Embed Size (px)
Citation preview

Aus dem Fraunhofer-Institut für Produktionsanlagen und Konstruktionstechnik (IPK) und der Klinik für Mund-, Kiefer-, Gesichtschirurgie / Klinische Navigation und Robotik
der Charité - Universitätsmedizin Berlin
Projektionsbildgestützte Navigation und Leistungssteuerung einer chirurgischen Fräse in der Wirbelsäulenchirurgie
vorgelegt von Diplom-Ingenieur
Emanuel Jank aus Berlin
von der Fakultät V (Verkehrs- und Maschinensysteme) der Technischen Universität Berlin
zur Erlangung des akademischen Grades Doktor der Ingenieurwissenschaften
- Dr.-Ing. -
genehmigte Dissertation
Promotionsausschuss: Vorsitzender:
Prof. Dr.-Ing. Marc Kraft Gutachter:
Prof. Dr.-Ing. Jörg Krüger Prof. Dr.-Ing. Erwin Keeve Prof. Dr. med. Jürgen Meixensberger
Tag der wissenschaftlichen Aussprache: 29. April 2010
Berlin 2011
D 83


Danksagung
III
Danksagung
Diese Arbeit ist während meiner Tätigkeit als wissenschaftlicher Mitarbeiter am Berliner Zentrum für Mechatronische Medizintechnik (BZMM) entstanden, einer Kooperation des Fraunhofer Instituts für Produktionsanlagen und Konstruktionstechnik (IPK) und der Kli-nik für Mund-, Kiefer- und Gesichtschirurgie/ Klinische Navigation und Robotik der Cha-rité - Universitätsmedizin Berlin.
Herrn Professor Dr.-Ing. Jörg Krüger, dem Leiter des Instituts für Werkzeugmaschinen und Fabrikbetrieb (IWF) der TU Berlin und ehemals kommissarischem Leiter des Bereichs Medizintechnik am IPK, danke ich sehr herzlich für die kontinuierliche Unterstützung meiner Arbeit und deren Begutachtung. Professor Dr.-Ing. Erwin Keeve, dem Direktor des BZMM, danke ich für die Anerkennung der Arbeit als Gutachter und die Möglichkeit, die schriftliche Ausarbeitung unter seiner Leitung zu beenden.
Weiterhin danke ich Professor Dr. med. Jürgen Meixensberger, dem Direktor der Klinik und Poliklinik für Neurochirurgie am Universitätsklinikum Leipzig, für die Initiierung des Projekts, dessen fachliche Begleitung und Begutachtung meiner Arbeit. An dieser Stelle möchte ich ebenfalls besonders seinem Oberarzt Dr. med. Christos Trantakis für die Be-treuung des Projekts, die hilfreichen Ratschläge und konstruktiven Diskussionen danken. Die gewährten Einblicke in die klinische Routine haben meine Arbeit wesentlich bereichert und motiviert. Darüber hinaus danke ich dem Team des Innovation Center Computer Assisted Surgery (ICCAS) der Universität Leipzig, insbesondere Dr. Werner Korb und Dr. Ronny Grunert, für ihre freundliche Unterstützung.
Mein Dank gilt weiterhin Professor Dr.-Ing Marc Kraft für die Übernahme des Vorsitzes im Promotionsausschuss.
Ganz besonderen Dank möchte ich an meine ehemaligen Kollegen am BZMM richten. Ih-nen sind die hervorragenden Vorarbeiten zu verdanken, auf denen ich meine Arbeit auf-bauen konnte. Dr.-Ing. Andreas Rose, Sven Huth, Christian Winne, Dr.-Ing. Ralf Tita, Dr.-Ing. Dirk Mucha, Dr.-Ing. Timo Krüger, Bartosz Kosmecki und Marc Käseberg gilt größter Dank für die angenehme und spannende Zusammenarbeit sowie für die vielen inte-ressanten fachlichen Diskussionen.
Des Weiteren möchte ich mich bei meinen Eltern, meiner Familie und meinen Freunden bedanken. Ohne deren Hilfe, Zuspruch und auch Ablenkung wäre diese Arbeit nicht in die-ser Form und auf diesem Wege entstanden. Meiner lieben Oma Dr. Inge Jank danke ich be-sonders für ihre ausdauernde Unterstützung während des Korrekturlesens dieser Arbeit.
Emanuel Jank, September 2010


Inhalt
V
Inhaltsverzeichnis
1 Einleitung 1
2 Klinische Indikation und Problemstellung 3
2.1 Indikation und Bedeutung von Wirbelsäulenerkrankungen 3
2.2 Chirurgische Behandlung 4
2.2.1 Lumbaler Bandscheibenvorfall 4
2.2.2 Dekompression von Stenosen 5
2.2.3 Besonderheiten bei mikrochirurgischer Behandlung 5
2.2.4 Komplikationen 6
2.3 Problemstellung aus Sicht des Chirurgen 7
2.4 Anforderung an ein chirurgisches Unterstützungssystem 10
3 Stand der Technik 11
3.1 Klinische Navigationssysteme 11
3.1.1 Navigation mit Registrierung präoperativer Bilddaten 13
3.1.2 Navigation mit intraoperativer Bildgebung 15
3.1.3 Vergleich der verschiedenen Navigationsprinzipien 17
3.1.4 Leistungssteuerung aktiver Instrumente 18
3.2 Ausgewählte Methoden zur Operationsplanung 19
3.3 Klinische Anwendung der Navigation in der Wirbelsäulenchirurgie 20
4 Untersuchung der Bildgebungseigenschaften eines C-Bogens 22
4.1 Intraoperative Bildgebung mit C-Bögen 22
4.2 Untersuchung der magnetfeldbedingten Bildverzerrung 23
4.3 Untersuchung der radialen Bildverzerrung 24
4.4 Untersuchung der schwerkraftbedingten Verformung 25

Inhalt
VI
5 Zielsetzung 26
5.1 Zusammenfassung der offenen Probleme 26
5.2 Zielstellung der Arbeit 27
5.3 Eigenschaften des geplanten Systems 28
5.4 Betrachtung alternativer Lösungsansätze 29
5.5 Abgrenzung 30
6 Röntgenbildbasierte Navigation mit Leistungssteuerung 32
6.1 Eigener Ansatz 32
6.2 Verwendung des Systems im Operationssaal 33
6.2.1 Eingliederung in den Operationsverlauf 33
6.2.2 Benutzung des Systems 35
6.3 Systementwurf 37
6.3.1 Statische Systembeschreibung 37
6.3.2 Schnittstellen des Systems 39
6.3.3 Modellierung der Behandlungssituation 46
6.3.4 Dynamische Systembeschreibung 48
6.4 Betrachtung der Systemrisiken 60
7 Realisierung des Systems 62
7.1 Realisierung der Aufnahme von Bild- und Positionsdaten 63
7.1.1 Vermessung der Lage des Patienten 63
7.1.2 Vermessung der Instrumentenposition 65
7.1.3 Bestimmung der Röntgenbildposition 66
7.1.4 Umsetzung der Kalibrierung für das System 68
7.2 Visualisierung der chirurgischen Fräse in den Röntgenbilddaten 75
7.2.1 Initialisierung der Projektionsmatrix 76
7.2.2 Lagerichtiges Anzeigen von Objekten in der Bildprojektion 78
7.3 Realisierung der Arbeitsraumplanung 80
7.3.1 Realisierung der Planungsfunktion 80
7.3.2 Berechnung des 3D-Arbeitsraums 82
7.3.3 Berechnung der maximalen Instrumentenleistung 85

Inhalt
VII
7.3.4 Eigenschaften und Anwendung der Planungsfunktion 87
7.4 Die Sicherheitsarchitektur 89
7.4.1 Überprüfung der Bildverstärkerkalibrierung 89
7.4.2 Überprüfung der Instrumentennavigation 90
8 Evaluierung und Bewertung 92
8.1 Genauigkeit der Planungsfunktion 92
8.1.1 Versuchsaufbau 92
8.1.2 Durchführung 93
8.1.3 Ergebnisse und Auswertung 94
8.1.4 Diskussion 96
8.2 Genauigkeit der Arbeitsraumbegrenzung der Leistungssteuerung 97
8.2.1 Versuchsaufbau 97
8.2.2 Durchführung 99
8.2.3 Vermessung der gefrästen Oberflächen 101
8.2.4 Ergebnisse und Auswertung 101
8.2.5 Diskussion 103
8.3 Bewertung des realisierten Systems 103
9 Zusammenfassung und Ausblick 105
10 Bildnachweis 107
11 Literaturverzeichnis 108


1 - Einleitung
1
1 Einleitung
Die Entwicklung von chirurgischen Operationstechniken wird vom Bestreben der Opera-teure geprägt, die Behandlungsqualität zu steigern und gleichzeitig die Traumatisierung des Patienten zu reduzieren. Die postoperativen Schmerzen werden dadurch gemildert und die Genesung des Patienten beschleunigt. Diesen Vorteilen steht aber der Nachteil der gerin-gen Übersichtlichkeit des Operationsgebietes gegenüber. Der Chirurg kann über die schma-len Zugangswege das Operationsfeld und seine Instrumente nicht oder nur noch eingeschränkt einsehen. Dies erhöht die Schwierigkeiten bei der Führung der Instrumente und stellt eine wichtige Ursache für Komplikationen dar.
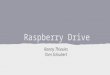
Um den Chirurgen bei der Ausrichtung seiner Instrumente zu unterstützen werden seit den 1980er Jahren Navigationssysteme entwickelt. Diese messen die Position und die Orientie-rung von chirurgischen Instrumenten und visualisieren diese innerhalb aufgenommener Bilddaten des Patienten (Abb. 1-1). Dadurch kann der Chirurg die Lage seiner Instrumente exakt bestimmen und Maßnahmen für den weiteren Operationsverlauf ableiten. Auch für die Unterstützung von Eingriffen an der Wirbelsäule sind solche Systeme entwickelt wor-den.
Abb. 1-1: Schematische Darstellung des Funktionsprinzips klinischer Navigationssysteme: Ein Positionssensor misst die räumliche Lage des Instruments und des Patienten. Die Position des Instruments wird anschließend lagerichtig in die Bilddaten des Patien-ten eingeblendet.
Eine Erweiterung des Navigationsprinzips ist die Beeinflussung der Instrumentenleistung durch das Navigationssystem selbst. Dabei wird die Leistung aktiver Instrumente, wie z.B. Bohrer oder Fräser, in Abhängigkeit der Position des Instruments relativ zu Planungsdaten gesteuert. Eine unbeabsichtigte Anwendung von Instrumenten kann damit aktiv verhindert

1 - Einleitung
2
werden, indem die Instrumentenleistung bei einer Abweichung von der Planung gedrosselt oder gar gestoppt wird.
Inhalt dieser Arbeit ist die Konzeption, Realisierung und technische Bewertung eines Na-vigationssystems mit Leistungssteuerung zur Unterstützung von Fräsvorgängen an der Wirbelsäule. Dabei wird erstmalig ein klinisch einsatzbares System mit Leistungssteuerung auf Basis von zweidimensionalen Röntgenbildern eines C-Bogens verwirklicht, um die Vorteile des C-Bogens hinsichtlich Handhabung, Strahlenbelastung und Verfügbarkeit zu nutzen. Das System soll den Operateur bei der Schaffung eines Zugangs zur Bandscheibe oder einer Spinalkanalverengung unterstützen. Die benachbarten empfindlichen Nerven im Spinalkanal dürfen dabei nicht verletzt werden. Die Leistungssteuerung ist hierbei die we-sentliche Komponente des neuartigen Navigationssystems. Sie verbessert die Handhabung des Systems, da der Operateur die Information des Navigationssystems kontinuierlich und intuitiv wahrnehmen kann. Für die Ausrichtung des Instruments und zur Verlaufskontrolle wird die Lage des Instruments in die Bilddaten eingeblendet. Durch diese Unterstüzungsfunktionen soll die Sicherheit und Genauigkeit beim Fräsen an der Wirbel-säule erhöht und ein Materialabtrag außerhalb des geplanten Bereichs verhindert werden.

2 - Klinische Indikation und Problemstellung
3
2 Klinische Indikation und Problemstellung
Zur Motivation dieser Arbeit und für ein besseres Verständnis der klinischen Gegebenhei-ten werden in diesem Kapitel die wirtschaftliche und soziale Bedeutung von Wirbelsäulen-erkrankungen sowie die chirurgischen Operationsmethoden beschrieben. Abschließend werden die klinischen Problemstellungen herausgearbeitet und die Anforderungen an ein geeignetes Unterstützungssystem definiert.
2.1 Indikation und Bedeutung von Wirbelsäulenerkrankungen
Pathologisch-anatomische Untersuchungen zeigen, dass bei jedem Menschen ab dem 30. Lebensjahr degenerative Veränderungen an seinen Bandscheiben nachweisbar sind (Krämer 2006). Diese Veränderungen können Schmerzen und neurologische Funktionsstö-rungen, wie Taubheit und Lähmungen bis hin zu Einschränkung der Organfunktionen, her-vorrufen. In den westlichen Industrieländern klagen ca. 40% der Bevölkerung mindestens einmal im Leben über relevante Symptome (Börm 2005). Die jährlichen direkten Kosten, die zur Behandlung von Erkrankungen der Wirbelsäule in Deutschland aufgebracht wer-den, belaufen sich auf ca. 10 Mrd. € und stellen eine der größten Belastungen für das Gesundheitssystem dar (Kohlmann 2005). Diese Zahlen decken sich mit einer europawei-ten Befragung von Schmerzpatienten, die ihre Schmerzen zu 32% im Rücken lokalisieren (Krämer 2006). Etwa zwei Drittel der Rückenbeschwerden betreffen den Lendenwirbelbe-reich.
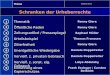
Abb. 2-1: Sagittales Schnittbild einer Magnetresonanztomographie (MRT) einer Wirbelsäule: Die gestrichelte Linie kennzeichnet eine Verengung des Spinalkanals im Bereich der Lendenwirbelsäule.
Die vorrangig schmerzhaften Symptome einer Wirbelsäulenerkrankung resultieren meist aus der Kompression der spinalen Nervenstrukturen. Dieser Druck kann durch einen Band-

2 - Klinische Indikation und Problemstellung
4
scheibenvorfall verursacht werden, bei dem Bandscheibengewebe in Richtung des Spinal-kanals vortritt. Eine chronische Funktionseinschränkung der Bandscheibe kann im weiteren Verlauf auch zu einer erhöhten Belastung der Wirbelgelenke führen und arthritische Ver-änderungen an den Facetten, den Pedikeln und insbesondere dem gelben Band (Ligamen-tum flavum), welches zwei Wirbelkörper miteinander verbindet, hervorrufen. Führen diese Verdickungen zu einer Verengung des Spinalkanals, wird von einer Spinalkanalstenose ge-sprochen. Da sich beide Erkrankungen in ähnlichen Symptomen äußern, wird die Diagnose durch geeignete bildgebende Verfahren gestellt. Insbesondere in Vorbereitung einer opera-tiven Therapie kommen dabei schichtbildgebende Verfahren, vor allem die Magnetreso-nanztomographie (MRT) und die Computertomographie (CT), zum Einsatz. Die Abb. 2-1 zeigt ein sagittales MRT-Schichtbild einer Wirbelsäule. Entlang der roten Linie ist deutlich eine Einengung des weißlich dargestellten Spinalkanals erkennbar.
2.2 Chirurgische Behandlung
Etwa 90% der Patienten mit lumbalen, also den Lendenabschnitt betreffenden Bandschei-benvorfällen können erfolgreich mit konservativen Therapien, d.h. ohne chirurgischen Ein-griff, behandelt werden (Börm 2005). Trotzdem wurden im Jahr 1996 in Deutschland 61 chirurgische Eingriffe pro 100.000 Einwohner durchgeführt (Kast 2000). Die Inzidenz für Spinalkanalstenosen wurde in einer schwedischen Studie mit 5 pro 100.000 Einwohner an-gegeben (Johnsson 1995; Schwerdtfeger 2005). Ziel beider Eingriffe ist die Entfernung des Gewebes, welches den Druck auf die Nerven verursacht, sowie die Schonung der Nerven und Blutgefäße. Wünschenswert ist ebenfalls die Erhaltung der Stabilität der Wirbelsäule durch Schonung der tragenden Gelenkteile und der hinteren Facette. Ist dies nicht möglich, bzw. ist die Stabilität durch Wirbelgleiten zusätzlich geschwächt, ist eine Fusion der Wir-belkörper durch eine Verschraubung erforderlich. Die Vorgehensweise zur chirurgischen Behandlung beider Erkrankungen wird im Folgenden beschrieben (Krämer 1990; Krämer 2005).
2.2.1 Lumbaler Bandscheibenvorfall
Operationstechnik der Wahl ist die Behandlung des Vorfalls über einen Zugangsweg vom Rücken durch das interlaminäre Fenster. Dabei wird der Patient in Bauchlage auf dem OP-Tisch gelagert. Die exakte Lokalisation des betroffenen Wirbelsäulensegments erfolgt durch einen Nadeleinstich und eine laterale Durchleuchtung mit einem C-Bogen. In der Achse der Wirbelsäule erfolgt in Höhe des Nadeleinstichs ein etwa 6 cm langer Haut-schnitt. Danach werden die Dornfortsätze der betroffenen Wirbelkörper dargestellt. An-schließend wird das Weichgewebe entlang der knöchernen Strukturen mobilisiert. Die Abb. 2-2 stellt den weiteren, entscheidenden Verlauf der Operation dar. Der Zugang zur Bandscheibe erfolgt durch den Spinalkanal, der wiederum durch das interlaminäre Fenster erreicht wird. Dieses Fenster befindet sich zwischen den beiden Wirbelkörpern und wird nach oben und unten durch die Wirbelbögen (Lamina), sowie seitlich durch den Dornfort-satz und das Wirbelgelenk begrenzt. Der Zwischenraum ist weiterhin durch das Gelbe Band (Ligamentum flavum) geschlossen. Um ausreichenden Zugang zum Spinalkanal zu schaffen, wird das Gelbe Band eingeschnitten (Flavektomie) und Teile der knöchernen Be-grenzung entfernt. Die Anatomie unterscheidet sich je nach betroffener Etage, sodass zur Erweiterung des Zugangs die Entfernung der Lamina (Hemilaminektomie), Teile des Wir-belgelenks und oder des Dornfortsatzes (Laminektomie) erforderlich sein können. Nach-

2 - Klinische Indikation und Problemstellung
5
folgend ist der Zugang zum Spinalkanal frei. Mit Hilfe eines Hakens wird der Nerven-schlauch mitsamt der Nervenwurzel verlagert, sodass die Bandscheibe und das ausgetrete-ne Bandscheibengewebe erreicht und behandelt werden können.
a) b)
Abb. 2-2: a) Darstellung einer Bandscheibenbehandlung. Die Instrumente werden durch das interlaminäre Fenster in den Spinalkanal geführt. Zur Erweiterung dieses Zugangs wurde Knochen von der Facette und dem Wirbelbogen entfernt. b) Sicht auf einen beidseitig eröffneten interlaminärem Zugang durch ein Mikroskop.
2.2.2 Dekompression von Stenosen
Die chirurgische Entfernung von Spinalkanalstenosen (SKS), also den anderen Verengun-gen des Spinalkanals, kann durch die vollständige Entfernung der beiden Wirbelbögen ein-schließlich des Dornfortsatzes (Laminektomie) und des darunter liegenden Bandes (Ligamentum interspinosum) erfolgen. Vorgehen der Wahl ist aber die interlaminäre De-kompression. Diese Vorgehensweise entspricht dem oben beschriebenen Eingriff zur Ver-sorgung lumbaler Bandscheibenvorfälle. Die den Spinalkanal verengenden Strukturen werden dabei durch das interlaminäre Fenster entfernt. Vorteil dieser Methode ist, dass sie einseitig erfolgen kann und dadurch die Invasivität verringert wird.
2.2.3 Besonderheiten bei mikrochirurgischer Behandlung
Die mikrochirurgischen Operationstechniken zur Behandlung von Bandscheibenvorfällen und Spinalkanalstenosen sind geprägt durch die Darstellung des Situs in der Tiefe über ei-nen sehr schmalen Zugang mit Ausleuchtung und Vergrößerung des Operationsfeldes und die Verwendung spezieller, abgewinkelter Instrumente (Krämer 2005). Oftmals wird der Zugang durch den Einsatz spezieller Retraktoren zur Spreizung des Weichgewebes ermög-licht. Abb. 2-3 zeigt einen solchen mikrochirurgischen Eingriff. Die Vorteile der mikrochi-rurgischen Versorgung ergeben sich aus dem schmalen Zugang und dem daraus resultierenden geringen Operationstrauma. Allerdings steigt auch die Anforderung an den Chirurgen, da die Orientierung aufgrund der eingeschränkten Sicht erschwert ist. Die mik-rochirurgischen Eingriffe sind technisch anspruchsvoller und benötigen eine längere Ope-

2 - Klinische Indikation und Problemstellung
6
rationszeit. Sie erhöhen das Risiko, dass die falsche Wirbeletage aufgesucht wird, oder dass die Dekompression der Nerven nur unvollständig erfolgt.
a) b)
Abb. 2-3: Mikrochirurgischer Eingriff an der Wirbelsäule: a) Einsatz des Operationsmikro-skops; b) minimalinvasiver Hautschnitt mit eingesetztem Retraktor und den typi-schen, abgewinkelten Instrumenten.
Weiterführend wurden minimal-invasive Operationsmethoden zur Behandlung von Band-scheibenvorfällen entwickelt, bei denen die Instrumente perkutan, also durch die Haut, ge-führt werden. Zu nennen ist die operative Therapie unter endoskopischer Sicht, die Auflösung des Bandscheibengewebes durch Enzyme (Chemonukleolyse), verschiedene Absaugmethoden und die Verdampfung des Gewebes mit einem Laser, der über eine feine Nadel in die betroffene Region geführt wird (Schmid 2000; Börm 2005). Aufgrund der sehr spezifischen Indikation der einzelnen Methoden und der daraus resultierenden gerin-gen Routine der Chirurgen sind diese Ansätze nicht verbreitet. Die Vorteilhaftigkeit ge-genüber den mikrochirurgischen Eingriffen wird teilweise kontrovers diskutiert.
2.2.4 Komplikationen
Die Eingriffe an der lumbalen Wirbelsäule bergen kaum lebensbedrohliche Risiken, sind aber komplikationsträchtig. Bis zu 20% der Bandscheibenoperationen erreichen nicht das optimale Operationsergebnis, weisen einen gestörten Heilungsverlauf auf oder erfordern Rezidiveingriffe. Die Häufigkeit der intraoperativen Komplikationen wird mit bis zu 3% angegeben und ist stark von der Erfahrung des Operateurs, der gewählten Operationsme-thode und den verfügbaren technischen Hilfsmitteln abhängig. In Krämer 2005 werden Komplikationen und ihre Häufigkeiten aus verschiedenen Studien zusammengefasst:
• Aufsuchen der falschen Etage (0–3,9%): Aufgrund der individuellen anatomischen Gegebenheiten und einer oft irreführenden Ertastung des Operationsgebiets gehört das Aufsuchen des falschen Wirbelsegments zu den häufigsten Fehlern bei Chirur-gen mit wenig Erfahrung. Bildgebung und Sensibilität für unerwartete anatomische Gegebenheiten, sowie Erfahrung minimieren das Risiko.

2 - Klinische Indikation und Problemstellung
7
• Duraeröffnung (0,8-5,3%, bei Rezidiveingriffen bis zu 17,4%): Als Duraeröffnung wird die Eröffnung des Hautschlauchs um das Rückenmark bezeichnet. Diese ent-steht oftmals nicht in Folge eines Fehlers des Operateurs, sondern ist teilweise nicht zu verhindern. Insbesondere bei Rezidiveingriffen mit entsprechender Vernarbung kann der Duraschlauch bei Mobilisierung reißen. Ebenso beim Einschnitt des Li-gamentum Flavum, wenn der Bandscheibenvorfall die Dura gegen die Einschnittstelle drückt.
• Nervenwurzelschädigung (0-8,0%): In Folge der während der Behandlung entste-henden mechanischen Kräfte bei der Verlagerung der Nervenwurzel, der auftreten-den Wärme durch den Verschluss der Blutgefäße mittels Elektrokoagulation und einer direkten Verletzung nach einer Duraeröffnung können vorübergehende oder bleibende Schäden an den Nerven hervorgerufen werden.
• Retroperitonale Verletzung (0,05%) sind Schädigungen der Organe und der großen Gefäße im Bauchraum, die direkt an die Bandscheiben angrenzen. Diese Komplika-tionen sind äußerst selten, stellen aber eine lebensbedrohliche Gefahr für den Pati-enten dar. Da kein Zugang zu diesen Arealen besteht, ist die intraoperative Erkennung und Versorgung äußerst schwierig.
• Blutung im Operationsgebiet erschwert die Sichtverhältnisse, insbesondere bei mi-nimal-invasiver Technik, und stört den Operationsverlauf. Blutung aus Venen oder gar Arterien müssen versorgt werden. Um das blutende Gefäß zu erreichen, muss oftmals der Zugang erweitert werden.
2.3 Problemstellung aus Sicht des Chirurgen
Die angeführten Komplikationen sind die Folge von Schwierigkeiten und Problemen, wel-che nachfolgend benannt und beschrieben werden. Die Probleme resultieren aus der spezi-fischen Operationsmethode, den allgemeinen Problemen im Operationssaal und den verfügbaren Instrumenten und Unterstützungssystemen.
Entfernung von knöchernen Strukturen
Eine der Herausforderungen bei den beschriebenen Eingriffen ist die Entfernung des knö-chernen Gewebes, welches sich in direkter Nachbarschaft zu den sensiblen Nervenstruktu-ren im Spinalkanal befindet. Die Abb. 2-4 zeigt drei Ansichten einer Computertomographie durch die Wirbelsäule in Höhe der Bandscheibe zwischen dem 3. und 4. lumbalen Wirbelkörper und des Spinalkanals. Vor allem in der axialen und korona-ren Ansicht ist zu erkennen, wie die knöchernen Strukturen des Dornfortsatzes, der Lamina und der Wirbelgelenke den Zugang zum Spinalkanal und der Bandscheibe versperren. Zur Schaffung eines Zugangs zum Situs ist es notwendig, Teile dieser knöchernen Strukturen zu entfernen. Eine Verletzung der angrenzenden Nerven muss dabei unbedingt verhindert werden.

2 - Klinische Indikation und Problemstellung
8
Abb. 2-4: Koronale, sagittale und axiale Computertomographie durch die Bandscheibe L3/L4. Der Zugangsweg über das interlaminäre Fenster ist mit Pfeilen gekennzeichnet. Die knöchernen Strukturen, welche den Zugang versperren, sind deutlich erkennbar (VHP 2009).
Das Abtragen der harten Gewebestrukturen am Knochen, den Gelenken und Knorpeln er-folgt mit Knochenstanzen nach Kerrision oder chirurgischen Fräsen (Abb. 2-5). Die Abb. 2-5c zeigt schematisch die Arbeitsweise dieser Instrumente: Die Knochenstanzen können unter den Knochenrand geführt werden, der dann schrittweise abgestanzt werden kann. Wenn sichergestellt wird, dass der untere Anschlag der Stanze am abzutragenden Gewebe anliegt, ist eine versehentliche Verletzung des anliegenden Duraschlauchs nahezu ausge-schlossen. Nachteil dieser Stanzen ist, dass Strukturen nur vom Rand her abgetragen wer-den können. Ihre Grenzen finden die Stanzen bei dicken Knochenstrukturen und bei der Einbringung von Öffnungen durch einen Knochen. Diese Nachteile können durch die Ver-wendung von Fräsen vermieden werden. Allerdings bergen Fräsen ein höheres Verlet-zungsrisiko. Ein kombinierter Einsatz von Fräse und Stanze ist ebenfalls möglich, wobei die Fräse zum Abtragen und Schwächen grober Strukturen genutzt wird und die Stanze zur Entfernung der letzten Knochenschicht vor dem Spinalkanal eingesetzt wird.
a) b) c)
Abb. 2-5: Instrumente zur Entfernung von Knochen an der Wirbelsäule: a) Knochenstanzen nach Kerrison; b) abgewinkelte, pneumatische Fräse der Firma Zeppelin; c) Sche-matische Darstellung der Anwendung der Instrumente zum Knochenabtrag.

2 - Klinische Indikation und Problemstellung
9
Orientierung im Operationsgebiet bei mikrochirurgischen Eingriffen
Ziel einer chirurgischen Behandlung ist, neben der Erreichung des klinischen Ziels auch die Schonung des Patienten und damit eine kurze Heilungs- und Rehabilitationsphase. Die Traumatisierung durch den Eingriff soll möglichst gering sein, weshalb die Zugangswege möglichst schmal gehalten werden. Die mikrochirurgischen und minimal-invasiven Opera-tionsmethoden wurden zur Erreichung dieses Ziels entwickelt. Die Verkleinerung der Zu-gangswege führt aber gleichermaßen zu einer Einschränkung des Sichtfeldes für den Chirurgen. Die Orientierung anhand der anatomischen Landmarken wird erschwert, da cha-rakteristische Merkmale der Anatomie nicht freigelegt werden. Die exakte Lokalisation der sensiblen Nervenstrukturen wird dadurch erschwert. Weiterhin ist der Arbeitsraum für die Instrumente eingeschränkt. Kochenstanzen, die zur Erweiterung der natürlichen Zugangs-wege eingesetzt werden, können nur noch bedingt verwendet werden. Die Bedeutung der Fräsen zum direkten Abtragen der Knochen nimmt zu. Die Häufigkeit der Komplikationen, die mit mangelnder Orientierung im Zusammenhang stehen, steigt.
Bildgebung zur Kontrolle des Operationsverlaufs
Zur Darstellung der intraoperativen Situation, der Kontrolle des Operationsverlaufs und des Operationsergebnisses werden intraoperativ Röntgensysteme eingesetzt. Standard ist die 2D-Bildgebung mit einem C-Bogen. Diese birgt das Problem der Strahlungsbelastung für den Patienten und das klinische Personal. Die Aufnahme von aussagekräftigen Bildda-ten kann ebenfalls problematisch sein, wenn die eingebrachten Instrumente, die Retraktoren und andere metallische Gegenstände die Bildqualität stören. Bei stark überge-wichtigen Patienten ist der Bildkontrast gering und die Ausrichtbarkeit des C-Bogens ein-geschränkt. Wünschenswert ist eine 3D-Bildgebung, da hier wesentliche Details besser erkennbar sind (Wirth 2001; Stöckle 2006).
Handhabung von Assistenzsystemen
Geräte und Systeme zur Unterstützung der Chirurgen müssen sich möglichst unauffällig in den Operationsablauf integrieren. Der zusätzliche Aufwand durch die Anwendung solcher Geräte sollte minimal sein: Ein zeitlicher Mehraufwand und höhere Kosten werden kaum akzeptiert. Weiterhin muss die Anwendung der Systeme sicher und fehlertolerierend mög-lich sein. Problematisch bei den Assistenzsystemen ist zumeist, dass der Operateur wäh-rend des Eingriffs auf das Operationsgeschehen und den Patienten konzentriert ist, sodass die eigentliche Benutzung des Assistenzsystem nur zeitweise erfolgt.
Erhaltung der Wirbelsäulenstabilität
Bei der Entfernung des Gewebes an der Wirbelsäule steht neben einer ausreichenden De-kompression der Nerven die Erhaltung der Funktionalität im Vordergrund. Dabei sollen stabilitätsrelevante Strukturen, z.B. die äußeren Anteile der Wirbelgelenke geschont wer-den, damit eine Versteifung der Wirbelsäule durch Verschraubungen vermieden werden kann. Zusätzlich führt die Schonung von Gewebe zu einer schnelleren Verheilung der Wunde und zu einer geringeren Narbenbildung im Gewebe.

2 - Klinische Indikation und Problemstellung
10
2.4 Anforderung an ein chirurgisches Unterstützungssystem
Forschungsgruppen und Unternehmen aus dem Medizintechnikbereich entwickeln chirur-gische Assistenzsysteme mit dem Ziel, die Chirurgen zu unterstützen. Dadurch soll die Häufigkeit von Komplikationen verringert und das Behandlungsergebnis verbessert wer-den. Die wichtigen Anforderungen an Systeme zur Unterstützung chirurgischer Eingriffe sind nachfolgend zusammengefasst:
• Unterstützung des Chirurgen: Primäres Ziel eines Unterstützungssystems ist es, den Chirurgen bei der Ausübung seiner Tätigkeit zu unterstützen, um die klinische Zielstellung in höherer Qualität zu erreichen. Typischerweise unterstützen solche Systeme die Handhabung und Führung von chirurgischen Instrumenten oder die Übertragung der Operationsplanung auf den Patienten.
• Bedienbarkeit: Das System muss für den Operateur intuitiv bedienbar sein. Die durch das System erzeugten Informationen müssen eindeutig und schnell interpre-tierbar sein, um Maßnahmen für den Operationsverlauf ableiten zu können.
• Integration in die Behandlungsumgebung: Das System muss in die bestehende Be-handlungsumgebung und in den Operationsablauf eingliedert werden. Dabei dürfen die vorhandenen Geräte und Instrumente in ihrer Funktion und Sicherheit nicht be-einträchtigt werden. Die Benutzung des Systems sollte, wenn möglich, nur minima-le Veränderungen an den eingespielten Arbeitsabläufen im Operationssaal erfordern.
• Kosten: Das System muss einen Nutzen und messbaren Vorteil für den Chirurgen und Patienten bieten. Diese Vorteile müssen den mit der Systembenutzung einher-gehenden zeitlichen und finanziellen Mehraufwand rechtfertigen.
• Genauigkeit, Reproduzierbarkeit und Sicherheit: Die Funktionen des System müs-sen mit einer wiederholbaren Genauigkeit arbeiten, damit das Behandlungsziel si-cher und exakt erreicht werden kann. Die Systemkomponenten und die Benutzung des Systems müssen derart gestaltet sein, dass die Einhaltung der angegebenen Grenzparameter garantiert werden kann. Dazu müssen Sicherheitsmechanismen in das System integriert werden, die dem Operateur die Überprüfung der Funktions-tüchtigkeit während des chirurgischen Eingriffs ermöglichen.
• Hygiene, Sterilität und Biokompatibilität: Teilkomponenten, welche mit dem Ope-rationssitus oder dem sterilen Personal Kontakt haben, müssen für diesen Kontakt geeignet sein. Das gewählte Material und der mechanische Aufbau müssen derart gestaltet sein, dass geeignete Reinigungs- und Sterilisierungsprozesse durchgeführt werden können, die die Sterilität der Komponente sicherstellen. Die Materialien dürfen keinen negativen Einfluss auf das lebende Gewebe haben.
• Erfüllung der allgemeinen Anforderungen: Neben den Anforderungen, die aus der speziellen klinischen Aufgabenstellung resultieren, müssen Unterstützungssysteme den gesetzlichen Vorschriften genügen. Diese sind in Deutschland im Medizinproduktegesetz (MPG) verankert, welches die Europäische Richtlinie 93/42/EWG über Medizinprodukte umsetzt (Schorn 2002).

3 - Stand der Technik
11
3 Stand der Technik
In diesem Kapitel werden Konzepte und Systeme aus dem Fachgebiet „Computer- und Ro-boterassistierte Chirurgie“ vorgestellt, die den Chirurgen bei der Bewältigung der klini-schen Herausforderungen unterstützen. Dabei wird der Stand der Technik bezüglich bekannter Assistenzsysteme für die Wirbelsäulenchirurgie beschrieben und die Lösungen für die spezifischen Problemstellungen erläutert. Insbesondere werden die folgenden Schwerpunkte betrachtet:
• Klinische Navigationssysteme mit präoperativer und intraoperativer Bildgebung
• Leistungssteuerung für aktive Instrumente
• Planungssysteme
• Klinische Anwendungen in der Wirbelsäulenchirurgie
Auf Robotiksysteme für die Wirbelsäulenchirurgie wird in dieser Arbeit nicht eingegangen. Eine hervorragende Übersicht zum Thema chirurgische Robotiksysteme ist aber in Pott 2005 gegeben. Als ein Beispiel soll hier das Miniaturrobotiksystem Spine Assist (Mazor Surgical Technologies Inc., USA) genannt werden, welches direkt am Wirbelkörper befes-tigt wird (Wolf 2004). Bei einem Kadaverversuch konnten Pedikelbohrungen mit einer Genauigkeit von 0,87±0,63 mm erstellt werden (Togawa 2007).
3.1 Klinische Navigationssysteme
Mit dem Begriff klinische Navigationssysteme werden Computersysteme bezeichnet, die dem Chirurgen während einer Operation die Ausrichtung der verwendeten Instrumente oder Implantate relativ zum Patienten visualisieren. Diese Systeme bestehen aus einem La-gesensor, einem Computer, einem Anzeigegerät und verschiedenen Lokalisatoren. Die Lokalisatoren sind geeignete Referenzkörper, deren räumliche Lage durch den verwende-ten Lagesensor gemessen wird. Für die Navigation werden diese Lokalisatoren am Patien-ten, an den verwendeten Instrumenten oder den Implantaten befestigt. Abb. 3-1 zeigt das Navigationssystem NaviScreen und ein Instrument mit Lokalisator zur Benutzung mit ei-nem Navigationssystem.

3 - Stand der Technik
12
a)
Lokalisator mit
drei Glaskugelmarkern
dentales Handstück
b)
Lagesensor
Anzeigegerät mit
integriertem Computer
mit Bedienlementen
Abb. 3-1: a) dentales Handstück mit Lokalistor zur Benutzung mit einem Navigationssystem und b) Navigationssystem NaviScreen
Einen guten Überblick über die Entwicklung der Navigationstechnik, ausgehend von den stereotaktischen Apparaten zu Beginn des 20. Jahrhunderts ist in Peters 2006 gegeben. Heute können folgende Klassen von Navigationssystemen unterschieden werden.
• Mit 3D-Bilddaten: Abb. 3-2a zeigt die Visualisierung des Navigationssystems FESS Control (Koulechov 2006b), das ein Shaverinstrument auf Basis einer Com-putertomographie (CT) navigiert.
• Mit 2D-Bilddaten: In Abb. 3-2b ist eine Darstellung eines 2D-Navigationssystems gezeigt. Hier wird die Lage des Instruments und eines Fixateurs in ein 2D-Röntgenbild eines C-Bogens eingeblendet.
• Ohne Bilddaten: Der Einsatz von Navigation ohne Bilddaten ist in der Orthopädie etabliert, z.B. bei der Implantation künstlicher Knie- oder Hüftgelenke. Die Syste-me helfen bei der achsenrichtigen Positionierung der Gelenke. Dazu werden die Bewegungsachsen des Patienten intraoperativ vermessen. Ein Beispiel dafür ist das Orthopilot® System (Aesculap AG, Deutschland).
a) b)
Abb. 3-2: a) Visualisierung des CT-basierten Navigationssystems FESS Control und b) An-sicht einer 2D-Navigation auf Basis eines Röntgenbildes.

3 - Stand der Technik
13
Werden Bilddaten für die Navigation verwendet, so benutzen die Systeme zur Berechnung der Position des Instruments innerhalb der Bilddaten das in Abb. 3-3 dargestellte geometri-sche Modell. In der realen Modalität wird die räumliche Ausrichtung des Instruments ge-genüber dem Patienten mit dem Lagesensor des Navigationssystems gemessen. Zusätzlich besteht die wesentliche Aufgabe, den Übergang zwischen der realen und virtuellen Modali-tät zu bestimmen. Bei der Verwendung von präoperativen Bilddaten wird dazu eine Regist-rierungsprozedur durchgeführt. Werden die Bilddaten intraoperativ aufgenommen, kann die Ausrichtung der Bilddaten direkt durch die Messung der Lage des bildgebenden Sen-sors während der Bildaufnahme bestimmt werden. In den folgenden Abschnitten werden die bekannten Prinzipien zur Navigation mit prä- und intraoperativen Bilddaten erläutert.
img
cam
pat
tool
tool'
Reale Modalität Virtuelle Modalität
Bilddaten
imgTpat
Abb. 3-3: Geometrisches Modell der klinischen Navigation: In der realen Modalität erfolgt die Messung der Lage des Instruments tool zum Patienten pat. Die virtuelle Modalität beinhaltet die Bilddaten und die Modellierung der Operation. Die Bestimmung des räumlichen Bezugs zwischen beiden Modalitäten ist eine der wesentlichen techni-schen Aufgaben eines Navigationssystems.
3.1.1 Navigation mit Registrierung präoperativer Bilddaten
Für eine Navigation auf Basis von präoperativen Bilddaten, insbesondere Computertomo-graphien (CT), muss ein Registrierverfahren durchgeführt werden, mit dem die Transfor-mation zwischen dem Patienten und dem Bilddatensatz imgTpat ermittelt wird. Zur Lösung dieses Problems werden stets die Merkmale benötigt, die sich sowohl in den Bilddaten als auch in der realen Operationssituation darstellen lassen. Lässt sich durch diese Merkmale ein Zwischenkoordinatensystem m aufspannen, welches in beiden Modalitäten bekannt ist, so lässt sich die gesuchte Transformation einfach berechnen:
img img mpat m pat= ⋅T T T (1)
Ergebnis der Registrierung ist zumeist eine affine Transformation, welche eine Rotation, Translation und Skalierung beinhalten. Im Folgenden sind die gängigen Methoden zur Be-stimmung der gesuchten Transformation beschrieben.

3 - Stand der Technik
14
3.1.1.1 Punkt-Zu-Punkt Registrierung
Die Registrierung von 3D-Bilddaten zum Patienten über Landmarken stellt den einfachsten und meist gewählten Ansatz dar. In diesem Verfahren werden drei oder mehr nicht kolli-neare Punkte in den beiden Modalitäten pat und img als Punktepaare identifiziert. Die ge-suchte Transformation wird dann ermittelt, indem z.B. das mittlere Fehlerquadrat (mean squared error, MSE)
( ) 2
1
1 nimg img pat
i pat iin =
− ⋅∑ p T p (2)
minimiert wird. Die Registrierung mit Landmarken erfordert die Auswahl geeigneter Punk-te. In der Kopfchirurgie können bspw. die Augenwinkel, der Nasenrücken oder der Nasen-winkel verwendet werden. Diese Punkte werden in den Bilddaten per Maus markiert und in der Operation z.B. mit einem Instrument angetastet. Die erreichbare Genauigkeit hängt stark von der Übereinstimmung der Bilddaten mit der realen Situation ab. Liegen die Landmarken auf der Haut, führt die plastische Verformung des Weichegewebes zu Abwei-chungen in der Registrierung.
In der Wirbelsäulenchirurgie werden die Landmarken derart gewählt, dass sie auf der Kno-chenoberfläche des Wirbelkörpers liegen. Um diese abzutasten, muss die Knochenoberflä-che der Wirbelkörper freigelegt werden. Die gewählten Merkmale sollten das Operationsgebiet möglichst umschließen, da dadurch die Genauigkeit der Registrierung steigt (Maurer 1997; Foley 1999). Eine Weiterentwicklung stellt die Verwendung von künstlichen Landmarken dar. Diese können in Form eines künstlichen Referenzkörpers am Patienten befestigt sein (Schermeier 2002) oder z.B. als Knochenschrauben zuvor implan-tiert werden (Maurer 1997). Die Positionen künstlicher Landmarken können exakter in den Bilddaten und auch in der Realität vermessen werden, wodurch die Registriergenauigkeit gesteigert wird.
3.1.1.2 Registrierung über Oberflächen
Die Registrierung über Punktepaare wird durch die Registrierung von Oberflächen vervoll-ständigt. Erste Ansätze sind die Extraktion von Oberflächen aus zwei unterschiedlichen 3D-Bilddaten zur Überlagerung derselben (Pelizzari 1989). Wird die gesuchte Oberfläche auch in der physischen Modalität pat erfasst, kann durch die Minimierung des Oberflä-chenabstands analog zu Gleichung 2 die gesuchte Transformation ermittelt werden. Die Oberfläche des Patienten kann taktil mit Hilfe eines Zeigeinstruments erfasst werden, des-sen Spitze über die Oberfläche des Patienten geführt wird (Lavallée 1995). Ebenfalls ist die Erfassung mit Hilfe eines Oberflächenlaserscanners (Troitzsch 2003) bekannt. Um die in-vasive Freilegung der knöchernen Oberflächen zu vermeiden, ist die Erfassung der Kno-chenoberfläche durch Auswertung von intraoperativen Ultraschallbildern entwickelt worden (Brendel 2002).
3.1.1.3 Registrierung über Konturen
Eine weitere Möglichkeit ist die Registrierung von 3D-Datensätzen mit zwei oder mehre-ren Röntgenbildern durch Contour-Matching-Verfahren. Hierbei werden aus künstlich er-

3 - Stand der Technik
15
zeugten Projektionsbildern des 3D-Datensatzes Konturen berechnet und mit den Konturen der realen Projektionsbilder verglichen (Murphy 1997; Kerrien 1999).
3.1.2 Navigation mit intraoperativer Bildgebung
Alternativ können die Bilddaten direkt im Operationssaal, zu Beginn und während des Eingriffs aufgenommen werden. Da die Position und Orientierung des Bildaufnahmesys-tems während der Bildgebung direkt gemessen werden kann, entfällt die sonst notwendige Registrierprozedur. Dafür wird eine Vermessung der Abbildungseigenschaften erforder-lich.
3.1.2.1 Zweidimensionale radiographische Bilddaten
Die Standardbildgebung in der Wirbelsäulenchirurgie ist die Durchleuchtung des Patienten mit einem C-Bogen. Diese Geräte erzeugen mittels Röntgenstrahlung ein Projektionsbild des Patienten. Abb. 3-4 zeigt die Anwendung eines C-Bogens im Operationssaal und ein entsprechendes Bild der Wirbelsäule. Der Bildverstärker kann bei diesen Systemen ver-messen werden, indem ein geeigneter Lokalisator am Bildverstärker befestigt wird (Hebecker 2003; Nolte 2003).
a) b)
Abb. 3-4: Intraoperative Aufnahme eines Projektionsbildes der Wirbelsäule mit einem C-Bogen vor dem Hautschnitt.
Um die Bilddaten eines C-Bogens intraoperativ in einem Navigationssystem nutzen zu können, muss die räumliche Lage der Bilddaten und die Position der Röntgenquelle be-stimmt werden. Die Standardkonstruktion für eine Kalibriervorrichtung besteht aus zwei koplanaren Platten, welche parallel zur Bildebene des C-Bogens vor der Eingangsöffnung des Bildverstärkers befestigt werden. Beide Platten enthalten Marker, die sich eindeutig im Röntgenbild abzeichnen (Nolte 1995; Hofstetter 1999). Die erste Platte wird während der Kalibrierung genutzt, um die räumliche Lage des Bildkoordinatensystems zu bestimmen. Die Marker in der zweiten Platte dienen der Vermessung der Röntgenquellenposition. Die Genauigkeit dieser Vermessung steigt mit dem Abstand der beiden Platten (Zeiss 2002). Über die Notwendigkeit einer exakt kalibrierten Röntgenquellenposition wird kontrovers diskutiert: Jain 2005 zeigt in einer Untersuchung, dass eine um 50 mm fehlkalibrierte Röntgenquelle keine relevanten Auswirkungen auf die Qualität einer 3D-Rekonstruktion hat.

3 - Stand der Technik
16
Ein weiteres Ziel der Kalibrierung ist die Kompensation der Bildverzerrung. Dazu werden die Marker der ersten Ebene verwendet (Rudin 1991; Brack 1996; Zykla 1999; Soimu 2002). Die Verzerrung ist dabei durch ein Polynom 5. Grades ausreichend genau darstell-bar (Liu 1999). Da die Verzerrung vom einwirkenden Magnetfeld abhängig und somit nicht konstant ist (Solzbach 1988), wird die Bildentzerrung für jedes aufgenommene Rönt-genbild neu berechnet (Zeiss 2002). Zumindest ein Teil des Kalibrierkörpers muss dafür auch während der Anwendung am Bildverstärker befestigt bleiben.
Eine Alternative ist in Sabczynski 2002a beschrieben. Hierbei wird die magnetisch beding-te Verzerrung in verschiedenen Positionen bestimmt. Gleichzeitig wird die Stärke und Ausrichtung des Magnetfeldes durch eine Sensorik am Bildverstärker gemessen und mit den jeweiligen Verzerrungsparametern verknüpft. Während der Benutzung wird die Aus-richtung und Stärke des Magnetfeldes erneut gemessen und anhand der gespeicherten Da-ten eine bestmögliche Bildentzerrung durchgeführt. Wird davon ausgegangen, dass das Magnetfeld unveränderlich ist, kann auf die sensorische Erfassung des Magnetfeldes ver-zichtet werden. Fahrig 1997 berichtet über ein stationäres Röntgensystem, bei dem die Bildverzerrung stellungsabhängig mit einem Winkelabstand von 2 Grad ermittelt wurde. In der Anwendung konnte die Verzerrung bis auf 0,5 Bildpunkte kompensiert werden.
Weiterhin ist eine mechanische Verformung der Röntgeneinheit in Abhängigkeit der Stel-lung des C-Bogens bekannt (Schkommodau 2002). Um diese Abweichung zu kalibrieren, wird die Messung der C-Stellung mit einem Schwerkraftsensor vorgeschlagen (Sabczynski 2002b; Sati 2002).
3.1.2.2 Dreidimensionale intraoperative Bildgebung
Für den intraoperativen Einsatz wurden mobile Computertomographen entwickelt. Abb. 3-5 zeigt den Tomoscan M-EG (Philips Medical Systems, Deutschland) während eines in-traoperativen Kopfscans. Diese Geräte unterscheiden sich von den stationären Computer-tomographen durch ihren mobilen Aufbau und eine etwas kompaktere Bauweise. Die gewonnenen Bilddaten lassen sich direkt in Navigationssystemen nutzen. Dazu kann bei-spielsweise die Gantry des CTs zum Aufnahmezeitpunkt vermessen werden (Queck 2002). Über eine entsprechende Kalibrierung und die Auswertung der im DICOM-Bilddatensatz gespeicherten Aufnahmeparameter ist die exakte Position der Bilddaten bestimmbar. Die Navigation auf Basis der Bilddaten einer intraoperativen Magnetresonanztomographie (MRT) ist ebenfalls möglich (Schenck 1995; Chinzei 2000).
Durch die Verwendung von intraoperativen CTs und MRTs entstehen wesentliche zusätz-liche Kosten. Zusätzlich ist die Bedienung dieser Geräte komplex. Die Strahlenexposition der CTs und das magnetische Feld der MRTs stellen erhöhte Anforderungen an die Operationssäale und deren Einrichtung. Daher wurden in den vergangenen Jahren C-Bögen mit einer 3D-Bildgebung ausgestattet. Zu nennen sind insbesondere der Iso-C3D (Siemens Medical Solutions, Deutschland) und der Vario 3D (Ziehm Imaging GmbH, Deutschland). Abb. 3-5a zeigt einen Iso-C3D im klinischen Einsatz. Der Bildverstärker ist mit einem Lokalisator für ein Navigationssystem ausgestattet, durch den die räumliche Lage der auf-genommenen Bilddaten gemessen werden kann. Die Auflösung des Iso-C3D wird mit 9 Li-nienpaaren pro Zentimeter (Rock 2001), die des Vario 3D mit 6 Linienpaaren (Tita 2007) angegeben. Gegenwärtig werden 3D-C-Bögen mit digitalen Bilddetektoren entwickelt, die

3 - Stand der Technik
17
eine deutliche Verbesserung der Ortsauflösung und des Bildkontrasts versprechen (Ritter 2007).
a) b)
Abb. 3-5: 3D-Bildgebung mit a) einem 3D-C-Bogen und b) einem intraoperativen CT.
3.1.3 Vergleich der verschiedenen Navigationsprinzipien
Tabelle 3-1 fasst die in Hebecker 2003 und Schäffler 2006 vorgestellten Vor- und Nachtei-le der einzelnen Navigationstechniken zusammen. Der wesentliche Vorteil der intraopera-tiven Bildgebung liegt im Verzicht auf die Registrierprozedur. Zusätzlich wird in Hüfner 2004 beschrieben, dass durch die Umlagerung des Patienten zwischen Bildgebung und Operation eine Veränderung der anatomischen Anordnung der relevanten Körperregion entstehen kann. Dadurch sind die Bilddaten für eine Navigation nicht mehr geeignet.
Tabelle 3-1: Vor- und Nachteile verschiedener Navigationsprinzipien
präoperative 3D-Billdgebung (CT)
intraoperative 3D-Bildgebung
(CT, 3D-C-Bogen)
intraoperative 2D-Bilddaten (C-Bogen
Vorteile + beste Bildqualität + keine Registrierung notwendig
+ 3D-Bilddaten
+ keine Registrierung
+ potentiell geringe Strahlung
+ Kosten und Verfüg-barkeit
Nachteile - keine Behandlung von Notfällen
- Intraoperative Regist-rierung notwendig
- intraoperative Strah-lung
- Kosten und Verfüg-barkeit
- Fehlende 3D-Information
Hinsichtlich der Strahlenbelastung ist in der Literatur keine eindeutige und statistisch gesi-cherte Aussage über die einzelnen Navigationsmethoden zu finden. Gebhard 2003 prüft die Strahlenbelastung an einem technischen Phantom und ermittelt, dass ein 3D-Scan mit ei-nem 3D-C-Bogen vom Typ Siemens Iso-C3D einer Dauerdurchleuchtung von 39,3s ent-spricht. Die Ergebnisse einer experimentellen Studie von Schäffler 2006 bestätigen, dass die 2D-Navigation bezüglich der Strahlenbelastung einer Navigation auf Basis eines

3 - Stand der Technik
18
3D-C-Bogens potentiell überlegen ist. In der klinischen Anwendung der Pedikelschraubennavigation wird jedoch das Gegenteil beobachtet (Gebhard 2003; Wendl 2003). Die Gründe für die erhöhte Strahlungsemission in der 2D-Navigation liegen in der aufwendigen Ausrichtung des C-Bogens in einem günstigen Winkel auf den richtigen Wir-belkörper. Dies bedingt insbesondere bei ungeübtem Personal zusätzliche Durchleuch-tungszeit (Wendl 2003).
Gebhard 2004 gewichtet die Vor- und Nachteile der unterschiedlichen Navigationsprinzi-pien mit den Anforderungen der klinischen Fragestellungen. Für Eingriffe an der unteren Brust- und der Lendenwirbelsäule wird die Verwendung von Navigation mit intraoperati-ver 2D-Bildgebung mit einem C-Bogen empfohlen. Hier kommen die Vorteile der gerin-gen Strahlenbelastung im Vergleich zum nicht-navigierten Eingriff und der einfachen Benutzung der C-Bögen zum Tragen. Die fehlende 3D-Information wirkt sich aufgrund der übersichtlicheren Anatomie kaum nachteilig aus und kann durch die geschickte Ausrich-tung des C-Bogens und die Aufnahme mehrerer Röntgenbilder kompensiert werden. Im Bereich der Halswirbelsäule wird dagegen die Navigation mit intraoperativer 3D-Bildgebung favorisiert, da hier eine exakte Darstellung der feinen Anatomie in drei Dimensionen notwendig ist.
3.1.4 Leistungssteuerung aktiver Instrumente
Das vorgestellte Prinzip der Navigation unterstützt den Chirurgen durch eine Visualisie-rung von Bild- und Positionsdaten. Durch die Interpretation der angezeigten Daten kann der Operateur eine Abweichung von der optimalen Behandlung erkennen und entsprechen-de Korrekturmaßnahmen ergreifen. Das Prinzip einer Leistungssteuerung für aktive In-strumente erweitert bestehende Navigationssysteme mit dem Ziel, eine Abweichung rechentechnisch zu bestimmen und durch eine Steuerung der Instrumentenleistung aktiv in die Behandlung einzugreifen (Lüth 2001). Dazu vergleicht das System die aktuellen Positi-onsdaten mit einer präoperativen Planung und berechnet ein entsprechendes Leistungssig-nal.
Kneissler 2005 untersucht die technischen Eigenschaften der Leistungssteuerung. Mit ei-nem technischen Versuchsaufbau wird beim Fräsen von geometrischen Primitiven eine Geometrietreue von unter einem Millimeter erreicht. Die Untersuchungen zeigen, dass das Fräsen mit Leistungsteuerung dem konventionellen Fräsen überlegen ist. Ebenso werden der Einfluss des Nachlaufes des Instruments und die Prinzipien einer stufenlosen Drehzahl-steuerung untersucht.
Für die Wirbelsäule wurde ein CT-basiertes Navigationssystem mit Leistungsteuerung vor-gestellt (Hein 2002; Mätzig 2005). Die Lage einer Fräse wird in die CT-Bilddaten einge-blendet und die Leistung außerhalb eines zuvor definierten Arbeitsraums abgeschaltet. In Mätzig 2005 wird ein solches System an einem Kadaver evaluiert. Im Bereich der Wirbel-bögen wurden zwei Kavitäten gefräst, wobei in einer Kavität der Knochen zum Spinalka-nal hin durchbrochen wurde. In der zweiten Kavität konnten 52 Messpunkte aufgenommen werden, deren mittlerer Abstand mit 0,8±0,4 mm angegeben wurde. Dabei wurde festge-stellt, dass tendenziell zuviel Material abgetragen wird und für die spätere klinische An-wendung die Berücksichtigung eines Sicherheitsabstandes vorgeschlagen.

3 - Stand der Technik
19
In Mätzig 2005 wird weiterhin ein Ansatz für ein 2D-Navigationssystem mit Leistungs-steuerung beschrieben. Ein erstes Funktionsmuster wurde aufgebaut, welches die Planung einer Linie im Röntgenbild erlaubt. Anhand dieser Linie bestimmt das System eine Grenz-ebene (Abb. 3-6). Eine pneumatische Fräse wurde gestoppt, sobald die Grenzfläche beim Fräsen erreicht wurde. An einem Prüfkörper wurde bis zur Abschaltung der Instrumenten-leistung gefräst. Die entstandene Ebene wurde an 48 Stellen mit einem Messschieber ver-messen. Die Genauigkeit wurde mit 0,4±0,2 mm angegeben.
Röntgenquelle
Planungs-
linie
Grenzebene
Projektionsebene mit
Röntgenbild
Patient
Abb. 3-6: Ansatz einer projektionsbildbasierten Leistungssteuerung nach Mätzig 2005: Durch die Planung einer Linie im Projektionsbild wird eine Grenzebene definiert. Oberhalb dieser Ebene kann das chirurgische Instrument aktiviert werden.
In Koulechov 2006a wird das Prinzip der Leistungssteuerung in der Kopfchirurgie evalu-iert. Dabei wurde ein Navigationssystem für die dentale Implantologie (Schermeier 2002) erweitert. Der eingesetzte Bohrer konnte nur dann aktiviert werden, wenn dieser in einer definierten Genauigkeit mit der geplanten Implantatachse ausgerichtet wurde. Ein zweites System navigiert auf Basis einer präoperativen Computertomographie einen Shaver in den Nasennebenhöhlen. Der Shaver kann dabei nur innerhalb eines geplanten Arbeitsvolumens aktiviert werden. Bei der Evaluierung der Leistungsteuerung am Patienten wurde eine Ver-besserung der Ergonomie und der Behandlung festgestellt (Koulechov 2006a; Koulechov 2006b; Strauss 2008).
3.2 Ausgewählte Methoden zur Operationsplanung
In diesem Abschnitt werden ausgewählte Methoden vorgestellt, mit deren Hilfe der Opera-teur, ausgehend von Bilddaten des Patienten, eine Operationsplanung durchführen kann. Ziel der Planungen ist es, Arbeitsräume für die Leistungssteuerung festzulegen oder ana-tomische Modelle des Patienten zu gewinnen.
Stand der Technik sind Planungssysteme für dreidimensionale Bilddaten eines Computer-tomographen. Durch die direkte räumliche Zuordnung der Bilddaten zu einer eindeutigen

3 - Stand der Technik
20
Raumposition lassen sich Zugangswege, Implantatpositionen oder Arbeitsbereiche direkt festlegen. Die einfachsten Systeme ermöglichen eine manuelle Segmentierung der Voxel durch eine direkte Markierung, ähnlich einem Pinselwerkzeug aus der digitalen Grafikbe-arbeitung (Mätzig 2005). Effizientere Systeme erlauben das Einzeichnen von Polygonen in die axialen Schichtbilder (Koulechov 2006a), um auch größere Flächen schnell markieren zu können. Methoden mit höherem Automatisierungsgrad erlauben eine interaktive oder vollautomatische Erstellung der Planung, indem die Grauwerte der Bilddaten, die Nachbar-schaftsbeziehungen der Voxel oder anatomisches Vorwissen verwendet werden (Kang 2003).
Für die Erstellung einer Operationsplanung aus Projektionsbildern eines C-Bogens sind im Stand der Technik ebenfalls Methoden bekannt. In Burgkart 2005 ist eine Methode zur Planung einer Umstellungsoperation des Oberschenkels beschrieben, welche ein einfaches Modell des Knochens aus zwei Projektionsbildern berechnet. Dafür markiert der Operateur verschiedene Landmarken in den Röntgenbildern. Unter Berücksichtigung der räumlichen Lage der Röntgenbilder berechnet das System ein einfaches Modell des Oberschenkels, be-stehend aus drei Achsen und einer Kugel. Anhand dieses Modells kann dann die Operation geplant und mit Navigationsunterstützung durchgeführt werden. Die Vorteile gegenüber einer CT-basierten Planung ergeben sich durch die geringere Strahlenbelastung und den ge-ringeren Aufwand (Burgkart 2005).
de la Fuente 2005 beschreibt ein System zur Segmentierung des Zementvolumens für Re-visionseingriffe am zementierten Oberschenkel. In wenigen Projektionsbildern wird die Zementstruktur segmentiert und dann dreidimensional rekonstruiert. Bei einer Verwendung von nur fünf Projektionsaufnahmen wird eine Genauigkeit der Planung von 1,2±0,5 mm angegeben. Das Volumen wird dabei aus den Konturen des Röntgenbildes rekonstruiert, indem eine Rückprojektion und eine Glättung mit Bézier-Splines nach Worthy 1983 und Caponetti 1990 durchgeführt werden. Da das Zementvolumen die Form einer Röhre auf-weist, wird durch die Splineinterpolation eine Genauigkeitsverbesserung erzielt. Für eine weitere Erhöhung der Genauigkeit kann zusätzlich die Form des chirurgischen Werkzeugs berücksichtigt werden.
3.3 Klinische Anwendung der Navigation in der Wirbelsäulenchirurgie
In der Wirbelsäulenchirurgie hat sich die navigierte Insertion von Pedikelschrauben fest etabliert. Dabei werden sowohl 3D-Bilddaten von CTs und 3D-C-Bögen, als auch zweidi-mensionale Projektionsbilder herkömmlicher C-Bögen verwendet. Beispiele für kommer-ziell erhältliche Systeme sind das VectorVision (Brainlab AG, Deutschland), die StealthStation (Medtronic Inc, USA) oder das Stryker Navigation System (Stryker GmbH & Co.KG, Deutschland). Abb. 3-7 zeigt die klinische Anwendung eines Navigationssys-tems.
Der klinische Nutzen der Navigation an der Wirbelsäule wird von klinischer Seite in ver-schiedenen Publikationen positiv beurteilt: Foley 2001 bewertet die Anwendung der 2D-Navigation der StealthStation von Medtronic. Dabei wurde eine navigierte Sonde in die Bohrungen des Pedikels eingeführt und ein Röntgenbild erstellt. Nachfolgend wurde die Abweichung zwischen der Röntgenprojektion und der virtuellen Einblendung gemessen. Die Instrumentenspitze wies eine mittlere Abweichung von 0,97±0,4 mm in der Position auf. Die gemessene Winkelabweichung wurde mit 2,7±0,6 ° angegeben. Die Überlage-

3 - Stand der Technik
21
rungsgenauigkeit wird als exzellent bezeichnet. Fritsch 2002 bewertet ebenfalls die 2D-Navigation des Medtronic-Systems und stellt eine Verminderung des Risikos einer me-dialen Fehlplatzierung der Pedikelschrauben fest. Als Vorteile gegenüber einer CT-basierten Navigation werden die geringe Strahlenbelastung, die gute Adaptierbarkeit an die tatsächliche OP-Situation und die automatische Registrierung hervorgehoben.
a) b)
Abb. 3-7: Einsatz des Navigationssystems VectorVision (Brainlab AG): a) Blick auf die eröff-nete Wirbelsäule mit angebrachtem Patientenlokalisator und einem eingebrachten Handbohrer mit Lokalisator; b) Darstellung auf dem Navigationssystem.
Holly 2003 und Gruetzner 2004 beschreiben die klinische Anwendung eines Navigations-systems mit Bilddaten eines intraoperativen 3D-C-Bogens für die Implantation von Pedikelschrauben in den Wirbelkörper. Im Vergleich zur Navigation mit präoperativen 3D-Daten und intraoperativen 2D-Bilddaten wird eine Senkung der Fehlplatzierungsrate festgestellt.

4 - Untersuchung der Bildgebungseigenschaften eines C-Bogens
22
4 Untersuchung der Bildgebungseigenschaften eines C-Bogens
Grundlage dieser Arbeit bilden intraoperativ aufgenomme Röntgenprojektionsbilder, die mit so genannten C-Bögen angefertigt werden. Inhalt dieses Kapitels ist die Untersuchung der Abbildungseigenschaften dieser Systeme. Ziel ist es insbesondere die Störeinflüsse zu untersuchen, die die Röntgenbildgebung beeinflussen. Die ermittelten Eigenschaften sollen als Basis für den späteren Entwurf eines Kalibrierverfahrens dienen, mit dem die räumliche Lage aufgenommener Röntgenbilder und die Projektionseigenschaften des Systems be-stimmt werden können.
4.1 Intraoperative Bildgebung mit C-Bögen
C-Bögen bestehen, wie in Abb. 4-1 dargestellt, aus einem Fahrstativ und einem Monitor-wagen. Das Fahrstativ trägt die bogenförmige C-Struktur, an der die Röntgenquelle und der Bildverstärker befestigt sind. Um das Röntgengerät flexibel auf den Patienten ausrichten zu können, kann die C-Struktur um die Schwenkachse, die Propellerachse und die C-Achse geschwenkt und entlang der Schubachse und der Hubachse verschoben werden. Der Bild-verstärker und die Röntgenquelle sind an der C-Struktur derart angeordnet, dass die von der Röntgenquelle ausgesendete Röntgenstrahlung vom Bildverstärker empfangen und in ein Bild umgewandelt werden kann. Zur Bildaufnahme wird der C-Bogen am OP-Tisch und dem Patienten positioniert, sodass sich die zu untersuchende Körperregion des Patien-ten im Strahlengang befindet. Auf ihrem Weg durch den Körper des Patienten durchdrin-gen die Röntgenstrahlen unterschiedliche Gewebearten und werden dadurch unterschiedlich stark abgeschwächt. Dadurch entsteht im Bildverstärker ein Projektionsbild der durchleuchteten Körperregion, das auf dem Monitorwagen angezeigt wird.
Bildverstärker
Röntgen-
quelle
C-Struktur
FahrstativMonitorwagen
Hubachse
Schwenkachse
Schubachse
C-Achse
Strahlen-
gang
Propellerachse
Abb. 4-1: Schematische Darstellung eines C-Bogens mit den wichtigsten Teilkomponenten und den Bewegungsachsen

4 - Untersuchung der Bildgebungseigenschaften eines C-Bogens
23
Für die Verwendung der Projektionsbilder im Unterstützungssystem müssen die räumliche Lage der aufgenommenen Röntgenbilder und die Abbildungseigenschaften des Röntgen-systems bekannt sein. Während der Benutzung werden die Bilddaten durch unterschiedli-che interne und externe Einflüsse verändert. Zu nennen sind (Käseberg 2009):
• die magnetisch bedingten Verzerrungen
• die radiale Verzerrung des Bildverstärkers (Kisseneffekt)
• die schwerkraftbedingte Verformung der C-Struktur
In den folgenden Abschnitten werden die Auswirkungen dieser Einflüsse und die Größe des verursachten Fehlers untersucht. Die Untersuchungen werden beispielhaft an einem C-Bogen des Typs BV-Libra 9" der Firma Philips Medical Systems durchgeführt.
4.2 Untersuchung der magnetfeldbedingten Bildverzerrung
Aufgabe des Bildverstärkers ist es, aus der Röntgenstrahlung ein sichtbares Bild zu erzeu-gen. Dabei werden die Röntgenstrahlen zunächst in Elektronen umgewandelt, die durch elektrische Felder beschleunigt werden. Die Elektronen treffen auf einen räumlich nachge-stellten Leuchtschirm, auf dem ein sichtbares Bild entsteht. Auf ihrem Weg durch den Bildverstärker werden die Elektronen durch Magnetfelder abgelenkt. Dies führt zu einer Beeinflussung des Bildes auf dem Leuchtschirm. Die Art der Beeinflussung ist dabei von der Richtung und der Stärke des Magnetfeldes abhängig.
a) b)
Abb. 4-2: a) Röntgenbild des am Bildverstärker angebrachten Punktrasterphantoms; b) Über-lagerung von acht Röntgenbildern bei einer Drehung in horizontaler C-Stellung durch das Erdmagnetfeld. Durch die magnetisch bedingte Verzerrung bewegen sich die Schatten durch das Bild.
Zum Nachweis des Effekts wurde ein Punktrasterphantom am Bildverstärker eines C-Bogens angebracht. Dieses enthält eine Vielzahl an Stahlkugeln mit 1,0 mm Durchmesser, welche sich in Form von einzelnen, punktförmigen Schatten im Röntgenbild abbilden (Abb. 4-2a). Für den Versuch wurde die C-Struktur in horizontale Stellung gebracht, so-dass die Röntgenstrahlung horizontal verläuft. Nachfolgend wurde das gesamte Fahrstativ

4 - Untersuchung der Bildgebungseigenschaften eines C-Bogens
24
um die eigene Achse und damit durch das Erdmagnetfeld gedreht. Während der Drehung wurden in gleichmäßigen Abständen acht Röntgenbilder aufgenommen. Abb. 4-2b zeigt eine Überlagerung dieser Bilder. Die punktförmigen Schatten der Marker werden durch die sich ändernde Magnetfeldrichtung in verschiedene Richtungen verschoben und bewegen sich durch das Röntgenbild. Die detaillierte Auswertung der einzelnen Röntgenbilder zeigt, dass Magnetfelder, die senkrecht zur Röntgenstrahlung verlaufen, die Bildinhalte verschie-ben. Magnetfelder, welche parallel zur Röntgenstrahlung verlaufen, bewirken eine spiral-förmige Verzerrung des Bildes (vgl. Abb. 4-3a) (Solzbach 1988). Zur Bestimmung des verursachten Fehlers wurden N=360 Markerschatten aus 24 Röntgenbildern untersucht, die in unterschiedlichen Ausrichtungen zum Erdmagnetfeld aufgenommen wurden. Für jeden Marker wurde die mittlere Position seiner Schatten im Bild bestimmt. Die magnetisch be-dingte Verschiebung der Schatten von dieser Position betrug im Mittel 0,4 mm, die maxi-male Abweichung 1,0 mm.
4.3 Untersuchung der radialen Bildverzerrung
Durch die Verwendung einer Linsenoptik im Kamerasystem des Bildverstärkers und durch den gekrümmten Eingangsbildschirm wird das Röntgenbild radial verzerrt. Es entsteht der charakteristische Kisseneffekt, der während der Benutzung des C-Bogens konstant ist. Zur Verdeutlichung wurde ein Linienphantom am Bildverstärker befestigt. Abb. 4-3a zeigt ein Röntgenbild dieses Phantoms. Die tangential verlaufenden Linien weisen eine sichtbare Krümmung auf. Die beiden durch den Mittelpunkt verlaufenden Linien sind S-förmig ver-zerrt. Diese Verzerrung ist ein Ergebnis der im Abschnitt 4.2 („Untersuchung der magnet-feldbedingten Bildverzerrung“, S. 23 ff.) besprochenen magnetisch bedingten Verzerrung.
a) b)
Abb. 4-3: a) Röntgenbild eines Linienphantom: die tangential angeordneten Linien werden durch den Kisseneffekt verzerrt. Die radial angeordneten Linien weisen eine magne-tisch bedingte, s-förmige Verzerrung auf. b) Ausschnitt eines Röntgenbildes eines Kugelrasters. Die unverzerrten Schattenpositionen sind mit Kreisen markiert.
Die radiale Verzerrung bewirkt, dass die Röntgenbilder zum Rand hin gestreckt werden. Um den Fehler der radialen Verzerrung zu bestimmen, wurde ein Punktrasterphantom am Bildverstärker befestigt und geröntgt. Um eine Beeinflussung durch das Magnetfeld zu mi-

4 - Untersuchung der Bildgebungseigenschaften eines C-Bogens
25
nimieren, wurde ein Röntgenbild in horizontaler C-Stellung mit senkrecht zur Strahlungs-richtung verlaufendem Erdmagnetfeld aufgenommen. Nachfolgend wurden in diesem Bild die Bildpositionen aller Markerschatten in Pixel relativ zum Mittelpunkt bestimmt. Da auch die räumlichen Positionen der Marker in Millimeter relativ zum Mittelpunkt bekannt sind, wurde ein Skalierungsfaktor bestimmt, mit dem die räumlichen Positionen in Bildpo-sitionen umgerechnet werden können. Der Skalierungsfaktor wurde mit einem Optimie-rungsverfahren berechnet, das die mittlere Differenz zwischen dem Radius der Schatten und dem Radius der berechneten Positionen über das gesamte Bild minimiert. Abb. 4-3b zeigt einen Ausschnitt des Röntgenbildes des Punktrasters. Mit Kreisen sind die berechne-ten Markerpositionen gekennzeichnet. Deutlich erkennbar ist die durch den Kisseneffekt verursachte radiale Verschiebung der Markerschatten gegenüber den berechneten Positio-nen. Die nicht-radialen Verschiebungen entstehen durch den verbleibenden Einfluss des Erdmagnetfelds. Die Standardabweichung der Radiusabweichung beträgt 1,03 mm über al-le Marker. Werden die drei Marker am äußeren Bildrand, bei denen die radiale Verzerrung besonders stark ist, nicht berücksichtigt, so beträgt die Standardabweichung nur 0,47 mm. Der optimierte Skalierungsfaktor bewirkt, dass die verursachte radiale Verschiebung in ei-nem bestimmten Abstand zwischen Bildmitte und Bildrand null ist. Dieser Abstand beträgt etwa zwei Drittel des Abstands zwischen Bildmitte und Bildrand.
4.4 Untersuchung der schwerkraftbedingten Verformung
Während der Benutzung des C-Bogens kann die C-Struktur in verschiedene Richtungen geneigt werden. Das Gewicht des Bildverstärkers und der Röntgenquelle führen dabei zu Verformungen der C-Struktur und damit zu einer Veränderung der Projektionseigenschaf-ten des C-Bogens. Die Verformung wurde untersucht, indem ein optischer Positionsmess-sensor vom Typ Polaris Vicra der Firma Northern Digital Inc. (Ontario, Kanada) an der Röntgenquelle und ein optischer Lokalisator am Bildverstärker befestigt wurde. Mit die-sem Aufbau wurde die Lage des Koordinatensystems locBV des Lokalisators im Koordina-tensystem cam des Positionssensors gemessen.
a)cam
locBV
b)
camlocBV
c)
camlocBV
Abb. 4-4: Hauptverformungseffekte der C-Struktur eines C-Bogens: a) Stauchung in vertikaler Stellung, b) Aufweiten in horizontaler Stellung und c) Durchhängen bei einer Pro-pellerachsneigung.
Abb. 4-4 zeigt die festgestellten Effekte: Durch die Schwerkraft wird die C-Struktur in der vertikalen Stellung gestaucht (Abb. 4-4a). Befindet sich die C-Struktur in horizontaler Stel-lung (Abb. 4-4b), wird die C-Struktur aufgeweitet. Die Aufweitung betrug gegenüber der Stauchung 2,3 mm. Wird der C-Bogen entlang der Propellerachse (P-Achse) gedreht (Abb. 4-4c), wurde ein Durchhängen der C-Struktur gegenüber der vertikalen Stellung von ±1,7 mm festgestellt.

5 - Zielsetzung
26
5 Zielsetzung
In diesem Kapitel wird die Zielstellung dieser Arbeit formuliert. Dazu werden eingangs die Defizite der Konzepte und Techniken zusammengefasst, die aus dem Stand der Technik bekannt sind. Anschließend wird die grundlegende Idee dieser Arbeit skizziert. Aufgabe dieses Kapitels ist es, die Grundzüge des geplanten Unterstützungssystems zu umreißen, sodass nachfolgend der Systementwurf durchgeführt werden kann.
5.1 Zusammenfassung der offenen Probleme
Durch die bestehenden Systeme und Forschungsansätze wird das Fräsen am Wirbelkörper nicht optimal unterstützt. Im Folgenden werden die Beschränkungen beschrieben, die für eine optimale Unterstützung der Anwendung aufgehoben werden sollen:
• Kein kliniktaugliches Unterstützungssystem für das mikrochirurgische Fräsen am Wirbelkörper: Derzeit ist kein kliniktaugliches Navigationssystem bekannt, das die Entfernung von knöchernen Strukturen am Wirbel unterstützt. Die bekannten, kli-nisch eingesetzten Navigationssysteme für die Wirbelsäulenchirurgie werden zur Ausrichtung von Instrumenten verwendet, z.B. eines Handbohrers bei Wirbelsäu-lenversteifungen.
• Eingeschränkter Informationsgehalt bei der 2D-Navigation: Bei der 2D-Navigation gehen durch die Abbildung der Anatomie auf zweidimensionale Projektionsbilder die räumlichen Informationen verloren. Dies kann durch die Aufnahme von mehre-ren Röntgenbildern aus verschiedenen Winkeln ausgeglichen werden. Allerdings steigt damit die Belastung des Chirurgen, der während der Behandlung Informatio-nen aus verschiedenen Projektionsbildern gleichzeitig erfassen und bewerten muss. Für die Navigation eines dynamischen Vorgangs wie das Führen einer Fräse ist die-se Form der 2D-Navigation ungeeignet, da die Aufmerksamkeit des Operateurs auf den Situs und nicht auf die Navigationsdarstellung gerichtet ist.
• Registrierung von 3D-Daten bei mikrochirurgischen Eingriffen: Die etablierten Registrierverfahren erfordern das Antasten der Knochenoberfläche, um die Lage der Bilddaten relativ zu einem Referenzsystem in der Operation zu bestimmen. Die Verfahren eignen sich daher nicht für mikrochirurgische Eingriffe, da hierbei mög-lichst kleine Operationsschnitte gewünscht sind und die Knochenoberfläche nicht freigelegt wird. Die Registrierung mittels intraoperativer Bildgebung (Röntgenpro-jektionsbilder) kumuliert zusätzliche Fehlereinflüsse. Das Verfahren ist nicht de-terministisch und anfällig gegenüber Artefakten in beiden Bildmodalitäten. Es gibt keine verlässlichen Angaben über die erreichbare Genauigkeit im klinischen Um-feld.
• Aufnahme von intraoperativen 3D-Bilddaten: Die intraoperative Aufnahme von 3D-Bilddaten mit Computertomographen oder 3D-C-Bögen erhöht den zeitlichen Aufwand während der Operation erheblich. Die entsprechende Hardware ist wegen der höheren Kosten nicht verbreitet. Insbesondere bei der Verwendung von intrao-

5 - Zielsetzung
27
perativen 3D-C-Bögen können Bewegungen des Patienten zu Bildartefakten führen, da die Bilddatenaufnahme 1-2 Minuten andauert und die Bewegung des Patienten nicht erfasst wird. Ebenso beeinflussen die im Situs befindlichen Instrumente und Implantate aus Metall die Bildqualität negativ. Die zusätzliche Strahlung ist für Pa-tient und klinisches Personal nachteilig.
• Unzulängliche Planungssysteme für 2D-Bilddaten: Derzeit ist kein Planungssystem bekannt, welches mit Projektionsbildern arbeitet und die Planung von geeigneten Arbeitsräumen an der Wirbelsäule zulässt. Der in Mätzig 2005 beschriebene Ansatz erlaubt eine projektionsbildbasierte Planung über die Definition einer Grenzfläche in verschiedenen Projektionsbildern. Diese ist aber nicht geeignet, die komplexe Form des Fräsbereichs zu planen. Es gibt keine Angaben darüber, wie exakt die ge-ometrische Form des Fräsgebietes mit diesem System geplant werden kann.
• Nachteile der Robotiksysteme: Roboterbasierte Systeme konnten sich bisher nicht etablieren. Gründe sind vor allem die hohen Kosten, die geringe Flexibilität, die Entkopplung des Arztes vom Patienten und der hohe Aufwand bei der Vorbereitung und Benutzung solcher Systeme. Da die Robotiksysteme auf den Verfahren der Na-vigation aufbauen, wirken die robotikspezifischen Probleme zusätzlich zu den Li-mitierungen der Navigationstechniken. Die hohe mechanische Genauigkeit der Robotersysteme kann dadurch in der klinischen Anwendung nicht erreicht werden.
5.2 Zielstellung der Arbeit
Zielstellung der Arbeit ist die Entwicklung eines Systems zur Unterstützung von Fräsvor-gängen an den knöchernen Strukturen der Wirbelsäule. Dabei sollen Konzepte entwickelt und evaluiert werden, die die genannten Limitierungen des Stands der Technik beheben. In diesem Abschnitt wird dazu ein neuartiges Verfahren skizziert, das den Operateur durch die visuelle Darstellung der Instrumentenposition und die Steuerung der Instrumentenleis-tung bei der Handhabung der chirurgischen Fräse unterstützt.
Abb. 5-1: Schematische Darstellung der Systemidee: In aufgenommenen Projektionsbildern wird ein Arbeitsbereich geplant. Anschließend wird die Position der Fräse in die Bilddaten eingeblendet und die Leistung entsprechend der Planung gesteuert.

5 - Zielsetzung
28
In Abb. 5-1 ist eine schematische Darstellung der Systemidee gezeigt. Vor dem Einsatz des Fräsinstruments nimmt der Chirurg mit einem C-Bogen Projektionsbilder der Zielregion auf. Die Bilddaten werden direkt in das Navigationssystem übertragen und zusammen mit den entsprechenden Positionsdaten abgespeichert. Das System bietet im Anschluss sofort eine Ansicht auf die aufgenommen Bilddaten, in die das Instrument lagerichtig eingeblen-det wird. Zur Planung kennzeichnet der Operateur innerhalb der Projektionsbilder die Ge-webe- und Knochenbereiche, die mit der chirurgischen Fräse entfernt werden sollen. Ist diese Planung abgeschlossen, berechnet das System aus den Eingaben des Operateurs einen 3D-Arbeitsbereich, der das abzutragende Gewebe umfasst. Nachfolgend unterstützt das System den Operateur bei der Durchführung des Fräsvorgangs durch die positionsabhängi-ge Steuerung der Instrumentenleistung und die bereits angesprochene Visualisierung des Instruments in den Bilddaten. Die Visualisierung dient dabei der gelegentlichen Orientie-rung. Während des Fräsens ist die Aufmerksamkeit des Chirurgen auf das OP-Gebiet ge-richtet. Die Darstellung der Navigationsinformationen erfolgt im Wesentlichen über die Steuerung der Instrumentenleistung. Diese verhindert zusätzlich eine Anwendung des In-struments außerhalb des geplanten Arbeitsbereichs. Um den Bilddatensatz oder die Pla-nung bei einer Änderung der OP-Situation anzupassen, kann der Operateur jederzeit neue Bilddaten aufnehmen oder die Planung verändern. Analog zu bekannten chirurgischen Na-vigationssystemen mit Leistungssteuerung können die einzelnen Phasen Bildgebung, Pla-nung und Behandlung unterschieden werden. Mit dem vorliegenden Konzept wird die chronologische Trennung der Phasen weitgehend aufgehoben.
5.3 Eigenschaften des geplanten Systems
Das soeben grob skizzierte System soll folgende Eigenschaften besitzen:
• Registrierfreie Bildaufnahme: Im Gegensatz zu anderen Navigationssystemen mit Leistungssteuerung ist keine Registrierprozedur erforderlich. Dies verringert im Allgemeinen die Invasivität des Eingriffs, ist weniger fehleranfällig und verringert den Aufwand bei der Systembenutzung.
• Einfache, kostengünstige Bildgebung: Das Navigationssystem beruht vollständig auf den Bilddaten eines C-Bogens. Diese Systeme gehören zur Standardausrüstung in den Operationssälen. Es werden keine besonderen Anforderungen hinsichtlich der Bildgebung gestellt.
• Ständige Aktualisierung der Bild- und Planungsdaten: Die einfache Handhabung der C-Bögen und die unkomplizierte Eingliederung von Bildgebung, Planung und Behandlung führen zu der Möglichkeit, auch während der Operation neue Bilddaten aufzunehmen. Die Planung kann dadurch flexibel an Änderungen im Operations-feld angepasst werden.
• Kontinuierlicher Informationsfluss: Durch die Darstellung der Navigationsinforma-tionen über die Instrumentenleistung besteht eine ständige Informationsübermitt-lung vom System zum Chirurgen, auch wenn die Visualisierung nicht betrachtet wird.
• Eignung für Mikrochirurgie: Da keine Registrierung durchgeführt werden muss, kann auf die Freilegung von bestimmten anatomischen Landmarken und Knochen-

5 - Zielsetzung
29
oberflächen verzichtet werden. Das System eignet sich für mikrochirurgische Ope-rationsmethoden.
5.4 Betrachtung alternativer Lösungsansätze
Um eine Navigation und Leistungssteuerung realisieren zu können, sind alternativ zum vorgestellten Ansatz auch andere Lösungsstrategien vorstellbar. In Abb. 5-2 ist eine hierar-chische Struktur mit den denkbaren Lösungen gezeigt. Die Lösungswege, die bereits aus dem Stand der Technik bekannt sind, sind mit dünnen, gestrichelten Pfeilen gekennzeich-net. Dies sind leistungssteuernde Navigationssysteme mit präoperativer oder intraoperati-ver 3D-Bildgebung. Konzepte, welche im Stand der Technik noch nicht hinreichend für die Verwendung in einem Navigationssystem mit Leistungssteuerung untersucht sind, sind durch die durchgezogenen Verbindungspfeile gekennzeichnet. Die dunkelgrauen, fettge-druckten Pfeile stellen die Lösungsstrategie dar, die in dieser Arbeit umgesetzt wird.
Abb. 5-2: Lösungswege zur Realsierung von Leistungssteuerung und Navigation. Die für diese Arbeit gewählte Lösungsstrategie ist grau hinterlegt.
Die gewählte Lösungsstrategie beinhaltet die intraoperative Bildgebung mit einem C-Bogen. Im Gegensatz zur intraoperativen 3D-Bildgebung sind die benötigten Geräte in je-dem Operationssaal verfügbar. Sie sind kostengünstig, haben eine im Vergleich geringe Strahlenbelastung und sind flexibel und einfach handhabbar. Gegenüber der Verwendung präoperativer Bilddaten ist keine räumliche Registrierung zum Operationsgebiet notwen-

5 - Zielsetzung
30
dig. Auf Basis der aufgenommenen 2D-Bilddaten sind nachfolgend eine 3D-Rekonstruktion und eine einfache 3D-Planung denkbar. Dies würde aber den Aufwand während der Bildgebung erhöhen, da eine zufriedenstellende 3D-Rekonstruktion möglichst viele Röntgenbilder erfordert. Weiterhin können die Bilddaten aufgrund der Konstruktion der C-Bögen und der Gegebenheiten im Operationssaal nur über einen eingeschränkten Winkelbereich aufgenommen werden. Dies führt wiederum zu einer Verringerung der 3D-Qualität. Daher wird für die Planung des Arbeitsraumes ein Konzept für eine 2D-Planung entwickelt. In der Tabelle 5-1 sind die Vor- und Nachteile der jeweiligen Strategien aufge-listet. Dies geschieht unter der Annahme, dass sich das geplante System mit den erwarteten Eigenschaften realisieren lässt.
Tabelle 5-1: Vor- und Nachteile der vorgestellten Lösungsstrategien mit intraoperativer 2D-Bildgebung.
Intraoperative 2D-Bildgebung mit an-schließender 3D-Rekonstruktion und 3D-
Planung
Intraoperative 2D-Bildgebung mit an-schließender 2D-Planung
+ Bilddaten mit 3D-Informationen
- Mehr Röntgenaufnahmen notwendig, um eine 3D-Rokunstruktion berechenen zu können
- Eingeschränkte 3D-Qualität durch ein-geschränkten Winkel
+ Schnelle Bildgebung
+ Einfacher Planungsvorgang
+ Bildgebung und Planung schnell wie-derholbar
- Keine 3D-Informationen während der Planung
5.5 Abgrenzung
Weiterhin gibt es Problemstellungen, Arbeitsgebiete und Konzepte welche in einem enge-ren thematischen Zusammenhang zu dieser Arbeit stehen, aber nicht weiter verfolgt wur-den. Dies sind beispielsweise:
• Kompensierung von Verzerrungseffekten der C-Bogenbilddaten: Projektionsbilder werden intraoperativ mit einem C-Bogen aufgenommen. Die den Patienten durch-dringende Röntgenstrahlung wird in einem so genannten Bildverstärker in ein sichtbares Bild umgewandelt. Während dieses Wandlungsprozesses treten Bild-verzerrungen auf, welche durch die Krümmung des Eingangsleuchtschirms und durch Magnetfelder verursacht werden. Eine ausführliche Übersicht über die ver-schiedenen Einflüsse auf die Bildgebung ist in Kapitel 4 („Untersuchung der Bild-gebungseigenschaften eines C-Bogens“, S. 22 ff.) gegeben. Aus dem Stand der Technik sind verschiedene, technisch ausgereifte Konzepte zur Bestimmung und Entzerrung der Kissenverzeichnung bekannt (vgl. Abschnitt 3.1.2.1 „Zweidimensionale radiographische Bilddaten“, S. 15 ff.).
• Verwendung von präoperativen Bilddaten: Zur Diagnose der ursächlichen Erkran-kung und der Eingriffsplanung liegen dem Operateur dreidimensionale Bilddaten (CT oder MRT) des Patienten vor. Eine Verwendung dieser Bilddaten zur Unter-stützung des Chirurgen bei der Planung oder dem Fräsen erfordert die Bestimmung der räumlichen Beziehung zwischen den Bilddaten und dem Patienten. Ansätze für

5 - Zielsetzung
31
eine solche Registrierung, auch auf Basis von intraoperativ gewonnenen Projekti-onsbildern sind im Kapitel 3 („Stand der Technik“, S. 11 ff.) gegeben.
• Rekonstruktion von Volumendaten aus den Projektionsbildern: Die zur Navigation verwendeten Projektionsbilder des Patienten sind in Position und Orientierung be-kannt, ebenfalls wird die Projektionsgeometrie des Systems bestimmt. Dadurch ist es möglich, aus den Projektionsbildern dreidimensionale Volumendaten zu rekon-struieren. Dazu bietet sich insbesondere die algebraische Rekonstruktionstechnik ART (Huth 2005) an.
• Registrierung und Kalibrierung der Bilddaten über anatomische oder künstliche Landmarken: In der Forschung werden Techniken entwickelt, die die Identifizie-rung korrespondierender Merkmale in den verschiedenen Projektionsbildern erlau-ben. In Yoo 2004 werden diese Daten genutzt, um die Abbildungseigenschaften und die räumliche Lage von C-Bogenbilddaten zu bestimmen. Diese Technik könn-te auf die Wirbelsäulenchirurgie übertragen werden, um auf eine Kalibrierung ver-zichten zu können.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
32
6 Röntgenbildbasierte Navigation mit Leistungssteuerung
Inhalt dieses Kapitels ist die Konzeption des in der Zielsetzung umschriebenen Unterstüt-zungssystems für die Wirbelsäulenchirurgie. Dazu wird zunächst der eigene Ansatz für das geplante System beschrieben. Nachfolgend wird auf die Eingliederung in den Operations-ablauf und die Benutzung des Systems im Operationssaal eingegangen. Schwerpunkt des Kapitels ist der Systementwurf aus statischer und dynamischer Sicht. Dabei werden die einzelnen Systemkomponenten und deren Funktionalität erläutert. Das Modell der Behand-lungssituation wird konzipiert und die Risiken analysiert, die durch die Benutzung des Sys-tems im klinischen Umfeld entstehen könnten.
6.1 Eigener Ansatz
Das zu realisierende System ist durch folgende neuartige Ansätze charakterisiert:
• Kontinuierliche Unterstützung mittels Navigation und Leistungssteuerung: Das ge-plante System soll den Chirurgen bei der Handhabung einer chirurgischen Fräse zur Entfernung von knöchernen Strukturen an der Wirbelsäule unterstützen. Dabei stellt das Bearbeiten des Knochens einen sehr dynamischen Prozess dar. Eine effi-ziente Unterstützung erfordert daher einen kontinuierlichen Informationsfluss zwi-schen Unterstützungssystem und Chirurg. Da die Aufmerksamkeit des Chirurgen während des Fräsvorgangs auf den Patienten gerichtet ist, kann eine herkömmliche Navigation, basierend auf einer Visualisierung der Instrumentenposition in den Bilddaten, keine wirksame Unterstützung bieten. Deshalb wird für das geplante Unterstützungssystem eine Steuerung der Instrumentenleistung in Abhängigkeit der Instrumentenposition realisiert. Der Chirurg erfährt über die verfügbare Fräsleis-tung eine kontinuierliche Darstellung der Navigationsdaten, auch wenn er die Navi-gationsvisualisierung nicht betrachtet. Zusätzlich kann das System eine übermäßige Abtragung von Gewebe aktiv verhindern, indem die Leistung des Instruments bei einer Überschreitung der geplanten Fräsgeometrie abgeschaltet wird.
• Adaptierbarer Bild- und Planungsdatensatz: Grundlage des geplanten Assistenz-systems sollen Bilddaten des Patienten sein, welche hinsichtlich der Darstellung des Operationsgebietes und der Strahlenbelastung optimiert aufgenommen werden können. Die Bildaufnahme soll dem Chirurgen die Möglichkeit bieten, den Patien-tenbilddatensatz jederzeit zu ergänzen oder zu ersetzen und damit die Bilddaten und die Planungsdaten dem Operationsverlauf anzupassen. Dies wird durch die In-tegration der 2D-Röntgenbildgebung und der Parallelisierung von Bildgebung, Pla-nung und Behandlung ermöglicht.
• Projektionsbildbasierte 3D-Arbeitsraumplanung: Um die Leistung des verwende-ten Instruments steuern zu können, muss dem System eine geeignete Eingriffspla-nung vorliegen. Dazu wird ein Planungsmodul realisiert, welches die Festlegung

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
33
eines dreidimensionalen Arbeitsraumes erlaubt. Innerhalb der aufgenommenen Pro-jektionsbilder des Patienten segmentiert der Chirurg die Bereiche, die mit Hilfe des Instrumentes bearbeitet werden sollen. Aus diesen zweidimensionalen Daten be-rechnet das System unter Kenntnis der Projektionsgeometrie einen dreidimensiona-len Arbeitsbereich.
• Integrierte Plausibilitätsprüfungen und Sicherheitskonzepte: Um die Funktionsfä-higkeit des Systems zu gewährleisten werden unterschiedliche Plausibilitäts-, Sicherheits- und Genauigkeitsprüfungen in das System integriert. Neben der Über-wachung der beteiligten Systemkomponenten werden Werkzeuge integriert, die dem Chirurgen die intraoperative Prüfung der Kalibrierung und Registrierung ge-statten. Dies ermöglicht die direkte Überwachung der einzelnen Arbeitsschritte und die sofortige Einleitung von Korrekturmaßnahmen.
6.2 Verwendung des Systems im Operationssaal
Im Vorfeld des Systementwurfs müssen die Eingliederung des Assistenzsystems in die kli-nischen Abläufe sowie dessen Benutzung im Operationssaal festgelegt werden. Klinische Assistenzsysteme sollen sich möglichst nahtlos in bestehende Abläufe einfügen und die Arbeit des klinischen Personals erleichtern.
6.2.1 Eingliederung in den Operationsverlauf
In den vorherigen Kapiteln wurde bereits ein Einblick in den Ablauf einer chirurgischen In-tervention an der Wirbelsäule gegeben. Durch die Anwendung des geplanten Systems ver-ändert sich der klinische Ablauf, insbesondere werden neue Arbeitsschritte hinzugefügt. Abb. 6-1 zeigt aus klinischer Sicht die wesentlichen Arbeitsschritte bei der Benutzung des Systems:
1. Lagerung des Patienten: Zu Beginn der Operation wird der narkotisierte Patient auf dem OP-Tisch in Bauchlage gelagert. Dabei ist darauf zu achten, dass die Wirbel-säule entlastet ist, um die Wirbelgelenke zu öffnen. Geeignet ist die Lagerung des Patienten in Hockstellung. Um ausreichend Bewegungsfreiraum für den C-Bogen zu schaffen, wird für das System eine Lagerung auf einer Ebene angestrebt, wobei der Bauch des Patienten zur Entlastung der Wirbelsäule mit Gelkissen, einem Wil-son-Frame oder ähnlichem gestützt wird.
2. Vorbereitung des Systems: Zur Vorbereitung des Systems gehört die Platzierung des Systems am OP-Tisch, die Ausrichtung der Kamera auf den Patienten, das Montieren des Lokalisators am Instrument und die Vermessung der Instrumenten-geometrie.
3. Vorbereitung des Patienten: Die ersten Schritte der Operation bestehen aus der Lo-kalisierung des Wirbelkörpers durch einen Nadeleinstich und eine Röntgenaufnah-me. Nachfolgend wird der Wirbelkörper dargestellt und der Patientenlokalisator am Dornfortsatz des zu behandelnden Wirbels befestigt.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
34
4. Erstellen von C-Bogenaufnahmen: Nachfolgend werden mit dem C-Bogen Projek-tionsbilder des zu behandelnden Wirbelkörpers aus verschiedenen Richtungen auf-genommen. Der C-Bogen wird dazu um den Patienten rotiert.
5. Durchführen der Planung: Die aufgenommenen Bilddaten werden auf dem Naviga-tionssystem dargestellt. Der Operateur plant in den einzelnen Aufnahmen den Ar-beitsraum, der mit dem Fräsinstrument bearbeitet werden soll.
6. Abtragen des Knochens durch Fräsen unter dem Mikroskop: Anschließend wird der zu entfernende Knochen mit dem Fräsinstrument entfernt. Dabei wird der Chi-rurg durch die Visualisierung des Systems und die Steuerung der Instrumentenleis-tung unterstützt.
Durchführen derPlanung
Erstellen von C-Bogen-aufnahmen
Vorbereitung desPatienten
Lagerung desPatienten
Vorbereitungdes Systems
Instrumentenleistungsteuern
Instrument visualisieren
Abtragen des Knochens durchFräsen unter dem Mikroskop
Abb. 6-1: Der Benutzungsablauf des geplanten Unterstützungssystems mit seinen wesentli-chen Arbeitsschritten
Für die reibungslose Anwendung des Systems muss die Aufstellung der einzelnen System-komponenten im Operationsbereich geplant werden. Zu berücksichtigen ist dabei eine freie

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
35
Sicht der Navigationskamera auf den Patienten und den C-Bogen sowie die Erreichbarkeit des Systems für das klinische Personal zur Eingabe von Befehlen. Dabei darf der Bewe-gungsraum des Personals, des Mikroskops und des C-Bogens nicht eingeschränkt werden. Je nach Indikation wird der Eingriff auf der linken oder der rechten Seite des Patienten durchgeführt. Abb. 6-2 zeigt die Anordnung des Systems im Operationssaal. Die Anästhe-sie beansprucht den Bereich am Kopf des Patienten. Der C-Bogen ist derart am OP-Tisch platziert, dass Projektionsbilder des zu behandelnden Wirbelsäulenbereichs erstellt werden können. Der Operateur steht seitlich neben der Röntgenquelle des C-Bogens, gegenüber dem Assistenten. Hinter dem Operateur ist das Stativ für das Mikroskop angeordnet. Ne-ben dem Operateur, in Richtung des Fußendes stehen die sterile Schwester und der Instru-mententisch. Die Aufstellung des Navigationssystems ist zwischen dem Assistenten und der sterilen Schwester geplant. Die Navigationskamera kann dabei von oben aus Richtung des Fußendes auf den Patienten ausgerichtet werden. der Monitor ist dabei gegenüber dem Operateur angeordnet. Die wenigen Bedienelemente können von der Schwester oder dem Assistenten auf Weisung des Operateurs erreicht werden. Um das System sowohl für die rechts-, als auch für die linksseitigen Eingriffe verwenden zu können, muss bei der Kon-struktion der Lokalisatoren auf die unterschiedliche Positionierung der Navigationsplatt-form gegenüber dem Instrument geachtet werden. Insbesondere muss die Sichtbarkeit des Lokalisators am Bildverstärker während der Bildaufnahme von beiden Seiten gewährleistet sein.
a)
Anästhesie
Mikroskop
C-BogenNavigations-
plattform
SchwesterOperateur
Assistenz
Instrumente
Röntgen-
quelle b)
Anästhesie
Mikroskop
C-Bogen
Navigations-
plattform
Schwester
Operateur
Assistenz
Instrumente
Röntgen-
quelle
Abb. 6-2: OP-Setup bei einem Eingriff auf der a) linken und der b) rechten Seite des Patienten
6.2.2 Benutzung des Systems
Nach der Eingliederung in den Operationsverlauf und in den Operationssaal wird in diesem Abschnitt die Benutzung des Systems durch den Bediener definiert. Abb. 6-3 zeigt schema-tisch die Abfolge der Arbeitsschritte, die zur Bedienung notwendig sind.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
36
Abb. 6-3: Darstellung der systembezogenen Arbeitsschritte, unterteilt in Systemvorbereitung und der zusammengeführten Bildgebungs-, Planungs- und Behandlungsphase
Im Folgenden sind diese Arbeitschritte einzeln beschrieben:
1. Vermessung des Instruments: Das Handstück des verwendeten Fräsinstruments kann mit unterschiedlichen Fräseinsätzen bestückt werden. Daher muss die Geo-metrie des Instruments und der Durchmesser des Fräskopfes durch das System be-stimmt werden können. Zur Durchführung dieser Vermessung wird ein Kalibrierkörper verwendet. Dieser enthält geeignete Vertiefungen und Bohrungen, mit deren Hilfe die Lage der Instrumentenspitze und der Durchmesser des verwen-deten Fräskopfes bestimmt werden können. Zum Starten des Kalibriervorgangs analysiert das System die relative Lage des Instruments zum Kalibrierkörper. Der Start, der Fortschritt und das Ende der Berechnungsvorgänge werden dem Benutzer visuell und akustisch angezeigt.
2. Anbringen des Patientenlokalisators: Um die Position des Wirbelkörpers erfassen zu können, wird ein Lokalisator am Wirbelkörper befestigt. Dieser Lokalisator be-steht aus einer Klemme, die den Dornfortsatz des zu behandelnden Wirbels fixiert. An dieser Klemme wird mittels eines Adapters der eigentliche Patientenlokalisator montiert. Der Adapter ermöglicht es, die Hauptrichtung des Lokalisators zum Posi-tionsmesssystem auszurichten und führt den Lokalisator aus der Sichtachse zwi-schen Chirurg und Wirbelkörper.
3. Ausrichten des C-Bogens: Während der Bildaufnahme soll der C-Bogen um den Patienten bewegt werden, um Projektionsbilder aus verschiedenen Winkeln auf-nehmen zu können. Damit die zu behandelnde Region aus allen Aufnahmerichtun-gen optimal abgebildet wird, muss der C-Bogen entsprechend am Patienten ausgerichtet werden. Dies geschieht durch die Aufnahme eines Bildes in der senk-rechten C-Stellung (Projektionsbild von anterior-posterior) und der horizontalen Stellung (laterales Projektionsbild).
4. Ausrichtung der Navigationskamera: Anschließend wird das Positionsmesssystem der Navigationsplattform auf den Situs ausgerichtet. Ziel ist es, dass sich die benö-

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
37
tigten Lokalisatoren während der Benutzung im Arbeitsraum des Messsystems be-finden, um optimale Messergebnisse zu erhalten. Dazu zeigt die Software einen Ausrichtedialog an, anhand dessen der Operateur die optimale Position und Blick-richtung des Sensors einstellen kann.
5. Aufnahme der Projektionsbilder: Zur Aufnahme der Projektionsbilder wird der C-Bogen um den Patienten rotiert. Während dieser Rotation löst der Operateur mit Hilfe eines Fuß- oder Handschalters die Strahlung und die Bildaufnahme aus. Das Unterstützungssystem erkennt die Aufnahme eines neuen Röntgenbildes automa-tisch und speichert das Röntgenbild auf der Navigationsplattform ab.
6. Durchführung der Planung: Nach Abschluss der Bildaufnahme erfolgt die Planung des Arbeitsraumes. Der Operateur segmentiert in den angezeigten Projektionsbil-dern die Bereiche, die mit dem Fräsinstrument entfernt werden sollen. Dazu wird in jedes Projektionsbild ein Polygonzug eingezeichnet, der diese Bereiche umrahmt. Dem Benutzer stehen ein Touchscreen und eine Maus zur Verfügung, um das Sys-tem zu bedienen.
7. Übernahme und Prüfung der Planung: Nach Abschluss der Planung berechnet das System anhand der geplanten Bereiche den dreidimensionalen Arbeitsbereich für das Instrument. Das resultierende Volumen wird in alle aufgenommenen Projekti-onsbilder lagerichtig eingeblendet. Der Operateur betrachtet nacheinander alle Pro-jektionsbilder und beurteilt die Lage des Arbeitsraumes. Im Anschluss muss die Planung bestätigt werden.
8. Betrachtung der Visualisierung und Fräsen: Nachfolgend unterstützt das System den Operateur bei der Handhabung des Fräsinstruments. Zur Positionierung der Fräse im Situs und zur Beurteilung der verbleibenden Knochenstärken kann der Benutzer die Visualisierungsfunktion des Systems verwenden. Diese blendet ein virtuelles Modell der Fräse an die Stelle in die aufgenommenen Projektionsbilder ein, an der sich das Instrument gegenwärtig befindet. Während des eigentlichen Fräsvorgangs blickt der Operateur durch das Mikroskop und kontrolliert visuell den Knochenabtrag. Während dieser Prozedur berechnet das System kontinuierlich den Abstand des Instruments zum definierten Arbeitsbereich. Nähert sich die Fräse ei-ner Grenzfläche, wird die Leistung des Instruments gedrosselt. Beim Erreichen der Grenzfläche wird das Instrument vollständig abgeschaltet.
6.3 Systementwurf
Zur Realisierung des neuen Ansatzes eines Unterstützungssystems mit Leistungssteuerung einer Fräse soll ein Navigationssystem mit intraoperativer 2D-Bildgbung mittels eines C-Bogens entwickelt werden. In diesem Abschnitt wird ein geeignetes System entworfen und aus statischer und dynamischer Sicht beschrieben.
6.3.1 Statische Systembeschreibung
Abb. 6-4 zeigt schematisch den statischen Aufbau des Systems. Hauptbestandteile sind ei-ne Navigationsplattform, ein C-Bogen, eine chirurgische Fräse, ein Patientenlokalisator und eine Vorrichtung zur Steuerung der Instrumentenleistung.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
38
<
Monitorwagen
C-Bogen
BV mit
Lokalisator
Fräse
mit Lokalisator
Patienten-
lokalisator
Positionsmesssystem
Navigations-
plattform
Steuer-
interface
Abb. 6-4: Statischer Systemaufbau während der Behandlung mit den verwendeten System-komponenten und den Daten- und Steuerleitungen
Die zentrale Komponente des Systems bildet eine Navigationsplattform. Diese besteht aus einem Steuer-PC, einem Monitor mit Touchscreen, einer Maus und einem optischen Posi-tionsmesssystem. Zum Anschluss an den C-Bogen wurde die Plattform um eine Netzwerk-schnittstelle erweitert.
Zur Bildaufnahme wird ein C-Bogen verwendet. Für die Messung der Lage des C-Bogens wird der Bildverstärker (BV) mit einem Lokalisator ausgerüstet. Das Computersystem des Monitorwagens ist über eine Datenleitung mit der Navigationsplattform verbunden. Über diese Schnittstelle werden die benötigten Daten, insbesondere die Projektionsbilder vom C-Bogen an die Navigationsplattform übermittelt.
Als chirurgisches Fräsinstrument wird eine elektronische High-Speed-Fräse verwendet. Zur Bestimmung von Position und Orientierung wird die Fräse mit einem Lokalisator ausge-stattet. Zu Beginn der Systembenutzung erfolgt die Vermessung der Geometrie des Instru-ments mit Hilfe eines speziellen Kalibrierkörpers. Die Drehzahl des Fräsinstruments wird durch den Operateur über ein Fußpedal stufenlos gesteuert.
Um die Drehzahl beeinflussen zu können, wird zwischen das Fräsinstrument und das Fußpedal eine Einheit zur Leistungssteuerung geschaltet. Diese Einheit kann das Signal des Fußpedals beeinflussen. Entsprechende Vorgaben werden durch das Navigationssystem er-zeugt, das über eine Datenschnittstelle an die leistungssteuernde Einheit angeschlossen ist.
Ein weiterer Bestandteil ist der Patientenlokalisator. Dieser besteht aus einer Klemme, welche fest mit dem Dornfortsatz eines Wirbelkörpers verbunden wird. Über einen Lokalisator kann damit die Lage des Wirbelkörpers durch das Positionsmesssystem be-stimmt werden.
Weiterhin ist zur Inbetriebnahme des Systems eine initiale Vermessung der Abbildungsei-genschaften des C-Bogens erforderlich. Dazu wird ein zusätzlicher Kalibrierkörper benö-

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
39
tigt. Da dieser nicht Bestandteil des Systems zum Zeitpunkt der Anwendung ist, wird er in Abb. 6-4 nicht aufgeführt.
6.3.2 Schnittstellen des Systems
Teil des Systementwurfs sind kommerziell erhältliche Komponenten und Vorarbeiten der eigenen Forschungsgruppe. Diese werden, teilweise mit Anpassungen oder Erweiterungen, in dieser Arbeit verwendet. Im Einzelnen sind dies:
• ein C-Bogen,
• eine Navigationsplattform,
• ein chirurgisches Frässystem,
• ein Vermessungskörper für das Fräsinstrument und
• ein Steuerinterface für die Fräse.
Die Eigenschaften dieser Komponenten und die vorgenommenen Modifikationen sind für das Verständnis entscheidend. Daher werden die Schnittstellen und Eigenschaften der ge-nannten Komponenten in den folgenden Abschnitten beschrieben.
6.3.2.1 C-Bogen
Die Basis des Systems sind Projektionsbilder, welche während des Eingriffs mit einem C-Bogen aufgenommen werden. Bei einem C-Bogen handelt es sich um ein mobiles Rönt-gengerät. Der Monitorwagen enthält einen Teil der Steuerelektronik und des Bildspeichers und trägt die Monitore zur Darstellung der Röntgenbilder. Das Fahrstativ trägt die namens-gebende C-Struktur, an deren Enden die Röntgenquelle und der Bildverstärker befestigt sind. Die C-Struktur ist in verschiedenen Achsen verstellbar und kann flexibel am Operati-onstisch ausgerichtet und zur Bildgebung verwendet werden.
Abb. 6-4a zeigt den verwendeten C-Bogen vom Typ Vario 3D der Firma Ziehm Imaging GmbH. Dieser C-Bogen zeichnet sich durch eine so genannte virtuelle Mechanik aus. Die-se stellt die Hub- und Schubachse automatisch derart ein, dass unabhängig von der C-Stellung ein zuvor definierter Raumpunkt im Zentralstrahl des Projektionskegels gehal-ten wird (Abb. 6-4b). Diese Technik ermöglicht eine isozentrische Rotation von Bildver-stärker und Röntgenquelle um einen Raumpunkt. Damit erlaubt der C-Bogen die Aufnahme von Bildern einer Patientenregion aus verschiedenen Blickwinkeln (Tita 2006).

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
40
a) b)
XR
S
H
Abb. 6-5: a) C-Bogen Vario 3D mit Fahrstativ und Monitorwagen im Hintergrund; b) Schema-tische Darstellung der virtuellen Mechanik zur isozentrischen Rotation der C-Struktur um den Patienten.
Da die Lage des Bildverstärkers des C-in der späteren Anwendung gemessen werden soll, wurde geprüft, ob der Bildverstärker während einer Rotation um den Patienten den optima-len Arbeitsraum des Positionsmesssensors verlässt. Dazu wurde ein prototypischer Lokalisator am C-Bogen befestigt und der C-Bogen mit aktivierter virtueller Mechanik um ein Isozentrum gedreht. Während der Bewegung wurden mit Hilfe der optischen Positi-onsmesskamera Positionsdaten aufgezeichnet. Die Drehbewegung wurde mit kleinstem und größtem Bewegungsradius durchgeführt. Abb. 6-6 zeigt einen Plot der Positionen bei-der Bewegungsbahnen aus Sicht der Kamera auf die C-Ebene (a) und aus der Deckenper-spektive (b). Zum besseren Verständnis ist im Hintergrund der Plots die Versuchsanordnung skizziert. Die gemessenen Positionen beziehen sich dabei auf einen Punkt an der Strahleneingangsebene des Bildverstärkers.
a)
−500 0 500
−400
−300
−200
−100
0
100
200
300
400
x [mm]
y [mm]
b)
−500 0 500−1700
−1600
−1500
−1400
−1300
−1200
−1100
y [mm]
z [mm]
Abb. 6-6: Positionen des Bildverstärkers bei zwei Rotationen um die C-Achse aus Sicht auf die C-Ebene (a) und aus der Deckenperspektive (b) mit minimalem und maximalem Abstand zwischen Bildverstärker und Isozentrum. Im Bildhintergrund ist die Anord-nung des C-Bogens und der Navigationskamera angedeutet.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
41
In Tabelle 6-1 sind komponentenweise die Bewegungsintervalle des Bildverstärkers wäh-rend einer C-Rotation mit maximalem Bildverstärkerabstand gelistet. In Richtung der X-Achse betrug die Bewegung 700,8 mm, in Richtung der Y-Achse 419,1 mm und in Rich-tung der Z-Achse 182,1 mm. Bei der späteren Konstruktion des Lokalisators für den Bild-verstärker muss berücksichtigt werden, dass je nach Anbringung und Ausdehnung des Lokalisators der hier festgestellte Arbeitsbereich weiter vergrößert wird.
Tabelle 6-1: Intervall der Messwerte in jede Raumrichtung.
Messrichtung Intervall der Messwerte [mm]
Abmessungen des benötigten Arbeitsraumes [mm]
Arbeitsraum der Ka-mera [mm]
in x-Richtung [-358,7 .. 342,1] 700,8 [-500 .. 500]
in y-Richtung [-126,5 .. 292,6] 419,1 [-450 .. 450]
in z-Richtung [1184,7 .. 1366,8] 182,1 [1000 … 1700]
6.3.2.2 Navigationsplattform
Für das geplante System wird eine Navigationsplattform vom Typ NaviBase (Abb. 6-7) verwendet, die in unserer Arbeitsgruppe entwickelt wurde. Auf dieser Plattform wurden unterschiedliche Anwendungen für die dentale Implantologie (Schermeier 2002), die HNO-Chirurgie (Koulechov 2006b; Winne 2007) und die MKG-Chirurgie (von Tiesenhausen 2006; von Tiesenhausen 2007) entwickelt und klinisch eingesetzt. Die Platt-form besteht aus einem Fahrstativ mit einem Container, in den der Steuer-PC und alle ver-wendeten Netzteile integriert sind. An einem Haltearm ist der 17-Zoll Farbmonitor mit Touchscreen befestigt. Unter dem Bildschirm befindet sich eine Ablage, auf der die Maus und der Spaceball (Eingabegeräte) angeordnet sind. In der Ablage ist ein DVD-RW Lauf-werk integriert.
Positions-
messkameraBildschirm
Eingabegeräte
Steuerrechner
Abb. 6-7: Navigationsplattform NaviBase und die wichtigsten Komponenten

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
42
Für die optische Positionsmessung ist eine Stereokamera vom Typ POLARIS Accedo der Firma Northern Digital Inc. (Ontario, Kanada) an einem zweiten Haltearm montiert. Dieser Sensor besteht aus einer Stereokamera, die durch eine Triangulation die Position von retro-reflektierenden Markern bestimmt. Zum Vermessen der Lage eines Objekts werden min-destens drei dieser Reflektoren zu einem Lokalisator zusammengefügt. Ist die Position der Reflektoren im Referenzkoordinatensystem loc des Lokalisators bekannt, errechnet der Steuerrechner des Sensors die Lage dieses Koordinatensystems relativ zum Bezugssystem cam des Sensors. Die Lagedaten werden dann als homogene 4x4 Transformationsmatrizen ausgelesen. Abb. 6-9b zeigt beispielhaft ein Instrument mit einem Lokalisator und dessen Referenzkoordinatensystem.
Der Sensor POLARIS Accedo kann insgesamt vier verschiedene Lokalisatoren zeitgleich im Raum vermessen. Zusätzlich sind alle weiteren Positionen von erkannten Reflektoren als Raumkoordinate abrufbar. Die Frequenz der Messung beträgt 20Hz. Der Hersteller er-mittelt die Genauigkeit des Sensors, indem ein einzelner Reflektor durch den Arbeitsraum bewegt wird. An ausreichend vielen Stellen wird der Fehler zwischen der gemessenen und der tatsächlichen Position bestimmt. Bei einem kalibrierten Sensor garantiert der Herstel-ler, dass das quadratische Mittel aller Fehler einen Grenzwert von 0,35 mm nicht über-schreitet (NDI 2004; Wiles 2004). Die Genauigkeit der Messungen in einer Anwendung ist typischerweise von verschiedenen Einflüssen geprägt, insbesondere durch die Konfigurati-onen der verwendeten Lokalisatoren (Geometrie und relative Abstände). Einen Vergleich der Genauigkeit verschiedener Sensorsysteme mit klinisch relevanten Lokalisatorkonfigurationen ist in Khadem 2000 gegeben. Die Messgenauigkeit kann durch ungünstige Einflüsse im klinischen Umfeld, z.B. Reflexionen an glänzenden Oberflächen, Verschmutzungen an den Reflektoren und starke Neigung der Lokalisatoren gegenüber der Hauptsichtachse, weiter negativ beeinflusst werden.
a)
−500 0 500
−400
−300
−200
−100
0
100
200
300
400
x [mm]
y [mm]
b)
−500 0 500−1700
−1600
−1500
−1400
−1300
−1200
−1100
y [mm]
z [mm]
Abb. 6-8: Positionen des Bildverstärkers bei zwei Rotationen um die C-Achse aus Sicht der Navigationskamera (a) und aus der Deckenperspektive (b) mit minimalem und ma-ximalen Abstand zwischen Bildverstärker und Isozentrum. Die grauen Felder kenn-zeichnen den optimalen Arbeitsraum des Positionsmesssensors.
Der Arbeitsraum, in dem laut Hersteller die angegebene Messgenauigkeit der Marker ein-gehalten wird, hat die Form eines ellipsoiden Zylinders (NDI 2003). Die erste Grundfläche liegt in einer Entfernung von 1225 mm zum Sensor. Die Länge des Hauptscheitels beträgt 390mm, die des Nebenscheitels 325 mm. Die zweite ellipsenförmige Grundfläche liegt in

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
43
einer Entfernung von 1700 mm zum Sensor. Ihre Scheitel sind 1,39-fach gegenüber der ersten Ellipse vergrößert. Abb. 6-8 zeigt die Bewegungsbahnen des Bildverstärkers wäh-rend einer C-Rotation mit minimalem und maximalem Abstand. Im Hintergrund ist der verfügbare Arbeitsraum der Navigationskamera eingezeichnet. Dabei ist zu erkennen, dass die Bewegungsbahn des Bildverstärkers während einer Rotation vom Arbeitsraum des Po-sitionssensors vollständig umschlossen ist. Die Messeigenschaften des Sensors sind somit für die gestellte Messaufgabe ausreichend.
6.3.2.3 Chirurgisches Frässystem
Zum Abtragen der Knochen wird die chirurgische High-Speed-Fräse microSpeed mit dem gewinkelten Hi-Line Handstück der Firma Aesculap AG & Co. KG (Tuttlingen, Germany) verwendet. In den Schaft der Fräse können entsprechend den Anforderungen unterschiedli-che Fräsertypen und Fräserdurchmesser eingesetzt werden. Die Fräse ist über ein Kabel mit der chirurgischen Steuereinheit verbunden. Die Drehzahl der Fräse wird vom Operateur über ein Fußpedal stufenlos eingestellt. Das Fußpedal verfügt über ein linkes und rechtes Pedal, um die Fräse im Links- oder Rechtslauf zu aktivieren. Die Pedale steuern zwei Po-tentiometer, an denen stellungsabhängig Spannungen abfallen. Diese Spannung wird durch die chirurgische Steuereinheit gemessen. Beträgt die gemessene Spannung 0V, so ist das entsprechende Pedal nicht gedrückt und die Fräse ist nicht aktiv. Wird das Pedal betätigt, steigen die Spannung und damit die Drehzahl des Instruments linear an. Ist das Pedal durchgedrückt, liegen 8V am Potentiometer des Fußpedals an und das Instrument dreht sich mit der maximalen Drehzahl von 75.000 Umdrehungen pro Minute.
a) b)
TCP
locI
Abb. 6-9: Elektronische High-Speed-Fräse der Firma Aesculap: a) Instrument mit Steuerein-heit und Fußpedal; b) Instrument mit montiertem Lokalisator und den relevanten Koordinatensystemen.
Zur Vermessung seiner Lage wird das Fräsinstrument, wie in Abb. 6-9b gezeigt, mit einem Lokalisator ausgestattet. Die vier Reflektoren des Lokalisators definieren das Instrumentenlokalisatorsystem locI, dessen Lage durch den Positionsmesssensor des Sys-tems erfasst wird. Für das System ist in der späteren Anwendung das Koordinatensystem TCP an der Instrumentenspitze und der Fräskopfdurchmesser d relevant. Da die Fräse und der Lokalisator zur Reinigung und Sterilisation zerlegt werden, wird die Instrumentengeo-metrie, also der Übergang locITTCP zwischen Lokalisator und Instrumentenspitze, zu Beginn jeder Anwendung mit Hilfe eines Vermessungskörpers bestimmt. Ebenso können verschie-

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
44
dene Fräsereinsätze mit verschiedenen Durchmessern mit dem Fräsinstrument verwendet werden.
6.3.2.4 Vermessungskörper für das Fräsinstrument
Um die Vermessung der Instrumentengeometrie realisieren zu können, wird ein Vermes-sungskörper benötigt (Abb. 6-10). Dieser Kalibrierkörper verfügt über vier reflektierende Glaskugelmarker, durch die das Koordinatensystem locK definiert wird. Die Lage dieses Koordinatensystems wird durch das Positionsmesssystem bestimmt.
z
x
y
RegistrierkerbeKalibrierbohrung
locK
Abb. 6-10: Kalibrierkörper für das Fräsinstrument mit Lokalisator, Kalibrierbohrung und Re-gistrierkerbe.
Ein Bestandteil des Kalibrierkörpers ist eine Kalibrierbohrung, in die das Fräsinstrument eingesteckt werden kann. Dadurch wird die Achse des Instruments in reproduzierbarer Art und Weise relativ zum Koordinatensystem locK ausrichtbar und vermessbar. Weiterhin verfügt der Kalibrierkörper über eine Kerbe, in die der Fräskopf des Instruments einge-schoben werden kann. Anhand der Lage des Fräskopfes in der Kerbe können der Mittel-punkt des Fräskopfes und dessen Durchmesser bestimmt werden. Das Verfahren zur Vermessung der Instrumentengeometrie ist im Abschnitt 6.3.4.6 („Instrumentenkalibrierung“, S. 56 ff.) beschrieben.
6.3.2.5 Schnittstelle zur Steuerung der Instrumentenleistung
Für die Steuerung der Instrumentenleistung wurde eine elektronische Steuereinheit entwi-ckelt, welche zwischen die chirurgische Steuereinheit, das Fräsinstrument, die Navigati-onsplattform und das Fußpedal geschaltet wird. Aufgabe dieser Einheit ist es, die Drehzahl der Fräse entsprechend den Vorgaben des Navigationssystems zu beeinflussen. Dabei wer-den folgende Anforderungen an dieses Interface gestellt:
• Die Steuereinheit erhält einen Wert in Prozent der maximal möglichen Leistung und generiert ein entsprechendes künstliches Fußpedalsignal.
• Die durch das Fußpedal vorgegebene Leistung darf nie überschritten werden.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
45
• Erfüllung allgemeiner Sicherheitsanforderungen gemäß EN DIN 60601-1 (DIN 1996).
• Galvanische Trennung der angeschlossenen Geräte.
• Sicherheitsabschaltung im Fall eines Fehlers oder eines Ausfalls der Navigations-plattform oder der Steuereinheit
• Abschaltung des Instruments bei Motordrehzahl ohne Freigabe
Abb. 6-11 zeigt schematisch den Aufbau des Steuerinterfaces und dessen Verbindung zu den beteiligten Systemkomponenten. Das Interface ist eine Hardwareeinheit und besteht aus einem Steuer-PC mit digitalen und analogen Ein- und Ausgängen, einem Relaismodul, einem Stromwandler, einem Trenntrafo und einem Watchdog. Das Fußpedal und das In-strument sind direkt an das Steuerinterface angeschlossen. Weiterhin wird das Steuerinter-face über drei Kabel mit den Eingängen für das Fußpedal, den Motor und die Versorgungsspannung der chirurgischen Steuereinheit verbunden. Die Kommunikation mit der Navigationsplattform ist über eine serielle Schnittstelle realisiert.
Abb. 6-11: Schematische Darstellung der funktionalen Zusammenhänge des Interfaces zur Steuerung der Instrumentenleistung.
Im Anwendungsfall erhält der Steuer-PC von der Navigationsplattform zyklisch einen pro-zentualen Wert der maximalen Fußpedalleistung. Die Prozentzahl wird in ein entsprechen-des Fußpedalsignal umgerechnet. Zeitgleich werden die beiden Spannungen, die an den beiden Fußpedalen anliegen, über analoge Eingänge des Steuer-PC’s digitalisiert. Das in-terne Steuerprogramm begrenzt die beiden gemessenen Fußpedalspannungen auf das durch die Navigationsplattform vorgegebene maximale Fußpedalsignal. Entsprechend dieser Be-rechnung werden über die analogen Ausgänge des Steuer-PC’s zwei modifizierte Fußpe-dalsignale für das linke und rechte Pedal erzeugt und an die chirurgische Steuereinheit ausgegeben. Der entsprechende Ausgang ist zusätzlich durch ein Relaismodul gesichert.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
46
Die chirurgische Steuereinheit erzeugt anhand des modifizierten Fußpedalsignals ein Leis-tungssignal zum Antrieb des Instruments. Dieses Leistungssignal wird wiederum durch das Steuerinterface geführt und mithilfe eines Stromwandlers und eines weiteren analogen Eingangs des PC’s digitalisiert. Diese Schaltung ermöglicht die Kontrolle des Zustands der Fräse.
Gemäß den Anforderungen muss im Fehlerfall sichergestellt werden, dass die Instrumen-tenleistung vollständig abgeschaltet wird. Für die Realisierung einer solchen Sicherheits-einrichtung bezieht die chirurgische Einheit ihre Versorgungsspannung über das Steuerinterface. Die Phase der Versorgungsspannung wird durch ein Watchdog-Modul ge-sichert. Dadurch wird die Spannungsversorgung unterbrochen, wenn kein regelmäßiges Triggersignal vom Steuer-PC an das Watchdog-Modul gesendet wird. Die chirurgische Einheit wird in diesem Fall vollständig ausgeschaltet.
6.3.3 Modellierung der Behandlungssituation
Neben der Beschreibung der Systemkomponenten ist die Abbildung des Operationsverlaufs durch eine systeminterne Modellierung wichtiger Bestandteil des Systementwurfs. In die-sem Kapitel wird zunächst die verwendete Notation definiert. Im Anschluss erfolgt der Entwurf des Behandlungsmodells.
6.3.3.1 Verwendete Notation
Innerhalb dieser Arbeit werden skalare Werte mit kleinen, kursiven Buchstaben (z.B. s) be-zeichnet. Eindimensionale Vektoren oder Tupel werden mit kleinen, fett gedruckten Buch-staben (z.B. p) dargestellt. Für Matrizen werden große, fett gedruckte Buchstaben (z.B. T) verwendet. Vektoren und Matrizen werden in dieser Arbeit zumeist zur Beschreibung räumlicher Zusammenhänge verwendet und beziehen sich dann auf Koordinatensysteme, deren Bezeichner kursiv gedruckt sind (z.B. locI). Das Bezugssystem eines Vektors oder einer Matrix wird links über dem jeweiligen Bezeichner notiert. Ein Vektor locIp zeigt bei-spielsweise auf einen Punkt, ausgehend vom Koordinatensystem locI.
Um Koordinaten zwischen verschiedenen Koordinatensystemen umrechnen zu können, werden homogene Koordinaten und Transformationen verwendet (Maxwell 1951). Z.B. beschreibt die Transformation ATB, welche Rotation und Translation das Koordinatensys-tem B gegenüber dem Bezugssystem der Matrix A ausführt. Mit ihrer Hilfe kann ein Punkt Bp, der im System B definiert ist, durch Multiplikation in das System A transformiert wer-den:
T; ( , , , )A A B BB mit x y z w= ⋅ =p T p p (3)
Um eine entsprechende Multiplikation durchführen zu können, wird der Punkt p als homo-gene Koordinate beschrieben, d.h. um eine zusätzliche Dimension erweitert. Dies ist not-wendig, um die Translation als Matrizenmultiplikation ausführen zu können. Ein Punkt enthält daher neben den Komponenten x, y, und z eine vierte Komponente w. Eine anschau-liche Beschreibung und Herleitung der Mathematik der homogenen Koordinaten und Transformationen ist in Fellner 1988 gegeben.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
47
6.3.3.2 Das Behandlungsmodell
Die im System verfügbaren Daten dienen der Modellierung der Operationssituation mit dem Ziel, die beschriebenen Assistenzfunktionen realisieren zu können. Die Modellierung umfasst insbesondere die geometrischen und räumlichen Zusammenhänge zwischen Bild-daten, den Projektionseigenschaften des C-Bogens, dem Patienten und dem Instrument. In diesem Abschnitt wird dieses Modell entworfen.
locI locP
locBV
cam
TCP
img
XR
Positionsmessung
Kalibrierung
locK
Abb. 6-12: Darstellung der mathematischen Modellierung der räumlichen Zusammenhänge der Behandlungssituation.
Zur Modellierung der Behandlungssituation wird die räumliche Lage der relevanten Objek-te im Raum erfasst. Abb. 6-12 zeigt die für die Modellierung relevanten Objekte, sowie de-ren Koordinatensysteme. Zur Vermessung der räumlichen Lage wird ein Positionsmesssystem verwendet, das die an den Objekten befestigten Lokalisatoren erfasst. Diese Übergänge sind in der Abbildung gestrichelt dargestellt. Die Übergänge, die nicht durch das Positionsmesssystem erfasst werden können, werden mit Hilfe von Kalibrierprozeduren ermittelt und sind in der Abbildung mit einem durchgehenden Ver-bindungspfeil gekennzeichnet. Die einzelnen Koordinatensysteme sind im Folgenden näher beschrieben:

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
48
• cam: Dieses Koordinatensystem ist das Basissystem des Positionsmesssensors. Alle Positionsdaten, die vom Sensor gemessen werden, beziehen sich auf dieses Koordi-natensystem.
• locP: Dieses Koordinatensystem wird durch den Patientenlokalisator gebildet. Die-ses Koordinatensystem ist während der Benutzung des Systems fest am Patienten befestigt und bildet das Bezugssystem für die interne Modellierung des Systems.
• locI: Der am Instrument angebrachte Lokalisator definiert dieses Koordinatensys-tem. Wird der Instrumentenlokalisator vom Messsystem erfasst, so wird der Über-gang zwischen den Koordinatensystemen cam und locI bestimmt.
• TCP: Der Ursprung dieses Koordinatensystems liegt im Zentrum des Fräskopfes. Seine Lage wird durch die Instrumentenkalibrierung und –registrierung relativ zum Instrumentenlokalisator bestimmt.
• locBV: Dieses Koordinatensystem wird durch den Lokalisators am Bildverstärker (BV) des C-Bogens gebildet. Es dient zur Erfassung der Lage der Röntgenaufnah-meeinheit und bildet das Bezugssystem für die Modellierung der Abbildungseigen-schaften des C-Bogens.
• img: Das Koordinatensystem eines Bildes wird mit img bezeichnet. Die Bilddaten liegen in der XY-Ebene dieses Systems.
• XR: Im Ursprung dieses Koordinatensystems befindet sich die Röntgenquelle. Da zu jedem aufgenommenen Bild eine Röntgenquellenposition gehört, bezieht sich das System TCP stets auf das Koordinatensystem img eines aufgenommen Bildes.
• locK: Für die Instrumentenkalibrierung wurde ein Kalibrierkörper konstruiert, ge-fertigt und in das System integriert, mit dessen Hilfe die Instrumentengeometrie vermessen werden kann (vgl. Abschnitte 6.3.2.4 „Vermessungskörper für das Fräs-instrument“, S. 44 ff. und 6.3.4.6 „Instrumentenkalibrierung“, S. 56 ff.). Am Kalibrierkörper ist ein Lokalisator angebracht, dessen Koordinatensystem locK von dem Positionsmesssensor bestimmt wird.
6.3.4 Dynamische Systembeschreibung
Die im Abschnitt 6.3.1 „Statische Systembeschreibung“ (S. 37 ff.) beschriebenen Kompo-nenten bilden zusammen ein System zur Unterstützung des Chirurgen beim Fräsen an der Wirbelsäule. In diesem Abschnitt wird dieses System aus dynamischer Sicht beschrieben. Dabei wird das System in funktionale Komponenten unterteilt und die Interaktionen zwi-schen den Komponenten beschrieben. Die Komponenten entsprechen den Hauptmodulen der auf der Navigationsplattform ausgeführten Software oder den Hardwarekomponenten des Systems.
Abb. 6-13 zeigt eine schematische Darstellung der dynamischen Systemarchitektur. Auf der linken Seite ist der Chirurg als Benutzer des Systems dargestellt. Auf der rechten Seite, innerhalb des dunkelgrau gerahmten Bereichs, finden sich die einzelnen Teilkomponenten der Navigationsplattform und ihrer Software. Dazwischen sind die Funktionalitäten des

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
49
C-Bogens, des verwendeten Instruments und der Leistungssteuerung angeordnet. Die Pfeile zwischen den einzelnen Komponenten stellen Datenflüsse, Steuerflüsse und Benutzerinter-aktionen dar. Da es sich um ein zeitdiskretes System handelt, wird das System zum Zeit-punkt eines definierten Systemzyklus k betrachtet. Die Taktung des Systems ist an die maximale Messfrequenz des Positionsmesssensors gekoppelt und beträgt 20Hz.
Navigationsplattform mit Steuersoftware
Daten-schnittstelle
Mensch-Maschine-
Schnittstelle (MMS)
Leistungssteuerung
lageüberwachte Instrumente
C-Bogen
Steuer-interface
Projektionsbild-registrierung
Behandlungsmodell
{img i, S i}, vpos(k), A(k), G(k)
Instrumenten-navigation
Leistungs-steuerung
Planungs-modul
Sicherheits-assistent
Fußpedal
yFräs
yFuß
img i
patA(k),vpos(k)
vSA(k)
vpos(k)
{img i},vpos(k)
Instrumenten-kalibrierung
vpos(k)G(k)
Patienten-lokalisator
Fräsinstrument
Kalibrierkörper
ySt(k)
uDCM
uC
A(k+1), S i
A(k), (img i, S i)
Bildaufnahme
DICOM Bilddaten
Lokalisator
Chi
rurg
Projektionsbild-kalibrierung
vpos(k)
vDCM(k),vrad(k)
vcal(k)
vplan(k)
delta(S i)
vSt(k)
vvis(k)
upos
Bild
gebu
ngP
lanu
ngB
ehan
dlun
g
Abb. 6-13: Dynamische Beschreibung des Systems mit den funktionalen Hauptkomponenten und deren Daten- und Steuerflüssen
Während des Eingriffs verwendet der Operateur den C-Bogen, um Projektionsbilder von der zu behandelnden Region des Patienten zu erstellen. Über die Datenschnittstelle des Systems werden die Positionsdaten upos der lageüberwachten Instrumente und des C-Bogens sowie die Bilddaten uDCM und Informationen über den Zustand des C-Bogens uC in das System eingespielt. Die Projektionsbildregistrierung verknüpft die Bilddaten mit den entsprechenden Positionsdaten unter Nutzung der Projektionsbildkalibrierung. Nachfol-gend werden das registrierte Bild imgi und die aktuellen Positionsdaten vpos(k) als Teil des Behandlungsmodells im Systemspeicher abgelegt. Dieses Behandlungsmodell enthält wei-terhin eine Datenstruktur für das Arbeitsvolumen A, die Instrumentengeometrie G und die bildspezifischen Segmentierungen Si. Sobald das Behandlungsmodell ein registriertes Röntgenbild enthält, erzeugt das Planungsmodul aus den Daten des Behandlungsmodells eine Visualisierung vplan(k), welche das aktuell ausgewählte Projektionsbild und verschie-dene interaktive Elemente über die Mensch-Maschine-Schnittstelle anzeigt. Die interakti-

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
50
ven Elemente der Darstellung dienen dem Operateur zur Definition oder Anpassung der Arbeitsbereichssegmentierung Si und der Visualisierungsparameter. Aus den Eingaben des Operateurs über die Eingabegeräte des Systems werden durch das Planungsmodul die Segmentierungen angepasst und nachfolgend der neue Arbeitsbereich A für das Fräsin-strument berechnet. Das Behandlungsmodell wird mit den geänderten Daten aktualisiert.
Vor der Benutzung des Systems für die Navigation und die Leistungssteuerung muss die Instrumentengeometrie G vermessen werden. Sobald der Operateur die Vermessungspro-zedur mit dem Fräsinstrument und dem Kalibrierkörper durchführt, ermittelt die Instru-mentenkalibrierung aus den Positionsdaten vpos(k) des Fräsinstruments und des Kalibrierkörpers die erforderlichen geometrischen Daten G, vor allem die Position des Mit-telpunkts des Fräskopfes und dessen Durchmessers.
Zur Behandlung führt der Operateur die Fräse über die zu entfernenden Strukturen. Die ak-tuellen Positionsdaten des Instruments und des Patienten werden dabei durch das System verarbeitet. Die Instrumentennavigation erzeugt aus den Daten des Behandlungsmodells eine Visualisierung, indem es die Bilddaten und ein virtuelles Modell des Fräsinstruments überlagert. Parallel dazu werden die Positionsdaten mit dem geplanten Arbeitsbereich A(k) der Fräse verglichen. Mit dem Ziel, eine Überschreitung der Arbeitsraumgrenzen zu ver-hindern, wird die Leistung gedrosselt, sobald sich die Fräse den Grenzen des Arbeitsrau-mes nähert. Ein Sicherheitsassistent kann die Leistung der Fräse ebenfalls abschalten. Die Soll-Leistung der Fräse vSt wird anschließend über eine Datenschnittstelle an das Steuerin-terface des Instruments übermittelt. Dieses erzeugt aus der aktuellen Fußpedalsstellung und dem Signal der Navigationsplattform ySt(k) die Instrumentenleistung yFräs, welche nachfol-gend direkt an das Fräsinstrument übermittelt wird.
Die Reaktionszeit des Systems auf eine Änderung der Fräsposition kann nun durch die Be-trachtung der Datenströme erfolgen. Die erste Verarbeitungsstufe ist die sensortechnische Erfassung der Positionsdaten, welche 50ms benötigt. In der zweiten Stufe berechnet das System die neue Leistungsvorgabe und übermittelt diese an die Steuereinheit. Parallel dazu wird die Visualisierung aktualisiert. Die Ausführung der zweiten Stufe soll nach 25ms ab-geschlossen sein, sodass die Gesamtreaktionszeit auf ein Ereignis maximal 75ms beträgt. Spätere Messungen am realisierten System bestätigen die Einhaltung dieses Grenzwertes.
Die soeben beschriebenen funktionalen Komponenten und ihre Eingangs- und Ausgangs-datenströme werden im Folgenden detaillierter beschrieben.
6.3.4.1 Datenschnittstelle
Die Datenschnittstelle dient zum Einlesen und zur Synchronisierung der externen Sensor-daten, sowie zur Ansteuerung der Leistungssteuerung und der Mensch-Maschine-Schnittstelle. Ihre Funktionalität wird im Folgenden näher erläutert.
Eingangssignale
Eingangsdaten des Systems sind die externen Sensordaten, welche vom verwendeten C-Bogen und dem Positionsmesssystem generiert werden. Dazu sind in der Datenschnitt-stelle die geeigneten Kommunikationsprotokolle asynchron zum System implementiert. Aufgabe des Moduls ist es, die Sensordaten zu geeigneten Zeitpunkten zu empfangen und

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
51
die Informationen in einem für die Weiterverarbeitung geeigneten Format und zu Beginn des Systemtakts zur Verfügung zu stellen. Damit übernimmt die Schnittstelle die Synchro-nisierung der eingehenden Datenströme auf den systeminternen Takt.
Das Eingangssignal des Positionsmesssystems upos enthält eine Reihe von homogenen 4x4 Transformationsmatrizen T, in welchen die Position und Orientierung des assoziierten Lokalisators abgespeichert ist. Dieses Signal enthält die Lage der Lokalisatoren am Bild-verstärker locBV, am Instrument locI, am Patienten locP und am Kalibrierkörper locK. upos kann dann als Tupel beschrieben werden:
( ), , ,cam cam cam campos locBV locT locP locK=u T T T T (4)
Ein zweites Eingangssignal wird vom C-Bogen erzeugt. Dieser ist über eine Netzwerk-schnittstelle an die Navigationsplattform angeschlossen. Der C-Bogen sendet Nachrichten im UDP/IP-Protokoll an die angeschlossene Navigationsplattform. Diese Nachrichten wer-den als Datenstrom
( ), ( ),C rad filet t=u u u (5)
bezeichnet. Der C-Bogen sendet diese Nachricht aus, sobald sich der Zustand der Strahlung ändert oder ein neues Projektionsbild im Bildspeicher des C-Bogens abgelegt wird. Die Nachricht enthält demnach einen Zeitstempel t, den aktuellen Strahlungszustand ab dem Zeitpunkt t, sowie den Ablageort des zuletzt gespeicherten Röntgenbildes. Enthält die Nachricht Informationen über ein neues Röntgenbild, so greift die Datenschnittstelle auf den Bildspeicher des C-Bogens zu und kopiert das im DICOM-Format gespeicherte Bild uDCM auf das Navigationssystem. Dieser Datenstrom wird als
( ),DCM M N I DCM= ×u a (6)
definiert. Das Röntgenbild hat die Größe MxN und ist als Funktion zu interpretieren, die jeden Pixel aus den MxN großen Ortsbereich auf eine Grauwertintensität I abbildet. Die Bilddaten sind in einer DICOM-kompatiblen Datei abgespeichert. Das DICOM-Format ist ein offener Standard zur Speicherung und Übertragung von Bilddaten und beliebigen Zu-satzinformationen. Diese Zusatzinformationen sind hier mit DCM bezeichnet und können über spezifizierte Schlüsselwörter ausgelesen werden. Relevant für die weitere Verarbei-tung im System ist insbesondere der Winkel der C-Stellung zum Zeitpunkt der Bildauf-nahme, welche durch den C-Bogen bestimmt und innerhalb der DICOM-Datei abgespeichert wird.
Die durch die Datenschnittstelle eingelesenen Informationen werden den weiterverarbei-tenden Systemmodulen zur Verfügung gestellt. Im Einzelnen sind dies das aufgenommene Röntgenbild vDCM(k) im DICOM-Format, der aktuelle Strahlungszustand vrad(k) und die aktuellen Positionsdaten vpos(k).
Ausgangssignale
Die Datenschnittstelle dient auch der Kommunikation mit dem Steuerinterface, welches die Instrumentenleistung steuert. Dazu wandelt die Datenschnittstelle das Signal vst(k) des

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
52
Leistungssteuerungsmoduls in ein Datensignal yst(k) um, welches über das RS232-Interface an das Steuerinterface gesendet wird. Das Ausgangssignal ist dabei definiert als
{ }( ) | 0 100sty k x x= ∈ ≤ ≤� (7)
und entspricht einer Zahl in Prozent der maximalen Instrumentenleistung.
Weiterhin ist die Mensch-Maschine-Schnittstelle ein Teil der Datenschnittstelle. Diese Komponente stellt die Visualisierungen des Systems vvis(k) und vplan(k) auf dem Monitor dar. Über die angeschlossenen Eingabegeräte kann der Operateur die einzelnen Funktionen des Systems, insbesondere die Planung, bedienen.
6.3.4.2 Projektionsbildregistrierung
Die Bilddatenregistrierung hat das Ziel, die aufgenommenen Projektionsbilder und die zu-gehörigen Positionsdaten zu verknüpfen. Dazu erhält das Modul von der Datenschnittstelle den Strahlungszustand, die Positionsdaten sowie die Bilddaten im DICOM-Format.
Operateur C-Bogen Datenschnittstelle Bildregistrierung
Auslöser
drückenBildaufnahme
Auslöser
loslassen
„Strahlung ein“
senden
„Strahlung aus“
senden
Positionen
speichern
Mittlere
Position
berechnen
Bild speichern
Dateinamen
senden
Bilddaten
bereitstellen
Datei
auslesen
Bild
registrieren
Abb. 6-14: Ablaufdiagramm der Bildaufnahme und -registrierung
Abb. 6-14 zeigt das Ablaufdiagramm der Registrierung: Nach Beginn einer Strahlungsaus-lösung werden in jedem Takt die Lage des Patientenkoordinatensystems und des Bildver-stärkerkoordinatensystems in einem Speicher abgelegt. Zum Ende der Strahlung wird mit allen im Speicher abgelegten Daten der mittlere Übergang locPT locBV zwischen Patient und Bildverstärker bestimmt. Steht nachfolgend ein neues Röntgenbild zur Verfügung, werden die Positions- und Bilddaten zu einem registrierten Röntgenbild imgi verknüpft, welches durch den Tupel
( )( ), , , ; 0..locP imgi DCM img XRi s i N= ∈img v T p (8)
ausgedrückt wird. Es enthält die Bilddaten im DICOM-Format, die Lage des Röntgenbildes relativ zum Patienten, die Position der Röntgenquelle relativ zum Bild und Pixelskalie-rungsparameter s. Der räumliche Bezug zwischen Bildverstärker und Bild sowie zwischen Bild und Röntgenquelle wird durch die nachfolgend beschriebene Projektionsbildkalibrie-

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
53
rung bereitgestellt. Das registrierte Röntgenbild wird als Teil des Behandlungsmodells für die weitere Verwendung abgelegt.
6.3.4.3 Projektionsbildkalibrierung
Die Aufgabe der Projektionsbildkalibrierung ist es, die räumlichen Zusammenhänge zwi-schen dem Bildverstärkerlokalisator, den Bilddaten und der Röntgenquelle zu bestimmen und diese der Projektionsbildregistrierung bereitzustellen. Die zu kalibrierenden Größen sind der Übergang locBVT img zwischen dem Bildverstärkerlokalisator und dem Bildkoordi-natensystem, die Position imgpXR der Röntgenquelle relativ zum Bild, sowie der Skalie-rungsparameter s. Da äußere Einflüsse auf den C-Bogen wirken (vgl. Kapitel 4 „Untersuchung der Bildgebungseigenschaften eines C-Bogens“, S. 22 ff.) und eine Bild-veränderung hervorrufen, sind die zu kalibrierenden Größen nicht konstant, sondern sind das Ergebnis einer Abbildung:
( ): ( ) , ,locBV imgDCM img XRf k s→v T p (9)
Diese Zuordnung gilt unter der Bedingung, dass die notwendigen Informationen über die äußeren Einflüsse als Teil der DICOM-Informationen gespeichert sind.
Bestimmung der Parameter
Um die räumlichen Übergänge zu bestimmen, werden an einer Vielzahl von C-Bogenstellungen Bilddaten aufgenommen und gespeichert. Während der Bildaufnahme muss eine Kalibriervorrichtung im Strahlengang angeordnet werden, deren röntgensichtba-re Marker die beiden Modalitäten Bild und Raum geeignet verknüpfen. Unter der Annah-me, dass durch eine geeignete Sensorik diese äußeren Einflüsse gemessen werden können, zeigt die Abb. 6-15 ein Blockdiagramm eines geeigneten Kalibrierprozesses.
Die einzelnen Berechungsschritte werden im Folgenden beschrieben:
• Zur Bestimmung der radialen Verzerrung wird ein Röntgenbild herangezogen, in dem sich die magnetische Verzeichnung nicht auswirkt. Ein solches Röntgenbild kann durch eine Aufnahme erstellt werden, bei der die Strahlung in vertikale Rich-tung verläuft. Die Magnetfelder bewirken dann zwar eine Bildverschiebung, welche aber durch eine Mittelung von mehreren vertikalen Bildern mit unterschiedlicher Fahrstativausrichtung kompensiert werden kann.
• Die Bildentzerrung entzerrt die einzelnen Bilddaten und ermittelt die Verzerrungs-parameter. Dadurch werden die radiale Verzerrung des Bildes und der magnetische Einfluss kompensiert. Die entsprechenden Parameter werden in den Kalibrierdaten gespeichert.
• Im nächsten Schritt erfolgt die Bestimmung der Bildlage gegenüber dem BV-Lokalisator. Die Merkmale des Kalibrierkörpers, deren Lage im Bild und im Raum bekannt ist, stellen einen Bezug zwischen beiden Modalitäten her, sodass der benö-tigte Übergang bestimmt werden kann.

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
54
• Zur Bestimmung der Röntgenquellenposition relativ zum Bild werden weitere Merkmale des Kalibrierkörpers im Bild analysiert. Mit Hilfe der bisher gewonne-nen Daten werden die Projektionsstrahlen rekonstruiert, an deren Schnittpunkt sich der Ursprung der Röntgenstrahlung befindet.
Die erzeugten Kalibrierdaten sollten mit den assoziierten Einflüssen in einer Tabelle ge-speichert werden bzw. als Funktion in Abhängigkeit der Einflüsse interpretiert werden. Vo-raussetzung für die Realisierung des Verfahrens ist, dass die äußeren Einflüsse messtechnisch bestimmt werden können. Die Umsetzung der Kalibrierung in das System ist in Abschnitt 7.1.4 („Umsetzung der Kalibrierung für das System“, S. 68 ff.) zu finden.
Radiale Verzerrung
Magnetfeldeinfluß
schwerkraftbedingte Verformung
Bildentzerrung
Vollständig entzerrte
Röntgenbilder
Bestimmung der
Bildposition
Bestimmung der
Röntgenquellenposition
Vollständig entzerrte
Röntgenbilder
Bestimmung der
radialen Verzerrung
Röntgenbilder
radiale
Bildverzerrung
magnetische
Verzerrung
Skalierungs-
faktor
Lage des
Röntgenbildes
Position der
Röntgenquelle
Abb. 6-15: Flussdiagramm einer vollständigen Kalibrierprozedur für einen C-Bogen zur Be-stimmung der räumlichen Lage von Röntgenbild und Röntgenquelle
Bereitstellung der Kalibrierdaten während der Anwendung
Das Ergebnis der Projektionsbildkalibrierung ist eine Tabelle mit einer Anzahl von n Ein-trägen, entsprechend der Anzahl der aufgenommenen Stützstellen. Im Fall der Anwendung des Systems wird ein neues Röntgenbild in beliebigen Winkelstellungen α aufgenommen. Im Fall, dass für diese Winkelstellung ein Eintrag vorhanden ist, werden die entsprechen-den Daten zurückgeliefert.
Ist für die neue Winkelstellung keine Stützstelle aufgenommen worden, werden die be-nachbarten Stützstellen a1 und a2 aus der Tabelle entnommen. Die gesuchten Werte werden dann aus den Werten der benachbarten Stützstellen interpoliert. Dazu wird zunächst das Gewicht w aus den Winkeln der Stützstellen berechnet:

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
55
1
2 1
wα αα α
−=−
(10)
Der Skalierungsfaktor s und die Position der Röntgenquelle imgpXR für die neue Winkelstel-lung wird dann linear interpoliert
1 2 1( )s s w s s= + − (11)
,1 ,2 ,1( )img img img imgXR XR XR XRw= + −p p p p (12)
Zur Bestimmung des Übergangs zwischen dem Lokalisatorkoordinatensystem und dem Bildkoordinatensystem locBVT img muss sowohl der translatorische Anteil t als auch der rotatorische Anteil R interpoliert werden. Die Interpolation von t erfolgt wiederum linear analog zu Gleichung 12. Die Bestimmung der Rotation erfolgt sphärisch linear gemäß dem Vorschlag aus Shoemake 1985.
6.3.4.4 Behandlungsmodell
Im Behandlungsmodell sind die Daten gespeichert, die das System zur Beschreibung der aktuellen Operationssituation benötigt. Dazu gehören alle N bisher aufgenommenen und registrierten Bilddaten (imgi) und der darin segmentierte Fräsbereich Si. Jeder Fräsbereich wird durch n Bildpositionen imgp beschrieben, die ein den Fräsbereich umrandendes Poly-gon definieren:
2,1imgi i i n= ∈ ≤ ≤S p � (13)
Zum Zeitpunkt der Registrierung eines neu aufgenommenen Bildes ist die Anzahl n der Eckpunkte des Polygons gleich Null. Weiterhin enthält das Behandlungsmodell alle aktuel-len Positionsdaten vpos(k) und den aktuellen Arbeitsbereich A(k) in Form eines Voxelvolumen. Initial enthält dieses Voxelvolumen keine Voxel, welche zu einem Ar-beitsbereich gehören. Weiterhin ist die Geometrie G(k) des Instruments gespeichert. Auf-gabe des Behandlungsmodells ist, die enthaltenen Daten den Systemkomponenten zur Verfügung zu stellen.
6.3.4.5 Planungsmodul
Das Planungsmodul dient der Definition des Arbeitsraumes A(k) für das chirurgische Fräs-instrument. Es hat die Aufgabe, die Daten des Behandlungsmodells geeignet zu visualisie-ren und diese entsprechend den Benutzereingaben zu modifizieren. Im Einzelnen sind dies:
• Visualisierung der Planungsdaten: Das Planungsmodul erzeugt einen Visualisie-rungsstrom vplan(k), der von der Mensch-Maschine-Schnittstelle angezeigt wird. Diese Visualisierung umfasst die Anzeige eines ausgewählten Projektionsbildes und die damit verknüpften Segmentierungsdaten Si, welche als interaktive Elemen-te angezeigt werden. Weiterhin wird der aktuelle Arbeitsbereich A(k) lagerichtig in die Projektionsbilder eingeblendet.
• Erstellen und Anpassen der Planung: Über die Benutzerschnittstelle nimmt das Planungsmodul Benutzereingaben entgegen, insbesondere die Änderungen ∆Si an

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
56
den angezeigten Planungselementen. Der Benutzer hat ebenfalls die Möglichkeit, neue Planungselemente hinzuzufügen.
• Berechnen des Arbeitsraumes: Nach der Erstellung oder Modifikation der Pla-nungselemente wird der resultierende Arbeitsbereich berechnet. Dazu werden aus den Planungsdaten und aus den Positionsdaten des assoziierten Projektionsbildes Teilvolumen erstellt, aus denen sich durch die Berechnung des Schnittvolumens der neue Arbeitsbereich A(k+1) berechnet (Abb. 6-16).
XRi
XRj
imgi
Teilvolumen eines
Projektionsbildes
3D-Arbeitsbereich
Segmentierungen
in den Bilddaten
imgj
Abb. 6-16: Prinzipdarstellung der Arbeitsraumplanung: In zwei oder mehreren Röntgenbildern werden 2D-Bereiche segmentiert, aus denen anhand der Projektionseigenschaften ein 3D-Arbeitsvolumen für das Instrument berechnet wird.
Anschließend werden die geänderten Planungsdaten und der Arbeitsbereich in das Behand-lungsmodell gespeichert.
6.3.4.6 Instrumentenkalibrierung
Die Datenschnittstelle liefert die Position und Orientierung des Lokalisators der Fräse im Bezugssystem des Behandlungsmodells. Für die Berechung der Instrumentenleistung und die Visualisierung der Navigationshinweise muss dem System die Geometrie des Fräsin-

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
57
struments bekannt sein. Diese Geometrie G(k) beinhaltet den Übergang vom Instrumentenlokalisator locI zur Fräserspitze TCP sowie den Radius r des eingesetzten Fräskopfes. Damit ist die Instrumentengeometrie definiert durch:
{ }( ) ,locITCPk r=G T
(14)
Zur Bestimmung dieser Geometrie wird ein Kalibrier- und Registrierverfahren nach Winne 2005 und Tita 2006 verwendet. In einem zweistufigen, automatischen Prozess wird mit Hilfe des bereits vorgestellten Kalibrierkörpers (Abschnitt 6.3.2.4 „Vermessungskörper für das Fräsinstrument“, S. 44 ff.) zunächst der Übergang zwischen dem Lokalisatorsystem und der Wirkachse gAchse des Instruments bestimmt. Dazu führt der Operateur das Instru-ment in eine passende Bohrung im Kalibrierkörper ein (Abb. 6-17a). Die Achse der Boh-rung ist durch die Konstruktion im Koordinatensystem locK des Kalibrierkörpers bekannt. In der beschriebenen Konfiguration ist die Wirkachse des Instruments mit der Achse der Bohrung überlagert. Mit Hilfe der Positionsdaten kann daher die Lage der Wirkachse rela-tiv zum Instrumentenlokalisator wie folgt berechnet werden:
locI locI cam locKAchse cam locK Achse= ⋅ ⋅g T T g (15)
a)
locKlocI
Wirkachse gAchse
b)
locK
Wirkachse gAchse
Mittelachseder Kerbe
Öffnungswinkel α
Ursprung derKerbe p
0
Abb. 6-17: Instrumentenvermessung: a) Bestimmung der Wirkachse durch Einführen des In-struments in eine Bohrung; b) Ermittlung der Position des Fräsers und dessen Radi-us durch Platzierung des Fräskopfes in einer Kerbe am Kalibrierkörper.
Im zweiten Schritt wird der Fräskopf in eine Kerbe am Kalibrierkörper geschoben (Abb. 6-17b). In dieser Stellung schneidet die Wirksachse des Instruments die Mittellinie der Kerbe. Ist diese Bedingung erfüllt, entspricht der Schnittpunkt dieser beiden Achsen dem Mittelpunkt des Fräskopfes TCP und wird mit pTCP bezeichnet. Der Übergang zwischen dem Instrumentenlokalisator und der Instrumentenspitze wird dann definiert durch:
0 0 0 1
locI locI locI locIlocI TCPx TCPy Achse TCP
TCP
=
g g g pT
, (16)
Dabei werden locIgx, und locIgy aus den Achsen des Koordinatensystems TCP und der Wirk-achse locIgAchse konstruiert und stehen zueinender senkrecht. Die Kerbe des Kalibrierkörpers verengt sich gleichmäßig und schließt sich in einem Punkt p0. Daher kann der Radius r des Fräskopfes bestimmt werden, indem der Fräskopf in die Kerbe eingeschoben und die Ent-

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
58
fernung des TCP zum Ursprung der Kerbe p0 ausgewertet wird. Der Radius r ergibt sich dann durch
( ) 0sin 2 TCPr α= ⋅ p p, (17)
mit α als Öffnungswinkel der Kerbe.
6.3.4.7 Instrumentennavigation
Zur Unterstützung des Chirurgen bei der Handhabung des Fräsinstruments wird das aus-gewählte Projektionsbild visualisiert und ein virtuelles Modell des Fräsinstruments lage-richtig in die Darstellung eingeblendet (Abb. 6-18). Da die Position der Röntgenquelle zu den Bilddaten und die Kantenlänge der einzelnen Bildpunkte während der Bildregistrie-rung ermittelt wurde, kann die Projektsgeometrie für das Röntgenbild modelliert und das Visualisierungssystem entsprechend initialisiert werden. Mit Hilfe der Instrumentengeo-metrie G(k) wird ein virtuelles Modell der Fräse erzeugt, welches die Durchmesser des verwendeten Fräskopfes berücksichtigt. Anhand der Positionsdaten kann die Lage des vir-tuellen Modells relativ zum Bild errechnet werden. Die erzeugte Visualisierung wird als Datenstrom vvis(k) bezeichnet.
Abb. 6-18: Die Komponente Instrumentennavigation erzeugt eine Visualisierung des angewähl-ten Röntgenbildes und des überlagerten, virtuellen Modells des Fräsinstruments.
6.3.4.8 Leistungssteuerung
Das Modul Leistungssteuerung dient der Berechung der Instrumentenleistung in Abhän-gigkeit der Position des Fräskopfes patTTCP relativ zum Arbeitsraum der Fräse A. Ziel ist es, die Leistung der Fräse beim Verlassen des Arbeitsbereichs abzuschalten. Im Stand der Technik (Abschnitt 3.1.4 „Leistungssteuerung aktiver Instrumente“, S. 18 ff.) wurden be-reits die Eigenschaften und bisherigen Anwendungen der Leistungssteuerung beschrieben. Wichtige Grundlagen sind insbesondere die folgenden Ergebnisse der technischen Unter-suchungen aus Kneissler 2005:

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
59
• Die Drehbewegung des Fräskopfes und der Widerstand beim Abtragen des Kno-chens führen zu einem Drehmoment, das auf das Instrument wirkt. Ein- und Aus-schaltvorgänge führen zu plötzlichen Änderungen dieses Moments und damit zu einer unbeabsichtigten Bewegung des Instruments. Zur Reduzierung dieses Effekts wird eine kontinuierliche Drosselung der Instrumentenleistung empfohlen. Ein wei-terer Vorteil der Leistungsdrosselung ist, dass der Operateur die Annäherung an den Grenzbereich durch die einsetzende Drosselung wahrnehmen kann.
• Weiterhin ist bekannt, dass bei geringer Leistung aufgrund des Widerstands beim Materialabtrag der Fräskopf gestoppt wird und kein Material abgetragen wird. Ein Materialabtrag bis zur Grenzfläche ist deshalb nur dann möglich, wenn beim Errei-chen der Grenzfläche eine Restleistung pmin zur Verfügung steht.
0
100
ySt(k) in
[%·pmax
]
dmin
d=0
pmin
pmax
d [mm]
innerhalb d(k)<0 außerhalb d(k)>0
Abb. 6-19: Steuerung des Leistungssignals in Abhängigkeit der Entfernung d(k) des Instruments zur Arbeitsraumgrenze nach Kneissler 2005.
Abb. 6-19 zeigt die Steuerung der Instrumentenleistung in Abhängigkeit des Abstandes d des Fräskopfs von der Arbeitsraumgrenze. Kontinuierlich wird der minimale Abstand d(k) zwischen dem Fräskopf und Arbeitsraumgrenze bestimmt. Befindet sich der Fräser in einer Entfernung, die größer als der Mindestabstand dmin ist, wird dem Instrument die maximale Fräsleistung pmax über das Steuerinterface freigegeben. Nähert sich das Fräsinstrument der Arbeitsraumgrenze, wird bei Unterschreitung des Grenzabstands dmin die Leistung linear verringert, sodass beim Erreichen der Grenzfläche eine Restleistung pmin zur Verfügung steht. Beim Überschreiten der Arbeitsraumgenze wird dann die Instrumentenleistung voll-ständig abgeschaltet. Bei der Berechnung der Leistung muss zusätzlich der Radius r des eingesetzten Fräskopfes berücksichtigt werden. ySt(k) wird wie folgt berechnet:
min
max minmin min
min
100% : ( )
( ) ( ( ) ) : ( ) 0
0% :0 ( )
ST
d k r d
p pk d k r p d d k r
d
d k r
+ < −= − + + ≤ + ≤
> +
v (18)

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
60
6.3.4.9 Sicherheitsassistent
Innerhalb der Komponente Sicherheitsassistent werden die systeminternen Daten und Pa-rameter analysiert, um bestimmte Fehlerzustände zu erkennen. Dazu hat das Modul Zugriff auf das Behandlungsmodell und die Datenschnittstelle. Wird ein kritischer Zustand festge-stellt, können audio-visuelle Hinweise auf der Mensch-Maschine-Schnittstelle ausgegeben werden. Besteht ein Risiko für den Patienten, kann die Leistung des Instruments gestoppt werden. Der Sicherheitsassistent kann beispielsweise die Geschwindigkeit des Fräskopfes derart überwachen, dass eine ausreichende sensortechnische Erfassung der Fräsbewegung sichergestellt ist.
6.4 Betrachtung der Systemrisiken
Für einen späteren Einsatz des Systems am Patienten ist es nach dem Medizinproduktegesetz (MPG) vorgeschrieben, eine Risikoanalyse durchzuführen (Schorn 2002, EU-Richtlinie 93/42/EWG). Hierbei soll das System kritisch auf Gefahren für Pati-ent, Bediener, Gegenstände und die Umwelt analysiert werden. Aus den erkannten Risiken werden Maßnahmen für die Systemrealisierung abgeleitet, um deren Auswirkung oder Auftrittshäufigkeit zu minimieren. Ein Verfahren zur Durchführung einer Risikoanalyse für Medizinprodukte ist in der Norm ISO 14971 (DIN 2007) angegeben.
Beispielhaft sollen in diesem Abschnitt drei Risiken beschrieben werden, die sich aus dem vorgeschlagenen Systemkonzept ergeben und zu einer Schädigung des Patienten führen könnten. Die Risiken und ihre Auswirkungen werden zunächst beschrieben und anschlie-ßend tabellarisch mögliche Auslöser und geeignete Maßnahmen zur Risikominimierung angeführt.
• Risikoszenario I: Die Instrumentenleistung kann nicht reduziert werden. Dadurch wird die Leistung der Fräse nicht gedrosselt und die Grenze des Arbeitsbereichs kann vom Operateur unbemerkt überschritten werden. Der Patient kann geschädigt werden, wenn sensible Strukturen durch das Fräsinstrument verletzt werden.
Beschreibung des Auslösers Maßnahme und erwartete Auswirkung
Die Kommunikation zur Navigations-plattform ist unterbrochen. Dadurch wird das Instrument nicht deaktiviert und der Patient kann verletzt werden
Es wird ein Triggersignal implementiert, anhand des-sen das Steuerinterface die Funktionsfähigkeit der Kommunikation sicherstellen kann. Die Auftrittswahrscheinlichkeit des Risikos wird mini-miert.
Es tritt ein Fehler im Steuerinterface auf (Hardware, Software). Dadurch wird das Instrument nicht deaktiviert und der Patient kann verletzt.
Es wird ein Watchdogrelais in die Steuereinheit ein-gebaut, das bei einer Störung die Spannungs-versorgung zur chirurgischen Einheit unterbricht. Die Auftrittswahrscheinlichkeit des Risikos wird mini-miert.
• Risikoszenario II: Die Geometrie des Instruments ist verändert. Dies kann in Folge des Zusammenbaus des Instruments vor der Operation geschehen, da die Instru-mente modular aufgebaut sind und in verschiedenen Konfigurationen zusammenge-setzt werden können. Dadurch verändert sich die Lage der Instrumentenspitze

6 - Röntgenbildbasierte Navigation mit Leistungssteuerung
61
relativ zum Instrumentenlokalisator. In Folge wird eine falsche Visualisierung und Leistungssteuerung erzeugt.
Beschreibung des Auslösers Maßnahme und erwartete Auswirkung
Die Geometrie des Instruments ist verändert, sodass die Position des Fräskopfes nicht mehr korrekt be-stimmbar ist. Der Patient kann ver-letzt werden.
Zu Beginn jeder Behandlung muss die Instrumenten-geometrie vermessen werden, um die Navigation und Leistungssteuerung nutzen zu können. Die Auftrittswahrscheinlichkeit des Risikos wird mini-miert.
• Risikoszenario III: Die Kalibrierung des C-Bogens ist ungültig. Dadurch wird in der Bildregistrierung die Lage von Röntgenbild und Röntgenquelle fehlerhaft be-stimmt. Dies kann zu einer falschen Visualisierung, einer fehlerhaften Steuerung der Instrumentenleistung und einer Schädigung des Patienten führen.
Beschreibung des Auslösers Maßnahme und erwartete Auswirkung
Der Lokalisator am C-Bogen ist un-bemerkt verrutscht. Dies führt zu ei-ner fehlerhaften Positionsmessung und der Patient wird evt. falsch be-handelt.
Es werden Marker in den Lokalisator integriert, die im Röntgenbild sichtbar sind. Der Chirurg überprüft, ob sich die Marker anders im Röntgenbild abbilden, als zum Zeitpunkt der Kalibrierung. Dadurch kann ein Verrutschen des Lokalisators erkannt werden. Die Auftrittswahrscheinlichkeit des Risikos wird mini-miert.
Die Abbildungseigenschaften des C-Bogens haben sich geändert, sodass die Kalibrierung ungültig ist und der Patient evt. falsch behandelt wird.
Es wird eine Prüfinstanz realisiert. Sobald der Patientenlokalisator geröntgt wird, werden die Markerkugeln mit einem virtuellen Modell überlagert. Anhand der Überlagerung kann die Gültigkeit der Ka-librierung geprüft werden. Die Auftrittswahrscheinlichkeit des Risikos wird mini-miert.

7 - Realisierung des Systems
62
7 Realisierung des Systems
Im Rahmen dieser Arbeit wurde ein Unterstützungssystem zum Fräsen an der Wirbelsäule realisiert, welches die in Kapitel 6 („Röntgenbildbasierte Navigation mit Leistungssteue-rung“, S. 32 ff.) vorgestellten Konzepte umsetzt. Inhalt dieses Kapitels ist die Beschrei-bung dieser Realisierung. Die Gliederung dieses Kapitels ist an die vier Hauptfunktionen des Systems angelehnt. Abb. 7-1 zeigt das System aus funktionaler Sicht mit seinen fol-genden vier Hauptaufgaben:
• Aufnahme von Bild- und Positionsdaten: Dieser Teil befasst sich mit den techni-schen Vorrichtungen zur Erfassung der benötigten Positions- und Bilddaten.
• Visualisierung der Navigationsdaten: Anhand der verfügbaren Positions- und Bild-daten wird eine Visualisierung berechnet, welche die Bilddaten und die virtuellen Modelle des Fräsinstruments lagerichtig visualisiert.
• Arbeitsraumplanung und Leistungssteuerung: Inhalt dieses Abschnittes ist die Rea-lisierung der Planungsfunktion, die Berechnung eines Arbeitsbereichs und die Er-mittlung einer Leistungsvorgabe für die chirurgische Fräse.
• Sicherheitsarchitektur: Automatische und interaktive Konzepte zur Sicherstellung der Funktionalität und Genauigkeit des Systems.
Abb. 7-1: Schematische Darstellung des Systems aus funktionaler Sicht.

7 - Realisierung des Systems
63
7.1 Realisierung der Aufnahme von Bild- und Positionsdaten
Um die späteren Unterstützungsfunktionen in Form der Visualisierung und der Leistungs-steuerung realisieren zu können, müssen dem System die räumlichen Beziehungen zwi-schen den aufgenommenen Bilddaten, dem Patienten und dem Instrument bekannt sein. Im Abschnitt 6.3.3 („Modellierung der Behandlungssituation“, S. 46 ff.) wurden bereits die geometrische Modellierung der räumlichen Bezüge beschrieben. In diesem Abschnitt wird nun die technische Realisierung der Aufnahme von Bild- und Positionsdaten dargelegt. Dabei wird die Vorrichtung zur Vermessung der Lage des Patienten und des Instruments beschrieben sowie die Bestimmung der Lage von Röntgenbild und Röntgenquelle erläutert.
7.1.1 Vermessung der Lage des Patienten
Das Ziel der Vermessung der Patientenlage ist es, ein Koordinatensystem zur Referenzierung der zu behandelnden Körperregion zu erhalten. Dies ist notwendig, da die aufgenommenen Bilddaten einen räumlichen und inhaltlichen Bezug zum abgebildeten Körperteil des Patienten aufweisen. Damit diese räumliche Beziehung zwischen Bilddaten und Patient messtechnisch erfasst werden kann, wird ein Referenzkoordinatensystem benö-tigt, das einen festen räumlichen Bezug zur abgebildeten Körperregion herstellt. Im Ab-schnitt 6.3.3 („Modellierung der Behandlungssituation“, S. 46 ff.) wurde dieses Koordinatensystem bereits als Patientenkoordinatensystem locP eingeführt. In der Literatur wird dieses System oftmals als dynamische Referenzierungsbasis (DRB) bezeichnet. Es wird durch einen Lokalisator definiert, dessen Lage durch das verwendete Positionsmess-system erfasst wird.
Da durch diese Arbeit ein Eingriff an der Wirbelsäule unterstützt werden soll, werden im Folgenden ein Lokalisator und eine Befestigungsvorrichtung für den Wirbelkörper be-schrieben. Die Anforderungen an diese Komponenten sind:
• Der Lokalisator muss fest mit dem Wirbelkörper verbunden werden können.
• Während der Bildgebung dürfen keine Artefakte verursacht werden.
• Die Befestigung muss an die unterschiedlichen Wirbelkörperformen anpassbar sein, da die Wirbelkörperform vom Patienten und von der zu behandelnden Wirbeletage abhängig ist.
• Die Sicht des Operateurs auf das Operationsfeld und die Führung der chirurgischen Instrumente darf nicht beeinträchtigt werden.
• Der Lokalisator muss sicher und mit ausreichender Genauigkeit durch den Lagesen-sor erfassbar sein.
• Die Vorrichtung muss sterilisierbar und biokompatibel sein.

7 - Realisierung des Systems
64
a)
Richtungs-
adapter
Wirbelklemme
Lokalisator
b)
Abb. 7-2: Lokalisator und Wirbelklemme für den Patienten: a) Foto der Einzelkomponenten; b) vollständig zusammengesetzter Patientenlokalisator am Wirbelmodell
Zur Umsetzung der Anforderungen wurde die in Abb. 7-2 gezeigte Vorrichtung entwickelt. Sie besteht aus den Teilkomponenten Wirbelklemme, Richtungsadapter und Lokalisator mit Glaskugelreflektoren. Die Wirbelklemme kann starr am Wirbelkörper befestigt wer-den, indem sie am Dornfortsatz aufgesetzt und die Klemmvorrichtung gespannt wird. Durch Edelstahlspitzen an den Innenflächen der Klemme wird ein Verrutschen verhindert. Mithilfe des Richtungsadapters wird der Lokalisator mit der Wirbelklemme verbunden. Der Adapter führt den Lokalisator aus dem Operationsgebiet und dreht die Sichtachse des Lokalisators in Richtung des Lagesensors, der am Fußende des Patienten positioniert ist. Je nach Anordnungen im Operationssaal kann der Lokalisator mit Hilfe des Richtungsadap-ters nach rechts oder links geneigt werden.
a) b)
Abb. 7-3: Röntgenbilder eines Wirbelsäulenpräparats mit angebrachter Wirbelklemme von der Seite (a) und von oben (b). Durch die Materialwahl und die Konstruktion wird die Sicht auf den Wirbel möglichst wenig verdeckt.

7 - Realisierung des Systems
65
Als Werkstoff zur Herstellung der Komponenten wurde der Kunststoff PEEK (Polyetheretherketon) verwendet. Dieser bietet eine ausreichende Festigkeit, ist dampfsteri-lisierbar, biokompatibel und ist für die Röntgenstrahlung weitgehend durchlässig (Škultétyová 2009). Die Konstruktion der Vorrichtung ermöglicht eine freie Sicht des Chi-rurgen auf den Situs und schränkt den Arbeitsbereich für den Chirurgen nur minimal ein. Abb. 7-3 zeigt Röntgenbilder der Wirbelklemme an einem Wirbelsäulenphantom.
7.1.2 Vermessung der Instrumentenposition
Als Teil des Behandlungsmodells (Abschnitt 6.3.3 „Modellierung der Behandlungssituati-on“, S. 46 ff.) erfasst das System die räumliche Lage der Instrumentenspitze. Mit Hilfe der Instrumentenkalibrierung wird die Geometrie des Instruments erfasst und relativ zum Ko-ordinatensystem locI, das durch einen Instrumentenlokalisator definiert wird, gespeichert. Ein geeigneter Lokalisator muss folgende Anforderungen erfüllen:
• Der Lokalisator muss starr mit dem Instrument verbunden sein.
• Die Benutzung des Instruments darf nicht beeinträchtigt werden.
• Der Lokalisator soll während der Benutzung des Instruments in Sensorrichtung ausgerichtet sein und eine gute Vermessung ermöglichen.
• Der Lokalisator und der Befestigungsvorrichtung am Instrument müssen sterilisierbar sein.
In Anlehnung an eine Lokalisatorbefestigung für ein dentales Handstück (Schermeier 2002) wurden für die verwendete chirurgische Fräse ein Adapterflansch und zwei Adapter-ringe konstruiert und gefertigt (Abb. 7-4a). Der Lokalisator selbst besteht aus einem Titan-grundkörper mit vier Glaskugelmarkern. Mit einem aus Titan gefertigten Adapterflansch und zwei Adapterringen wird der Lokalisator starr am Motor der Fräse befestigt. Der Adap-terflansch besitzt ein Führungspin, der beim Zusammensetzen in eine spezielle Kerbe am Motor rutscht (Abb. 7-4b).
a)
Motorkabel
MotorAdapter-
�ansch und
-ringe
Lokalisator
b)
Motor mit Kerbe
Adapter�ansch
mit Führungspin
Abb. 7-4: Lokalisator und Adapter für die chirurgische Fräse: a) Foto der Teilkomponenten; b) Nahaufnahme des Adapterflanschs und des Motors mit Führungspin und Kerbe

7 - Realisierung des Systems
66
Der Führungspin und die Kerben im Motorgehäuse garantieren einen starren und verdrehsicheren Sitz des Flansches und damit des Lokalisators auf dem Instrument. Insge-samt wurden zwei Kerben im Motorgehäuse eingefräst. Die Position der Kerben ist derart gewählt, dass der Lokalisator bei einer rechtshändigen Benutzung optimal in Richtung der Navigationsplattform am Fußende des Patienten zeigt. Je nach Operationsverlauf steht die Navigationsplattform links oder rechts vom Operateur. Abb. 7-5 zeigt die chirurgische Frä-se mit montiertem Lokalisator in beiden Konfigurationen.
a) b)
Abb. 7-5: Zusammengesetzte Fräse mit Lokalisator in a) linker Position und b) rechter Positi-on für unterschiedliche Anordnung der Navigationsplattform im OP
7.1.3 Bestimmung der Röntgenbildposition
Weiterhin sind die Bilddaten und ihre räumliche Lage zum Aufnahmezeitpunkt Bestandteil des Behandlungsmodells. Um die Lage der Bilddaten bestimmen zu können, wurde im Rahmen dieser Arbeit ein Lokalisator für den Bildverstärker gefertigt. Die Anforderungen an einen geeigneten Lokalisator für das Röntgensystem sind:
• Der Lokalisator muss starr mit dem Röntgensystem verbunden sein.
• Die Sichtbarkeit und Vermessbarkeit des Lokalisators muss während der Anwen-dung des C-Bogens im Operationssaal gewährleistet sein.
• Die Bildgebung und die Benutzbarkeit des C-Bogens darf durch den Lokalisator nicht eingeschränkt werden.
Bei der Konstruktion des Lokalisators für den Bildverstärker wurde das vorgeschlagene Se-tup für den Einsatz im Operationssaal und die Benutzung des C-Bogens betrachtet. Der C-Bogen steht während der Operation senkrecht zur Blickrichtung des Positionsmesssensors und wird mit dem Bildverstärker über den Patienten hinweg rotiert. Mit einer seitlichen Anbringung des Lokalisators am Bildverstärker wird gewährleistet, dass sich die Haupt-sichtachse des Lokalisators während der Rotation des C-Bogens nicht ändert und damit ei-ne optimale Sichtbarkeit und Vermessbarkeit durch den Positionssensor gegeben ist.

7 - Realisierung des Systems
67
a) b)
Abb. 7-6: Am Bildverstärker montierter Lokalisator zum Vermessen der Lage des Bildvertärkers: a) Sicht auf die rechte Lokalisatorgeometrie locBV_r und b) Sicht auf die linke Geometrie locBV
Abb. 7-6 zeigt den realisierten Bildverstärkerlokalisator. Der Grundkörper des Lokalisators besteht aus einem einseitig offenen Zylinder aus Acrylglas (PMMA). Über vier Bohrungen wird der Zylinder mit dem Bildverstärker verschraubt. Das Material, die zylindrische Form und die Verschraubung bilden einen starren Aufbau und einen stabilen Grundkörper für die Reflektorkugeln. Um die Positionserfassung von beiden Seiten her zu ermöglichen, wurden auf der linken und rechten Seite Gewindebohrungen in die Mantelfläche eingebracht, in die die Reflektoren eingeschraubt werden.
Da der verwendete Lagesensor nur vier Lokalisatorgeometrien unterscheiden kann, wurde auf beiden Seiten eine identische Geometrie verwendet. Diese wird durch die Reflektorkugeln 1-4 definiert. Die beiden Lokalisatoren mit den Koordinatensystemen locBV und locBV_r sind dadurch für den Lagesensor nicht unterscheidbar. Die Entschei-dung, ob es sich bei dem detektierten Lokalisator um die rechte oder linke Seite des Bild-verstärkers handelt, erfolgt erst durch die Analyse der fünften Reflektorkugel. Deren Position ist relativ zur Lokalisatorgeometrie auf beiden Seiten verschieden. Der Lagesensor ermittelt zusätzlich zu den detektierten Geometrien die Positionen von Einzelreflexionen. Durch einen Vergleich der Einzelreflexionen mit den aus der Konstruktion bekannten Posi-tionen der fünften Reflektorkugel kann das gemessene Koordinatensystem nachträglich ei-ner Seite des Lokalisators zugeordnet werden. Für den Fall, dass der Lokalisator der rechten Seite vermessen wird, wird die Lage des Koordinatensystems locBV wie folgt be-stimmt:
__
Aus derMessungKonstruktionder Kamera
cam cam locBV rlocBV locBV r locBV= ⋅T T T
1424314243. (19)
Durch dieses Vorgehen ist nach der Vermessung stets die Lage des Koordinatensystems locBV bekannt. Alle weiteren Berechnungen können sich daher auf dieses Koordinatensys-tem beziehen.

7 - Realisierung des Systems
68
7.1.4 Umsetzung der Kalibrierung für das System
Durch die Realisierung des Bildverstärkerlokalisators verfügt das Röntgensystem über ein Referenzkoordinatensystem, welches mit Hilfe des Lagesensors vermessen werden kann. Ziel des in den folgenden Abschnitten beschriebenen Kalibrierverfahrens ist nun, die räum-liche Lage der Röntgenbilddaten und die Abbildungsgeometrie des Röntgengeräts relativ zum Lokalisatorkoordinatensystem locBV zu bestimmen. Die im Einzelnen zu bestimmen-den Größen sind:
• locBVT img: Die Transformationsmatrix zur Beschreibung des Übergangs zwischen dem Koordinatensystem des Lokalisators locBV und dem Bild img.
• s: Der Skalierungsfaktor zur Umrechnung von Positionen aus der Dimension Mil-limeter in die Dimension Bildpunkte.
• imgpXR: Die Position der Röntgenquelle XR relativ zum Bildkoordinatensystem img.
Sobald das Kalibrierverfahren die benötigten Daten bestimmt hat, kann die Bildgebung des kalibrierten Röntgensystems durch ein einfaches Lochkameramodell nachgebildet werden (Abb. 7-7). Die magnetisch bedingte und die radiale Verzerrung werden dabei nicht be-rücksichtigt. Der entsprechende Einfluss ist verhälnismäßig klein, insbesondere bei einer günstigen Konstruktion des Kalibrierkörpers (vgl. Kapitel 4 „Untersuchung der Bildge-bungseigenschaften eines C-Bogens“, S. 22 ff.). Im Modell entspricht die Position der Röntgenquelle der Position der Kamera. Die Blickrichtung der Kamera ist senkrecht zur Bildebene. Da die Bildebene in der X-Y-Ebene des Koordinatensystems img liegt, ent-spricht die Blickrichtung der Kamera der Z-Achse des Koordinatensystems img. Im Schnittpunkt zwischen dieser Sichtachse und der Bildebene wird für die Projektion das Blickpunktkoordinatensystem B eingeführt.
p=(x, y, z)T
p‘=(x‘, y‘, z‘)T
img
B
XR
imgpXR
locBV
z0
Abb. 7-7: Modell der Projektion eines Raumpunkts p auf die Bildebene img
Die Umrechung eines Punktes locBVp aus dem dreidimensionalen Raum in die Bilddaten imgPX erfolgt dann in fünf Schritten:

7 - Realisierung des Systems
69
1. Transformation des Punktes in das Bildkoordinatensystem img
2. Verschiebung in das Koordinatensystem B des Blickpunkts der Kamera
3. Perspektivische Projektion in die Bildebene
4. Verschiebung in das Koordinatensystem img
5. Skalierung für die Umrechnung der Dimension von Raumpunkten [mm] in Bild-punkte [px]
Diese fünf Schritte lassen sich jeweils als 4x4 Transformationsmatrix formulieren. Die Transformation des Raumpunktes kann dann wie folgt ausgedrückt werden:
imgPX imgPX img B B img locBVlocBV img B B img locBV= ⋅ ⋅ ⋅ ⋅ ⋅p S T P T T p (20)
Die Projektionsmatrix BPB stellt sich vereinfacht dar, da die Projektionsebene in der X-Y-Ebene des Bezugssystems liegt. Die perspektivische Projektion lautet dann:
'
10
1 0 0 0
0 1 0 0
0 0 0 0
0 0 0
BB
z−
=
P . (21)
Dabei entspricht z0 der Entfernung der Bildebene zum Projektionszentrum, bzw. in der ge-gebenen Anwendung der Enfernung der Bildebene zur Röntgenquelle
0 .imgXRz z= p . (22)
Somit kann ein Raumpunkt Bp=(x, y, z) in einen projizierten Punkt Bp` umgerechnet wer-den, indem folgende Multiplikation durchgeführt wird:
'
10 0
1 0 0 0
0 1 0 0
0 0 0 0 0
0 0 0 1
B B BB
xx
yy
z
z z z−
= ⋅ = ⋅ =
p P p (23)
Nach den Rechenregeln für homogene Koordinaten werden die einzelnen Komponenten durch die 4. Komponente geteilt, sobald diese ungleich 1 ist. Damit ergibt sich für die ein-zelnen Komponenten von Bp´:
0 0'. ; '. und '. 0B B Bz zx x y y z
z z= ⋅ = ⋅ =p p p (24)
Dieses Verhältnis lässt sich ebenfalls durch die Betrachtung der Abb. 7-7 und die Anwen-dung des Strahlensatzes herleiten.

7 - Realisierung des Systems
70
Im Folgenden wird zunächst der technische Aufbau der Kalibriervorrichtung beschrieben. Anschließend wird das Verfahren zur Registrierung der Lage des Röntgenbilds und die Ka-librierung der Röntgenquellenposition erläutert. Abschließend wird der im System umge-setzte Kalibriervorgang erläutert.
7.1.4.1 Beschreibung des technischen Aufbaus
Zur Bestimmung der gesuchten Parameter wird eine Kalibriervorrichtung für den Bildver-stärker entworfen. Die Kalibrierung beruht auf dem Ansatz, dass kugelförmige Marker in zwei verschiedenen Ebenen vor dem Bildverstärker angeordnet werden. Die erste Ebene wurde direkt in den oben beschriebenen Lokalisator integriert. Diese Ebene enthält vier un-regelmäßig verteilte Stahlkugeln, nachfolgend auch Marker genannt, mit einem Durchmes-ser von 1,0 mm. In der Modellierung des Röntgensystems entspricht diese Ebene der Bildebene. Zur Bestimmung der Röntgenquellenposition wird eine zweite Ebene mit weite-ren Stahlkugeln am Lokalisator befestigt. Abb. 7-8 zeigt den Bildverstärkerlokalisator und den Kalibriervorsatz mit den Stahlkugeln.
a) b)
Abb. 7-8: Kalibriervorrichtung: a) Lokalisator am Bildverstärker mit vier Stahlkugeln in der Bildebene und b) aufgesetzter Kalibriervorsatz mit 6 Stahlkugeln
Zur Kalibrierung des C-Bogens wird ein Röntgenbild aufgenommen, in dem sich die Stahlkugeln als kleine, fast punktförmige Schatten abbilden. Abb. 7-9 zeigt ein Modell der Kalibriervorrichtung im Strahlengang des C-Bogens und das entstehende Röntgenbild. Als Referenzkoordinatensystem für die Modellierung der Bildgebung dient das Koordinaten-system locBV des Bildverstärkerlokalisators. Anhand der Konstruktionsdaten sind die Posi-tionen der Stahlmarker relativ zu diesem Koordinatensystem bekannt. Die Positionen der vier Stahlkugeln am Lokalisator werden locBVploc,i ; mit i ∈ [1, 4] bezeichnet. Die Positio-nen der sechs Stahlkugeln des Kalibriervorsatzes sind mit locBVpcal,j ; mit j ∈ [1, 6]. Ziel der Kalibrierung ist es, die Lage des Bildes, die Pixelgröße und die Position der Röntgenquelle zu bestimmen.

7 - Realisierung des Systems
71
a) b)
Abb. 7-9: a) Darstellung des Kalibriermodells mit Bildverstärkerlokalisator und Kalibriervorsatz im Strahlengang zwischen Röntgenquelle und Projektionsbild. Die relevanten Koordinatensysteme und die Stahlkugelmarker sind gekennzeichnet. b) Röntgenbild der Kalibriervorrichtung.
7.1.4.2 Umsetzung der Bildregistrierung
Ziel der folgenden Berechnung ist die Bestimmung der Transformationsmatrix locBVT img zwischen dem Lokalisatorkoordinatensystem des Bildverstärkers und dem Bildkoordina-tensystem sowie die Bestimmung des Skalierungsfaktors s. Diese Aufgabe wird gelöst, in-dem die vier Stahlkugeln eine Ebene im Raum definieren und das Bild auf diese Ebene gelegt wird. Im Folgenden sind die einzelnen Arbeitsschritte beschrieben, mit denen die gesuchte Transformation und die Pixelgröße berechnet werden:
• Erkennung eines geeigneten Röntgenbildes: Im ersten Schritt wird anhand des His-togramms des aufgenommenen Röntgenbildes entschieden, ob dieses für eine Re-gistrierung geeignet ist. Dazu werden das Histogramm und das Summenhistogramm über den inneren Bereich jedes aufgenommenen Röntgenbil-des bestimmt. Die Grauwerte der aufgenommenen Röntgenbilder liegen in einem Bereich [0, 255]. Die Histogrammfunktion hi mit i ∈ [0, 255] gibt die Anzahl der Pixel mit dem Grauwert i an. Abb. 7-10 zeigt ein zur Kalibrierung geeignetes Rönt-genbild und die zugehörigen Histgramme.
Abb. 7-10: a) Ein zur Kalibrierung geeignetes Röntgenbild der Kalibriervorrichtung; b) Histogramm und Summenhistogramm des Röntgenbildes.

7 - Realisierung des Systems
72
Der innere Bildbereich zeigt ein Bildrauschen und wenige, durch die Stahlkugeln erzeugte dunkle Bereiche auf. Charakteristisch für die zur Kalibrierung geeigneten Röntgenbilder ist das durch das Rauschen verursachte Maximum, um das sich die übrigen Grauwerte symmetrisch verteilen. Formal werden die Röntgenbilder zur Kalibrierung verwendet, wenn folgende Bedingungen erfüllt sind:
1. Es kann ein mittleres Gewicht g ermittelt werden, für das gilt:
1 255
0
[0;255] :g
i ji j g
g für das gilt MIN h h−
= =
∈ −
∑ ∑ (25)
2. Das Maximum des Histogramm m liegt im Bereich um das Gewicht:
[ 20; 20]m g g∈ − + (26)
3. Der Bereich um das Gewicht [g-66, g+66] enthält 94% der Bildinformatio-nen
• Detektion der Marker im Röntgenbild: Sobald ein Röntgenbild den Histogrammtest erfolgreich durchlaufen hat, wird ein Grauwert t als Schwellwert für die Markerdetektion bestimmt. Der Wert t wird derart gewählt, dass die 0,06 % der dunkelsten Grauwerte unterhalb dieser Schwelle liegen. Dieser Anteil entspricht dem zweifachen der Fläche im Suchbereich des Röntgenbildes, den die Markerschatten typischerweise einnehmen. Die so segmentierten Bildpunkte wer-den zu Gruppen zusammengefasst. Die vier größten Gruppen werden als Marker in-terpretiert. Dazu wird jeweils der Schwerpunkt der Gruppen bestimmt. Die vier resultierenden Bildpunkte imgpcal,i mit i ∈ [1, 4] werden für die weitere Berechnung verwendet.
• Berechnung des Skalierungsfaktors s: Der Skalierungsfaktor s mit der Dimension [px/mm] wird nachfolgend bestimmt, indem eine im Bild bekannte Länge durch ih-re reale Größe geteilt wird. Dazu werden die Strecken zwischen den Markern 1 und 3 sowie 2 und vier verwendet:
,1 ,3 ,2 ,4
,1 ,3 ,2 ,4
1
2
img img img imgcal cal cal cal
locBV locBV locBV locBVcal cal cal cal
s − − = ⋅ + − −
p p p p
p p p p (27)
Die Positionen der Marker sind derart gewählt, dass der Fehler durch die radiale Verzerrung in der Bildmitte möglichst geringe Auswirkungen aufweist (vgl. Ab-schnitt 4.3 „Untersuchung der radialen Bildverzerrung“, S. 24 ff.). Weiterhin wird von einem quadratischen Bildpunkt ausgegangen. Die Gültigkeit dieser Annahme wird während der Kalibrierung durch den Vergleich der beiden orthogonalen Stre-cken überprüft.
• Geometriedetektion: Nachfolgend wird geprüft, ob die Bildpositionen der vier ge-fundenen Marker mit der tatsächlichen geometrischen Anordnung in der Kalibriervorrichtung übereinstimmen. Dazu wird die Geometrie der segmentierten Punkte imgpcal,i mit der Geometrie der Stahlkugeln locBVpcal,i verglichen.

7 - Realisierung des Systems
73
• Ermittlung der Transformation: Nachfolgend wird die gesuchte Transformations-matrix ermittelt. Mit einem Downhill-Simplex-Verfahren (Press 1992) wird die ge-suchte Transformationsmatrix locBVT img optimiert, sodass der Abstand
4
0
locBV locBV imgi img i
i
s=
− ⋅ ⋅∑ p T p (28)
minimal ist.
Die Abb. 7-11 ist das Ergebnis der soeben beschriebenen Bildregistrierung. Die in den er-stellten Röntgenbildern detektierten Marker werden virtuell auf die realen Marker gemappt. Dadurch erhält das Röntgenbild eine feste räumliche Ausrichtung und Position, die durch die gefundene Transformation locBVT img und die Skalierung s beschrieben ist
locBV
img
Abb. 7-11: Visualisierung der Bildregistrierung: Das Röntgenbild wird auf die Stahlkugel-marker des Lokalisators gelegt.
7.1.4.3 Bestimmung der Position der Röntgenquelle
In einem zweiten Schritt wird die Position der Röntgenquelle relativ zum Bildkoordinaten-system bestimmt. Dazu werden die folgenden Arbeitsschritte durchgeführt:
• Ermitteln von Projektionsstrahlen: Zunächst werden die Bildpositionen imgpcal,j der Markerschatten ermittelt, die von den Stahlkugeln der zweiten Ebene der Kalibriervorrichtung verursacht werden. Da die Lage des Röntgenbildes und die Bildpunktgröße bereits bekannt sind, können die Raumkoordinaten der gefundenen Bildpositionen bestimmt werden:
( ), ,locBV locBV img
cal i img cal i s= ⋅ ⋅p T p (29)
Nachfolgend wird für jede Stahlkugel j∈[0, 5] der zugehörige Projektionsstrahl r j bestimmt, indem eine Gerade durch die Raumposition des erzeugten Bildpunktes locBVpcal,i und Raumposition der jeweiligen Stahlkugel gelegt wird:

7 - Realisierung des Systems
74
, , ,: ( )locBV locBV locBVi cal i cal i cal ig λ= + −r p p p (30)
• Berechnung der Röntgenquellenposition imgpXR: Abschließend wird die Position der Röntgenquelle bestimmt, indem der Schnittpunkt der berechneten Geraden r j ermit-telt wird.
7.1.4.4 Ablauf des Kalibriervorgangs
Im Kapitel 4 („Untersuchung der Bildgebungseigenschaften eines C-Bogens“, S. 22 ff.) wurde bereits gezeigt, dass die Abbildungseigenschaften des C-Bogens durch äußere Be-dingungen beeinflusst werden. Besonders stark wirkt sich die schwerkraftbedingte Verfor-mung auf die Bildgebung aus. Daher bestimmt das Kalibrierverfahren die gesuchten Werte in verschiedenen C-Stellungen und speichert die ermittelten Daten zusammen mit dem ein-gestellten C-Winkel.
Abb. 7-12: Ablaufdiagramm des Kalibriervorgangs zur Bestimmung von Bildlage und Rönt-genquellenposition in Abhängigkeit der möglichen C-Stellungen
Abb. 7-12 zeigt das Ablaufdiagramm der Kalibrierprozedur. Die einzelnen Arbeitsschritte werden im Folgenden erklärt:
• Systemvorbereitung: Hierbei erfolgt die Inbetriebnahme und Vorbereitung des Sys-tems auf die Kalibrierung. Dazu gehören ggf. die Montage des Lokalisators und der Aufbau des Navigationssystems. Weiterhin wird der Kalibriervorsatz am Lokalisator befestigt. Der technische Aufbau der Kalibrierung wurde im Abschnitt 7.1.4.1 („Beschreibung des technischen Aufbaus“, S. 70 ff.) beschrieben.
Für definierte Winkelstellungen:
o C-Bogen ausrichten: Der C-Bogen wird in die nächste Winkelstellung ge-bracht, in der ein neuer Kalibriervorgang gestartet werden soll. Anhand der Aufnahme von Kalibrierdaten in verschiedenen Winkelstellungen wird die

7 - Realisierung des Systems
75
schwerkraftbedingte Verformung der C-Struktur erfasst. Da diese gleichmä-ßig erfolgt, wird die Aufnahme von Kalibrierdaten mit einem Winkelab-stand von 5 Grad durchgeführt.
o Bild aufnehmen: Zur Berechnung der gesuchten Daten wird ein Röntgenbild aufgenommen. Im Strahlengang befindet sich bei der Bildaufnahme nur der Kalibrierkörper.
o Berechnung der gesuchten Parameter: Die Kalibriersoftware registriert an-hand des UDP-Signals des C-Bogens (vgl. Abschnitt 6.3.2.2 „Navigationsplattform“, S. 41 ff.) die Aufnahme eines neuen Bildes und speichert die aufgenommenen Bilddaten. Anschließend erfolgt die Bestim-mung der zu kalibrierenden Größen mit den in den Abschnitten 7.1.4.2 („Umsetzung der Bildregistrierung“, S. 71 ff.) und 7.1.4.3 („Bestimmung der Position der Röntgenquelle“, S. 73 ff.) beschriebenen Verfahren.
Nach Abschluss der Datenaufnahme:
• Verifikation und Aktivierung: Die ermittelten Kalibrierdaten werden durch die Kalibriersoftware gespeichert. Nach Abschluss des Vorgangs werden die neuen Kalibrierdaten in das System geladen. Zur Überprüfung der Kalibrierqualität wird das im Abschnitt 7.4.1 („Überprüfung der Bildverstärkerkalibrierung“, S. 89 ff.) beschriebene Verfahren durchgeführt und die Kalibriergenauigkeit anhand der Überlagerungsgenauigkeit abgeschätzt.
7.2 Visualisierung der chirurgischen Fräse in den Röntgenbilddaten
Im Folgenden soll das Visualisierungsmodul beschrieben werden, welches zur Darstellung der im System vorhanden Daten entwickelt wurde. Ziel ist es, die Projektionsbilddaten, ein virtuelles Modell der chirurgischen Fräse, die Planungsdaten und den berechneten Arbeits-raum räumlich richtig zu überlagern und dem Operateur anzuzeigen. Die Anforderungen an diese Visualisierung sind:
• Gemeinsame Visualisierung aller Daten in einem Visualisierungskontext
• Hardwarebeschleunigte Berechnung auf der Grafikkarte
• Einfache Benutzung und Erweiterung des Softwaremoduls
• Spiegelung und Rotation der erzeugten Ansicht
Um die genannten Anforderungen erfüllen zu können und unter Beachtung der Abbil-dungseigenschaften des C-Bogens wurde eine Visualisierung in OpenGL entwickelt. Im Abschnitt 7.1.4 („Umsetzung der Kalibrierung für das System“, S. 68 ff.) wurden bereits die Projektionseigenschaften des C-Bogens mit Hilfe eines einfachen Lochkameramodells beschrieben. Im Folgenden wird die Initialisierung des Kameramodells in der Open Gra-phics Library (OpenGL) mit Hilfe der in der Kalibrierung ermittelten Eigenschaften des C-Bogens erläutert.

7 - Realisierung des Systems
76
Abb. 7-13: Transformationsstufen bei der Darstellung von Koordinaten in einer OpenGL-Szene
OpenGL ist ein Softwareinterface zur Hardware der Grafikkarte. Die Schnittstelle spezifi-ziert verschiedene Befehle, mit deren Hilfe komplexe 3D-Szenen programmiert werden können. Teil der Darstellungsoperation von OpenGL sind die Transformationsstufen, wel-che ein Objekt vor der Anzeige durchläuft (Abb. 7-13). Im Einzelnen sind dies:
• Modell-View-Matrix: Transformiert ein Objekt aus seinem spezifischen Koordina-tensystem in das Koordinatensystem der OpenGL-Kamera. Diese Transformation ist objektspezifisch und wird vor dem Zeichnen der einzelnen Objekte gesetzt.
• Projektionsmatrix: Der Projektionsschritt transformiert die View-Koordinaten in einen Würfel mit den Eckpunktkoordinaten (-1, -1, -1) und (1, 1, 1). Für die spätere Position der transformierten Koordinate auf dem Bildschirm sind nachfolgend nur noch die x- und y-Komponenten der Koordinate verantwortlich. Die z-Komponente enthält lediglich die Tiefeninformation für ein späteres Z-Buffering. Diese Trans-formation ist szenenspezifisch und modelliert die Position und Eigenschaften der virtuellen Kamera
• Perspektivteilung: Nach der perspektivischen Transformation wird der w-Anteil der homogenen Koordinate ≠1. Zur Kompensation werden daher in diesem Schritt die einzelnen Komponenten durch w geteilt.
• Viewport-Transformation: Überführt die Koordinaten in den gerätespezifischen Koordinaten des Anzeigesystems, indem eine Verschiebung und eine Skalierung der Koordinaten durchgeführt werden.
7.2.1 Initialisierung der Projektionsmatrix
Wird der C-Bogen als Lochkamera angesehen, dann entspricht die Position der Röntgen-quelle der Position der OpenGL-Kamera. Die Blickrichtung der Kamera verläuft entlang der Bildnormalen. Die Y-Richtung der Kamera verläuft parallel zur Y-Achse des Bildes. Die Projektionsmatrix hat nun die Aufgabe, Koordinaten aus dem Kamerakoordinatensys-tem view in das OpenGL-interne, projektive Koordinatensystem PRJ zu überführen. Abb. 7-14 zeigt eine Modellierung der Projektion des C-Bogens als Umsetzung des in OpenGL verwendeten Kameramodells.

7 - Realisierung des Systems
77
img
XR = view
ptl
prb
En
Ef
g1
g2
p1
p2
locP
f
n
Abb. 7-14: Anwendung des OpenGL-Kameramodells zur Initialisierung einer Projektion gemäß der Abbildungseigenschaften des C-Bogens
Die Modellierung der Projektionseigenschaften des C-Bogens als OpenGL-Kamerasystem hat folgende Eigenschaften:
• das Basiskoordinatensystem für die Modellierung ist das Patientensystem locP
• der Ursprung des Kamerakoordinatensystems view entspricht der Position der Röntgenquelle XR
• Die beiden Tiefenschnittflächen En und Ef sind parallel zur X-Y-Ebene des view Koordinatensystems.
Für die Initialisierung der Szene wird zunächst das Sichtkoordinatensystem view bestimmt.
( ), ,locP locP cam locBV img img imgview cam locBV img view view XRmit= ⋅ ⋅ =T T T T T T E t (31)
view hat durch diesen Vorgang dieselbe Orientierung wie das Bildkoordinatensystem. Da-her enthält die Transformation imgTXR die Einheitsmatrix E im Rotationsanteil. Der Ur-sprung befindet sich im Ursprung der Röntgenstrahlung XR.
Die Beschreibung der Projektion in OpenGL kann durch einen Pyramidenstumpf erfolgen. Der Stumpf ist durch die Raumpunkte p1, p2, ptl und prb im view-Koordinatensystem voll-ständig bestimmt. Die Bestimmung der Punkte p1 und p2 erfolgt durch die Transformation der beiden gegenüberliegenden Bildeckpunkte aus dem Bildpunkteraum in das Koordina-tensystem view:
( )( )
1
2
0, 0, 0, 1
, , 0, 1
Tview viewp img
Tview viewp img
s s s
s w s h s
= ⋅ ⋅ ⋅ ⋅
= ⋅ ⋅ ⋅ ⋅
p T
p T (32)

7 - Realisierung des Systems
78
w entspricht dabei der Bildbreite und h der Bildhöhe. Im nächsten Schritt werden die Grundebene des Pyramidenstumpfs En berechnet. Die Ebene erfüllt die Gleichung
( ) ( )( ): 0 0,0, 1 0,0,n n= − ⋅ −E xr
(33)
und befindet sich in einer Entfernung von n mm von Ursprung des Sichtkoordinatensys-tems. Weiterhin werden die Projektionsgeraden g1 und g2 benötigt, die durch die Punkte p1, bzw. p2 und den Ursprung der Röntgenquelle verlaufen:
( )( )
1
2
: (0,0,0)
: (0,0,0)
view view Ttl tl
view view Trb rb
λ
λ
+ −
+ −
g p p
g p p (34)
Nun können die Punkte viewptl und viewpbr berechnet werden, indem die Schnittpunkte der Ebene En mit den geraden g1 und g2 bestimmt wird:
( )( )
1
2
Schnittpunkt ,
Schnittpunkt ,
viewrb n
viewtl n
=
=
p g E
p g E (35)
Abschließend wird die Projektionsmatrix gesetzt, indem die soeben bestimmten Werte als Eingaben für die OpenGL-Befehle dienen (Shreiner 2003):
{ObenBlickrichtungPositionder Kamera
. , . , . , 0,0, 1 ,0,1,0locP locP locPview view viewgluLookAt x y z
−
t t t1231444442444443
(36)
( ). , . , . , . , ,view view view viewtl br br tlglFrustum x x y y n fp p p p (37)
7.2.2 Lagerichtiges Anzeigen von Objekten in der Bildprojektion
Nachdem die Visualisierung vollständig initialisiert ist, können die vorhandenen Modelle lagerichtig gezeichnet werden, indem die folgenden Schritte eingehalten werden:
1. Setzen der Model-View-Matrix
2. Zeichnen des Modells im Modell-Koordinatensystem
Da die Initialisierung der Visualisierung relativ zum Koordinatensystem locP vorgenom-men wurde, beziehen sich auch die zu berechnenden Model-View-Matrizen auf dieses Ko-ordinatensystem. Allgemein können nun alle Objekte lagerichtig gezeichnet werden, von denen ein virtuelles Modell existiert und deren räumliche Lage relativ zum Koordinaten-system locP bekannt ist. Dazu gehören:
• die Projektionsbilddaten
• die chirurgische Fräse
• das Arbeitsvolumen

7 - Realisierung des Systems
79
• die Planungsdaten
Die benötigte Model-View-Matrix für die Bilddaten
MessungderNavigationskamera zum
Aufnahmezeitpunkt
locP locP cam locBVimg cam locBV img= ⋅T T T T
1442443 (38)
wurde während der Bildaufnahme in der Projektionsbildregistrierung bestimmt (Abschnitt 6.3.4.2 „Projektionsbildregistrierung“, S. 52 ff.). Die Model-View-Matrix für die chirurgi-sche Fräse
Messungder ErgebnisderNavigationskamera zumInstrumenten-
Aufnahmezeitpunkt vermessung
locP locP cam locItcp cam locI tcp= ⋅T T T T
1442443 123 (39)
wird im aktuellen Systemzyklus berechnet und setzt sich aus den Messdaten des Lagesen-sors und den Ergebnissen der Instrumentenkalibrierung (Abschnitt 6.3.4.6 „Instrumentenkalibrierung“, S. 56 ff.) zusammen. Analog dazu können die entsprechenden Matrizen zum visualisieren der restlichen Objekte bestimmt werden. Die Abb. 7-15 zeigt das Ergebnis der realisierten Visualisierung. Die Bilddaten des aktiven Röntgenbildes wer-den angezeigt und die weiteren Objekte, z.B. das Instrumentenmodell und der Arbeitsraum, werden lagerichtig eingeblendet.
Abb. 7-15: Intraoperative Visualisierung der Bilddaten, des verwendeten Instruments und des Arbeitsraumes in einer lagerichtigen Überlagerung

7 - Realisierung des Systems
80
7.3 Realisierung der Arbeitsraumplanung
Ziel der Arbeitsraumplanung ist es, ein effizientes Werkzeug zur intraoperativen Definition des Arbeitsbereichs für die chirurgische Fräse zu entwickeln. Dazu wurde für die Software ein Planungsmodul erstellt, das die aufgenommenen Bilddaten zusammen mit den Pla-nungsinformationen visualisiert. Der Operateur markiert in dieser Ansicht die zu entfer-nenden Strukturen durch die Definition eines Polygonzugs. Nach dem Start der Arbeitsraumberechnung bestimmt das System aus diesen Eingaben für jedes Projektions-bild ein Teilvolumen und verknüpft diese zu dem gewünschten Arbeitsbereich. Der Opera-teur kann den Polygonzug anschließend verifizieren und gegebenenfalls modifizieren, um den Arbeitsbereich anzupassen. Die Abb. 7-16 stellt den Ablauf der Planung dar.
Benutzungsablauf
Bild- und Planungs-
daten verifizieren
Berechnung
startenPlanung nicht
vollständig
Planung
vollständig
Planung erstellen
oder anpassen
automatisierter Systemvorgang
Aufspannen der
Teilvolumen
Konjunktion der
Teilvolumen
Daten
speichern
Abb. 7-16: Ablaufdiagramm der Arbeitsraumplanung mit Unterteilung in Benutzungsablauf und Systemvorgänge
7.3.1 Realisierung der Planungsfunktion
Die Planungsfunktion stellt das Interface der Arbeitsraumplanung zum Benutzer dar. Es ermöglicht dem Operateur die Durchführung der in Abb. 7-16 als Benutzungsablauf ge-kennzeichneten Arbeitsschritte. Sie umfasst die Anzeige der Bild- und Planungsdaten, die Bereitstellung von Funktionen zur Erstellung und Modifikation der Polygonzüge und zur Verifikation des berechneten 3D-Arbeitsraumes. Aufgabe des Benutzers ist es, mittels die-ser Funktionen die Bereiche in den Röntgenbildern zu kennzeichnen, die mit der Fräse ent-fernt werden sollen.

7 - Realisierung des Systems
81
a)
Abb. 7-17: Umsetzung der Planungsfunktion: Kennzeichnung der abzutragenden Facette eines Wirbelkörpers mit Hilfe eines Polygonzugs in einem Projektionsbild aus 28 Grad.
Die Abb. 7-17 zeigt die Visualisierung der Software im Planungsmodus. Die Visualisie-rung stellt das ausgewählte Röntgenbild imgi dar. Die Ansicht kann durch die Benutzung entsprechender Schaltflächen vergrößert, gedreht und gespiegelt werden. Ziel der Planung ist es, für das ausgewählte Röntgenbild i ein Polygon
( )0 1 1, ,..., ,img img imgi N mit N Anzahl der Eckpunkte−= =S p p p (40)
mit N geordneten Eckpunkten zu definieren. Mit Hilfe der Maus kann der Operateur neue Eckpunkte in die Punkteliste Si hinzufügen, bzw. vorhandene Punkte löschen oder ver-schieben.
7.3.1.1 Unterstüzung beim Planungsvorgang
Die intraoperative Anwendung der Röntgenbildgebung im Operationssaal ist weitgehend standardisiert und an die spezielle klinische Fragestellung angepasst. Bei Eingiffen an der Wirbelsäule erfolgt die Durchleuchtung des Patienten typischerweise lateral (von der Seite) und anterior-posterior (von vorne nach hinten). Die Interpretation von Röntgenbilddaten aus anderen Richtungen führt zu einer Erhöhung des Aufwandes im Operationssaal. Trotz-dem müssen zur Erstellung einer ausreichend genauen Planung auch Röntgenbilder aus un-typischen Richtungen aufgenommen und interpretiert werden. Um dem Operateur hierbei zu assistieren, wurden folgende Unterstützungsfunktionen realisiert:
• Einblendung des Arbeitsraumes: Bereits nach dem Erstellen einer Segmentierung im ersten Röntgenbild kann der Operateur die Berechnung des resultierenden Ar-beitsbereichs starten. Das System blendet den berechneten Arbeitsraum nachfol-gend in alle vorhandenen Röntgenbilder ein. Bei der Planung in einem Röntgenbild

7 - Realisierung des Systems
82
aus einem untypischen Winkel hilft diese Visualsierung bei der Interpretation der Bilddaten.
• Navigationsunterstützte Planung: Eine weitere Erleichterung in der Planungsphase stellt die Navigationsunterstützung dar. Sobald die Geometrie des Instruments ver-messen wurde und das Instrument in den Situs geführt wird, überlagert das System die Bilddaten mit dem virtuellen Modell der Fräse lagerichtig. Der Operateur kann das Instrument an die zu planende Struktur führen (Abb. 7-18a) und diese dann durch die Visualsierung des Systems sicher in den Röntgenbilddaten identifizieren (Abb. 7-18b).
a) b)
Abb. 7-18: Unterstüzung des intraoperativen Planungsvorgangs: Durch die Ausrichtung der Fräse an der zu entfernenden Struktur (a) und die entsprechende Darstellung des vir-tuellen Modells in den Bilddaten (b) wird die Interpretation von Röntgenbildern aus untypischen Richtungen erleichert.
7.3.2 Berechnung des 3D-Arbeitsraums
Inhalt dieses Abschnittes ist die Realisierung der Berechnung des 3D-Arbeitsraumes A aus den Planungsdaten Si. Das Konzept zur Generierung des 3D-Arbeitsraumes aus den Pro-jektionsbildern und den darin geplanten Flächen wurde bereits im Abschnitt 6.3.4.5 („Planungsmodul“, S. 55 ff.) beschrieben: Für jedes Röntgenbild wird ein Teilvolumen aufgespannt, welches einer Pyramide mit polygonaler Grundfläche entspricht. Dabei wird das Polygon aus den Segmentierungen gebildet, die der Operateur in der Planungsphase er-stellt. Die Spitze der Pyramide wird durch die Position der Röntgenquelle definiert. Durch eine Konjunktion aller Teilvolumen ergibt sich der Arbeitsraum für die Fräse.
Diese Funktion kann durch drei verschiedene Ansätze realisiert werden:
• Oberflächenbasierter Ansatz: In diesem Ansatz werden die Teilvolumen der ein-zelnen Röntgenbilder durch eine Oberfläche repräsentiert. Dabei bietet sich eine dreiecksbasierte Oberfläche an, bei der sich die Dreiecke aus den Kanten des Poly-gons und der Position der Röntgenquelle ergeben. Die Verknüpfung der Teilvolu-men kann dann rechentechnisch durch Surface-Intersection-Algorithmen realisiert werden. Hier bietet sich die Verwendung einer entsprechenden Softwarebibliothek an, z.B. SgCore (www.geometros.com). Nachteil dieses Ansatzes ist, dass der Be-

7 - Realisierung des Systems
83
rechnungsaufwand von der Komplexität der Teil- und Zwischenoberflächen ab-hängt und daher nicht konstant ist. Weiterhin ist eine Reihe von Sonderfällen zu beachten, z.B. beim Zerfall des Volumens in mehrere Teilvolumen.
• Volumenbasierter Ansatz: Eine weitere Möglichkeit der Berechnung ist die Reprä-sentation der Teilvolumen als Voxelvolumen. Mit Hilfe eines Scanline-Algorithmus können die pyramidalen Teilvolumen in eine Voxeldarstellung über-führt werden. Der resultierende Arbeitsraum sind dann die Voxel, die in allen Teil-volumen gesetzt sind. Nachteil dieses Ansatzes ist der hohe Bedarf an Speicherplatz in der Voxelrepräsentation und der Rechenaufwand bei der Konjunk-tion der Teilvolumen.
• Rekonstruktionstechnik: Das gesuchte Arbeitsvolumen kann ebenfalls durch die Verwendung einer Rekonstruktionstechnik bestimmt werden, analog zur Rekon-struktion von 3D-Volumenbilddaten aus Projektionsbildern. Dabei werden die Segmentierungen als binäre Bilddaten repräsentiert. Die Rekonstruktionstechnik er-stellt dann ein Voxelvolumen, welches das gesamte Volumen enthält. Vorteil dieses Ansatzes ist, dass der Rechenaufwand von der Anzahl der Röntgenbilder abhängig ist. Die Form oder die Anzahl der geplanten Polygone in den Projektionsbildern haben keinen Einfluss auf den Ablauf oder den Aufwand der Berechnung.
Nach der Analyse der Vor- und Nachteile der verfügbaren Ansätze wurde die Realsierung der Arbeitsraumberechnung mit Hilfe der Rekonstruktionstechnik gewählt. Dafür wurde die Implementierung einer Algebraischen Rekonstruktionstechnik (ART) von Huth 2005 verwendet, welche direkt auf der Hardware einer Grafikkarte ausgeführt wird. Für die Berechung des Arbeitsbereichs wird eine modifizierte Rückprojektion der ART verwendet. Abb. 7-19 zeigt das Konzept der Rekonstruktion. Die Planungsdaten werden anhand der Projektionseigenschaften des zugehörigen Röntgenbildes in ein Arbeitsvolumen A proji-ziert. Fortschreitend bildet sich im Arbeitsvolumen der Arbeitsbereich für das chirurgische Instrument ab.
a) XR
locPA
ASz
imgi
Si
b) XR
locPA
imgi
Si
imgi+1
Abb. 7-19: Zustand des Arbeitsraumvolumens nach der Projektion des ersten Planungsbildes (a) und nach Projektion des zweiten Bildes (b). Durch die Konjunktion der projizierten Planungsdaten mit dem initial gefüllten Arbeitsvolumens entsteht sukzessive eine Rekonstruktion des geplanten Arbeitsbereichs.

7 - Realisierung des Systems
84
Durch die Projektion der Planungsdaten wird ein Arbeitsraum locPA mit den Ausdehnungen X, Y und Z gefüllt. Die Kantenlänge der Voxel beträgt 0,5mm. Der Arbeitsraum enthält X×Y×Z Voxel, die den Wert 0 und 1 annehmen können:
{ }, , 0,1locP X Y Z= →A (41)
Dazu wird schichtweise eine Projektion der Planungsdaten in das Arbeitsvolumen vorge-nommen. Dazu werden Schichten ASz des Arbeitsbereichs betrachtet, welche in der X-Y-Ebene des Arbeitsraumes liegen:
{ }0,1 ; [0, ]Az X Y mit z Z= × → ∈S (42)
Im Folgenden ist der Algorithmus für die binäre Rekonstruktion des Arbeitsbereichs be-schrieben:
• Initialisierung eines Volumens: Es wird ein binäres Volumen locPA erzeugt und mit 1 gefüllt. Das Zentrum des Volumens wird in den Schnittpunkt der Zentralstrahlen der aufgenommenen Röntgenbilder gelegt. Das Bezugssystem ist der Patientenlokalisator locP.
Für jeden Planungsdatensatz
o Planungsbild erzeugen: Die Planungsdaten liegen in Form von einem oder mehreren Polygone in der Bildebene vor. Für die Projektion wird daraus ein binäres Planungsbild locPP erzeugt. Die Ausdehnung und die räumliche Lage des Planungsbildes entsprechen den Eigenschaften des assoziierten Rönt-genbildes. Die geplanten Bereiche des Bildes werden auf 1 gesetzt.
Für jede Schicht ASz des Arbeitsbereichs:
� Projektion der Planungsdaten: Mit Hilfe der Kalibrierung und der Positionsdaten des aktuellen Planungsbildes kann eine Projektions-matrix APlocP bestimmt werden, die das binäre Planungsbild auf die Ebene der aktuell ausgewählten Schicht projiziert:
A A locPlocP= ⋅P P P (43)
� Bestimmung der neuen Daten: Die Daten in der ausgewählten Schicht werden neu berechnet, indem eine Konjunktion der vorhan-denen binären Werte mit den Werten des projizierten Planungsbildes gebildet wird:
( 1) ( )A A Az z zk k+ = ∧S S P (44)
Abb. 7-19 zeigt den Zustand des rekonstruierten Arbeitsvolumens, nachdem das erste und das zweite Planungsbild vollständig in den Arbeitsbereich eingerechnet wurden. Ergebnis des Vorgehens ist ein binäres Arbeitsraumvolumen A. Voxel, welche zum Aktivierungsbe-reich des Instruments gehören, haben den Wert 1, die restlichen Voxel haben den Wert 0.

7 - Realisierung des Systems
85
7.3.3 Berechnung der maximalen Instrumentenleistung
Das Ergebnis der Arbeitsraumplanung ist ein binäres Voxelvolumen locPA, welches den re-konstruierten Arbeitsbereich für die Fräse beschreibt. Da der rekonstruierte Arbeitsbereich vollständig durch das Voxelvolumen locPA beschrieben ist, gilt, dass alle Randvoxel den Wert 0 haben:
{0, } {0, } {0, }: ( , , ) 0locPi X j Y k Z i j k∀ ∈ ∧ ∈ ∧ ∈ =A (45)
Im Abschnitt 6.3.4.8 („Leistungssteuerung“, S. 58 ff.) wurde bereits das Konzept zur Be-rechnung der Instrumentenleistung beschrieben. Die Leistungsvorgabe des Systems ist da-bei eine Funktion in Abhängigkeit von der minimalen Entfernung des Fräskopfes zur Arbeitsbereichsgrenze. Inhalt dieses Abschnittes ist daher die Beschreibung der benötigten Abstandsberechung. Die besondere Anforderung an den Algorithmus ist, dass die verfüg-bare Rechenkapazität im jeweiligen Systemzyklus beschränkt ist.
Um die Anforderungen hinsichtlich einer maximalen Reaktionszeit zu erfüllen, wird das Arbeitsvolumen locPA nach Abschluss der Planung auf ein Distanzvolumen locPD abgebil-det:
3: ; :locP locP locPf mit X Y Z⇒ × × →A D D � (46)
Die Dimensionen von locPA und locPD sind identisch. Dadurch ist jedem Voxel im Arbeits-volumen ein dreidimensionaler Vektor zugeordnet, der die minimale Entfernung und die Richtung zu Arbeitsraumgrenze beinhaltet. Die rechentechnische Realisierung der Funkti-on f ist an einen iterativen Breitensuchalgorithmus angelehnt und wird im Folgenden be-schrieben:
1. Initialisierung: Zunächst folgt eine Initialisierung der benötigten Datenstrukturen. Dabei werden Voxel auf der Arbeitsraumgrenze mit einem Nullvektor (0, 0, 0)T und die restlichen Voxel mit einem maximalen Vektor (2·X, 2·Y, 2·Z)T initialisiert. Dazu werden alle Voxel überprüft, ob sie Teil der Arbeitsraumgrenze sind. Dies ist der Fall, wenn sie nicht zum Arbeitsbereich gehören, aber einer ihrer Nachbarn Teil des Arbeitsbereichs ist. Diese Grenzvoxel erhalten den Distanzvektor (0, 0, 0) T und werden in die Voxelliste listModifizierteVoxel eingetragen:
Füralle Voxel v aus Gesamtvoxelmenge Setzte D(v) = 2*(X, Y, Z) Wenn A(v) == 0 dann Füralle n aus Nachbarn von v Wenn A(n) == 1 dann Setzte D(v) = (0, 0, 0) Hinzufügen v nach listModifizierteVoxel
In Abb. 7-20 ist die soeben beschriebene Initialisierung am Beispiel eines zweidi-mensionalen Rasters dargestellt. Das Raster auf der linken Seite repräsentiert das Arbeitsvolumen A mit dem grauen Arbeitsbereich. Das Raster auf der rechten Seite stellt das Distanzvolumen dar. Jede Zelle, die auf der Grenzfläche des Arbeitsbe-reichs liegt, ist dunkelgrau markiert. Diese Grenzzellen sind in der Liste listModifizierteVoxel eingetragen und dienen nachfolgend als Wurzel für den iterativen Algorithmus.

7 - Realisierung des Systems
86
Abb. 7-20: Illustration des Initialisierungsschritts. Im Distanzvolumen werden die Grenzvoxel mit dem Distanzvektor 0 (dunkelgrau) und die anderen Voxel mit einem maximal langen Vektor initialisiert
2. Distanzberechung: Zur Berechnung der Distanzen wird nun für jeden Voxel aus der Liste der modifizierten Voxel die Nachbarvoxel untersucht. Liegt der Nachbarvoxel innerhalb des Arbeitsbereichs, wird der Abstand dieses Nachbarvoxel zur Grenzflä-che bestimmt. Dieser Abstandsvektor wird im betrachteten Nachbarvoxel gespei-chert, sobald er kürzer als der vorhandene Abstandsvektor ist. Modifizierte Voxel werden wiederum in der Liste der modifizierten Voxel eingetragen.
Setze listVormalsModifizierteVoxel = listModifizierteVox el Setze listModifizierteVoxel = leere Liste Füralle v aus listVormalsModifizierteVoxel: Füralle n aus Nachbarn von v Berechne d = dist(v,n) + D(v) Wenn A(n) == 1 und d kürzer als d(n) dann Setze d(n) = d Hinzufügen v nach listModifizierteVoxel
Die Abb. 7-23 veranschaulicht anhand des oben verwendeten Beispielrasters das iterative Ablaufen der Voxel im Arbeitsbereich. Im ersten Schritt werden die Dis-tanzen für alle Voxel bestimmt, welche im Inneren des Arbeitsbereichs liegen und mit einer Grenzzelle benachbart sind. In den nächsten Schritten wird für die nächs-ten angrenzenden Zellen der kürzeste Weg ermittelt. Die dunkelgrau markierten Zellen sind Bestandteil der Liste listModifizierteVoxel .
Abb. 7-21: Iterative Berechung der Distanzvektoren jeder Zelle zur Grenzfläche des Arbeitsbereichs.

7 - Realisierung des Systems
87
Ergebnis der Planung ist das Distanzvolumen locPD. Zur Berechung der optimalen Leistung berechnet das System während der Verwendung der Fräse in jedem Systemtakt k die Lage der Instrumentenspitze relativ zum Patienten. Enthält das Distanzvolumen einen Voxel, der dieser Position entspricht, kann die minimale Distanz d(k) dieser Position zur nächsten Ar-beitsbereichsgrenze durch Auslesen des gespeicherten Vektors ermittelt werden. d(k) dient dann zur Berechnung der optimalen Instrumentenleistung gemäß der in Abschnitt 6.3.4.8 („Leistungssteuerung“, S. 58 ff.) beschriebenen Vorschrift.
7.3.4 Eigenschaften und Anwendung der Planungsfunktion
In diesem Abschnitt werden die Anwendbarkeit und die Eigenschaften der Planungsfunkti-on betrachtet. Es ist das Ziel, eine Planungsvorschrift für die Segmentierung der absteigen-den Facette eines einzelnen Wirbelkörpers zu erstellen. Abb. 7-22 zeigt eine axiale Ansicht einer Computertomographie (CT) eines Wirbelkörpers. Das zu segmentierende Teilstück des Knochens ist durch eine Kontour gekennzeichnet. Die für die klinische Anwendung re-levante Grenzlinie beim Abtragen des Knochens ist der Spinalkanal. Um diese Grenzen möglichst exakt mit der Planungsfunktion festzulegen, müssen Röntgenbilder verwendet werden, deren Projektionsrichtung tangential zur gewünschten Grenze verläuft. In Abb. 7-22 wurden daher zusammen mit einem Chirurgen sechs Projektionsrichtungen definiert, die die ausreichende Planung des umrandeten Bereichs ermöglichen.
15°
30°
45°
55°
90°
0°
Abb. 7-22: Axialer Schnitt durch einen menschlichen Wirbelknochen: Der abzutragende Be-reich an der Wirbelfacette ist mit einer Kontur umrandet. Es wurden sechs Tangen-ten eingezeichnet, mit denen die zum Spinalkanal zeigende Kontur nachgebildet werden kann.
Somit kann aus den Winkelstellungen der in Abb. 7-22 gezeigten Tangenten abgeleitet werden, aus welchen Richtungen Röntgenbilder aufgenommen werden müssen um eine

7 - Realisierung des Systems
88
Planung an der Facette durchführen zu können. Eine Planung wird damit mit den folgenden Arbeitsschritten durchgeführt:
1. Positionierung des C-Bogens am Wirbel, sodass der Bildverstärker auf der Seite des Patienten steht, die nicht zu operieren ist
2. Anbringen des Patientenlokalisators an die Wirbelklemme
3. Aufnahme von sechs Bildern aus den Winkeln 0, 15, 30, 45, 55 und 90 Grad.
4. Planung der Wirbelfacette in den einzelnen Röntgenbildern (Abb. 7-23)
Um die Genauigkeit der Planung festzustellen, wurde der geplante Arbeitsraum mit einer CT-Bilddatenbasierten Planung verglichen. Diese Untersuchung ist im Abschnitt 8.1 („Genauigkeit der Planungsfunktion“, S. 92 ff.) beschrieben. Festzuhalten sind die Eigen-schaften der realisierten Planungsfunktion:
• Axiale Schnitte durch den Arbeitsbereich sind immer konvex
• Durch das Hinzufügen von Planungsinformationen wird der Arbeitsbereich verklei-nert
a) b) c)
d) e) f)
Abb. 7-23: Planung der Wirbelfacette in sechs Projektionsbildern aus den vorgegebenen Win-keln 0, 15, 30, 45, 55 und 90 Grad.

7 - Realisierung des Systems
89
7.4 Die Sicherheitsarchitektur
Die Genauigkeit, die mit dem realisierten System erreicht werden kann, wird im Kapitel 8 („Evaluierung und Bewertung“, S. 92 ff.) untersucht. Während der Benutzung des Systems in der Klinik wirken aber weitere Faktoren auf das System, die die Genauigkeit negativ be-einflussen können. Dazu gehören:
• Beeinträchtigung der Kalibriergenauigkeit durch die Veränderung der Einstellun-gen am Röntgengerät oder durch eine Verschiebung des Lokalisators gegenüber dem Bildverstärker.
• Beeinflussung der Genauigkeit der Lagemessung durch unsachgemäße Handhabung des Lagesensors oder Verschmutzung bzw. Beschädigung der Lokalisatoren.
• Beeinflussung der Positionsmessung während der Bildaufnahme durch eine Bewe-gung des Patienten.
Um die sichere Anwendung des Systems zu ermöglichen, wurden verschiedene Sicher-heitsmechanismen und Plausibilitätsprüfungen in Form eines Sicherheitsassistenten (Ab-schnitt 6.3.4.9 „Sicherheitsassistent“, S. 60 ff.) in das System integriert. Diese ermöglichen es dem Operateur zu überprüfen, ob die durchgeführten Arbeitsschritte fehlerfrei erfolgt sind.
7.4.1 Überprüfung der Bildverstärkerkalibrierung
Die räumliche Lage der Röntgenbilder und deren Abbildungseigenschaften sind relativ zum Lokalisator des Bildverstärkers bekannt, nachdem das im Abschnitt 7.1.4 („Umsetzung der Kalibrierung für das System“, S. 68 ff.) beschriebene Kalibrierverfahren durchgeführt wurde. Im Anschluss muss sichergestellt werden, dass die Abbildungseigen-schaften des C-Bogens und die Befestigung des Lokalisators am Bildverstärker nicht ver-ändert werden. Dem Benutzer soll deswegen die Möglichkeit gegeben werden, eine Veränderung der Befestigung des Lokalisators festzustellen. Für die Prüfung wurden die Stahlkugeln verwendet, welche in den Lokalisator eingebracht sind und während der Kali-brierung der Bildregistrierung dienen (vgl. Abschnitt 7.1.4.1 „Beschreibung des techni-schen Aufbaus“, S. 70 ff.). Bei der Aufnahme von Röntgenbildern bilden sich diese Stahlkugeln im Röntgenbild ab. Analog zu dieser realen Projektion wird die Projektion an-hand der kalibrierten Daten nachgestellt. Dazu werden die Stahlmarker, deren räumliche Positionen locBVp bekannt sind, mit Hilfe der im Abschnitt 7.2 („Visualisierung der chirur-gischen Fräse in den Röntgenbilddaten“, S. 75 ff.) beschriebenen Visualisierung in das Röntgenbild eingeblendet. Abb. 7-24 zeigt diese Visualisierung.

7 - Realisierung des Systems
90
überlagerte Stahlkugel des
Bildverstärkerlokalisators
überlagerter Glaskugelmarker
des Patienenlokalisators
Abb. 7-24: Überprüfung der Bildregistrierung und der Röntgenquellenkalibrierung durch die Begutachtung Überlagerung der realen und künstlichen Projektion der Glasreflekto-ren und der Stahlkugeln des Bildverstärkerlokalisators.
Bei der Betrachtung der Darstellung wird überprüft, ob die künstliche Projektion mit der realen Abbildung der Stahlkugeln übereinstimmt. Wird eine Abweichung festgestellt, ist der kalibrierte Übergang locBVT img zwischen Bilddaten und Lokalisator bzw. der Skalie-rungsfaktor s ungültig.
Da die Stahlkugeln direkt in der virtuellen Bildebene liegen, kann ein Fehler in der Rönt-genpositionsbestimmung durch diese Methode nicht festgestellt werden. Um die gesamte Projektion auf ihre Funktionalität zu überprüfen, kann der Lokalisator des Patienten durch-leuchtet werden. Wie in Abb. 7-24 dargestellt, bilden sich die Reflektorkugeln und die verwendeten Sockel deutlich im Röntgenbild ab. Analog zur Überlagerung der Stahlmarker werden mit der künstlichen Projektion virtuelle Modelle der Kugeln in das Röntgenbild eingeblendet. Überlagert die künstliche Einblendung den Schatten der Kugel, ist die Sys-temkalibrierung gültig.
7.4.2 Überprüfung der Instrumentennavigation
Mithilfe einer zweiten visuellen Prüfung kann die Richtigkeit der Instrumentenvermessung überprüft werden. Dazu wurde in die Wirbelklemme eine Testmulde integriert. Diese be-steht aus einer 4,0 mm tiefen Bohrung mit 4,2 mm Durchmesser. In den fünf Seitenflächen der Mulde ist je ein Edelstahlstift mit 0,5 mm Durchmesser eingebracht. Die Achsen der Stifte schneiden sich im Zentrum der Mulde. Die Stifte bilden dadurch ein dreidimensiona-les Fadenkreuz, welches sich deutlich im Röntgenbild abzeichnet. Während des Eingriffs kann der Operateur die Fräse in die Vertiefung der Testmulde einsetzen (Abb. 7-25a). Ist die Kalibrierung und die Instrumentenvermessung korrekt, so wird das virtuelle Modell der chirurgischen Fräse derart visualisiert, das es sich im Zentrum des Fadenkreuzes befindet. In Abb. 7-25b ist ein Screenshot der Anwendung dargestellt, in dem eine leichte Abwei-chung erkennbar ist.

7 - Realisierung des Systems
91
a) b)
Abb. 7-25: Verwendung der Testmulde zur Überprüfung der Bildverstärkerkalibrierung und der Instrumentenvermessung: a) Einführen des Instruments in die Testmulde; b) Über-prüfung der Überlagerung des Fadenkreuz der Testmulde mit dem virtuellen Modell der Fräse.
7.4.2.1 Verifikation der Systemgenauigkeit mit anatomischen Landmarken
Eine weitere Möglichkeit zur Systemverifikation ist die Verwendung einer natürlichen Landmarke. Analog zum Vorgehen bei der Benutzung der Testmulde wird hierbei das ver-wendete Instrument an eine eindeutig identifizierbare Landmarke im Operationsgebiet po-sitioniert. Im Anschluss wird überprüft, ob die Visualisierung des Systems konsistent mit der realen Position des Instruments ist (vgl. Abb. 7-18). Der Vorteil dieser Methode ist, dass hierbei die gesamte Fehlerkette des Systems untersucht wird. Eine unbeabsichtigte Verschiebung der Wirbelklemme kann somit erkannt werden. Der Nachteil ist, dass natür-liche Landmarken, welche sich deutlich im Röntgenbild darstellen, kaum vorhanden sind bzw. während eines minimalinvasiven Eingriffs nicht freigelegt werden.

8 - Evaluierung und Bewertung
92
8 Evaluierung und Bewertung
In den nachfolgenden Abschnitten werden Experimente beschrieben, mit denen die techni-schen Eigenschaften des realisierten Systems untersucht wurden. Ziel war es insbesondere die Planungsgenauigkeit festzustellen und die Leistungssteuerung zu evaluieren. Die fol-genden grundlegenen Fragestellungen sollen durch die Untersuchungen beantwortet wer-den:
• Wie exakt kann die Wirbelfacette geplant werden? In dieser Untersuchung soll die Genauigkeit festgestellt werden, mit der ein definierter Knochenbereich am Wirbel geplant werden kann. Dazu wird mit dem realisierten System eine Planung vorge-nommen und der resultierende Arbeitsbereich mit einer CT-basierten Planung ver-glichen.
• Mit welcher Toleranz verhindert das System die Überschreitung des Arbeitsraums? An einem technischen Körper soll mit Hilfe des realisierten Systems eine definierte Struktur entfernt werden. Dabei wird soviel Material abgetragen, bis die Leistungs-steuerung des Systems einen weiteren Materialabtrag verhindert. Im Anschluss wird gemessen, wie weit die Grenzfläche überschritten werden konnte.
8.1 Genauigkeit der Planungsfunktion
Das Ziel der Arbeitsraumplanung ist es, einen Arbeitsbereich zu definieren, der die zu ent-fernende Struktur umschließt. Die realisierte Planung berechnet diesen Arbeitsbereich aus Eingaben, die der Operateur in den zweidimensionalen Projektionsbildern vornimmt. Es soll daher untersucht werden, wie genau der resultierende Arbeitsbereich die Zielstruktur nachbildet. Um diese Fragestellung zu beantworten, wird der geplante Arbeitsbereich mit einer CT-basierten Planung verglichen.
8.1.1 Versuchsaufbau
Das Enfernen der Facette zur Erweiterung des Zugangs zum Spinalkanal stellt die initiale Anwendung des Systems dar. Das Vorgehen zur Bildaufnahme und Arbeitsbereichspla-nung ist bereits im Abschnitt 7.3.4 („Eigenschaften und Anwendung der Planungsfunkti-on“, S. 87 ff.) vorgestellt. Abb. 8-1 zeigt den Prüfkörper, der zur Durchführung des Versuchs gefertigt wurde. Der Prüfkörper besteht aus einer stabilen Acrylglasplatte, auf der drei menschliche Wirbelkörperknochen und ein Referenzkörper samt Lokalistor befestigt sind (Schermeier 2002). Die zu planende Facette ist mit einem Stift markiert. Der Refe-renzkörper enthält sechs Titanstifte mit bekannten Positionen zum Lokalisator. Diese Stifte definieren ein Koordinantensystem pin, dessen Lage innerhalb der CT-Daten CT und dem Lokalisatorkoordinatensystem loc bekannt ist. Über diesen Weg können Positionen zwi-schen den beiden Modalitäten transformiert werden.

8 - Evaluierung und Bewertung
93
a)
Lokalisator
Referenzkörper
loc
Wirbelkörper
markierte
Facette
pin
locTpin
b)
Referenzkörper
Wirbelkörper
pin
CT
imgTpin
Abb. 8-1: Prüfkörper mit drei Wirbelkörpern, einem starr montiertem Lokalisator und einem Navigationsbogen mit sechs künstlichen Landmarken: a) Foto des Prüfkörpers; b) 3D-Ansicht des CT-Datensatzes
In Vorbereitung des Versuchs wurde eine Computertomographie des Prüfkörpers mit ei-nem Schichtabstand von 1,0 mm angefertigt (Philips Tomoscan M-EG). Die CT-Daten wurden in eine Visualisierungssoftware geladen, welche die Positionen der Titanstifte im Prüfkörper erkennt. Anhand der Konstruktionsdaten und der DICOM-Informationen wird die Transformation
CT CT pinloc pin loc= ⋅T T T (47)
zur Umrechnung von Positionen aus dem CT-Datensatz in das Koordinantensystem des Lokalisators errechnet. Die Software umfasst weiterhin ein Planungsmodul. In die axialen Schichten werden Polygonzüge eingezeichnet, die die zu planende Facette enthalten. Die resultierende Oberfläche wurde als dreiecksbasiertes Oberflächenmodell im STL-Format abgespeichert. Als Referenzkoordinatensystem für diese Oberfläche dient das Koordinaten-system des Lokalisators.
Weiterhin wurde die Software des realisierten Systems um eine Funktion erweitert, die den geplanten Arbeitsbereich in eine dreiecksbasierte Oberfläche überführt. Die Berechnung er-folgt mit einem Marching-Cube-Algorithmus, sodass die resultierenden Dreieckspunkte ei-ne räumliche Verteilung im Bereich der Voxelauflösung von 0,5 mm aufweisen. Die berechnete Oberfläche bezieht sich auf das Lokalisatorkoordinatensystem loc und wird in eine Datei gespeichert.
8.1.2 Durchführung
Ziel der Durchführung ist es, mit dem zu erprobenden System einen Arbeitsbereich zu pla-nen, der die markierten Knochenteile möglichst exakt umfasst. Dazu werden folgende Arbeitschritte durchgeführt:

8 - Evaluierung und Bewertung
94
1. Aufnahme von sechs Projektionsbildern des zu planenden Bereichs aus den Win-keln 0, 15, 30, 45, 55 und 90 Grad.
2. Erstellung eines Polygonzugs in jedem aufgenommenen Röntgenbild und Planung des markierten Knochenteils (Abb. 8-2).
Abb. 8-2: Ansicht der Applikation mit zwei Projektionsbildern und eingezeichnetem Polygonzug zur Planung des Arbeitsbereichs
3. Speichern der geplanten Oberfläche.
Der Versuch wurde von einem Laien, zwei Ingenieuren und einem Chirurgen durchgeführt.
8.1.3 Ergebnisse und Auswertung
Das Ergebnis der Durchführung sind vier dreiecksbasierte Oberflächen. Zunächst erfolgt eine visuelle Überprüfung der Planungsgenauigkeit. Dazu wurden der geplante Arbeitsbe-reich, die CT-basierte Referenzplanung und die CT-Bilddaten überlagert dargesellt. Abb. 8-3 zeigt einen Ausschnitt einer axialen Schicht durch den oberen Teil eines Wirbelkörpers mit dem Dornfortsatz und den Wirbelbögen. Der grau ausgefüllte Bereich repräsentiert die CT-basierte Planung, die weiße Kontur ist der Schnitt durch den geplanten Arbeitsbereich. Deutlich zu erkennen ist eine Ausbuchtung des geplanten Arbeitsbereichs in Richtung des Zugangswegs. Dies resultiert aus den Eigenschaften der Planungsfunktion, die in axialer Ebene nur konvexe Arbeitsräume berechnet. Weiterhin wurde die räumliche Anordnung der Bilder, also die Winkelstellungen, derart gewählt, dass die klinisch relevante Grenzflä-che in Richtung des Spinalkanals möglichst gut geplant werden kann. Daher wird aus den geplanten Oberflächen der Teil entfernt, der keine Grenze zum Spinalkanal aufweist und daher klinisch weniger relevant ist. Diese Segementierung wurde manuell durchgeführt. Abb. 8-3b zeigt eine CT-Schicht mit dem Resultat der Segmentierung. Die nachfolgenden statistischen Auswertungen erfolgen jeweils für die gesamten Planungsdaten und die kli-nisch relevanten Planungsdaten.

8 - Evaluierung und Bewertung
95
a)Spinalkanal
Zugangsweg
CT-basierte
Planung
projektions-
bildbasierte
Planung
b)
Spinalkanal
Zugangsweg
CT-basierte
Planung
klinsch
relevante
Planung
Abb. 8-3: Axiale CT-Schicht durch den oberen Teil des Wirbels mit überblendeter CT-basierteter Planung (graue Fläche) und der projektionsbildbasierten Planung (weiße Kontur): a) Darstellung mit der vollständigen projektionsbildbasierten Pla-nung; b) Für eine zweite Auswertung wird nur die klinisch relevante Grenzfläche zum Spinalkanal ausgewertet.
Zur Auswertung soll der Abstand zwischen dem geplanten Arbeitsbereich und der CT-basierten Planung berechnet werden. Dazu wird der minimale Abstand aller Dreiecks-punkte der Planung zur Oberfläche der CT-basierten Planung bestimmt. Dies ist möglich, da die Eckpunkte der Dreiecke gleichmäßig verteilt sind.
Tabelle 8-1 zeigt die statistische Auswertung der berechneten Abstände zwischen dem ge-planten Arbeitsbereich und der CT-basierten Planung. Die Auswertung erfolgt für die vier Experimentatoren getrennt. Die Planung mit der größten Abweichung (Ingenieur2) weist einen mittleren Abstand von -1,12 mm und einer Standardabweichung von 1,64 mm auf. Dabei geben negative Werte an, dass der geplante Arbeitsbereich die CT-basierte Planung überschreitet. Bei der Betrachtung der Genauigkeit der klinisch relevanten Grenzflächen zeigt sich eine höhere Genauigkeit. Die größte Abweichung weist die Planung des Chirur-gen auf. Sie beträgt im Mittel 0,58 mm mit einer Standardabweichung von 0,66 mm. Die positiven Mittelwerte aller Planungen zeigen an, dass die Planungen an die CT-basierte Planung in Richtung des Spinalkanals im Mittel nicht überschreiten. Die visuelle Kontrolle zeigt zudem, dass der geplante Arbeitsraum zwar die CT-basierte Planung teilweise über-schreitet, aber nicht in den Spinalkanal hinein ragt.

8 - Evaluierung und Bewertung
96
Tabelle 8-1: Statistische Auswertung der Abstandsdaten der gesamten Oberfläche und der kli-nisch relevanten Oberfläche
Distanz der gesamten Oberfläche zur
Referenz in [mm] Distanz der klinisch relevanten
Oberfläche zur Referenz in [mm]
N µ [mm]
σ [mm]
Max [mm]
Min [mm] N µ
[mm] σ
[mm] Max [mm]
Min [mm]
Laie 13397 -0,65 1,09 -4,06 1,99 7476 0,06 0,59 -1,44 1,99
Ingenieur 1 9633 -0,01 0,93 -4,78 2,26 7416 0,33 0,59 -1,93 2,26
Ingenieur 2 18360 -1,12 1,64 -5,96 1,56 7149 0,19 0,51 -1,27 1,56
Chirurg 9504 0,05 0,98 -4,42 2,20 5721 0,58 0,66 -1,66 2,20
Zusätzlich ist in Abb. 8-4 das Histogramm der bestimmten Abstände dargestellt. Die hellen Säulen werten die Abstände der gesamten Oberflächen aus. Die dunklen Säulen berück-sichtigen nur die Verteilung der klinisch relevanten Abstände auf der dem Spinalkanal zu-gewandten Seite. Die senkrechte schwarze Linie repräsentiert die CT-basierte Planung. Es ist zu erkennen, dass sich die klinisch relevante Grenzfläche enger um die CT-basierte Pla-nung verteilt.
Gesamte Planung
Relevante Planung
CT-Planung überschritten CT-Planung unterschritten
Hä
u#
gke
it
Abstand zur CT-basierten Planung [mm]
Abb. 8-4: Häufigkeitsverteilung der Abstände zwischen dem geplanten Arbeitsbereich und der CT-basierten Planung. Die hellgrauen Werte repräsentieren die gesamte Oberfläche, die Verteilung der klinisch relevanten Oberfläche wird durch die dunkelgrauen Bal-ken repräsentiert.
8.1.4 Diskussion
In der beschriebenen Untersuchung wurde die Genauigkeit der Planungsfunktion ermittelt, indem ein Vergleich mit einer CT-basierten Planung durchgeführt wurde. Es konnte ge-

8 - Evaluierung und Bewertung
97
zeigt werden, dass die realisierte Planungsfunktion und die definierte Bildaufnahme- und Planungsstrategie geeignet ist, einen die Wirbelkörperfacette umschließenden Arbeitsraum zu erstellen. Die relevanten Grenzen zum Spinalkanal wurden eingehalten und sind mit der CT-basierten Planung vergleichbar.
Neben der technischen Umsetzung ist die an die klinische Fragestellung angepasste Bild-aufnahme- und Planungsstrategie entscheidend für die guten Ergebnisse. Für die Anwen-dung des Systems in einer abweichenden Anatomie muss der Bildaufnahme- und Planungsvorgang erneut angepasst werden.
8.2 Genauigkeit der Arbeitsraumbegrenzung der Leistungssteuerung
Im folgenden Experiment wird untersucht, mit welcher Genauigkeit die Leistungsteuerung einen ungewollten Materialabtrag verhinden. Die Untersuchung wird an einem technischen Prüfkörper durchgeführt. Dieser enthält eine im Röntgenbild sichtbare Struktur, die mit der Fräse entfernt wird, bis das System einen weiteren Materialabtrag verhindert. Im Anschluss wird die Einhaltung der Zielfläche messtechnisch bestimmt. Es werden folgende Eigen-schaften erwartet:
• Im Mittel wird zu wenig Material abgetragen.
• Die maximale Überschreitung der Zielfläche soll kleiner als 2,0 mm sein.
8.2.1 Versuchsaufbau
Als Basis für den technischen Prüfkörper dient das in Abb. 8-5a abgebildete Rapid-Prototyping-Modell. Dieser Grundkörper verfügt an der oberen Kante über zwei kapsel-förmige Aussparungen mit einer Länge von 18,0 mm und einem Radius von 7,0mm. Für die spätere Vermessung wurde noch während der Konstruktion ein prüfkörperspezifisches Koordinatensystem block festgelegt, welches sich über die drei Seitenflächen A, B und C definiert (Abb. 8-5b). In diesem Koordinantensystem wurden Messstellen definiert, indem ein Punktraster in die Ausparungen projiziert wurde. Insgesamt sind N=4707 Messstellen pro Aussparung festgelegt. Die mittlere Kantenlänge des Rasters beträgt 0,21±0,05 mm, der maximale Abstand 0,36 mm.
a)
18,0mm
R 7,0mm
Abb. 8-5: a) Rapid-Prototyping-Modell des Grundkörpers mit den zwei kapselförmigen Aus-sparungen; b) 3D-Ansicht der Konstruktion mit dem prüfkörperspezifischen Koor-dinatensystem block und den Messpunkten.

8 - Evaluierung und Bewertung
98
Ausgehend von diesem Grundkörper wurde eine Silkonform abgenommen und 15 Prüfkör-per aus Zwei-Komponenten-Harz (Biresin G26, Sika GmbH) hergestellt. Da durch den Vervielfältigungsprozess Formabweichungen auftreten, wurden die 30 Aussparungen der 15 Prüfkörper messtechnisch erfasst. Als Messmittel wurde eine Koordinatenmessmaschi-ne (KMM) vom Typ Wenzel LH65 verwendet. Das System hat eine zulässige Messunsi-cherheit U3=3,0+(L/350) µm nach VDI2617. Die Messpunkte sind also auf weniger als 10 µm exakt. Mit Hilfe der Maschine wurden zunächst die drei Ebenen A, B, und C digita-lisiert und somit das Koordinatensystem block registriert. Anschließend wurde durch die Koordinatenmessmaschine die Oberfläche der realen Aussparungen erfasst, indem die Messsonde die vordefinierten Messpunkte anfährt und die tatsächlichen Positionen der Oberfläche im Koordinatensystems block vermisst (Abb. 8-6).
a) b)
block
y
z
x
Abb. 8-6: a) Portalmessmaschine LH65 (Firma Wenzel); b) Vermessung der Aussparungen
Grundkörper durch Antasten der vordefinierten Messstellen im Koordinatensystem block
Nachfolgend wurden die Aussparungen der 15 Prüfkörper mit rot eingefärbtem Harz ge-füllt. Das Harz-Härter-Gemisch wurde zusätzlich mit dem pulverförmigen Röntgenkon-trastmittel Bariumsulfat versetzt. Dadurch hebt sich die Füllung der Aussparung deutlich im Röntgenbild vom restlichen Prüfkörper ab.
Abb. 8-7: Die Aussparungen der Prüfkörper wurden mit eingefärbtem Harz gefüllt, das zusätz-lich mit Röntgenkonstrastmittel angereichert ist.

8 - Evaluierung und Bewertung
99
8.2.2 Durchführung
Nach Herstellung und Vermessung der Prüfkörper wurde der eigentliche Versuch im BMBF-geförderten „Innovation Center Computer Assisted Surgery (ICCAS)“ der Univer-sität Leipzig durchgeführt. Dabei wurden die folgenden Arbeitsschritte durchgeführt:
1. Starten des Systems und Funktionsprüfung: Das System wurde gestartet und die Überlagerungsgenauigkeit gemäß dem Vorschlag aus Abschnitt 7.4.1 („Überprüfung der Bildverstärkerkalibrierung“, S. 89 ff.) auf Funktionstüchtigkeit überprüft. Dazu wurde der Patientenlokalisator aus verschiedenen Winkeln ge-röntgt. Das System überlagert die Schatten der Kugeln des Lokalisators mit ent-sprechenden Einblendungen (Abb. 8-8). Das System wurde als funktionstüchtig eingestuft.
a) b)
Abb. 8-8: Screenshots der Software bei der Überprüfung der Systemfunktionalität: Die Lokalisatorkugeln sollten von den Einblendungen idealerweise genau über-lagert werden.
2. Befestigung des Patientenlokalisators, Bildaufnahme und Planung: Im Anschluss wurde der Patientenlokalisator am Prüfblock befestigt (Abb. 8-9a) und Projektions-bilder aus den Winkeln 0, 15, 30, 45, 60, 75 und 90 Grad aufgenommen. Der abzu-tragende Bereich wurde geplant (Abb. 8-9b).
3. Ausfräsen der gefüllten Aussparung: Nach der Durchführung der Kalibrierung und Registrierung des verwendeten Fräsers wurde die Füllung der Aussparung entfernt. Dabei wurde soviel Material entfernt, bis die Leistungsteuerung einen weiteren Ab-trag durch die vollständige Abschaltung der Instrumentenleistung verhindert hat.
4. Wiederholung der Arbeitsschritte 2 und 3.

8 - Evaluierung und Bewertung
100
a) b)
Abb. 8-9: a) Ausgefräster Prüfkörper mit angebrachtem Patientenlokalisator; b) Snapshot der Anwendung im Planungsmodus mit zwei Projektionsbildern eines Prüfkörpers und den entsprechenden Planungsdaten.
Der Versuch wurde von einem Ingenieur durchgeführt. Insgesamt wurden 22 Aussparun-gen an 11 Prüfkörpern gefräst. Bei sechs Prüfkörpern wurde ein 4,5 mm Diamantfräser eingesetzt, an zwei Prüfkörpern wurde mit einem 2,3 mm Diamantfräser gefräst. An den verbleibenden drei Prüfkörpern wurde ein 6,0 mm Rosenbohrer verwendet (Abb. 8-10). In allen Fräsvorgängen wurde die Leistung gedrosselt, sobald der Fräskopf einen Abstand von 3,0 mm zur nächsten Arbeitsbereichsgrenze unterschritten hat.
Abb. 8-10: Für den Versuch verwendete Fräsköpfe: 2,3 mm Diamantfräser, 4,5 mm Diamant-fräser und 6,0 mm Rosenbohrer (von links nach rechts).

8 - Evaluierung und Bewertung
101
8.2.3 Vermessung der gefrästen Oberflächen
Nach der Durchführung des Experiments wurde die Oberfläche der Aussparungen erneut mit der Koordinatenmessmaschine vermessen. Dabei wurde der Messaufbau verwendet, der zur Vermessung der ungefüllten Aussparung benutzt wurde. Während der Messungen wurde zunächst das Koordinatensystem block eines jeden Prüfkörpers registriert. Anschlie-ßend wurden an den vordefinierten Messtellen Koordinaten aufgenommen. Der Durchmes-ser des verwendeten Tasters von 0,5 mm und der mittlere Abstand zwischen den Messtellen von 0,21±0,05 mm erlaubt eine ausreichend genaue Erfassung des Oberfläche, da der kleinste verwendete Fräsdurchmesser 2,3 mm betrug.
8.2.4 Ergebnisse und Auswertung
Nach der Vermessung der gefrästen Oberflächen liegen für jede Aussparung zwei Punkte-mengen relativ zum Koordinatensystem block vor. Die erste Punktemenge ist das Resultat der Vermessung der ungefüllten Aussparungen. Sie stellt die Referenz dar, welche im idea-len Fall nach der Fräsung ebenfalls erreicht werden sollte. Diese Punktmenge wird in eine dreiecksbasierte Oberfläche überführt. Die zweite Punktmenge repräsentiert die Oberfläche nach der Fräsung der Aussparung. Zur Auswertung werden die Abstände zwischen der zweiten Punktmenge und der aus der ersten Punktmenge erzeugten Oberfläche bestimmt. Abb. 8-11 zeigt einen mit dem 2,3 mm Diamantbohrer gefrästen Prüfkörper. Darunter ist eine 3D-Ansicht der abgetasteten Oberfläche dargestellt. Die Abstände zur Referenzmes-sung sind in dieser Darstellung farbkodiert.
Abb. 8-11: Oberfläche des gefrästen Probekörpers C2 (2,3 mm Diamantbohrer) und der farbko-dierte Abstand zur Referenzfläche im Intervall von -3,0 mm (blau/violett) bis 3,0 mm (grün/rot).
Für eine statistische Auswertung wurden die mittlere Abweichung µ, die Standardabwei-chung σ, sowie die maximale und minimale Abweichung bestimmt. In der Tabelle 8-2 sind diese Daten für jede Aussparung aufgelistet. Negative Werte zeigen eine Überschreitung der Grenzfläche an. Die größte mittlere Abweichung von 1,77±0,64 mm wurde an der rechten Aussparung am Körper A1 (Diamantfräser 4,5 mm) festgestellt. Die beste mittlere Genauigkeit von 0,04±0,15 mm wurde mit dem 6,0 mm Rosenbohrer an der rechten Aus-

8 - Evaluierung und Bewertung
102
sparung des Prüfkörpers B3 erzielt. Bei der Betrachtung der Werte ist festzustellen, dass die beiden Aussparungen eines Prüfkörpers eine ähnliche Genauigkeit aufweisen. Die Standardabweichung der Differenzen zwischen dem Mittelwert der linken und der rechten Aussparung beträgt nur 0,13 mm. Genauigkeitsschwankungen treten aber zwischen den verschiedenen Prüfkörpern auf. Die Standardabweichung der Mittelwerte beträgt hier 0,39 mm.
Tabelle 8-2: Abstände der gefrästen Fläche zur Grenzoberfläche
linke Aussparung rechte Aussparung
Körper Fräser N µ [mm]
σ [mm]
Max [mm]
Min [mm] N µ
[mm] σ
[mm] Max [mm]
Min [mm]
A1 DB 4,5 4707 1,49 0,51 2,69 0,00 4707 1,77 0,64 2,91 0,00
A2 DB 4,5 4706 0,84 0,45 1,73 -0,61 4707 0,76 0,35 1,49 -0,10
A3 DB 4,5 4707 0,65 0,43 1,75 -0,14 4707 0,55 0,35 1,52 -0,45
A4 DB 4,5 4707 0,89 0,51 1,92 -0,21 4707 0,72 0,40 1,76 -0,70
A5 DB 4,5 4707 0,72 0,41 1,68 -0,13 4707 0,79 0,52 1,97 -0,33
B1 RB 6,0 4706 0,40 0,34 1,75 -0,44 4707 0,34 0,21 0,90 -0,14
B2 RB 6,0 4706 0,42 0,40 1,78 -0,34 4704 0,33 0,46 1,52 -0,89
B3 RB 6,0 4707 0,09 0,29 1,15 -1,20 4707 0,04 0,15 0,53 -0,44
C1 DB 2,3 4707 0,77 0,54 1,93 -0,78 4706 0,90 0,35 1,85 -0,19
C2 DB 2,3 4706 0,53 0,56 2,19 -0,48 4706 0,59 0,42 1,77 -0,21
C3 DB 4,5 4706 0,56 0,40 1,57 -0,82 4707 0,47 0,43 1,70 -0,36
Summe 51773 0,66 0,57 2,69 -1,20 51771 0,67 0,59 2,91 -0,89
In der Tabelle 8-3 sind die bestimmten Abstände für die einzelnen Fräsertypen zusammen-gefasst. Die geringste mittlere Abweichung von 0,27±0,36 mm wurde mit dem 6,0 mm Ro-senbohrer erzielt. Dieser Fräskopf weist aber mit -1,20 mm auch die größte Überschreitung der Grenzfläche auf. Insgesamt lag der mittlere Abstand bei 0,66±0,58 mm. Die größte Un-terschreitung betrug 2,91 mm und die höchste Überschreitung -1,20 mm.
Tabelle 8-3: Abstände der gefrästen Fläche zur Grenzoberfläche
Fräser Anzahl der
Aussparungen N µ [mm] σ [mm] Max [mm] Min [mm]
DF 2,3 4 18825 0,70 0,50 2,19 -0,78
DF 4,5 12 56482 0,85 0,59 2,91 -0,82
RB 6,0 6 28237 0,27 0,36 1,78 -1,20
Summe 22 103544 0,66 0,58 2,91 -1,20

8 - Evaluierung und Bewertung
103
8.2.5 Diskussion
Der Versuch hat gezeigt, dass mit Hilfe des realisierten Systems eine definierte, im Rönt-genbild erkennbare Struktur an einem technischen Körper entfernt werden kann. Im Mittel verhindert die Leistungssteuerung dabei erfolgreich einen Materialabtrag über die Grenz-fläche hinaus. Aus den Messwerten können folgende Eigenschaften des Systems abgeleitet werden:
• Die Hauptfehlerquelle des Systems scheint die Positionsmessung während der Bildaufnahme zu sein. In Tabelle 2 ist nur ein geringer Genauigkeitsunterschied zwischen der Fräsung auf der linken und rechten Seite eines Prüfblocks erkennbar, aber ein Unterschied zwischen den einzelnen Prüfkörpern, also zwischen den einzelnen Bildaufnahmen.
• Tabelle 8-3 zeigt die kleinste Standardabweichung bei dem größten Fräsdurchmes-ser (Rosenbohrer mit 6,0mm). Die Fläche ist also gleichmäßiger als bei den kleine-ren Fräsern. Die größte Überschreitung der Grenzfläche in der gesamten Messreihe ist ebenfalls mit diesem Fräskopf entstanden. Die visuelle Inspektion zeigt aber, dass dies durch ein Abrutschen an einer Kante und Nachlaufen des Fräsers am Randbereich verursacht wurde.
• Tabelle 8-3 zeigt weiterhin, dass mit dem Rosenbohrer im Mittel näher an die Grenzfläche herangefräst werden konnte. Dieser Umstand ist dadurch zu begrün-den, dass Rosenbohrer durch seine Schneideigenschaften mehr Material als die Di-amantfräser abtragen. Der Nachlauf der Fräse nach dem Abschalten wirkt sich bei Rosenbohrern entsprechend stärker aus.
• Im Mittel wurde zu wenig Material abgetragen. Erklärbar ist dies durch das Rau-schen der Positionsmessung. Befindet sich die Fräse kurz vor der Grenzfläche, ver-ursacht das Rauschen der Positionsdaten, dass das System bereits ein Überschreiten der Grenzfläche feststellt. Zusätzlich weist die chirurgische Einheit eine Verzöge-rung beim Einschalten der Fräsleistung auf. Durch diese Effekte wird die Fräsleis-tung abgeschaltet, bevor die Grenzfläche erreicht wird.
8.3 Bewertung des realisierten Systems
Durch die Experimente wurde nachgewiesen, dass das Konzept der 2D-Planung geeignet ist, einen anatomisch richtigen Arbeitsraum für die Fräse zu planen. Die Ergebnisse wur-den in Rose 2006 publiziert. In Dengl 2007 wurde das Experiment mit einem ähnlichen Aufbau wiederholt. Von 11 Personen wurden jeweils 20 Planungen erstellt und ausgewer-tet. Dabei wurde insbesondere bei unerfahrenen Chirurgen eine kontinuierliche Verbesse-rung der Planungsgenauigkeit festgestellt. Hinsichtlich der benötigten Zeit gab es keinen Lerneffekt. Im Mittel dauerte eine Planung etwa drei Minuten. Es wurde festgestellt, dass die Planungsfunktion im Alltagsgebrauch mit einem vertretbaren Aufwand und ausrei-chender Genauigkeit genutzt werden kann.
Im Vergleich zu einer CT-basierten 3D-Planung ist die realisierte Planungsfunktion hin-sichtlich des notwendigen zeitlichen Aufwandes und der Genauigkeit unterlegen. Im Ge-genzug ermöglicht das realisierte System aber die Einsparung der Registrierung, erlaubt die

8 - Evaluierung und Bewertung
104
Planung auf aktuellsten Bilddaten und kann mit einer vergleichsweise geringen Strahlen-exposition betrieben werden.
Im zweiten Experiment wurde gezeigt, dass die Leistungssteuerung eine Überschreitung des geplanten Arbeitsraums im Mittel verhindert. Eine Auswertung der Fräsgenauigkeit wurde in Jank 2007 veröffentlicht. Die Ergebnisse dieser Auswertung können für eine er-neute Parametrisierung der Leistungssteuerung verwendet werden. Ziel der Überarbeitung sollte die Erhaltung eines Sicherheitsabstandes sein.
Im Fazit der experimentellen Bewertung des Systems kann festgestellt werden, dass eine erfolgreiche Verwendung des umgesetzten Systems und der vorgestellten Konzepte im kli-nischen Einsatz denkbar ist.

9 - Zusammenfassung und Ausblick
105
9 Zusammenfassung und Ausblick
In der vorliegenden Arbeit wurde ein neuartiges System zur Unterstützung von Fräsproze-duren an der Wirbelsäule vorgestellt. Das System unterstützt den Operateur beim Ausrich-ten und Führen seines Fräsinstruments, indem die Instrumentenposition kontinuierlich in die Bilddaten des Patienten einblendet wird. Die Leistung des Instruments wird durch das System gesteuert, sodass das geplante Operationsergebnis möglichst exakt erreicht wird. Durch diese Leistungssteuerung wird zusätzlich eine unbeabsichtigte Schädigung der sen-siblen Strukturen, wie z.B. der Nerven im Spinalkanal, aktiv verhindert. Im Gegensatz zu konventionellen Navigationssystemen ohne Leistungssteuerung entsteht der Vorteil, dass die Navigationsunterstützung kontinuierlich an den Chirurgen geleitet wird. Eine ständige Beobachtung der visuell dargestellten Navigationsdaten und die damit verbundene Unter-brechung des Fräsvorgangs durch den Operateur ist nicht notwendig.
Als Datenbasis für das realisierte System dienen intraoperativ aufgenommene Projektions-bilder eines C-Bogens. Ein erster Vorschlag zu einem solchen System stammt aus Mätzig 2005. Ziel der vorliegenden Arbeit war die Realisierung eines klinisch einsetzbaren Proto-typen und dessen Erprobung. Dazu wurden verschiedene neuartige Konzepte entwickelt, welche in dieser Arbeit vorgestellt und bewertet wurden. Zu nennen ist dabei das Pla-nungsmodul, welches auf Basis weniger Projektionsbilder und einfacher Segmentierungen die Planung eines dreidimensionalen Arbeitsraumes erlaubt. Die Umsetzung der Leistungs-steuerung erfolgte erstmals durch eine Steuerung der Drehzahl des Fräsinstruments, wo-durch ein exakteres und ergonomischeres Fräsverhalten erreicht wird.
Die Grenzeigenschaften des realisierten Systems wurden in Experimenten ermittelt. Dabei wurde nachgewiesen, dass die realisierte Planungsfunktion die Planung von komplexen Strukturen exakt erlaubt. In einem zweiten Experiment wurde untersucht, mit welcher Ge-nauigkeit die Leistungssteuerung ein Überschreiten einer im Röntgenbild sichtbaren Gren-ze verhindert. Durch diese Untersuchungen wurde die Gesamtgenauigkeit des Systems ermittelt und die Einsetzbarkeit der gezeigten Konzepte nachgewiesen.
Ziel der weiteren Entwicklung kann die weitere Verbesserung der Anwendbarkeit des Sys-tems sowie dessen klinische Evaluierung sein. Die weiterführenden Arbeiten könnten fol-gende Schwerpunkte umfassen:
• Klinischer Einsatz des Systems: Voraussetzung für den klinischen Einsatz des Sys-tems ist dessen Zulassung nach dem Medizinproduktegesetz (MPG). Dies beinhal-tet insbesondere die Erstellung einer angemessenen Dokumentation, entsprechend den geltenden Vorschriften. Im Anschluss kann das System im Rahmen einer klini-schen Prüfung eingesetzt werden. Dabei soll die Leistungsfähigkeit des Systems festgestellt und die Anwendbarkeit im Operationssaal geprüft werden.
• Entwicklung von Planungsstrategien für weitere klinische Anwendungen: Die initi-ale Anwendung für das realisierte System ist das Abfräsen der absteigenden Facette

9 - Zusammenfassung und Ausblick
106
und des angrenzenden Wirbelbogenteils. Für diese Anwendung wurde eine entspre-chende Bildaufnahme- und Planungsvorschrift erstellt, deren Anwendbarkeit durch eine geeignete Genauigkeitsuntersuchung nachgewiesen wurde. Die Anwendung des Systems an einem anderen Teil des Wirbelkörpers oder in einem anderen klini-schen Fachgebiet erfordert die Erstellung einer angepassten Planungsvorschrift und deren erneute Untersuchung.
• Weiterentwicklung des Instrumentariums: Zur Reduzierung der Patiententraumati-sierung ist es das Ziel der Operateure, die Invasivität der Eingriffe zu senken. Um dieses Bestreben zu unterstützen, kann insbesondere der Patientenlokalisator wei-terentwickelt werden. Derzeit ist eine Befestigung am Dornfortsatz des Wirbelkör-pers vorgesehen, der daher zu Beginn des Eingriffs freigelegt werden muss. Um dies zu vermeiden ist beispielsweise eine Befestigung des Patientenlokalisators perkutan, also durch die Haut, denkbar. Ein möglicher Ansatz könnte die Verwen-dung von Kirschnerdrähten darstellen, die von außen im Wirbel verankert werden und den Patientenlokalisator tragen. Eine solche Befestigung wurde am Becken-kamm bereits erfolgreich eingesetzt (von Tiesenhausen 2007).

10 - Bildnachweis
107
10 Bildnachweis
Alle in dieser Arbeit verwendeten Abbildungen und Fotografien wurden am Fraunhofer-Institut für Produktionsanlagen und Konstruktionstechnik (IPK) oder der Klinik für Mund-, Kiefer-, Gesichtschirurgie / Klinische Navigation und Robotik der Charité - Universitäts-medizin Berlin erstellt.
Die Fotografien für die Abbildungen Abb. 2-1, Abb. 2-2b, Abb. 2-3 und Abb. 3-4a ent-standen an der Klinik für Neurochirurgie der Universität Leipzig.
Die Fotografien für die Abbildungen Abb. 3-5a, Abb. 3-7 und Abb. 6-1 entstanden an der Klinik für Unfall- und Wiederherstellungschirurgie der Charité – Universitätsmedizin Ber-lin.

11 - Literaturverzeichnis
108
11 Literaturverzeichnis
Börm W, Steiger H, Papavero L, Herdmann J, Ohmann J, Schwerdtfeger K (2005). Lumba-ler Bandscheibenvorfall. Leitlinien der Dt. Ges. f. Neurochirurgie.
Brack C, Götte H, Gossé F, Moctezuma J, Roth M, Schweikard A (1996). Towards Accu-rate X-Ray-Camera Calibration. Proc. Int. Symp. Computer Assisted Radiology: p 721-728.
Brendel B, Winter S, Rick A, Stockheim M, Ermert H (2002). Registration of 3D CT and ultrasound datasets of the spine using bone structures. Comput Aided Surg 7(3): p 146-155.
Burgkart R, Gottschling H, Roth M, Gradinger R, Schweikard A (2005). Fluoroskopie-basierte 3D-Navigation komplexer Korrekturosteotomien des proximalen Femurs. Der Orthopäde 34(11): p 1137-1143.
Caponetti L, Fanelli A M (1990). 3D Bone Reconstruction From Two X-ray Views. IEEE Engineering in Medicine and Biology Society 12(1): p 208-210.
Chinzei K, Hata N, Jolesz F, Kikinis R (2000). MR Compatible Surgical Assist Robot: System Integration and Preliminary Feasibility Study. Int Conf Med Image Comput Comput Assist Interv. MICCAI 2000: p 921-930.
de la Fuente M, Ohnsorge J A K, Schkommodau E, Jetzki S, Wirtz D C, Radermacher K (2005). Fluoroscopy-based 3-D reconstruction of femoral bone cement: a new ap-proach for revision total hip replacement. IEEE Trans Biomed Eng 52(4): p 664-675.
Dengl M, Grunert R, Trantakis C, Korb W, Jank E, Krüger J, Lüth T, Meixensberger J (2007). Vergleich von CT- mit C-Bogen-Segmentierungen für eine navigiert kon-trollierte Fräse in der Neurochirurgie. In: Horsch A, Deserno T M, Handels H, Meinzer H-P and Tolxdorff T (Hrsg.): Bildverarbeitung für die Medizin, Springer: p 121-125.
DIN (1996). DIN EN 60601-1: Medizinische elektrische Geräte - Teil1: Allgemeine Fest-legungen für die Sicherheit.
DIN (2007). DIN EN ISO 14971 Medizinprodukte - Anwendung des Risikomanagements auf Medizinprodukte.
Fahrig R, Moreau M, Holdsworth D W (1997). Three-dimensional computed tomographic reconstruction using a C-arm mounted XRII: correction of image intensifier distor-tion. Med Phys 24(7): p 1097-1106.
Fellner D W (1988). Computergrafik, BI-Wiss.-Verlag, Mannheim.

11 - Literaturverzeichnis
109
Foley K T, Clayton J B, Melkent A, Sherman M C (1999). Percutaneous registration appa-ratus and method for use in computer-assisted surgical navigation. WO99/15097.
Foley K T, Simon D A, Rampersaud Y R (2001). Virtual fluoroscopy: computer-assisted fluoroscopic navigation. Spine 26(4): p 347-351.
Fritsch E, Duchow J, Seil R, Grunwald I, Reith W (2002). Accuracy of fluoroscopic navi-gation of pedicle screws. CT-based evaluation of bone screw placement. Orthopäde 31(4): p 385-391.
Gebhard F, Kraus M, Schneider E, Arand M, Kinzl L, Hebecker A, Bätz L (2003). Radia-tion dose in OR – a comparison of computer assisted procedures. Der Unfallchirurg 106(6): p 492-497.
Gebhard F, Weidner A, Liener U C, Stöckle U, Arand M (2004). Navigation at the spine. Injury 35 Suppl 1: p 35-45.
Gruetzner P, Waelti H, Vock B, Hebecker A, Nolte L-P, Wentzensen A (2004). Navigation Using Fluoro-CT Technology: Concept and Clinical Experience in a New Method for Intraoperative Navigation. European Journal of Trauma 30(3): p 161-170.
Hebecker A (2003). C-Bogen-basierte Navigation. In: Konerman W H R (Hrsg.): Navigati-on und Robotic in der Gelenk- und Wirbelsäulenchirurgie, Springer-Verlag Berlin Heidelberg: p 29-35.
Hein A, Kneissler M, Maetzig M, Lueth T C (2002). Navigated Control - Ein neuer Ansatz für das exakte Fräsen an der Wirbelsäule. CURAC 2002. Leipzig.
Hofstetter R, Slomczykowski M, Sati M, Nolte L P (1999). Fluoroscopy as an imaging means for computer-assisted surgical navigation. Comput Aided Surg 4(2): p 65-76.
Holly L T, Foley K T (2003). Three-dimensional fluoroscopy-guided percutaneous thoraco-lumbar pedicle screw placement. Technical note. J Neurosurg 99(3 Suppl): p 324-329.
Hüfner T, Gebhard F, Grützner P A, Messmer P, Stöckle U, Krettek C (2004). Which na-vigation when? Injury 35 Suppl 1: p 30-34.
Huth S (2005). Röntgentomographie auf Basis der Algebraischen Rekonstruktionstechnik (ART) unter Nutzung der Grafikkartenhardware (Diplomarbeit). Berliner Zentrum fuer Mechatronische Medizintechnik, TU Berlin.
Jain A, Kon R, Zhou Y, Fichtinger G (2005). C-arm calibration--is it really necessary? Int Conf Med Image Comput Comput Assist Interv. MICCAI 2005: p 639-646.
Jank E, Rose A, Huth S, Korb W, Trantakis C, Meixensberger J, Krüger J (2007). Accura-cy analysis of a fluoroscopy based navigation system for power controlled spinal milling. Int J of Computer Assisted Radiology and Surgery 2 Supplement 1: p 490-491.

11 - Literaturverzeichnis
110
Johnsson K E (1995). Lumbar spinal stenosis: A retrospective study of 163 cases in south-ern Sweden. Acta Orthopaedica 66(5): p 403-405.
Kang Y, Engelke K, Kalender W A (2003). A new accurate and precise 3-D segmentation method for skeletal structures in volumetric CT data. Medical Imaging, IEEE Transactions on 22(5): p 586-598.
Käseberg M, Jank E, Keeve E (2009). Betrachtung der Fehlereinflüsse auf die Abbildungs-eigenschaften eines C-Bogens. Automatisierungstechnische Verfahren für die Me-dizin, VDI-Verlag, 2009. (Fortschritt-Berichte VDI, Reihe 17: Biotechnik, Medizintechnik 274).
Kast E, Antoniadis G, Richter H P (2000). Epidemiologie von Bandscheibenoperationen in der Bundesrepublik Deutschland. Zentralblatt für Neurochirurgie 61: p 22-25.
Kerrien E, Berger M-O, Maurincomme E, Launay L, Vaillant R e g, Picard L (1999). Fully Automatic 3D/2D Subtracted Angiography Registration. Int Conf Med Image Comput Comput Assist Interv. MICCAI 1999. London, UK, Springer-Verlag: p 664--671.
Khadem R, Yeh C C, Sadeghi-Tehrani M, Bax M R, Johnson J A, Welch J N, Wilkinson E P, Shahidi R (2000). Comparative tracking error analysis of five different optical tracking systems. Comput Aided Surg 5(2): p 98-107.
Kneissler M (2005). Ein System mit positionsabhängiger Leistungssteuerung für das ma-nuelle Fräsen in der Chirurgie (Dissertation), VDI Verlag Düsseldorf.
Kohlmann T, Schmidt C O (2005). Rückenschmerzen in Deutschland – eine epidemiologi-sche Bestandsaufnahme. Orthopädie und Rheuma 1: p 38-41.
Koulechov K (2006a). Leistungssteuerung chirurgischer Instrumente in der Kopf-Chirurgie (Dissertation), VDI-Verlag Düsseldorf.
Koulechov K, Strauss G, Dietz A, Strauss M, Hofer M, Lueth T C (2006b). FESS control: realization and evaluation of navigated control for functional endoscopic sinus sur-gery. Comput Aided Surg 11(3): p 147-159.
Krämer J (1990). Die mikrochirurgische Operation beim lumbalen Bandscheibenvorfall. Operative Orthopädie und Traumatologie 2(2): p 84-92.
Krämer J (2006). Bandscheibenbedingte Erkrankungen: Ursachen, Diagnose, Behandlung, Vorbeugung, Begutachtung, Georg Thieme Verlag, Stuttgart.
Krämer R, Herdmann J, Krämer J (2005). Mikrochirurgie der Wirbelsäule, Georg Thieme Verlag, Stuttgart.
Lavallée S, Sautot P, Troccaz J, Cinquin P, Merloz P (1995). Computer-assisted spine sur-gery: a technique for accurate transpedicular screw fixation using CT data and a 3-D optical localizer. J Image Guid Surg 1(1): p 65-73.

11 - Literaturverzeichnis
111
Liu R R, Rudin S, Bednarek D R (1999). Super-global distortion correction for a rotational C-arm x-ray image intensifier. Med Phys 26(9): p 1802-1810.
Lüth T C, Bier J, Bier A, Hein A (2001). Verfahren und System zum minimalen Gewebe-abtrag in der Medizin und Zahnmedizin sowie für Modell- und Manufakturarbeiten. DE10117403.
Mätzig M (2005). Ein leistungssteuerndes System für das navigierte Fräsen in der compu-terassistierten Wirbelsäulenchirurgie (Dissertation), VDI Verlag, Düsseldorf.
Maurer C R, Fitzpatrick J M, Wang M Y, Galloway R L, Maciunas R J, Allen G S (1997). Registration of head volume images using implantable fiducial markers. IEEE Trans Med Imaging 16(4): p 447-462.
Maxwell E A (1951). General Homogeneous Coordinates in Space of Three Dimensions, Cambridge University Press.
Murphy M J (1997). An automatic six-degree-of-freedom image registration algorithm for image-guided frameless stereotaxic radiosurgery. Med Phys 24(6): p 857-866.
NDI (2003). Polaris Accedo Combined Firmware Rev 001.
NDI (2004). POLARIS ACCEDO - Certificate of Calibration.
Nolte L P, Langlotz F (2003). Grundlagen der computerassistierten Chirurgie. In: Konerman W and Haaker R (Hrsg.): Navigation und Robotic in der Gelenk- und Wirbelsäulenchirurgie, Springer-Verlag Berlin Heidelberg: p 3-10.
Nolte L P, Zamorano L J, Jiang Z, Wang Q, Langlotz F, Berlemann U (1995). Image-guided insertion of transpedicular screws. A laboratory set-up. Spine 20(4): p 497-500.
Pelizzari C A, Chen G T, Spelbring D R, Weichselbaum R R, Chen C T (1989). Accurate three-dimensional registration of CT, PET, and/or MR images of the brain. J Com-put Assist Tomogr 13(1): p 20-26.
Peters T M (2006). Image-guidance for surgical procedures. Phys Med Biol 51(14): p 505-540.
Pott P P, Scharf H P, Schwarz M L (2005). Today's state of the art in surgical robotics. Comput Aided Surg 10(2): p 101-132.
Press W H, Teukolsky S A, Vetterling W T, Flannery B P (1992). Numerical Recipes in C: The Art of Scientific Computing, Cambridge University Press.
Queck J (2002). Ein navigierter mobiler Computer-tomograph für medizinische Anwen-dungen (Dissertation). Berlin, GCA-Verlag.
Ritter D, Orman J, Schmidgunst C, Graumann R (2007). 3D soft tissue imaging with a mobile C-arm. Comput Med Imaging Graph 31(2): p 91-102.

11 - Literaturverzeichnis
112
Rock C, Linsenmaier U, Brandl R, Kotsianos D, Wirth S, Kaltschmidt R, Euler E, Mut-schler W, Pfeifer K J (2001). Vorstellung eines neuen mobilen C-Bogen-/CT-Kombinationsgerät (ISO-C-3D) Erste Ergebnisse der 3D-Schnittbildgebung. Der Unfallchirurg 104(9): p 827-833.
Rose A, Jank E, Huth S, Trantakis C, Korb W, Strauss G, Meixensberger J, Krüger J (2006). Experimental comparison of fluoroscopy and ct based segmentation for spine application. Int J of Computer Assisted Radiology and Surgery 1 Supplement 1: p 194-196.
Rudin S, Bednarek D R, Wong R (1991). Accurate characterization of image intensifier distortion. Medical Physics 18(6): p 1145-1151.
Sabczynski J, Zylka W (2002a). Method and apparatus for calibration of and imaging by means of an X ray imaging apparatus sensitive to magnetic fields. EP 1313064.
Sabczynski J, Zylka W (2002b). Method and device for calibrating a gravity-sensitive im-age pick-up device and for imaging by means of such an image pick-up device. US 6,739,752.
Sati M, Cyr M (2002). Apparatus, system and method of calibrating medical imaging sys-tems. WO 2004/006770.
Schäffler A (2006). Experimentelle Studie zum Vergleich der Computernavigation mit 2D- und 3D- Bildwandlertechnologie am Beispiel der Pedikelschraubeninsertion im Be-reich der LWS (Dissertation), Medizinischen Fakultät der Charité – Universitäts-medizin Berlin.
Schenck J F, Jolesz F A, Roemer P B, Cline H E, Lorensen W E, Kikinis R, Silverman S G, Hardy C J, Barber W D, Laskaris E T (1995). Superconducting open-configuration MR imaging system for image-guided therapy. Radiology 195(3): p 805-814.
Schermeier O (2002). Ein Navigationssystem für die dentale Implantologie (Dissertation), VDI Verlag, Düsseldorf.
Schkommodau E, Soltau J, de la Fuente M, K. Radermacher K (2002). Genauigkeitsunter-suchungen zur mechanischen Steifigkeit des C-Bogens bei Navigationsaufgaben. Biomedizinische Technik. 47(1/1): p 41-43.
Schmid U D (2000). Mikrochirurgie lumbaler Bandscheibenvorfälle. Der Nervenarzt 71(4): p 265-274.
Schorn G H (2002). Medizinproduktegesetz, Wissenschaftliche Verlagsgesellschaft mbH, Stuttgart.
Schwerdtfeger K, Donauer E, Pitzen T, Gräber S, Steudel W I (2005). Lumbale Spinalka-nalstenose. Leitlinien der Dt. Ges. f. Neurochirurgie.
Shoemake K (1985). Animating rotation with quaternion curves. ACM Special Interest Group on Computer Graphics and Interactive Techniques. 19(3): p 245-254.

11 - Literaturverzeichnis
113
Shreiner D, Woo M, Neider J (2003). OpenGL Programming Guide: The Official Guide to Learning OpenGL, Version 1.4, Addison-Wesley Longman, Amsterdam.
Škultétyová Z (2009). Biomaterialienkatalog ( www.biomaterialienkatalog.de), Otto-von-Guericke-Universität Magdeburg.
Soimu D, Badea C, Pallikarakis N (2002). A novel approach for distortion correction for X-ray image intensifiers. Computerized Medical Imaging and Graphics 27(1): p 79-85.
Solzbach U, Wollschlager H, Zeiher A, Just H (1988). Optical distortion due to geomag-netism in quantitative angiography. Proceedings of Computers in Cardiology: p 355-357.
Stöckle U, König B, Schäffler A, Zschernack T, Haas N P (2006). Clinical experience with the Siremobil Iso-C(3D) imaging system in pelvic surgery. Unfallchirurg 109(1): p 30-40.
Strauss G, Hofer M, Fischer M, Koulechov K, Trantakis C, Manzey D, Meixenberger J, Dietz A, Lueth T C, Klapper H U (2008). First clinical application of a navigation-controlled shaver in paranasal sinus surgery. Surg Technol Int 17: p 19-25.
Tita R (2007). Variable isozentrische Steuerung für einen Standard-C-Bogen mit echtzeit-fähiger 3D-Rekonstruktion (Dissertation), VDI-Verlag Düsseldorf.
Tita R, Winne C, Koulechov K, Lüth T (2006). Instrument calibration with automatic di-ameter detection. Int J CARS 1(Suppl. 1): p 502.
Togawa D, Kayanja M M, Reinhardt M K, Shoham M, Balter A, Friedlander A, Knoller N, Benzel E C, Lieberman I H (2007). Bone-mounted miniature robotic guidance for pedicle screw and translaminar facet screw placement: part 2--Evaluation of system accuracy. Neurosurgery 60(2 Suppl 1): p 129-139.
Troitzsch D, Hoffmann J, Dammann F, Bartz D, Reinert S (2003). Registration using three-dimensional laser surface scanning for navigation in oral and craniomaxil-lofacial surgery. Zentralbl Chir 128(7): p 551-556.
VHP. (2009, April). Visible Human Project - The University of Michigan.
von Tiesenhausen C (2007). Ein Navigationssystem für autologe Knochentransplantationen (Dissertation), VDI-Verlag Düsseldorf.
von Tiesenhausen C, Klein M (2006). Navigierte einzeitige Defektversorgung bei Kno-chentransplantationen. Gemeinsame Jahrestagung der Deutschen, Österreichischen und Schweizerischen Gesellschaft für Biomedizinische Technik.
Wendl K, Recum J, Wentzensen A, Grützner P A (2003). Iso-C3D-gestützte navigierte Im-plantation von Pedikelschrauben an BWS und LWS. Der Unfallchirurg 106(11): p 907-913.

11 - Literaturverzeichnis
114
Wiles A D, Thompson D G, Frantz D D (2004). Accuracy assessment and interpretation for optical tracking systems. Proc Medical Imaging 5367: p 421-32.
Winne C (2005). Integration und Evaluierung des NavigatedControl Verfahrens in ein chi-rurgisches Navigationssystem für das navigierte Fräsen (Diplomarbeit). Berliner Zentrum fuer Mechatronische Medizintechnik, TU Berlin.
Winne C, Jank E, Krüger J (2007). Supporting endoscopic ENT-surgery using augmented reality visualizations. Proceedings: 4th International CAS-H Conference: p 168-169.
Wirth S, Euler E, Linsenmaier U, Rock C, Kotsianos D, Brandl R, Mutschler W, Pfeifer K J (2001). C-arm based computed tomography--A comparative study. CARS 2001.
Wolf A, Shoham M, Michael S, Moshe R (2004). Feasibility study of a mini, bone-attached, robotic system for spinal operations: analysis and experiments. Spine 29(2): p 220-228.
Worthy M N, Aggarwal J K (1983). Volumetric Descriptions of Objects from Multiple Views. Pattern Analysis and Machine Intelligence, IEEE Transactions on PAMI-5(2): p 150-158.
Yoo S K, Wang G, Collison F, Rubinstein J T, Vannier M W, Kim H J, Kim N H (2004). Three-dimensional localization of cochlear implant electrodes using epipolar ste-reophotogrammetry. IEEE Trans Biomed Eng 51(5): p 838-46.
Zeiss M (2002). Method for navigation-calibrating x-ray image data and a height-reduced calibration instrument. EP 1338247.
Zykla W, Sabczynski J, Weese J (1999). X-ray examination device and method for produc-ing undistorted x-ray images. EP 1052936.