweichungen zeigen einen starken Anstiegmit kleiner werdenden Elevationen �Abb� ����� F�urhochstehende Satelliten betragen die Standardabweichungen der Codemessungen um ��� m und die derPhasenmessungen um ��� mm� Bei ��� Elevation liegen sie bei ��� ��� m f�ur Codemessungen und ��� ��� mm bei Phasenmessungen�
Der Mehrdeutigkeitsterm bekommt erst auf der Ebene der Doppelten Di�erenzen die Eigenschaft derGanzzahligkeit� Doppelte Di�erenzen der Phasenmessungen ergeben sich aus der Di�erenz zweier einfacherDi�erenzen �Operator r� nach�
r �ijab�f � �jab � �iab
� r Rijab�r I
ijab�f �r T
ijab
�r Oij
ab �r Mij
ab�f��
�r Aij
ab�f�� � �f � r Nij
ab�f
�rKij
ab � �ijab�f�r��� ����
Da nun auch die Empf�angeruhrfehler und instrumentellen Verz�ogerungen eliminiert wurden� verbleibennur noch die Basislinienkoordinaten �Xab im Termr Rij
ab als prim�are Unbekannte�
F�ur kurze Basislinien vereinfacht sich ���� unter obenschon verwendeten Voraussetzungen zu�
r �ijab�f � r Rij
ab�r Mij
ab�f��
��f � r Nij
ab�f � �ijab�f�r��� ������
Bei der geometrischen Methode der Mehrdeutigkeitsl�osung verwendet man m�oglichst genaue N�aherungskoordinatendi�erenzen f�ur �Xab und kann somit reelle Werte f�ur r N
ij
ab�f berechnen�
Pr�azise Positionierung mit GPS ��
����������� ����������
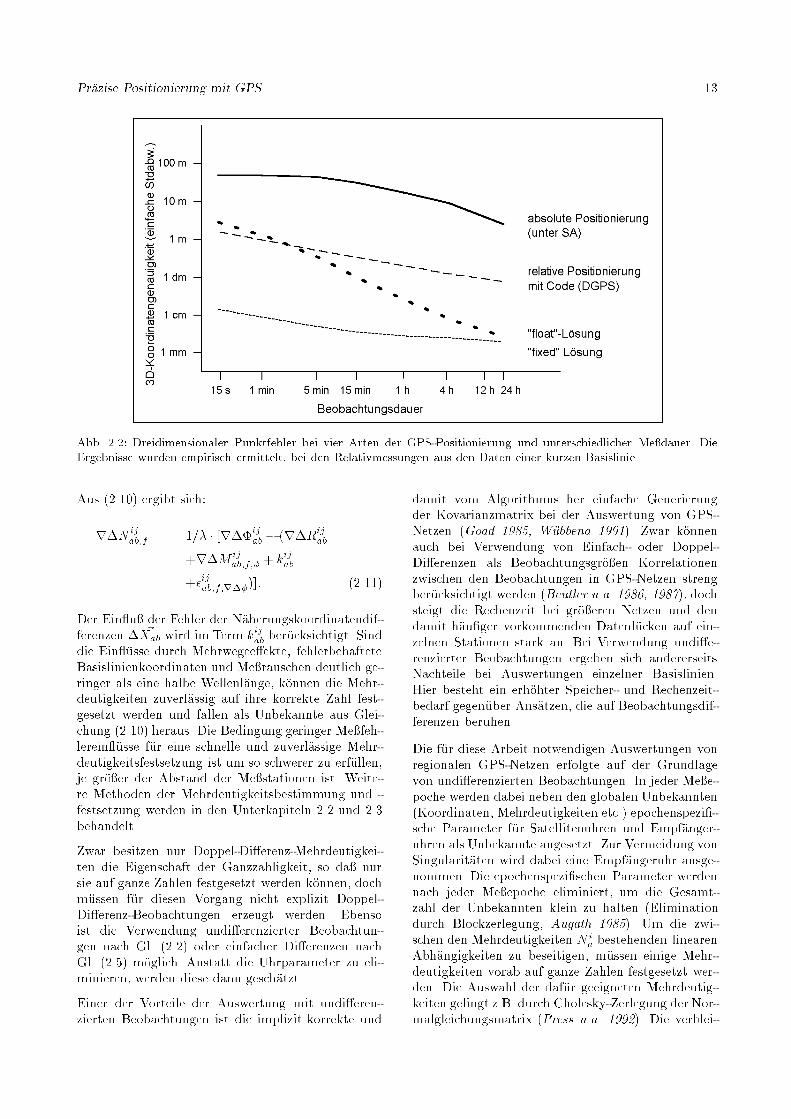
Abb� ���� Dreidimensionaler Punktfehler bei vier Arten der GPS�Positionierung und unterschiedlicher Me�dauer� DieErgebnisse wurden empirisch ermittelt� bei den Relativmessungen aus den Daten einer kurzen Basislinie�
Aus ������ ergibt sich�
r N ijab�f � ��� � �r �ijab� �r R
ijab
�r M ijab�f�� � kijab
��ijab�f�r����� ������
Der Ein�u der Fehler der N�aherungskoordinatendifferenzen �Xab wird im Term kij
abber�ucksichtigt� Sind
die Ein��usse durch Mehrwegee�ekte� fehlerbehafteteBasislinienkoordinaten und Me rauschen deutlich geringer als eine halbe Wellenl�ange� k�onnen die Mehrdeutigkeiten zuverl�assig auf ihre korrekte Zahl festgesetzt werden und fallen als Unbekannte aus Gleichung ������ heraus� Die Bedingung geringer Me fehlerein��usse f�ur eine schnelle und zuverl�assige Mehrdeutigkeitsfestsetzung ist um so schwerer zu erf�ullen�je gr�o er der Abstand der Me stationen ist� Weitere Methoden der Mehrdeutigkeitsbestimmung und festsetzung werden in den Unterkapiteln ��� und ���behandelt�
Zwar besitzen nur DoppelDi�erenzMehrdeutigkeiten die Eigenschaft der Ganzzahligkeit� so da nursie auf ganze Zahlen festgesetzt werden k�onnen� dochm�ussen f�ur diesen Vorgang nicht explizit DoppelDi�erenzBeobachtungen erzeugt werden� Ebensoist die Verwendung undi�erenzierter Beobachtungen nach Gl� ����� oder einfacher Di�erenzen nachGl� ����� m�oglich� Anstatt die Uhrparameter zu eliminieren� werden diese dann gesch�atzt�
Einer der Vorteile der Auswertung mit undi�erenzierten Beobachtungen ist die implizit korrekte und
damit vom Algorithmus her einfache Generierungder Kovarianzmatrix bei der Auswertung von GPSNetzen �Goad ���� W�ubbena ������ Zwar k�onnenauch bei Verwendung von Einfach oder DoppelDi�erenzen als Beobachtungsgr�o en Korrelationenzwischen den Beobachtungen in GPSNetzen strengber�ucksichtigt werden �Beutler u�a� ���� ����� dochsteigt die Rechenzeit bei gr�o eren Netzen und dendamit h�au�ger vorkommenden Datenl�ucken auf einzelnen Stationen stark an� Bei Verwendung undi�erenzierter Beobachtungen ergeben sich andererseitsNachteile bei Auswertungen einzelner Basislinien�Hier besteht ein erh�ohter Speicher und Rechenzeitbedarf gegen�uber Ans�atzen� die auf Beobachtungsdifferenzen beruhen�
Die f�ur diese Arbeit notwendigen Auswertungen vonregionalen GPSNetzen erfolgte auf der Grundlagevon undi�erenzierten Beobachtungen� In jeder Me epoche werden dabei neben den globalen Unbekannten�Koordinaten� Mehrdeutigkeiten etc�� epochenspezi�sche Parameter f�ur Satellitenuhren und Empf�angeruhren als Unbekannte angesetzt� Zur Vermeidung vonSingularit�aten wird dabei eine Empf�angeruhr ausgenommen� Die epochenspezi�schen Parameter werdennach jeder Me epoche eliminiert� um die Gesamtzahl der Unbekannten klein zu halten �Eliminationdurch Blockzerlegung� Augath ������ Um die zwischen den Mehrdeutigkeiten N i
a bestehenden linearenAbh�angigkeiten zu beseitigen� m�ussen einige Mehrdeutigkeiten vorab auf ganze Zahlen festgesetzt werden� Die Auswahl der daf�ur geeigneten Mehrdeutigkeiten gelingt z�B� durch CholeskyZerlegung der Normalgleichungsmatrix �Press u�a� ������ Die verblei

�� Pr�azise Positionierung mit GPS
benden Mehrdeutigkeiten N ia entsprechen dann denen
doppelter Di�erenzen�
GPS bietet mehrere Arten der Positionierung� die mitunterschiedlichem Me und Auswerteaufwand einenweiten Bereich von Genauigkeiten abdecken� Vier Arten der Positionierung� die gleichzeitig f�ur vier Genauigkeitsstufen stehen� sollen hier unterschieden werden� In aller Regel werden bei der Positionierungmit GPS alle Stufen bis zur gew�unschten Genauigkeitsstufe durchlaufen� Die jeweilige Vorstufe dient alsN�aherungsl�osung der ihr folgenden Stufe� In der Reihenfolge mit ansteigender Positionsgenauigkeit sinddies�
absolute Positionierung unter Verwendung derBeobachtungsgleichung ������ Hauptfehlerein�u sind die SAbedingten Satellitenuhrenfehler�
relative Positionierung mit Codemessungen�DGPS� unter Verwendung der Beobachtungsgleichung ������ Bei kurzen Basislinien �� ���km� ist der Hauptfehlerein�u die Mehrwegeausbreitung� Ihr Ein�u kann durch Phasengl�attungoder l�angerzeitige statische Messungen stark verringert werden�
die �oat L�osung basiert auf Phasenmessungenund wird � je nach Grad der Beobachtungsdifferenzierung � unter Verwendung einer der Beobachtungsgleichungen ������ ����� oder ���� erzeugt� Die Mehrdeutigkeiten werden als reelleZahlen mitgesch�atzt� aber nicht auf ganze Zahlenfestgesetzt�
die �xed L�osung basiert auch auf der Auswertung einer der drei Beobachtungsgleichungen������ ����� oder ����� Hier gilt� da alle oderzumindest ein Gro teil der DoppelDi�erenzMehrdeutigkeiten in einem Vorverarbeitungsschritt auf ganze Zahlen festgesetzt wurden�
Die mit diesen Verfahren erzielbaren Genauigkeitenlassen sich durch statische Beobachtungen und damitAkkumulation von Beobachtungen �uber die Zeit deutlich erh�ohen �Abb� ����� Zentimetergenaue Koordinaten ergeben sich bei kurzer Beobachtungsdauer nurbei festgesetzten Mehrdeutigkeiten� Der Mehrdeutigkeitsl�osung kommt somit eine besondere Bedeutungzu�
��� Linearkombinationen der
Phasenmessungen
Aus ZweifrequenzPhasenmessungen �und auchZweifrequenzCodemessungen� k�onnen unendlichviele Linearkombinationen gebildet werden� die in
bezug auf frequenzabh�angige Eigenheiten �Wellenl�ange� Ein�u der Ionosph�are� Me rauschen�zum Teil g�unstigere Eigenschaften aufweisen als dieUrsprungssignale� Der Darstellung von W�ubbena������ folgend werden Linearkombinationen derPhasenmessungen nach
�n�m � n � �� �m � �� ������
gebildet� wobei
��� �� � die Phasenmessungen auf L�bzw� L� in Zyklen �cy��
n�m � die Linearkoe!zienten �� und�n�m � die Phasenbeobachtungen der
Linearkombination
darstellen�
Die wichtigsten Auswahlkriterien f�ur sinnvolle Linearkombinationen der Phasenmessungen sind�
� die Ganzzahligkeit der Mehrdeutigkeit� dieerreicht wird� wenn n und m ganzzahligsind� Die Mehrdeutigkeit der Linearkombination Nn�m berechnet sich aus den L� und L�Mehrdeutigkeiten nach
Nn�m � n �N� �m �N�� ������
� die Wellenl�ange des Signals� Die Mehrdeutigkeitsl�osung nach ������ wird vereinfacht� wenndie Wellenl�ange �n�m m�oglichst gro ist�
�n�m � c���n � f� �m � f��� ������
� der ionosph�arische Ein�u auf die Koordinatenl�osung� Er wird hier durch den ionosph�arischen Verst�arkungsfaktor VI�n�m wiedergegeben�
VI�n�m ��n � f� �m � f��
�n � f� �m � f��� ������
� der ionosph�arische Ein�u auf die Mehrdeutigkeitsl�osung� Er ist durch das Verh�altnisvon ionosph�arischem Verst�arkungsfaktor VI�n�mzur Signalwellenl�ange �n�m gegeben �Wanninger������
� die St�arke des Me rauschens� ausgehend von��� rad �ICDGPS��� ���� unkorreliertemPhasenrauschen der Originalbeobachtungen� Siehat Bedeutung f�ur die Qualit�at der Koordinatenl�osung�
�n�m � �n�m �pn� �m� � �� ���� ������
Pr�azise Positionierung mit GPS ��
Signal n m � VI VI�� ��cm� ���m� �cm�
Originalsignal L� � � ��� ���� ��� ����Originalsignal L� � � ���� ����� ��� ���
Widelane LW � L� � � ���� ����� ��� ���Narrowlane LN � � ���� ����� �� ����
iono� gering beein�� L�� � ��� ����� ��� ���geom� gering beein�� L�� � ������ ������� ���� �����
ionosph�arenfrei L�� L� �� �� ��� ����� ��� ���geometriefrei LI � � L� �� �� � � � �
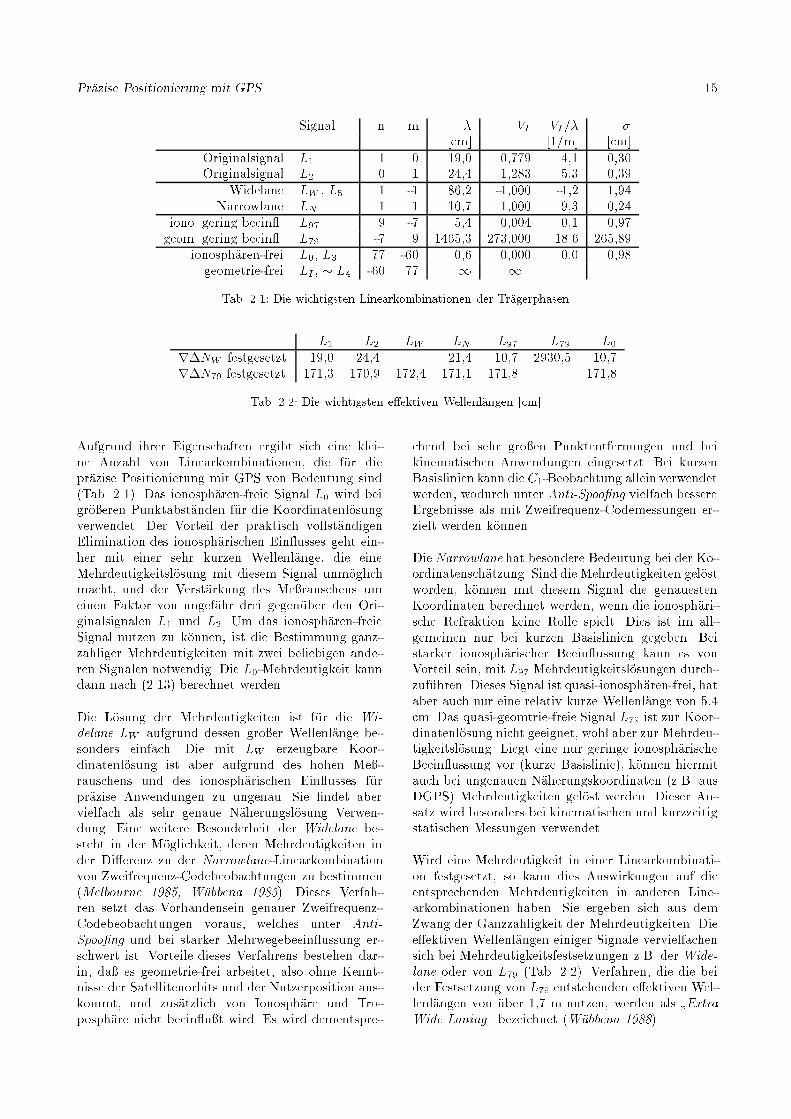
Tab� ���� Die wichtigsten Linearkombinationen der Tragerphasen�
L� L� LW LN L�� L�� L�r NW festgesetzt ��� ���� � ���� ���� ����� ����r N�� festgesetzt ����� ���� ����� ����� ����� � �����
Tab� ���� Die wichtigsten e ektiven Wellenlangen �cm��
Aufgrund ihrer Eigenschaften ergibt sich eine kleine Anzahl von Linearkombinationen� die f�ur diepr�azise Positionierung mit GPS von Bedeutung sind�Tab� ����� Das ionosph�arenfreie Signal L� wird beigr�o eren Punktabst�anden f�ur die Koordinatenl�osungverwendet� Der Vorteil der praktisch vollst�andigenElimination des ionosph�arischen Ein�usses geht einher mit einer sehr kurzen Wellenl�ange� die eineMehrdeutigkeitsl�osung mit diesem Signal unm�oglichmacht� und der Verst�arkung des Me rauschens umeinen Faktor von ungef�ahr drei gegen�uber den Originalsignalen L� und L�� Um das ionosph�arenfreieSignal nutzen zu k�onnen� ist die Bestimmung ganzzahliger Mehrdeutigkeiten mit zwei beliebigen anderen Signalen notwendig� Die L�Mehrdeutigkeit kanndann nach ������ berechnet werden�
Die L�osung der Mehrdeutigkeiten ist f�ur die Widelane LW aufgrund dessen gro er Wellenl�ange besonders einfach� Die mit LW erzeugbare Koordinatenl�osung ist aber aufgrund des hohen Me rauschens und des ionosph�arischen Ein�usses f�urpr�azise Anwendungen zu ungenau� Sie �ndet abervielfach als sehr genaue N�aherungsl�osung Verwendung� Eine weitere Besonderheit der Widelane besteht in der M�oglichkeit� deren Mehrdeutigkeiten inder Di�erenz zu der NarrowlaneLinearkombinationvon ZweifrequenzCodebeobachtungen zu bestimmen�Melbourne ���� W�ubbena ������ Dieses Verfahren setzt das Vorhandensein genauer ZweifrequenzCodebeobachtungen voraus� welches unter AntiSpoo�ng und bei starker Mehrwegebeein�ussung erschwert ist� Vorteile dieses Verfahrens bestehen darin� da es geometriefrei arbeitet� also ohne Kenntnisse der Satellitenorbits und der Nutzerposition auskommt� und zus�atzlich von Ionosph�are und Troposph�are nicht beein�u t wird� Es wird dementspre
chend bei sehr gro en Punktentfernungen und beikinematischen Anwendungen eingesetzt� Bei kurzenBasislinien kann die C�Beobachtung allein verwendetwerden� wodurch unter AntiSpoo�ng vielfach bessereErgebnisse als mit ZweifrequenzCodemessungen erzielt werden k�onnen�
Die Narrowlane hat besondere Bedeutung bei der Koordinatensch�atzung� Sind die Mehrdeutigkeiten gel�ostworden� k�onnen mit diesem Signal die genauestenKoordinaten berechnet werden� wenn die ionosph�arische Refraktion keine Rolle spielt� Dies ist im allgemeinen nur bei kurzen Basislinien gegeben� Beistarker ionosph�arischer Beein�ussung kann es vonVorteil sein� mit L�� Mehrdeutigkeitsl�osungen durchzuf�uhren� Dieses Signal ist quasiionosph�arenfrei� hataber auch nur eine relativ kurze Wellenl�ange von ���cm� Das quasigeomtriefreie Signal L�� ist zur Koordinatenl�osung nicht geeignet� wohl aber zur Mehrdeutigkeitsl�osung� Liegt eine nur geringe ionosph�arischeBeein�ussung vor �kurze Basislinie�� k�onnen hiermitauch bei ungenauen N�aherungskoordinaten �z�B� ausDGPS� Mehrdeutigkeiten gel�ost werden� Dieser Ansatz wird besonders bei kinematischen und kurzzeitigstatischen Messungen verwendet�
Wird eine Mehrdeutigkeit in einer Linearkombination festgesetzt� so kann dies Auswirkungen auf dieentsprechenden Mehrdeutigkeiten in anderen Linearkombinationen haben� Sie ergeben sich aus demZwang der Ganzzahligkeit der Mehrdeutigkeiten� Diee�ektiven Wellenl�angen einiger Signale vervielfachensich bei Mehrdeutigkeitsfestsetzungen z�B� der Widelane oder von L�� �Tab� ����� Verfahren� die die beider Festsetzung von L�� entstehenden e�ektiven Wellenl�angen von �uber ��� m nutzen� werden als
�Extra
Wide Laning� bezeichnet �W�ubbena ������

�� Pr�azise Positionierung mit GPS
Wurde die LW Mehrdeutigkeit festgesetzt� also der ganzzahlige Anteil der Phasenmessungen so ver�andert� da die LW Mehrdeutigkeitden Wert � erh�alt� so m�ussen die L� und L�Mehrdeutigkeiten identische Werte aufweisen� dadie LW Mehrdeutigkeit die Di�erenz der L� undL�Mehrdeutigkeiten darstellt� Derselbe Mehrdeutigkeitswert ist dann auch der wahre Wertder Mehrdeutigkeiten aller anderen in Tabelle ���erw�ahnten Linearkombinationen� wenn man derene�ektive Wellenl�angen ber�ucksichtigt�
Die erfolgreichste und zuverl�assigste Mehrdeutigkeitsl�osung l�a t sich mit der simultanen Verarbeitungaller Me gr�o en �ZweifrequenzPhase und Code� erzielen� Von Vorteil ist weiterhin� wenn Me fehler gering ausfallen� Dies ist insbesondere bei kurzen Basislinien �maximal wenige Kilometer L�ange� der Fall�Hier sind die ionosph�arischen Restfehler so gering�da die Messungen der zweiten Frequenz nicht f�ur dieBestimmung des ionosph�arischen Ein�usses genutztwerden m�ussen� sondern mit
�Extra Wide Laning�
Ans�atzen gearbeitet werden kann� Diese sind insbesondere dann erfolgreich� wenn auch die Mehrwegefehler gering ausfallen�
��� Mehrdeutigkeitssuchver�
fahren
Mehrdeutigkeitssuchverfahren betrachten nicht einzelne Mehrdeutigkeiten isoliert� sondern alle Mehrdeutigkeiten gemeinsam oder zumindest eine f�ur dieKoordinatenberechnung notwendige Mindestanzahl�Gesucht wird die Kombination von ganzzahligenMehrdeutigkeitswerten� die eine Koordinatenl�osungmit m�oglichst geringen Widerspr�uchen �kleinste Verbesserungsquadratsumme� erzeugt� In der Literaturder letzten Jahre �nden sich viele Beispiele und Variationen dieser Algorithmen� �Uberblicke und Vergleiche verschiedener Ans�atze �ndet man bei Erickson������ Hatch und Euler ������ sowie Han und Rizos����b��
Die wesentlichen Arbeitsschritte der Suchverfahrensind�
�� Erzeuge eine m�oglichst gute N�aherungsl�osung
der Basislinienkoordinaten �Xab� Die besten Ergebnisse sind mit kombinierten Auswertungender Phasen und Codebeobachtungen erzielbar�Bei kinematischen Anwendungen entspricht dasErgebnis im wesentlichen dem aus phasengegl�atteten Codebeobachtungen �DGPS� undbei langzeitigen statischen Beobachtungen entspricht es dem einer �oatL�osung �vgl� Abb� �����
�� Berechne reelle Sch�atzwerte der gesuchten Mehrdeutigkeiten und erzeuge einen Suchraum derganzzahligen Mehrdeutigkeitswerte� der in jedem Fall die wahren Werte enth�alt� Anstattdie originalen� untereinander korrelierten Mehrdeutigkeiten zu verwenden� k�onnen die Mehrdeutigkeiten auch in ein Set von dekorreliertenMehrdeutigkeiten transformiert werden �Teunissen ������ Dieses Verfahren begrenzt die Anzahl der ganzzahligen Mehrdeutigkeitskandidaten und beschleunigt damit die Suche nach demkorrekten L�osungsvektor�
�� Suche den L�osungsvektor mit der geringsten Verbesserungsquadratsumme� Eine fr�uhzeitige Elimination von falschen Mehrdeutigkeitskombinationen beschleunigt den Auswerteproze �
�� Entscheide� ob die beste L�osung auch eine eindeutige L�osung ist� Dies geschieht im allgemeinen�uber das Verh�altnis der Verbesserungsquadratsummen der besten und zweitbesten L�osungen�
Mehrdeutigkeitssuchverfahren gehen im allgemeinen davon aus� da nur geringe DoppelDi�erenzMe fehler auftreten� Sie sind somit auf Anwendungen bei kurzen Basislinien beschr�ankt �maximal einige Kilometer Abstand der Punkte�� Je gr�o er dievorhandenen Me fehler ausfallen� um so schwierigerwird die Unterscheidung der beiden besten L�osungen�In aller Regel wird dies dazu f�uhren� da keine eindeutige beste L�osung gefunden werden kann� Bei starkenMe fehlerein��ussen kann es aber auch vorkommen�da eine falsche Mehrdeutigkeitskombination als beste und eindeutige L�osung gew�ahlt wird�
Voraussetzung f�ur den Einsatz von Mehrdeutigkeitssuchverfahren f�ur Basislinien �uber einige KilometerL�ange ist also die Modellierung und e�ektive Reduzierung der entfernungsabh�angigen Fehlerein��usse�

��
� Fehlerquellen und Fehlerverminderung bei der
relativen Positionierung
Die bei der relativen Positionierung bedeutendstenFehlerquellen lassen sich in zwei Gruppen einteilen�Die erste Gruppe wird von denjenigen Fehlern gebildet� die durch relative Positionierung deutlich verringert werden k�onnen und deren verbleibende Restfehler in starkem Ma e vom Abstand der Stationenabh�angen� Es sind dies die Auswirkungen der Orbitfehler und die Refraktionsein��usse durch Ionosph�areund Troposph�are� Die zweite Gruppe enth�alt die stationsabh�angigen Fehlerein��usse� Dies ist zum einendie Mehrwegeausbreitung� die zwischen Stationen unkorreliert ist und dementsprechend durch Relativmessungen nicht verringert werden kann� Zum anderen geh�oren hierzu die Antennenphasenzentrumsfehler� die nur bei speziellem Me aufbau �baugleiche Antennen� gleiche Antennenausrichtung� kurze Basislinien� durch Relativauswertungen vermindert werdenk�onnen und deren verbleibende Restfehler nicht vomStationsabstand abh�angig sind�
Dieses Kapitel gibt einen �Uberblick �uber den Standder Forschung und die M�oglichkeiten� die einzelnenFehlerein��usse zu vermindern� Der Schwerpunkt liegtauf der Betrachtung regionaler Netze und kurzer Beobachtungszeiten�
��� Orbitfehler
Fehler der Satellitenorbits sind keine Beobachtungsfehler� aber durch die Einf�uhrung der Orbits in denAuswerteproze wirken sie sowohl auf die Datenauswertung �Mehrdeutigkeitsbestimmung� wie auch aufdie Koordinatenl�osung�
Die mit Abstand am h�au�gsten verwendeten Orbits sind die sogenannten broadcastOrbits� die alsTeil der Navigationsnachricht von den Satelliten zurVerf�ugung gestellt werden� Sie werden aus den Orbitbestimmungen des GPSKontrollsegments� welche auf den GPSBeobachtungen der f�unf GPSMonitorstationen beruhen� durch Pr�adiktion abgeleitet und den Satelliten �ubermittelt �Francisco ������Auch nach der Einf�uhrung von Selective Availability�SA� konnte �au er bei wenigen SATestbetrieben�keine Verschlechterung der broadcastOrbits festgestellt werden� so da man davon ausgehen kann�da OrbitSA nicht aktiviert ist� In Anbetracht derUSamerikanischen GPSPolitik� die die mittelfristige Abschaltung von SA beinhaltet �The White House������ ist mit einer Aktivierung auch kaum zu rechnen� Die im Vergleich zu pr�azisen Orbits ermittelte
Genauigkeit liegt um � m� wobei bei einzelnen Satelliten zum Teil deutlich gr�o ere Fehler auftreten k�onnen�Kouba und Mireault ����� Die Untersuchung derf�ur die GPSDatenauswertung von drei Monaten Permanentbeobachtungen verwendeten broadcastOrbits�November �� � Januar ��� ergab� da im Durchschnitt f�ur einen Satellitendurchgang pro Woche Orbitfehler von �� m bis maximal �� m aufgetreten sind�Wanninger ���a��
Seit einigen Jahren bietet der International GPS Service �IGS� weitere Orbitprodukte an� die augenblicklich kostenfrei zur Verf�ugung stehen und leicht erhalten und in die Datenauswertung implementiert werden k�onnen� Dies sind im einzelnen �Kouba und Mireault �����
� pr�azise IGSOrbits� Seit �� werden die Orbitbestimmungen von sieben IGSAnalysezentrenzu diesen kombinierten Orbits zusammengefa t�Die Analysezentren verwenden f�ur ihre Orbitberechnungen zwischen �� und ��� der IGSStationen� Pr�azise IGSOrbits stehen augenblicklich innerhalb von �� Tagen nach Abschlu derTagesmessungen zur Verf�ugung� Die aus den Widerspr�uchen zwischen Einzell�osung und kombinierter L�osung abgeleitete Genauigkeit liegt unter ��� m�
� rapid IGSOrbits� Sie stehen seit Mitte �� zurVerf�ugung� augenblicklich �� Stunden nach Messungsschlu � Auch sie ergeben sich als kombinierte L�osung aus den Ergebnissen der sieben Analysezentren� Ihre Genauigkeit im Vergleich zu denpr�azisen Orbits wird mit ��� m angegeben�
� pr�adizierte IGSOrbits� Die meisten derIGSAnalysezentren pr�adizieren die GPSSatellitenbahnen �uber zwei Tage� Auch hierwird eine kombinierte IGSL�osung erzeugt� dief�ur den Zeitraum �� h � �� h nach Messungsschlu als pr�adizierte Orbits �� Minuten vorTagesbeginn zur Verf�ugung gestellt werden� IhreGenauigkeit im Vergleich zu den pr�azisen Orbitswird mit � m und besser angegeben� Wie beiden broadcastOrbits treten hier insbesonders�aber nicht ausschlie lich� f�ur eine kleine Gruppe von Satelliten zum Teil sehr viel gr�o erePr�adiktionsfehler auf�
Um die Literaturangaben zu erg�anzen� wurden dieverschiedenen GPSOrbits f�ur die zuf�allig gew�ahl
�� Fehlerquellen und Fehlerverminderung
����������� �����������
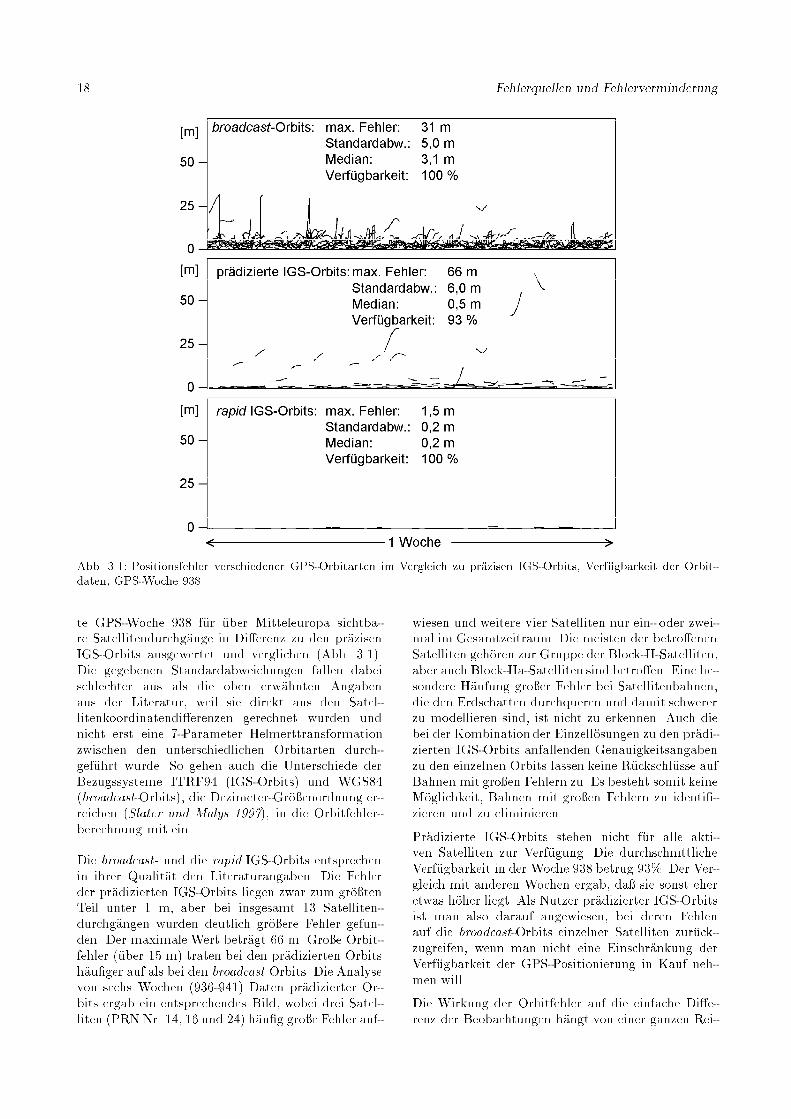
Abb� ���� Positionsfehler verschiedener GPS�Orbitarten im Vergleich zu prazisen IGS�Orbits� Verfugbarkeit der Orbit�daten� GPS�Woche ����
te GPSWoche �� f�ur �uber Mitteleuropa sichtbare Satellitendurchg�ange in Di�erenz zu den pr�azisenIGSOrbits ausgewertet und verglichen �Abb� �����Die gegebenen Standardabweichungen fallen dabeischlechter aus als die oben erw�ahnten Angabenaus der Literatur� weil sie direkt aus den Satellitenkoordinatendi�erenzen gerechnet wurden undnicht erst eine �Parameter Helmerttransformationzwischen den unterschiedlichen Orbitarten durchgef�uhrt wurde� So gehen auch die Unterschiede derBezugssysteme ITRF� �IGSOrbits� und WGS���broadcastOrbits�� die DezimeterGr�o enordnung erreichen �Slater und Malys ����� in die Orbitfehlerberechnung mit ein�
Die broadcast und die rapid IGSOrbits entsprechenin ihrer Qualit�at den Literaturangaben� Die Fehlerder pr�adizierten IGSOrbits liegen zwar zum gr�o tenTeil unter � m� aber bei insgesamt �� Satellitendurchg�angen wurden deutlich gr�o ere Fehler gefunden� Der maximale Wert betr�agt �� m� Gro e Orbitfehler ��uber �� m� traten bei den pr�adizierten Orbitsh�au�ger auf als bei den broadcastOrbits� Die Analysevon sechs Wochen ������ Daten pr�adizierter Orbits ergab ein entsprechendes Bild� wobei drei Satelliten �PRN Nr� ��� �� und ��� h�au�g gro e Fehler auf
wiesen und weitere vier Satelliten nur ein oder zweimal im Gesamtzeitraum� Die meisten der betro�enenSatelliten geh�oren zur Gruppe der BlockIISatelliten�aber auch BlockIIaSatelliten sind betro�en� Eine besondere H�aufung gro er Fehler bei Satellitenbahnen�die den Erdschatten durchqueren und damit schwererzu modellieren sind� ist nicht zu erkennen� Auch diebei der Kombination der Einzell�osungen zu den pr�adizierten IGSOrbits anfallenden Genauigkeitsangabenzu den einzelnen Orbits lassen keine R�uckschl�usse aufBahnen mit gro en Fehlern zu� Es besteht somit keineM�oglichkeit� Bahnen mit gro en Fehlern zu identi�zieren und zu eliminieren�
Pr�adizierte IGSOrbits stehen nicht f�ur alle aktiven Satelliten zur Verf�ugung� Die durchschnittlicheVerf�ugbarkeit in der Woche �� betrug ��� Der Vergleich mit anderen Wochen ergab� da sie sonst eheretwas h�oher liegt� Als Nutzer pr�adizierter IGSOrbitsist man also darauf angewiesen� bei deren Fehlenauf die broadcastOrbits einzelner Satelliten zur�uckzugreifen� wenn man nicht eine Einschr�ankung derVerf�ugbarkeit der GPSPositionierung in Kauf nehmen will�
Die Wirkung der Orbitfehler auf die einfache Di�erenz der Beobachtungen h�angt von einer ganzen Rei

Fehlerquellen und Fehlerverminderung �
he von variierenden Faktoren ab und wird in der Literatur nur wenig behandelt�
Dagegen hat folgende Faustformel von Bauersima��� �Beutler ����� �uber die Fortp�anzung der Orbitfehler in die Basislinienkoordinaten weite Verbreitunggefunden�
j�dlj
l�j �dOj
R� �����
Sie besagt� da das Verh�altnis von Orbitfehler j �dOjzur mittleren Entfernung R zwischen Stationen undSatellit dem Verh�altnis von Basislinienfehler j�dlj zurBasislinienl�ange l entspricht� Der Ein�u ist alsoin erster N�aherung linear zur Basislinienl�ange� Gleichung ����� bezieht sich auf alle drei Komponentendes Basislinienfehlervektors� Betrachtet man nur dieL�ange der Basislinie und damit insbesondere die Lagekomponenten� so fallen die Fehler um eine halbe bis ganze Gr�o enordnung geringer aus �Zielinski������ Auch bei dieser Fehlerabsch�atzung ist die lineare Abh�angigkeit von der Basislinienl�ange erkennbar�
��� Ionosph�arische Refraktion
Unter ionosph�arischer Refraktion versteht man dief�ur Mikrowellen dispersive Laufzeitverz�ogerung undStrahlkr�ummung der Signale in der oberen Atmosph�are �Ionosph�are und Protonosph�are�� Mit Hilfe derGPSZweifrequenzmessungen kann die ionosph�arische Refraktion praktisch vollst�andig erfa t und eliminiert werden� Trotzdem werden auch ZweifrequenzNutzer beeintr�achtigt �Wanninger ������
� Die Zweifrequenzkorrektur geht einher mit einerVerst�arkung der Mehrwegefehler und des Me rauschens� Bei einigen Anwendungen kann esdeswegen sinnvoll sein� auf die ionosph�arischeZweifrequenzKorrektur zugunsten eines geringeren Me rauschens zu verzichten�
� Die L�osung der Phasenmehrdeutigkeiten gelingtauch bei ZweifrequenzBeobachtungen schnellerund zuverl�assiger� wenn die ionosph�arischen Ein��usse auf die Relativmessungen verschwindendgering sind�
� Kleinr�aumige ionosph�arische St�orungen k�onnendas Empf�angerme verhalten negativ beein�ussen und zu einem verst�arkten Auftreten vonCycleSlips oder sogar l�angeren Datenausf�allenf�uhren�
Der f�ur die ionosph�arische Refraktion entscheidende Elektronengehalt der Ionosph�are unterliegt starken r�aumlichen �h�ohen und breitenabh�angigen� und
zeitlichen �tageszeit und jahreszeitlichen� sonnenaktivit�atsabh�angigen� Variationen� Die tageszeitlichst�arkste Ionisierung tritt nach dem Sonnenh�ochststand auf� die geringste Ionisierung vor Sonnenaufgang� Die breitenabh�angig st�arkste Ionisierung �ndetman in der �Aquatorregion �� ��� magnetische Breite�� die geringste Ionisierung imGrenzgebiet zwischenmittleren Breiten �� ������� magnetische Breite�und den Polarregionen �� ������ magnetische Breite�� Dementsprechend �nden sich in der �Aquatorregion auch die st�arksten gro r�aumigen horizontalenGradienten des Elektronengehalts� die bei der relativen GPSPositionierung vielfach von �ahnlich gro erBedeutung sind wie der absolute Elektronengehalt�Kleinr�aumige ionosph�arische St�orungen� die Phasenund Amplitudenszintillationen verursachen� treten inihrer st�arksten Form in der �Aquatorregion auf� H�au�ger� aber nicht so stark ausgepr�agt� sind sie auch inden Polarregionen anzutre�en� Die mittleren Breiten sind davon nur bei sehr starken magnetischenSt�urmen betro�en�
Wandernde ionosph�arische St�orungen mittlererGr�o e �Medium Scale Travelling Ionospheric Disturbances MSTIDs� sind dagegen in mittleren Breitenh�au�ger anzutre�en� Sie stellen f�ur die pr�aziserelative Positionierung mit GPS bei Beobachtungsdauern unter �� Minuten ein gro es Problem dar�Wanninger ������
Neben der Zweifrequenzkorrektur ist die relative GPSPositionierung die e�ektivste Methodezur Verringerung der Auswirkung ionosph�arischer Refraktion� So liefert die EinfrequenzKoordinatenbestimmung im Entfernungsbereichbis zu wenigen km genauere Ergebnisse als dieZweifrequenzKoordinatenbestimmung� Eine exaktere Entfernungsbereichsangabe ist nicht m�oglich� dahierbei eine Vielzahl von Faktoren Ein�u nehmen�Der Entfernungsbereich ist um so geringer� je st�arkerder absolute Elektronengehalt ist und je ausgepr�agter gro r�aumige Gradienten und ionosph�arischeSt�orungen sind�
Eine weitere M�oglichkeit� den Ein�u der ionosph�arischen Refraktion zu verringern� besteht in der Anwendung von Modellen� Bei deren Betrachtung sollen Pr�adiktionsmodelle ausgeschlossen werden� da sieaufgrund der gro en zeitlichen Variabilit�at der Ionosph�are selbst das Monatsmittel des integrierten Elektronengehalts nur ungen�ugend erfassen �Brown u�a������ und damit f�ur die relative Positionierung nichtin Frage kommen� Vielmehr bietet sich an� aktuelleModelle aus den ZweifrequenzGPSMessungen selbstabzuleiten�
Als Me gr�o en werden daf�ur genutzt�
� CodeMessungen �Lanyi und Roth ���� Mannucci u�a� ������ die Laufzeitdi�erenz der
�� Fehlerquellen und Fehlerverminderung
ZweifrequenzCodemessungen ist nicht direktproportional zum ionosph�arischen Elektronengehalt� sondern wird von di�erentiellen instrumentellen Laufzeitverz�ogerungen sowohl im Satelliten wie auch im Empf�anger verf�alscht� Diese Laufzeitverz�ogerungen m�ussen im Auswerteproze mitgesch�atzt oder als Kalibrierungswerteeingef�uhrt werden �Sard�on und Zarraoa �����Zur Verringerung der Mehrwegee�ekte und desMe rauschens werden im allgemeinen phasengegl�attete Codebeobachtungen �Echtzeit� oderauf das Codeniveau korrigierte Phasenbeobachtungen �PostProcessing� genutzt�
� undi�erenzierte Phasenmessungen �Georgiadouund Kleusberg ����a Wild u�a� ������ bei alleiniger Verwendung der Phasendaten mu pro Station und Satellit und auch f�ur jeden nicht beseitigten CycleSlip eine Unbekannte mitgesch�atztwerden� die die Summe aus Phasenmehrdeutigkeit und di�erentiellen instrumentellen Verz�ogerungen der Phasendaten erfa t�
� di�erenzierte Phasenmessungen �Schaer u�a������� insbesondere nach Festsetzung derDoppeldi�erenzPhasenmehrdeutigkeiten kannder Elektronengehalt auch aus di�erenziertenPhasenbeobachtungen abgeleitet werden� Voraussetzungen sind m�oglichst unterschiedlicheElevationswinkel� unter denen identische Signaleauf verschiedenen Stationen empfangen werden�d�h� m�oglichst gro e Abst�ande zwischen denStationen�
Alle in der Literatur behandelten Modelle beschreiben die Ionosph�are als zweidimensionales EinSchichtModell in der Form einer Kugelschale �SingleLayerModell� siehe auch Abb� ����� Dabei ergibt sichder Ein�u der ionosph�arischen Refraktion If auf eineMessung aus vertikalem Elektronengehalt V EC amDurchsto punkt des Signals durch die Ionosph�arenschicht� skaliert mit dem zugeh�origen Wert der ionosph�arischen MappingFunktion mI � �z�B� Wanninger������
If � ��
�
A
f��mI � V EC �����
mit
mI ��
cos zI�����
zI � arcsin
�re
re � hIsin z
������
wobei
A � ���� �m�s����f � Signalfrequenz �Hz��z � Zenitdistanz �rad��zI � Zenitdistanz in der mittleren Iono
sph�arenh�ohe �rad��re � Erdradius �m��hI � mittlere Ionosph�arenh�ohe �m��
z�B� ��� km�
Der vertikale Elektronengehalt VEC wird auf dieKoordinaten des Schnittpunktes des Satellitensignalsmit der Kugelschale bezogen� Die Modelle werden in einem Koordinatensystem von geographischer�geomagnetischer Breite � und Ortszeit tO dargestellt�
Die Beschreibung des vertikalen Elektronengehalts erfolgt �uber�
� zweidimensionale Polynome bei lokalen und regionalen Anwendungen �Lanyi und Roth ���� Georgiadou und Kleusberg ����a Wild u�a�������
V EC��� tO� �
nmaxXn�
mmaxXm�
anm � ��� ���n � �tO � t�O�m �����
mit
nmax�mmax � maximale Grade der Polynome� vielfach ������ oftohne gemischte Glieder�
anm � die Modellkoe!zienten���� t�O � Koordinaten des Polynom
ursprungs�
� Kugelfunktionsentwicklungen bei kontinentalenund globalen Anwendungen �Wilson und Mannucci ���� Schaer u�a� ������
V EC��� tO� �
nmaxXn�
nXm�
�anm cosmtO � bnm sinmtO��
Pnm�sin�� �����
mmax � nmax
wobei
nmax�mmax � Grad und Ordnung derKugelfunktionsentwicklung�
anm� bnm � die Modellkoe!zientenPnm � normierte zugeordnete
Legendresche Funktionen�Heiskanen und Moritz����
darstellen�

Fehlerquellen und Fehlerverminderung ��
� globales �oder regionales� Dreiecksnetz� f�ur deren Eckpunkte der vertikale Elektronengehalt alsstochastischer Proze gesch�atzt wird und wobeiinnerhalb der Dreiecke Interpolationsalgorithmen angewandt werden �Mannucci u�a� ������
Alle genannten Ans�atze k�onnen nur gro r�aumigeStrukturen der Ionosph�are beschreiben� Kleinr�aumigeund kurzperiodische Erscheinungen werden aufgrundder begrenzten r�aumlichen und zeitlichen Au��osungder Modelle nicht erfa t� Die Modelle liefern daher f�urviele Anwendungen der pr�azisen relativen und schnellen GPSPositionierung keine ausreichend genauenKorrekturen� Eine Erfassung kleinr�aumiger Strukturen gelingt nur unter Verwendung mehrerer Referenzstationen eines regionalen Netzes und di�erentieller� satellitenindividueller Modellierung �Websterund Kleusberg ���� Wanninger ����b�� wie sie imRahmen dieser Arbeit angewendet wird �Kapitel ���
Der absolute Elektronengehalt der Ionosph�are wirktsich auf die EinfrequenzAuswertung bei der relativen Positionierung in erster Linie in der Form eines Ma stabfehlers von der Gr�o e ��� � ��� ppmf�ur �� � ��� Elektronen pro m� VEC aus �Santerre������ In mittleren Breiten ist also mit maximal wenigen ppm Fehler zu rechnen� in Jahren geringer Sonnenaktivit�at mit weniger als � ppm� Hinzu kommendie Fehlerein��usse� die durch gro r�aumige Gradienten verursacht werden� die aufgrund tageszeitlicheroder breitenabh�angiger Variationen des Elektronengehalts entstehen� Ihre Auswirkungen liegen in mittleren Breiten im Bereich von unter einem bis zu wenigen ppm und betre�en alle drei Koordinatenkomponenten� Aufgrund der st�arkeren Ionisierung in der�Aquatorregion f�uhren beide genannten Fehlergruppendort zu deutlich gr�o eren Koordinatenfehlern�
Hinzu kommen die Fehleranteile aufgrund ionosph�arischer St�orungen� Sie wirken sich insbesondere aufkurzzeitige Messungen aus� So mu beim Auftretenvon MSTIDs bei Me dauern von weniger als �� bis�� Minuten mit Koordinatenfehlern von einigen Zentimetern selbst bei Basislinien von weniger als �� kmL�ange gerechnet werden� Bei einer l�angeren Me dauermitteln sich die E�ekte weitgehend heraus �Wanninger ������
��� Troposph�arische
Refraktion
Unter troposph�arischer Refraktion versteht man dief�ur Mikrowellen nicht dispersive Laufzeitverz�ogerungund Strahlkr�ummung der Signale in der unteren Atmosph�are �Troposph�are und Stratosph�are�� Man unterteilt den troposph�arischen Ein�u in eine trockene
Komponente� die im wesentlichen vom Luftdruckund der Temperatur abh�angig ist� und in eine vomWasserdampfgehalt bestimmte feuchte Komponente�Die trockene Komponente stellt den gr�o eren Anteil���� dar� Sie ist aber geringeren r�aumlichen undzeitlichen Ver�anderungen unterworfen und besser modellierbar als die Feuchtkomponente�
Die troposph�arische Refraktion wird bei der GPSAuswertung durch Standardtroposph�arenmodelle erfa t und weitgehend beseitigt� Die Einf�uhrung vonan den GPSPunkten durchgef�uhrten Wettermessungen f�uhrt aufgrund lokaler Anomalien im allgemeinennicht zu besseren Ergebnissen�
Die Standardmodelle bestehen meistens aus folgenden Komponenten�
� konstante Standardwerte f�ur Luftdruck� Temperatur� Luftfeuchtewerte f�ur eine Referenzh�ohe ��m��
� Modelle zur Umrechnung dieser Standardwertevon der Referenzh�ohe auf die tats�achliche Stationsh�ohe�
� Modelle zur Berechnung der Zenitverz�ogerungaus den Standardwerten und der Stationsh�ohe�z�T� auch der geographischen Breite der Station�� hier wird im allgemeinen zwischen Trockenund Feuchtkomponente unterschieden�
� Modelle f�ur troposph�arische MappingFunktionen� die die Umrechnung der Zenitverz�ogerung auf die Verz�ogerung unter einem gegebenenElevationswinkel erlauben� Auch hier wird vielfach zwischen Trocken und Feuchtkomponenteunterschieden�
Die existierenden Modelle der MappingFunktionenliefern f�ur Elevationswinkel �uber �� Grad vielfach vergleichbare Ergebnisse� Bei niedrigeren Elevationswinkeln gibt es aber zum Teil betr�achtliche Unterschiede� Vergleiche verschiedener MappingFunktionen mittats�achlichen Refraktionsbedingungen� die aus Radiosondenmessungen abgeleitet wurden� zeigen �Mendesund Langley ������ da z�B� die Modelle von Herring������ und Niell ������ bei niedrigen Elevationswinkeln deutlich bessere Ergebnisse liefern als viele derheutzutage bei GPSAuswertungen eingesetzten Modelle� wie z�B� die von Saastamoinen ������ Goadund Goodman ����� oder Black ������ Alle hiergenannten Modelle der troposph�arischen MappingFunktionen kommen ohne gemessene Wetterparameter aus und sind dementsprechend einfach anzuwenden�
Die verbleibenden Fehler nach Anbringung der troposph�arischen Korrektur aus Standardmodellen werden im allgemeinen durch die Di�erenzbildung bei der

�� Fehlerquellen und Fehlerverminderung
relativen Positionierung vermindert� F�ur kleinr�aumige Netze �bis �� km�� bei geringen H�ohenunterschieden �bis ��� m� und bei weitgehend homogenenRefraktionsbedingungen �keine starken Temperaturund Feuchtegradienten� keine Inversionswetterlagenetc�� liegen die Restfehler im mmBereich�
Bei gro r�aumigeren Netzen� gr�o eren H�ohenunterschieden� inhomogenen oder den Standardmodellenwidersprechenden Refraktionsbedingungen k�onnendie troposph�arischen Restfehler durch Einf�uhrung eines Zenitparameters dT z pro Station in der GPSAuswertung erfa t werden� Der Zusammenhang zumFehler einer Einzelbeobachtung ergibt sich aus
dT � mT � dTz �����
mit
dT � troposph�arische Restverz�ogerung�mT � troposph�arische MappingFunktion�dT z � troposph�arische Restverz�ogerung in
Zenitrichtung�
Dabei wird entweder ein konstanter Zenitparameter pro Beobachtungszeitraum von einer oder mehreren Stunden angesetzt oder die Parameter werden als zeitvariante stochastische Prozesse gesch�atzt�In kleinr�aumigen Netzen sollte aufgrund der hohenKorrelation der Zenitparameter dieser f�ur eine Station nicht angesetzt werden� so da nur relative troposph�arische Ein��usse ber�ucksichtigt werden �Rothacher und Mervart ������ Es werden dann f�ur alle Stationen b die troposph�arischen Restverz�ogerungen inZenitrichtung relativ zur gew�ahlten Station a durch
dTab � mT � dTzab �����
bestimmt� wobei
dTab � Di�erenz der troposph�arischenRestverz�ogerungen zwischen denStationen a und b�
dT zab � Di�erenz der troposph�arischen
Restverz�ogerungen in Zenitrichtungzwischen den Stationen a und b�
Aufgrund der vorausgesetzten geringen Entfernungzwischen den Stationen bleiben die stationsabh�angigen Di�erenzen der MappingFunktionen so klein�da sie vernachl�assigt werden k�onnen�
Die Einf�uhrung von Zenitparametern f�uhrt aufgrundderen hoher Korrelation mit den Stationsh�ohen zuung�unstigeren Fehlerfortp�anzungen der zuf�alligenFehleranteile in die Stationsh�ohen� W�ahrend bei einer Elevationsmaske von �� Grad ohne Zenitparameter die H�ohengenauigkeit um ungef�ahr einen Faktorvon � schlechter bestimmt werden kann als die derLagekomponenten� verschlechtert sich dieses Verh�altnis bei Einf�uhrung von Zenitparametern auf �� Die
Sch�atzung von troposph�arischen Zenitparametern inder GPSAuswertung macht also nur Sinn� wenntats�achlich Restverz�ogerungen noch vorhanden sind�z�B� bei gro r�aumigen Netzen� und somit systematische Fehler erfa t werden k�onnen� Durch Hinzunahme von Beobachtungen unter niedrigeren Elevationen kann die Korrelation zwischen Zenitparametern und H�ohen gesenkt werden und damit beideGruppen von Unbekannten genauer gesch�atzt werden �Santerre ���� Yunck ������ Die Hinzunahmevon Beobachtungen unter niedrigen Elevationen solltenur durchgef�uhrt werden� wenn Zenitparameter mitgesch�atzt werden� weil die troposph�arisch bedingtenFehler bei diesen Beobachtungen besonders gro ausfallen� Weiterhin ist zu beachten� da der Hinzunahme von Daten niedriger Elevationen aufgrund zunehmender Mehrwegeein��usse und abnehmender Datenverf�ugbarkeit Grenzen gesetzt sind�
Beim Ansatz eines Zenitparameters pro Station gehtman davon aus� da an den einzelnen Me stationenkeine Azimutabh�angigkeit der troposph�arischen Refraktion existiert� Um zus�atzlich Gradienten zu erfassen� kann der Ansatz ����� wie folgt erweitert werden �Herring ���� MacMillan ���� Rothacher u�a������
dT �
mT � dTz �
dmT
de� �cos � dTn � sin � dT e� ����
mit
dmT�de � Ableitung der troposph�arischenMappingFunktion nach derElevation�
� Azimut des Satelliten�dTn � Gradientenparameter in
NordS�udRichtung�dT e � Gradientenparameter in
OstWestRichtung�
Die zus�atzliche Sch�atzung von Gradientenparameternf�uhrt insbesondere zu einer Verbesserung der Lagekoordinaten�
Nicht modellierte oder eliminierte Restfehler der troposph�arischen Refraktion wirken besonders auf dieH�ohenkoordinate� jeder relative troposph�arische Fehler von � mmbewirkt einen H�ohenfehler von ungef�ahr� mm �Santerre ������ Die weiteren Ein��usse auf dieKoordinaten fallen sehr viel geringer aus� Die Azimutabh�angigkeit der Restfehler wirkt sich auf die Lagekoordinaten aus� Die Verbesserung der Wiederholungsgenauigkeit der Lagekoordinaten bei Sch�atzungtroposph�arischer Gradienten zeigt dies deutlich auf�Rothacher u�a� ����� Weiterhin f�uhren absolute troposph�arische Fehler zu einem Ma stabsfehler der Relativkoordinaten� Seine Gr�o e wird mit ���� ppm je� cm Restfehler abgesch�atzt �Beutler u�a� ������

Fehlerquellen und Fehlerverminderung ��
��� Mehrwegeausbreitung
Mehrwegeausbreitung bedeutet� da nicht nur dasSatellitensignal direkt die Empfangsantenne erreicht�sondern auch in der Empfangsantennenumgebung re�ektierte Signale� die sich dem direkten Signal �uberlagern� Die indirekten Signale weisen eine l�angereLaufzeit als das direkte Signal auf und erfahren eine Ver�anderung der zirkularen Rechtspolarisierungder Ursprungssignale� Inwieweit das direkte Signalverf�alscht wird� h�angt von den Re�exionseigenschaften in der Empfangsantennenumgebung und vom Antennenempfangsverhalten ab�
Mehrwegeausbreitung beein�u t die Signalamplitudeund die Messungen des Codes und der Tr�agermischphase� Der Ein�u auf die Codemessungen ist um ungef�ahr zwei Gr�o enordnungen st�arker �dm � m� alsder Ein�u auf die Phasenmessungen �mm � cm��Aufgrund der sich �andernden Umwegel�angen habenalle Mehrwegee�ekte einen stark periodischen Charakter� F�ur statische Empf�anger ergeben sich im Zusammenhang mit der Bewegung der GPSSatellitentypische Perioden von Stunden bei einem AbstandRe�ektor � Antenne von weniger als einemMeter undwenigen Minuten bei Abst�anden von mehreren Metern �Georgiadou und Kleusberg ����b�� Dabei gehenmaximale Codefehler einher mit maximaler Beein�u ung der Signalamplitude und gleichzeitig minimalen �Nulldurchgang� Phasenfehlern� Maximale Phasenfehler andererseits treten gleichzeitig mit minimalen �Nulldurchgang� Codefehlern und minimaler Signalamplitudenbeein�u ung auf �Axelrad u�a� ���� Sleewaegen �����
Die Verringerung der Mehrwegeausbreitung kann aufdrei Ebenen erfolgen�
� vor der Signalverarbeitung durch Auswahl derMe umgebung und des Antennendesigns�
� durch die Signalverarbeitung�� nach der Signalverarbeitung durch Weiterverarbeitung der Me gr�o en�
Durch keine Technik ist eine vollkommene Beseitigung der Mehrwegebeein�ussung erzielbar� so da nurein Zusammenwirken von mehreren Ans�atzen allerdrei Ebenen optimale Ergebnisse erzeugen kann�
Die Auswahl einer geeigneten Me umgebung ist diee�ektivste Methode� um Mehrwegeein��usse zu minimieren� Re�ektoren oberhalb des Antennenhorizonts und starke Re�ektoren unterhalb des Antennenhorizonts sollten vermieden werden� Oft ist eine Vermeidung einer Umgebung mit starken Mehrwegeein��ussen aber aufgrund anderer Restriktionenbei der Me punktwahl nicht m�oglich� Gerade GPSReferenzstationen weisen vielfach starke Mehrwege
ein��usse auf� wenn sie auf Geb�auded�achern installiertwerden�
GPSAntennen k�onnen in Bezug auf Mehrwegeein��usse optimiert werden� indem sie eine geringe Emp�ndlichkeit in Antennenhorizontn�ahe und unterhalbdes Horizonts aufweisen und maximale Emp�ndlichkeit f�ur zirkular rechtspolarisierte Signale besitzen �Braasch ������ Vergr�o erte Antennengrundplatten sollen unterhalb des Antennenhorizonts re�ektierte Signale abschirmen� Aufgrund von Signalbeugungserscheinungen an der Grundplattenkante istdie Abschirmung aber nur begrenzt erfolgreich� Eine Verbesserung tritt ein� wenn auf der Grundplatte ChokeRingElemente montiert sind� Grundplatteund ChokeRingElemente wirken aber nicht auf Signale� die von oberhalb des Antennenhorizonts einstrahlen �Weill �����
Bei der Verringerung der Mehrwegebeein�ussungdurch die Signalverarbeitung wurden in den �er Jahren etliche Fortschritte erzielt� Dabei wurde sich lange auf C�ACodeMessungen konzentriert� Erst seit�� �nden sich in der Literatur verst�arkt Quellen�die sich auch mit der Reduzierung der Phasenfehlerbesch�aftigen� Die wichtigsten Techniken sind�
� NarrowKorrelator� bei dem der Abstand desbeimMe vorgang verwendeten Korrelatorenpaares auf ���� bis ���� der SignalChipl�ange verkleinert wird und die Eingangsbandbreite auf �MHz oder mehr vergr�o ert wird �Van Dierendonck u�a� ���� Weill �����
� MEDLLTechnik �MEDLL Multipath Estimating Delay Lock Loop�� bei der es durch Erh�ohungder Anzahl von Korrelatoren auf �� oder mehrgelingt� die Korrelationsfunktion detailliert zuerfassen und somit den Ein�u einzelner Mehrwegesignale zu bestimmen und zu eliminieren�Townsend u�a� ������
� weitere Techniken sind in der Entwicklung� die�ahnliche Resultate wie die MEDLLTechnik erzielen� aber ohne den dabei notwendigen ger�atetechnischen Aufwand f�ur eine gro e Anzahl vonKorrelatoren� In der Literatur �nden sich aberkeine Einzelheiten zu den Funktionsweisen dieserTechniken� StrobeKorrelator �Garin und Rousseau ����� MMKorrelator �Hatch u�a� �����
Allen genannten Techniken gelingt eine Trennungvon direktem und indirekten Signalen nur� wenn derzus�atzliche Weg der Umwegsignale �� m oder deutlich mehr betr�agt� Bei k�urzeren zus�atzlichen Wegenwird die Mehrwegebeein�ussung des resultierendenSignals durch diese Techniken nicht vermindert� Gerade Phasenmessungen erfahren aber auch bei kurzenUmwegen maximale Fehler� so da hier bisher kaumFortschritte erzielt werden konnten� Bei geod�atischen

�� Fehlerquellen und Fehlerverminderung
Anwendungen� bei denen sich die Signalre�ektorenvielfach im geringen Abstand �wenige Meter� von derEmpfangsantenne be�nden� sind diese Techniken alsoweitgehend wirkungslos�
Nach der Signalverarbeitung liegen Code� Tr�agermischphasen und Signalamplitudenmessungen vor�je nach Empf�angertyp f�ur Messungen auf der ersten Frequenz oder auf beiden Frequenzen� Aufgrundder beschriebenen Eigenschaften der Mehrwegefehlerwerden folgende Techniken eingesetzt� um deren Ein�u auf die Mehrdeutigkeitsl�osung und Koordinatenbestimmung zu vermindern�
� Die bei geod�atischen Messungen am weitestenverbreitete Methode ist die Durchf�uhrung statischer Messungen und damit eine Mittelung derMehrwegefehler �uber die Sessiondauer� Bei typischen Perioden der Mehrwegefehler von wenigenMinuten sind minimale Beobachtungsdauern indieser Gr�o enordnung notwendig� um den Fehlerein�u deutlich zu senken�
� Die Codemehrwegefehler k�onnen durch Gl�attungmit den weniger beein�u ten Phasenmessungenstark vermindert werden �HatchFilter� Hatch������ Bei EinfrequenzMessungen wird dieGl�attungswirkung dadurch begrenzt� da die unterschiedliche Wirkung der Ionosph�are auf Code und Phase ber�ucksichtigt werden mu � MitZweifrequenzPhasenmessungen wird diese Limitierung �uberwunden�
� Aus der Di�erenz von Code und ZweifrequenzPhasenmessungen kann die Codemehrwegebeein�ussung berechnet werden� Geht man davonaus� da bei Referenzstationen mit unver�anderter Empfangsantennenumgebung die Mehrwegefehler f�ur Signale� die unter gleichem Einfallswinkel empfangen werden� identisch sind� so k�onnenin Echtzeit Korrekturen an die Codebeobachtungen angebracht werden� die aus �alteren Datenabgeleitet wurden� Die Korrekturmodelle k�onnenentweder f�ur jede Satellitenbahn einzeln gespeichert werden� da sich jede Satellitenbahn ungef�ahr nach �� h Sternzeit wiederholt �Bishopu�a� ����� oder als Kugelfunktionsmodell� wobeizwar weniger Koe!zienten abgespeichert werdenm�ussen� aber gleichzeitig eine geringere r�aumliche Au��osung erreicht wird �Kee und Parkinson������ Eine Verbesserung der Ergebnisse wirderreicht� wenn man die Ver�anderungen der Signalst�arke bei Satellitensignalen mit gleichemEinfallswinkel nutzt� um Variationen der Codemehrwegee�ekte abzuleiten und zu korrigieren�Sleewaegen �����
� Die Informationen der Signalamplitude k�onnenauch direkt zur Korrektur der Phasenmehrwegee�ekte verwendet werden �Axelrad u�a� ������
EchtzeitAnwendungen sind denkbar�� Liegen simultane Messungsdaten von mehrerenAntennen vor� so kann ausgenutzt werden� da Mehrwegee�ekte auch schon bei geringem Antennenabstand unkorreliert sind� Durch Zusammenfassung der korrespondierenden Messungenk�onnen so die Mehrwegee�ekte deutlich verringert werden� Die Anwendung dieser Technik setztdie Kenntnis der Koordinatendi�erenzen zwischen den Antennen und bei Anwendung aufPhasendaten die L�osung der Doppeldi�erenzMehrdeutigkeiten voraus �Raquet ���� Wanninger ���a� siehe auch Kapitel ���
Die gro e Anzahl von Ans�atzen zur Verminderung derMehrwegee�ekte deutet darauf hin� da die Problematik bisher nicht befriedigend gel�ost werden konnte�Da auch im Vermessungswesen die Entwicklung aufimmer k�urzere Me zeiten hingeht� nimmt die Bedeutung der Mehrwegeausbreitung als Fehlerquelle zu�Mehrwegee�ekte sind einer der Hauptgr�unde� warumbei wenigen Sekunden Messung � cmGenauigkeit inder Lage nicht garantiert werden kann�
��� Antennenphasenzentren
Das geometrische Phasenzentrum von GPSAntennenf�allt nicht exakt mit dem elektrischen Phasenzentrumzusammen� Dar�uber hinaus ist das wirksame elektrische Phasenzentrum eine Funktion der Richtung� ausder das Satellitensignal eintri�t� Der Abstand zwischen elektrischem und geometrischem Zentrum betr�agt bei geod�atischen Antennen Millimeter bis wenige Zentimeter und kann somit bei pr�azisen relativen Anwendungen nicht unber�ucksichtigt bleiben�Die Antennenphasenzentren f�ur L� und L� sind weitgehend unabh�angig voneinander� so da Koordinatenl�osungen� die mit der ionosph�arenfreien Linearkombination L� berechnet werden� vielfach verst�arktvon dieser Fehlerquelle betro�en sind�
Je nach erforderlicher Genauigkeit und angewandtem Kalibrierungsverfahren unterscheidet man zwischen mittleren Antennenphasenzentrumsfehlern undelevations und azimutabh�angigen Variationen� Konstruktionsbedingt weisen viele GPSAntennen ehereine Elevations als eine Azimutabh�angigkeit desPhasenzentrums auf� Ver�anderungen an der Antennengrundplatte oder Verwendung einer Antennenabdeckung �Dome� f�uhren zu Ver�anderungen des Phasenzentrums �Rothacher u�a� ���� Braun u�a� �����Verbleibende elevationsabh�angige Restfehler wirkensich bei der Datenauswertung insbesondere dann negativ aus� wenn andere ebenfalls elevationsabh�angige Unbekannte wie z�B� troposph�arische Zenitfaktoren oder Ionosph�arenmodelle gesch�atzt werden� F�ur

Fehlerquellen und Fehlerverminderung ��
die Anbringung von Korrekturwerten f�ur das Antennenphasenzentrum mu die r�aumliche Ausrichtungder Me antenne bekannt sein� Bei Vermessungsanwendungen ist dies meist durch Horizontierung undNordorientierung der Antenne gegeben�
F�ur Antennen einer Baureihe kann im allgemeinen von weitgehend identischen Antennenphasenzentrumsfehlern ausgegangen werde� so da bei gleicherAntennenausrichtung die Fehler bei der Relativmessung herausfallen� Dieses Verfahren ist aber bei langen Basislinien wirkungslos� weil dort die Signale unter verschiedenen Elevationen und Azimuten empfangen werden �Schupler und Clark ������ In diesem Fallsind auch relative Kalibrierungswerte zwischen zweiAntennentypen nicht ausreichend� Absolute Kalibrierungswerte sind notwendig�
Die Kalibrierung von GPSAntennen kann mit unterschiedlichem Aufwand und auf unterschiedlichenGenauigkeitsniveaus erfolgen� Grunds�atzlich gilt� da bei der Feldkalibrierung Relativmessungen mit geringem Antennenabstand vorgenommen werden� umden Ein�u von Refraktionsfehlern zu minimieren�Die Messungsdauer sollte mindestens �� Stunden betragen� um die maximale Satelliten�uberdeckung zunutzen und Ergebnisse mit Millimetergenauigkeit zuerzielen� Die Hauptfehlerquelle ist die Mehrwegeausbreitung� Bei Laborkalibrierungen in mikrowellentoten Kammern k�onnen elevations und azimutabh�angige Variationen des Phasenzentrums bestimmt werden �Schupler und Clark ������ Laborkalibrierungenerm�oglichen zwar absolute Kalibrierungen� sie sindaber sehr aufwendig�
Bei Feldkalibrierungen ergibt sich der mittlere Antennenphasenzentrumsfehler relativ zwischen zwei Antennen aus der Messung einer koordinatenm�a ig bekannten Basislinie� Die Kalibrierungswerte f�ur dieNord und Ostkomponenten k�onnen auch absolut bestimmt werden� wenn mit der zu kalibrierenden Antenne Messungen in mindestens zwei unterschiedlichen Orientierungen vorgenommen werden� Mehrwegefehler mitteln sich aufgrund der langen Me dauerweitgehend heraus� Die Kalibrierungswerte des mittleren Antennenphasenzentrums sind eine Funktion
der gew�ahlten Elevationsmaske und aufgrund derSatelliten�uberdeckung eine Funktion der geographischen Breite des Kalibrierungsortes�
Die relative� elevationsabh�angige Kalibrierung erfolgt mit den selben Me werten� Im Auswerteproze werden die Koe!zienten einer elevationsabh�angigenFunktion �z�B� eines Polynoms� als zus�atzliche Unbekannte angesetzt �Breuer u�a� ������ Mehrwegefehler werden �uber den gesamten Azimutbereich gemittelt und dadurch stark verringert� Absolute Kalibrierungswerte ergeben sich nur� wenn f�ur die Referenzsantenne absolute� elevationsabh�angige Kalibrierungswerte z�B� aus Labormessungen vorliegen�
Aus den erzeugten Me daten k�onnen auch elevationsund azimutabh�angige Kalibrierungswerte abgeleitetwerden� F�ur ihre Darstellung werden Kugelfunktionsentwicklungen verwendet �Rothacher u�a� ������Durch gemeinsames Drehen der Antennen gelingt esauch in mittleren Breiten� den gesamten Azimutbereich zu erfassen� Mehrwegee�ekte k�onnen dabei zugro en Kalibrierungsfehlern f�uhren� da deren Verringerung durch Mittelbildung nicht bzw� kaum m�oglichist� Absolute Kalibrierungswerte ergeben sich auchhier nur� wenn f�ur die Referenzsantenne absolute Kalibrierungswerte vorliegen� Absolute Kalibrierungswerte aus Feldmessungen bei gleichzeitiger weitgehender Elimination von Mehrwegee�ekten gelingt�wenn einerseits die Antenne nicht nur gedreht� sondern auch gekippt wird und andererseits Mehrwegeein��usse durch Wiederholungsmessungen nach einemSterntag erfa t werden �W�ubbena u�a� ����a��
F�ur Messungen in regionalen Referenzstationsnetzen ist eine relative Kalibrierung der Antennen ausreichend� Die Einrichtung von Referenzstationsnetzen verst�arkt die Bedeutung der Antennenkalibrierung� weil mehr und mehr Antennen unterschiedlicherBaureihen gemeinsam verwendet werden� Dies liegtzum einen daran� da der Nutzer einer Mobilstation h�au�g Ger�ate anderer Hersteller nutzt als die� dieim Referenzstationsnetz eingesetzt werden� Andererseits verwendet man auf den Referenzstationen vielfach Antennentypen �ChokeRingAntennen� ggf� mitAbdeckung�� die f�ur Mobilstationen ungeeignet sind�
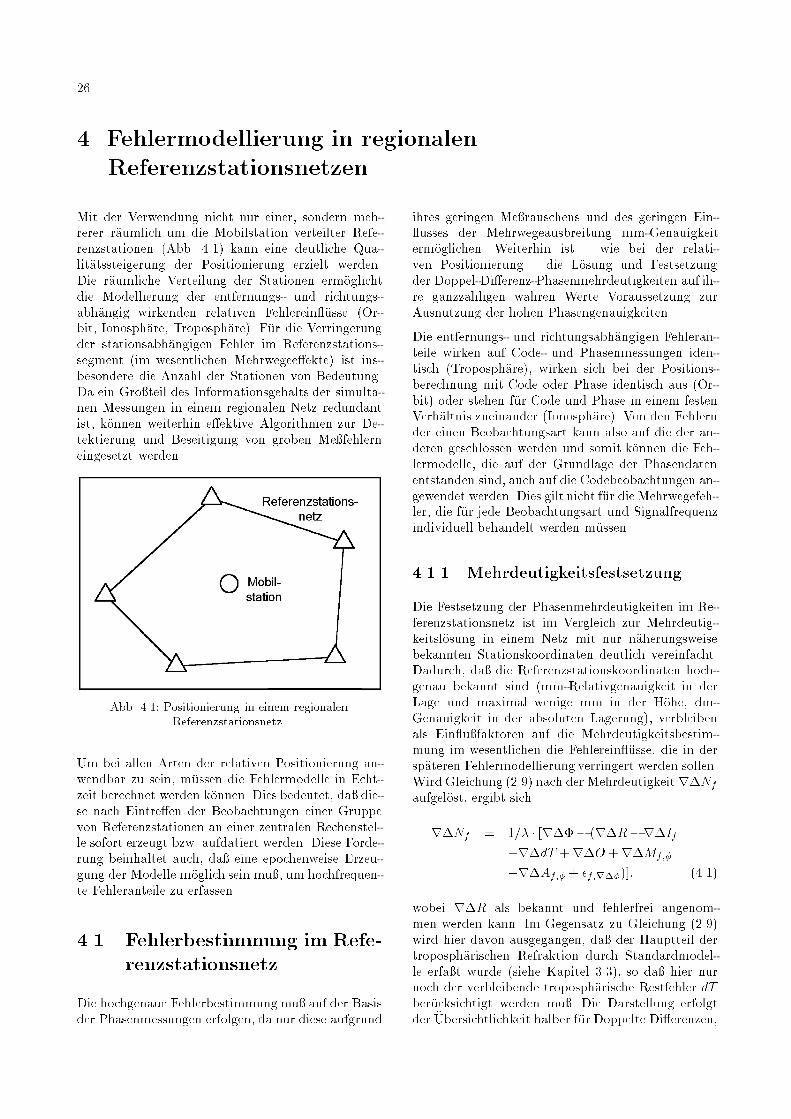
��
� Fehlermodellierung in regionalen
Referenzstationsnetzen
Mit der Verwendung nicht nur einer� sondern mehrerer r�aumlich um die Mobilstation verteilter Referenzstationen �Abb� ���� kann eine deutliche Qualit�atssteigerung der Positionierung erzielt werden�Die r�aumliche Verteilung der Stationen erm�oglichtdie Modellierung der entfernungs und richtungsabh�angig wirkenden relativen Fehlerein��usse �Orbit� Ionosph�are� Troposph�are�� F�ur die Verringerungder stationsabh�angigen Fehler im Referenzstationssegment �im wesentlichen Mehrwegee�ekte� ist insbesondere die Anzahl der Stationen von Bedeutung�Da ein Gro teil des Informationsgehalts der simultanen Messungen in einem regionalen Netz redundantist� k�onnen weiterhin e�ektive Algorithmen zur Detektierung und Beseitigung von groben Me fehlerneingesetzt werden�
����������
Abb� ���� Positionierung in einem regionalenReferenzstationsnetz�
Um bei allen Arten der relativen Positionierung anwendbar zu sein� m�ussen die Fehlermodelle in Echtzeit berechnet werden k�onnen� Dies bedeutet� da diese nach Eintre�en der Beobachtungen einer Gruppevon Referenzstationen an einer zentralen Rechenstelle sofort erzeugt bzw� aufdatiert werden� Diese Forderung beinhaltet auch� da eine epochenweise Erzeugung der Modelle m�oglich sein mu � um hochfrequente Fehleranteile zu erfassen�
��� Fehlerbestimmung im Refe�
renzstationsnetz
Die hochgenaue Fehlerbestimmung mu auf der Basisder Phasenmessungen erfolgen� da nur diese aufgrund
ihres geringen Me rauschens und des geringen Ein�usses der Mehrwegeausbreitung mmGenauigkeiterm�oglichen� Weiterhin ist � wie bei der relativen Positionierung � die L�osung und Festsetzungder DoppelDi�erenzPhasenmehrdeutigkeiten auf ihre ganzzahligen wahren Werte Voraussetzung zurAusnutzung der hohen Phasengenauigkeiten�
Die entfernungs und richtungsabh�angigen Fehleranteile wirken auf Code und Phasenmessungen identisch �Troposph�are�� wirken sich bei der Positionsberechnung mit Code oder Phase identisch aus �Orbit� oder stehen f�ur Code und Phase in einem festenVerh�altnis zueinander �Ionosph�are�� Von den Fehlernder einen Beobachtungsart kann also auf die der anderen geschlossen werden und somit k�onnen die Fehlermodelle� die auf der Grundlage der Phasendatenentstanden sind� auch auf die Codebeobachtungen angewendet werden� Dies gilt nicht f�ur die Mehrwegefehler� die f�ur jede Beobachtungsart und Signalfrequenzindividuell behandelt werden m�ussen�
����� Mehrdeutigkeitsfestsetzung
Die Festsetzung der Phasenmehrdeutigkeiten im Referenzstationsnetz ist im Vergleich zur Mehrdeutigkeitsl�osung in einem Netz mit nur n�aherungsweisebekannten Stationskoordinaten deutlich vereinfacht�Dadurch� da die Referenzstationskoordinaten hochgenau bekannt sind �mmRelativgenauigkeit in derLage und maximal wenige mm in der H�ohe� dmGenauigkeit in der absoluten Lagerung�� verbleibenals Ein�u faktoren auf die Mehrdeutigkeitsbestimmung im wesentlichen die Fehlerein��usse� die in dersp�ateren Fehlermodellierung verringert werden sollen�Wird Gleichung ���� nach der Mehrdeutigkeitr Nf
aufgel�ost� ergibt sich
r Nf � ��� � �r �� �r R�r If
�r dT �r O �r Mf��
�r Af�� � �f�r����� �����
wobei r R als bekannt und fehlerfrei angenommen werden kann� Im Gegensatz zu Gleichung ����wird hier davon ausgegangen� da der Hauptteil dertroposph�arischen Refraktion durch Standardmodelle erfa t wurde �siehe Kapitel ����� so da hier nurnoch der verbleibende troposph�arische Restfehler dTber�ucksichtigt werden mu � Die Darstellung erfolgtder �Ubersichtlichkeit halber f�ur Doppelte Di�erenzen�
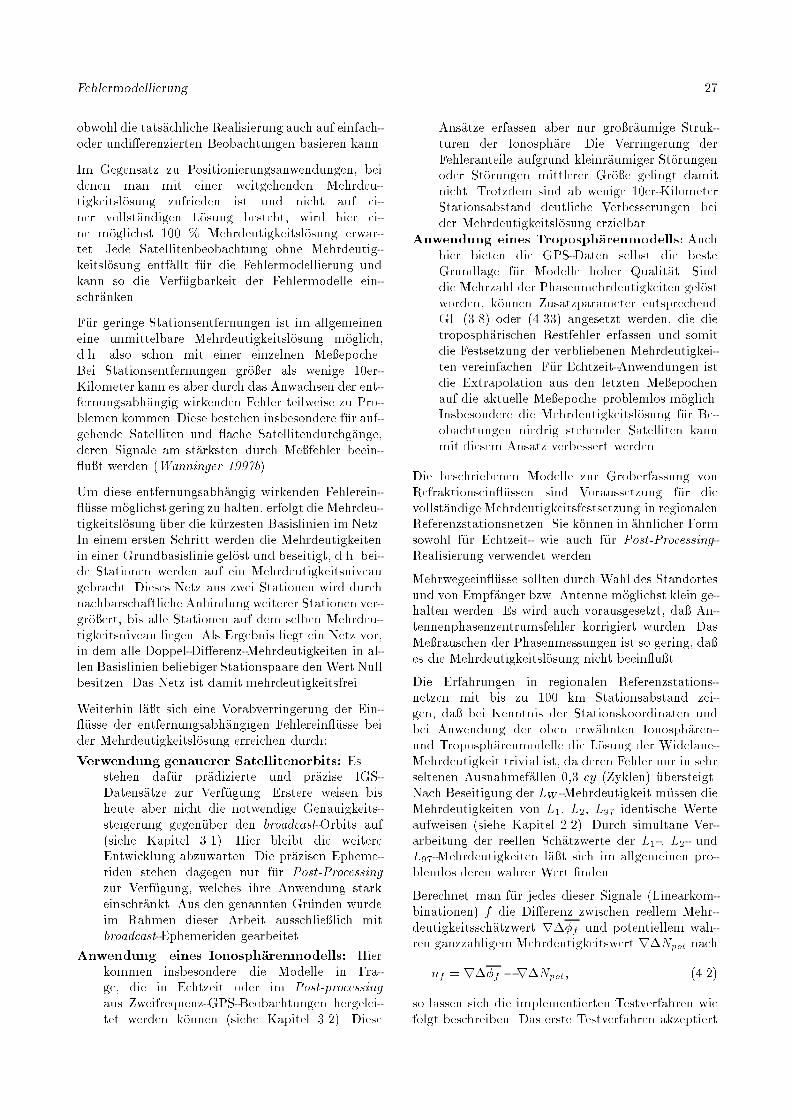
Fehlermodellierung ��
obwohl die tats�achliche Realisierung auch auf einfachoder undi�erenzierten Beobachtungen basieren kann�
Im Gegensatz zu Positionierungsanwendungen� beidenen man mit einer weitgehenden Mehrdeutigkeitsl�osung zufrieden ist und nicht auf einer vollst�andigen L�osung besteht� wird hier eine m�oglichst ��� � Mehrdeutigkeitsl�osung erwartet� Jede Satellitenbeobachtung ohne Mehrdeutigkeitsl�osung entf�allt f�ur die Fehlermodellierung undkann so die Verf�ugbarkeit der Fehlermodelle einschr�anken�
F�ur geringe Stationsentfernungen ist im allgemeineneine unmittelbare Mehrdeutigkeitsl�osung m�oglich�d�h� also schon mit einer einzelnen Me epoche�Bei Stationsentfernungen gr�o er als wenige ��erKilometer kann es aber durch das Anwachsen der entfernungsabh�angig wirkenden Fehler teilweise zu Problemen kommen�Diese bestehen insbesondere f�ur aufgehende Satelliten und �ache Satellitendurchg�ange�deren Signale am st�arksten durch Me fehler beein�u t werden �Wanninger ���b��
Um diese entfernungsabh�angig wirkenden Fehlerein��usse m�oglichst gering zu halten� erfolgt die Mehrdeutigkeitsl�osung �uber die k�urzesten Basislinien im Netz�In einem ersten Schritt werden die Mehrdeutigkeitenin einer Grundbasislinie gel�ost und beseitigt� d�h� beide Stationen werden auf ein Mehrdeutigkeitsniveaugebracht� Dieses Netz aus zwei Stationen wird durchnachbarschaftliche Anbindung weiterer Stationen vergr�o ert� bis alle Stationen auf dem selben Mehrdeutigkeitsniveau liegen� Als Ergebnis liegt ein Netz vor�in dem alle DoppelDi�erenzMehrdeutigkeiten in allen Basislinien beliebiger Stationspaare den Wert Nullbesitzen� Das Netz ist damit mehrdeutigkeitsfrei�
Weiterhin l�a t sich eine Vorabverringerung der Ein��usse der entfernungsabh�angigen Fehlerein��usse beider Mehrdeutigkeitsl�osung erreichen durch�
Verwendung genauerer Satellitenorbits� Esstehen daf�ur pr�adizierte und pr�azise IGSDatens�atze zur Verf�ugung� Erstere weisen bisheute aber nicht die notwendige Genauigkeitssteigerung gegen�uber den broadcastOrbits auf�siehe Kapitel ����� Hier bleibt die weitereEntwicklung abzuwarten� Die pr�azisen Ephemeriden stehen dagegen nur f�ur PostProcessingzur Verf�ugung� welches ihre Anwendung starkeinschr�ankt� Aus den genannten Gr�unden wurdeim Rahmen dieser Arbeit ausschlie lich mitbroadcastEphemeriden gearbeitet�
Anwendung eines Ionosph�arenmodells� Hierkommen insbesondere die Modelle in Frage� die in Echtzeit oder im Postprocessingaus ZweifrequenzGPSBeobachtungen hergeleitet werden k�onnen �siehe Kapitel ����� Diese
Ans�atze erfassen aber nur gro r�aumige Strukturen der Ionosph�are� Die Verringerung derFehleranteile aufgrund kleinr�aumiger St�orungenoder St�orungen mittlerer Gr�o e gelingt damitnicht� Trotzdem sind ab wenige ��erKilometerStationsabstand deutliche Verbesserungen beider Mehrdeutigkeitsl�osung erzielbar�
Anwendung eines Troposph�arenmodells� Auchhier bieten die GPSDaten selbst die besteGrundlage f�ur Modelle hoher Qualit�at� Sinddie Mehrzahl der Phasenmehrdeutigkeiten gel�ostworden� k�onnen Zusatzparameter entsprechendGl� ����� oder ������ angesetzt werden� die dietroposph�arischen Restfehler erfassen und somitdie Festsetzung der verbliebenen Mehrdeutigkeiten vereinfachen� F�ur EchtzeitAnwendungen istdie Extrapolation aus den letzten Me epochenauf die aktuelle Me epoche problemlos m�oglich�Insbesondere die Mehrdeutigkeitsl�osung f�ur Beobachtungen niedrig stehender Satelliten kannmit diesem Ansatz verbessert werden�
Die beschriebenen Modelle zur Groberfassung vonRefraktionsein��ussen sind Voraussetzung f�ur dievollst�andige Mehrdeutigkeitsfestsetzung in regionalenReferenzstationsnetzen� Sie k�onnen in �ahnlicher Formsowohl f�ur Echtzeit wie auch f�ur PostProcessingRealisierung verwendet werden�
Mehrwegeein��usse sollten durch Wahl des Standortesund von Empf�anger bzw� Antenne m�oglichst klein gehalten werden� Es wird auch vorausgesetzt� da Antennenphasenzentrumsfehler korrigiert wurden� DasMe rauschen der Phasenmessungen ist so gering� da es die Mehrdeutigkeitsl�osung nicht beein�u t�
Die Erfahrungen in regionalen Referenzstationsnetzen mit bis zu ��� km Stationsabstand zeigen� da bei Kenntnis der Stationskoordinaten undbei Anwendung der oben erw�ahnten Ionosph�arenund Troposph�arenmodelle die L�osung der WidelaneMehrdeutigkeit trivial ist� da deren Fehler nur in sehrseltenen Ausnahmef�allen ��� cy �Zyklen� �ubersteigt�Nach Beseitigung der LW Mehrdeutigkeit m�ussen dieMehrdeutigkeiten von L�� L�� L�� identische Werteaufweisen �siehe Kapitel ����� Durch simultane Verarbeitung der reellen Sch�atzwerte der L�� L� undL��Mehrdeutigkeiten l�a t sich im allgemeinen problemlos deren wahrer Wert �nden�
Berechnet man f�ur jedes dieser Signale �Linearkombinationen� f die Di�erenz zwischen reellem Mehrdeutigkeitssch�atzwert r �f und potentiellem wahren ganzzahligem Mehrdeutigkeitswert r Npot nach
nf � r �f �r Npot� �����
so lassen sich die implementierten Testverfahren wiefolgt beschreiben� Das erste Testverfahren akzeptiert
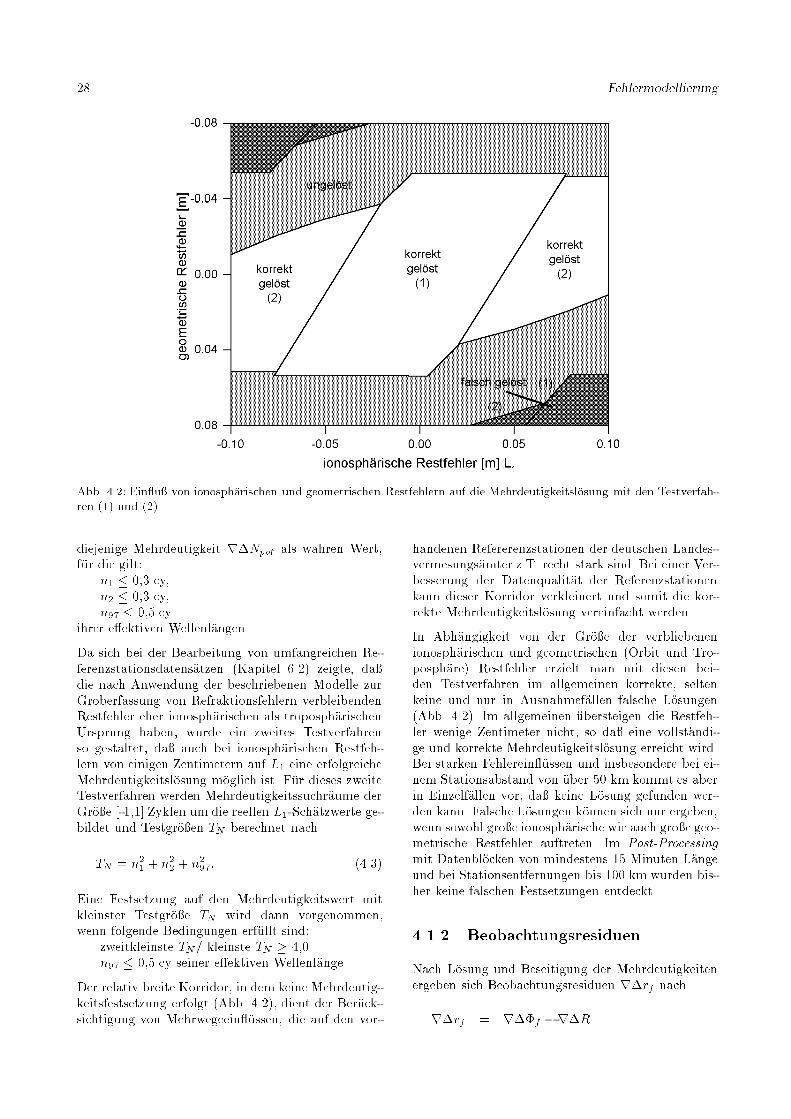
�� Fehlermodellierung
����������� ������
Abb� ���� Ein�u� von ionospharischen und geometrischen Restfehlern auf die Mehrdeutigkeitslosung mit den Testverfah�ren �� und ���
diejenige Mehrdeutigkeit r Npot als wahren Wert�f�ur die gilt�
n� � ��� cy�n� � ��� cy�n�� � ��� cy
ihrer e�ektiven Wellenl�angen�
Da sich bei der Bearbeitung von umfangreichen Referenzstationsdatens�atzen �Kapitel ���� zeigte� da die nach Anwendung der beschriebenen Modelle zurGroberfassung von Refraktionsfehlern verbleibendenRestfehler eher ionosph�arischen als troposph�arischenUrsprung haben� wurde ein zweites Testverfahrenso gestaltet� da auch bei ionosph�arischen Restfehlern von einigen Zentimetern auf L� eine erfolgreicheMehrdeutigkeitsl�osung m�oglich ist� F�ur dieses zweiteTestverfahren werden Mehrdeutigkeitssuchr�aume derGr�o e ����� Zyklen um die reellen L�Sch�atzwerte gebildet und Testgr�o en TN berechnet nach
TN � n�� � n�� � n���� �����
Eine Festsetzung auf den Mehrdeutigkeitswert mitkleinster Testgr�o e TN wird dann vorgenommen�wenn folgende Bedingungen erf�ullt sind�
zweitkleinste TN� kleinste TN � ���n�� � ��� cy seiner e�ektiven Wellenl�ange�
Der relativ breite Korridor� in dem keine Mehrdeutigkeitsfestsetzung erfolgt �Abb� ����� dient der Ber�ucksichtigung von Mehrwegeein��ussen� die auf den vor
handenen Refererenzstationen der deutschen Landesvermesungs�amter z�T� recht stark sind� Bei einer Verbesserung der Datenqualit�at der Referenzstationenkann dieser Korridor verkleinert und somit die korrekte Mehrdeutigkeitsl�osung vereinfacht werden�
In Abh�angigkeit von der Gr�o e der verbliebenenionosph�arischen und geometrischen �Orbit und Troposph�are� Restfehler erzielt man mit diesen beiden Testverfahren im allgemeinen korrekte� seltenkeine und nur in Ausnahmef�allen falsche L�osungen�Abb� ����� Im allgemeinen �ubersteigen die Restfehler wenige Zentimeter nicht� so da eine vollst�andige und korrekte Mehrdeutigkeitsl�osung erreicht wird�Bei starken Fehlerein��ussen und insbesondere bei einem Stationsabstand von �uber �� km kommt es aberin Einzelf�allen vor� da keine L�osung gefunden werden kann� Falsche L�osungen k�onnen sich nur ergeben�wenn sowohl gro e ionosph�arische wie auch gro e geometrische Restfehler auftreten� Im PostProcessingmit Datenbl�ocken von mindestens �� Minuten L�angeund bei Stationsentfernungen bis ��� km wurden bisher keine falschen Festsetzungen entdeckt�
����� Beobachtungsresiduen
Nach L�osung und Beseitigung der Mehrdeutigkeitenergeben sich Beobachtungsresiduen r rf nach
r rf � r �f �r R
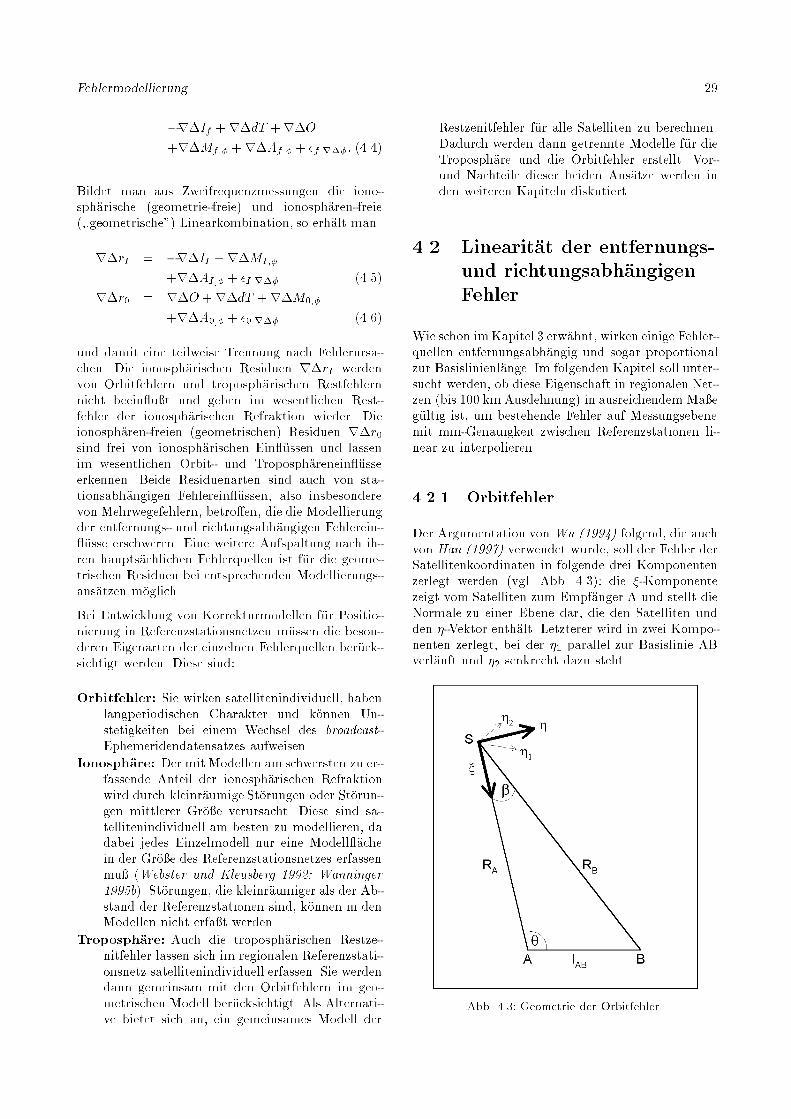
Fehlermodellierung �
� �r If �r dT �r O
�r Mf�� �r Af�� � �f�r��� �����
Bildet man aus Zweifrequenzmessungen die ionosph�arische �geometriefreie� und ionosph�arenfreie���geometrische�� Linearkombination� so erh�alt man
r rI � �r II �r MI��
�r AI�� � �I�r�� �����
r r� � r O�r dT �r M���
�r A��� � ���r�� �����
und damit eine teilweise Trennung nach Fehlerursachen� Die ionosph�arischen Residuen r rI werdenvon Orbitfehlern und troposph�arischen Restfehlernnicht beein�u t und geben im wesentlichen Restfehler der ionosph�arischen Refraktion wieder� Dieionosph�arenfreien �geometrischen� Residuen r r�sind frei von ionosph�arischen Ein��ussen und lassenim wesentlichen Orbit und Troposph�arenein��usseerkennen� Beide Residuenarten sind auch von stationsabh�angigen Fehlerein��ussen� also insbesonderevon Mehrwegefehlern� betro�en� die die Modellierungder entfernungs und richtungsabh�angigen Fehlerein��usse erschweren� Eine weitere Aufspaltung nach ihren haupts�achlichen Fehlerquellen ist f�ur die geometrischen Residuen bei entsprechenden Modellierungsans�atzen m�oglich�
Bei Entwicklung von Korrekturmodellen f�ur Positionierung in Referenzstationsnetzen m�ussen die besonderen Eigenarten der einzelnen Fehlerquellen ber�ucksichtigt werden� Diese sind�
Orbitfehler� Sie wirken satellitenindividuell� habenlangperiodischen Charakter und k�onnen Unstetigkeiten bei einem Wechsel des broadcastEphemeridendatensatzes aufweisen�
Ionosph�are� Der mit Modellen am schwersten zu erfassende Anteil der ionosph�arischen Refraktionwird durch kleinr�aumige St�orungen oder St�orungen mittlerer Gr�o e verursacht� Diese sind satellitenindividuell am besten zu modellieren� dadabei jedes Einzelmodell nur eine Modell��achein der Gr�o e des Referenzstationsnetzes erfassenmu �Webster und Kleusberg ����� Wanninger����b�� St�orungen� die kleinr�aumiger als der Abstand der Referenzstationen sind� k�onnen in denModellen nicht erfa t werden�
Troposph�are� Auch die troposph�arischen Restzenitfehler lassen sich im regionalen Referenzstationsnetz satellitenindividuell erfassen� Sie werdendann gemeinsam mit den Orbitfehlern im geometrischen Modell ber�ucksichtigt� Als Alternative bietet sich an� ein gemeinsames Modell der
Restzenitfehler f�ur alle Satelliten zu berechnen�Dadurch werden dann getrennte Modelle f�ur dieTroposph�are und die Orbitfehler erstellt� Vorund Nachteile dieser beiden Ans�atze werden inden weiteren Kapiteln diskutiert�
��� Linearit�at der entfernungs�
und richtungsabh�angigen
Fehler
Wie schon imKapitel � erw�ahnt� wirken einige Fehlerquellen entfernungsabh�angig und sogar proportionalzur Basislinienl�ange� Im folgenden Kapitel soll untersucht werden� ob diese Eigenschaft in regionalen Netzen �bis ��� km Ausdehnung� in ausreichendem Ma eg�ultig ist� um bestehende Fehler auf Messungsebenemit mmGenauigkeit zwischen Referenzstationen linear zu interpolieren�
����� Orbitfehler
Der Argumentation von Wu ������ folgend� die auchvon Han ����� verwendet wurde� soll der Fehler derSatellitenkoordinaten in folgende drei Komponentenzerlegt werden �vgl� Abb� ����� die �Komponentezeigt vom Satelliten zum Empf�anger A und stellt dieNormale zu einer Ebene dar� die den Satelliten undden �Vektor enth�alt� Letzterer wird in zwei Komponenten zerlegt� bei der �� parallel zur Basislinie ABverl�auft und �� senkrecht dazu steht�
����������
Abb� ���� Geometrie der Orbitfehler�
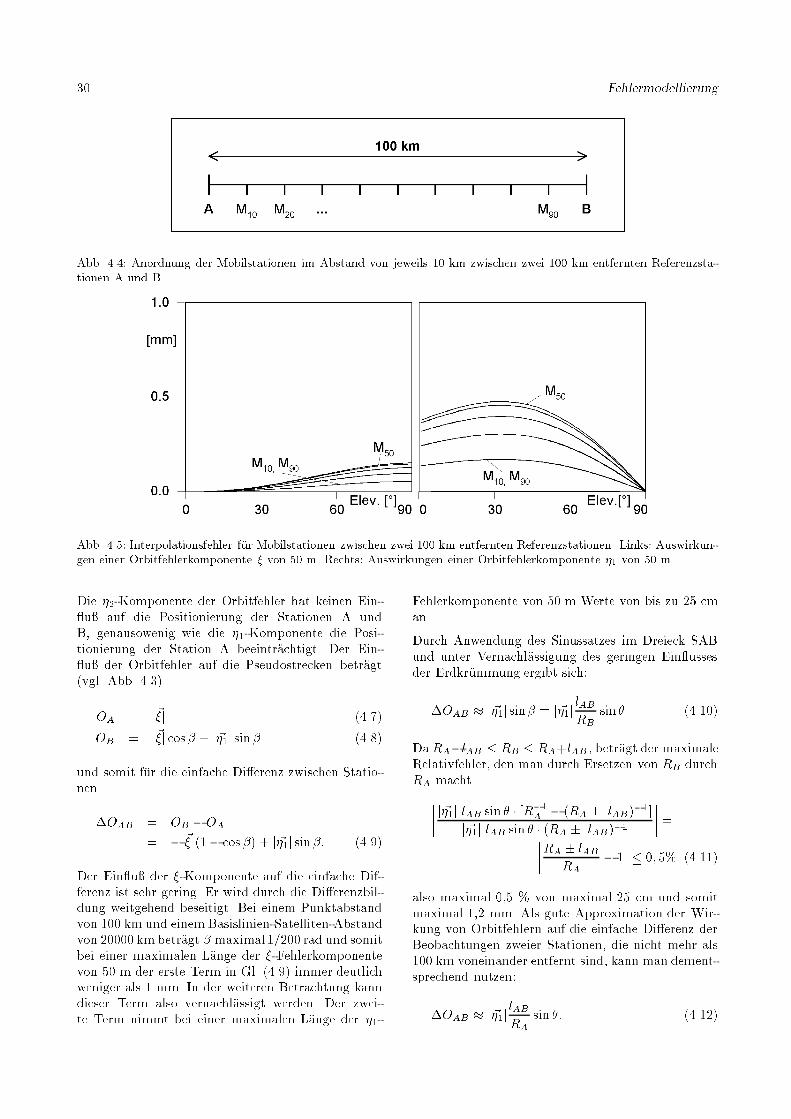
�� Fehlermodellierung
���������Abb� ���� Anordnung der Mobilstationen im Abstand von jeweils �� km zwischen zwei ��� km entfernten Referenzsta�tionen A und B�
����������� ����
Abb� ���� Interpolationsfehler fur Mobilstationen zwischen zwei ��� km entfernten Referenzstationen� Links� Auswirkun�gen einer Orbitfehlerkomponente � von �� m� Rechts� Auswirkungen einer Orbitfehlerkomponente �� von �� m�
Die ��Komponente der Orbitfehler hat keinen Ein�u auf die Positionierung der Stationen A undB� genausowenig wie die ��Komponente die Positionierung der Station A beeintr�achtigt� Der Ein�u der Orbitfehler auf die Pseudostrecken betr�agt�vgl� Abb� ����
OA � j��j �����
OB � j��j cos � j���j sin �����
und somit f�ur die einfache Di�erenz zwischen Stationen
OAB � OB �OA
� �j��j��� cos � � j���j sin � ����
Der Ein�u der �Komponente auf die einfache Differenz ist sehr gering� Er wird durch die Di�erenzbildung weitgehend beseitigt� Bei einem Punktabstandvon ��� km und einem BasislinienSatellitenAbstandvon ����� km betr�agt maximal ����� rad und somitbei einer maximalen L�ange der �Fehlerkomponentevon �� m der erste Term in Gl� ���� immer deutlichweniger als � mm� In der weiteren Betrachtung kanndieser Term also vernachl�assigt werden� Der zweite Term nimmt bei einer maximalen L�ange der ��
Fehlerkomponente von �� m Werte von bis zu �� cman�
Durch Anwendung des Sinussatzes im Dreieck SABund unter Vernachl�assigung des geringen Ein�ussesder Erdkr�ummung ergibt sich�
OAB � j���j sin � j���jlABRB
sin � ������
DaRA�lAB � RB � RA�lAB � betr�agt der maximaleRelativfehler� den man durch Ersetzen von RB durchRA macht
���� j���j lAB sin � � �R��A � �RA � lAB�
���
j���j lAB sin � � �RA � lAB���
���� �����RA � lABRA
� �
���� � �� �� ������
also maximal ��� � von maximal �� cm und somitmaximal ��� mm� Als gute Approximation der Wirkung von Orbitfehlern auf die einfache Di�erenz derBeobachtungen zweier Stationen� die nicht mehr als��� km voneinander entfernt sind� kann man dementsprechend nutzen�
OAB � j���jlABRA
sin �� ������
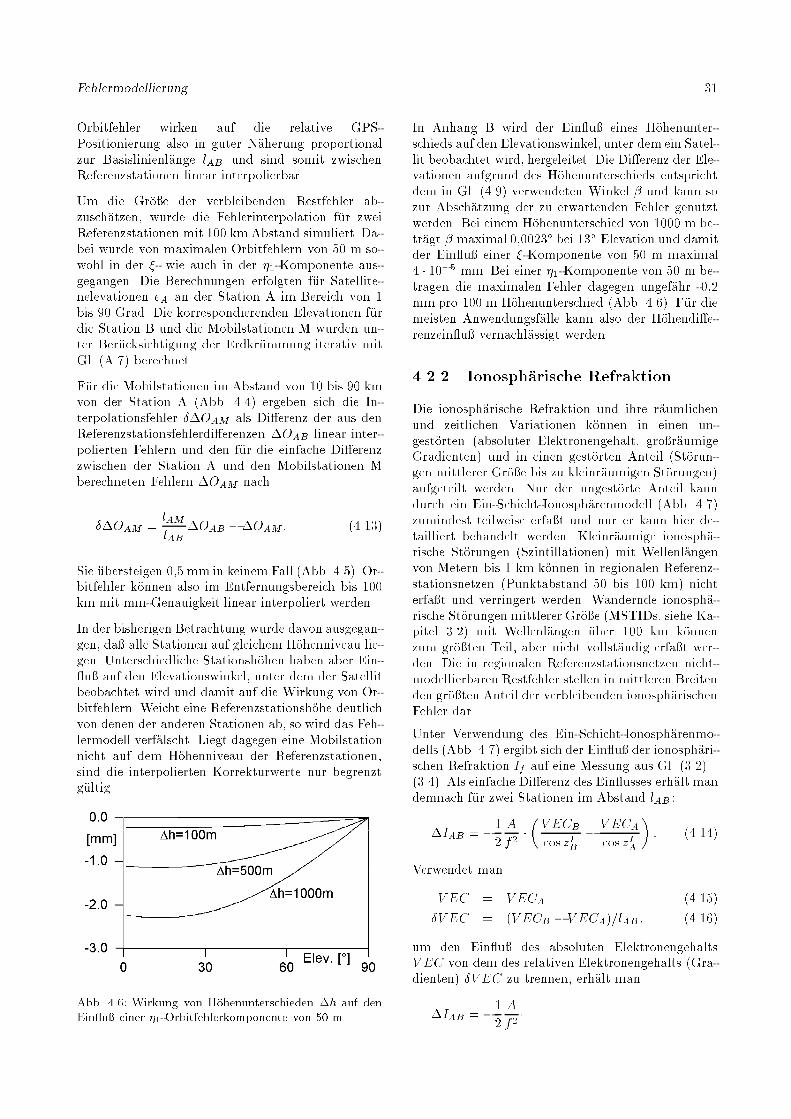
Fehlermodellierung ��
Orbitfehler wirken auf die relative GPSPositionierung also in guter N�aherung proportionalzur Basislinienl�ange lAB und sind somit zwischenReferenzstationen linear interpolierbar�
Um die Gr�o e der verbleibenden Restfehler abzusch�atzen� wurde die Fehlerinterpolation f�ur zweiReferenzstationen mit ��� km Abstand simuliert� Dabei wurde von maximalen Orbitfehlern von �� m sowohl in der � wie auch in der ��Komponente ausgegangen� Die Berechnungen erfolgten f�ur Satellitenelevationen eA an der Station A im Bereich von �bis � Grad� Die korrespondierenden Elevationen f�urdie Station B und die Mobilstationen M wurden unter Ber�ucksichtigung der Erdkr�ummung iterativ mitGl� �A��� berechnet�
F�ur die Mobilstationen im Abstand von �� bis � kmvon der Station A �Abb� ���� ergeben sich die Interpolationsfehler � OAM als Di�erenz der aus denReferenzstationsfehlerdi�erenzen OAB linear interpolierten Fehlern und den f�ur die einfache Di�erenzzwischen der Station A und den Mobilstationen Mberechneten Fehlern OAM nach
� OAM �lAMlAB
OAB � OAM � ������
Sie �ubersteigen ��� mm in keinem Fall �Abb� ����� Orbitfehler k�onnen also im Entfernungsbereich bis ���km mit mmGenauigkeit linear interpoliert werden�
In der bisherigen Betrachtung wurde davon ausgegangen� da alle Stationen auf gleichem H�ohenniveau liegen� Unterschiedliche Stationsh�ohen haben aber Ein�u auf den Elevationswinkel� unter dem der Satellitbeobachtet wird und damit auf die Wirkung von Orbitfehlern� Weicht eine Referenzstationsh�ohe deutlichvon denen der anderen Stationen ab� so wird das Fehlermodell verf�alscht� Liegt dagegen eine Mobilstationnicht auf dem H�ohenniveau der Referenzstationen�sind die interpolierten Korrekturwerte nur begrenztg�ultig�
��������
Abb� ���� Wirkung von Hohenunterschieden �h auf denEin�u� einer ���Orbitfehlerkomponente von �� m�
In Anhang B wird der Ein�u eines H�ohenunterschieds auf den Elevationswinkel� unter dem ein Satellit beobachtet wird� hergeleitet� Die Di�erenz der Elevationen aufgrund des H�ohenunterschieds entsprichtdem in Gl� ���� verwendeten Winkel und kann sozur Absch�atzung der zu erwartenden Fehler genutztwerden� Bei einem H�ohenunterschied von ���� m betr�agt maximal ������� bei ��� Elevation und damitder Ein�u einer �Komponente von �� m maximal� � ���� mm� Bei einer ��Komponente von �� m betragen die maximalen Fehler dagegen ungef�ahr ���mm pro ��� m H�ohenunterschied �Abb� ����� F�ur diemeisten Anwendungsf�alle kann also der H�ohendi�erenzein�u vernachl�assigt werden�
����� Ionosph�arische Refraktion
Die ionosph�arische Refraktion und ihre r�aumlichenund zeitlichen Variationen k�onnen in einen ungest�orten �absoluter Elektronengehalt� gro r�aumigeGradienten� und in einen gest�orten Anteil �St�orungen mittlerer Gr�o e bis zu kleinr�aumigen St�orungen�aufgeteilt werden� Nur der ungest�orte Anteil kanndurch ein EinSchichtIonosph�arenmodell �Abb� ����zumindest teilweise erfa t und nur er kann hier detailliert behandelt werden� Kleinr�aumige ionosph�arische St�orungen �Szintillationen� mit Wellenl�angenvon Metern bis � km k�onnen in regionalen Referenzstationsnetzen �Punktabstand �� bis ��� km� nichterfa t und verringert werden� Wandernde ionosph�arische St�orungen mittlerer Gr�o e �MSTIDs� siehe Kapitel ���� mit Wellenl�angen �uber ��� km k�onnenzum gr�o ten Teil� aber nicht vollst�andig erfa t werden� Die in regionalen Referenzstationsnetzen nichtmodellierbaren Restfehler stellen in mittleren Breitenden gr�o ten Anteil der verbleibenden ionosph�arischenFehler dar�
Unter Verwendung des EinSchichtIonosph�arenmodells �Abb� ���� ergibt sich der Ein�u der ionosph�arischen Refraktion If auf eine Messung aus Gl� ����� ������� Als einfache Di�erenz des Ein�usses erh�alt mandemnach f�ur zwei Stationen im Abstand lAB �
IAB � ��
�
A
f��
�V ECB
cos zIB�V ECA
cos zIA
�� ������
Verwendet man
V EC � V ECA ������
�V EC � �V ECB � V ECA��lAB � ������
um den Ein�u des absoluten ElektronengehaltsV EC von dem des relativen Elektronengehalts �Gradienten� �V EC zu trennen� erh�alt man
IAB � ��
�
A
f��
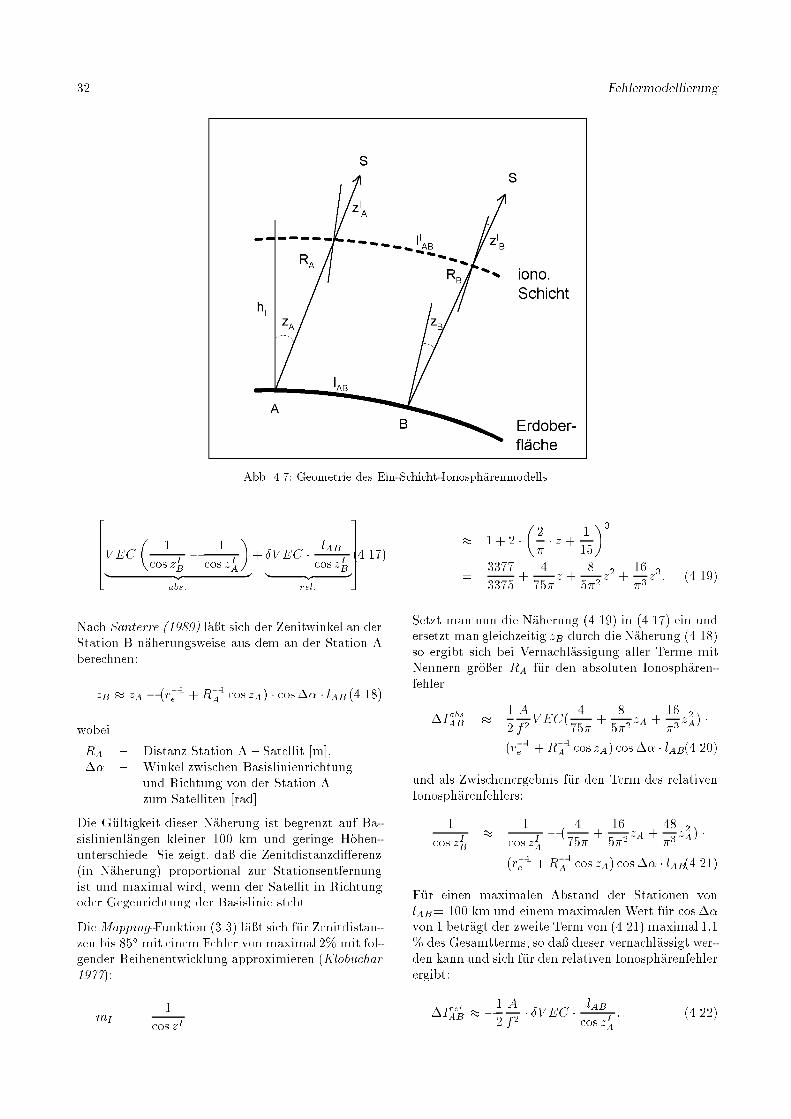
�� Fehlermodellierung
����������� ������
Abb� ���� Geometrie des Ein�Schicht�Ionospharenmodells�
�����V EC
��
cos zIB�
�
cos zIA
�� �z �
abs�
� �V EC �lAB
cos zIB� �z �rel�
�������
Nach Santerre ������ l�a t sich der Zenitwinkel an derStation B n�aherungsweise aus dem an der Station Aberechnen�
zB � zA � �r��e � R��
A cos zA� � cos � lAB ������
wobei
RA � Distanz Station A � Satellit �m�� � Winkel zwischen Basislinienrichtung
und Richtung von der Station Azum Satelliten �rad��
Die G�ultigkeit dieser N�aherung ist begrenzt auf Basislinienl�angen kleiner ��� km und geringe H�ohenunterschiede� Sie zeigt� da die Zenitdistanzdi�erenz�in N�aherung� proportional zur Stationsentfernungist und maximal wird� wenn der Satellit in Richtungoder Gegenrichtung der Basislinie steht�
DieMappingFunktion ����� l�a t sich f�ur Zenitdistanzen bis ��� mit einem Fehler von maximal �� mit folgender Reihenentwicklung approximieren �Klobuchar����
mI ��
cos zI
� � � � �
��
� z �
�
��
��
�����
������
��z �
�
��z� �
��
�z�� �����
Setzt man nun die N�aherung ����� in ������ ein undersetzt man gleichzeitig zB durch die N�aherung ������so ergibt sich bei Vernachl�assigung aller Terme mitNennern gr�o er RA f�ur den absoluten Ionosph�arenfehler
Iabs�AB ��
�
A
f�V EC�
�
����
��zA �
��
�z�A� �
�r��e �R��A cos zA� cos � lAB������
und als Zwischenergebnis f�ur den Term des relativenIonosph�arenfehlers�
�
cos zIB�
�
cos zIA� �
�
�����
��zA �
��
�z�A� �
�r��e �R��A cos zA� cos � lAB������
F�ur einen maximalen Abstand der Stationen vonlAB� ��� km und einem maximalen Wert f�ur cos von � betr�agt der zweite Term von ������ maximal ���� des Gesamtterms� so da dieser vernachl�assigt werden kann und sich f�ur den relativen Ionosph�arenfehlerergibt�
Irel�AB � ��
�
A
f�� �V EC �
lAB
cos zIA� ������
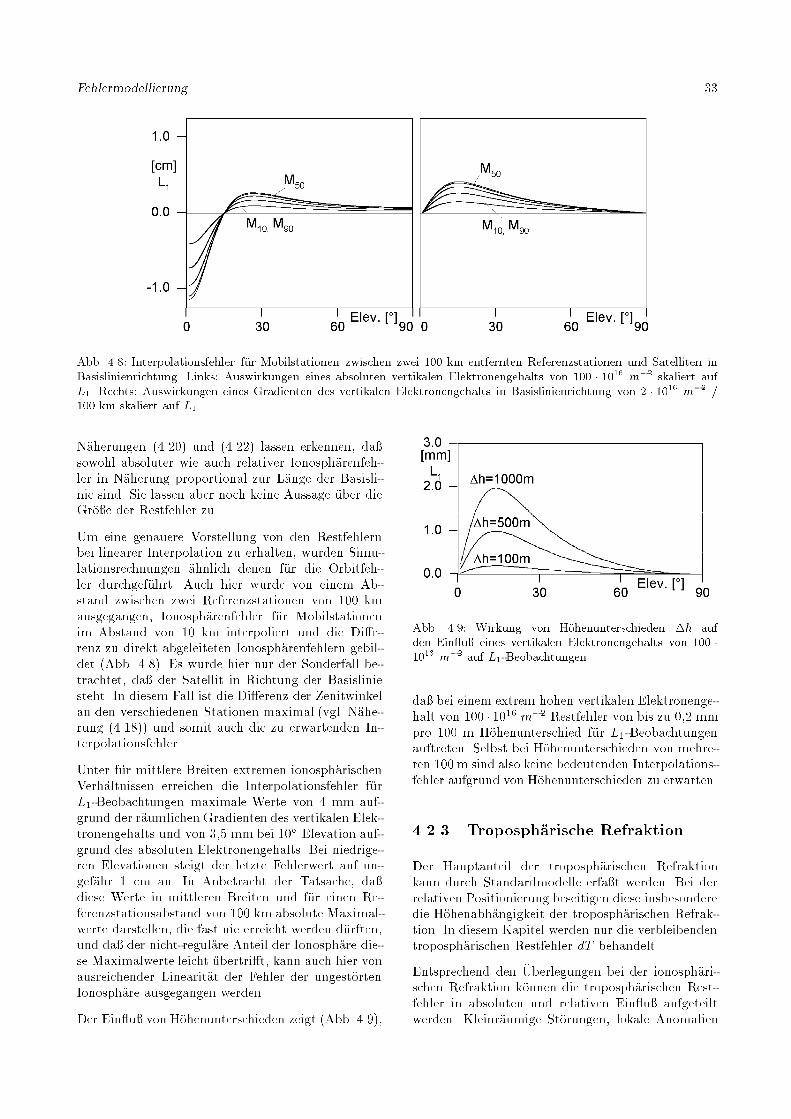
Fehlermodellierung ��
����������� ����
Abb� ���� Interpolationsfehler fur Mobilstationen zwischen zwei ��� km entfernten Referenzstationen und Satelliten inBasislinienrichtung� Links� Auswirkungen eines absoluten vertikalen Elektronengehalts von ��� � ���� m�� skaliert aufL�� Rechts� Auswirkungen eines Gradienten des vertikalen Elektronengehalts in Basislinienrichtung von � � ���� m�� ���� km skaliert auf L��
N�aherungen ������ und ������ lassen erkennen� da sowohl absoluter wie auch relativer Ionosph�arenfehler in N�aherung proportional zur L�ange der Basislinie sind� Sie lassen aber noch keine Aussage �uber dieGr�o e der Restfehler zu�
Um eine genauere Vorstellung von den Restfehlernbei linearer Interpolation zu erhalten� wurden Simulationsrechnungen �ahnlich denen f�ur die Orbitfehler durchgef�uhrt� Auch hier wurde von einem Abstand zwischen zwei Referenzstationen von ��� kmausgegangen� Ionosph�arenfehler f�ur Mobilstationenim Abstand von �� km interpoliert und die Di�erenz zu direkt abgeleiteten Ionosph�arenfehlern gebildet �Abb� ����� Es wurde hier nur der Sonderfall betrachtet� da der Satellit in Richtung der Basisliniesteht� In diesem Fall ist die Di�erenz der Zenitwinkelan den verschiedenen Stationen maximal �vgl� N�aherung ������� und somit auch die zu erwartenden Interpolationsfehler�
Unter f�ur mittlere Breiten extremen ionosph�arischenVerh�altnissen erreichen die Interpolationsfehler f�urL�Beobachtungen maximale Werte von � mm aufgrund der r�aumlichen Gradienten des vertikalen Elektronengehalts und von ��� mm bei ��� Elevation aufgrund des absoluten Elektronengehalts� Bei niedrigeren Elevationen steigt der letzte Fehlerwert auf ungef�ahr � cm an� In Anbetracht der Tatsache� da diese Werte in mittleren Breiten und f�ur einen Referenzstationsabstand von ��� km absolute Maximalwerte darstellen� die fast nie erreicht werden d�urften�und da der nichtregul�are Anteil der Ionosph�are diese Maximalwerte leicht �ubertri�t� kann auch hier vonausreichender Linearit�at der Fehler der ungest�ortenIonosph�are ausgegangen werden�
Der Ein�u von H�ohenunterschieden zeigt �Abb� ����
��������
Abb� ���� Wirkung von Hohenunterschieden �h aufden Ein�u� eines vertikalen Elektronengehalts von ��� �
���� m�� auf L��Beobachtungen�
da bei einem extrem hohen vertikalen Elektronengehalt von ��� � ��� m�� Restfehler von bis zu ��� mmpro ��� m H�ohenunterschied f�ur L�Beobachtungenauftreten� Selbst bei H�ohenunterschieden von mehreren ��� m sind also keine bedeutenden Interpolationsfehler aufgrund von H�ohenunterschieden zu erwarten�
����� Troposph�arische Refraktion
Der Hauptanteil der troposph�arischen Refraktionkann durch Standardmodelle erfa t werden� Bei derrelativen Positionierung beseitigen diese insbesonderedie H�ohenabh�angigkeit der troposph�arischen Refraktion� In diesem Kapitel werden nur die verbleibendentroposph�arischen Restfehler dT behandelt�
Entsprechend den �Uberlegungen bei der ionosph�arischen Refraktion k�onnen die troposph�arischen Restfehler in absoluten und relativen Ein�u aufgeteiltwerden� Kleinr�aumige St�orungen� lokale Anomalien
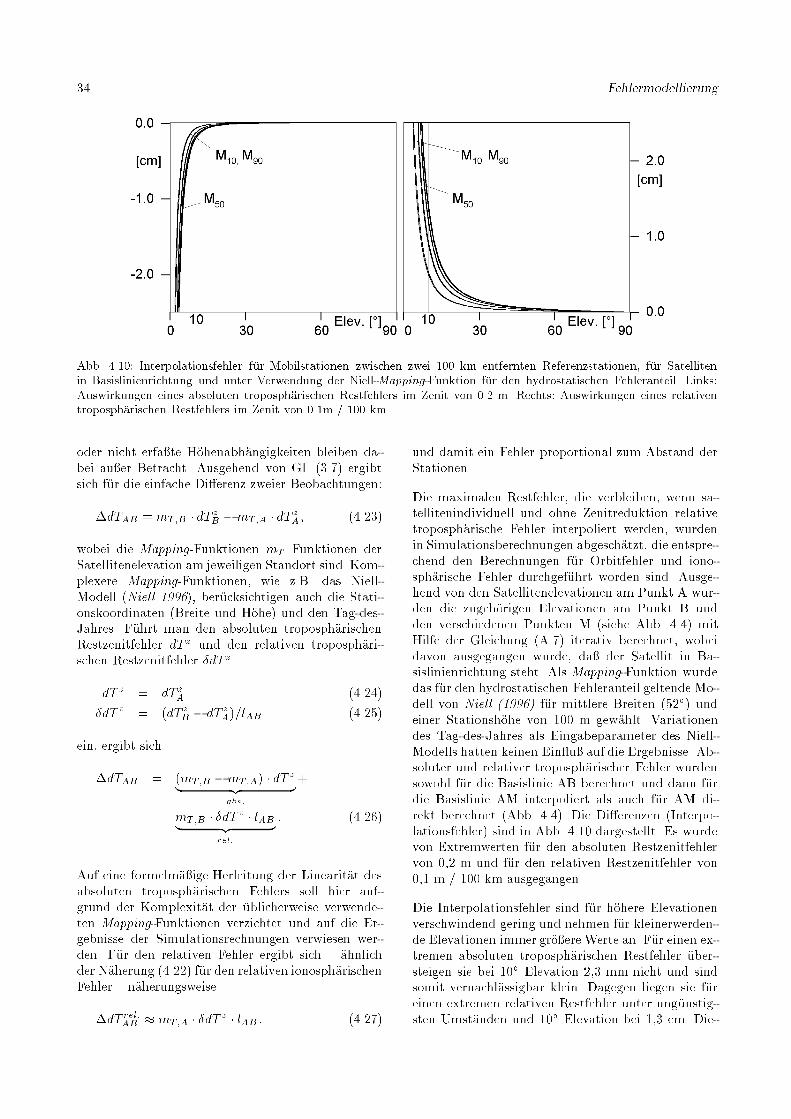
�� Fehlermodellierung
����������� ����
Abb� ����� Interpolationsfehler fur Mobilstationen zwischen zwei ��� km entfernten Referenzstationen� fur Satellitenin Basislinienrichtung und unter Verwendung der Niell�Mapping�Funktion fur den hydrostatischen Fehleranteil� Links�Auswirkungen eines absoluten tropospharischen Restfehlers im Zenit von ��� m� Rechts� Auswirkungen eines relativentropospharischen Restfehlers im Zenit von ���m � ��� km�
oder nicht erfa te H�ohenabh�angigkeiten bleiben dabei au er Betracht� Ausgehend von Gl� ����� ergibtsich f�ur die einfache Di�erenz zweier Beobachtungen�
dTAB � mT�B � dTzB �mT�A � dT
zA� ������
wobei die MappingFunktionen mT Funktionen derSatellitenelevation am jeweiligen Standort sind� Komplexere MappingFunktionen� wie z�B� das NiellModell �Niell ������ ber�ucksichtigen auch die Stationskoordinaten �Breite und H�ohe� und den TagdesJahres� F�uhrt man den absoluten troposph�arischenRestzenitfehler dT z und den relativen troposph�arischen Restzenitfehler �dT z
dT z � dT zA ������
�dT z � �dT zB � dT z
A��lAB ������
ein� ergibt sich
dTAB � �mT�B �mT�A� � dTz� �z �
abs�
�
mT�B � �dTz � lAB� �z �
rel�
� ������
Auf eine formelm�a ige Herleitung der Linearit�at desabsoluten troposph�arischen Fehlers soll hier aufgrund der Komplexit�at der �ublicherweise verwendeten MappingFunktionen verzichtet und auf die Ergebnisse der Simulationsrechnungen verwiesen werden� F�ur den relativen Fehler ergibt sich � �ahnlichder N�aherung ������ f�ur den relativen ionosph�arischenFehler � n�aherungsweise
dT rel�AB � mT�A � �dT
z � lAB � ������
und damit ein Fehler proportional zum Abstand derStationen�
Die maximalen Restfehler� die verbleiben� wenn satellitenindividuell und ohne Zenitreduktion relativetroposph�arische Fehler interpoliert werden� wurdenin Simulationsberechnungen abgesch�atzt� die entsprechend den Berechnungen f�ur Orbitfehler und ionosph�arische Fehler durchgef�uhrt worden sind� Ausgehend von den Satellitenelevationen am Punkt A wurden die zugeh�origen Elevationen am Punkt B undden verschiedenen Punkten M �siehe Abb� ���� mitHilfe der Gleichung �A��� iterativ berechnet� wobeidavon ausgegangen wurde� da der Satellit in Basislinienrichtung steht� Als MappingFunktion wurdedas f�ur den hydrostatischen Fehleranteil geltende Modell von Niell ������ f�ur mittlere Breiten ����� undeiner Stationsh�ohe von ��� m gew�ahlt� Variationendes TagdesJahres als Eingabeparameter des NiellModells hatten keinen Ein�u auf die Ergebnisse� Absoluter und relativer troposph�arischer Fehler wurdensowohl f�ur die Basislinie AB berechnet und dann f�urdie Basislinie AM interpoliert als auch f�ur AM direkt berechnet �Abb� ����� Die Di�erenzen �Interpolationsfehler� sind in Abb� ���� dargestellt� Es wurdevon Extremwerten f�ur den absoluten Restzenitfehlervon ��� m und f�ur den relativen Restzenitfehler von��� m � ��� km ausgegangen�
Die Interpolationsfehler sind f�ur h�ohere Elevationenverschwindend gering und nehmen f�ur kleinerwerdende Elevationen immer gr�o ere Werte an� F�ur einen extremen absoluten troposph�arischen Restfehler �ubersteigen sie bei ��� Elevation ��� mm nicht und sindsomit vernachl�assigbar klein� Dagegen liegen sie f�ureinen extremen relativen Restfehler unter ung�unstigsten Umst�anden und ��� Elevation bei ��� cm� Die
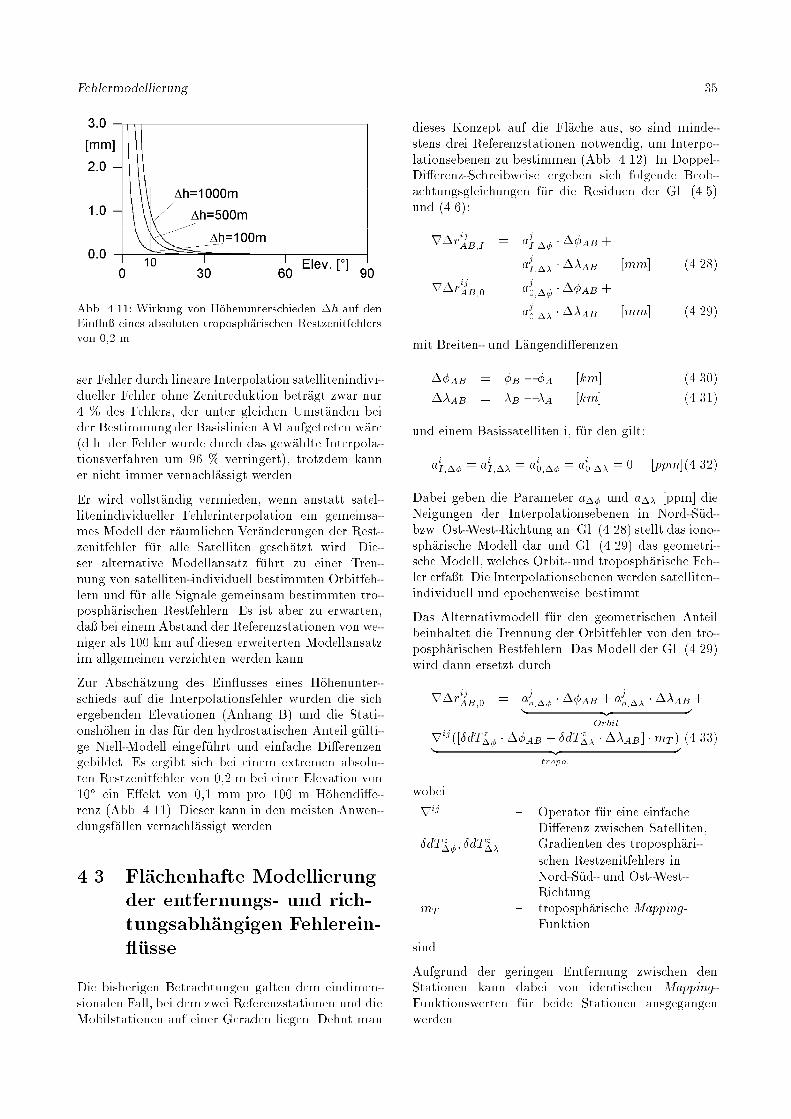
Fehlermodellierung ��
��������
Abb� ����� Wirkung von Hohenunterschieden �h auf denEin�u� eines absoluten tropospharischen Restzenitfehlersvon ��� m�
ser Fehler durch lineare Interpolation satellitenindividueller Fehler ohne Zenitreduktion betr�agt zwar nur� � des Fehlers� der unter gleichen Umst�anden beider Bestimmung der Basislinien AM aufgetreten w�are�d�h� der Fehler wurde durch das gew�ahlte Interpolationsverfahren um � � verringert�� trotzdem kanner nicht immer vernachl�assigt werden�
Er wird vollst�andig vermieden� wenn anstatt satellitenindividueller Fehlerinterpolation ein gemeinsames Modell der r�aumlichen Ver�anderungen der Restzenitfehler f�ur alle Satelliten gesch�atzt wird� Dieser alternative Modellansatz f�uhrt zu einer Trennung von satellitenindividuell bestimmten Orbitfehlern und f�ur alle Signale gemeinsam bestimmten troposph�arischen Restfehlern� Es ist aber zu erwarten�da bei einem Abstand der Referenzstationen von weniger als ��� km auf diesen erweiterten Modellansatzim allgemeinen verzichten werden kann�
Zur Absch�atzung des Ein�usses eines H�ohenunterschieds auf die Interpolationsfehler wurden die sichergebenden Elevationen �Anhang B� und die Stationsh�ohen in das f�ur den hydrostatischen Anteil g�ultige NiellModell eingef�uhrt und einfache Di�erenzengebildet� Es ergibt sich bei einem extremen absoluten Restzenitfehler von ��� m bei einer Elevation von��� ein E�ekt von ��� mm pro ��� m H�ohendi�erenz �Abb� ������ Dieser kann in den meisten Anwendungsf�allen vernachl�assigt werden�
��� Fl�achenhafte Modellierung
der entfernungs� und rich�
tungsabh�angigen Fehlerein�
��usse
Die bisherigen Betrachtungen galten dem eindimensionalen Fall� bei dem zwei Referenzstationen und dieMobilstationen auf einer Geraden liegen� Dehnt man
dieses Konzept auf die Fl�ache aus� so sind mindestens drei Referenzstationen notwendig� um Interpolationsebenen zu bestimmen �Abb� ������ In DoppelDi�erenzSchreibweise ergeben sich folgende Beobachtungsgleichungen f�ur die Residuen der Gl� �����und ������
r rijAB�I � ajI��� � �AB �
ajI��� � �AB �mm� ������
r rijAB�� � aj���� � �AB �
aj���� � �AB �mm� �����
mit Breiten und L�angendi�erenzen
�AB � �B � �A �km� ������
�AB � �B � �A �km� ������
und einem Basissatelliten i� f�ur den gilt�
aiI��� � aiI��� � ai���� � ai
���� � � �ppm��������
Dabei geben die Parameter a�� und a�� �ppm� dieNeigungen der Interpolationsebenen in NordS�udbzw� OstWestRichtung an� Gl� ������ stellt das ionosph�arische Modell dar und Gl� ����� das geometrische Modell� welches Orbit und troposph�arische Fehler erfa t� Die Interpolationsebenen werden satellitenindividuell und epochenweise bestimmt�
Das Alternativmodell f�ur den geometrischen Anteilbeinhaltet die Trennung der Orbitfehler von den troposph�arischen Restfehlern� Das Modell der Gl� �����wird dann ersetzt durch
r rijAB�� � ajo��� � �AB � ajo��� � �AB� �z �
Orbit
�
rij���dT z�� � �AB � �dT z
�� � �AB � �mT �� �z �tropo�
������
wobei
rij � Operator f�ur eine einfacheDi�erenz zwischen Satelliten�
�dT z��� �dT
z�� � Gradienten des troposph�ari
schen Restzenitfehlers inNordS�ud und OstWestRichtung
mT � troposph�arische MappingFunktion
sind�
Aufgrund der geringen Entfernung zwischen denStationen kann dabei von identischen MappingFunktionswerten f�ur beide Stationen ausgegangenwerden�
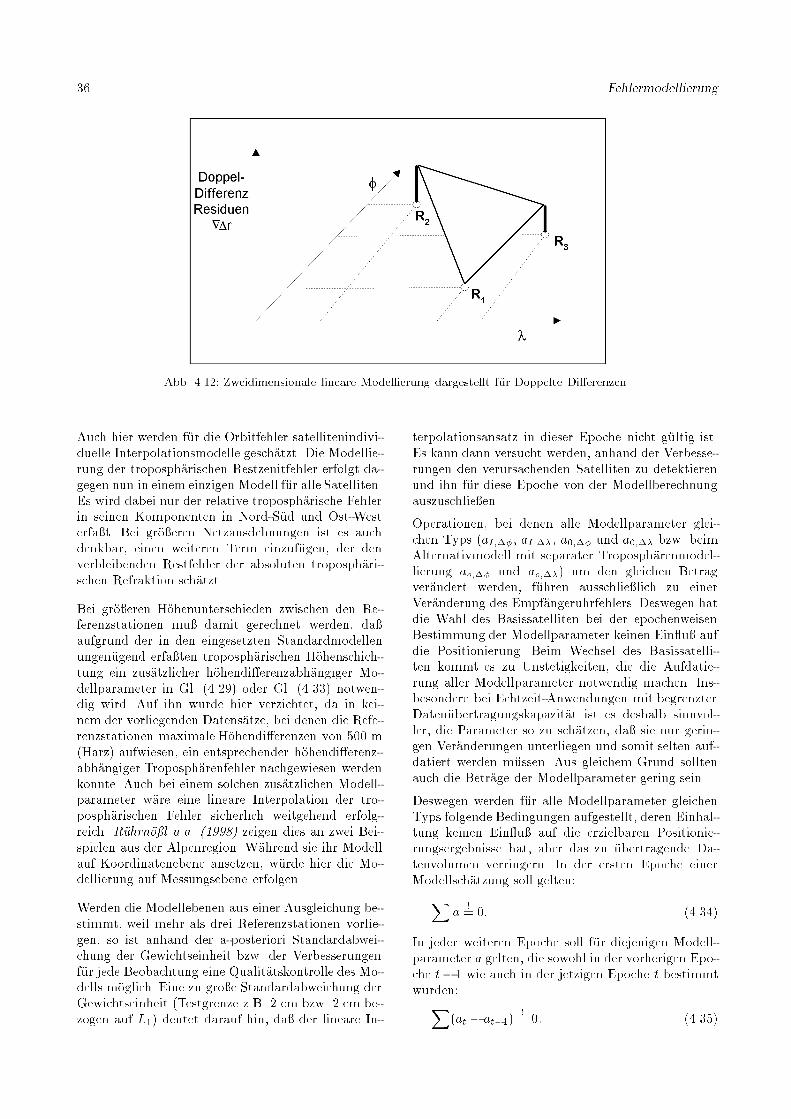
�� Fehlermodellierung
����������� �
Abb� ����� Zweidimensionale lineare Modellierung dargestellt fur Doppelte Di erenzen�
Auch hier werden f�ur die Orbitfehler satellitenindividuelle Interpolationsmodelle gesch�atzt� Die Modellierung der troposph�arischen Restzenitfehler erfolgt dagegen nun in einem einzigen Modell f�ur alle Satelliten�Es wird dabei nur der relative troposph�arische Fehlerin seinen Komponenten in NordS�ud und OstWesterfa t� Bei gr�o eren Netzausdehnungen ist es auchdenkbar� einen weiteren Term einzuf�ugen� der denverbleibenden Restfehler der absoluten troposph�arischen Refraktion sch�atzt�
Bei gr�o eren H�ohenunterschieden zwischen den Referenzstationen mu damit gerechnet werden� da aufgrund der in den eingesetzten Standardmodellenungen�ugend erfa ten troposph�arischen H�ohenschichtung ein zus�atzlicher h�ohendi�erenzabh�angiger Modellparameter in Gl� ����� oder Gl� ������ notwendig wird� Auf ihn wurde hier verzichtet� da in keinem der vorliegenden Datens�atze� bei denen die Referenzstationen maximale H�ohendi�erenzen von ��� m�Harz� aufwiesen� ein entsprechender h�ohendi�erenzabh�angiger Troposph�arenfehler nachgewiesen werdenkonnte� Auch bei einem solchen zus�atzlichen Modellparameter w�are eine lineare Interpolation der troposph�arischen Fehler sicherlich weitgehend erfolgreich� R�uhrn�o�l u�a� ������ zeigen dies an zwei Beispielen aus der Alpenregion� W�ahrend sie ihr Modellauf Koordinatenebene ansetzen� w�urde hier die Modellierung auf Messungsebene erfolgen�
Werden die Modellebenen aus einer Ausgleichung bestimmt� weil mehr als drei Referenzstationen vorliegen� so ist anhand der aposteriori Standardabweichung der Gewichtseinheit bzw� der Verbesserungenf�ur jede Beobachtung eine Qualit�atskontrolle des Modells m�oglich� Eine zu gro e Standardabweichung derGewichtseinheit �Testgrenze z�B� � cm bzw� � cm bezogen auf L�� deutet darauf hin� da der lineare In
terpolationsansatz in dieser Epoche nicht g�ultig ist�Es kann dann versucht werden� anhand der Verbesserungen den verursachenden Satelliten zu detektierenund ihn f�ur diese Epoche von der Modellberechnungauszuschlie en�
Operationen� bei denen alle Modellparameter gleichen Typs �aI���� aI���� a���� und a���� bzw� beimAlternativmodell mit separater Troposph�arenmodellierung ao��� und ao���� um den gleichen Betragver�andert werden� f�uhren ausschlie lich zu einerVer�anderung des Empf�angeruhrfehlers� Deswegen hatdie Wahl des Basissatelliten bei der epochenweisenBestimmung der Modellparameter keinen Ein�u aufdie Positionierung� Beim Wechsel des Basissatelliten kommt es zu Unstetigkeiten� die die Aufdatierung aller Modellparameter notwendig machen� Insbesondere bei EchtzeitAnwendungen mit begrenzterDaten�ubertragungskapazit�at ist es deshalb sinnvoller� die Parameter so zu sch�atzen� da sie nur geringen Ver�anderungen unterliegen und somit selten aufdatiert werden m�ussen� Aus gleichem Grund solltenauch die Betr�age der Modellparameter gering sein�
Deswegen werden f�ur alle Modellparameter gleichenTyps folgende Bedingungen aufgestellt� deren Einhaltung keinen Ein�u auf die erzielbaren Positionierungsergebnisse hat� aber das zu �ubertragende Datenvolumen verringern� In der ersten Epoche einerModellsch�atzung soll gelten�
Xa
�� �� ������
In jeder weiteren Epoche soll f�ur diejenigen Modellparameter a gelten� die sowohl in der vorherigen Epoche t� � wie auch in der jetzigen Epoche t bestimmtwurden�X
�at � at����� �� ������

Fehlermodellierung ��
Diese zweite Bedingung ist noch nicht ausreichend�um immer m�oglichst kleine Betr�age der Modellparameter zu garantieren� Ein Wegdriften der Modellparameter vom Mittelwert � aufgrund systematischerEin��usse wird durch folgende weitere Bedingung verhindert�
Xa � e���jaj
�� �� ������
wobei die Einf�uhrung einer Gewichtung auf der Basis der eFunktion den Ein�u gro er Parameter beiauf oder untergehenden Satelliten begrenzt� Die Bedingungen ������ und ������ stehen im Widerspruchzueinander� so da sie nicht gleichzeitig vollst�andigerf�ullt werden k�onnen� Sie werden deswegen gewichtetangewendet� wobei das Hauptgewicht auf Bedingung������ liegt und ������ nur der langfristigen Beibehaltung kleiner Betr�age der Modellparameter dient�
Die weitere Bearbeitung der ParameterZeitreihendurch Filterung zur Beseitigung hochfrequenterSt�orein��usse aufgrund von Mehrwegefehlern undMe rauschen erfolgt nun satellitenindividuell undf�uhrt somit zu einer tats�achlichen Ver�anderung dererzielbaren Positionierungsergebnisse� Hierbei ist zuber�ucksichtigen� da ionosph�arische E�ekte Periodenin der gleichen Gr�o enordnung aufweisen k�onnen�wie sie auch durch Mehrwegee�ekte erzeugt werden��� bis �� Minuten�� Orbitfehler und troposph�arische Restfehler sind dagegen langwelligerer Natur�so da k�urzerperiodische Mehrwegee�ekte herausge�ltert werden k�onnen� Weiterhin sind bei den Orbitfehlern m�ogliche Unstetigkeiten der Zeitreihen beimWechsel der broadcastEphemeriden zu ber�ucksichtigen�
Mit Hilfe der Modellparameter k�onnen nun inAbh�angigkeit von Koordinatendi�erenzen Beobachtungskorrekturen berechnet werden� Diese korrigieren relative Beobachtungsfehler �in einer Basislinie��aber keine absoluten Beobachtungsfehler� Die geometrischen Korrekturen werden auf alle Beobachtungsgr�o en �Code und Phase� zwei Frequenzen� identischangewendet� Bei der ionosph�arischen Korrektur mu dagegen die unterschiedliche Wirkung der ionosph�arischen Refraktion auf die Beobachtungsgr�o en ber�ucksichtigt werden�
��� Stationsabh�angige Fehler�
ein��usse
����� Mehrwegeausbreitung
Mehrwegeausbreitung kann als unkorelliert zwischenSatelliten und zwischen Referenzstationen angenommen werden� Dementsprechend wird sie wirksamverringert� wenn korrespondierende Messungen �uber�gleich oder ungleichgewichtete� Mittelbildung zusammengefa t werden� F�ur Phasendaten ist dabei Voraussetzung� da die Phasenmehrdeutigkeitenauf DoppelDi�erenzNiveau bestimmt und beseitigtwurden und sich somit die Beobachtungen der unterschiedlichen Stationen auf gleichem Mehrdeutigkeitsniveau be�nden� Weiterhin sollten bei regionalenoder gro r�aumigen Stationsnetzen die entfernungsund richtungsabh�angigen Fehler durch Modellierungerfa t und beseitigt worden sein� Die Verringerungder Mehrwegeausbreitung erfolgt f�ur jede der vier Beobachtungsgr�o en getrennt�
Die Verwendung eines gewichteten Mittels wird dannnotwendig� wenn bekannt ist� da die Mehrwegeein��usse an den Referenzstationen stark unterschiedlichausfallen� Ursache hierf�ur kann sowohl die Nutzungverschiedener Antennen und Empf�angertechnologien sein� wie auch mehr oder weniger g�unstige Re�exionsbedingungen in der Antennenumgebung� Es istauch denkbar� da man einzelne Stationen in vorgegebenen AzimutElevationsbereichen von der Mittelbildung ausschlie t� wenn in diesen Bereichen eine besonders starke Mehrwegebeein�ussung nachgewiesenwurde�
����� Antennenphasenzentren
Antennenphasenzentrumsfehler k�onnen durch Beobachtungen auf mehreren Referenzstationen nicht verringert werden� Sie m�ussen durch Kalibrierungen erfa t werden� Die Positionierung in Referenzstationsnetzen verst�arkt die Problematik der Antennenphasenzentrumsfehler� da hierbei vermehrt mit unterschiedlichen Antennentypen gemessen werden wird�siehe Kapitel �����
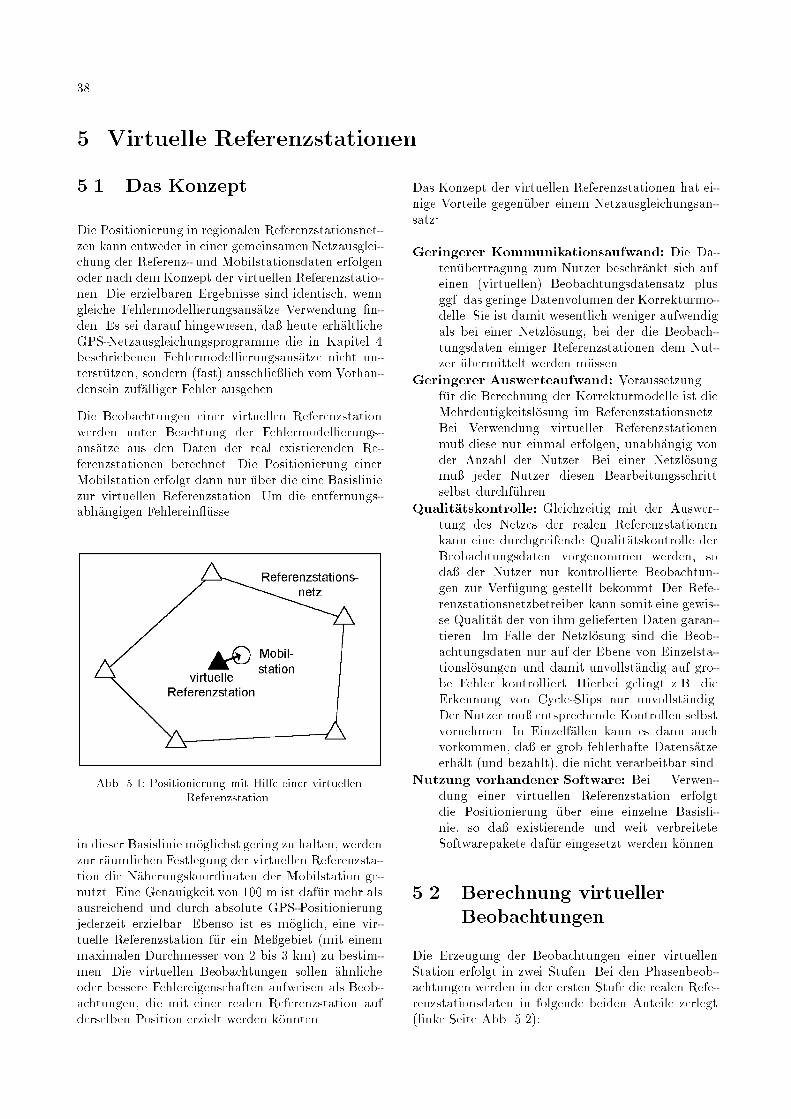
��
� Virtuelle Referenzstationen
��� Das Konzept
Die Positionierung in regionalen Referenzstationsnetzen kann entweder in einer gemeinsamen Netzausgleichung der Referenz und Mobilstationsdaten erfolgenoder nach demKonzept der virtuellen Referenzstationen� Die erzielbaren Ergebnisse sind identisch� wenngleiche Fehlermodellierungsans�atze Verwendung �nden� Es sei darauf hingewiesen� da heute erh�altlicheGPSNetzausgleichungsprogramme die in Kapitel �beschriebenen Fehlermodellierungsans�atze nicht unterst�utzen� sondern �fast� ausschlie lich vom Vorhandensein zuf�alliger Fehler ausgehen�
Die Beobachtungen einer virtuellen Referenzstationwerden unter Beachtung der Fehlermodellierungsans�atze aus den Daten der real existierenden Referenzstationen berechnet� Die Positionierung einerMobilstation erfolgt dann nur �uber die eine Basisliniezur virtuellen Referenzstation� Um die entfernungsabh�angigen Fehlerein��usse
����������
Abb� ���� Positionierung mit Hilfe einer virtuellenReferenzstation�
in dieser Basislinie m�oglichst gering zu halten� werdenzur r�aumlichen Festlegung der virtuellen Referenzstation die N�aherungskoordinaten der Mobilstation genutzt� Eine Genauigkeit von ��� m ist daf�ur mehr alsausreichend und durch absolute GPSPositionierungjederzeit erzielbar� Ebenso ist es m�oglich� eine virtuelle Referenzstation f�ur ein Me gebiet �mit einemmaximalen Durchmesser von � bis � km� zu bestimmen� Die virtuellen Beobachtungen sollen �ahnlicheoder bessere Fehlereigenschaften aufweisen als Beobachtungen� die mit einer realen Referenzstation aufderselben Position erzielt werden k�onnten�
Das Konzept der virtuellen Referenzstationen hat einige Vorteile gegen�uber einem Netzausgleichungsansatz�
Geringerer Kommunikationsaufwand� Die Daten�ubertragung zum Nutzer beschr�ankt sich aufeinen �virtuellen� Beobachtungsdatensatz plusggf� das geringe Datenvolumen der Korrekturmodelle� Sie ist damit wesentlich weniger aufwendigals bei einer Netzl�osung� bei der die Beobachtungsdaten einiger Referenzstationen dem Nutzer �ubermittelt werden m�ussen�
Geringerer Auswerteaufwand� Voraussetzungf�ur die Berechnung der Korrekturmodelle ist dieMehrdeutigkeitsl�osung im Referenzstationsnetz�Bei Verwendung virtueller Referenzstationenmu diese nur einmal erfolgen� unabh�angig vonder Anzahl der Nutzer� Bei einer Netzl�osungmu jeder Nutzer diesen Bearbeitungsschrittselbst durchf�uhren�
Qualit�atskontrolle� Gleichzeitig mit der Auswertung des Netzes der realen Referenzstationenkann eine durchgreifende Qualit�atskontrolle derBeobachtungsdaten vorgenommen werden� soda der Nutzer nur kontrollierte Beobachtungen zur Verf�ugung gestellt bekommt� Der Referenzstationsnetzbetreiber kann somit eine gewisse Qualit�at der von ihm gelieferten Daten garantieren� Im Falle der Netzl�osung sind die Beobachtungsdaten nur auf der Ebene von Einzelstationsl�osungen und damit unvollst�andig auf grobe Fehler kontrolliert� Hierbei gelingt z�B� dieErkennung von CycleSlips nur unvollst�andig�Der Nutzer mu entsprechende Kontrollen selbstvornehmen� In Einzelf�allen kann es dann auchvorkommen� da er grob fehlerhafte Datens�atzeerh�alt �und bezahlt�� die nicht verarbeitbar sind�
Nutzung vorhandener Software� Bei Verwendung einer virtuellen Referenzstation erfolgtdie Positionierung �uber eine einzelne Basislinie� so da existierende und weit verbreiteteSoftwarepakete daf�ur eingesetzt werden k�onnen�
��� Berechnung virtueller
Beobachtungen
Die Erzeugung der Beobachtungen einer virtuellenStation erfolgt in zwei Stufen� Bei den Phasenbeobachtungen werden in der ersten Stufe die realen Referenzstationsdaten in folgende beiden Anteile zerlegt�linke Seite Abb� �����
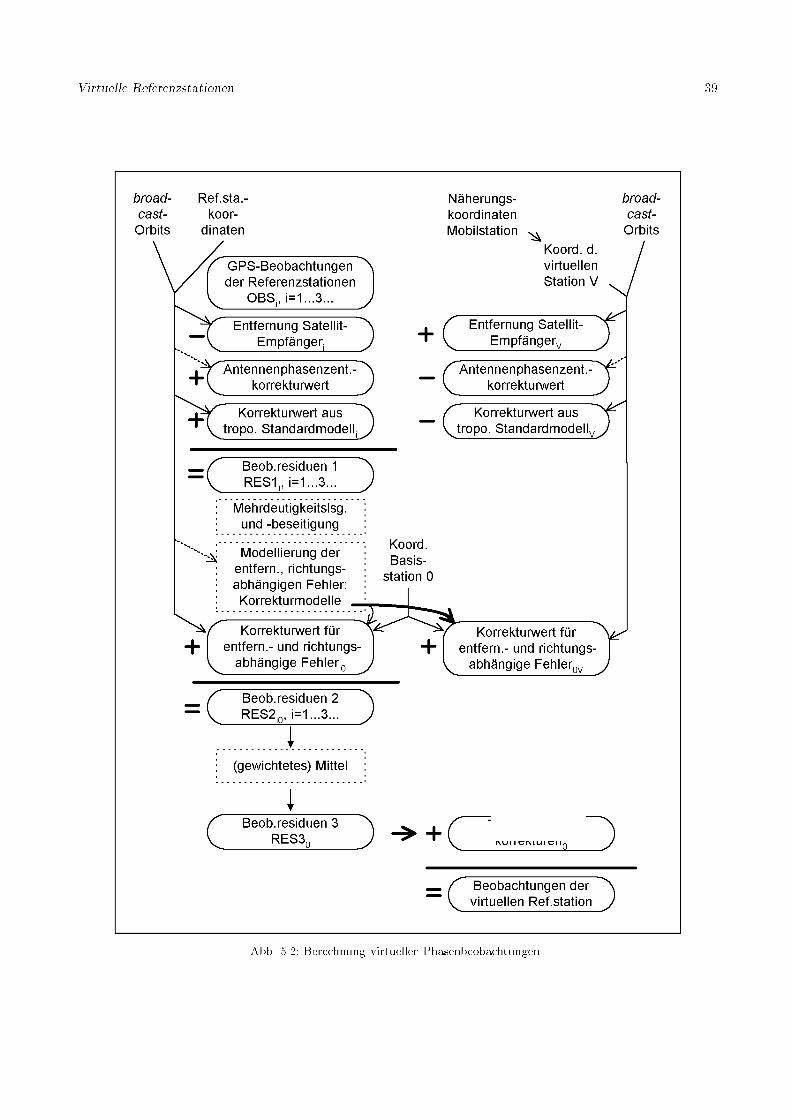
Virtuelle Referenzstationen �
����������� ������������������ !"#$%&'()*+,-./01234567
Abb� ���� Berechnung virtueller Phasenbeobachtungen�
�� Virtuelle Referenzstationen
Korrekturmodelle� die die entfernungs und richtungsabh�angigen Fehler erfassen� und
Beobachtungskorrekturen �Beobachtungsresiduen �� RES���� die sich auf eine gew�ahlte Positionim Netz �hier Basisstation � genannt� beziehen�
In der zweiten Stufe werden diese Anteile zu einem virtuellen Beobachtungsdatensatz zusammengesetzt� der sich auf die gew�ahlte Position der virtuellen Station bezieht �rechte Seite Abb� ����� F�ur dieCodebeobachtungen ist die Berechnung verk�urzt� esentf�allt die Mehrdeutigkeitsl�osung und die Modellierung der entfernungs und richtungsabh�angigen Fehler� Die notwendigen Korrekturmodelle werden vonden Phasendaten �ubernommen�
Die Berechnungen erfolgen vorteilhaft mit undi�erenzierten Beobachtungen� Hierbei gelingt die korrekteBer�ucksichtigung der algebraischen Korrelationen imReferenzstationsnetz problemlos� Im einzelnen sinddie im folgenden beschriebenen Berechnungsschrittedurchzuf�uhren� Die undi�erenzierten Beobachtungenan den Referenzstationen werden um die EntfernungSatellitEmpf�anger� wie sie sich aus den Referenzstationskoordinaten und broadcastBahnen ergibt� reduziert� Dies ist der entscheidende Schritt� um von Beobachtungen auf Beobachtungskorrekturen zu kommen�
Sind unterschiedliche Antennentypen auf den Referenzstationen im Gebrauch� m�ussen Antennenphasenzentrumskorrekturen angebracht werden� Alle Beobachtungsresiduen sollen sich auf einen Antennentyp beziehen� Relative Korrekturen sind daherin regionalen Netzen ausreichend� Will man nichtnur mittlere Antennenphasenzentrumsfehler� sondern auch elevationsabh�angige �oder elevations undazimutabh�angige� Anteile ber�ucksichtigen� m�ussenSatellitenElevationen �und Azimute�� die sich ausden Orbits und Stationskoordinaten berechnen lassen� in die Korrekturberechnung mit ein�ie en�
Die troposph�arische Korrektur auf der Grundlage eines Standardmodells zur Verminderung h�ohendi�erenzbedingter Refraktionsunterschiede ist Voraussetzung f�ur die sp�atere rein ��achenhafte Modellierungder troposph�arischen Restfehler� Einfache Modelleverwenden Satellitenelevation und Stationsh�ohe alsEingabeparameter in das Modell� Komplexere Modelle ben�otigen zus�atzlich die geographische Breite derStation und den Tag des Jahres�
Es ergibt sich ein erster Datensatz von Residuen �RES��� der zur L�osung der Phasenmehrdeutigkeiten im Referenzstationsnetz genutzt wird� Wieschon im Unterkapitel ����� diskutiert� ist die Erzeugung hochgenauer Korrekturmodelle nur nach erfolgreicher Mehrdeutigkeitsl�osung und beseitigung
m�oglich� Beobachtungen mit ungel�osten Mehrdeutigkeiten k�onnen f�ur die Modellierung nicht verwendetwerden und f�uhren zu einer verminderten Verf�ugbarkeit der Korrekturmodelle�
Wird zur Modellierung der entfernungs und richtungsabh�angigen Fehler der Ansatz gew�ahlt� derionosph�arische und geometrische Fehlerein��usse voneinander trennt� k�onnen die Modellparameter� wiein Unterkapitel ��� erl�autert� nun epochenweisegesch�atzt werden� Will man zus�atzlich Orbit undTroposph�arenrestfehler einzeln betrachten� mu hierauch die troposph�arische MappingFunktion ein�ie en� die es erlaubt� die Beobachtungsfehler auf dentroposph�arischen Restzenitfehler zu reduzieren� Liegen Beobachtungen von mehr als drei Referenzstationen vor� werden ausgleichende Interpolationsebenengesch�atzt und mit Hilfe der �Uberbestimmungen Ausrei er identi�ziert und beseitigt�
Die so erhaltenen Korrekturmodelle werden auf dieReferenzstationsdaten angewandt� um alle Beobachtungsresiduen auf die frei gew�ahlte Position einer �virtuellen� Basisstation� z�B� im Netz
�zentrum�� zu be
ziehen� Die damit erhaltenen Beobachtungsresiduen�RES�� sind also f�ur korrespondierende Messungen�gleicher Me zeitpunkt� gleicher Satellit� identischbis auf Empf�angeruhrfehler� stationsabh�angige Fehlerein��usse und Modellierungsfehler der angewandtenKorrekturmodelle�
Wenn alle realen Referenzstationen in einer Me epoche Beobachtungen zu den selben Satelliten aufweisen� k�onnen die korrespondierenden Beobachtungsresiduen nun gemittelt werden� um die stationsabh�angigen Fehlerein��usse zu verringern� Dieresultierenden Beobachtungsresiduen weisen danneinen Empf�angeruhrfehler auf� der dem Mittel derEmpf�angeruhrfehler der realen Beobachtungsresiduen entspricht�
Tats�achlich fehlen aber immer wieder Satellitenbeobachtungen bei einzelnen Stationen� In diesem Fallw�urde eine Mittelbildung �uber die verbleibenden Beobachtungen der restlichen Stationen einen falschenEmpf�angeruhrfehler dieser einen virtuellen Beobachtung erzeugen� L�oscht man in einer solchen Me epoche alle Beobachtungen dieser einen Station oder alleBeobachtungen dieses einen Satelliten� verliert manviele Informationen� Als Alternative bietet sich an�einen Basissatelliten zu w�ahlen� der von allen Stationen aus beobachtet wurde� Seine Beobachtungenwerden als Empf�angeruhrfehler dieser Me epoche betrachtet und alle Beobachtungen um sie reduziert�Diese Manipulation der Empf�angeruhren hat keinerlei Auswirkungen auf die Positionierung� Die Bildungdes �gewichteten� Mittels kann dann bei jedem einzelnen Satelliten mit der Anzahl tats�achlich vorhandenerBeobachtungen durchgef�uhrt werden�
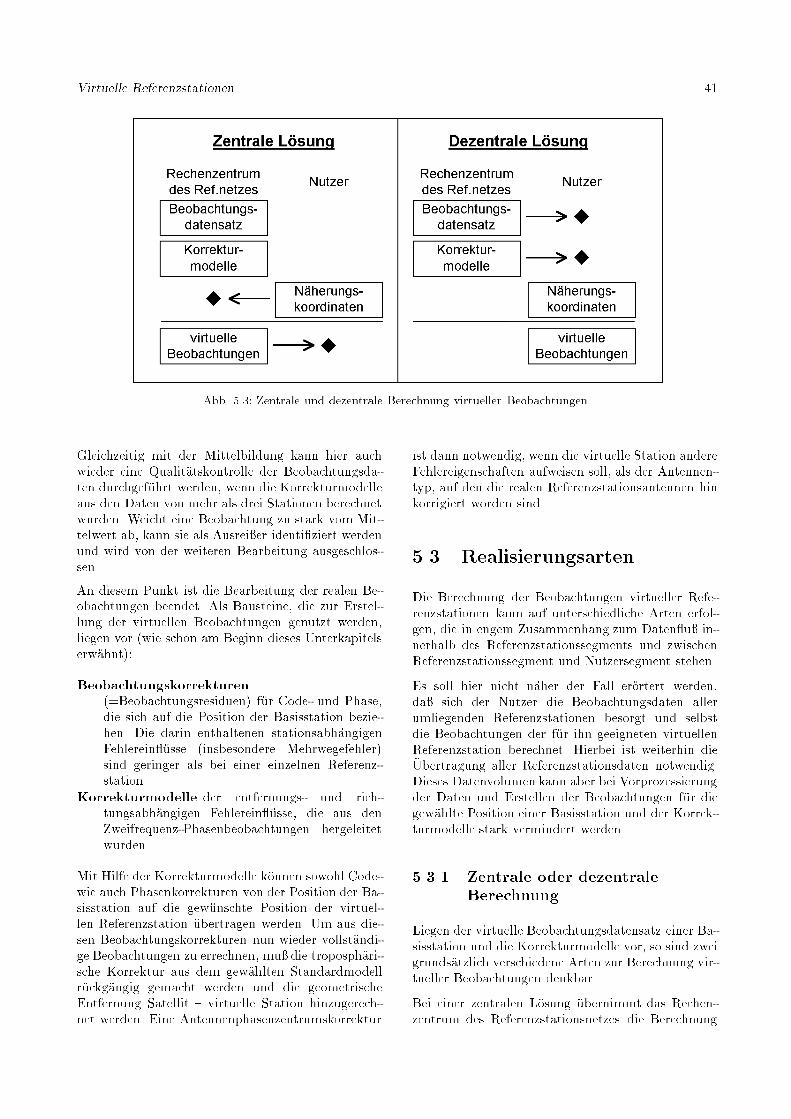
Virtuelle Referenzstationen ��
����������� ����
Abb� ���� Zentrale und dezentrale Berechnung virtueller Beobachtungen�
Gleichzeitig mit der Mittelbildung kann hier auchwieder eine Qualit�atskontrolle der Beobachtungsdaten durchgef�uhrt werden� wenn die Korrekturmodelleaus den Daten von mehr als drei Stationen berechnetwurden� Weicht eine Beobachtung zu stark vom Mittelwert ab� kann sie als Ausrei er identi�ziert werdenund wird von der weiteren Bearbeitung ausgeschlossen�
An diesem Punkt ist die Bearbeitung der realen Beobachtungen beendet� Als Bausteine� die zur Erstellung der virtuellen Beobachtungen genutzt werden�liegen vor �wie schon am Beginn dieses Unterkapitelserw�ahnt��
Beobachtungskorrekturen��Beobachtungsresiduen� f�ur Code und Phase�die sich auf die Position der Basisstation beziehen� Die darin enthaltenen stationsabh�angigenFehlerein��usse �insbesondere Mehrwegefehler�sind geringer als bei einer einzelnen Referenzstation�
Korrekturmodelle der entfernungs und richtungsabh�angigen Fehlerein��usse� die aus denZweifrequenzPhasenbeobachtungen hergeleitetwurden�
Mit Hilfe der Korrekturmodelle k�onnen sowohl Codewie auch Phasenkorrekturen von der Position der Basisstation auf die gew�unschte Position der virtuellen Referenzstation �ubertragen werden� Um aus diesen Beobachtungskorrekturen nun wieder vollst�andige Beobachtungen zu errechnen� mu die troposph�arische Korrektur aus dem gew�ahlten Standardmodellr�uckg�angig gemacht werden und die geometrischeEntfernung Satellit � virtuelle Station hinzugerechnet werden� Eine Antennenphasenzentrumskorrektur
ist dann notwendig� wenn die virtuelle Station andereFehlereigenschaften aufweisen soll� als der Antennentyp� auf den die realen Referenzstationsantennen hinkorrigiert worden sind�
��� Realisierungsarten
Die Berechnung der Beobachtungen virtueller Referenzstationen kann auf unterschiedliche Arten erfolgen� die in engem Zusammenhang zum Daten�u innerhalb des Referenzstationssegments und zwischenReferenzstationssegment und Nutzersegment stehen�
Es soll hier nicht n�aher der Fall er�ortert werden�da sich der Nutzer die Beobachtungsdaten allerumliegenden Referenzstationen besorgt und selbstdie Beobachtungen der f�ur ihn geeigneten virtuellenReferenzstation berechnet� Hierbei ist weiterhin die�Ubertragung aller Referenzstationsdaten notwendig�Dieses Datenvolumen kann aber bei Vorprozessierungder Daten und Erstellen der Beobachtungen f�ur diegew�ahlte Position einer Basisstation und der Korrekturmodelle stark vermindert werden�
����� Zentrale oder dezentraleBerechnung
Liegen der virtuelle Beobachtungsdatensatz einer Basisstation und die Korrekturmodelle vor� so sind zweigrunds�atzlich verschiedene Arten zur Berechnung virtueller Beobachtungen denkbar�
Bei einer zentralen L�osung �ubernimmt das Rechenzentrum des Referenzstationsnetzes die Berechnung
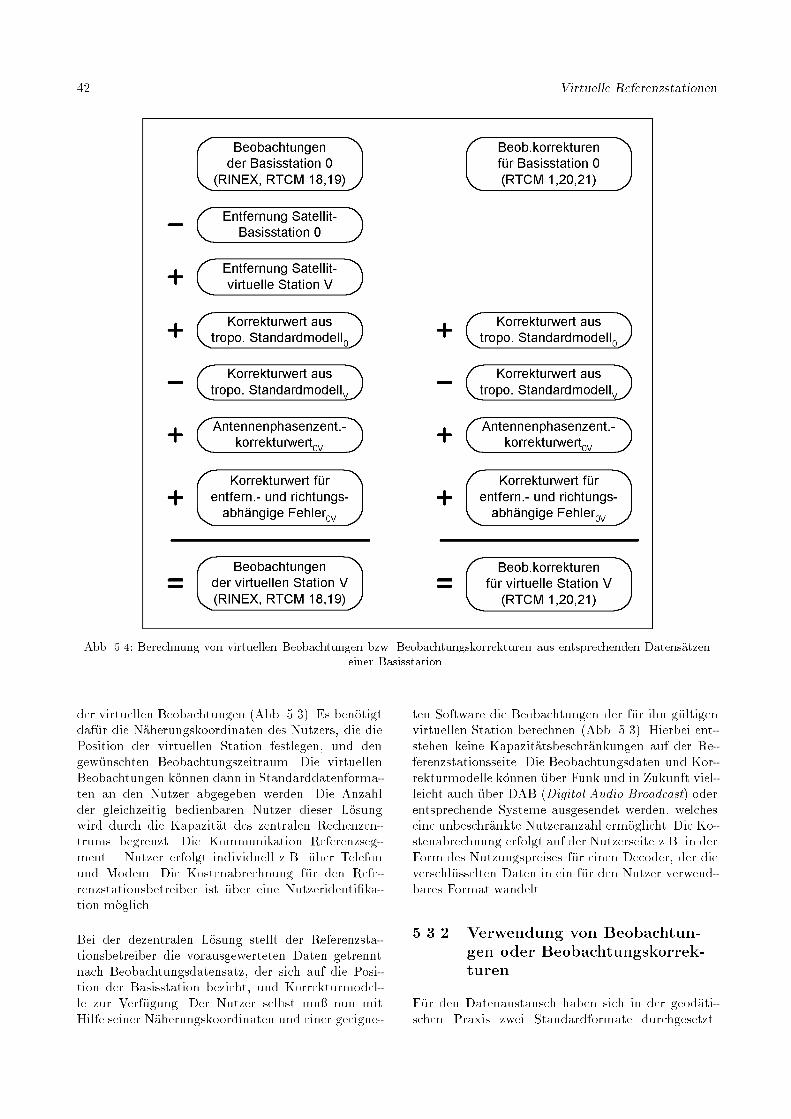
�� Virtuelle Referenzstationen
����������� ������������������ !"#
Abb� ���� Berechnung von virtuellen Beobachtungen bzw� Beobachtungskorrekturen aus entsprechenden Datensatzeneiner Basisstation�
der virtuellen Beobachtungen �Abb� ����� Es ben�otigtdaf�ur die N�aherungskoordinaten des Nutzers� die diePosition der virtuellen Station festlegen� und dengew�unschten Beobachtungszeitraum� Die virtuellenBeobachtungen k�onnen dann in Standarddatenformaten an den Nutzer abgegeben werden� Die Anzahlder gleichzeitig bedienbaren Nutzer dieser L�osungwird durch die Kapazit�at des zentralen Rechenzentrums begrenzt� Die Kommunikation Referenzsegment � Nutzer erfolgt individuell z�B� �uber Telefonund Modem� Die Kostenabrechnung f�ur den Referenzstationsbetreiber ist �uber eine Nutzeridenti�kation m�oglich�
Bei der dezentralen L�osung stellt der Referenzstationsbetreiber die vorausgewerteten Daten getrenntnach Beobachtungsdatensatz� der sich auf die Position der Basisstation bezieht� und Korrekturmodelle zur Verf�ugung� Der Nutzer selbst mu nun mitHilfe seiner N�aherungskoordinaten und einer geeigne
ten Software die Beobachtungen der f�ur ihn g�ultigenvirtuellen Station berechnen �Abb� ����� Hierbei entstehen keine Kapazit�atsbeschr�ankungen auf der Referenzstationsseite� Die Beobachtungsdaten und Korrekturmodelle k�onnen �uber Funk und in Zukunft vielleicht auch �uber DAB �Digital Audio Broadcast� oderentsprechende Systeme ausgesendet werden� welcheseine unbeschr�ankte Nutzeranzahl erm�oglicht� Die Kostenabrechnung erfolgt auf der Nutzerseite z�B� in derForm des Nutzungspreises f�ur einen Decoder� der dieverschl�usselten Daten in ein f�ur den Nutzer verwendbares Format wandelt�
����� Verwendung von Beobachtun�
gen oder Beobachtungskorrek�turen
F�ur den Datenaustausch haben sich in der geod�atischen Praxis zwei Standardformate durchgesetzt�

Virtuelle Referenzstationen ��
Dies ist zum einen das Receiver Independent Exchange Format �RINEX�� welches eine Beobachtungsspeicherung im ASCIIFormat erlaubt �Gurtner ������ Die Daten�ubertragung erfolgt in Dateien�Um das Datenvolumen zu verringern� werden Packprogramme verwendet� Eine Datenvolumenverringerung ist zus�atzlich mit dem au erhalb der eigentlichen RINEXDe�nition entstandenen HatanakaKomprimierungsalgorithmus m�oglich� Im RINEXFormat werden vollst�andige Beobachtungsdatens�atzeabgespeichert�
Ein zweites Datenformat� welches zum internationalen Standard geworden ist� sind die RTCM Recommended Standards for Di�erential NAVSTARGPS Service �RTCM ��� ������ welche im folgenden kurz RTCM genannt werden sollen� Sie dienender EchtzeitDaten�ubertragung im Funkverkehr oder�uber andere Datenverbindungen� Mit der Version ���von �� sind zwei M�oglichkeiten gegeben� GPSBeobachtungsgr�o en zu �ubertragen� die eine verwendet Beobachtungskorrekturen �Datensatztypen �� ��und ��� und die andere� �ahnlich RINEX� vollst�andigeBeobachtungen �Datensatztypen ��� ��� Die RTCMBeobachtungskorrekturen unterscheiden sich von denin Unterkapitel ��� de�nierten Beobachtungskorrekturen insbesondere in Bezug auf eine troposph�arischeKorrektur aus einem Standardmodell� Bei RTCMBeobachtungskorrekturen darf eine solche Korrekturnicht angebracht worden sein�
Werden dem Nutzer der Beobachtungsdatensatz derBasisstation in einem der beiden Standardformate und zus�atzlich die Korrekturmodelle in einemzu de�nierenden entsprechenden Format �dezentraleL�osung� �ubermittelt� so m�ussen die in Abb� ��� beschriebenen Berechnungsschritte durchgef�uhrt wer
den� um auf einen Datensatz der virtuellen Referenzstation im selben Datenformat zu kommen� Die Orbitdatens�atze� die zur Berechnung der Entfernung Satellit � Empf�anger verwendet werden� m�ussen mit denen �ubereinstimmen� f�ur die Korrekturmodelle vorliegen� Auch die troposph�arischen Korrekturen solltenmit dem Standardmodell gerechnet werden� welchesf�ur die Erzeugung der Korrekturmodelle Verwendungfand� Eine Antennenphasenzentrumskorrektur ist nurdann notwendig� wenn sich die virtuellen Beobachtungsdaten auf einen anderen Antennentyp beziehensollen� als die Basisstationsdaten� Die Korrekturender entfernungs und richtungsabh�angigen Fehler ergeben sich aus den �ubermittelten Korrekturmodellenund den Koordinatendi�erenzen Basisstation virtuelle Station�
Bei Verwirklichung einer zentralen Erzeugung virtueller Beobachtungen k�onnen die Berechnungennoch vereinfacht werden� wenn mit den Beobachtungsdi�erenzen� wie sie in Abb� ��� de�niert worden sind� gearbeitet wird� Die Berechnungsschritte ergeben sich dann aus der rechten H�alfte derselben Abbildung� Im Gegensatz zur Verwendungvon RTCMBeobachtungskorrekturen entf�allt hierdie Berechnung der troposph�arischen Korrekturenf�ur die Basistation� Will man als Ergebnis RTCMBeobachtungskorrekturen der virtuellen Referenzstation erhalten� so ist hier keine Berechnung der Satellitenelevationen an der Basisstation mehr notwendig� Als Parameter zur Berechnung der virtuellen Beobachtungskorrekturen werden die Koordinaten derBasisstation und der virtuellen Station sowie dieSatellitenelevationen �je nach Art der Antennenphasenkorrektur ggf� auch die Satellitenazimute� am Beobachtungsort der Mobilstation ben�otigt�
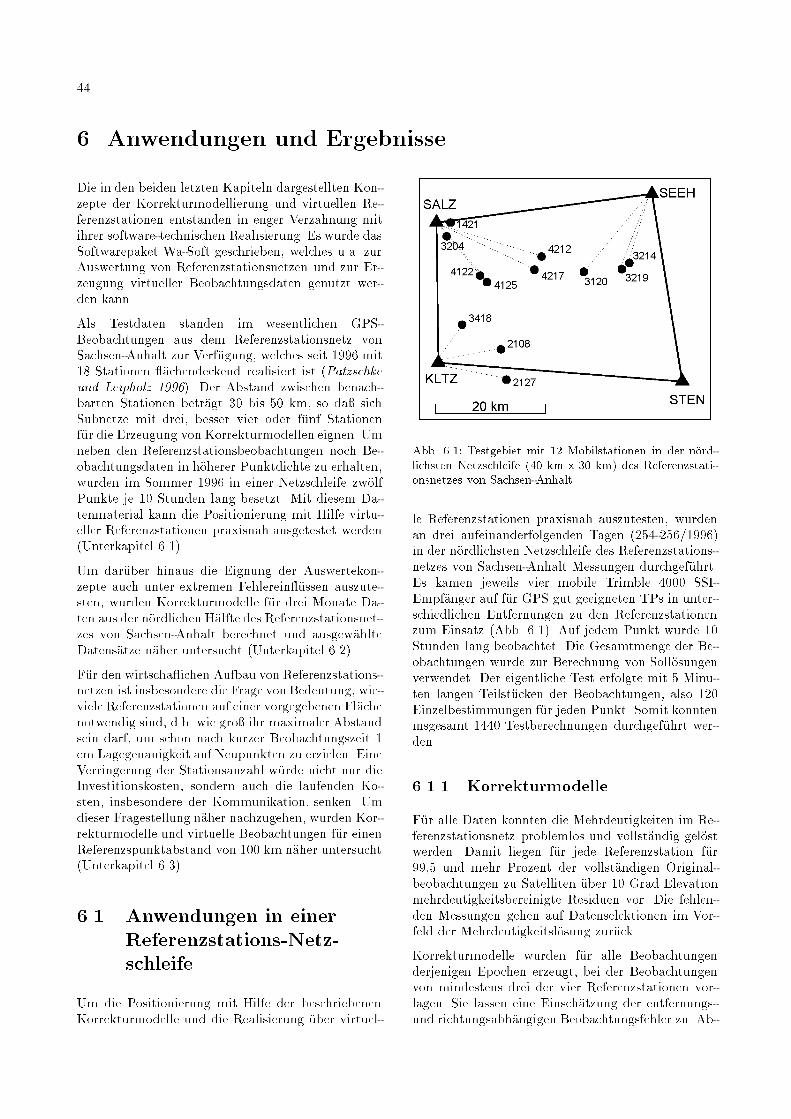
��
� Anwendungen und Ergebnisse
Die in den beiden letzten Kapiteln dargestellten Konzepte der Korrekturmodellierung und virtuellen Referenzstationen entstanden in enger Verzahnung mitihrer softwaretechnischen Realisierung� Es wurde dasSoftwarepaket WaSoft geschrieben� welches u�a� zurAuswertung von Referenzstationsnetzen und zur Erzeugung virtueller Beobachtungsdaten genutzt werden kann�
Als Testdaten standen im wesentlichen GPSBeobachtungen aus dem Referenzstationsnetz vonSachsenAnhalt zur Verf�ugung� welches seit �� mit�� Stationen ��achendeckend realisiert ist �Patzschkeund Leipholz ������ Der Abstand zwischen benachbarten Stationen betr�agt �� bis �� km� so da sichSubnetze mit drei� besser vier oder f�unf Stationenf�ur die Erzeugung von Korrekturmodellen eignen� Umneben den Referenzstationsbeobachtungen noch Beobachtungsdaten in h�oherer Punktdichte zu erhalten�wurden im Sommer �� in einer Netzschleife zw�olfPunkte je �� Stunden lang besetzt� Mit diesem Datenmaterial kann die Positionierung mit Hilfe virtueller Referenzstationen praxisnah ausgetestet werden�Unterkapitel �����
Um dar�uber hinaus die Eignung der Auswertekonzepte auch unter extremen Fehlerein��ussen auszutesten� wurden Korrekturmodelle f�ur drei Monate Daten aus der n�ordlichen H�alfte des Referenzstationsnetzes von SachsenAnhalt berechnet und ausgew�ahlteDatens�atze n�aher untersucht �Unterkapitel �����
F�ur den wirtscha�ichen Aufbau von Referenzstationsnetzen ist insbesondere die Frage von Bedeutung� wieviele Referenzstationen auf einer vorgegebenen Fl�achenotwendig sind� d�h� wie gro ihr maximaler Abstandsein darf� um schon nach kurzer Beobachtungszeit �cm Lagegenauigkeit auf Neupunkten zu erzielen� EineVerringerung der Stationsanzahl w�urde nicht nur dieInvestitionskosten� sondern auch die laufenden Kosten� insbesondere der Kommunikation� senken� Umdieser Fragestellung n�aher nachzugehen� wurden Korrekturmodelle und virtuelle Beobachtungen f�ur einenReferenzspunktabstand von ��� km n�aher untersucht�Unterkapitel �����
�� Anwendungen in einer
Referenzstations�Netz�
schleife
Um die Positionierung mit Hilfe der beschriebenenKorrekturmodelle und die Realisierung �uber virtuel
����������Abb� ���� Testgebiet mit �� Mobilstationen in der nord�lichsten Netzschleife �� km x �� km� des Referenzstati�onsnetzes von Sachsen�Anhalt�
le Referenzstationen praxisnah auszutesten� wurdenan drei aufeinanderfolgenden Tagen �����������in der n�ordlichsten Netzschleife des Referenzstationsnetzes von SachsenAnhalt Messungen durchgef�uhrt�Es kamen jeweils vier mobile Trimble ���� SSIEmpf�anger auf f�ur GPS gut geeigneten TPs in unterschiedlichen Entfernungen zu den Referenzstationenzum Einsatz �Abb� ����� Auf jedem Punkt wurde ��Stunden lang beobachtet� Die Gesamtmenge der Beobachtungen wurde zur Berechnung von Soll�osungenverwendet� Der eigentliche Test erfolgte mit � Minuten langen Teilst�ucken der Beobachtungen� also ���Einzelbestimmungen f�ur jeden Punkt� Somit konnteninsgesamt ���� Testberechnungen durchgef�uhrt werden�
����� Korrekturmodelle
F�ur alle Daten konnten die Mehrdeutigkeiten im Referenzstationsnetz problemlos und vollst�andig gel�ostwerden� Damit liegen f�ur jede Referenzstation f�ur�� und mehr Prozent der vollst�andigen Originalbeobachtungen zu Satelliten �uber �� Grad Elevationmehrdeutigkeitsbereinigte Residuen vor� Die fehlenden Messungen gehen auf Datenselektionen im Vorfeld der Mehrdeutigkeitsl�osung zur�uck�
Korrekturmodelle wurden f�ur alle Beobachtungenderjenigen Epochen erzeugt� bei der Beobachtungenvon mindestens drei der vier Referenzstationen vorlagen� Sie lassen eine Einsch�atzung der entfernungsund richtungsabh�angigen Beobachtungsfehler zu� Ab
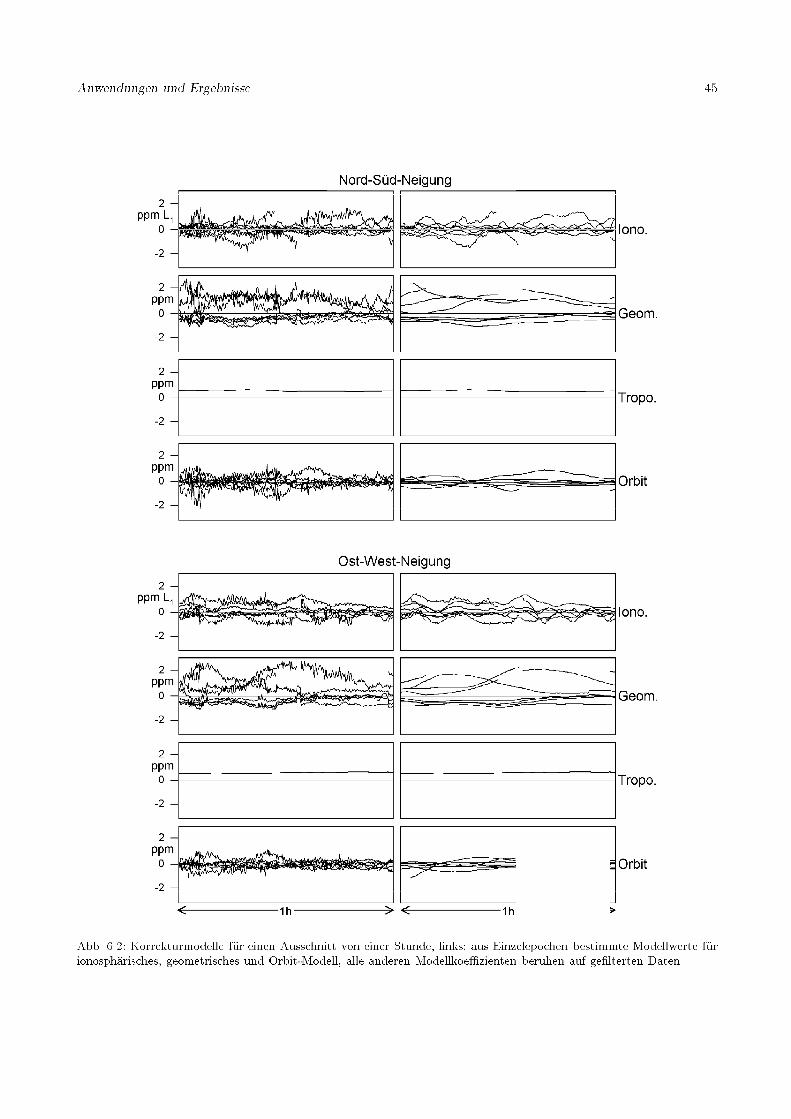
Anwendungen und Ergebnisse ��
����������� ������������������ !"#$%&'()*+,-./
Abb� ���� Korrekturmodelle fur einen Ausschnitt von einer Stunde� links� aus Einzelepochen bestimmte Modellwerte furionospharisches� geometrisches und Orbit�Modell� alle anderen Modellkoe�zienten beruhen auf ge�lterten Daten�

�� Anwendungen und Ergebnisse
bildung ��� zeigt einen Ausschnitt der Korrekturmodelle von einer Stunde� Es werden vier Modellartendargestellt� wobei das geometrische Modell auch introposph�arischen Anteil und Orbitanteil aufgespaltenwurde� Zur Korrektur werden also entweder das ionosph�arische und das geometrische Modell gemeinsamgenutzt oder das ionosph�arische� das troposph�arische und das OrbitModell� Wie in Unterkapitel ���beschrieben� werden ionosph�arisches� geometrischesund OrbitModell satellitenindividuell bestimmt� Injeder Epoche und f�ur jeden Satelliten ergeben sichsomit zwei Koe!zienten� die die NordS�udNeigungund die OstWestNeigung der Korrekturebene beschreiben� Jede durchgezogene Linie in Abbildung ���zeigt dementsprechend die zeitlichen Ver�anderungender Modellkoe!zienten f�ur einen Satelliten� Das troposph�arische Modell wird dagegen f�ur alle Satellitengemeinsam gesch�atzt� so da es durch ein Zahlenpaarpro Epoche beschrieben wird�
Da bei der epochenweisen Bestimmung der troposph�arischen Gradienten diese nur schwach bestimmt sind� werden die Tiefpa �ltereigenschafteneines Kalman�lters genutzt� um verbesserte Modellkoe!zienten zu erhalten� F�ur die anderen dreiModellarten werden sowohl aus Einzelepochen berechnete wie auch ge�lterte Modellkoe!zienten dargestellt �Abb� ����� Bei der Festlegung der Filterparameter mu darauf geachtet werden� da in der��achenhaften Modellierung der ionosph�arischen Refraktion kurzperiodischere Erscheinungen auftretenk�onnen als bei der Modellierung von troposph�arischen Restfehlern oder von Orbitfehlern� Dar�uberhinaus mu beim Wechsel des Ephemeridendatensatzes mit Unstetigkeiten gerechnet werden� die im geometrischen Modell bzw� im Orbitmodell ber�ucksichtigt werden m�ussen� Zur Festlegung der Filterparameter wurde hier von Gau MarkovProzessen ausgegangen �Brown und Hwang ����� und Korrelationszeiten von �� Minuten f�ur die Koe!zienten derionosph�arischen Modelle und �� Minuten f�ur die Koe!zienten der troposph�arischen� Orbit und geometrischen Modelle verwendet�
Der Ein�u der Wahl der Korrekturmodelle und derFilterung lassen sich am besten anhand von Positionierungsergebnissen aufzeigen� Eine repr�asentativeAuswahl von Koordinatengenauigkeiten bei kurzzeitigen statischen Beobachtungen �Tab� ���� zeigt� da bei unge�lterten Koe!zienten keinerlei Unterschiedezwischen Anwendung des geometrischen Modells einerseits und Anwendung von troposph�arischem undOrbitModell andererseits bestehen� Die Unterschiede sind auch nach einer Filterung so gering� da auf die Aufspaltung des geometrischen Modells f�urden Zweck der Positionierung verzichtet wurde� Dieverwendeten Filterans�atze f�uhrten im allgemeinenzu Ver�anderungen in den Standardabweichungen im
Referenzstation Filte L� L�Modelle rung Lage�H�ohe �cm�n�achste Ref� � � ������������� km�virtuelle Ref� nein ��������� ���������Iono� � Geom� ja ��������� ��������virtuelle Ref� nein ��������� ���������Iono��Tro��Orb� ja ��������� ��������
Referenzstation Filte L� L�Modelle rung Lage�H�ohe �cm�n�achste Ref� � � ������������� km�virtuelle Ref� nein ��������� ���������Iono� � Geom� ja ��������� ���������virtuelle Ref� nein ��������� ���������Iono��Tro��Orb� ja ��������� ���������
Referenzstation Filte L� L�Modelle rung Lage�H�ohe �cm�n�achste Ref� � � �������������� km�virtuelle Ref� nein �������� ���������Iono� � Geom� ja ��������� ���������virtuelle Ref� nein �������� ���������Iono��Tro��Orb� ja ��������� ���������
Tab� ���� Standardabweichungen der Lage� und Hohen�komponenten fur unterschiedliche Berechnungsvarian�ten bei Station�Tag des Jahres ��������� ������������������ Die Genauigkeiten wurden fur jeweils ��� Be�obachtungsperioden von � Minuten Dauer mit Wa�Softberechnet�
Submillimeterbereich und nur in Einzelf�allen um biszu ��� mm� Bei der ionosph�arenfreien L�osung tratensowohl Verbesserungen als auch Verschlechterungenauf� w�ahrend f�ur EinfrequenzL�osungen in den meisten F�allen leichte Genauigkeitsverluste zu erkennensind�
F�ur die im weiteren vorgestellten Ergebnisse aus dernachtr�aglichen Bearbeitung der Beobachtungsdatenwurde auf die Filterung der Modellkoe!zienten verzichtet� F�ur EchtzeitAnwendungen ist die Filterungzur �Uberbr�uckung von Datenl�ucken und Verringerungder zu �ubertragenen Datenmenge f�ur die Korrekturmodelle unverzichtbar� Datiert man die Modellkoe!zienten eines Satelliten immer dann auf� wenn sie sichum ���� ppm ver�andert haben� so ergeben sich f�ur denhier verwendeten Datensatz von dreimal �� StundenL�ange durchschnittliche Aufdatierungsabst�ande vonungef�ahr �� Sekunden f�ur die ionosph�arischen Koef�zienten und ungef�ahr �� Sekunden f�ur die geometrischen Koe!zienten�
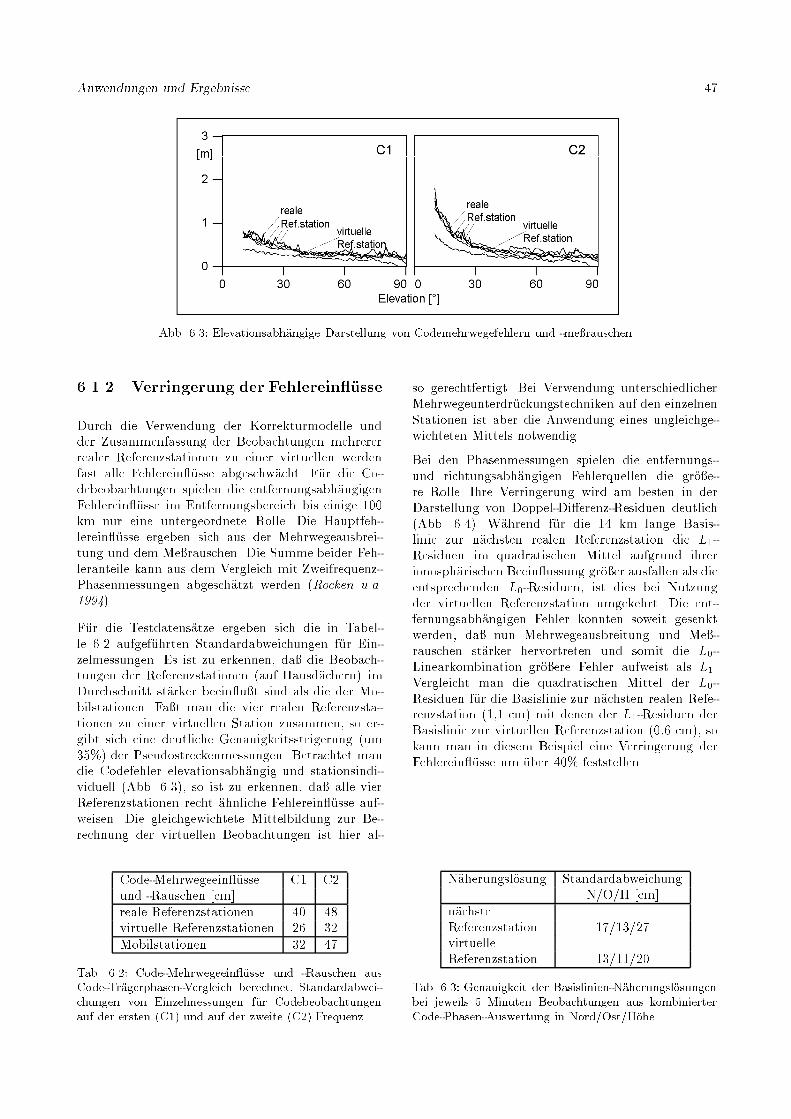
Anwendungen und Ergebnisse ��
����������� �
Abb� ���� Elevationsabhangige Darstellung von Codemehrwegefehlern und �me�rauschen�
����� Verringerung der Fehlerein�usse
Durch die Verwendung der Korrekturmodelle undder Zusammenfassung der Beobachtungen mehrererrealer Referenzstationen zu einer virtuellen werdenfast alle Fehlerein��usse abgeschw�acht� F�ur die Codebeobachtungen spielen die entfernungsabh�angigenFehlerein��usse im Entfernungsbereich bis einige ���km nur eine untergeordnete Rolle� Die Hauptfehlerein��usse ergeben sich aus der Mehrwegeausbreitung und dem Me rauschen� Die Summe beider Fehleranteile kann aus dem Vergleich mit ZweifrequenzPhasenmessungen abgesch�atzt werden �Rocken u�a�������
F�ur die Testdatens�atze ergeben sich die in Tabelle ��� aufgef�uhrten Standardabweichungen f�ur Einzelmessungen� Es ist zu erkennen� da die Beobachtungen der Referenzstationen �auf Hausd�achern� imDurchschnitt st�arker beein�u t sind als die der Mobilstationen� Fa t man die vier realen Referenzstationen zu einer virtuellen Station zusammen� so ergibt sich eine deutliche Genauigkeitssteigerung �um���� der Pseudostreckenmessungen� Betrachtet mandie Codefehler elevationsabh�angig und stationsindividuell �Abb� ����� so ist zu erkennen� da alle vierReferenzstationen recht �ahnliche Fehlerein��usse aufweisen� Die gleichgewichtete Mittelbildung zur Berechnung der virtuellen Beobachtungen ist hier al
CodeMehrwegeein��usse C� C�und Rauschen �cm�reale Referenzstationen �� ��virtuelle Referenzstationen �� ��Mobilstationen �� ��
Tab� ���� Code�Mehrwegeein�usse und �Rauschen ausCode�Tragerphasen�Vergleich berechnet� Standardabwei�chungen von Einzelmessungen fur Codebeobachtungenauf der ersten C�� und auf der zweite C�� Frequenz�
so gerechtfertigt� Bei Verwendung unterschiedlicherMehrwegeunterdr�uckungstechniken auf den einzelnenStationen ist aber die Anwendung eines ungleichgewichteten Mittels notwendig�
Bei den Phasenmessungen spielen die entfernungsund richtungsabh�angigen Fehlerquellen die gr�o ere Rolle� Ihre Verringerung wird am besten in derDarstellung von DoppelDi�erenzResiduen deutlich�Abb� ����� W�ahrend f�ur die �� km lange Basislinie zur n�achsten realen Referenzstation die L�Residuen im quadratischen Mittel aufgrund ihrerionosph�arischen Beein�ussung gr�o er ausfallen als dieentsprechenden L�Residuen� ist dies bei Nutzungder virtuellen Referenzstation umgekehrt� Die entfernungsabh�angigen Fehler konnten soweit gesenktwerden� da nun Mehrwegeausbreitung und Me rauschen st�arker hervortreten und somit die L�Linearkombination gr�o ere Fehler aufweist als L��Vergleicht man die quadratischen Mittel der L�Residuen f�ur die Basislinie zur n�achsten realen Referenzstation ���� cm� mit denen der L�Residuen derBasislinie zur virtuellen Referenzstation ���� cm�� sokann man in diesem Beispiel eine Verringerung derFehlerein��usse um �uber ��� feststellen�
N�aherungsl�osung StandardabweichungN�O�H �cm�
n�achsteReferenzstation ��������virtuelleReferenzstation ��������
Tab� ���� Genauigkeit der Basislinien�Naherungslosungenbei jeweils � Minuten Beobachtungen aus kombinierterCode�Phasen�Auswertung in Nord�Ost�Hohe�
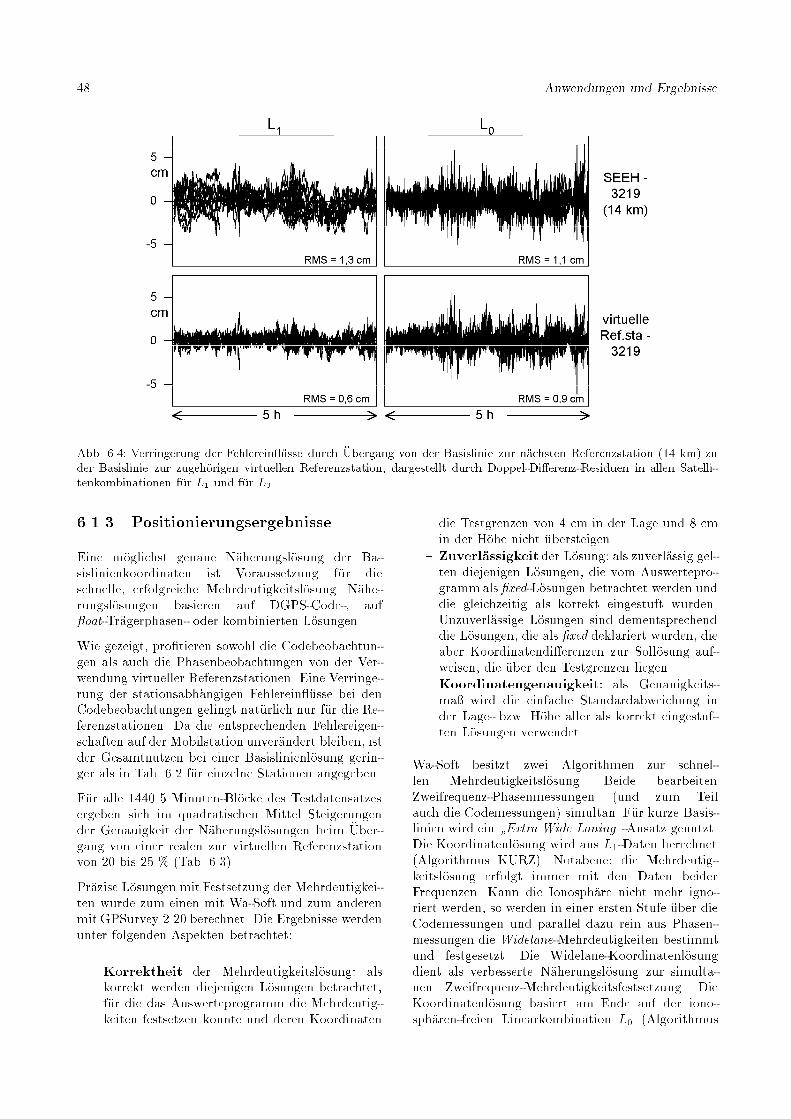
�� Anwendungen und Ergebnisse
����������� ����������
Abb� ���� Verringerung der Fehlerein�usse durch Ubergang von der Basislinie zur nachsten Referenzstation �� km� zuder Basislinie zur zugehorigen virtuellen Referenzstation� dargestellt durch Doppel�Di erenz�Residuen in allen Satelli�tenkombinationen fur L� und fur L��
����� Positionierungsergebnisse
Eine m�oglichst genaue N�aherungsl�osung der Basislinienkoordinaten ist Voraussetzung f�ur dieschnelle� erfolgreiche Mehrdeutigkeitsl�osung� N�aherungsl�osungen basieren auf DGPSCode� auf�oatTr�agerphasen oder kombinierten L�osungen�
Wie gezeigt� pro�tieren sowohl die Codebeobachtungen als auch die Phasenbeobachtungen von der Verwendung virtueller Referenzstationen� Eine Verringerung der stationsabh�angigen Fehlerein��usse bei denCodebeobachtungen gelingt nat�urlich nur f�ur die Referenzstationen� Da die entsprechenden Fehlereigenschaften auf der Mobilstation unver�andert bleiben� istder Gesamtnutzen bei einer Basislinienl�osung geringer als in Tab� ��� f�ur einzelne Stationen angegeben�
F�ur alle ���� � MinutenBl�ocke des Testdatensatzesergeben sich im quadratischen Mittel Steigerungender Genauigkeit der N�aherungsl�osungen beim �Ubergang von einer realen zur virtuellen Referenzstationvon �� bis �� � �Tab� �����
Pr�azise L�osungen mit Festsetzung der Mehrdeutigkeiten wurde zum einen mit WaSoft und zum anderenmit GPSurvey ���� berechnet� Die Ergebnisse werdenunter folgenden Aspekten betrachtet�
� Korrektheit der Mehrdeutigkeitsl�osung� alskorrekt werden diejenigen L�osungen betrachtet�f�ur die das Auswerteprogramm die Mehrdeutigkeiten festsetzen konnte und deren Koordinaten
die Testgrenzen von � cm in der Lage und � cmin der H�ohe nicht �ubersteigen�
� Zuverl�assigkeit der L�osung� als zuverl�assig gelten diejenigen L�osungen� die vom Auswerteprogrammals �xedL�osungen betrachtet werden unddie gleichzeitig als korrekt eingestuft wurden�Unzuverl�assige L�osungen sind dementsprechenddie L�osungen� die als �xed deklariert wurden� dieaber Koordinatendi�erenzen zur Soll�osung aufweisen� die �uber den Testgrenzen liegen�
� Koordinatengenauigkeit� als Genauigkeitsma wird die einfache Standardabweichung inder Lage bzw� H�ohe aller als korrekt eingestuften L�osungen verwendet�
WaSoft besitzt zwei Algorithmen zur schnellen Mehrdeutigkeitsl�osung� Beide bearbeitenZweifrequenzPhasenmessungen �und zum Teilauch die Codemessungen� simultan� F�ur kurze Basislinien wird ein
�Extra Wide Laning�Ansatz genutzt�
Die Koordinatenl�osung wird aus L�Daten berechnet�Algorithmus KURZ�� Notabene� die Mehrdeutigkeitsl�osung erfolgt immer mit den Daten beiderFrequenzen� Kann die Ionosph�are nicht mehr ignoriert werden� so werden in einer ersten Stufe �uber dieCodemessungen und parallel dazu rein aus Phasenmessungen die WidelaneMehrdeutigkeiten bestimmtund festgesetzt� Die WidelaneKoordinatenl�osungdient als verbesserte N�aherungsl�osung zur simultanen ZweifrequenzMehrdeutigkeitsfestsetzung� DieKoordinatenl�osung basiert am Ende auf der ionosph�arenfreien Linearkombination L� �Algorithmus
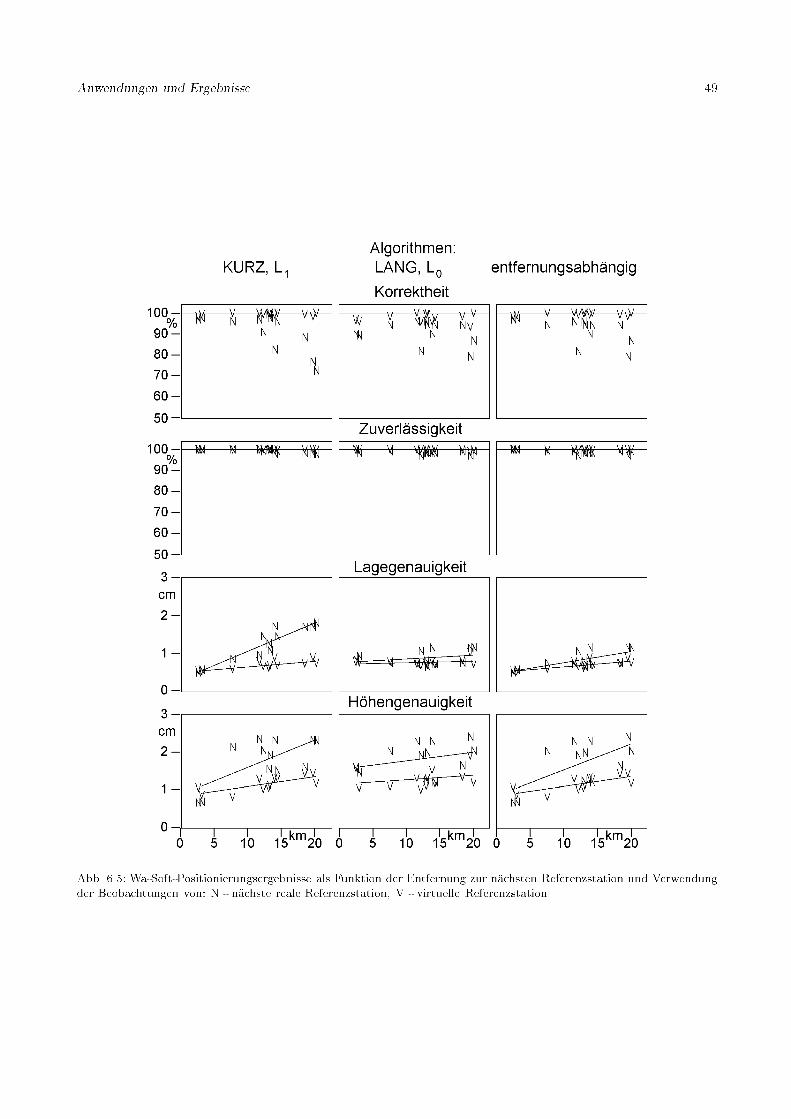
Anwendungen und Ergebnisse �
����������� ������������������ !"#$%&'()
Abb� ���� Wa�Soft�Positionierungsergebnisse als Funktion der Entfernung zur nachsten Referenzstation und Verwendungder Beobachtungen von� N � nachste reale Referenzstation� V � virtuelle Referenzstation�

�� Anwendungen und Ergebnisse
LANG�� Die Grenzen des Algorithmus KURZ sinddurch einen maximal vertr�aglichen ionosph�arischenEin�u gegeben� die Grenzen des Algorithmus LANGdagegen durch eine notwendige Mindestbeobachtungsdauer� Die Algorithmen arbeiten mit einerso hohen Korrektheits und Zuverl�assigkeitsquote�da bisher keine Notwendigkeit bestand� Mehrdeutigkeitssuchverfahren �siehe Unterkapitel ���� zuimplementieren�
Mit beiden Algorithmen wurden alle ���� Testdatens�atze bearbeitet� In den ersten beiden Spalten derAbbildung ��� sind die WaSoftErgebnisse der Algorithmen KURZ und LANG dargestellt� F�ur die Ergebnisse der dritten Spalte ist der Algorithmus entsprechend der Basislinienl�ange ausgew�ahlt worden�F�ur Basislinienl�angen �uber � km fand der Algorithmus LANG Anwendung� In allen anderen F�allen wurde der Algorithmus KURZ verwendet� also insbesondere bei Nutzung einer virtuellen Referenzstation�
Bei der Positionierung unter Verwendung dern�achsten Referenzstation weisen die Ergebnissedes Algorithmus KURZ eine starke Entfernungsabh�angigkeit auf� W�ahrend f�ur Basislinien unter� km L�ange sehr hohe Korrektheitsquoten ��uber���� ����ige Zuverl�assigkeit und sehr hohe L�Koordinatengenauigkeiten ���� cm in der Lage und��� cm in der H�ohe� erzielt werden konnten� verringert sich die Qualit�at der Ergebnisse mit steigender Basislinienl�ange� Die Resultate des AlogrithmusLANG sind kaum entfernungsabh�angig� die Korrektheitsquote von im Durchschnitt nur �� ist auf diekurze Beobachtungsdauer zur�uckzuf�uhren� Die L�Koordinaten sind f�ur Basislinienl�angen unter � kmaufgrund ihrer geringeren Beein�ussung durch Mehrwegee�ekte und Me rauschen genauer als die der L�L�osungen� F�ur l�angere Basislinien ist es aufgrund derionosph�arischen Ein��usse umgekehrt� Aber auch dieL�L�osungen unterliegen noch einer leichten Entfernungsabh�angigkeit� F�ur die Basislinien mit �� kmL�ange wurden Genauigkeiten von ��� cm in der Lageund ��� cm in der H�ohe erzielt�
Beim �Ubergang auf virtuelle Referenzstationenerh�alt man mit dem Algorithmus KURZ undL�Koordinatenl�osungen immer bessere Ergebnisse als mit dem Algorithmus LANG und L�Koordinatenl�osungen� Dies beweist die hohe Genauigkeit des ionosph�arischen Korrekturmodells� Geradedie M�oglichkeit� nun auf L�L�osungen �ubergehen zuk�onnen� tr�agt zur Steigerung der Koordinatengenauigkeit betr�achtlich bei� Alle Qualit�atskriterien verbesserten sich mit Ausnahme der H�ohengenauigkeit derbeiden Stationen� die in sehr geringem Abstand zurn�achsten Referenzstation liegen� Hier haben die Korrekturmodelle zus�atzliche Fehler in die Beobachtungen hineingetragen�
Es liegt die Vermutung nahe� da dies bei Verwendung von nur drei Referenzstationen vermieden werden kann� Durch den Modellierungsansatz erh�alt dabei eine nahe gelegene reale Referenzstation ein hohesGewicht� Andererseits liegen bei nur drei Referenzstationen keine �Uberbestimmungen bei der Korrekturmodellbestimmung vor� so da keine durchgreifende Zuverl�assigkeitskontrolle der Beobachtungsresiduen mehr m�oglich ist und auch die Mehrwegeein��usseauf die Phasenmessungen nicht mehr verringert werden k�onnen� Weitere Nachteile bei nur drei Referenzstationen ergeben sich bei Beobachtungsausf�allen einer einzelnen Station� die nun eine Korrekturmodellberechnung verhindert� Bei vier Stationen konntenmit den Beobachtungen der verbleibenden drei Stationen weiterhin Korrekturparameter ermittelt werden�
Die Ergebnisse von Testberechnungen mit jeweils dreiReferenzstationen sind im Vergleich zu den Ergebnissen� die mit vier Stationen erzielt wurden� dargestellt �Abb� ����� Au��allig sind die gr�o eren Variationen in der H�ohenkomponente im Vergleich zur Lage�F�ur die L�Resultate best�atigt sich die Vermutungder h�oheren Koordinatengenauigkeiten bei sehr kurzen Entfernungen zur n�achsten Referenzstation� Beigr�o eren Entfernungen ist aber keine eindeutige Tendenz in Richtung Verbesserung �oder Verschlechterung� festzustellen� Bei den L�L�osungen gibt es ehereine leichte Tendenz zur Verschlechterung� welche aufdie nun nicht mehr m�ogliche Verringerung der Mehrwegee�ekte zur�uckzuf�uhren sein d�urfte� Da insgesamtkeine deutliche Verbesserung der Ergebnisse zu erkennen ist� erfolgen auch alle weiteren Berechnungen mitvier realen Referenzstationen�
Datenauswertungen mit der NarrowlaneLinearkombination LN f�uhrten nicht zu h�oheren Genauigkeiten� wie man nach den Werten der Tabelle ���h�atte annehmen m�ussen� Sie lagen immer unter denender L�L�osungen� Die Ursachen liegen in den ionosph�arischen Restfehlern� die auf LN st�arker wirkenals auf L�� in der unter AntiSpoo�ng zum Teil geringeren L�Qualit�at und in me technisch bedingtenKorrelationen der L� und L�Me gr�o en�
Die Auswertung derselben Daten mit GPSurvey ����ergab in der Korrektheit und Zuverl�assigkeit derErgebnisse bessere und in der Koordinatengenauigkeit leicht schlechtere Ergebnisse als mit WaSoft�Wie auch andere Untersuchungen zeigten� verf�ugtGPSurvey �uber einen sehr erfolgreichen Mehrdeutigkeitssuchalgorithmus� Selbst die Einf�uhrung der virtuellen Beobachtungen konnte Korrektheit und Zuverl�assigkeit der Mehrdeutigkeitsl�osung nicht mehrverbessern� Dagegen pro�tierten die Genauigkeitenvon der Einf�uhrung virtueller Beobachtungen deutlich �Abb� �����
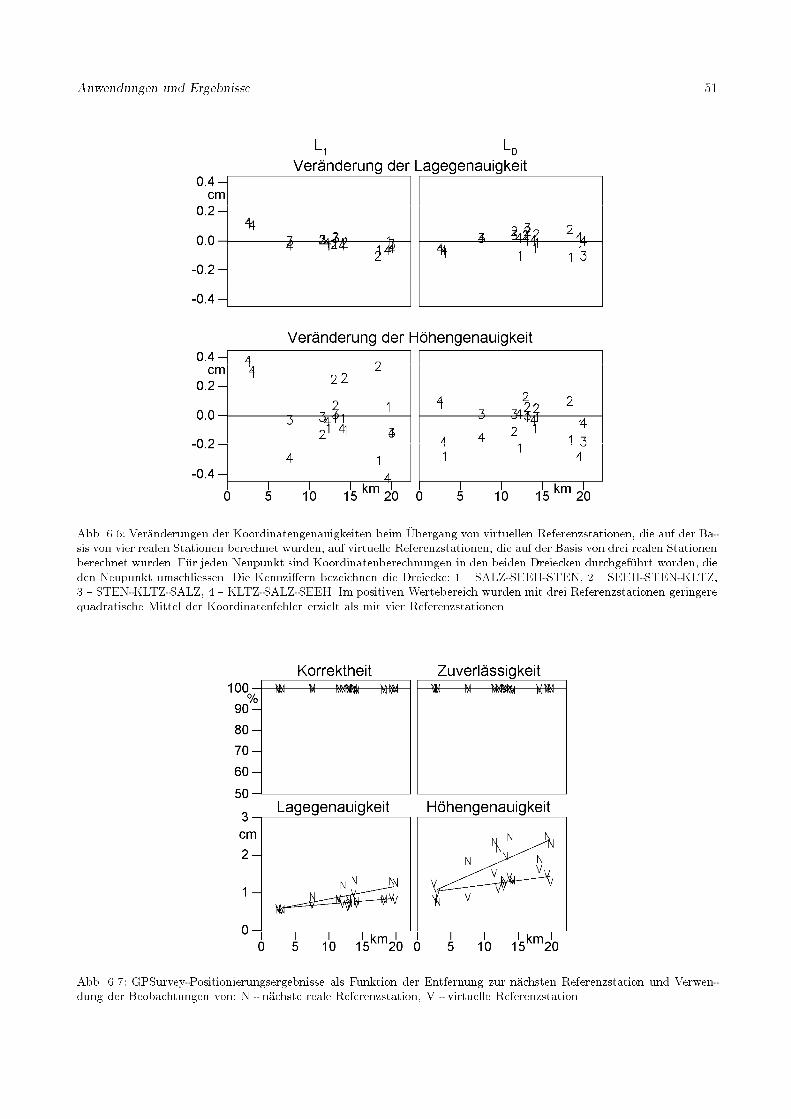
Anwendungen und Ergebnisse ��
����������� ������
Abb� ���� Veranderungen der Koordinatengenauigkeiten beim Ubergang von virtuellen Referenzstationen� die auf der Ba�sis von vier realen Stationen berechnet wurden� auf virtuelle Referenzstationen� die auf der Basis von drei realen Stationenberechnet wurden� Fur jeden Neupunkt sind Koordinatenberechnungen in den beiden Dreiecken durchgefuhrt worden� dieden Neupunkt umschliessen� Die Kennzi ern bezeichnen die Dreiecke� � � SALZ�SEEH�STEN� � � SEEH�STEN�KLTZ�� � STEN�KLTZ�SALZ� � � KLTZ�SALZ�SEEH� Im positiven Wertebereich wurden mit drei Referenzstationen geringerequadratische Mittel der Koordinatenfehler erzielt als mit vier Referenzstationen�
����������
Abb� ���� GPSurvey�Positionierungsergebnisse als Funktion der Entfernung zur nachsten Referenzstation und Verwen�dung der Beobachtungen von� N � nachste reale Referenzstation� V � virtuelle Referenzstation�
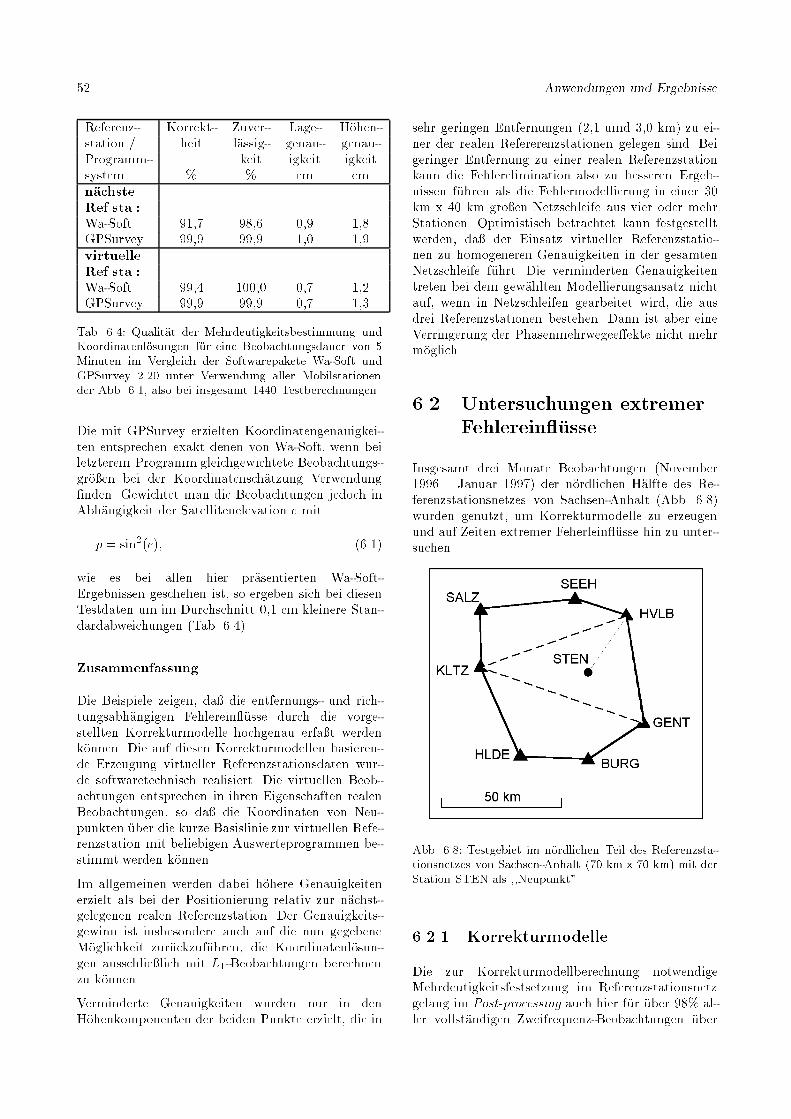
�� Anwendungen und Ergebnisse
Referenz Korrekt Zuver Lage H�ohenstation � heit l�assig genau genauProgramm keit igkeit igkeitsystem � � cm cmn�achsteRef�sta��WaSoft ��� ��� �� ���GPSurvey � � ��� ��virtuelleRef�sta��WaSoft �� ����� ��� ���GPSurvey � � ��� ���
Tab� ���� Qualitat der Mehrdeutigkeitsbestimmung undKoordinatenlosungen fur eine Beobachtungsdauer von �Minuten im Vergleich der Softwarepakete Wa�Soft undGPSurvey ���� unter Verwendung aller Mobilstationender Abb� ���� also bei insgesamt ���� Testberechnungen�
Die mit GPSurvey erzielten Koordinatengenauigkeiten entsprechen exakt denen von WaSoft� wenn beiletzterem Programm gleichgewichtete Beobachtungsgr�o en bei der Koordinatensch�atzung Verwendung�nden� Gewichtet man die Beobachtungen jedoch inAbh�angigkeit der Satellitenelevation e mit
p � sin��e�� �����
wie es bei allen hier pr�asentierten WaSoftErgebnissen geschehen ist� so ergeben sich bei diesenTestdaten um im Durchschnitt ��� cm kleinere Standardabweichungen �Tab� �����
Zusammenfassung
Die Beispiele zeigen� da die entfernungs und richtungsabh�angigen Fehlerein��usse durch die vorgestellten Korrekturmodelle hochgenau erfa t werdenk�onnen� Die auf diesen Korrekturmodellen basierende Erzeugung virtueller Referenzstationsdaten wurde softwaretechnisch realisiert� Die virtuellen Beobachtungen entsprechen in ihren Eigenschaften realenBeobachtungen� so da die Koordinaten von Neupunkten �uber die kurze Basislinie zur virtuellen Referenzstation mit beliebigen Auswerteprogrammen bestimmt werden k�onnen�
Im allgemeinen werden dabei h�ohere Genauigkeitenerzielt als bei der Positionierung relativ zur n�achstgelegenen realen Referenzstation� Der Genauigkeitsgewinn ist insbesondere auch auf die nun gegebeneM�oglichkeit zur�uckzuf�uhren� die Koordinatenl�osungen ausschlie lich mit L�Beobachtungen berechnenzu k�onnen�
Verminderte Genauigkeiten wurden nur in denH�ohenkomponenten der beiden Punkte erzielt� die in
sehr geringen Entfernungen ���� umd ��� km� zu einer der realen Refererenzstationen gelegen sind� Beigeringer Entfernung zu einer realen Referenzstationkann die Fehlerelimination also zu besseren Ergebnissen f�uhren als die Fehlermodellierung in einer ��km x �� km gro en Netzschleife aus vier oder mehrStationen� Optimistisch betrachtet kann festgestelltwerden� da der Einsatz virtueller Referenzstationen zu homogeneren Genauigkeiten in der gesamtenNetzschleife f�uhrt� Die verminderten Genauigkeitentreten bei dem gew�ahlten Modellierungsansatz nichtauf� wenn in Netzschleifen gearbeitet wird� die ausdrei Referenzstationen bestehen� Dann ist aber eineVerringerung der Phasenmehrwegee�ekte nicht mehrm�oglich�
�� Untersuchungen extremer
Fehlerein��usse
Insgesamt drei Monate Beobachtungen �November�� � Januar ��� der n�ordlichen H�alfte des Referenzstationsnetzes von SachsenAnhalt �Abb� ����wurden genutzt� um Korrekturmodelle zu erzeugenund auf Zeiten extremer Feherlein��usse hin zu untersuchen�
���������
Abb� ���� Testgebiet im nordlichen Teil des Referenzsta�tionsnetzes von Sachsen�Anhalt �� km x �� km� mit derStation STEN als ��Neupunkt��
����� Korrekturmodelle
Die zur Korrekturmodellberechnung notwendigeMehrdeutigkeitsfestsetzung im Referenzstationsnetzgelang im Postprocessing auch hier f�ur �uber �� aller vollst�andigen ZweifrequenzBeobachtungen �uber
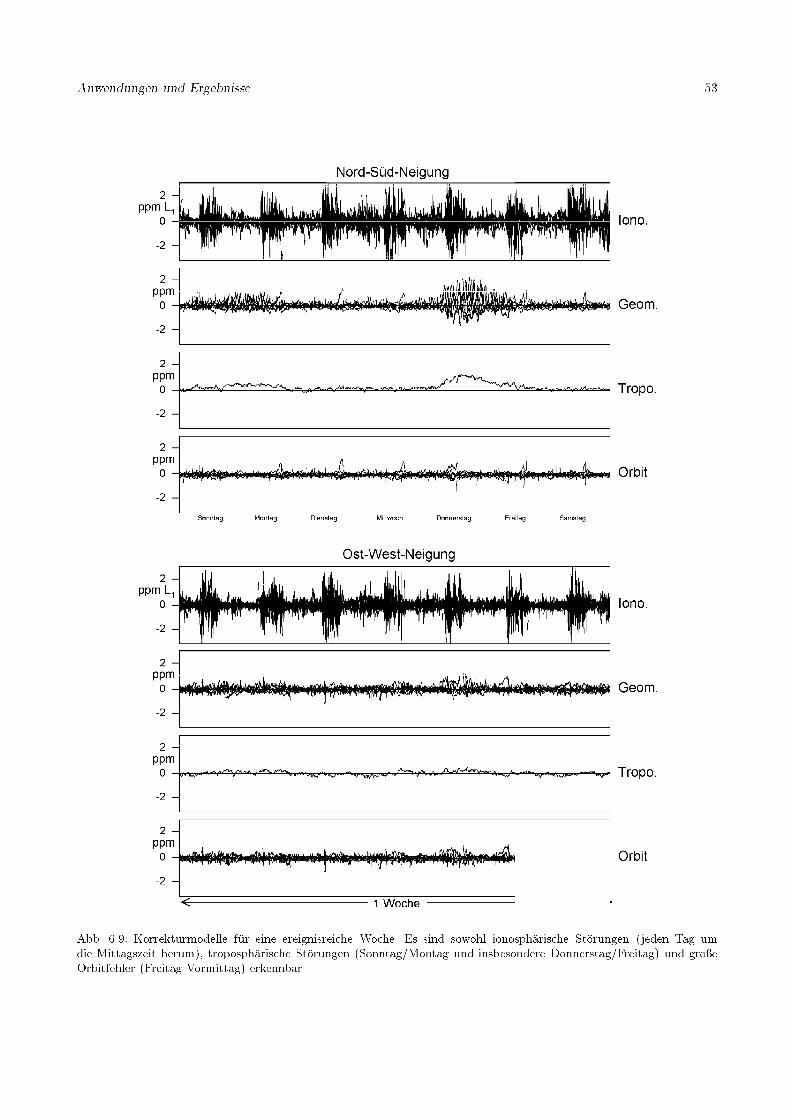
Anwendungen und Ergebnisse ��
����������� ������������������ !"#$%&'()*+,-./
Abb� ���� Korrekturmodelle fur eine ereignisreiche Woche� Es sind sowohl ionospharische Storungen jeden Tag umdie Mittagszeit herum�� tropospharische Storungen Sonntag�Montag und insbesondere Donnerstag�Freitag� und gro�eOrbitfehler Freitag Vormittag� erkennbar�
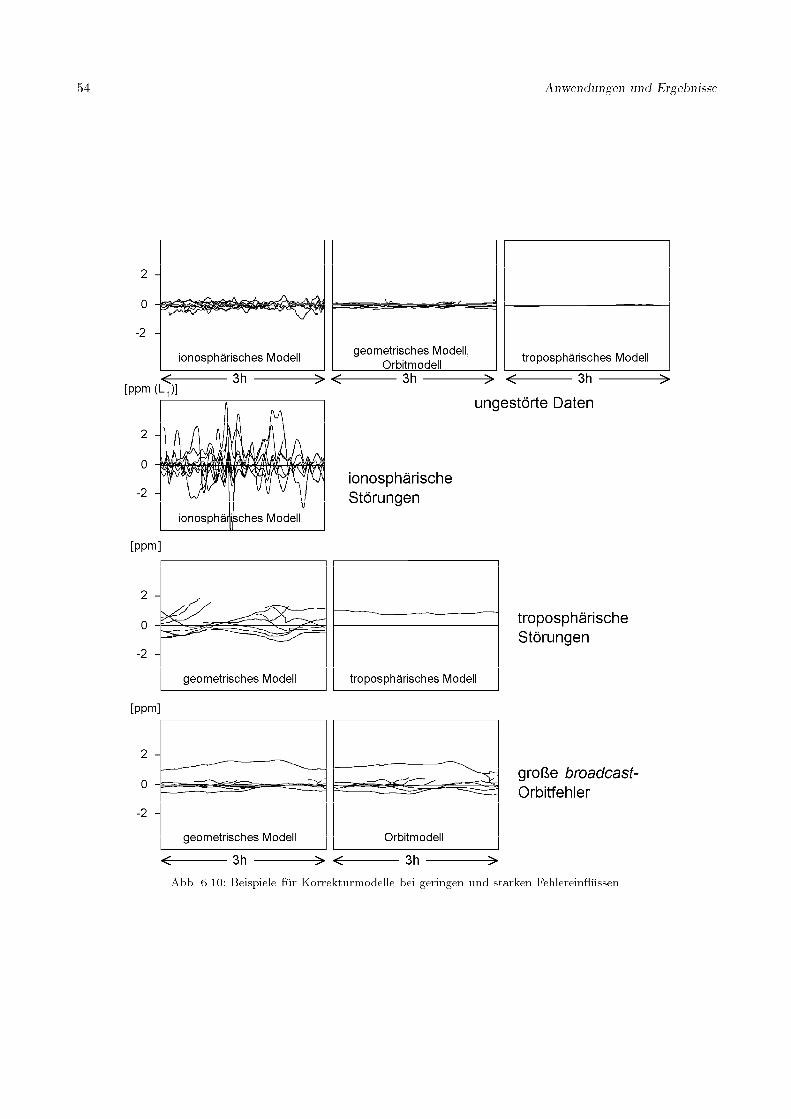
�� Anwendungen und Ergebnisse
����������� ������������������ !"#$%&'()
Abb� ����� Beispiele fur Korrekturmodelle bei geringen und starken Fehlerein�ussen�

Anwendungen und Ergebnisse ��
�� Grad Elevation� Dabei wurden zur Vorabverringerung der entfernungsabh�angigen Fehlerein��usse sowohl ein Modell des absoluten Elektronengehalts derIonosph�are angewendet als auch Zusatzparameter zurErfassung troposph�arischer Refraktion mitgesch�atzt�Unterkapitel ����� Trotzdem verbleibende einzelneMehrdeutigkeiten betre�en im allgemeinen tiefstehende Satelliten mit wenigen Beobachtungen�
Zeitreihen der Modellkoe!zienten eignen sich hervorragend zur Identi�zierung extremer ionosph�arischer�troposph�arischer oder Orbitfehlerein��usse auf die relative Positionierung� In mancher Woche konnten extreme Ein��usse aller drei Fehlerarten entdeckt werden�Abb� ���� Ionosph�arische St�orungen traten im allgemeinen in der Form von wandernden St�orungen mittlerer Gr�o e �MSTIDs� auf� die in mittleren Breiteninsbesondere in den Wintermonaten w�ahrend der Tageslichtstunden anzutre�en sind �siehe Unterkapitel����� Troposph�arische St�orungen werden durch Wetterfronten verursacht� die �uber das Me gebiet hinwegziehen� Die im Beispiel der Abbildung �� amDonnerstag und Freitag zu erkennende St�orung istdie st�arkste troposph�arische St�orung w�ahrend derdrei Monate� Gro e broadcastOrbitfehler wurden imDurchschnitt f�ur fast einen Satellitendurchgang proWoche entdeckt� Bei dem am Freitag Vormittag insbesondere im OstWestNeigungsKoe!zienten zu erkennenden Fehlerein�u betr�agt die Di�erenz zwischen broadcast und pr�azisen IGSOrbits bis zu ��m�
Ausgew�ahlte Beispiele f�ur Zeitreihen von Korrekturkoe!zienten bei ungest�orten und gest�orten Datenwerden in Abbildung ���� gegen�ubergestellt� Bei ungest�orten Daten �uberschreiten die Korrekturwerte ���ppm nicht� Maximale Werte werden bei ionosph�arischen St�orungen mit bis zu beobachteten � ppm �aufL� bezogen� erreicht� Hier treten auch die schnellsten Ver�anderungen der Korrekturwerte mit der Zeitauf� sie erreichten bis zu ��� ppm �L�� pro Minute�Troposph�arische St�orungen und Orbitfehler sind dagegen sehr viel langperiodischer und erreichten bei allen gesichteten Daten im geometrischen Modell maximale Werte von � ppm� Die Ver�anderungen der Korrekturwerte mit der Zeit lagen immer unterhalb ���ppm pro Minute� Bei der Realisierung von EchtzeitAnwendungen ergibt sich daraus die Schlu folgerung�da die Modellarten getrennt �ubertragbar sein sollten� da das ionosph�arische Modell in vielen F�allenh�au�ger aufdatiert werden mu als das geometrischeModell�
����� Positionierungsergebnisse
Die Positionierung der Station STEN wurde mit Hilfe ausgesuchter Beobachtungsdaten einer f�ur seine
N�aherungsposition berechneten virtuellen Referenzstation� welche aus den Daten der sieben umliegenden realen Referenzstationen abgeleitet wurde� durchgef�uhrt� Wieder wurden � Minuten lange Beobachtungsst�ucke verwendet und die Qualit�at der Ergebnisse anhand der Kriterien Korrektheit der Mehrdeutigkeitsl�osung und Koordinatengenauigkeit betrachtet� ZumVergleich dient die Positionierung von STEN�uber die k�urzeste Basislinie zu einer realen Referenzstation� n�amlich HVLB� welche � km von STEN entfernt liegt� Alle Berechnungen wurden mit GPSurvey���� durchgef�uhrt�
Es wurden Beobachtungszeitr�aume ausgesucht� die indie oben vorgestellten Kategorien ungest�orte Daten�ionosph�arische St�orungen� troposph�arische St�orungenoder gro e Orbitfehler einzuordnen waren� F�ur dieungest�orten Daten wurden drei volle Tage verwendet ���� �MinutenSt�ucke�� Von den gest�orten Beobachtungsdaten wurden jeweils etwa �� Stunden ausgew�ahlt�
Die Aufspaltung des geometrischen Modells in troposph�arisches und Orbitmodell hat keinen Ein�u aufdie Genauigkeit der Ergebnisse� Auch sind die Unterschiede zwischen ge�lterten und unge�lterten Koe!zienten so gering� da hier nur die L�osungen pr�asentiert werden� die auf unge�lterten Koe!zienten desionosph�arischen und geometrischen Modells beruhen�
F�ur die � km lange Basislinie HVLBSTEN und jeweils � Minuten Beobachtungen liegt die Quote korrekter Mehrdeutigkeitsl�osungen um �� �Tab� �����Wie die n�ahere Untersuchung der Daten mit gro enOrbitfehlern ergab� erreicht sie hier wohl aufgrundeiner �uberdurchschnittlich gro en Satellitenanzahleinen deutlich h�oheren Wert� Die niedrigste Anzahlkorrekter L�osungen ergab sich beim Auftreten ionosph�arischer St�orungen� Ansonsten wirkt sich das Vorhandensein von St�orungen nicht erkennbar negativauf die Mehrdeutigkeitsl�osung aus�
Bei der Berechnung der Basislinie virtuelle Referenzstation � STEN konnten in allen Datengruppendeutlich mehr korrekte Mehrdeutigkeitsl�osungen erzielt werden� Die Quote liegt hier zwischen � und����� Die nicht gel�osten Restf�alle sind zu einemgro en Teil auf schlechte Satellitengeometrien zur�uckzuf�uhren� Beim Auftreten ionosph�arischer St�orungengibt es mit �� weniger korrekte L�osungen� welchesauf noch vorhandene Restfehler ionosph�arischer Refraktion schlie en l�a t�
Beim Vergleich der Koordinatengenauigkeiten wurden f�ur die Basislinie HVLB � STEN L�L�osungenverwendet� wodurch ionosph�arische St�orungen hiernicht zu erkennen sind� Ebenso kommen die gro enOrbitfehler nicht zum Tragen� da sie nur einen Satelliten unter einer �uberdurchschnittlich gro en Sa
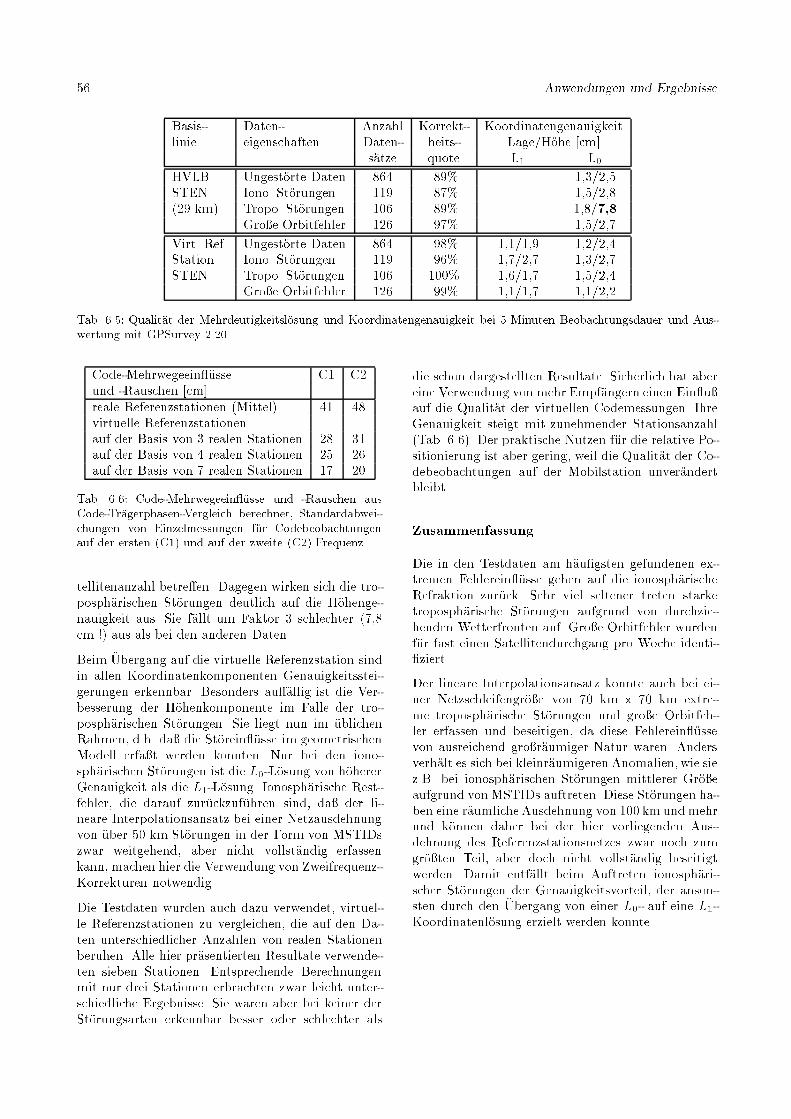
�� Anwendungen und Ergebnisse
Basis Daten Anzahl Korrekt Koordinatengenauigkeitlinie eigenschaften Daten heits Lage�H�ohe �cm�
s�atze quote L� L�
HVLB� Ungest�orte Daten ��� �� � �������STEN Iono� St�orungen �� ��� � ��������� km� Tropo� St�orungen ��� �� � ������
Gro e Orbitfehler ��� �� � �������
Virt� Ref� Ungest�orte Daten ��� �� ������ �������Station � Iono� St�orungen �� �� ������� �������STEN Tropo� St�orungen ��� ���� ������� �������
Gro e Orbitfehler ��� � ������� �������
Tab� ���� Qualitat der Mehrdeutigkeitslosung und Koordinatengenauigkeit bei � Minuten Beobachtungsdauer und Aus�wertung mit GPSurvey �����
CodeMehrwegeein��usse C� C�und Rauschen �cm�reale Referenzstationen �Mittel� �� ��virtuelle Referenzstationen ���auf der Basis von � realen Stationen �� ��auf der Basis von � realen Stationen �� ��auf der Basis von � realen Stationen �� ��
Tab� ���� Code�Mehrwegeein�usse und �Rauschen ausCode�Tragerphasen�Vergleich berechnet� Standardabwei�chungen von Einzelmessungen fur Codebeobachtungenauf der ersten C�� und auf der zweite C�� Frequenz�
tellitenanzahl betre�en� Dagegen wirken sich die troposph�arischen St�orungen deutlich auf die H�ohengenauigkeit aus� Sie f�allt um Faktor � schlechter ����cm "� aus als bei den anderen Daten�
Beim �Ubergang auf die virtuelle Referenzstation sindin allen Koordinatenkomponenten Genauigkeitssteigerungen erkennbar� Besonders au��allig ist die Verbesserung der H�ohenkomponente im Falle der troposph�arischen St�orungen� Sie liegt nun im �ublichenRahmen� d�h� da die St�orein��usse im geometrischenModell erfa t werden konnten� Nur bei den ionosph�arischen St�orungen ist die L�L�osung von h�ohererGenauigkeit als die L�L�osung� Ionosph�arische Restfehler� die darauf zur�uckzuf�uhren sind� da der lineare Interpolationsansatz bei einer Netzausdehnungvon �uber �� km St�orungen in der Form von MSTIDszwar weitgehend� aber nicht vollst�andig erfassenkann� machen hier die Verwendung von ZweifrequenzKorrekturen notwendig�
Die Testdaten wurden auch dazu verwendet� virtuelle Referenzstationen zu vergleichen� die auf den Daten unterschiedlicher Anzahlen von realen Stationenberuhen� Alle hier pr�asentierten Resultate verwendeten sieben Stationen� Entsprechende Berechnungenmit nur drei Stationen erbrachten zwar leicht unterschiedliche Ergebnisse� Sie waren aber bei keiner derSt�orungsarten erkennbar besser oder schlechter als
die schon dargestellten Resultate� Sicherlich hat abereine Verwendung von mehr Empf�angern einen Ein�u auf die Qualit�at der virtuellen Codemessungen� IhreGenauigkeit steigt mit zunehmender Stationsanzahl�Tab� ����� Der praktische Nutzen f�ur die relative Positionierung ist aber gering� weil die Qualit�at der Codebeobachtungen auf der Mobilstation unver�andertbleibt�
Zusammenfassung
Die in den Testdaten am h�au�gsten gefundenen extremen Fehlerein��usse gehen auf die ionosph�arischeRefraktion zur�uck� Sehr viel seltener treten starketroposph�arische St�orungen aufgrund von durchziehenden Wetterfronten auf� Gro e Orbitfehler wurdenf�ur fast einen Satellitendurchgang pro Woche identi�ziert�
Der lineare Interpolationsansatz konnte auch bei einer Netzschleifengr�o e von �� km x �� km extreme troposph�arische St�orungen und gro e Orbitfehler erfassen und beseitigen� da diese Fehlerein��ussevon ausreichend gro r�aumiger Natur waren� Andersverh�alt es sich bei kleinr�aumigeren Anomalien� wie siez�B� bei ionosph�arischen St�orungen mittlerer Gr�o eaufgrund vonMSTIDs auftreten� Diese St�orungen haben eine r�aumliche Ausdehnung von ��� km und mehrund k�onnen daher bei der hier vorliegenden Ausdehnung des Referenzstationsnetzes zwar noch zumgr�o ten Teil� aber doch nicht vollst�andig beseitigtwerden� Damit entf�allt beim Auftreten ionosph�arischer St�orungen der Genauigkeitsvorteil� der ansonsten durch den �Ubergang von einer L� auf eine L�Koordinatenl�osung erzielt werden konnte�
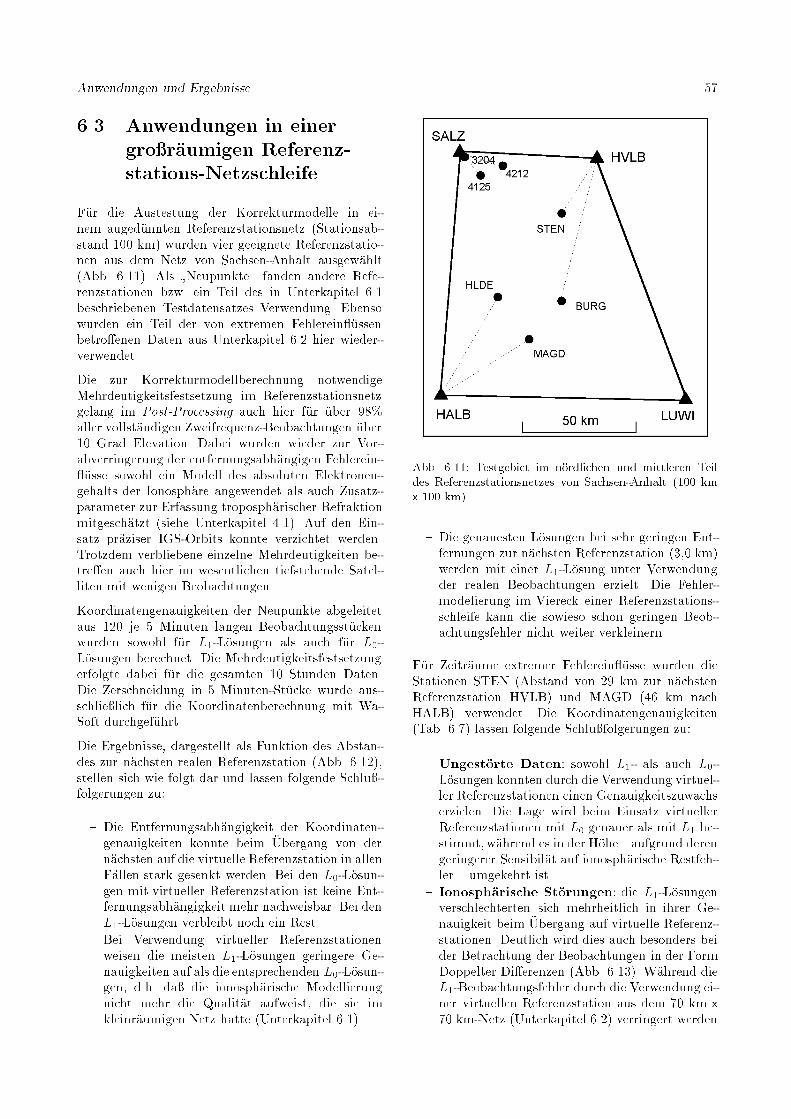
Anwendungen und Ergebnisse ��
�� Anwendungen in einer
gror�aumigen Referenz�
stations�Netzschleife
F�ur die Austestung der Korrekturmodelle in einem auged�unnten Referenzstationsnetz �Stationsabstand ��� km� wurden vier geeignete Referenzstationen aus dem Netz von SachsenAnhalt ausgew�ahlt�Abb� ������ Als
�Neupunkte� fanden andere Refe
renzstationen bzw� ein Teil des in Unterkapitel ���beschriebenen Testdatensatzes Verwendung� Ebensowurden ein Teil der von extremen Fehlerein��ussenbetro�enen Daten aus Unterkapitel ��� hier wiederverwendet�
Die zur Korrekturmodellberechnung notwendigeMehrdeutigkeitsfestsetzung im Referenzstationsnetzgelang im PostProcessing auch hier f�ur �uber ��aller vollst�andigen ZweifrequenzBeobachtungen �uber�� Grad Elevation� Dabei wurden wieder zur Vorabverringerung der entfernungsabh�angigen Fehlerein��usse sowohl ein Modell des absoluten Elektronengehalts der Ionosph�are angewendet als auch Zusatzparameter zur Erfassung troposph�arischer Refraktionmitgesch�atzt �siehe Unterkapitel ����� Auf den Einsatz pr�aziser IGSOrbits konnte verzichtet werden�Trotzdem verbliebene einzelne Mehrdeutigkeiten betre�en auch hier im wesentlichen tiefstehende Satelliten mit wenigen Beobachtungen�
Koordinatengenauigkeiten der Neupunkte abgeleitetaus ��� je � Minuten langen Beobachtungsst�uckenwurden sowohl f�ur L�L�osungen als auch f�ur L�L�osungen berechnet� Die Mehrdeutigkeitsfestsetzungerfolgte dabei f�ur die gesamten �� Stunden Daten�Die Zerschneidung in � MinutenSt�ucke wurde ausschlie lich f�ur die Koordinatenberechnung mit WaSoft durchgef�uhrt�
Die Ergebnisse� dargestellt als Funktion des Abstandes zur n�achsten realen Referenzstation �Abb� ������stellen sich wie folgt dar und lassen folgende Schlu folgerungen zu�
� Die Entfernungsabh�angigkeit der Koordinatengenauigkeiten konnte beim �Ubergang von dern�achsten auf die virtuelle Referenzstation in allenF�allen stark gesenkt werden� Bei den L�L�osungen mit virtueller Referenzstation ist keine Entfernungsabh�angigkeit mehr nachweisbar� Bei denL�L�osungen verbleibt noch ein Rest�
� Bei Verwendung virtueller Referenzstationenweisen die meisten L�L�osungen geringere Genauigkeiten auf als die entsprechenden L�L�osungen� d�h� da die ionosph�arische Modellierungnicht mehr die Qualit�at aufweist� die sie imkleinr�aumigen Netz hatte �Unterkapitel �����
����������� ��
Abb� ����� Testgebiet im nordlichen und mittleren Teildes Referenzstationsnetzes von Sachsen�Anhalt ��� kmx ��� km��
� Die genauesten L�osungen bei sehr geringen Entfernungen zur n�achsten Referenzstation ���� km�werden mit einer L�L�osung unter Verwendungder realen Beobachtungen erzielt� Die Fehlermodelierung im Viereck einer Referenzstationsschleife kann die sowieso schon geringen Beobachtungsfehler nicht weiter verkleinern�
F�ur Zeitr�aume extremer Fehlerein��usse wurden dieStationen STEN �Abstand von � km zur n�achstenReferenzstation HVLB� und MAGD ��� km nachHALB� verwendet� Die Koordinatengenauigkeiten�Tab� ���� lassen folgende Schlu folgerungen zu�
� Ungest�orte Daten� sowohl L� als auch L�L�osungen konnten durch die Verwendung virtueller Referenzstationen einen Genauigkeitszuwachserzielen� Die Lage wird beim Einsatz virtuellerReferenzstationen mit L� genauer als mit L� bestimmt�w�ahrend es in der H�ohe � aufgrund derengeringerer Sensibil�at auf ionosph�arische Restfehler � umgekehrt ist�
� Ionosph�arische St�orungen� die L�L�osungenverschlechterten sich mehrheitlich in ihrer Genauigkeit beim �Ubergang auf virtuelle Referenzstationen� Deutlich wird dies auch besonders beider Betrachtung der Beobachtungen in der FormDoppelter Di�erenzen �Abb� ������ W�ahrend dieL�Beobachtungsfehler durch die Verwendung einer virtuellen Referenzstation aus dem �� km x
�� kmNetz �Unterkapitel ���� verringert werden
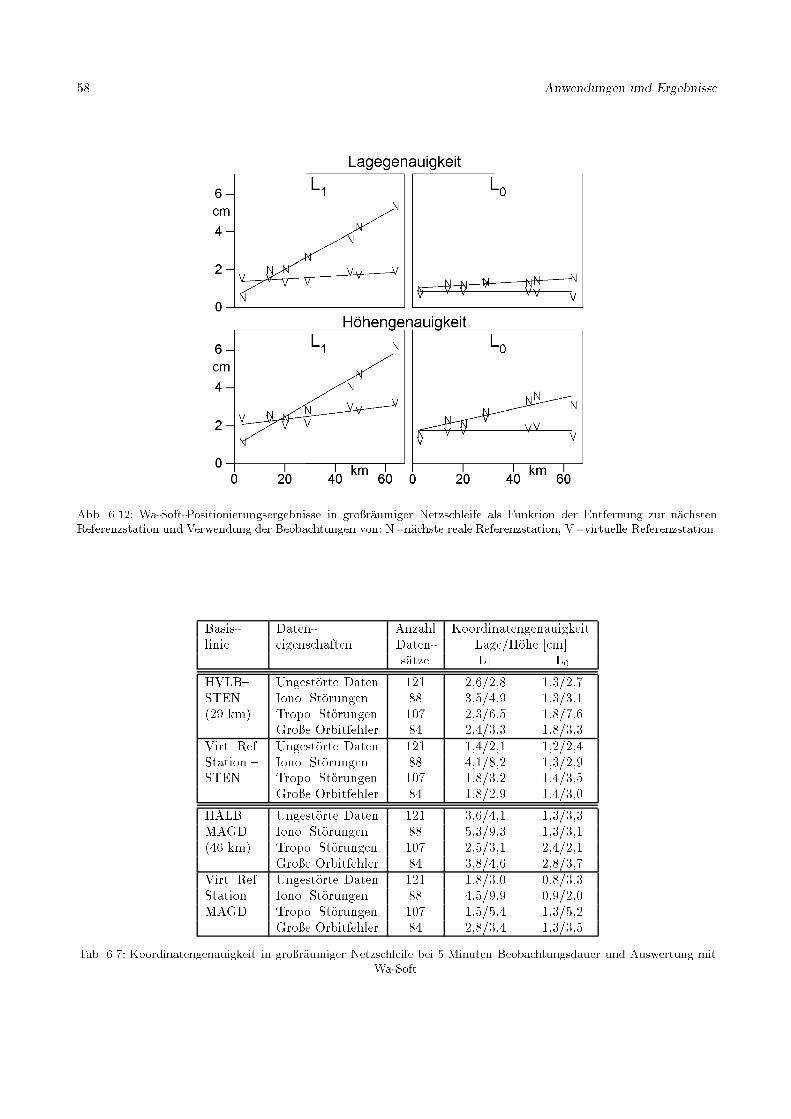
�� Anwendungen und Ergebnisse
����������� ��
Abb� ����� Wa�Soft�Positionierungsergebnisse in gro�raumiger Netzschleife als Funktion der Entfernung zur nachstenReferenzstation und Verwendung der Beobachtungen von� N � nachste reale Referenzstation� V � virtuelle Referenzstation�
Basis Daten Anzahl Koordinatengenauigkeitlinie eigenschaften Daten Lage�H�ohe �cm�
s�atze L� L�
HVLB� Ungest�orte Daten ��� ������� �������STEN Iono� St�orungen �� ������ ��������� km� Tropo� St�orungen ��� ������� �������
Gro e Orbitfehler �� ������� �������Virt� Ref� Ungest�orte Daten ��� ������� �������Station � Iono� St�orungen �� ������� ������STEN Tropo� St�orungen ��� ������� �������
Gro e Orbitfehler �� ������ �������
HALB� Ungest�orte Daten ��� ������� �������MAGD Iono� St�orungen �� ������ ���������� km� Tropo� St�orungen ��� ������� �������
Gro e Orbitfehler �� ������� �������Virt� Ref� Ungest�orte Daten ��� ������� �������Station � Iono� St�orungen �� ����� ������MAGD Tropo� St�orungen ��� ������� �������
Gro e Orbitfehler �� ������� �������
Tab� ���� Koordinatengenauigkeit in gro�raumiger Netzschleife bei � Minuten Beobachtungsdauer und Auswertung mitWa�Soft�
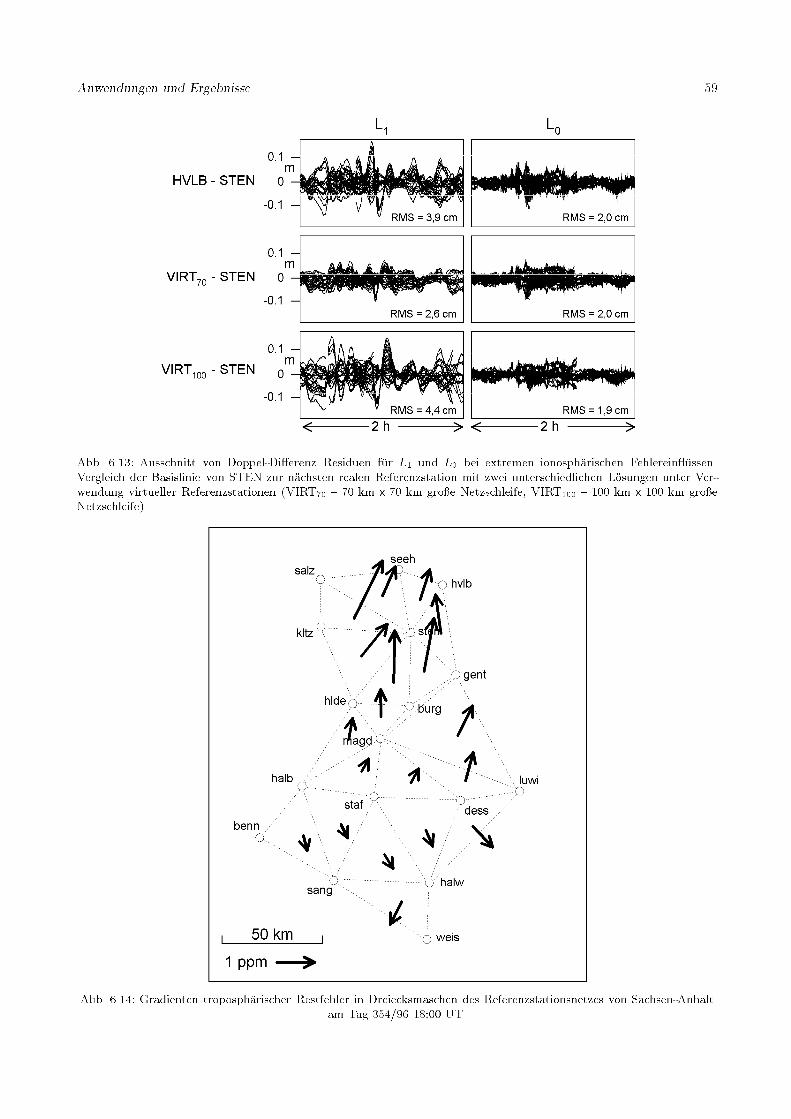
Anwendungen und Ergebnisse �
����������� ����������
Abb� ����� Ausschnitt von Doppel�Di erenz Residuen fur L� und L� bei extremen ionospharischen Fehlerein�ussen�Vergleich der Basislinie von STEN zur nachsten realen Referenzstation mit zwei unterschiedlichen Losungen unter Ver�wendung virtueller Referenzstationen VIRT�� � �� km x �� km gro�e Netzschleife� VIRT��� � ��� km x ��� km gro�eNetzschleife��
����������� �����������
Abb� ����� Gradienten tropospharischer Restfehler in Dreiecksmaschen des Referenzstationsnetzes von Sachsen�Anhaltam Tag ������ ����� UT�

�� Anwendungen und Ergebnisse
konnten� verst�arken sie sich im ��� km x ��� kmNetz� Die L�L�osungen sind davon nicht betroffen�
Die Ionosph�arenmodellierung ist hier alsovollst�andig gescheitert� Die Beobachtungsfehler konnten nicht verringert werden� sondernsie werden noch verst�arkt� Dies bedeutet� da auch die Mehrdeutigkeitsl�osung in der Basisliniezum Neupunkt erschwert wird� Wandernde ionosph�arische St�orungen mittlerer Gr�o e k�onnen also bei einem Referenzstationsabstand von ���km nicht mehr erfa t werden�
� Troposph�arische St�orungen� F�ur die Basislinien zur Station STEN gelang die Verringerungder troposph�arischen Fehler �Verbesserung derL�H�ohengenauigkeit von ��� cm auf ��� cm��wenn auch nicht so gut wie im kleineren Netz�vgl� Tab� ����� Dagegen wurden bei der StationMAGD erst durch die Verwendung der virtuellen Station relative troposph�arische Fehler in dieBeobachtungen eingef�uhrt �Verschlechterung derL�H�ohengenauigkeit von ��� cm auf ��� cm��
Dieses auf den ersten Blick widerspr�uchliche Ergebnis wird erkl�arlich� wenn die troposph�arischen Gradienten im gesamten Referenzstationsnetz von SachsenAnhalt betrachtet werden �Abb� ������ Sie wurden f�ur Stationsdreiecke beispielhaft f�ur einen Zeitpunkt der verwendeten Beobachtungsperiode berechnet �troposph�arisches Modell�� Es ist eine NordS�udGliederung zu erkennen mit den st�arksten Gradienten von �uber � ppm im n�ordlichen Netzteil bis zur Breite von HLDEBURGGENT� Esschlie en sich s�udlich schw�achere Gradienten mit�ahnlicher Ausrichtung bis zur Breite von HALBSTAFDESSLUWI an� Die Gradienten im s�udlichen Netzteil sind weniger ausgepr�agt und weisenin fast entgegengesetzte Richtung�
F�ur den gew�ahlten Zeitpunkt ergibt sich in der��� km x ��� km gro en Netzschleife HALBLUWIHVLBSALZ ein Gradient von ���� ppmmit einem Azimut von ���� Dies entspricht den
Fehlern der Basislinien STENHVLB sehr vielmehr �Di�erenz der troposph�arischen Zenitverz�ogerung� ��� cm bei � km Basislinienl�ange�� ��� ppm�� Basislinienazimut� ���� als denender Basislinie HALBMAGD �Di�erenz der troposph�arischen Zenitverz�ogerung� ��� cm auf ��km Basislinienl�ange �� ���� ppm�� Basislinienazimut� �����
Die in diesem Beispiel durchziehende Wetterfront f�uhrt also zu troposph�arischen St�orungen�die kleinr�aumiger sind als der gew�ahlte Abstandder Referenzstationen� Eine Verringerung dervon ihr erzeugten relativen Beobachtungsfehlerw�urde nur bei geringerem Abstand der Referenzstationen gelingen�
� Gro�e Orbitfehler� die gro en Orbitfehler eines einzelnen Satelliten spiegeln sich in den Koordinatengenauigkeiten nicht wider� Die Verwendung der virtuellen Referenzstation bewirkt eineGenauigkeitssteigerung der erzielten Ergebnisse�
Zusammenfassung
Die Modellierung der entfernungs und richtungsabh�angigen Fehlerein��usse gelingt in der ��� km x
��� km gro en Netzschleife nicht mehr so gut wie beieinem geringeren Referenzstationsabstand� Die L�L�osungen sind nur noch bei wenigen Basislinien genauer als die L�L�osungen� Der Genauigkeitszuwachs�der sich durch den �Ubergang auf L�L�osungen aufgrund deren geringerer Beein�u ung durch Mehrwegee�ekte und Me rauschen ergab� kann hier nichtmehr ausgenutzt werden�
Beim Auftreten extremer Fehlerein��usse der Ionosph�are und Troposph�are gelingt deren Beseitigungunvollst�andig oder nicht mehr� da die St�orein��ussegeringere r�aumliche Ausdehnungen haben als der Abstand der gew�ahlten Referenzstationen� Um auchsolch extreme Ein��usse erfassen zu k�onnen� mu einkleinerer Referenzstationsabstand gew�ahlt werden�

��
� Zusammenfassung und Ausblick
In konsequenter Weiterentwicklung der cmgenauenrelativen GPSPositionierung zu einem noch rationelleren und wirtschaftlicheren Me verfahren werdenmehr und mehr permanent arbeitende Referenzstationen aufgebaut� Sie erzeugen zum einen die Korrekturdaten� die f�ur die relative Positionierung notwendig sind und stellen zum anderen den Bezug zumgew�unschten geod�atischen Datum her�
Aufgrund der entfernungsabh�angig wirkenden Fehler�Orbitfehler� ionosph�arische und troposph�arische Refraktion� ist eine schnelle und zuverl�assige L�osungder Phasenmehrdeutigkeiten nur f�ur kurze Entfernungen �Gr�o enordnung �� km� zur n�achsten Referenzstation m�oglich� Auch die erzielbaren Koordinatengenauigkeiten sinken mit zunehmender Entfernung�Ein ��achendeckender Aufbau eines Referenzstationsnetzes� bei dem ein �� kmAbstand zur n�achsten Referenzstation nicht �uberschritten wird� ist aufgrundder sehr gro en Anzahl von notwendigen Stationenkostspielig� Kosteng�unstiger ist der Aufbau und Betrieb von weniger Stationen und daf�ur einer verbesserten Modellierung der entfernungsabh�angig wirkenden Fehlerein��usse�
Um die zu modellierenden Fehler mit mmGenauigkeit bestimmen zu k�onnen� m�ussen diePhasenmehrdeutigkeiten im Referenzstationsnetzgel�ost und festgesetzt worden sein� Aufgrund dermmgenau bekannten Stationskorrdinaten ist dieswesentlich einfacher durchzuf�uhren als f�ur nurn�aherungsweise bekannte Basislinien� Auch wennaus den GPSMessungen abgeleitete Modelle desabsoluten Elektronengehalts der Ionosph�are und dertroposph�arischen Refraktionsunterschiede zwischenden Stationen eingef�uhrt werden� verbleiben z�T� einige wenige ungel�oste Mehrdeutigkeiten meist niedrigstehender Satelliten mit wenigen Beobachtungen� DieUrsachen daf�ur liegen insbesondere bei Restfehlernder Refraktionsmodelle und bei Mehrwegefehlern�F�ur Beobachtungen mit ungel�osten Mehrdeutigkeitenk�onnen keine pr�azisen Korrekturmodelle berechnetwerden� so da sie von der weiteren Datenauswertung ausgeschlossen werden sollten� Die Anzahl derhiervon betro�enen Beobachtungen ist bei einemAbstand der Referenzstationen in der Gr�o enordnung von �� km im allgemeinen so gering �� ������ da keine Einschr�ankung der Verf�ugbarkeit derGPSPositionierung gegeben ist�
Durch Bildung entsprechender Linearkombinationender Ursprungssignale gelingt die Trennung nachden Fehlerursachen ionosph�arischer Refraktion aufder einen Seite sowie Orbitfehlern und troposph�ari
scher Refraktion auf der anderen� Eine weitere Aufspaltung in satellitenindividuelle Orbitfehler undtroposph�arische Zenitfehlerdi�erenzen ist m�oglich�bringt aber f�ur PostProcessingAnwendungen keine weiteren Vorteile� Der Modellierungsansatz bestimmt satelliten und epochenindividuell ionosph�arische und geometrische Korrekturmodelle� Mindestensdrei Referenzstationen sind notwendig� um ��achenhaft Korrekturmodelle zur Verringerung der entfernungsabh�angig wirkenden Fehler zu erzeugen�
Mittelt man zus�atzlich die korrespondierenden Beobachtungen der Referenzstationen� werden auch diestationsabh�angigen Fehler abgeschw�acht� Insbesondere die Mehrwegeein��usse auf die Codebeobachtungenk�onnen so verringert werden� was zu genaueren N�aherungsl�osungen der zu bestimmenden Mobilstationenf�uhrt und damit zu einer schnelleren und zuverl�assigeren Mehrdeutigkeitsl�osung in der Basisline zur Mobilstation�
Die Verwendung der Korrekturmodelle und die Mittelung korrespondierender Beobachtungen f�uhrt zumKonzept der virtuellen Referenzstationen� Dabei werden f�ur eine gew�ahlte Position� die m�oglichst nahzur Position der Mobilstation liegen sollte� die Beobachtungen einer virtuellen Referenzstation berechnet� Die cmgenaue Positionierung der Mobilstationerfolgt dann �uber die Basislinie zur virtuellen Station� Mit diesem Konzept k�onnen alle Vorteile einesReferenzstationsnetzes ausgenutzt werden und gleichzeitig vorhandene Algorithmen und Software zur Positionierung der Mobilstation angewandt werden� Jenach Realisierung des Konzepts ist das zur Mobilstation zu �ubertragende Datenvolumen genau so gro oder nur unwesentlich gr�o er als bei Verwendung nureiner einzigen Referenzstation�
Umfangreiche PostProcessingDatenauswertungenbest�atigen das Auswertekonzept� In Netzschleifenmit Ausdehnungen in der Gr�o enordnung von ��km x �� km gelang die weitgehende Erfassung undBeseitigung der entfernungsabh�angig wirkendenFehlerein��usse sogar unter extremen Fehlerbedingungen� Dies verbesserte die Mehrdeutigkeitsl�osungund verringerte die Koordinatenfehler bei der Positionierung von Mobilstationen� Restfehler verbliebenaber bei ionosph�arischen St�orungen mittlerer Gr�o e�die durch die Korrekturmodelle nicht vollst�andigerfa t werden konnten� Bei einem gr�o eren Abstandder Referenzstationen ���� km� f�uhrt der gew�ahlteAnsatz im allgemeinen auch zu guten Resultaten�er scheiterte aber beim Auftreten von ionosph�arischen und troposph�arischen St�orungen� Von daher

�� Zusammenfassung und Ausblick
scheint f�ur die in Mitteleuropa vorherrschendenRefraktionsbedingungen ein maximaler Abstand derReferenzstationen von �� km am besten geeignetzu sein� um mit einer m�oglichst geringen Anzahlvon Referenzstationen ��achendeckend cmgenaueGPSPositionierung zu erm�oglichen�
Die mit den Daten aus SachsenAnhalt erzielten Resultate k�onnen nicht direkt auf andere Regionender Erde �ubertragen werden� Beim Vorliegen anderer Refraktionsbedingungen mu das Auswertekonzept erweitert werden �z�B� zur Erfassung der troposph�arischen H�ohenabh�angigkeiten im Hochgebirge�� mu der maximal zul�assige Referenzstationsabstand geringer gew�ahlt werden �z�B� beim Auftreten troposph�arischer oder ionosph�arischer St�orungengeringerer r�aumlicher Ausdehnung� oder es mu sogar damit gerechnet werden� da der Modellierungsansatz zeitweise vollst�andig scheitert �bei starken�kleinr�aumigen ionosph�arischen St�orungen in den
Polarregionen und in der �Aquatorregion�� Ebensom�ussen die Ans�atze einem erneuten Praxistest unterzogen werden� wenn aufgrund st�arkerer Sonnenaktivit�at in den Jahren � bis ���� verst�arkt ionosph�arische St�orungen auftreten werden�
Dagegen sind verbesserte Resultate zu erwarten� wenn es gelingt� die Phasenmehrwegeausbreitung auf den Referenzstationen durch ausgereiftereEmpf�anger und Antennentechnik oder durch stationsweise MehrwegeKalibrierung zu verringern�
Auch die Verwirklichung einer dritten Me frequenz�wie sie f�ur die n�achste GPSSatellitengenerationgeplant ist und die insbesondere die Mehrdeutigkeitsl�osung vereinfachen und zuverl�assiger machenwird� wird Auswirkungen auf die Positionierung inregionalen GPSNetzen haben� Eine pr�azise Modellierung der entfernungs und richtungsabh�angigen Fehlerein��usse wird aber auch dann notwendig bleiben�
��
� Literatur
Abe� Y�� H� Tsuji ������� A Nationwide GPS Arrayin Japan for Geodynamics and Surveying� GeomaticsInfo Magazine� ��������
Augath� W� ������ Lagenetze� In� Pelzer� H� Hg���Geod�atische Netze in Landes� und Ingenieurvermes�sung II� Konrad Wittwer� Stuttgart� ��������
Augath� W�� M� Frohlich� H��H� Kropp� W� Sei�fert� M� Strerath ������� Aufbau von GPS�Per�manentstationen in Niedersachsen � Status ��������Nachrichten der Nieders�achsischen Vermessungs�und Katasterverwaltung� ��� ��������
Axelrad� P�� C� Comp� P� MacDoran ������� Use ofSignal�To�Noise Ratio for Multipath Error Correc�tion in GPS Di erential Phase Measurements� Me�thodology and Experimental Results� Proc� of IONGPS���� Salt Lake City� Utah� ��������
Beutler� G�� W� Gurtner� I� Bauersima� M� Ro�thacher ���� �� E�cient Computation of the In�verse of the Covariance Matrix of Simultaneous GPSCarrier Phase Di erence Observations� ManuscriptaGeodaetica� �����������
Beutler� G�� I� Bauersima� W� Gurtner� M� Ro�thacher ������� Correlations between SimultaneusGPS Double Di erence Carrier Phase Observationsin the Multistation Mode� Implementation Conside�rations and First Experiences� Manuscripta Geodae�tica� ���������
Beutler� G�� I� Bauersima� W� Gurtner� M� Ro�thacher� T� Schildknecht� A� Geiger �������Atmospheric Refraction and Other Important Bia�ses in GPS Carrier Phase Observations� In� Brunner�F�K�� Atmospheric E�ects on Geodetic Space Measu�rements� Monograph ��� School of Surveying� Uni�versity of New South Wales� ������
Beutler� G� ���� �� GPS Satellite Orbits� In� Kleus�berg� A�� P�J�G Teunissen Hg��� GPS for Geodesy�Springer Verlag� Berlin Heidelberg ����� �������
Bishop� G�J�� D�S� Coco� P�H� Kappler� E�A� Hol�land ������� Studies and Performance of a NewTechnique for Mitigation of Pseudorange MultipathE ects in GPS Ground Stations� Proc� of ION ����National Technical Meeting� San Diego� Ca�� ��������
Black� H�D� ������� An Easily Implemented Algo�rithm for the Tropospheric Range Correction� Jour�nal of Geophysical Research� ����B�� ����������
Braasch� M�S� ���� �� Multipath E ects� In� Parkin�son� B�W�� J�J� Spilker Hg��� Global Positioning Sy�stem Theory and Applications� Progress in Astro�nautics and Aeronautics� Vol ���� American Instituteof Aeronautics and Astronautics� Band �� ��������
Braun� J�� B� Stephens� O� Ruud� C� Meer�tens ������� The E�ect of Antenna Covers onGPS Baseline Solutions� University NAVSTARConsortium UNAVCO�� Boulder� CO� ����������http���unavco�ucar�edu�docs�science�dome report��
Breuer� B�� J� Campbell� A� Muller ������� GPS�Me�� und Auswerteverfahren unter operationellenGPS�Bedingungen� SPN Zeitschrift f�ur satelliten�gest�utzte Positionierung� Navigation und Kommuni�kation� ��������
Breuer� B�� J� Campbell� B� Gorres� J� Hawig�R� Wohlleben ������ Kalibrierung von GPS�Antennen fur hochgenaue geodatische Anwendun�gen� SPN Zeitschrift f�ur satellitengest�utzte Positio�nierung� Navigation und Kommunikation� ��������
Brown� L�D�� R�E� Daniell� M�W� Fox� J�A� Klo�buchar� P�H� Doherty ������� Evaluation of SixIonospheric Models as Predictors of Total ElectronContent� Radio Science� � �����������
Brown� R�G�� P�Y�C� Hwang ������� Introduction toRandom Signals and Applied Kalman Filtering� ��Au�age� John Wiley � Sons� New York�
Bruyninx� C� und �� Koautoren ������� The Use ofthe EUREF Permanent GPS Network for the Main�tenance of the European Terrestrial Reference Fra�me� In� Brunner� F�K� Hg���Advances in Positioningand Reference Frames� Proc� of the IAG Scienti�cAssembly� Rio de Janeiro� ����� ������
Erickson� C� ������� An Analysis of Ambiguity Re�solution Techniques for Rapid Static GPS SurveysUsing Single Frequency Data� Proc� of ION GPS����Albuquerque� NM� ��������
Francisco� S�G� ���� �� GPS Operational ControlSegment� In� Parkinson� B�W�� J�J� Spilker Hg���Global Positioning System Theory and Applications�Progress in Astronautics and Aeronautics� Vol ����American Institute of Aeronautics and Astronautics�Band �� ��������
Frohlich� M� ������ Zur Entwicklung eines Hoch�pr�azisen Permanenten Positionierungsservice HPPS�� Wissenschaftliche Arbeiten der Fachrich�tung Vermessungswesen der Universitat Hannover�Nr� ���� Hannover�
Garin� L�� J��M� Rousseau ������� Enhanced Stro�be Correlator Multipath Rejection for Code � Carri�er� Proc� of ION GPS���� Kansas City� Mo�� ��������
Gendt� G�� G� Dick� C� Reigber ������ Das IGS�Analysezentrum am GFZ Potsdam� Verarbeitungs�system und Ergebnisse� Zeitschrift f�ur Vermessungs�wesen� ������������
Georgiadou� Y�� A� Kleusberg �����a�� On the Ef�fect of Ionospheric Delay on Geodetic Relative GPSPositioning� Manuscripta Geodaetica� �������
Georgiadou� Y�� A� Kleusberg �����b�� On CarrierSignal Multipath E ects in Relative GPS Positio�ning� Manuscripta Geodaetica� �����������
Goad� C�C�� L� Goodman ������� A Modi�ed Hop��eld Tropospheric Refraction Correction Model�Prasentiert auf dem AGU Annual Fall Meeting� SanFrancisco� CA� Abstract� EOS� ������
�� Literatur
Goad� C�C� ������ Precise Relative Position Determi�nation Using Global Positioning System Carrier Pha�se Measurements in a Nondi erence Mode� FirstInt� Symp� on Positioning with the Global Positio�ning System� Rockville� ��������
Gurtner� W� ������� RINEX The Receiver Indepen�dent Exchange Format Version �� AstronomischesInstitut� Universitat Bern� Marz �����
Han� S�� C� Rizos ���� �� GPS Network Design andError Mitigation for Real�Time Continuous ArrayMonitoring System� Proc� of ION GPS���� KansasCity� Mo�� ����������
Han� S� ������� Carrier Phase�Based Long�Range GPSKinematic Positioning� UNISURV S���� School ofGeomatic Engineering� Sydney�
Han� S�� C� Rizos �����a�� An Instantaneous Ambi�guity Resolution Technique for Medium�Range GPSKinematic Positioning� Proc� of ION GPS���� Kan�sas City� Mo�� ����������
Han� S�� C� Rizos �����b�� Comparing GPS Ambi�guity Resolution Techniques� GPS World� Oktober����� ������
Hankemeier� P�� I� Engel� S� Koch ������� SAPOS� ein aktives Bezugssystem fur multifunktionaleAnwendungen� Zeitschrift f�ur Vermessungswesen�������������
Hatch� R�R� ������� The Synergism of GPS Code andCarrier Measurements� Proc� of the Third Inter� Geo�detic Symp� on Satellite Doppler Positioning� LasCruses� NM� Band �� ����������
Hatch� R�R�� H��J� Euler ������� Comparison of Se�veral AROF Kinematic Techniques� Proc� of IONGPS���� Salt Lake City� Utah� ��������
Hatch� R�R�� R�G� Keegan� T�A� Stansell �������Leica�s Code and Phase Multipath Mitigation Tech�niques� Proc� of ION ���� National Technical Mee�ting� Santa Monica� ��������
Heiskanen� W�A�� H� Moritz ��� ��� Physical Geo�desy� W�H� Freemann and Co�� San Francisco� Lon�don�
Herring� T�A� ������� Modeling Atmospheric Delaysin the Analysis of Space Geodetic Data� In� Munck�J�C� de� Spoelstra� T�A�Th� Hg��� Refraction ofTransatmospheric Signals in Geodesy� NetherlandsGeodetic Commission� Publications on Geodesy�Nr� ��� ��������
ICD�GPS���� ������� Navstar GPS Space Segment �Navigation User Interfaces� Revision C� ARINC Re�search Corporation� El Segundo� Ca��
IGS ������� International GPS Service for Geodyna�mics� Terms of Reference� In� Zumberge� J�F�� Fulton�D�E�� Neilan� R�E� Hg��� IGS ���� Annual Report�IGS Central Bureau� Jet Propulsion Laboratory� Pa�sadena� Ca�� ����
Jahn� C��H� ���� �� Pr�azise �near�online� Bestim�mung in der Landesvermessung mit Hilfe einesNetzes permanent messender GPS�Empf�anger aufReferenzstationen� Niedersachsisches Landesverwal�tungsamt� Abt� Landesvermessung� Hannover� Juli�����
Kee� C�� B� Parkinson ������� Calibration of Multi�path Errors on GPS Pseudorange Measurements�Proc� of ION GPS���� Salt Lake City� Utah� ��������
Kee� C� ���� �� Wide Area Di erential GPS� In� Par�kinson� B�W�� J�J� Spilker Hg��� Global PositioningSystem Theory and Applications� Progress in Astro�nautics and Aeronautics� Vol ���� American Instituteof Aeronautics and Astronautics� Band �� �������
Klobuchar� J�A� ������� Ionospheric time delay cor�rections for advanced satellite ranging systems�AGARD Conference Proc� ���� Propagation Limi�tations of Navigation and Positioning Systems� ��� ������
Kouba� J�� Y� Mireault ������� Analysis Coordina�ter Report� In� Zumberge� J�F�� Fulton� D�E�� Neilan�R�E� Hg��� IGS ���� Annual Report� IGS CentralBureau� Jet Propulsion Laboratory� Pasadena� Ca���������
Lanyi� G�E�� T� Roth ������� A comparison of map�ped and measured total ionospheric electron contentusing global positioning system and beacon satelliteobservations� Radio Science� �����������
MacMillan� D�S� ������ Atmospheric Gradients fromVery Long Baseline Interferometry Observations�Geophysical Research Letters� �������������
Mannucci� A�J�� B�D� Wilson� C�D� Edwards������� A New Method for Monitoring the Earth�sIonospheric Total Electron Content Using the GPSGlobal Network� Proc� of ION GPS���� Salt Lake Ci�ty� Utah� ����������
Melbourne� W�G� ������ The Case for Ranging inGPS�Based Geodetic Systems� First Inter� Symp� onPositioning with the Global Positioning System�Rockville� ��������
Mendes� V�B�� R�B� Langley ������� A Comprehen�sive Analysis of Mapping Functions Used in Mode�ling Tropopsheric Propagation Delay in Space Geo�detic Data� In� Cannon� M�E�� G� Lachapelle Hg���Proc� of the Inter� Symp� on Kinematic Systems inGeodesy� Geomatics and Navigation KIS ���� Ban �������
Mueller� T� ������� Wide Area Di erential GPS� GPSWorld� Juni ����� ������
Niell� A�E� ���� �� Global Mapping Functions for theAtmosphere Delay at Radio Wavelengths� Journal ofGeophysical Research� ����B�� ����������
Patzschke� S�� T� Leipholz ���� �� GPS�Referenzsta�tionen im Land Sachsen�Anhalt� Zeitschrift f�ur das�O�entliche Vermessungswesen in Sachsen�Anhalt LSA Verm� ����� ��������
Press� W�H�� Teukolsky� S�A�� Vetterling� W�T��Flannery� B�P� ������� Numerical Recipes inFORTRAN� Cambridge University Press� �� Au�a�ge� Cambridge� NY�
Raquet� J�F� ���� �� Multiple Reference GPS Recei�ver Multipath Mitigation Technique� Proc� ��nd An�nual Meeting of ION� Cambridge� Mass�� ��������
Rocken� C�� J� Johnson� J� Braun� C� Meertens� S�Perry ������� UNAVCO Facility GPS Receiver
Literatur ��
Tests� University NAVSTAR Consortium UNAV�CO�� Boulder� Colo��
Rothacher� M�� S� Schaer� L� Mervart� G� Beut�ler ������ Determination of Antenna Phase CenterVariations Using GPS Data� In� G� Gendt� G� DickHg��� Special Topics and New Directions� ���� IGSWorkshop� Potsdam� ��������
Rothacher� M�� L� Mervart ���� �� The BerneseGPS Software Version ��� User Manual� Astrono�misches Institut� Universitat Bern� Bern�
Rothacher� M�� T�A� Springer� S� Schaer� G� Beut�ler ������� Processing Strategies for Regional GPSNetworks� In� Brunner� F�K� Hg��� Advances in Po�sitioning and Reference Frames� Proc� of the IAGScienti�c Assembly� Rio de Janeiro� ����� �������
RTCM ��� ������� RTCM Recommended Standardsfor Di�erential NAVSTAR GPS Service� Version���� Radio Technical Commission For Maritime Ser�vices� Special Committee No� ���� �� Januar �����
Ruhrno�l� H�� F�K� Brunner� M� Rothacher������� Modellierung der tropospharischen Korrek�tur fur Deformationsmessungen mit GPS im al�pinen Raum� Allgemeine Vermessungs�Nachrichten����������
Santerre� R� ������� GPS Satellite Sky DistributionImpact on the Propagation of Some Important Er�rors in Precise Relative Positioning� Doktorarbeit�TR ���� Department of Surveying Engineering� Uni�versity of New Brunswick� Fredericton� Kanada�
Saastamoinen� J� ������� Contributions to the Theo�ry of Atmospheric Refraction� Part II� BulletinG�eod�esique� ����������
Sard�on� E�� N� Zarraoa ������� Estimation of TotalElectron Content Using GPS Data� How Stable arethe Di erential Satellite and Receiver InstrumentalBiases�� Radio Science� �������������
Schaer� S�� G� Beutler� L� Mervart� M� Rothacher�U� Wild ������ Global and Regional IonosphereModels Using the GPS Double Di erence Phase Ob�servable� In� G� Gendt� G� Dick Hg��� Special Topicsand New Directions� ���� IGS Workshop� Potsdam�������
Schupler� B�R�� T�A� Clark ������� How Di erentAntennas A ect the GPS Observable� GPS World�November�Dezember ����� ������
Slater� J�A�� S� Malys ������� WGS�� � Past� Pre�sent and Future� In� Brunner� F�K� Hg��� Advancesin Positioning and Reference Frames� Proc� of theIAG Scienti�c Assembly� Rio de Janeiro� ����� ����
Sleewaegen� J�M� ������� Multipath Mitigation� Be�ne�ts from Using the Signal�to�Noise Ratio� Proc� ofION GPS���� Kansas City� Mo�� ��������
Teunissen� P�J�G� ������ The Least�Squares Ambi�guity Decorrelation Adjustment� a Method for FastGPS Integer Ambiguity Resolution� Journal of Geo�desy� ���������
Teunissen� P�J�G�� A� Kleusberg ���� �� GPS Ob�servation Equations and Positioning Concepts� In�Kleusberg� A�� P�J�G Teunissen Hg��� GPS for Geo�desy� Springer Verlag� Berlin� Heidelberg� ��������
The White House ���� �� Fact Sheet U�S� GlobalPositioning System Policy� The White House� O�ceof Science and Technology Policy� National SecurityCouncil� ��� Marz �����
Townsend� B�� D�J�R� von Nee� P� Fenton� K� VanDierendonck ������ Performance Evaluation ofthe Multipath Estimating Delay Lock Loop� Proc� ofION ���� National Technical Meeting� Anaheim�Ca�� ��������
USCG ������ Global Positioning System Standard Po�sitioning Service Signal Speci�cation� U�S� CoastGuard USCG�� Navigation Center NAVCEN���� Au�age� �� Juni �����
Van Dierendonck� A�J�� P� Fenton� T� Ford������� Theory and Performance of Narrow Cor�relator Spacing in a GPS Receiver� Proc� of ION���� National Technical Meeting� San Diego� Ca����������
Van���cek� P�� D�E� Wells� A� Chrzanowski� A�C�Hamilton� R�B� Langley� J�D� McLaughlin�B�G� Nickerson ������� The Future of GeodeticNetworks� Proc� of the IAG� IUGG ��th General As�sembly� Hamburg� Band �� ��������
Wanninger� L� ������� Der Ein�u� ionospharischerStorungen auf prazise GPS�Messungen in Mitteleu�ropa� Zeitschrift f�ur Vermessungswesen� ����������
Wanninger� L� ������� Der Ein�u� der Ionosph�areauf die Positionierung mit GPS� WissenschaftlicheArbeiten der Fachrichtung Vermessungswesen derUniversitat Hannover� Nr� ���� Hannover�
Wanninger� L� ����a�� Enhancing Di erential GPSUsing Regional Ionospheric Error Models� BulletinG�eod�esique� ����������
Wanninger� L� ����b�� Improved Ambiguity Resolu�tion by Regional Di erential Modelling of the Ionos�phere� Proc� of ION GPS���� Palm Springs� Ca�� ������
Wanninger� L� ���� �� Fehlermodellierung in regiona�len Referenzstationsnetzen� ��� DVW�Fortbildungs�seminar GPS�Anwendungen und Ergebnisse ����Potsdam� DVW�Schriftenreihe �������� ��������
Wanninger� L� �����a�� Real�Time Di erential GPSError Modelling in Regional Reference Station Net�works� In� Brunner� F�K� Hg��� Advances in Positio�ning and Reference Frames� Proc� of the IAG Scien�ti�c Assembly� Rio de Janeiro� ����� ������
Wanninger� L� �����b�� Virtuelle Referenzstationenin regionalen GPS�Netzen� ��� DVW�Fortbildungs�seminar GPS�Praxis und Trends ���� Frankfurt amMain� DVW�Schriftenreihe �������� ��������
Weber� L�� A� Tiwari ������ DGPS ArchitectureBased on Separating Error Components� Virtu�al Reference Stations� and FM Subcarrier Broad�cast� Proc� ��st Annual Meeting of ION� ColoradoSprings� Co�� ��������
Webster� I�� A� Kleusberg ������� Regional Model�ling of the Ionosphere for Single Frequency Users ofthe Global Positioning System� Sixth Inter� Geode�tic Symp� on Satellite Positioning� Columbus� Ohio���������
�� Literatur
Weill� L�R� ������� Conquering Multipath� The GPSAccuracy Battle� GPS World� April ����� ������
Wells� D� �Hg�� ���� �� Guide to GPS Positioning�Canadian GPS Associates� Fredericton� Kanada�
Wild� U�� G� Beutler� W� Gurtner� M� Rotha�cher ������� Estimating the Ionosphere Using Oneor More Dual Frequency GPS Receivers� Fifth In�ter� Geodetic Symp� on Satellite Positioning� LasCruses� N�M�� ��������
Wilson� B�D�� A�J� Mannucci ������� InstrumentalBiases in Ionospheric Measurements Derived fromGPS Data� Proc� of ION GPS���� Salt Lake City�Utah� ����������
Wu� J�T� ������� Weighted Di erential GPS Methodfor Reducing Ephemeris Error�Manuscripta Geodae�tica� �������
Wubbena� G� ������ Software Developments forGeodetic Positioning with GPS Using TI����� Codeand Carrier Measurements� First Inter� Symp� onPositioning with the Global Positioning System�Rockville� ��������
Wubbena� G� ������� GPS Carrier Phases and ClockModeling� In� Groten� E�� R� Strau� Hg���GPS�Techniques applied to geodesy and surveying�Proc� Inter� GPS�Workshop� Darmstadt� April �����Springer Verlag� Heidelberg� ��������
Wubbena� G� ������� The GPS Adjustment SoftwarePackage GEONAP � Concepts and Models� Fifth
Inter� Geodetic Symp� on Satellite Positioning� LasCruses� N�M�� ��������
Wubbena� G� ������� Zur Modellierung von GPS�Beobachtungen f�ur die hochgenaue Positionsbestim�mung� Wissenschaftliche Arbeiten der Fachrich�tung Vermessungswesen der Universitat Hannover�Nr� ���� Hannover �����
Wubbena� G�� F� Menge� M� Schmitz� G� See�ber� C� Volksen ���� a�� A New Approach forField Calibration of Absolute Antenna Phase CenterVariations� Proc� of ION GPS���� Kansas City� Mo������������
Wubbena� G�� A� Bagge� G� Seeber� V� Boder� P�Hankemeier ���� b�� Reducing Distance Depen�dent errors for Real�Time Precise DGPS Applica�tions by Establishing Reference Station Networks�Proc� of ION GPS���� Kansas City� Mo�� ����������
Yunck� T�P� ������� Coping with the Atmosphere andIonosphere in Precise Satellite and Ground Positio�ning� Environmental E�ects on Spacecraft Positio�ning and Trajectories� Geophysical Monograph ���IUGG Volume ��� �����
Zielinski� J�B� ������� Covariances in �D Network Re�sulting form Orbital Errors� In� Groten� E�� R�Strau� Hg���GPS�Techniques applied to geodesy andsurveying� Proc� Inter� GPS�Workshop� Darmstadt�April ����� Springer Verlag� Heidelberg ����� ��������
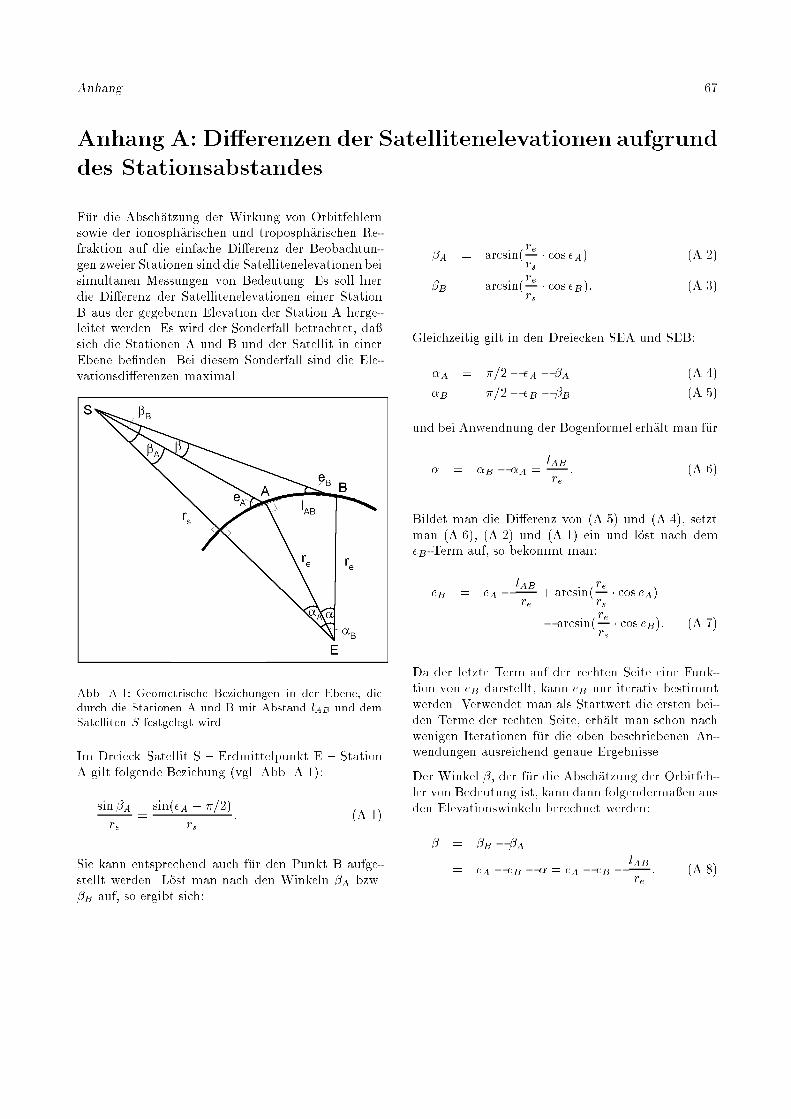
Anhang ��
Anhang A Dierenzen der Satellitenelevationen aufgrund
des Stationsabstandes
F�ur die Absch�atzung der Wirkung von Orbitfehlernsowie der ionosph�arischen und troposph�arischen Refraktion auf die einfache Di�erenz der Beobachtungen zweier Stationen sind die Satellitenelevationen beisimultanen Messungen von Bedeutung� Es soll hierdie Di�erenz der Satellitenelevationen einer StationB aus der gegebenen Elevation der Station A hergeleitet werden� Es wird der Sonderfall betrachtet� da sich die Stationen A und B und der Satellit in einerEbene be�nden� Bei diesem Sonderfall sind die Elevationsdi�erenzen maximal�
����������Abb� A��� Geometrische Beziehungen in der Ebene� diedurch die Stationen A und B mit Abstand lAB und demSatelliten S festgelegt wird�
Im Dreieck Satellit S � Erdmittelpunkt E � StationA gilt folgende Beziehung �vgl� Abb� A����
sin Are
�sin�eA � ���
rs� �A���
Sie kann entsprechend auch f�ur den Punkt B aufgestellt werden� L�ost man nach den Winkeln A bzw� B auf� so ergibt sich�
A � arcsin�rers� cos eA� �A���
B � arcsin�rers� cos eB�� �A���
Gleichzeitig gilt in den Dreiecken SEA und SEB�
A � ��� eA � A �A���
B � ��� eB � B �A���
und bei Anwendnung der Bogenformel erh�alt man f�ur
� B � A �lABre
� �A���
Bildet man die Di�erenz von �A��� und �A���� setztman �A���� �A��� und �A��� ein und l�ost nach demeBTerm auf� so bekommt man�
eB � eA �lABre� arcsin�
rers� cos eA�
� arcsin�rers� cos eB�� �A���
Da der letzte Term auf der rechten Seite eine Funktion von eB darstellt� kann eB nur iterativ bestimmtwerden� Verwendet man als Startwert die ersten beiden Terme der rechten Seite� erh�alt man schon nachwenigen Iterationen f�ur die oben beschriebenen Anwendungen ausreichend genaue Ergebnisse�
Der Winkel � der f�ur die Absch�atzung der Orbitfehler von Bedeutung ist� kann dann folgenderma en ausden Elevationswinkeln berechnet werden�
� B � A
� eA � eB � � eA � eB �lABre
� �A���
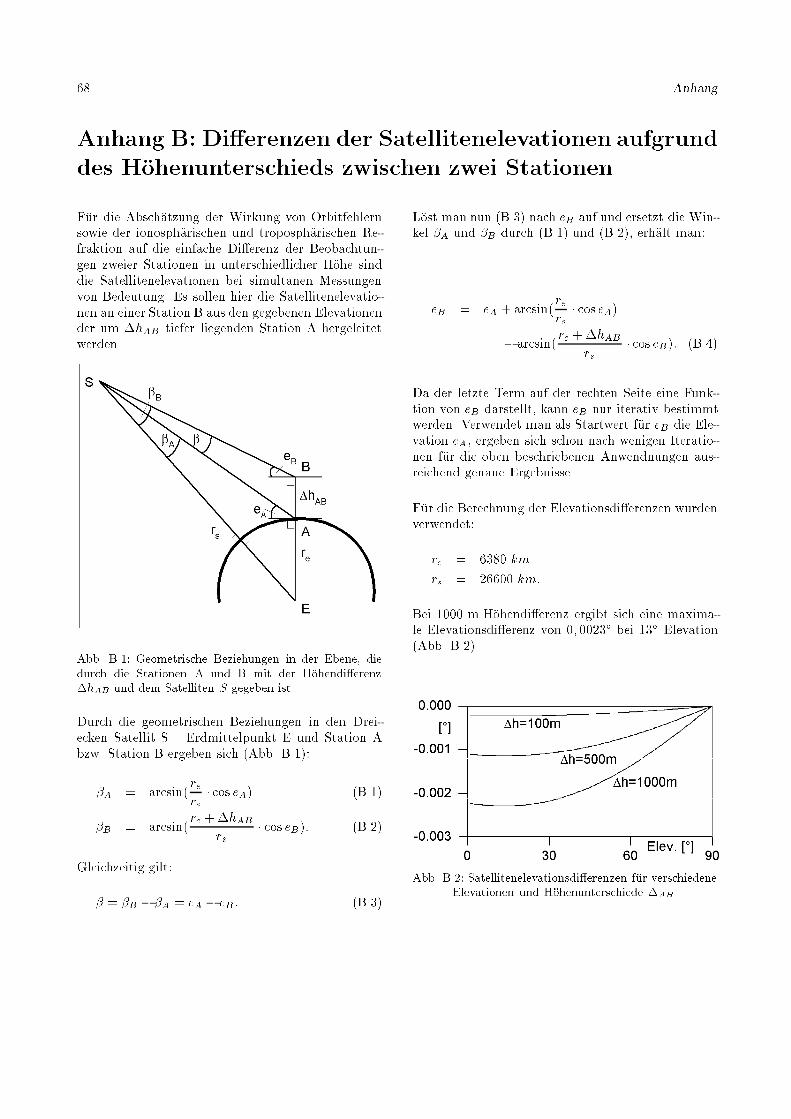
�� Anhang
Anhang B Dierenzen der Satellitenelevationen aufgrund
des H�ohenunterschieds zwischen zwei Stationen
F�ur die Absch�atzung der Wirkung von Orbitfehlernsowie der ionosph�arischen und troposph�arischen Refraktion auf die einfache Di�erenz der Beobachtungen zweier Stationen in unterschiedlicher H�ohe sinddie Satellitenelevationen bei simultanen Messungenvon Bedeutung� Es sollen hier die Satellitenelevationen an einer Station B aus den gegebenen Elevationender um hAB tiefer liegenden Station A hergeleitetwerden�
����������Abb� B��� Geometrische Beziehungen in der Ebene� diedurch die Stationen A und B mit der Hohendi erenz�hAB und dem Satelliten S gegeben ist�
Durch die geometrischen Beziehungen in den Dreiecken Satellit S � Erdmittelpunkt E und Station Abzw� Station B ergeben sich �Abb� B����
A � arcsin�rers� cos eA� �B���
B � arcsin�re � hAB
rs� cos eB�� �B���
Gleichzeitig gilt�
� B � A � eA � eB � �B���
L�ost man nun �B��� nach eB auf und ersetzt die Winkel A und B durch �B��� und �B���� erh�alt man�
eB � eA � arcsin�rers� cos eA�
� arcsin�re � hAB
rs� cos eB�� �B���
Da der letzte Term auf der rechten Seite eine Funktion von eB darstellt� kann eB nur iterativ bestimmtwerden� Verwendet man als Startwert f�ur eB die Elevation eA� ergeben sich schon nach wenigen Iterationen f�ur die oben beschriebenen Anwendnungen ausreichend genaue Ergebnisse�
F�ur die Berechnung der Elevationsdi�erenzen wurdenverwendet�
re � ���� km
rs � ����� km�
Bei ���� m H�ohendi�erenz ergibt sich eine maximale Elevationsdi�erenz von �� ����� bei ��� Elevation�Abb� B����
��������Abb� B��� Satellitenelevationsdi erenzen fur verschiedene
Elevationen und Hohenunterschiede �AB �