Embed Size (px)
Citation preview
Kurzskripten zur SchiffsfestigkeitProf.Dr.-Ing.habil.H.-J.Schlüter
Gerhard-Mercator-Universität -GH Duisburg Fachbereich Maschinenbau
Institut für Schiffstechnik Duisburg (ISD)
Oktober 1999
Inhaltsverzeichnis1.Der ebene gekrümmte Stab
Berechnung stat.unbest.Systeme 1.7
2.Der dünnwandige prismatische Stab2.1 Koordinatensystem,Spannungen,Schnittgrößen 2.1
2.2 Wölbunbehinderte Torsion (Saint-Venant-Torsion) 2.3
offene Querschnitte 2.4
einzellig geschlossene Querschnitte 2.5
mehrzellig geschlossene Querschnitte 2.7
2.3 Wölbbehinderte Torsion (Wölbkrafttorsion) 2.10
Berechnung des Drehpoles 2.15
Berechnungsschritte 2.17
graphische Darstellung 2.18
2.4 Querkraftbiegung 2.20
Berechnung des Schubmittelpunktes 2.25
Berechnungsschritte 2.26
graphische Darstellung 2.27
3.Balkentragwerke
3.1 Durchlaufträger auf starren Stützen 3.2
3.2 Durchlaufträger auf elastischen Stützen 3.7
graphische Darstellung 3.10
Integraltabelle 3.11
3.3 Das ebene Rahmentragwerk 3.12
graphische Darstellung 3.21
Integraltabellen 3.22
3.4 Der ebene Trägerrost 3.24
Tabelle der Nachgiebigkeiten 3.29
graphische Darstellung 3.33
4.Die Scheibe (ebener Spannungszustand)
4.1 Darstellung in karthesischen Koordinaten 4.1
4.2 Darstellung in Polarkoordinaten 4.6
4.3 Beispiele 4.9
5.Die dünne Platte5.1 Darstellung in karthesischen Koordinaten 5.2
5.2 Darstellung in Polarkoordinaten 5.9
5.3 Beispiele 5.13
5.4 Die orthotrope Platte 5.19
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 1.1 -
Höhere Stabstatik
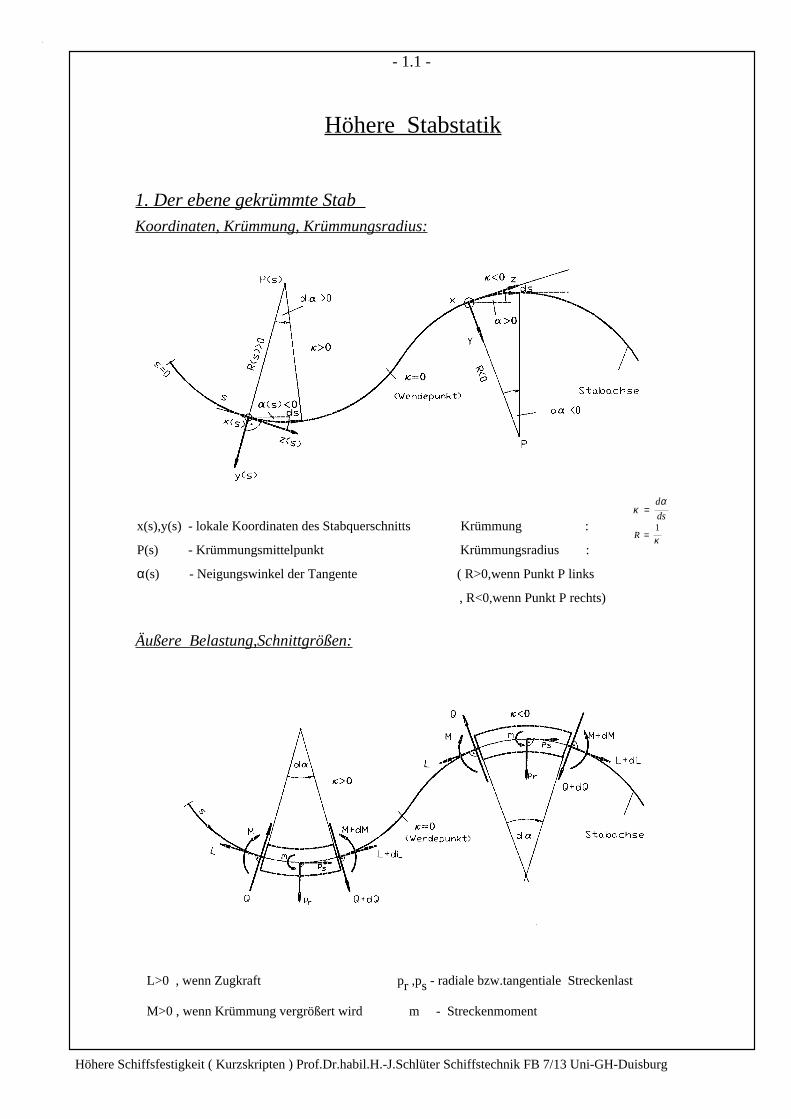
1. Der ebene gekrümmte Stab Koordinaten, Krümmung, Krümmungsradius:
Äußere Belastung,Schnittgrößen:
x(s),y(s) - lokale Koordinaten des Stabquerschnitts Krümmung :
P(s) - Krümmungsmittelpunkt Krümmungsradius :
α(s) - Neigungswinkel der Tangente ( R>0,wenn Punkt P links
, R<0,wenn Punkt P rechts)
R =1
κ
L>0 , wenn Zugkraft pr ,ps - radiale bzw.tangentiale Streckenlast
M>0 , wenn Krümmung vergrößert wird m - Streckenmoment
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
κα
=d
ds
-1.2-
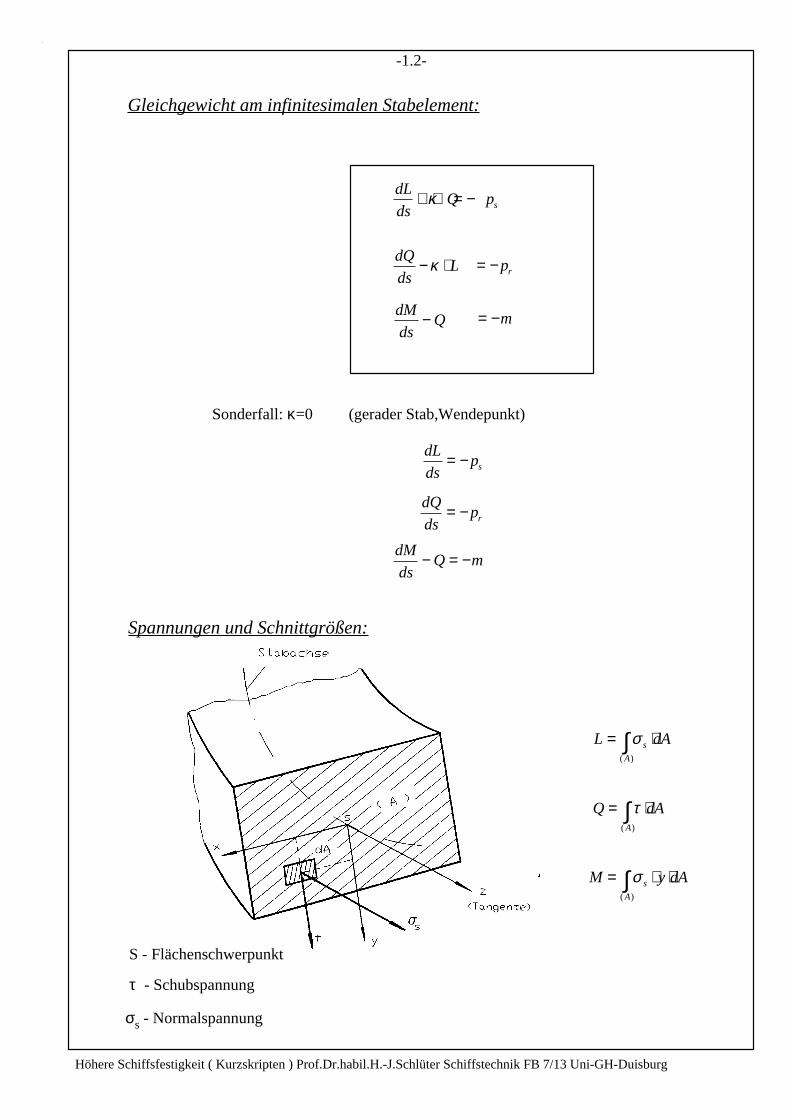
Gleichgewicht am infinitesimalen Stabelement:
dL
dsQ ps+ ⋅ = −κ
dQ
dsL− ⋅κ
dM
dsQ−
= − pr
= −m
dL
dsps= −
dQ
dspr= −
dM
dsQ m− = −
Sonderfall: κ=0 (gerader Stab,Wendepunkt)
Spannungen und Schnittgrößen:
L dAs
A
= ⋅∫σ( )
Q dAA
= ⋅∫τ( )
M y dAs
A
= ⋅ ⋅∫σ( )
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
S - Flächenschwerpunkt
τ - Schubspannung
σs - Normalspannung
- 1.3 -
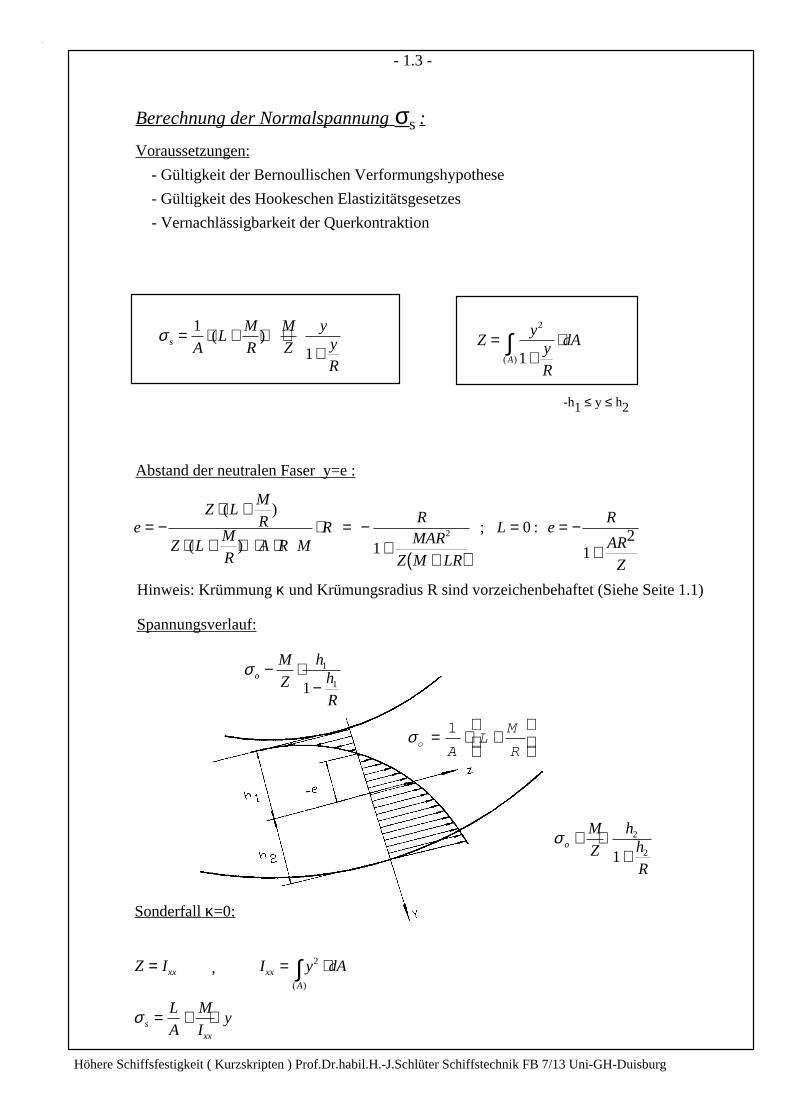
Berechnung der Normalspannung σs :
Voraussetzungen:
- Gültigkeit der Bernoullischen Verformungshypothese
- Gültigkeit des Hookeschen Elastizitätsgesetzes
- Vernachlässigbarkeit der Querkontraktion
eZ L
M
R
Z LM
RA R M
RR
MAR
Z M LR
L eR
AR
Z
= −⋅ +
⋅ + + ⋅ ⋅⋅ = −
++( )
= = −+
( )
( ) ; :
10
122
Abstand der neutralen Faser y=e :
Spannungsverlauf:
Z Ixx= I y dAxx
A
= ⋅∫ 2
( )
σ sxx
L
A
M
Iy= + ⋅
σ s AL
M
R
M
Z
yyR
= ⋅ + + ⋅+
1
1( ) Z
yyR
dAA
=+
⋅∫2
1( )
-h1 ≤ y ≤ h2
,
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Hinweis: Krümmung κ und Krümungsradius R sind vorzeichenbehaftet (Siehe Seite 1.1)
σo
AL
M
R= ⋅ +
1
σ o
M
Z
hh
R
+ ⋅+
2
21
σ o
M
Z
hh
R
− ⋅−
1
11
Sonderfall κ=0:

- 1.4 -
Formänderungsenergie:
WE G
dA dss
Al
= ⋅ + ⋅ ⋅∫∫12
2 2
( )( )( )
σ τ
h
R∠0 4, h=h1+h2 (Querschnittshöhe)
WEA
LM
Rds
Q
GAds
M
EIds
l Ql xxl
= ⋅ ⋅ + ⋅ + ⋅ ⋅ + ⋅ ⋅∫ ∫ ∫12
1 12
12
22 2
( ) ( ) ( )
( )
effektive Schubfläche AQ=αQA ( αQ - Schubkorrekturfaktor )
l- Stablänge
E- Elastizitätsmodul
G- Schubmodul
E = 2.(1+ν). G
ν - Querdehnungszahl
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
-1.5-
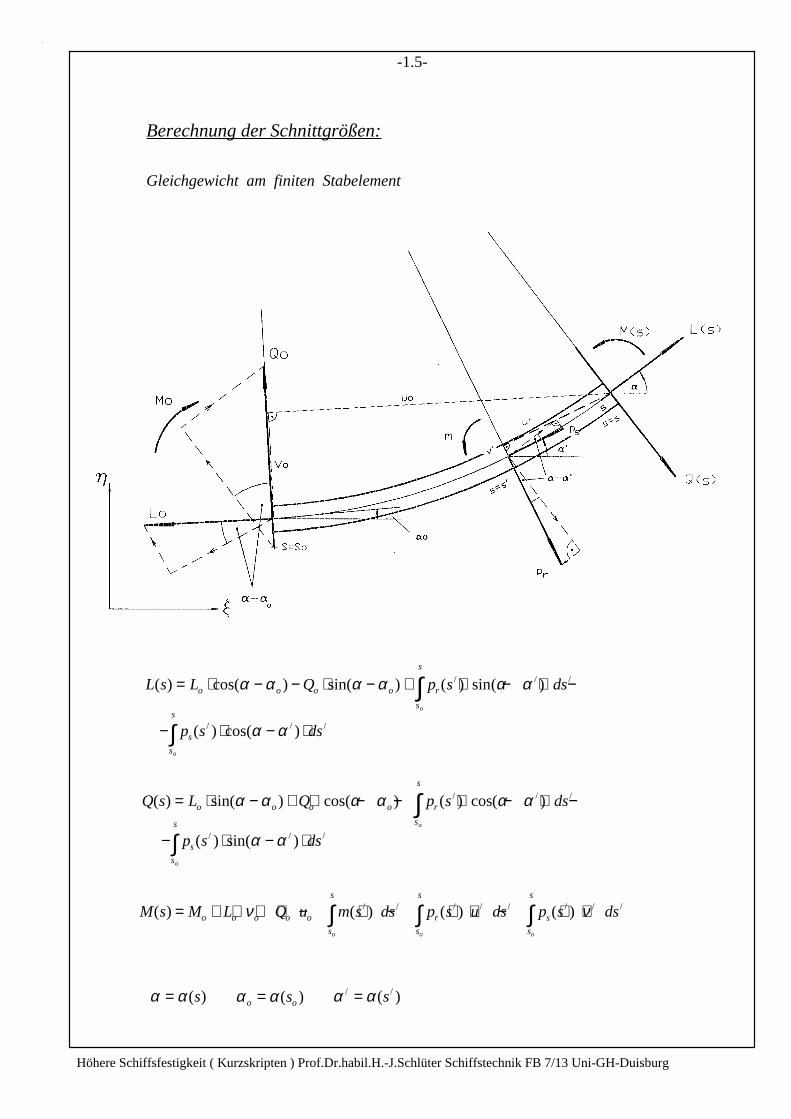
Berechnung der Schnittgrößen:
Gleichgewicht am finiten Stabelement
L s L Q p s dso o o o r
s
s
o
( ) cos( ) sin( ) ( ) sin( )/ / /= ⋅ − − ⋅ − + ⋅ − ⋅ −∫α α α α α α
Q s L Q p s dso o o o r
s
s
o
( ) sin( ) cos( ) ( ) cos( )/ / /= ⋅ − + ⋅ − − ⋅ − ⋅ −∫α α α α α α
M s M L Q u m s ds p s u ds p s dso o o o o
s
s
r
s
s
s
s
s
o o o
( ) ( ) ( ) ( )/ / / / / / / /= + ⋅ + ⋅ − ⋅ − ⋅ ⋅ − ⋅ ⋅∫ ∫ ∫ν ν
− ⋅ − ⋅∫ p s dss
s
s
o
( ) cos( )/ / /α α
− ⋅ − ⋅∫ p s dss
s
s
o
( ) sin( )/ / /α α
α α= ( )s α αo os= ( ) α α/ /( )= s
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
-1.6-
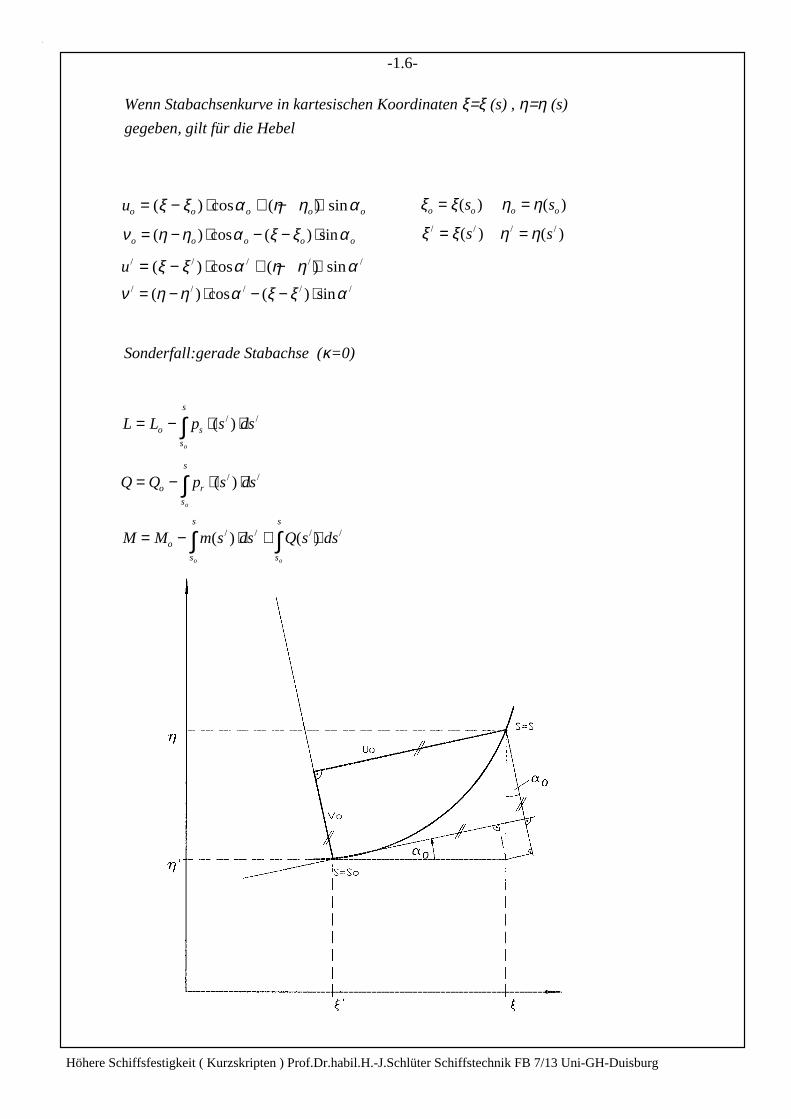
Wenn Stabachsenkurve in kartesischen Koordinaten ξ=ξ (s) , η=η (s)
gegeben, gilt für die Hebel
uo o o o o= − ⋅ + − ⋅( ) cos ( ) sinξ ξ α η η α
ξ ξ/ /( )= s
Sonderfall:gerade Stabachse (κ=0)
L L p s dso s
s
s
o
= − ⋅ ⋅∫ ( )/ /
Q Q p s dso r
s
s
o
= − ⋅ ⋅∫ ( )/ /
M M m s ds Q s dso
s
s
s
s
o o
= − ⋅ + ⋅∫ ∫( ) ( )/ / / /
ν η η α ξ ξ αo o o o o= − ⋅ − − ⋅( ) cos ( ) sin
ν η η α ξ ξ α/ / / / /( ) cos ( ) sin= − ⋅ − − ⋅
u / / / / /( ) cos ( ) sin= − ⋅ + − ⋅ξ ξ α η η α
η ηo os= ( )ξ ξo os= ( )
η η/ /( )= s
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

-1.7-
Berechnung statisch unbestimmter Systeme (Kraftgrößenmethode)
Arbeitsetappen:
1) Wahl eines statisch bestimmten Hauptsystems.
2) Definition der statisch Unbestimmten X1,......,Xn
3) Berechnung der Schnittgrößen Lo , Qo , Mo im statisch bestimmten Hauptsystem
infolge der gegebenen äußeren Belastungen.
4) Berechnung der Schnittgrößen Li , Qi , Mi (i=1,......,n) im statisch bestimmten
Hauptsystem infolge der fiktiven Einheitsbelastung Xi=1
5) Berechnung der Nachgiebigkeitsmatrix D=(dij) i,j=1,...,n
und des Vektors d=(dio) i=1,..,n
(l) bedeutet Integration über das gesamte Tragwerk.
Hinweise:
- Die Nachgiebigkeitsmatrix D ist symmetrisch , d.h., dij=dji .
Es brauchen also nur 1/2 n(n+1) Matrixelemente berechnet zu werden.
- Die Nachgiebigkeitsmatrix D ist positiv - definit.
dEA
LM
RL
M
Rds
GAQ Q ds
EIM M dsij
l
ii
jj
Ql
i jxxl
i j= ⋅ + + ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅∫ ∫ ∫1 1 1
( ) ( ) ( )
( )( )
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
i n
j n
==
1 2
0 1 2
, ,...,
, , ,...,
- 1.8 -
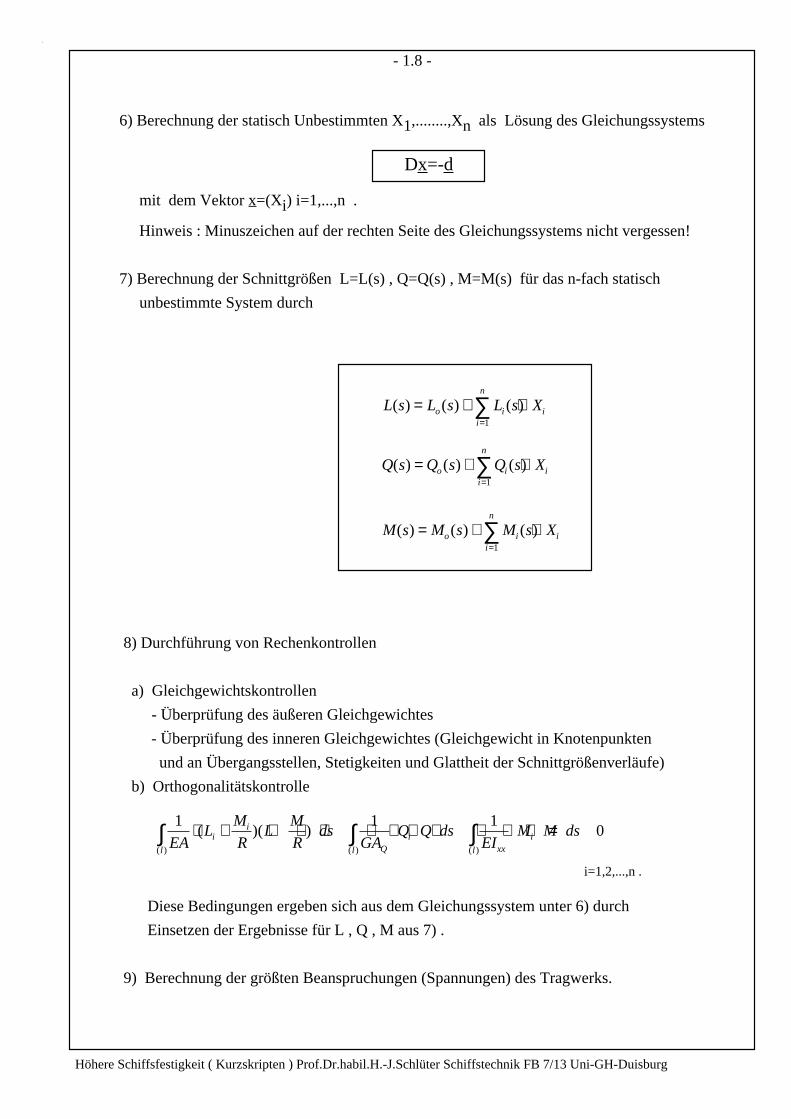
6) Berechnung der statisch Unbestimmten X1,........,Xn als Lösung des Gleichungssystems
mit dem Vektor x=(Xi) i=1,...,n .
Hinweis : Minuszeichen auf der rechten Seite des Gleichungssystems nicht vergessen!
7) Berechnung der Schnittgrößen L=L(s) , Q=Q(s) , M=M(s) für das n-fach statisch
unbestimmte System durch
Dx=-d
L s L s L s Xo ii
n
i( ) ( ) ( )= + ⋅=∑
1
Q s Q s Q s Xo ii
n
i( ) ( ) ( )= + ⋅=∑
1
M s M s M s Xo ii
n
i( ) ( ) ( )= + ⋅=∑
1
8) Durchführung von Rechenkontrollen
a) Gleichgewichtskontrollen
- Überprüfung des äußeren Gleichgewichtes
- Überprüfung des inneren Gleichgewichtes (Gleichgewicht in Knotenpunkten
und an Übergangsstellen, Stetigkeiten und Glattheit der Schnittgrößenverläufe)
b) Orthogonalitätskontrolle
Diese Bedingungen ergeben sich aus dem Gleichungssystem unter 6) durch
Einsetzen der Ergebnisse für L , Q , M aus 7) .
9) Berechnung der größten Beanspruchungen (Spannungen) des Tragwerks.
1 1 10
EAL
M
RL
M
Rds
GAQ Q ds
EIM M ds
l
ii
Ql
ixxl
i
( ) ( ) ( )
( )( )∫ ∫ ∫⋅ + + ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ =
i=1,2,...,n .
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 1.9 -
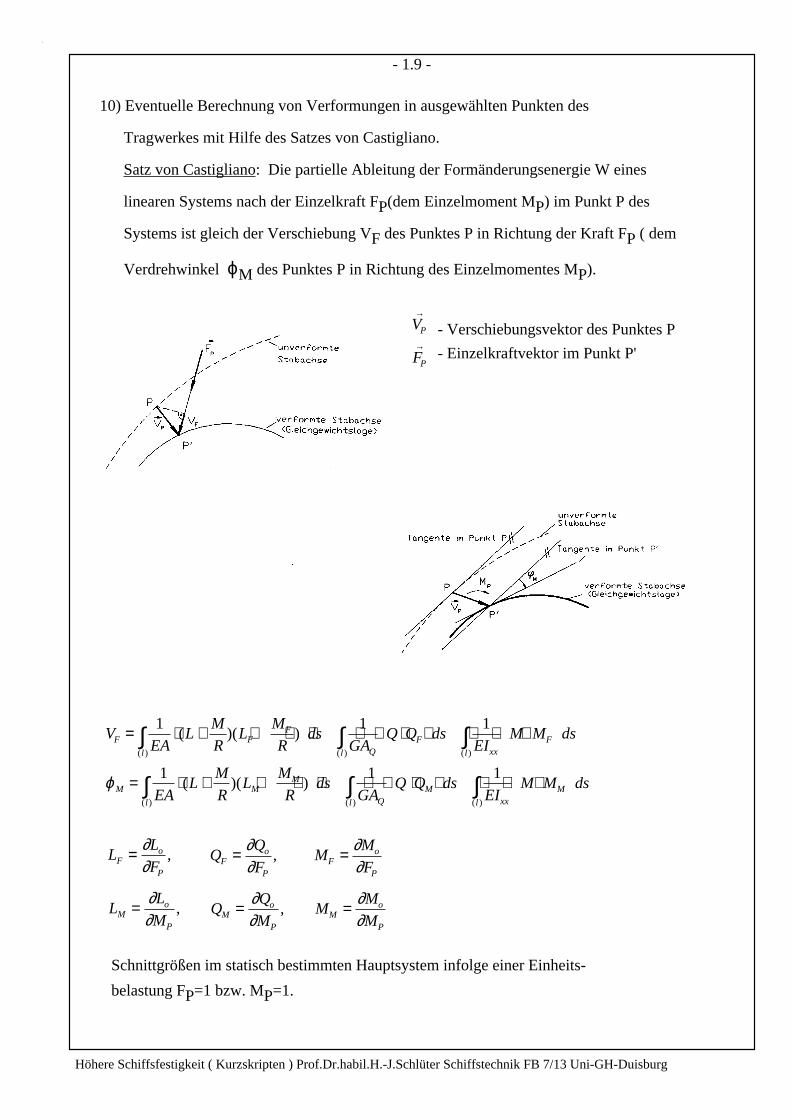
10) Eventuelle Berechnung von Verformungen in ausgewählten Punkten des
Tragwerkes mit Hilfe des Satzes von Castigliano.
Satz von Castigliano: Die partielle Ableitung der Formänderungsenergie W eines
linearen Systems nach der Einzelkraft FP(dem Einzelmoment MP) im Punkt P des
Systems ist gleich der Verschiebung VF des Punktes P in Richtung der Kraft FP ( dem
Verdrehwinkel ϕM des Punktes P in Richtung des Einzelmomentes MP).
VEA
LM
RL
M
Rds
GAQ Q ds
EIM M ds
EAL
M
RL
M
Rds
GAQ Q ds
EIM M ds
F
l
FF
Ql
Fxxl
F
M
l
MM
Ql
Mxxl
M
= ⋅ + + ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅
= ⋅ + + ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅
∫ ∫ ∫
∫ ∫ ∫
1 1 1
1 1 1( ) ( ) ( )
( ) ( ) ( )
( )( )
( )( )ϕ
LL
FFo
P
= ∂∂
,
LL
MMo
P
= ∂∂
,
FFo
P
= ∂∂
,
MMo
P
= ∂∂
,
MM
FFo
P
= ∂∂
MM
MMo
P
= ∂∂
Schnittgrößen im statisch bestimmten Hauptsystem infolge einer Einheits-
belastung FP=1 bzw. MP=1.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
V
F
P
P
→
→- Verschiebungsvektor des Punktes P
- Einzelkraftvektor im Punkt P'
- 1.10 -
Wenn im betrachteten Punkt P keine Einzelkraft FP bzw.Einzelmoment MP gegeben ist,
dann ist dort eine Hilfskraft H bzw. ein Hilfsmoment H einzuführen. Es gilt dann:
VW
HHH
=→
lim0
∂∂
ϕ ∂∂H
H
W
H=
→lim
0bzw.
so daß
V
EAL
M
RL
M
Rds
GAQ Q ds
EIM M dsH
H l
HH
Ql
Hxxl
Hϕ ( )( )
( ) ( ) ( )
= ⋅ + + ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅∫ ∫ ∫1 1 1
L Q MH H H, , sind die Schnittgrößen im statisch bestimmten Hauptsystem infolge der
fiktiven Einheitsbelastung H=1 .
,
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.1 -
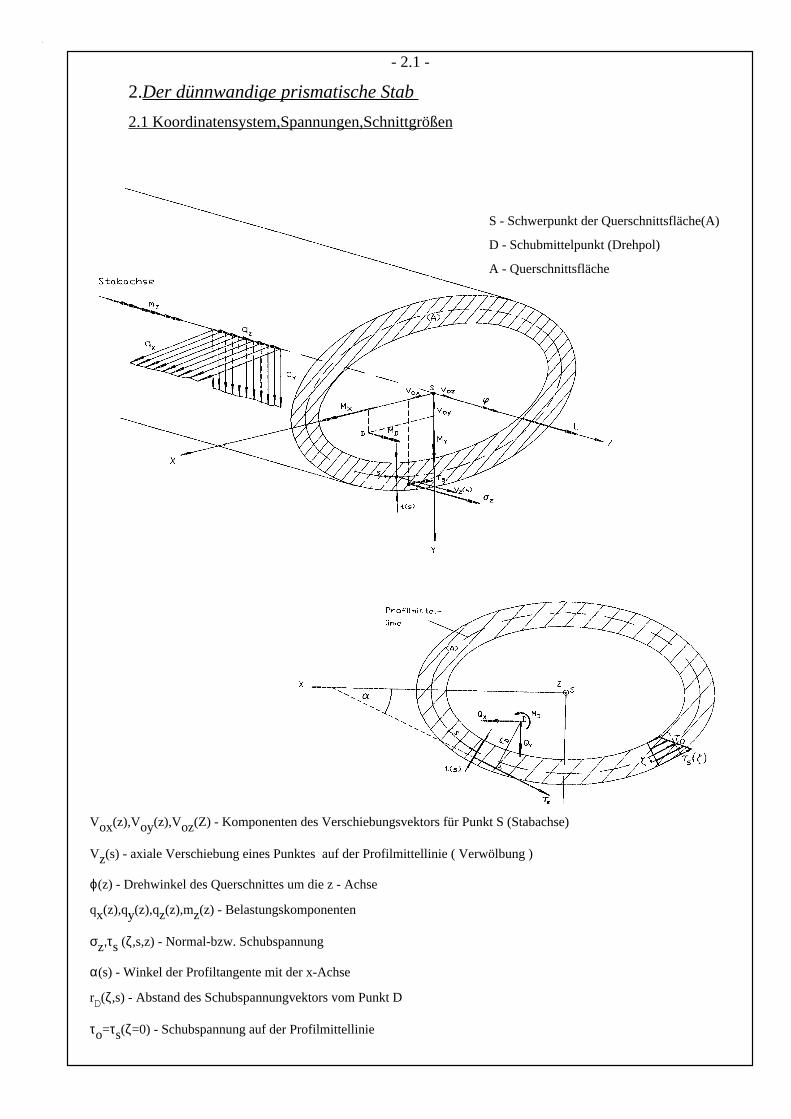
2.Der dünnwandige prismatische Stab
2.1 Koordinatensystem,Spannungen,Schnittgrößen
S - Schwerpunkt der Querschnittsfläche(A)
D - Schubmittelpunkt (Drehpol)
A - Querschnittsfläche
Vox(z),Voy(z),Voz(Z) - Komponenten des Verschiebungsvektors für Punkt S (Stabachse)
Vz(s) - axiale Verschiebung eines Punktes auf der Profilmittellinie ( Verwölbung )
ϕ(z) - Drehwinkel des Querschnittes um die z - Achse
qx(z),qy(z),qz(z),mz(z) - Belastungskomponenten
σz,τs (ζ,s,z) - Normal-bzw. Schubspannung
α(s) - Winkel der Profiltangente mit der x-Achse
rD(ζ,s) - Abstand des Schubspannungvektors vom Punkt D
τo=τs(ζ=0) - Schubspannung auf der Profilmittellinie
- 2.2 -
L z dAz
A
( )( )
= ∫σ
Q z dAX s
A
( ) cos( )
= − ⋅ ⋅∫τ α
Q z dAY s
A
( ) sin( )
= ⋅ ⋅∫τ α
M z y dAX z
A
( )( )
= ⋅ ⋅∫σ
M z x dAY z
A
( )( )
= − ⋅ ⋅∫σ
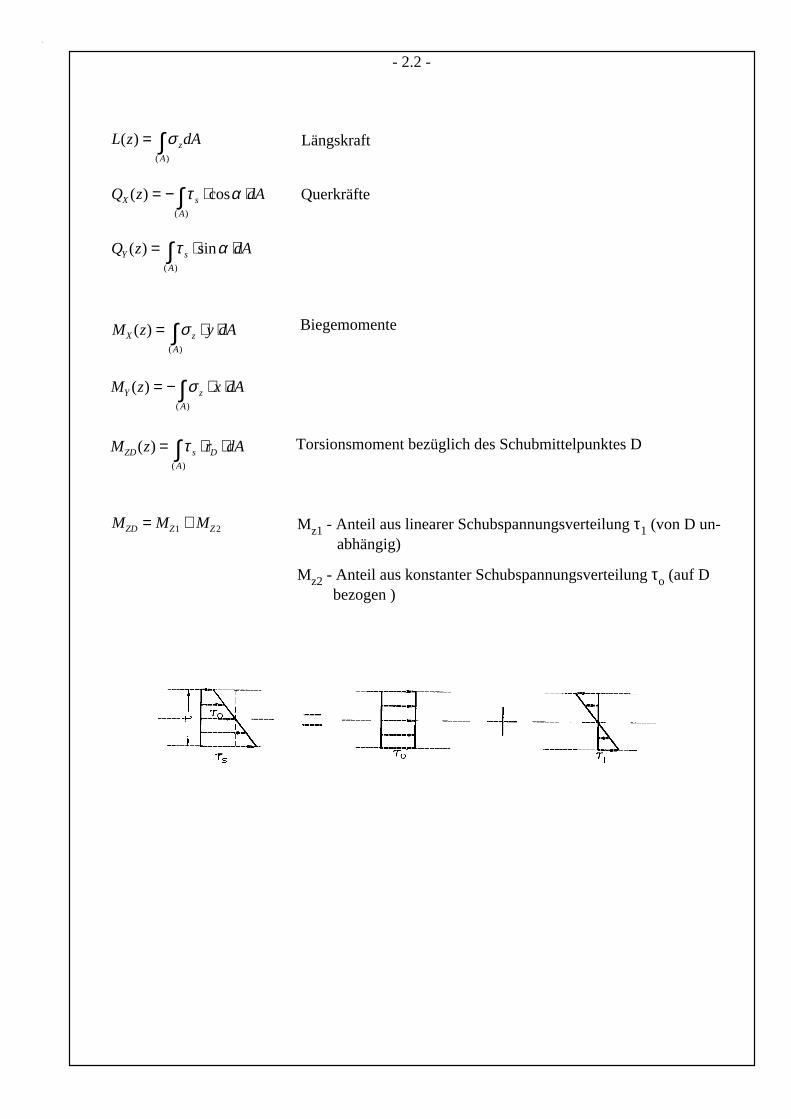
M M MZD Z Z= +1 2
M z r dAZD s
A
D( )( )
= ⋅ ⋅∫τ
Längskraft
Querkräfte
Biegemomente
Torsionsmoment bezüglich des Schubmittelpunktes D
Mz1 - Anteil aus linearer Schubspannungsverteilung τ1 (von D un- abhängig)
Mz2 - Anteil aus konstanter Schubspannungsverteilung τo (auf D bezogen )
- 2.3 -
2.2Wölbunbehinderte Torsion ( Saint - Venant - Torsion )
Voraussetzungen (Hypothesen)
• Gültigkeit der Saint - Venantschen Verformungshypothese
( Querschnittsebene dreht sich wie eine starre Ebene um die z-Achse ;Verwölbung unabhängig von z )
• Keine Behinderung der axialen Verschiebung ( Verwölbung) Vz(s) eines Querschnittspunktes
• Verformungsänderungen über die Profildicke sind vernachlässigbar
• Das Torsionsmoment Mz ist unabhängig vom Bezugspunkt
• Mz(z)=const.
• linearer Schubspannungsverlauf über die Profildicke
Drillung, Verwölbung, Wölbfunktion, Sektorkoordinate
Drillung:
Verwölbung:
V s V oG
s ds r s dsz z o
o
s
D
o
s
( ) ( ) ( ) ( )= + ′ ⋅ ′ − ⋅ ′ ′∫ ∫1 τ ϑ
ϑ ϕ ϕ( ) ' ( ) .zd
dzz const= = =
ΩD(s) - normierte Wölbfunktion , G - Schubmodul
ΩD
l
s t s ds( ) ( )( )
⋅ ⋅ =∫ 0
ω D D
o
s
s r s ds( ) ( )= ′ ′∫Sektorkoordinate:
V dAz
A( )∫ = 0 bzw.
V s sz D( ) ( )= ⋅Ω ϑ
Normierungsbedingung :
• Normalspannung σ z x yQ Q≡ ≡ ≡0 0 0und Querkraftkomponenten ,
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.4 -
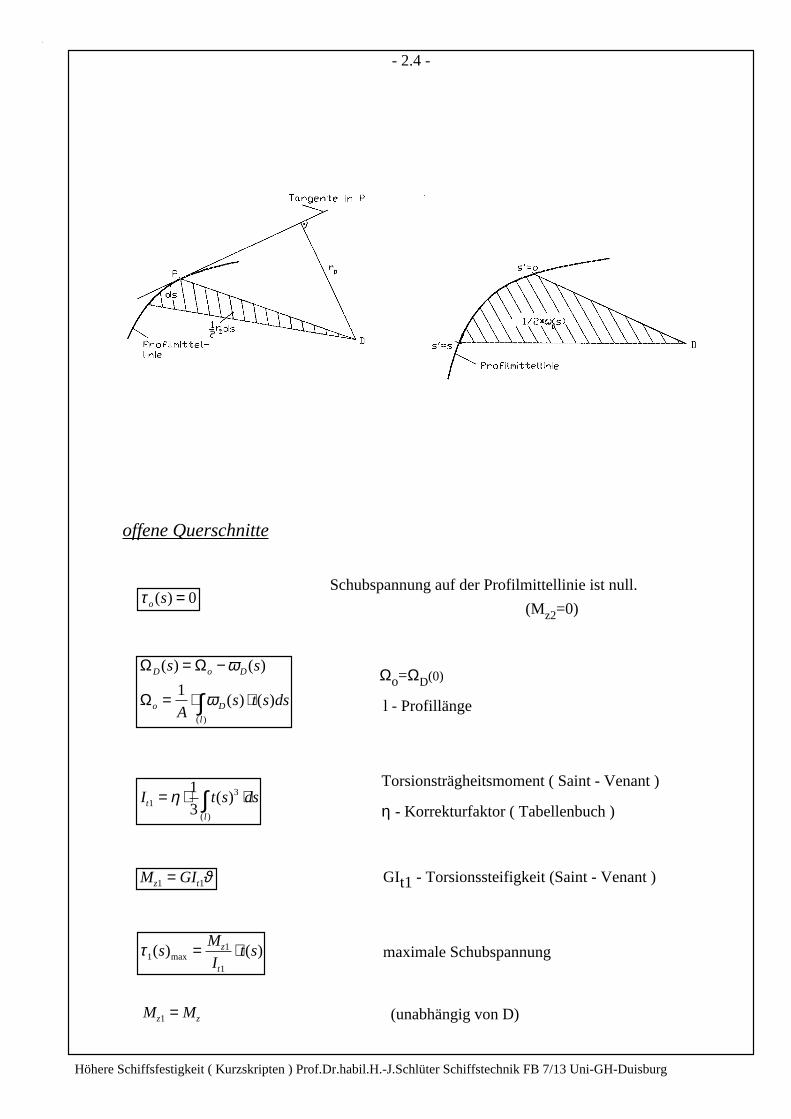
offene Querschnitte
τ o s( ) = 0
Ω Ω
Ω
D o D
o D
l
s s
As t s ds
( ) ( )
( ) ( )( )
= −
= ⋅ ⋅∫
ω
ω1
I t s dst
l
131
3= ⋅ ⋅∫η ( )
( )
M GIz t1 1= ϑ
τ11
1
( ) ( )maxsM
It sz
t
= ⋅
Ωo=ΩD(0)
l - Profillänge
(unabhängig von D)
Schubspannung auf der Profilmittellinie ist null.
(Mz2=0)
Torsionsträgheitsmoment ( Saint - Venant )
η - Korrekturfaktor ( Tabellenbuch )
GIt1 - Torsionssteifigkeit (Saint - Venant )
maximale Schubspannung
M Mz z1 =
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.5 -
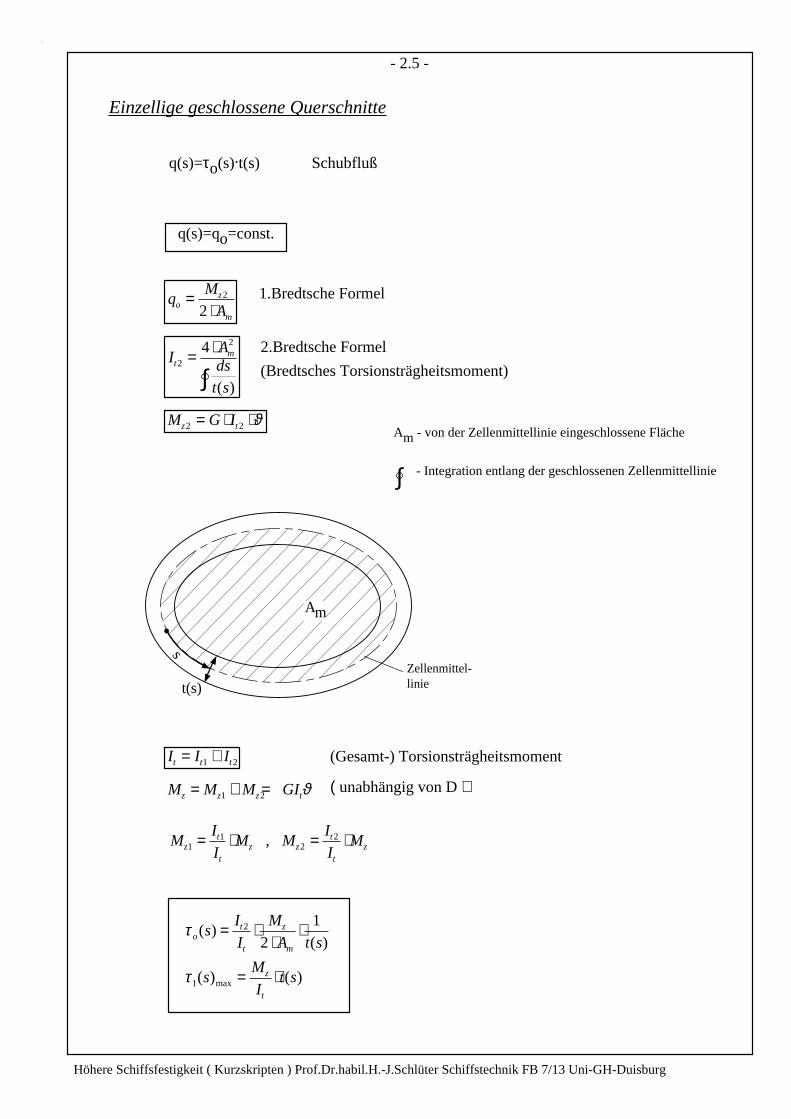
Einzellige geschlossene Querschnitte
q(s)=τo(s).t(s) Schubfluß
q(s)=qo=const.
qM
Aoz
m
=⋅
2
2
IAds
t s
tm
2
24= ⋅
∫ ( )
M G Iz t2 2= ⋅ ⋅ϑ
(Gesamt-) Torsionsträgheitsmoment
( unabhängig von D )
τ
τ
ot
t
z
m
z
t
sI
I
M
A t s
sM
It s
( )( )
( ) ( )max
= ⋅⋅
⋅
= ⋅
2
1
21
1.Bredtsche Formel
2.Bredtsche Formel
(Bredtsches Torsionsträgheitsmoment)
Am - von der Zellenmittellinie eingeschlossene Fläche
MI
IM M
I
IMz
t
tz z
t
tz1
12
2= ⋅ = ⋅,
I I It t t= +1 2
M M M GIz z z t= + =1 2 ϑ
s
t(s)Zellenmittel-linie
Am
- Integration entlang der geschlossenen Zellenmittellinie∫
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.6 -
A t s ds
sI
A
ds
t ss
s s
At s s ds
Dt
m o
s
D
D o D
o D
= ⋅
=⋅
⋅ ′′
−
= +
= − ⋅ ⋅ ⋅
∫
∫
∫
( )
( )( )
( )
( ) ( )
( ) ( )
*
*
*
Ω
Ω Ω Ω
Ω Ω
2
2
1
ω
ΩD s( ) ≡ 0
r s t sAds
t
Dm( ) ( )⋅ ≡ ⋅
∫2
z.B.:Kreiszellen,Dreieckzellen,Quadratzellen,beliebige Polygonzellen konstanter Wand-
dicke,die einen Kreis einhüllen.
Bemerkung: Ein einzelliger geschlossener Querschnitt ist genau dann ein wölbfreier Querschnitt ( ) ,wenn gilt
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.7 -
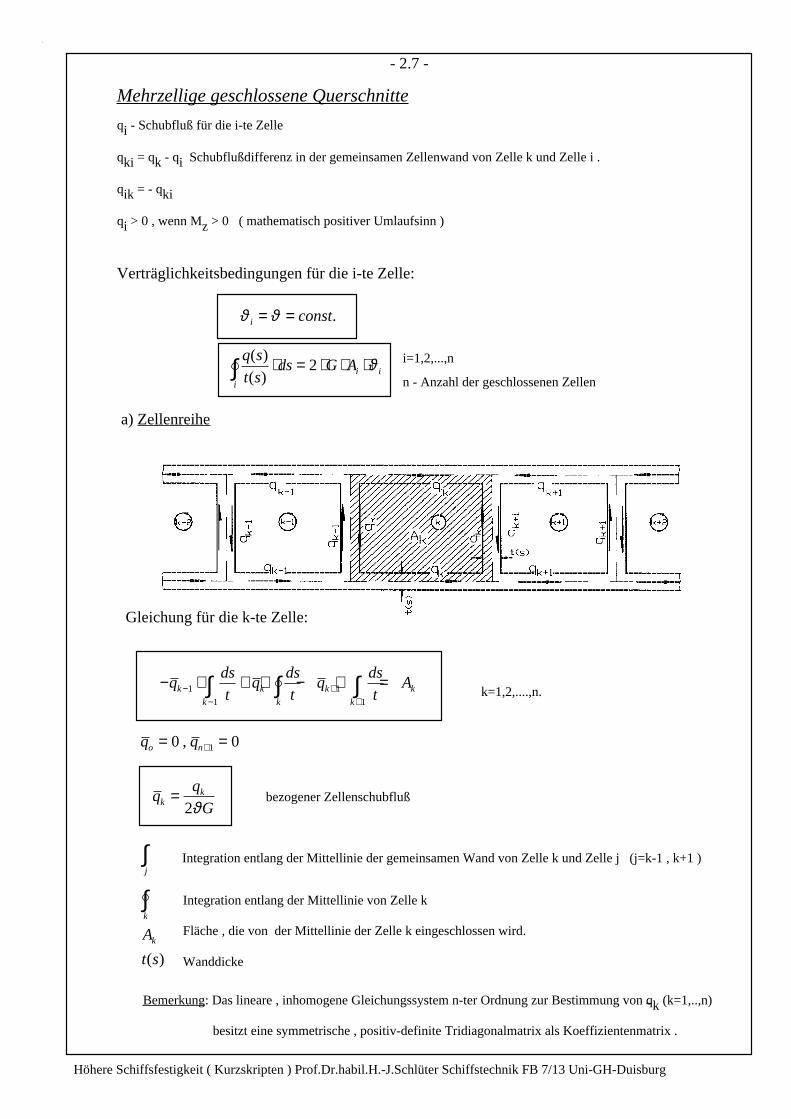
Mehrzellige geschlossene Querschnitte
qi - Schubfluß für die i-te Zelle
qki = qk - qi Schubflußdifferenz in der gemeinsamen Zellenwand von Zelle k und Zelle i .
qik = - qki
qi > 0 , wenn Mz > 0 ( mathematisch positiver Umlaufsinn )
Verträglichkeitsbedingungen für die i-te Zelle:
ϑ ϑi const= = .
i=1,2,...,n
n - Anzahl der geschlossenen Zellen
a) Zellenreihe
Gleichung für die k-te Zelle:
k=1,2,....,n.
Gkk=
2ϑ
− ⋅ + ⋅ − ⋅ =−−
++
∫ ∫ ∫qds
tq
ds
tq
ds
tAk
k
k
k
k
k
k1
1
1
1
q qo n= =+0 01,
Integration entlang der Mittellinie der gemeinsamen Wand von Zelle k und Zelle j (j=k-1 , k+1 )
Integration entlang der Mittellinie von Zelle k
Fläche , die von der Mittellinie der Zelle k eingeschlossen wird.
Wanddicke
j
k
kA
t s
∫
∫
( )
Bemerkung: Das lineare , inhomogene Gleichungssystem n-ter Ordnung zur Bestimmung von qk (k=1,..,n)
besitzt eine symmetrische , positiv-definite Tridiagonalmatrix als Koeffizientenmatrix .
bezogener Zellenschubfluß
q s
t sds G Ai i
i
( )( )
⋅ = ⋅ ⋅ ⋅∫ 2 ϑ
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.8 -
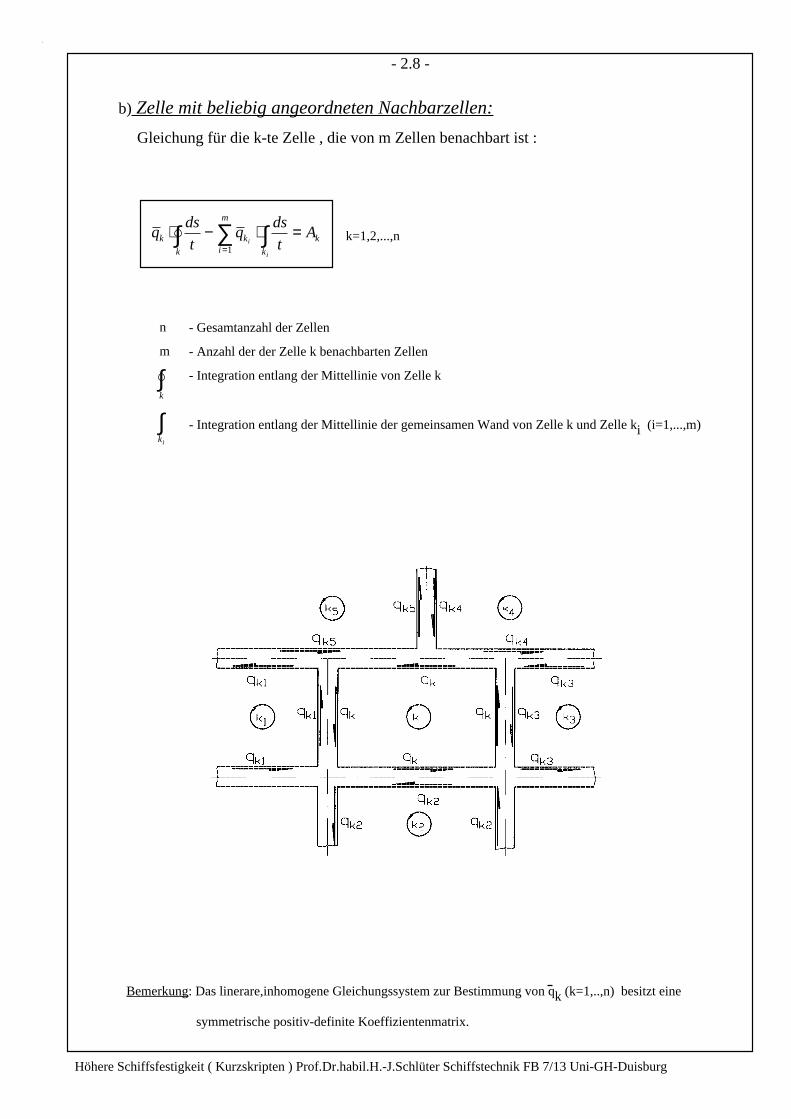
b) Zelle mit beliebig angeordneten Nachbarzellen:
Gleichung für die k-te Zelle , die von m Zellen benachbart ist :
qds
tq
ds
tAk
k
ki
m
k
ki
i
⋅ − ⋅ =∫ ∑ ∫=1
k=1,2,...,n
k
ki
∫
∫
- Gesamtanzahl der Zellen
- Anzahl der der Zelle k benachbarten Zellen
- Integration entlang der Mittellinie von Zelle k
- Integration entlang der Mittellinie der gemeinsamen Wand von Zelle k und Zelle ki (i=1,...,m)
Bemerkung: Das linerare,inhomogene Gleichungssystem zur Bestimmung von qk (k=1,..,n) besitzt eine
symmetrische positiv-definite Koeffizientenmatrix.
n
m
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.9 -
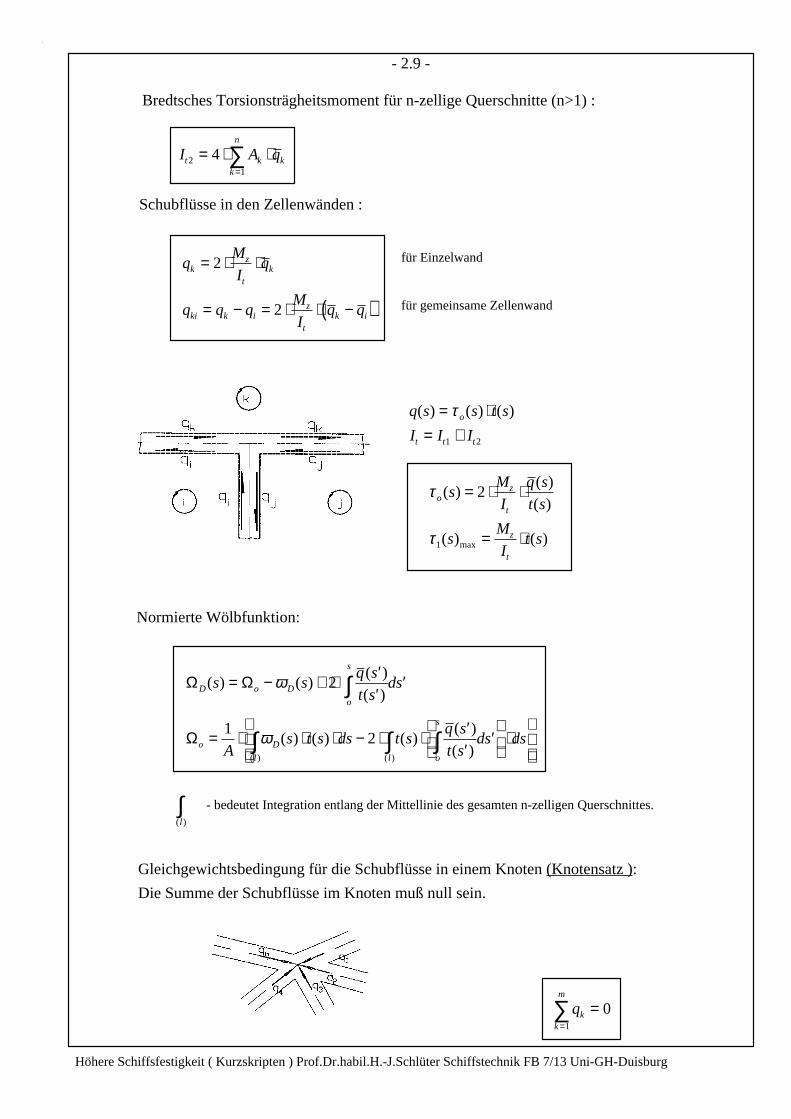
Bredtsches Torsionsträgheitsmoment für n-zellige Querschnitte (n>1) :
I A qt kk
n
k21
4= ⋅ ⋅=
∑
Schubflüsse in den Zellenwänden :
qM
Iq
q q qM
Iq q
kz
tk
ki k iz
tk i
= ⋅ ⋅
= − = ⋅ ⋅ −( )
2
2
für Einzelwand
für gemeinsame Zellenwand
q s s t s
I I Io
t t t
( ) ( ) ( )= ⋅= +
τ
1 2
Normierte Wölbfunktion:
Ω Ω
Ω
D o D
o
s
o D
l o
s
l
s sq s
t sds
As t s ds t s
q s
t sds ds
( ) ( )( )( )
( ) ( ) ( )( )( )
( ) ( )
= − + ⋅ ′′
′
= ⋅ ⋅ ⋅ − ⋅ ⋅ ′′
′
⋅
∫
∫ ∫∫
ω
ω
2
12
- bedeutet Integration entlang der Mittellinie des gesamten n-zelligen Querschnittes.
Gleichgewichtsbedingung für die Schubflüsse in einem Knoten (Knotensatz ):
Die Summe der Schubflüsse im Knoten muß null sein.
qkk
m
=∑ =
1
0
( )l∫
τ
τ
oz
t
z
t
sM
I
q s
t s
sM
It s
( )( )( )
( ) ( )max
= ⋅ ⋅
= ⋅
2
1
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
-2.10-
2.3 Wölbbehinderte Torsion (Wölbkrafttorsion) Voraussetzungen (Hypothesen)
• Die Querschnittsebene dreht sich um den Drehpol D.
• Die Dehnung der Profilmittellinie ist vernachlässigbar klein (Profiltreue).
• Verformungsänderungen über die Profildicke sind vernachlässigbar klein.
• Die Schubverzerrung infolge der Wölbschubspannung τω ist vernachlässigbar klein.
• L=0 , Qx=0 , Qy=0 , Mx=0 , My=0 .
• Wölbnormalspannung σω und Wölbschubspannung τω sind konstant über die Profildicke.
Damit gilt :
• Drillung ϑ=ϑ(z)
• Verwölbung Vz(s,z)=ΩD(s). ϑ(z)
• normierte Wölbfunktion ΩD(s) wie unter Abschnitt 2.2.
Wölbschubfluß qω(s,z)=τω(s,z).t(s) :
σ ϑω ( , ) ( ) ( )*s z E s zD= ⋅ ⋅ ′Ω
q s z E S s K zDω ω ϑ( , ) ˜ ( ) ( )*= − ⋅ +[ ] ⋅ ′′
˜ ( ) ( ) ( )S s s t s dsD D
o
s
ω = ′ ⋅ ′ ⋅ ′∫ Ω
q o z E K zω ϑ( , ) ( )*= − ⋅ ⋅ ′′ Wölbschubfluß an der Stelle s=0.
EE* =
−1 2ν
Wölbnormalspannung σz=σω :
sektorielles statisches Moment an der Stelle s
bezogen auf den Drehpol D
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

-2.11-
Bestimmung der Konstanten K: a) offener Querschnitt
Wenn qω(o,z)=0 ist , gilt K=0 .
b) einzelliger geschlossener Querschnitt
Aus der Erfüllung der Verträglichkeitsbedingung
folgtq s
t sdsω ( )
( )∫ ⋅ = 0
KS s
t sds
ds
t sD= − ⋅∫ ∫
˜ ( )( ) ( )
ω
c) n - zelliger geschlossener Querschnitt (n>1)
Aus der Erfüllung der Verträglichkeitsbedingungen
für jede Zelle folgt ähnlich wie in Abschn.2.2 ein lineares inhomogenes Gleich-
ungssystem zur Bestimmun der n Konstanten Kk (k=1,2,...,n) der einzelnen Zellen-
schubflüsse:
q s
t sds
k
ω ( )( )
⋅ =∫ 0
Das Gesamttorsionsmoment MzD setzt sich zusammen aus dem vom Bezugspunkt
unabhängigen Saint-Venantschen Torsionsmoment Mt und dem auf den Drehpol D
bezogenen Wölbtorsionsmoment MωD.
M G I mit I I I aus Abschn
M q r ds
t t t t t
D D
l
= ⋅ ⋅ = +
= ⋅ ⋅∫ϑ
ω ω
1 2 2 2. .
( )
M M MzD t D= + ω
M z E I zD Dω ωω ϑ( ) ( )*= − ⋅ ⋅ ′′
I s t s dsD D
l
ωω = ⋅ ⋅∫ Ω( )
( ) ( )2
- Wölbsteifigkeit
- Saint-Venantsche Torsionssteifigkeit
sektorielles Trägheitsmoment bezogen auf
den Drehpol D
E I
G ID
t
* ⋅⋅
ωω
( k=1,2,...,n )
Kds
tK
ds
t
S s
t sds k nk
k
kii
m
ki
D
k
⋅ − ⋅ = − ⋅ =∫ ∑ ∫ ∫=1
1 2˜ ( )
( ) , , ,..., .ω
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
-2.12-
Differentialgleichung für die Verdrillung ϑ=ϑ(z) :
E I z GI z M zD t ZD* ( ) ( ) ( )⋅ ⋅ ′′ − = −ωω ϑ ϑ 0<z<L , L-Stablänge
Randbedingungen (z=0 , z=L ) :
a) eingespannter Rand :
b) gabelgelagerter Rand :
c) freier Rand :
Drehung des Querschnittes an der Stelle z :
ϕ ϕ ϑ( ) ( ) ( )z o z dzo
z
= + ′ ⋅ ′∫
Allgemeine Lösung der Differentialgleichung für ϑ(z) :
ϑ(z)=ϑh(z)+ ϑp(z)
ϑ λ λ
ϑ λ λ
h
hz z
z a z a z
z b e b e
( ) cosh sinh
( )
= ⋅ + ⋅
= ⋅ + ⋅ −
1 2
1 2
λωω
= ⋅⋅
G I
E It
D*
M z M const zM
G I
M z M m z zG I
M m z
zD o po
t
zD o o pt
o o
( ) . : ( )
( ) : ( ) ( )
= = =⋅
= + ⋅ =⋅
⋅ +
ϑ
ϑ 1
Berechnung der Konstanten a1,a2 bzw. b1.b2 mit Hilfe der vorgegebenen Randbedingungen.
G
Ev* ( )= ⋅ −1
21
ϑ ν ϕϑ σ ϕϑ σ
ω
ω
= = =′ = = =′ = =
0 0 0
0 0 0
0 0
( ) .
( ) .
( ).
z und
und
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.13 -
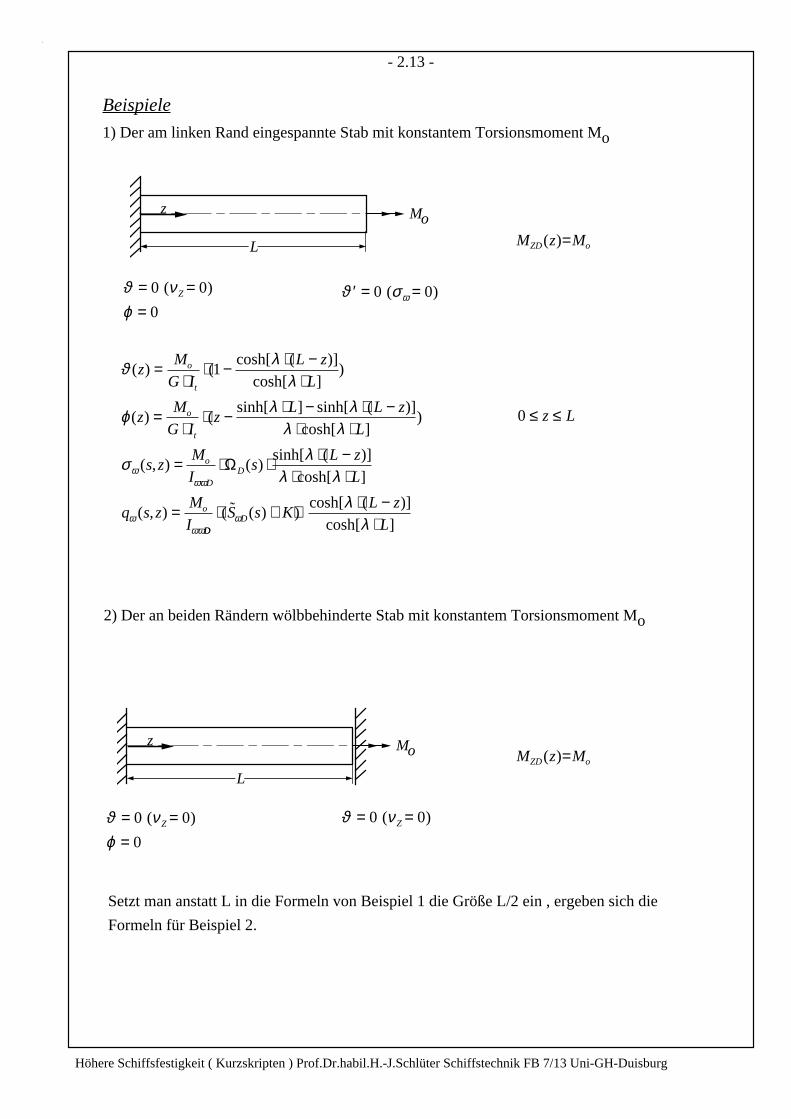
Beispiele
1) Der am linken Rand eingespannte Stab mit konstantem Torsionsmoment Mo
2) Der an beiden Rändern wölbbehinderte Stab mit konstantem Torsionsmoment Mo
ϑ νϕ
= ==
0 0
0
( )Z ϑ σω′ = =0 0( )
ϑ λλ
ϕ λ λλ λ
σ λλ λω
ωω
ωωω
( ) (cosh[ ( )]
cosh[ ])
( ) (sinh[ ] sinh[ ( )]
cosh[ ])
( , ) ( )sinh[ ( )]
cosh[ ]
( , )
zM
G I
L z
L
zM
G Iz
L L z
L
s zM
Is
L z
L
q s zM
I
o
t
o
t
o
DD
o
=⋅
⋅ − ⋅ −⋅
=⋅
⋅ − ⋅ − ⋅ −⋅ ⋅
= ⋅ ⋅ ⋅ −⋅ ⋅
=
1
Ω
DDDS s K
L z
L⋅ + ⋅ ⋅ −
⋅( ˜ ( ) )
cosh[ ( )]cosh[ ]ω
λλ
0 ≤ ≤z L
ϑ νϕ
= ==
0 0
0
( )Z ϑ ν= =0 0( )Z
Setzt man anstatt L in die Formeln von Beispiel 1 die Größe L/2 ein , ergeben sich die
Formeln für Beispiel 2.
M z MZD o( )=
M z MZD o( )=
L
z Mo
L
z Mo
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.14 -
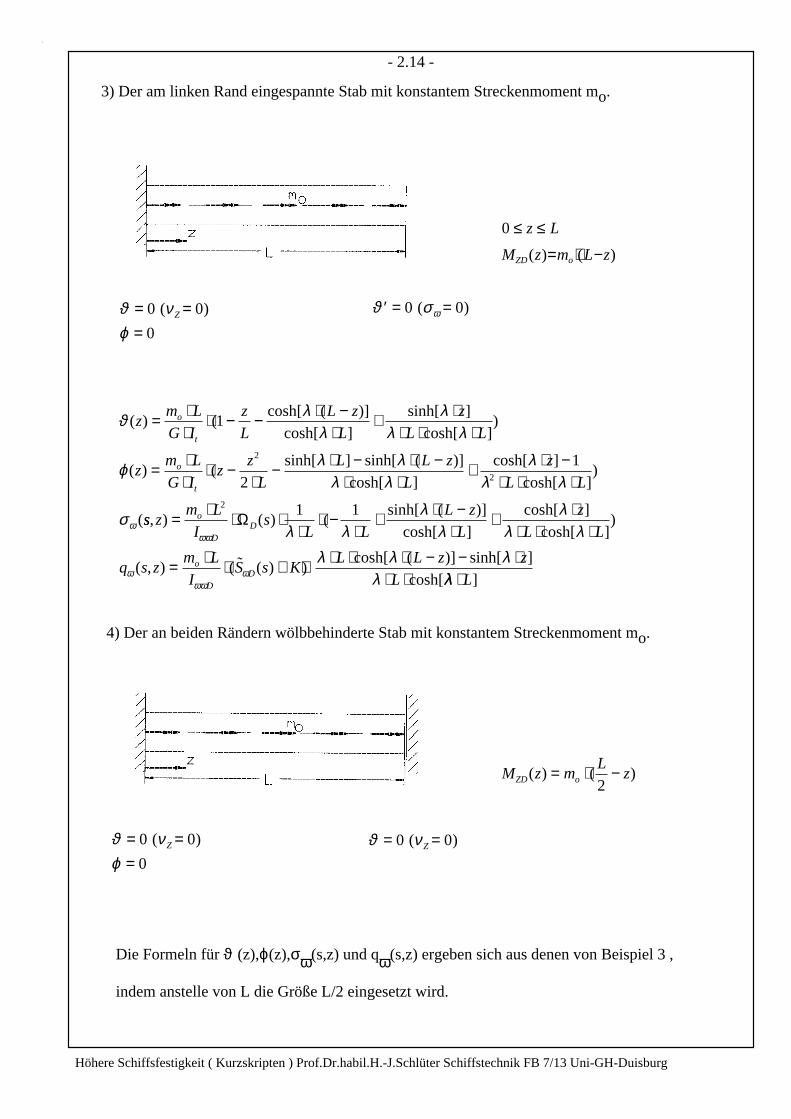
3) Der am linken Rand eingespannte Stab mit konstantem Streckenmoment mo.
ϑ νϕ
= ==
0 0
0
( )Zϑ σω′ = =0 0( )
0 ≤ ≤z L
ϑ λλ
λλ λ
ϕ λ λλ λ
λλ λ
σω
( ) (cosh[ ( )]
cosh[ ]sinh[ ]
cosh[ ])
( ) (sinh[ ] sinh[ ( )]
cosh[ ]cosh[ ]
cosh[ ])
(
zm L
G I
z
L
L z
L
z
L L
zm L
G Iz
z
L
L L z
L
z
L L
o
t
o
t
= ⋅⋅
⋅ − − ⋅ −⋅
+ ⋅⋅ ⋅ ⋅
= ⋅⋅
⋅ −⋅
− ⋅ − ⋅ −⋅ ⋅
+ ⋅ −⋅ ⋅ ⋅
1
212
2
ss zm L
Is
L L
L z
L
z
L L
q s zm L
IS s K
L L z z
L
o
DD
o
DD
, ) ( ) (sinh[ ( )]
cosh[ ]cosh[ ]
cosh[ ])
( , ) ( ˜ ( ) )cosh[ ( )] sinh[ ]
cosh[
= ⋅ ⋅ ⋅⋅
⋅ −⋅
+ ⋅ −⋅
+ ⋅⋅ ⋅ ⋅
= ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ − − ⋅⋅ ⋅
2 1 1
ωω
ωωω
ω
λ λλ
λλ
λ λλ λ λ
λ
Ω
λλ ⋅ L]
4) Der an beiden Rändern wölbbehinderte Stab mit konstantem Streckenmoment mo.
ϑ νϕ
= ==
0 0
0
( )Z ϑ ν= =0 0( )Z
M z mL
zZD o( ) ( )= ⋅ −2
Die Formeln für ϑ (z),ϕ(z),σω(s,z) und qω(s,z) ergeben sich aus denen von Beispiel 3 ,
indem anstelle von L die Größe L/2 eingesetzt wird.
M z m L zZD o( ) ( )= ⋅ −
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.15 -
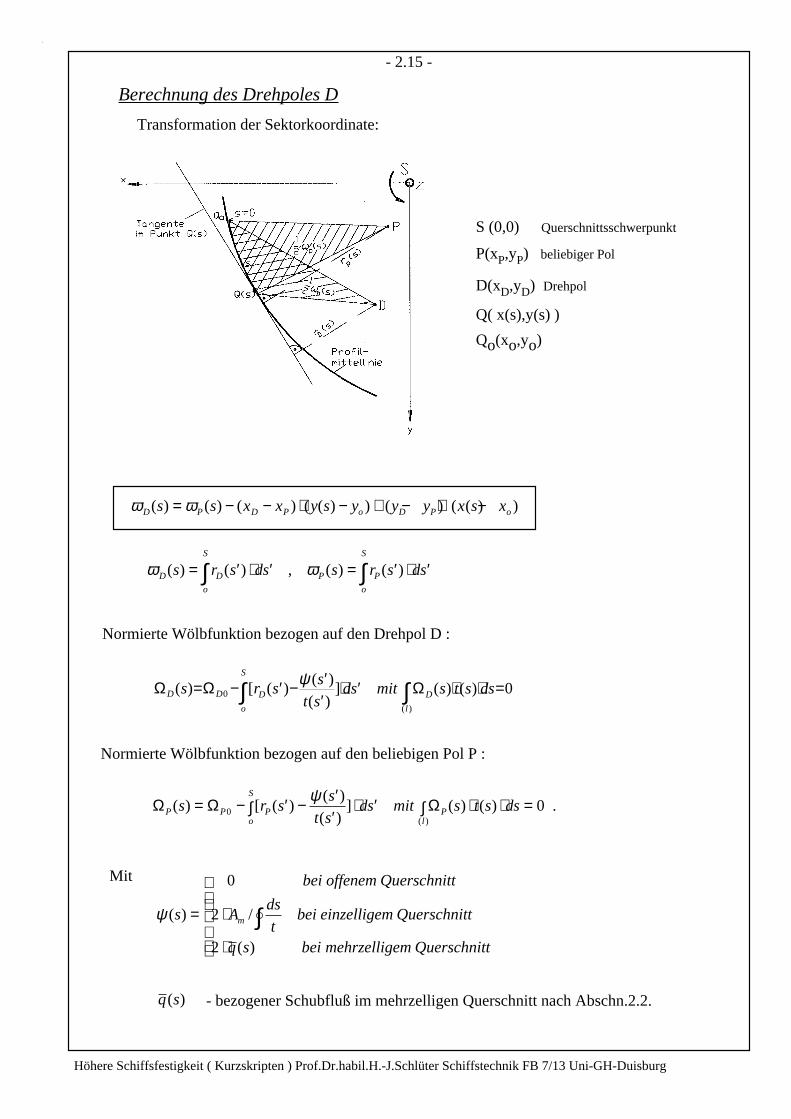
Berechnung des Drehpoles D
Transformation der Sektorkoordinate:
S (0,0) Querschnittsschwerpunkt
P(xP,yP) beliebiger Pol
D(xD,yD) Drehpol
Q( x(s),y(s) )
Qo(xo,yo)
ω ωD P D P o D P os s x x y s y y y x s x( ) ( ) ( ) ( ( ) ) ( ) ( ( ) )= − − ⋅ − + − ⋅ −
ω ωD D
o
S
P P
o
S
s r s ds s r s ds( ) ( ) , ( ) ( )= ′ ⋅ ′ = ′ ⋅ ′∫ ∫
Ω Ω ΩD D D
o
S
D
l
s r ss
t sds mit s t s ds( ) [ ( )
( )( )
] ( ) ( )( )
= − ′ − ′′
⋅ ′ ⋅ ⋅ =∫ ∫0 0ψ
Ω Ω ΩP P Po
S
Pl
s r ss
t sds mit s t s ds( ) [ ( )
( )( )
] ( ) ( ) .( )
= − ∫ ′ − ′′
⋅ ′ ∫ ⋅ ⋅ =0 0ψ
ψ ( ) /
( )
s
bei offenem Querschnitt
Ads
tbei einzelligem Querschnitt
q s bei mehrzelligem Querschnitt
m= ⋅
⋅
∫
0
2
2
q s( ) - bezogener Schubfluß im mehrzelligen Querschnitt nach Abschn.2.2.
Normierte Wölbfunktion bezogen auf den Drehpol D :
Normierte Wölbfunktion bezogen auf den beliebigen Pol P :
Mit
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 2.16 -
Transformation der Wölbfunktion :
Ω ΩD P D P D Ps s x x y s y y x s( ) ( ) ( ) ( ) ( ) ( )= + − ⋅ − − ⋅
Aus
folgt
und
S dAD D
A
ω = ⋅ =∫ Ω 0( )
I y dA I x dAyD D
A
xD D
A
ω ω= ⋅ ⋅ = = ⋅ ⋅ =∫ ∫Ω Ω0 0( ) ( )
, .
L dA M y dA M x dAA
x
A
y
A
= ⋅ = = ⋅ ⋅ = = − ⋅ ⋅ =∫ ∫ ∫σ σ σω ω ω0 0 0, ,( ) ( ) ( )
Die sektoriellen Deviationsmomente IωxD,IωyD bezüglich des Drehpols D sind null .
Daraus ergeben sich mit Hilfe obiger Transformationsbeziehung der Wölbfunktion die
beiden Gleichungen für die Koordinaten des Drehpols D :
x xI I I I
I I I
y yI I I I
I I I
D PyP yy xP xy
xx yy xy
D PyP xy xP xx
xx yy xy
− = −⋅ + ⋅
⋅ −
− =⋅ + ⋅
⋅ −
ω ω
ω ω
2
2
mit
und
I y dA I x dA I x y dAxx
A
yy
A
xy
A
= ⋅ = ⋅ = − ⋅ ⋅∫ ∫ ∫2 2
( ) ( ) ( )
, ,
I x dA I y dAxP P
A
yP P
A
ω ω= ⋅ ⋅ = ⋅ ⋅∫ ∫Ω Ω( ) ( )
, .
( Normierungsbedingung für ΩD )
Ist das Koordinatensystem ein Hauptachsensystem ( Ixy=0 ) , dann wird
x xI
I
y yI
I
D PyP
xx
D PxP
yy
− = −
− =
ω
ω
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.17 -
Berechnungsschritte
1) Berechnung der Schwerpunktkoordinaten und der Flächenträgheitsmomente Ixx,Iyy,Ixy .
2) Berechnung der bezogenen Schubflüsse q(s) und des Bredtschen Torsionsträgheitsmomentes It2.
3) Ermittlung der normierten Wölbfunktion ΩP(s) bezüglich eines beliebigen (zweckmäßigen)
Poles P(xP,yP).
4) Berechnung der sektoriellen Deviationsmomente IωxP,IωyP .
5) Berechnung der Koordinaten xD,yD des Drehpols D.
6) Berechnung der normierten Wölbfunktion ΩD(s) bezüglich des Drehpols D mit Hilfe der Trans- formationsformel
7) Berechnung des sektoriellen Trägheitsmomentes IωωD
8) Berechnung des sektoriellen statischen Momentes für den offengeschnittenen Quer- schnitt. (statisch bestimmtes Hauptsystem)
9) Berechnung der Integrationskonstanten K für jeden Schnitt als Lösung eines Gleichungssystems.
10) Berechnung der Verdrillung ϑ(z) und des Torsionswinkels ϕ(z) als Lösung der gegebenen Rand- wertaufgabe.
11) Ermittlung der Bredtschen Schubspannung τo(s,z), der Wölbnormalspannung σω(s,z) und der
Wölbschubspannung τω(s,z) :
˜ ( )S sDω
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Ω ΩD P D P D Ps s x x y s y y x s( ) ( ) ( ) ( ) ( ) ( )= + − ⋅ − − ⋅
τ ϑ
σ ϑ
τ ϑ
ω
ωω
o
D
D
s zq s
t sG z
s z E s z
s z ES s
t sz
( , )( )( )
( )
( , ) ( ) ( )
( , )˜ ( )
( )( )
*
**
= ⋅ ⋅
= ⋅ ′
= − ⋅ ⋅ ′′
2
Ω ˜ ( ) ˜ ( )*S s S s KD Dω ω= +
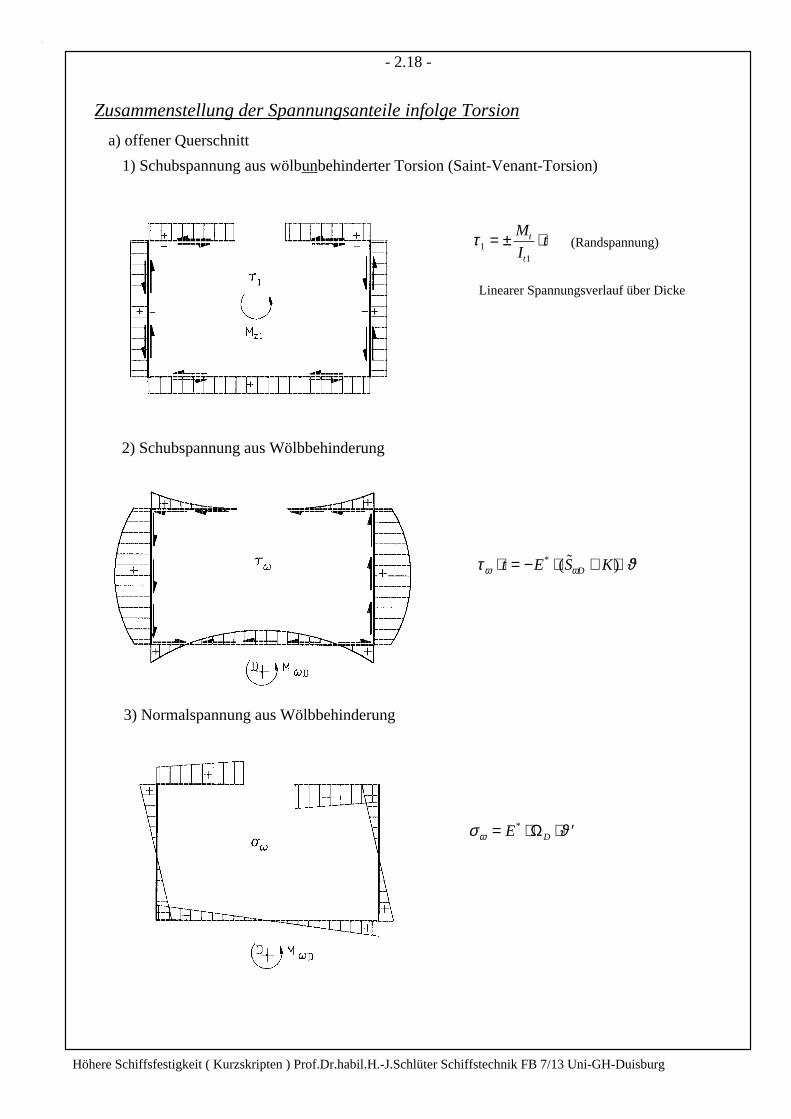
- 2.18 -
Zusammenstellung der Spannungsanteile infolge Torsion
a) offener Querschnitt
1) Schubspannung aus wölbunbehinderter Torsion (Saint-Venant-Torsion)
2) Schubspannung aus Wölbbehinderung
3) Normalspannung aus Wölbbehinderung
τ11
= ± ⋅M
Itt
t
τ ϑω ω⋅ = − ⋅ + ⋅ ′′t E S KD* ( ˜ )
σ ϑω = ⋅ ⋅ ′E D* Ω
(Randspannung)
Linearer Spannungsverlauf über Dicke
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
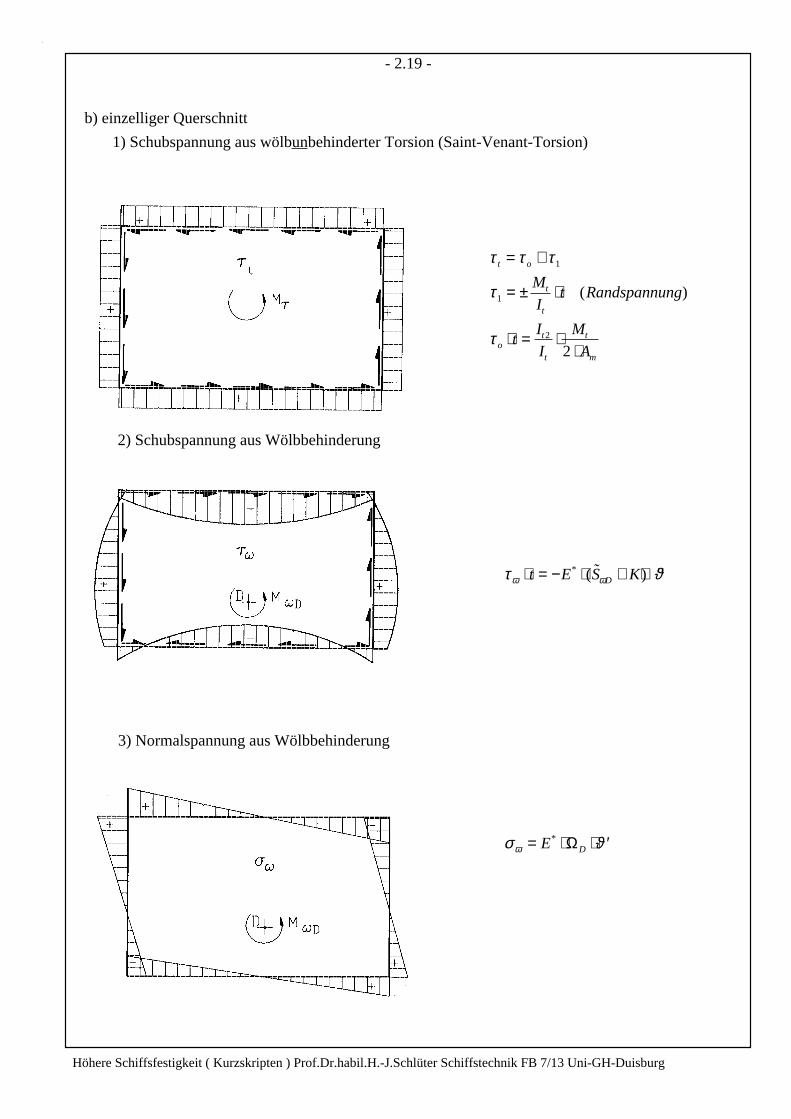
- 2.19 -
b) einzelliger Querschnitt
1) Schubspannung aus wölbunbehinderter Torsion (Saint-Venant-Torsion)
2) Schubspannung aus Wölbbehinderung
3) Normalspannung aus Wölbbehinderung
τ τ τ
τ
τ
t o
t
t
ot
t
t
m
M
It Randspannung
tI
I
M
A
= +
= ± ⋅
⋅ = ⋅⋅
1
1
2
2
( )
τ ϑω ω⋅ = − ⋅ + ⋅ ′′t E S KD* ( ˜ )
σ ϑω = ⋅ ⋅ ′E D* Ω
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 2.20 -
2.4 Querkraftbiegung
Voraussetzungen (Hypothesen )
• Verformungsänderungen über die Profildicke sind vernachlässigbar klein.
• Die Dehnung der Profilmittellinie ist vernachlässigbar klein (Profiltreue).
• Gültigkeit der Bernoullischen Verformungshypothese . Das bedeutet,
- die Querschnittsebene bleibt bei der Biegeverformung eben,
- die Querschnittsebene bleibt bei der Biegung senkrecht zur verformten Stabachse
( Die Verformung infolge Querkraftschubspannungen ist vernachlässigbar klein.).
• Die Biegenormalspannung σB und die Querkraftschubspannung τQ sind konstant über die Profildicke.
• Die Querkraft greift im Schubmittelpunkt M an.
• Torsionsmoment MzD=0 , und somit Drehwinkel ϕ=0.
Schnittgrößen infolge der Biegenormalspannung σz=σB :
L z dA s z t s ds
M z y dA s z y s t s ds
M z x dA s z x s t s ds
B
A
B
l
x B
A
B
l
y B
A
B
l
( ) ( , ) ( )
( ) ( , ) ( ) ( )
( ) ( , ) ( ) ( )
( ) ( )
( ) ( )
( ) ( )
= ⋅ = ⋅ ⋅
= ⋅ ⋅ = ⋅ ⋅ ⋅
= − ⋅ ⋅ = − ⋅ ⋅ ⋅
∫ ∫
∫ ∫
∫ ∫
σ σ
σ σ
σ σ
Schnittgrößen infolge Querkraftschubspannung τQ :
Q z dA s z t s s ds
Q z dA s z t s s ds
x Q
A
Q
l
y Q
A
Q
l
( ) cos ( , ) ( ) cos ( )
( ) sin ( , ) ( ) sin ( )
( ) ( )
( ) ( )
= − ⋅ ⋅ = − ⋅ ⋅ ⋅
= ⋅ ⋅ = ⋅ ⋅ ⋅
∫ ∫
∫ ∫
τ α τ α
τ α τ α
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
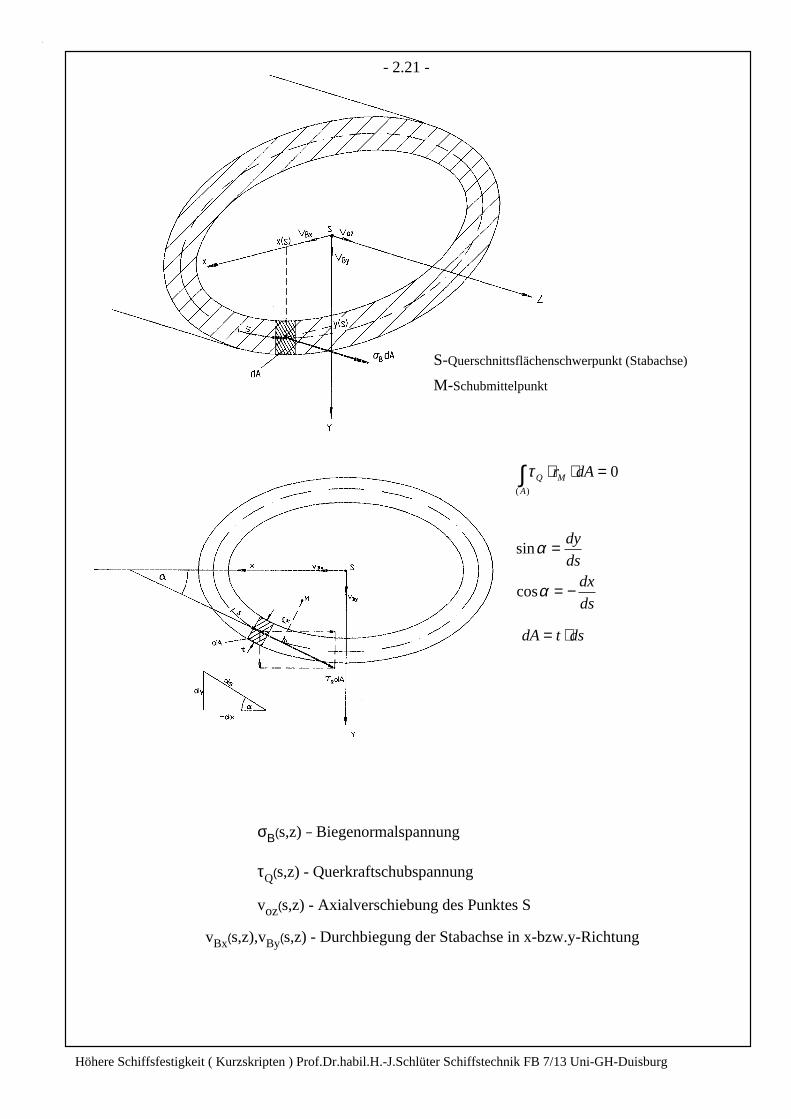
σΒ(s,z) − Biegenormalspannung
τQ(s,z) - Querkraftschubspannung
voz(s,z) - Axialverschiebung des Punktes S
vBx(s,z),vBy(s,z) - Durchbiegung der Stabachse in x-bzw.y-Richtung
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
S-Querschnittsflächenschwerpunkt (Stabachse)
M-Schubmittelpunkt
τQ M
A
r dA⋅ ⋅ =∫( )
0
sin
cos
α
α
=
= −
dy
dsdx
ds
- 2.21 -
dA t ds= ⋅

- 2.22 -
Axialverschiebung eines Querschnittspunktes P(x,y):
Zusammenhang zwischen Schnittgrößen und Biegeverformung:
Im Falle eines Hauptachsensystems (Ixy=0) gilt
Hinweis: Aufgrund der festgelegten Orientierung des Biegemomentes My steht in der
Gleichung für My ein Pluszeichen (My hat den gleichen Richtungssinn wie
die y-Achse).
Zusammenhang zwischen Biegenormalspannung und Schnittgrößen :
Im Falle eines Hauptachsensystems (Ixy=0 ) gilt
Gleichgewichtsbedingungen:
ν ν ν νzB oz Bx Bys z z z x s z y s( , ) ( ) ( ) ( ) ( ) ( )= − ′ ⋅ − ′ ⋅
L z E A z
M z E I z I z
M z E I z I z
oz
x xy Bx xx By
y yy Bx xy By
( ) ( )
( ) [ ( ) ( )]
( ) [ ( ) ( )]
*
*
*
= ⋅ ⋅ ′
= ⋅ ⋅ ′′ − ⋅ ′′
= ⋅ ⋅ ′′ − ⋅ ′′
ν
ν ν
ν ν
M z E I z
M z E I z
x xx By
y yy Bx
( ) ( )
( ) ( )
*
*
= − ⋅ ⋅ ′′
= ⋅ ⋅ ′′
ν
ν
σ Bxy x xx y
xx yy xy
yy x xy y
xx yy xy
s zL z
A
I M z I M z
I I Ix s
I M z I M z
I I Iy s( , )
( ) ( ) ( )( )
( ) ( )( )= +
⋅ − ⋅⋅ −
⋅ +⋅ − ⋅
⋅ −⋅
2 2
σ By
yy
x
xx
s zL z
A
M z
Ix s
M z
Iy s( , )
( ) ( )( )
( )( )= − ⋅ + ⋅
I y dA I x dA I x y dAxx
A
yy
A
xy
A
= ⋅ = ⋅ = − ⋅ ⋅∫ ∫ ∫2 2
( ) ( ) ( )
, ,
Q z M z
Q z M z
x y
y x
( ) ( )
( ) ( )
= − ′
= + ′
Querkraftschubfluß qQ = τQ t :
q s z q o zI S s I S s
I I IQ z
I S s I S s
I I IQ zQ Q
xx y xy x
xx yy xyx
xy y yy x
xx yy xyy( , ) ( , )
˜ ( ) ˜ ( )( )
˜ ( ) ˜ ( )( )= −
⋅ + ⋅⋅ −
⋅ −⋅ + ⋅
⋅ −⋅
2 2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.23 -
Im Falle eines Hauptachsensystems (Ixy=0) gilt
q s z q o zQ z
IS s
Q z
IS sQ Q
x
yyy
y
xxx( , ) ( , )
( ) ˜ ( )( ) ˜ ( )= − ⋅ − ⋅
˜ ( ) ( ) ( ) , ˜ ( ) ( ) ( ) .S s y s t s ds S s x s t s dsx
o
S
y
o
S
= ′ ⋅ ′ ⋅ ′ = ′ ⋅ ′ ⋅ ′∫ ∫
q q qQ Qx Qy= +
q s zQ z
IS s KQx
x
yyy y( , )
( )[ ˜ ( ) ]*= − ⋅ +
q s zQ z
IS s KQy
y
xxx x( , )
( )[ ˜ ( ) ]*= − ⋅ +
mit den Flächenmomenten an der Stelle s
Der Querkraftschubfluß wird zweckmäßigerweise zerlegt in die beiden Anteile
mit dem Schubfluß qQx infolge der Querkraft Qx
und dem Schubfluß qQy infolge der Querkraft Qy
wobei
Im Falle eines Hauptachsensystems (Ixy=0) gilt:
˜ ( )
˜ ( ) ˜ ( )
, ˜ ( )
˜ ( ) ˜ ( )* *S s
S sI
IS s
I
I I
S s
S sI
IS s
I
I I
x
xxy
yyy
xy
xx yy
y
yxy
xxx
xy
xx yy
=+ ⋅
−⋅
=+ ⋅
−⋅
1 12 2
˜ ( ) ˜ ( ) , ˜ ( ) ˜ ( ) .* *S s S s S s S sx x y y= =
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 2.24 -
Bestimmung der Konstanten Kx und Ky :
a) offener Querschnitt
Wenn qQ(0,z)=0 ist , gilt Kx=0 und Ky=0
b) einzelliger geschlossener Querschnitt
Aus Erfüllung der Verträglichkeitsbedingung
folgt :
KS s
t sds
ds
t s
KS s
t sds
ds
t s
xx
yy
= − ⋅
= − ⋅
∫ ∫
∫ ∫
˜ ( )( )
/( )
˜ ( )
( )/
( )
*
*
Kds
tK
ds
t
S
tds
Kds
tK
ds
t
S
tds
xk
k
xki
kii
mx
k
yk
k
yki
kii
my
k
⋅ − ⋅∑ = − ⋅
⋅ − ⋅∑ = − ⋅
∫ ∫ ∫
∫ ∫ ∫
=
=
1
1
˜
˜
*
*
c) n - zelliger geschlossener Querschnitt (n>1)
Aus Erfüllung der Verträglichkeitsbedingungen
(k=1,2,...,n) für jede Zelle folgt ähnlich wie in Abschn.2.2 jeweils ein lineares
inhomogenes Gleichungssystem zur Bestimmung der Konstanten Kxk und Kyk
(k=1,2,...,n) der einzelnen Zellenschubflüsse:
Bemerkungen:
- Jede Zelle darf nur durch einen einzigen Schnitt geöffnet werden. Der Schnitt dient
als Integrationsanfang (s=0) der betrachteten Zelle. Der in diesem Schnitt vorhandene
Schubfluß ist bis auf den Faktor (-Qx/Iyy) bzw. (-Qy/Ixx) gleich der Konstanten Kyk bzw.Kxk
des Zellenflusses der betrachteten Zelle k.
- In jedem Knoten des Stabquerschnittes muß die Knotengleichgewichtsbedingung
(Knotensatz) erfüllt sein : Die Summe aller Schubflüsse in einem Knoten muß null sein.
(k=1,2,...,n)
q
tds und
q
tdsQx Qy∫ ∫⋅ = ⋅ =0 0
q
tds und
q
tdsQx Qy
k k∫ ∫⋅ = ⋅ =0 0
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.25 -
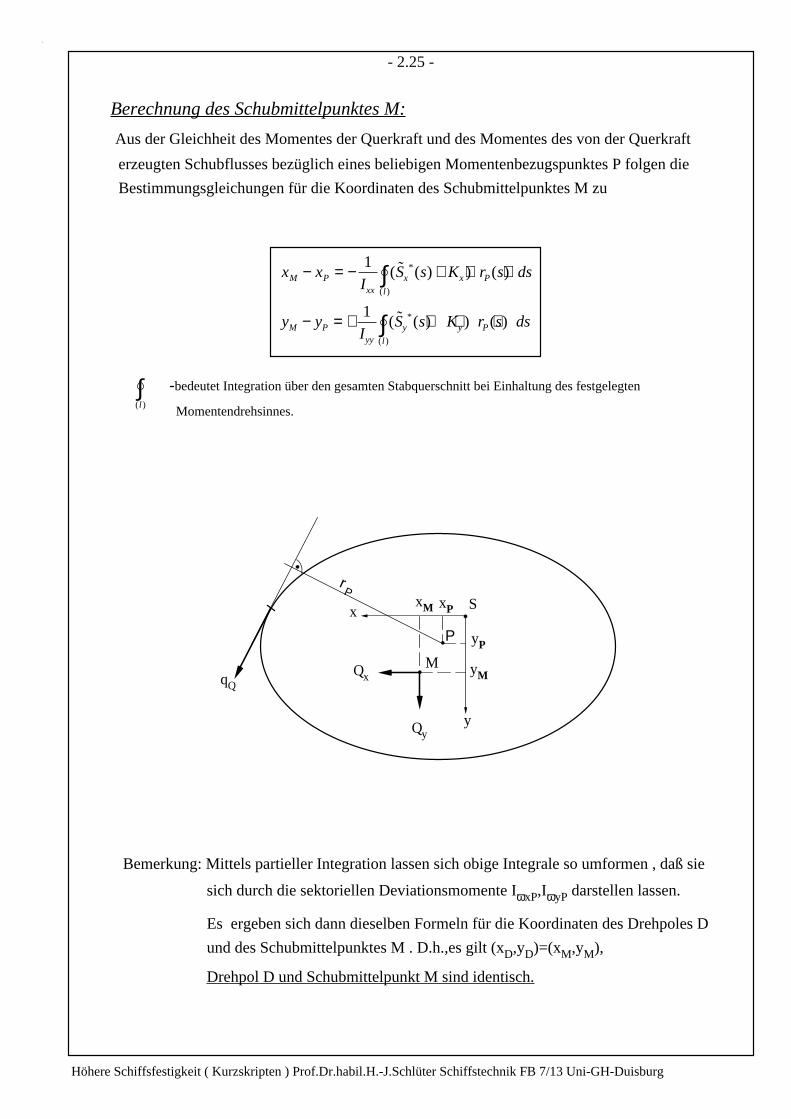
Berechnung des Schubmittelpunktes M:
Aus der Gleichheit des Momentes der Querkraft und des Momentes des von der Querkraft
erzeugten Schubflusses bezüglich eines beliebigen Momentenbezugspunktes P folgen die
Bestimmungsgleichungen für die Koordinaten des Schubmittelpunktes M zu
-bedeutet Integration über den gesamten Stabquerschnitt bei Einhaltung des festgelegten
Momentendrehsinnes.
Bemerkung: Mittels partieller Integration lassen sich obige Integrale so umformen , daß sie
sich durch die sektoriellen Deviationsmomente IωxP,IωyP darstellen lassen.
Es ergeben sich dann dieselben Formeln für die Koordinaten des Drehpoles D
und des Schubmittelpunktes M . D.h.,es gilt (xD,yD)=(xM,yM),
Drehpol D und Schubmittelpunkt M sind identisch.
x xI
S s K r s ds
y yI
S s K r s ds
M Pxx
x x P
l
M Pyy
y y P
l
− = − + ⋅ ⋅
− = + + ⋅ ⋅
∫
∫
1
1
( ˜ ( ) ) ( )
( ˜ ( ) ) ( )
*
( )
*
( )
( )l∫
xM xP S
yP
yM
yQy
Qx
P
x
M
rP
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.26 -
Berechnungsschritte
1) Berechnung der Koordinaten des Querschnittsflächenschwerpunktes S.
2) Berechnung von Ixx,Iyy,Ixy und von
3) Bestimmung der Konstanten Kx und Ky
4) Berechnung der Biegenormalspannung σB(s,z)
5) Berechnung der Querkraftschubflüsse qQx(s,z) , qQy(s,z) .
6) Berechnung der Koordinaten des Schubmittelpunktes M .
˜ ( ) , ˜ ( ) . ˜ *( ) , ˜ *( ).Sx s Sy s bzw Sx s Sy s
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 2.27 -
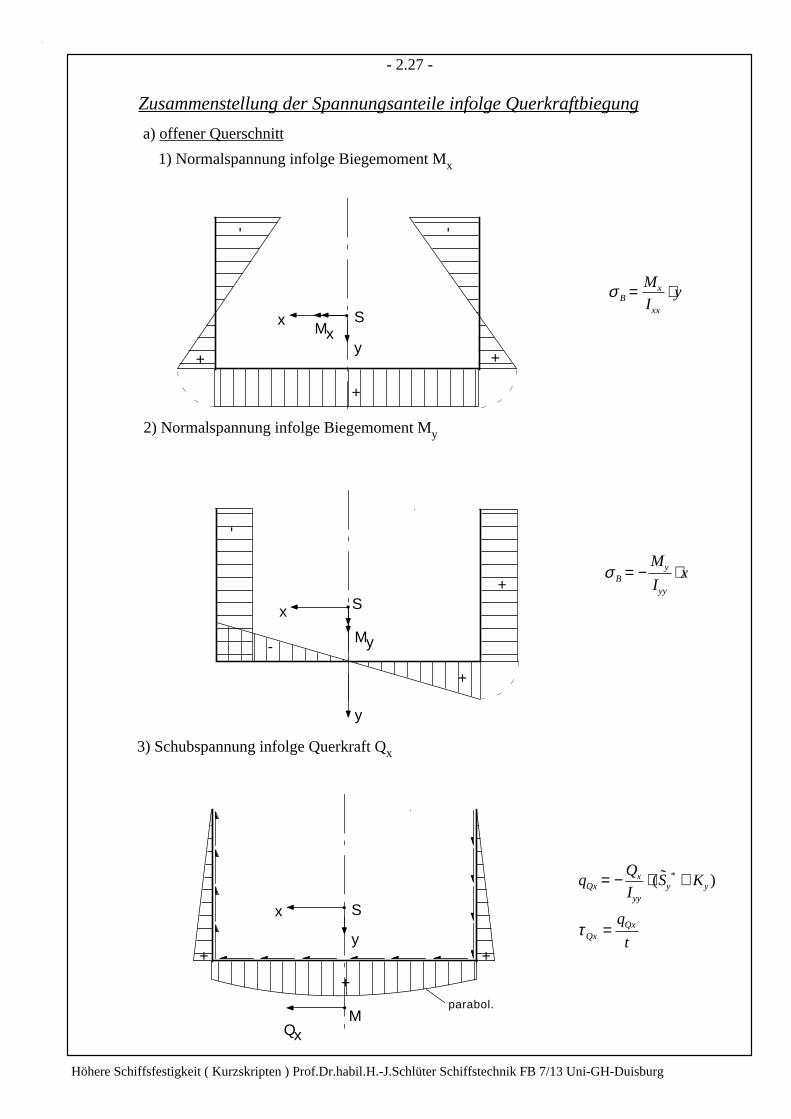
Zusammenstellung der Spannungsanteile infolge Querkraftbiegung
a) offener Querschnitt
1) Normalspannung infolge Biegemoment Mx
2) Normalspannung infolge Biegemoment My
3) Schubspannung infolge Querkraft Qx
σ Bx
xx
M
Iy= ⋅
σ By
yy
M
Ix= − ⋅
IS K
q
t
Qxx
yyy y
QxQx
= − ⋅ +
=
( ˜ )*
τ
SMx
x
y+
+
+
- -
S
My
x
y
-
-
+
+
Sx
y++
+
MQx
parabol.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
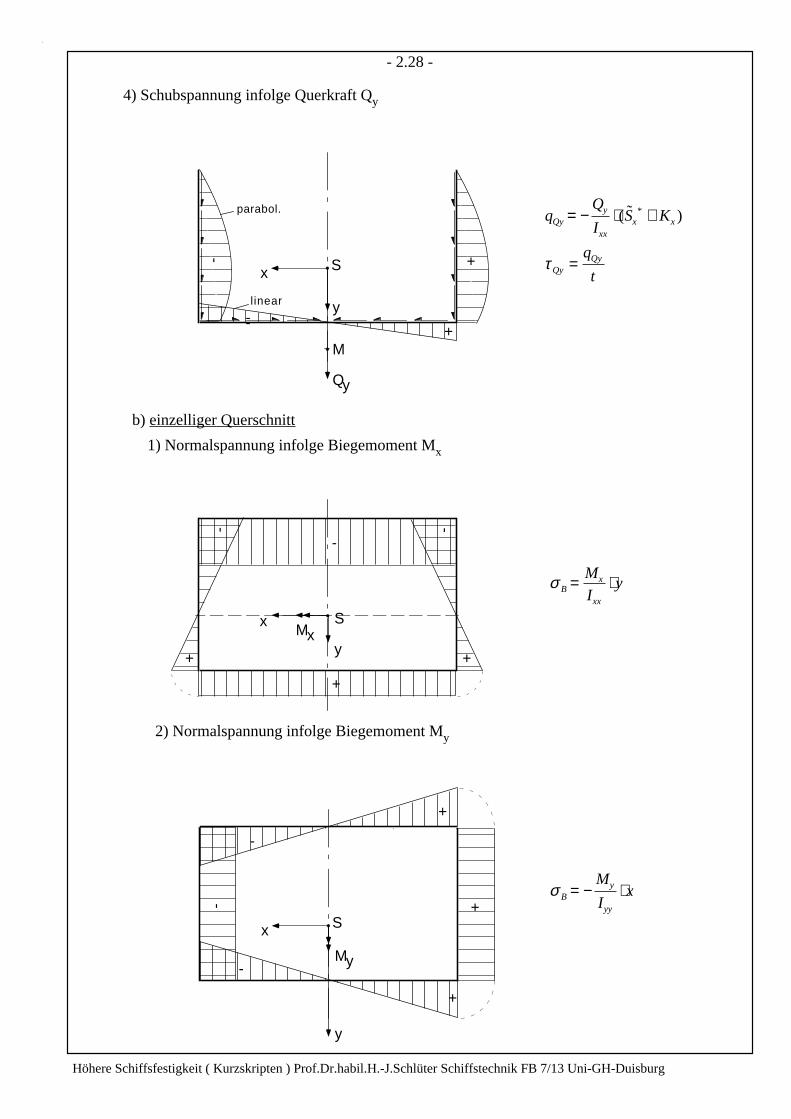
- 2.28 -
b) einzelliger Querschnitt
1) Normalspannung infolge Biegemoment Mx
2) Normalspannung infolge Biegemoment My
4) Schubspannung infolge Querkraft Qy
IS K
q
t
Qyy
xxx x
QyQy
= − ⋅ +
=
( ˜ )*
τ
σ Bx
xx
M
Iy= ⋅
σ By
yy
M
Ix= − ⋅
Sx
y
M
Qy
linear
parabol.
-
-+
+
-
SMx
x
y
-
+
+
-
+
-
S
My
x
y
-
+
+
-
+
-
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
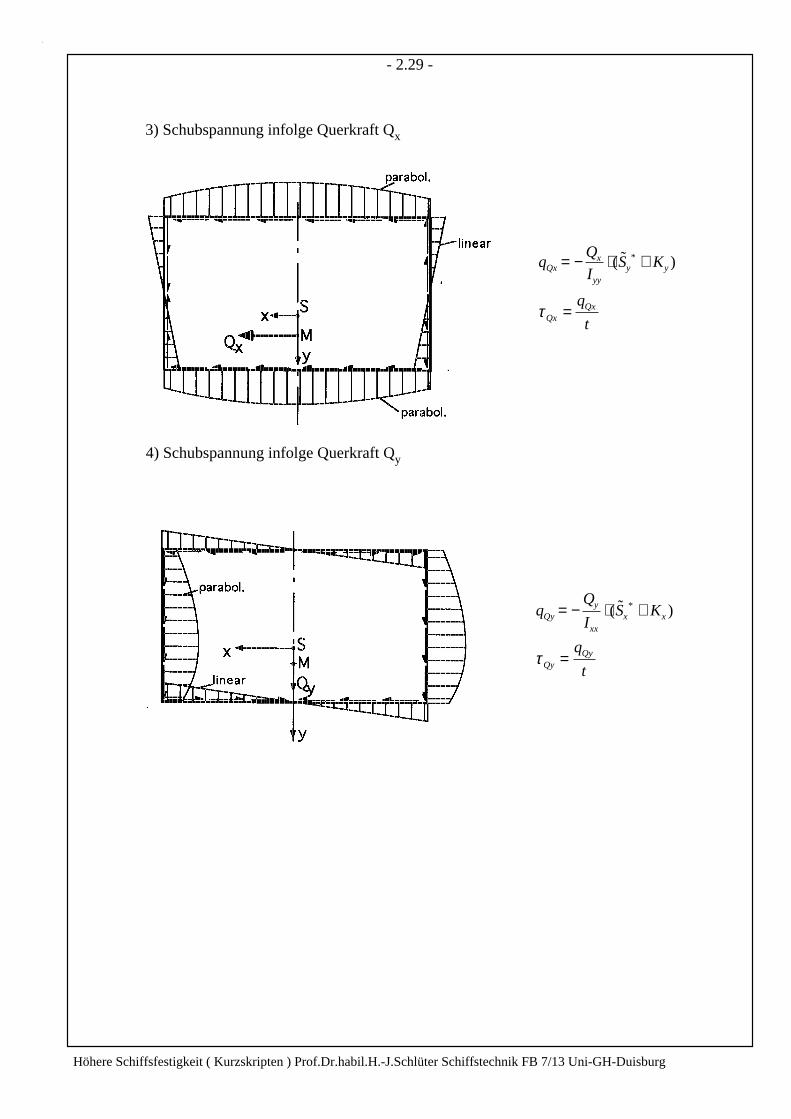
- 2.29 -
3) Schubspannung infolge Querkraft Qx
4) Schubspannung infolge Querkraft Qy
IS K
q
t
Qxx
yyy y
QxQx
= − ⋅ +
=
( ˜ )*
τ
IS K
q
t
Qyy
xxx x
QyQy
= − ⋅ +
=
( ˜ )*
τ
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 3.1 -
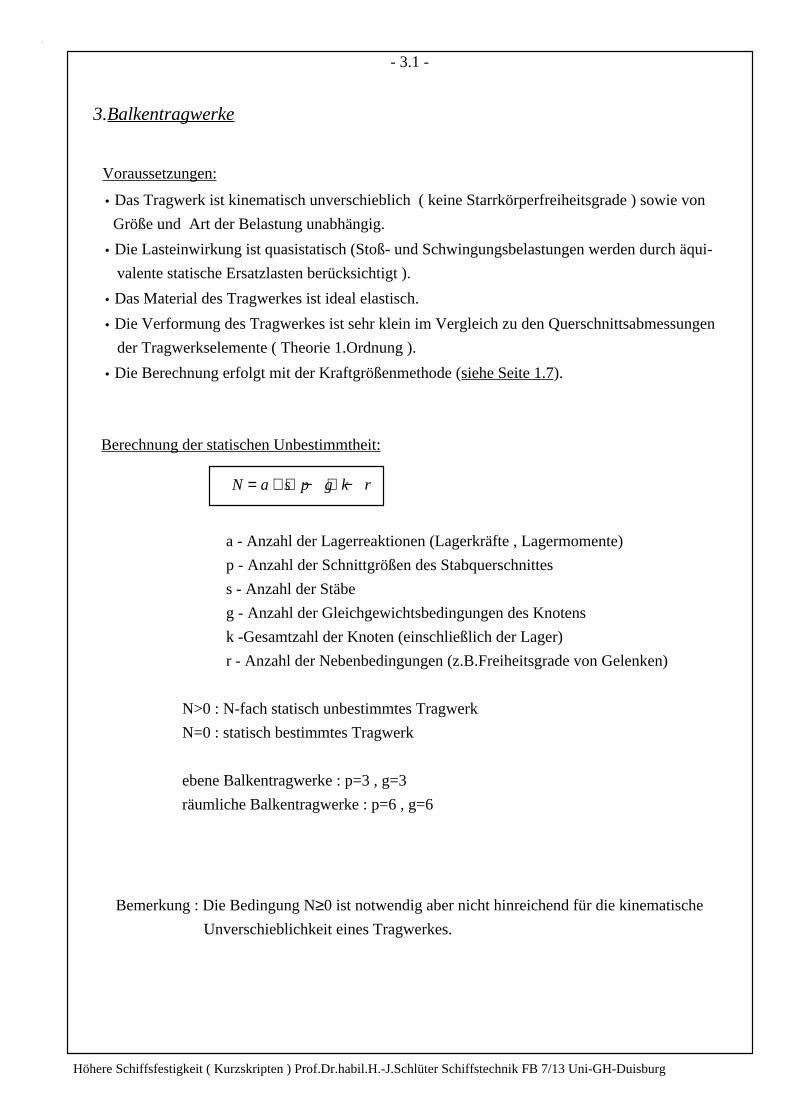
3.Balkentragwerke
Voraussetzungen:
• Das Tragwerk ist kinematisch unverschieblich ( keine Starrkörperfreiheitsgrade ) sowie von
Größe und Art der Belastung unabhängig.
• Die Lasteinwirkung ist quasistatisch (Stoß- und Schwingungsbelastungen werden durch äqui-
valente statische Ersatzlasten berücksichtigt ).
• Das Material des Tragwerkes ist ideal elastisch.
• Die Verformung des Tragwerkes ist sehr klein im Vergleich zu den Querschnittsabmessungen
der Tragwerkselemente ( Theorie 1.Ordnung ).
• Die Berechnung erfolgt mit der Kraftgrößenmethode (siehe Seite 1.7).
Berechnung der statischen Unbestimmtheit:
N a s p g k r= + ⋅ − ⋅ −
a - Anzahl der Lagerreaktionen (Lagerkräfte , Lagermomente)
p - Anzahl der Schnittgrößen des Stabquerschnittes
s - Anzahl der Stäbe
g - Anzahl der Gleichgewichtsbedingungen des Knotens
k -Gesamtzahl der Knoten (einschließlich der Lager)
r - Anzahl der Nebenbedingungen (z.B.Freiheitsgrade von Gelenken)
N>0 : N-fach statisch unbestimmtes Tragwerk
N=0 : statisch bestimmtes Tragwerk
ebene Balkentragwerke : p=3 , g=3
räumliche Balkentragwerke : p=6 , g=6
Bemerkung : Die Bedingung N≥0 ist notwendig aber nicht hinreichend für die kinematische
Unverschieblichkeit eines Tragwerkes.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
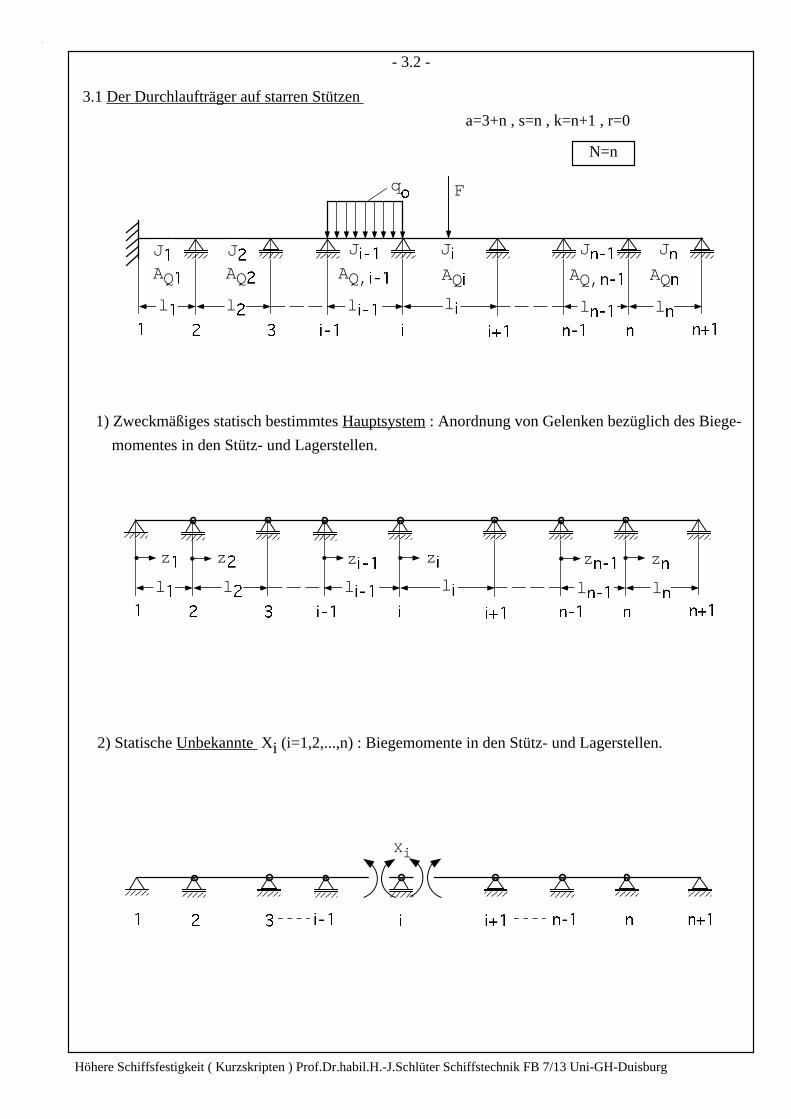
- 3.2 -
3.1 Der Durchlaufträger auf starren Stützen
a=3+n , s=n , k=n+1 , r=0
1) Zweckmäßiges statisch bestimmtes Hauptsystem : Anordnung von Gelenken bezüglich des Biege-
momentes in den Stütz- und Lagerstellen.
2) Statische Unbekannte Xi (i=1,2,...,n) : Biegemomente in den Stütz- und Lagerstellen.
l l l l l l
JJJJJ J
AQ, AQAQAQ,AQAQ
q F
l l l l l l
zzzzz z
Xi
N=n
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
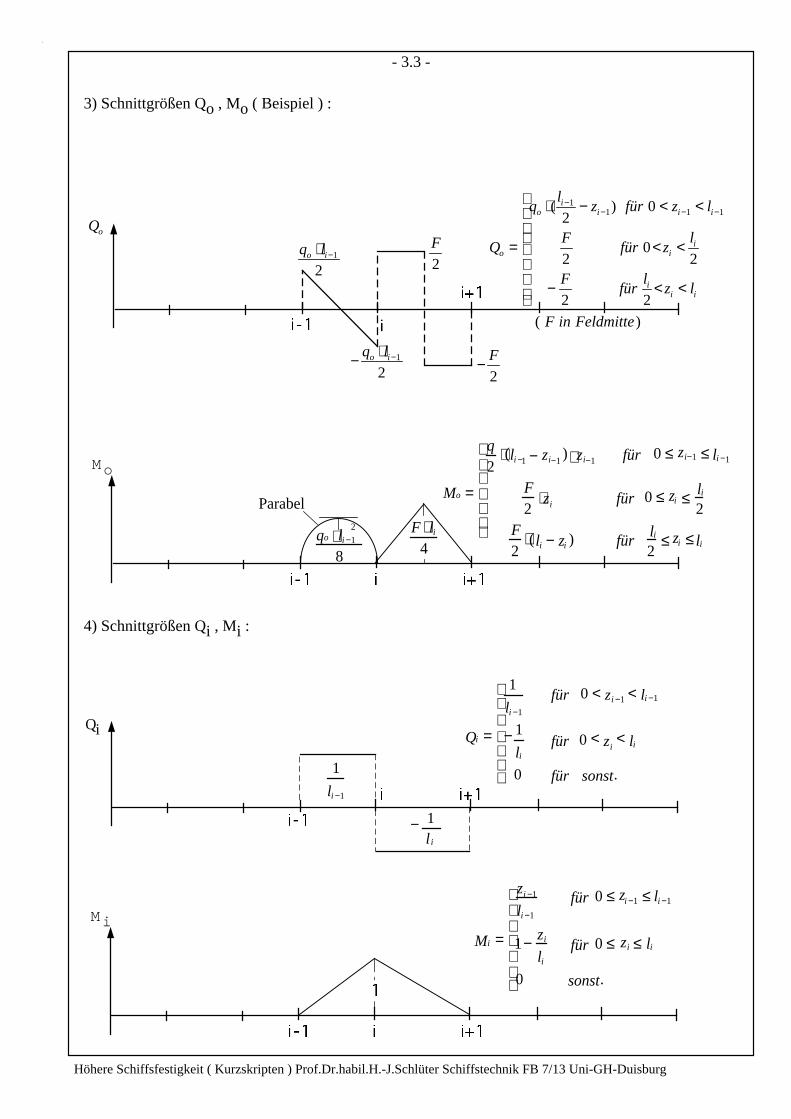
- 3.3 -
Q
ql
z für z l
Ffür z
l
Ffür
lz l
F in Feldmitte
o
oi
i i i
ii
ii i
=
⋅ − < <
< <
− < <
−− − −( )
( )
11 1 12
0
20
2
2 2
Qo
q lo i⋅ −1
2
− ⋅ −q lo i 1
2
F
2
− F
2
3) Schnittgrößen Qo , Mo ( Beispiel ) :
4) Schnittgrößen Qi , Mi :
qo ⋅ li −1
2
8
Mo
F ⋅ li
4
ParabelMo =
q2
⋅(li −1 − z ) ⋅ zi−1 für 0 ≤ ≤ li
F2
⋅zi für 0 ≤ ≤2
F2
⋅( − zi ) für2
≤ ≤
i−1
li
zi−1 −1
zi
zi
li
li li
− 1
il
1
li −1
Qi Qi =
1
lfür 0 < z < l
− 1
li
für 0 < zi< li
0 für sonst.
i −1
i −1 i −1
MiMi =
zi −1
li −1
für 0 ≤ ≤
1− zi
li
für 0 ≤ ≤
0 sonst.
zi −1 li −1
z lii
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 3.4 -
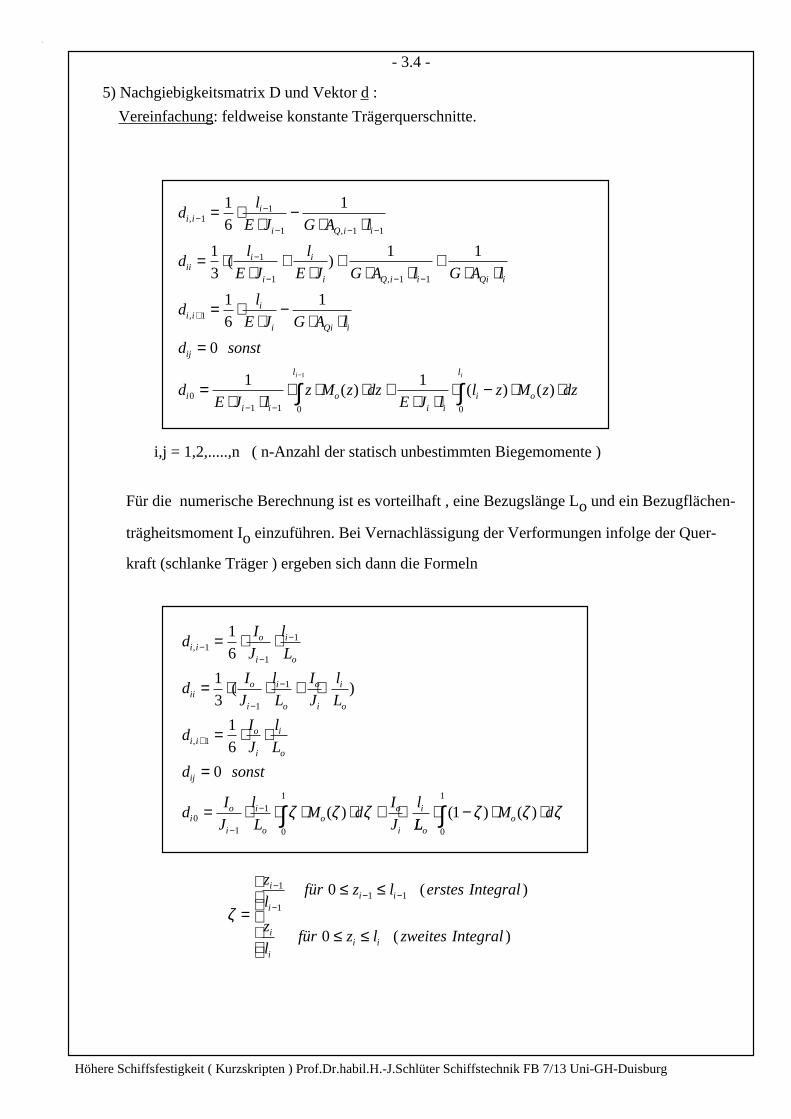
5) Nachgiebigkeitsmatrix D und Vektor d :
Vereinfachung: feldweise konstante Trägerquerschnitte.
dl
E J G A l
dl
E J
l
E J G A l G A l
dl
E J G A l
d sonst
d
i ii
i Q i i
iii
i
i
i Q i i Qi i
i ii
i Qi i
ij
i
,,
,
,
( )
−−
− − −
−
− − −
+
= ⋅⋅
−⋅ ⋅
= ⋅⋅
+⋅
+⋅ ⋅
+⋅ ⋅
= ⋅⋅
−⋅ ⋅
=
11
1 1 1
1
1 1 1
1
0
16
1
13
1 1
16
1
0
==⋅ ⋅
⋅ ⋅ ⋅ +⋅ ⋅
⋅ − ⋅ ⋅− −
−
∫ ∫1 1
1 1 0 0
1
E J lz M z dz
E J ll z M z dz
i io
l
i ii o
li i
( ) ( ) ( )
i,j = 1,2,.....,n ( n-Anzahl der statisch unbestimmten Biegemomente )
Für die numerische Berechnung ist es vorteilhaft , eine Bezugslänge Lo und ein Bezugflächen-
trägheitsmoment Io einzuführen. Bei Vernachlässigung der Verformungen infolge der Quer-
kraft (schlanke Träger ) ergeben sich dann die Formeln
dI
J
l
L
dI
J
l
L
I
J
l
L
dI
J
l
L
d sonst
dI
J
l
LM d
I
J
l
i io
i
i
o
iio
i
i
o
o
i
i
o
i io
i
i
o
ij
io
i
i
oo
o
i
i
,
,
( )
( )
−−
−
−
−
+
−
−
= ⋅ ⋅
= ⋅ ⋅ + ⋅
= ⋅ ⋅
=
= ⋅ ⋅ ⋅ ⋅ + ⋅∫
11
1
1
1
1
01
1
0
1
16
13
16
0
ζ ζ ζLL
M do
o⋅ − ⋅ ⋅∫ ( ) ( )10
1
ζ ζ ζ
ζ =≤ ≤
≤ ≤
−
−− −
z
lfür z l erstes Integral
z
lfür z l zweites Integral
i
ii i
i
ii i
1
11 10
0
( )
( )
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 3.5 -
6) Gleichungssystem :
Gleichung für die Stützstelle i :
Die Nachgiebigkeitsmatrix ist eine symmetrische positiv-definite Tridiagonalmatrix.
d X d X d X di i i ii i i i i io, ,− − + +⋅ + ⋅ + ⋅ = −1 1 1 1
, ,
d d
d d
d d O
d d
d
X
X
X
X
Xn n n n
nn
n
n
11 12
22 23
33 34
1 1 1
1
2
3
1
⋅ ⋅⋅ ⋅
⋅ ⋅⋅ ⋅
⋅ ⋅
⋅⋅⋅⋅⋅
− − − −
= −
⋅⋅⋅⋅⋅
−
d
d
d
d
dn
n
10
20
30
1 0
0
,
,
7) Schnittgrößen Q(z) , M(z) im i-ten Feld :
Q z Q zl
X X für z l
M z M zz
lX
z
lX für z l
i o ii
i i i i
i o ii
ii
i
ii i i
( ) ( ) ( )
( ) ( ) ( )
= + − < <
= + − ⋅ + ⋅ ≤ ≤
+
+
10
1 0
1
1
Dreimomentengleichung
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Hinweise:
- Die Integrale lassen sich sehr einfach mit Hilfe von Integraltabellen berechnen (Siehe
Integraltabellen zum Durchlaufträger).
- Ist der Querschnitt des Durchlaufträgers konstant (Ji=Io=const. ,i=1,2,...,n) , dann sind die Formeln vom Flächenträgheitsmoment unabhängig .
- Wenn die Stütze i eine Symmetriestütze ist, gilt bei Ausnutzung der Symmetrie von
Tragwerk und Belastung mit
l l J J
dl
EJd
l
EJd
EJ lz M z dz
i i i i
i ii
ii i
i
iio
i io
li
= =
=⋅
=⋅
=⋅
⋅ ⋅ ⋅
− −
−−
−
−
− − −
−
∫
1 1
11
1
1
1 1 1 06 3
1 1
,
, , ( ), ,
symmetrisch
- 3.6 -
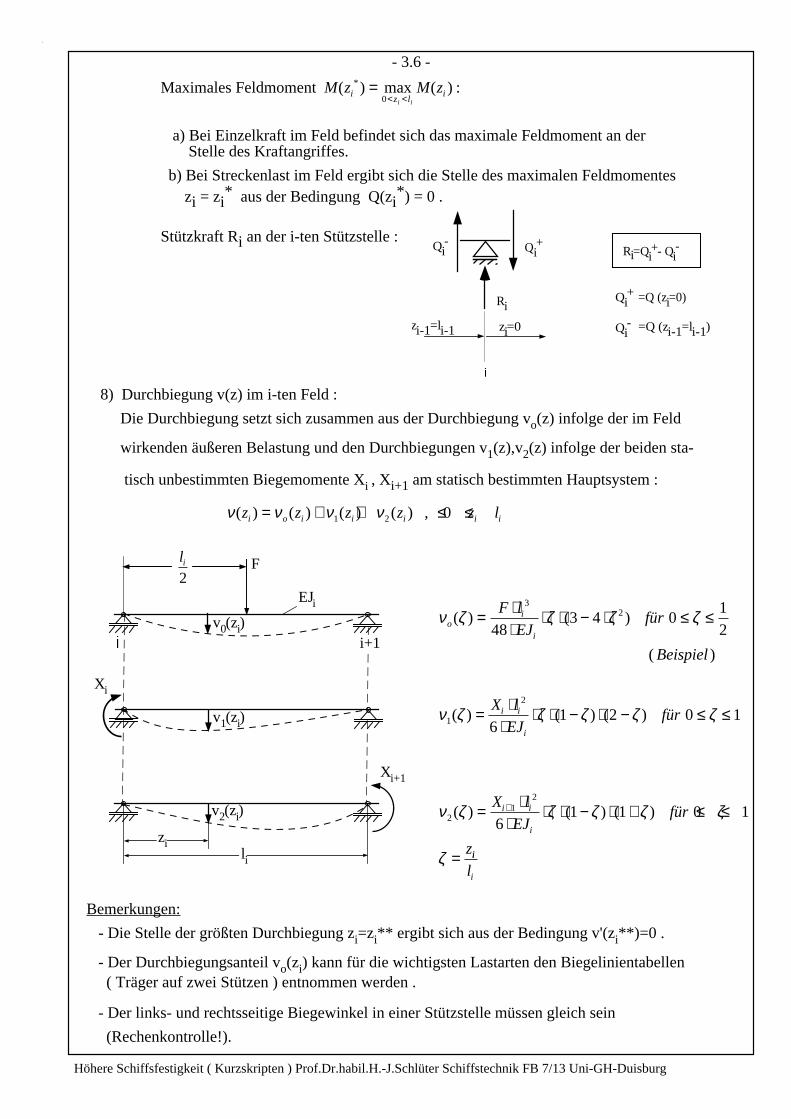
8) Durchbiegung v(z) im i-ten Feld :
Die Durchbiegung setzt sich zusammen aus der Durchbiegung vo(z) infolge der im Feld
wirkenden äußeren Belastung und den Durchbiegungen v1(z),v2(z) infolge der beiden sta-
tisch unbestimmten Biegemomente Xi , Xi+1 am statisch bestimmten Hauptsystem :
ν ν ν ν( ) ( ) ( ) ( ) ,z z z z z li o i i i i i= + + ≤ ≤1 2 0
ν ζ ζ ζ ζ
ν ζ ζ ζ ζ ζ
ν ζ ζ ζ ζ ζ
ζ
oi
i
i i
i
i i
i
F l
EJfür
Beispiel
X l
EJfür
X l
EJfür
z
( ) ( )
( )
( ) ( ) ( )
( ) ( ) ( )
= ⋅⋅
⋅ ⋅ − ⋅ ≤ ≤
= ⋅⋅
⋅ ⋅ − ⋅ − ≤ ≤
= ⋅⋅
⋅ ⋅ − ⋅ + ≤ ≤
=
+
32
1
2
21
2
483 4 0
12
61 2 0 1
61 1 0 1
ii
il
v0(zi)
v1(zi)
v2(zi)
i+1
Xi+1
Xi
li
zi
li
2F
EJi
Bemerkungen:
- Die Stelle der größten Durchbiegung zi=zi** ergibt sich aus der Bedingung v'(zi**)=0 .
- Der Durchbiegungsanteil vo(zi) kann für die wichtigsten Lastarten den Biegelinientabellen ( Träger auf zwei Stützen ) entnommen werden .
- Der links- und rechtsseitige Biegewinkel in einer Stützstelle müssen gleich sein
(Rechenkontrolle!).
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Qi+Qi
-
Ri
zi-1=li-1 zi=0
Ri=Qi+- Qi
-
Qi+
Qi-
=Q (zi=0)
=Q (zi-1=li-1)
Maximales Feldmoment
a) Bei Einzelkraft im Feld befindet sich das maximale Feldmoment an der Stelle des Kraftangriffes.
b) Bei Streckenlast im Feld ergibt sich die Stelle des maximalen Feldmomentes zi = zi
* aus der Bedingung Q(zi*) = 0 .
Stützkraft Ri an der i-ten Stützstelle :
M z M ziz l
ii i
( ) max ( ) :* =< <0
- 3.7 -
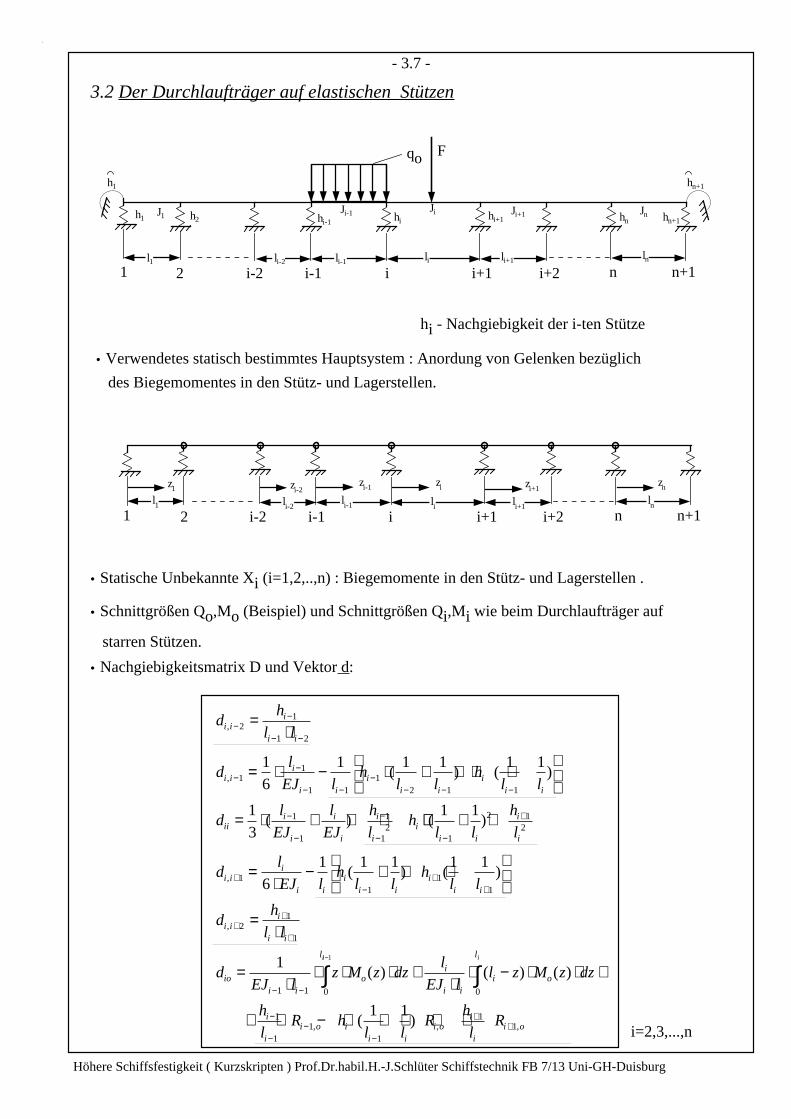
3.2 Der Durchlaufträger auf elastischen Stützen
1 2 i-1 i i+1 i+2 n n+1i-2l1 li-2 li-1 li li+1 ln
J1Ji-1 Ji Ji+1 Jnh2 hi-1 hi hi+1 hn
qo F
h1
h1
hn+1
hn+1
• Verwendetes statisch bestimmtes Hauptsystem : Anordung von Gelenken bezüglich
des Biegemomentes in den Stütz- und Lagerstellen.
• Statische Unbekannte Xi (i=1,2,..,n) : Biegemomente in den Stütz- und Lagerstellen .
• Schnittgrößen Qo,Mo (Beispiel) und Schnittgrößen Qi,Mi wie beim Durchlaufträger auf
starren Stützen.
• Nachgiebigkeitsmatrix D und Vektor d:
1 2 i-1 i i+1 i+2 n n+1i-2l1 li-2 li-1 li li+1
ln
znzi+1zizi-1zi-2
z1
dh
l l
dl
EJ lh
l lh
l l
dl
EJ
l
EJ
h
lh
i ii
i i
i ii
i ii
i ii
i i
iii
i
i
i
i
ii
,
, ( ) ( )
( )
−−
− −
−−
− −−
− − −
−
−
−
−
=⋅
= ⋅ − ⋅ + + ⋅ +
= ⋅ + + +
21
1 2
11
1 11
2 1 1
1
1
1
12
16
1 1 1 1 1
13
⋅⋅ + +
=⋅
− + + +
=⋅
=⋅
⋅ ⋅ ⋅
−
+
+−
++
++
+
− −
( )
( ) ( )
( )
,
,
1 1
61 1 1 1 1
1
1
2 12
11
11
21
1
1 1 0
l l
h
l
dl
EJ lh
l lh
l l
dh
l l
dEJ l
z M z dz
i i
i
i
i ii
i ii
i ii
i i
i ii
i i
ioi i
o
lii il
EJ ll z M z dz
h
lR h
l lR
h
lR
i
i ii
l
o
i
ii o i
i ii o
i
ii o
−
∫ ∫+⋅
⋅ − ⋅ ⋅ +
+ ⋅ − ⋅ + ⋅ + ⋅−
−−
−
++
1
0
1
11
1
11
1 1
( ) ( )
( ), , ,
hi - Nachgiebigkeit der i-ten Stütze
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
i=2,3,...,n

- 3.8 -
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
i
dl
EJh
lh h
dl
EJ l
h
lh
l l
dh
l l
dEJ l
l z M z dzh
lR
h
lR
i
l
o
=
=⋅
+ + +
=⋅
− + +
=⋅
=⋅
⋅ − ⋅ ⋅ − ⋅ + ⋅∫
1
31
61 1 1
1
111
11 2 1 2
121
1 1
1
12
1 2
132
1 2
101 1
1
0
1
110
2
1
1
:
( )
( )
( ) ( )
)
2020
i n
dh
l l
dl
EJ lh
l l
h
l
dl
EJh
lh h
dEJ l
n nn
n n
n nn
n nn
n n
n
n
n nn
nn
nn n
nn n
= +
=⋅
=⋅
− ⋅ + +
=⋅
+ + ⋅ +
=⋅
+ −−
+−
+
+ + + +
+
1
61 1 1
31
1
1 11
11
1
1 1 1 2 1
1 0
:
( )
( )
,
,
,
,
)
⋅⋅ ⋅ ⋅ + ⋅ − ⋅∫ ++z M z dz
h
lR
h
lR
l
on
nn
n
nn
n
0
01
1 0( ) ,
mit der Stützkraft Rio der i-ten Stütze im statisch bestimmten Hauptsystem infolge der
gegebenen äußeren Belastung:
Die unterstrichenen Ausdrücke ergeben die Anteile , die aufgrund der Nachgiebigkeit
der Stützen hinzugekommen sind .
Für das gegebene Belastungsbeispiel gilt
Hinweis: Wenn die Stütze i eine Symmetriestütze ist, gilt bei Ausnutzung der Symmetrie
von Tragwerk und Belastung mit
R Q Qio io io= −+ − .
RF
q lio o i= + ⋅ ⋅ −212 1 .
l l J J h h h h
dh
l l
dl
EJ lh
l l
h
l
dl
i i i i i i i i
i ii
i i
i ii
i ii
i i
i
i
i i
= = = =
=⋅
=⋅
− ⋅ + + ⋅
=
− − + − + −
−−
− −
−−
− −−
− − −
1 1 1 1 2 2
21
1 2
11
1 11
2 1 161 1 1 2
, , ,
( )
,
,
,ii
i
i
i
i
i
ii i
l
oi
ii
i
ii
EJ
h
l
h
l
dEJ l
z M z dzh
lR
h
lR
i
−
−
−
− −
− −
−
−−
−
⋅+ + ⋅
=⋅
⋅ ⋅ ⋅ + ⋅ − ⋅−
∫
1
1
1
12
12
01 1 0
1
11 0
10
32
1 1
( ) , ,
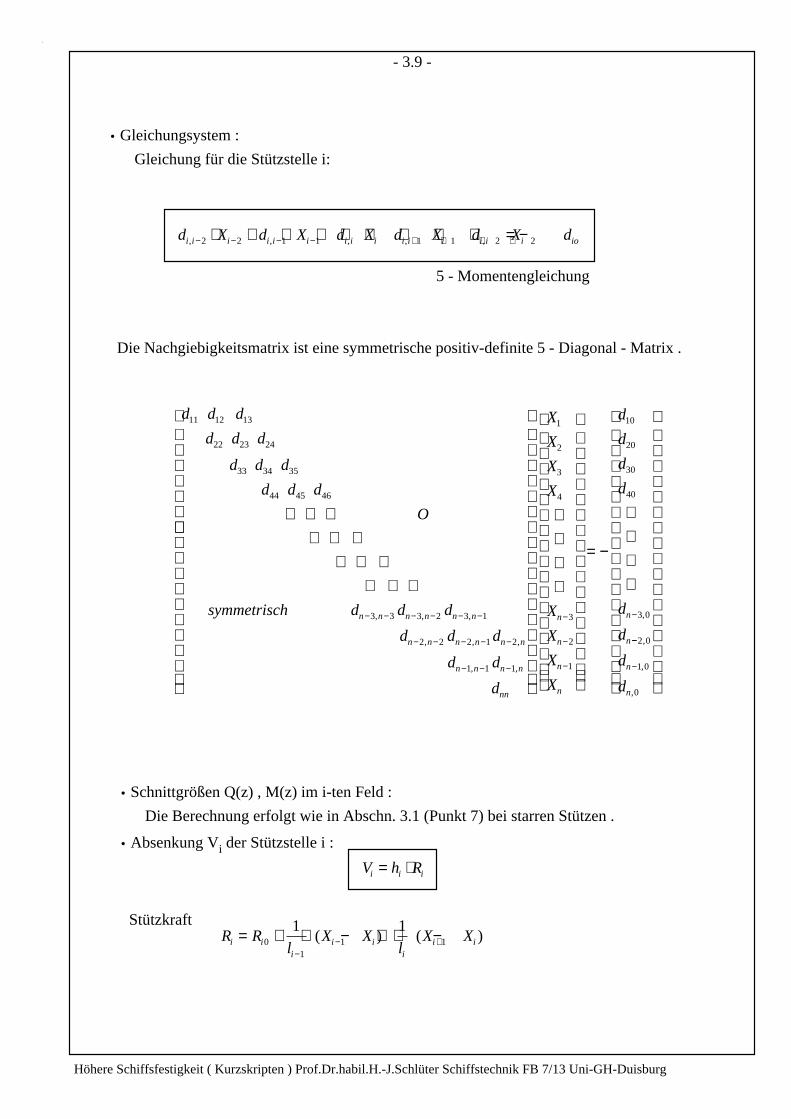
- 3.9 -
d X d X d X d X d X di i i i i i i i i i i i i i i io, , , , ,− − − − + + + +⋅ + ⋅ + ⋅ + ⋅ + ⋅ = −2 2 1 1 1 1 2 2
5 - Momentengleichung
Die Nachgiebigkeitsmatrix ist eine symmetrische positiv-definite 5 - Diagonal - Matrix .
, , ,
, , ,
, ,
d d d
d d d
d d d
d d d
O
symmetrisch d d d
d d d
d d
d
n n n n n n
n n n n n n
n n n n
nn
11 12 13
22 23 24
33 34 35
44 45 46
3 3 3 2 3 1
2 2 2 1 2
1 1 1
⋅ ⋅ ⋅⋅ ⋅ ⋅
⋅ ⋅ ⋅⋅ ⋅ ⋅
− − − − − −
− − − − −
− − −
⋅⋅⋅⋅
= −
⋅⋅⋅⋅
−
−
−
−
X
X
X
X
X
X
X
X
d
d
d
d
d
dn
n
n
n
n
n
1
2
3
4
3
2
1
10
20
30
40
3 0,
−−
−
2 0
1 0
0
,
,
,
d
dn
n
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
• Gleichungsystem :
Gleichung für die Stützstelle i:
• Schnittgrößen Q(z) , M(z) im i-ten Feld :
Die Berechnung erfolgt wie in Abschn. 3.1 (Punkt 7) bei starren Stützen .
• Absenkung Vi der Stützstelle i :
Stützkraft
V h Ri i i= ⋅
R Rl
X Xl
X Xi ii
i ii
i i= + ⋅ − + ⋅ −−
− +01
1 1
1 1( ) ( )
- 3.10 -
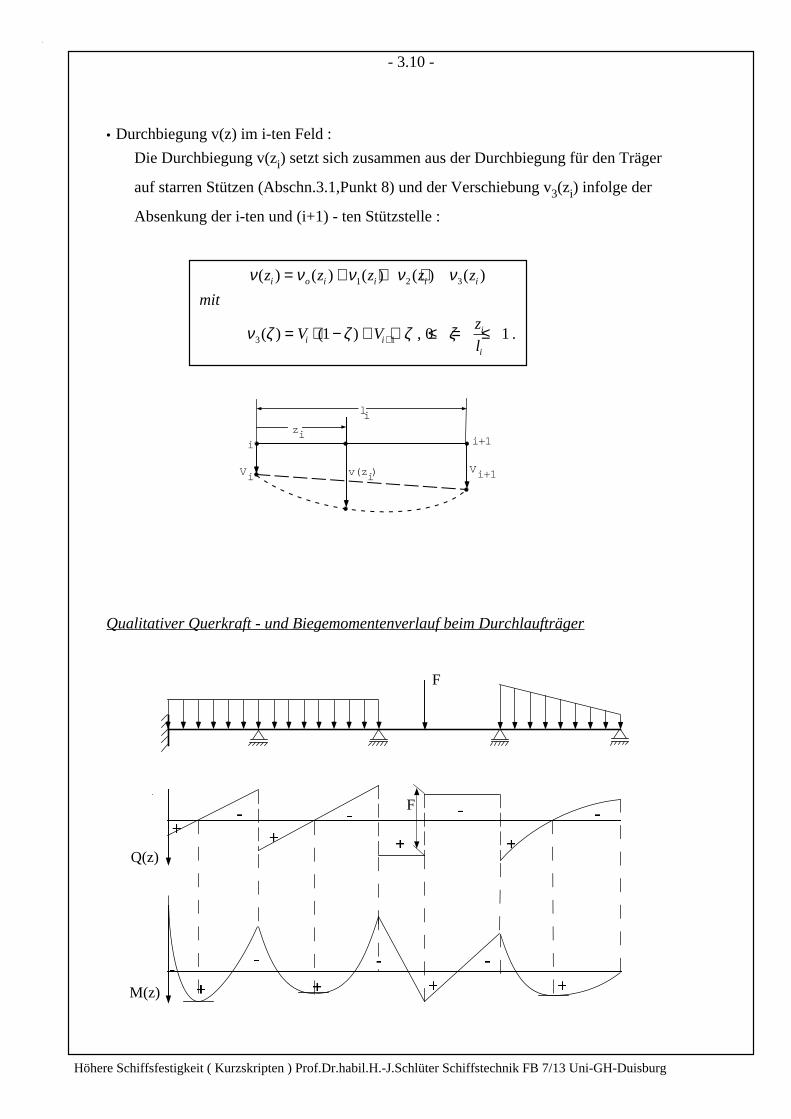
• Durchbiegung v(z) im i-ten Feld :
Die Durchbiegung v(zi) setzt sich zusammen aus der Durchbiegung für den Träger
auf starren Stützen (Abschn.3.1,Punkt 8) und der Verschiebung v3(zi) infolge der
Absenkung der i-ten und (i+1) - ten Stützstelle :
Qualitativer Querkraft - und Biegemomentenverlauf beim Durchlaufträger
ν ν ν ν ν
ν ζ ζ ζ ζ
( ) ( ) ( ) ( ) ( )
( ) ( ) , .
z z z z z
mit
V Vz
l
i o i i i i
i ii
i
= + + +
= ⋅ − + ⋅ ≤ = ≤+
1 2 3
3 11 0 1
F
Q(z)
M(z)
F
li
v(zi)
i+1
Vi+1Vi
i
zi
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

Lastfall
F
z
a bl
Ro Ro+ -
q1
z
lRo Ro
+ -
q2
M z0 ( )F a
ll z
⋅ ⋅ −( )
0 ≤ ≤z a
z M z dzl
⋅ ⋅∫ 0
0
( ) 16
⋅ ⋅ ⋅ ⋅ +F a b l a( ) lq q
4
1 23607 8⋅ ⋅ + ⋅( )
( ) ( )l z M z dzl
− ⋅ ⋅∫ 0
0
16
⋅ ⋅ ⋅ ⋅ +F a b l b( )l
q q4
1 23608 7⋅ ⋅ + ⋅( )
ν ζ ζ( ) mitz
l0 1≤ = ≤
F b l
EJ
a
l
b
l
⋅ ⋅⋅
⋅ ⋅ ⋅ +
−
22
61ζ ζ
l
EJq
q q
4
12
2 12 3
3601 15 1
7 7 3 3
⋅⋅ ⋅ − ⋅ ⋅ ⋅ + − +
− ⋅ + ⋅ − ⋅ − ⋅
ζ ζ ζ ζ
ζ ζ ζ
( ) [ ( )
( ) ( )]F a l
EJ
b
l
a
l
⋅ ⋅⋅
⋅ − ⋅ ⋅ +
− −
22
61 1 1( ) ( )ζ ζ
F b
lz
⋅ ⋅
a z l≤ ≤ 0 ≤ ≤z l
16
3 1 2 1⋅⋅ ⋅ ⋅ + − ⋅ + ⋅ ⋅ −
lq l q q l z z l z[ ( ) ( )] ( )
R0+ F
b
l⋅ l
q q6
2 1 2⋅ ⋅ +( )
R0− F
a
l⋅
lq q
621 2⋅ + ⋅( )
0 ≤ ≤ζ a
l
a
l≤ ≤ζ 1
-3.11-
Integraltabelle zum Durchlaufträger
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 3.12 -
3.3 Das ebenen Rahmentragwerk Empfehlungen für die Auswahl des statisch bestimmten Hauptsystems :
• möglichst einfache rechnerische Handhabung
• Ausnutzung der Symmetrie oder Asymmetrie von Tragwerk und äußerer Belastung
• möglichst gute Konditionierung der Nachgiebigkeitsmatrix (Diagonaldominanz) .
Erzeugung statisch bestimmter Hauptsysteme durch Einführung von
• Biegemomentgelenken ( Biegemoment ist statische Unbestimmte.Siehe Durchlaufträger Abschn.3.1)
• Querkraftgelenken (Querkraft ist statische Unbestimmte.Siehe Trägerrost Abschn.3.4 )
• Längskraftgelenken (Längskraft ist statische Unbestimmte )
• Schnitte auf der Symmetrieachse des Tragwerkes (Q=0 bzw. Q=F/2 bei symmetrischer äußerer
Belastung ; M=0 bzw. M=M*/2 bei asymmetrischer äußerer Belastung ). Es braucht dann nur
eine Tragwerkshälfte betrachtet zu werden.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 3.13 -
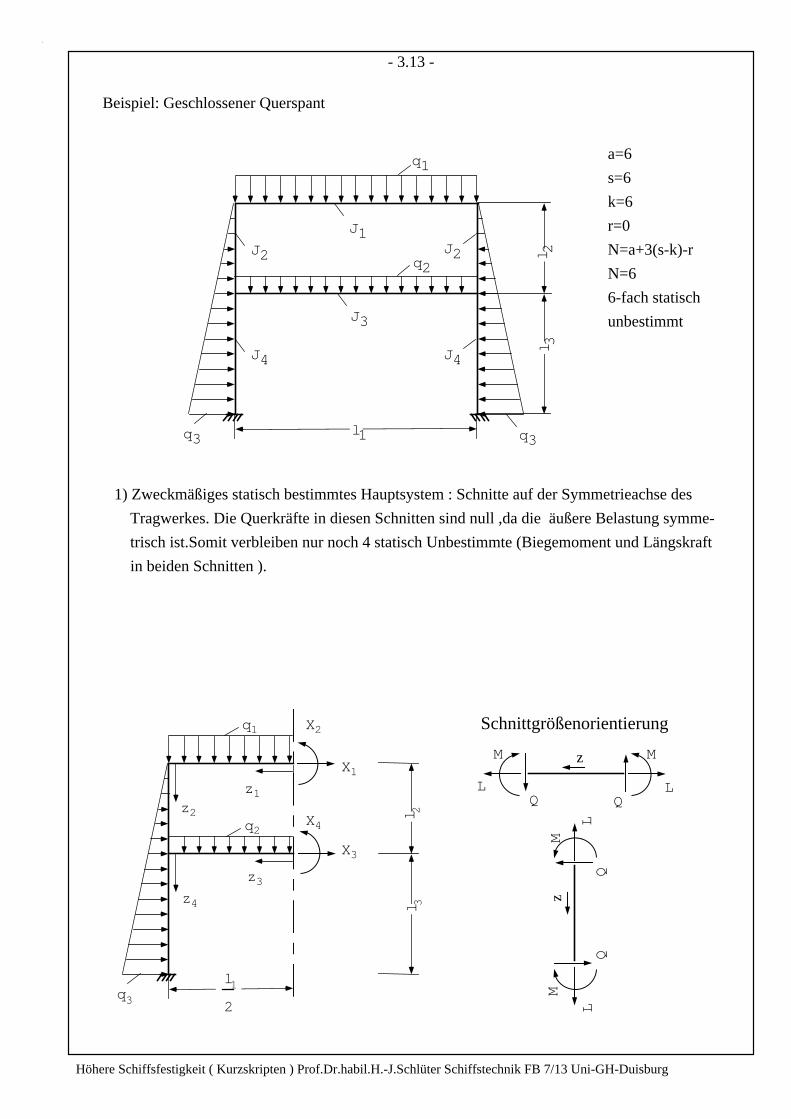
Beispiel: Geschlossener Querspant
q1
J1J2
J4 J4
J2
J3
q2
q3q3l1
l 3l 2
1) Zweckmäßiges statisch bestimmtes Hauptsystem : Schnitte auf der Symmetrieachse des
Tragwerkes. Die Querkräfte in diesen Schnitten sind null ,da die äußere Belastung symme-
trisch ist.Somit verbleiben nur noch 4 statisch Unbestimmte (Biegemoment und Längskraft
in beiden Schnitten ).
a=6
s=6
k=6
r=0
N=a+3(s-k)-r
N=6
6-fach statisch
unbestimmt
l 3l 2
q3
l1
2
q1
X1
X3
X2
X4
z1z2
z4
z3
Schnittgrößenorientierung
Q Q
MM
L L
z
MM
L
z
Lq2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 3.14 -
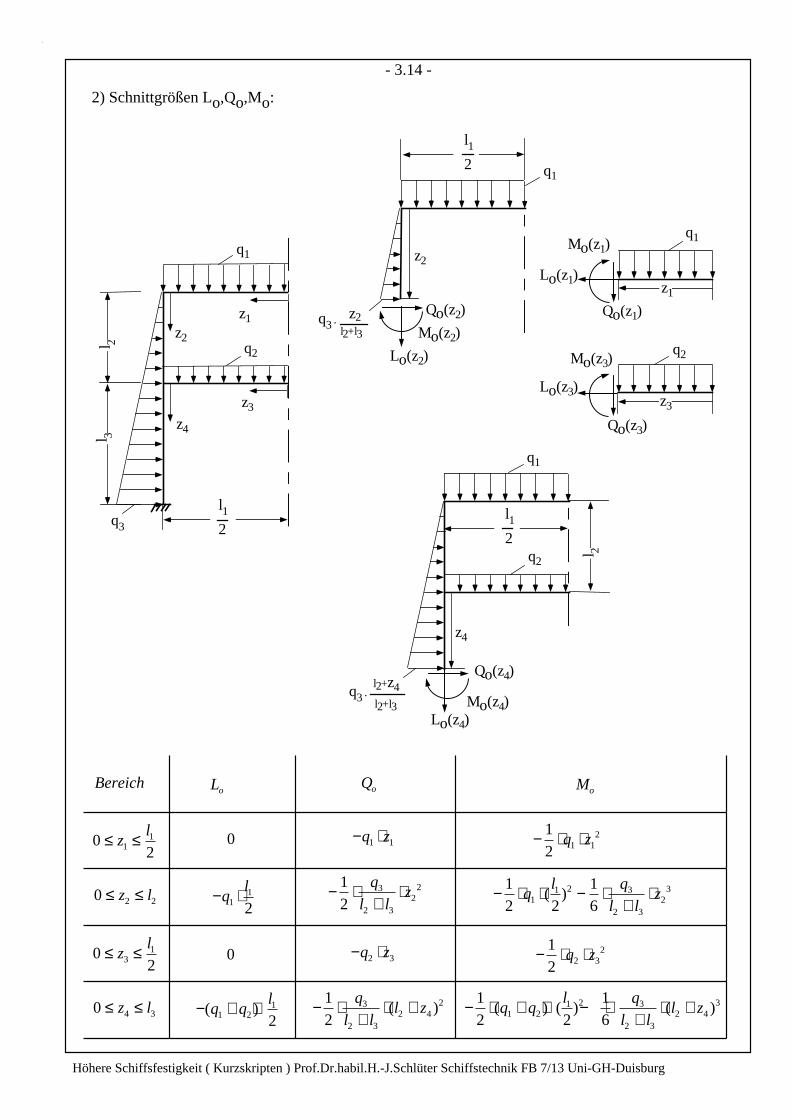
2) Schnittgrößen Lo,Qo,Mo:
Bereich LoQo Mo
0211≤ ≤zl 0 − ⋅q z1 1
− ⋅ ⋅ − ⋅+
⋅12 2
161
1 2 3
2 32
3ql q
l lz( )0 2 2≤ ≤z l − ⋅q
l1
1
2− ⋅
+⋅1
23
2 32
2q
l lz
− ⋅ ⋅12 1 1
2q z
0231≤ ≤zl
0 − ⋅q z2 3 − ⋅ ⋅12 2 3
2q z
0 4 3≤ ≤z l − + ⋅( )q ql
1 21
2− ⋅
+⋅ +1
23
2 32 4
2q
l ll z( ) − ⋅ + ⋅ − ⋅
+⋅ +1
2 2161 2
1 2 3
2 32 4
3( ) ( ) ( )q ql q
l ll z
l 3l 2
q3
l12
q1
z1z2
z4
z3
l12
q1
z4
l 2
q3 .
Qo(z4)
Lo(z4)Mo(z4)
q2
q2
z2 l2+l3
l12 q1
z2
q3 .Qo(z2)
Lo(z2)
Mo(z2)
q1
Lo(z1)
Mo(z1)
Qo(z1)
z1
q2
Lo(z3)
Mo(z3)
Qo(z3)
l2+l3
l2+z4
z3
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
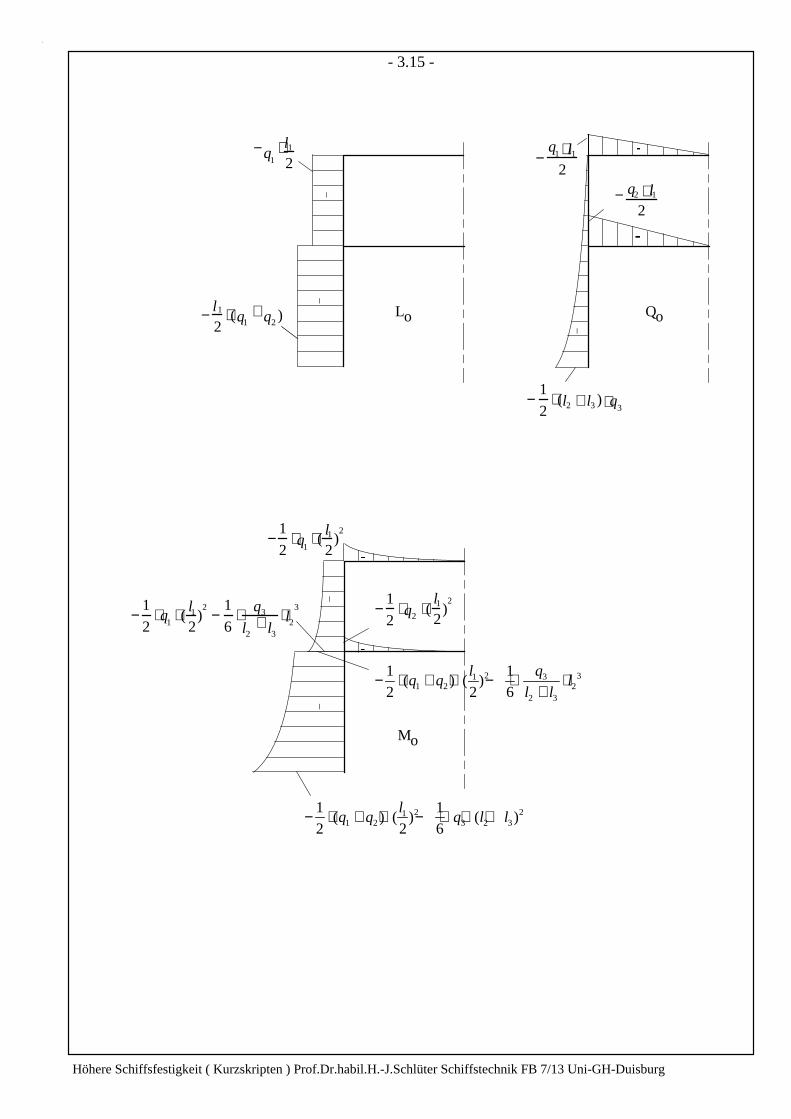
- 3.15 -
--
Lo
−q1
⋅ l1
2
-
Qo
−1
2⋅ (l2 + l3 ) ⋅ q
3
− q2 ⋅ l12
−q
1 ⋅ l1
2
--
Mo
−1
2⋅ q
1⋅ (
l12
)2
−1
2⋅ q2
⋅( )2
− ⋅ + ⋅ − ⋅+
⋅12 2
161 2
1 2 3
2 32
3( ) ( )q ql q
l ll
− ⋅ + ⋅ − ⋅ ⋅ +12 2
161 2
1 23 2 3
2( ) ( ) ( )q ql
q l l
−1
2⋅ q
1⋅ (
l12
)2
−1
6⋅ q3
l2+ l3
⋅l2
3
− l1
2⋅(q1
+ q2)
l12
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
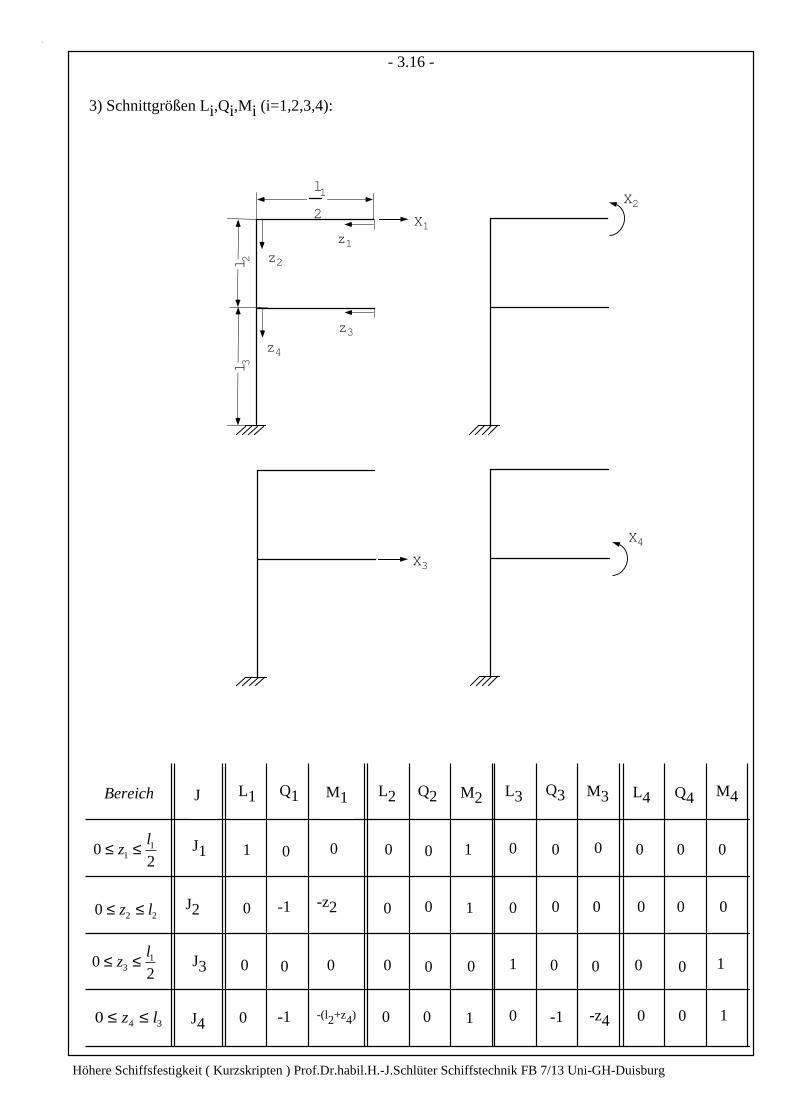
- 3.16 -
Bereich J L1 Q1 M1
0211≤ ≤zl
0 2 2≤ ≤z l
0231≤ ≤zl
0 4 3≤ ≤z l
L3 Q3 M3 L4 Q4 M4
J1 1 0 0
J2 0 -z2
J3
J4-(l2+z4)
0
0
-1
-1
0 0
L2 Q2 M2
0
0
0
0
0
0
0
0
1
1
0
1
0
0
1
0
0
0
0
-1
0
0
0
-z4
0
0
0
0
0
0
0
0
0
0
1
1
3) Schnittgrößen Li,Qi,Mi (i=1,2,3,4):
l 3l 2
z3
z1z2
z4
X1
X3
X4
X2l1
2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 3.17 -
4) Nachgiebigkeitsmatrix D und Vektor d:
Es wird nur die Biegeverformungsenergie berücksichtigt (schlanke Balken).
Somit gilt
und
dM M
EJdz i jij
i j
l
=⋅
⋅ = =∫ 1 2 3 4 0 1 2 3 4, , , ; , , , ,( )
dEJ
z dzEJ
l z dzl
EJ
l l l
EJ
dEJ
z dzEJ
l z dzl
EJ
l l l
EJ
l l
l l
112
2
0 42
2 23
2
3 23
23
40
122 0 4
22
2
2
3 22
22
40
1 13 3
1 12 2
2 3
2 3
= ⋅ ⋅ + ⋅ + ⋅ =⋅
+ + −⋅
= − ⋅ ⋅ − ⋅ + ⋅ = −⋅
− + −⋅
∫ ∫
∫ ∫
( )( )
( )( ) ==
= ⋅ ⋅ + ⋅ = ⋅ + =
= − ⋅ + ⋅ = − ⋅ + =
= ⋅ + ⋅ + ⋅
∫
∫
∫ ∫ ∫
d
dEJ
z l z dzl
EJ
l ld
dEJ
l z dzl
EJl
ld
dEJ
dzEJ
dzEJ
dz
l
l
l l l
21
134
2
0
32
4
2 331
144
2
0
3
42
341
221 0
2
2 0 4 0
12 3
12
1 1 1
3
3
1 2 3
( ) ( )
( ) ( )
/
==⋅
+ +
= − ⋅ ⋅ = −⋅
=
= ⋅ = =
= ⋅ ⋅ =⋅
= − ⋅ ⋅ = −⋅
=
∫
∫
∫
∫
l
EJ
l
EJ
l
EJ
dEJ
z dzl
EJd
dEJ
dzl
EJd
dEJ
z dzl
EJ
dEJ
z dzl
EJd
d
l
l
l
l
1
1
2
2
3
4
234 0
32
432
244 0
3
442
334
2
0
33
4
344 0
32
443
2
12
1
13
12
3
3
3
3
44443 0
2
4 0
1
3
3
4
1 12
1 3
= ⋅ + ⋅ =⋅
+∫ ∫EJdz
EJdz
l
EJ
l
EJ
l l/
dEJ
ql q
l lz z dz
EJq q
l q
l ll z l z dz
dEJ
l
l
102
11
23
2 3
3
0
41 2
12
3
2 32
3
2
0
20
1 12 2
16
1 12 2
16
1
2
3
= ⋅ ⋅ ⋅
+ ⋅
+⋅
⋅ ⋅
+ ⋅ ⋅ +( ) ⋅
+ ⋅
+⋅ +( )
⋅ +( ) ⋅
= −
∫
∫
111
2
0
2
21
12
3
2 3
3
0
41 2
12
3
2 32
3
0
12
1 12 2
16
1 12 2
16
1 2
⋅ ⋅ ⋅ ⋅ − ⋅ ⋅ ⋅ + ⋅
+⋅
⋅
− ⋅ ⋅ +( ) ⋅
+ ⋅
+⋅ +( )
⋅
∫ ∫q z dzEJ
ql q
l lz dz
EJq q
l q
l ll z dz
l l
l
/
33
∫
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
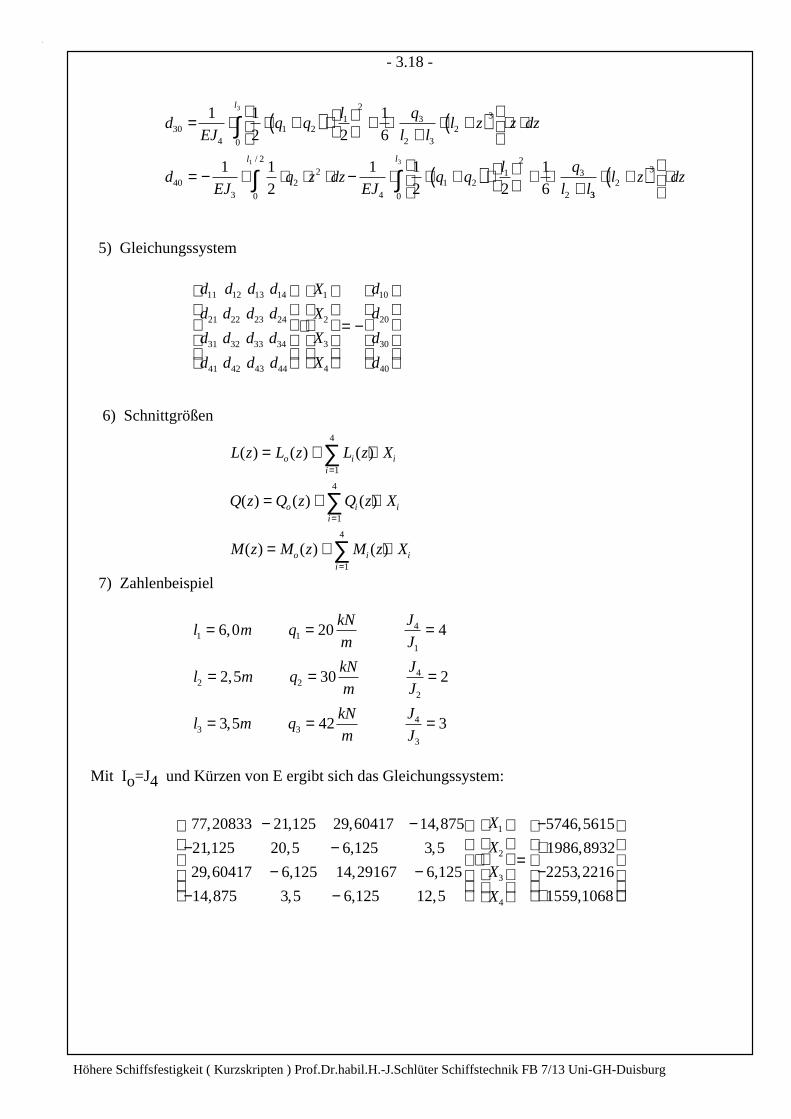
- 3.18 -
dEJ
q ql q
l ll z z dz
dEJ
q z dzEJ
q ql q
l l
l
l
304
1 21
23
2 32
3
0
403
22
0
2
41 2
12
3
2
1 12 2
16
1 12
1 12 2
16
3
1
= ⋅ ⋅ +( ) ⋅
+ ⋅
+⋅ +( )
⋅ ⋅
= − ⋅ ⋅ ⋅ ⋅ − ⋅ ⋅ +( ) ⋅
+ ⋅
+
∫
∫/
332
3
0
3
⋅ +( )
⋅∫ l z dz
l
5) Gleichungssystem
6) Schnittgrößen
7) Zahlenbeispiel
Mit Io=J4 und Kürzen von E ergibt sich das Gleichungssystem:
d d d d
d d d d
d d d d
d d d d
X
X
X
X
d
d
d
d
11 12 13 14
21 22 23 24
31 32 33 34
41 42 43 44
1
2
3
4
10
20
30
40
⋅
= −
L z L z L z X
Q z Q z Q z X
M z M z M z X
o i ii
o i ii
o i ii
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
= + ⋅
= + ⋅
= + ⋅
=
=
=
∑
∑
∑
1
4
1
4
1
4
77 20833 21 125 29 60417 14 875
21 125 20 5 6 125 3 5
29 60417 6 125 14 29167 6 125
14 875 3 5 6 125 12 5
5746 5615
1986 8932
2253 2216
1559 1068
1
2
3
4
, , , ,
, , , ,
, , , ,
, , , ,
,
,
,
,
− −− −
− −− −
⋅
=
−+−+
X
X
X
X
l m qkN
m
J
J
l m qkN
m
J
J
l m qkN
m
J
J
1 14
1
2 24
2
3 34
3
6 0 20 4
2 5 30 2
3 5 42 3
= = =
= = =
= = =
,
,
,
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
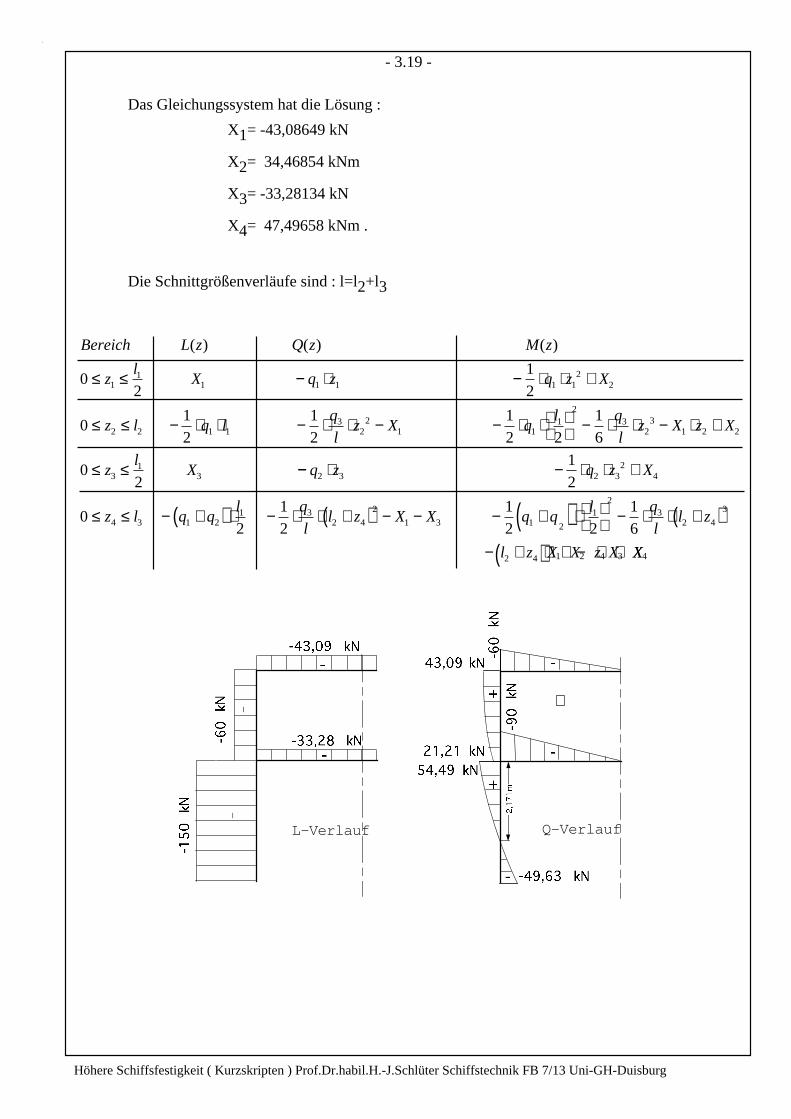
- 3.19 -
Das Gleichungssystem hat die Lösung :
X1= -43,08649 kN
X2= 34,46854 kNm
X3= -33,28134 kN
X4= 47,49658 kNm .
Die Schnittgrößenverläufe sind : l=l2+l3
Bereich L z Q z M z
zl
X q z q z X
z l q lq
lz X q
l q
lz X z X
zl
X
( ) ( ) ( )
02
12
012
12
12 2
16
02
11
1 1 1 1 12
2
2 2 1 13
22
1 11
23
23
1 2 2
31
3
≤ ≤ − ⋅ − ⋅ ⋅ +
≤ ≤ − ⋅ ⋅ − ⋅ ⋅ − − ⋅ ⋅
− ⋅ ⋅ − ⋅ +
≤ ≤ −− ⋅ − ⋅ ⋅ +
≤ ≤ − +( ) ⋅ − ⋅ ⋅ +( ) − − − +( ) ⋅
− ⋅ ⋅ +( )
− +( )⋅ + − ⋅ +
q z q z X
z l q ql q
ll z X X q q
l q
ll z
l z X X z X
2 3 2 32
4
4 3 1 21 3
2 4
2
1 3 1 2
12
32 4
3
2 4 1 2 4 3
12
02
12
12 2
16
XX4-
L-Verlauf
-
Q-Verlauf
⋅
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
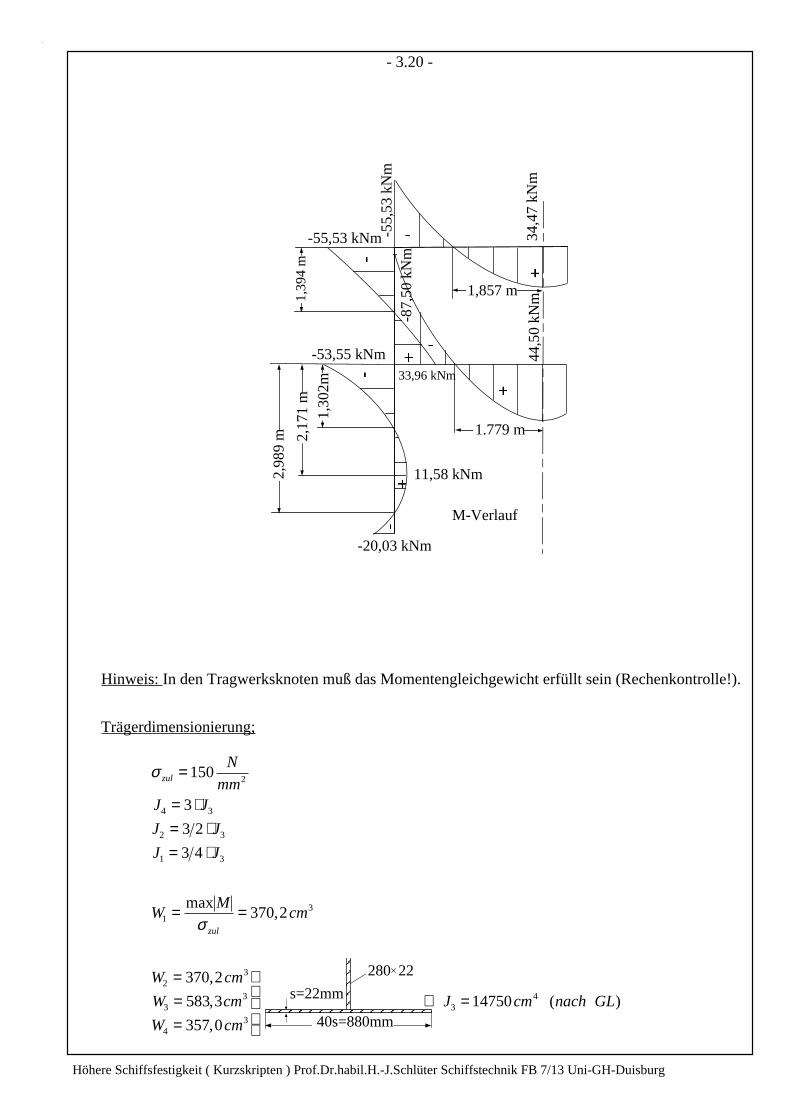
- 3.20 -
-55,
53 k
Nm
-20,03 kNm34
,47
kNm
11,58 kNm
M-Verlauf
-55,53 kNm
-53,55 kNm 44,5
0 kN
m1,39
4 m
1,30
2m2,
171
m
2,98
9 m 1.779 m
1,857 m
-87,
50 k
Nm
33,96 kNm
Hinweis: In den Tragwerksknoten muß das Momentengleichgewicht erfüllt sein (Rechenkontrolle!).
Trägerdimensionierung;
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
σ
σ
zul
zul
N
mmJ J
J J
J J
WM
cm
W cm
W cm
W cm
J cm nach GL
=
= ⋅= ⋅= ⋅
= =
===
⇒ =
150
3
3 2
3 4
370 2
370 2
583 3
357 0
14750
2
4 3
2 3
1 3
13
23
33
43
34
max,
,
,
,
( ) 40s=880mm
280 22
s=22mm
- 3.21 -
Höhere Schiffsfestigkeit ( K
urzskripten ) Prof.Dr.habil.H
.-J.Schlüter Schiffstechnik FB 7/13 U
ni-GH
-Duisburg
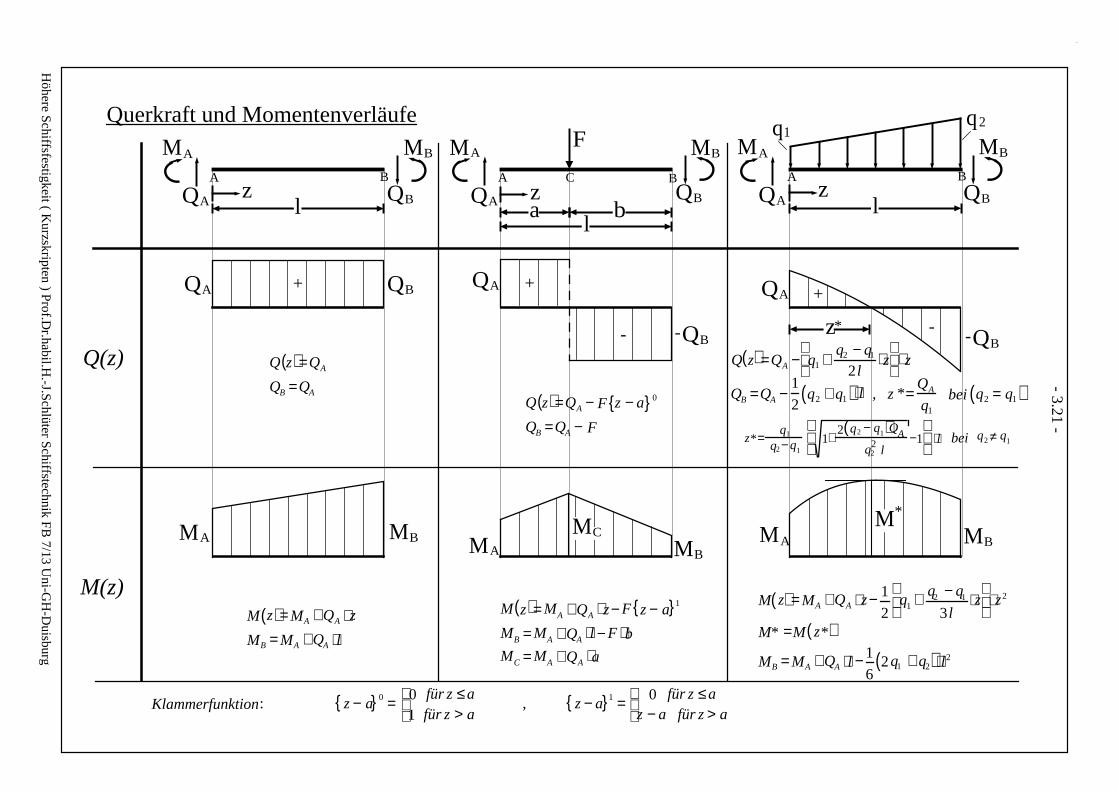
0 für z ≤a
1 für z > aKlammerfunktion: z − a 0 = , z − a 1 = 0 für z ≤a
z − a für z > a
lz
q1MA
QA
q2
MB
QB
A B
lz
A B
MA
QA
MB
QB
lza b
F
A BC
MA
QA
MB
QB
+QA QB +
-
QA
QB- QB-
QA
-
+
MA MBMC
MA MBMA MB
M*
Querkraft und Momentenverläufe
z*
Q z( )=QA
QB =QA
M z( )= MA +QA ⋅ z
MB = MA +QA ⋅l
Q z( )=QA − F z − a 0
QB =QA − F
M z( )= MA +QA ⋅ z− F z − a 1
MB = MA +QA ⋅l − F ⋅b
MC = MA +QA ⋅a
M z( ) = MA +QA ⋅ z− 1
2q1 + q2 − q1
3l⋅ z
⋅ z2
M* =M z*( )
MB = MA +QA ⋅l − 1
62q 2+ q1( )⋅l2
M(z)
Q(z)
z*= −q2 q1
q1 1+ 2 −( )QA2 l
−1
⋅l q2 ≠ q1bei
q2 q1
q2
Q z( ) =QA − q1 +q2 − q1
2l⋅ z
⋅ z
QB =QA −1
2q2 + q1( )⋅l , z *=
QA
q1
q2 = q1( )bei
- 3.22 -
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
lz
q1
M AQA
q2
lzM A
QA
1
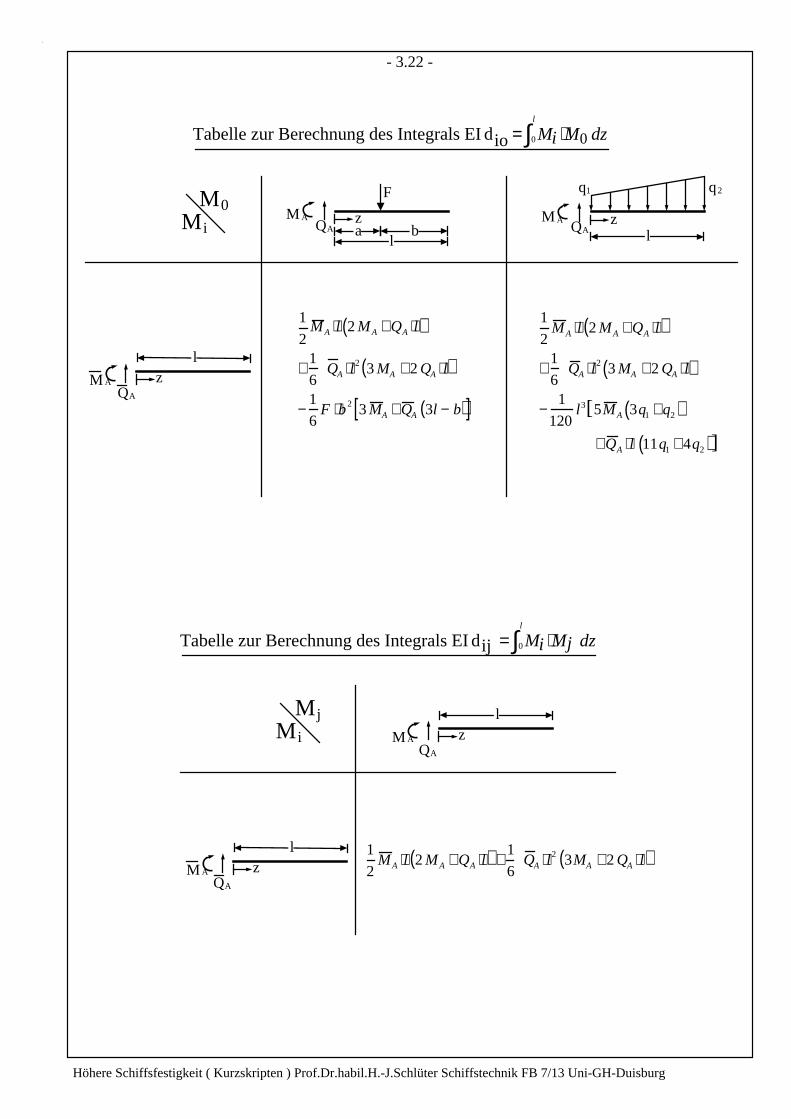
2MA ⋅l 2 MA +QA ⋅l( )
+1
6QA ⋅l2 3 MA +2 QA ⋅l( )
−1
6F ⋅b2 3 MA +QA 3l − b( )[ ]
1
2MA ⋅l 2 MA +QA ⋅l( )
+1
6QA ⋅l2 3 MA +2 QA ⋅l( )
−1
120l3[5MA 3q1 +q2( )
+QA ⋅l 11q1 +4q2( )]
l
z
F
a bM A
QA
Tabelle zur Berechnung des Integrals EI dio = Mi ⋅M dz0
l
∫ 0
M0Mi
lzM A
QA
MjMi
lzM A
QA
Tabelle zur Berechnung des Integrals EI dij = Mi ⋅Mj dz0
l
∫
1
2MA ⋅l 2 MA +QA ⋅l( ) +
1
6QA ⋅l2 3MA +2 QA ⋅l( )
- 3.23 -
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
lz
q1
QA
q2
lz
QA
l
z
F
a bQA
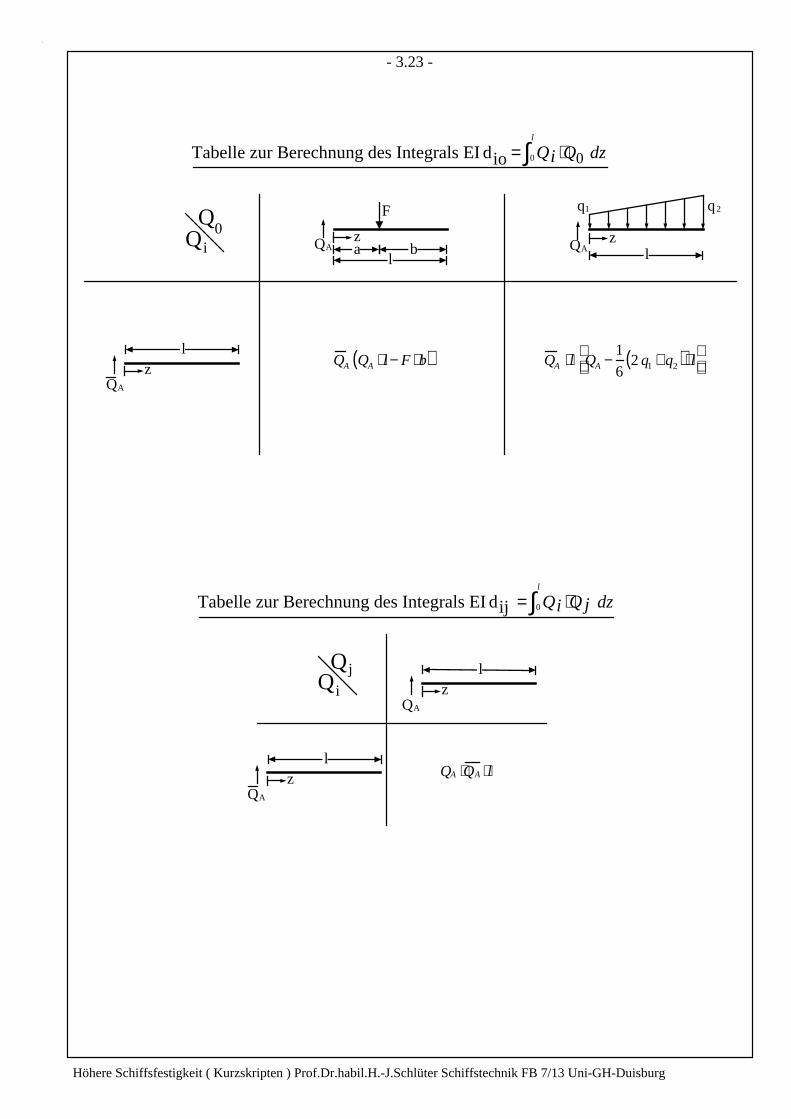
Tabelle zur Berechnung des Integrals EI dio = Qi ⋅Q dz0
l
∫ 0
Q0Qi
QA QA ⋅ l − F ⋅ b( ) QA ⋅l QA −1
62 q1 +q2( )⋅ l
lz
QA
lz
QA
QjQi
QA ⋅QA ⋅l
Tabelle zur Berechnung des Integrals EI dij = Qi ⋅Q j dz0
l
∫
- 3.24 -
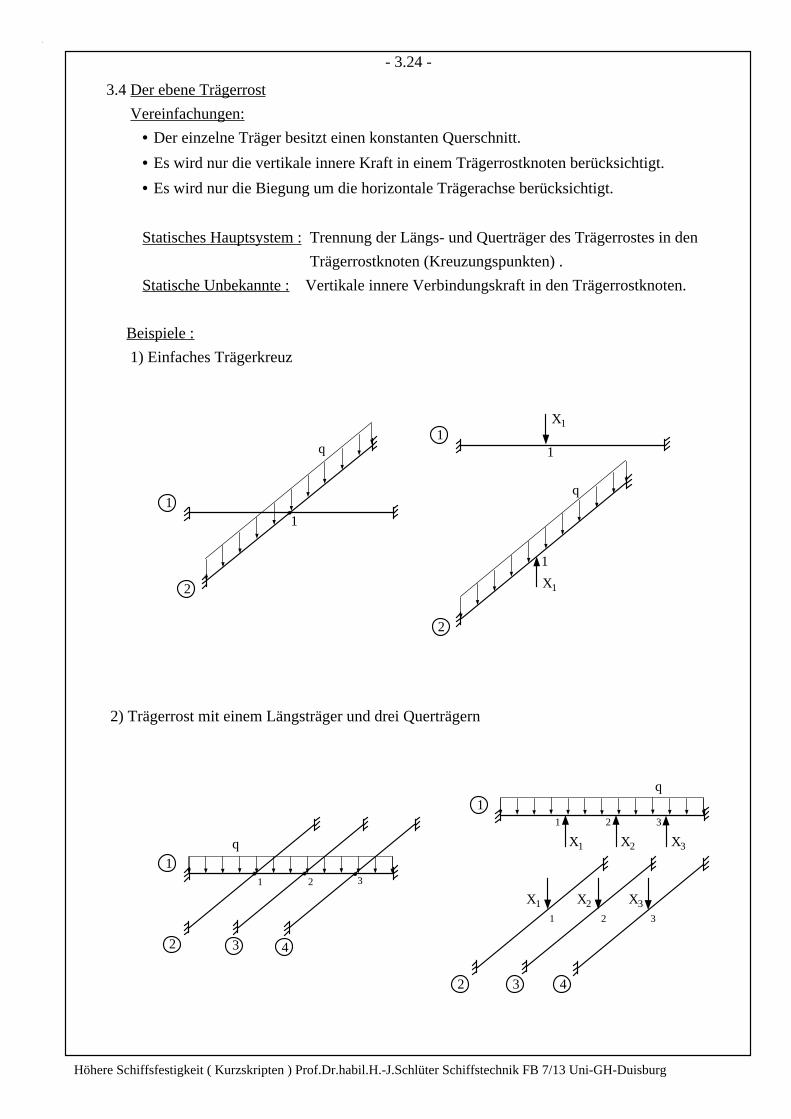
3.4 Der ebene Trägerrost
Vereinfachungen:
• Der einzelne Träger besitzt einen konstanten Querschnitt.
• Es wird nur die vertikale innere Kraft in einem Trägerrostknoten berücksichtigt.
• Es wird nur die Biegung um die horizontale Trägerachse berücksichtigt.
Statisches Hauptsystem : Trennung der Längs- und Querträger des Trägerrostes in den
Trägerrostknoten (Kreuzungspunkten) .
Statische Unbekannte : Vertikale innere Verbindungskraft in den Trägerrostknoten.
Beispiele :
1) Einfaches Trägerkreuz
2) Trägerrost mit einem Längsträger und drei Querträgern
q
11
2
1
q
1
2
1
X1
X1
q
1
1
2
2 3
q
1
1
2
2 3
3 4
X1 X2 X3
1 2 3
X1 X2 X3
3 4
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
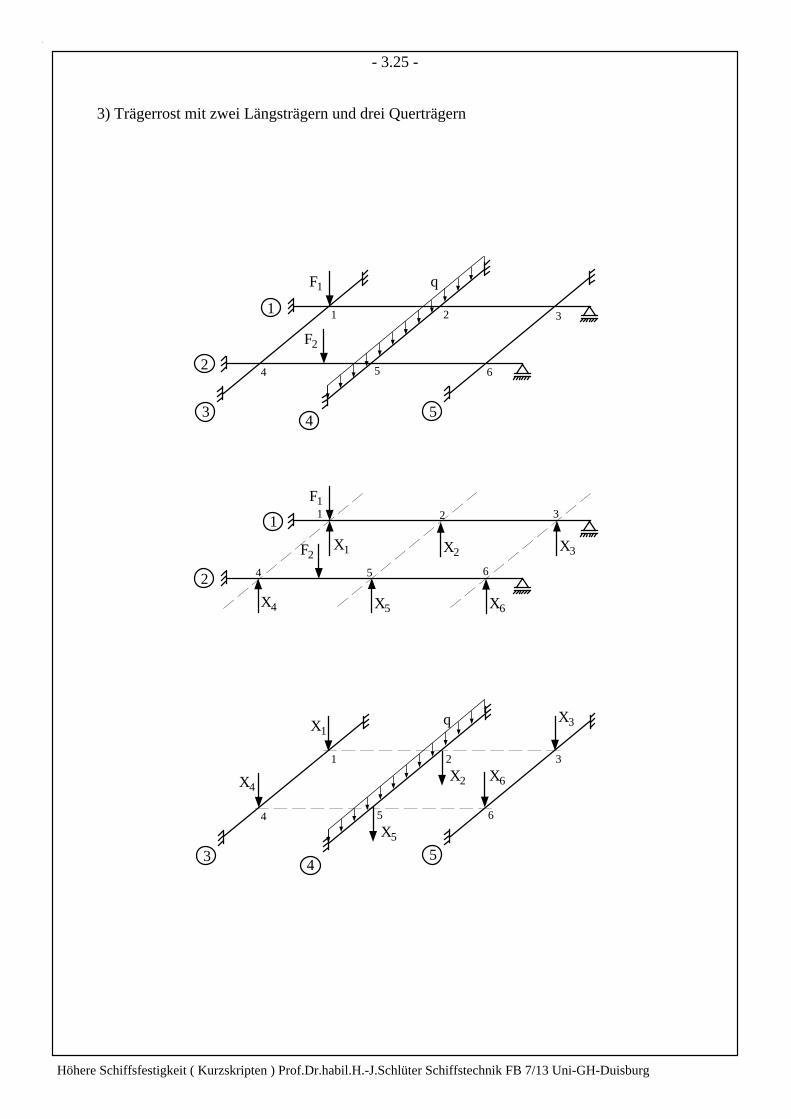
- 3.25 -
3) Trägerrost mit zwei Längsträgern und drei Querträgern
2
13
X3
2
X2
5
X1
X5 X6
4
X4
6
1
F2
F1
3
X3
5
2
X2
4
5
X1
3
X5
X6
6
1
4
X4
q
3
5
2
4
5
F1
3
6
1
42
1
F2
q
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 3.26 -
q1
q2
f1
1
1
1
X1
X1
q1
q2
Verformungsbedingung in einem Kreuzungspunkt : Die Durchbiegungen der Träger in
einem Kreuzungspunkt müssen gleich sein.
Diese Verformungsbedingung liefert für jeden Kreuzungspunkt eine Gleichung. Man erhält für
einen Trägerrost mit n Kreuzungspunkten somit n Gleichungen zur Bestimmung der n statischen
Unbekannten Xi (i=1,2,...,n) .
Nachgiebigkeit dij(k) : Durchbiegung des Trägers k an der Stelle i infolge der Einheitslast an der
Stelle j.
Es gilt : dij(k)=dji
(k) i,j = 1,2,...,n
Nachgiebigkeit dio(k) : Durchbiegung des Trägers k an der Stelle i infolge der gegebenen äußeren
Belastung am Träger k.
Kreuzungspunktgleichungen (Beispiele ):
1) einfaches Trägerkreuz
d X d d X d f
oder d d X d d
Xd d
d d
Durchbiegung des Kreuzungspunktes
fd d d
111
1 101
112
1 102
1
111
112
1 102
101
110
210
1
111
112
111
110
211
2
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
( ) ( ) (
( )
: ( )
:
⋅ + = ⋅ − + =
+ ⋅ = −
= −+
= ⋅ + )) ( )
( ) ( )
⋅+
d
d d10
1
111
112
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
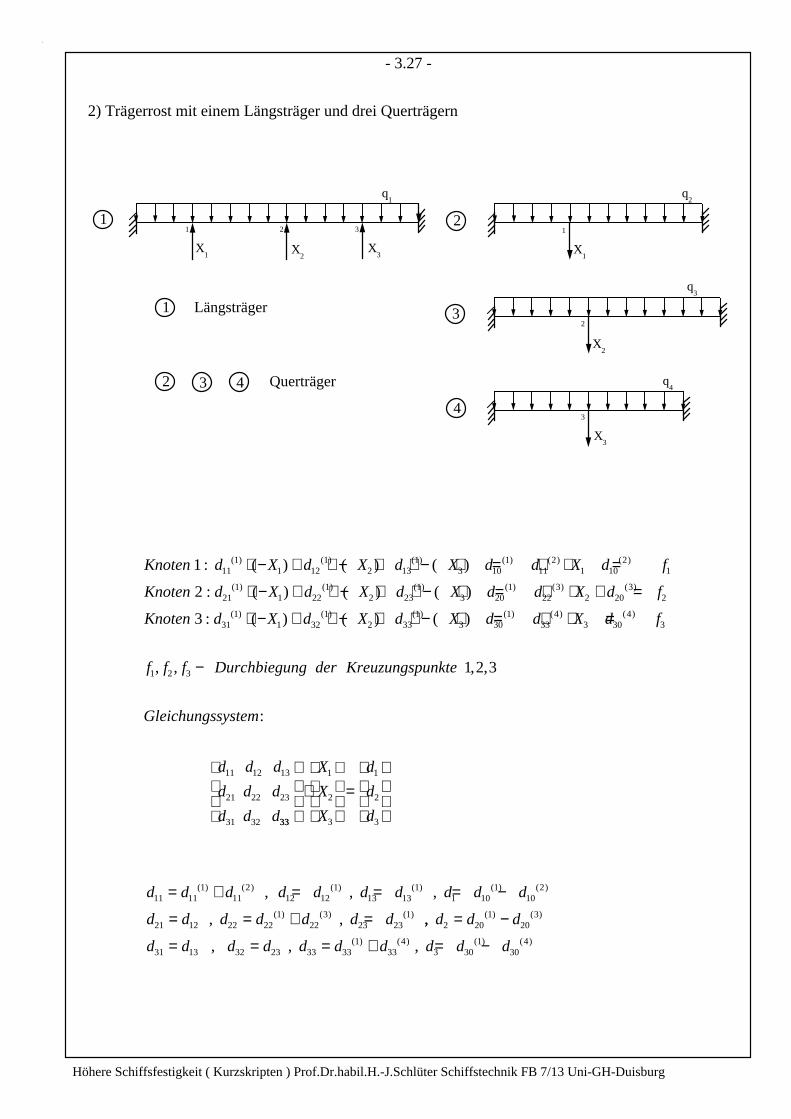
- 3.27 -
Knoten d X d X d X d d X d f
Knoten d X d X d X d d X
1
2
111
1 121
2 131
3 101
112
1 102
1
211
1 221
2 231
3 201
223
2
: ( ) ( ) ( )
: ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
⋅ − + ⋅ − + ⋅ − + = ⋅ + =
⋅ − + ⋅ − + ⋅ − + = ⋅ ++ =
⋅ − + ⋅ − + ⋅ − + = ⋅ + =
−
d f
Knoten d X d X d X d d X d f
f f f Durchbiegung der Kreuzungspunkte
Gleichungssystem
d d d
d d d
d d d
203
2
311
1 321
2 331
3 301
334
3 304
3
1 2 3
11 12 13
21 22 23
31 32
3
1 2 3
( )
( ) ( ) ( ) ( ) ( ) ( ): ( ) ( ) ( )
, , , ,
:
3333
1
2
3
1
2
3
11 111
112
12 121
13 131
1 101
102
21 12 22 221
223
23 231
⋅
=
= + = = = −
= = + =
X
X
X
d
d
d
d d d d d d d d d d
d d d d d d d
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
, , ,
, , ,,
, , ,
( ) ( )
( ) ( ) ( ) ( )
d d d
d d d d d d d d d d
2 201
203
31 13 32 23 33 331
334
3 301
304
= −
= = = + = −
2) Trägerrost mit einem Längsträger und drei Querträgern
q1
X3X
2X
1
1 2 3
q2
X3
X2
X1
1
2
3
q3
q4
3
4
21
1
2 3 4
Längsträger
Querträger
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
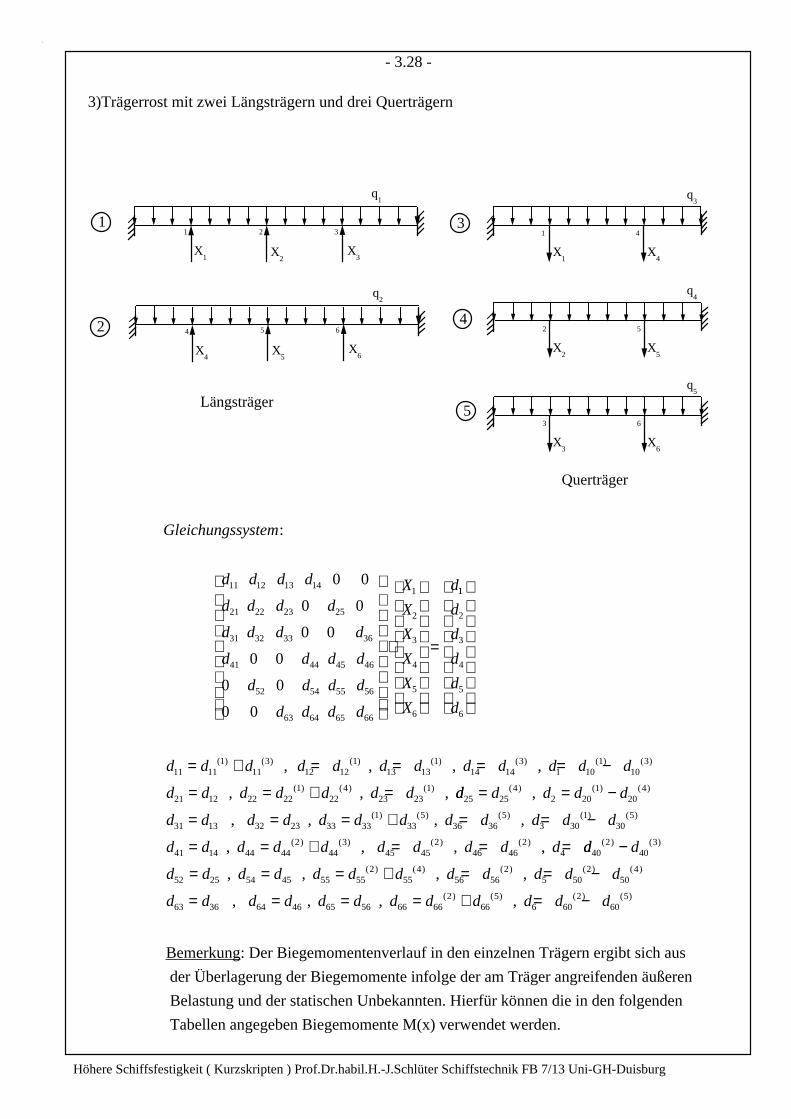
- 3.28 -
Gleichungssystem
d d d d
d d d d
d d d d
d d d d
d d d d
d d d d
X
X
X
X
X
X
d
:
11 12 13 14
21 22 23 25
31 32 33 36
41 44 45 46
52 54 55 56
63 64 65 66
1
2
3
4
5
6
0 0
0 0
0 0
0 0
0 0
0 0
⋅
=
11
2
3
4
5
6
11 111
113
12 121
13 131
14 143
1 101
103
21 12 22 221
224
23 231
d
d
d
d
d
d d d d d d d d d d d d
d d d d d d d
= + = = = = −
= = + =
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
, , , ,
, , , dd d d d d
d d d d d d d d d d d d
d d d d d d d d d d
25 254
2 201
204
31 13 32 23 33 331
335
36 365
3 301
305
41 14 44 442
443
45 452
46 462
4
= = −
= = = + = = −
= = + = = =
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
,
, , , ,
, , , , dd d
d d d d d d d d d d d d
d d d d d d d d d d d d
402
403
52 25 54 45 55 552
554
56 562
5 502
504
63 36 64 46 65 56 66 662
665
6 602
605
( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
, , , ,
, , , ,
−
= = = + = = −
= = = = + = −
3)Trägerrost mit zwei Längsträgern und drei Querträgern
q1
X3X
2X
1
1 2 3
q3
X1
1
X4
43
42
1
5Längsträger
Querträger
q2
X6X
5X
4
4 5 6
q4
X2
2
X5
5
q5
X3
3
X6
6
Bemerkung: Der Biegemomentenverlauf in den einzelnen Trägern ergibt sich aus
der Überlagerung der Biegemomente infolge der am Träger angreifenden äußeren
Belastung und der statischen Unbekannten. Hierfür können die in den folgenden
Tabellen angegeben Biegemomente M(x) verwendet werden.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
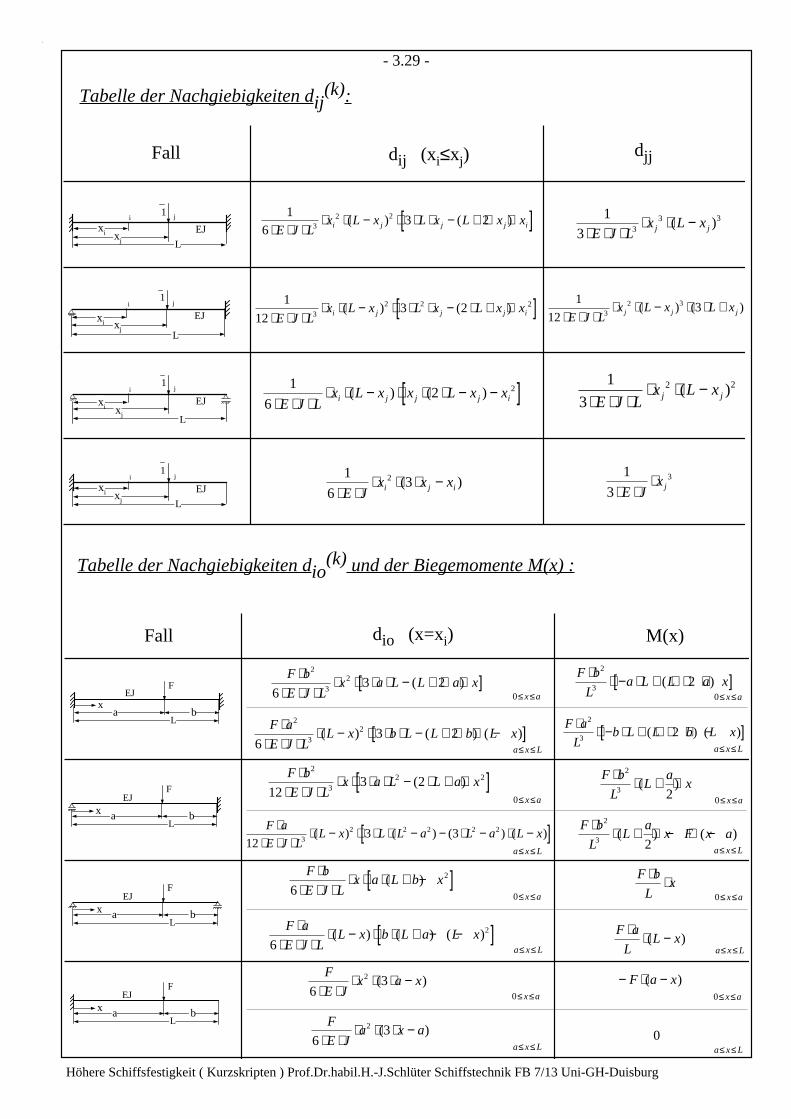
- 3.29 -
Tabelle der Nachgiebigkeiten dij(k):
EJxj L
xi
j1i 1
3 33 3
⋅ ⋅ ⋅⋅ ⋅ −
E J Lx L xj j( )
EJ
L
xi
j1
i
xj
1
123 2
32 2 2
⋅ ⋅ ⋅⋅ ⋅ − ⋅ ⋅ ⋅ − ⋅ + ⋅[ ]
E J Lx L x L x L x xi j j j i( ) ( )
1
123
32 3
⋅ ⋅ ⋅⋅ ⋅ − ⋅ ⋅ +
E J Lx L x L xj j j( ) ( )
EJ
L
j1
i
xi xj
1
62 2
⋅ ⋅ ⋅⋅ ⋅ − ⋅ ⋅ ⋅ − −[ ]
E J Lx L x x L x xi j j j i( ) ( )
1
32 2
⋅ ⋅ ⋅⋅ ⋅ −
E J Lx L xj j( )
EJxj L
xi
j1
i 1
632
⋅ ⋅⋅ ⋅ ⋅ −
E Jx x xi j i( )
1
33
⋅ ⋅⋅
E Jxj
EJ
aL
x
F
b
16
3 232 2
⋅ ⋅ ⋅⋅ ⋅ − ⋅ ⋅ ⋅ − + ⋅ ⋅[ ]
E J Lx L x L x L x xi j j j i( ) ( )
F b
La L L a x
⋅ ⋅ − ⋅ + + ⋅ ⋅[ ]2
32( )
xEJ
aL
F
b
F b
E J Lx a L L a x
⋅⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ − ⋅ + ⋅[ ]2
32 2
123 2( )
F b
LL
ax F x a
⋅ ⋅ + ⋅ − ⋅ −2
3 2( ) ( )
xEJ
aL
F
b
F b
E J Lx a L b x
⋅⋅ ⋅ ⋅
⋅ ⋅ ⋅ + −[ ]6
2( )
F a
LL x
⋅ ⋅ −( )
xEJ
aL
F
bF
E Ja x a
632
⋅ ⋅⋅ ⋅ ⋅ −( ) 0
F a
E J LL x b L L b L x
⋅⋅ ⋅ ⋅
⋅ − ⋅ ⋅ ⋅ − + ⋅ ⋅ −[ ]2
32
63 2( ) ( ) ( )
F b
E J Lx a L L a x
⋅⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ − + ⋅ ⋅[ ]2
32
63 2( )
F b
LL
ax
⋅ ⋅ + ⋅2
3 2( )
F a
Lb L L b L x
⋅ ⋅ − ⋅ + + ⋅ ⋅ −[ ]2
32( ) ( )
F a
E J LL x L L a L a L x
⋅⋅ ⋅ ⋅
⋅ − ⋅ ⋅ ⋅ − − ⋅ − ⋅ −[ ]12
3 33
2 2 2 2 2( ) ( ) ( ) ( )
F a
E J LL x b L a L x
⋅⋅ ⋅ ⋅
⋅ − ⋅ ⋅ + − −[ ]6
2( ) ( ) ( )
F
E Jx a x
632
⋅ ⋅⋅ ⋅ ⋅ −( )
F b
Lx
⋅ ⋅
− ⋅ −F a x( )
a x L≤ ≤
0≤ ≤x a
Fall dij (xi≤xj) djj
Tabelle der Nachgiebigkeiten dio(k) und der Biegemomente M(x) :
Fall dio (x=xi) M(x)
a x L≤ ≤
0≤ ≤x a
a x L≤ ≤
0≤ ≤x a
a x L≤ ≤
0≤ ≤x a
a x L≤ ≤
0≤ ≤x a
a x L≤ ≤
0≤ ≤x a
a x L≤ ≤
0≤ ≤x a
a x L≤ ≤
0≤ ≤x a
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
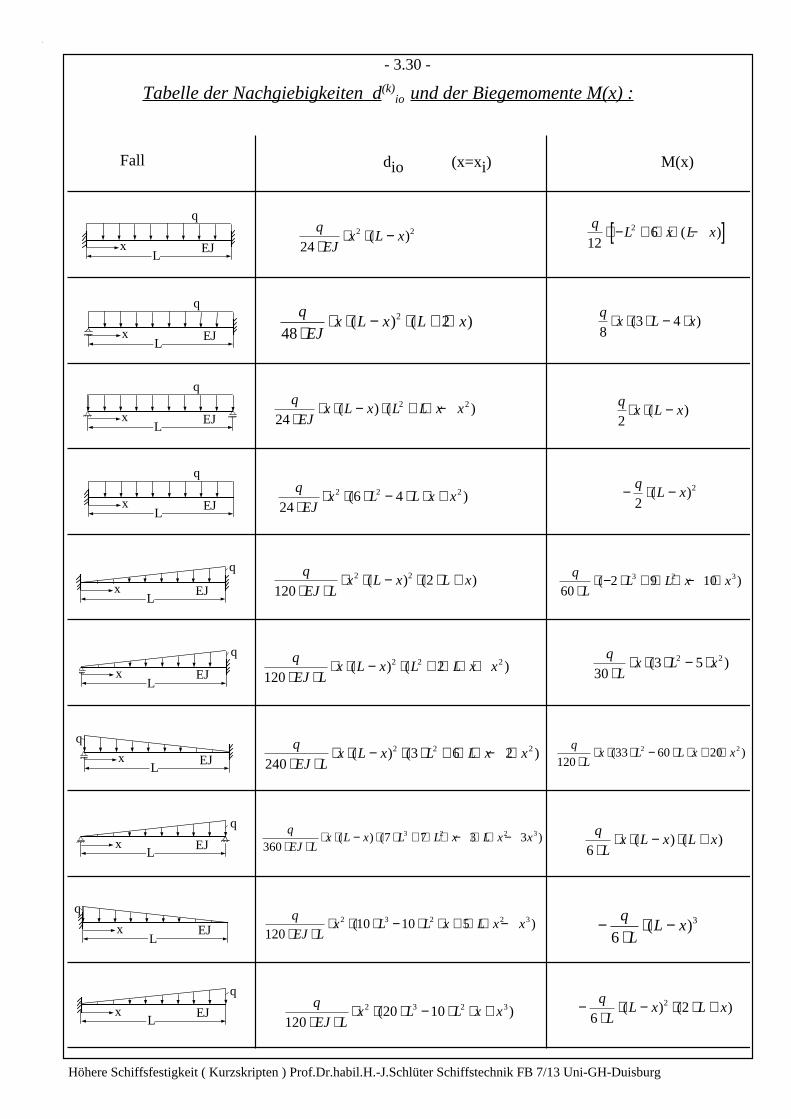
- 3.30 -
Tabelle der Nachgiebigkeiten d(k)io und der Biegemomente M(x) :
q
EJL
x
q
EJL
x
q
EJL
x
q
EJL
x
q
EJL
x
q
EJL
x
q
EJL
x
q
EJL
x
q
EJL
x
q
EJL
x
q
EJx L x L x
4822
⋅⋅ ⋅ − ⋅ + ⋅( ) ( )
q
EJx L x L L x x
242 2
⋅⋅ ⋅ − ⋅ + ⋅ −( ) ( )
q
EJx L L x x
246 42 2 2
⋅⋅ ⋅ ⋅ − ⋅ ⋅ +( )
q
EJ Lx L x L x
12022 2
⋅ ⋅⋅ ⋅ − ⋅ ⋅ +( ) ( )
q
EJ Lx L x L L x x
12022 2 2
⋅ ⋅⋅ ⋅ − ⋅ + ⋅ ⋅ +( ) ( )
q
EJ Lx L x L L x x
2403 6 22 2 2
⋅ ⋅⋅ ⋅ − ⋅ ⋅ + ⋅ ⋅ − ⋅( ) ( )
q
EJ Lx L x L L x L x x
3607 7 3 33 2 2 3
⋅ ⋅⋅ ⋅ − ⋅ ⋅ + ⋅ ⋅ − ⋅ ⋅ −( ) ( )
q
EJ Lx L L x L x x
12010 10 52 3 2 2 3
⋅ ⋅⋅ ⋅ ⋅ − ⋅ ⋅ + ⋅ ⋅ −( )
q
EJ Lx L L x x
12020 102 3 2 3
⋅ ⋅⋅ ⋅ ⋅ − ⋅ ⋅ +( )
qx L x
83 4⋅ ⋅ ⋅ − ⋅( )
qx L x
2⋅ ⋅ −( )
− ⋅ −qL x
22( )
q
LL L x x
602 9 103 2 3
⋅⋅ − ⋅ + ⋅ ⋅ − ⋅( )
q
Lx L x
303 52 2
⋅⋅ ⋅ ⋅ − ⋅( )
q
Lx L L x x
12033 60 202 2
⋅⋅ ⋅ ⋅ − ⋅ ⋅ + ⋅( )
q
Lx L x L x
6 ⋅⋅ ⋅ − ⋅ +( ) ( )
−⋅
⋅ −q
LL x
63( )
−⋅
⋅ − ⋅ ⋅ +q
LL x L x
622( ) ( )
q
EJx L x
242 2
⋅⋅ ⋅ −( )
qL x L x
1262⋅ − + ⋅ ⋅ −[ ]( )
Fall dio (x=xi) M(x)
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
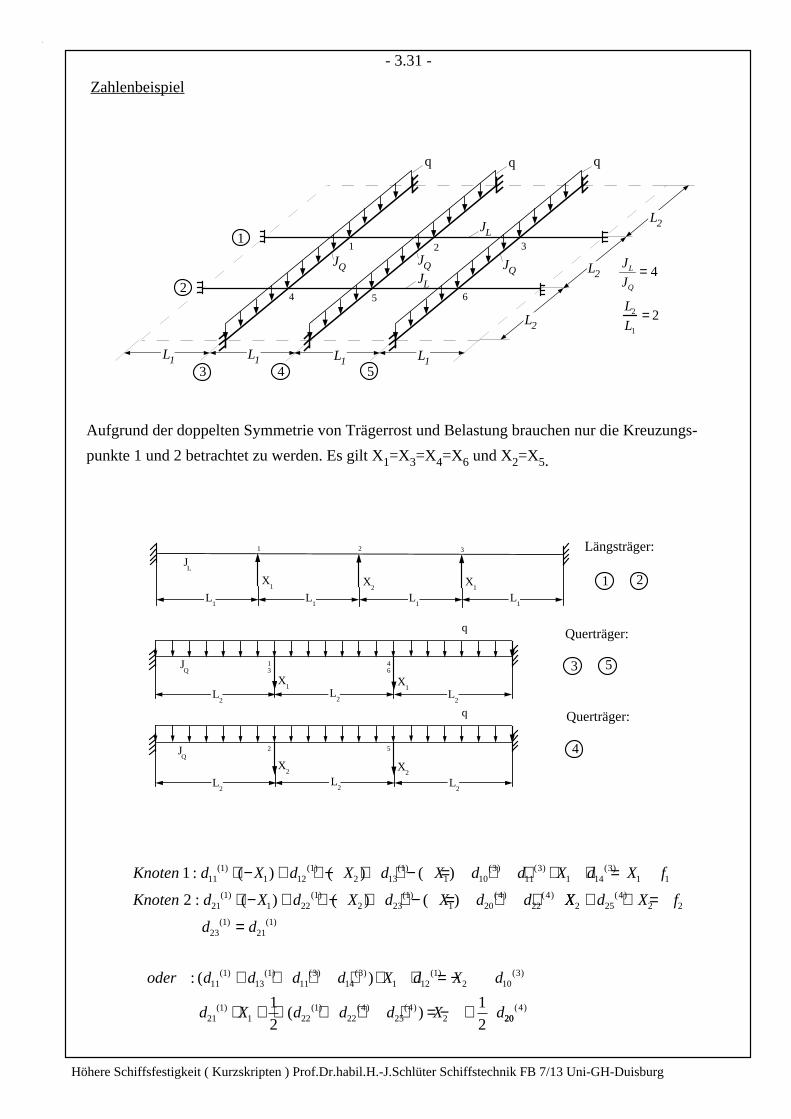
- 3.31 -
3
5
2
4
5
3
6
1
42
1
L2
L2
L2
L1L1L1L1
JQJQ JQJL
JL
q q q
L2
L1
= 2
J
JL
Q
= 4
Zahlenbeispiel
q
X1
X1
13
46
JQ
Querträger:
q
X2
X2
2 5
Längsträger:
L2
L2 L
2
L2
L2 L
2
X1 X
2X
1
L1
L1
L1
L1
JL
1 2 3
1 2
3 5
Querträger:
4JQ
Aufgrund der doppelten Symmetrie von Trägerrost und Belastung brauchen nur die Kreuzungs-
punkte 1 und 2 betrachtet zu werden. Es gilt X1=X3=X4=X6 und X2=X5.
Knoten d X d X d X d d X d X f
Knoten d X d X d X d d
1
2
111
1 121
2 131
1 103
113
1 143
1 1
211
1 221
2 231
1 204
224
: ( ) ( ) ( )
: ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
⋅ − + ⋅ − + ⋅ − = + ⋅ + ⋅ =
⋅ − + ⋅ − + ⋅ − = + ⋅ XX d X f
d d
oder d d d d X d X d
d X d d d X d
2 254
2 2
231
211
111
131
113
143
1 121
2 103
211
1 221
224
254
2
12
12
+ ⋅ =
=
+ + + ⋅ + ⋅ = −
⋅ + ⋅ + + ⋅ = − ⋅
( )
( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
: ( )
( ) 20204( )
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 3.32 -
dL
E Jd
L
E Jd
L
E Jd
L
E J
dL
E Jd
L
E Jd
q L
E
L L L L
Q Q
111 1
3
121 1
3
131 1
3
221 1
3
113 2
3
143 2
3
103 2
4
964
16
13192
13
881
11162
16
( ) ( ) ( ) ( )
( ) ( ) ( )
, , ,
, ,
= ⋅⋅
= ⋅⋅
= ⋅⋅
= ⋅⋅
= ⋅⋅
= ⋅⋅
= ⋅ ⋅⋅⋅
= = =
⋅⋅
+ ⋅⋅
⋅ + ⋅⋅
⋅ = − ⋅ ⋅⋅
⋅⋅
⋅ + ⋅
J
d d d d d d
In die Kreuzungspunktgleichungen eingesetzt
L
E J
L
E JX
L
E JX
q L
E J
L
E JX
Q
L Q L Q
L
224
113
254
143
204
103
13
23
113
22
4
13
1
524
16
16
16
16
12
( ) ( ) ( ) ( ) ( ) ( ), ,
:
( )
(( )
:
[ ( ) ] ( )
[ (
13
16
112
6
54
112
13
23
22
4
13
2
1
31 2
2
1
32
12
1
⋅⋅
+ ⋅⋅
⋅ = − ⋅ ⋅⋅
⋅ ⋅
+ ⋅ ⋅ + = − ⋅ ⋅ ⋅
+ + ⋅ ⋅
L
E J
L
E JX
q L
E J
oder nach Multiplikation mitE J
L
J
J
L
LX X
J
J
L
Lq L
XJ
J
L
L
L Q Q
L
L
Q
L
Q
L
Q
)) ] ( )
,
32
2
1
32
2
1
12
4 2
⋅ = − ⋅ ⋅ ⋅ ⋅
= =
XJ
J
L
Lq L
FürJ
J
L
Lergibt sich die Lösung zu
L
Q
L
Q
X q L X q L1 2 2 20 935755 0 886132= − ⋅ ⋅ = − ⋅ ⋅, , ,
Nachgiebigkeiten:
Durchbiegung der Kreuzungspunkte (Probe!) :
f f f fL
E Jq L X
L
E JX X
q L
E J
f fL
E Jq L X
L
E JX X
Q L Q
Q L
1 3 4 62
3
2 113
1 22
4
2 52
3
2 213
1
6 654
0 06424466
6 3
= = = =⋅ ⋅
⋅ ⋅ + = −⋅ ⋅
⋅ ⋅ + = ⋅ ⋅⋅ ⋅
= =⋅ ⋅
⋅ ⋅ + = −⋅ ⋅
⋅ +
( ) ( ) ,
( ) ( 222
4
0 1138686
) ,= ⋅ ⋅⋅ ⋅q L
E JQ
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
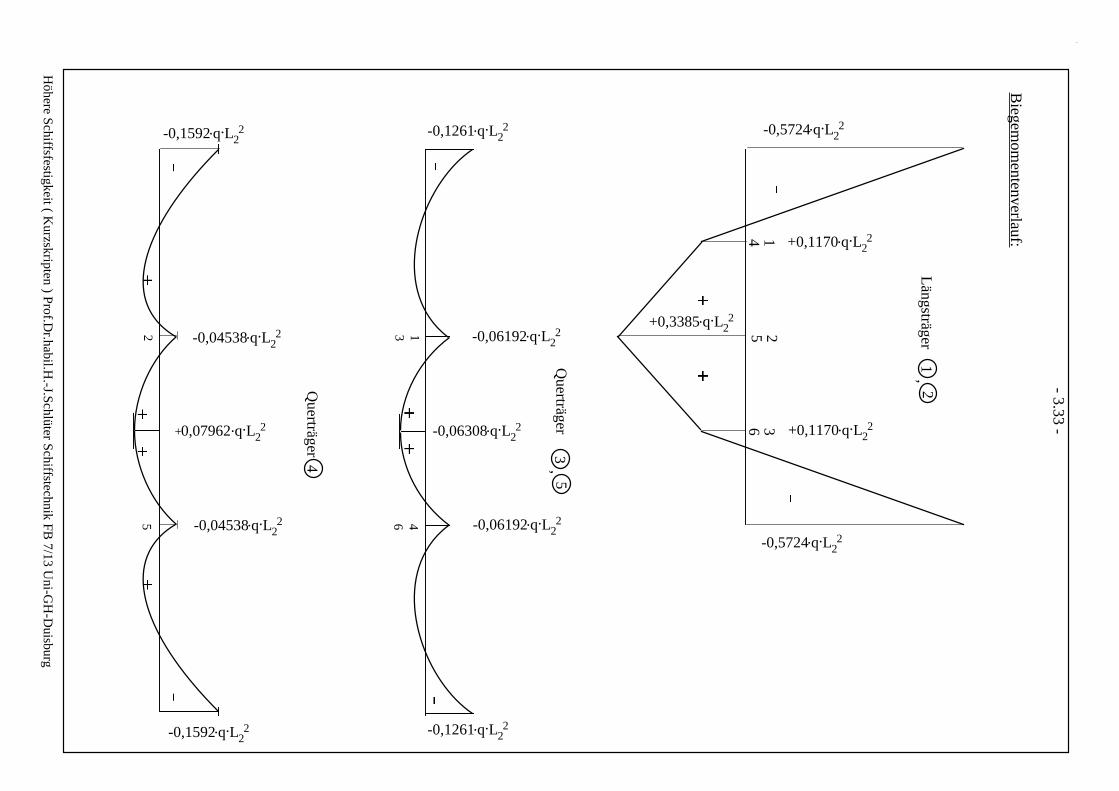
- 3.33 -
+0,3385.q.L22
2536
14
+0,1170.q.L22
+0,1170.q.L22
-0,5724.q.L22
-0,5724.q.L22
Längsträger
21
,
-0,06192.q.L22
-0,1261.q.L22
-0,1261.q.L22
46 -0,06192.q.L22
13
Querträger
53
,
-0,06308.q.L22
-0,04538.q.L22
-0,1592.q.L22
52
Querträger 4
-0,1592.q.L22
-0,04538.q.L22
+0,07962.q.L22
Biegem
omentenverlauf:
Höhere Schiffsfestigkeit ( K
urzskripten ) Prof.Dr.habil.H
.-J.Schlüter Schiffstechnik FB 7/13 U
ni-GH
-Duisburg
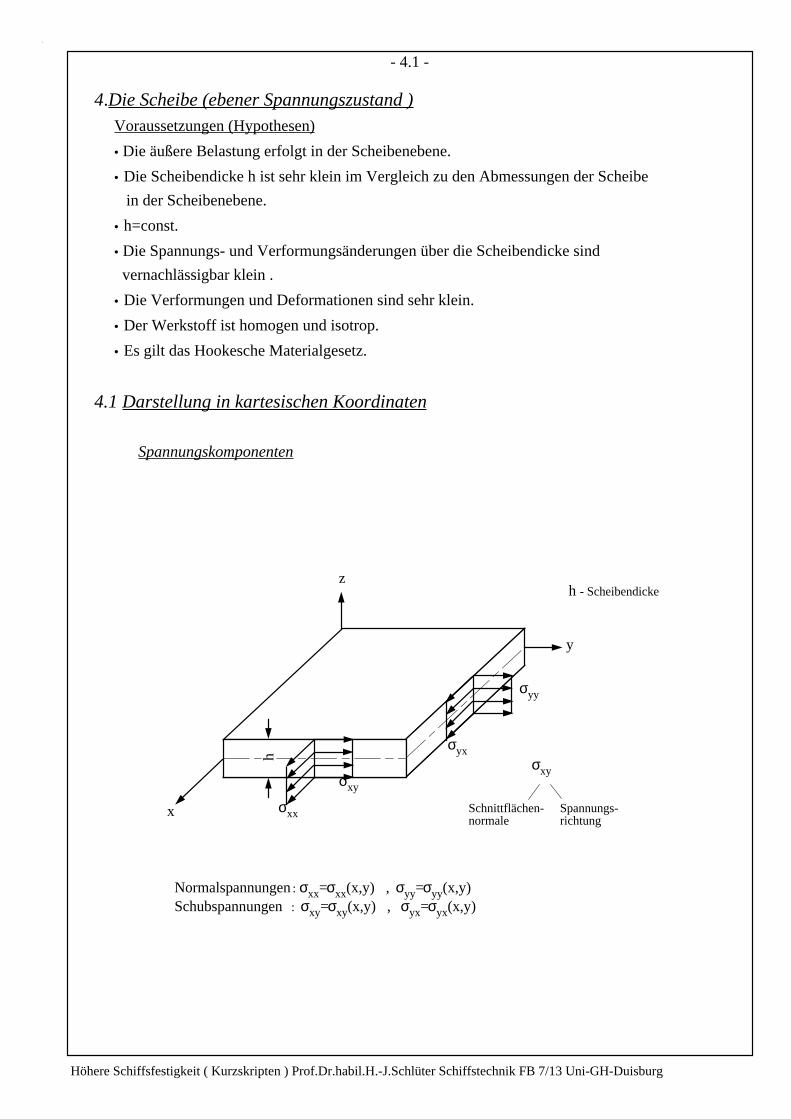
- 4.1 -
4.Die Scheibe (ebener Spannungszustand ) Voraussetzungen (Hypothesen)
• Die äußere Belastung erfolgt in der Scheibenebene.
• Die Scheibendicke h ist sehr klein im Vergleich zu den Abmessungen der Scheibe
in der Scheibenebene.
• h=const.
• Die Spannungs- und Verformungsänderungen über die Scheibendicke sind
vernachlässigbar klein .
• Die Verformungen und Deformationen sind sehr klein.
• Der Werkstoff ist homogen und isotrop.
• Es gilt das Hookesche Materialgesetz.
4.1 Darstellung in kartesischen Koordinaten
Spannungskomponenten
z
x
y
σxx
σxy
σyx
σyy
h σxy
Schnittflächen-normale
Spannungs-richtung
Normalspannungen : σxx=σxx(x,y) , σyy=σyy(x,y)Schubspannungen : σxy=σxy(x,y) , σyx=σyx(x,y)
h - Scheibendicke
− ≤ ≤hz
h
2 2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
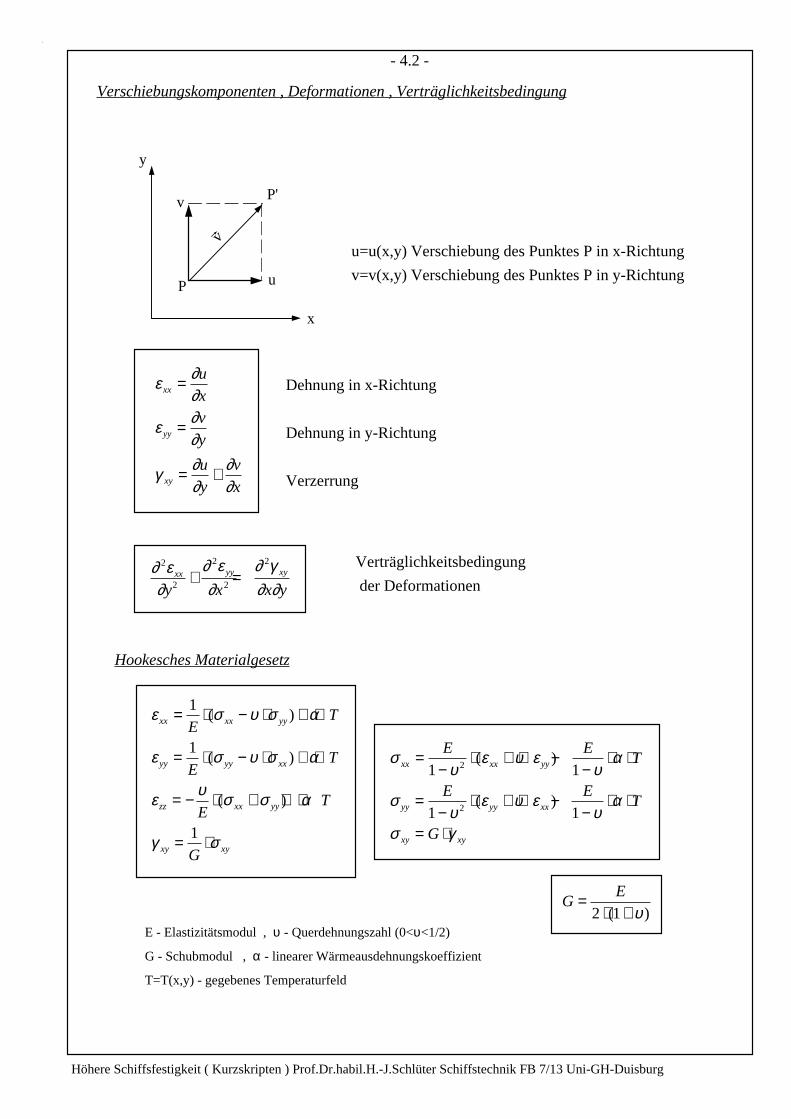
- 4.2 -
Verschiebungskomponenten , Deformationen , Verträglichkeitsbedingung
ε ∂∂
ε ∂∂
γ ∂∂
∂∂
xx
yy
xy
u
xv
y
u
y
v
x
=
=
= +
∂ ε∂
∂ ε∂
∂ γ∂ ∂
2
2
2
2
2xx yy xy
y x x y+ =
Dehnung in x-Richtung
Dehnung in y-Richtung
Verzerrung
Verträglichkeitsbedingung
der Deformationen
P
x
y
P'
v
v
u
u=u(x,y) Verschiebung des Punktes P in x-Richtung
v=v(x,y) Verschiebung des Punktes P in y-Richtung
Hookesches Materialgesetz
ε σ υ σ α
ε σ υ σ α
ε υ σ σ α
γ σ
xx xx yy
yy yy xx
zz xx yy
xy xy
ET
ET
ET
G
= ⋅ − ⋅ + ⋅
= ⋅ − ⋅ + ⋅
= − ⋅ + + ⋅
= ⋅
1
1
1
( )
( )
( )
συ
ε υ ευ
α
συ
ε υ ευ
α
σ γ
xx xx yy
yy yy xx
xy xy
E ET
E ET
G
=−
⋅ + ⋅ −−
⋅ ⋅
=−
⋅ + ⋅ −−
⋅ ⋅
= ⋅
1 1
1 1
2
2
( )
( )
E - Elastizitätsmodul , υ - Querdehnungszahl (0<υ<1/2)
G - Schubmodul , α - linearer Wärmeausdehnungskoeffizient
T=T(x,y) - gegebenes Temperaturfeld
GE=
⋅ +2 1( )υ
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
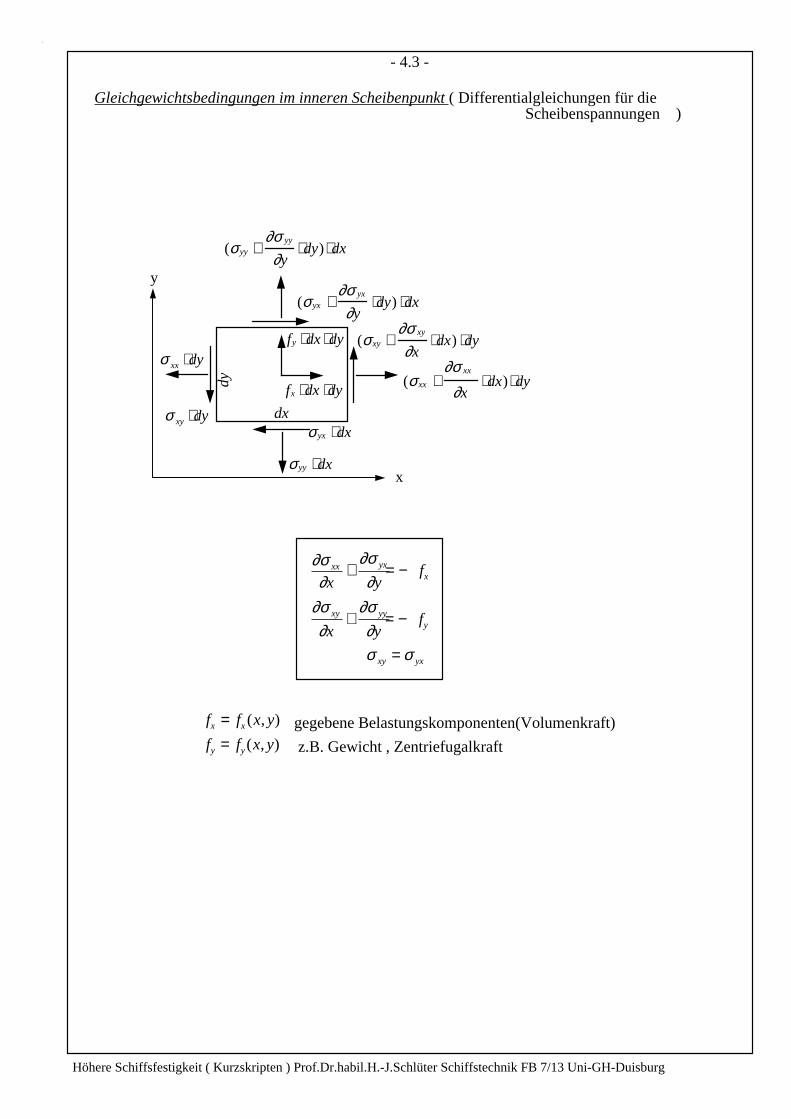
- 4.3 -
Gleichgewichtsbedingungen im inneren Scheibenpunkt ( Differentialgleichungen für die Scheibenspannungen )
σ xx dy⋅
σyx ⋅ dx
σyy ⋅ dx
fx ⋅ dx ⋅dy
fy ⋅ dx ⋅ dy
(σyy +∂σ yy
∂y⋅ dy) ⋅ dx
(σyx +∂σ yx
∂y⋅dy) ⋅dx
(σxy +∂σ xy
∂x⋅ dx) ⋅dy
dx
dy
y
x
(σxx +∂σ xx
∂x⋅ dx) ⋅ dy
σ xy dy⋅
∂σ∂
∂σ∂
∂σ∂
∂σ∂σ σ
xx yxx
xy yyy
xy yx
x yf
x yf
+ = −
+ = −
=
f f x y
f f x yx x
y y
==
( , )
( , )gegebene Belastungskomponenten(Volumenkraft)
z.B. Gewicht , Zentriefugalkraft
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
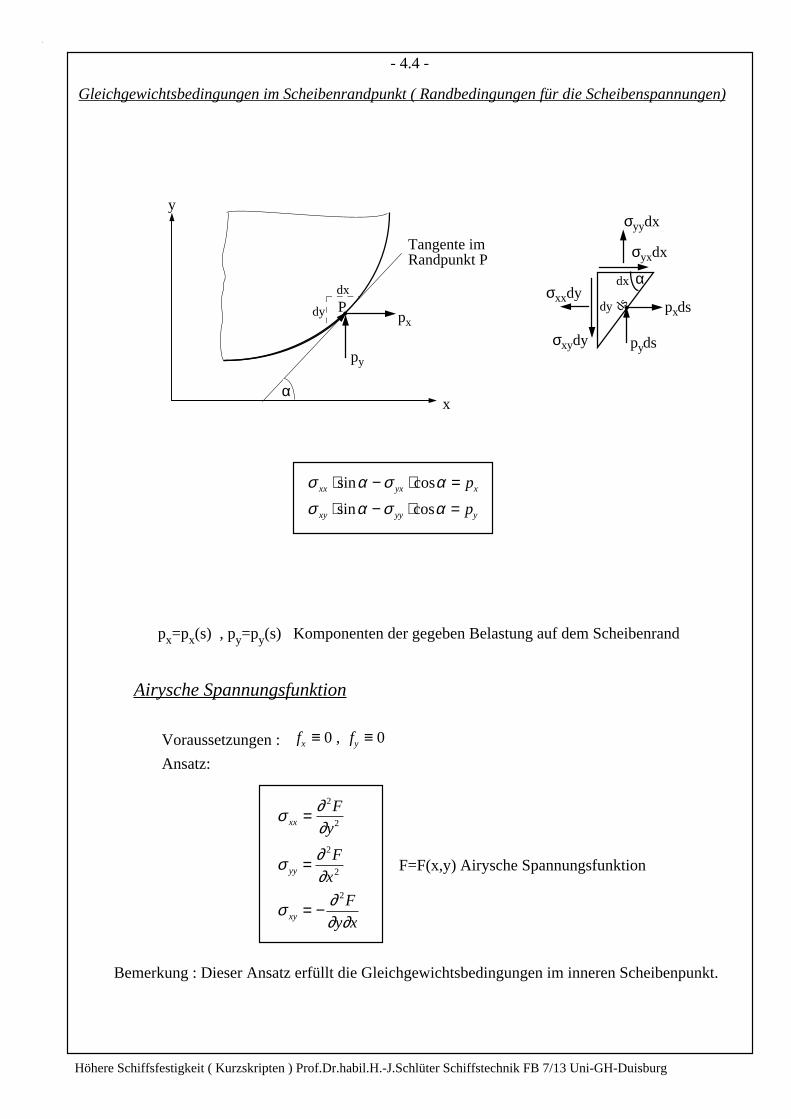
- 4.4 -
Gleichgewichtsbedingungen im Scheibenrandpunkt ( Randbedingungen für die Scheibenspannungen)
y
x
px
py
Pdx
dy
Tangente imRandpunkt P
α
σyxdx
σxydy
dx
dy pxds
pyds
α
ds
σyydx
σxxdy
σ α σ ασ α σ α
xx yx x
xy yy y
p
p
⋅ − ⋅ =
⋅ − ⋅ =
sin cos
sin cos
σ ∂∂
σ ∂∂
σ ∂∂ ∂
xx
yy
xy
F
y
F
x
F
y x
=
=
= −
2
2
2
2
2
F=F(x,y) Airysche Spannungsfunktion
f fx y≡ ≡0 0,
Bemerkung : Dieser Ansatz erfüllt die Gleichgewichtsbedingungen im inneren Scheibenpunkt.
px=px(s) , py=py(s) Komponenten der gegeben Belastung auf dem Scheibenrand
Airysche Spannungsfunktion
Voraussetzungen :
Ansatz:
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 4.5 -
Differentialgleichung für F(x,y):
∆
∆∆
= +
= + ⋅ +
∂∂
∂∂
∂∂
∂∂ ∂
∂∂
2
2
2
2
4
4
4
2 2
4
42
x y
x x y y
Andere Schreibweise:
∆∆ ∆F E T= − ⋅ ⋅α
mit
Laplace-Differentialoperator in
kartesischen Koordinaten
∂∂
∂∂ ∂
∂∂
α ∂∂
∂∂
4
4
4
2 2
4
4
2
2
2
22F
x
F
x y
F
yE
T
x
T
y+ ⋅ + = − ⋅ ⋅ +
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
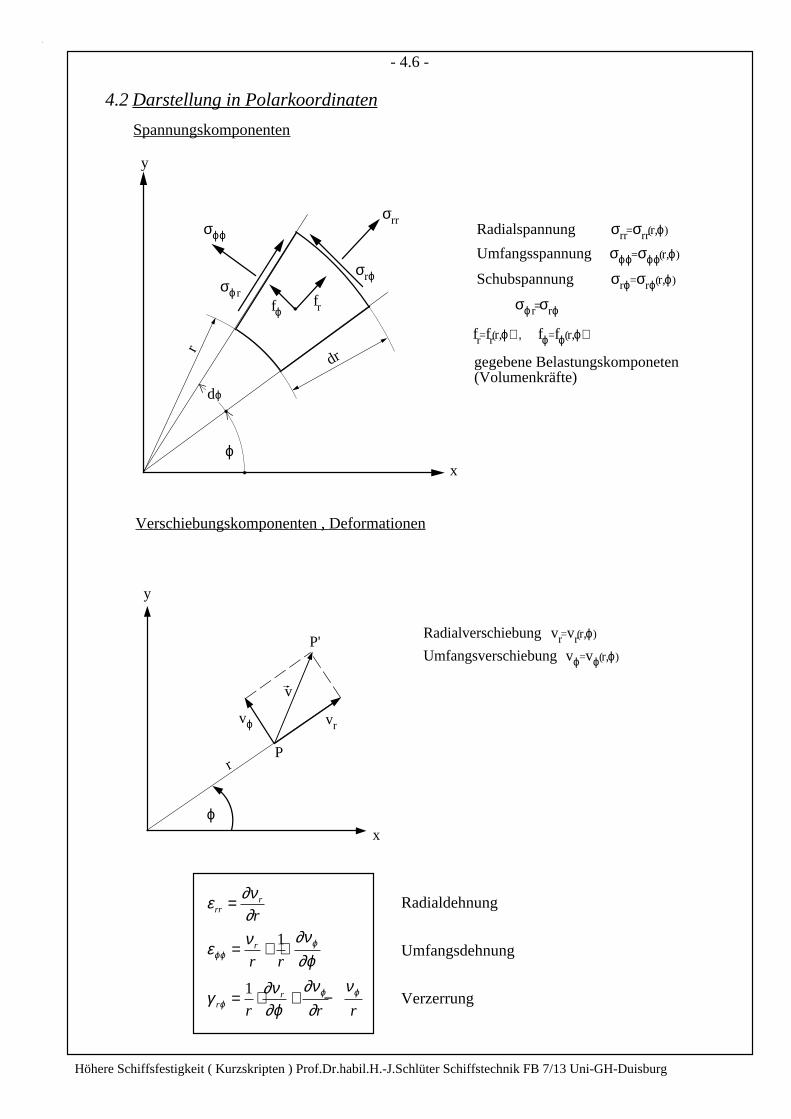
- 4.6 -
4.2 Darstellung in Polarkoordinaten
Spannungskomponenten
frfϕ
drr
dϕ
ϕ
σϕ r
σϕϕ
σrr
σr ϕ
x
y
Radialspannung σrr=σrr(r,ϕ)
Umfangsspannung σϕϕ=σϕϕ(r,ϕ)
Schubspannung σr ϕ=σr ϕ(r,ϕ)
σϕ r=σr ϕ
fr=fr(r,ϕ) , fϕ=fϕ(r,ϕ)
gegebene Belastungskomponeten(Volumenkräfte)
Verschiebungskomponenten , Deformationen
y
x
P'
v
vrvϕ
Pr
ϕ
Radialverschiebung vr=vr(r,ϕ)
Umfangsverschiebung vϕ=vϕ(r,ϕ)
Radialdehnung
Umfangsdehnung
Verzerrung
ε ∂ν∂
ε ν ∂ν∂ϕ
γ ∂ν∂ϕ
∂ν∂
ν
ϕϕϕ
ϕϕ ϕ
rrr
r
rr
r
r r
r r r
=
= + ⋅
= ⋅ + −
1
1
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 4.7 -
Hookesches Materialgesetz
ε σ υ σ α
ε σ υ σ α
ε υ σ σ α
γ σ
ϕϕ
ϕϕ ϕϕ
ϕϕ
ϕ ϕ
rr rr
rr
zz rr
r r
ET
ET
ET
G
= ⋅ − ⋅ + ⋅
= ⋅ − ⋅ + ⋅
= − ⋅ + + ⋅
= ⋅
1
1
1
( )
( )
( )
συ
ε υ ευ
α
συ
ε υ ευ
α
σ γ
ϕϕ
ϕϕ ϕϕ
ϕ ϕ
rr rr
rr
r r
E ET
E ET
G
=−
⋅ + ⋅ −−
⋅ ⋅
=−
⋅ + ⋅ −−
⋅ ⋅
= ⋅
1 1
1 1
2
2
( )
( )
∂σ∂
σ σ ∂σ∂ϕ
∂σ∂ϕ
σ ∂σ∂σ σ
ϕϕ ϕ
ϕϕ ϕ ϕϕ
ϕ ϕ
rr rr rr
r r
r r
r r rf
r r rf
+−
+ ⋅ = −
⋅ +⋅
+ = −
=
1
1 2
Gleichgewichtsbedingungen im inneren Scheibenpunkt
Bemerkung : Dieser Ansatz erfüllt die Gleichgewichtsbedingungen im inneren
Scheibenpunkt.
σ ∂∂
∂∂ϕ
σ ∂∂
σ ∂∂
∂∂ϕ
ϕϕ
ϕ
rr
r
r
F
r r
F
F
r
r r
F
= ⋅ + ⋅
=
= − ⋅ ⋅
1 1
1
2
2
2
2
2
( )
f fr j≡ ≡0 0, .
Airysche Spannungsfunktion F=F(r,ϕ)
Voraussetzung :
Ansatz :
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 4.8 -
Differentialgleichung für F(r,ϕ) :
Sonderfall : Rotationssymmetrischer Spannungszustand .
σrr=σrr(r) , σϕϕ=σϕϕ(r) , σrϕ= 0 .
Differentialgleichung für F=F(r) :
allgemeine Lösung :
1 1 1r
d
drr
d
dr r
d
drr
dF
drE
r
d
drr
dT
dr⋅ ⋅ ⋅ ⋅ ⋅ ⋅ = − ⋅ ⋅ ⋅ ⋅[ [ ( )]] ( )α
F r Er
T r dr dr C r r C r C r C
r
dF
drE
rT r dr C r C
C
r
d F
drE T E
rT
rr
( ) ( ) ln ln
( ln )
= − ⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ + ⋅ + ⋅ +
= ⋅ = ⋅ ⋅ ⋅ ⋅ + ⋅ + ⋅ + ⋅ +
= = − ⋅ ⋅ + ⋅ ⋅ ⋅
∫∫
∫
α
σ α
σ α αϕϕ
1
1 11 2 2
1
12
22
3 4
2 1 232
2
2 2 rr dr C r CC
r⋅ + ⋅ ⋅ + + ⋅ −∫ 1 2
322 3 2( ln )
∂∂
∂∂
∂∂
∂∂
∂∂ϕ
∂∂ ∂ϕ
∂∂ ∂ϕ
∂∂ϕ
α ∂∂
∂∂
∂∂ϕ
4
4
3
3 2
2
2 3 4
4
4 2
4
2 2
3
3
2 4
2
2
2
2 2
2
2
2 1 1 1 2
2 4 1 1
F
r r
F
r r
F
r r
F
r r
F
r
F
r
r
F
r r
FE
T
r r
T
r r
T
+ ⋅ − ⋅ + ⋅ + ⋅ + ⋅
− ⋅ + ⋅ = − ⋅ ⋅ + ⋅ + ⋅( ))
∆
∆∆
= + ⋅ + ⋅
= + ⋅ − ⋅ + ⋅ + ⋅ + ⋅ − ⋅ + ⋅
∂∂
∂∂
∂∂ϕ
∂∂
∂∂
∂∂
∂∂
∂∂ϕ
∂∂ϕ ∂
∂∂ϕ ∂
∂∂ϕ
2
2 2
2
2
4
4
3
3 2
2
2 3 4
4
4 2
4
2 2 3
3
2 4
2
2
1 1
2 1 1 1 2 2 4
r r r r
r r r r r r r r r r r r r
Andere Schreibweise:
∆∆ ∆F E T= − ⋅ ⋅α
mit
Laplace-Differentialoperator in
Polarkoordinaten
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
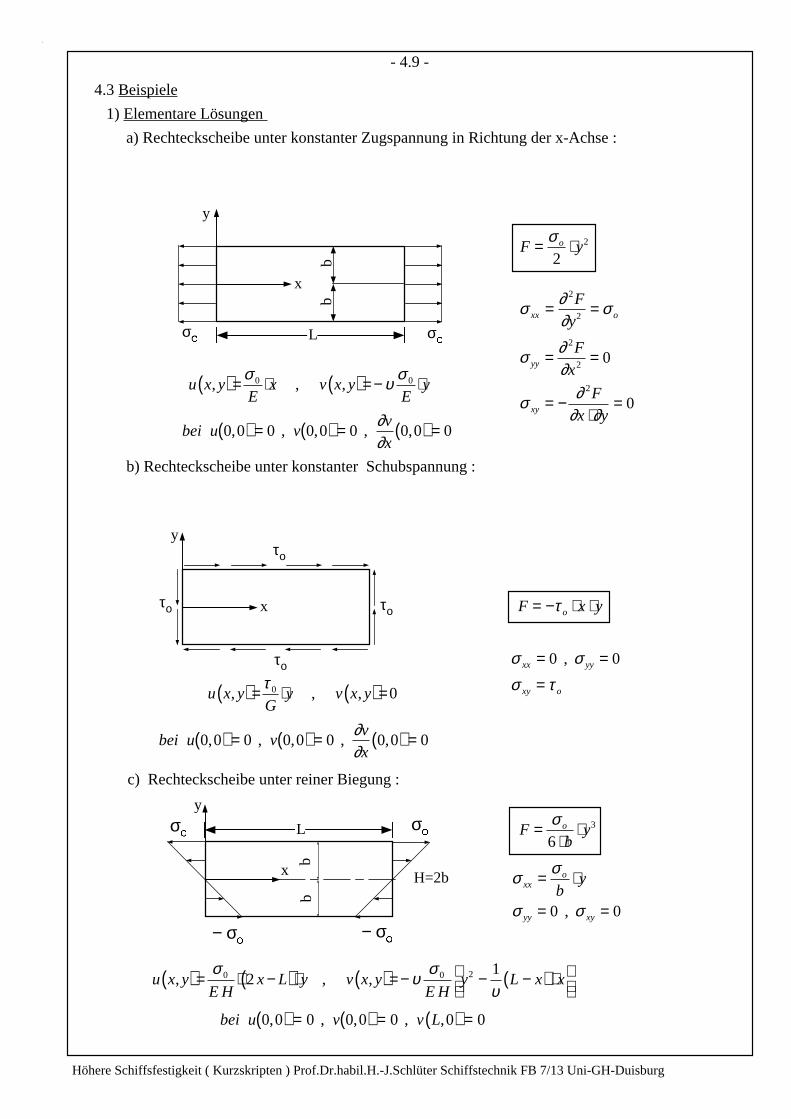
- 4.9 -
4.3 Beispiele
1) Elementare Lösungen
a) Rechteckscheibe unter konstanter Zugspannung in Richtung der x-Achse :
b) Rechteckscheibe unter konstanter Schubspannung :
c) Rechteckscheibe unter reiner Biegung :
y
x
σ σb
bL
y
x
τo
τo
τo
τo
y
x
bb
σσ
− σ− σ
L
H=2b
F yo= ⋅σ2
2
σ ∂∂
σ
σ ∂∂
σ ∂∂ ∂
xx o
yy
xy
F
y
F
x
F
x y
= =
= =
= −⋅
=
2
2
2
2
2
0
0
F x yo= − ⋅ ⋅τ
σ σσ τ
xx yy
xy o
= =
=
0 0,
Fb
yo=⋅
⋅σ6
3
σ σ
σ σ
xxo
yy xy
by= ⋅
= =0 0,
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
, , ,
, , , , ,
u x yE
x v x yE
y
bei u vv
x
( )= ⋅ ( )= − ⋅
( ) = ( ) = ( ) =
σ υ σ
∂∂
0 0
0 0 0 0 0 0 0 0 0
, , ,
, , , , ,
u x yG
y v x y
bei u vv
x
( )= ⋅ ( )=
( ) = ( ) = ( ) =
τ
∂∂
0 0
0 0 0 0 0 0 0 0 0
u x yE H
x L y v x yE H
y L x x
bei u v v L
, , ,
, , , , ,
( )= ⋅ −( )⋅ ( )= − − −( ) ⋅
( ) = ( ) = ( ) =
σ υ συ
0 0 221
0 0 0 0 0 0 0 0
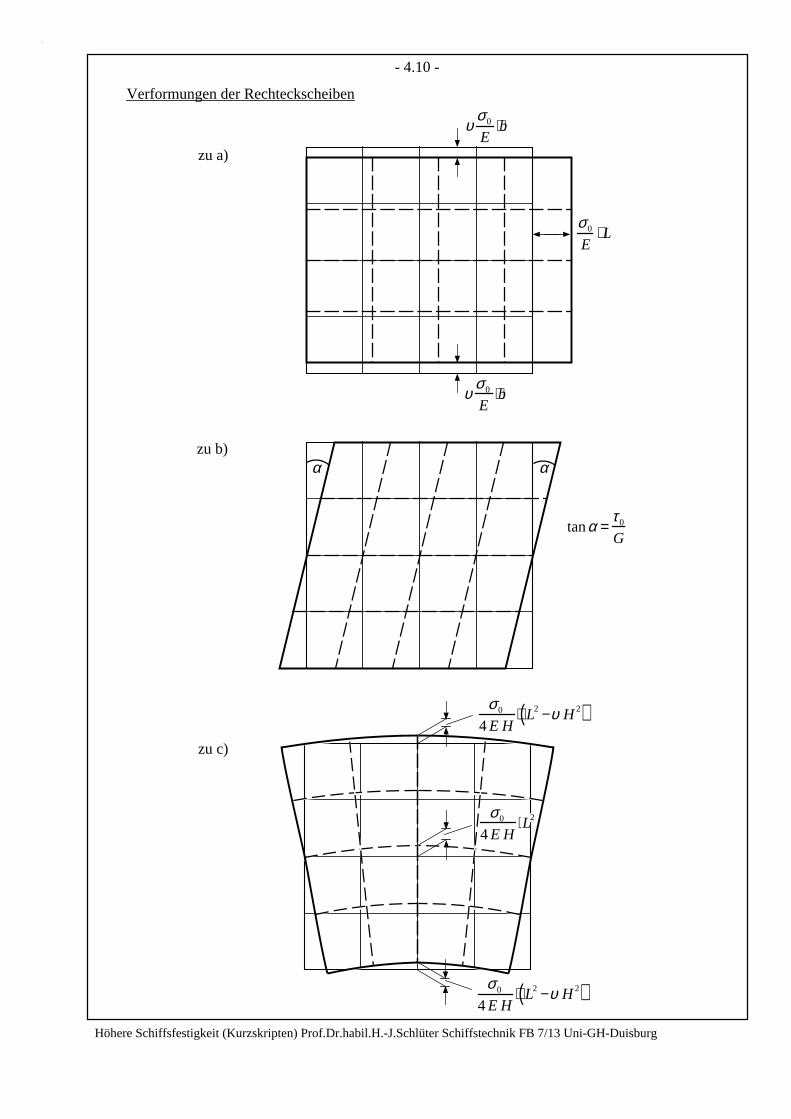
Höhere Schiffsfestigkeit (Kurzskripten) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
υ σ0
E⋅b
σ0
E⋅ L
tanα =τ0
G
σ0
4 E H⋅ L2 −υ H 2( )
υ σ0
E⋅b
αα
σ0
4 E H⋅L2
σ0
4 E H⋅ L2 −υ H 2( )
Verformungen der Rechteckscheiben
zu a)
zu b)
zu c)
- 4.10 -
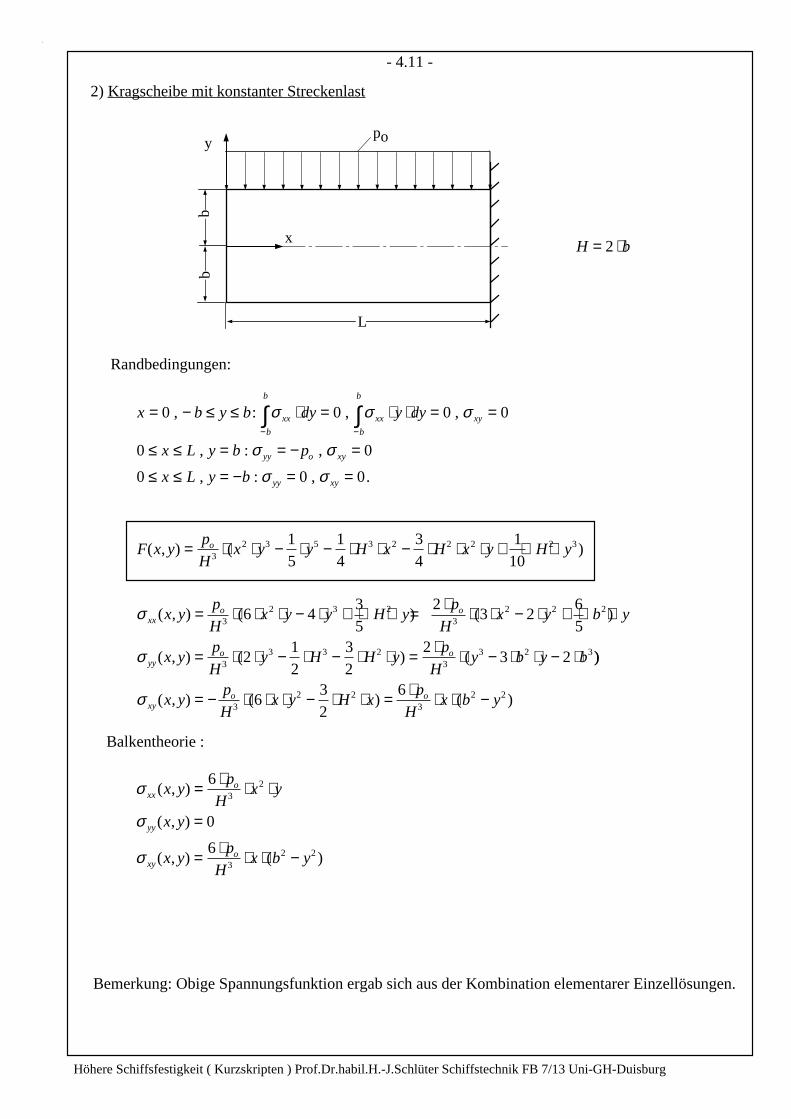
- 4.11 -
2) Kragscheibe mit konstanter Streckenlast
Bemerkung: Obige Spannungsfunktion ergab sich aus der Kombination elementarer Einzellösungen.
y
x
po
bb
L
x b y b dy y dy
x L y b p
x L y b
xx
b
b
xx
b
b
xy
yy o xy
yy xy
= − ≤ ≤ ⋅ = ⋅ ⋅ = =
≤ ≤ = = − =
≤ ≤ = − = =
− −∫ ∫0 0 0 0
0 0
0 0 0
, : , ,
, : ,
, : , .
σ σ σ
σ σσ σ
σ
σ
xxo o
yyo o
x yp
Hx y y H y
p
Hx y b y
x yp
Hy H H y
p
Hy b y b
( , ) ( ) ( )
( , ) ( ) (
= ⋅ ⋅ ⋅ − ⋅ + ⋅ ⋅ = ⋅ ⋅ ⋅ − ⋅ + ⋅ ⋅
= ⋅ ⋅ − ⋅ − ⋅ ⋅ = ⋅ ⋅ − ⋅ ⋅ − ⋅
32 3 2
32 2 2
33 3 2
33 2 3
6 435
23 2
65
212
32
23 2 ))
( , ) ( ) ( )σ xyo ox y
p
Hx y H x
p
Hx b y= − ⋅ ⋅ ⋅ − ⋅ ⋅ = ⋅ ⋅ ⋅ −3
2 23
2 2632
6
σ
σ
σ
xxo
yy
xyo
x yp
Hx y
x y
x yp
Hx b y
( , )
( , )
( , ) ( )
= ⋅ ⋅ ⋅
=
= ⋅ ⋅ ⋅ −
6
0
6
32
32 2
Balkentheorie :
Randbedingungen:
F x yp
Hx y y H x H x y H yo( , ) ( )= ⋅ ⋅ − ⋅ − ⋅ ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅3
2 3 5 3 2 2 2 2 315
14
34
110
H b= ⋅2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
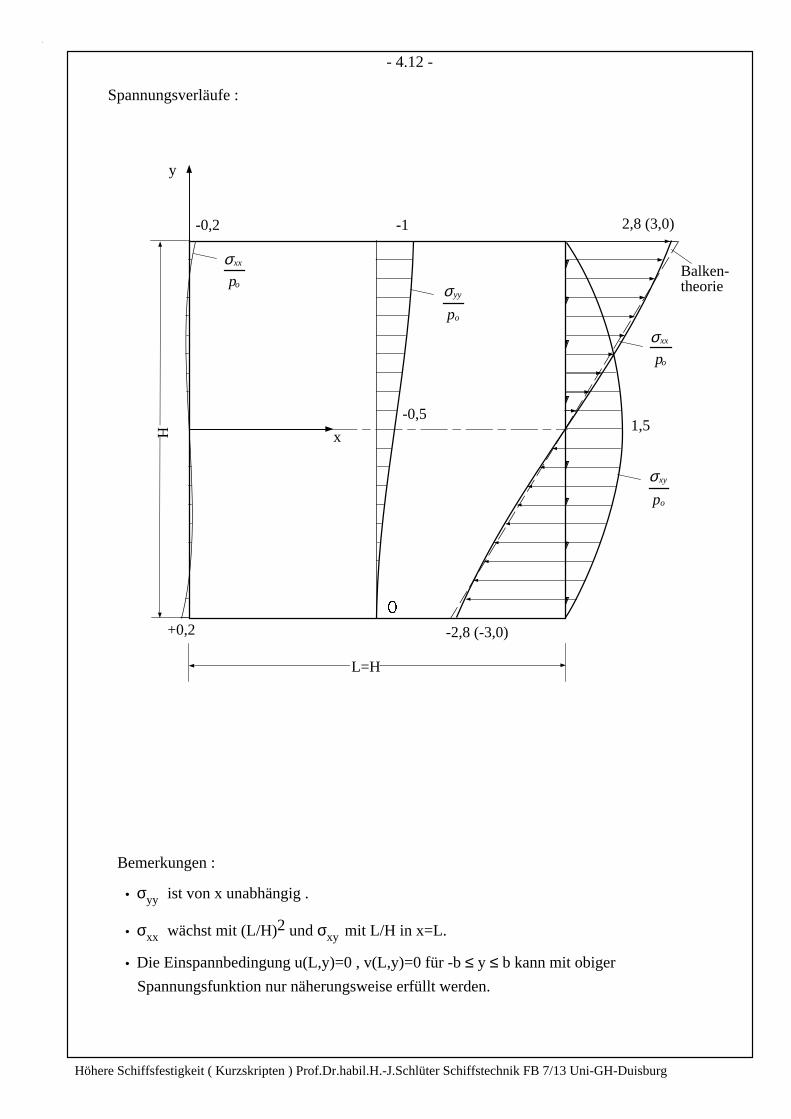
- 4.12 -
Spannungsverläufe :
y
x
-0,2 -1 2,8 (3,0)
-0,51,5
-2,8 (-3,0)+0,2
Balken-theorie
σxx
po σyy
po
σxx
po
σxy
po
H
L=H
Bemerkungen :
• σyy ist von x unabhängig .
• σxx wächst mit (L/H)2 und σxy mit L/H in x=L.
• Die Einspannbedingung u(L,y)=0 , v(L,y)=0 für -b ≤ y ≤ b kann mit obiger
Spannungsfunktion nur näherungsweise erfüllt werden.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
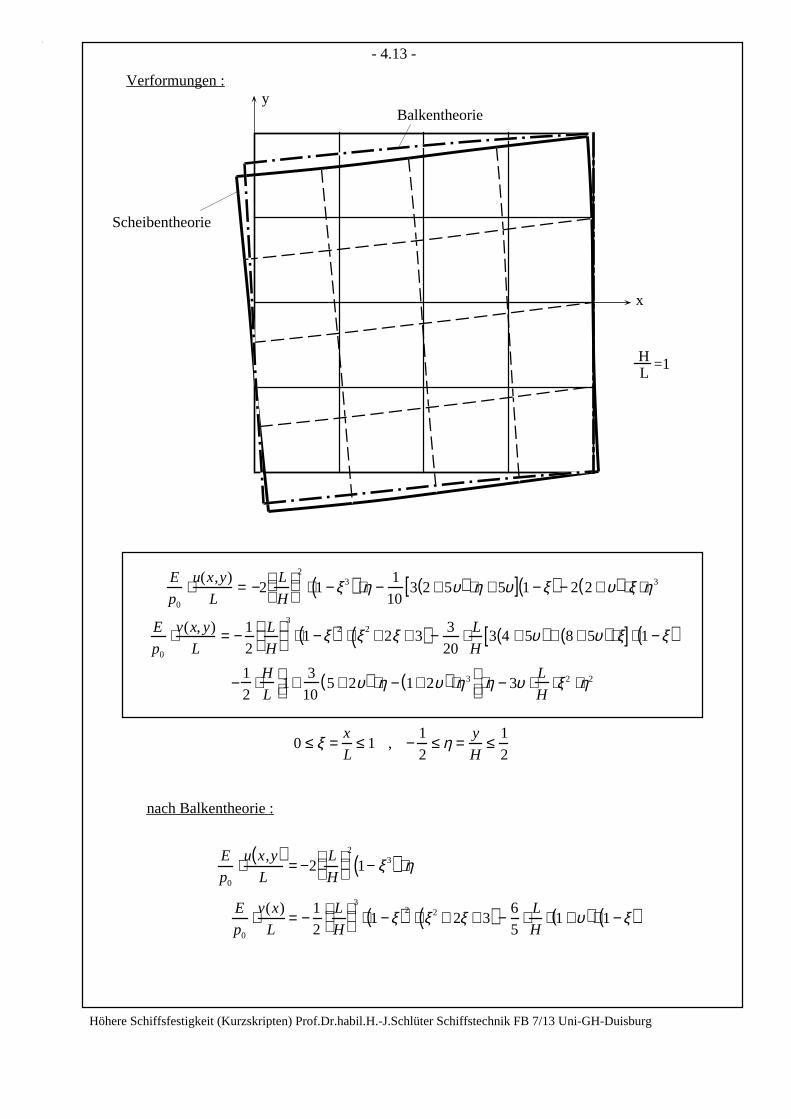
Höhere Schiffsfestigkeit (Kurzskripten) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Verformungen :
- 4.13 -
nach Balkentheorie :
E
p0
⋅u x,y( )
L= −2
L
H
2
1− ξ 3( ) ⋅η
E
p0
⋅v(x)
L= −
1
2
L
H
3
⋅ 1 −ξ( )2⋅ ξ 2 + 2ξ + 3( ) −
6
5⋅
L
H⋅ 1 +υ( )⋅ 1 −ξ( )
Balkentheorie
Scheibentheorie
y
x
HL
=1
E
p0
⋅u(x,y)
L= −2
L
H
2
⋅ 1 −ξ 3( )⋅η −1
103 2 + 5υ( ) ⋅η + 5υ[ ] 1 −ξ( ) − 2 2 + υ( ) ⋅ξ ⋅η3
E
p0
⋅ v(x, y)
L= − 1
2
L
H
3
⋅ 1 −ξ( )2 ⋅ ξ 2 + 2ξ + 3( ) − 3
20⋅ L
H3 4 + 5υ( ) + 8 + 5υ( )⋅ ξ[ ]⋅ 1 −ξ( )
−1
2⋅H
L1+
3
105 + 2υ( ) ⋅η − 1+ 2υ( )⋅η3
⋅η − 3υ ⋅L
H⋅ξ 2 ⋅η2
0 ≤ ξ =x
L≤ 1 , −
1
2≤ η =
y
H≤
1
2
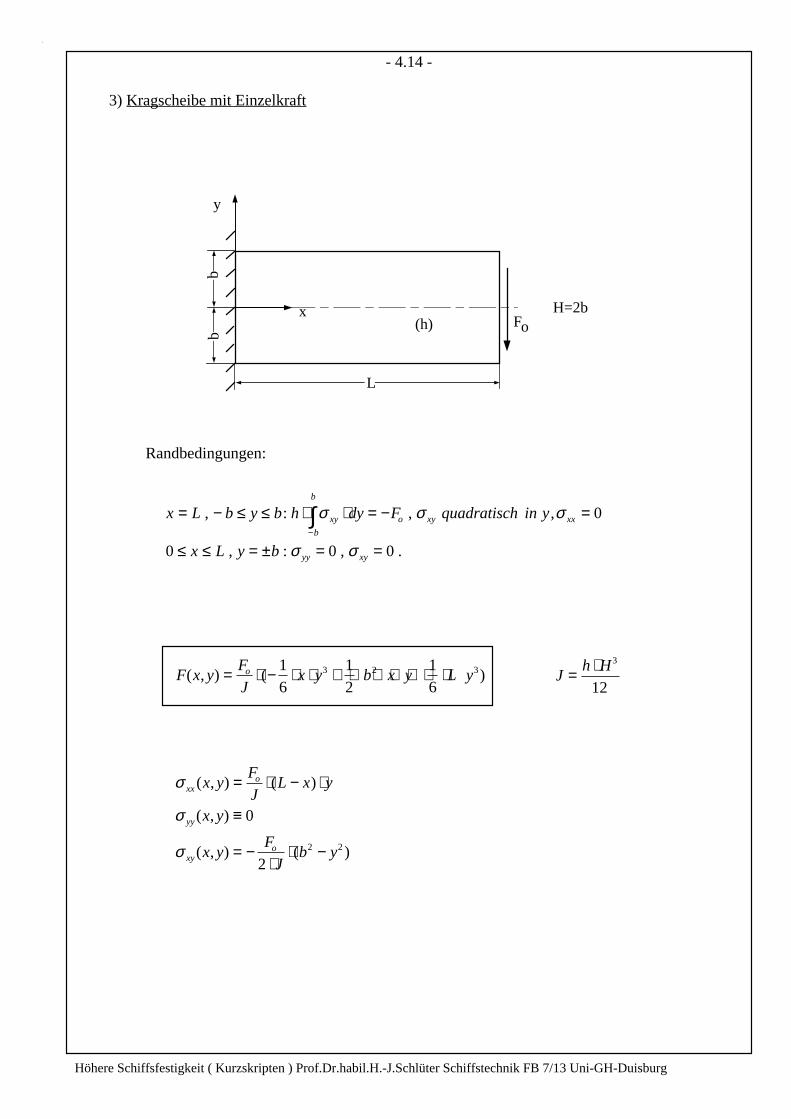
- 4.14 -
3) Kragscheibe mit Einzelkraft
y
x
bb
L
Fo(h)H=2b
x L b y b h dy F quadratisch in y
x L y b
xy
b
b
o xy xx
yy xy
= − ≤ ≤ ⋅ ⋅ = − =
≤ ≤ = ± = =−∫, : , ,
, : , .
σ σ σ
σ σ
0
0 0 0
σ
σ
σ
xxo
yy
xyo
x yF
JL x y
x y
x yF
Jb y
( , ) ( )
( , )
( , ) ( )
= ⋅ − ⋅
≡
= −⋅
⋅ −
0
22 2
Randbedingungen:
F x yF
Jx y b x y L yo( , ) ( )= ⋅ − ⋅ ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅1
612
16
3 2 3 Jh H= ⋅ 3
12
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
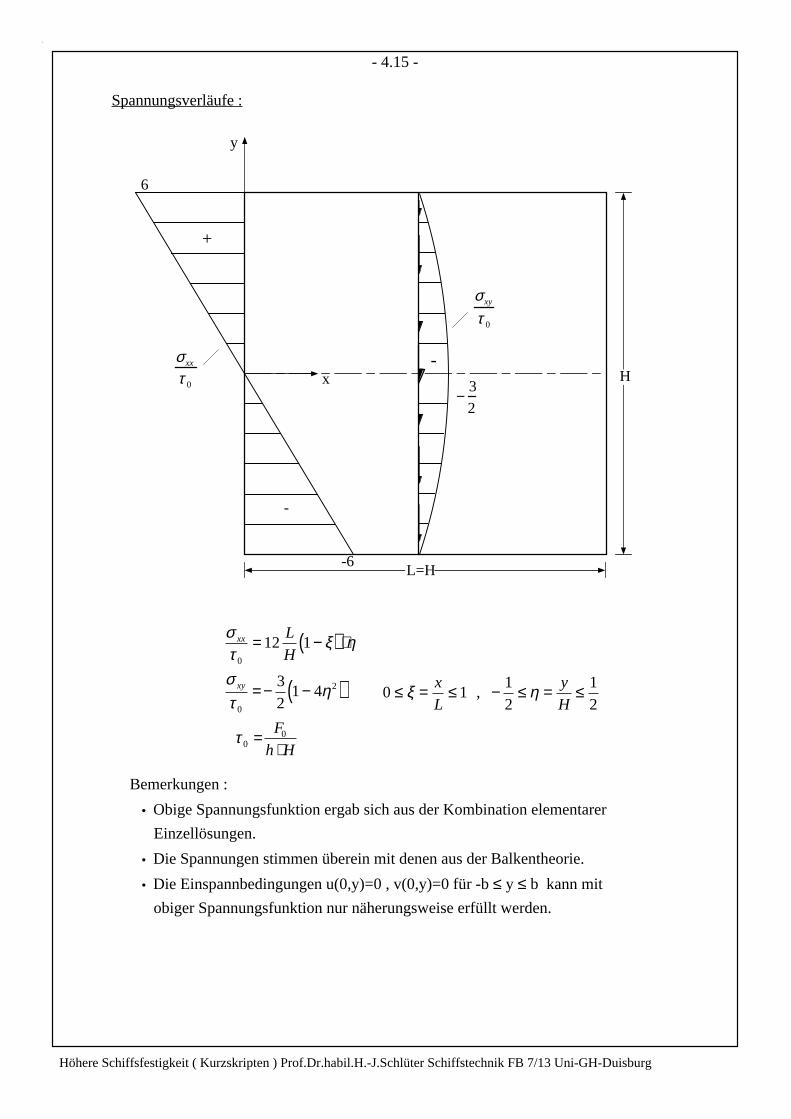
- 4.15 -
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
−3
2
x
y
+
-
L=H
H
6
-
-6
σxx
τ 0
σxy
τ 0
Spannungsverläufe :
Bemerkungen :
• Obige Spannungsfunktion ergab sich aus der Kombination elementarer
Einzellösungen.
• Die Spannungen stimmen überein mit denen aus der Balkentheorie.
• Die Einspannbedingungen u(0,y)=0 , v(0,y)=0 für -b ≤ y ≤ b kann mit
obiger Spannungsfunktion nur näherungsweise erfüllt werden.
στ
ξ η
στ
η
τ
xx
xy
L
H
F
h H
0
0
2
00
12 1
32
1 4
= −( ) ⋅
= − −( )
=⋅
0 112
12
≤ = ≤ − ≤ = ≤ξ ηx
L
y
H ,
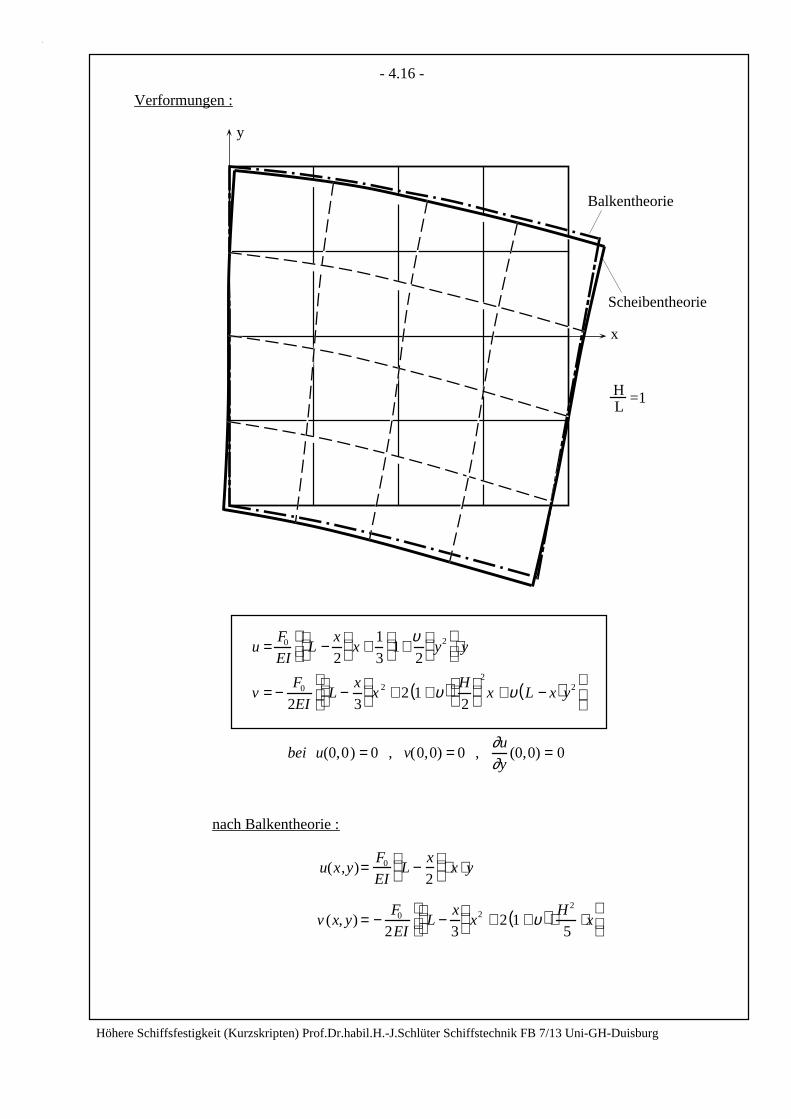
Höhere Schiffsfestigkeit (Kurzskripten) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Verformungen :
- 4.16 -
u =F0
EIL −
x
2
x +
1
31+
υ2
y2
⋅ y
bei u(0,0) = 0 , v(0,0) = 0 ,∂u
∂y(0,0) = 0
v = −F0
2EIL −
x
3
x 2 + 2 1 +υ( ) H
2
2
x +υ L − x( )y2
y
x
Balkentheorie
Scheibentheorie
HL
=1
u(x,y)=F0
EIL −
x
2
⋅ x ⋅ y
v (x, y) = −F0
2EIL −
x
3
x2 + 2 1 +υ( )⋅
H 2
5⋅ x
nach Balkentheorie :

- 4.17 -
4) Dreieckscheibe mit Dreieckslast
y
x
po
L
p(x)
y = −H
L⋅ x
Hp(x) = po ⋅
x
L
0 0 0
0 0 0
≤ ≤ = = − ⋅ =
≤ ≤ = − ⋅ + ⋅ = + ⋅ =
x L y px
L
x L yH
Lx
H
L
H
L
yy o xy
xy xx yy xy
, : ,
, : , .
σ σ
σ σ σ σ
σ
σ
σ
xx o
yy o
xy o
x y pL
H
x
L
y
H
x y px
Lx L
x y pL
H
y
H
H
Lx y
( , ) ( ) ( )
( , )
( , )
= ⋅ ⋅ + ⋅
= − ⋅ ≤ ≤
= − ⋅ ⋅ − ⋅ ≤ ≤
2 2
0
0
Randbedingungen:
F x y p Lx
L
x
L
y
H
y
Ho( , ) ( ) ( ) ( ) ( )= ⋅ ⋅ − ⋅ + ⋅ ⋅ + ⋅
2 3 2 316
12
13
Bemerkungen : Die Einspannbedingungen u(L,y)=0 , v(L,y)=0 für -H ≤ y ≤ 0 kann mit
obiger Spannungsfunktion nur näherungsweise erfüllt werden.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
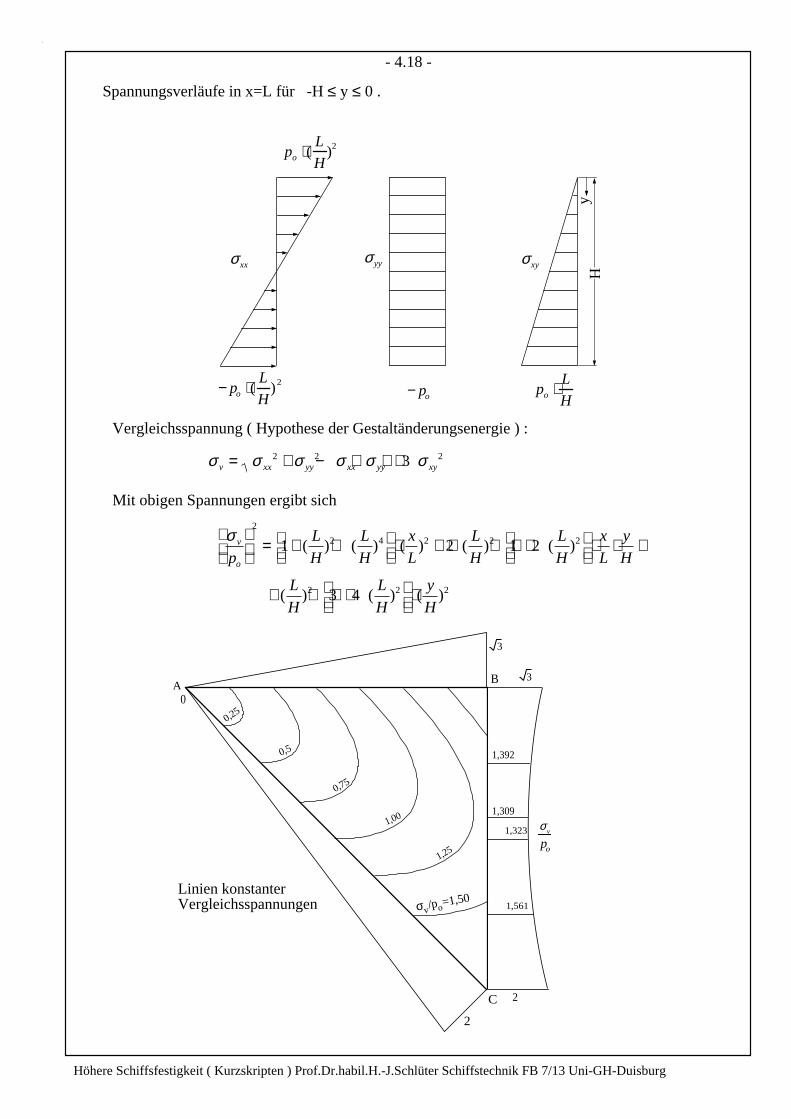
- 4.18 -
Spannungsverläufe in x=L für -H ≤ y ≤ 0 .
H
y
po ⋅(L
H)2
− po ⋅(L
H)2
σxxσyy σxy
po ⋅L
H− po
Vergleichsspannung ( Hypothese der Gestaltänderungsenergie ) :
Mit obigen Spannungen ergibt sich
σ σ σ σ σ σv xx yy xx yy xy= + − ⋅ + ⋅2 2 23
σ v
op
L
H
L
H
x
L
L
H
L
H
x
L
y
H
L
H
L
H
y
H
= + +
⋅ + ⋅ ⋅ + ⋅
⋅ ⋅ +
+ ⋅ + ⋅
⋅
2
2 4 2 2 2
2 2 2
1 2 1 2
3 4
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
BA
C 2
2
0
1,392
1,309
1,323
1,25
1,00
0,75
0,5
0,25
σv
po
σv/po=1,501,561
3
3
Linien konstanterVergleichsspannungen
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
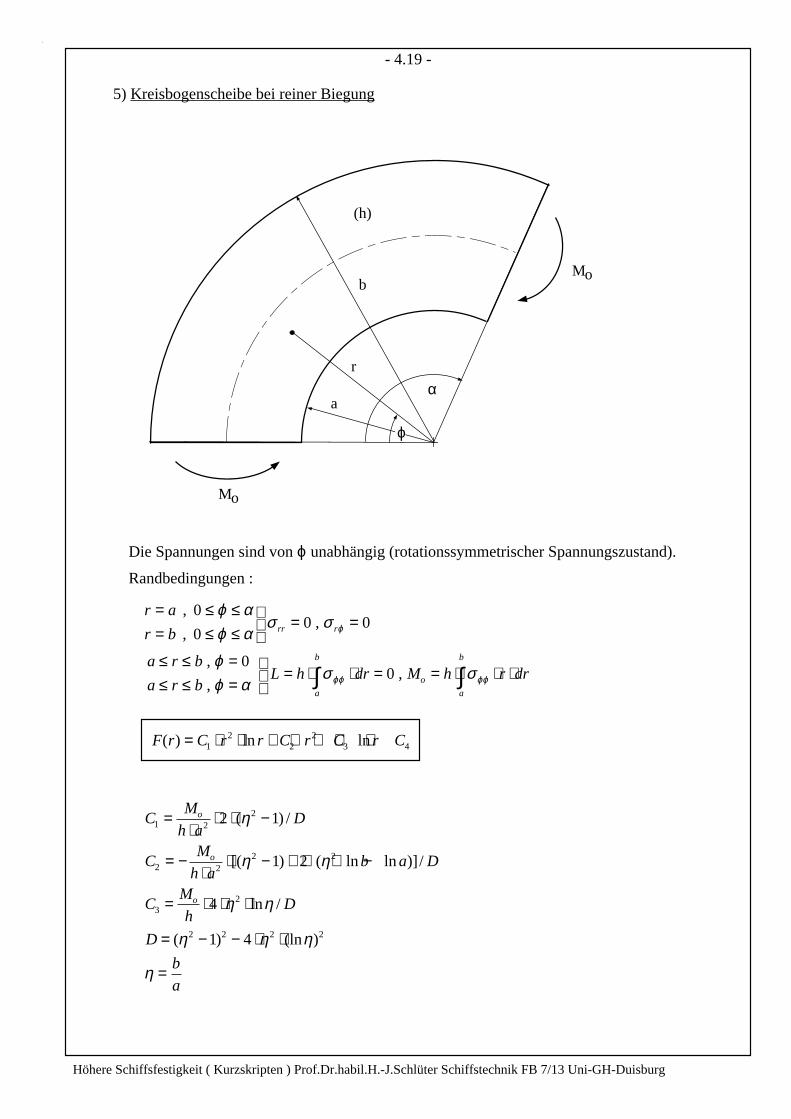
- 4.19 -
5) Kreisbogenscheibe bei reiner Biegung
(h)
b
r
a
ϕ
α
Mo
Mo
Die Spannungen sind von ϕ unabhängig (rotationssymmetrischer Spannungszustand).
Randbedingungen :
r a
r b
a r b
a r bL h dr M h r dr
rr r
o
a
b
a
b
= ≤ ≤= ≤ ≤
= =
≤ ≤ =≤ ≤ =
= ⋅ ⋅ = = ⋅ ⋅ ⋅∫ ∫
,
,,
,
,,
0
00 0
00
ϕ αϕ α
σ σ
ϕϕ α
σ σ
ϕ
ϕϕ ϕϕ
F r C r r C r C r C( ) ln ln= ⋅ ⋅ + ⋅ + ⋅ +12
22
3 4
CM
h aD
CM
h ab a D
CM
hD
D
b
a
o
o
o
1 22
2 22 2
32
2 2 2 2
2 1
1 2
4
1 4
=⋅
⋅ ⋅ −
= −⋅
⋅ − + ⋅ ⋅ −
= ⋅ ⋅ ⋅
= − − ⋅ ⋅
=
( ) /
[( ) ( ln ln )]/
ln /
( ) (ln )
η
η η
η η
η η η
η
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
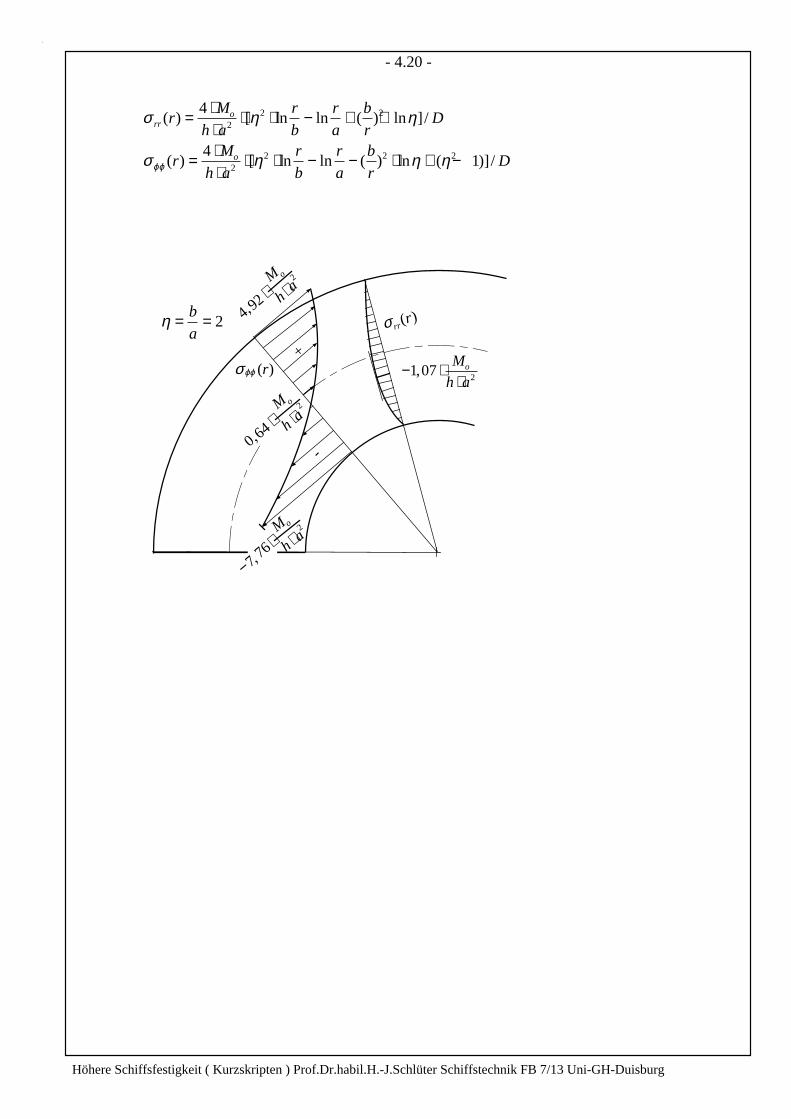
- 4.20 -
σ η η
σ η η ηϕϕ
rro
o
rM
h a
r
b
r
a
b
rD
rM
h a
r
b
r
a
b
rD
( ) [ ln ln ( ) ln ]/
( ) [ ln ln ( ) ln ( )]/
= ⋅⋅
⋅ ⋅ − + ⋅
= ⋅⋅
⋅ ⋅ − − ⋅ + −
4
41
22 2
22 2 2
+
-
σ rr(r)
σϕϕ (r)
0,64 ⋅M o
h ⋅a2
4,92 ⋅M o
h ⋅ a2
η = =b
a2
− ⋅⋅
1 07 2,M
h ao
−7,76 ⋅
M o
h ⋅ a2
η = =b
a2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
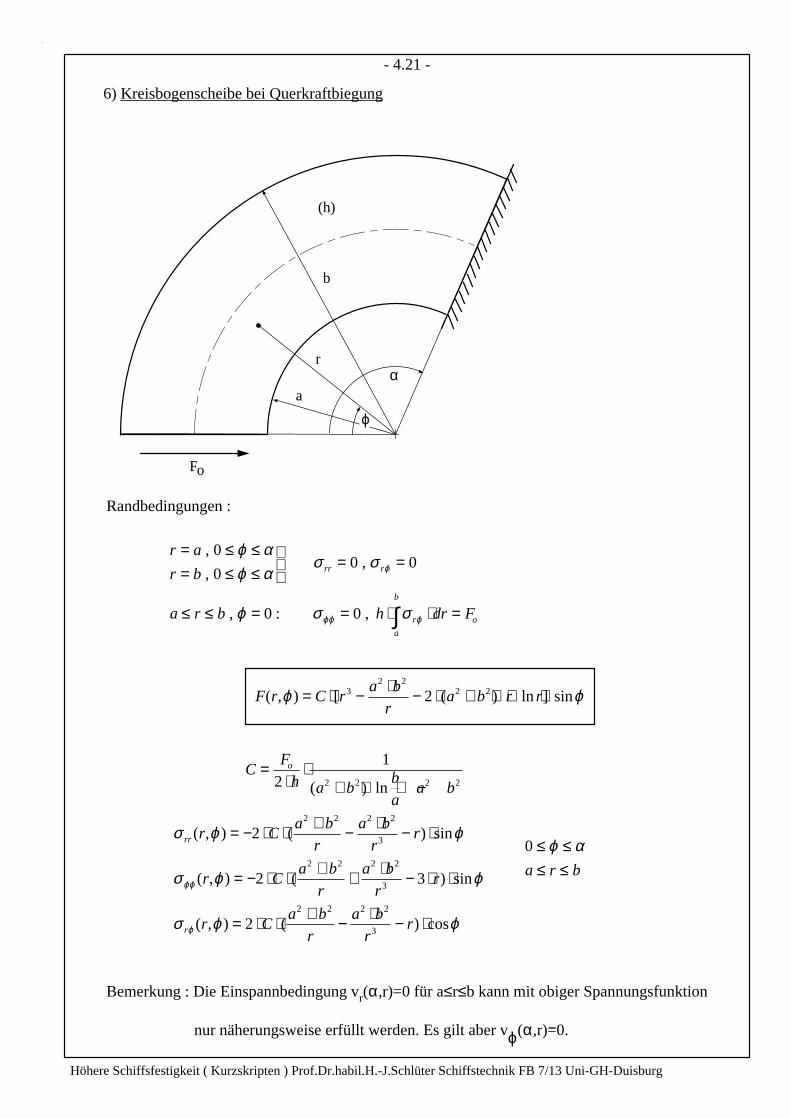
- 4.21 -
6) Kreisbogenscheibe bei Querkraftbiegung
Randbedingungen :
Bemerkung : Die Einspannbedingung vr(α,r)=0 für a≤r≤b kann mit obiger Spannungsfunktion
nur näherungsweise erfüllt werden. Es gilt aber vϕ(α,r)=0.
r a
r b
a r b h dr F
rr r
r o
a
b
= ≤ ≤= ≤ ≤
= =
≤ ≤ = = ⋅ ⋅ =∫
,
,,
, : ,
0
00 0
0 0
ϕ αϕ α
σ σ
ϕ σ σ
ϕ
ϕϕ ϕ
F r C ra b
ra b r r( , ) [ ( ) ln ] sinϕ ϕ= ⋅ − ⋅ − ⋅ + ⋅ ⋅ ⋅3
2 22 22
ϕ
(h)
b
r
aα
Fo
CF
h a bb
aa b
r Ca b
r
a b
rr
r Ca b
r
a b
rr
r Ca b
r
o
rr
r
=⋅
⋅+ ⋅ + −
= − ⋅ ⋅ + − ⋅ − ⋅
= − ⋅ ⋅ + + ⋅ − ⋅ ⋅
= ⋅ ⋅ +
21
2
2 3
2
2 2 2 2
2 2 2 2
3
2 2 2 2
3
2 2
( ) ln
( , ) ( ) sin
( , ) ( ) sin
( , ) (
σ ϕ ϕ
σ ϕ ϕ
σ ϕ
ϕϕ
ϕ −− ⋅ − ⋅a b
rr
2 2
3 ) cosϕ
0 ≤ ≤≤ ≤
ϕ αa r b
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
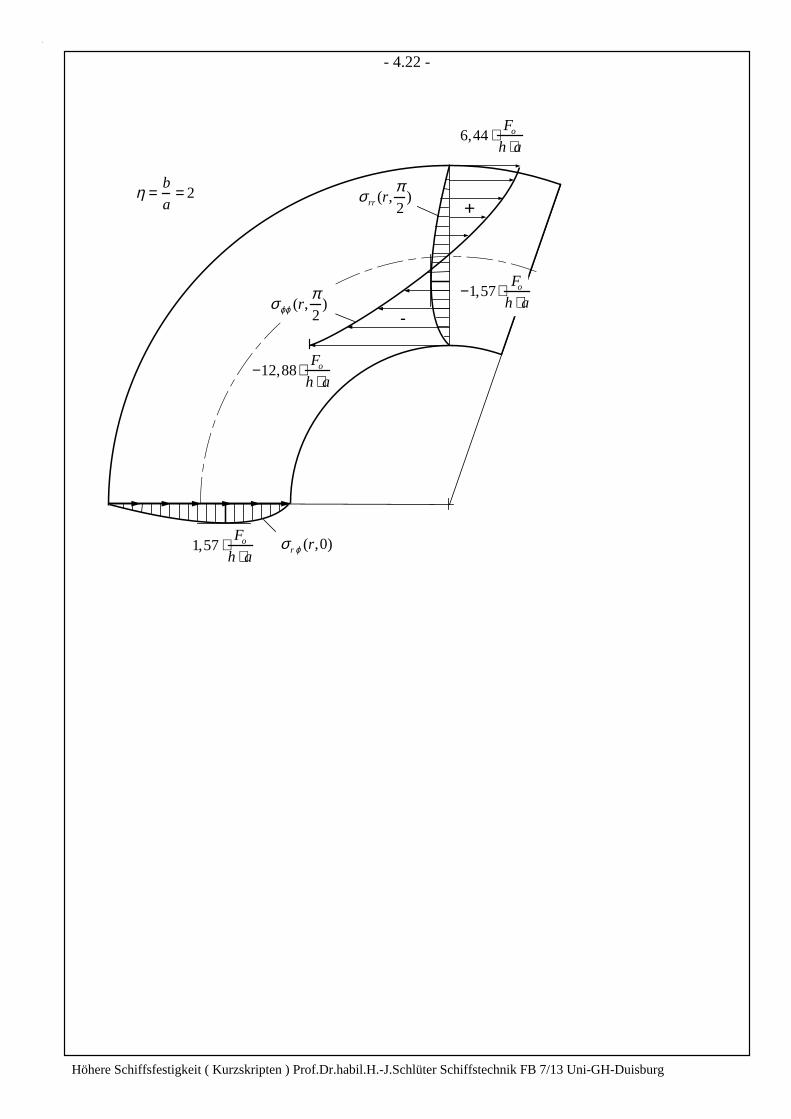
+
-
6,44 ⋅Fo
h ⋅a
−1,57 ⋅Fo
h ⋅ a
−12,88 ⋅Fo
h ⋅ a
σrr (r,π2
)
σϕϕ (r,π2
)
η =b
a= 2
1,57 ⋅Fo
h ⋅ aσr ϕ (r,0)
- 4.22 -
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 5.1 -
5. Die dünne Platte
Voraussetzungen (Hypothesen)
• Die äußere Belastung erfolgt senkrecht zur Plattenebene.
• Die Plattendicke h ist sehr klein im Vergleich zu den Abmessungen der Platte in der Plat-
tenebene.
• h=const.
• Es gilt die Bernoullische Verformungshypothese.
• Die Deformationen sind sehr klein.
• Die Durchbiegung w ist klein (< h/5) und unabhängig von der Dickenkoordinate z.
• Der Werkstoff ist homogen und isotrop.
• Es gilt das Hookesche Werkstoffgesetz.
• Die Normalspannung σzz ist vernachlässigbar klein.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
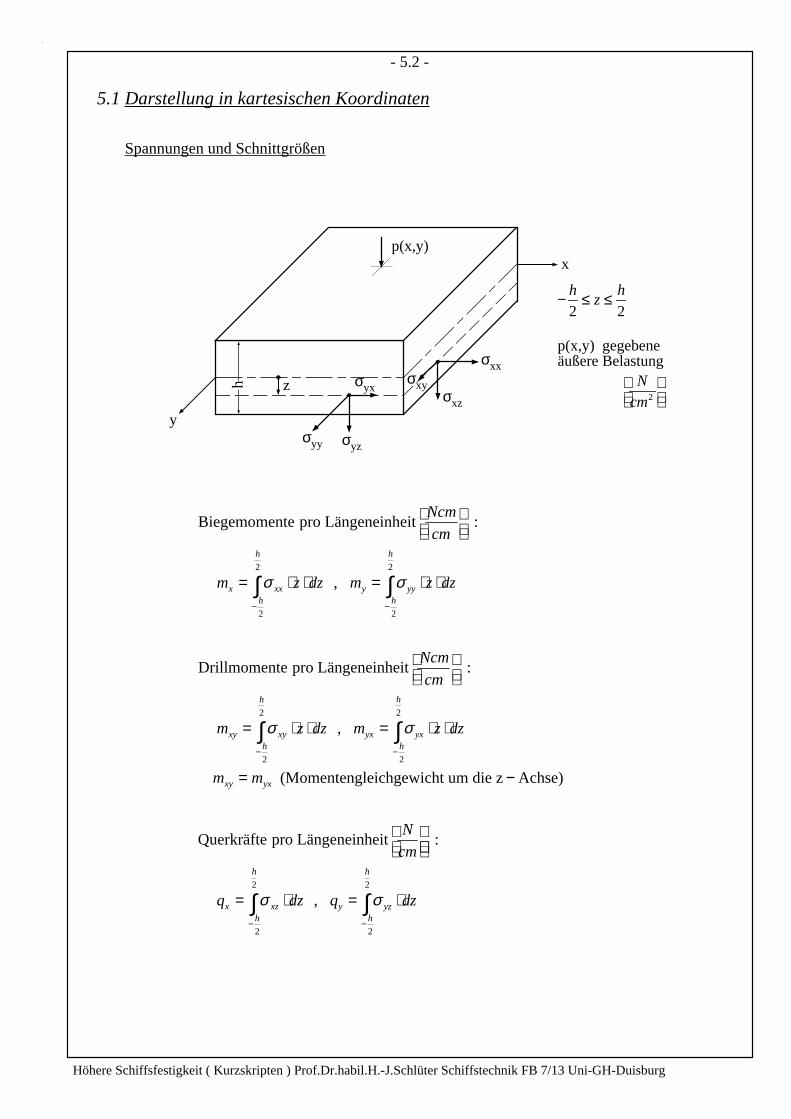
- 5.2 -
5.1 Darstellung in kartesischen Koordinaten
Spannungen und Schnittgrößen
hp(x,y)
x
σxx
σxz
σxy
σyy σyz
σyxz
y
− ≤ ≤hz
h
2 2
p(x,y) gegebeneäußere Belastung
N
cm2
Biegemomente pro Längeneinheit
Drillmomente pro Längeneinheit
(Momentengleichgewicht um die z Achse)
Querkräfte pro Längeneinheit
Ncm
cm
m z dz m z dz
Ncm
cm
m z dz m z dz
m m
N
cm
x xxh
h
y yyh
h
xy xyh
h
yx yxh
h
xy yx
= ⋅ ⋅ = ⋅ ⋅
= ⋅ ⋅ = ⋅ ⋅
= −
− −
− −
∫ ∫
∫ ∫
:
,
:
,
σ σ
σ σ
2
2
2
2
2
2
2
2
= ⋅ = ⋅− −
∫ ∫
:
, q dz q dzx xzh
h
y yzh
h
σ σ
2
2
2
2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
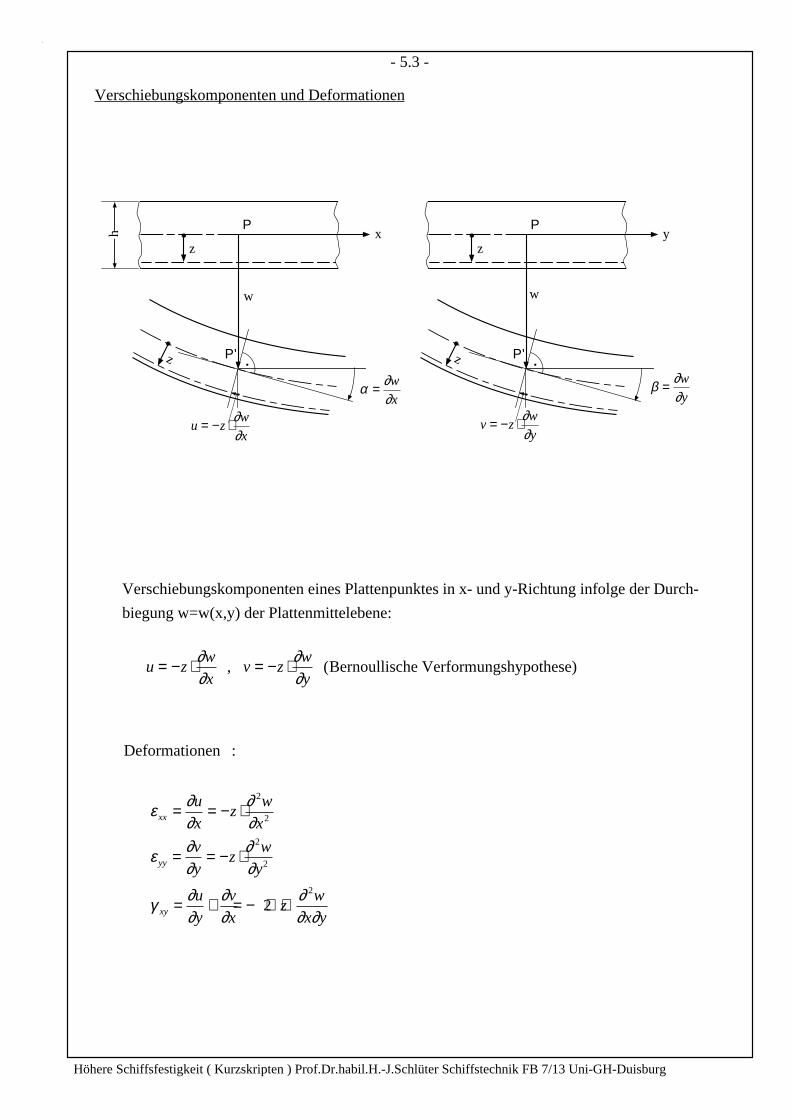
- 5.3 -
Verschiebungskomponenten und Deformationen
Verschiebungskomponenten eines Plattenpunktes in x- und y-Richtung infolge der Durch-
biegung w=w(x,y) der Plattenmittelebene:
, (
u zw
xv z
w
y
u
xz
w
x
v
yz
w
y
u
y
v
xz
w
x y
xx
yy
xy
= − ⋅ = − ⋅
= = − ⋅
= = − ⋅
= + = − ⋅ ⋅
∂∂
∂∂
ε ∂∂
∂∂
ε ∂∂
∂∂
γ ∂∂
∂∂
∂∂ ∂
Bernoullische Verformungshypothese)
Deformationen :
2
2
2
2
2
2
xP
w
z
h
z P'
u zw
x= − ⋅ ∂
∂
α ∂∂
= w
x
yP
w
z
z P'
v zw
y= − ⋅ ∂
∂
β ∂∂
= w
y
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.4 -
Hookesches Materialgesetz
Mit dem Hookeschen Materialgesetz für den ebenen Spannungszustand (Siehe Abschn.4.1)
und den Deformationen für die Platte ergibt sich:
συ
∂∂
υ ∂∂ υ
α
συ
∂∂
υ ∂∂ υ
α
συ
∂∂ ∂
xx
yy
xy
E z w
x
w
y
ET
E z w
y
w
x
ET
E z w
x y
= − ⋅−
⋅ + ⋅ −−
⋅ ⋅
= − ⋅−
⋅ + ⋅ −−
⋅ ⋅
= − ⋅+
⋅
1 1
1 1
1
2
2
2
2
2
2
2
2
2
2
2
( )
( )
Bemerkung : Die Plattenspannungen σxx , σyy , σxy sind linear abhängig von der Dicken-
koordinate z. In der Plattenmittelfläche sind diese Spannungen null, wenn T(x,y,0)= 0.
Für die Schnittmomente gilt:
m Kw
x
w
ym
m Kw
y
w
xm
m Kw
x y
x T
y T
xy
= − ⋅ + ⋅ −
= − ⋅ + ⋅ −
= − − ⋅ ⋅
( )
( )
( )
∂∂
υ ∂∂
∂∂
υ ∂∂
υ ∂∂ ∂
2
2
2
2
2
2
2
2
2
1
KE h= ⋅⋅ −
3
212 1( )υ
Plattenbiegesteifigkeit
Die Spannungen durch die Schnittgrößen ausgedrückt:
συ
α
συ
α
σ
xx x T
yy y T
xy xy
z
hm m
ET
z
hm m
ET
z
hm
= ⋅ ⋅ + −−
⋅ ⋅
= ⋅ ⋅ + −−
⋅ ⋅
= ⋅ ⋅
121
121
12
3
3
3
( )
( )
mE
T z dz
T T x y z
Th
h
= ⋅−
⋅ ⋅ ⋅
=
−
∫αυ1
2
2
Temperaturmoment
gegebenes Temperaturfeld( , , )
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
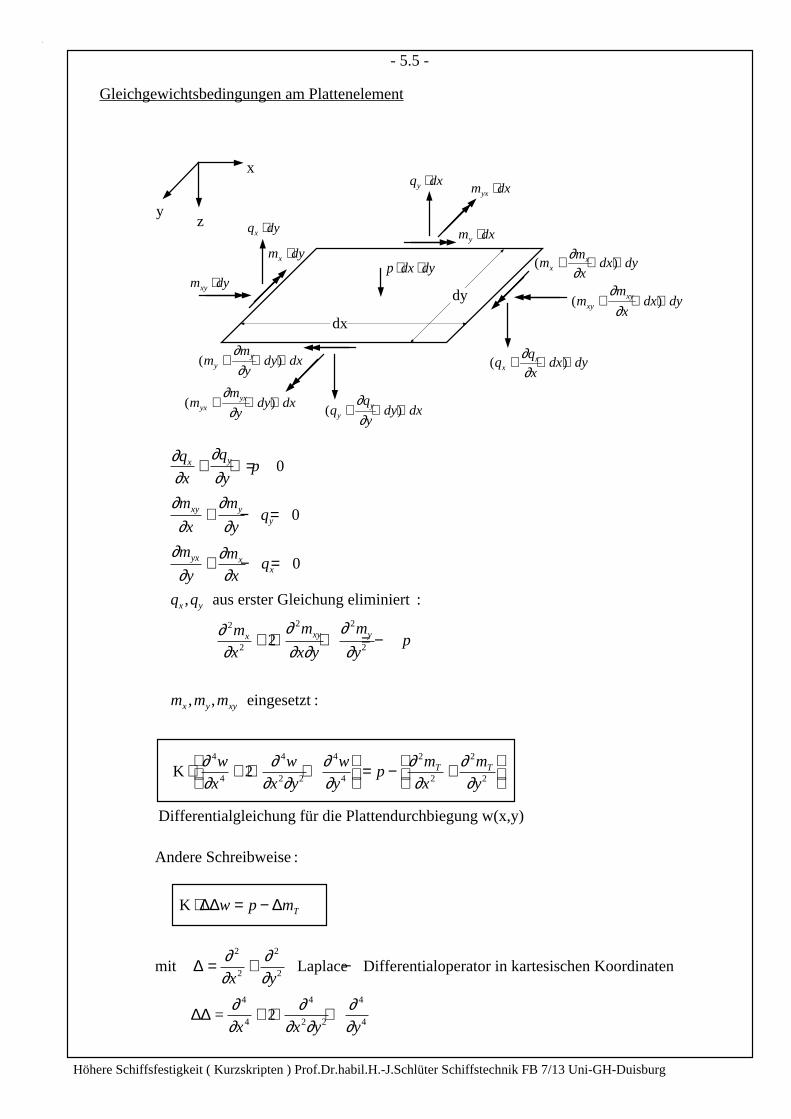
- 5.5 -
Gleichgewichtsbedingungen am Plattenelement
x
zy
p dx dy⋅ ⋅
m dxyx ⋅
m dyxy ⋅
m dxy ⋅m dyx ⋅
q dyx ⋅
q dxy ⋅
ydy dxy
y+ ⋅ ⋅∂∂
xdx dyx
x+ ⋅ ⋅∂∂
( )mm
ydy dxy
y+ ⋅ ⋅∂∂
( )mm
xdx dyx
x+ ⋅ ⋅∂∂
( )mm
ydy dxyx
yx+ ⋅ ⋅∂∂
( )mm
xdx dyxy
xy+ ⋅ ⋅∂∂
dx
dy
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂ ∂
∂∂
q
x
q
yp
m
x
m
yq
m
y
m
xq
q q
m
x
m
x y
m
yp
m m m
x y
xy yy
yx xx
x y
x xy y
x y xy
+ + =
+ − =
+ − =
+ ⋅ + = −
0
0
0
22
2
2 2
2
,
, ,
aus erster Gleichung eliminiert :
eingesetzt :
K4 4 4
⋅ + ⋅ +
= − +
∂∂
∂∂ ∂
∂∂
∂∂
∂∂
w
x
w
x y
w
yp
m
x
m
yT T
4 2 2 4
2
2
2
22
Differentialgleichung für die Plattendurchbiegung w(x,y)
Andere Schreibweise :
K
mit Laplace Differentialoperator in kartesischen Koordinaten
=
⋅ = −
= + −
+ ⋅ +
∆∆ ∆
∆
∆∆
w p m
x y
x x y y
T
∂∂
∂∂
∂∂
∂∂ ∂
∂∂
2
2
2
2
4
4
4
2 2
4
42
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
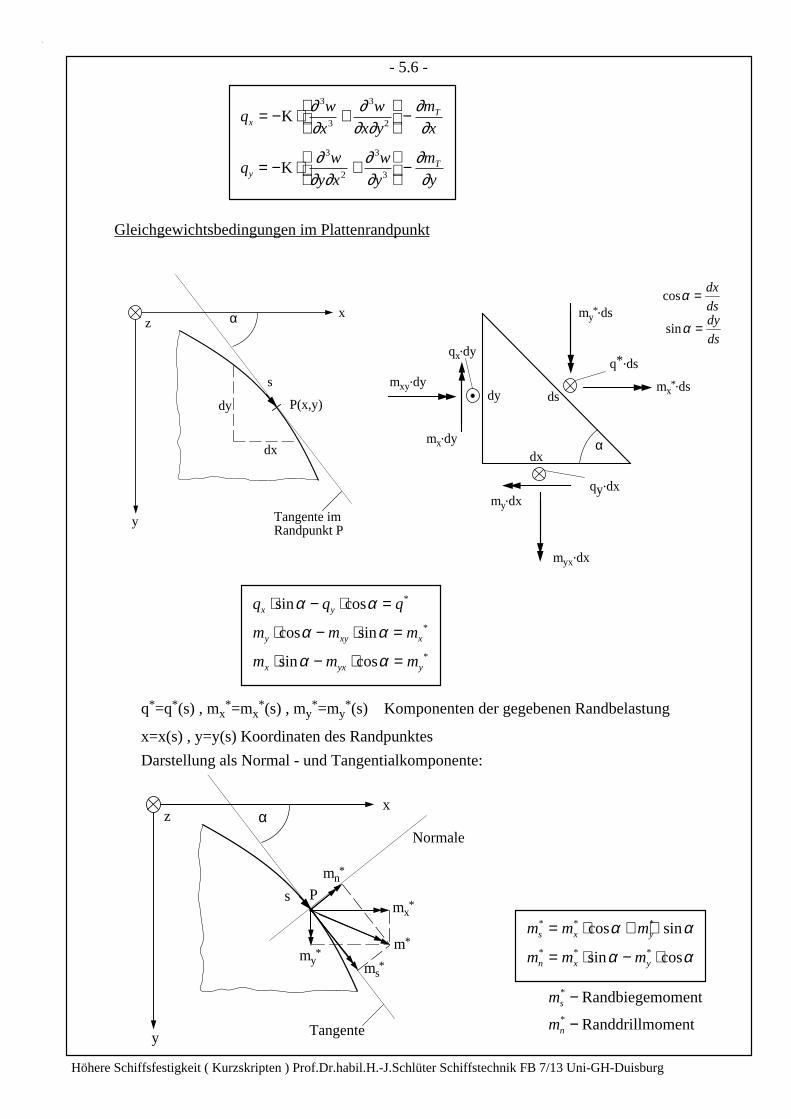
s
P(x,y)
dx
dy
α
Tangente imRandpunkt P
x
y
z
αdx
dy ds
myx.dx
my.dx
mx*.ds
my*.ds
mx.dy
mxy.dy
q*.ds
qy.dx
qx.dy
cosα = dx
ds
sinα = dy
ds
qw
x
w
x y
m
x
qw
y x
w
y
m
y
xT
yT
= − ⋅ +
−
= − ⋅ +
−
K
K
3 3
3 3
∂∂
∂∂ ∂
∂∂
∂∂ ∂
∂∂
∂∂
3 2
2 3
q q q
m m m
m m m
x y
y xy x
x yx y
⋅ − ⋅ =
⋅ − ⋅ =
⋅ − ⋅ =
sin cos
cos sin
sin cos
*
*
*
α α
α α
α α
s P
α
Tangente
x
y
z
mx*
my*
mn*
m*
ms*
Normale
- 5.6 -
q*=q*(s) , mx*=mx
*(s) , my*=my
*(s) Komponenten der gegebenen Randbelastung
x=x(s) , y=y(s) Koordinaten des Randpunktes
Darstellung als Normal - und Tangentialkomponente:
Gleichgewichtsbedingungen im Plattenrandpunkt
m
m
s
n
*
*
−
−
Randbiegemoment
Randdrillmoment
m m m
m m m
s x y
n x y
* * *
* * *
cos sin
sin cos
= ⋅ + ⋅
= ⋅ − ⋅
α α
α α
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
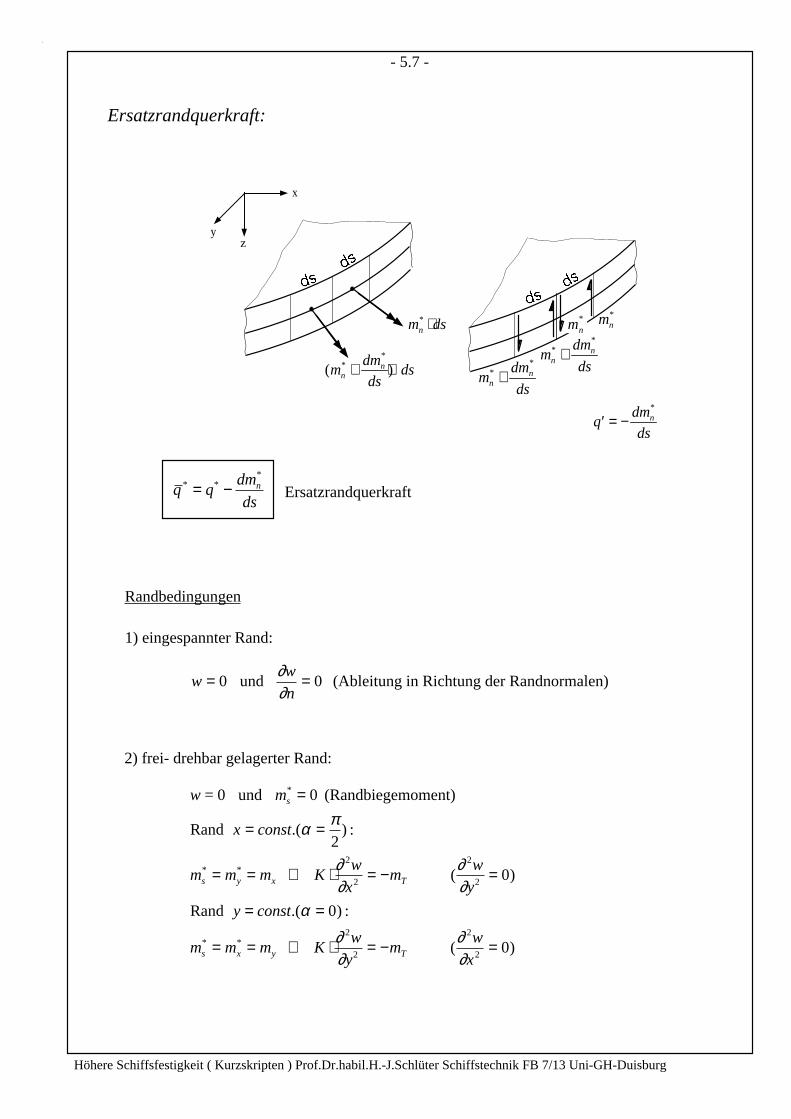
- 5.7 -
Ersatzrandquerkraft:
Randbedingungen
1) eingespannter Rand:
ww
n= =0 0 und (Ableitung in Richtung der Randnormalen)
∂∂
2) frei- drehbar gelagerter Rand:
w m
x const
m m m Kw
xm
w
y
y const
m m m Kw
ym
w
x
s
s y x T
s x y T
= und (Randbiegemoment)
Rand
Rand
0 0
2
0
0
0
2
2
2
2
2
2
2
2
.( ) :
( )
.( ) :
( )
*
* *
* *
=
= =
= = ⇒ ⋅ = − =
= =
= = ⇒ ⋅ = − =
α π
∂∂
∂∂
α∂∂
∂∂
m dsn* ⋅
( )**
mdm
dsdsn
n+ ⋅
x
zy
mn*
mn*
mdm
dsnn**
+m
dm
dsnn**
+
′ = −qdm
dsn*
Ersatzrandquerkraftq qdm
dsn* **
= −
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.8 -
m und q
x const
m m Kw
x
w
ym
q qm
yK
w
x
w
x y
m
x
y const
s
s x T
xxy T
* *
*
*
.( ) :
( )
( )
.(
= =
= =
= ⇒ ⋅ + ⋅ = −
= + ⇒ ⋅ + − ⋅
= −
=
0 0
2
2
2
2
2
2
3
3
3
2
(Ersatzrandquerkraft)
Rand
Rand
α π
∂∂
υ ∂∂
∂∂
∂∂
υ ∂∂ ∂
∂∂
αα∂∂
υ ∂∂
∂∂
∂∂
υ ∂∂ ∂
∂∂
=
= ⇒ ⋅ + ⋅ = −
= − − ⇒ ⋅ + − ⋅
= −
0
2
2
2
2
2
3
3
3
2
) :
( )
( )
*
*
m m Kw
y
w
xm
q qm
xK
w
y
w
x y
m
y
s y T
yyx T
3) freier Rand:
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
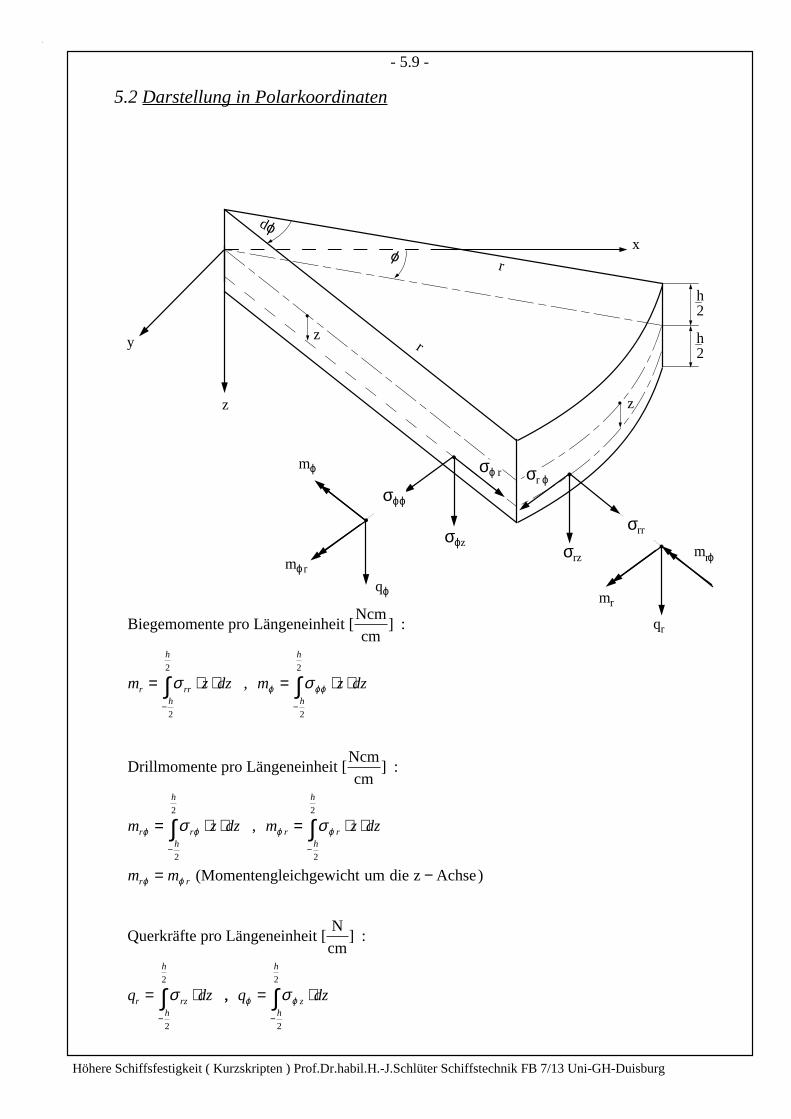
- 5.9 -
5.2 Darstellung in Polarkoordinaten
x
y
z
z
r
z
mϕ
mϕ r
mr
mrϕ
qϕ
σϕϕ
σrr
qr
σrz
σr ϕ
σϕz
σϕ r
ϕ
dϕ
h2
h2
r
Biegemomente pro Längeneinheit [Ncmcm
] :
Drillmomente pro Längeneinheit [Ncmcm
] :
(Momentengleichgewicht um die z Achse)
Querkräfte pro Längeneinheit [Ncm
] :
m z dz m z dz
m z dz m z dz
m m
q dz
r rrh
h
h
h
r rh
h
r rh
h
r r
r rzh
h
= ⋅ ⋅ = ⋅ ⋅
= ⋅ ⋅ = ⋅ ⋅
= −
= ⋅
− −
− −
−
∫ ∫
∫ ∫
∫
σ σ
σ σ
σ
ϕ ϕϕ
ϕ ϕ ϕ ϕ
ϕ ϕ
2
2
2
2
2
2
2
2
2
2
,
,
,, q dzzh
h
ϕ ϕσ= ⋅−
∫2
2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.10 -
Durchbiegung der Plattenmittelebene : w=w(r,ϕ) .
Für die Schnittmomente gilt :
m =
m =
m m
r − ⋅ + ⋅ ⋅ + ⋅
−
− ⋅ ⋅ + ⋅ + ⋅
−
= = − − ⋅ ⋅ − ⋅ + ⋅
Kw
r r
w
r r
wm
Kr
w
r r
w w
rm
Kr
w
r
T
T
r r
∂∂
υ ∂∂
∂∂ϕ
∂∂
∂∂ϕ
υ ∂∂
υ ∂∂ϕ
ϕ
ϕ ϕ
2
2 2
2
2
2
2
2
2
2
2
1 1
1 1
11 1
( )
( ) (∂∂∂ ∂ϕ
2w
r)
συ
α
συ
α
σ
ϕϕ ϕ
ϕ ϕ
rr r T
T
r r
z
hm m
ET
z
hm m
ET
z
hm
= ⋅ ⋅ + −−
⋅ ⋅
= ⋅ ⋅ + −−
⋅ ⋅
= ⋅ ⋅
121
121
12
3
3
3
( )
( )
K w p mT⋅ −∆∆ ∆=
Die Spannungen durch die Schnittmomente ausgedrückt :
Die Gleichgewichtsbedingungen am Plattenelement ergeben die Differentialgleichung
für die Plattendurchbiegung w=w(r,ϕ)
mE
T z dz
T T r z
T
h
= ⋅−
⋅ ⋅ ⋅
=
∫αυ
ϕ
1
2
Temperaturmoment
gegebenes Temperaturfeld
-h
2
( , , )
∆
∆∆
= + ⋅ + ⋅ −
= + ⋅ − ⋅ + ⋅ + ⋅ + ⋅ − ⋅ + ⋅
∂∂
∂∂
∂∂ϕ
∂∂
∂∂
∂∂
∂∂
∂∂ϕ
∂∂ϕ ∂
∂∂ϕ ∂
∂∂ϕ
2
2 2
2
2
4
4
3
3 2
2
2 3 4
4
4 2
4
2 2 3
3
2 4
2
2
1 1
2 1 1 1 2 2 4
r r r r
r r r r r r r r r r r r r
Laplace Differentialoperator in Polarkoordinaten
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
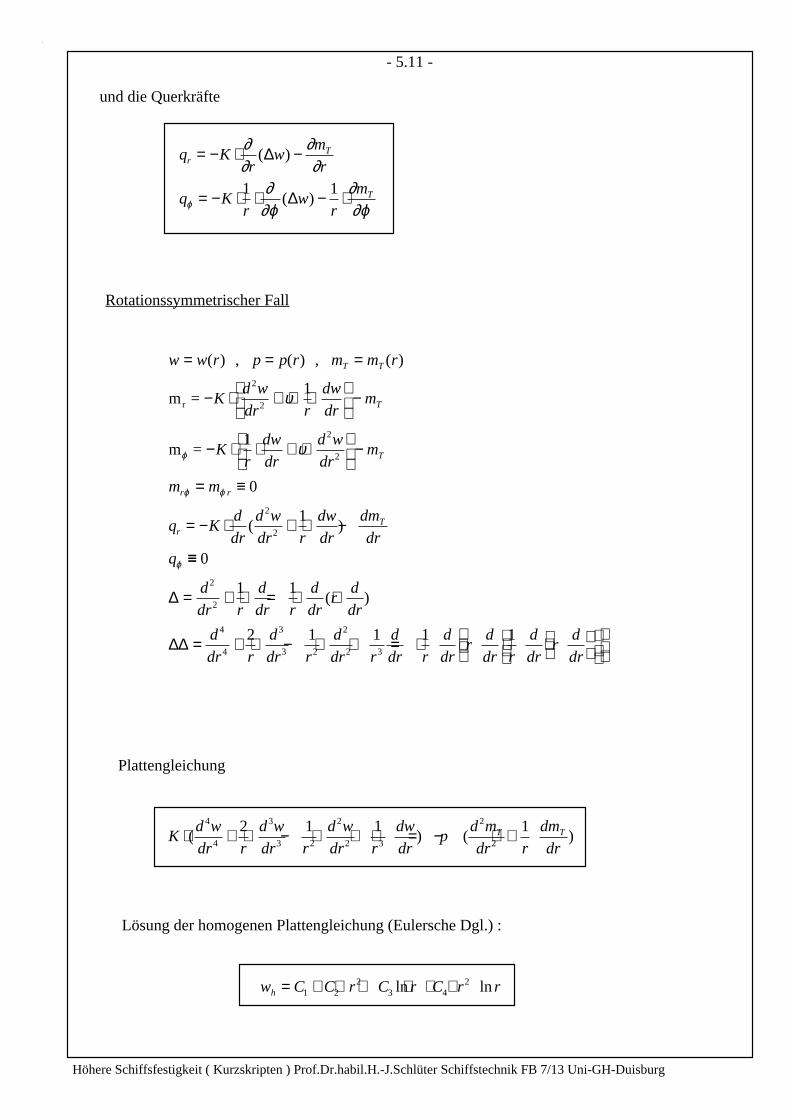
- 5.11 -
und die Querkräfte
q Kr
wm
r
q Kr
wr
m
rT
T
= − ⋅ −
= − ⋅ ⋅ − ⋅
∂∂
∂∂
∂∂ϕ
∂∂ϕϕ
( )
( )
∆
∆1 1
Kd w
dr r
d w
dr r
d w
dr r
dw
drp
d m
dr r
dm
drT T⋅ + ⋅ − ⋅ + ⋅ = − + ⋅( ) ( )
4
4
3
3 2
2
2 3
2
2
2 1 1 1
w C C r C r C r rh = + ⋅ + + ⋅ ⋅1 22
3 42ln ln
Rotationssymmetrischer Fall
w w r p p r m m r
Kd w
dr r
dw
drm
Kr
dw
dr
d w
drm
m m
q Kd
dr
d w
dr r
dw
dr
dm
drq
T T
T
T
r r
rT
= = =
− ⋅ + ⋅ ⋅
−
− ⋅ ⋅ + ⋅
−
= ≡
= − ⋅ + ⋅ −
( ) , ( ) , ( )
( )
m =
m =
r
2
2
2
2
2
2
1
1
0
1
υ
υϕ
ϕ ϕ
ϕ ≡≡
= + ⋅ = ⋅ ⋅
= + ⋅ − ⋅ + = ⋅ ⋅ ⋅ ⋅
0
1 1
2 1 1 1 1
2
2
4
4
3
3 2
2
2 3
∆
∆∆
d
dr r
d
dr r
d
drr
d
dr
d
dr r
d
dr r
d
dr r
d
dr r
d
drr
d
dr r
d
drr
d
dr
( )
Plattengleichung
Lösung der homogenen Plattengleichung (Eulersche Dgl.) :
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.12 -
Partikulärlösung der inhomogenen Plattengleichung :
w w w
wK r
r m dr dr
wK r
rr
r p dr dr dr dr
p
T
= +
= −− ⋅
⋅ ⋅ ⋅ ⋅ ⋅
= ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
∫∫
∫ ∫∫∫
1 2
1
2
11
1
1 1 1
( )( )
( ( ( ) ) )
υ
Bemerkung : Vergleiche die Differentialgleichungen für die Airysche Spannungsfunktion in
Abschnitt 4.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
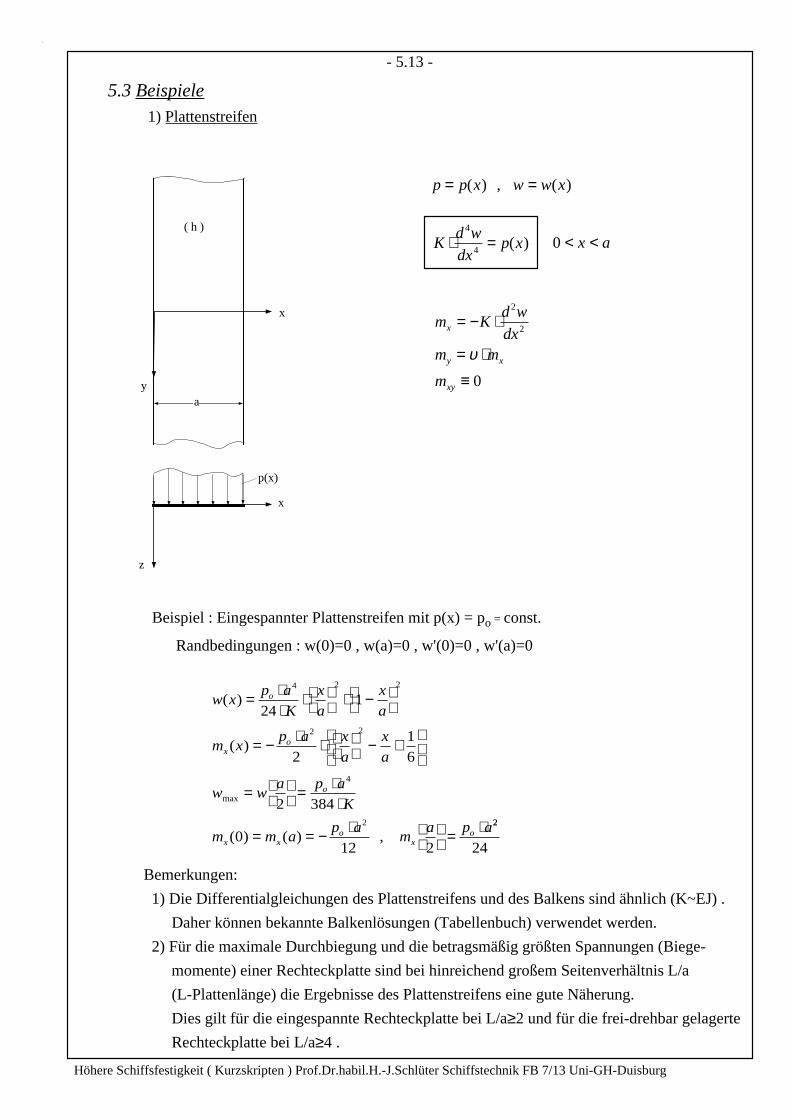
- 5.13 -
x
ya
( h )
x
p(x)
z
p p x w w x= =( ) , ( )
Beispiel : Eingespannter Plattenstreifen mit p(x) = po = const.
Randbedingungen : w(0)=0 , w(a)=0 , w'(0)=0 , w'(a)=0
w xp a
K
x
a
x
a
m xp a x
a
x
a
w wa p a
K
m m ap a
ma p a
o
xo
o
x xo
xo
( )
( )
( ) ( ) ,
max
= ⋅⋅
⋅
⋅ −
= − ⋅ ⋅
− +
=
= ⋅
⋅
= = − ⋅
= ⋅
4 2 2
2 2
4
2
241
216
2 384
012 2
22
24
Bemerkungen:
1) Die Differentialgleichungen des Plattenstreifens und des Balkens sind ähnlich (K~EJ) .
Daher können bekannte Balkenlösungen (Tabellenbuch) verwendet werden.
2) Für die maximale Durchbiegung und die betragsmäßig größten Spannungen (Biege-
momente) einer Rechteckplatte sind bei hinreichend großem Seitenverhältnis L/a
(L-Plattenlänge) die Ergebnisse des Plattenstreifens eine gute Näherung.
Dies gilt für die eingespannte Rechteckplatte bei L/a≥2 und für die frei-drehbar gelagerte
Rechteckplatte bei L/a≥4 .
Kd w
dxp x⋅ =
4
4 ( )
m Kd w
dxm m
m
x
y x
xy
= − ⋅
= ⋅
≡
2
2
0
υ
0 < <x a
5.3 Beispiele 1) Plattenstreifen
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.14 -
2) Eingespannte elliptische Platte bei konstanter Flächenlast
y
x
b
( h )
a
Ellipsengleichung :
x
a
y
b
p x y p consto
+
=
= =
2 2
1
( , ) .
w x y Cx
a
y
b
Cp a b
K a b a bo
( , )
[ ( ) ( ) ]
= ⋅
+
−
= ⋅ ⋅⋅ ⋅ ⋅ + − ⋅ ⋅
1
2 2 2
1
4 4
2 2 2 2
1
8 3 2
w w C
m C bx
a
y
ba
x
a
y
b
m C ax
a
y
b
x
y
max ( , )= =
= − ⋅ ⋅ ⋅
+
−
+ ⋅ ⋅
+ ⋅
−
= − ⋅ ⋅
+ ⋅
−
0 0
3 1 3 1
3 1
1
22
2 22
2 2
22
2 2
υ
+ ⋅ ⋅ ⋅
+
−
= − ⋅ − ⋅ ⋅ ⋅
= ⋅ ⋅⋅ ⋅ + − ⋅ ⋅
υ
υ
bx
a
y
b
m C x y
Cp a b
a b a b
xy
o
22 2
2
2
2 2
2 2 2 2
3 1
2 1
2 3 2
( )
[ ( ) ( ) ]
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
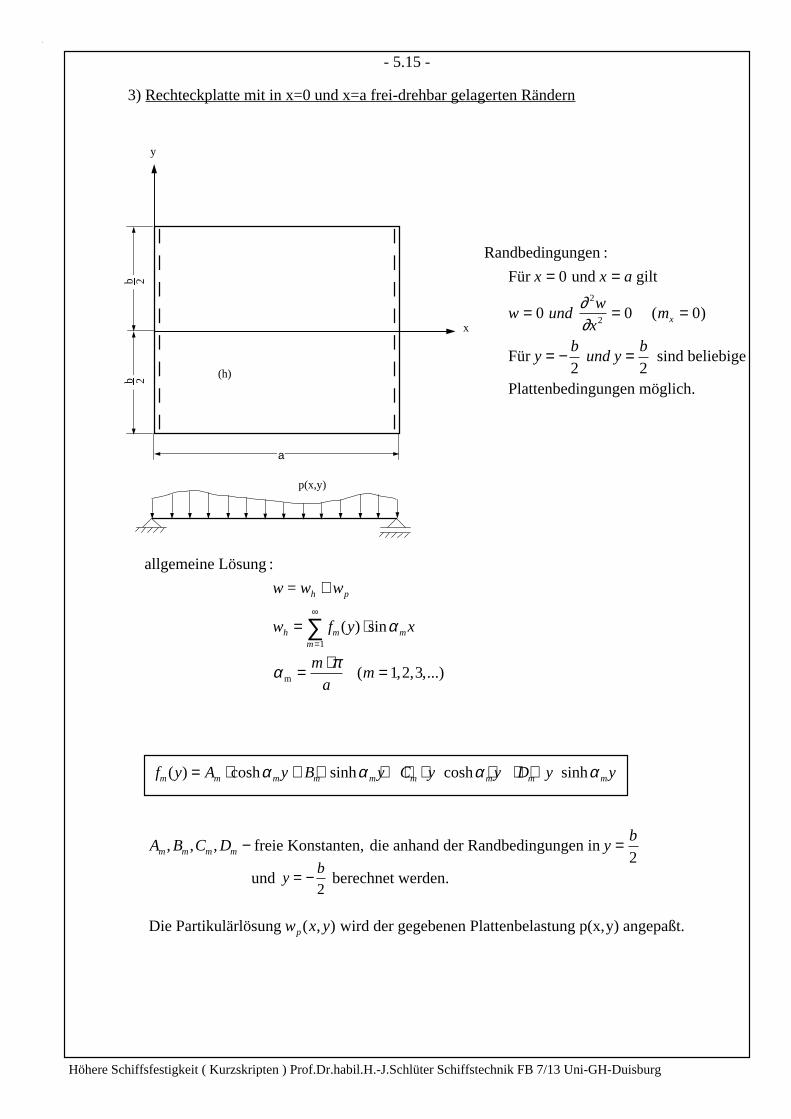
- 5.15 -
3) Rechteckplatte mit in x=0 und x=a frei-drehbar gelagerten Rändern
(h)
a
x
y
p(x,y)
b 2b 2
Randbedingungen :
Für und gilt
(
Für sind beliebige
Plattenbedingungen möglich.
x x a
w undw
xm
yb
und yb
x
= =
= = =
= − =
0
0 0 0
2 2
2
2
∂∂
)
allgemeine Lösung :
=
m
w w w
w f y x
m
am
h p
h m mm
+
= ⋅
= ⋅ =
=
∞
∑ ( ) sin
( , , ,...)
α
α π1
1 2 3
A B C D yb
w x y
m m m m
p
, , ,
( , )
− =freie Konstanten, die anhand der Randbedingungen in
und berechnet werden.
Die Partikulärlösung wird der gegebenen Plattenbelastung p(x,y) angepaßt.
2
f y A y B y C y y D y ym m m m m m m m m( ) cosh sinh cosh sinh= ⋅ + ⋅ + ⋅ ⋅ + ⋅ ⋅α α α α
yb= −2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
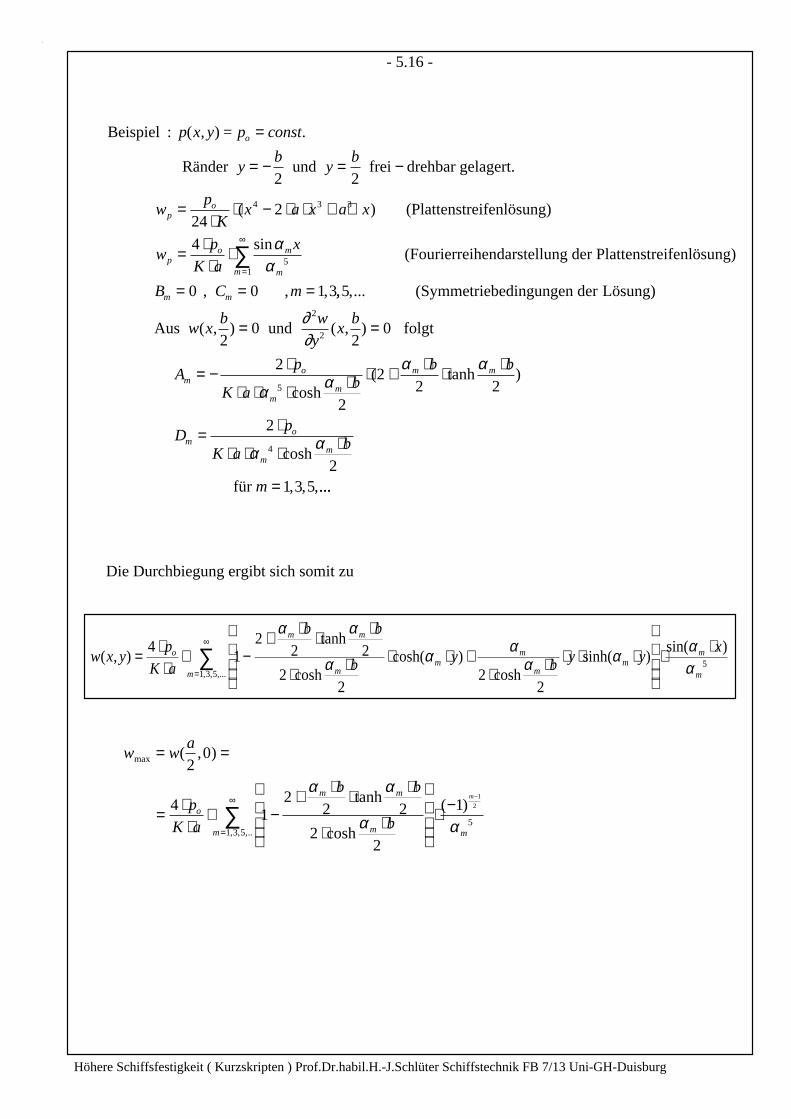
- 5.16 -
Beispiel : ( , ) =
Ränder und frei drehbar gelagert.
(Plattenstreifenlösung)
(Fourierreihendarstellung der Plattenstreifenlösung)
p x y p const
yb
yb
wp
Kx a x a x
wp
K a
x
B C m
o
po
po m
mm
m m
=
= − = −
=⋅
⋅ − ⋅ ⋅ + ⋅
= ⋅⋅
⋅
= = ==
∞
∑
.
( )
sin
, , ,
2 2
242
4
0 0 1 3
4 3 3
51
αα
,, ,...
( , ) ( , )
cosh
( tanh )
cosh
, , ,
5
20
20
2
2
22 2
2
21 3 5
2
2
5
4
(Symmetriebedingungen der Lösung)
Aus und folgt
für
w xb w
yx
b
Ap
K ab
b b
Dp
K ab
m
mo
mm
m m
mo
mm
= =
= − ⋅
⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅
= ⋅
⋅ ⋅ ⋅ ⋅
=
∂∂
α αα α
α α
......
w x yp
K a
b b
b y b y yxo
m m
mm
m
mm
m
mm
( , )tanh
coshcosh( )
coshsinh( )
sin( )
, , ,...
= ⋅⋅
⋅ −+ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ +⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅=
∞
∑41
22 2
22
22
51 3 5
α α
α α αα α α
α
Die Durchbiegung ergibt sich somit zu
w wa
p
K a
b b
bo
m m
mm m
m
max
, , ,..
( , )
tanh
cosh
( )
= =
= ⋅⋅
⋅ −+ ⋅ ⋅ ⋅
⋅ ⋅
⋅ −=
∞
∑−
20
41
22 2
22
1
1 3 55
1
2
α α
α α
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.17 -
4) Kreisplatte unter konstanter Flächenlast p(r,ϕ)=po=const.
a) eingespannte Kreisplatte
b) frei-drehbar gelagerte Kreisplatte
w rp
Ka r r a
m rp
a r
m rp
a r
o
ro
o
( ) ( )
( ) [( ) ( ) ]
( ) [( ) ( ) ]
=⋅
⋅ − ≤ ≤
= ⋅ + ⋅ − + ⋅
= ⋅ + ⋅ − + ⋅ ⋅
640
161 3
161 1 3
2 2 2
2 2
2 2
υ υ
υ υϕ
w rp
Ka a r r
m r p a r r a
m rp
a r
o
r o
o
( ) (( )
)
( ) ( )
( ) [( ) ( ) ]
=⋅
⋅ ++
⋅ − ⋅ ++
⋅ ⋅ +
= + ⋅ ⋅ − ≤ ≤
= ⋅ + ⋅ − + ⋅ ⋅
6451
2 31
316
0
163 1 3
4 2 2 4
2 2
2 2
υυ
υυ
υ
υ υϕ
h r
po
aa
h r
po
aa
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
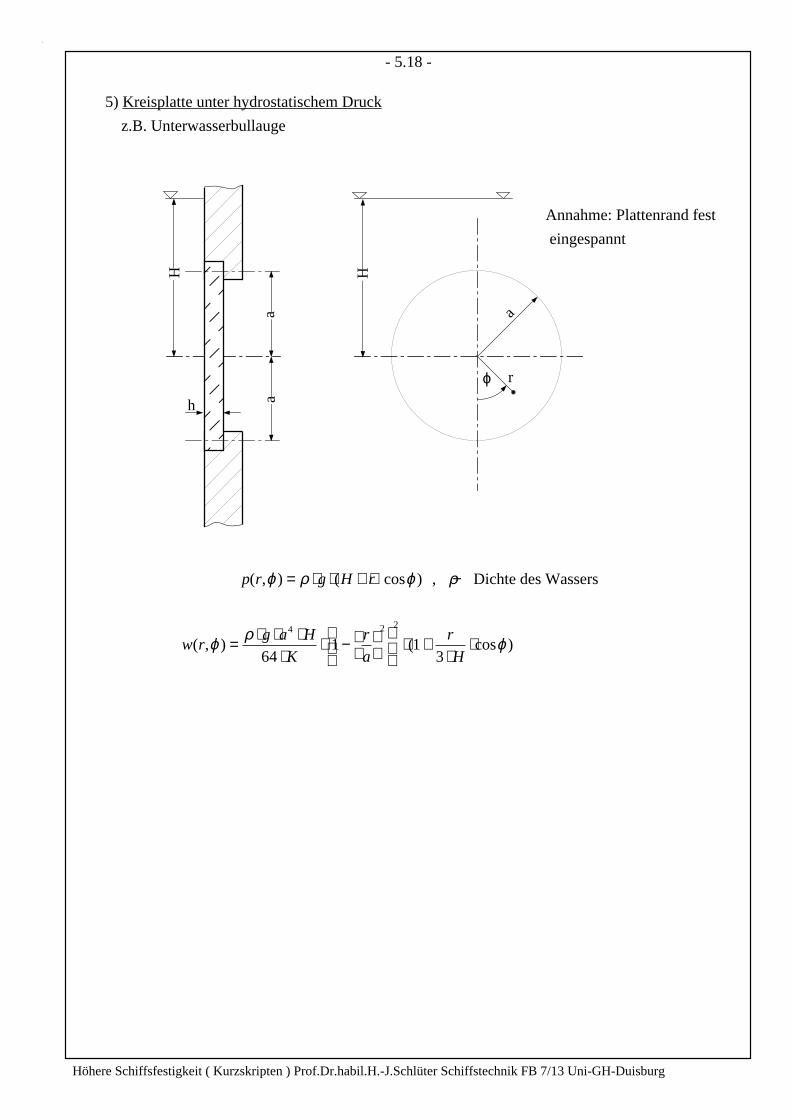
- 5.18 -
5) Kreisplatte unter hydrostatischem Druck
z.B. Unterwasserbullauge
( , ) ( cos ) ,
( , ) ( cos )
p r g H r
w rg a H
K
r
a
r
H
ϕ ρ ϕ ρ
ϕ ρ ϕ
= ⋅ ⋅ + ⋅ −
= ⋅ ⋅ ⋅⋅
⋅ −
⋅ +
⋅⋅
Dichte des Wassers
4 2 2
641 1
3
h
aa
H Hr
a
ϕ
Annahme: Plattenrand fest
eingespannt
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 5.19 -
5.4 Die orthotrope Platte
Voraussetzungen (Hypothesen)
• Die Werkstoff-bzw. Struktureigenschaften der Platte sind verschieden in x-und y-Richtung
(Orthotropie).
• Die Inhomogenitäten des Werkstoffes bzw. der Struktur der Platte sind hinreichend klein
(z.B.Faserdurchmesser und Faserabstände bei Verbundwerkstoffen;Steifenabstände bei
verrippten Platten),so daß sie "verschmiert" werden können.
• Die Werkstoff-bzw.Struktureigenschaften sind von der x- und der y-Koordinate unabhängig.
• Die äußere Belastung erfolgt senkrecht zur Plattenebene.
• Die Abmessungen der Platte bezüglich der z-Koordinate sind sehr klein im Vergleich zu den
Abmessungen in der Plattenebene.
• Es gilt die Bernoullische Verformungshypothese.
• Die Deformationen sind sehr klein.
• Die Durchbiegung w ist klein und unabhängig von der z-Koordinate.
• Es gilt das Hookesche Gesetz für orthotrope Werkstoffe.
• Die Normalspannung σzz ist vernachlässgbar klein.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.20 -
5.4.1 homogene orthotrope Platten
Hookesches Materialgesetz :
oder
ν νx
x
y
yE E=
E Ex y
x y
y
,
,
,
−
−
−
−
Elastizitätsmodul in x - bzw. y - Richtung
Querdehnungszahl in x - bzw.y - Richtung
linearer Wärmeausdehnungskoeffizient in x - bzw.y - Richtung
G orthotroper Gleitmodul
x
xy
ν να α
Schnittmomente:
Querkräfte:q K
w
xK H
w
x y
m
x
q Kw
yK H
w
x y
m
y
x x xy xyTx
y y xy xyTy
= − ⋅ + + ⋅ +
= − ⋅ + + ⋅ +
[ ( ) ]
[ ( ) ]
∂∂
∂∂ ∂
∂∂
∂∂
∂∂ ∂
∂∂
3
3
3
2
3
3
3
2
σν ν
ε ν ε α ν α
σν ν
ε ν ε α ν α
σ γ
xxx
x yxx y yy x y y
yyy
x yyy x xx y x x
xy xy xy
ET
ET
G
=− ⋅
⋅ + ⋅ − + ⋅ ⋅
=− ⋅
⋅ + ⋅ − + ⋅ ⋅
= ⋅
1
1
[( ) ( ) ]
[( ) ( ) ]
ε σ νσ
α
εσ
ν σ α
γσ
xxxx
xy
yy
yx
yyyy
yx
xx
xy
xyxy
xy
E ET
E ET
G
= − ⋅ + ⋅
= − ⋅ + ⋅
=Symmetriebedingung
m Kw
xK
w
ym
m Kw
yK
w
xm
m Hw
x ym
x x xy Tx
y y yx Ty
xy xy yx
= − ⋅ + ⋅ +
= − ⋅ + ⋅ +
= − ⋅ =
( )
( )
∂∂
∂∂
∂∂
∂∂
∂∂ ∂
2
2
2
2
2
2
2
2
2K Kyx xy=
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Bei Gültigkeit der Bernoullischen Verformungshypothese (Siehe Seite 5.3) gilt
σν ν
∂∂
ν ∂∂
α ν α
σν ν
∂∂
ν ∂∂
α ν α
σ
xxx
x yy x y y
yyy
x yx y x x
xy
Ez
w
x
w
yT
Ez
w
y
w
xT
= −− ⋅
⋅ ⋅ + ⋅
+ + ⋅ ⋅
= −− ⋅
⋅ ⋅ + ⋅
+ + ⋅ ⋅
=
1
1
2
2
2
2
2
2
2
2
( )
( )
−− ⋅ ⋅ ⋅⋅
22
z Gw
x yxy
∂∂ ∂

-
Sonderfall : Materialgrößen unabhängig von z
Bemerkungen:
• Das orthotrope Material ist ohne Betrachtung der Temperatur durch 4 Materialgrößen,z.B.
Ex,Ey,νx,Gxy ,beschrieben.
• Die obigen Beziehungen für die Schnittgrößen sowie die Differentialgleichung für die
Plattendurchbiegung setzen voraus ,daß die Materialeigenschaften symmetrisch zur
Plattenmittelebene z=0 sind (z.B.Ex(z)=Ex(-z) ). Ansonsten wäre eine Kopplung zwischen
Scheiben- und Plattenproblem zu berücksichtigen.
KE h
KE h
K K K
HG h
mE
T z dz mE
xx
x yy
y
x yxy y x x y
xyxy
Txx x y y
x y h
h
Tyy y x
= ⋅⋅ − ⋅
=⋅
⋅ − ⋅= ⋅ = ⋅
=⋅
=⋅ + ⋅
− ⋅⋅ ⋅ ⋅ =
⋅ +
−
∫
3 3
3
2
2
12 1 12 1
6 1
( ) ,
( ) ,
, ( )
, (
ν ν ν νν ν
α υ αυ υ
α υ ⋅⋅− ⋅
⋅ ⋅ ⋅−
∫α
υ υx
x y h
h
T z dz)
12
2
KE
z dz KE
z dz K
KE
z dz H G z dz
mE
xx
x yh
h
xyy x
x yh
h
yx
yy
x yh
h
xy xyh
h
Txx
x yx y
=− ⋅
⋅ ⋅ =⋅
− ⋅⋅ ⋅ =
=− ⋅
⋅ ⋅ = ⋅ ⋅ ⋅
=− ⋅
⋅ +
− −
− −
∫ ∫
∫ ∫
1 1
12
1
2
2
22
2
2
2
2
22
2
2
ν νν
ν ν
ν ν
ν να ν
,
,
( ⋅⋅ ⋅ ⋅ ⋅ =− ⋅
⋅ + ⋅ ⋅ ⋅ ⋅− −
∫ ∫αν ν
α ν αyh
h
Tyy
x yy x x
h
h
T z dz mE
T z dz) , ( )
2
2
2
2
1
συ υ
υ υυ υ
α υ α
συ υ
υ
xxx
x y x y xyy y xy x xy y x y
x
x yx y y
yyy
x y x y xyx x
E z
K K KK K m K K m
E T
E z
K K KK
= ⋅− ⋅ ⋅ ⋅ −
⋅ − ⋅ ⋅ − − ⋅ ⋅ − ⋅− ⋅
⋅ + ⋅
=⋅
− ⋅ ⋅ ⋅ −⋅ −
( ) ( )[( ) ( ) ] ( )
( ) ( )[(
* *
1 1
1
2
2 ⋅⋅ ⋅ − − ⋅ ⋅ −⋅
− ⋅⋅ + ⋅
=⋅ ⋅
⋅ − ≤ ≤
K m K K mE T
G z
Hm
hz
h
xy y xy x y xy
x yy x x
xyxy
xyxy
) ( ) ] ( )
* *υυ υ
α υ α
σ
1
2
2 2
m m m Kw
xK
w
y
m m m Kw
yK
w
x
x x Tx x xy
y y Ty y yx
*
*
= + = − ⋅ + ⋅
= + = − ⋅ + ⋅
∂∂
∂∂
∂∂
∂∂
2
2
2
2
2
2
2
2
συ υ
α υ α
συ υ
α υ α
σ
xx xx
x yx y y
yy yy
x yy x x
xy xy
z
hm
ET
z
hm
ET
z
hm
= ⋅ ⋅ −− ⋅
⋅ + ⋅ ⋅
= ⋅ ⋅ −− ⋅
⋅ + ⋅ ⋅
= ⋅ ⋅
121
121
12
3
3
3
*
*
( )
( )
Spannungen durch die Schnittmomente ausgedrückt:
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
- 5.21 -
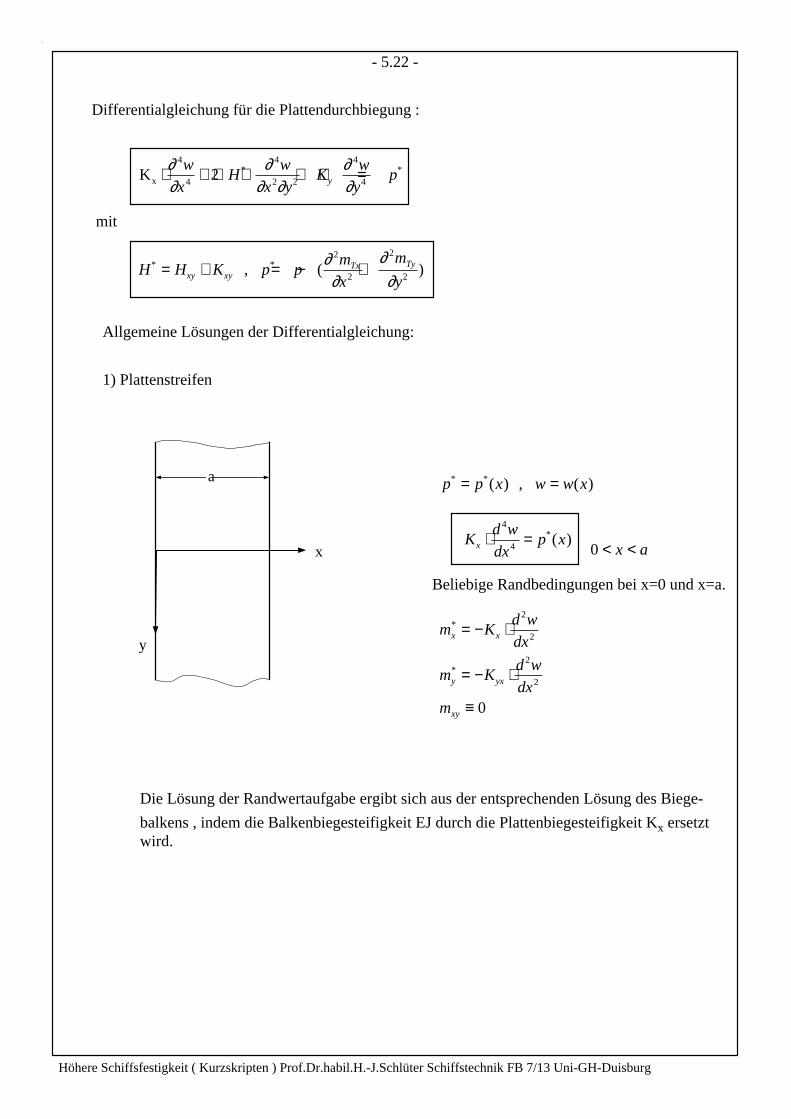
- 5.22 -
x
y
a p p x w w x* *( ) , ( )= =
Kd w
dxp xx ⋅ =
4
4*( )
0 < <x a
Differentialgleichung für die Plattendurchbiegung :
Kx ⋅ + ⋅ ⋅ + ⋅ =∂∂
∂∂ ∂
∂∂
4
4
4
2 2
4
42w
xH
w
x yK
w
ypy
* *
mit
H H K p pm
x
m
yxy xyTx Ty* * , ( )= + = − +∂
∂∂∂
2
2
2
2
Allgemeine Lösungen der Differentialgleichung:
1) Plattenstreifen
Beliebige Randbedingungen bei x=0 und x=a.
Die Lösung der Randwertaufgabe ergibt sich aus der entsprechenden Lösung des Biege-
balkens , indem die Balkenbiegesteifigkeit EJ durch die Plattenbiegesteifigkeit Kx ersetztwird.
m Kd w
dx
m Kd w
dxm
x x
y yx
xy
*
*
= − ⋅
= − ⋅
≡
2
2
2
2
0
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
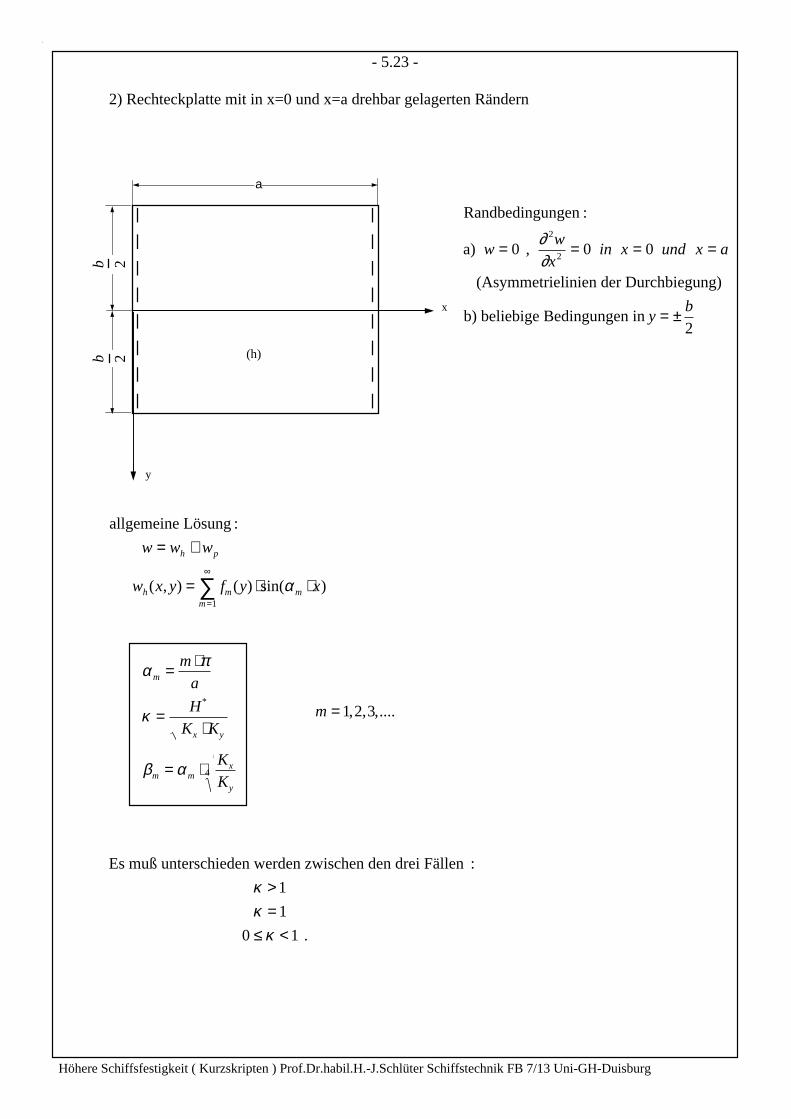
- 5.23 -
2) Rechteckplatte mit in x=0 und x=a drehbar gelagerten Rändern
(h)
a
x
y
b 2
b 2
Randbedingungen :
a)
(Asymmetrielinien der Durchbiegung)
b) beliebige Bedingungen in
,
ww
xin x und x a
yb
= = = =
= ±
0 0 0
2
2
2
∂∂
allgemeine Lösung :
w w w
w x y f y x
h p
h m mm
= +
= ⋅ ⋅=
∞
∑ ( , ) ( ) sin( )α1
α π
κ
β α
m
x y
m mx
y
m
a
H
K K
K
K
= ⋅
=⋅
= ⋅
*
4
m = 1 2 3, , ,....
Es muß unterschieden werden zwischen den drei Fällen :
1
1
0 1 .
κκ
κ
>=
≤ <
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.24 -
κ
δ γ δ γ
δ β κ κ γ
δ γ δ γ
>
= ⋅ + ⋅ + ⋅ + ⋅
= ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅
= ⋅ + −
⋅ ⋅ − ⋅ − ⋅
1
12
:
( )
( ) cosh( ) cosh( ) sinh( ) sinh( )
,
* * * *f y A e B e C e D e
oder
f y A y B y C y D y
m my
my
my
my
m m m m m m m m m
m m
m m m m
mm m
m mß y
mß y
mß y
mß y
m m m m m m m m m
f y A e B y e C e D y e
oder
f y A ß y B y ß y C ß y D y ß
m m m m
= ⋅ − −
=
= ⋅ + ⋅ ⋅ + ⋅ + ⋅ ⋅
= ⋅ ⋅ + ⋅ ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅
⋅ ⋅ − ⋅ − ⋅
β κ κ
κ
2 1
1:
( )
( ) cosh( ) cosh( ) sinh( ) sinh(
* * * *
⋅⋅
≤ <
= ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ +
+ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅
= ⋅ ⋅ ⋅ ⋅ +
⋅ ⋅
− ⋅ − ⋅
y
f y A e y B e y
C e y D e y
oder
f y A y y B
m my
m my
m
my
m my
m
m m m m m
m m
m m
)
:
( ) cos( ) sin( )
cos( ) sin( )
( ) cosh( ) cos( )
* *
* *
0 1κ
γ γ
γ γ
δ γ
δ δ
δ δ
⋅⋅ ⋅ ⋅ ⋅ ++ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅
= ⋅ + = ⋅ −
= −
sinh( ) cos( )
cosh( ) sin( ) sinh( ) sin( )
,
, , , , , ,* * * *
δ γδ γ δ γ
δ κ γ κ
m m
m m m m m m
m m m m
m m m m m m m m
y y
C y y D y y
ß ß
A B C D A B C D
yb
12
12
2
Die Konstanten bzw. werden anhand der Randbedingungen
in und yyb
w x y
p x y
p=2
berechnet. Die Partikulärlösung wird der gegebenen Platten -
belastung entsprechend gewählt.
( , )
( , )
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
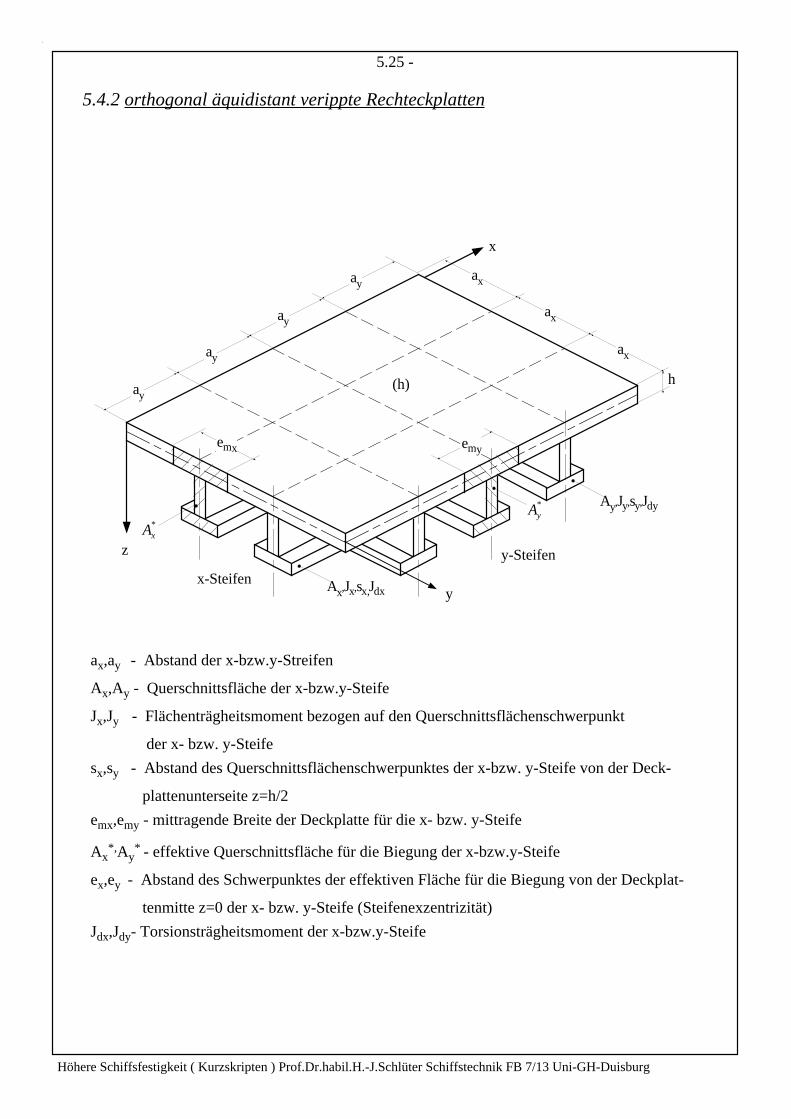
5.25 -
ax,ay - Abstand der x-bzw.y-Streifen
Ax,Ay - Querschnittsfläche der x-bzw.y-Steife
Jx,Jy - Flächenträgheitsmoment bezogen auf den Querschnittsflächenschwerpunkt
der x- bzw. y-Steife
sx,sy - Abstand des Querschnittsflächenschwerpunktes der x-bzw. y-Steife von der Deck-
plattenunterseite z=h/2
emx,emy - mittragende Breite der Deckplatte für die x- bzw. y-Steife
Ax*,Ay
* - effektive Querschnittsfläche für die Biegung der x-bzw.y-Steife
ex,ey - Abstand des Schwerpunktes der effektiven Fläche für die Biegung von der Deckplat-
tenmitte z=0 der x- bzw. y-Steife (Steifenexzentrizität)
Jdx,Jdy- Torsionsträgheitsmoment der x-bzw.y-Steife
5.4.2 orthogonal äquidistant verippte Rechteckplatten
y
z
ax
ax
ax
ay
ay
ay
ay(h)
emy
Ax,Jx,sx,Jdx
emx
Ay,Jy,sy,Jdy
x-Steifen
y-Steifen
x
h
Ax*
Ay*
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.26 -
Verformungshypothese (Bernoulli) :
Deformationen :
( , , ) ( , ) ( ) ( , )
( , , ) ( , ) ( ) ( , )
( )
u x y z u x y z ex
w x y
x y z x y z ey
w x y
u
x
u
xz e
w
x
y
o x
o y
xxo
x
yyo
= − − ⋅
= − − ⋅
= = − − ⋅
= =
∂∂
ν ν ∂∂
ε ∂∂
∂∂
∂∂
ε ∂ν∂
∂ν∂
2
2
yyz e
w
y
hz
hH
u
y x
u
y xz e e
w
x y
hz
h
hz
h
y
xyo o
x y
xx
− − ⋅
− ≤ ≤ +
= + = + − ⋅ + + ⋅ − ≤ ≤
− ≤ ≤
( )
[ ( )] (
) :
∂∂
γ ∂∂
∂ν∂
∂∂
∂ν∂
∂∂ ∂
σ
2
2
2
2 2
22 2
2 2
nur für Deckplatte)
Hookesches Materialgesetz :
Deckplatte (
== ⋅ + ⋅ = ⋅ + ⋅
− ⋅ − ⋅ + ⋅ − ⋅
= ⋅ + ⋅ = ⋅ + ⋅
−
E Eu
x yE z e
w
xz e
w
y
E Ey
u
x
xx yyo o
x y
yy yy xxo o
* * *
* *
( ) ( ) ( )
( )
ε υ ε ∂∂
υ ∂ν∂
∂∂
υ ∂∂
σ ε υ ε ∂ν∂
υ ∂∂
2
2
2
2
EE z ew
yz e
w
x
Gu
y xG
u
y xG z e e
w
x y
EE
Steifenh
y x
xyo o
x y
*
*
( ) ( )
( )
(
⋅ − ⋅ + ⋅ − ⋅
= ⋅ +
= ⋅ +
− ⋅ ⋅ − +[ ] ⋅
=−
∂∂
υ ∂∂
σ ∂∂
∂ν∂
∂∂
∂ν∂
∂∂ ∂
υ
2
2
2
2
2
2
2
1
2≤≤ ≤ +
= ⋅ = ⋅ − ⋅ − ⋅ −
= ⋅ = ⋅ − ⋅ − ⋅ −
= ⋅ ⋅ = ⋅∫
zh
H
E Eu
xE z e
w
xx Steife
E Ey
E z ew
yy Steife
ne
dA Du
xx xxo
x
yy yyo
y
xmx
xx x
A
xo
x
2
1
2
2
2
2
):
( ) ( )
( ) ( )
*
( )*
σ ε ∂∂
∂∂
σ ε ∂ν∂
∂∂
σ ∂∂
Schnittgrößen:
xxD
ye
w
y
ne
dA Dy
Du
xe
w
x
n dz Du
y xe e
oy
ymy
yy y
A
yo o
x
xy xy
zh
h
o ox
y
+ ⋅ ⋅ + ⋅
= ⋅ ⋅ = ⋅ + ⋅ ⋅ + ⋅
= ⋅ = − ⋅ ⋅ + + +
∫
∫=−
υ ∂ν∂
∂∂
σ ∂ν∂
υ ∂∂
∂∂
σ υ ∂∂
∂ν∂
( )
( )
(
*
( )*
2
2
2
2
2
2
1
12 yy
w
x y) ⋅
∂∂ ∂
2
− ≤ ≤ +
−
hz
hH
H Steifenhöhe2 2
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.27 -n n
me
z e dA Kw
xK
w
yD e
y
me
z e dA Kw
yK
w
x
yx xy
xmx
xx x x
A
x xy xo
ymy
yy y y
A
y yx
x
y
=
= ⋅ ⋅ − ⋅ = − ⋅ + ⋅
− ⋅ ⋅ ⋅
= ⋅ ⋅ − ⋅ = − ⋅ + ⋅
∫
∫
1
1
2
2
2
2
2
2
2
σ ∂∂
∂∂
υ ∂ν∂
σ ∂∂
∂∂
( )
( )
*
( )
*
( )
*
*22
2
2 2 2 12
− ⋅ ⋅ ⋅
= − ⋅ − ⋅ − ⋅ ⋅ = − ⋅ − − ⋅ ⋅ ⋅ +
= − ⋅ − ⋅
=−
=−
∫
υ ∂∂
σ ∂∂ ∂
∂∂ ∂
υ ∂∂
∂ν∂
σ
D eu
x
m e z dzG J
e
w
x yH
w
x yD e
u
y x
m e z dz
yo
xy xy x
zh
h
dx
mxxy x
o o
yx xy y
z
( )
( )hh
h
dy
myyx y
o oG J
e
w
x yH
w
x yD e
u
y x2
2 2 2 12∫ −
⋅⋅ = − ⋅ − − ⋅ ⋅ ⋅ +
∂∂ ∂
∂∂ ∂
υ ∂∂
∂ν∂
D E h KE h
EE
GE
D DE A
eD D
E A
e
K K D e EJ A s
he
e
K K D e EJ A s
xx
mxy
y
my
x x
x x x x
mx
y y
y y y
= ⋅ = ⋅ =−
=⋅ +
= + ⋅ = +⋅
= + ⋅ + ⋅+ ⋅ + −
= + ⋅ + ⋅+ ⋅
**
* , , , ( )
,
( )
(
3
2
2
2
2
12 1 2 1
2
υ υ
++ −
= = + ⋅ ⋅( )= − ⋅ + ⋅ + − ⋅ ⋅ ⋅ +
= − ⋅ +⋅
+ − ⋅ ⋅ ⋅ +
=− ⋅ ⋅ +
he
e
K K K D e e
H KG J
eD e e e
H KG J
eD e e e
eA s
h
y
my
xy yx x y
xydx
mxx x y
yxdy
myy x y
x
x x
2
11
2
11
2
12
2
2
)
( ) ( )
( ) ( )
( )
υ
υ υ
υ υ
υ
⋅ + − ⋅=
− ⋅ ⋅ +
⋅ + − ⋅h e Ae
A sh
h e Amx xy
y y
my y( ) ,
( )
( )1
12
12
2
2υ
υ
υ
′ ⋅ − ⋅ = ′ ⋅ − ⋅ =∫ ∫E z e dA und E z e dAx x
A
y y
Ax y
( ) ( ) *
( )
*
( )* *
0 0
H Hyx xy≠ m myx xy≠ .
( , )e ex y≠ ≠0 0
Bemerkungen:
• Wenn die Versteifung in x- Richtung und in y-Richtung unterschiedlich ist ,dann gilt für
die Drillsteifigkeiten und für die Drillmomente
• Die Steifenexzentrizitäten ex,ey ergeben sich aus den Bedingungen
mit E'=E* für die Deckplatte und E'=E für die Steife.
• Bei exzentrischen Versteifungen entsteht eine Kopplung zwischen
Scheiben-und Plattenproblem.
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
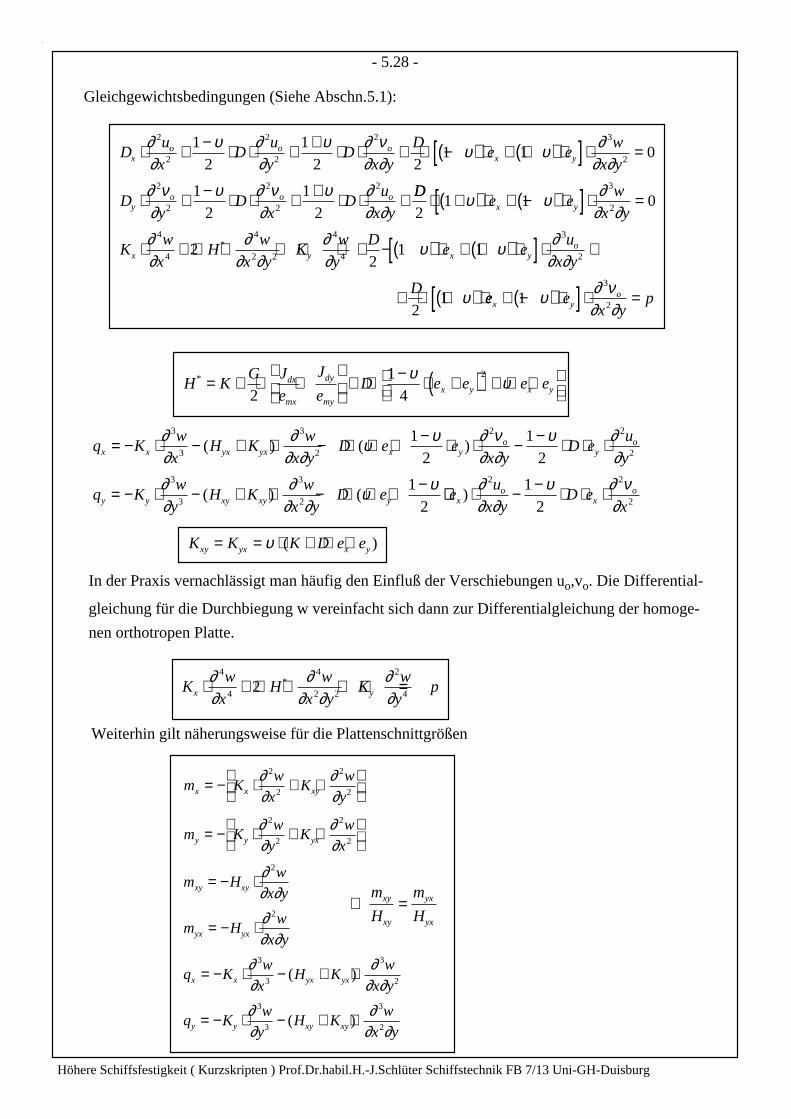
- 5.28 -
Gleichgewichtsbedingungen (Siehe Abschn.5.1):
Du
xD
u
yD
x y
De e
w
x y
Dy
Dx
Du
x y
xo o o
x y
yo o o
⋅ + − ⋅ ⋅ + + ⋅ ⋅ + ⋅ −( ) ⋅ + +( ) ⋅[ ] ⋅ =
⋅ + − ⋅ ⋅ + + ⋅ ⋅ +
∂∂
υ ∂∂
υ ∂ ν∂ ∂
υ υ ∂∂ ∂
∂ ν∂
υ ∂ ν∂
υ ∂∂ ∂
2
2
2
2
2 3
2
2
2
2
2
2
12
12 2
1 1 0
12
12
DDe e
w
x y
Kw
xH
w
x yK
w
y
De e
u
x y
D
x y
x y x yo
21 1 0
22
1 1
21
3
2
4
4
4
2 2
4
4
3
2
⋅ +( ) ⋅ + −( ) ⋅[ ] ⋅ =
⋅ + ⋅ ⋅ + ⋅ + ⋅ −( ) ⋅ + +( ) ⋅[ ] ⋅ +
+ ⋅ +( ) ⋅
υ υ ∂∂ ∂
∂∂
∂∂ ∂
∂∂
υ υ ∂∂ ∂
υ
*
ee ex y
px yo+ −( ) ⋅[ ] ⋅ =1
3
2υ ∂ ν∂ ∂
H KG J
e
J
eD e e e edx
mx
dy
myx y x y
* = + ⋅ +
+ ⋅ − ⋅ +( ) + ⋅ ⋅
2
14
2υ υ
q Kw
xH K
w
x yD e e
x yD e
u
y
q Kw
yH K
w
x yD e
x x yx yx x yo
yo
y y xy xy y
= − ⋅ − + ⋅ − ⋅ ⋅ + − ⋅ ⋅ − − ⋅ ⋅ ⋅
= − ⋅ − + ⋅ − ⋅ ⋅ + −
∂∂
∂∂ ∂
υ υ ∂ ν∂ ∂
υ ∂∂
∂∂
∂∂ ∂
υ υ
3
3
3
2
2 2
2
3
3
3
2
12
12
12
( ) ( )
( ) ( ⋅⋅ ⋅ − − ⋅ ⋅ ⋅eu
x yD e
xxo
xo)
∂∂ ∂
υ ∂ ν∂
2 2
2
12
In der Praxis vernachlässigt man häufig den Einfluß der Verschiebungen uo,vo. Die Differential-
gleichung für die Durchbiegung w vereinfacht sich dann zur Differentialgleichung der homoge-
nen orthotropen Platte.
Kw
xH
w
x yK
w
ypx y⋅ + ⋅ ⋅ + ⋅ =∂
∂∂
∂ ∂∂∂
4
4
4
2 2
2
42 *
Weiterhin gilt näherungsweise für die Plattenschnittgrößen
m Kw
xK
w
y
m Kw
yK
w
x
x x xy
y y yx
= − ⋅ + ⋅
= − ⋅ + ⋅
∂∂
∂∂
∂∂
∂∂
2
2
2
2
2
2
2
2
m Hw
x y
m Hw
x y
q Kw
xH K
w
x y
q Kw
yH K
w
x y
xy xy
yx yx
x x yx yx
y y xy xy
= − ⋅
= − ⋅
= − ⋅ − + ⋅
= − ⋅ − + ⋅
∂∂ ∂∂∂ ∂
∂∂
∂∂ ∂
∂∂
∂∂ ∂
2
2
3
3
3
2
3
3
3
2
( )
( )
⇒ =m
H
m
Hxy
xy
yx
yx
K K K D e exy yx x y= = ⋅ + ⋅ ⋅υ ( )
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg

- 5.29 -
σ ∂∂
υ ∂∂
σ ∂∂
υ ∂∂
σ υ ∂∂
xx x y
yy y x
xyx y
E z ew
xz e
w
y
E z ew
yz e
w
x
E ze e w
x
= − ⋅ − ⋅ + ⋅ − ⋅
= − ⋅ − ⋅ + ⋅ − ⋅
= − − ⋅ ⋅ −+
⋅
*
*
*
( ) ( )
( ) ( )
( )
2
2
2
2
2
2
2
2
2
12 ∂∂
σ ∂∂
σ ∂∂
y
hz
hDeckplatte
E z ew
xfür
hz H
hx Steife
E z ew
yfür
hz H
hy Steife
H H Höhe der x bzw y
xx x x
yy y y
x y
− ≤ ≤
= − ⋅ − ⋅ ≤ ≤ + −
= − ⋅ − ⋅ ≤ ≤ + −
− − −
( )
( ) ( )
( ) ( )
, .
2 2
2 2
2 2
2
2
2
2
SteifeSteife
Für die Spannungen in Deckplatte und Steife gilt näherungsweise
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg
Literatur
[1] I.Szabo : Höhere Technische Mechanik. 4.Aufl.
Springer-Verlag B./G./H. 1964
[2] H.Göldner : Lehrbuch Höhere Festigkeitslehre
Bd.1 : Grundlagen der Elastizitätslehre. 3.Aufl.
Fachbuchverlag Leipzig 1991
[3] H.Göldner,u.a. : Lehrbuch Höhere Festigkeitslehre.
Bd.2 : Probleme der Elastizitäts-,Plastizitätz-und Viskoelastizitätztheorie. 3.Aufl.
Fachbuchverlag Leipzig 1992
[4] H.Göldner,u.a. : Arbeitsbuch Höhere Festigkeitslehre.
Fachbuchverlag Leipzig
[5] S.Sähn , H.Göldner : Arbeitsbuch Bruch-und Beurteilungskriterien in der Festigkeitslehre.
Fachbuchverlag Leipzig 1993
[6] A.Pflüger : Statik der Stabtragwerke.
Springer-Verlag B./G./H. 1978
[7] S.Timoshenko , S.Woinowsky-Krieger : Theory of Plates and Shells.
Mc Graw-Hill Book Company 1959
[8] K.Marquerre , H.-T.Woernle : Elastische Platten.
B.-I.-Wissenschaftsverlag M./W./Z. 1975
[9] E.V.Lewis(Ed.) : Principles of Naval Architecture.
published by SNAME 1988
[10] O.F.Hughes : Ship Structural Design.
published by SNAME 1988
[11] H.Eschenhauer, W.Schell: Elastizitätstheorie (Grundlagen, Flächentragwerke, Struktur-
optimierung); 3. vollständig überarbeitet und erweiterte Auflage
B.-I. Wissenschaftsverlag M./L./W./Z. 1993
[12] H.Eschenhauer, W.Schell: Elastizitätstheorie, Formel und Aufgabensammlung.
B.-I. Wissenschaftsverlag M./L./W./Z. 1994
[13] H.-J. Schlüter, A.G. Kohlhaupt, R. Plum, Ch. Weißenborn: Übungsaufgaben zur
Schiffsfestigkeit, ISD 1998
Höhere Schiffsfestigkeit ( Kurzskripten ) Prof.Dr.habil.H.-J.Schlüter Schiffstechnik FB 7/13 Uni-GH-Duisburg




























