-
Rastreamento de Objetos por Eigenbackground e Separação em
Classes
Greice Martins de Freitas, Clésio Luis TozziUniversidade de
Campinas
Faculdade de Engenharia Elétrica e de ComputaçãoAv. Albert
Einstein - 400
CP 6101 - Campinas, SP, Brasil{greice,
clesio}@dca.fee.unicamp.br
Resumo
Modelos de background e subtração de fundo
utilizandosubespaços são uma opção em visão computacional por
seubaixo custo de processamento, viabilizando aplicações emtempo
real. Neste contexto, este trabalho apresenta um sis-tema de
rastreamento de objetos utilizando o modelo defundo Eigenbackground
para segmentação dos objetos emmovimento e um sistema de
classificação que permite mo-nitorá-los quando sofrem oclusão
ou estão indisponı́veis.Também é apresentado um método de
atualização do Ei-genbackground através da modificação dos
vetores quecompõem seu subespaço. O sistema proposto foi testado
emvı́deos das bases de dados PETS e CAVIAR.
1. Introdução
O barateamento da instalação e obtenção de câmeras
desegurança têm resultado numa grande demanda por siste-mas
robustos e confiáveis de monitoramento de atividadeshumanas,
auxiliando no trabalho dos operadores de vı́deono controle de
entrada e saı́da de pessoas em um ambientebem como suas
atividades.
Neste contexto, é desejável um sistema que permita
pro-cessamento em tempo real, visando o acompanhamento
dosindivı́duos levando em conta as variações no ambiente
comomudanças de iluminação, sombra e entradas e saı́das de
ob-jetos de natureza diversa.
Em Visão Computacional, a análise de movimentoatravés de
vı́deos pode consistir em três etapas funda-mentais: detecção,
rastreamento e reconhecimento [11].Os objetos em movimento, ou
foreground, são reconhe-cidos e segmentados durante a etapa de
detecção, fun-damental para o sucesso da análise uma vez que
forneceinformações para as demais etapas. Os objetos detecta-dos
são seguidos e associados quadro a quadro durante a
etapa de rastreamento e, finalmente, na etapa de
reconheci-mento, os objetos são classificados quanto à sua
natureza,isto é, identifica-se, por exemplo, se o objeto é uma
pes-soa, um carro ou apenas uma árvore balançando.
O presente trabalho visa propor um sistema de monito-ramento das
atividades humanas baseado no rastreamentodos objetos de foreground
através da associação de obje-tos por cor, área e posição e
velocidade dos centróides, ob-tidos através da aplicação do
Filtro de Kalman. Durante orastreamento, os objetos são
organizados em classes que re-presentam seu estado, ou seja,
estados que definem se o ob-jeto entra na cena, sai, está em
oclusão etc. O modelo desegmentação proposto é baseado
decomposição do modelode fundo, ou background, em autoespaço
através da Ana-lise de Componentes Principais (PCA).
2. Detecção de Movimento: Eigenbackground
A detecção, ou segmentação, de objetos móveis numacena é
uma etapa fundamental na análise de movimento,sendo determinante
para que as etapas de rastreamento e re-conhecimento recebam dados
coerentes e precisos [5]. Den-tre os métodos de segmentação
destaca-se a Subtração deFundo, na qual assume-se que o fundo de
uma sequênciade cenas é estático ou sofre lentas variações ao
longo dotempo, portanto passı́vel de modelagem. O modelo,
“sub-traı́do”da cena atual, resulta na identificação de objetos
emmovimento.
Métodos de subtração de fundo vêm sendo estudadosdesde o
final da década de 70 [6], entretanto tornaram-semais populares
com a introdução de modelos gaussianospara a modelagem dos pixels
do fundo [15]. Desde então,outras abordagens tais como mistura de
gaussianas [13] eHidden Markov Models [12] foram propostas para a
mode-lagem individual dos pixels.
Em oposição à modelagem da variação individual dos pi-xels,
Oliver et al. [9] propuseram uma subtração de fundochamada
Eigenbackground, baseada na decomposição da
-
imagem em autoespaço, com o objetivo de obter o menornúmero de
caracterı́sticas que represente o fundo com pre-cisão.
Um autoespaço que modela o fundo é formado pelas pri-meiras N
imagens da sequência de vı́deo. Delas são toma-das a média µa e
a matriz de covariância Ca, que pode serdiagonalizada pela
decomposição La = ΦaCaΦTa , onde Φaé a matriz de autovetores da
matriz de covariância e La é amatriz diagonal de seus
autovalores. Aplicando a Analisede Componente Principal - Principal
Component Analy-sis(PCA) sobre a matriz diagonal, obtém-se ΦM ,
matriz quecontém os M maiores autovetores de Ca.
Objetos móveis são tipicamente pequenos em relaçãoà cena e
não aparecem na mesma posição nos N primei-ros quadros, desta
forma não contribuem significativamentena formação do modelo de
fundo, bem como variações deiluminação e ruı́dos nas
imagens.
Com o fundo da cena modelado, uma nova imagem Iipode ser
projetada no autoespaço e em seguida transfor-mada para o espaço
original:
Bi = (ΦTMΦM (Ii − µa)) + µ (1)
Desta forma, os objetos em movimento são detectadosaplicando um
limiar à diferença absoluta Di = |Ii −Bi|.
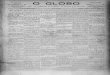
A figura 1 mostra um exemplo da decomposição emautoespaço e o
resultado da subtração de fundo. Pode-senotar que objetos em
movimento, ou objetos do foreground,são claramente
identificados.
Embora a utilização desta modelagem forneça bons re-sultados,
o background ainda está sujeito a mudanças comovariações de
iluminação e incorporação de objetos. O mo-delo de
atualização adotado no presente trabalho foi pro-posto por Hall
et al [3]. A cada nova coleção com K no-vos dados, obtemos B =
(B1B2...Bk), onde Bi é a i-ésimanova imagem vetorizada. Podemos
atualizar a média por:
µ′a = (1− β)µa + βµb, (2)
onde β é a taxa de aprendizado. Entretanto calcular
di-retamente a atualização da matriz de covariância, C ′a
bemcomo seus autovalores e autovetores, é indesejável uma vezque
este processo é lento e, portanto, impraticável em temporeal [4].
Desta maneira C ′a é decomposto como:
C ′a = [U |E]D[U |E]T , (3)
onde E é uma base ortonormal dos novos dados e D =RΣRT , sendo
Σ uma matriz diagonal de autovalores de C ′ae R uma matriz de
rotação. Desta forma, a decomposiçãode C ′a é equivalente à
decomposição da matriz D, de di-mensão muito menor:
D = [U |E]TC ′a[U |E]. (4)
(a)
(b)
(c)
Figura 1. Decomposição em autoespaço: (a)imagem de entrada,
(b) imagem reconstruı́dadepois de projetada no autoespaço e
(c)diferença das imagens (a) e (b).
3. Rastreamento
A complexidade da etapa de rastreamento está em as-sociar
objetos do foreground num instante t com objetosdo instante
seguinte t + 1, uma vez que os mesmos podemapresentar variações
em sua velocidade, direção e topolo-gia, além de estarem
sujeitos a agrupamentos, separações,aparecimentos e
desaparecimentos.
A associação dos objetos entre cenas é feita através deuma
medida de custo envolvendo a previsão gerada pelofiltro de Kalman
e atributos do objeto: distribuições decor e área. As entidades
cujo movimento pretende-se ras-trear através do filtro de Kalman
são representadas peloscentróides, e seu vetor de estados é
composto pelas respec-tivas posições e velocidades.
Além de estabelecer métricas de associação, para
umrastreamento consistente é necessário criar uma estruturade
dados que acompanhe os objetos rastreados em suasmudanças de
estado, desta forma auxiliando na associação
-
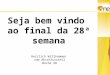
Figura 2. Fluxograma da transição de clas-ses.
de objetos entre as cenas e no monitoramento de atividades[8].
Com o objetivo de monitorar tais mudanças sem per-der o objeto
seguido ou fazer falsas associações, bem comoevitar o
rastreamento de ruı́dos, cada objeto pode transi-tar entre sete
diferentes classes: Fundo, Iniciante, Perma-nente, Temporariamente
indisponı́vel, Oclusão, Separado,Desaparecido e Fora de cena.
3.1. Classes
Como discutido na seção 3, os objetos seguidos podemser
classificados segundo seis diferentes classes descritas aseguir,
baseadas no trabalho de Lei e Xu [8]. O modelo detransição entre
classes é mostrada pela figura 2.
Iniciante Qualquer objeto classificado como foregrounde
encontrado numa das regiões pré definidas comoregiões de
entrada, isto é, portas ou limites da ima-gem por onde é
possı́vel um objeto entrar, é inicial-mente classificado como
Iniciante. Não se pode afir-mar se o objeto é apenas um ruı́do ou
um objeto emmovimento, desta forma são realizadas duas medidasde
confiança para que o objeto transite para a classePermanente ou
seja descartado. A primeira medida dizrespeito à quantidade de
quadros em que o objeto foiseguido e a segunda ao “fator de
movimento”, calcu-lado por:
mov = (σ2cx
σ2vx + �+
σ2cyσ2vy + �
)/2, (5)
onde σ2cx(σ2cx) é a variância da posição do centróide
na
direção x(y) e σ2vx(σ2vy) a variância da velocidade do
centróide na direção x(y) e � uma pequena constantepara
impedir divergência.
Fundo Um objeto é classificado como Fundo se foi iden-tificado
como um objeto de foreground e encontra-sefora das regiões de
entrada. Este objeto pode passarpara a classe Permanente se
permanecer na cena porum certo perı́odo de tempo e, ao se
movimentar, sur-gir um novo objeto de foreground em sua
localizaçãoinicial. Este novo objeto é gradualmente integrado
aofundo da cena através da adaptação do fundo.
Permanente Um objeto neste estado é classificado comoum objeto
em movimento, entretanto seu estado podemudar e consequentemente
ser classificado como (a)Temporariamente Indisponı́vel: parte da
estrutura dacena esconde o objeto (ex.: Pessoa que passa atrás
deum poste ou coluna); (b) Oclusão: um ou mais objetosse juntam
(ex.: Grupo de pessoas que se encontram);(c) Separado: o objeto
divide-se em duas ou mais par-tes (ex.: Grupo de pessoas que se
desfaz).
Temporariamente Indisponı́vel Se o objeto volta à cena,então
retorna à classe Permanente, caso contrário, secontinua nesta
classe durante um certo número de ce-nas, é classificado como
Desaparecido.
Oclusão Ainda é possı́vel adquirir algumas informaçõessobre
o objeto enquanto encontra-se neste estado comoposição e
velocidade, analisando tais atributos do ob-jeto formado pela
união dos objetos em Oclusão. Seo objeto volta a aparecer então
volta à classe perma-nente, caso contrário, segue em
Oclusão.
Separado Um objeto Separado têm como produto doisou mais
objetos classificados como Partes. Caso adistância entre os
centróides das Partes aumente gra-dativamente no decorrer das
cenas, então são classi-ficadas como pertencentes à classe
Permanente, casocontrário, continuam classificadas como Partes
até quese unam novamente e então o objeto classificado
comoSeparado volta à classe Permanente ou ainda, são apli-cadas
as mesmas medidas de confiança da classe Inici-ante, então as
Partes podem cegar à classe Permanenteou serem descartadas.
Desaparecido Uma vez que o objeto é classificado
comoDesaparecido pode evoluir para duas classes: Fora decena ou
Permanente. Se a métrica descrita na seção 3.2associa as
caracterı́sticas do objeto Desaparecido a umnovo objeto, então é
classificado como Permanente,caso contrário, decorrido um
determinado número decenas, o objeto é classificado como Fora de
cena.
Fora de cena Considera-se que objetos desta classe estáfora de
cena e portanto não retornará. Desta forma,informações sobre o
objeto podem ser excluı́das damemória.
-
3.2. Métrica de Associação
São utilizadas duas métricas de associação para
correla-cionar objetos numa cena no instante t a objetos na
cenaseguinte, no instante t + 1. A primeira métrica é baseadana
distância entre as posições dos centróides e a segundanos
histogramas de cor e áreas dos objetos, sendo esta utili-zada
quando existem objetos nas classes Temporariamenteindisponı́vel
e/ou Oclusão. Esta divisão ocorre em virtudede eventuais falhas
na previsão da posição dos centróidesfornecidas pelo filtro de
Kalman, uma vez que o mesmo,para objetos nestas classes, não pode
ser corrigido com no-vas medidas.
3.2.1. Associação de Centróides São calculadas asdistâncias
euclidianas entre as posições dos centróides es-timadas pelo
filtro de Kalman e as posições medidasna cena atual. Os objetos
são associados se a distânciafor mı́nima e menor que um limite
estabelecido. Se al-gum centróide dos objetos medidos não se
associa comalgum centróide estimado, então considera-se um novo
ob-jeto em cena e este é classificado como Iniciante.
3.2.2. Associação de Cor e Área Cada objeto encontradona cena
carrega um atributo de cor Hh,s,vi e outro de áreaAi, ondeH
h,s,vi são os histogramas de hue, saturation e va-
lue. O histograma de cor é formado por:
H(x) =N(x)∑l
j=1N(xj)(6)
onde N(x) é o número de pixels com valores iguais a xe l o
número de valores do histograma. A área Ai é dadapelo número de
pixels do objeto.
Assim como na associação de centróides, os objetos
sãoassociados se sua função custo for mı́nima e menor que
umlimite pré-definido assim, um objeto i é associado a um ob-jeto
j se os custos CAi,j e C
Hi,j são mı́nimos e satisfazem:{CAi,j < T1CHi,j < T2
(7)
Baseado na distribuição χ2, o custo CHi,j é calculado
por:
CHi,j =l∑
b=1
(Hi(b)−Hm(b))2
Hm(b), (8)
onde Hm(b) =Hi(b)+Hm(b)
2 .O custo entre áreas é calculado por:
CAi,j = 1−min(Ai, Aj)max(Ai, Aj)
2
. (9)
Note que o custoCAi,j varia entre 0 e 1, sendo que quandoos
objetos têm áreas similares o custo será aproximada-mente 0 e,
caso contrário, aproximadamente 1.
4. Resultados
Com o objetivo de avaliar o sistema proposto, o mesmofoi testado
em imagens de câmeras de segurança adquiridasatravés do conjunto
de dados CAVIAR [2] e PETS [10].
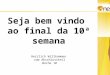
A figura 3 mostra os resultados obtidos em duassequências de
vı́deo diferentes. Na sequência repre-sentada pela figura 3 (a),
uma pessoa entra na cenae é classificada como objeto Permanente 1.
Logo de-pois, um grupo de pessoas entra e é classificado
comoobjeto Permanente 2. A priori não há como classifi-car o
objeto 2 como grupo, uma vez que este entra juntona cena. Na
sequência os objetos se juntam, sendo clas-sificadas como Oclusão
e então se separam, voltando àclasse Permanente e novamente são
classificadas como ob-jeto 1 e 2.
A sequência representada pela figura 3 (b) mostra duaspessoas
que entram na cena caminhando juntas, contudodetecta-se apenas um
objeto uma vez que as pessoas estãoconectadas e a subtração de
fundo sozinha não é suficientepara fazer este tipo de
reconhecimento. Após uma brevepausa as pessoas se separam, sendo
classificadas comoPartes de um objeto da classe Separado, e
caminham emdireções opostas. Neste momento, a distância entre as
Par-tes aumenta a cada cena que desta forma passam a ser
clas-sificadas como objetos Permanentes e o objeto Separado
éexcluı́do.
Nas sequências de video testadas, o sistema apresen-tou bons
resultados, rastreando o alvo em aproximadamente86% dos quadros,
sendo o sucesso do rastreamento propor-cional à eficácia da
subtração de fundo. Em vı́deos muitosruidosos como o mostrado na
figura 3 (a), ocorreu frequen-temente a fragmentação dos objetos
seguidos, dificultandoa identificação dos mesmos, principalmente
em presença deoclusões.
A variação da luminosidade numa mesma cena tambémcausou
algumas falhas no processo de segmentação, sendodesejável a
aplicação de diferentes thresholds na mesmaimagem, normalmente 2
ou 3 para sequências de vı́deo queapresentam esta variação. Este
processo pode ser automa-tizado recalculando o threshold da
diferença Di (seção 2),como discutido nos trabalhos [4, 3].
5. Conclusões e Perspectivas
O presente trabalho contempla um sistema de visãocomputacional
para detecção e rastreamento de obje-tos em vı́deos de
segurança, visando sua aplicação emtempo real. O sistema é
baseado na segmentação atravésde da decomposição do background
em autoespaço e naorganização dos objetos de foreground em
classes que re-presentam seu estado, permitindo monitorá-los
mesmoquando sofrem oclusão ou estão indisponı́veis.
-
(a) (b)
Figura 3. Resultados da aplicação do algo-ritmo em duas
sequencias de vı́deos diferen-tes. As letras p e o, representam,
respectiva-mente, as classes Permanente e Oclusão.
Como trabalho futuro pretende-se avançar na etapa
dereconhecimento, focando na identificação de pessoas. Paratal,
espera-se identificar periodicidades nos objetos de fo-reground com
o objetivo de reconhecer a marcha humana[14, 1, 7].
Referências
[1] C. Bregler. Learning and recognizing human dynamics invideo
sequences. In Computer Vision and Pattern Recogni-tion, 1997.
Proceedings., 1997 IEEE Computer Society Con-ference on, pages
568–574, Jun 1997.
[2] CAVIAR. Ec funded caviar project/ist 2001
37540.http://groups.inf.ed.ac.uk/vision/CAVIAR/CAVIARDATA1/, 2001.
[Online; accessed15-Junho-2009].
[3] P. Hall, D. Marshall, and R. Martin. Merging and
splittingeigenspace models. IEEE Trans. Pattern Anal. Mach.
Intell.,22(9):1042–1049, 2000.
[4] B. Han and R. Jain. Real-time subspace-based
backgroundmodeling using multi-channel data.
[5] W. A. Higashino. Estudo comparativo de algoritmos
desubtração de fundo em sequencias de imagens. Master’s the-sis,
Universidade Estadual de Campinas - UNICAMP, 2006.
[6] R. Jain and H.-H. Nagel. On the analysis of accumulative
dif-ference pictures from image sequences of real world
scenes.Pattern Analysis and Machine Intelligence, IEEE
Transacti-ons on, PAMI-1(2):206–214, April 1979.
[7] C.-S. Lee and A. Elgammal. Gait tracking and
recognitionusing person-dependent dynamic shape model. In
Automa-tic Face and Gesture Recognition, 2006. FGR 2006. 7th
In-ternational Conference on, pages 553–559, April 2006.
[8] B. Lei and L.-Q. Xu. Real-time outdoor video
surveillancewith robust foreground extraction and object tracking
viamulti-state transition management. Pattern Recogn.
Lett.,27(15):1816–1825, 2006.
[9] N. Oliver, B. Rosario, and A. Pentland. A bayesian com-puter
vision system for modeling human interactions. Pat-tern Analysis
and Machine Intelligence, IEEE Transactionson, 22(8):831–843, Aug
2000.
[10] PETS2001. 2nd ieee international workshop on per-formance
evaluation of tracking and
surveillance.http://ftp.pets.rdg.ac.uk/PETS2001/DATASET1/TESTING/,
2001. [Online; accessed 30-Junho-2009].
[11] R. Pinho, J. Tavares, and M. Correia. Introdução à
análisede movimento por visão computacional. Relatório
Interno,Faculdade de Engenharia, Universidade do Porto, 2004.
[12] J. Rittscher, J. Kato, S. Joga, and A. Blake. A
probabilisticbackground model for tracking. In ECCV ’00:
Proceedingsof the 6th European Conference on Computer Vision-Part
II,pages 336–350, London, UK, 2000. Springer-Verlag.
[13] C. Stauffer and W. Grimson. Learning patterns of
activityusing real-time tracking. Pattern Analysis and Machine
In-telligence, IEEE Transactions on, 22(8):747–757, Aug 2000.
[14] L. Wang, T. Tan, H. Ning, and W. Hu. Silhouette
analysis-based gait recognition for human identification.
IEEETransactions on Pattern Analysis and Machine
Intelligence,25(12):1505–1518, 2003.
[15] C. Wren, A. Azarbayejani, T. Darrell, and A. Pentland.
Pfin-der: real-time tracking of the human body. Pattern Analysisand
Machine Intelligence, IEEE Transactions on, 19(7):780–785, Jul
1997.