Embed Size (px)
Citation preview

Einfuhrung in die Theorie
der algebraischen Kurven
und deren Eigenschaften
Roger Bottcher
3. Auflage
FernUniversitat in Hagen
Fachbereich Mathematik

Einfuhrung in die Theorie der algebraischen Kurven und deren Eigenschaften
Eine Einfuhrung unter besonderer Berucksichtigung der Darstellungdes projektiven Abschlusses von Kurven im Raum P2(R)und unter Einsatz von Mathematica
Roger Bottcher
Mathematics Subject Classification (1991):
12D05, 14A10, 14A25, 14H20, 14H45, 14H52,
14L30, 14Q05, 51A05, 51A20, 68U05
Frontispiz: Kartesisches Blatt im P2(R) mit zwei Projektionen
3. Auflage, Februar 2006
FernUniversitat in Hagen, Fachbereich Mathematik

Abstract
In der algebraischen Geometrie werden Fragestellungen bzgl. raumlicher Be-ziehungen durch einen Vorgang des besonderen Modellierens von Geometrie inFragestellungen der Algebra verwandelt. Diese Arbeitsweise wird hier an demBegriff der Kurve diskutiert, der zu den fruchtbarsten Konzeptionen der reinenund angewandten Mathematik gehort. Gegenstand dieser Einfuhrung in dieTheorie der algebraischen Kurven, die als Nullstellenmengen von Polynomenuber Ringe oder Korper definiert werden, sind ebene affine und projektiveKurven. Dabei konnen letztere als eine Kompaktifizierung der affinen Kurvenangesehen werden, die es erlauben, die Klassifikation und das Schnittverhal-ten – mit weitreichenden Anwendungen – sehr ubersichtlich zu gestalten. Vonbesonderer Bedeutung ist die Betrachtung komplexer Kurven, weil erst deralgebraisch abgeschlossene Korper der komplexen Zahlen weitreichende Aus-sagen uber die Struktur der Kurven ermoglicht. Die Theorie der algebraischenKurven wird hier bis zu ersten Ergebnissen der Schnitttheorie – mit Anwen-dungen auf Quadriken und Kubiken – und der Vorstellung der PluckerschenFormeln entwickelt; viel Wert wird auf Beispiele und konkrete Berechnungengelegt, welche die Theorie vertiefen und veranschaulichen sollen. Der Schwer-punkt der Arbeit – als Teilgebiet der algebraischen Geometrie – liegt mehr aufdie Herausarbeitung geometrischer Aspekte und ihrer algebraischen Formulie-rung, weniger auf den Ausbau des Kurvenbegriffes auf moglichst umfassendealgebraische Konzeptionen.
Vorwort
Die Theorie der komplexen algebraischen Kurven als Inhalt einer Abschlußarbeit be-handeln zu konnen, erfreut mich aus mehreren Grunden: sie bietet u.a. eine glanzen-de Zusammenfassung vieler Themen des Mathematikstudiums und verdeutlicht sobereits auf relativ elementarer Ebene die Einheit der Mathematik, daruber hinausspannt sie einen großen Bogen von Fragestellungen und Ideen, welche Mathematikerseit uber 350 Jahren behandelten und noch immer weiter entwickeln, was mich alsdritten Grund zu dem Ausblick kommen laßt, den diese Theorie auf die aktuelle For-schung gestattet, die hier in den letzten Jahren besonders beeindruckende Resultateerzielt hat. Hier seien nur die Faktorisierung großer Zahlen (1985) mit elliptischenKurven durch Hendrik W. Lenstra und naturlich die von Gerhard Frey entwickel-te Verbindung zwischen der Fermat-Gleichung xn + yn = zn und den elliptischenKurven (1984) genannt. Aber alles das geht weit uber diese Arbeit hinaus, tragtaber evtl. doch dazu bei, den Reiz zu erleben, der bereits von den Grundlagen deralgebraischen Kurven ausgeht.
Ziel dieser Arbeit ist es, einen gut lesbaren und anregenden Einstieg in dieTheorie der komplexen algebraischen Kurven zu bieten, der es Studierende (auchangrenzender Fachrichtungen) gestattet, einen Eindruck von der Vernetztheit derMathematik gewinnen zu lassen.

Hier noch einige Hinweise, die den technischen Teil der Arbeit betreffen. Vieleder in dieser Arbeit dargestellten Bilder wurden mit Mathematica 4.0 erzeugt; dastrifft insbesondere auf alle Darstellungen von algebraischen u.a. Kurven zu. Auchverschiedene Berechnungen wurden mit Mathematica 4.0 durchgefuhrt, worauf aneinigen Stellen im Text besonders hingewiesen, bzw. im Anhang vertieft auf einigeAspekte bei Nutzung dieses (machtigen) Programms eingegangen wird. Die vor-liegende Textfassung wurde mit dem Public Domain Standard LATEX erstellt. Furdie Unterstutzung von Seiten des Rechenzentrums der FernUniversitat Hagen beiImplementierung und Nutzung dieser Software mochte ich mich bedanken.
Mit der diesem Text zugrunde liegenden Diplomarbeit beschließe ich mein grund-standiges Studium der Mathematik an der FernUniversitat Hagen. Fur die vielenwertvollen Hinweise, Anmerkungen und Korrekturen gilt mein ganz besonderer Dankmeinem Betreuer Herrn Prof. Andrei Duma, dessen Arbeitsgebiet der KomplexenAnalysis mich von Anbeginn des Studiums reizte und zur Mitarbeit animierte. Trotzder durch das Fernstudium bedingten Entfernung, verstand er es stets, einen regenKontakt und eine intensive Zusammenarbeit aufrecht zu erhalten.
Hinweise zur zweiten und dritten Auflage
Die vorliegende Ausgabe der Einfuhrung in die Theorie der algebraischen Kurvenweicht an einigen Stellen (erheblich) von der als eigentliche Diplomarbeit eingereich-ten Fassung ab! Das betrifft nicht nur die wenigen formalen Gesichtspunkte, die hierfortgelassen wurden, sondern im wesentlichen inhaltliche Aspekte, denen hier mehrRaum und eine z.T. andere Fassung gegeben wurde. Es muß daher doppelt betontwerden, daß alle Ungenauigkeiten und evtl. vorkommenden Fehler nicht in der Ver-antwortung meines Betreuers Herrn Prof. Duma liegen, sondern allein auf Kostendes Autors dieser Schrift gehen.
Das Ziel einer Diplomarbeit der Mathematik liegt nach meiner Auffassung in demUmgang mit ’mathematischem Material’ und der luckenlosen Darstellung und ggf.Weiterentwicklung eines Ausschnittes einer Theorie, wobei das Beschreiten eigenerWege in der Auswahl und Zusammenstellung des Stoffes, sowie der Aufbereitung undAnwendung des Materials besonders gefordert werden soll. Die eigentliche Theorie,die hier dargestellt wird, ist also nicht neu. Die im Text vorkommenden Beispielestammen ungefahr zur Halfte vom Autor, die andere besteht aus Ubungsaufgabender Literatur, die fur diese Arbeit gelost und etwas breiter dargestellt wurden. Neu –oder zumindest vom Autor so in keiner Literatur gefunden – ist die Darstellung undAusarbeitung bzw. Berechnung der reellen projektiven Kurven mit Hilfe der Doppel-pyramide 1 (mit identifizierten antipodalen Punkten) unter Mathematica. Dennochist auch diese Idee nicht vollkommen neu: in [Fischer94] werden algebraische Kur-ven ausgiebig im Fundamentaldreieck dargestellt (allerdings ohne Angabe, wie man
1Speziell wurde ein Oktaeder verwendet, allerdings wird in der Arbeit durchgangig der BegriffDoppelpyramide gebraucht, da es auf die speziell dem Oktaeder zukommenden Eigenschaften nichtankommmt; wesentlich war mir eine abwickelbare “Hemisphare“.

iii
denn nun eigentlich auf eine solche Darstellung kommt, auch werden nur Ausschnit-te von Kurven im stilisierten Fundamentaldreieck nach Art von Bild 2.25 gezeigtund die Art der Herstellung der angegebenen Bilder nicht systematisch abgeleitet),[BK81] projeziert Kurven auf einer mit dem P2(R) identifizierten Kreisscheibe unddas war fur mich der Ausloser, die Darstellung von Kurven im reellen projektivenRaum neu zu durchdenken und sie konkret in dem hier eingefuhrten Gitter zu be-rechnen. Die Grundlagen fur diese Uberlegungen werden im zweiten Kapitel undihre Ausfuhrungen in den Anhangen E und G entwickelt. Außerdem wurden einigeeigene Untersuchungen zur taktischen Punkt-Geraden-Konfiguration im Anhang Fund Satz 3.3.1.20 gesammelt.
Das oben erwahnte Ziel bringt es mit sich, daß die Darstellung einer Diplom-arbeit moglichst konzis erfolgt. Die vorliegende Ausgabe mochte gerade diesen Stil(behutsam) aufweiten und ein verstarktes Gewicht auf eine anschauliche Prasenta-tion des Stoffes legen 2 – auch wenn (evtl. sogar leider) nicht gesagt werden kann,daß es sich hier gewissermaßen um die popularwissenschaftliche Darstellung meinerursprunglichen Arbeit handelt. In wie weit dies dennoch gelungen ist, kann nur die(hoffentlich interessierte und interessiert gemachte) Leserin entscheiden.
Die Arbeit muß nicht in strenger Reihenfolge aller Kapitel gelesen werden; je nachInteresse, Zeit und thematischem Schwerpunkt, kann der Leser sich einen eigenenAusschnitt herausgreifen. Hierbei mochte ich abschließend behilflich sein und einigeTipps geben.
Jemand, dem ein fluchtiger Eindruck vom Hintergrund und den Fragestellungender Thematik genugt, sollte bei der Einfuhrung starten, dann gleich auf Abschnitt1.4 ubergehen – und im Grunde genommen kann er es bei diesen gut 30 Seiten be-lassen!
Erster Eindruck:
• Einfuhrung und
• Abschnitt 1.4.
Mochte die Leserin zumindest einen etwas fundierteren Blick auf den mathema-tischen Hintergrund werfen, welcher der modernen Theorie zugrunde liegt, solltesie das komplette erste Kapitel lesen und dann evtl. auch den Ausblick auf die“klassische Geometrie“ nicht versaumen, um zumindest die Kraft abschatzen zukonnen, die in der Algebraisierung eines genuin geometrischen Konzeptes liegt. AlsVorkenntnisse werden hierfur nur Ergebnisse aus der Linearen Algebra und Analysisbenotigt.
Mathematischer Hintergrund:
• Einfuhrung,
• Kapitel 1,
• Abschnitt 3.2.2 und ggf.2So ist z.B. der gesamte Abschnitt 1.4 uber beruhmte algebraische – und nicht algebraische
– Kurven fur diese zweite Auflage hinzugekommen. Auch die Anwendungen im letzten Kapitelwurden hinzugefugt.

iv
• ausgewahlte Abschnitte (eigener Wahl) des Kapitels 6,
• Zusammenfassung.
Dann wiederum kann ich mir Interessierte vorstellen, die sich mit algebraischenKurven bereits gut auskennen und vor allem Naheres uber die hier ausgearbeiteteDarstellung des topologischen Abschlusses dieser in den Fundamentaldreiecken er-fahren mochten.
Projektiver Abschluß:• Abschnitt 2.2.2,
• Anhang E,
• Anhang G.2.
Das Programm Mathematica wird laufend eingesetzt. Leser, welche einen “be-rechenbaren Zugang“ zur Theorie suchen, haben es daher nicht leicht. Hier eineAuswahl von Abschnitten, die besonderen Bezug auf den Einsatz von Mathematicanehmen. Im letzten Kapitel wird die (nur ubersichtartig) vorgestellte Theorie nichtmehr so strikt vom konkret dargestellten Einsatz von Mathematica getrennt.
Einsatz von Mathematica :• Abschnitt 1.4 (S. 53),
• Beispiel 4.1.8 (S. 178),
• Beispiel 5.3.4 (S. 205),
• Abschnitte 6.3, 6.5 (S. 248, S. 262)und naturlich der ganze
• Anhang Gund Teile von
• Anhang H.
Sollte ich jemanden vergessen haben? Nun, allen steht es offen, in der Arbeitzu schmokern, zu blattern, die Bilder zu betrachten, Fehler zu suchen (mit großerAufmerksamkeit habe ich solche zu vermeiden gesucht – bin mir aber unsicher, wirk-lich alle vermieden zu haben), schlussigere Beweise zu finden, die Beispielaufgabeneleganter zu losen oder auch einfach, die Sonate von A bis Z durchzuhoren. Benotigtwerden, wie oben bereits genannt, breitere Kenntnisse der Linearen Algebra, Ana-lysis und ein wenig Topologie – nebst einem gewissen Gefuhl fur Takt und Maß.
Am Ende befindet sich ubrigens ein kommentiertes – und insbesondere uber dieAusarbeitungen des Kapitels 6 stark angewachsenes – Literaturverzeichnis, das indieser Auflage erheblich erweitert wurde, so daß die Leserin entscheiden kann, obund mit welchen der angegebenen Quellen sie die hier behandelten Fragestellungenweiterfuhrend oder auch abschweifend betrachten mochte. Dabei habe ich mich imallgemeinen auf leicht zugangliche Quellen beschrankt und insbesondere auch einigeBucher popularwissenschaftlicher Pragung mit aufgenommen: eine Art der Darstel-lung, die mir ganz besonders am Herzen liegt und die ich in dem Abschnitt 1.4 undim Kapitel 6 anstrebte, die tatsachlich umzusetzen mir aber wohl nur ansatzweisegelang.

Inhaltsverzeichnis
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iVorwort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iHinweis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
I Introduktion 1
Einfuhrung 3
II Exposition 9
1 Grundlegende Betrachtungen 111.1 Affin-algebraische Kurven . . . . . . . . . . . . . . . . . . . . . . . . 111.2 Homogene Polynome . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.3 Charakterisierung von Kurvenpunkten . . . . . . . . . . . . . . . . . 231.4 Beruhmte algebraische Kurven . . . . . . . . . . . . . . . . . . . . . . 32
2 Komplexe Projektive Raume 592.1 Projektive Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.1.1 Aufbau und Topologie des projektiven Raumes . . . . . . . . . 592.1.2 Abbildungsverhalten von Pn . . . . . . . . . . . . . . . . . . . 622.1.3 Projektive Transformationen . . . . . . . . . . . . . . . . . . . 65
2.2 Projektive algebraische Kurven . . . . . . . . . . . . . . . . . . . . . 672.2.1 Algebraische Struktur projektiver Kurven . . . . . . . . . . . 672.2.2 Darstellung projektiver Kurven . . . . . . . . . . . . . . . . . 74
2.3 Affine und projektive algebraische Kurven . . . . . . . . . . . . . . . 83
III Durchfuhrung 95
3 Algebraische Eigenschaften 973.1 Schnittverhalten algebraischer Kurven . . . . . . . . . . . . . . . . . 97
3.1.1 Die Resultante . . . . . . . . . . . . . . . . . . . . . . . . . . 973.1.2 Der Satz von Bezout . . . . . . . . . . . . . . . . . . . . . . . 98
3.2 Anwendungen auf Quadriken . . . . . . . . . . . . . . . . . . . . . . . 114
v

vi INHALTSVERZEICHNIS
3.2.1 Klassifikation der Quadriken . . . . . . . . . . . . . . . . . . . 1143.2.2 Satze der klassischen Geometrie . . . . . . . . . . . . . . . . . 119
3.3 Wendepunkte und Kubiken . . . . . . . . . . . . . . . . . . . . . . . 1273.3.1 Hessesche Kurve . . . . . . . . . . . . . . . . . . . . . . . . . 1273.3.2 Klassifikation der Kubiken . . . . . . . . . . . . . . . . . . . . 1493.3.3 Gruppeneigenschaft auf Kubiken . . . . . . . . . . . . . . . . 158
4 Singularitaten 1734.1 Einfluß auf das geometrische Verhalten . . . . . . . . . . . . . . . . . 1734.2 Tangentialraume und Singularitaten . . . . . . . . . . . . . . . . . . . 1814.3 Singularitaten bei der Vereinigung von Kurven . . . . . . . . . . . . . 188
5 Duale Kurven 1915.1 Dualer Raum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1915.2 Polare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1965.3 Duale Kurven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2035.4 Pluckersche Formeln . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
IV Reprise 229
6 Anwendungen und Ausblick 2316.1 Funktionentheorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2316.2 Zahlentheorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2346.3 Kryptologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2486.4 Abelsche Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2586.5 Knotentheorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2626.6 Robotik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2706.7 Kurven und Ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2756.8 Einige topologische Eigenschaften . . . . . . . . . . . . . . . . . . . . 2786.9 Divisoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
Zusammenfassung 291
V Koda 295
Anhange 297
A Der Satz uber implizite Funktionen 297
B Zur Resultante 301B.1 Definition und Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . 301B.2 Berechnung von Schnittmultiplizitaten . . . . . . . . . . . . . . . . . 312B.3 Beweis von Satz 3.1.2.6 . . . . . . . . . . . . . . . . . . . . . . . . . . 315

INHALTSVERZEICHNIS vii
C Linearsysteme 321
D Parametrisierung von algebraischen Kurven 327
E Zum Fundamentaldreieck 337
F Die taktische Punkt-Geraden-Konfiguration 341F.1 Konstruktion einer Konfiguration . . . . . . . . . . . . . . . . . . . . 341F.2 Projektive Transformation von Konfigurationen . . . . . . . . . . . . 346
G Der Einsatz von Mathematica 361G.1 Darstellung von ebenen Kurven . . . . . . . . . . . . . . . . . . . . . 361G.2 Darstellung des projektiven Abschlusses . . . . . . . . . . . . . . . . 363G.3 Berechnung der Hesseschen . . . . . . . . . . . . . . . . . . . . . . . . 373G.4 Quadratische Reste . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375G.5 Eine Erganzung zur Darstellung von Knoten . . . . . . . . . . . . . . 379
H Miszellen 385H.1 Zur Kochschen Kurve . . . . . . . . . . . . . . . . . . . . . . . . . . . 385H.2 Explizite Angabe der Fibonacci-Zahlen . . . . . . . . . . . . . . . . . 389H.3 Einige Spiralen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 390H.4 Einhullende als algebraische Kurven . . . . . . . . . . . . . . . . . . . 394
Symbolverzeichnis 401
Literaturverzeichnis 405

viii INHALTSVERZEICHNIS

Abbildungsverzeichnis
1 Zykloide und Hypozykloide . . . . . . . . . . . . . . . . . . . . . . . . . 32 Der reelle Schnitt von Y 2 = X3+X2 und ihr komplexer projektiver Abschluß 5
1.1 Reelle Schnitte einiger algebraischer Kurven . . . . . . . . . . . . . . . . 131.2 Die Koch-Schneeflocke ist keine algebraische Kurve . . . . . . . . . . . . 141.3 Reeller Schnitt der Neilschen Parabel (Y − 1)2 = X3 . . . . . . . . . . . 161.4 Zerfall in d Geraden im Punkt (a, b) . . . . . . . . . . . . . . . . . . . . 241.5 Doppelpunkt, gewohnlicher Doppel- und Tripelpunkt . . . . . . . . . . . 251.6 (X4 + Y 4)2 = X2Y 2 und (X4 + Y 4 −X2 − Y 2)2 = 9X2Y 2 . . . . . . . . 261.7 Reeller Schnitt der Neilschen Parabel (X − Y )2 = (X + Y )3 . . . . . . . . 281.8 Die Vereinigung von vier Tangenten . . . . . . . . . . . . . . . . . . . . 291.9 Reeller Schnitt von Y 2 = X3 −X . . . . . . . . . . . . . . . . . . . . . 301.10 Reeller Schnitt des kartesischen Blattes X3 + Y 3 = 3cXY . . . . . . . . . 301.11 Reelle Schnitte des kartesischen Blattes X3 + Y 3 = 3cXY ; c = 1; c = 0,5;
c = 0 und c = −1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311.12 “Storung“ des kartesischen Blattes X3 + Y 3 = 3cXY + ε; ε = −0,5; ε =
−0,2; ε = +0,2; ε = +0,5 . . . . . . . . . . . . . . . . . . . . . . . . . . 311.13 Kissoide des Diocles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321.14 Parametrisierung der Kissoide . . . . . . . . . . . . . . . . . . . . . . . 331.15 Losung des Delischen Problems: 2y3
0 = x30 . . . . . . . . . . . . . . . . . 34
1.16 Die Versiera der Agnesi . . . . . . . . . . . . . . . . . . . . . . . . . . 351.17 Konchoide des Nicomedes: 2 = a > k = 1 . . . . . . . . . . . . . . . . . 351.18 Konchoide des Nicomedes: a = k = 2 . . . . . . . . . . . . . . . . . . . . 361.19 Konchoide des Nicomedes: 2 = a < k = 4 . . . . . . . . . . . . . . . . . 361.20 Parametrisierung der Konchoide des Nicomedes . . . . . . . . . . . . . . 371.21 Dreiteilung des Winkels α (I) . . . . . . . . . . . . . . . . . . . . . . . 371.22 Dreiteilung des Winkels α (II) . . . . . . . . . . . . . . . . . . . . . . . 371.23 Cassinische Kurven: a = 2, k =1,9 ; 2 ; 2,2 und 2,8 (von innen nach außen) 381.24 Bernoullische Lemniskate . . . . . . . . . . . . . . . . . . . . . . . . . . 391.25 Torus mit R = 2 und r = 1 . . . . . . . . . . . . . . . . . . . . . . . . . 391.26 Spiren des Perseus aus einem Torus mit R = 2 und r = 1 . . . . . . . . . 401.27 Spiren des Perseus in raumlicher Darstellung . . . . . . . . . . . . . . . 411.28 Definition der limacon des Pascal . . . . . . . . . . . . . . . . . . . . . 411.29 limacon des Pascal: a = 2 und k = 1; 2; 3 (von links nach rechts) . . . . . 421.30 Dreiteilung eines Winkel α an der limacon mit a = 2 und k = 1 . . . . . . 43
ix

x ABBILDUNGSVERZEICHNIS
1.31 Entstehung der Trisektrix . . . . . . . . . . . . . . . . . . . . . . . . . 441.32 Trisektrix mit a = 1 und Prinzip der Winkeldreiteilung . . . . . . . . . . 451.33 Entstehung der Epi- und Hypozykloide . . . . . . . . . . . . . . . . . . 451.34 Kardioide: R = r = a = 1 und Nephroide: R = 2, r = a = 1 . . . . . . . . 451.35 Zwei Epizykloiden mit: R = 2, a = 1 und r = 1
2 (links), sowie r = 14 (rechts) 46
1.36 Deltoid und Astroide . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471.37 Das Problem des Kakeya (I) . . . . . . . . . . . . . . . . . . . . . . . . 471.38 Das Problem des Kakeya (II) . . . . . . . . . . . . . . . . . . . . . . . . 481.39 Zwei Hypozykloiden mit: R = 5, a = 2 und r = 1 (links), sowie r = 1
2
(rechts) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481.40 Eine Teetasse mit punktformiger Lichtquelle in (−1, 0) . . . . . . . . . . 491.41 Die Katakaustik bei punktformiger Lichtquelle . . . . . . . . . . . . . . . 491.42 Eine Teetasse mit parallel einfallendem Licht . . . . . . . . . . . . . . . 501.43 Die Katakaustik bei parallel einfallendem Licht . . . . . . . . . . . . . . 501.44 Bewegung eines Stabes mit den Endpunkten auf dem Achsenkreuz . . . . 511.45 Astroide als Einhullende . . . . . . . . . . . . . . . . . . . . . . . . . . 511.46 Lissajous-Kurven mit a = b = 1, t0 = π/6 und ω1 : ω2 nach Angabe . . . . 521.47 Lissajous-Kurven mit a = b = 1, t0 = π/5 und ω1 : ω2 nach Angabe . . . . 521.48 Lissajous-Kurven mit a = b = 1, t0 = π/2 und ω1 : ω2 nach Angabe . . . . 521.49 Verschiedene Spiralen . . . . . . . . . . . . . . . . . . . . . . . . . . . 551.50 Kettenlinie und Brachistochrone . . . . . . . . . . . . . . . . . . . . . . 561.51 Kettenlinie und ihre Evolvente, die Traktrix . . . . . . . . . . . . . . . . 561.52 Gewohnliche Zykloide mit r = 1 und a = 0, 5; 1, 0 und 1, 5 . . . . . . . . 571.53 Gewohnliche Zykloide mit Krummungskreis im Punkt P . . . . . . . . . . 571.54 (Teile von) Epi- und Hypozykloide mit R/r =
√2 . . . . . . . . . . . . . 58
2.1 Parallele Geraden schneiden sich in der projektiven Ebene . . . . . . . . . 602.2 Offene Mengen in Pn und Cn+1\{0} . . . . . . . . . . . . . . . . . . . . 612.3 XY 4 + Y Z4 + XZ4 = 0 in einer Projektion auf [x, y, 1] und [x, 1, z] . . . . 702.4 XY 4 + Y Z4 + XZ4 = 0 in einer Projektion auf [1, y, z] . . . . . . . . . . 702.5 Die drei Projektionen von X2Y 3 + X2Z3 + Y 2Z3 = 0 . . . . . . . . . . . 712.6 Projektion von Y 2Z = X2(X − Z) auf [x, y, 1] . . . . . . . . . . . . . . . 732.7 Projektion von Y 2Z = X(X − Z)2 auf [x, y, 1] . . . . . . . . . . . . . . . 732.8 Projektion von Y 2Z = X(X − Z)(X − 2Z) auf [x, y, 1] . . . . . . . . . . 732.9 Projektion von Fermat-Kurven fur n = 1, . . . , 5 . . . . . . . . . . . . . . 742.10 Die reelle projektive Gerade P1(R) . . . . . . . . . . . . . . . . . . . . . 752.11 Die reelle projektive Ebene P2(R) als Modell im R3 . . . . . . . . . . . . 762.12 Eine projektive Kurve in P2(R) . . . . . . . . . . . . . . . . . . . . . . 762.13 Der Raum P2(R) als Doppelpyramide . . . . . . . . . . . . . . . . . . . 772.14 Die aufgeklappte Pyramide aus Bild 2.13 als Koordinatensystem des P2(R) 772.15 Der projektive Abschluß von X3 + Y 3 = Z3 . . . . . . . . . . . . . . . . 782.16 Der projektive Abschluß von XY 4 + Y Z4 + XZ4 = 0 . . . . . . . . . . . 792.17 Spezielle Anordnungen der Dreiecke aus Bild 2.16 . . . . . . . . . . . . . 792.18 Der projektive Abschluß von X2Y 3 + X2Z3 + Y 2Z3 = 0 . . . . . . . . . 802.19 Spezielle Anordnungen der Dreiecke aus Bild 2.18 . . . . . . . . . . . . . 80

ABBILDUNGSVERZEICHNIS xi
2.20 Die Kurve C : X2 + Y 2 = Z2 und die Gerade Gt in P2 . . . . . . . . . . . 812.21 Die Abbildung β . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 822.22 Die affine Kurve C als Schnitt von C mit {[x, y, 1]} . . . . . . . . . . . . 842.23 Projektiver Abschluß der Geraden X − 2Y + 5 = 0 in P2(R) . . . . . . . . 852.24 Projektiver Abschluß der Parabel X2 = Y in P2(R) . . . . . . . . . . . . 852.25 Projektiver Abschluß der Parabel X2 = Y in P2(R) in verzerrten Funda-
mentaldreiecken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862.26 Projektiver Abschluß der Neilschen Parabel in P2(R) . . . . . . . . . . . 862.27 Die Neilsche Parabel in P2(R) als Bild auf eine Kugel und in verzerrter
Abwicklung in die Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . 862.28 Projektiver Abschluß des Kartesischen Blattes X3 + Y 3 = 3XY in P2(R) . 872.29 Projektiver Abschluß der Strophoide (X − 2)Y 2 = −X2(X + 2) in P2(R)
und unter Umordnung der Fundamentaldreiecke I und III . . . . . . . . . 872.30 Die komplexe Strophoide und ihre Asymptoten . . . . . . . . . . . . . . 882.31 Die Kurve Cλ in den singularen Fallen fur λ = −1, α, α . . . . . . . . . . 922.32 Die Familie von Kurven Cλ fur die Parameter λ = −2,5; −2; −1,5; −1; 0;
1 und 2 unter verschiedenen Schnitten (I) . . . . . . . . . . . . . . . . . 932.33 Die Familie von Kurven Cλ fur die Parameter λ = −2,5; −2; −1,5; −1; 0;
1 und 2 unter verschiedenen Schnitten (II) . . . . . . . . . . . . . . . . . 94
3.1 Neun Schnittpunkte der Kubiken Y = X3 − 4X und X = Y 3 − 4Y . . . . 993.2 Das kartesische Blatt X3+Y 3 = 3XY und die Gerade X+Y = 3 in affiner
(links) und projektiver (rechts) Sicht . . . . . . . . . . . . . . . . . . . . 1083.3 Der Telegrafendraht-Effekt . . . . . . . . . . . . . . . . . . . . . . . . . 1093.4 Zylinder-Konstruktion . . . . . . . . . . . . . . . . . . . . . . . . . . . 1103.5 Das kartesische Blatt X3 + Y 3 = 3XY und die Gerade 2X − Y = 0 in
affiner (links) und projektiver (rechts) Sicht . . . . . . . . . . . . . . . . 1103.6 Die Kurven K1 und K2 in den Veranderlichen X = x1, Y = y1 + iy2 ∈ C . 1113.7 Die Kurven K1 und K2 in den Veranderlichen X = x1, Y = y1 ∈ R in
affiner und projektiver Darstellung . . . . . . . . . . . . . . . . . . . . . 1123.8 Die Kurven K1 und K2 in den Veranderlichen X = x1, Y = iy2 ∈ C in
affiner und projektiver Darstellung . . . . . . . . . . . . . . . . . . . . . 1123.9 Kubiken mit 9 Schnittpunkten: liegen 6 auf einer (irreduziblen) Quadrik,
dann die restlichen 3 notwendigerweise auf einer Geraden . . . . . . . . . 1133.10 Homoomorphismus zwischen C und P1 . . . . . . . . . . . . . . . . . . . 1173.11 Pascals “mystisches Hexagon“ in einer Ellipse . . . . . . . . . . . . . . . 1203.12 ... in einer Parabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1203.13 ... und in einer Hyperbel . . . . . . . . . . . . . . . . . . . . . . . . . . 1203.14 Der Satz von Pascal bei zwei parallel verlaufenden Seiten eines einer Ellipse
einbeschriebenen Sechsecks . . . . . . . . . . . . . . . . . . . . . . . . . 1213.15 Das der Ellipse E einbeschriebene Sechseck S mit jeweils drei parallelen
Seiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1223.16 Der projektive Abschuß der Konfiguration aus Bild 3.15 . . . . . . . . . . 1223.17 Eine Umkehrung des Satzes von Pascal . . . . . . . . . . . . . . . . . . 1233.18 Ein Funfeck in einer irreduziblen Quadrik . . . . . . . . . . . . . . . . . 123

xii ABBILDUNGSVERZEICHNIS
3.19 Aufgabe: An die Quadrik C soll in p die Tangente konstruiert werden . . 1243.20 Die Schritte 2 und 3 zur Konstruktion der Tangente . . . . . . . . . . . . 1243.21 Die Schritte 4 und 5 zur Konstruktion der Tangente . . . . . . . . . . . . 1253.22 Ein Dreieck in einer irreduziblen Quadrik . . . . . . . . . . . . . . . . . 1253.23 Der Satz von Pappos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1263.24 Das Auftreten von Wendepunkten: Ip(C, T ) = r + 2, mit r ≥ 1 . . . . . . 1273.25 Das kartesische Blatt C und seine Hessesche . . . . . . . . . . . . . . . . 1303.26 Das kartesische Blatt C und seine Hessesche im projektiven Abschluß . . . 1303.27 Die Kubik Y 2Z = X(X − Z)2 und ihre Hessesche . . . . . . . . . . . . . 1313.28 Die Kubik Y 2Z = X(X − Z)2 und ihre Hessesche im projektiven Abschluß 1323.29 Die Kubik Y 2Z = X2(X − Z) und ihre Hessesche . . . . . . . . . . . . . 1323.30 Die Kubik Y 2Z = X2(X − Z) und ihre Hessesche im projektiven Abschluß 1333.31 Weierstraßsche Normalformen fur z = 1 . . . . . . . . . . . . . . . . . . 1393.32 Weierstraßsche Normalformen fur y = 1 . . . . . . . . . . . . . . . . . . 1403.33 Die (94, 123)-Konfiguration . . . . . . . . . . . . . . . . . . . . . . . . . 1413.34 Y 2Z = X3 + XZ2 + Z3 fur Z = 1 und Y = 1 . . . . . . . . . . . . . . . 1423.35 Einige Kubiken in affinen Schnitten . . . . . . . . . . . . . . . . . . . . 1493.36 Neilsche Parabel und Newtonscher Knoten in reellen Schnitten . . . . . . 1553.37 Definition der Summe p⊕ q auf C . . . . . . . . . . . . . . . . . . . . . 1583.38 Konstruktion des Inversen −p . . . . . . . . . . . . . . . . . . . . . . . 1593.39 Assoziativitat von ⊕ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1603.40 Die vier Falle bzgl. des Schnittes einer Geraden T mit der Kubik C . . . . 1633.41 Gitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1643.42 Topologisches Modell von C/Λ . . . . . . . . . . . . . . . . . . . . . . . 1643.43 Analytische Landschaft der Weierstraßschen ℘-Funktion (Gitter s.o.) . . . 1673.44 Kontur der analytischen Landschaft (vgl. Bild 3.43) . . . . . . . . . . . . 1673.45 Gitter zur Kubik Y 2 = 4X3 − 5X − 1 . . . . . . . . . . . . . . . . . . . 1723.46 Addition auf der Kubik Y 2 = 4X3 − 5X − 1 . . . . . . . . . . . . . . . . 172
4.1 Beispiele zu Korollar 4.1.4 fur die Falle d = 3, 4 und 5 . . . . . . . . . . . 1754.2 links: Kubik mit zwei Doppelpunkten, rechts: das kann keine Kubik sein . 1764.3 Abrollvorgang zweier Kreise . . . . . . . . . . . . . . . . . . . . . . . . 1784.4 Zwei Zykloiden bzw. Quartiken mit genau drei Singularitaten . . . . . . . 1794.5 Tangentialkegel an die durch P , Q und R definierten Kurven . . . . . . . 1834.6 Menge aller komplexen Geraden durch den Ursprung O = (0, 0) . . . . . . 1844.7 Aufblasung von C2 im Ursprung . . . . . . . . . . . . . . . . . . . . . . 1844.8 Aufblasung von C in U1 . . . . . . . . . . . . . . . . . . . . . . . . . . 1864.9 Aufblasung von C in U2 . . . . . . . . . . . . . . . . . . . . . . . . . . 1874.10 Aufblasung von C im Ursprung . . . . . . . . . . . . . . . . . . . . . . 187
5.1 Inzidenz von Punkt und Hyperebene im Pn und dem Dualraum P∗n . . . . 1935.2 Der Satz von Pappos und seine Dualform . . . . . . . . . . . . . . . . . 1955.3 Polaren an den Kreis K . . . . . . . . . . . . . . . . . . . . . . . . . . 1965.4 Der Fall 0 < a < 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1975.5 Der Fall 0 < a < 1 in einer gemeinsamen Darstellung . . . . . . . . . . . 197

ABBILDUNGSVERZEICHNIS xiii
5.6 Die durch Z = 0 definierte Polare im Fall a = 0 . . . . . . . . . . . . . . 198
5.7 Tangenten im Fall a = 0: reeller und komplexer Schnitt . . . . . . . . . . 198
5.8 Reeller Schnitt der Quartik Cε mit ε = −0, 05 . . . . . . . . . . . . . . . 199
5.9 Die Quartik C−0,05 mit zwei Polaren und zugehorigen Tangenten im reellenSchnitt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
5.10 Die Quartik Cε und einige ihrer Polaren fur verschiedene Parameter . . . 199
5.11 Das kartesische Blatt C und ihre duale Kurve C∗ . . . . . . . . . . . . . 205
5.12 Das kartesische Blatt C und seine duale Kurve C∗ im projektiven Abschluß206
5.13 C und ihre duale Kurve C∗ als Schnitt mit z = 1 . . . . . . . . . . . . . 207
5.14 C und ihre duale Kurve C∗ im projektiven Abschluß . . . . . . . . . . . 207
5.15 Dreiblattriges Kleeblatt und ihre duale Kurve . . . . . . . . . . . . . . . 208
5.16 Duale Kurve des dreiblattrigen Kleeblattes in zwei affinen Schnitten . . . 209
5.17 Duale Kurve des dreiblattrigen Kleeblattes in projektiver Darstellung . . . 209
5.18 Duale Kurve des dreiblattrigen Kleeblattes als geschlossener Kurvenzug . . 210
5.19 Duale Kurve des dreiblattrigen Kleeblattes parkettiert in verzerrten Fun-damental“dreiecken“ die Ebene . . . . . . . . . . . . . . . . . . . . . . 210
5.20 Satz des Brianchon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
5.21 Dualitat der Satze von Pascal und Brianchon . . . . . . . . . . . . . . . 212
5.22 Die Dualitat von Schnittpunkten einer Gerade mit C∗ und Tangenten an C 213
5.23 Die Kurvenschar Ct fur t = −8, −5, −1, 0, 0,1 , 0,5 , 1 und 2 . . . . . . . 214
5.24 Die Kurve C1 mit ihrer Polaren (gestrichelt) in affiner Projektion . . . . . 215
5.25 Die affine Kurve C−1 mit ihrer Polaren (gestrichelt) in affiner Projektion . 215
5.26 Die Kurvenschar Ct fur t = −8, −5, −1, 0, 0,1 , 0,5 , 1 und 2 . . . . . . . 216
5.27 Die duale Kurve C∗1 in affiner Projektion . . . . . . . . . . . . . . . . . . 216
5.28 Die duale Kurve C∗0 in affiner Projektion . . . . . . . . . . . . . . . . . . 217
5.29 Verminderung der Anzahl der Tangenten und damit der Klasse . . . . . . 217
5.30 Die Kurve C und ihre durch den Doppelpunkt verlaufenden Zweige (links);kein einfacher Doppelpunkt (rechts) . . . . . . . . . . . . . . . . . . . . 219
5.31 Einfache Spitze (links); keine einfache Spitze (rechts) . . . . . . . . . . . 220
5.32 Kartesisches Blatt mit zwei Zweigen im Doppelpunkt . . . . . . . . . . . 220
5.33 Entwicklung des Zweiges mit Y = 0 als Tangente in eine Potenzreihe . . . 222
5.34 Entsprechung von Doppelpunkt mit Doppeltangente und Wendepunkt mitSpitze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
5.35 Verlauf der Polaren durch den einfachen Doppelpunkt und die einfacheSpitze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
5.36 Komplexer Schnitt des kartesischen Blattes C und seiner dualen Kurve C∗ 228
6.1 Analytische Fortsetzung von√
z . . . . . . . . . . . . . . . . . . . . . . 232
6.2 Verklebung zweier Kopien von C . . . . . . . . . . . . . . . . . . . . . . 232
6.3 Riemannsche Flache als Definitionsbereich von√
z . . . . . . . . . . . . . 233
6.4 Riemannsche Flache zu√
(z − a)(z − b)(z − c) . . . . . . . . . . . . . . 234
6.5 Einige Pythagoreische (affine) Tripel auf dem Kreis . . . . . . . . . . . . 235
6.6 Fermat-Kurven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236

xiv ABBILDUNGSVERZEICHNIS
6.7 Y 2 = X3− 2 und einige rationale Punkte aus der Sequenz der ersten zehnPaare nach Bachets Duplikationsformel (numerische Werte nach 4 Ziffernabgebrochen) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
6.8 Einige Gruppenelemente der durch p1, p2 und p3 erzeugten Gruppe E(Q) . 2396.9 Die elliptische Kurve C11 ⊂ F3 . . . . . . . . . . . . . . . . . . . . . . . 2436.10 Alle elliptischen Kurven im F3 . . . . . . . . . . . . . . . . . . . . . . . 2456.11 Einhullende 2 − (Y 2 − XY − X2)2 = 0 von “Fibonacci-Zahlen-Punkte“
(un, un+1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2476.12 Der Achterknoten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2626.13 Stereographische Projektion in C× {Re (y)} . . . . . . . . . . . . . . . . 2646.14 Eine einfache Verbindung . . . . . . . . . . . . . . . . . . . . . . . . . 2656.15 Torus nach impliziter Gleichung . . . . . . . . . . . . . . . . . . . . . . 2666.16 Torus nach impliziter Gleichung mit ε = 1 . . . . . . . . . . . . . . . . . 2666.17 Variation von arctan w
ω−ρ . . . . . . . . . . . . . . . . . . . . . . . . . . 2676.18 Kleeblattknoten auf dem Torus . . . . . . . . . . . . . . . . . . . . . . 2686.19 Kleeblattknoten in Mathematica . . . . . . . . . . . . . . . . . . . . . . 2686.20 Torus in parametrischer Form (vgl. Bild 6.16) . . . . . . . . . . . . . . . 2696.21 Kleeblattschlinge auf Torus in Mathematica . . . . . . . . . . . . . . . . 2696.22 Sechsachsiger Industrieroboter . . . . . . . . . . . . . . . . . . . . . . . 2706.23 Zwei Ansichten der komplexen Kurve C : XY = 0 . . . . . . . . . . . . . 2796.24 Sphare mit drei Henkeln . . . . . . . . . . . . . . . . . . . . . . . . . . 2796.25 Kleine Verformung einer singularen Kurve . . . . . . . . . . . . . . . . . 2816.26 Uberlagerung zweier topologischer Raume . . . . . . . . . . . . . . . . . 2816.27 Ebene uberlagert Kleinsche Flasche . . . . . . . . . . . . . . . . . . . . 2826.28 Ebene uberlagert projektive Ebene . . . . . . . . . . . . . . . . . . . . . 2836.29 Eine verzweigte Uberlagerung . . . . . . . . . . . . . . . . . . . . . . . 2836.30 Einige Kurven in Form von Gleichungen, reellen Schnitten und topologi-
schen Raumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2856.31 Zwei affine Schnitte der Kurve C . . . . . . . . . . . . . . . . . . . . . . 287
B.1 Schnitt der parallelen Geraden X + Y − Z = 0 und X + Y − 5Z = 0 in P2 313
C.1 Linearsystem von Quadriken: links der Dimension 2, rechts der Dimension 1323
D.1 Riemannsche Flache und holomorphe Abbildung auf C . . . . . . . . . . 328D.2 Das Gitter Λ und der komplexe Torus C/Λ . . . . . . . . . . . . . . . . 329D.3 Lokale Liftung von S . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329D.4 Lokale Liftung von S und Karte θ . . . . . . . . . . . . . . . . . . . . . 330D.5 Singularitatenauflosungen von C und C∗ . . . . . . . . . . . . . . . . . . 331D.6 Affiner Kegel von C und Tangente T . . . . . . . . . . . . . . . . . . . . 331D.7 Die Kurve X6 −X2Y 3 − Y 5 = 0 . . . . . . . . . . . . . . . . . . . . . . 334D.8 Das kartesische Blatt X3 + Y 3 = 3XY . . . . . . . . . . . . . . . . . . . 335D.9 Die Kurve (X2 − Y )2 = Y 3 . . . . . . . . . . . . . . . . . . . . . . . . . 336
E.1 Beschreibung von P mit dem Tripel (sa, sb, sc) . . . . . . . . . . . . . . . 337E.2 Gitter, in dem alle Punkte von P2(R) darstellbar sind . . . . . . . . . . . 339

ABBILDUNGSVERZEICHNIS xv
E.3 Darstellung einer projektiven Kurve C in dem Gitter der Fundamentald-reiecke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
F.1 Anfanglicher Aufbau zur Konstruktion einer (94, 123)-Konfiguration I . . . 341F.2 Anfanglicher Aufbau zur Konstruktion einer (94, 123)-Konfiguration II . . 342F.3 Weiterer Aufbau zur Konstruktion einer (94, 123)-Konfiguration . . . . . . 343F.4 Tetraeder TT auf der Riemannschen Zahlenkugel C (hier mit α = eπi/3) . . 354F.5 Die 12 Elemente aus den Restklassen K4 und K5 . . . . . . . . . . . . . 355F.6 Die 12 Elemente der Tetraedergruppe T . . . . . . . . . . . . . . . . . . 356
G.1 Einbettung der Fundamentaldreiecke zum Zwecke der Darstellung in den E2363G.2 Der reelle Schnitt der Strophoide (G.5) mit a = 2 fur z = 1 . . . . . . . . 364G.3 Der reelle Schnitt der Strophoide (G.5) mit a = 2 fur y = ±√3 . . . . . . 365
H.1 Die reflektierten Strahlen bei punktformiger Lichtquelle . . . . . . . . . . 394H.2 Duale Kurve (Tangentenschar) und Einhullende (Kardioide) . . . . . . . . 396H.3 Die reflektierten Strahlen bei parallel einfallendem Licht . . . . . . . . . . 396H.4 Duale Kurve (Tangentenschar) und Einhullende (Nephroide) . . . . . . . 398H.5 Lage der Stabe in Abhangigkeit des Winkels ϕ . . . . . . . . . . . . . . . 398H.6 Duale Kurven der Tangentenschar in zwei verschiedenen Schnitten und
Einhullende (Astroide) . . . . . . . . . . . . . . . . . . . . . . . . . . . 399

xvi ABBILDUNGSVERZEICHNIS

Teil I
Introduktion
1


Einfuhrung
... dem Menschen, es sind alles bloß Abschattierungenvon ein und demselben wichtigen und ... hauptsachlichenInteresse, namlich dem Interesse am Menschen, ...
Thomas Mann, Der Zauberberg
Die Idee, geometrische Objekte durch Gleichungen zu beschreiben, sie damit einer“algebraischen Methode“ zuganglich zu machen und diese programmatisch als ana-lytische Geometrie durchzufuhren, geht auf Rene Descartes (1596 La Haye - 1650Stockholm) und Pierre de Fermat (1601 Beaumont-de-Lomagne - 1655 Castres),zwei der bedeutendsten Mathematiker des 17. Jahrhunderts, zuruck. Brennpunktdes Interesses waren und sind dabei insbesondere Kurven, die als eindimensionaleObjekte verhaltnismaßig einfach, gleichzeitig jedoch in vielfaltigste Weise in Anwen-dungen verwoben sind. Fruher war dies vor allem in der Mechanik der Fall; heute,in entsprechender Abstraktion, spielen algebraische Kurven in vielen Gebieten ei-ne bedeutende Rolle: innerhalb der Mathematik selbst, etwa der Zahlentheorie, derKnotentheorie mit ihren Bezugen zur angewandten Mathematik oder auch der In-formationstechnik in Form der Codierungstheorie bzw. Kryptologie.
Das charakteristische Moment der hier auftretenden Kurven ist es, sie als Null-stellenmenge geeigneter Funktionen aufzufassen. Bereits Gottfried Wilhelm Leibniz(1646 Leipzig - 1716 Hannover) unterschied zwischen transzendenten und algebrai-schen Kurven, je nachdem welche Art von Funktion fur die Betrachtung der Nullstel-lenmenge ausgewahlt wird. Das Bild 1 soll den Unterschied zwischen beiden Typenvon Kurven illustrieren.
r
R
Bild 1: Zykloide und Hypozykloide
Bei der links dargestellten handelt es sich um eine Zykloide, die den Abrollvor-gang eines Kreises auf einer Geraden beschreibt; wobei die Kurve (wie angedeutet)der Weg ist, den ein ausgewahlter Punkt des Kreises zurucklegt. Da die Zykloidedie Abrollgerade in unendlich vielen Punkten trifft, ist sie nicht als Nullstellenmen-ge eines Polynoms (Abschnitt 3.1.2) beschreibbar – und damit nicht algebraisch!
3

4
Aufgrund der parameterabhangigen Darstellung (mit r = 1) von x = t − sin t undy = 1− cos t handelt es sich um eine transzendente Kurve. Wird der Kreis nicht aufeiner Geraden, sondern innerhalb eines dreimal so großen Kreises abgerollt, dann legtein fester Randpunkt des kleineren Kreises die im rechten Teil des Bildes 1 gezeigteHypozykloide zuruck, welche nun im Gegensatz zur vorangegangenen eine algebrai-sche Kurve ist (dies ist genau dann der Fall, wenn das Verhaltnis zwischen R und reine rationale Zahl ist). Fur R = 3 und r = 1 ist sie namlich die Nullstellenmengedes Polynoms (X2 + Y 2)2 − 8X(X2 − 3Y 2) + 18(X2 + Y 2)− 27. 3
Die Allgemeinheit in der Aufstellung von Kurvengleichungen entspricht der All-gemeinheit eines der Grundprobleme der algebraischen Kurventheorie: die Klassifika-tion von Kurven nach einheitlichen Gesichtspunkten. Isaac Newton (1643 Woolst-horpe - 1727 London) untersuchte in umfassender Weise Kubiken – Gleichungen derForm f(X,Y ) = 0 mit f als Polynom dritten Grades – und wandte dabei konsequentdie analytische Methode an 4, wobei er insbesondere die Kurven ihrem asymptoti-schen Verhalten nach klassifizierte und zu vier Typen von Gleichungen kam, derenLosungsverhalten hinsichtlich von Wurzeln ihn zu 72 Fallen fuhrte. Diese Vielfaltvon Einzelfallen, bei einer algebraisch doch recht einfachen Form wie einem ku-bischen Polynom, macht deutlich, daß nach einem ubergreifenden Prinzip gesuchtwurde, das eine einheitlichere Darstellung von Kurven ermoglichen sollte – und imAnsatz befindet sich dieses Prinzip bereits in der Newtonschen Arbeit.
Dabei werden, modern gesprochen, die Kurven projektiv kompaktifiziert und alsgleich angesehen, wenn sie durch birationale Transformation auseinander hervorge-hen. Dieser Gedanke, die Geometrie projektiv zu entwickeln, wurde im neunzehntenJahrhundert vor allem durch Gaspard Monge (1746 Beaume - 1818 Paris) und Vic-tor Poncelet (1788 Metz - 1867 Paris) verfolgt. Der Ausbau zu einer analytischenprojektiven Geometrie fand dann durch August Ferdinand Mobius (1790 Schul-pforta - 1868 Leipzig) und Julius Plucker (1801 Wuppertal - 1868 Bonn) statt.Wesentlich an dieser Betrachtung ist, daß “unendlich ferne“ Punkte nicht mehr ge-sondert berucksichtigt werden mussen, sondern als gleichberechtigte Kurvenpunktegelten und das Verstandnis von Kurven erheblich vereinfachen.
Als man im neunzehnten Jahrhundert die komplexen Zahlen – vor allem durchArbeiten von Carl-Friedrich Gauss (1777 Brunswick - 1855 Gottingen) – besserverstand, wurde deutlich, wie nutzlich es ist, komplexe Nullstellen von Polynomen zuberucksichtigen. So entarten im Reellen Kurven wie X2 +Y 2 = 0 zu einem einzelnenPunkt oder Polynome wie X2 + Y 2 = −1 fuhren zu leeren Mengen. Wird dagegendie Nullstellenmenge als eine Teilmenge des komplexen Raumes C2 betrachtet, so ist
3Beide Kurven besitzen daruber hinaus eine Vielzahl an interessanten Eigenschaften (Brachi-stochrone als Losung eines der ersten Variationsprobleme der Neuzeit; Kakeya-Problem) - sieheauch Abschnitt 1.4.
4Er fuhrte außerdem den Begriff der Singularitat einer Kurve ein; dies sind Stellen, wo – verein-facht aber doch treffend gesagt – die Kurve i.a. nicht “glatt“ aussieht. Uberhaupt Newton: mit ihmbekam die Untersuchung der analytischen Geometrie einen ganz neuen und modernen Schwung,es finden sich bei ihm die kartesischen Koordinaten und die Polarkoordinaten in der heute ubli-chen Weise, er betrachtete Paramterdarstellungen und gab seinen Ergebnissen eine ausgepragtgraphische Darstellung.

EINFUHRUNG 5
diese niemals leer (Fundamentalsatz der Algebra) und – abgesehen von singularenPunkten – von der “komplexen Dimension eins“ (Satz uber implizite Funktionen –siehe Anhang A). Ebenso ist es im Reellen ein nahezu hoffnungsloses Unterfangen,uber die Gleichheit algebraischer Kurven bzgl. des Aufbaues ihrer definierendenPolynome allgemeine Aussagen zu treffen. Im Komplexen dagegen gestaltet sichdiese Situation in Form klassischer Nullstellensatze sehr ubersichtlich. Es ist dahersinnvoll, die Theorie der algebraischen Kurven im Komplexen zu entwickeln undfallweise gelegentlich in die Welt der reellen Zahlen zuruckzukehren.
Desweiteren gestattet diese “komplexe Sicht“ der algebraischen Kurven den Ein-satz funktionentheoretischer Methoden. Insbesondere lassen sich diese Kurven nachBernhard Riemann (1826 Breselenz (Hannover) -1866 Selasca) als RiemannscheFlachen auffassen. Dabei ist es nicht verwunderlich, komplexe Kurven als Flachenzu bezeichnen, denn unter der Identifikation des C2 mit dem R4 stellen sie Mannig-faltigkeiten der reellen Dimension zwei dar – dazu muß allerdings bemerkt werden,daß aufgrund des inneren Aufbaus der Riemannschen Flachen der R4 sicherlich nichtder geeignete Ort ist, diese Flachen zu “entwickeln“. Werden die Kurven desweite-ren unter einer komplexen projektiven Geometrie behandelt, sind sie topologischgesehen kompakte Flachen. Das schematisch zu sehende Bild 2 gibt von dem topolo-gischen Abbild der Kurve Y 2 = X3 + X2 einen Eindruck, wobei der eingezeichnete“unendlich ferne“ Punkt analog zum Abschluß der komplexen Ebene C in Form derbekannten Riemannschen Sphare entsteht.
8
Bild 2: Der reelle Schnitt von Y 2 = X3 + X2 und ihr komplexer projektiver Abschluß
Gegen Ende des neunzehnten und zu Begin des zwanzigsten Jahrhunderts wurdedie Theorie der algebraischen Kurven erheblich abstrahiert und Kurven uber allge-meine Korper betrachtet, was zum eigentlichen Begriff der algebraischen Varietatfuhrte. Der weitere Ausbau zur algebraischen Geometrie, die ein reichhaltiges Zu-sammenspiel vieler verschiedener Disziplinen wie Algebra, Analysis und Topologiebenotigt und ermoglicht, war eines der fruchtbarsten Unternehmungen der neuerenMathematik.
Das Ziel dieser Arbeit ist es, eine grundsatzliche Einfuhrung in die Theorie deralgebraischen Kurven zu geben; und aus den oben genannten Grunden, eine mitbesonderer Blickrichtung auf komplexe Kurven. Die Arbeit siedelt sich damit auchin das Gebiet der algebraischen Geometrie an, beschrankt sich aber in Hinblick auf

6
den gebotenen Umfang einer Diplomarbeit bewußt auf den roten Faden der ebenenKurventheorie uber den Korper der komplexen Zahlen. Dennoch wird sicherlichdeutlich werden, wie elegant und effektiv es die eher abstrakt gelagerte Algebravermag, innerhalb der doch auch und in besonderer Weise von der Anschauunglebenden Geometrie Zusammenhange zu begrunden und Einsichten zu stiften.
Gemaß der oben nur kurz skizzierten Geschichte der algebraischen Kurven, glie-dert sich die Arbeit in funf Hauptkapitel, einem Abschlußkapitel und mehrerenAnhangen. Zunachst werden grundsatzliche Eigenschaften ebener affiner Kurven be-schrieben, was sich als aquivalent zur Untersuchung von Polynomen in zwei Verander-lichen erweisen wird. Sofern es die Theorie leicht ermoglicht, werden – der große-ren Allgemeinheit wegen – die Resultate auch in n Variablen formuliert. Mit derabschließenden kurzen Charakterisierung von Kurvenpunkten bietet das erste Ka-pitel bereits einen kleinen, aber doch geschlossenen Uberblick uber die Theorie undgrundsatzlichen Fragestellungen, die sich im Zusammenhang mit komplexen alge-braischen Kurven stellen.
Besonders zur Vorbereitung auf das dritte Kapitel wird im zweiten Teil der kom-plexe projektive Raum eingefuhrt, der es gestattet, algebraische Kurven zu kompak-tifizieren. Dabei werden zunachst projektive Kurven mit Hilfe homogener Polynomedefiniert, die zu bestimmten gewohnlichen ebenen Kurven “assoziiert“ sind. Außer-dem wird eine geometrische Darstellung des projektiven Abschlusses uber die reellenZahlen erarbeitet. Die Schnitttheorie mit ihrem zentralen Satz von Etienne Bezout5 (1730 Nemours - 1783 Basses-Loges (nahe Fontainbleau)) ermoglicht zahlreicheAnwendungen in der klassischen Geometrie, von denen einige prasentiert werdensollen. Insbesondere werden die algebraischen Kurven der Ordnung zwei und drei –die Quadriken und Kubiken – eingehender untersucht; dabei wird es sich erweisen,daß die Kubiken mit einer wunderbaren Gruppenstruktur versehen sind.
Ein besonderer Reiz geht von den Stellen einer Kurve aus, an der sie sich “un-gewohnlich benimmt“ und i.a. nicht “glatt“ aussieht: die Singularitaten. Bereits imersten Kapitel werden sie eingefuhrt und uns dann auf Schritt und Tritt begegnen.Ihnen ist das vierte Kapitel gewidmet.
Das funfte Kapitel behandelt das Prinzip der Dualitat, das es erlaubt, eine ge-wissermaßen “spiegelbildliche Welt“ des projektiven Raumes aufzubauen. Es warstets ein besonders nachhaltig verfolgtes Ziel in der Theorie der Kurven, Invariantenzu finden, welche die Kurve “an sich“, unabhangig von dem ihr unterlegten Koor-dinantensystem beschreiben. Die Pluckerformeln werden sich dabei als großartigerZusammenhang erweisen, der zwischen bestimmten Invarianten einer Kurve und derzu ihr dualen Kurve besteht.
5Nach darauf hinfuhrenden Bemerkungen von Isaac Newton und Colin MacLaurin (1698 Kil-modan - 1746 Edinburgh) wurde dieser Satz allerdings schon 1748 von Leonhard Euler (1707Basel - 1783 St. Petersburg) und 1750 von Gabriel Cramer (1704 Genf - 1752 Bagnols-sur-Ceze)bewiesen. Dabei erweist vor allem Euler sich neben Newton als zweiter “Motor“, der die Theorieder Kurven entscheidend vorantrieb: er behandelte die Theorie der gekrummten Linien, faßte dieKlassifkation weiter zusammen (so z.B. die 72 Newtonschen Falle auf 16 Arten), bestimmte Kurvenmit bestimmten Eigenschaften und behandelte Begriffe wie Tangenten, Doppelpunkte etc. reinalgebraisch.

EINFUHRUNG 7
Der letzte Teil soll einen ganz kurzen Ausblick auf die Fragestellungen geben,die hier nicht mehr (ausfuhrlich) behandelt werden, sich aber der hier prasentiertenTheorie als nachstes anschlossen. Auch empfande der Autor diese Arbeit als etwasunvollstandig, wenn zumindest nicht der ein oder andere dort erwahnte Begriff gefal-len und die Anwendungsbereiche der Theorie der algebraischen Kurven kurz ange-rissen worden waren. Die Kurzberichte uber die Anwendungen sollen dabei nicht sosehr eine erschopfende Darstellungen des jeweiligen Einsatzes algebraischer Kurvengeben, sondern vielmehr in Form von Ubersichtsartikeln das Potential verdeutlichen,welches das Konzept der algebraischen Geomtrie bietet. Daraus erklart sich auch derheterogene Charakter der Darstellungen: einige Artikel sind recht knapp gehalten,andere sind lang und vertiefen einzelne Aspekte ausfuhrlich. Ihre Zusammenstellun-gen spiegelt stark den Geschmack des Autors wider.
Was sind und was sollen die Anhange? Mit dem hier vereinten Material werdenverschiedene Ziele verfolgt. So bieten einige Anhange Hintergrundinformationen, diezwar nicht unmittelbar auf algebraische Kurven Bezug nehmen, aber doch als Grund-lage entscheidend zu einem besseren Verstandnis beitragen (Anhange A ’Der Satzuber implizite Funktionen’, E ’Zum Fundamentaldreieck’). In Anhang D ’Parame-trisierung von algebraischen Kurven’ wird vor allem zitiertes Material bereitgestellt,das sich leider wenig organisch dem eigentlichen Text hatte einfugen lassen. Ande-re wiederum sind eng mit dem Haupttext verzahnt, besitzen aber Umfange (undgewannen wahrend des Schreibens eine Dynamik), die den Fluß dieses doch wesent-lichen Teils der Arbeit unangemessen hemmen und auch fur das erste Lesen nichtunbedingt vertieft werden mussen (Anhange B ’Zur Resultante’, C ’Linearsysteme’,F ’Die taktische Punkt-Geraden-Konfiguration’, H ’Miszellen’). Es sei dennoch be-tont, daß insbesondere Anhang B fur den inhaltlichen Aufbau, fur das Gerust desGanzen von entscheidender Bedeutung ist und ihm erst seine Tragfahigkeit verleiht– es ist indes der sicherlich am starksten technisch gepragte Teil. Der Anhang G ’DerEinsatz von Mathematica ’ schließlich bietet zusatzliches Material uber die Entwick-lung der hier gebotenen Inhalte auf einem Rechner und laßt deutlich werden, wiedie vielen Bilder dieser Arbeit entstanden sind.
Sofern diese Arbeit Neuland beschreitet, wird dieses vor allem in den Anhangenurbar gemacht: im Anhang A wird der “klassische“ reelle Satz uber implizite Funk-tionen auf den C2 erweitert, die Fundamentaldreiecke als den projektiven Kurvenunterlegtes Koordinatensystem werden in E entwickelt, F vereint hier angestellteUntersuchungen mit den Ergebnissen aus [BK81] und der Anhang G gibt einenUberblick uber die eingesetzte Software und die speziell fur diese Arbeit erstelltenRoutinen.

8

Teil II
Exposition
9


Kapitel 1
Grundlegende Betrachtungen
1.1 Affin-algebraische Kurven
In diesem Abschnitt soll das Konzept der algebraischen Kurve entwickelt werden.Dazu wird zunachst der nutzliche und recht allgemeine Begriff der Varietat ein-gefuhrt, der dann im folgenden geeignet einzuschranken ist.
Definition 1.1.1. Seien f1, . . . , fr Polynome in K[X1, . . . , Xn], dann wird die Men-ge der gemeinsamen Nullstellen
V (f1, . . . , fr) := { ξ = (x1, . . . , xn) ∈ Kn | f1(ξ) = 0, . . . , fr(ξ) = 0}
als Varietat (von f1, . . . , fr) bezeichnet.
Nach dieser Definition ist zum Beispiel eine komplexe Gerade in C2 eine Varietat,da sie Nullstellenmenge eines Polynom ersten Grades αX + βY + γ ist. Auch einPunkt (a, b) ist eine Varietat, denn er ist die Nullstelle der zwei Polynome X − aund Y − b.
Fur die hier behandelte Einfuhrung in die Theorie der ebenen algebraischen Kur-ven, soll die Varietat V (P ) eines Polynoms P ∈ K[X,Y ] bzw. K[X, Y, Z] betrachtetwerden – wobei noch immer ein großer Reichtum zu beobachten ist. Wenn keineweiteren Annahmen getroffen werden, soll K stets der Korper der komplexen ZahlenC sein; in speziellen Fallen (der Anschauung oder gesonderten Anwendung) werdenwir gelegentlich auf den Korper der reellen Zahlen R einschranken.
Der Ring der Polynome C[X] bzw. C[X, Y ] hat viel Ahnlichkeit mit dem derganzen Zahlen Z(+, ·). Dazu gehort speziell, daß er faktoriell ist und daher jedesPolynom P ∈ C[X,Y ] eine eindeutige Primfaktorenzerlegung (in irreduzible Poly-nome) P = P1
k1 · · · Prkr (1.1)
besitzt (z.B. [S88] in §60). Die zum Polynom P gehorende Menge V (P ) zerfallt alsoin einzelne Komponenten und besitzt als Pendant zum Produkt von P die Darstel-lung V (P ) = V (P1) ∪ . . . ∪ V (Pr) . (1.2)
11

12 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Dabei fallt auf, daß die irreduziblen Polynome Pν , ν = 1, . . . , r, nur noch einfachvorkommen, da fur die Betrachtung von Nullstellen die Potenzen der einzelnen Po-lynome selbstverstandlich keine Rolle spielt. Fur den Zerfall eines Polynoms P bzw.die Multiplikation mehrerer Polynome P1 . . . Pr ist die Auswirkung von mehrfachvorkommenden Faktoren auf die entsprechende Varietat also unerheblich.
Die umgekehrte, von den Varietaten V (P ) und V (Q) ausgehende Betrachtungwird durch den nachfolgenden Sachverhalt aus [BK81] von Eduard Study (1862Coburg - 1930 Bonn) aufgeklart. Ein recht ausfuhrlicher Beweis dieser Aussage istauch in [Fischer94] enthalten.
Lemma von Study. Es seien P, Q ∈ C[X, Y ] mit den Nullstellenmengen V (P )bzw. V (Q). Wenn P irreduzibel ist und V (P ) ⊂ V (Q) gilt, dann ist P ein Teilervon Q.
Diese Aussage ist ein Spezialfall des Nullstellensatzes von David Hilbert (1862Konigsberg - 1943 Gottingen), der hier seiner großen Bedeutung wegen ebenfallsnoch vorgestellt werden soll. Bzgl. des recht umfangreichen (und in verschiede-nen Quellen gut dokumentierten) Beweises verweisen wir wieder auf die Literatur([Artin93], [S88] und [WaerdenII]). Dabei ist zu beachten, daß der Satz in den beidenersten Texten eine etwas andere und an die moderne Algebra orientierte Darstel-lung annimmt. In [Artin93] (Kapitel 10, §7 und §8) wird die “Ruckubersetzung“ zuder hier prasentierten Fassung fur algebraische Kurven aber besonders deutlich undschon beschrieben. Wesentlich an den beiden hier wiedergegebenen Satzen ist, daßes sich bei C um einen algebraisch abgeschlossenen Korper handelt – ein Pendantzu dem Polynomring uber die reellen Zahlen besteht nicht.
Hilbertscher Nullstellensatz. Fur die Polynome P, Q ∈ C[X, Y ] gilt die Gleich-heit der Nullstellenmengen
V (P ) = V (Q)
genau dann, wenn es zwei positive ganze Zahlen µ und ν gibt, so daß P das PolynomQµ und Q das Polynom P ν teilt; bzw. dazu aquivalent genau dann, wenn P und Qdieselben irreduziblen Faktoren besitzen, die sich nur jeweils in einem konstantenFaktor unterscheiden.
Die geometrisch gesehene Teilmengenbeziehung entspricht also algebraisch derBeziehung der Teilbarkeit zwischen den Polynomen. Danach treten Komponentenvon Nullstellenmengen immer als Faktoren desjenigen Polynoms auf, das die gesam-te Varietat definiert. Polynome mit mehrfach vorkommenden Faktoren enthaltenalso keinerlei zusatzliche Information oder geometrische Reichhaltigkeit, so daß essinnvoll ist, wenn im folgenden i.a. von Polynomen ohne mehrfach vorkommendeFaktoren ausgegangen wird (fur die Definition von Invarianten wie dem Grad einerKurve und die Betrachtung von Singulartaten ist dies ohnehin unerlaßlich). Auf Ba-sis dieser Erkenntnis soll nun die folgende grundlegende Definition getroffen werden.
Definition 1.1.2. Ist P ∈ C[X, Y ] ohne mehrfach vorkommende Faktoren, so wird
C := V (P ) = {(x, y) ∈ C2 |P (x, y) = 0}als die durch P definierte affin-algebraische Kurve bezeichnet.

1.1. AFFIN-ALGEBRAISCHE KURVEN 13
Beispiel 1.1.3. Um einen ersten (bzw. nach der Einfuhrung: zweiten) Eindruck von derVielfalt algebraischer Kurven zu bekommen, sind in dem Bild 1.1 die folgenden vier Kurvenin Form reeller Schnitte dargestellt:Pascalsche Schnecke C := V (P ), D := V (Q), vierblattriges Kleeblatt K := V (R) undN := V (S) mit den Polynomen
P := (2X2 + 2Y 2 − 3X)2 − (X2 + Y 2) ,
Q := X2 + Y 2 − 10X2Y 2(X2 − Y 2)2 ,
R := (X2 + Y 2)3 − 4X2Y 2 ,
S := 2X4 − 3X2Y + Y 2 − 2Y 3 + Y 4 . ¤
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
K
-1.5-1-0.5 0.5 1 1.5
0.5
1
1.5
2
x
y
N
0.5 1 1.5 2
-1
-0.5
0.5
1
x
y
C
-2 -1 1 2
-2
-1
1
2
x
y
D
Bild 1.1: Reelle Schnitte einiger algebraischer Kurven
Oft werden wir vereinfacht auch nur von algebraischen Kurven sprechen, wobeiaus dem Kontext heraus i.a. klar ist, ob es sich um eine affine oder eine projekti-ve Kurve handelt, die spater noch eingefuhrt wird. Warum es berechtigt ist, vonKurven zu sprechen, wird im Anhang A mit Hilfe des Satzes uber implizite Funktio-nen begrundet. Danach konnen Effekte wie die flachenfullende Peanokurve 1 (siehe
1Giuseppe Peano (1858 Cueno - 1932 Turin)

14 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
[Mandelbrot87], Tafel 75) bei algebraischen Kurven nicht auftreten! Auch fraktaleKurven, wie die in Bild 1.2 gezeigte Koch 2 -Schneeflocke, sind nicht algebraischerArt. Der rechte Teil des Bildes zeigt die Entstehung der Kochschen Kurve als Fol-ge eines rekursiv angewandten Verfahrens, das beginnend bei einem Initiator (eineStrecke der Lange 1) eine Folge von Kurven erzeugt, die letztlich in der fraktalenKurve konvergiert. Dabei wird in jedem Schritt erneut der gezeigte Generator aufdie einzelnen (und verkurzten) Strecken angewandt, d.h. in jedem Schritt werdendie Strecken gegen den Generator vertauscht. (Nahere Informationen findet man in[Mandelbrot87], [PJS92]; die hier gezeigten Kurven wurden in Mathematica berech-net: der Anhang H.1 zeigt, wie dabei in Mathematica verfahren wurde.)
Schritt 6
Schritt 5
Schritt 4
Schritt 3
Schritt 2
Generator
Initiator
Bild 1.2: Die Koch-Schneeflocke ist keine algebraische Kurve
Unsere vorherigen Uberlegungen haben gezeigt, daß bei gegebener algebraischerKurve C = V (P ) = V (Q) das ihr zugrunde liegende Polynom bis auf einen Fak-tor λ ∈ C\{0} festliegt: P = λQ. Im Gegensatz zur Varietat impliziert hier dasSprechen uber algebraische Kurven immer ein gekurzt vorliegendes Polynom, durchwelches sie definiert werden. Die Primzerlegung (1.1) aufgreifend, soll das der KurveC zugrundeliegende Polynom P also stets von der Form
P = P1 · · · Pr ,
mit verschiedenen irreduziblen Polynomen P1, . . . , Pr, sein. Diese Form wird auch alsMinimalpolynom bezeichnet, durch das die Kurve C eindeutig bestimmt ist. Uberdie motivierende Betrachtung in (1.2) hinaus, soll diese algebraische Eigenschaft nunin die Geometrie der algebraischen Kurven ubersetzt werden.
2Niels Fabian Helge von Koch (1870 Stockholm - 1924 Danderyd)

1.1. AFFIN-ALGEBRAISCHE KURVEN 15
Definition 1.1.4. Eine algebraische Kurve C ⊂ C2 heißt reduzibel oder zerlegbar,wenn es algebraische Kurven C1, C2 mit C1 6= C2 gibt, so daß
C = C1 ∪ C2
gilt. Andernfalls heißt die Kurve irreduzibel, d.h. fur jede Darstellung C = C1 ∪C2
folgt C1 = C2 = C.
Damit kann der folgende Satz formuliert werden, der die Irreduzibilitat einerKurve mit dem sie definierenden Polynom in Zusammenhang bringt.
Satz 1.1.5. Eine algebraische Kurve C = V (P ) ⊂ C2 ist genau dann irreduzibel,wenn das Polynom P ∈ C[X, Y ] irreduzibel ist.
Beweis. Sei P = P1 · P2 reduzibel mit teilerfremden P1, P2 ∈ C[X,Y ]. O.B.d.A. sei P1
irreduzibel, dann gilt nach dem Lemma von Study V (P1) 6⊂ V (P2). Und wegen C =V (P ) = V (P1) ∪ V (P2) ist C reduzibel.
Ist umgekehrt C = C1∪C2 als die Vereinigung der algebraischen Kurven C1 = V (P1) 6=V (P2) = C2 darstellbar, so folgt aus dem Hilbertschen Nullstellensatz o.B.d.A. die Existenzeines irreduziblen Faktors Q ∈ C[X, Y ] von P1, der das Polynom P2 nicht teilt. D.h. Pbesitzt mindestens zwei verschiedene Primfaktoren und ist somit reduzibel. ¤
Abschließend sei der Vollstandigkeit wegen noch bemerkt, daß die Vereinigungvon zwei affin-algebraischen Kurven A = V (P ) und B = V (Q) wieder eine affin-algebraische Kurve C = V (P ·Q) ist. Nach Definition 1.1.2 ist lediglich darauf zu ach-ten, daß das durch Multiplikation gewonnene Polynom P ·Q um mehrfach vorkom-mende Faktoren gekurzt wird, d.h. die Kurve C durch V (Minimalpolynom von P ·Q)reprasentiert wird.
Das nachfolgend betrachtete Beispiel soll deutlich machen, daß nicht unmittelbarklar ist, ob eine gegebene Teilmenge des C2 auch eine algebraische Kurve ist.
Beispiel 1.1.6. Wir mochten zeigen, daß sich hinter der folgenden differentialgeometrischorientierten Parameterform
φ : C −→ C2
t 7−→ φ(t) := (t2, t3 + 1)
eine algebraische Kurve verbirgt. Hierbei handelt es um die in Bild 1.3 dargestellte NeilscheParabel 3 (die Darstellung zeigt dabei lediglich t ∈ R).
Aus x := t2 und y := t3 +1 folgt t6 = x3 = (y−1)2, so daß mit P (x, y) := x3− (y−1)2
die Beziehung
Φ := {φ(t) | t ∈ C} ⊂ C := {(x, y) ∈ C2 |P (x, y) = 0} folgt.
3Der Name geht auf William Neil (1637 Bishopsthorpe - 1670 White Waltham) zuruck, derdiese Kurve 1660 rektifizierte. Die Neilsche Parabel war eine der ersten Kurven, bei der dies gelang.

16 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
-1-0.5 0.5 1 1.5 2
-2
-1
1
2
3
4
x
y
Bild 1.3: Reeller Schnitt der Neilschen Parabel (Y − 1)2 = X3
Nun sei (x, y) ∈ C. Fur x = 0 ist y = 1 und mit t = 0 gilt x = t2 und y = t3 + 1.Im folgenden sei x 6= 0 und t ∈ C ein fester Wert mit t2 = x (so daß also auch fur −t dieGleichheit (−t)2 = x gilt). Aus t6 = (−t)6 = x3 = (y − 1)2 folgt jetzt
(y − 1)2 − t6 = ((y − 1)− t3)((y − 1) + t3) = 0
und damity − 1− t3 = 0 ∨ y − 1 + t3 = 0
⇔ y = t3 + 1 ∨ y = (−t)3 + 1.
Also hat t oder −t die Eigenschaft φ(t) = (x, y) oder φ(−t) = (x, y), d.h. C ⊂ Φ.Das durch φ gegebene Bild φ(C) ist also tatsachlich als Nullstellenmenge des Polynoms Pdarstellbar. Wir zeigen noch, daß C eine irreduzible Kurve ist! Aufgrund von Satz 1.1.5wird dies uber die Irreduzibilitat von P nachgewiesen. Aus der Annahme
P = X3 − (Y − 1)2
= (X + R(Y ))︸ ︷︷ ︸P1(X)
(X2 + XS(Y ) + T (Y ))︸ ︷︷ ︸P2(X)
= X3 + X2(R(Y ) + S(Y )) + X(R(Y )S(Y ) + T (Y )) + R(Y )T (Y )
mit R, S, T ∈ C[Y ] ergeben sich durch Koeffizientenvergleich drei Bedingungen:
R(Y ) + S(Y ) = 0, R(Y )S(Y ) + T (Y ) = 0 und R(Y )T (Y ) = −(Y − 1)2.
Aus den ersten beiden folgt R(Y ) = −S(Y ) und T (Y ) = S2(Y ), was in die dritte eingesetztzum Widerspruch S3(Y ) = (Y −1)2 fuhrt. Eine angenommene Faktorisierung von P (X, Y )in der Form
P (X, Y ) = Q(Y )(X3 + X2R(Y ) + xS(Y ) + T (Y )
)
wieder mit Polynomen Q, R, S, T ∈ C[Y ] fuhrt unmittelbar zu Q(Y ) = 1. ¤

1.1. AFFIN-ALGEBRAISCHE KURVEN 17
Die im vorherigen Beispiel aufgetretene Kurve war bereits, wie gezeigt wurde,nicht zerlegbar – es handelt sich hierbei also um eine einzige Komponente. Es gibt al-lerdings noch einfachere nicht zerlegbare Kurven. Die Charakterisierung “einfacher“kann dabei uber den Grad einer Kurve getroffen werden.
Definition 1.1.7. Der Grad oder die Ordnung d einer durch das Polynom P fest-gelegten algebraischen Kurve C, ist der Grad des Polynoms P :
d = Grad(C) := Grad(P ) .
Da nach Definition 1.1.2 stets mit Minimalpolynomen gearbeitet wird, ist der sofestgelegte Grad einer Kurve eindeutig bestimmt. Ist das Polynom in zwei VariablenX,Y ∈ C in der Form P =
∑µ,ν cµν Xµ Y ν gegeben, bestimmt sich der Grad also
zu d = max{µ + ν | cµν 6= 0}.Hiermit kann als einfachste irreduzible Kurve nun die Gerade definiert werden,
die ein Polynom vom Grad eins darstellt. 4
Definition 1.1.8. Eine Kurve αX + βY + γ = 0 vom Grad eins mit α, β, γ ∈ Cwird als Gerade bezeichnet.
Die Namen der Kurven nachst hoherer Ordnung lauten Quadrik bzw. Kubik bzw.Quartik usw. bei einem Kurvengrad von 2 bzw. 3 bzw. 4 usw.
Bei Addition und Multiplikation zweier Polynome P,Q ∈ C[X] verhalt sich derGrad in der folgenden Weise (siehe [PB91])
Grad(P + Q) ≤ max{Grad(P ), Grad(Q)} , (1.3)
Grad(P ·Q) = Grad(P ) + Grad(Q) . (1.4)
Wegen C[X1, X2, . . . , Xn] = C[X1][X2] . . . [Xn] ubertragt sich dieses Verhaltendann auch auf Polynome in mehreren Variablen.
Ein elementares Ergebnis ist die Erhaltung des Grades unter einem Wechsel derKoordinaten. Der Grad ist somit eine Invariante fur eine algebraische Kurve.
Satz 1.1.9. Unter regularen Transformationen der Koordinaten bleibt der Grad ei-ner algebraischen Kurve erhalten.
Beweis. Die Koordinaten (ξ, η) ∈ C2 seien aus einer regularen Transformation der karte-sischen Koordinaten (x, y) ∈ C2 hervorgegangen. Und die algebraische Kurve C sei durchdas Polynom P definiert. Dann entsteht aus P das Polynom P (ξ, η) := P (x(ξ, η), y(ξ, η))und durch die inverse Transformation ergibt sich P aus dem Polynom P .
Wegen der Abhangigkeiten x = x(ξ, η), y = y(ξ, η) folgt aus (1.3) und (1.4) dieAbschatzung Grad(P ) ≤ Grad(P ). Umgekehrt ergibt sich aus ξ = ξ(x, y), η = η(x, y)die Beziehung Grad(P ) ≤ Grad(P ). ¤
4Es sei an dieser Stelle noch einmal festgehalten, daß ein Polynom vom Grad null - also einkonstanter Faktor 6= 0 - keine Kurve darstellt. Fur konstante Polynome Q(X, Y ) = const. 6= 0gilt trivialerweise V (Q) = {(x, y) ∈ C2 |Q(x, y) = 0} = ∅, so daß fur ein P ∈ C[X, Y ] giltV (P Q) = V (P ) ∪ V (Q) = V (P ).

18 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
1.2 Homogene Polynome
Homogene Polynome spielen in vielfaltige Weise eine bedeutende Rolle im weiterenVerlauf der Theorie. Um an den entsprechenden Stellen alle wichtigen Eigenschaftenbereit zu haben, ist ihnen dieser eigene Abschnitt gewidmet.
Definition 1.2.1 (Homogene Polynome). Ein von Null verschiedenes Polynom P ∈C[X1, . . . , Xn] heißt homogen vom Grad d, wenn
P (λX1, . . . , λXn) = λdP (X1, . . . , Xn)
fur alle λ ∈ C gilt.
Homogene Polynome lassen sich leicht an ihrem Aufbau erkennen. Der folgendeSatz zeigt, daß jedes Polynom vom Grad d eine Summe von Monomen vom Grad dist.
Satz 1.2.2. Ein von Null verschiedenes Polynom P ∈ C[X1, . . . , Xn] ist homogenvom Grad d genau dann, wenn es von der Form
P (X1, . . . , Xn) =∑
ν1+···+νn=d
cν1...νn Xν11 . . . Xνn
n (1.5)
ist, wobei cν1...νn ∈ C.
Beweis. Sei P ∈ C[X1, . . . , Xn] ein Polynom vom Grad m, o.B.d.A. kann P dann in derForm
P (X1, . . . , Xn) =m∑
µ=0
Mµ(X1, . . . , Xn)
mitMµ(X1, . . . , Xn) :=
∑ν1+···+νn=µ
cν1...νn Xν11 . . . Xνn
n
dargestellt werden. Fur ein λ ∈ C gilt dann
P (λX1, . . . , λXn) =m∑
µ=0
λµ Mµ(X1, . . . , Xn). (1.6)
Verschwinden die Koeffizienten cν1...νn mit ν1 + · · ·+ νn = µ fur µ 6= d, so ist das PolynomP homogen vom Grad d.
Umgekehrt folgt aus (1.6) bei Homogenitat von P die Gleichheit
m∑
µ=0
λµ Mµ(X1, . . . , Xn) = λdm∑
µ=0
Mµ(X1, . . . , Xn),
bzw.
m∑µ=0µ6=d
λµ Mµ(X1, . . . , Xn) + λd
Md(X1, . . . , Xn)−
m∑
µ=0
Mµ(X1, . . . , Xn)
= 0 (1.7)

1.2. HOMOGENE POLYNOME 19
fur alle λ ∈ C. Weil die linke Seite von (1.7) ein Polynom in λ ist, gibt es aufgrund desFundamentalsatzes der Algebra nur endlich viele Nullstellen. Bei der fur λ unendlichenGrundmenge C kann (1.7) also nur dann verschwinden, wenn alle Koeffizienten diesesPolynoms Null sind:
Mµ(X1, . . . , Xn) = 0 und fur µ 6= d : Md(X1, . . . , Xn)−m∑
µ=0
Mµ(X1, . . . , Xn) = 0,
was aquivalent zu
P (X1, . . . , Xn) = Md(X1, . . . , Xn) =∑
ν1+···+νn=d
cν1...νn Xν11 . . . Xνn
n
ist. ¤
Mit der im letzten Beweis verwendeten Darstellung ergibt sich unmittelbar dasnachste Resultat.
Korollar 1.2.3. Jedes nicht verschwindende Polynom P ∈ C[X1, . . . , Xn] vom Gradm kann eindeutig als Summe homogener Polynome geschrieben werden:
P = Pd0 + · · ·+ Pdm ,
wobei die Pdk, k = 0, . . . m, homogen vom Grad dk mit d0 < · · · < dm sind.
In zwei Variablen haben diese Polynome das Aussehen:
d0 = 0 : c00 ,d1 = 1 : c10X + c01Y ,d2 = 2 : c20X
2 + c11XY + c02Y2 ,
d3 = 3 : c30X3 + c21X
2Y + c12XY 2 + c03Y3 ,
...
Neben der Darstellung als Summe, soll jetzt die Form von Produkten auf ihrVerhalten bzgl. Homogenitat uberpruft werden. Auch hier ist wieder eine klare undschone Antwort moglich.
Satz 1.2.4. Jeder Faktor eines homogenen Polynoms ist seinerseits homogen.
Beweis. Sei P ∈ C[X1, . . . , Xn] ein homogenes Polynom mit der Faktorisierung P = QR,wobei auch Q,R ∈ C[X1, . . . , Xn] seien. Nach Korollar 1.2.3 konnen Q und R in der Form
Q = Qd0+ · · ·+ Qdq
mit d0 < d1 < . . . < dq undR = Rd0
+ · · ·+ Rdrmit d0 < d1 < . . . < dr
notiert werden. Hiervon jedoch mussen jeweils in Q und R bis auf einen Summanden alleverschwinden, da sonst P die Gestalt
P = QR = Qd0Rd0
+ · · ·+ QdqRdr
besitzt, was zu mindestens zwei verschieden homogenen Summanden fuhrte, namlichQd0
Rd0vom Grad d0 + d0 und Qdq
Rdrvom Grad dq + dr. ¤

20 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Ein sehr wichtiges Resultat in Hinblick auf die Theorie algebraischer Kurvenergibt sich fur Polynome in zwei Variablen. Dies ist Inhalt des folgenden Lemmas.
Lemma 1.2.5. Ein nicht verschwindendes homogenes Polynom P ∈ C[X, Y ] inzwei Variablen vom Grad d zerfallt in ein Produkt linearer Polynome
P (X, Y ) =d∏
k=1
(αkX + βkY )
fur bestimmte Zahlen αk, βk ∈ C.
Beweis. Wegen Satz 1.2.2 kann o.B.d.A.
P (X, Y ) =d∑
l=0
alXlY d−l = Y d
d∑
l=0
al
(X
Y
)l
(1.8)
geschrieben werden, wobei die Koeffizienten a0, . . . , ad ∈ C nicht samtlich verschwinden.Es sei η = max
al 6=0{l | l = 0, . . . , d}, so daß die letzte Summe in (1.8) als komplexes Polynom
in einer Variablen X/Y vom Grad η vollstandig faktorisiert werden kann:
d∑
l=0
al
(X
Y
)l
= aη
η∏
k=1
(X
Y− wk
)
mit bestimmten Nullstellen w1, . . . , wη ∈ C. Dies ergibt in (1.8) eingesetzt das gewunschteErgebnis
P (X, Y ) = aηYd
η∏
k=1
(X
Y− wk
)= aηY
d−ηη∏
k=1
(X − wkY ) . ¤
Die Erhaltung der Homogenitat und Summation ihres Grades bei Bildung desProduktes zweier Polynome ist klar:
(P Q)(λX1, . . . , λXn) = P (λX1, . . . , λXn) Q(λX1, . . . , λXn)
= λdP P (X1, . . . , Xn) λdQQ(X1, . . . , Xn)
= λdP +dQ(P Q)(X1, . . . , Xn).
Ebenso die Tatsache, daß sich nur Polynome vom gleichen Grad der Homogenitatwieder zu einem homogenen Polynom addieren.
Korollar 1.2.6. Das Produkt zweier homogener Polynome P,Q ∈ C[X1, . . . , Xn]vom Grad dP bzw. dQ ist wieder homogen und vom Grad dP + dQ.
Die Addition zweier homogener Polynome ist hingegen nur dann homogen, wenndie beiden Summanden homogen vom gleichen Grad sind.
Uber diese Art von Homogenitat hinaus gibt es noch den Begriff der gewichtet-homogenen oder auch quasi-homogenen Polynome, worauf in [BK81] naher einge-gangen wird. Dabei wird jedem Argument Xk eines Polynoms P ∈ C[X1, . . . , Xn]

1.2. HOMOGENE POLYNOME 21
ein eigener Gewichtungsfaktor zugeordnet bzgl. dessen sich das gesamte Polynomdann wieder homogen verhalt:
P (λw1X1, . . . , λwnXn) = λd P (X1, . . . , Xn) .
In diesem Fall ist P gewichtet-homogen mit den Gewichten w1, . . ., wn und demGrad d. Wie in Satz 1.2.2 ist wieder leicht zu erkennen, daß diese Polynome vomAufbau
P (X1, . . . , Xn) =∑
w1ν1+···+wnνn=d
cν1...νn Xν11 . . . Xνn
n
sind. Im Anhang B, siehe Seite 310, wird gezeigt, welche Rolle gewichtete Polynomebei der Resultante und der Diskriminante von Polynomen spielen.
Zwei Aspekte sollen abschließend noch behandelt werden. Der erste spielt bei denspater eingefuhrten projektiven Kurven eine wichtige Rolle. Es ist die Homogenisie-rung von Polynomen, die hier zunachst rein technisch eingefuhrt werden soll und erstim Abschnitt 2.3 seine geometrische Bedeutung erfahrt. Wie der Name bereits sagt,wird durch den Vorgang der Homogenisierung eines Polynoms Q ∈ C[X1, . . . , Xn] einweiteres und homogenes Polynom P gewonnen, was allerdings nur durch Erhohungder Anzahl der freien Variablen moglich ist.
Definition 1.2.7 (Homogenisierung). Ist Q ∈ C[X1, . . . , Xn] ein beliebiges Polynomvom Grad m, so wird durch
P (X0, X1, . . . , Xn) := Xm0 Q
(X1
X0, . . . Xn
X0
)
das homogenisierte Polynom P ∈ C[X0, X1, . . . , Xn] gewonnen.
Offensichtlich ist P homogen vom Grad m und es gilt die Beziehung
P (1, X1, . . . , Xn) = Q(X1, . . . , Xn).
Die Irreduzibilitat eines Polynoms “vererbt“ sich bei der Homogenisierung, wasInhalt des folgenden Satzes ist.
Satz 1.2.8. Sei Q ∈ C[X1, . . . , Xn] und P ∈ C[X0, X1, . . . , Xn] seine Homogenisie-rung. Dann gilt die Aquivalenz:
Q irreduzibel ⇐⇒ P irreduzibel.
Beweis. Angenommen P ist reduzibel, also von der Form P = GH mit zwei PolynomenG,H ∈ C[X0, X1, . . . , Xn]. Nach Satz 1.2.4 sind dann G und H ebenfalls homogen undaufgrund des Homogenisierungsverfahrens nicht von der Form G(X0, X1, . . . , Xn) = Xr
0
bzw. H(X0, X1, . . . , Xn) = Xr0 . Dann aber ist wegen
Q(X1, . . . , Xn) = P (1, X1, . . . , Xn) = G(1, X1, . . . , Xn) H(1, X1, . . . , Xn)
auch Q zerlegbar. Laßt sich umgekehrt Q als Produkt Q = K ·L mit K, L ∈ C[X1, . . . , Xn]schreiben, so ist P das Produkt der homogenisierten Polynome K und L. ¤

22 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Abschließend sollen noch zwei Resultate dargestellt werden, welche die Homo-genitat eines Polynoms mit der Operation der partiellen Differentiation in Zusam-menhang bringen. Das erste ist ein Erhaltungssatz und zeigt, daß die Homogenitateines Polynoms auch bei einer Ableitung erhalten bleibt, wobei der Grad allerdingsum eins reduziert wird.
Satz 1.2.9. Sei P ∈ C[X1, . . . , Xn] ein homogenes Polynom vom Grad m, so sinddie ersten partiellen Ableitungen von P wieder homogen vom Grad m− 1 oder ver-schwinden.
Beweis. Fur homogene Monome Xν11 . . . Xνn
n vom Grad m = ν1+. . .+νn folgt die Aussageunmittelbar aus
∂(Xν11 . . . Xνn
n )∂Xk
={
νk Xν11 . . . Xνk−1
k . . . Xνnn , falls νk ≥ 1,
0 , sonst.
Da P von der Form (1.5) nach Satz 1.2.2 ist, ubertragt sich die vom Grad her um einsreduzierte Homogenitat wegen der Linearitat der Operation ∂ /∂Xk auf ganz P . ¤
Schließlich soll die Homogenitat eines Polynoms noch mit einer partiellen Diffe-rentialgleichung charakterisiert werden. Hier gilt das folgende schone Ergebnis vonLeonhard Euler.
Lemma 1.2.10 (Eulersche Relation). Ein Polynom P ∈ C[X1, . . . , Xn] ist homogenvom Grad m genau dann, wenn es der folgenden partiellen Differentialgleichunggenugt:
n∑ν=1
Xν∂P
∂Xν
= mP . (1.9)
Beweis. Die angegebene Gleichung ergibt sich aus Differentiation der Identitat
P (λX1, . . . , λXn) = λmP (X1, . . . , Xn)
nach λ (verallgemeinerte Kettenregel) und anschließender Einschrankung auf λ = 1. ¤

1.3. CHARAKTERISIERUNG VON KURVENPUNKTEN 23
1.3 Charakterisierung von Kurvenpunkten
Die wesentliche Unterscheidung von Kurvenpunkten findet zwischen regularen undsingularen Punkten statt. In den Singularitaten – sofern vorhanden – weist einealgebraische Kurve ein besonderes Verhalten auf, das eingehender in dem Kapitel4 untersucht werden soll. Durch die fundamentale Definition und Auswirkung auchauf andere Eigenschaften algebraischer Kurven, kommen wir jedoch nicht umhin,bereits hier in dem Kapitel uber die Grundlagen die Definition voranzustellen undeinige wenige Beispiele anzufuhren.
Definition 1.3.1. Ein Punkt (a, b) einer durch das Polynom P definierten KurveC wird singularer Punkt oder Singularitat von C genannt, wenn
∂P
∂X(a, b) =
∂P
∂Y(a, b) = 0
gilt. Sonst handelt es sich um einen regularen Punkt.
Die Kurve in Beispiel 1.1.6 weist an dem Knick in (0,1) eine Singularitat auf.Ein fluchtiger Blick auf Bild 1.3 in diesem Beispiel zeigt bereits die Exponiertheitdieser Stelle im Verlauf der Kurve. Auf geometrische Aspekte wird weiter unten unddann noch einmal spater gesondert eingegangen. Hier sollen zunachst die technischenMittel bereitgestellt werden. 5 In diesem Zusammenhang wird es sich als wichtigerweisen, daß aufgrund der polynomialen Struktur von C, die Kurve gewissermaßenals endliche Taylorreihe 6 entwickelbar ist - genauer: das Polynom P , das die KurveC definiert, kann um einen beliebigen Punkt als endliche Taylorreihe geschriebenwerden, da alle Ableitungen der Ordnung > Grad P verschwinden.
Bemerkung 1.3.2. Ein Polynom P ∈ C[X,Y ] vom Grad m laßt sich in jedem Punkt(a, b) ∈ C als endliche Taylorentwicklung
P (X, Y ) =∑
0≤µ+ν≤m
1µ! ν!
(X − a)µ (Y − b)ν ∂µ+νP
∂Xµ∂Y ν(a, b)
schreiben.
Die folgende Definition nutzt das Ableitungsverhalten fur eine quantitative Cha-rakterisierung von Kurvenpunkten.
Definition 1.3.3. Die Multiplizitat Multp(P ) des Polynoms P in einem Punktp = (a, b) ∈ V (P ) ist die kleinste positive ganze Zahl m, so daß
∂mP
∂Xµ∂Y ν(a, b) 6= 0
fur bestimmte µ ≥ 0, ν ≥ 0 mit µ + ν = m. Ist P ein Minimalpolynom, wirddadurch die Multiplizitat Multp(C) einer durch das Polynom P festgelegten KurveC in einem Punkt p = (a, b) ∈ C definiert: Multp(C) := Multp(P ) .
5An dieser Stelle muß nun auf jeden Fall eine nicht minimale Form P = Q2 vermieden werden,weil sonst die durch P definierte Kurve C uberall singular ware!
6Brook Taylor (1685 Edmonton - 1731 London)

24 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Daraus ergibt sich sofort die folgende Eigenschaft von regularen Punkten einerKurve.
Korollar 1.3.4.Ein Kurvenpunkt p ∈ C ist genau dann regular, wenn Multp(C) = 1 gilt.
Der Begriff des Grades einer algebraischen Kurve hat uns im Abschnitt 1.1 zureinfachsten Form von Kurven gefuhrt: der Geraden. Der folgende Satz zeigt, waspassiert, wenn nun die Multiplizitat in einem Kurvenpunkt sogar den Grad derKurve erreicht.
Satz 1.3.5. Sei C eine durch das Polynom P definierte affin-algebraische Kurve vomGrad d. Ist (a, b) ein Punkt der Kurve C, in dem diese die Multiplizitat d erreicht,so zerfallt P in d lineare Faktoren, d.h. C ist die Vereinigung von d Geraden durch(a, b).
x
y
a
b
Bild 1.4: Zerfall in d Geraden im Punkt (a, b)
Beweis. Nach Definition 1.3.3 ist d = Grad(P ) die kleinste positive ganze Zahl mit∂dP
∂Xµ∂Y ν (a, b) 6= 0, µ + ν = d. Damit ist das in (a, b) entwickelte (und mit P uberein-stimmende) Taylor-Polynom
∑
µ+ν=d
∂dP
∂Xµ∂Y ν
∣∣∣∣(a,b)
(X − a)µ(Y − b)ν
µ! ν!= P (X, Y )
homogen und zerfallt nach Lemma 1.2.5 in d lineare Polynome der Form
αk(X − a) + βk(Y − b), k = 1, . . . , d.
Nach Def. 1.1.8 ist C somit die Vereinigung der Nullstellenmengen von d Geraden. ¤
Geraden sind aber nicht nur eigenstandige Kurven innerhalb der Theorie, son-dern sie treten auch in vielfaltige Weise als Hilfsobjekte in Erscheinung. Eine davonist die Tangente an eine algebraische Kurve C, die sich mit den jetzt bereit gestelltenMitteln zu einem gegebenen Punkt (a, b) ∈ C leicht charakterisieren laßt. Findet die

1.3. CHARAKTERISIERUNG VON KURVENPUNKTEN 25
Taylorentwicklung in einem Kurvenpunkt namlich nur bis zum Wert der Multipli-zitat m ≤ Grad(P ) statt, so ist das m-te Taylorpolynom homogen vom Grad m(da alle geringeren Ableitungen verschwinden) und zerfallt wegen Lemma 1.2.5 inlineare Faktoren - die Tangenten an diesen Punkt. Dies gibt Anlaß zu der folgendenDefinition, die sich spater auch als Grundlage fur konkrete Berechnungen bewahrenwird.
Definition 1.3.6. Die Kurve C sei in dem Punkt (a, b) ∈ C von der Multiplizitatm. Das Polynom
Pm(X,Y ) :=∑
µ+ν=m
1
µ! ν!(X − a)µ (Y − b)ν ∂µ+νP
∂Xµ∂Y ν(a, b) (1.10)
ist dann homogen vom Grad m. Die (nicht notwendig paarweise verschiedenen) mlinearen Polynome der Form
α(X − a) + β(Y − b) mit (α, β) ∈ C\{0},deren Produkt Pm(X,Y ) ist, heißen die Tangenten von C im Punkt (a, b).
In regularen Punkten kann die Tangente offenbar leicht in der folgenden Weiseangegeben werden.
Korollar 1.3.7. Ist (a, b) ein regularer Punkt der Kurve C, so verlauft durch diesenPunkt genau eine Tangente, die durch
∂P
∂X
∣∣∣∣(a,b)
(X − a) +∂P
∂Y
∣∣∣∣(a,b)
(Y − b) = 0
gegeben ist.
Schließlich kommen den Punkten je nach Multiplizitat und der Anzahl ihrerverschiedenen Tangenten bestimmte Namen zu. In dem Bild 1.5 sind einige dieserPunkte dargestellt.
Bild 1.5: Doppelpunkt, gewohnlicher Doppel- und Tripelpunkt
Definition 1.3.8. Ein Punkt (a, b) ∈ C wird als Doppelpunkt (bzw. Tripelpunktusw.) bezeichnet, wenn seine Multiplizitat zwei (bzw. drei usw.) betragt. Ein sin-gularer Punkt (a, b) wird als gewohnlich bezeichnet, wenn das Polynom (1.10) kei-nen mehrfachen Faktor enthalt, d.h. wenn die Kurve m verschiedene Tangenten imPunkt (a, b) besitzt.

26 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Beispiel 1.3.9. Die durch (X4 + Y 4)2 = X2Y 2 definierte Kurve – siehe Bild 1.6, links– hat einen singularen Punkt der Multiplizitat vier im Ursprung, der nicht gewohnlichist; die Kurve (X4 + Y 4 − X2 − Y 2)2 = 9X2 Y 2 hat eine gewohnliche Singularitat derMultiplizitat vier im Ursprung – siehe Bild 1.6, rechts. ¤
Bild 1.6: (X4 + Y 4)2 = X2Y 2 und (X4 + Y 4 −X2 − Y 2)2 = 9X2Y 2
Wird das eine Kurve definierende Polynom P unter einer regularen Koordina-tentransformation (Ξ, Θ) = T (X,Y ), mit (X, Y ), (Ξ, Θ) ∈ C2, betrachtet, so stellensich die m-ten partiellen Ableitungen von
P (Ξ, Θ) := P (T−1(Ξ, Θ))
nach der Kettenregel in Form der Summe
∂mP
∂Ξµ ∂Θm−µ=
m∑
k=1
k∑
l=1
ckl(Ξ, Θ)∂kP
∂Xk−l ∂Y l
dar, wobei die Koeffizienten ckl(Ξ, Θ) von den partiellen Ableitungen von T nach Ξund Θ abhangen. Analog zum Ergebnis der Invarianz des Grades einer Kurve bzw.eines Polynoms nach Satz 1.1.9 ergibt daraus sich die
Bemerkung 1.3.10. Die Multiplizitat und die Eigenschaft eines singularen Punktes ge-wohnlich zu sein, ist invariant bzgl. regularer Transformationen.
Bevor auf einige weitere Beispiele eingegangen wird, soll der gewohnliche Dop-pelpunkt noch uber die zweiten Ableitungen des der Kurve zugrunde liegenden Po-lynoms charakterisiert werden.
Satz 1.3.11. Sei (a, b) ein singularer Punkt der durch das Polynom P gegebenenKurve C. Unter dieser Voraussetzung gilt, daß (a, b) genau dann ein gewohnlicherDoppelpunkt ist, wenn
(∂2P
∂X∂Y
∣∣∣∣(a,b)
)2
6= ∂2P
∂X2
∣∣∣∣(a,b)
∂2P
∂Y 2
∣∣∣∣(a,b)
. (1.11)

1.3. CHARAKTERISIERUNG VON KURVENPUNKTEN 27
Beweis. Die Annahme eines doppelten Faktors des Polynoms P2 nach (1.10) in (a, b),d.h. es gibt α, β ∈ C, so daß
(α(X − a) + β(Y − b))2 = P2(X, Y )
=12
∂2P
∂X2
∣∣∣∣(a,b)
(X − a)2 +∂2P
∂X∂Y
∣∣∣∣(a,b)
(X − a)(Y − b) +12
∂2P
∂Y 2
∣∣∣∣(a,b)
(Y − b)2 ,
ist – wie Koeffizientenvergleich ergibt – aquivalent zur Aussage: es gibt α, β ∈ C, so daß
α2 =12
∂2P
∂X2
∣∣∣∣(a,b)
, β2 =12
∂2P
∂Y 2
∣∣∣∣(a,b)
und 4α2β2 =
(∂2P
∂X∂Y
∣∣∣∣(a,b)
)2
=∂2P
∂X2
∣∣∣∣(a,b)
∂2P
∂Y 2
∣∣∣∣(a,b)
gilt. Mit dieser Aquivalenz konnen nun die beiden im obigen Satz enthaltenen Schlußrich-tungen gezeigt werden.’⇒’: Durch Widerspruch: aus der Annahme
(∂2P
∂X∂Y
∣∣∣∣(a,b)
)2
=∂2P
∂X2
∣∣∣∣(a,b)
∂2P
∂Y 2
∣∣∣∣(a,b)
= 0
folgt, daß (a, b) kein Doppelpunkt ist; aus
(∂2P
∂X∂Y
∣∣∣∣(a,b)
)2
=∂2P
∂X2
∣∣∣∣(a,b)
∂2P
∂Y 2
∣∣∣∣(a,b)
6= 0 ,
ergibt sich gemaß der zuvor gezeigten Aquivalenz die Zerlegung von P2 in einen doppeltenFaktor, so daß (a, b) kein gewohnlicher Doppelpunkt sein kann.’⇐’: Wird nun die Ungleichung (1.11) vorausgesetzt, so konnen
∂2P
∂X∂Y
∣∣∣∣(a,b)
,∂2P
∂X2
∣∣∣∣(a,b)
,∂2P
∂Y 2
∣∣∣∣(a,b)
nicht zusammen verschwinden und aufgrund der oben gezeigten Aquivalenz gibt es keinendoppelten Faktor in dem Polynom P2, somit ist (a, b) ein gewohnlicher Doppelpunkt. ¤
An dieser Stelle sollen einige Beispiele von affin-algebraischen Kurven betrach-tet werden, welche die im Verlauf dieses Abschnitts angegebenen Definitionen undErgebnisse verdeutlichen sollen.
Beispiel 1.3.12. Betrachten wir zunachst die durch das Polynom
P = Y 3 − Y 2 + X3 −X2 + 3Y 2X + 3X2Y + 2XY
gegebene Kurve C. In der Zusammenfassung
P = (X + Y )3 − (X − Y )2
und der regularen Transformation U := X+Y, V := X−Y , die zum aquivalenten Polynom
Q(U, V ) = P (X(U, V ), Y (U, V )) = U3 − V 2

28 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
-0.5 0.5 1 1.5
-0.5
0.5
1
1.5
u
v
x
y
Bild 1.7: Reeller Schnitt der Neilschen Parabel (X − Y )2 = (X + Y )3
fuhrt, ist wieder die bereits in Beispiel 1.1.6 aufgetretene Neilsche Parabel zu entdecken.Diesmal liegt sie jedoch bzgl. der Koordinaten X und Y nach Bild 1.7 gedreht vor.
Aufgrund der Bemerkung 1.3.10 kann bereits an dieser Stelle festgestellt werden, daßsich die vorliegende Kurve wie jene aus Beispiel 1.1.6 verhalten wird. Die Berechnung vonSingularitaten erfolgt nun gunstigerweise mit Hilfe des Polynoms Q bzw. seinen erstenAbleitungen
Q(u, v) = u3 − v2 = 0,∂Q
∂U(u, v) = 3u3 = 0,
∂Q
∂V(u, v) = −2v = 0,
was zum einzigen singularen Punkt (0, 0) ∈ C fuhrt. Wegen ∂2Q∂V 2 (0, 0) = −2 6= 0 betragt
die Multiplizitat in der Kurve C in der Singularitat zwei. Aus der Faktorisierung von (1.10)
∂2Q
∂U2
∣∣∣∣(0,0)
U2
2!+
∂2Q
∂U∂V
∣∣∣∣(0,0)
UV
1! 1!+
∂2Q
∂V 2
∣∣∣∣(0,0)
V 2
2!= −2
V 2
2= −1 · V · V
ergibt sich die Doppeltangente V = 0 bzw. X = Y in den ursprunglichen Koordinaten.Das bedeutet, daß (0, 0) kein gewohnlicher Doppelpunkt ist. ¤
Beispiel 1.3.13. Nun sei C als Nullstellenmenge von
P = X4 + Y 4 −X2Y 2
definiert. Auch hier liegt wieder die einzige Singularitat in (0, 0) vor, weil in
∂P
∂X(x, y) = 2x(2x2 − y2) = 0 ,
∂P
∂Y(x, y) = 2y(2y2 − x2) = 0
alle Kombinationen verschwindender Faktoren zu (0, 0) fuhren. Erst in den vierten Ablei-tungen
∂4P
∂X4(0, 0) =
∂4P
∂Y 4(0, 0) = 24,
∂4P
∂X2 ∂Y 2(0, 0) = −4
verschwindet P in (0, 0) nicht, so daß C hier also von der Multiplizitat vier ist. Warumdiese Kurve i.G. zum vorhergehenden Beispiel sich im Ursprung so anders verhalt wird

1.3. CHARAKTERISIERUNG VON KURVENPUNKTEN 29
verstandlich, wenn das Polynom P4 aus Definition 1.3.6 betrachtet wird:
P4 =∑
µ+ν=4
∂4P
∂Xµ∂Y ν
∣∣∣∣(0,0)
Xµ Y ν
µ! ν!= X4 −X2Y 2 + Y 4 , (1.12)
was fur m = 4 = Grad(P ) das Ausgangspolynom P selbst sein muß. Ohne zu rechnen,erkennen wir jetzt: P zerfallt (Lemma 1.2.5) vollstandig in lineare Polynome und ist einProdukt von vier Geraden und die Singularitat in (0, 0) deren Schnittpunkt. Damit stelltC die Vereinigung seiner Tangenten in (0, 0) dar. Diese sollen abschließend noch angegebenwerden.
Mit ξ := x2, η := y2 ergibt die Betrachtung von Nullstellen von (1.12) zunachst
ξ2 − ξη + η2 = 0, mit den Losungen ξ = η eiπ/3 oder ξ = η e−iπ/3 ,
so daß (1.12) in
X4 −X2Y 2 + Y 4 = (X2 − Y 2 eiπ/3)(X2 − Y 2 e−iπ/3)= (X − Y eiπ/6)(X + Y eiπ/6)(X − Y e−iπ/6)(X + Y e−iπ/6)
zerfallt. Die vier Tangenten, deren Vereinigung C darstellt, sind also:
X − Y eiπ/6 = 0 , X + Y eiπ/6 = 0 ,
X − Y e−iπ/6 = 0 , X + Y e−iπ/6 = 0 .
Das schematisch zu verstehende Bild 1.8 zeigt, daß lediglich der Schnittpunkt (0, 0)dieser vier Geraden im Reellen liegt – der reelle Schnitt besteht also diesmal nur aus einemeinzigen Punkt. ¤
R2
I (0,0) Rg2
I C2
Bild 1.8: Die Vereinigung von vier Tangenten
Beispiel 1.3.14. In Bild 1.9 wird die durch
P = X3 −X − Y 2
gegebene Kurve C (eingeschrankt auf R2) gezeigt.Die ersten Ableitungen
∂P
∂X(X, Y ) = 3X2 − 1 ,
∂P
∂Y(X, Y ) = −2Y
besitzen nur in (±√
33 , 0) 6∈ C Nullstellen. Die in P gegebene Kurve ist also nichtsingular.
¤

30 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
-1 -0.5 0.5 1 1.5 2
-2
-1
1
2
x
y
Bild 1.9: Reeller Schnitt von Y 2 = X3 −X
Beispiel 1.3.15. Schließlich sei die durch
P = X3 + Y 3 − 3cXY mit c ∈ Rgegebene Kurvefamilie Cc betrachtet, die als “folium cartesii“ bzw. kartesisches Blattbezeichnet wird. Wieder auf R eingeschrankt, ist ein Vertreter fur c > 0 in Bild 1.10dargestellt, wobei a =
√2c/2 gilt.
x
y
a
3a
-c
-c
Bild 1.10: Reeller Schnitt des kartesischen Blattes X3 + Y 3 = 3cXY
Die ersten Ableitungen
∂P
∂X(X,Y ) = 3X2 − 3cy ,
∂P
∂Y(X, Y ) = 3Y 2 − 3cX
besitzen nur in (0, 0) eine Nullstelle, worin die zweiten Ableitungen ∂2P∂X2 = 6X und ∂2P
∂Y 2 =6Y ebenfalls verschwinden. Wegen
∂2P
∂X ∂Y= −c und
∂3P
∂X3=
∂3P
∂Y 3= 6 6= 0
hangt somit die Multiplizitat von Cc in (0, 0) von dem Parameter c ab:
Mult(0,0)(Cc) ={
2, falls c 6= 0,3, falls c = 0.

1.3. CHARAKTERISIERUNG VON KURVENPUNKTEN 31
Im zweiten Fall kann jetzt aufgrund von Satz 1.3.5 bereits festgestellt werden, daß die Kur-ve C0 in drei Geraden zerfallen muß. Diese erhalt man aus der Faktorisierung von (1.10) zu
X3 + Y 3 = (X + Y )(X2 −XY + Y 2) = (X + Y )(X − Y eπi/3)(X − Y e−πi/3) .
Fur c 6= 0 ist die Singularitat (0, 0) ein gewohnlicher Doppelpunkt. Die Tangenten ergebensich unmittelbar bei Aufstellung von (1.10), das in diesem Fall das Aussehen −cXY hatund damit die verschiedenen Tangenten X = 0 und Y = 0 liefert. Das unten dargestellteBild 1.11 zeigt das kartesische Blatt fur verschiedene Werte von c.
Interessant anzumerken ist evtl. noch, daß die Singularitat in (0, 0) bei “kleinstenStorungen“ verschwindet – genauer: die Kurve X3 + Y 3 − 3cXY = ε ist nichtsingular furε 6= 0 mit |ε| klein genug (siehe Bild 1.12). ¤
-2 -1 1 2
-2
-1
1
2c= 0
x
y
-2 -1 1 2
-2
-1
1
2 c= -1
x
y
-2 -1 1 2
-2
-1
1
2c= 1
x
y
-2 -1 1 2
-2
-1
1
2c= 0,5
x
y
Bild 1.11: Reelle Schnitte des kartesischen Blattes X3 + Y 3 = 3cXY ; c = 1; c = 0,5;c = 0 und c = −1
-2 -1 1 2
-2
-1
1
2e= -0,5
x
y
-2 -1 1 2
-2
-1
1
2e= 0,5
x
y
-2 -1 1 2
-2
-1
1
2e= -0,2
x
y
-2 -1 1 2
-2
-1
1
2e= 0,2
x
y
Bild 1.12: “Storung“ des kartesischen Blattes X3 + Y 3 = 3cXY + ε; ε = −0,5; ε = −0,2;ε = +0,2; ε = +0,5

32 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
1.4 Beruhmte algebraische Kurven
Wie kaum eine andere mathematische Disziplin verbindet die Theorie algebraischerKurven fruhe und sehr fruhe Ergebnisse der Mathematik mit denen der modernenForschung. Dieser letzte Abschnitt des Grundlagenkapitels soll eine kleine Ubersicht“beruhmter Kurven“ der Mathematikgeschichte geben. Es wird dabei kein Anspruchauf Vollstandigkeit erhoben, da dieser den Rahmen einer Ubersichtsarbeit sprengte.Es soll vielmehr erreicht werden, den Blick fur eine Vielfalt zu offnen, der als “Motor“der entwickelten Theorie Antrieb verliehen hat, diese Vielfalt nicht einfach nur zubestaunen, sondern sie strukturieren, damit besser verstehen und auch angemessenwurdigen zu konnen.
Zum Teil handelt es sich im folgenden um Kurven, die bereits lange vor ReneDescartes und Pierre de Fermat, die am Beginn der Einfuhrung standen, bekanntwaren. Dennoch hat es seinen guten Grund, diese Arbeit bzw. die in der Einfuhrunggegebene kurze Ideengeschichte mit diesen beiden Mathematikern beginnen zu las-sen, da die Algebraisierung – der eigentliche Gegenstand dieser Arbeit – mit ihnenbegann.
Die Kissoide des Diocles
Mit der Kissoide loste Diocles (240 v.Chr. Carystus - 180 v.Chr.) das Delische Problemder Verdopplung von Kuben. In dem linken Teil des Bildes 1.13 ist diese Kurve zusammenmit ihrem “Bildungsgesetz“ OP = AB zu sehen.
-0.5 0.5 1 1.5 2
-3
-2
-1
1
2
3
x
y
O P
AB
Bild 1.13: Kissoide des Diocles
Danach sind die Abstande OP und AB auf einer durch den Ursprung verlaufendenGeraden gleich. Es ist hierbei O der Ursprung, P der zweite Kurvenpunkt, auf den dieGerade trifft und A bzw. B sind die Schnittpunkte der Geraden mit dem Kreis (vom

1.4. BERUHMTE ALGEBRAISCHE KURVEN 33
Ursprung verschieden) bzw. mit der Geraden X = a, wobei a der Durchmesser des Kreisessei.
Rechts in dem Bild 1.13 ist die von der Kurve und dem Kreis eingeschlossene Flachedargestellt, die an ein Efeublatt erinnert, woher der Name dieser Kurve stammt (griech.κισσoς = Efeu). Man beachte, daß i.G. zur Neilschen Parabel die Kissoide asymptotischist.
Mit Hilfe der Skizze im Bild 1.14 kann ein Kurvenpunkt (x, y) der Kissoide leicht alsFunktion des Winkels ϕ angegeben werden, unter dem die Gerade durch den Ursprungzur x-Achse verlauft.
j 2jO
A
P
B
a
2
a
2
}(1 + cos(2 )j
x
y
Bild 1.14: Parametrisierung der Kissoide
Der Abstand AB berechnet sich danach zu
AB =a
cosϕ−
a2 (1 + cos 2ϕ)
cosϕ=
a2 (1− cos 2ϕ)
cosϕ= OP
so daß zunachstx =
a
2(1− cos 2ϕ) , y =
a
2(1− cos 2ϕ)
sinϕ
cosϕ
entsteht. Mit cos 2ϕ = 1− 2 sin2 ϕ ergibt sich weiter
x = a sin2 ϕ und y = asin3 ϕ
cosϕ,
woraus sich die Winkelfunktionen leicht entfernen lassen: (a− x)y2 = a3 sin6 ϕ = x3 . DieKissoide wird also durch das Polynom
(a−X) Y 2 = X3 (1.13)
definiert. Die Kurve im Bild 1.13 zeigt den Verlauf mit einem Durchmesser von a = 2.Die Kissoide enthalt einen Kurvenpunkt (x0, y0) mit der Eigenschaft
2 y30 = x3
0 , (1.14)
was gerade der oben angesprochenen Losung des Delischen Problems entspricht. DieserPunkt ist der Schnittpunkt der Kurve mit der Geraden
Y = −12
X +a
2. (1.15)

34 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Denn aus (1.15) folgt fur den Schnittpunkt 2y0 = a− x0, was in (1.13) zu der Beziehung(1.14) fuhrt. Das Bild 1.15 zeigt die geometrischen Verhaltnisse wieder mit a = 2; alsnumerische Werte ergeben sich
x0 = 0.7729764191286187 , y0 = 0.6135117904356906 .
2
1
1
+
=x
x
y
y
y
0
0
0
0
0
Bild 1.15: Losung des Delischen Problems: 2y30 = x3
0
Die Versiera der Agnesi
Diese Kurve 7 nach Maria Gaetana Agnesi (1718 Milan - 1799 Milan) wird nach Bild1.16 definiert, d.h. eine durch den Ursprung verlaufende Gerade schneide einen Kreis vomDurchmesser a nach Skizze in dem (vom Ursprung verschiedenen Punkt) A = (xA, yA)und die senkrecht verlaufende Gerade X = a im Punkt B = (xB, yB), dann ist der auf derKurve liegende Punkt durch P := (xA, yB) festgelegt.
Analog zu den Verhaltnissen der Kissoide ergibt sich uber den Winkel
ϕ = ](OB, x−Achse)
die folgende parametrisierte Darstellung
x(ϕ) =a
2(1 + cos 2ϕ) = a cos2 ϕ , y(ϕ) = a tanϕ = a
sinϕ
cosϕ,
woraus sich die Winkelfunktionen wieder eliminieren lassen:
a2(a− x) = a2 · a (1− cos2 ϕ
)= a3 sin2 ϕ = xy2 .
Das die Kurve definierende Polynom ist also
XY 2 = a2(a−X) .
7Im angelsprachigen Raum ist sie als ’The Witch of Agnesi’ bekannt.

1.4. BERUHMTE ALGEBRAISCHE KURVEN 35
-0.5 0.5 1 1.5 2
-3
-2
-1
1
2
3
x
y
O
P
A
B
Bild 1.16: Die Versiera der Agnesi
Die Konchoide des Nicomedes
Gegeben sei eine zur x-Achse im Abstand a parallel verlaufende Gerade. Eine durch denUrsprung gehende Gerade schneide die Konchoide in den Punkten P und P′ bzw. dieParallele zur Abszisse in dem Punkt A. Dann ist nach Bild 1.17 P′A = AP = k = const.
-8 -6 -4 -2 2 4 6 8
1
2
3
4
x
y
OP’
A
P
Bild 1.17: Konchoide des Nicomedes: 2 = a > k = 1
Je nach den Verhaltnissen von a und k ergeben sich unterschiedliche Ausformungender Kurve. In dem Bild 1.17 ist a > k, in 1.18 der Fall a = k und in 1.19 schließlich a < kzu sehen.
Mit dieser Kurve loste Nicomedes (280 v.Chr. - 210 v.Chr.) ein ebenfalls klassischesProblem der antiken Geometrie: die Dreiteilung des Winkels. Der Name der Kurve ruhrtvon der muschelformigen Gestalt (griech. κoνχη = Muschel).
Das die Kurve definierende Polynom wird wieder aus einer Parametrisierung gewonnen.

36 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
-8 -6 -4 -2 2 4 6 8
1
2
3
4
x
y
Bild 1.18: Konchoide des Nicomedes: a = k = 2
-8 -6 -4 -2 2 4 6 8
-2
2
4
6
x
y
Bild 1.19: Konchoide des Nicomedes: 2 = a < k = 4
Diese ergibt sich zunachst nach Bild 1.20 zu
x(ϕ) =(
a
sinϕ+ k
)· cosϕ , y(ϕ) = a + k sinϕ ,
woraus die Winkelfunktionen wieder entfernt werden konnen und sich das die Konchoidebestimmende Polynom zu
(Y − a)2(X2 + Y 2) = k2Y 2
ergibt.Kann die Konchoide als Kurvenzug konstruiert werden, kann ein gegebener Winkel
in der folgenden Weise gedrittelt werden. Es sei der Winkel α = ]AOB nach Bild 1.21gegeben, so daß B der Fupunkt des in A auf den anderen Winkelschenkel gefallten LotesG ist. Jetzt wird die Konchoide K zu G und dem Scheitel O gezeichnet, wobei k = 2OAsei (Anm.: es gilt a = OB und k = AP). Die durch A verlaufende Parallele zum SchenkelOB schneidet die (dem Punkt O abgewandte Seite der) Konchoide K im Punkt C. DerWinkel β = ]BOC ist ein Drittel des Ausgangswinkels: β = 1
3α.Die Begrundung wird in dem Bild 1.22 gegeben: es sei E der Schnittpunkt von OC
mit G und D der Mittelpunkt der Strecke CE. Nach Konstruktionsprinzip der Konchoide

1.4. BERUHMTE ALGEBRAISCHE KURVEN 37
j
a
kk sin j
k cos j
x
y
{cos j a / sin jO
Bild 1.20: Parametrisierung der Konchoide des Nicomedes
OO
AA
P
BB
C
a
bK
GG
Bild 1.21: Dreiteilung des Winkels α (I)
ist DA = AO. Das Dreieck 4OAD ist also gleichseitig, so daß sich γ′ = γ ergibt. Wegenγ′ = 2β (Winkelbeziehung am Punkt D) und α = β + γ, folgt daraus die Behauptungα = 3β.
O
A
P
B
C
D
E
b
b
b
g
g
K
G
k
Bild 1.22: Dreiteilung des Winkels α (II)

38 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Die Cassinischen Kurven
Es seien zwei Punkte A und B im Abstand 2a gegeben. Die zugehorige Cassinische Kurveist dann die Menge aller Punkte P, fur die mit einer Konstanten k gilt PA ·PB = k2. Fura = 2 und verschiedene Werte fur k zeigt das Bild 1.23 verschiedene Cassinische Kurven.
-4 -2 2 4
-2
-1
1
2
x
y
A B
Bild 1.23: Cassinische Kurven: a = 2, k =1,9 ; 2 ; 2,2 und 2,8 (von innen nach außen)
Mit der im R2 ublichen Norm ‖ · ‖ kann das die Kurven definierende Polynom leichtangegeben werden. Mit A = (−a, 0), B = (a, 0) und wie ublich P = (x, y) gilt
‖(x, y)− (−a, 0)‖2 ‖(x, y)− (a, 0)‖2 = k4 ,
so daß sich als Polynom(X2 + Y 2 + a2)2 − 4a2X2 = k4 (1.16)
ergibt. Diese Kurven wurden von dem italienischen Astronomen Giovanni Domenico Cas-sini (1625 Perinalde - 1712 Paris) erfunden, der meinte, daß die Sonne auf einer derartigenkonvexen Kurve die Erde umlauft, wobei die Erde in einem der Brennpunkte steht.
Im Fall a = k liegt eine Kurve mit einem gewohnlichen Doppelpunkt vor: dies ist dieLemniskate von Jacob Bernoulli (1654 Basel - 1705 Basel) (ληµνισκoς = Schleife inForm einer 8). Das Polynom (1.16) reduziert sich in diesem Fall auf
(X2 + Y 2)2 = 2a2(X2 − Y 2) ,
bzw.(X2 + Y 2)2 = 4a2XY ,
wenn ein um 45◦ gedrehtes Koordinatensystem verwendet wird (siehe Bild 1.24).Diese Kurven waren in einem anderen Zusammenhang aber bereits viel fruher bekannt!
Nachdem schon Menachmos (ca. 350 v.Chr.) durch Schneiden eines Kegels mit einerEbene die (von Apollonius von Pergae (262 v.Chr. Perga - 190 v.Chr. Alexandria)intensiv untersuchten Kegelschnitte) Ellipse, Hyperbel und Parabel 8 gefunden hatte,
8Die Ursprunge der einfachsten Kurven Gerade und Kreis liegen in vorgeschichtlicher Zeit. Siekommen bereits in fruhesten mathematischen Schriften vor und die ersten Versuche, zu strengenDefinitionen und Beweisen zu kommen – Thales von Milet (624 v.Chr. Miletus - 547 v.Chr.Miletus) – beschaftigten sich mit diesen Objekten.

1.4. BERUHMTE ALGEBRAISCHE KURVEN 39
-2 -1 1 2
-2
-1
1
2
x
y
Bild 1.24: Bernoullische Lemniskate
kam der griechische Mathematiker Perseus (ca. 150 v.Chr.) auf die Idee, einen Torus miteiner Ebene parallel zur Rotationsachse zu schneiden. Die Griechen nannten den TorusSpira (griech. σπιρα = Spira), so daß diese Schnittkurven auch als die Spiren des Perseusbezeichnet werden.
Sie stehen mit den Cassinischen Kurven in folgendem Zusammenhang. Ist r der Radiuseines Kreises, der um eine Achse im Abstand R vom Kreismittelpunkt rotiert, so entstehtein Torus nach Bild 1.25, der in der folgenden Weise parametrisiert ist:
x(φ, ψ)y(φ, ψ)z(φ, ψ)
=
(R + r cosφ) cos ψ(R + r cosφ) sin ψ
r sinφ
. (1.17)
-2
0
2
-2
0
2
-1-0.5
00.51
-2
0
2
Bild 1.25: Torus mit R = 2 und r = 1

40 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Nun sei d der Abstand der Schnittebene von der Achse. Dann sind die Spiren desPerseus die Cassinischen Kurven genau dann, wenn d = r ist. In diesem Fall gilt a = Rund 2rR = k2. Die Cassinischen Kurven sind also Spezialfalle der Spiren des Perseus. Dieskann wie folgt eingesehen werden. Zuerst werden die polynomialen Beziehungen Spirendurch Entfernen der Winkelfunktionen aus (1.17) bestimmt: etwa mit Hilfe von Mathema-tica durch
Eliminate[{ X==(R + r Cos[phi])Cos[psi], Y==(R + r Cos[phi])Sin[psi],
Z==r Sin[phi],
(Sin[phi])^2 + (Cos[phi])^2==1, (Sin[psi])^2 + (Cos[psi])^2==1},
{ Sin[phi], Cos[phi], Sin[psi], Cos[psi] }]
X^4 + X^2 (− 2 r^2 − 2 R^2 + 2 Y^2 + 2 Z^2) ==
−r^4 + 2 r^2 R^2 − R^4 + 2 r^2 Y^2 + 2 R^2 Y^2
− Y^4 + 2 r^2 Z^2 − 2 R^2 Z^2 − 2 Y^2 Z^2 − Z^4
Das ergibt zunachst das Polynom
r4 + R4 + (X2 + Y 2 + Z2)2 = 2R2(X2 + Y 2 − Z2) + 2r2(R2 + X2 + Y 2 + Z2)
in R[X,Y, Z] mit den freien Variablen als Achsen. Wird der Torus in Y = d geschnitten,erhalten wir ein Polynom in X und Z, das
r4 + R4 + (d2 + X2 + Z2)2 = 2R2(d2 + X2 − Z2) + 2r2(R2 + d2 + X2 + Z2)
lautet. Fur d = ν4 , ν = 0, . . . , 12, sind die Spiren des Perseus in den Bildern 1.26 und
1.27 dargestellt. Dabei kann man sich vorstellen, wie der Torus in der Mitte beginnendfortlaufend bis zum Ende geschnitten wird. Wegen r = 1 ist die vorkommende Lemniskateeine der Cassinischen Kurven.
-3 -2 -1 1 2 3
-1
-0.5
0.5
1
x
z
Bild 1.26: Spiren des Perseus aus einem Torus mit R = 2 und r = 1
Ist nun d = r, so entsteht (mit der Umbezeichnung Y = Z) das Polynom
(X2 + Y 2 + R2)2 − 4R2X2 = 4R2r2 ,
das verglichen mit (1.16) gerade die oben angegebenen Beziehungen ergibt.

1.4. BERUHMTE ALGEBRAISCHE KURVEN 41
-2
0
2
-1-0.50
0.5
1
-1-0.50
0.5
Bild 1.27: Spiren des Perseus in raumlicher Darstellung
Die limacon des Pascal
Die Menge aller Punkte P, die nach Bild 1.28 einen festen Abstand AP = k auf einer durchden Ursprung verlaufenden Gerade wahren, wobei A der von O verschiedene Schnittpunktauf einem Kreis vom Durchmesser a ist, werden als limacon bzw. Schnecke des Pascalbezeichnet.
-1 1 2 3 4 5
-3
-2
-1
1
2
3
x
y
O
P
A
Bild 1.28: Definition der limacon des Pascal
Das Bild 1.29 zeigt verschiedene Falle fur k = 1, 2 und 3, wobei stets a = 2 gilt. Liegtder Mittelpunkt des Kreises vom Durchmesser a nach Bild 1.28 im Punkt (0, a/2), so kanndie Abhangigkeit der Polarkoordinaten der Kurve unmittelbar angegeben werden:
r = a cos θ + k . (1.18)

42 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
-1 1 2 3 4 5
-3
-2
-1
1
2
3
x
y
-1 1 2 3 4 5
-3
-2
-1
1
2
3
x
y
-1 1 2 3 4 5
-3
-2
-1
1
2
3
x
y
Bild 1.29: limacon des Pascal: a = 2 und k = 1; 2; 3 (von links nach rechts)
Eine Angabe in kartesischen Koordinaten ergibt sich unter Beachtung von
cos2 θ =1
1 + tan2 θ, tan θ =
y
xund r2 = x2 + y2 ,
was mit (1.18) zur = a
x
r+ k bzw. (r2 − ax)2 = k2r2
fuhrt. Das die limacon des Pascal definierende Polynom ist also
(X2 + Y 2 − aX)2 = k2(X2 + Y 2) .
Als Spezialfall k = a (siehe mittlere Kurve im Bild 1.29) ergibt sich die Kardioide (s.u.Seite 44).
Im Fall a = 2k (linker Teil im Bild 1.29) kann die limacon zur Winkeldreiteilungeingesetzt werden: dazu wird ein Winkel α von der x−Achse und einer Geraden im Punkt(12a, 0) = (k, 0) abgetragen; die Gerade treffe die limacon im Punkt P; eine zweite Gerade,
die O und P verbindet bildet nun mit der ersten Gerade einen Schnittwinkel von 13α (siehe
Bild 1.30).Zum Beweis betrachten wir die rechts im Bild 1.30 dargestellte Skizze, welche die
geometrischen Verhaltnisse aus Bild 1.30 herausarbeitet. Es gilt zunachst
α = β + γ . (1.19)
Uber den Cosinussatz erhalten wir weiter den folgenden Zusammenhang fur die mit wbezeichnete Strecke
w2 = k2 + k2(2 cos γ + 1)2 − 2k2(2 cos γ + 1) cos γ
= 2k2(cos γ + 1) . (1.20)
Aus cos γ = xk(2 cos γ+1) ergibt sich eine Beziehung fur die die Differenz
x− k = k(2 cos2 γ + cos γ − 1
).
Das schließlich fuhrt mit (1.20) zu
cos2 α =(x− k)2
w2=
k2(2 cos2 γ + cos γ − 1
)2
2k2(cos γ + 1)=
12
(2 cos2 γ + cos γ − 1
)(2 cos γ − 1) ,

1.4. BERUHMTE ALGEBRAISCHE KURVEN 43
0.5 1 1.5 2 2.5 3 3.5
-1
1
2
x
y
O
P
k
k
k
k
α
α 3
y
xx k-k
k(2
cos
+ 1)
g
w
a
b
g
g} }P
O
Bild 1.30: Dreiteilung eines Winkel α an der limacon mit a = 2 und k = 1
woraus sich
cos 2α = 2 cos2 α− 1=
(2 cos2 γ + cos γ − 1
)(2 cos γ − 1)− 1
= 4 cos3 γ − 3 cos γ
= cos 3γ
ergibt, d.h. es gilt
2α = 3γ bzw. γ =23α ,
was mit (1.19) die Aussage β = 13α liefert.
Die Trisektrix
Diese Kurve fuhrt ihren “Verwendungszweck“ bereits im Namen, wie die Konchoide unddie limacon des Pascal kann mit ihr das klassische Problem der Winkeldreiteilung durch-gefuhrt werden. Sie wurde von Colin MacLaurin erfunden und geht die Winkeldreiteilungdirekt an. Nach Bild 1.31 wird bei gegebenen Punkten O und S fur jede durch O unterdem Winkel ϕ verlaufende Gerade eine durch S verlaufende Gerade konstruiert, welchedie x−Achse im Winkel von 3ϕ schneidet: der Schnittpunkt beider Geraden sei der PunktP. Bei variablem Winkel ϕ ist die Trisektrix die Menge der Schnittpunkte P.
Mit dem Winkel ϕ und OS = 2a ergibt sich eine Parametrisierung der Kurve aus demSchnittpunkt der beiden oben angegebenen Geraden
Y −X tan ϕ = 0 und Y −X tan 3ϕ + 2a tan 3ϕ = 0
zux(ϕ) = 2a
tan 3ϕtan 3ϕ− tanϕ
, y(ϕ) = 2atan 3ϕ tanϕ
tan 3ϕ− tanϕ.

44 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
P
O
j 3j
S
Bild 1.31: Entstehung der Trisektrix
Die Winkelfunktion kann durch die Beziehung
tan 3ϕ =3 tanϕ− tan3 ϕ
1− 3 tan2 ϕ
eliminiert werden, was wieder in Mathematica durchgefuhrt wird (dabei steht t abkurzendfur tanϕ und t3 fur den Ausdruck tan 3ϕ):
Eliminate[{ Y − X t == 0, Y − X t3 + 2 a t3 == 0,
(1 − 3 t^2) t3 == 3 t − t^3 }, {t, t3}]
X^2 ( − 3 a + X) Y + (a + X) Y^3 == 0
Lassen wir die triviale Losung Y = 0 fort, so ergibt sich
(a + X)Y 2 = X2(3a−X)
als die Trisektrix definierendes Polynom. Das Bild 1.32 zeigt die Trisektrix als Ganzes (mita = 1). Gleichzeitig ist die jetzt durchfuhrbare Winkeldreiteilung zu sehen: ein gegebenerWinkel α wird einfach im Punkt S an der x−Achse abgetragen, der von der x−Achseverschiedene Schenkel des Winkels treffe die Trisektrix auf der dem Winkel zugewandtenSeite im Punkt P, dann gilt ]SOP = 1
3α.
Weitere algebraische Kurven
Epi- und Hypozykloiden entstehen durch Abrollvorgange zweier Kreise, je nach den Verhalt-nissen der Radien und des “Auslaufers“ entstehen dabei algebraische oder transzendenteKurven (siehe auch Einfuhrung). Das Bild 1.33 verdeutlicht den Vorgang des Abrollens, in[Netz83] oder auch [BS85] wird umfangreiches Material zur Beschreibung dieser Kurvenangegeben (im Abschnitt 4.1 kommen wir kurz auf diese Kurven zuruck).
Die Epizykloide (Epitrochoide) entsteht, indem ein Kreis mit dem Radius r außenauf einem zweiten Kreis vom Radius R abrollt (Parameterdarstellung, z.B. [Netz83]):
(x(τ)y(τ)
)= (R + r)
(cos(τ)sin(τ)
)− a
(cos
(R+r
r τ)
sin(
R+rr τ
))
.
Spezielle Epizykloiden sind die Kardioide mit R = r = a und die Nephroide mitR = 2r = 2a, die in dem Bild 1.34 dargestellt sind.

1.4. BERUHMTE ALGEBRAISCHE KURVEN 45
-1 1 2 3
-3
-2
-1
1
2
3
x
y
O S
P
αα 3
Bild 1.32: Trisektrix mit a = 1 und Prinzip der Winkeldreiteilung
R R
rr
a
a
t t
x x
yy
Bild 1.33: Entstehung der Epi- und Hypozykloide
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
-4 -2 2 4
-4
-2
2
4
Bild 1.34: Kardioide: R = r = a = 1 und Nephroide: R = 2, r = a = 1

46 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Als definierende Polynome ergeben sich (die Darstellung wurde analog zur Vorgehens-weise im Beispiel 4.1.8, im Abschnitt 4.1 des Kapitels uber Singularitaten auf Seite 178,gefunden; eine intensivere Betrachtung wird zudem weiter unten im Zusammenhang mitSchwingungen gefuhrt):
Kardioide : 8R3X + (X2 + Y 2)2 = 3R4 + 6R2(X2 + Y 2) , (1.21)
Nephroide : 3R4(4X2 − 5Y 2) + 4(X2 + Y 2)3 = 4R2(R4 + 3(X2 + Y 2)2
). (1.22)
Die auftretenden Kurven konnen recht schnell zu aufwendigen Verlaufen fuhren, dienurmehr mit Polynomen sehr hoher Ordnung zu beschreiben sind. Das Bild 1.35 zeigt zweisolcher Falle, wobei darauf verzichtet wurde, die Polynome zu bestimmen.
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
Bild 1.35: Zwei Epizykloiden mit: R = 2, a = 1 und r = 12 (links), sowie r = 1
4 (rechts)
Bei der Hypozykloide (Hypotrochoide) rollt ein Kreis vom Radius r innen auf einemweiteren Kreis vom Radius R ab (Parameterdarstellung, z.B. [Netz83]):
(x(τ)y(τ)
)= (R− r)
(cos(τ)sin(τ)
)+ a
(cos
(R−r
r τ)
− sin(
R−rr τ
))
.
Spezielle Hypozykloiden sind das Deltoid mit R = 3r = 3a und die Astroide mit R =4r = 4a, die in dem Bild 1.36 dargestellt sind.
Werden die Winkelfunktionen wieder (unter Einsatz der Additionstheoreme) elimi-niert, so ergibt sich
3Y 2(2R2 + 8RX + 2X2 + Y 2) = (R−X)3(R + 3X) (1.23)
als Polynom fur das Deltoid und fur die Astroide der Ausdruck
3R4(X2 + Y 2) + (X2 + Y 2)3 = R6 + 3R2(X4 − 7X2Y 2 + Y 4) , (1.24)
der zeigt, daß die vierspitzige Hypozykloide bereits eine Kurve sechster Ordnung ist!Die dreispitzige Hypozykloide wurde von Leonhard Euler 1745 im Zusammenhang mit
optischen Problemen untersucht. Spater (1857) studierte sie auch Jakob Steiner (1796Utzenstorf - 1863 Bern), weswegen sie auch Steinersche Hypozykloide heißt. Sie besitzt

1.4. BERUHMTE ALGEBRAISCHE KURVEN 47
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
-4 -2 2 4
-4
-2
2
4
Bild 1.36: Deltoid und Astroide
die folgende faszinierende Eigenschaft ([Ogilvy79]): im Jahre 1917 fragte der japanischeMathematiker S. Kakeya nach der kleinsten Flache, in der eine Strecke der Lange 1 um360◦ gedreht werden kann. In den nachsten zehn Jahren wurde das Problem von erstklas-sigen Mathematikern in Angriff genommen: ohne Erfolg. Ein Kreis vom Durchmesser 1erfullt die Bedingung der Drehung um 360◦ sicher; mit einer Flache von π/4 ≈ 0, 78 istdiese allerdings recht groß. Besser ist ein gleichseitiges Dreieck, wobei die Strecke durchgeschicktes Hin- und Herbewegen (wenn die Strecke das Ende des in Bild 1.37 eingezeich-neten Bogens erreicht) herumgedreht werden kann – Flache:
√(3)/3 ≈ 0, 58. Noch besser
aber ist das Deltoid mit einer “Hohe“ von 1, das einen Flacheninhalt von π/8 besitzt: dasist halb so viel wie beim Kreis!
Bild 1.37: Das Problem des Kakeya (I)
In dem Jahrzehnt, wahrend das Problem ungelost blieb, wurde allgemein angenom-men, daß die Flache von π/8 nicht vermindert werden konne. Dann befaßte sich AbramSamoilovitch Besicowitsch (1891 Berdyansk - 1970 Cambridge, Cambridegeshire) mitdem Problem, der seine unerwartete Losung 1928 veroffentlichte: er bewies, daß es keinekleinste Flache gibt! Die Flache, in der die Einheitsstrecke um 360◦ gewendet werden kann,kann beliebig klein gemacht werden. Der Trick liegt in einer Vielzahl von Bewegungen: Ver-schiebungen langs der Strecke, die keinen Platz “kosten“, und Drehungen von sehr kleinenWinkeln. Der Beweis wird in [Ogilvy79] angedeutet und lauft auf eine Uberlappung vonFlachen hinaus, auf denen die winzigen Rotationen unter Einschalten von Translationenreduziert werden konnen.

48 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Angenommen wir mochten die Einheitsstrecke um 30◦ drehen (wie unten links im Bild1.38 angedeutet), d.h. die Strecke soll von Zustand x in den Zustand z versetzt werden.Nach einer Drehung von 15◦ bis zum Zustand y wird die Drehung gestoppt und die Streckein die Lage y′ verschoben (siehe rechts). Das kostet – durch entsprechend kleine Rotatio-nen und entsprechend große Translationen in Richtung der Strecke (wie in der Bildmittein allgemeiner Lage angedeutet) – eine (gestrichelt gezeichnete) Flache, die kleiner als diegepunktete (oben rechts) ist. Dann kann die Drehung um weitere 15◦ fortgesetzt werden.Durch die gewonnene Uberlappung wurde die Flache des sonst benotigten Dreieckes erheb-lich reduziert. Durch eine geistreiche Kombination solcher Bewegungen war Besicowitschimstande, zu zeigen, wie man unter jeden fest vorgegebenen Flacheninhalt bleibt.9
x
y
yy’
z
Bild 1.38: Das Problem des Kakeya (II)
Auch bei den Hypozykloiden konnen mit hohen Radienverhaltnissen wieder ebensoschone wie hochgradige Kurven entstehen; einen Eindruck hiervon soll das Bild 1.39 ver-mitteln.
-6 -4 -2 2 4 6
-6
-4
-2
2
4
6
-6 -4 -2 2 4 6
-6
-4
-2
2
4
6
Bild 1.39: Zwei Hypozykloiden mit: R = 5, a = 2 und r = 1 (links), sowie r = 12 (rechts)
9Dabei bleiben eine Reihe von offenen Fragen: die von Besicowitsch konstruierte Flache ist einvielfach verbundener Bereich; kann ein einfach zusammenhangender Bereich die Flache des Deltoidsunterschreiten? Dies ist in der Tat so und ein “funfzackiges Gebiet“ benotigt nur 3/4 der Flachedes Deltoids, um die Einheitsstrecke vollstandig zu drehen. In diesem Zusammenhang tauchen eineReihe von weiteren Fragen auf ...

1.4. BERUHMTE ALGEBRAISCHE KURVEN 49
Die Epizykloiden treten in den folgenden Vorgangen (unerwartet) wieder in Erschei-nung. Betrachten wir eine Teetasse nach Bild 1.40, die aus einer punktformigen Lichtquellein (−1, 0) beleuchtet wird. Welches Muster bildet die Reflektionsfront, die sogenannte Ka-takaustik aus, die auch gut zu beobachten ist, wenn eine Tasse in das Sonnenlicht gehaltenwird?
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild 1.40: Eine Teetasse mit punktformiger Lichtquelle in (−1, 0)
Die Losung zeigt das Bild 1.41, links. In der rechten Abbildung wurden nur die reflek-tierten Strahlen dargestellt, da das einfallende Licht gar nicht wahrgenommen wird. Dieeingezeichnete Hullkurve (Enveloppe) legt die Vermutung nahe, daß sich eine Kardioideausbildet, was im Anhang H.4 gezeigt wird. 10
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild 1.41: Die Katakaustik bei punktformiger Lichtquelle
10Dem Konzept der algebraischen Kurven gemaß, wird dieser Nachweis mit Hilfe von dualenKurven gefuhrt, die erst im Kapitel 5 eingefuhrt werden.

50 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Tritt parallel einfallendes Licht auf das innere einer Teetasse bzw. allgemein einesgewoblten Spiegels – Bild 1.42, dann bildet sich eine Nephroide aus. Das Bild 1.43 zeigt dieeine Halfte der Nephroide als Einhullende der Reflektionsfront. Auch fur diese Katakaustikwird der Nachweis, eine Nephroide auszubilden im Anhang H.4 gefuhrt.
-1.5 -1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild 1.42: Eine Teetasse mit parallel einfallendem Licht
-1.5 -1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild 1.43: Die Katakaustik bei parallel einfallendem Licht
Abschließend sei erwahnt, daß auch die vierspitzige Hypozykloide als Einhullende inErscheinung tritt. Nach Bild 1.44 verbleibe ein Stab mit seinen Endpunkten auf demAchsenkreuz, bewege sich aber ansonsten beliebig. In dem Bild 1.45 ist die sich ausbildendeEnveloppe zu sehen, die eine Astroide ist. Wieder sei auf den Anhang H.4 verwieden, woder Nachweis dieser Auspragung gefuhrt wird.

1.4. BERUHMTE ALGEBRAISCHE KURVEN 51
Bild 1.44: Bewegung eines Stabes mit den Endpunkten auf dem Achsenkreuz
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild 1.45: Astroide als Einhullende
Die Lissajous-Kurven 11 entstehen gewissermaßen durch “senkrecht zueinander verlau-fende Schwingungen“, d.h. es werden zwei “eigenstandige“ Schwingungen x(t) und y(t) alsPhasenportrait dargestellt, womit wir wieder eine parametrisch dargestellte Kurve erhal-ten. Diese Familie von Kurven wird somit durch
x(t) = a sin(ω1t) , y(t) = b sin(ω2(t + t0))
beschrieben, wobei a, b, ω1, ω2, t0 ∈ R konstante Parameter sind (es sei ω1, ω2 > 0). Istdas Verhaltnis der beiden Kreisfrequenzen ω1 und ω2 rational, d.h. ω1
ω2∈ Q, so kann mit
ganzen, positiven Zahlen m, n ∈ N mit mn = ω1
ω2per Substitution
mτ := ω1 t und nτ := ω2 taus den Beziehungen
x(τ) = a sinmτ , y(τ) = b cos(ω2t0) sin nτ + b sin(ω2t0) cos nτ (1.25)
ein Gleichungssystem gewonnen werden, das zu einem Polynom aufgelost werden kann(siehe Elimination nach [WaerdenII]). Das garantiert dann (wie oben bei den Epi- und
11Diese Kurven wurden 1850 in Europa zuerst von Jules Antoine Lissajous (1822 Versailles -1880 Plombieres) behandelt. Von dem amerkanischen Mathematiker und Astronomen NathanielBowditch (1773 Salem - 1838 Boston) wurden sie allerdings bereits 1815 im Zusammenhang mitder Bewegung eines Doppelpendels untersucht.

52 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Hypozykloiden) im Falle rationaler Radienverhaltnisse, daß diese Kurven algebraischerNatur sind.
Bevor wir uns diesen Vorgang der Bestimmung algebraischer Beziehungen aus derParametrisierung mit trigonometrischen Funktionen anhand der Lissajous-Kurven genaueruntersuchen, betrachten wir einige dieser Kurven in den Bildern 1.46, 1.47 und 1.48; dieVerhaltnisse der Kreisfrequenzen ω1 : ω2 sind in den jeweiligen Bildern vermerkt.
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
2:1
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
3:1
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
3:2
Bild 1.46: Lissajous-Kurven mit a = b = 1, t0 = π/6 und ω1 : ω2 nach Angabe
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
2:1
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
3:1
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
3:2
Bild 1.47: Lissajous-Kurven mit a = b = 1, t0 = π/5 und ω1 : ω2 nach Angabe
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
5:3
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
5:4
Bild 1.48: Lissajous-Kurven mit a = b = 1, t0 = π/2 und ω1 : ω2 nach Angabe

1.4. BERUHMTE ALGEBRAISCHE KURVEN 53
Jetzt nehmen wir die Bestimmung der hier waltenden algebraischen Beziehungen inAngriff. Zunachst benotigen wir die Additionstheoreme fur das n bzw. m−fache einesWinkels. Dies geschieht am gunstigsten aus der Moivreschen 12 Beziehung (durch Vergleichder Real- und Imaginarteile)
cos νϕ + i sin νϕ = (cosϕ + i sinϕ)ν =ν∑
k=0
ik(
ν
k
)cosν−k τ sink τ
und liefert die beiden Beziehungen
sin νϕ =ν∑
k∈Nu
(−1)(k−1)/2
(ν
k
)cosν−k τ sink τ
und
cos νϕ =ν∑
k∈Ng
(−1)k/2
(ν
k
)cosν−k τ sink τ .
Fur die Lissajous-Kurven gilt damit, daß sich ihre parametrisierten Koordianten aus denfolgenden Summen zusammensetzen
x(τ) = a sinmτ =m∑
k∈Nu
(−1)(k−1)/2 a
(m
k
)
︸ ︷︷ ︸=:αk
cosm−k τ sink τ
undy(τ) = b cos(ω2t0) sin nτ + b sin(ω2t0) cos nτ
=n∑
k∈Nu
(−1)(k−1)/2 b cos(ω2t0)(
n
k
)
︸ ︷︷ ︸=:βk
cosn−k τ sink τ +
n∑
k∈Ng
(−1)k/2 b sin(ω2t0)(
n
k
)
︸ ︷︷ ︸=:βk
cosn−k τ sink τ .
Kurzen wir jetzt noch
c := cos τ , s := sin τ , X := x , Y := y
ab und definieren αk := 0 fur alle geraden k ∈ N0, so entsteht das Gleichungssystem
X =∑m
k=0 αkcm−ksk ,
Y =∑n
k=0 βk cn−ksk ,
1 = c2 + s2 ,
aus dem c und s nach [WaerdenII] eliminierbar sind. Das soll mit Hilfe von Mathematicaan zwei Beispielen demonstriert werden.
12Abraham de Moivre (1667 Vitry - 1754 London)

54 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
Zuerst betrachten wir ein Winkelverhaltnis von ω1 : ω2 = 2 : 1 mit den Angaben ausBild 1.46, links. Wir definieren die Kreisfrequenzen, die Phaenverschiebung und die Bezie-hungen der Schwingungen nach (1.25), nehmen eine trigonometrische Erweiterung vor undkonnen dann schließlich die mit c und s (fur cos und sin) abgekurzten Winkelfunktioneneliminieren:
ω1 = 2; ω2 = 1; t0 = π/6;Sin[ω1 t]
Cos[ω2 t0] Sin[ω2 t] + Sin[ω2 t0] Cos[ω2 t] TrigExpand[Sin[2t]]
Sin[2t] 2 Cos[t] Sin[t]
Cos[t]/2 + √3 Sin[t]/2
Eliminate[{X == 2 c s, Y == c/2 + √3 s / 2, c^2 + s^2 == 1}, {c, s}]
4 X^2 + √3 X (4 − 8 Y^2) == −3 + 16 Y^2 − 16 Y^4
Der links im Bild 1.46 gezeigte Kurvenzug ist also eine durch
P2:1 = X2 +√
3X(1− 2Y 2) + 4Y 4 − 4Y 2 + 3/4
definierte algebraische Kurve. Werden die Angaben nach Bild 1.46, rechts, verarbeitet,entsteht die folgende Sequenz von Kommandos:
ω1 = 3; ω2 = 2; t0 = π/6;Sin[ω1 t]
Cos[ω2 t0] Sin[ω2 t] + Sin[ω2 t0] Cos[ω2 t]
Sin[3t]
√3 Cos[2t]/2 + Sin[2t]/2
TrigExpand[Sin[3t]]
TrigExpand[√3 Cos[2t]/2 + Sin[2t]/2]
3 Cos[t]^2 Sin[t] − Sin[t]^3
√3 Cos[t]^2 / 2 + Cos[t] Sin[t] − √3 Sin[t]^2 / 2
Eliminate[{X == 3 c^2 s − s^3, Y == √3 c^2 / 2 + c s − √3 s^2 / 2,
c^2 + s^2 == 1}, {c, s}]
Y^2 (−9 + 24 Y^2 − 16 Y^4) == − 4 X^2 + 4 X^4
Diese Kurve also wird durch folgendes Polynom definiert:
P3:2 = X4 −X2 + Y 2(2Y 2 − 3/2)2 .

1.4. BERUHMTE ALGEBRAISCHE KURVEN 55
Keine algebraischen Kurven
... sind nach unserer Definition auf Seite 12 also solche, die sich nicht als Nullstellenmengeeines Polynoms darstellen lassen. Auch diese sind recht vielfaltiger Natur mit z.T. wich-tigen Anwendungen. Manchesmal lernt man ein Gebiet erst schatzen und kennen, wennman auch einen Blick auf die Grenzen oder daruber hinaus geworfen hat. Das soll jetztnoch in der hier gebotenen Kurze in Form einer Ubersicht erfolgen (es wird also bewußtauf eine Ableitung der einzelnen Kurven verzichtet und nur ihre Herkunft angedeutet).
Wir beginnen mit den einfachen Kurven (x, sinx) und (x, ex), die beide nicht algebra-isch sind. Das bedeutet aber nicht, daß jede Parametrisierung mit transzendenten Funk-tionen automatisch nicht algebraischer Art ware: ein Gegenbeispiel sind die Epi- undHypozykloiden mit r/R ∈ Q – siehe oben. Ein wesentliches Erkennungsmerkmal, nachdem nicht algebraische Kurven aussortiert werden konnen, ist der Satz von BEZOUT, der(vereinfacht bzw. in schwacher Form) besagt, daß die Anzahl der Schnittpunkte einer alge-braischen Kurve mit einer Geraden (oder einer anderen algebraischen Kurve) stets endlichist (siehe Abschnitt 3.1.2, Satz 3.1.2.2, S.99).
Alle Spiralen sind nicht algebraischer, sondern transzendenter Natur: Archimedische,Cornusche (Klothoide oder Eulersche Spirale), Fermatsche, hyperbolische, logarithmische,Nielsensche. Einen Eindruck von den Verlaufen dieser Spiralen gibt das Bild 1.49 (vonlinks nach rechts und oben nach unten) – nahere Angaben zur Erzeugung der Kurven gibtder Anhang H.3 auf Seite 390 (siehe auch [Gray94], [Spallek94], [BS85] oder [Netz83]).
-2 -1 1 2 3 4
-2
-1
1
2
3
4
-4 -2 2 4
-6
-4
-2
2
4
-2-1.5-1-0.5 0.5 1
-1
-0.5
0.5
1
1.5
2
-10-7.5-5-2.5 2.5 5
-7.5
-5
-2.5
2.5
5
7.5
0.250.50.7511.251.5
0.25
0.5
0.75
1
1.25
1.5
-4 -2 2 4
-4
-2
2
4
Bild 1.49: Verschiedene Spiralen
Zwei (wiederum transzendente) Kurven – siehe Bild 1.50 – sind das Ergebnis naturwis-senschaftlicher Probleme: die Kettenlinie (die Kurve einer frei durchhangenden, in denPunkten A und B aufgehangten Kette) und die Brachistochrone (griech. βραχιστoςχρoνoς = kurzeste Zeit; die Kurve, auf der ein massebehafteter Punkt unter Einwirkungder Schwerkraft in kurzester Zeit – in Punkt A losgelassen – den Punkt B erreicht), dies

56 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
war das Problem, das 1696 von Johann Bernoulli (1667 Basel - 1748 Basel) in der Actaeruditorum aufgeworfen und von mehrern bedeutenden Mathematikern gelost wurde: IsaacNewton, Gottfried Wilhelm Leibniz, Jacob Bernoulli und Guillaume Francois Antoine DeL’Hospital (1661 Paris - 1704 Paris).
A
B
A
B
P
Bild 1.50: Kettenlinie und Brachistochrone
Die Kettenlinie wird durchy = a · cosh
x
a
beschrieben. Sie besitzt als Evolvente (Abwickelnde) die Traktrix, auch Schlepp- oderZiehkurve genannt, die von Leibniz eingefuhrt wurde und das freie Seilende beschreibt,wenn das andere Ende auf der x−Achse entlang gezogen wird:
(a · arcosh
a
y−
√a2 − y2 , y
).
Diese beiden Kurven sind zusammen in dem Bild 1.51 dargestellt.
-2 -1 1 2
1
2
3
x
y
Ketten-
linie
Traktrix
Bild 1.51: Kettenlinie und ihre Evolvente, die Traktrix

1.4. BERUHMTE ALGEBRAISCHE KURVEN 57
Die Brachistochrone ist ein Bogen einer gewohnlichen Zykloide, welche uns bereits inder Einfuhrung begegnete, siehe auch Bild 1 in der Einfuhrung auf Seite 3.
Die gewohnliche Zykloide beschreibt das Abrollen eines Kreises vom Radius r aufeiner Geraden (wobei a die Entfernung des die Kurve letztlich beschreibenden Punktesvom Mittelpunkt des Kreises ist). Ihre Parameterdarstellung nach Bild 1.52 ist
(x(τ)y(τ)
)= r
(τ
1
)− a
(sin τ
cos τ
).
2 4 6 8 10 12-0.5
0.5
1
1.5
2
2.5y
0,5
1,0
1,5
Bild 1.52: Gewohnliche Zykloide mit r = 1 und a = 0, 5; 1, 0 und 1, 5
Sie besitzt die reizvolle und in Bild 1.53 dargestellte Eigenschaft: Fur jeden Punkt Pder Zykloide wird der Krummungsradius OP von der Basis B halbiert.
O
P
B
Bild 1.53: Gewohnliche Zykloide mit Krummungskreis im Punkt P
Auch Hypo- und Epizykloide mit irrationalem Verhaltnis der abrollenden Kreise – einBeispiel dieses Falles zeigt das Bild 1.54 – sind keine algebraischen Kurven mehr.
Schließlich sei noch einmal betont, daß auch die in dem Bild 1.2, Seite 14, bzw. AnhangH.1, Seite 385, gezeigten Fraktale keine Kurven algebraischer Art sind.

58 KAPITEL 1. GRUNDLEGENDE BETRACHTUNGEN
-2 2 4
-2
2
4
-1 1 2
-1.5
-1
-0.5
0.5
1
1.5
2
Bild 1.54: (Teile von) Epi- und Hypozykloide mit R/r =√
2

Kapitel 2
Komplexe Projektive Raume
2.1 Projektive Geometrie
2.1.1 Aufbau und Topologie des projektiven Raumes
Werden komplexe algebraische Kurven – so wie sie bisher eingefuhrt wurden – in demRaum C2 betrachtet, sind sie niemals kompakt. Dies ergibt sich wieder unmittelbaraus der polynomialen Struktur der algebraischen Kurve, denn zu jedem beliebigenfesten y ∈ C liegt in P (X, y) ∈ C[X] ein Polynom vor, das mindestens eine Nullstellex aufweist (Fundamentalsatz der Algebra). Die zu P gehorende Kurve C enthalt(x, y) und damit erweist sich C als unbeschrankt.
Bemerkung 2.1.1.1. Eine komplexe affin-algebraische Kurve ist niemals kompakt.
Fur viele Zwecke ist es sinnvoll, dieser Situation auszuweichen und algebraischeKurven zu kompaktifizieren, indem “unendlich ferne Punkte“ zu C2 geeignet hinzu-adjungiert werden. Um dies zu prazisieren, wird das Konzept der projektiven Raumebenutzt.
Definition 2.1.1.2. Der n-dimensionale, komplexe projektive Raum Pn ist dieQuotientenmenge
Pn := (Cn+1\{0})/∼nach der Aquivalenzrelation ∼, die folgendermaßen definiert ist:
(x0, x1, . . . , xn) ∼ (y0, y1, . . . , yn)
:⇔ ∃λ ∈ C\{0} : (y0, y1, . . . , yn) = (λx0, λx1, . . . , λxn).
Die Aquivalenzklassenx = [x0, x1, . . . , xn]
werden als Punkte von Pn bezeichnet, die in dem Tupel
x = (x0, x1, . . . , xn)
enthaltenen Werte als homogene Koordinaten von x. P1 heißt komplexe projektiveGerade und P2 komplexe projektive Ebene.
59

60 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Der n-dimensionale, komplexe projektive Raum Pn ist also die Menge der ein-dimensionalen Untervektorraume von Cn+1 ; die Elemente (Punkte) x ∈ Pn sinddie Aquivalenzklassen nicht verschwindender Vektoren (x0, x1, . . . , xn) ∈ Cn+1, sodaß Pn insgesamt die Gesamtheit der zu den homogenen Koordinaten gehorendenAquivalenzklassen ist:
Pn = { [x0, x1, . . . , xn] | (x0, x1, . . . , xn) ∈ Cn+1\{0} } .
Die projektive Geometrie untersucht Objekte in den Raumen Pn; dabei spie-len also genau diejenigen Eigenschaften eine Rolle, die bei beliebiger Kollineationerhalten bleiben.
Bezogen auf den P2 steht damit das folgendermaßen prazisierte Konzept des“unendlich fernen Punktes“ zur Verfugung: jeder Punkt (x, y) ∈ C2 wird mit demeindimensionalen, linearen Unterraum im C3 identifiziert, der von (x, y, 1) aufge-spannt wird. Jeder Punkt [x, y, z] ∈ P2 bzw. jede Gerade im C3, die nicht in derEbene z = 0 liegt, hat dann ein Pendant in Form der homogenen Koordinaten(
xz, y
z, 1
)zu einem Punkt
(xz, y
z
) ∈ C2. Alle eindimensionalen Unterraume in derEbene z = 0 konnen als “unendlich ferne Punkte“ betrachtet werden. Dieses Zu-sammenspiel von Cn+1 und Pn wird in dem Abschnitt 2.1.2 weiter verfolgt. Das Bild2.1 verdeutlicht die Motivation, die hinter diesem Konzept der projektiven Ebenesteht. Dabei werden Punkte der Euklidischen Ebene Bildpunkten auf einer projek-tiven Ebene via “Sehstrahl“ zugeordnet. “Unendlich ferne“ Punkte liegen dann aufder Fluchtgeraden, die mit Z = 0 assoziiert werden kann.
projektiveEbene
Ebene R mitparallelen Geraden
2
8
I
Fluchtgerade
Bild 2.1: Parallele Geraden schneiden sich in der projektiven Ebene
Auf weitere Eigenschaften und Veranschaulichungen des projektiven Raumeswird weiter unten eingegangen (insbesondere in Abschnitt 2.2.2, wo der reelle pro-jektive Raum betrachtet wird). Als nachstes soll gezeigt werden, daß dieser neueRaum tatsachlich alle Punkte “einfangt“ und somit “in sich beschrankt“ ist. Dazuwird eine geeignete Topologie auf Pn eingefuhrt. Unter Definition der Abbildung
Π : Cn+1\{0} −→ Pn (2.1)
(x0, x1, . . . , xn) 7−→ [x0, x1, . . . , xn] ,
wird auf Pn die Quotiententopologie aus der gewohnlichen Topologie des Cn+1\{0}induziert, d.h. eine Teilmenge B ⊂ Pn ist genau dann offen (abgeschlossen), wenn

2.1. PROJEKTIVE GEOMETRIE 61
das Urbild Π−1(B) offen (abgeschlossen) in der ublichen Topologie des Cn+1\{0} ist.Das Bild 2.2 zeigt, daß der in Pn offenen Menge B in Cn+1\{0} ein Kegel Π−1(B) –allerdings ohne Spitze – entspricht.
PIC \ {0}
B
P ( )B
n+1n
1
[ ] =p p
p
p
P
_
Bild 2.2: Offene Mengen in Pn und Cn+1\{0}
Anders gesagt: die Topologie auf Pn ist die feinste Topologie, fur welche dieAbbildung Π stetig ist. Aquivalent dazu ist die in der folgenden Bemerkung zusam-mengefaßte Aussage (siehe z.B. [Ossa92]).
Bemerkung 2.1.1.3. Ist T ein topologischer Raum, so ist eine Abbildung f : Pn → Tgenau dann stetig, wenn die Komposition f◦Π : Cn+1\{0} → T stetig ist; oder allgemeiner:fur eine Teilmenge B ⊂ Pn ist f : B → T genau dann stetig, wenn f ◦ Π : Π−1(B) → Tstetig ist.
Der in solcher Weise mit einer Topologie versehene Raum Pn ist hausdorffsch 1
(d.h. zu je zwei verschiedene Punkte von Pn konnen disjunkte Umgebungen in Pn
gefunden werden) und als stetiges Bild der Sphare
S2n+1 := {(x0, x1, . . . , xn) ∈ Cn+1 | |x0|2 + |x1|2 + . . . + |xn|2 = 1}
kompakt.
Bemerkung 2.1.1.4. Der projektive Raum Pn ist hausdorffsch und kompakt.
Beweis. (Kompaktheit) Die Menge
S2n+1 := {(x0, x1, . . . , xn) ∈ Cn+1 | |x0|2 + |x1|2 + . . . + |xn|2 = 1}
ist eine Sphare der Dimension 2n + 1. Nach dem Satz von Heine-Borel 2 ist sie als abge-schlossene und beschrankte Teilmenge des Cn+1 kompakt. Die Einschrankung
Π|S2n+1 : Cn+1\{0} ⊃ S2n+1 → Pn
1Felix Hausdorff(1868 Breslau - 1942 Bonn)2Heinrich Eudard Heine (1821 Berlin - 1881 Halle) und Emile Borel (1871 Saint Affrique
Averyon - 1956 Paris)

62 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
ist stetig (Bemerkung 2.1.1.3), so daß das Bild Π|S2n+1(S2n+1) ebenfalls kompakt ist. DieKompaktheit von Pn folgt nun aus der Surjektivitat von Π|S2n+1 , was jetzt gezeigt werdensoll.
Sei also [x0, x1, . . . , xn] ∈ Pn, dann ist
λ := |x0|2 + . . . + |xn|2 > 0 und
[x0, x1, . . . , xn] = [λ−1/2x0, . . . , λ−1/2xn].
Fur die in der rechten Aquivalenzklasse angegebenen homogenen Koordinaten ist
|λ−1/2x0|2 + . . . + |λ−1/2xn|2 = 1, so daß
[x0, x1, . . . , xn] ∈ Π|S2n+1(S2n+1). ¤
Der Beweis der Hausdorffeigenschaft fur Pn wird spater nachgeholt, da uns zurZeit hierfur die Mittel noch fehlen.
2.1.2 Abbildungsverhalten von Pn
Der Begriff der Hyperebene wird nachfolgend haufig gebraucht. Er kann mit Hilfeder oben eingefuhrten Abbildung Π definiert werden und eroffnet uns eine weitereSicht auf die projektiven Raume.
Definition 2.1.2.1. Eine Hyperebene im Pn ist das Bild eines (im Ursprung punk-tierten) n-dimensionalen Untervektorraumes von Cn+1 unter Π : Cn+1\{0} → Pn.
Wir definieren jetzt die folgenden Teilmengen U0, . . . , Un des Pn durch
Uk := {[x0, x1, . . . , xn] ∈ Pn |xk 6= 0}, (2.2)
wobei die Bedingung xk 6= 0 von der Wahl der homogenen Koordinaten unabhangigist. Weil die Menge
Π−1(Uk) = {(x0, x1, . . . , xn) ∈ Cn+1 |xk 6= 0}offen in Cn+1\{0} ist, resultiert aus der Stetigkeit von Π die Offenheit der Uk in Pn.Aus den Mengen Uk ergeben sich die folgenden Hyperebenen.
Bemerkung 2.1.2.2. Das Komplement von Uk in Pn ist die Hyperebene
Hk := {[x0, x1, . . . , xn] ∈ Pn |xk = 0} .
Die Menge Hk = Pn\Uk ist offensichtlich das Bild von
{λ1e1 + . . . + λk−1ek−1 + 0 ek + λk+1ek+1 + . . . + λn+1en+1}\{(0, . . . , 0)}mit λ1, . . . , λn+1 ∈ C und e1, . . . , en+1 als kanonische Standardbasis des Vektorrau-mes Cn+1 unter Π. Die Hyperebene Hn kann offenbar mit dem projektiven Raum

2.1. PROJEKTIVE GEOMETRIE 63
Pn−1 identifiziert werden: Hn ≡ Pn−1. Damit kann Pn beginnend bei
H1 ≡ P0 = { [x0, x1] ∈ P1 |x1 = 0 } = {∞ := [1, 0] }induktiv aufgebaut werden:
P0 ≡ {einzelner Punkt} ≡ {∞}, (2.3)
P1 ≡ C ∪ P0 ≡ C ∪ {∞},P2 ≡ C2 ∪ P1 ≡ C2 ∪ {Linie im Unendlichen},
...
Pn ≡ Cn ∪ Pn−1 .
Jetzt soll auf das Abbildungsverhalten zwischen Cn, Cn+1\{0} und Pn einge-gangen werden, was uns zur Erkenntnis fuhren wird, daß Cn und Uk = Pn\Hk
homoomorph sind. Dazu werden die Abbildungen
φk : Uk −→ Cn
[x0, x1, . . . , xk, . . . , xn] 7−→(
x0
xk
, . . . ,xk−1
xk
,xk+1
xk
, . . . ,xn
xk
)
fur k = 0, 1, . . . , n betrachtet.
Hilfssatz 2.1.2.3. Die Abbildung φk : Uk −→ Cn ist ein Homoomorphismus.
Beweis. Fur zwei Punkte u = [u0, . . . , un] und v = [v0, . . . , vn] aus P2 gelte
φk(u) =(
u0
uk, . . . ,
un
uk
)=
(v0
vk, . . . ,
vn
vk
)= φk(v) ;
dann folgt (u0, . . . , un) = ukvk
(v0, . . . , vn) und damit [u0, . . . , un] = [v0, . . . , vn] , d.h. dieAbbildung φk ist injektiv. Sei nun [w1, . . . , wn] ∈ Cn; dann wird
[w1, . . . , wk, 1, wk+1, . . . , wn] ∈ Uk
offensichtlich von φk auf(
w11 , . . . , wn
1
)= (w1, . . . , wn) abgebildet, so daß φk auch surjek-
tiv ist. Die zuletzt angestellte Betrachtung der Surjektivitat von φk liefert zugleich dieUmkehrabbildung:
ψk := φ−1k : Cn −→ Uk
(y1, . . . , yn) 7−→ [y1, . . . , yk, 1, yk+1, . . . , yn].
Sowohl φk als auch die Inverse ψk sind stetig. Dies folgt aus Bemerkung 2.1.1.3, denn dieVerkettung φk ◦ Π : Π−1(Uk) −→ Cn ist komponentenweise stetig. Wird der gewohnlicheVektorraum Cn (analog zur Abbildung ψk) in der folgenden Weise stetig in Cn+1\{0}eingebettet
`k : Cn −→ Cn+1\{0} (2.4)(y1, . . . , yn) 7−→ (y1, . . . , yk, 1, yk+1, . . . , yn),
(Einbettung in die k-te Koordinate), dann ist die Verknupfung ψk = Π◦`k als Kompositionvon zwei stetigen Funktionen ebenfalls stetig. ¤

64 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Damit ist nachgewiesen, daß die Raume Uk und Cn homoomorph zueinander sind.
Die Zahlen des Tupels φ0([x0, x1, . . . , xn]) =(
x1
x0, . . . , xn
x0
)werden als inhomogene
Koordinaten bezeichnet.
Mit der in Beweis des Hilfssatzes 2.1.2.3 eingefuhrten Einbettung (2.4) des Cn
in den Raum Cn+1\{0} gibt das kommutative Diagramm
Cn ψk−−−→ Uk
`k
yyid|Uk
Cn+1\{0} Π−−−→ Pn
eine vollstandige Ubersicht der Abbildungsstruktur zwischen den eingefuhrten Raum-en.
Aus Satz 2.1.2.3 ergibt sich noch etwas mehr [DR99]: der n-dimensionale pro-jektive Raum Pn ist eine komplexe Mannigfaltigkeit. Dabei ist {U0, . . . , Un} eineoffene Uberdeckung von Pn und die Abbildungen φ0, . . ., φn sind n-Karten 3 auf Pn.Die Karten φν und φµ sind holomorph-vertraglich 4, weil die Ubergangsabbildung(letztlich die Koordinatentransformation)
φν ◦ φµ−1(x1, . . . , xn) = φν ([x1, . . . , xµ−1, 1, xµ, . . . , xn])
=
(x1
xν
, . . . ,xµ−1
xν
,1
xν
,xµ
xν
, . . . ,xν−1
xν
,xν+1
xν
, . . . ,xn
xν
)
biholomorph ist. Der Pn ist damit zusammen mit der von dem komplexen Atlas{φ0, φ1, . . . , φn} induzierten komplexen Struktur 5 eine n-dimensionale, komplexeMannigfaltigkeit 6.
Wir werden im Ausblick noch sehen, wie Untermannigfaltigkeiten, RiemannscheFlachen und algebraische Teilmengen in der komplexen Mannigfaltigkeit der projek-tiven Ebene miteinander zusammenhangen.
3Eine komplexe n-Karte auf einen hausdorffschen topologischen Raum X ist ein Homoomor-phismus φ : U → U zweier offener Teilmengen U ⊂ X und U ⊂ Cn.
4Zwei komplexe Karten φ : U → U , ψ : V → V heißen holomorph-vertraglich, wenn entwederU ∩ V leer oder die Ubergangsabbildung von φ nach ψ
φ(U ∩ V ) → ψ(U ∩ V ), x 7→ ψ(φ−1(x)
)
biholomorph ist.5Eine Aquivalenzklasse von Atlanten auf X .6Der topologische Raum X zusammen mit einer festen komplexen Struktur wird eine komplexe
Mannigfaltigkeit genannt.

2.1. PROJEKTIVE GEOMETRIE 65
2.1.3 Projektive Transformationen
Oftmals ist es nutzlich, die Koordinaten im projektiven Raum zu wechseln. Dieswird uber projektive Transformationen durchgefuhrt, die in der folgenden Definitioneingefuhrt werden.
Definition 2.1.3.1. Eine projektive Transformation von Pn ist eine Bijektion
T : Pn → Pn (2.5)
[x0, x1, . . . , xn] 7→ [y0, y1, . . . , yn] ,
so daß ein Isomorphismus τ : Cn+1 → Cn+1 von C-Vektorraumen existiert, fur denT ◦ Π = Π ◦ τ gilt. Das Diagramm
PnT−−−→ Pn
Π
xxΠ
Cn+1\{0} τ−−−→ Cn+1\{0}ist also kommutativ.
Der Isomorphismus τ wird durch eine invertierbare (n + 1) × (n + 1)-Matrixmit komplexen Koeffizienten gegeben. Deshalb kann man sagen, daß jede projektiveTransformation von einer invertierbaren (n + 1) × (n + 1)-Matrix mit komplexenKoeffizienten induziert wird. Dabei ist zu beachten, daß zwei Matrizen genau danndieselbe Transformation definieren, wenn sie sich um einen skalaren Faktor unter-scheiden; eine Transformation T von Pn auf sich kann also mit der Menge
{λA ∈ Cn+1,n+1 |λ ∈ C\{0}}identifiziert werden, wobei A eine Matrix sei, welche den nach Definition 2.1.3.1existierenden Isomorphismus von Cn+1 vermittelt.
Diese Sicht eroffnet die folgende Analogie: In Erweiterung der allgemeinen linea-ren Gruppe GL(n,C) 7 operiert die projektive lineare Gruppe
PGL(n + 1,C) = GL(n + 1,C) / λ id
auf Pn. Dabei ist die Gruppe PGL wie oben erlautert ein Quotient, der durch diefolgende Aquivalenzrelation auf die Elemente (= Isomorphismen) der allgemeinenlinearen Gruppe GL bestimmt ist:
τ, σ ∈ GL(n + 1,C) : τ ∼ σ :⇐⇒ ∃λ ∈ C\{0} : τ = σ ◦ λ id ,
d.h. zwei Isomorphismen des Cn+1 sind definitorisch aquivalent, wenn sie durch einezentrische Streckung um den komplexen Faktor λ 6= 0 auseinander hervorgehen.
Die beiden nachfolgenden Lemmata geben zwei nutzliche Eigenschaften projek-tiver Transformationen an, die im weiteren Verlauf der Kurventheorie benotigt wer-den.
7GL(n,K) ist die allgemeine lineare Gruppe, also die Gruppe der K-Isomorphismen von Kn.Sie kann mit der Gruppe der invertierbaren Matrizen aus Kn,n identifiziert werden.

66 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Lemma 2.1.3.2. Eine projektive Transformation ist stetig.
Beweis. Ist T eine projektive Transformation, so existiert ein Homomorphismus τ mitT ◦Π = Π◦ τ ; da sowohl Π (Bemerkung 2.1.1.3(2)) als auch τ als Homomorphismus stetigsind, ergibt die Verkettung Π ◦ τ wieder eine stetige Abbildung, so daß also auch T ◦ Πstetig ist. Nach Bemerkung 2.1.1.3 folgt hieraus die Stetigkeit von T . ¤
Außerdem gilt die folgende Existenzaussage, die eine projektive Transformationsicherstellt, wenn Punkte des Pn in bestimmter Konfiguration gegeben sind.
Lemma 2.1.3.3. Gegeben seinen n + 2 verschiedene Punkte p0, . . . ,pn und q imPn, von denen keine n + 1 auf einer Hyperebene liegen, dann gibt es eine eindeutigeprojektive Transformation, die pk in [0, . . . , 0, 1, 0, . . . , 0], mit der 1 an k-ter Stelle,und q in [1, . . . , 1] abbildet.
Beweis. Seien u0, . . . , un und v Elemente von Cn+1, deren Bilder unter Π die Punktep0, . . . ,pn und q sind. Die Vektoren u0, . . . , un bilden dann eine Basis von Cn+1 (dielineare Unabhangigkeit in Cn+1 wird durch die Tatsache garantiert, daß p0, . . . ,pn nichtin einer Hyperebene liegen!), so daß es einen eindeutigen Automorphismus τ von Cn+1 gibt,der u0, . . . , un in die kanonische Basis e1 = (1, 0, . . . , 0), . . . ,en+1 = (0, . . . , 0, 1) abbildet.Der Vektor v =
∑nk=0 λkuk wird unter τ dann in
τ(v) = τ(n∑
k=0
λkuk) =n∑
k=0
λkτ(uk) =n∑
k=0
λkek+1
= (λ0, λ1, . . . , λn)T
abgebildet, wobei alle komplexen Zahlen λ0, . . . , λn nicht verschwinden (weil laut Voraus-setzung keine n + 1 gegebenen Punkte im Pn auf einer Hyperebene liegen, was lineareUnabhangigkeit von je n + 1 der Vektoren u0, . . . , un, v bedeutet, d.h. v muß durch alleu0, . . . , un nichttrivial “aufgespannt“ werden).
Die Verkettung von τ mit der durch die Matrix
1/λ0 0 . . . 00 1/λ1 . . . 0...
.... . .
...0 0 . . . 1/λn
definierten linearen Abbildung α bestimmt eindeutig als Isomorphismus von Cn+1 eineprojektive Transformation, welche die gewunschte Eigenschaft besitzt:
T (pk) = T ◦Π(uk)= Π ◦ (α ◦ τ) (uk) = Π ◦ α(ek+1)
= [0, . . . , 0,1λk
, 0, . . . , 0] = [0, . . . , 0, 1, 0, . . . , 0] mit k = 0, . . . , n
und T (q) = T ◦Π(v)= Π ◦ (α ◦ τ) (v) = Π ◦ α ((λ0, . . . , λn)) = [1, . . . , 1] . ¤
Mit diesem Lemma kann jetzt gezeigt werden, daß der projektive Raum Pn haus-dorffsch ist.

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 67
Beweis. (Fortsetzung von Bemerkung 2.1.1.4 – Hausdorffeigenschaft.) Fur verschiedenePunkte p und q aus Pn ist zu zeigen, daß sie offene, im Durchschnitt leere Umgebungenhaben.
In Hilfssatz 2.1.2.3 wurde gezeigt, daß φ0 : U0 → Cn ein Homoomorphismus ist, woU0 eine offene Menge von Pn ist. Liegen p und q in U0, dann besitzen φ0(p) und φ0(q)disjunkte Umgebungen V und W in Cn, da der n-dimensionale komplexe Vektorraumhaussdorffsch ist! Die Mengen φ−1
0 (V ) und φ−10 (W ) sind dann offene, disjunkte Umge-
bungen von p und q in Pn. Insbesondere ist dies der Fall, wenn p = [1, 0, . . . , 0] undq = [1, 1, . . . , 1].
Im allgemeinen konnen Punkte p0, . . ., pn in Pn gefunden werden, so daß p0 = pund keine n + 1 der n + 2 Punkte p0, . . ., pn und q auf einer Hyperebene liegen. Dannexistiert nach Lemma 2.1.3.3 eine projektive Transformation T : Pn → Pn, die p auf[1, 0, . . . , 0] und q auf [1, 1, . . . , 1] abbildet. Daß die Punkte [1, 0, . . . , 0] und [1, 1, . . . , 1]disjunkte Umgebungen φ−1
0 (V ) und φ−10 (W ) besitzen wurde bereits gezeigt. Weil T wegen
Lemma 2.1.3.2 stetig und bijektiv ist, sind die Teilmengen T−1(φ−10 (V )) und T−1(φ−1
0 (W ))offene, disjunkte Umgebungen der Punkte p und q in Pn. ¤
2.2 Projektive algebraische Kurven
2.2.1 Algebraische Struktur projektiver Kurven
Die im ersten Kapitel eingefuhrten algebraischen Kurven C ⊂ C2 sollen jetzt aufden projektiven Raum P2 fortgesetzt werden. Das hat den Vorteil, daß nunmehr“unendlich ferne Punkte“ im zuvor eingefuhrten Sinne als gleichberechtigte Kurven-punkte behandelt werden konnen – was insbesondere die Klassifikation von Kurveneines bestimmten Grades erheblich vereinfacht und uberschaubarer gestaltet.
Wieder sollen die Kurven als Nullstellenmengen geeigneter Polynome definiertwerden. Als Analogon zu den (Kurven)Punkten (x, y) ∈ C ⊂ C2, treten hier nundie Aquivalenzklassen [x, y, z] ∈ P2 in Erscheinung. Wegen
[x, y, z] = [u, v, w] ⇔ (x, y, z) = λ(u, v, w), λ ∈ C\{0} ,
muß dann fur das die Kurve in P2 definierende Polynom P bzgl. der Nullstellen dieGleichheit
P (x, y, z) = 0 = P (u, v, w)
gelten, was die Unabhangigkeit der Wahl homogener Koordinaten auf die Nullstel-lenverteilung von P bedeutet:
P (u, v, w) = 0 ⇔ P (λu, λv, λw) = 0 .
Daher ist es sinnvoll, algebraische Kurven in P2 uber die in Abschnitt 1.2 eingefuhr-ten homogenen Polynome zu definieren.
Definition 2.2.1.1. Sei P ein nichtverschwindendes homogenes Polynom in C[X,Y, Z]. Unter der Voraussetzung, daß P keine mehrfach vorkommenden Faktorenenthalt, ist
C := {[x, y, z] ∈ P2 |P (x, y, z) = 0}die durch P definierte projektiv-algebraische Kurve.

68 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Alle im Grundlagenkapitel 1 angestellten Betrachtungen ubertragen sich mutatismutandis auf projektiv-algebraische Kurven (die im folgenden der Kurze wegen aucheinfach als projektive Kurven bezeichnet werden). Dazu gehort zunachst wieder eineAussage, wann zwei projektive Kurven gleich sind. Auch hier liefert der HilbertscheNullstellensatz die Antwort.
Bemerkung 2.2.1.2. Genau wie in C2 definieren zwei homogene Polynome P, Q ∈ C[X,Y, Z] ohne mehrfach vorkommende Faktoren dieselben projektiven Kurven in P2 genaudann, wenn sie durch skalare Multiplikation auseinander hervorgehen.
Desweiteren ist anzumerken, daß die Vereinigung von zwei oder mehreren pro-jektiven Kurven wieder eine projektive Kurve ergibt. Dazu ist analog wie bei affinenKurven unter Kurzung mehrfach auftretender Faktoren wieder mit Minimalpolyno-men zu arbeiten; außerdem stellt Korollar 1.2.6 den Erhalt der Homogenitat beiProdukt der die projektiven Kurven definierenden Polynome sicher.
Die folgenden vier Definitionen fassen die grundlegenden Begriffe uber projektiveKurven zusammen.
Definition 2.2.1.3. Der Grad einer durch das homogene Polynom P definierten projek-tiven Kurve C in P2 ist der Grad von P .
Die Kurve C wird als irreduzibel bezeichnet, wenn P irreduzibel ist – andernfalls heißtsie reduzibel.
Eine durch das homogene Polynom Q definierte irreduzible projektive Kurve D heißteine Komponente von C, wenn Q das Polynom P teilt.
Definition 2.2.1.4. Ein Punkt p = [a, b, c] der durch das homogene Polynom P definier-ten projektiven Kurve C in P2 heißt singular, wenn
∂P
∂X(p) =
∂P
∂Y(p) =
∂P
∂Z(p) = 0
ist – sonst heißt er regular. Weist die Kurve C keine Singularitaten auf, so bezeichnetman sie als nichtsingular.
Definition 2.2.1.5. Eine projektive Kurve, die durch die lineare Gleichung
αX + βY + γZ = 0 (2.6)
definiert wird, wobei α, β, γ ∈ C nicht samtlich verschwinden sollen, nennt man (projekti-ve) Gerade.
Die Tangente in einem nichtsingularen Punkt p = [a, b, c] ∈ C der durch das homogenePolynom P gegebenen projektiven Kurve C ist die Gerade
∂P
∂X(p) X +
∂P
∂Y(p) Y +
∂P
∂Z(p) Z = 0 . (2.7)
Bemerkung 2.2.1.6. Die Tangente an eine projektive Kurve ist zunachst wie im affinenFall auch durch
∂P
∂X
∣∣∣∣p
(X − a) +∂P
∂Y
∣∣∣∣p
(Y − b) +∂P
∂Z
∣∣∣∣p
(Z − c) = 0 (2.8)

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 69
gegeben. Wegen der Eulerschen Relation nach Lemma 1.2.10
X∂P
∂X+ Y
∂P
∂Y+ Z
∂P
∂Z= 3 P ,
d.h. insbesondere
a∂P
∂X
∣∣∣∣p
+ b∂P
∂Y
∣∣∣∣p
+ c∂P
∂Z
∣∣∣∣p
= 3 P (a, b, c) = 0 ,
ist (2.8) aquivalent zu der in (2.7) angegebenen Form.
Definition 2.2.1.7. Die Multiplizitat Multp(P ) des Polynoms P in einem Punkt p =(a, b, c) ∈ V (P ) ist die kleinste positive ganze Zahl m, so daß
∂mP
∂Xµ ∂Y ν ∂Zρ(a, b, c) 6= 0
fur µ, ν, ρ mit µ+ν+ρ = m, gilt. Ist P Minimalpolynom, so ist die Multiplizitat Multp(C)in einem Punkt p = [a, b, c] ∈ C der durch das homogene Polynom P definierten projekti-ven Kurve C der Wert Multp(C) := Multp(P ).
Die nachfolgenden vier Beispiele untersuchen die jeweils gegebenen Kurven aufSingularitaten und bestimmen die Multiplizitat in ihnen. Die gezeigten Darstellun-gen sind eine Auswahl reeller Schnitte der auf die Hyperebenen [x, y, 1] bzw. [x, 1, z]bzw. [1, y, z] projezierten Kurve, d.h. es werden die Bilder der projektiven Kurvenunter den Homoomorphismen
φz : [x, y, 1] 7→ (x, y) ∈ R2 bzw.
φy : [x, 1, z] 7→ (x, z) ∈ R2 bzw.
φx : [1, y, z] 7→ (y, z) ∈ R2 bzw.
dargestellt.
Beispiel 2.2.1.8. Es sei die projektive Kurve C ⊂ P2 gegeben durch das homogenePolynom
P = XY 4 + Y Z4 + XZ4.
Mit den Ableitungen PX = Y 4 + Z4, PY = 4XY 3 + Z4, PZ = 4Y Z3 + 4XZ3 fuhrt dieSuche nach Singularitaten auf das nichtlineare Gleichungssystem
x(y4 + z4) + yz4 = 0 (I),y4 + z4 = 0 (II),
4xy3 + z4 = 0 (III),4z3(x + y) = 0 (IV).
Aus (II) und (I) folgtyz4 = 0 ⇔ y = 0 ∨ z = 0
und damit wegen (II) y = z = 0. Die Gleichungen (III) und (IV) sind dann fur beliebigex ∈ C erfullt (wobei naturlich x 6= 0 in P2 bei y = z = 0 sein muß). Die einzige Singularitatliegt also in dem Fundamentalpunkt p := [1, 0, 0].

70 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Weiteres partielles Ableiten ergibt
PXX = 0, PY Y = 12XY 2, PZZ = 12Z2(X + Y ), PXY = 4Y 3, PXZ = 4Z3, PY Z = 4Z3,
die in p ebenso verschwinden wie die dritten Ableitungen
PXXX = 0, PY Y Y = 24XY, PZZZ = 24Z(X + Y ),PXXY = 0, PXY Y = 12Y 2, PXXZ = 0, PXZZ = 12Z2,PY Y Z = 0, PY ZZ = 12Z2, PXY Z = 0.
Erst die vierte Ableitung von P nach Y zeigt
∂4P
∂Y 4
∣∣∣∣p
= 24 6= 0.
Die Multiplizitat von C in p ist also vier.Die Bilder 2.3 und 2.4 stellen die reellen Schnitte der Kurve unter den Abbildungen
φx, φy und φz dar. ¤
-2 -1.5 -1 -0.5 0.5 1 1.5 2
-1.5
-1
-0.5
0.5
1
1.5x
y
I
IIIII
IV
-2 -1.5 -1 -0.5 0.5 1 1.5 2
-1
-0.5
0.5
1 x
z
I
IIIV
III
Bild 2.3: XY 4 + Y Z4 + XZ4 = 0 in einer Projektion auf [x, y, 1] und [x, 1, z]
-3 -2 -1 1
-4
-2
2
4 z
yp
I
IIIII
IV
Bild 2.4: XY 4 + Y Z4 + XZ4 = 0 in einer Projektion auf [1, y, z]

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 71
Beispiel 2.2.1.9. Wir betrachten die durch
P = X2Y 3 + X2Z3 + Y 2Z3
definierte projektive Kurve C. Die Berechnung von Singularitaten fuhrt zu dem folgendenGleichungssystem:
P (x, y, z) = x2(y3 + z3) + y2z3 = 0 (I),Px(x, y, z) = 2x(y3 + z3) = 0 (II) ,Py(x, y, z) = y(3x2y + 2z2) = 0 (III),Pz(x, y, z) = 3z2(x2 + y2) = 0 (IV).
Aus (II) folgt x = 0 ∨ y3 + z3 = 0.Betrachten wir zunachst den Fall x = 0: aus (I) folgt hieraus y = 0∨ z = 0 und damit
weiter im Falle von y = 0 aus (III) und (IV) z 6= 0 beliebig, bzw. im Fall von z = 0, daßy 6= 0 beliebig ist. Damit liegen bereits zwei Singularitaten vor:
p = [0, 0, 1] und q = [0, 1, 0].
Jetzt sei y3 + z3 = 0, dann folgt wieder aus (I) die Disjunktion y = 0 ∨ z = 0. Im Fallvon y = 0 liefert (IV) die Aussage x = 0∨ z = 0, wobei (III) fur x = 0 ein beliebiges z 6= 0und fur z = 0 ein beliebiges x 6= 0 erlaubt. Analog folgt unter der Annahme von z = 0 aus(III) zunachst x = 0 ∨ y = 0 und aus (IV) dann ein beliebiges y 6= 0 bzw. ein beliebigesx 6= 0. Als einzige weitere Singularitat ergibt sich also u = [1, 0, 0].
-4 -3 -2 -1 1 2 3 4
-6
-5
-4
-3
-2
-1
1
x
y
p
z = 1
III
III IV
-4 -3 -2 -1 1 2 3 4
-2
-1.5
-1
-0.5
0.5
1
1.5
x
z
qy= 1
I
IIIIV
II
-4 -3 -2 -1 1 2 3 4
-2
-1
1
2
y
z
u
x= 1
I
IIIII
IV
Bild 2.5: Die drei Projektionen von X2Y 3 + X2Z3 + Y 2Z3 = 0
Wegen PXX = 2(Y 3 + Z3) und damit
PXX(p) = Pxx(q) = 2 6= 0
ist die Multiplizitat von C in p und q jeweils zwei.

72 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
In u verschwinden alle zweiten Ableitungen von P . Erst fur PZZZ = 6(X2 + Y 2) gilt
PZZZ(u) = 6 6= 0,
d.h. in u betragt die Multiplizitat von C drei.Das Bild 2.5 zeigt die reellen Schnitte der Kurve, in allen drei Projektionen auf die
Hyperebenen. Die Singularitat [0, 0, 1] tritt dabei als isolierter Punkt in Erscheinung; auchder singulare Punkt [0, 1, 0] ist deutlich auszumachen. ¤
Beispiel 2.2.1.10. Jetzt sei die projektive Kurve C durch das Polynom
P = Y 2Z −X(X − Z)(X − λZ), λ ∈ C ,
gegeben. Eine Singularitat muß den folgenden Bedingungen genugen:
P (x, y, z) = x3 − (1 + λ)x2z + λxz2 = 0 (I),Px(x, y, z) = 3x2 − 2λxz − 2xz + λz2 = 0 (II),Py(x, y, z) = −2yz = 0 (III),Pz(x, y, z) = −(1 + λ)x2 + 2λxz − y2 = 0 (IV).
Aus (III) folgt y = 0 ∨ z = 0, was im folgenden durch Fallunterscheidungen naher unter-sucht werden soll:
(III)⇒ y = 0 ∨ z = 0(I)⇒ x = 0 ∨ x = z ∨ x = λz
(I)⇒ x = 0(II)⇒ fur λ = 0 und
(II)⇒ z2 = λz2, wegen(II)⇒ liefert wie womit jetzt aber
z 6= 0 ist (IV) er- z 6= 0 folgt λ = 1 nebenstehend (IV) fur y 6= 0fullt: und z 6= 0 beliebig, λ = 0; [0, 0, 1] nicht mehr losbar
λ = 0; [0, 0, 1] was auch (IV) ge- oder wieder wirdnugt: λ = 1; [1, 0, 1] λ = 1; [1, 0, 1]
Es existieren also zwei Werte fur λ, fur welche jeweils eine Singularitat vorhanden ist:
λ = 0 : p = [0, 0, 1] und λ = 1 : q = [1, 0, 1].
Fur andere Werte des Parameters λ ist C nichtsingular. Mit PXX = 6X − 2λZ − 2Z giltim Falle von
λ = 0 : PXX(p) = −2 6= 0
und furλ = 1 : PXX(q) = 2 6= 0 ,
so daß in beiden Fallen die Multiplizitat von C in den Singularitaten zwei ist. Die dreinachfolgenden Bilder veranschaulichen das hier untersuchte Verhalten. In Bild 2.6 wird dieProjektion der Kurve auf [x, y, 1] gezeigt, wobei λ = 0 ist; die Singularitat ist in [0, 0, 1] zuerkennen. Bild 2.7 zeigt die Kurve fur λ = 1, wobei wieder auf [x, y, 1] projeziert wurde;hier tritt die Singularitat in [1, 0, 1] in Erscheinung. In dem abschließenden Bild 2.8 wurdeλ = 2 gewahlt und die Kurve abermals einer Projektion auf [x, y, 1] unterworfen – dieKurve ist jetzt nichtsingular. ¤

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 73
-1 -0.5 0.5 1 1.5 2 2.5 3
-2
-1.5
-1
-0.5
0.5
1
1.5
2
x
y
p
Bild 2.6: Projektion von Y 2Z = X2(X − Z) auf [x, y, 1]
-1 -0.5 0.5 1 1.5 2 2.5 3
-2
-1.5
-1
-0.5
0.5
1
1.5
2
x
y
q
Bild 2.7: Projektion von Y 2Z = X(X − Z)2 auf [x, y, 1]
-2 -1 1 2 3 4
-2
-1.5
-1
-0.5
0.5
1
1.5
2
x
y
Bild 2.8: Projektion von Y 2Z = X(X − Z)(X − 2Z) auf [x, y, 1]

74 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Beispiel 2.2.1.11. Zum Abschluß in diesem Beispielblock sollen die durch
P = Xn + Y n − Zn , n > 0 ,
definierten Fermat-Kurven Cn betrachtet werden. Notwendige Bedingungen fur Singula-ritaten ergeben sich aus den ersten partiellen Ableitungen zu
PX(x, y, z) = nxn−1, PY (x, y, z) = nyn−1, PZ(x, y, z) = −nzn−1 .
Diese Gleichungen sind unter der Bedingung, daß x, y, z nicht alle zusammen verschwinden,nicht losbar. Die Fermat-Kurven sind also fur alle n ∈ N nichtsingular. Das Bild 2.9 zeigtSchnitte der ersten funf Kurven mit der reellen Ebene. Die in R2 unbeschrankten Kurvenentsprechen den ungeraden Werten n = 1, 3 und 5. ¤
-2 -1.5 -1 -0.5 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0.5
1
1.5
2
x
y
Bild 2.9: Projektion von Fermat-Kurven fur n = 1, . . . , 5
2.2.2 Darstellung projektiver Kurven
Als Teilmenge des P2 wird auf eine projektive Kurve die in Abschnitt 2.1.1 ein-gefuhrte Topologie des P2 induziert und wir erhalten jetzt die beabsichtigte Kom-paktifizierung von Kurven.
Satz 2.2.2.1. Eine projektiv-algebraische Kurve ist kompakt und Hausdorffsch.
Beweis. Abgeschlossene Mengen kompakter Raume sind kompakt ([Ossa92]), so daß esgenugt, jede projektive Kurve als abgeschlossene Teilmenge des P2 nachzuweisen. Sei
C = {[x, y, z] ∈ P2 |P (x, y, z) = 0}dann ist nach Bemerkung 2.1.1.3 dies genau dann der Fall, wenn
Π−1(C) = {(x, y, z) ∈ C3\{0} |P (x, y, z) = 0}eine abgeschlossene Teilmenge von C3\{0} ist. Dies aber folgt sofort aus der Tatsache, daßPolynome stetig sind und somit das Urbild Π−1(C) = P−1({0}) der kompakten Menge{0} unter P abgeschlossen sein muß.
Jede Teilmenge eines Hausdorffschen Raumes ist Hausdorffsch, so daß die obige Aus-sage direkt aus der Bemerkung 2.1.1.4 folgt. ¤

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 75
Bisher wurden projektive Kurven durch die in Abschnitt 2.1.2 eingefuhrtenSchnitte bzw. Bilder unter den Homoomorphismen φk, k = 0, . . . , n, im Falle des Pn
(insbesondere φx, φy, φz bei P2) dargestellt. Die Eigenschaft der Kompaktheit solljetzt genutzt werden, um zu einer besseren und den projektiven Kurven adaquateDarstellung zu gelangen.
Dabei beschranken wir uns auf den reellen Fall (was nicht ausschließt, daß auchwieder komplexe Kurven dargestellt werden konnen – ihre komplexen Anteile sinddann aber wieder reell zu parametrisieren) und stellen kurz den projektiven RaumP2(R) vor. Dazu ist in der Definition 2.1.1.2 lediglich der Korper C durch R zuersetzen. Der reelle projektive Raum P2(R) besteht also ebenfalls wieder aus derGesamtheit der eindimensionalen Untervektorraume – diesmal des R3 – die geradedie Punkte des P2(R) darstellen. In dem Bild 2.10 wird die Konzeption der Ad-junktion eines “unendlich fernen“ Punktes in der reellen projektiven Gerade P1(R)veranschaulicht.
1
8
[0,1]
[1,0]P ( R)
P ( R)
I
I
I
I
IR
[ ,1] = [ , ],x xl l
l @ 0
x
1
1
Bild 2.10: Die reelle projektive Gerade P1(R)
Danach werden zunachst (linker Bildteil) auf R2 wieder Aquivalenzklassen [x, y]in der ublichen Weise eingefuhrt. Wie bereits oben geschildert, ist der P1(R) aberkompakt, so daß der rechte Bildteil eine adaquatere Darstellung der reellen pro-jektiven Gerade ist. Doch auch diese Ansicht muß noch erganzt werden: auf derSphare S1 sind gegenuberliegende Punkte miteinander zu identifizieren (siehe dieAndeutung der beiden hell hervorgehobenen Punkte).
Insbesondere bleiben auch alle im Abschnitt 2.1 angestellten Uberlegungen undErgebnisse erhalten, da anstelle des Korpers C in jenem Abschnitt auch stets hatte Rstehen konnen (im Falle algebraischer Varietaten ist das naturlich anders!). Danachist Pn(R) wieder eine (diesmal reelle) Mannigfaltigkeit – wie dies in Bild 2.10 furdie reelle projektive Gerade bereits angedeutet wurde. Die reelle projektive EbeneP2(R) kann man als eine kompakte Flache im R3 modellieren (genauer: Immersionenvon P2(R) in R3). Analog zur Darstellung im Beweis von Satz 2.1.1.4 ist P2(R) dasΠ-Bild der Sphare S2, auf der wieder antipodale Punkte miteinander zu identifizie-ren sind. Dies wird topologisch durch eine gelochte Kugel und dem Ansetzen einerKreuzhaube realisiert, was in Bild 2.11 dargestellt ist. Dabei stellt die im oberen Teildes P2(R) dargestellte Linie eine Selbstdurchdringung der Sphare dar. Dieser Teil

76 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
P ( R)I I
S2
2
M
Bild 2.11: Die reelle projektive Ebene P2(R) als Modell im R3
der Flache – die Kreuzhaube – ist ein in die Berandung des Loches der Sphare S2
eingesetztes Mobiusband M – wie angedeutet. Daraus wird die folgende maßgebliche(topologische) Eigenschaften der projektiven Ebene verstandlich.
Bemerkung 2.2.2.2. P2(R) ist eine nichtorientierbare Flache.
Im Abschnitt uber Anwendungen und Ausblicke wird die “innere Struktur“ derprojektiven Ebene durch eine Uberlagerung erklart; auch die Entstehung der in Bild2.11 gezeigten Selbstdurchdringung wird dort verdeutlicht.
Nach dieser Veranschaulichung des Raumes P2(R) kommen wir wieder auf al-gebraische Varietaten zuruck. Das Bild 2.12 zeigt, wie die homogenen Koordinaten(x, y, z) in R3\{0} die Aquivalenzklasse [x, y, z] bzw. den Punkt p in P2(R) festle-gen. Die Nullstellenmenge eines homogenen Polynoms kann man sich dann als eineTeilmenge von eindimensionalen Untervektorraumen vorstellen – wie in Bild 2.12angedeutet.
x y
z
[0,0,1]
[1,0,0] [0,1,0]
Punkte in P ( R)2
R
I I
I
p = [ , , z]x y
( , )x y,z
1~Kurve in P (IR)C 2I
3
Bild 2.12: Eine projektive Kurve in P2(R)
Anstelle der kompletten Untervektorraume sollen jetzt lediglich ihre Durchstoß-punkte mit einer geeigneten Flache betrachtet werden. Hierzu bote sich eine Sphareum den Ursprung (0, 0, 0) an – leider hat sie den Nachteil, nicht in die Ebene ab-wickelbar zu sein. Daher wahlen wir die in Bild 2.13 gezeigte Doppelpyramide. Of-

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 77
fenbar kommen alle eindimensionalen Untervektorraume des R3 mit ihr zum Schnitt,d.h. alle Punkte des P2(R) sind auf ihr erfaßbar.
Weil gegenuberliegende Seiten dieser Pyramide miteinander identisch sind (anti-podale Punkte auf ihr gehoren zu einer Aquivalenzklasse in P2(R)), erhalt man denprojektiven (reellen) Raum als eine Konfiguration aus vier Dreiecken, die in Bild2.14 dargestellt sind. Die hinzuadjungierten Punkte der Form [x, y, 0] konnen dannwieder in einem prazisen Sinn als “unendlich fern“ bezeichnet werden.
[0,0,1]
[0,1,0]
[1,0,0]
x
y
z[ , , ]x y z
ID
IIID
IIID
IVDIID
IID
IVD
ID
Bild 2.13: Der Raum P2(R) als Doppelpyramide
[0,0,1]
[0,0,1]
[0,1,0]
[0,1,0]
[1,0,0]
[1,0,0]
x= 0
x = 0
y= 0
x<
0
y= 0
y = 0
x= 0
y<
0
z = 0
z= 0
z= 0
z < 0
[ , , ]x y z
ID
IIID
IVD IID
Bild 2.14: Die aufgeklappte Pyramide aus Bild 2.13 als Koordinatensystem des P2(R)
Die vier Dreiecke ∆I, ∆II, ∆III, ∆IV werden als Fundamentaldreiecke bezeich-net, ihre Eckpunkte [1, 0, 0], [0, 1, 0] und [0, 0, 1] als Fundamentalpunkte.

78 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Das im letzten Bild 2.14 gezeigte Gitter der abgewickelten Doppelpyramide mitidentifizierten gegenuberliegenden Seiten wird sich dabei gewissermaßen als Koor-dinatensystem bewahren, um die projektiven Kurven zeichnen und in der Ebenedarstellen zu konnen. Wie das konkret geschieht wird in den Anhangen E (wo dieanalytische Geometrie dieser Darstellung entwickelt wird) und G, Abschnitt G.2 (wounter Einsatz von Mathematica die Darstellung berechnet wird) erklart.
Beispiel 2.2.2.3. Zunachst soll die in Beispiel 2.2.1.11, Seite 74, eingefuhrte Fermat-Kurve Xn + Y n = Zn fur n = 3 in Form ihres kompakten Abschlusses dargestellt werden,siehe Bild 2.15.
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
1,-1,0 -1,1,0DI
DIIDIV
DIII
Bild 2.15: Der projektive Abschluß von X3 + Y 3 = Z3
Deutlich ist zu erkennen, wie die Kurve (vgl. Bild 2.9, Seite 74) von [1,−1, 0] bis zumhierzu identischen Punkt [−1, 1, 0] – also gewissermaßen vom “unendlich fernen“ bis zum“unendlich fernen Punkt“ – verlauft. ¤
Beispiel 2.2.2.4. Jetzt soll die in Beispiel 2.2.1.8, Seite 69, durch
P = XY 4 + Y Z4 + XZ4
definierte Kurve im Gitter der Fundamentaldreiecke ihren projektiven Abschluß finden.Dieser ist in Bild 2.16 gezeigt.
Diese Darstellung enthalt die gesamten reellen Schnitte der projektiven Kurve. Umdas einzusehen, werden die Fundamentaldreiecke I und III weggelassen und die Dreiecke IIund IV z.T. gespiegelt und in der Ebene gedreht. Das Bild 2.17 zeigt die so entstandenenKurven, welche die projektiv abgeschlossenen Pendants zu den in den Bilder 2.3, 2.4, Seite70f, gezeigten Kurven sind (die Kurvenverlaufe sind bequem uber die eingezeichnetenQuadranten zu verfolgen bzw. zu vergleichen). ¤
Beispiel 2.2.2.5. Nun greifen wir noch das Beispiel 2.2.1.9 von Seite 71 auf. Der projek-tive Abschluß der durch
P = X2Y 3 + X2Z3 + Y 2Z3
definierte Kurve ist in Bild 2.18 dargestellt.Das Bild 2.19 zeigt durch gesonderte Anordnung der Fundamentaldreiecke III und IV
wieder, daß alle in dem Bild 2.5, Seite 71, dargestellten Aspekte der Kurve unter denentsprechenden Schnitten in der kompakten Form nach Bild 2.18 bereits erfaßt sind. ¤

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 79
[0,1,0] [0,0,1]
[0,0,1]
[1,0,0]
[0,1,0][1,0,0]
D II
D III
D I
D IV
z = 0
z = 0 z = 0
y = 0
y = 0
x = 0
x = 0
Bild 2.16: Der projektive Abschluß von XY 4 + Y Z4 + XZ4 = 0
[0,1,0][0,1,0]
[0,0,1]
[0,0,1]
[0,0,1]
[1,0,0]
[0,1,0][0,1,0]
[1,0,0][1,0,0]
D II
D II
D IV
D IV
x = 0y = 0
p
p
p
[0,1,0]
[0,0,1]
[0,0,1]
[1,0,0]
[1,0,0]
D II
D IV
x = 0
p
p
Bild 2.17: Spezielle Anordnungen der Dreiecke aus Bild 2.16

80 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
[0,1,0]
[0,0,1]
[0,0,1] [1,0,0]
[0,1,0][1,0,0]
D II
D III
D I
D IV p
p
u
u
q
q
Bild 2.18: Der projektive Abschluß von X2Y 3 + X2Z3 + Y 2Z3 = 0
[0,1,0][0,1,0]
[0,1,0]
[0,1,0]
[0,0,1][0,0,1]
[0,0,1]
[0,0,1]
[0,0,1]
[0,1,0]
[1,0,0] [1,0,0]
[1,0,0][1,0,0]
[1,0,0]
D III
D III
D III
D IV
D IV
D IV
y = 0
z = 0
z = 0
p
q
u
Bild 2.19: Spezielle Anordnungen der Dreiecke aus Bild 2.18

2.2. PROJEKTIVE ALGEBRAISCHE KURVEN 81
Abschließend ein instruktives Beispiel, in dem exemplarisch das Arbeiten im pro-jektiven Raum P2 gezeigt werden soll, indem wahlweise zwischen dem VektorraumC3 und dem projektiven Raum gewechselt wird. Die folgenden Rechnungen undBilder zeigen, wie analytische Geometrie im P2 effektiv betrieben werden kann.
Beispiel 2.2.2.6. Ziel der angestellten Betrachtung ist es, parametrische Losungen derGleichung des Pythagoras (569 v.Chr. Samos - 475 v.Chr.) x2 + y2 = z2 zu gewinnen.Dies soll in der Methodik der analytischen Geometrie durchgefuhrt werden.
Zunachst wird X2 + Y 2 = Z2 als projektive Kurve C aufgefaßt und die Schnittpunktemit der durch die Punkte [0, 1, 1] und [t, 0, 1] definierten Gerade Gt bestimmt. Die GeradeGt in P2 wird durch den in C3 zweidimensionalen Unterraum
Gt ={
[x, y, z] ∈ P2 |(
xyz
)= µ
(011
)+ λ
(t01
), µ, λ ∈ C
}
definiert, der nach (2.6) auch in Form der Geradengleichung X + tY − tZ = 0 notiertwerden kann. Die Schnittpunkte von Gt mit der Kurve C ergeben sich aus
λ2 t2 + µ2 = (µ + λ)2 ⇔ λ(λ(t2 − 1)− 2µ) = 0⇔ λ = 0 ∨ 2µ = λ(t2 − 1)
zuλ = 0 :
(xyz
)= µ
(011
)Π7−→ [0, 1, 1] ∈ P2 und
µ = 12λ(t2 − 1) :
(xyz
)= 1
2λ( 2t
t2−1t2+1
)Π7−→ [2t, t2 − 1, t2 + 1] ∈ P2 .
Das Bild 2.20 zeigt die (reell angenommene) Situation im R3, die stark ausgezogendargestellte Ebene ist der Schnitt [x, y, 1], unter dem C der hierin gezeigte Kreis vomRadius eins ist.
x
y
z
[ ,0,1]t
[0,1,1]
[0,0,1]
[1,0,0]
[0,1,0]
t
[2 , -1, +1]t t t2 2
C
C~
G : [ , 0, 1], [0, 1, 1]tt
Bild 2.20: Die Kurve C : X2 + Y 2 = Z2 und die Gerade Gt in P2

82 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Diese Schnittpunkte vermitteln jetzt eine bijektive Abbildung β zwischen der durchy = 0 definierten komplexen Geraden L und der Kurve C (siehe Bild 2.21):
β : L −→ C
[t, 0, 1] 7−→{ [
2t, t2 − 1, t2 + 1], falls t 6= 0,
[0, 1, 1] , sonst.
xy
y = 0
z[ ,0,1]t
[0,0,1]
[1,0,0]
[0,1,0]
t
t1
Bild 2.21: Die Abbildung β
Injektivitat : seien s, t 6= 0 und β([t, 0, 1]) = β([s, 0, 1]), d.h.
(2t2, t2 − 1, t2 + 1) = λ(2s, s2 − 1, s2 + 1) fur ein λ ∈ C\{0},dann folgt
t = λs und aus den ubrigen Koordinaten λ2 = λ = 1, d.h. s = t.
Fur o.B.d.A. s = 0 und t 6= 0 kann es andererseits kein λ 6= 0 geben, so daß (2t2, t2 −1, t2 + 1) = λ(2s, s2 − 1, s2 + 1) gilt.Surjektivitat : fur [0, 1, 1] ∈ C, ist β([1, 0, 0]) = [0, 1, 1]; ist [x, y, z] ∈ C mit x 6= 0, so gilt
β([y+z
x , 0, 1])
=[2x(y + z), y2 + z2 + 2yz − x2, y2 + z2 + 2yz + x2
]
=[2x(y + z), 2y2 + 2yz, 2z2 + 2yz
](mit x2 + y2 = z2)
= [x(y + z), y(y + z), z(y + z)] = [x, y, z].
Die Bijektion β verrat uns jetzt mit µ, λ, t ∈ C und λ := tµ uber
[λ, 0, µ]β7−→ [
2t, t2 − 1, t2 + 1]
=[2tµ · µ, (tµ)2 − µ2, (tµ)2 + µ2
]
=[2λµ, λ2 − µ2, λ2 + µ2
],
daß alle komplexen Losungen der pythagoreischen Gleichung
x2 + y2 = z2
von der Formx = 2λµ, y = λ2 − µ2 , z = λ2 + µ2
sind. ¤

2.3. AFFINE UND PROJEKTIVE ALGEBRAISCHE KURVEN 83
2.3 Affine und projektive algebraische Kurven
Wie der letzte Abschnitt schon deutlich machte, hangen affine und projektive Kur-ven eng miteinander zusammen. Von jeder affinen Kurve kann man zu projektivenKurven gelangen, indem Punkte im “Unendlichen“ hinzuadjungiert werden, wasdann zum projektiven Abschluß der affinen Kurve fuhrt.
In Abschnitt 2.1.2 wurden die zu Cn homoomorphen Teilmengen Uk nach (2.2)eingefuhrt. Um affine Kurven in C2 bzw. projektive Kurven in P2 zu untersuchen,soll der komplexe Raum C2 jetzt mit
U = {[x, y, z] ∈ P2 | z 6= 0}durch den Homoomorphismus
φ : U −→ C2
[x, y, z] 7−→(x
z,y
z
)
mit der Umkehrabbildung
ψ : C2 −→ U
(x, y) 7−→ [x, y, 1]
identifiziert werden.
Wir gehen nun von einer projektiven Kurve C aus, die durch das nichtkonstantehomogene Polynom P ∈ C[X, Y, Z] vom Grad d definiert sei. Wird – wie obenbeschrieben – der C2 mit U identifiziert, so stellt der Schnitt von C mit U die affineKurve C in C2 dar, die durch das inhomogene Polynom
P (X, Y, 1) ∈ C[X, Y ]
in zwei Variablen definiert wird. Sofern Z kein Faktor von P ist (d.h. die projektiveKurve C keine Gerade der Art Z = 0 enthalt 8 ), ist auch dieses Polynom bzw. dieKurve C vom Grad d.
Den Vorgang des Schnittes mit U = {[x, y, 1]} kann man sich nach Bild 2.22vorstellen – wobei hier wieder der C2 vereinfacht als eine Ebene dargestellt wurde.
Ist nun umgekehrt durch das i.a. inhomogene Polynom
Q =∑
µ+ν≤d
cµ,νXµY ν ∈ C[X,Y ]
vom Grad d eine affine Kurve C definiert, so kann diese wieder als Schnitt von Umit einer diesmal durch das homogene Polynom
P := Zd Q
(X
Z,Y
Z
)=
∑
µ+ν≤d
cµ,νXµY νZd−µ−ν ∈ C[X,Y, Z] (2.9)
8Dies kann sinnvollerweise stets ausgeschlossen werden, indem z.B. P um den Faktor Z gekurztwird – wobei der Grad um eins verringert wird. Auch konnte eine Koordinatentransformationvorgenommen werden, bzw. man betrachtet Identifizierungen von C2 mit {[x, y, z]|x 6= 0} oder{[x, y, z]|y 6= 0}.

84 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
x y
z
[0,0,1]
[1,0,0]
[0,1,0]
Punkte in P2I
[ , , 1]x y
( , )x y1
und Kurve in CC2
und
in C2
~Kurve in PC 2I
Bild 2.22: Die affine Kurve C als Schnitt von C mit {[x, y, 1]}
definierten projektiven Kurve C gedeutet werden. Dabei wird (2.9) offensichtlichdurch das in Abschnitt 1.2 und Definition 1.2.7 beschriebene Verfahren der Homo-genisierung eines Polynoms gewonnen. Fur die so bestimmte projektive Kurve Ckonnen jetzt auch die Schnittpunkte mit der “unendlich fernen“ Geraden Z = 0 zu
C ∩ {[x, y, 0] ∈ P2} = {[x, y, 0] ∈ P2 |P (x, y, 0) =∑
0≤µ≤d
cµ,d−µxµyd−µ = 0}
angegeben werden. Dabei kann das darin auftauchende homogene Polynom P (X, Y, 0)nach Lemma 1.2.5 in ein Produkt linearer Faktoren
∏
1≤k≤d
(αkX + βkY ) (2.10)
zerlegt werden.
Definition 2.3.1. Ist C eine durch das Polynom Q ∈ C[X,Y ] definierte affinealgebraische Kurve in C2, P ∈ C[X,Y, Z] das nach (2.9) durch Homogenisierung ausQ gebildete Polynom, so heißen die aus P (X,Y, 0) nach (2.10) durch Faktorisierunggewonnenen Geraden die Asymptoten zur affinen Kurve C.
Die in (2.10) auftretenden Asymptoten αkX + βkY entsprechen dabei Punkten[−βk, αk] im P1, die gemaß dem induktiven Aufbau der Raume Pn nach (2.3) genaudie Punkte von C \C sind, wobei C ⊂ P2 = C2∪P1 und C ⊂ C2 betrachtet werden.
In diesem Sinne erhalten wir eine bijektive Korrespondenz zwischen affinen Kur-ven C in C2 und projektiven Kurven C in P2, welche nicht die “im Unendlichen“liegende Gerade Z = 0 enthalten. Das folgende Beispiel gibt einen Uberblick vonprojektiven Abschlussen einiger Kurven, die uns bereits begegnet sind; dabei kommtwieder das unter Abschnitt 2.2.2 eingefuhrte Gitter der Fundamentaldreiecke zumEinsatz.

2.3. AFFINE UND PROJEKTIVE ALGEBRAISCHE KURVEN 85
Beispiel 2.3.2. Die nachfolgenden Bilder zeigen die projektiven Abschlusse der in deruntenstehenden Tabelle 2.1 aufgelisteten Kurven.
Tabelle 2.1: Verzeichnis der gezeigten projektiven Abschlusse
Bild affine Kurve projektiver Abschluß
GeradeBild 2.23 X − 2Y + 5 = 0 X − 2Y + 5Z = 0
ParabelBild 2.24 X2 = Y X2 = Y Z
Neilsche ParabelBild 2.26 X3 = Y 2 X3 = Y 2Z
Kartesisches BlattBild 2.28 X3 + Y 3 = 3XY X3 + Y 3 = 3XY Z
StrophoideBild 2.29 (X − 2)Y 2 = −X2(X + 2) (X − 2Z)Y 2 = −X2(X + 2Z)
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
Bild 2.23: Projektiver Abschluß der Geraden X − 2Y + 5 = 0 in P2(R)
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
Bild 2.24: Projektiver Abschluß der Parabel X2 = Y in P2(R)

86 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
[0,1,0]
[1,0,0]
[0,0,1]
C~
Bild 2.25: Projektiver Abschluß der Parabel X2 = Y in P2(R) in verzerrten Fundamen-taldreiecken
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
Bild 2.26: Projektiver Abschluß der Neilschen Parabel in P2(R)
[0,0,1]
[0,0,1]
[0,1,0]
[1,0,0]
[1,0,0]
Bild 2.27: Die Neilsche Parabel in P2(R) als Bild auf eine Kugel und in verzerrter Ab-wicklung in die Ebene

2.3. AFFINE UND PROJEKTIVE ALGEBRAISCHE KURVEN 87
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
Bild 2.28: Projektiver Abschluß des Kartesischen Blattes X3 + Y 3 = 3XY in P2(R)
0,0,1
0,1,0 1,0,0
1,0,0 0,1,0
0,0,1
1,0,0 0,1,0
Bild 2.29: Projektiver Abschluß der Strophoide (X − 2)Y 2 = −X2(X + 2) in P2(R) undunter Umordnung der Fundamentaldreiecke I und III
Laufen die Kurven in den Fundamentalpunkten aus verschiedenen Fundamentaldrei-ecken zusammen, so macht die Parabel in Bild 2.24 deutlich, daß die gleichseitig gestaltetenFundamentaldreiecke die Kurve zwar topologisch richtig, unter dem Gesichtspunkt derDifferenzierbarkeit jedoch nicht adaquat widerspiegeln. Die Parabel X2 = Y ist naturlichnichtsingular, obwohl der in Bild 2.24 gezeigte projektive Abschluß zwei Knicke in [0, 0, 1]und [0, 1, 0] aufweist. In [Fischer94] werden die Fundamentaldreiecke verzerrt dargestellt.Die an das Dreieck I angrenzenden Fundamentaldreiecke sind in der Ebene jetzt nichtmehr als Ganzes erfaßbar. Danach gewinnt der projektive Abschluß der Parabel das inBild 2.25 zu betrachtende Aussehen.
In Bild 2.27 ist die Neilsche Parabel in ihrer projektiven Form noch einmal uber ihreDurchstoßpunkte (im P2(R) bzw. R3\{0}) mit einer Kugel anstelle der in Bild 2.13, Seite77, dargestellten Doppelpyramide zu sehen. Dabei ist die Darstellung der Kugel so zuverstehen, daß gegenuberliegende Punkte auf ihr miteinander zu identifizieren sind (wastopologisch wieder zu einer Kugel mit Kreuzhaube aquivalent ist). ¤

88 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Am Beispiel der Strophoide soll an dieser Stelle noch einmal auf die in Definition2.3.1, Seite 84, eingefuhrten Asymptoten zu einer affinen Kurve naher eingegangenwerden.
Beispiel 2.3.3. Die durch Q = X2(X + 2) + Y 2(X − 2) affin gegebene Strophoide wirddurch Homogenisierung zu P = X2(X + 2Z) + Y 2(X − 2Z) projektiv abgeschlossen.Nach Lemma 1.2.5 kann P (X, Y, 0) als homogenes Polynom in zwei Veranderlichen in einProdukt linearer Faktoren
P (X, Y, 0) = X3 + XY 2 = X (X + iY ) (X − iY )
zerlegt werden. Dies sind nach Definition 2.3.1 gerade die Asymptoten der durch P defi-nierten projektiven Strophoide.
-5
0
5
-4
0
4
-10
-5
0
5
10
-4
0
4
x1
y1
i y2
R2
I
Bild 2.30: Die komplexe Strophoide und ihre Asymptoten
In Bild 2.30 ist die Strophoide X2(X + 2) + Y 2(X − 2) = 0 mit ihren Asymptoten(gestrichelte und strichpunktierte Geraden) dargestellt, dabei ist x = x1 + ix2, y = y1 +iy2 ∈ C. Fur die gezeigte Darstellung wurde x2 = 0 gesetzt. ¤
Zum Abschluß dieses Kapitels soll die Korrespondenz von Singularitaten unter-sucht werden. Ist die projektive Kurve C nichtsingular, so gilt dies auch fur dieassoziierte affine Kurve C. Die Umkehrung gilt dagegen i.a. nicht, da bei dem pro-jektiven Abschluß Punkte im “Unendlichen“ hinzuadjungiert werden, die sich alssingular erweisen konnen. 9 Es gilt die folgende Aussage.
9So ergibt beispielsweise der projektive Abschluß der Kurve XY 2 = 1 unter dem Schnitt mit{[1, y, z]} die Neilsche Parabel Y 2 = Z3 mit einer Singularitat in [1, 0, 0].

2.3. AFFINE UND PROJEKTIVE ALGEBRAISCHE KURVEN 89
Lemma 2.3.4. Es sei [a, b, c] ein Punkt der projektiven Kurve
C = {[x, y, z] ∈ P2 |P (x, y, z) = 0}.Gilt c 6= 0, so ist [a, b, c] genau dann ein nicht singularer Punkt von C, wenn
(ac, b
c
)ein nichtsingularer Punkt der affinen Kurve
C = {(x, y) ∈ C2 |P (x, y, 1) = 0}ist. Daneben entspricht bei Identifizierung von C2 mit
U = {[x, y, z] ∈ P2 | z 6= 0}die projektive Tangente an C im Punkt [a, b, c] ∈ P2 derjenigen im Punkt
(ac, b
c
) ∈ C2
von C.
Beweis. Der Punkt(
ac , b
c
)ist genau dann eine Singularitat von C, wenn
P
(a
c,b
c, 1
)= 0 = PX
(a
c,b
c, 1
)= PY
(a
c,b
c, 1
)
gilt. Weil das Polynom P und seine Ableitungen (Satz 1.2.9) homogen sind und wegenc 6= 0 ist das genau dann der Fall, wenn
P (a, b, c) = 0 = PX(a, b, c) = PY (a, b, c).
Nach der Eulerschen Relation (1.9) nach Lemma 1.2.10 ist dies aquivalent dazu, daßauch die partielle Ableitung nach Z in (a, b, c) verschwinden muß:
P (a, b, c) = 0 = PX(a, b, c) = PY (a, b, c) = PZ(a, b, c) ,
so daß die obige Singularitat in C genau dann auftritt, wenn [a, b, c] ein singularer Punktvon C ist.
Wird der C2 in der genannten Weise mit der Menge U identifiziert, so stellt die in P2
definierte Tangente
XPX(a, b, c) + Y PY (a, b, c) + ZPZ(a, b, c) = 0
in C2 die GeradeXPX(a, b, c) + Y PY (a, b, c) + PZ(a, b, c) = 0 (2.11)
dar; unter Benutzung der Eulerschen Relation (1.9) im Punkt (a, b, c) gilt
dP (a, b, c) = 0 = aPX(a, b, c) + bPY (a, b, c) + cPZ(a, b, c), bzw.
PZ(a, b, c) = −a
cPX(a, b, c)− b
cPY (a, b, c)
und wegen Homogenitat der Ableitungen stellt sich (2.11) dann zu
(X − a
c
)PX
(a
c,b
c, 1
)+
(Y − b
c
)PY
(a
c,b
c, 1
)= 0
dar, was die Tangente an C im Punkte(
ac , b
c
)im C2 ist. ¤

90 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
Das abschließende Beispiel soll alle besprochenen Aspekte in diesem Kapitel nocheinmal zusammenfassen. Dabei wird deutlich, wie die unterschiedlichen Begriffe undErgebnisse zusammenspielen, um das Verhalten einer gegebenen Kurve zu verstehen.
Beispiel 2.3.5. Wir betrachten die durch das parameterabhangige homogene Polynom
P = X3 + Y 3 + Z3 + 3λXY Z mit λ ∈ Cgegebene Familie von projektiven Kurven Cλ. Dabei soll nun zunachst untersucht werden,fur welche Werte von λ die Kurven nichtsingular sind. Aus Beispiel 2.2.1.11 folgt diessofort fur λ = 0. Daher soll im folgenden stets λ 6= 0 gelten.
Aus den partiellen Ableitungen von P ergibt sich als Bedingung fur eine Singularitat[a, b, c] ∈ P2 das folgende Gleichungssystem
P (a, b, c) = a3 + b3 + c3 + 3λabc = 0 , (I)PX(a, b, c) = 3a2 + 3λbc = 0 , (II)PY (a, b, c) = 3b2 + 3λac = 0 , (III)PZ(a, b, c) = 3c2 + 3λab = 0 , (IV)
Hieraus folgt, daß keine der Komponenten a, b oder c verschwindet; denn unter derAnnahme einer Singularitat der Form [a, b, 0] o.B.d.A. folgt aus (II) und (III) sofort aucha = b = 0, was aber wegen [a, b, c] ∈ P2 nicht sein kann: es ist also a, b, c 6= 0.
Nach Division von a2 bzw. b2 bzw. c2 der Beziehungen (II) bzw. (III) bzw. (IV) ergebensich als weitere notwendige Bedingung fur eine Singularitat die Gleichheiten
b c
a2=
a c
b2=
a b
c2
und damita3 = b3 = c3. (V)
Wegen [a, b, c] ∈ P2 und a, b, c 6= 0 kann o.B.d.A. c = 1 gesetzt werden, wobei sich (V)dann in der Form
a3 = 1 ∧ b3 = 1
darstellt. Sofern es singulare Punkte gibt, sind sie also von der Gestalt[e
2πi3
µ, e2πi3
ν , 1]
mit µ, ν = 0, 1, 2.Welche und ob uberhaupt mogliche Kombinationen der µ, ν = 0, 1, 2 auftreten, legen
jetzt (I)-(IV), d.h. insbesondere der Parameter λ, fest. Dabei folgt aus allen Gleichungen(I)-(IV) unter dem Ergebnis (V) mit c = 1 die Beziehung
1 + λab = 0 ,
woraus sich mogliche Werte fur λ zu
λ = −a−1 b−1 = eπi · e 2πi3
µ · e 2πi3
ν = eπi− 2πi3
τ
mit τ = 0, 1, 2 (wegen Periodizitat) berechnen. Singularitaten sind also nur fur
λ ∈{−1, e
πi3 , e−
πi3
}= {−1, α, α} (2.12)

2.3. AFFINE UND PROJEKTIVE ALGEBRAISCHE KURVEN 91
zu erwarten, wobei α := eπi3 und der Parameter λ dann aus der Nullstellenmenge des
Kreisteilungspolynomsλ3 + 1 = (λ + 1)(λ2 − λ + 1)
ist. Erneut legen die Bedingungen (I)-(IV) fest, welche Punkte [e2πiµ/3, e2πiν/3, 1] mit Wer-ten fur λ nach (2.12) Singularitaten von Cλ bilden. Es ergibt sich die folgende Ubersicht,die zeigt, daß zu jedem Wert von λ aus (2.12) je drei Singularitaten auftreten:
λ = −1 : [ 1, 1, 1 ] (µ = ν = 0),[ e
2πi3 , e
4πi3 , 1 ] (µ = 1, ν = 2),
[ e4πi3 , e
2πi3 , 1 ] (µ = 2, ν = 1);
λ = α : [ e4πi3 , e
4πi3 , 1 ] (µ = ν = 2),
[ 1, e2πi3 , 1 ] (µ = 0, ν = 1),
[ e2πi3 , 1, 1 ] (µ = 1, ν = 0);
λ = α : [ e2πi3 , e
2πi3 , 1 ] (µ = ν = 1),
[ 1, e4πi3 , 1 ] (µ = 0, ν = 2),
[ e4πi3 , 1, 1 ] (µ = 2, ν = 0).
Welcher Art sind die auftretenden Singularitaten nun? Mit der oben gezeigten Korre-spondenz zwischen affinen und projektiven Kurven wird zur Beantwortung dieser Fragejetzt kurzzeitig durch Identifikation von U mit C2 die Familie von affinen Kurven Cλ
betrachtet, die durch das Polynom Q(X,Y ) = P (X, Y, 1) definiert sind. Dabei bleibeninsbesondere die Singularitaten nach Lemma 2.3.4 erhalten. Um das Verhalten in den sin-gularen Punkten weiter zu analysieren, konnen nun die im ersten Kapitel, Abschnitt 1.3,entwickelten Methoden benutzt werden.
Beispielhaft betrachten wir zunachst den Fall λ = −1 und die zur projektiven KurveC−1 assoziierte Kurve C−1, die durch
Q(X, Y ) := P (X, Y, 1) = X3 + Y 3 + 1− 3XY
definiert ist. Aus den zweiten partiellen Ableitungen
∂2Q
∂X2= 6X ,
∂2Q
∂X∂Y= −3 ,
∂2Q
∂Y 2= 6Y (2.13)
ergibt sich mit Satz 1.3.11 und Definition 1.3.8 zunachst, daß alle auftretenden Singula-ritaten gewohnliche Doppelpunkte sind. Weiter kann jetzt Definition 1.3.6 und Gleichung(1.10) benutzt werden, um die Geradengleichungen der Tangenten zu finden; es ergibt sichaus (2.13) in dem Punkt φ([1, 1, 1]) = (1, 1) das Polynom
∂2Q
∂X2
∣∣∣∣(1,1)
(X − 1)2
2!+
∂2Q
∂X∂Y
∣∣∣∣(1,1)
(X − 1)(Y − 1)1! 1!
+∂2Q
∂Y 2
∣∣∣∣(1,1)
(Y − 1)2
2!
= 3(X − 1)2 − 3(X − 1)(Y − 1) + 3(Y − 1)2,
das sich zu3
(X − Y eπi/3 − e−πi/3
) (X − Y e−πi/3 − eπi/3
)(2.14)

92 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
faktorisieren laßt, womit zwei Tangenten bestimmt sind. Genauso kann in dem singularenPunkt (e2πi/3, e4πi/3) vorgegangen werden, wo die Faktorisierung des Polynoms (1.10) dieTangenten
6 e2πi3
(X − e
2πi3
)2
2!− 3
(X − e
2πi3
)(Y − e
4πi3
)
1! 1!+ 6 e
4πi3
(Y − e
4πi3
)2
2!
= 3 e2πi3
((X − e
2πi3
)2− e−
2πi3
(X − e
2πi3
)(Y − e
4πi3
)+ e
2πi3
(Y − e
4πi3
)2)
= 3 e2πi3 (X + Y + 1)
(X − Y e−
πi3 − e
πi3
). (2.15)
liefert. Dabei fallt auf, daß jeweils die zweiten Faktoren in (2.14) und (2.15) gleich sind,d.h. die Singularitaten in (1, 1) und (e2πi/3, e4πi/3) besitzen dieselbe Tangente. Daruberhinaus ergeben alle bisher gefundenen Tangenten sogar eine Faktorisierung des PolynomsQ :
(X + Y + 1)(X − Y e
πi3 − e−
πi3
)(X − Y e−
πi3 − e
πi3
)= X3 + Y 3 + 1− 3XY,
d.h. die Kurve C−1 zerfallt vollstandig in drei Geraden (Tangenten), von denen jeweilszwei durch eine der drei Singularitaten verlauft.
In gleicher Weise verhalt sich die Kurve Cλ auch fur die Parameter λ = α und λ = α.Die Faktorisierungen in lineare Komponenten wird jetzt zusammenfassend angegeben,wobei wieder die projektive Kurve betrachtet werden kann (die Zerlegung im projektivenFall wird dabei einfach durch Homogenisierung gewonnen):
λ = −1 : (X + Y + Z)(X − αY − αZ)(X − αY − αZ)= X3 + Y 3 + Z3 − 3XY Z ;
λ = α : −α (−αX + Y + Z)(X − αY + Z)(X + Y − αZ)= X3 + Y 3 + Z3 + 3αXY Z ;
λ = α : −α (−αX + Y + Z)(X − αY + Z)(X + Y − αZ)= X3 + Y 3 + Z3 + 3αXY Z .
Das Bild 2.31 gibt das Aussehen der Kurven C−1, Cα, Cα und die Lage der Tangentenbzw. Singularitaten wieder.
- + + = 0aX Y Z
X Y Z- + = 0a
x y z+ - = 0a
[e , ,1]4 i/3p
e4 i/3p
[1,e ,1]2 i/3p
[ ,1,1]e2 i/3p
X Y Z+ + = 0
X- Y Za a- = 0X Y Z- - = 0a a
[e ,e ,1]4 i/3 2 i/3p p
[e ,e ,1]2 i/3 4 i/3p p
[1,1,1]
- + + = 0aX Y Z
X Y Z- + = 0aX Y Z+ - = 0a
[e ,e ,1]2 i/3 2 i/3p p
[1, ,1]e4 i/3p
[ ,1,1]e4 i/3p
Bild 2.31: Die Kurve Cλ in den singularen Fallen fur λ = −1, α, α

2.3. AFFINE UND PROJEKTIVE ALGEBRAISCHE KURVEN 93
Reelle Schnitte der Kurve Cλ fur mehrere Werte des Parameters λ sind im Bild 2.32 zusehen (der je verwendete Wert fur λ wurde an die Kurven notiert). Im Falle von λ = −1mutiert die Kurve zu der dargestellten Gerade X+Y +1 = 0 und dem Punkt (1, 1), welcherder gemeinsame “Durchstoßpunkt“ der Geraden X − αY − α = 0 bzw. X − αY − α = 0mit dem R2 ist. Hier zeigt sich, wie ungenugend der reelle Schnitt die Situation zuweilenwiderspiegeln kann. Daher wurden die Kurven Cλ noch einmal komplex geschnitten, wobeidie Schnittebene innerhalb des C2 in die drei Tangenten gelegt wurde, die im singularenFall λ = −1 auftreten. Um wieder zu einer ebenen Darstellung zu gelangen, werden diekomplexen Variablen x und y durch die Transformation 10
x = x1 + ix2 = −32(ξ + η) + 1 + i
√3
2 (ξ − η) , (2.16)
y = y1 + iy2 = −32(ξ + η) + 1 − i
√3
2 (ξ − η) (2.17)
ersetzt und die Kurve mit den (reellen!) Variablen ξ und η beschrieben. Das Ergebnisist im Bildes 2.33 zu erkennen. Dabei ist die Gerade X − αY − α = 0 die Abszisseξ = 0 und X − αY − α = 0 die Ordinate η = 0. Der daraus entstehende Schnitt mitX + Y + 1 = 0 stellt sich als Gerade ξ + η − 1 = 0 dar. Eine Variation von λ ergibt danndie um diese Geraden angeordneten Kurven. So liefert etwa λ = −1 das reelle Polynomξη(ξ2 + η2 − 1) und fur einen Wert von λ = 2 ist der Schnitt durch die Nullstellenmengevon 27(ξ + η)(ξ + η − ξη − 1) + 9 definiert. (Da die Kurven zu “dicht liegen“, um dieWerte des Parameters λ einzutragen, gibt das darunter stehende Bild zur Orientierung dieKurven an, die zu λ > −1 bzw. zu λ < −1 gehoren, wahrend die drei Geraden die Kurvefur λ = −1 darstellen.) ¤
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
0
0
0
1
2
-1
-1
-1
2
21
1
-1,5
-2-2,5
-2,5
-2.5
-2
-2-1,5
-1.5
Bild 2.32: Die Familie von Kurven Cλ fur die Parameter λ = −2,5; −2; −1,5; −1; 0; 1und 2 unter verschiedenen Schnitten (I)
10Die Transformation kann durch Aufstellen der komplexen Ebenengleichung(x, y) = ξ
((e4πi/3, e2πi/3)− (1, 1)
)+ η
((e2πi/3, e4πi/3)− (1, 1)
)+ (1, 1) gefunden werden.

94 KAPITEL 2. KOMPLEXE PROJEKTIVE RAUME
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
l< -1
l< -1
l> -1
l> -1
l> -1
l< -1
l< -1
Bild 2.33: Die Familie von Kurven Cλ fur die Parameter λ = −2,5; −2; −1,5; −1; 0; 1und 2 unter verschiedenen Schnitten (II)

Teil III
Durchfuhrung
95


Kapitel 3
Algebraische Eigenschaften
In wie vielen Punkten schneiden sich zwei projektive Kurven? Diese Fragestellungund daraus erwachsene Anwendungen stehen im Mittelpunkt dieses Kapitels. Einevollstandige Beantwortung der ersten Fragestellung wird durch den Satz von Bezoutgegeben. Bei der Formulierung des Satzes ist eine geeignet festzulegende Schnittmul-tiplizitat wesentlich, fur die Beweisfuhrung dagegen der Begriff der Resultante, aufden zunachst eingegangen werden soll.
Die wichtigsten Anwendungen werden eine Klassifkation der Quadriken und Ku-biken sein, sowie algebraische Erklarungen von einigen geometrischen Satzen. Insbe-sondere wird sich zeigen, daß die Kubiken mit einer besonderen Gruppeneigenschaftausgezeichnet sind.
3.1 Schnittverhalten algebraischer Kurven
3.1.1 Die Resultante
In diesem Unterabschnitt soll ein fur die nachfolgenden Beweise sehr effizientes tech-nisches Hilfsmittel bereitgestellt werden. Dabei handelt es sich um die Resultantezweier Polynome aus C[X]. Um die Stringenz des Haupttextes zu erhalten, wird furdie genaue Definition auf den Anhang B verwiesen, wo eine weiterfuhrende Betrach-tung des hier nur uber seine Eigenschaften eingefuhrten Begriffes stattfindet.
Sind zwei Polynome P,Q ∈ C[X] gegeben, so leistet die Resultante RP,Q von Pund Q nun folgendes:
Lemma 3.1.1.1. Die Polynome P und Q haben genau dann einen gemeinsamennichtkonstanten Faktor, wenn gilt
RP,Q = 0 .
Die Resultante stellt also fest, ob zwei Polynome eine gemeinsame Nullstelleaufweisen – in genau diesem Fall verschwindet sie. Dabei bestimmt sich ihr Wertaus den Koeffizienten der Polynome P und Q (siehe Def. B.1.1), ohne daß eineexplizite Berechnung der Nullstellen von P oder Q notig ist. Um die Resultante
97

98 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
auch fur Polynome in drei Variablen zur Verfugung zu haben, wird ein P ∈ C[X, Y,Z] = C[X][Y, Z] als Polynom uber C[X] in der Form
P (X,Y, Z) = a0(Y, Z) + a1(Y, Z)X + · · ·+ an(Y, Z)Xn ,
mit Koeffizienten aus dem Ring C[Y, Z], aufgefaßt. Die Resultante hat dann die inden nachfolgenden Lemmata genannten Eigenschaften.
Lemma 3.1.1.2. Es seien P,Q ∈ C[X,Y, Z] homogene Polynome vom Grad n undm. Dann ist die Resultante RP,Q(Y, Z) ein homogenes Polynom in Y und Z vomGrad n ·m.
Lemma 3.1.1.3. Es seien P,Q ∈ C[X,Y, Z] homogene Polynome, so daß
P (1, 0, 0) 6= 0 6= Q(1, 0, 0) .1
In diesem Fall haben die Polynome P (X,Y, Z) und Q(X, Y, Z) genau dann einengemeinsamen nicht konstanten homogenen Faktor, wenn das Polynom RP,Q(Y, Z)verschwindet.
Die Beweise der drei aufgefuhrten Lemmata und konkrete Moglichkeiten, dieResultante zu berechnen, werden im Anhang B gegeben.
3.1.2 Der Satz von Bezout
Bevor der Satz von Bezout in seiner vollen Machtigkeit vorgestellt wird, sollen nochzwei Abschatzungen uber die mogliche Anzahl von Schnittpunkten zweier projek-tiver algebraischer Kurven vorgenommen werden, deren Beweise sich weiter untenbefinden. Außerdem sollen i.a. gemeinsame Komponenten der betrachteten Kurvenausgeschlossen werden, weil andernfalls der triviale Fall von unendlich vielen ge-meinsamen Schnittpunkten vorlage. Jetzt aber zunachst eine untere Abschatzung.
Satz 3.1.2.1. Zwei projektive algebraische Kurven C und D in P2 schneiden sichin mindestens einem Punkt.
Dabei ist es naturlich wesentlich, projektive Kurven zu betrachten. Denn in P2
schneiden sich beispielsweise auch die (in C2) parallelen Geraden
αX + βY + γ1Z = 0 und αX + βY + γ2Z = 0,
mit γ1 6= γ2, in genau einem Punkt, namlich dem hinzuadjungierten “unendlichfernen Punkt“ [−β, α, 0].
Eine obere Abschatzung der moglichen Anzahl von Schnittpunkten liefert derfolgende Satz. Zusammen mit 3.1.2.1 ergibt das bereits einen guten Einblick, wasder Satz von Bezout leisten wird.
1Dies ist notwendig, um sicher zu stellen, daß P bzw. Q vom gleichen Grad sowohl als Polynomein C[X] (mit Koeffizienten aus C[Y,Z]) als auch in C[X,Y, Z] sind.

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 99
Satz 3.1.2.2 (Schwache Form des Satzes von Bezout). Besitzen zwei projektiveKurven C und D in P2 vom Grad n bzw. m keine gemeinsamen Komponenten, soschneiden sie sich in hochstens n ·m Punkten.
Die im Bild 3.1 gezeigten Kubiken sind ein Beispiel, wo die volle Anzahl derSchnittpunkte von n ·m (= 32 = 9 Punkte in diesem Fall) ausgeschopft wird. Dabeiwurde vereinfacht ein reeller Schnitt mit z = 1 betrachtet, da hier alle Schnittpunkteim Endlichen liegen.
x
y
Bild 3.1: Neun Schnittpunkte der Kubiken Y = X3 − 4X und X = Y 3 − 4Y
Eine weitere Folgerung dieser oberen Abschatzung betrifft die in der Einfuhrunggezeigte Zykloide (siehe Seite 3, Bild 1, links). Da sie mit der Abrollgeraden (alsKurve vom Grad eins) unbegrenzt viele Schnittpunkte aufweist, kann sie nach Satz3.1.2.2 keine algebraische Kurve sein. Auch die Hypozykloide ist fur den Fall R/r 6∈Q keine algebraische Kurve, da unendlich viele Schnittpunkte mit der algebraischenKurve des Abrollkreises vorliegen.
Die Beweise der beiden Abschatzungen greifen wesentlich auf den folgenden Hilfs-satz zuruck, der die Lemmata des Abschnittes 3.1.1 in Form von aquivalenten Aus-sagen anordnet.
Hilfssatz 3.1.2.3. Es seien P, Q homogene Polynome in C[X,Y, Z], welche dieprojektiven Kurven C und D definieren, und es seien b, c ∈ C nicht beide Null; dannsind die folgenden Aussagen aquivalent zueinander:
(1) (bZ − cY ) ist ein Faktor von RP,Q(Y, Z).
(2) Fur P (X) := P (X, b, c), Q(X) := Q(X, b, c) ∈ C[X] ist RP ,Q = 0.
(3) Es gibt ein a ∈ C mit [a, b, c] ∈ C ∩D.
Beweis. (1) ⇒ (2): Ist RP,Q(Y, Z) = (bZ − cY )R(Y, Z), mit einem Quotienten R ∈C[Y, Z], dann folgt RP ,Q = RP,Q(b, c) = 0 ·R(b, c) = 0.
(2) ⇔ (3): Nach Lemma 3.1.1.1 verschwindet RP ,Q genau dann, wenn P und Q eine
gemeinsame Nullstelle a ∈ C besitzen, d.h. P (a) = P (a, b, c) = 0 = Q(a, b, c) = Q(a).

100 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
(2) ⇒ (1): Nach Lemma 3.1.1.2 ist RP,Q(Y,Z) homogen vom Grad n ·m und kann somitnach Lemma 1.2.5 in der Form des Produkts
RP,Q(Y, Z) =n·m∏
k=1
(bkZ − ckY ) mit bk, ck ∈ C
geschrieben werden. Wegen RP ,Q = RP,Q(b, c) = 0 sei o.B.d.A. b1c − c1b = 0 und b1 =
βb 6= 0 fur ein β ∈ C\{0}, woraus b1c− c1b = β ·(bc− c1
β b)
= 0 bzw. auch c1 = βc folgt,d.h. bZ − cY = β · (b1Z − c1Y ) ist ein Faktor von RP,Q(Y, Z). ¤
Damit ergibt sich jetzt die untere Abschatzung von mindestens einem gemeinsa-men Schnittpunkt nahezu von selbst.
Beweis (von Satz 3.1.2.1). Nach Lemma 3.1.1.2 ist RP,Q(Y,Z) homogen und besitztdamit nach Lemma 1.2.5 einen Faktor der Form bZ − cY mit b, c ∈ C, so daß nicht beideb und c verschwinden. Nach Hilfssatz 3.1.2.3 ist dies bereits hinreichend fur die Existenzeines a ∈ C mit der Eigenschaft [a, b, c] ∈ C ∩D. ¤
Auch die obere Abschatzung greift auf den eben vorgestellten Hilfssatz zuruck,benotigt aber noch die Berucksichtigung bestimmter geometrischer Verhaltnisse.
Beweis (von Satz 3.1.2.2). Der Beweis wird durch Widerspruch gefuhrt, indem man ausder Annahme, daß mindestens n ·m+1 gemeinsame Punkte vorliegen, auf die Konsequenzeiner gemeinsam vorliegenden Komponente von C und D schließt.
Unter dieser Annahme sei S ⊆ C ∩D irgend eine Menge mit n ·m + 1 verschiedenenSchnittpunkten von C und D. Dann sei q ein Punkt in P2, der nicht in C ∪D und auchauf keiner der endlich vielen Geraden durch zwei verschiedene Punkte von S liegt. Durcheine geeignete projektive Transformation kann o.B.d.A. q = [1, 0, 0] angenommen werden.Dann sind die Kurven C und D durch homogene Polynome P bzw. Q ∈ C[X,Y, Z] vomGrad n bzw. m definiert, so daß
P (1, 0, 0) 6= 0 6= Q(1, 0, 0)
gilt, weil q 6∈ C ∪D. Ist [a, b, c] ∈ S, dann konnen nicht b und c beide verschwinden, weil
P (a, b, c) = 0 = Q(a, b, c)
und [1, 0, 0] 6∈ S. Daher ist bZ−cY ein Faktor von RP,Q(Y, Z) (mit Hilfssatz 3.1.2.3, (3) ⇒(1)). Ist des weiteren [α, β, γ] ∈ S ein von [a, b, c] verschiedener Punkt, dann ist βZ − γYkein skalares Vielfaches von bZ − cY , da sonst [1, 0, 0] auf der Geraden bZ = cY durchdie Punkte [a, b, c] und [α, β, γ] lage. D.h. jeder der n ·m + 1 Punkte von S “produziert“einen von den anderen verschiedenen linearen Faktor der ResultanteRP,Q(Y, Z), die mithinidentisch verschwinden muß. Nach Lemma 3.1.1.3 besitzen C und D damit im Widerspruchzur Annahme eine gemeinsame Komponente. ¤
Unter Anwendung einer im weiteren Verlauf noch naher zu definierenden Schnitt-multiplizitat Ip(C,D) 2 zweier Kurven C und D in einem Punkt p ∈ P2, soll jetztder Satz von Bezout vorgestellt werden.
2von engl. Intersection = Schnitt

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 101
Satz von Bezout. Sind C und D zwei projektive Kurven in P2 vom Grad n bzw. m,die keine gemeinsamen Komponenten besitzen, so schneiden sie sich unter Beruck-sichtigung der Schnittmultiplizitat in genau n ·m Punkte, d.h. es gilt
∑p∈C∩D
Ip(C,D) = n ·m .
Bevor dieser Satz bewiesen werden soll, ist zunachst die Einfuhrung der genann-ten Schnittmultiplizitat nachzuholen. Dies kann auf zweierlei Weise geschehen. Einedirekte Definition hat den Vorteil, unmittelbar zu nennen, was die Schnittmultipli-zitat bedeutet und wie sie zu berechnen ist. Allerdings sind nach Einfuhrung einersolchen direkten Definition die wesentlichen Eigenschaften (insbesondere die Un-abhangigkeit von der Wahl der Koordinaten) doch anschließend einzeln nachzuwei-sen. Wir folgen daher im wesentlichen [Kirwan92] in seiner axiomatischen bzw. im-pliziten Aufstellung der Schnittmultiplizitat, indem eine Reihe von Postulaten (letzt-lich die Eigenschaften) aufgestellt werden, von denen anschließend gezeigt wird, daßsie die so eingefuhrte Schnittmultiplizitat eindeutig festlegen und diese tatsachlichexistent ist. Sie kann dabei – sofern die Lage eines ausgezeichneten Punktes beruck-sichtigt wird – mit Hilfe der Resultante berechnet werden.
Anmerkung : Im folgenden wird das Auftreten von mehrfachen Komponenten in ei-ner Kurve nicht ausgeschlossen – dies wird insbesondere im ersten Teil des Beweises desnachfolgenden Satzes genutzt. Bzgl. der “algebraischen Eigenschaften“ bedeutet das keineEinschrankung (wie sie etwa im ersten Kapitel genannt wurden). Mehrfach vorhandeneKomponenten fuhren einfach zu mehrfach gezahlten Schnittmultiplizitaten; i.a. sollte maneine Darstellung wahlen, die so etwas naturlich vermeidet.
Satz 3.1.2.4. Fur alle projektiven Kurven C und D in P2 und p ∈ P2 existiert eineeindeutig definierte Schnittmultiplizitat Ip(C, D) ∈ N0 ∪ {∞}, welche die Eigen-schaften (1) bis (6) erfullt:
(1) Ip(C,D) = Ip(D,C) ;
(2) Ip(C,D) = ∞, wenn p auf einer gemeinsamen Komponente von C und Dliegt, sonst ist Ip(C,D) eine nichtnegative ganze Zahl;
(3) Ip(C,D) = 0 genau dann, wenn p 6∈ C ∩D ;
(4) zwei Geraden schneiden sich in ihrem Schnittpunkt mit der Schnittmultiplizitateins;
(5) sind die projektiven Kurven C1 bzw. C2 definiert durch die homogenen Poly-nome P1 bzw. P2 und die Kurve C durch P := P1 · P2, so gilt
Ip(C,D) = Ip(C1, D) Ip(C2, D) ;

102 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
(6) sind die Kurven C und D durch die homogenen Polynome P und Q vom Gradn und m definiert und ist die projektive Kurve E durch das Polynom P ·R+Qmit einem homogenen Polynom R vom Grad m− n definiert, so gilt
Ip(C, D) = Ip(C,E) .
Besitzen die projektiven Kurven C und D keine gemeinsame Komponente undwerden projektive Koordinaten so gewahlt, daß die Bedingungen
(i) [1, 0, 0] liegt nicht in C ∪D,
(ii) [1, 0, 0] liegt nicht auf einer Geraden durch zwei verschiedene Punkte von C ∩D,
(iii) [1, 0, 0] liegt nicht auf einer Tangente an C oder D in einen der Punkte aus C ∩D
erfullt sind, dann ist die Schnittmultiplizitat Ip(C, D) von C und D in jedem Punktp = [a, b, c] ∈ C ∩ D die großte ganze Zahl k, so daß (bZ − cY )k die ResultanteRP,Q(Y, Z) teilt.
Dabei ist in (5) zu verstehen, daß ∞ · n := ∞ (auch fur n = 0).
Beweis. Zunachst sei vereinfachend anstelle von Ip(C,D) im folgenden die NotationIp(P, Q) verwendet, wenn die Kurven C bw. D durch die homogenen Polynome P bzw. Qdefiniert sind.
Eindeutigkeit : Zunachst soll gezeigt werden, daß die Schnittmultiplizitat Ip(P,Q) nurunter Benutzung der Eigenschaften (1)− (6) berechnet werden kann, so daß diese Eigen-schaften die Schnittmultiplizitat eindeutig festlegen.
Da alle Eigenschaften (1)− (6) von den Koordinaten unabhangig sind, kann o.B.d.A.p = [0, 0, 1] angenommen werden. Weil (1) und (5) die Bedingungen fur zusammengesetzteKurven beschreiben, kann des weiteren angenommen werden, daß P und Q irreduzibel sind.Außerdem kann aufgrund von (2) bzw. (3) angenommen werden, daß Ip(P, Q) endlich bzw.echt großer als Null ist.
Da die Aussage der Eindeutigkeit eine uber ganze positive Zahlen ist, wird zum Beweisdie vollstandige Induktion herangezogen. Dabei sei
Ip(P, Q) =: k > 0 .
Die Induktionsvoraussetzung ist: Jede Schnittmultiplizitat, die kleiner als k ist, laßt sichnur unter Einsatz der Eigenschaften (1)− (6) berechnen.Als Induktionsschluß ist jetzt zu zeigen, daß dies auf Basis der Induktionsvoraussetzungauch fur die Schnittmultiplizitat Ip(P,Q) = k zutrifft.
Wir betrachten nun die Polynome P (X, 0, 1), Q(X, 0, 1) ∈ C[X], die vom Grad r bzw.s seien, wegen (1) kann o.B.d.A. r ≤ s angenommen werden. Jetzt sind zwei Falle zuberucksichtigen.
Fall r = 0: In diesem Fall ist P (X, 0, 1) konstant und wegen p = [0, 0, 1] ∈ C, d.h.P (0, 0, 1) = 0, ist P (X, 0, 1) = 0. Da P (X, Y, Z) ein homogenes Polynom ist, gilt auch furP (X, 0, Z) = 0, so daß P (X, Y, Z) = Y R(X,Y, Z) (3.1)

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 103
mit einem homogenen Polynom R ∈ C[X, Y, Z] gilt. 3 Auch die Struktur des Polynoms Qsoll deutlicher zum Ausdruck gebracht werden. Es ist
Q(X, Y, Z) = Q(X, 0, Z) · Y 0 + S(X, Y, Z) · Y 1
= Xd T (X, Z) + Y S(X,Y, Z) (3.2)
mit homogenen Polynomen S ∈ C[X,Y, Z] und T ∈ C[X, Z]. Weil in Q(X, 0, Z) wegenQ(0, 0, 1) = 0 kein Monom in Z vorliegt, soll hier Xd so herausmultipliziert werden, daßT (0, 1) 6= 0 gilt. Wieder wegen Q(0, 0, 1) = 0, ist dann d > 0, also positiv.Es ist festzuhalten, daß p = [0, 0, 1] wegen T (0, 1) 6= 0 nicht auf der durch das homogenePolynom T definierten projektiven Kurve liegt. Aufgrund der Eigenschaft (3) verschwindetdie Schnittmultiplizitat dieser Kurve mit der Geraden Y = 0 in p also:
Ip(Y, T (X,Z)) = 0 . (3.3)
Außerdem liefert die Eigenschaft (4) bzgl. der beiden durch p verlaufenden Geraden X = 0und Y = 0 den Wert
Ip(Y,X) = 1 . (3.4)
Unter Benutzung der Eigenschaft (5) erhalten wir nun mit der Darstellung (3.1) die Be-ziehung
Ip(P, Q) = Ip(R,Q) + Ip(Y,Q) . (3.5)
Der zweite Summand kann jetzt mit (3.2) und der Eigenschaft (6) zu
Ip(Y,Q) = Ip(Y, Xd T (X, Z))
bestimmt werden; der mehrmalige Einsatz der Eigenschaft (5) auf den rechts stehendenAusdruck ergibt weiter:
Ip(Y, Xd T (X, Z)) = d Ip(Y,X)︸ ︷︷ ︸=1, wg. (3.4)
+ Ip(Y, T (X,Z))︸ ︷︷ ︸=0, wg. (3.3)
= d > 0 .
Deshalb nimmt (3.5) jetzt die Form
Ip(P, Q) = Ip(R, Q) + d = k (3.6)
an. Und weil d > 0, ist 0 ≤ Ip(R, Q) < k und kann damit nach Induktionsvoraussetzungeindeutig aus den Eigenschaften (1)− (6) bestimmt werden. Wegen der Summe (3.6) trifftdiese Eindeutigkeit jetzt auch auf Ip(P, Q) zu, so daß der Induktionsschluß fur den Fallr = 0 bewiesen ist.
Anmerkung : Fur die zuletzt gemachte Aussage ist wesentlich, daß d echt großer als Null ist.Denn andernfalls erhielte man die Gleichheit Ip(P, Q) = Ip(R, Q) = k, die den gewunsch-ten Schluß nicht zulaßt!
3Als Beispiel fur diesen Fall sei das Polynom P = XY Z +Y 3 +Y 2Z genannt. Wegen r = 0 kannes keinen Summanden XνZµ, also mit Y 0, geben. Wegen P (0, 0, 1) = 0 kann auch kein Monom inZ auftreten.

104 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Fall r > 0: In diesem Fall kann o.B.d.A. davon ausgegangen werden, daß die Polyno-me P (X, 0, 1) und Q(X, 0, 1) die Monome Xr und Xs als Summanden besitzen (andern-falls leistet dies eine Multiplikation mit geeigneten Konstanten). Ist Grad(P ) = n undGrad(Q) = m, dann wird das homogene Polynom
S(X,Y, Z) := Zn+s−r Q(X, Y, Z)−Xs−rZm P (X, Y, Z)
gebildet. 4 Damit ist der Grad t des Polynoms S(X, 0, 1) = Q(X, 0, 1)−Xs−r P (X, 0, 1) ∈C[X] echt kleiner als s. Da P und Q als verschieden und irreduzibel angenommen wurden,ist S von Null verschieden. (Der Fall S = 0 fuhrt zu Zn−m+s−rQ = Xs−rP , d.h. zerlegba-ren Polynomen P bzw. Q oder P = Q mit s− r = 0 und n−m = 0.) Aus der Eigenschaft(6) ergibt sich jetzt zunachst
Ip(P, S) = Ip(P, P · (−Xs−rZm) + (Zn+s−rQ)
)= Ip
(P, (Zn+s−rQ)
),
und daraus weiter mit (1) und (5)
Ip(P, S) = Ip(P,Zn+s−r)︸ ︷︷ ︸=0
+Ip(P, Q) = Ip(P,Q) .
Jetzt wird P und Q durch P und S (oder im Falle von t < r durch S und P ) ersetzt.Nach einer endlichen Anzahl von Schritten erreicht man dann den Fall r = 0. Damit istdie Eindeutigkeit der mit (1)− (6) festgelegten Schnittmultiplizitat gezeigt.
Existenz : Zum Nachweis der Existenz wird die folgende Definition der Schnittmulti-plizitat Ip(C, D) getroffen:
• Wenn p auf einer gemeinsamen Komponente von C und D liegt, ist Ip(C, D) := ∞.
• Liegt p nicht in C ∩D, ist Ip(C, D) := 0.
• Es ist p ∈ C ∩D, aber p liegt nicht auf einer gemeinsamen Komponente von C undD. In diesem Fall werden alle gemeinsamen Komponenten von C und D entferntund solche Koordinaten gewahlt, die den im Satz genannten Bedingungen (i)− (iii)genugen. Ist in diesen Koordinaten p = [a, b, c], dann ist Ip(C, D) als großte ganzeZahl k definiert, so daß (bZ − cY )k die Resultante RP,Q(Y, Z) teilt.
Jetzt ist zu zeigen, daß diese Definition den Bedingungen (1)− (6) genugt.
(1) Nach Lemma B.1.8, Anhang B, Seite 308, bewirkt die Vertauschung der Polynome Pund Q in der Resultante RP,Q(Y, Z) allenfalls ein Wechsel des Vorzeichens dieser, so daßdie Frage der Teilbarkeit nicht betroffen ist.
(2) Diese Eigenschaft folgt aus Lemma 3.1.1.3 – nach der die Resultante nur dann ver-schwindet, wenn P und Q einen gemeinsamen nicht konstanten Faktor, bzw. die KurvenC und D eine gemeinsame Komponente besitzen – und dem Hilfssatz 3.1.2.3 – nach demfur p = [a, b, c] ∈ C ∩D der Linearanteil (bZ − cY ) ein Teiler von RP,Q(Y,Z) ist. D.h. imFalle, daß p auf einer gemeinsamen Komponente von C und D liegt, kann die einzig dannverschwindende Resultante genutzt werden, um Ip(C, D) := ∞ zu definieren; ansonstengarantiert Hilfssatz 3.1.2.3 die Ganzzahligkeit der Schnittmultiplizitat.
(3) Wieder liefert die in Hilfssatz 3.1.2.3 genannte Aquivalenz, daß im Fall von p =
4Beispielsweise fuhrt P = XZ2 + Y 3 und Q = X3Z + X2Y 2 + Y 2Z2 mit n = 3, m = 4, r = 1und s = 3 auf das Polynom S = Z5Q−X2Z4P = X2Y 2Z4(Z − Y ) + Y 2Z7.

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 105
[a, b, c] 6∈ C ∩D auch (bZ − cY ) kein Faktor von RP,Q(Y, Z) ist, d.h. nur (bZ − cY )0 = 1– wegen der Koordinatenwahl ist b, c 6= 0 und die notierte Potenz wohldefiniert – teilt dieResultante, d.h. genau im Fall von p 6∈ C ∩D ist die Schnittmultiplizitat Null.
(4) O.B.d.A. kann p = [0, 0, 1] als Schnittpunkt der zwei Geraden G1 : X + αY = 0 undG2 : X + βY = 0 angenommen werden. Nach Definition B.1.1 im Anhang B ergibt sich
RG1,G2(Y, Z) =∣∣∣∣
αY 1βY 1
∣∣∣∣ = (α− β)Y 1 ,
was durch (0 · Z − 1 · Y )k mit maximal k = 1 teilbar ist.
(5) Die Eigenschaft ergibt sich unmittelbar aus Lemma B.1.10, Anhang B auf Seite 309.
(6) Auch diese Eigenschaft ist eine Konsequenz des Rechnens mit Determinanten, dienamlich durch die Addition einer Linearkombination von Zeilen zu einer anderen nichtverandert werden. Sei
RP,Q(Y, Z) = det((ρij)1≤i,j≤m+n
),RP,PR+Q(Y,Z) = det
((σij)1≤i,j≤m+n
)
und R(X, Y, Z) = c0(Y, Z) + c1(Y, Z)X + c2(Y,Z)X2 + · · ·+ cm−n(Y, Z)Xm−n ,
dann ist
σij ={
ρij , falls i ≤ m,
ρij +∑m−n
k=0 ck ρi−m+k,j , falls i > m ,
wie man bei Ausmultiplizieren von P · R bzw. an dem unten dargestellten Ausschnittaus der Resultante feststellt (dabei sind wieder wie ublich aν(Y,Z) die Koeffizienten desPolynoms P und bµ(Y, Z) die von Q):
RP,PR+Q(Y, Z) = det((σij)1≤i,j≤m+n
)
=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a0 . . . . . . aj . . .0 aj−1 . . ....
...0 a1
a0... 0
. . ....
0 0b0 + c0a0 . . . . . . bj + c0aj + . . . + cja0
0 . . . bj−1 + c0aj−1 + . . . + cj−1a0. . .
......
. . .
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Damit giltRP,PR+Q(Y, Z) = det(σij) = det(ρij) = RP,Q(Y,Z) ,
was den Beweis zur Existenz der Schnittmultiplizitat abschließt. ¤

106 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Als Konsequenz der Koordinatenwahl (i)−(iii) in Satz 3.1.2.4 ist das in Hilfssatz3.1.2.3(3) aufgefuhrte a ∈ C bei gegebenem b, c ∈ C eindeutig. Denn aus
[a1, b, c] = [a2, b, c] ∈ C ∩D folgt [a1 − a2, 0, 0] = [1, 0, 0] ∈ G,
mit G als Verbindungsgeraden von [a1, b, c] und [a2, b, c]. Oder anders ausgedruckt:auf der Verbindungsgeraden eines Schnittpunktes [a, b, c] mit [1, 0, 0] liegt kein wei-terer Schnittpunkt von C und D.
Mit diesem Konzept der Schnittmultiplizitat kann jetzt der Satz von Bezout inseiner starken Form bewiesen werden.
Beweis (des Satzes von Bezout). Es seien die Koordinaten so gewahlt, daß die Bedingun-gen (i)−(iii) aus Satz 3.1.2.4 erfullt sind. Die Kurven C bzw. D seien durch die homogenenPolynome P bzw. Q ∈ C[X, Y, Z] definiert. Dann ist die Resultante RP,Q(Y,Z) nach Lem-ma 3.1.1.2 ein homogenes Polynom und kann nach Lemma 1.2.5 in die Form
RP,Q(Y, Z) =l∏
k=1
(bkZ − ckY )dk
mit l ≤ n ·m faktorisiert werden, wobei
d1 + d2 + · · ·+ dl = n ·m
und (bj , cj) kein skalares Vielfaches von (bk, ck), j 6= k, ist.Aufgrund des Hilfssatzes 3.1.2.3 gibt es jetzt Werte ak ∈ C, so daß [ak, bk, ck] ∈ C ∩D
und wegen der Koordinatenwahl (siehe obige Bemerkung) sind diese Werte eindeutig. D.h.die Punkte pk := [ak, bk, ck] bilden – wieder wegen 3.1.2.3 – den gesamten Durchschnitt
C ∩D = {pk | k = 1, 2, . . . , l} .
Nach Satz 3.1.2.4 gilt dannIpk
(C,D) = dk ,
woraus jetzt der Satz von Bezout
Ip1(C, D) + Ip2(C,D) + . . . + Ipl(C, D) = n ·m
folgt. ¤
Folgende hilfreiche Aussagen uber das Verhalten der Schnittmultiplizitat konnennoch getroffen werden.
Lemma 3.1.2.5. Es seien C und D Kurven ohne gemeinsame Komponente. Istp ∈ C ∩D ein singularer Punkt von C, dann gilt Ip(C, D) > 1.
Beweis. O.B.d.A. konnen Koordinaten gewahlt werden, so daß p = [a, b, c] = [0, 0, 1]und die Bedingungen (i) − (iii) aus Satz 3.1.2.4 erfullt sind. Dann ist zu zeigen, daß(bZ − cY )2 = Y 2 die Resultante RP,Q(Y,Z) teilt, wobei C bzw. D durch die homogenenPolynom P bzw. Q ∈ C[X, Y, Z] definiert seien.
Weil p eine Singularitat von C ist, gilt fur P die Bedingung
∂P
∂X(0, 0, 1) =
∂P
∂Y(0, 0, 1) = P (0, 0, 1) = 0 .

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 107
Somit ist P eine Summe von Monomen mindestens vom Grad zwei in X und Y :
P (X,Y, Z) = Y 2A0(Y,Z) + Y A1(Y, Z)X + A2(Y, Z)X2 + . . . + An(Y, Z)Xn ,
jeweils mit Aν ∈ C[Y,Z], ν = 0, . . . , n. Ebenso folgt aus
Q(0, 0, 1) = 0
die Summe von Monomen vom Grad eins in X und Y :
Q(X, Y, Z) = Y B0(Y, Z) + B1(Y, Z)X + . . . + Bm(Y, Z)Xm
mit Bµ ∈ C[Y, Z], µ = 0, . . . ,m, und Bµ(Y, Z) = bµZm−1 + Y Cµ(Y, Z) fur µ = 0, 1 mitC0, C1 ∈ C[Y, Z]. Die Resultante RP,Q(Y, Z) besitzt in den ersten beiden Spalten danndas Aussehen
RP,Q(Y, Z) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Y 2A0(Y,Z) Y A1(Y, Z) . . .0 Y 2A0(Y,Z) . . .0 0 . . ....
......
b0Y Zm−1 + Y 2C0(Y,Z) b1Zm−1 + Y C1(Y, Z) . . .
0 b0Y Zm−1 + Y 2C0(Y,Z) . . .0 0 . . ....
......
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Ist b0 = 0, teilt Y 2 die erste Spalte und damit RP,Q(Y, Z).
Fur b0 6= 0 wird der Faktor Y aus der ersten Spalte gezogen. Dann wird die zweiteSpalte von dem b1
b0-fachen der ersten Spalte subtrahiert, womit in der zweiten Spalte von
RP,Q(Y, Z) dann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
. . . Y A1(Y, Z)− b1b0
Y A0(Y, Z) . . .
. . . Y 2A0(Y, Z) . . .
. . . 0 . . ....
......
. . . Y C1(Y, Z)− b1b0
Y C0(Y,Z) . . .
. . . b0Y Zm−1 + Y 2C0(Y, Z) . . .
. . . 0 . . ....
......
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
erscheint; diese ist dann durch Y und RP,Q(Y, Z) damit insgesamt durch Y 2 teilbar. ¤
Damit kann der folgende Satz bewiesen werden, der die Schnittmultiplizitat zwi-schen Kurven mit der in Definition 2.2.1.7 eingefuhrten Multiplizitat eines Kurven-punktes in Verbindung bringt. (Der Beweis befindet sich seines Umfanges wegengesondert in dem Abschnitt B.3 des Anhanges B.)

108 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Satz 3.1.2.6. Es seien C und D Kurven ohne gemeinsame Komponente und p ∈C ∩D. Dann gilt:
(i) Ip(C, D) ≥ Multp(C) Multp(D) ,
(ii) die Gleichheit gilt genau dann, wenn die Tangenten von C in p paarweiseverschieden von den Tangenten von D in p sind.
Als Spezialfall ergibt sich hieraus der im folgenden Korollar formulierte Fall, indem die Schnittmultiplizitat zweier Kurven in einem Punkt genau eins betragt.
Korollar 3.1.2.7. Es seien C und D projektive Kurven in P2 und p ein beliebigerPunkt aus P2. Es gilt Ip(C, D) = 1 genau dann, wenn p ein nichtsingularer Punktvon C und D ist und die Tangenten an C und D in p verschieden sind.
Bevor dieser Abschnitt mit einem Satz abgeschlossen wird, der weitreichendeAnwendungen zulaßt, soll der Satz von Bezout an zwei Beispielen veranschaulichtwerden. Dabei soll zum Ausdruck kommen, wie die Schnittpunkte zu bewerten sindund daß die Betrachtung des projektiven Abschlusses wichtig sein kann. Die genauequantitative Bestimmung der Schnittmultiplizitaten des ersten Beispiels wird in demAnhang B, Abschnitt B.2, durchgefuhrt – da sie recht technisch ist, lenkte sie hiervon den wesentlichen Ideen ab.
Beispiel 3.1.2.8. Wir betrachten zunachst das durch X3 + Y 3 = 3XY definierte kar-tesische Blatt C und die durch die Gleichung X + Y = 3 gegebenen Gerade G1 nachBild 3.2. Die Kurven C und G1 schneiden sich zunachst offensichtlich in dem (affinen)Punkt (3/2, 3/2) mit der Schnittmultiplizitat 2 (da ein tangentialer Schnitt vorliegt). Dieprojektiven Abschlusse C und G1 liefern zu p = [3/2, 3/2, 1] den noch “fehlenden“ Punktu = [1,−1, 0] = [−1, 1, 0] “im Unendlichen“ (siehe rechten Teil des Bildes 3.2), der dieSchnittmultiplizitat 1 besitzen muß, damit die Summe der Schnittmultiplizitaten sich (wieerwartet) zu
Ip(C, G1) + Iu(C, G1) = 2 + 1 = 3 · 1 = GradC ·GradG1
addiert.
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4y
x
CG1
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
1,-1,0 -1,1,0
C
G1
Bild 3.2: Das kartesische Blatt X3 + Y 3 = 3XY und die Gerade X + Y = 3 in affiner(links) und projektiver (rechts) Sicht

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 109
Auch auf die Gefahr hin, im folgenden eine nur vage und ungenaue Ausdrucksweise zuverwenden, soll die “Natur“ des Schnittpunktes u “im Unendlichen“ noch kurz diskutiertwerden. Obwohl die Gerade G1 “weit entfernt vom Ursprung“ (asymptotisch) zum karte-sischen Blatt C parallel verlauft, ist zu betonen, daß der Schnittpunkt u nicht tangentialist! Die Kurven C und G1 nahern sich also nicht immer weiter an, um dann in u ineinanderzu “munden“, sondern sie “treffen“ sich dort gewissermaßen.
Interessant in diesem Zusammenhang, ist sicherlich auch das Buch [Ernst82] zu erwah-nen, wo im Kapitel 8 Untersuchungen auf dem Gebiet der Perspektive, Abschnitt NeueGesetze, diese Sichtweise am Beispiel von Telegrafendrahte nach Bild 3.3 diskutiert undanalog zu der hier verwendeten Doppelpyramide mit Hilfe einer Zylinder-Konstruktiongeometrisch veranschaulicht wird. Dabei wird argumentiert, daß aus der Sicht eines unterden Drahten liegenden Betrachters (vgl. Bild 3.3) der Verlauf der Telegrafendrahte alsgebogene Linien erscheinen. Der Zylinder nach Bild 3.4 gibt dann in Form der beidenSchnittellipsen eine Projektion der perspektiven Ansicht wieder.
Anzumerken bleibt noch, daß dieses Buch daruber hinaus deutlich macht, wie derKunstler Maurits Cornelis Escher (1898 Leeuwarden - 1972 Laren) solche mathemati-schen Methoden und Inhalte gestalterisch umzusetzen verstand und gleichzeitig auch wie-der unsere Raumauffassung daran in Frage stellt bzw. verwirrt! Bzgl. der hier geschildertenProblematik der Perspektive vergleiche man vor allem die beiden Lithographien Oben undUnten von 1947 und Treppenhaus (mit den eigenwilligen ’wentelteefjes’ – wie Escher sienennt – also etwa ’Krempeltierchen’ ubersetzt) von 1951. In der erst genannten Graphikspringt bzw. kehrt sich der Blickwinkel an der Fluchtgeraden um. In dem zweiten Bildwerden vermittels einer Gleitspiegelung lokal konsistente zu einem global inkonsistentenRaumgefuge zusammengesetzt.
p
p
q
q
Bild 3.3: Der Telegrafendraht-Effekt
Auch in dem rechten Teil des Bildes 3.2 wird der oben angesprochene “Schnitteffekt“deutlich, wo zu erkennen ist, wie die Kurven C und G1 in nicht tangentialer Weise aufeinan-der zulaufen. Damit wird auch klar, daß sich parallele Geraden mit der Schnittmultiplizitat

110 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
p
q
Bild 3.4: Zylinder-Konstruktion
eins “im Unendlichen“ schneiden (auch dies wird im Anhang B, Abschnitt B.2, berechnetund damit auf Basis der Definition in dem Satz 3.1.2.4 klar begrundet).
Das Bild 3.5 zeigt die affine und projektive Sicht des kartesischen Blattes C und diedurch 2X = Y definierte Gerade G2. Hier schneiden sich die beiden Kurven im Endlichen.Da in (0, 0) die Kurve C eine Singularitat besitzt, ist dieser Schnittpunkt von C und G2
wieder mit der Vielfachheit 2 zu zahlen, wahrend der Schnittpunkt (2/3, 4/3) gewohnlichist, also die Schnittmultiplizitat 1 aufweist. ¤
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3 y
x
CG2
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
C
G2
Bild 3.5: Das kartesische Blatt X3 + Y 3 = 3XY und die Gerade 2X − Y = 0 in affiner(links) und projektiver (rechts) Sicht
Beispiel 3.1.2.9. Die uber X2+Y 2 = 1 und (X−1)2+Y 2 = 1 definierten Kurven K1 undK2 schneiden sich offensichtlich in den (affinen) Punkten (1/2,
√3/2) und (1/2,−√3/2).
Als Kurven vom Grad 2 sind jedoch zwei weitere Schnittpunkte zu erwarten. Im AnhangB, Beispiel B.1.3, wird gezeigt, daß mit Hilfe der Resultante RP,Q(Y, Z) fur
P := X2 + Y 2 − Z2 und Q := (X − Z)2 + Y 2 − Z2
auf zwei weitere Schnittpunkte bei z = 0 geschlossen werden kann.

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 111
Dieses Ergebnis wird auch geometrisch verstandlich, wenn K1 und K2 als komplexe undprojektive Kurven aufgefaßt werden. Betrachten wir die Kurven zunachst in komplexenVariablen X = x1 + ix2, Y = y1 + iy2 ∈ C mit x1, x2, y1, y2 ∈ R, so ergibt die Darstellungvon K1 und K2 die in Bild 3.6 gezeigten Kurven (die stark ausgezogene Kurve stellt dabeiK1, die schwach ausgezogene K2 dar), wenn o.B.d.A. der imaginare Anteil von X zu Nullgesetzt wird (x2 = 0), d.h. die Kurven in dem Koordinatensystem x1 − y1 − y2 entwickeltwerden.
-4-2
02
4
-2
-1
0
12
-4
-2
0
2
4
K 1
K 2
i y2
y1
x1
Bild 3.6: Die Kurven K1 und K2 in den Veranderlichen X = x1, Y = y1 + iy2 ∈ C
Jetzt zeigen sich die im Komplexen gelegenen Hyperbeln
x21 − y2
2 = 1 bzw. (x1 − 1)2 − y22 = 1
der Kurven K1 bzw. K2 in dem “Schnitt“ X = x1, Y = iy2. Eine projektive Auffassungdieser komplexen ebenen Kurven in der Form
x21 − y2
2 = Z2 bzw. (x1 − z)2 − y22 = Z2
laßt nun die beiden bei z = 0 liegenden Schnittpunkte [1, i, 0] und [1,−i, 0] von K1 und K2
leicht erkennen (wegen y2 = ±1 – als imaginarer Anteil von y – ist die zweite Koordinatedie imaginare Einheit in beiden Vorzeichen).
In den Bildern 3.7 und 3.8 sind die projektiven Abschlusse der Kreise und Hyperbelnneben den affinen Darstellungen zu sehen. Die Kurven in der x1 − y1−Projektion kannman sich als Durchdringungskurven der Kegel X2 + Y 2 = Z2 bzw. (X − Z)2 + Y 2 = Z2
mit der Doppelpyramide vorstellen. Die Schnittpunkte der projezierten Kreise sind[
12 ,±
√3
2 , 1]
=[
1−√3/32 ,±
√3−12 , 1−√3/3
].
Insgesamt wird deutlich, daß sich K1 und K2 in vier verschiedenen Punkten jeweils mitder Vielfachheit von eins schneiden. Wobei auch hier die Hyperbeln zwar asymptotisch inparallele Geraden munden, diese aber schneiden sich mit der Schnittmultiplizitat eins “imUnendlichen“! ¤

112 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
-1 -0.5 0.5 1 1.5 2
-1.5
-1
-0.5
0.5
1
1.5
x1
y1
K 1
K 2
III
III IV
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,1,0
I
IIIV
III
K1
K2
Bild 3.7: Die Kurven K1 und K2 in den Veranderlichen X = x1, Y = y1 ∈ R in affinerund projektiver Darstellung
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
x1
i y2
K1
K2
I
II
III
IV
0,0,10,-i,0 -1,0,0
1,0,0 0,i,0
0,-i,0
1,i,0
-1,-i,0= 1,i,0
1,-i,0 -1,i,0= 1,-i,0
K1
K2
I II
IV
III
Bild 3.8: Die Kurven K1 und K2 in den Veranderlichen X = x1, Y = iy2 ∈ C in affinerund projektiver Darstellung

3.1. SCHNITTVERHALTEN ALGEBRAISCHER KURVEN 113
Abschließend wird als erste “echte“ Anwendung des Satzes von Bezout ein Theo-rem vorgestellt, das in den nachfolgenden Abschnitten verschiedentlich zum Einsatzkommt. Dieser Satz wurde auch von Bartel L. van der Waerden (1903 Amster-dam - 1996 Zurich) (siehe [Waerden79]) in seinem Heidelberger Vortrag (in etwasallgemeinerer Form) zitiert und mit dem schonen Bild 3.9 veranschaulicht.
Bild 3.9: Kubiken mit 9 Schnittpunkten: liegen 6 auf einer (irreduziblen) Quadrik, danndie restlichen 3 notwendigerweise auf einer Geraden
Satz 3.1.2.10. Schneiden sich zwei projektive Kurven C und D vom Grad n ingenau n2 Punkten in P2 und liegen genau n ·m dieser Punkte auf einer irreduziblenKurve E vom Grad m < n, dann liegen die verbleibenden n(n −m) Schnittpunkteauf einer Kurve, die vom Grad n−m ist.
Beweis. Die Kurven C, D und E seien durch die homogenen Polynome P,Q und R ∈C[X, Y, Z] definiert. Der Punkt [a, b, c] liege auf E\(C∩D). Dann schneiden sich die durchλP +µQ mit λ := Q(a, b, c) und µ := −P (a, b, c) definierte Kurve K vom Grad n und dieKurve E in mindestens n ·m + 1 Punkte, namlich in [a, b, c] und den n ·m Punkten vonC ∩D, die nach Voraussetzung auf E liegen (und von [a, b, c] 6∈ C ∩D verschieden sind).
Nach Satz 3.1.2.2 (Schwache Form des Satzes von Bezout) muß E dann eine mitK gemeinsame Komponente aufweisen. Da E irreduzibel ist, ist diese Komponente dieKurve E selbst. Daraus folgt fur das K definierende Polynom λP +µQ die FaktorisierungλP + µQ = R S mit einem nicht konstanten Polynom S ∈ C[X, Y, Z] vom Grad n −m.Fur Punkte [u, v, w] ∈ C ∩ D ist damit R(u, v, w) = 0 oder S(u, v, w) = 0. Daher liegenalle n(n − m) Punkte von C ∩ D, die nicht auf E liegen, auf der durch das Polynom Sdefinierten Kurve vom Grad n−m. ¤

114 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
3.2 Anwendungen auf Quadriken
3.2.1 Klassifikation der Quadriken
Wie im Grundlagenkapitel 1, Abschnitt 1.1, bereits erwahnt, werden die algebrai-schen Kurven vom Grad zwei als Quadriken bezeichnet. In allgemeiner Form sindsie also (als projektive Kurve) die Nullstellenmenge des homogenen Polynoms
P = α1X2 + α2Y
2 + α3Z2 + β1XY + β2XZ + β3Y Z (3.7)
mit Koeffizienten α1, α2, α3, β1, β2, β3 ∈ C. Aufgabe in diesem ersten Unterabschnittuber die Quadriken soll eine vollstandige Klassifikation dieser Kurven sein. Dazuschreiben wir die quadratische Form (3.7) in der Matrixnotation
P (r) = rT Ar (3.8)
mit r = (x, y, z)T ∈ C3\{0} als homogene Koordinaten eines Punktes aus P2 undo.B.d.A. eine symmetrische Matrix
A :=
α112β1
12β2
12β1 α2
12β3
12β2
12β3 α3
∈ C3,3 . (3.9)
Eine projektive Transformation r 7→ r bzw. ein Koordinatenwechsel in Form desIsomorphismus’ r = B r, B ∈ C3,3, laßt sich in (3.8) jetzt einfach in der Weise
P (r) = rT BT AB r (3.10)
erfassen. Damit kann die quadratische Form (3.8) auf eine Normalform gebrachtwerden, welche eine vollstandige Ubersicht uber die Quadriken gestattet.
Satz 3.2.1.1. Die Gleichung jeder Quadrik ist unter einer geeigneten projektivenTransformation aquivalent zu einer der drei folgenden Normalformen
(1) X2 + Y 2 + Z2 = 0 ,
(2) X2 + Y 2 = 0 ,
(3) X2 = 0 .
Beweis. Hier folgen wir einer Idee aus [Ruppert96], Kapitel 5 Quadriken, Lemma 3, derein konstruktives Verfahren fur die Gewinnung der Normalform (1), (2) oder (3) angibt (inetwas verallgemeinerter Fassung fur n Variablen). Es sei P ∈ C[X1, X2, X3] ein homogenesPolynom vom Grad zwei.
Fall 1: Es kommt X2k fur ein k = 1, 2, 3 explizit in P vor. Durch Vertauschen 5 von X1
mit Xk kann die Form
P (X1, X2, X3) = cX21 + X1Q(X2, X3) + R(X2, X3)
5Strenggenommen mußten alle im folgenden vorgenommenen Koordiantenwechsel zu “neuen“Variablen- und Polynombezeichnungen fuhren – vereinfachend bleiben wir bei der Notation vonX1, X2 und X3 bzw. P .

3.2. ANWENDUNGEN AUF QUADRIKEN 115
mit c 6= 0 und Q,R ∈ C[X2, X3] erreicht werden. Durch den Koordinatenwechsel X1 =√cX1 kann o.B.d.A. c = 1 angenommen werden, womit weiter
P (X1, X2, X3) =(X1 + 1
2Q(X2, X3))2 + R(X2, X3)− 1
4Q(X2, X3)2
gilt. Wird jetzt die Transformation X1 = X1 + 12Q(X2, X3) vorgenommen, so ist o.B.d.A.
P (X1, X2, X3) = X21 + S(X2, X3) mit S ∈ C[X2, X3].
Ist das Polynom S 6= 0, so kann die obige Prozedur bzgl. dieses Polynoms wiederholtwerden.Fall 2: Es kommt kein X2
k fur ein k = 1, 2, 3 in P vor. Da P vom Grad zwei ist, gibt esdann Indizes k 6= l, so daß XkXl in P vorkommt. Wird die Transformation Xl = Xl + Xk
durchgefuhrt, so enthalt P den Term X2k , womit Fall 1 zur Anwendung kommen kann. ¤
Dieses Vorgehen soll an einem konkreten Beispiel erlautert werden.
Beispiel 3.2.1.2. Die Quadrik 9Z2 + 2iXY − 4XZ = 0 soll auf eine der obigen Normal-formen gebracht werden.
Die folgende Auflistung gibt alle durchzufuhrenden Transformationen an (und benutztzur Vermeidung der Vielzahl sonst notiger Bezeichnungen nach erfolgter Transformationwieder die alten Variablennamen X, Y bzw. Z):
(XYZ
)=
(0 0 10 1 01 0 0
)
︸ ︷︷ ︸=:A1
(XYZ
): 9X2 + 2iZY − 4XZ bzw. 9X2 + 2iY Z − 4XZ ,
(XYZ
)=
(3 0 00 1 00 0 1
)
︸ ︷︷ ︸=:A2
(XYZ
):
X2 + 2iY Z − 43XZ bzw.
X2 + 2iY Z − 43XZ =
(X − 2
3Z)2 + 2iY Z − 4
9Z2 ,
(XYZ
)=
(1 0 −2/30 1 00 0 1
)
︸ ︷︷ ︸=:A3
(XYZ
): X2 + 2iY Z − 4
9 Z2 bzw. X2 + 2iY Z − 49Z2 ,
(XYZ
)=
(1 0 00 0 10 1 0
)
︸ ︷︷ ︸=:A4
(XYZ
): X2 + 2iZY − 4
9 Y 2 bzw. X2 − 49Y 2 + 2iY Z ,
(XYZ
)=
( 1 0 00 2i/3 00 0 1
)
︸ ︷︷ ︸=:A5
(XYZ
):
X2 + Y 2 + 3Y Z bzw.X2 + Y 2 + 3Y Z = X2 +
(Y + 3
2Z)2 − 9
4Z2 ,
(XYZ
)=
( 1 0 00 1 3/20 0 1
)
︸ ︷︷ ︸=:A6
(XYZ
): X2 + Y 2 − 9
4 Z2 bzw. X2 + Y 2 − 94Z2 ,
(XYZ
)=
( 1 0 00 1 00 0 3i/2
)
︸ ︷︷ ︸=:A7
(XYZ
): X2 + Y 2 + Z2 bzw. X2 + Y 2 + Z2 .

116 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Mit der Verkettung
B := A7A6A5A4A3A2A1 =(−2/3 0 3
2i/3 3/2 0
0 3i/2 0
)und B−1 =
( 0 −3i/2 3/2
0 0 −2i/3
1/3 −i/3 1/3
)
ergibt sich dann (ebenfalls) die Normalisierung von
A =(
0 i −2i 0 0
−2 0 9
)nach (3.9) zu (B−1)T AB−1 =
(1 0 00 1 00 0 1
).
Dabei geht im Gegensatz zu (3.10) die Inverse von B in die Normalisierung von A ein, weilalle obigen Transformationen zusammengefaßt in der Form r = B r formuliert wurden. Diegegebene Quadrik ist also der Normalform (1) aus Satz 3.2.1.1 aquivalent. ¤
Von den drei in Satz 3.2.1.1 dargestellten Typen von Quadriken ist nur die durchdas Polynom aus (1) P1(X,Y, Z) := X2 + Y 2 + Z2 definierte nichtsingular. Im Fall(2) zerfallt die Quadrik in zwei Komponenten:
P2(X, Y, Z) := X2 + Y 2 = (X + i Y ) (X − i Y ) ;
im Fall (3) liegt eine Doppelgerade vor (also eine i.a. zu vermeidende Kurvendefini-tion mit mehrfacher Komponente).
Es gibt also nur eine irreduzible nichtsingulare Quadrik, die wiederum vermogeder Transformation
(XYZ
)=
(1 0 00 i 10 i −1
)(UVW
)bzw.
(XYZ
)=
(1 0 00 −i/2 −i/2
0 1/2 −1/2
)(UVW
)
zu der durch
Q(U, V, W ) = P (X(U, V,W ), Y (U, V, W ), Z(U, V, W )) = U2 − V W
definierten Quadrik aquivalent ist.
Korollar 3.2.1.3. Jede irreduzible projektive Quadrik in P2 ist unter einer projek-tiven Transformation aquivalent zu der durch X2 = Y Z definierten; insbesondereist sie nichtsingular.
Interessant ist noch die folgende homoomorphe Einbettung der durch X2 = Y Zdefinierten (und damit jeder irreduziblen) Quadrik C in die komplexe projektiveGerade P1. Diese ist durch den folgenden Homoomorphismus gegeben.
Satz 3.2.1.4. Die Abbildungω : P1 → C , ω([x, y]) := [xy, y2, x2]
ist ein Homoomorphismus: C ' P1 (siehe Bild 3.10).
Beweis. Injektivitat : 1. Fall : y1 = 0. Aus [x1y1, y21, x2
1] = [x2y2, y22, x2
2] folgt y2 = 0 unddamit x1 6= 0 6= x2 sowie [x1, 0] = [1, 0] = [x2, 0].
2. Fall : x1 = 0. Analog zum 1. Fall ergibt sich y1 6= 0 6= y2 sowie [0, y1] = [0, 1] = [0, y2].
3. Fall : Alle x1, x2, y1, y2 sind von Null verschieden. Aus [x1y1, y21, x2
1] = [x2y2, y22, x2
2]folgt die Existenz einer Zahl λ 6= 0, so daß

3.2. ANWENDUNGEN AUF QUADRIKEN 117
x1y1 = λx2y2 , x21 = λx2
2 und y21 = λy2
2, woraus λ =x1
x2
y1
y2=
(x1
x2
)2
=(
y1
y2
)2
, bzw.
α :=x1
x2=
y1
y2und damit [x1, y1] = [αx2, αy2] = [x2, y2] folgt.
Surjektivitat : Es sei [u, v, w] ∈ C, d.h. u2 = vw. 1. Fall : Es sei v 6= 0, dann istω([u, v]) = [uv, v2, u2] = [vu, vv, vw] = [u, v, w].
2. Fall : Nun gelte w 6= 0, hieraus folgt
ω([w, u]) = [wu, u2, w2] = [wu, wv, ww] = [u, v, w].
Der Nachweis der Surjektivitat fuhrt zur Umkehrfunktion von ω :
ω−1 : C → P1 , ω−1([x, y, z]) =
{[x, y] , falls y 6= 0,
[z, x] , falls z 6= 0.(3.11)
Diese ist wohldefiniert, da fur ein [x, y, z] ∈ C, d.h. x2 = yz, im Fall von y, z 6= 0 auchx 6= 0 und es gilt
[x, y] = [x2, xy] = [yz, yx] = [z, x].
[0,1][1,1]
[0,0,1]
[1,1,1]
[-1,1,1]
[0,1,0]
DI
DII
C
C
P
P
I
I
2
1
h
x
[-1,1]x = 0
z = 0
y = 0
y = 0
x
y
~
1
1-1
w
w
1_
[1,0]
Bild 3.10: Homoomorphismus zwischen C und P1
Die Stetigkeit der beiden Abbildungen ω und ω−1 ergibt sich mit der in Kapitel 2 ein-gefuhrten Quotiententopologie auf den Pn. Aus der komponentenweise stetigen Funktionω ◦Π1, mit
(x, y) Π1−→ [x, y] ω−→ [xy, y2, x2],
ergibt sich die Stetigkeit von ω.

118 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Zum Nachweis der Stetigkeit von ω−1 fuhren wir zunachst die beiden offenen Teilmen-gen
U2 :={(x, y, z) ∈ C3\{0, 0, 0} | y 6= 0
}und
U3 :={(x, y, z) ∈ C3\{0, 0, 0} | z 6= 0
}
von C3\{0, 0, 0} ein. Es gilt fur Π2 : C3\{0, 0, 0} → P2 die Beziehung Π−12 (C) ⊂ U2 ∪ U3.
Nach Bemerkung 2.1.1.3 genugt es, die Stetigkeit von ω−1 ◦ Π2|Π−12 (C) zu zeigen. Hierfur
wiederum ist es hinreichend, die beiden Abbildungen
ω2 := ω−1 ◦Π2|Π−12 (C)∩U2
und ω3 := ω−1 ◦Π2|Π−12 (C)∩U3
als stetig nachzuweisen. Es gilt nun mit (3.11):1. ω2(x, y, z) = [x, y], d.h. ω2 ist die Komposition der Projektion C3 → C2, (x, y, z) 7→ (x, y)gefolgt von Π1 : C2\{0, 0} → P1. Deshalb ist ω−1 ◦Π2|Π−1
2 (C)∩U2als Komposition von zwei
stetigen Abbildungen auch stetig.
2. ω3(x, y, z) = [z, x], d.h. ω3 ist die Komposition der Einschrankung von C3 → C2,(x, y, z) 7→ (z, x) mit Π1. Als Komposition von zwei stetigen Abbildungen ist daher auchω−1 ◦Π2|Π−1
2 (C)∩U3stetig.
Dabei haben wir uns von den beiden Diagrammen
(x, y, z) −−−−→ (x, y)
Π−12 (C) ∩ U2 −−−−→ C2\{(0, 0)}
Π2
yyΠ1
Cω−1−−−−→ P1
und
(x, y, z) −−−−→ (z, x)
Π−12 (C) ∩ U3 −−−−→ C2\{(0, 0)}
Π2
yyΠ1
Cω−1−−−−→ P1
mit y 6= 0 und z 6= 0 leiten lassen. ¤
Eine Quadrik ist durch das Polynom (3.7) bis auf einen Faktor eindeutig definiert.D.h. sechs Werte aus C bestimmen bis auf ein skalares Vielfaches eine Quadrik. Esergibt sich die folgende Entsprechung.
Bemerkung 3.2.1.5. Eine Quadrik im P2 bestimmt einen Punkt im P5 und umgekehrt.
Jetzt betrachten wir die Menge Qp aller durch einen Punkt p = [u, v, w] ∈ P2
verlaufenden Quadriken. Dann entspricht die Menge
Vp := {a := (a1, . . . , a6)T ∈ C6 | a1u
2 + a2v2 + a3w
2 +
a4uv + a5uw + a6vw = 0} (3.12)
= {a ∈ C6 | 〈(u2, v2, w2, uv, uw, vw)T , a〉 = 0}
den Koeffizienten aller Polynome, durch welche die Quadriken aus Qp definiertsind. Vp ist ein komplexer Untervektorraum der Dimension funf des C6. Das BildΠ( Vp\{0} ) (unter der in Abschnitt 2.1.1 in (2.1) eingefuhrten Abbildung Π :C6\{(0, . . . , 0)} → P5, siehe Seite 60) ist also laut Definition 2.1.2.1 eine Hyperflachein P5.

3.2. ANWENDUNGEN AUF QUADRIKEN 119
Weil sich funf Hyperflachen in P5 in mindestens einem Punkt a schneiden unddieser nach der obigen Bemerkung 3.2.1.5 einer Quadrik entspricht (in dem Sinne,daß a = [a1, . . . , a6] einen “Koeffizientensatz“ bis auf skalares Vielfaches der Quadrikdefiniert), gilt damit der folgende Satz (siehe auch Anhang C).
Satz 3.2.1.6. Durch funf Punkte des P2 verlauft mindestens eine Quadrik.
Beweis. Funf Punkte p1, . . . ,p5 ∈ P2 legen funf Untervektorraume der oben in (3.12)definierten Art Vp1 , . . . , Vp5 fest, die sich als Hyperflachen Π(Vp1), . . . , Π(Vp5) in P5 ineinem Punkt schneiden, was nach Bemerkung 3.2.1.5 einer Quadrik in P2 entspricht.
Anmerkung : Der direkte Nachweis dieses Satzes ist auf die Losung eines einfach unterbe-stimmten, homogenen linearen Gleichungssystems M a = 0 zuruckfuhrbar. Dabei stehenin M ∈ C5,6 zeilenweise homogene Koordinaten u2
1, v21, w
21, . . . , v1w1 und u2
2, v22, . . ., etc.
der funf Punkte pν = [uν , vν , wν ], ν = 1, . . . , 5, und in a die sechs Koeffizienten a1, . . . , a6.Die Aussage behauptet dann, daß dieses Gleichungssystem stets nichttrivial losbar ist. ¤
3.2.2 Satze der klassischen Geometrie
Die Wirksamkeit der behandelten Schnitttheorie soll hier in Bezug auf Quadriken aneinigen Ergebnissen der klassischen Geometrie demonstriert werden. Wir beginnenmit Blaise Pascals “mystischem Sechseck“, das gleich in machtiger Verallgemeine-rung auf den P2 erfaßt werden soll.
Satz 3.2.2.1 (Pascal). Die gegenuberliegenden Seiten eines in einer irreduziblenQuadrik einbeschriebenen Sechsecks in P2 schneiden sich in drei auf einer Geradeliegenden Punkten.
Die Bilder 3.11, 3.12 und 3.13 zeigen Auspragungen in der Euklidischen Geo-metrie; d.h. alle Punkte liegen in der reellen Ebene R2. Die irreduziblen Quadrikensind hier eine Ellipse in Bild 3.11, eine Parabel in Bild 3.12 und eine Hyperbel nachBild 3.13, bei der demonstriert wird, daß die Punkte auf der Quadrik auch ein nichtkonvexes Sechseck formen konnen.
Beweis. Die sechs voneinander verschiedenen Eckpunkte des auf der irreduziblen Qua-drik E gegebenen Sechseckes seien in mathematisch positivem Drehsinn mit p1, . . . ,p6
bezeichnet. Desweiteren seien Gµ ν die durch pµ und pν , µ, ν = 1, . . . , 6, µ 6= ν, verlaufen-den Geraden, die durch die linearen Polynome Lµ ν definiert seien.
Jeweils die Geraden bzw. Seiten G12, G34, G56 und G23, G45, G61 seien jetzt zu dendurch die Polynome L12 · L34 · L56 und L23 · L45 · L61 definierten Kurven C und D vomGrad n := 3 vereinigt. Der folgende Schluß basiert nun auf die in Satz 3.1.2.10 vorgestellteAnwendung des Satzes von Bezout.
Die Kurven C und D schneiden sich in genau n2 = 9 Punkte: und zwar mit m := 2in genau m · n = 6 Eckpunkte des auf E liegenden Sechsecks und in den drei Punkte dereinander gegenuberliegenden Seiten – also G12 und G45, G23 und G56, sowie G34 und G61.Nach Satz 3.1.2.10 liegen diese n(n−m) = 3 Punkte auf einer Kurve hochstens vom Gradn−m = 1, also einer Geraden. ¤

120 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
p2
p1
p5
p6
p3
p4
E
Bild 3.11: Pascals “mystisches Hexagon“ in einer Ellipse
p2
p1
p5
p6
p3
p4
E
Bild 3.12: ... in einer Parabel
E
p2
p1
p5
p6
p3
p4
Bild 3.13: ... und in einer Hyperbel

3.2. ANWENDUNGEN AUF QUADRIKEN 121
Durch die Formulierung und den Beweis des Satzes von Pascal fur den projek-tiven Raum P2 gilt das Resultat auch fur zum Teil parallel verlaufende Seiten desSechseckes – ein Fall, der in der Euklidischen Geometrie ausgeschlossen werden muß.Das Bild 3.14 zeigt den Fall fur zwei parallel verlaufende Seiten eines einer Ellipseeinbeschriebenen Sechseckes. Hier liegen alle Schnittpunkte auf der Geraden G, der-jenige der Seiten durch p4 und p5 bzw. p1 und p2 im hinzuadjungierten “unendlichfernen“ Punkt. Das folgende Beispiel vertieft den Fall von jeweils drei parallel ver-laufenden Seiten eines Sechseckes auf einer Ellipse.
p2
p1p
5
p6
p3
p4
E
G
Bild 3.14: Der Satz von Pascal bei zwei parallel verlaufenden Seiten eines einer Ellipseeinbeschriebenen Sechsecks
Beispiel 3.2.2.2. Es sei die durch das Polynom P = X2 + 4Y 2 − 6XZ − 16Y Z + 21Z2
definierte irreduzible Quadrik E gegeben – dabei handelt es sich um die in Bild 3.15gezeigte Ellipse in einem reellen Schnitt mit z = 1. Die sechs Punkte
p1 :=[3−
√3, 5/2, 1
], p2 :=
[3−√3, 3/2, 1
], p3 := [3, 1, 1] ,
p4 :=[3 +
√3, 3/2, 1
], p5 :=
[3 +
√3, 5/2, 1
], p6 := [3, 3, 1]
markieren ein der Quadrik E einbeschriebenes Sechseck, dessen gegenuberliegende Seiten
R1 durch p1 und p2 : X − (3−√3)Z = 0 ,
R2 durch p4 und p5 : X − (3 +√
3)Z = 0 ,
S1 durch p5 und p6 :√
3X + 6Y − (18 + 3√
3)Z = 0 ,
S2 durch p2 und p3 :√
3X + 6Y − ( 6 + 3√
3)Z = 0 ,
T1 durch p1 und p6 : −√3X + 6Y − (18− 3√
3)Z = 0 ,
T2 durch p3 und p4 : −√3X + 6Y − ( 6− 3√
3)Z = 0
parallel verlaufen. Es ergibt sich dann in P2, daß sich
die Geraden R1 und R2 in [0, 1, 0],die Geraden S1 und S2 in [6,−
√3, 0] und
die Geraden T1 und T2 in [6,√
3, 0]
schneiden, was in dem Bild 3.16 wieder in Form der Gitter der Fundamentaldreiecke dar-gestellt ist. ¤

122 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
-1 1 2 3 4 5 6 7
-1
1
2
3
4
T1
T2
R1
R2
S2
S1
x
y
Bild 3.15: Das der Ellipse E einbeschriebene Sechseck S mit jeweils drei parallelen Seiten
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
0,1,0
T1
T1
T2
T2
R1
R2S2
S1
z= 0
z= 0
z= 0z= 0
z= 0
-6,Sqrt3 , 0
6,Sqrt3 , 0
6,Sqrt3 , 0
Bild 3.16: Der projektive Abschuß der Konfiguration aus Bild 3.15
Der Satz von Pascal laßt sich verschiedentlich variieren. Hier zunachst seine Um-kehrung, die in Bild 3.17 illustriert ist und ahnlich wie der obige Satz wieder unterzu Hilfenahme von Ergebnis 3.1.2.10 bewiesen wird (die irreduzible Kurve E ist dies-mal die gegebene Gerade, die verbleibenden Punkte mussen dann auf einer Kurvevom Grad zwei liegen).
Korollar 3.2.2.3. Sind die Schnittpunkte der gegenuberliegenden Seiten eines Sechs-eckes kollinear, so ist das Sechseck einer Quadrik eingeschrieben.

3.2. ANWENDUNGEN AUF QUADRIKEN 123
p1
p2
p3
p4
p5
p6
EL6 1
L4 5
L5 6
L1 2
L2 3
L3 4
Bild 3.17: Eine Umkehrung des Satzes von Pascal
Fallen die Punkte p1 und p6 nach Bild 3.11 zusammen, so kann der folgende(etwas “umstandlich“ zu formulierende) Satz fur ein Funfeck aufgestellt werden(siehe auch Bild 3.18).
Korollar 3.2.2.4. Ein Funfeck F sei einer irreduziblen Quadrik E einbeschrie-ben. In einem Eckpunkt p1 von F sei T die Tangente an E. Desweiteren seien p2,p3, p4 und p5 die ubrigen Eckpunkte von F – beginnend von p1 in mathematischpositivem Sinne gezahlt. Wird mit Lµ ν die Verbindungsgerade der Punkte pµ undpν , µ, ν = 1, . . . , 5, µ 6= ν, bezeichnet, so liegen die Schnittpunkte von T und der“gegenuberliegenden“ Seite L34, von L12 und L45, sowie der Seiten L23 und L51 aufeiner Geraden.
p2
p = p6 1p5
p3
p4
Tangente TE
F
L1 2
L2 3
L3 4
L5 1
L4 5
Bild 3.18: Ein Funfeck in einer irreduziblen Quadrik
Dieser Satz kann jetzt zu einer wunderbaren Konstruktion der Tangente an eineQuadrik (der Euklidischen Geometrie) in einem gegebenen Punkt verwendet werden,wobei unter Ausschluß eines Zirkels lediglich ein Lineal zum Einsatz kommt!

124 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Bemerkung 3.2.2.5 (Konstruktion einer Tangente mit dem Lineal).Das Bild 3.19 zeigt im linken Teil die Aufgabenstellung, nach der an die Quadrik C in demauf ihr liegenden Punkt p die Tangente an C zu konstruieren ist. Der rechte Teil des Bildesenthalt den ersten Schritt des Konstruktionsvorganges. Mit dem Lineal ist ausgehend von
pp
p1
p2p3
p4
CCAusgangs-situation
Schritt 1
Bild 3.19: Aufgabe: An die Quadrik C soll in p die Tangente konstruiert werden
dem Punkt p ein Funfeck in die Quadrik C zu zeichnen, was durch fortlaufende Erzeugungzunachst der Punkte p1, p4 und dann der Punkte p2, p3 geschehen kann (von p ausgehendwird mit dem Lineal also eine beliebige Gerade gezogen, die C in dem von p verschiedenenPunkt p1 usw. trifft). Damit die nachfolgenden Schritte (wenig raumgreifend) durchgefuhrtwerden konnen, sind die Punkte naturlich geeignet zu plazieren.
Im zweiten Schritt sind jetzt die durch p1, p2 und p, p4 bzw. p, p1 und p3, p4
definierten Geraden bis zu den Schnittpunkten in s12 bzw. s34 zu verlangern (siehe Bild3.20 – links). Durch die Schnittpunkte s12 und s34 ist die Gerade G festgelegt, die nun im
p
p1
p2
p3
p4
s3 4
s1 2
C
Schritt 2 Schritt 3
p
s3 4
s1 2
C
G
Bild 3.20: Die Schritte 2 und 3 zur Konstruktion der Tangente
dritten Schritt nach Bild 3.20 – rechter Teil – gezeichnet wird.Nun wird die durch p2 und p3 definierte Gerade mit G zum Schnitt in dem Punkt s23
nach Bild 3.21 – linker Teil – gebracht. Im letzten und funften Schritt werden die Punktes23 und p zu der Geraden T verbunden, die jetzt nach Satz 3.2.2.4 gerade die Tangente inp an C sein muß. ¤

3.2. ANWENDUNGEN AUF QUADRIKEN 125
Schritt 4 Schritt 5
p
Cp2
p3
s2 3
G
p
Cs2 3
G
Tangente
T
Bild 3.21: Die Schritte 4 und 5 zur Konstruktion der Tangente
Wird die zuvor angestellte Uberlegung weiter getrieben und fallen jeweils diePunkte p1 und p6, p2 und p3, sowie die Punkte p4 und p5 aus Bild 3.11 zusammen,so kann der folgende Satz gewonnen werden. Eine Auspragung in der EuklidischenGeometrie – wieder in Form einer Ellipse – ist in Bild 3.22 dargestellt.
Korollar 3.2.2.6. Ein Dreieck sei einer irreduziblen Quadrik einbeschrieben. Dannliegen die Schnittpunkte der Seiten des Dreiecks und der Tangenten an die Quadrikin dem der entsprechenden Seite gegenuberliegenden Punkt des Dreiecks auf einerGeraden.
p4= p
5
p2= p
3
p6= p
1
E
Bild 3.22: Ein Dreieck in einer irreduziblen Quadrik
Ahnlich wie der Satz von Pascal kann auch der von Pappos von Alexandria(ca. 290 Alexandria - ca. 350) mit Hilfe der Aussage 3.1.2.10 bewiesen werden.

126 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Satz 3.2.2.7 (Pappos). Es seien M und N zwei projektive Geraden in P2 mit denauf sie gelegenen Punkten
p1,p2,p3 ∈ M\(M ∩N),
q1,q2,q3 ∈ N\(M ∩N).
Dann liegen die Schnittpunkte der Verbindungsgeraden Lµν der Punkte pµ und qν
und Lνµ der Punkte pν und qµ mit 1 ≤ µ < ν ≤ 3 auf einer Geraden (siehe Bild3.23).
p1
p2
r2
r3r
1
q1
q3
q2
p3
N
M
L2 3
L1 2
L3 2
L2 1
L1 3
L3 1
Bild 3.23: Der Satz von Pappos
Beweis. Die projektiven Kurven C := L12∪L23∪L31 und D := L21∪L32∪L13 vom Gradn := 3 schneiden sich genau in n2 = 9 Punkte: p1, p2, p3, q1, q2, q3, sowie drei weiterenPunkten, die mit r1, r2 und r3 bezeichnet seien.
Mit m := 1 liegen genau m · n = 3 Punkte – o.B.d.A. etwa p1, p2, p3 – auf einerirreduziblen Kurve – der Geraden M – vom Grad m = 1 < 3 = n. Die verbleibenden sechsPunkte q1, q2, q3, r1, r2, r3 sind nach Satz 3.1.2.10 auf einer Kurve E plaziert, derenGrad hochstens n−m = 2 betragt. Weil q1, q2, q3 auf der Geraden N liegen und r1, r2,r3 6∈ N ∪M weder auf M noch auf N gelegen sind, muß E eine Quadrik sein (sonst warenalle genannten Punkte kollinear). Desweiteren muß diese Quadrik die lineare KomponenteN enthalten und mithin zerfallen.
Dann aber mussen die Punkte r1, r2, r3 auf der anderen Zerfallskomponente liegen,die wegen GradE = 2 und GradN = 1 eine Gerade sein muß. ¤

3.3. WENDEPUNKTE UND KUBIKEN 127
3.3 Wendepunkte und Kubiken
3.3.1 Hessesche Kurve
Die Kubiken besitzen ein reicheres Verhalten als die Quadriken. Dazu zahlt ins-besondere die Existenz von Wendepunkten, die in dem hier behandelten Konzeptder algebraischen Kurven eine Verallgemeinerung der ublichen Wendepunkte einesGraphen sind, wie sie aus der Analysis I bekannt sind. Ihre allgemeine (und vonKubiken unabhangige) Einfuhrung geschieht wieder uber die zweiten Ableitungendes eine Kurve definierenden Polynoms.
Nach [BK81] wird ein Wendepunkt einer algebraischen Kurve folgendermaßenuber die Schnittmultiplizitat definiert.
Definition 3.3.1.1. Sei C eine projektive algebraische Kurve. Ein regularer Punktp ∈ C heißt ein r-facher Wendepunkt von C, wenn
Ip(C, T ) = r + 2
gilt, wobei T die Tangente an C in p ist, die keine Komponente von C sein soll.Wird nur von einem Wendepunkt gesprochen, so ist ein einfacher Wendepunkt, alsor = 1, gemeint.
Das Bild 3.24 veranschaulicht im Affinen die Falle r = 0, fur den kein Wende-punkt vorliegt, und r ≥ 1, fur den die Kurve C die Tangente T im Wendepunkt p“kreuzt“.
TT
C Cpp
r = 0 r 1S
Bild 3.24: Das Auftreten von Wendepunkten: Ip(C, T ) = r + 2, mit r ≥ 1
Die Berechnung von Wendepunkten kann mit Hilfe des nun erlauterten Konzep-tes von Ludwig Otto Hesse (1811 Konigsberg - 1874 Munchen) erfolgen. Dazu wirdjedem homogenen Polynom ein weiteres homogenes Polynom zugeordnet.
Definition 3.3.1.2. Sei P ∈ C[X, Y, Z] ein homogenes Polynom vom Grad d. DasHessesche Polynom HP von P ist durch die Determinante
HP =
∣∣∣∣∣∣
PXX PXY PXZ
PY X PY Y PY Z
PZX PZY PZZ
∣∣∣∣∣∣definiert.

128 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Bemerkung 3.3.1.3. Da die zweiten partiellen Ableitungen von P homogen vom Gradd−2 sind (“zweimalige Anwendung“ von Satz 1.2.9), ist das Hessesche Polynom homogenvom Grad 3(d− 2) und bestimmt damit ebenfalls eine projektive Kurve.
Definition 3.3.1.4. Sei C die durch das homogene Polynom P ∈ C[X, Y, Z] de-finierte projektive Kurve. Die durch das homogene Polynom HP definierte KurveH(C) heißt die Hessesche (Kurve) zu C.
Wie bei allen anderen Kurven auch, ist es wieder wichtig eine von den “unterleg-ten“ Koordinaten unabhangige Formulierung zu finden. Das folgende Lemma stelltsicher, daß dies mit der Defintion 3.3.1.4 gelungen ist.
Lemma 3.3.1.5. Die Hessesche Kurve H(C) hangt nicht von der Wahl der Koor-dinaten ab.
Beweis. Die Kurve C sei durch das Polynom P ∈ C[X1, X2, X3] definiert. Wird einKoordinatenwechsel (X1, X2, X3)T = B(Y1, Y2, Y3)T mit invertierbarer Matrix B ∈ C3,3
durchgefuhrt, gelangt man zur Darstellung von C durch das Polynom
Q(Y1, Y2, Y3) := P (X1(Y1, Y2, Y3), X2(Y1, Y2, Y3), X3(Y1, Y2, Y3)) ∈ C[Y1, Y2, Y3] .
Die zweite Ableitung von Q nach Yµ, Yν , µ, ν = 1, 2, 3, ergibt sich daraus zu
∂2Q
∂Yµ∂Yν=
3∑
i=1
3∑
j=1
∂2P
∂Xi∂Xj
∂Xj
∂Yν
· ∂Xi
∂Yµ+
∂P
∂Xi
∂2Xi
∂Yµ∂Yν︸ ︷︷ ︸=0
,
d.h. die dem Hesseschen Polynom HQ zugrunde liegende Matrix transformiert sich wieeine quadratische Form:
(∂2Q
∂Yµ∂Yν
)
1≤µ,ν≤3
=(
∂Xi
∂Yµ
)
1≤µ,i≤3
(∂2P
∂Xi∂Xj
)
1≤i,j≤3
(∂Xj
∂Yν
)
1≤j,ν≤3
= BT
(∂2P
∂Xi∂Xj
)
1≤i,j≤3
B .
Daraus folgt HQ = (detB)2HP und fur die Hessesche Kurve H(C) schließlich
H(C) = V (HQ) = V (HP ) . ¤
Der nachfolgende Satz zeigt die zentrale Verbindung zwischen einer projektivenKurve und der mit ihr korrespondierenden Hesseschen Kurve.
Satz 3.3.1.6. Sei C ⊂ P2 eine projektive Kurve und H(C) die Hessesche zu C. DerDurchschnitt von C und H(C) ist die Vereinigung von Wendepunkten und Singula-ritaten von C, also:
C ∩H(C) = {w ∈ P2 |w ist ein Wendepunkt von C } ∪{ s ∈ P2 | s ist eine Singularitat von C } .

3.3. WENDEPUNKTE UND KUBIKEN 129
Beweis. Die projektive Kurve C sei durch das homogene Polynom P vom Grad d defi-niert. Der Punkt p liege auf C und durch eine geeignete Koordinatentransformation kanno.B.d.A. p = [0, 0, 1] und Y = 0 als Tangente an C in p angenommen werden. Dann hatdas Polynom P im Affinen die Gestalt
P = a0Y + (b0X2 + b1XY + b2Y
2) +O(T3(X,Y )),
wobei O(Tn(X,Y )) Terme in X und Y der Ordnung n und hoher meinen. Wird P homo-genisiert, so gewinnen wir das die Kurve C beschreibende Polynom
P = a0Y Zd−1 + (b0X2 + b1XY + b2Y
2)Zd−2 +O(T3(X, Y )) .
Mit den Ableitungen
PX = (2b0X + b1Y )Zd−2 +O(T2(X, Y )) ,
PY = a0Zd−1 + (b1X + 2b2Y )Zd−2 +O(T2(X, Y )) ,
PXX = 2b0Zd−2 +O(T1(X, Y )) ,
PXY = b1Zd−2 +O(T1(X, Y )) ,
PY Y = 2b2Zd−2 +O(T1(X, Y ))
und dem Lemma 3.3.1.11 berechnet sich das Hessesche Polynom im Punkt p zu
HP (0, 0, 1) = (d− 1)2
∣∣∣∣∣∣
2b0 b1 0b1 2b2 a0
0 a0 0
∣∣∣∣∣∣= −2 a2
0 b0(d− 1)2 . (3.13)
Im folgenden sei W die Menge der Wendepunkte und S die der Singularitaten von C.Es ist C in p genau dann singular, wenn a0 = 0, was HP (0, 0, 1) = 0 bzw. p ∈ H(C)
zur Folge hat.Im folgenden sei C in p nichtsingular, d.h. o.B.d.A. a0 = 1. Weil Q(X,Y, Z) := Y = 0
die Tangente T an C in p ist, berechnet sich die Schnittmultiplizitat Ip(C, T ) von Kurveund Tangente nach Definition 3.1.2.4 aus der Resultante
RP,Q(X,Z) =
∣∣∣∣∣∣∣∣∣∣∣
(b0X2Zd−2 +O(T3(X))) (aZd−1 + b1X + . . .) (. . .) . . . (. . .)
0 10 1
. . .0 1
∣∣∣∣∣∣∣∣∣∣∣= b0X
2Zd−2 +O(T3(X))
als Polynom in C[X, Z]. Wegen p = [0, 0, 1] ist die Schnittmultiplizitat Ip(C, T ) jetzt diemaximale Potenz ν mit der RP,Q(X, Z) von (1 ·X − 0 · Z)ν teilbar ist:
(1) b0 6= 0: Ip(C, T ) = 2 und p ist kein Wendepunkt;
(2) b0 = 0: Ip(C, T ) ≥ 3, d.h. p ist ein Wendepunkt.
Mit der Beziehung (3.13) folgt daraus die Behauptung. ¤

130 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Beispiel 3.3.1.7. Wir betrachten erneut das durch P = X3 + Y 3 − 3XY Z definiertekartesische Blatt C. Die Hessesche H(C) hierzu laßt sich nach Definition 3.3.1.2 uber dasPolynom
HP = −54X3 − 54Y 3 − 54XY Z
bestimmen. Wobei leicht zu erkennen ist, daß es sich wieder um ein kartesisches Blatthandelt. Das Bild 3.25 zeigt die Kurve C und ihre Hessesche in den zwei reellen Schnittenfur z = 1 und y = 1. Der in Bild 3.26 gezeigte projektive Abschluß bietet wieder einengroßeren Uberblick und faßt die Schnitte fur z = 1 und y = 1 zusammen.
-2 -1 1 2
-2
-1
1
2
x
y
C
HC
s-2 -1 1 2
-3
-2
-1
1
2
3
x
z
C
HC
w1
Bild 3.25: Das kartesische Blatt C und seine Hessesche
[0,1,0] [0,0,1] [1,0,0]
[0,1,0][1,0,0]
[1,0,0]
[0,0,1]
[0,0,1]
D II
D II
D I
D I
D IVD III
D III
C
H( )Cw1
s
Bild 3.26: Das kartesische Blatt C und seine Hessesche im projektiven Abschluß
Die Berechnung der Schnittpunkte von C und H(C) fuhrt auf das Gleichungssystem{
P (a, b, c) = a3 + b3 − 3abc = 0,
− 154HP (a, b, c) = a3 + b3 + abc = 0,
das die folgenden Losungen besitzt:
s = [0, 0, 1], w1 = [1,−1, 0],
w2 = [1, eπi/3, 0], w3 = [1, e−πi/3, 0] .
Eine Betrachtung der ersten partiellen Ableitungen ergibt, daß in s eine Singularitat vor-liegt. Ihre Schnittmultiplizitat mit H(C) muß nach Satz 3.1.2.6 großer als vier sein (da

3.3. WENDEPUNKTE UND KUBIKEN 131
Mults(C) = Mults (H(C)) = 2 und die Tangenten der beiden Kurven in der Singularitatzusammenfallen). Die Betrachtung der Resultante
RP,− 1
54HP(Y, Z) = 64Y 6Z3
zeigt, daß diese durch (0 · Z − 1 · Y )6 teilbar ist, d.h.
Is(C,H(C)) = 6 .
Die ubrigen drei Punkte w1, w2 und w3 sind Wendepunkte, jeweils mit der Schnittmulti-plizitat
Iwν (C,H(C)) = 1 , ν = 1, 2, 3 ,
davon ist in den reellen Schnitten nach Bild 3.25 bzw. 3.26 jedoch nur der reelle Punktw1 sichtbar. ¤
Beispiel 3.3.1.8. Ganz ahnlich verhalt sich die durch P = Y 2Z −X(X − Z)2 definierteKubik C (vgl. Beispiel 2.2.1.10, Fall λ = 1 im Bild 2.7 auf Seite 73). Die Hessesche H(C)berechnet sich zu
HP = 24XY 2 − 8X2Z − 16Y 2Z + 16XZ2 − 8Z3 .
Die reellen Schnitte in Bild 3.27 fur z = 1 und y = 1 wirken zunachst im Vergleich mit denBildern 3.25 und 3.26 aus dem vorangegangenen Beispiel recht verschieden. Der in Bild3.28 dargestellte projektive Abschluß zeigt jedoch, daß eine geometrisch ganz gleichartigeKonfiguration vorliegt (vgl. mit Bild 3.26).
-1 -0.5 0.5 1 1.5 2 2.5 3
-2
-1.5
-1
-0.5
0.5
1
1.5
2
x
y
s
C
HC
-6 -4 -2 2 4 6
-6
-4
-2
2
4
6
x
z
C
w1
HC
Bild 3.27: Die Kubik Y 2Z = X(X − Z)2 und ihre Hessesche
Wieder schneidet die Hessesche die Kurve C in einer Singularitat s = [1, 0, 1] mit derMultiplizitat sechs und in drei Wendepunkten
w1 = [0, 1, 0], w2 = [1, 4√
3i,−3], w3 = [1,−4√
3i,−3]
mit einfacher Multiplizitat, von denen in den Bildern 3.27 und 3.28 nur der “unendlichferne“ reelle Punkt w1 zu sehen ist. ¤

132 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
[0,1,0][0,0,1]
[0,0,1]
[0,1,0]
[1,0,0]
[1,0,0]D I
D IV
D IV
C
H( )C
w1
s
Bild 3.28: Die Kubik Y 2Z = X(X − Z)2 und ihre Hessesche im projektiven Abschluß
Beispiel 3.3.1.9. Abschließend soll noch die durch P = Y 2Z − X2(X − Z) definierteKubik C (vgl. Beispiel 2.2.1.10, Fall λ = 0 im Bild 2.6 auf Seite 73) untersucht werden.Die Hessesche H(C) berechnet sich in diesem Fall zu
HP = 24XY 2 − 8X2Z − 8Y 2Z .
Neben den Schnitten fur z = 1 und y = 1 in Bild 3.29 ist auch wieder der projektiveAbschluß in Bild 3.30 dargestellt.
-1 -0.5 0.5 1 1.5 2 2.5 3
-2
-1
1
2
x
y
C
HC
s
w1
w2
-3 -2 -1 1 2 3
-2
-1
1
2
x
zC
HC
w3
w1
w2
Bild 3.29: Die Kubik Y 2Z = X2(X − Z) und ihre Hessesche
Diesmal liegen drei reelle Wendepunkte vor:
w1 =[
43 , 4
√3
9 , 1]
=[√
3, 1, 3√
34
], w2 =
[43 ,−4
√3
9 , 1]
=[−√3, 1,−3
√3
4
]
und der “unendlich ferne“ Punkt w3 = [0, 1, 0].
Die Schnittmultiplizitat von C und H(C) betragt in ihnen jeweils eins. Der reell isoliertliegende Punkt s = [0, 0, 1] ist eine Singularitat, wobei wieder Is(C,H(C)) = 6 gilt. ¤

3.3. WENDEPUNKTE UND KUBIKEN 133
[0,1,0][0,0,1]
[0,0,1]
[0,1,0]
[1,0,0]
[1,0,0]
D I
D IV
D IV
CH( )C
w3
w1
s
w2
Bild 3.30: Die Kubik Y 2Z = X2(X − Z) und ihre Hessesche im projektiven Abschluß
Mit Hilfe des Hesseschen Polynoms konnte also eine Alternativdefinition vonWendepunkten gegeben werden.
Definition 3.3.1.10 (Alternative zu Def. 3.3.1.1). Ein nichtsingularer Punkt [a, b, c]einer durch das homogene Polynom P ∈ C[X, Y, Z] definierten projektiven Kurve Cin P2 heißt Wendepunkt von C, wenn gilt
HP (a, b, c) = 0 .
Wir mochten jetzt zeigen, daß diese Definition im Fall einer “gewohnlichen“Funktion y(x) mit der Bedingung d2y
dx2 = 0 ubereinstimmt. Dazu ist das folgendeLemma hilfreich; es gestattet, das Hessesche Polynom ohne eine Ableitung nach derdritten Variable auszudrucken (ggf. kann man also im Affinen verbleiben).
Lemma 3.3.1.11. Ist P ∈ C[X, Y, Z] ein homogenes Polynom vom Grad d > 1,dann gilt
Z2HP = (d− 1)2
∣∣∣∣∣∣
PXX PXY PX
PY X PY Y PY
PX PY d · P/(d− 1)
∣∣∣∣∣∣.
Beweis. In Lemma 1.2.10 (siehe Seite 22) wurde die Eulersche RelationXPX + Y PY + ZPZ = d P (3.14)
bewiesen. Weil die ersten Ableitungen von P ebenfalls homogene Polynome (vom Gradd− 1) sind, kann die Eulersche Relation auf sie ein weiteres mal angewandt werden:
XPXX + Y PXY + ZPXZ = (d− 1)PX , (3.15)XPY X + Y PY Y + ZPY Z = (d− 1)PY , (3.16)XPZX + Y PZY + ZPZZ = (d− 1)PZ . (3.17)
Wird jetzt in der Determinante HP die unterste Zeile mit Z multipliziert und betrachtetman die Linearkombination mit den ersten beiden Zeilen unter skalarer Multiplikation der

134 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
ersten Zeile mit X und der zweiten mit Y , so entsteht unter Ausnutzung der drei Glei-chungen (3.15)-(3.17) der Ausdruck
ZHP =
∣∣∣∣∣∣
PXX PXY PXZ
PY X PY Y PY Z
ZPZX ZPZY ZPZZ
∣∣∣∣∣∣= (d− 1)
∣∣∣∣∣∣
PXX PXY PXZ
PY X PY Y PY Z
PX PY PZ
∣∣∣∣∣∣.
Analog dazu wird nun die letzte Spalte in der soeben gewonnenen Determinante mit Zmultipliziert und mit den ersten beiden linearkombiniert (wobei die erste Spalte mit Xund die zweite mit Y multipliziert wird). Dabei wird ein weiteres mal die Beziehung (3.15),(3.16) und in der unteren Zeile (3.14) benutzt:
Z2HP = (d− 1)
∣∣∣∣∣∣
PXX PXY ZPXZ
PY X PY Y ZPY Z
PX PY ZPZ
∣∣∣∣∣∣= (d− 1)
∣∣∣∣∣∣
PXX PXY (d− 1)PX
PY X PY Y (d− 1)PY
PX PY dP
∣∣∣∣∣∣. ¤
Um den Gedankengang wie die gewohnliche Definition eines Wendepunktes mitder Definition 3.3.1.10 zusammenhangt wieder aufzunehmen, betrachten wir jetztden Schnitt P (X, Y, 1) = 0 (3.18)
einer durch P definierten projektiven Kurve C bei z = 1; o.B.d.A. sei ∂P∂Y6= 0 vor-
ausgesetzt. Dann kann (3.18) lokal als eine implizite Definition einer holomorphenFunktion y = y(x) betrachtet werden (siehe Anhang A). Es soll jetzt die zweite Ab-leitung y′′(x) berechnet werden. Aus (3.18) ergibt sich mit der Kettenregel zunachst
d
dxP (x, y(x), 1) =
∂P
∂x+
∂P
∂y
dy
dx= 0 ,
und hierausdy
dx= −Px
Py
.
Die zweite Ableitung
d2
dx2P (x, y(x), 1) =
d
dx
(∂P
∂x+
∂P
∂y
dy
dx
)
=∂2P
∂x2+
∂2P
∂x∂y
dy
dx+
(∂2P
∂y∂x+
∂2P
∂y2
dy
dx
)dy
dx+
∂P
∂y
d2y
dx2
=∂2P
∂x2+
(dy
dx
)2∂2P
∂y2+ 2
dy
dx
∂2P
∂x∂y+
d2y
dx2
∂P
∂y= 0
liefert
d2y
dx2=
2PxPyPxy − (Py)2Pxx − (Px)
2Pyy
(Py)3=
1
(Py)3
∣∣∣∣∣∣
Pxx Pxy Px
Pyx Pyy Py
Px Py 0
∣∣∣∣∣∣;
und mit Lemma 3.3.1.11 folgt jetzt (wegen P (x, y, 1) = 0) fur d > 1 die Beziehung
d2y
dx2=
HP (x, y, 1)
(d− 1)2 (Py)3. (3.19)

3.3. WENDEPUNKTE UND KUBIKEN 135
Der in Beziehung (3.19) zum Ausdruck kommende Zusammenhang eines Wende-punktes mit der zweiten Ableitung einer implizit definierten Funktion kann in Formder folgenden Bemerkung zusammengefaßt werden.
Bemerkung 3.3.1.12. Ist [a, b, 1] ∈ C bzw. P (a, b, 1) = 0 und PY (a, b, 1) 6= 0, so ist[a, b, 1] genau dann ein Wendepunkt von C, wenn die zweite Ableitung von Y nach Xverschwindet, sofern Y uber die implizite Gleichung P (X,Y, 1) = 0 als Funktion von Xverstanden werden kann.
Damit korrespondiert der in Definition 3.3.1.10 eingefuhrte Wendepunkt mit derDefinition des Wendepunktes eines Graphen, wie er ublicherweise in der Analysis Ieingefuhrt wird (siehe etwa [Beekmann91]).
Uber das Vorkommen von Wendepunkten sind noch genauere Angaben moglich,was jetzt in zwei Schritten gezeigt werden soll. Zunachst benotigen wir das folgendeLemma, das die endliche Anzahl von Schnittpunkten einer Kurve C von hoheremGrad als zwei mit der Hesseschen H(C) garantiert (dies ist aquivalent zur Aussage,daß die Kurve C keine Komponente von H(C) ist!). Danach kann dann abhangigvom Grad die genaue Anzahl von Wendepunkten als Resultat der Schnitttheorieangegeben werden.
Lemma 3.3.1.13. Sei C eine irreduzible projektive Kurve vom Grad d ≥ 2. Danngibt es nur endlich viele Wendepunkte, bzw. hierzu aquivalent: C ist keine Kompo-nente von H(C).
Beweis. Die Annahme von unendlich vielen Wendepunkten fuhrt unmittelbar zur Kon-sequenz, daß jeder Punkt der Kurve C ein Wendepunkt sein muß. Denn aufgrund vonSatz 3.3.1.6 ergeben sich die Wendepunkte von C als Schnittpunkte mit der Kurve H(C),d.h. es konnen entweder nur endlich viele auftreten (Satz von Bezout) oder C ist eineKomponente von H(C).
Wir nehmen also an, daß jeder Punkt der Kurve C ein Wendepunkt ist. O.B.d.A. seidas die Kurve C definierende Polynom P ∈ C[X,Y, Z] so gewahlt, daß
P (0, 0, 1) = 0 6= ∂P
∂Y(0, 0, 1)
gilt. Mit Hilfe des Satzes uber implizite Funktionen (nach Anhang A) kann uber das Poly-nom P (X,Y, 1) ∈ C[X, Y ] jetzt folgende Aussage getroffen werden: es gibt eine holomorpheFunktion g : U → V mit U und V als offene Umgebungen von 0 in C, so daß g(0) = 0; furx ∈ U , y ∈ V gilt außerdem
P (x, y, 1) = 0 genau dann, wenn y = g(x).
Da jeder Punkt von C ein Wendepunkt ist, ergibt sich nach Bemerkung 3.3.1.12
g′′(x) = 0 fur alle x ∈ U.
Weil g(0) = 0 ist, gibt es ein α ∈ C, so daß
g(x) = αx

136 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
(d.h. g ist eine lineare Funktion) und das Polynom P (X, αX, 1) ∈ C[X] ist identisch Nullauf U . Damit ist Y − αX ein Teiler des Polynoms P (X, Y, 1) und weil P als irreduzibelangenommen wurde, ist P ein skalares Vielfaches von Y −αX, d.h. d = 1 im Widerspruchzur Annahme d ≥ 2.
Die Annahme einer gemeinsamen Komponente von C und H(C) fuhrt also notwendigdazu, daß C eine Gerade ist. Fur irreduzible Kurven von hoherem Grad kann dies somitnicht der Fall sein, d.h. der Satz von Bezout und Satz 3.3.1.6 garantieren endlich vieleSchnittpunkte und damit endlich viele Wendepunkte. ¤
Im zweiten Schritt kann jetzt eine genaue Aussage uber die Anzahl moglicherWendepunkte gemacht werden.
Satz 3.3.1.14. Sei C eine nichtsingulare projektive Kurve vom Grad d. Dann geltendie Aussagen:
(1) ist d ≥ 2, dann hat C hochstens 3d(d− 2) Wendepunkte;
(2) ist d ≥ 3, dann hat C mindestens einen Wendepunkt.
Beweis. In Vorwegnahme einer Aussage (Satz 4.1.2) des vierten Kapitels, folgt aus derNichtsingularitat einer Kurve ihre Irreduzibilitat. Nach Lemma 3.3.1.13 ist die nichtsin-gulare Kurve C von hoherem Grad als zwei also keine Komponente von H(C), so daß derSatz von Bezout, Seite 101, auf die Kurven C und ihre Hessesche H(C) angewandt werdenkann, wonach sie sich hochstens in
Grad(C) ·Grad(H(C)) (3.20)
Punkten bzw. Wendepunkten schneiden.Aus Definition 3.3.1.4 der Hesseschen und der Bemerkung 3.3.1.3, nach der die Hes-
sesche Kurve vom Grad 3(d − 2) ist, ergibt sich der erste Teil der obigen Aussage jetztunmittelbar aus (3.20).
Im Fall d ≥ 3 ist Grad(H(C)) ≥ 1, d.h. die Beziehung (3.20) garantiert mindestenseinen Wendepunkt. ¤
Quadriken besitzen also – wie zu erwarten – keine Wendepunkte, Kubiken da-gegen stets mindestens einen bzw. mit Multiplizitat gezahlt hochstens neun. Dabeikann uber nichtsingulare Kubiken noch eine genauere Aussage getroffen werden.
Zunachst ist die Schnittmultiplizitat einer Kubik mit ihrer Tangente in einemWendepunkt kleiner als oder gleich drei (Bezout), nach Definition 3.3.1.1 ist sieaber auch großer als oder gleich drei, so daß sie genau drei betragt. Daher sindalle Wendepunkte einer Kubik einfache Wendepunkte. Außerdem gilt das folgendeLemma bzgl. der Schnittmultiplizitat mit der Hesseschen.
Lemma 3.3.1.15. Sei C eine nichtsingulare Kubik und p ein Wendepunkt, dannist die Schnittmultiplizitat der Kubik und ihrer Hesseschen in p gleich eins:
Ip(C,H(C)) = 1 .

3.3. WENDEPUNKTE UND KUBIKEN 137
Beweis. Sei C eine nichtsingulare Kubik und o.B.d.A. [0, 0, 1] ein Wendepunkt mit Y = 0als Wendetangente. Dann wird C durch das homogene Polynom
P = Y Z2 + (a1XY Z + a2Y2Z) + (b0X
3 + b1X2Y + b2XY 2 + b3Y
3)
mit a1, a2, b0, b1, b2, b3 ∈ C und b0 6= 0 definiert. Das Hessesche Polynom hierzu ist
HP = −24b0XZ2 + (2a21 − 8b1)(a2Y + Z)Y Z + X ·Q(X, Y, Z)
mit Q ∈ C[X, Y, Z] und Q(0, 0, 1) = 0. Die Tangente von H(C) im Wendepunkt [0, 0, 1]ist damit
∂HP
∂X
∣∣∣∣[0,0,1]
X +∂HP
∂Y
∣∣∣∣[0,0,1]
Y +∂HP
∂Z
∣∣∣∣[0,0,1]
(Z − 1)
= −24b0X + (2a21 − 8b1)(Y + 2(Z − 1)) = 0
und wegen b0 6= 0 verschieden von der Wendetangente Y = 0, so daß nach Satz 3.1.2.7 gilt
I[0,0,1](C,H(C)) = 1 . ¤
Korollar 3.3.1.16.Eine nichtsingulare Kubik besitzt genau 9 einfache Wendepunkte.
Mit Hilfe zweier Normalformen kann daruber hinaus die Lage dieser Wendepunk-te genau charakterisiert werden. Wir beginnen mit der sogenannten Weierstraßschen6 Normalform, zu der jede singularitatenfreie Kubik aquivalent ist.
Es sei C eine nichtsingulare Kubik, die o.B.d.A. in [0, 1, 0] einen Wendepunktmit Z = 0 als Wendetangente enthalte. Dann hat das C definierende Polynom dieForm
Y 2Z + (a1XY Z + a2Y Z2) + (b0Z3 + b1XZ2 + b2X
2Z + b3X3) (3.21)
mit a1, a2, b0, b1, b2, b3 ∈ C und b0 6= 0. In affiner Auspragung und unter quadratischerErganzung
Y 2 + a1XY + a2Y + b0 + b1X + b2X2 + b3X
3
= (Y +1
2(a2 + a1X)
︸ ︷︷ ︸:=Y
)2 + b0 + b1X + b2X2 + b3X
3 − 1
4(a2 + a1X)2
= Y 2 + b3X3 + X2(b2 − 1
4a2
1) + X(b1 − 1
2a1a2) + b0 − 1
4a2
2
kann also o.B.d.A. die Kurve C durch
Y 2 + c0 + c1X + c2X2 + b3X
3 (3.22)
definiert angenommen werden. Desweiteren kann jetzt noch eine kubische Erganzung
X := 3√
b3
(X +
c2
3 b3
), b3 6= 0 ,
6Karl Weierstrass (1815 Ostenfelde - 1897 Berlin)

138 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
vorgenommen werden, die in (3.22) zu
Y 2 +
(c0 − c1c2
3 b3
+2 c3
2
27 b3
)+
(c1
b1/33
− c22
3 b1/33
(2
b3
− 1
))X + X3
fuhrt, was bedeutet, daß C in geeigneten Koordinaten durch
P := Y 2 −X3 − aX − b
definiert werden kann. Da C nichtsingular sein soll, muß
∂P
∂X(x, y) = −3x2 − a = 0 ,
∂P
∂Y(x, y) = 2y = 0
ausgeschlossen werden. Die verschwindenden Ableitungen treten also genau dannauf, wenn y = 0 und x2 = −a/3, was in P (x, y) = x3 + ax + b = 0 zu
x4 + ax2 + bx =a2
9+
a2
3+ bx = 0, bzw. bx = −4
9a2
fuhrt. Abermaliges Quadrieren ergibt schließlich
4a3 + 27b2 = 0
als aquivalente Bedingung fur das Auftreten von Singularitaten. Damit ist der fol-gende Satz gewonnen.
Satz 3.3.1.17. Jede nichtsingulare Kubik ist projektiv aquivalent zu der durch dieWeierstraßsche Normalform
Y 2Z = X3 + aXZ2 + bZ3 (3.23)
definierten Kubik C. Dabei ist C genau dann nichtsingular, wenn gilt:
4a3 + 27b2 6= 0 . (3.24)
Anmerkung I : Der Ausdruck 4a3 + 27b2 ist die nach Anhang B (bis auf das Vorzeichen)definierte Diskriminante des Polynoms R := X3 + aX + b, denn es gilt
RR,R′ :=
∣∣∣∣∣∣∣∣∣∣
b a 0 1 00 b a 0 1a 0 3 0 00 a 0 3 00 0 a 0 3
∣∣∣∣∣∣∣∣∣∣
= 4a3 + 27b2 .
Anmerkung II : Zusammenfassend soll die projektive Transformation, welche das Polynom(3.21) in die Weierstraßsche Normalform (3.23) uberfuhrt, hier noch einmal angegebenwerden: unterliegen die homogenen Koordinaten dem folgenden Isomorphismus
X
Y
Z
=
−b
1/33 0 a2
1−4b2
12b2/33
12a1 1 1
2a2
0 0 1
XYZ

3.3. WENDEPUNKTE UND KUBIKEN 139
bzw. invertiert
XYZ
=
− 1
b1/33
0 a21−4b212b3
a1
2b1/33
1 −a1(a21−4b2)+12a2b3
24b3
0 0 1
X
Y
Z
,
so nimmt das allgemeine Polynom der Form (3.21) die Weierstraßsche Normalform
Y 2Z − X3 +a2
1 (a21 − 8 b2) + 24 a1 a2 b3 + 16 (b2
2 − 3 b1 b3)
48 b4/33
XZ2
− 1864 b2
3
(a6
1 − 12 a41 b2 + 36 a3
1 a2 b3 − 144 a1 a2 b2 b3
+24 a21 (2 b2
2 − 3 b1 b3)− 8 (8 b32 − 36 b1 b2 b3 − 27 (a2
2 − 4 b0) b23)
)Z3
an.
Beispiel 3.3.1.18. Die Bilder 3.31 und 3.32 zeigen die reellen Schnitte einiger Weierstraß-scher Normalformen fur z = 1 und y = 1. Die Parameter a und b sind in die entsprechenden
Diagramme als Paare (a, b) eingetragen; dabei ist a = a22 = − 3
√274 fur die Kubik unten
und in der Mitte. ¤
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
1,0
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
a22,1
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
-1,0
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
0,1
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
0,0
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
0,-1
x
y
Bild 3.31: Weierstraßsche Normalformen fur z = 1

140 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
-2-1.5-1-0.5 0.5 1 1.5 2
-4-3-2-1
1234
1,0x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
a22,1
x
y
-2-1.5-1-0.5 0.5 1 1.5 2
-4-3-2-1
1234
-1,0
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
0,1
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
0,0
x
y
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
0,-1
x
y
Bild 3.32: Weierstraßsche Normalformen fur y = 1
Als erstes Ergebnis bzgl. der Lage von Wendepunkten nichtsingularer Kubikenerhalten wir damit zunachst die folgende Aussage.
Korollar 3.3.1. Sei C eine nichtsingulare Kubik und p1 und p2 zwei Wendepunkte.Dann ist der dritte Schnittpunkt der durch p1 und p2 verlaufenden Geraden mit Cwieder ein Wendepunkt.
Beweis. O.B.d.A. kann C als in Weierstraßscher Normalform vorliegend und in p1 =[0, 1, 0] ein Wendepunkt angenommen werden. Ist dann zunachts p2 = [xWP , yWP , 1] einweiterer (endlicher) Wendepunkt, so ist die durch p1 und p2 verlaufende Gerade G durchdie Determinante ∣∣∣∣∣∣
X Y Z0 1 0
xWP yWP 1
∣∣∣∣∣∣= X − xWP Z = 0
definiert. Als weiterer Schnittpunkt mit C ergibt sich dann
p3 = [xWP ,−yWP , 1] ,
der aus Grunden der Symmetrie wieder ein Wendepunkt ist, denn in dem HesseschenPolynom
24XY 2 + 24aX2Z + 72bXZ2 − 8a2Z3 (3.25)
der Weierstraßschen Normalform tritt Y nur quadratisch auf. Insbesondere zeigt (3.25) inVerbindung mit der Weierstraßschen Normalform, daß es keinen weiteren (“im Unendli-chen“ liegenden) Wendepunkt [xWP , yWP , 0] gibt. ¤

3.3. WENDEPUNKTE UND KUBIKEN 141
Damit ist die Lage der neun Wendepunkte einer nichtsingularen Kubik vollstandiggeklart: durch je drei Wendepunkte verlauft eine Gerade, so daß durch jeden Wen-depunkt vier Verbindungsgeraden gehen und es insgesamt 9·4
3= 12 Verbindungsge-
raden gibt.Dies ist eine “klassische“ Punkt-Geraden-Konfiguration. Dabei spricht man allge-
mein von einer (mp, nq)-Konfiguration, wenn in der Ebene m Punkte und n Geradenvorliegen, so daß durch jeden Punkt p der Geraden verlaufen und auf jeder der Ge-raden q Punkte liegen (siehe z.B. [HCV96]). Die Wendepunkte einer nichtsingularenKubik bilden also eine (94, 123)-Konfiguration. Das Bild 3.33 aus [BK81] zeigt dasSchema einer solchen Konfiguration.
p00
p22
p12
p11
p21
p02
p01
p10
p20
Bild 3.33: Die (94, 123)-Konfiguration
Die (94, 123)-Konfiguration ist isomorph zur Konfiguration der 9 Punkte und 12Geraden in der affinen Ebene F2
3 uber den Primzahlkorper F3 der Charakteristik3. Wobei der Isomorphismus durch die Zuordnung pµ, ν 7→ (µ, ν) gegeben ist. Inder reellen Ebene ist eine (94, 123)-Konfiguration nicht zu realisieren. Nach Korollar3.3.1 existiert aber eine solche in der komplexen projektiven Ebene P2 und in demnachsten Beispiel wird eine konkrete Anordnung berechnet.
Anmerkung : Die folgenden Beispiele werden numerisch behandelt. Alle Berechnungenwurden mit Mathematica 4.0 durchgefuhrt, die Zahlenangaben nach der siebten Nachkom-mastelle ohne Rundung abgebrochen.
Alle Rechungen hatten auch symbolisch – also unter Beibehaltung der vollen Allge-meinheit von a, b ∈ C – vorgenommen werden konnen. Leider werden die dabei entstehen-den Ausdrucke sehr unhandlich. Fur den praktischen Umgang mit den hier vorgestelltenMethoden – darum schließlich soll es in den Beispielen gehen – mogen die numerischenAngaben ausreichen. ¤
Beispiel 3.3.1.19. Eine (94, 123)-Konfiguration kann anhand der Weierstraßschen Nor-malform Y 2 = X3 + X + 1 (3.26)
(Bild 3.34) quantitativ angegeben werden, wegen a = b = 1 ist die so definierte Kubiknichtsingular (vgl. Diskriminante (3.24)).

142 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
x
y
u1
u2
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
x
z
u3
u1
u2
Bild 3.34: Y 2Z = X3 + XZ2 + Z3 fur Z = 1 und Y = 1
Die Wendepunkte uν , ν = 1, . . . , 9, ergeben sich als gemeinsame Nullstellen des Poly-noms P := Y 2Z −X3 −XZ2 − Z3 und seines Hesseschen Polynoms
HP = 24XY 2 + 24X2Z + 72XZ2 − 8Z3
zu
u1.= [0.0801139, 1.0395326, 1],
u2.= [0.0801139,−1.0395326, 1],
u3.= [0, 1, 0],
u4.= [−1.2225941, 1.4317996i, 1],
u5.= [0.5712401− 1.7541073i, 0.4964895 + 1.9395336i, 1],
u6.= [0.5712401 + 1.7541073i,−0.4964895 + 1.9395336i, 1],
u7.= [0.5712401− 1.7541073i,−0.4964895− 1.9395336i, 1],
u8.= [−1.2225941,−1.4317996i, 1],
u9.= [0.5712401 + 1.7541073i, 0.4964895− 1.9395336i, 1]
und bilden in der Anordnung
u1
u9
u6
u5
u8
u3u
2
u4
u7
eine zu p ∈ F23 nach Bild 3.33 isomorphe (94, 123)-Konfiguration. ¤

3.3. WENDEPUNKTE UND KUBIKEN 143
Durch
p1 := [0, 1,−1] , p2 := [−1, 0, 1] , p3 := [ 1,−1, 0] ,
p4 := [0, 1, α] , p5 := [ α, 0, 1] , p6 := [ 1, α, 0] , (3.27)
p7 := [0, α, 1] , p8 := [ 1, 0, α] , p9 := [ α, 1, 0]
wird eine weitere Punkt-Geraden-Konfiguration (94, 123) gegeben, wobei α ∈ C einevon −1 verschiedene dritte “negative“ Einheitswurzel ist, d.h. α2 − α + 1 = 0. 7
Letzteres ergibt sich aus der Bedingung
det(pµ, pν , pη)!= 0 (3.28)
fur alle Indizes
(µ, ν, η) ∈ {(1, 2, 3), (4, 5, 6), (7, 8, 9),(1, 4, 7), (2, 5, 8), (3, 6, 9),(1, 5, 9), (2, 6, 7), (3, 4, 8),(1, 6, 8), (2, 4, 9), (3, 5, 7)} ,
wobei pµ, pν , pη homogene Koordinaten der Punkte pµ,pν ,pη seien. Dann verschwin-den entweder die Determinanten aus (3.28) oder es ergibt sich α3 + 1 = 0. Die Kon-figuration (3.27) kann nach Multiplikation der “unteren Zeile“ mit dem konjugiertkomplexen Wert α auch in der Form
p1 := [0, 1,−1] , p2 := [−1, 0, 1] , p3 := [ 1,−1, 0] ,
p4 := [0, 1, α] , p5 := [ α, 0, 1] , p6 := [ 1, α, 0] ,
p7 := [0, 1, α] , p8 := [ α, 0, 1] , p9 := [ 1, α, 0]
geschrieben werden.
Alle (94, 123)-Konfiguration in P2 sind untereinander projektiv transformierbar.Von daher ist es auch gerechtfertigt, von der (94, 123)-Konfiguration zu sprechen,wie dies im Bild 3.33 geschehen ist.
Satz 3.3.1.20. Es seien zweimal je neun verschiedene Punkte
P := {pµ ∈ P2 |µ = 1, . . . , 9 } , Q := {qν ∈ P2 | ν = 1, . . . , 9 }
in P2 gegeben, die jeweils nicht alle auf einer Gerade liegen.
Verlauft jede durch zwei der Punkte aus P bzw. Q gehende Gerade auch durcheinen dritten der gegebenen Punkte aus P bzw. Q (bilden sie also jeweils eine(94, 123)-Konfiguration), so sind die Mengen P und Q projektiv aufeinander trans-formierbar.
7Wir werden im Anhang F eine solche Konfiguration systematisch ableiten!

144 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Beweis. Die Punkte der Mengen P bzw. Q seien so durchnumeriert, daß sich jeweils dieKoinzidenzen nach den nachfolgenden Schemata
p1
p9
p6
p5
p8
p3p
2
p4
p7
q1
q9
q6
q5
q8
q3q
2
q4
q7
P := =: QT
ergeben. Jetzt spielen die drei folgenden Ergebnisse eine entscheidende Rolle:
• Nach Lemma F.2.1 (Anhang F, S.346) ist jede projektive Transformation einer(94, 123)-Konfiguration wieder eine solche.
• Satz 2.1.3.3 (Kapitel 2, S.66) garantiert die Existenz einer projektiven Transformati-on, die vier nicht in einer Hyperebene gelegene Punkte auf a1 = [1, 0, 0], a2 = [0, 1, 0],a3 = [0, 0, 1] und b = [1, 1, 1] abbildet.
• Jede (94, 123)-Konfiguration, welche die Punkte a1, a2, a3 und b enthalt ist nachBemerkung F.1.1 (Anhang F, S. 345) mit eines der beiden im Anhang F abgeleitetenSchemata 8
a1 = [1, 0, 0] , c = [1, 1, 0] , a2 = [0, 1, 0] ,d2 = [0, 1, σ] , b = [1, 1, 1] , d4 = [σ, 0, 1] , (3.29)d1 = [σ, 1, σ] , a3 = [0, 0, 1] , d3 = [σ, 1, 1] ,
wobei σ ∈ {eπi/3, e−πi/3
}ist, identisch.
Daraus folgt jetzt unmittelbar, daß jedes der beiden oben gezeigten Schemata P undQ in eines der beiden Schemata (3.29) ubergeht, wenn die Punkte p1, p3, p8 und p5 bzw.q1, q3, q8 und q5 auf die Punkte a1, a2, a3 und b transformiert werden. Genauer : esgibt projektive Transformationen T1 : P → S oder T1 : P → S bzw. T2 : Q → S oderT2 : Q → S. Mit der im Anhang F angegebenen projektiven Tranformation Tσ exitiertdamit gemaß der Abbildungsstrukturen
P T−−−−→ Q
T1
yyT2
S id−−−−→ S
oder
P T−−−−→ Q
T1
yyT2
S Tσ−−−−→ S
oder
P T−−−−→ Q
T1
yyT2
S T−1σ−−−−→ S
oder
P T−−−−→ Q
T1
yyT2
S id−−−−→ S
eine projektive Transformation
T = T−12 ◦ T1 oder T = T−1
2 ◦ Tσ ◦ T1 oder T = T−12 ◦ T−1
σ ◦ T1 ,
welche P in Q abbildet. ¤8Dabei bezeichnen wir die Menge (3.29) fur σ = eπi/3 wieder mit S und bei einem Wert von
σ = e−πi/3 mit S.

3.3. WENDEPUNKTE UND KUBIKEN 145
Wie man konkret solche Transformation findet wird im Anhang F, AbschnittF.2 beschrieben. Das nachste Beispiel soll jedoch bereits hier einen Eindruck davonvermitteln.
Beispiel 3.3.1.21. Sollen die Punkte U := {uν | ν = 1, . . . , 9} aus Beispiel 3.3.1.19 in diePunkte P nach (3.27) mit α
.= 0.5 + 0.8660254 i uberfuhrt werden, so bilden wir zunachstmit einem Verfahren nach Anhang F die Punkte u1, u3, u8 und u5 auf a1 = [1, 0, 0],a2 = [0, 1, 0], a3 = [0, 0, 1] und b = [1, 1, 1] ab. Dies geschieht uber die Matrix
A1 :=
−1.5959564 0 −1.9512069−0.7979782− 1.0990947i 1 −0.9756034 + 0.0880527i−1.9036879− 1.0990947i 0 0.1525118 + 0.0880527i
,
die uber Bildung der entsprechenden Aquivalenzklassen die projektive Transformation T1
vermittelt. Man erkennt z.B.
T1(u4) =[0, 1, e−πi/3
],
d.h.T1(U) = S .
Genauso wird jetzt P per
A2 :=
−α1−α2
−α1−α2
11−α2
−α1−α2
11−α2
11−α2
11+α
11+α
11+α
auf S (siehe Anhang F auf Seite 348) transformiert. Damit ist die Transformation
T : U −→ P
einfach durch die Matrixmultiplikation
A := A−12 A1 =
−0.5528548− 1.2406167i −0.5 + 0.8660254i 0.5640576− 0.8008710i−0.5528548− 1.2406167i 0.5− 0.8660254i 0.5640576− 0.8008710i−0.7979782− 0.8160507i 0 −0.9756034 + 1.8659003i
zu gewinnen. Da sie bis auf einen skalaren Faktor bestimmt ist, kann sie auch durchMultiplikation mit −0.2996863 + 0.6725017 i auf die (etwas gefalligere) Form
1.0000000 −0.4325604− 0.5957868 i 0.3695467 + 0.6193398 i1.0000000 0.4325604 + 0.5957868 i 0.3695467 + 0.6193398 i
0.7879387− 0.2920824 i 0.0000000 −0.9624462− 1.2152798 i
.
gebracht werden. ¤
Zur Herstellung einer ersten (94, 123)-Konfiguration wahlten wir die Berechnungder Wendepunkte einer in Weierstraßscher Normalform gegebenen nichtsingularenKubik.

146 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Nach Satz 3.3.1.20 kann aber jetzt auch gefragt werden, welche Kubik neunWendepunkte der Form (3.27) aufweist. Dazu bestimmen wir zunachst eine KubikC, die durch alle diese neun Punkte verlauft und nehmen C durch
P := k1X3 + k2Y
3 + k3Z3 + k4X
2Y + k5 X2Z +k6Y
2X + k7Y2Z + k8Z
2X + k9Z2Y + k10 X Y Z
definiert an, wobei die Koeffizienten kν ∈ C, ν = 1, . . . , 10, jetzt geeignet zu wahlensind. Betrachten wir zunachst
P (p1) = P (0, 1,−1) = k2 − k3 − k7 + k9 = 0 ,P (p2) = P (0, 1, α) = k2 + α3k3 + αk7 + α2 = 0 ,P (p3) = P (0, α, 1) = α3k2 + k3 + α2k7 + αk9 = 0 ,
woraus wegen α3 = −1 das Gleichungssystem
k2 − k3 − k7 + k9 = 0 , (I)k2 − k3 + α k7 + α2k9 = 0 , (II)k2 − k3 − α2k7 − α k9 = 0 (III)
entsteht. Unter Berucksichtigung von α2 − α + 1 = 0 ergibt die Summation von(I)+(II)+(III) die Gleichheit
k2 = k3 ,
womit aus (I), (II) und (III) die Beziehungen k7 = k9, k7 = −αk9 und k9 = −αk7
folgen, welche lediglichk7 = k9 = 0
als Losung zulassen. Analog ergeben sich aus P (p4) = P (p5) = P (p6) = 0 dieKoeffizienten
k1 = k3 und k5 = k8 = 0
und aus P (p7) = P (p8) = P (p9) = 0 die ubrigen Koeffizienten zu
k1 = k2 und k4 = k6 = 0.
Sei k := k1 = k2 = k3, so ist das Polynom P bis auf k, k10 ∈ C zu
P = k(X3 + Y 3 + Z3) + k10 XY Z
eindeutig bestimmt. Weil die triviale Losung k = 0 ausgeschlossen werden muß(sonst ware die Kurve singular), kann das so gewonnene Polynom mit λ := k10
3 kin
der FormP = X3 + Y 3 + Z3 + 3λXY Z (3.30)
geschrieben werden. Die dadurch definierte Kubik C wurde bereits in Beispiel 2.3.5ausgiebig betrachtet. Insbesondere wurde festgestellt, daß C nur im Falle von λ ∈{−1, α, α} singular ist.
Die Berechnung der Wendepunkte von C mittels des Hesseschen Polynoms
HP = −54λ2(X3 + Y 3 + Z3) + 54(4 + λ3)XY Z

3.3. WENDEPUNKTE UND KUBIKEN 147
fuhrt jetzt gerade wieder zu den neun Punkten (3.27), so daß die durch das Poly-nom P in (3.30) definierte Kubik C die oben gesuchte Kurve ist. Wir fassen diesesResultat in Form eines Satzes zusammen.
Satz 3.3.1.22. Eine nichtsingulare Kubik, welche die in (3.27) angegebenen neunWendepunkte hat, wird durch das Polynom (bis auf eine von Null verschiedene mul-tiplikative Konstante)
P = X3 + Y 3 + Z3 + 3λXY Z , λ 6∈ {−1, α, α}, (3.31)
definiert.
Das nachste Beispiel zeigt die konkrete Transformation einer Kubik in die Form(3.31).
Beispiel 3.3.1.23. Die in Weierstraßsche Normalform vorliegende Kubik (3.26) aus Bei-spiel 3.3.1.19 mit a = b = 1 soll auf die Normalform (3.31) transformiert werden.
Dazu bilden wir zuerst die Wendepunkte uν , ν = 1, . . ., 9, der (94, 123)-Konfigurationauf die Punkte (3.27) ab und nutzen dann diese Transformation, um Y 2Z = X3+XZ2+Z3
in die Normalform (3.31) zu uberfuhren.Die Transformation uν 7→ pν wurde bereits im Beispiel 3.3.1.21 durchgefuhrt. Sie wird
durch folgende Matrix
A.=
0.4937197 + 0.0102962 i −0.2074292− 0.2986054 i 0.1760756 + 0.3095852 i0.4937197 + 0.0102962 i 0.2074292 + 0.2986054 i 0.1760756 + 0.3095852 i0.3920282− 0.1360940 i 0.0000000 −0.4626658− 0.6099172 i
.
vermittelt – wobei wieder ein skalarer Faktor gewahlt wurde, um die Matrix fur die folgendeKoordinatentransformation geeignet zu skalieren. Der Wechsel der Koordinaten erfolgtjetzt mittels
(X, Y, Z)T = A(X, Y , Z
)T
bzw.(
XYZ
)= A−1
(XYZ
).=
( 0.7309595+0.0305007i 0.7309595+0.0305007i 0.6704945+0.1175434i−0.7845748+1.1294374i 0.7845748−1.1294374i 0.0000000
0.1384150−0.3716370i 0.1384150−0.3716370i −0.6163230+0.7148487i
)(XYZ
).
Die letzte Beziehung vermag nun Y 2Z = X3 + XZ2 + Z3, auf die Form
X3 + Y 3 + Z3 + (6.6948496 + 2.4817263 i)XY Z
zu transformiert. Es ist also
λ.= 2.2316165 + 0.8272421 i . ¤
Hinter der im Satz 3.3.1.22 angegebenen Form (3.31) verbirgt sich sogar eineNormalform.

148 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Korollar 3.3.1.24. Jede nichtsingulare Kubik ist projektiv transformierbar auf diedurch das Polynom
P = X3 + Y 3 + Z3 + 3λXY Z , λ 6∈ {−1, α, α},definierte Form und weist dann die in (3.27) angegebenen neun Wendepunkte auf.
Beweis. O.B.d.A. konnen homogene Koordinaten (X,Y, Z) so gewahlt werden, daß [1, 0, 0]und [0, 1, 0] Wendepunkte der nichtsingularen Kubik C sind, sowie Y = 0 und X = 0 diezugehorigen Wendetangenten.
In dem C definierenden Polynom verschwinden dann fur X = Y = 0 alle Terme außerZ3, d.h. das Polynom enthalt außer Z3 nur durch XY teilbare Monome:
XY (αX + βY + γZ) + ζZ3 = 0 .
Weil C nichtsingular ist, ergibt sich α, β, ζ 6= 0. Damit konnen anstelle der Koordinaten(X, Y, Z) auch (αX, βY, ζ1/3Z) verwendet werden, so daß sich als die Kubik definierendeGleichung
XY (X + Y + γZ) + Z3 = 0
einstellt. Durch Berechnung der drei partiellen Ableitungen ergibt sich γ3 + 27 6= 0 alsBedingung fur die Singularitatenfreiheit der Kubik C.
Werden nun desweiteren die neuen Koordinaten (X, Y , Z) nach der Transformation(3X3YZ
)=
(−1 2 −γ2 −1 −γ0 0 1
)(XYZ
)eingesetzt, dann erhalten wir als definierendes Polynom
−2X3 + 3X2Y + 3XY 2 − 2Y 3 + (27 + γ3)Z3 − 3γZ(X2 − XY + Y 2) = 0 . (3.32)
Jetzt ist zu erkennen, daß sich X2 − XY + Y 2 in die Linearformen (X + ηY )(X + η2Y )aufspalten laßt, wobei η und η2 die beiden Losungen e±2πi/3 von η2 + η + 1 = 0 sind.Weiter ist die Summe der homogenen Terme 3-ter Ordnung in X, Y in (3.32) bis auf einVorzeichen die Summe der 3-ten Potenzen dieser beiden Linearfaktoren, d.h. die Gleichung(3.32) laßt sich in der Form
−(X + ηY )3 − (X + η2Y )3 + (27 + γ3)Z3 − 3γZ(X + ηY )(X + η2Y ) = 0 (3.33)
schreiben. Wird nun eine neue Transformation(
XYZ
)=
( 1 η 01 η2 00 0 1
)(XYZ
)auf die Koordinaten
(X, Y , Z) durchgefuhrt, so geht (3.33) uber in
−X3 − Y 3 + (27 + γ3)Z3 − 3γXY Z = 0 (3.34)
Die abschließende Transformation(
XYZ
)=
( −1 0 00 −1 00 0 (27+γ3)1/3
)(XYZ
)uberfuhrt (3.34) jetzt
in die gewunschte Form
X3 + Y 3 + Z3 + 3 ( −γ3
27+γ3 )1/3
︸ ︷︷ ︸λ
XY Z = X3 + Y 3 + Z3 + 3 λXY Z = 0
mit einem beliebigen Parameter λ ∈ C, außer den drei Wurzeln fur λ3 + 1 = 0. ¤Die jetzt eigentlich noch stattzufindende Diskussion bzgl. des Parameters λ und
die Aquivalenz zweier Kuben Cλ und Cλ′ verschieben wir auf den Anhang F, Ab-schnitt F.2 bzw. auf den nachsten Abschnitt. Dort tauchen erneut Kuben mit nureinem Parameter auf und dann soll die Frage nach der Art jenes Parameters und derprojektiven Aquivalenz zweier Kuben in gleicher Normalform beantwortet werden.

3.3. WENDEPUNKTE UND KUBIKEN 149
3.3.2 Klassifikation der Kubiken
Die Kubiken zeigen ein weitaus reicheres Verhalten als die Quadriken. In dem Bild3.35 sind die folgenden Kubiken in dem affinen Schnitt [x, y, 1] gezeigt: (von linksnach rechts und von oben nach unten)
(Y 3 −X3)− 6(Y 2 −X2)Z + 3(Y −X)Z2 = 3Z3 , Y 2Z = X3 ,
Y 3 + X2Z −XY (X + Y ) = 3Z3 ,
(Y −X)3 − 10(Y 2 −X2)Z + 2Y Z2 − 4XZ2 = 2Z3 ,
Y 2Z = X3 −XZ2 , Y 3 + X2Z −XY (X + Y ) = 10Z3 ,
Y 2Z = X3 + X2Z , Y 2Z = X3 −X2Z , Y 2Z = X3 + 2X2Z + Z3 .
Trotz dieser Vielfalt konnen erstaunlicherweise nur drei Typen von Kubiken auftre-ten, wie am Ende dieses Abschnittes klar wird.
-1-0.5 0.5 1 1.5
-2
-1.5
-1
-0.5
0.5
1
1.5
2
0.5 1 1.5 2 2.5
-2
-1.5
-1
-0.5
0.5
1
1.5
2
-2 -1 1 2
-3
-2
-1
1
2
3
-4 -2 2 4 6 8 10 12
-4
-2
2
4
6
8
10
12
-1-0.5 0.5 1 1.5 2
-2
-1
1
2
-10-7.5-5-2.5 2.5 5 7.510
-10
-7.5
-5
-2.5
2.5
5
7.5
10
-4 -2 2 4 6
-4
-2
2
4
6
-0.5 0.5 1 1.5 2
-2
-1
1
2
-10-7.5-5-2.5 2.5 5 7.510
-10
-7.5
-5
-2.5
2.5
5
7.5
10
Bild 3.35: Einige Kubiken in affinen Schnitten

150 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Zwei Normalformen von Kubiken sind uns bereits im Zusammenhang mit derUntersuchung von Wendepunkten begegnet: die Weierstraßsche Normalform unddie symmetrische Form in Satz 3.3.1.24.
In diesem Abschnitt sollen noch drei weitere Normalformen aufgestellt werden,die projektiv aquivalent zu allen ubrigen Kubiken sind und somit die Aussage zu-lassen, daß es lediglich drei Formen von Kubiken gibt.
Wir beginnen mit dem nichtsingularen Fall (was in Hinsicht auf Kapitel 4, Satz4.1.2, die Irreduzibilitat der Kurve zur Folge hat). In Abweichung zur Weierstraß-schen Normalform enthalt die im folgenden angegebene Kubik nur einen “freien“Parameter.
Satz 3.3.2.1. Es sei C eine nichtsingulare Kubik in P2. Dann ist C unter einerprojektiven Transformation aquivalent zu der durch
Y 2Z = X(X − Z)(X − λZ) (3.35)
definierten Kurve mit einem Parameter λ ∈ C\{0, 1}.Beweis. Wird der rechte Teil der Weierstraßschen Normalform Y 2 = X3 + aX + b nachSatz 3.3.1.17 mit Hilfe seiner drei Wurzeln ω1, ω2, ω3 ∈ C faktorisiert, so geht diese Nor-malform in Y 2 = (X − ω1)(X − ω2)(X − ω3) (3.36)
uber. Dabei sind alle Wurzeln ων , ν = 1, 2, 3, verschieden, weil C sonst singular ware.Daher kann auf die homogenisierte Form von (3.36)
Y 2Z = (X − ω1Z)(X − ω2Z)(X − ω3Z) (3.37)
nun die folgende projektive Transformation angewandt werden: nun die folgende projektiveTransformation angewandt werden:
[X, Y , Z
]=
[X − ω1Z
ω2 − ω1, ηY, Z
](3.38)
mit η ∈ C und η2 = (ω2 − ω1)−3, bzw. invertiert
[X, Y, Z] =
[(ω2 − ω1)X + ω1Z,
Y
η, Z
]. (3.39)
Dies uberfuhrt das Polynom (3.37) in die gewunschte Fassung
Y 2Z = X(X − Z
)(X − ω3 − ω1
ω2 − ω1Z
)
mit λ := ω3−ω1ω2−ω1
∈ C\{0, 1}. ¤
Die Angabe vor dem eben notierten Satz 3.3.2.1, daß diese Normalform mitnur einem Parameter auskommt (i.G. zur Weierstraßschen Normalform) bedarf derErganzung. Denn die Reduktion auf einen Parameter ist mit einer fehlenden Eindeu-tigkeit erkauft, d.h. zwei Kubiken der Form (3.35) mit unterschiedlichen Parameternkonnen durchaus isomorph (d.h. projektiv aquivalent) zueinander sein.

3.3. WENDEPUNKTE UND KUBIKEN 151
Bevor dies weiter verfolgt wird, stellen wir noch folgende Betrachtung an: Auchin der Form (3.36) sind zwei Parameter verborgen. Denn o.B.d.A. kann ω1 6= 0angenommen werden, so daß sich (3.36) in der Form
(Y 2
ω13
)Z =
(X
ω1
− Z
)(X
ω1
− ω2
ω1
Z
)(X
ω1
− ω3
ω1
Z
)
auf(Y 2)Z = (X − Z)(X − αZ)(X − βZ)
projektiv transformieren laßt mit nunmehr zwei Parametern α, β ∈ C.Die Normalform (3.35) mit nur einem Parameter bedarf daher jetzt der folgenden
Erganzung.
Satz 3.3.2.2. Die durch
Y 2Z = X(X − Z)(X − λ1Z) und Y 2Z = X(X − Z)(X − λ2Z)
mit λ1, λ2 ∈ C\{0, 1} definierten Kubiken sind genau dann isomorph, wenn gilt:
λ2 ∈{
λ1,1
λ1
, 1− λ1,1
1− λ1
,λ1 − 1
λ1
,λ1
λ1 − 1
}.
Beweis. Im Beweis zum Satz 3.3.2.1 haben wir folgendes gezeigt: sind ω1, ω2, ω3 ∈ Csamtlich verschieden voneinander, so sind die durch
Y 2Z = (X − ω1Z)(X − ω2Z)(X − ω3Z) und Y 2Z = X(X − Z)(X − λZ)
definierten Kubiken isomorph genau dann, wenn fur den Parameter
λ =ω3 − ω1
ω2 − ω1∈ C\{0, 1}
gilt.
Tabelle 3.1: Permutationen von 0, 1, λ1
ω1 ω2 ω3 λ2 = ω3−ω1
ω2−ω1ω1 ω2 ω3 λ2 = ω3−ω1
ω2−ω1
0 1 λ1λ1−01−0
= λ1 0 λ1 1 1−0λ1−0
= 1λ1
1 0 λ1λ1−10−1
= 1− λ1 1 λ1 0 0−1λ1−1
= 11−λ1
λ1 0 1 1−λ1
0−λ1= λ1−1
λ1λ1 1 0 0−λ1
1−λ1= λ1
λ1−1
Hieraus ergibt sich jetzt das oben angegebene Resultat, wenn {ω1, ω2, ω3} = {0, 1, λ1}in jeder Reihenfolge (siehe Tabelle 3.1) in λ2 := λ = ω3−ω1
ω2−ω1eingesetzt wird. Die sich
ergebenden projektiven Transformationen konnen wieder dem Beweis zum Satz 3.3.2.1entnommen werden. Hierzu sind in (3.38) bzw. (3.39) die Werte von ω1, ω2, ω3 in derentsprechenden Reihenfolge gegen 0, 1 und λ1 auszutauschen. ¤

152 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Anmerkung : Recht reizvoll ist die Analogie dieses Resultats zum sogenannten Doppel-verhaltnis der projektiven Geometrie. Dem Abschnitt 2.1 kann entnommen werden, daßin der projektiven Geometrie weder Abstande, noch Verhaltnisse von Abstanden erhaltenbleiben. Wohl aber bleibt ein bestimmtes Verhaltnis von Verhaltnissen erhalten.
Die vier (verschiedenen) Punkte p1, p2, p3 und p4 ∈ P2 seien auf der projektivenGerade G gelegen. Mit homogenen Koordinaten p1, p2, p3 und p4 ∈ C3 konnen dann etwap3 und p4 zur Basis 〈p1, p2〉 in dem Untervektorraum G < C3 dargestellt werden:
p3 = λ123 p1 + µ12
3 p2 , p4 = λ124 p1 + µ12
4 p2 ,
wobei keine der skalaren Linearfaktoren λ12k , µ12
k , k = 3, 4, verschwindet.
Definition 3.3.2.3. Seien die vier Punkte p1,p2,p3 und p4 ∈ P2 kollinear, dann heißt
DV (p1,p2;p3,p4) :=λ12
3 /µ123
λ124 /µ12
4
=λ12
3 µ124
λ124 µ12
3
mit den oben eingefuhrten Linearfaktoren das Doppelverhaltnis der vier Punkte.
Das Doppelverhaltnis ist wohldefiniert, weil aus den geanderten homogenen Koordi-naten p′k = αk pk, αk 6= 0, k = 1, 2, 3, 4, uber
(λ123 )′ =
α3
α1λ12
3 , (λ124 )′ =
α4
α1λ12
4 , (µ123 )′ =
α3
α2µ12
3 , (µ124 )′ =
α4
α2µ12
4
die Beziehung
DV (p′1,p′2;p
′3,p
′4) =
(λ123 )′ (µ12
4 )′
(λ124 )′ (µ12
3 )′=
α3α1
λ123
α4α2
µ124
α4α1
λ124
α3α2
µ123
= DV (p1,p2;p3,p4)
folgt. Das Doppelverhaltnis hangt also nicht von der Wahl der Vektoren im C3 ab.Bei 4 Punkte konnen 4! = 24 Doppelverhaltnisse DV (ps1 ,ps2 ;ps3 ,ps4) mit (s1, s2, s3,
s4) als eine Permutation von (1, 2, 3, 4) gebildet werden. Dabei gibt es aber tatsachlich nursechs verschiedene Doppelverhaltnisse, die uber alle Permutationen von Punkten jeweilsviermal auftreten. Wie konnen diese berechnet werden?
Zunachst ist festzuhalten, daß DV (ps1 ,ps2 ;ps3 ,ps4) = λs1s2s3
µs1s2s4
λs1s2s4
µs1s2s3
mit den (allgemei-
nen) Linearfaktoren der Darstellungen
ps3 = λs1s2s3
ps1 + µs1s2s3
ps2 , ps4 = λs1s2s4
ps1 + µs1s2s4
ps2 (3.40)
arbeitet. Stellen wir die (jeweiligen Basis-)Vektoren ps1 und ps2 wieder zur (festen) Basis〈p1, p2〉 dar, so gilt 9
ps1 = λ12s1
p1 + µ12s1
p2 , ps2 = λ12s2
p1 + µ12s2
p2
und das in den Linearkombinationen (3.40) von ps3 und ps4 eingesetzt liefert
ps3 =(λs1s2
s3λ12
s1+ µs1s2
s3λ12
s2
)︸ ︷︷ ︸
=λ12s3
p1 +(λs1s2
s3µ12
s1+ µs1s2
s3µ12
s2
)︸ ︷︷ ︸
=µ12s3
p2 ,
ps4 =(λs1s2
s4λ12
s1+ µs1s2
s4λ12
s2
)︸ ︷︷ ︸
=λ12s4
p1 +(λs1s2
s4µ12
s1+ µs1s2
s4µ12
s2
)︸ ︷︷ ︸
=µ12s4
p2 .
9Vorsicht: jetzt konnen Linearfaktoren naturlich auch verschwinden.

3.3. WENDEPUNKTE UND KUBIKEN 153
Dann konnen die auf 〈ps1 , ps2〉 Bezug nehmenden Linearfaktoren uber
(λ12
s3µ12
s3
λ12s4
µ12s4
)=
(λs1s2
s3µs1s2
s3
λs1s2s4
µs1s2s4
) (λs1s2
s1µs1s2
s1
λs1s2s2
µs1s2s2
)
nur mit solchen auf 〈p1, p2〉 basierenden ausgedruckt werden:
(λs1s2
s3µs1s2
s3
λs1s2s4
µs1s2s4
)=
(λ12
s3µ12
s3
λ12s4
µ12s4
) (λs1s2
s1µs1s2
s1
λs1s2s2
µs1s2s2
)−1
=1∣∣∣∣
λs1s2s1
µs1s2s1
λs1s2s2
µs1s2s2
∣∣∣∣
−
∣∣∣∣λ12
s2µ12
s2
λ12s3
µ12s3
∣∣∣∣∣∣∣∣
λ12s1
µ12s1
λ12s3
µ12s3
∣∣∣∣
−∣∣∣∣
λ12s2
µ12s2
λ12s4
µ12s4
∣∣∣∣∣∣∣∣
λ12s1
µ12s1
λ12s4
µ12s4
∣∣∣∣
.
Damit kann das Doppelverhaltnis DV (ps1 ,ps2 ;ps3 ,ps4) stets mit Linearfaktoren zur Basis〈p1, p2〉 ausgedruckt werden:
DV (ps1 ,ps2 ;ps3 ,ps4) =
∣∣∣∣λ12
s2µ12
s2
λ12s3
µ12s3
∣∣∣∣∣∣∣∣
λ12s1
µ12s1
λ12s4
µ12s4
∣∣∣∣∣∣∣∣
λ12s2
µ12s2
λ12s4
µ12s4
∣∣∣∣∣∣∣∣
λ12s1
µ12s1
λ12s3
µ12s3
∣∣∣∣
und wir erhalten bei Definition von DV (p1,p2;p3,p4) =: λ die in Tabelle 3.2 daraufbezogenen sechs verschiedenen Werte (vgl. mit Tabelle 3.1).
Tabelle 3.2: Doppelverhaltnisse von vier Punkten
ps1 ps2 ps3 ps4 DV (ps1 ,ps2 ; ps1 ps2 ps3 ps4 DV (ps1 ,ps2 ;ps3 ,ps4) ps3 ,ps4)
p1 p2 p3 p4 λ p3 p1 p2 p4λ−1
λ
p1 p2 p4 p31λ
p3 p1 p4 p2λ
λ−1
p1 p3 p2 p4λ
λ−1p3 p2 p1 p4 1− λ
p1 p3 p4 p2λ−1
λp3 p2 p4 p1
11−λ
p1 p4 p2 p31
1−λp3 p4 p1 p2 λ
p1 p4 p3 p2 1− λ p3 p4 p2 p11λ
p2 p1 p3 p41λ
p4 p1 p2 p3 1− λ
p2 p1 p4 p3 λ p4 p1 p3 p21
1−λ
p2 p3 p1 p41
1−λp4 p2 p1 p3
λ−1λ
p2 p3 p4 p1 1− λ p4 p2 p3 p1λ
λ−1
p2 p4 p1 p3λ
λ−1p4 p3 p1 p2
1λ
p2 p4 p3 p1λ−1
λp4 p3 p2 p1 λ

154 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Der “Motor“ fur diese Parallelitat liegt in der zum Doppelverhaltnis ganz ahnlichenParameterstruktur der oben behandelten Faktorform von Kubiken. Die Tabelle wurde mitMathematica unter Berucksichtigung von
λ121 = 1 , µ12
1 = 0 und λ122 = 0 , µ12
2 = 1
berechnet, d.h. es verbleiben lediglich die im Doppelverhaltnis DV (p1,p2;p3,p4) auftre-tenden Koeffizienten λ12
3 , λ124 , µ12
3 und µ124 . So liefert z.B.
den elften Eintrag in Tabelle 3.2. Mit einer Schleife uber alle Permutationen konnen dannalle 24 Ausdrucke bzw. die 6 verschiedenen Werte ermittelt werden.
Nach dem 1872 von Felix Klein (1849 Dusseldorf - 1925 Gottingen) aufgestelltenErlanger Programm wird unter projektiver Geometrie die Untersuchung der Eigenschaftenund Begriffe verstanden, die invariant gegenuber projektiven Abbildungen T sind. Mit demDoppelverhaltnis haben wir tatsachlich eine solche Eigenschaft gefunden, wie man sich aus
qk = T (pk) bzw. homogen qk = αk τ(pk),
k = 1, 2, 3, 4, 0 6= αk ∈ C, leicht klar macht: aus
q3 = α3τ(p3) = α3λ123 τ(p1) + α3µ
123 τ(p2) = λ12
3
α3
α1q1 + µ12
3
α3
α2q2 = η12
3 q1 + θ123 q2 ,
q4 = α4τ(p4) = α4λ124 τ(p1) + α4µ
124 τ(p2) = λ12
4
α4
α1q1 + µ12
4
α4
α2q2 = η12
4 q1 + θ124 q2
folgt namlich
DV (q1,q2;q3,q4) =η123 · θ12
4
η124 · θ12
3
=λ12
3α3α1· µ12
4α4α2
λ124
α4α1· µ12
3α3α2
=λ12
3 · µ124
λ124 · µ12
3
= DV (p1,p2;p3,p4) .
Kubiken sind ganz besondere Kurven (wie im nachsten Abschnitt noch deutlicher wird)und zur Ehre ihrer Erfindung meinten wir, diesen kleinen Exkurs uber weiterfuhrendeErgebnisse und Zusammenhange der projektiven Geometrie hier haben einschieben zudurfen (siehe auch Anhang F bzgl. einer anderen Normalform von Kubiken). ¤

3.3. WENDEPUNKTE UND KUBIKEN 155
Abschließend wird der Fall von singularen, aber unzerlegbaren Kubiken behan-delt. (Reduzible Kubiken sind wenig ergiebig: es handelt sich um drei Geraden odereine Gerade und eine Quadrik – Wendepunkte sind dann keine vorhanden.) Dazustellen wir zunachst das folgende Lemma auf.
Lemma 3.3.2.4. Eine irreduzible Kubik hat hochstens eine Singularitat.
Beweis. Angenommen die irreduzible Kubik C weist zwei verschiedene singulare Punktep und q auf. Verlauft die Gerade G durch diese beiden Punkte, dann gelten nach Lemma3.1.2.6 die Abschatzungen
Ip(C, G) ≥ Multp(C) ≥ 2 und Iq(C,G) ≥ 2 .
Daraus ergibt sich
∑
r∈C∩G
Ir(C, G) ≥ 4 > 3 = Grad(C) ·Grad(G) ,
d.h. nach dem Satz von Bezout muß G eine Komponente von C sein, was aber im Wider-spruch zu ihrer angenommenen Irreduzibilitat steht.
Somit kann eine irreduzible Kubik nicht mehr als eine Singularitat besitzen. ¤
Das einzige, wesentliche Unterscheidungsmerkmal zweier singularer, irreduziblerKubiken kann also nur sein, ob die Tangenten in der einzig vorhandenen Singularitatzusammenfallen oder in zwei getrennte Geraden zerfallen (siehe Bild 3.36).
Satz 3.3.2.5. Eine singulare, irreduzible Kubik ist projektiv aquivalent zu
einer Neilschen Parabel: Y 2Z = X3 oder
einem Newtonschen Knoten: Y 2Z = X3 + X2Z .
1 2
-2
-1
1
2
x
y
1 2
-2
-1
1
2
x
y
Bild 3.36: Neilsche Parabel und Newtonscher Knoten in reellen Schnitten

156 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Beweis. Wir beginnen die Uberlegungen zunachst wieder der besseren Uberschaubarkeitim Affinen, was zudem erlaubt ist, wenn wir o.B.d.A. in [0, 0, 1] die einzige Singularitatvon C annehmen. Dann ist C durch das Polynom
P = a1X3 + a2X
2Y + a3XY 2 + a4Y3 + b1X
2 + b2XY + b3Y2
mit komplexen Koeffizienten definiert. Nach Definition 1.3.6 ergeben sich die Tangentenvon C in p := (0, 0) als Faktoren von
P2 = b1X2 + b2XY + b3Y
2 .
Wie bereits genannt, konnen nur zwei Falle vorkommen: die Tangenten
(i) : fallen zusammen oder(ii) : es sind verschiedene Geraden.
(i) : Unter einer evtl. durchzufuhrenden projektiven Transformation kann o.B.d.A. P2 =Y 2, d.h. b1 = 1 und b2 = b3 = 0 angenommen werden. Dann muß a1 6= 0 sein (sonst ist Pzerlegbar). Das homogenisierte Polynom P besitzt dann das Aussehen
P = Y 2Z + a1X3 + a2X
2Y + a3XY 2 + a4Y3 . (3.41)
Verwendet man statt X nun den Term X
a1/31
− a2Y3a1
, so kann der in X quadratische Anteil
entfernt werden. Eine Substitution in Z und ein Vorzeichenwechsel in X fuhren dann aufdie angegebene Form der Neilschen Parabel; die genaue Angabe der durchzufuhrendenprojektiven Transformation ist
[X, Y , Z
]=
[−a
1/31 X +
a2Y
3a2/31
, Y,
(a2
2
3a4/31
− a3
a1/31
)X +
(2a3
2
27a21
− a2a3
3a1+ a4
)Y + Z
],
bzw.
[X, Y, Z] =
[− X
a1/31
− a2Y
3a1, Y ,
(a3
a1/31
− a22
3 a4/31
)X +
(a2a3
3 a1− 2a3
2
27 a21
− a4
)Y + Z
],
welche das Polynom (3.41) inP = Y 2Z − X3
ubergehen laßt.
(ii) : In diesem Fall kann wieder mit einer evtl. durchzufuhrenden projektiven Transfor-mation o.B.d.A. P2 = XY gesetzt werden, d.h. b2 = 1 und b1 = b3 = 0. Jetzt mußa1, a4 6= 0 sein, um wieder eine Zerlegbarkeit von P auszuschließen. In diesem Fall nimmtdas homogenisierte Polynom P das folgende Aussehen an:
P = XY Z + a1X3 + a2X
2Y + a3XY 2 + a4Y3 . (3.42)
Um auf die oben angegebene Form zu kommen, sind drei projektive Transformationendurchzufuhren. Zunachst fuhrt
[X, Y, Z] =
[X
a1/31
,Y
a1/34
,−a2X
a1/31
− a3Y
a1/34
− a1/31 a
1/34 Z
]

3.3. WENDEPUNKTE UND KUBIKEN 157
in (3.42) zuP = X3 + Y 3 − XY Z .
Jede irreduzible, singulare Kubik mit zwei verschiedenen Tangenten in der Singularitat istsomit projektiv auf die Form
P = X3 + Y 3 −XY Z (3.43)
transformierbar. Unter der zweiten Transformation
[X, Y, Z] =[X, Y ,−3X − 3Y + Z
]
wird das eben gewonnene Polynom (3.43) in
P = (X + Y )3 − XY Z
uberfuhrt. Wir halten erneut fest, daß die betrachtete Kubik somit auch zu
P = (X + Y )3 −XY Z (3.44)
projektiv aquivalent ist. Schließlich wird dieses Polynom (3.44) durch
[X, Y, Z] =
[X
2− Y
2,X
2+
Y
2,−4Z
]
in die endgultige VersionP = X3 + X2Z − Y 2Z
projektiv transformiert. ¤
Die Ergebnisse dieses Abschnittes werden in der folgenden Aussage zusammen-gefaßt.
Korollar 3.3.2.6. Eine irreduzible Kubik ist projektiv aquivalent zu eine der dreifolgenden Falle und kann dem entsprechend auf eine der angegebenen Normalformentransformiert werden:
nichtsingularer Fall:
Y 2Z = X(X − Z)(X − λZ) , λ ∈ C\{0, 1} ,
singulare Falle:gewohnlicher Doppelpunkt in der Singularitat:
Y 2Z = X3 ,
zwei verschiedene Tangenten in der Singularitat:
XY Z = X3 + Y 3 oder XY Z = (X + Y )3 oder Y 2Z = X3 + X2Z .
Die hier erwahnten Kubiken wurden bereits ausgiebig in dem Beispiel 2.2.1.10,Seite 72f, auf ihre Singularitaten und in den Beispielen 3.3.1.8 und 3.3.1.9, Seite131f, auf ihre Wendepunkte untersucht.

158 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
3.3.3 Gruppeneigenschaft auf Kubiken
Kubiken sind unter allen algebraischen Kurven solche von ganz besonderer Be-deutung und Auszeichnung. Dieses Kapitel soll durch die Beschreibung einer sehrschonen Gruppeneigenschaft auf Kubiken abgeschlossen werden, die sich fur mo-derne mathematische Algorithmen als außerordentlich fruchtbar erwiesen hat (siehez.B. [Nebe00] uber die Faktorisierung ganzer Zahlen und Kapitel 6, Abschnitt 6.2)und die auf Kurven anderer Ordnung so nicht vorhanden ist!
Die grundlegende Eigenschaft der Konstruktion einer Gruppe auf einer singu-laritatenfreien Kubik liegt in der Beobachtung, daß eine durch zwei Punkte aufder Kubik verlaufene Gerade diese in genau einem weiteren Punkt schneidet (unterBerucksichtigung der Schnittmultiplizitat). Die Gruppe wird mithin so zu konstru-ieren sein, daß zwei Punkte der Kubik auf einen geeigneten dritten Punkt auf ihrabgebildet werden. Sofern es eine solche Gruppe gibt, ergeben sich aus ihr per Trans-lation sofort weitere Gruppen, so daß die Plazierung des neutralen Elementes keineausgezeichnete Rolle spielen sollte. Wir machen daher zunachst die folgende Defini-tion.
Definition 3.3.3.1. Es sei C eine nichtsingulare Kubik in P2 und p0 ∈ C ein aufihr gelegener Punkt. Die folgende Abbildung definiert die Summe zweier Punkte aufC: ⊕ : C × C −→ C
(p,q) 7−→ p⊕ q := r ,
wobei der Punkt r wie folgt festgelegt ist: sei r′ der dritte Schnittpunkt, der durchdie Punkte p und q verlaufenden Geraden mit C, so ist r der dritte Schnittpunktvon C mit der Geraden, die durch r′ und p0 verlauft (siehe Bild 3.37).
p
pp
q
q r:= r0
´I
C
Bild 3.37: Definition der Summe p⊕ q auf C
Fallen zwei Punkte auf C zusammen, so ist mit der durch sie verlaufenden Gera-den die Tangente an C gemeint. Mit der so eingefuhrten Summation zweier Punkteentsteht die folgende Gruppe auf C, wobei der Nachweis der Assoziativitat die ei-gentliche Schwierigkeit darstellt.

3.3. WENDEPUNKTE UND KUBIKEN 159
Satz 3.3.3.2. Es sei C eine nichtsingulare Kubik in P2, p0 ∈ C ein auf ihr gelegenerPunkt und ⊕ die in Definition 3.3.3.1 eingefuhrte Summe. Dann ist (C,⊕) eineabelsche 10 Gruppe.
Beweis (Neutrales Element, Inverses). (1) Der Punkt p0 stellt das neutrale Element derGruppe dar. Eine durch p0 und einen weiteren Punkt p ∈ C verlaufende Gerade, die C inr′ schneidet, fallt offensichtlich mit der durch r′ und p0 festgelegten Gerade zusammen,so daß
p0 ⊕ p = p
gilt.
(1.1) Weil die Reihenfolge der Punkte p und q auf der durch sie verlaufenden Gerade keineRolle spielt, ist die Verknupfung ⊕ auch kommutativ.
(2) Das Inverse −p zum Element p wird nach Bild 3.38 mit Hilfe der Tangente T inp0 an C konstruiert. Wegen der Schnittmultiplizitat zwei von T und C in p0, schneidetdie Tangente T die Kubik C in genau einem weiteren Punkt p1. Die durch p und p1
verlaufende Gerade schneidet C jetzt in dem Inversen −p, denn die Konstruktion vonp ⊕ −p fuhrt nach Def. 3.3.3.1 zu r′ = p1 und der dritte Schnittpunkt der durch diesenPunkt und p0 gehenden Geraden fallt mit p0 zusammen, d.h.
p⊕−p = p0 . ¤
p
p
p
- p
0
1
C
T
Bild 3.38: Konstruktion des Inversen −p
Teilbeweis (Assoziativitat). (3) Der Nachweis der Assoziativitat der Summe ⊕ ist amumfangreichsten und wir werden hier fur den allgemeinen Fall nur einen Teilbeweis erbrin-gen. Es soll die Gleichheit von (p ⊕ q) ⊕ r und p ⊕ (q ⊕ r) nachgewiesen werden, dazuwird
p ⊕ q = s ,s ⊕ r = t ,q ⊕ r = u
gesetzt und es ist p ⊕ u = t
10Niels Henrik Abel (1802 Frindoe(nahe Stavangar) - 1829 Froland)

160 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
zu zeigen. Werden die bei der Summation von s, t und u entstehenden Hilfspunkte wiedermit s′, t′ und u′ bezeichnet, so ist zu zeigen, daß p, u und t′ auf einer Geraden liegen, wiees im Bild 3.39 gezeigt ist.
p
p
q
r
s
s
tt
uu
0
´
´
´
L1
L3
L2
G1
G3
G2
C
Bild 3.39: Assoziativitat von ⊕
Wir definieren hierzu die folgenden Geraden:
L1 : Gerade durch p, q, s′ ,L2 : Gerade durch r, s, t′ ,L3 : Gerade durch p0, u, u′ ,G1 : Gerade durch p0, s, s′ ,G2 : Gerade durch q, r, u′ .
Nun kommt Satz 3.1.2.10, Seite 113, zum Einsatz. Dazu sei D := L1 ∪ L2 ∪ L3 neben dergegebenen Kubik C eine weitere Kurve vom Grad n = 3. Angenommen D und C schneidensich in genau n2 = 9 verschiedenen Punkten (p0, p, q, r, s, u, s′, t′, u′) und weil auf derGeraden G1 als Kurve vom Grad m = 1 die n ·m = 3 Punkte p0, s und s′ liegen, folgtaus Satz 3.1.2.10, daß die verbleibenden n(n −m) = 6 Punkte p, q, r, u, t′ und u′ aufeiner Quadrik liegen. Weil drei dieser sechs Punkte: q, r und u′ auf der Geraden G2 liegen,muß G2 eine Komponente dieser Quadrik sein, die mithin in zwei Geraden zerfallt. Liegendie Punkte p, u und t′ nicht auf G2, so mussen sie auf der zweiten mit G3 bezeichnetenGeraden liegen, was zu zeigen war – sofern alle bezeichneten Punkte verschieden sind 11.¤
Damit liegen auf einer singularitatenfreien ebenen Kubik zwei Arten von Struk-ture vor: einerseits die der projektiv-algebraischen Mannigfaltigkeit, andererseits dieeiner abelschen Gruppe. Da die zweite Struktur genuin aus der ersten hervorgeht,
11Die anderen Falle – zusammenfallende Punkte bzw. Schnittmultiplizitaten mit Geraden großerals zwei – ergeben nach Aussage von [BK81] algebraisch abgeschlossene Teilmengen. In [DS98](PartI, Chapter 3, §2. Jacobians of Curves and of Riemann Surfaces) wird diese Fragestellung mitDivisoren behandelt.

3.3. WENDEPUNKTE UND KUBIKEN 161
hoffen wir auf eine entsprechende Vertraglichkeit beider miteinander, was folgen-des bedeuten soll: Auf der Kategorie der projektiv-algebraischen Mannigfaltigkeitdefiniert man die sogenannten regularen Abbildungen. Dabei heißt eine Abbildungf : G → H zweier projektiv-algebraischer Mannigfaltigkeiten regular, wenn G undH so mit affinen Koordinatenumgebungen Uν und Vµ uberdeckt werden konnen,daß es fur jeden Punkt in G eine Umgebung Uν und eine Umgebung Vµ seines Bild-punktes mit f : Uν → Vµ gibt, so daß bzgl. der zugehorigen affinen Koordinaten fdurch eine rationale Funktion mit nicht verschwindendem Nenner beschrieben wird.Konnen dann die Abbildungen
C × C −→ C ,
bzw. C −→ C ,
die (p,q) in p⊕ q bzw. p in −p abbilden, als regular nachgewiesen werden, hattenwir die oben angedeutete Vertraglichkeit gewonnen.
Dazu soll die Addition jetzt analytisch formuliert werden und wir benutzen dafurden allgemeinen Fall der (nichtsingularen) Weierstraßschen Normalform
Y 2Z = X3 − aXZ2 − bZ3 mit 4a3 + 27b2 6= 0
und den Spezialfall: O := p0 := [0, 1, 0], d.h. das neutrale Element ist der (einzige)“unendlich ferne“ Punkt der Kubik, der gleichzeitig Wendepunkt ist!
Daher kann bequemerweise das Aufstellen analytischer Additionsbeziehungenunter einer affinen Betrachtung und der gesonderten Betrachtung des einen Spezi-alfalls “Punkt liegt im Unendlichen“ durchgefuhrt werden. Auch ist bei r′ = (x, y)der sich hieraus ergebende Punkt r := p⊕ q einfacherweise (x,−y).
Sei also jetzt T die durch p = (x1, y1) und q = (x2, y2) verlaufende Gerade(o.B.d.A. sei p,q 6= O), die fur x1 6= x2 zu
Y = y1 + ω(X − x1) mit ω :=y2 − y1
x2 − x1
notiert werden kann. Wird Y jetzt in die affine Form
Y 2 = X3 − aX − b (3.45)
eingesetzt, so erhalten wir eine kubische Gleichung in X der Gestalt
X3 − ω2X2 + (a− 2ω(y1 − ωx1))X + b− (y1 − ωx1)2 = 0
mit den Wurzeln x1, x2 und x3, wobei nach dem Wurzelsatz von Vieta 12 (z.B.[Gellert77])
x1 + x2 + x3 = ω2
gilt. Wir erhalten also fur die Koordinaten von r = p⊕ q = (x3, y3) die Beziehungen
x3 = −x1 − x2 + ω2 und y3 = −y1 − ω(x3 − x1) .
12Francois Viete (lat. Vieta) (1540 Fontenay-le-Comte - 1603 Paris)

162 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Jetzt sind abschließend noch drei verbleibende Falle fur x1 = x2 zu diskutieren.
x2 = x1, y2 = y1 6= 0 : also p = q und T ist Tangente an die Kubik C in p (jedochnicht von der Art X = const.). Da Ip(C, T ) = 2, existiert noch einzig r′ als verblei-bender Schnittpunkt zwischen C und T . Die Tangente finden wir nach Korollar 1.3.7(siehe Abschnitt 1.3, Seite 25):
(−3x21 − a)(X − x1) + 2y1(Y − y1) = 0 .
Das ergibt wie oben wieder mit Y = y1 + ω(X − x1) und ω :=3x2
1+a
2y1eine kubische
Gleichung in X, die jetzt wieder im quadratischen Term den Koeffizienten −ω2 be-sitzt und (ein weiteres Mal mit Vieta) die Beziehungen
x3 = −x1 − x2 + ω2 und y3 = −y1 − ω(x3 − x1)
fur r = (x3, y3) = p⊕q liefert, wobei zu beachten ist, daß ω in diesem Fall abweichendvom ersten (mit derselben Konstellation fur x3, y3) erklart ist.
x2 = x1, y2 = y1 = 0 : also p = q und T ist Tangente an die Kubik C in p (jetztjedoch von der Art X = const., da C bzgl. der x−Achse symmetrisch ist und C alsnichtsingulare Kurve keinen isolierten Punkt auf Y = 0 besitzen kann). Da wiederIp(C, T ) = 2, existiert nurmehr ein weiterer Schnittpunkt von T mit der Kubik C.Weil T parallel zur y−Achse verlauft, muß dies der “unendlich fern“ gelegene Punkt[0, 1, 0] = O sein. Also ist in diesem Fall p⊕ q = 2p = O.
x2 = x1, y2 = −y1 : also p = −q und damit unmittelbar p⊕ q = p⊕ (−p) = O.
Wir fassen diese Falle in ubersichtlicher Form zusammen und notieren das Er-gebnis in Form des folgenden Satzes.
Satz 3.3.3.3. Ist C eine nichtsingulare und durch die Weierstraßsche Normalformdefinierte Kubik, dann gelten mit O := p0 := [0, 1, 0] fur zwei von O verschiedenePunkte p = [x1, y1, 1], q = [x2, y2, 1] ∈ C fur die in Definition 3.3.3.1 formulierteAddition
r = [x3, y3, z3] = p⊕ q
die folgenden Beziehungen:
x3 = −x1 − x2 + ω2 ,y3 = −y1 − ω(x3 − x1) ,z3 = 1 mit ω = y2−y1
x2−x1, falls x2 6= x1;
x3 = −x1 − x2 + ω2 ,y3 = −y1 − ω(x3 − x1) ,
z3 = 1 mit ω =3x2
1+a
2y1, falls x2 = x1 ∧ y2 = y1 6= 0;
x3 = 0, y3 = 1, z3 = 0 , falls x2 = x1 ∧ y2 = y1 = 0;
x3 = 0, y3 = 1, z3 = 0 , falls x2 = x1 ∧ y2 = −y1.
Das Bild 3.40 zeigt diese vier Falle am Beispiel der durch Y 2 = X3 − 2X + 1definierten nichtsingularen Kubik.

3.3. WENDEPUNKTE UND KUBIKEN 163
-2 -1 1 2 3
-3
-2
-1
1
2
3
x
y
C
T1
T2
T3 T4
Bild 3.40: Die vier Falle bzgl. des Schnittes einer Geraden T mit der Kubik C
In [Hartshorne77] (Chapter II, Part 6) wird mit Hilfe von Divisoren gezeigt, wiesich dieser Fall tatsachlich zu einer Gruppe fugt. Dabei ist es nicht notwendig, einegesonderte Untersuchung fur die Assoziativitat der Addition zu fuhren, sondernes wird gezeigt, daß es zur oben eingefuhrten Operation eine Korrespondenz zurGruppe der sogenannten Divisorenklasse gibt.
Wir kommen im Abschnitt 6.9 kurz auf Divisoren und ihren Einsatz bzgl. derAssoziativitat der auf elliptischen Kurven erklarten Operation ⊕ zuruck.
Eine besonders tiefliegende Beschreibung der zu den singularitatenfreien Kubikengehorenden abelschen Gruppeneigenschaft ist funktionentheoretischer Natur, womiteinmal mehr deutlich wird, daß zum Studium der algebraischen Kurven am geeignet-sten der Korper der komplexen Zahlen herangezogen wird. Die singularitatenfreienKubiken werden dabei mit den eindimensionalen komplexen Tori identifiziert. Umdiese zu gewinnen, definieren wir zunachst den Begriff des Gitters:
Definition 3.3.3.4. Es seien ω1, ω2 ∈ C zwei R-linear unabhangige Vektoren 13,dann heißt die Teilmenge
Λ = Zω1 ⊕ Zω2 = {m1ω1 + m2ω2 |m1,m2 ∈ Z } ⊂ Cein Gitter (siehe Bild 3.41).
Als nachstes betrachtet man den Quotienten bzw. die Faktorgruppe C/Λ, die furzwei Punkte z, w ∈ C in der folgenden Weise gegeben ist:
z ∼ w : z ≡ w mod Λ :⇐⇒ z − w ∈ Λ ,
d.h. eine Aquivalenzklasse (Bahn) von z ist also durch
[z ] = {w ∈ C |w − z ∈ Λ } = z + Λ
13Man uberlege sich folgendes: zwei komplexe Zahlen z = x + iy, w = u + iv – als Vektoren~z = (x, y)T , ~w = (u, v)T im R2 aufgefaßt – sind genau dann R-linear unabhangig, wenn wenn beidevon Null verschieden sind und ihr Quotient nicht reell ist! Hinweis: Im
(zw
)= det(~w,~z)
||~w||22 .

164 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Re
Im
w
w
w w
w
w
1
1 2
1
2
2
_
_
+
Bild 3.41: Gitter
gegeben. Da Λ eine Untergruppe der additiven Gruppe C ist, hat C/Λ in kanonischerWeise die Struktur einer abelschen Gruppe mit der Addition
[z ]⊕ [w ] := [z + w ] .
Außerdem besitzt C/Λ in kanonischer Weise die Struktur einer eindimensionalenkomplexen Mannigfaltigkeit: Eine Funktion auf einer offenen Menge U ⊂ C/Λ istper definitionem genau dann holomorph, wenn ihre Komposition mit der Quotien-tenabbildung
C −→ C/Λ , z 7−→ [z ]
auf dem Urbild von U holomorph ist. Die Addition und Inversenbildung auf C/Λwerden durch holomorphe Funktionen beschrieben, so daß die beiden Struktureneiner abelschen Gruppe und einer komplexen Mannigfaltigkeit vertraglich miteinan-der sind. Als topologische Mannigfaltigeit ist C/Λ homoomorph zu S1×S1 – einemTorus nach Bild 3.42, der als komplexer Torus bezeichnet wird.
w
w
w w
1
1 22
0
+
Bild 3.42: Topologisches Modell von C/Λ

3.3. WENDEPUNKTE UND KUBIKEN 165
Um weiter zu unserer Gruppenaddition auf Kubiken vorzudringen, betrachtenwir jetzt meromorphe 14 Funktionen auf dem komplexen Torus. Ist f eine solcheFunktion auf C/Λ, dann ist uber die Komposition mit der Quotientenabbildungnach dem Schema
z ∈ C f−−−→ Cy[z] ∈ C/Λ
die Abbildung f eine meromorphe Funktion auf ganz C. Die Invarianz bzgl. desGitters Λ bedeutet jetzt
f(z + m1ω1 + m2ω2) = f(z) , z ∈ C .
Das ist gleichbedeutend mit
f(z + ω1) = f(z + ω2) = f(z) .
Eine solche Funktion f ist also doppelt periodisch! Diese Funktionen tragen einenbestimmten Namen.
Definition 3.3.3.5. Eine meromorphe Funktion f zum Gitter Λ mit der Eigenschaft
f(z + ω) = f(z) fur ω ∈ Λ und z ∈ C
wird als elliptische Funktion bezeichnet.
Joseph Liouville (1809 Saint-Omer - 1882 Paris) zeigte 1847 in seinen Vorle-sungen die folgenden drei grundlegenden Satze uber elliptische Funktionen ([FB93]).
Satz 3.3.3.6 (Erster Liouvillescher Satz). Jede elliptische Funktion ohne Polstelleist konstant.
Satz 3.3.3.7 (Zweiter Liouvillescher Satz). Eine elliptische Funktion hat nur end-lich viele Pole modulo Λ, und die Summe ihrer Residuen verschwindet:
∑z
Res(f ; z) = 0 .
Hierbei durchlaufe z ein Vertretersystem modulo Λ aller Pole von f .
14Eine meromorphe Funktion auf einem offenen Bereich D ⊂ C ist eine Abbildung
f : D → C
mit den folgenden Eigenschaften (z.B. [FB93]):
(i) Die Menge der Unendlichkeitsstellen S = f−1(∞) ist diskret in D.
(ii) Die Einschrankung f |D\S : D\S → C ist holomorph.
(iii) Die Unendlichkeitsstellen von f sind Pole von f |D\S .

166 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Definition 3.3.3.8. Die Ordnung einer elliptischen Funktion ist die Anzahl allerPole auf dem Periodentorus C/Λ, wobei jeder Pol so oft gezahlt wird, wie seineVielfachheit angibt:
Ord(f) := −∑
a
ord(f ; a) .
Hierbei durchlaufe a ein Vertretersystem modulo Λ aller Pole von f . 15
Unter dem Begriff b-Ord verstehen wir weiter:
b-Ord(f) := # der b-Stellen auf C/Λ mit Vielfachheit gezahlt.
Satz 3.3.3.9 (Dritter Liouvillescher Satz). Eine nichtkonstante elliptische Funktionf nimmt auf C/Λ jeden Wert gleich oft an, wobei die Werte mit ihren Vielfachheitenzu zahlen sind:
Ord(f) = b-Ord(f) fur b ∈ C .
Insbesondere hat f modulo Λ gleichviele Null- und Polstellen.
Durch die folgende Funktion ist nun eine (moglichst einfache) elliptische Funktionder Ordnung 2 gegeben. Diese wurde 1862/63 durch K. Weierstraß angegeben (findetsich allerdings auch schon 1847 bei Ferdinand Gotthold Eisenstein (1823 Berlin -1852 Berlin)).
Definition 3.3.3.10. Die durch
℘(z; Λ) := ℘(z) :=1
z2+
∑
ω∈Λ\{0}
(1
(z − ω)2− 1
ω2
)fur z 6∈ Λ,
℘(z) := ∞ fur z ∈ Λ,
definierte Funktion heißt Weierstraßsche ℘-Funktion zum Gitter Λ.
Es gibt eine Fulle von besonderen Eigenschaften zu dieser interessanten Funkti-on. Wir wollen uns hier nur auf diejenigen beschranken, die in Hinblick auf unseregesuchte Verbindung zu Kubiken von besonderer Bedeutung sind. Zunachst wollenwir uns aber einen graphischen Eindruck der Funktion verschaffen. Dies ist uber Ma-thematica wieder leicht moglich, da die Weierstraßsche ℘-Funktion dort einprogram-miert ist. 16 Die Bilder 3.43 und 3.44 zeigen die analytische Landschaft |℘(x + iy)|der Weierstraßschen ℘-Funktion fur das Gitter
Z⊕ (12
+√
32
i)Z .
15Das Minuszeichen stammt von der negativen Ordnung fur Pole; die Ordnung von f ist alsonicht negativ.
16Dabei ist sie dort in der Form WeierstrassP[z, {g2, g3}] abgelegt, d.h. es kann nicht uberdas durch ω1 und ω2 definierte Gitter auf ℘ zugegriffen werden, sondern uber die – spater nocheingefuhrten – Koeffizienten g2 und g3. Nach [Remmert91], Kapitel 10, § 2, wurde dabei g2 = 0und g3 = Γ( 1
3 )18/(2π)6 gewahlt, was zum angegebenen Gitter Z ⊕ (12 +
√3
2 i)Z fuhrt, das aus g2
und g3 in Mathematica per WeierstrassHalfPeriods[{g2, g3}] erhaltlich ist.

3.3. WENDEPUNKTE UND KUBIKEN 167
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
0102030
-1
-0.5
0
0.5
1
-0.5
0
0.5
1
01020
-1-0.5
00.5
1
-1
-0.5
00.5
1
0
10
20
30
-1-0.5
00.5
-1
-0.5
00.5
Bild 3.43: Analytische Landschaft der Weierstraßschen ℘-Funktion (Gitter s.o.)
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
Bild 3.44: Kontur der analytischen Landschaft (vgl. Bild 3.43)
Eine der fur uns wesentlichen Eigenschaften der Weierstraßschen ℘-Funktionergibt sich aus dem Zusammenhang mit ihrer Ableitung (also in Form einer Diffe-rentialgleichung).
Zunachst ist die angegebene Reihe außerhalb von Λ tatsachlich holomorph undes ist gliedweises differenzieren erlaubt, was
℘′(z) = −2∑ω∈Λ
1
(z − ω)3
ergibt (℘′ ist also ebenfalls eine meromorphe Funktion, wieder doppelt periodischund hat seine Polstellen ebenfalls in den Punkten von Λ und zwar solche von 3.Ordnung). Die Laurent17-Entwicklung von ℘ ist in einer Umgebung des Ursprungs,wegen ℘(z) = ℘(−z) und weil ℘(z)− 1
z2 holomorph in der Umgebung von z = 0 undin z = 0 verschwindet, von der Form
℘(z) =1
z2+ a2z
2 + a4z4 + . . . , (3.46)
17Pierre Alphonse Laurent (1813 Paris - 1854 Paris)

168 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
was differenziert und quadriert
(℘′(z))2 =4
z6− 8a2
z2− 16a4 + . . . (3.47)
ergibt. Wird (3.46) in die dritte Potenz erhoben, dann gelangen wir zu
℘(z)3 =1
z6+
3a2
z2+ 3a4 + . . . . (3.48)
Aus (3.46), (3.47) und (3.48) folgt jetzt, daß die Funktion
(℘′)2 − 4℘3 + 20a2℘ + 28a4
in einer Umgebung des Ursprungs holomorph ist und in z = 0 verschwindet. Pol-stellen kann sie allenfalls in Λ aufweisen – sie ist jedoch doppelt periodisch undverschwindet in z = 0: also ist sie in der ganzen Ebene holomorph. Aus ihrer Eigen-schaft als doppelt periodische Funktion folgt aber noch mehr: sie muß auf C damitauch beschrankt sein und nach Liouville (Satz von Liouville 18 [Remmert84]) mithinkonstant und weil sie in z = 0 verschwindet somit identisch Null sein. Wir habendamit also die Differentialgleichung 1. Ordnung
(℘′)2 − 4℘3 + 20a2℘ + 28a4 = 0
gewonnen, welche die Weierstraßsche ℘-Funktion erfullen muß. Die vom Gitter Λabhangigen Koeffizienten a2 und a4 lassen sich durch gliedweises Differenzieren von℘(z)− 1
z2 gewinnen:
a2 = 3∑
ω∈Λ\{0}ω−4 , a4 = 5
∑
ω∈Λ\{0}ω−6 .
Setzt man abkurzend
g2 := 60∑
ω∈Λ\{0}ω−4 , g3 := 140
∑
ω∈Λ\{0}ω−6 ,
dann erhalten wir die obige Differentialgleichung 19 in der Form
(℘′)2 = 4℘3 − g2℘− g3 . (3.49)
18Satz von Liouville: Jede beschrankte ganze Funktion ist konstant.19Die Verbindung zu elliptischen Integralen (vgl. auch Abschnitt 6.4, S. 258) liegt jetzt nicht
mehr fern: wird x = ℘(z) gesetzt, so erhalten wir aus (3.49) das elliptische Integral
z =∫
dx√4x3 − g2x− g3
.
Die Umkehrfunktionen dieser Integrale stellen nun gerade die elliptischen Funktionen dar.

3.3. WENDEPUNKTE UND KUBIKEN 169
Wir kommen jetzt wieder auf die algebraischen Kurven zuruck und mochtenden eben angegebenen Perioden-Torus (auf dem ℘ “lebt“) als algebraische Kurveauffassen. Mit Hilfe von (3.49) ist dies nun leicht moglich. Es wird
X = x(z) = ℘(z) , Y = y(z) = ℘′(z)
gesetzt, so daß dann
C(g2, g3) : Y 2 = 4X3 − g2X − g3 (3.50)
gilt – was jetzt gerade die Gleichung einer Kubik in Weierstraßscher Normalform(bis auf Konstanten, vgl. Satz 3.3.1.17 auf S. 138) ist. Es folgt also, daß fur z ∈ C,z 6∈ Λ, der Punkt (x(z) = ℘(z), y(z) = ℘′(z)) auf der Kurve C(g2, g3) nach (3.50)liegt. Damit haben wir eine biholomorphe ([FB93]) Abbildung
β : C/Λ\{[0]} −→ C(g2, g3)
[z ] 7−→ (℘(z), ℘′(z))
gewonnen, die den punktierten Torus auf die affine Kubik C abbildet. Wieder kanndiese Abbildung auch projektiv abgeschlossen werden, so daß sie auch in den Pol-stellen wohldefiniert wird; diese werden namlich auf den “unendlich fernen“ Punkt[0, 1, 0] abgebildet:
C/Λ −→ C(g2, g3)
[z ] 7−→{
[℘(z), ℘′(z), 1] , falls [z] 6= [0] ,
[0, 1, 0] , falls [z] = [0] .
Bemerkung 3.3.3.11. Als eindimensionale komplexe Mannigfaltigkeiten sind also allenichtsingularen Kubiken biholomorph aquivalent zu eindimensionalen komplexen Tori undumgekehrt.
Aus diesem Zusammenhang stammt auch der Name elliptische Kurven furdiese Kubiken, weil ihre Theorie via der oben festgestellten Biholomorphie nichtsanderes als die Funktionentheorie der elliptischen Funktionen ist.
Und damit ist letztlich auch der Zusammenhang mit der ganz zu Beginn dieses(langen) Abschnittes formulierten Gruppeneigenschaft weiter- und tiefergehend ver-standen. Denn die auf C/Λ in naturliche Weise gebildete abelsche Gruppe (C/Λ,⊕)pflanzt sich jetzt uber das Additionstheorem fur die Weierstraßsche ℘-Funktion aufelliptische Kurven (Kubiken) in der oben erklarten Art fort. Es gilt namlich (z.B.nach [FB93]) der
Satz 3.3.3.12 (Additionstheorem der ℘-Funktion). Es seien z, w ∈ C, so daß z+w,z − w, z und w nicht im Gitter Λ enthalten sind. Dann gilt
℘(z + w) = −℘(z)− ℘(w) +1
4
(℘′(z)− ℘′(w)
℘(z)− ℘(w)
)2
.

170 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
Fur die Kubik (Y
2
)2
= X3 − g2
4X − g3
4
vergleiche man die so gebildete Addition nun mit der Addition von zwei Punkten aufeiner Kubik in Weierstraßscher Normalform nach Satz 3.3.3.3. Dann ist zu erkennen,daß die dort eingefuhrte Addition
r = p⊕ q , p,q, r ∈ C ,
auf der Kubik C : Y 2 = 4X3 − g2X − g3 gerade der Addition
[z]⊕ [w] = [z + w]
auf dem Periodentorus C/Λ entspricht, d.h. diese durch die oben angegebene biho-lomorphe Abbildung
[z]⊕ [w] = [z + w]β7−→ [℘(z), ℘′(z), 1]︸ ︷︷ ︸
p
⊕ [℘(w), ℘′(w), 1]︸ ︷︷ ︸q
= [℘(z + w), ℘′(z + w), 1]︸ ︷︷ ︸p⊕q= r
(mit z, w etc. nicht auf dem Gitter) miteinander verknupft sind.
Beispiel 3.3.3.13. Die Kubik C sei durch das in Weierstraßscher Normalform vorliegendePolynom
Y 2 = 4X3 − 5X − 1
definiert – es gilt also: g2 = 5 und g3 = 1. Fur die beiden Punkte
p1 = [x1, y1, 1] =
[− 3
10,7√
525
, 1
]und p2 = [x2, y2, 1] =
[32,√
5, 1]
soll jetzt (unter Einsatz von Mathematica) die Addition auf der Kubik und ihrem Pendant,dem komplexen Torus, durchgefuhrt werden. Dieser ergibt sich aus dem Gitter Λ mit
ω1.= 2,35625 und ω2
.= 2,68736i .
Das Gitter (und die Weierstraßsche ℘-Funktion hierzu) ist in Bild 3.45 dargestellt. UberMathematica ist es aus den Koeffizienten g2 und g3 leicht erhaltlich:
Auf dem Periodentorus kann jetzt die oben angegebene Addition durchgefuhrt werden.Aus den Punkten p1 und p2 im P2 erhalten wir als Bilder auf dem Torus die Punkte
q1 = ℘−1(x1) und q2 = ℘−1(x2) ,

3.3. WENDEPUNKTE UND KUBIKEN 171
was wieder uber Mathematica berechnet wird:
Die Addition zum Punkt q3 fuhrt zu
Dieser kann jetzt per β auf die Kubik C abgebildet werden, was die Koordinaten
x3 = ℘(q3) und y3 = ℘′(q3) .
ergibt. Mathematica liefert hierfur
D.h. der dritte Punkt ist p3 = [−1, 0, 1]. Das wird jetzt durch die Addition von Punkten aufder Kubik nach Satz 3.3.3.3 bestatigt. Diese Addition wird in Mathematica durchgefuhrtund ergibt mit der zusatzlichen Belegung
uber die Steigung
wie erwartet den Punkt
Die Gruppenaddition der Punkte p1 und p2 in der eben durchgefuhrten Weise auf derKubik C ist in Bild 3.46 zu sehen. Damit wurde auch in einem numerischen Beispiel ge-zeigt, wie sich die Kubik mit ihrer abelschen Gruppe der Punktaddition und der komplexePeriodentorus mit seiner in naturliche Weise abelschen Addition entsprechen. ¤

172 KAPITEL 3. ALGEBRAISCHE EIGENSCHAFTEN
22
13
[ ]
q
q
q2
1
3
Bild 3.45: Gitter zur Kubik Y 2 = 4X3 − 5X − 1
q
1
3
2
b
-1 -0.5 0.5 1 1.5 2
-1
1
2
3
x
y
C
p2
p1
p3
Bild 3.46: Addition auf der Kubik Y 2 = 4X3 − 5X − 1

Kapitel 4
Singularitaten
In den vorangehenden Kapiteln konnte verfolgt werden, daß außerhalb der singularenStellen einer algebraischen Kurve “alles einfacher“ und “naturlicher“ gestaltet wer-den kann. Singularitaten dagegen mußten teilweise umgangen und gesondert behan-delt werden (Anzahl von Wendepunkten, Klassifikation) oder explizit ausgeschlossenwerden (Satz von Pascal, Gruppeneigenschaft auf Kubiken).
Im folgenden sollen die Singularitaten einer algebraischen Kurve daher noch ein-mal eingehender betrachtet werden. Einerseits, um ihr Verhalten bzw. ihr Einflußauf den Verlauf algebraischer Kurven besser zu verstehen, andererseits, um vielewichtige Eigenschaften uber sie in einem ubersichtlichen Kapitel zusammenzufassen.
In Wiederholung von Kapitel 1, Definition 1.3.1 und Kapitel 2, Definition 2.2.1.4fuhren wir fur affin-algebraische Kurven 1 die Menge
Sing(C) :={
(x, y) ∈ C2 |P (x, y) = 0 ∧ ∂P∂X
(x, y) = ∂P∂Y
(x, y) = 0}
,
bzw. fur projektive Kurven die Menge
Sing(C) :={
[x, y, z] ∈ P2 | ∂P∂X
(x, y, z) = ∂P∂Y
(x, y, z) = ∂P∂Z
(x, y, z) = 0}
aller Singularitaten der entsprechenden Kurve ein. Dabei kann in der Definition derMenge Sing(C) auf die explizite Angabe von P (x, y, z) = 0 wegen der EulerschenRelation 1.2.10 verzichtet werden.
4.1 Einfluß auf das geometrische Verhalten
Aufgrund des inzwischen erarbeiteten Wissens uber Kurven und deren Schnittver-halten, konnen auch uber Singularitaten weitere und weitreichende Eigenschaftenangegeben werden. Dazu gehort zunachst der nachfolgende Satz, der ein weiteresmal verdeutlicht, daß algebraische Kurven im wesentlichen, d.h. bis auf endlich vieleAusnahmen, “gutmutig“ sind.
1Im folgenden wird i.a. aus dem Zusammenhang klar, ob eine affine oder projektive Kurvegemeint ist, oft gelten die aufgestellten Satze auch sowohl fur affine wie auch fur projektive Kurven,so daß die Tilde zur Bezeichnung projektiver Kurven fortgelassen wird.
173

174 KAPITEL 4. SINGULARITATEN
Satz 4.1.1. Eine irreduzible projektive Kurve C in P2 hat hochstens endlich vieleSingularitaten, d.h. fur irreduzible Kurven ist die Menge Sing(C) endlich.
Beweis. Die Existenz von Singularitaten wird hier auf die Schnittpunkte von Kurvenzuruckgefuhrt, die nach der schwachen Form des Satzes von Bezout (3.1.2.2) nur in end-licher Anzahl vorliegen konnen.
Es sei C eine durch das homogene Polynom P vom Grad d definierte Kurve. Einenotwendige Bedingung fur das Vorliegen einer Singularitat im Punkt p ist die Bedingung
p ∈ C ∩ C ′ , (4.1)
wobei die Kurve C ′ durch eine geeignete partielle Ableitung von P definiert ist. DieseEignung bestimmt sich aus der Eigenschaft, daß die betreffende partielle Ableitung nichtverschwinden sollte, weil die Bedingung (4.1) sich sonst auf die triviale Aussage p ∈ Creduziert.
Die Existenz einer (geeigneten) nichtverschwindenden partiellen Ableitung ist aberstets gesichert. O.B.d.A. kann [1, 0, 0] 6∈ C angenommen werden, so daß der KoeffizientP (1, 0, 0) von Xd in P ∈ C[X, Y, Z] ungleich Null ist. Nach Satz 1.2.9 ist damit
Q(X,Y, Z) := ∂P∂X (X,Y, Z)
homogen vom Grad d−1, das aufgrund der obigen Annahme nicht identisch verschwindet.Damit definiert Q eine projektive Kurve D in P2. Weil C irreduzibel und D von geringeremGrad als C ist, besitzen beide Kurven keine gemeinsame Komponente. Nach Satz 3.1.2.2schneiden sich also beide Kurven in hochstens d(d− 1) verschiedene Punkte. ¤
Es ist also festzuhalten, daß Singularitaten die Ausnahme sind. Das gilt auchfur nichtirreduzible Kurven, da diese aus endlich viele irreduzible Komponenten zu-sammengesetzt sind (mehrfach vorkommende Komponenten bzw. Faktoren werdenausgeschlossen). Treten gar keine singularen Stellen auf, so kann bereits auf dieIrreduzibilitat der Kurve geschlossen werden.
Satz 4.1.2. Eine nichtsingulare projektive Kurve C in P2 ist irreduzibel.
Beweis. Es sei C := {[x, y, z] ∈ P2 |P (x, y, z)Q(x, y, z) = 0} eine zerlegbare Kurve. Dadie Polynome P und Q ihrerseits Kurven definieren, gibt es nach der schwachen Formdes Satzes von Bezout, Seite 99, ein [a, b, c] ∈ P2, so daß P (a, b, c) = 0 = Q(a, b, c). Indem Beweis von Lemma 4.3.1 (siehe unten Abschnitt 4.3) wird gezeigt, daß [a, b, c] eineSingularitat ist. ¤
Die Neilsche Parabel (siehe Beispiel 1.1.6) macht deutlich, daß die Umkehrungdieses Satzes i.a. falsch ist. Der (korrekte) negierte Umkehrschluß, daß eine zu-sammengesetzte Kurve mindestens eine Singularitat besitzt, wird weiter unten imAbschnitt 4.3 noch einmal behandelt.
Desweiteren ist zu betonen, daß der Satz 4.1.2 nur im P2 gilt. So ist etwa die Ver-einigung windschiefer Geraden im P3 eine nichtsingulare aber offensichtlich reduzibleKurve.
Bei Beweis der folgenden Aussagen kommt der Satz von Bezout erneut zur An-wendung. Dabei soll zunachst die im Beweis zum Satz 4.1.1 vorkommende Abschat-zung von d(d−1) zur Anzahl von Singularitaten einer Kurve vom Grad d verbessertwerden.

4.1. EINFLUSS AUF DAS GEOMETRISCHE VERHALTEN 175
Satz 4.1.3. Eine Kurve vom Grad d in P2 ohne mehrfache Komponenten hat hoch-stens d(d−1)
2singulare Punkte.
Beweis. Sei C eine durch das homogene Polynom P ∈ C[X, Y, Z] vom Grad d ohnemehrfachen Faktor definierte Kurve. O.B.d.A. konnen wir annehmen, daß Q := ∂P
∂Z nichtidentisch verschwindet. Dann wird durch Q eine Kurve D vom Grad d − 1 definiert undP von Q nicht geteilt (Lemma B.1.14, siehe Anhang B, Seite 310), so daß im weiterenVerlauf der Satz von Bezout angewandt werden kann.
Fur einen singularen Punkt p gilt wegen Multp(C) ≥ 2 und Satz 3.1.2.6 zunachstIp(C, D) ≥ 2 . Es seien nun p1 . . . ,ps singulare Punkte von C, dann gilt nach dem Satzvon Bezout
2s ≤∑
p∈{p1...,ps}⊆C∩D
Ip(C, D) ≤∑
p∈C∩D
Ip(C,D) = d(d− 1) ,
so daß es hochstens s ≤ d(d−1)2 Singularitaten geben kann. ¤
Fur die Vereinigung von d Geraden in P2 ergibt sich daraus sofort das folgendeResultat.
Korollar 4.1.4. Sind d verschiedene Geraden G1, . . . , Gd in P2 gegeben, so schnei-den sie sich in hochstens d(d−1)
2Punkte. Die Kurve G1∪ . . .∪Gd besitzt also maximal
d(d−1)2
Singularitaten.
In dem Bild 4.1 sind die (affinen – da alle Schnittpunkte im Endlichen liegen)Falle fur d = 3, 4 und 5 illustriert, wo sich maximal 3, 6 bzw. 10 Schnittpunkteergeben konnen.
Bild 4.1: Beispiele zu Korollar 4.1.4 fur die Falle d = 3, 4 und 5
Der folgende Satz zeigt was passiert, wenn von den d(d−1)2
maximal moglichenSingularitaten mehr als d
2auf einer Geraden liegen.
Satz 4.1.5. Besitzt eine projektive Kurve C vom Grad d in P2 (echt) mehr als d/2singulare Stellen, die alle auf einer Geraden G liegen, so ist G eine Komponentevon C.
Beweis. Aus der Annahme, daß C und G ohne gemeinsame Komponente sind, d.h. ins-besondere G keine von C ist, wird mit dem Satz von Bezout und dem Lemma 3.1.2.5 derfolgende Widerspruch abgeleitet:
d =∑
p∈C∩G
Ip(C, G) ≥∑
p∈Sing(C)∩G
Ip(C, G) > d2 · 2 = d.

176 KAPITEL 4. SINGULARITATEN
Daher mussen C und G eine gemeinsame Komponente enthalten; wegen Grad(G) = 1 istdiese Komponente die Gerade G selbst. ¤
Als Beispiel kann eine Kubik mit zwei Doppelpunkten genannt werden: Nach demletzten Satz enthalt diese die Verbindungsgerade der zwei Doppelpunkte als Kom-ponente und sieht dann aus wie im linken Teil des Bildes 4.2. Ein Erscheinungsbildwie im rechten Teil dargestellt kann bei Kubiken dagegen nicht auftreten.
Bild 4.2: links: Kubik mit zwei Doppelpunkten, rechts: das kann keine Kubik sein
Desweiteren gilt das folgende Resultat fur Quartiken, um auch einmal Kurvenvon hoherem Grad als drei zu behandeln.
Satz 4.1.6. Eine projektive Kurve C in P2 vom Grad vier mit vier singularen Punk-ten ist reduzibel.
Beweis. Der Beweis wird ahnlich wie im vorherigen Satz durch Widerspruch gefuhrt,indem zunachst angenommen wird, daß eine Quartik C mit vier verschiedenen, singularenPunkten p1, p2, p3, p4 ∈ C nicht zerlegbar ist.
Es sei p5 ∈ C ein weiterer und von den Singularitaten p1, . . . , p4 verschiedener Punktvon C. Dann gibt es nach Satz 3.2.1.6 eine Quadrik D, welche durch alle funf Punkte p1,. . . , p5 verlauft. Wegen Lemma 3.1.2.5 gilt
Ipk(C, D) ≥
{2, fur k = 1, . . . , 4 ,1, fur k = 5.
Aufgrund der Annahme, daß C nicht zerlegbar ist, besitzen C und D keine gemeinsamenKomponenten, so daß der Satz von Bezout jetzt den Widerspruch
8 = Grad(C) ·Grad(D) =∑
p∈C∩G
Ip(C, G) ≥5∑
l=1
Ipl(C, G) ≥ 4 · 2 + 1 = 9
liefert. Daher mussen C und D eine gemeinsame Komponente besitzen. Wegen Grad(C) =4 > 2 = Grad(D) muß die Quartik C dann zerlegbar sein. ¤
Der vorhergehende Satz und das Lemma 3.3.2.4, nach der irreduzible Kubikenhochstens eine Singularitat aufweisen, zeigt, daß die Abschatzung von maximald(d−1)
2singularen Punkten in Satz 4.1.3 fur irreduzible Kurven nicht besonders gut
ist. Diese soll in einem zweiten Schritt jetzt noch einmal verbessert werden.

4.1. EINFLUSS AUF DAS GEOMETRISCHE VERHALTEN 177
Satz 4.1.7. Eine irreduzible Kurve vom Grad d in P2 hat hochstens (d−1)(d−2)2
sin-gulare Punkte.
Beweis. Hier arbeiten wir wieder mit dem Konzept der Linearsysteme nach Anhang C.Sei C eine Kurve vom Grad d. Die Kurven vom Grad d− 2 bilden dann einen projektivenRaum der Dimension N := (d−2)(d+1)
2 .Die Kurve C habe die singularen Punkte p1 . . . ,ps, wobei o.B.d.A. s ≤ N angenommen
werden kann – ansonsten betrachte man nur s = N Singularitaten. Jetzt werden r = N−sweitere Punkte q1 . . . ,qr auf C ausgewahlt. Dann gibt es eine Kurve D vom Grad d− 2,die durch die N Punkte p1 . . . ,ps, q1 . . . ,qr verlauft. Weil C als irreduzibel angenommenwurde, haben C und D keine gemeinsame Komponente, so daß der Satz von Bezout jetzt
2s + r ≤∑
p∈C∩D
Ip(C, D) = d(d− 2)
liefert. Mit r = (d−2)(d+1)2 folgt hieraus s ≤ (d−1)(d−2)
2 . Und wegen (d−1)(d−2)2 < N =
(d+1)(d−2)2 kann es nicht mehr als s singulare Punkte geben. ¤
Abschließend kann jetzt noch die Frage gestellt werden, ob es (stets) irreduzi-
ble Kurven vom Grad d gibt, welche die volle Anzahl von (d−1)(d−2)2
Singularitatenerreichen?
Zur Beantwortung dieser Frage werden s = (d−1)(d−2)2
verschiedene Punkte p1, . . .,ps ∈ P2 gewahlt und das Verschwinden der ersten drei Ableitungen eines geeignetenPolynoms P ∈ C[X, Y, Z] in den entsprechenden Punkten gefordert:
∂P
∂X
∣∣∣∣pν
=∂P
∂Y
∣∣∣∣pν
=∂P
∂Z
∣∣∣∣pν
= 0
fur ν = 1, . . . , s. Das ergibt bei allgemeiner Lage der s Punkte 32(d−1)(d−2) lineare
Bedingungen. Die Tabelle 4.1 faßt die sich ergebenden Verhaltnisse fur d = 3 bis 7zusammen (die nichtsingularen Falle d = 1 und d = 2 sind ohne Belang).
Tabelle 4.1: Anzahl von linearen Bedingungen und Singularitaten
Grad d 3 4 5 6 7
max. Anzahlsingularer Punkte (d−1)(d−2)
21 3 6 10 15
lineare Be-dingungen 3(d−1)(d−2)
23 9 18 30 45
signifikanteKoeffizienten d(d+3)
29 14 20 27 35
Hierin zeigt sich, daß allenfalls fur d ≤ 5 die volle Anzahl von maximal moglichenSingularitaten erreicht werden kann. Fur Kubiken sind die Neilsche Parabel und derNewtonsche Knoten wieder als Beispiele zu nennen (siehe Bilder 3.36 auf Seite 155).

178 KAPITEL 4. SINGULARITATEN
Fur Quartiken – also d = 4 – konnen die (bereits in der Einfuhrung erwahnten undim Abschnitt 1.4 betrachteten) Hypozykloiden angefuhrt werden, die genau drei reellsichtbare singulare Punkte aufweisen.
Beispiel 4.1.8. Nach Bild 4.3 ergeben sich die Hypozykloiden aus dem Abrollen einesKreises mit Radius r in einem großeren Kreis mit Radius R (vgl. auch Bild 1.33 auf Seite45), wobei der Weg des Punktes P verfolgt wird, der sich im Abstand a vom Mittelpunkt
des kleineren Kreises bewegt. Aus der Abrollbedingung_
AB=_
BK folgt zunachst fur dieWinkelverhaltnisse
Rα = rβ , bzw. κ :=R
r=
β
α.
Der Abrollvorgang ergibt eine geschlossene Kurve genau dann, wenn κ ∈ Q. Wird dieHypozykloide mit dem Winkel α parametrisiert, so sind aus Bild 4.3 fur die Koordinaten(x, y) ∈ R2 die Beziehung
x(α) = (R− r) cosα + a cos(β − α) = (R− r) cos α + a cos R−rr α ,
y(α) = (R− r) sinα − a sin(β − α) = (R− r) sin α − a sin R−rr α ,
abzulesen.
R
xy
a
b
B
A
P
Ka
r
Bild 4.3: Abrollvorgang zweier Kreise
Das Bild 4.4 zeigt eine Hypozykloide C1 mit den Werten
R = 3, r = 1, a = 1 : x(α) = 2 cosα + 2 cos2 α− 1, y(α) = 2 sinα− 2 sin α · cosα (4.2)
im linken Bildteil und im rechten eine Hypozykloide C2 mit
R = 6, r = 2, a = 3 : x(α) = 4 cosα + 6 cos2 α− 3, y(α) = 4 sinα− 6 sin α · cosα . (4.3)
Hieraus konnen jetzt durch Elimination Polynome in X und Y erhalten werden (sieheauch den Abschnitt uber ’Weitere algebraische Kurven’ auf Seite 44). Dazu werden (4.2)bzw. (4.3) jeweils in Gleichungen der Form
F1(X, sin2 α, cos2 α) = 0, F2(Y, sin2 α, cos2 α) = 0

4.1. EINFLUSS AUF DAS GEOMETRISCHE VERHALTEN 179
-1 1 2 3
-2
-1
1
2
x
y
C1
-4 -2 2 4 6
-6
-4
-2
2
4
6
x
y
C2
Bild 4.4: Zwei Zykloiden bzw. Quartiken mit genau drei Singularitaten
durch mehrfaches Quadrieren und Umstellen umgeformt. Anschließend konnen dann indem Gleichungssystem
F1(X, sin2 α, cos2 α) = 0 ,F2(Y, sin2 α, cos2 α) = 0 ,
sin2 α + cos2 α = 1
die Terme sin2 α und cos2 α entfernt werden. Dies kann in etwas muhseliger Weise “vonHand“ ausgefuhrt werden oder unter Einsatz von Mathematica mit Hilfe des KommandosEliminate. So liefert z.B.
die gesuchten Polynome der Quartiken, d.h.
X4 + 2X2Y 2 + Y 4 − 8X3 + 24XY 2 + 18X2 + 18Y 2 − 27
fur C1 nach (4.2) und fur C2 nach (4.3) das Polynom
9X4 + 18X2Y 2 + 9Y 4 − 96X3 + 288XY 2 + 238X2 + 238Y 2 − 343. ¤
Die vorangegangenen Ergebnisse und Beispiele zeigen, daß es eine Grenze furdie Anzahl und “Komplexitat“ von Singularitaten einer Kurve bei vorgegebenemGrad gibt. Dieser Abschnitt soll beendet werden, indem noch einige weiterreichendeAussagen uber die Multiplizitat der Singularitaten getroffen werden. Dazu stellenwir den folgenden wichtigen Satz an den Anfang.
Satz 4.1.9. Haben zwei projektive Kurven vom Grad n bzw. m keine gemeinsameKomponente und sind die Multiplizitaten in ihren k gemeinsamen Punkten rν bzw.sν mit ν = 1, . . . , k, so gilt
k∑ν=1
rν sν ≤ n ·m .

180 KAPITEL 4. SINGULARITATEN
Beweis. Der Satz laßt sich auf den von Bezout zuruckfuhren. Seien pν , ν = 1, . . . , k, diegemeinsamen Punkte der Kurven C und D vom Grad n bzw. m, die keine gemeinsameKomponente besitzen sollen, so gilt zunachst nach Bezout
k∑
ν=1
Ipν (C, D) = n ·m. (4.4)
Nach Satz 3.1.2.6 ist die Schnittmultiplizitat zweier Kurven in einem Punkt großer odergleich dem Produkt der Multiplizitaten der einzelnen Kurvenpunkte:
Ipν (C,D) ≥ Multpν (C) Multpν (D)
fur alle ν = 1, . . . , k. Damit nimmt (4.4) die gewunschte Form an:∑
p∈C∩D
Multp(C)Multp(D) ≤ n ·m. ¤
Das folgende Ergebnis ist eine Verallgemeinerung von Satz 4.1.3 und bezieht sichauf die Multiplizitat der Singularitaten.
Satz 4.1.10. Hat eine projektive Kurve vom Grad n ohne mehrfache Komponentenin k Punkten die Multiplizitaten rν, ν = 1, . . . , k, dann gilt
n(n− 1) ≥k∑
ν=1
rν (rν − 1) . (4.5)
Beweis. Die Kurve C ⊂ P2 sei vom Grad n und werde durch das homogene PolynomP ∈ C[X, Y, Z] definiert, das ohne mehrfache Faktoren sei. Wir wahlen Koordinaten wie imBeweis zum Satz 4.1.1, siehe Seite 174. Dann ist wieder Q := PX ein nichtverschwindendes,homogenes Polynom vom Grad n−1, das die Kurve C ′ definiere. Außerdem haben P und Qkeine gemeinsamen Faktoren (nach den Ergebnissen uber die Diskriminante nach AnhangB, insbesondere Korollar B.1.14, siehe Seite 310).
Jetzt besitze C in den Punkten pν , ν = 1, . . . , k, die Multiplizitaten rν > 1. Dann istQ(pν) = PX(pν) = 0, d.h. pν ∈ C ′ und Multpν (C ′) = rν − 1. Nach dem vorhergehendenSatz 4.1.9 gilt damit die Ungleichung
∑kν=1 rν(rν − 1) ≤ n(n− 1). ¤
Ist die Kurve C eine Komposition von n verschiedenen, durch einen Punkt ver-laufende Geraden, so besitzt sie genau eine Singularitat der Multiplizitat n. DieUngleichung 4.5 zeigt, daß diese im allgemeinen Fall nicht verbessert werden kann.
Fur irreduzible Kurven kann dagegen wieder eine scharfere Abschatzung gemachtwerden, wie das folgende Resultat zeigt.
Satz 4.1.11. Hat eine irreduzible projektive Kurve vom Grad n in k Punkten dieMultiplizitaten rν, ν = 1, . . . , k, dann gilt
(n− 1)(n− 2) ≥k∑
ν=1
rν (rν − 1) .

4.2. TANGENTIALRAUME UND SINGULARITATEN 181
Beweis. Die Kurve C sei vom Grad n, da sie keine mehrfachen Komponenten aufweist,liefert der vorangegangene Satz
∑k
ν=1rν (rν − 1)/2 ≤ n(n− 1)/2 ≤ (n− 1)(n + 2)/2 .
Nach Anhang C konnen fur eine Kurve vom Grad n− 1
(n− 1) · ((n− 1) + 3)2
=(n− 1)(n + 2)
2
lineare Bedingungen gestellt werden, die sich um jede Festlegung einer Multiplizitat vonrν − 1 im Punkt pν um rν(rν−1)
2 vermindern. D.h. es existiert eine Kurve C ′ vom Gradn− 1, die in den Punkten pν die Multiplizitaten rν − 1 besitzt und durch
(n− 1)(n + 2)2
−k∑
ν=1
rν(rν − 1)2
einfache Punkte von C verlauft.Da C irreduzibel und C ′ von geringerem Grad als C ist, konnen C und C ′ keine
gemeinsame Komponente besitzen. Der Satz 4.1.9 liefert dann
n · (n− 1) ≥k∑
ν=1
rν(rν − 1) +(n− 1)(n + 2)
2−
k∑
ν=1
rν(rν − 1)2
,
was zur angegebenen Aussage fuhrt. ¤
Auch diese Ungleichung kann nicht verbessert werden, denn die durch dieGleichung Xn + Y n−1 = 0 definierte irreduzible Kurve hat im Ursprung einen(n− 1)−fachen Punkt.
Weist die Kurve mehrere Komponenten auf, so gilt der folgende verallgemeinern-de Satz, dessen Nachweis per Induktion uber κ zu gewinnen ist.
Satz 4.1.12. Hat eine projektive Kurve vom Grad n mit κ verschiedenen Kompo-nenten in k Punkten die Multiplizitaten rν, ν = 1, . . . , k, dann gilt
(n− 1)(n− 2)/2 + κ− 1 ≥k∑
ν=1
rν (rν − 1)/2 .
4.2 Tangentialraume und Singularitaten
Die Einfuhrung von Tangentialraumen folgt der ublichen differentialgeometrischenWeise, nach der an einer durch die Gleichung h(X1, . . . , Xn) = 0 gegebenen Hyper-flache H ⊆ Cn eine lineare Approximation konstruiert wird. In unserem Fall soll essich bei der Gleichung h wieder um ein Polynom vom Grad d handeln.
Es sei p = (p1, . . . , pn) ∈ H und die Taylorentwicklung von h in p durch dieSumme homogener Polynome
h = h0 + h1 + h2 + . . . + hd

182 KAPITEL 4. SINGULARITATEN
gegeben. Der Summand h1 wird dann in der Form h1 = 0 als Tangentialraum vonH in p aufgefaßt:
h1(X) =n∑
ν=1
∂h
∂Xν
∣∣∣∣p
(Xν − pν) = 〈∇h, X − p〉 = 0 mit X = (X1, . . . , Xn) .
Fur affin-algebraische Kurven ergibt sich daraus die folgende Festlegung.
Definition 4.2.1. Der Tangentialraum an eine durch das Polynom P ∈ C[X, Y ]gegebene affine Kurve C in einem Punkte p = (p1, p2) ∈ C ist definiert durch
Tp(C) :={
(x, y) ∈ C2 |PX(p) (x− p1) + PY (p) (y − p2) = 0}
.
Beispiel 4.2.2. Der Tangentialraum der durch P = Y 2−X3 definierten Neilschen ParabelC ergibt sich in (1, 1) aus PX(1, 1) = −3, PY (1, 1) = 2 zu
T(1,1)(C) :={
(x, y) ∈ C2 | 〈(−3, 2), (x− 1, y − 1)〉 = 0}
,
d.h. er ist durch die Gerade Y = 32X − 1
2 gegeben. Als weitere Feststellung ergibt sich: in(0, 0) entartet der Tangentialraum zu T(0,0)(C) = C2. ¤
Liegt in h ein homogenes Polynom vom Grad d in n komplexen VeranderlichenX = (X1, . . . , Xn) vor, so gilt zunachst fur eine Nullstelle p ∈ Cn die Beziehung
〈∇h, X − p〉 = 〈∇h, X〉 ,
weil aufgrund der Eulerschen Relation 1.2.10 der hierin auftretende Subtrahendverschwindet:
n∑ν=1
∂h
∂Xν
∣∣∣∣p
pν = d · h(p) = 0 .
Bei der Ubertragung des obigen Konzeptes des Tangentialraumes auf durch ho-mogene Polynome definierte projektiv-algebraische Kurven genugt also die folgendeAngabe.
Definition 4.2.3. Der Tangentialraum an eine durch das homogene Polynom P ∈C[X, Y, Z] gegebene projektive Kurve C in einem Punkte p ∈ C ist definiert durch
PTp(C) := { [x, y, z] ∈ P2 |PX(p) x + PY (p) y + PZ(p) z = 0} .
Beispiel 4.2.4. Wieder soll an die – diesmal durch P = Y 2Z−X3 projektiv abgeschlosse-ne – Neilschen Parabel C ⊂ P2 der Tangentialraum in zunachst [1, 1, 1] angegeben werden.Wegen PX(1, 1, 1) = −3, PY (1, 1, 1) = 2 und PZ(1, 1, 1) = 1 gilt
PT[1,1,0](C) := { [x, y, z] ∈ P2 | − 3X + 2Y + Z = 0 } ,
und er stellt wieder eine – jetzt projektive – Gerade dar. In der Singularitat [0, 0, 1] ergibtsich entsprechend zum obigen Beispiel PT[0,0,1](C) = P2. ¤

4.2. TANGENTIALRAUME UND SINGULARITATEN 183
In den beiden vorangegangenen Beispielen haben wir gesehen, daß die lineareApproximation in einer Singularitat mittels des Tangentialraumes viel zu umfassendist. Eine bessere Approximation soll nun mit Hilfe des sogenannten Tangentialkegelserfolgen. Da es sich um eine lokale Betrachtung handelt, wird lediglich der affine Fallbehandelt werden.
Wieder betrachten wir die Taylorentwicklung eines Polynoms P ∈ C[X,Y ] indem Punkt p mit P (p) = 0 als Summe homogener Polynome
P = Pm + Pm+1 + . . . .
Das darin auftauchende Polynom Pm 6= 0 wird der Leitterm von P im Zeichen L(P )genannt. Nach Lemma 1.2.5, Seite 20, zerfallt L(P ) in Linearfaktoren und nachDefinition 1.3.6 sind dies gerade die (verschiedenen) Tangenten an die durch dasPolynom P definierten affinen Kurve C.
Definition 4.2.5. Der Tangentialkegel einer durch das Polynom P definierten Kur-ve C ist
Tcp(C) ={
(x, y) ∈ C2 |L(P ) = 0}
. (4.6)
Wobei L(P ) der Leitterm der Taylorentwicklung von P im Punkt p ∈ C ist, d.h.L(P ) ist das homogene Polynom geringster Ordnung in der Taylorentwicklung vonP , das nicht verschwindet.
In nichtsingularen Punkten p gilt Tcp(C) = Tp(C).
Beispiel 4.2.6. Exemplarisch sollen die Tangentialkegel im Ursprung der durch P =Y 2 −X3, Q = Y 2 −X3 −X2 und R = X2Y + XY 2 −X4 − Y 4 definierten Kurven C, Dund E betrachtet werden. Es ergeben sich die Leitterme
L(P ) = Y 2, L(Q) = Y 2 −X2 und L(R) = XY (X + Y ) .
Das Bild 4.5 zeigt die dadurch definierten Tangentialkegel. ¤
1 2
-2
-1
1
2
x
y
1 2
-2
-1
1
2
x
y
0.5 1
0.5
1
x
y
C D E
Tc ( )C
Tc ( )D Tc ( )E
(0,0)
(0,0) (0,0)
Bild 4.5: Tangentialkegel an die durch P , Q und R definierten Kurven

184 KAPITEL 4. SINGULARITATEN
Tangentialkegel spielen auch eine wichtige Rolle bei der Beseitigung von Singula-ritaten durch die sogenannte Aufblasung (blow-up) eines Punktes. Das soll jetztnoch in Kurze erlautert werden.
SeiC2 :=
{((x1, x2), [y1, y2]) ∈ C2 × P1 | x1y2 = x2y1
}
undσ : C2 → C2 , (p, p) 7→ p .
Das Bild 4.6 veranschaulicht die Mannigfaltigkeit C2 und die Projektion σ. DieMenge C2 enthalt den Graphen der im Kapitel 2 eingefuhrten Abbildung Π :C2\{(0, 0)} → P1.
O
C
C
C
2
( , ) =x x p1 2
[ , ] =y y1 2 p
Bild 4.6: Menge aller komplexen Geraden durch den Ursprung O = (0, 0)
Offensichtlich beinhaltet σ−1 ((0, 0)) alle Paare (O,p) mit p ∈ P1, so daß σ−1 ((0, 0))mit P1 identifiziert werden kann.
Es kann also gesagt werden, daß der Ursprung O = (0, 0) von C2 im C2 mittels σin alle Richtungen “explodiert“ (siehe die Andeutung dieses Vorganges im Bild 4.7).Deshalb spricht man von der Aufblasung von C2 im Ursprung, die durch σ bewirktwird. Kurz wird σ als Aufblasung bezeichnet.
O
ss ( )O
-1
C C2 2~
Bild 4.7: Aufblasung von C2 im Ursprung
Was passiert dabei mit einer im Ursprung liegenden Singularitat einer (affinen)Kurve?
Ist also C ⊂ C2 eine algebraische Kurve mit einer Singularitat in O, so definierenwir zunachst
C := σ−1(C\{O}) (4.7)

4.2. TANGENTIALRAUME UND SINGULARITATEN 185
als abgeschlossene Hulle des Urbildes der Kurve C ohne die Singularitat O in demGraph C2 und mochten nun
C ∩ σ−1(O)
bestimmen. Dazu fuhren wir
U1 :={
((x1, x2), [y1, y2]) ∈ C2 | y1 6= 0}
undU2 :=
{((x1, x2), [y1, y2]) ∈ C2 | y2 6= 0
}
ein; U1 und U2 sind offen, zusammenhangend und es gilt C2 = U1 ∪ U2. Die Ein-schrankungen von σ auf U1 und U2 wirken wie folgt
σ|U1(((x, y), [1, u])) = (x, ux) ,
σ|U2(((x, y), [v, 1])) = (vy, y) .
Und wir erhalten damit
U1 ∩ σ−1(O) = {((x = 0, y), [1, u]) | y, u ∈ C } und (4.8)
U2 ∩ σ−1(O) = {((x, y = 0), [v, 1]) |x, v ∈ C } . (4.9)
Sei nun C durch das Polynom P ∈ C[X, Y ] definiert und
P = Pm + Pm+1 + Pm+2 + . . .
die Taylorentwicklung in homogene Polynome. Dann wird die Varietat C (siehe(4.7)) in U1 durch
P (X, UX) = Xm (Pm(1, U) + XPm+1(1, U) + . . .) , d.h.
Pm(1, U) + XPm+1(1, U) + . . . = 0 (4.10)
definiert und ebenso in U2 durch
P (V Y, Y ) = Y m (Pm(V, 1) + Y Pm+1(V, 1) + . . .) , d.h.
Pm(V, 1) + Y Pm+1(V, 1) + . . . = 0 . (4.11)
Die Faser σ−1(O) aber wird dann in U1 durch
Pm(1, U) = 0
(wegen X = 0 nach (4.8)) und in U2 durch
Pm(V, 1) = 0
(nach (4.9) ist Y = 0) beschrieben. Insgesamt gilt also
C ∩ σ−1(O) ={
((0, 0), [v, u]) ∈ C2 |Pm(v, u) = L(P ) = 0}
.

186 KAPITEL 4. SINGULARITATEN
Wegen der Definition 4.2.5 des Tangentialkegels nach (4.6), kann die im Ursprung“aufgeblasene“ Singularitat mit diesem identifiziert werden. Die Abbildung
σ|σ−1(C) : σ−1(C) −→ C
heißt daher die Aufblasung von C in der Singularitat O von C oder die Aufblasungvon C in dem Ursprung (wo C eine Singularitat besitzt).
D.h. bei der Aufblasung von C im Ursprung wird die Singularitat in O durchden Tangentialkegel von C in O ersetzt.
Beispiel 4.2.7. Wir betrachten den durch P = Y 2 −X3 −X2 definierten NewtonschenKnoten C, der im Ursprung einen gewohnlichen Doppelpunkt aufweist. Die Taylorent-wicklung von P in homogene Polynome in der oben erwahnten Art ist
P = Y 2 −X2︸ ︷︷ ︸
P2
+ (−X3)︸ ︷︷ ︸P3
.
Die Varietat C nach (4.7) wird in den Karten U1 und U2 jetzt durch
P (X,UX) = U2X2 −X2 −X3 = 0 , d.h. P1(X, U) := U2 − 1−X = 0
bzw.
P (V Y, Y ) = Y 2 − V 2Y 2 − V 3Y 3 = 0 , d.h. P2(V, Y ) := 1− V 2 − V 3Y = 0
definiert. Insbesondere im Ursprung (X = 0) bzw. (Y = 0) bewirkt die Aufblasungσ|σ−1(C)(O) eine Ersetzung der Singularitat im Ursprung nach
u2 − 1 = 0 ∧ 1− v2 = 0
durch [1, 1] und [1,−1]. Dieser Vorgang und C in Form der beiden durch P1 = 0 undP2 = 0 in U1 und U2 definierten Kurven ist in den Bilder 4.8 und 4.9 dargestellt.
-1 1 2
-2 -2
-1-1
11
2 2
2x
u
-1 1
yPI 1
C2
C2C
2~[1, 1]
[-1, 1]
[-1, 1]
[1, 1]
[0, 1]
0
x
Bild 4.8: Aufblasung von C in U1

4.2. TANGENTIALRAUME UND SINGULARITATEN 187
-2 -1 1 2
-3
-2
-1
1
2
3
PI 1
C2
C2C
2~
[1, 1]
[-1, 1]
[-1, 1] [1, 1]
[0, 1]
0 -2 -1 1 2
-1
1
2
x
y
y
v
Bild 4.9: Aufblasung von C in U2
Der eigentliche Vorgang der Auflosung wird in dem Bild 4.10 besonders veranschau-licht. Dabei werden in Form reeller Schnitte die beiden nach P1 = 0 und P2 = 0 definiertenKurven dem Newtonschen Knoten C uberlagert. Im linken Bildteil ist dies in U1 gezeigt(dabei wurde P1 = 0 um drei Einheiten in dem Graph nach oben verschoben, um einenanschaulicheren Verlauf zu bekommen), das rechts gezeigte Bild gibt die Auflosung in U2
durch P2 = 0 wieder. ¤
-2
-1
0
1
2
0
2
4
-1 0 1 2
-1
0
1
2
-2 -1 1 2
-2
0
2
4
0
-4
PI 1
PI 1
C
C
2
2
C2~
v
x
xy
y
us
s
C2~
Bild 4.10: Aufblasung von C im Ursprung

188 KAPITEL 4. SINGULARITATEN
4.3 Singularitaten bei der Vereinigung von Kur-
ven
Die Vereinigung von Kurven ergibt neue Singularitaten, wie bereits im Satz 4.1.2zum Ausdruck kam. Der folgende Satz zeigt, daß alle Schnittpunkte von Kurven-komponenten singulare Stellen sind!
Lemma 4.3.1. Es seien C und D zwei projektive algebraische Kurven ohne gemein-same Komponenten. Dann gilt fur die Vereinigung der Kurven:
Sing(C ∪D) = Sing(C) ∪ Sing(D) ∪ (C ∩D).
Beweis. Die Kurven C und D seien durch die Polynome P,Q ∈ C[X1, X2, X3] definiert.Dann ist
C ∪D = V (R) mit R := P ·Qund wegen
∂R
∂Xk
∣∣∣∣p
= Q(p)∂P
∂Xk
∣∣∣∣p
+ P (p)∂Q
∂Xk
∣∣∣∣p
gilt fur ein p ∈ Sing(C ∪ D) die folgenden Aquivalenzen (stets unter der VoraussetzungR(p) = 0):
∂R
∂Xk
∣∣∣∣p
= 0 ⇔ P (p) = 0 ∧ ∂P∂Xk
= 0, k = 1, 2, 3
∨ Q(p) = 0 ∧ ∂Q∂Xk
= 0, k = 1, 2, 3 ∨ P (p) = Q(p) = 0
⇔ p ∈ Sing(C) ∨ p ∈ Sing(D) ∨ p ∈ C ∩D. ¤Der nachfolgende Satz beinhaltet die Verallgemeinerung auf n Komponenten, die
zu einer gemeinsamen Kurve zusammengesetzt werden.
Satz 4.3.2. Sei C die aus n Komponenten bestehende Kurve C :=⋃n
ν=1 Cν , danngilt fur die Menge der Singularitaten von C die Beziehung
Sing(C) =n⋃
ν=1
Sing(Cν) ∪n⋃
µ,ν=1µ6=ν
(Cµ ∩ Cν) . (4.12)
Beweis. (Vollstandige Induktion.) Der Induktionsanfang fur n = 1 ist trivial. Der In-duktionsschluß erfolgt jetzt unter Benutzung der Induktionsvoraussetzung (4.12) und vonLemma 4.3.1
Sing(C ∪ Cn+1) = Sing(C) ∪ Sing(Cn+1) ∪ (C ∩ Cn+1)
=n⋃
ν=1
Sing(Cν) ∪n⋃
µ,ν=1µ 6=ν
(Cµ ∩ Cν)
∪Sing(Cn+1) ∪ (Cn+1 ∩n⋃
ν=1
Cν)
=n+1⋃
ν=1
Sing(Cν) ∪n+1⋃
µ,ν=1µ6=ν
(Cµ ∩ Cν). ¤

4.3. SINGULARITATEN BEI DER VEREINIGUNG VON KURVEN 189
Mit diesen beiden Satzen wird die negierte Umkehrung von Satz 4.1.2 klar, wo-nach eine zusammengesetzte Kurve mindestens eine Singularitat aufweist. Denn istC = D ∪ E die Vereinigung der voneinander verschiedenen Komponenten D undE, so schneiden diese sich in mindestens einem Punkt (Kapitel 3, Satz 3.1.2.1), derdamit eine singulare Stelle der Kurve C ist.

190 KAPITEL 4. SINGULARITATEN

Kapitel 5
Duale Kurven
Neben der Einfuhrung “unendlich ferner“ Punkte ist das Prinzip der Dualitat wohleines der faszinierendsten Aspekte der projektiven Geometrie.
Dieses Prinzip ermoglicht es, die Rolle von Punkten und Geraden im P2 bzw.allgemein die von Punkten und Hyperebenen im Pn zu vertauschen und dadurch zuneuen Einsichten uber Objekte in projektiven Raumen zu gelangen.
5.1 Dualer Raum
In den Quellen [Walker78] und [Fischer94] wird der projektive Raum recht kurz undunter sofortigem Einsatz von Koordinaten eingefuhrt, [BK81] gibt eine recht plasti-sche, aber weniger formale Darstellung. Die kurzeste Einfuhrung bietet [Harris92]mit der Angabe, daß ahnlich wie der projektive Raum auf einem Vektorraum auf-gebaut ist, der duale projektive Raum auf dem dazu dualen Vektorraum aufsetzt.Diese Idee soll hier verfolgt und breiter ausgebaut werden.
So wie in Definition 2.1.1.2 der projektive Raum Pn aus Aquivalenzklassen einesn + 1-dimensionalen Vektorraumes V entstand, soll jetzt der zu Pn duale Raum P∗naus dem dualen Vektorraum
V∗ = HomK(V,K)
konstruiert werden, wobei wieder exemplarisch der komplexe Vektorraum Cn+1 be-trachtet wird.
Definition 5.1.0.14. Der n-dimensionale, komplexe duale projektive Raum P∗n istder Quotient
P∗n :=((Cn+1
)∗ \{o}) /∼∗
nach der Aquivalenzrelation ∼∗ , wonach zwei nichtverschwindende Linearformenω, θ ∈ (Cn+1)∗\{o} = HomC(Cn+1,C)\{o} genau dann aquivalent modulo der Rela-tion ∼∗ sind, wenn es ein λ ∈ C\{0} gibt, so daß ω = λ θ gilt; man schreibt ω ∼∗ θ.Eine Aquivalenzklasse ω von ω wird als Punkt von P∗n bezeichnet.
Jetzt soll gezeigt werden, daß Hyperebenen in Pn mit den Punkten des P∗n kor-respondieren. Ist ω ∈ HomC(Cn+1,C)\{o} eine nicht verschwindende Linearform, so
191

192 KAPITEL 5. DUALE KURVEN
ist V = Kern ω ein n-dimensionaler Untervektorraum von Cn+1, der gegenuber ska-larer Multiplikation von ω invariant ist (d.h. Kern ω = Kern (λω) fur alle λ ∈ C∗).In diesem Sinne kann
Vω := Kern ω mit ω ∈ ω
als n-dimensionaler Untervektorraum einer ganzen Aquivalenzklasse bzw. Punktesaus P∗n definiert werden. Nach Definition 2.1.2.1 der Hyperebene (siehe Seite 62) istnun Π(Vω) (mit der in (2.1) definierten Abbildung, siehe Seite 60) eine Hyperebeneim Pn. Auch kann jeder Hyperebene H ⊂ Pn ein n-dimensionaler UntervektorraumV = Π−1(H)∪{0} im Cn+1 zugeordnet werden, der gerade der Kern einer Linearformbis auf skalares Vielfaches ist.
Diese Korrespondenz kann auch mittels Koordinaten zum Ausdruck gebrachtwerden und ist dann zum einen rechnerisch zuganglich, zum anderen kann besserherausgearbeitet werden, wie der zu P∗n duale Raum (der zu Pn biduale Raum)beschaffen ist. Dazu betrachten wir den Vektor a ∈ Cn+1 und die durch die MatrixA := aT ∈ C1,n+1 vermittelte Linearform
ω : Cn+1 → C , p 7→ Ap = 〈a, p〉 ,
(also den Reprasentanten eines Punktes im P∗n) wobei das ubliche Skalarprodukt 〈·, ·〉auf die als Zeilenvektor aT , a ∈ Cn+1, zu interpretierende Matrix A Bezug nimmt.(In diesem Sinne korrespondieren naturlich die Vektoren des Dualraums (Cn+1)∗ mitdenen des Vektorraums Cn+1.) Damit ist nun
V = Kern ω = {p ∈ Cn+1 | 〈a, p〉 = 0}
der zu a orthogonale, n-dimensionale Untervektorraum und Π(V \{0}) die mit ωbzw. a korrespondierende Hyperebene im Pn.
Umgekehrt bestimmt ein Punkt p ∈ Pn in Cn+1 uber seine homogenen Koordi-naten p einen eindimensionalen Untervektorraum
Up = {λ p ∈ Cn+1 |λ ∈ C } < Cn+1
(siehe Interpretation des P2 auf Seite 60). Das orthogonale Komplement
U⊥p = { a ∈ Cn+1 | 〈a, p〉 = 0 }
kann jetzt als n-dimensionaler Untervektorraum aller durch A = aT ∈ C1,n+1 ver-mittelten Linearformen aufgefaßt werden, welche die homogenen Koordinaten vonp auf Null abbilden, d.h.
U⊥p ≡ V ∗ <
(Cn+1
)∗,
der durch die Abbildung
Π∗ :(Cn+1\{0})∗ −→ P∗n
ω 7−→ ω
eine Hyperebene im P∗n bildet.

5.1. DUALER RAUM 193
Die wechselseitige Beziehung von Pn und P∗n liegt also in der verschiedenen In-terpretation des verschwindenden Skalarproduktes
〈a, p〉 = 0 (5.1)
begrundet, das gerade die Inzidenz von Punkten und Hyperebenen nach Bild 5.1beschreibt.
Punkt im P∗n Hyperebene im Pn
ω H = Π(V )
H∗ = Π∗(V ∗) p
Hyperebene im P∗n Punkt im Pn
S a p = 0k k
\
\
Bild 5.1: Inzidenz von Punkt und Hyperebene im Pn und dem Dualraum P∗n
Danach wird durch die Vorgabe eines Punktes im P∗n eine Hyperebene im Pn
und umgekehrt durch eine Hyperebene im P∗n wieder ein Punkt im Pn festgelegt.Und in dieser Weise kann der Dualraum von P∗n wieder mit Pn identifiziert werden:(P∗n)∗ = P∗∗n = Pn.
Beispiel 5.1.1. Es sei die durch p1 = [1, 1, 0, 0], p2 = [1, 0, i, 0] und p3 = [0, 2, 0, i]festgelegte Hyperebene H im P3 betrachtet. Gesucht ist der im P∗3 dazu korrespondierendePunkt.
Dazu betrachten wir
V := span(p1 =
1100
, p2 =
10i0
, p3 =
020i
) = Π−1(H)
und erganzen V durch geschickte Wahl eines (linear unabhangigen) vierten Vektors zu
C3+1 = V ⊕ span(p4 = e4 = (0, 0, 0, 1)T )
als direkte Summe aus V und einem eindimensionalen Untervektorraum. Jetzt wird mitHilfe des Gram-Schmidtschen 1 Orthogonalisierungsverfahrens (siehe [Brieskorn85] oder[PB91]) die Basis (p1, p2, p3, p4) durch (q1, q2, q3, q4) ersetzt, fur die
〈qi, qj〉 = 0 , i 6= j ,
1Jorgen Pedersen Gram (1850-1916), Erhard Schmidt (1876-1959)

194 KAPITEL 5. DUALE KURVEN
gilt (auf die Normiertheit braucht hierbei nicht geachtet zu werden, da letztlich alle Ergeb-nisse wieder in projektive Raume ubertragen werden). Dabei bleiben die drei Basisvektoren
q1 =
1100
, q2 =
−ii20
, q3 =
−22
−2ii
im Untervektorraum V , so daß die eigentliche Frucht dieser Berechnung, namlich derVektor
a := q4 =
i−i−1
2
,
“auf V senkrecht steht“, d.h. es gilt
V ⊥ = U = {λ a |λ ∈ C } .
Dieser Vektor wird jetzt aber als Element aus C1,4 aufgefaßt: A := aT = (i,−i,−1, 2). Ervermittelt dann die Linearform
ω : C3+1 → C , v 7→ Av = (i,−i,−1, 2) v ,
welche via Π∗(ω) = ω als Reprasentant der Aquivalenzklasse ω den gesuchten Punkt imP∗3 darstellt. ¤
Wir betrachten jetzt wieder den projektiven Raum P2, bei dem die HyperebenenGeraden sind. Dann gilt: jeder Punkt p ∈ P2 korrespondiert mit einer GeradenL∗ ⊂ P∗2 und jede Gerade L ⊂ P2 mit einem Punkt p∗ ∈ P∗2. Fur die Inzidenz vonPunkten und Geraden kann somit folgende Aquivalenz ausgesprochen werden:
p ∈ L ⇐⇒ L∗ 3 p∗ . (5.2)
Und damit gewinnt man das folgende Prinzip, das es gestattet, Aussagen uberdie Inzidenz von Punkten und Geraden in solche uber die Inzidenz von Geraden undPunkte umzuformen.
Dualitatsprinzip. Wird in einem Satz uber die Inzidenz von Punkten und Geradenuberall das Wort “Gerade“ durch “Punkt“ und umgekehrt und jede Aussage der Art“der Punkt p liegt auf der Geraden L“ durch “die Gerade L∗ geht durch den Punktp∗“ und umgekehrt ersetzt, entsteht wieder ein wahrer Satz bzgl. der Inzidenz vonPunkten und Geraden.
Als ersten Anwendungsfall stellen wir das duale Gegenstuck des Satzes von Pap-pos 3.2.2.7 (siehe Seite 125) vor. Da dieses nur mit der Inzidenz von Punkten undGeraden operiert, kommen wir mit dem eben formulierten (ersten) Dualitatsprinzipaus.

5.1. DUALER RAUM 195
Satz 5.1.0.15 (Dualform des Satzes von Pappos 3.2.2.7).Es seien m∗ und n∗ ∈ P∗2 zwei projektive Punkte mit jeweils drei durch sie verlau-fende Geraden
P ∗1 , P ∗
2 , P ∗3 durch m∗ und
Q∗1 , Q∗
2 , Q∗3 durch n∗ ,
die jeweils verschieden von der Verbindungsgerade durch m∗ und n∗ sind. Dannschneiden sich die durch die Punkte
l∗µν = P ∗µ ∩Q∗
ν und l∗νµ = P ∗ν ∩Q∗
µ , 1 ≤ µ < ν ≤ 3 ,
verlaufenden Geraden in einem Punkt (siehe Bild 5.2).
*m
*
*n
P
P
I
I
2
2
*
g
R 1
P1
P2
Q1
Q3
Q2
P3
R2
R 3
*l12
*l32
*l23
*l13
*l31
*l21
p1
p2
r2r
3
r1
q1
q3
q2
p3
N
M
L2 3
L1 2
L3 2
L2 1
L1 3
L3 1
G
Bild 5.2: Der Satz von Pappos und seine Dualform
Um dieses (erste) Dualitatsprinzip auszuweiten, benotigen wir jetzt noch denBegriff der dualen Kurve, der im folgenden entwickelt werden soll. Zuvor jedoch solldas nutzliche Konzept der Polaren vorgestellt werden, das als Hilfsmittel im weiterenVerlauf von Bedeutung ist.

196 KAPITEL 5. DUALE KURVEN
5.2 Polare
Im vorhergehenden Abschnitt haben wir gesehen, wie sich Punkte und Geradenin den zueinander dualen Raumen entsprechen. An dieser Stelle soll daher kurzauf besondere Geraden bzgl. einer algebraischen Kurve eingegangen werden: denTangenten, die durch einen vorgegebenen Punkt verlaufen.
Die projektive Kurve C sei wieder durch ein homogenes Polynom P ∈ C[X, Y, Z]definiert. Ist die Kurve C im Punkt p ∈ C glatt, so ist die Tangente nach Definition2.2.1.5, Seite 68, durch die Geradengleichung
∂P
∂X
∣∣∣∣p
X +∂P
∂Y
∣∣∣∣p
Y +∂P
∂Z
∣∣∣∣p
Z = 0 (5.3)
gegeben. Ein beliebiger Punkt q = [a, b, c] ∈ P2 liegt also genau dann auf derTangente (5.3), wenn
∂P
∂X
∣∣∣∣p
a +∂P
∂Y
∣∣∣∣p
b +∂P
∂Z
∣∣∣∣p
c = 0
gilt. Das gibt Anlaß zu der folgenden Definition.
Definition 5.2.1. Sei C eine projektiv-algebraische Kurve, die durch das homogenePolynom P ∈ C[X,Y, Z] definiert ist, wobei Grad(C) = n ≥ 2 gelte. Ist q =[a, b, c] ∈ P2, so heißt die durch das Polynom
DqP = a∂P
∂X+ b
∂P
∂Y+ c
∂P
∂Z(5.4)
vom Grad n − 1 definierte Kurve die Polare Pq(C) von C bzgl. des Punktes q alsPol.
Beispiel 5.2.2. Als sehr elementare Anwendung des Konzeptes der Polaren betrachtenwir den durch das homogene Polynom P = X2 +Y 2−Z2 definierten projektiven Kreis K.
q qq
a aa = 1x xx
y yy
K KK
P K P KP K
1 1
0 00
qq q
Bild 5.3: Polaren an den Kreis K
O.B.d.A. bestimmen wir jetzt die Polaren zu K bzgl. des Pols q = [a, 0, 1], mit a > 0.Nach 5.4 sind diese durch das Polynom
12 DqP = aX − Z

5.2. POLARE 197
definiert. Betrachten wir zunachst wieder reelle Schnitte im Endlichen (d.h. z 6= 0), sosind die Polaren Pq(K) an den Kreis K die durch X = 1/a festgelegten und im Bild 5.3dargestellten Geraden.
Im linken Teil (Fall a > 1) ist deutlich zu erkennen, wie die Schnittpunkte der Polarenmit dem Kreis die durch q verlaufenden Tangenten bestimmen. Im Fall a = 1 (der Pol liegtauf dem Kreis) ist die Polare selbst die Tangente. Der ganz rechts im Bild dargestellte Falla > 1 wirkt paradox, da durch den im Inneren des Kreises gelegenen Pol keine Tangentenan den Kreis zu verlaufen scheinen.
q p q
a ax x
yi y
KK
P KP K
P K
1 1-1
0 0
q
p
q
12
1 11/a
Bild 5.4: Der Fall 0 < a < 1
Diese Situation fuhrt zu zweierlei Interpretationen, die beide in Bild 5.4 illustriert sind.Betrachten wir den komplexen Schnitt [x1 + 0 · i, 0 + y2 · i, 1] von K, so erhalten wir dierechts abgebildete Hyperbel. Offenbar werden durch die Schnittpunkte der Polaren mitdem “komplexen Kreis“ wieder die Tangenten durch den Pol q bestimmt. Der linke Teildes Bildes dagegen verdeutlicht, daß auch im Reellen eine sinnvolle, gewissermaßen “dualeSituation“ vorliegt: sei p = [1/a, 0, 1] der Schnittpunkt der Polaren Pq(K) mit X = 0, soverlauft die Polare dieses Punktes durch q; Polare und Pol vertauschen ihre Rollen. DasBild 5.5 gibt die reelle und komplexe Situation gemeinsam wieder.
-2
0
2 -2
-1
0
1
2
-2
-2
0
0
2
2
i y2
x1
y1
q
p
R2
I
Bild 5.5: Der Fall 0 < a < 1 in einer gemeinsamen Darstellung

198 KAPITEL 5. DUALE KURVEN
Auch fur den bisher ausgeschlossenen Fall a = 0 liefert die Polare sinnvolle Ergebnisse.Es gilt in diesem Fall 1
2DqP = Z und die Polare ist die “im Unendlichen“ liegende GeradeZ = 0 (vgl. Bild 5.6).
x1
x1
- i y2
y1
zz
Z = 0Z = 0
Bild 5.6: Die durch Z = 0 definierte Polare im Fall a = 0
Die Tangenten werden in diesem Fall entweder parallele Geraden (reeller Schnitt) odersie bilden die Asymptoten an die im Komplexen erscheinende Hyperbel (Bild 5.7). ¤
a = 0a = 0
x x
y i y
KK
P K
P K
1 1-1
q
q
12
1 1
Bild 5.7: Tangenten im Fall a = 0: reeller und komplexer Schnitt
Beispiel 5.2.3. Es wird die auf Felix Klein zuruckgehende und durch
P1 · P2 = εZ4 mit P1 = X2 + 14Y 2 − Z2 , P2 = 1
4X2 + Y 2 − Z2
definierte Quartik Cε betrachtet. Das Bild 5.8 zeigt eine solche Kurve fur einen negativenParameter ε. Die Polaren an einen vorgegebenen Punkt q = [a, b, c] ergeben sich gemaßDefinition 5.2.1 durch das Polynom
DqP = aX(2P2 + 1
2P1
)+ bY
(12P2 + 2P1
)− 2cZ(P2 + P1 + 2εZ2
).
Nach der einleitenden Motivation dieses Abschnittes verlaufen jetzt alle Tangenten von qan die Kurve Cε durch die Schnittpunkte von Cε mit der Polaren Pq(Cε). Dies ist fur diebeiden Punkte q1 = [0, 0, 1] und q2 = [15, 26, 10] in dem Bild 5.9 dargestellt.
Im links dargestellten Fall ist die Polare Pq1(C−0,05) ein Kreis und es existieren vierDoppeltangenten. Der zweite Fall fuhrt zu 12 Schnittpunkten zwischen C−0,05 und der Po-laren Pq2(C−0,05), von denen 8 im Reellen liegen und entsprechend 8 Tangenten festlegen.Das Bild 5.10 schließlich faßt Kurven fur mehrere Parameter zusammen: ε = 0,99; 0,3; 0(die Kurve zerfallt in zwei Ellipsen); −0,3 und −0,5. ¤

5.2. POLARE 199
-2 -1 1 2
-2
-1
1
2
x
y
Cε
Bild 5.8: Reeller Schnitt der Quartik Cε mit ε = −0, 05
-2 -1 1 2
-2
-1
1
2
x
y
C
P Cq1
q1
-2 -1 1 2
-2
-1
1
2
x
y
C
P Cq2
q2
Bild 5.9: Die Quartik C−0,05 mit zwei Polaren und zugehorigen Tangenten im reellenSchnitt
-2 -1 1 2
-2
-1
1
2
x
y
Cε
-2 -1 1 2
-2
-1
1
2
x
y
C
P Cq q
Bild 5.10: Die Quartik Cε und einige ihrer Polaren fur verschiedene Parameter

200 KAPITEL 5. DUALE KURVEN
Wie in dem Beispiel bereits deutlich wurde, besitzt die Polare die folgendenEigenschaften.
Satz 5.2.4. Unter den Voraussetzungen von Definition 5.2.1 gilt:
(1) Die Polare Pq(C) ist nicht von der Wahl der Koordinaten abhangig.
(2) Es ist DqP = 0 genau dann, wenn C aus n Geraden durch q besteht.
(3) Jede gemeinsame Komponente von C und Pq(C) ist eine Gerade, die durch qverlauft.
(4) Es gilt Sing(C) ⊂ Pq(C).
Beweis. (1) Es sei C durch das Polynom P ∈ C[X1, X2, X3] definiert und
(X1, X2, X3
)T= A (X1, X2, X3)
T
eine regulare Koordinatentransformation, d.h. A ∈ C3,3 ist eine regulare 3 × 3-Matrix.Außerdem sei p ∈ C und q ∈ P2 ein beliebiger Punkt mit homogenen Koordinaten p bzw.q. Damit wird C in den neuen Koordinaten durch das Polynom
Q(X1, X2, X3) = P (X1(X1, X2, X3), X2(X1, X2, X3), X3(X1, X2, X3))
definiert und die homogenen Koordinaten der Punkte p und q transformieren sich zu p =Ap und q = Aq. Mit der zeilenweisen Notation der Nabla-Operatoren ∇ :=
(∂
∂Xk
)k=1,2,3
und ∇ :=(
∂∂Xk
)k=1,2,3
stellt
∇Q∣∣∣p
= ∇P |p A−1
eine Beziehung der totalen Ableitung von Q in p zu derjenigen von P in p her. Fur dasdie Polare im Pol q definierende Polynom erhalten wir deshalb im Punkt p die Gleichheit
DqQ(p) = ∇Q∣∣∣p
q = ∇P |p A−1 Aq = ∇P |p q = DqP (p) .
(2) Wegen (1) kann o.B.d.A. q = [0, 0, 1] angenommen werden.′ ⇐′: Deshalb sind die n durch q verlaufenden Geraden bzw. das C definierende PolynomP von der Form
P (X, Y, Z) = Πnk=1(αkX + βkY + 0 · Z) .
Mit ∂P∂Z = 0 gilt daher DqP = ∇Pq = 0.
′ ⇒′: Umgekehrt bedeutet DqP = 0, daß P nicht von Z abhangt und das homogenePolynom Q(X, Y ) = P (X, Y, 1) vom Grad n zerfallt nach Lemma 1.2.5 in n Linearfaktorender Form αkX + βkY .
(3) Es kann wieder o.B.d.A. q = [0, 0, 1] angenommen werden.′ ⇐′: Enthalt C eine durch q verlaufende Gerade, so ist das C definierende Polynom Pvon der Form
P (X, Y, Z) = (αX + βY ) R(X, Y, Z)

5.2. POLARE 201
mit α, β ∈ C und R ∈ C[X, Y, Z]. Die Polare mit q als Pol ist dann
DqP =∂P
∂Z= (αX + βY )
∂R
∂Z,
d.h. C und Pq(C) besitzen die durch αX +βY definierte Gerade als gemeinsame Kompo-nente.′ ⇒′: Angenommen C und Pq(C) enthalten eine gemeinsame durch das Polynom Q gege-bene Komponente und das C definierende Polynom P besitzt Minimaldarstellung. Danngelten o.B.d.A. fur q = [0, 0, 1] die Beziehung
P = QR1 und
DqP =∂Q
∂ZR1 + Q
∂R1
∂Z= QR2
mit homogenen Polynomen Q,R1, R2 ∈ C[X,Y, Z], und es folgt aus der letzten Gleichung,daß Q das Produkt R1QZ teilt. Ist die partielle Ableitung QZ 6= 0, so teilt Q den FaktorR1, so daß P von Q2 geteilt wird und im Widerspruch zu unserer Annahme, P besitzeMinimaldarstellung, steht. Also ist QZ = 0 und mithin Q ∈ C[X,Y ] homogen in zweiVariablen. Nach Lemma 1.2.5 zerfallt Q also in ein Produkt linearer Faktoren, so daß Pund DqP einen gemeinsamen linearen Faktor bzw. C und Pq(C) eine Gerade durch q alsgemeinsame Komponente aufweisen.
(4) Ist p ∈ Sing(C), so gilt ∂P∂X
∣∣p
= ∂P∂Y
∣∣p
= ∂P∂Z
∣∣p
= 0 , d.h. DqP = 0 fur alle q ∈ P2. ¤
Wir halten noch einmal das wichtigste Moment der Polaren in dem folgendenKorollar fest.
Korollar 5.2.5. Die Tangenten von einem Punkt q ∈ P2 an eine projektive KurveC sind die Verbindungsgeraden von q mit den Schnittpunkten von C – abzuglich derSingularitaten – mit ihrer Polaren Pq(C).
Ahnlich wie bei den Wendepunkten wurden also auch hier die gesuchten Punktedurch den Schnitt von C mit einer zweiten Hilfskurve gefunden. Nach dem Satz vonBezout gilt daher das in der folgenden Bemerkung festgehaltene Ergebnis.
Bemerkung 5.2.6. Es verlaufen durch einen Punkt q an eine Kurve C vom Grad nhochstens n · (n − 1) Tangenten. Diese Zahl verringert sich durch das Vorkommen vonDoppeltangenten (wie im obigen Beispiel), Wendetangenten und Singularitaten.
Fur die genaue Zahlung mit Schnittmultiplizitat ist die folgende Eigenschafthilfreich.
Lemma 5.2.7. Die Kurve C besitze in p eine einfache Tangente G, d.h. Ip(C, G) =2. Ist q ∈ G ein von p verschiedener Punkt, so gilt
Ip(C,Pq(C)) = 1 ,
d.h. die Polare Pq(C) verlauft in p transversal durch C.

202 KAPITEL 5. DUALE KURVEN
Beweis. O.B.d.A. kann p = [0, 0, 1] und eine durch Y = 0 definierte Tangente G an-genommen werden. Dann ist das die Kurve C definierende Polynom P nach Anhang B,Lemma B.2.3 auf Seite 314 von der Form
P = X2Q(X, Z) + Y R(X, Y, Z)
mit Q ∈ C[X, Z], R ∈ C[X, Y, Z] und Q(0, 1) 6= 0, R(0, 0, 1) 6= 0. (Bzgl. Lemma B.2.3vertauschen die Variablen X und Y hier ihre Rollen.) Da die Tangente zu Y = 0 ange-nommen wurde, muß nun fur den betrachteten Pol q = [a, 0, 1] mit a 6= 0 gelten. Wirzeigen jetzt, daß unter diesen Umstanden der Koeffizient α der Tangente αX + βY vonPq(C) in p nicht verschwindet, woraus nach Satz 3.1.2.6 die gewunschte Aussage folgt.
Das die Polare Pq(C) definierende Polynom ist
DqP = ∇P (a, 0, 1)T = 2aX Q + aX2 ∂Q∂X + Y
(a ∂R
∂X + ∂R∂Z
)+ X2 ∂Q
∂Z
und der Koeffizient α berechnet sich daraus zu
α =∂DqP
∂X
∣∣∣∣(0,0,1)
= 2aQ(0, 1) 6= 0 . ¤
Abschließend sei noch die folgende abgeleitete Aussage uber die Anzahl derSchnittpunkte einer Gerade mit einer Kurve angegeben.
Korollar 5.2.8. Es sei C eine projektive algebraische Kurve vom Grad n und q 6∈ C.Dann haben fast alle Geraden durch q mit C genau n einfache Schnittpunkte.
Beweis. Sei G eine durch q verlaufende Gerade, die C in einem nichtsingularen Punkt pvon hoherer Schnittmultiplizitat als eins schneidet: Ip(C, G) > 1. Dann ist G eine durchq verlaufende Tangente an C. Das folgt aus Satz 3.1.2.6, denn aus Ip(C,G) ≥ 2 > 1 · 1 =Multp(C) · Multp(D) ergibt sich mit 3.1.2.6(ii), daß die Tangenten von C in p mit dervon G in p nicht verschieden sein konnen – mithin ist die Gerade G selbst die Tangentean C in p.
Andernfalls schneidet eine durch q verlaufende Gerade die Kurve C nurmehr in sin-gularen Punkten in einer hoheren Schnittmultiplizitat als eins.
Beide der oben genannten Falle tauchen als Schnittpunkte der Kurve C mit ihrerPolaren Pq(C) im Pol q auf. Es gibt also nur endlich viele Punkte auf C, die von einer durchq verlaufenden Geraden in hoherer Schnittmultiplizitat als eins geschnitten bzw. beruhrtwerden. D.h. fast alle durch q verlaufenden Geraden treffen C mit der Schnittmultiplizitateins und besitzen damit nach dem Satz von Bezout n einfache Schnittpunkte. ¤

5.3. DUALE KURVEN 203
5.3 Duale Kurven
Jetzt greifen wir wieder die im ersten Abschnitt formulierte Aquivalenz (5.2) aufund geben folgende darauf beruhende Definition an.
Definition 5.3.1. Sei C ⊂ P2 eine algebraische Kurve. Dann bezeichnet man mit
C ∗ := {p∗ ∈ P∗2 | die zum Punkt p∗ duale Gerade L ist eine Tangente an C }
die zu C duale Menge.
Ist die Kurve C ⊂ P2 eine Gerade, so besteht C∗ offenbar nur aus einem Punktund ist dann sicherlich keine algebraische Kurve. Um diesen Fall auszuschließen, solleine Kurve C im folgenden keine Gerade als Komponente enthalten. Unter diesenUmstanden gilt der folgende Satz (siehe [Fischer94]), von dem wir hier nur (i) be-weisen werden. Der Nachweis von (ii) und (iii) wird in [Fischer94] mit Hilfe vonParametrisierungen uber Riemannsche Flachen gefuhrt.
Satz 5.3.2. Sei C ⊂ P2 eine algebraische Kurve, die keine Gerade als Komponentehat. Dann gelten die folgenden Eigenschaften:
(i) Die zu C duale Menge C∗ ⊂ P∗2 ist eine algebraische Kurve.
(ii) Ist C irreduzibel, so ist auch C∗ irreduzibel und es ist GradC∗ ≥ 2.
(iii) Die duale Kurve, der zu C dualen Kurve ist gleich C: (C∗)∗ = C∗∗ = C.
Beweis von (i). Ist die Kurve C durch das homogene Polynom P ∈ C[X, Y, Z] im P2 de-finiert, so gilt es nachzuweisen, daß fur die zu C duale Kurve C∗ im P∗2 ein sie definierendeshomogenes Polynom P ∗ ∈ C[U, V, W ] existiert.
Ist p = [x, y, z] ein regularer Punkt von C, dann ist nach Definition 2.2.1.5 durch
X PX |p + Y PY |p + Z PZ |p = 0
die Tangente T an C im Punkt p definiert. Der zu T duale Punkt p∗ = [u, v, w] ist also(im Sinne der Beziehung (5.1)) durch
u = PX |p , v = PY |p , w = PZ |p (5.5)
bestimmt. Diese drei Gleichungen sind fur einen regularen Punkt aquivalent zu den beidenGleichungen w PX |p − u PZ |p = 0, w PY |p − v PZ |p = 0 . (5.6)
Außerdem gilt nach der Eulerschen Relation (siehe Lemma 1.2.10)
x PX |p + y PY |p + z PZ |p = 3P (p) = 0 ,
was nun gerade der Dualitat xu + y v + z w = 0 (5.7)
nach Beziehung (5.1) entspricht. Die Menge der Punkte p∗ = [u, v, w] ∈ P∗2, welche dieGleichungen (5.6) und (5.7) losen, besteht also genau aus den Punkten von C∗ zusammenmit den Geraden im P∗2, welche den Buscheln von Geraden im P2 durch die singularenPunkte von C entsprechen (in den singularen Punkten von C entfallen offensichtlich die

204 KAPITEL 5. DUALE KURVEN
Gleichungen in (5.6), so daß lediglich durch (5.7) eine Hyperebene bzw. Gerade im P∗2festgelegt wird).
Es ist also zu zeigen, daß die Menge C aller homogenen Koordinaten (u, v, w) furwelche die drei Gleichungen (5.6) und (5.7) eine Losung in (x, y, z) besitzen, die Nullstel-lenmenge eines homogenen Polynoms R ∈ C[U, V, W ] ist. Das aber wird gerade durch dasnachfolgende Lemma aus [BK81] gesichert. ¤
Lemma 5.3.3. Es seien F1, . . . , Fk, . . . , Fr ∈ C[X1, . . . , Xr] homogene Polynomeder Grade gk mit unbestimmten Koeffizienten ak,i, i = 1, . . . , gk. Dann existiert einhomogenes Polynom R ∈ C[a1,1, a1,2, . . . , a1,g1 , a2,1, . . . , ak,i, . . . , ar,gr ] in den unbe-stimmten Koeffizienten der Fk, so daß
R(a1,1, a1,2, . . . , a1,g1 , a2,1, . . . , ak,i, . . . , ar,gr) = 0
genau dann, wenn die Fk eine nicht triviale gemeinsame Nullstelle haben:
F1(x1, . . . , xr) = 0, . . . , Fr(x1, . . . , xr) = 0 .
Fur den Beweis verweisen wir auf [WaerdenII], §133, der letztlich wieder eineErweiterung des Hilbertschen Nullstellensatzes ist.
Die Suche nach der zu einer gegebenen Kurve C dualen Kurve C∗ lauft damitalso auf die Elimination von X, Y und Z in dem Gleichungssystem
U X + V Y + W Z = 0 ,
W ∂P∂X
(X,Y, Z)− U ∂P∂Z
(X, Y, Z) = 0 ,
W ∂P∂Y
(X, Y, Z)− V ∂P∂Z
(X, Y, Z) = 0
(5.8)
hinaus, wobei die Kurve C durch das homogene Polynom P ∈ C[X, Y, Z] definiertsei. Dies kann analog zum Beispiel 4.1.8 wieder unter Einsatz von Mathematicageschehen, was in den beiden nachfolgenden Beispielen gezeigt wird. Zuvor soll nochein interessanter Weg zur Berechnung von dualen Kurven nach [Fischer94] verfolgtwerden.
Die projektive Kurve C sei durch das homogene Polynom P ∈ C[X, Y, Z] vom Grad ndefiniert. Eine im P2 verlaufende Gerade L sei durch UX + V Y + WZ = 0 bestimmt. MitZ = − 1
W (UX + V Y ) wird jetzt
Q(X,Y ) := Wn P (X, Y,− 1W (UX + V Y )) (5.9)
= b0Yn + b1Y
n−1X + . . . + bn−1Y Xn−1 + bnXn
betrachtet, wobei die Koeffizienten b0, . . . , bn ∈ C[U, V, W ] homogen vom Grad n sind(Homogenisierung nach Definition 1.2.7).
Die Nullstellen von Q entsprechen den Schnittpunkten von C und L. Definieren wirjetzt R(X) := Q(X, 1), dann ist die Diskriminante DR (siehe Anhang B, Definition B.1.11auf Seite 309) von R ein homogenes Polynom in C[U, V, W ] und C ′ := V (DR) eine alge-braische Kurve im P∗2.
Ist die durch den Punkt [u, v, w] ∈ P∗2 bestimmte Gerade T ⊂ P2 eine Tangente anC, so besitzt C mit T einen zweifachen Schnittpunkt und Q eine mehrfache Nullstelle.

5.3. DUALE KURVEN 205
Ist diese [1, 0], so ist b0 = 0, andernfalls hat das Polynom R eine mehrfache Nullstelle. Inbeiden Fallen (Definition der Diskriminante als Resultante von R und R′ bzw. KorollarB.1.14) verschwindet die Diskriminante: DR(U, V, W ) = 0. Das bedeutet, daß C∗ ⊂ C ′ unddas die duale Kurve C∗ definierende Polynom kann aus den Faktoren (unter “Abtrennungvon Geraden“) von DR(U, V, W ) gefunden werden.
Beispiel 5.3.4. Wir betrachten zunachst wieder das durch P = X3+Y 3−3XY Z definiertekartesische Blatt C.
-2 2 4 6
-2
2
4
6
x
y
C
C*
Bild 5.11: Das kartesische Blatt C und ihre duale Kurve C∗
Die anstehenden Berechnungen konnen leicht mit Mathematica durchgefuhrt werden.Zunachst wird das Polynom P definiert und seine Ableitungen nach X, Y und Z bestimmt:
Anschließend werden durch das bereits im Beispiel 4.1.8 eingesetzte Kommando Eliminatein dem Gleichungssystem (5.8) die Variablen X und Y entfernt, was zu
fuhrt, woraus leicht auch Z3 eliminiert werden kann. Eine Faktorisierung trennt jetzt nochdie durch die Singularitat der Kurve C im Ursprung entstehende Gerade W = 0 ab:
Eine gleichzeitige Eliminierung von X, Y und Z fuhrt in Mathematica lediglich zur Mel-dung True, d.h. die Eliminierung kann durchgefuhrt werden. Besser ist es, hier mit demauf (5.5) basierenden Gleichungssystem
{U X + V Y + W Z = 0 ,
U = ∂P∂X (X, Y, Z), V = ∂P
∂Y (X,Y, Z), W = ∂P∂Z (X, Y, Z)
(5.10)

206 KAPITEL 5. DUALE KURVEN
zu arbeiten. Dies liefert dann sofort eine Minimalform
Die zum kartesischen Blatt C duale Kurve C∗ ⊂ P∗2 ist also eine Quartik, die durch dasPolynom
P ∗ = 3U2V 2 − 4U3W − 4V 3W + 6UV W 2 −W 4
definiert und im Bild 5.11 neben dem kartesischen Blatt dargestellt ist (wobei ein reellerSchnitt mit w = 1 gezeigt wird). Der projektive Abschluß zeigt wieder einmal mehr. Dieserist in Bild 5.12 dargestellt.
[0,0,1]
[0,0,1]
[0,0,1]
[0,1,0][0,1,0]
[0,1,0][0,1,0]
[1,0,0][1,0,0]
[1,0,0][1,0,0]
CC
CC **
Bild 5.12: Das kartesische Blatt C und seine duale Kurve C∗ im projektiven Abschluß
Dabei sind die links im Bild dargestellten Kurven in den ublichen Fundamentaldrei-ecken plaziert. Den rechten Bildteil muß man sich verzerrt vorstellen. Dazu werden dieentsprechenden Dreieckseiten in Pfeilrichtung in horizontale Position gebracht und dasuntere Fundamentaldreieck ∆III nach oben verschoben (so daß der ’unten’ und ’oben’gezeigte Fundamentalpunkt [0, 0, 1] zusammenkommt). In dieser Darstellung wird jetztdeutlich, daß die duale Kurve C∗ eine Cardioide (Herzkurve) ist.
Dieses Beispiel soll abgeschlossen werden, indem die Berechnung des Polynoms P ∗
nach [Fischer94] vorgefuhrt wird. Diese kommt ohne die Losung bzw. Eliminierung einesGleichungssystems aus. Die Bestimmung des Polynoms Q nach (5.9) fuhrt hier zunachstauf
Q(X, Y ) = W 3P (X,Y,− 1W (UX + V Y )) = W 3X3 + 3UW 2X2Y + 3V W 2XY 2 + W 3Y 3
mit Koeffizienten aus C[U, V,W ]. Die Diskriminante von
R(X) := Q(X, 1) = W 3 + 3V W 2X + 3UW 2X2 + W 3X3
berechnet sich zu
−81U2V 2W 11 + 108U3W 12 + 108V 3W 12 − 162UV W 13 + 27W 15
woraus −27W 11 abgetrennt werden kann und dann wieder das oben angegebene PolynomP ∗ entsteht. ¤

5.3. DUALE KURVEN 207
Beispiel 5.3.5. Als weitere Kurve C soll die durch das homogene Polynom
P = X2 + Y 2 + Z2 − 2XY − 2XZ − 2Y Z
definierte untersucht werden. Durch das Kommando
werden in Mathematica wieder neben P die partiellen Ableitungen bereitgestellt. Das Eli-minieren von X, Y und Z in dem Gleichungssystem (5.10) (siehe vorhergehendes Beispiel)liefert
Und damit ist die zu C duale Kurve C∗ durch das Polynom P ∗ = UV +UW +V W definiert.Die Kurven C und C∗ sind fur z = 1 bzw. w = 1 gemeinsam in Bild 5.13 aufgetragen.
-2 2 4
-1
1
2
3
4
5
x
y
C C*
Bild 5.13: C und ihre duale Kurve C∗ als Schnitt mit z = 1
C
C*
[0,0,1]
[1,0,1] [0,1,1]
[1,1,0]
[1,0,0][0,1,0]
[1,0,0] [0,1,0]
Bild 5.14: C und ihre duale Kurve C∗ im projektiven Abschluß

208 KAPITEL 5. DUALE KURVEN
Das Bild 5.14 zeigt den reellen projektiven Abschluß der beiden Kurven. Dabei wirdC zum dargestellten, die Fundamentaldreiecke in den Punkten [1, 0, 1], [1, 1, 0], [0, 1, 1]beruhrenden Kreis. Die duale Kurve ist die gestrichelt abgebildete und durch alle Fun-damentalpunkte verlaufende Hyperbel, wobei die gepunktet dargestellten Geraden ihreAsymptoten sind. ¤
Beispiel 5.3.6. Nun betrachten wir noch das im linken Teil des Bildes 5.15 dargestellte“dreiblattrige Kleeblatt“ C. Diese Quartik ist die Nullstellenmenge von
P = (X2 + Y 2)2 + 3X2Y Z − Y 3Z
und ihre duale Kurve C∗ (ebenfalls im affinen Schnitt [x, y, 1] in Bild 5.15 gezeigt) die von
P ∗ = 27U6 − 162U4V 2 + 243U2V 4 − 972U4V W − 648U2V 3W + 324V 5W
−828U4W 2 − 1656U2V 2W 2 − 828V 4W 2 + 384U2V W 3
−128V 3W 3 + 1024U2W 4 + 1024V 2W 4 .
-1 -0.5 0.5 1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
x
y
C
-2 -1 1 2
-1
1
2
x
y
C*
Bild 5.15: Dreiblattriges Kleeblatt und ihre duale Kurve
Die Kurve C weist einen Dreifachpunkt als Singularitat im Ursprung auf. Dieser fuhrtzu der Dreifachtangente Z = 0 ihrer dualen Kurve C∗, die erst im affinen Schnitt [x, 1, z]sichtbar wird (siehe Bild 5.16, rechter Teil).
Eine Ubersicht dieser recht interessanten Kurve sechsten Grades ist wieder uber ihrenprojektiven Aufriß erhaltlich. Die im Bild 5.16 dargestellten Schnitte werden dabei in demBild 5.17 vereint (vgl. mit den nebenstehenden Schnitten).
Zu einer außerordentlich plastischen Darstellung dieser Kurve gelangt man, wenn dieoben angeordneten Fundamentaldreiecke so verzerrt werden, bis die Seiten x = 0 derbeiden Fundamentaldreiecke III und IV zusammenfallen. Das Bild 5.18 zeigt den dannentstehenden geschlossenen Kurvenzug. Die drei im “Endlichen liegenden“ Schnittpunkteentsprechen dabei den drei Doppeltangenten der Originalkurve C (vgl. mit Bild 5.15,links). Die hell gekennzeichneten Punkte sind die “unendlich fern“ plazierten, durch welchedie Doppeltangente Z = 0 verlauft.

5.3. DUALE KURVEN 209
-10 -5 5 10
-10
-7.5
-5
-2.5
2.5
5
7.5
10
x
y
C*
-4 -2 2 4
-2
-1
1
2
x
z
C*
Bild 5.16: Duale Kurve des dreiblattrigen Kleeblattes in zwei affinen Schnitten
[0,1,0]
[0,1,0] [0,1,0]
[0,0,1]
[1,0,0][1,0,0]
[ 3 , 1, 0][ 3 , 1, 0]
[1,0,0] [1,0,0]D II
D III
D III
D I
D IV
D IV
x = 0
x = 0 x= 0
y= 0 y = 0
y = 0y
= 0
z = 0z = 0
z = 0
z = 0
z = 0
z = 0Ö
-Ö
x
x
y
z
0
y = 1
z = 1
Bild 5.17: Duale Kurve des dreiblattrigen Kleeblattes in projektiver Darstellung

210 KAPITEL 5. DUALE KURVEN
[0,1,0]
[0,1,0]
[0,1,0][0,1,0]
[1,0,0]
[1,0,0]D II
D III
D I
D IV
z= 0
z = 0
z= 0
z = 0
z= 0
z= 0
z= 0
z= 0
Bild 5.18: Duale Kurve des dreiblattrigen Kleeblattes als geschlossener Kurvenzug
Liegen die Fundamental“dreiecke“ in dieser Weise verzerrt vor (nur der “unendlichferne Rand“ z = 0 liegt außen!), kann die Ebene mit ihnen vollstandig parkettiert werden(der Leser moge sich andere Parkettierungen uberlegen, mit dem ublicherweise verwende-ten Gitter ist dies ohne weiteres – geometrisch sinnvoll motiviert – schwerlich moglich).Diese Parkettierung zeigt das Bild 5.19. Stellt man sich eine durch die Partitionierung derEbene induzierte Aquivalenzrelation hierauf vor, so liegen Verhaltnisse wie in einem endli-chen, aber unbegrenzten Universum vor. Dies wird wunderschon in dem mathematischenVideo The Shape of Space demonstriert. 2 ¤
Bild 5.19: Duale Kurve des dreiblattrigen Kleeblattes parkettiert in verzerrten Funda-mental“dreiecken“ die Ebene
2Dieser Film wurde u.a. wahrend des VIDEOMATH FESTIVALs in der Urania gezeigt, das imRahmen des Internationalen Mathematikerkongresses in Berlin 1998 (ICM ’98) abgehalten wurde.Bei sich bietender Gelegenheit sollte man auf keinen Fall versaumen, sich diesen Film anzusehen,da vielerlei Inhalte noch adaquater in kinasthetischer Weise vermittelbar sind.

5.3. DUALE KURVEN 211
Mit Hilfe der so gewonnenen dualen Kurve mit der Eigenschaft (iii) aus Satz5.3.2, kann die in (5.2) formulierte Aquivalenz um die Aussage
L ist Tangente an C in p ⇐⇒ L∗ ist Tangente an C∗ in p∗ (5.11)
erweitert werden; dabei ist p ein regularer Punkt von C, ferner L∗ die zu p dualeGerade und p∗ wieder der zur Tangente L an C in p duale Punkt.
Das Dualitatsprinzip beinhaltet damit auch Kurven, so daß aus jedem Satz uberInzidenzen von Punkten und Geraden, Inzidenzen von Punkten mit Kurven undBeruhrung von Geraden und Kurven durch Dualisierung ein entsprechender Satz zuerhalten ist. Dies soll jetzt am Beispiel des Satzes von Pascal demonstriert werden,dessen duales Gegenstuck der Satz von Charles-Julien Brianchon (1783 Sevres -1864 Versailles) ist (siehe Bild 5.20).
Satz 5.3.7 (Satz des Brianchon). Die Verbindungsgeraden gegenuberliegenderEcken eines einer irreduziblen Quadrik umschriebenen Sechsecks schneiden sich ineinem Punkt.
Bild 5.20: Satz des Brianchon
Beweis. Ausgehend vom Pascalschen Satz 3.2.2.1 (siehe Seite 119) sei einer irreduziblenQuadrik E ein Sechseck mit den Eckpunkten p1, . . ., p6 und den Seiten G12, G34, G56 undG23, G45, G61 einbeschrieben. Mit q1, q2, q3 seien die Schnittpunkte gegenuberliegenderSeiten (also G23 mit G56, G34 mit G61 und G12 mit G45) bezeichnet (siehe Bild 5.21 –oberer Teil “Spiegelbildseite P2“).
Jetzt wird in der dualen Ebene P∗2 die zur irreduziblen Quadrik E duale Quadrik E∗
betrachtet (daß es sich bei E∗ wieder um eine Quadrik handelt, ist eine Folge der imnachsten Abschnitt behandelten Pluckerschen Formeln). Zudem seien die zu den GeradenGij , i, j = 1, . . . , 6, dualen Punkte p∗ij , die zu den Punkten pi dualen Geraden L∗i , i =1, . . . , 6, sowie die zu q1, q2 und q3 dualen Geraden H∗
1 , H∗2 und H∗
3 .

212 KAPITEL 5. DUALE KURVEN
p
p
p
p
p
q
q
q
p
p
p
pp
p
p
E
E
G2 3
G1 2G
3 4
G4 5
G5 6
G6 1
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
m
H1
H2
H3
L4
L5
L1
L3
L6
L2
S
S
P
P
I
I
2
2
*23
34
45
56
61
1
3
2
3
2
1
65
4
12
Bild 5.21: Dualitat der Satze von Pascal und Brianchon
Nun gibt es vier Aussagen uber die Lage der eben aufgezahlten Objekte im P2 undaufgrund des Dualitatsprinzips vier dazu duale Aussagen im P∗2. Diese sind im folgendenzusammengestellt, dabei ist die letzte Aussage gerade die Schlußfolgerung des Satzes vonPascal. Ihr duales Pendant wird sich dann als Satz von Brianchon herausstellen.
Nr. Aussage im P2 Aussage im P∗2 Ref.
1 Die Punkte p1, . . ., p6 und Die Punkte p∗12, . . ., p∗61 und (5.2)Geraden G12, . . ., G61 bilden Geraden L∗1, . . ., L∗6 bildenein Sechseck S. ein Sechseck S∗.
2 S ist der Quadrik E einbe- S∗ ist der Quadrik E∗ um- (5.11)schrieben (d.h. die Punkte pi schrieben (d.h. die Geraden H∗
i
liegen auf E). tangieren E∗).
3 qk, k = 1, 2, 3, sind die Schnitt- H∗k , k = 1, 2, 3, sind die Verbin- (5.2)
punkte gegenuberliegender dungsgeraden gegenuberliegenderSeiten von S. Ecken von S∗.
4 Die Punkte q1, q2, q3 liegen Die Geraden H∗1 , H∗
2 , H∗3 schnei- (5.2)
kollinear auf einer Geraden M . den sich in einem Punkt m∗.
Die zuletzt im P∗2 gemachte Aussage ist gerade der Satz des Brianchon. Damit wirddeutlich, daß dieser der zum Satz von Pascal duale ist. ¤

5.4. PLUCKERSCHE FORMELN 213
5.4 Pluckersche Formeln
Bisher wurde uber die Ordnung bzw. den Grad einer dualen Kurve nichts gesagt.Das soll jetzt nachgeholt werden. Fur einen wichtigen Spezialfall kann sogar einvollstandiger Zusammenhang zwischen der Anzahl von Doppeltangenten, Wende-punkten und Spitzen mit dem Grad der entsprechenden dualen Kurve hergestelltwerden. Wir beginnen die Untersuchung mit der folgenden Definition.
Definition 5.4.1. Sei C eine projektiv-algebraische Kurve vom Grad ≥ 2, die keineGerade als Komponente besitzt. Die Klasse n∗ von C ist der Grad ihrer dualen KurveC∗, also n∗ := Grad(C∗).
Fur die Klasse einer Kurve C soll jetzt zunachst eine erste Abschatzung erarbeitetwerden. Dies geschieht auf Basis des Dualitatsprinzips (5.11) und des Satzes vonBezout.
Ist C∗ die zu C duale Kurve und L∗ ⊂ P∗2 eine Gerade, so gilt fur den Grad n∗
der dualen Kurve C∗ nach dem Satz von Bezout die Beziehung
n∗ =∑
p∗∈C∗∩L∗Ip∗(C
∗, L∗) .
Wegen Korollar 5.2.8 gilt nach Satz 5.2.7 fur fast alle Geraden Ip(C∗, L∗) = 1 undn∗ ist somit die maximale Anzahl der Schnittpunkte einer Geraden mit der dualenKurve C∗.
Es sei nun q ∈ P2 der zur Geraden L∗ duale Punkt; aufgrund der oben genanntenVoraussetzungen ist q 6∈ C. Die Schnittpunkte p∗k, 1 ≤ k ≤ n∗, von L∗ mit C∗ im P∗2entsprechen nach dem Dualitatsprinzip (5.11) den durch q verlaufenden Tangentenan C – sofern C nichtsingular ist. Das Bild 5.22 veranschaulicht diese Situation.Dabei kann L∗ im P2 als durch q verlaufendes Geradenbuschel interpretiert wer-den, von dem lediglich die (abzahlbar vielen) Tangenten die Kurve C mit hohererMultiplizitat als eins schneiden (Korollar 5.2.8).
q
p
p
p
LL
L
L
L
*
*
*
*
**
*
*
C
C
1
1
kk
n
n
P PI I2 2
*
Bild 5.22: Die Dualitat von Schnittpunkten einer Gerade mit C∗ und Tangenten an C

214 KAPITEL 5. DUALE KURVEN
Nach Abschnitt 5.2 schneidet die Polare Pq(C) gerade die zum Pol q 6∈ Cgehorenden Punkte von C heraus, durch welche (die abzahlbar vielen) Geradendurch q verlaufen, die C in einer hoheren Multiplizitat als eins schneiden. Ist dieKurve C vom Grad n, so sind nach Bemerkung 5.2.6 dies hochstens n · (n−1) Punk-te. Besitzt die Kurve C Singularitaten, so vermindert dies die Anzahl moglicherTangenten, wie das folgende Beispiel zeigt.
Beispiel 5.4.2. Wir betrachten die folgende Schar von Kurven Ct, welche durch
Pt(X, Y, Z) = Y 2Z −X3 − 4X2Z − tZ3
definiert sind. Dabei sei der reelle Parameter t ∈ ] − 25627 , 3[. 3 Fur t 6= 0 sind die Kurven
Ct nichtsingular, wie man sich aus den partiellen Ableitungen
Pt,X = −X(3X + 8Z) , Pt,Y = 2Y Z , Pt,Z = −4X2 + Y 2 − 3tZ2
leicht klar macht. Nur fur t = 0 weist C0 im affinen Ursprung (0, 0) eine Singularitat auf.Das Bild 5.23 zeigt die Kurvenschar in affiner Projektion mit z = 1; die Kurven mit t < 0liegen dabei “innen“ und “rechts“ von der Kurve C0.
-4 -3 -2 -1 1 2
-3
-2
-1
1
2
3
x
y
Ct
t< 0
t < 0
Bild 5.23: Die Kurvenschar Ct fur t = −8, −5, −1, 0, 0,1 , 0,5 , 1 und 2
Wahlen wir als Pol den Punkt q = [2, 0, 1] aus, so verlaufen durch diesen fur allet 6= 0 genau sechs verschiedene Tangenten an Ct. Diese Situation ist fur den Fall t = 1in Bild 5.24 dargestellt. Wobei der Ubersichtlichkeit wegen fur den linken und rechtenBildteil verschiedene Skalierungen benutzt wurden, da die Lage der Beruhrungspunkteder Tangenten von q an C1 recht verschieden ausfallen: vier liegen eng im Bereich x < 0zusammen: x
.= −1,89322, x.= −0,131641 (Bild 5.24 – links), zwei ergeben sich bei
x.= 8,02486 (wie im rechten Bildteil zu sehen).Fur negative Werte des Parameters t liegen zwei der sechs Tangenten im Komplexen. In
dem Bild 5.25 sind die sich ergebenden Kurven C−1 fur Y = y1+iy2, y1, y2 ∈ R, zusammenaufgetragen. Dabei ist die stark gezeichnete Kurve der reelle Schnitt der affinen KurveY 2Z −X3 − 4X2 + 1 = 0 mit y2 = 0. Die schwacher durchgezogene Kurve kennzeichnet
3Fur τ = − 25627 besitzt Cτ in [8, 0,−3] eine Singularitat – im folgenden wollen wir uns aber auf
diejenige in [0, 0, 1] fur t = 0 konzentrieren; die Einschrankung t < 3 hangt mit der weiter untengetroffenen Wahl des Pols q = [2, 0, 1] zusammen.

5.4. PLUCKERSCHE FORMELN 215
-4 -3 -2 -1 1 2
-3
-2
-1
1
2
3
x
y
C1
1P Cq
q-10 -5 5 10 15
-30
-20
-10
10
20
30
x
y
q
Bild 5.24: Die Kurve C1 mit ihrer Polaren (gestrichelt) in affiner Projektion
den Verlauf im Komplexen mit y1 = 0. Die gestrichelt dargestellten Kurven sind wiederdie Polaren: der links gezeigte Ast des reellen Schnittes, der geschlossene Kurvenzug istdie Polare im Komplexen. Zusammen mit dem rechten Teil des Bildes 5.25 konnen dannwieder alle sechs sich ergebenden Tangenten betrachtet werden.
-4 -2 2
-4
-2
2
4
x
y1iy2
C-1
q-7.5 -5 -2.5 2.5 5 7.5 10
-30
-20
-10
10
20
30
x
y1iy2
q
Bild 5.25: Die affine Kurve C−1 mit ihrer Polaren (gestrichelt) in affiner Projektion
Die Kurvenschar Ct zusammen mit ihren Polaren sind fur einige Parameter im Bild 5.26dargestellt, wobei wieder eine reelle, affine Projektion gewahlt wurde. Jetzt ist deutlich zuerkennen, daß sich im Falle t = 0 die Anzahl der Tangenten um zwei reduziert.
Das wird auch im Bild der dualen Kurven deutlich. Diese sind durch
P ∗t = tUV 2(−36U2 + 144V 2)W + (−16U4 + 128U2V 2 − 256V 4 − 54tV 4)W 2
+U(4U2 − 144V 2)W 3 + 27V 2W 4
−t(4U6 − 48U4V 2 + 192U2V 4 − 256V 6 − 27tV 6)
definiert (dies ergibt sich aus einer Berechnung, die analog zu denen aus Abschnitt 5.3verlauft). Das Bild 5.27 zeigt die duale Kurve C∗
1 zur Kurve C1 aus Bild 5.24 in einem

216 KAPITEL 5. DUALE KURVEN
-4 -3 -2 -1 1 2
-3
-2
-1
1
2
3
x
y
Ct
P Cq
q
Bild 5.26: Die Kurvenschar Ct fur t = −8, −5, −1, 0, 0,1 , 0,5 , 1 und 2
affinen Schnitt mit v = 1. Die beiden zu sehenden Singularitaten entsprechen den Wende-punkten der Kurve C1. Die durch 2U +W = 0 definierte Gerade L∗ ⊂ P∗2 ist dual zum Polq ∈ P2. Die sechs zu erkennenden Schnittpunkte dieser Geraden mit der dualen Kurve C∗
1
entsprechen den sechs Tangenten von q an C1. 4
-4 -2 2 4
-4
-3
-2
-1
1
2
3
4
w
u
Ct
*L*
-10 -5 5 10
-6
-4
-2
2
4
6
w
u
C1*L
*
Bild 5.27: Die duale Kurve C∗1 in affiner Projektion
Der Fall t = 0 reduziert die Anzahl der Schnittpunkte jetzt auf vier, wie im Bild 5.28zu erkennen ist. Die senkrechte Gerade W = 0, welche durch die beiden Scheitelpunkteder dargestellten Parabeln verlauft, ist die duale zum Punkt [0, 0, 1] – also zur Singularitatvon C0 im affinen Ursprung (0, 0). ¤
4Interessant anzumerken ist evtl. noch der Fall, wenn L∗ genau durch die beiden Singularitatenvon C∗1 verlauft: dies reduziert ebenfalls die Anzahl der Tangenten von q an Ct, da die zuvorgetrennt liegenden Beruhrungspunkte jetzt in den Wendepunkten zusammenfallen. Dieser Falltritt jedoch erst fur t > 3 auf und wurde in der obigen Betrachtung ausgeschlossen.

5.4. PLUCKERSCHE FORMELN 217
-10 -5 5 10
-6
-4
-2
2
4
6
w
u
C0*L
*
Bild 5.28: Die duale Kurve C∗0 in affiner Projektion
Der allgemeine Fall wird noch einmal im Bild 5.29 veranschaulicht, wo im P∗2 diezum Punkt q duale Gerade L∗ durch einen Wendepunkt von C∗ verlauft, was im P2
einer Singularitat entspricht.
qp
p
p
L
L
L
L
L
*
*
*
*
**
*
*
CC
1
1
kk
n
n
P PI I2 2
*
Bild 5.29: Verminderung der Anzahl der Tangenten und damit der Klasse
Damit haben wir die in der folgenden Bemerkung angestellte Abschatzung nach-gewiesen.
Bemerkung 5.4.3. Die Klasse n∗ einer Kurve C ⊂ P2, mit Grad(C) ≥ 2 und keinerGeraden als Komponente, ist die hochstmogliche Anzahl von Tangenten, die von einemPunkt P2 ⊃ q 6∈ C an glatte Punkte von C gelegt werden konnen.
Eine nichtsingulare Kurve C vom Grad n ≥ 2 hat die Klasse n · (n− 1). Fur singulareKurven C vom Grad n ≥ 2 ist die Klasse kleiner als n · (n − 1), wobei jeder singularePunkt die Klasse mindert.
Die Formeln von Julius Plucker vermogen es, fur einen wichtigen Spezialfall einegenaue Aussage uber die Klasse einer Kurve anzugeben.

218 KAPITEL 5. DUALE KURVEN
Als Vorbereitung charakterisieren wir nach [Fischer94] die einfachsten Singula-ritaten einer Kurve. Dabei wird vor allem die lokale Parametrisierung von einzelnen“Kurvenzweigen“ eine wichtige Rolle spielen, da erst mit diesen eine spater durch-zufuhrende Berechung von Resultanten effektiv moglich ist!
Nach Definition 2.2.1.7 (siehe Abschnitt 2.2, Seite 69) ist eine projektive Kurve Cim Punkt p ∈ C genau dann singular, wenn Multp(C) ≥ 2, d.h. im einfachsten Fallgilt Multp(C) = 2. Es sei C durch das homogene Minimalpolynom P ∈ C[X, Y, Z]definiert und o.B.d.A. p = [0, 0, 1] und Q(X,Y ) := P (X, Y, 1). Nach Korollar 1.2.3uber homogene Polynome (siehe Abschnitt 1.2, Seite 19) kann Q dann als Summeder homogenen Summanden
Q = Q2 + Q3 + . . . + Qn
geschrieben werden, wobei die Qk ∈ C[X,Y ], k = 2, . . . , n := Grad(C), homogenvom Grad k sind. Fur den Summanden
Q2 = c0X2 + c1XY + c2Y
2
sind die zwei folgenden Falle zu unterscheiden.
Fall 1: Ist die um c0 gekurzte Diskriminante 4c0c2 − c21 6= 0 von Q2(X, 1) (siehe
Anhang B, Definition B.1.11, S. 309), so besitzt Q2 zwei verschiedene Nullstellen imP1, d.h. gemaß der Faktorisierung nach Lemma 1.2.5, hat C in p zwei verschiedeneTangenten. Nach der Terminologie von Definition 1.3.8 ist p also ein gewohnlicherDoppelpunkt und die Koordinaten konnen so transformiert werden, daß Q2 = XYgilt. Dann sind die Tangenten nach (1.10) in Definition 1.3.6 (S. 25) die beidenGeraden X = 0 und Y = 0. Nach Satz 3.1.2.6(ii) (S. 108) gilt fur die dort notierteAbschatzung in (i) fur jede der beiden Tangenten T in p die Beziehung Ip(C, T ) > 2.
Ein Punkt p ∈ C wird als einfacher Doppelpunkt bezeichnet, wenn gilt
Multp(C) = 2 und Ip(C, T ) = 3 .
Die zweite Bedingung bedeutet nun fur den Summanden
Q3 = d0X3 + d1X
2Y + d2XY 2 + d3Y3 , (5.12)
daß X und Y diesen nicht teilen (das macht man sicht leicht aus den beiden Resul-tanten RQ,X=0(Y ) und RQ,Y =0(X) klar, die in der Hauptdiagonale aus Einsen be-stehen, bis auf das erste Element, das gerade d3Y
3 bzw. d0X3 enthalt). Wir konnen
also o.B.d.A. d0 = d3 = −1 setzten. Die affine Gleichung eines einfachen Doppel-punktes ist also durch
Q = XY −X3 − Y 3 + R mit R ∈ C[X, Y ], Multp(R) ≥ 3, XY teilt R3, (5.13)
definiert. Betrachten wir die Kurve C im Doppelpunkt p = (0, 0) nach Bild 5.30innerhalb einer hinreichend kleinen Umgebung, so kann sie als Vereinigung von zwei(lokalen) Zweigen aufgefaßt werden. Die Bedingung Ip(C, T ) = 3 besagt dann, daßkeiner diese Zweige in p bzw. affin p einen Wendepunkt hat. Die rechts im Bild5.30 gezeigte Singularitat kann daher kein einfacher Doppelpunkt sein, da einer derZweige dort einen Wendepunkt aufweist.

5.4. PLUCKERSCHE FORMELN 219
x x
y y
Wende-punkt
p
p
Bild 5.30: Die Kurve C und ihre durch den Doppelpunkt verlaufenden Zweige (links);kein einfacher Doppelpunkt (rechts)
Nach dem Satz uber implizite Funktionen (siehe Anhang A auf Seite 297) hatder Zweig mit der Tangente Y = 0 eine lokale Darstellung bzw. Parametrisierungder Art
C→ C2 , t 7→ (x = t, y = φ(t))
mit holomorpher Funktion φ und – wegen p = (0, 0) – gilt φ(0) = 0. Aufgrund derspeziellen Gestalt von Q nach (5.13) ist
φ(t) = t2 +∑
k≥3
αk tk . (5.14)
In eben solcher Weise kann dann auch der andere Zweig mit X = 0 als Tangentedargestellt werden: t 7→ (
t2 +∑
k≥3 βktk, t
).
Fall 2: Ist 4c0c2 − c21 = 0, dann hat Q2 eine doppelte Nullstelle und C in p nur
eine Tangente: p ist eine Spitze der Kurve C und es kann so transformiert werden,daß Q2 = Y 2 ist. Auch hier gilt wieder fur die Tangente T in p die AbschatzungIp(C, T ) > 2.
Die Spitze wird als einfach bezeichnet, wenn gilt
Multp(C) = 2 und Ip(C, T ) = 3 .
Fur den dritten Summanden Q3 von Q bedeutet das in der Gestalt (5.12) die Be-dingung d0 6= 0, so daß o.B.d.A. wieder d0 = −1 angenommen werden kann. Damiterhalten wir
Q = Y 2 −X3 + Y R + S (5.15)
mit homogenem R ∈ C[X,Y ] vom Grad 2 und S ∈ C[X, Y ] mit Multp(S) ≥ 4(d.h. S ist entweder Null oder besitzt keine Glieder bis zum Grad 4, siehe Definition1.3.3 auf Seite 23) als affine Gleichung einer einfachen Spitze. Das Bild 5.31 stelltder Darstellung einer einfachen Spitze (linker Bildteil) eine nicht einfache Spitzegegenuber. 5
5Dies ist die Spitze der durch X4 + X2Y 2 − 2X2Y −XY 2 + Y 2 = 0 definierten Kurve D, furdiese gilt I(0,0)(D, T ) = 4 mit T als Tangente Y = 0 im Ursprung.

220 KAPITEL 5. DUALE KURVEN
x
x
y y
p
Bild 5.31: Einfache Spitze (links); keine einfache Spitze (rechts)
Einmal mehr auf [Fischer94] verweisend, existiert um p eine lokale Parametrisie-rung der Gestalt
C→ C2 , t 7→ (tn, φ(t))
mit n = 2 = Multp(C) (was hier nicht bewiesen wird – [Fischer94], Kapitel 7). AusKoeffizientenvergleich in Q(t2, φ(t)) = 0 ergibt sich die Darstellung
φ(t) = t3 +∑
k≥4
αk tk . (5.16)
Als lokale numerische Invarianten (siehe die Bezeichnungen aus dem Anhang Dauf Seite 327, Lemma D.5) ergeben sich
a1 = 1 und a2 = 0 . (5.17)
Beispiel 5.4.4. Bzgl. des im Bild 5.32 dargestellten Doppelpunktes (0, 0) des durch
P (X, Y ) = XY −X3 − Y 3
(affin) definierten kartesischen Blattes, sollen die ersten Glieder – in einer hinreichendkleinen Umgebung – einer Potenzreihe fur den Zweig mit Y = 0 als Tangente bestimmtwerden.
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
C
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild 5.32: Kartesisches Blatt mit zwei Zweigen im Doppelpunkt
Mit dem Ansatz X = t und Y = φ(t) liefert P (t, φ(t)) = 0 zunachst die kubischeGleichung
φ3(t) + (−t)︸︷︷︸=:p
φ(t) + t3︸︷︷︸=:q
= 0 ,

5.4. PLUCKERSCHE FORMELN 221
die bereits in reduzierter Form vorliegt (vgl. [Gellert77], womit auch die nachfolgendenLosungen bestimmt werden). Wird
∆ :=(q
2
)2+
(p
3
)3=
t6
4− t3
27
definiert, so stellen sich folgende Losungen ein:
∆ > 0 : eine reelle, zwei konjugiert komplexe,∆ = 0 : drei reelle – zwei fallen zusammen,∆ < 0 : drei verschiedene reelle (casus irreducibilis).
Wie leicht zu erkennen ist (vgl. auch mit Bild 5.32) gilt
Losungen von φ(t) fur
t < 0 : eine reelle, zwei konjugiert komplexe,0 < t < 41/3
3 : drei verschiedene reelle,t > 41/3
3 : eine reelle, zwei konjugiert komplexe.
Nach [Gellert77] ist nun fur t < 0 die (reelle) Funktion φ zu
φ(t) =3
√− t3
2+
√t6
4− t3
27+
3
√− t3
2−
√t6
4− t3
27(5.18)
bestimmt. Fur den Parameterbereich 0 < t < 41/3
3 liefert der dritte Fall des casus irredu-cibilis
φ(t) = 2 3√
r cos(
ϕ
3+
4π
3
)mit r =
√t3
27und cosϕ = −1
2
√27t3 (5.19)
die Losung fur den Zweig mit waagerechter Tangente.Aus (5.18) und (5.19) laßt sich nun durch Taylorentwicklung die Potenzreihe um den
Ursprung gewinnen. Dabei fuhren beide Funktionen (also fur t < 0 und t > 0) – soweitnumerisch entwickelt – zur selben Reihe. Diese kann wieder mit Mathematica uber dasKommando Series bequem bestimmt werden, wie hier am Beispiel des casus irreducibilisfur den Fall t > 0 zu sehen ist:
Darin bedeutet, daß die Losung y3 um den Wert t= 0 bis zur Ordnung 20 zu entwickelnist. Die gesuchte Potenzreihe ist also
φ(t) = t2 + t5 + 3t8 + 12t11 + 55t14 + 273t17 + 1428t20 + ... ,
die mit der obigen Angabe (5.14) korrespondiert. Das Bild 5.33 zeigt die beiden Zweige(dunne, durchgezogene Linie) des kartesischen Blattes C (dunne, gestrichelte Linie außer-halb des Kreises) um den Ursprung mit den Entwicklungen der obigen Potenzreihe bis zuden Potenzen 2, 5 und 8 (jeweils durch Angabe dieser Zahlen gekennzeichnet). ¤

222 KAPITEL 5. DUALE KURVEN
-1 -0.5 0.5 1
-0.5
-0.25
0.25
0.5
0.75
1
x
y
2 2
5
58 8
C
Bild 5.33: Entwicklung des Zweiges mit Y = 0 als Tangente in eine Potenzreihe
Fur den Fall 2 einer einfachen Spitze kann das Beispiel 1.1.6 auf Seite 15 be-trachtet werden.
Aufgrund dieser Charakterisierung wird der folgende Typ von Kurve festgelegt.
Definition 5.4.5. Eine projektiv-algebraische Kurve C ⊂ P2 wird als Pluckerkurvebezeichnet, wenn
(i) C irreduzibel und Grad(C) ≥ 2 ist und
(ii) C ebenso wie C∗ als Singularitaten hochstens einfache Doppelpunkte und ein-fache Spitzen aufweisen.
Fur die Entsprechung von Invarianten der Anzahl (im Zeichen #) verschiedenergeometrischer Spezifika einer Pluckerkurve und ihrer dualen Kurve, gibt der folgendeSatz Auskunft.
Satz 5.4.6. Fur eine Pluckerkurve C und ihrer dualen Kurve C∗ gilt
(i) d∗ := # Doppelpunkte von C∗ = # Doppeltangenten von C,(ii) s∗ := # Spitzen von C∗ = # Wendepunkte von C,(i)∗ d := # Doppelpunkte von C = # Doppeltangenten von C∗,(ii)∗ s := # Spitzen von C = # Wendepunkte von C∗.
Beweis. (i) Diese Gleichheit ergibt sich wieder aus dem Dualitatsprinzip. Denn jederPunkt einer Kurve C entspricht im dualen Raum einer Tangente an die zu C duale KurveC∗. Somit geht der Doppelpunkt im dualen Raum in eine Doppeltangente uber.(ii) Aus Anhang D, Beziehung (D.7) ergibt sich mit den numerischen Invarianten (5.17)a1 = 1, a2 = 0 einer einfachen Spitze das Ergebnis a∗1 = 0 und a∗2 = 1; nach den Aussagen(D.4) und (D.5) entsprechen sich also bei dualen Kurven einfache Spitzen und einfacheWendepunkte.Die Aussagen (i)∗ und (ii)∗ sind zu den ersten beiden Aussagen dual. ¤

5.4. PLUCKERSCHE FORMELN 223
Das Bild 5.34 zeigt, wie ein einfacher Doppelpunkt von C∗ im P∗2 einer Doppel-tangente an C im P2 und ein Wendepunkt von C∗ im P∗2 einer einfachen Spitze vonC im P2 (und umgekehrt) entspricht.
P
P
I
I
2
2
*
Bild 5.34: Entsprechung von Doppelpunkt mit Doppeltangente und Wendepunkt mitSpitze
Beispiel 5.4.7. Jede irreduzible Quadrik oder Kubik ist eine Pluckerkurve. So gilt etwafur die Neilsche Parabel
n = 3, d = 0, s = 1, sowie n∗ = 3, d∗ = 0, s∗ = 1 .
(Anm.: Die duale Kurve zur Neilsche Parabel ist wieder eine Neilsche Parabel.) ¤
Beispiel 5.4.8. Fur das zuletzt in Beispiel 5.3.4 betrachtete kartesische Blatt und seineduale Kurve gilt
n = 3, d = 1, s = 0, sowie n∗ = 4, d∗ = 0, s∗ = 3 .
Die Ordnung des kartesischen Blattes ist als Kubik drei, seine Klasse ist vier, es besitzt dreiWendepunkte (siehe Beispiel 3.3.1.7) und keine Doppeltangente. Mithin besitzt die dualeKurve keinen Doppelpunkt, drei Spitzen, eine Doppeltangente und keinen Wendepunkt.In den Bildern 5.11 und 5.12 ist nur eine (reelle) Spitze zu erkennen. ¤
Beispiel 5.4.9. Das im linken Teil des Bildes 5.15 aus Beispiel 5.3.6 dargestellte “dreiblatt-rige Kleeblatt“ ist keine Pluckerkurve. Die Kurve fallt deshalb aus dem Rahmen derPluckerkurven, weil sie – leicht erkennbar – einen Dreifachpunkt als Singularitat im Ur-sprung aufweist. Dieser fuhrt zu der Dreifachtangente Z = 0 ihrer dualen Kurve, die erstim affinen Schnitt [x, 1, z] sichtbar wird (siehe Bild 5.16, rechter Teil). ¤

224 KAPITEL 5. DUALE KURVEN
Die oben eingefuhrten Invarianten sind jetzt in der folgenden von Julius Pluckerangegebenen Weise miteinander verknupft.
Satz 5.4.10 (Pluckerformeln). Fur eine Pluckerkurve C ⊂ P2 gilt:
(i) n∗ = n(n− 1)− 2d− 3s (Klassenformel),
(ii) s∗ = 3n(n− 2)− 6d− 8s (Wendepunktformel),
(i)∗ n = n∗(n∗ − 1)− 2d∗ − 3s∗,
(ii)∗ s = 3n∗(n∗ − 2)− 6d∗ − 8s∗.
Beweis. Der Beweis der Pluckerschen Formeln laßt sich auf den Satz von Bezout zuruck-fuhren. Wobei es wieder genugt, die Aussagen (i) und (ii) zu zeigen, weil (i)∗ und (ii)∗
daraus durch Dualisierung folgen. Wir geben einen Beweis nach [Fischer94] an.
Klassenformel : Zum Nachweis dieser Beziehung wird die Kurve C mit ihrer PolarenPq(C) geschnitten; dabei ist der Pol q genugend allgemein zu wahlen, d.h. durch q sollengenau n∗ Tangenten durch die Punkte p1, . . . ,pn∗ von C verlaufen. Hierfur ist es not-wendig (und ausreichend), den Punkt q außerhalb der endlich vielen Doppeltangenten,Wendetangenten und Tangenten durch singulare Punkte von C zu plazieren.
Nach dem Satz von Bezout gilt jetzt fur die Polare Pq(C) nach Definition 5.2.1 mitden Eigenschaften nach Korollar 5.2.5 und Lemma 5.2.7 die Beziehung
Grad(C) ·Grad(Pq(C)) = n · (n− 1) =∑
p∈C∩Pq(C)
Ip(C,Pq(C))
= n∗ · 1 +∑
p∈Sing(C)
Ip(C,Pq(C)) .
Fur nichtsingulare Kurven gilt also n∗ = n(n−1), und bei den beiden evtl. vorkommendenTypen von Singularitaten fur Pluckerkurven, ist jetzt
Ip(C,Pq(C)) ={
2 , falls p einfacher Doppelpunkt ist,3 , falls p einfache Spitze ist
zu zeigen.
1. Fall: p ist einfacher Doppelpunkt. Sei o.B.d.A. p = [0, 0, 1], dann ist C nach (5.13)durch
P = XY Zn−2 + F (X,Y, Z)
definiert, wobei F ein homogenes Polynom mit Multp(F ) ≥ 3 ist. Daraus ergibt sich furdas die Polare definierende Polynom
DqP = q1Y Zn−2 + q2XZn−2 + G(X, Y, Z)
mit q = [q1, q2, q3] und Multp(G) ≥ 2. Da X = 0 und Y = 0 Tangenten an C in p sind,sind bei der Wahl von q die Koordinaten q1, q2 6= 0, d.h. die Polare ist in dem Punktp glatt (wie einfaches Ableiten von DqP zeigt): Multp(Pq(C)) = 1. Nach Definition deseinfachen Doppelpunktes auf Seite 218 ist Multp(C) = 2, so daß sich nach Wahl von q

5.4. PLUCKERSCHE FORMELN 225
(die Tangenten von C und Pq(C) fallen in p nicht zusammen) und dem Satz 3.1.2.6(ii)nun tatsachlich ergibt
Ip(C,Pq(C)) = Multp(C) ·Multp(Pq(C)) = 2 .
2. Fall: p ist einfache Spitze. Sei o.B.d.A. wieder p = [0, 0, 1], dann ist C nach (5.15) durch
P = Y 2Zn−2 −X3Zn−3 + Y Zn−3R(X,Y ) + F (X, Y, Z)
definiert. Das Polynom F ist homogen und in p gilt Multp(F ) ≥ 4. Fur das Polynom derPolaren folgt daraus die Gestalt
DqP = 2q2Y Zn−2 + G(X, Y, Z)
mit Multp(G) ≥ 2. Weil q nicht auf der Tangente Y = 0 durch die Spitze p liegt, ist q2 6= 0und Pq(C) glatt in p. Die obige Darstellung DqP von Pq(C) liefert Y = 0 als Tangentevon Pq(C) in p, d.h. C und ihre Polare Pq(C) haben eine gemeinsame Tangente, und nachSatz 3.1.2.6 ist Ip(C,Pq(C)) > 2. Fur den genauen Nachweis der Schnittmultiplizitat vondrei benutzen wir jetzt die lokale Parametrisierung (5.16) von C in p:
X(t) = t2 , Y (t) = t3 + . . . , Z(t) = 1
und setzen diese in DqP ein, was zum Polynom
φ(t) := (DqP )(X(t), Y (t)) = 2q2t3 + η(t) mit Mult0(η) ≥ 4
fuhrt (letzteres, weil Multp(G) ≥ 2 und η(t) = G(t2, t3 + . . . , 1)). Nach Anhang D, SatzD.6 (in dem die Rollen der Keime der beiden Zweige vertauscht werden) erhalten wir
Ip(C,Pq(C)) = Mult(t=0)(φ(t)) = 3 .
Das Bild 5.35 macht noch einmal deutlich, wie die Lage der Singularitaten von C und diedurch diese verlaufende Polare Pq(C) zueinander angeordnet sind.
P C
P C
q
q
x x
y y
p
p
CC
Bild 5.35: Verlauf der Polaren durch den einfachen Doppelpunkt und die einfache Spitze
Wendepunktformel : Diese Beziehung wird analog zur vorhergehenden nachgewiesen,wobei diesmal C mit ihrer Hesseschen zum Schnitt gebracht wird und die Beziehungs∗ ≤ 3n(n − 2) nach Satz 3.3.1.14(1) genauer gefaßt werden kann. Denn nach dem Satz

226 KAPITEL 5. DUALE KURVEN
von Bezout ergibt sich nach dem Lemma 3.3.1.15 uber die Schnittmultiplizitat von H(C)mit der Kurve C die Abschatzung
Grad(C) ·Grad(H(C)) = 3n(n− 2) =∑
p∈C∩H(C)
Ip(C,H(C))
= s∗ · 1 +∑
p∈Sing(C)
Ip(C,H(C)) .
Bei den beiden evtl. vorkommenden Typen von Singularitaten fur Pluckerkurven, ist jetzt
Ip(C,H(C)) ={
6 , falls p einfacher Doppelpunkt ist,8 , falls p einfache Spitze ist
zu zeigen.
1. Fall: p ist einfacher Doppelpunkt. Sei o.B.d.A. p = [0, 0, 1], dann konnen wir (als lokaleBetrachtung) im Affinen verbleiben und C ist nach (5.13) durch
Q = XY −X3 − Y 3 + R
definiert. Nach Definition 3.3.1.2 und Lemma 3.3.1.11 ergibt sich daraus die Hessesche inihren niedrigsten Termen zu
HQ = (n− 1)(n− 2)XY + n(n− 1)(X3 + Y 3) + S ,
wobei diese Berechnung mit Mathematica durchgefuhrt wurde und alle ubrigen Terme indem Polynom S mit Multp=(0,0)(S) ≥ 3 zusammengefaßt wurden. Im Vergleich zu derFestlegung auf Seite 218 hat also auch die Hessesche H(C) im Ursprung p einen einfachenDoppelpunkt mit denselben Tangenten wie die Kurve C (vgl. Bilder 3.25 und 3.27 aufSeite 130f). Fur den Nachweis der Schnittmultiplizitat von 6 benutzen wir jetzt wiedereine lokale Parametrisierung (5.14) von C in p fur die beiden Zweige:
X(t) = t , Y (t) = t2 + . . . und X(t) = t2 + . . . , Y (t) = t
und setzen diese in HQ ein:
φ(t) := HQ(X(t), Y (t)) = 2(n− 1)2t3 + η(t) mit Mult0(η) ≥ 4
fur beide Zweige. Wieder nach Anhang D, Satz D.6 (mit vertauschten Rollen der beidenKeime) erhalten wir
Ip(C,H(C)) = 2 ·Mult0(φ) = 6 .
2. Fall: p ist einfache Spitze. Sei wieder o.B.d.A. p = [0, 0, 1] und C nach (5.15) durch
Q = Y 2 −X3 + d1X2Y + d2XY 2 + d3Y
3 + S mit Multp(S) ≥ 4
definiert. Die Berechnung des Hesseschen Polynoms HQ wird sehr umfangreich. Wieder

5.4. PLUCKERSCHE FORMELN 227
unter Einsatz von Mathematica (Anhang G.3) erhalt man als Terme niedrigster Ordnung
HQ = − 2(n− 1)(n− 3) X5 (d21 + 3d2)
+ 2(n− 1)(n− 3) X4 (Y (d31 + 2d1d2 − 9d3) − 3)
+ 4(n− 1)(n− 3) X3 (Y 2(d21d2 + d2
2 + 6d1d3) + 2Y d1)+ 4(n− 1)(n− 3) X2 (Y 3(d1d
22 − d2
1d3 + 6d2d3) + 3Y 2d2)+ 2(n− 1)(n− 3) X (Y 4(d3
2 − 2d1d2d3 + 9d23) + 12Y 3d3)
+12(n− 1)(n− 2) X Y 2
+ 2(n− 1)(n− 3) Y 5 (d22 − 3d1d3)d3
+ 2(n− 1)(n− 3) Y 4 (d22 − 4d1d3)
− 4(n− 1)(n− 2) Y 3 d1 + . . . ,
(5.20)
wobei . . . wieder fur Summanden hoherer Ordnung als funf steht. Wird die Kurve C inder Spitze p mit der Parametrisierung (vgl. (5.16))
X(t) = t2 , Y (t) = t3 + . . .
versehen und diese in (5.20) eingesetzt, so erhalten wir
φ(t) = 6(n− 1)2t8 + η(t) mit Mult0(η) ≥ 9 .
Wieder nach Anhang D, Satz D.6 ergibt sich abschließend
Ip(C,H(C)) = Mult0(φ) = 8 . ¤
Die folgenden einfachen Beispiele veranschaulichen den Einsatz der PluckerschenFormeln.
Beispiel 5.4.11. Fur eine irreduzible Quadrik ist n = 2 und die Pluckerschen Formelnliefern
2 ≤ n∗ = 2− 2d− 3s und 0 ≤ s∗ = −6d− 8s .
Also muß gelten n∗ = 2 und d = s = s∗ = 0; aus (i)∗ folgt n = 2 = 2 − 2d∗ und damitd∗ = 0: die zur irreduziblen Quadrik duale Kurve ist also wieder eine Quadrik und beidesind nichtsingular. ¤
Beispiel 5.4.12. Fur das kartesische Blatt C vom Grad n = 3 mit einem Doppelpunktd = 1 und keiner Spitze s = 0 ergeben die Pluckerformeln
n∗ = n(n− 1)− 2d− 3s = 3 · 2− 2− 0 = 4 und s∗ = 3n(n− 2)− 6d− 8s = 9− 6− 0 = 3 ,
d.h. auch ohne die in Beispiel 3.3.1.7 gewonnene Kenntnis uber die Wendepunkte des kar-tesischen Blattes wissen wir jetzt, daß C drei Wendepunkte und die duale Kurve C∗ zumkartesischen Blatt drei Spitzen hat. Diese sollen jetzt noch dargestellt werden: die Singula-ritaten ergeben sich nach Beispiel 5.3.4 aus den Nullstellen der drei partiellen AbleitungenP ∗
U , P ∗V und P ∗
W von
P ∗ = 3U2V 2 − 4U3W − 4V 3W + 6UV W 2 −W 4 . (5.21)
Die Singularitaten von C∗ bestimmen sich danach zu
[1, 1, 1] ,[e4πi/3, e2πi/3, 1
]und
[e2πi/3, e4πi/3, 1
].

228 KAPITEL 5. DUALE KURVEN
In affinen Koordinaten [u, v, 1] = [u1 + iu2, v1 + iv2, 1] wird jetzt die komplexe Transfor-mation
(u, v) = ξ((
e4πi/3, e2πi/3)− (1, 1)
)+ η
((e2πi/3, e4πi/3
)− (1, 1)
)+ (1, 1) (5.22)
durchgefuhrt (diese ist identisch mit der im Beispiel 2.3.5, Seite 90, gezeigten Transfor-mation!), welche die drei Spitzen von C∗ in eine (reelle) affine Ebene bringt, die durch dieKoordinaten ξ und η aufgespannt wird. Der Schnitt der so in den C2 gelegten Ebene mitder dualen Kurve C∗ ist dann die Nullstellenmenge
{ (ξ, η) ∈ R2 | ξ4 + 2ξ3η − 2ξ3 + 3ξ2η2 + ξ2 + 2ξη3 − 2ξη + η2 − 2η3 + η4 = 0 } ,
in welche das unter (5.22) transformierte Polynom (5.21) auftritt.
-0.5 0.5 1 1.5
-0.5
0.5
1
1.5
ξ
η
C*
C
Bild 5.36: Komplexer Schnitt des kartesischen Blattes C und seiner dualen Kurve C∗
Das Bild 5.36 zeigt jetzt die drei von den Pluckerformeln “vorausgesagten“ Spitzender dualen Kurve C∗. ¤Beispiel 5.4.13. Fur eine irreduzible Kubik konnen jetzt genau drei Falle auftreten. Aus(i)∗ sieht man, daß n∗ = 0 oder 1 ausgeschlossen ist, also: n∗ = 2 und damit aus (i):2 ≤ 6− 2d− 3s, was zwingend zu den folgenden drei Fallen fuhrt.
1. d = s = 0: n∗ = 6, s∗ = 9, d∗ = 0; siehe etwa die im Beispiel 2.2.1.10 diskutierte unddurch Y 2Z −X(X − Z)(X − 2Z) = 0 definierte Kurve, Bild 2.8 auf Seite 73.
2. d = 1, s = 0: n∗ = 4, s∗ = 3, d∗ = 0; siehe z.B. den durch Y 2Z−X3−X2Z = 0 definiertenNewtonschen Knoten oder das durch X3 + Y 3 − 3XY Z = 0 festgelegte kartesische Blatt(Beispiele 5.3.4 und 5.4.12).
3. d = 0, s = 1: n∗ = 3, s∗ = 1, d∗ = 0; wofur die Neilsche Parabel mit Y 2Z − X3 = 0genannt werden kann, siehe auch Beispiel 5.4.7. ¤
Neben diesen Pluckerschen Formeln gibt es auch eine Verallgemeinerung von MaxNoether (1844 Mannheim - 1921 Erlangen), welche dann auch das in Beispiel 5.3.6dargestellte “Kleeblatt“ umfaßt. Hierfur sei auf die Literatur [BK81], [Fischer94]verwiesen.

Teil IV
Reprise
229


Kapitel 6
Anwendungen und Ausblick
Hier soll ein kleiner Einblick in die reichhaltigen Anwendungen der algebraischenKurven (Abschnitte 6.1 bis 6.6) und ein noch kleinerer Ausblick auf das weite Feld(Abschnitte 6.7 bis 6.9) gegeben werden, das dieser Arbeit an Inhalten folgt oderals nachstes folgen konnte.
Mit diesem Kapitel – auch nicht mehr Teil der ursprunglichen Arbeit – verlassenwir das Feld der eigenen (Teil-)Untersuchungen, Ausfuhrungen und Wendungen desStoffes, nehmen vielmehr verstarkt auf die angegebene Literatur Bezug und versu-chen eine weniger technische Darstellung und einen großeren erzahlerischen Fluß.Auf Beweise wird durchgehend verzichtet und es soll mehr die Ideengeschichte zujedem der folgenden Teilgebiete in den Vordergrund treten.
6.1 Funktionentheorie
Riemannsche Flachen wurden bereits des ofteren erwahnt. Die Funktionentheorienun ist der eigentliche Ort ihrer Entstehung und der Nutzen dieser Flachen kannleicht an der folgenden Problematik eingeschatzt werden.
Wir betrachten die komplexe Wurzelfunktion√
z auf den schraffierten, kreisformi-gen Bereich nach Bild 6.1 (linker Teil) und versuchen nun langs zweier verschiedenerWege eine analytische Fortsetzung dieser Funktion. Dabei seien die beiden genann-ten Wege einfach die Kreisbogen γ1 : eit und γ2 : e−it mit 0 ≤ t ≤ π. Wir erhaltendann die Funktionen f1 und f2 wieder nach Bild 6.1, angedeutet durch ihre Abbil-dungsbereiche. Wegen
f1(−1) = i 6= −i = f2(−1)
gilt aber
f1 6= f2 !
Was passiert hier? Ist√
z mehrdeutig oder mussen wir die analytische Fortsetzungwillkurlich an einem Punkt abbrechen?
Die geniale Idee von Bernhard Riemann war es nun, als Definitionsbereich von√
znicht mehr C zu verwenden, sondern eine der komplexen Ebene uberlagerte Flache –eben die Riemannsche Flache. Es soll an dieser Stelle bewußt eine moglichst intuitive
231

232 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
1
ii
C
C
i_
i_
1_
ReRe
Im
Im
1
g
g
1
2
- z
f
f
2
1
Bild 6.1: Analytische Fortsetzung von√
z
Vorstellung einer solchen Flache vermittelt werden. Wir werden im Abschnitt 6.8in etwas technischerer Weise auf den Begriff der Uberlagerung zuruckkommen unddamit die Riemannsche Flache genauer beschreiben konnen. 1
Wir nehmen dazu nun zunachst zwei Kopien von C und schneiden diese ent-lang des Strahls [0,∞) auf und verkleben die erste Kante des Schnittes der erstenKopie mit der zweiten Kante des Schnittes der zweiten Kopie miteinander. Dannverkleben wir genauso die zweite Kante der ersten Kopie von C mit der erstenKante der zweiten Kopie – und behalten dabei im Hinterkopf, daß sich die beidenso gebildeten Verklebungen nicht beruhren! Im Raum ausgefuhrt erhalt man eineSelbstdurchdringung nach Bild 6.2, die funktionentheoretisch jedoch belanglos ist.
0
8
Bild 6.2: Verklebung zweier Kopien von C
Diese Flache S lost aber nun tatsachlich unser Problem und gestaltet, als Defini-tionsbereich zugrunde gelegt,
√z zu einer analytischen Funktion auf ganz S. Denn
1Dazu sei angemerkt, daß der Begriff der Uberlagerung auch an den Beginn der Untersuchungenvon Hermann Weyl (1885 Elmshorn - 1955 Zurich) in dem wunderbaren Buch [Weyl13] uber dieRiemannsche Flache steht.
Die Reihenfolge ihrer Einfuhrung und Behandlung in dieser Arbeit ist daher die folgende:
• die Idee von Bernhard Riemann in funktionentheoretischem Zusammenhang,
• ihre topologische Einfuhrung durch den Begriff der Uberlagerung nach Abschnitt 6.8,
• ihre Nutzbarmachung bei der Parametrisierung nach Anhang D.

6.1. FUNKTIONENTHEORIE 233
nach Bild 6.3 munden die Wege γ1 und γ2 nun in zwei verschiedene Punkte auf S,die auf i und −i abgebildet werden: es ist damit eine Funktion f := f1 = f2 =
√z
gefunden, welche die Wurzelfunktion analytisch fortsetzt.Man erkennt, daß S aus zwei “Blattern“ besteht und daß man von einem Blatt
in das andere kommt, wenn man einmal um den sogenannten “Verzweigungspunkt“z = 0 herumlauft.
1
i
C
i_
1_
Re
Im
g2 f
f
1
2
g1
S
Bild 6.3: Riemannsche Flache als Definitionsbereich von√
z
Wir konnen uns jetzt aber S auch als die algebraische Kurve{
(z, w) ∈ C2 |w2 = z}
vorstellen, wobei eine Kopie von C\[0,∞) mit{
(z, w) ∈ C2 |w = +√
z}
und die andere Kopie mit{
(z, w) ∈ C2 |w = −√z}
korrespondiert. Auch fur Kurven von hoherem Grad liefert diese Uberlegung eineKorrespondenz von Riemannscher Flache und algebraischer Kurve. So liefert die zurelliptischen Kurve
Y 2 = (X − a)(X − b)(X − c)
gehorende Riemannsche Flache nach Bild 6.4 (mit in den Blattern verlaufende Kur-ve) die analytische Fortsetzung von
f(z) =√
(z − a)(z − b)(z − c) ,
wobei die a, b, c ∈ C verschieden voneinander sein mogen.Riemannsche Flachen kann man auch fur andere als “nur algebraische“ Funktio-
nen konstruieren. Mit diesem ersten Eindruck verlassen wir aber bereits das Gebietder Funktionentheorie und kommen zur Konigin der Mathematik.

234 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
a
bc
8
Bild 6.4: Riemannsche Flache zu√
(z − a)(z − b)(z − c)
6.2 Zahlentheorie
In dem Buch [Kanigel93] wird davon erzahlt, wie der englische Mathematiker God-frey Harold Hardy (1877 Cranleigh - 1947 Cambridge) eines Tages seinen indi-schen Kollegen Srinivasa Aiyangar Ramanujan (1887 Erode - 1920 Kumbakonam)im Krankenhaus besuchte und ihm gegenuber erwahnte, daß er mit einem Taxi derNr. 1729 gekommen sei, was vermutlich eine ziemlich langweilige Zahl sei. “Nein,Hardy“, erwiderte Ramanujan, “es ist eine sehr interessante Zahl. Es ist namlich diekleinste naturliche Zahl, die man auf zwei verschiedene Weisen als Summe von zweiKubikzahlen ausdrucken kann!“ Es gilt namlich
1729 = 93 + 103 = 13 + 123 .
Ubersetzt in unsere Theorie der algebraischen Kurven, haben wir damit eine Kubik
X3 + Y 3 = 1729
gewonnen, die (mindestens) zwei ganzzahlige Punkte besitzt! Fragen, Probleme undUntersuchungen dieser sogenannten Diophantischen 2 Gleichungen (in Form alge-braischer Kurven im allgemeinen und elliptischer Kurven im besonderen) gibt essehr viele. Das Buch [ST92] gibt einen guten Einblick in typische Fragestellungenund liefert auch einige Anworten. So gilt etwa nach dem
Satz von Thue-Siegel 3: Ist C eine nichtsingulare Kurve, die durch eine GleichungF (X, Y ) = 0 mit ganzzahligen Koeffizienten definiert ist, dann besitzt C nur endlichviele Punkte mit ganzzahlige Koordinaten. ¤
2Diophantos von Alexandria, ca. 200 - ca. 2843Carl Ludwig Siegel (1896-1981) verallgemeinerte ein erstes Ergebnis von Axel Thue (1863-
1922)

6.2. ZAHLENTHEORIE 235
Fur den Fall
X3 + Y 3 = m , m ∈ N (6.1)
lassen sich mogliche (Losungs-)Punkte (x, y) ∈ Z2 ihrer Große nach sogar abschatzen:jede erfullt
max{|x| , |y |} ≤ 2
√m
3.
Betrachten wir diese Problematik fur projektive Kurven C, die durch homogenePolynome P (X,Y, Z) definiert werden, so rucken (im Endlichen: z 6= 0) wegen
P (X, Y, Z) = P (XZ
, YZ, 1) = 0
auch rationale Punkte von affinen Kurven ins Blickfeld. Beruhmtestes Beispiel isthier sicherlich Fermats großer Satz, nach welchem
Xn + Y n = Zn
fur n > 2 in X, Y und Z keine ganzzahligen und von Null verschiedenen Losungenhat. Sucht man nach rechtwinkligen Dreiecken mit ganzzahligen Seiten, so erhaltman die spezielle Form
X2 + Y 2 = Z 2 .
Die Frage nach Losungen laßt sich mindestens bis in die babylonische Mathematikzuruckverfolgen. Bereits Pythagoras soll die unendlich vielen Losungstripel 4
(2k + 1, 2k2 + 2k, 2k2 + 2k + 1
), k = 1, 2, 3, . . . ,
gekannt haben; diese Folge beginnt mit (3, 4, 5), (5, 12, 13), (7, 24, 25), . . ., und –neben (1, 0) und (0, 1) – sind die ersten vier dieser Zahlentripel affin im Bild 6.5 aufdem Kreis zu sehen.
-0.2 0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
x
y
1,0
0,1
3\5,4\55\13,12\13
7\25,24\259\41,40\41
Bild 6.5: Einige Pythagoreische (affine) Tripel auf dem Kreis
4Nach Beispiel 2.2.2.6 auf Seite 81 brauchen wir lediglich λ = k + 1 und µ = k setzen, umdiese Tripel in der Form (y, x, z) zu erhalten.

236 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Die Frage nach von Null verschiedenen ganzzahligen Losungen fur den allgemei-nen Fall n > 2 wurde dann von Fermat durch seine Randnotiz uber den “wunderbarenBeweis“ in seiner Ausgabe der Arithmetica des Diophantos beruhmt – und beruchtigt.Dies wird alles in spannender Weise in [Singh98] erzahlt, ebenso wie der weitereWeg dieses Problems, der lange aus Fehlversuchen, Irrtumern und des schließlichenErfolgs von Andrew Wiles bestand und endlich besteht. Sehr gelungene und gutlesbare Artikel zum Wilesschen Beweis sind in [Faltings96] enthalten.
Die Suche nach ganzzahligen Losungen von Xn + Y n = Zn ist also aquivalentzur Suche nach Punkten mit rationalen Koordinaten, welche auf der affinen Kurve
Xn + Y n = 1
liegen. Sieht man von den trivialen Losungen (1, 0), (0, 1), (−1, 0) und (0,−1) ab,so gibt es also im Bild 6.6 nur auf Kreis und Gerade (n = 1 bzw. n = 2) rationalePunkte.
-2 -1 1 2
-2-1.5
-1-0.5
0.51
1.52
x
y
n= 4
-2 -1 1 2
-2-1.5
-1-0.5
0.51
1.52
x
y
n= 5
-2 -1 1 2
-2-1.5
-1-0.5
0.51
1.52
x
y
n= 6
-2 -1 1 2
-2-1.5
-1-0.5
0.51
1.52
x
y
n= 1
-2 -1 1 2
-2-1.5
-1-0.5
0.51
1.52
x
y
n= 2
-2 -1 1 2
-2-1.5
-1-0.5
0.51
1.52
x
y
n= 3
Bild 6.6: Fermat-Kurven
Wahrend der vielen Arbeiten am Beweis wurde auch bewußt, daß es eine adaqua-tere Einteilung von Kurven als die nach dem Grad gibt. Im Abschnitt 6.8 wird dasGeschlecht von Kurven eingefuhrt. Und 1983 bewies Gerd Faltings, daß jede kom-plexe algebraische Kurve vom Geschlecht mindestens zwei hochstens endlich vielerationale Punkte besitzt. Da die Fermat-Kurve vom Grad n das Geschlecht
1
2(n− 1)(n− 2)
aufweist (siehe Geschlecht-Grad-Formel in Abschnitt 6.8), folgt fur n ≥ 4, daß eshochstens endlich viele Losungen gibt (nachdem bereits Euler den Fall n = 3 alsohne Losungen nachwies).

6.2. ZAHLENTHEORIE 237
Daß affine Kubiken im allgemeinen durchaus viele rationale Punkte aufweisenkonnen, zeigt die Differenz zwischen einem Quadrat und einem Kubus:
Y 2 −X3 = c , c ∈ Z .
Fur diesen Typ von Problem fand Bachet 5 1621 seine beruhmte Duplikationsformel
(x4 − 8cx
4y2,−x6 − 20cx3 + 8c2
8y3
),
nach welcher aus einer bereits gefundenen Losung (x, y) weitere generiert werdenkonnen. Hat man beispielweise durch 52−33 = 25−27 = −2 =: c eine Losung (3, 5)fur
Y 2 −X3 = −2
gefunden, dann liefert die Duplikationsformel die weiteren Paare(
129
100,
383
1000
),
(2340922881
58675600,113259286337279
449455096000,
),
(30037088724630450803382035538503505921
3010683982898763071786842993779918400,
−164455721751979625643914376686667695661898155872010593281
5223934923525719974563641453744978655831227509874752000
), . . . ,
die hier wieder mit Mathematica berechnet wurden. Bachet ist durch geschickte al-gebraische Umformungen (wahrend seiner Studien der Diophantischen Arithmetica)auf diese Beziehung gekommen. Erinnern wir uns an den Abschnitt 3.3.3 uber Grup-pen auf Kubiken und insbesondere an die “Verdopplungsformel“ im Satz 3.3.3.3 furden Fall x1 = x2 und y1 = y2 6= 0, so wird aufgrund der rationalen Darstellung desSchnittpunktes der Kubik mit der Tangente in (x, y) = (x1, y1) = (x2, y2) deutlich,daß bei rationalem x und y auch dieser wieder rational sein muß. 6 Berechnen wiralso nach Satz 3.3.3.3 aus
xS = −2x +
(3x2 + a
2y
)2
und yS = y +3x2 + a
2y(xS − x)
(die Spiegelung an der x-Achse konnen wir einstweilen fortlassen) den Schnittpunkt(xS, yS) der durch (x, y) verlaufenden Tangente mit Y 2 = X3 + aX + b, so erhaltenwir als (verallgemeinerte) Duplikationsformel fur die Weierstraßsche Normalform
(x4 − 2ax2 − 8bx + a2
4y2,−x6 − 5ax4 − 20bx3 + 5a2x2 + 4abx + 8b2 + a3
8y3
),
5Claude-Gaspar Bachet de Meziriac (1581-1638)6Unter Berucksichtigung projektiv “unendlich ferner Punkte“ und der Symmetrie der Kubiken
in Weierstraßscher Normalform, sollte der “Startpunkt“ also moglichst nicht auf der x-Achse liegen,um gehaltvolle Sequenzen rationaler Punkte zu erhalten – was ohnehin nur fur 3
√c ∈ Q moglich
ist.

238 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
die sich mit a = 0 und b = c zu der von Bachet angegebenen einschranken laßt. Wasist an diesem Resultat so wichtig? Erstens verbindet es eine algebraische Fragestel-lung mit einer geometrischen Methode (die fur unseren besonderen Fall Y 2 −X3 =−2 zum Bild 6.7 fuhrt) und zweitens motiviert es zu einer weiteren Frage (wasdas Wichtigere ist!): lassen sich alle rationalen Punkte so, d.h. durch fortgesetz-te Schnittpunkte von Geraden bzw. Tangenten mit der unterlagerten algebraischenKurve, finden?
0.5 1 1.5 2 2.5 3 3.5
-6
-4
-2
2
4
6
x
y
0
1
4
5
78
9
10
. . .
. . .
Bild 6.7: Y 2 = X3−2 und einige rationale Punkte aus der Sequenz der ersten zehn Paarenach Bachets Duplikationsformel (numerische Werte nach 4 Ziffern abgebrochen)
Auch auf diese Frage gibt es eine Antwort in Form eines wunderbaren Ergebnis-ses von Mordell 7 , das direkt an Abschnitt 3.3.3 anknupft:
Satz von Mordell: Hat eine ebene nichtsingulare Kubik einen rationalen Punkt,dann ist die Gruppe der rationalen Punkte endlich erzeugt. ¤
Man kann also mit der im Abschnitt 3.3.3 formulierten Gruppe alle rationalenPunkte “einfangen“ und sich auch auf diese beschranken (d.h. die Konstruktionsme-thoden fuhren nicht aus diesem Bereich heraus, wie unschwer an den Gleichungenaus Satz 3.3.3.3 abzulesen ist). Bedenken wir noch, daß auch die reellen und diekomplexen Punkte Gruppen bilden, so erhalten wir die folgende Kette von Gruppenauf Kubiken:
{O} < C(Q) < C(R) < C(C) .
Das Bild 6.8 zeigt beispielsweise einige (wenige) Elemente der Gruppe E(Q) der auf
E : Y 2 = X3 − 112 X + 400
7Louis Joel Mordell (1888 Philadelphia - 1972 Cambridge, Cambridgeshire)

6.2. ZAHLENTHEORIE 239
liegenden rationalen Punkte. Diese wird durch die Punkte p1 = (0, 20), p2 = (4, 4)und p3 = (8, 4) erzeugt. 8 Die Konstruktion von p1 ⊕ p2 nach Abschnitt 3.3.3, Defi-nition 3.3.3.1 wird durch die eingezeichneten Hilfsgeraden verdeutlicht. Es wurdenindes keine Punkte der Art ⊕p1 ⊕ p1 ⊕ . . .⊕ p1 eingezeichnet.
-10
y
x5-5 10 15
-20
-40
40
20
60
p1
p3
p2
J Jp p1 2
J Jp p1 3
J J Jp p p1 2 3
p p1 3I Jp
1
Jp2
J Jp p2 3
J Ip p2 3
p p2 3J
p p1 2I
p p2 3I
Jp3
Bild 6.8: Einige Gruppenelemente der durch p1, p2 und p3 erzeugten Gruppe E(Q)
Das bringt uns sofort zu der Frage nach Punkten von endlicher Ordnung 9 (dienun zunachst nicht unbedingt rational sein mussen), d.h. nach Punkten, fur diemp = O gilt. Eine Art von Punkt endlicher Ordnung fallt uns sogleich ein: es istq = (α, 0) mit α3 +aα+ b = 0, fur den offensichtich (projektiv) q⊕q = [0, 1, 0] = Ogilt, d.h. q ist von der Ordnung zwei. Ob er Element der Gruppe der rationalenPunkte ist, hangt selbstverstandlich davon ab, ob α ∈ Q ist. Tatsachlich folgt je-doch noch weitaus mehr und in [ST92] werden einige bemerkenswerte Satze hieruberangegeben, die wir hier zitieren mochten:
8In [ST92] wird der Satz von Mordell fur Y 2 = X3 + aX2 + bX bewiesen und es werdenauch einige spezielle Falle diskutiert, fur die solch ein Erzeugendensystem aufgestellt wird. Ob esallerdings ein allgemeines Verfahren gibt, das bei gegebener Kubik das Erzeugendensystem fur dieGruppe der auf ihr gelegenen rationalen Pnkte liefert, weiß man nicht.
9Ein Element g der Gruppe G mit neutralem Element e heißt von der Ordnung m ∈ N, wenn
mg := g ◦ g ◦ . . . ◦ g︸ ︷︷ ︸m-mal
= e
(multiplikativ kann auch gm geschrieben werden) gilt, aber m′ g 6= e fur alle 1 ≤ m′ ≤ m ist.Existiert eine solche naturliche Zahl m, so heißt g von endlicher Ordnung, andernfalls heißt es vonunendlicher Ordnung.

240 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Punkte der Ordnung zwei und drei: Es sei C die durch 10
Y 2 = P (X) = X3 + aX2 + bX + c
definierte nichtsingulare Kurve. Dann gilt
• Ein Punkt p = (x, y) 6= O auf C ist von der Ordnung zwei genau dann, wenny = 0.
• C hat genau vier Punkte, deren Ordnung 2 teilt (dies sind O als Punkt derOrdnung eins und die drei – verschiedenen – Nullstellen αk, k = 1, 2, 3, vonP – C ist nichtsingular! – in der Form (αk, 0)). Diese vier Punkte bilden dasProdukt zweier zyklischer Gruppen der Ordnung zwei.
• Ein Punkt p = (x, y) 6= O auf C ist von der Ordnung drei genau dann, wenndie x-Koordinate eine Wurzel des folgenden Polynoms ist:
ψ3(X) = 3X4 + 4aX3 + 6bX2 + 12cX + (4ac− b2) .
• C hat genau neun Punkte, deren Ordnung 3 teilt (dies sind zunachst wiederO und die folgenden acht Punkte der Ordnung drei: (βk,±γk), k = 1, 2, 3, 4,wobei die βk die vier (komplexen) Wurzeln von ψ3 sind und fur jedes dieserWerte γk eine der Quadratwurzeln γk =
√βk ist). ¤
Bemerkung: Dieser Satz kann ubrigens mehr oder minder leicht mit den in dieserArbeit bereit gestellten Mitteln bewiesen werden. Hinweis zur letzten Aussage: es istψ3(X) = 2P (X)P ′′(X) − P ′(X)2 und aus Satz 4.1.2 folgt die Irreduzibilitat von C, jetztkann mit Lemma B.1.13 ein Widerspruch abgeleitet werden, sollte ψ3 nicht vier verschie-dene Wurzeln besitzen. Die nachsten beiden Satze sind nicht mehr so ohne weiteres zuzeigen. Wobei der Beweis des Satzes von Nagell-Lutz in [ST92] gefuhrt wird; der von Ma-zur ist ebenso schon wie schwer.
Satz von Nagell-Lutz: Es sei durch
Y 2 = P (X) = X3 + aX2 + bX + c
eine nichtsingulare Kubik mit ganzzahligen Koeffizienten a, b, c definiert und es sei
D = −4a3c + a2b2 + 18abc− 4b3 − 27c3
die Diskriminante 11 des kubischen Polynoms P (X). Angenommen p = (x, y) ist einrationaler Punkt endlicher Ordnung, dann sind x und y ganzzahlig! und es gilt
• entweder y = 0, in diesem Fall hat p die Ordnung zwei,
• oder y teilt D. ¤
10In [ST92] wird i.a. mit der i.G. zur Weierstraßschen Normalform etwas allgemeineren FormY 2 = X3 + aX2 + bX + c gearbeitet.
11Zur Diskriminante eines Polynoms siehe Anhang B, Definition B.1.11 auf Seite 309.

6.2. ZAHLENTHEORIE 241
Bemerkung: Die Umkehrung dieses Satzes gilt nicht! Es kann durchaus ganzzahligePunkte mit y teilt D geben, die von unendlicher Ordnung sind.
Satz von Mazur: Sei C eine nichtsingulare rationale kubische Kurve. Angenom-men C(Q) enthalt einen Punkt der endlichen Ordnung m, dann gilt
entweder 1 ≤ m ≤ 10 oder m = 12 .
Genauer: die Menge aller Punkte endlicher Ordnung in C(Q) bilden eine Untergrup-pe, die von eine der beiden folgenden Formen ist:
• Eine zyklische Gruppe der Ordnung N mit 1 ≤ N ≤ 10 oder N = 12.
• Das Produkt zweier zyklischer Gruppen der Ordnung zwei und 2N mit1 ≤ N ≤ 4. ¤
Von großem Nutzen sind elliptische Kurven uber endliche Korper 12 (wie im nachstenAbschnitt 6.3 uber Kryptologie noch zu sehen sein wird). Nun stellt sich dabeizunachst die Frage, wie “Kurven“ auf endliche Korper zu interpretieren sind, dasich kein eigentlich kontinuierlicher Kurvenzug ergibt. Das muß es auch nicht undman betrachtet das eine Kurve definierende Polynom P vielmehr formal, d.h. suchteinfacherweise nach Punkten (x, y) ∈ Fp, die P (x, y) = 0 erfullen. Insbesondere beider Untersuchung von Gruppen auf Kubiken in Fp bleiben dann alle Beziehungennach Abschnitt 3.3.3, Satz 3.3.3.3 erhalten, d.h. insbesondere auch die zuvor getrof-fene notwendige Unterscheidung zwischen nichtsingularen und singularen Kubiken.
Wieviele Punkte auf einer nichtsingularen elliptischen Kurve C im endlichenKorper Fp uberhaupt liegen konnen, beantwortet das Theorem von Hasse-Weil 13,nach dem
1 + p− 2√
p ≤ #C(Fp) ≤ 1 + p + 2√
p
gilt (dies wird in [ST92] andiskutiert).
12Endliche Koper sind wunderbar und einfach aufgebaut. Von der Ordnung p werden sie mit Fp
bezeichnet und hier der Hauptsatz uber sie aus [Artin93]:
Hauptsatz uber endliche Korper: Sei p eine Primzahl, und sei q = pr mit r ≥ 1.
• Es gibt einen Korper der Ordnung q.• Je zwei Korper der Ordnung q sind isomorph.• Sei L ein Korper der Ordnung q. Die multiplikative Gruppe L× der Elemente ungleich Null
ist zyklisch von der Ordnung q − 1.• Die Elemente von L sind Nullstellen des Polynoms Xq − X. Dieses Polynom zerfallt uber
L und hat keine mehrfache Nullstelle.• Jedes irreduzible Polynom vom Grad r in Fp[X ] ist ein Teiler von Xq −X. Die irreduziblen
Faktoren von Xq −X in Fp[X ] sind genau die irreduziblen Polynome in Fp[X ], deren Graddie Zahl r teilt.
• Ein Korper der Ordnung q enthalt genau dann einen Teilkorper der Ordnung q′ = pk, wennk die Zahl r teilt. ¤
13Helmut Hasse (1898 Kassel - 1979 Ahrensburg) und Andre Weil(1906 Straßburg - 1998Princeton)

242 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Wir wollen nun die Gruppen auf elliptischen Kurven in Fp an einem ausgewahltenBeispiel naher untersuchen. Dabei wird das neutrale Element wieder der (einzige)“unendlich ferne“ Punkt [0, 1, 0] sein, d.h. wir setzen stillschweigend wieder denprojektiven Abschluß P2(Fp) voraus. In [Faltings96] werden alle elliptischen Kurvenim F5 vollstandig mit ihrer Gruppenstruktur schematisch dargestellt. Wir geben unshier bescheidener und streben das gleiche nur fur den F3 an, d.h. wir mochten alleauf
Cab : Y 2 = X3 + aX + b , a, b ∈ F3 , 4a3 − 27b2 6= 0 ,
im Sinne des Abschnittes 3.3.3 operierende Gruppen angeben. Zunachst ist zu er-kennen, daß es fur a = 0 keine nichtsingularen Kubiken im F3 gibt, da
4 · 0− 27 · b2 ≡ 27 b2 ≡ 0 mod 3 .
Fur alle anderen Kombinationen a, b ∈ F3 existieren sehr wohl nichtsingulare ellip-tische Kurven mit entsprechenden Gruppen. Fur a = 1 betrachten wir exemplarischden Fall
C11 : Y 2 = X3 + X + 1
und bestimmen zunachst nach Tabelle 6.1 alle affinen Punkte 14 (x, y) ∈ C11 ⊂ F23.
Tabelle 6.1: Affine Punkte von C11
x ∈ F3 x3 + x + 1 mod 3 = Quadratzahl y2 ? y (x, y)
0 1 ja 1, 2 (0, 1), (0, 2)
1 0 ja 0 (1, 0)
2 2 nein − −
Fugen wir noch, wie oben bereits gesagt, den “unendlich fernen“ Punkt O =[0, 1, 0] ∈ P2(Fp) als neutrales Element hinzu (betrachten wir also C11 wieder kon-sequent als projektive Kurve), so enthalt C11 vier Elemente 15 :
C11 = {O, (1, 0), (0, 1), (0, 2) } .
Nach Abschnitt 3.3.3 wissen wir nun, daß C11 eine Gruppe der Ordnung vier bildetund mit Hilfe der Beziehungen nach Satz 3.3.3.3 auf Seite 162 konnen wir die Struk-tur dieser Gruppe untersuchen. Dabei sind die Beziehungen bzgl. der Addition und
14Fur große p entsteht hier erstens das Problem zu entscheiden, ob ein Korperelement z ∈ Fp eineQuadratzahl ist und zweitens, ggf. die Quadratwurzel zu finden. Wir kommen hierauf im Abschnitt6.3 bzw. im Anhang G.4 zuruck.
15Nach Hasse-Weil ergibt sich im F3 die Abschatzung
1 + 3− 2√
3 ≤ 1 ≤ #C(F3) ≤ 7 ≤ 1 + 3 + 2√
3
und wir werden sehen, daß sich beide Extreme einstellen: elliptische Kuven mit nur einem Element– dem neutralen – und eine elliptische Kurve mit sieben Elementen!

6.2. ZAHLENTHEORIE 243
Verdopplung von Kurvenpunkten hier im Sinne des Fp=3 aufzufassen:
Addition zweier Punkte:
(x3, y3) = (x1, y1)⊕ (x2, y2) =
O , falls x1 = x2 ,(−x1 − x2 + ω2 ,−y1 + (x1 − x3) ω ) mod p , falls x1 6= x2
mit
ω ≡ y2 − y1
x2 − x1
mod p ;
Verdopplung eines Punktes:
(x2, y2) = 2 (x1, y1) =
O , falls y1 = 0 ,(−2x1 + ω2 ,−y1 + (x1 − x2) ω ) mod p , falls y1 6= 0
mit
ω ≡ 3x21 + a
2y1
mod p .
Hiermit nun konnen wir (0, 1) und (0, 2) rasch als erzeugendes Element ausma-chen, denn es gilt:
1 (0, 1) = (0, 1) , 2 (0, 1) = (1, 0) , 3 (0, 1) = (0, 2) , 4 (0, 1) = O bzw.
1 (0, 2) = (0, 2) , 2 (0, 2) = (1, 0) , 3 (0, 2) = (0, 1) , 4 (0, 2) = O .
C11 ist also homomorph zur zyklischen Gruppe der Ordnung vier: C11∼= Z4 und
diese operiert auf den Punkten der elliptischen Kurve C11 nach Bild 6.9.
O
(0, 2)
(0, 1)(1, 0)
Bild 6.9: Die elliptische Kurve C11 ⊂ F3
Genauso sind C10 und C12 homomorph zu Z4, deren “Verlaufe“ mit allen anderenelliptischen Kurven des F3 im Bild 6.10 zusammenfassend angegeben sind.
Kommen wir jetzt abschließend noch zu a = 2. Am schnellsten ist b = 2 zuerledigen, da 2 ≡ x3 + 2x + 2 mod 3, x ∈ F3, keine Quadratzahl im F3 ist und C22
somit nur den einen Punkt O enthalt.

244 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Reichhaltiger sind die Falle b = 0 und b = 1; hier rechnet man rasch die folgendenMengen aus:
C20 = {O, (0, 0), (1, 0), (2, 0)} und
C21 = {O, (0, 1), (0, 2), (1, 1), (1, 2), (2, 1), (2, 2)} .
Die aus den obigen Beziehungen zur Addition und Verdopplung von Punktenauf elliptischen Kurven im Fp zu gewinnende Additionstafel fur die Punkte von C20
ist in Tabelle 6.2 angegeben. Hieraus ergibt sich fur die elliptische Kurve C20 derGruppenhomomorphismus C20
∼= Z2 × Z2 .
Tabelle 6.2: Addition von Punkten auf C20
⊕ O (0, 0) (1, 0) (2, 0)
O O (0, 0) (1, 0) (2, 0)
(0, 0) (0, 0) O (2, 0) (1, 0)
(1, 0) (1, 0) (2, 0) O (0, 0)
(2, 0) (2, 0) (1, 0) (0, 0) O
O
(1, 0)(0, 0) (2, 0)
2 x
Mit sieben Elementen ist C21 nun die umfangreichste elliptische Kurve im F3;aber auch ihre zugrunde liegende Gruppenstruktur ist wieder recht einfach, denn in(0, 1) etwa finden wir ein erzeugendes Element:
1 (0, 1) = (0, 1) , 2 (0, 1) = (1, 1) ,
3 (0, 1) = (2, 2) , 4 (0, 1) = (2, 1) ,
5 (1, 2) = (0, 1) , 6 (0, 1) = (0, 2) ,
7 (0, 1) = O .
Die Punkte auf C21 formen also eine zur zyklischen Gruppe siebter Ordnunghomomorphe Gruppe.
Damit sind alle elliptischen Kurven im F3 beschrieben und das Bild 6.10 zeigtzusammenfassend alle elliptischen Kurven im F3 auf einem Blick.

6.2. ZAHLENTHEORIE 245
keine
nicht-
singuläre
elliptische
Kurve
a
b
0
0
1
1
2
2
O
O
O
O
O
O
I
II
F
FP ( )
3
32
}C Z12 4=~ C Z22 1=~
C Z11 4=~ C Z21 7=~
C Z ZD20 2 2=~C Z10 4=~
Bild 6.10: Alle elliptischen Kurven im F3

246 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Abschließend soll ein etwas “kurioser Fall“ kurz beleuchtet werden, bei demPolynome von Bedeutung sind und algebraische Kurven uberraschend in Aktiontreten. Dieser “Fall“ beginnt mit Hilberts zehntem Problem, das nach einem Algo-rithmus fragt, der entscheidet, ob eine vorgelegte diophantische Gleichung losbar ist(fur detailliertere Informationen siehe [Alexandrov98]). Dieses Problem wurde 1970von Jurij Matijasevic im negativen Sinne entschieden, d.h. es gibt keinen solchenAlgorithmus. Dabei brachte Matijasevic einen Fragenkomplex zum Abschluß, dervon Martin Davis, Hilary Putnam und Julia Robinson behandelt wurde (siehe[AL95], Teil II, § 21). Diese behandelten den Themenkomplex unter dem Aspektvon rekursiv berechenbaren Zahlenmengen und wichtig fur uns ist das folgende sichdabei ergebende Theorem ([KW97]):
Jede auflistbare Untermenge von N (dies schließt alle berechenbaren Un-termengen von N ein) ist der positive Wertebereich eines Polynoms uberden ganzen Zahlen.
Das bedeutet etwa, daß die Primzahlen als der positive Wertebereich eines Po-lynoms darstellbar sind! Allerdings zeigt das obige Theorem lediglich die Existenzsolcher Polynome an, nicht in konstruktiver Weise ihren Aufbau und das Auffindeneines Polynoms bei gegebener Untermenge aus N kann sehr schwer sein!
Fur die Fibonacci-Zahlen 16 indes ist das Polynom in nur zwei Variablen auf-stellbar und von uberraschend einfachem Aufbau ([KW97]):
F = y(2− (
y2 − yx− x2)2
),
diese Beziehung ist unschwer als affin-algebraische Kurve zu identifizieren und derrechts von y stehende Faktor stellt nach Bild 6.11 nun gewissermaßen eine “Einhullen-
16Leonardo von Pisa (ca. 1170 Pisa - ca. 1250 Pisa), genannt Fibonacci, fragte in seinemBuch Liber abaci nach der Anzahl von Kaninchenpaaren am Ende eines Jahres, angefangen miteinem neugeborenen Kaninchenpaar und wenn jedes Paar, beginnend am Ende des zweiten Lebens-monates, monatlich ein weiteres Paar zur Welt bringt. Diese Fragestellung fuhrt auf die rekursiveGleichung un+2 = un+un+1 mit un als die Anzahl der Paare im n-ten Monat und mit u0 = u1 = 1,was zur Folge 1, 1, 2, 3, 5, 8, 13, 21, 34, ... fuhrt. Im Anhang H.2 wird die explizite Angabe
un = A αn + B βn ,
mit α = 1+√
52 , β = 1−√5
2 , A = 1+√
5/52 , B = 1−√5/5
2 abgeleitet. Dabei wird die in diesem Zu-sammenhang eher selten in’s Spiel gebrachte Z-Transformation eingesetzt. Die Folge besitzt eineReihe bemerkenswerter Eigenschaften, die in vielerlei Nachschlagewerke gefunden werden konnen.Bemerkenswert ist der Zusammenhang mit dem Goldenen Schnitt (dynamische Symmetrie), so giltfur die Folge der Quotienten zweier aufeinander folgender Glieder
α = limn→∞
un+1
un= 1 +
1
1 +1
1 +1
1 +1
. . .
=
√
1 +
√1 +
√1 +
√1 + . . . .

6.2. ZAHLENTHEORIE 247
de“ fur die Fibonacci-Zahlen dar. Der “Trick“ dabei ist, daß
(y2 − xy − x2)2 =
(y − 1 +
√5
2︸ ︷︷ ︸α
x)(y − 1−√5
2︸ ︷︷ ︸β
x)
2
genau fur zwei aufeinander folgende Fibonacci-Zahlen den Wert 1 annimmt (die ein-gezeichneten Geraden und Asymptoten der Einhullenden sind y = αx und y = βx)und fur alle anderen ganzen, positiven Zahlen goßer als 1 wird. Dadurch wer-den die Fibonacci-Zahlen durch den Ausdruck 2 − (y2 − yx− x2)
2gewissermaßen
“herausgefiltert“ und das Polynom F liefert uber die Multiplikation mit y im posi-tiven Wertebereich nur Fibonacci-Zahlen.
-2 -1 1 2 3 4 5 6
-2
2
4
6
8
x
y
Bild 6.11: Einhullende 2 − (Y 2 − XY − X2)2 = 0 von “Fibonacci-Zahlen-Punkte“(un, un+1)

248 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Am Ende dieses Abschnittes soll auch das Primzahlenpolynom noch angegebenwerden, um zu zeigen, wie unterschiedlich diese “aufzahlenden“ Polynome geartetsein konnen – und naturlich um der Schonheit des Resultates willen! Das folgende([Devlin94] entnommene) Polynom besitzt 26 Variablen (hierfur werden einfach dieBuchstaben des lateinischen Alphabets a, b, . . . , z benutzt), ist vom Grad 25 und eswaren betrachtliche Anstrengungen erforderlich, bis seine Aufstellung James Jones,Daihachiro Sato, Hideo Wada und Douglas Wiens im Jahre 1977 gelang (auchhier wird wieder das gleiche Prinzip wie bei den Fibonacci-Zahlen verfolgt, nachdem der rechts von k + 2 stehende Faktor die Primzahlen “herausfiltert“, d.h. dieangegebene Form erzeugt ausschließlich positive Werte, wenn k + 2 eine Primzahlund der rechts stehende Faktor gleich 1 ist):
P+Primzahl =
(k + 2
) (1 − (w z + h + j − q)2
− ((g k + 2g + k + 1)(h + j) + h− z)2
− (2n + p + q + z − e)2
− (16(k + 1)3(k + 2)(n + 1)2 + 1− f 2
)2
− (e3(e + 2)(a + 1)2 + 1− o2
)2
− ((a2 − 1)y2 + 1− x2
)2
− (16r2y4(a2 − 1) + 1− u2
)2
− (((a− u2(u2 − a))2 − 1)(n + 4dy)2 + 1− (x + cu)2
)2
− (n + l + v − y)2
− ((a2 − 1)l2 + 1−m2
)2
− (ai + k + 1− l − i)2
− (p + l(a− n− 1) + b(2an + 2a− n2 − 2n− 2)−m
)2
− (q + y(a− p− 1) + s(2ap + 2a− p2 − 2p − 2) − x
)2
− (z + pl(a− p) + t(2ap− p2 − 1)− pm
)2)
.
6.3 Kryptologie
Der romische Staatsmann Gaius Julius Caesar (100-44 v.Chr.) war einer der ersten,der kryptologische Techniken benutzt haben soll ([Beutelspacher96], [Bauer00]). Aufihn soll das folgende Verschiebungsverfahren zuruckgehen:
Klartext: a b c d e f g h i j k l m n o p q r s t u v w x y z,
Geheimtext: D E F G H I J K L M N O P Q R S T U V W X Y Z A B C.
Dadurch werden die Worte “algebraische kurve“ zur scheinbar sinnlosen Buchsta-benfolge “DOJHEUDLVFKH NXUYH“. Werden die Buchstaben von 0 bis 25 durch-

6.3. KRYPTOLOGIE 249
numeriert, erhalt man die Verschlusselungsfunktion
f(x) = x + 3 mod 25 fur x ∈ {0, 1, . . . , 25}und die Entschlusselungsfunktion
f−1(x) = x− 3 mod 25 .
Naturlich sind solche Codes leicht entschlusselbar 17, da Haufigkeitsanalysen uberdas Vorkommen einzelner Buchstaben in einer bestimmten Sprache rasch zu erstenZuordnungen fuhren, die dann durch geschicktes Testen (insbesondere bei langerenTexten) zur Entschlusselung fuhren. In [Bauer00] wird dieses Thema recht ausfuhr-lich behandelt und es mag interessant sein, fur die englische und deutsche Sprachehier (empirische) Haufigkeiten nach Tabelle 6.3 anzugeben 18.
Tabelle 6.3: Zeichenwahrscheinlichkeiten in % im Englischen und Deutschen (aus[Bauer00])
Zeichen englisch deutsch Zeichen englisch deutsch
a 8,04 6,47 n 7,09 9,84
b 1,54 1,93 o 7,60 2,98
c 3,06 2,68 p 2,00 0,96
d 3,99 4,83 q 0,11 0,02
e 12,51 17,48 r 6,12 7,54
f 2,30 1,65 s 6,54 6,83
g 1,96 3,06 t 9,25 6,13
h 5,49 4,23 u 2,71 4,17
i 7,26 7,73 v 0,99 0,94
j 0,16 0,27 w 1,92 1,48
k 0,67 1,46 x 0,19 0,04
l 4,14 3,49 y 1,73 0,08
m 2,53 2,58 z 0,09 1,14
Es bilden sich damit folgende Reihenfolgen heraus:
englisch: e t a o i n s r h l d c u m f p g w y b v k x j q z,
deutsch: e n i r s a t d h u l g o c m b f w k z p v j y x q.
Interessant ist evtl. noch die Bemerkung, daß Georg K. Zipf und Benoıt B. Man-delbrot empirische Formeln fur die Haufigkeit des k-ten Buchstabens aufgestellt
17Wie auch z.B. Edgar Allan Poe (1809-1849) in seiner in die Weltliteratur eingegangenenErzahlung Der Goldkafer verdeutlicht, wo Legrand, Protagonist der Story, den auf einer heteroge-nen Substitution mit gewohnlichen Lettern basierenden Code knackt.
18Dabei ist zu bemerken, daß je nach Quelle solche Angaben in ihren einzelnen Werten auchschwanken.

250 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
haben, namlich
p(k) ∝ 1/k und p(k) ∝ 1/(k + c)m fur geeignete positive c,m ,
die viele Sprachen erstaunlich gut treffen!
Doch kommen wir nun zur allgemeinen Situation der verschlusselten Nachrich-tenubertragung zuruck:
Person A mochte einen Text T an Person B senden. A hat die Ver-schlusselungsfunktion f und macht aus Text T den Text S = f(T ), deran B ubermittelt wird. Darauf wendet B die Entschlusselungsfunktionf−1 auf die ubermittelte Nachricht S an und erhalt gemaß T = f−1(S)den Originaltext. Dabei werden i.a. f und insbesondere f−1 geheim ge-halten!
Im folgenden gehen wir nur auf die auf Whitfield Diffie und Martin Hellman(1976) zuruckgehenden Public-Key-Kryptosysteme ein (siehe hierzu [Bauer00],[Beutelspacher96] und [Ruppert96]): f kann dabei offentlich gehalten werden, dahieraus f−1 praktisch nicht zu berechnen ist. An dem Nachrichtenaustausch nehmenmehrere Personen A, B, . . . teil. Jeder der Teilnehmer hat eine Verschlusselungs-funktion fA, fB, . . . und die zugehorige Entschlusselungsfunktion f−1
A , f−1B , . . .. In
einem offentlichen Verzeichnis findet man die Daten
(A, fA) , (B, fB) , . . . ,
wahrend die zugehorige Entschlusselungsfunktion f−1T nur dem jeweiligen Teilneh-
mer T ∈ {A,B, . . .} selbst bekannt ist!Angenommen A mochte B nun den Text T zukommen lassen – verschlusselt
naturlich! Der Teilnehmer A sendet dann fB(T ) und B kann leicht T = f−1B (fB(T ))
zuruck erhalten. Weil andere Teilnehmer nur ihre eigene Entschlusselungsfunktionkennen, also f−1
C , f−1D , . . ., nicht aber f−1
B , konnen sie fB(T ) nicht entschlusseln.
Auch das Problem der Authentifikation ist mit diesem System durchfuhrbar: Awahlt ein (zusatzliches Test-)Wort P und erganzt in der Nachricht an B am Ende desTextes T das Wort fB(f−1
A (P )). Am Ende des Textes erhalt B damit das zunachstunverstandliche Wort f−1
B (fB(f−1A (P ))) = f−1
A (P ), worauf B aber den offentlichenSchlussel fA anwenden kann und das verstandliche Wort fA(f−1
A (P )) = P erhalt;da nur A die Funktion f−1
A bekannt ist, nur A also P in der verschlusselten Weisef−1
A (P ) “verpacken“ konnte, ist A als Absender identifiziert.
Mathematisch gesehen stellt sich jetzt also die folgende Frage:
Gibt es Verschlusselungsfunktionen f , so daß sich f−1 aus f praktischnicht bestimmen laßt?
Die Antwort ist JA, und die algebraische Geometrie vermag es, in Form elliptischerKurven wieder einen kleinen Beitrag zu leisten. Zunachst schauen wir uns aber dieprinzipielle Arbeitsweise solcher Verschlusselungsfunktionen im Einsatz an; dazu istdie Betrachtung des popularen RSA-Verfahrens besonders gut geeignet.

6.3. KRYPTOLOGIE 251
RSA-Verfahren: Das RSA-Verfahren ist nach seinen Entwicklern Ronald L. Rivest,Adi Shamir und Leonard M. Adleman (1978) benannt. Die Einwegfunktion (und damitdie Sicherheit) des Verfahrens beruht darauf, daß es einfach ist, (auch große) Zahlen zumultiplizieren (und damit auch zu potenzieren), aber schwer, solche Zahlen zu faktorisie-ren.
Es werden große Primzahlen p und q gewahlt und n := p · q bestimmt. Dann wird k sogewahlt, daß ggT (k, kgV (p − 1, q − 1)) = 1 gilt. Wird der Text in Zahlen 0 ≤ T ≤ n − 1ubersetzt, so ist die Verschlusselungsfunktion
f(T ) ≡ T k mod n . (6.2)
Trotz der Große von n, kann f den Text T nur durch Multiplikationen verschlusseln,was effektiv ausfuhrbar ist. Wie sieht nun die Entschlusselungsfunktion aus? Wir beginnenbei einer Betrachtung bzgl. der Wahl von k. (Alle nachfolgend angegebenen algebraischenZusammenhange konnen in [Lorenz96] und besonders umfassend in [S88] gefunden wer-den.)
Die Abbildung T 7→ T k sollte auf Z/nZ naturlich bijektiv sein (damit die Entschlusse-lung eindeutig ist!). Insbesondere sollte dies auch auf der Gruppe 19 (Z/nZ)× der Fall sein.Wegen 20
(Z/nZ)× ∼= Zp−1 × Zq−1
sollte daher die Multiplikation auf dem Produkt der zyklischen Gruppen Zp−1 × Zq−1
bijektiv sein und also ggT (k, p− 1) = ggT (k, q − 1) = 1, bzw. damit auch
ggT (k, kgV (p− 1, q − 1)) = 1
gelten. Womit die Bedingung fur ein “funktionierendes“ k formuliert ist.
19Es ist (Z/nZ)× die Einheitengruppe von
Z/nZ = {[0 ] , [1 ] , [2 ] , . . . , [n− 1]} ,
d.h. sie enthalt alle invertierbaren Elemente der als Ring aufgefaßten Menge Z/nZ. Ihre Ordnungbetragt ∣∣(Z/nZ)×
∣∣ = ϕ(n) ,
dabei ist ϕ die Eulersche Funktion
ϕ(n) := # {a ∈ N | 0 ≤ a < n und ggT (a, n) = 1} .
Fur Primzahlen p gilt also insbesondere |(Z/pZ)×| = p− 1.20Fur eine positive ganze Zahl m ist die additive Gruppe der Restklassen
Z/mZ ∼= Zm
homomorph zur zyklischen Gruppe Zm. Wegen des chinesischen Restsatzes kann mit der kanoni-schen Primzahlzerlegung m = pν1
1 pν22 · · · pνr
r diese als Produkt
Zm = Zpν11× Zp
ν22× . . .× Zpνr
r
dargestellt werden. Fur Primzahlen p und q gilt insbesondere die Beziehung
(Z/(p · q)Z)× ∼= (Z/pZ)× × (Z/qZ)× ∼= Zp−1 × Zq−1 .

252 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Der Exponent 21 der Gruppe (Z/nZ)× ist
Exp (Z/nZ)× = kgV (p− 1, q − 1) =: P .
Mit dem erweiterten Eukidischen Algorithmus ([Beutelspacher96] oder auch [Wolfram99])kann man sich nun (da P und k nach Wahl letzterem teilerfremd sind) eine Zahl l berech-nen, die
k l ≡ 1 mod P
erfullt. D.h. es gilt k l = 1 + νP , fur eine ganze Zahl ν. Fur ein S ∈ (Z/nZ)× gilt dann
f(S)l ≡ Sk l = S1+νP ≡ S mod n .
Weil n quadratfrei ist, gilt diese Aussage aber fur alle S ∈ Z/nZ, womit die Entschlusse-lungsfunktion
f−1(S) ≡ S l mod n
gefunden ist und auch sie insbesondere nur durch Potenzieren d.h. Multiplizieren aus-zufuhren ist. Der Trick besteht nun darin, daß man l nur dann effektiv berechnen kann,wenn man die Faktorisierung von n hat; andernfalls ist l praktisch nicht zu finden.
Um die Arbeitsweise konkret zu demonstrieren, mochten wir (als Person A) nun den(geheimen) Text
das kennwort heißt goofy.
verschlusselt an die Person B senden. Da das RSA-Verfahren mit Zahlen arbeitet, wirdder Text zunachst mit der Tabelle 6.4 ubersetzt (z.B. auch ASCII o.a.).
Tabelle 6.4: Ubersetzung von Text in Zahlen
a b c d e f g h i
00 01 02 03 04 05 06 07 08 09
j k l m n o p q r s
10 11 12 13 14 15 16 17 18 19
t u v w x y z ß . ,
20 21 22 23 24 25 26 27 28 29
Damit lautet der obige Text
04011900110514142315182000080509272000071515062528
und kann nun (in geeigneter Modifikation) mit (6.2) verarbeitet werden. Angenommen Bhat seine Verschlusselung 22 so bekannt gemacht:
( B , n = 101671 , k = 9 ) ,
21Sei G eine Gruppe mit neutralem Element e. Die ganzen Zahlen n mit an = e fur alle a ∈ Gbilden eine Untergruppe UG von Z: UG = mZ mit eindeutig bestimmten m ∈ N. Die Zahl m heißtder Exponent von G im Zeichen ExpG .
Nach Konstruktion gilt aExpG = e.22Anmerkung: Wir arbeiten hier mit kleinen Zahlen, um das Prinzip zu verdeutlichen; in Wirk-
lichkeit liegen dem Produkt n Primzahlen mit ca. 100 bis 200 Stellen zugrunde!

6.3. KRYPTOLOGIE 253
dann konnen wir den Text in 5-er Pakete aufteilen und unter Einsatz von Mathematica soverschlusseln (also Si = fB(Ti) mit fB nach (6.2) und zu einer Liste zusammengefaßt):
und mithin (unter Einfugung von Nullen, falls das entsprechende Paket Si weniger als funfStellen besitzt)
12988720649018901225172460544252190918911885366010
senden. Empfanger B aber kann sich jetzt bei seiner Kenntnis von p und q den Exponentender Gruppe (Z/nZ)× bestimmen
und aus k die Zahl l bestimmen (in Mathematica ist der erweiterte Euklidische Algorithmusbereits implementiert und liefert fur den allg. Fall d = ggT (a, b) uber ExtendedGCD – alsoextended greatest common divisor – die beiden Zahlen x und y mit d = xa + yb)
Damit lauft die Entschlusselung ganz analog zur Verschlusselung ab:
und Person B hat den Text T in Klarform erhalten (in den 5-er Paketen sind die fuhrendenNullen zu erganzen und die Ubersetzung in Buchstaben bzw. anderen Zeichen hat nochzu erfolgen).
Hat man die Faktoren von n nicht (und bei 100- bis 200-stelligen Primzahlen gibt esheute keinen effektiven Algorithmus, der diese liefert), dann kann man l und damit dieEnschlusselungsfunktion nicht effektiv berechnen. ¤

254 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Andere Verfahren beruhen auf dem diskreten Logarithmus: Ist Zm eine zy-klische Gruppe, z ∈ Zm und n eine naturliche Zahl, so kann (durch Binarzerlegungdes Exponenten n, [Bauer00])
b = zn := z ◦ z ◦ . . . ◦ z︸ ︷︷ ︸n-mal
berechnet werden. Ist aber umgekehrt b ∈ G gegeben, so gibt es eine eindeutigenaturliche Zahl n (modulo der Ordnung m = |Z|), fur die b = zn gilt; n wird derdiskrete Logarithmus genannt, und diesen zu berechnen kann sehr schwer sein! Wieman sich diese Schwierigkeit bzw. Einwegfunktion wieder als Kryptosystem zu Nutzemacht, zeigt die nachste Beschreibung.
DL-Verfahren: (Allgemeines Prinzip nach [Ruppert96].) Es sei die abelsche GruppeG der Ordnung |G| und eine Ubersetzung vereinbart, nach welcher Text T in Elementeg ∈ G ubertragen werden kann. Jeder Teilnehmer T wahlt sich eine (Zufalls-)Zahl eT ∈ Nund berechnet sich eine weitere Zahl dT mit
eT dT ≡ 1 mod |G| .
Nun mochte A an B die Nachricht h ∈ G senden; in zeitlicher Reihenfolge werden danndie folgenden Nachrichten ausgetauscht:
A sendet zunachst heA an B ,
B sendet dann heA eB an A zuruck ,
A sendet dann heA eB dA an B
und B kann jetzt das Element (weil G abelsch! und dA und dB entsprechend berechnetwurden)
heA eB dA dB = heA dA eB dB = h
bestimmen. Ausgetauscht werden
heA , heA eB und heA eB dA = heA dA eB = heB ;
dies sind alles Elemente der von h erzeugten Gruppe H. Die Sicherheit bzw. die Gefahrbesteht nun darin: wenn jemand den diskreten Logarithmus fur H losen kann, so kommtdies einem “Knacken“ des Codes gleich. Das ist folgendermaßen einzusehen. Nach denobigen Ausfuhrungen liefert der diskrete Logarithmus fur die Elemente
b := heA und z := heA eB
den Wert n ∈ N mitheA = heA eB n ,
d.h.eA ≡ eA eB n mod|H| und damit 1 ≡ eB n mod|H|
und weil man heB hat, kann man sich also nun berechnen:
(heB )n = heB n = h .

6.3. KRYPTOLOGIE 255
Da es aber (fur große Gruppen) außerordentlich schwer ist, den diskreten Logarithmuszu berechnen (nach [Beutelspacher96] meinen einige Experten sogar noch schwieriger alsdie Faktorisierung großer Zahlen), ist das DL-Verfahren recht sicher. Das Verbluffende ist,daß außer der Abmachungen auf G keine Schlussel benotigt werden. ¤
Welche Gruppen kommen nun fur G in Frage? Bedingung ist, daß Potenziereneffektiv durchzufuhren sein sollte, das Logarithmusproblem aber nicht. Beispiele fursolche Gruppen sind nun (siehe [Bauer00]):
• (Z/pZ)× mit einer großen Primzahl p,
• Fpk wieder mit einer großen Primzahl p und
• E(Fpk), die nach dem vorigen Abschnitt 6.2 erwahnte Gruppe der rationalenZahlen auf einer elliptischen Kurve uber Fpk .
Es gibt noch andere Anwarter fur geeignete Gruppen. Aber abschließend schauenwir uns zwei Beispiele an: eines auf (Z/pZ)× basierend und eines nach [Ruppert96],das endlich elliptische Kurven benutzt.
Beispiel. Wir arbeiten wieder (bequemerweise) in Mathematica und mochten als PersonA erneut das Kennwort “goofy“ senden. Nach Tabelle 6.4 lautet der ubersetzte Text
T = 0715150625 ,
der nun nach dem DL-Verfahren mittels (Z/pZ)× an B zu ubermitteln ist. Wir schneidenT wieder in Teilstucke
T1 = 7151 und T2 = 50625 .
Die Primzahl p sollte also großer als T2 sein (um das Prinzip zu verdeutlichen, wahlen wirwieder eine sehr kleine Primzahl). Mathematica liefert uns als 6000-te Primzahl
was hier als ausreichend angesehen wird. Die Zahlen eA und (fur B) eB wahlen wir nichtrein zufallig; damit uberhaupt passende dA und dB gefunden werden konnen, sollten eA,eB teilerfremd zu p− 1 sein: einfacherweise werden also ebenfalls Primzahlen ausgesucht.In Mathematica liefert der erweiterte Euklidische Algorithmus sofort auch die Werte dA
und dB
es gilt dann tatsachlich

256 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Nun konnen wir anfangen, die beiden Teilstucke zu ubertragen
Diese konnen von B jetzt mit seiner Kenntnis von dB entschlusselt werden:
Der Code ist nur dann zu brechen, wenn wir auf H (das ist gleich (Z/pZ)×, da G nichtnur abelsch, sondern auch zyklisch ist) den diskreten Logarithmus berechnen konnten.Durch Probieren hat man bei p = 59359 schon einiges zu tun. Naturlich kennen wir dB
und konnen daher den Exponenten von z.B. T eA1 zur Basis T eAeB
1 angeben:
¤
Beispiel. Einbettung von Text in eine elliptische Kurve: Der Text T sei wieder durchZahlen m mit 0 ≤ m < M ubersetzt.
Wir wahlen eine naturliche Zahl κ und suchen eine Primzahl p mit p > Mκ. Es istjetzt eine elliptische Kurve
E : Y 2 = X3 + aX + b
uber Fp auszuwahlen. Nun soll m als Textbaustein in E eingebettet werden: wir setzen
x = mκ + j
an und starten mit j = 1. Fur die Zahl
y2 := x3 + ax + b

6.3. KRYPTOLOGIE 257
wird getestet, ob sie in Fp ein Quadrat ist. Wenn dies nicht der Fall ist, wird x durch x+1ersetzt, solange x ≤ mκ + j. Andernfalls bestimmen wir y ∈ Fp mit y2 = y2 (uber denTest, ob y2 quadratisch mod p ist und – falls das der Fall ist – wie man ein passendes yberechnet, wird im Anhang G uber Mathematica , Abschnitt G.4 kurz berichtet). Dannist (x, y) ∈ E(Fp) und der Textbaustein m wird dem Punkt Pm = (x, y) zugeordnet.(Die Wahrscheinlichkeit, daß alle κ berechneten Zahlen y2 keine Quadrate modulo p sind,betragt 0,5κ.)
Ist umgekehrt der Punkt P = (x, y) gegeben, so finden wir mit x = mκ+ j, 1 ≤ j ≤ κ,den Baustein m =
[x−1
κ
].
Sollen z.B. M = 1010 Zahlen benutzt werden, so kann κ = 30 und als Primzahlp = 3 · 1011 + 121 gewahlt werden, was p > Mκ erfullt. Mit der elliptischen Kurve
E : Y 2 = X3 − 30 · 72 X − 56 · 73
wird dann unser Text “das kennwort heißt goofy.“ gemaß der Ubersetzung nach Tabelle6.4
04011900110514142315182000080509272000071515062528
diesmal in zehn Zahlen unterteilt und in die Punkte von E eingebettet:
i m = Ti j Pm = (x, y)
1 0401190011 1 (12035700331, 233258503855)
2 0514142315 1 (15424269451, 205093797032)
3 1820000805 3 (54600024153, 182362400844)
4 0927200007 4 (27816000214, 96652975834)
5 1515062528 2 (45451875842, 247365591808)
Diese Gruppenelemente konnen jetzt wieder in Form von entsprechenden Potenzenversandt werden. Wie man allerdings geeignete elliptische Kurven wahlt, ist ein Kapitel fursich. Insbesondere ist #E(Fp) nicht leicht zu berechnen, dabei sollte E(Fp) durchaus einegroße zyklische Untergruppe besitzen. [Ruppert96] bietet hierfur einen gewissen Ausblick.¤

258 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
6.4 Abelsche Integrale
Komplexe algebraische Kurven tauchen auch im Zusammenhang mit Integralen vonbesonderem Typ auf. Wir beginnen unsere Diskussion mit der Frage nach dem In-tegral ∫ b
a
r(x)dx
einer rationalen Funktion r(x) = p(x)q(x)
mit Polynomen p und q. Die Funktion r kannin Partialbruche
r(x) = Polynom(x) +α1
(x− β1)k1+
α2
(x− β2)k2+ . . .
zerlegt werden (die Potenzen k sind dabei positive ganze Zahlen, die Werte α undβ konnen auch komplex sein). Das unbestimmte Integral von r(x) ist damit also dieSumme rationaler Funktionen und Summanden der Gestalt
α ln(x− β) , sofern k = 1 .
Als nachstes betrachten wir das Integral
∫ b
a
1√1 + x2
dx
mit einer Wurzelfunktion im Nenner. Es kann unter der Substitution
x =2t
1− t2
auf ein Integral vom obigen Typ, also auf eines mit einer rationalen Funktion zuruck-gefuhrt werden. Das gilt ganz allgemein: jedes Integral der Form
∫ b
a
R(x,√
1 + x2)dx
mit R(x, y) = P (x,y)Q(x,y)
als rationale Funktion in zwei Variablen, kann unter der obengezeigten Substitution in ein Integral einer rationalen Funktion von t verwandeltwerden. Ahnlich kann mit jedem Integral der Form
∫ b
a
R(x,w(x))dx
verfahren werden, wobei R(x, y) rational und w(x) eine in [a, b] stetige Funktion vonx ist, so daß w(x) und x eine polynomiale Gleichung vom Grad zwei
a1w(x)2 + (a2x + a3)w(x) + a4x2 + a5x + a6 = 0

6.4. ABELSCHE INTEGRALE 259
erfullen – die Koeffizienten a1, . . . , a6 konnen dabei wieder komplex sein. Unter“trickreichen“ Substitutionen kann das angegebene Integral wieder auf eines einerrationalen Funktion zuruckgefuhrt werden.
Das fuhrt uns zu der folgenden Definition, die einen wichtigen Typ von Integralerfaßt.
Definition. Ein Abelsches Integral ist ein Integral der Form
∫
γ
R(z, w(z))dz
mit γ : [0, 1] → C als stetiger Weg in C, R(x, y) als rationale Funktion in zweiVariablen und w(z) als stetige Abbildung von z auf dem Bild von γ, so daß w(z)und z einer polynomialen Beziehung genugen: P (z, w(z)) = 0 . ¤
Erfullt die Abbildung w die Beziehung
w(z)2 = (z − α1)(z − α2) . . . (z − αk)
mit α1, α2, . . . , αk ∈ C, dann wird
∫
γ
R(z, w(z))dz
als elliptisches Integral bezeichnet, wenn k gleich 3 oder 4 ist, man nennt eshyperelliptisches Integral, wenn k mindestens 5 betragt.
Integrale dieser Form wurden im letzten Jahrhundert intensiv erforscht, insbe-sondere von dem norwegischen Mathematiker Niels H. Abel, nach dem sie auchbenannt sind. Sie tauchen an vielen Stellen der angewandten Mathematik auf.
Beispiel. Die Bogenlange einer Ellipse
x2
a2+
y2
b2= 1
zwischen den x-Koordinaten c und d ist
1a
∫ d
c
a4 + (b2 − a2)x2
√(a2 − x2)(a4 + (b2 − a2)x2)
dx ,
was ein elliptisches Integral darstellt. ¤

260 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Beispiel. Elliptische Integrale tauchen auch im Zusammenhang mit der Losung der Dif-ferentialgleichung fur das einfache Pendel auf (mit θ als Winkel der Auslenkung):
θ = −k sin θ .
Wird dies mit 2θ multipliziert, kann die so entstehende Gleichung zu
(θ)2 = 2k cos θ + c
integriert werden (Kettenregel). Wird weiter x = cos θ substituiert, so erhalten wir aus
x(t) = − sin θ(t) · θ(t)
die Beziehung x2 = (1−x2)(2kx+c) und damit fur x das Integral (Trennung der Variablen)∫
dt =∫ (
(1− x2)(2kx + c))− 1
2 dx ,
was wieder ein elliptisches Integral ist. ¤
Warum verhalten sich die Abelschen Integrale, mit denen dieser Abschnitt be-gann – sie konnten auf Integrale rationaler Funktionen zuruckgefuhrt werden –, imGegensatz zu den Integralen der letzten Beispiele – gar keine geschlossene Losungist mehr angebbar – so anders?
Die Frage kann aus der Theorie der algebraischen Kurven beantwortet werdenund ergibt sich letzlich aus der Konstruktion eines allgemeineren Typs von Integral,das auf Riemannschen Flachen “lebt“.
Das soll jetzt in Kurze beleuchtet werden. Zunachst definiert man auf den unsbereits begegneten Riemannschen Flachen S meromorphe Funktionen f : S → P1.23 Weiter fuhrt man sogenannte meromorphe Differentiale f dg ein, fur die be-stimmte Vertraglichkeitsbedingungen einzuhalten sind. 24 Mit Hilfe dieses Konstruk-tes kann auf Riemannschen Flachen integriert werden:
∫
γ
f dg =
∫ b
a
f ◦ γ(t) (g ◦ γ)′ (t)dt ,
wobei γ : [a, b] → S wieder ein stuckweise glatter Weg ist und ein weiteres mal zuuberprufen ist, ob diese Konstruktion konsistent ist. 25
23Diese sind interessanter als holomorphe Funktionen, da alle holomorphen Funktionen f : S → Cauf kompakten Riemannschen Flachen – diese sind fur uns als algebraische Kurven gerade wichtig– konstant sind.
24Dies lauft wie bei Mannigfaltigkeiten ublich wieder mit holomorphen Karten φ : S ⊃ U → Vab: fdg = fdg :⇔ (f ◦ φ−1)(g ◦ φ−1) = (f ◦ φ−1)(g ◦ φ−1) .
25Es muß uberpruft werden, daß im Falle von fdg = fdg auch
∫ b
a
f ◦ γ(t) (g ◦ γ)′ (t) dt =∫ b
a
f ◦ γ(t) (g ◦ γ)′ (t) dt
gilt.

6.4. ABELSCHE INTEGRALE 261
Jetzt versuchen wir, den Weg von diesen Integralen zu den Abelschen zu fin-den. Die projektiv-algebraische Kurve C ⊂ P2 (letztlich die kompakte RiemannscheFlache S) sei durch das homogene Polynom P (X, Y, Z) = 0 definiert. Weiter seien fund g rationale Funktionen auf der algebraisch-projektiven Kurve C\Sing(C) undγ ein stuckweise glatter Weg auf C\Sing(C), der nicht durch Polstellen des mero-morphen Differentials f dg verlauft. Wie gewohnt nehmen wir an, daß C nicht dieGerade Z = 0 im “Unendlichen“ ist und g die Funktion
[x, y, z] 7→ x
z
ist. Arbeiten wir daruber hinaus in affinen Koordinaten, so kann dx anstelle von dgbenutzt werden und f wird die rationale Funktion R(x, y), so daß obiges Integral zu
∫
γ
f dg =
∫
γ
R(x, y) dx (6.3)
wird. Die Variable y ist uber die “Nebenbedingung“ P (x, y, 1) = 0 eine Funktionvon x.
Das Integral (6.3) wird als elliptisches Integral bezeichnet, falls C eine elliptischeKurve ist, d.h. vom Typ
Y 2 = (X − α1)(X − α2) . . . (X − αk) (6.4)
mit verschiedenen komplexen Werten α1, α2, . . . αk und k = 3 oder 4 ist. Im Fallevon k ≥ 5 sprechen wir wieder von hyperelliptischen Integralen.
Wir sahen oben, daß im Falle von k = 1 oder 2 diese Integrale stets durchSummen rationaler Funktionen und Logarithmen ausgedruckt werden konnen, furk ≥ 3 dies aber nicht mehr der Fall war. Das unterschiedliche Losungsverhaltenstammt nun von den verschiedenen Typen von algebraischen Kurven, auf die fals meromorphe Funktion definiert ist und auf denen verborgenerweise auch dasAbelsche Integral “lebt“.
Eine irreduzible Kurve (6.4) in P2 vom Grad 1 oder 2 ist aber zur komplexenprojektiven Gerade P1 isomorph (siehe Satz 3.2.1.4 auf Seite 116). Elliptische undhyperelliptische Kurven dagegen sind vom Geschlecht eins und hoher (siehe unten,Abschnitt 6.8), so daß sie nicht homoomorph, geschweige denn isomorph zu P1 seinkonnen!

262 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
6.5 Knotentheorie
Lord Kelvin (William Thomson, 1824 Belfast - 1907 Netherhall, Ayrshire), ei-ner der Begrunder der Thermodynamik, versuchte – erfolglos –, das Periodensystemder Elemente zu erklaren, indem er annahm, Atome seien Knoten im Gefuge eineshypothetischen Athers. Der schottische Mathematiker Peter Guthrie Tait (1831Dalkeith Midlothian - 1901 Edinburgh) und der amerikanische Mathematiker C.N.Little arbeiten an Knotentabellen, welche die Knoten nach ihrer Komplexitat ord-neten. Von Tait sind diese Tabellen in [Epple99] abgedruckt, und man sollte bei sichbietender Gelegenheit nicht versaumen, einen oder mehrere Blicke darauf zu werfen!
Im zwanzigsten Jahrhundet tauchten Knoten in einer Vielzahl verschiedener na-turwissenschaftlicher Untersuchungen auf (Knoten in DNS-Molekulen, Stringtheorie,statistische Mechanik [Faltings96]) und ließen die Knotentheorie zu einem fruchtba-ren Zweig der Mathemauk anwachsen. Nicht zuletzt, weil die grundlegenden Ob-jekte ihrer Theorie der Geometrie in ihren verschiedenen Auspragungen von langerHand her vertraut sind: ein Knoten ist letztlich nicht anderes, als eine glatte, dop-pelpunktfreie, geschlossene Kurve, die etwa dadurch entsteht, indem eine beliebigverschlungene Schnur in ihren Enden miteinader verbunden wird.
Eine gute Ubersicht bietet das Knotenbuch [Adams95], in dem sich auch eini-ge Anwendungen finden und wo die grundlegenden Ideen der Theorie anschaulicherlautert werden. So sind etwa – wie so oft in der Mathematik – Invarianten zu fin-den, welche Knoten ganz unabhangig von ihrem Erscheinungsbild klassifizieren (inBild 6.12 sind z.B. drei verschiedene Darstellungen eines Knotens, des sogenanntenAchterknotens, dargestellt). Wir werden nun mit Hilfe der algebraischen Kurvensehen, wie sich erste Untersuchungen durchfuhren und einfache Knoten erzeugenlassen ([Kirwan92]).
Bild 6.12: Der Achterknoten
In vorhergehenden Abschnitten konnten wir bereits feststellen, daß es schwierigist, aus reellen Schnitten einen Uberblick uber eine komplexe Kurve zu gewinnen.Insbesondere bei Singularitaten gibt es eine bessere Methode, das Verhalten einerKurve in der Nahe eines solchen Punktes (a, b) zu studieren: Die Kurve wird miteiner kleinen dreidimensionalen Sphare
{(x, y) ∈ C2 | |x− a|2 + |y − b|2 = ε2
}
im C2 = R4 geschnitten. Dieser Schnitt wird sich als Knoten in der dreidimen-sionalen Sphare herausstellen. Diese Sphare kann dabei topologisch mit dem Eu-

6.5. KNOTENTHEORIE 263
klidischen Raum R3 zusammen mit einem zusatzlichen Punkt im “Unendlichen“aufgefaßt werden (vgl. auch Abschnitt 6.8), wenn eine stereographische Projektionverwendet wird.
Angenommen das Zentrum (a, b) liegt im Ursprung (0, 0) des C2. Dann bildet diestereographische Projektion von (0, ε) jeden hiervon verschiedenen Punkt (x, y) ∈ C2
auf den Schnittpunkt ab, der sich durch eine (0, ε) und (x, y) verlaufende (reelle)Gerade mit dem dreidimensionalen reellen Raum
{(p, q) ∈ C2 | Re (q) = 0
}
ergibt. Mit den Raumkoordinaten (u, v, w) ∈ R3 erhalten wir also unter
(u, v, 0, w) = (Re (p), Im (p), Re (q), Im (q))
aus der Geradengleichung((x, y)T − (0, ε)T
)t + (0, ε)T = (p, q)T
≡
Re (x)Im (x)Re (y)− εIm (y)
t +
00ε0
=
uv0w
die Abbildung 26
(x, y) 7→{ (
ε Re (x)ε−Re (y)
, ε Im (x)ε−Re (y)
, ε Im (y)ε−Re (y)
), falls Re (y) 6= ε ,
∞ , falls Re (y) = ε .
Das Bild 6.13 gibt von dieser Projektion einen Eindruck, wobei die Koordinate Im (y)unterdruckt wurde und somit nur der Ausschnitt C × R gezeigt wird. Der Punkt(x, y) erscheint dann seinerseits als Projektion (x, Re (y)) und die stereographischeProjektion von (0, ε) aus schneidet in C den Punkt p des Paares (p, q). In der durch(0, 0), x und (0, ε) aufgespannten Schnittebene kann an Hand der stark berandetgezeichneten Dreiecke jetzt noch einmal die obige Abbildung in ihren beiden erstenKoordinaten abgelesen werden.
Die Umkehrabbildung auszurechnen, kann als gute Ubung im Umgang mit nicht-linearen Gleichungssystemen gesehen werden. Mit Mathematica erhalt man mittels
eine sofortige Antwort (dabei wurde x = x1 + ix2 und y = y1 + iy2 gesetzt).
26Aus der Bedingung (Re (y) − ε)t + ε = 0 ergibt sich fur Re (y) 6= ε der reelle Parametert = ε
ε−Re (y) .

264 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
( , Re( ))x y
(0, 0)
Im( )x
Re( )y
Re( )y
Re( )p
Re( )p
Re( )x
Re( )x
e
e
x
p
p
x
Im( )p
(0, 0)
(0, 0)
Bild 6.13: Stereographische Projektion in C× {Re (y)}
Wir haben also die Inverse
(u, v, w) 7→ ε
u2 + v2 + w2 + ε2
(2ε(u + iv), u2 + v2 + w2 − ε2 + 2εiw
),
∞ 7→ (0, ε) .
Beispiel. Angenommen die algebraische Kurve C ist durch
XY = Y 2
definiert: das ist die Vereinigung der beiden Geraden Y = 0 und X = Y , so daß Cim Ursprung eine Singularitat aufweist. Unter der oben angegebenen stereographischenProjektion schneidet C die Sphare {(x, y) ∈ C2 | |x|2 + |y|2 = ε2} in dem Kreis
{(u, v, w) ∈ R3 |u2 + v2 = ε2 , w = 0}(als Bild von y = 0 und der Bedingung |x|2 = ε2) und
{(u, v, w) ∈ R3 | v = w, (u− ε)2 + 2v2 = 2ε2}(aus x = x1 + ix2 = y1 + iy2 = y folgt v = w und uber x1 = uε
u+ε , x2 = vεu+ε die angegebe-
ne Ellipsengleichung in der u-v-Ebene). Das Bild 6.14 zeigt diese beiden mit Mathematicaerstellten Schnittkurven und offenbart die nichtzusammenziehbare Konfiguration: die Kur-ve C zeigt in der Singularitat unter der stereographischen Projektion eine Umschlingungzweier Kreise. ¤

6.5. KNOTENTHEORIE 265
-10
12 -1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
-10
12
u
v
w
Bild 6.14: Eine einfache Verbindung
Beispiel. Als nachstes betrachten wir noch einmal die Neilsche Parabel
C : Y 2 = X3 .
Jeder Punkt (x, y) ∈ C dieser Kurve kann in der Form
(x, y) = (s2, s3)
mit einem eindeutigen s ∈ C geschrieben werden (vgl. Beispiel 1.1.6). In dieser Notationliegt ein Kurvenpunkt (x, y) genau dann auf der Sphare S2 = { (x, y) ∈ C ||x|2+|y|2 = ε2 } ,wenn |s| = δ mit δ als eindeutiger, positiver Losung von
δ4 + δ6 = ε2 .
Der Durchschnitt von C mit der angegebenen Sphare ist also
C ∩ S2 = { (δ2e2it, δ3e3it) | t ∈ [0, 2π) } ,
was wiederum in der Teilmenge
∆ = { (x, y) ∈ C | |x| = δ2, |y| = δ3 }
von S2 enthalten ist: C ∩ S2 ⊂ ∆ ⊂ S2. Unter stereographischer Projektion wird ∆ nunin solche (u, v, w) ∈ R3 abgebildet, die gerade (unter der oben angegebenen Inversen)
|x| = 2ε2
u2 + v2 + w2 + ε2
√u2 + v2 = δ2
erfullen, was sich zu
2ε2√
u2 + v2 = δ2 (u2 + v2 + w2 + ε2) bzw. (√
u2 + v2 − ε2δ−2︸ ︷︷ ︸ρ
)2 + w2 = ε2δ2︸︷︷︸r2
umstellen laßt. Das aber ist die Gleichung eines Torus’, wie man sich nach Bild 6.15 leichtuberlegt (die Gleichung enthalt gewissermaßen zwei Kreise).
Das Bild 6.16 zeigt eine Darstellung in Mathematica mit ε = 1 (woraus δ in derangegebenen Weise folgt). Dazu ist es gunstig, die komplexen Losungen zu unterdruckenund w in der folgenden Weise zu definieren:

266 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
v
v
w
u
r
r
( ) + =u w rr
u + = r
_ 2
2
2
2
2
2
Bild 6.15: Torus nach impliziter Gleichung
-2-1
0
1
2
-2
-1
0
1
2
-1
-0.5
0
0.5
1
-2-1
0
1
2
-2
-1
0
1
2
Bild 6.16: Torus nach impliziter Gleichung mit ε = 1
Damit haben wir das Bild von ∆ unter der stereographischen Projektion verstanden.Nun zuruck zur Menge C∩S2 ⊂ ∆; diese findet sich somit unter der stereographischen Pro-jektion auf dem Torus wieder. Wir versuchen diese nun in der folgenden qualitativen Weisezu verstehen: wir verfolgen den mit t parametrisierten Weg C ∩S2 und beobachten seinen

6.5. KNOTENTHEORIE 267
prinzipiellen Verlauf im stereographischen Bild auf dem Torus. Dabei bedeutet prinzipi-ell, daß wir die Anzahl der Umlaufe um die w-Achse (also entlang des “Rotationskreises“u2+v2 = (ε2δ−2)2) und um die “Langenkreise“ ((ω−ε2δ−2)2+w2 = ε2δ2 mit ω2 := u2+v2)feststellen.
Wandern wir in C ∩ S2 also entlang der Punkte(δ2 e2it , δ3 e3it
)
mit t von 0 bis 2π, dann umlauft das Bild dieser Kurve unter der stereographischenProjektion die w-Achse mit dem Winkel
arctanv
u= arctan
Im (x)Re (x)
= arg(x) = 2t .
D.h. das stereographisch projezierte Bild von C ∩S2 umlauft den “Rotationskreis“ um diew-Achse zweimal!
Auf den “Langskreisen“ konnen wir den Winkel 27
arctanw
ω − ρ= arctan
w√u2 + v2 − ε2δ−2
= arctanεIm (y)/(ε− Re (y))
ε|x|/(ε− Re (y))− ε2δ−2
= arctanIm (y)
|x| − εδ−2(ε− Re (y))
= arctansin(3t)√
1 + δ2 cos(3t)− δ4
verfolgen. Dieser zeigt nun an, daß sich das stereographisch projezierte Bild von C ∩ S2
dreimal um diesen Kreis “wickelt“, wenn t von 0 nach 2π variiert. Fur unseren numerischangenommen Fall von ε = 1 stellt sich diese Variation des Winkels in Mathematica nachBild 6.17 dar.
1 2 3 4 5 6
-1.5
-1
-0.5
0.5
1
1.5
Bild 6.17: Variation von arctan wω−ρ
Damit liegt eine sogenannte Kleeblattschlinge nach Bild 6.18 auf dem Torus vor.
27Mit |x| = δ2 und ε =√
δ4 + δ6.

268 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Bild 6.18: Kleeblattknoten auf dem Torus
Diese hatte in Mathematica auch direkt “berechnet“ oder besser: dargestellt werdenkonnen. Dazu definieren wir zunachst einfach C ∩ S2 durch
und setzen dies in die stereographische Projektion ein:
Dann ergibt ein parametrischer Plot im R3 mit t als Parameter das Bild 6.19.
-1
0
1
2 -2
-1
0
1
2
-0.5
0
0.5
-1
0
1
2
Bild 6.19: Kleeblattknoten in Mathematica
Wird auch der Torus noch einmal neu nach Abschnitt 1.4, Gleichung (1.17) auf Seite39 berechnet, so erhalten wir das Bild 6.20, das nun zusammen mit dem Knoten – derKleeblattschlinge – die Darstellung in Bild 6.21 unter veranderter Perspektive ergibt.
Eine erganzende Betrachtung findet sich im Anhang G, Abschnitt G.5 auf Seite 379, womittels sogenannter ’Rohrenknoten’ (Tubeknots) bzgl. des Knotenverlaufs anschaulichereBilder erzeugt werden konnen. ¤

6.5. KNOTENTHEORIE 269
-2
-1
0
1
2-2
-1
0
1
2
-0.5
0
0.5
-2
-1
0
1
2
Bild 6.20: Torus in parametrischer Form (vgl. Bild 6.16)
-2
-1
0
1
2
-2
-1
0
1
2-0.50
0.5
-2
-1
0
1
2
-2
-1
0
1
2
Bild 6.21: Kleeblattschlinge auf Torus in Mathematica

270 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
6.6 Robotik
Der Schriftsteller Karel Capek pragte 1920 den Begriff ’Roboter’ in seinem Buhnen-stuck “Rossums Universalroboter“ 28. Darin entwickeln der brillante WissenschaftlerRossum und sein Sohn aus einer von ihnen erfundenen dem Protoplasma ahnlichenSubstanz Roboter, die der Menschheit dienen und alle korperlichen Arbeiten ver-richten sollen. Die Geschichte endet jedoch tragisch, als die Roboter sich in ihrerRolle als dienende Wesen nicht mehr einfugen, und gegen ihre Herren zu rebellierenbeginnen.
Die Absichten der heutigen Ingenieurwissenschaft Robotik ([GWNO87]) nehmensich bescheidener aus. Sie verstehen unter Industrieroboter einen Bewegungsau-tomaten (mit mehreren Achsen), der hinsichtlich seines Bewegungsablaufes freiprogrammierbar und gegebenfalls sensorgefuhrt ist. Typische Probleme der Robotiksind:
• Bahnkinematik (Positionierung, Erreichbarkeit),
• Wiederholgenauigkeit (Regelung, Mechanik),
• Sensorik und Aktorik.
Im folgenden gehen wir lediglich auf den ersten Punkt naher ein. Der Roboter bestehtdabei aus mehreren starren Korpern, die mit Gelenken verbunden sind, siehe Bild6.22 links.
x
x
y
y
z
z
Bild 6.22: Sechsachsiger Industrieroboter
Dabei taucht die naturliche Frage auf:
Wie sind zu einer gegebenen Lage und Orientierung des Endeffektors allemoglichen Gelenkstellungen zu finden?
28Dabei bedeutet das tschechische Wort ’robota’ soviel, wie von einem starken Arbeiter bedientzu werden.

6.6. ROBOTIK 271
Diese Frage wird in der Literatur als IPP-Problem (Inverse Position Problem) be-zeichnet und fuhrt zur Angabe effektiver Bahnsteuerungen fur Roboter. Diese konnenin globale und lokale Bahnfuhrungen unterteilt werden. Erstere werden i.a. durchSpline-Interpolationen gelost und off-line programmiert: die Bahn wird dem Robo-ter vor Arbeitsablauf vorgegeben. Mochte man flexibel auf sich verandernde Ar-beitsbedingungen reagieren, sind (sensorgefuhrte) lokale Bahnsteuerungen notwen-dig. Hierbei erscheint das zentrale Problem der Singularitaten: soll der Roboter ineiner bestimmten Position eine neue anfahren, so konnen zwar Gelenkstellungen exi-stieren, welche diese lokale Uberfuhrbarkeit ermoglichen, diese aber evtl. nur durchextrem schnelle Gelenkanderungen erreichen. Wann und wie also tauchen diese Sin-gularitaten auf und welcher mathematischen Natur ist das IPP-Problem?
Um diese Frage zu beleuchten, kommen wir zum Aufbau des Industrieroboterszuruck. Zumachst gilt es die Lage des Endeffektors im Raum zu beschreiben. Dabeilassen wir uns von der Uberlegung leiten, in welcher Weise die Lage und Orientierungdesselben im Raum verandert werden kann: dies sind bei sechs Freiheitsgraden dreilineare und drei rotatorische Bewegungen (vgl. Bild 6.22 rechts).
Die orthogonale Gruppe O(3) beschreibt alle Drehungen im Raum 29; davonkonnen jedoch nur diejenigen zur Beschreibung herangezogen werden, welche dieOrientierung im Raum beibehalten, dies ist die Untergruppe SO(3) < O(3) – diespezielle orthogonale Gruppe:
SO(3) = { τ ∈ O(3) |“Die Drehung τ erhalt die Orientierung im Raum.“ }=
{A ∈ GL(3) |AT A = I und det A = 1
}.
Zusammen mit den durch den Vektorraum R3 modellierten linearen Bewegungenerhalten wir zur Beschreibung der Roboterkinematik damit die sechsdimensionaleLiegruppe 30
SO(3) × R3 ,
welche alle orientierungserhaltenden Bewegungen im Raum umfaßt. Vom geometri-schen Gesichtspunkt aus ist eine Liegruppe eine differenzierbare Mannigfaltigkeit,zusatzlich besitzt sie eine algebraische Struktur (siehe etwa [Knorrer96]). Beschrei-ben wir mit den Matrizen A,B ∈ SO(3) Drehungen und mit den Vektoren a, b ∈ R3
lineare Bewegungen, so ist die Gruppenoperation ◦ von (A, a), (B, b) ∈ SO(3)× R3
als Hintereinanderausfuhrung der beiden Bewegungen (zuerst) “Drehung A und Ver-schiebung a“ und (dann) “Drehung B und Verschiebung b“ auf die Position p uber
B(Ap + a) + b = BAp + Ba + b
also durch
(B, b) ◦ (A, a) = (BA, Ba + b)
29Also O(3) ={A ∈ GL(3) |AT A = I
}, wobei wir stillschweigend voraussetzen, daß alle Grup-
pen hier (zunachst) uber die reellen Zahlen definiert sind.30Marius Sophus Lie (1842 Nordfjordeide - 1899 Kristiania (Oslo))

272 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
gegeben. Damit haben wir die moglichen Lagen des Endeffektors beschrieben: durchAngabe eines Elementes aus SO(3)×R3 (also letztlich durch Richtung und Position).
Wird der Roboter wieder als eine Kette von starren Korpern K0 (als Sockel),K1, . . ., Kn (als Endeffektor) betrachtet, die uber Gelenke verbunden sind (vgl. Bild6.22), so ergibt jede Gelenkstellung eine bestimmte Endeffektorlage, d.h. die Mengealler Gelenkstellungen Q des Roboters kann uber die Manipulatorfunktion
M : Q −→ SO(3)× R3
auf Endeffektorlagen abgebildet werden. Weil die einzelnen Bewegungen der Gelenkeunabhangig voneinander erfolgen konnen, ergibt sich die Menge Q einfacherweise alsProdukt
Q = Q1 × . . .×Qn
der einzelnen Gelenkstellungen Qν , ν = 1, . . . , n, die bei Teleskoparmen eine Bewe-gung auf einer Geraden, bei Rotationsachsen eine Kreisbewegung parametrisieren.Die Menge Q ist dann eine n-dimensionale differenzierbare Mannigfaltigkeit undauch die Manipulatorfunktion M ist differenzierbar ([GWNO87]). Das inverse Posi-tionsproblem (IPP) laßt sich damit folgendermaßen erfassen:
Ist p ∈ SO(3) × R3 eine Position des Endeffektors, so sind alle Gelenk-positionen q ∈ Q gesucht, so daß
M(q) = p
gilt, d.h. der Endeffektor seine gewunschte Lage einnimmt.
Hierzu sind zwei Resultate wesentlich:
(1) Damit M(Q) zumindest “lokal“ surjektiv ist, muß die Jacobimatrix
(∂M/∂tν)ν=1,...,n|qmaximalen Rang aufweisen. Da M in die sechsdimensionale Liegruppe SO(3)×R3 abbildet, bedeutet das offenbar, daß notwendigerweise auch Q sechsdimen-sional sein muß, bzw. technisch gesprochen: der Roboter muß mindestens 6-achsig sein (vgl. ein weiteres mal mit Bild 6.22).
(2) Außerdem gilt folgendes weitreichendes Ergebnis ([BJS95]):Ist M : Q → SO(3)×R3 die Manipulatorabbildung eines 6-achsigen Knickarm-roboters, so ist IPP aquivalent zum Losen des folgenden reellen Gleichungssy-stems:
0 = Fk = ak1Z1Z3 + ak2Z1Z4 + ak3Z2Z3 + ak4Z2Z4
+ ak5Z5Z7 + ak6Z5Z8 + ak7Z6Z7 + ak8Z6Z8
+ ak9Z1 + ak10Z2 + ak11Z3 + ak12Z4
+ ak13Z5 + ak14Z6 + ak15Z7 + ak16Z8 , k = 1, . . . , 4 ,
0 = Fk = Z22k−9 + Z2
2k−8 − 1 , k = 5, . . . , 8 .

6.6. ROBOTIK 273
Und damit waren wir in Anbetracht dieses polynomialen Gleichungssystems (wennauch der Dimension 8) bei algebraischen Kurven angelangt.
Die Fragen nach der lokalen Bahnsteuerung munden also in Fragen nach Ei-genschaften des obigen Gleichungssystems von polynomialer Struktur, die aus derTheorie der algebraischen Kurven beantwortet werden konnen.
Zur numerischen Behandlung wechselt man zunachst zum komplexen Korper C,und versucht dann mit Hilfe der Homotopiemethode Losungen zu finden. Das Prin-zip dieser Methode beruht auf folgender Uberlegung: ist F : Cn → Cn (in unseremFall ist n = 8) eine Polynomabbildung und F (z) = 0 (also die Nullstellenmenge)gesucht, so wahle man zunachst eine Polynomabbildung G : Cn → Cn, deren Null-stellenmenge G(z) = 0 ’einfach’ zu bestimmen ist und betrachte dann die Homotopie
H(z, t) = (1− t) ·G(z) + t · F (z) , t ∈ [0, 1] .
Durchlauft nun der Parameter t das Intervall von 0 nach 1, so “verwandeln“ sichentlang der Homotopie H(z, t) = 0 (dem sogenannten Fortsetzungspfad) Losungenvon G(z) = 0 in solche von F (z) = 0. Dabei stellen sich folgende Fragen:
• Konnen so alle Nullstellen von F gefunden werden, d.h. besitzt Ggenugend Nullstellen und fuhren diese samtlich per Fortsetzungs-pfade zu solchen von F?
• Konnen Fortsetzungspfade divergieren?
Auf beiden Fragen weiß die Theorie eine Antwort zu geben. Zunachst ist es beigeschickter 31 Wahl von G = (g1, . . . , gn) : Cn → Cn mit den Komponentenfunktio-nen
gν = cν Zdνν − bν
moglich, alle Nullstellen zu finden; H(z, t) = 0 besteht dabei aus d1 · . . . · dn glattenFortsetzungspfaden in Cn. Fortsetzungspfade konnen allerdings divergieren; diesesProblem bekommt man aber wieder durch das Verfahren der Homogenisierung (sieheAbschnitt 1.2 und im besonderen Def. 1.2.7) der Ausgangsgleichungen in den Griff,da ja IPP glucklicherweise ein Gleichungssystem polynomialer Natur induziert!
Bei der numerischen Behandlung steht man also vor dem Problem, bei n = 8und dν = 2, ν = 1, . . . , 8, eines 6-achsigen Roboters 28 = 256 Fortsetzungspfadebetrachten zu mussen. Wir werden jetzt abschließend sehen, wie uns hier die alge-braische Geometrie zu deutlichen Einsparungen verhilft. Dazu werden algebraischeVarietaten auf Produktraume Pk1 × . . . × Pkm eingefuhrt und ein verallgemeinerterSatz von Bezout vorgestellt ([BJS95], [Kunz97], [Ruppert96]).
31Die Koeffizienten cν und bν der Komponentenfunktionen von G sind dabei “generisch“ zuwahlen: ein Begriff der Algebra, auf den wir hier nicht naher eingehen.

274 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Definition (m-Homogenisierung). Es sei eine algebraische Abbildung
F = (f1, . . . , fn)T : Cn −→ Cn
(z1, . . . , zn)T 7−→
f1(z1, . . . , zn)...
fn(z1, . . . , zn)
(die Komponentenfunktionen definieren also in der Form fν(Z1, . . . , Zn) = 0 alge-braische Kurven) gegeben. Ihre m-Homogenisierung wird folgendermaßen aufge-stellt:
• Zunachst ist eine disjunkte Zerlegung der Polynomvariablen
{Z1, Z2, . . . , Zn} = Z1 ∪ . . . ∪ Zm
zu wahlen (es ist also m ≤ n) und zu jeder Menge Zµ, µ = 1, . . . , m, eineHomogenisierungsvariable Z0µ. Damit wird der Raum Cn also in direkter Weisein den Produktraum Ck1 × . . .× Ckm partitioniert.
• Durch die Homogenisierung der Komponentenfunktion fν zu
fν(Z01, Z1, . . . , Z0µ, . . . , Z0m, . . . , Zn) :=
Zd1ν01 · . . . · Zdµν
0µ · . . . · Zdmν0m · fν
(Z1
Z01
, . . . ,Zn
Z0m
),
ν = 1, . . . , n, wobei dµν den Grad des Polynoms fν in der VariablenmengeZµ angibt (es wird also fν fur alle Zl ∈ Zµ einer Variablenmenge bzgl. desGrades dµν von fν in dieser Variablenmenge homogenisiert), wird der komplexeProduktraum Ck1+1× . . .×Ckm+1 in den projektiven Produktraum Pk1× . . .×Pkm eingebettet. ¤
Fur die so entstandene algebraische Varietat V (f1, . . . , fν) =: V (F (k1,...,km)) =:V (F (m)) gibt es wieder einen Satz von Bezout bzgl. der Multiplizitaten von Schnitt-punkten. Anstelle des Produktes der Kurvengrade (vgl. Satz 3.1.2 auf Seite 101) tritthier nun die sogenannte Bezout-Zahl d von V (F (m)) auf, welche der Koeffizient desSummanden Xk1
1 ·Xk22 · . . . ·Xkm
m in
n∏ν=1
m∑µ=1
dµν Xµ
ist. Damit gilt ein verallgemeinerter Satz von Bezout.
Satz. Ist F (m) eine m-Homogenisierung der algebraischen Abbildung F : Cn → Cn
mit der Bezout-Zahl d, so gilt∑
p∈V (f1)∩...∩V (fn)
Ip(V (f1), . . . , V (fn)) = d ,
d.h. V (F (m)) besitzt mit Schnittmultiplizitat gezahlt genau d gemeinsame Nullstel-len. ¤

6.7. KURVEN UND IDEALE 275
Dieser Satz kann jetzt auf IPP angewandt werden! Dazu betrachten wir die 2-Homogenisierung F (2) von F : C8 → C8 bzgl. der Partitionierung
Z1 := {Z1, Z2, Z5, Z6} und Z2 := {Z3, Z4, Z7, Z8} .
Die ersten vier Gleichungen von F liefern dann (d1ν = 1, d2ν = 1), ν = 1, . . . , 4, unddie ubrigen den Grad (d1ν = 2, d2ν = 0), ν = 5, 6, und (d1ν = 0, d2ν = 2), ν = 7, 8.Hieraus ergibt sich uber
(X1 + X2)4 · 4X2
1 · 4X22 = 16X2
1X22 (. . . + 6X2
1X22 + . . .) = 96X4
1X42 + . . .
die Bezout-Zahld = 96 ,
so daß in dem kompaktifizierten Raum 32 nach lediglich 96 Fortsetzungspfaden ge-sucht werden muß! Das ist gegenuber 256 Pfaden eine Einsparung um den Faktor22
3. Es geht aber noch besser: eine genauere Analyse der Nullstellenmenge V (F (2)) ⊂
P4 × P4 zeigt, daß genau 8 Nullstellen der Multiplizitat 4 “im Unendlichen“ liegen.Das reduziert die moglichen Fortsetzungspfade auf 96 − 8 · 4 = 64 (was zum Fak-tor 4 fuhrt!). Weiterfuhrende Untersuchungen betrachten nicht nur die polynomialeStruktur des vom IPP induzierten Gleichungssystems F , sondern auch die Koeffi-zienten a11, a12, . . ., die miteinander verknupft sind und ihrerseits parametrisierbarsind. Neuere Methoden setzen das oben (grob) vorgestellte Homotopieverfahren di-rekt auf die Parametrierung der Koeffizienten an und es gibt Ergebnisse, die zu 16Fortsetzungspfade fuhren.
Es konnte also gesehen werden, wie Methoden der algebraischen Geometrie Lo-sungsmengen geschickt einzugrenzen vermogen – wenn erst einmal das zu Grundeliegende Problem auf eine polynomiale Form gebracht wurde!
6.7 Kurven und Ideale
In dem ersten Kapitel fuhrten wir den Begriff der algebraischen Varietat ein (sieheDefinition 1.1.1 auf Seite 11). Fur den Gegenstand unserer hier angestellten Unter-suchungen – den Kurven – schrankten wir den Begriff geeignet ein.
Das Gebiet der algebraischen Geometrie nun beschaftigt sich mit den Eigenschaf-ten dieser ganz allgemein aufgefaßten Varietaten. Und der Zusammenhang dieseszunachst geometrischen Konzeptes mit der Algebra wird durch folgenden Hauptsatz([Artin93], Kapitel 10, §8) hergestellt (mit der Abkurzung X := (X1, . . . , Xn)).
Satz. Seien f1, . . . , fr Polynome in C[X1, . . . , Xn], und sei V die durch das Glei-chungssystem f1(X) = 0, . . . , fr(X) = 0 definierte Varietat sowie A das Ideal 33 (f1,. . ., fr). Die maximalen Ideale 34 des Restklassenringes R = C[X]/A entsprechenbijektiv den Punkten von V . ¤
32Streng genommen ist naturlich zuvor in Pk1 × . . . × Pkm ein neues Homotopieverfahren zuformulieren.
33Es wird durch alle Linearkombinationen (f1, . . . , fr) = {∑rk=1 gkfk | gk ∈ C[X]} erzeugt.
34Ein Ideal M eines Ringes R heißt maximal, wenn M 6= R ist und wenn M in keinem anderenIdeal als in M und R enthalten ist.

276 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Dieser Satz zeigt, daß die Geometrie der durch das Gleichungssystem
f1(X1, . . . , Xn) = . . . = fr(X1, . . . , Xn) = 0
definierten Varietat durch die Struktur des Ringes R = C[X1, . . . , Xn]/(f1, . . . , fr)bestimmt ist (und umgekehrt). Einer eingehenden Untersuchung der algebraischenGeometrie mit besonderer Betonung der Algebra (so wie in dieser Arbeit die Geo-metrie betont wurde!) widmen sich die Bucher [Kunz97] und [Mumford76]. Auch[Harris92] und [Hartshorne77] sind stark durch die algebraische Seite dieses Gebie-tes gepragt (fur eingehendere Buchbesprechungen siehe Literaturverzeichnis).
Fur unser Konzept der Kurve laßt sich dieser Zusammenhang folgendermaßenformulieren. Es sei in C eine algebraische Kurve 35 gegeben, dann legt diese mit Hilfeder beiden folgenden Satze ein Ideal I fest ([Walker78]).
Satz. Fur ein Polynom Q ∈ C[X] gilt: Q ∈ I ⇔ Q(a) = 0 fur alle (endlichen)Punkte a ∈ C. ¤
Satz. Gilt Q(a) = 0 fur alle Q ∈ I ⇒ a ∈ C. ¤
Umgekehrt kann eine Kurve C auch uber ein gegebenes Ideal I bestimmt werden.Dies trifft jedoch nicht in allen Fallen zu, so daß es geeignete Zusatzbedingungenzu erfullen gilt. Um diese Bedingungen zu formulieren, definieren wir zunachst dieDimension eines Ideal I ∈ C[X].
Definition. Ein Ideal I ∈ C[X] ist von der Dimension r, wenn r Elemente f1, . . ., fr
aus C[X] existieren, so daß fur alle Polynome g ∈ C[Z1, . . . , Zr], die nicht identischNull sind, die Beziehung
g(f1, . . . , fr) 6∈ Igilt und keine r + 1 Elemente aus C[X] mit dieser Eigenschaft existieren. ¤
Damit gilt nun ([Walker78]) der
Satz. Das Ideal I ∈ C[X] ist das Ideal einer irreduziblen algebraischen Kurve in Pn
genau dann, wenn I ein Primideal 36 und von der Dimension eins ist. ¤
In diesem Zusammenhang ergibt sich folgende interessante Konsequenz, die wie-der in das allgemeine Gebiet der algebraischen Geometrie fallt. Zunachst formulierenwir den Hilbertschen Nullstellensatz (siehe Kapitel 1, auf Seite 12) in algebraischerForm (nun wieder nach [Artin93]):
35Dabei spielt es keine entscheidende Rolle, ob C affin oder projektiv ist, da das Ideal im Falleprojektiver Kurven sich aus homogenen Polynomen zusammensetzt.
36Nach [Lorenz96] gilt die Definition: Sei R ein kommutativer Ring mit Eins. Ein Ideal I von Rheißt ein Primideal von R, wenn R/I ein Integritatsring ist. Genau dann ist also ein Ideal I 6= Rein Primideal, wenn allgemein
ab ∈ I ⇒ a ∈ I oder b ∈ Igilt. Es folgt: Jedes maximale Ideal von R ist auch Primideal von R.

6.7. KURVEN UND IDEALE 277
Hilbertscher Nullstellensatz: Es gibt eine bijektive Beziehung zwischen den ma-ximalen Idealen des Polynomrings C[X1, . . . , Xn] und den Punkten des komple-xen n-dimensionalen Raumes. Dabei entspricht ein Punkt a = (a1, . . . , an) ∈ Cn
dem Kern des durch f(X) 7→ f(a) definierten Einsetzungshomomorphismus ea :C[X1, . . . , Xn] → C. Der Kern Ma dieser Abbildung ist das Ideal, das von denlinearen Polynomen X1 − a1, . . ., Xn − an erzeugt wird. ¤
Als nachstes beantworten wir die Frage, ob ein Ring moglicherweise gar keinemaximalen Ideale haben kann:
Satz. Sei R ein Ring. Jedes Ideal A 6= (1) von R ist in einem maximalen Idealenthalten. ¤
Es bleibt an dieser Stelle darauf hinzuweisen, daß fur den Beweis dieses Satzesdas Auswahlaxiom oder das Zornsche Lemma benotigt wird. Als Folgerung ergibtsich, daß lediglich der Nullring keine maximalen Ideale hat.
Werden die beiden letzten Satze zusammengefuhrt, so ergibt sich die folgendenicht offensichtliche Folgerung.
Korollar. Es seien f1, . . . , fr Polynome in C[X1, . . . , Xn]. Hat das Gleichungssystem
f1(X) = . . . = fr(X) = 0
keine Losung in Cn, so ist 1 eine Linearkombination
1 =r∑
k=1
gkfk
der Polynome f1, . . . , fr mit polynomialen Koeffizienten. ¤
Denn sofern das System f1(X) = . . . = fr(X) = 0 keine Losung besitzt, exi-tiert nach dem Hilbertschen Nullstellensatz kein maximales Ideal, welches A :=(f1, . . . , fr) enthalt. Nach dem zuletzt zitierten Satz folgt daraus aber, daß A = (1)sei muß.
Beispiel. Im allgemeinen besitzen drei Polynome f1, f2, f3 in zwei Variablen X undY keine gemeinsame Nullstelle, so daß sie uber C[X,Y ] zu 1 linear kombiniert werdenkonnen. Betrachten wir etwa
f1(X, Y ) = X2 + Y 2 − 1 , f2(X, Y ) = X2 − Y + 1 , f3(X,Y ) = XY − 1 .
Mit Mathematica und dem Kommando
stellt man zunachst fest, daß f1(x, y) = f2(x, y) = f3(x, y) = 0 keine Losung in C2 besitzt.

278 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Setzen wir die folgende Linearkombination mit 11 Unbekannten an
so ergibt sich folgendes Gleichungssystem bzw. Losung:
D.h. es ergibt sich die folgende konkrete Linearkombination
113
((4X + 5Y − 2)f1 + (5Y 2 − 4X + 3Y + 2)f2 + (−5XY − 8X − 4Y − 9)f3
)= 1
im Polynomring C[X, Y ]. ¤
6.8 Einige topologische Eigenschaften
Der rein topologische Standpunkt ist ein grundlegender, der mit wenigen Annahmenauskommt, weitreichende Konsequenzen zieht und damit eigentlich an den Beginneiner Ausfuhrung stehen konnte. Er steht hier leider als Schlußlicht – und das in einerEinfuhrungsarbeit bewußtermaßen: je geringer die mathematischen Voraussetzungenausfallen, desto hoher muß die Motivation angelegt sein; und die uber Polynomedefinierten algebraischen Kurven bieten der einfuhrenden Darstellung nun einmaleinen ganz anderen Einstieg (siehe Kapitel 1).
Das bedeutet aber nicht, daß die topologischen Eigenschaften nicht ebenso faszi-nierend waren – im Gegenteil. Auch gestattet die Topologie einen eher vollstandigenUberblick bzgl. des Aussehens von komplexen algebraischen Kurven. In der ganzenArbeit verfolgte uns das Problem, einen Eindruck von komplexen Kurven zu geben,denn im Gegensatz zum R2 besitzt C2 vier reelle Dimensionen (vgl. auch Anhang A).Nichtsdestoweniger konnen wir Skizzen dieser Kurven entwerfen, welche die topolo-gischen Verhaltnisse akkurat wiedergeben, die aber nicht die tatsachliche Plazierungder Kurve im C2 widerspiegeln. Es sei also ein weiteres mal betont, daß alle im fol-genden angegebenen Bilder die Kurven als topologische Raume beschreiben!

6.8. EINIGE TOPOLOGISCHE EIGENSCHAFTEN 279
Wir nehmen diese Situation als Ausgangspunkt, um den topologischen Raumder durch
XY = 0
definierten Kurve C zu entwerfen. Offensichtlich ist C die Vereinigung von zwei kom-plexen Geraden (reellen Ebenen), die durch X = 0 und Y = 0 gegeben sind und sichim Ursprung (0, 0) ∈ C2 schneiden. Fugen wir den Ebenen wieder einen “unendlichfernen“ Punkt hinzu (Riemannsche Zahlenkugel), so erhalten wir topologisch gese-hen C als die Vereinigung zweier Spharen, die sich in (0, 0) beruhren – soweit dastopologische Bild, das akkurate topologische Bild! Zeichnen wir jetzt aber die zweiSpharen nach Bild 6.23 auf, so geraten wir bereits in das Dilemma des Verlustes deralgebraischen Akkuratesse.
8 81 2 8 8
1 2
(0,0)(0,0)
Bild 6.23: Zwei Ansichten der komplexen Kurve C : XY = 0
Die linke Darstellung imaginiert, daß sich die beiden komplexen Geraden imUrsprung tangential beruhren – das ist naturlich keineswegs der Fall. Soll zumAusdruck kommen, daß C im Ursprung eine Singularitat aufweist, so konnte manvielmehr zu der rechts angegebenen Darstellung greifen – aber besitzen auch dieeinzelnen Spharen dort eine Singularitat?
Diese Vorsicht beachtend, kann man letztlich jede nichtsingulare projektive Kur-ve in P2 topologisch gesehen als eine Sphare mit g Henkeln auffassen, wie dies inBild 6.24 angedeutet wird. Die Zahl g wird dabei als das Geschlecht der Kurvebezeichnet.
=~
Bild 6.24: Sphare mit drei Henkeln
Das Geschlecht g einer Kurve ist mit dem Grad d der Kurve eng verknupft. Hiergilt die Beziehung des nachfolgenden Satzes. Aufgrund der Ergebnisse aus Kapitel3 genugt es wieder, irreduzible Kurven zu betrachten.

280 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Satz (Geschlecht-Grad-Formel). Das Geschlecht einer nichtsingularen projektivenKurve C vom Grad d in P2 ist
g =1
2(d− 1)(d− 2) . ¤
Wir werden diesen Satz hier nicht beweisen, mochten aber doch einige Ideenzu seinem Beweis angeben und so ein Gefuhl fur das topologische Geschehen aufalgebraischen Kurven entwickeln: Zuerst werden d komplexe projektive Geraden inallgemeiner Lage zur Kurve C0 ⊂ P2 vom Grad d vereint. Dann bemerken wir nocheinmal, daß eine komplexe Gerade zur Sphare homoomorph ist 37, so daß topologischgesehen C0 homoomorph zu der Vereinigung von d Spharen ist, die sich in 1
2d(d− 1)
Punkte beruhren (siehe Korollar 4.1.4 auf Seite 175).Jetzt werden die Koeffizienten des die Kurve C0 definierenden Polynoms ge-
ringfugig “gestort“ bzw. verandert, so daß aus C0 die nichtsingulare Kurve C1 vomGrad d entsteht (man erinnere sich an das Beispiel 1.3.15 im Grundlagenkapitel 1auf Seite 30) 38. Dann beginnen die Spharen an ihren Beruhrungspunkten “kleineHalse“ bzw. “Schlauche“ nach Bild 6.25 auszubilden. Genau d − 1 von diesen Ver-bindungen werden benotigt, um die d Spharen zu einer Sphare zu vereinen. D.h. dieaus C0 durch kleine Verformung gewonnene nichtsingulare Kurve C1 ist topologischaquivalent zu einer Sphare mit
1
2d(d− 1)− (d− 1) =
1
2(d− 1)(d− 2)
Henkeln. Zum Beweis sind jetzt noch weitere Schritte notwendig (Koeffizientenstorungverandert nicht die Topologie der Kurve, Cnichtsing
d [X,Y, Z] ist wegzusammenhangend),die hier aber nicht mehr diskutiert werden sollen.
Fur singulare Kurven werden die Verhaltnisse komplizierter. So startet man beieiner irreduziblen projektiven Kurve C mit den Singularitaten p1, . . ., pr mit einerSphare C mit g Henkeln und einer stetigen Surjektion
π : C −→ C ,
die sich bei “Heraustrennen“ der Singularitaten zu einem Homoomorphismus
π|C\π−1{p1,...,pr} : C\π−1{p1, . . . ,pr} −→ C\{p1, . . . ,pr}37Sei G eine komplexe Gerade im P2, dann gilt
G ∼= S2 ={(u, v, w) ∈ R3 |u2 + v2 + w2 = 1
}.
Das kann durch eine stereographische Projektion ϕ : S2 → G, (u, v, w) 7→ [u + iv, 1− w, 0] gezeigtwerden, wobei die Gerade G unter einer projektiven Transformation als Gerade Z = 0 angenommenwurde.
38Formal kann das aus der Aussage gewonnen werden, daß die Menge Cnichtsingd [X,Y, Z] der
komplexen nichtsingularen homogenen Polynome vom Grad d in den Variablen X, Y und Z dichtin der Menge aller dieser Polynome Cd[X,Y, Z] liegt.

6.8. EINIGE TOPOLOGISCHE EIGENSCHAFTEN 281
Bild 6.25: Kleine Verformung einer singularen Kurve
einschranken laßt. Die positive ganze Zahl g wird wieder das Geschlecht der KurveC genannt. Die Menge der Punkte π−1(pk) ist fur jedes 1 ≤ k ≤ r endlich und ihreAnzahl hangt von der Art der Singularitat in der folgenden Weise ab: ist pk einegewohnliche Singularitat von C der Multiplizitat m ≥ 2, dann enthalt π−1(pk) genaum Punkte. Fur nicht gewohnliche Singularitaten liegen die Verhaltnisse allerdingsanders. Fur die Singularitat p von C : Y 2Z = X3 im Ursprung enthalt π−1(p) nureinen Punkt und π : C → C ist damit ein Homoomorphismus.
Die obige Geschlecht-Grad-Formel kann fur alle diese Falle erweitert werden.Dazu benotigt man aber in großerer Prazision ein Konzept zur Beschreibung derUrbilder der Singularitaten unter π. Das wird unter dem Begriff der Uberlagerunggeleistet, der zunachst lediglich auf topologische Raume X und Y aufsetzt.
Definition. Eine stetige, offene und diskrete Abbildung p : Y → X heißt eineUberlagerung von X oder eine Uberlagerungsabbildung. ¤
Dabei bedeutet diskret, daß fur jedes x ∈ X die Faser p−1(x) (siehe Bild 6.26)entweder leer oder eine diskrete Teilmenge von Y ist, d.h. ∀y ∈ p−1(x) : ∃Vy :Vy ∩ p−1(x) = {y}, wobei Vy eine geeignete Umgebung von y in Y ist.
Die einzelnen Mengen Vj des Urbildes U von p heißen die einzelnen Blatter derUberlagerung (rechter Bildteil 6.26)
p x( )-1
Y
Xx
V
y
y
p
V
U
Blätterj
Bild 6.26: Uberlagerung zweier topologischer Raume

282 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Beispiel. Um einen Eindruck von der Reichhaltigkeit des Begriffes der Uberlagerung zugeben, betrachten wir die im Bild 6.27 dargestellte Kleinsche Flasche. Diese wird von derEbene R2 durch die Abbildung
pF : R2 → I2/RF
nach Bild 6.27 (linker Teil) uberlagert. Die Kleinsche Flasche wird dabei durch den to-pologisch homoomorphen Quotienten I2/RF beschrieben, den man durch die folgendeAquivalenzrelation
(x, y) RF (x′, y′) :⇐⇒ ( (x, y) = (x′, y′) ∨({x, x′} = {0, 1} ∧ y = y′) ∨({y, y′} = {0, 1} ∧ x = 1− x′) ∨{x, x′, y, y′} ⊂ {0, 1})
auf das Einheitsquadrat I2 ⊂ R2 erhalt. Die “topologisch aquivalente Verwandlung“ zurKleinschen Flasche ist im rechten Bildteil 6.27 wiedergegeben. Dabei werden der angege-benen Aquivalenzrelation RF gemaß die Rander von I2 in der nach Pfeilrichtung gezeigtenWeise miteinander identifiziert (zu unterscheiden ist zwischen den Randern mit Einfach-und Doppelpfeilen). Wer zu diesem und dem nachsten Beispiel eine ebenso vergnuglichewie hochst instruktive weitergehende Erlauterung sucht, sollte sich [Stewart97] anschauen.Hier wird auch eine implizite Geichungen der Kleinschen Flasche im R3 angegeben. ¤
x
y
pF
Bild 6.27: Ebene uberlagert Kleinsche Flasche
Beispiel. Insbesondere uberlagert die Ebene die projektive Ebene. Dies leistet die Uber-lagerung
pE : R2 → I2/RE
in der nach Bild 6.28 links gezeigten Weise. Dabei “formt“ die Aquivalenzrelation
(x, y) RE (x′, y′) :⇐⇒ ( (x, y) = (x′, y′) ∨({x, x′} = {0, 1} ∧ y = 1− y′) ∨({y, y′} = {0, 1} ∧ x = 1− x′))
das Einheitsquadrat zur projektiven Ebene, was wieder im rechten Teil des Bildes 6.28veranschaulicht wird und eine bekannte Darstellung der projektiven Ebene P2(R) entstehenlaßt (vgl. mit Bild 2.11). ¤

6.8. EINIGE TOPOLOGISCHE EIGENSCHAFTEN 283
x
y
pE
Bild 6.28: Ebene uberlagert projektive Ebene
Besonders zu berucksichtigen sind Verzweigungspunkte einer Uberlagerung, indenen diese eine fehlende lokale Injektivitat aufweist. Ein solcher Verzweigungspunkty0 ist in dem Bild 6.29 dargestellt.
Definition. Ein Punkt y0 ∈ Y heißt Verzweigungspunkt der Uberlagerung p :Y → X , wenn es keine offene Umgebung V von y0 gibt, so daß p|V injektiv ist. ¤
Y
X
y
pp
0
V
Bild 6.29: Eine verzweigte Uberlagerung
Der folgende Satz aus [Artin93] impliziert nun insbesondere, daß auch die kom-plexe Nullstellenmenge eines Polynoms eine Uberlagerung darstellt.
Satz. Sei P ∈ C[X,Y ] ein irreduzibles Polynom, das nicht nur von X abhangt undbezeichne n den Grad des Polynoms in Y .
• Zu jedem Wert a ∈ C gibt es hochstens n Punkte von V (P ), deren x-Koordinategleich a ist.
• Es gibt eine endliche Teilmenge ∆ von C mit folgender Eigenschaft: Zu jedemWert a ∈ C\∆ gibt es genau n Punkte von V (P ), deren x-Koordinate gleicha ist. ¤

284 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Hieraus ergibt sich namlich die folgende Uberlagerungsabbildung aus einem Po-lynom.
Satz. Sei P ∈ C[X, Y ] ein irreduzibles Polynom vom Grad n in der Variablen Y .Dann ist die durch P definierte Riemannsche Flache S zusammen mit der Projek-tion S → C, (x, y) 7→ x, eine n-blattrige verzweigte Uberlagerung der komplexenZahlenebene. ¤
Letztendlich liegen uber den endlich vielen Punkten bzw. x-Werten aus ∆ ⊂ Cweniger als n Blatter. Fur die Riemannsche Flache zu Y 2 = X nach Bild 6.3 liegtim Ursprung ein Verzweigungspunkt. Auch das Bild 6.4 zeigt drei solche Verzwei-gungspunkte: a, b und c.
Diese Uberlegungen sind jetzt noch fur unsere projektiven Kurven nutzbar zumachen. Dazu ersetzt man gewissermaßen einfach C durch P1 und uberlagert dieprojektive Gerade mit der projektiven Kurve C. Dies geschieht – unter der Annahme[0, 1, 0] 6∈ C – durch die Abbildung
φ : C → P1 , φ [x, y, z] = [x, z] .
Damit schließlich kann der sogenannte Verzweigungsindex definiert werden, den wiraus [Kirwan92] ubernehmen.
Definition. Der Verzweigungsindex νφ [a, b, c] von φ im Punkt [a, b, c] ∈ C =V (P ) ist die Ordnung der Nullstelle des Polynoms P (a, Y, c) in Y an der Stelley = b. ¤
Ein Punkt [a, b, c] ist dann wieder ein Verzweigungsunkt, wenn νφ [a, b, c] > 1 ist.Hier noch einige nutzliche Eigenschaften zum Verzweigungsindex:
• Es ist νφ [a, b, c] > 0 genau dann, wenn [a, b, c] ∈ C.
• Es idt νφ [a, b, c] > 1 genau dann, wenn
P (a, b, c) = 0 =∂P
∂Y(a, b, c) ,
d.h. genau dann, wenn [a, b, c] ∈ C und die Tangente in [a, b, c] an C den Punkt[0, 1, 0] enthalt.
• Es ist νφ [a, b, c] > 2 genau dann, wenn
P (a, b, c) = 0 =∂P
∂Y(a, b, c) =
∂2P
∂Y 2(a, b, c) ,
wobei dies genau dann der Fall ist, wenn [a, b, c] ein Wendepunkt von C istund die Tangente von C in [a, b, c] den Punkt [0, 1, 0] enthalt.
Damit kann die Grad-Geschlecht-Formel fur singulare Kurven angegeben werden,die zunachst die obige Beziehung fur nichtsingulare Kurven beinhaltet und diesegeeignet vermindert.

6.8. EINIGE TOPOLOGISCHE EIGENSCHAFTEN 285
Satz (Noethers Formel). Das Geschlecht einer irreduziblen projektiven Kurve Cvom Grad d in P2 ist
g =1
2(d−1)(d−2) −
∑
p∈Sing(C)
δ(p) . ¤
Dabei ist fur einen singularen Punkt p der irreduziblen projektiven Kurve C =V (P ) der Wert δ die ganze Zahl
δ(p) =1
2
(Ip(P, PY )− νφ(p) + #π−1{p}) ,
wobei solche Koordinaten gewahlt seien, daß [0, 1, 0] nicht auf C oder auf eine derendlich vielen Tangenten an C durch Wendepunkte w ∈ C\Sing(C) liegt. Fur einenBeweis dieses Satzes verweisen wir auf [Kirwan92]. Wir mochten aber nicht versaum-en, an dieser Stelle das topologische Pendant zu einigen Kurven anzugeben. Das Bild6.30 zeigt funf Vertreter und neben den ublichen reellen Schnitten bei z = 1 ihretopologischen Strukturen.
8 8
1 2
X Y
a b= 1+
2
2
2
2
88
88
2
4
1
3
X Y+ = 14 4
8Y X X= +2 23
8Y X=2 3
8Y X X=2 3_
Bild 6.30: Einige Kurven in Form von Gleichungen, reellen Schnitten und topologischenRaumen

286 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
6.9 Divisoren
Das Geschlecht einer Kurve C kann neben seiner topologischen Einfuhrung (vgl.vorhergehenden Abschnitt) auch mit Hilfe der holomorphen Struktur auf C charak-terisiert werden. Dies fuhrt wiederum zwei Gebiete der Mathematik zusammen undmundet in dem berumten Satz von Riemann-Roch, der viele nutzliche Anwendungenbereithalt: z.B. den Nachweis der Assoziativitat der im Abschnitt 3.3.3 definiertenAddition von Punkten auf elliptischen Kurven.
Die angesprochene holomorphe Struktur auf C entsteht aus der nichttrivialenFrage nach der Existenz nicht-konstanter meromorpher Funktionen auf C – aufgefaßtwieder als kompakte Riemannsche Flache.
An dem Beginn der Entwicklung steht der Begriff des Divisors D einer projek-tiven Kurve C. Dieser ist eine endliche formale Summe
D :=∑p∈C
npp ,
wobei nur endlich viele np ∈ Z von Null verschieden sind.
Wir konnen uns einen Divisor als endliche Punktmenge mit vorgegebenen Viel-fachheiten vorstellen.
Der Grad eines Divisors ist zu
deg(D) :=∑p∈C
np
erklart. Divisoren werden in der ublichen Weise miteinander addiert und voneinandersubtrahiert 39. Die Menge alle Divisoren auf C bilden dann eine abelsche GruppeDiv(C).
Gilt np ≥ 0 fur alle p ∈ C, dann schreiben wir D ≥ 0 und D heißt effektiv. Furzwei Divisoren wird D ≥ D′ notiert, wenn D −D′ ≥ 0 gilt.
Interessant wird es, wenn wir eine nichtverschwindende meromorphe Funktion fauf C betrachten. Meromorphe Funktionen auf C werden dabei gemaß dem Konzeptder komplexen Mannigfaltigkeiten (nach Anhang D) mit Hilfe von Karten 40 von Cauf C erklart, d.h. f hat eine Pol- oder Nullstelle der Multiplizitat m im Punktp ∈ C genau dann, wenn f ◦ θ−1 : C ⊃ U → C einen Pol oder eine Nullstelle derMultiplizitat m in θ(p) ∈ U aufweist. D.h. in der Nahe von θ(p) konnen wir
f ◦ φ−1(z) = (z − θ(p))−m g(z) oder f ◦ φ−1(z) = (z − θ(p))m g(z)
(unabhangig von der gewahlten Karte θ) schreiben, wobei g holomorph ist undin θ(p) nicht verschwindet. Als nachstes weisen wir meromorphe Funktionen einenDivisor zu.
39Also gilt beispielsweise (3p1 + 4p2) + (−2p1 + 2p3) = (p1 + 4p2 + 2p3) .40Dabei identifizieren wir vereinfacht C mit der ihr zugeordneten Mannigfaltigkeit S, so daß die
im folgenden eigentlich notwendig einzuschaltende Abbildung ϕ nach Satz D.1 fortgelassen wird!

6.9. DIVISOREN 287
Definition. Der Divisor einer meromorphen Funktion f auf C, die nicht iden-tisch verschwindet, ist
(f ) :=∑p∈C
npp ,
wobei fur np gilt:
np :=
−m, f hat einen Pol der Multiplizitat m an der Stelle p,
m , f hat eine Nullstelle der Multiplizitat m an der Stelle p,0 , sonst .
Ein Divisor dieser Art (also die formale Differenz der Null- und Polstellen einermeromorphen Funktion) wird Hauptdivisor genannt. ¤
Fur zwei meromorphe Funktionen f und g 6= 0 gelten die Beziehungen:
(f g) = (f ) + (g) und
(f
g
)= (f )− (g) . (6.5)
Beispiel. Wir mochten nun auf der durch Y 2 Z = X3 + Z3 definierten projektiven KurveC den Divisor von
f : C2 ⊃ G → C , (x, y) 7→ x
y
bestimmen. Dazu betrachten wir f |C und bestimmen nach (6.5) zunachst die Divisoren (x)und (y). Zuerst werden die “im Unendlichen“ gelegenen Punkte der Kurve C untersucht:dies ist nur p0 = [0, 1, 0]. Die Projektionen bzw. Schnitte mit
x =X
Z, y =
Y
Zund u =
X
Y, v =
Z
Y(6.6)
zeigt das Bild 6.31: namlich y2 = x3 + 1 im Endlichen (linker Teil) und v = u3 + v3 “imUnendlichen“ (rechte Darstellung).
-1 1 2 3
-4
-2
2
4
x
y
C
-3 -2 -1 1 2 3
-3
-2
-1
1
2
3
u
v
C
Bild 6.31: Zwei affine Schnitte der Kurve C

288 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Aus (6.6) folgt sofort
x =u
vsowie y =
1v
.
Da wir “im Unendlichen“ in der Nahe von p0 die Kurve C durch v = u3 (der Ordnungnach!, um die es hier geht) erfassen konnen, ist x = u
u3 = 1u2 und np0 = −2 fur (x), analog
folgt fur den Divisor (y) aus y = 1u3 der Wert von np0 = −3. (Genauer: es ist u “im
Unendlichen“ uniformisierend und v besitzt wegen v(1− v2) = u3 die Ordnung 3.)Im Endlichen haben x und y keine Polstellen. Nullstellen fur x auf C sind p1 = [0, 1, 1]
und p2 = [0,−1, 1]. Die Funktion x ist dort uniformisierend und es gilt np1 = np2 = 1. DieNullstellen von y auf C sind p3 = [−1, 0, 1], p4 = [eπi/3, 0, 1] und p5 = [e−πi/3, 1, 1]. Dortist jeweils die Funktion y uniformisierend und somit gilt np3 = np4 = np5 = 1. Damitbestimmen sich die Divisoren (x) und (y) zu
(x) = −2p0 + p1 + p2 , (y) = −3p0 + p3 + p4 + p5
und nach (6.5) der von f auf C zu
(f) =(
x
y
)= p0 + p1 + p2 − p3 − p4 − p5 .
Der Grad der jeweiligen Hauptdivisoren ist also in allen drei Fallen Null. ¤
Tatsachlich ist das letzte Ergebnis bzgl. des verschwindenden Grades kein Zufall.Es gilt vielmehr der folgende Satz ([Kirwan92]).
Satz. Der Grad eines Hauptdivisors auf einer nichtsingularen projektiven Kurve istNull. ¤
An dieser Stelle kann naturlich umgekehrt gefragt werden, welche Divisoren vomGrad Null Divisoren rationaler Funktionen bzw. kurz: Hauptdivisoren sind. EineAntwort liefert [Ruppert96]: Jeder Divisor vom Grad Null auf P1 ist Divisor einerFunktion. Auf projektive Raume hoherer Dimension verallgemeinert stimmt der Satzallerdings nicht.
Jetzt konstruieren wir uns folgenden C-Vektorraum. Es sei zunachst C wiedereine nichtsingulare projektive Kurve und p1, . . ., pr ∈ C Kurvenpunkte, die bewertetmit den ganzen Zahlen npk
, k = 1, . . . , r den Divisor D :=∑r
k=1 npkpk definieren.
Dann ist L(D) die Menge aller meromorphen Funktionen f auf C, die
(f) + D ≥ 0
erfullen – zuzuglich der Nullfunktion. Mit anderen Worten gehort eine meromorpheFunktion f auf C zu L(D), wenn
(1) f holomorph ist und allenfalls in den Punkten pν , ν ∈ I ⊂ Nr, mit npν > 0Polstellen besitzt, deren Multiplizitat hochstens npν betragen,
(2) f in denjenigen Punkten pµ, µ ∈ J ⊂ Nr, mit npµ < 0 Nullstellen aufweist,deren Multiplizitat mindestens npµ betragen.

6.9. DIVISOREN 289
Tatsachlich ist der C-Vektorraum L(D) zu einem Divisor D von endlicher Di-mension, wir kurzen l(D) := dimL(D) ab. Von zentraler Bedeutung ist der folgendeSatz (z.B. [Kirwan92]).
Satz von Riemann-Roch 41: Fur eine nichtsingulare projektive Kurve C des Ge-schlechts g gibt es einen Divisor K auf C (den sogenannten kanonischen Divisor),so daß fur alle Divisoren D auf C die Dimensionsbeziehung
l(D)− l(K −D) = deg(D) + 1− g
gilt. ¤Der kanonische Divisor entsteht dabei aus holomorphen Differentialformen auf
C und es gilt mit D = 0 zunachst
l(0)− l(K) = 1− g .
Nun ist l(0) die Dimension des Vektorraumes L(0) aller holomorphen Funktionenauf C und mit der Eigenschaft, daß jede holomorphe Funktion auf C konstant ist,laßt sich auf l(0) = 1 schließen und wir erhalten:
g = l(K) ,
d.h. das Geschlecht ist gleich der Dimension des kanonischen Divisors oder umge-kehrt: es existiert stets eine nichtverschwindende holomorphe Differentialform aufjeder irreduziblen projektiven Kurve C vom Geschlecht g > 0.
Abschließend eine Anwendung des Satzes von Riemann-Roch, die uns wieder aufelliptische Kurven und die hierauf erklarte punktweise Addition fuhrt. Dazu stellenwir noch ein Korollar aus [Kirwan92] voran:
Korollar. • Wenn D < 0, dann gilt l(D) = 0.
• Ist K ein kanonischer Divisor auf C, dann ist deg K = 2(g−1), wobei g wiederdas Geschlecht der Kurve C bezeichnet. ¤
Des weiteren ubernehmen wir nun auch aus [Kirwan92] den Beweis der allgemei-nen Assoziativitat der punktweise erklarten Addition ⊕ auf einer elliptischen KurveC (vgl. Abschnitt 3.3.3).
Dazu greifen wir wieder die Konfiguration des Teilbeweises von Seite 159 auf(vgl. auch Bild 3.39):
p ⊕ q = s ,s ⊕ r = t ,q ⊕ r = u ,p ⊕ u = v ,
wobei nun (p ⊕ q) ⊕ r = t = v = p ⊕ (q ⊕ r) zu zeigen ist.
41Gustav Roch (1839-1866)

290 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Weil p, q und s′ kollinear sind, existiert ein lineares homogenes Polynom inC[X, Y, Z], das in p, q und s′ verschwindet. Ahnlich gibt es ein lineares homogenesPolynom, das in s, s′ und p0 verschwindet. Der Quotient dieser Polynome ist einemeromorphe Funktion ϕ auf C mit Nullstellen in p, q, s′ und Polstellen in s, p0 unds′ (jeweils mit Multiplizitat gezahlt).
Ahnlich kann eine meromorphe Funktion ψ auf C konstruiert werden, die Null-stellen in s, r und Polstellen in t, p0 besitzt.
Dann ist ϕψ eine meromorphe Funktion auf C mit Nullstellen in p, q und rund Polstellen in p0 (mit Multiplizitat zwei) und t. Genauso kann eine meromorpheFunktion auf C mit Nullstellen in p, q, r und Polstellen in p0 (wieder der Multi-plizitat zwei) und v hergestellt werden. Unter der Annahme t 6= v ist der Quotientdieser beiden meromorphen Funktionen wieder eine meromorphe Funktion auf Cmit einer einfachen Nullstelle in v und einem einfachen Pol in t und keinen weiterenNull- oder Polstellen.
Aufgrund der Geschlecht-Grad-Formel des vorhergehenden Abschnittes 6.8 wis-sen wir, daß fur C mit d = 3 das Geschlecht g = 1 betragt. Betrachten wir nun denPunkt t als einen Divisor von C und sei K ein kanonischer Divisor von C, so giltaufgrund des obigen Korollars
deg K = 0 und damit l(K − t︸ ︷︷ ︸deg<0
) = 0 .
Nach dem Satz von Riemann-Roch folgt daraus nun
l(t) = deg(t) + 1− g = 1 ,
d.h. die einzige meromorphe Funktion auf C mit einer hochstens einfachen Polstellein t ist eine konstante Funktion und damit muß t = v gelten. ¤

Zusammenfassung
Eine ebene affin-algebraische Kurve C ist die Nullstellenmenge eines PolynomsP ∈ C[X,Y ] in zwei Veranderlichen (ublicherweise wird die Kurve C = V (P ) als al-gebraische Varietat bezeichnet), wobei konsequenterweise der Korper der komplexenZahlen zu Grunde gelegt wird. Dies hat nicht nur den Vorteil, daß Kurven nicht zurleeren Menge degenerieren konnen (Fundamentalsatz der Algebra), sondern auch,daß jedes Polynom eine eindeutige Primfaktorenzerlegung besitzt und deswegen mitHilfe des Hilbertschen Nullstellensatzes eine eindeutige Aussage daruber getroffenwerden kann, unter welchen Bedingungen zwei Polynome dieselbe Kurve definieren.In der Regel geht man von einer Minimaldarstellung des die Kurve C definierendenPolynoms P aus, d.h. P ist um alle mehrfach vorkommenden Faktoren gekurzt. EineKurve wird dabei als irreduzibel bezeichnet, wenn das unterlagerte Polynom nichtfaktorisiert werden kann.
Das Ziel dieser Arbeit ist es, elementare Eigenschaften algebraischer Kurvenherauszuarbeiten. Dies sind im besonderen Invarianten, d.h. die Kurve charakte-risierende Eigenschaften, die unabhangig von den zu Grunde gelegten Koordina-ten sind, und Punkte, in denen die Kurve ein ungewohnliches Verhalten zeigt. Dieeinfachste Invariante ist der Grad der Kurve, der dem Grad des sie definierenden(Minimal-)Polynoms entspricht. Als besonders charakteristische Punkte treten dieSingularitaten s einer algebraischen Kurve in Erscheinung, in denen die partiellenAbleitungen des Polynoms verschwinden: PX(s) = PY (s) = 0. Die Multiplizitateines Punktes p ∈ C beschreibt dabei die kleinste naturliche Zahl, fur die eine mehr-fache partielle Ableitung nicht verschwindet. Ist diese in einem Punkt gleich eins,so wird der Punkt als regular bezeichnet (dies stellt den Normalfall dar, in einemgesonderten Kapitel wird gezeigt, daß eine Kurve nur endlich viele Singularitatenbesitzen kann). In ihren regularen Punkten besitzt die Kurve genau eine Tangente.Ist die Multiplizitat in dem betreffenden Punkt großer als eins, konnen dies auchmehrere und u.U. gleiche bzw. zusammenfallende Tangenten sein.
Außerhalb der endlich vielen Singularitaten sieht eine algebraische Kurve “glatt“aus und der Satz uber implizite Funktionen macht deutlich, daß lokal stets eineParametrisierung von C = V (P (X, Y )) der Art (t, g(t)) bzw. (h(t), t) mit holo-morphen Funktionen g bzw. h moglich ist. Diese Form rechtfertigt es, VarietatenV (P ) als Kurven zu bezeichnen, da sie Objekte der (moglicherweise komplexen)Dimension eins sind. Wird die Kurve in C2 betrachtet, so stellt sie reell gesehennaturlich eine Flache im vierdimensionalen Raum dar (aufgrund der Natur eineralgebraischen Varietat kommen dabei nur Riemannsche Flachen in Frage); das ge-
291

292 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
wohnte “Kurvenbild“ ergibt sich aber wieder, wenn diese Flache mit einer Ebene indem mit C2 identifizierten R4 zum Schnitt gebracht wird. Hiervon wird in dieser Ar-beit auch vielfach Gebrauch gemacht, wobei insbesondere die klassische AuspragungC = {(x, y) ∈ R2 |P (x, y) = 0 } herangezogen wird. Selbstverstandlich sind nicht alleKurven auch algebraische. Gegenbeispiele sind transzendente Kurven wie (t, sin(t))mit einem reellen oder komplexen Parameter t oder auch Fraktale, die evtl. sogarvon gebrochener Dimensionalitat sein konnen.
Der bloße Augenschein zeigt, daß algebraische Kurven eine enorme Vielfalt auf-weisen. Eine der wesentlichen Momente der Kurventheorie ist die Klassifikation,d.h. die Einordnung von Kurven nach bestimmten Typen. Eine Methodik, Kurvenzu vereinheitlichen und als “Ganzes“ betrachten zu konnen, ist ihre Einbettungbzw. Definition in projektive Raume. Das hat insbesondere den Vorteil, “unendlichfern“ liegende Punkte nicht gesondert behandeln zu mussen, sondern die Kurve alsKompakta beschreiben und mit anderen vergleichen zu konnen. Da ebene Kurvenbetrachtet werden, wird fur unsere Untersuchungen der komplexe zweidimensionaleprojektive Raum P2 := P2(C) eingesetzt, der auch als projektive Ebene bezeich-net wird. Dieser kann letztlich als Vereinigung von “Sehstrahlen“ aufgefaßt werden,wobei vom Betrachter aus gesehen hintereinander liegende Punkte nicht aufgelostbzw. unterschieden werden konnen und konsequenterweise als identisch betrachtetwerden. Der projektive Raum P2 ist somit die Gesamtheit aller eindimensionalenUntervektorraume in C3 bzw. in reeller Auspragung in R3. Formal ist P2 also ausdiesen dreidimensionalen Raumen zu gewinnen, indem eine Partitionierung derartin Aquivalenzklassen vorgenommen wird, daß zwei Punkte p1 und p2 in sogenanntenhomogenen Koordinaten (x, y, z) und (u, v, w) genau dann aquivalent sind, wenn siesich lediglich durch einen Skalar λ “unterscheiden“: (u, v, w) = λ(x, y, z), λ 6= 0. Derdadurch in P2 betrachtete Punkt p laßt sich also durch die Aquivalenzklasse [x, y, z]eindeutig festmachen. Um auch Aussagen uber die Lage geometrischer Objekte indiesem Raum treffen zu konnen, wird er mit der Quotiententopologie ausgestattet,welche durch die auf C3 ubliche Topologie induziert wird. Unter dieser Topologie istder Raum P2 Hausdorffsch und kompakt.
Sollen nun in dem so konstruierten Raum algebraische Kurven beschrieben wer-den, geschieht das durch homogene Polynome P ∈ C[X,Y, Z], welche die notwendigeEigenschaft besitzen, daß ihr Wert langs auf einem eindimensionalen Unterraum sichlinear verhalt, d.h. fur (u, v, w) = λ(x, y, z) gilt P (x, y, z) = λmP (u, v, w), wobei Pals homogen vom Grad m bezeichnet wird. Daraus folgt nun erwunschterweise, daßdie Nullstellenmenge von homogenen Polynomen P sinnvoll auf Punkte [x, y, z] =[u, v, w] ∈ P2 definiert werden kann, da durchgangig P (x, y, z) = P (u, v, w) = 0fur aquivalente Punkte im C3 gilt, die Element der projektiven Varietat V (P )sind. Die so definierten Kurven C werden als projektiv-algebraisch bezeichnet. Siehangen mit den oben eingefuhrten affin-algebraischen Kurven eng zusammen: diezur affin-algebraischen Kurve C assoziierte projektiv-algebraische Kurve C wirddurch Homogenisierung des sie definierenden Polynoms P (X, Y ) gewonnen. Dabeiwird aus P vom Grad m ein Polynom Q ∈ C[X, Y, Z] konstruiert, das sich durchQ(X, Y, Z) = ZmP (X
Z, Y
Z) aus P bestimmt und gerade C definiert. Umgekehrt laßt

ZUSAMMENFASSUNG 293
sich jede durch ein homogenes Polynom Q definierte projektiv-algebraische Kurve Cals affin-algebraische auffassen, welche dann durch das Polynom Q(X, Y, 1) definiertwird.
Die projektiv-algebraischen Kurven sind als Teilmenge des projektiven Raumesebenfalls Hausdorffsch und kompakt, womit das gewunschte vorlaufige Ziel erreichtist, algebraische Kurven als “Ganzes“ geeignet betrachten und eine Klassifizierung inAngriff nehmen zu konnen, die in der Vielzahl der im Affinen moglichen Effekte nichtertrinkt. Fur Quadriken und Kubiken (Kurven vom Grad zwei und drei) wird dieseKlassifikation im Text vollstandig durchgefuhrt. Auch eine graphische Konstrukti-on wird vorgestellt, um die Kompakta projektiver Kurven (in reeller Auspragung)darstellen zu konnen, dabei werden die eindimenionalen Raume des R3 auf eineDoppelpyramide projeziert und in die Ebene aufgeklappt – dadurch entstehen so-genannte Fundamentaldreiecke, in die sich die projektive Kurve plazieren und alsGanzes betrachten laßt. Die dazu notwendigen Berechungen und graphischen Ausga-bemoglichkeiten werden in Mathematica entwickelt und in einem Anhang gesondertdargestellt.
Ein fur die (elementare) Theorie außerst wichtiges Hilfsmittel ist die Ausarbei-tung des Schnittverhaltens zweier Kurven. Dabei sind wieder besonders aussage-kraftige Resultate im projektiven Raum bzw. bei projektiv-algebraischen Kurven zuverzeichnen. Das zentrale Ergebnis ist der Satz von Bezout
∑p∈C∩D
Ip(C,D) = n ·m,
der mit Hilfe der Schnittmultiplizitat Ip(C, D) der Kurven C und D im Punkt p(letztlich eine Bewertung der Art des Schnittpunktes: singular, tangential, mehr-fach, etc.) uber die exakte Anzahl der Schnittpunkte zweier projektiver KurvenAuskunft gibt und behauptet, daß diese (unter entsprechender Bewertung, d.h.mit Schnittmultiplizitat gezahlt) das Produkt der Kurvengrade n := Grad(C) undm := Grad(D) ist. Insbesondere besitzen zwei projektiv-algebraische Kurven stetsmindesten einen Schnittpunkt und hochstens n ·m viele. Als recht abstrakter Partstellt sich die genaue Definition und Bestimmung der Schnittmultiplizitat heraus(die eine Verallgemeinerung der Vielfachheit von Nullstellen eines “gewohnlichen“Polynoms ist). Diese wird uber das Konzept der Resultante entwickelt, das es gestat-tet, Aussagen uber gemeinsame Nullstellen zweier Polynome zu treffen. Dieser ehertechnische (aber wichtige) Teil wird ebenfalls in einem eigenen Anhang zur Arbeitbehandelt.
Ist diese technische Hurde genommen, erweist sich der Satz von Bezout als sehrwirkungsvolles Werkzeug, geometrische Beziehungen von Kurven in der Ebene al-gebraisch zu begrunden und einsichtig zu machen. Hohepunkt ist hier sicherlich derBeweis des Satzes uber Pascals “mystischem Hexagon“.
Die Kubiken nehmen unter den algebraischen Kurven eine besondere Positionein. Auf ihnen laßt sich in abstrakter Weise eine Punktaddition erklaren, die eineabelsche Gruppe initiiert. Diese hat in den letzten Jahren an erheblicher Bedeutungbei der Faktorisierung großer Zahlen gewonnen.

294 KAPITEL 6. ANWENDUNGEN UND AUSBLICK
Auch treten bei den Kubiken (und allgemein bei Kurven vom Grad großer alszwei) Wendepunkte auf, die uber die Schnittmultiplizitat mit Tangenten in den be-treffenden Punkten leicht zu definieren sind. Aquivalent dazu ist eine Auffassung, diemit den zweiten partiellen Ableitungen des die Kurve definierenden Polynoms arbei-tet. Daraus ergibt sich die Konstruktion der sogenannten Hesseschen Kurve, welchedie Originalkurve in allen Singularitaten und eben den Wendepunkten schneidet.
Die irreduziblen Kubiken zeichnen sich wieder besonders aus: es ist moglich einevollstandige Ubersicht uber die Anzahl und Lage der auftretenden Wendepunktezu geben. Hat eine nichtsingulare Kurve vom Grad d ≥ 2 hochstens 3d(d − 2)Wendepunkte, so besitzt eine irreduzible Kubik genau 9 Wendepunkte, welche eine(94, 123)-Konfiguration annehmen, d.h. es liegen 9 Punkte und 12 Geraden in derprojektiven Ebene vor, so daß durch jeden der Punkte genau 4 Geraden verlaufenund auf jeder Geraden 3 Punkte liegen.
Die Singularitaten einer Kurve sind besonders charakteristisch – nicht nur fur dasAussehen der Kurve. Eines der wesentlichen Resultate der hier behandelten Kurven-theorie ist, daß jede algebraische Kurve nur endlich viele singulare Punkte besitzenkann. Aus der Nichtsingularitat einer Kurve folgt bereits ihre Irreduzibilitat (manbeachte jedoch, daß die Umkehrung i.a. falsch ist). Auch konnen uber die maximalauftretende Anzahl von Singularitaten in Abhangigkeit des Kurvengrades wieder ei-nige Abschatzungen angestellt werden. Desweiteren wird deutlich gemacht, wie beider Vereinigung von Kurven neue Singularitaten entstehen. Schließlich wird nochkurz das Konzept des Tangentialkegels vorgestellt. In Anlehnung an differentialgeo-metrische Untersuchungen kann an jedem glatten Kurvenpunkt der Tangentialraumkonstruiert werden. In Singularitaten kann dieser nicht mehr sinnvoll gebildet wer-den, an seine Stelle tritt der Tangentialkegel – dieser spielt bei der Auflosung vonSingularitaten eine wichtige Rolle.
So wie die projektive Ebene P2 aus dem dreidimensionalen Vektorraum C3 her-vorgeht, kann der duale projektive Raum P∗2 aus dem dualen Vektorraum (C3)∗
konstruiert werden. Die zueinander dualen Raume P2 und P∗2 sind durch zwei Dua-litatsprinzipien eng miteinander verbunden. Das erste der Prinzipien beschreibt dieInzidenz von Punkt und Gerade in den Raumen, nach dem jeden Punkt [α, β, γ] ∈ P2
(bzw. jedes dadurch verlaufende Geradenbuschel) eine Gerade αU + βV + γW = 0im P∗2 entspricht. Fur das zweite Dualitatsprinzip wird die zu einer algebraischenKurve C ⊂ P2 duale Kurve C∗ im P∗2 definiert, welche die Menge der Tangenten anC ist, die uber das erste Dualitatsprinzip zu einer Menge von Punkten im dualenRaum fuhrt. Es stellt sich heraus, daß die so gewonnene Teilmenge C∗ ⊂ P∗2 (unterentsprechenden Voraussetzungen) selbst wieder eine algebraische Kurve ist. Uberdas zweite Dualitatsprinzip (die Korrespondenz von Kurvenpunkten auf C∗ undTangenten an C bzw. umgekehrt) ergibt sich dann z.B. aus dem Satz von Pascal derdes Brianchon als duales Pendant.
Die Invarianten wie Grad der Kurve, Anzahl der Doppelpunkte, Doppeltangen-ten, Wendepunkte und Spitzen der zueinander dualen Kurven werden durch dieFormeln von Plucker verknupft.

Teil V
Koda
295


Anhang A
Der Satz uber impliziteFunktionen
An dieser Stelle soll begrundet werden, warum es gerechtfertigt ist, bei algebraischenVarietaten von Kurven bzw. komplexen Flachen zu sprechen. Dazu wird zunachstder Satz uber implizite Funktionen aus [Beekmann91] zitiert, der dann geeignet aufunsere Situation der (komplexen) algebraischen Kurven anzuwenden ist.
Satz uber implizite Funktionen. Sei M eine offene Teilmenge von Rm+n und sei
F = (F1, . . . , Fn) : M −→ Rn (A.1)(xy
) 7−→ F (x, y) = (F1(x, y), . . . , Fn(x, y))T
stetig differenzierbar.Es gebe ein (a, b) ∈ M mit a ∈ Rm und b ∈ Rn, so daß gilt:
F (a, b) = 0 und det F ′y(a, b) 6= 0. (A.2)
Fur (x, y) ∈ M sei dabei
F ′y(x, y) =
Dm+1F1(x, y) . . . Dm+nF1(x, y)...
...Dm+1Fn(x, y) . . . Dm+nFn(x, y)
∈ Rnn (A.3)
die Untermatrix von F ′(x, y), die aus den partiellen Ableitungen nach den y1, . . . ,yn besteht.Dann gibt es eine offene Umgebung U von a in Rm und eine offene Umgebung Vvon b in Rn und ein stetig differenzierbares g : U → V mit den Eigenschaften:
(1) U × V = {(x, y) ∈ Rm+n |x ∈ U, y ∈ V } ⊂ M ;
(2) fur alle x ∈ U gilt F (x, g(x)) = 0;
(3) aus (x, y) ∈ U × V und F (x, y) = 0 folgt y = g(x).
(“Die Gleichung F (x, y) = 0 laßt sich in U × V eindeutig nach y auflosen.“)
297

298 ANHANG A. DER SATZ UBER IMPLIZITE FUNKTIONEN
Auf Basis dieses Satzes konnen fur eine durch das komplexe Polynom P ∈C[X, Y ] definierte affine Kurve C die folgenden Uberlegungen angestellt werden.Zunachst sei (a, b) ∈ C2 ein nichtsingularer Punkt von C, d.h. es gelte
P (a, b) = 0 und o.B.d.A.∂P
∂y(a, b) 6= 0.
Wird jetzt C mit R2 bzw. C2 mit R4 identifiziert, kann in einer offenen TeilmengeM ⊂ R2+2 mit (Re x, Im x, Re y, Im y) ∈ M analog zu (A.1) die folgende stetigdifferenzierbare Funktion
FP : M −→ R2
Re x
Im x
Re y
Im y
7−→ FP (Re x, Im x, Re y, Im y) :=
(Re P (x,y)Im P (x,y)
)
mit x, y ∈ C und FP (Re x, Im x, Re y, Im y) = 0 definiert werden.Wird das Polynom P (a, y) =: f(y) als holomorphe Funktion f in y aufgefaßt,
dann ist∂P
∂y(a, b) 6= 0 aquivalent zu f ′(b) 6= 0,
woraus (siehe [Remmert84], Kapitel 1, Abschnitt 2: Komplexe und reelle Differen-zierbarkeit)
| f ′(b) |2 =
∣∣∣∣(Re f)Re y (Re f)Im y
(Im f)Re y (Im f)Im y
∣∣∣∣ 6= 0
folgt. In der reellen Form von FP bedeutet das mit
(FP )′(Re y,Im y) (Re x, Im x, Re y, Im y) =
(∂Re P∂Re y
(Re x, Im x, Re y, Im y) ∂Re P∂Im y
(Re x, Im x, Re y, Im y)
∂Im P∂Re y
(Re x, Im x, Re y, Im y) ∂Im P∂Im y
(Re x, Im x, Re y, Im y)
)∈ R2,2
die Bedingung
det (FP )′(Re y,Im y) (Re a, Im a, Re b, Im b) 6= 0,
womit (A.2) fur die Funktion FP erfullt ist.Nach dem Satz uber implizite Funktionen gibt es dann eine offene Umgebung U
von (Re a, Im a) ∈ R2, eine offene Umgebung V von (Re b, Im b) ∈ R2 und eine stetigdifferenzierbare Funktion g in der Form
g : U −→ V(
x1
x2
) 7−→ g(x1, x2) =
(g1(x1, x2)g2(x1, x2)
)
mit U × V ⊂ M , so daß fur alle (x1, x2) ∈ U gilt
FP (x1, x2, g(x1, x2)) = 0.

299
Desweiteren folgt aus (x1, x2, y1, y2) ∈ U × V und FP (x1, x2, y1, y2) = 0 die Darstel-lung (y1, y2) = g(x1, x2).
Dieses Ergebnis wird nun “ruckubersetzt“ fur das komplexe Polynom P . Dafurwird zunachst die komplexe (nicht notwendig holomorphe) Funktion
G : C −→ Cx = x1 + i x2 7−→ G(x) := g1(x1, x2) + i g2(x1, x2)
definiert. Außerdem seien U , V ∈ C, so daß x = x1 + i x2 ∈ U bzw. y = y1 + i y2 ∈ Vgenau dann, wenn (x1, x2)
T ∈ U bzw. (y1, y2)T ∈ V .
Damit ergibt sich aus den oben angegebenen Eigenschaften von FP , daß fur allex = x1 + i x2 ∈ U , y = y1 + i y2 ∈ V die Schlußfolgerung
P (x, y) = 0 ⇔ Re P (x1 + i x2, y1 + i y2) = 0 ∧ Im P (x1 + i x2, y1 + i y2) = 0
⇔ FP (x1, x2, y1, y2) = 0
⇒ (y1, y2) = g(x1, x2)
⇔ y1 + i y2 = G(x1 + i x2)
zutrifft, d.h. in U × V ∈ C2 kann P (x, y) in der Form des Graphen
y = G(x)
dargestellt werden. Somit ist eine komplexe algebraische Varietat eine Kurve derkomplexen Dimension eins im ublichen Sinne.
Nur in den endlich vielen Singularitaten (siehe Satz 4.1.1) einer algebraischenKurve versagt die oben gefuhrte Argumentation. Weil diese jedoch aufgrund ihrerendlichen Anzahl isoliert liegen, stellt sich das Bild einer algebraischen Varietat alsbis auf endlich viele Ausnahmen als glatte Kurve bzw. Flache dar.
Eine analoge Uberlegung zu den reellen Schnitten von algebraischen Varietaten(die identisch mit dem oben angegebenen Satz uber implizite Funktionen ist, dakeine “Ubersetzung“ fur komplexwertige Abbildungen zu leisten ist) fuhrt zum Er-gebnis, daß sie sich lokal als Graph einer reellen Funktion darstellen lassen und somitgewohnliche Kurven sind.

300 ANHANG A. DER SATZ UBER IMPLIZITE FUNKTIONEN

Anhang B
Zur Resultante
B.1 Definition und Eigenschaften
Die Resultante ist ein Hilfsmittel um zu entscheiden, ob zwei Polynome eine ge-meinsame Nullstelle besitzen; dabei wird lediglich mit den Koeffizienten operiert,ohne die in Frage stehenden Nullstellen zu bestimmen. Wir gehen dabei zunachstvon Polynomen in einer Veranderlichen aus. Außerdem bezeichne K einen beliebigenKorper der Charakteristik Null.
Definition B.1.1. Es seien
P = a0 + a1X + . . . + anXn, mit a0, . . . , an ∈ K, an 6= 0, und
Q = b0 + b1X + . . . + bmXm, mit b0, . . . , bm ∈ K, bm 6= 0,
zwei Polynome vom Grad n bzw. m. Die Resultante RP,Q von P und Q ist die(m + n)× (m + n) Determinante
RP,Q :=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a0 a1 . . . an
a0 a1 . . . an
. . . . . .
a0 a1 . . . an
. . . . . .
a0 a1 . . . an
b0 b1 . . . bm
b0 b1 . . . bm
. . . . . .
b0 b1 . . . bm
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
m Zeilen
,
n Zeilen
wobei die freigelassenen Stellen mit 0 besetzt werden.
Fur zwei Polynome P, Q aus K[X,Y, Z] nach Abschnitt 3.1.1, Seite 98, wirddie Resultante wie oben definiert, die Koeffizienten ak und bk aber als Polynome
301

302 ANHANG B. ZUR RESULTANTE
ak(Y, Z) und bk(Y, Z) ∈ K[Y, Z] aufgefaßt. In diesem Fall ist RP,Q(Y, Z) ebenfallsein Polynom in zwei Veranderlichen, das fur Y = b und Z = c mit der Resultanteder Polynome P (X, b, c) und Q(X, b, c) ubereinstimmt.
Hier zunachst ein Beispiel, in dem entschieden wird, ob zwei gegebene Polynomein einer Veranderlichen eine gemeinsame Nullstelle besitzen.
Beispiel B.1.2. Gegeben seien die Polynome
P = −3− 4X + 2 X2 + 4 X3 + X4 und Q = 15 + 11X + 5 X2 + X3.
Die Resultante bestimmt sich dann zu
RP,Q =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
−3 −4 2 4 1 0 00 −3 −4 2 4 1 00 0 −3 −4 2 4 115 11 5 1 0 0 00 15 11 5 1 0 00 0 15 11 5 1 00 0 0 15 11 5 1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= 0
und zeigt damit (mindestens) eine gemeinsame Nullstelle an. Die Faktorisierung
P = (X − 1) (X + 1)2 (X + 3) und Q = (X + 1− 2 i) (X + 1 + 2 i) (X + 3)
ergibt, daß diese gemeinsame Nullstelle −3 ist. ¤
Jetzt soll das Beispiel 3.1.2.9 aufgegriffen werden, wobei es unser Ziel ist, mitHilfe der Resultante die beiden komplexen Nullstellen zu finden, die zunachst nichtoffensichtlich als Schnittpunkte der gegebenen (komplexen) Kreise in Erscheinungtraten.
Beispiel B.1.3. Die Polynome P und Q aus Beispiel 3.1.2.9 werden als Polynome in C[Z]mit Koeffizienten aus C[X, Y ] aufgefaßt:
P (X, Y, Z) = (X2 + Y 2) · Z0 + 0 · Z1 + (−1) · Z2 , (B.1)Q(X, Y, Z) = (X2 + Y 2) · Z0 + (−2X) · Z1 . (B.2)
Dann ergibt sich die Resultante RP,Q als ein homogenes Polynom in X und Y :
RP,Q(X, Y ) =
∣∣∣∣∣∣
X2 + Y 2 0 −1X2 + Y 2 −2X 0
0 X2 + Y 2 −2X
∣∣∣∣∣∣= 3X4+2X2 Y 2−Y 4 = (X2+Y 2)(3X2−Y 2).
Jetzt ist zu erkennen, daß Nullstellen bzw. Schnittpunkte nur fur
X2 + Y 2 = 0 und 3X2 = Y 2
zu erwarten sind. Dabei fuhrt die links stehende Gleichung zu den Nullstellen x = 1und y = ±i, was in (B.1) bzw. (B.2) nur z = 0 zulaßt, d.h. “projektiv“ sind [1,±i, 0]die zwei “im reellen verborgenen“ Schnittpunkte der betrachteten Kurven. Die anderenbeiden projektiven Schnittpunkte ergeben sich aus der rechts stehenden Beziehung mity = ±√3x und z = 2 zu [1,±√3, 2]. ¤

B.1. DEFINITION UND EIGENSCHAFTEN 303
Die wichtigsten Eigenschaften wurden in den Lemmata 3.1.1.1 fur Polynome ineiner und in 3.1.1.2, 3.1.1.3 fur homogene Polynome in drei Veranderlichen beschrie-ben; diese sollen jetzt bewiesen werden. Dazu werden zwei weitere wichtige Lemmatabenotigt.
Lemma B.1.4. Die Polynome P, Q ∈ K[X] seien vom Grad n ≥ 1 bzw. m ≥ 1. FolgendeAussagen sind aquivalent:
(1) P und Q besitzen einen gemeinsamen nicht konstanten Faktor.
(2) Es existiert ein Polynom mit einem Grad von hochstens n + m− 1, das von P undQ geteilt wird.
(3) Es existieren zwei Polynome φ, ψ ∈ K[X] mit Grad(φ) ≤ n−1 bzw. Grad(ψ) ≤ m−1,so daß gilt: Pψ = Qφ.
Beweis. (1) ⇒ (2): Besitzen P und Q einen gemeinsamen nicht konstanten Faktor R ∈K[X], so lassen sie sich in der Form
P = Rφ und Q = Rψ (B.3)
darstellen, wobei φ und ψ zwei Polynome sind, die offenbar von geringerem Grad als Pbzw. Q sind. Aus (B.3) folgt jetzt sofort, daß S := Rφψ = Pψ = Qφ ∈ K[X] von P undQ geteilt wird und hochstens vom Grad n + m− 1 ist.
(2) ⇒ (3): Es sei S ∈ K[X] mit Grad(S) ≤ n + m − 1 und P und Q teile das PolynomS. Dann gibt es zwei Polynome φ, ψ ∈ K[X], so daß S = Pψ = Qφ , mit Grad(ψ) ≤n + m− 1−Grad(P ) = m− 1 und Grad(φ) ≤ n + m− 1−Grad(Q) = n− 1.
(3) ⇒ (1): Unter der Annahme von Pψ = Qφ mit den oben gemachten Voraussetzungen,wird Q in Primfaktoren Q1, . . . , Qr zerlegt (siehe Kapitel 1, Abschnitt 1.1, auf Seite 11),so daß
P ψ = Q1 · · · Qr φ
gilt. Dann mussen diese auch auf der linken Seite Pψ erscheinen. Wegen Grad(ψ) <Grad(Q) konnen diese aber nicht alle in ψ enthalten sein, so daß P und Q mindestenseinen gemeinsamen nicht konstanten Faktor besitzen mussen. ¤
Beweis (von Lemma 3.1.1.1). Die Eigenschaft einer verschwindenden Resultante bei einergemeinsam vorliegenden Nullstelle bzw. eines gemeinsamen nichtkonstanten Faktors kannauf zweierlei Weise gezeigt werden.
Nach Lemma B.1.4 ist das Vorhandensein eines gemeinsamen Faktors der Polynome
P = a0 + a1X + . . . + anXn, mit a0, . . . , an ∈ K, an 6= 0, undQ = b0 + b1X + . . . + bmXm, mit b0, . . . , bm ∈ K, bm 6= 0,
aquivalent zur Existenz zweier Polynome
φ = α0 + α1X + . . . + αn−1Xn−1 , mit α0, . . . , αn−1 ∈ K und
ψ = β0 + β1X + . . . + βm−1Xm−1, mit β0, . . . , βm−1 ∈ K ,
so daß
P (X) ψ(X) = (a0 + a1X + . . . + anXn)(β0 + β1X + . . . + βm−1Xm−1) (B.4)
= (b0 + b1X + . . . + bmXm)(α0 + α1X + . . . + αn−1Xn−1) = Q(X) φ(X)

304 ANHANG B. ZUR RESULTANTE
gilt. Das Polynom P (X)ψ(X)−Q(X)φ(X) muß also verschwinden, was bei Koeffizienten-vergleich der ausmultiplizierten Beziehung (B.4) zu dem linearen Gleichungssystem
a0 −b0
a1 a0 −b1 −b0...
. . ....
. . .... −bn−1 . . . −b0
an . . . a0 −bn . . . −b1. . .
an . . . a0...
.... . . . . . −b0
a0 . . ....
a1 −bm . . .. . .
.... . .
an −bm
β0
β1...
βm−1
α0
α1...
αn−1
=
00...0
fur die Koeffizienten der Polynome φ und ψ fuhrt (die unbesetzten Stellen in der angegebe-nen Matrix sind wieder mit Nullen zu fullen). Dieses homogene Gleichungssystem besitztnur dann eine nichttriviale Losung, wenn die Determinante der links stehenden MatrixNull ist. Werden die Spalten ab der Position m + 1 mit −1 multipliziert und die Matrixtransponiert, ist dies gleichbedeutend mit dem Verschwinden der in Definition B.1.1 an-gegebenen Determinante, wodurch die Resultante RP,Q definiert ist.
Eine etwas andere Argumentation verfolgt [Harris92], die wegen ihrer ungemein plasti-schen Interpretation von RP,Q hier noch kurz erwahnt werden soll. Die Polynome P undQ besitzen genau dann einen gemeinsamen nichtkonstanten Faktor, wenn es nach LemmaB.1.4 ein Polynom vom Hochstgrad m+n−1 gibt, das von beiden geteilt wird, bzw. wennder Raum der von P und Q teilbaren Polynome vom Grad hochstens m + n − 1 die Di-mension kleiner oder gleich m+n hat. Dies bedeutet insbesondere die lineare Abhangigeitder Polynome
P, X · P, X2 · P, . . . , Xn−1 · P, Q, X ·Q, . . . , Xm−1 ·Q . (B.5)
Nun wirken die Monome Xk wie ein “Shiften“ der Koeffizienten, so daß die Abhangigkeitder Polynome in (B.5) gerade das Verschwinden der Determinante
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a0 a1 . . . an 0 0 . . . 00 a0 a1 . . . an 0 . . . 0...
...0 0 . . . a0 a1 . . . an
b0 b1 . . . bm 0 0 . . . 00 b0 b1 . . . bm 0 . . . 0...
...0 0 . . . 0 b0 b1 . . . bm
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
bedeutet. ¤

B.1. DEFINITION UND EIGENSCHAFTEN 305
Jetzt wird die Erweiterung der obigen Argumentation auf Polynome inK[X,Y, Z]durchgefuhrt. Die eigentliche Schwierigkeit liegt darin, bei verschwindender Resul-tante die gemeinsamen Faktoren im Ring K[Y, Z] nachzuweisen. Hierzu ist das fol-gende grundlegende Lemma von Bedeutung, das aus [Lorenz96] (Kapitel uber Prim-zerlegung in Polynomringen) zitiert wird:
Lemma B.1.5 (Lemma von Gauß). Der Ring R sei faktoriell 1, K sein Quotientenkorperund P ∈ R[X]. Gilt dann
P (X) = R(X) S(X) mit normierten R, S ∈ K[X],
so haben R und S nur Koeffizienten aus R.
Fur unseren Gebrauch ist dabei R = K[Y, Z] und R[X] = K[Y, Z][X] zu setzen.Der Quotietenkorper K =: K(Y, Z) ist dann der Korper der rationalen Funktionen,d.h. Funktionen vom Aufbau
P (Y, Z)
Q(Y, Z),
wobei Zahler und Nenner Polynome aus dem Ring K[Y, Z] sind. Das zitierte Lemmabesagt dann also, daß eine uber K(Y, Z)[X] mogliche Faktorisierung auch eine Fak-torisierung in K[Y, Z][X] = K[X, Y, Z] nach sich zieht. Mit anderen Worten: wennP und Q in K(Y, Z)[X] einen gemeinsamen Faktor besitzen, so auch in K[X,Y, Z](in dieser Form kann das obige Lemma auch in [Artin93] im Abschnitt uber Faktor-zerlegung gefunden werden).
Beweis (von Lemma 3.1.1.3). Es wird angenommen, daß P und Q homogen vom Gradm bzw. n sind und die Eigenschaft
P (1, 0, 0) 6= 0 6= Q(1, 0, 0)
besitzen. O.B.d.A. kann P (1, 0, 0) = 1 = Q(1, 0, 0) vorausgesetzt werden, d.h. P und Qsind vom Aussehen
P = Xn + an−1(Y, Z)Xn−1 + . . . + a1(Y, Z)X + a0(Y, Z)Q = Xm + bm−1(Y, Z)Xm−1 + . . . + b1(Y,Z)X + b0(Y, Z) ,
mit Koeffizienten aus K[Y, Z].
Angenommen P und Q besitzen jetzt einen nicht konstanten homogenen Faktor. WegenP (1, 0, 0) 6= 0 muß dieser Faktor die Gestalt Xr − A haben, wobei A ein homogenesPolynom in X, Y , Z ist, bei welchem ein Summand der Form αXr nicht erscheint. Dannmuß aus P = (Xr −A)V folgen, daß auch V die Gestalt Xn−r −A1 hat, wobei in A1 keinSummand der Form βXn−r erscheint. Die Polynome P und Q sind dann also vom Aufbau
P = (Xr −A)(Xn−r −A1
), Q = (Xr −A)
(Xm−r −A2
)
mit A,A1, A2 ∈ K[X, Y, Z].
1Ein Integritatsring (d.h. ein kommutativer, nullteilerfreier Ring mit 1 6= 0), in dem jedesElement ungleich Null eine eindeutige Zerlegung in irreduzible Faktoren besitzt, heißt faktoriell.

306 ANHANG B. ZUR RESULTANTE
Damit besitzen auch P (X, b, c) und Q(X, b, c) ∈ K[X] fur alle b, c ∈ K einen gemeinsamenFaktor (Xr −A(X, b, c)) und nach Lemma 3.1.1.1 verschwindet somit fur alle b, c ∈ K dieResultante: RP,Q(b, c) = 0. Das bedeutet aber, daß in diesem Fall allgemein RP,Q(Y, Z)verschwinden muß. (An dieser Stelle ist es notwendig, daß der Korper K von der Charak-teristik Null ist! Nur dann kann fur ein Polynom W ∈ K[X] von W (a) = 0 fur alle a ∈ Kauf das Verschwinden von W bzw. umgekehrt geschlossen werden.)
Der umgekehrte Fall wird jetzt mit dem oben zitierten Lemma von Gauß bzw. sei-ner angefugten Interpretation erledigt. Da K(Y,Z) ein Korper ist, kann der gesamte Be-weisgang (Lemma B.1.4 und Ausfuhrungen zum Beweis des Lemmas 3.1.1.1) fur Polyno-me mit Koeffizienten aus diesem Quotientenkorper wiederholt werden. Danach folgt ausRP,Q(Y, Z) = 0, daß P und Q in K(Y, Z) einen gemeinsamen Faktor besitzen. Wie obenausgefuhrt, bedeutet das auch einen gemeinsamen Faktor in dem Ring K[Y, Z]. ¤
Beispiel B.1.6. Gegeben seien die homogenen Polynome
P = X4 −X3Z −XY 2Z + Y 2Z und Q = X5 −X3Y 2 −X2Y 2Z + Y 4Z
in C[X,Y, Z]. Als Polynome in C[X] mit Koeffizienten aus C[Y,Z] bestimmt sich dieResultante zu
RP,Q(Y, Z) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Y 2Z2 −Y 2Z 0 −Z 1 0 0 0 00 Y 2Z2 −Y 2Z 0 −Z 1 0 0 00 0 Y 2Z2 −Y 2Z 0 −Z 1 0 00 0 0 Y 2Z2 −Y 2Z 0 −Z 1 00 0 0 0 Y 2Z2 −Y 2Z 0 −Z 1
Y 4Z 0 −Y 2Z −Y 2 0 1 0 0 00 Y 4Z 0 −Y 2Z −Y 2 0 1 0 00 0 Y 4Z 0 −Y 2Z −Y 2 0 1 00 0 0 Y 4Z 0 −Y 2Z −Y 2 0 1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= 0
und zeigt damit (mindestens) einen gemeinsamen nicht konstanten Faktor an. Die Fakto-risierung
P =(Y 2Z −X3
)(Z −X) und Q =
(Y 2Z −X3
)(X + Y ) (Y −X)
ergibt, daß in jeder der durch P bzw. Q definierten Kurve eine Neilsche Parabel als Kom-ponente enthalten ist. ¤
Beweis (von Lemma 3.1.1.2). Die Polynome
P = a0(Y, Z) + a1(Y, Z)X + . . . + an(Y, Z)Xn ,
Q = b0(Y, Z) + b1(Y, Z)X + . . . + bm(Y, Z)Xm ,
mit a0(Y, Z), . . . , an(Y, Z), b0(Y, Z), . . . , bm(Y, Z) ∈ K[Y, Z], an, bm 6= 0, seien homogenvom Grad dP bzw. dQ; dann sind die Koeffizienten
ak(Y, Z) homogen vom Grad dP − k , fur k = 0, . . . , n undbk(Y, Z) homogen vom Grad dQ − k , fur k = 0, . . . , m .

B.1. DEFINITION UND EIGENSCHAFTEN 307
Mit einem λ ∈ K gilt dann fur die Resultante (die Polynome ak(Y, Z) bzw. bk(Y, Z) werdenzu ak bzw. bk abgekurzt, unbezeichnete Stellen tragen eine Null)
RP,Q(λY, λZ) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
λdP a0 λdP−1a1 λdP−2a2
λdP a0 λdP−1a1. . .
λdP−nan
λdP−n+1an−1 λdP−nan
λdQb0 λdQ−1b1 λdQ−2b2
λdQb0 λdQ−1b1. . .
λdQ−mbm
λdQ−m+1bm−1 λdQ−mbm
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Jetzt wird fur k ≤ m die k−te Zeile mit λdQ−k+1 und fur m+1 ≤ k ≤ m+n die m+k−teZeile mit λdP−k+1 multipliziert; dann entsteht
λPm
k=1(dQ−k+1)λPn
k=1(dP−k+1)RP,Q(λY, λZ) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
λdP +dQa0 λdP +dQ−1a1 λdP +dQ−2a2
λdP +dQ−1a0 λdP +dQ−2a1. . .λdP +dQ−n−m+2an
λdP +dQ−n−m+2an−1 λdP +dQ−n−m+1an
λdP +dQb0 λdP +dQ−1b1 λdP +dQ−2b2
λdP +dQ−1b0 λdP +dQ−2b1. . .λdP +dQ−n−m+2bm
λdP +dQ−n−m+2bm−1 λdP +dQ−n−m+1bm
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
und es ist leicht zu erkennen, daß die entsprechenden Faktoren spaltenweise wieder ausder Determinante gezogen werden konnen. Damit ergibt sich
λPm
k=1(dQ−k+1)λPn
k=1(dP−k+1)RP,Q(λY, λZ) = λPn+m
k=1 (dP +dQ−k+1)RP,Q(Y,Z) bzw.
RP,Q(λY, λZ) = λm·dP +n·dQ+n(n−1)
2+
m(m−1)2
− (n+m)(n+m−1)2 RP,Q(Y, Z)
= λm·dP +n·dQ−n·mRP,Q(Y,Z).
Fur dP = n und dQ = m ist also RP,Q(λY, λZ) = λnmRP,Q(Y, Z). ¤
Abschließend sollen noch einige Anmerkungen zur Berechnung und zu Eigenschaftender Resultante bzw. eines daraus abgeleiteten Begriffes angegeben werden. Zunachst solldas Lemma 3.1.1.2 auf Polynome in r Variablen X1, . . . , Xr erweitert werden. Dies isteinfach, da sich die eben gefuhrte Argumentation genauso mit homogenen Koeffizienten-polynomen in X1, . . . , Xr−1 wiederholen laßt. Wir gewinnen damit sofort die folgendeAussage.
Korollar B.1.7. Es seien P und Q homogene Polynome in K[X1, . . . , Xr] vom Grad nbzw. m, die wir speziell als Polynome in Xr mit Koeffizienten aus K[X1, . . . , Xr−1] be-trachten. Die Resultante RP,Q(X1, . . . , Xr−1) ist dann ein homogenes Polynom vom Gradn ·m in K[X1, . . . , Xr−1].

308 ANHANG B. ZUR RESULTANTE
Die Resultante der Polynome P und Q ist bzgl. Vertauschung i.a. nicht symmetrisch,wie das folgende Lemma zeigt.
Lemma B.1.8. Fur zwei Polynome P, Q ∈ K[X] vom Grad n bzw. m gilt
RP,Q = (−1)m·nRQ,P .
Analog gilt dies auch fur Polynome in K[X, Y, Z].
Beweis. Vertauscht man in RP,Q die letzten n Zeilen jeweils m−mal nach oben, so erhaltman aus RP,Q unter Multiplikation von (−1)n·m die Resultante RQ,P . ¤
Als nachstes bestimmen wir die Resultante fur Polynome, die vollstandig faktorisiertvorliegen (was in einem algebraisch abgeschlossenen Korper stets moglich ist). Mit Hilfeder so gewonnenen Darstellung ergeben sich eine Fulle weiterer Einsichten.
Lemma B.1.9. Liegen die Polynome P und Q ∈ K[X] vom Grad n bzw. m vollstandigfaktorisiert in der Form
P = a(X − ρ1)(X − ρ2) · · · (X − ρn) ,
Q = b(X − σ1)(X − σ2) · · · (X − σm)
vor, mit ρ1, . . . , ρn, σ1, . . . , σm ∈ K, dann gilt:
(1) RP,Q = am bn∏n
ν=1
∏mµ=1 (σµ − ρν) ,
(2) RP,Q = bn∏m
µ=1 P (σµ) ,
(3) RP,Q = (−1)n·m am∏n
ν=1 Q(ρν) .
Beweis. Nach Lemma 3.1.1.1 ist RP,Q = 0 genau dann, wenn ρν = σµ fur irgendein1 ≤ ν ≤ n bzw. 1 ≤ µ ≤ m. Jetzt konnen P und Q als homogene Polynome in K[ρ1, . . . ,ρn, σ1, . . . , σm, X] und RP,Q nach Korollar B.1.7 als eines in K[ρ1, . . . , ρn, σ1, . . . , σm]betrachtet werden. Dann ist (σµ − ρν) ein Faktor von RP,Q (nach Divisionsalgorithmus,siehe z.B. [WaerdenI], §28).
Diese Argumentation gilt allgemein fur alle 1 ≤ ν ≤ n und 1 ≤ µ ≤ m, so daß
S := ambn∏n
ν=1
∏m
µ=1(σµ − ρν) (B.6)
die Resultante RP,Q(ρ1, . . . , ρn, σ1, . . . , σm) teilt. Da die Linearformen (ρν − σµ) unterein-ander teilerfremd sind, ist S selbst ein in ρ1, . . . , ρn, σ1, . . . , σm homogenes Polynom vomGrad n ·m und somit gilt sogar, daß S ein skalares Vielfaches von RP,Q ist.
Gemaß der Definition der Polynome P , Q und dem Aufbau der Resultante nach Defi-nition B.1.1 ist am
0 bnm ein hierin vorkommender Term. Mit
P = aXn + . . . + (−1)n a∏n
ν=1ρν und Q = bXm + . . .
gewinnt dieser Term das Aussehen
(−1)nm am(∏n
ν=1ρν
)m· bn = (−1)nm ambn
∏n
ν=1ρm
ν .

B.1. DEFINITION UND EIGENSCHAFTEN 309
Multipliziert man die Doppelprodukte von (B.6) aus, so erkennt man, daß dieser Termauch in S enthalten ist, d.h. RP,Q = S.
Hieraus ergeben sich jetzt rasch die zwei weiteren angegebenen Formen (2) und (3) furdie Resultante:
RP,Q = ambnn∏
ν=1
m∏
µ=1
(σµ − ρν)
= bnm∏
µ=1
a (σµ − ρ1) · · · (σµ − ρn)︸ ︷︷ ︸P (σµ)
= bnm∏
µ=1
P (σµ)
= amn∏
ν=1
(−1)m b (ρν − σ1) · · · (ρν − σm)︸ ︷︷ ︸Q(ρν)
= (−1)nm amn∏
ν=1
Q(ρν) . ¤
Aufgrund dieser Darstellung durch Produkte, ergibt sich die folgende Eigenschaft.
Korollar B.1.10. Fur Polynome P,Q, R ∈ K[X] gilt
RP,QR = RP,QRP,R .
Das Ergebnis gilt auch fur Polynome in K[X, Y, Z], wobei die Resultanten wieder als Po-lynome in K[Y, Z] aufzufassen sind.
Beweis. Die Eigenschaft bzgl. Polynome aus K[X] folgt sofort aus der Darstellung (1) desLemmas B.1.9 und einer entsprechenden Zusammenfassung der Produkte, der vollstandigin Linearfaktoren zerlegten Polynome.
Sind die Polynome P , Q und R aus K[X, Y, Z], so ergibt sich zunachst
RP,QR(b, c) = RP,Q(b, c)RP,R(b, c)
fur alle b, c ∈ K, und somit gilt allgemein
RP,QR(Y, Z) = RP,Q(Y, Z)RP,R(Y, Z) .
¤
An dieser Stelle soll abschließend noch auf die Diskriminante eines Polynoms einge-gangen werden. Im folgenden sei P stets ein normiertes Polynom – d.h. fur Grad(P ) = nsei an = 1 – und K ein algebraisch abgeschlossener Korper der Charakteristik Null.
Definition B.1.11. Ist P =∏n
i=1 (X − ρi) ∈ K[X], so heißt
DP :=∏
i<j
(ρi − ρj)2
die Diskriminante des Polynoms P .
Die Diskriminante hangt in der folgenden Weise mit der Resultante zusammen.
Satz B.1.12. Ist P ∈ K[X] ein Polynom vom Grad n und P ′ seine Ableitung, dann gilt
DP = (−1)12n(n−1)RP,P ′ .

310 ANHANG B. ZUR RESULTANTE
Beweis. Wir stellen P (X) =∏n
i=1(X − ρi) wieder vollstandig faktorisiert dar. Die Ablei-tung P ′ ergibt sich uber die Produktregel daraus zu
P ′(X) =n∑
k=1
n∏j=1j 6=k
(X − ρj) ,
so daß
P ′(ρi) =n∏
j=1j 6=i
(ρi − ρj)
gilt. Die Resultante RP,P ′ kann jetzt unter Benutzung dieses Ausdrucks und mit LemmaB.1.9 in Form der Darstellung (3) folgendermaßen formuliert werden:
RP,P ′ = (−1)n(n−1)n∏
i=1
P ′(ρi) =n∏
i=1
n∏j=1j 6=i
(ρi − ρj) .
Jeder der n(n−1)2 Faktoren ρi − ρj kommt einmal positiv und einmal negativ vor, daher
gilt abschließend
RP,P ′ = (−1)12n(n−1)
n∏j=1j 6=i
(ρi − ρj)2 = (−1)12n(n−1) DP .
¤
Mit der Diskriminante eines Polynoms kann entschieden werden, ob das betreffendePolynom einen mehrfachen Faktor enthalt. Dazu zeigen wir zunachst das folgende Lemma.
Lemma B.1.13. Es seien P , R ∈ K[X] und R irreduzibel. Dann ist P durch R2 genaudann teilbar, wenn R das Polynom P und seine Ableitung P ′ teilt.
Beweis. ’⇒’: Es gibt ein Polynom φ ∈ K[X], so daß P = R2 φ. Dann gilt fur die AbleitungP ′ = 2RR′φ + R2φ′, die ebenfalls durch R teilbar ist.
’⇐’: Ist P und P ′ durch R teilbar, so gibt es zwei Polynome φ, ψ ∈ K[X], so daß
P = R φ und P ′ = R′ φ + R φ′ = R ψ
gilt. Da R irreduzibel ist und Grad(R′) < Grad(R), ergibt die links stehende Gleichung,daß φ von R geteilt wird. Aus der rechts stehenden folgt jetzt die Teilbarkeit von P durchR2. ¤
Dies kann jetzt naturlich auch mit Hilfe der Resultante bzw. Diskriminante ausgedrucktwerden.
Korollar B.1.14. Die Diskriminante eines Polynoms verschwindet genau dann, wenndas Polynom einen mehrfachen Faktor bzw. eine mehrfache Nullstelle enthalt.

B.1. DEFINITION UND EIGENSCHAFTEN 311
Zum Schluß soll der im Abschnitt 1.2 erwahnte Gedanke (siehe Seite 20) der gewichtethomogenen Polynome aufgegriffen werden. Angenommen die Polynome P und Q besitzendie Darstellungen
P = Πni=1(X −Xi) = Xn + an−1(X1, . . . , Xn)Xn−1 + . . . + a0(X1, . . . , Xn) und
Q = Πmj=1(X − Yj) = Xm + bm−1(Y1, . . . , Ym)Xm−1 + . . . + b0(Y1, . . . , Ym) .
Dann ist die ResultanteRP,Q = Πn
ν=1Πmµ=1(Yµ −Xν)
homogen in den X1, . . . , Xn, Y1, . . . , Ym vom Grad n · m. Der Koeffizient ai bzw. bj istbis auf das Vorzeichen die n− i-te bzw. m− j-te elementarsymmetrische Funktion in X1,. . ., Xn bzw. Y1, . . ., Ym. Da diese “Variablen“ das Gewicht 1 haben, fuhrt dies dazu, denKoeffizienten ai bzw. bj das Gewicht n − i bzw. m − j zu geben. Dann gilt wegen derHomogenitat der Resultante RP,Q in den Xν , Yµ offensichtlich:
Die Resultante der Polynome a0 +a1X + . . .+an−1Xn−1 +Xn und b0 +b1X +
. . . + bm−1Xm−1 + Xm ist gewichtet-homogen vom Grad n ·m, wenn ai das
Gewicht n− i und bj das Gewicht m− j erhalt.
Insbesondere folgt daraus fur die Diskriminante:
Die Diskriminante des Polynoms a0+a1X+. . .+an−1Xn−1+Xn ist gewichtet-
homogen vom Grad n · (n − 1) mit dem Gewicht n − i fur den Koeffizientenai.
Beispiel B.1.15. Fur die Polynome
P = a0 + a1X + X2 und Q = b0 + b1X + b2X2 + X3
ergibt sich
RP,Q =
∣∣∣∣∣∣∣∣∣∣
a0 a1 1 0 00 a0 a1 1 00 0 a0 a1 1b0 b1 b2 1 00 b0 b1 b2 1
∣∣∣∣∣∣∣∣∣∣
= a30 + 3a0a1b0 − a3
1b0 + b20 − 2a2
0b1 + a0a21b1 − a1b0b1+
a0b21 − a2
0a1b2 − 2a0b0b2 + a21b0b2 − a0a1b1b2 + a2
0b22 ,
wobei RP,Q in den Koeffizienten a0, . . ., b2 gewichtet-homogen vom Grad sechs ist, dabeigilt: a0 ist vom Gewicht 2 und a1 vom Gewicht 1, die Koeffizienten b0, b1 und b2 sind vonden Gewichten 3, 2 und 1. ¤
Beispiel B.1.16. Die Diskriminanten der Polynome
P = X3 + ax + b und Q = X4 + aX2 + bX + c
sind
DP = (−1)3 · RP,P ′ =
∣∣∣∣∣∣∣∣∣∣
b a 0 1 00 b a 0 1a 0 3 0 00 a 0 3 00 0 a 0 3
∣∣∣∣∣∣∣∣∣∣
= −(4a3 + 27b2) ,

312 ANHANG B. ZUR RESULTANTE
wobei DP gewichtet-homogen vom Grad sechs ist und a das Gewicht 2 bzw. der Koeffizientb das Gewicht 3 besitzt. Analog ergibt sich
DQ = (−1)6 · RQ,Q′ =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
c b a 0 1 0 00 c b a 0 1 00 0 c b a 0 1b 2a 0 4 0 0 00 b 2a 0 4 0 00 0 b 2a 0 4 00 0 0 b 2a 0 4
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=
−4a3b2 − 27b4 + 16a4c + 144ab2c− 128a2c2 + 256c3
als gewichtet-homogenes Polynom in a, b und c vom Grad 12; dabei ist a vom Gewicht 2,b vom Gewicht 3 und c vom Gewicht 4. ¤
B.2 Berechnung von Schnittmultiplizitaten
Die in Kapitel 3, Abschnitt 3.1.2, angegebenen Eigenschaften der Schnittmulti-plizitat erlauben es in einigen Fallen, diese aus den geometrischen Verhaltnissen“abzulesen“. Das trifft nach Satz 3.1.2.6 insbesondere fur nichtsingulare Schnitt-punkte zweier algebraischer Kurven zu, die verschiedene Tangenten aufweisen: hierist die Schnittmultiplizitat eins.
Jetzt sollen zunachst die Schnittmultiplizitaten aus Beispiel 3.1.2.8 mit Hilfe desSatzes 3.1.2.4 konkret ausgerechnet werden.
Beispiel B.2.1. Es sollen die Schnittmultiplizitaten der Schnittpunkte des kartesischenBlattes C und der Geraden G1 und G2 aus Beispiel 3.1.2.8 berechnet werden.
Mit P = X3 + 0 ·X2 − 3XY Z + Y 3 und Q1 = X + Y − 3Z als die Kurven C und G1
definierenden Polynome, gilt zunachst
RP,Q1(Y, Z) =
∣∣∣∣∣∣∣∣
1 0 −3Y Z Y 3
1 Y − 3Z 0 00 1 Y − 3Z 00 0 1 Y − 3Z
∣∣∣∣∣∣∣∣= −12Y 2Z + 36Y Z2 − 27Z3
= −12Z(
32Z − Y
)2.
Der Schnittpunkt p =[
32 , 3
2 , 1]
liefert jetzt den Faktor(
32Z − Y
), welcher maximal mit
der Potenz k = 2 die Resultante RP,Q1(Y, Z) teilt. Nach Satz 3.1.2.4 betragt die Schnitt-multiplizitat von C und D in p also Ip(C, G1) = 2.
Analog kann von dem Schnittpunkt u = [1,−1, 0] auf den Faktor −Z geschlossen wer-den, derRP,Q1(Y, Z) maximal nur in der ersten Potenz schneidet, so daß hier Iu(C, G1) = 1ist.
Die Gerade G2 wird durch das Polynom Q2 = X − 2Y definiert, womit sich die Resul-tante
RP,Q2(Y, Z) =
∣∣∣∣∣∣∣∣
1 0 −3Y Z Y 3
2 −Y 0 00 2 −Y 00 0 2 −Y
∣∣∣∣∣∣∣∣= −9Y 3 + 12Y 2Z = 3Y 2 (4Z − 3Y )

B.2. BERECHNUNG VON SCHNITTMULTIPLIZITATEN 313
ergibt. Der Schnittpunkt q :=[
23 , 4
3 , 1]
= [2, 4, 3] fuhrt jetzt auf den Faktor (4Z − 3Y ),der die Resultante RP,Q2(Y,Z) nur in der ersten Potenz teilt: Iq(C,G2) = 1. Der imUrsprung der affinen Ebene gelegene Schnittpunkt 2 w := [0, 0, 1] wird mit dem Faktor−Y bewertet und man erkennt, daß die maximale Potenz hier zwei betragt, mit der −Yzur Potenz erhoben die Resultante RP,Q2(Y, Z) teilt, so daß Iw(C,G2) = 2 gilt. ¤
Des weiteren soll die in Beispiel 3.1.2.8 erwahnte Schnittmultiplizitat zweier par-alleler Geraden G1‖G2 berechnet werden. Diese seien definiert durch
L1(X,Y, Z) = αX + βY + γ1Z und L2(X,Y, Z) = αX + βY + γ2Z,
wobei γ1 6= γ2 und o.B.d.A. α 6= 0 gelte. Dann ist die Resultante von L1 und L2 dasPolynom
RL1,L2(Y, Z) =
∣∣∣∣α βY + γ1Zα βY + γ2Z
∣∣∣∣ = −α(γ1 − γ2)Z
und die Schnittmultiplizitat von G1 und G2 in u := [β,−α, 0] betragt
Iu(G1, G2) = 1 ,
weil (−αZ)k das Polynom RL1,L2(Y, Z) maximal in der ersten Potenz k = 1 teilt.
Beispiel B.2.2. Das Bild B.1 zeigt die Schnittverhaltnisse der durch X +Y −Z = 0 undX + Y − 5Z = 0 definierten Geraden in der projektiven Ebene, dargestellt nach dem inKapitel 2 eingefuhrten Gitter.
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
G 1
G 2
Bild B.1: Schnitt der parallelen Geraden X + Y − Z = 0 und X + Y − 5Z = 0 in P2
2Daß der Punkt [1, 0, 0] auf eine der Tangente von C im Ursprung liegt, ist fur die Berechnung derSchnittmultiplizitat nicht wesentlich; die Bedingung (iii) in Satz 3.1.2.4 zielt darauf, die Einzigkeitdes Schnittpunktes zu sichern.

314 ANHANG B. ZUR RESULTANTE
Ist p ein glatter Punkt der Kurve C ⊂ P2 und T die Tangente an C durch p, sowird
k := Ip(C, T )
auch als Kontaktordnung bezeichnet: es ist 2 ≤ k ≤ ∞. Denn nach Korollar 3.1.2.7muß fur jede Tangente die Schnittmultiplizitat in ihrem Beruhrungspunkt mit derKurve großer als eins sein. Ist die Tangente selbst eine Komponente der Kurve, soerreicht die Kontaktordnung den formal eingefuhrten Wert ∞.
Bei Wahl spezieller Koordinaten kann eine nutzliche Aussage uber die Darstel-lung des Polynoms getroffen werden, durch welches die Kurve mit gegebener Kon-taktordnung definiert wird.
Lemma B.2.3. Die projektive Kurve C sei im Punkt p = [0, 0, 1] glatt und besitzedort die Tangente T : X = 0 mit der Kontaktordnung
k = Ip(C, T ) .
Dann wird C durch das Polynom vom Aufbau
P (X,Y, Z) = Y kQ(Y, Z) + XR(X, Y, Z)
definiert, wobei Q ∈ C[Y, Z], R ∈ C[X, Y, Z] mit Q(0, 1) 6= 0 und R(0, 0, 1) 6= 0 gilt.
Beweis. Es sei die Kurve C durch das Polynom P ∈ C[X, Y, Z] und die Tangente T =V (X) im Punkt p = [0, 0, 1] durch F ∈ C[X,Y, Z] definiert. Dann ist
P = A(Y, Z) + B(Y, Z)X + . . . , A, B ∈ C[Y,Z] ,F = 0 + 1 · X
und somit
RP,F (Y, Z) =
∣∣∣∣∣∣∣∣∣∣∣
A(Y, Z) B(Y, Z) . . . . . . . . .0 1 0 . . . 00 0 1 0...
.... . .
0 0 0 1
∣∣∣∣∣∣∣∣∣∣∣
= A(Y, Z) .
Wegen der geforderten Kontaktordnung k = Ip(C, T ) im Punkt p = [0, 0, 1] muß dasPolynom A(Y, Z) genau durch (0 · Z − 1 · Y )k teilbar, d.h. vom Aufbau
A(Y, Z) = Y kQ(Y,Z) , Q ∈ C[Y, Z] ,
sein. Dabei ist Q(0, 1) 6= 0, da sonst aus Q ein weiteres Monom Y herausgezogen werdenkonnte und dann die Kontaktordnung von k verletzte. Das Polynom P gewinnt dann dieDarstellung
P = Y kQ(Y,Z) + XR(X,Y, Z) , R ∈ C[X, Y, Z] ,
woraus sich die Tangente mit Hilfe der partiellen Ableitungen
PX = R + XRX , PY = kY k−1Q + Y kQY , PZ = Y kQZ + XRZ
im Punkt p = [0, 0, 1] zu
XPX(0, 0, 1) + Y PY (0, 0, 1) + ZPZ(0, 0, 1) = X ·R(0, 0, 1) = 0
bestimmt. D.h. schließlich muß auch R(0, 0, 1) 6= 0 sein, womit alles gezeigt ist. ¤

B.3. BEWEIS VON SATZ 3.1.2.6 315
B.3 Beweis von Satz 3.1.2.6
Es seien Koordinaten gewahlt, die o.B.d.A. folgendes ermoglichen: p = [0, 0, 1] und esgelten die Bedingungen (i)−(iii) aus Satz 3.1.2.4; dabei bedeuten (ii) bzw. (iii) bei dieserWahl von p insbesondere, daß auf der Geraden Y = 0 außer p kein weiterer Schnittpunktvon C und D liegt, bzw. daß Y = 0 keine Tangente an C oder D in p ist.
Die Kurven C und D seien durch die homogenen Polynome P und Q ∈ C[X, Y, Z]definiert. Es gelte abkurzend
r := Multp(C) , s := Multp(D) und
F (X, Y ) := P (X,Y, 1) , G(X, Y ) := Q(X, Y, 1) ∈ C[X, Y ] .
Dabei werden F und G insbesondere als Polynome in X mit Koeffizienten aus C[Y ] aufge-faßt. Dies erspart zum einen die gesonderte Notation von Z und ist andererseits im weite-ren Verlaufe des Beweises erlaubt, weil p “im Endlichen“ liegt und P und Q homogen sind.
Sei k := r · s. Fur den ersten Teil ist dann (wegen Satz 3.1.2.4) zu zeigen, daß Y k dieResultante RF,G(Y ) teilt.
Aus Multp(C) = r, Multp(D) = s und p = [0, 0, 1] folgt
F = Y rA0(Y )︸ ︷︷ ︸a0
+Y r−1A1(Y )︸ ︷︷ ︸a1
X + . . . + Y Ar−1(Y )︸ ︷︷ ︸ar−1
Xr−1 + Ar(Y )︸ ︷︷ ︸ar
Xr + . . . + Am(Y )︸ ︷︷ ︸am
Xm
und
G = Y sB0(Y )︸ ︷︷ ︸b0
+Y s−1B1(Y )︸ ︷︷ ︸b1
X + . . . + Y Bs−1(Y )︸ ︷︷ ︸bs−1
Xs−1 + Bs(Y )︸ ︷︷ ︸bs
Xs + . . . + Bn(Y )︸ ︷︷ ︸bn
Xn,
mit Aµ, Bν ∈ C[Y ], µ = 0, . . . , m, ν = 0, . . . , n. Dann ist die Resultante von F und G alsPolynome in X (unbesetzte Stellen tragen wieder eine Null)
RF,G(Y ) =∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Y rA0(Y ) Y r−1A1(Y ) . . . Y Ar−1(Y ) Ar(Y ) . . . Am(Y )Y rA0(Y ) . . .
. . . . . .Y rA0(Y ) . . . Am(Y )
Y sB0(Y ) Y s−1B1(Y ) . . . Y Bs−1(Y ) Bs(Y ) . . . Bn(Y )Y sB0(Y ) . . .
. . . . . .Y sB0(Y ) . . . Bn(Y )
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Analog zur Vorgehensweise im Beweis von Lemma 3.1.1.2, siehe Abschnitt B.1, Seite 306,wird fur 1 ≤ k ≤ s die k-te Zeile mit Y s−k+1 und fur 1 ≤ k ≤ r die k + n-te Zeile mitY r−k+1 multipliziert. Werden dann aus den ersten r + s Spalten die Monome in Y wiederherausgezogen, verbleibt eine Determinante – wieder ein Polynom in Y – die mit D(Y )bezeichnet wird:

316 ANHANG B. ZUR RESULTANTE
YPs
k=1(s−k+1)YPr
k=1(r−k+1)RF,G(Y ) =∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Y r+sA0 Y r+s−1A1 Y r+s−2A2 . . . Y s+1Ar−1 Y sAr . . . Y sAm
Y r+s−1A0 Y r+s−2A1 . . . Y s+1Ar−2 Y sAr−1 . . .. . .
Y r+s−2A0 . . .. . .
Y r+1A0 Y rA1 . . ....
. . .Y r+sB0 Y r+s−1B1 Y r+s−2B2 . . . Y r+1Bs−1 Y rBs . . .
Y r+s−1B0 Y r+s−2B1 . . ....
Y r+s−2B0 . . .. . . . . .
Y s+1B0 Y sB1 . . ....
. . .
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= YPr+s
k=1(r+s−k+1) ·D(Y ) .
Dabei wurde abkurzend das Argument Y in den in der Determinante stehenden PolynomenAµ, Bν , µ = 0, . . . , m, ν = 0, . . . , n, fortgelassen. Die Potenzen von Y summieren sich aufdie rechte Seite zusammengebracht zu
r+s∑
k=1
(r + s− k + 1)−r∑
k=1
(r − k + 1)−s∑
k=1
(s− k + 1)
=r+s+1∑
l=1
l −r∑
l=1
l −s∑
l=1
l =(r + s + 1)(r + s)− r(r + 1)− s(s + 1)
2= r · s .
D.h.RF,G(Y ) = Y r·sD(Y ) , (B.7)
womit der erste Teil gezeigt ist.
Fur den zweiten Teil muß nun gezeigt werden, daß r · s die hochste Potenz von Yist, die RF,G(Y ) teilt – unter der Bedingung, daß die Tangenten von C in p paarweiseverschieden von denen von D in p sind. Dazu wird die letzte Darstellung (B.7) vonRF,G(Y )aufgegriffen und fur die oben eingefuhrte Determinante D(0) 6= 0 nachgewiesen, d.h. y = 0ist keine Nullstelle von D(Y ) und mithin ist die Resultante von F und G genau durch Y r·s
teilbar.Die Gleichungen fur die Tangenten von C und D in p = (0, 0) in affiner Form (nach
Definition 1.3.6) sind
Fr(X, Y ) = A0(0)Y r + A1(0)Y r−1X + . . . + Ar−1(0)Y Xr−1 + Ar(0)Xr,
Gs(X, Y ) = B0(0)Y s + B1(0)Y s−1X + . . . + Bs−1(0)Y Xs−1 + Bs(0)Xs.
Aquivalente Bedingung fur paarweise Verschiedenheit der Tangenten von C gegenuber de-nen von D ist, daß Fr und Gs keinen gemeinsamen nichtkonstanten Faktor haben, d.h.aufgrund von Lemma 3.1.1.1: C und D haben paarweise verschiedene Tangenten genau

B.3. BEWEIS VON SATZ 3.1.2.6 317
dann, wenn gilt
RFr,Gs(Y ) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
A0(0)Y r A1(0)Y r−1 . . . Ar(0)A0(0)Y r . . . Ar(0)
. . . . . .A0(0)Y r . . . Ar(0)
B0(0)Y s B1(0)Y s−1 . . . Bs(0)B0(0)Y s . . . Bs(0)
. . . . . .B0(0)Y s . . . Bs(0)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
6= 0.
Uber die inzwischen schon mehrfach bewahrte Methodik der zeilenweisen Multiplikationund des spaltenweise Herausziehens geeigneter Faktoren, kann jetzt eine Aussage nur mitden Koeffizienten Aµ(0) und Bν(0) gewonnen werden. Dazu wird fur 1 ≤ k ≤ s die k-teZeile mit Y s−k+1 multipliziert und fur 1 ≤ k ≤ r die s + k-te Zeile mit Y r−k+1. Anschlie-ßendes spaltenweises Herausziehen von Y r+s, Y r+s−1, usw. bis Y liefert
RFr,Gs(Y ) = Y r·s
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
A0(0) A1(0) . . . Ar(0)A0(0) . . . Ar(0)
. . . . . .A0(0) . . . Ar(0)
B0(0) B1(0) . . . Bs(0)B0(0) . . . Bs(0)
. . . . . .B0(0) . . . Bs(0)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣︸ ︷︷ ︸
=: D1
.
D.h. die paarweise Verschiedenheit fur die Tangenten von C und D in p = (0, 0) istaquivalent zu
D1 6= 0 .
Die oben genannte Voraussetzung, daß auf der Geraden Y = 0 außer p kein weitererSchnittpunkt von C und D liegt, hat zur Folge, daß die Gleichungen
F (X, 0) = Xr(Ar(0) + Ar+1(0)X + . . . + Am(0)Xm−r
)= 0 ,
G(X, 0) = Xs(Bs(0) + Bs+1(0)X + . . . + Bn(0) Xn−s
)= 0
nur x = 0 als gemeinsame Losung besitzen. Das bedeutet insbesondere, daß die rechtsstehenden Polynome
Ar(0) + Ar+1(0)X + . . . + Am(0)Xm−r , (B.8)Bs(0) + Bs+1(0)X + . . . + Bn(0)Xn−s (B.9)
keine gemeinsame Nullstelle haben – auch nicht x = 0, denn weil Y = 0 keine Tangente anC bzw. D ist, teilt Y die Gleichungen fur die Tangenten Fr und Gs nicht, d.h. Ar(0) 6= 0

318 ANHANG B. ZUR RESULTANTE
und Bs(0) 6= 0. Die Resultante von (B.8) und (B.9) verschwindet also nicht:
D2 :=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Ar(0) Ar+1(0) . . . Am(0)Ar(0) . . . Am(0)
. . . . . .Ar(0) . . . Am(0)
Bs(0) Bs+1(0) . . . Bn(0)Bs(0) . . . Bn(0)
. . . . . .Bs(0) . . . Bn(0)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
6= 0 .
Jetzt kommen wir auf D(0) wieder zuruck und stellen eine Verbindung zu den eben un-tersuchten Determinanten D1 und D2 her, die so eng mit den Tangenten von C und D inp verknupft sind. Betrachtet wir D(Y ) an der Stelle y = 0, so erhalten wir das Schema
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
A0 . . . . . . Ar
. . . . . .. . . . . .
. . . . . .A0 . . . . . . Ar
. . . . . . Ar . . . . . . Am
. . . . . .Ar . . . . . . Am
B0 . . . . . . . . . . . . Bs
. . . . . .B0 . . . . . . . . . . . . Bs
. . . . . . Bs . . . . . . Bn
. . . . . .Bs . . . . . . Bn
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
s
r
n
m
︸ ︷︷ ︸r+s
︸ ︷︷ ︸n+m−r−s
︸ ︷︷ ︸n+m
(vgl. mit der Einfuhrung von D(Y ) auf Seite 316). Unbezeichnete Stellen tragen darinwieder eine Null und abkurzend wurde
Aµ := Aµ(0), Bν := Bν(0), µ = 0, . . . , m, ν = 0, . . . , n,
gesetzt. Die auftauchenden diagonalformigen Blocke sind diejenigen Strukturen, die ste-hen bleiben, wenn Y ≡ 0 wird. Durch die Multiplikation von Y in den einzelnen Zeilenwahrend des auf Seite 315 beschriebenen Vorganges zur Konstruktion von D(Y ) und desanschließenden (nur teilweisen!) Herausziehens aus den Spalten der Determinante, bleibt Yaußerhalb der gezeigten “Blockstruktur“ als Faktor der dort stehenden Polynome erhalten,so daß diese bei Y = 0 aus D(0) verschwinden.

B.3. BEWEIS VON SATZ 3.1.2.6 319
Kurzen wir weiter die darin enthaltenen s× (r + s) bzw. r × (r + s) großen Matrizenmit
A1 :=
A0 . . . . . . Ar
. . . . . .A0 . . . . . . Ar
, B1 :=
B0 . . . . . . Bs
. . . . . .B0 . . . . . . Bs
und
A2 :=
Ar . . . . . . Am
. . . . . .Ar . . . . . . Am
, B2 :=
Bs . . . . . . Bn
. . . . . .Bs . . . . . . Bn
ab, so sind ( A1
B1
)und
( A2
B2
)
quadratische Matrizen der Große (r + s)× (r + s) bzw. (n + m− r− s)× (n + m− r− s).Eine Determinante der Form
D :=
∣∣∣∣∣∣∣∣
A1
B1Θ
. . .A2
B2
∣∣∣∣∣∣∣∣
}r + s
}n + m− r − s
︸ ︷︷ ︸r+s
︸ ︷︷ ︸n+m−r−s
entsteht aus D(0) jetzt durch sukzessives Vertauschen der r Zeilen der Matrix B1 mit denn− s vielen Zeilen des Blockes A2; das sind
ρ := (n− s) + (n− s + 1) + . . . + (n− s + r − 1) =r−1∑
k=0
(n− s + k) = r(n− s + r−1
2
)
Vertauschungen, so daßD(0) = (−1)ρ D
gilt. Wegen
D1 =∣∣∣∣A1
B1
∣∣∣∣ und D2 =∣∣∣∣A2
B2
∣∣∣∣und (siehe [PB91], Determinantenberechnung)
D =∣∣∣∣A1
B1
∣∣∣∣ ·∣∣∣∣A2
B2
∣∣∣∣erhalten wir schließlich
D(0) = (−1)ρ D1 ·D2
als die angekundigte und gewunwschte Beziehung zwischen den drei Determinantnen, dieuns jetzt namlich zu dem folgenden Schuß verhilft. Sind die Tangenten von C paarweisevon denen von D in p = (0, 0) verschieden, gilt D1 6= 0 und wegen D2 6= 0, folgt hieraus,daß y = 0 keine Nullstelle von D(Y ) ist:
D(0) 6= 0.
Deshalb gilt: Teilt Y l das Polynom RF,G(Y ), so gilt l ≤ r · s und damit gilt: r · s ist diehochste Potenz, fur welche Y l die Resultante RF,G(Y ) teilt, also ist Ip(C,D) = r · s. ¤

320 ANHANG B. ZUR RESULTANTE

Anhang C
Linearsysteme
Es wird die Menge aller homogenen Polynome in drei komplexen Veranderlichen∑
ν1+ν2+ν3=d
aν1 ν2 ν3Xν1Y ν2Zν3 (C.1)
vom Grad d betrachtet. Die Anzahl der Kombination von drei Elementen X, Yund Z zur d-ten Klasse Xν1Y ν2Zν3 ohne Rucksicht auf die Reihenfolge und mitWiederholung ist
N =
(3 + d − 1
d
)=
(d + 2)!
d! 2!=
(d + 1)(d + 2)
2.
Daher ist die Menge aller homogenen Polynome vom Grad d in drei komplexenVeranderlichen ein komplexer Vektorraum der Dimension N : CN .
Werden in Hinblick auf algebraische Kurven im P2 zwei homogene Polynome alsaquivalent angesehen, wenn sie sich lediglich durch einen konstanten Faktor unter-scheiden (Hilbertscher Nullstellensatz), so verringert sich die Anzahl der Dimensionum eins und die so als Quotient aufgefaßte Menge der homogenen Polynome in dreikomplexen Veranderlichen wird zum projektiven Raum PN−1 = P d(d+3)
2
.
In diesem Sinne kann gesagt werden, daß ein Punkt aus P d(d+3)2
eine Kurve vom
Grad d im P2 bestimmt bzw. umgekehrt, eine Kurve im P2 vom Grad d als Punktim projektiven Raum P d(d+3)
2
aufgefaßt werden kann. 1
Betrachten wir nun einen Untervektorraum V der Dimension r + 1 von CN , dervon den r + 1 linear unabhangigen Vektoren v0, . . ., vr aufgespannt werde:
V := span (v0, v1, . . . , vr) < CN .
Dann wird das BildΠN (V\{0, . . . , 0}) ⊂ PN−1
unter ΠN nach (2.1), Abschnitt 2.1.1, Seite 60, als Linearsystem der Dimension rbezeichnet. In der oben erklarten Weise der Korrespondenz eines Punktes aus PN−1
1Fur d = 1 ist dies die im Kapitel 5 behandelte Dualitat von Punkten und Geraden.
321

322 ANHANG C. LINEARSYSTEME
und einer Kurve im P2, kann damit gesagt werden, daß ein solches Linearsystemdurch r + 1 linear unabhangige Kurven festgelegt ist und jede Kurve des Linearsy-stems einer Linearkombination der Form
r∑ρ=0
λρPρ = 0 , λρ ∈ C ,
entspricht, wobei die Pρ linear unabhangige Polynome vom Grad d sind. Man erhaltsie durch die Korrespondenz der (Basis-)Vektoren aus V und der als Koeffizienten-satz zu interpretierenden Punkte des PN nach
ΠN(vρ) =: [aρν1ν2ν3
]ν1+ν2+ν3=d ∈ PN , ρ = 0, 1, . . . , r ,
und damit in der Weise nach (C.1) zu
Pρ =∑
ν1+ν2+ν3=d
aρν1 ν2 ν3
Xν1Y ν2Zν3 .
Ist r = 1 so spricht man anstelle von einem eindimensionalen Linearsystem auchvon einem linearen Buschel von Kurven.
Linearsysteme gewinnen ihre Bedeutung und geometrischen Reiz durch die fol-gende Uberlegung. Es sollen Kurven vom Grad d durch eine vorgegebene Anzahl vonPunkten (sogenannte Basispunkte – base points nach [Walker78]) verlaufen. Wirdeine Kurve C wieder in Form eines homogenen Polynoms P nach (C.1) definiert, sobedeutet die Forderung, daß C durch einen Punkt p = [p1, p2, p3] ∈ P2 verlaufen soll
P (p1, p2, p3) =∑
ν1+ν2+ν3=d
aν1 ν2 ν3 pν11 pν2
2 pν33 = 0 . (C.2)
Das ist eine lineare Gleichung in den Unbestimmten aν1 ν2 ν3 mit den komplexenKoeffizienten pν1
1 pν22 pν3
3 , die auch als eine lineare Bedingung bezeichnet wird.Da die Nullstellenmenge von homogenen Polynomen bis auf einen konstanten
Faktor bestimmt ist, konnen also stets N − 1 = d(d+3)2
lineare Bedingungen gestelltwerden, um mindestens ein Tupel (aν1 ν2 ν3) mit ν1+ν2+ν3 = d, also N komplexe Ko-effizienten, zu erhalten, bzw. mindestens einen Punkt [ad,0,0, . . . , a0,0,d] im projektivenRaum PN−1. Werden weniger Punkte vorgegeben, sind Linearsysteme verschiedenerReichhaltigkeit (bzw. genauer: Dimension) zu gewinnen, wie das folgende Beispielzeigt.
Beispiel C.1. Wir mochten ein Linearsystem von Quadriken durch die Basispunkteb1 = [1, 1, 1], b2 = [0, 0, 1] und b3 = [1, 0, 1] gewinnen. Es ist also d = 2 und wegendes allgemeinen Aufbaus des die Quadrik definierenden Polynoms
P = a200X2 + a020Y
2 + a002Z2 + a110XY + a101XZ + a011Y Z
ist N = 6. Als homogenes Gleichungssystem fur die hierin auftretenden Koeffizientenergibt sich
1 1 1 1 1 10 0 1 0 0 01 0 1 0 1 0
︸ ︷︷ ︸=:K
(a200, a020, a002, a110, a101, a011)T = (0, 0, 0, 0, 0, 0)T ,

323
wobei in der 3 × 6-Matrix K die Werte von X2, Y 2, . . ., Y Z an den Stellen b1, b2 undb3 stehen. Da K vom Rang n = 3 ist, besteht die Losungsmenge dieses homogenen Glei-chungssystems aus einem N − Rang(K) = 6 − 3 = 3-dimensionalen Untervektorraum Vdes CN=6, der orthogonal zu dem Untervektorraum W ist, der von den Zeilenvektorender Matrix K aufgespannt wird, so daß C6 = V ⊕W die direkte Summe dieser beidenUntervektorraume ist. Wir erhalten (z.B. Orthogonalisierungsverfahren)
V = span(v0 := (1, 0, 0, 0,−1, 0)T ,
v1 := (0, 1, 0, 0, 0, 1)T ,
v2 := (0, 2, 0,−1, 0,−1)T )
und damitΠ6(V\{(0, 0, 0, 0, 0, 0)}) ⊂ P5
als r = N − n− 1 = 2-dimensionales Linearsystem im P5. Dabei entsprechen jetzt in deroben genannten Weise Punkte des projektiven Raumes P5 wieder Quadriken, so daß auchvon einem Linearsystem von Quadriken gesprochen werden kann. Dieses wird dann ausden Vektoren v0, v1 und v2 sich ergebenden Basispolynomen
P0 = X2 −XZ = X(X − Z) ,
P1 = Y 2 − Y Z = Y (Y − Z) ,
P2 = 2Y 2 −XY − Y Z = Y (2Y −X − Z)
aufgespannt. Das Bild C.1(links) zeigt einige Linearkombinationen
λ0P0 + λ1P1 + λ2P2 = 0
hieraus in affinen Schnitten (mit [λ0, λ1, λ2] ∈ P2 und den Basispolynomen X(X − 1),
-1 1 2 3
-2
-1
1
2
3
x
y
-1.5 -1 -0.5 0.5 1 1.5 2 2.5
-1.5
-1
-0.5
0.5
1
1.5
2
2.5
x
y
Bild C.1: Linearsystem von Quadriken: links der Dimension 2, rechts der Dimension 1

324 ANHANG C. LINEARSYSTEME
Y (Y − 1), Y (2Y 2 −X − 1)): [1, 1, 0] ist der Kreis, [1, 2, 1], [1, 1, 3], [50, 1, 2] sind Ellipsen(die ersten beiden sind die langgestreckten, die letzte ist die hochgestreckte), [−1, 1, 0] sinddie beiden sich in (1/2, 1/2) schneidenden Geraden, [−1, 1, 1], [−10, 1, 1] schließlich sindHyperbeln (wobei letztere die hochgestreckte, sich an X = 0, X = 1 “anlehnende“ ist).
Geben wir noch einen weiteren Basispunkt b4 = [0, 1, 1] vor. So entsteht die Matrix
K =
1 1 1 1 1 10 0 1 0 0 01 0 1 0 1 00 1 1 0 0 1
vom Rang n = 4 und die Dimension des Linearsystems verringert sich auf r = N−n−1 = 1.Dieses ist
Π6(span(v0 := (1, 0, 0, 0,−1, 0)T ,
v1 := (0, 1, 0, 0, 0, 1)T )\{(0, 0, 0, 0, 0, 0)}) ⊂ P5
bzw. in Form von Quadrikenλ0P0 + λ1P1
mitP0 = X(X − Z) und P1 = Y (Y − Z) .
Das Bild C.1(rechts) zeigt einige Kurven aus diesem Buschel. Werden die Koeffizientender Linearkombination λ0, λ1 wieder zu Elementen des projektiven Raums P1 zusammen-gefaßt, so enthalt dieses Bild die den folgenden Punkten entsprechenden Kurven: [1, 1] alsKreis, [2, 1], [5, 1], [8, 1], [15, 1] als hochgestreckte Ellipsen, [1, 2], [1, 5], [1, 8], [1, 15] alslanggestreckte Ellipsen, [−1, 1] als sich kreuzende Diagonalen, [−2, 1], [−5, 1], [−12, 1] alshochgestreckte und [1,−2], [1,−5], [1,−8], [1,−12] als langgestreckte Hyperbeln. ¤
Nach dem oben Gesagten erhalten wir damit die folgende Situation: durch d(d+3)2
vorgegebene Basispunkte im P2 verlauft mindestens eine projektive Kurve vom Gradd. (Siehe auch die Bemerkung 3.2.1.5 und den Satz 3.2.1.6 im Abschnitt 3.2 auf Seite118f.) Ist diese Kurve durch die Basispunkte eindeutig bestimmt, so spricht man vonPunkten in allgemeiner Lage, sonst von Punkten in spezieller Lage bezuglich Kurvend-ten Grades.
Sind m = d(d+3)2
Basispunkte pµ, µ = 1, . . . , m, gegeben, so kann ihre Lage bzgl.Kurven vom Grad d durch den Rang der aus dem Polynom (C.2) entstehendenm× (m + 1)-Matrix (mit homogenen Koordinaten pµ = (pµ,1, pµ,2, pµ,3))
K =(pν1
µ,1 pν2µ,2 pν3
µ,3
)µ=1,...,m , ν1+ν2+ν3=d
=
pd1,1 pd−1
1,1 p1,2 pd−11,1 p1,3 pd−2
1,1 p21,2 . . . pν1
1,1pν21,2p
ν31,3 . . . p1,2p
d−11,3 pd
1,3
pd2,1 pd−1
2,1 p2,2 pd−12,1 p2,3 pd−2
2,1 p22,2 . . . pν1
2,1pν22,2p
ν32,3 . . . p2,2p
d−12,3 pd
2,3
......
......
. . ....
. . ....
...
pdµ,1 pd−1
µ,1 pµ,2 pd−1µ,1 pµ,3 pd−2
µ,1 p2µ,2 . . . pν1
µ,1pν2µ,2p
ν3µ,3 . . . pµ,2p
d−1µ,3 pd
µ,3
......
......
. . ....
. . ....
...
pdm,1 pd−1
m,1pm,2 pd−1m,1pm,3 pd−2
m,1p2m,2 . . . pν1
m,1pν2m,2p
ν3m,3 . . . pm,2p
d−1m,3 pd
m,3

325
leicht uberpruft werden: ist
{Rang K = m = d(d+3)
2, dann befinden sich die Punkte pµ in allgemeiner Lage,
Rang K < m = d(d+3)2
, dann befinden sich die Punkte pµ in spezieller Lage
bzgl. Kurven vom Grad d. Denn K stellt in der Form
K (ad,0,0, ad−1,1,0, . . . , aν1,ν2,ν3 , . . . , a0,0,d)T = (0, 0, . . . , 0)T (C.3)
gerade das homogene Gleichungssystem fur die Polynomkoeffizienten aν1,ν2,ν3 aus(C.2) dar, das nur dann eine eindeutige Losung (bis auf einen skalaren Faktor)besitzt, wenn der Rang von K genau m ist. Das bedeutet mit anderen Worten,daß aus (C.3) ein inhomogenes, lineares Gleichungssystem mit einer m×m-Matrixgewonnen werden kann, das dann eindeutig losbar ist. Hierzu wird ein geeignetgewahlter (nicht verschwindender) Koeffizient aµ1,µ2,µ3 , µ1 + µ2 + µ3 = d, auf einsgesetzt und die entsprechende Spalte der Matrix K auf die rechte Seite gebracht.
Beispiel C.2. Wir untersuchen jetzt die m = 9 Wendepunkte (3.27) der bereits verschie-dentlich betrachteten Kubik X3 + Y 3 + Z3 + 3λXY Z = 0 , λ 6∈ {−1, α, α}, aus Abschnitt3.3.1 auf Seite 143 bzgl. Kurven vom Grad d = 3. Es ergibt sich
K =
0 0 0 0 0 0 1 −1 1 −1−1 0 1 0 0 −1 0 0 0 1
1 −1 0 1 0 0 −1 0 0 00 0 0 0 0 0 1 α α2 −1
−1 0 α2 0 0 α 0 0 0 11 α 0 α2 0 0 −1 0 0 00 0 0 0 0 0 −1 α2 α 11 0 α 0 0 α2 0 0 0 −1
−1 α2 0 α 0 0 1 0 0 0
mit drei voneinander linear abhangigen Spaltenvektoren (die Summe der Spalten 1, 7 und10 verschwindet) und dem Nullvektor in Spalte 5. D.h.
Rang K < m = 9
und die Punkte (3.27) befinden sich nicht in allgemeiner, sondern in spezieller Lage bzgl.Kubiken!
Eine durch die neun Punkte (3.27) verlaufende Kubik ist also nicht eindeutig bestimmt(wie auch schon im Satz 3.3.1.22 festgestellt wurde). Im Beispiel 2.3.5 wird im Bild 2.32auf Seite 93 das entstehende Buschel von Kubiken veranschaulicht. ¤
Es konnen zudem Linearsysteme betrachtet werden, bei denen (auch) die Mul-tiplizitat in den Basispunkten vorgegeben ist. Dies fuhrt naturlich zu einer Verrin-gerung vorgebbarer Punkte, durch die eine Kurve bzw. Kurvenschar verlaufen soll.

326 ANHANG C. LINEARSYSTEME
Soll etwa eine (affine 2) Kurve C im Punkt p von der Multiplizitat s sein, somussen alle partiellen Ableitungen des die Kurve definierenden Polynoms P biss− 1 im Punkt p verschwinden:
P (p) = 0 (0-te Ableitungen) ,
PX(p) = PY (p) = 0 (1-te Ableitungen) ,
PXX(p) = PXY (p) = PY Y (p) = 0 (2-te Ableitungen) ,
. . . . . ....
PXX...X(p) = PXX...Y (p) = . . . = PY Y ...Y (p) = 0 (s− 1-te Ableitungen) .
Die Anzahl partieller Ableitungen vom Grad ς betragt (Kombinationen von zweiElementen – X und Y – zur ς-ten Klasse mit Wiederholung) 3
(2 + ς − 1
ς
)=
(ς + 1
ς
)= ς + 1 .
Insgesamt ergibt dass−1∑ς=0
(ς + 1) =s∑
ς′=1
ς ′ =s(s + 1)
2
Bedingungen je Basispunkt. Darauf Bezug nehmende Satze werden im Kapitel 4,Abschnitt 4.1 auf den Seiten 179ff behandelt.
Beispiel C.3. Eine Kurve verlaufe durch d(d+3)2 Punkte in allgemeiner Lage – dann ist sie
nach dem oben Gesagten eindeutig bestimmt. Verlangen wir nun die Existenz mindestenseiner Singularitat im Punkt p, so muß die Forderung aufgegeben werden, nach der dieKurve durch genau d(d+3)
2 Punkte zu verlaufen hat.Wegen der drei zusatzlichen Linearbedingungen P (p) = PX(p) = PY (p) = 0 (oder
naturlich auch PX(p) = PY (p) = PZ(p) = 0), muß die Anzahl der vorgebbaren Punktevielmehr auf
d(d + 3)2
− 3 =d2 + 3d− 6
2reduziert werden. ¤
2Fur projektive Kurven gelten dieselben Zusammenhange; der Ubersichtlichkeit wegen be-schranken wir uns auf die affine Formulierung.
3Da projektive Kurven durch homogene Polynome definiert werden, andert sich die Anzahlnicht: es ist lediglich die Variable Z in den entsprechenden partiellen Ableitungen geeignet multi-plikativ zu erganzen.

Anhang D
Parametrisierung vonalgebraischen Kurven
Bei der effektiven Handhabung dualer Kurven, stoßen wir an die Grenze der bisherentwickelten Theorie der algebraischen Kurven.
Dieser Anhang soll helfen, einen gewissen Ausblick auf die weitere Theorie zugestatten. Er faßt die wesentlichen Ergebnisse uber die Parametrisierung von alge-braischen Kurven zusammen, die wir zum Beweis der Pluckerschen Formeln benoti-gen. Zitiert wird aus [Fischer94], wo auch alle Beweise zu finden sind. Unterstutztwird die summarische Auflistung dieses Anhanges auch von den Werken [DR99] und[Kirwan92], die besonders auf die hier eine wichtige Rolle spielenden RiemannschenFlachen eingehen.
Ziel der Parametrisierung von algebraischen Kurven ist es, eine explizite Darstel-lung zu gewinnen, wie sie aus der Differentialgeometrie bekannt ist (siehe Beispiel1.1.6 bzgl. der Neilschen Parabel, Seite 15). Anstelle der impliziten Gleichung
P (X,Y, Z) = 0
mit einem Polynom P ∈ C[X,Y, Z] uber die eine Kurve C hier ublicherweise definiertwird, liefert eine Parametrisierung mit einem komplexen Parameter t ∈ C eineDarstellung der Form
[x(t), y(t), z(t)] ∈ C bzw. f(t) := P (x(t), y(t), z(t)) = 0 .
Dies hat den Vorteil, daß – besonders in Hinblick auf den Beweis der PluckerschenFormeln – die Multiplizitat von C in einem Punkt p sich (einfacher) aus der Mul-tiplizitat des Polynoms f ∈ C[t] an der Stelle t0 mit p = [x(t0), y(t0), z(t0)] ergibt.Soviel zur Motivation der Einfuhrung von Parametrisierungen.
Wesentliche Basis fur eine Parametrisierung von komplexen Kurven ist der fol-gende Satz.
Satz D.1 ([Fischer94], 5.3). Zu jeder irreduziblen algebraischen Kurve C ⊂ P2 gibtes eine kompakte Riemannsche Flache S und eine holomorphe Abbildung
ϕ : S → C ,
so daß ϕ|S\ϕ−1(Sing(C)) : S\ϕ−1(Sing(C)) → C\Sing(C) biholomorph ist.
327

328 ANHANG D. PARAMETRISIERUNG VON ALGEBRAISCHEN KURVEN
PI 2
C
j
S
der komplexenDimension eins
Bild D.1: Riemannsche Flache und holomorphe Abbildung auf C
Dies wird als Singularitatenauflosung von C bezeichnet (Bild D.1). Dabei bautder Begriff der Riemannschen Flache auf das Konzept der komplexen Mannigfaltig-keit auf (fur die in diesem Zusammenhang wichtigen Begriffe wie komplexe n-Kartezur Beschreibung der lokalen Homoomorphie zwischen der komplexen Mannigfaltig-keit S und dem Raum Cn, holomorph-vertraglich und Ubertragungsabbildung fur dieUbertragung zweier Karten, komplexer Atlas als eine Zusammenfassung von Karten,die eine Uberdeckung von S liefern, verweisen wir auf [DR99] und [Kirwan92]). EineRiemannsche Flache ist dann nichts anderes als eine zusammenhangende, eindimen-sionale, komplexe Mannigfaltigkeit.
Um jetzt zumindest einen gewissen Eindruck von diesen Objekten zu vermitteln,erwahnen wir in aller Kurze zwei typische Beispiele, die uns bereits im Laufe diesesTextes begegnet sind!
Beispiel D.2. Die Riemannsche Sphare P1 = C∪{∞} nach Kapitel 2, Abschnitt 2.1.2, inder induktiven Konstruktion (2.3) ist eine Riemannsche Flache. Nach Satz 3.2.1.4 stelltenwir auch fest, daß P1 zu jeder irreduziblen Quadrik homoomorph ist! ¤
Beispiel D.3. Auch der komplexe Torus nach Kapitel 3, Abschnitt 3.3.3, ist eine Rie-mannsche Flache. Zur Erinnerung: Es seien ω1, ω2 komplexe Zahlen, die als Vektoren uberden Korper R linear unabhangig sind. Dann ist das Gitter
Λ := {m1ω1 + m2ω2 |m1,m2 ∈ Z }eine additive Untergruppe von C. Die Quotientengruppe C/Λ (versehen mit der Quotien-tentopologie) ist dann eine Riemannsche Flache, von der Bild D.2 eine Vorstellung gebensoll. ¤
Den Torus im Bild D.1 als Reprasentant einer kompakten Riemannschen Flachezu verwenden, hatte also seinen guten Grund.
Es ist erstaunlich, daß auch in dem ausgezeichneten Werk uber Algebra [Artin93]ein recht ahnliches Ergebnis (Kapitel 13, § 7 – (7.14) Hauptsatz) bzgl. Erweite-rungskorper behandelt wird. Sehr ergiebig zu lesen, ist auch der Abschnitt uberalgebraische Geometrie in diesem Buch (Kapitel 10, § 8), wo gezeigt wird, daß essich bei den oben erwahnten Riemannschen Flachen letztlich um n-blattrige Uber-lagerungen handelt (was auch in [DR99] ausfuhrlich erlautert wird).
Das folgende Lemma garantiert jetzt die (lokale) Existenz der oben motiviertenParametrisierung.

329
C
w
w
w
w
1
1
2
2
x
i y
Bild D.2: Das Gitter Λ und der komplexe Torus C/Λ
Lemma D.4 ([Fischer94], 5.3). Ist o ∈ S ein fester Punkt und t eine in o zentrierteKoordinate in einer genugend kleinen offenen Umgebung US ⊂ S, dann gibt es zuϕ|US
eine sogenannte lokale Liftung, d.h. eine holomorphe Abbildung
ψ : US → C3\{0} , t 7→ (ψ1(t), ψ2(t), ψ3(t)) , (D.1)
so daß ϕ|US= [ψ1, ψ2, ψ3] (siehe Bild D.3).
PI 2
S S
o
j
t tt
i t
1
2
U
C
C
C
C
C {0}\3
P
|US
y
Bild D.3: Lokale Liftung von S
Uber das Aussehen dieser lokalen Liftung kann des weiteren mit Hilfe des fol-genden Lemmas sogar eine genau Aussage getroffen werden.
Lemma D.5 ([Fischer94], 5.4, Lemma). Sei U ⊂ C eine offene Umgebung von0 und φ : U → C3\{0} eine holomorphe Abbildung, so daß φ(U) nicht in einerGeraden enthalten ist. Dann gibt es eindeutig bestimmte a1, a2 ∈ N derart, daß φsich nach einer linearen Transformation von C3\{0} beschreiben laßt durch φ(t) =(φ1(t), φ2(t), φ3(t)) mit
φ1(t) = t1+a1 + . . . , φ2(t) = t2+a1+a2 + . . . , φ3(t) = 1 . (D.2)
Dabei steht . . . fur Terme hoherer Ordnung in t.
Die Zahlen a1, a2 werden als lokale numerische Invarianten der Parametrisierungφ an der Stelle t = 0 bezeichnet.

330 ANHANG D. PARAMETRISIERUNG VON ALGEBRAISCHEN KURVEN
Dann kann man sich nach Bild D.4 eine Parametrisierung einer algebraischen KurveC in der Umgebung eines Punktes p ∈ C der Art
X(t) = t1+a1 + . . . , Y (t) = t2+a1+a2 + . . . und Z(t) = 1
vorstellen. Dabei ist θ : US → U eine komplexe Karte auf S. Das Bild D.4 gibteine vollstandige Ubersicht bzgl. der Abbildungsstruktur, basierend auf den obigenSatzen D.1, D.4 und D.5.
PI 2
S S
o
o
j
t
t
t = t + t1 2i
t
t
i t
i t
1
1
2
2
U
U
C
C
C
C
C
C {0}\3
P
|US
f
y
q
Bild D.4: Lokale Liftung von S und Karte θ
Die wesentliche Hilfe fur das Kapitel 5, Abschnitt 5.4, besteht nun in den fol-genden drei Resultaten.
1. Ist C = φ(U) das um p = φ(0) von φ definierte Kurvenstuck, so gilt
Multp(C) = 1 + a1 und Ip(C,Tp(C)) = 2 + a1 + a2 . (D.3)
Daraus folgt:p ist Singularitat von C ⇐⇒ a1 6= 0 , (D.4)
p ist Wendepunkt von C ⇐⇒ a2 6= 0 und a1 = 0 . (D.5)
Eine Aussage uber die lokalen numerischen Invarianten der dualen Kurve C∗ erhaltman, wenn aus der Singularitatenauflosung ϕ : S → C eine von C∗ konstruiert wird(siehe Bild D.5):
ϕ∗ : S −→ C∗ .
Dabei startet man zunachst mit einer lokalen Liftung ψ : US → C, welche danngeeignet holomorph fortgesetzt werden kann (siehe wieder [Fischer94], Abschnitt5.3). Es sei
ψk(t) :=dψk(t)
dtund Ψ(t) :=
(ψ1(t) ψ2(t) ψ3(t)
ψ1(t) ψ2(t) ψ3(t)
),

331
P
P
I
I
2
2
**
*
S S
o
C
C
j
j
tt
i t
1
2
U
Bild D.5: Singularitatenauflosungen von C und C∗
dann ist ϕ in einem Punkt t0 ∈ S genau dann immersiv, wenn die Zeilen von A(t0)linear unabhangig sind. Die Tangente an die Kurve C im Punkt p := [x0, y0, z0] :=Π ◦ ψ(t0) wird dann (im C3) durch die Vektoren ψ(t0), ψ(t0) aufgespannt – dieeigentlich im P2 vorliegende Tangente T ist durch
Π(span(ψ(t0), ψ(t0))\{0}
)
gegeben; das Bild D.6 veranschaulicht diese Situation im C3, wobei die komplexenKoordinaten x, y und z ∈ C wieder als eindimensionale Linien dargestellt wurden.
C {0}\3
xy
z
p = [ , , ]x y z0 0 0
Ct
t0
p
q x y, z= ( , )
y( )t0
y( )t0 y yD
Tangente : + + = 0T X Y Zg g g1 2 3
Bild D.6: Affiner Kegel von C und Tangente T
Es sind jetzt diejenigen Punkte q = [x, y, z] ∈ T , fur die in homogenen Koordi-naten q = (x, y, z) die Beziehung
〈q, ψ(t0)× ψ(t0)〉 = 0

332 ANHANG D. PARAMETRISIERUNG VON ALGEBRAISCHEN KURVEN
gilt, was wieder im Bild D.6 dargestellt ist. D.h. die Tangente T wird durch
γ1X + γ2Y + γ3Z = 0
definiert, wobei die γk = (−1)k det Ψk(t0) die Minoren von Ψ(t0) sind:
γ1
γ2
γ3
=
∣∣∣∣∣∣
e1 e2 e3
ψ1(t0) ψ2(t0) ψ3(t0)
ψ1(t0) ψ2(t0) ψ3(t0)
∣∣∣∣∣∣=
ψ2(t0)ψ3(t0)− ψ3(t0)ψ2(t0)
ψ3(t0)ψ1(t0)− ψ1(t0)ψ3(t0)
ψ1(t0)ψ2(t0)− ψ2(t0)ψ1(t0)
. (D.6)
Weil die ψk, k = 1, 2, 3, holomorph sind, gilt dies auch fur die γk, und die “dualeSingularitatenauflosung“ ϕ∗ : S → C∗ ist durch Fortsetzung von
ϕ∗ : US → C∗ , : t 7→ [γ1(t), γ2(t), γ3(t)] ∈ P∗2zu gewinnen. Werden nun die Koordinaten aus Lemma D.5 gewahlt: ϕ|US
= [φ1, φ2, φ3],so gilt
ψ1(t) = φ1(t) = t1+a1 + . . . , ψ1(t) = (1 + a1)ta1 + . . . ,
ψ2(t) = φ2(t) = t2+a1+a2 + . . . , ψ2(t) = (2 + a1 + a2)t1+a1+a2 + . . . ,
ψ3(t) = φ3(t) = 1 , ψ3(t) = 0 .
Die Berechnung der γk nach (D.6) ergibt
γ1(t) = −(2 + a1 + a2)t1+a1+a2 + . . . ,
γ2(t) = (1 + a1)ta1 + . . . ,
γ3(t) = (1 + a2)t2+2a1+a2 + . . .
und um die lokalen numerischen Invarianten von ϕ∗ zu bestimmen, sind jetzt nochdie hochsten gemeinsamen Potenzen von t aus der obigen Darstellung herauszuzie-hen, d.h. ta1 zu entfernen, was schließlich zu ϕ∗|US
= [φ∗1, φ∗2, φ
∗3] mit
φ∗1(t) = −(2 + a1 + a2)t1+a2 + . . . ,
φ∗2(t) = (1 + a1) + . . . ,
φ∗3(t) = (1 + a2)t2+a2+a1 + . . .
fuhrt. Als zweites Ergebnis erhalten wir damit:
2. Sind a∗1 und a∗2 die lokalen numerischen Invarianten von ϕ∗, so gilt
a∗1 = a2 und a∗2 = a1 . (D.7)
Auf diesem Wege konnte man auch die fur das zweite Dualitatsprinzip wichtigeEigenschaft C∗∗ = C beweisen.

333
Außerdem benotigen wir den folgenden Satz als 3. Ergebnis:
Satz D.6 ([Fischer94], 8.4). Seien C und C ′ Kurvenkeime, C = V (P ) mit minima-lem P ∈ C〈X, Y 〉, und sei C ′ irreduzibel mit einer lokalen Parametrisierung (φ1, φ2).Dann ist die Schnittmultiplizitat erklart durch
I(C,C ′) = MulttP (φ1(t), φ2(t)) .
Hierin kommen eine ganze Reihe von neuen Begriffen vor, welche durch die fol-genden Angaben kurz kommentiert werden sollen.
• Der obige Satz D.6 erscheint in [Fischer94] als Definition, von der dort ge-zeigt wird, daß sie mit der hier per Resultante definierten Schnittmultiplizitatubereinstimmt.
• Die Eigenschaft eines Polynoms minimal zu sein, wird wieder im Sinne desAbschnittes 1.1, Seite 14, gebraucht.
• Die Menge C〈X, Y 〉 ⊂ C[[X,Y ]] meint den Ring der konvergenten Potenzrei-hen, der sich aus dem Ring der formalen Potenzreihen
C[[X,Y ]] := { f =∑
(µ,ν)∈N×NaµνX
µY ν | aµν ∈ C }
ergibt (mit der Korrespondenz im ublichen Sinne: Einsetzen spezieller Werte(x, y) ∈ C2 fur die Variablen X, Y ).
• Der Begriff des Kurvenkeims ist recht abstrakt und soll hier nur kurz gestreiftwerden. Er stellt eine Aquivalenzklasse von konvergenten Potenzreihen dar,die auf bestimmten offenen Mengen (Polyzylinder) ubereinstimmen.
Der Satz D.6 stellt eine Verallgemeinerung auf allgemeinere Konzepte als die derKurven dar. Fur unsere Zwecke konnte er folgendermaßen vereinfacht werden:
Satz D.7 (Vereinfachung von D.6). Seien C und D algebraische Kurven: C =V (P ) mit minimalem P ∈ C[X, Y ] und sei D irreduzibel mit einer lokalen Pa-rametrisierung (φ1, φ2). Dann ist die Schnittmultiplizitat von C und D im Punktp = (φ1(t0), φ2(t0)) ∈ C ∩D durch
Ip(C,D) = Multt=t0 P (φ1(t), φ2(t))
gegeben.

334 ANHANG D. PARAMETRISIERUNG VON ALGEBRAISCHEN KURVEN
Abschließend soll in diesem Anhang noch ganz kurz auf die rationale Parame-trisierung algebraischer Kurven eingegangen werden. Dazu definieren wir zunachstden Begriff der rationalen Kurve.
Definition D.8. Sei C eine durch P (X,Y ) = 0 definierte affine, irreduzible Kurve.C wird genau dann als rational bezeichnet, wenn es zwei rationale Funktionen φ, ψ∈ C[λ] mit den folgenden Eigenschaften gibt:
(i) außer endlich vielen Parametern λ gilt fur alle ubrigen Werte λ dieBeziehung (φ(λ), ψ(λ)) ∈ C;
(ii) mit endlich vielen Ausnahmen gilt fur alle (x, y) ∈ C, daß es genauein λ0 mit x = φ(λ0), y = ψ(λ0) gibt.
Dabei lassen sich diese beiden Eigenschaften aus zwei Grunden nicht vermeiden:erstens sind rationale Funktionen nicht fur alle Werte der Variablen definiert undzweitens gilt es, singulare Punkte von C zu berucksichtigen!
Beispiel D.9. Wir betrachten die durch P (X, Y ) = X6−X2Y 3−Y 5 = 0 definierte (affine)Kurve C. Diese ist im Bild D.7 dargestellt und weist im Ursprung eine (fast unsichtbareoder doch zumindest unscheinbare) Singularitat auf. Eine rationale Parametrierung dieserKurve ist durch
φ(λ) =λ2 + 1
λ5, ψ(λ) =
λ2 + 1λ6
gegeben. Hier ist die einzige Ausnahme nach Def. D.8, Fall (i), der Wert λ = 0 und nachFall (ii) die Singularitat (0, 0) die einzige Ausnahme mit der Doppelbelegung λ0 = ±i. ¤
-1 -0.5 0.5 1-0.2
0.2
0.4
0.6
0.8
1
1.2
x
y
C
Bild D.7: Die Kurve X6 −X2Y 3 − Y 5 = 0
Der folgende Satz ([Walker78]) macht eine Aussage, wann eine Kurve rationalist – und zwar uber eine Verscharfung bzw. Einschrankung von Satz 4.1.11.
Satz D.10. Eine irreduzible Kurve vom Grad n mit k Punkten der Multiplizitatenrν, ν = 1, . . . , k, ist rational, wenn
(n− 1)(n− 2) =k∑
ν=1
rν (rν − 1) .

335
Beispiel D.11. Jetzt betrachten wir das nach X3 + Y 3 = 3 X Y definierte kartesischeBlatt B vom Grad n = 3. Dieses weist nach Bild D.8 wieder im Ursprung eine Singularitatauf. Diese ist der einzige Punkt mit einer Multiplizitat r1 = 2 großer als eins. Es gilt
(n− 1)(n− 2) = 2 · 1 =k=1∑
ν=1
rν (rν − 1)
und nach Satz D.10 ist B damit rational und es existieren zwei rationale Funktionen:
X(λ) =3λ
1 + λ3, Y (λ) =
3λ2
1 + λ3mit λ ∈ ]−∞,−1[ ∪ ]− 1,∞[ .
Der Ausnahmewert (im Reellen) nach Fall (i) ist λ = −1, fur welchen die rationale Dar-stellung nicht definiert ist. Das auf Seite 362 ganz unten dargestellte Bild verdeutlicht den“Ausnahmepunkt“ (0, 0), der eigentlich nach Fall (ii) nur zu einem solchen wird, wennman neben λ = 0 auch λ → ±∞ zulaßt. ¤
-2 -1 1 2
-2
-1
1
2
x
y
B
Bild D.8: Das kartesische Blatt X3 + Y 3 = 3XY
Satz D.10 ist bewußt in nur einer Richtung formuliert, da es auch rationaleKurven mit
(n− 1)(n− 2) >
k∑ν=1
rν (rν − 1)
gibt. Dazu ein abschließendes Beispiel.
Beispiel D.12. Die durch (X2 − Y )2 = Y 3 definierte Kurve C – siehe Bild D.9 – besitzteinen (nicht gewohnlichen) Doppelpunkt im Ursprung als einzige Singularitat. Dennochist C rational, denn es gibt zwei Funktionen
φ(λ) =λ2 − 1
λ3, ψ(λ) =
(λ2 − 1)2
λ4mit λ 6= 0 ,
die der Definition D.8 entsprechen. ¤

336 ANHANG D. PARAMETRISIERUNG VON ALGEBRAISCHEN KURVEN
-2 -1 1 2
0.5
1
1.5
2
x
y
Bild D.9: Die Kurve (X2 − Y )2 = Y 3

Anhang E
Zum Fundamentaldreieck
In Kapitel 2, Abschnitt 2.1.1, wurde der projektive Raum P2(R) durch vier soge-nannte Fundamentaldreiecke charakterisiert. Hier sollen die Beziehungen der Koor-dinaten innerhalb dieses Gitters beschrieben werden, so daß konkrete Berechungenund Darstellungen in P2(R) ermoglicht werden. Dazu stellen wir die nachfolgendeBetrachtung an.
In einem nichtentarteten Dreieck 4ABC liege ein gegebener Punkt P nach BildE.1 (linke Seite). Seine Lage in 4ABC soll nun durch die “Koordinaten“ sa, sb undsc als Abstande von den Seiten a, b und c beschrieben werden.
A B
C
sa
sb
sc
ab
c A A’B
B’
C
sas
bs
c
hc
ab
c’
ba
P
P
Bild E.1: Beschreibung von P mit dem Tripel (sa, sb, sc)
Dabei gilt fur die Lange von A′B′, die mit c′ bezeichnet sei, im rechten Teil desBildes E.1 die Beziehung
c′ = c− sb
sin α− sa
sin β.
Weil sich die Hohen in dem Dreieck zu
ha = c sin β = b sin γ ,
hb = a sin γ = c sin α ,
hc = b sin α = a sin β
337

338 ANHANG E. ZUM FUNDAMENTALDREIECK
berechnen, ergibt die Betrachtung des Verhaltnisses sc/hc aufgrund der Ahnlichkeitder Dreiecke 4ABC und 4A′B′P jetzt das folgende Resultat
4ABC ∼ 4A′B′P :sc
hc
=c′
c=
c− sb
sin α− sa
sin β
c
= 1− sb
c sin α− sa
c sin β
= 1− sb
hb
− sa
ha
,
d.h. es gilt fur die Koordinaten (sa, sb, sc) die Beziehung
sa
ha
+sb
hb
+sc
hc
= 1 .
Damit sind wir zu dem Ergebnis gelangt: jedes (zunachst positive) Tripel (a0,a1, a2) mit a0 + a1 + a2 = 1 beschreibt genau einen Punkt in dem Dreieck 4ABC.Fur diesen Punkt gilt sa = a0ha, sb = a1hb und sc = a2hc. Dies bedeutet weiter, daßjeder Punkt [x, y, z] ∈ P2(R) in dem Fundamentaldreieck darstellbar ist; es existiertnamlich ein σ ∈ R, so daß
(ξ, η, ζ) = σ(x, y, z) bzw. [ξ, η, ζ] = [x, y, z] mit ξ + η + ζ = 1 ,
dabei ist σ = 1x+y+z
, was wohldefiniert ist, da x, y, z nicht gleichzeitig verschwinden.
Treten negative Werte der homogenen Koordinaten (x, y, z) auf, brauchen ledig-lich die Falle
(i) x < 0 ∧ y, z ≥ 0 ,(ii) y < 0 ∧ x, z ≥ 0 ,(iii) z < 0 ∧ x, y ≥ 0
berucksichtigt werden. Wegen der auf R3\{0} definierten Aquivalenzrelation giltnamlich (fur a, b, c > 0):
[−a,−b,−c] = [a, b, c] , [a,−b,−c] = [−a, b, c] ,[−a, b,−c] = [a,−b, c] , [−a,−b, c] = [a, b,−c] .
Werden negative Koordinaten – die, wie eben gezeigt, immer nur einzeln auftre-ten – in die entsprechend entgegensetzte Richtung senkrecht bzgl. der Dreieckseitengemessen, so konnen alle Punkte des P2(R) nach Bild E.2 plaziert werden. Es ergebensich dann die folgenden vier Dreiecke, die ein Gitter fur den P2(R) aufspannen:
∆I : x, y, z ≥ 0 ,∆II : y, z ≥ 0 ∧ x < 0 ,∆III : x, z ≥ 0 ∧ z < 0 ,∆IV : x, y ≥ 0 ∧ y < 0
(die Numerierung der Dreiecke erfolgt dabei in ublicher Weise wie im x − y−Ko-ordinatensystem, d.h. beginnend bei dem ersten Quadranten x, y > 0 und dannfortlaufend in mathematisch positivem Drehsinn).

339
x= 0
x = 0
h= 0
x<
0
h= 0
h = 0
x= 0
h<
0
z = 0
z= 0
z= 0
z < 0
[x,h,z]
ID
IIID
IVD IID
hx
z
Bild E.2: Gitter, in dem alle Punkte von P2(R) darstellbar sind
Dabei ergeben sich die “Gitterkoordinaten“ (ξ, η, ζ) aus einem gegebenen Punkt[x, y, z] ∈ P2 einfach zu
(ξ, η, ζ) = σ(x, y, z) mit σ =1
|x|+ |y|+ |z| , (E.1)
wobei darauf zu achten ist, daß die homogenen Koordinaten (x, y, z) ggf. mit −1gespiegelt werden (so daß hochstens immer nur eine Koordinate negativ ist).
Da jede projektiv-algebraische Kurve C uber ein homogenes Polynom vom Gradd definiert wird, kann damit der projektive Abschluß einer Kurve in der Form V (P )mit
P (ξ, η, ζ) = P (σx, σy, σz) = σdP (x, y, z)
graphisch nach Bild E.3 erfaßt werden. Wie das konkret fur gegebene Kurven ge-schehen kann, wird in dem Anhang G uber Mathematica beschrieben.
[x,h,z]
h x
z
~C V P= ( ( , , ))x h z
8
8
Bild E.3: Darstellung einer projektiven Kurve C in dem Gitter der Fundamentaldreiecke

340 ANHANG E. ZUM FUNDAMENTALDREIECK

Anhang F
Die taktischePunkt-Geraden-Konfiguration
F.1 Konstruktion einer Konfiguration
In diesem Anhang werden einige interessante und tieferliegende Eigenschaften derauch als taktisch bezeichneten (94, 123)-Punkt-Geraden-Konfiguration entwickelt.Sie ist uns im Abschnitt 3.3.1 als Konfiguration von Wendepunkten nichtsingularerKubiken begegnet (siehe auch Bild 3.33, S. 141).
Zunachst werden wir zeigen, daß zu vier verschiedenen Punkten des P2, vondenen keine drei auf einer Hyperbene liegen, genau zwei (94, 123)-Konfigurationenexistieren! Nach Satz 2.1.3.3 auf Seite 66 konnen dazu o.B.d.A. die Punkte
a1 = [1, 0, 0] , a2 = [0, 1, 0] , a3 = [0, 0, 1] und b = [1, 1, 1]
angenommen werden. Diese liegen dann nach Abbildung F.1 und es sind die dazugehorigen Punkte c und d1, d2, d3 und d4 gesucht.
Z = 0
Y = 0 X = 0
( = 0) =X Y X Y_
a = [0, 0, 1]
b = [1, 1, 1]
a = [1, 0, 0]1
d1
d4
d3
d2
a = [0, 1, 0]2
3
c
Bild F.1: Anfanglicher Aufbau zur Konstruktion einer (94, 123)-Konfiguration I
341

342 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
Der Punkt c ergibt sich sofort als Schnittpunkt der beiden durch a1 und a2
bzw. a3 und b verlaufenden Geraden. Aber es soll zunachst einmal zusammengefaßtwerden, was wir auf Grund der Lage der vier angenommenen Punkte bisher alleswissen:
festgelegte Geraden: a1 a2 : Z = 0 , a1 b : Y = Z ,
a1 a3 : Y = 0 , a2 b : Z = X ,
a2 a3 : X = 0 , a3 b : X = Y ;
Schnittpunkte: a1 a2 |/ a3 b : [1, 1, 0] = c ,
a2 a3 |/ a1 b : [0, 1, 1] , was nicht d3 ist!
a1 a3 |/ a2 b : [1, 0, 1] , was nicht d1 ist!
Die jetzt noch vier unbekannten Punkte d1, d2, d3 und d4 sind nach Bild F.2plaziert.
Z = 0
Y = 0 X = 0
X Y=
Y Z=
Y Z=
Z X=
Z X=
a = [0, 0, 1]
b = [1, 1, 1]
c = [1, 1, 0]
a = [1, 0, 0]1
d1
d4
d3
d2
a = [0, 1, 0]2
3
Bild F.2: Anfanglicher Aufbau zur Konstruktion einer (94, 123)-Konfiguration II
D.h. es gelten zunachst die folgenden und aus Bild F.2 einfach abzulesendenAussagen:
d1 liegt auf a2 b : X = Z ,
d2 liegt auf a2 a3 : X = 0 ,
d3 liegt auf a1 b : Y = Z ,
d4 liegt auf a1 a3 : Y = 0 ,
die nun zu den folgenden (vorlaufigen) Formen dieser Punkte fuhren:
d1 = [α1, β1, α1] , d2 = [0, β2, α2] ,
d3 = [β3, α3, α3] , d4 = [α4, 0, β4] .
Die hierin auftauchenden Unbekannten αµ, βν ∈ C, µ, ν = 1, 2, 3, 4, sind nicht be-liebig wahlbar. Wir benotigen jetzt weitere Aussagen bzgl. der Lage der vier Punk-te, denn unserer Kenntnis uber die (94, 123)-Punkt-Geraden-Konfiguration ist noch

F.1. KONSTRUKTION EINER KONFIGURATION 343
nicht erschopft. In dem Bild F.2 fehlen namlich noch 6 Geraden, welche die Punk-te d1, d2, d3 und d4 naher festlegen. Dies fuhrt nach Bild F.3 zu den folgendenLagebeziehungen:
d1, a3, d3 liegen auf G1 ,
d2, b, d4 liegen auf G2 ,
d1, d2, a1 liegen auf G3 ,
d3, d4, a2 liegen auf G4 ,
d1, c, d4 liegen auf G5 ,
d2, c, d3 liegen auf G6 .
a
b
c
a1
d1
d4
d3
d2
a2
3
G
G
G
G
GG
1
6
3
2
5
4
Bild F.3: Weiterer Aufbau zur Konstruktion einer (94, 123)-Konfiguration
Die Gerade G1 ⊂ P2 fuhrt im C3\{0} bzgl. der auf ihr gelegenen Punkte a3, d1
und d3 zu der Beziehung
u(
001
)+ v
( α1β1α1
)=
(β3α3α3
),
was uns die Aussageβ1 β3 = α1 α3 (F.1)
gewinnen laßt. Ebenso liefern die auf G2 gelegenen Punkte b, d2 und d4 uber denZusammenhang
u(
111
)+ v
(0β2α2
)=
( α40β4
),
die Beziehungβ2 β4 = α4 (β2 − α2) . (F.2)
Aus diesen Zusammenhangen kann jetzt folgende weitere Einschrankung der An-zahl der Variablen gemacht werden:
es muß α1 6= 0 sein, sonst ware d1 = a2 – also:
d1 =
[1,
β1
α1
, 1
]= [1, η, 1] mit η :=
β1
α1
6= 0 , sonst ware d1 = a2 b |/ a1 a3 ;

344 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
es muß α3 6= 0 sein, sonst ware d3 = a1 – also:
d3 =
[β3
α3
, 1, 1
]=
[1
η, 1, 1
], wegen (F.1) β1β3 = α1α3 ;
es muß β2 6= 0 sein, sonst ware d2 = a3 – also:
d2 =
[0, 1,
α2
β2
]= [0, 1, σ] mit σ :=
α2
β2
6= 1 , sonst ware d2 = a1 b |/ a2 a3 ;
es muß β4 6= 0 sein, sonst ware d4 = a1 – also:
d4 =
[α4
β4
, 0, 1
]=
[1
1− σ, 0, 1
], wegen (F.2) β2β4 = α4(β2 − α2).
Wir fassen zusammen, daß wir das Aussehen der gesuchten Punkte zu
d1 = [1, η, 1] , d2 = [0, 1, σ] ,
d3 = [1/η, 1, 1] , d4 = [1/(1− σ), 0, 1]
mit komplexen η 6= 0, σ 6= 1 weiter eingeschrankt haben. Jetzt wird untersucht, wiedie Lagebeziehungen der Geraden G3 und G4 uns weiterhelfen. Auf G3 liegen diePunkte a1, d1 und d2, so daß
u(
100
)+ v
(1η1
)=
(01σ
)
gilt. Daraus entnehmen wir η σ = 1 bzw. (wegen η 6= 0 )
σ =1
η. (F.3)
Die Gerade G4 liefert mit den Punkten a2, d3 und d4 per
u(
010
)+ v
(1/η11
)=
(1/(1−σ)
01
)
die Gleichungη = 1− σ . (F.4)
Wieder erhalten wir aus (F.3) und (F.4) eine quadratische Gleichung (und zwardieselbe wie fur α auf Seite 143):
σ2 − σ + 1 = 0 .
Wieder ist σ also eine von −1 verschiedene dritte “negative“ Einheitwurzel:
σ ∈ {eπi/3 , e−πi/3
}.
Damit kann η eliminiert werden und wir haben
d1 = [σ, 1, σ] , d2 = [0, 1, σ] ,
d3 = [σ, 1, 1] , d4 = [σ, 0, 1]

F.1. KONSTRUKTION EINER KONFIGURATION 345
gewonnen. Diese sind jetzt noch auf Konsistenz bzgl. der Lage auf den Geraden G5
und G6 zu uberprufen. Es gilt auf G5 fur d1, c und d4 tatsachlich
1 ·(
σ1σ
)+ (−1) ·
(110
)+ (−σ) ·
(σ01
)=
(000
)
und auch d2, c und d3 liegen nach
1 ·(
01σ
)+ σ2 ·
(110
)+ (−σ) ·
(σ11
)=
(000
)
auf einer Geraden, die wir mit G6 bezeichnet hatten.
Damit haben wir eine (weitere) (94, 123)-Punkt-Geraden-Konfiguration abgelei-tet; diese ist
a1 = [1, 0, 0] , c = [1, 1, 0] , a2 = [0, 1, 0] ,
d2 = [0, 1, σ] , b = [1, 1, 1] , d4 = [σ, 0, 1] , (F.5)
d1 = [σ, 1, σ] , a3 = [0, 0, 1] , d3 = [σ, 1, 1] .
Sie ist i.G. zu der in (3.27) angegebenen jedoch nicht symmetrisch. Dabei be-deutet Symmetrie in diesem Zusammenhang folgendes: Wird fur eine negative dritteEineitswurzel fur α in der Konfiguration (3.27) die konjugiert komplexe eingesetzt,so geht nach Vertauschung (der beiden letzten Zeilen) die Konfiguration wieder insich uber.
Das gilt fur die Konfiguration (F.5) nicht. Denn je nachdem, ob σ = eπi/3 oderσ = e−πi/3 ist, entstehen zwei verschiedene Konfigutionen, die unter bloßer Vertau-schung einzelner Punkte nicht auseinander zu gewinnen sind – dabei bleiben vier derPunkte (namlich die zu Beginn unabhangig von Parametern festgelegten Punkte a1,a2, a3 und b) erhalten. Und das ist der Vorteil an dieser Konfiguration, die diesesPhanomen besonders deutlich macht. Fur die folgende Diskussion bezeichnen wirdie Menge (F.5) fur σ = eπi/3 mit S und bei einem Wert von σ = e−πi/3 mit S.
Dadurch ist also klar geworden:
Bemerkung F.1.1. Bzgl. vier verschiedener Punkte im P2, von denen keine drei aufeiner Hyperebene liegen, ist die (94, 123)-Punkt-Geraden-Konfiguration nicht eindeutigbestimmt; aber sie ist auch nicht zu beliebigen Konfigurationen ausbaubar: es gibt vielmehrgenau zwei Konfigurationen hierzu. 1
1Das gilt naturlich auch fur die symmetrische Konfiguration (3.27). Werden z.B. die vier“Basispunkte“ [0, 1,−1], [1,−1, 0], [α, 0, 1] und [1, 0, α] mit festem α gewahlt, so ist – neben dembisher behandelten – auch das Schema
[0, 1, −1] , [−1, 0, 1] , [1, −1, 0] ,[1 + α, −α, α] , [α, 0, 1] , [2− α, α− 2, 3] ,
[3α, −1− α, 1 + α] , [1, 0, α] , [1 + α, −α, α]
zu gewinnen, das ganz analog zur oben gezeigten Vorgehensweise abgeleitet werden kann.

346 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
F.2 Projektive Transformation von Konfiguratio-
nen
Alle diese Konfigurationen sind projektiv aufeinander transformierbar. Dies ist In-halt des Satzes 3.3.1.20, der seiner Wichtigkeit wegen im Haupttext belassen wurde.Der Satz basiert wesentlich auf die im ersten Abschnitt dieses Anhanges konstruierteKonfiguration (F.5) und dem folgenden Lemma:
Lemma F.2.1. Die projektive Transformation einer (94, 123)-Punkt-Geraden-Kon-figuration ist wieder eine solche.
Beweis. Die voneinander verschiedenen Punkte p1, . . ., p9 bilden in der hier ublichen An-ordnung eine (94, 123)-Konfiguration genau dann, wenn fur ihre homogenen Koordinaten
det(pµ, pν , pη) = 0
fur alle Indizes(µ, ν, η) ∈ {(1, 2, 3), (4, 5, 6), (7, 8, 9),
(1, 4, 7), (2, 5, 8), (3, 6, 9),(1, 5, 9), (2, 6, 7), (3, 4, 8),(1, 6, 8), (2, 4, 9), (3, 5, 7)}
gilt. Ist nun T eine projektive Transformation mit dem Isomorphismus τ , dann liegen dieBilder τ(pk) ∈ C3, k = 1, . . . , 9, in voneinander verschiedenen eindimensionalen Untervek-torraumen, d.h. die Punkte Π(τ(pk)) ∈ P2 sind voneinander verschieden und offensichtlichgilt:
det(τ(pµ), τ(pν), τ(pη)) = 0
fur alles Indizes der oben gezeigten Menge. ¤
Das stets wiederkehrende Verfahren, solche projektiven Transformationen beigegebenen Konfigurationen zu bestimmen, beruht auf dem folgenden Prinzip, das esgestattet, die im Satz 2.1.3.3 festgestellte Existenz einer Transformation mit den dortgenannten Eigenschaften konkret zu berechnen. Dabei schranken wir einerseits aufden P2 ein, andererseits betrachten wir gleich zweimal vier verschiedene, beliebigePunkte, von denen aber keine drei auf einer Hyperebene liegen (auf einer Seite alsonicht notwendigerweise das Quartett von [1, 0, 0], [0, 1, 0], [0, 0, 1] und [1, 1, 1]). Esseien also die Mengen
H := {p1, p2, p3, p4} und K := {q1, q2, q3, q4}
mit Punkten in der soeben angegebenen Lage gegeben. Gesucht ist dann eine pro-jektive Transformation T |H : H → K.
Wir arbeiten wieder mit den “unterlagerten“ Isomorphismen des C3 und be-trachten homogene Koordinaten pµ, qν , µ, ν = 1, 2, 3, 4, der Punkte aus H und K.Drei der jeweiligen (nunmehr) Vektoren – o.B.d.A. seien dies
{ p1, p2, p3 } und { q1, q2, q3 }

F.2. PROJEKTIVE TRANSFORMATION VON KONFIGURATIONEN 347
– bilden jeweils eine Basis des Vektorraumes C3. Das bedeutet nun zum einen, daßes fur die nichtverschwindenden Vektoren p4 bzw. q4 eine nichttriviale Darstellungder Form
p4 = α1p1 + α2p2 + α3p3 und q4 = β1q1 + β2q2 + β3q3 (F.6)
gibt. Dabei verschwindet keiner der Koeffizienten aufgrund der Annahme, daß keinedrei Punkte aus H bzw. K ⊂ P2 auf einer Hyperebene liegen. Eine konkrete Berech-nung der Linearkombinationen kann durch invertieren der Matrizen (p1, p2, p3) und(q1, q2, q3) (mit den entsprechenden Basisvektoren als Spalten) uber
α1
α2
α3
= (p1, p2, p3)
−1p4 bzw.
β1
β2
β3
= (q1, q2, q3)
−1q4
geschehen. Zum anderen existiert ein durch eine Matrix A ∈ C3,3 vermittelter Iso-morphismus von C3, so daß die genannten Basen ineinander unter Berucksichtigungnoch naher zu spezifizierender Maßstabsfaktoren λ1, λ2, λ3 ∈ C abgebildet werden:
Ap1 = λ1q1, Ap2 = λ2q2, Ap3 = λ3q3 . (F.7)
Es werden also lediglich die “Richtungen“, nicht die genauen Basisvektoren inein-ander uberfuhrt, was in Hinblick auf die durch die Matrix A vermittelte projektiveTransformation T auch sinnvoll ist.
Aus der Bedingung
Ap4!= q4
ergeben sich jetzt die oben genannten Maßstabsfaktoren uber
Ap4 = α1Ap1 + α2Ap2 + α3Ap3 = α1λ1q1 + α2λ2q2 + α3λ3q3 = q4
und der nichttrivialen Darstellung (F.6) zu
λ1 =β1
α1
, λ2 =β2
α2
, λ3 =β3
α3
.
Aus (F.7) berechnet sich die Matrix A jetzt als Produkt zweier aus den genanntenSpaltenvektoren bestehenden Matrizen zu
A = (λ1q1, λ2q2, λ3q3) (p1, p2, p3)−1 . ¤
Wir fassen diese abgeleitete “Berechnungsvorschrift“ in dem folgenden Satz zu-sammen. Fur die Transformation zweier (94, 123)-Konfigurationen ineinander sindalso geeignete “Basispunkte“ auszuwahlen und diese aufeinander abzubilden. Wirwerden das nachfolgend an einigen exponierten Konfigurationen diskutieren.

348 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
Satz F.2.2. Sind zweimal vier jeweils verschiedene Punkte {p1,p2,p3,p4} und{q1,q2,q3,q4} ⊂ P2 gegeben, von denen jeweils keine drei auf einer Hyperebeneliegen, so kann die projektive Transformation
T : pk 7−→ qk , k = 1, 2, 3, 4,
aus dem Isomorphismus τ : C3 → C3 mit der korrespondierenden Matrix A gewon-nen werden, wobei A wie folgt (bis auf einen skalaren Faktor) bestimmt ist (mit pµ,qν, µ, ν = 1, 2, 3, 4, als homogene Koordinaten der jeweiligen Punkte) 2:
α1
α2
α3
:= (p1, p2, p3)
−1p4 ,
β1
β2
β3
:= (q1, q2, q3)
−1q4 ,
λ1 = β1
α1, λ2 = β2
α2, λ3 = β3
α3,
A = (λ1q1, λ2q2, λ3q3) (p1, p2, p3)−1 .
Mit Hilfe dieser Konstruktion sollen nun einige der entwickelten Schemata pro-jektiv ineinander uberfuhrt werden. Wir beginnen mit den Konfigurationen (3.27)und (F.5). Hier hangt die Transformation von den konkreten Werten fur α und σab. So ist z.B. das Schema (3.27) auf (F.5) in der Weise
b = [1, 1, 1]
c = [1, 1, 0]a = [1, 0, 0]1
d = [0, 1, ]s2
d = [ , 1, ]s s1
d = [ , 0, 1]s4
d = [ , 1, 1]s3
a = [0, 1, 0]2
a = [0, 0, 1]3
p = [ , 0, 1]a
p = [-1, 0, 1]p = [0, 1, -1]1
p = [0, 1, ]a4 5
p = [0, , ]a 17
p = [1, , 0]a6
p = [ , 1, 0]a9
p = [1, -1, 0]32
p = [1, 0, ]a8
T1
transformierbar, wenn σ = α = e−πi/3 gilt. Das Verfahren aus Satz F.2.2 liefertzunachst
(α1α2α3
)=
(0 1 11 −1 0
−1 0 α
)−1( α01
)=
(α/(1+α) α/(1+α) −1/(1+α)α/(1+α) −1/(1+α) −1/(1+α)1/(1+α) 1/(1+α) 1/(1+α)
)(α01
)=
(α−1α−1
1
),
( β1
β2
β3
)=
(1 0 00 1 00 0 1
)−1( 111
)=
(111
)und λ1 = −1
1−α, λ2 = −1
1−α, λ3 = 1 .
Die projektive Transformation T1 wird also durch die Matrix
AT1 =
(−11−α
0 0
0 −11−α
0
0 0 1
)(α
1+αα
1+α−11+α
α1+α
−11+α
−11+α
11+α
11+α
11+α
)=
−α1−α2
−α1−α2
11−α2
−α1−α2
11−α2
11−α2
11+α
11+α
11+α
vermittelt.
2Wie oben gezeigt wurde, verschwindet keiner der Werte α1, α2 und α3.

F.2. PROJEKTIVE TRANSFORMATION VON KONFIGURATIONEN 349
Ist dagegen σ = α = eπi/3, so sind die Schemata (3.27) und (F.5) etwa in der Art
b = [1, 1, 1]
c = [1, 1, 0]a = [1, 0, 0]1
d = [0, 1, ]s2
d = [ , 1, ]s s1
d = [ , 0, 1]s4
d = [ , 1, 1]s3
a = [0, 1, 0]2
a = [0, 0, 1]3
p = [0, 1, -1]1
p = [0, 1, ]a4
p = [ , 0, 1]a5
p = [0, , ]a 17
p = [1, , 0]a6
p = [ , 1, 0]a9
p = [1, -1, 0]3
p = [-1, 0, 1]2
p = [1, 0, ]a8
T2
projektiv transformierbar, also die zweite und dritte “Zeile mit Punkten“ zu vertau-schen. Wobei T2 uber die Matrix
AT2 =
11−α2
11−α2
−α1−α2
11−α2
−α1−α2
−α1−α2
11+α
11+α
11+α
vermittelt wird. Die Berechnung verlauft analog zum eben gegebenen Beispiel ab.Dabei ist nur zu beachten, daß jetzt an den entsprechenden Stellen mit der Matrix(p1, p3, p5) gearbeitet wird und (α1, α2, α3)
T = (p1, p3, p5)−1p8 gilt.
Sollen bei σ = α = eπi/3 die Punkte in der Weise
b = [1, 1, 1]
c = [1, 1, 0]a = [1, 0, 0]1
d = [0, 1, ]s2
d = [ , 1, ]s s1
d = [ , 0, 1]s4
d = [ , 1, 1]s3
a = [0, 1, 0]2
a = [0, 0, 1]3
p = [0, 1, -1]1
p = [ , 0, 1]a5
p = [1, -1, 0]3
p = [1, 0, ]a8
T3
?
?
??
?
projektiv transformiert werden, so sind die von den vier Punkten p1, p3, p5 und p8
gelassenen Lucken, mit dem zuvor gezeigten Schema
p1 = [0, 1, −1] , p2 = [−1, 0, 1] , p3 = [1, −1, 0] ,
p4 = [1 + α, −α, α] , p5 = [α, 0, 1] , p6 = [2− α, α− 2, 3] ,
p7 = [3α, −1− α, 1 + α] , p8 = [1, 0, α] , p9 = [1 + α, −α, α]
zu besetzen! Dann ist
b = [1, 1, 1]
c = [1, 1, 0]a = [1, 0, 0]1
d = [0, 1, ]s2
d = [ , 1, ]s s1
d = [ , 0, 1]s4
d = [ , 1, 1]s3
a = [0, 1, 0]2
a = [0, 0, 1]3
p = [0, 1, -1]1
p = [1+ , 1 , ]a aa4
p = [ , 0, 1]a5
p = [3 , , ]-1- 1+a a a7
p = [2- , , 3]a-2a6
p = [1+ , - , ]a a a9
p = [1, -1, 0]3
p = [-1, 0, 1]2
p = [1, 0, ]a8
T3
wieder uber
AT3 = AT1 =
−α1−α2
−α1−α2
11−α2
−α1−α2
11−α2
11−α2
11+α
11+α
11+α
realisierbar.

350 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
Schließlich soll noch die Menge S auf S projektiv transformiert werden. Dies istwieder unter Vertauschung der zweiten und dritten Zeile der Punkteschemata
b = [1, 1, 1]
c = [1, 1, 0]a = [1, 0, 0]1 a = [0, 1, 0]2
a = [0, 0, 1]3
Ts
d = [0, 1, ]2 ei p
3
d = [ , 1, 1]3 ei p
3
d = [ , 0, 1]4 ei p
3
d = [ , 1, ]1 ei p
3 ei p
3
d = [0, 1, ]2
_
a = [1, 0, 0]1
_
d = [ , 1, 1]3
_
d = [ , 0, 1]4
_
a = [0, 1, 0]2
_
d = [ , 1, ]1 ei p
3
_
e e
eei p
3i p
3
i p
3i p
3
_ _
__
_
a = [0, 0, 1]3
_
b = [1, 1, 1]_
c = [1, 1, 0]_
moglich. Die Transformation Tσ bzw. die sie vermittelnde Matrix ist also nach SatzF.2.2 unter der Abbildung von
a1 7→ a1 , a2 7→ a2 , a3 7→ b und b 7→ a3
zu berechnen, was zur Matrix
ATσ =
−1 0 1
0 −1 1
0 0 1
fuhrt.
Wir verlassen jetzt das Feld der eigenen Untersuchungen und schließen uns ein-mal mehr [BK81] an, um einen kurzen Ausblick auf die taktische Konfiguration zugeben. Wir kommen zunachst auf die Angabe der (94, 123)-Konfiguration in Bild3.33 (S. 141) zuruck, welche die affine Ebene F2
3 ist. Diese Angabe war kein Selbst-zweck, sondern sie erlaubt eine vollstandige Ubersicht bzgl. der Struktur der obensporadisch angegebenen projektiven Transformationen.
Wir beginnen dazu mit den Automorphismen von F23, die gerade die affinen
Automorphismen dieser Punkte sind; diese bilden die affine Gruppe
A(2,F3) .
Da es in der Ebene F23 neun Translationen gibt, ist die Ordnung der affinen Gruppe
ord(A(2,F3)) = 9 · ord(GL(2,F3)) .
Die Ordnung der allgemeinen linearen Gruppe uber den Korper F3 ergibt sich ausder Anzahl aller Matrizen
(a11 a12a21 a22
) ∈ (F3)2,2 (dies sind 34 = 81 als 3 Elementezur 4-ten Klasse) abzuglich aller singularen Matrizen. Diese sind ebenso einfach zubestimmen:
zum Zeilenvektor (0, 0) gesellen sich neun (also alle) Vektoren aus F23;
zum Zeilenvektor (0, 1) die drei linear abhangigen 0¯ (0, 1), 1¯ (0, 1), 2¯ (0, 1);
. . .
zum Zeilenvektor (2, 2) die drei linear abhangigen 0¯ (2, 2), 1¯ (2, 2), 2¯ (2, 2).
Das sind 9 + 3 · (9− 1) = 33 Matrizen, so daß die Ordnung der allgemeinen linearenGruppe ord(GL(2,F3)) = 48 betragt. Die affine Gruppe A(2,F3) ist also eine derOrdnung 432.

F.2. PROJEKTIVE TRANSFORMATION VON KONFIGURATIONEN 351
Hierin existiert eine normale Untergruppe vom Index 2, die spezielle affine Grup-pe SA(2,F3), die von den Translationen und den Elementen der speziellen linearenGruppe
SL(2,F3) = {A ∈ GL(2,F3) | det A = 1 }erzeugt wird. Wegen ord(SL(2,F3)) = 24 gilt
ord(SA(2,F3)) = 9 · 24 = 216 .
Die Ruckkehr zum eigentlichen Thema dieser Arbeit uber algebraische Kurvenwird jetzt durch folgende tiefgreifende Verbindung hergestellt: Die Gruppe SA(2,F3)wird durch Kollineationen von (94, 123) in der projektiven Ebene induziert, diesleistet die Hessesche Gruppe G216.
Dies ist die Gruppe von 216 Kollineationen, welche durch 5 Kollineationen Kν ,ν = 1, . . . , 5, erzeugt wird. Diese sind die in der folgenden Tabelle F.1 zusammenge-stellten Abbildungen 3 (x, y, z) 7→ (x′, y′, z′). (Wobei α wieder gemaß der Konfigu-ration (3.27) zu wahlen ist, d.h. es gilt insbesondere α3 = −1.)
Tabelle F.1: Verzeichnis der funf Kollineationen, die G216 erzeugen
K1 K2 K3 K4 K5
x 7→ x′ = y x x αx− y − z x + y + z
y 7→ y′ = z z α2y −x + αy − z x− αy + α2z
z 7→ z′ = x y −αz −x− y + αz x + α2y − αz
Dabei entsprechen K1 und K3 den Translationen in F23 mit den Vektoren (0, 2)
und (2, 0) (damit hat man zwei Basisvektoren aller neun Translationen). Die Kolli-neationen K2, K4 und K5 entsprechen den speziellen linearen Gruppenmitgliedern
A2 :=
(2 0
0 2
), A4 :=
(1 0
1 1
), A5 :=
(0 1
2 0
)
aus SL(2,F3), die ein Erzeugendensystem dieser Gruppe der Ordnung 24 bilden. DieEntsprechungen der Operationen auf F2
3 bzw. (94, 123) ⊂ P2 konnen den folgendenSchemen entnommen werden. Dabei wird innerhalb F3 in der ublichen Weise modulo3 gerechnet 4 und die (94, 123)-Konfiguration den Transformationen nach Tabelle F.1unterworfen. Die Berechnungen wurden in Mathematica angestellt (wobei zu beachtenist, daß die homogenen Koordinaten u.U. zu reskalieren sind, um auf die gewohntenrechts stehenden Konfigurationen zu kommen ! ):
3Dabei ist zu beachten, daß aufgrund der hier von [BK81] abweichenden Notation (sowohl vonP2 als auch von (94, 123)) die angegebenen Transformationen von denen in [BK81] abweichen!
4Außerdem kurzen wir die Operation ◦ ((1 00 1
),(
ab
)), a, b ∈ F3, in SA(2,F3) verkurzt mit ⊕(
ab
)ab. Genauso verfahren wir fur ◦ ((
a11 a12a21 a22
),(
00
)), a11, a12, a21, a22 ∈ F3, was zu ¯(
a11 a12a21 a22
)verein-
facht angegeben wird.

352 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
F23 : (0, 0) (0, 1) (0, 2) (94, 123) : [0, 1,−1] [−1, 0, 1] [1,−1, 0]
(1, 0) (1, 1) (1, 2) [0, 1, α] [α, 0, 1] [1, α, 0](2, 0) (2, 1) (2, 2), [0, α, 1] [1, 0, α] [α, 1, 0],
⊕(0, 2) : (0, 2) (0, 0) (0, 1) ◦K1 : [1,−1, 0] [0, 1,−1] [−1, 0, 1](1, 2) (1, 0) (1, 1) [1, α, 0] [0, 1, α] [α, 0, 1](2, 2) (2, 0) (2, 1), [α, 1, 0] [0, α, 1] [1, 0, α],
⊕(2, 0) : (2, 0) (2, 1) (2, 2) ◦K3 : [0, α, 1] [1, 0, α] [α, 1, 0](0, 0) (0, 1) (0, 2) [0, 1,−1] [−1, 0, 1] [1,−1, 0](1, 0) (1, 1) (1, 2), [0, 1, α] [α, 0, 1] [1, α, 0],
¯(2 00 2
): (0, 0) (0, 2) (0, 1) ◦K2 : [0, 1,−1] [1,−1, 0] [−1, 0, 1]
(2, 0) (2, 2) (2, 1) [0, α, 1] [α, 1, 0] [1, 0, α](1, 0) (1, 2) (1, 1), [0, 1, α] [1, α, 0] [α, 0, 1],
¯(1 01 1
): (0, 0) (0, 1) (0, 2) ◦K4 : [0, 1,−1] [−1, 0, 1] [1,−1, 0]
(1, 1) (1, 2) (1, 0) [α, 0, 1] [1, α, 0] [0, 1, α](2, 2) (2, 0) (2, 1), [α, 1, 0] [0, α, 1] [1, 0, α],
¯(0 12 0
): (0, 0) (1, 0) (2, 0) ◦K5 : [0, 1,−1] [0, 1, α] [0, α, 1]
(0, 2) (1, 2) (2, 2) [1,−1, 0] [1, α, 0] [α, 1, 0](0, 1) (1, 1) (2, 1), [−1, 0, 1] [α, 0, 1] [1, 0, α].
Das angesprochene Erzeugendensystem liefert die 24 Elemente von SL(2,F3)z.B. uber die folgenden Verkettungen:(
1 00 1
)= A2
2 = A34 = A4
5 ,(
2 00 2
)= A2 ,(
1 01 1
)= A4 ,
(2 02 2
)= A4A2 ,(
0 12 0
)= A5 ,
(0 21 0
)= A5A2 ,(
1 02 1
)= A2
4 ,(
2 01 2
)= A2
4A2 ,(1 12 0
)= A5A4 ,
(2 21 0
)= A5A4A2 ,(
0 12 1
)= A4A5 ,
(0 21 2
)= A4A5A2 ,(
2 12 0
)= A5A
24 ,
(1 21 0
)= A5A
24A2 ,(
0 12 2
)= A2
4A5 ,(
0 21 1
)= A2
4A5A2 ,(1 10 1
)= A4A5A4 ,
(2 20 2
)= A4A5A4A2 ,(
2 10 2
)= A5A4A5 ,
(1 20 1
)= A5A4A5A2 ,(
2 11 1
)= A4A5A
24 ,
(1 22 2
)= A4A5A
24A2 ,(
1 11 2
)= A2
4A5A4 ,(
2 22 1
)= A2
4A5A4A2 ,
so daß man aufgrund des Gruppenhomomorphismus’
SA(2,F3) −→ G216,((
1 00 1
), (0, 2)
) 7−→ K1,((
1 00 1
), (2, 0)
) 7−→ K3,((2 00 2
), (0, 0)
) 7−→ K2 ,((
1 10 1
), (0, 0)
) 7−→ K4,((
0 12 0
), (0, 0)
) 7−→ K5
wieder auf ord(G216) = 216 kommt.

F.2. PROJEKTIVE TRANSFORMATION VON KONFIGURATIONEN 353
Jedes Element der Hesseschen Gruppe G216 uberfuhrt also eine (94, 123)- Konfi-guration der Form (3.27) in sich, so daß zwei Kubiken Cλ, Cµ der Form (3.31) nachSatz 3.3.1.22 auf Seite 147
Cλ : X3 + Y 3 + Z3 + 3λXY Z = 0
bzw.
Cµ : X3 + Y 3 + Z3 + 3µXY Z = 0
genau dann durch eine projektive Transformation T auseinander hervorgehen, wennT ∈ G216 ist.
Damit ist eine qualitative Aussage uber die Isomorphie zweier Kubiken der Form(3.31) gewonnen – es liegt aber noch kein quantitatives Ergebnis der Form nachSatz 3.3.2.2 vor. Dies soll jetzt abgeleitet werden, wobei wir zunachst die folgendeVorbetrachtung anstellen: es wird untersucht, wie G216 auf dem im folgenden mit Lbezeichneten Buschel (3.31) operiert (zu L siehe auch Beispiel C.2 des Anhangs Cuber Linearsysteme auf Seite 321 bzw. 325).
In G216 existiert eine normale Untergruppe G18 der Ordnung 18, die jedes Cλ
in sich uberfuhrt: es sind die Kollineationen K1, K2 und K3, welche G18 erzeu-gen 5 und auf dem Linearsystem L trivial operieren. Daher kann die (nichttriviale)Uberfuhrung von Cλ und Cµ besser mit der Quotientengruppe F := G216/G18 beant-wortet werden, welche durch die Restklassen von K4 und K5 erzeugt wird und vonder Ordnung 12 ist. 6
Die Restklassen bzgl. des eindimensionalen Systems L erhalt man aus den inver-sen Kollineationen
xyz
= K−1
4 (x′, y′, z′) =1
3
(1− α)x′ − y′ − z′
−x′ + (1− α)y′ − z′
−x′ − y′ + (1− α)z′
und
xyz
= K−1
5 (x′, y′, z′) =1
3
x′ + y′ + z′1α
(αx′ − y′ + (1− α)z′)1α
(αx′ + (1− α)y′ − z′)
und dem Einsetzen in (3.31), was zu Gleichungen der Form
x′3 + y′3 + z′3 + 3σx′y′z′ = 0 (F.8)
5G18 ist also homomorph zu der durch die beiden Translationen ⊕(2, 0), ⊕(0, 2) (das sind insge-samt wieder neun affine Abbildungen) und die Transformation ¯(
2 00 2
)(das sind mit id = ¯(
1 00 1
)zwei weitere Elemente) erzeugte Gruppe. Diese wiederum ist homomorph zur Untergruppe U ={( 1 0
0 1
),(
2 00 2
)} der Ordnung 2 von SL(2,F3) – weil die zuvor zu G18 homomorphe Gruppe alleTranslationen von F2
3 enthalt, die trivialerweise damit auch fortgelassen werden konnen.6Diese bekommt man auch, wenn in dem Schema der Erzeugung von SL(2,F3) auf Seite 352 je
eine Zeile zu einer Aquivalenzklasse vereint wird, was gerade den 12 Nebenklassen(
a11 a12a21 a22
) ◦ U ,a11, a12, a21, a22 ∈ F3, entspricht.
Ergiebiger bzgl. Kubiken ist aber die direkte Betrachtung der Restklassen von K4 und K5, womitnun im Haupttext fortgefahren werden soll.

354 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
fuhrt. D.h. der Parameter λ wird in den Parameter σ = σ(λ) abgebildet – und dasist gerade die Operation der Restklassen K4 und K5 auf dem Linearsystem L. Dieoben genannte Substitution kann bequem mit Mathematica erledigt werden. Ausden Normalformen (F.8) erhalt man dann
K4(λ) =2(α− 1) + αλ
1 + (α− 1)λund K5(λ) =
2− λ
1 + λ.
Nun betrachten wir zunachst die Parameter λ, fur die Cλ zerfallt (vgl. Beispiel 7
2.3.5 auf Seite 90): −1 , α , α , ∞und berechnen, wie die genannten Restklassen auf diesen Parametern operieren:
K4(−1) = −1, K4(α) = ∞, K4(α) = α, K4(∞) = α,
K5(−1) = ∞, K5(α) = α, K5(α) = α, K5(∞) = −1.
Satz F.2.3. Die Operation der Quotientengruppe F auf das Linearsystem L istaquivalent zur Operation der Tetraedergruppe T auf der Riemannschen ZahlenkugelC.
Dabei kann man sich die Verhaltnisse nach Bild F.4 vorstellen: das Tetraeder TTwird durch die vier Eckpunkte auf der (zur Sphare S2 ⊂ R3 topologisch identifizier-ten) Riemannschen Zahlenkugel C gebildet, die bei der stereographischen Projektionder Zerfallsparameter von C auf C entstehen.
ReIm
8
8
C
C
~
1
1
1
0
1
2
3
3
-
-
2
2
i
i
a
a
a
a
TT
Bild F.4: Tetraeder TT auf der Riemannschen Zahlenkugel C (hier mit α = eπi/3)
7Dabei wurden die Zerfallsparameter hier um ∞ erweitert, was etwas unschon ist und eigentlich[ξ, ζ] = [1, 0] ∈ P1 mit Cλ = C[ξ,ζ] als Kubik der folgenden Form gemeint ist:
ζ(X3 + Y 3 + Z3) + 3ξXY Z = 0

F.2. PROJEKTIVE TRANSFORMATION VON KONFIGURATIONEN 355
Der Beweis von Satz F.2.3 ergibt sich einfacherweise aus einem Vergleich derOperationen von F auf L und der Tetraedergruppe. Wir haben zunachst die folgen-den zwolf Bilder oder Elemente 8 :
id = K25 = K3
4 ({−1, α, α, ∞}) = { −1, α, α, ∞ } ,
K4 ({−1, α, α, ∞}) = { −1, ∞, α, α } ,
K5 ({−1, α, α, ∞}) = { ∞, α, α, −1 } ,
K24 ({−1, α, α, ∞}) = { −1, α, ∞, α } ,
K5 ◦ K4 ({−1, α, α, ∞}) = { α α, ∞, −1 } ,
K4 ◦ K5 ({−1, α, α, ∞}) = { ∞ −1, α, α } ,
K5 ◦ K24 ({−1, α, α, ∞}) = { α ∞, α, −1 } ,
K24 ◦ K5 ({−1, α, α, ∞}) = { ∞ α, −1, α } ,
K4 ◦ K5 ◦ K4 ({−1, α, α, ∞}) = { α −1, α, ∞ } ,
K5 ◦ K4 ◦ K5 ({−1, α, α, ∞}) = { α α, −1, ∞ } ,
K4 ◦ K5 ◦ K24 ({−1, α, α, ∞}) = { α −1, ∞, α } ,
K24 ◦ K5 ◦ K4 ({−1, α, α, ∞}) = { α ∞, −1, α } .
(F.9)
Die Tetraedergruppe T ist nun die Gruppe von Drehungen, die ein Tetraederin sich uberfuhren. Dies sind 12 Operationen: die identische Rotation (als neutralesElement), 8 Drehungen um 120◦ um die 4 Achsen, die durch die Ecken des Tetraedersgehen (dies sind die 8 Elemente der Ordnung 3) und 3 Drehungen um 180◦ um die3 Achsen, welche durch die Kantenmittelpunkte des Teraeders verlaufen (dies sinddie 3 Elemente der Ordnung 2). Das Bild F.6 stellt die 12 Elemente dieser Gruppeals Ubersicht dar, wobei TT als konkreter Tetraeder gewahlt wurde (vgl. auch Bild5 in [Faltings96], Die Klassifikation der endlichen einfachen Gruppen; dieser Artikelbietet eine wunderschone Einfuhrung in die Gruppentheorie und einen großartigenAusblick auf die Forschungsfront). Das untenstehende Bild F.5 stellt gewissermaßendie Kopplung zur Tetraedergruppe her: an denselben Platzen wie im Bild F.6 stehenhier als Pendant die 12 Elemente, die aus den Restklassen gebildet werden konnen.
id
K4
2^
K4
^
K5
^
°K4
2^K5
^
° K4
2^K5
^
°° K4
^K5
^K5
^
°° K5
^K4
^K4
^
°°K4
2
K5
^K4
^^
°°K4
2
K5
^K4
^^
°K5
^K 4
^
°K4
^K5
^
Bild F.5: Die 12 Elemente aus den Restklassen K4 und K5
8Diese sind homomorph zu den als Aquivalenzklassen gelesenen Zeilen des Matrizenschematasauf Seite 352.

356 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
8
8
8
88
8
8
8
8
8
8
8
1
1
1
1
1
1
1
1
1
1
1
1a
a
a
a
a
a
a
a
a
a
a
aa
a
a
a
a
a
a
a
a
a
a
a
°
°
°
°
°°
°
°
°°
°
°
K
K
id
4
4
2
2
^
^K4
2^
K
K
4
4 2
2
K4
^ K4
^
K
K
K
5
5
5
^
^
^
K5
^
K4
^
K5
^
K5
^K5
^
K5
^
K
K
K
4
4
4
^
^
^
K5
^
K4
^
^
^
K 4
^
K5
^
Bild F.6: Die 12 Elemente der Tetraedergruppe T
Damit sind wir unserer gesuchten quantitativen Aussage, wann zwei KubikenCλ, Cµ der Form (3.31) projektiv aquivalent sind, ein gutes Stuck naher gekommen:durch die zu T homomorphen Operationen von F , wird der Parameter λ auf 12Werte λ1, . . . , λ12 abgebildet und Cµ kann in Cλ genau dann projektiv transformiertwerden, wenn fur ein k = 1, . . . , 12 die Gleichheit µ = λk gilt.
Beispiel F.2.4. Ist etwa die Kubik C1 : X3 + Y 3 + Z3 + 3XY Z , d.h. λ = 1, gegeben,so liefern die 12 Abbildungen (F.9) die Werte
id(1) = 1 , K4(1) = 2 +√
3 i ,
K5(1) = 12 , K2
4(1) = 2−√3 i ,
K5 ◦ K4(1) = −14 −
√3
4 i , K4 ◦ K5(1) = 12 + 3
√3
4 i ,
K5 ◦ K24(1) = −1
4 +√
34 i , K2
4 ◦ K5(1) = 12 − 3
√3
4 i ,
K4 ◦ K5 ◦ K4(1) = −12 +
√3
2 i , K5 ◦ K4 ◦ K5(1) = −12 −
√3
2 i ,
K4 ◦ K5 ◦ K24(1) = −5
2 +√
32 i , K2
4 ◦ K5 ◦ K4(1) = −52 −
√3
2 i ,
d.h. eine Kubik Cµ : X ′3 + Y ′3 + Z ′3 + 3µX ′Y ′Z ′ mit µ als einen der obigen Werte laßtsich via eine entsprechende Kombination der inverseren Kollineationen K−1
4 (X ′, Y ′, Z ′)und K−1
5 (X ′, Y ′, Z ′) auf C1 transformieren. ¤

F.2. PROJEKTIVE TRANSFORMATION VON KONFIGURATIONEN 357
Dieses Resultat entspricht seiner Form nach dem Inhalt des Satzes 3.3.2.2 ausAbschnitt 3.3.2 auf Seite 151 fur die dort gewahlte Normalform von elliptischenKurven. Eine elegantere Formulierung gelingt mit dem Aufsuchen einer Funktion ϕ,so daß
ϕ(λ) = ϕ(λ1) = . . . = ϕ(λ12) .
Dann namlich gilt die folgende Aussage: Cµ ist in Cλ projektiv transformierbar genaudann, wenn ϕ(µ) = ϕ(λ).
In [BK81] wird beschrieben, wie das Auffinden einer solchen Funktion mit derkanonischen Abbildung C → C\T verbunden ist. Dabei wird kurz beschrieben,daß auch der Orbitraum C\T topologisch wieder als 2-Sphare aufgefaßt werdenkann und damit sowohl C als auch C\T als abstrakte algebraische Kurve aufgefaßtwerden konnen (siehe auch Anhang D, Beispiel D.2 auf Seite 328) und somit weiterC→ C\T zu einer Abbildung
P1 → P1
[u, v] 7→ [P (u, v), Q(u, v)]
aquivalent ist, wobei P , Q homogene Polynome vom Grad 12 mit folgender Eigen-schaft sind:
P , Q sind invariant bzgl. Operationen von T , d.h. bei jeder Operationvon einem Element von T multiplizieren sie sich mit derselben Konstan-te. (Die Nullstellen von P und Q mussen also, unter Berucksichtigungihrer Multiplizitat, 12 Punkte sein, welche unter Operationen von T un-tereinander lediglich vertauscht werden.)
Fur diese Punkte werden die Ecken des Tetraeders TT gewahlt; diese sind in inho-mogenen Koordinaten: ∞, −1, α, α .
Wahlen wir die homogenen Koordinaten [u, v] ∈ P1 mit λ = uv∈ C, dann treten
diese Eckpunkte als Nullstellen des homogenen Polynoms
v(u + v)(u− αv)(u− αv) = v(u3 + v3) (F.10)
auf. Um zu uberprufen, ob dieses Polynom unserer obigen Eigenschaft genugt, istjetzt zu testen, wie es sich auf den homogenisierten Restklassenoperationen K4 undK5 verhalt. Es ergibt sich zunachst mit
K4(uv) =
2(α− 1) + α uv
1 + (α− 1) uv
=2(α− 1)v + αu
v + (α− 1)u=
2α2v + αu
v + α2u=
2αv + u
αv + αu
die AbbildungK4(
uv) : [u, v] 7→ [u + 2αv, αu + αv] ,
was nun in (F.10) eingesetzt tatsachlich die Invarianz
(αu + αv)((u + 2αv)3 + (αu + αv)3
)= 9α2v(u3 + v3)

358 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION
ergibt. Ebenso liefert
K5(uv) =
2− uv
1 + uv
=2v − u
v + uund K5(
uv) : [u, v] 7→ [−u + 2v, u + v]
die Invarianz
(u + v)((−u + 2v)3 + (u + v)3
)= 9v(u3 + v3) .
Vier weitere unter T invariante Punkte sind die Mittelpunkte 9 der Dreiecke desTetraeders TT :
0, 2, −2α, −2α .
Hieraus nun ist das homogene Polynom
u(u− 2v)(u + 2αv)(u + 2αv) = u(u3 − 8v3)
zu gewinnen. Mittels der homogenen Koordinaten [u, v] und den Abbildungen K4(uv)
und K5(uv) stellen wir zunachst wieder die beiden folgenden Invarianzen fest:
(u + 2αv)((u + 2αv)3 − 8(αu + αv)3
)= 9u(u3 − 8v3)
und
(−u + 2v)((−u + 2v)3 − 8(u + v)3
)= 9u(u3 − 8v3) .
Damit erhalten wir jetzt in
P (u, v) = u3(u3 − 8v3)3 und
Q(u, v) = v3(u3 + v3)3
die beiden gewunschten Polynome vom Grad 12. Kehren wir zu affinen Koordinatenzuruck, d.h. betrachten wir wieder λ = u
vim Urbildraum und P
Qim Bildraum, so
erhalten wir die rationale Funktion
j(λ) =λ3(λ3 − 8)3
(λ3 + 1)3,
die einen dreifachen Pol fur die vier Werte ∞,−1, α und α aufweist, fur welche dieKubiken gerade zerfallen (vgl. Beispiel 2.3.5 auf Seite 90). Fur die ubrigen Werteλ ∈ C wird j(λ) als die j-Invariante bezeichnet, mit der nun abschließend derfolgende schone Satz formuliert werden kann.
9Dabei wurden diese zunachst vom Mittelpunkt der Riemannschen Zahlenkugel C auf die Pe-ripherie von C projeziert und dann weiter stereographisch auf die Ebene C.
Die angegebenen Koordinaten kann man nach Bild F.4 berechnen, denn durch die dort gezeig-ten Verhaltnisse besitzt C einen Durchmesser von
√2 und das einbeschriebene Tetraeder TT eine
Kantenlange von 23
√3. Uber elementare geometrische Beziehungen sind dann die Koordinaten
ableitbar.

F.2. PROJEKTIVE TRANSFORMATION VON KONFIGURATIONEN 359
Satz F.2.5. Es sei j(λ) = λ3(λ3−8)3
(λ3+1)3die j-Invariante der elliptischen Kurve Cλ der
FormX3 + Y 3 + Z3 + 3λXY Z = 0 , λ3 6= −1.
Dann sind Cλ und Cµ genau dann projektiv transformierbar, wenn
j(λ) = j(µ)
gilt.
Beispiel F.2.6. Wir nehmen Bezug auf das Beispiel F.2.4, wo die Kubik
C1 : X3 + Y 3 + Z3 + 3XY Z ,
d.h. λ = 1, gegeben war. Dort stellten wir fest, daß C1 zu allen Kubiken
Cµ : X ′3 + Y ′3 + Z ′3 + 3µX ′Y ′Z ′
mitµ ∈ { 1 , 2 +
√3 i , −1
4 −√
34 i ,
12 , 2−√3 i , −1
4 +√
34 i ,
12 + 3
√3
4 i , −12 +
√3
2 i , −52 +
√3
2 i ,
12 − 3
√3
4 i , −12 −
√3
2 i , −52 −
√3
2 i }projektiv aquivalent ist.
Mit Hilfe der j-Invarianten stellen wir nun tatsachlich fest, daß
j(1) = j(2 +√
3 i) = j(−14 −
√3
4 i) =
j(12) = j(2−√3 i) = j(−1
4 +√
34 i) =
j(12 + 3
√3
4 i) = j(−12 +
√3
2 i) = j(−52 +
√3
2 i) =
j(12 − 3
√3
4 i) = j(−12 −
√3
2 i) = j(−52 −
√3
2 i) = −73
23= −343
8.
gilt. ¤

360 ANHANG F. DIE TAKTISCHE PUNKT-GERADEN-KONFIGURATION

Anhang G
Der Einsatz von Mathematica
Dieser Anhang soll einen kurzen Uberblick geben, wie einige der in dieser Arbeitdargestellten Bilder entstanden sind. Auf dem Softwaremarkt gibt es mittlerweile(Stand: erstes Quartal 2000) eine Reihe von Programmen (Matlab, Maple, Mathema-tica, u.a.), die sowohl das symbolische Rechnen unterstutzen, als auch das Erstellenvon anspruchsvollen Graphiken leicht ermoglichen. Aufgrund seiner relativ weitenVerbreitung wird an dieser Stelle Mathematica (Version 4.0) benutzt.
Die in dem Abschnitt G.2 angestellten Uberlegungen sind jedoch von dem einge-setzten Programm weitestgehend unabhangig, so daß auch der projektive Abschlußin der hier gezeigten Form leicht auf andere Graphikprogramme ubertragen werdenkann.
G.1 Darstellung von ebenen Kurven
Die Darstellung reeller Schnitte von algebraischen Kurven steht uber das Komman-do ImplicitPlot unmittelbar zur Verfugung. Damit dieser Befehl in einer neu-en Arbeitsumgebung bereitgestellt wird, ist allerdings zuvor das Paket Graphics
’ImplicitPlot’ zu laden. Die beiden folgenden Eingaben in einem sogenanntenNotebook zeigen das Laden des Pakets und die von Mathematica darauf hin bereit-gestellten Umgebungen:
Hierin soll jetzt der reelle Schnitt (oder genauer: ein Teil des reellen Schnittes)des kartesischen Blattes x3 +y3 = 3xy erzeugt werden. In dem in eckigen Klammernstehenden Argument von ImplicitPlot, sind Mathematica nun eine Reihe von Ein-zelheiten mitzuteilen. Dazu gehort als erstes, welche Polynomgleichung dargestelltwerden soll; zusatzlich wird der Bereich bzgl. der x-Koordinate, fur den die Kurvezu berechnen ist, die Linienstarke und der Bereich, in dem die Kurve dargestelltwerden soll, angegeben. In dieser Reihenfolge produziert die nachfolgende Eingabedas gezeigte Bild des kartesischen Blattes.
361

362 ANHANG G. DER EINSATZ VON MATHEMATICA
-4 -3 -2 -1 1 2 3 4
-4
-3
-2
-1
1
2
3
4
Dabei konnen viele der so erzeugten Graphiken auch beliebig kombiniert undzusammen dargestellt werden (fur Einzelheiten sei dabei auf [Wolfram99] verwiesen).
Sind Kurven in der Parameterform (x(t), y(t)) gegeben, ist das Kommando Pa-
rametricPlot zu verwenden. So kann das oben dargestellte kartesische Blatt etwaauch in der rational parametrischen Form (siehe Anhang D)
x(t) =3t
1 + t3, y(t) =
3t2
1 + t3mit t ∈ ]−∞,−1[ ∪ ]− 1,∞ [
beschrieben werden. Als zweites Argument ist jetzt der Bereich des Parameters tanzugeben, fur den die parametrisierte Kurve aufgetragen werden soll. Wir lassenzunachst Teile der drei Aste zeichnen, indem der Parameter zu −10 ≤ t ≤ −1,1bzw. −0,9 ≤ t ≤ 0 bzw. 0 ≤ t ≤ 10 gewahlt wird.
Die drei Graphiken werden abschließend als Array zusammengestellt. Uber die Ein-gabe von Show konnen einzelne Graphiken zusammen aufgetragen werden, so daß diedrei Aste einen Eindruck des gesamten Verlaufes der kartesischen Blattes vermitteln.
-2 -1.5 -1 -0.5 0.5 1 1.5 2
-3
-2
-1
1
2
3

G.2. DARSTELLUNG DES PROJEKTIVEN ABSCHLUSSES 363
G.2 Darstellung des projektiven Abschlusses
Sollen in dem nach Anhang E beschriebenen Raum Kurven dargestellt werden, soist das in Bild E.2 gezeigt Gitter in die affine Ebene E2 einzubetten. Dies soll hierin der nach Bild G.1 gezeigten Weise geschehen.
x= 0
x = 0
h= 0
x<
0
h= 0
h = 0
x= 0
h<
0
z = 0
z= 0
z= 0
z < 0
[x,h,z]
ID
IIID
IVD IID
(0,1)
(2 3/3,1)
(2 3/3,-1)
( 3/3,0) ( 3,0)
(4 3/3,1)
hx
z
Ö
Ö
Ö Ö
Ö
Bild G.1: Einbettung der Fundamentaldreiecke zum Zwecke der Darstellung in den E2
Dabei wird wiederum jeder Punkt [ξ, η, ζ] des Gitters in Form eines Elementes(x, y) ∈ E2 beschrieben. Sind die Fundamentalpunkte des P2(R) in der Weise
∆I : (√3/3,0), (
√3,0), (2
√3/3,1);
∆II : (√3,0), (4
√3/3,1), (2
√3/3,1);
∆III : (2√3/3,-1), (
√3,0), (
√3/3,0);
∆IV : (√3/3,0), (2
√3/3,1), (0,1);
eingebettet, so kann ein Punkt p = (x, y) ∈ E2 parametrisch in Abhangigkeit von ξ, ηund ζ beschrieben werden. Es ergeben sich die folgenden Beziehungen zwischen denKoordinaten [ξ, η, ζ] des Gitters des P2(R) und den Koordianten (x, y) der Ebene E2
(wobei in den entsprechenden Dreiecken hier die positiven Koordinaten eingesetztwerden):
∆I : x =√
33
(1 + 2η + ζ), (G.1)
y = ζ ;
∆II : x =√
33
(4− η − 2ζ), (G.2)
y = 1− η ;

364 ANHANG G. DER EINSATZ VON MATHEMATICA
∆III : x =√
33
(2− ξ + η), (G.3)
y = −1 + ξ + η ;
∆IV : x =√
33
(ξ + 2ζ), (G.4)
y = 1− ξ .
Abschließend soll der projektive Abschluß der durch das homogene Polynom
P (x, y, z) = (x + az)x2 + (x− az)y2 , a ∈ R\{0}, (G.5)
definierten Strophoide in Mathematica mit Hilfe der oben angegebenen Zusam-menhange erarbeitet werden. Um den Abschluß “exakt und vollstandig“ darzustel-len, werden drei Schnitte in die projektive Kurve (G.5) gelegt. Die dann jeweilsaffinen Kurven werden abschnittsweise durch die Koordinate x parametrisiert.
Nach Bild G.2 geschieht das zunachst fur z = 1 in dem Bereich −2 ≤ x ≤ 1jeweils mit Hilfe der Funktionen
y1,o(x) := x
√a + x
a− x(G.6)
und y1,u(x) := −x
√a + x
a− x= −y1,o(x). (G.7)
x
yz = 1
III
III IV
1-2 0
3
3
y
yy
y
1
1
-
1,u
1,u
1,o
1,o
Bild G.2: Der reelle Schnitt der Strophoide (G.5) mit a = 2 fur z = 1
Damit sind die Aste in dem Bild G.2 dann in der Form
(x(t), y(t), z(t)) = (t, y1,o(t), 1) bzw. (x(t), y(t), z(t)) = (t, y1,u(t), 1),
mit t ∈ [−2, 1], beschreibbar. In P2(R) stellen sich die Punkte dieses Kurvenab-schnittes als Aquivalenzklasse [x(t), y(t), 1] dar, die, entsprechend der Beziehungen(E.1) “umgerechnet“, in das obige Gitter graphisch aufgetragen werden konnen.

G.2. DARSTELLUNG DES PROJEKTIVEN ABSCHLUSSES 365
Damit der vollstandige Abschluß dargestellt werden kann, wird in (G.5) jetztdie Koordinate y in x = 1 bei y = y1,o(1) bzw. y = y1,u(1) “festgehalten“; wirbetrachten also die Schnitte fur y = ±√3 und parametrisieren diese wieder mit derKoordiante x. Diesmal nach Bild G.3 in dem Bereich 0 ≤ x ≤ 1, wobei sich dieKurvenabschnitte uber die Funktion
z±(x) :=x
a
3 + x2
3− x2(G.8)
in der Weise
(x(t), y(t), z(t)) = (t,√
3, z±(t)) bzw. (x(t), y(t), z(t)) = (t,−√
3, z±(t))
mit t ∈ [0, 1] darstellen lassen. Die Punkte in P2(R) sind dann [t,√
3, z±(t)] und[t,−√3, z±(t)].
IV
x
z
I
1
1
0
y = 31
x
z
1
1
0
31
y = -
zGzG
Bild G.3: Der reelle Schnitt der Strophoide (G.5) mit a = 2 fur y = ±√3
Die Umsetzung dieses “Programms“ in Mathematica soll jetzt in kommentierterWeise geschehen.
Zunachst werden die Fundamentaldreiecke gezeichnet. Dies geschieht uber dieVerbindung der in E2 definierten Eckpunkte von ∆I, ∆II, ∆III und ∆IV mit Hilfedes Befehls ListPlot, der es gestattet die in einer sogenannten Liste aufgefuhrtenKoordinaten als Polygonzug darzustellen (uber die Option PlotJoined → True).
Mit Hilfe des oben bereits benutzten Befehls Show werden die Dreiecke zu einem Bildzusammengefaßt und unter verschiedenen Angaben bzgl. des Fonts mit DI, DII, DIIIund DIV beschriftet.

366 ANHANG G. DER EINSATZ VON MATHEMATICA
0.5 1 1.5 2
-1
-0.5
0.5
1
DI
DIIDIV
DIII
Der in ’(* ... *)’ eingeschlossene String ist ein Kommentar und soll anzeigen, daßjetzt die Strophoide (G.5) betrachtet wird. Gleichzeitig wird dabei a = 2 gesetzt,d.h. fur die ubrige “Mathematica -Sitzung“ ist a jetzt mit dem numerischen Wert 2belegt.
Jetzt werden die Funktionen (G.6) und (G.7) in Mathematica definiert, was durchAngabe des Funktionsnamens gefolgt von dem Argument mit einem “underscore“und der mit ’:=’ eingeleiteten Angabe der Funktionsbeziehung geschieht. Das ein-fache Kommando Plot zeigt, wie die so festgelegten Funktionen benutzt werdenkonnen: y1,o und y1,u werden gleichzeitig uber x aufgetragen.
-2 -1.5 -1 -0.5 0.5 1
-2
-1
1
2
Ebenso wird die Funktion (G.8) (wieder einfacherweise in Abkurzung des Namenshier zu z) definiert. Außerdem ist der Schnitt an der Stelle y = ±√3 dargestellt.

G.2. DARSTELLUNG DES PROJEKTIVEN ABSCHLUSSES 367
-1 -0.5 0.5 1
-1.5
-1
-0.5
0.5
1
1.5
Bevor wir zu der Einbettung des projektiven Abschlusses dieser Kurven in denE2 kommen, soll noch eine Darstellung erarbeitet werden, die es erlaubt einen Blickauf die raumlichen Verhaltnisse zu werfen. Dazu werden die soeben dargestelltenebenen Kurven als Kurven im Raum aufgefaßt und unter Einsatz der Befehle
uber die Angabe des sie definierenden Tripels (x, y, z) einem anderen Graphikformatzugeordnet. Außerdem wird der Ursprung des Koordinatensystems (0, 0, 0) mit P
bezeichnet und uber Graphics3D ebenfalls dem notwendigen Format zugewiesen.
-2-1
01
-2
0
2
0
0.5
1
-2-1
01
-2
0
2
-2-1
01
-2
0
2
0
0.5
1
-2-1
01
-2
0
2
Der Verlauf der dargestellten Kurven macht nun deutlich, wie die projektiveKurve (G.5) in drei Ebenen geschnitten wurde. Desweiteren soll die Auswahl von

368 ANHANG G. DER EINSATZ VON MATHEMATICA
funf linearen Unterraumen L1 bis L5 des R3 die Punkte des P2(R) veranschaulichen,die als Durchstoßpunkte mit der zum P2 topologisch aquivalenten Doppelpyramideden projektiven Abschluß der Strophoide erzeugen.
Wie oben beschrieben, definieren die Tripel [x, y1,o(x), 1], [x, y1,u(x), 1] und [x,±√3, z±(x)] die projektive Strophoide. Mit Hilfe der Beziehung (E.1) werden diesedann auf die dem Gitter angepaßten Bedingungen (Summe der Absolutbetrage derKoordinaten gleich eins) normiert. Fur den Ast (x, y1,o(x), 1) geschieht das in Ma-thematica durch eine weitere Definition von Funktionen.
Die Kurvenabschnitte in E2 bzw. dem Gitter des P2(R) findet jetzt unter Benut-zung der Gleichungen (G.1) bis (G.4) statt, je nachdem, in welchem Quadranten dieKurvenstucke liegen. So liegt
[x, y1,o(x), 1] =: [ξ1(x), η1(x), ζ1(x)],
mit ξ1(x) + η1(x) + ζ1(x) = 1 und 0 ≤ x ≤ 1 im ersten Quadranten bzw. im Funda-mentaldreieck ∆I, so daß die den entsprechenden Kurvenast beschreibenden Paare(x, y) ∈ E2 mit der Beziehung (G.1) bestimmt werden. Fur −2 ≤ x ≤ 0 hinge-gen liegt [ξ1(x), η1(x), ζ1(x)] im dritten Quadranten, daher wird fur die Bestimmungdieses Kurvenastes die Gleichungen (G.3) eingesetzt.
1.161.18 1.221.241.26
0.30.40.50.60.70.80.9
0.8 0.9 1.1
-0.9-0.8-0.7-0.6-0.5-0.4-0.3
Dabei ist zu beachten, daß in der Formulierung [x, y1,o(x), 1] fur −2 ≤ x ≤ 0 zweinegative Koordinaten auftreten. Dies wurde in der Angabe der Transformation furKA3 durch Multiplikation mit dem Faktor−1 berucksichtigt – daher liegen gegenuberder Beziehung (G.3) in der Berechung fur den Ast KA3 die homogenen Koordinatenξ1, η1 und ζ1 negiert vor. Die beiden dargestellten Kurven, sind jetzt die in BildG.2 mit y1,o bezeichneten Abschnitte der Strophoide, jeweils in den Bereichen −2 ≤x ≤ 0 und 0 ≤ x ≤ 1, bezogen auf die Projektion auf die Doppelpyramide bzw.das Gitter fur den P2(R). Etwas spater werden die einzelnen Aste zu einem Ganzenzusammengefugt und ihre Lage bzgl. des Gitters gezeigt. Zunachst soll lediglich die“graphische Information“ in Mathematica in Form der Kurvenabschnitte KA1, KA3,
etc. bereitgestellt werden.

G.2. DARSTELLUNG DES PROJEKTIVEN ABSCHLUSSES 369
Als nachstes werden die Aste der Form [x, y1,u(x), 1] im vierten und zweitenQuadranten berechnet.
0.5 0.6 0.7 0.8 0.9 1.1
0.75
0.775
0.825
0.85
0.875 1.5 1.6 1.7 1.8 1.9
0.8
0.85
0.9
0.95
In der zusammenfassenden Ausgabe der Kurvenabschnitte KA1, KA2, KA3, KA4
liegt jetzt die folgende Situation vor.
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
Es fehlen also noch die bis “ins Unendliche“ laufenden Abschnitte. Diese werdenwie oben beschrieben durch Schnitte bei y = ±√3 und Variation von x im Inter-vall [0, 1] bestimmt. Es ergeben sich die unter Berucksichtigung der Koordinaten[x,±√3, z±(x)] die folgenden Eingaben in Mathematica.

370 ANHANG G. DER EINSATZ VON MATHEMATICA
1.161.18 1.221.241.26
0.30.40.50.60.70.80.9 0.1 0.2 0.3 0.4
0.75
0.8
0.85
0.9
0.95
Damit liegt der projektive Abschluß vollstandig vor. Leider sieht er ziemlichfragmentiert aus.
0,0,10,1,0 1,0,0
1,0,0 0,1,0
0,0,1
Durch Umordnung der translier- und spiegelbaren Fundamentaldreiecke kann je-doch eine andere Darstellung ermoglicht werden. Dazu werden die Dreiecke ∆I bzw.

G.2. DARSTELLUNG DES PROJEKTIVEN ABSCHLUSSES 371
∆III ein weiteres mal in die Ebene E2 eingebettet, und zwar – topologisch korrekt– an die Stirnseiten der Fundamentaldreiecke ∆IV bzw. ∆II, so daß die Strophoidezusammenhangend dargestellt werden kann. Die zusatzlichen Fundamentaldreieckebesitzen dann die Eckpunkte
∆I : (0,1), (2√3/3,1), (
√3/3,2);
∆III : (2√3/3,1), (4
√3/3,1), (
√3,2)
und sind uber die Beziehungen
∆I : x =√
33
(ξ + 2ζ),y = 1 + ξ;
∆III : x =√
33
(2 + 2ξ + η),y = 1 + η,
fur (x, y) ∈ E2, mit dem P2(R) verbunden. In Mathematica sind also wieder zweiDreiecke uber ListPlot
zu definieren, womit ein erweitertes Gitter entsteht.
-0.5 0.5 1 1.5 2 2.5
-1
-0.5
0.5
1
1.5
2
DIDIIDIV
DIII
DI DIII
Alle Kurvenabschnitte in den bisherigen Fundamentaldreiecken ∆I und ∆III sindjetzt auf die neue Lage zu beziehen:

372 ANHANG G. DER EINSATZ VON MATHEMATICA
Dann endlich ergibt sich ein viel ansprechenderes Bild des reellen projektivenAbschlusses der Strophoide.
0,0,1
0,1,0 1,0,0
1,0,0 0,1,0
0,0,1
1,0,0 0,1,0

G.3. BERECHNUNG DER HESSESCHEN 373
Schließlich konnen auch noch die “alten“ Fundamentaldreiecke ∆I und ∆III fort-gelassen werden.
0,0,1
0,1,0 1,0,0
1,0,0 0,1,0
1,0,0 0,1,0
Viele der im Haupttext gezeigten Bilder von projektiven Abschlussen sind ahn-lich entstanden, wobei ganz unterschiedliche Parametrisierungen zum Einsatz ka-men. Zur Demonstration der prinzipiellen Arbeitsweise mit Mathematica mag dieDarstellung des projektiven Abschlusses der Strophoide stellvertretend fur die ubri-gen Bilder stehen.
G.3 Berechnung der Hesseschen
Als Beispiel betrachten wird den Einsatz der Hesseschen im Abschnitt 5.4 zumBeweis der Pluckerschen Formeln. Hier taucht auf Seite 226 das Polynom

374 ANHANG G. DER EINSATZ VON MATHEMATICA
auf, das hier gleich mit der Matrix seiner zweiten Ableitungen (in Anlehnung anLemma 3.3.1.11, S. 133) berechnet wurde. Das Hessesche Polynom ergibt sich darausdann zu
Dies kann evtl. noch vereinfacht werden und nach der Variablen x sortiert werden:
Einige der Koeffizienten konnen faktorisiert werden (Mathematica fuhrt dies nichtselbstandig durch!):
Damit liegt die Darstellung (5.20) nach Seite 227 vor. In dieses Polynom kann jetztdie Parametrisierung (bzw. die hochsten Potenzen hiervon) eingesetzt werden. Dazuist es nicht erforderlich die Variablen x und y permanent fur die restliche Sitzung inMathematica auf t2 bzw. t3 festzulegen, sondern uber die Sequenz /.{x → a , y → b}ist eine temporare Zuweisung (hier auf die fiktiven Werte a und b) moglich:

G.4. QUADRATISCHE RESTE 375
Schließlich kann hierin wieder nach den Potenzen von t sortiert werden:
Der Koeffizient in der niedrigsten Potenz von t kann jetzt noch vereinfacht werden:
Was dann endlich auf das angegebene Polynom φ(t) (siehe Seite 227) fuhrt.
G.4 Quadratische Reste
Um einen Text in eine elliptische Kurve einzubetten (siehe letztes Beispiel im Ab-schnitt 6.3), ist es notwendig in Fp zu testen, ob ein Quadrat vorliegt und wie dieWurzel mod p aussieht, d.h. es ist das Problem ξn ≡ a mod p zu losen, wenn a, nund p gegeben sind, ξ aber gesucht bzw. zu beantworten ist, ob es uberhaupt einesolche Kongruenz gibt.
Wir werden uns hier (nicht zuletzt aus Grunden mangelnden Platzes: leider)nur rein instrumentell mit diesem Problem beschaftigen, d.h. fur uns wieder, eineRechenvorschrift in Mathematica zu schreiben, die das Problem lost – und zumin-dest das Entscheidungsinstrument, ob eine solche Kongruenz fur quadratische Restevorliegt, ist in Mathematica vorhanden.
Eine ausfuhrliche Beschreibung des Problems wird in [Bundschuh92] geboten,insbesondere wird dort auf die uns hier interessierenden quadratischen Reste einge-gangen. Die Frage, ob es einen quadratischen Rest von a modulo p gibt, wird dortmit dem sogenannten Legendre 1 -Symbol
(a
p
):=
{1 , falls a quadratischer Rest modulo p,
−1 , falls a quadratischer Nichtrest modulo p
behandelt. Zentrales Ergebnis sind die beiden Erganzungssatze zum quadratischenReziprozitatsgesetz, mit denen (a
p) konkret berechnet werden kann (diese waren be-
reits Fermat bekannt, aber erst Euler und Lagrange 2 lieferten hierfur Beweise; auch
1Adrien-Marie Legendre (1752-1833)2Joseph Louis Lagrange (1736-1813)

376 ANHANG G. DER EINSATZ VON MATHEMATICA
Legendre machte einen – luckenhaften – Beweisversuch und fuhrte das obige Symbolein; ganz unabhangig davon entwarf Carl Friedrich Gauss – Mathematicorum Prin-cipi – in seiner epochemachenden Disquisitiones Arithmeticae verschiedene Beweisefur die Erganzungssatze zum quadratischen Reziprozitatsgesetz, insgesamt lieferteer acht methodisch verschiedene!). Glucklicherweise findet sich in Mathematica dasLegendre-Symbol unter JacobiSymbol[n, m] 3 , das zu ( n
m) wird, wenn m eine
ungerade Primzahl ist.Als Beispiel betrachten wir fur p = 13 die multiplikative Gruppe (Z/pZ)× von
Fp; diese kann in Mathematica etwa so
erzeugt werden. Wir sehen in der Diagonale sechs verschiedene Quadratreste:
{ 1 , 3 , 4 , 9 , 10 , 12 } .
Jetzt kann auch ohne diese Multiplikationstafel mittels
entschieden werden, daß 12 tatsachlich, 6 aber kein quadratischer Rest ist.Wie findet man aber jetzt die Wurzeln modulo p von Quadratresten? Hierzu
wurde [Giblin93] zu Rate gezogen. Er gibt dort (und begrundet – was wir hiernicht tun werden) die folgende (auf “quadratische“ Untergruppen von zyklischenGruppen) beruhende Methode an (die hier jetzt gerafft dargestellt wird):
3Carl Gustav Jacob Jacobi (1804-1851)

G.4. QUADRATISCHE RESTE 377
geg.: a, p ; ges.: ξ, so daß ξ2 ≡ a mod p ;
• berechne s0 und k, so daß p− 1 = 2s0 (2k + 1) (p wird als ungerade Primzahlvorausgesetzt),
• es gelte (ap) = 1 und z wird so von Hand gesetzt, daß ( z
p) = −1,
• Start mit: ξ0 ≡ ak+1, n0 ≡ a2k+1, c0 ≡ z2k+1 (wegen ξ20 ≡ an0 waren wir bei n0
bereits fertig: ξ = ξ0),
• jetzt ist die neue Potenz s1 so bestimmen, daß n2s1
0 ≡ 1 gilt,
• es ist t0 = s0 − s1 und b0 ≡ c2t0−1
0 ,
• zweiter Schritt: wir bekommen ξ1 ≡ ξ0b0, n1 ≡ n0b20 und c1 ≡ b2
0,
• ist n1 6≡ 1 erhohe den Index um 1 und fahre im Sinne von Punkt vier fort, bisni ≡ 1, dann ist ξ = ξi,
• also: bestimme s2 so, daß n2s2
1 ≡ 1 gilt,
• es ist t1 = s1 − s2, b1 ≡ c2t1−1
1 ,
• damit ξ2 ≡ ξ1b1, n2 ≡ n1b21, c2 ≡ b2
1,
• n2 ≡ 1 ?
• ...
Das soll jetzt in Mathematica anhand des letzten Beispiels von Abschnitt 6.3 demon-striert werden. Wir geben zunachst die Werte nach diesem Beispiel in Mathematicavor:
Dann definieren wir die elliptische Kurvenfunktion und teilen den ubersetzten Textin zehn Pakete
Am Beispiel vom dritten Teilstuck soll die Enbettung in die elliptische Kurve jetzt
berechnet werden. Dazu wird κ so lange erhoht, bis (y2p ) = 1, also:

378 ANHANG G. DER EINSATZ VON MATHEMATICA
Nun suchen wir von y2 die Quadratwurzel modulo p. Dazu wird p zunachst in derForm 2s0(2k + 1) dargestellt:
Jetzt wird gemaß der obigen Vorgehensweise z so gewahlt, daß (y2p ) = −1 gilt
(da Quadratreste die Ausnahme sind, ist es nicht schwer, einen passenden Wert zufinden)
Schließlich gehen wir in den folgendermaßen programmierten Algorithmus:
Und es gilt tatsachlich:

G.5. EINE ERGANZUNG ZUR DARSTELLUNG VON KNOTEN 379
G.5 Eine Erganzung zur Darstellung von Knoten
Im Abschnitt 6.5 auf Seite 262 des Erganzungskapitels 6 untersuchten wir (beschei-dene) Anfange der Knotentheorie und sahen, daß sich unter stereographischer Pro-jektion die Singularitaten einer algebraischen Kurve bei Schnitt mit einer reellenSphare zu Knoten herausbilden.
Die Bilder 6.19 und 6.21 (Seiten 268f) zeigen Darstellungen der (aus der NeilschenParabel gewonnenen) Kleeblattschlinge. Leider wird im Bild 6.19 der eigentlicheVerlauf des Knotens nicht recht deutlich: es ist zu uberlegen (und evtl. mit Hilfe desBildes 6.21 zu klaren), welcher Teil des Knotens an den anderen Teilen der Kurvevorbeilauft.
In diesem Abschnitt soll uber sogenannte Tubeknots (also frei ubersetzt ’Rohrenk-noten’) eine anschaulichere Darstellung erzeugt werden. Dazu greifen wir auf Kon-zepte der Differentialgeometrie zuruck und erarbeiten mit [Gray94] “ausgedehnte“Kurven, d.h. eine Raumkurve wird als Schlauch oder Rohre dargestellt und vermagdadurch, ein deutlicheres Aussehen uber ihren Verlauf zu geben. Kurven werden alsoletztlich zu Flachen besonderer Art: den Kurvenverlauf entsprechend “gekrummtenZylindern“ - eben Schlauchen!
Es sei also γ : [a, b] → R3 eine Raumkurve. Weil die Binormale
~b(t) :=γ(t)× γ(t)
‖γ(t)× γ(t)‖2
und Normale~n(t) = ~b× ~t ,
dabei ist
~t(t) :=γ(t)
‖γ(t)‖2
der Tangentialvektor, senkrecht zur Kurve γ verlaufen, gilt dies auch fur den Kreis
θ 7→ r(
cos θ ~n(t) + sin θ~b(t))
mit Radius r im Punkt γ(t). Bewegt sich dieser Kreis nun entlang der Kurve γ,bildet er die Flache
(t, θ) 7→ γ(t) + r(
cos θ ~n(t) + sin θ~b(t))
,
die nun gerade unsere Schlauchkurve ist.

380 ANHANG G. DER EINSATZ VON MATHEMATICA
In Mathematica sind also zunachst folgende Funktionen zu definieren:
Dann kann mit Hilfe der numerischen Werte fur ε und δ und der Definition derFunktion g nach Abschnitt 6.5 auf Seite 268 ein parametrischer Plot versucht werden:
Diesen jedoch stoppte ich auf meinem Rechner nach allzu langer Wartezeit undhorbarem Swapping. Bei einem leistungsfahigem Rechner sollte diese (kurze) Abfol-ge eigentlich kein Problem sein. Bei schwacheren Rechnern (also etwa meinem) hilftfolgendes Verfahren weiter: im letzten Schritt – also der Berechnung der eigentlichenGraphik – sind Mathematica soviel (symbolische) Auswertungen wie moglich zu er-sparen. D.h. sie sollten Mathematica vor Aufruf des Parametricplots zur Verfugunggestellt werden, durfen dann auch ruhig lang und unhandlich sein und Vereinfachun-gen konnen entfallen.
Dazu werden die obigen Vektorfunktionen des Frenet 4 -3-Beines neu definiertund auf Vereinfachungen (Simplify, Factor) wird verzichtet:
Auch die Funktion g wird direkt definiert
und die Auswertung bzgl. Real- und Imaginarteil nicht Mathematica uberlassen.Schließlich berechnen wir vorher die aufwendigen Ausdrucke fur ~b und ~n. Dies fuhrtzu sehr langen Ausdrucken, was uns aber nicht storen muß. Geben wir nun
ein, so liefert Mathematica einen sehr langen Ausdruck, der (hier abgekurzt) zurdirekten Definition der Binormalen
4Jean Frederic Frenet (1816 Perigueux - 1900 Perigueux)

G.5. EINE ERGANZUNG ZUR DARSTELLUNG VON KNOTEN 381
herangezogen wird. Genauso ergibt die Eingabe von
einen sehr, sehr langen Ausdruck:

382 ANHANG G. DER EINSATZ VON MATHEMATICA
Auch diesen Ausdruck benutzen wir nun wieder direkt zur Definition der Nor-malen (dazu setzt man sich an den Beginn des Ausdruckes in der Antwort von Ma-thematica und gibt die Zeichenfolge der zu definierenden Funktion an; Mathematicakopiert den Ausdruck dann in ein neues Eingabefeld).
Setzen wir jetzt noch den Radius r vorher auf einen numerischen Wert unsererWahl und die tubecurve direkt in die parametrische Plotanweisung, so entsteht dasKommando
-1
0
1
2 -2
-1
0
1
2
-1
-0.5
0
0.5
1
-1
0
1
2
und erzeugt in der Tat die angegebene Darstellung (vgl. mit Bild 6.19 – mit demTubeknoten wird nun deutlich, wie sich die Kleeblattschlinge umwindet). Unteranderer Perspektive sieht der Knoten so aus:
-10 1
2
-2-1
01
2
-1
-0.5
0
0.5
1
-10 1
2
-2-1
01
2

G.5. EINE ERGANZUNG ZUR DARSTELLUNG VON KNOTEN 383
Wird der Tubeknoten zusammen mit dem nach Abschnitt 6.5 angegebenen Torus(nach Bild 6.20) aufgetragen, erhalten wir schließlich dieses Aussehen:
-2
-1
0
1
2
-2
-1
0
1
2
-1-0.5
00.51
-2
-1
0
1
2
-2
-1
0
1
2

384 ANHANG G. DER EINSATZ VON MATHEMATICA

Anhang H
Miszellen
H.1 Zur Kochschen Kurve
An dieser Stelle soll ein kurz kommentiertes Listing vorgestellt werden, das dieBerechnung der Kochschen Kurve unter Mathematica ermoglicht (vgl. Bild 1.2 imAbschnitt 1.1 auf Seite 14).
Durch den rekursiven Aufbau der Kurve wird deutlich, “wie anders“ fraktaleKurven i.G. zu algebraischen Kurven sind. Die Berechnung startet mit dem Gene-rator, der in Form einer Liste angelegt wird:
Dann werden vier Funktionen definiert, die auf Listen operieren: die erste Funk-tion reduziert die Große der in der Liste angegebenen Gestalt um ein Drittel (dazuist es notwendig – wie in allen Funktionen – die Liste im “Ursprung anzuheften“:daher die Subtraktion mit dem Aufpunkt der Liste), die zweite und dritte Funktiondrehen die Liste außerdem noch um 60◦ (wieder durch beginnende Translation in denUrsprung und anschließender Verschiebung in den zweiten bzw. dritten Eckpunkt,um das zweite bzw. dritte Segment durch eine selbstahnliche Kopie der Kurve zuersetzen). Die vierte Funktion tauscht das letzte Segment aus, so daß eine Drittelungder Große und Translation in den vierten Eckpunkt ausreicht.
385

386 ANHANG H. MISZELLEN
Jetzt kann der Generator viermal auf sich angewandt werden und mit einerleeren Liste beginnend, werden die entstehenden Liste zusammengefaßt, um dasanschließende Plotten moglichst einfach zu gestalten.
Diese Prozedur kann fortgesetzt werden, wobei die die zuvor generierten Listenin den oben definierten Funktionen jeweils als Argument eingesetzt werden.

H.1. ZUR KOCHSCHEN KURVE 387
Dies wird schließlich bis zu einer Tiefe von sechs Generationen durchgefuhrt(wenn man den aus dem Initiator entstandenen Generator als ersten Schritt be-trachtet). Die so zuletzt erzeugt Liste LZ5 besteht aus 1024 Generatoren.

388 ANHANG H. MISZELLEN
0.2 0.4 0.6 0.8 1
0.05
0.1
0.15
0.2
0.25
Die in Bild 1.2, siehe Seite 14, gezeigte Koch-Schneeflocke ist aus drei der obengezeigten Teilstucke zusammengesetzt, die jeweils um 120◦ bzw. −120◦ gedreht undentsprechend Verschoben sind. Diese Operationen kann man uber folgende Instruk-tionen durchfuhren:
Die Schneeflocke setzt sich dann aus dem Oberteil, s.o. in Liste LZ5, und demrechten und linken Teil zusammen:
Die Kochsche Kurve ist naturlich keine algebraische Kurve, da sie in gewissemSinne “nur noch aus Singularitaten besteht“. Werden bei dem Entstehungsprozeßnicht nur Strecken betrachtet, sondern ganze Geraden, so sind zumindest die Fol-genglieder (wenn auch als Vereinigung entsprechend vieler Geraden sehr einfache)algebraische Kurven.

H.2. EXPLIZITE ANGABE DER FIBONACCI-ZAHLEN 389
H.2 Explizite Angabe der Fibonacci-Zahlen
Die Folge un+2 = un + un+1, n ∈ N0, mit u0 = u1 = 1 kann sehr effizient durchdie Z-Transformation “gelost“ werden. Diese lineare! Transformation ist fur eineZahlenfolge (un) n ∈ N0 durch die Korrespondenz
(un)n∈N0
Z◦−−• U(z) =∞∑
n=0
unz−n , z ∈ C ,
definiert. Materialien zur Z-Transformation finden sich z.B. in der Sammlung [BS85].Es werden hier lediglich zwei wichtige Eigenschaften der Transformation benotigt:der Verschiebungssatz
(un+k)n∈N0
Z◦−−• zk
(U(z)−
k−1∑ν=0
uνz−ν
)
und eine spezielle Rucktransformierte
z
z − γ
Z−1
•−−◦ (γn)n∈N0.
Damit gilt nun
un+2 − un+1 − un = 0Z◦−−• z2
(U(z)− u0 − u1z
−1)− z (U(z)− u0)− U(z) ,
woraus sich im komplexen Bildbereich die Funktion
U(z) =z2
z2 − z − 1=
z2
(z − α)(z − β)=
1√5
(αz
z − α− βz
z − β
)
mit α = 1+√
52
, β = 1−√52
ergibt. Aufgrund der Linearitat der Transformation kannmit Hilfe der oben notierten Korrespondenz bzgl. einer speziellen Funktion jetztfolgender Zusammenhang hergestellt werden:
U(z)Z−1
•−−◦ (un)n∈N0=
(1√5
(αn+1 − βn+1
))
n∈N0
.
Dies kann (damit im n−ten Folgenglied auch nur die n−te Potenz auftaucht unddie irrationale Zahl aus dem Nenner verschwindet) zu
un =1 +
√5/5
2αn +
1−√5/5
2βn = Aαn + Bβn
umgeformt werden, dabei ist A = 1+√
5/52
, B = 1−√5/52
.

390 ANHANG H. MISZELLEN
H.3 Einige Spiralen
Hier sollen kurz die Gleichungen aufgelistet werden, um die im Abschnitt 1.4 erwahn-ten Spiralen (siehe Bild 1.49 auf Seite 55) zu plotten. Informationen uber Spiralenfindet man in den Werken [Gray94], [Spallek94]; die Nachschlagewerke [BS85] und[Netz83] bieten ebenfalls eine Ubersicht, wobei allerdings der mathematische Hin-tergrund weniger herausgearbeitet wird.
Die Archimedische 1 Spirale entsteht durch die folgende in radialer Richtunglinear wachsende Bewegung:
-10 -7.5 -5 -2.5 2.5 5
-7.5
-5
-2.5
2.5
5
7.5
Die Straßenbauer-Kurve (Klothoide, Cornusche oder auch Eulersche Spirale) ent-steht bei der Frage nach einem Straßenverlauf mit sich stetig anderndem Krummungs-verhalten (anders also als ein Ubergang von einer Gerade zu einem Kreisbogen!).Dabei stoßt man auf eine Parameterform der Art
φ(t) =
(∫ t
0
cost2
2dt ,
∫ t
0
sint2
2dt
),
welche die sogenannten Fresnelschen Integrale beinhaltet, die nicht elementar aus-wertbar sind. In Mathematica kann man sich durch Definition der folgenden Funk-tionen geschickt aus der Affaire ziehen:
Auf Basis dieser Funktion kann dann wieder uber einen ParametricPlot dasfolgende Bild erzeugt werden.
1Archimedes (287 v.Chr. Syrakus - 212 v.Chr. Syrakus) einer der ganz großen, modern den-kenden antiken Mathematiker

H.3. EINIGE SPIRALEN 391
0.250.50.75 1 1.251.51.75
0.25
0.5
0.75
1
1.25
1.5
1.75
Dabei gibt Mathematica an, daß die Funktionen nicht “ubersetzt“ werden konnenund der Code in der Art eines Interpreters abgearbeitet werden muß - die Erstellungder gezeigten Spirale war eine der zeitaufwendigsten Unternehmungen dieser Arbeitin Mathematica.
Die Fermatsche Spirale wachst in radialer Richtung nur mit der Potenz 1/2, diehyperbolische schrumpft – ihren Namen entsprechend – umgekehrt proportional zumLaufparameter, wahrend die logarithmische exponentiell wachst (mit zunehmendenParameter) bzw. sich logarithmisch zusammenzieht (bei abnehmenden Parameter),was die folgenden drei Kommandos und Bilder zeigen.

392 ANHANG H. MISZELLEN
-4 -2 2 4
-4
-2
2
4
-2 -1 1 2 3 4
-2
-1
1
2
3
4
-4 -2 2 4
-6
-4
-2
2
4

H.3. EINIGE SPIRALEN 393
Die letzte der hier kurz vorgestellten Spiralen ist die Nielsensche 2:
-2 -1.5 -1 -0.5 0.5 1
-1
-0.5
0.5
1
1.5
2
Dabei sind die beiden Integralwinkelfunktionen wie folgt definiert:Integralsinus:
Si(t) =
∫ t
0
sin τ
τdτ ,
Integralkosinus:
Ci(t) = −∫ ∞
t
cos τ
τdτ = CE + ln|t| −
∫ t
0
1− cos τ
τdτ
(mit der Eulerschen Konstante CE = − ∫∞0
e−x ln xdx ≈ 0, 577215665) .
Bemerkenswert an dieser Spirale ist ihre naturliche Gleichung: κ(s) = exp(s), d.h.die Krummung wachst exponentiell mit der Bogenlange an!
2Niels Nielsen (1865 Orslev - 1931 Kopenhagen)

394 ANHANG H. MISZELLEN
H.4 Einhullende als algebraische Kurven
Kaustiken als algebraische Kurven
Der Nachweis, daß es sich bei den im Abschnitt 1.4, Seite 49ff, gezeigten Katakausti-ken tatsachlich um algebraische Kurven handelt (Kardioide und Nephroide) benotigtdas Konzept der dualen Kurve, wobei die reflektierten Strahlen als Tangenten derEinhullenden im dualen Raum gerade die duale Kurve der Einhullenden definieren.Diese ist also nach dem Gleichungssystem (5.8) auf Seite 204 zu gewinnen.
Dazu beschreiben wir zunachst die Tangenten im Falle einer punktformigenLichtquelle im Punkt Q = (−1, 0) nach Bild H.1 und beginnen mit einem unterdem Winkel ϕ einfallenden Lichtstrahl, der durch den Parameter t zu
(x(t)
y(t)
)=
(−1
0
)+ 2t cos ϕ
(cos ϕ
sin ϕ
), t = 0, . . . , 1 ,
beschrieben werden kann. Dabei gilt im Punkt P=(cos 2ϕ, sin 2ϕ) an der Peripherieder Tasse bzw. des Kreises nun das Prinzip “Einfallswinkel = Ausfallswinkel“, waszu folgendem parametrisch erfaßten reflektierten Lichtstrahl fuhrt 3:
(x(t)
y(t)
)=
(cos 2ϕ
sin 2ϕ
)− t
(cos 3ϕ
sin 3ϕ
), t = 0, . . . , 2 cos ϕ .
j
j
j
P
x
y
Q 3j
P
x
y
2j
Bild H.1: Die reflektierten Strahlen bei punktformiger Lichtquelle
Der Schnittpunkt der reflektierten Lichtstrahlen mit der x-Achse kann folgen-dermaßen bestimmt werden. Zunachst berechnen wir den (vom Einfallswinkel ϕabhangigen) “Durchstoßparameter“ t0 aus
y = 0 = sin 2ϕ− t0(ϕ) sin 3ϕ zu t0(ϕ) =sin 2ϕ
sin 3ϕ, ϕ 6= 0 ,
3Diese Beziehungen waren auch die Grundlage fur die Berechnung der Bilder 1.40 bis 1.43mit den Katakaustiken in Mathematica, wobei ϕ innerhalb einer Schleife in diskreten Schrittenverandert wurde.

H.4. EINHULLENDE ALS ALGEBRAISCHE KURVEN 395
und als Grenzwert fur den waagerecht einfallenden Strahl ergibt sich
t0(0) := limϕ→0
sin 2ϕ
sin 3ϕ=
2
3, so daß x0 := x(t0(0)) = cos 0− 2
3cos 0 =
1
3.
Die Singularitat sitzt also an derselben Stelle wie bei der Kardioide (mit R = 1/3).Daß die reflektierten Lichtstrahlen generell eine solche einhullen wird jetzt nach demoben beschriebenen Konzept nachgewiesen.
Dazu eliminieren wir zuerst den Parameter t aus der Darstellung fur die reflek-tierten Strahlen und erhalten dann die Geradengleichungen
X sin 3ϕ− Y cos 3ϕ = sin ϕ ,
die als Punkte [u, v, 1] ∈ P∗2 im Dualraum aufgefaßt werden und dort folgende mitMathematica wieder leicht zu findende Kurve definieren:
Das so gewonnene Polynom kann homogenisiert (Definition 1.2.7) und seine dualeDarstellung (die “Ruckdualisierung“ in den P2 sozusagen) nach Abschnitt 5.3 (vgl.etwa Beispiel 5.3.4 auf Seite 205) wieder mit Mathematica gewonnen werden:
Die Einhullende ist also im affinen Schnitt bei z = 1 durch die polynomiale Bezie-hung
8X + 27X4 + 54X2Y 2 + 27Y 4 = 1 + 18X2 + 18Y 2
definiert. In dem Bild H.2 sind die beiden entstehenden Kurven abgebildet: links die(im dualen Raum P∗2) als Punkte aufgefaßten Tangenten und damit also die dualeKurve zu der rechts im Bild zu sehenden Einhullenden. Diese ist eine Kardioide, wieder Vergleich von (1.21) mit R = 1/3 nach Abschnitt 1.4 mit dem obigen Polynomzeigt:
1
27
(8X + 27X4 + 54X2Y 2 + 27Y 4 − 1− 18X2 − 18Y 2
)
= 8(
13
)3+ (X2 + Y 2)2 − 3
(13
)4 − 6(
13
)2(X2 + Y 2) .

396 ANHANG H. MISZELLEN
-3 -2 -1 1
-3
-2
-1
1
2
3
u
v
-1 -0.5 0.5 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
x
y
Bild H.2: Duale Kurve (Tangentenschar) und Einhullende (Kardioide)
Genauso kann bei parallel einfallendem Licht vorgegangen werden. Hier erhaltman nach Bild H.3 zunachst
(x(t)
y(t)
)=
(0
sin ψ
)+ t
(1
0
), t = −1, . . . , cos ψ ,
als einfallendes Licht (wenn zwischen den einzelnen Strahlen nach dem gezeigtenWinkel ψ unterschieden wird). In P=(cos ψ, sin ψ) wird dieses dann in den als Tan-gente zur Einhullenden aufzufassenden Strahl reflektiert:
(x(t)
y(t)
)=
(cos ψ
sin ψ
)− t
(cos 2ψ
sin 2ψ
), t = 0, . . . , 2 cos ψ .
y
y
y
P
x
y
y
2y
P
x
y
Bild H.3: Die reflektierten Strahlen bei parallel einfallendem Licht
Wieder bestimmen wir die Schnittpunkte mit der x-Achse, um zunachst die Lageder Singularitat abzuschatzen:
y = 0 = sin ψ − t0(ψ) sin 2ψ , d.h. t0(ψ) =sin ψ
sin 2ψfur ψ 6= 0

H.4. EINHULLENDE ALS ALGEBRAISCHE KURVEN 397
und als Grenzwert fur den mittig einfallenden Strahl ergibt sich
t0(0) := limϕ→0
sin ψ
sin 2ψ=
1
2, so daß x0 := x(t0(0)) = cos 0− 1
2cos 0 =
1
2.
Das laßt bereits auf eine Nephroide mit R = 1/2 schließen. Diese finden wir tatsach-lich, wenn zuerst wieder eine Geradengleichung der reflektierten Strahlen ohne denParameter t aufgestellt wird:
X sin 2ψ − Y cos 2ψ = sin ψ
und diese dann wieder als von ϕ abhangige Punkte im Dualraum interpretiert wer-den:
Diese wird ein weiteres mal dualisiert und ergibt dann mit
die bei z = 1 affine Einhullende zu
48X4 +96X2Y 2 + 48Y 4− 12X2 +15Y 2 +1 = 64X6 +192X4Y 2 +192X2Y 4 +64Y 6 .
Ein Vergleich mit (1.22) als Gleichung der Nephroide fur R = 1/2 zeigt die Uber-einstimmung:
1
16
(12X2 − 15Y 2 + 64(X2 + Y 2)3 − 1− 48(X2 + Y 2)2
)
= 3(
12
)4(4X2 − 5Y 2) + 4(X2 + Y 2)3 − 4
(12
)2((
12
)4+ 3(X2 + Y 2)2
).
Das Bild H.4 stellt die zunachst gewonnene duale Kurve und die entstehende Ein-hullende gegenuber.
Damit wird deutlich, wie es die algebraische Geometrie auch in zunachst ty-pisch analytisch erscheinenden Fragestellungen vermag, eine Antwort zu liefern. In[Spallek94] wird gezeigt, wie man differentialgeometrisch mit Hilfe des Frenetbeins(~t, ~n) aus Tangential- und Normalenvektor die Einhullende gewinnen kann. Beruck-sichtigt man die oben per Mathematica durchgefuhrten Berechnugen, so ist der Re-chenaufwand in beiden Vorgehensweisen in etwa gleich.

398 ANHANG H. MISZELLEN
-2 -1 1 2
-2
-1
1
2
u
v
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild H.4: Duale Kurve (Tangentenschar) und Einhullende (Nephroide)
Astroide als Enveloppe
Abschließend soll gezeigt werden, daß die in Bild 1.45 gezeigt Astroide tatsachlichdie Einhullende des “Bewegungsvorganges“ im Bild 1.44 ist. Nach Bild H.5 kommtein Stab unter dem eingezeichneten Winkel ϕ in den Eckpunkten A=(cos ϕ, 0) undB=(0, sin ϕ) zu liegen, wobei o.B.d.A. a = 1 gesetzt wurde.
A
B
jj
jj
Bild H.5: Lage der Stabe in Abhangigkeit des Winkels ϕ
Da der Stab die Tangente der Einhullenden ist, kann eine parametrische Formder Tangente einfacherweise durch B−A gewonnen werden:
(x(t)
y(t)
)=
(cos ϕ
0
)+ t
(− cos ϕ
sin ϕ
), t = 0, . . . , 1 .
D.h. die Tangenten sind durch das Polynom
X sin ϕ + Y cos ϕ = sin ϕ cos ϕ , bzw. − 1
cos ϕ︸ ︷︷ ︸U
X − 1
sin ϕ︸ ︷︷ ︸V
Y + 1 = 0
gegeben, was in P∗2 zur projektiv-algebraischen Kurve
U2W 2 + V 2W 2 − U2V 2

H.4. EINHULLENDE ALS ALGEBRAISCHE KURVEN 399
fuhrt. Mathematica liefert wieder die dazu duale (Hull-)Kurve:
Ein Vergleich mit der Form (1.24) auf Seite 46 fur R = 1 zeigt die Ubereinstim-mung der hier erzielten Gleichung mit der in Abschnitt 1.4 aufgestellten. Das BildH.6 zeigt die duale Kurve in zwei Schnitten und die sich daraus ergebende Astroide.
-2 -1 1 2
-2
-1
1
2
u
v
-2 -1 1 2
-2
-1
1
2
u
w
-1 -0.5 0.5 1
-1
-0.5
0.5
1
x
y
Bild H.6: Duale Kurven der Tangentenschar in zwei verschiedenen Schnitten undEinhullende (Astroide)

400 ANHANG H. MISZELLEN

Symbolverzeichnis
In dieser Sammlung sind alle Symbole aufgenommen, die typischerweise fur die Theo-rie der algebraischen Kurven von Bedeutung sind und haufig benotigt werden. Zueinem kleinen Teil konnte eine Doppelbedeutung von (gangigen) Symbolen (wie etwaU oder V , die sowohl als offene Umgebung als auch als adjungierte Variablen auf-treten und insbesondere p, das in vielerlei verschiedenen Bedeutungen daherkommt)nicht vermieden werden – deren Bedeutung dann aber stets aus dem Kontext ein-deutig hervorgeht. Wichtige und fur die Theorie pragnante Abkurzungen wie etwadie Schnittmultiplizitat, Hessesche oder die ublichen Mengensymbole fur die Zah-lensysteme werden naturlich durchgehend einheitlich verwendet.
# Anzahl bestimmter Objekte
C projektiv-algebraische Kurve
C ∗ zur Kurve C bzw. C duale Kurve
C Korper der komplexen Zahlen
C∗ im Ursprung gelochte Gaußsche Zahlenebene: C∗ = C\{0}C die um ∞ adjungierte Menge: C = C ∪ {∞}C Riemannsche Zahlenkugel
C[X,Y ] Polynomring uber C
C[X,Y, Z] Ring der homogenen Polynome in den Variablen X, Y und Z
C/Λ durch das Gitter Λ induzierte Faktorgruppe in C, Periodentorus
d Grad eines homogenen Polynoms;
Anzahl der Doppelpunkte von C
d∗ Anzahl der Doppelpunkte von C∗
δ(p) Minderung des Geschlechts einer Kurve durch die Singularitat p
DR Diskriminante des Polynoms R
Fundamentaldreiecke fur∆I x, y, z ≥ 0∆II x < 0 ∧ y, z ≥ 0∆III z < 0 ∧ x, y ≥ 0∆IV y < 0 ∧ x, z ≥ 0
401

402 ANHANG H. MISZELLEN
DV (p1,p2; Doppelverhaltnis der Punkte p1,p2,p3,p4 ∈ P2
p3,p4)
e Basis des naturlichen Logarithmus’
E2 zweidimensionaler Euklidischer Raum
f, F allg. Abbildung
F Quotientengruppe G216/G18 aus der Hesseschen Gruppe
Fp Korper der Charakteristik p (Galoisfeld)
F23 affine Ebene uber den Korper F3
g holomorphe Abbildung C→ C;
Geschlecht einer projektiven algebraischen Kurve
g2, g3 Koeffizienten der Weierstraßschen Normalform
G18 normale Untergruppe von G216 der trivial auf L operierendenKollineationen
G216 Hessesche Gruppe (von Kollineationen in der projektiven Ebene)
GL allgemeine lineare Gruppe
Grad(C) Grad der Kurve C
Grad(P ) Grad des Polynoms P
HP Hessesches Polynom zu P
H(C) Hessesche Kurve zu C
i imaginare Einheit
I Einheitsmatrix
id identische Abbildung bzw. Operation
Im (z) imaginarer Teil z2 von z = z1 + iz2 ∈ CIp(C,D) Schnittmultiplizitat der Kurven C und D im Punkt p
I2 Einheitsquadrat [0, 1]× [0, 1]
K Kollineation der projektiven Ebene
K, R Quotientenkorper zum Integritatsring
K Korper der Charakteristik Null
λ Skalar, i.a. aus C
L Linearsystem der Kubiken Cλ : X3 + Y 3 + Z3 + 3λXY Z = 0
Λ Gitter Zω1 ⊕ Zω2 in C
Multp(P ) Multiplizitat des Polynoms P im Punkt p

H.4. EINHULLENDE ALS ALGEBRAISCHE KURVEN 403
Multp(C) Multiplizitat der Kurve C im Punkt p
n∗ Klasse der Kurve C
νφ(p) Verzweigungsindex von φ im Punkt p
∇ Nabla-Operator ∇ :=(
∂∂X1
, ∂∂X2
, . . . , ∂∂Xn
)
N Menge der naturlichen Zahlen
N0 Menge der naturlichen Zahlen mit Null
Nu Menge der naturlichen, ungeraden Zahlen = {2n− 1 |n ∈ N}Ng Menge der naturlichen, geraden Zahlen (mit Null) = {2n |n ∈ N0}O(3) orthogonale Gruppe (des R3)
Ord(f) Ordnung der elliptischen Funktion f
p Primzahl
p Punkt im Cn+1
p Punkt im Pn
℘ Weierstraßsche ℘-Funktion
P, Q Punkte in der Euklidischen Ebene
P, Q Polynome uber C
P,Q (94, 123)-Konfigurationen
Pq(C) Polare der Kurve C im Pol q
φ Abbildung I → Cn bzw.
φ, ψ Homoomorphismen
PGL projektive lineare Gruppe
Pn allg. projektiver Raum, insbesondere uber C
Pn(R) reeller projektiver Raum
P∗n dualer projektiver Raum, insbesondere uber C
P2(F3) projektiver Raum uber den endlichen Korper F3
PTp(C) Tangentialraum der projektiven Kurve C im Punkt p
PXkpartielle Ableitung von P (X0, X1, . . . , Xn) nach Xk, k = 0, . . . , n
R, S u.a. Polynome uber C
Re (z) reeller Teil z1 von z = z1 + iz2 ∈ CRE Aquivalenzrelationen zur projektiven Ebene
RF Aquivalenzrelationen zur Kleinschen Flasche

404 ANHANG H. MISZELLEN
R, K Integritatsring und Quotientenkorper
R Korper der reellen Zahlen
RP,Q Resultante der Polynome P (X) und Q(X)
RP,Q(Y, Z) Resultante der Polynome P und Q ∈ C[X, Y, Z]
s, s∗ Anzahl der Spitzen von C, bzw. der von C∗
S2 Sphare (i.a. ⊂ R3)
SA spezielle affine Gruppe
SL spezielle lineare Gruppe
SO(3) spezielle orthogonale Gruppe (des R3)
Sing(C) Menge der Singularitaten der Kurve C
〈·, ·〉 Skalarprodukt in Cn+1
t komlexer oder reeller Parameter
T projektive Transformation
TT Tetraeder auf Riemannsche Zahlenkugel
T Tetraedergruppe
Tp(C) Tangentialraum der affinen Kurve C im Punkt p
Tcp(C) Tangentialkegel der affinen Kurve C im Punkt p
V (P ) Varietat des Polynoms P
(ξ, η, ζ) Koordinaten eines projektiven Punktes mit |ξ|+ |η|+ |ζ| = 1zur Darstellung im Gitter der Fundamentaldreiecke
(x0, x1, . . . , xn) homogene Koordinaten eines Punktes p in Cn+1\{0}[x0, x1, . . . , xn] Punkt in Pn
(x, y) Element im Euklidischen Raum E2
X, Y, Z, X0, zum Korper C adjungierte Elemente, um dieX1, . . . , Xn Polynomringe C[X],C[X,Y ] etc. zu bilden
X , Y topologische Raume
Z Ring der ganzen Zahlen
Zm zyklische Gruppe der Ordnung m
Z/mZ additive Restklassengruppe mod m
(Z/mZ)× Einheitengruppe des Restklassenrings Z/mZZ◦−−• Korrespondenz der Z-Transformierten
(94, 123) Punkt-Geraden-Konfiguration im P2

Literaturverzeichnis
[Adams95] Colin C. Adams, Das Knotenbuch, Einfuhrung in die mathematische Theorieder Knoten, Spektrum Akademischer Verlag, Heidelberg, Berlin, Oxford, 1995
[Ahlfors79] Lars V. Ahlfors, Complex Analysis, Third Edition, McGraw-Hill Book Com-pany, London, Singapore, 1979
[Alexandrov98] P.S. Alexandrov, Die Hilbertschen Probleme, erlautert von einem Auto-renkollektiv unter der Redaktion von P.S. Alexandrov, Verlag Harri Deutsch, Thunund Frankfurt am Main, 1998
[AL95] W.S. Anglin, J. Lambek, The Heritage of Thales, Springer Verlag, New York,Berlin, Heidelberg, 1995
[Artin93] Michael Artin, Algebra, Birkhauser Verlag, Basel, Boston, Berlin, 1993
[BJS95] A. Bachem, M. Junger, R. Schrader (Hrsg.), Mathematik in der Praxis, Fallstu-dien aus Industrie, Wirtschaft, Naturwissenschaft und Medizin, Springer Verlag,Berlin, Heidelberg, 1995
[Bauer00] Friedrich L. Bauer, Entzifferte Geheimnisse, Methoden und Maximen der Kryp-tologie, Springer Verlag, Berlin, Heidelberg, 2000
[BRST64] Heinrich Behnke, Reinhold Remmert, Hans-Georg Steiner, Horst Tietz, DasFischer Lexikon, Mathematik 1 und 2, Fischer Bucherei, Frankfurt am Main, 1964
[Beekmann91] W. Beekmann, Analysis II, Kurs der FernUniversitat Hagen, Hagen, 1991
[Beutelspacher96] Albrecht Beutelspacher, Kryptologie, Eine Einfuhrung in die Wissen-schaft vom Verschlusseln, Verbergen und Verheimlichen. Ohne alle Geheimniskrame-rei, aber nicht ohne hinterlistigen Schalk, dargestellt zum Nutzen und Ergotzen desallgemeinen Publikums. 5. Auflage, Vieweg Verlag, Braunschweig, Wiesbaden, 1996
[BK81] Egbert Brieskorn, Horst Knorrer, Ebene algebraische Kurven, Birkhauser Verlag,Boston, Basel, Stuttgart, 1981
[Brieskorn83] Egbert Brieskorn, Lineare Algebra und analytische Geometrie I, ViewegVerlag, Braunschweig, 1. Auflage 1983, Nachdruck 1985
[Brieskorn85] Egbert Brieskorn, Lineare Algebra und analytische Geometrie II, ViewegVerlag, Braunschweig, 1985
405

406 LITERATURVERZEICHNIS
[BS85] I.N. Bronstein, K.A. Semendjajew, Taschenbuch der Mathematik, Verlag HarriDeutsch, Thun und Frankfurt am Main, 1985
[Buchmann96] Johannes Buchmann, Faktorisierung großer Zahlen, Spektrum der Wissen-schaft 09/1996, Spektrum der Wissenschaft, Verlagsgesellschaft mbH, Heidelberg,1996
[Bundschuh92] Peter Bundschuh, Einfuhrung in die Zahlentheorie, Springer Verlag, Ber-lin, Heidelberg, 1992
[DS98] V.I. Danilov, V.V. Shokurov, Algebraic Curves, Algebraic Manifolds and Schemes,Springer Verlag, Berlin, Heidelberg, New York, 1998
[Devlin94] Keith Devlin, Sternstunden der modernen Mathematik, Beruhmte Problemeund neue Losungen, 3. Auflage, dtv wissenschaft, Deutscher Taschenbuch Verlag,Munchen, 1994
[DR99] Andrei Duma, Wolfgang Radtke, Einfuhrung in die Theorie der RiemannschenFlachen, Kurs der FernUniversitat Hagen, Hagen, 1999
[Epple99] Moritz Epple, Die Entstehung der Knotentheorie, Kontexte und Konstruktioneneiner modernen mathematischen Theorie, Vieweg Verlag, Braunschweig, Wiesbaden,1999
[Ernst82] Bruno Ernst, Der Zauberspiegel des M.C. Escher, dtv, Munchen, 1982
[Falconer93] Kenneth J. Falconer, Fraktale Geometrie, Spektrum Akademischer Verlag,Heidelberg, Berlin, Oxford, 1993
[Faltings96] Gerd Faltings (Hrsg.), Moderne Mathematik, Spektrum, Heidelberg, Berlin,Oxford, 1996
[Fischer94] Gerd Fischer, Ebene algebraische Kurven, Vieweg Verlag, Braunschweig, Wies-baden, 1994
[FB93] Eberhard Freitag, Rolf Busam, Funktionentheorie, 2. Auflage, Springer Verlag,Berlin, Heidelberg, 1993
[Gellert77] W. Gellert (Hrsg.), Kleine Enzyklopadie Mathematik, 2. Auflage, Verlag HarriDeutsch, Thun und Frankfurt, 1977
[Giblin93] Peter Giblin, Primes and Programming, An Introduction to Number Theorywith Computing, Cambridge University Press, Cambridge, 1993
[Gray94] Alfred Gray, Differentialgeometrie, Klassische Theorie in moderner Darstellung,Spektrum Akademischer Verlag, Heidelberg, 1994
[GWNO87] Mikell P. Groover, Mitchell Weiss, Roger N. Nagel, Nicholas G. Odrey, Robo-tik umfassend, McGraw-Hill Book Company, Hamburg, 1987
[Harris92] Joe Harris, Algebraic Geometry, A First Course, Springer Verlag, New York,Berlin, Heidelberg, 1992

LITERATURVERZEICHNIS 407
[Hartshorne77] R. Hartshorne, Algebraic Geometry, Springer Verlag, Berlin, Heidelberg,New York, 1977
[Herrlich95] Horst Herrlich, Topologie I, Kurs der FernUniversitat Hagen, Hagen, 1995
[HCV96] David Hilbert, Stephan Cohn-Vossen, Anschauliche Geometrie, 2. Auflage,Springer Verlag, Berlin, Heidelberg, New York, 1996
[Janich80] Klaus Janich, Topologie, Springer Verlag, Berlin, Heidelberg, New York, 1980
[Kanigel93] Robert Kanigel, Der das Unendliche kannte, Das Leben des genialen Mathe-matikers Srinivasa Ramanujan, Vieweg Verlag, Braunschweig, Wiesbaden, 1993
[Kirwan92] Francis Kirwan, Complex Algebraic Curves, Cambridge University Press,Cambrige, 1992
[KW97] V. Klee, S. Wagon, Alte und neue ungeloste Probleme in der Zahlentheorie undGeometrie der Ebene, Birkhauser Verlag, Basel, 1997
[Knorrer96] Horst Knorrer, Geometrie, Vieweg Verlag, Braunschweig, Wiesbaden, 1996
[Korner98] Thomas William Korner, Mathematisches Denken, Vom Vergnugen am Um-gang mit Zahlen, Birkhauser Verlag, Basel, Boston, Berlin, 1998
[Kunz97] Ernst Kunz, Einfuhrung in die algebraische Geometrie, Vieweg Verlag, Braun-schweig, Wiesbaden, 1997
[Lorenz96] Falko Lorenz, Einfuhrung in die Algebra I, 3. Auflage, Spektrum AkademischerVerlag, Heidelberg, Berlin, Oxford, 1996
[Mandelbrot87] Benoıt B. Mandelbrot, Die fraktale Geometrie der Natur, Birkhauser,Basel, 1987
[Mann24] Thomas Mann, Der Zauberberg, Fischer Verlag, Frankfurt am Main, 1924
[Mumford76] David Mumford, Algebraic Geometry I / Complex Projective Varieties, Re-print of the 1976 Edition, Springer Verlag, Berlin, Heidelberg, New York, 1995
[Nebe00] Gabriele Nebe, Faktorisierung ganzer Zahlen, Jahresbericht der DMV, 102. BandHeft 1, B.G. Teubner, Wiesbaden, Stuttgart, Leipzig, 2000
[Netz83] Hrsg. H. Netz, Formeln der Mathematik, 5. Auflage, neu bearbeitet von J. Rast,Carl Hanser Verlag, Munchen, Wien, 1983
[Ogilvy79] C. Stanley Ogilvy, Unterhaltsame Geometrie, 2. Auflage, Vieweg Verlag,Braunschweig, Wiesbaden, 1979
[Oort99] Frans Oort, Alterating singularities, Mitteilungen der DMV, Heft 4/99, DeutscheMathematiker Vereinigung, Berlin, 1999
[Ossa92] Erich Ossa, Topologie, Vieweg Verlag, Braunschweig, Wiesbaden, 1992

408 LITERATURVERZEICHNIS
[PJS92] Heinz-Otto Peitgen, Hartmut Jurgens, Dietmar Saupe, Bausteine des Chaos –Fraktale, Springer Verlag, Klett-Cotta, Berlin, Heidelberg, 1992
[PB91] D. Pumplun, D. Brummer, Lineare Algebra II, Kurs der FernUniversitat Hagen,Hagen, 1991
[Quaisser94] Erhard Quaisser, Diskrete Geometrie, Spektrum Akademischer Verlag, Hei-delberg, Berlin, Oxford, 1994
[Remmert84] Reinhold Remmert, Funktionentheorie I, Springer Verlag, Berlin, Heidel-berg, New York, Tokyo, 1984
[Remmert91] Reinhold Remmert, Funktionentheorie 2, 2. Auflage, Springer Verlag, Berlin,Heidelberg, New York, Tokyo, 1991
[Ruppert96] Wolfgang M. Ruppert, Algebraische Geometrie, Theorie und Anwendungen,Vorlesungsskripte, Universitat Erlangen-Nurnberg, ab WS 1996/97
[S88] Gunter Scheja, Uwe Storch, Lehrbuch der Algebra, Teil 2, B.G. Teubner, Stuttgart,1988
[S00] C.J. Scriba, P. Schreiber, 5000 Jahre Geometrie, Geschichte, Kulturen, Menschen,Springer Verlag, Berlin, Heidelberg, New York, 2000
[ST92] Joseph H. Silverman, John Tate, Rational Points on Elliptic Curves, SpringerVerlag, New York, Berlin, Heidelberg, 1992
[Singh98] Simon Singh, Fermats Letzter Satz, Die abenteuerliche Geschichte eines mathe-matischen Ratsels, Carl Hanser Verlag, Munchen, Wien, 1998
[Spallek94] Karlheinz Spallek, Kurven und Karten, 2. Auflage, Bibliographisches Institut,Wissenschaftverlag, Mannheim, 1994
[Spiegel82] Murray R. Spiegel, Komplexe Variablen, Schaum’s Outline, McGraw-Hill BookCompany, Hamburg, London, 1982
[Stewart97] Ian Stewart, Spiel, Satz und Sieg fur die Mathematik, Vergnugliche Ausflugein die Welt der Zahlen, Insel Verlag, insel taschenbuch 1926, Frankfurt am Mainund Leipzig, 1997
[SZ94] Ralph Stocker, Heiner Zieschang, Algebraische Topologie, Eine Einfuhrung, 2. Auf-lage, B.G. Teubner, Stuttgart, 1994
[Waerden79] Bartel L. van der Waerden, Meine Gottinger Lehrjahre, Gastvortrag in Hei-delberg, 1979, Mitteilungen der DMV, Heft 2/97, Deutsche Mathematiker Vereini-gung, Berlin, 1997
[WaerdenI] Bartel L. van der Waerden, Algebra I, 9. Auflage, Springer Verlag, Berlin,Heidelberg, New York, 1993
[WaerdenII] Bartel L. van der Waerden, Algebra II, 6. Auflage, Springer Verlag, Berlin,Heidelberg, New York, 1993

LITERATURVERZEICHNIS 409
[Walker78] Robert J. Walker, Algebraic Curves, Springer Verlag, New York, Heidelberg,Berlin, 1978
[Weyl13] Hermann Weyl, Die Idee der Riemannschen Flache, Teubner-Archiv zur Mathe-matik, Hrsg. von Reinhold Remmert, Nachdruck von 1913, B.G. Teubner, Leipzig,1997
[Wolfram99] Stephen Wolfram, The Mathematica Book, 4th ed., Wolfram Me-dia/Cambridge University Press, 1999
Kommentare: Es gibt Bucher, aus denen man zuweilen nur einen einzigen Satz benotigt,behalt und fur die eigene Arbeit fruchtbar macht – evtl. kein schlechter Schnitt. Die aufge-listete Literatur kann grob in zwei Bereiche unterteilt werden: Quellen, aus denen fur dieseArbeit reichlich geschopft wurde und Werke, die vor allem der Anregung und des Ausblicksdienten, die zuweilen in die “Ein-Satz-Kategorie“ gehoren, womit selbstverstandlich mehruber den Nutzer des Buches, als uber das Buch selbst gesagt ist. So großartige Bucher,wie die von Egbert Brieskorn, gehoren zweifelsohne in beide Bereiche! Alle hier gemachtenBemerkungen spiegeln naturlich die personliche Sicht des Autors wider. Und so endet dieArbeit wie sie begann.
Znachst sind die Werke zu besprechen, die sich konkret mit algebraischen Kurvenbefassen. Es sind vor allem drei Bucher, auf denen Bezug genommen wurde: [BK81],[Fischer94] und [Kirwan92].
Herausragend ist naturlich das Standardwerk von Egbert Brieskorn und Horst Knorrer[BK81] – ein herrliches Werk, das die Geschichte der Mathematik und ihre kulturelleBedeutung nicht außer Acht laßt und immer wieder die Querverbindung der Kurventheoriezu anderen Gebieten der Mathematik sucht und findet.
Seiner Klarheit wegen, wurde in dieser Arbeit verstarkt [Kirwan92] zu Rate gezogen.Das Buch konzentriert sich auf grundlegende Ideen und entwickelt diese in HilbertscherManier (’immer mit den einfachsten Beispielen anfangen’): der Stoff ist stringent aufgebautund die benotigten Techniken anderer Gebiete der Mathematik werden problemorientierteingefuhrt und abgehandelt – ein mit Gewinn zu lesendes Werk. Neben dem ublichenStoffumfang werden auch Differentialformen auf Riemannsche Flachen und der Satz vonRiemann-Roch behandelt. Der P2 wird klar und bundig eingefuhrt, eine weitergehendeVeranschaulichung – durch Fundamentaldreiecke etwa – wird indes nicht geboten. Es istzu vermuten, daß der Text auf die moderneren Inhalte zielt und als Grundlage auf dieheutigen Forschungsarbeiten hinarbeiten soll. Fur die dualen Kurven und PluckerschenFormeln bleibt dann kein Raum mehr. Das mag man bedauern, da Kirwan hier in seinerklaren Art, sicherlich wertvolles zu Tage gefordert hatte, aber man sollte seinen kompaktenText evtl. besser so nehmen wie er ist: eine ausgezeichnete Grundlage fur weitere undvertiefende Lekture.
Auch die kompakt aufgemachte Zusammenstellung [Fischer94] deckt einen großen Be-reich der Kurventheorie ab (und mochte nach eigenem Bekunden eine tragbare Versiondes Standardwerkes [BK81] sein – und ist es z.T. wohl auch), bleibt aber doch an vielenStellen zu knapp und erfordert sehr intensives Lesen (was je nach Leserkreis sicherlich keinNachteil sein muß). Dafur wird ausfuhrlich auf die Pluckerschen Formeln eigegangen undes findet sich eine ebenso knappe wie die Phantasie anregende Einfuhrung des projektivenRaums. Zusammen mit den stilisierten Fundamentaldreiecken, die dort laufend gebotenwerden, ergab das keine schlechte Motivation, den P2(R) und die projektiven Kurven hierineinmal rechentechnisch “richtig“ zu Leibe zu rucken.

410 LITERATURVERZEICHNIS
Die anderen Werke zur algebraischen Geometrie waren fur diese Arbeit eher vonanregendem Charakter: [Harris92] besticht durch seine Vielfalt und motivierenden Bilderund Beispiele – gibt sich dafur leider im Beweismaterial sehr zuruckhaltend (aber das Buchist im Sinne eines “was es alles so gibt“ doch sehr nutzlich), [Hartshorne77] – mit gleichemTitel aufwartend – ist viel umfangreicher, vertieft das Material ausfuhrlich und strebt dieallgemeine Darstellung ganz unabhangig von Kurven an, [Walker78] arbeitet besondersdie Grundlagen sehr grundlich auf und erwies sich in einigen Punkten der Unsicherheit alsrettender Anker (seine knappe, kurze und konzise Einfuhrung des dualen Raumes sollteman sich nicht entgehen lassen), [Ruppert96] ist eine wahre Fundgrube, die Darstellungz.T. etwas gedrangt, was aber als Vorlesungsskript wohl begrundet ist, auch [DS98] – inzugigem Stil abgefaßt und mit weit uber diese Arbeit weisendem Material – war punktuellvon gutem Nutzen (inbesondere das dort knapp diskutierte Konzept des “blow up“ regtemich zu einer breiteren Darstellung an). Die “komplexe Sicht“ von Mannigfaltigen wird in[DR99] prasentiert; zielgerichtet wird auf den Begriff der Riemannschen Flache hingearbei-tet; dieser wird dann ausgiebig erortert, mit vielen Beispielen diskutiert und abschließendals topologisches Konzept der Uberlagerung behandelt. In [ST92] rucken die elliptischenKurven in das Zentrum zahlentheoretischer Interessen. In einem gut zu lesenden Stil wirdhier besonders die Problematik der diophantischen Gleichungen in ihren verschiedenenAspekten behandelt.
Der Artikel [Oort99] faßt in der bewahrten Manier der DMV-Mitteilungen Wesentlichesund Neues zur Auflosung von Singularitaten zusammen und gibt etwas von der Spannungwieder, die mit der Forschung (nicht nur in der algebraischen Geometrie) einhergeht.
Die beiden Werke [Kunz97] und [Mumford76] mogen einen Eindruck davon geben,wie weit die algebraische Geometrie vorangeschritten ist – und wie elementar der hiervorgelegte Ausschnitt der Kurventheorie ist! In [Kunz97] wird die algebraische Geome-trie ebenso algebraisch aufgezogen, wie sie in dieser Arbeit geometrisch angefaßt wurde.Bei [Mumford76] handelt es sich um eine klassische Forschungsmonographie, die vertiefteEinarbeitung benotigt.
Besonders erwahnt werden soll das Geometriebuch [Knorrer96], das deutlich macht,auf wie hohem Niveau ein grundlegendes (und in jungster Vergangenheit leider etwas ver-drangtes) Fach dargestellt werden kann. Alle Fragen zur klassischen Geometrie (ganz un-abhangig vom “projektiven Standpunkt“), zu SO(3), SO(3)×R3, zur Lorentz-Geometrie,zum Parallelenaxiom und vieles andere mehr findet sich dort auf hohem Niveau und ge-lungene Weise zur Sprache gebracht – ein Geometriebuch, das Freude macht!
Die beiden Bucher [Falconer93] und [Quaisser94] – Spezialmonographien uber die frak-tale und diskrete Geometrie – machen deutlich, wie vielfaltige Methoden die Geometriezum Verstandnis der Welt bereithalt. Beide Gebiete sind allerdings eher lose mit der (zu-mindest hier abgehandelten) Theorie der algebraischen Kurven verbunden. Das gilt ebensofur das ausgezeichnete Buch [PJS92], das in gut zuganglicher Weise einen Einstieg in diefraktale Welt bietet. Dabei wird in [PJS92] weniger die mengentheoretisch orientierte Dar-stellung von [Falconer93] gesucht, sondern mehr durch nachvollziehbare und nachprogram-mierbare Beispiele und vertiefte Diskussionen darauf Wert gelegt, zu eigenen Ergebnissenoder doch zumindest “Experimenten“ zu kommen.
Auch [Adams95] schließt sich diesem Charakter des Uberlicks bzgl. der Knotentheoriean und erschließt einem das Gebiet durch eine Vielzahl von Bildern und anschaulichenBeschreibungen, halt aber auch vertiefendes Material zu verschiedenden Fragestellungenbereit und streicht uberdies die bedeutende Rolle der Polynome einmal mehr heraus. Mit

LITERATURVERZEICHNIS 411
[Epple99] wird ein Werk uber die Knotentheorie vorgelegt, das wieder die geschichtli-che Entwicklung dieses Faches besonders betont und einmal mehr deutlich macht, daßsich Mathematik immer in großere Problemfelder der Wissenschaft entfaltet bzw. daraufzuruckwirkt.
Schon vom Titel gibt sich [HCV96] bescheidener, in seiner grundlegenden Art aberein außerordentlich motivierendes Werk. Die beiden Artikel [Nebe00] und [Buchmann96]machen deutlich, wie unterschiedlich eine Thematik dargestellt werden kann – naturlichist die Zielgruppe in beiden Fallen eine (wenn wohl auch nicht vollstandig) andere. Diesein den letzten Jahren intensiv untersuchte Anwendung macht deutlich, wie die Theorieder algebraischen Kurven als ein Gebiet der reinen Mathematik auch wieder ihren Weg indie angewandte Mathematik nimmt.
Das Buch [S00] wiederum faßt noch einmal alle Aspekte einer 5000 Jahre alten Diszi-plin zusammen und verdeutlicht: gleichgultig, wo man ein- und dazusteigt, die Geometriebleibt ein spannendes Feld mit enormer Motivation auch fur die abstraktesten Begriffs-bildungen in der Mathemanik. Geschichtlich interessant und gelungen werden hier auchdie mathematischen Forschungen von fruhen Kulturen (Agypten, China, Japan, Byzanz)diskutiert.
In der Differentialgeometrie werden Kurven einmal weniger algebraisch als ana-lytisch gewendet. Sofern die hier behandelten Fragestellungen einen mehr analytischenCharakter bekommen, kann das Material mit [Gray94] und [Spallek94] vertieft werden.Zwei Bucher, die viele wunderbare Kurven und deren Eigenschaften bereithalten. Insbe-sondere [Gray94] fuhrt durch, was auch ich mir z.T. wunschte: die Prasentation des Stoffesin enger Verzahnung mit ihrer Umsetzung in Mathematica. Dies hat den Vorteil, den mitMathematica ausgestatteten Leser sofort die Moglichkeit an die Hand zu geben, selbstweitere “Experimente“ zu starten und ein “Gefuhl“ fur den Stoff zu bekommen. Freilichhatte sich die Darstellung der Moglichkeiten und des Einsatzes von Mathematica dannnicht auf den Anhang beschranken durfen und der Aufbau der ganzen Arbeit hatte einanderer werden mussen.
Hohe Abstraktion zu Beginn, sehr machtig in ihrer Entfaltung, nimmt die Algebraeine inhaltliche Schlusselposition ein. [Artin93] ist das fur mich wunderbarste Lehrbuchder Algebra. Alle Begriffe, die in der Algebra besonders reichhaltig eingefuhrt werden, sindhervorragend motiviert, der Stoffumfang ist wohlausgewogen und das Lesen und Studierenin dem Buch ein wahres Vergnugen.
Die Klassiker sind naturlich [WaerdenI] und [WaerdenII]; zwar geht die Algebra heuteetwas andere Wege, aber der Stoff ist grundlegend und mit Gewinn zu lesen. Gerade furdiese Arbeit, die sich nur so weit wie notig algebraisch geben mochte, stellt das Werkvon Bartel L. van der Waerden eine hervorragende Quelle dar. Mehr in die zweite Kate-gorie (der Anregung selbstverstandlich, nicht der Ein-Satz-Kategorie) gehort sein schonerVortrag [Waerden79], obwohl ein Bild direkt von seiner Tafel Eingang in diese Arbeit fand!
Eine Fundgrube und Referenz ist das dreibandig angelegte Werk [S88]. Ebenso wie in[Lorenz96] wird der Stoff etwas trocken dargereicht, die Aufnahme in der Literaturlistespricht aber fur sich: das ein oder andere Resultat fand sich denn eben doch in diesenWerken am pragnantesten formuliert. Beide Werke sind weniger zum genußvollen Lesengeeignet, als vielmehr zum Nachschlagen und gezielten Auf- und Ausarbeiten von einzelnenAspekten und benotigten Bausteinen fur die eigene Arbeit – so ist es zumindest mirergangen.

412 LITERATURVERZEICHNIS
Auch aus der Linearen Algebra wurden einige Inhalte (wie stets) benotigt. Die Fullesehr guter Bucher macht es schwer, nur wenige zu nennen: die luckenlose und umfangreicheDarstellung [PB91] des Lehrmaterials der FernUniversitat Hagen war fur mich aber amergiebigsten (der große Vorteil dieses Lehrmaterials sind die durchgangig dargestelltenBeweise und reichlichen Ubungsaufgaben).
Am spannendsten aufbereitet wurde der Stoff wieder einmal von Egbert Brieskorn in[Brieskorn83] und [Brieskorn85]. Bereits der Einstieg in die Lineare Algebra – ja, in dieMathematik selbst – im ersten Band machen klar, ein wie großes Abenteuer, aber ein wieschwieriges und auch verantwortungsvolles Handeln die Produktion und Diskussion vonErkenntnis ist.
Die benotigten Ergebnisse aus der Analysis wurden vom Autor wieder einmal amsichersten aus Materialien der FernUniversitat geschopft: [Beekmann91] gibt einen her-vorragenden und luckenlosen Uberblick (insbesondere die Grundlagenkurse zur LinearenAlgebra und Analysis bilden fur sich genommen uberragende Lehrbucher). Besonders derSatz uber implizite Funktionen, um den es hier geht, wird dort ausgiebig diskutiert undin seinen verschiedenen Auspragungen bewiesen. Eine direkt im Komplexen formulierteFassung findet sich in [DR99]. Da beide Versionen (reell und komplex) in dieser Arbeitbenotigt werden, wurde allerdings vor allem auf [Beekmann91] Bezug genommen und diekomplexe Version fur die hier (eigens) benotigten Bedurfnisse ausformuliert.
Zusammenhange aus der komplexen Analysis bzw. Funktionentheorie wurden ausden beiden sehr tiefgreifenden Buchern [Remmert84] und [Remmert91] geschopft. Dabeinimmt Reinhold Remmert besonderen Bezug auf die geschichtliche Entwicklung der Be-griffe und Motivationen der Funktionentheorie – ein mit Gewinn zu lesendes Werk! Kom-pakter und mit einer Fulle von Ergebnissen und didaktisch sehr geschickt geschriebenstellt auch [FB93] eine Quelle dar, die hier immer wieder gerne zu Rate gezogen wurde.Noch kompakter und geradezu beruhmt ist naturlich [Ahlfors79].
Mit [Spiegel82] mochte ich hier (als Mathematiker in provokanter Weise) eine Lanzefur die Bucher der Schaum Publishing Company brechen. Klaus Janich warnt vor ihnen(im Literaturhinweis 6.10 seiner ’Lineare[n] Algebra’, Springer, Berlin, Heidelberg, 1991)und bemerkt, daß es sich hierbei eher um eine Art mathematischer Subkultur handelt.Vermutlich setzte ich mich – mehr oder minder bewußt – als ausgepragter und ausge-pichter Autodidakt viel zu lange dem Dunstkreis einer solchen Kultur aus, um nicht dochvon ihr angetan, ja begeistert zu sein. Der Studienanfanger in Mathematik, den Janichsich hier vermutlich vorstellt: unbefleckt und die reine Lehre aufsaugend, sich von allenunorthodxen Darbietungen fernhaltend (wie der Schachschuler, der es 15 Monate lang a laEmpfehlung von Tarrasch 4 aushalt, die trockensten Regel- und Positionsstudien nicht nuruber sich ergehen zu lassen, nein, diese auch noch voller Drang aufzunehmen, ohne – ichbetone – ohne! eine einzige vollstandige Partie zu spielen!!), dieser Studienanfanger in Ma-thematik war ich ohnehin nie: viel zu fruh (und ohne rechten Leitfaden) horte ich von denerstaunlichsten mathematischen Dingen und verstand von dem, was ich las, weniger als ichwollte. Und mich (damals, manchmal heute) in diesem Stadium befindend, habe ich durchdas Mich-Abarbeiten-Konnen dieser ausgesprochen inhomogenen Aufgaben, dem offenenCharakter und der lapidaren Art der Bucher doch einiges an Handwerk gelernt, habe ichmich rechentechnisch “abschleifen“ konnen und zu jedem noch so fern liegenden Konzept
4Siegbert Tarrasch(1862-1934): “Das Partiespielen im Anfangerstadium ist der sichere Wegzur Stumperschaft.“

LITERATURVERZEICHNIS 413
die Art gefunden, wie man daraus eine Aufgabe, ein Problem, eine Auseinandersetzungformuliert und diskutiert.
Dann ware noch die Topologie zu erwahnen – es wird deutlich, wie viele Quellen indie Theorie der algebraischen Kurven zusammenfließen. Topologische Resultate werden vorallem bei dem Aufbau des projektiven Raumes gebraucht. Sehr motivierend geschrieben ist[Janich80], dabei kombiniert Klaus Janich wie in vielen seiner anderen Bucher wieder eineklare Auswahl mit großem didaktischen Geschick. Das Buch [Ossa92] bietet ebenfalls einegroße Ubersicht und stellt die hier benotigten Zusammenhange zugig bereit – als Lehrbuchund Einstieg in die Topologie freilich an manchen Stellen etwas zu zugig. Fur die Theorieder Uberlagerungen waren besonders die Werke [Herrlich95] und [SZ94] hilfreich. Der Kurs[Herrlich95] bietet – wie bei dem Lehrmaterial der FernUniversitat ublich – wieder einebesonders ausgiebige und gut aufbereitete Form des Stoffes dar. In [SZ94] ist der Einstiegin das spannende Gebiet der algebraischen Topologie besonders gelungen.
Miszellaneen: Ein Manual zu besprechen, ist vielleicht der Pedanterie zu viel; den-noch, auch im Softwarebereich gibt es große Unterschiede, wie diese den Einstieg erleich-tern und Zugang zum Vorrat an Moglichkeiten schaffen. Zwar darf ich mich selbst als“Matlab-Fan“ bezeichnen, fur die Belange dieser Arbeit aber waren z.T. etwas feinergeschliffene Werkzeuge von Noten. Auch wenn das “getting started“ etwas hohere Hurdenals in Matlab setzt: in Anbetracht der hohen Anzahl von Bildern, die in dieser ArbeitEingang fanden und hinter denen z.T. eine gehorige Portion Rechenleistung steckt, leisteteMathematica ausgezeichnete Dienste. Insbesondere die Vielzahl von vorgefertigten Kom-mandos zur Erstellung von Graphiken waren sehr nutzlich. Das umfangreiche Handbuch[Wolfram99], das komplett als on-line-Hilfe verfugbar ist, bietet im Zweifelsfall verlaßlicheHilfe.
Und wo wir schon bei Manualen sind, so sollen auch drei Handbucher zur Mathematiknoch erwahnt werden, die alle einen recht eigenen Stil verfolgen. Der große Erfolg von[BS85] liegt sicher in dem Umfang seines gebotenen Materials; dennoch werde ich nichtrecht glucklich mit dem insgesamt unubersichtlich aufgemachten Werk. Zwar bietet es vie-lerlei Tabellen (die ohne Zweifel sehr nutzlich sind), aber die Anordnung der Themen, diez.T. unubliche Notation und das allgemein herrschende Gedrange in dem Buch lassen ein“richtiges Lesen“ nicht aufkommen – evtl. sollen “Formelsammlungen“ wie diese auch einzum Verweilen aufmunterndes Lesen nicht aufkommen lassen. Ganz anders prasentiert sich[Netz83], weniger umfangreich im Stoff, wird hier aber deutlich mehr geschafft: ist mannicht mehr ganz am Stoff, so fuhrt der klare Stil, die gute Ubersichtlichkeit und die klei-nen, klar abgesetzten Beispiele, einen schnell und ohne den Ruckgriff auf Zusatzliteraturzum Wesentlichen, das sich gut aufbereitet, zugig fur die eigenen Belange einsetzen laßt.Wieder anders, vermag [Gellert77] einen runden Einblick in die Mathematik zu geben. Beielementaren Themen beginnend (die wunderschon aufgebaut sind! – und aus denen auchich mich fur diese Arbeit bediente), wenden die Herausgeber sich im mittleren Teil derhoheren Mathematik zu, um im dritten und letzten Teil einige Spezialgebiete vorzustellen.Dabei wird durch die geschickt farbig abgesetzten Blocke eine gute Ubersicht gewahrlei-stet. Die Vielzahl von Beispielen, fundierten Herleitungen, naturlichen Motivationen undgeschichtlichen Uberblicke laden sowohl zum Schmokern als auch zur weiteren Vertiefungder Themen ein.
Die beiden Werke [AL95] und [KW97] sind auch Sammlungen. Ihrer Aufmachung undganzem Charakter nach aber solche, die zum Verweilen geradezu einladen. Das Erbe des

414 LITERATURVERZEICHNIS
Thales [AL95] ist als Zeitreise durch die Mathematik angelegt; eine solche halt naturlicheine Fulle von Stoff bereit, so daß die einzelnen Portionen auf kleine Happchen beschranktbleiben mussen. Diese sind zwar recht anregend, eine Vertiefung des Materials wird undkann indes nicht geboten werden (was in Beibehaltung der Themenvielfalt wohl auchunmoglich ware). Sammlungen wie [KW97] machen die anhaltende Spannung der Mathe-matik deutlich: eine Fulle von anstehenden – z.T. erschreckend elementaren – Problemenwarten auf ihre Losung. Ein “Zuklappen“ der Mathematik als “Formelsammlung“ stehtin keiner Weise zu befurchten – und widersprache auch der ganzen Tatigkeit des Mathe-matikers. Daß dennoch zuweilen nutzliche Rezepte die Kuche in Form von Sammlungenwie [Netz83] verlassen, spricht eher fur die grazile, auch umsichtige Art des Koches, alsfur die Erschopfung der kreativen Reserve.
Und kaum einer ist geeigneter als Ian Stewart, einem großeren Publikum diese stillenReserven schmackhaft zu machen. In [Stewart97] bietet er wieder zwolf Kurzgeschichten,die Mathematik im besten und unterhaltsamsten Sinne des Wortes erzahlen. Besondershingewiesen sei an dieser Stelle auf ’Alle Parallelen fuhren nach Rom’, welche die pro-jektive Geometrie zum Thema wahlt und mit verschiedenen Bildern zur Boyschen Flache– ein weiteres Modell der projektiven Ebene – und sogar mit einem polyedrischen Mo-dell zu dieser Flache zum Selbstbasteln aufwartet, und auf ’Die unheimliche Begegnungder Fermatschen Art’, die sich mit algebraischen bzw. im besonderen elliptischen Kurvenbeschaftigt. 5
Auch [BJS95] besteht aus einer Reihe von Einzelaufsatzen, welche die hohe Kunst derangewandten Mathematik in den unterschiedlichsten Bereichen vorfuhren. Die Beitragesind zwar sehr knapp gehalten, das Buch kann jedoch im besten Sinne als Alibi dafurgenommen werden, daß auch die abstraktesten Ergebnisse der Mathematik letztlich in diePraxis gelangen. Was meines Erachtens nicht nur die Einheit der Mathematik, sondernauch die Einheit menschlichen Denkens und Handelns zeigt.
Das wahrhaft umfassende Buch [GWNO87] schließlich ist ein tatsachlich interdiszi-plinar gestaltetes Werk. Es macht deutlich, wie eine Vielzahl von Gebieten – nicht zuletztauch wieder die Mathematik als “Kitt“ – zusammenwirken, um ein Ziel zu erreichen,gewissermaßen eine Vision zu verwirklichen.
In [Beutelspacher96] gibt Albrecht Beutelspacher eine runde Einfuhrung in die Kryp-tologie, die fur Einsteiger (wie mich) gerade den richtigen Stoffumfang bietet – nicht zuumfangreich, aber doch die spezifischen Techniken dieses Gebietes pragnant herausgearbei-tet. Großartig ist [Bauer00] mit seinen geschichtlichen Ruckblicken und reichlichen Anwen-dungen. Es werden stets gute und ausfuhrliche Einstiege in die Grundprobleme gegeben,allerdings werden die mathematischen Methoden nicht genugend tief entwickelt; was aber
5Auch wenn der gleich genannte Text nur am Rande mit algebraischen Kurven zu tun hat –recht und bei Lichte gesehen hat er es eher oder ausschließlich mit geometrischer Zahlentheorie–, so muß ich ihn hier doch noch erwahnen, zu schade ware es, sollte dieser herausragende Wurfhier nicht genannt werden: ’Ein Weihnachtslied in Prosa, nebst einer Erlauterung eines Satzes vonPierre de Fermat und des zugehorigen Beweises von Hermann Minkowski, erdacht und in Wortegesetzt von Ian Stewart’, aus Spektrum der Wissenschaft, Dezember 1990. Was laßt sich uber dieseKurzgeschichte nun wieder bessers sagen als das: von der ’afterwards’ (ja, ich las das Original erstdanach – man kann nicht alle Weltliteratur am Schnurchen haben, wenn man epische Lasten ganzanderen Kalibers hieft), von der im nachhinein denn also erst gelesenen Originalschrift CharlesDickens, des ’A Christmas Carol in Prose: Being a Ghost Story of Christmas’ war ich enttauscht.Die Stewartsche Paraphrase dieses Werkes konnte man in Schopenhauerische Weise als gegluckteParallele zum Candide sehen!

LITERATURVERZEICHNIS 415
evtl. auch der Zielsetzung dieses Buches (mit seinem reichlichen Bildmaterial, das auchnicht so schnell anderwertig zu finden ist) nicht gerecht wurde. Mochte man also einenwunderschonen Uberblick lesen, wo auch die Mathematik nicht zu kurz kommt, wahleman [Bauer00]. Mathematisch (didaktisch) mehr auf weniger Raum – ohne zu hetzen,immer parlando – schafft dagegen [Beutelspacher96]. Spatestens bei elliptischen Kurvenmußten jedoch beide Bucher passen: hier half [Ruppert96] weiter. Daruber hinaus warenauch wieder einige Kenntnisse der Zahlentheorie notwendig. In [Bundschuh92] kann mansich insbesondere uber Potenzreste und das Legendre-Symbol ausfuhrlich informieren. DasBuch fuhrt rasch und schnorkellos zu den wesentlichen Ergebnissen und bietet zuweilenkleine geschichtliche Ruckblicke. Schließlich wartet [Giblin93] mit Programmen, aber leidernicht mit in Pseudocode ubersichtlich dargestellten Algorithmen auf. Ich mochte jedochnicht unnotig klagen: was ich in Mathematica nicht fand, hier stand’s!
Abschließend sollen noch kurz einige wunderbare Bucher erwahnt werden, durch dieich mich anregen ließ und von der diese Arbeit zumindest indirekt profitierte. Im Grundegenommen muß ein weiteres Mal [BK81] genannt werden, das sich streckenweise wie einspannender Roman liest.
Unter der Herausgabe als Lexikon, konnte bei [BRST64] so manchem der Gedankean eine trockene Sammlung bloßer Fakten entstehen. Genau das Gegenteil ist jedoch derFall! Und darum wird diese Sammlung auch hier und nicht in der vorhergehenden Rubrikbesprochen. Die Autorenschaft versteht es in hervorragender Weise, einen ebenso pragnan-ten, wie spannenden Uberblick uber große Teile der Mathematik auszubreiten. Das gelingtihnen vor allem durch eine problemorientierte und -motivierte Darstellung, die es somitversteht, den lebendigen Charakter der Mathematik zu entfalten; die niemals so sehr aufdas Sammeln von bloßen Fakten aus war und ist, sondern problemgetrieben operiert. DieProblemfelder werden dann in großer Klarheit formal einwandfrei weiterentwickelt.
Sehr gut aufgemacht ist [Weyl13]: es bettet den Originaltext von Hermann Weyl ineinen geschichtlichen Kontext ein, der zeigt, wie dieser große Text der Mathematik seinenAnfang nahm und was ihm folgte. Nicht unerwahnt bleiben soll auch der Ausspruch Weyls:“Fast liegt mir mehr an Ausdruck und Gestaltung als an der Erkenntnis selbst.“ Einunderstatement und doch auch wahr, wenn man an die großartigen Bucher von Weyldenkt!
Das wunderschone Werk [Mandelbrot87] hat naturlich nicht direkt mit algebraischenKurven zu tun (stellt vielmehr die andere Seite des hier prasentierten Gebietes dar, be-grenzt es mithin, ohne es doch abzuschotten, denn letztlich sind alle Arbeitsbereiche derMathematik miteinander verbunden); es macht deutlich, auf wie hohem Niveau Mathema-tik zur Anschauung gebracht werden kann, ohne den Anspruch der Wissenschaftlichkeit zuverlieren. Und naturlich zeigt es, welche Kurven – außer den algebraischen – noch existie-ren: Modelle, welche die Natur in manchen Fallen wohl angemessener einfangen, ersinnenoder konstruieren. In eine ahnliche Kategorie fallt das Buch [Ernst82]; hier wurde mirdeutlich, wie fruchtbar ein (Ab)Schweifen der Gedanken in anderen Arbeiten sein kann,mit denen sich Menschen auseinandersetzen.
Das leider viel zu kurze Buch [Ogilvy79] zeigt, wie vielfaltig geometrische Probleme aufganz elementarer Stufe entstehen, die zu faszinierenden Untersuchungen und verbluffendenErgebnissen gefuhrt haben.
Die Broschure [Faltings96] gibt in einer Reihe von gut verstandlichen Aufsatzen be-kannter zeitgenossischer Mathematiker abwechslungsreich wieder, wie vielfaltig der An-wendungsbereich und Ideenreichtum moderner Mathematik ist. Insbesondere gibt Ger-

416 LITERATURVERZEICHNIS
hard Frey hier eine schone Ubersicht des Beweises von Andrew Wiles zum FermatschenTheorem, bei der bekanntlich elliptische Kurven eine bedeutende Rolle spielen. In dieserwirklich gelungenen Darstellung wird einiges an Techniken erklart, die in dem Beweis eineRolle spielen; dabei gelingt Frey eine gute Balance von Genauigkeit und Andeutungen, sodaß man nach Lekture dieses Aufsatzes (naturlich) keinen vollstandigen Beweis in Handenund Kopf halt (ein solcher ist immer noch ca. 100 Seiten lang und richtet sich an ein Fach-publikum), aber eine sehr gute Idee von den Schaltstellen und den Gebieten bekommt, dieAndrew Wiles erstaunlicherweise zu verbinden verstand.
Diese Tiefe und Konzentration wird in [Singh98] zu Gunsten eines großeren erzahleri-schen Flusses gewendet. Mit großer Spannung vermag Singh die Geschichte, den Verlaufund die Akteure des Theorems darzustellen.
Dichter am Stoff (noch ohne die Losung von Wiles zu kennen) vieler Problemfelder derMathematik, gelingt es Keith Devlin in [Devlin94] eine vorzugliche Reihen von Aufsatzenzu prasentieren, die immer den Kern und Angelpunkt des jeweiligen Gebietes besondersherausprapariert. In dieser Arbeit wird aus dem Kapitel uber das Zehnte HilbertscheProblem das Primzahlenpolynom zitiert. Besonders erwahnt werden soll aber auch diebesondere Betonung der inneren Geometrie im Abschnitt uber Mannigfaltigkeiten, diees eben eher gebietet das Mobiusband als eine durchsichtige Flache zu konstruieren, dienicht orientierbar ist und nicht sofort mit der Einseitigkeit zu beginnen, die erst in derEinbettung eine Rolle spielt und bei der viele Autoren in popularwissenschaftlichen Textenstehen bleiben.
Alle Hilbertschen Probleme vom 2. Internationalen Mathematikerkongreß in Paris imJahre 1900 enthalt [Alexandrov98], wo alle diese fur die Mathematik des 20-ten Jahrhun-derts richtungsweisenden Fragestellungen von unterschiedlichen Autoren vorgestellt unddiskutiert werden.
Der englische Mathematiker Wiles studierte in Cambridge; Thomas Korner, Professoran derselben Universitat, macht in seinem mit Genuß zu lesenden Buch [Korner98] deut-lich, wie England es immer wieder verstand, neben diesen abstrakten Leistungen auch’pragmatism’ und ’rationalism’ zu vereinigen. Auch in [Kanigel93] wird das englische Le-bensgefuhl anschaulich zur Sprache gebracht. Das Buch lebt von der Spannung diesesZusammenkommens Indiens und Englands oder auch von den abstoßenden (und anzie-henden) Kraften dieser Lander, verkorpert – und dadurch so recht lebendig werdend –durch die beiden “Protagonisten“ Srinivasa Ramanujan und Godfrey Harold Hardy. Wirddie Beziehung (hier unzweifelhaft die des Kolonialismus’) zweier Gesellschaften nicht erstdann besonders deutlich, nachvollziehbar, wenn sie unter dem Blickwinkel tatiger Men-schen erscheint, die darin verwoben sind, weil sie weniger diese Beziehung geschaffen alsvielmehr mit ihr leben (sie dadurch naturlich auch tragen) und wenn das/ein uns vertrau-tes Arbeitsgebiet unter der Randbedingung dieser Beziehung erscheint? Nun, alles das istin diesem Buch enthalten und laßt das Lesen zu einem großen Erlebnis werden.
Und abschließend sei noch erwahnt, daß der Reichtum an Reflexion, Geschichte undMensch-Sein im großen Lebensbuch [Mann24] ohnehin jede meiner kulturellen Außerungenbeeinflußt; eine solche mit dieser Komposition vorgelegt zu haben, war ich in besonderemMaße bestrebt, diese als eine solche zu betrachten, bleibt jedoch dem Leser uberlassen.




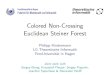











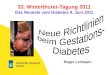


![[etis hagen] - portafolio](https://img.pdfslide.org/doc/110x75/568c55e91a28ab4916c49d44/etis-hagen-portafolio.jpg)